Embed Size (px)
DESCRIPTION
Frequenzgang für abgetastete/zeitdiskrete Systeme. Einfluss der Abtastung auf Phasengang, Abnahme der Phasenreserve, Reglerauslegung für zeitdiskrete Systeme - Eine Einführung
Citation preview
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 1/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 1/24
Regelungstechnik 2 für EITTeil 3: Frequenzgang mit Abtastung
Version 1.1
Prof. Dr. David Zogg
Institut für Automation IAHochschule für TechnikFachhochschule Nordwestschweiz
Windisch, März 2012
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 2/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 2/24
Dokumentenkontrolle
Änderungen
Version Datum Autoren Bemerkung
1.0 16.01.2012 David Zogg Erstellung
1.1 13.03.2012 David Zogg Abschn. 4.8 ergänzt
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 3/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 3/24
1. Zweck 4 2. Referenzen 4 3. Symbol- und Abkürzungsverzeichnis 4 4. Einführung 6 4.1. Lernziele 6 4.2. Praxisbeispiel „Kaffeemaschine“ 6 4.3. Frequenzgang mit Abtastung – das Totzeitelement 6 4.4. Einfluss des Totzeitelementes – Abnahme der Phasenreserve 7 4.5. Analyse der Diskretisierung in MATLAB 9 4.6. Wahl der Abtastrate - Shannon 10 4.7. „Kehrseite“ der schnellen Abtastung 12 4.8. Regelkreis mit Abtastung am Praxisbeispiel „Kaffeemaschine“ 13 4.9. Aliasing-Effekt und Anti-Aliasing-Filter 18 4.10. Anwendung des Anti-Aliasing-Filters am Praxisbeispiel (Übung) 19 4.11. Zusammenfassung 24
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 4/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 4/24
1. Zweck
Das vorliegende Skript dient als Grundlage für das Modul „Regelungstechnik 2“ (rt2) im6. Semester des Studiengangs Elektro- und Informationstechnik (EIT).
Im Modul „Regelungstechnik 1“ (rt1) des 5. Semesters wurde die Auslegung von zeitkon-tinuierlichen PID- und Zustandsreglern behandelt. Das vorliegende Modul „Regelungs-
technik 2“ (rt2) befasst sich nun mit der zeitdiskreten Darstellung.
In den bisherigen Teilen 1 und 2 wurden die Grundlagen der Signalabtastung im Zeitbe-reich erarbeitet.
Im vorliegenden dritten Teil wird der Einfluss der Signalabtastung auf den Frequenz-gang untersucht.
2. Referenzen
[ 1 ] H. Mann, H. Schiffelgen, R. Froriep: Einführung in die Regelungstechnik, 11. Auf-lage, Hanser Verlag, München 2009
[ 2 ] M. Reuter, S. Zacher: Regelungstechnik für Ingenieure, 12. Auflage, Vie- weg+Teubner Verlag, Wiesbaden 2008
[ 3 ] H. Gassmann: Theorie der Regelungstechnink, 2. Auflage, Verlag Harri Deutsch,Rapperswil/Frankfurt 2003
[ 4 ] H.P. Geering: Regelungstechnik, 3. Auflage, Springer Verlag, Zürich/Berlin 1994
3. Symbol- und Abkürzungsverzeichnis
A Aktuator
A/D Analog-Digital-Wandler
CAN Controller Area Network (Realtime-Bussystem)
D/A Digital-Analog-Wandler
e Regelfehler
FOH First Order Hold (Abtastung erster Ordnung)
G Strecke (Übertragungsfunktion)
i Imaginär-Anteil
K Regler (Übertragungsfunktion)
K P Verstärkung P-Anteil
K I Verstärkung I-Anteil
K D Verstärkung D-Anteil
MU Messumformer
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 5/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 5/24
PWM Pulse Width Modulation (Pulsbreitenmodulation)
S Sensor
s Laplace-Operator
T A Abtastzeit
T T Totzeit
T N Nachstellzeit (I-Anteil)
T V Vorhaltezeit (D-Anteil)
u Eingangsgrösse (Stellgrösse, Steuergrösse)
w Führungsgrösse (Sollwert)
x Zustandsgrösse
y Ausgangsgrösse (Messgrösse, Istwert)
ZOH Zero Order Hold (Abtastung nullter Ordnung)
ϕ Phasendrehung / Phasenverschiebung (rad oder °)
ω Kreisfrequenz (rad/s)
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 6/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 6/24
4. Einführung
4.1. Lernziele
Lernziel Taxonomiestufe (Bloom)Einfluss der Signalabtastung auf den Phasengang
kennen
Verständnis
Verschiedene Diskretisierungsmethoden (‘foh’, ‘zoh’,‘tustin’) anwenden können
Anwendung
Shannon-Theorem in die Praxis umsetzen können Anwendung Aliasing-Effekt kennen und Anti-Aliasing-Filter aus-legen können
Anwendung
4.2. Praxisbeispiel „Kaffeemaschine“
Das Praxisbeispiel „Kaffeemaschine wurde in Teil 1, Abschnitt 4.2 beschrieben. Es geht
um die Erwärmung von Wasser im Thermoblock. Für die Regelstrecke wurde die Über-tragungsfunktion G(s) eines Tiefpasses 2. Ordnung angenommen mit der Temperaturals Ausgangsgrösse y und der Heizleistung als Stellgrösse (Eingangsgrösse) u:
( 1 ))()(
)(21 asas
bsG
+⋅+=
4.3. Frequenzgang mit Abtastung – das Totzeitelement
In Teil 2, Abschnitt 4.3 haben wir gesehen, dass das Abtast-/Halteglied mit einem Tot-
zeitelement beschrieben werden kann, während die Totzeit T T gerade die halbe Abtast-zeit T A ist:
( 2 )22
A A
T
T i
T s
sT eee
ω −−−
==
In Gleichung ( 2 ) wurde der Laplace-Operator s mit i ω ersetzt (ω = Kreisfrequenz inrad/s, i = Imaginär-Anteil). Damit kann das Totzeitelement als reine Phasendrehungaufgefasst werden. Die Phasendrehung ϕ nimmt mir der Frequenz ω zu:
( 3 )
2
AT ω ϕ =
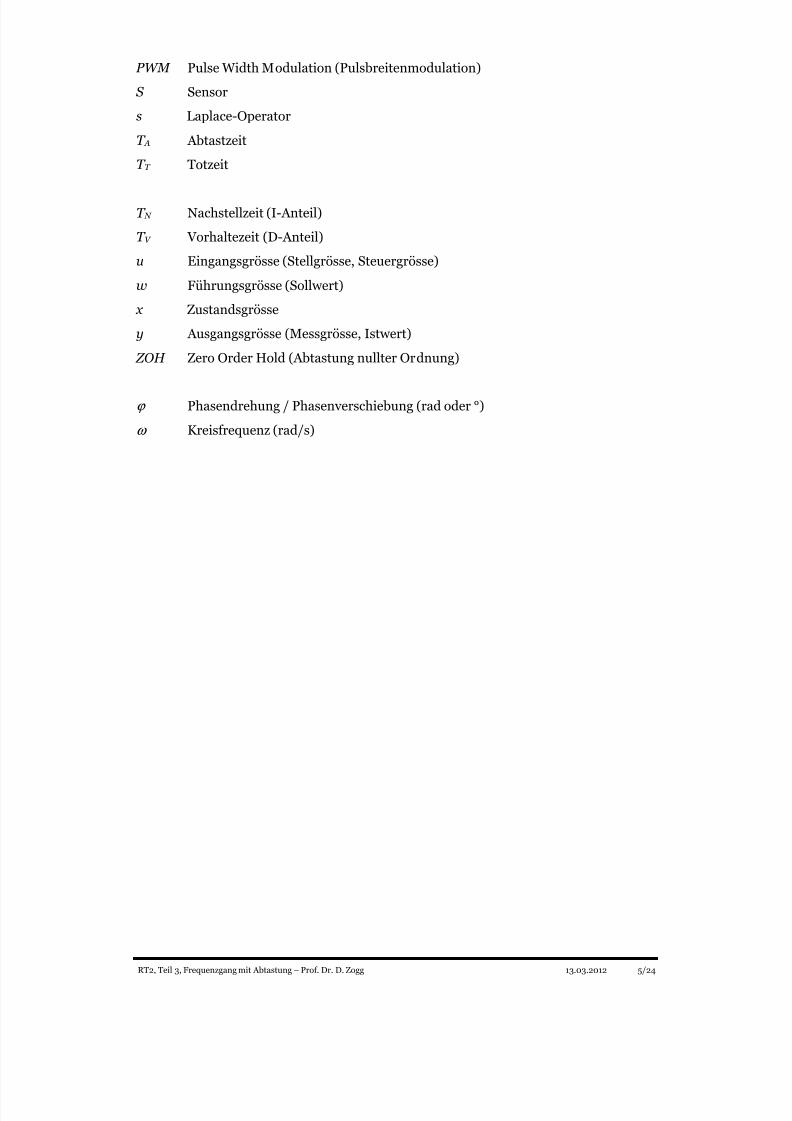
Stellt man nun das Totzeitelement ( 2 ) im Nyquist-Diagramm dar, so folgt eine Darstel-lung als Kreis mit Radius 1 (Abbildung 1). Die Kurve startet im Punkt (Re = 1, Im = 0) und „dreht sich“ mit zunehmendem ϕ in Pfeilrichtung.
ϕ
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 7/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 7/24
Abbildung 1: Totzeitelement im Nyquist-Diagramm
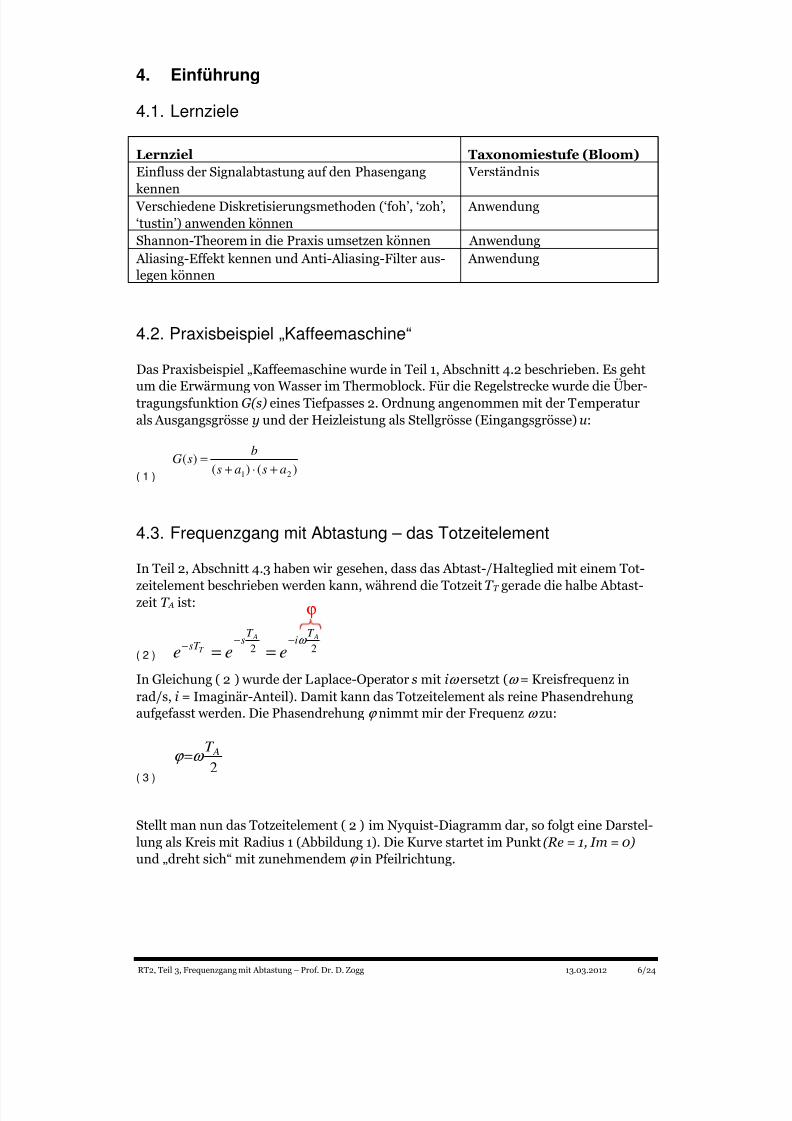
Daraus kann der Amplituden- und Phasengang abgeleitet werden (Abbildung 2). In derlogarithmischen Skala folgt für die konstante Amplitude 1 eine horizontale Linie bei 0dB. Die Phase ϕ wäre in einer linearen Skala eine Gerade (proportional zu ω ), in der lo-garithmischen Skala eine Kurve, welche mit zunehmender Frequenz gegen unten läuft.
