Embed Size (px)
Citation preview

Albert-Ludwigs-Universität Freiburg Kiepenheuer-Institut für SonnenphysikFakultät für Mathematik und Physik
Diplomarbeit im Fach Physik
Testaufbau eines neuen Sensors zurBestimmung der Wellenfrontdeforma-tion in optischen Sonnenteleskopen
Dirk Schmidt
April 2006
Betreut von Professor Dr. O. von der Lühe


»Klein φ macht auch Mist.«Dieter Sommer
Physik-Lehreram Kepler-Gymnasium Freiburg


Inhaltsverzeichnis
Nomenklatur 9
1. Einleitung 11
2. Abriss der Fourier-Optik 132.1. Skalare Beschreibung elektromagnetischer Wellen . . . . . . . . . . . . . . .13
2.1.1. Ebene Wellen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .142.1.2. Sphärische Wellen . . . . . . . . . . . . . . . . . . . . . . . . . . .152.1.3. Zerlegung in ebene Wellen . . . . . . . . . . . . . . . . . . . . . . .152.1.4. Amplitudentransmission . . . . . . . . . . . . . . . . . . . . . . . .15
2.2. Skalare Beugungstheorie . . . . . . . . . . . . . . . . . . . . . . . . . . . .162.2.1. Beugung in der Rayleigh-Sommerfeld-Region . . . . . . . . . . . .162.2.2. Beugung in der Fresnel-Region . . . . . . . . . . . . . . . . . . . .182.2.3. Beugung in der Fraunhofer-Region . . . . . . . . . . . . . . . . . .192.2.4. Optische Fourier-Transformation . . . . . . . . . . . . . . . . . . . .20
2.3. Sphärische Linsen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .212.3.1. Amplitudentransmission . . . . . . . . . . . . . . . . . . . . . . . .212.3.2. Linsen und Beugung . . . . . . . . . . . . . . . . . . . . . . . . . .22
2.4. Abbildungen mit inkohärentem Licht . . . . . . . . . . . . . . . . . . . . . .252.4.1. Kenngrößen abbildender Systeme . . . . . . . . . . . . . . . . . . .26
3. Adaptive Optik in der Astronomie 293.1. Motivation und Entwicklung der Adaptiven Optik . . . . . . . . . . . . . . .293.2. Beobachtungen durch die Erdatmosphäre . . . . . . . . . . . . . . . . . . .30
3.2.1. Atmosphärische Einflüsse auf astronomische Beobachtungen . . . . .303.2.2. Beschreibung der turbulenten Atmosphäre . . . . . . . . . . . . . . .313.2.3. Modale Beschreibung der Wellenfront . . . . . . . . . . . . . . . . .32
3.3. Die Funktionsweise adaptiver Optik . . . . . . . . . . . . . . . . . . . . . .343.3.1. Klassische Adaptive Optik . . . . . . . . . . . . . . . . . . . . . . .343.3.2. Anisoplanatismus . . . . . . . . . . . . . . . . . . . . . . . . . . . .34
3.4. Wellenfrontmessung in der Sonnenbeobachtung . . . . . . . . . . . . . . . .353.4.1. Modale Messung . . . . . . . . . . . . . . . . . . . . . . . . . . . .353.4.2. Zonale Messung . . . . . . . . . . . . . . . . . . . . . . . . . . . .363.4.3. Der Hartmann-Shack Wellenfrontsensor . . . . . . . . . . . . . . . .36
5

Inhaltsverzeichnis
4. Wellenfrontmessung mittels optischer Differentiation 394.1. Die Idee . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .394.2. Allgemeine analytische Beschreibung . . . . . . . . . . . . . . . . . . . . .40
4.2.1. Die Intensität in der Austrittspupille . . . . . . . . . . . . . . . . . .404.3. Die Maske . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .42
4.3.1. Intensitäten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .434.3.2. Binäre Masken . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44
4.4. Wellenfrontrekonstruktion . . . . . . . . . . . . . . . . . . . . . . . . . . .444.5. Einbau im Teleskop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45
5. Flüssigkristallanzeigen 475.1. Flüssige Kristalle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .475.2. TFT-LC-Displays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .48
6. Versuchsaufbau 516.1. Skizze und Beschreibung . . . . . . . . . . . . . . . . . . . . . . . . . . . .51
6.1.1. Der Videoprojektor . . . . . . . . . . . . . . . . . . . . . . . . . . .556.2. Beugung am LCD-Panel . . . . . . . . . . . . . . . . . . . . . . . . . . . .58
6.2.1. Die Amplitudentransmission eines LCD-Panels . . . . . . . . . . . .586.2.2. Das Beugungsmuster des LCD-Panels . . . . . . . . . . . . . . . . .58
6.3. Der deformierbare Spiegel . . . . . . . . . . . . . . . . . . . . . . . . . . .616.3.1. Die Form der Membran . . . . . . . . . . . . . . . . . . . . . . . .616.3.2. Ansteuerung des OKO-Spiegels . . . . . . . . . . . . . . . . . . . .63
6.4. Das Twyman-Green Interferometer . . . . . . . . . . . . . . . . . . . . . . .666.4.1. Funktionsweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . .666.4.2. Bemerkungen zur Verwendung des Interferometers . . . . . . . . . .67
6.5. Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .686.5.1. Programm zur Steuerung des Wellenfrontsensors . . . . . . . . . . .686.5.2. Programm zur Auswertung der Sensordaten . . . . . . . . . . . . . .706.5.3. Programm zur Auswertung der Spiegelform . . . . . . . . . . . . . .716.5.4. Programm zur grafischen Darstellung der Daten . . . . . . . . . . . .72
7. Durchführung 737.1. Interferometrische Bestimmung der Spiegelform als Referenz . . . . . . . . .73
7.1.1. Kalibrierung des Interferometers . . . . . . . . . . . . . . . . . . . .737.1.2. Schwierigkeiten bei der interferometrischen Messung . . . . . . . . .74
7.2. Einrichtung und Vermessung des OKO-Spiegels . . . . . . . . . . . . . . . .747.3. Justierung des Aufbaus . . . . . . . . . . . . . . . . . . . . . . . . . . . . .757.4. Wellenfrontsensortestmessungen . . . . . . . . . . . . . . . . . . . . . . . .76
7.4.1. Messreihen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .76
8. Ergebnisse 818.1. Spiegelform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .81
8.1.1. Auswertung der Interferometerdaten . . . . . . . . . . . . . . . . . .818.1.2. Reproduzierbarkeit der Membranform . . . . . . . . . . . . . . . . .82
6

Inhaltsverzeichnis
8.1.3. Membranformen und ihre Ableitungen . . . . . . . . . . . . . . . .848.2. Messungen mit dem Wellenfrontsensor . . . . . . . . . . . . . . . . . . . . .90
8.2.1. Verhalten beim Vorzeichenwechsel der Aberrationen . . . . . . . . .908.2.2. Vergleich zweier identischer Messreihen . . . . . . . . . . . . . . . .958.2.3. Auswirkungen der Objektstruktur . . . . . . . . . . . . . . . . . . .978.2.4. Unscharfe Objektstrukturen . . . . . . . . . . . . . . . . . . . . . .988.2.5. Vergrößerung der Objektstruktur auf dem LCD . . . . . . . . . . . .988.2.6. Vergrößerung des Gesichtsfelds . . . . . . . . . . . . . . . . . . . .1008.2.7. Variation der Amplitude . . . . . . . . . . . . . . . . . . . . . . . .1018.2.8. Vergleich mit numerischer Simulation . . . . . . . . . . . . . . . . .105
8.3. Zusammenfassung und Fazit . . . . . . . . . . . . . . . . . . . . . . . . . .106
A. Zernike-Polynome 109A.1. Explizite Form . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .109A.2. Grafische Darstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .110A.3. Ableitungen der Zernike-Polynome . . . . . . . . . . . . . . . . . . . . . .112
A.3.1. Ableitungen in kartesichen Koordianten . . . . . . . . . . . . . . . .112A.3.2. Die Nollschen Matrizen . . . . . . . . . . . . . . . . . . . . . . . .113
B. Verkabelung des OKO-Spiegels 115
Abbildungsverzeichnis 117
Tabellenverzeichnis 119
Literaturverzeichnis 121
Danksagung 123
7


Nomenklatur
Symbole
c Vakuumlichtgeschwindigkeit k Wellenzahlλ Wellenlänge ω = 2πc
λ Kreisfrequenzf Brennweite einer Linse D Aperturduchmesser
~x = (x, y, z) Ortsraumkoordinaten ~s = (ξ, η) Frequenzraumkoordinatene Euler-Zahl i imaginäre Einheit
Operationen
Komplexe Konjugation: w := a+ i b ⇒ w∗ = a− i b (0.1)
Faltung: f(~x) ∗ h(~x) :=
∞∫∫−∞
f(~x′)h(~x− ~x′) dx′ dy′ (0.2)
Kreuzkorrelation: f(~x) ? g(~x) :=
∞∫∫−∞
f(~x′) g(~x+ ~x′) dx′ dy′ (0.3)
Kreuzkovarianzfunktion Cfg(~x) :=
∞∫∫−∞
f(~x′) g∗(~x+ ~x′) dx′ dy′ (0.4)
Fourier-Transformation: F{f(~x)} := F (~s) :=
∞∫∫−∞
f(~x) e−i 2π ~s·~x dxdy (0.5)
Rücktransformation: F−1{F (~s)} := f(~x) :=
∞∫∫−∞
F (~s) e+i 2π ~s·~x dξ dη (0.6)
Faltungstheorem: F{f(~x) ∗ h(~x)} = F (~s)H(~s) (0.7)
Abkürzungen
Bi,l :=e ikzi,l
iλzi,lq (x, y; a) := e iπa[x2+y2]
zi,j := zj − zi δi,j :=
{1 wenni = j
0 wenni 6= jr :=
√x2 + y2
9

Skalare Funktionen
Kammfunktion: comb(x) :=∞∑
n=−∞δ(x− n); comb(x, y) := comb(x) comb(y)
Rechteckfunktion: rect(x) :=
1 wennx < 10, 5 wennx = 10 wennx > 1
; rect(x, y) := rect(x) rect(y)
Sinc-Funktion: sinc(x) :=sin(πx)πx
; sinc(x, y) := sinc(x) sinc(y)
Sombrerofunktion: somb(r) :=2 J1(πr)πr
mit J1(r) Bessel-Funktion 1. Art
Zylinderfunktion: cyl(r) :=
1 wennr < 10, 5 wennr = 10 wennr > 1
10

1. Einleitung
»Funkle, funkle, kleiner Stern,wer du bist, wüßt’ ich so gern.«
(Jane Taylor, 1806)
Die Sonne ist der uns nächstliegende Stern. Der zweitnächste Stern, Proxima Centauri, ist be-reits über zwei Millionen mal weiter von der Erde entfernt als die Sonne. Die meisten Sternein unserer Galaxie sind nochmals um einige Größenordnungen weiter entfernt. Die Oberflä-che der Sonne weist Feinstrukturen der Größenordnung 100 Kilometer auf. Von der Erdeaus erscheint diese typische Skala unter einem Winkel von etwa 1/10 Bogensekunde. Diesentspricht im sichtbaren Licht auch der ungefähren Beugungsgrenze der Winkelauflösung ei-nes 1-Meter-Teleskops. Um die feinskaligen Strukturen auf entfernten Sternen untersuchenzu können, wären Teleskope mit einer Öffnung größer als unser ganzer Planet notwendig.Bis zur Realisierung fantastisch anmutender Weltraumobservatorien ist die Sonne das einzigeLabor, mit dem experimentelle Stellarphysik bei feinen Skalen gemacht werden kann, derenErkenntnisse von großer Bedeutung auch für das Verständnis fremder Sterne sind.
Eine beugungsbegrenzte Auflösung wird jedoch schon bei Teleskopdurchmessern ab etwa10-20 Zentimetern von der Luft der Erdatmosphäre erschwert. Bei der Beobachtung durchdie Erdatmosphäre wird die erreichbare Winkelauflösung unabhängig vom Teleskop aufgrundturbulenter Geschwindigkeitsfelder mit geringen lokalen Temperaturfluktuationen auf etwa ei-ne Bogensekunde beschränkt. Denn diese Temperaturfluktuationen führen zu Schwankungendes Brechungsindex’, die die optische Weglänge innerhalb von Millisekunden verändern undsomit die gradlinige Ausbreitung von Licht beeinflussen, mit der Folge, dass ebene Wellen-fronten beim Durchlaufen der Erdatmosphäre verformt werden. Der gleiche Effekt kann amHorizont über einer stark aufgeheizten Straße oder über einer Kerzenflamme betrachtet wer-den. Die deutlichste Auswirkung dieses sog. Seeings ist dabei eine zufällige Bewegung desOjektbildes in der Bildebene des Teleskops. Beim Betrachten eines Sterns sind zudem nochPhantombilder, die sog. Speckles, erkennbar.
Seit Begin der 1970er Jahre versuchen Astronomen mit statistischen Mehoden Kurzeitauf-nahmen auf geeignete Art und Weise zu mitteln, um diese störenden Einflüsse der Erdat-mosphäre im Nachhinein herauszurechen. Dies ist unter dem Namen Speckle-Interferometriebekannt.
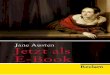
Die Adaptive Optik, die seit den 1990er Jahren Einzug in die Astronomie hält, soll dasSeeing in Echtzeit und optisch kompensieren, so dass bereits das aufzunehmende Bild im Ide-alfall beugungsbegrenzt aufgelöst ist (siehe Abbildung 1.1). In optisch adaptiven Systemenwird dazu die optische Weglänge – z. B. mit einem deformierbaren Spiegel – entsprechend derWellenfrontverformung korrigiert. Zur Bestimmung dieser Verformung wird ein Wellenfront-sensor benötigt.
11

1. Einleitung
Abbildung 1.1.: Zwei fotografische Aufnahmen im G-Band des selben Sonnenflecks bei normalenSeeing (links) und bei angeschalteter adaptiver Optik (rechts). Die Bilder zeigen einen Ausschnitt vonetwa60′′ × 60′′. Aufnahme: Kasia Mikurda (KIS) am Vacuum Tower Telescope (VTT) mit dem Kie-penheuer Adaptive Optics System (KAOS), 2003.
Momentan werden in der Sonnenphysik nur Hartmann-Shack Wellenfrontsensoren einge-setzt. Diese können jedoch nicht flexibel an die gegebenen Seeingverhältnisse angepasst wer-den. Mit dieser Diplomarbeit soll ein neuartiger, optisch differenzierender Wellenfrontsensor(Optical Differentiation Wavefront Sensor) für die Sonnenbeobachtung auf Basis einer Flüs-sigkristallanzeige experimentell aufgebaut und getestet werden, der in dieser Hinsicht nichteingeschränkt ist. Entsprechende Flüssigkristallanzeigen finden heutzutage in Videoprojek-toren breite Verwendung und sind zu niedrigen Preisen zu erwerben. Für den Test wird derWellenfrontsensor auf ein künstliches Beobachtungsziel gerichtet und in den Lichtweg einebekannte Aberration eingeführt, die der Sensor erkennen soll.
In Kapitel 2 über Fourier-Optik werden die grundlegenden Modelle der Lichtausbreitungund Bildentstehung, die für das Verständnis des Wellenfrontsensors wichtig sind, aufgeführt.Im darauffolgenden Kapitel 3 werden die auflösungsbeschränkenden Einflüsse der Erdatmo-sphäre erläutert und wie die Adaptive Optik diese kompensiert. In Kapitel 4 wird das Prinzipder optischen Wellenfrontdifferentiation erklärt. In Kapitel 5 werden die für diese Arbeit wich-tigen Eigenschaften von Flüssigkristallen bzw. Flüssigkristallanzeigen behandelt. Der Testauf-bau des Wellenfrontsensors wird detailliert in Kapitel 6 vorgestellt. Die Vorgehensweise beider experimentellen Durchführung und die Ergebnisse sind in den Kapiteln 7 und 8 darge-stellt.
12

2. Abriss der Fourier-Optik
»Fouriers Theorem ist nicht nur eines der schönsten Ergebnisseder modernen Analysis, sondern es könnte ein unabkömmlichesInstrument der Behandlung fast jeder tiefgründigen Frage dermodernen Physik liefern.«
(Lord Kelvin, 1867)
Die Fourier-Optik beschreibt die Ausbreitung von Licht im freien Raum. Sie beruht auf derskalaren Theorie des Lichts, die nur die Amplitude der elektromagnetischen Feldvektoren be-trachtet. Die Fourier-Optik kann daher keine Beschreibung für Polarisationszustände liefern.Für die Behandlung der Lichtausbreitung im freien Raum ist die Polarisation jedoch nicht vonBedeutung. In diesem Kapitel werden kurz die Grundlagen der Fourier-Optik, die dem Ver-ständnis der Beugung und der Bildentstehung in einem Teleskop dienen, in Anlehnung an dasBuchLinear Systems, Fourier Transforms and Opticsvon Jack D. Gaskill ([5]) dargestellt.
2.1. Skalare Beschreibung elektromagnetischerWellen
Die elektrische FeldamplitudeE : R3×R 7→ R einer monochromatischen, linear polarisiertenelektromagnetischen Welle wird durch
E(~x, t) = a(~x) cos(ω0t− φ(~x)) (2.1)
beschrieben, wobei~x = (x, y, z) ist. Die komplexe DarstellungE : R3 × R 7→ C
E(~x, t) = a(~x)e i[ω0t−φ(~x)] = a(~x)e−iφ(~x) · e iω0t , (2.2)
so dassE(~x, t) = <{E(~x, t)
}ist, erleichtert die folgenden Rechnungen: Der stationäre Term
u(~x) := a(~x)e iφ(~x) (2.3)
wird komplexe Amplitudegenannt. In der komplexen Schreibweise separiert die Feldamplitudealso im Ort und in der Zeit, so dass
E(~x, t) = u∗(~x) · e iω0t (2.4)
ist. Da sich das zeitliche Verhalten vonE also immer einfach durch die Multiplikation derkomplexen Amplitudeu∗(~x) mit e iω0t ergibt, genügt es im Folgenden nur die komplexe Am-plitudeu(~x) zu betrachten.
13

2. Abriss der Fourier-Optik
Die StrahlungsleistungI : R3 7→ R+ einer elektromagnetischen Welle ist definiert durch
I(~x) :=⟨∣∣∣E(~x, t)
∣∣∣2⟩t
= |u(~x)|2 . (2.5)
Sie gibt die pro Fläche und Zeit durch eine elektromagnetische Welle transportierte Energiean und hat die Einheit W/m2.
2.1.1. Ebene Wellen
Die Feldamplitude einer unendlich ausgedehnten Welle mit fester AmplitudeA, die sich mitder Wellenlängeλ in Richtung~k ausbreitet, wird durch
E(~x, t) = A cos(ω0t− ϕ− ~k · ~x) (2.6)
beschrieben. Eine Welle nach Gleichung (2.6) hat ebene Wellenfronten und wirdebene Wellegenannt. Ihre Phase im Koordinatenursprung istϕ und für den Wellenvektor~k gilt
~k =2πλ
(γx, γy, γz) , mit γ2x + γ2
y + γ2z = 1 . (2.7)
Istαi der Winkel zwischen deri-ten Koordinatenachse und der Ausbreitungsrichtung~k, dannist
γi = cosαi , mit i ∈ {x, y, z} . (2.8)
Die komplexe Amplitude einer ebenen Welle ist in kartesischen Koordinaten gegeben durch
u(x, y, z) = Ae iϕe ikγzz · e ik[γxx+γyy] . (2.9)
Der rechnerischen Einfachheit halber sei im Folgenden das kartesische Koordinatensystemstets so definiert, dass seine positivez-Achse mit der Ausbreitungsrichtung der ebenen Welleübereinstimmt. Zuweilen wird im Folgenden die Abkürzung
ui(x, y) := u(x, y, zi) (2.10)
für die komplexe Amplitude in einer festen Ebene mitz = zi benutzt. Für eine ebene Welle,die sich entlang derz-Achse ausbreitet gilt somit:
ui(x, y) = A e iϕe ikzi (2.11)
Weiterhin soll gelten:i > l⇒ zi > zl
Anmerkung: Ebene Wellen sind eine Idealisierung und – da sie insbesondere keiner ausge-zeichneten Quelle entspringen und ihre Energie nicht endlich ist – unphysikalisch. In Ab-schnitt 2.1.3 wird erläutert, dass ebene Wellen nicht nur als Näherung Verwendung finden,sondern dass sie – für die exakte und bequeme Beschreibung beliebiger physikalischer Wellendienend – von grundlegender Bedeutung für die Fourier-Optik sind.
14

2.1. Skalare Beschreibung elektromagnetischer Wellen
2.1.2. Sphärische Wellen
Nach dem Prinzip von Huygens und Fresnel ist jeder Punkt einer Wellenfront der Ursprungeiner sphärischen Elementarwelle, die auch unter dem Namen Huygens-Wavelet bekannt ist.Es ist die Überlagerung dieser Elementarwellen, durch die Beugungseffekte in Abschnitt 2.2erklärt werden können. Die komplexe Amplitude einer sphärischen Welle, die von dem Punkt(α, β, 0) ausgeht, wird durch
u(x, y, z) = D cosψe ikR
R(2.12)
beschrieben, wobei
R := z
√1 +
[x− αz
]2+[y − βz
]2!� λ (2.13)
der Abstand des Punktes(x, y, z) von der Quelle ist und
cosψ :=z
R(2.14)
der Inklinationsfaktor. Istz > 0, so beschreibt Gleichung (2.12) eine sphärische Welle, dievom Punkt(α, β, 0) aus divergiert, istz < 0, beschreibt Gleichung (2.12) eine sphärischeWelle, die auf den Punkt(α, β, 0) konvergiert.
2.1.3. Zerlegung in ebene Wellen
Die komplexe Amplitudeui(x, y) einer beliebigen, aber physikalischen Welle ist immer Fou-rier-transformierbar. IstUi(ξ, η) := F {ui(x, y)} die Transformierte vonui(x, y), dann lässtsichui(x, y) wiederum als Rücktransformation darstellen:
ui(x, y) = F−1 {Ui(ξ, η)} =∫∫
Ui(ξ, η) e i 2π[ξx+ηy] dξ dη (2.15)
Nach Gleichung (2.9) beschreibt der Exponentialterme i 2π[ξx+ηy] eine ebene Welle mit Am-plitude 1, die sich in Richtung(λξ, λη,
√1− λ2[ξ2 + η2]) ausbreitet.
Die komplexe Amplitudeui(x, y) einer physikalischen Welle kann als li-neare Superposition sich in verschiedene Richtungen ausbreitender, ebenerWellen verstanden werden.Ui(ξ, η) wird deswegen auchWinkelspektrumvonui(x, y) genannt.
2.1.4. Amplitudentransmission
Die Wirkung einer Transparenz – bspw. einer Blende oder eines Dias – auf eine Welle wirddurch diekomplexe Amplitudentransmissiont : R2 7→ C beschrieben. Istu−(x, y) die kom-plexe Amplitude der Welle unmittelbar vor der Blende undu+(x, y) die komplexe Amplitude
15

2. Abriss der Fourier-Optik
unmittelbar hinter der Blende, so ist die komplexe Amplitudentransmission definiert als
t(x, y) :=u+(x, y)u−(x, y)
. (2.16)
Unter Kenntnis der komplexen Amplitudentransmission eines Objektes lässt sich die auslau-fende Welle ausu+(x, y) = t(x, y)u−(x, y) bestimmen. Da eine Transparenz ein passivesElement ist, gilt darüber hinaus
|t(x, y)|2 ≤ 1 .
Das bedeutet: eine Transparenz kann die Amplitude ortsabhängig schwächen und eine ortsab-hängige Phasenverschiebung einführen.
2.2. Skalare Beugungstheorie
Trifft eine ebene Welle im freien Raum senkrecht auf eine Blende, deren Öffnung deutlichgrößer als ihre Wellenlänge ist, so lassen sich auf einem Schirm nach der Blende interessanteHelligkeitsverteilungen beobachten. Diese sog. Beugungsmuster verändern ihren Charaktermit wachsender Entfernung zwei Mal. Der gesamte Bereich hinter der Blende wirdRayleigh-Sommerfeld-Regiongenannt. In der Nähe der Blende entspricht die Helligkeitsverteilung inetwa dem Quadrat der Transmission der Blende. In größerer Entfernung, der sog.Fresnel-Region, werden Beugungseffekte aufgrund des Huygens-Fresnelschen Prinzips signifikant unddeutliche Variationen in der Helligkeit treten auf. In noch größerer Entfernung scheinen dieMuster glatter, und es treten darüber hinaus auch völlig dunkle Bereiche auf. Dieser BereichheißtFraunhofer-Region.
2.2.1. Beugung in der Rayleigh-Sommerfeld-Region
Die Beugungsformel von Rayleigh und Sommerfeld beschreibt das Ausbreiten einer optischenWelle zwischen zwei beliebigen Ebenen: Istu1(x, y) die komplexe Amplitude in der Ebenemit z = z1, dann ist die Amplitude in einer Ebene mitz = z2 gegeben durch
u2(x, y) =
∞∫−∞
∞∫−∞
u1(x′, y′)[
1kr12
− i] [
z12λr212
]e ikr12 dx′ dy′ , (2.17)
wobei die Abkürzungen
z12 := z2 − z1, r12 := z12
√1 +
[x− x′z12
]2+[y − y′z12
]2(2.18)
benutzt werden. Istr12 � λ, vereinfacht sich Gleichung (2.17) zu
u2(x, y) ≈∞∫
−∞
∞∫−∞
u1(x′, y′)z12
iλr212e ikr12 dx′ dy′ . (2.19)
16

2.2. Skalare Beugungstheorie
Nach den Gleichungen (2.12) und (2.13) beschreibt1/r212 e ik12r eine sphärische Welle, diesich vom Punkt(x′, y′, z1) ausbreitet. Gleichung (2.19) liefert somit eine mathematische Be-schreibung des Prinzips von Huygens und Fresnel, nach dem sich Elementarwellen zu einerneuen Welle superpositionieren.
Das Doppelintegral in Gleichung (2.19) ist ein Faltungsintegral, so dass
u2(x, y) = u1(x, y) ∗ h12(x, y) (2.20)
mit der Abkürzung
h12(x, y) :=
exp
{ikz12
√1 +
x2
z12+y2
z12
}
iλz12
√1 +
x2
z12+y2
z12
(2.21)
geschrieben werden kann. Gleichung (2.20) beschreibt die Antwort des linearen, ortsunab-hängigen Systemsfreier Raum zwischenz1 und z2 auf eine Anregung durch die komplexeAmplitude u1(x, y). Die Funktionh12(x, y) ist dann alsImpulsantwortdieses Systems zuinterpretieren.1
Das Faltungsintegral in Gleichung (2.19) ist i. Allg. schwierig zu berechnen. Da aber fürlineare, ortsunabhängige Systeme die Impulsantworth12(x, y) aus derTransferfunktion
H12(ξ, η) = F {h12(x, y)} (2.22)
des Systems durch eine inverse Fourier-Transformation gegeben ist, lässt sichu2(x, y) wegendes Faltungstheorems bequem mit der Gleichung
u2(x, y) = F−1 {U1(ξ, η)H12(ξ, η)} (2.23)
ausrechnen.
Transferfunktion des freien Raums
Die TransferfunktionH12(ξ, η) des freien Raumes zwischenz1 und z2 wird aus folgenderÜberlegung gewonnen: Für die Phasenϕl und ϕi einer ebenen Welle, die sich unter demWinkel αz = arccos(
√1− λ2[ξ2 + η2]) zur z-Achse zwischen den beiden Ebenenzl undzi
ausbreitet, gilt nach Gleichung (2.9):
ϕl = ϕ+ kγzzl , ϕi = ϕ+ kγzzi
⇒ ϕl − ϕi = kγz[zl − zi] = k√
1− λ2[ξ2 + η2] [zl − zi] =: ∆φ(ξ, η) (2.24)
Bei der Ausbreitung im freien Raum erfährt eine elektromagnetische Welle also eine Phasen-verschiebung in Abhängigkeit von ihrer Ortsfrequenz. Daraus ergibt sich für den freien Raumzwischen den Ebenenzi undzl die Übertragungsfunktion
Hi,l(ξ, η) =Ul(ξ, η)Ui(ξ, η)
= e i ∆φ(ξ,η) = e ik√
1−λ2[ξ2+η2] [zl−zi] . (2.25)
1Zum Hintergrund dieser Betrachtungsweise sei an dieser Stelle auf [5] verwiesen.
17

2. Abriss der Fourier-Optik
2.2.2. Beugung in der Fresnel-Region
Bisher wurden keine Forderungen an die Ausdehnung vonu1(x, y) gestellt. Da reale Licht-quellen aber immer endlich groß sind und in Experimenten häufig Blenden zum Einsatz kom-men, erscheint es plausibel,u1(x, y) auf ein Gebiet zu beschränken. Befinde sich also in derEbenez1 eine Blende mit der Transmissiont1(x, y) und der maximalen radialen AusdehnungL1, so muss für die komplexe Amplitudeu+
1 (x, y) unmittelbar nach der Blende
u+1 (x, y) = 0 ,wenn
√x2 + y2 > L1 (2.26)
gelten. In der Praxis ist die komplexe Amplitude der fortschreitenden Welle ebenfalls nur ineinem beschränkten Bereich √
x2 + y2 6 L2 (2.27)
der Ebenez2 interessant. Diese beiden Einschränkungen ergeben zusammen
[x− x′]2 + [y − y′]2 6 [L1 + L2]2 , (2.28)
wobei (x, y) die Koordinate in der Ebenez2 bezeichnet und(x′, y′) die Koordinate in derEbenez1. Die Reihenentwicklung vonkr12 mit r12 aus Gleichung (2.18) lautet
k r12 = k z12
√1 +
[x− x′z12
]2+[y − y′z12
]2≈ k z12 +
k
2 z12
[(x− x′)2 + (y − y′)2
]− k
8 z312
[(x− x′)2 + (y − y′)2
]2.
(2.29)
Durch Erfüllen der1. Fresnelschen Bedingung
|z12|3!� π [L1 + L2]4
4λ(2.30)
wird der dritte Term in (2.29) wesentlich kleiner als ein Radiant und wird vernachlässigt, d. h.
k r12 ≈ k z12 +k
2 z12
[(x− x′)2 + (y − y′)2
]. (2.31)
Darüber hinaus sei der Abstandz12 zwischen Blende und Beobachtungsebene deutlich größerals die lateralen Ausdehnungen des Experiments, so dass auch die2. Fresnelsche Bedingung
|z12|!� L1 + L2 (2.32)
erfüllt ist. Nach Gleichung (2.28) folgt dann[x − x′]2 + [y − y′]2 � z212, und es folgt aus
Gleichung (2.29)r212 ≈ z2
12 . (2.33)
18

2.2. Skalare Beugungstheorie
Die beiden sog.Fresnelsche Näherungenaus den Gleichungen (2.31) und (2.33) vereinfachendie Rayleigh Sommerfeld Gleichung aus (2.19) zum Fresnelschen Beugungsintegral
u2(x, y) =e ikz12
ikz12
∞∫−∞
∞∫−∞
u+1 (x′, y′) · e
iπ
λz12[(x−x′)2+(y−y′)2]
dx′ dy′ (2.34)
und Gleichung (2.21) zur Impulsantwort des freien Raumes in der Fresnelschen Näherung
h12(x, y) = B12 q
(x, y;
1λz12
)(2.35)
mit
Bi,l :=e ikzi,l
iλzi,l, q (x, y; a) := e iπa[x2+y2] . (2.36)
Durch Fourier-Transformation ergibt sich die Transferfunktion
H12(ξ, η) = F{h12(x, y)} = e ikz12e−iπλz12[ξ2+η2]
= e ikz12q∗ (ξ, η;λz12) . (2.37)
Um Beugungsmuster in einem radialen Bereich von 20 cm nach den Fresnelschen Bedin-gungen beobachten zu können, ist für eine Blende mit 2 cm Durchmesser bei Beleuchtungdurch eine ebene Welle mitλ = 500 nm ein Abstandz12 ≈ 30 m erforderlich.
Sphärische Wellen in der Fresnelschen Näherung
Unter Anwendung der Fresnelschen Näherungen (Gl. (2.31) u. (2.33)) auf eine Kugelwelle(Gl. (2.12)), die vom Punkt(0, 0, z1) ausgehend divergiert, ergibt sich für die komplexe Am-plitude in einer Ebenez = z2 in der Fresnel-Region:
u2(x, y) ≈D
z12e ikz12e
iπ
λz12[x2+y2]
=D
z12e ikz12q
(x, y;
1λz12
)(2.38)
2.2.3. Beugung in der Fraunhofer-Region
Wird nun sogar gefordert, der Abstandz12 von Blende und Beobachtungsebene solle vielgrößer als die Blendenöffnung sein, so dass dieFraunhofersche Bedingung
|z12|!� πL2
1
λ(2.39)
erfüllt ist, wird aus dem Phasenfaktor im Fresnelschen Beugungsintegral aus Gleichung (2.34)
π
λ z12
[(x− x′)2 + (y − y′)2
]≈ π
λ z12[x2 + y2]− 2π
λ z12[xx′ + yy′] , (2.40)
19

