Embed Size (px)
Citation preview

21 Dynamik des Laufers
21.1 Allgemeines
Schon der Schopfer der ersten Dampfturbine, Gustaf de Laval, erkannte, daB die hohen Drehzahlen der Rotoren thermischer Turbomaschinen auf besondere dynamische Probleme fUhren. Es existiert nach de Laval fur einen gegebenen Laufer eine kritische Drehzahl, die wesentlich mit seiner Biege-Eigenschwingungszahl zusammenfallt und bei der die Welle nicht dauernd betrieben werden darf mit Rucksicht auf Schwingungen, die ein gefahrliches AusmaB annehmen k6nnen. Oberhalb wie unterhalb del' kritischen Drehzahl ist abel' ein einwandfreier Betrieb moglich. Die Theorie del' kritischen Drehzahl wurde schon friih entwickelt, VOl' allem durch Fappl [1] und Stodola [2, 3], del' nicht nur ein Verfahren zur Bestimmung kritischer Drehzahlen beliebig gestalteter "Wellen angebell konnte, sondern auch feinere Effekte analysierte. Insbesondere konnte er zeigen, daB der liberkritische Laufzustand des dampfungsfreien, symmetrischen, isotrop gelagerten Einscheibenrotors, del' nul' durch die Unwucht erregt wird, stabil ist, sofern nul' die Exzentrizitat hinreichend klein ist gegenuber dem Tragheitsradius. - Die dynamische Berechnung del' Rotoren besclm'inkte sich durch J ahrzehnte hindurch auf die Bestimmung der kritischen Drehzahlen.
Die praktische Erfahrung zeigte illdessell schon immel', daB die Laufer ein Verhalten zeigten, das von dies en klassischen Vorstellung deutlich abwich. Einerseits erwiesen sich die AusschHige bei del' kritischen Drehzahl meist als uberraschend klein. Die aus der Theorie gefolgerte Meinung, daB eine kritische Dl'ehzahl sehr rasch durchfahren werden mlisse, die z.B. selbst in dem hervorragenden Werk von Biezeno und Grammel [4] vertreten wird, wurde durch die Erfahrung nicht bestatigt. Oft ist es sogar moglich, unbegrenzt in der kritischen Drehzahl zu fahren, und heute wird dies verlangt. - Anderseits sind bei anderen Drehzahlen (meist im llberkl'itischen Gebiet) sporadisch immer wieder Laufstorungen aufgetreten. Ein physikalisches VersUindnis diesel' Erscheinungen fehlte weitgehend. Zu ihrer Venneidung kannte man nul' Erfahrungsregeln, die abel' nie zuverlassig waren.
Die Klarung diesel' Erscheinungen setzte in den funfziger J ahren ein. Hagg und Sankey [5, 6] konnten - allerdings nul' unter speziellen Bedingungen - die Dampfung im 01-film del' Gleitlager experiment ell hestimmen. Nach diesen Ergebnissen wurden die kleinen Ausschlage beim Durchgang durch die kritische Drehzahl verstandlich. In den oben erwahnten zusatzlichen Laufstorungen erkannte man selbsterregte Schwingungen, die durch drei verschiedene Mechanismen ausgelost werden. Die innere Dampfung des Rotors bewirkt oberhalb del' kritischen Drehzahl eine Labilisierung des Laufzustandes, die nur durch auBere Dampfung unterdruckt werden kann. Unter bestimmten Bedingungen geht yom Olfilm del' Lager eine Anfachung selbsterregter Schwingungen aus (sog. ,oil whip'). SchlieBlich haben die Spaltstromungen am Laufradumfang und in Labyrinthdichtungen die Tenden~, eine einmal eingeleitete Schwingung weiter anzufachen (sog. Spalterregung).
Die Theorie hat unter Ausnutzung del' Moglichkeiten des Computers Verfahren gefunden, um die kritischen Drehzahlen komplizierter, mehrfach gelagerter Laufersystemc genau zu berechnen (auch bei nachgiebiger Lagerung), was friiher nicht zuverlassig gelang. Die oben genannten Selbsterregungseffekte wurden zunachst je fur sich allein unter vereinfachenden Annahmen theoretisch und experimentell untersucht. Erst der Computer
W. Traupel, Thermische Turbomaschinen© Springer-Verlag, Berlin/Heidelberg 1982

462 21 Dynamik des Liiufers
eroffnete abel' die Moglichkeit einer theoretischen Behandlung des gesamten Problemkomplexes unter wirklichkeitsnahen Voraussetzungen. Heute sind wir in del' Lage, in einem zusammenhangenden Rechnungsgang die kritischen Drehzahlen und das Stabilitatsverhalten von Rotorsystemen zu bestimmen. Bei gegebener Unwuchtverteilung konnen auch die Ausschlage berechnet werden. In solche Rechnungen gehen allerdings empirische Unterlagen ein (iiber Spalterregung und Lagerverhalten), die noch nicht in geniigend umfassender Weise vorliegen.
Nachfolgend werden zunachst am einfachen Beispiel des Laval-Rotors - eine einzige Scheibe an einer masselosen Welle - einige grundlegende Zusammenhange aufgezeigt. Alsdann erfolgt die Behandlung des allgemeinen Problems.
21.2 Laval-Rotor, elementare Theorie
Als Laval-Rotor bezeichnet man die Anordnung, bei del' eine Scheibe in del' Mitte einer masselosen Welle angeordnet ist (vgl. Abb. 21.2.1). Die urspriingliche Laval-Turbine kam in del' Tat diesem einfachen Grenzfall sehr nahe. Aus Symmetriegriinden bewegt sich dabei die Scheibe sichel' in ihrer Mittelebene. Da das Eigengewicht fiir den Vorgang unwesentlich ist, kann es sogleich aus del' Betrachtung weggelassen werden. Die Kri1fte, welche die Scheibe von del' Welle erfahrt, sind, wenn xw, Yw die Koordinaten des DurchstoBpunktes W del' Wellenachse durch die Scheibenmittelebene bedeuten
X = - kxw, Y = -kyw. 21.2(1)
Hier kennzeichnet lc die Steifigkeit del' Welle (ihre "Federkonstante"). Hat die Scheibe die Masse 1n und den Tragheitsradius x, so lauten die Bewegungsgleichungen mit den Bezeichnungen del' Abb. 21.2.1:
1nX = -kxw,
1nY = -lcYw, mx2ip = elc(yw cos rp - Xw sin rp).
21.2(2)
21.2(3)
21.2(4)
Gl. 21.2(4) formuliert die Erhaltung des Drehimpulses und gilt daher HiI' stationaren Zustand, wo das System kein resultierendes Moment empfangt. Wenn man 21.2(4) in del' Form
meip = ( : r kCyw cos rp - Xw sin rp) 21.2(5)
w~
0
m <
y w -
y -~~ e I
Yw -w, , 0 Xw X x
Abb. 21.2.1. Laval·Rotor: Scheibe an masseloser Welle

21.2 Laval-Rotor, elementare Theor'ie 463
schreibt und beachtet, daB (ejx)2 praktisch vernachHissigbar klein wird, folgt
if = 0 . . . cP = wt. 21.2(6)
Eine Integrationskonstante CPo kann entfallen, da stets del' Zeitnullpunkt so gewahlt werden kann, daB cp = wt gilt. Mit
Xw = x - e cos cp = x - e cos wt,
Yw = Y - e sin cp = Y - e sin wt
21.2(7)
21.2(8)
ergeben sich durch Einsetzen in GIn. 21.2(2) und (3) die beiden Differentialgleichungen
.. k k x + -x =-e cos wt, 21.2(9)
m m
.. k k. Y + - Y = - e sm wt, m m
21. 2( 10)
deren allgemeine Lasung lautet
wobei
x = A cos wet + B sin wet + 1 _ (:jwe)2 cos wt
Y = 0 cos wel + D sin wet + 1 _ (:jwe)2 sin wt,
21.2(11)
21.2(12)
21.2(13)
die Kreisfrequenz del' Biegeeigenschwingung des Systems ist. Die Glieder mit den Integrationskonstanten A ... D stell en die allgemeine Biegeschwingung des Systems dar. Ohne weitere auBere Erregung und bei del' geringsten auBeren Dampfung wird diese Bewegung mit del' Zeit exponentiell abklingen. Was dann iibrigbleibt, sind zwei aufeinander senkl'echte Schwingungen gleicher Amplitude und mit 90° Phasenverschiebung, also eine zirkular polarisierte Schwingung, m. a. W. eine Kreisbewegung mit del' Winkelgeschwindigkeit w und dem Radius
21.2(14)
del' flir w --+ We nach Unendlich strebt; We ist die kritischc Winkclaeschwindiakeit. Beachtlicherweise wirdr positiv, wcnn w < We' negativ, wenn w > We' Dies bedeutet,
daB im unterkritischen Gebiet die Welle sich in del' Richtung del' Unbalance ausbiegt, im l'lberkritischen Gebiet in entgegengesetzter Richtung. Abb. 21.2.2a und b stell en diese Verhaltnisse dar, und es ist leicht nachzupriifen, daB beides magliche dynamische Gleichgewichtszustande sind; man hat nul' die Ri.ickstellkraft del' ausgebogenen Welle del' Fliehkraft gleichzusetzen und findet G1. 21.2(14) bestatigt. Hingegen drangt sich bei Betrachtung del' Abb. 21.2.2b die Vermutung auf, daB del' iiberkl'itische Laufzustand instabil sei, denn wenn man sich den Schwerpunkt urn einen noch so kleinen Betrag nach auBen verschoben denkt, nimmt die Fliehkraft starker zu als die Ri.ickstellkraft. In del' Tat ist das System im i.ibel'kritischell Laufzustand instabil, sobald man die Scheibe durch eillen
y S Y / ~e ~ W
" e W S
T' Abb. 21.2.2. Lage von Drehzentrum 0, Schwerpunkt S und WellendurchstoB -
0 X x punkt W. a) Unterkritischer Laufzustand; a b b) iiberkritischer Laufzustand

464 21 Dynamik des Laufers
Massenpunkt ersetzt. Stodola [3] konnte indessen zeigen, daB das axiale Tragheitsmoment eine Stabilisierung herbeifiihrt. Stabilitat ist nach seiner Untersuchung gewahrleistet, sobald
21.2(15)
Wir verzichten darauf, Stodolas Herleitung hier wiederzugeben, da moderne Theorien die Stabilitatsfrage unter sehr viel allgemeineren Voraussetzungen (Olfilmkrafte, Spalterregung, innere Dampfung) behandeln.
Urn den Ubergang vom unterkritischen zum iiberkritischen Laufzustand zu verfolgen, muB die Dampfung eingefiihrt werden, da ohne diese del' Ausschlag in W = We nach Unendlich strebt. Wenn angenommen wird, daB del' Bewegung des Scheibenschwerpunktes in den beiden Koordinatenrichtungen die dampfenden Krafte -bx und -by entgegenstehen, lauten die erganzten Bewegungsgleichungen
.. b. Ie k x + - x + - x = - e cos wt,
'In 1n 7n 21.2(lG)
.. b. k k. y + -y + -y =-e sm wt.
1n 1n 1n 21.2(17)
Sie sind identisch mit del' Gleichung des einfachell Schwingers, so daG die Losung von dort iibernommen werden kann:
x e cos (wt - 'Ip)
y e sin (wt - 'Ip)
21. 2( 18) 1/[1 _ (~)2]2 + [ bW2]2 ~ We 1nWe
V[ ( w )2]2 [bW]2 ' 1 -~: + 'In(t);
~ ~arctan[m~"< (~) 1 (;J 1 21.2(19)
Das sind zwei aufeinandcr senkrecht stehendc, urn 90° phasenverschobene Schwingungen, die zusammen cine Kreisbewegung mit del' Winkelgeschwindigkeit (j) ergeben. 1m Re[Sonanzfall (j) = We entsteht die endliche Amplitude
CIlHOe 1·m"" =-b- 21.2(20)
wahrend gleichzeitig 'IjJ = 90°. Wcit unter del' kritischen Winkelgeschwindigkeit, also wenn (t)/we 1 wird 'IjJ -+ 0 0
• Uber del' kritischen Winkelgeschwindigkeit, also HiT W/We 1, wird 'IjJ -+ 180°, d.h. es bestehen die Verhaltnisse nach Abb. 21.2.2a und b. Bei OJ = We,
steht C = WS nach Abb. 21.2.3 senkl'echt auf del' Wellenauslenkung OW, und zwar weist e in Richtung del' Dl'ehbewegung. Damit ist del' stetige Ubel'gang vom untel'kritischen zum iibel'kl'itischen Laufzustand hel'gestellt.
DaB del' in Abb. 21.2.3 dargestellte kritische Laufzustand ein Gleichgewichtszustand ist, laBt sich in folgender Weise unmittelbar einsehen. Die ausgebogene Welle iibt auf die
-- ---Scheibe die Riickstellkl'aft P r = k(OW) aus, die nach innen weist und die Richtung OW
hat. AuBel'dem erfahrt die Scheibe eine senkrecht zum Radius rw = OW stehende und entgegen del' Bewegung weisende bremsende Kraft P b = brwOJ. Die Resultierende aus PI' und P b ist eine Kraft P, die nach GroBe und Richtung del' Fliehkraft P z = mrOJ2 entgegen-gesetzt gleich sein muG. Hiel' ist r = OS. Nun ist

21.2 Laval-Rotor, elementare Theorie
y
w
Abb. 21.2.3. Gleiehgewiehtsbetmchtung beim kritischen Laufzustand. Drehmoment Mb ist aufzuwenden
zur Uberwindung des bremsenden Momentes
Mb =Pe cos)'
somit also durch Einsetzen del' Ausdriicke fiir Pb und P r auch
brww e elc lcrw = rw ... j'w = bw .
465
x
21.2(21)
Bei sehr kleiner Dampfung wird OW:> e, somit also del' Winkel y sehr klein und folglich rw R:; r, P R:; Pro Also wird Pz R:; P" woraus
mrw2 = lcr, w=V:~· 21.2(22)
Da abel' ylc/,rn = We, kann man durch Einsetzen von lc =nwJ~ in Gl. 21.2(21) das Ergebnis auf die Form
r 21.2(2;3)
bringen. Die erste diesel' Gleichungen sagt aus, daB del' durch Abb. 21.2.3 dargestellte Laufzustand dann und nur dann eintritt, wenn die Winkelgeschwindigkeit gleich del' Kreisfrequenz del' Biegeschwingung des Systems ist, wahl' end mit del' zweiten Beziehung Gl. 21.2(20) wiedergewonnen ist.
Del' wirkliche Dampfungsmechanismus ist allerdings komplizierter als hier vorausgesetzt, denn die Dampfungskrafte entstehen VOl' allem in den Lagern und greifen nur zu einem meist verllachlassigbaren kleinen Teil an del' Lauferscheibe an. Fiir die genauere Analyse del' Verhaltnisse verweisen wir auf Abschn. 21.4.
AbschlieBend sei noch auf den idealisierten Grenzfall des dampfungsfreien, vollkommen zentrischen Laval-Rotors hingewiesen. Wenn del' Schwerpunkt S mit del' Winkelgeschwindigkeit w auf einem Kreis mit dem Radius r um das geometrische Zentrum 0 rotiert, ist die Fliehkraft mrw2 , die Riickstellkraft kr, so daB die Gleichgewichtsbedingung lautet
lc In'/'w2 = leI' . .. w 2 =-.
m 21.2(24)
Nur bei diesel' Winkelgeschwindigkeit, die offensichtlich wieder die Kreisfrequenz del' Eigenschwingung ist, ist r =f= 0 iiberhaupt moglich, und zwar ist dann an sich jedes r denkbar. Hat ein vollkommen unwuchtfreier Rotor also seine kritische Winkelgeschwindigkeit, so ist er bei jeder Auslenkung im indifferenten Gleichgewicht. Hier tritt bereits zutage, daB das Problem del' kritischen Drehzahl ein Eiycnwc'/'tprobZcm ist. Das Problem des dynamischen Gleichgewichts laBt im allgemeinen nur die triviale Losung zu, d. h. die Welle erfahrt iiberhaupt keine Auslenkung. Nul' bei einem Wert del' Winkelgeschwindigkeit - dem Eigenwert - ist sie beliebiger Auslenkungen fahig.
Man beachte iibrigens, welchen Charakter die Bewegung del' Welle unter den in diesem Abschnitt gemachten einfachen Voraussetzungen stets hat. Die ausgebogene ''VelIe schlagt wie ein starrer Korper (also ohne wechselnde Deformationen zu edeiden) mit del' Winkelgeschwindigkeit w um die geometrische Drehachse.

466 21 Dynamik des Laufers
21.3 Laval-Rotor in anisotrop elastischen Lagern
Anisotrope (d.h. nicht in, allen Richtungen gleiche) Elastizitat ist in der Regel bei der Lagerung der Rotoren gegeben, weshalb hier der EinfluB solcher Anisotropie am einfachen Beispiel des Laval-Rotors untersucht werde. Abb. 21.3.1 stellt den Typus der Lagerung schematisch dar. Es sind kl und k2 die Federkonstanten in den beiden Richtungen x und y. Erfahrt also das Lager Verschiebungen x' und y', so entstehen die riickstellenden Krafte
21.3(1)
Es ist hier der Einfachheit halber angenommen, daB keine Koppelkoeffizienten auftreten, d.h. eine Verschiebung in Richtung x erzeugt nicht auch eine Kraft in y-Richtung und umgekehrt.
Die Scheibe moge wiederum unter der Voraussetzung sehr kleiner Exzentrizitat behandelt werden, so daB hinreichend genau eine gleichformige Rotation mit der Winkelgeschwindigkeit w angenommen werden darf und eine Formulierung des Drallsatzes sich eriibrigt. Fiir den Winkel cp (Abb. 21.3.2) gilt also cp = wt. 1st k die elastische Konstante del' Welle, so sind die beiden Kraftkomponenten der ausgebogenen Welle auf die Scheibe
x = -k(x - x' - e cos wt), Y = -k(y - y' - esin wt), 21.3(2)
wo x und y die Schwerpunktskoordinaten sind. Bei masselos vorausgesetzten Lagern ist
Abb. 21.3.1. ]'edernd abgestiitztes Lager
X =2X', Y =2Y'.
y
$ y ------------------------I I I
~l Yw ---------------''--~'4_..L....J--I
2 (kt x'-t-bl x') !/ -----0-;<;' I"
12(k.y'+bzY'l
o x'
I k(yw-Y') I ' I I I I I I I
21.3(3)
x
Abb. 21.3.2. Zur Aufstellung del' Differentialgleichungen des Laval-Rotors mit federnd abgestiitzten Lagern
Wenn man fiir X, X', Y, Y' die obigen Ausdriicke einsetzt und nach x' und y' auflost, folgt
x' x - e cos wt
2kl + 1 k
y' y - esin wt
2k2 1 -+ k
21.3(4)
Die fiir den Scheibenschwerpunkt und die x-Richtung formulierte Bewegungsgleichung lautet, wem1 man sofort noch eine Dampfungskraft -bx beifiigt
'InX =X - bx 21.3(5) odeI' mit 21.3(2) auch
lnX + k(x - x') + bx = ke cos wt. 21.3(6)
Wenn man hier noch x' nach del' ersten del' GIn. 21.3(4) einsetzt und ordnet, erhalt man die nachfolgende Gl. 21.3(7), del' wir sogleich noch die analoge Gleichung fiir die y-Rich-

21.3 Laval-Rotor in anisotrop elastischen Lagern 457
tung beifiigen:
.. b. k[ 1 ] k[ 1 ] x + In X + In 1 + k/2kl X = In 1 + k/2kl e cos wt, 21.3(7)
.. b. k[ 1 ] lc[ 1 ] _ y + In Y + In 1 + lc/2k2 Y = In 1 + lc/2k2 e smwt. 21.3(8)
Beide Gleichungen sind voneinander unabhangig und unterscheiden sich von den GIn. 21.3(16) und (17) nul' durch die Koeffizienten. Dementsprechend werden jetzt die Kreisfrequenzen del' beiden Eigenschwingungen
/ k [ 1 ] WeI = V 1n 1 + lc/2lcl '
21.3(9)
'Viederum moge abgesehen werden von den allgemeinen Losungen del' verkiirzten GIn. 21.2(7) und (8), die bei Abwesenheit von Erregungskraften exponentiell abklingen. Dann bleiben als stationare Losungen iibrig
_ e cos (wt -"PI) x
- V[l- C:JT + [~:~J' e sin (wt - '!fJ2)
Y = 21.3(10)
V[l - C~2rr + [~:~J
tan '!fJI b 1
lnWel (w:) - (;~J ' b 1
tan '!fJ2 = -- ------lnWe2 (W~2) - ( ::J 21.3(11)
Die groBten Ausschlage XllUtxl Ylllax, die im Resonanzfall erreicht werden, sind
e11~Wel xlllax =-b-
e1nwe2 Ylllax = -b- . 21.3(12)
Wie aus den Gin. 21.3(9) hervorgeht, bewirkt eine Nachgiebigkeit del' Lagerung eine Herabsetzung del' kritischen Drehzahl; ist diese Nachgiebigkeit in zwei aufeinander senkrecht stehenden Richtungen verschieden, so werden zwei kritische Drehzahlen erhalten. -Die angegebene Losung erlaubt es auch, die Schwel'pnnktsbewegung zu analysieren. Die beiden aufeinander senkrecht stehenden Schwingungsbewegnngen x(t) und y(t) haben hier wedel' gleiche Amplituden noch urn 90° verschobene Phasen. Daher ist die Bewegung keine zirkular polarisierte Schwingnng. Es werde angenommen, die Nachgiebigkeit in x-Richtung sei groBer als die in y-Richtung, also WeI < (l)e2, und zwal' sei del' Untel'schied betrachtlich. Dann ergibt sich nach den Gin. 21.3(10) und (11) das in Abb. 21.3.3 dargestellte Verhalten.
Wenn W < Wel (Fall 1), bewegt sich del' Schwel'punkt auf einer Ellipse, die kreisahnlichen Charakter hat, solange man weit Ullter (l)el bleibt und immer schlanker wird, je mehr man sich WeI nahert. Del' Umlaufsinn stimmt mit dem Drehsinn iiberein. "Venn W = WeI (Fall 2), wird die Ellipse auBerordentlich langgezogen. Bei weiterer Steigerung del' Drehzahl wird sie noch schlanker Ulld degeneriert wenig oberhalb Wel> namlich dort, wo '!fJI - 1jJ2 = n/2, zu einer Geraden (Fall 3). Bei weiterer Drehzahlsteigerung wird '!fJI - '!fJ2 > n/2. Hier erscheint die Ellipse wieder, wird nun abel' entgegen dem Drehsinn des Rotors durchlaufen (Fall 4). - Weiter andert die Ellipse ihre Orientierung, wird, wenn WeI und W e2 hinreichend weit auseinanderliegen (wobei sich '!fJI - '!fJ2 voriibergehend dem Wert n nahert) sehr kreisahnlich, um dann wieder schlanker zu werden, weil '!fJI - '!fJ2 wieder abnimmt. SchlieBlich wird sie knapp unterhalb W = We2 wieder zur Geraden, wo '!fJI - '!fJ2 = n/2 (Fall 6). In W = We2 ist die Bahn wieder eine schlanke Ellipse, die im Drehsinn des Rotors durchlaufen wird (Fall 6). Steigert man (I) immer weiter iiber W e2 hinaus, so wird die Ellipse immer kreisahnlicher und schrumpft mehr und mehr zusammen (Fall 7).

