Embed Size (px)
Citation preview

11
Software ubiquitärer SystemeHardware: Kommunikation
Michael Engel und Olaf SpinczykArbeitsgruppe Eingebettete Systemsoftware
Lehrstuhl für Informatik 12TU Dortmund [email protected]://ess.cs.uni-dortmund.de/~os/
http://ess.cs.tu-dortmund.de/DE/Teaching/SS2012/SuS/
02.3 – Hardware: Kommunikation 22
Inhalt● Grundlagen der Datenübertragung
● Technologieüberblick
● Energiebetrachtung
● Drahtgebunden● KFZ-Bussysteme im Überblick
● CAN-Bus
● Energie im CAN-Netz
● (Un-)sicherheit
● Drahtlos ● Technologie und Geschichte
● Bluetooth, RF-Funk, ZigBee
● Zusammenfassung
02.3 – Hardware: Kommunikation 33
Inhalt● Grundlagen der Datenübertragung
● Technologieüberblick
● Energiebetrachtung
● Drahtgebunden● KFZ-Bussysteme im Überblick
● CAN-Bus
● Energie im CAN-Netz
● (Un-)sicherheit
● Drahtlos ● Technologie und Geschichte
● Bluetooth, RF-Funk, ZigBee
● Zusammenfassung
02.3 – Hardware: Kommunikation 44
Kommunikationsgrundlagen● Datenübertragung über elektromagnetische Wellen
● ...in Trägermedien (Kabel, Glasfaser)● ...drahtlos
● Direktübertragung digitaler Signale● „Basisband-Übertragung“, z.B. 10Base2-Ethernet● Problem: asynchrone Übertragung ohne expliziten Takt
- siehe serielle Schnittstelle
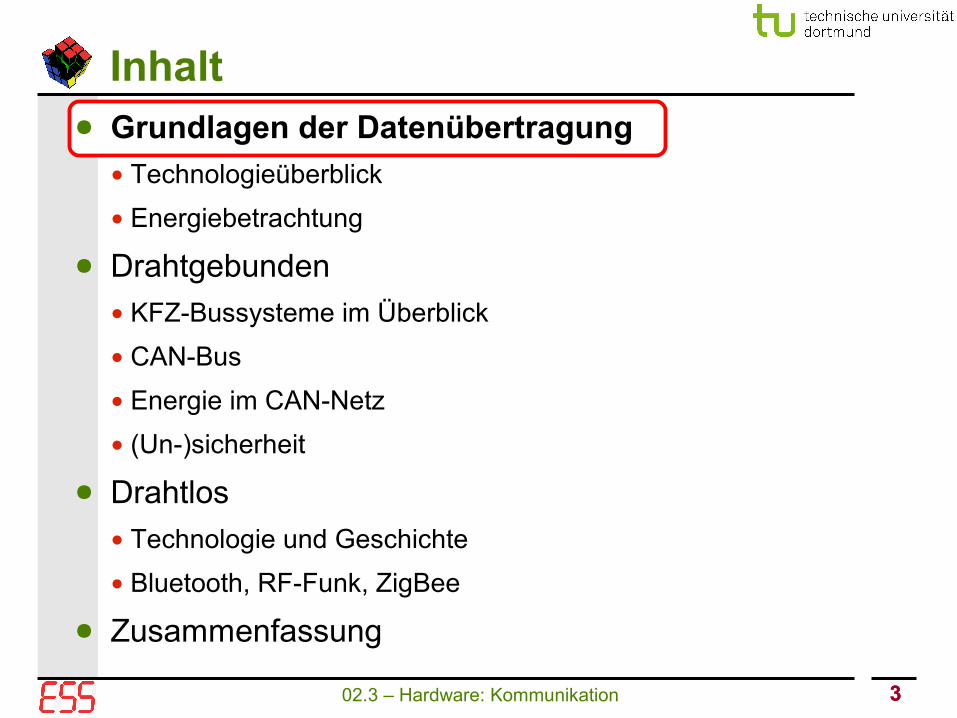
● Mehrere identische Bits in Folge ergeben konstanten Pegel- Bitgrenzen für Empfänger nicht mehr erkennbar
- Modulation erforderlich,z.B. Manchester-2 beiEthernet
- XOR von Clock-und Datensignal
- Benötigt 2-fache Bandbreitenormaler async. Komm.
(Quelle: Wikipedia)
02.3 – Hardware: Kommunikation 55
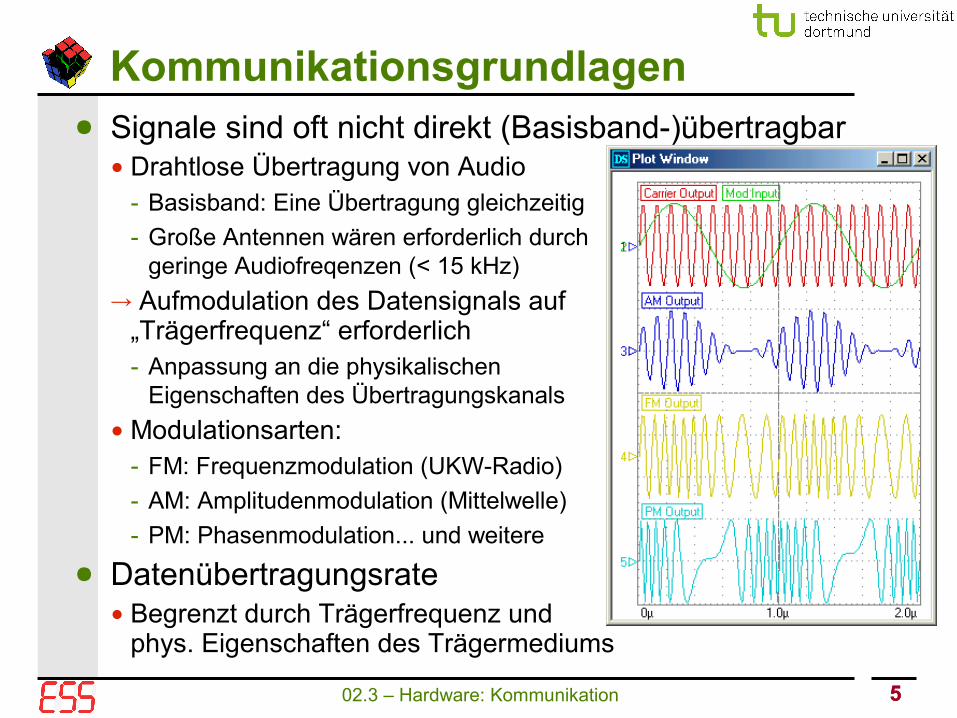
Kommunikationsgrundlagen● Signale sind oft nicht direkt (Basisband-)übertragbar
● Drahtlose Übertragung von Audio- Basisband: Eine Übertragung gleichzeitig
- Große Antennen wären erforderlich durch geringe Audiofreqenzen (< 15 kHz)
→ Aufmodulation des Datensignals auf „Trägerfrequenz“ erforderlich- Anpassung an die physikalischen
Eigenschaften des Übertragungskanals