2. Abriss der Fourier-Optik
und das Fresnelsche Integral vereinfacht sich zur Fraunhoferschen Beugungsformel:
u2(x, y) =e ikz12
ikz12e
iπ
λz12[x2+y2]
∞∫−∞
∞∫−∞
u+1 (x′, y′) · e
−i2πλz12
[xx′+yy′]
dx′ dy′
︸ ︷︷ ︸=U+
1
“x
λ z12, y
λ z12
”(2.41)
⇔ u2(x, y) = B12 q
(x, y;
1λ z12
)U+
1
(x
λz12,
y
λ z12
)(2.42)
Die komplexe Amplitude in der Fraunhofer-Region ist nach Gleichung (2.42) also proportio-nal zur Fourier-transformierten Amplitude direkt im Anschluss an die Blende. Somit bildetdie komplexe Amplitude in der Fraunhofer-Region das Winkelspektrum der Amplitude imAnschluss an die Blende ab. Dem Ort(x, y) in der Ebenez2 entspricht dabei die Frequenz(x/[λz12], x/[λz12]). Die komplexe Amplitudeu2(x, y) gibt somit den Beitrag der ebenenWelle mit der Ausbreitungsrichtung(x/[λz12], y/[λz12],
√1− [x2 + y2]/z12) zur Amplitu-
deu+1 in der Blende an.
2.2.4. Optische Fourier-Transformation
Wird die Transparenzt1(x, y) mit einer ebenen Welleu−1 (x, y) = A e i[kz1+ϕ] senkrecht be-leuchtet, dann ist die komplexe Amplitudeu+
1 (x, y) im Anschluss an die Transparenz nachGleichung (2.16)
u+1 (x, y) = A e i[kz1+ϕ]t1(x, y) . (2.43)
Ihre Fourier-Transformierte lautet
U+1 (ξ, η) = A e i[kz1+ϕ]T1(ξ, η) . (2.44)
Somit ist nach Gleichung (2.42) die komplexe Amplitude in der Fraunhofer-Region propor-tional zur Fourier-Transformierten TransmissionsfunktionT1 multipliziert mit dem quadrati-schen Phasensignalq. Das Betragsquadrat von Gleichung (2.42)
I2(x, y) = |u2(x, y)|2 =[
1λz12
]2 ∣∣∣∣U+1
(x
λz12,y
λz12
)∣∣∣∣2 (2.45)
entspricht der Helligkeitsverteilung auf einem Schirm an der Positionz2 in der Fraunhofer-Region. Das Einsetzen von Gleichung (2.44) führt auf:
I2(x, y) =|A|2
(λz12)2
∣∣∣∣T1
(x
λz12,y
λz12
)∣∣∣∣2 (2.46)
Die Helligkeitsverteilung in der Fraunhofer-Region einer gebeugten ebe-nen Welle entspricht dem Powerspektrum der beugenden Transmission.
20

2.3. Sphärische Linsen
z1
z2
z3
x
z
Linse
konjugierter PunktAusgangspunkt
Abbildung 2.1.: Wirkung einer sphärischen Linse auf eine Kugelwelle
2.3. Sphärische Linsen
Linsen sind das wichtigste und bekannteste optische Bauelement. Mit ihrer Hilfe können ab-bildende Systeme wie Teleskopobjektive realisiert werden. In der geometrischen Optik sindsie lediglich refraktive optische Elemente zur Beeinflussung der gradlinigen Ausbreitung vonLicht. In der Fourier-Optik wird die Funktion von sphärischen Linsen als Spekralanalysator2
interpretiert. Einesphärische Linsewandelt nach Definition eine einfallende Kugelwelle ineine auslaufende Kugelwelle mit verändertem Krümmungsradius um. Die Bezeichnung sphä-risch bezieht sich im eigentlichen Sinne nur auf diese Eigenschaft und nicht auf ihre Form.Prinzipiell besteht kein Unterschied zwischen (dispersionslosen) refraktiven und reflektivenElementen, die diese Eigenschaft erfüllen.
2.3.1. Amplitudentransmission
In Abbildung 2.1 ist eine sphärische Linse in der Ebenez = z2 skizziert, die mit einer Kugel-welle beleuchtet wird. Die sphärische Linse wandelt die einfallende Kugelwelle in eine andereKugelwelle um. Die einfallende Kugelwelle habe ihr Zentrum im Punkt(0, 0, z1) auf der op-tischen Achse. In der Fresnelschen Näherung lautet ihre komplexe Amplitude nach (2.38)
u−2 (x, y) = Aq
(x, y;
1λz12
)(2.47)
unmittelbar vor der Linse. Die AmplitudeA enthält dabei auch die Phase der Welle. Dieauslaufende Welle habe ihr Zentrum im Punkt(0, 0, z3). Für ihre komplexe Amplitude giltdann mitq(x, y;−a) = q∗(x, y; a)
u+2 (x, y) = Aq∗
(x, y;
1λz23
)pl(x, y) , (2.48)
wobeipl(x, y) die Aperturfunktion der Linse ist. Sie verschwindet außerhalb der Linse undist innerhalb idealerweise 1. Aus den beiden komplexen Amplituden unmittelbar vor und nachder Ebenez2 ergibt sich die komplexe Amplitudentransmission einer sphärischen Linse:
tl(x, y) =u+
2 (x, y)u−2 (x, y)
= q∗(x, y;
1λz12
+1
λz23
)pl(x, y) (2.49)
2Mit Spektrum ist hier das Winkelspektrum und nicht etwa das chromatische Spektrum gemeint!
21

2. Abriss der Fourier-Optik
ebeneBeobachtungs−
z1
z2
z3
z4
z5
x
TransparenzLinse
z
Abbildung 2.2.: Beugung einer Kugelwelle mit einer sphärischen Linse.
Die beiden Ebenenz1 und z3 mit den Zentren der Kugelwellen werdenkonjugierte Ebenengenannt, da sie über die Linsengleichung für eine Linse mit der Brennweitef
1f
=1z12
+1z23
(2.50)
miteinander verbunden sind. Die Amplitudentransmission einer sphärischen Linse mit derBrennweitef lautet somit
tl(x, y) = q∗(x, y;
1λf
)pl(x, y) . (2.51)
2.3.2. Linsen und Beugung
Im Folgenden wird die komplexe Amplitude in einiger Entfernung hinter der Linse betrachtet.In einer Ebenez = z3 zwischen der Linse und der Beobachtungsebene beiz = z4 soll sicheine Transparenzt3(x, y) – beispielsweise eine Blende oder ein Dia – befinden. Die Linse wirdmit einer Kugelwelle beleuchtet, die vom Punkt(0, 0, z1) mit z1 < z2 aus divergiert. Die Linsefokussiere die auslaufende Kugelwelle auf den Punkt(0, 0, z5). Der Aufbau ist in Abbildung2.2 grafisch veranschaulicht. Für die komplexe Amplitude nach der Linse gilt nach Gleichung(2.48):
u+2 (x, y) = Aq∗
(x, y;
1λz25
)pl(x, y) (2.52)
Nach der skalaren Beugungstheorie (2.20) ist die komplexe Amplitude unmittelbar vor derTransparenz durch die Faltung vonu+
2 mit der Impulsantworth23(x, y) des freien Raumeszwischen den Ebenenz2 undz3 gegeben. Erfülltz23 = z3−z2 die Fresnelschen Bedingungen,
22

2.3. Sphärische Linsen
so folgt mit Gleichung (2.35)
u−3 (x, y) = u+2 (x, y) ∗ h23(x, y) = u+
2 (x, y) ∗[B23 q
(x, y;
1λz23
)]. (2.53)
Die durch die Transparenz transmittierte Amplitude ist nach Gleichung (2.16) gegeben durch
u+3 (x, y) = u−3 (x, y) t3(x, y) . (2.54)
Um nun die komplexe Amplitude in der Beobachtungsebenez4 zu erhalten, sollu+3 wieder
gemäß den Fresnelschen Bedingungen propagieren, d. h. :
u4(x, y) = u+3 (x, y) ∗
[B34 q
(x, y;
1λz34
)](2.55)
Befindet sich die Transparenz dicht hinter der Linse, kann ihre Aperturfunktion näherungs-weise auf die Transparenz projiziert werden. Die komplexe Amplitude vor der Ebenez3 kanndann als eine konvergierende Kugelwelle
u−3 (x, y) ≈[Az25z35
]e ikz23q∗
(x, y;
1λz35
)(2.56)
angesehen werden. Durch die Projektion der Aperturfunktion auft3(x, y) ist dann
u+3 (x, y) ≈ A
z25z35
e ikz23q∗(x, y;
1λz35
)· pl
(z25z35
x,z25z35
y
)t3(x, y) . (2.57)
Legt man die Beobachtungsebene in die zuz1 konjugierte Ebenez5 und löst Gleichung (2.55)für z4 = z5, so erhält man
u5(x, y) ≈Az25z35
e ikz23B35
[1
λz25
]2q
(x, y;
1λz35
)× Pl
(x
λ z25,
y
λ z25
)∗ T3
(x
λ z35,
y
λ z35
)(2.58)
und
I5(x, y) = |u5(x, y)|2 ≈|A|2[z25z35
]2 [ 1λz25
]4 [ 1λ z35
]2×∣∣∣∣Pl
(x
λ z25,
y
λ z25
)∗ T3
(x
λ z35,
y
λ z35
)∣∣∣∣2 (2.59)
mit Pl(ξ, η) := F{pl(x, y)} undT3(ξ, η) := F{t3(x, y)}.
Große Linsen Für eine unendlich ausgedehnte Linse mitpl(x, y) = 1 (d. h.Pl(ξ, η) = δ(ξ, η)) entsprechen die Gleichungen (2.58) und (2.59) den Ergebnissen des Ab-schnitts 2.2.4 über optische Fourier-Transformation, da
δ
(x
λ z25,
y
λ z25
)∗ T3
(x
λ z35,
y
λ z35
)= T3
(x
λ z35,
y
λ z35
).
23

2. Abriss der Fourier-Optik
z2
z3 5
z4
z
x
Transparenz Linse Fraunhofer−Ebene
=zf
Abbildung 2.3.: Beleuchtung einer Transparenz vor einer Linse mit ebener Welle. Die Brennebeneentspricht der Fraunhofer-Ebene
Ein Aufbau nach Abbildung 2.3 arbeitet in diesem Fall als ein Spektralanalysator für dieTransparenzt3(x, y). Die Ebenez = z5 heißtFraunhofer-EbeneoderFourier-Ebene.
Durch Beleuchtung mit einer konvergierenden Welle wird die Entfernungder Fraunhofer-Region verkürzt und die Skala des Beugungsmusters ver-kleinert. Eine spärische Linse ist ein Spektralanalysator der beugendenTransmission.
Beugungsgrenze der Winkelauflösung
Die endliche Form der Linsenapertur sorgt wegen der Faltung in Gleichung (2.58) für eineVerschmierung des Transparenzspektrums. Für eine runde Linsenapertur mit dem Durchmes-serd, d. h.pl(x, y) = cyl(r/d) mit r =
√x2 + y2 ist
Pl(ξ, η) = d2π
4somb(d
√ξ2 + η2) .
Nach entfernen der Transparenz, d. h.
t(x, y) = 1 ⇔ T3
(x
λ z25,
y
λ z25
)= (λz25)2δ(x, y)
und beim senkrechten Beleuchten der Linse mit einer ebenen Welle, so dassz25 = f ist, istdie Helligkeitsverteilung in der Bild- bzw. Brennebene gegeben als
If(r) = |A|2[
1λ f
]2d4
4
J1
(πd
r
λ f
)dr
λ f
2
. (2.60)
24

2.4. Abbildungen mit inkohärentem Licht
fz1
z2
z3 4
z>>z12
z
(x’’,y’’)
Bildebene
D
x
Objektebene Eintrittspupille Austrittspupille
(x’,y’)
f
Abbildung 2.4.: Schematische Darstellung eines abbildenden Systems
Dabei istJ1(r) die Bessel-Funktion erster Art. Beir0 ≈ 1.22λf/d liegt die erste Nullstel-le von If(r). Der Kreis mit dem Radiusr0 wird Beugungs- oderAiry-Scheibchengenannt.Man kannρ0 := r0/(λf) als Auflösungsgrenze des zuvor erwähnten Spektralanalysators de-finieren, oberhalb derer zwischen zwei ebenen Wellen verschiedener Frequenzen nicht mehrunterschieden werden kann. Dies ist dasRayleighsche Auflösungskriterium.
2.4. Abbildungen mit inkohärentem Licht
In diesem Abschnitt wird die Abbildung weit entfernter, ausgedehnter selbstleuchtender Ob-jekte, wie z. B. der Sonne, in eine Bildebene erläutert. Das Objekt wird als eine Ansammlungzeitlich nicht korrelierter Punktquellen aufgefasst. Das ausgesandte Licht ist daher nicht ko-härent. Das abbildende System wird über seine Eintritts- sowie Austrittspupille und seine(kohärente) Impulsantwort charakterisiert, die für konkrete Konfigurationen aus den in Ab-schnitt 2.3 vorgestellten Methoden bestimmt werden können. Für Details sei auf [5, Kapitel11] verwiesen.
In Abbildung 2.4 ist eine Kugelwelle dargestellt, die von einem Punkt(x′, y′) des Ob-jekts aus divergiert und auf die Eintrittspupille des Systems als nahezu ebene Welle trifft. DasSystem wandelt diese Welle in eine auf den Punkt(x, y) in der Brenn- bzw. Bildebene kon-vergierende Kugelwelle um, die beim Verlassen des Systems an der Austrittspupille gebeugtwird.
Die Intensitätsverteilung, die ein einzelner Punkt(x′, y′) des Objektes in der Bildebenez4erzeugt, ist gegeben durch
I4(x, y;x′, y′) =FEP
z212
I1(x′, y′)∣∣∣∣P (x− f
z12x′, y − f
z12y′)∣∣∣∣2 . (2.61)
25

2. Abriss der Fourier-Optik
I1(x′, y′) ist die Intensität des Quellpunktes,z12 ist der Abstand zwischen Objekt und Ein-trittspupille und FlächeFEP der Eintrittspupille.f ist die Brennweite des Systems undP (ξ, η) = F {p(x, y)} ist die Fourier-tranformierte der Pupillenfunktionp(x, y) des Systems.Die FunktionPSF(x, y) := |P (x, y)|2 heißtPunktverbreiterungsfunktion. Sie entspricht demBetragsquadrat der (inkohärenten) Impulsantwort des Systems, die durch die Fourier-Trans-formierte der Aperturfunktionp(x, y) gegeben ist. Eine ebene Welle, die senkrecht auf dasSystem trifft, erzeugt in dessen Brennebene eine Intensitätsverteilung, die proportional zumBetragsquadrat der Fourier-transformierten Aperturfunktion ist.
Die gesamte IntensitätsverteilungI4(x, y), die alle Punkte des Objektes zusammen in derBildebene erzeugen, ist durch die Summe einzelnen VerteilungenI4(x, y;x′, y′) gegeben:
I4(x, y) =∫∫
I4(x, y;x′, y′) dx′ dy′ (2.62)
=FEP
z212
∫I1(x′, y′) PSF
(x− f
z12x′, y − f
z12y′)
dx′ dy′ (2.63)
=FEP
z212
I1(x, y) ∗ PSF(f
z12x,
f
z12y
)(2.64)
Die Intensitätsverteilung in der Bildebene eines abbildenden Systems ergibtsich aus der Faltung der Objektintensität mit der skalierten Punktverbrei-terungsfunktion des Systems.
Die Punktverbreiterungsfunktion eines runden abbildenden Systems mit der Eintrittsöff-nungd ist identisch mit dem Quadrat der Sombrero-Funktion aus Gleichung (2.60)
PSF(x, y) =
J1
(πd
r
λ f
)dr
λ f
2
, r =√x2 + y2 . (2.65)
Entsprechend gilt für runde abbildende Systeme auch das Rayleighsche Auflösungskriterium,das die Winkelauflösung auf
δ0 ≈ 1.22λ
d(2.66)
begrenzt.
2.4.1. Kenngrößen abbildender Systeme
Neben der PunktverbreiterungsfunktionPSF(ξ, η) = |F{p(x, y)}|2 kann das Leistungsvermö-gen eines optischen Systems äquivalent durch seine optische TransferfunktionOTF(ξ, η) :=F{PSF(x, y)} beschrieben werden. Nach dem Satz von Wiener-Khinchine
Cff (~x) = F−1{|F (~s)|2} ↔ F{Cff (~x)} = F{F−1{|F (~s)|2}} = |F (−~s)|2 (2.67)
über die AutokovarianzfunktionCff einer Funktionf gilt
OTF(x, y) = F{PSF(ξ, η)} = F{F{Cpp(−x, y)}} = Cpp(x, y) . (2.68)
26

2.4. Abbildungen mit inkohärentem Licht
Jedoch beinhaltet sowohl die optische Transferfunktion als auch die Punktverbreiterungsfunk-tion weniger Information über das System als die Pupillenfunktion oder ihre Transformierte,da weder die Autokorrelation noch das Bilden des Betragsquadrats invertierbar ist. Die Funk-tionenPSF undOTF genügen aber zur Beschreibung eines abbildenden Systems bei inkohä-renter Beleuchtung. Wir fassen zusammen:
F−1
F−1
-
-�
�
??
Pupille Bildebene
PSFOTFF
F
BetragsquadratAutokorrelation
Mit der optischen Transferfunktion kann Gleichung (2.64) als
F{I4(x, y)} =FEP
f2F{I1(x, y)} · OTF
(z12fξ,z12fη
)(2.69)
formuliert werden. Die i. Allg. komplexwertige optische Transferfunktion kann in zwei Teileaufgeteilt werden:
OTF(ξ, η) = MTF(ξ, η) e i PTF(ξ,η) (2.70)
Die ModulationstransferfunktionMTF(ξ, η) gewichtet die Ortsfrequenzen und bestimmt denKontrast der Abbildung. Sie fällt üblicherweise mit zunehmenden Frequenzbeträgen ab undlegt somit die Auflösung des abbildenden Systems fest. Insbesondere für die Adaptive Optikund interferometrische Anwendungen ist auch die PhasentransferfunktionPTF(ξ, η), die diefrequenzabhängige Phasenverschiebung eines optischen Systems beschreibt, von Bedeutung.
27


3. Adaptive Optik in der Astronomie
»Denn die Luft, durch welche wir nach den Sternen blicken,ist in beständigem Erzittern, wie wir [...] aus dem Funkeln derFixsterne erkennen. Aber die Sterne funkeln nicht [...].«
(Isaac Newton, 1718)
In diesem Kapitel wird, durch die BücherAdaptive Optics for Astronomical TelescopesvonJohn W. Hardy ([6]) undPrinciples of Adaptive Opticsvon Robert K. Tyson ([12]) inspiriert,ein kleiner Überblick über die Entwicklung und das Prinzip der Adaptiven Optik gegeben. Eswird kurz erklärt, wie die atmosphärischen Auswirkungen auf die Lichtausbreitung beschrie-ben und wie Wellenfronten gemessen werden können.
3.1. Motivation und Entwicklung der Adaptiven Optik
Sterne funkeln. Dies wird ein jeder bestätigen, der in einer warmen Sommernacht gen einenwolkenlosen Himmel blickt. Bereits Sir Isaac Newton erkannte, dass dieses Funkeln –Szin-tillation genannt – jedoch keine Eigenschaft der Sterne ist, sondern von der Erdatmosphäreverursacht wird [8]. So romantisch das Sternenfunkeln in einer klaren Sommernacht auchsein kann, stellen die atmosphärischen Auswirkungen auf die Lichtausbreitung (Seeing) einernsthaftes Problem für astronomische Beobachtungen dar, da die Abbildungen von Sternendramatisch verschlechtert werden.
Im Jahre 1948 wurde mit dem 5-Meter-Hale-Teleskop auf dem Mount Palomar das damalsweltweit größte Teleskop in Betrieb genommen.1 Mit dieser großen Öffnung war es möglich,lichtschwächere Objekte am Nachthimmel zu finden und somit auch tiefer in das All und wei-ter in die Vergangenheit des Universums zu blicken als jemals zuvor (vgl. Gleichung (2.64)).Die theoretische Winkelauflösungsgrenze des 5-Meter-Teleskops beträgt nach dem Rayleigh-schen Kriterium aus Gleichung (2.66) ca. 1/40 Bogensekunde. Im Durchschnitt wurde wäh-rend der Beobachtungen ein Wert von ca. 2 Bogensekunden erreicht und nur in seltenen Fälleneine Auflösung bis zu 1/3 einer Bogensekunde [1].
Während seiner Tätigkeit am Palomar-Observatorium regte Horace Babcock 1953 an, miteinem Stellglied den Lichtstrahl zu modifizieren und so das Seeing zu kompensieren [1]. AlsStellglied schlug Babcock einen elektrostatisch geladenen Spiegel vor, der mit einem dünnenÖlfilm bedeckt ist und mit einem Kathodenstrahl gerastert wird, so dass sich die Filmdickeund somit die optische Weglänge lokal verändert. Ein solcher Spiegel wurde damals in TV-Großbildprojektoren (Eidophor) zur Bilderzeugung eingesetzt.
1Erst das 1975 fertiggestellte BTA-6-Teleskop des nordkaukasischen Selentschuk-Observatoriums war mit seinem6-Meter-Spiegel größer.
29

3. Adaptive Optik in der Astronomie
Die technischen Anforderungen an ein System das atmosphärisches Seeing in Echtzeit(zumindest partiell) kompensiert sind gewaltig. Der zivilen Wissenschaft gelang es erst imJahre 1993 mit ADONIS2 am 3,6-Meter-Infrarot-Teleskop der Europäischen Südsternwarte(ESO) auf La Silla in Chile ein derartiges System zu realisieren. Konzepte zur Kompensie-rung des Seeings durch Modifizierung des Lichtstrahls in Echtzeit werden unter dem Be-griff Adaptive Optik3 zusammengefasst. In den fünf Jahrzehnten des Kalten Krieges betriebdas US-amerikanische Verteidigungsministerium unter strengster Geheimhaltung Forschun-gen auf dem Gebiet der Adaptiven Optik. Ziel war es, nach dem Sputnik-Schock, möglichstdetaillierte Bilder von russischen Satelliten zu erhalten. Nach dem Zerfall der Sowjet Unionwurden die Entwicklungen 1992 der wissenschaftlichen Gemeinschaft zur Verfügung gestellt.Seit 1998 arbeitet schließlich auch das Hale-Teleskop mit einer adaptiven Optik zur Verbes-serung der Abbildungsqualität [11]. Heutzutage wird an fast allen optischen Großteleskopenadaptive Optik eingesetzt, um eine beugungsbegrenzte Auflösung zu erreichen. In der Son-nenbeobachtung wurde die erste Adaptive Optik am National Solar Observatory (NSO) aufdem Sacramento Peak im Jahre 1999 realisiert. Das Vacuum Tower Telescope (VTT) desKiepenheuer-Instituts für Sonnenphysik (KIS) auf Teneriffa arbeitet seit 2002 im Alltagsbe-trieb erfolgreich mit adaptiver Optik und ist heute führend bei der Entwicklung einer multi-konjugierten adaptiven Optik (MCAO) zur Vergrößerung des korrigierten Bildfeldes.
Auf das genaue Prinzip der adaptiven Optik wird im übernächsten Abschnitt eingegangen.Es folgt eine kurze Übersicht über das Zustandekommen atmosphärischer Störungen.
3.2. Beobachtungen durch die Erdatmosphäre
3.2.1. Atmosphärische Einflüsse auf astronomischeBeobachtungen
Die Erdatmosphäre ist eine Quelle schwerwiegender, prinzipieller Beschränkungen von astro-nomischen Beobachtungen. Wegen ihrer streuenden Wirkung (Himmelblau) können licht-schwache Objekte nur auf der sonnenabgewandten Seite (Nacht) beobachtet werden, und ihrevielfältige molekulare Zusammensetzung verhindert durch Absorption Beobachtungen überweite Bereiche des elektromagnetischen Spektrums. Die Adaptive Optik hat nun die Aufgabeaus dem das Teleskop erreichende Licht maximale räumliche Information über ein Zielobjektim Visuellen und nahen Infrarot zu erhalten.
Die optisch störenden Gebiete der Atmosphäre sind an guten Beobachtungsorten haupt-sächlich auf Scherwinde in einer Höhe von ca. 10 000 Metern begrenzt. Insbesondere bei derSonnenbeobachtung tritt ein weiterer Effekt auf: Die Einstrahlung der Sonne erhitzt den Bodenund Konvektionszellen entstehen, die den Lichtweg in Bodennähe stören. In diesen Gebietenverursachen kleine, lokale Temperaturschwankungen von weniger als einem Kelvin leichteVariationen des Luftbrechungsindex. Die Summe dieser Variationen führt zu signifikant un-terschiedlichen optischen Weglängen für parallele, benachbarte Strahlen.4 In der Folge wirdeine ebene Wellenfront bei der Passage dieser Gebiete verformt. Die Abweichungen von einer
2ADaptive Optics Near Infrared System3Nicht zu verwechseln mitAktiver Optik, die nur stationäre instrumentelle Einflüsse kompensiert.4Dies ist der sog. geometrische Ansatz, der keinerlei Beugungseffekte berücksichtigt.
30

3.2. Beobachtungen durch die Erdatmosphäre
ebenen Wellenfront können mehrere Wellenlängen betragen. Die Zeitskala für die Brechungs-indexfluktuationen beträgt Millisekunden.
3.2.2. Beschreibung der turbulenten Atmosphäre
Nach dem Turbulenzmodell für inkompressible, strömende Fluide von Andrei N. Kolmogorowwird ein Teil der Energie der einfallenden Sonnenstrahlung in Luftwirbeln mit der typischenGrößeL0 aufgefangen. Diese Wirbel zerfallen in einer Kaskade in immer kleinere Wirbel, bisschließlich bei einer weiteren typischen Größel0 die Turbulenz zum erliegen kommt und dieEnergie als Reibungswärme dissipiert wird. Die beiden Skalen sind mit der ReynoldszahlRenach
l0 =L0
Re3/4(3.1)
miteinander verknüpft. Die innere Skalal0 beträgt Millimeter, und die äußere SkalaL0 reichtvon einem Meter in Bodennähe bis zu mehreren hundert Metern in höheren Schichten. Mitzahlreichen Arbeiten konnte die Statistik der lokalen Brechungsindexfluktuationen auf die Sta-tistik der Turbulenzzellen zurückgeführt werden. Dabei wird ausgenutzt, dass die Variation-en des Luftbrechungsindex direkt den trägen Temperaturfluktuationen entsprechen, da lokaleDruckstörungen mit Schallgeschwindigkeit ausgeglichen werden. Die großen Turbulenzzellenwirken sich optisch stärker als die kleinen Wirbel aus. Auf eine detaillierte Betrachtung derKolmogorowschen Turbulenzstatistik wird an dieser Stelle verzichtet, da sie für einen erstenTestaufbau des optisch differenzierenden Wellenfrontsensors nicht von unmittelbarer Bedeu-tung ist.
David L. Fried erforschte die optische Abbildung durch die turbulente Atmosphäre hin-durch. Er definierte die Auflösungsleistung eines Teleskops mit der optischen Transferfunkti-onT (ξ, η) durch
R :=∫∫
B(ξ, η)T (ξ, η) dξ dη . (3.2)
B(ξ, η) ist die optische Transferfunktion der Erdatmosphäre und kann über die Kolmogo-rowsche Turbulenzstatistik berechnet werden [6, Abschnitt 3.4.2]. Bei kleinen (aberrations-freien) Teleskopen entsprichtRλ2 der Öffnungsfläche des Teleskops. Für große Teleskopeist R =
∫∫B(ξ, η) dξ dη. Der Fried-Parameterr0 definiert den Durchmesser eines fiktiven
Teleskops für das ∫∫T (ξ, η) dξ dη =
∫∫B(ξ, η) dξ dη (3.3)
erfüllt ist. Für ein solches Teleskop beträgt die Standardabweichung der Wellenfront über diePupilleλ/(2π).
Der Fried-Parameter ist also ein Maß für die optische Turbulenz der Atmosphäre. Fürein Teleskop, dessen Öffnung größer als10 r0 ist, erhält man über die volle Halbwertsbrei-te des Bildes einer Punktquelle in der Teleskopbrennebene (Seeing-Scheibchen) die Seeing-begrenzte Winkelauflösung, kurzSeeinggenannt,
δSeeing=λ
r0. (3.4)
31

3. Adaptive Optik in der Astronomie
Ab einem TeleskopdurchmesserD > r0 ist die Auflösung wegen des Seeings begrenzt undnicht mehr durch Beugung. Teleskope mitD < r0 nehmen die atmosphärischen Einflüssehöchstens als Bildbewegungen wahr, die aufgrund von Wellenfrontverkippungen über die ge-samte Apertur entstehen. Bei Kurzzeitaufnahmen beeinflussen die Bildbewegungen die Auflö-sung jedoch nicht. Der Fried-Parameter liegt an astronomischen Beobachtungsorten bei einerWellenlänge von 500 Nanometern typischer Weise zwischen 7 und 12 Zentimetern und dieAuflösungsgrenze bei etwa einer Bogensekunde. Typische Wellenfrontabweichungen in einer1 Meter großen Pupille bewegen sich im Bereich von ca. 3 bis 6µm was in etwa 6 bis 12Wellenlängen entspricht.
3.2.3. Modale Beschreibung der Wellenfront
Aberrationen von optischen Geräten mit runder Öffnung werden analytisch üblicherweise mitZernike-Polynomenbeschrieben. Diese orthogonalen Polynome, benannt nach dem niederlän-dischen Nobelpreisträger Frits Zernike, sind auf dem Einheitskreis und in Polarkoordinatendefiniert. Robert J. Noll führte eine neue Normierung der Polynome und ein Ordnungsschemaein [9]. Noll zeigte die Möglichkeit auf, atmosphärische Aberrationen einer ebenen Wellen-front als zufällige Komposition dieser modifizierten Zernike-Polynome zu betrachten: DiePhasenlageφ(r, θ) einer Wellenfront in einer Pupille des DurchmessersR lautet
φ(Rρ, θ) =∞∑
j=1
aj Zj(ρ, θ). (3.5)
Zj(ρ, θ) bezeichnet das Zernike-Polynomj-ter Ordnung. Die Koeffizientenai sind normal-verteilt und haben den Mittelwert Null. Ihre Kovarianz folgt aus der Kolmogorowschen Tur-bulenzstatistik.
Definition der Zernike-Polynome
Die Zernike-Polynome sind nach [3] in Polarkoordinaten (0 ≤ ρ ≤ 1 und0 ≤ θ ≤ 2π) wiefolgt definiert:
Zj(ρ, θ) = Zmn (ρ, θ) := Rm
n (ρ) ·
{cos(mθ) , wennm ≥ 0sin(mθ) , wennm < 0
(3.6)
mit
Rmn (ρ) :=
[n−m]/2∑l=0
[−1]l [n− l]l![
n+m2 − l
]![
n−m2 + l
]!ρn−2l (3.7)
für n ∈ N mitm = −n; . . . ; 0; . . . ;n und (n−m) gerade. (3.8)
Der Indexn markiert die radiale Ordnung und der Indexm die azimutale Frequenz. Die Mo-den sind so zu ordnen, dassj genau dann gerade ist, wennm ≥ 0 ist. Bei gegebenemnwerdendie Moden nachm aufsteigend sortiert. Es gilt:
Rmn (1) = 1 und |Zm
n (ρ, θ)| ≤ 1 (3.9)
32

3.2. Beobachtungen durch die Erdatmosphäre
Die Orthogonalität der Zernike-Polynome ist durch
1π
1∫0
2π∫0
Zj(r, θ)Zj′(r, θ) ρdθ dρ = δj j′ (3.10)
gesichert.Nolls modifizierte Zernike-Polynome beinhalten zusätzlich zu Gleichung (3.6) noch den
Normierungfaktor√
2(n+ 1), wennm 6= 0, bzw.√n+ 1, wennm = 0.
Die ersten 15 Zernike-Polynome sind in Tabelle A.1 explizit aufgeführt und auf den Seiten110-111 grafisch dargestellt.
Ableitungen von Zernike-Polynomen
Noll hat desweiteren gezeigt, dass sich der Radialanteil der Zernike-Polynome über Bessel-Funktionen erster Art durch das Integral
Rmn (ρ) = 2π(−1)[n−m]/2
∞∫0
Jn+1(2πk) Jm(2πkρ) dk (3.11)
ausdrücken läßt. Durch Anwendung der Eigenschaften der Bessel-Funktionen fand er heraus,dass die Ableitungen von Zernike-Polynomen durch
~∇Zj =∞∑
j′=1
~γj j′ Zj′ (3.12)
gegeben sind. Die so genannten Nollschen Matrizenγ(x)j j′ bzw.γ(y)
j j′ sind in kartesischen Ko-ordinaten gegeben durch
γ(x)j j′ =
∫Zj′
Zj
dxd2ρ (3.13)
γ(y)j j′ =
∫Zj′
Zj
dyd2ρ . (3.14)
Es stellt sich heraus, dass die Ableitung der Zernike-ModeZj(ρ, θ) nur aus Moden besteht,deren Ordnung kleiner alsj ist. Die beiden Matrizen sind auf Seite 113 notiert. Die Ablei-tungen der ersten 21 Zernike-Polynome sind in Tabelle A.1 explizit aufgeführt.
Entwicklung nach Zernike-Polynomen
Die Koeffizientenaj in Gleichung (3.5) zur Entwicklung einer beliebigen Phasenfunktionφ(r, θ) innerhalb eines Kreises mit dem RadiusR nach Zernike-Moden erhält man aus demIntegral
aj =1
πR2
∫Apertur
φ(r, θ)Zj(r/R, θ) d2r. (3.15)
33

