Embed Size (px)
Citation preview
Hochfrequenztechnik I
Vorlesungsskript
2012
Fachgebiet Hochfrequenztechnik Prof. Dr.-Ing. Klaus Petermann
überarbeitet unter Mitarbeit von
Dr.-Ing. Christian-Alexander Bunge
Die Vorlesung beinhaltet die folgenden Abschnitte: EIN Einführung LEI Leitungsgleichungen WEL Wellenausbreitung auf Leitungen SMI Impedanztransformation, Smith-Diagramm STR Streumatrix IMP Impulse auf Leitungen EB Ebene Wellen, Polarisation LA Lineare Antennen GR Antennen in der Nähe von Grenzflächen AP Aperturantennen HO Hohlleiter HS Hohlleitersysteme ONT Grundlagen der optischen Nachrichtentechnik S Signaldarstellung im Zeit- und Frequenzbereich L Lineare, zeitinvariante, elektronische Netzwerke P Passive Komponenten HLD Halbleiterdioden BPT Bipolarer Transistor FET Feldeffektransistoren RAU Rauschen
Literaturhinweise Der gesamte Bereich der Hochfrequenztechnik wird recht umfassend dargestellt in: Zinke, O., Brunswig, H., (Hrsg. Von A. Vlcek u. H.L. Hartnagel): Lehrbuch der Hochfrequenztechnik, Band 1 und Band 2, Springer-Verlag Berlin, 6. Auflage bzw. 5. Auflage, 2000 bzw. 1999
Umfassendes Handbuch über die gesamte Hochfrequenztechnik: Meinke, Gundlach: Taschenbuch der Hochfrequenztechnik, Springer-Verlag Berlin, 5. Auflage 1992
Für das Selbststudium eignen sich: Abschnitte EIN bis IMP, Unger, H.G.: Elektromagnetische Wellen auf Leitungen, Hüthig Verlag, Heidelberg, 4. Auflage 1996,
geeignet zur selbständigen Erarbeitung feldtheoretischer Grundlagen (Abschnitte EB bis HS),
Unger, H.G.: Elektromagnetische Theorie für die Hochfrequenztechnik, Teil 1 und Teil 2, Hüthig Verlag, Heidelberg, 2. Auflage 1988/1989, sonstige Abschnitte,
Voges, E.: Hochfrequenztechnik Hüthig Verlag, Heidelberg, 3. Auflage 2004 Sonstige empfehlenswerte Literatur:
Balanis, C.A.: Antenna Theory, Analysis and Design, John Wiley, 3rd edition 2005
Detlefsen, J., Siart, U.: Grundlagen der Hochfrequenztechnik, Oldenbourg Verlag, überarb. Auflage 2012
Hoffmann, M.: Hochfrequenztechnik, ein systemtheoretischer Zugang, Springer-Verlag, Berlin Heidelberg 1997
Landstorfer, F., Graf, H.: Rauschprobleme der Nachrichtentechnik, Oldenbourg Verlag, München 1977
Nibler, F.: Hochfrequenzschaltungstechnik, Expert Verlag, 3. Auflage 1998
Unger, H.G.: Hochfrequenztechnik in Funk und Radar, Teubner Verlagsgesellschaft Stuttgart, 4. Auflage 1994
Zimmer, G.: Hochfrequenztechnik, Lineare Modelle (mit Windows Software), Springer Verlag, Berlin Heidelberg, 2000
Hochfrequenztechnik I Einführung EIN/1
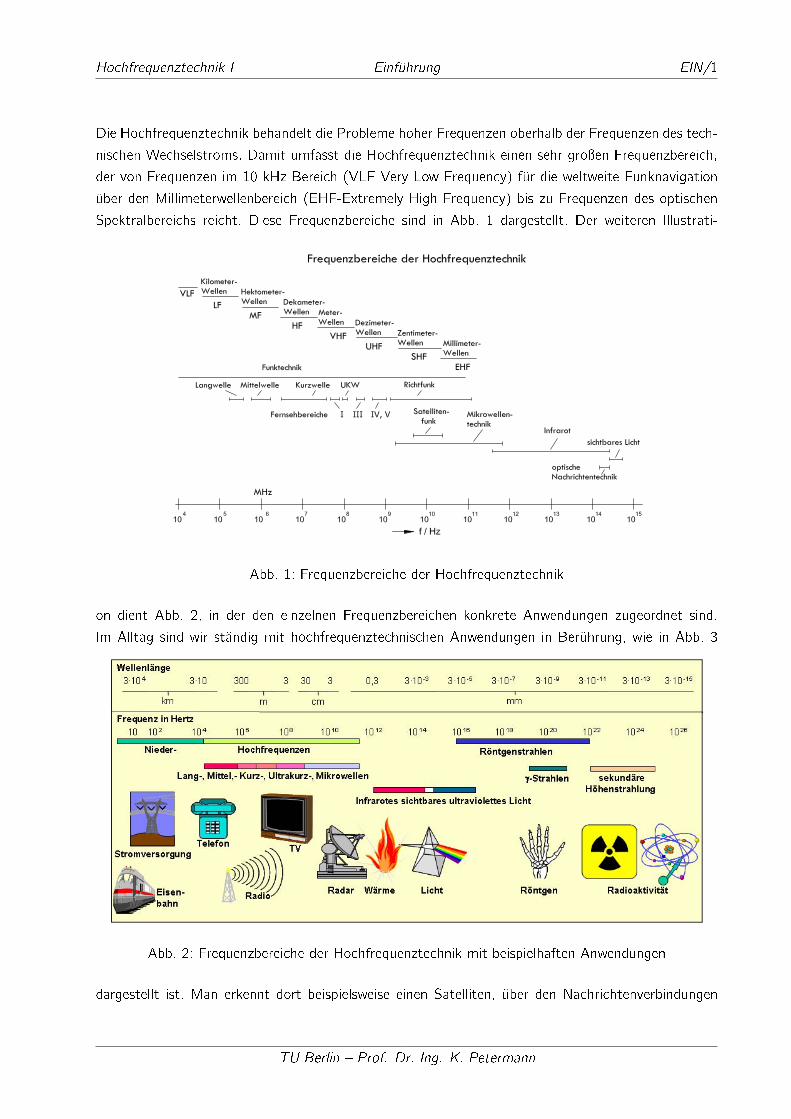
Die Hochfrequenztechnik behandelt die Probleme hoher Frequenzen oberhalb der Frequenzen des tech-
nischen Wechselstroms. Damit umfasst die Hochfrequenztechnik einen sehr groÿen Frequenzbereich,
der von Frequenzen im 10 kHz-Bereich (VLF-Very Low Frequency) für die weltweite Funknavigation
über den Millimeterwellenbereich (EHF-Extremely High Frequency) bis zu Frequenzen des optischen
Spektralbereichs reicht. Diese Frequenzbereiche sind in Abb. 1 dargestellt. Der weiteren Illustrati-
Abb. 1: Frequenzbereiche der Hochfrequenztechnik
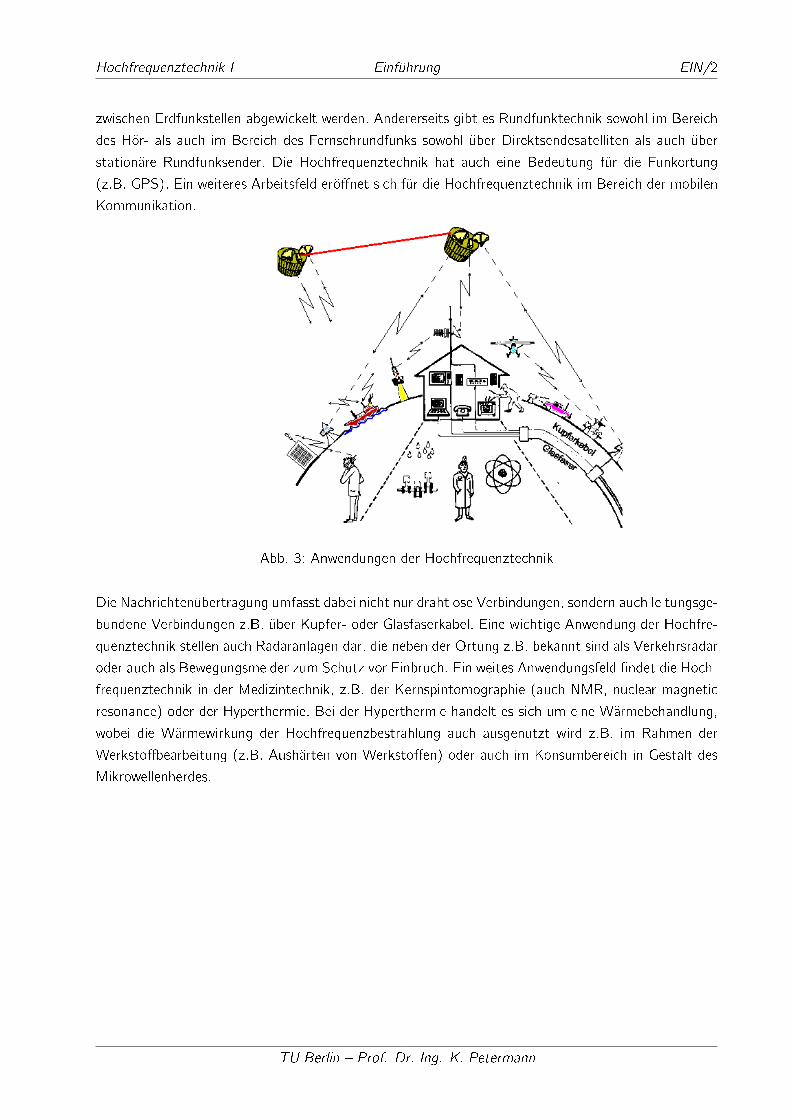
on dient Abb. 2, in der den einzelnen Frequenzbereichen konkrete Anwendungen zugeordnet sind.
Im Alltag sind wir ständig mit hochfrequenztechnischen Anwendungen in Berührung, wie in Abb. 3
Abb. 2: Frequenzbereiche der Hochfrequenztechnik mit beispielhaften Anwendungen
dargestellt ist. Man erkennt dort beispielsweise einen Satelliten, über den Nachrichtenverbindungen
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Einführung EIN/2
zwischen Erdfunkstellen abgewickelt werden. Andererseits gibt es Rundfunktechnik sowohl im Bereich
des Hör- als auch im Bereich des Fernsehrundfunks sowohl über Direktsendesatelliten als auch über
stationäre Rundfunksender. Die Hochfrequenztechnik hat auch eine Bedeutung für die Funkortung
(z.B. GPS). Ein weiteres Arbeitsfeld erö�net sich für die Hochfrequenztechnik im Bereich der mobilen
Kommunikation.
Abb. 3: Anwendungen der Hochfrequenztechnik
Die Nachrichtenübertragung umfasst dabei nicht nur drahtlose Verbindungen, sondern auch leitungsge-
bundene Verbindungen z.B. über Kupfer- oder Glasfaserkabel. Eine wichtige Anwendung der Hochfre-
quenztechnik stellen auch Radaranlagen dar, die neben der Ortung z.B. bekannt sind als Verkehrsradar
oder auch als Bewegungsmelder zum Schutz vor Einbruch. Ein weites Anwendungsfeld �ndet die Hoch-
frequenztechnik in der Medizintechnik, z.B. der Kernspintomographie (auch NMR, nuclear magnetic
resonance) oder der Hyperthermie. Bei der Hyperthermie handelt es sich um eine Wärmebehandlung,
wobei die Wärmewirkung der Hochfrequenzbestrahlung auch ausgenutzt wird z.B. im Rahmen der
Werksto�bearbeitung (z.B. Aushärten von Werksto�en) oder auch im Konsumbereich in Gestalt des
Mikrowellenherdes.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Leitungsgleichungen LEI/1
1 Vorbetrachtung
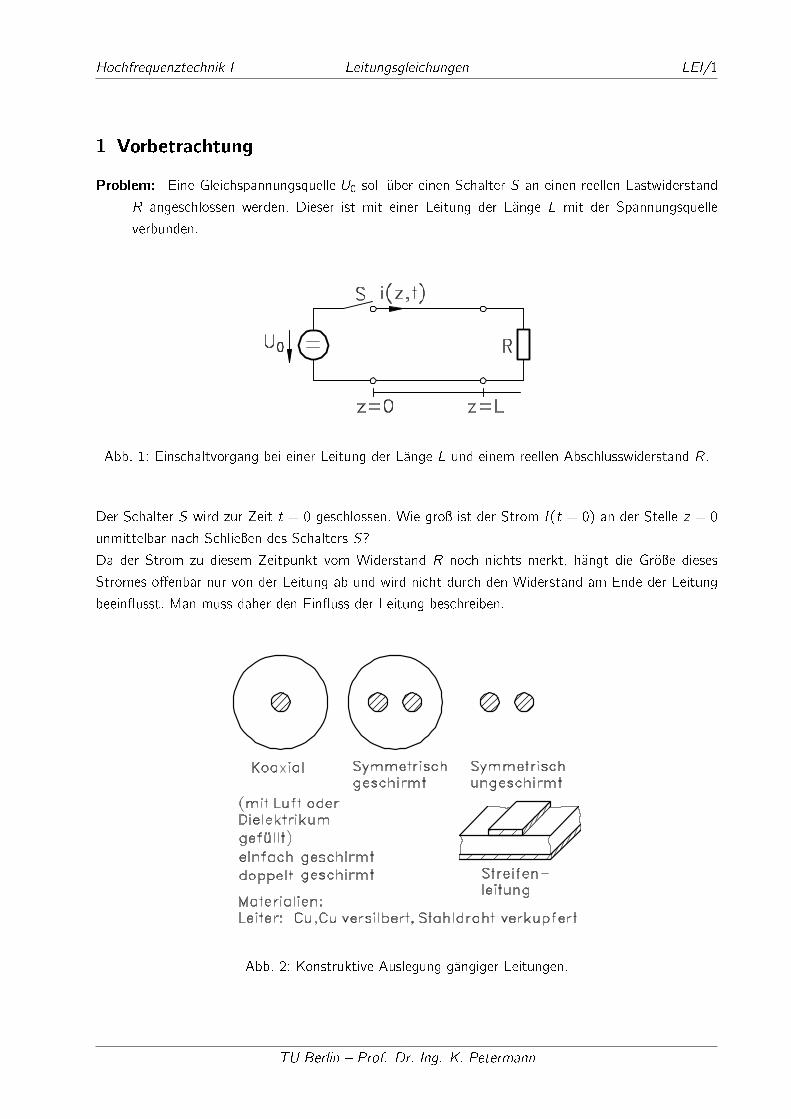
Problem: Eine Gleichspannungsquelle U0 soll über einen Schalter S an einen reellen Lastwiderstand
R angeschlossen werden. Dieser ist mit einer Leitung der Länge L mit der Spannungsquelle
verbunden.
Abb. 1: Einschaltvorgang bei einer Leitung der Länge L und einem reellen Abschlusswiderstand R.
Der Schalter S wird zur Zeit t = 0 geschlossen. Wie groÿ ist der Strom I(t = 0) an der Stelle z = 0
unmittelbar nach Schlieÿen des Schalters S?
Da der Strom zu diesem Zeitpunkt vom Widerstand R noch nichts merkt, hängt die Gröÿe dieses
Stromes o�enbar nur von der Leitung ab und wird nicht durch den Widerstand am Ende der Leitung
beein�usst. Man muss daher den Ein�uss der Leitung beschreiben.
Abb. 2: Konstruktive Auslegung gängiger Leitungen.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Leitungsgleichungen LEI/2
Tabelle 1: Isoliermaterialien
Luft Polyethylen Te�on Polyvinylchlorid (PVC) Nylon
"r 1 2,28 2,1 4-5 3,5
1.1 Leitungsstrukturen
In Abb. 2 sind unterschiedliche Leitungsstrukturen dargestellt. Leitungen �ndet man damit in Nach-
richtenkabeln, aber z.B. auch bei Leiterplatten oder auf Computerchips.
2 Herleitung der Leitungsgleichungen
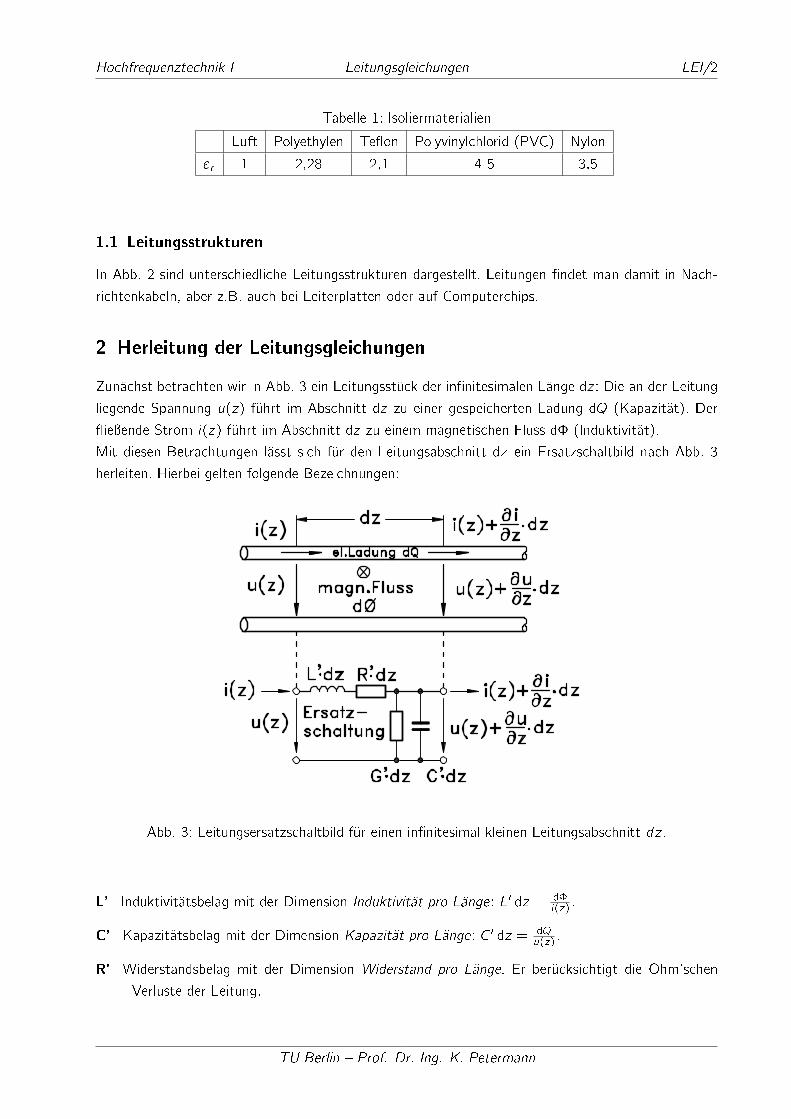
Zunächst betrachten wir in Abb. 3 ein Leitungsstück der in�nitesimalen Länge dz : Die an der Leitung
liegende Spannung u(z) führt im Abschnitt dz zu einer gespeicherten Ladung dQ (Kapazität). Der
�ieÿende Strom i(z) führt im Abschnitt dz zu einem magnetischen Fluss d� (Induktivität).
Mit diesen Betrachtungen lässt sich für den Leitungsabschnitt dz ein Ersatzschaltbild nach Abb. 3
herleiten. Hierbei gelten folgende Bezeichnungen:
Abb. 3: Leitungsersatzschaltbild für einen in�nitesimal kleinen Leitungsabschnitt dz .
L' Induktivitätsbelag mit der Dimension Induktivität pro Länge: L0 dz = d�i(z) .
C' Kapazitätsbelag mit der Dimension Kapazität pro Länge: C0 dz = dQu(z) .
R' Widerstandsbelag mit der Dimension Widerstand pro Länge. Er berücksichtigt die Ohm'schen
Verluste der Leitung.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Leitungsgleichungen LEI/3
G' Leitwertsbelag mit der Dimension Leitwert pro Länge. Er berücksichtigt die dielektrischen Verluste
der Leitung.
Aus Abb. 3 lassen sich die folgenden Beziehungen für Spannung und Strom ableiten:
u(z + dz) = u(z) +@u
@zdz = u(z)� L0 dz
@i
@t� R0 dz � i(z) (1)
i(z + dz) = i(z) +@i
@zdz = i(z)� C0 dz
@u
@t� G0 dz � u(z) (2)
Aus Gl. (1) und (2) folgen die Leitungsgleichungen:
@u
@z= �R0 � i(z)� L0
@i
@t(3)
@i
@z= �G0 � u(z)� C0
@u
@t(4)
2.1 Herleitung der Wellengleichung
Die Gleichungen (1) bis (4) gelten für allgemeine zeit- und ortsabhängige Signale. Für die weitere
Betrachtung ist es jedoch zunächst einfacher, eine harmonische Zeitabhängigkeit anzunehmen. So
ergibt sich
u(z; t) = U(z) cos(!t + �(z)) = <fU(z) � exp(j!t)g (5)
mit einem ortsabhängigen Zeiger U(z) = U(z) �exp(j�(z)), wobei U(z) die ortsabhängige Spannungs-amplitude und �(z) die Phase darstellen.
Die Ableitung nach der Zeit berechnet sich dann folgendermaÿen:
@u
@t= �!U(z) � sin(!t + �(t)) = <fj!U(z) � exp(j!t)g (6)
beziehungsweise in Zeigerdarstellung:
u(z; t) d t U(z); i(z; t) d t I(z)
@u
@td t j! � U(z); @i
@td t j! � I(z)
Aus den Leitungsgleichungen Gl. (3), (4) folgt dann:
dU
dz= �I(z) � (R0 + j!L0) (7)
dI
dz= �U(z) � (G0 + j!C0) (8)
Gl. (7) wird nach z di�erenziert, und der Ausdruck dIdz wird dann mit Gl. (8) ersetzt:
d2U
dz2= �(R0 + j!L0)
dI
dz= (R0 + j!L0)(G0 + j!C0) U (9)
beziehungsweised2U
dz2= 2 � U mit =
√(R0 + j!L0)(G0 + j!C0) (10)
mit der Ausbreitungskonstanten .
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Leitungsgleichungen LEI/4
2.2 Wellenausbreitung auf Leitungen
Die obige Gl. (10) stellt die Wellengleichung dar mit den zwei folgenden Lösungen:
Uh = U1 exp(� � z); Ur = U2 exp( � z) (11)
Wie wir später noch sehen werden, beschreiben die beiden Lösungen in (11) jeweils die hin- bzw.
rücklaufende Welle. U1 und U2 stellen die Spannungszeiger der hin- und der rücklaufenden Welle auf
der Leitung an der Stelle z = 0 dar. Die allgemeine Lösung ist die Überlagerung beider Wellen:
U(z) = Uh(z) + Ur (z) (12)
Daraus lässt sich mit Gl. (7) der Stromverlauf I(z) bestimmen:
I(z) =
R0 + j!L0︸ ︷︷ ︸1
ZL
(U1 exp(� z)� U2 exp(+ z)) (13)
oder in Kurzschreibweise:
I(z) = Ih(z) + Ir (z) =Uh(z)
ZL
� Ur (z)
ZL
: (14)
Hier steht ZL für den Leitungswellenwiderstand mit
ZL =R0 + j!L0
=
√R0 + j!L0
G0 + j!C0=
Uh
Ih= �Ur
Ir: (15)
Die Ausbreitungskonstante lässt sich in Realteil und Imaginärteil aufteilen
= �+ j�;
wobei der Realteil � die Dämpfungskonstante und der Imaginärteil � die Phasenkonstante darstellen.
Für die hinlaufende Welle ergibt sich dann z.B.:
Uh = U1 exp(� z) = U1 exp(��z) exp(�j�z); (16)
wobei exp(��z) die Dämpfung, und exp(�j�z) die Phasendrehung beschreiben.
Das Argument der ersten Exponentialfunktion ergibt sich folgendermaÿen:
� � z = � ln
(jU(z)jjU(0)j
)(17)
Die Dimension der Dämpfungskonstante � ist gegeben als[Npm
](Neper pro Meter).
Häu�g wird das Dämpfungsmaÿ �0 in[dB
m
]angegeben. Es wird folgendermaÿen de�niert:
�0 � z = �20 � lg(jU(z)jjU(0)j
)dB (18)
) �0[dB
m
]=
(20
ln(10)
)�
[Np
m
]= 8; 69 � �
[Np
m
]
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Leitungsgleichungen LEI/5
3 Verlustarme Kabel
Verlustarme Kabel weisen sehr geringe ohm'sche Verluste auf, so dass R0 � !L0 und G0 � !C0 gelten.
