Embed Size (px)
Citation preview
Technische Anleitung Nr. 8Technische Anleitung Nr. 8
Elektrisches Bremsen

2 Technische Anleitung Nr. 8 - Elektrisches Bremsen
3Technische Anleitung Nr. 8 - Elektrisches Bremsen
Inhalt
1. Einleitung ............................................................... 5
1.1 Allgemeines ............................................................. 51.2 Übersicht über Antriebsapplikationen mit Drehzahl-
und Drehmomentregelung ..................................... 5
2. Berechnung der Bremsleistung ........................ 7
2.1 Allgemeine Dimensionierungsprinzipien für daselektrische Bremsen ............................................... 7
2.2 Grundlegende Beschreibung der Last .................. 82.2.1 Konstantmoment und quadratisches
Moment ........................................................ 82.2.2 Berechnung von Bremsmoment und
Bremsleistung ............................................. 82.2.3 Zusammenfassung und Schlussfolgerungen 12
3. Elektrisches Bremsen mit Antrieben ............... 13
3.1 Motorflussbremsung .............................................. 133.2 Bremschopper und Bremswiderstand .................. 14
3.2.1 Energiespeicherung im Frequenzumrichter 143.2.2 Arbeitsweise des Bremschoppers ............. 15
3.3 Aufbau einer anti-parallel arbeitendenThyristorbrücke ....................................................... 17
3.4 Aufbau der IGBT-Brücke ........................................ 193.4.1 Arbeitsweise der IGBT-Rückspeiseeinheiten 193.4.2 Regelung der IGBT-Rückspeisung ............. 193.4.3 Direkte Drehmomentregelung als direkte
Leistungsregelung ...................................... 203.4.4 Dimensionierung einer IGBT-
Rückspeiseeinheit ....................................... 223.5 Gleichspannungs-Sammelschiene ........................ 23
4. Lebensdauerkosten verschiedener Artenelektrischer Bremsung ........................................ 25
4.1 Kalkulation der direkten Energiekosten ................ 254.2 Berechnung der Investitionskosten ....................... 254.3 Berechnung der Lebensdauerkosten .................... 26
5. Symbole und Definitionen .................................. 30
6. Index ..................................................................... 32

4 Technische Anleitung Nr. 8 - Elektrisches Bremsen
5Technische Anleitung Nr. 8 - Elektrisches Bremsen
1.1 Allgemeines
Kapitel 1 - Einleitung
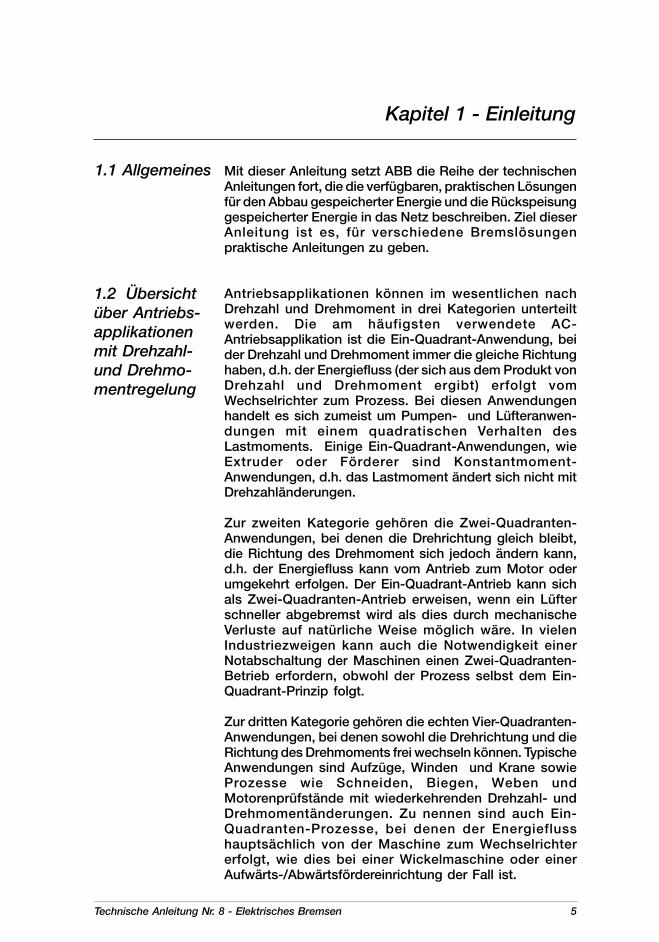
Mit dieser Anleitung setzt ABB die Reihe der technischenAnleitungen fort, die die verfügbaren, praktischen Lösungenfür den Abbau gespeicherter Energie und die Rückspeisunggespeicherter Energie in das Netz beschreiben. Ziel dieserAnleitung ist es, für verschiedene Bremslösungenpraktische Anleitungen zu geben.
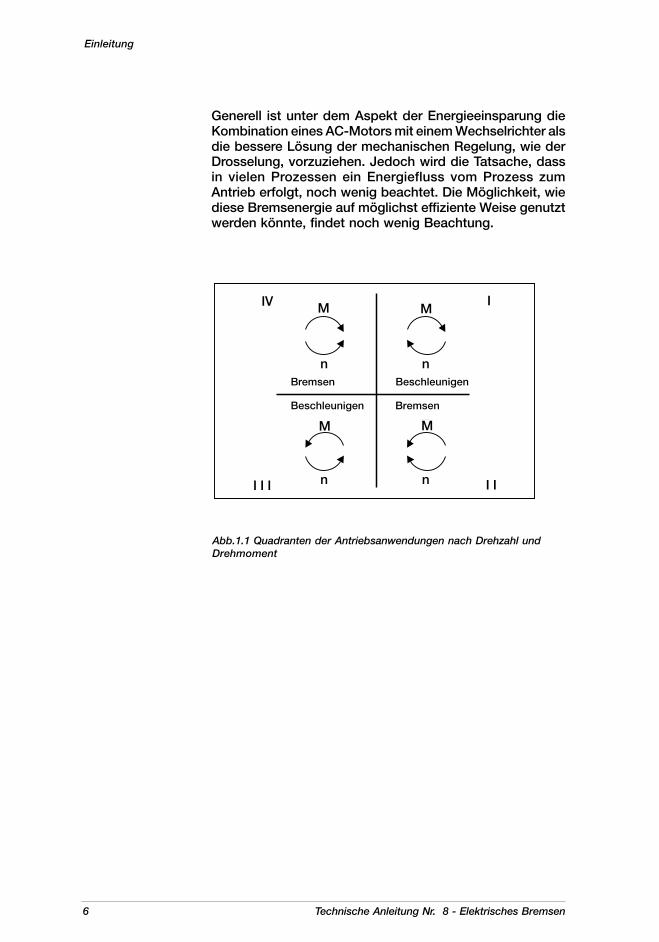
Antriebsapplikationen können im wesentlichen nachDrehzahl und Drehmoment in drei Kategorien unterteiltwerden. Die am häufigsten verwendete AC-Antriebsapplikation ist die Ein-Quadrant-Anwendung, beider Drehzahl und Drehmoment immer die gleiche Richtunghaben, d.h. der Energiefluss (der sich aus dem Produkt vonDrehzahl und Drehmoment ergibt) erfolgt vomWechselrichter zum Prozess. Bei diesen Anwendungenhandelt es sich zumeist um Pumpen- und Lüfteranwen-dungen mit einem quadratischen Verhalten desLastmoments. Einige Ein-Quadrant-Anwendungen, wieExtruder oder Förderer sind Konstantmoment-Anwendungen, d.h. das Lastmoment ändert sich nicht mitDrehzahländerungen.
Zur zweiten Kategorie gehören die Zwei-Quadranten-Anwendungen, bei denen die Drehrichtung gleich bleibt,die Richtung des Drehmoment sich jedoch ändern kann,d.h. der Energiefluss kann vom Antrieb zum Motor oderumgekehrt erfolgen. Der Ein-Quadrant-Antrieb kann sichals Zwei-Quadranten-Antrieb erweisen, wenn ein Lüfterschneller abgebremst wird als dies durch mechanischeVerluste auf natürliche Weise möglich wäre. In vielenIndustriezweigen kann auch die Notwendigkeit einerNotabschaltung der Maschinen einen Zwei-Quadranten-Betrieb erfordern, obwohl der Prozess selbst dem Ein-Quadrant-Prinzip folgt.
Zur dritten Kategorie gehören die echten Vier-Quadranten-Anwendungen, bei denen sowohl die Drehrichtung und dieRichtung des Drehmoments frei wechseln können. TypischeAnwendungen sind Aufzüge, Winden und Krane sowieProzesse wie Schneiden, Biegen, Weben undMotorenprüfstände mit wiederkehrenden Drehzahl- undDrehmomentänderungen. Zu nennen sind auch Ein-Quadranten-Prozesse, bei denen der Energieflusshauptsächlich von der Maschine zum Wechselrichtererfolgt, wie dies bei einer Wickelmaschine oder einerAufwärts-/Abwärtsfördereinrichtung der Fall ist.
1.2 Übersichtüber Antriebs-applikationenmit Drehzahl-und Drehmo-mentregelung
6 Technische Anleitung Nr. 8 - Elektrisches Bremsen
Abb.1.1 Quadranten der Antriebsanwendungen nach Drehzahl undDrehmoment
Einleitung
Bremsen Beschleunigen
Beschleunigen Bremsen
Generell ist unter dem Aspekt der Energieeinsparung dieKombination eines AC-Motors mit einem Wechselrichter alsdie bessere Lösung der mechanischen Regelung, wie derDrosselung, vorzuziehen. Jedoch wird die Tatsache, dassin vielen Prozessen ein Energiefluss vom Prozess zumAntrieb erfolgt, noch wenig beachtet. Die Möglichkeit, wiediese Bremsenergie auf möglichst effiziente Weise genutztwerden könnte, findet noch wenig Beachtung.
M M
M M

7Technische Anleitung Nr. 8 - Elektrisches Bremsen
elektr.
mech. (2.1)1)
(2.2)
1) Siehe Kapitel 5 - Symbole und Definitionen auf Seite 30
Die Berechnung der notwendigen Bremsleistung beginntbei der Mechanik. Zumeist besteht die Anforderung darin,das mechanische System innerhalb einer vorgegebenenZeit abzubremsen; oder der Prozess enthält untergeordneteZyklen, in denen der Motor generatorisch mit konstanteroder sich nur geringfügig ändernder Drehzahl läuft.