Abbildung 2: Amplituden- und Phasengang des Totzeitelementes
4.4. Einfluss des Totzeitelementes – Abnahme der Phasenreserve
Der Einfluss des Totzeitelementes ( 2 ) soll nun anhand eines einfachen Beispiels be-schrieben werden. Die zeitkontinuierliche Übertragungsfunktion sei durch einen Tief-pass 1. Ordnung gegeben ( 4 ).
( 4 )as
bsG
+
=)(
Zusammen mit dem Totzeitelement ergibt sich für den abgetasteten Fall:
( 5 ) 2)( AT i
z eas
bsG
ω −
⋅
+
=
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 8/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 8/24
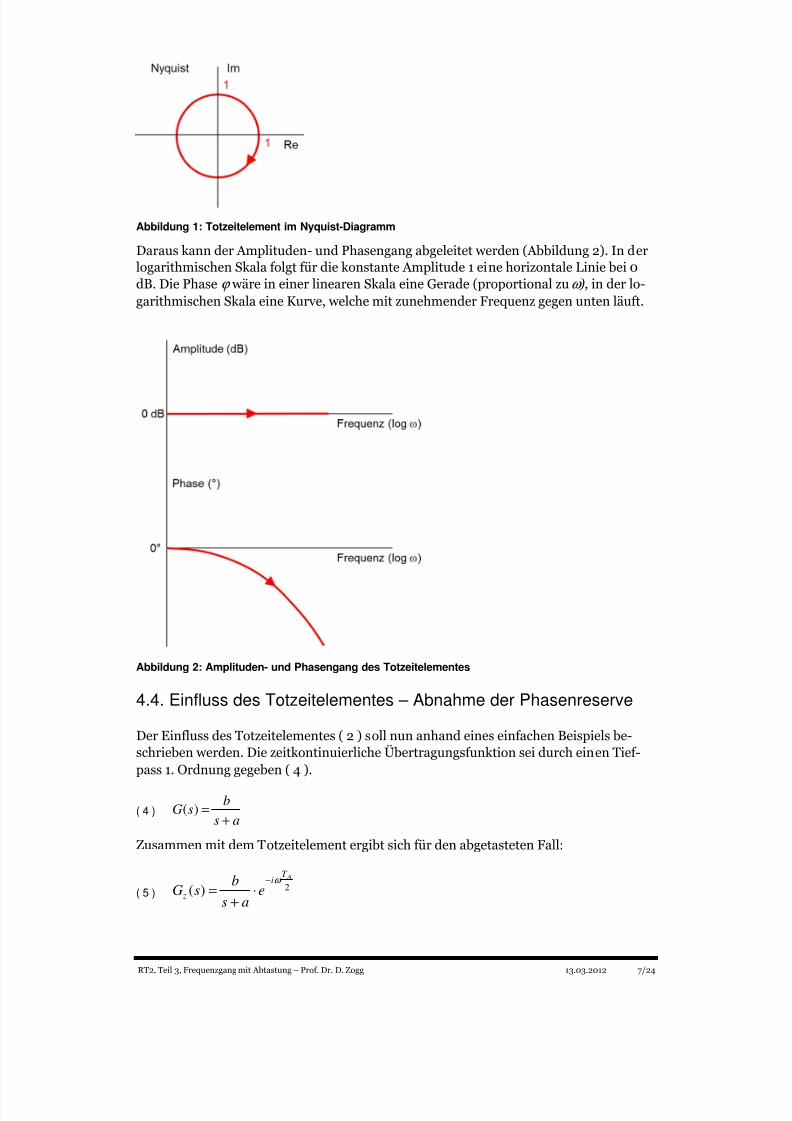
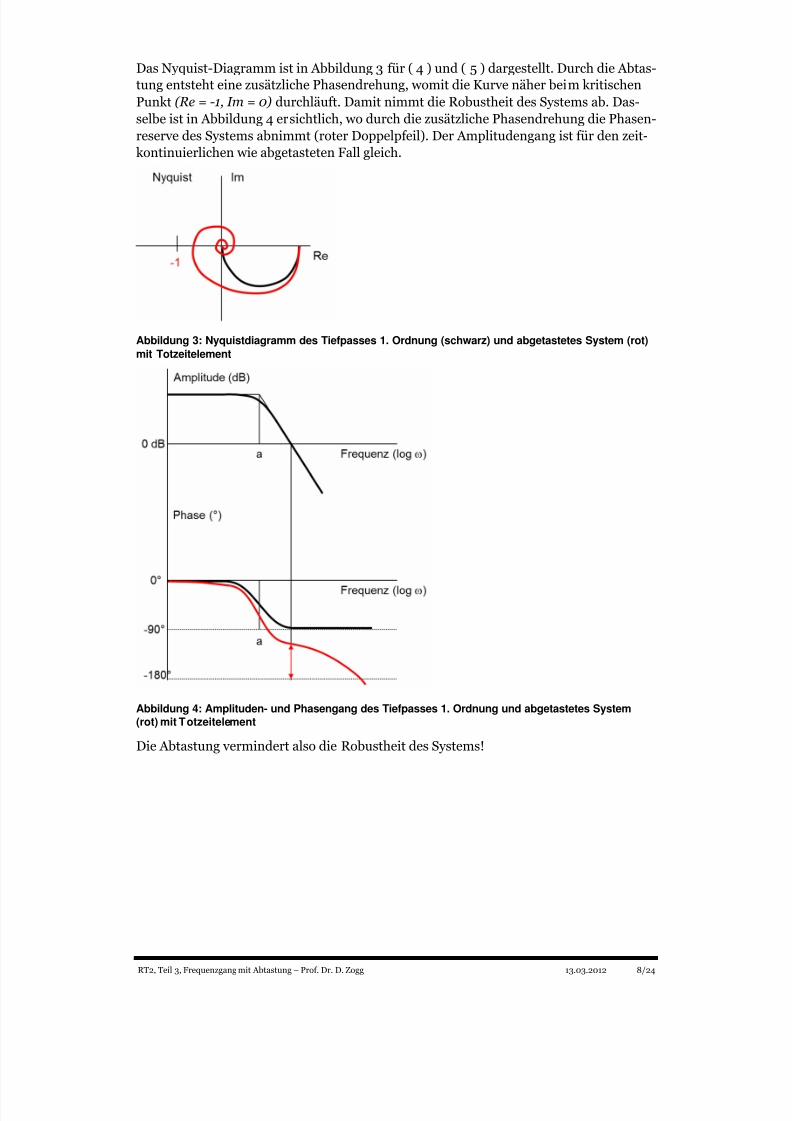
Das Nyquist-Diagramm ist in Abbildung 3 für ( 4 ) und ( 5 ) dargestellt. Durch die Abtas-tung entsteht eine zusätzliche Phasendrehung, womit die Kurve näher beim kritischenPunkt (Re = -1, Im = 0) durchläuft. Damit nimmt die Robustheit des Systems ab. Das-selbe ist in Abbildung 4 ersichtlich, wo durch die zusätzliche Phasendrehung die Phasen-reserve des Systems abnimmt (roter Doppelpfeil). Der Amplitudengang ist für den zeit-kontinuierlichen wie abgetasteten Fall gleich.
Abbildung 3: Nyquistdiagramm des Tiefpasses 1. Ordnung (schwarz) und abgetastetes System (rot)
mit Totzeitelement
Abbildung 4: Amplituden- und Phasengang des Tiefpasses 1. Ordnung und abgetastetes System(rot) mit Totzeitelement
Die Abtastung vermindert also die Robustheit des Systems!
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 9/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 9/24
4.5. Analyse der Diskretisierung in MATLAB
Der Einfluss der Abtastung soll nun in MATLAB® analysiert werden. Dazu wird die Re-gelstrecke der Kaffeemaschine („Thermoblock“) entsprechend Gleichung ( 1 ) verwendet,also ein Tiefpass 2. Ordnung.
Für die Analyse werden folgende MATLAB-Befehle wervendet:
Funktion MATLAB-BefehlRegelstrecke zeitkontinuierlich(aus Teil 1)
G = b/((s+a1)*(s+a2))
Diskretisierung Gz = c2d(G, Tabtast, method)
Tabtast = 0.1
method = ‘foh’, ‘zoh’, ‘tustin’
Bode-Diagramm (für G und Gz) bode(G, Gz)
Sprungantwort (für G und Gz) step(G, Gz)
File: RT2_Lektion3_Regelstrecke_Diskret_Kaffeemaschine.m
Für die Diskretisierung werden verschiedene Methoden verwendet:
• ZOH (Zero-Order-Hold). Methode 0. Ordnung, stückweise konstant, siehe
Rechteckregel im Skript Teil 2, Abschnitt 4.4.• FOH (First-Order-Hold). Methode 1. Ordnung, stückweise linear, siehe Trapez-
regel im Skript Teil 2, Abschnitt 4.4.• TUSTIN (Approximation nach Tustin). Diese Approximation werden wir später
im Skript Teil 4 kennenlernen. Als Vergleich ist sie bereits hier aufgeführt.