3. Adaptive Optik in der Astronomie
3.3. Die Funktionsweise adaptiver Optik
3.3.1. Klassische Adaptive Optik
Ein optisch adaptives System besteht konzeptuell aus drei Komponenten: einer Vorrichtungzur Messung (Sensor) der Phasenlage in der Pupille, einem Rekonstruktionsprozessor und ei-nem Stellglied (Aktor) zur Manipulation der optischen Weglänge zwischen Pupille und Bild-ebene des Teleskops (siehe Abbildung 3.1). Die Phasenmessung übernimmt ein Wellenfront-sensor, auf den in Abschnitt 3.4 genauer eingegangen wird. Die Manipulation der optischenWeglänge wird in der Regel mittels kipp- und deformierbarer Spiegel bewerkstelligt. Bei ei-ner klassischen Adaptiven Optik befindet sich der deformierbare Spiegel deshalb praktischerWeise in einer zur Pupille konjugierten Ebene und der Kippspiegel möglichst dicht davor. Esgibt auch Ansätze die Phasenlage mit Flüssigkristallanzeigen zu glätten [4]. Ein Rekonstruk-tionsprozessor berechnet aus den Sensordaten die Steuersignale für den Aktor zur Korrekturder Wellenfront und verbindet beide Komponenten in einem – üblicherweise – geschlossenenRegelkreis.
Rekontrukti−
onsprozessor
deformierbarer Spiegel
Hauptspiegel
Strahlteiler
Kippspiegel
Wellenfront
wiss. Instrumente
WFS
Abbildung 3.1.: Schematischer Aufbau einer adaptiven Optik mit geschlossenem Regelkreis. Ein Re-konstruktionsprozessor (Parallelcomputer) wertet die Signale des Wellenfrontsensors (WFS) aus undsteuert die beiden beweglichen Spiegel an. Der Kippspiegel korrigiert Bildbewegungen und der defor-mierbare Spiegel Wellenfrontdeformationen höherer Ordnungen.
3.3.2. Anisoplanatismus
Ein optisch adaptives Teleskop nach Abbildung 3.1 misst streng genommen nur die atmosphä-rischen Einflüsse entlang seiner Sichtlinie bzw. optischen Achse. Lichtstrahlen, die von einerabweichenden Richtung die Teleskopöffnung erreichen, haben im Allgemeinen eine andereWeglängenstörung erfahren und können somit nicht korrigiert werden (siehe Abb. 3.2). Die-se Tatsache –Anisoplanatismusgenannt – wirkt sich sowohl auf nächtliche Beobachtungen alsauch auf Sonnenbeobachtungen aus: Die Helligkeit nachtastronomischer Objekte reicht oftnicht aus, um Wellenfrontmessungen durchzuführen. Daher werden benachbarte Objekte miteiner scheinbaren Helligkeit im sichtbaren und nahen infraroten Licht von mindestens 10-15
34

3.4. Wellenfrontmessung in der Sonnenbeobachtung
turbulente
SchichtEintrittsöffnung Bildebene
h
θ
Abbildung 3.2.: Grafik zur Veranschaulichung des Anisoplanatismus’.
Magnituden als Referenz herbeigezogen. (Diese sog. Leitsterne können sowohl echte Sternesein, als auch künstliche Leuchttürme, die mit Laseranregung in der oberen Erdatmosphäreerzeugt werden.) Die Sonne hingegen kann bei ihrer Beobachtung selbst als Referenz die-nen. Wegen des Anisoplanatismus’ kann jedoch nicht über die ganze Sonnenscheibe korrigiertwerden, sondern nur über ein beschränktes Gebiet. Der Winkel-Anisoplanatismus ist eine dergroßen Einschränkungen aktueller, optisch adaptiver Teleskope.
Der isoplanatische Winkelθ0 ist derjenige Winkel zur Sichtlinie, bei dem die durchschnitt-liche Abweichung der Wellenfronten entlang der Sichtlinie und entlangθ0 in der Apertur einenRadiant beträgt. Der isoplanatische Winkelθ0 ist neben dem Fried-Parameterr0 abhängig vonder Höheh der turbulenten Luftschicht und der Winkeldistanzz der Sichtlinie zum Zenit. Füreine einzelne turbulente Luftschicht gilt:
θ0 ∝ 0,31 cos(z)r0h
(3.16)
Für sichtbares Licht liegtθ0 zwischen zwei und drei Bogensekunden.
3.4. Wellenfrontmessung in der Sonnenbeobachtung
Für astronomische adaptive Optiken ist es erforderlich, die Wellenfront in der Eintrittspupillean etwa 5-20 Punkten/Meter gleichzeitig mit einer Frequenz bis zu 1 kHz zu kennen. Dermittlere Fehler einer Messung sollte dabei nicht mehr als 0,1 Wellenlängen betragen.
In der adaptiven Optik wird zwischen der modalen und der zonalen Methode zur direktenMessung der Wellenfront in der Teleskoppupille unterschieden:
3.4.1. Modale Messung
Bei der modalen Messung wird die Wellenfront über die gesamte Pupille in Moden zerlegt.Die Zerlegung der Wellenfront in zwei linear unabhängige Verkippungen und in Defokus isteinfach realisierbar (siehe Hartmann-Shack Methode in Abschnitt 3.4.3 und Messerschneide-methode [12, Kap. 5.2.3]).
35

3. Adaptive Optik in der Astronomie
PhotodetektorenWellenfront Mikrolinsen
Abbildung 3.3.: Schematische Darstellung eines Hartmann-Shack Wellenfrontsensors. Der mittlereWellenfrontgradient innerhalb einer Subapertur führt in der Bildebene zu einer Bildbewegung.
3.4.2. Zonale Messung
Bei der zonalen Messung wird die Pupille durch mehrere, identische Subaperturen in Zonenunterteilt. Die Größe einer Subapertur ist so gewählt, dass die dominierende Aberration einerWellenfrontverkippung entspricht. Nach Abschnitt 3.2.2 ist das für SubaperturdurchmesserD′ < r0 der Fall. Die gleichzeitige und unabhängige Messung dieser Verkippung in allenSubaperturen, beschreibt den lokalen Gradienten der Wellenfront innerhalb der gesamten Pu-pille. Die räumliche Auflösung einer solchen Messung wird allein von der Größe bzw. Anzahlder Subaperturen bestimmt. Aufgrund der Endlichkeit vonr0 braucht die Auflösung aber nichtbeliebig hoch zu sein. Die maximale Anzahl der zu korrigierenden Subaperturen ist in etwa(D/r0)2. Zur zonalen Wellenfrontmessung in der Hartmann-Shack Wellenfrontsender weitverbreitet.
Auch wenn die Bestimmung höherer Moden mittels der modalen Messung deutlich kom-plizierter wird, sind modale und zonale Messungen prinzipiell gleichwertig. Die Werte aus dermodalen Messung können in zonale Daten umgewandelt werden und umgekehrt. Dies ermög-licht die Verwendung zonaler Wellenfrontsensordaten mit modalgesteuerten deformierbarenSpiegeln.
3.4.3. Der Hartmann-Shack Wellenfrontsensor
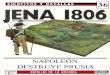
Hartmann-Shack Wellenfrontsensoren erfreuen sich in der adaptiven Optik einer großen Be-liebtheit. Ihr Funktionsprinzip ist einfach und ihre Leistung ist robust gegen äußere Einflüssewie Temperatur und Vibrationen. In der Sonnenbeobachtung wie u. a. imKiepenheuer InstitutAdaptive Optic System(KAOS) am VTT kommen sie heute exklusiv zum Einsatz. Aber auchin der Augenheilkunde werden Sensoren nach dem von Roland Shack erweiterten PrinzipJohannes Hartmanns zur präzisen und objektiven Bestimmung von Sehfehlern verwendet.
Ein Hartmann-Shack Wellenfrontsensor, wie er in Abbildung 3.3 dargestellt ist, bestehtaus einer regelmäßigen, zweidimensionalen Anordnung identischer Mikrolinsen – einem sog.Lensletarray – und einem mehrkanaligen Photosensor in der Bildebene dieser Linsen. Die Mi-krolinsen befinden sich in der Regel in einer konjugierten Ebene der Teleskoppupille. DieLinsenanordnung unterteilt die Pupille in einzelne Bereiche in denen die durchschnittlicheWellenfrontverkippung bestimmt wird (zonale Messung): Jede Mikrolinse erzeugt ein Bild
36

3.4. Wellenfrontmessung in der Sonnenbeobachtung
des betrachteten Objekts auf dem Photosensor. Eine Wellenfrontverkippung entlang einer sol-chen Linse bewirkt eine Verschiebung des Bildes weg von der optischen Achse. Im Falle ei-nes unaufgelösten Sterns entspricht das Bild dem Beugungsmuster der Mikrolinse. Um diei. Allg. zweidimensionale Verschiebung des Beugungsscheibchens zu bestimmen, sind proMikrolinse wenigstens 2×2 Pixel auf dem Photosensor erforderlich. Die Position des Beu-gungsscheibchens wird über die Analyse seines Intensitätsschwerpunktes ermittelt. Ein ausge-dehntes Objekt wie die Sonne wird jedoch nicht als Beugungsscheibchen auf den Photosensorabgebildet sondern als aufgelöste Struktur (siehe Abschnitt 2.4). Um anisoplanatische Effek-te zu verhindern, muss das Gesichtsfeld des Sensors kleiner als der anisoplanatische Winkelθ0 sein, so dass nur ein kleiner Teil der Sonne abgebildet wird. Die Verschiebung der Bilderwird mittels numerischer Korrelationsmethoden bestimmt, die ein gewisses Maß an Kontrastund Detailreichtum der Bilder benötigen. Um die nötige Auflösung zu erreichen, sind jedochdeutlich mehr als 2×2 Pixel pro Subapertur erforderlich.
Der Hartmann-Shack Sensor am VTT besteht aus 37 hexagonal angeordneten Mikrolinsen.Die Kantenlänge einer Linse beträgt 0,2525 mm und ihre Brennweite 40 mm. Das Gesichts-feld von ca.10′′ × 10′′ wird auf einen CCD-Chip im Maßstab von 0,5′′/Pixel abgebildet, sodass eine Subapertur mit einer Auflösung von 20×20 Pixeln abgetastet wird. Bei den ver-wendbaren 30-36 Subaperturen und einer erforderlichen Abtastrate von 1 kHz, stellt dies eineenorme technische Anforderung an den Photosensor dar, die erst mit der modernen Entwick-lung der CCD- und Computertechnologie gemeistert werden konnte. Die komplette Steuerungvon KAOS ist auf einem Parallelcomputer mit acht 800 MHz UltraSPARC III Prozessoren im-plementiert.
Limitationen
Wie bereits erwähnt, ist die räumliche Auflösung des Wellenfrontgradients bei der zonalenMessung von der Größe der Subaperturen abhängig. Die Subaperturen des Hartmann-Shack-Sensors dürfen jedoch nicht zu klein werden, da sonst ihre Winkelauflösung aufgrund vonBeugung verringert wird und die Bilder der Sonnenoberfläche in der Bildebene des Mikro-linsen in der Folge verschmieren und an Kontrast verlieren. Die Korrelationsmessungen derSubaperturbilder sind nicht mehr möglich. Andererseits dürfen die Subaperturen auch nichtso groß sein, dass höhere Wellenfrontaberrationen innerhalb einer Subapertur als einfacheVerkippungen zum tragen kommen, da dann die Subaperturbilder unscharf würden und de-ren Bewegung verschwände. Ein Hartmann-Shack Wellenfrontsensor kann wegen der festenSubaperturgröße nicht optimal an das momentane Seeing angepasst werden.
37


4. Wellenfrontmessung mittelsoptischer Differentiation
Von der Lühe hat 1988 einen optisch differenzierenden Wellenfrontsensor auf Basis einesFlüssigkristallbildschirms (LCD) vorgeschlagen [7], der insbesondere für die Beobachtungausgedehnter inkohärenter Zielobjekte mit geringem Kontrast, wie z. B. der Sonnengranula-tion, geeignet sein soll. Im Rahmen dieser Diplomarbeit soll erstmals das vorgeschlageneKonzept experimentell demonstriert werden. Frühere Versuche mit Flüssigkristallanzeigen ausTaschen-TV-Geräten schlugen fehl, da der Kontrast dieser Anzeigen nicht ausreichte und diePixelabmessungen zu groß waren. Die technischen Daten moderner LCD-Panels, wie sie inhandelsüblichen Videoprojektoren Verwendung finden, sind vielversprechend und motiviereneinen erneuten Versuch.
4.1. Die Idee
Der Aufbau des optisch differenzierenden Wellenfrontsensors ist in Abbildung 4.1 skizziert.Eine Linse in einer Ebenez2 bildet das betrachtete, sich praktisch im Unendlichen befindlicheObjekt in der Brennebenez3 ab. Eine zweite Linse, deren Brennebene mit dieser Bildebenezusammenfällt, erzeugt ein Bild von der Eintrittspupille in der Ebenez5, die sog. Austritts-pupille. Die Idee von der Lühes ist es, in die Bildebenez2 eine komplexe Amplitudentrans-missionm(ξ, η) – Maske genannt – in Form eines LCDs zu bringen, die das momentane Bilddes Objekts auf eine Weise moduliert, die die momentane lokale Wellenfrontverkippung inder Eintrittspupille entlang einer Richtung, die durch die Maske vorgegeben ist, in der Aus-trittspupille in Form von lokalen Intensitätsschwankungen sichtbar macht. Mit zwei solcher
f1z
2z
3z
42
fz
5
z
1. Linse 2. LinseMaske
Bildebene AustrittspupilleEintrittspupille
(ξ′,η′)
Abbildung 4.1.: Schematischer Aufbau des optisch differenzierenden Wellenfrontsensors.
39

4. Wellenfrontmessung mittels optischer Differentiation
Masken, die die Wellenfrontverkippung entlang zueinander senkrechten Richtungen messbarmachen, ließen sich so die lokalen Wellenfrontgradienten bestimmen und daraus durch Inte-gration die Wellenfront in der Pupille rekonstruieren. Auf die Berechnung der Maske wird erstin Abschnitt 4.3 eingegangen. Da möglicherweise verschiedene Methoden zum Ziel führen,sei hier nur angemerkt, dass die Maske aus dem Objektbild selbst entsteht. Die Maske an sichist statisch, sie wird nur aktualisiert, wenn sich die Objektstruktur zu sehr verändert hat. Beider Sonne würde die Maske nur einmal innerhalb einiger weniger Minuten aktualisiert wer-den müssen. Die typische Reaktionszeit moderner LCDs von ca. 10-20µs ist somit nicht vonBelang.
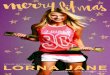
Zum intuitiven Zugang des zugrunde liegenden Prinzips stelle man sich eine ebene Wellen-front vor, die schräg auf die Pupille fällt. Wie bereits in Abschnitt 3.4.3 über den Hartmann-Shack Sensor erwähnt wurde, führt diese Wellenfrontverkippung über die gesamte Apertur zueiner Verschiebung des Bildes. In Abbildung 4.2 sind beispielhaft Überlagerungen eines Son-nengranulationsbildes mit einer entsprechenden Maske gezeigt. Bewegt sich das Bild aufgrundeiner Verkippung der Wellenfront horizontal, so nimmt die Gesamthelligkeit in der Bildebeneund im Weiteren damit auch in der Austrittspupille je nach Richtung der Bewegung zu oderab. Die Erweiterung dieses Prinzips zur Messung der Gesamtwellenfrontverkippung in derPupille hin zu lokalen Verkippungen in Subaperturen stellt keine Schwierigkeit dar.
4.2. Allgemeine analytische Beschreibung
Obgleich Abbildung 4.2 einen intuitiven Zugang zu von der Lühes Idee gewährt, sollen seineBerechnungen kurz anhand der in Kapitel 2 dargestellten Erkenntnisse über die Ausbreitungvon Licht erläutert werden. Zuvor werden kurz die verwendeten Koordinaten erklärt:Von einem einzelnen Punkt(x′, y′, z1) des weit entfernten Objekt geht eine Kugelwelle aus,die am Ort der Eintrittspupille als ebene Welleu−2 (x, y;x′, y′, z1) interpretiert werden kann.Das Winkelspektrum einer solchen Welle besteht nur aus einer Frequenz(ξ′, η′), die stellver-tretend für den Ort der Quelle auf dem Objekt steht, und wir schreiben deshalb der Einfachheithalber(x′, y′, z1) ≡ (ξ′, η′).
4.2.1. Die Intensität in der Austrittspupille
Ein System aus zwei Linsen, deren Brennebenen zusammenfallen, wie in Abbildung 4.1 ge-zeigt, ist eine Hintereinanderschaltung zweier Spektralanalysatoren. Dass eine solche Kaskadeals ein Signalskalierer wirkt, wird schnell plausibel, wenn man an das Kepler-Fernrohr denkt,das den Winkeldurchmesser des betrachten Objekts vergrößert und nach dem eben beschrie-ben Prinzip aus zwei Linsen aufgebaut ist. Das Einbringen der Maske in die Fourier-Ebenez3 erlaubt ein selektives Abschwächen von Raumfrequenzen der Pupillenamplitude. Aus demSignalskalierer wird so ein optischer oder räumlicher Filter.
Die komplexe Amplitudeu3(x, y; ξ′, η′), die der Objektpunkt(ξ′, η′) in der Brennebe-ne z3 erzeugt, ist proportional zur Fourier-Transformierten der Amplitudeu2(x, y; ξ′, η′) =t2(x, y)u−2 (x, y; ξ′, η′), die er in der Pupillenebenez2 erzeugt. Dabei istt2(x, y) die Trans-mission der Pupille. Die Ortskoordinate(x, y, z3) in der Brennebene entspricht(ξ′λf1, η′λf1).
40

4.2. Allgemeine analytische Beschreibung
(a) Objektstruktur in derBildebene: Sonnengranulation(10′′×10′′)
(b) Quasibinäre Maske fürhorizontale Richtung
(c) Produkt aus Bild (a) undMaske (b). (Ausschnitt:8′′×8′′) ∆x = 0, I = 1
(d) ∆x = −7,I = 0.88
(e) ∆x = −3,I = 0.90
(f) ∆x = 3, I = 1.10 (g) ∆x = 7, I = 1.12
Abbildung 4.2.: Eine horizontale Bewegung des Bildes (a) führt in der Überlagerung,d. h. Multiplikation, mit der entsprechenden Maske (b) zu einer Variation der Gesamthelligkeit in derBildebene (c)-(g). Die Verschiebung∆x in Pixeln und die GesamthelligkeitI ist jeweils angeben. Ist dieVerschiebung nicht zu groß, spiegelt die Gesamthelligkeit sowohl ihre Richtung als auch ihren Betragwider.
Es gilt:
u−3 (x, y; ξ′, η′) ∝ F{u2(x, y; ξ′, η′)}∣∣∣ ξ = x/(λf1)η = y/(λf1)
= U2
(x
λ f1,y
λ f1; ξ′, η′
)(4.1)
In der Brennebenez3 wird U2(ξ, η) mit der komplexen Transmissionm(ξ, η) der Maske mo-duliert, so dass
u+3 (x, y; ξ′, η′) ∝ U2
(x
λ f1,y
λ f1; ξ′, η′
)·m(
x
λ f1,y
λ f1
)(4.2)
ist. Die zweite Linse führt wiederum eine Fourier-Transformation durch, sodass die komplexeAmplitude in der Austrittspupille durch
u5(x, y; ξ′, η′) ∝ F{U2
(x
λ f1,y
λ f1; ξ′, η′
)·m(
x
λ f1,y
λ f1
)} ∣∣∣ ξ = x/(λf2)η = y/(λf2)
(4.3)
41

4. Wellenfrontmessung mittels optischer Differentiation
(a) ReferenzbildI(ξ, η):Sonnengranulation.Ausschnitt von10′′×10′′
(b) HorizontaleMaske fürx-Richtung.Entspricht derhorizontalenAbleitung desReferenzbildes vonrechts nach links.
(c) Vertikale Maskefür y-Richtung.Entspricht dervertikalen Ableitungdes Referenzbildesvon oben nach unten.
(d) Quasibinärehorizontale Maske
(e) Quasibinärevertikale Maske
Abbildung 4.3.: Die Masken (b) u. (c) werden nach Gl. (4.7) u. (4.8) mit∆ = 0.16′′aus dem Refe-renzbild (a) erzeugt. Die Erstellung der quasibinären Masken (d) u. (e) aus den normalen Masken (b) u.(c) wird in Abschnitt 4.3.2 erläutert.
gegeben ist. Unter Zuhilfenahme des Faltungstheorems aus Gleichung (0.7) ergibt sich
u5(x, y; ξ′, η′) = u2
(−f2f1x,−f2
f1y; ξ′, η′
)∗M
(−f1f2x,−f1
f2y
). (4.4)
Die gesamte IntensitätsverteilungI5(x, y) in der Austrittspupille, die durch Betrachtungdes inkohärenten Objekts hervorgerufen wird, ist durch die Summe der Betragsquadrate derkomplexen Amplitudeu5(x, y; ξ′, η′) über alle Punkte(ξ′, η′) des Objektes gegeben:
I5(x, y) =∫∫
|u5(x, y; ξ′, η′)|2 dξ′ dη′ (4.5)
=∫∫ ∣∣∣∣u2
(f2f1x,f2f1y; ξ′, η′
)∗M
(f2f1x,f2f1y
)∣∣∣∣2 dξ′ dη′ (4.6)
Die IntensitätsverteilungI5(x, y) hängt also sowohl von den einzelnen Amplituden in derPupille, die den Wellenfrontfehler enthalten als auch von der Maske ab. Die Ausdehnung derIntensitätsverteilung wird von dem Skalierungsfaktorf2/f1 bestimmt.
4.3. Die Maske
Wie müssen nun die Transmissionsverteilungen der Masken aussehen, damit die lokale Wel-lenfrontverkippung entlang derx- bzw.y-Richtung in der Austrittspupille sichtbar wird? Vonder Lühe schlägt für die horizontale Maske
mx(ξ, η) = B + C
[I
(ξ +
∆2, η
)− I
(ξ − ∆
2, η
)](4.7)
42

4.3. Die Maske
und analog für die vertikale Maske
my(ξ, η) = B + C
[I
(ξ, η +
∆2
)− I
(ξ, η − ∆
2
)](4.8)
vor, wobei I(ξ, η) die Intensität in der Bildebene des Objektpunktes mit den Koordinaten(ξ, η) ist, sowieB undC Konstanten, die dafür sorgen, dass0 ≤ m(ξ, η) ≤ 1 erfüllt ist.Wie von der Lühe gezeigt hat, darf die Schrittweite∆ nicht wesentlich größer als die Korre-lationslängelc der BildstrukturI(ξ, η) sein. Die beiden eckigen Klammern kann man jeweilsals skalierten Differenzenquotienten der Helligkeit der Bildebene in die jeweilige Richtunginterpretieren. In Abbildung 4.3 (a)-(c) sind ein Referenzbild und die daraus konstruierte ho-rizontale bzw. vertikale Maske beispielhaft aufgezeigt.
4.3.1. Intensitäten
Für die IntensitätenI5(x, y) in der Austrittspupille erhält von der Lühe mit dem Ansatz
u2(x, y) = t2(x, y)︸ ︷︷ ︸Apertur
√I(ξ, η) e−i[xξ+yη]︸ ︷︷ ︸
ebene Welle
e iφ(x,y)︸ ︷︷ ︸Abweichung von
ebener Welle
(4.9)
für die aberrierte komplexe Amplitude in der Eintrittspupille nach Gleichung (4.6) mit denMaskentransmissionen aus den Gleichungen (4.7) und (4.8):
I5x(x, y) ≈ B2 F (0, 0) + 4BC
∣∣∣∣Fx
(δ02
)∣∣∣∣2 sin(φ(x, y)− φ
(x− δ0
2, y
))(4.10)
I5y(x, y) ≈ B2 F (0, 0) + 4BC
∣∣∣∣Fy
(δ02
)∣∣∣∣2 sin(φ(x, y)− φ
(x, y − δ0
2
))(4.11)
Dabei sind
F (x, y) = F{I(ξ, η)} =∫∫
I(ξ, η)e−i2π[xξ+yη]dξ dη (4.12)
die Fourier-transformierte Struktur und∣∣∣∣Fx
(δ02
)∣∣∣∣2 :=
∞∫−∞
∞∫0
|F (x, y)|2 sin(π∆x) dxdy (4.13)
∣∣∣∣Fy
(δ02
)∣∣∣∣2 :=
∞∫0
∞∫−∞
|F (x, y)|2 sin(π∆ y) dxdy (4.14)
Skalierungsfaktoren. Die Differenz im Sinus der Gleichungen (4.10) und (4.11) ist der ge-suchte Phasenunterschied zweier Punkte, die im Abstandδ0/2 in der jeweiligen Richtungvoneinander entfernt liegen. Dieser Abstand ergibt sich aus der Breite des Powerspektrums|F (x, y)|2, der Schrittweite∆ und der Korrelationslängelc. Es gilt
δ0 =∆|∆|2
,wenn ∆ ≡ lc . (4.15)
43

4. Wellenfrontmessung mittels optischer Differentiation
Ist der Phasenunterschied deutlich kleiner alsπ/2, so sind die Gleichungen (4.10) und(4.11) linear in den lokalen Wellenfrontverkippungen, so dass
I5x(x, y) ≈ B2 F (0, 0) + 4BC
∣∣∣∣Fx
(δ02
)∣∣∣∣2 [φ(x, y)− φ(x− δ0
2, y
)](4.16)
I5y(x, y) ≈ B2 F (0, 0) + 4BC
∣∣∣∣Fy
(δ02
)∣∣∣∣2 [φ(x, y)− φ(x, y − δ0
2
)](4.17)
gilt. Der konstante, additive TermF (0, 0) in den Gleichungen (4.10) und (4.11) spiegelt dieGesamtintensität des Objekts wider. Variiert diese mit der Zeit, so führt dies zu einer verän-derten IntensitätI5(x, y). Der Einfluss der Gesamtintensität auf das Messsignal kann kom-pensiert werden, indem die Transmission der Masken in kurzen Abständen invertiert wird,d. h.m−1(ξ, η) := 1 − m(ξ, η) und die Differenzen der so erhaltenen Intensitäten gebildetwerden. Das Ergebnis ist dann direkt proportional zur lokalen Wellenfrontverkippung, z. B.
∆I5x(x, y) ≈ 8BC∣∣∣∣Fx
(δ02
)∣∣∣∣2 [φ(x, y)− φ(x− δ0
2, y
)]. (4.18)
4.3.2. Binäre Masken
Von der Lühe hat gezeigt, dass bereits quasibinäre Masken mit im Wesentlichen zwei Trans-missionsstufen – durchlässig und nicht durchlässig – entsprechend den Gleichungen (4.7) und(4.8), wie in Abbildung 4.3 (d) u. (e) dargestellt, für die Anwendung ausreichen. Die qua-sibinären Masken werden aus den normalen Masken 4.3 (b) bzw. (c) erstellt: Die weißen(transparenten) Bildpunkte der quasibinären Maske sind Bildpunkte, deren Transmission überdem Median der normalen Maske liegt, und die schwarzen (intransparenten) Bildpunkte sinddiejenigen mit einer geringeren Transmission als dem Median. Die wenigen grauen (halbtrans-parenten) Bildpunkte der quasibinären Maske markieren den Median der normalen Maske.
Die vorgeschlagene Reduzierung der Transmissionsstufen über den Median impliziert, dasseine quasibinäre Maske und ihre Invertierte die gleiche Gesamtdurchlässigkeit haben, da dieAnzahl der weißen Bildpunkte gleich der Anzahl der schwarzen Bildpunkte ist. Dadurch istdie Intensität in der Bildebenez3 beim Invertieren der Maske erhalten, was fundamental fürdie Funktionsweise des Wellenfrontsensors ist.
Die Möglichkeit, die Anzahl der Transmissionsstufen auf quasi zwei (maximal durchläs-sig und undurchlässig) zu reduzieren ist von großer Wichtigkeit, da die optische Weglängein einer Flüssigkristallzelle von ihrem Transparenzgrad abhängt, um zusätzliche Wellenfront-störungen durch die Flüssigkristallanzeige zu verhindern. Im Folgenden ist mit Maske immereine quasibinäre Maske gemeint.
4.4. Wellenfrontrekonstruktion
Aus den lokalen Wellenfrontverkippungen nach Gleichung (4.18) kann die Wellenfront modalrekonstruiert werden. Eine beliebige Wellenfrontφ(x, y) kann nach Gleichung (3.5) als eine
44

4.5. Einbau im Teleskop
Reihe
φ(x, y) =∞∑
j=1
aj Zj(x, y) (4.19)
aus Zernike-PolynomenZj(x, y) dargestellt werden.1 Der Gradient dieser Wellenfront kanndann durch
~∇φ(x, y) =∞∑
j=1
aj~∇Zj(x, y) (4.20)
beschrieben werden. Aus einem gegeben Satz vonN Messwerten~βk der lokalen Wellenfront-kippung in Form von Helligkeitswerten auf einem CCD-Chip können die Koeffizientenaj
in Gleichung (4.19) über die Minimierung der quadratischen Abweichung (siehe Abschnitt6.5.2)
χ2 =N∑
k=1
~βk −∞∑
j=1
aj~∇Zj(x, y)
2
(4.21)
bestimmt werden.Prinzipiell kann die Wellenfront auch durch eine künstliche Zerlegung in Subaperturen auf
zonale Art und Weise aus den durchnschnittlichen Gradienten innerhalb dieser Subaperturenwie bei einem Hartmann-Shack Sensor rekonstruiert werden (siehe dazu z. B. [6, Kapitel 8]).Die Größe der Subaperturen kann dabei optimal auf das Seeing eingestellt werden.
4.5. Einbau im Teleskop
Ein Vorschlag von der Lühes, wie das beschriebene Wellenfrontsensorkonzept realisiert wer-den kann, um gleichzeitig alle Daten mit einer einzelnen photometrischen Aufnahme zu ge-winnen, die für eine Wellenfrontrekonstruktion erforderlich sind, nutzt die polarisationsdre-hende Eigenschaft von Flüssigkristallzellen mit Hilfe zweier Wollastonprismen2 aus. DieserVorschlag ist in Abbildung 4.4 schematisch skizziert. In einer Bildebene begrenzt eine Feld-blende das Gesichtsfeld auf ca. 10 Bogensekunden. Mit einer Kollimatorlinse und einem Wol-lastonprisma werden zwei divergierende Strahlen unterschiedlicher Polarisation erzeugt. Miteiner weiteren Linse werden in diesen Strahlen auf dem Flüssigkristallbildschirm zwei ge-trennte Bilder der Bildebene erzeugt. Der nackte Flüssigkristallbildschirm ohne irgendwelchePolarisatoren trägt zwei Masken für die Bestimmung der lokalen Wellenfrontverkippung ent-lang zweier Richtungen. Die Masken sind ohne diese Polarisatoren hier noch nicht als Trans-parenzgrad sondern als Polarisationsdrehwinkel kodiert. Im spannungslosen Zustand drehteine Flüssigkristallzelle die Polarisationsrichtung um 90°, während sie bei angelegter (maxi-maler) Spannung unverändert bleibt. Auf diese Weise sind auf dem Flüssigkristallbildschirmgleichzeitig und an dem selben Ort die quasibinäre Maske und ihre Inverse geschaltet. Miteinem weiteren Wollastonprisma kann nun der quasibinäre Transparenzgrad der Masken auf
1Selbstverständlich können auch andere Basisfunktion zur Darstellung benutzt werden.2Ein Wollastonprisma ist ein polarisierender Strahlteiler, das einen einfallenden unpolarisierten Lichtstrahl in zwei
unter einem Winkel von 15-45° divergierende Strahlen aufteilt, die senkrecht zueinander polarisiert sind.
45

4. Wellenfrontmessung mittels optischer Differentiation
Feldblende
������������������������������������������������������
������������������������������������������������������
Linse 1
Wollaston 1Linse 2
Wollaston 2
Linse 3
Detektor
LCD
����������������������������
����������������������������
������������������
������������������
����������������������������
����������������������������
������������������
������������������
Abbildung 4.4.: Schematische Darstellung einer Anordung zur vollständigen Bestimmung des Wel-lenfrontgradienten mit einer einzigen photometrischen Aufnahme. Die Kamera, anhand deren Livebildesdie Masken erzeugt werden, ist nicht eingezeichnet. Grafik und Idee: O. von der Lühe.
zwei weiteren getrennten Strahlen realisiert werden, so dass über eine abbildende Linse letzt-lich vier Pupillenbilder auf einem Photodetektor entstehen, die die vollständige Informationüber den Wellenfrontgradienten beinhalten. Es müssen nur noch jeweils die zwei Bilder einerRichtung subtrahiert und aus diesen Differenzen die Wellenfront nach Abschnitt 4.4 rekon-struiert werden.
46