Es ist wichtig zu bedenken, dass Geräte, die beimelektrischen Bremsen eingesetzt werden, nach derBremsleistung dimensioniert werden. Die mechanischeBremsleistung hängt vom Bremsmoment und der Drehzahlab (Formel 2.1). Je höher die Drehzahl, desto höher ist dieLeistung. Diese Leistung wird dann bei einer festgelegtenSpannung und einem bestimmten Strom übertragen. Jehöher die Spannung ist, desto weniger Strom wird für diegleiche Leistung benötigt (Formel 2.2). Der Strom ist dieprimäre Komponente, die die Kosten bei Niederspannungs-AC-Antrieben bestimmt.
Formel (2.2) enthält den Term cosφ. Dieser Term gibt an,wieviel Motorstrom für die Magnetisierung des Motorsverwendet wird. Der Magnetisierungsstrom erzeugt keinDrehmoment und wird deshalb vernachlässigt.
Andererseits wird dieser Motor-Magnetisierungsstrom nichtvon der AC-Einspeisung, die den Stromrichter versorgt,bezogen, d.h. der zum Wechselrichter fließende Strom istniedriger als der in den Motor eingespeiste Strom. DieseTatsache bedeutet, dass auf der Einspeiseseite cosφnormalerweise nahe 1,0 ist. Es ist zu beachten, dass inFormel (2.2) angenommen wurde, dass bei derUmwandlung von Gleichspannung in Wechselspannungkein Verlust auftritt. Bei dieser Umwandlung enstehen zwarVerluste, die in diesem Zusammenhang jedochvernachlässigt werden können.
Kapitel 2 - Berechnung der Bremsleistung
2.1 AllgemeineDimensionie-rungsprinzipienfür das elektri-sche Bremsen
8 Technische Anleitung Nr. 8 - Elektrisches Bremsen
Last
LastMotor
Last
Last
Last
Last
Zunächst soll der Fall betrachtet werden, bei dem die Lastden Typ Konstantmoment hat und das Antriebssystem nichtin der Lage ist, das Bremsmoment zu erzeugen, d.h. derAntrieb selbst ist ein Ein-Quadrant-Antrieb. Die benötigteBremszeit kann mit der folgenden Gleichung berechnetwerden. Beachten Sie, dass in Formel (2.7) deutlich wird,dass das benötigte Drehmoment für die Beschleunigung(oder Verzögerung) der Trägheit, die Reibung und dasLastmoment dem Motormoment entgegengesetzt sind.
In der Praxis kann die Wirkung der Reibung nur schwergenau bestimmt werden. Bei der Annahme, dass dieReibung Null ist, ergibt sich für die Berechnung der Zeit einsicheres Ergebnis.
2.2 Grundlegen-de Beschrei-bung der Last
Lasten können typischerweise als Konstantmoment oderquadratisches Drehmoment kategorisiert werden.Quadratisches Lastmoment bedeutet, dass dasLastmoment proportional zum Quadrat der Drehzahl ist.Es bedeutet auch, dass die Leistung die dritte Potenz derDrehzahl ist. Bei Anwendungen mit Konstantmoment istdie Leistung direkt proportional zur Drehzahl.
Konstantmoment:
C: Konstantmoment
2.2.1KonstantmomentundquadratischesDrehmoment
Quadratisches Drehmoment:
2.2.2 Berech-nung vonBremsmomentund Bremslei-stung
Bei stationärem Betrieb (die Winkelbeschleunigung α istNull) muss das Drehmoment des Motors dem Reibungs-moment, welches proportional der Winkeldrehzahl ist, unddem Lastmoment bei dieser Drehzahl entsprechen. Dasbenötigte Bremsmoment und die benötigte Leistungunterscheiden sich in Bezug auf die Zeit bei diesen beidenLasttypen erheblich.
Berechnung der Bremsleistung
(2.3)
(2.4)
(2.5)
(2.6)
(2.7)
(2.8)
9Technische Anleitung Nr. 8 - Elektrisches Bremsen
(nStart_nEnde )
Last
,
)EndeStart
nn _
Last
Last
Start Ende )= Start Ende
n )_n(
Berechnung der Bremsleistung
Aus der Auflösung von t ergibt sich folgende Formel:
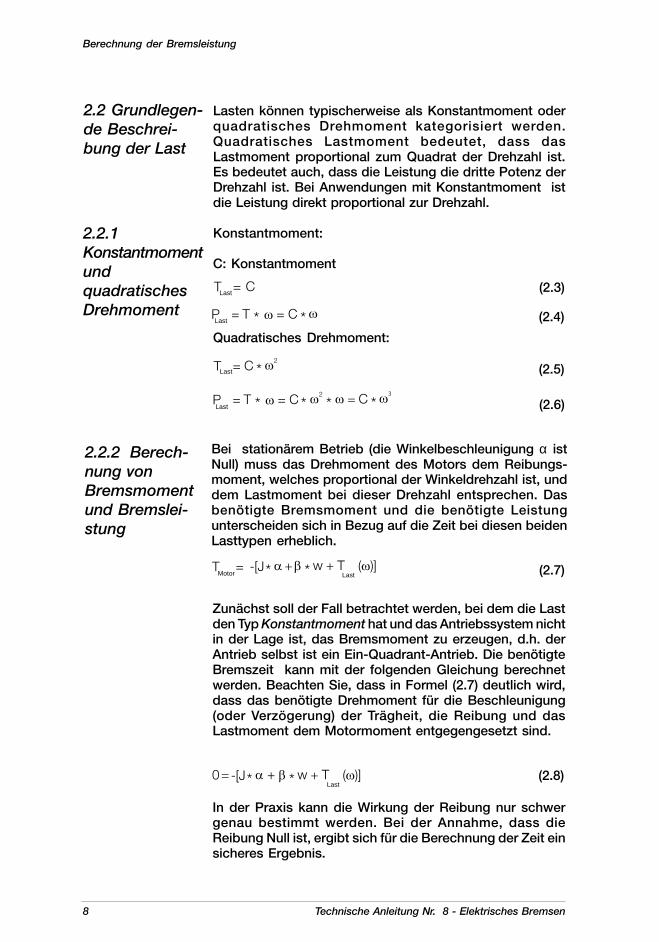
Wird bei einem Trägheitsmoment der Last von 60 kgm2
und einem Lastmoment über den gesamten Drehzahlbereichvon 800 Nm bei Drehzahl 1000 U/min das Drehmomentdes Motors Null gesetzt, geht die Last in der folgendenZeit gegen Null:
Dies gilt für Anwendungen, bei denen das Lastmoment abBeginn des Bremsvorgangs konstant bleibt. Wenn dasLastmoment entfällt (z.B. das Förderband reißt), bleibt diekinetische Energie der Mechanik unverändert, dasLastmoment, das die Mechanik verzögern würde, wirkt jetztnicht. In dem Fall, wenn der Motor die Drehzahl nichtabbremst, verringert sich die Drehzahl nur aufgrund dermechanischen Reibung.
Jetzt soll der Fall mit gleichem Massenträgheitsmomentund dem gleichen Lastmoment bei 1000 U/min betrachtetwerden, bei dem sich nun jedoch das Lastmomentquadratisch ändert. Wenn die kumulierte Bremszeit inAbhängigkeit von der Drehzahl dargestellt wird, zeigt sich,dass die natürliche Bremszeit bei niedrigeren Drehzahlenz.B. von 200 U/min auf 100 U/min deutlich länger ist imVergleich zu der Drehzahländerung von 1000 U/min auf900 U/min.
Natürliche Bremskurve bei konstanter Last
Leis
tung
[10
* k
W],
Zei
t [s
], D
rehm
omen
t [1
00 *
Nm
]
kumulierte Zeitnatürl. Brems-leistung [kW] * 10
natürl. Brems-
Drehzahl [U/min]
(2.9)
(2.10)
(2.11)
Abb. 2.1 Kumulierte Bremszeit, Bremslastleistung und Drehmoment inAbhängigkeit von der Drehzahl.
moment [Nm] * 100
10 Technische Anleitung Nr. 8 - Elektrisches Bremsen
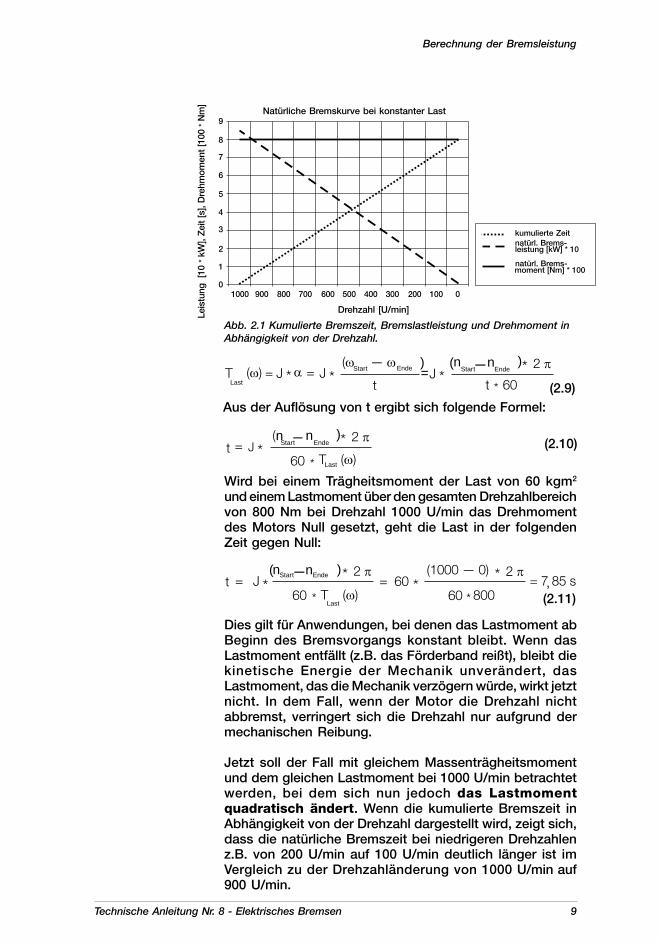
Abb. 2.2 Natürliche Bremskurve bei der Bremslastleistung und demDrehmoment eines Lüfters von 90 kW in Abhängigkeit der Drehzahl
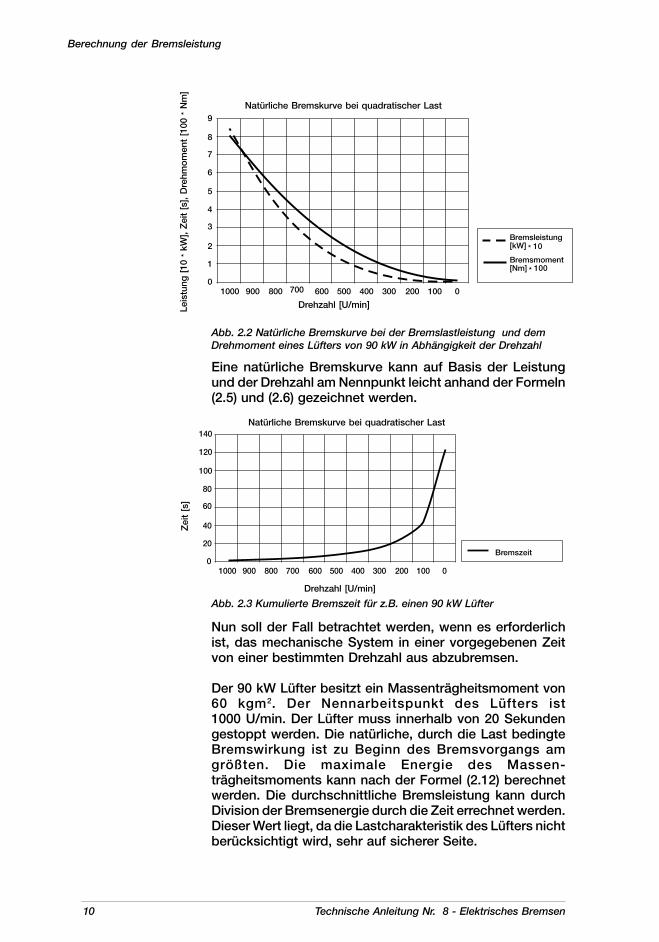
Abb. 2.3 Kumulierte Bremszeit für z.B. einen 90 kW Lüfter
Nun soll der Fall betrachtet werden, wenn es erforderlichist, das mechanische System in einer vorgegebenen Zeitvon einer bestimmten Drehzahl aus abzubremsen.