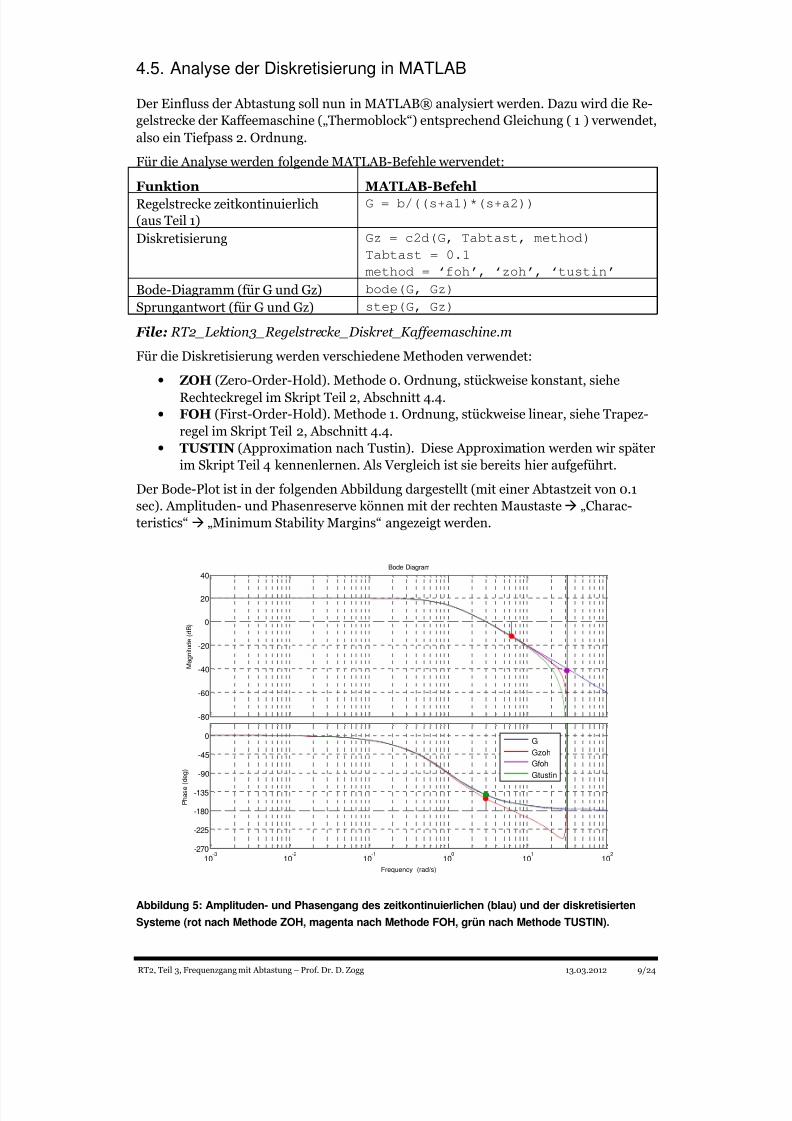
Der Bode-Plot ist in der folgenden Abbildung dargestellt (mit einer Abtastzeit von 0.1sec). Amplituden- und Phasenreserve können mit der rechten Maustaste „Charac-teristics“ „Minimum Stability Margins“ angezeigt werden.
Abbildung 5: Amplituden- und Phasengang des zeitkontinuierlichen (blau) und der diskretisierten
Systeme (rot nach Methode ZOH, magenta nach Methode FOH, grün nach Methode TUSTIN).
-80
-60
-40
-20
0
20
40
M a g n i t u d e ( d B )
10-3
10-2
10-1
100
101
102
-270
-225
-180
-135
-90
-45
0
P h a s e ( d e g )
Bode Diagram
Frequency (rad/s)
G
Gzoh
Gfoh
Gtustin
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 10/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 10/24
Es ist klar ersichtlich, dass die unterschiedlichen Diskretisierungsmethoden mehr oder weniger gute Approximationen des zeitkontinuierlichen Falls sind.
Im Phasengang ergibt die TUSTIN- und die FOH-Methode die beste Approximation fürdas gewählte System. Die TUSTIN-Methode ist im Allgemeinen sehr „phasentreu“ und wird deshalb bevorzugt gewählt, wenn die Robustheit eine grosse Rolle spielt. Die ZOH-Methode hat hier wesentlich grösseren Phasenabfall.
Im Amplitudengang zeigt die TUSTIN-Methode hingegen einen grösseren Abfall bei
hohen Frequenzen, was aber oft weniger relevant ist.
Bemerkung: Hier wurde als Beispiel eine Regelstrecke diskretisiert. In der Realität wird natürlich nicht die Regelstrecke, sondern der zugehörige Regler diskretisiert. DerEinfluss des Abtastens ist aber im Wesentlichen derselbe. Strecke, Regler und Abtastungsind ja in Serie geschaltet. Die Diskretisierung des gesamten Regelkreises wird weiterunten behandelt.
Übung: Spielen Sie mit der Abtastzeit (aktuell 0.1 sec). Beobachten Sie den Einfluss vonzunehmender Abtastzeit aufs Bode-Diagramm. Was macht die Phasenreserve?
4.6. Wahl der Abtastrate - Shannon
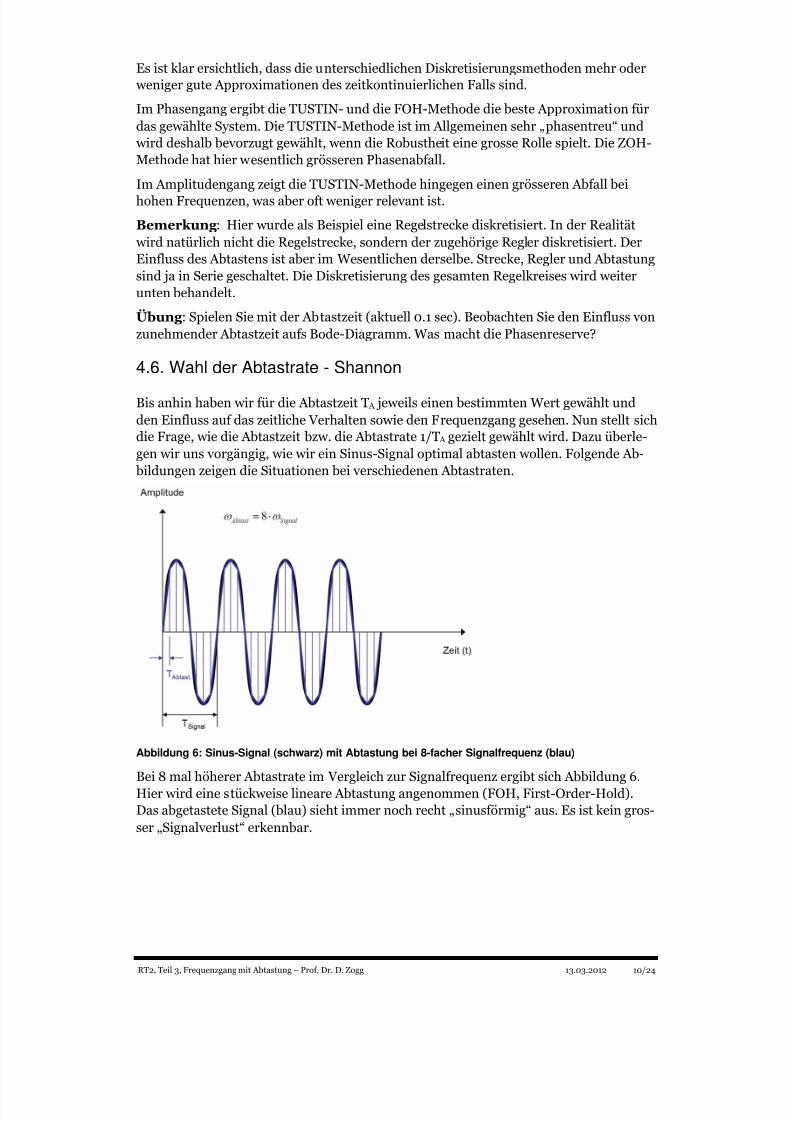
Bis anhin haben wir für die Abtastzeit T A jeweils einen bestimmten Wert gewählt undden Einfluss auf das zeitliche Verhalten sowie den Frequenzgang gesehen. Nun stellt sichdie Frage, wie die Abtastzeit bzw. die Abtastrate 1/T A gezielt gewählt wird. Dazu überle-gen wir uns vorgängig, wie wir ein Sinus-Signal optimal abtasten wollen. Folgende Ab- bildungen zeigen die Situationen bei verschiedenen Abtastraten.
Abbildung 6: Sinus-Signal (schwarz) mit Abtastung bei 8-facher Signalfrequenz (blau)
Bei 8 mal höherer Abtastrate im Vergleich zur Signalfrequenz ergibt sich Abbildung 6.Hier wird eine stückweise lineare Abtastung angenommen (FOH, First-Order-Hold).Das abgetastete Signal (blau) sieht immer noch recht „sinusförmig“ aus. Es ist kein gros-ser „Signalverlust“ erkennbar.
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 11/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 11/24
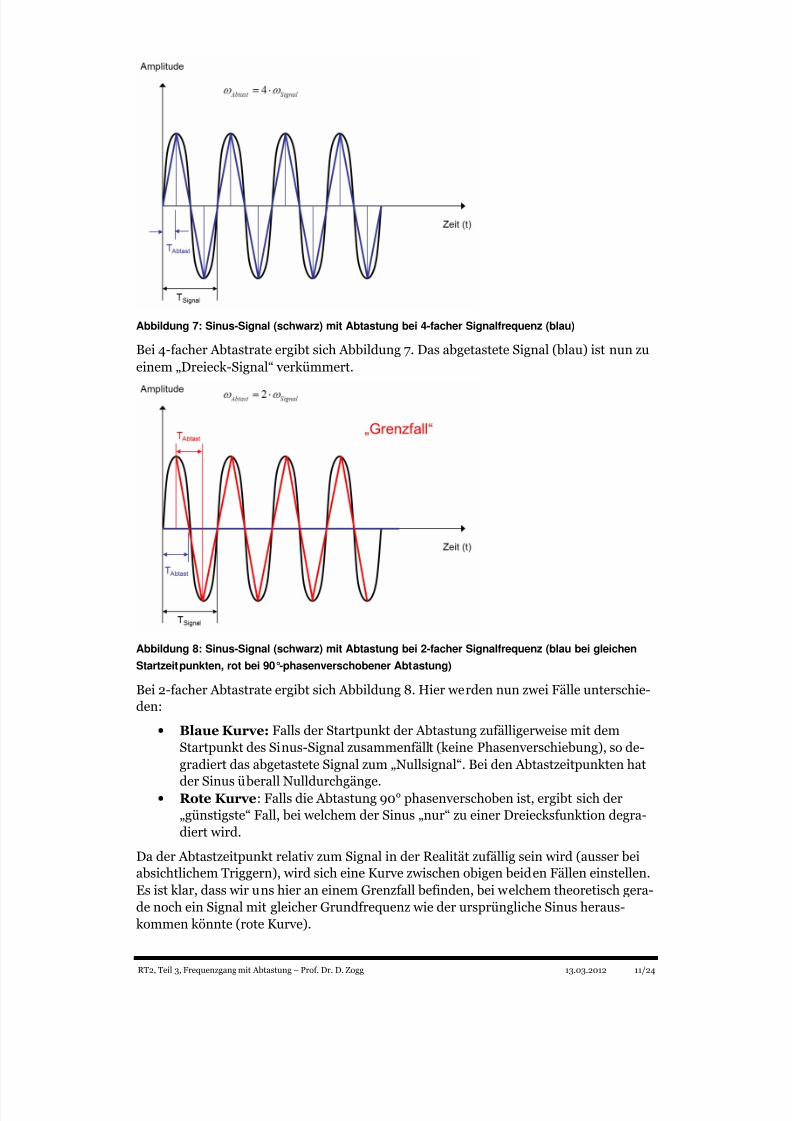
Abbildung 7: Sinus-Signal (schwarz) mit Abtastung bei 4-facher Signalfrequenz (blau)
Bei 4-facher Abtastrate ergibt sich Abbildung 7. Das abgetastete Signal (blau) ist nun zueinem „Dreieck-Signal“ verkümmert.
Abbildung 8: Sinus-Signal (schwarz) mit Abtastung bei 2-facher Signalfrequenz (blau bei gleichen
Startzeitpunkten, rot bei 90°-phasenverschobener Abtastung)
Bei 2-facher Abtastrate ergibt sich Abbildung 8. Hier werden nun zwei Fälle unterschie-den:
• Blaue Kurve: Falls der Startpunkt der Abtastung zufälligerweise mit demStartpunkt des Sinus-Signal zusammenfällt (keine Phasenverschiebung), so de-gradiert das abgetastete Signal zum „Nullsignal“. Bei den Abtastzeitpunkten hat
der Sinus überall Nulldurchgänge.• Rote Kurve: Falls die Abtastung 90° phasenverschoben ist, ergibt sich der
„günstigste“ Fall, bei welchem der Sinus „nur“ zu einer Dreiecksfunktion degra-diert wird.
