Embed Size (px)
Citation preview
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Triangulierung von einfachen Polygonen
- Seminarvortrag von Tobias Kyrion -
Inhalt:
1.1 Die Problemstellung
2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone
3.2 Triangulierung monotoner Polygone
Quellenangabe
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
1.1 Die Problemstellung
Definition
Polygon:endlich viele paarweise verschiedene EckpunkteP1, ...,Pn ∈ R2, n ∈ N
Seiten:Verbindungsstrecken PiPi+1, i = 1, ...,n− 1 und PnP1
einfach:Die Seiten schneiden sich paarweise nicht.
Sinnvoll: eine Orientierung der Seiten
Im Folgenden seien diese immer im Uhrzeigersinn angeordnet.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
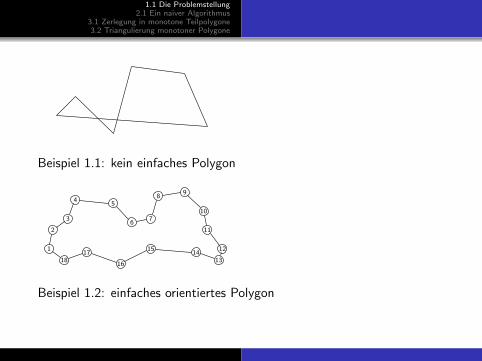
Beispiel 1.1: kein einfaches Polygon
1
2
3
45
67
89
10
11
12
1314
15
16
1718
Beispiel 1.2: einfaches orientiertes Polygon
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Definition
Diagonale:Verbindungsstrecke von zwei EckpunktenPk,Pl, k, l ∈ {1, ...,n}, k 6= l, die selbst keine Seite ist, keineandere Seite schneidet und vollstandig im Inneren des Polygonsverlauft
Letzteres bedeutet:Durch Einfugen der Diagonale wird das Polygon in zwei kleineredisjunkte Teilpolygone zerlegt.
Die Diagonale ist dann jeweils eine Seite dieser Teilpolygone,welche beide auch einfach sind.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Fur einfache Polygone existiert mindestens eine Diagonale.
Dreiecke sind offenbar Polygone mit kleinstmoglicherEckenanzahl, die einfach sind und in die man keine Diagonale mehreinsetzen kann.
Induktiv beweist man somit, dass fur jedes einfache Polygon eineZerlegung in Dreiecke konstruierbar ist.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Solch eine Zerlegung nennt man Triangulation.
Problemstellung:Bestimme Triangulation nur durch Hinzunahme von Diagonalen.
Beachte:Neue Diagonalen durfen die bereits eingefugten nicht schneiden,denn es sollen keine inneren (Schnitt-)Punkte generiert werden.
Außerdem:Eine Triangulation eines einfachen Polygons mit n ∈ N Eckpunktenbesteht immer aus n− 2 Dreiecken.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
2.1 Ein naiver Algorithmus
Wie erzeugt man nun algorithmisch eine Triangulation?
Eine mogliche Realisierung bietet der sogenannteear-clipping-Algorithmus.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Definition
Ecke:zwei (bzgl. der Orientierung) aufeinanderfolgende Seiten, alsoPi−1PiPi+1, i = 2, ..,n− 1 und PnP1P2, Pn−1PnP1
Innenwinkel :Die Seiten einer Ecke Pi−1PiPi+1 umschließen am mittleren PunktPi jeweils zwei Winkel (i = 2, ..,n− 1). In Durchlaufrichtungrechts von den Seiten Pi−1Pi und PiPi+1 liegt der Innenwinkel.