5. Flüssigkristallanzeigen
Flüssigkristalle haben sich in den letzten zwei Jahrzehnten zu einem wichtigen Medium zurVisualisierung zeitlich veränderlicher Information entwickelt. Anzeigen auf Basis flüssigerKristalle sind Teil unseres (all-)täglichen Lebens geworden. Sie bilden einen Grundstock fürdie moderne, digitale Welt, für die kompakte und energieeffiziente Anzeigeelemente ebensowichtig sind wie hochintegrierte Schaltkreise.
Breite Anwendung fanden die Flüssigkristallanzeigen oder Liquid Crystal Displays (LCD)erstmals zu Beginn der 1980er Jahre in Armbanduhren und Taschenrechnern. Heute befindensich LCDs in nahezu jedem elektronischen Gerät, das seinem Benutzer Informationen mit-teilen soll, die über seinen Betriebsstatus hinausgehen. Komplexe interaktive Funktionen vonvielen Geräten, wie z. B. Telekommunikationsgeräten oder Kopierern, werden überhaupt erstdurch die Verwendung kompakter Anzeigeelemente möglich.
Große Fortschritte auf dem Gebiet der Halbleitertechnik haben dazu geführt, dass die über100 Jahre alte, sperrige Elektronenstrahlröhre aktuell zunehmend von Flüssigkristallbildschir-men aus Fernsehgeräten und Computermonitoren verdrängt wird. In der Videoprojektion spieltdie Elektronenstrahlröhre heute überhaupt keine Rolle mehr. Dies ist die Domäne hochmo-derner Flüssigkristalltechnologie und der mikromechanischen DLP-Technologie1 von TexasInstruments.
Im folgenden Abschnitt werden die prinzipiellen, für unsere Anwendung relevanten, Eigen-schaften von Flüssigkristallen dargelegt. Darauf folgt ein Abschnitt, der ihre Anwendung inAnzeigeelementen erklärt.
5.1. Flüssige Kristalle
Flüssige Kristalle? Dieser Begriff, der von Otto Lehmann2 eingeführt wurde, scheint zunächstwidersprüchlich. Versteht man doch unter einer Flüssigkeit eine Substanz, deren Molekülefrei beweglich sind. Flüssigkeiten sind isotrop und weisen keinerlei Fernordnung auf. Im Ge-gensatz dazu sind die Moleküle von festen Körpern mit ihren Schwerpunkten an feste Ortegebunden und können höchstens elastische bzw. vibratorische Bewegungen ausführen. DieMoleküle von Kristallen sind in einem periodischen, dreidimensionalen Gitter anisotrop an-geordnet.
Manche Stoffe mit länglichen Molekülen zeigen in begrenzten Temperaturbereichen (beiNormaldruck) Eigenschaften, die sowohl typisch für Kristalle als auch für Flüssigkeiten sind.In dieser flüssigkristallinen Phase sind die Moleküle immernoch leicht verschiebbar, es bildensich jedoch spontan makroskopische, anisotropische Bereiche mit innerer Ordnung aus.
1Digital Light Processing,http://www.dlp.com2Deutscher Physiker, 1855-1922
47

5. Flüssigkristallanzeigen
Abbildung 5.1.: Die Ordnungsphasen flüssiger Kristalle. Die nematische Phase (links), die cholester-inische Phase (mitte) und die smektische Phase (rechts).
Es gibt verschiedene Ordnungstypen von Flüssigkristallen, die in Abbildung 5.1 skizziertsind. Für die Anzeigentechnik ist fast ausschließlich die nematische Phase interessant, in derdie länglichen Moleküle bevorzugt in eine gemeinsame Richtung zeigen, aber ansonsten kei-nerlei räumliche Ordnung aufweisen, wie dies auch bei normalen, isotropen Flüssigkeiten derFall ist.
5.2. TFT-LC-Displays
Der schematische Aufbau einer einfachen Zelle (Segment oder Pixel) eines Flüssigkristallbild-schirms ist in Abbildung 5.2 gezeigt. In einer Zelle eines LCDs sind nematische Flüssigkris-talle zwischen zwei Glasplatten eingeschlossen. Auf der Innenseite der Glasplatten befindetsich eine transparente Elektrode aus Indiumzinnoxid (ITO). Die Elektroden sind mit Polyimidbeschichtet, das eine Rauigkeit mit einer Vorzugsrichtung aufweist. Die länglichen Flüssig-kristallmoleküle richten sich nach dieser Richtung aus. Die Vorzugsrichtungen der Elektro-denrauigkeit sind um 90º gegeneinander verdreht, so dass sich die Flüssigkristalle spiralför-mig zwischen den beiden Glasplatten ausrichten. Dies ist die sog. gedreht-nematische Phase(twisted nematic phase). Die in dieser Weise angeordneten Flüssigkristalle drehen nun die Po-larisationsrichtung von Licht, das parallel zur Spiralachse durch die Displayzelle ausbreitet.Mit steigender Spannung zwischen den Elektroden richten sich die Flüssigkristallmolekülewegen ihres großen Dipolmoments immer stärker in Richtung des elektrischen Feldes aus unddie polarisationsdrehende Eigenschaft geht immer mehr verloren. Mit zwei Polarisationsfilternauf der Außenseite der Glasplatten wird so ein Lichtventil realisiert. Sind diese beiden Polari-satoren parallel zu einander ausgerichtet, so ist das LCD im spannungslosen Zustand opak undwerden mit wachsender Spannung durchsichtig. Sind die Polarisatoren um 90º gegeneinanderverdreht, verhält es sich genau anders herum und das Display ist im spannungslosen Zustanddurchsichtig.
In modernen Thinfilmtransistor-LC-Displays (TFT-LCD) sind die Pixel in einer aktivenMatrixstruktur angeordnet, in der jedes Pixel jeweils über einen eigenen Dünnschichttransistorund einen Kondensator verfügt (nicht in Abb 5.2 dargestellt). Über den Transistor wird derKondensator ge- oder entladen, der die gewünschte Spannung zwischen den Pixelelektrodenhält.
48

5.2. TFT-LC-Displays
ITO−Elektrode
ITO−Elektrode
Flüssigkristall
Glas
GlasPolarisator
Analysator
Abbildung 5.2.: Schematische Darstellung der Funktionsweise einer LCD-Zelle. Die parallel zu denITO-Elektroden ausgerichteten, gedreht-nematisch angeordneten Flüssigkristallmoleküle (links) richtensich beim Anlegen einer Spannung auf (rechts). Bei gekreuztem Polarisator und Analysator erscheint dieZelle im spannunglosen Zustand durchsichtig und bei angelegter Maximalspannung opak.
49


6. VersuchsaufbauDie Neugier steht immer anerster Stelle eines Problems,das gelöst werden will.
(Galileo Galilei)
In diesem Kapitel wird detailliert beschrieben, wie der optisch differenzierende Wellenfront-sensor aus einem Videoprojektor realisiert wurde. Zum Test des Sensors wurde mit einemKollimator ein künstliches Zielobjekt erzeugt und mit einem deformierbaren Spiegel eine steu-erbare, bekannte Wellenfrontaberration erzeugt, die der Sensor erkennen sollte.
6.1. Skizze und Beschreibung
Für den Testaufbau, der in Abbildung 6.1 skizziert ist, wurden folgende Komponenten ver-wendet:
• ein LCD-Videoprojektor (Hitachi Illumina PJ-TX100)
• ein deformierbarer Spiegel (OKO MMDM 37 Ch, 15 mm)
– ein Hochspannungsverstärker (OKO 20 Channel Amplifier, 1997)
– Digital-analog-Wandler (OKO DAC-40 USB)
• ein PC mit Linux (Debian Sarge mit SuSE Kernel 2.6.8-24.14 wegen Kamera-Kernelmodul)
– eine Grafikkarte für Mehrbildschirmbetrieb mit DVI-Ausgang (NVIDIA GeForceFX 5200 Chip)
– eine USB 2.0 Karte (NEC Controllerchip)
• ein Twyman-Green Interferometer (FisbaµPhase)
– ein PC mit Windows 95
• eine CMOS-USB-Kamera (VRmagic VRmC-4pro/BW)
• drei achromatische Bikonvexlinsen: 2× Edmund L45-268 (f = 500 mm), 1× EdmundL32-327 (f = 100 mm)
• drei lineare Polarisationsfilter
• zwei Planspiegel
51

6. Versuchsaufbau
• ein Kaltglas KG3
• ein UV-Filter
• vier Zeiss-Schienen und weitere mechanische Komponenten
Aus dem Videoprojektor habe ich zwei LCD-Panels und die Quecksilberhochdruckdampf-lampe samt ihrer Linsenoptik ausgebaut (siehe Abschnitt 6.1.1). Das Panel LCD1 wird mitder Lampe und ihrer Linsenoptik, bestehend aus dem Kondensor K und den Integratorlinsen-arrays, gleichmäßig ausgeleuchtet. Um das Panel und den Polarisationsfilter P1 vor thermi-schen Schäden aufgrund der Lampenintensität zu schützen, wird das Licht der Lampe an einerGlasscheibe in Richtung des Panels LCD1 reflektiert. Der Einfallswinkel des Lampenlichtszur Glasscheibe beträgt ca. 56º. Bei diesem Winkel wird ca. 16 % der einfallenden Intensitätreflektiert [2, S. 456, Abb. IV.15]. Das übrige Licht wird durch das Glas transmittiert und aufeiner schwarzen Fläche (nicht dargestellt) absorbiert. Da bei ca. 56º auch der Brewster- bzw.Polarisationswinkel von Glas liegt, ist das reflektierte Licht bereits stark linear polarisiert [2,S. 448, Abb. IV.7, Tab. IV.1, S. 456, Abb. IV.15]. Der entsprechend ausgerichtete PolarisatorP1 muss so nur noch wenig Energie dissipieren. (Das Kaltglas vor dem Polarisator P1 sollteursprünglich als Wärmeschutz für das LCD1 bei geradem Strahlengang wirken. Seine Absorp-tionsleistung war jedoch nicht ausreichend, so dass ich letztlich die beschriebene Reflexionan einer Glasscheibe verwendet habe. Das Kaltglas verblieb jedoch weiter im Strahlengang.)Zum Schutz der LCD-Panels und der Personen im Raum vor der UV-Strahlung der Queck-silberlampe habe ich einen UV-Filter zwischen dem zweiten Linsenarray des Intregrators unddem Kondensor platziert.
Das Panel LCD1 befindet sich in der Brennebene der Linse L1, die somit das Muster aufdem LCD in das Unendliche projiziert. Der Lichtstrahl wird dann unter einem Winkel von 96ºüber Planspiegel M1 auf den deformierbaren Spiegel DM gelenkt, der eine künstliche, verän-derbare Aberration in die bis dahin ebene Wellenfront einführt. Der Polarisator P2 zwischenLCD1 und L1 ist gegenüber P1 um 90º gedreht. Über Planspiegel M2 wird der Lichtstrahl wie-der in die ursprüngliche Richtung gelenkt und trifft auf Linse L2. Diese bildet in ihrer Brenn-ebene das Muster von LCD1 im Maßstab 1 ab. Wegen der ungeraden Anzahl an Spiegeln istdas Bild – anders als bei einem herkömmlichen 4f-Aufbau – nur um die horizontale Mittelach-se gespiegelt. In der Bildebene der Linse L2 befindet sich außerdem das zweite LCD-PanelLCD2. Die Linse L3 bildet diese Ebene in das Unendliche ab. Die Kamera C ist in der Ebeneplatziert, die konjugiert zur Position des deformierbaren Spiegels ist. Der Polarisator P3 zwi-schen L3 und der Kamera ist gegenüber P2 um 90º gedreht. Das Interferometer ist senkrechtvor dem deformierbaren Spiegel hinter den beiden Umlenkspiegeln M1 und M2 positioniert.
Zur Demonstration des Wellenfrontsensorprinzips wird auf Panel LCD1 ein Ausschnitt so-larer Granulation von ca.10′′ × 10′′ (128× 128 Pixel) geschaltet. Somit simuliert die An-ordnung aus L1 und LCD1 die unendlich weit entfernte Sonne. Der deformierbare Spiegelsimuliert die Auswirkungen der Erdatmosphäre auf die Ausbreitung des Lichts (Seeing). DieLinse L2 kann konzeptionell als Hauptspiegel eines Teleskops betrachtet werden.
Auf Panel LCD2 wird eine nach Gleichung (4.7) bzw. (4.8) erstellte Maske mit drei Trans-missionsstufen geschaltet. Damit die Orientierungen der Maske und der abgebildeten Granu-lation übereinstimmen, muss die Maske um die Horizontale gespiegelt werden.
52

6.1. Skizze und Beschreibung
P3
L3
L2
M2
M1
L1
P1
P2
LCD
1LC
D2
DM
K Lam
pe
I
UV
−F
ilter
Inte
grat
or
Gla
s
CK
G
Abb
ildun
g6.
1.:
Ski
zze
des
Test
aufb
aus:
Der
Lich
tweg
verlä
uftv
onre
chts
nach
links
.Lin
seL
1pr
ojiz
iert
die
aufL
CD 1
gesc
halte
teS
onne
ngra
nula
ti-on
ins
Une
ndlic
he(S
onne
nsim
ulat
or).
Übe
rdie
Pla
nspi
egel
M1
und
M2
wird
derS
trah
lauf
den
defo
rmie
rbar
enS
pieg
elD
Mge
lenk
t,de
rein
ede
finie
rte
Wel
lenf
ront
aber
ratio
ner
zeug
t(S
eein
gsim
ulat
or).
Lins
eL
2,
LCD
2,
Lins
eL 3
und
die
Kam
era
Cbi
lden
den
Wel
lenf
ront
sens
or.
Das
Inte
rfer
omet
erI
verm
isst
die
For
mde
sde
form
ierb
aren
Spi
egel
szu
rR
efer
enz.
53

6. Versuchsaufbau
L 3
L 2
LCD
1
L 1
LCD
2
Kam
era
Inte
rfer
omet
er
D/A
−W
andl
er
Pro
jekt
orV
erst
ärke
r
Lam
pe
OK
O−
Spi
egel
Abb
ildun
g6.
2.:
Fot
ogra
fisch
eA
ufna
hme
des
Test
aufb
aus.
Wäh
rend
der
Mes
sung
enw
ardi
eK
amer
aau
fein
em3-
achs
igen
Kre
uztis
chm
ontie
rt.
54

6.1. Skizze und Beschreibung
Auflösung 1280 Spalten× 720 Zeilen (HDTV 720p, 16:9)Kontrast 1200:1Helligkeit 1200 Ansi-LumenLampenart Quecksilberhochdruckdampflampe (200 Bar)Lampenleistung 150 WEingang (RGB) VGA, SVGA, UXGA
Tabelle 6.1.: Wichtige technische Daten des Hitachi Illumina PJ-TX100 Videoprojektors
Die Anordnung aus L2, LCD2, L3 und C stellt eine Realisation des von von der Lühe vor-geschlagenen Wellenfrontsensorprinzips dar. Das Interferometer vermisst die Form des defor-mierbaren Spiegels als Referenz. Die Wellenfrontsensormessungen müssen mit dem Gradien-ten der interferometrisch gemessenen Spiegelform übereinstimmen.
6.1.1. Der Videoprojektor
Der verwendete Videoprojektor mit der Marken- und Modellbezeichnung Hitachi IlluminaPJ-TX100 ist ein handelsüblicher HDTV-Heimkinoprojektor basierend auf der 3LCD Tech-nologie von Epson1. Der Projektor verfügt über drei identische monochrome LCD-Panels mitdenen mittels additiver Farbmischung der Grundfarben Rot, Grün und Blau ein farbiges Bilderzeugt werden kann. Die optische Funktionsweise des Projektors ist in Abbildung 6.3 ge-zeichnet. Der Projektor wird von dem Linux PC über den DVI-Ausgang der NVidia TwinViewGrafikkarte angesteuert. Die technischen Daten sind in Tabelle 6.1 notiert.
K
KK
S
S
LCDP
dichroitisches Prisma
K
Lampe
S
Projektionslinse
dichroitische Spiegel
Abbildung 6.3.: Schematischer Aufbau eines 3LCD Videoprojektors: Das weiße Licht der Lampe wirdmit dichroitischen Spiegeln in je einen roten, grünen und blauen Strahl aufgeteilt und über Planspiegel(S) zu dem LCD des jeweiligen Farbkanals geleitet. Über ein dichroitisches Prisma werden die Strahlenwieder vereint. Die Kondensorlinsen (K) lenken das Licht der Lampe in die Projektionslinse, die einreelles Bild der LC-Displays erzeugt.
1http://www.3lcd.com
55

6. Versuchsaufbau
TypHigh Temperature Poly-Silicon Thin-Film TransisorHTPS-TFT (aktive Matrix)
Bildschirmdiagonale 1,8 cm (0,7 Zoll)Bildschirmmaße
15,4 mm× 8,7 mm(Breite× Höhe)Pixelanzahl
1284× 724(Spalten× Zeilen)Pixelabstand
12µm× 12µm(Breite× Höhe)Pixelwandstärke 2,5µmFüllfaktor ca. 60 %Gehäusemaße
23,2 mm× 24,6 mm× 5,8 mm(Breite× Höhe× Tiefe)Seitenverhältnis 16:9Displayfarbe monochromMikrolinsen unbekannt
AnschlußFlexible Printed Circuit (FPC) mit 36 AdernDrahtabstand 0,50 mm (0,020")Dicke 0,30 mm (0,012")
Tabelle 6.2.: Technische Daten der LCD-Panels des Typs Epson L3D07H aus dem PJ-TX100Projektor. Quelle:http://www.epsondevice.com/htps_e/products/list_size_07.html (31.03.2005). Anmerkung: In HDTV-Systemen wie dem PJ-TX100 werden üblicherweise nur1280× 720 Pixel adressiert. Die übrigen 4 Pixel dienen dem Projektorhersteller als Einbautoleranz.
Die Lampe
Die Lampe des Projektors ist eine Quecksilberhochdruckdampflampe mit einem Arbeitsdruckvon 200 Bar. Durch diesen hohen Druck werden die fünf sichtbaren Quecksilberlinien zueinem kontinuierlichen Spektrum verbreitert, das für das menschliche Auge bläulich-weißerscheint. Außerdem wird die radiale Ausdehnung der Lichtquelle praktisch auf einen Punktbeschränkt2.
Die Lampe und ihren Axiallüfter habe ich ausgebaut und in ein Aluminiumgehäuse mon-tiert, das von der mechanischen Werkstatt herstellt wurde. Die 2- bzw. 3-adrigen Kabel derLampe und des Lüfters habe ich um ca. 1 Meter verlängert. Um Resonanzschwingungenbei laufendem Lüfter zu vermindern, legte ich Gewichte auf das Gehäuse, die die Eigenfre-quenz der Gehäusemontierung verschieben. Um eine möglichst gleichmäßige Ausleuchtungdes Bildfeldes zu erreichen, befinden sich im Projektor zwei Linsenarrays, die von Epson Inte-grator genannt werden. Diese habe ich zusammen mit der Kondensorlinse ebenfalls ausgebautund im originalen Abstand auf der optischen Bank montiert.
56

6.1. Skizze und Beschreibung
Abbildung 6.4.: Links: Leiterplatte zur Verbindung eines 36-poligen ZIF-FPC-Sockels (Typ Molex54104-3692) mit einer 40-poligen Stiftleiste (abgewinkelt). Die 40-poligen Stiftleiten zweier identi-scher Leiterplatten werden 1:1 miteinander verbunden. An eine der beiden Leiterplatten wird ein LCD-Panel angeschlossen. Die andere Leiterplatte wird über ein FFC-Kabel (Typ Molex 98266-0386) an dieHauptplatine des Videoprojektors angeschlossen. Layout: Peter Markus (KIS), Herstellung: Fa. Bauer-Elektronik (St. Wendel), Bestückung: Physikalisches Institut und KIS. Rechts: Fotografische Aufnahmeeines Halterungsblechs mit montiertem LCD-Panels und Leiterplatte.
Die LCD-Panels
Die technischen Daten der LCD-Panels des Typs Espon sind in Tabelle 6.2 notiert. Das LCD-Panel des roten und das Panel des grünen Kanals habe ich aus dem Projektor ausgebaut undauf ein Halterungsblech an einer Zeiss-Stange montiert, das von der mechanischen Werkstatthergestellt wurde. Dabei war zu beachten, dass die beiden LCDs wegen der Eigenschaften desdichroitischen Prismas spiegelverkehrte Videosignale erhalten. Das Panel des grünen Kanalsübernimmt die Rolle von LCD1 und das Panel des roten Kanals die Rolle von LCD2.
An den LCD-Panels ist ein 36-poliges FPC3-Flachbandkabel fest montiert, das über einenZIF4-Sockel mit der Hauptplatine des Projektors verbunden ist. Um die auf der optischenBank aufgebauten LCD-Panels ansteuern zu können, ist eine Verlängerung der Signalleitungum ca. 1 Meter erforderlich. Hierzu habe ich ein 40-poliges Flachbandkabel mit Pfostensteck-verbindern (ähnlich einem IDE-Kabel von PCs) konfektioniert. Eine Leiterplatte mit einer40-poligen Stiftleiste und mit einem 36-poligen ZIF-FPC-Sockel (siehe Abb. 6.4) verbindetein FPC-Kabel mit dem Flachbandkabel. Mit zwei solcher Leiterplatten und einem weiteren36-poligen FFC5-Kabel habe ich unter Berücksichtigung der Polung je ein Verlängerungska-bel für die beiden LCD-Panels realisiert.
2http://www.3lcd.com/eg/ftr_ps_2_e.html (04.04.2005)3Flexible Printed Circuit4Zero Insertion Force5Flexible Flat Cable
57

6. Versuchsaufbau
6.2. Beugung am LCD-Panel
Die Pixelgröße der verwendeten LCD-Panels ist 12µm (Tabelle 6.2). Bei diesen Abmessun-gen ist es erforderlich, Erscheinungen, die durch Beugung am LCD-Panel auftreten, zu ken-nen. Nachfolgend wird gezeigt, dass die Beugung zu einer Vervielfachung der Pupillenbilderführt. Bei der Auswahl der Linse L2 wurde dafür Sorge getragen, dass die Pupillenbilder nichtüberlappen.
6.2.1. Die Amplitudentransmission eines LCD-Panels
Ein LCD-Panel mit matrixartiger Pixelanordnung verhält sich im Wesentlichen wie ein einfa-ches Kreuzgitter. Die Amplitudentransmissionl(x, y) eines solchen LCD-Panels ist
l(x, y) = b(x, y) ∗M2∑
m=−M2
N2∑
n=−N2
δ(x− np) · δ(y −mp) (6.1)
b(x, y) Aperturfunktion eines PixelsM Anzahl der Zeilen (gerade) z. B.M = 724N Anzahl der Spalten (gerade) z. B.N = 1284p Abstand der Pixel z. B.p = 12 µm
Für quadratische Pixel mit der Seitenlänged < p ist die Aperturfunktion unter Vernachlässi-gung des Dünnschichttransistors (TFT) gegeben durch
b(x, y) = rect(xd,y
d
). (6.2)
Anstelle von Gleichung (6.1) können wir äquivalent
l(x, y) =
M2∑
m=−M2
N2∑
n=−N2
b(x− np, y −mp) (6.3)
oder
l(x, y) = [b(x, y) ∗∞∑
m=−∞
∞∑n=−∞
δ(x− np) · δ(y −mp)︸ ︷︷ ︸=p−2comb( x
p , yp )
] · rect(x
Np,y
Mp
)(6.4)
schreiben und die jeweils besser handhabbare Form verwenden.
6.2.2. Das Beugungsmuster des LCD-Panels
Die komplexe Amplitude des Fraunhofer-Beugungsmusters ist nach Abschnitt 2.2.3 propor-tional zur Fourier-transformierten Transmissionsfunktion. Die Intensitätsverteilung des Beu-gungsmusters entspricht nach Gleichung (2.5) dem Betragsquadrat der komplexen Amplitude.
58

6.2. Beugung am LCD-Panel
0
1
-25 -20 -15 -10 -5 0 5 10 15 20 25
kom
pl. A
mpl
itude
[a.u
.]
x [mm]
λf/p
sinc(dx/(λf))
(a) Die Beugungsordnungen sind durch den Ausdruck[sinc(d ξ, d η) · comb(p ξ, p η)] festgelegt. Sie sind aufder x-Achse an den Stellen± l · λf/p lokalisiert. IhreAmplitude wird vonsinc(d ξ, d η) bestimmt.
-1
-0,5
0
0,5
1
x [mm]
y [m
m]
sinc(Npx/(λf),Mpy/(λf))
-0,02 -0,01 0 0,01 0,02
-0,02
-0,01
0
0,01
0,02
(b) Die Form einer einzelnen Beugungsordnung wirddurchsinc(N p x/(λf), M p y/(λf)) beschrieben.Die Breite der Beugungsordnungen ist proportional zumKehrwert der Panelgröße.
Abbildung 6.5.: Grafische Darstellungen des Beugungsmuster der LCD-Panels bei der Wellenlängeλ = 632, 8 nm in der Brennebene einer Linse mit der Brennweitef = 100 mm, so dassξ = x/(λf)ist.
Im Folgenden wird angenommen, dass das LCD-Panel vollständig beleuchtet wird. Das heißt,die Beugung findet an allen Pixeln statt. Unter Verwendung des Faltungstheorems berechnenwir nach Gleichung (6.4)
L(ξ, η) := F {l(x, y)}
=[F {b(x, y)} · F
{1p2
comb(x
p,y
p
)}]∗ F
{rect
(x
N p,y
M p
)}=[F {b(x, y)} · 1
p2p2 comb (p ξ, p η)
]∗N M p2 sinc (N p ξ,M p η) . (6.5)
Für das quadratische Pixel aus Gleichung (6.2) gilt
F {b(x, y)} = F{
rect(xd,y
d
)}= d2 sinc(d ξ, d η) . (6.6)
Das Beugungsmuster des vollständig beleuchteten LCD-Panels ist somit proportional zur Fal-tung
L(ξ, η) = d2N pM p [sinc(d ξ, d η) · comb(p ξ, p η)]︸ ︷︷ ︸periodische (Pixel-)Struktur des Gitters
∗ sinc(N p ξ,M p η)︸ ︷︷ ︸endl. Ausdehnung des Gitters
(6.7)
Der Ausdrucksinc(d ξ, d η) · comb(p ξ, p η) ist eine Kammfunktion mit individuell gewich-tetenδ-Impulsen, die die Beugungsordnungen repräsentieren (siehe Abb. 6.5 (a)). Ihre La-ge wird einzig vom Pixelabstandp bestimmt. Die Helligkeit der Beugungsordnungen wirddagegen nur von der Form und Ausdehnung der Pixelapertur beeinflusst. In dem Ausdruck
59

6. Versuchsaufbau
Abbildung 6.6.: Fotografische Aufnahme des Beugungsmusters des LCD-Panels in der Brennebeneeiner Linse mit der Brennweitef = 100 mm bei einer Wellenlängeλ = 632, 8 nm: Der rote Kreismarkiert die nullte Beugungsordnung. Es ist zu erkennen, dass die Maxima nach außen hin dunklerwerden. Die scheinbar asymmetrische Helligkeitsverteilung der Maxima wurde durch eine ungleich-mäßige Beleuchtung des Schirms während der Aufnahme verursacht. Der Abstand der Maxima beträgt(5, 26± 0.02) mm.
sinc(N p ξ,M p η), der durch die Faltung die eigentlich scharfen Beugungsordnungen ver-schmiert und so ihre Struktur bestimmt, spiegelt sich die endliche Ausdehnung des LCD-Panels wider (siehe Abb. 6.5 (b)).Wir fassen diese Erkenntnisse zusammen:
Periodizität des LCD-Panels ↔ Lage der BeugungsordnungenPixelform und Pixelgröße ↔ Helligkeit der Beugungsordnungen
räumliche Ausdehnung des LCD-Panels↔ Form der Beugungsordnungen
Beobachtung des Beugungsmusters
Beobachtet man das Beugungsmuster in der Brennebene einer Linse mit der Brennweitef , soist ξ = x/(λf) undη = y/(λf), und man erhält
comb(pξ, pη)∣∣∣ ξ = x/(λf)η = y/(λf)
=∞∑
n=−∞
∞∑n=−∞
δ
(x
λf− n
p
)δ
(y
λf− m
p
)
= (λf)2∞∑
n=−∞
∞∑n=−∞
δ
(x− nλf
p
)δ
(y −mλf
p
). (6.8)
Der Abstand zweier benachbarter Beugungsordnungen entspricht demnachλf/p. In Abbil-dung 6.6 ist die Intensitätsverteilung des Beugungsmusters der im Testaufbau verwendetenLCD-Panels fotografisch festgehalten. Das Panel wurde hierfür mit einem kollimierten Laser-Strahl der Wellenlängeλ = 632, 8 nm beleuchtet. Der Schirm befindet sich in der Brennebeneder Linse L3 mit der Brennweitef3 = 100 mm. Ein Vergleich mit dem berechneten Abstand
60

6.3. Der deformierbare Spiegel
der Beugungsmusterλf3p
=632, 8 nm 100 mm
12 µm≈ 5, 27 mm
mit dem gemessenen Abstand von(5, 26 ± 0, 02) mm bestätigt den im Datenblatt des LCD-Panels angegebenen Pixelabstandp = 12 µm.
Auswirkungen der Beugung auf den Testaufbau
Die beschriebene Beugung am LCD-Panel hat zur Folge, dass die Pupille mit dem Durchmes-serDmehrere Bilder in der Brennebene der Linse L3 erzeugt. Der DurchmesserD′ = f3/f2Ddieser Pupillenbilder wird durch die Vergrößerungf3/f2 des afokalen Linsensystems L2L3
bestimmt. Damit sich die Pupillenbilder nicht überlappen, muss ihr Abstand größer als ihrDurchmesser sein, d. h. es muss
λf3p
>f3f2D ⇔ D <
λf2p
(6.9)
gelten. Das Airy-Scheibchen der Pupille misst in der Brennebene der Linse L2 im Durchmes-serd = 2 · 1, 22λf2/D. In der Brennebene der Linse L2 befindet sich auch das LCD-Panel.Zusammen mit der BedingungD < λf2/p aus Gleichung (6.9) können wir
d > 2 · 1, 22p (6.10)
für den Durchmesser des Airy-Scheibchens fordern, wenn sich die gebeugten Pupillenbildernicht überlappen sollen.
Die Pupille und die Objektivlinse L2 sind so zu wählen, dass der Durch-messer des Beugungsscheibchens den doppelten Pixelabstand übersteigt.
6.3. Der deformierbare Spiegel
Der Membranspiegel (MMDM6) des Herstellers OKO Technologies besteht aus einer mit Alu-minium beschichteten Siliziumnitrid-Membran mit 15 Millimeter Durchmesser, die über ei-nem Silizium-Chip aufgehängt ist (siehe Abb. 6.7). Auf diesem Chip ist eine hexagonale Elek-trodenstruktur aufgedruckt, die die 37 Aktuatoren bildet. Die Form der Membran kann durchAnlegen einer elektrischen Spannung zwischen der Membran und den Aktuatorelektroden be-einflusst werden.
6.3.1. Die Form der Membran
Die vertikale Auslenkungh(x, y) der Siliziumnitrid-Membran, die von einer Zugverteilungρ(x, y) hervorgerufen wird, kann mit der Poisson-Gleichung(
∂2
∂x2 +∂2
∂y2
)h(x, y) =
ρ(x, y)T
(6.11)
6Micromachined Membrane Deformable Mirror
61

6. Versuchsaufbau
+−
+−
+−
+−
+−
Membran
Aktuatorspannung Aktuatorelektrode
Abbildung 6.7.: Schematischer Aufbau eines Membranspiegels mit einseitiger Elektrodenstruktur(links) und eine fotografische Aufnahme des 37-kanaligen OKO-Spiegels. Die gestrichelte Linie ist dieentspannte Membran.
mit Dirichletscher Randbedingungh(x, y) = 0 entlang der Membranaufhängung beschriebenwerden [14].T ist die Vorspannung, mit der die Membran aufgehängt ist. Der Zug auf dieMembran, die von der elektrischen SpannungV (x, y) verursacht wird, ist gegeben durch
ρ(x, y) ≈ ε ε0V (x, y)2
d, (6.12)
wobeid der Abstand zwischen der entspannten Membran und der Aktuatorelektrodenstrukturist.
Wie muss nun die Zugverteilungρ(x, y) aussehen, um die Membran definiert auszulen-ken? Seihi(x, y) die Auslenkung, die von einem Einheitszug zwischen deri-ten Elektrodeund der Membran hervorgerufen wird. Diese sog. Einfluss- oder Antwortfunktion kann durchLösen der Poisson-Gleichung (6.11) oder durch Messung bekannt sein. Nimmt man an, dasssich die Einflussfunktionen aller Aktuatorelektroden linear zu der Gesamtauslenkungh(x, y)überlagern [13], so erhält man
h(x, y) =n∑
i=1
ai hi(x, y). (6.13)
Dabei istai der Steuerwert desi-ten Aktuators undn die Anzahl der Aktuatoren. Entwickeltman die Gesamtauslenkung nach Zernike-Polynomen, so lauten die Koeffizienten:
bj =∫∫
h(x, y)Zj(x, y) dxdy =∫∫ n∑
i=1
ai hi(x, y)Zj(x, y) dxdy
=n∑
i=1
ai
∫∫hi(x, y)Zj(x, y) dxdy
(6.14)
Das Integral ∫∫hi(x, y)Zj(x, y) dxdy =: cji (6.15)
62

