Embed Size (px)
Citation preview
Deckblatt
Welche Safety-Funktionen können mit der Interpolation an der fehler-sicheren Technologie-CPU genutzt werden?
Technologie-CPU
FAQ Februar 2011
Service & Support
Answers for industry.
Fragestellung
2 Safety-Funktionen bei Interpolation
V1.0, Beitrags-ID: 48205977
Dieser Beitrag stammt aus dem Service&Support Portal der Siemens AG, Sector Industry, Industry Automation and Drive Technologies. Es gelten die dort genannten Nutzungsbedingungen (www.siemens.com/nutzungsbedingungen).
Durch den folgenden Link gelangen Sie direkt zur Downloadseite dieses Dokuments.
http://support.automation.siemens.com/WW/view/de/48205977
Frage Welche Safety-Funktionen können mit der Interpolation an der fehlersicheren Technologie-CPU genutzt werden?
Antwort Folgen Sie zur umfassenden Beantwortung dieser Frage den in diesem Dokument aufgeführten Handlungsanweisungen und Hinweisen.
Inhaltsverzeichnis
Safety-Funktionen bei Interpolation V1.0, Beitrags-ID: 48205977 3
Inhaltsverzeichnis 1 Einführung.......................................................................................................... 4
1.1 Interpolation mit der Technologie-CPU................................................ 4 1.1.1 Übersicht .............................................................................................. 4 1.1.2 Kinematiken.......................................................................................... 4 1.1.3 Bahnobjekt ........................................................................................... 6 1.1.4 Technologiefunktionen zur Interpolation .............................................. 8 1.2 Safety-Funktionen des SINAMICS S120 ............................................. 8 1.2.1 Übersicht .............................................................................................. 8 1.2.2 Kategorien .......................................................................................... 10 1.2.3 Funktionsweise................................................................................... 11
2 Programmprinzip ............................................................................................. 12 2.1 Nutzung der Safety-Funktionen an einem Bahnobjekt ...................... 12 2.1.1 Grundsätzliches.................................................................................. 12 2.1.2 Empfohlene Safety-Funktionen.......................................................... 12 2.1.3 Safe Operating Stop (SOS)................................................................ 12 2.1.4 Safely-Limited Speed (SLS)............................................................... 13 2.1.5 Safe Speed Monitor (SSM) ................................................................ 14 2.2 Realisierung in der fehlersicheren Technologie-CPU ........................ 15 2.2.1 Funktionsprinzip ................................................................................. 15 2.2.2 Prinzip der Programmierung .............................................................. 15
3 Zusätzliche Hinweise....................................................................................... 18 3.1 SINAMICS-Parameter der Safety-Funktion „SOS“ ............................ 18 3.2 Parameterberechnung FB 482 „MC_GroupInterrupt“ ........................ 19 3.2.1 Prinzip................................................................................................. 19 3.2.2 Berechnung ........................................................................................ 20
1 Einführung
4 Safety-Funktionen bei Interpolation
V1.0, Beitrags-ID: 48205977
1 Einführung Die fehlersichere Technologie-CPU 317TF-2 DP vereint 3 CPU-Funktionalitäten in einem Gerät:
Standard SIMATIC-SPS
Fehlersichere SPS mit Distributed Safety
Motion Control Funktionalität
Ab der Version V4.2 von S7-Technology ist es möglich, mit der Technologie-CPU interpolierte Verfahrbewegungen auszuführen.
In den nachfolgenden Kapiteln sollen die Besonderheiten bei der Nutzung der in-terpolierten Verfahrbewegungen der Technologie-CPU im Zusammenhang mit den integrierten Sicherheitsfunktionen von Safety Integrated näher dargestellt werden.
Hinweis Das vorliegende Dokument bezieht sich auf die Nutzung der Safety Funktionen des Antriebssystems SINAMICS S120 im Zusammenhang mit der Technologie-CPU. Die Nutzung anderer Antriebssysteme, wie z.B. SINAMICS S110 oder SINAMICS G120 ist jedoch ebenso möglich.
1.1 Interpolation mit der Technologie-CPU
1.1.1 Übersicht
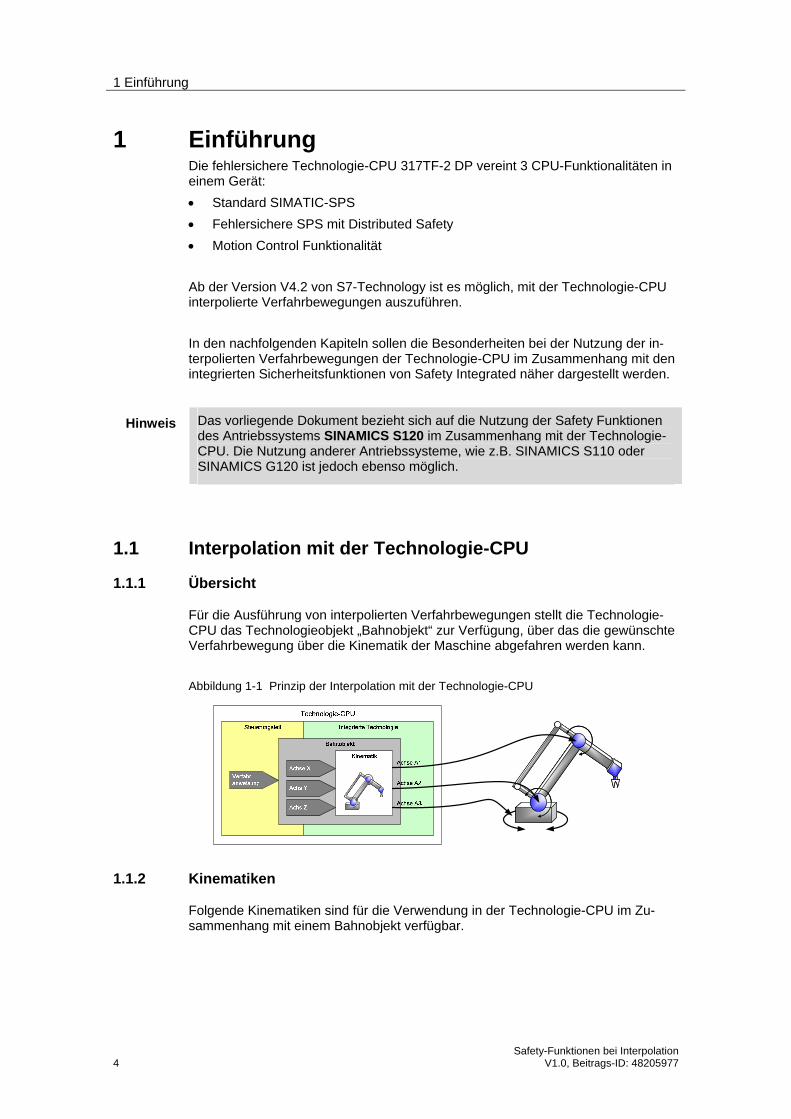
Für die Ausführung von interpolierten Verfahrbewegungen stellt die Technologie-CPU das Technologieobjekt „Bahnobjekt“ zur Verfügung, über das die gewünschte Verfahrbewegung über die Kinematik der Maschine abgefahren werden kann.
Abbildung 1-1 Prinzip der Interpolation mit der Technologie-CPU
1.1.2 Kinematiken
Folgende Kinematiken sind für die Verwendung in der Technologie-CPU im Zu-sammenhang mit einem Bahnobjekt verfügbar.
1 Einführung
Safety-Funktionen bei Interpolation V1.0, Beitrags-ID: 48205977 5
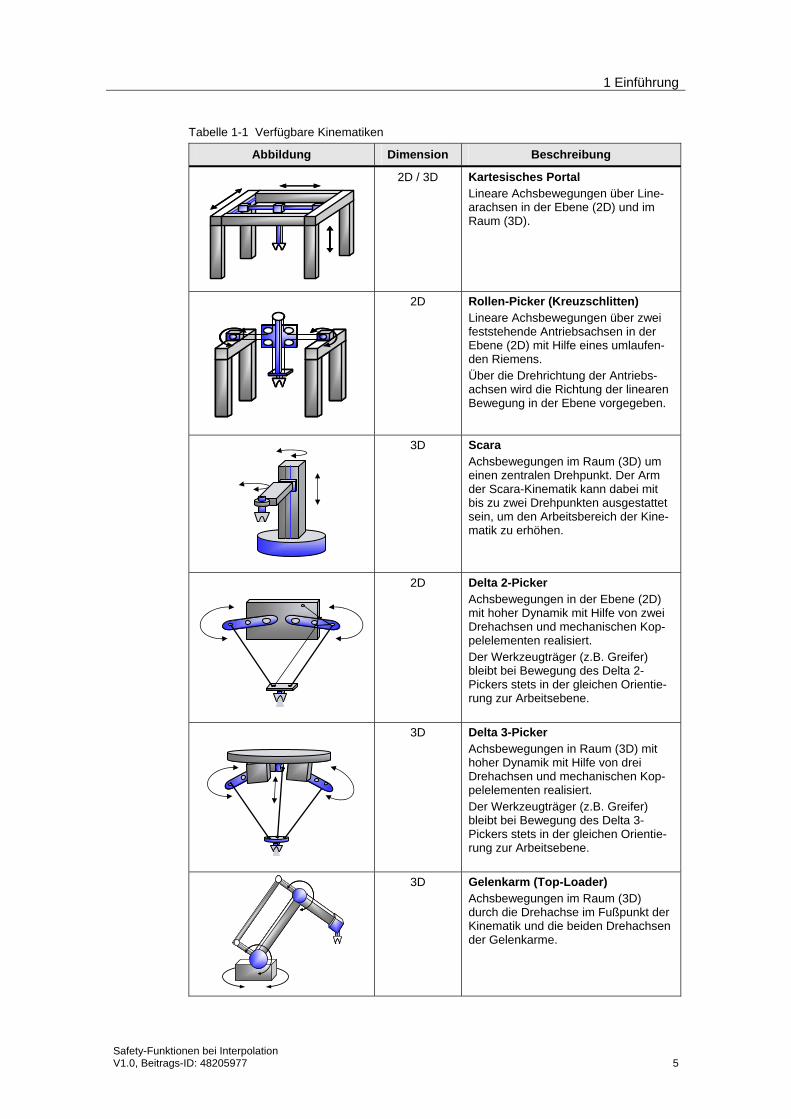
Tabelle 1-1 Verfügbare Kinematiken
Abbildung Dimension Beschreibung
2D / 3D Kartesisches Portal Lineare Achsbewegungen über Line-arachsen in der Ebene (2D) und im Raum (3D).
2D Rollen-Picker (Kreuzschlitten) Lineare Achsbewegungen über zwei feststehende Antriebsachsen in der Ebene (2D) mit Hilfe eines umlaufen-den Riemens. Über die Drehrichtung der Antriebs-achsen wird die Richtung der linearen Bewegung in der Ebene vorgegeben.