konvex :Ein konvexer Eckpunkt Pi hat einen Innenwinkel kleiner als 180◦.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
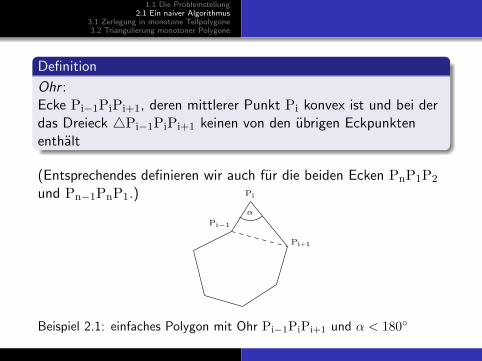
Definition
Ohr :Ecke Pi−1PiPi+1, deren mittlerer Punkt Pi konvex ist und bei derdas Dreieck 4Pi−1PiPi+1 keinen von den ubrigen Eckpunktenenthalt
(Entsprechendes definieren wir auch fur die beiden Ecken PnP1P2
und Pn−1PnP1.)α
Pi−1
Pi
Pi+1
Beispiel 2.1: einfaches Polygon mit Ohr Pi−1PiPi+1 und α < 180◦
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
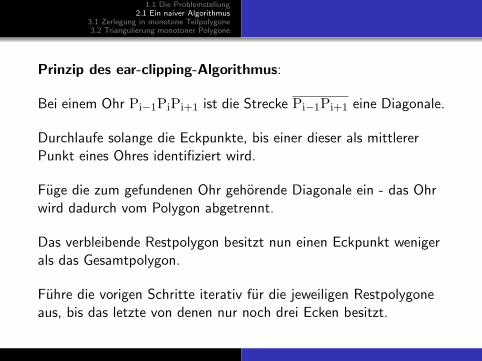
Prinzip des ear-clipping-Algorithmus:
Bei einem Ohr Pi−1PiPi+1 ist die Strecke Pi−1Pi+1 eine Diagonale.
Durchlaufe solange die Eckpunkte, bis einer dieser als mittlererPunkt eines Ohres identifiziert wird.
Fuge die zum gefundenen Ohr gehorende Diagonale ein - das Ohrwird dadurch vom Polygon abgetrennt.
Das verbleibende Restpolygon besitzt nun einen Eckpunkt wenigerals das Gesamtpolygon.
Fuhre die vorigen Schritte iterativ fur die jeweiligen Restpolygoneaus, bis das letzte von denen nur noch drei Ecken besitzt.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
0
P1
P2
P3
P4
P5
P6
P7
1
P1
P2
P3
P4
P5
P6
2
P1 P2
P3
P4
P5
3
P1
P2
P3
P4
4
P1
P2
P3
5
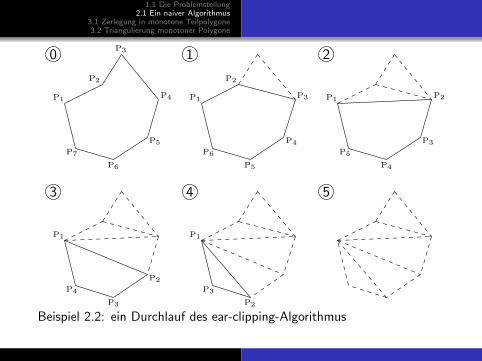
Beispiel 2.2: ein Durchlauf des ear-clipping-Algorithmus
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Zur Korrektheit:
Alle einfachen Polygone besitzen mindestens ein Ohr.
Nach Abtrennen eines Ohres ist das verbleibende Teilpolygoneinfach - dieses besitzt somit auch ein Ohr.
Bei jedem Abtrennen eines Ohres wird die Eckenanzahl n um 1verkleinert, d.h. der Algorithmus terminiert nach ngesamt − 3Iterationen.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Zur Laufzeit:
Prufen, ob Punkt x in Dreieck 4abc liegt:
O(1)
Prufen, ob aktuelle Ecke Pi−1PiPi+1 ein Ohr ist (liegt einer vonden n− 3 anderen Eckpunkten in 4Pi−1PiPi+1?):
O(n− 3)
Die Laufzeitsumme aller Iterationen - also die Gesamtlaufzeit -betragt hochstens:
O(∑n
k=4(k− 3)) = O(n2)
Der ear-clipping-Algorithmus besitzt folglich quadratischeLaufzeit.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
3.1 Zerlegung in monotone Teilpolygone
Frage:
Gibt es schnellere Algorithmen zur Triangulation?
Strategie, um die Laufzeit zu verbessern:
1. Zerlege das einfache Polygon in monotone Polygone, welchein diesem Abschnitt behandelt werden.
2. Trianguliere diese in Linearzeit, was im nachsten Abschnittgezeigt wird.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
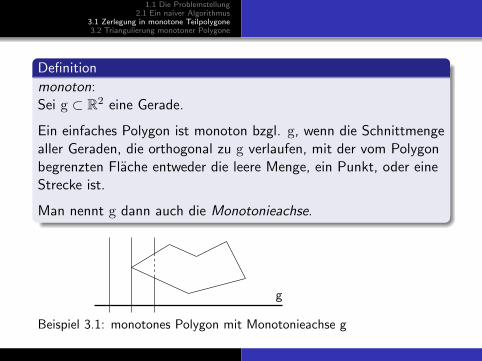
Definition
monoton:Sei g ⊂ R2 eine Gerade.