● Modulationsarten:- FM: Frequenzmodulation (UKW-Radio)
- AM: Amplitudenmodulation (Mittelwelle)
- PM: Phasenmodulation... und weitere
● Datenübertragungsrate● Begrenzt durch Trägerfrequenz und
phys. Eigenschaften des Trägermediums
02.3 – Hardware: Kommunikation 66
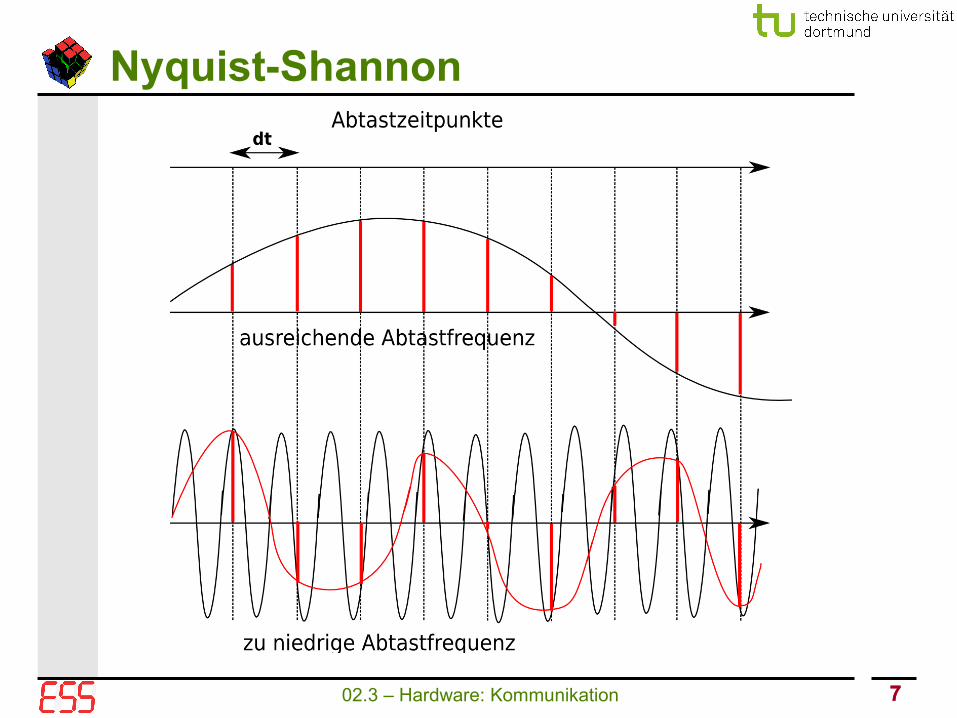
Eigenschaften von Trägerfrequenzen● Problem: Konvertierung eines Signals in eine numerische Sequenz
● Funktion, die in Raum und/oder Zeit diskret ist● Grundlage: Nyquist-Shannon-Abtasttheorem [3]:
● Ein kontinuierliches, bandbegrenztes Signal, mit einer Minimalfrequenz von fmin
Hz und einer Maximalfrequenz fmax
, muss mit einer Frequenz größer als
2 x (fmax
– fmin
) abgetastet werden, damit aus dem so erhaltenen zeitdiskreten
Signal das Ursprungssignal ohne Informationsverlust rekonstruiert werden kann
● Nyquist-Shannon-Theorem beschränkt die erreichbare Datenrate● Beispiel: analoge Telefonübertragung
● Leitungen für Frequenzen von 300 bis 3400 Hz ausgelegt → Δf = 3100 Hz● Analoge Modems übertrugen daher ursprünglich nur bis 1200 bit/s
02.3 – Hardware: Kommunikation 77
Nyquist-Shannon
02.3 – Hardware: Kommunikation 88
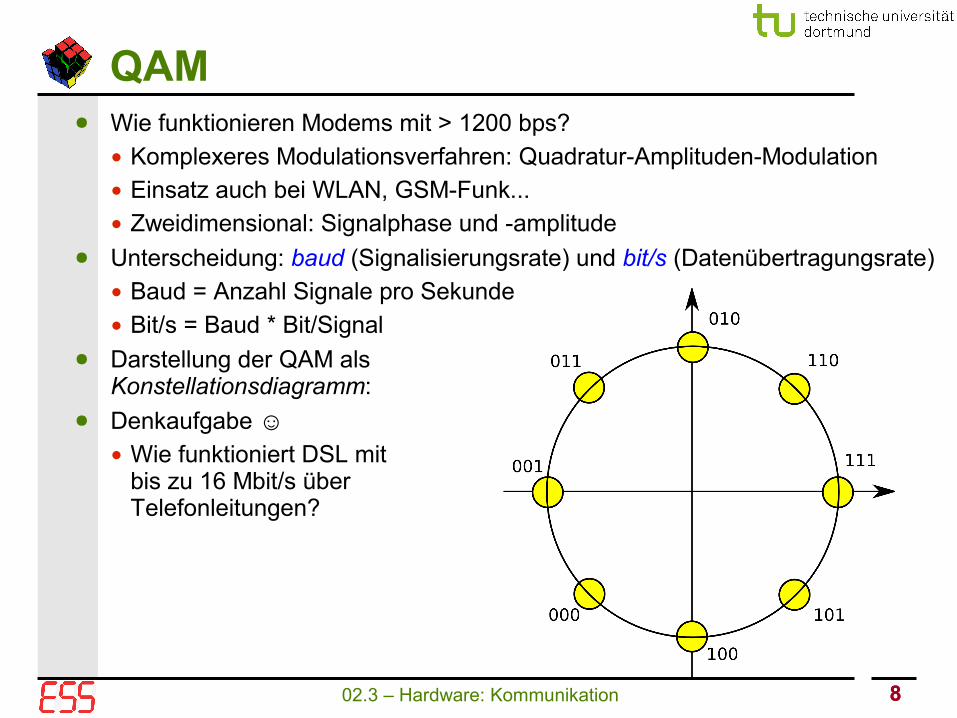
QAM● Wie funktionieren Modems mit > 1200 bps?
● Komplexeres Modulationsverfahren: Quadratur-Amplituden-Modulation● Einsatz auch bei WLAN, GSM-Funk...● Zweidimensional: Signalphase und -amplitude
● Unterscheidung: baud (Signalisierungsrate) und bit/s (Datenübertragungsrate)● Baud = Anzahl Signale pro Sekunde● Bit/s = Baud * Bit/Signal
● Darstellung der QAM als Konstellationsdiagramm:
● Denkaufgabe ☺● Wie funktioniert DSL mit
bis zu 16 Mbit/s überTelefonleitungen?
02.3 – Hardware: Kommunikation 99
Übertragungsraten und Energie● Anforderung: Lange Batterielaufzeit
● Insbesondere bei Sensornetzwerken- Keine Infrastruktur, hohe Kosten für Installation und Ersatz
- Aber auch bei sonstigen Mobilgeräten
● Stetige Verbesserungen bei Funktionalität, Größe, Energieverbrauch● z.B. Faktor 1,6/Jahr bei Rechenleistung für Signalverarbeitung bei