3D Scara Achsbewegungen im Raum (3D) um einen zentralen Drehpunkt. Der Arm der Scara-Kinematik kann dabei mit bis zu zwei Drehpunkten ausgestattet sein, um den Arbeitsbereich der Kine-matik zu erhöhen.
2D Delta 2-Picker Achsbewegungen in der Ebene (2D) mit hoher Dynamik mit Hilfe von zwei Drehachsen und mechanischen Kop-pelelementen realisiert. Der Werkzeugträger (z.B. Greifer) bleibt bei Bewegung des Delta 2-Pickers stets in der gleichen Orientie-rung zur Arbeitsebene.
3D Delta 3-Picker Achsbewegungen in Raum (3D) mit hoher Dynamik mit Hilfe von drei Drehachsen und mechanischen Kop-pelelementen realisiert. Der Werkzeugträger (z.B. Greifer) bleibt bei Bewegung des Delta 3-Pickers stets in der gleichen Orientie-rung zur Arbeitsebene.
3D Gelenkarm (Top-Loader) Achsbewegungen im Raum (3D) durch die Drehachse im Fußpunkt der Kinematik und die beiden Drehachsen der Gelenkarme.
1 Einführung
6 Safety-Funktionen bei Interpolation
V1.0, Beitrags-ID: 48205977
1.1.3 Bahnobjekt
Das Technologieobjekt „Bahnobjekt“ übernimmt die Koordination der Einzelachsen und vereinfacht so die Anwendung anspruchsvoller Kinematiken mit der Technolo-gie-CPU.
Die prinzipielle Funktion des Bahnobjekts bzw. die Verschaltung der Achsen ist im folgenden Bild dargestellt.
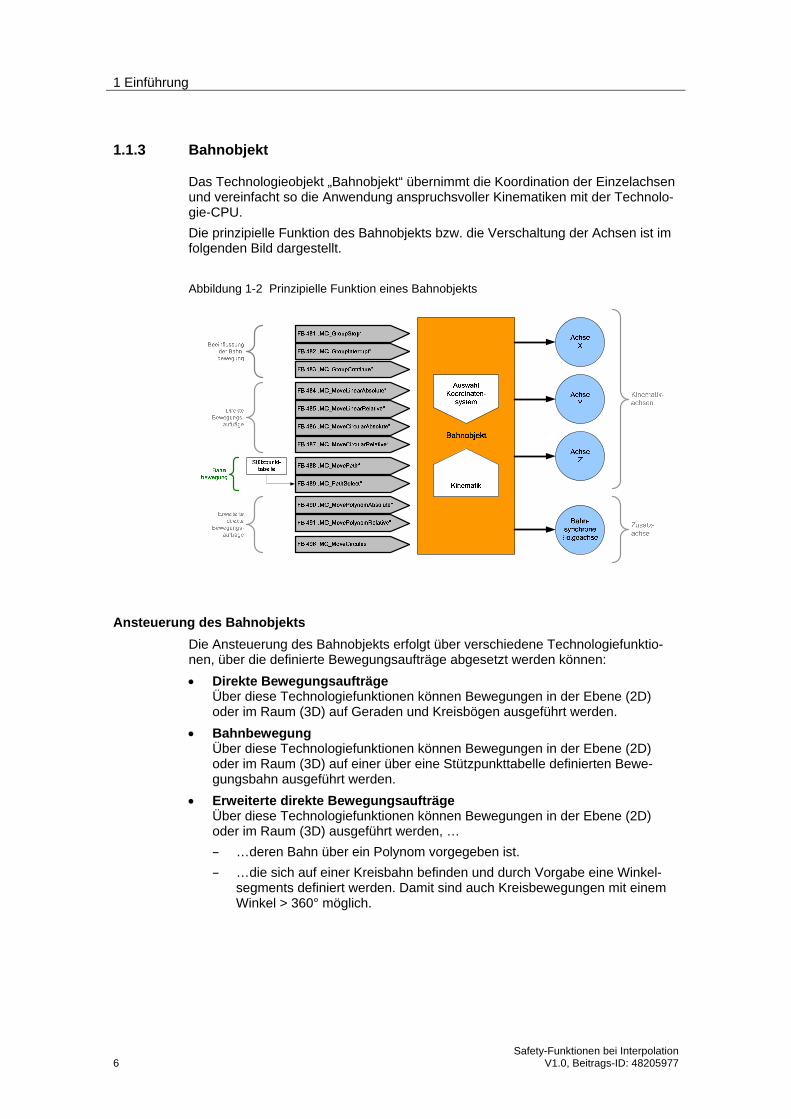
Abbildung 1-2 Prinzipielle Funktion eines Bahnobjekts
Ansteuerung des Bahnobjekts
Die Ansteuerung des Bahnobjekts erfolgt über verschiedene Technologiefunktio-nen, über die definierte Bewegungsaufträge abgesetzt werden können:
Direkte Bewegungsaufträge Über diese Technologiefunktionen können Bewegungen in der Ebene (2D) oder im Raum (3D) auf Geraden und Kreisbögen ausgeführt werden.
Bahnbewegung Über diese Technologiefunktionen können Bewegungen in der Ebene (2D) oder im Raum (3D) auf einer über eine Stützpunkttabelle definierten Bewe-gungsbahn ausgeführt werden.
Erweiterte direkte Bewegungsaufträge Über diese Technologiefunktionen können Bewegungen in der Ebene (2D) oder im Raum (3D) ausgeführt werden, …
– …deren Bahn über ein Polynom vorgegeben ist.
– …die sich auf einer Kreisbahn befinden und durch Vorgabe eine Winkel-segments definiert werden. Damit sind auch Kreisbewegungen mit einem Winkel > 360° möglich.
1 Einführung
Safety-Funktionen bei Interpolation V1.0, Beitrags-ID: 48205977 7
Stützpunkttabelle
Über die Stützpunkttabelle besteht die Möglichkeit, verschiedene über Stützpunkte beschriebene Bewegungsbahnen in das Bahnobjekt einzulesen. Die Stützpunkt-tabelle muss dazu für die Verwendung im Bahnobjekt mit der Technologiefunktion FB 489 „MC_PathSelect“ aufbereitet werden. Die Bahnbewegung kann dann über die Technologiefunktion FB 488 „MC_MovePath“ ausgeführt werden.
Achse X / Achse Y / Achse Z
Diese Achsen stellen die Einzelachsen der Kinematik dar und müssen zur Nutzung im Zusammenhang mit einem Bahnobjekt als Technologieobjekt „Bahnachse“ in S7T Config angelegt werden.
Bei zweidimensionalen Bahnobjekten kann die Zuordnung der Achsrichtungen (X, Y, Z) bei der Definition der Kinematik individuell ausgewählt werden. Über diese Auswahl wird dann auch die Bearbeitungsebene der Maschine (XY, XZ, YZ) fest-gelegt.
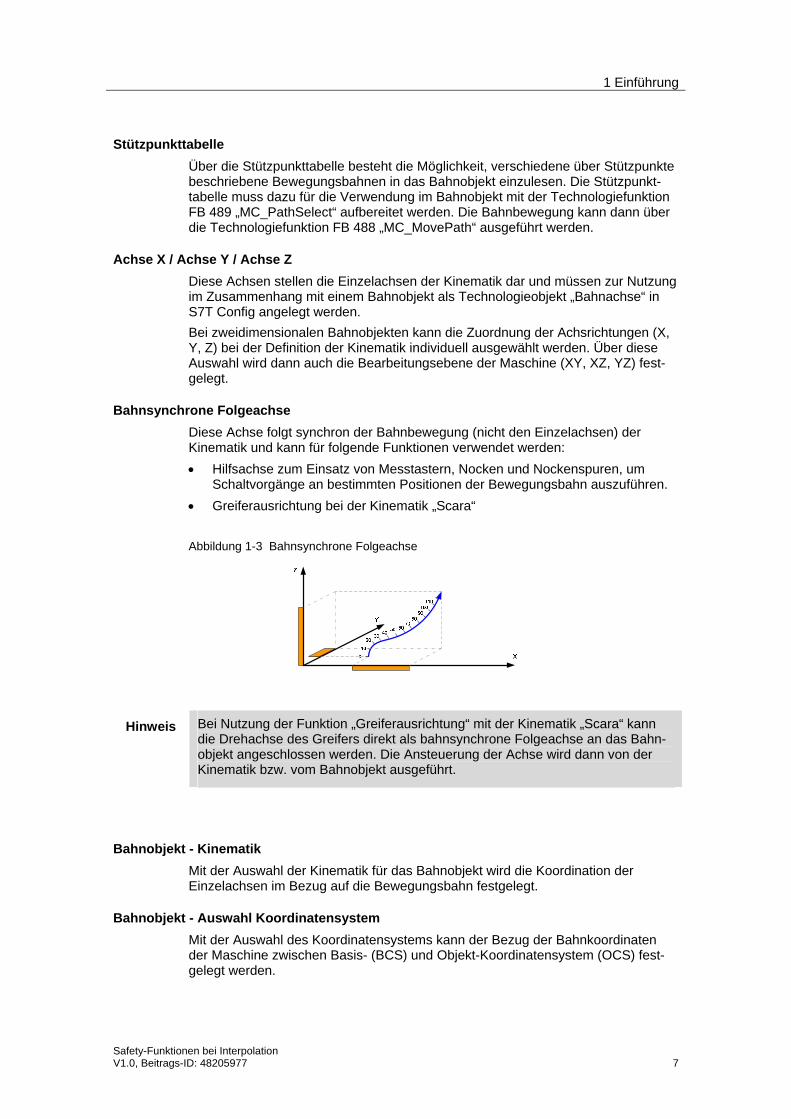
Bahnsynchrone Folgeachse
Diese Achse folgt synchron der Bahnbewegung (nicht den Einzelachsen) der Kinematik und kann für folgende Funktionen verwendet werden:
Hilfsachse zum Einsatz von Messtastern, Nocken und Nockenspuren, um Schaltvorgänge an bestimmten Positionen der Bewegungsbahn auszuführen.
Greiferausrichtung bei der Kinematik „Scara“
Abbildung 1-3 Bahnsynchrone Folgeachse
Hinweis Bei Nutzung der Funktion „Greiferausrichtung“ mit der Kinematik „Scara“ kann die Drehachse des Greifers direkt als bahnsynchrone Folgeachse an das Bahn-objekt angeschlossen werden. Die Ansteuerung der Achse wird dann von der Kinematik bzw. vom Bahnobjekt ausgeführt.
Bahnobjekt - Kinematik
Mit der Auswahl der Kinematik für das Bahnobjekt wird die Koordination der Einzelachsen im Bezug auf die Bewegungsbahn festgelegt.