Ein einfaches Polygon ist monoton bzgl. g, wenn die Schnittmengealler Geraden, die orthogonal zu g verlaufen, mit der vom Polygonbegrenzten Flache entweder die leere Menge, ein Punkt, oder eineStrecke ist.
Man nennt g dann auch die Monotonieachse.
g
Beispiel 3.1: monotones Polygon mit Monotonieachse g
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Definition
x-monoton bzw. y-monoton:Ein monotones Polygon ist x-monoton bzw. y-monoton, falls diex-Achse bzw. die y-Achse des kartesischen Koordinatensystems imR2 seine Monotonieachse ist.
Der nachfolgende Algorithmus zerlegt ein einfaches Polygon inx-monotone Teilpolygone.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Er funktioniert nach dem scan-line-Prinzip:
Lasse eine imaginare zur y-Achse parallele Gerade - die scan-line -von links nach rechts uber das gesamte Polygon wandern.
Verarbeite stets nur Punkte, die bereits links von der scan-lineliegen.
Speichere diese Punkte in einer priority-queue. Punkte mitgroßerer x-Koordinate haben dabei hohere Prioritat.
Suchen, Einfugen oder Loschen von Punkten in der priority-queueist in O(log(n)) Zeit moglich.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Wir stellen fest:
Das Polygon besitzt:
einen Eckpunkt Pl, der von allen Eckpunkten am weitestenlinks liegt
einen Eckpunkt Pr, der von allen Eckpunkten am weitestenrechts liegt
eine obere Kette (d.h. ein Streckenzug bestehend ausSeiten), die bei Pl beginnt und bei Pr endet
eine untere Kette, die ebenfalls bei Pl beginnt und bei Pr
endet
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
(Zur Vereinfachung nehmen wir an, dass es keine zwei Eckpunktemit gleichen y-Koordinaten gibt.)
Alle Eckpunkte der oberen Kette, außer naturlich Pl und Pr, liegenoberhalb der unteren Kette.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Wir wandern nun gleichzeitig entlang der oberen und unterenKette von links nach rechts.
Es kann dabei passieren, dass sich dabei die Durchlaufrichtungvon rechts nach links oder links nach rechts andert.
Definition
turn-vertex :Eckpunkt, an dem sich die Durchlaufrichtung andert (d.h. seinVorganger und sein Nachfolger haben beide großere bzw. kleinerex-Koordinaten als der turn-vertex)
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
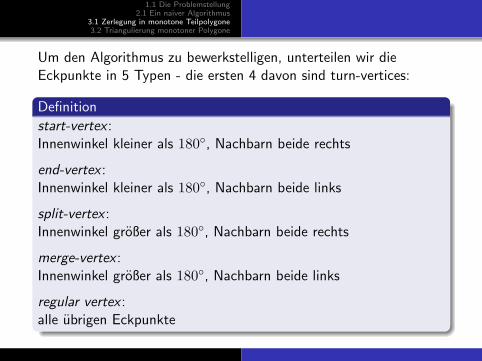
Um den Algorithmus zu bewerkstelligen, unterteilen wir dieEckpunkte in 5 Typen - die ersten 4 davon sind turn-vertices:
Definition
start-vertex :Innenwinkel kleiner als 180◦, Nachbarn beide rechts
end-vertex :Innenwinkel kleiner als 180◦, Nachbarn beide links
split-vertex :Innenwinkel großer als 180◦, Nachbarn beide rechts
merge-vertex :Innenwinkel großer als 180◦, Nachbarn beide links
regular vertex :alle ubrigen Eckpunkte
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
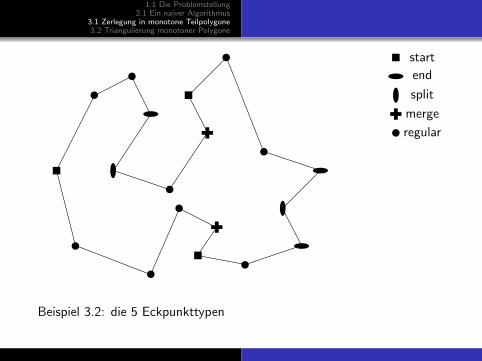
start
end
split
merge
regular
Beispiel 3.2: die 5 Eckpunkttypen
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Grundidee des Algorithmus:
Ein einfaches Polygon ist x-monoton, falls es weder split- nochmerge-vertices besitzt.
Eliminiere also jeden split- oder merge-vertex durch Einfugen einergeeigneten Diagonale.