gleichbleibender Energie
● Aber: Energieverbrauch für Funkübertragung (pro Bit) bleibt ~konstant● Fundamentale Grenze bei Analog-Digital-Wandlung (Shannon,
Maxwell-Theoreme): speed*resolution/power● Es gibt kein Moore’s Law für Batterietechnologie
- Verbesserung ~ 5%/Jahr
02.3 – Hardware: Kommunikation 1010
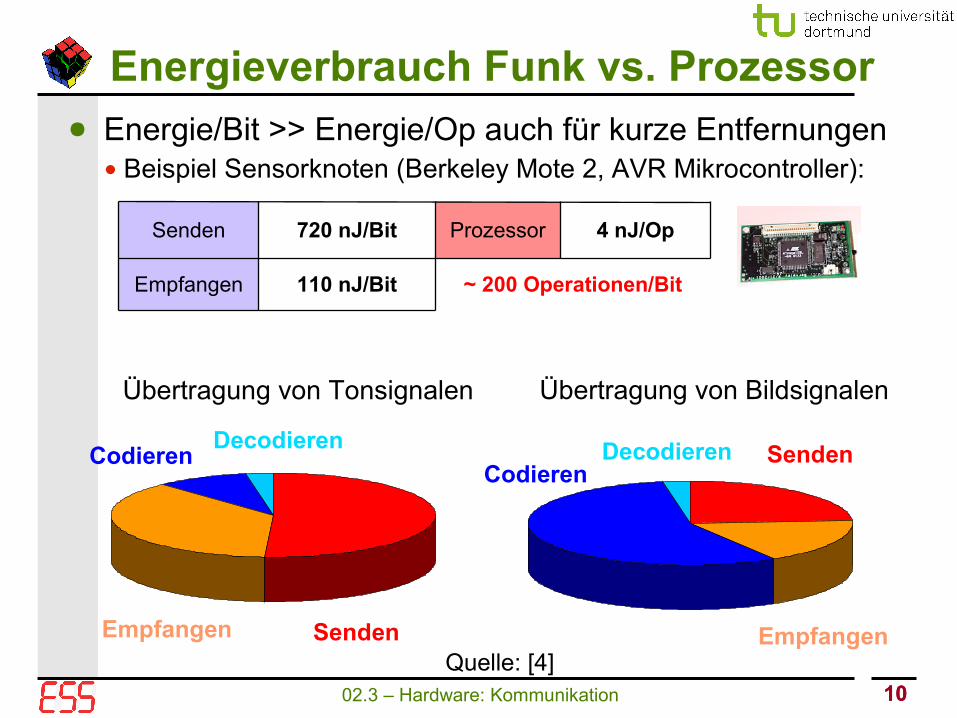
Energieverbrauch Funk vs. Prozessor● Energie/Bit >> Energie/Op auch für kurze Entfernungen
● Beispiel Sensorknoten (Berkeley Mote 2, AVR Mikrocontroller):
Empfangen
Senden
110 nJ/Bit
720 nJ/Bit 4 nJ/Op
~ 200 Operationen/Bit
Prozessor
SendenEmpfangen
CodierenDecodieren
Senden
Empfangen
CodierenDecodieren
Übertragung von Tonsignalen Übertragung von Bildsignalen
Quelle: [4]
02.3 – Hardware: Kommunikation 1111
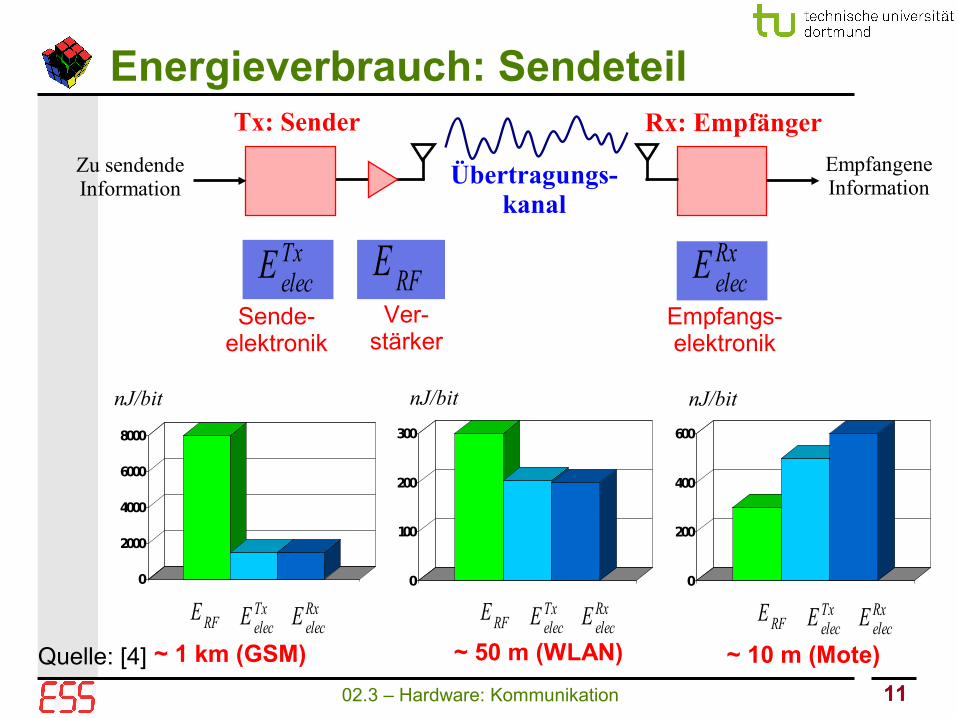
Energieverbrauch: SendeteilTx: Sender Rx: Empfänger
Übertragungs-kanal
Zu sendendeInformation
EmpfangeneInformation
E elecTx E elec
RxE RFSende-
elektronikEmpfangs-elektronik
Ver-stärker
~ 1 km (GSM)
0
2000
4000
6000
8000
0
100
200
300
0
200
400
600
E elecTx E elec
RxE RF E elecTx E elec
RxE RF E elecTx E elec
RxE RF
nJ/bit nJ/bit nJ/bit
~ 50 m (WLAN) ~ 10 m (Mote)Quelle: [4]
02.3 – Hardware: Kommunikation 1212
Frequenzbereiche● Nutzung von Funkfrequenzen ist Regulation unterworfen
● Durch die Bundesnetzagentur für Elektrizität, Gas, Telekommunikation, Post und Eisenbahnen
● Unregulierte Frequenzbänder verfügbar● Ursprünglich: nicht nutzbar wegen Interferenzen von elektrischen
und elektronischen Geräten (z.B. Mikrowelle: 2,4 Ghz)- Deshalb reserviert
● ISM-Bänder (Industry, Science, Medicine)● Kommunikation über ISM-Frequenzbereiche muß Störungen durch
andere Geräte tolerieren können● Lizenz- und anmeldefrei nutzbar● Verschiedene Frequenzbereiche:
- 433.05–434.79 MHz (z.B. RF-Funkchips)
- 2.400–2.500 GHz (z.B. Bluetooth, WLAN 802.11b/g/n, ZigBee...)
● ...und überlastet? Bluetooth, WLAN, ZigBee, ...