6.3. Der deformierbare Spiegel
ist der Koeffizient derj-ten Mode in der Zernike-Zerlegung der Einflussfunktion desi-ten Ak-tuators. Somit kann die Zernike-Zerlegung der Membranform bei gegebenen Aktuatorwertenaus Gleichung (6.14) in Matrixschreibweise dargestellt werden:
bj =n∑
i=1
cji ai (6.16)
⇔ ~b = C~a (6.17)
mit ~b ∈ Rm, C ∈ Rm×n und~a ∈ Rn. Die Zernike-Zerlegung~b der Membranauslenkungergibt sich also aus der Multiplikation der EinflussmatrixC mit den Aktuatorwerten~a.
Durch (pseudo)invertieren erhält man die RekonstruktionsmatrixC−1, aus der man für einegewünschte Membranform~b die erforderlichen Aktuatorwerte~a aus
~a = C−1~b (6.18)
bestimmen kann.
6.3.2. Ansteuerung des OKO-Spiegels
Hardwareseitig Der Silizium-Chip mit der Aktuatorstruktur und der Spiegelmembran istüber einen 40-poligen PGA7-Sockel mit einer Leiterplatte verbunden, die die Anschlüsse derAktuatorelektroden und der elektrisch leitenden Aluminiumbeschichtung der Membran aufzwei 20-polige Stiftleisten verteilt (siehe Abbildung 6.8). Über ein 20-adriges Flachbandka-bel wird jeweils eine Stiftleiste mit dem 20-poligen Ausgang eines nicht-invertierenden 20-kanaligen Hochspannungsverstärker (20 Ch Amp OKO 1997) verbunden. Die beiden Verstär-kerkarten sind zusammen mit einem regelbaren Netzteil zur Spannungsversorgung in ein 19-Zoll-Rackgehäuse eingebaut. Die beiden Verstärker sind eingangsseitig über 20-adrige Flach-bandkabel mit dem 40-kanaligen 12-bit OKO DAC 40 USB Digital-analog-Wandler verbun-den, der seinerseits über USB an einen PC angeschlossen ist.
Da die Pinbelegung des neuangeschaften USB-D/A-Wandlers nicht mit der Belegung derfrüher am KIS verwendeten ISA-Steckkarten-D/A-Wandler identisch war und die vorhande-nen Bezeichnungen verwirrend waren, habe ich die Verdrahtung von den D/A-Wandlerpinsbis zu den Spiegelelektroden nachgemessen und neue konsistente Bezeichnungen eingeführt.Bei dieser Gelegenheit habe ich alle Flachbandkabel mit verpolungssicheren Steckverbindernausgerüstet und die Stiftleisten auf der Spiegelleiterplatte von der Elektronikwerkstatt gegenStiftwannen mit Verpolungsschutz austauschen lassen. Ein falsches Anschließen, das zur Zer-störung des Spiegels führen würde, ist fortan nicht mehr möglich. Das neue Verdrahtungs-schema ist dem Verstärkergehäuse beigelegt und in Tabelle B.1 festgehalten.
Die Versorgungsspannung der Verstärkerkarten und der Arbeitsbereich des Digital-analog-Wandlers sind so zu einstellen, dass die Aktuatorspannung die auf dem Spiegel notierten 175Volt nicht überschreitet.
7Pin Grid Array
63

6. Versuchsaufbau
31 1
1121
(a) Die Aktuatorstruktur und die PGA-Pins desOko-Spiegels. Quelle: OKO Technologies.
20
19
2
1
(b) 20-polige Stiftleiste (male).
1
2 20
19
(c) 20-poliger Steckverbinder(female).
Abbildung 6.8.: Die in Tabelle B.1 verwendeten Pinbezeichnungen des PGA-Sockels (a) und derFlachbandkabelverbindungen (b) und (c). Jeweils in Frontansicht.
Softwareseitig
Die Datenübertragung zwischen dem Digital-analog-Wandlerchip und dem PC über den USBübernimmt ein USB-FIFO des Typs FT245BM. Dieser IC kann unter Linux mit der Pro-grammbibliothek libftd2xx angesprochen werden. Basierend auf der plattformunabhängigenProgrammbibliothek Qt habe ich ein GUI-Programm Mirror Control (mcontrol) geschrieben(siehe Abb. 6.9), das unter Verwendung von libftd2xx Steuerbits zum DA-Wandler sendet undso die Spiegelaktuatoren steuert. Mirror Control ermöglicht es, durch Anklicken den Wert ei-nes jeden Aktuators manuell zu wählen. Desweiteren ist es möglich, die gewünschten Anteileder ersten 21 Zernike-Moden an der Membranform über Eingabefelder zu wählen. Hierzumuss das Programm eine Rekonstruktionsmatrix nach Gleichung (6.15) einlesen. Die Steuer-bits werden dann aus Gleichung (6.18) bestimmt.
Die Rekonstruktionsmatrix des Spiegels wird numerisch mit dem GUI-Programm Respon-se berechnet, das von der Lühe in Tcl/TK und C geschrieben hat. Ausgehend von einem li-nearen Zusammenhang zwischen Zugρi(x, y) und angelegter ElektrodenspannungVi(x, y)bestimmt Response aus der Poisson-Gleichung (6.11) numerisch die Einflussfunktionen al-ler 37 Aktuatoren. Aus den Einflussfunktionen berechnet Response nach Gleichung (6.15) dieEinflussmatrixelementecji. Diese Matrix invertiert Response mit einer Singulärwertzerlegung(siehe Abschnitt 6.5.2 und [10, Kapitel 2.6]). Als Eingabeinformation benötigt Response zurBerechnung der Einflussfunktionen Angaben zur Aktuatorstruktur und den Durchmesser derMembranaufhängung. Für die Aufstellung der Interaktionsmatrix sind noch der Durchmesserder Pupille, innerhalb derer nach Zernike-Polynomen entwickelt werden soll, und die maxi-male radiale Ordnung der Entwicklung einzugeben.
Mirror Control verwendet die Aktuatornummerierung wie sie im Datenblatt des Spiegels
64

6.3. Der deformierbare Spiegel
Abbildung 6.9.: Bildschirmfoto des Programms Mirror Control zur Steuerung des deformierbarenOKO Spiegels.
65

6. Versuchsaufbau
dargestellt ist und die Nollsche Indizierung der Zernike-Moden. Beim Einlesen der Kontroll-matrix wird berücksichtigt, dass Response abweichende Bezeichnungen verwendet.
Anmerkungen
1. Die Spiegelmembran wird beim Anlegen einer Aktuatorspannung immer nur in Rich-tung der Elektroden gezogen. Um eine beidseitige Auslenkung zu ermöglichen bedarfes einer transparenten Elektrodenstruktur über der Vorderseite der Spiegelmembran.
2. Es ist daher erforderlich die Membran mit einer für alle Elektroden konstanten Bias-spannung vor zu deformieren. Die resultierende Form entspricht im Wesentlichen einemDefokus. Die Biasspannung sollte so gewählt sein, dass die Membran mit ihrem halbenMaximalhub durchhängt, d.h.VBias = Vmax/
√2.
3. Die nach der Gleichung (6.18) konstruierten Auslenkungen beziehen sich somit nichtauf die entspannte Membran sondern auf die Biasform. Um den zusätzlichen Defokusim beschriebenen Aufbau zu eliminieren, wird die Linse L2 entsprechend verschoben.
4. Die Dirichletsche Randbedingung verbietet der Spiegelmembran, auf ihrer ganzen Flä-che Zernike-Moden nachzubilden. Dies ist nur innerhalb eines bestimmten Radius’möglich. Von der mechanischen Werkstatt wurde ein Rahmen mit einem austausch- undjustierbaren Blendenblech gefertigt, der auf den Spiegelchip geschoben werden kann.Die Blende befindet sich so nächstmöglich an der Spiegelmembran im Abstand vonetwa 5 Millimetern.
6.4. Das Twyman-Green Interferometer
Das FisbaµPhase Interferometer dient der Vermessung der Spiegelauslenkungh(x, y). IhrGradient soll später mit den Ergebnissen des Wellenfrontsensors verglichen werden. Die nachAbschnitt 6.3.2 berechneten Steuerspannungen für die Aktuatoren des deformierbaren Spie-gels sind lediglich eine Richtschnur. Es kann nicht erwartet, dass auf diese Weise Zernike-Moden mit hoher Präzision synthetisiert werden können. Zhu et al [15] haben einen geschlos-senen adaptiven Regelalgorithmus entwickelt, der die Aktuatorspannungen iterativ einstellt,bis die gewünschte Genauigkeit erreicht ist. Da die Software des Fisba Interferometers keineProgrammierschnittstelle (API) zur Verfügung stellt, konnte ich den Regelalgorithmus nichtverwenden. Für den Testaufbau ist eine möglichst präzise Zernike-förmige Spiegelform oh-nehin nicht erforderlich. Es ist nur wichtig, die Spiegelform bzw. ihren Gradienten möglichstgut zu kennen. Das FisbaµPhase Interferometer ist ein Twyman-Green Interferometer. Inter-ferometer dieses Typs werden häufig - so auch am KIS - dazu benutzt, die Qualität von Linsenund Spiegel zu bestimmten.
6.4.1. Funktionsweise
In einem Twyman-Green Interferometer wird ein kollimierter Laserstrahl an einem Strahlteilerin zwei zueinander senkrechte Strahlen gleicher Intensität aufgeteilt (siehe Abb. 6.10). Einer
66

6.4. Das Twyman-Green Interferometer
Laser
Strahlteiler
Strahlaufweiter
Referenzfläche
Photosensoren
Testfläche
Kollimator
Abbildung 6.10.: Schematischer Aufbau eines Twyman-Green Interferometers.
der beiden Strahlen trifft senkrecht auf eine plane Referenzfläche und wird zurückreflektiert.Der andere Strahl trifft senkrecht auf die Testfläche und wird ebenfalls reflektiert. Mit einemStrahlaufweiter wir der Durchmesser des Teststrahls an die Größe der Testfläche angepasst.Die beiden reflektierten Strahlen werden von dem Strahlteiler wieder vereint und interferierenmiteinander. Mit einem CCD-Sensor wird das Interferenzmuster aufgenommen.
Ist die Testfläche eben, so ist die Intensitätsverteilung auf dem CCD-Sensor homogen. Wirddie Testfläche geneigt, besteht das Interferogramm aus äquidistanten hellen und dunklen Strei-fen, die senkrecht zum Gradienten der geneigten Testfläche verlaufen. Diese Interferenzstrei-fen (Fringes) können i. Allg. als Höhenlinien der Testfläche angesehen werden. Der Abstandzwischen zwei benachbarten hellen und dunklen Streifen beträgt eine halbe Wellenlänge.
Das FisbaµPhase Interferometer verschiebt während des Messvorgangs zudem die Re-ferenzfläche um insgesamt eine halbe Wellenlänge in fünf Schritten (Phase-Shifting). Ohnehierauf näher einzugehen, sei erwähnt, dass diese Methode eine höhere Präzision zulässt alsdie statische Methode mit feststehender Referenzfläche.
6.4.2. Bemerkungen zur Verwendung des Interferometers
• Bisher wurde bei der Verwendung des Interferometers am KIS die Testfläche senkrechtzum feststehenden Interferometer justiert. Da im vorliegenden Fall die Ausrichtung deszu vermessenden deformierbaren Spiegels bereits durch den Strahlengang des Testauf-baus vorgegeben ist, war es notwendig, zwei Schrauben der Interferometerhalterunggegen Schrauben mit Feingewinde zu ersetzen, die eine genauere Justage des Interfero-meters senkrecht zum deformierbaren Spiegel erlaubten. Dies wurde von der mechani-schen Werkstatt erledigt.
• Der Teststrahl des Interferometers hat in der vorhandenen Konfiguration einen Durch-messer von 50 Millimetern. Die Testfläche hat einen Durchmesser von 7 Millimetern.Damit wird nicht die volle Fläche der CCD-Kamera mit 165× 165 Pixeln des Interfe-rometers genutzt. Ein Strahlweiter mit einem kleineren Durchmesser war von der FirmaFisba nicht mehr erhältlich. Die Testfläche wird in der Folge nur an ca. 500 Punkten
67

6. Versuchsaufbau
vermessen. Die FisbaµShape Software des Interferometers kann die Oberfläche erstab 1 000 Datenpunkten analytisch – z. B. in Zernike-Polynome – zerlegen. Deshalb habeich das Programm fisbafit (siehe Abschnit 6.5.3) geschrieben, das die Messwerte ausden Fisba Dateien einlesen und Zernike-Moden an sie fitten kann.
6.5. Software
6.5.1. Programm zur Steuerung des Wellenfrontsensors
Um die Objektstruktur und die Masken auf die LCD-Panels zu schalten und die Wellenfront-sensorkamera auszulesen, habe ich das Programm wavefrontsensor geschrieben. Dieses Pro-gramm ist weitgehend plattformunabhängig gestaltet. Für das Zeichnen der Masken und dasEinlesen der Grafikdatei wird die Programmbibliothek Simple DirectMedia Layer (SDL)8 ver-wendet, die für alle wichtigen Hard- und Softwareplattformen existiert. Für das Auslesen derVRmagic USB Kamera stellt der Hersteller sowohl für Windows als auch für Linux Treiber-bibliotheken zur Verfügung.9
In einem Programmdurchlauf werden die vollständigen Daten, die für die Wellenfrontre-konstruktion erforderlich sind, ohne Interaktion mit dem Benutzer aufgezeichnet. Das Pro-gramm liest zu Beginn eine monochrome Pixelgrafikdatei mit der Objektstruktur ein. Aus derObjektstruktur werden nach den Gleichungen (4.7) bzw. (4.8) die horizontale und die ver-tikale Maske berechnet und, wie in Abschnitt 4.3.2 beschrieben, in drei Grauwerte kodiert.Zu diesen beiden quasibinären Masken werden die inversen Masken durch Vertauschen vonSchwarz und Weiß erstellt. Um die Objektstruktur nur auf das LCD-Panel des grünen Kanalszu schalten, werden die Rot- und Blau-Werte aller ihrer Pixel auf Null gesetzt. Analog werdendie Masken nur auf das Panel des roten Kanals geschaltet, indem die Grün- und Blau-Werteihrer Pixel auf Null gesetzt werden. Das Programm erzeugt dann ein schwarzes rahmenlo-ses Fenster. In dieses Fenster werden im ersten Schritt nun mittig die grüngefärbte Objekt-struktur und die rotgefärbte horizontale Maske gezeichnet (siehe Abb. 6.11). Mit der Kamerawird anschließend eine Sequenz von Bildern aufgenommen, die fortlaufend in eine Datei ausvorzeichenlosen 8-Bit Ganzzahlen geschrieben wird. Im nächsten Schritt wird die rotgefärbteMaske durch ihre ebenfalls rotgefärbte Inverse ausgetauscht und wieder eine Sequenz von Bil-dern aufgenommen. Diese beiden Schritte werden ebenso für die vertikale Masken wiederholt.In der Ausgabedatei befinden sich somit nach dem Programmdurchlauf vier Sequenzen vonMessungen, aus denen der Gradient der Wellenfront bestimmt werden kann (siehe Abschnitt6.5.2).
Hinweise zur Verwendung von wavefrontsensor
Das Programm wavefrontsensor benötigt neben dem Dateinamen der Pixelgrafikdatei nochdie Belichtungszeit der Kamera. Optional können u. a. das∆ aus den Gleichungen (4.7) und
8http://www.libsdl.org9Das benötigte Linux-Kernelmodul ist jedoch nur kompiliert erhältlich, daher muss ein von VRmagic unterstüzter
Kernel verwendet werden.
68

6.5. Software
Abbildung 6.11.: Ein typischer Bildschirminhalt während einer Wellenfrontmessung. Die schwarzeFläche ist das Fenster des Programms wavefrontsensor mit der grüngefärbeten Objektstruktur und ei-ner rotgefärbeten Maske. Es deckt den Anzeigebereichs des Projektors am DVI-Ausgang vollständigab. Auf dem Bildausschnitt rechts neben diesem Fenster ist das Fenster des Programms Mirror Controlzur Steuerung des deformierbaren Spiegels und ein Terminal zum Ausführen von wavefrontsensor po-sitioniert. Dieser Bereich wird auf dem Monitor am VGA-Ausgang angezeigt. Der rechteckige Bereichunterhalb des schwarzen Fensters wird auf keinem Anzeigegerät dargestellt.
(4.8) zur Maskenberechnung und ein Zoomfaktor zum Vergrößern der Objektstruktur und derMaske auf den LCD-Panels angeben werden.
1. Während eines Programmdurchlaufs dürfen die Aktuatorwerte des deformierbaren Spie-gels nicht verändert werden, da sonst die einzelnen Kameraaufnahmen nicht zu der sel-ben Wellenfrontaberration gehören!
2. Der Linux PC verfügt über eine NVIDIA Grafikkarte, die einen Mehrbildschirmbetriebermöglicht. Der Videoprojektor ist an den DVI-Ausgang der Karte und der Kontrollmo-nitor an den VGA-Ausgang angeschlossen. Mit der NVIDIA Treibersoftware könnenbeide Ausgänge zu einem virtuellen Bildschirm zusammengefasst werden. Dies ist au-ßerordentlich praktisch, da auf diese Weise mit dem PC normal gearbeitet und z. B. dasKamerabild live beobachtet werden kann. Das Fenster mit der Objektstruktur und derMaske wird dann einfach in dem Anzeigebereich des virtuellen Bildschirms platziert,der auf dem DVI-Ausgang ausgeben wird. Der typische Bildschirminhalt während einerWellenfrontmessung ist in Abbildung 6.11 gezeigt.
3. Obwohl die Kameradaten direkt in die Ausgabedatei geschrieben werden, spielt dieBytereihenfolge keine Rolle, da die Abtastung nur mit einer Tiefe von 8-Bit erfolgt. So-mit können die Daten ohne Konvertierung auch auf Big-Endian-Systemen ausgewertetwerden.
69

6. Versuchsaufbau
6.5.2. Programm zur Auswertung der Sensordaten
Die Aufnahmesequenzen in der von wavefrontsensor geschriebenen Datei werden mit klei-nen Hilfsprogrammen, auf die hier nicht eingegangen werden soll, gemittelt und anschließenddie Intensitätsdifferenzen der jeweiligen Maskenrichtungen gebildet. Zur Auswertung dieserDifferenzdaten habe ich das Programm reconstructor geschrieben. Dieses liest eine Datei aus8 oder 32 Bit langen Ganzzahlen ein und führt innerhalb einer frei wählbaren Analysemas-ke eine Zerlegung der Helligkeitswerte in Zernike-Polynome durch. Das Programm kann aufWunsch mehrere Pixel zu einem zusammenfassen (pixel binning). Damit kann die Auflösungdes Wellenfrontsensors künstlich verringert werden, da so die Anzahl der Subaperturen redu-ziert wird.
Für die Datenanalyse stehen zwei Methoden zur Reihenentwicklung nach Zernike-Polynom-en nach Gleichung (3.5) zur Verfügung. Zum einen die einfache Zerlegung nach Gleichung(3.15), die einer Multiplikation der Daten mit den Zernike-Polynomen und einer anschließen-den Aufsummierung entspricht. Zum anderen die Methode der linearen Annäherung, die nach-folgend erklärt wird. Beide Methoden sind zwar im Falle der linear unabhängigen Zernike-Polynome prinzipiell identisch, jedoch stellte sich bei Tests während der Programmierungheraus, dass die zweite Methode bei verrauschten Daten zu stabileren Ergebnissen führt. Des-weiteren werden bei der zweiten Methode gleichzeitig und ohne weiteres Zutun die Fehler derKoeffizienten aufgrund der endlichen Zerlegung und ein Güteparameter (χ2) von der verwen-deten Programmbibliothek mitbestimmt.
Lineare Anpassung
Die Methode der linearen Anpassung (linear least squares fit) eignet sich für Datensätze, be-stehend aus den Messwertenyi (i = 1; . . . ;N ), die in eine Linearkombination vonM Basis-funktionenZk(~x) zerlegt werden sollen [10]. Die Modellfunktion hat dann die Form
y(~x) =M∑
k=1
ak Zk(~x) . (6.19)
Gesucht werden nun die Fitparameter bzw. Koeffizientenak. Als Gütefunktion, die Aussagenüber die Qualität der endlichen Zerlegung erlaubt, wird
χ2 :=N∑
i=1
(yi − y(~xi)
σi
)2
(6.20)
gewählt. Dabei istyi der i-te Messwert,~xi seine Koordinate undσi seine Standardabwei-chung. Der beste Satz von Parameternak (k = 1; · · · ;M ) ist nun derjenige, derχ2 minimiert.Mit den Definitionen
bi :=yi
σi; Ai j :=
Zj(~xi)σi
mit i = 1; . . . ;N undj = 1; . . . ;M (6.21)
kann Gleichung (6.19) als lineares Gleichungssystem der Form
χ2 =∣∣∣A~a−~b
∣∣∣2 (6.22)
70

6.5. Software
geschrieben werden.DieN ×M -Matrix A mit N > M kann allgemein als Produkt dreier Matrizen dargestellt
werden:A = UWVT (6.23)
Dabei istU eineN ×M -Matrix, W eineM ×M -Diagonalmatrix undVT die TransponierteeinerM ×M -Matrix V. Die MatrizenU undV sind in ihren Spalten orthogonal. Dies ist diesogenannte Singulärwertzerlung (Singular Value Decomposition, kurz SVD).
Die Lösung zur Minimierung von Gleichung (6.22) ist nun durch
~a =M∑i=1
(U(i)
~b
wi
)V(i) (6.24)
gegeben [10, Kapitel 15.4].U(i) bzw. V(i) ist der dabei deri-te Zeilenvektor der MatrixUbzw.V undwi dasi-te Diagonalelement der MatrixW, der sog.i-te Singularwert der MatrixA. Die Varianz des Parameteraj ist
σ2aj
=M∑i=1
(Vj i
wi
)2
. (6.25)
Das Programm reconstructor benutzt die Funktion gsl_multifit_linear aus der Programm-bibliothek GNU Scientific Library (GSL)10, die die beschriebene Methode inklusive der Sin-gulärwertzerlung der MatrixA in UWVT implementiert. Die Implementierung von GSLwurde vorgezogen, da sie im Gegensatz zur entsprechenden Funktion von Numerical Recipesauch mit mehrdimensionalen skalaren Datensätzen ohne Modifikation umgehen kann. DerFunktion aus der GSL werden lediglich der Datensatz (yi u.~xi) und die ausgewertete Design-matrixA übergeben.
Hinweise zur Verwendung von reconstructor
Neben dem Namen der einzulesenden Datei muss reconstrutor noch die Geometrie der Ana-lysemaske übergeben werden. Es kann zwischen der langsameren aber stabileren linearen An-passung und der schnelleren, einfachen Zerlegung gewählt werden. Neben dem Pixel-Binningkann u. a. noch die maximale Ordnung der Zernike-Zerlegung angegeben werden. Das Pro-gramm gibt die Eingabeparameter sowie Statistiken der Daten und die Koeffizienten der Zerle-gung auf die Standardausgabe aus. Zur Kontrolle der Lage und des Radius’ der Analysemaskewird außerdem eine PGM-Datei mit der eingezeichneten Maske gespeichert.
6.5.3. Programm zur Auswertung der Spiegelform
Da die FisbaµShape Software, wie in Abschnitt 6.4.2 erwähnt, nicht für die Datenanalyseverwendet werden kann, habe ich auf Basis von reconstructor das Programm fisbafit geschrie-ben, das die Fisba-Dateien einlesen kann. In Erweiterung zu reconstructor ignoriert fisbafit
10http://www.gnu.org/software/gsl/
71

6. Versuchsaufbau
ungültige Datenpunkte, die bei der Interferometermessung auftreten können. Da im eigent-lichen Sinne nicht die Auslenkung der Spiegelmembran interessiert sondern ihre Ableitung,berechnet fisbafit aus den Zernike-Koeffizienten der Auslenkung nach Gleichung (3.12) zu-sätzlich die Koeffizientenc(x)
j bzw. c(x)j der Ableitungen inx und iny-Richtung. Der Fehler
sc(x)j
der Koeffzienten der Ableitunngen entlang derx-Richtung wird gemäß der Gaußschen
Fehlerfortpflanzung aus den Fehlernscj der Koeffizientencj und der Nollschen Matrixγ(x)i j
brechnet:
sc(x)j
=
√√√√ n∑i=1
(γ
(x)i j scj
)2
(6.26)
Analoges gilt für die Ableitung entlang dery-Achse.
Hinweise zur Verwendung von fisbafit
Fisbafit können neben dem Dateinamen und Angaben zur Analysemaske u. a. noch Parameterüber die Standardabweichung der Datenpunkte, die Wellenlänge des Interferometers und diegrößte Ordnung der Zernike-Zerlegung übergeben werden. Fisbafit gibt neben den Koeffizien-ten der Spiegelform, ihrer Ableitungen und sämtlicher Fehler auch Angaben zur Statistik derSpiegelform aus.
6.5.4. Programm zur grafischen Darstellung der Daten
Zur grafischen Darstellung der Daten verwende ich das frei verfügbare Programm gnuplot11
in einer Vorabversion von 4.1, die binäre zweidimensionale Datensätze einlesen kann.
11http://www.gnuplot.info
72

7. Durchführung
In diesem Kapitel werden die Art und Weise beschrieben, wie ich bei den Messungen vorgingund wie die Daten gewonnen wurden, deren Auswertung im nächsten Kapitel folgt.
7.1. Interferometrische Bestimmung der Spiegelformals Referenz
Um die Wellenfrontsensordaten beurteilen zu können, ist es erforderlich, die zu messendeWellenfront auf eine andere, erprobte Art und Weise zu bestimmen. Unter der Annahme aber-rationsfreier Linsen und Planspiegel ist die Wellenfront durch die um den Faktor 2 gestreckteForm des deformierbaren Spiegels gegeben. Für die Referenzmessung der Spiegelform ver-wendete ich das FisbaµPhase Interferometer.
7.1.1. Kalibrierung des Interferometers
Das FisbaµPhase Interferometer muss einmal nach jeder Justierung der inneren Referenzflä-che mit einer äußeren Referenzfläche kalibriert werden, um die Ausrichtung dieser innerenReferenzfläche und den Einfluss des Strahlaufweiters zu kompensieren. Die Kalibrationsmes-sung wird anschließend von den eigentlichen Oberflächenmessungen abgezogen. Für die vor-liegende Anwendung bieten sich zwei Kalibrierungsansätze an: zum einen die Kalibrierungmit einem planen Referenzspiegel und zum anderen die Kalibrierung mit der Biasform1 desMembranspiegels. Beide Ansätze haben ihre Vor- und Nachteile. Während die Kalibrierungmit der planen Referenzfläche die Bestimmung der tatsächlichen Membranform erlaubt, siehtder Wellenfrontsensor nur die tatsächliche Form abzüglich des konstanten aber unbekanntenDefokus’, der aus der Verschiebung der Linse L2 (siehe Abschnitt 6.3.2) folgt.2 Die FisbaµShape Software ist zwar in der Lage, neben linearen Aberrationen auch Defokusanteile auseiner Messung automatisch herauszurechnen, jedoch gibt sie keinerlei Informationen über dieAmplitude des abgezogenen Defokus’ aus. Schwerer wiegt hingegen die Beobachtung, dassder abgezogene Defokus bei wiederholten Messungen trotz unveränderter Spiegelform unter-schiedlich war. Dies ist sicher eine Folge der im Prinzip zu wenigen Datenpunkte innerhalbder Pupille, so dass einzelne Ausreißer, insbesondere am Rand, trotz Glättung und Interpolie-rung deutlichen Einfluss auf den herausgerechneten Defokus haben. Dieses Problem tritt beiMessungen, die mit der Biasform des Spiegels kalibriert sind, nicht auf. Jedoch stellen dieseMessungen nicht die tatsächliche Spiegelform dar, sondern eben nur die Abweichung von der
1Mit Biasform bezeichne ich diejenige Form, die die Spiegelmembran beim Anlegen der Biasspannung annimmt.2Im strengen Sinn sieht der Wellenfrontsensor natürlich nur die Ableitung, der von der Spiegelmembran deformier-
ten Wellenfront (abzüglich des Defokus’) und nicht die Form der Membran bzw. der Wellenfront.
73

7. Durchführung
Biasform. In erster Näherung entspricht die Biasform einem Defokus. In diesem Fall ergebendie Interferometermessungen prinzipiell das gleiche wie der Wellenfrontsensor mit passenddefokussierter Linse L2. Der Wellenfrontsensor sieht nämlich immer die tatsächliche Formabzüglich des konstanten Defokus’ der Linse L2. Weicht die Biasform von der Parabelformdes Defokus’ ab, so geht bei den interferometrischen Messungen Information über die tatsäch-liche Membranform verloren. Alle interferometrischen Messungen der Spiegelform habe ichmit beiden beschriebenen Kalibrierungen durchgeführt.
7.1.2. Schwierigkeiten bei der interferometrischen Messung
Schon beim ersten Kontakt mit dem Interferometer wurde mir klar, dass sich die Messungendamit nicht so einfach gestalten, wie ich es mir vorgestellt hatte. Ein prinzipielles Problemder Interferometrie ist ihre hohe Sensibilität für vibratorische Ereignisse. So war auf demLive-Interferogramm jeder einzelne Takt einer benachbarten Abwasserpumpe zu erkennen.Stühlerücken und im Flur laufende Personen machten sich ebenso bemerkbar wie zufallen-de Türen. Auch der rotierende Lüfter der Projektorlampe verhinderte jegliche erfolgreicheMessung mit dem Interferometer. Doch auch unter völlig ruhigen Bedingungen bedurfte esi. d. R. mehrerer Messungen, um die Spiegelapertur möglichst lückenlos zu erfassen. DieseProblematik lies sich aber mit Geduld bekämpfen. Jedoch zeigte sich eine weitere Schwierig-keit bei der Bestimmung der Spiegelform mit dem vorhandenden Fisba Interferometer: DieAuflösung der CCD-Kamera beträgt 165× 165 Pixel. Der aufgeweitete Messstrahl hat einenDurchmesser von 50 Millimetern.3 Für die Abtastung der Spiegelapertur mit dem Durchmes-ser 7 mm stehen somit nur ca. 500 der 27 225 Pixel zur Verfügung. Die FisbaµShape Softwareder verwendeten Version stürzt bei der Zernike-Analyse der gemessenen Oberfläche ab, wennweniger als 1 000 Datenpunkte zur Verfügung stehen. Dieses Problem konnte mit dem selbst-geschriebenen Programm fisbafit zur Auswertung der Daten umgangen werden.
Eine echte Schwierigkeit stellte allerdings das Festlegen des Radius’ und insbesondere derPosition der Analysemaske bei so wenigen Datenpunkten dar (siehe Abbildung 8.1). Die Aper-tur des deformierbaren Spiegels ist auf dem von FisbaµShape berechneten Höhenprofil nichterkennbar. Einzig anhand der Interferogramme konnte die Apertur abgeschätzt werden. Jedochzeigen sich in einem Interferogramm praktisch immer – also auch bei spannungsloser Spiegel-membran – dunkle Interferenzstreifen (Fringes). Außerdem war der Übergang zwischen Öff-nung und Blende auf dem Bild der CCD-Kamera nicht als Sprung erkennbar, sondern warleicht mit dem Hintergrundmuster verwaschen (Abb. 8.1). Die hieraus folgenden Schwierig-keiten bei der Datenauswertung und meine Lösung werden im nächsten Kapitel erklärt.
7.2. Einrichtung und Vermessung des OKO-Spiegels
Auf dem verwendeten OKO-Spiegel war eine Maximalspannung von 175 Volt notiert. DenAusgangsbereich des Digital-analog-Wandlers und die Versorgungsspannung der beiden 20-kanaligen Hochspannungsverstärker habe so eingestellt, dass dieser Wert nicht überschrit-
3Es war nicht möglich von der Firma Fisba einen Strahlaufweiter mit kleinerem Durchmesser zu beziehen. Auf eineEigenkonstruktion ähnlich einem Galilei-Teleskop wurde verzichtet, da eine Ausrichtung zweier Linsen mit dererforderlichen Präzision mit vorhandenen Komponenten nicht realistisch war.
74