Der 90 kW Lüfter besitzt ein Massenträgheitsmoment von60 kgm2. Der Nennarbeitspunkt des Lüfters ist1000 U/min. Der Lüfter muss innerhalb von 20 Sekundengestoppt werden. Die natürliche, durch die Last bedingteBremswirkung ist zu Beginn des Bremsvorgangs amgrößten. Die maximale Energie des Massen-trägheitsmoments kann nach der Formel (2.12) berechnetwerden. Die durchschnittliche Bremsleistung kann durchDivision der Bremsenergie durch die Zeit errechnet werden.Dieser Wert liegt, da die Lastcharakteristik des Lüfters nichtberücksichtigt wird, sehr auf sicherer Seite.
Berechnung der Bremsleistung
Eine natürliche Bremskurve kann auf Basis der Leistungund der Drehzahl am Nennpunkt leicht anhand der Formeln(2.5) und (2.6) gezeichnet werden.
Natürliche Bremskurve bei quadratischer Last
Leis
tung
[10
* k
W],
Zei
t [s
], D
rehm
omen
t [1
00 *
Nm
]Z
eit
[s]
Bremsleistung[kW] * 10
Bremsmoment[Nm] * 100
Drehzahl [U/min]
Bremszeit
Natürliche Bremskurve bei quadratischer Last
Drehzahl [U/min]
11Technische Anleitung Nr. 8 - Elektrisches Bremsen
,
,
Berechnung der Bremsleistung
Wenn der Bremschopper für den Wert von 16,4 kWdimensioniert ist und das Motorbremsvermögen bei einerhöheren Drehzahl weit über 16,4 kW liegt, muss der Antriebmit einer Überwachungsfunktion für die maximaleRückspeiseleistung ausgestattet werden. Diese Funktionist bei einigen Antrieben verfügbar.
Wenn die Dimensionierung des Bremschoppers für einebestimmte Bremszeit optimiert werden soll, hilft Abbildung(2.3) weiter. Die Drehzahl fällt ohne zusätzliches Bremsenschnell von 1000 auf 500 U/min. Die natürlicheBremswirkung zu Beginn des Bremsvorgangs ist amgrößten. Dies bedeutet, dass der Motor zunächst nicht mitder obengenannten Leistung von 16 kW abgebremstwerden muss. Wie in Abbildung (2.3) dargestellt, fällt dieDrehzahl innerhalb von 10 Sekunden ohne zusätzlichesBremsen von 1000 U/min auf 500 U/min. Zu diesemZeitpunkt beträgt das Lastmoment nur 25 % desNennwertes und die in dem Lüfter gespeicherte kinetischeEnergie beträgt nur 25 % der Energie bei 1000 U/min. Wenndie für 1000 U/min. durchgeführte Berechnung mit500 U/min. wiederholt wird, zeigt sich, dass dieBremsleistung zum Erreichen einer Verzögerung von500 U/min auf 0 U/min ca. 8 kW beträgt. Wie schon in denvorangegangenen Berechnungen ist dies ein sicherer Wert,weil die von der Lastcharakteristik abhängige natürlicheBremskurve nicht berücksichtigt wird.
Zusammenfassend ergibt sich: das Ziel für eineVerzögerung von 1000 U/min auf 0 U/min in 20 Sekundenwird mit einem auf 8,2 kW dimensionierten Bremschopperund Widerstand erreicht. Wenn der Grenzwert des Antriebsfür die Rückspeisung auf 8,2 kW eingestellt wird, wird dieBremsleistung auf einen entsprechenden Wert gesetzt.
(2.12)
(2.13)
(2.14)
(2.15)
12 Technische Anleitung Nr. 8 - Elektrisches Bremsen
Es gibt grundsätzlich zwei Lasttypen: konstantes undquadratisches Lastmoment.
Applikation mit konstantem Drehmoment:
Die Charakteristik des Lastmoments hängt nicht von derDrehzahl ab. Das Lastmoment bleibt über den gesamtenDrehzahlbereich in etwa gleich.Die Leistung erhöht sich linear mit der Drehzahlerhöhungund umgekehrt.Typische Anwendungen mit konstantem Drehmoment:Krane, Aufzüge und Förderer.
Anwendung mit quadratischem Drehmoment:
Das Lastmoment erhöht sich auf das Quadrat derDrehzahl.Bei einer Erhöhung der Drehzahl erhöht sich die Leistungproportional zur dritten Potenz der Drehzahl.Typische Anwendungen mit quadratischemDrehmoment: Lüfter und Pumpen.
Bewertung der Bremsleistung:
Bei quadratischer Lastcharakteristik erfolgt eine schnellenatürliche Verzögerung von 50-100 % der Nenndreh-zahl. Dies sollte bei der Dimensionierung der benötigtenBremsleistung ausgenutzt werden.Das quadratische Lastmoment bedeutet, dass beiniedrigen Drehzahlen die natürliche Verzögerung imwesentlichen auf der Reibung beruht.Die Charakteristik bei konstantem Lastmoment ist einekonstante natürliche Verzögerung.Die Bremsleistung ist vom Drehmoment und der Drehzahlan einem festgelegten Betriebspunkt abhängig. DieDimensionierung des Bremschoppers entsprechendder Spitzenbremsleistung führt meistens zu einerÜberdimensionierung.Die Bremsleistung hängt nicht vom Motor-Nennstrom(Drehmoment) oder der Leistung an sich ab.Wenn das Lastmoment zu Beginn des Bremsvorgangsentfällt, ist die natürliche Bremswirkung gering. Daswirkt sich auf die Dimensionierung des Bremschoppersaus.
2.2.3Zusammenfas-sung undSchlussfolge-rungen
Berechnung der Bremsleistung
13Technische Anleitung Nr. 8 - Elektrisches Bremsen
3.1 Motor-flussbremsung
Der moderne AC-Antrieb besteht aus einemEingangsgleichrichter, der die Wechselspannung inGleichspannung umwandelt, die in den DC-Kondensatorengespeichert wird. Der Wechselrichter wandelt dieGleichspannung in eine Wechselspannung zurück, die denAC-Motor mit der gewünschten Frequenz versorgt. Diebenötigte Prozessenergie fließt durch den Gleichrichter, dieGleichspannungs-Sammelschiene und den Wechselrichterzum Motor. Die in den DC-Kondensatoren gespeicherteEnergie ist sehr gering verglichen mit der benötigtenEnergie, d.h. der Gleichrichter muss ständig die vom Motorbenötigte Leistung plus die im Antriebssystemauftretenden Verluste liefern.
Die Flussbremsung ist ein auf den Motorverlustenbasierendes Verfahren. Wenn das Antriebssystemabgebremst werden muss, wird der Motorfluss und somitauch der im Motor verwendete Magnetisierungsstromerhöht. Die Flussregelung kann auf einfache Weise durchdie direkte Drehmomentregelung erreicht werden (siehehierzu Technische Anleitung Nr. 1). Mit DTC wird derWechselrichter direkt geregelt, damit das erforderlicheDrehmoment und der Fluss für den Motor erreicht werden.Während der Flussbremsung befindet sich der Motor in derDTC-Regelung, die sicherstellt, dass der Motor entlang derfestgelegten Drehzahlrampe abgebremst wird. DiesesVerfahren unterscheidet sich völlig von der häufig inAntrieben verwendeten Gleichstrombremsung. BeimVerfahren der Gleichstrombremsung wird der Gleichstromin den Motor eingespeist, wobei während desBremsvorgangs die Regelung des Motorflusses verlorengeht. Die auf DTC basierende Flussbremsung ermöglichtes, den Motor bei Bedarf schnell vom Bremsen aufmotorische Leistung umzuschalten.