468 21 Dynamik des Laufers
Orehsinn "'"
o 2
3
+
W <: weT Y'1- '¥'2 <: ¥-
Wet <: W <: we2
1fl- '¥'2 = ~
Wei <W <: Wez :;r;
1f1-1f2:> 3"
5
6
7
Wei <: W <: wez
1f1-1fz = ¥-
Abb. 21.3.3. Bahnkurven des Schwerpunktes bei elastischer Lagerung mit verschiedener Nachgiebigkeit in horizontaler und vertikaler Richtung. Zwischen Laufzustanden 3 und 5 lauft Schwerpunktsbewegung im
Gegenlauf
Liegen weI und W e2 weniger weit auseinander als hier vorausgesetzt, so wird das Gebiet del' gegenlaufigen Parzessionsbewegung des Schwerpunktes schmaleI' und verschwindet schlieBlich ganz, d. h. Fall 3 wird dann mit Fall 5 identisch. Riicken WeI und W e2 SO nahe zusammen, daB im ganzen Gebiet "PI - "P2 < nj2, dann geht zwischen den beiden kritischen Winkelgeschwindigkeiten die Ellipse des Falles 2 unter stetiger Verformung in die des Falles 6 iiber. Die Ellipsen sind dann kreisahnlicher und werden im Grenzfall WeI = W e2 ZU identischen Kreisen. - Es ist hier del' symmetrische Aufbau des LavalRotors vorausgesetzt worden. Eine Verallgemeinerung, bei del' diese Symmetriebedingung fallengelassen wurde, gibt Pjiltzner [7]. Grundsatzlich werden die gleichen Effekte erhalten wie im symmetrischen Fall.
21.4 Laval-Uotol' mit llicht dl'chsymmetrischel' Welle
Ein anderel' Typus von Anisotropie liegt VOl' beim nicht drehsymmetrischen Lanfer. Eine geringfiigige Storung del' Drehsymmetrie kann schon gegeben sein durch Keilnuten in einer ~Welle. Insbesondere sind abel' bei den Rotol'en del' elektrischen Generatoren die Tragheitsmomente beziiglich del' Verbindungslinie del' Pole und beztiglich del' dazu senkrecht stehenden Haupttragheitsachse verschieden. - Del' Einfachheit halber setzen wir nachfolgend wiederum den Laval-Rotor ohne Dampfung in stan'en Lagern voraus.
Es ist zweckmaBig, diese Untersuchung durchzufiihren in einem Koordinatensystem, das mit del' Winkelgeschwindigkeit W des Rotors umlauft und des sen Koordinatenachsen ~, 'Y} Haupttragheitsachsen sind, denen die Tragheitsmomente J max und J mill entsprechen (vgl. Abb. 21.4.1). 1st del' DurchstoBpunkt W del' Wellenachse um ~w,'Y}w aus del' neutralen Lage 0 ausgelenkt, so erfahrt die Scheibe elastische Riickstellkrafte
21.4(1)
wobei ki und kz die elastischen Konstanten entsprechend den beiden Haupttragheitsmomenten sind, und zwar sei ki < lcz Die Bewegungsgleichungen lauten
m~ = -kI~W - mg sin wt + mw2~ + 2mwij,
lnij = -k2lJTv - mg cos wt + mw2'Y} + 2mw~. 21.4(2)
21.4(3)

21.4 Laval-Rotor mit nieht drehsymmetriseher 'Welle 469
Imi.n
..................................
-~~----.-+--+-----! max
Abb. 21.4.1. Gleichgewichtsbetrachtung filr nieM drehsymmetrische Welle
In dies en Gleichungen ist jeweils das dritte und vierte Glied rechts die betreffende Komponente der Zentrifugal- und Coriolis-Kraft, die im rotierenden System eingefuhrt werden mussen. Die Glieder mit dem Faktor mg stellen den EinfluB der Schwere dar, der hier nicht ubergangen werden dad. Die Formulierung des Drallsatzes kann aus gleichen Grunden wie friiher entfallen. Es dad vielmehr kostante Winkelgeschwindigkeit vorausgesetzt werden, womit der Winkel fJ (Abb. 21.4.1) unveranderlich bleibt. Da nun
;-w =;- - e cos fJ, 1]w = 1] - e sin fJ , 21.4(4)
lassen sich die Bewegungsgleichungen 21.4(2) und (3) in die Form
t (ki 2) I:: 2· ki fJ . r; + - - W r; - (1)1] = - e cos - g sm wt m n~
21.4(5)
ij + (k2 _ (1)2) 1] - 2 w~ = k2 e sin fJ - g cos wt rn m
21.4(6)
bringen. Die Partikularlosung dieses Gleichungssystems lautet folgendermaBen. Wir setzen
WeI = Yki/m , 21.4(7) Dann ist
(I)~I 4w2 - W~2 _ ;- = 2 2 e COS fJ + 2 2 2 (2 2) 2 g sm wt,
WeI - (I) WeI W e2 - WeI + W e2 W 21.4(8)
W~2. 4w2 - W~2 1) = -2 ---2 e sm fJ + 2 2 2( 2 2) 2 g COS wt.
W e2 - W W eIW e2 - WeI + W e2 W 21.4(9)
Insbesondere ergibt sich damit
;- = 00 wenn (I) = WeI, 17 = 00 wenn OJ = W e2. 21.4(10)
Dieses Ergebnis ist plausibel, denn es besagt, daB die kritische Drehzahl sich aufspaltet in zwei Werte, die den elastischen Konstanten ki und k2 entsprechen. AuBerdem konnen aber die oszillierenden Glieder in 21.4(8) und (9), die mit del' Schwere zusammenhangen, unendliche Amplituden annehmen, denn ihr Nenner verschwindet in W = wY ' wo
W Y =-2( 2 2)· W e1 + OJ e2
21.4(11)
Wenn OJeI und OJe2 nur sehr wenig verschieden sind, so daB bei del' Setzung
WeI = OJ - 15, We2 = OJ + 15 21.4(12)

470 21 Dynamik des Lamers
b klein ist im Vergleich zum Mittelwert
geht Gl. 21.4(11) mit groBer Genauigkeit in
W W =-
g 2
21.4(13)
21.4(14)
iiber. Praktisch liegt stets der Fall vor, wo b klein ist gegen ro, so daB auch 21.4(14) gilt. Die durch die Schwere bedingte kritische Drehzahl ist also halb so groB wie diejenige, die der mittleren Biegesteifigkeit der Welle entspricht. Dieses Ergebnis kann man sich leicht verstandlich machen. GemaB 21.4(8) und (9) hat die durch die Schwere bedingte Schwingung im rotierenden Koordinatensystem die Frequenz w. Yom ruhenden Beobachter aus wird daher die Frequenz 2w. In der Tat nimmt die Welle im Verlaufe der Drehung zweimal eine Lage ein, wo sie in senkrechter Richtung die groBte Steifigkeit aufweist und zweimal eine solche, wo die Steifigkeit in senkrechter Richtung ein Minimum wird. Also wird sie unter dem EinfluB der Schwere zwei Schwingungen je Umdrehung ausfiihren, und wenn sie mit der halben "normalen" kritischen Drehzahllauft, tritt folglich Resonanz ein. Die Beobachtung, daB manche Rotoren bei der halben kritischen Drehzahl etwas vergroBerte Schwingungsausschlage zeigen, findet hier ihre Erklarung.
Zur Erganzung des Bildes miissen wir noch die allgemeine Losung der verkiirzten Differentialgleichungen 21.4(5) und (6) (ohne Storungsfunktionen) betrachten. Man findet sie, indem man mit dem Ansatz
g = A cos ((ht + T1) + B cos (e2t + T2),
1] = 0 sin (e1t + T1) + D sin (e2t+ i 2) } 21.4(15)
in die Differentialgleichungen eingeht. Es ergibt sich dann, daB el und e2 der gemeinsamen Bestimmungsgleichung
21.4(16)
geniigen miissen. Diese Gleichung hat zwei reelle positive Wurzeln e2 nur, wenn
2 WeI W e2 2 2 2 2 ( 2 + 2) W + 2 > (W - WeI) (W - W e2) > O. 21.4(17)
Dies ist erfiillt, wenn entweder W < WeI oder W > We2 (es ist WeI < W e2)' Somit beschreiben die GIn. 21.4(15) dann Schwingungen mit beliebiger konstanter Amplitude, die aber beim Vorhandensein auBerer Dampfung verschwinden. 1m Gebiet WeI < W < W e2 gilt hingegen fiir das Konstantglied in 21.4(16)
21.4(18)
Dann hat Gl. 21.4(16) eine reelle positive und eine reelle negative Wurzel e2 ; d.h. aber, daB eines der e imaginar ist. In 21.4(15) erscheinen damit Hyperbelfunktionen, die mit t unbeschrankt anwachsen, womit Instabilitat gegeben ist. 1m Gebiet WeI < W < W e2 stellen zwa.r die Losungen Gin. 21.4(8) und (9) ein dynamisches GIeichgewicht dar, doch ist es instabil. Deshalb ist theoretisch der ganze Bereich WeI < W < W2 als kritisch zu betrachten. In Wirklichkeit besorgt die Dampfung in den Olfilmen der Lager die Begrenzung der Ausschlage wie dies auch fiir die kritischen Drehzahlen gilt. - Das Problem ist hier fiir den Laval-Rotor behandelt. Grundsatzlich das gleiche erhalt z.B. Kellenberger [8] fiir den Fall der gleichmaBig mit Masse belegten Welle konstanten Querschnittes.

21.5 Mechanismen der Selbsterregung 471
21.5 Mechanismen del' Selbstel'l'egung
a) Allgemeines
Die theoretischen Untersuchungen del' Abschn. 21.2-4 gehoren aIle zum klassischen Typ, bei dem die Unwucht, und beim nicht drehsymmetrischen Laufer die Schwerkraft als einzige erregende Kraite in Betracht gezogen werden. Daneben konnen abel' Selbsterregungsmechanismen wirksam werden, und zwar ausgehend von del' inneren Dampfung des Rotors, vom 01£ilm del' Lager odeI' von den Spaltstromungen in Schaufelungen und Labyrinthdichtungen. Selbsterregte Schwingungen sind dadurch gekennzeichnet, daB del' Rotor mit einer Winkelgeschwindigkeit W rotiert und mit del' Kreisfrequenz We einer seiner Eigenschwingungen (meist mit del' tiefsten) schwingt. Schwingungsfrequenz und Drehfrequenz sind also verschieden. - Die Ausfiihrungen dieses Abschnittes haben nur das Ziel, die Selbsterregungsmechanismen anschaulich verstandlich zu machen. Sie stellen keine exakte Theorie dar. Deshalb wird einheitlich die vereinfachende Annahme gemacht, die Rotorschwingung sei zirkular polarisiert. Del' Rotation des Laufers uberlagert sich also eine kreis£ormige Prazessionsbewegung seines Schwerpunktes mit We.
b) 1 nnere Diimpjung
Abb. 21.5.1 zeigt oben fUr drei verschiedene FaIle einen Schnitt durch die ausgebogene Welle in del' Scheibenmittelebene (es ist del' Laval-Rotor vorausgesetzt). Unten sind die zugehorigen Kraitedreiecke dargestellt. Das Koordinatensystem ~,'YJ rotiert mit del' Winkelgeschwindigkeit W des Rotors. 0 ist die Projektion del' Lagerzapfenmittelpunkte auf die Bildebene. Del' Drehsinn ist del' Gegenuhrzeigersinn.
1m Falle a lauft del' Rotor unterkritisch, also W < We. Sein Schwerpunkt S prazessiert mit del' Eigenfrequenz We auf einem Kreise mit Radius r, und zwar in gleichem Umlaufsinn wie die Rotordrehung. Es liegt also del' sog. Gleichla~lj VOl'. Gegenuber dem Koordinantensystem ~, 17 prazessiert die Welle also mit einer Kreisfrequenz We - w, und zwar
a
7J
IJp o ~w
b
o ~w
W > We, Wp ~ We
7J
o ~w
Abb.21.5.1. Innere Dampfungskraft.e und damit entstehende Bewegung des VVellenschwerpunktes S bei einer durch auBere Starung einmal eingeleiteten Prazessionsbewegung der Welle mit der Kreisfrequenz OJe ihrer Eigenschwingung. a) Welle lauft unterkritisch und prazessiert im Gleichlauf; b) Welle lauft iiberkritisch und
prazessiert im Gleichlauf; c) Welle prazessiert im Gegenlauf

472 21 Dynu,mik des Liiufers
im Gegenuhrzeigersinn. In diesem Koordinatensystem ist die zeitliche Deformation erkennbar, welche die Welle "erlebt". In del' gezeichneten Lage wird die Faser A mit zunehmender Zeit gestreckt, die Faser B gestaucht. Infolge del' Werkstoffhysteresis entsteht nun in del' Faser A, wie in allen Fasern der Zone, die der Streckung unterworfen ist, eine kleine zusatzliche Zugspannung senkrecht zur Bildebene. Umgekehrt ruft die Hysteresis in der Faser B und del' ganzen Zone, die gerade gestaucht wird, eine Druckspannung hervor. Dieser nicht elastisch bedingten Spannungsverteilung entspricht ein Biegemoment M b • SolI dieses aber bestehen konnen, so muB an den beiden Lagerzapfen je eine zusatzliche Lagerreaktion LIP in der in Abb. 21.5.1a dargestellten Richtung angreifen, derart, daB LlPlj2 = lYlb mit 1 als Lagerabstand. Allerdings entsteht auf diese Weise beziiglich des Schwerpunktes S auch ein Drehmoment 2r LIP im Gegenuhrzeigersinn. SolI die Scheibe keine Winkelbeschleunigung erfahren, so muB am System ein Gegenmoment LIM gleichen Betrages im Uhrzeigersinn angreifen. Dies ist ein Unterschied der Drehmomente an der Scheibe und an der Wellenkupplung, der sich von selbst einstellt, wenn auf konstante Drehzahl eingeregelt wird. - Die beiden Lagerkrafte LIP und das Moment LIM haben zusammen den gleichen Effekt, wie wenn die Kraft 2L1P im Schwerpunkt angreifen wiirde, der zudem noch der elastischen Riickstellkraft ausgesetzt ist, die 1nrw; betragt. So entsteht das unten angegebene KrMtedreieck mit der Resultierenden R. Es entsteht offensichtlich eine Kraftkomponente, die (vom ruhenden Beobachter aus betrachtet) der Prazessionsbewegung entgegensteht. Deshalb wird eine einmal eingeleitete Prazessionsbewegung allmahlich wieder verschwinden. Die tatsachliche Schwerpunktbahn wird del' gestrichelten Linie b entsprechen, d. h. die Bewegung ist stabil.
1m Falle b ist iiberkritischer Lauf vorausgesetzt, also W > We' Wiederum erfolge die Prazessionsbewegung im Gleichla7tf. Da nun aber das Koordinatensystem mit einer Winkelgeschwindigkeit rotiert, die iiber We liegt, bleibt die Prazessionsbewegung hinter dem Koordinatensystem zuriick. S bewegt sich also nun beziiglich des Koordinatensystems im Uhrzeigersinn mit W - We' Somit wird jetzt die Faser A gestaucht, die Faser B gestreckt. Die Wiederholung del' gleichen Uberlegung fiihrt auf eine Kraft LIP und ein Moment LI M von entgegengesetztem Vorzeichen gegeniiber dem vorhergehenden Fall und somit auch auf das dargestellte Kraftedreieck, das jetzt - yom ruhenden Beobachter aus gesehen -eine Komponente in Richtung del' Prazessionsbewegung ergibt. Die einmal eingeleitete Bewegung wird also weiter verstarkt und es entsteht eine Bahnkurve b wie dargestellt. Der ubMkritische LatIf wird also infolge der inneren Dii1npfung instabil.
Das Paradoxon, daB die innere Dampfung, die doch stets mit Energiedissipation verbunden ist, eine StOrbewegung weiter anfachen kann, erklart sich wie folgt. Das Drehmoment, das der Rotor durch die Schaufelung erfahrt, ist um LIM groBer als dasjenige, das der Rotor an den Nutzleistungsempfanger abgibt, und zwar weist LIM in die Richtung der Raddrehung. Der Leistungsbetrag W Ll1YI deckt die Energiedissipation und liefert die zusatzliche Energie fiir die weitere Anfachung der Storbewegung.
Fall c (Abb. 21.5.1) stellt einen Laufzustand dar, bei welchem der Rotor im Gegenlauf (im angegebenen Beispiel im Uhrzeigersinn) prazessiert. Die Winkelgeschwindigkeit del' Prazession ist also wp = - We, wahrend der Rotor mit beliebiger \Vinkelgeschwindigkeit (() lauft. 1m rotierenden Koordinatensystem ~, 'Y) hat die Prazession die Winkelgeschwindigkeit W + We im Uhrzeigersinn, unabhangig von der GroBe von w. Also sind LIP und Ll2vI gleich gerichtet wie im FaIle b, und auch das Kraftedreieck hat die gleiche Gestalt wie dort. Da die Prazession im ruhenden Koordinatensystem aber die umgekehrte Richtung hat wie unter b (Uhrzeigersinn), wird die Bewegung gehemmt, klingt also ab, wie die ge&trichelte Bahnkurve b andeutet. Der Gegenlauf wird bei beliebiger Winkelgeschwindigkeit W abgedampft, fiihrt also niemals zur Instabilitat.
Das Gesamtergebnis ist also, daB oberhalb der kritischen Drehzahl unter dem Ein£luB del' inneren Dampfung allcin Instabilitat besteht, die aus dem Gleichlauf hervorgeht. SoIl doch Stabilitat erreicht werden, so muB diese durch ii7tfJerc Diirnpfung - vor allem durch den Ol£ilm der Lager - herbeigefiihrt werden. Beim einfachen schwingenden Stab, der

21.5 Meehanismen der Selbsterregung 473
mit der Kreisfrequenz We schwingt, ist bekanntlich der Zusammenhang zwischen der Dampfungskonstanten b und dem logarithmischen Dekrement b gegeben durch
b = nbjmwe • 21.5(1)
Beim Rotor ist die Kreisfrequenz der Deformation, die ja fiir die inn ere Dampfung maBgebend ist, We - w. Dies ist also in obiger Formel anstelle von We einzusetzen. Wenn man noch nach b auflost, erhalt man
b = m(we - w) ~. n
21.5(2)
Kennt man also das b des Werkstof£es, so kann man nach dieser Formel die Dampfungskonstante b berechnen und rechnen, als ob die Dampfungskraft im Schwerpunkt angreifen wiirde, denn bei W > We wird b negativ, d.h. man erhalt die labilisierende Wirkung richtig. Eine sehr umfassende Analyse des Einflusses der inneren Dampfung unter verschiedenen Voraussetzungen gibt Tondl [9].
c) Selb8terregung durch den Olfilm
Der Olfilm del' Gleitlager, der im ordnungsgemaBen Laufzustand die notwendige auBere Dampfung schaUt, kann seinel'seits Ursache der Instabilitat und damit einer selbsterregten Schwingung sein, eine Erscheinung, fiir die sich die englische Bezeichnung oil whip eingefiihl't hat. Folgende Uberlegungen mogen dies qualitativ vel'standlich machen.
Abb. 21.5.2a stellt einen Lagerzapfen in einer zylindri8chen Lager8chale dar. Durch eine auBere Storung werde der Rotor in Schwingung versetzt, und es wird vereinfachend angenommen, die Schwingung sei zirkular polarisiert. Dann prazessiel't auch der Lagerzapfen mit der Kreisfrequenz We der Eigenschwingung auf einem Kreis mit dem Radius br, und zwar mage die Bewegung im Gleichlauf stattfinden, also im gleichen Drehsinn wie die Winkelgeschwindigkeit W des Laufers (in der Abbildung im Gegenuhrzeigersinn). -Zur Untersuchung des Vorganges ist es zweckmaBig, ein Koordinatensystem einzufiihren, dessen Ul'sprung im Zapfenmittelpunkt C liegt und das mit der Winkelgeschwindigkeit We
rotiert. Gegeniibel' diesem Koordinatensystem rotiert der Zapfen mit der "\iVinkelgeschwindigkeit W - We> die Schale aber mit - We, also im entgegengesetzten Drehsinn (Uhrzeigersinn) .
Nun sei W < 2we • Dann ist W - We < w" d. h. der Zapfen rotiert in unserem Koordinatensystem im Gegenuhrzeigersinn langsamer als die Lagerschale im Uhrzeigersinn rotiert. Damit fardert die Lagerschale von rechts mehr 01 zur Engstelle 8 als der Zapfen
a b Abb. 21.5.2. Zur Veranschaulichung der Olfilmstabilitat von Gleitlagern. a) Lager mit zylindrischer Schale; h) VierfHichengleitlager, Krafte an einem Zapfen der mit W > we rotiert und auf kreisformiger Bahn mit del'
Eigenfrequenz We prazessiert

474 21 Dynamik des Laufers
wegfiihrt. In s entsteht ein DurchfluB von rechts nach links, und dementsprechend baut sich Hings ab ein hoherer Oldruck auf als langs be. In einem ruhenden Koordinatensystem prazessiert der Zapfenmittelpunkt mit der Geschwindigkeit v = We or. Da auf der Vorderseite ab der Druck hoher ist als auf der Riickseite be, entsteht eine resultierende Kraft, die der Geschwindigkeit v entgegensteht und somit die einmal eingeleitete Bewegung dampft. Bei W < 2we ist somit del' Lauf stabil.
1st W > 2we, dann folgt W - We > We, d.h. del' Zapfen rotiert im bewegten Koordinatensystem schneller als die Lagerschale. Er fordert somit langs eb mehr 01 nach dem Spalt s als die Lagerschale wegfordert. Es entsteht also in s ein DurchfluB von links nach rechts, und dementsprechend baut sich langs be ein hoherer Druck auf als Hings abo Der Zapfen erfahrt nun eine Kraft, die in die gleiche Richtung weist wie v, wodurch die einmal eingeleitete Prazessionsbewegung weiter angefacht wird. Bei W > 2we ist somit del' Lauf instabil.
Man kann diese Stabilitatsgrenze, die bei zylindrischer Lagerschale mindestens in erster Naherung bei W = 2we liegt, sehr stark nach oben verschieben durch sog. Mehrflaehengleitlager (MFG-Lager). Abb. 21.5.2b zeigt eine solche Anordnung mit vier Flachen, die so gestaltet sind, daB vier Olkeile entstehen. Hier sind allerdings die Verhaltnisse so verwickelt, daB nur noch eine ganz qualitative Uberlegung moglich ist. Wieder werde vereinfachend angenommen, dem Laufer werde eine zirkular polarisierte Eigenschwingung erteilt, so daB der Zapfenmittelpunkt eine kreisformige Prazessionsbewegung mit Radius or und der Kreisfrequenz We ausfiihre. In den Spaltraumen 1-4 treten dann je zwei Effekte auf. Einerseits schleppt del' rotierende Zapfen an seiner Oberflache 01 in den Spaltraum hinein und zwar so, daB es gegen die Engstelle zu gefordert wird; dies ist del' Schlepp~ffekt. Anderseits verdrangt del' Zapfen zufolge seiner Prazessionsbewegung 01, der sog. Verdrang~mgseffekt.
1m Spaltraum 1 addieren sich Schleppeffekt und Verdrangungseffekt, und da zudem der Austrittsspalt eng ist, entsteht eine groBe Kraft Pl' Auch im Spaltraum 2 addieren sich beide Effekte (der Verdrangungseffekt ist sogar sehr groB, weil der Zapfen sich nach rechts bewegt), doch ist del' Austrittsspalt so groB, daB die entstehende Kraft P 2 nicht allzu groB wird. 1m Spaltraum 3 ist del' Verdrangungseffekt negativ, d.h. er subtrahiert sich vom Schleppeffekt, und da zudem der Austrittsspalt groB ist, entsteht nur eine sehr kleine Kraft P 3 . 1m Spaltraum 4 ist der Verdrangungseffekt stark negativ (Zapfen entfernt sich von del' Lagerschale), der Austrittsspalt abel' eng, so daB trotzdem eine Kraft P 4
von mittlerer GroBe zustandekommt. Wenn man nun das Kraftepolygon aus Pl'" P 4
bildet, entsteht eine Resultierende R, die gemaB Abb. 21.5.2b eine der Prazessionsgeschwindigkeit v entgegengesetzte Komponente besitzt und folglich die Prazessionsbewegung abdampft. Es ist also im Gleichlauf Stabilitat gegeben, und im Gegenlauf ware dies iibrigens in noch hoherem lVlaBe der Fall. - Man kann sich abel' leicht vergegenwartigen, daB auch bei diesem Lager schlieBlich eine Stabilitatsgrenze erreicht wird. Wird namlich W so hoch, daB praktisch nur noch der Schleppeffekt wirksam ist, dann wird P 4
des kleinen Austrittsspaltes wegen groB, und das Kraftepolygon liefert eine Resultierende mit einer Komponente in Richtung v, womit Labilitat entsteht.
Die Stabilitatsgrenze des MFG-Lagers liegt praktisch sehr viel hoher als die des zylindrischen Lagers. Besonders gfmstig ist dabei asymmetrische Anordnung der Gleitflachen. Das haufig verwendete Lager mit "Zitronenspiel" liegt zwischen dem zylindrischen und dem MFG-Lager. Giinstigste Eigenschaften werden erreicht mit MFG-Lagern, deren tragende Flachen frei einstellbar (kippbar) gelagert sind.
d) Spalterregung
Ein weiterer Erregungsmechanismus entsteht durch die Spaltstromungen in Stufen und auch allgemein in Labyrinthdichtungen. Abb. 21.5.3 dient der Veranschaulichung dieser Effekte, oben fiir die Turbine, unten fiir den Verdichter. Wieder werde verein-

21.5 Mechanismen der Selbsterregung 475
Turb.
a Jt 2]( 'P
Verd.
a Jt
Abb.21.5.3. Zur Veranschaulichung der Spalterregung bei Turbinen und Verdichtern. Links: Spalterregung durch ungleichmaBige Tangentialkrafte an Schaufelkranzen; rechts: Spalterregung durch Druckverteilungen
in Labyrinthdichtungen
fachend angenommen, daB der Laufer durch eine auBere Sti::irung in eine zirkular polarisierte Schwingung versetzt wird. Seiner Rotation mit der Winkelgeschwindigkeit W iiberlagert sich also eine Prazessionsbewegung mit We auf einem Kreis mit Radius (Jr. In del' oben links gezeichneten Lage des Turbinenrotors ist das radiale Schaufelspiel oben klein und unten groB. Deshalb erfahrt wegen del' unterschiedlichen Spaltverluste die Schaufel o ben eine Tangentialkraft T', die gr6Ber ist als die entsprechende Tangentialkraft T" unten. Die Summation aller Schaufelkrafte ergibt somit eine von links nach rechts weisende Resultierende. Erfolgt die Prazessionsbewegung wie angedeutet im Gleichlauf, so wird sie durch diese Kraft weiter angefacht, womit die selbsterregte Schwingung entsteht.
Aber auch bei Labyrinthdichtungen ohne Schaufeln kann ein Erregungseffekt entstehen. Im Bild oben rechts ist eine augenblickliche Lage del' Welle innerhalb des Labyrinthgehauses dargestellt. Wenn nun das Fluid im Spalt auBer del' axialen Durchtrittsgeschwindigkeit auch eine Tangentialgeschwindigkeit aufweist (das wird praktisch stets in mehr odeI' weniger hohem MaBe der Fall sein) entsteht bei Gleichlauf eine Druckverteilung gemaB del' ausgezogenen Kurve im Diagramm rechts. Dort ist iiber dem Winkel cp der Mittelwert p des Druckes iiber del' axialen Tiefe aufgetragen. Ohne tangentiale Geschwindigkeitskomponente ergibt sich eine Verteilung gemiiB der gestrichelten Kurve. - Die Entstehung diesel' Druckverteilungen ist anschaulich nicht ohne weitere3 plausibel. Sie ergibt sich aus einer komplizierteren Untersu chung , vgl. etwa Hochre1~ther [10] und Urlichs [14] und wird auch experimentell gefunden. Ihre Bestimmung gelingt allerdings heute erst in grober NiLherung. - Aus del' Druckverteilung folgt nun, daB eine nach rechts gerichtete resultierende Kraft entsteht, welche die einmal eingeleitete Schwingung weiter anfacht.
Unten in Abb. 21.5.3 sind die Verhaltnisse im Verdichter dargestellt, wiederum links der Schaufelkranz, rechts die Labyrinthdichtung. Die Bedingungen sind analog denen in der Turbine, nur ist es hier der Gegenlauf (Prazessionsbewegung in dem der Rotordrehung entgegengesetzten Drehsinn), del' durch die auftretenden Krafte weiter angefacht wird.
Man beachte, daB die Spalterregung an sich bei jeder Winkelgeschwindigkeit mi::iglich ist, nicht nur im iiberkritischen Laufzustand. Die Spalterregung ist in neuerer Zeit ins Zentrum des Interesses geriickt, weil sie bei der hohen Leistungskonzentration moderner Maschinen besonders stark in Erscheinung tritt.