Dadurch zerfallt das Polygon in zwei Teilpolygone. In beidenTeilpolygonen ist der ursprungliche split- oder merge-vertex keinsplit- oder merge-vertex mehr.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
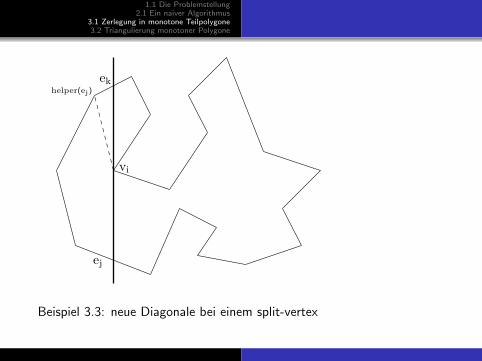
Einfugen von Diagonalen bei split-vertices:
Die scan-line erreiche nun einen split-vertex vi. Wir versuchen anvi eine Diagonale so einzufugen, dass ihr anderer Endpunkt einEckpunkt links von vi ist.
Die scan-line schneidet das Polygon an zwei Seiten ek, ej
unmittelbar oberhalb bzw. unterhalb von vi.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Definition
helper(ej):derjenige Eckpunkt in der priority-queue (d.h. links von derscan-line) mit maximaler x-Koordinate, dessen Lot auf die Seite ej
vollstandig im Inneren des Polygons liegt
Schließlich muss man nur noch die Diagonale zwischen vi undhelper(ej) einsetzen, um vi zu eliminieren.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
vi
ej
ekhelper(ej)
Beispiel 3.3: neue Diagonale bei einem split-vertex
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Einfugen von Diagonalen bei merge-vertices:
Der Endpunkt der Diagonale, die wir an einem merge-vertex vi
einsetzen, muss rechts von vi liegen. Wir wahlen ihn so, dass seinex-Koordinate minimal ist.
Problem:Wenn die scan-line vi erreicht, sind die Eckpunkte rechts von vi
noch unbekannt.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Das Problem ist jedoch leichter, als es dem ersten Anschein nachist:
Die scan-line schneidet das Polygon wiederum an zwei Seitenek, ej unmittelbar oberhalb bzw. unterhalb von vi und vi istzudem der aktuelle helper(ej).
Die scan-line schreitet weiter nach rechts. Sobald ein neuerhelper(ej) gefunden wird, ist dieser der gesuchte rechte Endpunktfur die neue Diagonale.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Falls kein neuer helper(ej) gefunden wird, so verbinde vi mit demrechten Endpunkt von helper(ej).
Jedesmal, wenn der helper einer Seite aktualisiert wird, uberprufenwir, ob der alte helper ein merge-vertex war. Falls ja, wird dieVerbindungsdiagonale eingesetzt.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
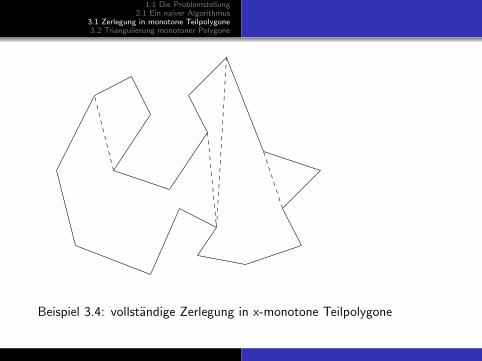
Beispiel 3.4: vollstandige Zerlegung in x-monotone Teilpolygone
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Zur Korrektheit:
Das Eliminieren von split- und merge-vertices durch Hinzufugenvon Diagonalen liefert nur x-monotone Teilpolygone.
Die helper-Eigenschaft wird benutzt, damit sich die Diagonalennicht schneiden.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Zur Laufzeit:
Priority-queue-Operationen:
O(log(n))
notige Anzahl an priority-queue-Operationen:
O(n)
Damit ergibt sich die Gesamtlaufzeit:
O(n ∗ log(n))
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
3.2 Triangulierung monotoner Polygone
Wir betrachten nun ein x-monotones Polygon.
Es seien Pl und Pr wiederum die beiden Eckpunkte, die amweitesten links bzw. rechts liegen.