Bahnobjekt - Auswahl Koordinatensystem
Mit der Auswahl des Koordinatensystems kann der Bezug der Bahnkoordinaten der Maschine zwischen Basis- (BCS) und Objekt-Koordinatensystem (OCS) fest-gelegt werden.
1 Einführung
8 Safety-Funktionen bei Interpolation
V1.0, Beitrags-ID: 48205977
1.1.4 Technologiefunktionen zur Interpolation
Für die Steuerung einer interpolierten Bahnbewegung mit Hilfe eines Bahnobjekts stehen folgende Technologiefunktionen zur Verfügung:
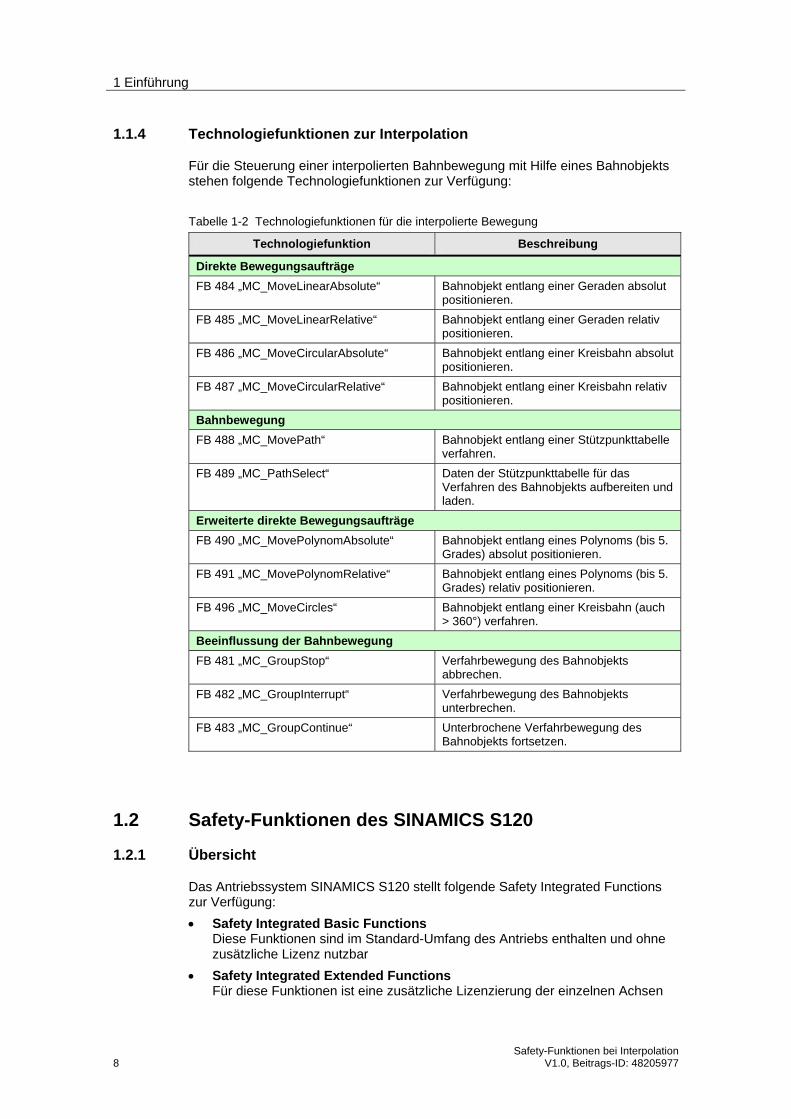
Tabelle 1-2 Technologiefunktionen für die interpolierte Bewegung
Technologiefunktion Beschreibung
Direkte Bewegungsaufträge
FB 484 „MC_MoveLinearAbsolute“ Bahnobjekt entlang einer Geraden absolut positionieren.
FB 485 „MC_MoveLinearRelative“ Bahnobjekt entlang einer Geraden relativ positionieren.
FB 486 „MC_MoveCircularAbsolute“ Bahnobjekt entlang einer Kreisbahn absolut positionieren.
FB 487 „MC_MoveCircularRelative“ Bahnobjekt entlang einer Kreisbahn relativ positionieren.
Bahnbewegung
FB 488 „MC_MovePath“ Bahnobjekt entlang einer Stützpunkttabelle verfahren.
FB 489 „MC_PathSelect“ Daten der Stützpunkttabelle für das Verfahren des Bahnobjekts aufbereiten und laden.
Erweiterte direkte Bewegungsaufträge
FB 490 „MC_MovePolynomAbsolute“ Bahnobjekt entlang eines Polynoms (bis 5. Grades) absolut positionieren.
FB 491 „MC_MovePolynomRelative“ Bahnobjekt entlang eines Polynoms (bis 5. Grades) relativ positionieren.
FB 496 „MC_MoveCircles“ Bahnobjekt entlang einer Kreisbahn (auch > 360°) verfahren.
Beeinflussung der Bahnbewegung
FB 481 „MC_GroupStop“ Verfahrbewegung des Bahnobjekts abbrechen.
FB 482 „MC_GroupInterrupt“ Verfahrbewegung des Bahnobjekts unterbrechen.
FB 483 „MC_GroupContinue“ Unterbrochene Verfahrbewegung des Bahnobjekts fortsetzen.
1.2 Safety-Funktionen des SINAMICS S120
1.2.1 Übersicht
Das Antriebssystem SINAMICS S120 stellt folgende Safety Integrated Functions zur Verfügung:
Safety Integrated Basic Functions Diese Funktionen sind im Standard-Umfang des Antriebs enthalten und ohne zusätzliche Lizenz nutzbar
Safety Integrated Extended Functions Für diese Funktionen ist eine zusätzliche Lizenzierung der einzelnen Achsen
1 Einführung
Safety-Funktionen bei Interpolation V1.0, Beitrags-ID: 48205977 9
des Antriebs notwendig. Eine nicht ausreichende Lizenzierung wird über eine Warnung (A13000) und die LED RDY (Blinkt grün/rot mit 0,5 Hz) angezeigt.
Basic Safety Functions
Folgende Safety Integrated Basic Functions sind im SINAMICS S120 verfügbar:
Safe Torque Off (STO) STO ist eine Sicherheitsfunktion zur Vermeidung von unerwartetem Anlauf nach EN60204-1:2006 Abschnitt 5.4.
Safe Stop 1 (SS1, time controlled) Safe Stop 1 setzt auf die Funktion "Safe Torque Off" auf. Damit kann ein Stillsetzen nach EN 60204-1:2006 der Stop-Kategorie 1 realisiert werden.
Safe Brake Control (SBC) Die Funktion SBC dient zur sicheren Ansteuerung einer Haltebremse.
– Hinweis zu Power/Motor Modules der Bauform Chassis: Bei der Bauform Chassis wird SBC wird nur von Power/Motor Modules mit Bestellnummer ...3 oder höher unterstützt. Zusätzlich ist hier noch ein Safe Brake Adapter (SBA) notwendig.
– Hinweis zu Power/Motor Modules der Bauform Blocksize: Power Modules Blocksize benötigen für diese Funktion zusätzlich ein Safe Brake Relay.
Extended Safety Functions
Folgende Safety Integrated Extended Functions sind im SINAMICS S120 verfüg-bar:
Safe Torque Off (STO) STO ist eine Sicherheitsfunktion zur Vermeidung von unerwartetem Anlauf nach EN60204-1:2006 Abschnitt 5.4.
Safe Stop 1 (SS1, time and acceleration controlled) Die Funktion SS1 setzt auf die Funktion "Safe Torque Off" auf. Damit kann ein Stillsetzen nach EN 60204-1:2006 der Stop-Kategorie 1 realisiert werden.
Safe Stop 2 (SS2) Die Funktion SS2 dient zum sicheren Abbremsen des Motors mit anschließen-dem Übergang in den Zustand "Safe Operating Stop" (SOS). Damit kann ein Stillsetzen nach EN 60204-1:2006 der Stop-Kategorie 2 realisiert werden.
Safe Operating Stop (SOS) SOS dient als Schutz gegen ungewollte Bewegung. Der Antrieb befindet sich in Regelung und ist nicht von der Energiezufuhr getrennt.
Safely-Limited Speed (SLS) Die Funktion SLS dient zum Schutz gegen ungewollt hohe Geschwindigkeiten des Antriebs.
Safe Speed Monitor (SSM) Die Funktion SSM überwacht sicher eine Geschwindigkeitsgrenze und gibt ein sicheres Ausgangssignal, ohne eine Reaktion des Antriebs hervorzurufen.
Safe Acceleration Monitor (SBR) Die Funktion Safe Acceleration Monitor überwacht sicher eine Antriebsbe-schleunigung. Sie ist Bestandteil der Funktionen SS1 und SS2.
Safe Brake Ramp (SBR) Die Funktion Safe Brake Ramp ist eine sichere Überwachung der Brems-rampe. Sie ist Bestandteil der Funktionen SS1 geberlos und SLS geberlos.
1 Einführung
10 Safety-Funktionen bei Interpolation
V1.0, Beitrags-ID: 48205977
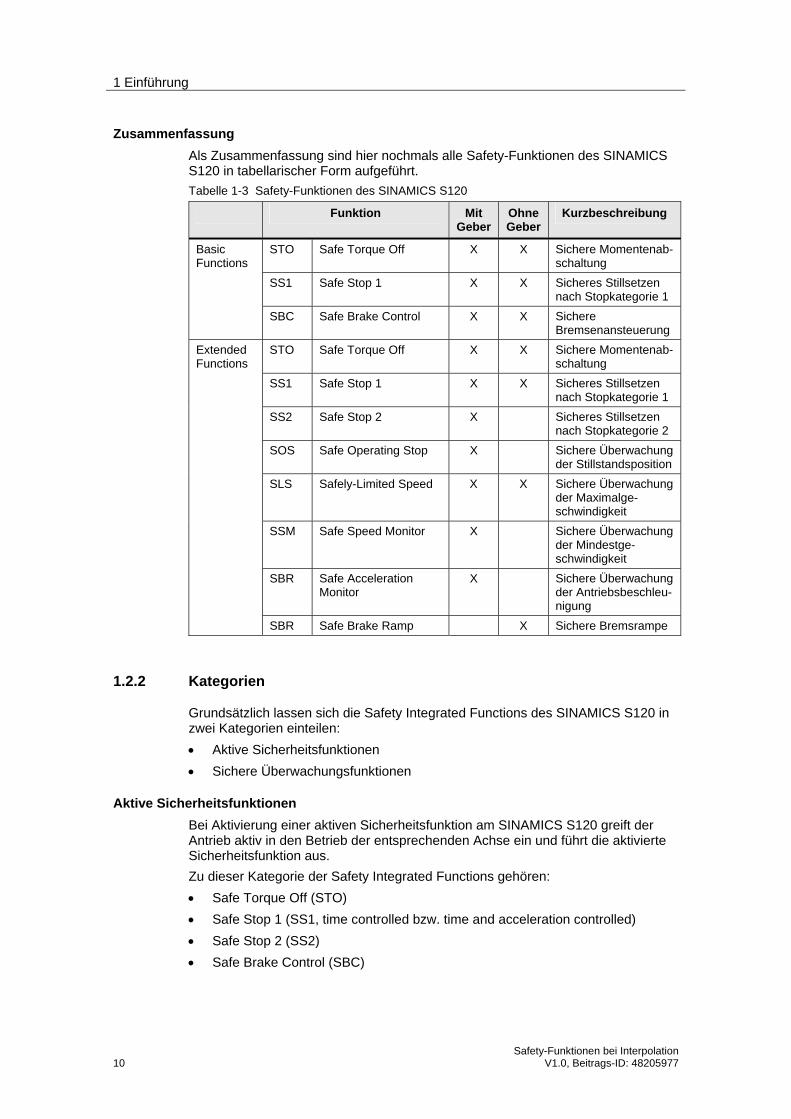
Zusammenfassung
Als Zusammenfassung sind hier nochmals alle Safety-Funktionen des SINAMICS S120 in tabellarischer Form aufgeführt.
