Embed Size (px)
Citation preview

Universität Bremen
Kognitive Robotik I
Service-Robotik
Thomas Röfer
Zeitleiste der RobotikDefinitionen
Asimov‘s „Robotergesetze“Anforderungen an Service-Roboter
Arten von Service-RoboternWirtschaftliche Bedeutung
Klassifikation der Anwendungen
BeispieleZukunft der Service-Robotik
Kognitive Robotik I – Service-Robotik 2
Universität Bremen
Zeitleiste der Robotik
Karel Čapek
1921
Prog.Arm
1954
Shakey
1968
100,000 Roboter
1984
Unimation
1961
Service-Roboter
1980
Isaac Asimov
1941
Kognitive Robotik I – Service-Robotik 3
Universität Bremen
Asimov‘s „Robotergesetze“
� §1� Ein Roboter darf keinen Menschen verletzen oder
durch Unterlassen die Verletzung eines Menschen zulassen.
Sicherheit(Safety)
Sicherheit(Safety)
Shared Control,Verlässlichkeit
Shared Control,Verlässlichkeit
VerfügbarkeitVerfügbarkeit
� §2� Ein Roboter muss den Anweisungen von Menschen
gehorchen, außer sie stehen in Konflikt mit §1.
� §3� Ein Roboter muss seine eigene Existenz schützen,
außer dies steht im Konflikt zu §1 oder §2.
Kognitive Robotik I – Service-Robotik 4
Universität Bremen
Service-Roboter – Definition I
�2Ser|vice [»≥Ÿ– ∂ Í ≥], der, auch: das; -, -s [... ∂ Í ≥ od. ... ∂ Í ≥Í ≥] «Pl. selten» [engl. service = Dienst, Bedienung < (a)frz. service < lat. servitium = Sklavendienst, zu: servire, servieren]
� Ro|bo|ter, der; -s, - [engl. robot (< tschech. robot, zu: robota, Robot); nach dem engl. Titel „Rossum's Universal Robots“ des 1920 erschienenen sozialutopischen Dramas des tschech. Schriftstellers K. Čapek (1890-1938)]: 1. (Technik) (der menschlichen Gestalt nachgebildeter) Automat mit beweglichen Gliedern, der bestimmte mechanische Tätigkeiten verrichtet; Maschinenmensch
DUDEN Deutsches Universalwörterbuch (1995)
Kognitive Robotik I – Service-Robotik 5
Universität Bremen
Service-Roboter – Definition II
� Service-Roboter betanken Fahrzeuge, reparieren Atomkraftwerke, kümmern sich um Ältere, überwachen Museen, erforschen fremde Planeten oder reinigen Flugzeuge. Was also sind Service-Roboter?
� Service-Roboter bilden eine Zwischenstufe in der Evolution von Industrierobotern zu Persönlichen Robotern, die in 20 Jahren eine wichtige Rolle in unserem Leben spielen werden.
� Service-Roboter sind mobil, sie verändern ihre Umgebung, sie interagieren mit Menschen oder führen eigenständig Aufgaben aus, die das menschliche Dasein erleichtern.
IEEE und IPA-FhG Datenbank der Service-Robotik
Kognitive Robotik I – Service-Robotik 6
Universität Bremen
Anforderungen an Service-Roboter
� Bedienbarkeit� Mensch-Maschine-Schnittstelle� Benutzbar von Laien
� Service auf hohem Niveau� Robust� Effizient
� Genau� Rentabel
� Zuverlässigkeit� Sicherheit� Verfügbarkeit
� Verlässlichkeit