Damit kann man für den Wellenwiderstand ZL aus Gleichung (15) folgende Vereinfachung einführen:
ZL �√j!L0
j!C0=
√L0
C0(19)
Man beachte, dass der Wellenwiderstand unter diesen Bedingungen reell wird. Die Ausbreitungskon-
stante ergibt sich dann mit Gl. (10) näherungsweise:
= j!pL0C0
√√√√(1 + R0
j!L0
)(1 +
G0
j!C0
)� j!
pL0C0
(1 +
R0
2j!L0+
G0
2j!C0
)
Mit = �+ j� heiÿt das für die Dämpfungs- und Phasenkonstante:
� =R0
2
√C0
L0+
G0
2
√L0
C0=
R0
2 � ZL+
G0 � ZL
2(20)
� = !pL0C0 (21)
4 Anwendung auf eine Koaxialleitung
Als Beispiel für eine Leitung wird ein Koaxialkabel betrachtet. Der schematische Aufbau einer solchen
Abb. 4: Schematischer Aufbau (links) und Feldverteilungen (rechts) in einer Koaxialleitung.
Koaxialleitung ist in Abb. 4 dargestellt. Hierbei hat der Innenleiter den Durchmesser d , der Auÿenleiter
den Durchmesser D.
Auf Grund des Skin-E�ekts �ieÿt der Strom nur an der Ober�äche des Innen- bzw. Auÿenleiters. Daher
bilden sich das elektrische und magnetische Feld im Wesentlichen nur im Dielektrikum mit � = �0
und " = "0"r aus.
Das magnetische Feld hat nur eine �-Komponente H�:
H� = � I
2�r(22)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Leitungsgleichungen LEI/6
Das elektrische Feld besitzt nur eine radiale Komponente Er :
Er = � U
r � ln(Dd
) wegen
D
2∫d
2
�Er dr = U (23)
Da ~E und ~H nur in der transversalen Ebene (senkrecht zur Ausbreitungsrichtung) liegen, bezeichnet
man die Welle als TEM-Welle (transversal elektromagnetisch).
Der Induktivitätsbelag L0 dz = d�I errechnet sich folgendermaÿen:
d� = dz
D
2∫d
2
�0(�H�) dr = dz � �0 ln(D
d
)I
2�(24)
) L0 =�0
2�ln
(D
d
)(25)
Der Kapazitätsbelag C0 dz = dQU errechnet sich folgendermaÿen:
dQ = � dz � 2�D2� "0"rEr
(r =
D
2
)= dz � 2�"0"r U
ln(Dd
)) C0 =
2�"0"r
ln(Dd
) (26)
Der Widerstandsbelag R0 setzt sich aus den Widerständen am Innen- und Auÿenleiter zusammen.
Diese Widerstände berechnen sich mit der spezi�schen Leitfähigkeit � und der Skin-Eindringtiefe z0:
z0 =
√2
!�0�:
Als Zahlenwertgleichung ergibt sich beispielsweise für Kupfer (Cu): z0;Cu � 2; 1 �mpf =GHz
.
) R0 =1
�z0
(1
�D+
1
�d
)Voraussetzung : z0 � d (27)
Der Ausdruck (� � z0)�1 wird gelegentlich auch als Wandwiderstand RW = (� � z0)�1 bezeichnet. Für
Kupfer ergibt sich RW � 8; 3 � 10�3√f =GHz.
Der Leitwertsbelag G0 ergibt sich auf Grund der dielektrischen Verluste im Isolator:
G0 = !C0 � tan � (28)
Mit Kenntnis dieser Werte lässt sich der Leitungswellenwiderstand ZL berechnen:
ZL =
√L0
C0=
√�0
"0︸ ︷︷ ︸120�
1
2�p"r
ln
(D
d
)=
60 � ln(Dd
)p"r
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Leitungsgleichungen LEI/7
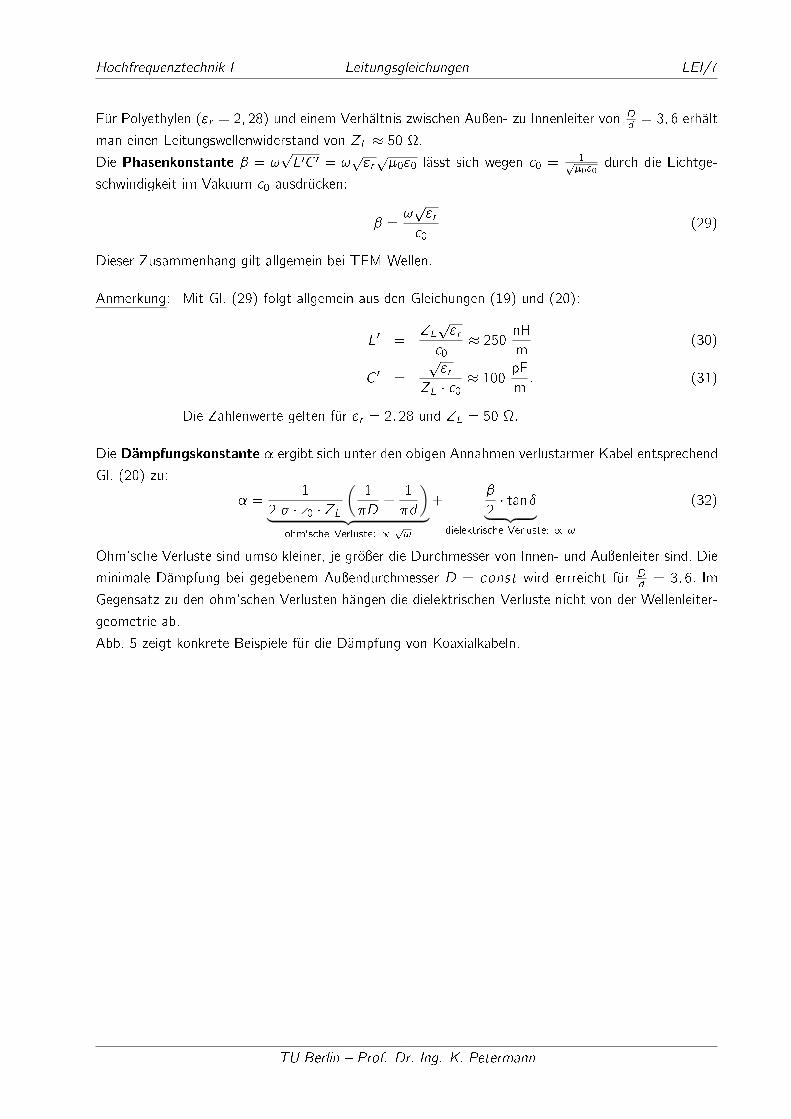
Für Polyethylen ("r = 2; 28) und einem Verhältnis zwischen Auÿen- zu Innenleiter von Dd = 3; 6 erhält
man einen Leitungswellenwiderstand von ZL � 50 .
Die Phasenkonstante � = !pL0C0 = !
p"rp�0"0 lässt sich wegen c0 = 1p
�0"0durch die Lichtge-
schwindigkeit im Vakuum c0 ausdrücken:
� =!p"r
c0(29)
Dieser Zusammenhang gilt allgemein bei TEM-Wellen.
Anmerkung: Mit Gl. (29) folgt allgemein aus den Gleichungen (19) und (20):
L0 =ZLp"r
c0� 250
nH
m(30)
C0 =
p"r
ZL � c0 � 100pF
m: (31)
Die Zahlenwerte gelten für "r = 2; 28 und ZL = 50 .
Die Dämpfungskonstante � ergibt sich unter den obigen Annahmen verlustarmer Kabel entsprechend
Gl. (20) zu:
� =1
2 � � z0 � ZL
(1
�D+
1
�d
)︸ ︷︷ ︸
ohm0sche Verluste: / p!
+�
2� tan �︸ ︷︷ ︸
dielektrische Verluste: / !
(32)
Ohm'sche Verluste sind umso kleiner, je gröÿer die Durchmesser von Innen- und Auÿenleiter sind. Die
minimale Dämpfung bei gegebenem Auÿendurchmesser D = const wird errreicht für Dd = 3; 6. Im
Gegensatz zu den ohm'schen Verlusten hängen die dielektrischen Verluste nicht von der Wellenleiter-
geometrie ab.
Abb. 5 zeigt konkrete Beispiele für die Dämpfung von Koaxialkabeln.
TU Berlin � Prof. Dr.-Ing. K. Petermann
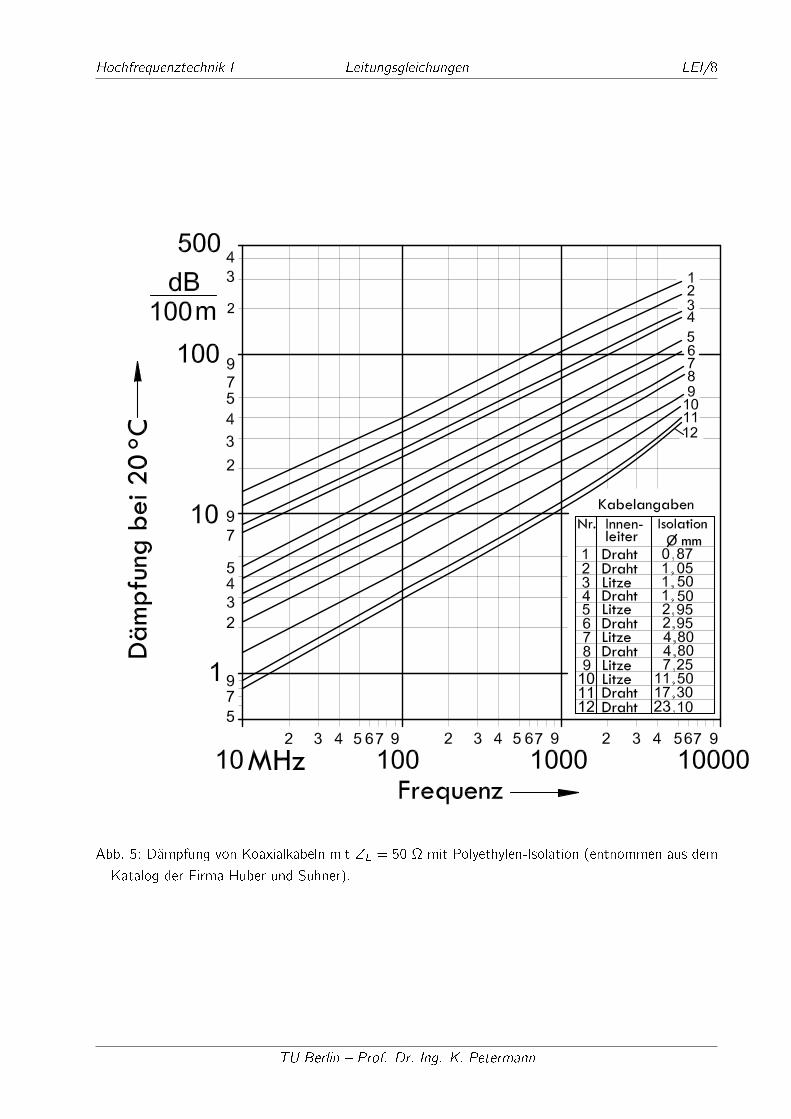
Hochfrequenztechnik I Leitungsgleichungen LEI/8
Abb. 5: Dämpfung von Koaxialkabeln mit ZL = 50 mit Polyethylen-Isolation (entnommen aus dem
Katalog der Firma Huber und Suhner).
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Wellenausbreitung auf Leitungen WEL/1
1 Vorbetrachtung
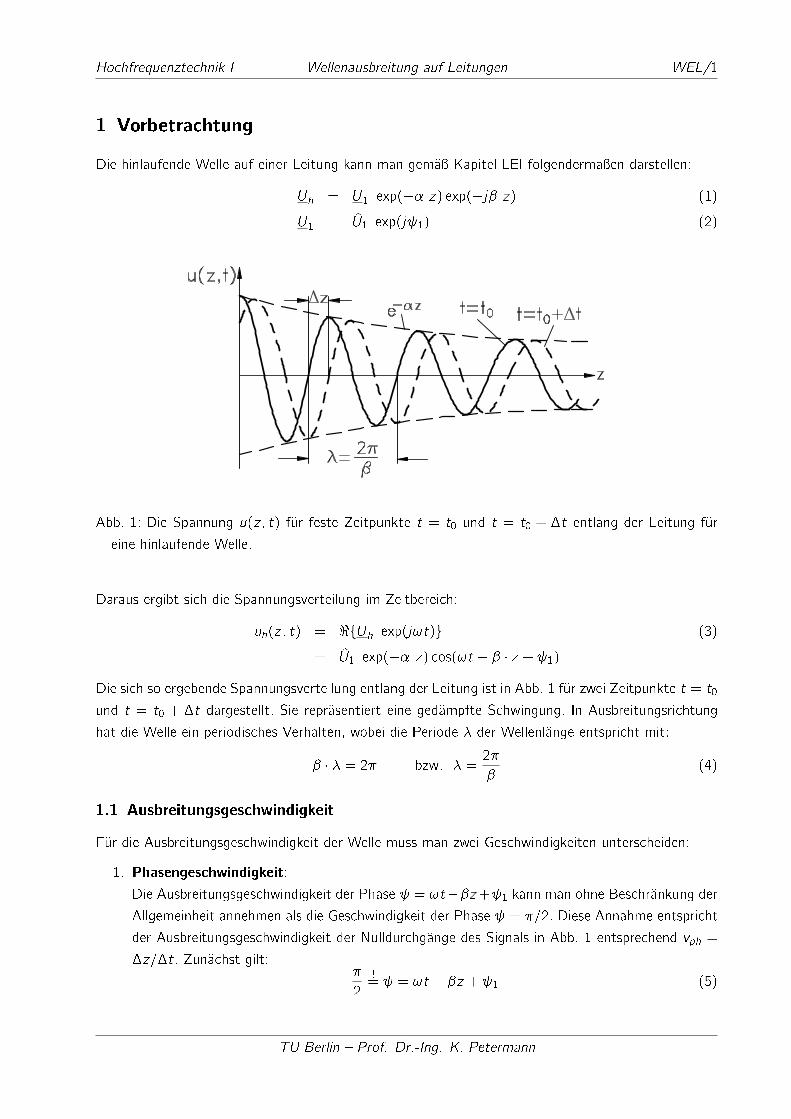
Die hinlaufende Welle auf einer Leitung kann man gemäÿ Kapitel LEI folgendermaÿen darstellen:
Uh = U1 exp(�� z) exp(�j� z) (1)
U1 = U1 exp(j 1) (2)
Abb. 1: Die Spannung u(z; t) für feste Zeitpunkte t = t0 und t = t0 + �t entlang der Leitung für
eine hinlaufende Welle.
Daraus ergibt sich die Spannungsverteilung im Zeitbereich:
uh(z; t) = <fUh exp(j!t)g (3)
= U1 exp(�� z) cos(!t � � � z + 1)
Die sich so ergebende Spannungsverteilung entlang der Leitung ist in Abb. 1 für zwei Zeitpunkte t = t0
und t = t0 + �t dargestellt. Sie repräsentiert eine gedämpfte Schwingung. In Ausbreitungsrichtung
hat die Welle ein periodisches Verhalten, wobei die Periode � der Wellenlänge entspricht mit:
� � � = 2� bzw: � =2�
�(4)
1.1 Ausbreitungsgeschwindigkeit
Für die Ausbreitungsgeschwindigkeit der Welle muss man zwei Geschwindigkeiten unterscheiden:
1. Phasengeschwindigkeit:
Die Ausbreitungsgeschwindigkeit der Phase = !t��z+ 1 kann man ohne Beschränkung der
Allgemeinheit annehmen als die Geschwindigkeit der Phase = �=2. Diese Annahme entspricht
der Ausbreitungsgeschwindigkeit der Nulldurchgänge des Signals in Abb. 1 entsprechend vph =
�z=�t. Zunächst gilt:�
2
!= = !t � �z + 1 (5)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Wellenausbreitung auf Leitungen WEL/2
Aus der Ableitung von Gl. 5 nach der Zeit ergibt sich die Phasengeschwindigkeit vph = dzdt:
! � �dzdt
= 0 = ! � � � vph; (6)
woraus:
vph =!
�(7)
folgt. Für verlustlarme Wellenleiter gilt mit Gl. (LEI 29) vph = c0p"r
.
2. Gruppengeschwindigkeit:
Die Ausbreitung von Pulsen auf einer Leitung wird durch die Gruppengeschwindigkeit beschrie-
ben. Pulse sind keine harmonischen Signale mehr, sondern bestehen aus mehreren Frequenz-
komponenten. Sie lassen sich allerdings aus einer Überlagerung von harmonischen Signalen zu-
sammensetzen.
Betrachtet man im einfachsten Fall die Überlagerung zweier harmonischer Signale mit den Fre-
quenzen !1 und !2 mit gleicher Amplitude U1 und der Annahme verschwindender Verluste
(� = 0), gilt:
u(z; t) = U1fcos(!1t � �1z) + cos(!2t � �2z)g
= 2U1 cos
[!1 � !2
2t � �1 � �2
2z
]︸ ︷︷ ︸
Einh�ullende
cos
[!1 + !2
2t � �1 + �2
2z
](8)
Für einen festen Zeitpunktt ist u(z; t)jt=konst in Abb. 2 dargestellt.
Die Gruppengeschwindigkeit entspricht der Ausbreitungsgeschwindigkeit der Einhüllenden:
vgr =!1 � !2
�1 � �2 (9)
Für den Übergang zu sehr kleinen Frequenzabständen !1 � !2 � !1; !2 wird daraus:
vgr =d!
d�(10)
Die Gruppengeschwindigkeit vgr gibt auch die Ausbreitungsgeschwindigkeit der transportierten
Leistung an und ist somit i.A. kleiner als die Lichtgeschwindigkeit. Wenn sich die Gruppen- und
Phasengeschwindigkeit unterscheiden, sprechen wir von dispersiver Wellenausbreitung, d.h.:
Dispersion = vph 6= vgr (11)
1.2 Beispiele
1. Verlustarme Leitung mit � nach Gl. (LEI 28):
1
vgr=d(!p"r
c0
)d!
=
p"r
c0︸ ︷︷ ︸1
vph
+!
c0
dp"r
d!︸ ︷︷ ︸Dispersionsanteil
(12)
Der Dispersionsanteil ist bei einer verlustarmen Leitung i.A. sehr klein.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Wellenausbreitung auf Leitungen WEL/3
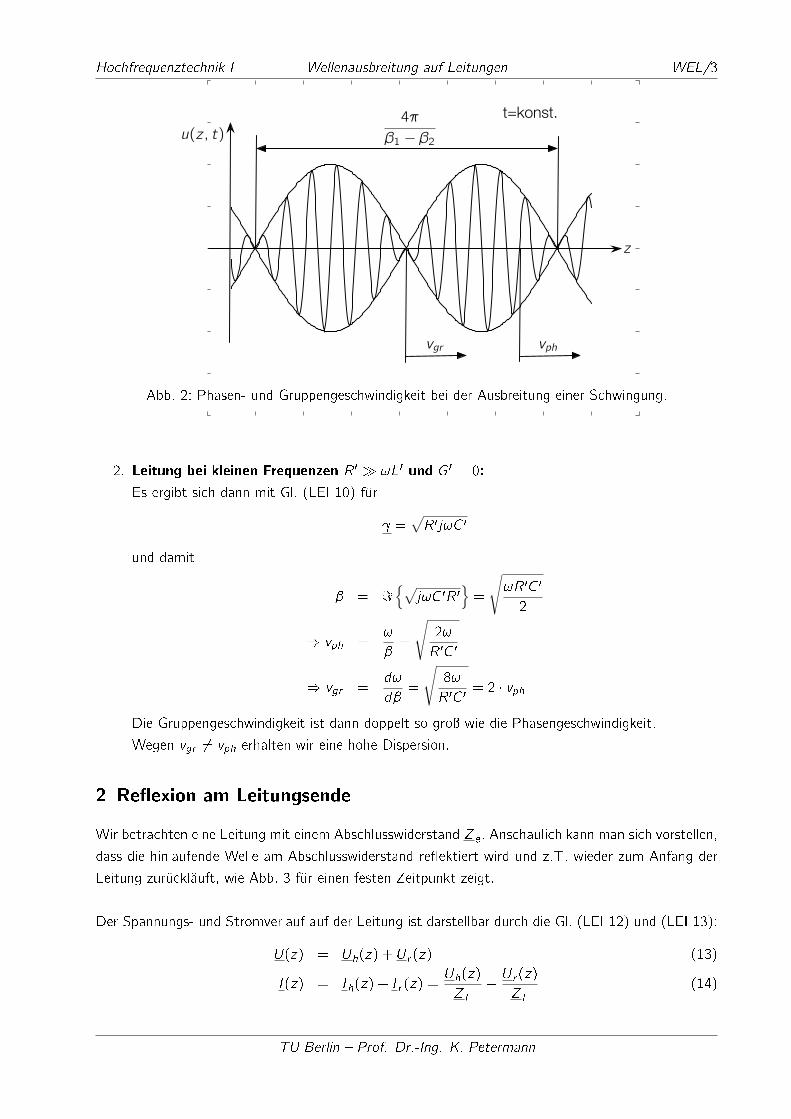
t=konst.4!
"1 ! "2
vgr vph
u(z, t)
z
Abb. 2: Phasen- und Gruppengeschwindigkeit bei der Ausbreitung einer Schwingung.
2. Leitung bei kleinen Frequenzen R0 � !L0 und G0 = 0:
Es ergibt sich dann mit Gl. (LEI 10) für
=√R0j!C0
und damit
� = ={√
j!C0R0}=
√!R0C0
2
) vph =!
�=
√2!
R0C0
) vgr =d!
d�=
√8!
R0C0 = 2 � vph
Die Gruppengeschwindigkeit ist dann doppelt so groÿ wie die Phasengeschwindigkeit.
Wegen vgr 6= vph erhalten wir eine hohe Dispersion.
2 Re�exion am Leitungsende
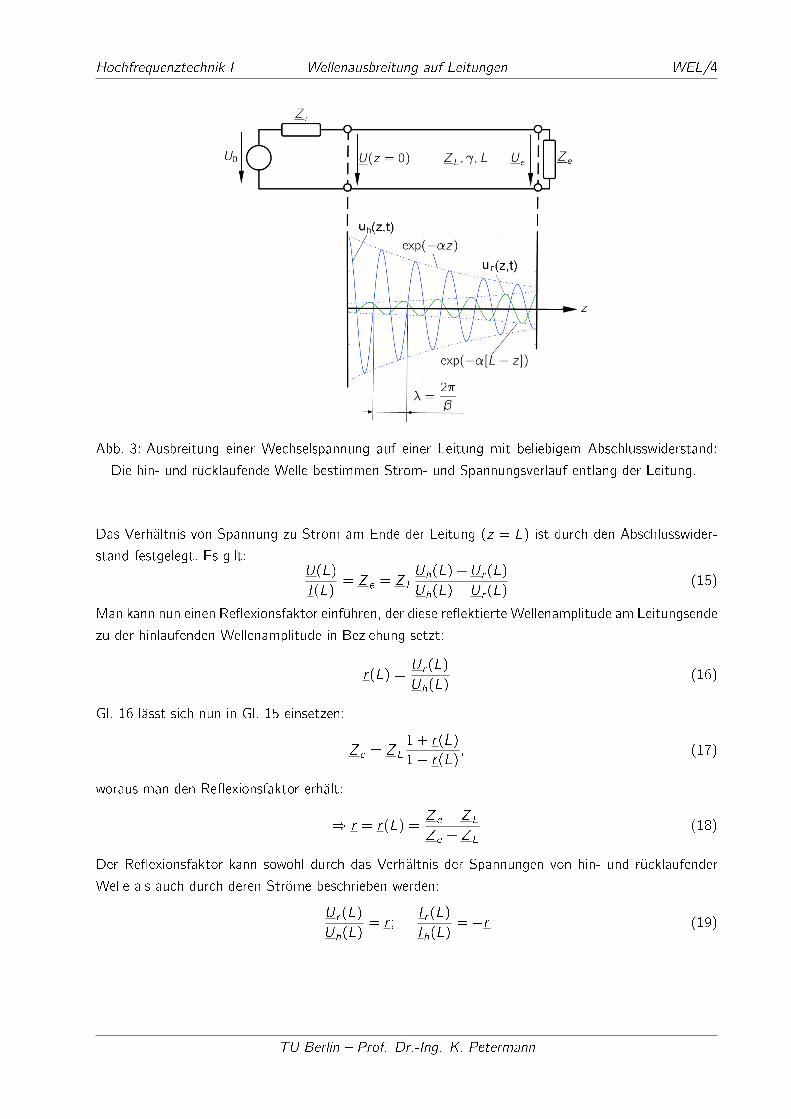
Wir betrachten eine Leitung mit einem Abschlusswiderstand Ze . Anschaulich kann man sich vorstellen,
dass die hinlaufende Welle am Abschlusswiderstand re�ektiert wird und z.T. wieder zum Anfang der
Leitung zurückläuft, wie Abb. 3 für einen festen Zeitpunkt zeigt.