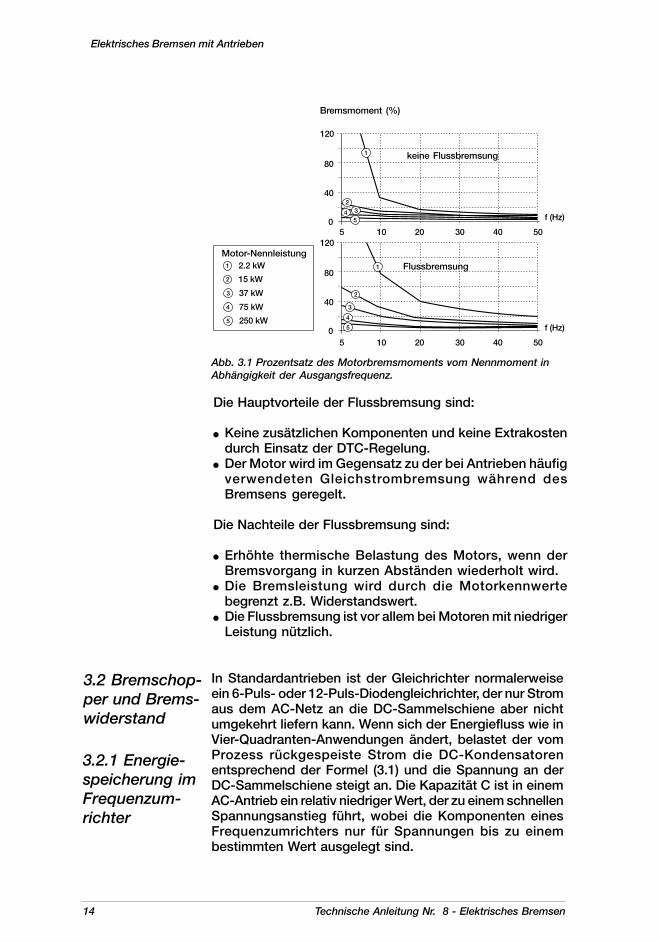
Bei Flussbremsung bedeutet der erhöhte Strom höhereVerluste im Motor. Die Bremsleistung wird deshalb aucherhöht, obwohl die an den Frequenzumrichter abgegebeneBremsleistung nicht erhöht wird. Der erhöhte Strom erzeugtin den Motorwiderständen erhöhte Verluste. Je höher derWiderstandswert ist, desto höher ist dieBremsenergieaufnahme im Motor. In Motoren mit geringerLeistung (unter 5 kW) ist der Widerstand des Motors inRelation zum Nennstrom des Motors relativ groß. Je höherdie Leistung oder die Spannung des Motors, desto geringerist der Widerstand des Motors im Hinblick auf denMotorstrom. Mit anderen Worten die Flussbremsung ist inMotoren mit niedriger Leistung am effektivsten.
Kapitel 3 - Elektrisches Bremsen mit Antrieben
14 Technische Anleitung Nr. 8 - Elektrisches Bremsen
Die Hauptvorteile der Flussbremsung sind:
Keine zusätzlichen Komponenten und keine Extrakostendurch Einsatz der DTC-Regelung.Der Motor wird im Gegensatz zu der bei Antrieben häufigverwendeten Gleichstrombremsung während desBremsens geregelt.
Die Nachteile der Flussbremsung sind:
Erhöhte thermische Belastung des Motors, wenn derBremsvorgang in kurzen Abständen wiederholt wird.Die Bremsleistung wird durch die Motorkennwertebegrenzt z.B. Widerstandswert.Die Flussbremsung ist vor allem bei Motoren mit niedrigerLeistung nützlich.
Abb. 3.1 Prozentsatz des Motorbremsmoments vom Nennmoment inAbhängigkeit der Ausgangsfrequenz.
3.2 Bremschop-per und Brems-widerstand
3.2.1 Energie-speicherung imFrequenzum-richter
In Standardantrieben ist der Gleichrichter normalerweiseein 6-Puls- oder 12-Puls-Diodengleichrichter, der nur Stromaus dem AC-Netz an die DC-Sammelschiene aber nichtumgekehrt liefern kann. Wenn sich der Energiefluss wie inVier-Quadranten-Anwendungen ändert, belastet der vomProzess rückgespeiste Strom die DC-Kondensatorenentsprechend der Formel (3.1) und die Spannung an derDC-Sammelschiene steigt an. Die Kapazität C ist in einemAC-Antrieb ein relativ niedriger Wert, der zu einem schnellenSpannungsanstieg führt, wobei die Komponenten einesFrequenzumrichters nur für Spannungen bis zu einembestimmten Wert ausgelegt sind.
Elektrisches Bremsen mit Antrieben
Bremsmoment (%)
keine Flussbremsung
FlussbremsungMotor-Nennleistung
15Technische Anleitung Nr. 8 - Elektrisches Bremsen
3.2.2 Arbeits-weise desBremschoppers
Um einen übermäßigen Anstieg der Spannung der DC-Sammelschiene zu verhindern, gibt es zwei Möglichkeiten:Der Wechselrichter selbst verhindert den Energiefluss vomProzess zum Frequenzumrichter. Dies erfolgt durchBegrenzung des Bremsmoments, um die DC-Sammelschienenspannung konstant zu halten. DiesesMerkmal der Überspannungsregelung ist in den meistenmodernen Antrieben eine Standardausstattung. Dasbedeutet jedoch, dass das Bremsprofil der Maschine nichtder vom Benutzer vorgegebenen Drehzahlrampeentspricht.
Die Energiespeicherkapazität des Wechselrichters istzumeist sehr klein. Bei einem 90 kW Antrieb beispielsweiseliegt die typische Kapazität bei 5 mF. Wenn der Antrieb mit400 V AC gespeist wird, hat die DC-Sammelschiene denWert von 1,35 * 400 = 565 V DC. Angenommen dieKondensatoren sind für maximal 735 V DC ausgelegt, dannkann die Zeit, in der 90 kW Nennleistung in den DC-Kondensator eingespeist werden kann, wie folgt, berechnetwerden:
Dieser Wertebereich gilt generell für alle modernenNiederspannungs-AC-Antriebe unabhängig von ihrerLeistung. In der Praxis bedeutet das, dass derÜberspannungsregler und die Drehmomentregelung desAC-Motors sehr schnell sein müssen. Außerdem muss dieAktivierung der Rückspeisung oder des Bremschoppers inAntrieben sehr schnell sein.
Die andere Möglichkeit, die Sammelschienengleich-spannung zu begrenzen, ist, die Bremsenergie über einenBremschopper zum Bremswiderstand zu leiten. DerBremschopper ist ein elektrischer Schalter, der dieSammelschienengleichspannung in einen Widerstand leitet,in dem die Bremsenergie in Wärme umgewandelt wird. DieBremschopper werden automatisch aktiviert, wenn derIstwert der Sammelschienengleichspannung einenbestimmten Grenzwert überschreitet, der von derNennspannung des Wechselrichters abhängig ist.
Elektrisches Bremsen mit Antrieben
(3.1)
(3.2)
(3.3)
16 Technische Anleitung Nr. 8 - Elektrisches Bremsen
Die Hauptvorteile der Lösung mit Bremschopper undWiderstand sind:
Einfacher elektrischer Aufbau und bewährte Technik.Geringe Investitionen für Chopper und Widerstand.Der Chopper arbeitet auch noch nach Ausfall derWechselspannung. Bremsen bei Netzausfall ist z.B. beiAufzügen oder anderen sicherheitsrelevantenAnwendungen notwendig.
Die wesentlichen Nachteile des Bremschoppers und desWiderstandes sind:
Die Bremsenergie geht verloren, wenn erwärmte Luft nichtanders genutzt werden kann.
Der Bremschopper und die Widerstände benötigenzusätzlich Platz.
Zusätzliche Investitionen im Kühl- und Wärme-rückgewinnungssystem können erforderlich sein.
Bremschopper werden meistens für einen bestimmtenZyklus dimensioniert z.B. 100 % Leistung 1/10 Minuten,lange Bremszeiten erfordern eine genauere Dimen-sionierung des Bremschoppers.Erhöhtes Brandrisiko aufgrund des heißen Wider-standes und eventuell in der Umgebungsluft vor-handene Staubpartikel und chemische Stoffe.Die während des Bremsens erhöhte Sammel-schienengleichspannung verursacht eine erhöhteBelastung der Motorisolation.
Wann ist der Einsatz von Bremschoppern richtig:
Gelegentlich benötigter Bremszyklus.
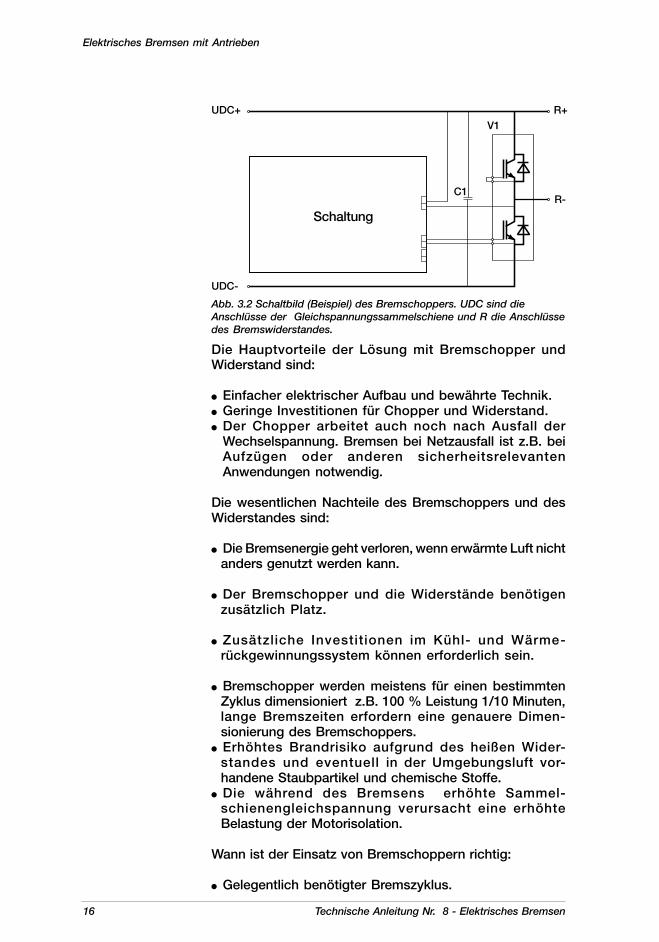
Abb. 3.2 Schaltbild (Beispiel) des Bremschoppers. UDC sind dieAnschlüsse der Gleichspannungssammelschiene und R die Anschlüssedes Bremswiderstandes.