476 21 DynfLmik des Laufcrs
c) Kiinstlichc Dampf1.lng
Sowohl die Labilisierung durch Spalterregung als auch diejenige durch innere Dampfung mussen durch auBere Dampfung ausgeglichen werden. Diese hat normalerweise ihren Sitz im Olfilm der Lager. Der Arbeitsbereich der Lager muB also hinreichend Distanz halten von der Stabilitatsgrenze der Lager selbst, damit genugend Dampfungsreserve besteht. Man zieht aber neuerdings auch in Erwagung, kunstlich auBere Dampfung zu schaffen durch eine dampfende Bettung des Lagers. Diese MaBnahme war schon immer iiblich bei Walzlagern, weil dort der Olfilm fehlt. Verschiedene Wege sind hier moglich. Bei der QnetschOldampfnng werden Olpolster vorgesehen, die bei schwingender Lagerbewegung verdrangt werden mussen und so Energie dissipieren. Beim Blechpaketdampferwird del' Lagerkorper mit Paketen von Blechen umgeben, zwischen die Olfilme einsickern und so fur Dampfung sorgen. An die Stelle von Blechpaketen konnen auch Dmhtkisscn treten. Eine weitete Moglichkeit besteht darin, den Lagerkorper in Knnststojj hoher Hysteresis zu betten.
Ein Problem bei allen diesen Losungen besteht darin, die Dampfung richtig zu bemessen, denn es lauft nicht etwa darauf hinaus, einfach eine moglichst hohe Dampfungskonstante zu erreichen. Das laBt sich leicht aufzeigen durch eine Betrachtung an dem einfachen System aus Feder (Federkonstante k) und Dampfungsglied (Dampfung b), das in Abb. 21.5.4 dargestellt ist. Das System wird del' periodischen Kraft P unterworfen. Sein Verhalten wird beschrieben durch die Differentialgleichung
kx + bx = Po sin wt. 21.5(3)
Ihre periodische Partikularlosung wird gewonnen durch den Ansatz
x = A sin wt + B cos wt, x = w(A cos cot - B sin cot). 21.5( 4)
Einsetzen diesel' Ausdrucke in 21.5(3) und Identifizieren der Koeffizienten von sin und cos fiihrt auf
Die von del' Kraft P geleistete Arbeit ist gegeben durch
dW = P dx = p:.c dt = Pow(A cos wt - B sin wt) sin wt dt,
also fUr einen vollen Zyklus
2n/w
W = Pow J (A cos wt - B sin co) sin wt dt = -nBPo, o
0,8 / /"
V k /
/1 I / I
/
0,6 P=Posinw! oJ
~ 0,4
0,2
DO :r
0,2 0,4 [ [
0,6 0,8 J,D -I bwlk [[ [ I 5 3 2 1.5 I.D-)
21.5( 4')
21.5(5)
Abb. 21.5.4. Links: Modell aus Feder und Dampfungsglied zur Beschreibung des Mechanismlls der kiinstlichen Dampfnng; rechts: relative Dissipationsarbeit WjWmax in Funktion der GroBe bwjk

21.6 Laval-Rotor bei beliebigel' Lagerung und Spaltel'regung, Stabilitatsuntersuchung 477
somit auch W = nP5(bw)
k2 + (bW)2 . 21.5(6)
Wist offenbar gerade die pro Zyklus dissipierte Arbeit, die moglichst groB sein solI. Um optimale Verhaltnisse aufzufinden, hat man bei festem Po und k nach bw abzuleiten und die Ableitung Null zu setzen. So findet man
bw =k. 21.5(7)
Diese Gleichung liefert das b, das bei gegebenem k beste Dampfung erreicht, wo also W = Wmax • In Abb. 21.5.4 ist noch WJWmax in Funktion von bwJk dargestellt. Es zeigt sich, daB bei nicht optimalem b noch in weitem Bereich ein giinstiger Dampfungseffekt erreicht wird. - Unter komplizierten Bedingungen (Koppeleffekte \) gilt diese einfache Relation zwar nicht mehr, doch gewinnt man einen Anhaltspunkt iiber giinstige GroBenordnungen und erkennt, daB es sich in jedem Falle um ein Problem del' gegenseitigen Abstimmung del' Charakteristika handelt.
Es ist beachtlich, daB schon bei der ersten Maschine, die iiberhaupt iiberkritisch lief, del' Laval-Turbine, kiinstliche Dampfung vorgesehen war. Abb. 21.5.5 zeigt die Lagerkonstruktion. Zufolge ihrer extremen Lange muB die Lagerschale den Schlagbewegungen del' Welle folgen. Dabei wird in ihrer kugeligen Zentrierung Energie dissipiert. Diese Dampfung kann durch geeignete Bemessung del' Feder, die dem Ring rechts an die Kugel driickt,zweckmaBig abgestimmt werden. Offensichtlich wollt,e de Laval so den gefahrlosen Durchgang durch die kritische Drehzahl sichern. Zugleich eliminierte er damit die ganzen Stabilitatsprobleme, die damals noch nicht bekannt waren.
Abb. 21.5.5. Lageranordnung mit kiinstlichel' Diimpfung bei del' Laval-Turbine
21.6 Laval-Uotor bei beliebiger I,agerung und Sl)alterregnng, Stabilit1itsulltersuchung
In diesem Abschnitt werden die Mechanismen, die zur Selbsterregung fLi.hren konnen mit in die Theorie des Laval-Rotors einbezogen. Das ist mehrfach durchgefiihrt worden, vgl. etwa [11, 12]. Nachfolgend halten wir uns an die Ausfiihrungen von Thomas [13], del' die Theorie auf eine mathematisch besonders einfache Form bringen konnte. Ausgangspunkt ist wieder die Disposition nach Abb. 21.3.2, doch ist del' Zusammenhang zwischen del' Auslenkung des Lagerzapfens und del' auf den Zapfen einwirkenden Kraft durch ein allgemeineres Gesetz gegeben, das durch die Matrizengleichung
[X'] [leu k12] [X'] [bu b12 ] [X'] Y' = - le21 k22 y' - b21 b22 if' 21.6(1)
wiedergegeben wird, die an die Stelle von 21.3(1) tritt. Charakteristisch fiir das Verhalten des Lagers ist also das Auftreten von Koppelgliedern k12 und le21 im Gesetz del' Nachgiebigkeit und ferner von Dampfungsgliedern bij • - Weiter moge an der Scheibe eine

478 21 Dynamik des Liiufers
Spalterregungskraft angreifen, deren Komponenten Qx und Qy gegeben seien durch (q der Spalterregungskoeffizient)
[Qx] [0 -q] [xw] Qy = +q 0 Yw'
21.6(2)
An sich wiirde ein allgemeinerer Ansatz wie Gl. 21.6(1) die Verhaltnisse noch genauer beschreiben. 1m allgemeinen nehmen aber einzig die hier beibehaltenen Glieder eine betrachtliche GroBe an, so daB der Ansatz fiir eine grundsatzliche Untersuchung geniigt. Er beschreibt genau die Situation nach Abb. 21.5.3, denn eine Auslenkung in y-Richtung erzeugt eine Kraft in x-Richtung und umgekehrt. Del' antimetrische Aufbau del' q-Matrix entspricht der Kreissymmetrie der Anordnung, die meist gegeben ist (nicht bei Teilbeaufschlagung !).
Wesentlich fUr die Stabilitat sind die Arbeitsbetrage, die durch die einzelnen Krafte am System geleistet werden. Dabei sollen nachfolgend nur die x-Komponenten der Krafte betrachtet werden; die Beitrage der y-Komponenten ergeben sich daraus in Analogie. Del' Einfachheit halber wird auch die Exzentrizitat e = 0 gesetzt, da diese weder die Stabilitat noch die Eigenfrequenzen beeinfluBt. Die Zapfenbewegung wird beschrieben durch
x' = i;' sin wet, 21.6(3)
Die Kreisfrequenz We der Taumelbewegung (Eigenfrequenz) ist nicld die Winkelgeschwindigkeit W des Laufers. Nachfolgend werden nun die von den Anteilen kllX', k12Y" bllx', bl2 j;' del' Kraft X' herriihrendenArbeitsanteile (pro Zyklus) W IV W 12 , Wdll, W d12 berechnet.
2,,/we W n = - kn X'2W e I sin wet cos Wel dt = o.
o
2,,/we lV12 = -k12Y'X'We I sin (wet - 'Ip) cos weldt = -k12Y'X'WeJ 12'
o
2n/we
dll - - nX We COS" wet l = - :7Wn X We' W - b '.'2 2 I 0 d 1. "2 2
o
2,,/w
Wd12 = -b12Y'X'W~ I cos (Wet - 1fJ)COS(1)etdt = -b12Y'X'(1)'Pdl~' o
21.6(4)
21. G( 5)
21.6(6)
21.6(7)
Die Integrale J 12 und J d12 sind im allgemeinen von Null verschieden. J 12 verschwindet £lir 1fJ = 0, :77:, 2:77: ... wahrend J d12 fiir :77:/2,3:77:/2, ... Null wird.
Die wesentliche mathematische Vereinfachung besteht nun darin, die an den Lagerzapfen angreifenden Krafte in den Scheibenmittelpunkt zu reduzieren. Dazu muG vor allem die gesamte Federkonstante kn bestimmt werden, die sich aus del' Hintereinanderschaltung del' Welle mit del' Federkonstanten k und del' Lager mit del' Federkonstanten 2kll (Faktor 2 weil zwei Lager) ergibt. Es ist leicht zu verifizieren, daB gilt
1 1 1 =-=-+--, kll k 2kll

21.6 Laval-Rotor bei beliebiger Lagerung und Spalterregung, Stabilitatsuntersuchung 479
woraus die nachfolgende Gleichung folgt, del' sogleich die entsprechende fiir y-Richtung beigefUgt ist:
- k kn = 1 + k/2kn '
- k k22 = 1 + k/2k22 . 21.6(8)
Nun darf wei tel' angenommen werden, daB auch del' Scheibenmittelpunkt - dessen Koordinaten nun einfach x, y genannt werden, weil sie mit denen des Schwerpunktes identisch sind - eine harmonische Bewegung ausfuhre, womit gesetzt werden kann
y = y sin (we t - 1p). 21.6(9)
Wenn nun im Scheibemnittelpunkt Krafte angreifen sollen, welche die gleiche Arbeit leisten wie diejenigen, die effektiv an den Zapfen angreifen, so muB fliT deren Koeffi-zienten k12' bn , b12 offenbar gelten
2W -b '9 2 dll = - n nX"OJ e,
Del' Vergleich mit 21.6(5), (6), (7) liefert
21.6(10)
21.6(11)
21.6(12)
Del' Beitrag von b12 erweist sich als sehr klein und soIl daher vernachlassigt werden. Da die Amplituden im umgekehrten Verhaltnis stehen wie die Federkonstanten, also z.B.
x'/~; = knlkn' folgt aus 21.6(8) und (12)
2lc2
k12 = (len + le/2) (lc22 + 1c12) lc12 , 2Jc2
bn = (kn + le/2)2 bn , 21.6(13)
- 2lc2
le21 = (len + le/2) (le 22 + le/2) lew - 2le2
b22 = (le22 + k/2) b22 · 21.6(14)
Damit kann nun 21.6(1) ersetzt werden durch eine Gleichung fUr ideelle, im Scheibenzentrum angreifende Krafte X*, y*:
21.6(15)
- - - - - -Dabei sind len, le12 , Jc 21> le22 , bn , b22 mit 21.6(8), (13) und (14) aus dem ursprunglich gege-benen Lagerkonstanten zu bestimmen.
SchlieBlich kann man noch zur Bel'llcksichtigung del' vVel'kstoffdampfung cine "\veitere il11 Scheibenzentrul11 angl'eifende Dal11pfungskraft einfUhren del'en x-Kol11ponente
Xw = -b(x - x') = -bwe(x - x') 21.G(16)
betragt, wobei b aus Gl. 21.5(2) gegeben ist (b wird bei OJ > OJe negativ, womit X", im Sinne del' Labilisiel'ung wirkt). Auch 21.6(16) soIl ersetzt werden durch die Form
21.6(17) Dann ist
s0l11it - b b --~--.,,--=c:--
1 - 1 + le/2kn ' - b b2 = 1 + le/2le22 . 21.6(18)

480 21 Dynamik des Laufers
Nun sind alle Krafte dmch die Scheibenmittelpunktskoordinaten und ihre Ableitungen ausgedriickt, womit die Bewegungsgleichungen direkt hingeschrieben werden kannen:
mi + (bn + b1 ) x + len x + (le12 + q) y = 0, I my + (b22 + b2) if + le22 Y + (le21 - q) x = o.
21.6(19)
Del' einfache Aufbau diesel' Gleichungen erlaubt die Berechnung del' Stabilitatsgrenze in geschlossener Form. Mit dem Ansatz
x = Cx exp (At), Y = cy exp (At) 21.6(20)
geht 21.6(19) iiber in das System del' charakteristischen Gleichungen, das nichttriviale Lasungen cx , cy nul' hat, wenn seine Koeffizientendeterminante verschwindet, d. h. wenn
mA2 + (bn + b1) A + len
le21 - q
k12 + q
mA2 + (b22 + b2) A + 122 =0.
Diese Bestimmungsgleichung fiir A hat im allgemeinen komplexe Wmzeln
A = 0 ±iwe ,
21.6(21)
21.6(22)
die Eigenwefte. Es treten stets Paare von konjugiert komplexen Lasungen auf, wie durch das Doppelvorzeichen angedeutet. Aus del' Struktur des Gleichungssystems folgt, daB nm ein solches Paar auftritt. Es ist
cxp V,t) = exp [( 0 + iwe) t] = exp (bt) exp (iwet) = exp (ot) (sin wet + i cos wet), 21. 6(23)
d. h. del' Vorgang ist eine harmonische Schwingung, die mit t exponentiell anwachst odeI' abklingt. Stabilitat ist gegeben bei 0 < O. Mit 0 = 0 wird die Stabilitatsgrenze erhalten. Nm in diesem Grenzfall hat die Lasung genau den Charakter, del' mit 21.6(3) bzw. (9) bereits vorausgesetzt wurde, doch bleiben die Voraussetzungen hinreichend genau erfiillt, sofel'll del' Betrag von 0 klein ist. Fiir jeden Eigenwert }, liefert 21.6(21) ein festes, im allgemeinen komplexes Verhaltnis cu/cx , womit auch die Phasenverschiebung gegeben ist, die in 21.6(9) dmch den Phasenwinkel 7p wiedergegeben wird. Die Lasung des homogenen Gleichungssystems beschreibt den Vorgang, del' entsteht, wenn die unwuchtfreie Welle dmch eine auBere Starung aus ihrer Gleichgewichtslage gebracht wird und dann durch eine abklingende Schwingung ihre Gleichgewichtslage wieder findet (0 < 0) odeI' aber instabil eine sich immer mehr aufschaukelnde Schwingung ausfiihrt (0 > 0). DaB zwei Vorzeichen von We auftreten besagt, daB zwei Bewegungsvorgange maglich sind, Gleichlauf und Gegenlauf.
1st A = iwe, d.h. 0 = 0, so erlaubt 21.6(21) eine geschlossene Lasung, was deshalb bedeutsam ist, weil dies ja gerade die Stabilitalsgrenze ist. Es magen folgende Bezeichnungen eingefiihrt werden:
1" _ lell + k22 Ie = 2 '
b1 + b22 + b2
2
Die Lasung We fiir den Sonderfall 0 = 0 sei w; genannt. Man findet dafiir
V'le .,/ A+B w* = - /2 .
e 'in! (1 +A) (1 + B)·
21. 6(24)
21.6(25)

21.6 Laval-Rotor bei beliebiger Lagerung und Spalterregung, Stabilitatsuntel'suehung 481
Sie liegt zwiseheu den beiden Werten V ku/1n und Vk22/m, die den beiden extremen Federkonstanten entspreehen wurden. Aus der Spalterregungskraft q bildet man zweekmaBig die dimensionslose GroBe
S q/k. 21.6(26)
Fur diese laBt sieh naeh Thomas [13J ebenfalls ein gesehlossener Ausdruek finden, namlieh
S - (0 - 1) E 1/[(0 + 1) E]2 4B [2 8(A + B) (1 - A)2] - 2 ± V 2 + (1 + B)2 D (1 + A) (1 + B) + 1 + A . 21.6(27)
Diese Gleiehung besehreibt die Abhangigkeit der Spalterregung an der Stabilitatsgrenze von den versehiedenen maBgebenden Parametern, namlieh: A Anisotropie der Federsteifigkeit, B Anisotropie del' Dampfung, 0 Anisotropie del' Lagerkopplung, D mittlere Dampful1g, E Lagerkopplung. Kennt man S, so ist
21.6(28)
die Bedingung, del' die Spalterregungskraft genugen muB, damit Stabilitat gesiehert sei. 1st S = 0, so bedeutet dies, daB die Stabilitat schon dureh die anderen Effekte ersehOpft ist. In Gl. 21.6(27) gibt das untere Vorzeiehen eil1 negatives S (weshalb in 21.6(28) absolute Betrage einzusetzen sind). Das bedeutct, daB die Spalterregung entgegen del' Lagererl'egung wirksam ist, wie das beim Verdiehter zutrifft. Da die Stromungskrafte mit waehsender Leistung zunehmen, wil'd verstandlieh, daB bei fester Drehzahl und zunehmender Leistung von einer gewissen Grenze an Laufstorungen eintreten konnen, dann namlieh, wenn die Bedingung 21.6(28) nieht mehr erfiHlt ist.
Abb. 21.6.1 zeigt Reehenergebnisse ans [13]. Die Diagramme a, b, e fassen eine Parameterstudie zusammen. Anffallen mag, daB selbst mit del' Dampfnng D = ° noeh Stabilitat gewahrleistet sein kann, sobald A < 1. Das mag uberrasehen, da doeh die Spalterregung Arbeit am Rotor leistet, die irgendwo dissipiert werden mnB. Dureh die Lager-zapfenkrafte wil'd diese Arbeit znnaehst aufgenommen. Aneh bei b = 0, somit D = ° wird Arbeit im Lager dissipiel't, namlieh dureh die Sehubspannungen im Sehmierfilm, d. h. also dureh eine Erhohnng del' Lagerl'eibung. - Das Diagramm d gibt die Anwendung dieser Ergebnisse auf bestimmte Lager wieder, Kurve 1 ein zylindrisehes Lager, Kurve 2 ein Lager mit "Zitronenspiel", Kurve 3 ein Dreikeil-MFG-Lager, Kurve 4 ein Kippsegment-Dreikeillager. Abszisse ist das Verhaltnis del' Winkelgesehwindigkeit zur kritisehen Winkelgesehwindigkeit. Man crkennt, wie komplex das Problem ist, denn es gibt kein
B=I;C=-I;[=O C=-I;O=QI;[=O B=I;0=QU=Q2 Q50~----~-----' ,------,-----,
f\~O,k
0,6 J
O~-----L----~ L-____ _L ____ ~ L-~ __ L-__ ~ ~ __ ~ ____ ~_=~~
Q50 Q75 1,000 Q5 1,0 -2 0 2 Q8 1,2 1.6 2,0 A- B- C- wlwe -
a b c d
Abb. 21.6.1. Systemerregungsparameter S an Stabilitatsgrenze in Fnnktion del' maBgebenden Variablen. Nach Thoma8 [13]. a) Stabilitii.tsgl'enze in Funktiou von Fecleranisotl'opie A und Dampfuug D bei vcrschwimlcmder Lagerkopplung E (l'eine Spa\t.erl'egnng); b) Stabilitiitsgl'enze in Funktion von Dampfungsanisotl'opie B llml Feclel'anisotl'opie A bei Verschwinden del' Lagerkopplung E; c) Stabilitiitsgrel17;e in Fnuktion von Lagerkopplungsanisotropie C und Federanisotropie A; d). Sin .B'unktion von w/we fiir: 1 zylinclrisches Lager, 2 Zweikeil-
lager, 3 Dreikeillager, 4 Kippsegment-Dl'eikeillager.

482 21 Dynamik des Laufers
Lager, das in allen Fallen giinstigste Resultate liefert. Wo die Kurven 1 und 2 die Abszissenachse erreichen, liegt die Stabilitatsgrenze des 0lfilms (Grenze fiir oil whip), da ohne Werkstoffdampfung gerechnet wurde.
21. 7 Die kritischen Drehzahlen eines beUebigen drehsymmetrischen LauIers
Wir betrachten einen Laufer drehsymmetrischer, abel' sonst beliebiger Gestalt, del' auf einer beliebigen Zahl von Lagern ruht (Abb. 21.7.1). An del' Stelle z werde ein Ausschnitt mit del' axialen Dicke dz herausgegriffen. Es sei 0 del' DurchstoBpunkt del' Verbindungslinie del' Lagermittelpunkte durch die Ebene z = const, zugleich del' Ursprung des Koordinatensystems x, y. Punkt W mit den Koordinaten xw,y wist del' DurchstoBpunkt del' ausgebogenen geometrischen Mittellinie, S mit den Koordinaten x, y del' Schwerpunkt des betrachteten Ausschnittes. Del' Abstand zwischen W und S ist die lokale Exzentrizitat e(z), die unter einem Winkel cp liegt (vgl. Abb. 21. 7 .1). In del' in z gelegenen Schnittebene werden vom links dieses Schnittes gelegenen Rotorteil auf den rechts liegenden eine Schubkraft mit den Komponenten X, Y und ein Drehmoment M ausgeiibt. In del' Ebene z + dz greifen dann die Krafte -(X + dX), -(Y + dY) und das Drehmoment - (M + dM) an. (Minuszeichen, weil es sich urn die Reaktionen handelt, die vom rechts liegenden auf den links liegenden Teil ausgeiibt werden.) Da e sehr klein ist, kann aus gleichen Griinden wie beim unter 21.2 behandelten Laval-Rotor die Betrachtung del' Momente entfallen und es bleiben als Bewegungsgleichungen
xdm = -dX, ydm = -dY. 21.7(1)
Das betrachtete Rotorelement wird allerdings bei del' Ausbiegung des Laufers nicht mehr senkrecht auf del' Verbindungslinie del' Lagermittelpunkte stehen. Diesel' Effekt sei hier del' Einfachheit halber vernachlassigt; er kann spateI' mit eingeschlossen werden.
Nachfolgend wird die ganze theoretische Entwicklung nul' fiir die x-Richtung durchgefiihrt, da das Ergebnis in y-Richtung in genauer Analogie folgt. Del' EinfluB del' Schwerkraft bewirkt beim drehsymmetl'ischen Laufer weitel' nichts als die Uberlagerung einel' statischen Dul'chbiegung. Mit del' Massenverteilungsfunktion
p,(z) - dmjdz schreibt sich die Bewegungsgleichung
__ dX p,x = -a;;.
21.7(2)
21. 7(3)
~·'-T:':--~ __ ~ __ -,~l~~--~-4-_-_-_-_-'-_-------------------~ -t-+-
I I
I :
I W
~-----z'----------~
x x
Abb. 21. 7.1. Zur allgemeinen Untersuchung der Bewegung eines Laufers

21. 7 Die kritischen Drehzahlen eines beliebigen drehsymmetrischen Lamers 483
Aus der Gleichformigkeit der Drehung folgt mit £0 als Winkelgeschwindigkeit des Laufers
und da
auch
f{J = f{Jo(z) + wt,
x = Xw + e cos f{J
Xw = x -e cos (f{Jo + wt) = x - e [cos f{Jo cos wt - sin f{Jo sin wt].
21.7(4)
21.7(5)
21. 7(6)
Denkt man sich an irgendeiner Stelle z' des ruhend gedachten Rotors eine Einheitskraft in x-Richtung angreifend, so wird dadurch an der Stelle Z eine Ausbiegung in x-Richtung (also ein xw) entstehen, die Wx(z', z) genannt sei. Wx ist die Einjluj3zahl einer Kraft in z' in bezug auf die Stelle z. In Wx kann sehr wahl eine N achgiebigkeit der Lager eingeschlossen werden, nicht aber eine Kopplung zwischen x- und y-Richtung, wie sie unter 12.6 durch die Koeffizienten k12 und k21 wiedergegeben wird. - Da nun -xp,(z') dz' die d'Alembertsche Tragheitskraft auf ein Element der Lange dz' ist, findet man in z die Ausbiegung
I
xw(z) = - J Wx(z', z) fl(z') x(z') dz'. 21. 7(7) o
Mit 21. 7(6) folgt also I
x(z) - e(z) [cos f{Jo(z) cos wt - sin f{Jo(z) sin wt] = - J Wx(z', z) fl(z')x(z') dz'. 21.7(8) o
Fur diese Integro-Differentialgleichung machen wir den Losungsansatz 00
x = L; un(z) Pn(t) + U 1(z) cos wt + U 2(z) sin wt, n=1
WO Un> PIP Uv U2 noch unbekannte Funktionen sind. Einsetzen in 21.7(8) liefert
L; UnPn + U 1 cos wt + U 2 sin wt - e [cos f{Jo cos wt - sin f{Jo sin wt]
I
= - L; Pn J Wx(z', Z)/h(Z') u,,(z') dz' + o
I
+ £02 r Wx(z', z) fl(z') [U1 (z') cos wt + Uz(z') sin wt] dz'. b
Diese Gleichung ist erfiillt, wenn jede der folgenden erfullt ist: I
u,,(z) Pn(t) = -1)" J Wx(Z', z) fl(Z') u,,(z') dz' o
I
n = 1,2,
U1(z) - e(z) cos f{Jo(z) = £02 J Wx(Z', z) fl(z') U 1(z') dz', o
I
U 2(z) + e(z) sin f{Jo(z) = £02 J WAz', z) fl(Z') Uz(z') dz'. o
G1. 21.7(11) kann in die Form
jjn(t) Pn(t)
Un(z) 2 I = -Wnx
J Wx(z',z) fl(Z') un(z') dz' o
... ,
21. 7(9)
21. 7(10)
21. 7(11)
21. 7(12)
21.7(13)
21. 7(14)
gebracht werden. Da der Ausdruck in Pn nicht von z, derjenige in Un nicht von t abhangt, mussen beide gleich einer Konstanten sein, die - w~x genannt wurde. Damit folgt aus 21.7(14) einerseits
21.7(15)

484 21 Dynamik des Liiufers
wo An und Bn Integrationskonstanten sind. Weiter folgt abel' auch
I
'Un(z) = w~x J Wc(z', z) p(z') 'Un(z') dz' . o
21. 7(16)
Dies ist abel' nichts anderes als die Integralgleichung del' Biege-Eigenschwingung des Rotors. Sie hat nichttriviale Losungen nul' fiir die Eigenwerte Wlx, W2x, ... , Wnx, ..• und die 'Un sind die zugehorigen Eigenfunktionen, d. h. die verschiedenen Biegeschwingungsformen, denen die Kreisfrequenzen Wnx entsprechen.
Um G1. 21.7(12) weiter zu analysieren, entwickeln wir die Funktion U1 nach den Eigenfunktionen 1t,p setzen also nach Art einer Fourier-Reihe
00
U1 = ::E Un'Un · 21. 7(17) ,,=1
Damit geht 21. 7(12) iiber in
00 00 I
::E an'Un - eo cos CPo = w 2 ::E an I Wx(Z', z) p(z') 'Un(Z') dz'. n=1 ,,=1 0
Jedes del' hier auftretenden Integrale ist nach 21.7(16) nichts anderes als 'll,Jz)lw~x, so daB wir erhaIten
odeI'
::E. 00 [1 - (~. )2J an'lln = e cos CPo. n=1 Wnx
21. 7(18)
Del' rechts stehende Ausdruck gibt den VerI auf del' lokalen Exzentrizitat und ihrer Lage in Funktion von z wieder. Diese Funktion kann selbst wiederum nach Eigenfunktionen entwickelt werden, und das gleiche gilt von del' Funktion e sin CPo' die spateI' ebenfalls noch gebraucht wird. Man kann also setzen
mit . I
00
e cos CPo = ::E (Xn1tn' ,,=1
11tn(z) e(z) cos CPo(Z) dz (Xn = 0 I
J 'll~(Z) dz, o
00
e sin CPo = ::E f3n'Un n=1
I
I 'un(z) e(z) sin CPo(z) dz f3n = 0 I
J 1t~(Z) dz o
Durch Einsetzen von 21. 7(19) in (18) gewinnt man sogleich
Das gleiche Verfahren auf G1. 21.7(13) angewandt, liefert
00
U 2 = ::E b,{Un , ,,=1
21. 7(19)
21. 7 (20)
21. 7(21)
21.7(22)
21.7(23)