Tabelle 1-3 Safety-Funktionen des SINAMICS S120
Funktion Mit Geber
OhneGeber
Kurzbeschreibung
STO Safe Torque Off X X Sichere Momentenab-schaltung
SS1 Safe Stop 1 X X Sicheres Stillsetzen nach Stopkategorie 1
Basic Functions
SBC Safe Brake Control X X Sichere Bremsenansteuerung
STO Safe Torque Off X X Sichere Momentenab-schaltung
SS1 Safe Stop 1 X X Sicheres Stillsetzen nach Stopkategorie 1
SS2 Safe Stop 2 X Sicheres Stillsetzen nach Stopkategorie 2
SOS Safe Operating Stop X Sichere Überwachung der Stillstandsposition
SLS Safely-Limited Speed X X Sichere Überwachung der Maximalge-schwindigkeit
SSM Safe Speed Monitor X Sichere Überwachung der Mindestge-schwindigkeit
SBR Safe Acceleration Monitor
X Sichere Überwachung der Antriebsbeschleu-nigung
Extended Functions
SBR Safe Brake Ramp X Sichere Bremsrampe
1.2.2 Kategorien
Grundsätzlich lassen sich die Safety Integrated Functions des SINAMICS S120 in zwei Kategorien einteilen:
Aktive Sicherheitsfunktionen
Sichere Überwachungsfunktionen
Aktive Sicherheitsfunktionen
Bei Aktivierung einer aktiven Sicherheitsfunktion am SINAMICS S120 greift der Antrieb aktiv in den Betrieb der entsprechenden Achse ein und führt die aktivierte Sicherheitsfunktion aus.
Zu dieser Kategorie der Safety Integrated Functions gehören:
Safe Torque Off (STO)
Safe Stop 1 (SS1, time controlled bzw. time and acceleration controlled)
Safe Stop 2 (SS2)
Safe Brake Control (SBC)
1 Einführung
Safety-Funktionen bei Interpolation V1.0, Beitrags-ID: 48205977 11
Sichere Überwachungsfunktionen
Bei Aktivierung einer sicheren Überwachungsfunktion am SINAMICS S120 greift der Antrieb zuerst nicht in den Betrieb der Achse ein, sondern beschränkt sich auf eine sichere Überwachung der Achse. Erst nach Ablauf einer begrenzenden Bedingung der Überwachungsfunktion, z.B. einer Verzögerungszeit, greift der Antrieb durch Aufruf einer aktiven Sicherheits-funktion aktiv in den Betrieb der entsprechenden Achse ein.
Zu dieser Kategorie der Safety Integrated Functions gehören:
Safe Operating Stop (SOS)
Safely-Limited Speed (SLS)
Safe Speed Monitor (SSM)
1.2.3 Funktionsweise
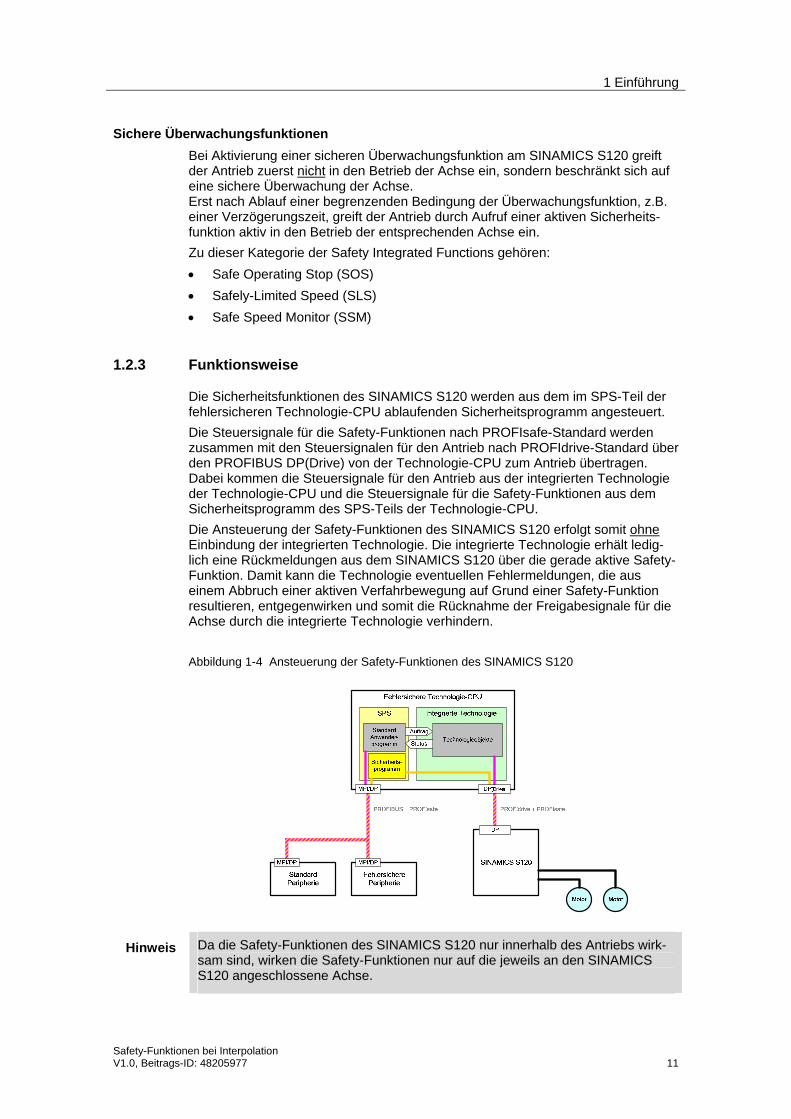
Die Sicherheitsfunktionen des SINAMICS S120 werden aus dem im SPS-Teil der fehlersicheren Technologie-CPU ablaufenden Sicherheitsprogramm angesteuert.
Die Steuersignale für die Safety-Funktionen nach PROFIsafe-Standard werden zusammen mit den Steuersignalen für den Antrieb nach PROFIdrive-Standard über den PROFIBUS DP(Drive) von der Technologie-CPU zum Antrieb übertragen. Dabei kommen die Steuersignale für den Antrieb aus der integrierten Technologie der Technologie-CPU und die Steuersignale für die Safety-Funktionen aus dem Sicherheitsprogramm des SPS-Teils der Technologie-CPU.
Die Ansteuerung der Safety-Funktionen des SINAMICS S120 erfolgt somit ohne Einbindung der integrierten Technologie. Die integrierte Technologie erhält ledig-lich eine Rückmeldungen aus dem SINAMICS S120 über die gerade aktive Safety-Funktion. Damit kann die Technologie eventuellen Fehlermeldungen, die aus einem Abbruch einer aktiven Verfahrbewegung auf Grund einer Safety-Funktion resultieren, entgegenwirken und somit die Rücknahme der Freigabesignale für die Achse durch die integrierte Technologie verhindern.
Abbildung 1-4 Ansteuerung der Safety-Funktionen des SINAMICS S120
Hinweis Da die Safety-Funktionen des SINAMICS S120 nur innerhalb des Antriebs wirk-sam sind, wirken die Safety-Funktionen nur auf die jeweils an den SINAMICS S120 angeschlossene Achse.
2 Programmprinzip
12 Safety-Funktionen bei Interpolation
V1.0, Beitrags-ID: 48205977
2 Programmprinzip
2.1 Nutzung der Safety-Funktionen an einem Bahnobjekt
2.1.1 Grundsätzliches
In der fehlersicheren Technologie-CPU wird mit Hilfe eines Bahnobjekts die kine-matische Transformation aus dem kartesischen Koordinatensystem, in dem die interpolatorische Bewegung der Maschinenachsen programmiert wird, auf das Koordinatensystem der Maschinenachsen durchgeführt. Mit der Interpolation wird dabei die Bewegungsführung innerhalb des kartesischen Koordinatensystems in der CPU berechnet.
Die Safety-Funktionen der fehlersicheren Technologie-CPU bzw. des Antriebssys-tems SINAMICS S120 wirken jedoch nur auf die am SINAMICS S120 angeschlos-senen Maschinenachsen. Eine Koordination der am SINAMICS S120 angeschlos-senen Achsen mit Hilfe der Interpolation ist im Bezug auf die Safety-Funktionen nicht möglich. Aus diesem Grund können nicht alle Safety-Funktionen des SINAMICS S120 im Zusammenhang mit der Interpolation bzw. einem Bahnobjekt genutzt werden.
Die für die Nutzung im Zusammenhang mit der Bahninterpolation empfohlenen Safety-Funktionen finden Sie in den folgenden Kapiteln.
2.1.2 Empfohlene Safety-Funktionen
Da in den meisten Fällen mit einem Bahnobjekt eine koordinierte Bewegung der Maschinenachsen für eine interpolierte Bewegung realisiert wird, können meist nicht alle Safety-Funktionen des SINAMICS S120 genutzt werden.
Die Sicherheitsfunktionen aus der Kategorie aktive Sicherheitsfunktionen sind für die Anwendung an einem Bahnobjekt in den meisten Fällen nicht einsetzbar, da diese Funktionen nur auf die einzelnen am SINAMICS S120 angeschlossenen Ma-schinenachsen wirken. Eine koordinierte Bewegung der Achsen bei aktiver Sicher-heitsfunktion ist damit nicht möglich. Die Bahnbewegung würde in diesem Fall die interpolierte Bewegungsbahn verlassen.