7.3. Justierung des Aufbaus
ten werden konnte. Die maximale Ausgangsspannung des Digital-analog-Wandlers, also die-jenige Spannung, die dem Steuerwert 4095 entspricht, betrug dann3,027(5) Volt und dieVersorgungsspannung203,0(5) Volt. Dies führte zu einer maximalen Aktuatorspannung von176,0(5) Volt.
Der Biassteuerwert des deformierbaren Spiegels betrug während sämtlicher Experimente2896 ≈ 4095/
√2, da die Spiegelmembran bei diesem Wert wegen der quadratischen Ab-
hängigkeit der Kraft von der Aktuatorspannung etwa zur Hälfte ausgelenkt sein sollte (sie-he Abschnitt 6.3). Die Versorgungsspannung der Hochspannungsverstärker habe ich in losenzeitlichen Abständen überprüft. Auf der eingebauten Skala ablesbare Abweichungen dieserSpannung konnte ich dank des stabilisierten Netzgeräts nicht beobachten.
Zu Beginn der experimentellen Durchführung habe ich einmalig die ersten 21 Zernike-Moden mit verschiedenen Amplituden in einer Apertur mit 7 Millimeter Durchmesser auf demSpiegel angesteuert und diesen interferometrisch vermessen. Diejenigen Moden, die der Spie-gel augenscheinlich am schönsten erzeugt hat, habe ich für die Wellenfrontsensormessungenausgewählt. Neben den beiden Verkippungen waren das Defokus, Astigmatismus, 3-strahligerAstigmatismus und sphärische Aberration.
Um die Anzahl der Datenpunkte bei den Interferometermessungen zu erhöhen, habe ichauch eine Blende mit 9 Millimeter Durchmesser (und der passenden Rekonstruktormatrix)probiert. Leider waren die so erhaltenen Membranformen nicht mehr so schön wie die mit derkleineren Apertur. Deswegen habe ich im Folgenden stets die Blende mit 7 Millimeter Durch-messer gewählt. Dieser Durchmesser erfüllt die Forderung aus Gleichung (6.9): Bei einerWellenlängeλ = 500 nm und der Brennweitef2 = 500 mm könnte der Blendendurchmesserbei der Pixelgrößep = 12 µm bis zu 20 Millimeter betragen. Ein kleinerer Durchmesser iststets unkritisch.
Die Blenden habe ich per Augenmaß anhand des Live-Interferogramms bei maximalerSpannung an der Zentralelektrode des Spiegels bzw. bei angelegter Biasspannung möglichstgenau über der Spiegelmembran zentriert. Eine nicht exakt zentrische Positionierung führt beider Zernike-Analyse der Apertur jedoch lediglich zu Beiträgen in den ersten drei Moden.
Während der ersten Wellenfrontsensormessungen habe ich die Spiegelform jeweils vor undnach der Messung interferometrisch festgehalten. (Eine simultane Messung ist wegen desLampenlüfters nicht möglich.) Ein Drift konnte nicht festgestellt werden. Es hat sich sogargezeigt, dass sich die Membran und die Steuerelektronik im Rahmen der Bestimmungsgenau-igkeit reproduzierbar verhält (siehe Abschnitt 8.1.2). Aufgrund dieser Erkenntnis habe ich beiden nachfolgend beschriebenen Wellenfrontsensortestmessungen nicht jede wiederangesteu-erte Spiegelform interferometrisch vermessen.
7.3. Justierung des Aufbaus
Vor Beginn der einzelnen Messreihen habe ich mit einem Testmuster auf dem LCD1 und aufdem LCD2 überprüft, ob LCD1 exakt auf LCD2 abgebildet wurde. Dazu habe ich eine weitereLinse mit der Brennweite 400 Millimeter hinter die Linse L3 gebracht, die auf einem Schirmein vierfach vergrößertes, reales Bild von der LCD2-Ebene erzeugt. Bei einer Abweichungkonnte entweder LCD2 in der Höhe oder seitlich verfahren werden oder der deformierbare
75

7. Durchführung
Spiegel mittels einer kippbaren Montierung in der Neigung (Deklination) oder durch feinfüh-liges Drehen des Zeiss-Stifts azimutal justiert werden.
Es stellte sich schnell heraus, dass die Neigung wenigstens einmal am Tag vor Beginn einerMessreihe justiert werden muss. Dabei ist nicht abschließend klar, ob die hölzerne Arbeits-platte, auf der der Testaufbau befestigt war, arbeitet oder ob die Montierung des Spiegelslangsam driftet. Ein zu Testzwecken zusätzlich auf die Arbeitsplatte gestelltes Gewicht voneinigen Kilogramm verursachte ungefähr die gleiche Verschiebung des Bildes von LCD1 inder LCD2-Ebene, wie sie innerhalb eines Tages auftritt. Da diese Verschiebung allerdingsauffallend oft nur in eine Richtung weist, ist nicht klar, ob sie einzig von der Arbeitsplatteherrührt, die sich aufgrund raumklimatischer Variationen verformt. Die tägliche Verschiebunghabe ich immer über die Neigung der Spiegelmontierung ausgeglichen. Da an dieser keineSkala oder ein sonstiger Indikator angebracht war, konnte ich nicht beobachten, inwiefern dieMontierung driftet.
Die VRmagic Kamera war auf einem dreiachsigen Kreuztisch montiert, der es ermöglichte,die Austrittspupille4 des Wellenfrontsensors präzise auf dem CMOS-Sensor zu zentrieren. Dadie Kamera zur zuvor beschriebenen Überprüfung der Spiegelneigung aus dem Strahlengangentfernt werden musste, stellte der Kreuztisch eine große Erleichterung dar.5 Die Integrations-zeit wurde so festgelegt, dass die Pixelwerte des Livebildes innerhalb der Pupille visuell etwasüber dem mittleren Grauwert lagen.
7.4. Wellenfrontsensortestmessungen
7.4.1. Messreihen
Die ersten 6 Messreihen (21_12, 22_12_1, 22_12_2, 23_12_1, 23_12_2 und 23_12_3)6 dientendem Kennenlernen des Wellenfrontsensors. Ich habe sie an drei aufeinander folgenden Ta-gen aufgenommen. Auf die einzelnen Szenarien soll genauso wenig eingegangen werden wieauf die gewonnenen Wellenfrontsensordaten. Vor und nach jeder Einzelmessung habe ich –wie bereits erwähnt – den deformierbaren Spiegel interferometrisch vermessen. Es war jedochwünschenswert, die Spiegelform nicht nach jeder Veränderung der Aktuatorspannungen er-neut zu messen. Zum einen impliziert dieses Vorgehen dauerndes Ein- und Ausschalten desVideoprojektors, was eine starke Belastung für die Quecksilberhochdruckdampflampe dar-stellt und ihre Lebensdauer drastisch verkürzt. Zum anderen nehmen allein die Warmlauf-phase der Lampe und die Nachlaufzeit ihres Lüfters weit mehr Zeit in Anspruch als eineeinzelne Messung selbst. Aus diesen sechs ersten Messreihen war allerdings ersichtlich, dassdie Spiegelform im Rahmen der Bestimmungsgenauigkeit reproduzierbar ist. Somit war esnicht nötig, zu jeder Wellenfrontsensortestmessung die Spiegelform erneut interferometrischzu bestimmen.
Die verwendeten Objektstrukturen sind in Abbildung 7.1 dargestellt. Die zugehörigen qua-sibinären Masken wurden mit der Schrittweite∆ = 0,16′′ erstellt. Als Belichtungszeit habe
4genauer gesagt: die Austrittspupille in der nullten Beugungsordnung (vgl. Abschnitt 6.2.2).5Das Programm reconstructor ermöglicht zwar die Analysemaske beliebig zu platzieren, jedoch konnte ich diese
dank des Kreuztisches immer einfach in die Mitte des Gesichtsfeldes legen.6Hinweis: der Name einer Messreihe setzt sich zusammen aus dem Tag der Messreihe und ihrer chronologischen
Position. So ist z. B. 23_12_2 die zweite Messreihe am 23. Dezember.
76

7.4. Wellenfrontsensortestmessungen
(a) Fleck (b) Granulation (c) Grsmall (d) Grsmall_rot
(e) Grsmall_norm (f) Grsmall_blurred (g) Grsmall_blurred_10 (h) Gran_2
Abbildung 7.1.: Drei verschiedene Objektstrukturen und Variationen. Die mit Fleck bzw. Granulati-on bezeichneten Bilder zeigen einen Ausschnitt der Sonnenoberfläche von 7′′×7′′, Grsmall zeigt einenAusschnitt von 10′′×10′′. Alle drei Bilder sind 128×128 Pixel groß. Der mit Gran_2 bezeichnete Bil-de zeigt einen Ausschnitt von 14′′×14′′(256×256 Pixel). Fleck und Grsmall wurden von O. von derLühe (KIS) und Granulation von Friedrich Wöger (KIS) jeweils mit adaptiver Optik aufgenommen undSpeckle-rekonstruiert. Gran_2 entstammt der selben Aufnahme wie der Ausschnitt Fleck. Grsmall_rotist eine um 90° gedrehte Version von Grsmall. Grsmall_norm wurde so bearbeitet, dass der Kontrastgenau 15% entspricht. Grsmall_blurred und Grsmall_blurred_10 sind weichgezeichnete Versionen vonGrsmall.
ich, wenn nicht anders angegeben, 400 Millisekunden gewählt. Ich habe für jede der vier Mas-ken jeweils 10 Bilder mit der CMOS-Kamera aufgenommen und später gemittelt. Nach demUmschalten der Masken auf dem LCD-Panel habe ich 5 Sekunden mit dem Aufzeichnen dernächsten Bildsequenz gewartet, um sicher zu gehen, dass die Messungen nicht von Memory-effekten beeinflusst wurden.
Messreihe 06_01_1
Diese erste Messreihe nach dem Kennenlernen des Aufbaus bestand darin, die Auswirkungeneines Vorzeichenwechsels der Aberration bei maximaler Steueramplitude zu untersuchen. Dieverwendeten Aberrationen und Steueramplituden sind in Tabelle 7.1 notiert. Diese Messreihesollte als Anhaltspunkt dienen, inwiefern der Wellenfrontsensor verschiedene Aberrationen er-kennt. Dazu habe ich die Szenen Fleck, Granulation, Grsmall, Grsmall_norm und Grsmall_rotaus Abbildung 7.1 benutzt. Die um 90° gedrehte Szene Grsmall_rot habe ich benutzt, um her-auszufinden, ob die Wellenfrontmessung sowohl in horizontaler Richtung als auch in vertikalerRichtung funktioniert. Beide Szenen müssen theoretisch zum selben Ergebnis führen. Außer-dem ist das Drehen einer Szene um 90° im Prinzip gleichwertig zum Drehen der Aberrationum 90° durch Wechsel des Vorzeichens der azimutalen Frequenzm der Zernike-Polynome.Am Ende der Messreihe habe ich den deformierbaren Spiegel in allen verwendeten Formenmit dem Interferometer vermessen.
77

7. Durchführung
Zernike-Modej 2 3 4 5 10 11positive Amplitude 118700 97400 102500 42300 28100 12770negative Amplitude -119100 -93650 -54000 -42300 -28000 11750
Tabelle 7.1.: Die in dem Programm Mirror Control eingestellten Steueramplituden in den Messreihen06_01_1, 09_01_1, 09_01_2 und 09_01_5 beim Biassteuerwert 2896. Der größte Aktuatorsteuerwertbei diesen Amplituden beträgt jeweils 4095. Dies ist der größtmögliche Steuerwert des 12-Bit Digital-analog-Wwandlers. (Anmerkung: Fürj = 5 ist der maximale Steuerwert bei positiver Amplitude erstbei 42500 erreicht.)
Messreihe 09_01_1
Diese zweite Messreihe habe ich drei Tage später aufgenommen. Sie entspricht der Mess-reihe 06_01_1. Allerdings habe ich hier auf eine erneute interferometrische Vermessung derSpiegelform verzichtet.
Messreihe 09_01_2
Im Rahmen dieser Messreihe interessierte ich mich für den Einfluss der Pixelgröße der LCD-Panels auf die Wellenfrontmessung. Dazu habe ich das jeweilige Bild auf LCD1 und die zuge-hörigen Masken auf LCD2 nach ihrer Erstellung um Faktor 3 (ohne Interpolierung) vergrößert.Wegen des somit auch größeren Energieflusses in der Pupille habe ich die Belichtungszeit auf100 Millisekunden verkürzt. Ansonsten ging ich wie in Messreihe 09_01_1 vor.
Messreihe 09_01_3
Ziel dieser Messreihe war, es die Sensibilität des Wellenfrontsensors auf die Amplitude derAberrationen zu beobachten. Aufgrund des geringen Hubs des verwendeten OKO-Spiegelshabe ich, um die Charakteristik der jeweiligen Aberration zu behalten, die maximalen Steuer-amplituden aus Tabelle 7.1 um ungefähr den Faktor1/
√2 skaliert. Bei der Defokusmessung
habe ich nur die positive Amplitude benutzt, weil der maximale negative Hub entgegen derBiasvorspannung fürj = 4 doch recht gering war und die Spiegelmembran bei einer weiterenReduzierung der negativen Amplitude praktisch ihre Biasform angenommen hätte. Die ver-wendeten Steueramplituden sind in Tabelle 7.2 notiert. Als Objektstruktur habe ich bei dieserMessung nur noch das Bild Grsmall verwendet und die Belichtungszeit wieder auf 400 Mil-lisekunden gesetzt. Zusammen mit der Messreihe 09_01_1 ergaben sich so vier7 Amplitudenpro Aberration, deren Wellenfront bei unveränderter Justierung des deformierbaren Spiegelsgemessen wurde. Die Spiegelform der hier verwendeten Amplituden habe ich am Ende derMessreihe 09_01_5 interferometrisch festgehalten.
7bzw. drei beim Defokus
78

7.4. Wellenfrontsensortestmessungen
Zernike-Modej 2 3 4 5 10positive Amplitude 83933 68872 72478 29910 19798negative Amplitude -83933 -66229 — -29910 -19798
Tabelle 7.2.: Die Amplituden der Spiegelsteuerung bei Messreihe 09_01_3.
Messreihe 09_01_4
Obwohl der OKO-Spiegel mit der verwendeten Berechnung der Aktuatorwerte höhere Zernike-Moden nur schlecht erzeugen konnte, habe ich drei höhere Aberrationen bei maximaler Steu-eramplitude mit dem Wellenfrontsensor analog zur Messreihe 09_01_3 vermessen. Diese sindin Tabelle 7.3 notiert. Auch bei dieser Messreihe habe ich nur das Bild Grsmall als Objekt-struktur benutzt.
Zernike-Modej 15 20 21positive Amplitude 12410 6645 7480negative Amplitude -12200 -6690 -7430
Tabelle 7.3.: Die Amplituden der Spiegelsteuerung bei Messreihe 09_01_4.
Messreihe 09_01_5
Alle bis hierhin verwendeten Objektstrukturen waren bereits dank adaptiver Optik und Speck-lerekonstruktion beugungsbegrenzt aufgelöst, und die Masken wurden aus eben diesen Bildernberechnet. Um den Einfluss des Seeings auf die Maskenerstellungen aus einer noch verwa-schenen Objektstruktur beim Einschalten einen adaptiven Optik zu untersuchen, habe ich aufdas Bild Grsmall mit Hilfe des Bildbearbeitungsprogramms GIMP8 einen Gaußschen Weich-zeichner mit dem Radius 6,2 Pixeln und 10 Pixeln angewendet. Dies entspricht bei der Pi-xelskala von 0,08′′/px einem Seeing von einer bzw. von 1,8 Bogensekunden. Zusammen mitdem unverwaschenen Bild habe ich Wellenfrontsensordaten bei den selben Aberrationen undSteueramplituden wie bei den Messreihen 06_01_1, 09_01_1 und 09_01_2 aufgenommen.
Messreihe 09_01_6
Diese einzelne Messung, die eigentlich im Rahmen der Reihe 09_01_5 entstand, sollte zei-gen, ob sich eine Vergrößerung des Gesichtsfeldes auf das Verhalten des Wellenfrontsensorsauswirkt. Dazu habe ich das Bild Gran_2 aus Abbildung 7.1 als Objektstruktur verwendet.Die Aberrationen und Steueramplituden waren die selben wie bei Messreihe 09_01_5. Da dieAberration in diesem Testaufbau direkt in der Pupille erzeugt wurde, spielte hier Anisoplana-tismus, der das benutzbare Gesichtsfeld noch oben begrenzt, keine Rolle.
8GNU Image Manipulation Program,http://www.gimp.org
79


8. Ergebnisse
8.1. Spiegelform
8.1.1. Auswertung der Interferometerdaten
Wegen der in Abschnitt 7.1.1 aufgeführten Probleme mit der Fisba Software habe ich michentschieden, für die Bestimmung der Spiegelform die Messungen mit der Kalibrierung mitder Biasform auszuwerten – wohl wissend, dass der Wellenfrontsensor so prinzipiell mehr In-formationen über die Spiegelform gewinnt als das Interferometer. Bei dem anderen Kalibrie-rungsansatz würden sich die Ableitungen des unbekannt schwankenden Defokus’ in unbe-kannter Weise auf die Ableitungen höherer Zernike-Moden auswirken.
Die Auswertung der Interferometerdaten habe ich mit dem in Abschnitt 6.5.3 beschriebenenProgramm fisbafit vorgenommen. Das Programm zerlegt das Höhenprofil der Spiegelform inZernike-Moden und berechnet daraus mittels der Nollschen Matrizen die Koeffizienten derhorizontalen Ableitung entlang derx-Achse und der vertikalen Ableitung entlang dery-Achse.Die Spiegelform habe ich dabei in die ersten 21 Zernike-Moden zerlegt. Somit istZ15 diehöchste Zernike-Mode in den Ableitungen.
Wie im vorigen Kapitel angedeutet, waren die Auswertungen der Interferometerdaten we-gen des zu großen Strahlaufweiters mit Schwierigkeiten verbunden. In Abbildung 8.1 sindbeispielhaft ein Interferogramm und ein interferometrisch bestimmtes Höhenprofil der Spie-gelmembran dargestellt. Die rot eingezeichnete Analysemaske, innerhalb derer die Zernike-Zerlegung durchgeführt wird, hat einen Durchmesser von 21 Pixeln. Es ist zu erkennen, dasses nicht möglich ist, die Analysemaske über dem Interferogramm eindeutig zu zentrieren unddass der Rand des Höhenprofils ausgefranst ist und keine Aussage über die Apertur erlaubt.
−1500
−1000
−500
0
500
1000
1500
2000
Aus
lenk
ung
[Å]
78
88
98
108
118
52 62 72 82 92
y [Z
eile
]
x [Spalte]
Astigmatismus j=5, Amp=42300
Abbildung 8.1.: Ein Interferogramm der Spiegelmembran bei angesteuertem Defokus und eine roteingezeichnete Analysemaske (links) und ein interferometrisch bestimmtes Höhenprofil der Spiegel-membran bei angesteuertem Astigmatismus (rechts).
81

8. Ergebnisse
Es stellte sich heraus, dass die Zernike-Zerlegung des Höhenprofils in einer Maske die-ser geringen Größe empfindlich von der Lage der Analysemaske abhängt. Schon eine Ver-schiebung der Analysemaske um einen Pixel kann zu dramatisch unterschiedlichen Zernike-Koeffizienten führen. Daher habe ich jedes Höhenprofil innerhalb vier verschiedener Maskengleichen Durchmessers analysiert. Die Zentren der Analysemasken habe ich dabei in einem2×2 Pixel großen Gebiet um den geschätzten Mittelpunkt der Spiegelapertur verschoben. AlsSchätzer der Zernike-Zerlegungc(x)
j der Membranformableitungen innerhalb der Spiegelaper-tur entlang derx-Richtung verwendete ich dann die Mittelwerte der von fisbafit ausgegebenenZernike-Koeffizienten der Ableitung vierer solcher Analysemasken (I, . . . , IV), d. h.
c(x)j ≡ c
(x)j =
c(x)jI
+ c(x)jII
+ c(x)jIII
+ c(x)jIV
4(8.1)
Als Schätzfehlersc(x)j
eines Koeffizientenc(x)j verwende ich die Standardabweichung der
cjI ; . . . ; cjIV , d. h.
sc(x)j
=
√√√√(c(x)jI− c(x)
j
)2
+(c(x)jII− c(x)
j
)2
+(c(x)jIII− c(x)
j
)2
+(c(x)jIV− c(x)
j
)2
3(8.2)
Die Gleichungen (8.1) und (8.2) gelten analog auch für die Ableitung entlang dery-Achse.Es sei darauf hingewiesen, dass diecjI ; . . . ; cjIV keine statistischen Zufallsvariablen sind
und dass der angegebene Schätzfehler nicht der Fehler des Erwartungswerts statistischer Va-riablen ist. Vielmehr handelt es sich bei Gleichung (8.2) um eine Abschätzung der systemati-schen Unsicherheit der beschriebenen Bestimmung der Membranformableitungen.
8.1.2. Reproduzierbarkeit der Membranform
In Abbildung 8.2 sind die Zernike-Koeffizienten dreier Membranformen (nicht ihrer Ablei-tungen) aus fünf unabhängigen Messreihen gezeigt, die während der ersten Testphase desWellenfrontsensors entstanden. Es ist gut zu erkennen, dass die Membranform beim Anle-gen definierter Aktuatorspannungen reproduzierbar war, da die Koeffizienten verschiedenerMessreihen in den meisten Fällen innerhalb des einfachen Fehlerbalkens konstant sind. Beiwenigen Ausnahmen sind sie noch innerhalb des doppelten Fehlerbalkens konstant. In Abbil-dung 8.2(a) ist deutlich die sich zeitlich verändernde Neigung des Spiegels gegenüber demInterferometer und dem Wellenfrontsensor an den stark variierenden Koeffizientenc3 zu er-kennen. Der Tisch und die Spiegelmontierung wurde zwischen den Messreihen 22_12_1 und22_12_2 nicht berührt. Trotzdem zeigt sich hier bereits ein kleiner Drift der Spiegelneigung.Über Nacht veränderte sichc3 von(1921±71) Å auf (6692±54) Å. Vor Beginn der Messreihe23_12_2 wurde der Spiegel wieder bestmöglich ausgerichtet. Auch zwischen den Messungen23_12_2 und 23_12_3 ist ein kleiner Drift inc3 zu erkennen. Bei der Membranformanalysebei angesteuerten, nichtlinearen Aberrationen (j ≥ 4) wurden die linearen ModenZ2 undZ3 von der FisbaµShape Software herausgerechnet, so dass die Ausrichtung des Spiegelsignoriert wird.
82

8.1. Spiegelform
−3000
−2000
−1000
0
1000
2000
3000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21
c j [Å
]
j
horizontale Verkippung, j=2, Amp=118700
22_12_122_12_223_12_123_12_223_12_3
(a) Horizontale Verkippung. An den unterschiedlichenWerten vonc3 lässt sich die veränderlicheSpiegelneigung ablesen. Bei Messreihe 23_12_1 istc3 = 6692 Å.
−1000
−500
0
500
1000
1500
2000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21
c j [Å
]
j
Defokus, j=4, Amp=102500
22_12_122_12_223_12_223_12_3
(b) Defokus. Die Daten der Messreihe 23_12_1 warenwegen unphysikalischer Werte in Zentrumsnähe nichtbrauchbar.
−600
−400
−200
0
200
400
600
800
1000
1200
1400
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21
c j [Å
]
j
Astigmatismus, j=5, Amp=42300
22_12_122_12_223_12_123_12_223_12_3
(c) Astigmatismus.
Abbildung 8.2.: Die Zernike-Zerlegung verschiedener Spiegelformen (horizontale Verkippung, Defo-kus, Astigmatismus) aus fünf getrennten Messreihen.
83

8. Ergebnisse
8.1.3. Membranformen und ihre Ableitungen
In diesem Abschnitt sind die Ergebnisse der interferometrischen Bestimmung der Spiegel-membranform nach den Wellenfrontsensormessungen 06_01_1 und 09_01_4 aufgeführt. Die-se Ergebnisse dienen in Abschnitt 8.2 als Referenz für die Wellenfrontsensordaten. Um demLeser das Durchforsten unübersichtlicher Schaubilder weitestmöglich zu ersparen, führe icham Beispiel der horizontalen Verkippung die Ergebnisse samt Schaubilder in der nötigen Aus-führlichkeit vor. Anschließend erläutere ich kurz die Ergebnisse der weiteren angesteuertenMembranformen. Am Ende ist ein Schaubild mit allen gewonnen Daten gezeichnet, das dieErkenntnisse noch einmal veranschaulicht. Zunächst sind in Abbildung 8.3 die Höhenprofileder Membran bei den angesteuerten Aberrationen und Amplituden aus Tabelle 7.1 gezeigt.
−4000
−3000
−2000
−1000
0
1000
2000
3000
4000
Aus
lenk
ung
[Å]
j=2, Amp=−119100
−3000
−2000
−1000
0
1000
2000
3000
4000
5000
Aus
lenk
ung
[Å]
j=3, Amp=−93650
−3000
−2000
−1000
0
1000
2000
3000
4000
Aus
lenk
ung
[Å]
j=4, Amp=−54000
−4000
−3000
−2000
−1000
0
1000
2000
3000
4000
Aus
lenk
ung
[Å]
j=2, Amp=118700
−3000
−2000
−1000
0
1000
2000
3000
4000
5000
Aus
lenk
ung
[Å]
j=3, Amp=97400
−3000
−2000
−1000
0
1000
2000
3000
4000
Aus
lenk
ung
[Å]
j=4, Amp=102500
−1500
−1000
−500
0
500
1000
1500
2000
Aus
lenk
ung
[Å]
j=5, Amp=−42300
−1500
−1000
−500
0
500
1000
1500
2000
2500
Aus
lenk
ung
[Å]
j=10, Amp=−28000
−1500
−1000
−500
0
500
1000
1500
2000
2500
Aus
lenk
ung
[Å]
j=11, Amp=−11750
−1500
−1000
−500
0
500
1000
1500
2000
Aus
lenk
ung
[Å]
j=5, Amp=42300
−1500
−1000
−500
0
500
1000
1500
2000
2500
Aus
lenk
ung
[Å]
j=10, Amp=28100
−1500
−1000
−500
0
500
1000
1500
2000
2500
Aus
lenk
ung
[Å]
j=11, Amp=12770
Abbildung 8.3.: Die interferometrisch bestimmten Höhenprofile der Spiegelmembran bei angesteu-erten Aberrationen aus Tabelle 7.1. Die Aberration und die Amplitude ist über dem jeweiligen Profilnotiert. Die Daten entstammen der Messreihe 06_01_1.
84

8.1. Spiegelform
−2000
−1500
−1000
−500
0
500
1000
1500
2000
2500
3000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21
c j [Å
]
j
Auslenkung (j=2)
−119100, 06_01_1−83933, 09_01_1
83933, 09_01_1118700, 06_01_1
Abbildung 8.4.: Zernike-Analyse der Membranform bei angesteuerter horizontaler Verkippung.
Horizontale Verkippung ( j = 2)
In Abbildung 8.4 ist die Zernike-Analyse der Membranform bei angesteuerter horizontalerVerkippung aufgetragen. Wie erwartet zeigtc2 den größten Beitrag. Bei dieser Aberration istder maximale Hub der Membran, d. h.max(c2 Z2(x, y))−min(c2 Z2(x, y))
2 · c2(118 700)− c2(−119 100)2
≈ (4 366± 97) Å,
wobei z. B.c2(118 700) für den Koeffizientenc2 bei der angesteuerten Amplitude 118 700steht. Die Mittelung führe ich durch, um die Spiegelausrichtung gegenüber dem Interferometerzu kompensieren. Der Faktor 2 vor dem Bruch ist der Zernike-ModeZ2(x, y) geschuldet,deren Hub bereits 2 beträgt. Der Peak-to-Valley-Wert der Membran beträgt
[max(118 700)−min(118 700)] + [max(−119 100)−min(−119 100)]2
= 5 315 Å.
Hier bedeutet z. B.max(118 700) die maximale Auslenkung der Membran bei der eingestell-ten Steueramplitude 118 700. Die Daten der großen und der kleinen Amplituden stammen auszwei getrennten Messreihen. Der Einfluss der Spiegelausrichtung ist an der Verschiebung derbeidenc2(±83 933) nach oben deutlich zu erkennen. Das von der Ausrichtung unabhängigeVerhältnis der Amplituden- und Koeffizientenabstände ist nämlich
c2(118 700)− c2(−119 100)c2(83 933)− c2(−83 933)
≈ 118 700 + 119 10083 933 + 83 933
.
und deutet hier auf eine lineare Abhängigkeit der Membranauslenkung von der Steuerampli-tude hin. Die deutlich variierenden Koeffizientenc3 gründen in der veränderlichen Spiegel-neigung. Die höheren Ordnungen weisen fast alle von Null verschiedene, aber im Rahmen
85

8. Ergebnisse
−750
−500
−250
0
250
500
750
1000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
c j(x
) [Å/m
m]
j
horizontale Ableitung (j=2)
−119100, 06_01_1−83933, 09_01_1
83933, 09_01_1118700, 06_01_1
−750
−500
−250
0
250
500
750
1000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
c j(y
) [Å/m
m]
j
vertikale Ableitung (j=2)
−119100, 06_01_1−83933, 09_01_1
83933, 09_01_1118700, 06_01_1
Abbildung 8.5.: Ableitungen der Zernike-Analyse der Membranform bei angesteuerter horizontalerVerkippung.
der Unsicherheit konstante Koeffizienten auf. Eine leichte Abhängigkeit von der eingestelltenAmplitude zeigen nur die beiden Astigmatismus-Koeffizientenc5 und c6. In Abbildung 8.5sind die Zernike-Koeffizienten der horizontalen (c
(x)j ) und der vertikalen (c(y)
j ) Ableitung derMembranform dargestellt. Es stellt sich heraus, dass die auffallend von Null verschiedenen,aber konstanten Koeffizientenc4, c7, c11, c12 undc17 deutliche Auswirkungen auf die Koef-fizienten der Ableitungen beinhalten. Es trägt nämlich z. B.c11 mit dem doppelten Gewichtvon c6 zu c(x)
2 bei. Die leicht schwankenden Astigmatismusbeiträgec5 und c6 gehen in denFehlerbalken der Ableitungen unter. Die zum Teil recht großen Fehlerbalken der Ableitungenentstehen ebenfalls bei der Aufsummierung der Koeffizienten der Ableitungen höherer Ord-nungen (siehe Gleichung (3.12)).
Vertikale Verkippung ( j = 3)
Die Zernike-Analyse der Membranform bei angesteuerter vertikaler Verkippung zeigt sofortdie eben angesprochene unterschiedliche Spiegelausrichtung bei den Messreihen 06_01_1 und09_01_1. Es ist nämlich|c3(−66 229; 09_01_1)| > |c3(−93 650; 06_01_1)|. Aber auch beidieser Aberration verhält sich die Membran praktisch linear:
c3(97 400)− c3(−93 650)c3(68 872)− c3(−68 872)
≈ 97 400 + 93 65068 872 + 68 872
.
Der Membranhub beij = 3 ist (3 733± 223) Å und der Peak-to-Valley-Wert ist 5 211 Å. DieKoeffizientencj mit j ≥ 4 zeigen den gleichen Verlauf wie bei der aufgeprägten horizontalenVerkippung.
86

8.1. Spiegelform
Defokus ( j = 4)
Die linearen ModenZ2(x, y) und Z3(x, y) waren von hier an stets von der FisbaµShapeSoftware herausgerechnet, so dassc2 und c3 im Rahmen der Bestimmungsgenauigkeit ver-schwinden. Auffallend groß sind hier die Fehlerbalken von mehreren Hundert Ångström. DieDefokus-Koeffizientenc4(102 500) = (1934± 94) Å und c4(72 478) = (1366± 97) Å neh-men die größten Werte allercj an und dominieren auch die Ableitungen. An dem Koeffizien-tenc4(−54 000) = (−361± 92) Å und an den Peak-to-Valley-Werten PV(−54 000)=2 026 Åund PV(102 500)=6 497 Å wird offensichtlich, dass die Spiegelmembran nur einen geringenDefokus entgegen der Biasform erzeugen kann. Ein linearer Zusammenhang zwischen Steuer-amplitude und Membranauslenkung ist hier nicht erkennbar. Die zuvor schwankenden Astig-matismuskoeffizientenc5 und c6 sind jetzt auch im Rahmen ihres Fehlers konstant. Dafürzeigen nun die Komac8 und die sphärische Aberrationc11 leichte Schwankungen der Größen-ordnung 150 Ångström bei der Veränderung der Steueramplitude. Die sphärische Aberrationschlägt sich auch deutlich in den Ableitungen (c
(x)8 bzw. c(y)
7 ) nieder. Im Übrigen Verhaltensich die höheren Koeffizienten wie in den vorigen Fällen.
Astigmatismus ( j = 5)
Beim Ansteuern eines Astigmatismus’ nimmtc4 ungefähr wieder den selben konstanten Wertan wie bei den anderen aufgeprägten Aberrationen. Die Peak-to-Valley-Werte betragenPV(−42 300)=3 194 Å und PV(42 300)=3 852 Å, und diec5 dominieren die Membranformmit Beträgen der Größenordnung 750 - 1 200 Ångström. Auch sie verhalten sich linear zu denSteueramplituden. Zusätzlich zeigen hier die Koeffizientenc9 undc13 eine kleine Schwankungvon unter 200 Ångström beim Ändern der Amplitude. Die übrigen Koeffizienten verhaltensich ähnlich wie in den Fällen der linearen Membranauslenkungj = 2 und j = 3. DieAbleitungen vonZ5(x, y) undZ13(x, y) bestehen beide aus Beiträgen vonc
(x)3 bzw.c(y)
2 . Die
Schwankungen vonc13 führen darüber hinaus zu kleinen Schwankungen inc(x)7 undc(x)
9 bzw.
in c(y)8 undc(y)
10 .
3-strahliger Astigmatismus ( j = 10)
Die vorigen Beobachtungen wiederholen sich auch bei dieser Aberration. So sind hier alleKoeffizientencj außerc14, c18 und natürlichc10 beim Ändern der Steueramplitude konstant.Die Beträge vonc10 bewegen sich in der Größenordnung 600 - 900 Ångström und zeigenebenfalls lineares Verhalten. Die Schwankungen derc14 undc18 liegen unter 200 Ångström.Die beiden Astigmatismenc5 undc6 weisen hier jedoch sehr große Unsicherheiten von meh-reren Hundert Ångström auf. Sowohlc14 als auchc18 wirken sich nebenc10 deutlich auf dieAbleitungen aus. Insbesondere wirdc(x)
6 bzw.c(y)5 gleichermaßen vonc10 undc18 festgelegt.
So gibt es auch hier wieder eine Überschneidung in den Ableitungen der angesteuerten Mem-branform und der Membrangrundform. Die Peak-to-Valley-Werte sind PV(−28 000)=2 993 Åund PV(28 100)=3 367 Å.
87