21.8 Die Kreiselwirkung 485
Nun werden die erhaltenen Ausdriicke GIn. 21.7(15), (16), (17), (21), (22), (23), in (9) eingefUhrt. Das liefert die erste del' beiden nachfolgenden GIeichungen. Die zweite fUr die y-Richtung ergibt sich in einfacher Analogie dazu.
~ J () (A . B' ) 1J,n(Z) [ 13' 1 x = L..J 1 'Un Z . n cos wnxt + n SIn wnxt + 1 _ (I )2 IXn COS wt - n SIn wt]J' n=l W Wnx
21.7(24)
y = J; 1J Vn(Z) (On cos Wnyt + Dn sin wnyt) + 1 _ V(n(j) )2 [Yn COS wt - bn sin wt] } . n=l W Wny
21.7(25)
Die Vn sind die Eigenfunktionen fiir die y-Richtung. Sie sind mit den Eigenfunktionen in x-Richtung dann nicht identisch, wenn die Lagerelastizitaten in beiden Richtungen verschieden sind, und dementsprechend unterscheiden sich auch die Eigenwerte W ny von den W nx ' Die Yn und bn sind gebildet wie IXn und 13m vgl. 21. 7(20), abel' mit Vn anstatt Un'
Bei del' Diskussion del' GIn. 21.7(24) und (25) ist zu beachten, daB ohne Dampfung und ohne andere Erregungskrafte als die Exzentrizitat gerechnet wurde und auch eine Kopplung del' Bewegungen in x- und y-Richtung unberiicksichtigt geblieben ist. Die Gliedel' mit den Integrationskonstanten An ... Dn stellen die ungedampften Biege-Eigenschwingungen dar, die unabhangig von del' Winkelgeschwindigkeit 0) mit den verschiedenen Eigenfrequenzen O)n erfolgen und einmal angestoBen, sich unbegrenzt erhalten. In Wirklichkeit treten Verhaltnisse auf, wie sie im vorangehenden Abschnitt behandelt wtuden, d. h. entweder difl Schwingungen verschwinden asymptotisch durch Dampfungskrafte (Stabilitat) oder sie werden durch einen Selbsterregungsmechanismus immer mehr angefacht.
Die restlichen Glieder stellen die unwuchterregten Schwingungen dar, deren Kreisfrequenz stets gleich del' Winkelgeschwindigkeit des Laufers ist. Sobald W gleich einem del' Eigenwerte Wn ist, vei'schwindet unter del' Voraussetzung del' Dampfungsfreiheit einer del' Nenner und es entsteht ein unendlicher Ausschlag. Man beachte die vollstandige Analogie zu den fiir den Laval-Rotor giiltigen GIn. 21.2(11) und (12). Das Spektrum der Kreisjrequenzen der sihntlichen Biege-Eigenschwingungen ist also identisch mit dem Spektrum der kriti8chen Winkelgeschwindigkeiten. - Interessant ist, welche GroBe hier an die Stelle del' Exzentrizitat des Laval-Rotors tritt. Man hat die Exzentrizitatsverteilung langs des Laufers nach Art einer "verallgemeinerten Fourier-Reihe" nach Eigenfunktionen zu entwickeln. Die so entstehenden Entwicklungskoeffizienten del' verschiedenen Ordnungen n iibernehmen die Rolle del' Exzentrizitat fUr diese Ordnung. Alle diese Koeffizienten sollten moglichst klein sein, was del' Grund dafiir ist, daB die Auswuchtung del' Rotoren in mehreren Ebenen erfolgen muB.
Eine gewisse Komplikation kommt praktisch dadurch hinzu, daB Kopplungse££ekte zwischen den Richtungen x und y stets vorhanden sind, wahrend hier die heiden Bewegungen voneinander vollig unabhangig sind. Bei isotroper Lagerung werden beide Bewegungen genau gleich, nul' um 90° phasenverschoben, d. h. man hat die zirkular polarisierte Schwingung. Die verformte Rotorachse rotiert dann wie eine starre Kurve im Raum und del' Rotor erleidet keine periodische Verformung.
21.8 Die Kreiselwirkung
In den vorangehenden Abschnitten wurde stets voransgesetzt, daB die Scheibe odeI' das einzelnei Lauferelement in seiner Ebene schwinge, daB' also del' Ein£luB del' Neigung del' Lauferachse vernachlassigbar sei. Diesel' ,EinfluB wird' nachfolgend untersucht. Abb. 21.8.1 zeigt die Disposition. 1m Koordinatensystem x, y, z ist z die Drehachse. Del'

486
x
y
21 Dynamik des Laufers
w Z
Abb.21.8.1. Zur Herleitung der Beziehungen tiber die Kreiselwirkung
Rotor dreht mit der Winkelgeschwindigkeit W in Richtung z betrachtet im Uhrzeigersinn. In Zo sitzt eine Scheibe, deren Tragheitsmoment bezuglich der z-Achse Bz sei. 1st die Scheibe dunn, so ist ihr Tragheitsmoment bezuglich jedes Radius Br = Bz/2. Die den Koordinatenrichtungen zugeordneten Einheitsvektoren seien r: r k~
Nun mage zunachst angenommen werden, der Rotor fuhre mit der Kreisfrequenz We
eine Biegeschwingung aus, und zwar ausschlieBlich in der Ebene XZ. In einem beliebigen Augenblick hat dann die Rotorachse a an der Stelle Zo eine Neigung q;y, die stets so klein sein wird, daB cos q;y = 1 gesetzt werden darf. Die z-Komponente des Dralles der Scheibe ist dann
21.8(1)
Andert sich im Zeitintervall dt die Neigung q; urn dq;, so ist (vgl. die obere Figur in Abb. 21.8.1)
womit
21.8(2)
Der Drall bezuglich einer y-parallelen Schwerachse der Scheibe ist nach dem oben Gesagten
21.8(3)
mithin
21.8(4)
Analoge Formeln erhalt man, wenn man eine Schwingung ausschlieBlich in der Ebene yz betrachtet. Anstelle der GIn. 21.8(2) und (4) findet man dann (vgl. auch Abb. 21.8.1)
dD B·· 7 __ z = _ 21p~. dt 2
21.8(2'), (4')
Wenn nun das Problem im d'Alembertschen Sinne als Gleichgewichtsproblem formuliert wird, sind die einzufiihrenden Momente LIM = -dD/dt. Mit den nachfolgend angegebenen Ansatzen fur die Schwingungsbewegung ergeben sich die entsprechenden d' Alembertschen Momente:

21.8 Die Kreiselwirkung 487
Schwing1Ing in xz-Ebene:
q; = g; cos wet, 21.8(5 )
21.8(6)
Schwing'nng in yz-Ebene:
"P = 1p sin wet, 1p = - w~1p sin wi, 21.8(7)
21.8(8)
An sich willkiirlich ist hier fiir die Schwingung in der yz-Ebene ein Ansatz gemacht, der gegeniiber dem fiir die xz-Ebene um n/2 nacheilt. Dann folgt aus der Uberlagerung beider Bewegungen ein Fall, der praktisch hiiufig wenigstens anniihernd verwirklicht ist. Setzt man noch weiter gleiche Amplituden voraus, also g; = -!p, und iiberlagert dann die beiden Bewegungen, so erhiilt man die zirkular polarisierte Schwingumg im Gleichlwuj':
LIMa; = iBzrp [WWe - (~~] sin wet, LIMy = -jBz rp [WWe - ~~] cos wi. 21.8(9)
Dies ist ein Momentvektor, der stets senkrecht auf del' Ebene steht, die yom Scheibenzentrum und der z-Achse aufgespannt wird, und der bei positivem g; der Prazessionsbewegung entgegen gerichtet ist. Der Betrag des Vektors ist
LIM = Bzrp [WWe - W;] . 21.8(10)
\;V enn nur die Verhaltnisse bei del' kritischen Drehzahl interessieren, also W = We' wird Co A 2
LIM =~we. 2
21.8(11)
Dies ist die Relation, die bei vielen Verfahren zur Berechnung kritischer Drehzahlen verwendet wird, da die meisten von ihnen die zirkular polarisierte Schwingung im Gleichlauf voraussetzen. Abb. 21.8.2a und b stellen fUr zwei typische Falle den Verlauf des Biegemomentes M in del' Welle dar, wie es sich unter dem EinfluB del' Kreiselwirkung einstellt. Wo wesentliche Massen nur zwischen den Lagern angeordnet sind (Fall a), ist die Verschiebung del' kritischen Drehzahl durch die Kreiselwirkung meist sehr klein; die Kreiselwirkung kann daher in del' Regel vernachlassigt werden. Bei iiberhangenden Massen, Fall b, muB sie hingegen beriicksichtigt werden. Man beachte, daB bei einer Umkehr del' Drehrichtung und somit auch des Drehsinnes del' Prazessionsbewegung wieder die gleiche Richtung von LIM herauskommt, und daher die Situation nach Abb. 21.8.2 unverandert bleibt.
V 1\
V 1\
~~ a ~-~
Abb. 21.8.2. Verlauf des Biegemomentes Munter dem EinfluB der Kreiselwirkung. a) Scheibe zwischen Lagern; b) iiberhangende Scheibe

488 21 Dynamik des Laufers
Dureh Umkehr des Vorzeiehens beim Sehwingungsansatz 01. 21.8(7) elltsteht del' Gegenla'Uf. Hierbei geht 21.8(9) iiber in
21.8(9')
Del' Momentvektor weist wieder del' Prazessionsbewegung entgegen und hat den Betrag
LIM = eip [WWe + ~;], 21.8(10')
wird also bei der kritisehen Drehzahl selbst
LIM = 3eztw; . 21.8(11')
Del' Gegenlauf ist seltener als del' Gleiehlauf. Er kommt vor bei Kompressoren, wenn die Spalterregung aIle anderen Erregungsursaehen bei weitem iibersteigt.
Es geht aus diesel' Herleitung hervol', daB im allgemeinen FaIle die Kreiselwirkung nieht einfaeh dureh Beifiigen eines konstanten Momentes LIM beri.'tcksiehtigt werden kann. Es findet vielmehr eine kompliziertere Kopplung del' Bewegungen in x- und y-Riehtung statt.
21.9 Bestimmung lrritischer Drehzahlen nach (lern Verfahren von Sto(lola
Von den klassisehen Verfahren zur Bestimmung kritischer Drehzahlen hat dasjenige von Stodola [3J die groBte Verbreitung gefunden, da es sieh beliebiger Rotorgeometrie anpaBt. Vorausgesetzt wird allerdings, daB die Schwingung entweder zirkular polarisiert sei odeI' bei anisotroper Lagerung, daB keine Kopplung zwischen den Bewegungen in Riehtung x und y bestehe. In beiden Fallen hat das Sehwingungsproblem die gleiehe einfaehe Struktur.
In Abb. 21.9.1 ist eine beliebig abgesetzte Welle vorausgesetzt. Sie fiihre eine Biegesehwingung mit del' Kreisfrequenz We aus. 1st an del' Stelle z del' Aussehlag 'U(z), so wird del' Amplitudenwert del' Besehleunigung -w~'u(z). Ein Massenelement dm in z erfahrt demzufolge die d'Alembertsehe Tragheitskraft
dF = w;u(z) dm = w~u(z) ~: dz. 21.9(1)
An del' Stelle z hat del' Rotor den wirksamen Quersehnitt f mit dem Tragheitsmoment J. -Es wurde absiehtlich vom wirksamen Querschnitt gesproehen, denn bei einem Seheibenlaufer ist z.B. del' Quersehnitt del' Scheiben nieht zur trbertragung del' Biegemomente wirksam. - Die Massenverteilung m(z) ist ebenfalls durch die Laufergeometrie gegeben. Wenn an einer Stelle z' eine Einheitskraft normal zur Rotorachse angreift, so entsteht an der Stelle z eine Auslenkung W(z', z). Dieses Wist also die unter 21.7 eingefiihrte EinfluBfunktion, die dureh Geometrie und Werkstoff gegeben ist. Unter Beaehtung von 21.9(1) wird also die Ausbiegung 'U(z) unter dem EinfluB der samtliehen Tragheitskrafte
u(z) = w; .f W(z', z) n(z') (ddm ) dz'. o ,Z z'
21. 9(2)
Dureh (dmjdz)z, solI angedeutet sein, daB die Ableitung in z' zu bilden ist. Die obere Integrationsgrenze z ist del' Koordinatenwert am reehten Ende der ·Welle. - G1. 21.9(2) ist eine Integralgleiehung fiir die Funktion ~~(z), die niehttriviale Losungen nur hat, fill' bestimmte vVerte WeI' W e2, •.. , die Eigenwerte des Problems. Das Verfa,hren von Stodola ist eine graphische Methode zur Losung diesel' Integralgleichung.

21.9 Bestimmung kritischer Drehzahlen nach dem Verfahren von Stodola 489
r H=1
O~------------~--~r-~~ P,
u Pz
Abb. 21.9.1. Verfahren von StorZola zur Bestimmung kritischer Drehzahlen mit Bel'ucksichtigung del' clastischen Lagerung und der Kreiselwil'kung
Abweichend von del' Stodola'schen Originaldarstellung wird hier zur dimensionslosen Behand1ung iibergegangen, weil dann undurchsichtige MaBstabsfragen vermieden werden. Die stetige Massenvertei1ung del' Welle wird ersetzt durch Einze1massen 1nll 1n2 , ••• , 1nil
... , 1nz, del'en Tragheitsmomente beziiglich del' Drehachse ell e2, ..• , ei , ... , ez seien. Del' Lagerabstand sei 1 (vgl. Abb. 21.9.1). Dann fiihren wir die folgenden dimensionslosen GroBen ein:
EJ {}=EJ'
o 0
W *(r 1:) - JoEo W(' ) <"" =--p Z,Z, 21.9(3)
21.9(4)
Eo, J o, io sind Elastizitatsmodul, Flachentragheitsmoment und Querschnitt an irgendeiner ausgewahlten Stelle des Lanfers (beliebig wah1baI') und (] die Dichte des Werkstofies. VVeiter seien kit und kb die Fedel'konstanten del' beiden Lager an den Stellen A und B, Abb. 21.9.1 (Lagerkrafte pro Einheit del' Zapfenvel'schiebung). Daraus werden die fo1-

490 21 Dynamik des Liiufers
genden dimensionslosen Werte ge bildet :
kaZS kbZS xa J E ' xb - J E . 21.9(5)
o 0 0 0
Wenn man noch setzt 7l(~i) = ui, geht die Integralgleichung 21. 9( 2) mit der Diskretisierung und den einge£iihrten Bezeichnungen in die Summengleichung
_ 2 e10l4 ~ W*(t t) _ 2 e10l4 U 7li - We J E.'::'" "i' "i U i!1i - We J E' i
o 0 1~1 0 0 21.9(6)
iiber. Der nur von ~i abhangende Summenausdruck ist hier mit U i abgekiirzt, eine GroBe, die offensichtlich proportional Ui ist. Da die Gleichung in 7l homogen ist, darf man die Ui
und somit auch die U i sogleich als dimensionslose GroBen auffassen. Die Funktion u(~) beschreibt also eine affine Verzerrung der elastischen Linie.
Die Aufgabe lauft also darauf hinaus, die Gestalt der elastischen Linie unter dem EinfluB der Tragheitskrafte zu bestimmen, was Stodola nach der Mohrschen Methode des Krafte- und Seilpolygons durch£iihrt. Das Verfahren beginnt damit, eine Kurve u(~) nach Schatzung anzunehmen. In den Lagerpunkten ~ = 0 und 1 hat U im allgemeinen nicht den Wert Null, sondern ist vielmehr gleich U a bzw. 7lb zu setzen, entsprechend der Nachgiebigkeit der Lager. Als Anhaltspunkt zur Schatzung der U a und tlb kann dienen, daB die damit verbundene Verschiebung des groBten Ausschlages U max umgekehrt proportional dem Verhaltnis der kritischen Drehzahlen ohne und mit Lagerelastizitat ist. - Ausgehend von der geschatzten Kurve 7l(~) konnen fiir die Aufpunkte i, in denen die Massen mi
angebracht werden, die GroBen Pi = Ui!1i bestimmt werden. Diese faBt man als Krafte auf und konstruiert das Kraftepolygon mit der Poldistanz H = 1. Das hieraus folgende Seilpolygon mit seiner SchluBlinie AB ist in Abb. 21.9.1 ebenfalls diinn eingetragen. Ohne Kreiselwirkung ist die in diesem Seilpolygon erscheinende Ordinate bereits ein MaB fiir das ortliche Biegemoment. SolI die Kreiselwirkung beriicksichtigt werden, so ist an dieser Stelle eine Korrektur notwendig. Das dimensionslose MaB £iir das Kreiselmoment der Masse mi ist
L1<Pi =Ai(~~t~"i' 21.9(7)
Mit dem angegebenen Ai gilt dies £iir den Gleichlauf; bei Gegenlauf ware das Dreifache des Wertes nach G1. 21.9(4) einzusetzen. - In ~i springt also die Kurve des Momentverlaufes um L1 <Pi und verlauft im iibrigen parallel zur urspriinglichen, nicht korrigierten Seillinie. Dies ist in Abb. 21. 9.1 eingetragen. Hinsichtlich der Richtung von L1 <Pi ist folgendes zu beachten. Es ist iiblich, das positive 7l, wie auch das positive Moment nach unten aufzutragen. L1 <Pi ist nach oben anzusetzen, wo U mit wachsendem ~ zunimmt und umgekehrt. 1m Zweifelsfalle ist einfach der Drehsinn des Kreiselmomentes nach der Herleitung unter 21.8 zu beachten. - Am rechten Wellenende des gezeigten Beispieles nimmt z. B. 7l ab, da es negativ ist und sein Betrag zunimmt; deshalb ist dort L1 <P nach unten abzutragen. - Das so korrigierte Seileck fiihrt anstatt auf den bisherigen Endpunkt B zu einem neuen, der im vorliegenden Beispiel etwas tiefer liegt als B. Die strichpunktiert eingetragene Verbindungsgerade mit A ist die neue SchluBlinie. Zwischen ihr und del' berichtigten Seillinie erscheint die GroBe <P, die ein MaB fiir das Biegemoment ist. Die trbertragung del' strichpunktierten Geraden ins Kraftepolygon erlaubt dort die Bestimmung zweier Strecken Ra und R b , die den Reaktionen in den Lagern in ~ = 0 und ~ = 1 proportional sind.
Ausgehend von dem jetzt bekannten Verlauf <P(~) kann mit dem gegebenen 1J(~) auch <Pj1J in Funktion von ~ aufgetragen werden (vgl. Abb. 21.9.1). Diese GroBe ist proportional del' lokalen Kriimmung, weshalb aus ihr durch den nachfolgend beschriebenen IntegrationsprozeB die Gestalt del' elastischen Linie (in affiner Verzerrung) gewonnen werden kann. Die zwischen dem Linienzug <Pj1J in Funktion von ~ und del' Abszisse erscheinende

21.9 Bestimmung kritischer Drehzahlen nach dem Verfahren von Stodola 491
Flache tent man ein in Flachenstiicke ai> die man als Krafte auffaBt, und mit denen man erneut mit H = 1 das Kraftepolygon konstruiert. Das daraus folgende Seilpolygon mit seiner gestrichelt eingetragenen SchluBlinie gibt die Gestalt der elastischen Linie. Die Bestimmung der Gesamtausschlage verlangt aber noch die Beriicksichtigung der Nachgiebigkeit der Lager. Dies geschieht durch Zufiigen der Strecken
Ua = Ra , Ub = Rb 21.9(8) Ua Ub
an den Stellen ~ = 0 und 1. Die so entstehenden Punkte verbindet man durch die ausgezogene SchluBlinie. Zwischen ihr und dem Seilpolygon erscheint die GroBe U(~). Ohne Kreiselwirkung ist sie in den Punkten ~i identisch mit dem U i nach Gl. 21.9(6). Das folgt unmittelbar aus der Bedeutung von Ui . Es ist hier nur nicht iiber die EinfluBfunktion W* bestimmt worden, sondern durch die Mohrsche Seileckmethode, was aber den Wert Ui nicht verandert. Mit Kreiselwirkung ist Ui die Verallgemeinerung der mit Gl. 21.9(6) eingefUhrten GroBe, die diesen Zusatzeffekt noch beriicksichtigt und kann also in diese Gleichung eingesetzt werden.
Nun ist zu fordern, daB Ui dem Ui proportional sei, was aber nul' dann zutreffen wird, wenn Ui gerade richtig geschatzt war. Deshalb bestimmt man eine verbesserte Naherung mit Ui = aUi' wobei die Konstante a nach Gesichtspunkten der zeichnerischen ZweckmaBigkeit gewahlt werden kann. Damit wird das Verfahren wiederholt. So wird weitergefahren bis das Verhaltnis des erhaltenen U i zum Ausgangswert Ui hinreichend genau fiir alle i gleich ist. 1m allgemeinen ist das spatestens nach der zweiten Wiederholung der Fall. Nach Gl. 21.9(6) ist dann mit
21. 9(9)
die Kreisfrequenz del' Eigenschwingung gegeben. Anstatt u;jUi - das ja fiir alle i gleich sein soUte - setzt man zweckmaBig einen iiber die i gemittelten Wert (u/U)m ein. Man kann alsdann sogleich eine Formel angeben fiir die Frequenz Pe = we/2n, die zugleich die sekundliche kritische Drehzahl ist:
21.9(10)
Man beachte, daB der maBgebende Mittelwert (u/U)m vor allem durch die Werte im Bereich des groBten Ausschlages bestimmt wird. Bei [4] findet sich ein Verfahren, diesen Mittelwert genauer zu bestimmen, doch diirfte sich diese Komplikation kaum lohnen, wenn die Endlosung U i geniigend genau bestimmt wurde.
Bei der Beschreibung des Verfahrens ist stillschweigend vorausgesetzt worden, daB es konvergiere. Das trifft zu fiir die Schwingung erster Ordnung, nicht aber fUr die hoheren Ordnungen. Wiirde man ~l(~) fUr eine hohere Schwingungsordnung schatz en und nun das Verfahren anwenden, so wiirde es nach einer groBeren Zahl von Iterationen wieder zur Grundschwingung konvergieren. In [4] ist gezeigt, wie man bei jedem Iterationsschritt die erste Ordnung wieder eliminieren und so eine Konvergenz nach der zweiten Ordnung herbeifiihren kann. Solche Verfahren sind aber umstandlich und haben ihre Bedeutung durch das Aufkommen der Computermethoden verloren. Das Verfahren laBt sich auch so ausgestalten, daB Wellen auf mehr als zwei Lagern behandelt werden, wie Stodola [3] gezeigt hat. Auch dies ist aber nur mit groBem Zeitaufwand moglich und kommt daher heute nicht mehr in Frage.
AbschlieBend moge hier noch eine einfache Formel hergeleitet werden, die von der Vorstellung des einfachen Laval-Rotors ausgeht. Mit der Federkonstante k der Welle ist die Kreisfrequenz seiner Eigenschwingung
We = V k . 21.9(11) 1n

492 21 Dynamik des Ltiufers
Bei waagrechter ·Welle wird sich die lVIasse unter dem EinfluB del' Schwel'e um eine Pfeilhohe f einsenken, die gegeben ist durch
G =mg =kf. 21.9(12)
Somit ist kim = glf, folglich auch
21.9(13)
Will man f in cm, g in cm/s2 einsetzen und die kl'itische Dl'ehzahl nk in min-1 erhalten, so liefert dies
300 nk = Jli . 21.9(14)
Dies ist die Formel von Foppl, die es gestattet, aus del' statischen Durchbiegung mindestens einen Naherungswel't del' kritischen Drehzahl zu el'halten.
21.10 Berechnung kritischer Dl'ehzahlen nach dem Verfahren del' finiten Elemente
Das Aufkommen del' Computer hat dazu gefuhrt, daB in zunehmendem lVIaBe del' lVIatrizenkalkUl zur Berechnung kritischer Drehzahlen herangezogen wurde. Zunachst stand dabei das Verfahren del' Uberlragungsmatr'izen im Vordergrund, vgl. [15-18] und die zusammenfassende Darstellung [19]. Dieses Verfahl'en al'beitet befriedigend bei vollig stal'l'er, wie auch bei weichel' Lagerung. Hingegen entstehen in einem Zwischenbereich - sehr harte, abel' nicht vollkommen starre Lagerung - numerische Schwierigkeiten. lVIan hat daher in neuel'er Zeit diese lVIethode verlassen zugunsten derjenigen del' .finiten Elemente, bei del' diese Schwierigkeiten nicht entstehen, vgl. Spieth und Uhrig [20].
Abb. 21.10.1a veranschaulicht ein Gedankenmodell des Laufers, wie es zur Behandlung del' Aufgabe herangezogen werden kann. Del' Rotor wird ersetzt durch ein System von scheibenformigen lVIassen, die durch elastische, masselose Stabe (die finiten Elemente) miteinander vel'bunden sind. Das Ganze ruht auf einer beliebigen Zahl von Lagern, die starr odeI' beliebig elastisch sein konnen. Wiederum ist hier wie im vorangehenden Abschnitt vorausgesetzt, daB die Schwingung entweder zirkular polarisiert sei, odeI' abel' daB zwei aufeinander senkrechtstehende Schwingungsrichtungen bestehen, zwischen denen keine Kopplung existiert, so daB beide Richtungen gleich behandelt werden konnen (mit verschiedenen Lagerelastizitaten). An del' Stelle j sitzt eine Scheibe mit del' lVIasse mi
und dem lVIassentragheitsmoment Bi. Die Schwingungsamplitude ist dort Uj (bei zirkular
n n II II : I r,,E1; f;., q I i I~======~======~I i r- Ii ----Ij----j i
b u u j k
Abb. 21.10.1. a) Ersatzsystem, bestehend aus Scheiben und masselosen elastischen WeIIenstueken, elastisch gelagert; b) Scheibe j mit den angrenzenden WeIIenstii.cken