02.3 – Hardware: Kommunikation 1313
Inhalt● Grundlagen der Datenübertragung
● Technologieüberblick
● Energiebetrachtung
● Drahtgebunden● KFZ-Bussysteme im Überblick
● CAN-Bus
● Energie im CAN-Netz
● (Un-)sicherheit
● Drahtlos ● Technologie und Geschichte
● Bluetooth, RF-Funk, ZigBee
● Zusammenfassung
02.3 – Hardware: Kommunikation 1414
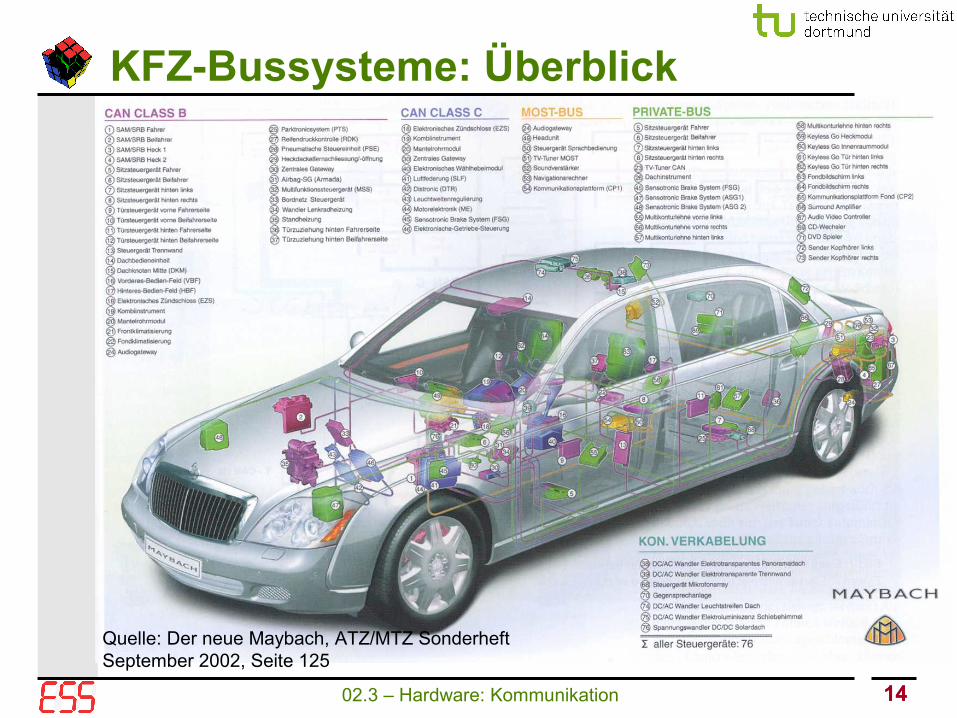
KFZ-Bussysteme: Überblick
Quelle: Der neue Maybach, ATZ/MTZ SonderheftSeptember 2002, Seite 125
02.3 – Hardware: Kommunikation 1515
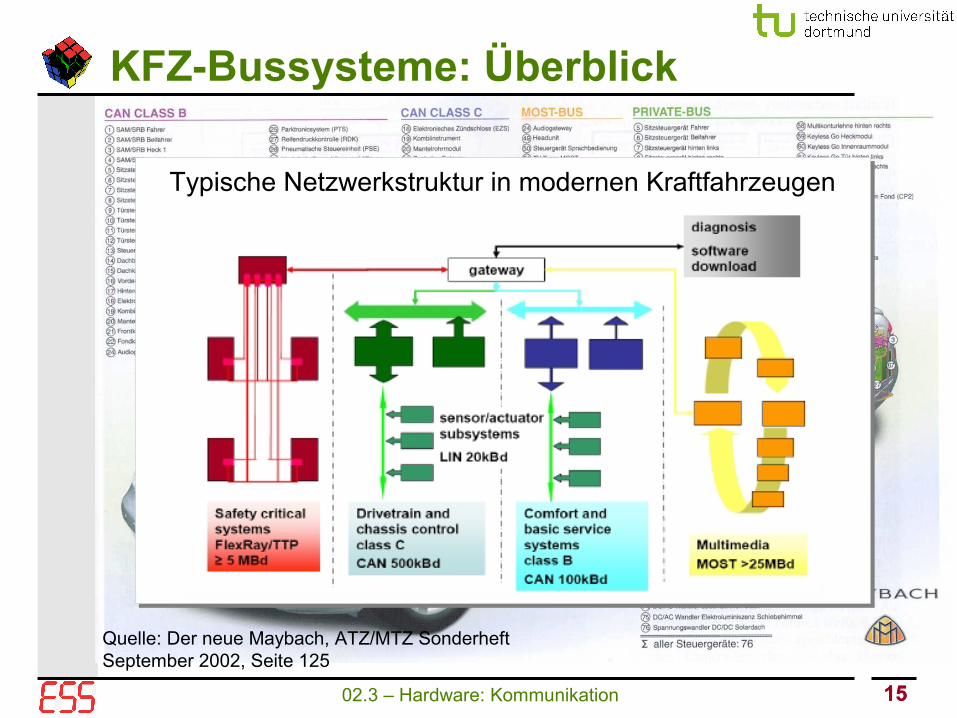
KFZ-Bussysteme: Überblick
Quelle: Der neue Maybach, ATZ/MTZ SonderheftSeptember 2002, Seite 125
Typische Netzwerkstruktur in modernen KraftfahrzeugenTypische Netzwerkstruktur in modernen Kraftfahrzeugen
02.3 – Hardware: Kommunikation 1616
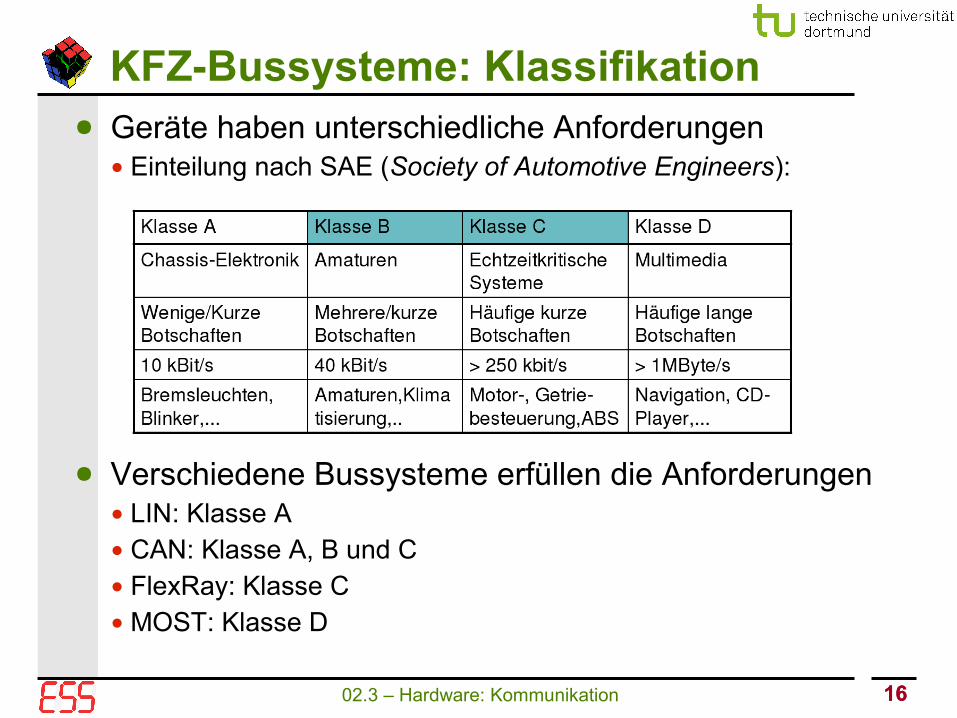
KFZ-Bussysteme: Klassifikation● Geräte haben unterschiedliche Anforderungen
● Einteilung nach SAE (Society of Automotive Engineers):
● Verschiedene Bussysteme erfüllen die Anforderungen● LIN: Klasse A● CAN: Klasse A, B und C● FlexRay: Klasse C● MOST: Klasse D
02.3 – Hardware: Kommunikation 1717
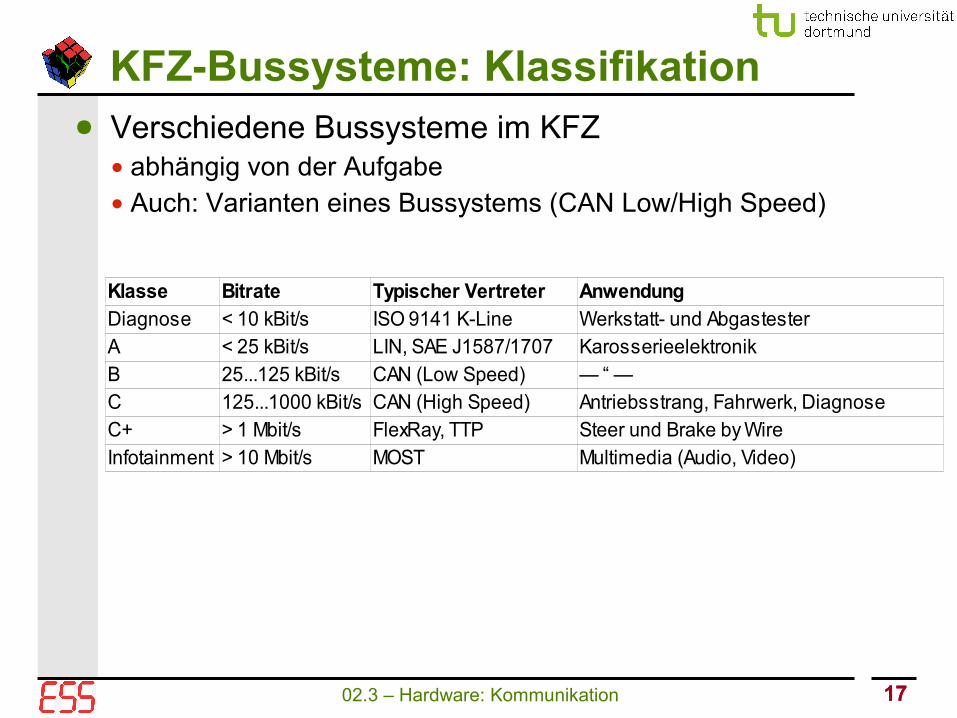
KFZ-Bussysteme: Klassifikation● Verschiedene Bussysteme im KFZ
● abhängig von der Aufgabe● Auch: Varianten eines Bussystems (CAN Low/High Speed)
Diagnose ISO 9141 K-LineA LIN, SAE J1587/1707B CAN (Low Speed) — “ —C CAN (High Speed)C+Infotainment MOST Multimedia (Audio, Video)
Klasse Bitrate Typischer Vertreter Anwendung< 10 kBit/s Werkstatt- und Abgastester< 25 kBit/s Karosserieelektronik25...125 kBit/s125...1000 kBit/s Antriebsstrang, Fahrwerk, Diagnose> 1 Mbit/s FlexRay, TTP Steer und Brake by Wire> 10 Mbit/s
02.3 – Hardware: Kommunikation 1818
● Seit 1983 von Bosch entwickelt● Ziel: Reduktion der vorhandenen Kabelbäume im KFZ
● Datendurchsatz bis zu 1 MBit/s● Entwurfsziele
● kleine Controller● kostengünstig● robust● leicht zu konfigurieren und erweitern● automatische Fehlererkennung