Der Spannungs- und Stromverlauf auf der Leitung ist darstellbar durch die Gl. (LEI 12) und (LEI 13):
U(z) = Uh(z) + Ur (z) (13)
I(z) = Ih(z) + Ir (z) =Uh(z)
ZL
� Ur (z)
ZL
(14)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Wellenausbreitung auf Leitungen WEL/4
Abb. 3: Ausbreitung einer Wechselspannung auf einer Leitung mit beliebigem Abschlusswiderstand:
Die hin- und rücklaufende Welle bestimmen Strom- und Spannungsverlauf entlang der Leitung.
Das Verhältnis von Spannung zu Strom am Ende der Leitung (z = L) ist durch den Abschlusswider-
stand festgelegt. Es gilt:U(L)
I(L)= Ze = ZL
Uh(L) + Ur (L)
Uh(L)� Ur (L)(15)
Man kann nun einen Re�exionsfaktor einführen, der diese re�ektierte Wellenamplitude am Leitungsende
zu der hinlaufenden Wellenamplitude in Beziehung setzt:
r(L) =Ur (L)
Uh(L)(16)
Gl. 16 lässt sich nun in Gl. 15 einsetzen:
Ze = ZL
1 + r(L)
1� r(L) ; (17)
woraus man den Re�exionsfaktor erhält:
) r = r(L) =Ze � ZL
Ze + ZL
(18)
Der Re�exionsfaktor kann sowohl durch das Verhältnis der Spannungen von hin- und rücklaufender
Welle als auch durch deren Ströme beschrieben werden:
Ur (L)
Uh(L)= r ;
Ir (L)
Ih(L)= �r (19)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Wellenausbreitung auf Leitungen WEL/5
2.1 Beispiele
1. Anpassung: Ze = ZL
Es ergibt sich
r = 0 (20)
Die hinlaufende Welle läuft somit in den Abschlusswiderstand hinein, ohne dass eine re�ektierte
Welle entsteht.
2. Kurzschluss: Ze = 0
Es ergibt sich mit Gl. 18:
r =�ZL
ZL
= �1: (21)
Die Spannung am Ende der Leitung wird zu Null erzwungen. Die hinlaufende Welle wird damit
vollständig am Leitungsende re�ektiert, d.h. die gesamte Energie der Welle läuft wieder zurück.
3. Leerlauf: Ze !1Es ergibt sich mit Gl. 18:
r = +1 (22)
Der Strom wird am Ende der Leitung wird zu Null erzwungen. Die Welle wird auch vollständig
re�ektiert, so dass die gesamte Energie der Welle wieder zurückläuft.
4. reaktiver Abschluss: Ze = jX, z.B. jX = j!L oder jX = 1j!C
Mit Gl. 18 ergibt sich:
r =jX � ZL
jX + ZL
(23)
Für reellen Leitungswellenwiderstand ZL gilt dann: r = exp(j ) mit = 2 � arctan(ZL
X
).
D.h. die Welle wird auch dann vollständig re�ektiert: jr j = 1, aber mit einer Phasendrehung .
3 Re�exionsfaktor an beliebiger Stelle z auf der Leitung
Die hinlaufende Wellenamplitude lässt sich auch auf das Leitungsende beziehen:
Uh(z) = U1 exp(� z) = Uh(L) exp[ (L� z)] (24)
In derselben Art kann man die rücklaufende Welle beschreiben:
Ur (z) = U2 exp( z) = Ur (L) exp[� (L� z)] (25)
Damit ergibt sich der e�ektive Re�exionsfaktor an der Stelle z (nicht mehr am Leitungsende):
r(z) =Ur (z)
Uh(z)=Ur (L)
Uh(L)exp[�2 (L� z)] = r(L) � exp[�2 (L� z)] (26)
Der Re�exionsfaktor an einer beliebigen Stelle z hängt damit in einfacher Weise mit dem Re�exions-
faktor am Ende der Leitung zusammen.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Wellenausbreitung auf Leitungen WEL/6
Wenn man in der Ausbreitungskonstanten = �+ j� die Dämpfungs- und die Phasenkonstante jeweils
getrennt berücksichtigt, erhält man für den Spannungsverlauf:
U(z) = Uh(L) exp[�(L� z)] exp[j�(L� z)] + Ur (L) exp[��(L� z)] exp[�j�(L� z)] (27)
In gleicher Art und Weise beschreibt man den Stromverlauf:
ZL � I(z) = Uh(L) exp[�(L� z)] exp[j�(L� z)]� Ur (L) exp[��(L� z)] exp[�j�(L� z)] (28)
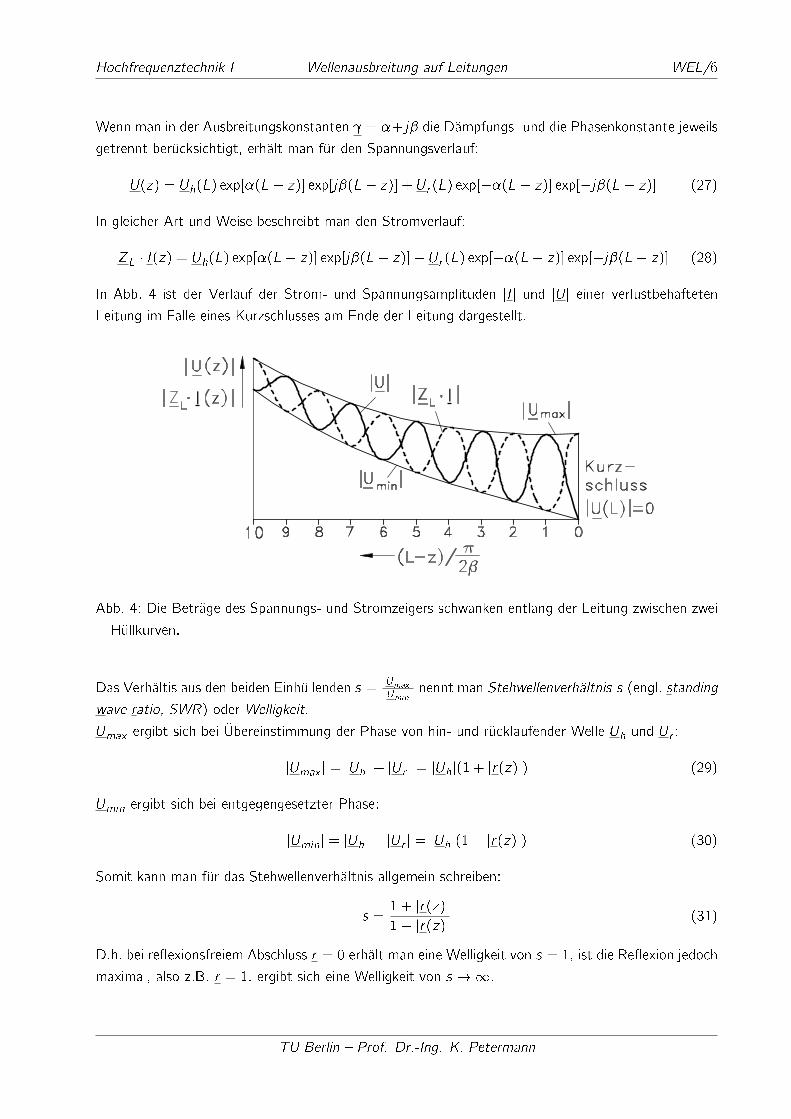
In Abb. 4 ist der Verlauf der Strom- und Spannungsamplituden jIj und jUj einer verlustbehaftetenLeitung im Falle eines Kurzschlusses am Ende der Leitung dargestellt.
I I
Abb. 4: Die Beträge des Spannungs- und Stromzeigers schwanken entlang der Leitung zwischen zwei
Hüllkurven.
Das Verhältis aus den beiden Einhüllenden s = jUmax jjUminj nennt man Stehwellenverhältnis s (engl. standing
wave ratio, SWR) oder Welligkeit.
Umax ergibt sich bei Übereinstimmung der Phase von hin- und rücklaufender Welle Uh und Ur :
jUmax j = jUhj+ jUr j = jUhj(1 + jr(z)j) (29)
Umin ergibt sich bei entgegengesetzter Phase:
jUminj = jUhj � jUr j = jUhj(1� jr(z)j) (30)
Somit kann man für das Stehwellenverhältnis allgemein schreiben:
s =1 + jr(z)j1� jr(z)j (31)
D.h. bei re�exionsfreiem Abschluss r = 0 erhält man eine Welligkeit von s = 1, ist die Re�exion jedoch
maximal, also z.B. r = 1, ergibt sich eine Welligkeit von s !1.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Wellenausbreitung auf Leitungen WEL/7
Der Betrag des Re�exionsfaktors hängt nur vom Betrag des Re�exionsfaktors am Ende der Leitung
r(L) und der Dämpfungskonstanten � der Leitung ab (siehe auch Gl. 26):
jr(z)j = jr(L)j exp[�2�(L� z)] (32)
Daraus ergibt sich, dass bei verlustbehafteten Leitungen zum Generator hin (z ! 0) der Betrag des
Re�exionsfaktors jr(z)j kleiner wird, und die Welligkeit dem Wert s ! 1 entgegenstrebt.
Bei verlustfreien Leitungen (� = 0) wird jr(z)j und damit die Welligkeit unabhängig vom Ort z .
3.1 Beispiele
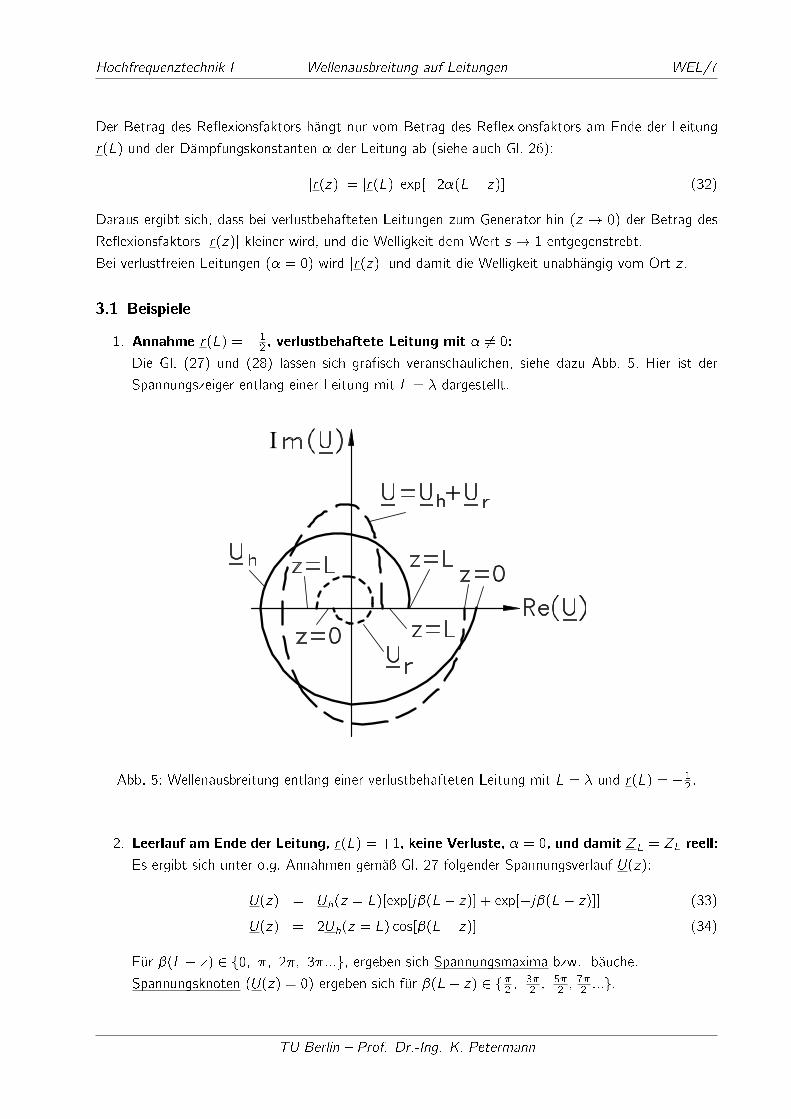
1. Annahme r(L) = �12, verlustbehaftete Leitung mit � 6= 0:
Die Gl. (27) und (28) lassen sich gra�sch veranschaulichen, siehe dazu Abb. 5. Hier ist der
Spannungszeiger entlang einer Leitung mit L = � dargestellt.
Abb. 5: Wellenausbreitung entlang einer verlustbehafteten Leitung mit L = � und r(L) = �12.
2. Leerlauf am Ende der Leitung, r(L) = +1, keine Verluste, � = 0, und damit ZL = ZL reell:
Es ergibt sich unter o.g. Annahmen gemäÿ Gl. 27 folgender Spannungsverlauf U(z):
U(z) = Uh(z = L)[exp[j�(L� z)] + exp[�j�(L� z)]] (33)
U(z) = 2Uh(z = L) cos[�(L� z)] (34)
Für �(L� z) 2 f0; �; 2�; 3�:::g, ergeben sich Spannungsmaxima bzw. -bäuche.
Spannungsknoten (U(z) = 0) ergeben sich für �(L� z) 2 f�2; 3�
2; 5�
2; 7�
2:::g.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Wellenausbreitung auf Leitungen WEL/8
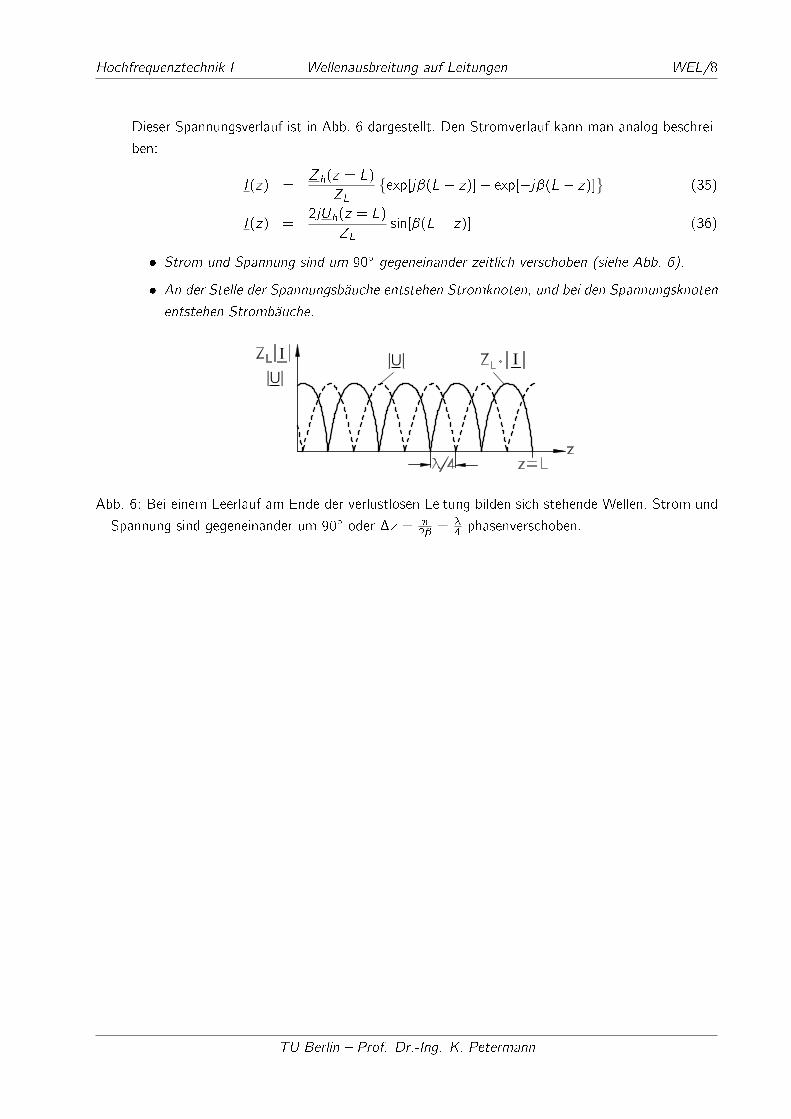
Dieser Spannungsverlauf ist in Abb. 6 dargestellt. Den Stromverlauf kann man analog beschrei-
ben:
I(z) =Zh(z = L)
ZL
{exp[j�(L� z)]� exp[�j�(L� z)]} (35)
I(z) =2jUh(z = L)
ZL
sin[�(L� z)] (36)
� Strom und Spannung sind um 90� gegeneinander zeitlich verschoben (siehe Abb. 6).
� An der Stelle der Spannungsbäuche entstehen Stromknoten, und bei den Spannungsknoten
entstehen Strombäuche.
|U||U|
Abb. 6: Bei einem Leerlauf am Ende der verlustlosen Leitung bilden sich stehende Wellen. Strom und
Spannung sind gegeneinander um 90� oder �z = �2�
= �4phasenverschoben.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Impedanztransformation, Smith-Diagramm SMI/1
1 Spannungs- und Stromtransformation
Wir wollen die Leitung in Abb. 1 als Vierpol betrachten. Dann können wir Beziehungen zwischen den
Spannungen und Strömen am Anfang Ua, Ia und am Ende Ue und Ie herstellen:
Ua = Uh(0) + Ur (0) = U1 + U2 (1)
Ia =Uh(0)
ZL
� Ur (0)
ZL
=U1
ZL
� U2
ZL
(2)
Ue = Uh(L) + Ur (L) = U1 exp(� L) + U2 exp(+ L) (3)
Ie =Uh(L)
ZL
� Ur (L)
ZL
=1
ZL
(U1 exp(� L)� U2 exp(+ L)) (4)
Abb. 1: Betrachtung der Leitung als Vierpol.
Nun kann man Gl. (3) und (4) nach U1 und U2 au�ösen:
U1 =Ue + ZL � Ie
2exp(+ L) (5)
U2 =Ue � ZL � Ie
2exp(� L) (6)
Gl. (5) und (6) lassen sich nun in Gl. (1) und (2) einsetzen, so dass man einen Ausdruck für Ua erhält:
Ua = Ue
1
2fexp( L) + exp(� L)g︸ ︷︷ ︸
cosh( L)
+ZL � Ie1
2fexp( L)� exp(� L)g︸ ︷︷ ︸
sinh( L)
) Ua = Ue cosh( L) + ZL � Ie sinh( L) (7)
Wenn entsprechend Gl. (5) und (6) in Gl. (2) eingesetzt werden, ergibt sich für den Strom am Anfang
der Leitung:
Ia =Ue
ZL
sinh( L) + Ie cosh( L) (8)
Zusammengefasst kann man obige Gleichungen als Kettenmatrix schreiben:Ua
Ia
=
cosh( L) ZL � sinh( L)sinh( L)=ZL cosh( L)
Ue
Ie
(9)
Mit solch einer Kettenmatrix lassen sich auch Hintereinanderschaltungen von Leitungen beschreiben.
Dann müssen die Matrizen, die die einzelnen Leitungen beschreiben, miteinander multipliziert werden.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Impedanztransformation, Smith-Diagramm SMI/2
2 Widerstandstransformation
Der Abschlusswiderstand Ze =Ue
Ie
sei bekannt. Gesucht ist dann der transformierte Widerstand Za =Ua
Ia
am Anfang der Leitung. Zur Bestimmung des transformierten Widerstands muss man nur das
Verhältnis von Spannung zu Strom am Anfang der Leitung bilden. Aus Gl. (7) und (8) folgt dann mit
Ue = Ze � Ie :Ua
Ia= Za = ZL
Ze cosh( L) + ZL sinh( L)
Ze sinh( L) + ZL cosh( L)(10)
und damit
) Za = ZL
Ze + ZL tanh( L)
ZL + Ze tanh( L)(11)
2.1 Spezialfälle
1. Anpassung: Ze = ZL
Der Abschlusswiderstand transformiert sich unverändert an den Anfang der Leitung: Za = ZL.
2. Sehr lange, verlustbehaftete Leitung mit � � z � 1:
) sinh( L) � 1
2exp( L) � cosh( L) ) tanh( L) � 1
) Za = ZL
D.h. die Welle sieht den Abschlusswiderstand am Ende der Leitung nicht mehr und wird nur
durch die Leitung selbst beein�usst.
3. Verlustfreie Leitung mit � = 0:
Der Leitungswellenwiderstand einer solchen Leitung ist rein reell: ZL = ZL, und für die Ausbrei-
tungskonstante gilt = j�, so dass sich ergibt:
sinh( L) = sinh(j�L) = j sin(�L)
cosh( L) = cosh(j�L) = cos(�L)
tanh(j�L) = j � tan(�L); (12)
woraus dann aus Gl. (11) folgt:
) Za = ZL
Ze + j ZL tan(�L)
ZL + j Ze tan(�L)(13)
2.2 Spezialfälle einer verlustfreien Leitung
1. �4 -Leitung: Eine
�4 -Leitung ist durch eine Leitungslänge L = �
4 bzw. �L = �2 charakterisiert.
Damit gilt
tan(� � L)!1; (14)
und aus Gl. (13) folgt für die Impedanz am Anfang der Leitung:
) Za =Z2L
Ze
(15)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Impedanztransformation, Smith-Diagramm SMI/3
Entsprechend Gl. (15) führt damit eine �4 -Leitung zu einer Impedanzinversion. Eine �
4 -Leitung
lässt sich auch zur Impedanzanpassung verwenden. Wenn z.B. Ze = Re und Za = Ra vorgegeben
sind, lässt sich die Forderung erfüllen, wenn ZL als geometrischer Mittelwert beider Widerstände
gewählt wird:
ZL =√Ra Re (16)
2. �2 -Leitung: Eine
�2 -Leitung wird durch � � L = � charakterisiert. Daher ist tan(� � L) = 0, und
aus Gl. (13) folgt einfach:
Za = Ze (17)
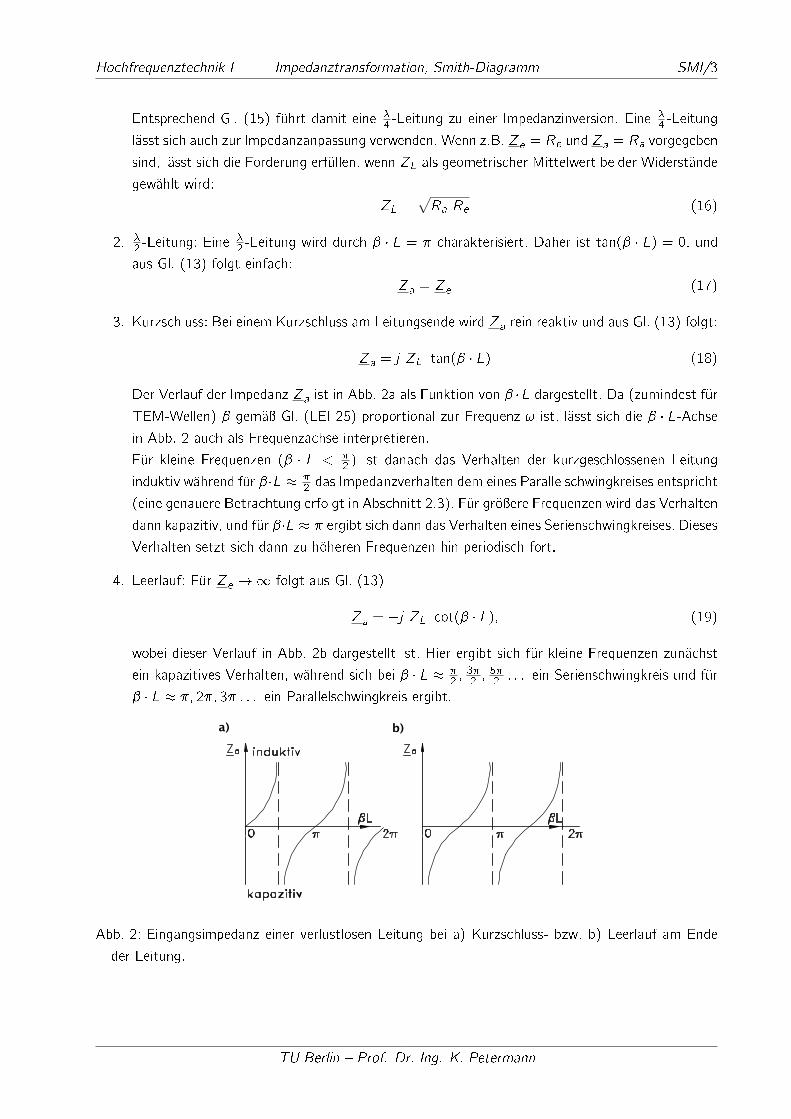
3. Kurzschluss: Bei einem Kurzschluss am Leitungsende wird Za rein reaktiv und aus Gl. (13) folgt:
Za = j ZL tan(� � L) (18)
Der Verlauf der Impedanz Za ist in Abb. 2a als Funktion von � �L dargestellt. Da (zumindest für
TEM-Wellen) � gemäÿ Gl. (LEI 25) proportional zur Frequenz ! ist, lässt sich die � � L-Achsein Abb. 2 auch als Frequenzachse interpretieren.