21.10 Bel'echnung kritischel' Dl'ehzahlen nach dem Verfahren del' finiten Elemente 493
polarisierter Schwingung der Ausschlagradius), die Neigungsamplitude der Welle gJj. Mit ij, EJj und lj werden Querschnitt, Biegesteifigkeit und Lange des rechts an die Masse mj
anschlieBenden Wellenstiickes bezeichnet (Abb. 21.10.1b). Da unter den gegebenen Voraussetzungen alle Massen in gleicher Phase schwingen,
kann die Bewegungsgleichung im d' Alembertschen Sinne als Gleichgewichtsbedingung formuliert werden, wobei alle Werte Amplitudenwerte sind. Die Kraft Qj und das Kreiselmoment M j der Masse mi auf die Welle sind dann gegeben durch
g. M 1 2
j = - -gJjW • 2
21.10(1)
Das Minuszeichen in der Gleichung fiir M j riihrt von der Vorzeichenkonvention her; nach Abb. 21.10.1 wird das Drehmoment im Gegenuhrzeigersinn positiv gerechnet. - Nun muB Gleichgewicht bestehen zwischen Qi und M j einerseits und der Summe der Krafte und
o
11
Ui~I·~.~ /
2q'lcl~~._
3
4 -o~~- f['jcl
y
{
[1, 0=-12 -3 = all
Z I 1
E1 11 = +6 -f = aZI
Z i
t El o =+12-j- =b l, I
3 ' E1
11= -6 -' =b1l ZJ , j' EJ.
0= -6 -+ =b12 Z 4 1
1 EJ. 11=+1,-)' =bll
Ii
11
'f'j = I
o
1 __________
~ /
--co-G
-"~ uk =17
-c~ S --------v f['k C I
EJ t o =+12-f =bi,
Z J 5
11 - 6 Ef; - b" - + J - 21 Z j
EJ 1 0= -12-+ = CII I j
EJ. f7 11=-6 _J = C21 lJ J
H } a=+6~=Ci2 8
11= +2 - =cl ? I J . ]
Abb.21.10.2. Zul' Aufstellung des Gleichungssystems derfiniten Elemente: Normierte Verfornnmgen und ihnell zugeordnete Querkrafte und Momellte

494 21 Dynamik des Laufers
Momente, die von den beiden Wellenstiicken mit Index i und j ausgeiibt werden, anderseits. Urn dies zu erreichen, wird folgendermaBen vorgegangen. Fur beide Wellenstiicke werden je vier normierte Verformungen betrachtet. Verformungszustand 1 des Wellenstiickes i ist z.B. gekennzeichnet durch Ui = 1, f{Ji = 0, ui = 0, f{Ji = 0. Dabei sind die in Abb.21.10.2 angegebenen au und a21 die Kraft und das Moment, die rechts (also an der Stelle j) a7tj das Wellenstuck cinwirken musscn, wenn diese Verformung bestehen soIl. Ebenso ist Verformungszustand 2 gekennzeichnet durch Ui = 0, f{Ji = 1, ui = 0, f{Ji = ° und a 12 und a 22
sind die entsprechenden Krafte und Momente usw. Es ist nun leicht zu sehen, daB jeder beliebige Verformungszustand des in Abb. 21.10.1 b dargestellten Systems durch eine line are Kombination der insgesamt acht normierten Verformungszustande nach Abb. 21.10.1 darstellbar ist. Die gesamte Kraft Qi und das gesamte Moment M i , das von der Scheibe j auf die beiden Wellenstiicke ausgeubt wird, ergibt sich aus der Summation der einzelnen Anteile, deren Superposition den Verformungszustand darstellt. Es ergibt sich somit:
a n 7ti + a 12f{Ji + (b~l + b~:l) ui + (b~2 + b,~:2) f{Ji + Cnuk + C12f{Jk = Qi' }
a 217Li + a 22f{Ji + (b21 + b21 ) ui + (b22 + b22 ) f{Ji + C21U k + C22f{Jk = Mi'
21.10(2)
Wenn man hier noch fur Qi und Mi die Ausdrucke nach Gl. 21.10(1) einsetzt, liegt ein Gleichungspaar vor, das in den Variablen Ui, f{Ji, ui' f{Ji' Uk> f{Jk homogen ist.
Hier ist vorausgesetzt, daB am Ort des betrachteten Knotenpunktes j eine Scheibe sei. Handelt es sieh abel' urn ein Lager (Punkte 1, v, n im Beispiel Abb. 21.10.1), dann gilt anstelle von 21.10(1)
21.10(3)
Hier ist k i die Federkonstante des Lagers, Qi die Lagerkraft, wahrend das Moment, das vom Lager auf die Welle ausgeubt wird, praktiseh Null ist.
Fur die praktisehe Durehfiihrung del' Reehnung erweist sieh die naehfolgende Um-formung als zweekmaBig. Es sei l irgendeine BezugsHtnge des Rotors (z. B. die gesamte Lagerdistanz) und EJ seine Biegesteifigkcit an irgendeiner ausgezeiehneten Stelle. Dann setzt man
li = f3i~ 21.10( 4)
womit dic iX und f3 definiert sind. W citeI' wird die Variable f{J ersetzt durch
21.10(5)
was den Vorteil ergibt, daB beide Variablen die gleiehe Dimension haben. An die Stelle der a, b und c, die aus Abb. 21.10.2 hervorgehen, treten nun die folgenden Ausdrucke:
iX-
An = -12 f3i ' A (j iXi
21 = + . f3r ' iX - 1 A22 = + 2 f3: '
21.10(6)
O 6 iXi 21 = - f3J'
Man beachte, daB die B den bisherigen b' + b" entsprechen; so tritt etwa Bn an die Stelle von b~l + b~~_ SchlieBlieh werden noeh die folgenden Abkurzungen eingefuhrt
m.l3 _ 1 fli =-=-,
EJ eT .Q _ 1
'U'i =-=-, 2EJ
k·[3 _ 1 Xi ==-.
EJ 21.10(7)

21.10 Berechnung kritischel' Drehzahlen nach dem Verfahl'en del' finiten Elemente 495
Die Bedeutung del' Symbole ist z. T. eine andere als im vorangehenden Abschnitt, da wir uns hier an die Originalarbeit [20] anlehnen. Mit diesen Definitionen geht das Gleichungspaar 21.10(2), wenn in Punktj eine Scheibe sitzt, iiber in
AnUi + A 12q>i + (Bn - fli(2) Uj + B 12q>j + 0nUk + 012q>k = 0, }
A 21Ui + A 22q>i +B21Ui + (B22 + {}i (2 ) q>i + 021Uk + 022q>k = O. 21.10(8)
lndem man hier aIle GroBen durch ihre Definitionsgleichungen ausdriickt, wird man tatsachlich wieder auf das Gleichungspaar 21.10(2) zuriickgefiihrt. 1st del' Punktj ein Lager, so sind einfach die folgenden Anderungen vorzunehmen:
(Bn - fli(2) ist zu ersetzen durch (Bn + %i),
(B22 + {}i(2) ist zu ersetzen durch B 22 .
Die Koeffizienten A, B, ° sind natiirlich fiir jeden Punkt j besonders nach dem Schema 21.10(6) zu bilden.
Die u und q> haben an sich die Dimension einer Lange. Da die Gleichungen abel' homogen sind, kann man die U und q> ebensogut als dimensionslos auffassen, indem man sie auf irgendeine Bezugslange bezogen denkt, die nicht mit 1 identisch sein muB. Dann sind die Gln. 21.10(8) dimensionslos, was giinstige Bedingungen fiir die numerische Behandlung schafft. Die fli und {}i haben die Dimension T2, wahrend die %i dimensionslos sind. -1m Falle del' stanen Lagerung degeneriert fiir den Lagerpunkt die erste Gleichung einfach zu ui = 0, was man ohne weiteres auch verifizieren kann, indem man sie durch %j dividiert und dann %i gegen 00 streb en laBt.
Fiir jeden Knoten del' gegebenen Welle - 1 bis n im Beispiel Abb. 21.10.1 - existiert nun ein Gleichungspaar des Typs Gl. 21.10(8). Die Zusammenfassung aller diesel' Gleichungen fiihrt auf ein homogenes System von 2n Gleichungen mit 2n Unbekannten u und q>, das den in Abb. 21.10.3 dargestellten Aufbau hat. Die Gleichungen fiir j = 1 und n enthalten zwei Unbekannte weniger als die anderen, da sie den beiden \Vellenenden entsprechen. Ist [S] die Koeffizientenmatrix dieses Gesamtgleichullgssystems und det [S] del' Wert del' aus [S] gebildeten Determinante, so ist zu fordern
det [S] = 0, 21.10(9)
wenn das System nichttriviale Losungen haben solI. Da einzelne del' Koeffizientell in [S] die GroBe w2 enthalten (siehe Gl. 21.10(8)), ist 21.10(9) eine Bestimmungsgleichung fiir w, deren Wurzeln We!> We2' We3, •.. genannt seien; sie sind die Kreisfrequenzen del' Eigenschwingungen, mithin die kritischen Winkelgeschwindigkeiten. Abb. 21.10.4 zeigt schematisch ein Laufersystem einer Dampfturbogruppe, Abb. 21.10.5 fiir dieses Laufersystem
Abb. 21.10.3. Aufbau des Gleichungssystems del' finiten Elemente

496 21 Dynamik des Laufers
HD MDT MDIND Generator
Abb.21.10.4. Schema des Laufersystems einer Turbogeneratorgruppe
IDB " I "\ 1D6~---r;----------+----;-----++----~~~-~"-~
/,,'-
10' \ 102 \ . .--,_._.1'- (
t IJ---l\--+----4--L--_~_-=-_=__=__=_~~_=_-\-\tf'~ I-=-~-=---==-~~=-tt~~=-=-=-----~~--tl--_+I 5 -1J i __ ____ +-__ " __ +-___ ++-l ____ --+lc--c_-+i
{g_102~-\,
-ID'- -' "'-', ) ---------+---+---~---..~--------- --
_106 ~----I--+- .. ------ .. - ----+1-------- -- \--
) ./ \ _IDB f---+--"' .......... -- .,;.--~"----------t-.....:::===_~---''d_I
1D00 looo Jooo mini 1,000 n-
Abb. 21.10.5. Veri auf del' Determinallten det[S] in Funktion del' Dl'ehzahI n hiI' das Laufersystem Abb. 21.10A. Nach Spieth Hml Uhrig [20]. Ausgezogene Kurve bei starTer, strichpunktierte bei elastischer Lagerung Ie = 20 l!ft
den Verlauf von det [8] in Punktion del' Drehzahl n = (60/2n) OJ, nach [20]. Die ausgezogene Kurve gilt HiI' starre Lagerung, die striehpunktierte fiir eine Lagernachgiebigkeit von k = 20 (.Lm/t = 2,04· 10-9 miN. Die kritischen Drehzahlen sind gegeben durch die Schnittpunkte diesel' Kurven mit del' Achse L1 = O. Man erkennt, daB die Lagernachgiebigkeit die Werte del' kritischen Drehzahlen vollstandig verschiebt.
Del' Ersatz das Rotors durch ein System von Massen und masselose St~ibc ist nicht die einzige M6g1ichkeit, die man hat. Es k6nnen auch Elemente anderer Art herangezogen werden. Beispiele gibt etwa Uhrig [19]. Die Koeffizienten a, b, c erhalten dann einen anderen Aufbau. Die Struktur des Verfahrens und das Vorgehen bleiben abel' unverandert. Del' Vorteil solcher Varianten besteht darin, daB man u. U. mit weniger Knotenpunkten auskommt, was zu einer Abkiirzung del' Rechenzeit fiihren kann.
Perner laBt sich das Verfahren so ausgestalten, daB zusammengesetzte Systeme behandelt werden konnen, wie etwa die in Abb. 21.10.6 dargestellte Turbo-Generatorgruppe mit ihrem Stahlfundament. Das Laufersystem ist del' Balken 1, Pundamenttisch und Gehause bilden den Balken 2. Beide lassen sich behandeln wie oben fUr den Laufer aufgezeigt. Pedern zwischen Balken 1 und 2 reprasentieren die Lager, Pedern zwischen Balken 2 und dem starren Betonfundament die Pundamentstiitzen. Es sei an einer Lagerstelle 'V die Pederkonstante des Lagers 7c", wahrend die zugehorige Pundamentstiitze fl die Federkonstante lei' besitze. Wenn die nach oben positiv gerechneten Auslenkungen von Welle und Pundamenttisch ~~v und 1[", sind, gelten anstelle del' ersten del' GIn. 21.10(3) die folgenden Beziehungen fiir die Querkrafte Q" und Q", an den beiden Knotenpunkten.
21.10(10)
Die Gleichungssysteme fiir Balken 1 und :2 sind an sich gleich aufgebaut wie friiher, nur enthalten sie dank del' Relationen 21.10(10) auch 11,-\Verte des anderen Balkens. Somit bilden beide Systeme zusammen ein gekoppeltes Gleichungssystem. Die Rechnung ist gesondert durchzufiihl'en fUr die vel'tikale und die horizontalc Richtnng, da ja die l:Werte fUr beide Richtungen im allgemeinen verschieden sein werden.

21.10 Berechnung kritischer Drehzahlen nach dem Verfahren del' finiten Elemente 497
Fun dam en ttisch
liiufersysfem Bafken 1
Abb.2LI0.G. Dampfturbo-Generatorgruppe auf Stahlfundament und zllgehoriges Ersatzsystem
Die Methode del' finiten Elemente eignet sich auch zur Berechnullg von Drehschwingungen. Diese sind zwal' seltenel', k6nnen abel' doch auftl'eten. Ungleiche Belastung del' Phasen eines Dl'ehstromgenerators fiihrt z. B. zu einer periodischen Variation des von ihm aufgenommenen Dl'ehmomentes. Die entsprechenden Resonanzen lassen sich vermeiden, da ja die Maschine nur bei del' Synchl'ondrehzahl belastet wird. Stehen einzelne Wellenstrange durch Zahnradgetriebe miteinander in Verbindung, so rufen die Vel'zahnungsfehler Drehmomentschwankungen hervol'. Diese muD man tiefhalten, indem man cine groDe Drehelastizitat im Zahnradgetl'iebc vorsieht. 1m Gegensatz zu den Biegeschwingungen wirkt hiel' die Werkstoffhysterese stets dampfend.
Abb. 21.10.7 a zeigt die Anordnung eines Wellensystems, das ans Scheiben mit den Massentragheitsmomenten (9j und 'Wellen mit den Langen lj nnd den polaren Tragheitsmomenten J pi gebildet ist. Mit Gals Gleitmodnl ist dann die Tol'sionssteifigkeit des Wellenstuckes li
T. = GJ))!.... 1 - lj . 21.10(11 )
Es sei weiter Yj die Willkelamplitudc del' Drehschwingullg an del' Stelle del' Masse j. V,1 enn nun Mi die Amplitude des Momentes ist, das von links auf die Scheibe j ausgeilbt wir-d, hLUtet die Bewegungsgleichung dieser Scheibe
Abb. 21.10.7. Zur Behandlung der Drehschwingungen. a) Einfache Welle;
b) zwei 'Wellen durch Getriebe verbunden
a
b
21.10(12)
j k n

498 21 Dynamik des Laufers
da ja w~yj del' Amplitudenwert von Yj ist. Nun ist abel'
Ti{Yj - Yi) = M i, Tj{Yk - Yj) = M j, 21.10(13)
folglich durch Einsetzen diesel' Ausdriicke in 21.10(12)
-TiYi + (Ti + T j- w~8j) Yj - TjYk = O. 21.10(14)
Fiir jeden Knotenpunktj gilt eine solche Gleichung, die drei Unbekannte enthalt; nul' die Gleichungen fiir die beiden Wellenenden enthalten nur zwei Unbekannte. Alle diese Gleichungen zusammen bilden ein homogenes System, das einen zu del' Darstellung Abb. 21.10.3 analogen Aufbau hat, nur daB hier nul' eine Gleichung pro Knoten auf tritt, dort zwei.
Sind zwei Wellen gemaB Abb. 21.10.7b durch ein Zahnradgetriebe verbunden, so ist das Vorgehen folgendermaBen abzuwandeln. Es seien 8j und 81' die Massentragheitsmomente del' beiden Zahnrader, r' und r" ihre Teilkreisradien, yj und y1' die Amplituden ihrer Winkelausschlage, und F sei die Amplitude del' Umfangskraft. Die Bewegungsgleichungen del' beiden Zahnrader lauten dann in Analogie zu 21.10(12)
M F ' 28 F" M 28" " 21 10(15) i- r = We " jYj, r - j =we"jYj· .
Wenn man hier M j und Mi analog zu 21.10(13) ausdriickt und einsetzt, erhalt man
Ti(Yt - Yi) - Fr' = w~8jyj, Fr" - Tj(Yk - yj') = w~8j'yj'. 21.10(16)
Dem ist noch die Beziehung yj r' = yj'r" 21.10(17)
beizufiigen. Aus den GIn. 21.10(16) und (17) lassen sich .F und Y;' eliminieren. Dann liegt wieder eine einzige lineare homogene Gleichung in Yi, yj und Yk VOl'. Bei del' Bewegungsgleichung fiir den Knoten kist lediglich yj' durch yjr'lr" zu ersetzen. Damit wird die mathematische Struktur des Problems genau gleich wie bei del' einfachen Welle, und die Losung erfolgt gleich wie dort: Man hat die von We abhangige Determinante del' Koeffizientenmatrix des Gesamtgleichungssystems Null zu setzen und erhalt mit den so bestimmten Eigenwerten We die Kreisfrequenzen del' Torsionsschwingungen des Systems.
21.11 Theorie del' Stabilitat und del' AusscbIage schwingender Laufer
Mit dem Aufkommen del' Computer sind Berechnungsverfahren in groBerer Zahl entwickelt worden, die es erlauben, bei grundsatzlich beliebiger Geometrie und Lagerung die Laufstabilitat zu untersuchen und Aussagen iiber die zu erwartenden Schwingungsausschlage zu gewinnen, vgl. [21-27]. Diese Theorien fiihren, obwohl formal mathematisch verschieden, wesentlich auf die gleichen Resultate, untel'scheiden sich abel' in Rechenaufwand und Leistungsfahigkeit. Die neuen Theorien [24-27], die sich auf das Verfahren del' finiten Elemente stiitzen, sind in diesel' Beziehung am giinstigsten. Die nachfolgende Darstellung schlieBt unmittelbar an die Ausfiihrungen des vorangehenden Abschnittes an, die nur einer entsprechenden Verallgemeinerung bediirfen.
Da die Lagerung im allgemeinen anisotrop sein wird, wird ein Koordinatensystem x, y, z nach Abb. 21.8.1 verwendet und auch die in jenem Abschnitt hergeleiteten Beziehungen konnen iibernommen werden. Die Projektion der Welle auf die xz-Ebene entspricht der Abb. 21.10.1; am Knotenpunkt jist die Auslenkung Uj und die Neigung fPj.
Die.Projektion auf die yz-Ebene hat eine analoge Gestalt, wobei Auslenkung undNeigung hier mit Vj und "Pj bezeichnet werden mogen. Abweichend von Abschn. 21.10 sollen diese Symbole hier nicht Amplitudenwerte, sondern Momentanwerte bedeuten. Die Gin. 21.10(2) gelten abel' trotzdem, sobald man auch unter Qj und M j Momentanwel'te versteht, denn diese Gleichungen beschreiben ja lediglich das elastische Verhalten del' Welle. Es sind zwei Paare solcher Gleichungen zu formulieren, fiir die Richtungen x und y. Wenn man

21.11 Theorie der Stabilitat und der Ausschlage schwingender Laufer 499
noch setzt b~1 + b~~ = bn , b~z + b~~ = bIZ usw., entsteht so folgende GIeichungsgruppe:
allui + a 12f/Ji + blluj + b12f/Jj + cllUk + C12f/Jk = QXj,
a 21u i + a 22f/Ji + b 2IUj + b 22f/Jj + C21Uk + C22f/Jk = M yj ,
allvi + a 12"Pi + bllvj + b 12"Pj + CllVk + C12"Pk = QYj'
a 21v i + a 22"Pi + b 21Vj + b 22"Pj + C21Vk + C22"Pk = M xj • I 21.11(1)
1st del' betrachtete Knoten j eine Sche'ibe, so lauten die Ausdrucke fUr die beiden Komponenten del' Querkraft im unwuchtfreien FaIle
Qxj = -mjiij - qjVj, Qyj = -miv} + qiUj' 21.11(2)
Riel' ist jeweils das erste Glied rechts die d' Alembertsche Tragheitskraft. Das zweite ist die Spalterregungskraft, wie sie durch den Ansatz G1. 21.6(2) gegeben ist. Es ist also qi
del' Spalterregungskoeffizient an del' Stelle j. - Die Momente MXj und M yj (wobei die Indices x und y die Richtung des Momentvektors andeuten) ergeben sich nach den GIn. 21.8(2), (4), (2'), (4') zu
. ej .. MYi = -eiW"Pj - Tf/Jj' 21.11(3)
Beziiglich del' Vorzeichen beachte man das folgende. Die beiden Projektionen del' Wellenachse sind jeweils von del' Seite zu betrachten, bei del' eine VergroBerung del' Neigung eine Drehung del' Tangente im Gegenuhrzeigersinn bedeutet, und die Momente sind, so betrachtet, im Gegenuhrzeigersinn positiv.
1st del' Knoten j ein Lager, so lauten die entsprechenden Gleichungen unter Verwendung des Ansatzes G1. 21.6(1)
Qxj = -leXXUj - le".yVj - bx.,/uj - bxiJ}, } 21.11(4) Qyi = -leYXUj - leyyVj - byx~ij - byyvj.
M yj = 0, Mxj = O. 21.11(5)
Riel' sind die Indices 1 und 2 del' Koeffizienten le und b durch x und y ersetzt, urn Verwechslungen mit den anderen hier auftretenden Indices zu vermeiden. Del' Einfachheit halber ist bei den Koeffizienten del' GIn. 21.11(4) del' Indexj, del' auf das betrejjende Lager verweist, weggelassen worden, wie ja auch die Koeffizienten in den GIn. 21.11(1) fUr jedes j besonders zu bilden sind.
Die GIn. 21.11(4) setzen voraus, daB die Lagerschalen starr gehalten seien. Trifft dies nicht zu, sondern ruhen sie etwa auf einem nachgiebigen Fundament, so sind die Ansatze sinngemaB zu verallgemeinern, wobei wie in 21.10(10), Koordinatendiffcrenzen an die Stelle del' Koordinaten treten.
Nun sind in del' GIeichungsgruppe 21.11(1) die rechts stehenden Querkrafte und Momente durch die Ausdrueke naeh den GIn. 21.11(2) und (3) bzw. (4) und (5) zu ersetzen, worauf aIle Glieder auf die linke Seite des Gleiehheitszeiehens genom men werden. Weiter ist die bereits unter 21.10 angegebene Transformation durehzufUhren, d.h. man setzt
Wj =If/Ji' Pi =l"Pj 21.11(6)
mit 1 als Bezugslange wie unter 21.10. Zu den dort angegebenen GIn. 21.10(4), (6) und (7) ist noeh beizufUgen
_ I3 qj qj EJ ' 21.11(7)
- 13 -le xx -- lexx EJ ' analog leXY ' kyx, kyy, 21.11(8)
- ~ -b xx bxx EJ' analog bxy , byx , byy . 21.11(9)

500 21 Dynamik des Liiufers
Die G~eichungsgruppe 21.11(1) geht dann, wenn j einer Scheibe entspricht, in die Form
AnUi + A 12q)i + Bnui + B 12q)i + 0nUk+ 012q)k + #i'ui + ?/ivi = 0,
A 21Ui + A 22q)i + B 21Ui + B 22q)i + 021Uk + 022q)k+ #iq)i + 2#jw':Pi = 0,
AnVi + A 12 P i + Bnvi + B 12P i + 0nVk + 012Pk + #/Vj - qiui = 0,
A 21Vi + A 22P i + B 21Vi + B 22P i + 021Vk + 022P k + #/Pi - 2#iwd>j = 0
uber. 1st der Knoten j ein Lager, so lautet sie
AllUi + A 12q)t + Blluj +B12q)j + 01l7£k + 012q)k + + kxxuj + kxyvj + bx,itj + bxyvj = 0,
A 21'Ui + A 22 q)i + B 21Uj + B 22 q)j + 0217£k + 022q)k = 0,
AllVi + A 12 P i + BllVj + B 12 P j + 0llVk + 012Pk +
+ kyxuj + kyyvj + byxuj + byyvj = 0,
A 21Vi + A 22 P i + B21Vj + B 22 P j + 021Vk + 022Pk = o.
21.11(10)
21.11(11)
Fur jeden Knoten gilt nun eine Gleichungsgruppe der Form 21.11(10) oder (11), wobei am linken Wellenende die Glieder mit Index i, am rechten diejenigen mit Index k wegfallen. So entsteht ein Gesamtgleichungssystem, das nach den Variablen und ihren Ableitungen geordnet und als Matrizengleichung geschrieben werden kann. Es bezeichne {7£}
die Kolonnenmatrix, die von oben nach unten die folgenden Glieder enthalt: Ul> q)1' V1,
P1, U2, q)2' .•. , Vno Pn· Ebenso sei {11,} die Kolonnenmatrix 11,1 ... Pn und {ii} die Kolonnenmatrix ii1 ... P'I. Dann kann das genannte Gesamtgleichungssystem in der Form
[M] {u} + [B] {it} + [K] {u} = 0 21.11(12)
geschrieben werden. Die Glieder der Matrizen [M], [B], [K] sind die entsprechenden Koeffizienten der Gleichungsgruppen des Typs 21.11(10) und (11). Gl. 21.11(12) reprasentiert ein homogenes System linearer Differentialgleichungen mit konstanten Koeffizienten. Der Losungsansatz lautet
{U} = {u}exp (At),
wo {il} die {u}-Matrix in t = 0 ist. Da
{il} = A{U} exp (At), {ii} = A2{il} exp (At),
ergibt sich durch Einsetzen in Gl. 21.11(12)
([M]A2 + [B]A + [K]) {il} = o.
21.11(13)
21.11(14)
21.11(15)
Dies ist das charakteristische Gleichungssystern, ein homogenes System linearer Bestimmungsgleichungen fur die Glieder von {u}. Es ist das genaue Analogon des Gleichungssystems, das unter 21.10 erhalten wurde. Wie dort, ist die Existenz einer nichttrivialen Losung an die Bedingung des Verschwindens der Koeffizientendeterminante gebunden, d. h. es ist zu fordern
det ([M]A2 + [B]A + [K]) = o. 21.11(16)
Diese Bestimmungsgleichung fur die Eigenwerte A hat die Losungen
21.11(17)
Sie sind im allgemeinen komplex, was mit der Struktur des Gleichungssystems zusammenhangt, das erste Ableitungen enthalt (im Gegensatz zu der Situation unter 21.10). Auch die Elemente von {it}, die sich als L6sung von 21.11(15) ergeben, sind komplex. DaB