8. Ergebnisse
Sphärische Aberration ( j = 11)
Ein sphärische Aberration konnte der OKO-Spiegel nicht so gut erzeugen. Zwar sindc11(12 770) = (377± 16) Å und c11(−11 750) = (−12 ± 29) Å deutlich vom vorher kon-stanten Wert der Größenordnung 160 Ångström verschieden, jedoch weisen die anderen, wiezuvor konstanten Koeffizienten teilweise ebenfalls Beiträge dieser Größe auf. Dies hat wiederzur Folge, dass die Ableitungen stark von der Grundform beeinflusst wird. Die Peak-to-Valley-Werte sind hier PV(−11 750)=2 328 Å und PV(12 770)=3 101 Å.
4-strahliger Astigmatismus ( j = 15) und j = 20
Bei noch höheren angesteuerten Aberrationen zeigt sich qualitativ das gleiche Ergebnis wie beider sphärischen Aberration: Die Membran kann hohe Aberrationen nicht mit großer Auslen-kung erzeugen. Die Peak-to-Valley-Werte bewegen sich zwischen 2 500 und 3 000 Ångström.Der jeweilige Koeffizient (c15 bzw.c20) reagiert zwar wie erwartet auf Veränderungen des Vor-zeichens der Steueramplitude, er geht jedoch in den übrigen, konstanten Koeffizienten nahezuunter.
Zusammenfassung
Die Membranform zeigt unabhängig der aufgeprägten Aberration und Steueramplitude einepraktisch konstante Grundform, die im Wesentlichen von Astigmatismus und Koma bestimmtwird. Aber auch die Moden der 11. und 17. Ordnung treten bei der Zernike-Analyse hervor.Die Zernike-Analysen aller eingestellter Aberrationen und Amplituden (Tabellen 7.1 - 7.3)sind in Abbildung 8.6 dargestellt. Die konstante Membrangrundform ist ebenso gut zu er-kennen wie die jeweiligen Auswirkungen der farbkodierten Aberrationen. Die gewünschtenAberrationen lassen sich bis einschließlich der 10. Ordnung gut auf den Spiegel aufprägen.Erst bei höheren Ordnungen wird der Hub der Membran zu gering, und sie kann nicht mehrdie gewünschte Form annehmen. Die Ausrichtung des Spiegels hat nur Auswirkungen auf dieAbleitungen vonZ2(x, y) undZ3(x, y). Da der Wellenfrontsensor und das Interferometer je-doch mit Sicherheit nicht exakt im gleichen Winkel (senkrecht) zum Spiegel stehen, ist einkonstanter, von Null verschiedener Wert vonc2 undc3 bedeutungslos.
88

8.1. Spiegelform
−3000
−2000
−1000
0
1000
2000
3000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21
c j [Å
]
j
Auslenkung
2345
10111520
−1000
−500
0
500
1000
1500
2000
2500
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
c j(x
) [Å/m
m]
j
horizontale Ableitung
2345
10111520
−1000
−500
0
500
1000
1500
2000
2500
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
c j(y
) [Å/m
m]
j
vertikale Ableitung
2345
10111520
Abbildung 8.6.: Zernike-Analysen aller verwendeten Membranformen (oben) der Messreihen06_01_1 und 09_01_1 und die zugehörigen Ableitungen (mitte und unten). Die angesteuerten Aber-rationen sind farbkodiert. Auf eine Kennzeichnung der Amplitude wurde hier zur besseren Übersichtverzichtet. Größere Koeffizienten korrespondieren i. d. R. mit größeren angelegten Amplituden. Die Ko-effizienten zusammengehörigen Koeffizienten sind zur besseren Erkennbarkeit mit Linien verbunden.
89

8. Ergebnisse
8.2. Messungen mit dem Wellenfrontsensor
Die Auswertung der Wellenfrontsensordaten wurde mit dem in Abschnitt 6.5.2 beschriebenenProgramm reconstructor durchgeführt. Die Austrittspupille hatte einen Radius von etwa 83Pixeln, so dass hier eine leichte Unsicherheit bei der Positionierung der Analysemaske nichtzu den Problemen führt, die bei den Interferometerdaten auftraten. Bei der Bestimmung derHelligkeitsverteilung mit der CMOS-Kamera traten zwei statistische Fehlerquellen auf: zumeinen das Untergrundrauschen der Kamera und zum anderen die Unsicherheit des Zählvor-gangs aufgrund der Photonenstatistik. Um das Signal-Rausch-Verhältnis zu erhöhen, habe ichdie pro Maske aufgenommenen zehn Bilder gemittelt. Die StandardabweichungσFrameseinesfesten Pixels dieser Bilder ist dabei für alle Pixel kleiner als 3. Der FehlerσDiff eines einzel-nen Datenpunkts der Differenz der Helligkeiten bei direkter und inverser Maske auf LCD2
berechnet sich dann nach der Gaußschen Fehlerfortpflanzung zu
σDiff =√
2σFrames< 4,2. (8.3)
Die Standardabweichung der Zernike-Koeffizienten bei der Zerlegung eines solchen Diffe-renzbildes nach Gleichung (6.25) ist mitσDiff stets kleiner als 0,05. Da die Koeffizientendeutlich größer sind, enthalten ihre Schaubilder keine Fehlerbalken. Das bedeutet, dass dieBestimmung der Helligkeitsverteilungen bzw. ihrer Differenz in der Austrittspupille und dieZerlegung in die ersten 15 Zernike-Polynome keinem signifikanten Fehler unterliegen.
8.2.1. Verhalten beim Vorzeichenwechsel der Aberrationen
Zuerst soll dargestellt werden, wie der Wellenfrontsensor auf die Aberrationen mit wechseln-dem Amplitudenvorzeichen reagiert hat. In den Abbildungen 8.7-8.13 sind dazu beispielhaftdie Helligkeitsdifferenzen in der Austrittspupille und insbesondere ihrer Zernike-Zerlegungencxj bzw.cyj bei Verwendung der Objektstruktur Grsmall und der horizontalen bzw. der verti-kalen Masken für Aberrationen mit wechselndem Vorzeichen bei maximaler Steueramplitudegezeigt. Zum Vergleich sind ebenfalls die Zernike-Zerlegungen der Membranformableitungeneingezeichnet. Die Daten entstammen der Messreihe 06_01_1. Hier soll zunächst nur beachtetwerden, wie sich die Vorzeichen der Koeffizientencxj
undcyjbeim Umschalten des Vorzei-
chens der Steueramplitude verhalten. Eine etwas nähere Betrachtung der Koeffizientenbeträgein Bezug auf die Steueramplitude findet in Abschnitt 8.2.7 statt. Die absoluten Beträge dercxj
und cyjlasse ich völlig jedoch außer Acht, da es durchaus denkbar ist, dass die Koeffizien-
ten der Wellenfrontsensordaten nicht alle in gleicher Weise mit denen der interferometrischenDaten korreliert sind.
90

8.2. Messungen mit dem Wellenfrontsensor
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=2, Amp=−119100, horizontal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=2, Amp=118700, horizontal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=2, Amp=−119100, vertikal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=2, Amp=118700, vertikal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=3, Amp=−93650, horizontal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=3, Amp=97400, horizontal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=3, Amp=−93650, vertikal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=3, Amp=97400, vertikal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=4, Amp=−54000, horizontal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=4, Amp=102500, horizontal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=4, Amp=−54000, vertikal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=4, Amp=102500, vertikal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=5, Amp=−42300, horizontal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=5, Amp=42300, horizontal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=5, Amp=−42300, vertikal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=5, Amp=42300, vertikal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=10, Amp=−28000, horizontal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=10, Amp=28100, horizontal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=10, Amp=−28000, vertikal
−60
−40
−20
0
20
40
60In
tens
itäts
diffe
renz
[a.u
.]
j=10, Amp=28100, vertikal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=11, Amp=−11750, horizontal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=11, Amp=12770, horizontal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=11, Amp=−11750, vertikal
−60
−40
−20
0
20
40
60
Inte
nsitä
tsdi
ffere
nz [a
.u.]
j=11, Amp=12770, vertikal
Abbildung 8.7.: Die Intensitätsdifferenzen in der Austrittspupille bei den angesteuerten Aberrationenaus Tabelle 7.1. Die Aberration und die Amplitude ist über dem jeweiligen Profil notiert. Die Datenentstammen der Messreihe 06_01_1.
91

8. Ergebnisse
Horizontale Verkippung ( j = 2)
In Abbildung 8.8 ist bei den Ordnungenj = 1; 2; 4; 11 der horizontalen Ableitung paralle-les Verhalten der Koeffizienten des Spiegels und der des Wellenfrontsensors zu beobachten.Bei j = 3 reagiert der Wellenfrontsensor antiparallel. Jedoch insbesondere beij = 7, aberauch beij = 5, ist das Wellenfrontsensorergebnis nicht mit der interferometrisch bestimmtenSpiegelform erklärbar. Die vertikale Membranformableitung (c
(y)j ) bleibt beim Wechsel des
Amplitudenvorzeichens konstant. Auch die Koeffizientencyj des Wellenfrontsensor zeigensich beim Vorzeichenwechsel im Wesentlichen unbeeinflusst. Lediglichcy1 zeigt hier größere
Abweichungen trotz konstantemc(y)1 .
−2000
−1500
−1000
−500
0
500
1000
1500
2000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
−60
−40
−20
0
20
40
60c j(x
) bzw
. cj(y
) [Å/m
m] (
Spi
egel
)
c xj b
zw. c
y j [a
.u.]
(WF
S)
j
horizontale Verkippung (j=2)
horizontal vertikal
Spiegel @ 118700 Spiegel @ −119100 WFS @ 118700 WFS @ −119100
Abbildung 8.8.: Zernike-Zerlegung der Helligkeitsdifferenz und der Membranformableitungen in ho-rizontale Richtung (links) und in vertikale Richtung (rechts) bei angesteuerter horizontaler Verkippungbei den Steueramplituden−119 100 (blau) und 118 700 (rot).
Vertikale Verkippung ( j = 3)
Das Ergebnis der vertikalen Ableitung bei angesteuerter horizontaler Verkippung wiederholtsich hier, wie es zu erwarten ist, bei der horizontalen Ableitung in Abbildung 8.9. Bei dervertikalen Ableitung reagiert der Wellenfrontsensor in den Ordnungenj = 1 und j = 2,hier jedoch antiparallel, auf den Wechsel des Amplitudenvorzeichens. Wie zuvor hat dieserWechsel auch Auswirkungen auf Koeffizienten, die nicht mit der interferometrisch bestimmtenMembranform erklärt werden können. So zeigt hier vor allemcy4 eine starke Reaktion auf den
Wechsel des Amplitudenvorzeichens, obwohlc(y)4 auch in Bezug auf Abbildung 8.8 praktisch
konstant ist. Im übrigen reagiert auchcy5 auf den Vorzeichenwechsel. Waren die beidenc(y)5 in
Abb. 8.8 noch deutlich verschieden, so liegen sie nun praktisch übereinander. Diecy5 verhaltensich aber genau anders herum: Sie waren in Abb. 8.8 nahe bei einander und sind nun deutlichvon einander unterscheidbar. Ein ähnliches Verhalten lässt sich auch beicy11 der vertikalenWellenfrontsensordaten beobachten.
92

8.2. Messungen mit dem Wellenfrontsensor
−2000
−1500
−1000
−500
0
500
1000
1500
2000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
−60
−40
−20
0
20
40
60c j(x
) bzw
. cj(y
) [Å/m
m] (
Spi
egel
)
c xj b
zw. c
y j [a
.u.]
(WF
S)
j
vertikale Verkippung (j=3)
horizontal vertikal
Spiegel @ 97400 Spiegel @ −93650 WFS @ 97400 WFS @ −93650
Abbildung 8.9.: Die Zernike-Zerlegungen bei angesteuerter vertikaler Verkippung analog zu Abb. 8.8.
Defokus ( j = 4)
Der Vorzeichenwechsel des angesteuerten Defokus’ ist in Abbildung 8.10 deutlich in den Ko-effizienten 2. und 8. bzw. 3. und 7. Ordnung sowohl in den Membranformableitungen als auchin den Wellenfrontsensordaten zu erkennen. Es fällt jedoch auf, dass sich die Koeffizientencx2
undcx8 der horizontalen Wellenfrontsensormessung nun antiparallel zu den Koeffizienten derabgeleiteten Membranform verhält. Wie schon bei den vorangegangenen Aberrationen tretenauch hier wieder Effekte in den Wellenfrontsensordaten auf, die nicht mit der interferometrischbestimmten Membranform übereinstimmen.
−2000
−1500
−1000
−500
0
500
1000
1500
2000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
−60
−40
−20
0
20
40
60c j(x
) bzw
. cj(y
) [Å/m
m] (
Spi
egel
)
c xj b
zw. c
y j [a
.u.]
(WF
S)
j
Defokus (j=4)
horizontal vertikal
Spiegel @ 102500 Spiegel @ −54000 WFS @ 102500 WFS @ −54000
Abbildung 8.10.: Die Zernike-Zerlegungen bei angesteuertem Defokus analog zu Abb. 8.8.
Astigmatismus ( j = 5)
Beim angesteuerten Astigmatismus reagiert der Wellenfrontsensor, wie in Abbildung 8.11dargestellt ist, in der horizontalen Ableitung wieder parallel zur Membranformableitung indem dominierenden Koeffizientenc(x)
3 und in dem weniger ausgeprägtenc(x)7 . Auch in der
vertikalen Ableitung zeigt der Wellenfrontsensor paralleles Verhalten in den charakteristischen
93

8. Ergebnisse
Ordnungenj = 2 undj = 8. Hier ist jedoch insbesondere die Ursache der großen Diskrepanzim Koeffizientency4 nicht aus den Interferometerdaten ersichtlich.
−2000
−1500
−1000
−500
0
500
1000
1500
2000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
−60
−40
−20
0
20
40
60c j(x
) bzw
. cj(y
) [Å/m
m] (
Spi
egel
)
c xj b
zw. c
y j [a
.u.]
(WF
S)
j
Astigmatismus (j=5)
horizontal vertikal
Spiegel @ 42300 Spiegel @ −42300 WFS @ 42300 WFS @ −42300
Abbildung 8.11.: Die Zernike-Zerlegungen bei angesteuertem Astigmatismus analog zu Abb. 8.8.
3-strahliger Astigmatismus ( j = 10)
In Abbildung 8.12 ist zu sehen, dass der Wellenfrontsensor auch bei dieser Aberration auf diecharakteristischen Ordnungenj = 6 und j = 12 bzw. j = 5 und j = 13 der Membran-formableitungen reagiert. Die im Vergleich zu Abbildung 8.10 heftige Reaktion des Sensorsauf c(x)
12 könnte bedeuten, dass er (wenigstens manche) Aberrationen erst beim Überschreiteneiner gewissen Schwelle erkennen kann.
−2000
−1500
−1000
−500
0
500
1000
1500
2000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
−60
−40
−20
0
20
40
60c j(x
) bzw
. cj(y
) [Å/m
m] (
Spi
egel
)
c xj b
zw. c
y j [a
.u.]
(WF
S)
j
3−strahl. Ast. (j=10)
horizontal vertikal
Spiegel @ 28100 Spiegel @ −28000 WFS @ 28100 WFS @ −28000
Abbildung 8.12.: Die Zernike-Zerlegungen bei angesteuertem Astigmatismus analog zu Abb. 8.8.
Sphärische Aberration ( j = 11)
Eine sphärische Aberration konnte mit dem OKO-Spiegel, wie in Abschnitt 8.1.3 gezeigt,nicht mehr gut erzeugt werden konnte. Dennoch sind auch hier in den Zernike-Zerlegungender Wellenfrontsensordaten (Abbildung 8.13) deutliche Reaktionen bei den charakteristischenOrdnungenj = 8 bzw.j = 7 der Membranformableitungen zu erkennen.
94

8.2. Messungen mit dem Wellenfrontsensor
−2000
−1500
−1000
−500
0
500
1000
1500
2000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
−60
−40
−20
0
20
40
60c j(x
) bzw
. cj(y
) [Å/m
m] (
Spi
egel
)
c xj b
zw. c
y j [a
.u.]
(WF
S)
j
Sphärische Aberration Klee (j=11)
horizontal vertikal
Spiegel @ 12770 Spiegel @ −11750 WFS @ 12770 WFS @ −11750
Abbildung 8.13.: Die Zernike-Zerlegungen bei angesteuerter sphärischer Aberration analog zu Abb.8.8.
Höhere Ordnungen
Leider gingen die Wellenfrontsensordaten der Messreihe 09_01_4 bei den Aberrationen 15.und 21. Ordnung verloren, bevor ich sie gesichert hatte, so dass nur noch die Daten für dieAberration der 20. Ordnung vorhanden waren. Die Zernike-Zerlegungen dieser Daten sindin Abbildung 8.14 dargestellt. Auch hier ist deutlich der Effekt des Vorzeichenwechsels derAmplitude an den Ordnungenj = 14 bzw. j = 15 sowohl in den Membranformableitungenals auch in den Wellenfrontsensordaten erkennbar. Der Wellenfrontsensor zeigt jedoch keineReaktion auf die ebenfalls veränderlichen Koeffizientenc
(x)10 bzw.c(y)
9 .
−2000
−1500
−1000
−500
0
500
1000
1500
2000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
−60
−40
−20
0
20
40
60c j(x
) bzw
. cj(y
) [Å/m
m] (
Spi
egel
)
c xj b
zw. c
y j [a
.u.]
(WF
S)
j
j=20
horizontal vertikal
Spiegel @ 6645 Spiegel @ −6690 WFS @ 6645 WFS @ −6690
Abbildung 8.14.: Die Zernike-Zerlegungen bei aufgeprägtem Aberration 20. Ordnung analog zuAbb.8.8.
8.2.2. Vergleich zweier identischer Messreihen
Obwohl die beiden Messreihen 06_01_1 und 09_01_1 vom Ablauf identisch waren, weisendie Wellenfrontsensordaten zum Teil deutliche Unterschiede auf. In den Abbildungen 8.15und 8.16 sind beispielhaft die Zernike-Zerlegungen der Wellenfrontsensordaten mit der Ob-jektstruktur Grsmall und angesteuertem Defokus bzw. 3-strahligem Astigmatismus aus den
95

8. Ergebnisse
Messreihen 06_01_1, 09_01_1 und 09_01_5 aufgetragen. Es fällt sofort auf, dass die Ampli-tuden der Koeffizienten fast immer deutlich unterschiedlich sind. Während die Zerlegungenin Bild 8.16 wenigstens im Verlauf der Koeffizienten übereinstimmten, ist dies in Abbildung8.15 nicht gegeben. Bemerkenswert sind hier zudem die sehr großen Koeffizientencx2 undcx8 bzw. cy3 bzw. cy7 der Messreihe 09_01_5. Zwar wurde die Neigung des Spiegels zwi-schen den Messreihen 09_01_3 und 09_01_4 verstellt und die Kamera aus dem Strahlengangentfernt, allerdings wurden beide wieder so positioniert wie zuvor. Die Projektorlampe warwährend aller Messreihen am 9. Januar unterbrechungslos in Betrieb. Vielleicht kann die da-mit verbundene Erwärmung der LCD-Panels oder der Polarisatoren den Effekt in Messrei-he 09_01_5 erklären. Nähere Untersuchungen habe dazu allerdings nicht angestellt, so dassich letztlich keine Aussage über die Ursache treffen kann. Ebenfalls – bei Annahme reprodu-zierbarer Membranformen – nicht ergründlich sind die Ursachen des teilweise verschiedenenVerlaufs der Zernike-Zerlegung. Spekulativ könnte neben thermischer Effekte auch ein verän-dertes Raum-Seeing in Frage kommen. Auf und über dem Tisch des Versuchsaufbaus befindensich zwei Lüfter, die möglicherweise störende Luftströmungen hervorrufen. Denkbar ist auch,dass der Rahmen der Bestimmungsgenauigkeit und Reproduzierbarkeit der Membranform zugroß ist und der Wellenfrontsensor auf Abweichungen in diesem Bereich reagiert. Dass essich bei den unterschiedlichen Verläufen um Rauschen der Intensitätsbestimmungen handelt,schließe ich aus, da die Standardabweichungen der Kamerabilder der Aufnahmesequenzenwie erwähnt gering sind und sich auch das Livebild auf dem Monitor innerhalb ein bis zweiMinuten nicht visuell wahrnehmbar entwickelt. Ohne Klärung dieses Effekts erschien es mirnicht sinnvoll zu sein, eine genaue Korrelation der Koeffizienten der Membranformableitun-gen und der Intensitätsdifferenzen zu suchen. Somit konnte ich den Wellenfrontsensor auchnicht eichen, um quantitative Aussagen über die aberrierte Wellenfront treffen.
−60
−40
−20
0
20
40
60
80
100
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
cx
j bzw
. c
yj [
a.u
.] (
WF
S)
j
Defokus (j=4), Amp=102500
horizontal vertikal
06_01_1 09_01_1 09_01_5
Abbildung 8.15.: Zernike-Zerlegungen von Wellenfrontsensordaten aus verschiedenen Messreihen(06_01_1, 09_01_1 und 09_01_5) bei angesteuertem Defokus mit maximaler Amplitude.
96

8.2. Messungen mit dem Wellenfrontsensor
−30
−20
−10
0
10
20
30
40
50
60
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
cx
j bzw
. c
yj [
a.u
.] (
WF
S)
j
3−strahl. Ast. (j=10), Amp=28100
horizontal vertikal
06_01_1 09_01_1 09_01_5
Abbildung 8.16.: Zernike-Zerlegungen von Wellenfrontsensordaten aus verschiedenen Messreihen(06_01_1, 09_01_1 und 09_01_5) bei angesteuertem 3-strahligen Astigmatismus mit maximaler Am-plitude.
8.2.3. Auswirkungen der Objektstruktur
Wie sich der Wellenfrontsensor bei den verschiedenen Objektstrukturen verhielt, ist beispiel-haft in den Abbildungen 8.17 und 8.18 dargestellt. Für diese Abbildung wurden die Aberra-tionen ausgesucht, die am meisten (Abb. 8.17) und die am wenigsten (Abb. 8.18) sensibel aufdie Objektstruktur waren. Es ist ersichtlich, dass die leicht unterschiedliche Normierung derBilder Grsmall und Grsmall_norm überhaupt keine Auswirkungen mit sich brachte. Bemer-kenswert sind die teilweise deutlichen Unterschiede der Koeffizienten bei Verwendung derBildes Grsmall und seiner gedrehten Version Grsmall_rot insbesondere in Abb. 8.17. In dieserAbbildung zeigen sich ebenfalls deutliche Abweichungen zwischen den Daten, die mit granu-lationsartigen Objektstrukturen (Grsmall und Granulation) und denen die mit dem Bild zweierumbraler Kerne entstanden sind. In Abb. 8.18 werden diese Abweichungen aber wesentlich
−1
−0,5
0
0,5
1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
cx
j bzw
. c
yj [
a.u
.] (
WF
S)
j
Defokus (j=4), Amp=102500
horizontal vertikal
Fleck Granulation Grsmall Grsmall_rot Grsmall_norm
Abbildung 8.17.: Zernike-Zerlegungen von Wellenfrontsensordaten mit verschiedenen Objektstruktu-ren bei angesteuertem Defokus mit maximaler Amplitude. Die Koeffizienten sind hier so normiert, dassder jeweils größte Koeffizient 1 ist. Die Daten entstammen der Messreihe 06_01_1.
geringer, so dass sich die Objektstruktur hier praktisch nicht auf die Wellenfrontsensordatenauswirkt.
97

8. Ergebnisse
−1
−0,5
0
0,5
1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
cx
j bzw
. c
yj [
a.u
.] (
WF
S)
j
3−strahl. Ast.(j=10), Amp=−28000
horizontal vertikal
Fleck Granualtion Grsmall Grsmall_rot Grsmall_norm
Abbildung 8.18.: Zernike-Zerlegungen von Wellenfrontsensordaten mit verschiedenen Objektstruktu-ren bei angesteuertem 3-strahligen Astigmatismus analog zu Abb. 8.17.
8.2.4. Unscharfe Objektstrukturen
Die Wellenfrontsensordaten aus der Messreihe 09_01_5, die die Auswirkungen weichgezeich-neter Objektstrukturen zum Gegenstand hatte, sind in Abbildung 8.19 am Beispiel des 3-strahligen Astigmatismus’ dargestellt. Die einzelnen Zerlegungen unterscheiden sich nur inder Amplitude. Offensichtlich beeinflussten die verwendeten Unschärfen die Leistungsfähig-keit des Wellenfrontsensors nicht.
−40
−20
0
20
40
60
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
cx
j bzw
. c
yj [
a.u
.] (
WF
S)
j
3−strahl. Ast. (j=10)
horizontal vertikal
Grsmall, 28100Grsmall_blurred, 28100
Grsmall_blurred_10, 28100Grsmall, −28000
Grsmall_blurred, −28000Grsmall_blurred_10, −28000
Abbildung 8.19.: Zernike-Zerlegung der Wellenfrontsensordaten mit der beugungsbegrenzten Objekt-struktur Grsmall und den weichgezeichneten Versionen Grsmall_blurred und Grsmall_blurred_10 beimaximalen positiver und negativer Amplituden.
8.2.5. Vergrößerung der Objektstruktur auf dem LCD
Das Vergrößern der Objektstruktur und der Maske auf den LCD-Panels um den Faktor 3 zeigteuneinheitliche Auswirkungen. In Abbildung 8.20 sind beispielhaft Zernike-Zerlegungen vonWellenfrontsensordaten bei Verwendung der horizontalen Maske bei diesen Vergrößerungenaufgetragen. Während sich die Daten bei der angesteuerten horizontalen Verkippung mit derAmplitude 118 700 bei der Vergrößerung dramatisch ändern und sich auch der Verlauf der
98

8.2. Messungen mit dem Wellenfrontsensor
Koeffizientencxjfür j ≥ 4 auseinander entwickelt, bleibt der Verlauf der Koeffizienten bei
angesteuertem 3-strahligen Astigmatismus trotz Vergrößerung ähnlich. Der Peak-to-Valley-Wert der Spiegelmembran bei der horizontalen Verkippung ist ca. 1,5 Mal größer als beim3-strahligen Astigmatismus, und die charakteristischen Koeffizientenc2 bzw. c5 der jeweili-gen Membranform unterscheiden sich sogar um den Faktor 2. Dies legt die Vermutung nahe,dass die Bildgröße auf den LCD-Panels entscheidenden Einfluss bei einer gegebenen Aberra-tionsamplitude auf das Messergebnis hat. Zwar findet der Wellenfrontsensor bei der vergrö-ßerten Darstellung in Abb. 8.20(a) den charakteristischen Koeffizientencx1 des Wellenfront-gradienten, jedoch weichen die Verläufe der Koeffizienten feinskaliger Aberrationen deutlichvoneinander ab.
−1
−0,5
0
0,5
1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
c xj (
WF
S)
j
horizontale Verkippung (j=2)
horizontal
zoom=1, Amp=−119100zoom=3, Amp=−119100
zoom=1, Amp=118700zoom=3, Amp=118700
(a) Zerlegung der Daten bei angesteuerter horizontalerVerkippung.
−1
−0,5
0
0,5
1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
c xj (
WF
S)
j
3−strahliger Astigmatismus (j=10)
horizontal
zoom=1, Amp=−28000zoom=3, Amp=−28000
zoom=1, Amp=28100zoom=3, Amp=28100
(b) Zerlegung der Daten bei angesteuertem 3-strahligenAstigmatismus.
Abbildung 8.20.: Zernike-Zerlegung der (horizontalen) Wellenfrontsensordaten bei einfacher unddreifach vergrößertem Objektbild (Grsmall) und Maske bei zwei angesteuerten Aberrationen.
99

8. Ergebnisse
8.2.6. Vergrößerung des Gesichtsfelds
Um die Auswirkung der Gesichtsfeldverdoppelung aus Messreihe 09_01_6 beispielhaft zuzeigen, sind in Abbildung 8.21 wieder die Ergebnisse mit dem geringsten und mit dem größ-ten Effekt als Zernike-Zerlegung dargestellt. Der in Abbildung 8.21(a) deutlich zu erkennendeUnterschied zwischen den Koeffizientencx2 undcx8 bzwcy3 undcy7 bei den beiden Gesichts-feldern und der Steueramplitude 102 500 waren einzigartig. Bei den anderen verwendeten Ab-errationen waren die Unterschiede wesentlich geringer. Ein eindeutiger Trend auf die Wellen-frontsensordaten bei der Verdoppelung des Gesichtsfeldes kann aber anhand dieser Messreihesonst nicht ausgemacht werden. Dies legt die Vermutung nahe, dass das verwendete einfacheGesichtsfeld für eine Wellenfrontmessung mittels optischer Differentiation ausreicht. Die Ein-brüche bei angesteuertem Defokus könnten bedeuten, dass der lineare Bereich bei dem größe-ren Gesichtsfeld kleiner ist, da der Peak-to-Valley-Wert der Spiegelmembran bei maximalenSteueramplituden beim Defokus 1,5 Mal größer war als beim 3-strahligen Astigmatismus.
−60
−40
−20
0
20
40
60
80
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
cx
j bzw
. c
yj [
a.u
.] (
WF
S)
j
Defokus (j=4)
horizontal vertikal
Grmsall, −54000 bild1, −54000 Grsmall, 102500 bild1, 102500
(a)
−60
−40
−20
0
20
40
60
80
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
cx
j bzw
. c
yj [
a.u
.] (
WF
S)
j
3−strahl. Ast. (j=10)
horizontal vertikal
Grsmall, −28000 bild1, −28000 Grsmall, 28100 bild1, 28100
(b)
Abbildung 8.21.: Zernike-Zerlegung der Wellenfrontsensordaten bei einfachem Gesichtsfeld (Grs-mall, 128×128 Pixel) und bei doppeltem Gesichtsfeld (Gran_2, 256×256 Pixel) bei den Aberrationen4. (a) und 10. Ordnung (b) mit maximaler positiver und negativer Steueramplitude.
100

8.2. Messungen mit dem Wellenfrontsensor
8.2.7. Variation der Amplitude
In diesem Unterabschnitt werden die Ergebnisse der Messungen 09_01_1 und 09_01_3 mitvariierenden Steueramplituden diskutiert. Dafür werden immer die Zernike-Koeffizienten derMembranformableitungen gegen die Steueramplituden aufgetragen. Darunter sind jeweils diedazugehörigen Koeffizienten der Wellenfrontsensordaten in gleicher Weise darstellt.
Horizontale Verkippung ( j = 2)
In Abbildung 8.22 sind die Ergebnisse der Tests bei angesteuerter horizontaler Verkippungdargestellt. Es ist zu erkennen, dass sichc
(x)1 und cx1 in gleicher Weise entwickeln. Die ab-
soluten Werte dieser Koeffizienten dürfen jedoch nicht miteinander verglichen werden, da derWellenfrontsensor und das Interferometer nicht exakt im gleichen Winkel zum deformierba-ren Spiegel ausgerichtet sind. Die übrigen Koeffizienten der horizontalen Ableitung zeigenkeine größere Variation bei den vier getesteten Amplituden. Lediglichcx4 zeigt den Trend,mit wachsender Amplitude zu fallen. Die Ursache des Sprungs des Koeffizientenc
(y)1 der ver-
tikalen Membranformableitung zwischen den Steueramplituden−83 933 und 83 933 liegt inder veränderten Spiegelneigung, da die Membranform dieser Amplituden nach der Messrei-he 09_01_6 interferometrisch aufgenommen wurde und nicht nach der Messreihe 06_01_1.Ansonsten sind die Koeffizientenc(y)
j im Wesentlichen konstant, wenn auch sehr groß. DerWellenfrontsensor findet hier starke, veränderliche Beiträge in den Ordnungenj = 1; 3; 4; 7.
−800
−600
−400
−200
0
200
400
600
800
1000
−119100 −83933 83933 118700
c j(x
) [Å/m
m] (
Spi
egel
)
Amplitude
horizontale Verkippung (j=2)
12
34
56
78
910
1112
1314
15
−800
−600
−400
−200
0
200
400
600
800
1000
−119100 −83933 83933 118700
c j(y
) [Å/m
m] (
Spi
egel
)
Amplitude
horizontale Verkippung (j=2)
12
34
56
78
910
1112
1314
15
−40
−30
−20
−10
0
10
20
30
40−119100 −83933 83933 118700
c xj [a
.u.]
(WF
S)
Amplitude
horizontale Verkippung (j=2)
12
34
56
78
910
1112
1314
15−40
−30
−20
−10
0
10
20
30
40−119100 −83933 83933 118700
c yj [a
.u.]
(WF
S)
Amplitude
horizontale Verkippung (j=2)
12
34
56
78
910
1112
1314
15
Abbildung 8.22.: Zernike-Zerlegungen der Membranformableitungen (1. Zeile) und der Wellenfront-sensordaten (2. Zeile) bei veränderlicher horizontaler Verkippung. Die Zernike-Koeffizienten (farblichkodiert) sind jeweils gegen die Steueramplitude des angesteuerten Defokus’ aufgetragen.
101