Es besitzt auch eine obere und untere Kette, die beide bei Pl
beginnen und bei Pr enden.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Wir stellen fest:
Da das Polygon keine split- oder merge-vertices besitzt, sind dieKetten geordnet:
Eckpunkte auf den Ketten haben stets kleinere x-Koordinaten alsihre Nachfolger in den Ketten, wenn man von links nach rechtswandert.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Definition
monotoner Berg :x-monotones Polygon, dessen obere oder untere Kette nur aus denEckpunkten Pl und Pr besteht
Definition
monotoner Streifen:x-monotones Polygon, dessen Eckpunkte abwechselnd zur oberenoder unteren Kette gehoren, wenn man sie nach der Große ihrerx-Koordinaten ordnet
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
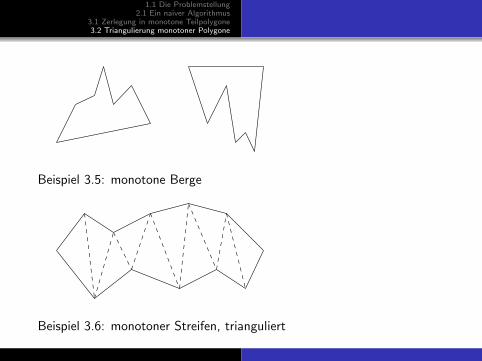
Beispiel 3.5: monotone Berge
Beispiel 3.6: monotoner Streifen, trianguliert
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Monotone Berge kann man auf diese Weise triangulieren:
Bestimme zunachst alle konvexen Eckpunkte in der langeren Ketteund speichere sie in einem Stapel L.
Jeder dieser konvexen Eckpunkte ist schon automatisch einmittlerer Punkt eines Ohres.
Entferne den obersten Eckpunkt Pi aus dem Stapel und fuge diezu seinem Ohr gehorende Diagonale ein.
Aktualisiere entsprechend die Innenwinkel des linken und rechtenNachbarpunktes von Pi.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Falls einer oder beide Nachbarpunkte nun konvex sind und sienicht mit Pl oder Pr ubereinstimmen, lege sie auf dem Stapel ab.
Wiederhole diese Prozedur so lange, bis der Stapel leer ist.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
0
P1
P2
P3
P4
1
P1
P2
P3
2
P1
P23
P1
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
4
P1
5
P1
6
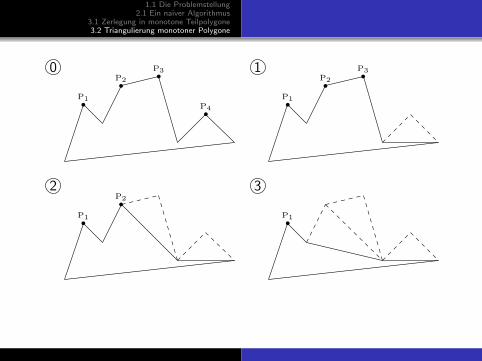
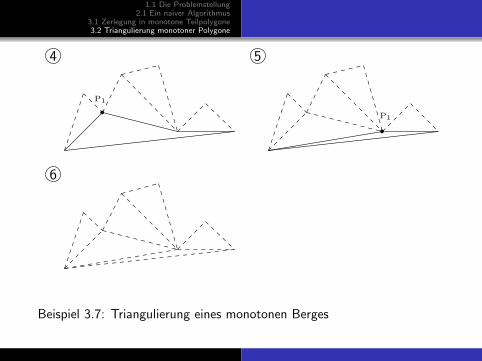
Beispiel 3.7: Triangulierung eines monotonen Berges
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Zur Korrektheit:
Die Verbindungsstrecke vom linken und rechten Nachbarn eineskonvexen Eckpunkts in der langeren Kette eines monotonen Bergesist eine Diagonale.
Jeder monotone Berg besitzt in der langeren Kette mindestenseinen konvexen Eckpunkt.
Jedes Restpolygon ist auch ein monotoner Berg und besitzt somitauch mindestens einen konvexen Eckpunkt in seiner langeren Kette.
In jeder Iteration wird demnach genau ein Ohr abgeschnitten.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Zur Laufzeit:
Hochstens n− 2 Eckpunkte befinden sich im Stapel.
Initialisierung, d.h. prufen jedes Eckpunktes auf Konvexitat undbelegen des Stapels:
O(n)
Entfernen eines Punktes und Einfugen der Diagonale:
O(1)
Gesamtlaufzeit (d.h. Initialisierung plus Zeit, bis der Stapel leerist):
O(n)
Der Algorithmus besitzt also lineare Laufzeit.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Die Triangulierung eines monotonen Streifens ist trivial:
Verbinde aufsteigend nach der x-Koordinate abwechselnd dieEckpunkte aus der oberen und unteren Kette mit Diagonalen.