Aus diesem Grund kommen für die Anwendung an einem Bahnobjekt meist nur die Sicherheitsfunktionen aus der Kategorie sichere Überwachungsfunktionen in Frage:
Safe Operating Stop (SOS)
Safely-Limited Speed (SLS)
Safe Speed Monitor (SSM)
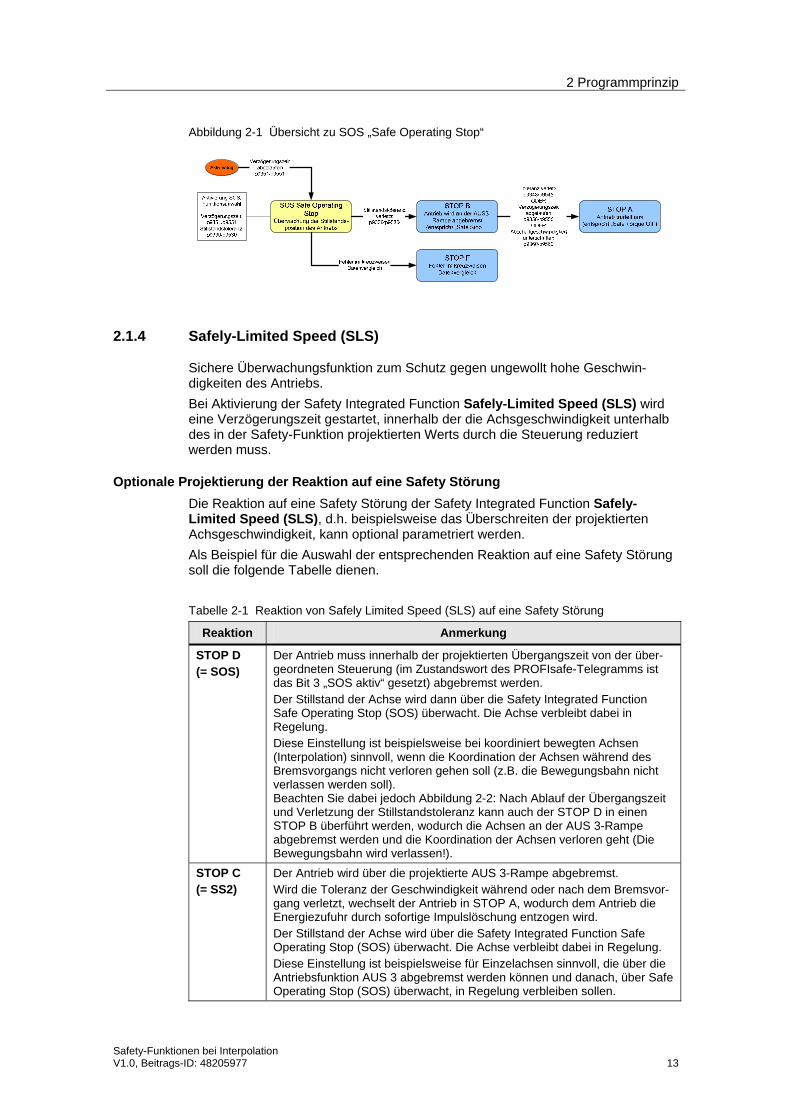
2.1.3 Safe Operating Stop (SOS)
Sichere Überwachungsfunktion zum Schutz gegen ungewollte Bewegung. Der Antrieb befindet sich in Regelung und ist nicht von der Energiezufuhr getrennt.
Sollte bei der Überwachung des Stillstands der Achse die Stillstandstoleranz ver-letzt werden, wird ein STOP B mit anschließendem STOP A ausgelöst, wodurch die Achse an der AUS 3-Rampe abgebremst und von der Energiezufuhr getrennt wird.
2 Programmprinzip
Safety-Funktionen bei Interpolation V1.0, Beitrags-ID: 48205977 13
Abbildung 2-1 Übersicht zu SOS „Safe Operating Stop“
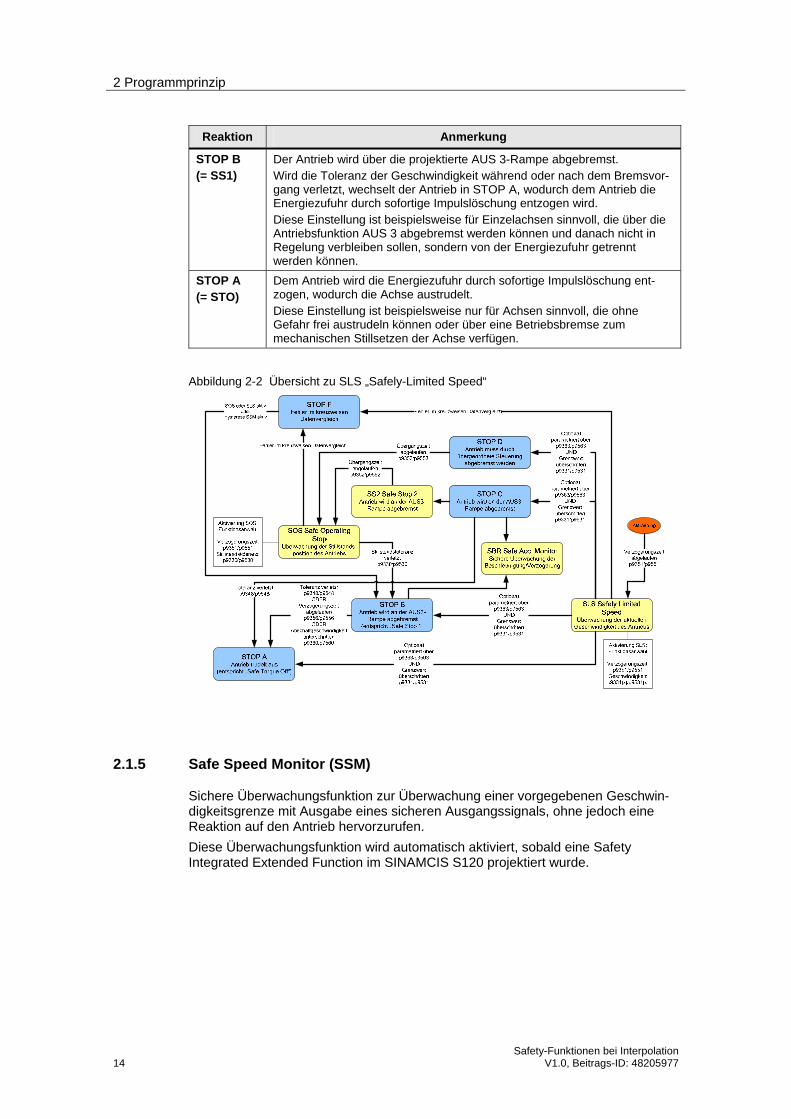
2.1.4 Safely-Limited Speed (SLS)
Sichere Überwachungsfunktion zum Schutz gegen ungewollt hohe Geschwin-digkeiten des Antriebs.
Bei Aktivierung der Safety Integrated Function Safely-Limited Speed (SLS) wird eine Verzögerungszeit gestartet, innerhalb der die Achsgeschwindigkeit unterhalb des in der Safety-Funktion projektierten Werts durch die Steuerung reduziert werden muss.
Optionale Projektierung der Reaktion auf eine Safety Störung
Die Reaktion auf eine Safety Störung der Safety Integrated Function Safely-Limited Speed (SLS), d.h. beispielsweise das Überschreiten der projektierten Achsgeschwindigkeit, kann optional parametriert werden.
Als Beispiel für die Auswahl der entsprechenden Reaktion auf eine Safety Störung soll die folgende Tabelle dienen.
Tabelle 2-1 Reaktion von Safely Limited Speed (SLS) auf eine Safety Störung
Reaktion Anmerkung
STOP D (= SOS)
Der Antrieb muss innerhalb der projektierten Übergangszeit von der über-geordneten Steuerung (im Zustandswort des PROFIsafe-Telegramms ist das Bit 3 „SOS aktiv“ gesetzt) abgebremst werden. Der Stillstand der Achse wird dann über die Safety Integrated Function Safe Operating Stop (SOS) überwacht. Die Achse verbleibt dabei in Regelung. Diese Einstellung ist beispielsweise bei koordiniert bewegten Achsen (Interpolation) sinnvoll, wenn die Koordination der Achsen während des Bremsvorgangs nicht verloren gehen soll (z.B. die Bewegungsbahn nicht verlassen werden soll). Beachten Sie dabei jedoch Abbildung 2-2: Nach Ablauf der Übergangszeit und Verletzung der Stillstandstoleranz kann auch der STOP D in einen STOP B überführt werden, wodurch die Achsen an der AUS 3-Rampe abgebremst werden und die Koordination der Achsen verloren geht (Die Bewegungsbahn wird verlassen!).
STOP C (= SS2)
Der Antrieb wird über die projektierte AUS 3-Rampe abgebremst. Wird die Toleranz der Geschwindigkeit während oder nach dem Bremsvor-gang verletzt, wechselt der Antrieb in STOP A, wodurch dem Antrieb die Energiezufuhr durch sofortige Impulslöschung entzogen wird. Der Stillstand der Achse wird über die Safety Integrated Function Safe Operating Stop (SOS) überwacht. Die Achse verbleibt dabei in Regelung. Diese Einstellung ist beispielsweise für Einzelachsen sinnvoll, die über die Antriebsfunktion AUS 3 abgebremst werden können und danach, über Safe Operating Stop (SOS) überwacht, in Regelung verbleiben sollen.
2 Programmprinzip
14 Safety-Funktionen bei Interpolation
V1.0, Beitrags-ID: 48205977
Reaktion Anmerkung
STOP B (= SS1)
Der Antrieb wird über die projektierte AUS 3-Rampe abgebremst. Wird die Toleranz der Geschwindigkeit während oder nach dem Bremsvor-gang verletzt, wechselt der Antrieb in STOP A, wodurch dem Antrieb die Energiezufuhr durch sofortige Impulslöschung entzogen wird. Diese Einstellung ist beispielsweise für Einzelachsen sinnvoll, die über die Antriebsfunktion AUS 3 abgebremst werden können und danach nicht in Regelung verbleiben sollen, sondern von der Energiezufuhr getrennt werden können.
STOP A (= STO)
Dem Antrieb wird die Energiezufuhr durch sofortige Impulslöschung ent-zogen, wodurch die Achse austrudelt. Diese Einstellung ist beispielsweise nur für Achsen sinnvoll, die ohne Gefahr frei austrudeln können oder über eine Betriebsbremse zum mechanischen Stillsetzen der Achse verfügen.