8. Ergebnisse
Vertikale Verkippung ( j = 3)
In Abbildung 8.23 sind die Ergebnisse bei veränderlicher vertikaler Verkippung dargestellt.Auch hier ist der Sprung der Koeffizientenc(x)
1 und c(y)1 zwischen den Steueramplituden
−66 229 und 68 872 der unterschiedlichen Spiegelausrichtung bei den interferometrischenMessungen geschuldet. Die übrigen Koeffizienten der horizontalen Membranformableitungsind konstant. Der Wellenfrontsensor findet jedoch deutliche Beiträge erster und vierter Ord-nung. Der Koeffizientcy1 fällt mit kleiner werdendemc(y)
1 , jedoch entwickelt er (wie auch dieanderencyj ) sich zwischen den Amplituden 68 872 und 97 400 praktisch nicht.
−800
−600
−400
−200
0
200
400
600
800
1000
−93650 −66229 68872 97400
c j(x
) [Å/m
m] (
Spi
egel
)
Amplitude
vertikale Verkippung (j=3)
12
34
56
78
910
1112
1314
15
−800
−600
−400
−200
0
200
400
600
800
1000
−93650 −66229 68872 97400
c j(y
) [Å/m
m] (
Spi
egel
)
Amplitude
vertikale Verkippung (j=3)
12
34
56
78
910
1112
1314
15
−40
−30
−20
−10
0
10
20
30
40−93650 −66229 68872 97400
c xj [a
.u.]
(WF
S)
Amplitude
vertikale Verkippung (j=3)
12
34
56
78
910
1112
1314
15−40
−30
−20
−10
0
10
20
30
40−93650 −66229 68872 97400
c yj [a
.u.]
(WF
S)
Amplitude
vertikale Verkippung (j=3)
12
34
56
78
910
1112
1314
15
Abbildung 8.23.: Zernike-Zerlegungen in Analogie zu Abb. 8.22 bei veränderlicher vertikaler Verkip-pung.
Defokus ( j = 4)
In Abbildung 8.24 sind die Ergebnisse bei veränderlichem Defokus dargestellt. Der wachsendeDefokus ist deutlich an den Koeffizientenc(x)
2 bzw. c(y)3 zu erkennen. Der Wellenfrontsensor
zeigt sich in den Koeffizientencx2 undcy3 sensibel auf den wachsenden Defokus. Die in Ab-
schnitt 8.1.3 angesprochene leichte Variation vonc(x)8 bzw. c(y)
7 ist bei der hier gedrucktenSkala von Abb. 8.24 nicht sichtbar, sie ist jedoch vorhanden. In den Wellenfrontsensordatentreten diese Variationen incx8 bzw. cy7 deutlich zum Vorschein. Die charakteristischen Ord-nungen der Membranformableitungen und der Wellenfrontsensordaten beij = 2 und j = 8bzw. j = 3 undj = 7 entwickeln sich hier parallel, während sie sich in den nächsten beidenUnterabschnitten antiparallel entwickeln. Weiterhin ist festzustellen, dass die Koeffizientencx2 undcy3 bei der Steueramplitude 102 500 vom Betrag her kleiner sind als bei der Steueram-plitude 72 478. Der maximale erzeugte Defokus liegt also möglicherweise bereits außerhalbdes monotonen Bereichs des Wellenfrontsensors.
102

8.2. Messungen mit dem Wellenfrontsensor
−1000
−500
0
500
1000
1500
2000
2500
3000
−54000 72478 102500
c j(x
) [Å/m
m] (
Spi
egel
)
Amplitude
Defokus (j=4)
12
34
56
78
910
1112
1314
15
−1000
−500
0
500
1000
1500
2000
2500
3000
−54000 72478 102500
c j(y
) [Å/m
m] (
Spi
egel
)
Amplitude
Defokus (j=4)
12
34
56
78
910
1112
1314
15
−40
−30
−20
−10
0
10
20
30
40−54000 72478 102500
c xj [a
.u.]
(WF
S)
Amplitude
Defokus (j=4)
12
34
56
78
910
1112
1314
15−40
−30
−20
−10
0
10
20
30
40−54000 72478 102500
c yj [a
.u.]
(WF
S)
Amplitude
Defokus (j=4)
12
34
56
78
910
1112
1314
15
Abbildung 8.24.: Zernike-Zerlegungen in Analogie zu Abb. 8.22 bei veränderlichem Defokus.
Astigmatismus ( j = 5)
In Abbildung 8.25 sind die Ergebnisse bei veränderlichem Astigmatismus dargestellt. Das inAbschnitt 8.1.3 angesprochene lineare Verhalten der Spiegelmembran ist an den Koeffizien-tenc(x)
3 undc(y)2 nocheinmal erkennbar. Auch die Wellenfrontsensorkoeffizientencx3 undcy4
verhalten sich bei den verwendeten Amplituden nahezu linear. Auch die in Abschnitt 8.25angesprochene Auswirkung der Steueramplitude auf die Koeffizientenc
(x)7 undc(y)
8 kann beiden Koeffizientencx7 und cy8 erkannt werden. Insbesondere in der horizontalen Ableitungfindet der Wellenfrontsensor große, aber praktisch konstante Koeffizienten anderer Ordnun-gen, die anhand den Interferometerdaten nicht erklärt werden können. Jedoch waren bereits inAbbildung 8.24 große, wenn auch veränderliche Beiträge voncx1 undcx4 vorhanden.
3-strahliger Astigmatismus ( j = 10)
In Abbildung 8.26 sind die Ergebnisse bei veränderlichem 3-strahligen Astigmatismus dar-gestellt. Auch hier ist das lineare Verhalten der Spiegelmembran an den Koeffizientenc
(x)6
undc(y)5 zu erkennen. Wenigstens in der horizontalen Ableitung (cx12) erkennt auch hier der
Wellenfrontsensor die Ableitung des in Abschnitt 8.1.3 angesprochenen veränderlichen Ko-effizienten der Membranformc18. Zu bemerken ist auch, dass der Wellenfrontsensor erneutdie selben Beiträge voncx1 und cx4 in der horizontalen Ableitung anzeigt wie zuvor beimDefokus.
103

8. Ergebnisse
−800
−600
−400
−200
0
200
400
600
800
1000
−42300 −29910 29910 42300
c j(x
) [Å/m
m] (
Spi
egel
)
Amplitude
Astigmatismus (j=5)
12
34
56
78
910
1112
1314
15
−800
−600
−400
−200
0
200
400
600
800
1000
−42300 −29910 29910 42300
c j(y
) [Å/m
m] (
Spi
egel
)
Amplitude
Astigmatismus (j=5)
12
34
56
78
910
1112
1314
15
−40
−30
−20
−10
0
10
20
30
40−42300 −29910 29910 42300
c xj [a
.u.]
(WF
S)
Amplitude
Astigmatismus (j=5)
12
34
56
78
910
1112
1314
15−40
−30
−20
−10
0
10
20
30
40−42300 −29910 29910 42300
c yj [a
.u.]
(WF
S)
Amplitude
Astigmatismus (j=5)
12
34
56
78
910
1112
1314
15
Abbildung 8.25.: Zernike-Zerlegungen in Analogie zu Abb. 8.22 bei veränderlichem Astigmatismus.
−800
−600
−400
−200
0
200
400
600
800
1000
−28000 −19798 19798 28100
c j(x
) [Å/m
m] (
Spi
egel
)
Amplitude
3−strahl. Ast. (j=10)
12
34
56
78
910
1112
1314
15
−800
−600
−400
−200
0
200
400
600
800
1000
−28000 −19798 19798 28100
c j(y
) [Å/m
m] (
Spi
egel
)
Amplitude
3−strahl. Ast. (j=10)
12
34
56
78
910
1112
1314
15
−40
−30
−20
−10
0
10
20
30
40−28000 −19798 19798 28100
c xj [a
.u.]
(WF
S)
Amplitude
3−strahl. Ast. (j=10)
12
34
56
78
910
1112
1314
15−40
−30
−20
−10
0
10
20
30
40−28000 −19798 19798 28100
c yj [a
.u.]
(WF
S)
Amplitude
3−strahl. Ast. (j=10)
12
34
56
78
910
1112
1314
15
Abbildung 8.26.: Zernike-Zerlegungen in Analogie zu Abb. 8.22 bei veränderlichem 3-strahligenAstigmatismus.
104

8.2. Messungen mit dem Wellenfrontsensor
8.2.8. Vergleich mit numerischer Simulation
Mit der numerischen Simulation der optischen Wellenfrontdifferentiation, die ich im Rahmenmeines Hauptpraktikums geschrieben habe, habe ich abschließend die Reaktion des Wellen-frontsensors bei der Objektstruktur Grsmall auf die Aberrationen berechnet, die die Spiegel-membran bei angesteuertem Astigmatismus und 3-strahligem Astigmatismus bei den Steu-eramplituden aus Tabelle 7.1 erzeugt. Das Ergebnis ist in Form von Zernike-Zerlegungen inAbbildung 8.27 dargestellt. Auch hier ist zu erkennen, dass sich die charakteristischen Koef-fizienten der Membranformableitungen und die berechneten Daten parallel verhalten. Jedochbesteht hier ebenfalls keine quantitativ einheitliche Korrelation. Auffallend sind auch hier wie-der die großen Beiträge voncx1 undcy1 , wie sie auch in den realen Messdaten (Abb. 8.25 und8.26) vorzufinden waren.
−1000
−500
0
500
1000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15−150
−100
−50
0
50
100
150
c j(x
) bzw
. cj(y
) [Å/m
m] (
Spi
egel
)
c xj b
zw. c
y j [a
.u.]
(WF
S)
j
Astigmatismus (j=5)
horizontal vertikal
WFS @ 42300 WFS @ −42300 Spiegel @ 42300 Spiegel @ −42300
−1000
−500
0
500
1000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15−150
−100
−50
0
50
100
150
c j(x
) bzw
. cj(y
) [Å/m
m] (
Spi
egel
)
c xj b
zw. c
y j [a
.u.]
(WF
S)
j
3−strahl. Ast. (j=10)
horizontal vertikal
WFS @ 28100 WFS @ −28000 Spiegel @ 28100 Spiegel @ −28000
Abbildung 8.27.: Zernike-Zerlegungen der simulierten Wellenfrontsensordaten und der Membran-formableitungen in Analogie zu Abb. 8.22 bei veränderlichem Astigmatismus (oben) und 3-strahligemAstigmatismus (unten). Die Koeffizientencx1 undcy1 nehmen jeweils Werte der Größenordnung−1 100bzw.−800 an.
105

8. Ergebnisse
8.3. Zusammenfassung und Fazit
Mit dem vorgestellten Testaufbau wurde das Prinzip des optisch differenzierenden Wellen-frontsensors (Optical Differentiation Wavefront Sensor) experimentell realisiert. Bei diesemWellenfrontsensor wird die elektromagnetische Feldverteilung in der Bildebene durch einenFlüssigkristallbildschirm moduliert. Dazu wird eine Maske mit drei Transmissionsstufen aufdiesen Bildschirm geschaltet. Die Maske wird aus einer Richtungsableitung der betrachtetenObjektstruktur berechnet. Die Helligkeitsverteilung in der Austrittspupille des Sensors solltenach theoretischen Überlegungen die Ableitung der einfallenden Wellenfront entlang dieserRichtung repräsentieren. Mit zwei linear unabhängigen Masken dieser Art kann somit derWellenfrontgradient in der Eintrittsöffnung räumlich aufgelöst in der Austrittspupille photo-metrisch bestimmt werden.
In dem Testaufbau wurde die von einem simulierten Objekt ausgehende Wellenfront durcheinen deformierbaren Spiegel aberriert. Die Spiegelform wurde mit einem Interferometer alsReferenz bestimmt. Es konnte gezeigt werden, dass die Helligkeitsverteilung in der Austritts-pupille des Testaufbaus bei Verwendung der quasibinären Masken von der einlaufenden Wel-lenfront mitbestimmt wird und dass der Wellenfrontsensor die charakteristischen Koeffizien-ten des erzeugten Wellenfrontgradienten zu erkennen vermag. Jedoch traten stets zusätzlicheBeiträge anderer Ordnungen auf, deren Ursache nicht geklärt werden konnte. Die Daten zwei-er prinzipiell identischer Messreihen von verschiedenen Tagen zeigten zudem deutliche Ab-weichungen, die weit über den statistischen Fehler der Helligkeitsbestimmung hinaus gingen.
Die Ursachen dieses Verhaltens könnten neben der instabilen Montierung auch in thermi-schen Effekten der optischen Komponenten liegen oder aber auch in störendem Raumseeingaufgrund zahlreicher Wärmequellen und Lüfter. Möglicherweise war aber auch die Bestim-mung der Form des deformierbaren Spiegels nicht präzise genug und die daraus folgendeAnnahme reproduzierbarer Aberrationen zu optimistisch. Daher konnte keine Eichung desWellenfrontsensors vorgenommen werden, die eine quantitative Untersuchung erlaubt hätte.
Es stellte sich heraus, dass weder die verwendeten solaren Objektstrukturen noch das ver-doppelte Gesichtsfeld in Anbetracht dieser Unregelmäßigkeiten wesentlichen Einfluss auf dieLeistungsfähigkeit des Wellenfrontsensors zeigen. Allerdings scheint die Pixelskala der Mas-ke bzw. der Abbildungmaßstab des Objekts auf das LCD-Panel sehr wohl von Bedeutung zusein und sollte nicht zu groß gewählt werden. Die veränderlichen Ergebnisse beim Rotierender Objektstruktur um 90° lassen vermuten, dass der Sensor mit den verwendeten quasibinärenMasken nicht nur die Wellenfrontableitung sichtbar macht. Von einer leichten Unschärfe derObjektstruktur zeigte sich der Wellenfrontsensor unbeeinflusst.
Die erste Realisierung der optisch differenzierenden Wellenfrontsensors ermutigt also, die-ses Konzept weiter zu entwickeln. Bei einer weiteren Untersuchung mit dem Aufbau im Op-tiklabor muss jedoch erst seine mechanische Stabilität erhöht werden. Darüberhinaus mussdie Präzision der Referenzmessung der aberrierten Wellenfront erhöht werden. Dazu könnteder Teststrahl des Interferometers entsprechend im Durchmesser verkleinert werden. Am bes-ten geeignet wäre jedoch ein zweiter Wellenfrontsensor (bspw. ein Hartman-Shack Sensor),der über einen geteilten Strahl die momentane Wellenfront simultan vermisst. Bei der weiterenEvaluierung des Konzepts sollte unbedingt auch überlegt werden, ob es weitere, möglichweisebesser geeignete Funktionale zur Maskenerstellung aus der Objektstruktur gibt.
Für den Spätsommer dieses Jahres ist es geplant, einen Aufbau wie in Abschnitt 4.5 be-
106

8.3. Zusammenfassung und Fazit
schrieben am Vacuum Tower Telescope (VTT) des Observatorio del Teide auf Teneriffa ein-zubauen. Dort wird es möglich sein, präzise definierte Aberrationen mit dem deformierbarenSpiegel der adaptiven Optik KAOS zu erzeugen und den Sensor unter realen Bedingungen ander Sonne zu testen.
107


A. Zernike-Polynome
A.1. Explizite Form
j n m Zmn (r, φ) Bedeutung
1 0 0 1 Kolben2 1 +1 r cos(φ) Verkippung inx-Richtung3 1 −1 r sin(φ) Verkippung iny-Richtung4 2 0 2r2 − 1 Defokus5 2 −2 r2 sin(2φ) Astigmatismus 1. Ordnung, 0°6 2 +2 r2 cos(2φ) Astigmatismus 1. Ordnung, 45°7 3 −1 [3r2 − 2r] sin(φ) Koma 1. Ordnung8 3 +1 [3r2 − 2r] cos(φ) Koma 1. Ordnung9 3 −3 r3 sin(3φ) 3-strahliger Astigmatismus, 0°
10 3 +3 r3 cos(3φ) 3-strahliger Astigmatismus, 30°11 4 0 [6r4 − 6r2 + 1] sphärische Aberration12 4 +2 [4r4 − 3r2] cos(2φ) Koma 2. Ordnung, 0°13 4 −2 [4r4 − 3r2] sin(2φ) Koma 2. Ordnung, 45°14 4 +4 r4 cos(4φ) 4-strahliger Astigmatismus, 0°15 4 −4 r4 sin(4φ) 4-strahliger Astigmatismus, 22,5°16 5 +1 [10r5 − 12r3 + 3r] cos(φ)17 5 −1 [10r5 − 12r3 + 3r] sin(φ)18 5 +3 [5r5 − 4r3] cos(3φ)19 5 −3 [5r5 − 4r3] sin(3φ)20 5 +5 r5 cos(5φ)21 5 −5 r5 sin(5φ)
Tabelle A.1.: Die ersten 21 Zernike-Polynome und ihre Bedeutungen.
109

A. Zernike-Polynome
A.2. Grafische Darstellung
Z1
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z1
-1
0
1 -1
0
1
-1
0
1
Z2
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z2
-1
0
1 -1
0
1
-1
0
1
Z3
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z3
-1
0
1 -1
0
1
-1
0
1
Z4
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z4
-1
0
1 -1
0
1
-1
0
1
Z5
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z5
-1
0
1 -1
0
1
-1
0
1
Z6
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z6
-1
0
1 -1
0
1
-1
0
1
Z7
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z7
-1
0
1 -1
0
1
-1
0
1
Z8
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z8
-1
0
1 -1
0
1
-1
0
1
Z9
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z9
Abbildung A.1.: Die ersten 9 Zernike-Polynome.
110

A.2. Grafische Darstellung
Z10
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z10 Z11
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z11 Z12
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z12
Z13
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z13 Z14
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z14 Z15
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z15
Z16
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z16 Z17
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z17 Z18
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z18
Z19
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z19 Z20
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z20 Z21
-1
0
1x -1
0
1
y
-1
0
1
-1
0
1
Z21
Abbildung A.2.: Die Zernike-Polynome der Ordnungen 10-21.
111

A. Zernike-Polynome
A.3. Ableitungen der Zernike-Polynome
A.3.1. Ableitungen in kartesichen Koordianten
j n m ddxZj(x, y) d
dyZj(x, y)
1 0 0 0 02 1 +1 Z1 03 1 −1 0 Z1
4 2 0 4Z2 4Z3
5 2 −2 2Z3 2Z2
6 2 +2 2Z2 −2Z3
7 3 −1 3Z5 Z1 + 2Z4 − 3Z6
8 3 +1 Z1 + 3Z4 + 3Z6 3Z5
9 3 −3 3Z5 3Z6
10 3 +3 3Z6 −3Z5
11 4 0 4Z2 + 8Z8 4Z3 + 8Z7
12 4 2 2Z2 + 4Z8 + 4Z10 −2Z3 − 4Z7 + 4Z9
13 4 −2 2Z3 + 4Z7 + 4Z9 2Z2 + 4Z8 − 4Z10
14 4 4 4Z10 −4Z9
15 4 −4 4Z9 4Z10
16 5 +1 Z1 + 3Z4 + 3Z6 + 5Z11 + 5Z12 3Z5
17 5 −1 3Z5 + 5Z13 Z1 + 3Z4 − 3Z6 + 5Z11 − 5Z12
18 5 +3 3Z6 + 5Z12 −3Z5 − 5Z13
19 5 −3 3Z5 + 5Z13 + 5Z15 3Z6 + 5Z12 − 5Z14
20 5 +5 5Z14 −5Z15
21 5 −5 5Z15 5Z14
Tabelle A.2.: Die Ableitungen der ersten 21 Zernike-Polynome.
112

A.3. Ableitungen der Zernike-Polynome
A.3.2. Die Nollschen Matrizen
γ(x) =
0 0 0 0 0 0 0 0 0 0 0 0 0 0 01 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 00 4 0 0 0 0 0 0 0 0 0 0 0 0 00 0 2 0 0 0 0 0 0 0 0 0 0 0 00 2 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 3 0 0 0 0 0 0 0 0 0 01 0 0 3 0 3 0 0 0 0 0 0 0 0 00 0 0 0 3 0 0 0 0 0 0 0 0 0 00 0 0 0 0 3 0 0 0 0 0 0 0 0 00 4 0 0 0 0 0 8 0 0 0 0 0 0 00 2 0 0 0 0 0 4 0 4 0 0 0 0 00 0 2 0 0 0 4 0 4 0 0 0 0 0 00 0 0 0 0 0 0 0 0 4 0 0 0 0 00 0 0 0 0 0 0 0 4 0 0 0 0 0 01 0 0 3 0 3 0 0 0 0 5 5 0 0 00 0 0 0 3 0 0 0 0 0 0 0 5 0 00 0 0 0 0 3 0 0 0 0 0 5 0 0 00 0 0 0 3 0 0 0 0 0 0 0 5 0 50 0 0 0 0 0 0 0 0 0 0 0 0 5 00 0 0 0 0 0 0 0 0 0 0 0 0 0 5
(A.1)
γ(y) =
0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 01 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 4 0 0 0 0 0 0 0 0 0 0 0 00 2 0 0 0 0 0 0 0 0 0 0 0 0 00 0 −2 0 0 0 0 0 0 0 0 0 0 0 01 0 0 3 0 −3 0 0 0 0 0 0 0 0 00 0 0 0 3 0 0 0 0 0 0 0 0 0 00 0 0 0 0 3 0 0 0 0 0 0 0 0 00 0 0 0 −3 0 0 0 0 0 0 0 0 0 00 0 4 0 0 0 8 0 0 0 0 0 0 0 00 0 −2 0 0 0 −4 0 4 0 0 0 0 0 00 2 0 0 0 0 0 4 0 −4 0 0 0 0 00 0 0 0 0 0 0 0 −4 0 0 0 0 0 00 0 0 0 0 0 0 0 0 4 0 0 0 0 00 0 0 0 3 0 0 0 0 0 0 0 5 0 01 0 0 3 0 −3 0 0 0 0 5 −5 0 0 00 0 0 0 −3 0 0 0 0 0 0 0 −5 0 50 0 0 0 0 3 0 0 0 0 0 5 0 −5 00 0 0 0 0 0 0 0 0 0 0 0 0 0 −50 0 0 0 0 0 0 0 0 0 0 0 0 5 0
(A.2)
113


B. Verkabelung des OKO-Spiegels
Verdrahtung
Aktuator DAC Verstärker Spiegelhalter PGA Messboxbuchse
IN OUT (siehe Markierung) (Box an DAC) (Box an AMP)
Ch
1-19
(Membran) 1 25 1 1 1 2 21 11 16 12 12 17 17 42 19 8 20 20 26 12 α3 14 13 13 13 35 16 64 10 17 9 9 39 11 15 6 21 5 5 8 18 76 7 20 8 8 14 10 37 15 12 16 16 22 15 58 20 7 19 19 28 α 129 18 9 17 17 30 13 1410 13 14 14 14 33 6 1611 12 15 11 11 37 4 1712 2 26 2 2 2 8 813 4 23 3 3 4 9 1914 3 24 4 4 6 19 915 5 22 6 6 10 7 1816 8 19 7 7 12 3 1017 9 18 10 10 16 1 1118 16 11 15 15 19 5 1519 17 10 18 18 24 14 13
Ch
20-3
7
(Membran) 21 25 1 1 21 23 2320 35 12 16 16 27 29 2621 37 10 18 18 29 28 2522 38 9 17 17 32 25 2823 39 8 20 20 34 27 γ24 36 11 15 15 36 26 2925 24 23 3 3 38 22 2126 26 21 5 5 40 24 2027 22 26 2 2 3 β β28 23 24 4 4 5 21 2229 25 22 6 6 7 20 2430 27 20 8 8 9 36 3731 28 19 7 7 11 37 3632 29 18 10 10 13 34 3533 30 17 9 9 15 35 3434 31 16 12 12 18 32 3335 32 15 11 11 20 33 3236 33 14 14 14 23 30 3137 34 13 13 13 25 31 30
(nicht verb.) 40 7 19 19 31 γ 27
(DAC-40, 2x20-Ch Amplifiers, 37-Ch OKO Spiegel, Messbox)
Tabelle B.1.: Verdrahtungsschema des OKO-Spiegels. Die Pinnummerierung der Stifleisten und desPGA-Sockels sind in Abbildung 6.3.2 erklärt.
115


Abbildungsverzeichnis
1.1. Zwei Aufnahmen eines Sonnenflecks mit und ohne adaptiver Optik. . . . . .12
2.1. Wirkung einer sphärischen Linse auf eine Kugelwelle . . . . . . . . . . . . .212.2. Beugung einer Kugelwelle mit einer sphärischen Linse. . . . . . . . . . . . .222.3. Beleuchtung einer Transparenz vor einer Linse mit ebener Welle. . . . . . . .242.4. Schematische Darstellung eines abbildenden Systems . . . . . . . . . . . . .25
3.1. Schematischer Aufbau einer adaptiven Optik mit geschlossenem Regelkreis. .343.2. Grafik zur Veranschaulichung des Anisoplanatismus’. . . . . . . . . . . . . .353.3. Schematische Darstellung eines Hartmann-Shack Wellenfrontsensors. . . . .36
4.1. Schematischer Aufbau des optisch differenzierenden Wellenfrontsensors . . .394.2. Wirkung der Maske beim optisch differenzierenden Sensor . . . . . . . . . .414.3. Referenzbild und Masken . . . . . . . . . . . . . . . . . . . . . . . . . . . .424.4. Schematische Darstellung einer Anordung zur vollständigen Bestimmung des
Wellenfrontgradienten mit einer einzigen photometrischen Aufnahme. . . . .46
5.1. Die Ordnungsphasen flüssiger Kristalle. . . . . . . . . . . . . . . . . . . . .485.2. Schematische Darstellung der Funktionsweise einer LCD-Zelle. . . . . . . .49
6.1. Skizze des Testaufbaus . . . . . . . . . . . . . . . . . . . . . . . . . . . . .536.2. Fotografische Aufnahme des Testaufbaus. Während der Messungen war die
Kamera auf einem 3-achsigen Kreuztisch montiert. . . . . . . . . . . . . . .546.3. Schematischer Aufbau eines 3LCD Videoprojektors . . . . . . . . . . . . . .556.4. Leiterplatte zur Verbindung eines ZIF-FPC-Sockels mit einer Stiftleiste . . .576.5. Grafische Darstellungen des Beugungsmuster der LCD-Panels . . . . . . . .596.6. Fotografische Aufnahme des Beugungsmusters des LCD-Panels . . . . . . .606.7. Schematischer Aufbau und Fotografie des OKO-Spiegels. . . . . . . . . . . .626.8. Pinbezeichnungen bei der Verkabelung des OKO-Spiegels. . . . . . . . . . .646.9. Bildschirmfoto des Programms Mirror Control. . . . . . . . . . . . . . . . .656.10. Schematischer Aufbau eines Twyman-Green Interferometers. . . . . . . . . .676.11. Ein typischer Bildschirminhalt während einer Wellenfrontmessung. . . . . .69
7.1. Die verwendeten Objektstrukturen. . . . . . . . . . . . . . . . . . . . . . . .77
8.1. Ein Interferogramm und ein Höhenprofil der Spiegelmembran. . . . . . . . .81
117

Abbildungsverzeichnis
8.2. Zernike-Zerlegungen verschiedener Spiegelformen. . . . . . . . . . . . . . .838.3. Höhenprofile der Spiegelmembran. . . . . . . . . . . . . . . . . . . . . . . .848.4. Zernike-Analyse der Membranform bei angesteuerter horizontaler Verkippung.858.5. Ableitungen der Zernike-Analyse der Membranform bei horiz. Verkippung. .868.6. Zernike-Analysen aller verwendeten Membranformen und ihre Ableitungen. .898.7. Intensitätsdifferenzen in der Austrittspupille. . . . . . . . . . . . . . . . . . .918.8. Vergleich der Sensordaten mit der Spiegelform bei horiz. Verkippung. . . . .928.9. Vergleich der Sensordaten mit der Spiegelform bei vertik. Verkippung. . . . .938.10. Vergleich der Sensordaten mit der Spiegelform bei Defokus. . . . . . . . . .938.11. Vergleich der Sensordaten mit der Spiegelform bei Astigmatismus. . . . . . .948.12. Vergleich der Sensordaten mit der Spiegelform bei 3-stahl. Astigmatismus. .948.13. Vergleich der Sensordaten mit der Spiegelform bei sphärischer Aberration. . .958.14. Vergleich der Sensordaten mit der Spiegelform bei Aberration 20. Ordnung. .958.15. Zernike-Zerlegungen von Sensordaten aus verschiedenen Messreihen. . . . .968.16. Zernike-Zerlegungen von Sensordaten aus verschiedenen Messreihen. . . . .978.17. Zernike-Zerlegungen von Sensordaten mit verschiedenen Objektstrukturen. .978.18. Zernike-Zerlegungen von Sensordaten mit verschiedenen Objektstrukturen. .988.19. Zernike-Zerlegung der Sensordaten bei weichgezeichneter Objektstruktur. . .988.20. Zernike-Zerlegung der Sensordaten bei vergrößertem Objektbild und Maske.998.21. Zernike-Zerlegung der Sensordaten bei Verdoppelung des Gesichtsfelds. . . .1008.22. Vergleich der Sensordaten mit der Spiegelform bei veränderl. horiz Verkippung.1018.23. Vergleich der Sensordaten mit der Spiegelform bei veränderl. vertik. Verkippung.1028.24. Vergleich der Sensordaten mit der Spiegelform bei veränderlichem Defokus. .1038.25. Vergleich der Sensordaten mit der Spiegelform bei veränderl. Astigmatismus.1048.26. Vergleich der Sensordaten mit der Spiegelform bei veränderl. 3-strahl. Astig.1048.27. Vergleich simulierter Sensordaten mit der Spiegelform. . . . . . . . . . . . .105
A.1. Die ersten 9 Zernike-Polynome. . . . . . . . . . . . . . . . . . . . . . . . .110A.2. Die Zernike-Polynome der Ordnungen 10-21. . . . . . . . . . . . . . . . . .111
118

Tabellenverzeichnis
6.1. Wichtige technische Daten des Hitachi Illumina PJ-TX100 Videoprojektors .556.2. Technische Daten der LCD-Panels des Typs Epson L3D07H . . . . . . . . .56
7.1. Die Amplituden der Spiegelsteuerung bei Messreihe 06_01_1, 09_01_1, 09_01_2und 09_01_5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .78
7.2. Die Amplituden der Spiegelsteuerung bei Messreihe 09_01_3. . . . . . . . .797.3. Die Amplituden der Spiegelsteuerung bei Messreihe 09_01_4. . . . . . . . .79
A.1. Die ersten 21 Zernike-Polynome und ihre Bedeutungen. . . . . . . . . . . . .109A.2. Die Ableitungen der ersten 21 Zernike-Polynome. . . . . . . . . . . . . . . .112
B.1. Verdrahtungsschema des OKO-Spiegels . . . . . . . . . . . . . . . . . . . .115
119


Literaturverzeichnis
[1] BABCOCK, H. W.: The Possibility of Compensating Astronomical Seeing. Publicationsof the Astronomical Society of the Pacific (PASP), 65(386):229–236, 1953. 29
[2] BERGMANN, L. und C. SCHAEFER: Optik, Bd. 3 d. ReiheLehrbuch der Experimental-physik. de Gruyter, Berlin / New York, 7. Aufl., 1978. 52
[3] BORN, M. und E. WOLF: Principles of Optics. Pergamon Press, Oxford, England, 6.Aufl., 1980. 32
[4] DOU, R. und M. K. GILES: Closed-loop adaptive-optics system with a liquid-crystaltelevision as a phase retarder. Optics Letters, 20:1583–1585, Juli 1995. 34
[5] GASKILL , J. D.:Linear Systems, Fourier Transforms and Optics. John Willey & Sons,New York, 1978. 13, 17, 25
[6] HARDY , J. W.:Adaptive Optics for Astronomical Telescopes. Nr. 16 inOxford Series inOptical and Imaging Sciences. Oxford University Press, 1998. 29, 31, 45
[7] LÜHE, O. VON DER: Wavefront Error Measurement Technique Using Extended, Incohe-rent Light Sources. Optical Engineering, 27:1078–1087, 1988. 39
[8] NEWTON, I.: Opticks: Or a Treatise of the Reflections, Refractions, Inflections and Co-lours of Light, S. 98. Burndy Library, London, 2. Aufl., 1718.http://burndy.mit.edu/Collections/Babson/Online/Opticks/ . 29
[9] NOLL , R. J.:Zernike Polynomials and atmospheric turbulence. Journal of the OpticalSociety of America, 66:207–211, 1976. 32
[10] PRESS, W. H., B. P. FLANNERY, S. A. TEUKOLSKY und W. T. VETTERLING: Nu-merical Recipes in C: The Art of Scientific Computing. Cambridge University Press,Cambridge (UK) and New York, 2nd Aufl., 1992. 64, 70, 71
[11] SPIE: First tip/tilt correction with the Palomar 200-inch adaptive optics system, Bd.3353, March 1998. 30
[12] TYSON, R. K.: Principles of Adaptive Optics. Academic Press, 1991. 29, 35
[13] TYSON, R. K. und B. WEST FRAZIER: Microelectromechanical System ProgrammableAberration Generator for Adaptive Optics. Applied Optics, 40:2063–2067, Mai 2001.62
121

Literaturverzeichnis
[14] VDOVIN , G. und P. M. SARRO: Flexible mirror micromachined in silicon. AppliedOptics, 34:2968–2972, Juni 1995. 62
[15] ZHU, L., P.-C. SUN, D.-U. BARTSCH, W. R. FREEMAN und Y. FAINMAN : AdaptiveControl of a Micromachined Continuous-Membrane Deformable Mirror for AberrationCompensation. Applied Optics, 38:168–176, Jan. 1999. 66
122

Danksagung
123


Hiermit erkläre ich, dass ich diese Arbeit selbständig und nur mit den angegebenen Hilfsmit-teln angefertigt habe. Alle Stellen, die dem Wortlaut oder dem Sinne nach anderen Werkenentnommen wurden, sind durch Angabe der Quellen als Entlehnung kenntlich gemacht.
Dirk Schmidt, Freiburg im April 2006