Da der Abtastzeitpunkt relativ zum Signal in der Realität zufällig sein wird (ausser beiabsichtlichem Triggern), wird sich eine Kurve zwischen obigen beiden Fällen einstellen.Es ist klar, dass wir uns hier an einem Grenzfall befinden, bei welchem theoretisch gera-de noch ein Signal mit gleicher Grundfrequenz wie der ursprüngliche Sinus heraus-kommen könnte (rote Kurve).
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 12/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 12/24
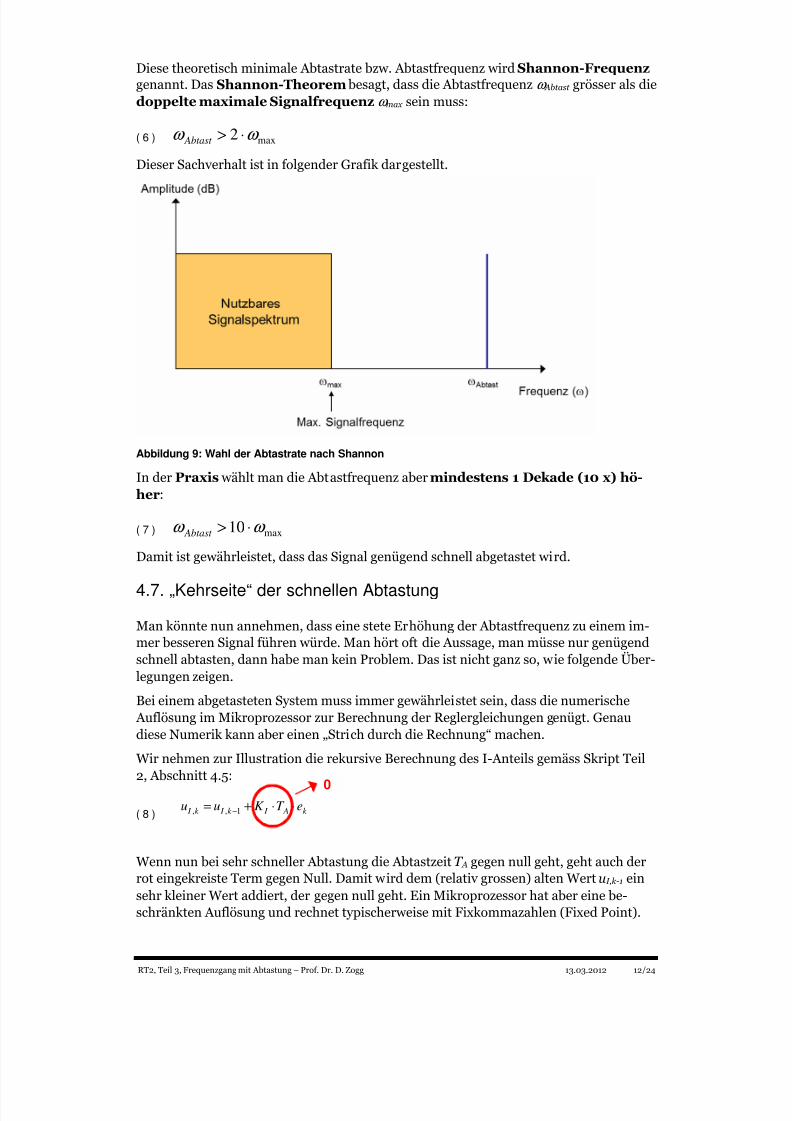
Diese theoretisch minimale Abtastrate bzw. Abtastfrequenz wird Shannon-Frequenz genannt. Das Shannon-Theorem besagt, dass die Abtastfrequenz ω Abtast grösser als diedoppelte maximale Signalfrequenz ω max sein muss:
( 6 ) max2 ω ω ⋅> Abtast
Dieser Sachverhalt ist in folgender Grafik dargestellt.
Abbildung 9: Wahl der Abtastrate nach Shannon
In der Praxis wählt man die Abtastfrequenz aber mindestens 1 Dekade (10 x) hö-her:
( 7 ) max10 ω ω ⋅> Abtast
Damit ist gewährleistet, dass das Signal genügend schnell abgetastet wird.
4.7. „Kehrseite“ der schnellen Abtastung
Man könnte nun annehmen, dass eine stete Erhöhung der Abtastfrequenz zu einem im-mer besseren Signal führen würde. Man hört oft die Aussage, man müsse nur genügendschnell abtasten, dann habe man kein Problem. Das ist nicht ganz so, wie folgende Über-legungen zeigen.
Bei einem abgetasteten System muss immer gewährleistet sein, dass die numerische Auflösung im Mikroprozessor zur Berechnung der Reglergleichungen genügt. Genaudiese Numerik kann aber einen „Strich durch die Rechnung“ machen.
Wir nehmen zur Illustration die rekursive Berechnung des I-Anteils gemäss Skript Teil2, Abschnitt 4.5:
( 8 ) k A I k I k I eT K uu ⋅⋅+=−1,,
Wenn nun bei sehr schneller Abtastung die Abtastzeit T A gegen null geht, geht auch derrot eingekreiste Term gegen Null. Damit wird dem (relativ grossen) alten Wert u I,k-1 einsehr kleiner Wert addiert, der gegen null geht. Ein Mikroprozessor hat aber eine be-schränkten Auflösung und rechnet typischerweise mit Fixkommazahlen (Fixed Point).
0
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 13/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 13/24
Damit können nicht beliebig kleine Werte addiert werden und der „Update“ des I- Anteils funktioniert wegen Rundungsfehlern nicht mehr.
Noch schlimmer geht es dem D-Anteil. Hier ist ebenfalls die rekursive Darstellung ausSkript Teil 2, Abschnitt 4.5 dargestellt:
( 9 )
)( 1, −−⋅= k k
A
Dk D ee
T
K u
Bei sehr kleiner Abtastzeit T A geht der rot eingekreiste Term gegen unendlich. Bei be-schränkter Fixkommazahl kann es zu einem „Overflow“ kommen. Andererseits wird derTerm (ek - ek-1) immer kleiner, da ja die Änderung des Regelfehlers ek von einem Abtast-zeitpunkt zum nächsten immer kleiner wird. Multipliziert man sehr grosse mit sehr klei-nen Werten, stösst man wieder an die Grenzen der Fixkommaberechnung bzw. Auflö-sung (Rundungsfehler).
Zudem kommt noch das Problem des „Quantisierungsrauschens“, welches bei der A/D-Wandlung entsteht. Hat man beispielsweise eine Auflösung von 8 bit, so kann dasniederwertigste Bit (Least Significant Bit LSB) zwischen 0 und 1 schwanken:
1011 1010 - 1011 1011
Bei einer Multiplikation mit dem sehr grossen Term K D /T A können enorm hoheSchwankungen des D-Anteils entstehen, welche unannehmbar sind.
Die Aussage „je schneller abgetastet wird, desto besser“ stimmt also nicht. Im Gegensatzdazu muss die Abtastrate zwar genügend schnell gewählt werden (Shannon), aber immernoch so, dass im Mikroprozessor keine numerischen Probleme auftreten.
4.8. Regelkreis mit Abtastung am Praxisbeispiel „Kaffeemaschine“
Der gesamte Regelkreis soll nun zeitdiskret in MATLAB® analysiert werden. Dazu wird wieder die Regelstrecke der Kaffeemaschine aus Abschnitt 4.2 verwendet, diesmal abermit einem zeitdiskreten Regler zu einem vollständigen Regelkreis geschlossen.
Für die Analyse werden folgende MATLAB-Befehle wervendet:
Funktion MATLAB-BefehlZeitkontinuierlicher PID-T1-Regler(muss realisierbar sein!)
K = Kp + Ki/s + (Kd*s)/(T1*s+1);
Startwerte für Reglereinstellung Kp = 0.5; Ki = 0.2; Kd = 0.3;
T1 = 1/100;
Diskretisierung des Reglers Kz = c2d(K, Tabtast, method)
TAbtast = 0.5
method = ‘foh’
Diskretisierung der Strecke
(nur für MATLAB-Analyse notwendig!)
Gz = c2d(G, Tabtast, method)
method = ‘tustin’Gleichungen des Regelkreises Lz = Kz*Gz;
Tz = Lz/(1+Lz);
Bode-Diagramme und Sprungantwor-ten
bode(K, Kz);
bode(L, Lz);
bode(T, Tz); step(T, Tz);
File: RT2_Lektion3_Regelkreis_Diskret_Kaffeemaschine.m
∞∞∞∞
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 14/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 14/24
Für die Diskretisierung wird zunächst die FOH (First Order Hold) Methode verwendet.Der zeitkontinuierliche PID-Regler muss einen realisierbaren D-Anteil haben, damit erdiskretisiert werden kann. Deshalb ist der zusätzliche Pol bei 1/T1 gesetzt (Abflachungdes Amplitudenganges bei hohen Frequenzen). Die Regelstrecke wird in der Realitätnatürlich nicht diskretisiert. Dies ist hier nur für die Analyse in MATLAB notwendig, daso die Systeme einfach in Serie geschaltet werden können (Operator *, siehe Gleichun-gen des Regelkreises).
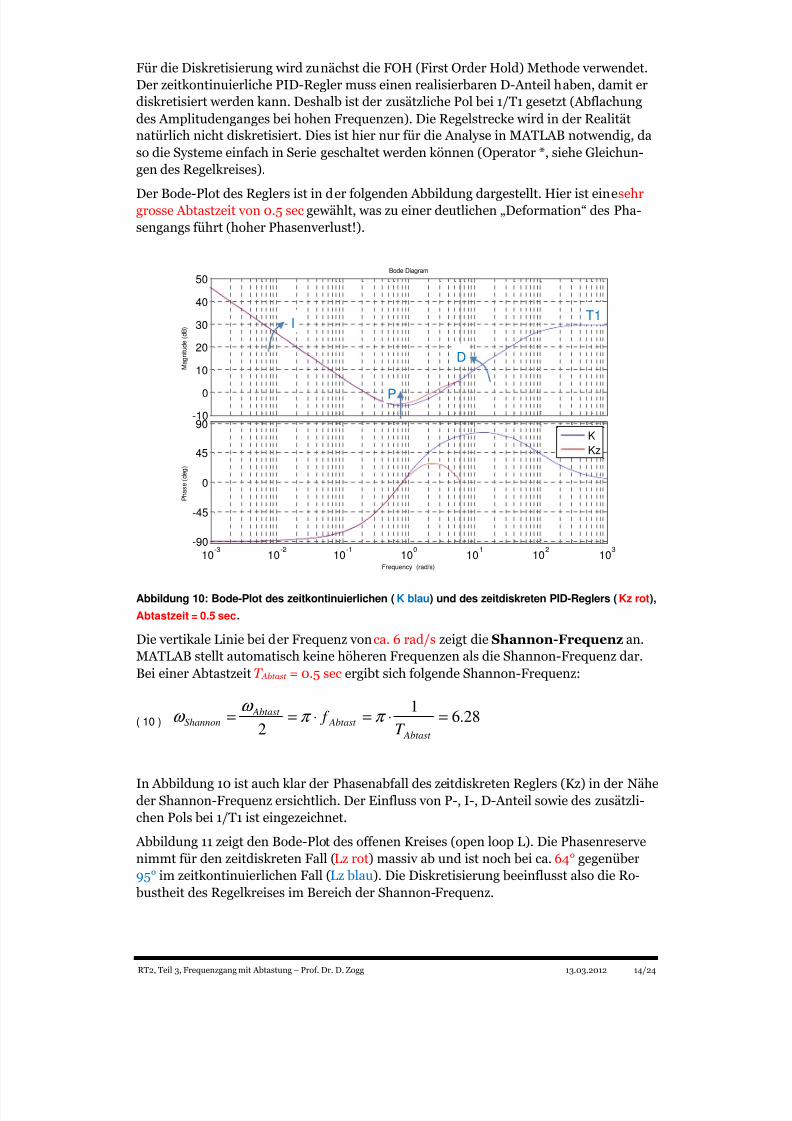
Der Bode-Plot des Reglers ist in der folgenden Abbildung dargestellt. Hier ist eine sehrgrosse Abtastzeit von 0.5 sec gewählt, was zu einer deutlichen „Deformation“ des Pha-sengangs führt (hoher Phasenverlust!).