Abbildung 2-2 Übersicht zu SLS „Safely-Limited Speed“
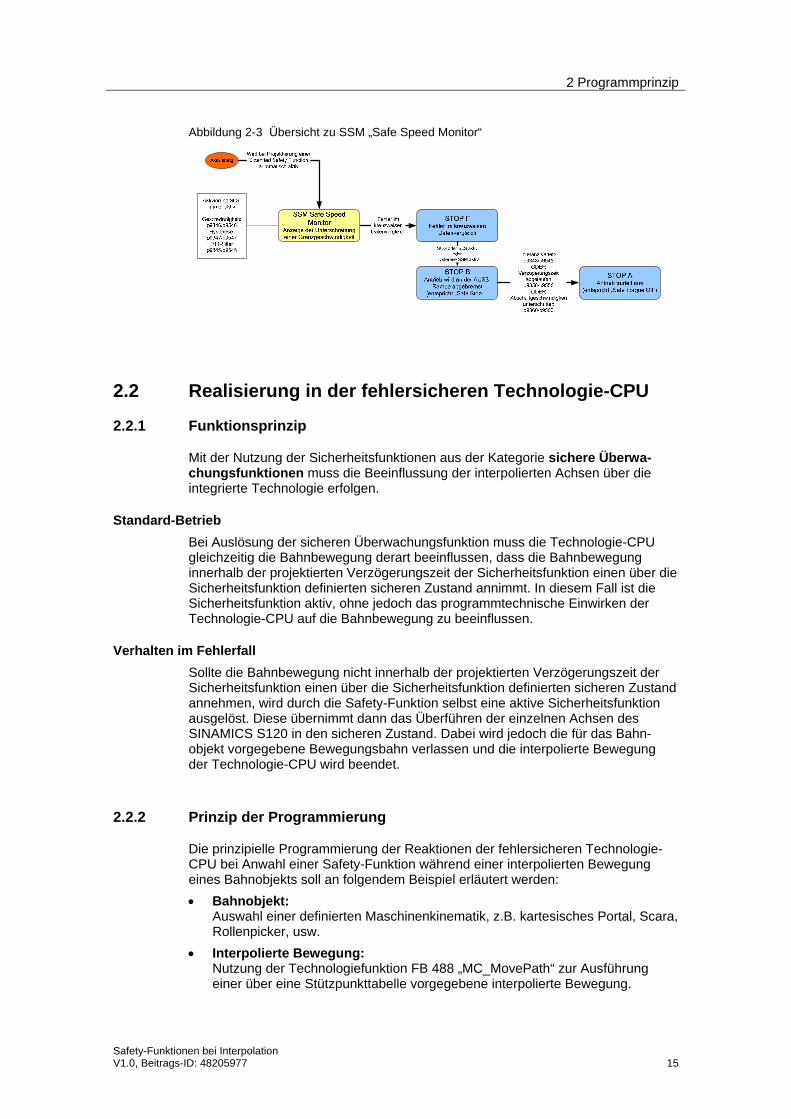
2.1.5 Safe Speed Monitor (SSM)
Sichere Überwachungsfunktion zur Überwachung einer vorgegebenen Geschwin-digkeitsgrenze mit Ausgabe eines sicheren Ausgangssignals, ohne jedoch eine Reaktion auf den Antrieb hervorzurufen.
Diese Überwachungsfunktion wird automatisch aktiviert, sobald eine Safety Integrated Extended Function im SINAMCIS S120 projektiert wurde.
2 Programmprinzip
Safety-Funktionen bei Interpolation V1.0, Beitrags-ID: 48205977 15
Abbildung 2-3 Übersicht zu SSM „Safe Speed Monitor“
2.2 Realisierung in der fehlersicheren Technologie-CPU
2.2.1 Funktionsprinzip
Mit der Nutzung der Sicherheitsfunktionen aus der Kategorie sichere Überwa-chungsfunktionen muss die Beeinflussung der interpolierten Achsen über die integrierte Technologie erfolgen.
Standard-Betrieb
Bei Auslösung der sicheren Überwachungsfunktion muss die Technologie-CPU gleichzeitig die Bahnbewegung derart beeinflussen, dass die Bahnbewegung innerhalb der projektierten Verzögerungszeit der Sicherheitsfunktion einen über die Sicherheitsfunktion definierten sicheren Zustand annimmt. In diesem Fall ist die Sicherheitsfunktion aktiv, ohne jedoch das programmtechnische Einwirken der Technologie-CPU auf die Bahnbewegung zu beeinflussen.
Verhalten im Fehlerfall
Sollte die Bahnbewegung nicht innerhalb der projektierten Verzögerungszeit der Sicherheitsfunktion einen über die Sicherheitsfunktion definierten sicheren Zustand annehmen, wird durch die Safety-Funktion selbst eine aktive Sicherheitsfunktion ausgelöst. Diese übernimmt dann das Überführen der einzelnen Achsen des SINAMICS S120 in den sicheren Zustand. Dabei wird jedoch die für das Bahn-objekt vorgegebene Bewegungsbahn verlassen und die interpolierte Bewegung der Technologie-CPU wird beendet.
2.2.2 Prinzip der Programmierung
Die prinzipielle Programmierung der Reaktionen der fehlersicheren Technologie-CPU bei Anwahl einer Safety-Funktion während einer interpolierten Bewegung eines Bahnobjekts soll an folgendem Beispiel erläutert werden:
Bahnobjekt: Auswahl einer definierten Maschinenkinematik, z.B. kartesisches Portal, Scara, Rollenpicker, usw.
Interpolierte Bewegung: Nutzung der Technologiefunktion FB 488 „MC_MovePath“ zur Ausführung einer über eine Stützpunkttabelle vorgegebene interpolierte Bewegung.
2 Programmprinzip
16 Safety-Funktionen bei Interpolation
V1.0, Beitrags-ID: 48205977
Safety-Funktion: Nutzung der sicheren Überwachungsfunktion Safe Operating Stop (SOS) zur Überwachung des sicheren Stillstands einer Achse.
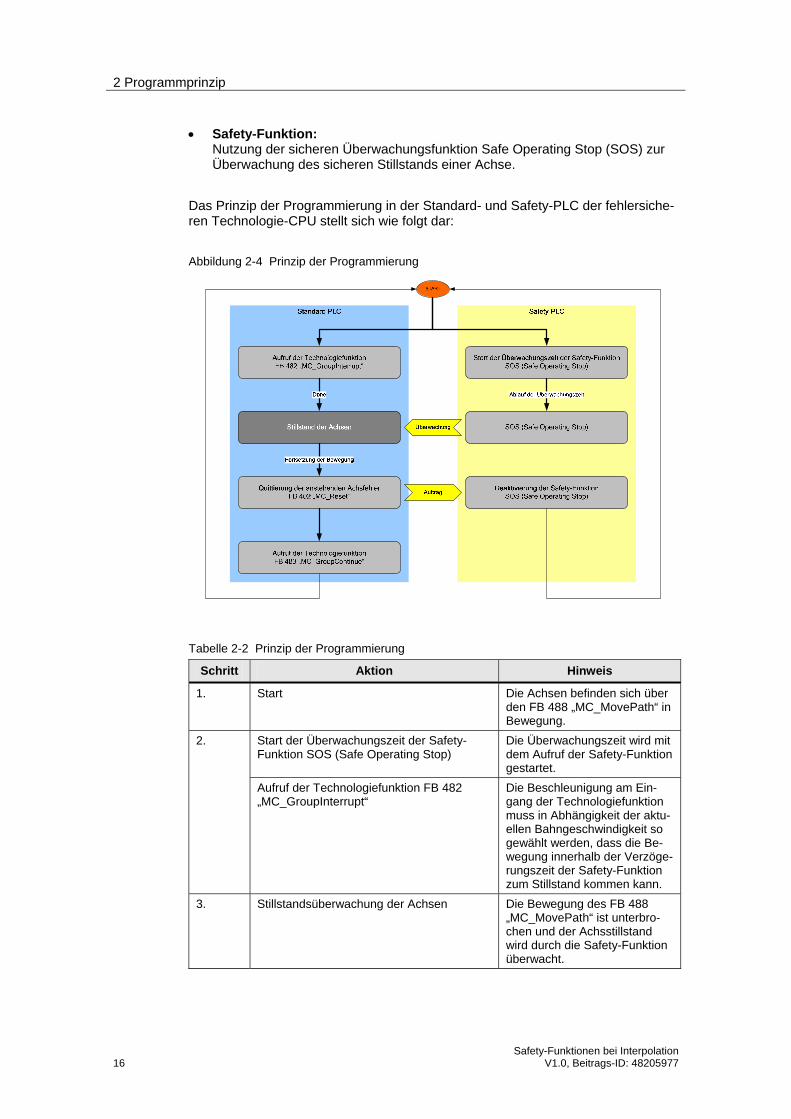
Das Prinzip der Programmierung in der Standard- und Safety-PLC der fehlersiche-ren Technologie-CPU stellt sich wie folgt dar:
Abbildung 2-4 Prinzip der Programmierung
Tabelle 2-2 Prinzip der Programmierung
Schritt Aktion Hinweis
1. Start Die Achsen befinden sich über den FB 488 „MC_MovePath“ in Bewegung.
Start der Überwachungszeit der Safety-Funktion SOS (Safe Operating Stop)
Die Überwachungszeit wird mit dem Aufruf der Safety-Funktion gestartet.
2.
Aufruf der Technologiefunktion FB 482 „MC_GroupInterrupt“
Die Beschleunigung am Ein-gang der Technologiefunktion muss in Abhängigkeit der aktu-ellen Bahngeschwindigkeit so gewählt werden, dass die Be-wegung innerhalb der Verzöge-rungszeit der Safety-Funktion zum Stillstand kommen kann.
3. Stillstandsüberwachung der Achsen Die Bewegung des FB 488 „MC_MovePath“ ist unterbro-chen und der Achsstillstand wird durch die Safety-Funktion überwacht.