Dieser Algorithmus ist offensichtlich korrekt und hat lineareLaufzeit.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Nun zu beliebigen monotonen Polygonen:
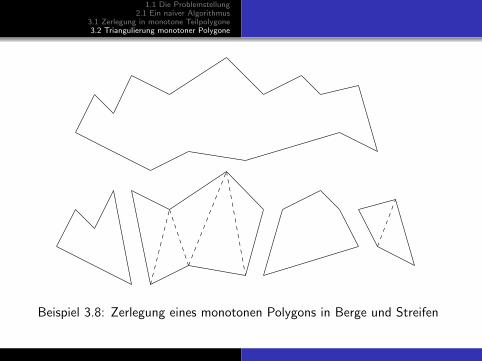
Jedes monotone Polygon lasst sich in monotone Berge und Streifenzerlegen.
Diese sind in Linearzeit triangulierbar. Man kann mit Hilfe dieserZerlegung beliebige monotone Polygone in linearer Laufzeittriangulieren!
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Beispiel 3.8: Zerlegung eines monotonen Polygons in Berge und Streifen
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Initialisiere einen Stapel mit dem Eckpunkt Pl.
Verwende ferner die beiden Zahlvariablen UpCntr und DownCntrvom Typ Integer, die mit dem Wert 0 initialisiert werden.
Wandere gleichzeitig auf der oberen und unteren Kette von linksnach rechts.
Im Folgenden lege jeweils denjenigen nachsten Eckpunkt aus deroberen oder unteren Kette auf den Stapel, welcher die kleinerex-Koordinate hat.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Ist dieser aus der oberen Kette, so erhohe UpCntr um 1 und setzeDownCntr gleich Null, andernfalls erhohe DownCntr um 1 undsetze UpCntr gleich Null
Bevor UpCntr oder DownCntr gleich Null gesetzt werden, konnenfolgende drei Falle auftauchen:
1. UpCntr bzw. DownCntr = 0 (Initialisierung)
2. UpCntr bzw. DownCntr = 1
3. UpCntr bzw. DownCntr > 1
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
1. Fall:Nichts zu tun.
2. Fall:Die Verbindungsstrecke vom aktuellen Punkt und dem oberstenPunkt auf dem Stapel ist eine Diagonale, die zu einemmonotonen Streifen gehort. Fuge diese ein und ersetze denobersten Punkt auf dem Stapel mit dem aktuellen.
3. Fall:Der aktuelle Punkt ist der rechte Endpunkt Pr eines monotonenBerges, der aus den Punkten im Stapel besteht. Triangulierediesen und leere anschließend den Stapel, bevor dort der aktuellePunkt abgelegt wird.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Zur Korrektheit:
Es ist klar, dass die monotonen Streifen direkt trianguliert werden.
Der Algorithmus fur die monotonen Berge ist korrekt, somit ist dieTriangulierung jedes Teilberges ein korrekter Schritt.
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Zur Laufzeit:
Da die monotonen Streifen direkt trianguliert werden, ist dieTriangulation aller Streifen insgesamt beschrankt durch:
O(n)
Das Polygon besitze j ∈ N Teilberge. Die Teilberge besitzenn1, ...,nj ∈ N Eckpunkte. Es gilt auf jeden Fall:
∑jk=1 nk < 2n
Laufzeit zur Triangulierung aller Berge:∑jk=1 O(nk) = O(n)
Gesamtlaufzeit:
O(n)
Linear!
1.1 Die Problemstellung2.1 Ein naiver Algorithmus
3.1 Zerlegung in monotone Teilpolygone3.2 Triangulierung monotoner Polygone
Quellenangabe
M. de Berg, O. Cheong, M. van Krefeld, M. Overmars:Computational Geometry, Algorithms and Applications, p. 45 - 60
http://valis.cs.uiuc.edu/~sariel/teach/2004/b/webpage/lec/24_triang_II.pdf


![Flur 26 Hst Freiligrathplatz - Düsseldorf€¦ · 15 I 13 I 18 16 17 II I I I 14 12 II 10 II I I 4a II I 6 II 8 II 8 II 10 II I I-I-I-I I I I I I I I I I I /LOLHQWKDOVWUD H B8 'DQ]LJHU](https://img.pdfslide.org/doc/110x75/6061ca6ec0f4fb4c5004df74/flur-26-hst-freiligrathplatz-dsseldorf-15-i-13-i-18-16-17-ii-i-i-i-14-12-ii.jpg)


