Abbildung 10: Bode-Plot des zeitkontinuierlichen (K blau) und des zeitdiskreten PID-Reglers (Kz rot),
Abtastzeit = 0.5 sec.
Die vertikale Linie bei der Frequenz von ca. 6 rad/s zeigt die Shannon-Frequenz an.MATLAB stellt automatisch keine höheren Frequenzen als die Shannon-Frequenz dar.Bei einer Abtastzeit T Abtast = 0.5 sec ergibt sich folgende Shannon-Frequenz:
( 10 ) 28.61
2=⋅=⋅==
Abtast
Abtast Abtast
ShannonT
f π π ω
ω
In Abbildung 10 ist auch klar der Phasenabfall des zeitdiskreten Reglers (Kz) in der Näheder Shannon-Frequenz ersichtlich. Der Einfluss von P-, I-, D-Anteil sowie des zusätzli-chen Pols bei 1/T1 ist eingezeichnet.
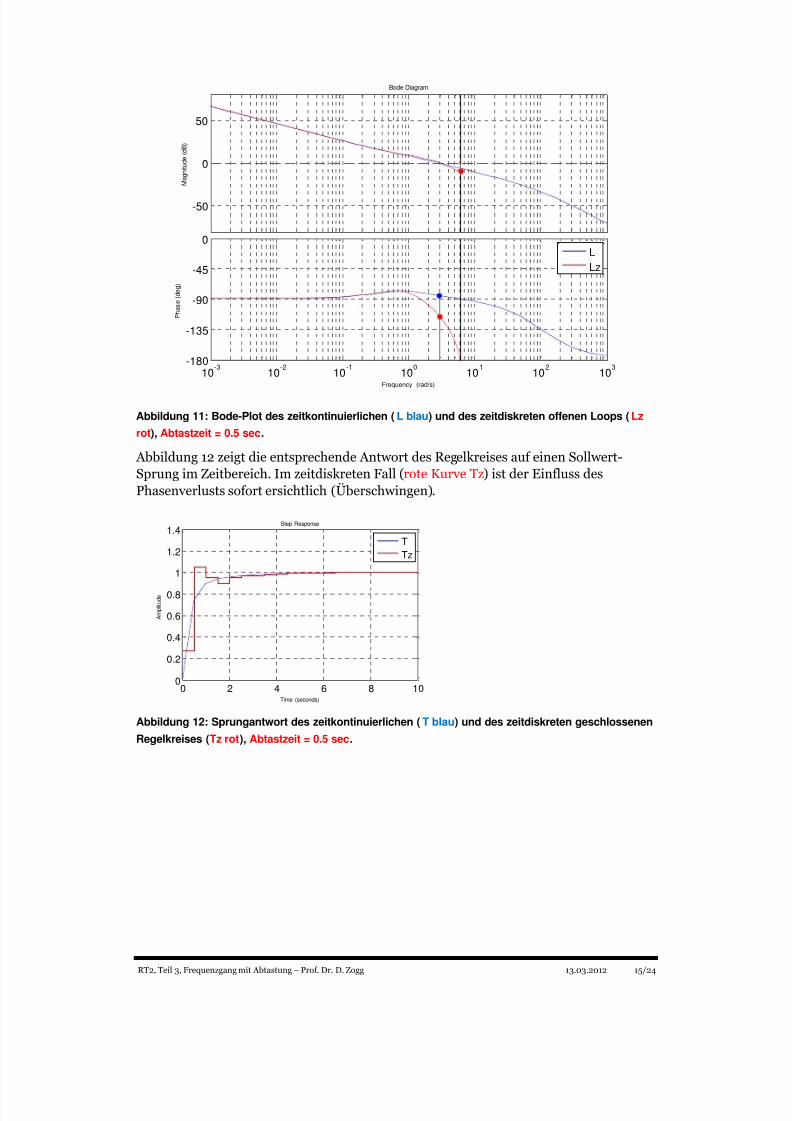
Abbildung 11 zeigt den Bode-Plot des offenen Kreises (open loop L). Die Phasenreservenimmt für den zeitdiskreten Fall (Lz rot) massiv ab und ist noch bei ca. 64° gegenüber95° im zeitkontinuierlichen Fall (Lz blau). Die Diskretisierung beeinflusst also die Ro- bustheit des Regelkreises im Bereich der Shannon-Frequenz.
-10
0
10
20
30
40
50
M a g n i t u d e ( d B )
10-3
10-2
10-1
100
101
102
103
-90
-45
0
45
90
P h a s e ( d e g )
Bode Diagram
Frequency (rad/s)
KKz
I
P
D
T1
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 15/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 15/24
Abbildung 11: Bode-Plot des zeitkontinuierlichen (L blau) und des zeitdiskreten offenen Loops (Lz
rot), Abtastzeit = 0.5 sec.
Abbildung 12 zeigt die entsprechende Antwort des Regelkreises auf einen Sollwert-Sprung im Zeitbereich. Im zeitdiskreten Fall (rote Kurve Tz) ist der Einfluss desPhasenverlusts sofort ersichtlich (Überschwingen).
Abbildung 12: Sprungantwort des zeitkontinuierlichen (T blau) und des zeitdiskreten geschlossenen
Regelkreises (Tz rot), Abtastzeit = 0.5 sec.
-50
0
50
M a g n i t u d e ( d B )
10-3
10-2
10-1
100
101
102
103
-180
-135
-90
-45
0
P h a s e ( d e g )
Bode Diagram
Frequency (rad/s)
LLz
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (seconds)
A m p l i t u d e
T
Tz
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 16/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 16/24
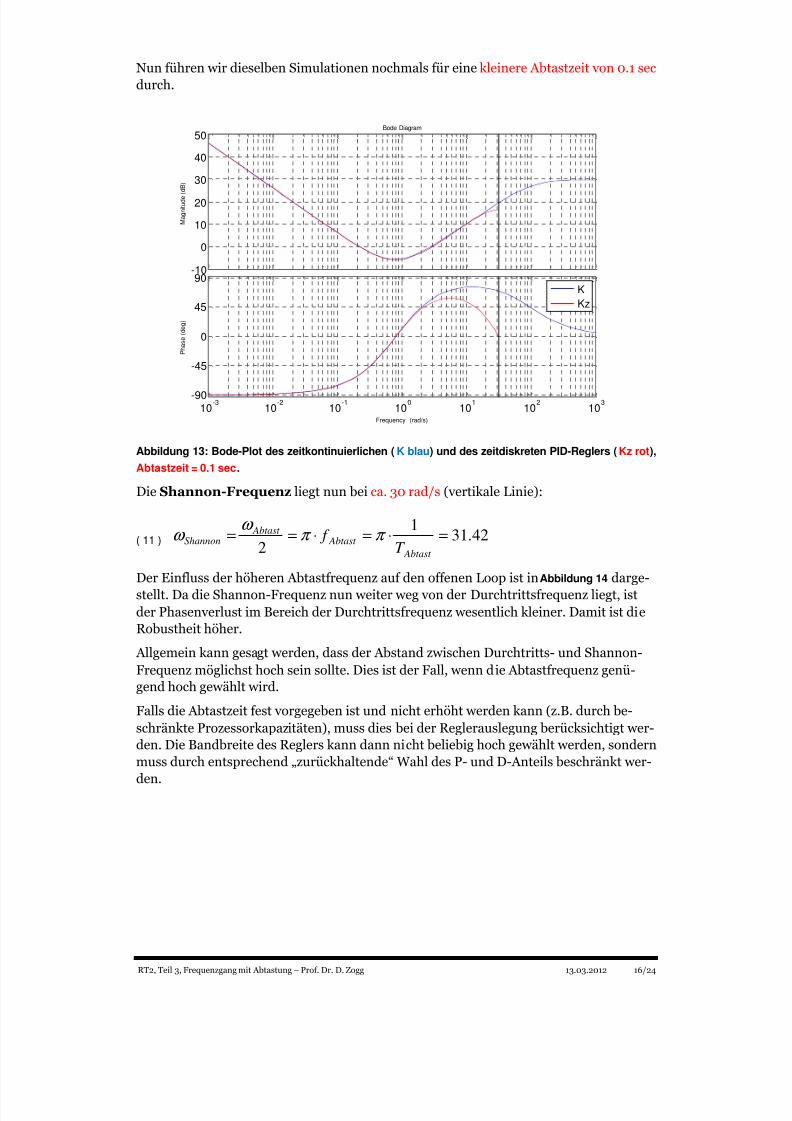
Nun führen wir dieselben Simulationen nochmals für eine kleinere Abtastzeit von 0.1 secdurch.
Abbildung 13: Bode-Plot des zeitkontinuierlichen (K blau) und des zeitdiskreten PID-Reglers (Kz rot),
Abtastzeit = 0.1 sec.
Die Shannon-Frequenz liegt nun bei ca. 30 rad/s (vertikale Linie):
( 11 ) 42.311
2=⋅=⋅==
Abtast
Abtast Abtast
ShannonT
f π π ω
ω
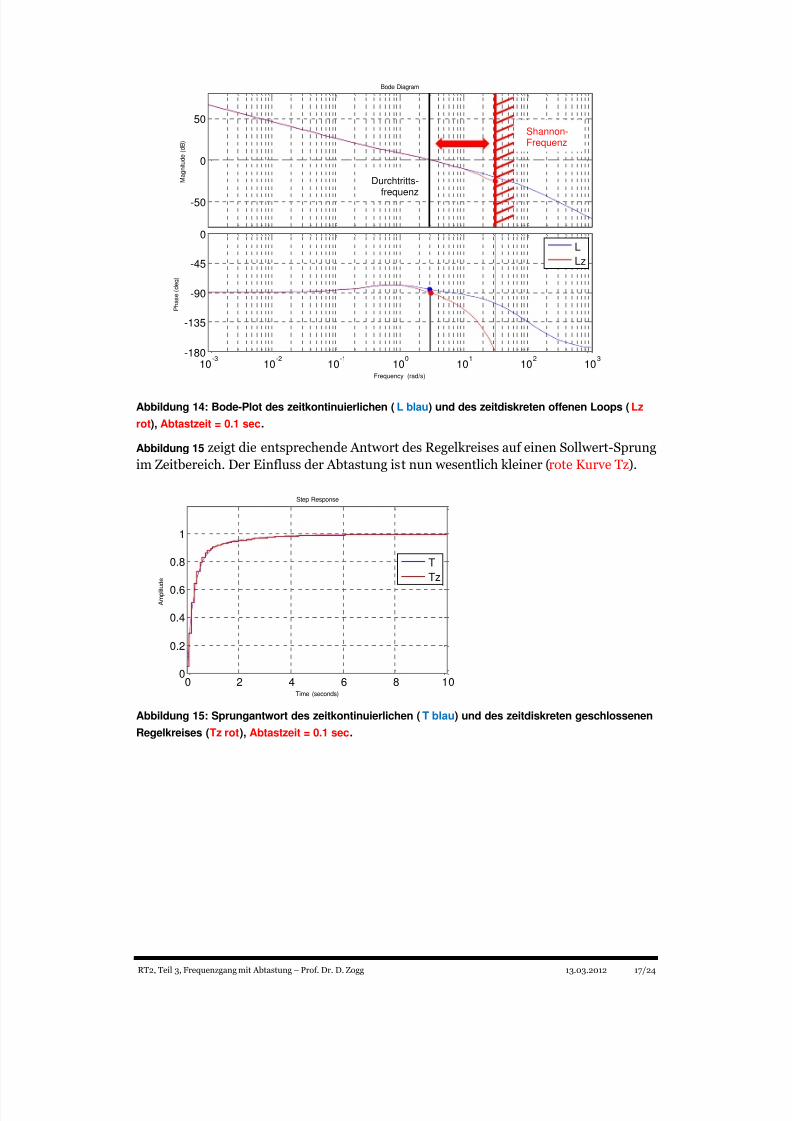
Der Einfluss der höheren Abtastfrequenz auf den offenen Loop ist in Abbildung 14 darge-stellt. Da die Shannon-Frequenz nun weiter weg von der Durchtrittsfrequenz liegt, istder Phasenverlust im Bereich der Durchtrittsfrequenz wesentlich kleiner. Damit ist dieRobustheit höher.