2 Programmprinzip
Safety-Funktionen bei Interpolation V1.0, Beitrags-ID: 48205977 17
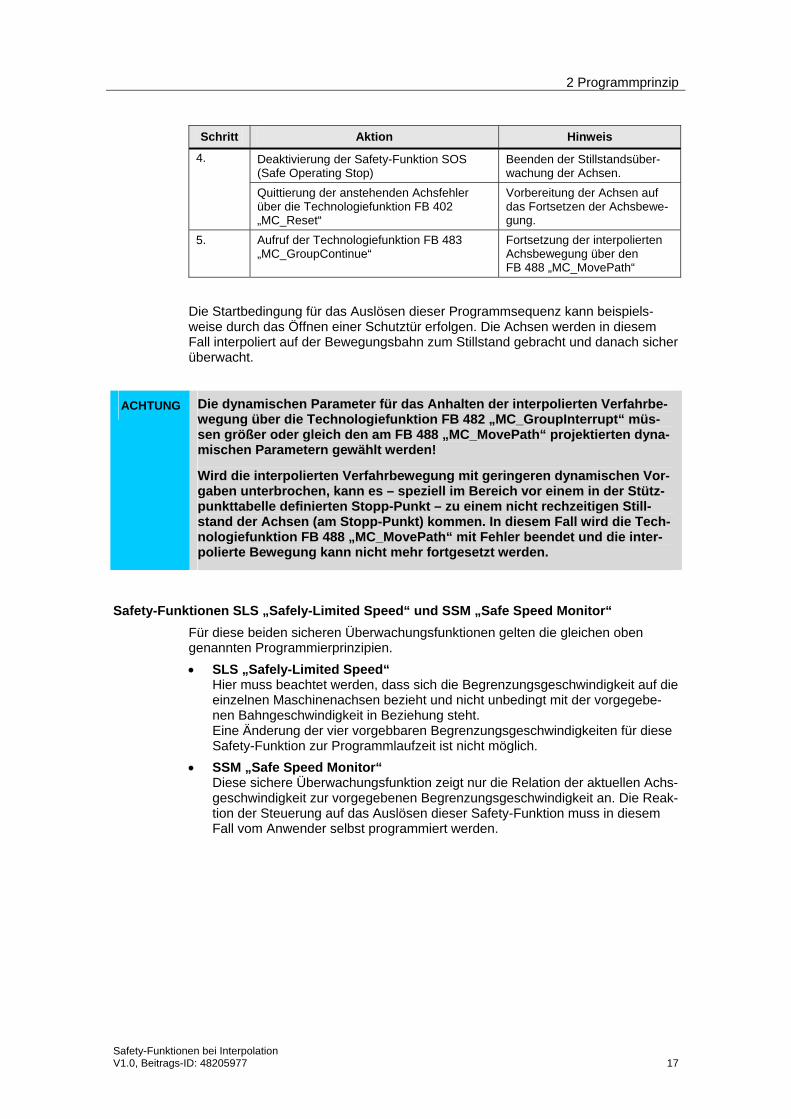
Schritt Aktion Hinweis
Deaktivierung der Safety-Funktion SOS (Safe Operating Stop)
Beenden der Stillstandsüber-wachung der Achsen.
4.
Quittierung der anstehenden Achsfehler über die Technologiefunktion FB 402 „MC_Reset“
Vorbereitung der Achsen auf das Fortsetzen der Achsbewe-gung.
5. Aufruf der Technologiefunktion FB 483 „MC_GroupContinue“
Fortsetzung der interpolierten Achsbewegung über den FB 488 „MC_MovePath“
Die Startbedingung für das Auslösen dieser Programmsequenz kann beispiels-weise durch das Öffnen einer Schutztür erfolgen. Die Achsen werden in diesem Fall interpoliert auf der Bewegungsbahn zum Stillstand gebracht und danach sicher überwacht.
ACHTUNG Die dynamischen Parameter für das Anhalten der interpolierten Verfahrbe-wegung über die Technologiefunktion FB 482 „MC_GroupInterrupt“ müs-sen größer oder gleich den am FB 488 „MC_MovePath“ projektierten dyna-mischen Parametern gewählt werden!
Wird die interpolierten Verfahrbewegung mit geringeren dynamischen Vor-gaben unterbrochen, kann es – speziell im Bereich vor einem in der Stütz-punkttabelle definierten Stopp-Punkt – zu einem nicht rechzeitigen Still-stand der Achsen (am Stopp-Punkt) kommen. In diesem Fall wird die Tech-nologiefunktion FB 488 „MC_MovePath“ mit Fehler beendet und die inter-polierte Bewegung kann nicht mehr fortgesetzt werden.
Safety-Funktionen SLS „Safely-Limited Speed“ und SSM „Safe Speed Monitor“
Für diese beiden sicheren Überwachungsfunktionen gelten die gleichen oben genannten Programmierprinzipien.
SLS „Safely-Limited Speed“ Hier muss beachtet werden, dass sich die Begrenzungsgeschwindigkeit auf die einzelnen Maschinenachsen bezieht und nicht unbedingt mit der vorgegebe-nen Bahngeschwindigkeit in Beziehung steht. Eine Änderung der vier vorgebbaren Begrenzungsgeschwindigkeiten für diese Safety-Funktion zur Programmlaufzeit ist nicht möglich.
SSM „Safe Speed Monitor“ Diese sichere Überwachungsfunktion zeigt nur die Relation der aktuellen Achs-geschwindigkeit zur vorgegebenen Begrenzungsgeschwindigkeit an. Die Reak-tion der Steuerung auf das Auslösen dieser Safety-Funktion muss in diesem Fall vom Anwender selbst programmiert werden.
3 Zusätzliche Hinweise
18 Safety-Funktionen bei Interpolation
V1.0, Beitrags-ID: 48205977
3 Zusätzliche Hinweise
3.1 SINAMICS-Parameter der Safety-Funktion „SOS“
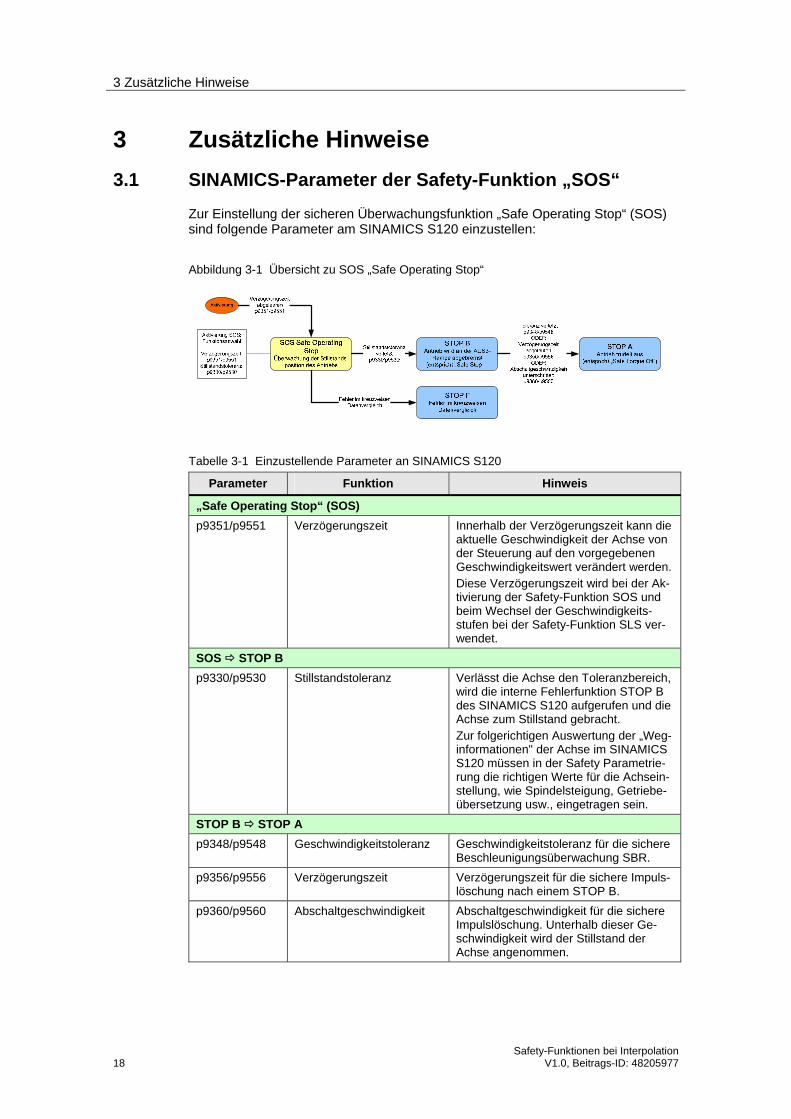
Zur Einstellung der sicheren Überwachungsfunktion „Safe Operating Stop“ (SOS) sind folgende Parameter am SINAMICS S120 einzustellen:
Abbildung 3-1 Übersicht zu SOS „Safe Operating Stop“
Tabelle 3-1 Einzustellende Parameter an SINAMICS S120
Parameter Funktion Hinweis
„Safe Operating Stop“ (SOS)
p9351/p9551 Verzögerungszeit Innerhalb der Verzögerungszeit kann die aktuelle Geschwindigkeit der Achse von der Steuerung auf den vorgegebenen Geschwindigkeitswert verändert werden. Diese Verzögerungszeit wird bei der Ak-tivierung der Safety-Funktion SOS und beim Wechsel der Geschwindigkeits-stufen bei der Safety-Funktion SLS ver-wendet.
SOS STOP B
p9330/p9530 Stillstandstoleranz Verlässt die Achse den Toleranzbereich, wird die interne Fehlerfunktion STOP B des SINAMICS S120 aufgerufen und die Achse zum Stillstand gebracht. Zur folgerichtigen Auswertung der „Weg-informationen" der Achse im SINAMICS S120 müssen in der Safety Parametrie-rung die richtigen Werte für die Achsein-stellung, wie Spindelsteigung, Getriebe-übersetzung usw., eingetragen sein.
STOP B STOP A
p9348/p9548 Geschwindigkeitstoleranz Geschwindigkeitstoleranz für die sichere Beschleunigungsüberwachung SBR.
p9356/p9556 Verzögerungszeit Verzögerungszeit für die sichere Impuls-löschung nach einem STOP B.
p9360/p9560 Abschaltgeschwindigkeit Abschaltgeschwindigkeit für die sichere Impulslöschung. Unterhalb dieser Ge-schwindigkeit wird der Stillstand der Achse angenommen.