21.11 Theorie der Stabilitat und der Ausschlage schwingender Laufer 501
damit doch eine physikalisch reelle Losung gegeben ist, erkennt man wie folgt. Infolge des homogenenCharakters des Gleichungssystems wird es zugleich mit einer komplexen Losung auch durch die ihr konjugiert komplexe erfUllt. Die UberIagerung beider Losungen ist abel' reell; daher geniigt es, den Realteil einer komplex en Losung zu betrachten.
Die Losungen des homogenen Gleichungssystems beschreiben Eigen8chwing~tngen del' Welle, wie sie durch eine einmalige auBere Storung eingeleitet werden konnen. Die Wev
sind die Kreisfrequenzen del' Eigenschwingungen, mithin auch die kritischen Winkelgeschwindigkeiten, wahrend die ~v den weiteren zeitlichen VerIauf del' Amplituden del' einmal angestoBenen Schwingungen beschreiben. Diese klingen ab, wenn ~,. < O. Stabilitat ist demnach dann gewahrleistet, wenn ~v < 0 fiir aIle '1'. Uber Verfahren zur Auffindung del' Eigenwerte Av vgl. etwa Zurm11hl [28]. Einen speziell fUr Turborotoren geeigneten Algorithmus entwickelt Nordmann [29]. Abb. 21.11.1 zeigt Rechenergebnisse nach [27] fiir einen Dampfturbinenlaufer auf sieben Dreikeillagern. Da die Lagerkollstanten, die in [B] und [K] eingehen, Funktionen del' Winkelgeschwindigkeit sind, muB die Eigellwertberechnung nicht nul' einmal dul'chgefiihrt werden, sOlldern in Funktion von w, was ein Ergebnis liefert wie in Abb. 21.11.1 dal'gestellt. Wo W = We", liegen kritische Drehzahlell, wahrend del' instabile Bereich dort beginnt, wo eines del' ~v - hier 01 - positiv wird.
Die Theorie laBt sich so ausgestalten, daB auch unwuchterzwungene Schwingungsausschlage bestimmt werden konnen. Es weise z.B. die Masse mj gegeniiber del' geometrischen Drehachse eine Exzentrizitat ej auf. An die Stelle del' Gin. 21.11(2) tritt dann
Qxj = -mj [u} - (ej cos wt + ej' sin wt)] - qjVi, 1 Q,lIj = -mi [Vj + (ejsin wt - ej' cos wt)] + qj1l'j' f
250 5"
200
t 150 . 3~ 100
50
DO 50 100 150 200 250 300 !,oo W_
0 50 100 150 200 250 300 5' !,OO
0
t -5 1-~ -L <"<
5"
I -10
21.11(2')
Abb. 21.11.1. Eigenkreisfrequcnzen Wev und Anfachungskoeffizienten A,. eines Rot.orsystems in Funktion der Winkelgeschwindigkeit w. Nach N01'dmann [27]

502 21 Dynamik des Liiufers
Hier ist Sj = y' sj2 + sj'2 und durch sf und sj' wird die Winkellage der Exzentrizitiit bestimmt.Wenn man diese Starungsglieder mitnimmt und sogleich zur komplexen Schreibweise ubergeht, erscheinen in der Gleichungsgruppe 21.11(10) rechts die folgenden Glieder:
fli Re {si exp [i(wt - If'i)]} , 0,
J1i Re {SiCXP li (wt + ~ - If'i)]} , O.
Die Matrizengleichung 21.11(12) nimmt dann die Form
[M]{ii} + [B]{u} + [K]{n} = Re [{F} exp (iwt)] 21.11(18)
an, wobei die Kolonnenmatrix {F} alle Starungsglieder zusammenfaBt. Die Partikuliirlasung dieser Gleichung gewinnt man durch den Ansatz
{n} = {nc} cos wt + {ns} sin wt =
= Re ({Ltc} - i{1ts}) (cos wt + sin wt) = Re [{U} exp (iwt)]. 21.11(19)
Ableiten und Einsetzen in Gl. 21.11(18) liefert
([K] - OJ2[M] + iw[B]){U} = {F}. 21.11(20)
Dieses Gleichungssystem kann nach einem komplexen GauB-AIgorithmus gelast werden. Man erhiilt schlieBlich die siimtlichen Ausschliige, die in {U} zusammengefaBt sind. Dies kann nach Bedarf fur jedes w durchgefuhrt werden, insbesondere auch fur die kritischen Winkelgeschwindigkeiten, wo Maxima der Ausschliige zu erwarten sind.
Die Durchfuhrung dieser Rechnung geht aus von GraBe und Lage der Exzentrizitiiten, die ja in {F} zusammengefaBt sind. Da diese aber im voraus nicht bekannt sein werden, wird man typische Annahmen treffen und verifizieren, ob die Ausschliige in zuliissigen Grenzen bleiben. Abb. 21.11.2 zeigt ein solches Rechenergebnis nach [27] fur den gleichen
250 $-1
t 200
i l50
100
100 f.tm 80
20
_/ 7;
-=i
151'·/ I I r-- .s!- -,-VI I
I I I I
I I I I
I I I I I
I I vrHO I I I
I I
\ 1/ MO
I ~ h K NOI
~ ~ ~ ~
~OO 200 w_
HO MO NOI N02
slaM inslabll -------
Xl I Amo,
d9-== Qa N02
/
300 $-1 1.00
[jEN ERR
Abb. 21.11.2. GroOte Rotorausschlage Amax in Funktion der Winkelgeschwindigkeit w fUr das gleiche Laufersystem wie Abb. 21.11.1. Nach
N01'drnann [27]

21.12 Die Spalterregung 503
Laufer wie Abb. 21.11.1. Die Uberlagerung der Bewegung in x- und y-Richtung liefert dabei im allgemeinen elliptische Bahnen der Wellenzentren an den verschiedenen Punkten j. Dabei ergibt die Rechnung von selbst, ob die Ellipse im Gleichlauf oder im Gegenlauf durchlaufen wird, wie ja auch Aufspaltungen kritischer Drehzahlen infolge del' Anisotropie del' Lagerung durch die Bestimmung del' Eigenwerte von selbst erhalten werden.
Bei der Durchfiihrung solcher Rechnungen erhebt sich die Frage, bis zu welcher Eigenhequenz We" sie ausgedehnt werden sollen. Mathematisch hangt die Zahl del' existierenden Ordllungen ab von del' Zahl der Einzelmassen, d. h. also von del' Art der Diskretisierung. Prinzipiell konnte nun irgendeines del' (jv positiv werden, was Labilitat bedeuten wiirde. Tatsachlich wird es abel' nicht notig sein, sehr hohe Schwingungsordnungen einzubeziehen. Die Rechnung vernachlassigt die Werkstoffdampfung. Diese kann notfalls summarisch in die Spalterregungskoeffizienten eingeschlossen werden. Bei Frequenzen, die iiber del' Drehzahl liegen, wirkt sie immer stabilisierend und dies mit steigender Frequenz immer mehr. Deshalb treten sehr hochfrequente Schwingungen faktisch nicht auf.
McGuire [30J beschreibt z.B. die dynamischen Lauferuntersuchungen, wie sie in del' Praxis beim Neuentwurf mehrgehausiger Maschinen durchgefiihrt werden. Zunachst wird del' Laufer jedes einzelnen Gehauses fiir sich vereinfachend als unabhangig und zweifach gelagert betrachtet und die Stabilitat ohne Spalterregung untersucht, womit das Verhalten del' Lager in Erscheinung tritt. Dann wird noch die Spalterregung mitberiicksichtigt, mindestens dort, wo diesel' Effekt wesentlich ist (hohe Dichte des Fluids, schlanke Rotoren). Gegebenenfalls wird die Lagerkonstruktion geandert, so daB ein befriedigendes Ergebnis erzielt wird. 1st dies errreicht, so darf erwartet werden, daB bei del' nachfolgenden Behandlung des mehrfach gelagerten Gesamtsystems ein giinstiges Ergebnis herauskommen wird. Dabei konnen Rechnungen mit und ohne Einbezug eines elastischen Fundamentes durchgefiihrt werden, was wesentlich sein kann, da die Nachgiebigkeit des Fundamentes die Wirksamkeit del' Olfilmdampfung herabsetzt. Bei del' definitiven Berechnung werden auch Ausschlage bestimmt.
An sich sind unsere heutigen Rechenverfahren auBerordentlich leistungsfahig. Trotzdem scheinen die Ergebnisse noch nicht in allen Fallen zu befriedigen, wobei allerdings die theoretische Beurteilung del' Stabilitat im allgemeinen eher zu ungiinstig ausfallt. Die Unzulanglichkeit kann abel' kaum in del' Struktur del' Theorie selbst liegen, sondern sie ist eher in del' Ungenauigkeit del' Eingaben zu suchen, welche die Spalterregung und das Verhalten del' Lager beschreiben. Beachtet man etwa den schleifenden Schnitt del' Kurve v = 1, Abb. 21.11.2, mit del' Achse (j" = 0, so wird verstandlich, daB selbst verhaltnismaBig kleine Fehler del' Eingaben die Lage del' rechnerischen Stabilitatsgrenze wesentlich verschieben konnen.
Treten an ausgefiihrten Maschinen Schwierigkeiten auf, so sind die Anderung del' Lagerkonstruktion und del' Lagerspiele die wichtigsten Mittel zur Abhilfe. Dabei haben MaBnahmen, welche die Stabilitatsgrenze nach oben verschieben die Tendenz, die Resonanzausschlage zu vergroBern, so daB hier ein optimaler Mittelweg gefunden werden muB. Der unter 21.5 bereits beschriebene Weg, Lager dampfend zu betten, gewinnt im Zusammenhang mit dieser Situation an Bedeutung.
21.12 Die Spalterregung
Spalterregung entsteht durch die zwei in Abschn. 21.5 beschriebenen Mechanismen, Variation del' Umfangskraft infolge del' Spaltverluste und asymmetrische Druckverteilung iiber Deckbandern und in Labyrinthdichtungen, vgl. insbes. Abb. 21.5.3. Es sind dariiber in neuerer Zeit Untersuchungen in groBerer Zahl durchgefuhrt worden, etwa [10-14, 31-35]. Der Ansatz Gl. 21.6(2), del' auch in Gl. 21.11(2) iibernommen wurde, ist der einfachst mogliche: Er ist linear und enthint nur einen einzigen Koeffizienten, den labilisie-

504 21 Dynamik des Liiufers
renden Koppelkoeffizienten q. In Wirklichkeit kommen noch weitere Effekte hinzu, wie stromungsbedingte Momente infolge del' Schiefstellung del' Lauferscheiben und ebenso Krafte und Momente, die den Verformungsgeschwindigkeiten proportional sind, vgl. etwa [32-35]. Es wird abel' aus diesen Untersuchungen deutlich, daB nul' del' Koppelkoeffizient q einen maBgebenden EinfluB auf das Stabilitatsverhalten ausubt. Koeffizienten, die Kraft und Ausschlag in gleicher Koordinatenrichtung verbinden, sind sehr klein gegenuber den entsprechenden elastischen Koeffizienten. Momentkoeffizienten treten in ihrer GroBenordnung stark zuriick. Die den Deformationsgeschwindigkeiten proportionalen Krafte sind schon deshalb gering, weil diese Geschwindigkeiten um Zehnerpotenzen tiefer liegen als die Stramungsgeschwindigkeiten. Deshalb kann der einfache Ansatz 21.6(2) als genugend betrachtet werden.
Es mage zunachst die 8palterregung dttrch Variation der Umfangskraft behandelt werden, ein Mechanismus, del' erstmals durch Thomas [36] angegeben wurde. Abb. 21.12.1 stellt die Situation dar. In del' gezeigten Lage wi I'd die Variation del' Spaltweite 15 beschrieben durch
15 = 150 - e cos gJ, 21.12(1)
wo 150 die mittlere Spaltweite, e die Exzentrizitat des Laufers bedeuten. Einem Sektor mitZentriwinkel dgJ an del' Stelle gJ entspricht eineTangentialkraft dT, die positiv gerechnet werde, wenn sie in die Richtung del' Raddrehung weist, also im FaIle del' Turbine. Die fUr die Spalterregung maBgebende Querkraft dQ ist
dQ =dTcos gJ.
Abb. 21.12.1. Zur Herleitung der Formeln fiir Spalterregung durch Umfangskriifte
21.12(2)
Die Tangentialkraft dT muB im Euler-Radius r angreifend gedacht werden, wo die Umfangsgeschwindigkeit 1f = wr betragt. Del' auf dgJ entfallende Radleistungsanteil dP ist
womit dP = udT,
dP dQ = ---=-- cos gJ.
1t
21.12(3)
21.12(4)
Fur die hier natige Genauigkeit genhgt es, den Euler-Radius durch den mittleren Radius tm
zu ei'setzen. Bei del' nachfolgenden Herleitung mage nun stets links die Gleichung fill' die Turbine,
rechts diejenige fUr den Verdichter geschrieben werden. Es sei Llhs die isentrope Enthalpieanderung in del' Stufe, 'If = Llhs/it 2 die ihr entsprechende Druckzahl, (.!cz del' Mittelwert del' axialen Massenstromdichte im Sektor dgJ und 1J del' Wirkungsgrad, del' Llhs mit dem

21.12 Die Spalterregung 505
spezifischen Arbeitsumsatz verkniipft. Dann gilt
1,2 1,2 dP S-N -2d
. = 2 (lCz'/flu1] rp, r~ - ri,r '/flU 2
dP = - 2 (lcz -drp, 1}
21.12(5)
Fiir den Wirkungsgrad werde gesetzt
1} = 170 - LlCsp, 1 1 - =-+ LlCsJl , 1] 1]0
21.12(6)
wobei LlCsp die Abweichung des Spaltverlustes gegeniiber dem Wert ist, den er bei b = bo annimmt. Es liiJ3t sich mithin auch schreiben
dc'm ( .I> " ) 1] = 'I}O - db U - (/0 , 1 _ 1 dCsp (" " ) - -+-u-u 17 - 170 db 0 ,
21.12(7)
odeI' mit 21.12(1) 1 1 dCs])
- =-- --e cos rp. 1] 170 db
21.12(8)
Wenn man dies noch in 21.12(5) einsetzt und 21.]2(4) beachtet, folgt
dQ 1'~ - ri,r - [ dCsJl ] d = 2 (lCz '/flu 1]0 + db e cos rp cos rprp Turbine,
dQ r~ - ri,r - [ 1 dCsJl ] d = - '2 ecz'/flu 1}0 - db e cos rp cos rp rp Verdichter. 21.12(9)
Es ist nun wesentlich zu erkennen, daB die Integration, die von hier aus Q liefert nicht in willkiirfreier Weise moglich ist. Die Variation del' Spaltweite nach Gl. 21.12(1) wird namlich im allgemeinen zur Folge haben, daB auch die Massenstromdichte (lcz und selbst del' Druckumsatz, also '/fl, Funktion von rp werden, doch kann eine allgemeingiiltige Angabe dariiber nicht gemacht werden. Man hat iiblicherweise, ohne den einschrankenden CharaIder diesel' Annahme zu beachten, nur 1) als Funktion von rp eingefiihrt.. Einzig Piltz [34] macht hier eine genauere Untersuchung, kommt abel' auch nicht ohne willkiirliche Annahme aus, - Es gibt zwei Extremannahmen, welche die Integration del' Gl. 21.12(9) sogleich ermoglichen. Die eine ist die klassische Annahme, wonach nur 1} Funktion von rp ist. Die andere ist eine sinnvolle Naherung bei Schaufelungen mit Deckbandern und Labyrinthdichtungen. Dort kann man von del' Vorstellung ausgehen, del' Spaltverlust entstehe lediglich dadurch, daB ein Teil des Fluids die Schaufelung umgeht. In del' Schaufelung selbst wird dann langs des Umfanges iiberall gleich viel Arbeit umgesetzt. 1m Rahmen des hier angegebenen Formalismus bedeutet dies im FaIle del' Turbine (lCz1] = const, und da auch '/fl = const vorausgesetzt wird, liefert die Integration Q = O.
Die klassische Annahme, daB nul' 1) von rp abhange, fiihrt nur im FaIle del' Turbine auf ein sinnvolles El'gebnis. Die Schl'eibweise laBt sich dann vel'einfachen, da
r~ - ri,r 1i~ 2 ecz drp=2n drp ,
wo ni del' gesamte Massenstl'om del' Stufe ist. Dann liefel't die Integration von 0 bis 2n
Q = m'/flue dCsJl
2 db'
somit wil'd also schlieBlich del' gesuchte Koeffizient q = Q/e
ni'/flu dCsJl q =-2- db .
21.12(10)
21.12(11)
Del' gleiche Formalismus, auf den Verdichter iibel'tl'agen, liefert das physikalisch unplausible Ergebnis, daB T bei kleinel'em Spiel kleinel' wird, Plausibel ist vielmehr das Umgekehl'te und somit die Annahme, daB schlieBlich auch Gl. 21.12(11) fiir den Vel'dichter

506 21 Dynamik des Laufers
iibernommen werden kanne, aber mit umgekehrtem Vorzeichen, also
rrillpU dCsp q = --2- d(J . 21.12(12)
Das kann aber nur erhalten werden, wenn man voraussetzt, daB (!Cz1jJ im umgekehrten Sinne Funktion von cp sei wie 1/17, und zwar miissen z.B. (!Cz und 1jJ einzeln je die gleiche prozentuale Veranderung aufweisen wie 1/17, doch mit entgegengesetztem Vorzeichen. Das ist nicht undenkbar, diirfte aber jedenfalls eine Extremannahme darstellen.
Spalterregung durch Variation der Umfangskraft allein ist nur im FaIle der Anordnung mit frei endigenden Schaufeln eine sinnvolle Annahme. Nur in diesem FaIle scheint man damit mindestens bei der Turbine etwa die richtige GraBenordnung zu treffen, vgl. [37]. Es sei also empfohlen, bei frei endigenden Schaufeln nach Gl. 21.12(11) bzw. (12) zu rechnen. Damit wird man vor allem beim Verdichter den Effekt eher iiberschatzen, was aber auf der sicheren Seite liegt. Die GraBe dCsp/d(J ist entweder fiir den gegebenen Schaufelungstyp aus Messungen bekannt oder sie kann, wo solche fehlen, aus den aIlgemeinen Unterlagen in Bd. I, Kap. 8 gewonnen werden. - Man beachte noch, daB q hier fiir eine Stufe angegeben wurde, wahrend es im Rechenverfahren nach 21.11 auf eine Ersatzmasse zu beziehen ist, die nicht notwendig mit der Stufe identisch ist.
Die Spalterregung durch Druckverteilung uber Deckbandern kann formal wie folgt dargesteIlt werden. Es seien Dd der Durchmesser, b die axiale Breite des Deckbandes, 'Ud= wD/2 seine Umfangsgeschwindigkeit und (! die mittlere Dichte des Fluids iiber dem Deckband. Dann werde fiir die Querkraft Q gesetzt
21.12(13)
Unter (Jo ist die Dichtspaltweite am Labyrinthkamm zu verstehen. Der Aufbau der Formel entsteht aus der VorsteIlung, daB die Druckdifferenzen am Umfang samtlich proportional einem charakteristischen dynamischen Druck seien. Als solcher ist (!U~ gesetzt, und der empirische Beiwert K wird bei gegebener Geometrie davon abhangen, welches das Verhaltnis der Umfangskomponente der Stramung vor dem Deckband zu Ud ist.
GegebenermaBen ist man bei der Behandlung der Stufe mit Deckbandern davon ausgegangen, daB die Spalterregung teilweise von der Variation der Umfangskraft, teilweise von der Druckverteilung iiber dem Deckband herriihrt, vgl. [13, 32, 37]. In der formalen DarsteIlung wurden dann aIlerdings beide Effekte in einer Formel zusammengefaBt, deren Aufbau von der Vorstellung der Erregung durch Umfangskrafte ausgeht, also die Resultierende der Druckverteilung eigentlich in eine aquivalente Umfangskraft iibertragt. Uberblickt man nun den so definierten, aus den Versuchsergebnissen sich ergebenden Koeffizienten, so erkennt man, daB eine aIle durchgemessenen FaIle zusammenfassende Korrelation so auch nicht annahernd gelingt. Die Resultate legen vielmehr den Gedanken nahe, daB der umgekehrte Weg, namlich die Spalterregung auf Druckverteilung am Deckband zuriickzufiihren und die variable Umfangskraft nur als Nebeneffekt zu betrachten, besser zum Ziele fiihrt. Dies verspricht urn so mehr Erfolg, als bei der Deckbandschaufelung die einfache Vorstellung, die im Spaltverlust lediglich einen Leckverlust sieht und die auf konstante Umfangskraft fiihrt, eine gute Naherung ist. Wir haben daher die Versuche von Wohlrab [32] neu ausgewertet, indem Formel 21.12(13) zugrunde gelegt und aus den Versuchsergebnissen der Wert K bestimmt wurde 1.
Abb. 21.12.2 stellt die so gewonnenen Ergebnisse dar. Die Diagramme a, b, c entsprechen den bei Wohlrab mit A, B, 0 bezeichneten Stufen. Die wiedergegebenen Kurvenbander gehen direkt aus den Kurvenbandern der Bilder 3.14,3.21 und 3.22 der genannten
1 Herr Prof. Dr. H. J. Thomas hat uns in verdankenswerter Weise die hierzu niitigen Unterlagen zur Verfiigung gestelIt.

21.12 Die Spalterregung 507
Originalarbeit hervor. Abszisse ist die auf den Spitzendurchmesser bezogene Druckzahl
1fJs = L1hs/u~ ~ L1h8/U~, 21.12(14)
wahrend Wohlrab die Definition 1fJ = 2L1h8(U~ benutzt. Trotz del' groBen Verschiedenheit del' Geometrie del' drei Stufen ist del' Funktionalzusammenhang K = f( 1fJs) sehr ahnlich.
0)0
0,08
t 0,06 "'"
0,0;'
0.02
Trommels/ufe Tromme/stufe Kammers/ufe b/Od 00,0271, b/Dd =0,0370 b/Od = 0,0529
0--
(XI = fll= 31° (t, = fll= 17.3° (Xl= 12.9° /32=20,1°
I..: ~ I~
~ ~ ~ § ~ 8$ ~ Iff ~ ~ (J " ~ IA ill
Bl /~ '1
fJ ill f --r-" ~ I--- - "- -"-I--
2 0
a b
2 0 1fs-
c
2 0
- 1- --+--"--r--
,j
II 1/ -;
/ if 'I
II I
2
d
Abb. 21.12.2. Koeffizient K zur Berechnung der Spalterregung an Turbinenstufen, umgerechnete Ergebnisse von W ohlrab [32]
Das Kurvenband im Fane a ist lediglich deshalb besonders breit, weil die Streuung del' MeBpunkte besonders groB war. In del' urspriinglichen Darstellung von Wohlrab liegen die Kurvenbander weit auseinander. Die GroBe 1fJs hangt unmittelbar mit del' Umfangskomponente del' Geschwindigkeit am Laufraddeckband zusammen. DaB daher K mit 1fJs stark ansteigt, steht in Ubereinstimmung mit del' Theorie. Man wiirde vieUeicht erwarten, daB die Kurve fiir die Kammerstufe ihres kleineren Reaktionsgrades wegen hoher liegen miiBte als fiir die Trommelstufen. Dem steht abel' entgegen, daB bei del' Trommelstufe die Leitrader immerhin einen gewissen Beitrag zu den QuerkrMten liefern, bei den Kammerstufen praktisch keinen. - In Diagramm d ist die gestrichelte Linie so gelegt, daB sie die hochstliegenden Punkte del' Kurvenbander a, b, c verbindet. Die ausgezogene Gerade sei als Berechnungsunterlage empfohlen. vVenn man also den Koppelkoeffizienten aus
KDdbe.u~ q-~o
21.12(14')
bestimmt mit K nach dem durch Diagramm d gegebenen Linearansatz, so diirfte er eher reichlich eingesetzt sein, und man hat eine Rechnungsunterlage, die eine gewisse universelle GiHtigkeit besitzt. - Die Breite del' Kurvenbander entspricht iibrigens nicht nur reiner Streuung, sondern umfaBt auch den EinfluB des Axialspaltes zwischen Leit- und Laufrad, del' indessen nicht sehr einheitlich ist. Selbstverstandlich ist q wieder entsprechend umzurechnen, wenn die Ersatzmasse nach Abschn. 21.11 nicht mit del' Stufe identisch sein soUte.
Sehr bedeutsam ist das Problem del' Spalterregung auch bei Radialverdichtern mit Deckscheibe fiir Medien extrem hoher Dichte, z.B. flir Ammoniaksynthese. Abb. 21.12.3 stellt ein solches Verdichterrad dar. Die Spalterregung erfolgt im wesentlichen an del' Labyrinthdichtung del' Deckscheibe. Genaue Unterlagen darilber kann nul' del' Versuch liefern, doch gibt nachfolgende Uberlegung immerhin einen guten Anhaltspunkt. Tritt das Fluid mit del' Umfangskomponente Cu2 aus dem Laufrad aus, so hat del' riickstromende Teil

508 21 Dynamik des Laufers
im Dichtungsdurchmesser Da etwa die Umfangskomponente
Cua = Cu2 D2/Da·
Abb.21.12.3. Radialverdichterrad mit Deckscheibe
21.12(15)
Nun entspricht cua/ua ungefahr dem Wert 'ljJs in Abb. 21.12.2. Man kann also aus diesem Diagramm den zu 'ljJs = cua/ua gehorigenK-Wert ablesen und mit diesem vermoge 21.12(14') q bestimmen.
Bei HD-Turbinen konnen auch lange Labyrinthdichtungen an Wellen und Schubausgleichkolben wesentlich zur Spalterregung beitragen. Die in [10] und [31] entwickelten Theorien der Spalterregung in Labyrinthdichtungen laufen auf umfangreiche Differenzenrechnungen hinaus und sind fur lange Labyrinthdichtungen ungeeignet, weil sie Inkompressibilitat voraussetzen. Sie lassen sich ohne Zweifel derart verallgemeinern, daB die Kompressibilitat berucksichtigt wird, werden dann aber sehr aufwendig. Unvermeidlich gehen empirische Eingaben in solche Rechnungen ein (Reibungsbeiwerte), die unsicher sind und das Ergebnis so stark beeinflussen, daB sich die komplizierte Rechnung in Anbetracht der Ungenauigkeit des Resultates kaum lohnt. Hingegen liegen empirische Unterlagen von Benckert [59] vor. Wenn wir die Darstellung jenes Autors in die hier verwendete ubertragen, laBt sich setzen
21.12(16)
Hier ist U die Umfangsgeschwindigkeit im Labyrinthdurchmesser D, b die axiale Labyrinthbreite und e = ((Jl + (J2)/2, WO (Jl und (J2 die Dichte vor und nach der Labyrinthdichtung bezeichnen. Der empirische Koeffizient K entspricht der GroBe K~w/4E6w der Originalarbeit und ist in Abb. 21.12.4 wiedergegeben. Dieses Diagramm beruht auf Bild 8
0,026
0,022
t 0,018 "'-
0,011,
0,0100
\ ~~ ~~ ~ t;>,.,.
'«< ~ ~ ~ ~ ~~ f« ~ ~ ~ ~ ~ ~
r- ..:.c.::; ~ ~
0,2 0,1, 0,6 0,8 1,0 ~u2/2(Pl-P2) -
1,4
'\
'" '" ~ '" '\ 0,8
0,6 0 0,2 0,4 0,6 ,8 A'/(A'.AU)_
A'
~ ~
00 I AU
o
I
Abb.21.12.4. Zur Berechnung der Spalterregung in Labyrinthdichtungen