Für kleine Frequenzen (� � L < �2 ) ist danach das Verhalten der kurzgeschlossenen Leitung
induktiv während für ��L � �2 das Impedanzverhalten dem eines Parallelschwingkreises entspricht
(eine genauere Betrachtung erfolgt in Abschnitt 2.3). Für gröÿere Frequenzen wird das Verhalten
dann kapazitiv, und für ��L � � ergibt sich dann das Verhalten eines Serienschwingkreises. Dieses
Verhalten setzt sich dann zu höheren Frequenzen hin periodisch fort.
4. Leerlauf: Für Ze !1 folgt aus Gl. (13)
Za = �j ZL cot(� � L); (19)
wobei dieser Verlauf in Abb. 2b dargestellt ist. Hier ergibt sich für kleine Frequenzen zunächst
ein kapazitives Verhalten, während sich bei � � L � �2 ;
3�2 ; 5�2 : : : ein Serienschwingkreis und für
� � L � �; 2�; 3� : : : ein Parallelschwingkreis ergibt.
a) b)
Abb. 2: Eingangsimpedanz einer verlustlosen Leitung bei a) Kurzschluss- bzw. b) Leerlauf am Ende
der Leitung.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Impedanztransformation, Smith-Diagramm SMI/4
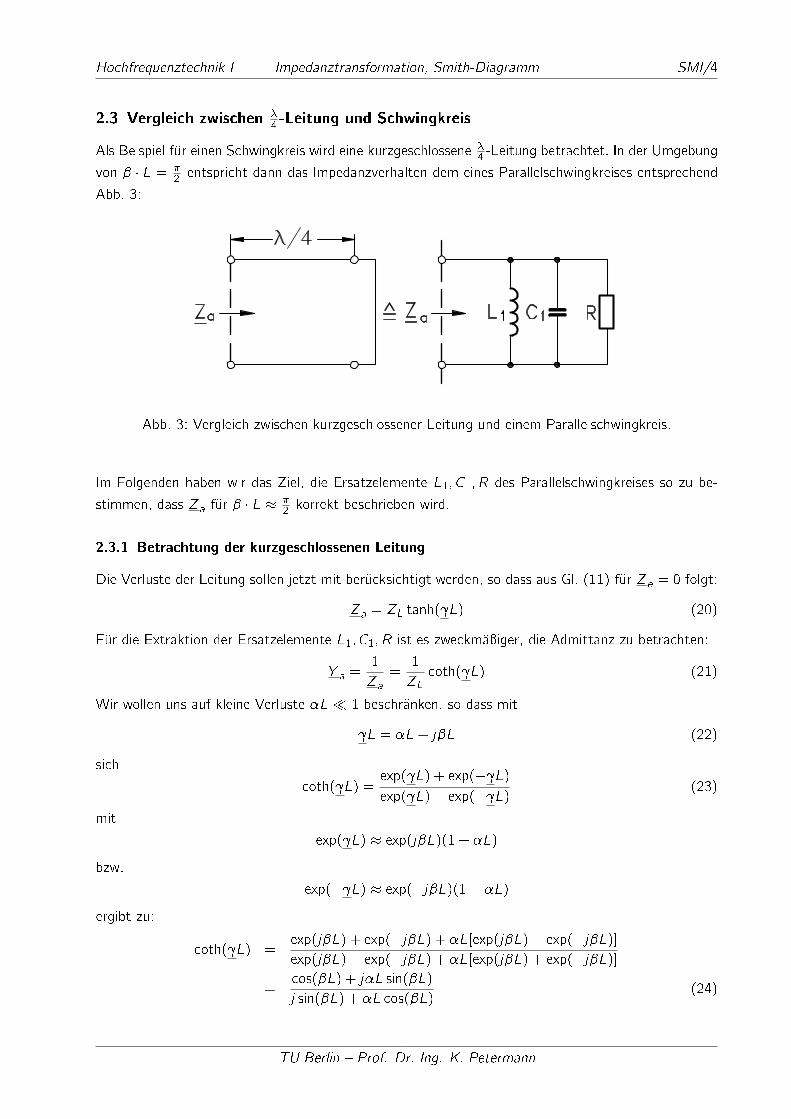
2.3 Vergleich zwischen �4-Leitung und Schwingkreis
Als Beispiel für einen Schwingkreis wird eine kurzgeschlossene �4 -Leitung betrachtet. In der Umgebung
von � � L = �2 entspricht dann das Impedanzverhalten dem eines Parallelschwingkreises entsprechend
Abb. 3:
Abb. 3: Vergleich zwischen kurzgeschlossener Leitung und einem Parallelschwingkreis.
Im Folgenden haben wir das Ziel, die Ersatzelemente L1; C1; R des Parallelschwingkreises so zu be-
stimmen, dass Za für � � L � �2 korrekt beschrieben wird.
2.3.1 Betrachtung der kurzgeschlossenen Leitung
Die Verluste der Leitung sollen jetzt mit berücksichtigt werden, so dass aus Gl. (11) für Ze = 0 folgt:
Za = ZL tanh( L) (20)
Für die Extraktion der Ersatzelemente L1; C1; R ist es zweckmäÿiger, die Admittanz zu betrachten:
Y a =1
Za
=1
ZL
coth( L) (21)
Wir wollen uns auf kleine Verluste �L� 1 beschränken, so dass mit
L = �L+ j�L (22)
sich
coth( L) =exp( L) + exp(� L)exp( L)� exp(� L) (23)
mit
exp( L) � exp(j�L)(1 + �L)
bzw.
exp(� L) � exp(�j�L)(1� �L)
ergibt zu:
coth( L) =exp(j�L) + exp(�j�L) + �L[exp(j�L)� exp(�j�L)]exp(j�L)� exp(�j�L) + �L[exp(j�L) + exp(�j�L)]
=cos(�L) + j�L sin(�L)
j sin(�L) + �L cos(�L)(24)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Impedanztransformation, Smith-Diagramm SMI/5
Da wir den Schwingkreis in der Nähe von � � L � �2 betrachten, wird cos(�L) sehr klein, und für die
Admittanz Y a folgt aus Gl. (21) mit (24) für �L� 1 und �L � �2 :
Y a =1
ZL
[�j cos(�L)
sin(�L)+ �L
](25)
Mit � = !p"r=c0 bzw. � = !=Vph und der Resonanzfrequenz !0 für � � L = �
2 (d.h. !0Lvph
= �2 ) folgt
aus Gl. (25):
Y a =1
ZL
[�j cot(�L) + �L] =1
ZL
�j cot(!Lvph
)+ �L
=
1
ZL
�j cot((! � !0)L
vph+
�
2
)+ �L
; (26)
was sich für (! � !0)Lvph� 1 näherungsweise schreiben lässt als:
Y a �1
ZL
(j(! � !0)L
vph+ �L
)(27)
2.3.2 Vergleich mit diskretem Schwingkreis
Der Gesamtleitwert des Parallelschwingkreises in Abb. 3 kann folgendermaÿen dargestellt werden:
Y a = j
(!C1 � 1
!L1
)+
1
R(28)
Wenn man nun die Resonanzfrequenz !0 =1pL1C1
einführt und Frequenzen in ihrer Nähe (j!�!0j �!0) betrachtet, erhält man folgenden Ausdruck:
Y a � j(! � !0) � 2C1 +1
R(29)
Durch Koe�zientenvergleich mit Gl. (27) erkennt man, dass sich der Leitungsresonator in der Nähe
der Resonanzfrequenz !0 durch einen äquivalenten Schwingkreis ersetzen lässt, dessen äquivalente
diskrete Bauelemente folgende Gröÿen haben:
C1 =L
2 ZL vph=
C0
2� L; (30)
wobei von ZL =√L0=C0 und vph = 1=
pL0C0 Gebrauch gemacht wurde. Weiterhin ergibt sich
R =ZL
� � L =
√L0
C01
� � L (31)
L1 =8L0
�2� L: (32)
Die Güte Q des Schwingkreises ergibt sich zu:
Q = !0C1 � R =!0
2� � vph (33)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Impedanztransformation, Smith-Diagramm SMI/6
2.3.3 Beispiel
Für f0 =!0
2� = 1000MHz und vph = 2 � 108ms, sowie � = 0; 1 dB
mergibt sich eine Güte von Q = 1370.
Die Länge L des Leitungsschwingkreises wird dann zu L = 5cm. Es lassen sich umso höhere Güten
erreichen, je geringer die Dämpfung und je höher die Resonanzfrequenz wird.
3 Smith-Diagramm
Eine Impedanztransformation ist auch mit Hilfe des sog. Smith-Diagramms möglich. Dazu wird die
Gl. (WEL 18) zunächst auf den Leitungswellenwiderstand normiert:
r =Ze=ZL � 1
Ze=ZL + 1=
z � 1
z + 1(34)
Hierbei ist z die normierte Impedanz am Ende der Leitung � nicht zu verwechseln mit der Ortskoor-
dinate z !
Gl. (34) beschreibt eine konforme Abbildung von der z-Ebene (z = u + jv) in die r -Ebene. Physi-
kalisch realisierbar als passive Abschlüsse sind nur Impedanzen mit <(z) > 0 (nur positive ohm'sche
Widerstände). Die rechte z-Halbebene mit <(z) > 0 wird in das Innere des Einheitskreises abgebildet.
Abb. 4: Das Smith-Diagramm ist die Abbildung der rechten z-Halbebene in den Einheitskreis in der
r -Ebene.
3.1 Abbildung ausgezeichneter Punkte
Die imaginäre Achse in der z-Ebene wird auf den Einheitskreis in der r -Ebene abgebildet:
z = j � v ) r =jv � 1
jv + 1= exp(j�) mit � = � � 2 arctan(v)
Die reelle Achse in der z-Ebene wird wiederum auf die reelle Achse der r -Ebene abgebildet:
z = u ) r =u � 1
u + 1) rein reeller Bruch,
wobei sich für den Bereich u > 0 reelle Werte r zwischen r = �1 (Kurzschluss, u = 0) und r = +1
(Leerlauf, u !1) innerhalb des Einheitskreises ergeben.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Impedanztransformation, Smith-Diagramm SMI/7
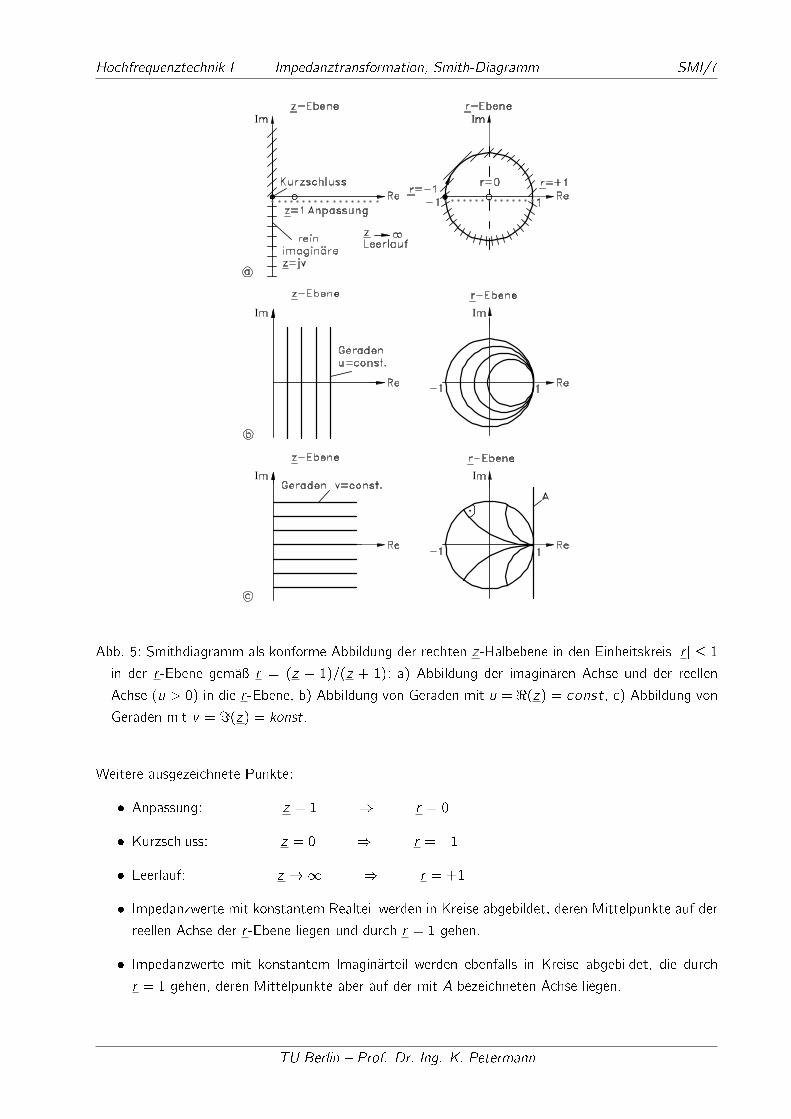
Abb. 5: Smithdiagramm als konforme Abbildung der rechten z-Halbebene in den Einheitskreis jr j � 1
in der r -Ebene gemäÿ r = (z � 1)=(z + 1): a) Abbildung der imaginären Achse und der reellen
Achse (u > 0) in die r -Ebene, b) Abbildung von Geraden mit u = <(z) = const, c) Abbildung von
Geraden mit v = =(z) = konst.
Weitere ausgezeichnete Punkte:
� Anpassung: z = 1 ) r = 0
� Kurzschluss: z = 0 ) r = �1
� Leerlauf: z !1 ) r = +1
� Impedanzwerte mit konstantem Realteil werden in Kreise abgebildet, deren Mittelpunkte auf der
reellen Achse der r -Ebene liegen und durch r = 1 gehen.
� Impedanzwerte mit konstantem Imaginärteil werden ebenfalls in Kreise abgebildet, die durch
r = 1 gehen, deren Mittelpunkte aber auf der mit A bezeichneten Achse liegen.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Impedanztransformation, Smith-Diagramm SMI/8
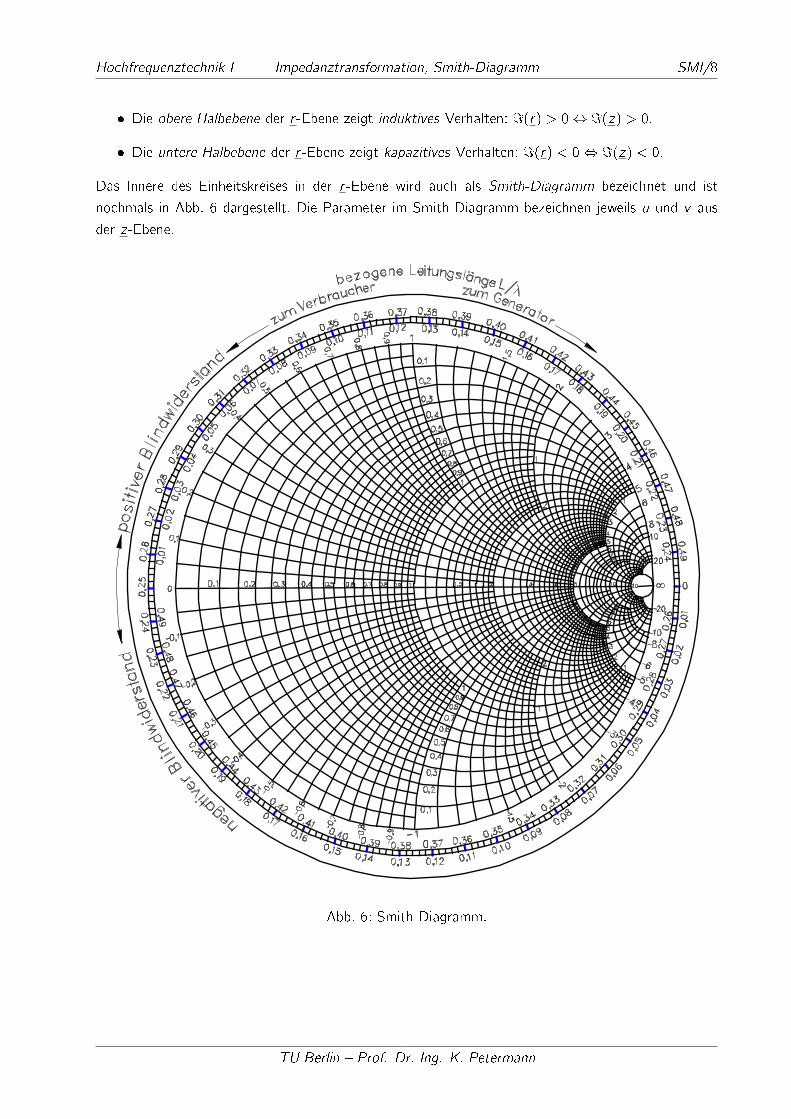
� Die obere Halbebene der r -Ebene zeigt induktives Verhalten: =(r) > 0, =(z) > 0.
� Die untere Halbebene der r -Ebene zeigt kapazitives Verhalten: =(r) < 0, =(z) < 0.
Das Innere des Einheitskreises in der r -Ebene wird auch als Smith-Diagramm bezeichnet und ist
nochmals in Abb. 6 dargestellt. Die Parameter im Smith-Diagramm bezeichnen jeweils u und v aus
der z-Ebene.
Abb. 6: Smith-Diagramm.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Impedanztransformation, Smith-Diagramm SMI/9
4 Impedanztransformation mit dem Smith-Diagramm
Mit dem Smith-Diagramm lässt sich in sehr einfacher Form die Impedanztransformation entlang einer
Leitung beschreiben. Die Transformation des Re�exionsfaktors vom Leitungsende an den Leitungsan-
fang erfolgt gemäÿ Gl. (WEL 26):
r(0) = r(L) exp(�2 L) (35)
= r(L) exp(�2�L)︸ ︷︷ ︸Dämpfung
exp(�2j� � L)︸ ︷︷ ︸Phasendrehung zum Generator
(36)
r(L) =Ze=ZL � 1
Ze=ZL + 1=
z(L)� 1
z(L) + 1(37)
r(0) =Za=ZL � 1
Za=ZL + 1=
z(0)� 1
z(0) + 1(38)
Somit ist die Vorgehensweise folgendermaÿen:
Ze sei vorgegeben, dann ergibt sich die normierte Impedanz am Leitungsende zu:
z(L) =Ze
ZL
(39)
z(L) wird nun im Smith-Diagramm eingetragen, so dass r(L) vorliegt. Im Smith-Diagramm wird dann
r(L) gemäÿ Gl. (36) in r(0) umgewandelt. Aus r(0) folgt dann die normierte Impedanz z(0), woraus
dann schlieÿlich nach Entnormierung die gesuchte Impedanz am Anfang der Leitung entsteht.
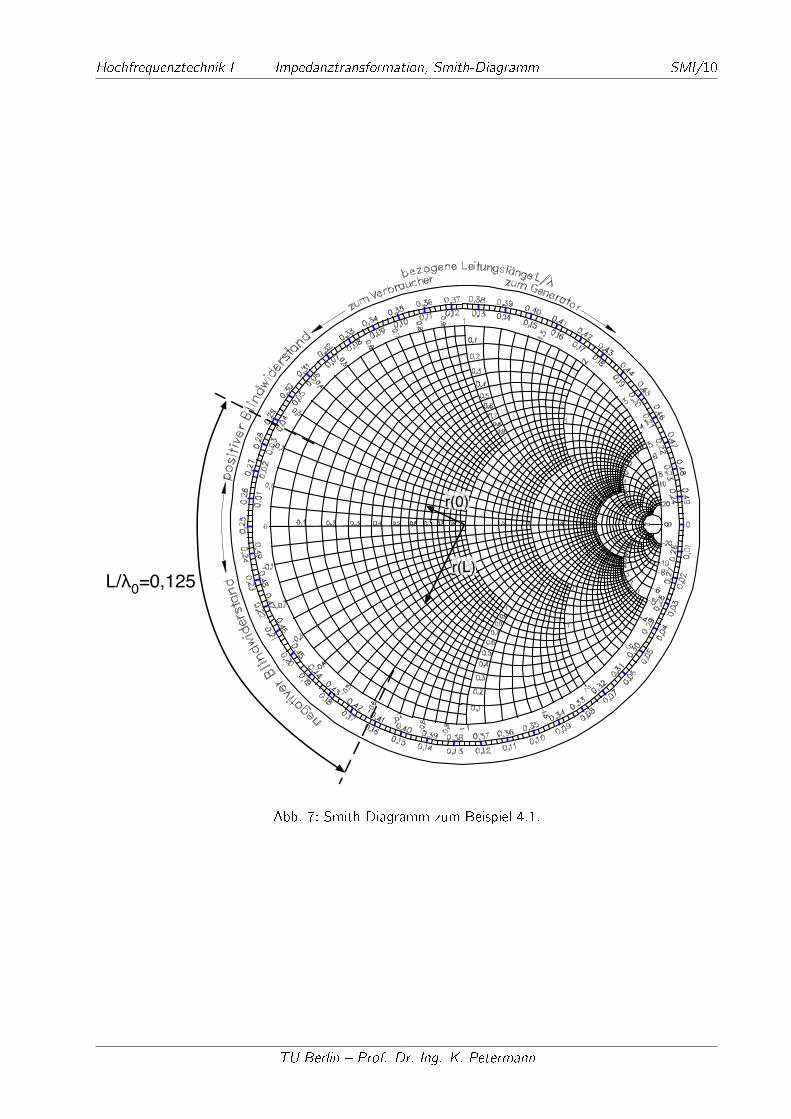
4.1 Beispiel: Ze = 25 (1� j); ZL = 50; L = �=8.
Ze = 25 (1� j)) z(L) =1
2(1� j)
Aus z(L) ergibt sich r(L) in Abb. 7. Mit der Annahme, dass die Verluste exp(�2�L) = 12 betragen,
folgt aus Gl. (36) ein jr(0)j = 12 jr(L)j.
Die Leitungslänge L = �8 führt zu einer Phasendrehung 2 � � �L = �
2 , so dass sich dann r(0) in Abb. 7
ergibt. Aus dem Smith-Diagramm lässt sich dann z(0) = 0; 65+ j 0; 15 ablesen, woraus sich schlieÿlich
ein Za = 32; 5 + j 7; 5 ergibt.
4.2 weitere Beispiele
1. verlustlose, am Ende kurzgeschlossene Leitung mit L�= 0; 199) Za = 3j ZL
2. verlustlose, am Ende o�ene Leitung mit L�= 0; 1) Za = �1; 4j ZL
4.3 Vorgehensweise bei komplexeren Fragestellungen
Wenn man z.B. eine Impedanztransformation an den Anfang einer verketteten Leitung mit unter-
schiedlichen Leitungswellenwiderständen vornehmen möchte (siehe Abb. 8), muss man folgendermaÿen
vorgehen:
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Impedanztransformation, Smith-Diagramm SMI/10
r(0)
r(L)L/λ0=0,125
Abb. 7: Smith-Diagramm zum Beispiel 4.1.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Impedanztransformation, Smith-Diagramm SMI/11
1. Ze bezüglich ZL2 normieren
2. Mit Smith-Diagramm die Impedanz Za2 am Anfang von Leitung 2 ermitteln
3. Die Impedanz Ze1 am Ende von Leitung 1 ist gegeben durch Ze1 = Za2 + Z0
4. Ze1 bezüglich des Leitungswellenwiderstands der Leitung 1, ZL1 normieren
5. Mit Smith-Diagramm die Impedanz Za bestimmen
Abb. 8: Leitungsanordnung mit zwei seriell verschalteten Elementen Z0 und Ze .
5 Transformation von Admittanzen mit dem Smith-Diagramm
In den letzten Abschnitten wurde der Re�exionsfaktor r immer bezüglich der normierten Impedanz z
betrachtet. Nun soll beschrieben werden, wie das Smith-Diagramm bezüglich der normierten Admittanz
y verwendet werden kann. Dazu soll noch einmal die Abbildungsvorschrift für z und analog dazu von
y angegeben werden:
r =Ze � ZL
Ze + ZL
=z � 1
z + 1mit z =
Ze
ZL
�r =ZL � Ze
ZL + Ze
=y � 1
y + 1mit y =
ZL
Ze
=1
z
Daraus ist ersichtlich, dass sich r zu z verhält, wie �r zu y .