● Inzwischen sehr verbreitet● Medizintechnik, nautische Instrumente,
Kontrollsysteme für Fahrstühle,Textilproduzierende Maschinen,Industrieroboter, ...
CAN-Bus [1]
02.3 – Hardware: Kommunikation 1919
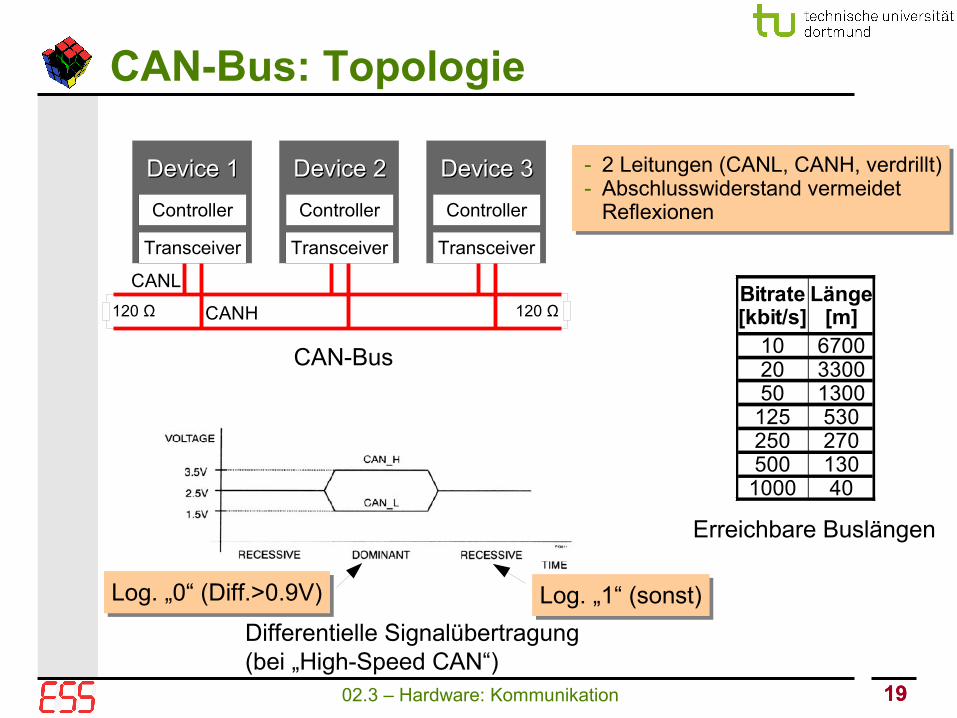
CAN-Bus: Topologie
Device 1Device 1
Transceiver
Controller
Device 2Device 2
Transceiver
Controller
Device 3Device 3
Transceiver
Controller
CANL
CANH
CAN-Bus
120 Ω 120 Ω
- 2 Leitungen (CANL, CANH, verdrillt)- Abschlusswiderstand vermeidet
Reflexionen
- 2 Leitungen (CANL, CANH, verdrillt)- Abschlusswiderstand vermeidet
Reflexionen
10 670020 330050 1300
125 530250 270500 130
1000 40
Bitrate[kbit/s]
Länge[m]
Differentielle Signalübertragung(bei „High-Speed CAN“)
Erreichbare Buslängen
Log. „1“ (sonst)Log. „1“ (sonst)Log. „0“ (Diff.>0.9V)Log. „0“ (Diff.>0.9V)
02.3 – Hardware: Kommunikation 2020
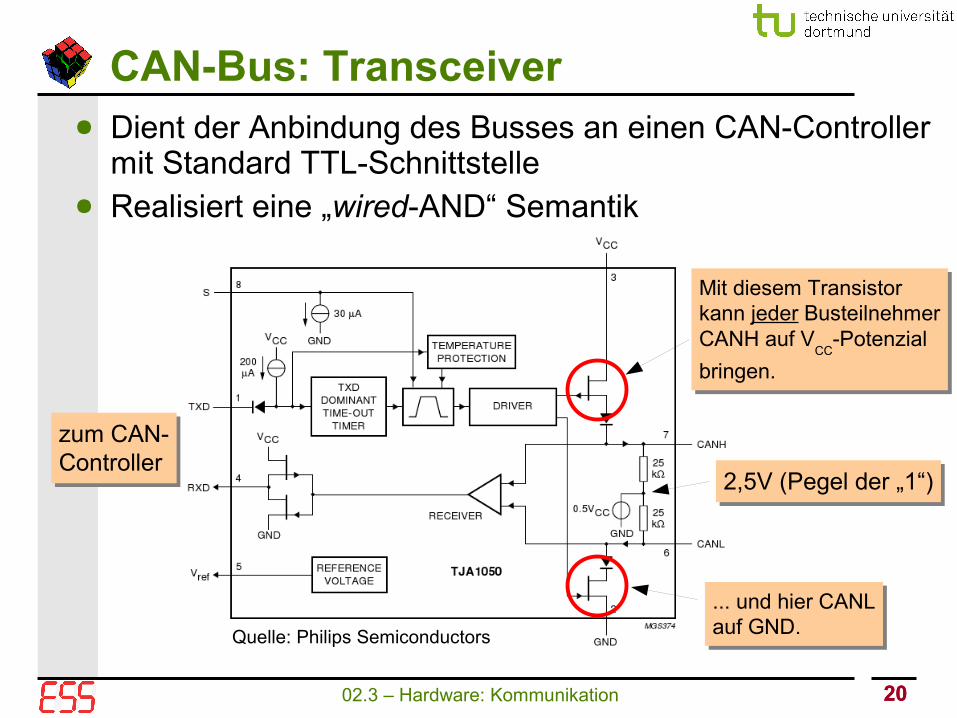
CAN-Bus: Transceiver● Dient der Anbindung des Busses an einen CAN-Controller
mit Standard TTL-Schnittstelle● Realisiert eine „wired-AND“ Semantik
zum CAN-Controllerzum CAN-Controller
2,5V (Pegel der „1“)2,5V (Pegel der „1“)
Mit diesem Transistorkann jeder BusteilnehmerCANH auf V
CC-Potenzial
bringen.
Mit diesem Transistorkann jeder BusteilnehmerCANH auf V
CC-Potenzial
bringen.
... und hier CANLauf GND.... und hier CANLauf GND.Quelle: Philips Semiconductors
02.3 – Hardware: Kommunikation 2121
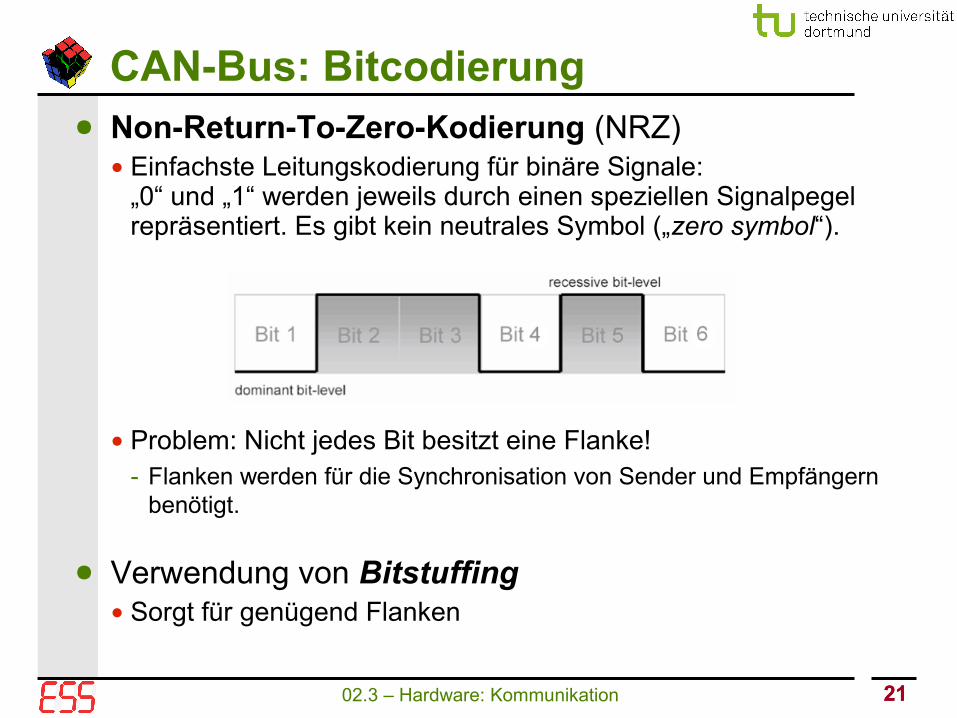
CAN-Bus: Bitcodierung● Non-Return-To-Zero-Kodierung (NRZ)
● Einfachste Leitungskodierung für binäre Signale:„0“ und „1“ werden jeweils durch einen speziellen Signalpegel repräsentiert. Es gibt kein neutrales Symbol („zero symbol“).
● Problem: Nicht jedes Bit besitzt eine Flanke!- Flanken werden für die Synchronisation von Sender und Empfängern
benötigt.
● Verwendung von Bitstuffing● Sorgt für genügend Flanken
02.3 – Hardware: Kommunikation 2222
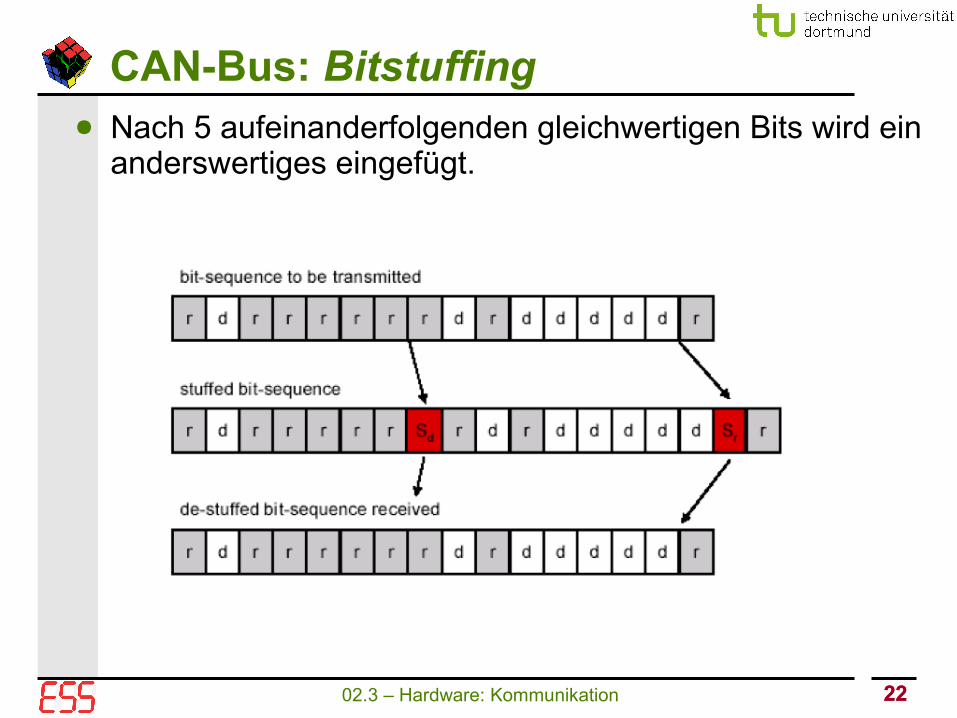
CAN-Bus: Bitstuffing● Nach 5 aufeinanderfolgenden gleichwertigen Bits wird ein
anderswertiges eingefügt.