21.13 Grundlagen der Lagertheorie 509
in [59], das fur das Labyrinth an einer rotiel'enden Welle gilt. In Abb. 21.12.4 ist PI del' Druck VOl' del' Dichtung, P2 derjenige nach diesel'. Del' Faktor (X (vgl. Abb. 21.12.4) gibt noch eine Korl'ektur in Funktion von A'j(A' + AU), wo A' die ruhende, AU die bewegte LabyrinthobedHiche bedeuten. Die mittlere Umfangsgeschwindigkeit des Fluids im Labyrinth, die maBgebend ist, hangt von diesem Verhaltnis abo Mit Rucksicht auf die Spalterregung erweist es sich als vorteilhaft, die Kamme del' Labyrinthdichtungen auf del' stillstehenden Seite anzubringen.
Die Tatsache, daB bei Dampfturbinen Laufstorungen durch Spalterregung aufgetreten sind, sobald die Leistung einen gewissen kritischen Wert erreichte, hat dazu gefiihrt, die Leistung unmittelbar als die erregende Ursache zu betrachten, also den E££ekt del' Umfangskraft in den Vordergrund zu schieben. Bei del' HD-Turbine ist abel' del' Druck und damit die Dichte del' Leistung praktisch proportional und dadurch, d. h. also durch die Druckverteilungen ist die Erregung primal' gegeben.
21.13 Grundlagen der Lagertheorie
Die Lager industrieller Turbomaschinen sind ublicherweise Olgeschmierte Gleitlager, wobei stets mit vollkommen £lussiger Reibung gerechnet werden dad. Damit sind die Vorgange nach del' hydrodynamischen Schmiedilmtheorie edaBbar. Das mag zunachst die Vorstellung erwecken, daB von den physiko-chemischen Eigenschaften des Schmiermittels nul' die Zahigkeit von Bedeutung sei, was indessen del' Edahrung widersprechen wurde. Insbesondere macht die Schmiedilmtheorie die Voraussetzung vollkommener Haftung zwischen dem Schmiedilm und den Obedlachen, die den Schmierspalt begrenzen. Ob diese Voraussetzung erfiHlt ist, hangt von molekularphysikalischen Gegebenheiten ab, weshalb die Wahl des Schmiermittels nnd del' Werksto££e wesentlich ist. An austenitischen Stahlen ist in diesel' Beziehung schon gelegentlich ein unglU1stiges Verhalten heohachtet worden, vereinzelt ctuch an ·Wellen aus ferritischem 13- %-Cr-Stahl. Allerdings scheiut hoi solchen Schwierigkeiten auch die Gegenwart von Verunreinigungen eine Rolle zu spielen. Kleinste Fremdkorper, die eine Verietzung del' Wellenoberflache bewirken, konnen bei hartenden Werksto££en zur Spanbildung fuhren, was die rasche Zerstorung des Lagers herheifiihrt. Uher die Frage des Haftens des Schmiermittels vgl. etwa Knmps [38j. -Selbstverstandlich ist auch die Tempemturbestiindigkeit des Schmierols von maBgebelldcr Bedeutung. Einen Uberblick uber die Eigenschaften del' Schmierole geben Lang und Steinhilper [39J.
Man ist bestrebt, die fhi.ssige Reibung auch beim Anlaufen und Stillsetzen und beim langsamen Durchdrehen del' auHer Betrieh gesetzten Maschine sicherzustellen, um Abnutzung oder Beschadigung del' Lagerschalen zu vermeiden. Das fruher iibliche intermittierende Weiterdrehen ("Sclutlten") des Laufers del' stillgesetzten Maschine hat sich in diesel' Beziehung nicht bewahrt. Heute zieht man ein stetiges Durchdrehen mit etwa GO min- I VOl', wobei in den Lagern Gleitgeschwindigkeiten von etwa 0,5 bis 2 mjs auftreten und schon Flussigkeitsreibung gegeben ist. AuBerdem erzeugt dann die Schaufelung eine systematische Ventilationswirkung, wodurch die thermisch bedingte Verkrummung del' Gehauseteile unterbunden wird. Zum Schutze del' Lager beim Losbrechen aus dem Stillstand und zur Verminderung des Losbrechdrehmomentes wird jetzt oft eine besondere Hochdruckschmierung vorgesehen, die im normalen Betrieb abgestellt wird. Bei diesel' wird mit einer Kolbenpumpe (Diesel-Einspritzpumpe) Schmierol mit einem Druck von 70 bis 300 bar durch eine kleine Bohrung an einem Punkt del' untersten Mantellinie in die Lagerschale eingefiihrt (vgl. Abb. 21.13.1). In del' Umgebung der Lochmiindung, die entsprechend gestaltet werden muB, bildet sich so ein "Drucksee" , auf clem cler Zapfen selbst im Stillstand schwimmt. 1m Betriebe wurde diese Schmierung nicht genugell, cla del' Olclurchsatz zur Abfiihrung cler Lagerreibungswarme nicht ausreichen wurde.

510 21 Dynamik des Liiufers
Abb. 21.13.1. Hochdruckschmierung eines Trag- Abb. 21.13.2. Zur Herleitung der Differentialgleichung der lagers Schmierfilmtheorie
Nachfolgend wird die grundlegende Differentialgleichung der Schmierfilmtheorie hergeleitet. In einem ruhenden Koordinatensystem x, y, z (Abb. 21.13.2) mogen sich die beiden Flachen 1 und 2 in folgender Weise bewegen. Die x-Komponente der Geschwindigkeit der FHiche 1 sei Ut> wahrend die y- und z-Komponenten Null sein mogen. Die xKomponente der Flache 2 sei U2 , die z-Komponente Null. Die y-Komponente sei V, und zwar muB nicht vorausgesetzt werden, daB sie von x unabhangig sei. Wenn del' Korper 2 z. B. eine Kippbewegung ausfuhrt, wird V eine line are Funktion von x. Del' Raum zwischen beiden Flachen sei erfullt von einer inkompressiblen zahen Flussigkeit, die an beiden Wanden hafte, und zwar moge vorerst laminm·c Bcwcgung vorausgesetzt werden. Gesucht ist das aus dem Stromungsvorgang folgende Druckfeld, bei dem p jederzeit von y unabhangig ist, da die Spalthohe h sehr klein gegenuber den ubrigen Abmessungen ist. Ferner seien die Zahigkeitskrafte derart groB, daB ihnen gegeniiber die Tragheitskrafte vernachlassigt werden konnen. Sind u, v, w die x, y, z entsprechenden Geschwindigkeitskomponenten in einem beliebigen Raumpunkt, so wird die Bewegung der Flussigkeit durch folgende Differentialgleichungen beschrieben. Die Kontinuitiitsglcichuny lautet
fht 8v ow _ 0 8x + oy + 8z - , 21.13(1)
wahrend clas Bewegungsgesetz unter den gegebenen Voraussetzungell dul'ch
21.13(2)
ausgesprochen wird. Gleichungsgruppe 21.13(2) ist das System del' Gleichungen von Navier und Stokes, in dem die Tragheitsglieder weggelassen sind. Bei del' Stromung durch den, sehr engen Spalt konnen ferner 82ujox2 und 02u joz2 gegen 02ujoy2 vernachlassigt werden und das Entsprechende gilt auch fur v und w. Damit vereinfacht sich das Gleich ungssystem in folgender Weise:
21.13(3)

21.13 Gl'undlagen del' Lagel'theol'ie 511
Da nun nach Voraussetzung op/ox und op/oz nicht von y abhangen, kcilmen diese Gleichungen sogleich integriert werden, wobei folgende Grenzbedingungen gelten:
In y = 0 gilt: ~t = U V v = 0, W = 0, )
in y = h gilt: ~t = U 2' V = V + U 2 :~, W = O.
Damit fiihrt die Integration von 21.13(3) auf
_ 1 op 2 U 2 - U1 U - 211 OX (y - hy) + h Y + U 1 ,
( oh) y v = V + U20X lb'
W =-21 ~P (y2 - hy). 11 uZ
I }
21.13(4)
21.13(5)
Die so erhaltenen Ausdriicke kannen in 21.13(1) eingefiihrt werden, womit diese Gleichung iibergeht in
~(h3 OP) + ~(h3 OP) = (j (U + U.) eh + 12V. ox 11 ox OZ 11 OZ 1 2 ox 21.13(6)
Dies ist die Reynolds8che Differentialgleichung, welche die Basis del' Schmierfilmtheorie darstellt. Obwohl an sich ein nicht gekriimmter Spalt vorausgesetzt wurde, laBt sich die Gleichung ohne weiteres auch auf das Traglager anwenden, weil del' Kriimmungsradius sehr gro13 ist gegeniiber del' Spaltweite. Ferner kann sogleich angenommen werden, daB nul' einer del' beiden Karpel' eine Bewegung in x-Richtung ausfiihrt, deren Geschwindigkeit U sei, im praktischen Falle also die Umfangsgeschwindigkeit des Zapfens. Weiter seien r del' Zapfenradius, Llr das kleinste Spiel zwischen Zapfen und Schale bei zentrischer Zapfenlage, 170 die Zahigkeit des Schmiermittels am Eintritt und w die Winkelgeschwindigkeit. Dann lassen sich folgende dimensionslose GraBen einfiihren:
h H=-=T' LJr
Llr 1p =-,
l'
nU Llr Re_C:--, 110
_ v v =-
- WLIT '
1} 1}* =-= -,
170
ll_p(L), 170w
Re* -- 'IpRe,
- z z
- V V == w Llr .
_ 10
10 --U'
21.13(7)
Wenn weitel' b und d Breite und Durchmesser des Zapfens sind, G die vom Lager aufgenommene Querkraft (Gewicht) und Pm = G/bd die mittlere Flachenpressung, la13t sich auch mit diesel' del' entsprechende mittlel'e Dl'uckparameter
IIm - Pm (L) = So 21.13(8) 170 W
bilden, del' auch als SommcrJeld-Zahl bezeichnet wird. Es ist nun leicht zu verifizieren, daB mit diesen Festsetzungen die Diffel'entialgleichung 21.13(6) in die folgende Form iibergeht:
21.13(9)

512 21 Dynamik des Laufers
Bei diesel' Rerleitung ist stets rein laminare Spaltstromung vorausgesetzt. Bei groBen Lagern und hohen U mfangsgeschwindigkeiten gelangt man abel' ins Gebiet des turbulent strcnnenden Schmierfilms. Die damit notige Verallgemeinerung del' Theorie wird erreicht durch einen empirischen Turbulenzansatz. Als dimensionsloser Schubspannungsparameter werde eingefiihrt
T =iC7:W )' 21.13(10)
Die beiden Schubspannungskomponenten Txy und Tzy sind dann gegeben durch
- _ * (1 +~) 8w i Zy -1] 8-' ')I Y
21.13(11)
Riel' ist ')I die kinematische Zahigkeit, ')Is die scheinbare kinematische Zahigkeit, die den turbulenten Impulsaustausch beschreibt. Die gesamte Schubspannung wird
21.13(12)
Die Empirie geht nun ein in den Ansatz, del' £iiI' ')Is/v gemacht wird. Dong-Oul Han [40J verwendet fUr das wandnahe Gebiet den Ansatz von Reichardt [57]
(~) = 0,4[Y V Re !.il + 10,7 tanh ( y VRe Iii )] ')I IV 1]* 10,7 1]*
21.13(13)
und fur den AuHenbereich denjenigen von Nunner, siehe Hinze [58]
(~) = 0 035 Re H2 ,/ 2 + 2 , .'. V i1 i2 , ')I II rJ'"
21.13(14)
wo 1:1 und 1:2 die Schubspannungsva,riablen an den Begrenzungswanden 1 und 2 sind. Es ist dann
21.13(15)
d.h. es ist in jedem Punkt del' klein ere del' beiden Werte (vs/v)JV und (')Is/lI)A einzusetzen. Erganzt man nun das Reibungsglied del' Navier-Stokesschen Gleichungen in del' "Weise, die durch die GIn. 21.13(11) gegeben ist und fUhrt man diese Erganzung dnrch die Herleitung hindurch weitcl', so ist man schlicBlich auf folgendes gefiihrt, vgl. [40J. Man sctze
If d-} "V
I(y) = 1 +' ')Is/1' ' o
H
I = .f I (y) dy, u
21.13(Hj)
-_ J!! ydy
J(y) = -1 + -/ ' , ')I;, ')I o
H
J = I J(f;) dy. o
21.13(17)
K," = , [ J _ (1 J) ,* j8Il]' 12 J(N) J(N) - .I + 2 - J(N) / 1) H &p
21.13(18)
"" J -' 12 [J(H) J(H) - J]
21.13(19)
Dann geht die Reynoldssche Druckgleichung uber in
21.13(20)

21.14 Rechenverfahren und Ergebnisse der Lagertheorie 513
Obwohl diese Gleichung den gleichen Aufbau hat wie G1. 21.13(9), ist die Komplikation doch sehr groB, denn man muB die K fiir jeden Punkt aus den Relationen 21.13(12)-(19) iterativ berechnen. Die dazu benotigten TXY und TZy ergeben sich aus
- all - - 0 Tzy = OZ Y - Tzy ( ), 21.13(21)
welche Gleichungen aus 21.13(3) folgen und wobei die Wandschubspannungell die Werte
- all J(H) 1]* TXy(O) = - aq; J(H) + J(H) ,
_ oil J(H) Tzy(O) = - 8z J(H) 21.13(22)
besitzen. - Ein wei teres iteratives Vorgehen ist notwendig zur Ermittlung des Verlaufes von 1]*. Da die Zahigkeit temperaturabhangig ist, erfordert dies die Ermittlung der Temperaturverteilung, was mit Hil£e der Energiegleichung geschieht, vg1. [40]. Dieser Schritt ist aber im laminaren und turbulenten FaIle selten notig, da man eine sehr gute Naherung erhalt, wenn man mit einem konstanten mittleren 1] rechnet.
Die in der Reynoldsschen Differentialgleichung - in der Form 21.13(9) oder (20) -auftretende Funktion H ist durch die Schalengeometrie und die Zapfenlage gegeben. Hingegen sind ihr noch die Randbedingungcn beizu£iigen. Die tragende Flache reiche von rp A
bis rpE (gegebenenfalls del' volle Umfang 277:)' und es herrsche nirgends wesentlicher Unterdruck. Sogleich in dimensionsloser Form geschrieben, lautet dann die Bedingung £iir die beiden seitlichen Rander, daB der Druck dort verschwindet, also
Il(rp, Z = ±b/d) = O. 21.13(23)
An den beiden Enden rpA und rpE herrschen die beiden Taschendrucke IlA und lIE, d.h. es ist
21.13(24)
Die Losung kann, VOl' allem beim voll umschlossenen Lager, leicht zu dem Ergebnis £iihren, daB bereichsweise ein stark negativer Druck entsteht, was aber ausgeschlossen wurde, weil es physikalisch unmoglich ist. Wo ein solcher Unterdruck theoretisch entstehen wiirde, herrscht praktisch der Verdampfungsdruck des Oles. Diese Ausgestaltung der Theorie ist wohl von Floberg und J alcobs8on [41] erstmals vorgenommen worden, wobei als Verdampfungsdruck vereinfachend der atmospharische Druck gewahlt wird, der zugleich den Drucknullpunkt darstellt. Erhalt man rechnerisch Unterdruckgebiete, so muB man dort II = 0 setzen und sie als Gebiete der Verdampfung und Lu£tausscheidung betrachten. Die Reynoldssche Druckgleichung verlangt, daB an der Grenze, wo der Druckberg in dieses Gebiet iibergeht, die Bedingung oll/orp = 0 erfiillt ist. Man muB also nach einer ersten Durchrechnung an der so erhaltenen Grenze des Gebietes diese Bedingung stellen, die Rechnung wiederholen und die Grenze iterativ verschieben bis aIle Bedingungen erfiillt sind.
21.14 Rechenverfahren und Ergebnisse der Lagertheorie
Die mathematische Schwierigkeit, daB der Druckparameter II in der Reynoldsschen Differentialgleichung von zwei Variablen abhangt, hat man friiher durch vereinfachende Annahmen zu umgehen versucht, insbesondere so, daB man die Variation des Druckes liber die axiale Breite durch Parabelgesetze approximierte, deren Exponenten aus der Erfahrung erschlossen wurden, vg1. etwa [42-44]. Obwohl diese Theorien in vielen Fallen befriedigten, ist die Beurteilung der Genauigkeit im Einzel£alle nicht leicht moglich. Mit dem Aufkommen des Computers lag es nahe, die partielle Differentialgleichung in iiblicher Weise durch Diskretisierung und Ubergang zur Differenzenrechnung zu lOsen. Aus nume-

514 21 Dynamik des Liiufers
rischen Grunden ist dabei eine Variablentransformation durchzufUhren, vg1. [39, 40, 45, 46]. Das Rechenverfahren zur Bestimmung der stationaren Lagerdaten laBt sich in groBen Zugen wie folgt beschreiben.
I
I
JJ5,t<9 '-- I
'1 A, g )'
f--~j3
I g A
Abb. 21.14.1. Lagerzapfcn in Lagcrschale, allgemeine Situation
Ausgangspunkt ist die Wahl einer Exzentrizitat e - bzw. des entsprechenden Wertes e = e/LJr - und die Schatzung eines Verlagerungswinkels fJ des Zapfenzentrums Z (Abb. 21.14.1). - In der Abbildung ist eine kreiszylindrische Lagerschale dargestellt, doch erlaubt das Verfahren beliebige Schalengeometrie. - Erfolgt die Lagerbelastung senkrecht nach unten, so bewegt sich Z mit steigender Last langs einer Kurve g, der Giimbel-Linie, die bei zylindrischer Lagerschale naherungsweise ein Kreis ist. Bei anderer Schalengeometrie kann man mindestens fur den Anfang del' Iteration die kreisformige Gumbellinie zugrunde legen. Mit del' Lage von Z ist bei gegebener Schalengeometrie die Funktion
H in G1. 21.13(9) odeI' (20) bestimmbar, und da im stationaren Falle V = ° ist, kann jetzt die Losung del' Differentialgleichung mit den Randbedingungen erfolgen. Sie liefert die II-Verteilung am Lagerzapfen und aus deren Integration auch die Richtung del' resultierenden Kraft, die abel' mit der Richtung del' Belastung iibereinstimmen sollte. 1st dies nicht del' Fall, so ist del' ·Winkel fJ entsprechend zu verandern. 1m Falle del' turbulenten Bewegung ist in den IterationsprozeB noch die Bestimmung der Kx und Kz einzubeziehen, wie unter 21.13 angegeben. 1st schlieBlich die Iteration beendet, so kennt man die Verteilung del' Geschwindigkeiten aus den Gin. 21.13(5) (die in dimensionslose Form zu bringen sind, und in denen bei Turbulenz die Zahigkeit durch den verallgemeinerten Ausdruck zu ersetzen ist). So gewinnt man den SchmiermitteldurchfluB, die Schubspannungsverteilung am Zapfen, mithin den Reibungskoeffizienten und ebenso die resultierende Druckkraft, d.h. die Lagerbelastung, die dem Ausgangswert e entspricht. - Diese Rechnung fUr mehrere c durchgefuhrt, liefert schlieBlich die exakte Gumbellinie und das vollstaridige Verhalten des Lagers in Funktion seiner Belastung.
Von besonderer Bedeutung ist die Bestimmung des 'instationih'en Verhaltens, d. h. del' unter 21.6 eingefUhrten Koeffizienten lcij und bij . ZweckmaBig bildet man aus diesen dimensionslose GroBen gemaB
LJr Yij -lcijO ' 21.14(1)
Hier ist G die statische Lagerbelastung (Gewicht). Das V orgehen bei del' Ermittlung diesel' Koeffizienten kann anhand del' Figur in Abb. 21.14.1 rechts veranschaulicht werden. Ausgangspunkt ist eine Gleichgewichtslage: del' ZapfenmittelpunktZ liegt also auf del' Gumbellinie g. Von hier aus denkt man sich den Zapfen einmal in horizontaler Richtung nach Zv

21.14 Rechenverfahren und Ergebnisse der Lagertheorie 515
einmal in vertikaler Richtung nach Z2 verschoben. Die Verschiebungsstrecken LlI und Ll2 sind sogleich dimensionslos zu verstehen, d. h. LlI ist z. B. die durch r dividierte Strecke ZZI'
Nun sei F; die aus del' II-Verteilung ermittelte statische Zapfenkraft; del' Akzent bedeute, daB es sich urn den dimensionslosen Wert handelt, del' entsteht aus del' II-Verteilung und mit einem Zapfenradius 1. Nun wird Punkt Zl festgehalten, fUr diese Zapfenlage die II-Verteilung gerechnet und aus diesel' durch Integration die Kraft ff;.. Ebenso ergibt sich fUr die Zapfenlage Z2 eine Kraft Ji';. Alsdann sind
..... , ..... , -, - - ....... LlFI = FI - F., LlF~ = F; - F~ 21.14(2)
die Zusatzkrafte, die den Verschiebungen LlI und Ll2 entsprechen. LlF~ hat die Komponenten LlF~l und LlF;l, wahrend LI]i\ die Komponenten LlF;2 und LlF;2 besitzt. Beachtet man die Definition von 11 Gl. 21.13(7) und diejenige von Yii' Gl. 21.14(1), so laBt sich leicht verifizieren, daB
21.14(3)
Urn die f3ii zu bestimmen, geht man wieder von del' Gleichgewichtslage aus und stellt sich VOl', del' Zapfen bewege sich mit einer Geschwindigkeit 10 durch diese Lage hindurch, einmal in horizontaler, einmal in vertikaler Richtung. Die Geschwindigkeit 10 wird so gewahlt, daB wjw Llr = 1. Aus del' Geometrie del' Lagerschale ergeben sich fUr die horizon-tale und die vertikale Bewegung je eine Verteilung del' GroBe V(IP), die bisher stets Null war. Nun werde V in Gl. 21.13(20) eingesetzt und 11 ersetzt durch 11 + Llll, wo Llll del' Anteil ist, del' durch das Hinzutreten von V bedingt ist. Da die Storbewegung als klein vorausgesetzt wird, zerfallt dann die Differentialgleichung in zwei Gleichungen, eine fiir den statischen Anteil und eine fUr die Storung V allein, die lautet
~ l H3 .. O(Llll)] + r~ l~ O(LI!l)] = 12 V. OIP Kx'Y)'" oIP dz Kz'Y)'" bz
21.14(4)
Fiir jede diesel' beiden Storbewegungen erhalt man aus diesel' Gleichung eine Losung, deren Integrale die Zapfenkrafte (dimensionslos) p~, f; ergeben. Diese wiederum haben Komponenten P{l> P~l' P;2' P~'l.' Aus ihnen ergibt sich
21.14(5)
wie unter Beachtung del' Definition 21.14(1) zu verifizieren ist. Bei den ganzen theoretischen Entwicklungen ist hier vorausgesetzt worden, daB die
Tragheitsglieder in den Bewegungsgleichungen vernachlassigbar seien. Das trifft stets zu bei turbulenter Bewegung, wahrend im laminaren FaIle flir
Be 1jJ ? ,...., 1, 21.14(6)
del' EinfluB del' Traghcitskriifte spiirbar wird. Das fiihrt zu einer weiteren Komplikation del' Theol'ie, vgl. [40].
Obwohl die Schmierfilmtheorie eine auBel'ol'dentliche Verfeinel'ung erfahren hat, stiitzen sich die Hel'steller nicht allein auf die Theorie, sondern weitgehend auch auf Versuche. Abb.21.14.2 zeigt eine Versuchseinrichtung von BBC, die zur Erpl'obung del' Kippsegmentlager groBer Dampfturbinen dient. Die Belastung wird hier von hydraulischen Kolben aus tiber Belastungssegmente aufgebl'acht. Eine andere Anordnung besteht darin, den Zapfen praktisch spielfrei in Walzlagern zu halten und dafUr die Schale von auBen zu belasten und beweglich anzuordnen, so daB sie die Verschiebungen erfahrt, vgl. etwa [47]. Gemessen wird in del' Regel die Druckverteilung und die relative Verlagerung zwischen Zapfen und Schale. Je nach Versuchsanordnung kann die Belastung auch dynamisch erfolgen.

516 21 Dynamik des Laufel's
Abb.21.14.2. Lagel'vel'suchsstand von BBe zur Priifung gl'oBel' Gleitlagel'. Nach Hohn [53]
Theoretische und experimentelle Ergebnisse libel' Gleitlager sind in del' Literatur in groBer Zahl veroffentlicht, vgl. etwa [48-51]. In [39] finden sich umfassendetheoretisch bestimmte Unterlagen libel' Lager mit zylindrischer Schale. Abb. 21.14.3 faBt einige diesel' Ergebnisse flir das vollumschlossene Lager zusammen. Mit del' Flachenpressung Pm=Glbd folgt mit So = Pm(1p2frJw) die Sommerfeld-Zahl, worauf aus den Diagrammen s, p, und q bestimmt werden kOnnen. Alsdann sind Reibungsleistung P, durchzusetzender minimaler 0lvolumenstrom Q und 0ltemperaturerhohung LIT
P = p,GU, Q = qrU Llr, LlT = PlecQ, 21.14(7)
wo e und c Dichte und spezifische Warmekapazitat des Lagers sind.
1,6 I II 40
\ 1,6
1 \ b/d=W / I \ b/d=0,5 b/d=W V
fJ I--/ 1\
\ ......1
/ 0,5 V /
V ....... y 0,1, ~ "-
K I'-.. V ..........
........-V 0,1,
I--o 0,2 0,1, 0,6 0,8
r--r-r-:: o 0,2 0,1, 0,6 0,8
o 0,2 0,1, 0,6 0,8
e-
Abb. 21.14.3. Rechnel'ergebnisse fllr voll umschlossene Gleitlager mit zylindrischer Schale. Nach Lang und Steinhilper [39]
In Abb. 21.14.4 sind ein Lager mit zylindrischer Schale, ein Zitronenlager und ein MFG-Dreikeillager veranschaulicht, wahrend Abb. 21.14.5 von Glienicke [48] experimentell besiimmte Daten libel' Dampfungs- und Federkonstanten zusammenfaBt. Die Lager hatten samtlich bid = 0,5, wahrend die Spiel daten die folgenden sind: Zylinderlager Llrlr = 0,0019, Zitronenlager ilrminlr = 0,00135, !1rmaxlr = 0,00365, MFG-Lager Llrmin/r = 0,0011, Llrmaxlr = 0,00429. Ma,n beachte, daB IIm zugleich die Sommerfeld-Zahl ist, wahrend die Ordinatenwerte mit Yii und fJii identisch sind.