Kognitive Robotik I – Service-Robotik 7
Universität Bremen
Sicherheit in der Service-Robotik
Steigende Sicherheitsanforderung
Kognitive Robotik I – Service-Robotik 8
Universität Bremen
Arten von Service-Robotern
� Bau� Bergbau� Büro� Entertainment � Feuerbekämpfung� Hobby / Freizeit� Hotel / Restaurant� Landwirtschaft� Marketing� Medizin
� Minenräumung� Pflege / Rehabilitation� Reinigung� Raumfahrt� Räumarbeiten / Reparatur� Tanken� Sortierung� Überwachung� Unterwasser
IEEE und IPA-FhG Datenbank der Service-Robotik
Kognitive Robotik I – Service-Robotik 9
Universität Bremen
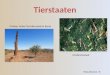
Reha
Unter-wasser
Über-wachung
Reinigung
Tanken
Medizin
Haushalt
500 1000 1500 2000 Stückzahlen
Wirtschaftliche Bedeutung
50+300
200+200
400+200
300+500
50+800
800+70002000+12500
Roboterbestand 1998
Prognose für 1999-2002
UN/ECE und IFR (1999)
Kognitive Robotik I – Service-Robotik 10
Universität Bremen
Kategorien von Service-Robotern
Service-Roboter
Service-Roboter
Autonomes Ausführenherkömmlicher Aufgaben
Autonomes Ausführenherkömmlicher Aufgaben
ReinigungReinigung
TankenTanken
Autonomes Ausführen neuartiger Aufgaben
Autonomes Ausführen neuartiger Aufgaben
InspektionInspektion
EntertainmentEntertainment
Unterstützung bei neuartigen Aufgaben
Unterstützung bei neuartigen Aufgaben
RehabilitationRehabilitation
BetreuungBetreuung
Unterstützung bei herkömmlichen Aufgaben
Unterstützung bei herkömmlichen Aufgaben
MedizinMedizin
BüroBüro
Kognitive Robotik I – Service-Robotik 11
Universität Bremen
Haushalt
� Anwendungsgebiete� Reinigungsaufgaben im Haus, außer Haus� Rasenmäher, „Staubsauger“
� Anforderungen� Sicher
� Einfach zu benutzen� Kostengünstig
� Nutzen� Automatisierung „unliebsamer“ Aufgaben
� Rationalisierung im kommerziellen Bereich
� Beispiele� Staubsauger (Kärcher AG)� Rasenmäher (Friendly Robots, Israel)
Kognitive Robotik I – Service-Robotik 12
Universität Bremen
Tankroboter
� Anwendungsgebiete� Automatische Tankstelle
� Anforderungen� Robust und fehlertolerant� Präzise
� Nutzen� Zeitgewinn
� Gesundheitsrisiko reduziert� „Super, Ingo, nicht Diesel!“
� Beispiele� AutoFill (Schweden)

Kognitive Robotik I – Service-Robotik 13
Universität Bremen
Straßenbau
� Anwendungsgebiete� Asphaltierung von Straßen� Vermessung, Markierungen
� Anforderungen� Schnell
� Umweltfreundlich� Kostengünstig
� Nutzen� Preiswerter Straßenbelag
hoher Qualität
� Beispiele� RoadRobot (EU-Projekt)
Kognitive Robotik I – Service-Robotik 14
Universität Bremen
Reinigung
� Anwendungsgebiete� Bahnhöfe, Flughäfen,
Bürogebäude� Flugzeuge, Boot, etc.
� Anforderungen� Sicher� Robust
� Nutzen� Rationalisierung� Zeitersparnis
� Beispiele� ACROMATIC (Hako)� Fassaden-Kletterer (FhG-IFF)� Skywash SW33 (Putzmeister)
Kognitive Robotik I – Service-Robotik 15
Universität Bremen
Kategorien von Service-Robotern
Service-Roboter
Service-Roboter
Autonomes Ausführenherkömmlicher Aufgaben
Autonomes Ausführenherkömmlicher Aufgaben
RasenmähenRasenmähen
TankenTanken
Autonomes Ausführen neuartiger Aufgaben
Autonomes Ausführen neuartiger Aufgaben
InspektionInspektion
EntertainmentEntertainment
Unterstützung bei neuartigen Aufgaben
Unterstützung bei neuartigen Aufgaben
RehabilitationRehabilitation
BetreuungBetreuung
Unterstützung bei herkömmlichen Aufgaben
Unterstützung bei herkömmlichen Aufgaben
MedizinMedizin
BüroBüro
Kognitive Robotik I – Service-Robotik 16
Universität Bremen
Medizin
� Anwendungsgebiete� Operationsunterstützung� (Minimalinvasive) Chirurgie
� Anforderungen� Sicher� Präzise� „Fail-safe“ (!)
� Nutzen� Präzision bei Operationen� Ermöglichung neuer OPs� Weniger OP-Aufwand
� Beispiele� Surgical Robotics Lab (Charite, Berlin)
Kognitive Robotik I – Service-Robotik 17
Universität Bremen
Bürogehilfen
� Anwendungsgebiete� Großraumbüro-Management� Gruppenarbeitskoordination� Führung, Raumsuche, Post etc.
� Anforderungen� Mensch-Maschine-
Interaktion� Flexibel, robust,
zuverlässig� Kartenorientiert
� Nutzen� Produktivitätssteigerung
� Beispiele� Jijo 2 (Japan)
Kognitive Robotik I – Service-Robotik 18
Universität Bremen
Kategorien von Service-Robotern
Service-Roboter
Service-Roboter
Autonomes Ausführenherkömmlicher Aufgaben
Autonomes Ausführenherkömmlicher Aufgaben
RasenmähenRasenmähen
TankenTanken
Autonomes Ausführen neuartiger Aufgaben
Autonomes Ausführen neuartiger Aufgaben
InspektionInspektion
EntertainmentEntertainment
Unterstützung bei neuartigen Aufgaben
Unterstützung bei neuartigen Aufgaben
RehabilitationRehabilitation
BetreuungBetreuung
Unterstützung bei herkömmlichen Aufgaben
Unterstützung bei herkömmlichen Aufgaben
MedizinMedizin
BüroBüro