02.3 – Hardware: Kommunikation 2323
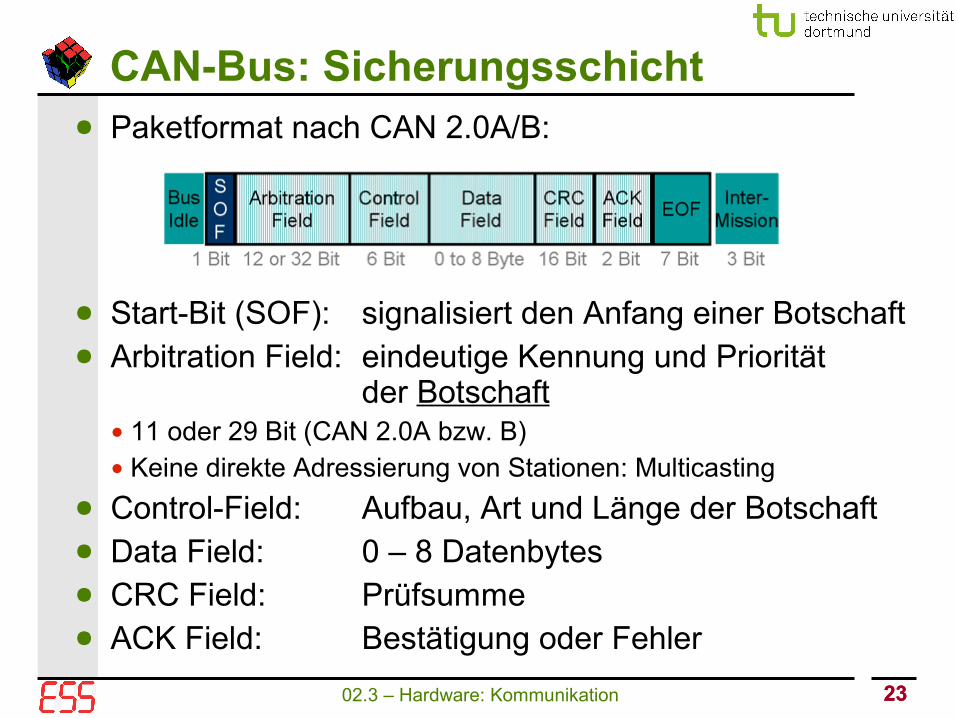
CAN-Bus: Sicherungsschicht● Paketformat nach CAN 2.0A/B:
● Start-Bit (SOF): signalisiert den Anfang einer Botschaft ● Arbitration Field: eindeutige Kennung und Priorität
der Botschaft ● 11 oder 29 Bit (CAN 2.0A bzw. B)● Keine direkte Adressierung von Stationen: Multicasting
● Control-Field: Aufbau, Art und Länge der Botschaft ● Data Field: 0 – 8 Datenbytes● CRC Field: Prüfsumme ● ACK Field: Bestätigung oder Fehler
02.3 – Hardware: Kommunikation 2424
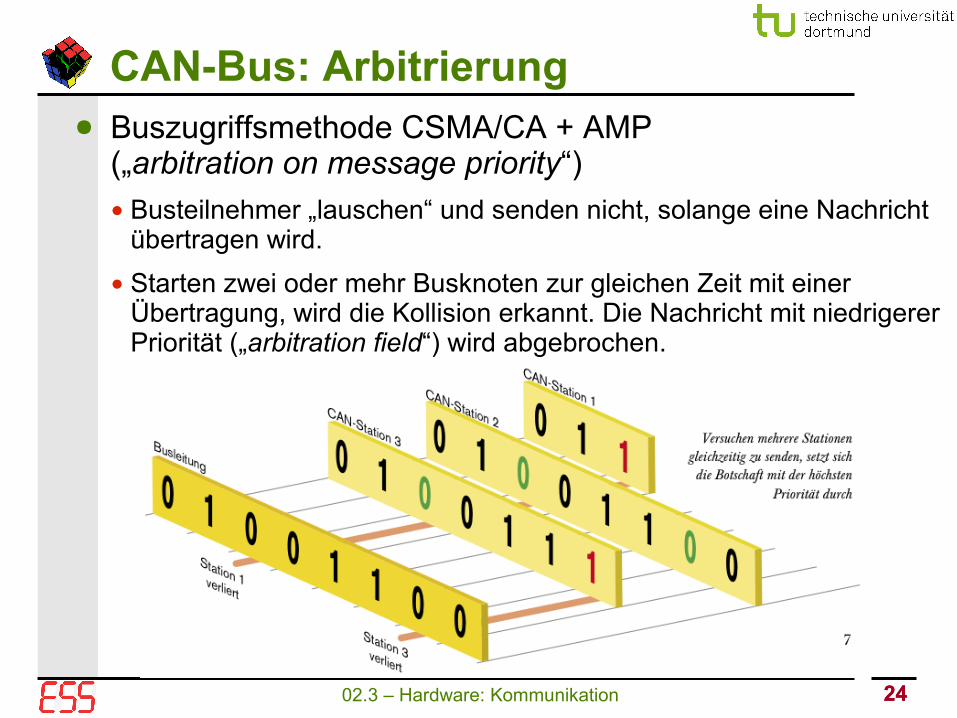
CAN-Bus: Arbitrierung● Buszugriffsmethode CSMA/CA + AMP
(„arbitration on message priority“)● Busteilnehmer „lauschen“ und senden nicht, solange eine Nachricht
übertragen wird.
● Starten zwei oder mehr Busknoten zur gleichen Zeit mit einer Übertragung, wird die Kollision erkannt. Die Nachricht mit niedrigerer Priorität („arbitration field“) wird abgebrochen.
02.3 – Hardware: Kommunikation 2525
CAN-Bus: Fehlerbehandlung● Jeder CAN-Controller überprüft beim Empfang Format und
Prüfsumme● Sendet Bestätigung oder Fehlermeldung
● Acknowledgement & End of Frame
● Bei Fehlermeldung ignorieren alle Controller die Botschaft ● Eigener Fehlerzähler protokolliert Fehlermeldungen
● ggf. wird der Bus ausgeschaltet (reaktiviert sich selbstständig)
● Hohe Zuverlässigkeit und schnelle Fehlermeldung
● Automatische Wiederholung von Nachrichten im Fehlerfall
02.3 – Hardware: Kommunikation 2626
CAN-Bus: Praxis (1)● Nachrichten werden periodisch gesendet
● Jeweils Ist- und Sollzustand für das jeweilige Steuergerät● Die Nachrichtenkennung ist gleichzeitig Priorität und Typ
● Für die höchstpriore Nachricht ist diemaximale Latenz vorhersagbar.● Für andere Nachrichten durch die Periode im Prinzip ebenfalls
Ein CAN-basierter Beschleunigungssensorvon Volkswagen
02.3 – Hardware: Kommunikation 2727
CAN-Bus: Praxis (2)
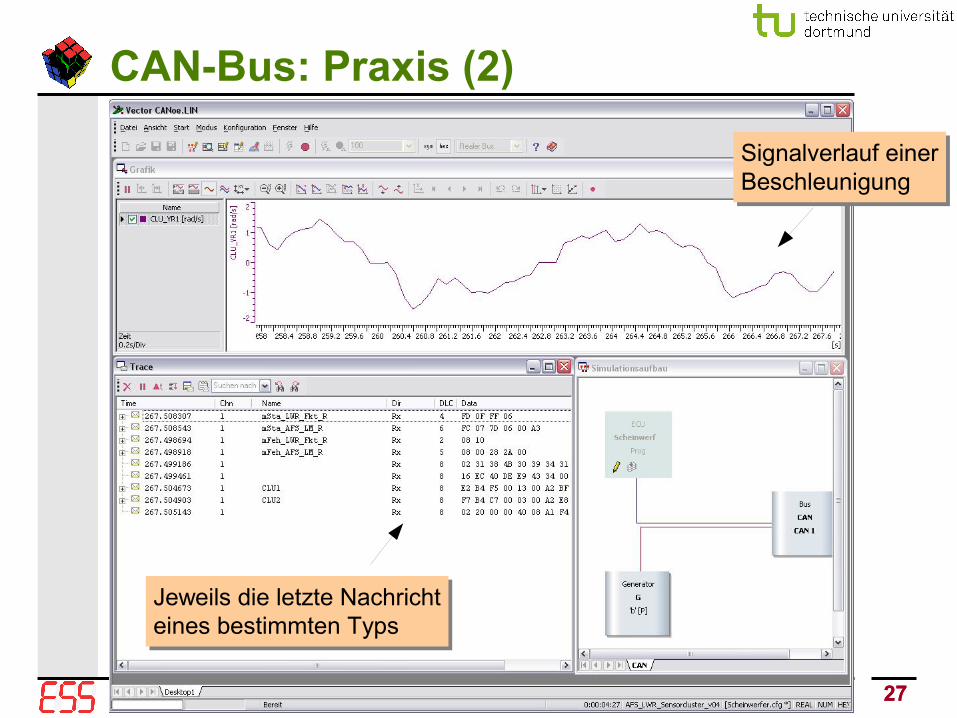
Signalverlauf einerBeschleunigungSignalverlauf einerBeschleunigung
Jeweils die letzte Nachrichteines bestimmten TypsJeweils die letzte Nachrichteines bestimmten Typs
02.3 – Hardware: Kommunikation 2828
CAN-Bus: Energiesparen● Automotive Steuergeräte verfügen i.d.R. über einen
System Basis Chip (SBC)● Regelung und Überwachung der Betriebsspannung
● RESET Generator
● Watchdog
● Bus-Schnittstelle (z.B. CAN oder LIN)
● Aufwachlogik (wake-up logic)
● Der Watchdog schaltet das Steuergerät ab,falls es nicht normal funktioniert.● Software muss den Watchdog-Timer regelmäßig neu aufziehen.