Graphisch lässt sich dieser Zusammenhang durch eine Punktspiegelung am Koordinatenursprung dar-
stellen.
) Im Smith-Diagramm ist y bei bekannter Impedanz z durch Spiegelung am Ursprung bestimmbar.
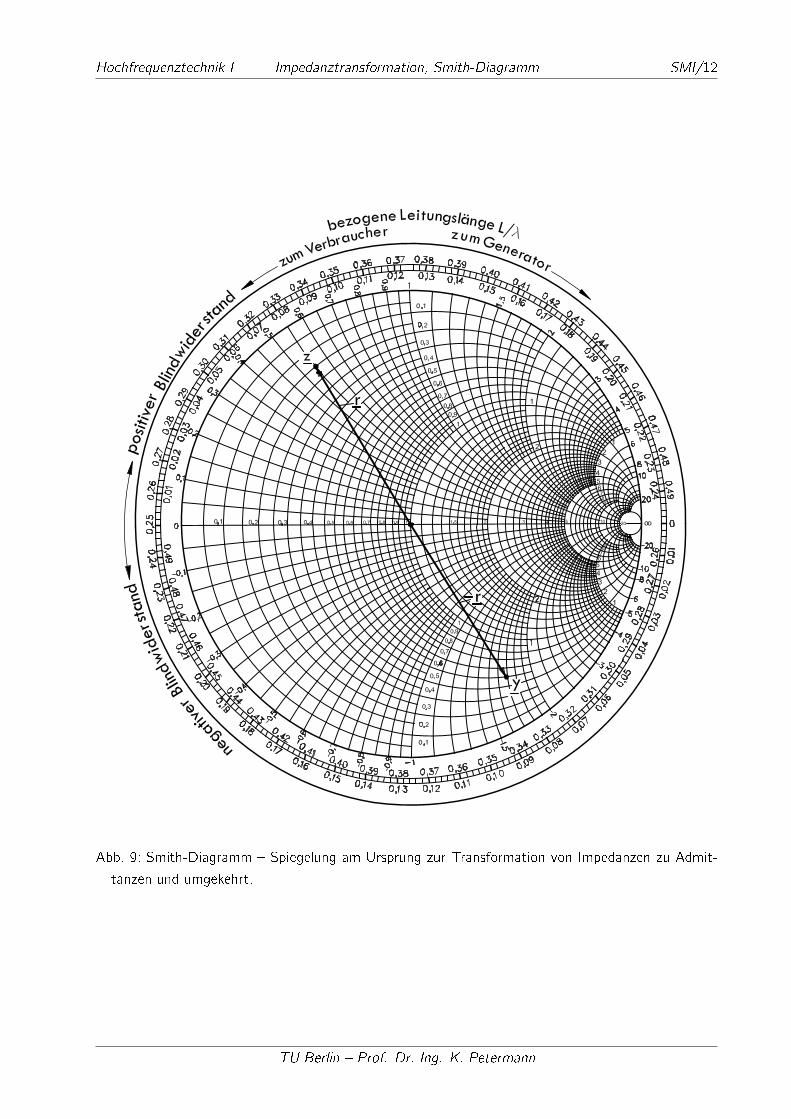
5.1 Beispiel
Die normierte Impedanz am Ende der Leitung sei z = 0; 15 + j � 0; 55:
z = 0; 15 + j � 0; 55) y = 0; 5� j � 1; 7
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Impedanztransformation, Smith-Diagramm SMI/12
Abb. 9: Smith-Diagramm � Spiegelung am Ursprung zur Transformation von Impedanzen zu Admit-
tanzen und umgekehrt.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Impedanztransformation, Smith-Diagramm SMI/13
Der Vorgang der Spiegelung ist in Abb. 9 dargestellt.
5.2 Vorgehensweise bei komplexeren Fragestellungen
Die Transformation von y mit dem Smith-Diagramm erfolgt völlig analog zur Transformation von z .
Die Betrachtung der Admittanzen ist zweckmäÿig bei Leitungsanordnungen, die parallelgeschaltete
Elemente beinhalten, weil sich dann ihre Admittanzen addieren.
5.2.1 Beispiel für Analyse mit Admittanzen
Abb. 10: Leitungsanordnung mit parallelgeschalteten Elementen.
Ein Beispiel für eine Anordnung mit parallel verschalteten Elementen ist in Abb. 10 dargestellt. Wir
wollen folgende Annahmen machen. Sie sollten dieses Beispiel selbst bearbeiten.
L1 = 0; 176 �; L2 = 0; 125 �; verlustfreie Leitungen
ZL1 = ZL2 = ZL; Y e = 0 (Leerlauf); Z0 = ZL
) ya= Y a � ZL =
ZL
Za
= 1� j
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Streumatrix STR/1
In den letzten Abschnitten wurden die Hochfrequenzsignale mit Strom- und Spannungsamplituden
beschrieben. Da diese Signale elektromagnetische Wellen darstellen, die sich auf Leitungen ausbreiten,
kann man sie auch allgemeiner mit Wellenamplituden beschreiben. In dieser Darstellung ist es dann
sinnvoller, die Wellenamplituden nicht auf Strom oder Spannung, sondern auf die von der Welle geführ-
te Leistung zu beziehen. Bauelemente lassen sich dann in Form von Streumatrizen charakterisieren,
die durch die hinein- und herauslaufenden Wellenamplituden de�niert werden, die relativ einfach zu
messen sind.
1 Normierte Wellenamplituden
Zuerst wollen wir, ausgehend von Strom- und Spannungsamplituden, das Konzept der normierten
Wellenamplituden einführen. Diese normierten Wellenamplituden sollen auf die transportierte Leistung
bezogen werden. Um die transportierte Leistung auf einer Leitung berechnen zu können, gehen wir
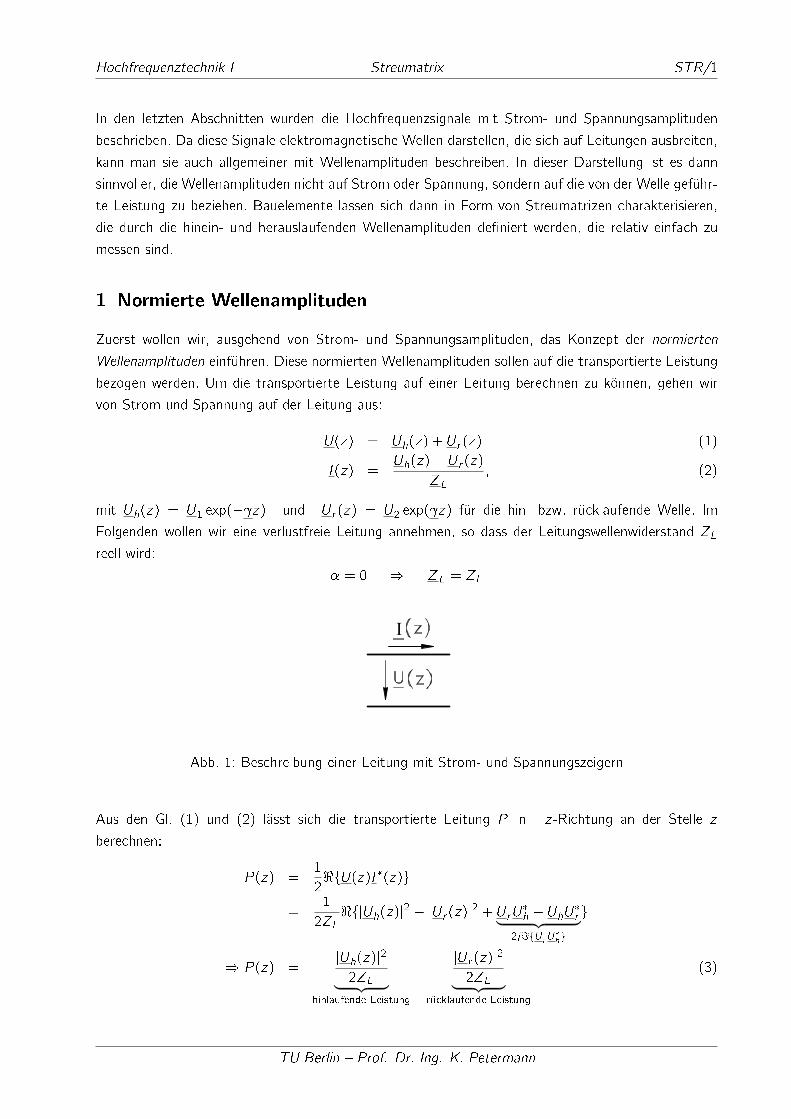
von Strom und Spannung auf der Leitung aus:
U(z) = Uh(z) + Ur (z) (1)
I(z) =Uh(z)� Ur (z)
ZL
; (2)
mit Uh(z) = U1 exp(� z) und Ur (z) = U2 exp( z) für die hin- bzw. rücklaufende Welle. Im
Folgenden wollen wir eine verlustfreie Leitung annehmen, so dass der Leitungswellenwiderstand ZL
reell wird:
� = 0 ) ZL = ZL
Abb. 1: Beschreibung einer Leitung mit Strom- und Spannungszeigern
Aus den Gl. (1) und (2) lässt sich die transportierte Leitung P in +z-Richtung an der Stelle z
berechnen:
P (z) =1
2<fU(z)I�(z)g
=1
2ZL
<fjUh(z)j2 � jUr (z)j2 + UrU�h � UhU
�r︸ ︷︷ ︸
2j=fUrU�
hg
g
) P (z) =jUh(z)j22ZL︸ ︷︷ ︸
hinlaufende Leistung
� jUr (z)j22ZL︸ ︷︷ ︸
rücklaufende Leistung
(3)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Streumatrix STR/2
Solange der Leitungswellenwiderstand reell ist, besteht die auf der Leitung geführte Leistung also
aus einem hinlaufenden Teil, der proportional zu jUhj2 ist, und einem rücklaufenden Teil proportional
zu jUr j2. Daher ist es sinnvoll, normierte, leistungsbezogene Wellenamplituden einzuführen, die die
hinlaufende und rücklaufende Welle repräsentieren:
a(z) =Uh(z)p
ZL
; b(z) =Ur (z)p
ZL
:
Die Beschreibung der Leistung vereinfacht sich dann folgendermaÿen:
P (z) =1
2fja(z)j2 � jb(z)j2g: (4)
Spannung und Strom ergeben sich dann aus den Überlagerungen der hin- und rücklaufenden Wellen:
U(z) =√ZLfa(z) + b(z)g (5)
I(z) =1pZL
fa(z)� b(z)g (6)
Die Gröÿen ja(z)j und jb(z)j lassen sich einfach aus Leistungsmessungen bestimmen.
Der Re�exionsfaktor ergibt sich wie gehabt als Verhältnis der rück- zur hinlaufenden Welle:
r(z) =Ur (z)
Uh(z)=
b(z)
a(z)(7)
2 Beschreibung eines Zweitores mit der Streumatrix
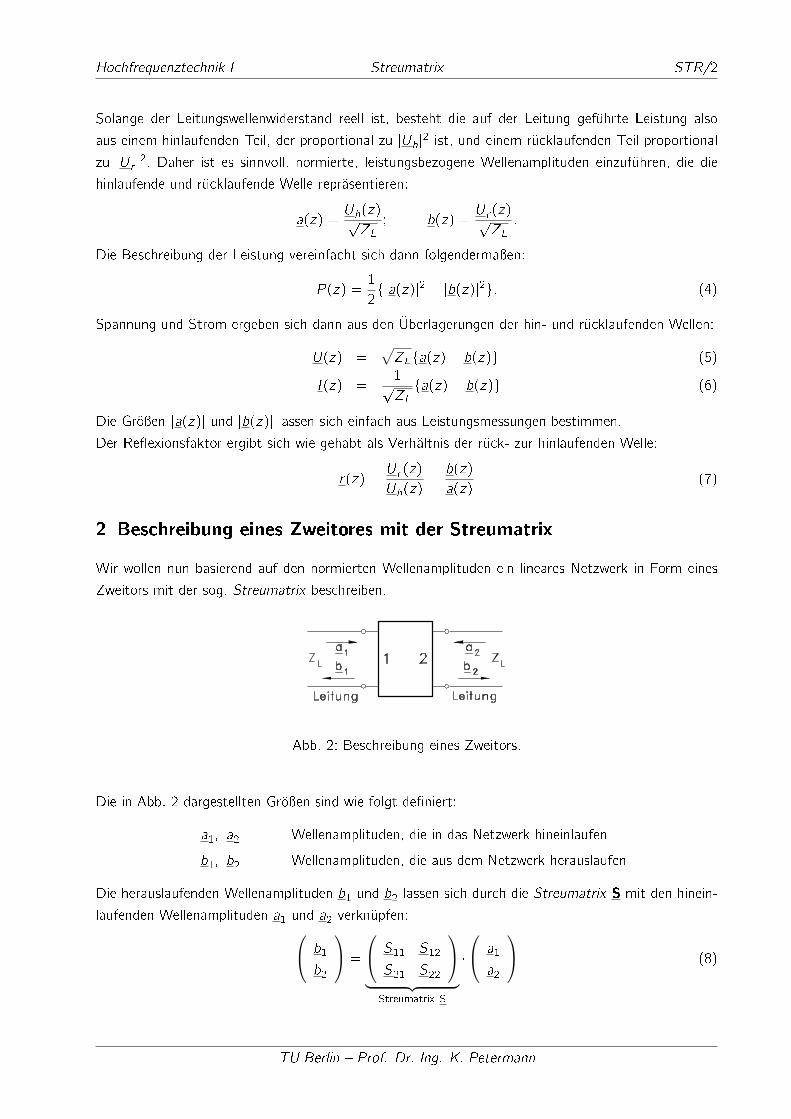
Wir wollen nun basierend auf den normierten Wellenamplituden ein lineares Netzwerk in Form eines
Zweitors mit der sog. Streumatrix beschreiben.
Abb. 2: Beschreibung eines Zweitors.
Die in Abb. 2 dargestellten Gröÿen sind wie folgt de�niert:
a1; a2 Wellenamplituden, die in das Netzwerk hineinlaufen
b1; b2 Wellenamplituden, die aus dem Netzwerk herauslaufen
Die herauslaufenden Wellenamplituden b1 und b2 lassen sich durch die Streumatrix S mit den hinein-
laufenden Wellenamplituden a1 und a2 verknüpfen: b1
b2
=
S11 S12
S21 S22
︸ ︷︷ ︸
Streumatrix S
� a1
a2
(8)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Streumatrix STR/3
Hierbei entsprechen die beiden Komponenten S11 und S22 den Re�exionsfaktoren bei ausgangs- bzw.
eingangsseitiger Anpassung. Die beiden anderen Komponenten S21 und S12 beschreiben die Trans-
mission in Hin- bzw. in Rückrichtung.
2.1 Beispiele
Zwei Beispiele sollen die Eigenschaften von Streumatrizen verdeutlichen.
1. Leitung mit Wellenwiderstand ZL und Länge L:
Wenn wir die hin- und rücklaufenden Wellen betrachten, ergibt sich eine Phasendrehung (und
Dämpfung) gemäÿ der Länge der Leitung:
b2 = a1 exp(� L) (9)
b1 = a2 exp(� L) (10)
Damit ergibt sich die Streumatrix zu:
) S =
0 exp(� L)exp(� L) 0
: (11)
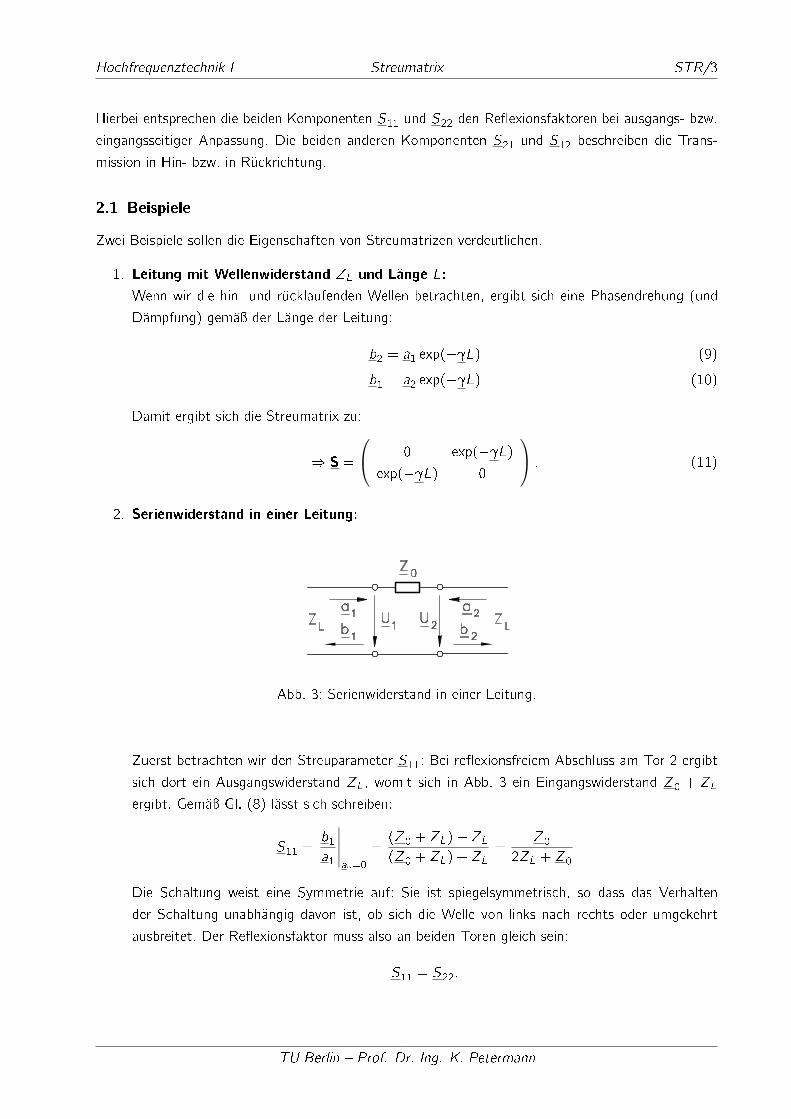
2. Serienwiderstand in einer Leitung:
Abb. 3: Serienwiderstand in einer Leitung.
Zuerst betrachten wir den Streuparameter S11: Bei re�exionsfreiem Abschluss am Tor 2 ergibt
sich dort ein Ausgangswiderstand ZL, womit sich in Abb. 3 ein Eingangswiderstand Z0 + ZL
ergibt. Gemäÿ Gl. (8) lässt sich schreiben:
S11 =b1
a1
∣∣∣∣∣a2=0
=(Z0 + ZL)� ZL
(Z0 + ZL) + ZL
=Z0
2ZL + Z0
Die Schaltung weist eine Symmetrie auf: Sie ist spiegelsymmetrisch, so dass das Verhalten
der Schaltung unabhängig davon ist, ob sich die Welle von links nach rechts oder umgekehrt
ausbreitet. Der Re�exionsfaktor muss also an beiden Toren gleich sein:
S11 = S22:
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Streumatrix STR/4
Nun betrachten wir die Transmission:
S21 =b2
a1
∣∣∣∣∣a2=0
Dei re�exionsfreiem Abschluss am Tor 2 (ausgedrückt durch a2 = 0) ergibt sich in Abb. 3 ein
Spannungsteiler:U2
U1
=ZL
Z0 + ZL
(12)
U1 beinhaltet dabei die hinlaufende Welle mit a1 und die rücklaufende Welle mit b1, so dass
sich U1 = Uh;1(1+S11) schreiben lässt (Uh1 � Spannung der hinlaufenden Welle am Tor 1). Es
ergibt sich damit
S21 =b2
a1
∣∣∣∣∣a2=0
=U2
Uh1
=U2
U1
U1
Uh1
=ZL
Z0 + ZL
(1 + S11) =2 � ZL
Z0 + 2 � ZL
(13)
Auÿerdem gilt Reziprozität: Die Richtung der Ausbreitung hat keine Auswirkung auf die Aus-
breitungseigenschaften. Eine Welle, die sich von Tor 1 nach 2 ausbreitet, erfährt die gleiche
Übertragung, wie eine Welle, die sich in entgegengesetzter Richtung ausbreitet. Für die Streu-
matrix ergibt sich somit:
S21 = S12:
Die Beziehung S21 = S12 gilt bei allen reziproken, auch unsymmetrischen Netzwerken!
3 Signal�ussdiagramm
Eine einfache Beschreibung der Wellen ist mit dem Signal�ussdiagramm möglich. Darin stellt jeder
Knoten die Summe der in ihn hineinlaufenden Wellenamplituden dar. Jeder Pfad fordert die Multiplikati-
on mit dem Wert, der dem Pfad zugeordnet ist. Solch ein Signal�ussdiagramm ist in Abb. 4 dargestellt.
Wir stellen einen Vierpol mit bekannten Streuparametern im Signal�ussdiagramm dar:
Abb. 4: Signal�ussdiagramm eines Zweitors.
Für die beiden herauslaufenden Wellenamplituden des Zweitors bzw. Vierpols ergeben sich demnach
folgende Beziehungen:
b2 = S21a1 + S22a2; b1 = S11a1 + S12a2
Das Signal�ussdiagramm für zwei hintereinandergeschaltete Vierpole ist in Abb. 5 dargestellt.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Streumatrix STR/5
3.1 Beispiel: Beschreibung der Transmission S0021
durch zwei Vierpole
Wir betrachten beispielhaft die Transmission S0021 =
b2
a1
∣∣∣a2=0
in Abb. 5. Als Hilfsgröÿe führen wir hier
die Wellenamplitude bx ein:
bx = a1 � S21 + bxS011 � S22 ) bx = a1
S21
1� S011S22
Es ergibt sich dann für b2:
b2 = S021 � bx = a1
S21S021
1� S011S22
;
woraus dann für S0021 =
b2
a1
∣∣∣a2=0
folgt:
S0021 =
S21S021
1� S011S22
Abb. 5: Signal�ussdiagramm zwei hinter einander geschalteter Zweitore.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Impulse auf Leitungen IMP/1
1 Vorüberlegung
Bisher wurde nur die Übertragung harmonischer Signale einer bestimmten Frequenz betrachtet. Aller-
dings werden auch pulsförmige Vorgänge mit Leitungen übertragen. Um diese Vorgänge beschreiben
zu können, hat man grundsätzlich die Möglichkeit, die Pulse mittels der Fourier-Transformation in
seine Spektralanteile zu zerlegen und dann die Übertragung dieser Anteile getrennt von einander zu
betrachten. Schlieÿlich müssen die übertragenen Spektralanteile wieder überlagert werden, indem man
eine Fourier-Rücktransformation vornimmt. Diese allgemeine Vorgehensweise ist immer möglich, je-
doch ist sie sehr aufwändig und wird insbesondere bei verlustbehafteten oder dispersiven Leitungen
angewandt.
2 Pulsausbreitung auf verlustfreien, nicht dispersiven Leitungen
Wir wollen im Folgenden die Pulsausbreitung in verlustfreien und nicht dispersiven (vph = vgr = v)
Leitungen betrachten. Der Ausgangspunkt sind die bereits bekannten Leitungsgleichungen (LEI 3 und
LEI 4), wobei die Komponenten, die die Verluste beschreiben, vernachlässigt werden (R0 = G0 = 0)
und die Induktivitäts- und Kapazitätsbelege L0 und C0 frequenzunabhängig werden:
@u
@z= �L0
@i
@t(1)
@i
@z= �C0
@u
@t: (2)
Wenn man nun die Gl. (1) partiell nach z und Gl. (2) partiell nach t ableitet, erhält man eine Wellen-
gleichung:
@2u
@z2= �L0
@2i
@t@z;
@2i
@t@z= �C0
@2u
@t2
) @2u
@z2=
1
v2@2u
@t2mit v =
1pL0C0
(3)
Gl. (3) beschreibt eine allgemeine Wellengleichung, die durch folgenden Ansatz gelöst wird:
u(z; t) = fh
(t � z
v
)+ fr
(t +
z
v
); (4)
bei der die beliebigen Funktionen fh() und fr () jeweils eine hin- und rücklaufende Welle beschreiben.