:H.14 Rechenverfahl'en und Ergebnisse del' Lagel'theoric 517
Abb. 21.14.4. a) Zylindrisches Lager; b) Lager mit Zitronenspiel (Zweikeillager); c) MFG-Dreikeillager
10
8
......
-'I / -c 10 ,\ I
~ i"-~
I -2
O,Z I
V
22
t-J.1
12
I 21
lylindrisches lager
v V
~v V V JJ-- 11
-12_ l--I---
---
.-I-
----r-
1,0 1,'f 1,8 ZJ
Zilronenloger NflF- OreilreJllogsr
V V l--l.-- P V
t- 22 ~
21 i-- h 11
t- n 21
V ~ 12
H~ -I-
rst I J I"- 22 22 -t--
r-- 11 t-- t-!!. I I
.i
V1i 21 21 12 I
0,2 0,1f at 0,80,1 0,2 0,3 JJm-
Abb.21.14.5. Dampfungs- und Federkonstanten von zylindrischen Lagern, Zitronenlagern und MFG-Dreikeillagern, bid = 0,5. Kraftangriff senkrecht von oben nach unten, nach Versuchen von Glienicke [48]. Es ist
(LlrlllinG)kij = Yij' (LlrminG)wbii = fJij' 7Cm = So
Abb. 21.14.6 gibt den Zusammenhang zwischen So und f fUr drei typische Lager nach [49] wieder und zeigt, daB diejenigen Lagertypen , die gunstige Stabilitatseigenschaften besitzen, weniger belastbar sind bei gegebenem f. Feder- und Dampfungskonstanten fur Kippsegmentlager nach [49] gibt Abb. 21.14.7. Auch kleines bid vermindert ubrigens die spezifische Tragfahigkeit und erh6ht die Stabilitat.
Del' Ubergang zur Turbulenz des Schmierfilmes setzt etwa ein bei Re = U l1rlv R::! 500-1000, abhangig von del' Geometrie des Lagers, vgl. [52, 53]. Kippsegmentlager scheinen hier ein besonders gunstiges Verhalten zu zeigen, vgl. Varga [54]. Abb. 21.14.8 zeigt nach [.40] f in Funktion von So fur verschiedene Re, wah rend Abb. 21.14.9 die zugehorigen Feder- und Dampfungskonstanten gibt, alles fUr ein MFG-Vierflachenlager. Die Kurven iiber die Pii und Yij konnten zunachst den Eindruck vermitteln, daB die Stabilitat durch die Turbulenz nicht stark beeinfluBt werde. Man muB aber beachten, daB fiir eine gegebene Lagerbelastung So mit hoher Turbulenz ein kleineres f entsteht. Bestimmt man fiir dieses die Pii und Yii' so erhalt man Werte, die yom laminaren Fall stark ab-

518 21 Dynamik des Liiufers
0.8 -
/ I I/' o o
V ~
l/
2 -~ :::::-/' I
-
50-
-e-
r- - c---
2
0.5
0.4
0.3
0.2 ~ t--
Sl 0.1
0
-07 '0
/ ./
0.1
/" /" 22
./
II
21 -=:::. :::::.::: r;r 0.2 0,3
t--rE---I--
/' I-22 V .....-
f-- 12
I--I--e- 21 ........
r-
0.4 0 0,1 0.2 50-
0,3
0.08
0.06
0.04 t 0.02 i o
-0.02 X -0.04
0.4
Abb. 21.14.6. Zusammenhang zwischen £ und So fur verschiedene Lagertypen: 1 zylindrische Lagerschale, 2 Zitronenlager, 3 MFGDreikeillager, bld= 0,8. Nach Glienicke [49]
Abb. 21.14.7. Feder- und Dampfungskonstanten eines Kipp_ segmentlagers mit drei Segmenten, bid = 0,73
0.8
i f o o
10 22 II
8
6
21
2
o
-2
-4 12
-I-::: ~ -}-/ ;:.-V
~1' ~ 0,2 0.4 0.6
50-
~~ ~ ~ ,. ~ ~. \ ~ ----
E"-'
~ ',,::::-.
0,8
Abb.21.14.8. Zusammenhang zwischen £ und So fur einMFGVierflachengleitlager, bid = 0,5, Llrmax/Llrmin = 3, fur ver
W schiedene Reynolds-Zahlen: 1 laminar; 2 turbulent, He =
2000; .3 turbulent, Be = 5000. Nach Don(J-Chul Han [40]
7
~ 6
/, 22
d7' ~
~
Re = llLlr v
-
~ -- Laminar
---- Re = 2000 '----
5
~ -.- Re = 5000
~ ~ ~ ~
-...; ~ :-:::::..:: \ ~ ~ ~ 22
3 !--. 11.21 ~ --~ p:::::;;
~ ~. 12
Re= uLlr --
I v --Laminar ----Re=2000 - -
~ ~ ~~
-.....; ~ ~II
12,21 o -·-Re=5000
I I I -6 -I o 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 0 0.1 0.2 OJ 0.4 0.5 0.6 0.7 0.8 0.9 U
E- E-
Abb. 21.14.9. Feder- und Dampfungskonstanten fUr ein MFG-Vierflachengleitlager bid = 0,5, Llrmax/Llr min = 3, fur verschiedene Reynolds-Zahlen

21.15 Unterlagen liber Axiallager 519
weichen. Grosso modo hat die Turbulenz etwa den EHekt einer erhohten Zahigkeit, woinit das Lager ein Verhalten zeigt, als ob die Belastung (Sommerfeld-Zahl) kleiner ware. Kleine Lagerbelastung ver8chlechtert abel' die Stabilitatseigenschaften, und das gl£liche gilt daher auch von der Turbulenz. Dem kann man entgegenwirken, indem man die mittlere FHichenpressung Pm im FaIle der Turbulenz hoher wahlt. Allgemein vergroBert die Turbulenz den Reibungskoeffizienten in einem MaBe, das von del' jeweiligen Situation abhangt, beim trbergang vom laminaren Fall auf Re = 5000 z.B. urn einen Faktor 1,7 bis 3,5. 1m laminaren Gebiet ist fl/"P fUr festes So unabhangig von Re.
Bei Kippsegmentlagern muB in Extremfallen auch die Segmentmasse mit in die dynamische Betrachtung einbezogen werden, vgl. [40], da dann das sog. Segmentflattern auftreten kann.
Radiale Lagerspiele der Gleitlager liegen in del' GroBenordnung Llr/r = 1-4%0' kleinste im Normalbetrieb zulassige Schmierspaltweiten etwa bei 0,01-0,02 mm. Flachenpressungen betragen bei klein en Maschinen nur wenige bar, bei groBen hingegen bis 40 bar. Die Gleitgeschwindigkeiten erreichen bei groBen Maschinen 100 mis, liegen abel' bei kleineren sehr viel tiefer. Ais Schmierolerwarmung wird etwa 15°C zugelassen.
21.15 Unterlagen liber Axiallager
Die theoretische Grundlage zur Berechnung del' Axiallager ist die gleiche wie fUr die Traglager. Die tragende Flache wird stets in einzelne Sektoren eingeteilt, die leicht geneigt angeordnet werden, damit Olkeile entstehen. Diese tragenden Flachen soIl en in Umfangsrichtung nicht zu dicht aufeinander folgen, damit genugend Raum fur Zu- und Abfuhr des Schmieroles bleibt. Die Lucken sollten etwa 30-40% der verfugbaren Ringflache einnehmen. Fur hohe Anspruche werden solche Lager als Michell-Lager (amerikan. King8b1try-Lager) ausgebildet. Bei dies en werden die einzelnen Tragklotze kippbar und exzentrisch unterstutzt, so daB sie die leichte Neigung im Betrieb von selbst annehmen.
Abb. 21.15.1. Elastisch unterstlitzte Tragkliitze eines Michell-Lagers (BBe)
Die Ahstiitzung der Klotze wird so ausgebildet, daB eine moglichst gleichmaBige Verteilung des Schubes gesichert ist. Heute bevorzugt man zu diesem Zweck elastische Unterstiitzungen, wie im Beispiel Abb. 21.15.1. SolI das Lager in beiden Richtungen Schub aufnehmen konnen, so muB dafUr gesorgt werden, daB jeweils auch auf del' entlasteten Seite eine gewisse Restbelastung bleibt, so daB die Schraglage der Klotze ~uch dann gesichert ist, was durch elastische Elemente erreicht werden kann. Dann ist das Lager unempfindlich gegen Schubumkehr. Fricke [55] untersucht Axiallager mit kreisformigen, zentral unterstutzten Gleitschuhen, bei denen sich die Keilform des Schmierspaltes durch elastische Deformation des Gleitschuhes einstellt. Fur kleinere Belastungen genugen auch Axiallager mit festen Gleitflachen, die ihre Schraglage lediglich durch Bearbeitung erhalten.
Berechnungsunterlagen fUr Axiallager liegen in groBer Zahl VOl', vgl. die zusammenfassende Darstellung in [39]. Umfassende Berechnungen hat Pinku8 [56] durchgefuhrt, indem er die DiHerentialgleichung durch Differenzenrechnung integrierte. Abb.21.15.2 zeigt die Anordnung des Gleitschuhes und gibt die Bezeichnungen. Del' GrundriB des Kreissektors ist gekennzeichnet durch den Winkel e und das Breitenverhaltnis B/ R. Die Dicke h des Olspaltes hangt gemaB
h=a+ f (l-:) 21.15(1)

520
10
8
6
3
2
1,0
0,8
0,2
1 a aOB
0,06
0,0 'I
0.03
0,02
1
:.l1 Dynamik des Laufer::;
Abb.21.15.2. Tragfliiche eines Axiallagers
f-- 1 EJ = 300 f- 2 = '100 I f-- 3 =550
f = 1 f-'1 =800
./
.£. ~ ~
~ ~ ~
I '1-~ l-f- t::; -I-': r;;; ~ a 1 I-- 3 / T=z
f-- 2------1
W # r...",..
~ ~
~ -t::; ~ J=t I--HI f----
3~ ~ ;..-- /' "/ f--f--2 . 1
~ ~ V
~ a 1
~ T=8 - ./
f-- If ...... A / 1/ ~ ~ / /' V ..... f-
I-- 31~'" V 'l:: 1 2 l7 ~ ~ ~
~ ~ ~
liI~ ~ V 3 t/
0,3 AS 0,6 0,7 0.8 0.5 B/R-
Abb. 21.15.3. Kennzahl T fUr die Tragfahigkeit von Axiallagcrn. Nach Pinkus [56]

:H.15 Unterlagen liber Axiallager 521
vom Winkel I} abo Die Rechenergebnisse sind in Abb. 21.15.3-7 zusammengefaBt. Die Berechnung eines Lagers kann anhand dieser Diagramme wie folgt durchgefiihrt werden.
Man wahlt Anzahl und Abmessungen der TragfHichen, einschlieBlich der Abmessungf (Abb. 21.15.2), welche die Schraglage der FHiche festlegt. Aus dem aufzunehmendenAxialschub A gewinnt man die mittlere FHichenpressung Pm und kann hiermit die Kennzahl
T = 'Yjn8 (B)2 Pm f
21.15(2)
berechnen, wobei n8 die sekundliche Drehzahl ist. Mit den bekannten T und B( R erhalt man aus Abb. 21.15.3 durch Interpolieren a(f, somit also a. Es ist zu priifen, ob dieser Abstand noch zugelassen werden kann. Befriedigt die Lasung, so lassen sich aus Abb. 21.15.4-7 die GraBen j, q., qe, {}p und yp bestimmen. Mit z als Anzahl der Kippsegmente
/ '1
1 12
.' ,/1
/ ,/ 11
10 j ~'
" V " / ~' /t /
9
/ V ,/2 ,
I /' V V /2 8
7 / / V V /'
.I / /V/
.' 1';' /
I " / 1', " A .' ,-
/ / " V / " /. ,,' / / " / V ~
1/ / .,' ;' ,,'" V /. 1" ""3 .-'-5
/ / /' ,/ /' ~: .. .",3 / ..-/ /. " /' ~
. .. V .-./
/ / '" ..- /' ~ ; .. ./ V kf.;. /;' /' .... " V ~ ~"'f . ,' ./ .... ...- . ... 3
", ~;, ,," ....- .... ; r; .. . ' V i-""''f
". V "... l,....--'
~ ' ..
V "... ~
".: ... ' "....-1'"' ...... "....-.... & ;.~ ~ :....---
020 0 30 0 0 'f00 50 60 0 70 0 80 0
B-
Abb. 21.15.4. Kennzahl.i zur Berechnung der ReibungsleiRtung von Axiallagern. Nach Pinku8 [56]
-- BIR = 1/3 ----- BIR = 1/2 -.-.-.- BIR = 2/3
1 al! = 1/8 2 al! = 1/-1 3 alf = 1/2 4 al! = 1

522 21 Dynamik des Laufers
~~~~~~~~~~~-~~~~~ .-~F--: ......... F-' F-
~8 J....-'::~:;;.-~t%
B 1 /~ r--=""3 /~ ~7r- R +-1/.""" A~I7~"+----+-+--+---1-+--+-j--J.,.....-::1--::I
VB __ ~~
y /
90· B-
Abb. 21.15.5. Faktor qs zur Berechnung des OIdurchflusses durch AxialIager. Nach Pinkus [56]. In jeder Kurvenschar Kurven von oben nach unten gultig fur a/I = 1/8, 1/4, 1/2, 1
0,29
t 0,16
0,08
o
t 0,16
~
0,08
o
t ~16 ~
~08
---
........
--...
-....
-
r-. 1
r- 2 -3
If
r-....... 1
r---~ r----...;;
-.J
If
r-.... 1 ............ r-t. r---. i'-rl- .....
If
I a -1 1 1- ; If -':,/2 r-1-- ..... 3 = 1/9 -I- 9 1/8 r-
B 1 rr=-z r--.-r-. ---~ r---- r--
JL.?. R 3
r--r-. l-t::: r- to--
r-- I- r-- I-- r--
0 50 60 0 70 0 80 0
€J-Abb. 21.15.6. Faktor qe zur Berechnung des OIdurchfIusses durch AxialIager. Nach Pinkus [56]

21.15 Unterlagen iiber Axiallager
werden dann Reibungsleistung P und Olvolumenstrom Q
zj:rt'Y}n;R4 P=--j-
Q =znRBjns{qs + qe + : [1 - ~ (~)J;},
523
21.15(3)
21.15(4)
wahrend mit -&p und Yr die Koordinaten des Stiitzungspunktes gegeben sind. Die dritte der Gin. 21.14(7) liefert auch die TemperaturerhOhung.
o~ r--,---,------., 8/H=1/3 B/R= 1/2 B/R=2/3
8=80° v· .. ~ ~Ssc ~ WO
t a8~~-1--T--r~ ~<l..IQ:)
@=800 7
.\~ ;S ~~ '100
\.J ~ ~ ~O' ~ ~ 30°
......
~ ~ .. 30° '10' s? r- .L / .L
a6l---j----t---r--T~
.... ~o 'IO~ ~ ~ ...
... t-- ~ r-~o .. r-r--.............. -4.@=800 ~
t 0,5~H?'-F::;E~ ~I~
l'--~800
o 0,8 o 0/1 0,8 o 0/1 0,8 a!f
Abb. 21.15.7. Diagramm zur Berechnung des Angriffspunktes der Resultierenden der Oldruckkrafte bei Axiallagern. Nach Pinkus [56]
Ais einfache Naherung kann auch folgendes verwendet werden. Es ist
L = n(2R - B) -&/360° 21.15(5)
die mittlere GIeitschuhlange und q = LIB. Schreibt man sich dann die Minimalsfaltweite a vor, so laBt sich der Axialschub
A = 1)w(2R - B) zB£2 15a2 (1 + q2)
iibertragen, und der Reibungskoeffizient wird
f1, = V'Y}w(2R - B) nzB(1 + q2)IA.
21.15(6)
21.15(7)
Kleinstzulassige Spaltweiten a haben die GroBenordnung 0,01-0,02 mm. Bei Kippsegmentlagern konnen die Flachenpressungen etwa 35 bar erreichen, wahrend die Umfangsgeschwindigkeiten im Mittelkreis bis auf 80-100 m/s ansteigen konnen. Bei Lagern mit festen Tragflachen wird man die Flachenpressung nicht iiber 10 bar wahlen, die mittleren Umfangsgeschwindigkeiten nicht iiber 60 bis hOchstens 80 m/s. Allgemein soIl die Erwarmung des Schmieroles 20°C nicht iiberschreiten.

524 :21 Dynamik des Laufers
Literatur zu Kap. 21
1. Foppl, A.: Das Problem der Lavalschen Turbinenwelle. Civiling. (1895) 248-250. 2. Stodola, A.: Neuere Beobachtungen iiber die kritischen Umlaufzahlen von Wellen. Schweiz. Bauztg. 68
(1916) 210-214. 3. Stodola, A.: Dampf- und Gasturbinen, 6. Aufl. Berlin: Springer 1924. 4. Biezeno, C. R.; Grammel, R.: Technische Dynamik, 2. Aufl. Berlin, Gottingen, Heidelberg: Springer 1953. 5. Bagg, A. C.; Sankey, G. 0.: Some Dynamic Properties of Oil-Film Journal Bearings with Refference to
Unbalance Vibration of Rotors. Trans. ASME, J. Appl. Mech. 23 (1956) 302-306. 6. Bagg, A. C.: Sankey, G. 0.; Film Properties for Unbalance Vibration Calculations. Trans. ASME, J. Appl.
Mech. 25 (1958) 141-143. 7. Pjutzner, B.: Das dynamische Verhalten von rotierenden Wellen unter Beriicksichtigung der Schmierfilm
elastizitat in den Lagern. Forsch. lng.-Wes. 32 (1966) 19-28. 8. Kellenberger, W.: Biegeschwingungen einer unrunden rotierenden Welle in horizontaler Lage. lng. Arch.
26 (1958) 302-318. 9. Tondl, A.: Some Problems of Rotor Dynamics. London: Chapman and Hall Hl65.
10. Bochreuther, W.: Krafte bei axial durchstromten Spaltdichtungen. Diss. Univ. Stuttgart 1975. 11. Pollmann, E.: Stabilitat einer in Gleitlagern rotierenden Welle mit Spalterregung. Fortschr.-Ber. VDI-Z,
Reihe 1, Nr. 15 (1969). 12. W oklrab, R.: EinfluB der Lagerung auf die Laufstabilitat einfacher Rotoren mit Spalterregung. Konstruk
tion 28 (1976) 473-478. 13. Thomas, B. J.: Zur Laufstabilitat einfacher Turborotoren, besonders bei Spalterregung, Konstruktion
30 (1978) 339-344. 14. Urlichs, K.: Die Spaltstromung bei thermischen Turbomaschinen als Ursache fUr die Entstehung schwin
gungsanfachender Querkrafte. lng. Arch. 45 (1976) 193-208. 15. Prohl, M. A.: A General Method for Calculating Critical Speeds of Flexible Rotors. J. Appl. Mech. 12 (1945)
142-146. 16. Bigret, R.: Nouvelles methodes de determination des vitesses critiques de flexion d'un rotor repostant
sur paliers. Rev. Gen. Mec. (1953) 35-43. 17. Fuhrke, B.: Bestimmung von Balkenschwingungen mit Hilfe des Matrizenkalkiils. lng. Arch. 23 (1955)
329-384. .
18. di Taranto, R. A.: Natural Frequences of Nonuniform Beams. Trans. ASME, J. Appl. Mech. 25 (1958) 57-63.
19. Uhrig, R.: Elastostatik und Elastokinetik in Matrizenschreibweise. Berlin, Heidelberg, New York: Springer 1973.
20. Spieth, R.; Uhrig, R.: Schwingungsberechnung rotierender Wellen. Brown Boveri Nachr. 48 (1966) 107 bis 116.
21. Schirmer, G. F.: Zur Stabilitat der Schwingungen von Turbinenwellen. Diss. TH Darmstadt 1969. 22. Vogel, D. B.: Die Stabilitat gleitgelagerter Rotoren von Turbomaschinen unter besonderer Beriicksichti
gung einer Erregung durch Spaltstrome. Diss. TU Miinchen 1969. 23. Gasch, R.: Selbsterregte Schwingungen rotierender Wellen. Konstruktion 23 (1971) 5-13. 24. Gasch, R.: Unwuchterzwungene Schwingungen lind Stabilitat von Turbinenlaufern. Konstruktion 25 (1973)
161-168. 25. Grabowski, B.: Zur modal en Simulation des instationaren Schwingungsverhaltens von Turbolaufern. Diss.
TU Hannover 1976. 26. Nordmann, R.: Schwingungsberechnung von nichtkonservativen Rotoren mit Hilfe von Links- und Rechts-
Eigenvektoren. VDl Ber. Nr. 269 (1976) 175-182. 27. Nordmann, R.: Schwingungen von Turborotoren. Konstruktion 30 (HJ78) 345-351. 28. Zurmuhl, R.: Praktische Mathematik, 5. Aufl. Berlin, Heidelberg, New York: Springer 1965. 29. Nordmann, R.: Ein Naherungsverfahren zur Berechnung der Eigenwerte und Eigenformen von Turbo
rotoren mit Gleitlagern, Spalterregung auBerer und innerer Dampfung, Diss. TH Darmstadt 1974. 30. McGuire, P. M.: The Dynamic Design of Large Turbine Generator Rotor Systems. lnst. of Mech. Eng.,
Conf. Steam turbines for the 1980's, London 1979, p. 217-224. 31. Urlichs, K.: Dureh Spaltstromung hervorgerufene Querkrafte an den Laufern thermischer Turbomaschinen.
Diss. TU Miinchen 1975. 32. Wohlrab, R.: Experimentelle Ermittlung spaltstromungsbedingter Krafte an Turbinenstufen und deren
, EinfluB auf die Laufstabilitat einfacher Rotoren. Diss. TU Miinchen 1975. 34. Piltz, E.: Belastung von Dampfturbinenlaufradern bei Auslenkungen der Welle. Konstruktion 24 (1972)
141-148. 35. Piltz, E.: EinfluB von Dampfbelastungen auf die Stabilitatsgrenze einer einstufigen Modellturbine. Kon
struktion 25 (1973) 130-135. 36. Thomas, B. J.: lnstabile Eigenschwingungen von Turbinenlaufern, angefacht durch Spaltstromungen in
Stopfbiichsen und Schaufelungen. Bull. de. l'AlM Nr. 11/12 (1958) 1039-1063.

Literatur zu Kap. 21 525
37. Thomas, H. J.; Urlicks, K.; Wohlrab, R.: Lauferinstabilitat bei thermischen Turbomaschinen infolge Spalterregung. VGB Kraftwerkstechnik 56 (1976) 377-383.
38. Kamps, R.: Lager- und Schmiertechnik. Dusseldorf: VDI-Verlag 1957. 39. Lang, O. R.; Steinhilper, W.: Gleitlager, (Konstruktionsbucher, Bd.31). Berlin, Heidelberg, New York:
Springer 1978. 40. Dong-Chul Han: Gleitlager-Turbulenz. Forschungsberichte der FVV, Heft 265, Frankfurt 1979. 41. Floberg, L.; Jakobsson, B.: The Finite Journal Bearing Considering Vaporization. Transactions of Chalmers
University of Technology, N 109, Goteborg, 1957. 42. Schiebel, A.; Komer, K.: Die Gleitlager, Berechnung und Konstruktion. Berlin: Springer 1933. 43. Frankel, A.: Berechnung von zylindrischen Gleitlagern. Mitt. lnst. Thermodynamik u. Verbrennunga
motoren, ETH Zurich. Zurich: Leemann H)44. 44. Vogelpohl, G.: Zur Integration der Reynoldsschen Gleichung fUr das Zapfenlager endlicher Breite. lug.
Arch. 14 (1943-44) 192-212. 45. Sassenfeld, H.; Walther, A.: Gleitlagerberechnungen. VDI-Forschungsheft, Nr.4H. Dusseldorf: VDI
Verlag 1954. 46. Hakansson, B.: The Journal Bearing Considering Variable Viscosity. Trans. of Chalmers Univ. of Techno
logy, Goteborg 1965. 47. Dillenkofer, H.: Einflu.B der Lage der Olzufiihrungsstelle auf das Betrieb~verhalten stationar belasteter
zylindrischer Gleitlager endlicher Breite. Diss. Univ. Stuttgart 1975. 48. Glienicke, J.: Feder- und Dampfungskonstanten von Gleitlagern fUr Turbomaschinen und deren Einflu.B
auf das Schwingungsverhalten eines einfachen Rotors. Diss. TH Karlsruhe 1966. 49. Glienicke, J.: Experimentelle Ermittlung der statischen und dynamischen Eigenschaften von Gleitlagern
fur schnellaufende Wellen. - Einflu.B der Spaltgeometrie und der Lagerbreite. Fortschrittsber. VDI-Z, Reihe 1, Nr. 22 Dusseldorf 1970.
50. Sckaffrath, G.: Ein Verfahren zur Berechnung der vier Feder- und Dampfungskoeffizienten von Radial-lagern. Forsch. lng. Wes. 35 (1969) 184.
51. Klumpp, R.: Ein Beitrag zur Theorie von Kippsegmentlagern. Diss. TV Karlsruhe 1975. 52. Leonhard, H.: Gleitlagerturbulenz, Forschungsberichte der FVV, Heft R 342, Frankfurt 1979. 53. Hohn, A.: Die Lager von Dampfturbogruppen. Brown Boveri Mitt. 62 (1975) 72-83. 54. Varga, Z.: Kippsegment-Radiallager 900 mm fUr Dampfturbogruppen: Eigenschaften und Erprobung.
Brown Boveri Mitt. 64 (1977) 309-320. 55. Fricke, J.: Das Axiallager mit kippbeweglichen Kreisgleitschuhen. VDI-Forschungsheft, Nr. 567, Dussel
dorf 1975. 56. Pinkus, 0.: Solution of the Tapered-Land Sector Thrust Bearing. Trans. ASME 80 (1958) 1510-1516. 57. Reichardt, H.: Vollstandige Darstellung der turbulenten Geschwindigkeitsverteilung in glatten Leitungen.
ZAMM 31 (1951) 208-219. 58. Hinze, J.: Turbulence. New-York: McGraw-Hill 1959. 59. Benckert, H.: Dynamisches Verhalten von Labyrinthdichtungen. In: Festschrift zum 60. Geburtstag von
Prof. Dr. J. Wachter, Vniv. Stuttgart 1980.



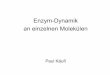











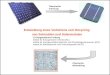










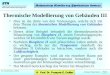

![Buchliteratur - Springer978-3-322-99491...Thermische Turbomaschinen, Berlin 1958. [A 19] J. Zucrow. Aircraft and Missile Propulsion, New York 1958. [A 20] A. Betz, Einflihrung in die](https://img.pdfslide.org/doc/110x75/614abe1112c9616cbc699cf5/buchliteratur-springer-978-3-322-99491-thermische-turbomaschinen-berlin-1958.jpg)