● Durch die Aufwachlogik kann das gesamte Steuergeräte komplett abgeschaltet werden, bis z.B. eine bestimmte CAN-Botschaft eintrifft.
02.3 – Hardware: Kommunikation 2929
CAN-Bus: (Un-)Sicherheit● CAN-Botschaften in heutigen Fahrzeugen
sind i.d.R. nicht verschlüsselt.● Ausnahme: Neuprogrammierung
● Kennung und Inhalt der CAN-Botschaften sind vertraulich
● Zugriff auf den CAN-Bus ist möglich● Vorgeschriebene OBD2/EOBD-Schnittstelle
● Mindestens für Bastler
● Nachrichtenformat teils leicht zu erraten
● Manipulationen möglich● Kann fatale Folgen haben
02.3 – Hardware: Kommunikation 3030
Inhalt● Grundlagen der Datenübertragung
● Technologieüberblick
● Energiebetrachtung
● Drahtgebunden● KFZ-Bussysteme im Überblick
● CAN-Bus
● Energie im CAN-Netz
● (Un-)sicherheit
● Drahtlos● Technologie und Geschichte
● Bluetooth, RF-Funk, ZigBee
● Zusammenfassung
02.3 – Hardware: Kommunikation 3131
Funknetzwerke● Übertragung von Daten über Funksignale● Erstes Funknetzwerk: ALOHAnet auf Hawaii (1970)
● Kommunikation zwischen einzelnen Standorten der Univ. Hawaii
● Frequenzmodulation, zwei 100 kHz-Kanäle: ● broadcast channel (413,475 MHz) ● random access channel (407,350 MHz)● Grundlage auch für kabelgebundene Netze wie Ethernet
● Simples Protokoll („Pure Aloha“):● Eine Station, die Daten senden will, sendet
diese direkt● Wenn Nachricht mit anderer Übertragung
kollidiert, „später“ die Sendung wiederholen
02.3 – Hardware: Kommunikation 3232
ALOHAnet● „Später“ wird bestimmt durch ein sog. „Backoff-Schema“
● Kritische Punkt des Protokolls● Qualität des Schemas beeinflußt signifikant die Effizienz des
Protokolls, die Übertragungskapazität und die Vorhersagbarkeit des Verhaltens
● „Pure Aloha“ hatte einen maximalen Durchsatz von ca. 18,4%- Also wurden 81,6% der gesamten verfügbaren Bandbreite verschwendet
aufgrund von Paketverlust durch Kollisionen
● Stern-Netzwerktopologie, ein zentraler Computer● Reduziert die Anzahl der möglichen Kollisionen
● Weiterentwicklung: „Slotted Aloha“● Einführung diskreter Zeitschlitze● Eine Station darf nur zu Beginn eines Zeitschlitzes Senden
- Reduktion der Anzahl möglicher Kollisionen
● Verbesserung des max. Durchsatzes auf 36,8%
02.3 – Hardware: Kommunikation 3333
RF-Funk● Senden von Informationen über einfache Funk-Modulatoren
● z.B. via Frequenzmodulation● Oft in ISM-Bändern (z.B. 434 MHz, 868 MHz)
● Niedrige Bitrate, keine Hardware-Unterstützung für höhere Protokolle● Funktionalität wie Medienzugriffskontrolle (MAC, Media Access
Control) und Übertragunssicherung (z.B. CRC) muss in Software realisiert werden
● Übertragungsraten von 9,6...250 kBit/s● Anwendungsgebiete:
- Fernbediente Spielzeuge, drahtloser Alarm, drahtlose Sensoren, Funktastaturen/-mäuse, Hausautomatisierung
02.3 – Hardware: Kommunikation 3434
RF-Funk-Module: RFM12● RFM12: Einfacher RF-Chip, preisgünstig (ca. 3 Eur) [5]
● SPI Slave-Gerät, 434, 868 und 915 MHz ISM-Band● Frequenzmodulation
- Verschiedene Bereiche innerhalb des jeweiligen Frequenzbandes
- z.B. 430,2400 - 439,7575MHz in Schritten von 2.5kHz
● Frequenzsprung-Anwendungen möglich- In Hardware unterstützt
● Reichweite: 25-30m (915MHz @ 9600 Bit/s indoor), 250m (outdoor)● Datenrate bis 115,2 kBit/s● Befehle über SPI:
- Frequenzeinstellung, Abweichungseinstellung, Sendeenergie und Datenrate
02.3 – Hardware: Kommunikation 3535
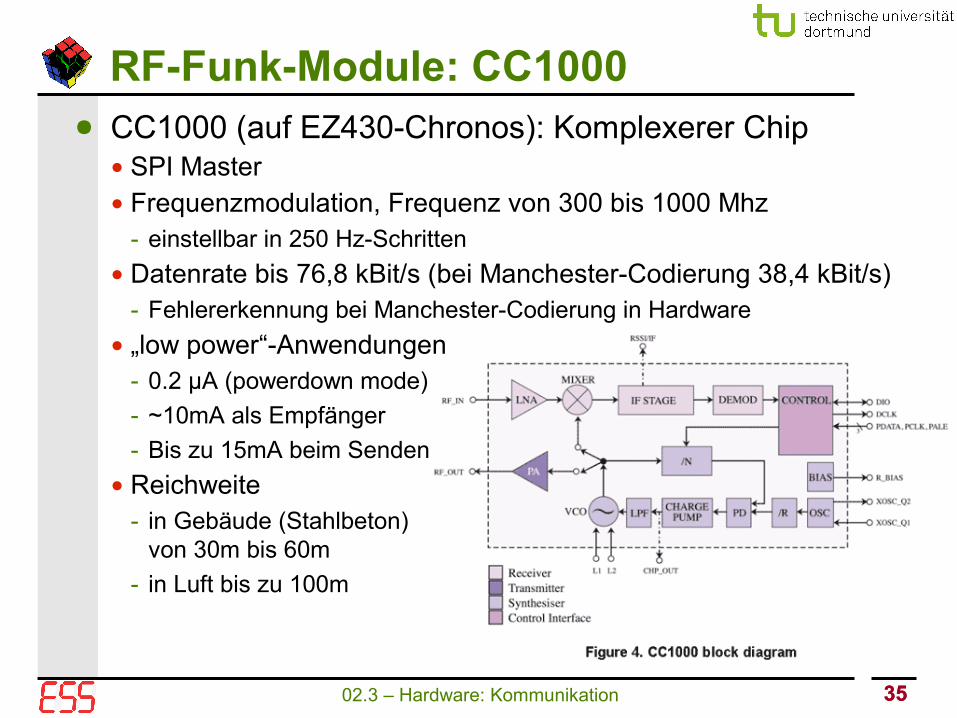
RF-Funk-Module: CC1000● CC1000 (auf EZ430-Chronos): Komplexerer Chip
● SPI Master● Frequenzmodulation, Frequenz von 300 bis 1000 Mhz
- einstellbar in 250 Hz-Schritten
● Datenrate bis 76,8 kBit/s (bei Manchester-Codierung 38,4 kBit/s)- Fehlererkennung bei Manchester-Codierung in Hardware
● „low power“-Anwendungen - 0.2 µA (powerdown mode)
- ~10mA als Empfänger
- Bis zu 15mA beim Senden
● Reichweite - in Gebäude (Stahlbeton)
von 30m bis 60m
- in Luft bis zu 100m
02.3 – Hardware: Kommunikation 3636
ZigBee● Offener Funknetz-Standard für Personal Area Networks (PANs)
● Physikalischer und MAC-Layer basieren auf IEEE 802.15.4● Verbindung auf Kurzstrecken (10 - 100 m)
● Drei verschiedene Gerätearten („ZigBee Devices“):● End Device: Einfache Geräte wie zum Beispiel Lichtschalter
- implementieren nur einen Teil der ZigBee-Protokolle