Elektrisches Bremsen mit Antrieben
UDC+
UDC-
R+
R-
V1
C1
Schaltung
17Technische Anleitung Nr. 8 - Elektrisches Bremsen
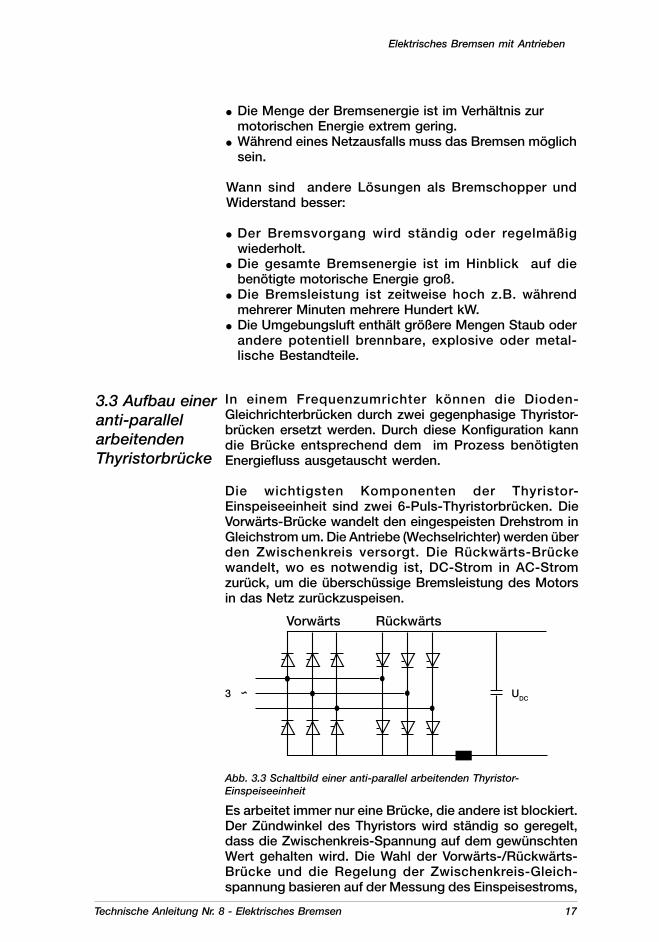
Es arbeitet immer nur eine Brücke, die andere ist blockiert.Der Zündwinkel des Thyristors wird ständig so geregelt,dass die Zwischenkreis-Spannung auf dem gewünschtenWert gehalten wird. Die Wahl der Vorwärts-/Rückwärts-Brücke und die Regelung der Zwischenkreis-Gleich-spannung basieren auf der Messung des Einspeisestroms,
3.3 Aufbau eineranti-parallelarbeitendenThyristorbrücke
In einem Frequenzumrichter können die Dioden-Gleichrichterbrücken durch zwei gegenphasige Thyristor-brücken ersetzt werden. Durch diese Konfiguration kanndie Brücke entsprechend dem im Prozess benötigtenEnergiefluss ausgetauscht werden.
Die wichtigsten Komponenten der Thyristor-Einspeiseeinheit sind zwei 6-Puls-Thyristorbrücken. DieVorwärts-Brücke wandelt den eingespeisten Drehstrom inGleichstrom um. Die Antriebe (Wechselrichter) werden überden Zwischenkreis versorgt. Die Rückwärts-Brückewandelt, wo es notwendig ist, DC-Strom in AC-Stromzurück, um die überschüssige Bremsleistung des Motorsin das Netz zurückzuspeisen.
Abb. 3.3 Schaltbild einer anti-parallel arbeitenden Thyristor-Einspeiseeinheit
Elektrisches Bremsen mit Antrieben
Die Menge der Bremsenergie ist im Verhältnis zurmotorischen Energie extrem gering.Während eines Netzausfalls muss das Bremsen möglichsein.
Wann sind andere Lösungen als Bremschopper undWiderstand besser:
Der Bremsvorgang wird ständig oder regelmäßigwiederholt.Die gesamte Bremsenergie ist im Hinblick auf diebenötigte motorische Energie groß.Die Bremsleistung ist zeitweise hoch z.B. währendmehrerer Minuten mehrere Hundert kW.Die Umgebungsluft enthält größere Mengen Staub oderandere potentiell brennbare, explosive oder metal-lische Bestandteile.
Vorwärts Rückwärts
UDC3
18 Technische Anleitung Nr. 8 - Elektrisches Bremsen
der Einspeisespannung und der Zwischenkreis-Spannung.Die DC-Drosselspule filtert die Stromspitzen aus demZwischenkreis heraus.
Die Hauptvorteile der anti-parallel arbeitendenThyristorbrücke sind:
Bewährte Technik.Geringere Investitionskosten als bei der IGBT-Lösung.Die Gleichspannung kann auf einen niedrigeren Wert alsdas Netz geregelt werden. Bei bestimmten Spezialan-wendungen kann das ein Vorteil sein.
Die wesentlichen Nachteile der anti-parallel arbeitendenThyristorbrücke sind:
Die DC-Sammelschienenspannung ist immer niedriger alsdie AC-Einspeisespannung, um eine Kommutations-reserve zu erhalten. Somit bleibt die in den Motoreingespeiste Spannung niedriger als dieWechselspannung der Einspeiseeinheit. Das kann durchEinsatz eines Step-up-Spartransformators in derEinspeisung umgangen werden.Bei Ausfall der AC-Einspeisung besteht die Gefahr, dassdie Sicherung aufgrund eines Ausfalls der Thyristor-kommutierung durchbrennt.Cosφ ändert sich mit der Belastung.Die Oberschwingungen sind größer als in rückspeise-fähigen IGBT-Einheiten.Die Verzerrung fließt durch andere Netzimpedanzenund kann bei anderen Geräten, die an dasselbe Netzangeschlossen sind, eine unerwünschte Verzerrung derSpannung verursachen.Bei Netzausfall besteht keine Bremsmöglichkeit.
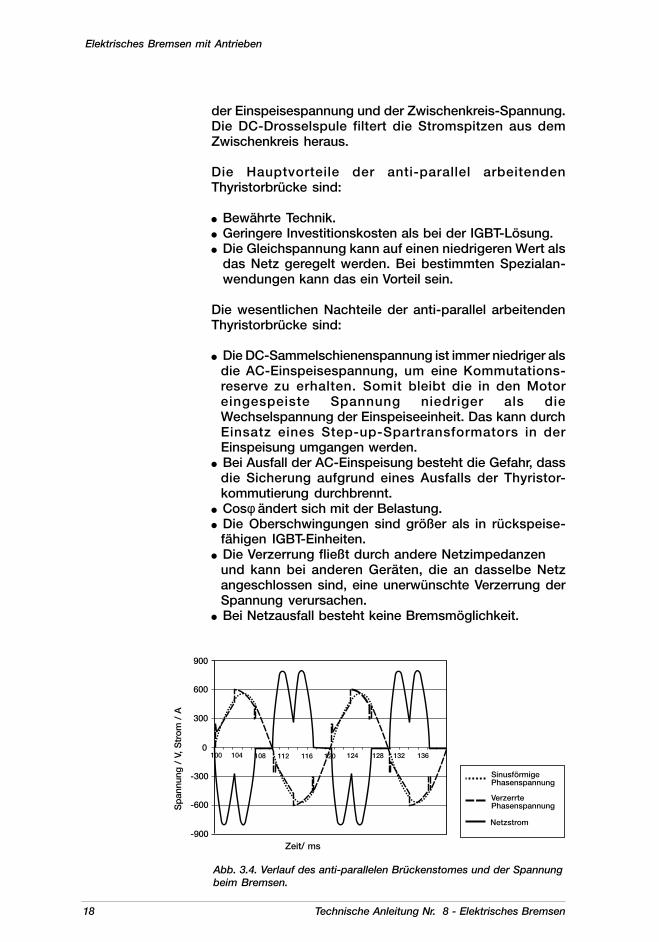
Abb. 3.4. Verlauf des anti-parallelen Brückenstomes und der Spannungbeim Bremsen.
Elektrisches Bremsen mit Antrieben
Sp
annu
ng /
V, S
trom
/ A
SinusförmigePhasenspannung
VerzerrtePhasenspannung
Netzstrom
Zeit/ ms
19Technische Anleitung Nr. 8 - Elektrisches Bremsen
,
,
,
,
,
,
,
Netz Netz2*U=
U
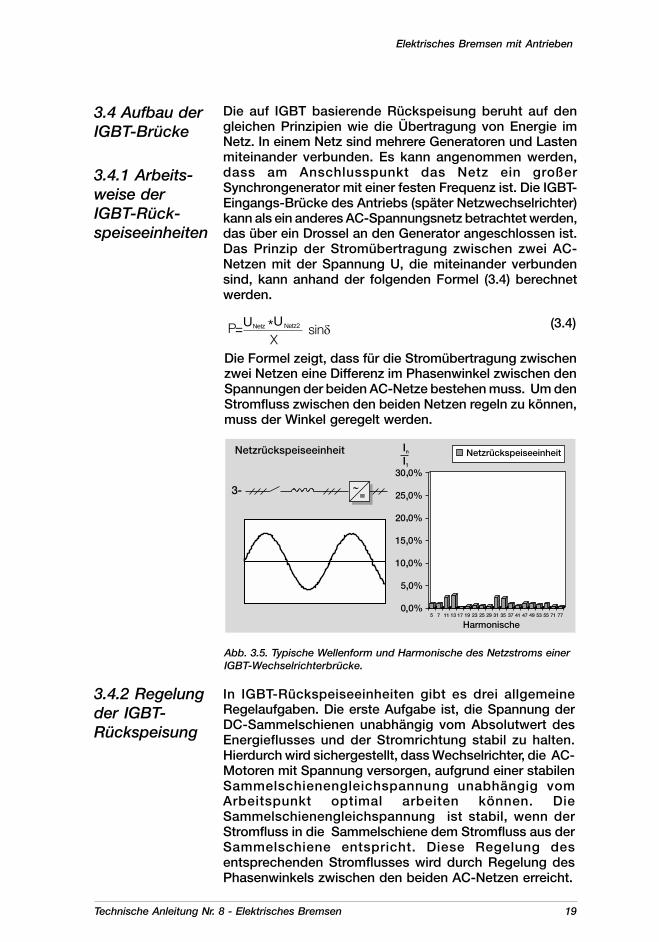
3.4 Aufbau derIGBT-Brücke
3.4.1 Arbeits-weise derIGBT-Rück-speiseeinheiten
Die auf IGBT basierende Rückspeisung beruht auf dengleichen Prinzipien wie die Übertragung von Energie imNetz. In einem Netz sind mehrere Generatoren und Lastenmiteinander verbunden. Es kann angenommen werden,dass am Anschlusspunkt das Netz ein großerSynchrongenerator mit einer festen Frequenz ist. Die IGBT-Eingangs-Brücke des Antriebs (später Netzwechselrichter)kann als ein anderes AC-Spannungsnetz betrachtet werden,das über ein Drossel an den Generator angeschlossen ist.Das Prinzip der Stromübertragung zwischen zwei AC-Netzen mit der Spannung U, die miteinander verbundensind, kann anhand der folgenden Formel (3.4) berechnetwerden.