Sie sind durch die Anfangsbedingungen festgelegt. Die Stromverteilung ergibt sich analog:
ZL � i(z; t) = fh
(t � z
v
)� fr
(t +
z
v
); (5)
2.1 Beispiel: Blitzeinschlag in eine Leitung
Durch atmosphärische Felder wird eine Ladungsverteilung Q0(z)mit der Gesamtladung Q =∫Q0(z) dz
auf der Leitung in�uenziert, die nach dem Blitzeinschlag zur Zeit t = 0 auf der Leitung plötzlich
ab�ieÿt. Es ergeben sich für Strom und Spannung zum Zeitpunkt t = 0:
u(z; 0) =Q0(z) dz
C0 dz= f (z) =
Q0(z)
C0= fh
(�z
v
)+ fr
(z
v
)(6)
ZL � i(z; 0) = 0 = fh
(�z
v
)� fr
(z
v
): (7)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Impulse auf Leitungen IMP/2
Aus Gl. (7) ergibt sich sofort:
fr
(z
v
)= fh
(�z
v
)(8)
Damit folgt dann mit Gl. (6)f (z)
2= fr
(z
v
)= fh
(�z
v
)(9)
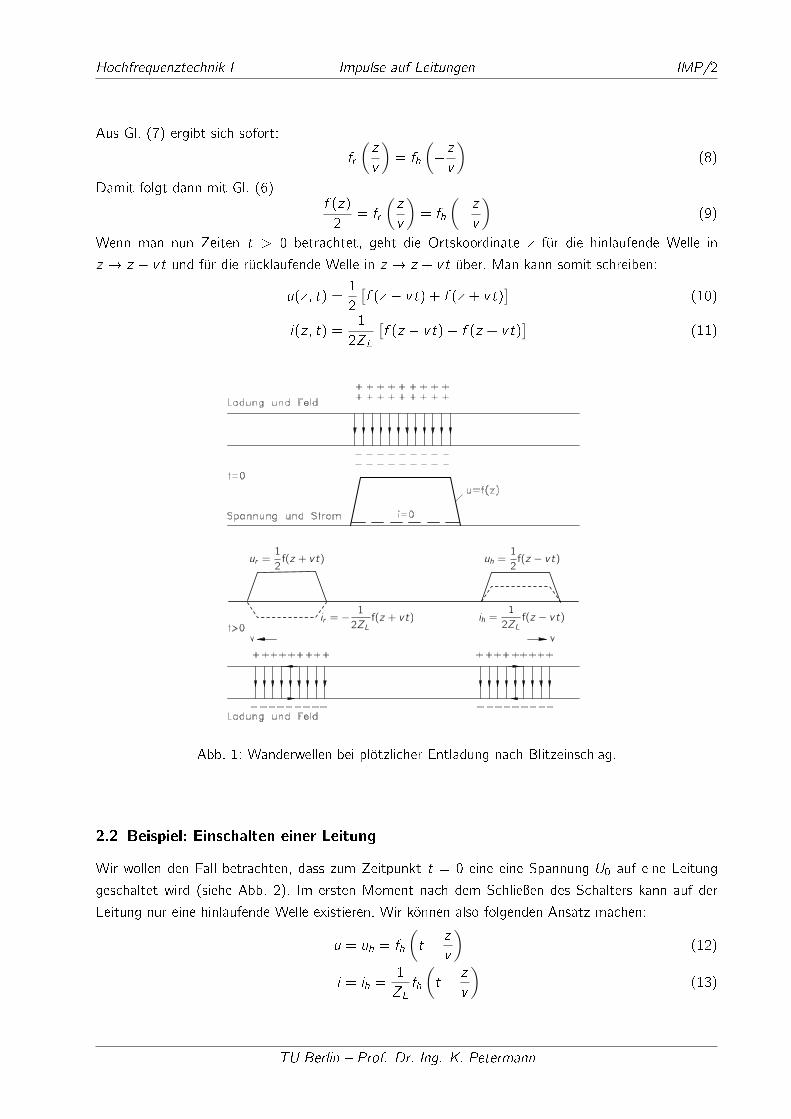
Wenn man nun Zeiten t > 0 betrachtet, geht die Ortskoordinate z für die hinlaufende Welle in
z ! z � vt und für die rücklaufende Welle in z ! z + vt über. Man kann somit schreiben:
u(z; t) =1
2
[f (z � vt) + f (z + vt)
](10)
i(z; t) =1
2ZL
[f (z � vt)� f (z + vt)
](11)
r
uh =1
2f(z ! vt)
ih =1
2ZLf(z ! vt)ir = !
1
2ZLf(z + vt)
ur =1
2f(z + vt)
Abb. 1: Wanderwellen bei plötzlicher Entladung nach Blitzeinschlag.
2.2 Beispiel: Einschalten einer Leitung
Wir wollen den Fall betrachten, dass zum Zeitpunkt t = 0 eine eine Spannung U0 auf eine Leitung
geschaltet wird (siehe Abb. 2). Im ersten Moment nach dem Schlieÿen des Schalters kann auf der
Leitung nur eine hinlaufende Welle existieren. Wir können also folgenden Ansatz machen:
u = uh = fh
(t � z
v
)(12)
i = ih =1
ZL
fh
(t � z
v
)(13)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Impulse auf Leitungen IMP/3
z
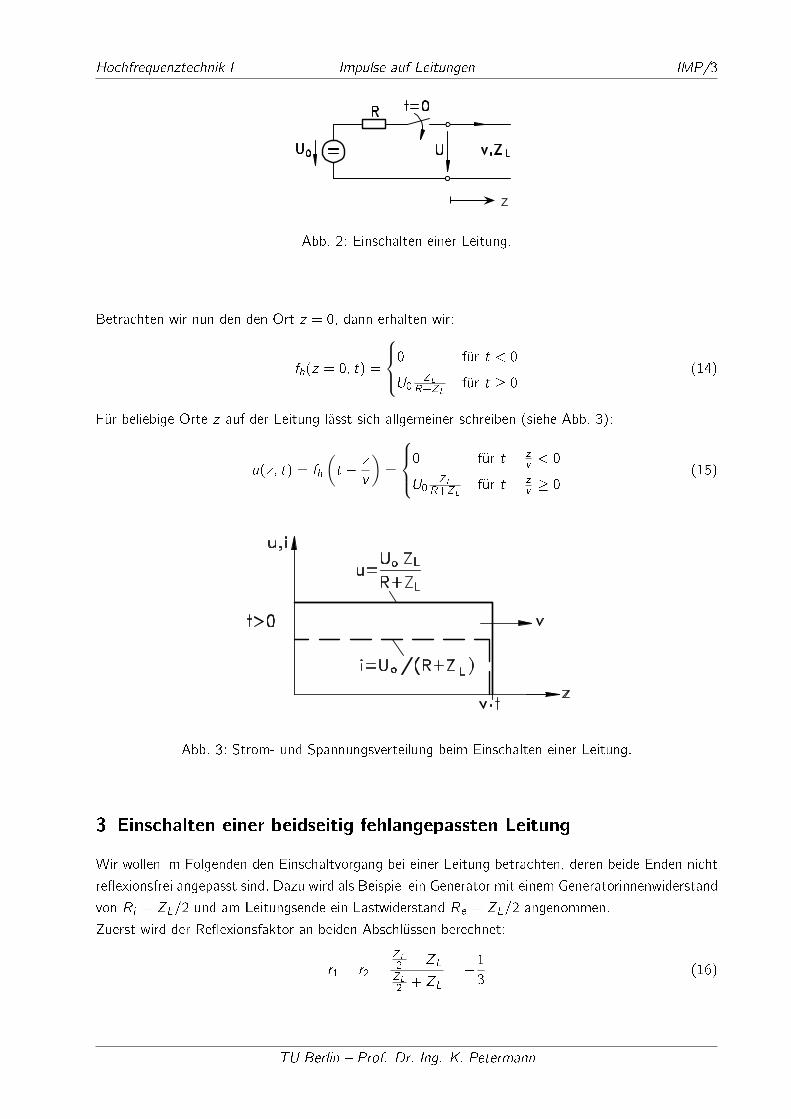
Abb. 2: Einschalten einer Leitung.
Betrachten wir nun den den Ort z = 0, dann erhalten wir:
fh(z = 0; t) =
0 für t < 0
U0ZL
R+ZLfür t � 0
(14)
Für beliebige Orte z auf der Leitung lässt sich allgemeiner schreiben (siehe Abb. 3):
u(z; t) = fh
(t � z
v
)=
0 für t � z
v< 0
U0ZL
R+ZLfür t � z
v� 0
(15)
Abb. 3: Strom- und Spannungsverteilung beim Einschalten einer Leitung.
3 Einschalten einer beidseitig fehlangepassten Leitung
Wir wollen im Folgenden den Einschaltvorgang bei einer Leitung betrachten, deren beide Enden nicht
re�exionsfrei angepasst sind. Dazu wird als Beispiel ein Generator mit einem Generatorinnenwiderstand
von Ri = ZL=2 und am Leitungsende ein Lastwiderstand Re = ZL=2 angenommen.
Zuerst wird der Re�exionsfaktor an beiden Abschlüssen berechnet:
r1 = r2 =ZL
2� ZL
ZL
2+ ZL
= �1
3(16)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Impulse auf Leitungen IMP/4
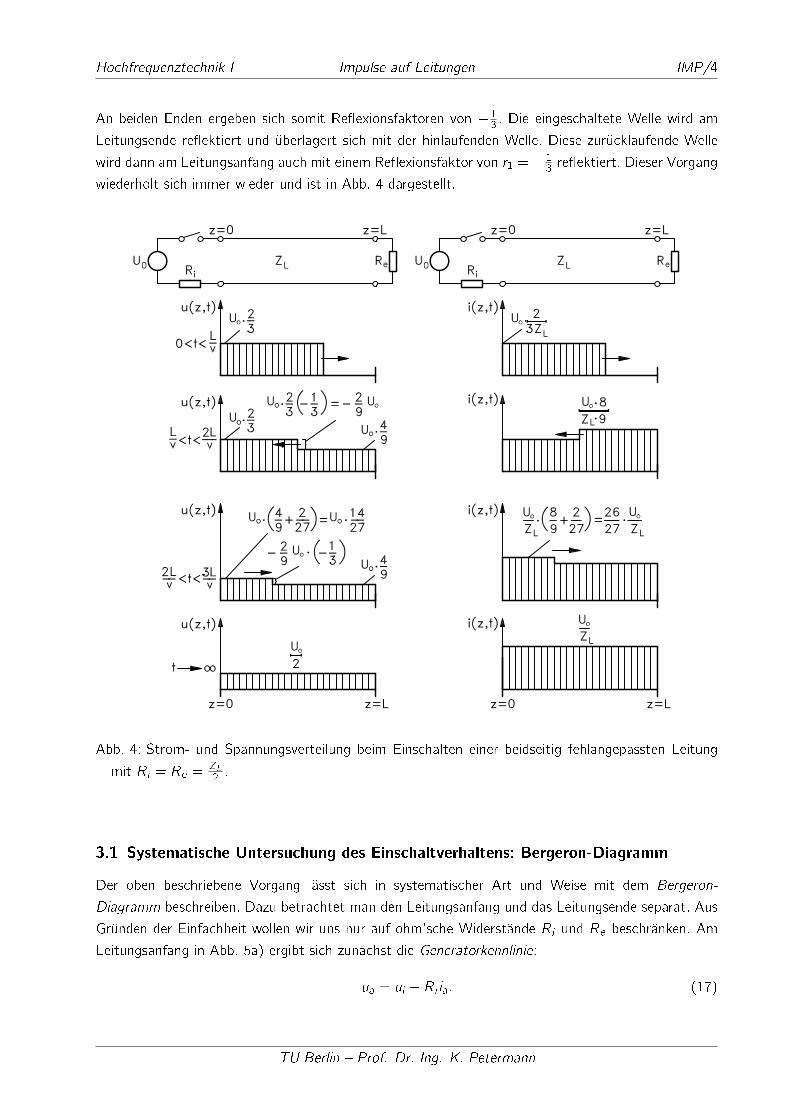
An beiden Enden ergeben sich somit Re�exionsfaktoren von �1
3. Die eingeschaltete Welle wird am
Leitungsende re�ektiert und überlagert sich mit der hinlaufenden Welle. Diese zurücklaufende Welle
wird dann am Leitungsanfang auch mit einem Re�exionsfaktor von r1 = �1
3re�ektiert. Dieser Vorgang
wiederholt sich immer wieder und ist in Abb. 4 dargestellt.
Abb. 4: Strom- und Spannungsverteilung beim Einschalten einer beidseitig fehlangepassten Leitung
mit Ri = Re =ZL
2.
3.1 Systematische Untersuchung des Einschaltverhaltens: Bergeron-Diagramm
Der oben beschriebene Vorgang lässt sich in systematischer Art und Weise mit dem Bergeron-
Diagramm beschreiben. Dazu betrachtet man den Leitungsanfang und das Leitungsende separat. Aus
Gründen der Einfachheit wollen wir uns nur auf ohm'sche Widerstände Ri und Re beschränken. Am
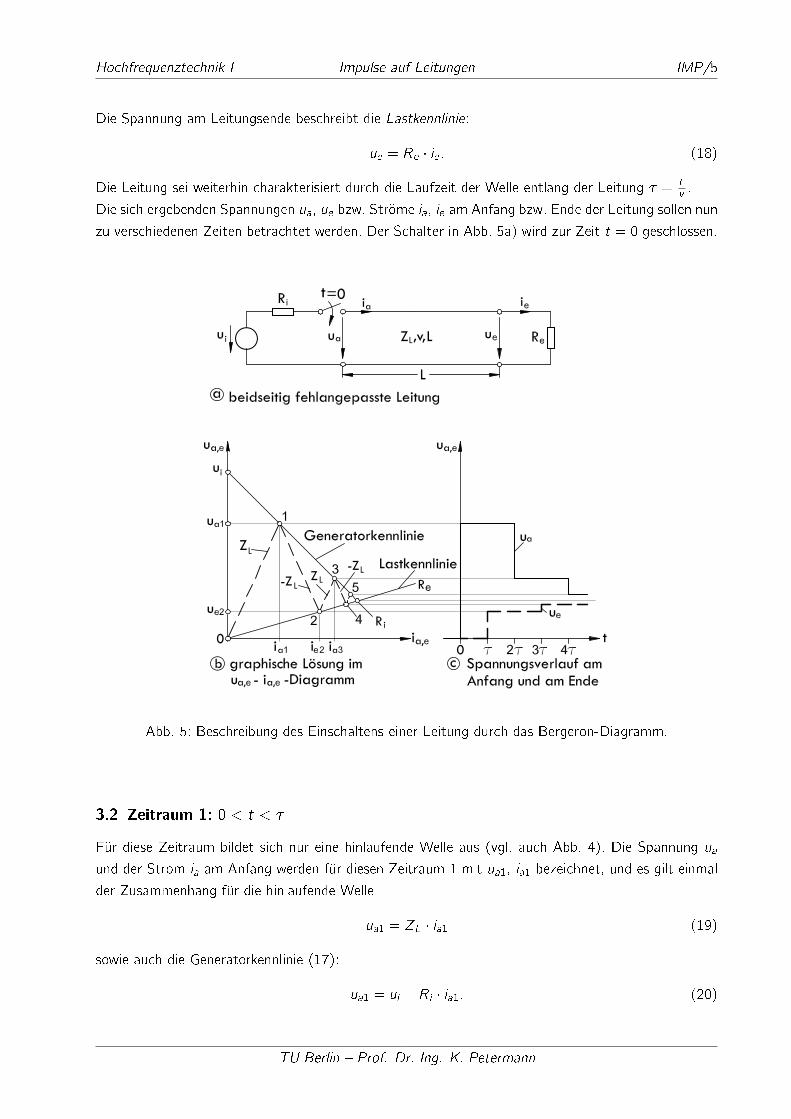
Leitungsanfang in Abb. 5a) ergibt sich zunächst die Generatorkennlinie:
ua = ui � Ri ia: (17)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Impulse auf Leitungen IMP/5
Die Spannung am Leitungsende beschreibt die Lastkennlinie:
ue = Re � ie : (18)
Die Leitung sei weiterhin charakterisiert durch die Laufzeit der Welle entlang der Leitung � = L
v.
Die sich ergebenden Spannungen ua, ue bzw. Ströme ia, ie am Anfang bzw. Ende der Leitung sollen nun
zu verschiedenen Zeiten betrachtet werden. Der Schalter in Abb. 5a) wird zur Zeit t = 0 geschlossen.
Abb. 5: Beschreibung des Einschaltens einer Leitung durch das Bergeron-Diagramm.
3.2 Zeitraum 1: 0 < t < �
Für diese Zeitraum bildet sich nur eine hinlaufende Welle aus (vgl. auch Abb. 4). Die Spannung ua
und der Strom ia am Anfang werden für diesen Zeitraum 1 mit ua1, ia1 bezeichnet, und es gilt einmal
der Zusammenhang für die hinlaufende Welle
ua1 = ZL � ia1 (19)
sowie auch die Generatorkennlinie (17):
ua1 = ui � Ri � ia1: (20)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Impulse auf Leitungen IMP/6
Eine graphische Lösung von Gl. (19) ist einfach im Bergeron-Diagramm gemäÿ Abb. 5b) möglich, wo
sich ua1, ia1 als Schnittpunkt der Geraden nach Gl. (19) und (20) ergibt.
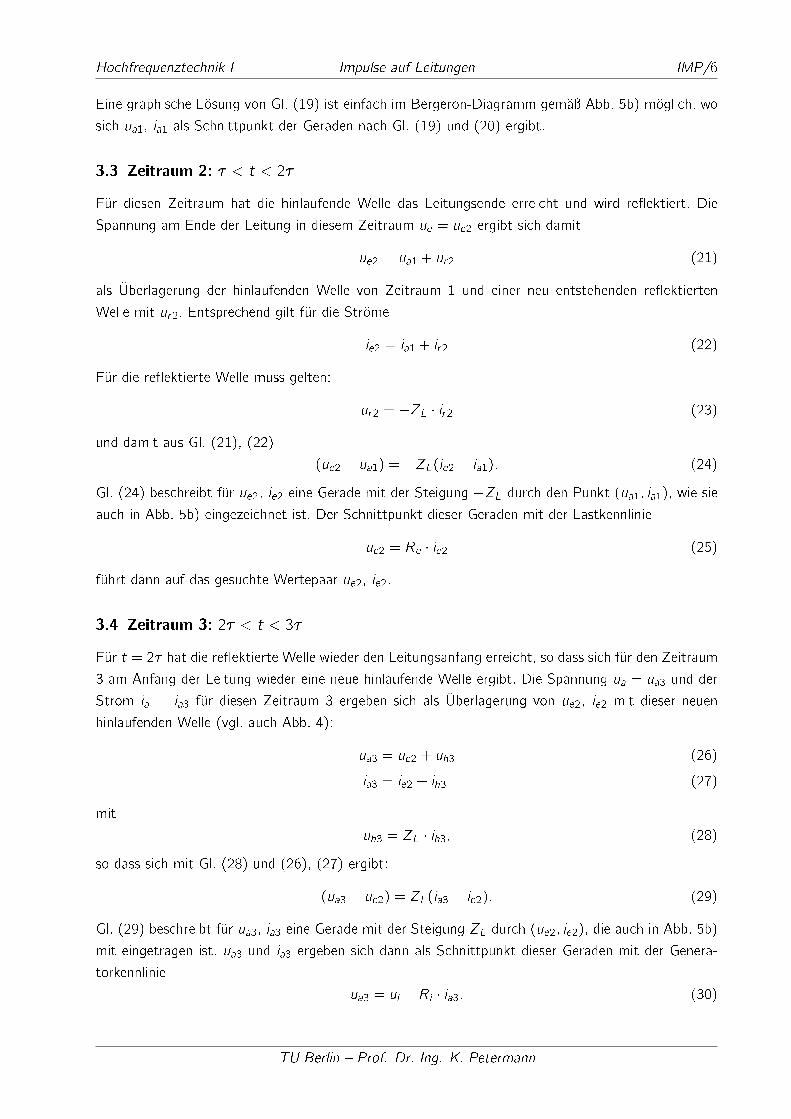
3.3 Zeitraum 2: � < t < 2�
Für diesen Zeitraum hat die hinlaufende Welle das Leitungsende erreicht und wird re�ektiert. Die
Spannung am Ende der Leitung in diesem Zeitraum ue = ue2 ergibt sich damit
ue2 = ua1 + ur2 (21)
als Überlagerung der hinlaufenden Welle von Zeitraum 1 und einer neu entstehenden re�ektierten
Welle mit ur2. Entsprechend gilt für die Ströme
ie2 = ia1 + ir2 (22)
Für die re�ektierte Welle muss gelten:
ur2 = �ZL � ir2 (23)
und damit aus Gl. (21), (22)
(ue2 � ua1) = �ZL(ie2 � ia1): (24)
Gl. (24) beschreibt für ue2, ie2 eine Gerade mit der Steigung �ZL durch den Punkt (ua1; ia1), wie sie
auch in Abb. 5b) eingezeichnet ist. Der Schnittpunkt dieser Geraden mit der Lastkennlinie
ue2 = Re � ie2 (25)
führt dann auf das gesuchte Wertepaar ue2, ie2.
3.4 Zeitraum 3: 2� < t < 3�
Für t = 2� hat die re�ektierte Welle wieder den Leitungsanfang erreicht, so dass sich für den Zeitraum
3 am Anfang der Leitung wieder eine neue hinlaufende Welle ergibt. Die Spannung ua = ua3 und der
Strom ia = ia3 für diesen Zeitraum 3 ergeben sich als Überlagerung von ue2, ie2 mit dieser neuen
hinlaufenden Welle (vgl. auch Abb. 4):
ua3 = ue2 + uh3 (26)
ia3 = ie2 + ih3 (27)
mit
uh3 = ZL � ih3; (28)
so dass sich mit Gl. (28) und (26), (27) ergibt:
(ua3 � ue2) = ZL(ia3 � ie2): (29)
Gl. (29) beschreibt für ua3, ia3 eine Gerade mit der Steigung ZL durch (ue2; ie2), die auch in Abb. 5b)
mit eingetragen ist. ua3 und ia3 ergeben sich dann als Schnittpunkt dieser Geraden mit der Genera-
torkennlinie
ua3 = ui � Ri � ia3: (30)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Impulse auf Leitungen IMP/7
Dieses Verhalten setzt sich entsprechend fort, bis für t ! 1 der Schnittpunkt zwischen Generator-
und Lastkennlinie erreicht wird.
Das sich schlieÿlich ergebende Zeitverhalten ist in Abb. 5c) sowohl für die Spannung am Anfang der
Leitung ua als auch am Ende der Leitung ue dargestellt.
Für ein kurzes Einschwingverhalten sollte Ri und/oder Ra nicht zu stark vom Wellenwiderstand ZL
abweichen.
3.5 Anwendung auf nichtlineare Generator- und Lastkennlinien
Das Bergeron-Diagramm ist im obigen Beispiel für sehr einfache Last- und Generatorkennlinien an-
gewandt worden. Es lässt sich auch auf nichtlineare Generator- und Lastkennlinien übertragen, bei
denen man gra�sch in gleicher Weise vorgeht wie oben beschrieben. Beispiele dafür sind Eingangs-
und Ausgangskennlinien von digitalen Schaltkreisen.