Allgemein kann gesagt werden, dass der Abstand zwischen Durchtritts- und Shannon-Frequenz möglichst hoch sein sollte. Dies ist der Fall, wenn die Abtastfrequenz genü-gend hoch gewählt wird.
Falls die Abtastzeit fest vorgegeben ist und nicht erhöht werden kann (z.B. durch be-schränkte Prozessorkapazitäten), muss dies bei der Reglerauslegung berücksichtigt wer-den. Die Bandbreite des Reglers kann dann nicht beliebig hoch gewählt werden, sondernmuss durch entsprechend „zurückhaltende“ Wahl des P- und D-Anteils beschränkt wer-
den.
-10
0
10
20
30
40
50
M a g n i t u d e ( d B )
10-3
10-2
10-1
100
101
102
103-90
-45
0
45
90
P h a s e ( d e g )
Bode Diagram
Frequency (rad/s)
KKz
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 17/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 17/24
Abbildung 14: Bode-Plot des zeitkontinuierlichen (L blau) und des zeitdiskreten offenen Loops (Lz
rot), Abtastzeit = 0.1 sec.
Abbildung 15 zeigt die entsprechende Antwort des Regelkreises auf einen Sollwert-Sprungim Zeitbereich. Der Einfluss der Abtastung ist nun wesentlich kleiner (rote Kurve Tz).
Abbildung 15: Sprungantwort des zeitkontinuierlichen (T blau) und des zeitdiskreten geschlossenen
Regelkreises (Tz rot), Abtastzeit = 0.1 sec.
-50
0
50
M a g n i t u d e ( d B )
10-3
10-2
10-1
100
101
102
103
-180
-135
-90
-45
0
P h a s e ( d e g )
Bode Diagram
Frequency (rad/s)
LLz
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
Step Response
Time (seconds)
A m p l i t u
d e
TTz
Shannon-Frequenz
Durchtritts-
frequenz
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 18/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 18/24
4.9. Aliasing-Effekt und Anti-Aliasing-Filter
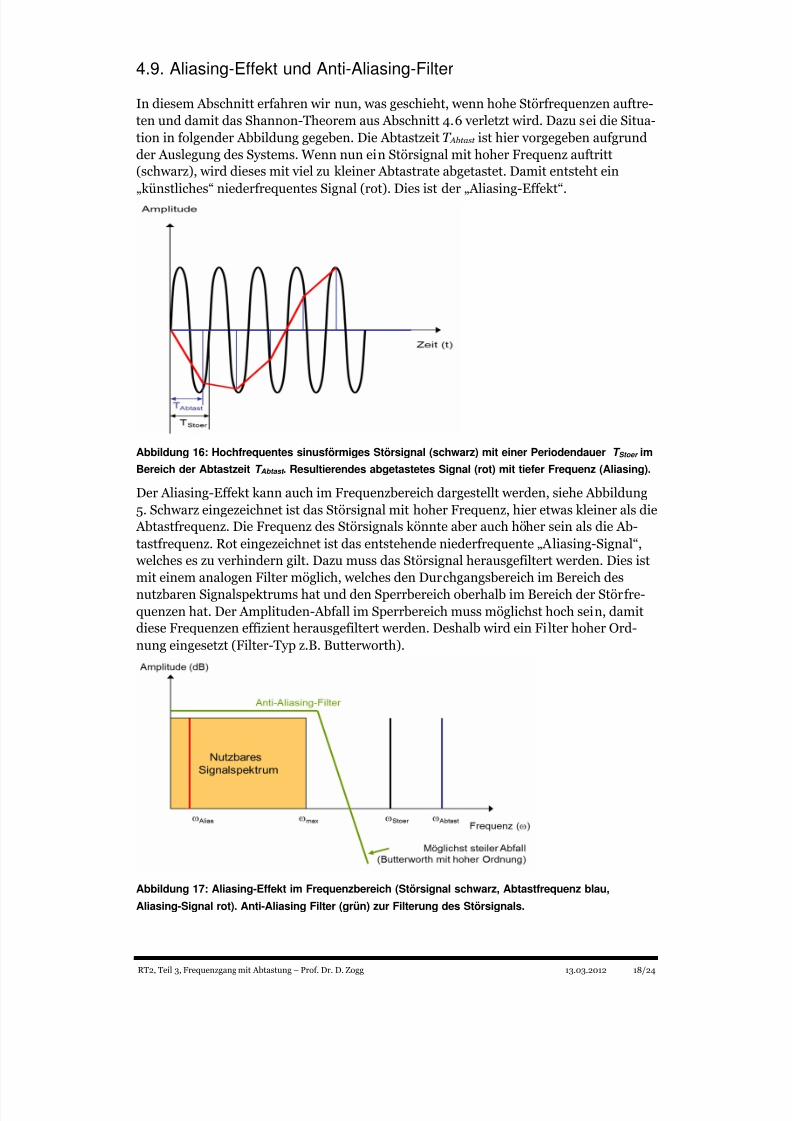
In diesem Abschnitt erfahren wir nun, was geschieht, wenn hohe Störfrequenzen auftre-ten und damit das Shannon-Theorem aus Abschnitt 4.6 verletzt wird. Dazu sei die Situa-tion in folgender Abbildung gegeben. Die Abtastzeit T Abtast ist hier vorgegeben aufgrundder Auslegung des Systems. Wenn nun ein Störsignal mit hoher Frequenz auftritt(schwarz), wird dieses mit viel zu kleiner Abtastrate abgetastet. Damit entsteht ein
„künstliches“ niederfrequentes Signal (rot). Dies ist der „Aliasing-Effekt“.
Abbildung 16: Hochfrequentes sinusförmiges Störsignal (schwarz) mit einer Periodendauer T Stoer im
Bereich der Abtastzeit T Abtast . Resultierendes abgetastetes Signal (rot) mit tiefer Frequenz (Aliasing).
Der Aliasing-Effekt kann auch im Frequenzbereich dargestellt werden, siehe Abbildung5. Schwarz eingezeichnet ist das Störsignal mit hoher Frequenz, hier etwas kleiner als die Abtastfrequenz. Die Frequenz des Störsignals könnte aber auch höher sein als die Ab-tastfrequenz. Rot eingezeichnet ist das entstehende niederfrequente „Aliasing-Signal“, welches es zu verhindern gilt. Dazu muss das Störsignal herausgefiltert werden. Dies istmit einem analogen Filter möglich, welches den Durchgangsbereich im Bereich desnutzbaren Signalspektrums hat und den Sperrbereich oberhalb im Bereich der Störfre-quenzen hat. Der Amplituden-Abfall im Sperrbereich muss möglichst hoch sein, damitdiese Frequenzen effizient herausgefiltert werden. Deshalb wird ein Filter hoher Ord-nung eingesetzt (Filter-Typ z.B. Butterworth).
Abbildung 17: Aliasing-Effekt im Frequenzbereich (Störsignal schwarz, Abtastfrequenz blau,
Aliasing-Signal rot). Anti-Aliasing Filter (grün) zur Filterung des Störsignals.
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 19/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 19/24
Anstelle eines analogen Filters kann auch ein digitales Filter eingesetzt werden. Dabei istaber zu beachten, dass die Abtastfrequenz des digitalen Filters wesentlich höher als dieStörfrequenzen liegt (Shannon-Theorem angewandt auf die Störfrequenzen). Dies wirdunter dem Begriff „Oversampling“ verstanden (Abtastrate des Filters ist ein Vielfachesder Abtastrate des Systems, n*ω Abtast).
4.10. Anwendung des Anti-Aliasing-Filters am Praxisbeispiel (Übung)
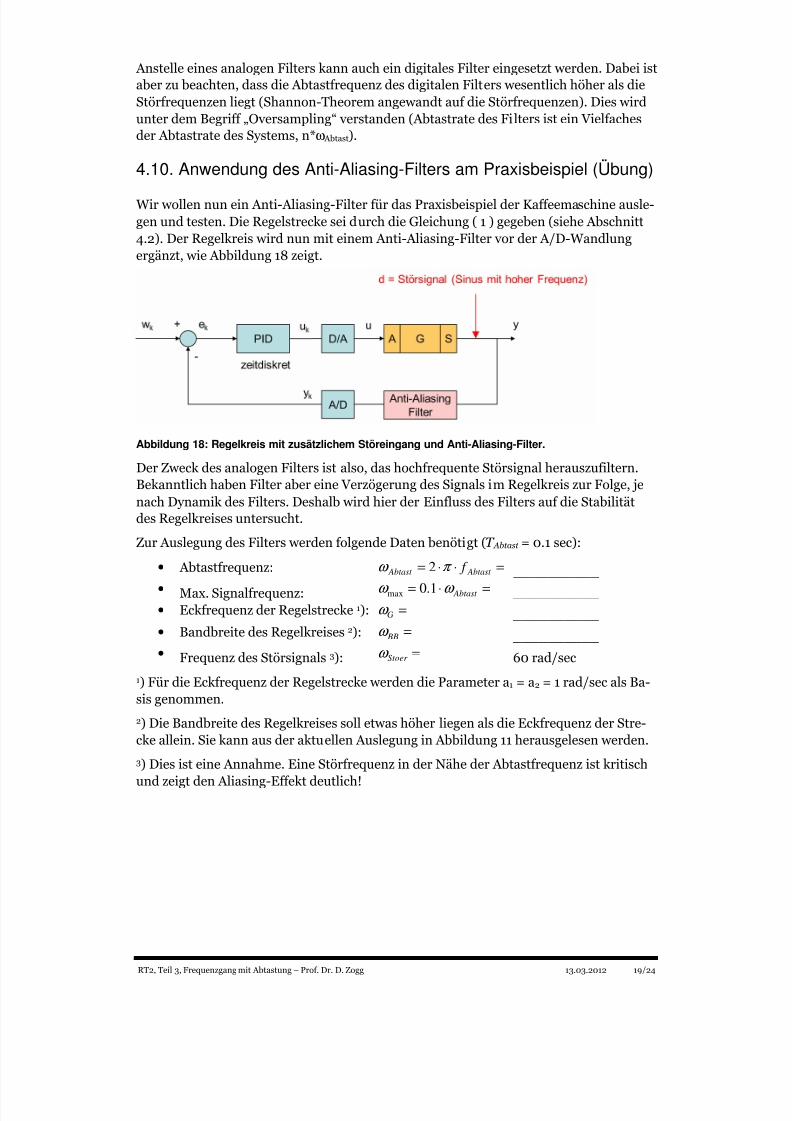
Wir wollen nun ein Anti-Aliasing-Filter für das Praxisbeispiel der Kaffeemaschine ausle-gen und testen. Die Regelstrecke sei durch die Gleichung ( 1 ) gegeben (siehe Abschnitt4.2). Der Regelkreis wird nun mit einem Anti-Aliasing-Filter vor der A/D-Wandlungergänzt, wie Abbildung 18 zeigt.