Die Formel zeigt, dass für die Stromübertragung zwischenzwei Netzen eine Differenz im Phasenwinkel zwischen denSpannungen der beiden AC-Netze bestehen muss. Um denStromfluss zwischen den beiden Netzen regeln zu können,muss der Winkel geregelt werden.
Abb. 3.5. Typische Wellenform und Harmonische des Netzstroms einerIGBT-Wechselrichterbrücke.
3.4.2 Regelungder IGBT-Rückspeisung
In IGBT-Rückspeiseeinheiten gibt es drei allgemeineRegelaufgaben. Die erste Aufgabe ist, die Spannung derDC-Sammelschienen unabhängig vom Absolutwert desEnergieflusses und der Stromrichtung stabil zu halten.Hierdurch wird sichergestellt, dass Wechselrichter, die AC-Motoren mit Spannung versorgen, aufgrund einer stabilenSammelschienengleichspannung unabhängig vomArbeitspunkt optimal arbeiten können. DieSammelschienengleichspannung ist stabil, wenn derStromfluss in die Sammelschiene dem Stromfluss aus derSammelschiene entspricht. Diese Regelung desentsprechenden Stromflusses wird durch Regelung desPhasenwinkels zwischen den beiden AC-Netzen erreicht.
Elektrisches Bremsen mit Antrieben
Netzrückspeiseeinheit Netzrückspeiseeinheit
Harmonische
(3.4)
20 Technische Anleitung Nr. 8 - Elektrisches Bremsen
Das zweite Regelziel ist die Minimierung des benötigtenEinspeisestroms, d.h. mit Cosϕ = 1,0 zu arbeiten. Dies wirddurch die Regelung der Ausgangsspannung des Netzwech-selrichters erreicht. Bei bestimmten Anwendungen ist eserwünscht, dass der IGBT-Netzwechselrichter auch alsinduktive oder kapazitive Last arbeitet.
Das dritte Regelziel ist die Minimierung der Oberschwin-gungen des Einspeisestroms. Die Hauptkriterien bei derPlanung sind die Impedanz der Drossel und ein geeignetesRegelverfahren.
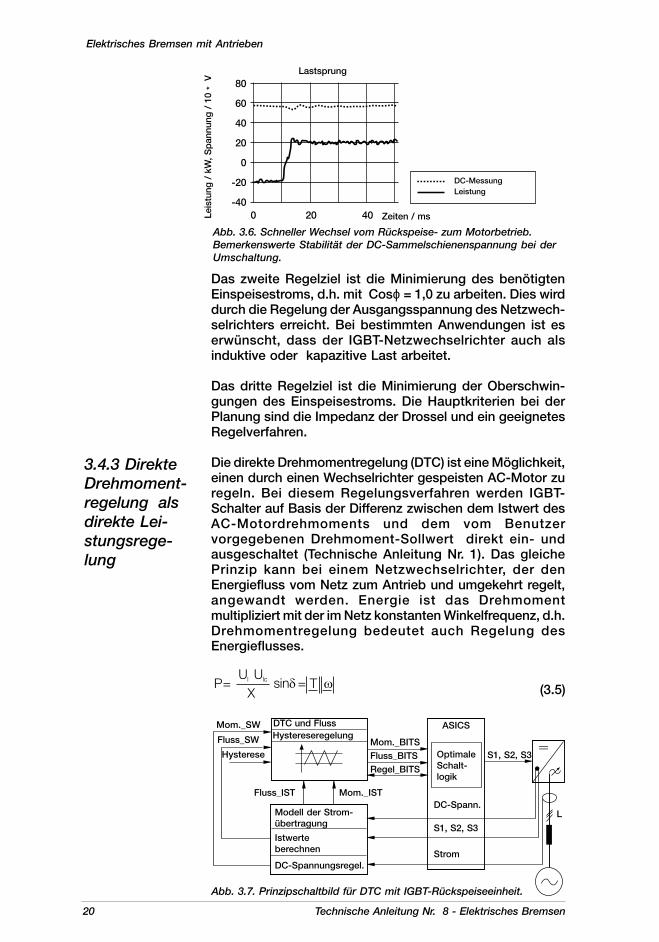
Die direkte Drehmomentregelung (DTC) ist eine Möglichkeit,einen durch einen Wechselrichter gespeisten AC-Motor zuregeln. Bei diesem Regelungsverfahren werden IGBT-Schalter auf Basis der Differenz zwischen dem Istwert desAC-Motordrehmoments und dem vom Benutzervorgegebenen Drehmoment-Sollwert direkt ein- undausgeschaltet (Technische Anleitung Nr. 1). Das gleichePrinzip kann bei einem Netzwechselrichter, der denEnergiefluss vom Netz zum Antrieb und umgekehrt regelt,angewandt werden. Energie ist das Drehmomentmultipliziert mit der im Netz konstanten Winkelfrequenz, d.h.Drehmomentregelung bedeutet auch Regelung desEnergieflusses.
3.4.3 DirekteDrehmoment-regelung alsdirekte Lei-stungsrege-lung
Elektrisches Bremsen mit Antrieben
Abb. 3.6. Schneller Wechsel vom Rückspeise- zum Motorbetrieb.Bemerkenswerte Stabilität der DC-Sammelschienenspannung bei derUmschaltung.
Zeiten / ms
DC-MessungLeistung
Leis
tung
/ k
W, S
pan
nung
/ 1
0 *
V
Lastsprung
Mom._SW DTC und FlussHystereseregelungFluss_SW
HystereseMom._BITSFluss_BITSRegel_BITS
S1, S2, S3OptimaleSchalt-logik
ASICS
DC-Spann.
S1, S2, S3
Strom
Fluss_IST Mom._IST
Modell der Strom-übertragung
Istwerteberechnen
DC-Spannungsregel.
L
(3.5)
Abb. 3.7. Prinzipschaltbild für DTC mit IGBT-Rückspeiseeinheit.
21Technische Anleitung Nr. 8 - Elektrisches Bremsen
Zeit / ms
Gleichspannung Istwert
Gleichspannung Sollwert
Sp
annu
ng /
V
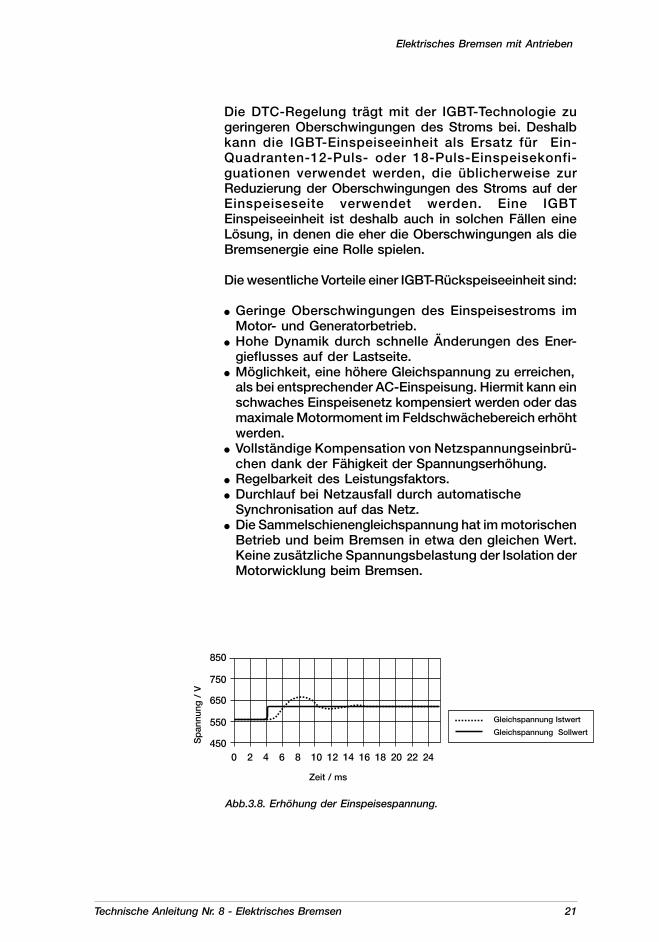
Die DTC-Regelung trägt mit der IGBT-Technologie zugeringeren Oberschwingungen des Stroms bei. Deshalbkann die IGBT-Einspeiseeinheit als Ersatz für Ein-Quadranten-12-Puls- oder 18-Puls-Einspeisekonfi-guationen verwendet werden, die üblicherweise zurReduzierung der Oberschwingungen des Stroms auf derEinspeiseseite verwendet werden. Eine IGBTEinspeiseeinheit ist deshalb auch in solchen Fällen eineLösung, in denen die eher die Oberschwingungen als dieBremsenergie eine Rolle spielen.
Die wesentliche Vorteile einer IGBT-Rückspeiseeinheit sind:
Geringe Oberschwingungen des Einspeisestroms imMotor- und Generatorbetrieb.Hohe Dynamik durch schnelle Änderungen des Ener-gieflusses auf der Lastseite.Möglichkeit, eine höhere Gleichspannung zu erreichen,als bei entsprechender AC-Einspeisung. Hiermit kann einschwaches Einspeisenetz kompensiert werden oder dasmaximale Motormoment im Feldschwächebereich erhöhtwerden.Vollständige Kompensation von Netzspannungseinbrü-chen dank der Fähigkeit der Spannungserhöhung.Regelbarkeit des Leistungsfaktors.Durchlauf bei Netzausfall durch automatischeSynchronisation auf das Netz.Die Sammelschienengleichspannung hat im motorischenBetrieb und beim Bremsen in etwa den gleichen Wert.Keine zusätzliche Spannungsbelastung der Isolation derMotorwicklung beim Bremsen.
Abb.3.8. Erhöhung der Einspeisespannung.
Elektrisches Bremsen mit Antrieben
22 Technische Anleitung Nr. 8 - Elektrisches Bremsen
,Einspeisung
Einspeisung
IU*
Die Festlegung des Einspeisestroms der IGBT-Einheitbasiert auf der benötigten Leistung. Angenommen diebenötigte Motorwellenleistung beträgt 130 kW und dieBremsleistung 100 kW. Zur Dimensionierung der IGBT-Einspeiseeinheit wird der Maximalwert der Motor- oderBremsleistung gewählt, in diesem Fall 130 kW. DieMotorspannung beträgt 400 V. Der Mindestwert für dasVersorgungsnetz ist 370 V.