4 Schlussbemerkung
In diesem Kapitel wurde die Ausbreitung von Impulsen auf Leitungen betrachtet und das Bergeron-
Diagramm als einfaches Hilfsmittel zur Beschreibung der Impulsausbreitung mit Re�exionen an den
Leitungsenden eingeführt. Die an den Enden der Leitungen auftretenden Re�exionen können insbe-
sondere bei sehr kurzen Pulsen, deren Breite im Bereich der Laufzeit der Leitung liegt, zu starken
Störungen und fehlerhafter Übertragung führen, da in diesem Falle die Pulse nicht nur verzerren, son-
dern auch noch Signalanteile sich mit benachbarten Pulsen überlagern können. Um diese Störungen
zu vermeiden, sollte die Signalquelle und/oder die Last möglichst re�exionsfrei abgeschlossen werden.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Ebene Wellen � Polarisation EB/ 1
1 Vorbetrachtung
Bevor wir die Wellenausbreitung im freien Raum betrachten, wollen wir noch einmal die Koaxialleitung
analysieren:
Die geführte Leistung einer Koaxialleitung (siehe Abschnitt STR) lässt sich folgendermaÿen beschrei-
ben:
Ph =1
2< (U � I�) (1)
Anstelle einer Beschreibung mit Strom- und Spannungsamplituden lässt sich die Leistungsdichte auch
mit Feldkomponenten in Form des Poynting-Vektors ausdrücken:
~S =1
2
(~E � ~H�
)(2)
Die gesamte geführte Leistung erhält man dann mittels einer Integration über den Leitungsquerschnitt
A senkrecht zur Ausbreitungsrichtung z :
Ph =
∫∫A
<(~S)~dA =
∫∫A
< (Sz) dA (3)
Nun wollen wir die Feldkomponenten aus Gl. (LEI 21) und (LEI 22) in einer Koaxialleitung in Gleichung
(3) einsetzen, um einen Ausdruck für die geführte Leistung in Abhängigkeit von der Geometrie der
Leitung zu erhalten:
Sz =1
2Er �H�
'
=1
2
�Ur � ln
(Dd
)(�I�
2�r
)=
1
2
U � I�2�r2 � ln
(Dd
)
) Ph =1
2<
UI�D=2∫d=2
1
2�r2 ln(Dd
)2�r dr︸ ︷︷ ︸
=1
(4)
Gl. (4) ist damit auch in Übereinstimmung mit Gl. (1). Mit dieser Abschätzung lässt sich erkennen,
dass sich die Leistungsübertragung entlang der Leitung sowohl mit Strom und Spannung als auch mit
elektromagnetischen Feldern beschreiben lässt. Da die Integration über den Querschnitt der Leitung
o�ensichtlich die gesamte Leistung berücksichtigt, kann man Folgendes feststellen:
� Die geführte Leistung be�ndet sich ausschlieÿlich im Dielektrikum zwischen Innen- und Auÿen-
leiter � dies gilt zumindest für eine Skin-Eindringtiefe z0 � d;D
� Innen- und Auÿenleiter übernehmen nur die Führung der elektromagnetischen Welle. Sie tragen
nicht zum Energietransport bei!
� Ohne diese Wellenführung lässt sich die Energie o�enbar auch im freien Raum übertragen.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Ebene Wellen � Polarisation EB/ 2
2 Maxwell'sche Gleichungen
Da wir gesehen haben, dass die Leistungsübertragung in einer Leitung mit Hilfe elektromagnetischer
Wellen beschreibbar ist, wollen wir im Folgenden die Eigenschaften solcher Wellen ausgehend von den
Maxwell'schen Gleichungen analysieren.
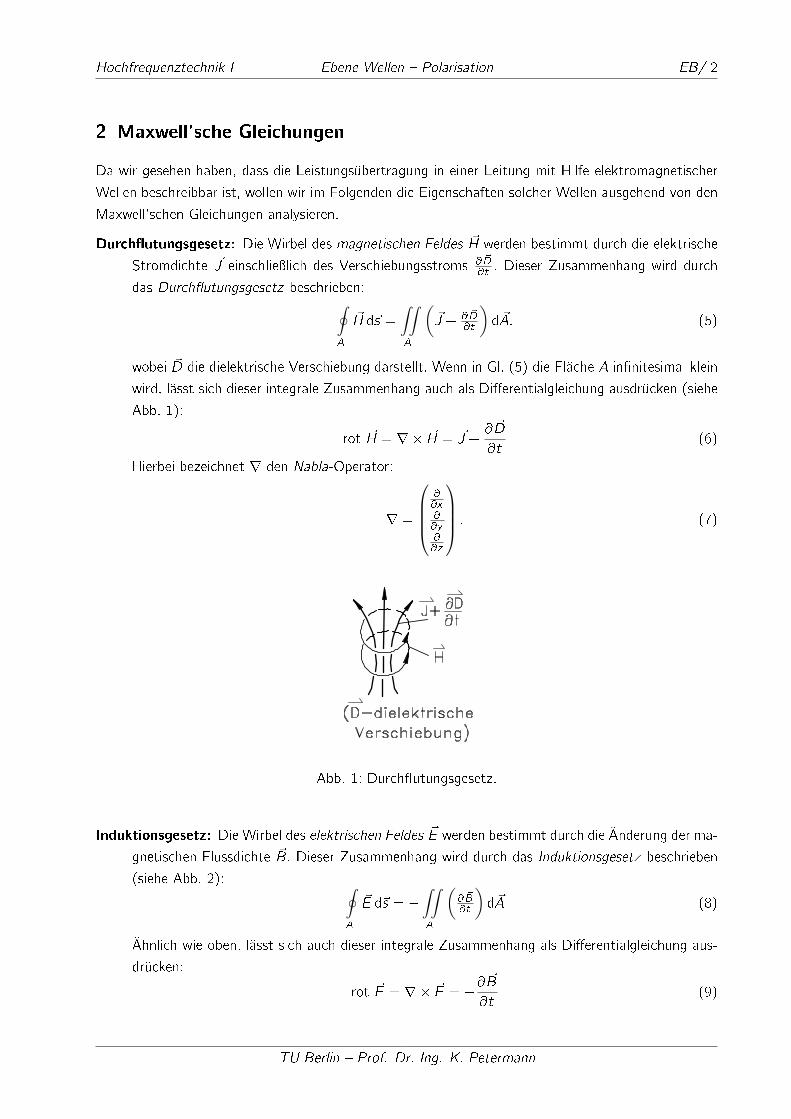
Durch�utungsgesetz: Die Wirbel des magnetischen Feldes ~H werden bestimmt durch die elektrische
Stromdichte ~J einschlieÿlich des Verschiebungsstroms @ ~D@t . Dieser Zusammenhang wird durch
das Durch�utungsgesetz beschrieben:∮A
~H d~s =
∫∫A
(~J + @ ~D
@t
)d~A; (5)
wobei ~D die dielektrische Verschiebung darstellt. Wenn in Gl. (5) die Fläche A in�nitesimal klein
wird, lässt sich dieser integrale Zusammenhang auch als Di�erentialgleichung ausdrücken (siehe
Abb. 1):
rot ~H = r� ~H = ~J +@ ~D
@t(6)
Hierbei bezeichnet r den Nabla-Operator:
r =
@@x@@y@@z
: (7)
Abb. 1: Durch�utungsgesetz.
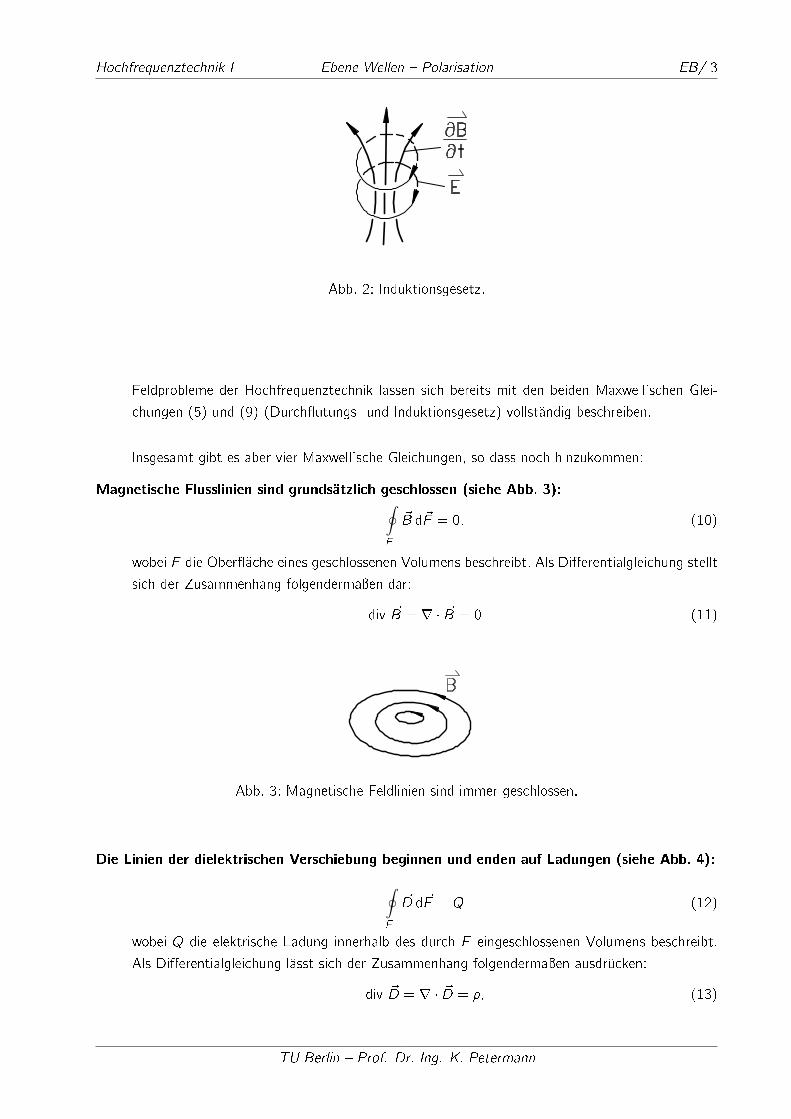
Induktionsgesetz: Die Wirbel des elektrischen Feldes ~E werden bestimmt durch die Änderung der ma-
gnetischen Flussdichte ~B. Dieser Zusammenhang wird durch das Induktionsgesetz beschrieben
(siehe Abb. 2): ∮A
~E d~s = �∫∫A
(@ ~B@t
)d~A (8)
Ähnlich wie oben, lässt sich auch dieser integrale Zusammenhang als Di�erentialgleichung aus-
drücken:
rot ~E = r� ~E = �@ ~B
@t(9)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Ebene Wellen � Polarisation EB/ 3
Abb. 2: Induktionsgesetz.
Feldprobleme der Hochfrequenztechnik lassen sich bereits mit den beiden Maxwell'schen Glei-
chungen (5) und (9) (Durch�utungs- und Induktionsgesetz) vollständig beschreiben.
Insgesamt gibt es aber vier Maxwell'sche Gleichungen, so dass noch hinzukommen:
Magnetische Flusslinien sind grundsätzlich geschlossen (siehe Abb. 3):∮F
~B d~F = 0; (10)
wobei F die Ober�äche eines geschlossenen Volumens beschreibt. Als Di�erentialgleichung stellt
sich der Zusammenhang folgendermaÿen dar:
div ~B = r � ~B = 0 (11)
Abb. 3: Magnetische Feldlinien sind immer geschlossen.
Die Linien der dielektrischen Verschiebung beginnen und enden auf Ladungen (siehe Abb. 4):
∮F
~D d~F = Q (12)
wobei Q die elektrische Ladung innerhalb des durch F eingeschlossenen Volumens beschreibt.
Als Di�erentialgleichung lässt sich der Zusammenhang folgendermaÿen ausdrücken:
div ~D = r � ~D = �; (13)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Ebene Wellen � Polarisation EB/ 4
mit der Raumladungsdichte �.
Abb. 4: Linien der dielektrischen Verschiebung.
Bei hochfrequenten Problemen (zeitveränderlichen ~D(t) bzw. ~B(t)) folgen Gl. (11) und (13) auto-
matisch aus Gl. (5) und (9).
Die Maxwell'schen Gleichungen lassen sich deutlich vereinfachen, wenn man die Feldgröÿen im Fre-
quenzbereich als Zeigergröÿen darstellt. Nimmt man z.B. für die magnetische Feldstärke ein har-
monisches Signal der Kreisfrequenz ! an, kann man das Signal folgendermaÿen in Zeigerdarstellung
schreiben:~H(t) = <
(~H exp(j!t)
)Wie man leicht sieht, ist die Ableitung nach der Zeit in Zeigerdarstellung durch eine einfache Multi-
plikation mit j! beschreibbar, wodurch sich die Maxwell'schen Gleichungen vereinfachen:
rot ~H = r� ~H = j!~D + ~J (14)
�rot ~E = �r� ~E = j!~B (15)
Für ! 6= 0 folgt aus Gl. (14) und (15) unmittelbar auch Gl. (11) und (13), so dass die Maxwell'schen
Gleichungen Gl. (14) und (15) die Basis für die folgende Betrachtung darstellen.
2.1 Materialgleichungen
Im letzten Abschnitt wurden die Feldgröÿen behandelt, als ob sie voneinander unabhängig wären. In
realen Materialien sind jedoch ~H und ~B sowie ~E und ~D meist miteinander in folgender Weise verknüpft:
~D = "0"r ~E (16)
~B = �0�r ~H (17)
Hierbei beschreiben "0 und �0 die Dielektrizitätskonstante und die Permeabilitätskonstante im freien
Raum, die jeweils Naturkonstanten darstellen. "r und �r sind dagegen die relative Dielektrizitätskon-
stante bzw. die relative Permeabililitätskonstante, die somit Materialeigenschaften beschreiben. Für
Vakuum gilt z.B. "r = �r = 1, während das häu�g für Dielektrika verwendete Polethylen ein "r = 2; 28
und �r � 1 aufweist.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Ebene Wellen � Polarisation EB/ 5
2.2 Stromdichte
Die Stromdichte ~J kann man in die drei Komponenten Leitungsstromdichte ~JL, Konvektionsstrom-
dichte ~JK und eingeprägte Stromdichte ~JE aufteilen:
~J = ~JL + ~JK + ~JE (18)
Die drei Gröÿen haben die folgende Bedeutung:
�~JL = � � ~E ist die Leitungsstromdichte mit der spezi�schen Leitfähigkeit des Materials �.
�~JK = � � ~v berücksichtigt die Bewegung freier Ladungsträger durch äuÿere Kräfte (z.B. im
Plasma), wobei ~v die Geschwindigkeit beschreibt, mit der sich die Raumladungsdichte � bewegt.
�~JE beschreibt die von auÿen erzwungene Stromdichte, wie sie z.B. bei Antennen vorkommt.
Setzen wir nun Gleichung (18) in die Maxwell'sche Gleichung Gl. (15) ein, so folgt:
r� ~H = j!"0"r ~E + �~E + ~JK + ~JE (19)
Die ersten beiden Terme lassen sich zusammenfassen zu:
r� ~H = j!" � ~E + ~JK + ~JE (20)
mit der komplexen Dielektrizitätskonstanten " = "0"r � j �! .
In ähnlicher Weise kann man auch die andere Maxwell'sche Gleichung mit einer komplexen Material-
konstante beschreiben:
�r� ~E = j!� ~H (21)
mit der komplexen Permeabilitätskonstanten � = �0��r , wobei der Imaginärteil von � die magnetischen
Verluste berücksichtigt.
3 Ebene Wellen
Die Gleichungen (20) und (21) beschreiben elektromagenetische Wellen in allgemeiner Weise. Im Fol-
genden wollen wir uns jedoch auf die meist zutre�ende Annahme beschränken, dass keine eingeprägten
Ströme und keine Konvektionsströme vorliegen: ~JE = ~JK = 0.
In diesem Fall vereinfachen sich Gl. (20) und (21) zu:
r� ~H = j!" ~E (22)
�r� ~E = j!�~H (23)
Die einfachsten Lösungen für die Gl. (22) und (23) erhält man für homogenes, also ortsunabhängiges
", �. Setzt man beide Gleichungen ineinander ein, ergibt sich:
�r�r� ~E + !2�" ~E = 0 (24)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Ebene Wellen � Polarisation EB/ 6
Mit der folgenden Identität aus der Vektoranalysis
r�r� ~E = r(r � ~E
)︸ ︷︷ ︸
=0 wegen r�~E=0
��~E
ergibt sich die Wellengleichung für die elektrische Feldstärke:
�~E + !2�"~E = 0 (25)
Hierbei beschreibt � den Laplace-Operator, der de�niert ist als �= @2
@x2+ @2
@y2+ @2
@z2für jede kartesische
Komponente von ~E.
Analog kann man die Wellengleichung auch für die magnetische Feldstärke herleiten
�~H + !2�"~H = 0 (26)
Ein einfaches Beispiel für eine Lösung von Gl. (25) ist die ebene Welle:
~E = ~E0 � exp(�j~k � ~r
)= ~E0 � exp
(�j(kxx + kyy + kzz))
(27)
Hierbei beschreibt ~r den Ortsvektor
~r =
x
y
z
(28)
und ~k den Wellenvektor
~k =
kx
ky
kz
; (29)
in dessen Richtung sich die ebene Welle in Gleichung (27) ausbreitet.
Gl. (27) löst Gl. (25) mit: (~k)2
= k2x + k2y + k2z = !2�" (30)
Obige Gl. (27) beschreibt eine ebene Welle, da Flächen mit konstanter Phase ' = ~k � ~r Ebenen
darstellen. Diese Phasen�ächen stehen senkrecht auf ~k und damit senkrecht zur Ausbreitungsrichtung.
Weiterhin führt Gl. (27) in Gl. (23) eingesetzt auf:
~H =~k � ~E
!�= ~H0 � exp
(�j~k � ~r
)mit ~H0 =
~k � ~E0
!�(31)
Analog folgt aus Gl. (22):
~E = �~k � ~H
!"(32)
Aus den Gleichungen (31) und (32) folgt, dass ~E, ~H und ~k bei ebenen Wellen jeweils senkrecht
aufeinander stehen.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Ebene Wellen � Polarisation EB/ 7
4 Polarisation
Wir wollen im Folgenden eine sich in z-Richtung ausbreitende ebene Welle betrachten und deren Eigen-
schaften genauer analysieren. Bei Ausbreitung in z-Richtung besitzt der Wellenvektor ~k ausschlieÿlich
eine z-Komponente, so dass man schreiben kann:
j~k = ~ez mit ~ez Einheitsvektor in z-Richtung
Mit dieser Schreibweise ergibt sich für die in z-Richtung ausbreitende ebene Welle:
~E = ~E0 � exp(� z) mit =√�!2�"
Man erkennt, dass dann, wenn das Argument der Exponentialfunktion rein imaginär wird, sich eine
ungedämpfte Wellenausbreitung ergibt. Das Argument der Exponentialfunktion wird rein imaginär,
wenn � und " positiv und reell sind.
Da der Wellenvektor ~k in z-Richtung zeigt, liegen ~E und ~H in der xy -Ebene und stehen dort senkrecht
aufeinander. Dieser Sachverhalt lässt sich folgendermaÿen beschreiben:
~E =
axay
E0 exp(� z) (33)
~H =
�ayax
H0 exp(� z) mit H0 =E0
ZF
(34)
Hierbei steht ZF =√�=" für den Feldwellenwiderstand, der das Verhältnis zwischen elektrischer und
magnetischer Feldstärke beschreibt. Im freien Raum ist der Feldwellenwiderstand rein reell:
ZF
∣∣∣∣Freiraum
= ZF0 =
√�0
"0= 120� (35)
Anmerkung: Streng genommen gilt der Zahlenwert in Gl. (35) nur, wenn für die Lichtgeschwindigkeit
c0 = 3 � 108 m
szugrunde gelegt wird. Exakt gilt ZF0 =
�0p�0"0
= �0 � c0 mit �0 = 4� � 10�7 Vs
Amund der
Lichtgeschwindigkeit im Vakuum c0 = 299792458 m
s.
Der Jones-Vektor
axay
ist ein Einheitsvektor der Länge 1 ) j ax j2 + j ay j2= 1.
Er beschreibt den Polarisationszustand der Welle.
4.1 Polarisationszustände im Zeitbereich
Im Folgenden wollen wir einige spezielle Polarisationszustände und ihren zeitlichen Verlauf betrachten.
Dabei wollen wir aus Vereinfachungsgründen von der Annahme ausgehen, dass eine ungedämpfte
Wellenausbreitung mit = j� mit � rein reell vorliegt. Dann ergibt sich folgender zeitlicher Verlauf:
~E(z; t) = E0
< (ax exp(�j�z) exp(j!t))<(ay exp(�j�z) exp(j!t)
) (36)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Ebene Wellen � Polarisation EB/ 8
Wenn wir in Gl. (36) ax und ay nach Betrag und Phase schreiben:
ax = jax j exp(j'x) (37)
ay = jay j exp(j'y ); (38)
ergibt sich:
~E(z; t) = E0
jax j cos[!t � �z + 'x ]
jay j cos[!t � �z + 'y ]
: (39)
Der elektrische Feldvektor in Gl. (36) bzw. Gl. (39) bewegt sich in Abhängigkeit von (!t � �z) auf
einer Ellipse, weshalb man im Allgemeinen auch von einem elliptischen Polarisationszustand spricht.
Spezialfälle stellen die lineare bzw. die zirkulare Polarisation dar, die in Folgenden detaillierter betrachtet
werden sollen.
4.2 Lineare Polarisation
Für 'x = 'y bewegt sich der Feldvektor ~E(z; t) in Gl. (39) auf einer Linie, so dass man dann von
linearer Polarisation spricht. Ohne Einschränkung der Allgemeinheit lässt sich dann 'x = 'y = 0 und
jax j = cos' sowie jay j = sin' setzen, so dass dann aus Gl. (39) folgt:
~E(z; t) = E0
cos'
sin'
cos(!t � �z) (40)
Der elektrische Feldvektor liegt in der xy -Ebene auf einer Geraden (siehe Abb. 5) im Winkel ' zur
x-Achse.
Abb. 5: Elektrischer Feldvektor bei linearer Polarisation.
4.3 Zirkulare Polarisation
Bei zirkularer Polarisation beschreibt der Vektor der elektrischen Feldstärke einen Kreis. Dabei weisen
die x- und y -Komponenten des Jones-Vektors jeweils die gleiche Länge von jax j = jay j = 1=p2 auf
und sind um �=2 zueinander phasenverschoben, d. h. beispielsweise:
ax =1p2
und ay =�jp2
(41)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Ebene Wellen � Polarisation EB/ 9
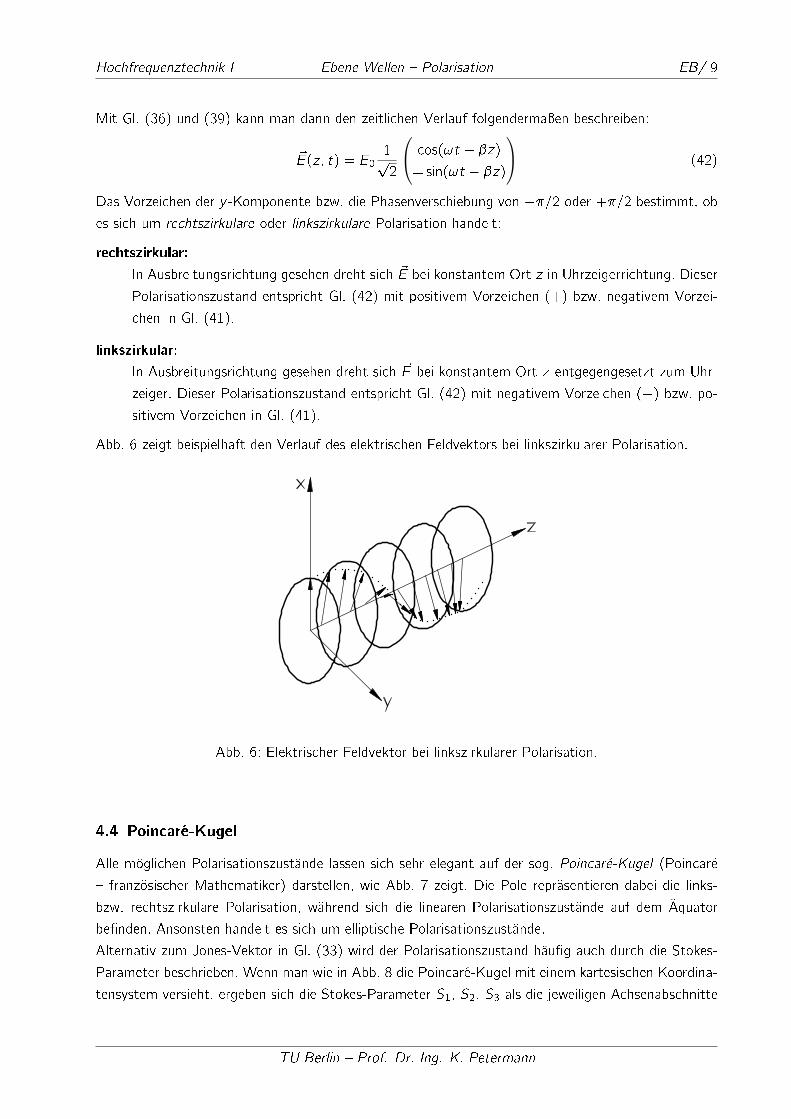
Mit Gl. (36) und (39) kann man dann den zeitlichen Verlauf folgendermaÿen beschreiben:
~E(z; t) = E01p2
cos(!t � �z)
� sin(!t � �z)
(42)
Das Vorzeichen der y -Komponente bzw. die Phasenverschiebung von ��=2 oder +�=2 bestimmt, ob
es sich um rechtszirkulare oder linkszirkulare Polarisation handelt:
rechtszirkular:
In Ausbreitungsrichtung gesehen dreht sich ~E bei konstantem Ort z in Uhrzeigerrichtung. Dieser
Polarisationszustand entspricht Gl. (42) mit positivem Vorzeichen (+) bzw. negativem Vorzei-
chen in Gl. (41).
linkszirkular:
In Ausbreitungsrichtung gesehen dreht sich ~E bei konstantem Ort z entgegengesetzt zum Uhr-
zeiger. Dieser Polarisationszustand entspricht Gl. (42) mit negativem Vorzeichen (�) bzw. po-sitivem Vorzeichen in Gl. (41).