Abbildung 18: Regelkreis mit zusätzlichem Störeingang und Anti-Aliasing-Filter.
Der Zweck des analogen Filters ist also, das hochfrequente Störsignal herauszufiltern.Bekanntlich haben Filter aber eine Verzögerung des Signals im Regelkreis zur Folge, jenach Dynamik des Filters. Deshalb wird hier der Einfluss des Filters auf die Stabilitätdes Regelkreises untersucht.
Zur Auslegung des Filters werden folgende Daten benötigt (T Abtast = 0.1 sec):
• Abtastfrequenz: =⋅⋅= Abtast Abtast f π ω 2 __________
• Max. Signalfrequenz: =⋅= Abtast ω ω 1.0max __________ • Eckfrequenz der Regelstrecke 1): =Gω __________
• Bandbreite des Regelkreises 2): = BBω __________
• Frequenz des Störsignals 3): =Stoer ω 60 rad/sec
1) Für die Eckfrequenz der Regelstrecke werden die Parameter a1 = a2 = 1 rad/sec als Ba-sis genommen.
2) Die Bandbreite des Regelkreises soll etwas höher liegen als die Eckfrequenz der Stre-cke allein. Sie kann aus der aktuellen Auslegung in Abbildung 11 herausgelesen werden.
3) Dies ist eine Annahme. Eine Störfrequenz in der Nähe der Abtastfrequenz ist kritisch
und zeigt den Aliasing-Effekt deutlich!
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 20/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 20/24
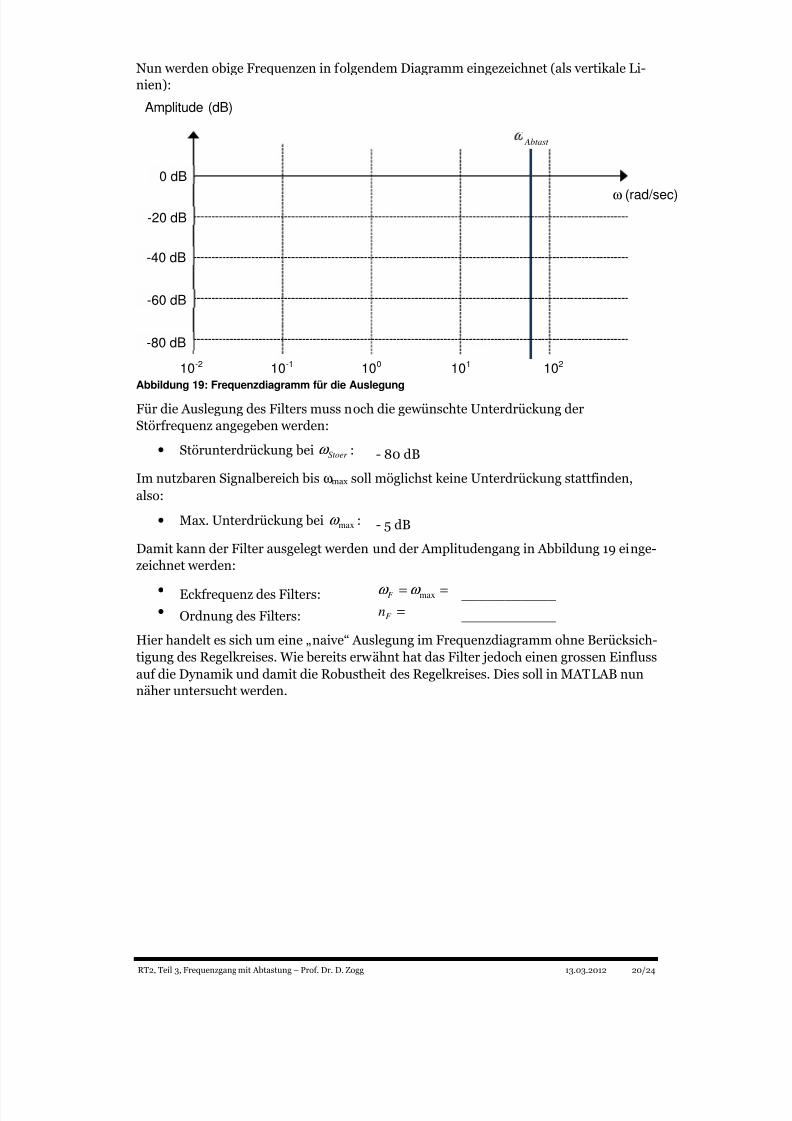
Nun werden obige Frequenzen in folgendem Diagramm eingezeichnet (als vertikale Li-nien):
Abbildung 19: Frequenzdiagramm für die Auslegung
Für die Auslegung des Filters muss noch die gewünschte Unterdrückung derStörfrequenz angegeben werden:
• Störunterdrückung bei Stoer ω : - 80 dB
Im nutzbaren Signalbereich bis ωmax soll möglichst keine Unterdrückung stattfinden,also:
• Max. Unterdrückung bei maxω : - 5 dB
Damit kann der Filter ausgelegt werden und der Amplitudengang in Abbildung 19 einge-zeichnet werden:
• Eckfrequenz des Filters: == maxω ω F ___________ • Ordnung des Filters: =F n ___________
Hier handelt es sich um eine „naive“ Auslegung im Frequenzdiagramm ohne Berücksich-tigung des Regelkreises. Wie bereits erwähnt hat das Filter jedoch einen grossen Einflussauf die Dynamik und damit die Robustheit des Regelkreises. Dies soll in MATLAB nunnäher untersucht werden.
ω (rad/sec)
Amplitude (dB)
10-2 10-1 100 101 102
Abtast
0 dB
-20 dB
-40 dB
-60 dB
-80 dB
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 21/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 21/24
Für das Filter-Design und die Regelkreisanalyse werden folgende MATLAB-Befehle ver- wendet:
Funktion MATLAB-BefehlButterworth-Filter [numF,denF] = butter(nF,wF,'s');
nF = Ordnung wF = Eckfrequenz 's' = zeitkontinuierlich
Umwandlung des Filters in dasTF-Format (transfer function)
F = tf(numF,denF)
Gleichungen des Open Loopsmit/ohne Filter (f)zeitkontinuierlich / zeitdiskret (z)
L = K*G; Lf = K*F*G; Lz = Kz*Gz;
Gleichungen des Closed Loopsmit/ohne Filter (f)zeitkontinuierlich / zeitdiskret (z)
T = L/(1+L); Tf = Lf/(1+Lf); Tz = Lz/(1+Lz);
Darstellung im Bode-Diagramm bode(F, G, {wmin, wmax}); bode(L,'b',Lz,'b-.',Lf,'r',{wmin, wmax}); bode(T,'b',Tz,'b-.',Tf,'r',{wmin, wmax});
File: RT2_Lektion3_Regelkreis_Diskret_Aliasing_Init.m
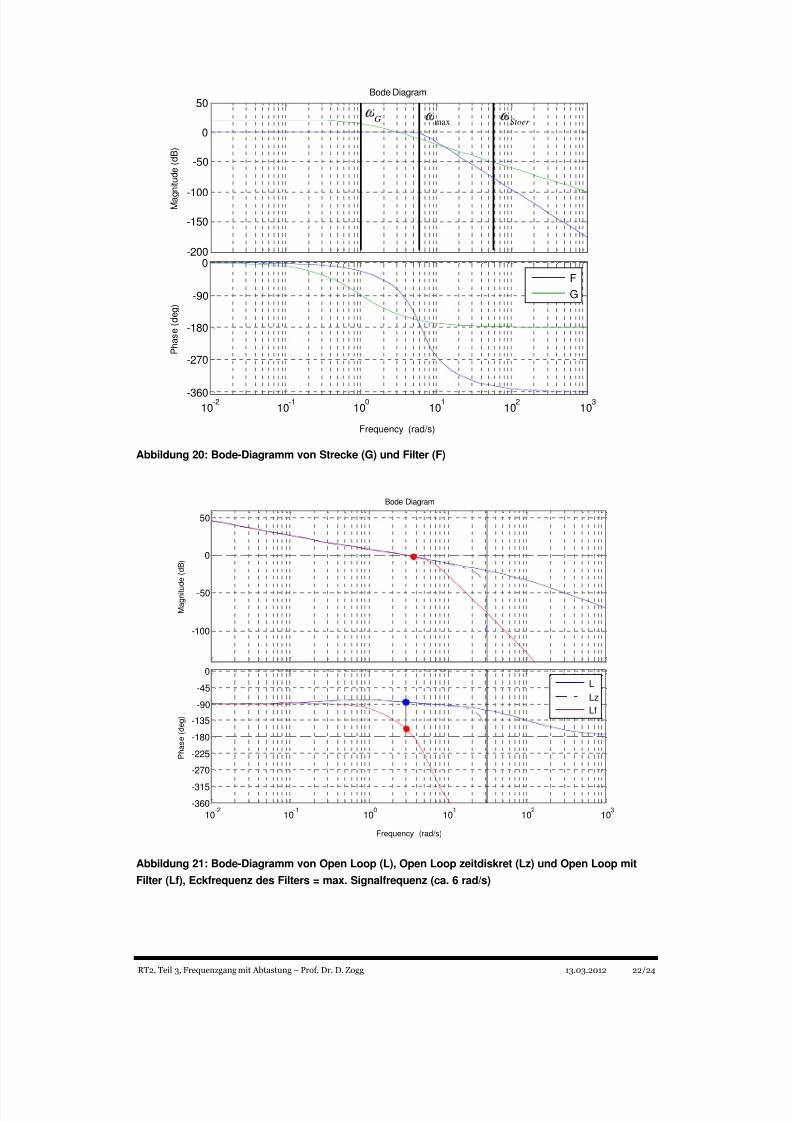
Abbildung 20 zeigt das Bode-Diagramm für den Filter F und die Strecke G. Bei der Stör-frequenz ω Stoer und der maximalen Signalfrequenz ω max kann überprüft werden, ob dieSpezifikationen eingehalten werden (-80 dB, -5 dB). Dies ist hier der Fall.
Wichtig ist aber die Überprüfung der Robustheit. In Abbildung 21 ist die Phasenreservefür den Fall ohne Filter (Loop L blau) und den Fall mit Filter (Lf rot) dargestellt. DiePhasenreserve nimmt mit Filter also massiv ab und ist mit den gewählten Parametern(n F = 4, ω F = ω max ) zu klein!