In diesem Fall kann die Fähigkeit der Spannungserhöhunggenutzt werden; die Sammelschienengleichspannung wirdsoweit erhöht, als wäre die Einspeisewechselspannung400 V. Der benötigte Einspeisestrom wird auf Basis von370 V berechnet. Bei angenommenen 5 % Verlusten imMotor und Antrieb beträgt die vom Netz benötigteGesamtleistung 136,5 kW. Der Einspeisestrom kann anhandder folgenden Formel berechnet werden:
Die Auswahl der IGBT-Rückspeiseeinheit erfolgtausschließlich nach dem berechneten Stromwert.
3.4.4 Dimen-sionierung einerIGBT Rück-speiseeinheit
Elektrisches Bremsen mit Antrieben
Die wesentlichen Nachteile einer IGBT-Rückspeiseeinheitsind:
Höhere Investitionskosten.Bei Netzausfall ist Bremsen nicht möglich.Hochfrequente Spannungsoberschwingungen aufgrundder hohen Schaltfrequenz. Diese Spannungskomponen-ten von mehreren Kilohertz können kleine, in anderenelektrischen Geräten verwendete Kondensatoren erre-gen. Mit einem geeigneten Planung und entsprechenderAnordnung der Einspeisetransformator für die verschie-denen Geräte können diese Phänomene eliminiert wer-den.
Wann empfiehlt sich die Verwendung einer IGBT-Rückspeiseeinheit:
Das Bremsen erfolgt kontinuierlich oder wiederholt sichregelmäßig.Die Bremsleistung ist sehr hoch.Wenn eine Platzersparnis gegenüber der Lösung mitBremswiderständen erzielt werden kann.Wenn die Grenzwerte der Netzoberschwingungen kritischsind.
(3.6)
23Technische Anleitung Nr. 8 - Elektrisches Bremsen
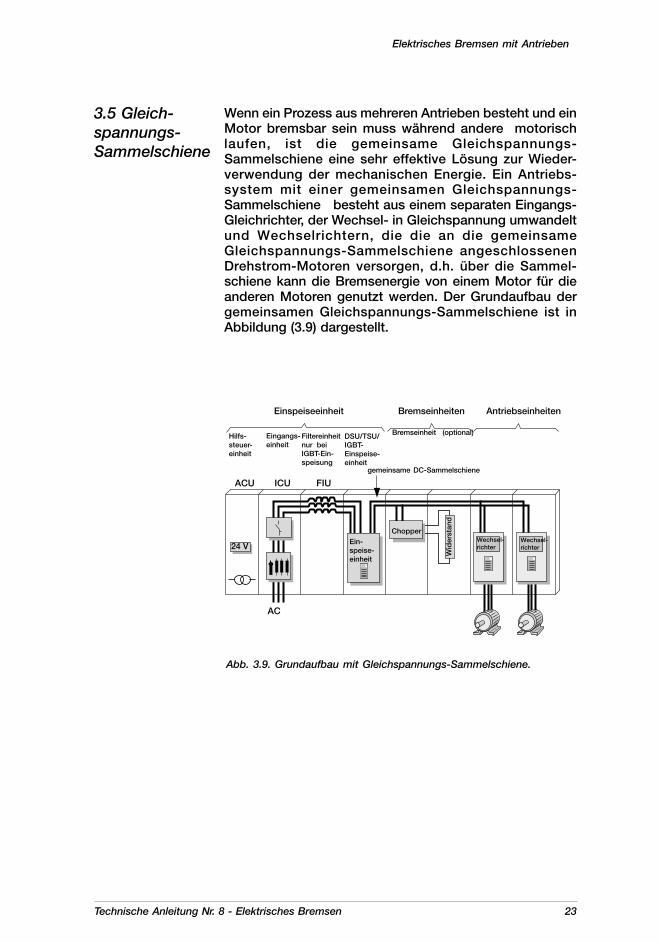
Abb. 3.9. Grundaufbau mit Gleichspannungs-Sammelschiene.
Elektrisches Bremsen mit Antrieben
Einspeiseeinheit Bremseinheiten Antriebseinheiten
Hilfs-steuer-einheit
ACU ICU FIU
24 V
AC
Eingangs-einheit
Filtereinheitnur beiIGBT-Ein-speisung
DSU/TSU/IGBT-Einspeise-einheit
Bremseinheit (optional)
gemeinsame DC-Sammelschiene
Ein-speise-einheit
Chopper
Wid
erst
and
Wechsel-richter
Wechsel-richter
Wenn ein Prozess aus mehreren Antrieben besteht und einMotor bremsbar sein muss während andere motorischlaufen, ist die gemeinsame Gleichspannungs-Sammelschiene eine sehr effektive Lösung zur Wieder-verwendung der mechanischen Energie. Ein Antriebs-system mit einer gemeinsamen Gleichspannungs-Sammelschiene besteht aus einem separaten Eingangs-Gleichrichter, der Wechsel- in Gleichspannung umwandeltund Wechselrichtern, die die an die gemeinsameGleichspannungs-Sammelschiene angeschlossenenDrehstrom-Motoren versorgen, d.h. über die Sammel-schiene kann die Bremsenergie von einem Motor für dieanderen Motoren genutzt werden. Der Grundaufbau dergemeinsamen Gleichspannungs-Sammelschiene ist inAbbildung (3.9) dargestellt.
3.5 Gleich-spannungs-Sammelschiene
24 Technische Anleitung Nr. 8 - Elektrisches Bremsen
Elektrisches Bremsen mit Antrieben
Die Hauptvorteile des Einsatzes der Gleichspannungs-Sammelschiene sind:
Einfacher Ausgleich des Energieflusses zwischen denAntrieben.Geringe Systemverluste bei der Umwandlung derBremsenergie durch die Gleichspannungs-Sammelschiene.Selbst wenn die momentane Bremsleistung höher ist alsdie motorische Leistung brauchen der Bremschopper undder Widerstand nicht auf die volle Bremsleistungausgelegt zu werden.Wenn die Bremsleistung voraussichtlich über längereZeiträume benötigt wird, können mehrere Gleichrichterkombiniert werden.
Die wesentlichen Nachteile der Verwendung derGleichspannungs-Sammelschiene mit Ein-Quadrant-Gleichrichter sind:
Die benötigte motorische Leistung muss größeroder gleich der Bremsleistung sein.Bremschopper und -Widerstand werden benötigt, wenndie erforderliche Bremsleistung die motorische Leistungübersteigt.
Wann sollte eine Gleichspannungs-Sammelschiene mit Ein-Quadranten-Gleichrichter verwendet werden:
Bei einer größeren Anzahl von Antrieben.Die motorische Leistung ist immer größer als die Brems-leistung oder der Bremschopper benötigt nur eine geringeBremsleistung.
25Technische Anleitung Nr. 8 - Elektrisches Bremsen
Kosten Bremszeit (Std./Tag) Durchschnittl. Bremsleistung (kW)
Energiepreis (Euro/kWh)* *
* 365 (4.1)
Kapitel 4 - Lebensdauerkostenverschiedener Arten elektrischer Bremsung
Die Ermittlung der über die gesamte Lebensdaueranfallenden Kosten wird bei Investitionen inenergiesparende Produkte immer wichtiger. Mit AC-Antrieben werden Motordrehzahl und das Drehmomentgeregelt. Diese Grundfunktion der AC-Antriebe führt, imVergleich mit anderen Verfahren, zu einer Reduzierung desEnergieverbrauchs. In Pumpen- und Lüfteranwendungenwerden Bremsvorgänge selten benötigt. Moderne AC-Antriebe werden jedoch zunehmend in Anwendungeneingesetzt, bei denen das Bremsen notwendig ist.
Einige technische Kriterien wurden oben bereits genannt.Nachfolgend werden die ökonomischen Faktoren derverschiedenen Ansätze für das elektrische Bremsenuntersucht.
Die direkten Energiekosten können z.B. anhand der Ener-giepreise und der geschätzten Bremszeit und Leistung proTag berechnet werden. Der Energiepreis schwankt vonLand zu Land, es kann jedoch ein typischer Wert von0,05 Euro pro Kilowattstunde angesetzt werden.1 Euro ~ 1 USD. Die jährlichen Energiekosten können mitder folgenden Formel errechnet werden:
Beispiel: ein 100 kW Antrieb läuft pro Jahr 8000 Stundenund bremst stündlich 5 Minuten mit einer durchschnittlichenLeistung von 50 kW, d.h. 667 Stunden pro Jahr. Die jährlichanfallenden direkten Kosten für die Bremsenergie betragen1668 Euro.
Die für die verschiedenen Bremsverfahren benötigteAusrüstung variiert. Die Investitionskosten der folgendenKomponenten müssen bewertet werden.
Bremschopper:
Die zusätzlichen Investitionskosten von Bremschopperund Widerstand plus die Kosten für den zusätzlich vonden Komponenten benötigten Platz.
Die Investitionskosten für die zusätzlich benötigte Küh-lung des Bremschoppers.
4.1 Kalkulationder direktenEnergiekosten
4.2 Berechnungder Investitions-kosten
26 Technische Anleitung Nr. 8 - Elektrisches Bremsen
Start Ende)( (n
Start
_nEnde
)
Elektrische Bremsung mit Thyristor oder IGBT:
Die zusätzlichen Investitionskosten für die Thyristor-oder IGBT-Nutzbremsung im Vergleich mit den Kostendes gleichen Antriebs ohne elektrische Bremsung.
Gleichspannungs-Sammelschiene:
Die zusätzlichen Investitionskosten für denBremschopper und den Widerstand einschl. des fürdiese Komponenten benötigten Platzes bei einer Lösungmit gemeinsamer Gleichspannungs-Sammelschiene.Die Kostendifferenz bei der Lösung mit Gleichspan-nungs-Sammelschiene und der entsprechenden Lösungmit Einzelantrieben.
Die Berechnung der während der Lebensdauer anfallendenKosten unterstützt die rein ökonomische Investitions-entscheidung. Der Energiepreis sowie der Preis derAntriebe schwankt in den verschiedenen Ländern und istvon den Energieversorgern, der Unternehmensgröße, demZinssatz, der Laufzeit der Investition und der gesamtenmakroökonomischen Situation abhängig. Die in denfolgenden Beispielen angegebenen Preise dienen lediglichzur Veranschaulichung des Berechnungsprinzips.