3 Zusätzliche Hinweise
Safety-Funktionen bei Interpolation V1.0, Beitrags-ID: 48205977 19
3.2 Parameterberechnung FB 482 „MC_GroupInterrupt“
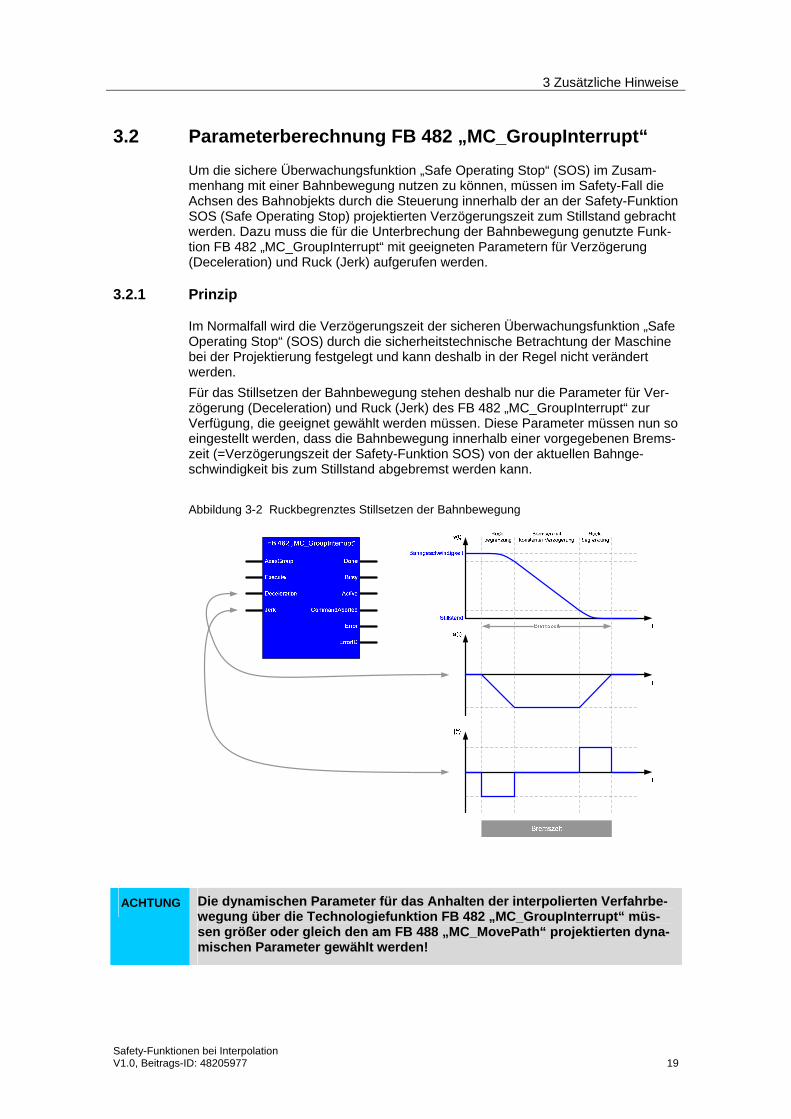
Um die sichere Überwachungsfunktion „Safe Operating Stop“ (SOS) im Zusam-menhang mit einer Bahnbewegung nutzen zu können, müssen im Safety-Fall die Achsen des Bahnobjekts durch die Steuerung innerhalb der an der Safety-Funktion SOS (Safe Operating Stop) projektierten Verzögerungszeit zum Stillstand gebracht werden. Dazu muss die für die Unterbrechung der Bahnbewegung genutzte Funk-tion FB 482 „MC_GroupInterrupt“ mit geeigneten Parametern für Verzögerung (Deceleration) und Ruck (Jerk) aufgerufen werden.
3.2.1 Prinzip
Im Normalfall wird die Verzögerungszeit der sicheren Überwachungsfunktion „Safe Operating Stop“ (SOS) durch die sicherheitstechnische Betrachtung der Maschine bei der Projektierung festgelegt und kann deshalb in der Regel nicht verändert werden.
Für das Stillsetzen der Bahnbewegung stehen deshalb nur die Parameter für Ver-zögerung (Deceleration) und Ruck (Jerk) des FB 482 „MC_GroupInterrupt“ zur Verfügung, die geeignet gewählt werden müssen. Diese Parameter müssen nun so eingestellt werden, dass die Bahnbewegung innerhalb einer vorgegebenen Brems-zeit (=Verzögerungszeit der Safety-Funktion SOS) von der aktuellen Bahnge-schwindigkeit bis zum Stillstand abgebremst werden kann.
Abbildung 3-2 Ruckbegrenztes Stillsetzen der Bahnbewegung
ACHTUNG Die dynamischen Parameter für das Anhalten der interpolierten Verfahrbe-wegung über die Technologiefunktion FB 482 „MC_GroupInterrupt“ müs-sen größer oder gleich den am FB 488 „MC_MovePath“ projektierten dyna-mischen Parameter gewählt werden!
3 Zusätzliche Hinweise
20 Safety-Funktionen bei Interpolation
V1.0, Beitrags-ID: 48205977
3.2.2 Berechnung
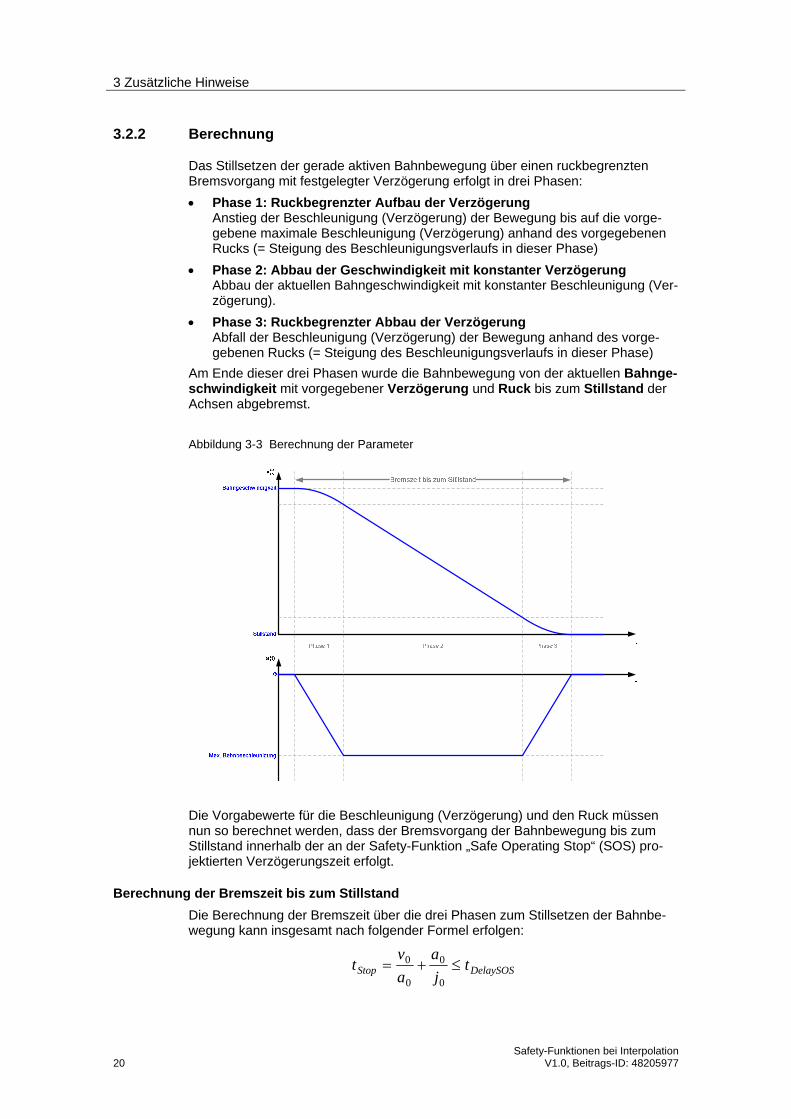
Das Stillsetzen der gerade aktiven Bahnbewegung über einen ruckbegrenzten Bremsvorgang mit festgelegter Verzögerung erfolgt in drei Phasen:
Phase 1: Ruckbegrenzter Aufbau der Verzögerung Anstieg der Beschleunigung (Verzögerung) der Bewegung bis auf die vorge-gebene maximale Beschleunigung (Verzögerung) anhand des vorgegebenen Rucks (= Steigung des Beschleunigungsverlaufs in dieser Phase)
Phase 2: Abbau der Geschwindigkeit mit konstanter Verzögerung Abbau der aktuellen Bahngeschwindigkeit mit konstanter Beschleunigung (Ver-zögerung).
Phase 3: Ruckbegrenzter Abbau der Verzögerung Abfall der Beschleunigung (Verzögerung) der Bewegung anhand des vorge-gebenen Rucks (= Steigung des Beschleunigungsverlaufs in dieser Phase)
Am Ende dieser drei Phasen wurde die Bahnbewegung von der aktuellen Bahnge-schwindigkeit mit vorgegebener Verzögerung und Ruck bis zum Stillstand der Achsen abgebremst.
Abbildung 3-3 Berechnung der Parameter
Die Vorgabewerte für die Beschleunigung (Verzögerung) und den Ruck müssen nun so berechnet werden, dass der Bremsvorgang der Bahnbewegung bis zum Stillstand innerhalb der an der Safety-Funktion „Safe Operating Stop“ (SOS) pro-jektierten Verzögerungszeit erfolgt.
Berechnung der Bremszeit bis zum Stillstand
Die Berechnung der Bremszeit über die drei Phasen zum Stillsetzen der Bahnbe-wegung kann insgesamt nach folgender Formel erfolgen:
DelaySOSStop tja
avt
0
0
0
0
3 Zusätzliche Hinweise
Safety-Funktionen bei Interpolation V1.0, Beitrags-ID: 48205977 21
Mit:
ngsBremsvorga des gungBeschleuni derAufbau zum Ruck MaximalerjngsBremsvorga des ng)(Verzögeru gungBeschleuni Maximalea
Bewegung der indigkeitBahngeschw Aktuellev
0
0
0
Wobei folgendes gilt:
Für die aktuelle Bahngeschwindigkeit sollte die Geschwindigkeit der Bahn-bewegung zum Zeitpunkt des Starts des Bremsvorgangs angegeben werden. Um die Berechnung jedoch nicht für jeden Bewegungsvorgang durchführen zu müssen, ist hier die in der Applikation maximal mögliche Bahngeschwindig-keit einzutragen. Eventuell ist dabei auch ein eventuell aktiver Override von >100% zu berücksichtigen.
Die maximale Beschleunigung (Verzögerung) des Bremsvorgangs ent-spricht dem an der Technologiefunktion FB 482 „MC_GroupInterrupt“ am Eingang Deceleration vorgegebenen Wert.
Der maximale Ruck entspricht dem am FB 482 „MC_GroupInterrupt“ am Eingang Jerk vorgegebenen Wert.
Faustformel zur Festlegung des maximalen Rucks
Um aus der oben genannten Formel bei vorgegebener Bahngeschwindigkeit und festgelegter Verzögerungszeit für die Safety-Funktion „Safe Operating Stop“ (SOS) die am Baustein FB 482 „MC_GroupInterrupt“ anzugebenden Werte für den maxi-malen Ruck und die maximale Verzögerung berechnen zu können (eine Gleichung mit zwei Unbekannten), muss der Ruck in Abhängigkeit von der Verzögerung vor-ab festgelegt werden.
Die Festlegung des maximalen Ruck kann nach folgender Formel durchgeführt werden:
001 a
tj
Jerk
Mit:
soll seinerreicht gungBeschleuni maximale die der nach Zeit,t Jerk
Als Faustformel sollte der Ruck so eingestellt werden, dass die maximale Be-schleunigung nach 50…100ms (= 0,05…0,1s) erreicht wird.
Damit ergibt sich für die Berechnung des Rucks:
10...201
Jerkt 00 20 aj … 00 10 aj
Berechnung der maximalen Beschleunigung
Die Berechnung der maximalen Beschleunigung kann nun mit Hilfe des nach der Faustformel festgelegten Rucks erfolgen.
JerkDelaySOS ttv
a
00





