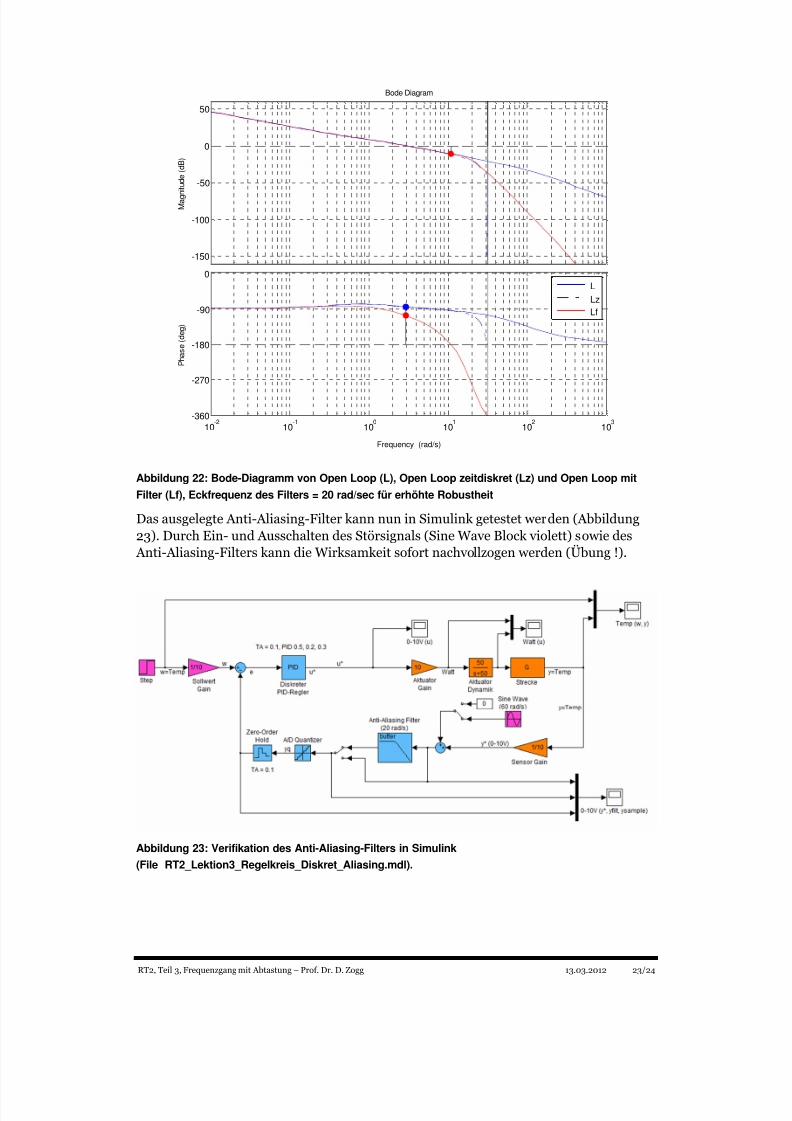
Um die Robustheit zu erhöhen, muss die Eckfrequenz erhöht werden, z.B. auf ω F = 20rad/sec. Damit entsteht die wesentlich höhere Phasenreserve in Abbildung 22. Hier wurde die Ordnung nicht erhöht (nach wie vor ist n F = 4). Damit wäre natürlich die Spe-
zifikation nicht mehr erfüllt (Übung: wie stark wird die Störung noch unterdrückt?). Miteiner entsprechend höherer Ordnung könnte die Spezifikation wieder erfüllt werden, wobei der Einfluss auf die Robustheit wiederum untersucht werden muss (Übung).
Zusammenfassend muss bei der Auslegung des Anti-Aliasing-Filters also auf fol-gende zwei Kriterien geachtet werden:
• Möglichst starke Unterdrückung der Störfrequenzen • Möglichst hohe Robustheit des Regelkreises mit Filter
Da diese zwei Kriterien widersprüchlich sind, muss ein Optimum dazwischen gewählt werden. Die Spezifikation der Störunterdrückung muss allenfalls angepasst werden. Ei-ne optimale Auslegung ist am besten mit einer Simulation möglich.
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 22/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 22/24
Abbildung 20: Bode-Diagramm von Strecke (G) und Filter (F)
Abbildung 21: Bode-Diagramm von Open Loop (L), Open Loop zeitdiskret (Lz) und Open Loop mit
Filter (Lf), Eckfrequenz des Filters = max. Signalfrequenz (ca. 6 rad/s)
-200
-150
-100
-50
0
50
M a g
n i t u d e ( d B )
10-2
10-1
100
101
102
103-360
-270
-180
-90
0
P h a s e ( d e g )
Bode Diagram
Frequency (rad/s)
F
G
-100
-50
0
50
M a g n i t u d e ( d B )
10-2
10-1
100
101
102
103
-360
-315
-270
-225
-180
-135
-90
-45
0
P h a s e ( d e g )
Bode Diagram
Frequency (rad/s)
L
LzLf
Stoer maxG
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 23/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 23/24
Abbildung 22: Bode-Diagramm von Open Loop (L), Open Loop zeitdiskret (Lz) und Open Loop mit
Filter (Lf), Eckfrequenz des Filters = 20 rad/sec für erhöhte Robustheit
Das ausgelegte Anti-Aliasing-Filter kann nun in Simulink getestet werden (Abbildung23). Durch Ein- und Ausschalten des Störsignals (Sine Wave Block violett) sowie des Anti-Aliasing-Filters kann die Wirksamkeit sofort nachvollzogen werden (Übung !).
Abbildung 23: Verifikation des Anti-Aliasing-Filters in Simulink
(File RT2_Lektion3_Regelkreis_Diskret_Aliasing.mdl).
-150
-100
-50
0
50
M a g n i t u d e ( d B )
Bode Diagram
Frequency (rad/s)
10-2
10-1
100
101
102
103
-360
-270
-180
-90
0
P h a s e ( d e g )
L
LzLf
5/17/2018 RT2 EIT Skript Teil3 Frequenzgang Abtastung V1.1 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil3-frequenzgang-abtastung-v11 24/24
RT2, Teil 3, Frequenzgang mit Abtastung – Prof. Dr. D. Zogg 13.03.2012 24/24
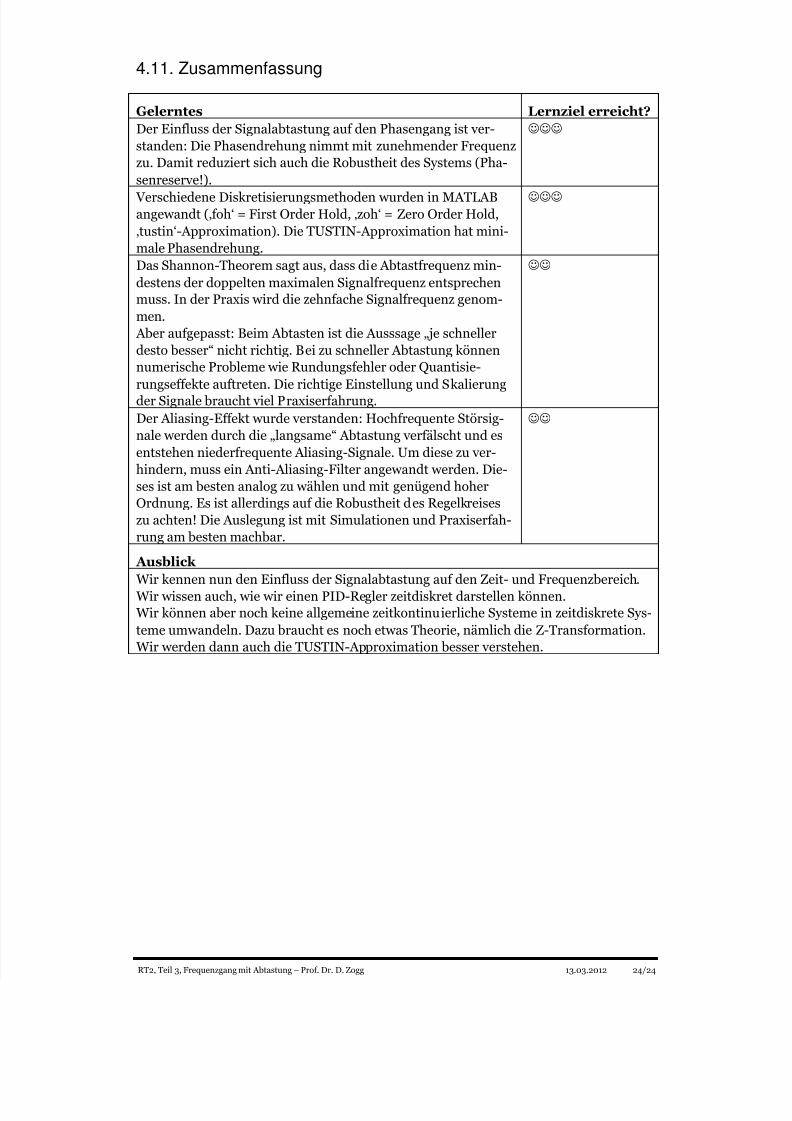
4.11. Zusammenfassung
Gelerntes Lernziel erreicht?Der Einfluss der Signalabtastung auf den Phasengang ist ver-standen: Die Phasendrehung nimmt mit zunehmender Frequenzzu. Damit reduziert sich auch die Robustheit des Systems (Pha-senreserve!).
☺☺☺
Verschiedene Diskretisierungsmethoden wurden in MATLABangewandt (‚foh‘ = First Order Hold, ‚zoh‘ = Zero Order Hold,‚tustin‘-Approximation). Die TUSTIN-Approximation hat mini-male Phasendrehung.
☺☺☺
Das Shannon-Theorem sagt aus, dass die Abtastfrequenz min-destens der doppelten maximalen Signalfrequenz entsprechenmuss. In der Praxis wird die zehnfache Signalfrequenz genom-men. Aber aufgepasst: Beim Abtasten ist die Ausssage „je schnellerdesto besser“ nicht richtig. Bei zu schneller Abtastung könnennumerische Probleme wie Rundungsfehler oder Quantisie-
rungseffekte auftreten. Die richtige Einstellung und Skalierungder Signale braucht viel Praxiserfahrung.
☺☺
Der Aliasing-Effekt wurde verstanden: Hochfrequente Störsig-nale werden durch die „langsame“ Abtastung verfälscht und esentstehen niederfrequente Aliasing-Signale. Um diese zu ver-hindern, muss ein Anti-Aliasing-Filter angewandt werden. Die-ses ist am besten analog zu wählen und mit genügend hoherOrdnung. Es ist allerdings auf die Robustheit des Regelkreiseszu achten! Die Auslegung ist mit Simulationen und Praxiserfah-rung am besten machbar.
☺☺
Ausblick Wir kennen nun den Einfluss der Signalabtastung auf den Zeit- und Frequenzbereich. Wir wissen auch, wie wir einen PID-Regler zeitdiskret darstellen können. Wir können aber noch keine allgemeine zeitkontinuierliche Systeme in zeitdiskrete Sys-teme umwandeln. Dazu braucht es noch etwas Theorie, nämlich die Z-Transformation. Wir werden dann auch die TUSTIN-Approximation besser verstehen.















![uesys vl02 AD Wandlung final 2.ppt [Kompatibilitätsmodus] · Gliederung Eigenschaften und Probleme der Analog/Digital-Umsetzung Einführung Abtastung Quantisierung Fehlergrößen](https://img.pdfslide.org/doc/110x75/5d58cdcc88c993793d8ba956/uesys-vl02-ad-wandlung-final-2ppt-kompatibilitaetsmodus-gliederung-eigenschaften.jpg)

![Hobby HiFi 4/2015 Hobby HiFi 4/2015 lmpedanz-Frequenzgang Freiluft Starke Resonanzen ab 900 Hz (vgl. K]irr-Frequenzgang), keine lmpedanzkontrolle. Klirrfaktor-Frequenzgänge K2, K3](https://img.pdfslide.org/doc/110x75/60bbb11daf38da295210638c/hobby-hifi-42015-hobby-hifi-42015-lmpedanz-frequenzgang-freiluft-starke-resonanzen.jpg)