Fall 1 - Gelegentliches Bremsen
Der folgende Anwendungsfall wird betrachtet:Die motorische Dauerleistung beträgt 200 kW bei einerWellendrehzahl von 1500 U/min. Bei einem Not-Halt-Befehlmuss die Anwendung innerhalb von 10 Sekundenherunterfahren. Die prozesstechnische Erfahrung zeigt,dass sich einmal pro Monat ein Not-Halt erreignet. DasMassenträgheitsmoment J des Antriebssystems beträgt122 kgm2. Bei Aktivierung des Not-Halts kann dasLastmoment vernachlässigt werden.
Berechnung des für den Motor benötigten Bremsmoments:
4.3 Berechnungder Lebens-dauerkosten
(4.2)
Lebensdauerkosten verschiedener Arten elektrischer Bremsung

27Technische Anleitung Nr. 8 - Elektrisches Bremsen
,
Brems, max.
Lebensdauerkosten verschiedener Arten elektrischer Bremsung
Das typische Drehmoment für einen Motor mit 200 kW,1500 U/min. beträgt ca. 1200 Nm. Ein herkömmlicher, voneinem Wechselrichter geregelter Drehstrom-Motor kannmit einem Drehmoment von 200 % des Nennwertes laufen.Um höhere Drehmomentwerte zu erreichen, wird einproportional höherer Motorstrom benötigt.Die Bremsleistung ist zu Beginn des Bremszyklus amgrößten.
Der Bremschopper und der Widerstand müssenunverzögert dem Strom für eine Leistung von 300 kWstandhalten. Die durchschnittliche Bremsleistung wirdnachfolgend berechnet.
Kosten der Widerstandsbremsung:Der benötigte Bremschopper ist für eine maximaleBremsleistung von 300 kW ausgelegt. Wenn der Antriebeine Leistungsbegrenzungsfunktion besitzt, kann derBremswiderstand auf 150,3 kW dimensioniert werden. Diezusätzlichen Kosten für den Bremschopper und denWiderstand betragen 4000 Euro.Der Bremswiderstand erfordert einen zusätzlichen Platzvon 0,4 m2 Bodenfläche. Die Kosten hierfür betragen500 Euro/m2.
Aufgrund des geringen Heizenergiebedarfs und derBremsung bei Not-Aus können zusätzliche Kosten für dieKühlung vernachlässigt werden.
Die gesamten zusätzlichen Investitionskosten betragen:
Bremschopper und Widerstand im Schrank eingebaut,4000 Euro.Platzbedarf 0,4 m2 * 500 Euro/m2, = 200 Euro.
(4.3)
(4.4)
(4.5)
28 Technische Anleitung Nr. 8 - Elektrisches Bremsen
,Kosten = 2,4 (Std./Tag Euro/kWh Euro
, ,Euro/kWh EuroKosten
Lebensdauerkosten verschiedener Arten elektrischer Bremsung
(4.6)
(4.7)
In diesem Fall können die Kosten für die Bremsenergievernachlässigt werden.
Kosten des 4Q-Antriebs:Die zusätzlichen Kosten einer entsprechenden Investitionfür elektrisches Bremsen mit anti-paralleler Thyristorbrückeim Vergleich mit einem Antrieb mit Bremschopper betragen7000 Euro. Wie erwartet, können die Energieeinsparungennicht als Argument zur Deckung der Kosten der zusätzlichbenötigten Investitionen herangezogen werden.
Fall 2 - Krananwendung
Folgender Anwendungsfall wird betrachtet:Kran mit einer Hubleistung von 100 kW. Der Kran benötigtim motorischen und generatorischen Betrieb die volleLeistung. Der längste Hub kann 3 Minuten dauern. Diedurchschnittliche Betriebsdauer für das Heben beträgt20 % über das Jahr.
Kosten der Widerstandsbremsung:Der Bremschopper und der Widerstand müssen für eineDauerbremsleistung von 100 kW mit einer maximalenBremszeit von 3 Minuten ausgelegt sein. Üblicherweise wirdder Bremschopper für eine Bremsdauer von 1 Minute alle10 Minuten dimensioniert.
Bremschopper und Widerstand in einen Schrankeingebaut kosten 7800 Euro.
Der mechanische Aufbau des Krans ermöglicht Schränkemit Bremschopper. Keine Kosten für zusätzlichenPlatzbedarf.
Es wird angenommen, dass der Kran 50 % der Betriebszeitgeneratorisch arbeitet, d.h. durchschnittlich 2,4 h/Tag. DieGesamtkosten der vernichteten Energie betragen pro Jahr:
Die Gesamtkosten der während eines Bremsvorgangsvernichteten Energie betragen:
29Technische Anleitung Nr. 8 - Elektrisches Bremsen
Lebensdauerkosten verschiedener Arten elektrischer Bremsung
Kosten des 4Q-Antriebs:Der IGBT-4Q-Antrieb wird für Krananwendungenempfohlen.
Die zusätzlichen Investitionskosten für elektrischesBremsen mit IGBT-Eingangsbrücke im Vergleich zu einemAntrieb mit Bremschopper betragen 4000 Euro.
Die Amortisierungsrechnung zeigt, dass eine zusätzlicheInvestition von 4000 Euro schon während des erstenBetriebsjahres eine Energieeinsparung in gleicher Höhebringt.
Fall 3 - Zentrifuge
Der folgende Anwendungsfall wird betrachtet:Zuckerzentrifuge mit 6-Pol-Motor, 160 kW Leistung. DerMotor benötigt für die Dauer von 30 Sekunden das volleDrehmoment, um die Charge auf die Maximaldrehzahlvon 1100 U/min zu beschleunigen, die Zentrifugeschleudert dann 30 Sekunden lang bei hoher DrehzahlFlüssigkeit aus der Charge. Wenn die Charge trockenist, bremst der Motor die Zentrifuge so schnell wiemöglich ab, um das Entleeren und Wiederbeschickenzu ermöglichen.
In einem Chargenzyklus sind die Beschickungs-,Zentrifugier- und Entleerungszeiten festgelegt, so dass dieeinzige Möglichkeit der Produktionssteigerung dieErhöhung der Beschleunigungs- und Verzögerungwerte ist.Das wird mit Hilfe eines IGBT-4Q-Antriebs erreicht, da dieZwischenkreis-Gleichspannung im Feldschwächungs-bereich (1000 bis 1100 U/min) für den Betrieb erhöht werdenkann. Damit können pro Zyklus 3 Sekunden gespart werden,wodurch sich die Zykluszeit von 110 Sekunden auf 107Sekunden verkürzt. Auf diese Weise kann der Durchsatz,also die Produktivität des Prozesses, gesteigert werden.Die Mehrkosten für IGBT betragen 10 %.
30 Technische Anleitung Nr. 8 - Elektrisches Bremsen
Kapitel 5 - Symbole und Definitionen
AC: Wechselstrom oder -spannung
B: Reibungskoeffizient
C: Konstante oder Koeffizient
Cosφ: Cosinus des elektrischen Winkels zwischen derGrundspannung und dem Grundschwingungsstrom
DC: Gleichstrom oder -spannung
DPF: Grundschwingungs-Verschiebungsfaktor definiertals Cosφ1, wobei φ1 der Phasenwinkel zwischendem aus der Einrichtung gezogenen Grundfrequ-enzstrom und der der Grundfrequenzkomponenteder Einspeisespannung ist.
I: Strom [Ampere, A]
J: Massenträgheitsmoment [kgm2]
n: Drehzahl [Umdrehungen pro Minute, U/min]
P: Leistung [Watt, W]
PF: Leistungsfaktor definiert als PF = P/S (Leistung/Voltampere) = I1 / Is * DPF (mit Sinusstrom ist PFgleich DPF).
T: Drehmoment (Newtonmeter, Nm)
t: Zeit
THD: Die gesamte nichtlineare Verzerrung im Strom wirddefiniert als:
wobei I1 der Effektivwert des Grundschwin-gungsstromes ist. Die THD in der Spannung kannauf ähnliche Weise berechnet werden.
(5.1)
31Technische Anleitung Nr. 8 - Elektrisches Bremsen
U: Spannung [V]
W: Energie [Joule, J]
ω: Winkeldrehzahl [Radiant/Sekunde, 1/s]
32 Technische Anleitung Nr. 8 - Elektrisches Bremsen
Kapitel 6 - Index
AAufzüge 12
BBremschopper 11, 12, 15, 16, 17,23, 24, 25, 26, 27Bremsleistung 7, 11, 12, 13, 15,17, 22, 23, 26
Ccosφ 7, 18, 29
DDC-Einspeisung, Bremsung 13Direkte Drehmomentregelung 13,20
EEin-Quadranten 5, 8, 21, 23Energiespeicherung 14, 15
FFlussbremsung 13, 14
GGleichrichter 13, 14, 17, 22, 23Gleichspannung 7Gleichspannungs-Sammelschiene 22, 23, 25
HHarmonische 18, 29
IIGBT 18, 19, 20, 21, 22, 24, 27,28Impedanz 18, 20
KKonstantmoment 8, 12Krane 12, 27
LLüfter 12
Nnatürliches Bremsen 10, 11, 12Netzwechselrichter 19, 20
OOberschwingungen 18, 29
PPumpen 12
Qquadratisches Moment 8, 12
TThyristorbrücke 17, 18, 26Trägheitsmoment 9, 10, 25, 29
UÜberdimensionierung 12Überspannungsregler 15
VVier-Quadranten 5
WWechselrichter 13, 15, 16, 19,20, 23, 25Wechselspannung 7
ZZentrifuge 27Zwei-Quadranten 5

33Technische Anleitung Nr. 8 - Elektrisches Bremsen

34 Technische Anleitung Nr. 8 - Elektrisches Bremsen

35Technische Anleitung Nr. 8 - Elektrisches Bremsen
ABB Automation Products GmbHStandard AntriebeDudenstrasse 44 - 46D - 68167 MannheimHotline Vertrieb 0180 - 33 22 400Fax 0621 381 1777Internet http://www.abb-drives.de
Cop
yrig
ht ©
AB
B A
utom
atio
n G
roup
Ltd
, 200
13B
FE 6
4456
211
R01
03
Änd
erun
gen
vorb
ehal
ten.
DE
16.0
3.20
01��
�����
������
������
�����