Kognitive Robotik I – Service-Robotik 19
Universität Bremen
Überwachung und Inspektion
� Anwendungsgebiete� Inspektion von Kanalsystemen� Überwachung von Gebäuden
� Anforderungen� Robust� Sicher
� Nutzen� Inspektion von bisher unerreichbaren
Rohren� Rationalisierung
� Beispiele� MAKRO (AiS-GMD)� CyberGuard (Cybermotion, Frankreich)
Kognitive Robotik I – Service-Robotik 20
Universität Bremen
Entertainment
� Anwendungsgebiete� Shows� Museen
� Freizeitparks
� Anforderungen� Sicher� Robust
� Nutzen� Neue Möglichkeiten der Unterhaltung
� Beispiel� EXPO Themenpark „Mobilität“ (ZKM / IML-FhG)
Kognitive Robotik I – Service-Robotik 21
Universität Bremen
Kategorien von Service-Robotern
Service-Roboter
Service-Roboter
Autonomes Ausführenherkömmlicher Aufgaben
Autonomes Ausführenherkömmlicher Aufgaben
RasenmähenRasenmähen
TankenTanken
Autonomes Ausführen neuartiger Aufgaben
Autonomes Ausführen neuartiger Aufgaben
InspektionInspektion
EntertainmentEntertainment
Unterstützung bei neuartigen Aufgaben
Unterstützung bei neuartigen Aufgaben
RehabilitationRehabilitation
BetreuungBetreuung
Unterstützung bei herkömmlichen Aufgaben
Unterstützung bei herkömmlichen Aufgaben
MedizinMedizin
BüroBüro
Kognitive Robotik I – Service-Robotik 22
Universität Bremen
Rehabilitationsroboter
� Anwendungsgebiete� Ältere, kranke und behinderte
Menschen� (Klinische) Rehabilitation
� Anforderungen� Zuverlässig und sicher� Einfach zu bedienen� Individuell anpassbar
� Nutzen� Steigerung der Mobilität, der
Selbstständigkeit und damitder Lebensqualität
� Beispiele� INSERVUM-Projekt (Ulm)� Rolland (Bremen)
Kognitive Robotik I – Service-Robotik 23
Universität Bremen
Rehabilitationsroboter
� Anwendungsgebiete� Ältere, kranke und behinderte
Menschen� (Klinische) Rehabilitation
� Anforderungen� Zuverlässig und sicher� Einfach zu bedienen� Individuell anpassbar
� Nutzen� Steigerung der Mobilität, der
Selbstständigkeit und damitder Lebensqualität
� Beispiele� INSERVUM-Projekt (Ulm)� Rolland (Bremen)
Kognitive Robotik I – Service-Robotik 24
Universität Bremen
Betreuungsroboter
� Anwendungsgebiete� Häusliche Pflege älterer Menschen
� Anforderungen� Zuverlässig
� Kostengünstig
� Nutzen� Intelligentes Erinnern
� Telepräsenz von Pflegepersonal
� Erfassung von (medizinischen) Daten
� Mobile Alltagshilfe
� Beispiele� NurseBot (CMU + Pittsburgh, USA)
� Care-O-bot (FIPA,Deutschland)

Kognitive Robotik I – Service-Robotik 25
Universität Bremen
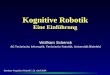
Humanoide Roboter
� Anwendungsgebiete� Verschiedene Dienste in men-
schengerechten Umgebungen� Anforderungen� Sicherer Gang, flexibler Stand� Treppen steigen� Robust gegen Unebenheiten
� Nutzen� Grundlagenforschung� Werbung
� Beispiele� Honda P3 (Japan)
Kognitive Robotik I – Service-Robotik 26
Universität Bremen
Humanoide Roboter – Asimo
Kognitive Robotik I – Service-Robotik 27
Universität Bremen
Humanoide Roboter – SDR-3X
Kognitive Robotik I – Service-Robotik 28
Universität Bremen
Humanoide Roboter – SDR-4X
Kognitive Robotik I – Service-Robotik 29
Universität Bremen
Zukunft der Service-Robotik
?