- daher auch RFD (Reduced Function Devices) genannt
- melden sich an Router ihrer Wahl an, bilden Sterntopologie.● FFD-Geräte (Full Function Devices)
- melden sich an existierendem Router an
- bilden so ein Netzwerk in Baum-Topologie
- können auch als Router agieren● Coordinator:
- Genau ein Router innerhalb eines PAN ist Coordinator
- Gibt grundlegende Parameter des PAN vor und verwaltet das Netz
02.3 – Hardware: Kommunikation 3737
Bluetooth● Drahtloses PAN
● IEEE Standard 802.15.1● Entwickelt als Kabelersatz (serielle Schnittstellen)● Energiesparend● Kostengünstig (US$5 pro Chip)● Nahbereich (10m), bis 100m erweitert (BT 2.1)● ISM-Frequenzband (2,4 GHz)
● Struktur: „Piconets“ mit bis zu 7 Geräten● Master-Slave-Paradigma, der Master verwaltet die Verbindungen● Ein Slave-Gerät kann Teil eines oder mehrerer Piconets sein● Ein Master kann auch Slave in einem anderen Piconet sein● Damit ist Routing in sog. „Scatternets“ möglich
- Scatternet = Netzwerk miteinander verbundener Piconets
02.3 – Hardware: Kommunikation 3838
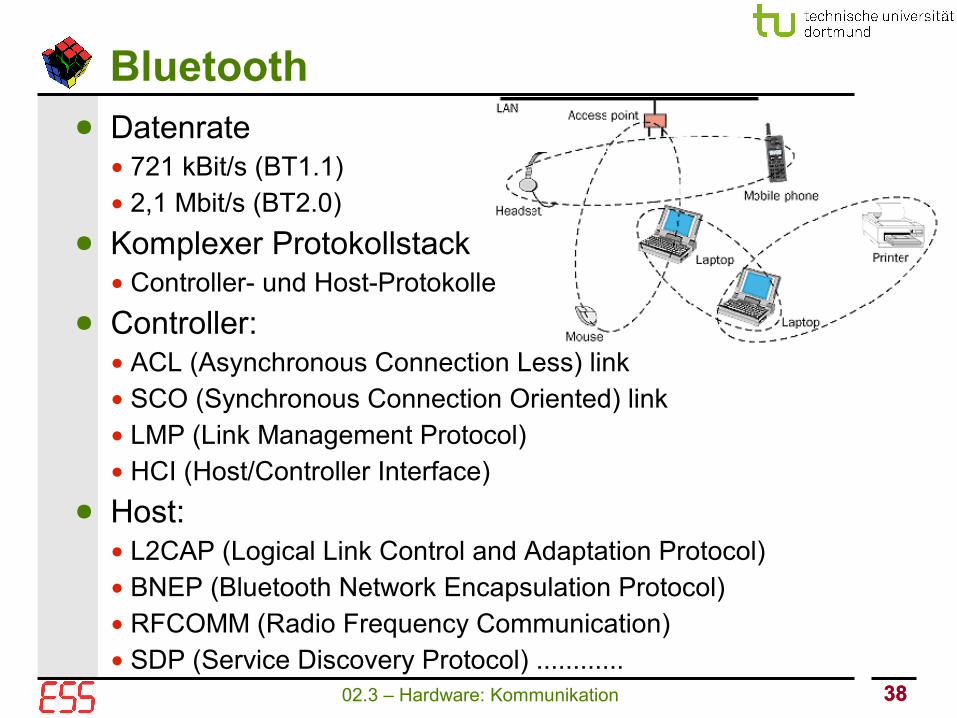
Bluetooth● Datenrate
● 721 kBit/s (BT1.1)● 2,1 Mbit/s (BT2.0)
● Komplexer Protokollstack● Controller- und Host-Protokolle
● Controller:● ACL (Asynchronous Connection Less) link● SCO (Synchronous Connection Oriented) link● LMP (Link Management Protocol)● HCI (Host/Controller Interface)
● Host:● L2CAP (Logical Link Control and Adaptation Protocol)● BNEP (Bluetooth Network Encapsulation Protocol)● RFCOMM (Radio Frequency Communication)● SDP (Service Discovery Protocol) ............
02.3 – Hardware: Kommunikation 3939
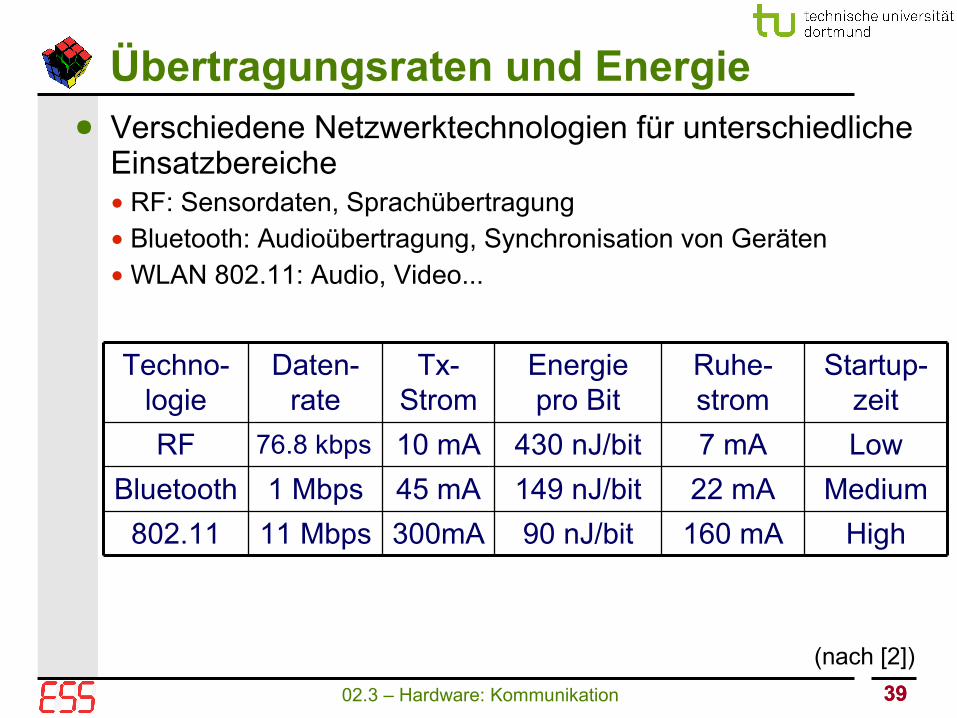
Übertragungsraten und Energie● Verschiedene Netzwerktechnologien für unterschiedliche
Einsatzbereiche● RF: Sensordaten, Sprachübertragung● Bluetooth: Audioübertragung, Synchronisation von Geräten● WLAN 802.11: Audio, Video...
160 mA
22 mA
7 mA
Ruhe-strom
802.11
Bluetooth
RF
Techno-logie
Low430 nJ/bit10 mA76.8 kbps
Medium149 nJ/bit45 mA1 Mbps
90 nJ/bit
Energie pro Bit
300mA
Tx- Strom
High11 Mbps
Startup-zeit
Daten- rate
(nach [2])
02.3 – Hardware: Kommunikation 4040
Inhalt● Grundlagen der Datenübertragung
● Technologieüberblick
● Energiebetrachtung
● Drahtgebunden● KFZ-Bussysteme im Überblick
● CAN-Bus
● Energie im CAN-Netz
● (Un-)sicherheit
● Drahtlos ● Technologie und Geschichte
● Bluetooth, RF-Funk, ZigBee
● Zusammenfassung
02.3 – Hardware: Kommunikation 4141
Zusammenfassung● Kommunikation ist zentrales Problem ubiquitärer Systeme
● Drahtlose (Funk-)Kommunikation ist die Regel● Drahtgebundene Kommunikation für begrenzte Aufgaben
● Funkübertragung ist wichtigster Energiefaktor bei Mobilgeräten● Verhältnis Funkenergie zu Energie für Rechenleistung
verschlechtert sich weiter
● Verschiedene Funktechnologien im Einsatz● Auswahlkriterien: Datenrate, Reichweite, Energieverbrauch, Kosten● Unterschiedlicher Software-Aufwand für Netzwerkfunktionen
● Stetige Weiterentwicklung● Aktuell: ZigBee (seit 2005)
02.3 – Hardware: Kommunikation 4242
Literatur[1] W. Zimmermann, R. Schmidgall, Bussysteme in der Fahrzeugtechnik – Protokolle und Standards, ATZ/MTZ-Fachbuch, Vieweg, ISBN 978-3-8348-0235-4, 3. Aufl., 2008
[2] Andreas Savvides, Yale University: Sensing Platforms and Power Consumption Issues, Lecture Slides
[3] Claude Elwood Shannon: Communication in the Presence of Noise; In: Proc. IRE, Vol. 37, No. 1 (Jan. 1949)
[4] Mani Srivastava: Challenges in Energy-aware Networked Sensor Systems, Lecture Slides, UCLA Networked & Embedded Systems Lab
[5] HOPE RF: RF12 Programming Guide
[6] ChipCon CC1000 Data Sheet



![Software ubiquitärer Systeme (SuS)...Quelle: [1] Nicht nur die Bibliotheken, sondern auch die virtuellen Maschinen unterscheiden sich. Nicht nur die Bibliotheken, ... – Pager, PDAs](https://img.pdfslide.org/doc/110x75/6005bebb936cdc30a623ccb5/software-ubiquitrer-systeme-sus-quelle-1-nicht-nur-die-bibliotheken.jpg)








![CAN - Bus.ppt [Kompatibilit tsmodus])ln.iuk.fh-dortmund.de/~gebhard/STA/vortraege/CAN-Bus__Bensch__Boehme.pdf · CAN -BUS 12.06.2008 Arnd Bensch, Bastian Böhme 3 Übersicht Bussysteme](https://img.pdfslide.org/doc/110x75/5d4e074088c99351698bd2dc/can-busppt-kompatibilit-tsmoduslniukfh-gebhardstavortraegecan-busbenschboehmepdf.jpg)