Abb. 6 zeigt beispielhaft den Verlauf des elektrischen Feldvektors bei linkszirkularer Polarisation.
Abb. 6: Elektrischer Feldvektor bei linkszirkularer Polarisation.
4.4 Poincaré-Kugel
Alle möglichen Polarisationszustände lassen sich sehr elegant auf der sog. Poincaré-Kugel (Poincaré
� französischer Mathematiker) darstellen, wie Abb. 7 zeigt. Die Pole repräsentieren dabei die links-
bzw. rechtszirkulare Polarisation, während sich die linearen Polarisationszustände auf dem Äquator
be�nden. Ansonsten handelt es sich um elliptische Polarisationszustände.
Alternativ zum Jones-Vektor in Gl. (33) wird der Polarisationszustand häu�g auch durch die Stokes-
Parameter beschrieben. Wenn man wie in Abb. 8 die Poincaré-Kugel mit einem kartesischen Koordina-
tensystem versieht, ergeben sich die Stokes-Parameter S1, S2, S3 als die jeweiligen Achsenabschnitte
TU Berlin � Prof. Dr.-Ing. K. Petermann
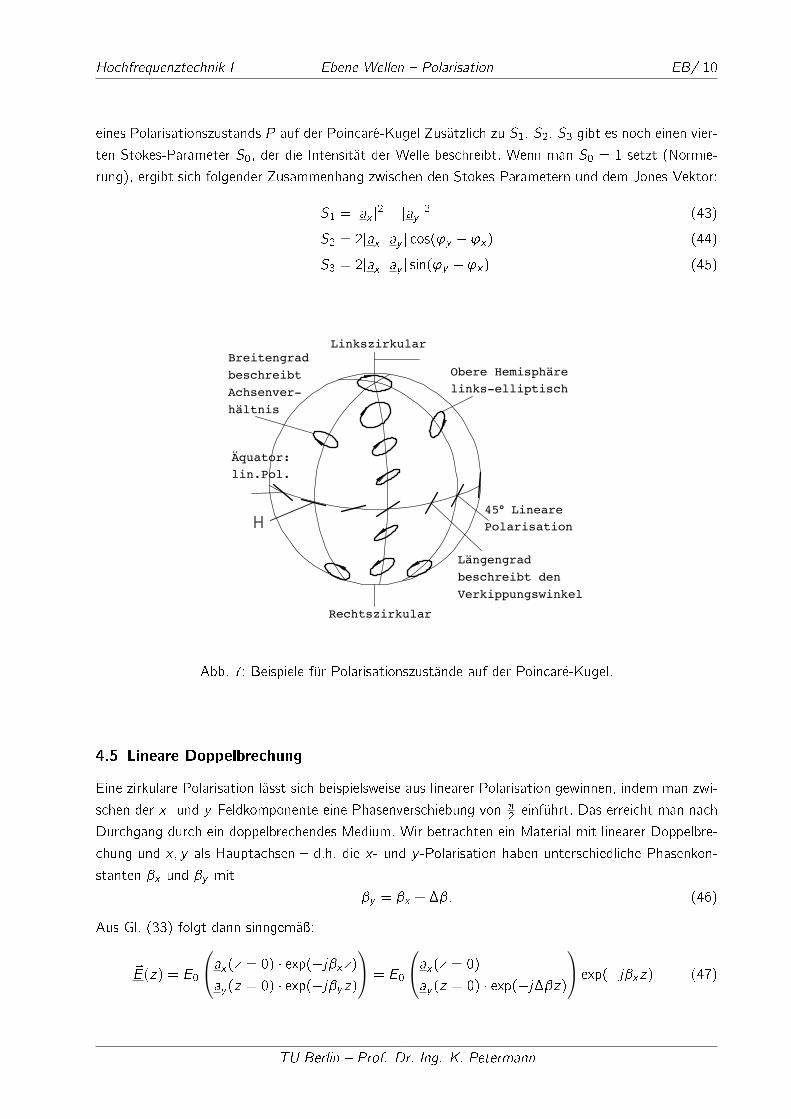
Hochfrequenztechnik I Ebene Wellen � Polarisation EB/ 10
eines Polarisationszustands P auf der Poincaré-Kugel Zusätzlich zu S1, S2, S3 gibt es noch einen vier-
ten Stokes-Parameter S0, der die Intensität der Welle beschreibt. Wenn man S0 = 1 setzt (Normie-
rung), ergibt sich folgender Zusammenhang zwischen den Stokes-Parametern und dem Jones-Vektor:
S1 = jax j2 � jay j2 (43)
S2 = 2jax jjay j cos('y � 'x) (44)
S3 = 2jax jjay j sin('y � 'x) (45)
Linkszirkular
Rechtszirkular
45° Lineare
Polarisation
Längengrad
beschreibt den
Verkippungswinkel
Obere Hemisphäre
links-elliptisch
Breitengrad
beschreibt
Achsenver-
hältnis
Äquator:
lin.Pol.
Abb. 7: Beispiele für Polarisationszustände auf der Poincaré-Kugel.
4.5 Lineare Doppelbrechung
Eine zirkulare Polarisation lässt sich beispielsweise aus linearer Polarisation gewinnen, indem man zwi-
schen der x- und y -Feldkomponente eine Phasenverschiebung von �2einführt. Das erreicht man nach
Durchgang durch ein doppelbrechendes Medium. Wir betrachten ein Material mit linearer Doppelbre-
chung und x; y als Hauptachsen � d.h. die x- und y -Polarisation haben unterschiedliche Phasenkon-
stanten �x und �y mit
�y = �x + ��: (46)
Aus Gl. (33) folgt dann sinngemäÿ:
~E(z) = E0
ax(z = 0) � exp(�j�xz)ay (z = 0) � exp(�j�yz)
= E0
ax(z = 0)
ay (z = 0) � exp(�j��z)
exp(�j�xz) (47)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Ebene Wellen � Polarisation EB/ 11
S3
S2
S1
-45°
+45°H
V
L
R
P
Abb. 8: Stokes-Parameter auf der Poincaré-Kugel.
Gehen wir nun bei z = 0 von einer linearen Doppelbrechung mit ' = 45� aus, erhalten wir für den
Jones-Vektor vor dem doppelbrechenden Material (z = 0, vgl. Gl. (40)):
ax(z = 0) = ay (z = 0) =1p2:
Nach der Ausbreitung durch das doppelbrechende Material erhalten wir an der Stelle z :
ax(z) =1p2; ay (z) =
1p2exp(�j��z)
1. Bei einer Phasenverschiebung um �=2 erhalten wir rechtszirkulare Polarisation:
�� � z =�
2(entspricht
�
4-Platte in der Optik) ) ay = � jp
2
2. Bei einer Phasenverschiebung um � spiegelt sich der Polarisationszustand an der x-Achse, da
die y -Komponente nun das umgekehrte Vorzeichen aufweist:
�� � z = � (entspricht�
2-Platte in der Optik) ) ay = � 1p
2
3. Bei einer Phasenverschiebung um 3�=2 (entspricht ��=2) erhalten wir linkszirkulare Polarisati-
on:
�� � z =3�
2) ay =
jp2
4. Bei einer Phasenverschiebung um 2� erhalten wir wieder den ursprünglichen Polarisationszu-
stand :
�� � z = 2� ) ay =1p2
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Ebene Wellen � Polarisation EB/ 12
Diese Transformation des Polarisationszustands lässt sich mit Hilfe der Poicaré-Kugel einfach veran-
schaulichen, indem man zunächst die beiden Eigenzustände des doppelbrechenden Mediums auf der
Poincaré-Kugel markiert (für das obige Beispiel wäre das die x- bzw. y -Polarisation oder in Abb. 8
die Punkte H und V ). Diese beiden Eigen-Polarisationszustände de�nieren eine Drehachse, um die der
Eingangspolarisationszustand (im obigen Beispiel lineare Polarisation mit ' = 45�) um den Winkel
�� � z auf der Poincaré-Kugel gedreht wird.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Lineare Antennen LA/1
1 Vorbetrachtung
Lineare Antennen basieren auf der Tatsache, dass aufgrund von Leiterströmen elektromagnetische
Energie abgestrahlt wird. Man kann diese Leiterströme als eingeprägte Ströme ansehen, jedoch �ieÿt
kein Konvektionsstrom. Aus Gl. (EB 20) folgt dann:
r� ~H = j!"~E + ~JE (1)
mit der eingeprägten Stromverteilung ~JE . Zusätzlich zur Betrachtung in Abschnitt EB wird noch eine
magnetische Stromdichte ~Jm eingeführt, so dass sich aus Gl. (EB 21) ergibt:
�r� ~E = j!� ~H + ~Jm (2)
Die physikalische Bedeutung dieses magnetischen Stromes wird später erläutert.
Wenn man nun Materialien mit homogenem " und � annimmt, kann man die beiden Gleichungen
(1) und (2) folgendermaÿen auswerten, wobei wir zunächst den Fall ohne magnetische Stromdichte
(~Jm = 0) betrachten:
1.1 Annahme: keine magnetischen Ströme (~Jm = 0)
Mit dieser Annahme ergibt sich mit der Identität r � (r � ~E) = 0 aus Gl. (2) ein quellenfreies
Magnetfeld:
r � ~H = 0: (3)
Somit ist ~H aus einem Vektorpotential ~A ableitbar, das folgendermaÿen de�niert wird. 1:
~H = r� ~A (4)
Aus Gl. (2) folgt dann:
r� (~E + j!�~A) = 0: (5)
Da sich aus obiger Gl. (5) die Wirbelfreiheit des Ausdrucks (~E+ j!�~A) ergibt, kann man diesen Vektor
auch als Gradienten eines Skalars ' schreiben:
~E + j!�~A = �r' (6)
~H aus Gl. (4) und ~E aus Gl. (6) kann man nun in Gl. (1) einsetzen und erhält:
r� (r� ~A)� !2�"~A = �j!"r'+ ~JE : (7)
Mit der Identität r� (r� ~A) = r(r � ~A)� �~A ergibt sich:
�~A+ k2 � ~A = r(j!"'+r � ~A)� ~JE (8)
mit der Wellenzahl k , entsprechend
k2 = !2�": (9)
1 Das Vektorpotential ~A wird hier bezüglich des Magnetfeldes ~H eingeführt. Häu�g wird das Vektorpotential auch auf
die magnetische Flussdichte ~B bezogen, aber in der Hochfrequenztechnik ist die hier gewählte Form üblicher
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Lineare Antennen LA/2
Physikalische Bedeutung haben nur die Wirbel des Vektorpotentials ~A aus Gl. (4). Man kann also über
die Quellen von ~A (d.h. über r � ~A) beliebig verfügen, so dass wir nun die Lorentz-Konvention
r � ~A = �j!"' (10)
anwenden, woraus sich für Gl. (8) folgender Ausdruck als Bestimmungsgleichung für das Vektorpo-
tential ~A ergibt:
�~A+ k2 ~A = �~JE : (11)
Mit Kenntnis des Vektorpotentials ~A lassen sich die Felder mittels
~H = r� ~A (12)
~E =1
j!"
(r�
(r� ~A
)� ~JE
)(13)
berechnen.
1.2 Annahme: keine eingeprägten elektrischen Ströme (~JE = 0)
Mit dieser Annahme ergibt sich analog zu Abschnitt 1.1 mit der Identität r � (r � ~H) = 0 ein
quellenfreies elektrisches Feld:
r � ~E = 0: (14)
Somit ist ~E aus einem Vektorpotential ~F ableitbar, das folgendermaÿen de�niert wird:
~E = �r� ~F : (15)
In analoger Weise zur Betrachtung in Abschnitt 1.1 folgt hier:
�~F + k2 ~F = �~Jm: (16)
Die Felder lassen sich dann aus dem Vektorpotential ~F folgendermaÿen berechnen:
~E = �r� ~F (17)
~H =1
j!�
(r�
(r� ~F
)� ~Jm
)(18)
1.3 Allgemeiner Fall mit magnetischen und elektrischen Strömen
Sind sowohl eingeprägte elektrische als auch magnetische Ströme vorhanden, lassen sich die entstehen-
den Felder als Überlagerung der beiden oben beschriebenen Fälle der Abschnitte 1.1 und 1.2 darstellen.
Die Felder berechnen sich dann aus den Vektorpotentialen ~A und ~F gemäÿ den Gl. (11) und (16) zu:
~E = �r� ~F +1
j!"
(r�
(r� ~A
)� ~JE
)(19)
~H = r� ~A+1
j!�
(r�
(r� ~F
)� ~Jm
)(20)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Lineare Antennen LA/3
2 Anwendung auf Hertzschen Dipol am Koordinatenursprung
Es wird ein Hertzscher Dipol am Koordinatenursprung x = y = z = 0 und Strom�uss in z-Richtung
angenommen. Die Abstrahlung soll in den freien Raum mit " = "0 und � = �0 erfolgen.
Wir haben damit keine eingeprägten magnetischen Ströme wie in Abschnitt 1.1:
~Jm = 0: (21)
Die eingeprägte elektrische Stromdichte ~JE ist nur im Koordinatenursprung ungleich Null, im sonstigen
Raum verschwindet sie auch, so dass man schreiben kann:
~JE = ~ez � (I � l) � �(x) � �(y) � �(z) (22)
mit der Dirac-Funktion �(x)
�(x) =
1 für x = 0
0 für x 6= 0;
wobeib∫
�a
�(x) dx = 1 für a; b > 0:
Der Strom �ieÿt also nur in z-Richtung, weshalb das Vektorpotential ~A gemäÿ Gl. (11) auch nur eine
z-Komponente aufweist. Wir können somit Gl. (11) folgendermaÿen schreiben:
�Az + k2
0Az = �(I � l) � �(x) � �(y) � �(z); (23)
wobei k0 = !p�0"0 = !=c0 die Wellenzahl im freien Raum darstellt.
Da in Gl. (23) alle Koordinatenrichtungen gleichberechtigt sind, wird sich ein punktsymmetrisches
Verhalten ergeben, das nur vom Radius r =√x2 + y2 + z2 abhängt. Wir können somit den Laplace-
Operator in Gl. (23) in Kugelkoordinaten und mit ausschlieÿlicher Radiusabhängigkeit aufstellen:
�Az =1
r2
d
dr
(r2
dAzdr
) : (24)
Mit diesem Ansatz ergibt sich aus Gl. (23) für r > 0 die homogene Gleichung:
1
r2
d
dr
(r2
dAzdr
)+ k20Az = 0; (25)
welche folgende Lösung besitzt:
Az(r) =A0r
exp(�jk0r): (26)
Der noch freie Parameter A0 muss nun so bestimmt werden, dass Gl. (23) für r ! 0 erfüllt wird. Es
ergibt sich damit
A0 =(I � l)4�
: (27)
TU Berlin � Prof. Dr.-Ing. K. Petermann
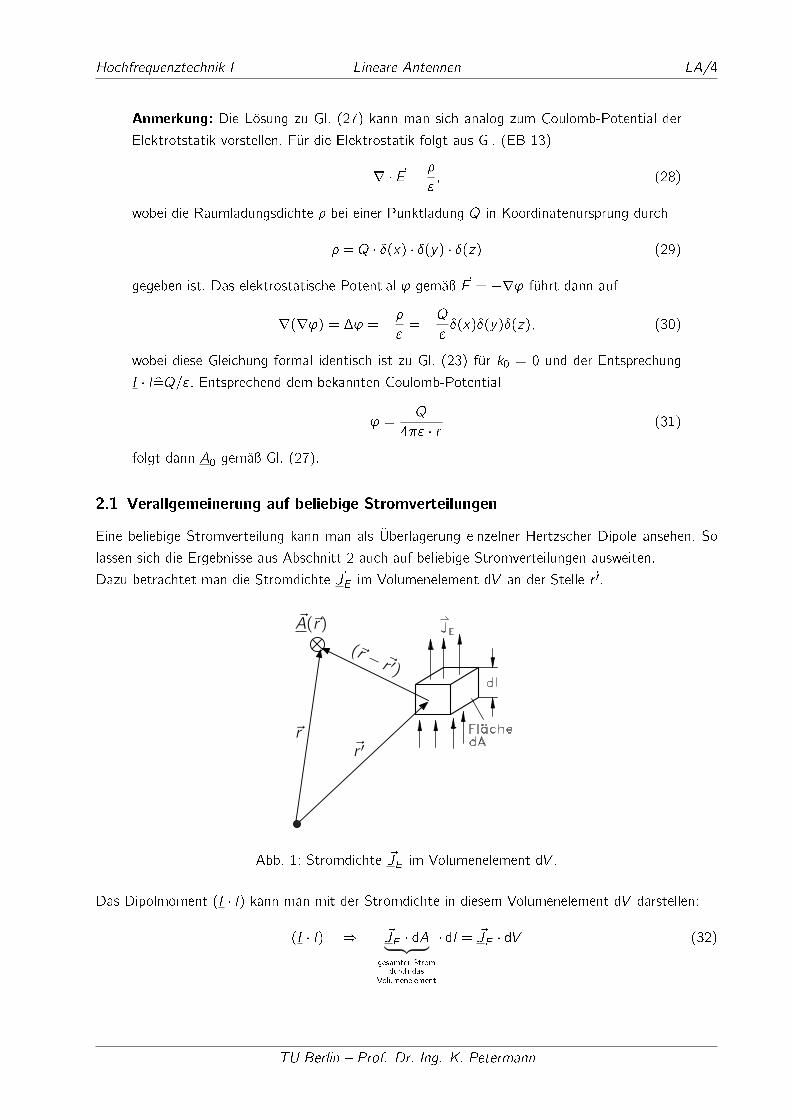
Hochfrequenztechnik I Lineare Antennen LA/4
Anmerkung: Die Lösung zu Gl. (27) kann man sich analog zum Coulomb-Potential der
Elektrotstatik vorstellen. Für die Elektrostatik folgt aus Gl. (EB 13)
r � ~E =�
"; (28)
wobei die Raumladungsdichte � bei einer Punktladung Q in Koordinatenursprung durch
� = Q � �(x) � �(y) � �(z) (29)
gegeben ist. Das elektrostatische Potential ' gemäÿ ~E = �r' führt dann auf
r(r') = �' = ��"= �Q
"�(x)�(y)�(z); (30)
wobei diese Gleichung formal identisch ist zu Gl. (23) für k0 = 0 und der Entsprechung
I � l=Q=". Entsprechend dem bekannten Coulomb-Potential
' =Q
4�" � r (31)
folgt dann A0 gemäÿ Gl. (27).
2.1 Verallgemeinerung auf beliebige Stromverteilungen
Eine beliebige Stromverteilung kann man als Überlagerung einzelner Hertzscher Dipole ansehen. So
lassen sich die Ergebnisse aus Abschnitt 2 auch auf beliebige Stromverteilungen ausweiten.
Dazu betrachtet man die Stromdichte ~JE im Volumenelement dV an der Stelle ~r 0.
!r!r !
(!r ! !r !)
!A(!r)
Abb. 1: Stromdichte ~JE im Volumenelement dV .
Das Dipolmoment (I � l) kann man mit der Stromdichte in diesem Volumenelement dV darstellen:
(I � l) ) ~JE � dA︸ ︷︷ ︸gesamter Strom
durch das
Volumenelement
� dl = ~JE � dV (32)
TU Berlin � Prof. Dr.-Ing. K. Petermann
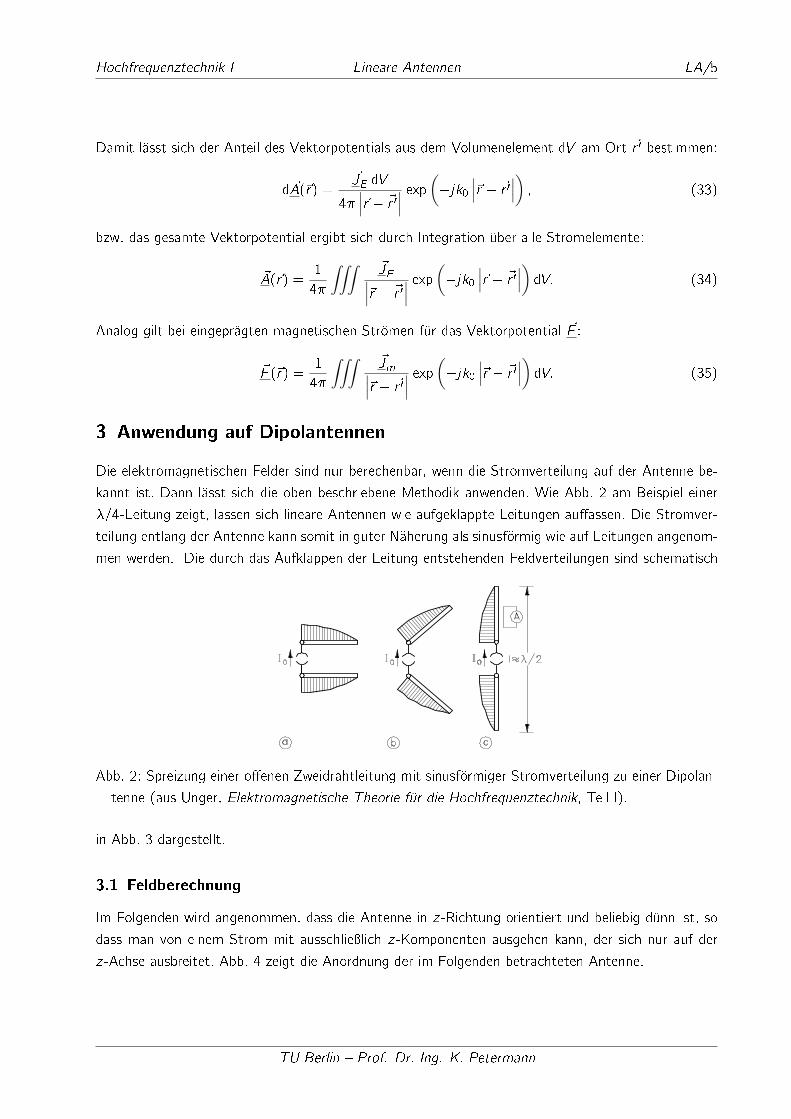
Hochfrequenztechnik I Lineare Antennen LA/5
Damit lässt sich der Anteil des Vektorpotentials aus dem Volumenelement dV am Ort ~r 0 bestimmen:
d~A(~r) =~JE dV
4�∣∣∣~r � ~r 0∣∣∣ exp
(�jk0
∣∣∣~r � ~r 0∣∣∣) ; (33)
bzw. das gesamte Vektorpotential ergibt sich durch Integration über alle Stromelemente:
~A(~r) =1
4�
∫∫∫ ~JE∣∣∣~r � ~r 0∣∣∣ exp(�jk0
∣∣∣~r � ~r 0∣∣∣) dV: (34)
Analog gilt bei eingeprägten magnetischen Strömen für das Vektorpotential ~F :
~F (~r) =1
4�
∫∫∫ ~Jm∣∣∣~r � ~r 0∣∣∣ exp(�jk0
∣∣∣~r � ~r 0∣∣∣) dV: (35)
3 Anwendung auf Dipolantennen
Die elektromagnetischen Felder sind nur berechenbar, wenn die Stromverteilung auf der Antenne be-
kannt ist. Dann lässt sich die oben beschriebene Methodik anwenden. Wie Abb. 2 am Beispiel einer
�=4-Leitung zeigt, lassen sich lineare Antennen wie aufgeklappte Leitungen au�assen. Die Stromver-
teilung entlang der Antenne kann somit in guter Näherung als sinusförmig wie auf Leitungen angenom-
men werden. Die durch das Aufklappen der Leitung entstehenden Feldverteilungen sind schematisch
Abb. 2: Spreizung einer o�enen Zweidrahtleitung mit sinusförmiger Stromverteilung zu einer Dipolan-
tenne (aus Unger, Elektromagnetische Theorie für die Hochfrequenztechnik, Teil I).
in Abb. 3 dargestellt.
3.1 Feldberechnung
Im Folgenden wird angenommen, dass die Antenne in z-Richtung orientiert und beliebig dünn ist, so
dass man von einem Strom mit ausschlieÿlich z-Komponenten ausgehen kann, der sich nur auf der
z-Achse ausbreitet. Abb. 4 zeigt die Anordnung der im Folgenden betrachteten Antenne.
TU Berlin � Prof. Dr.-Ing. K. Petermann
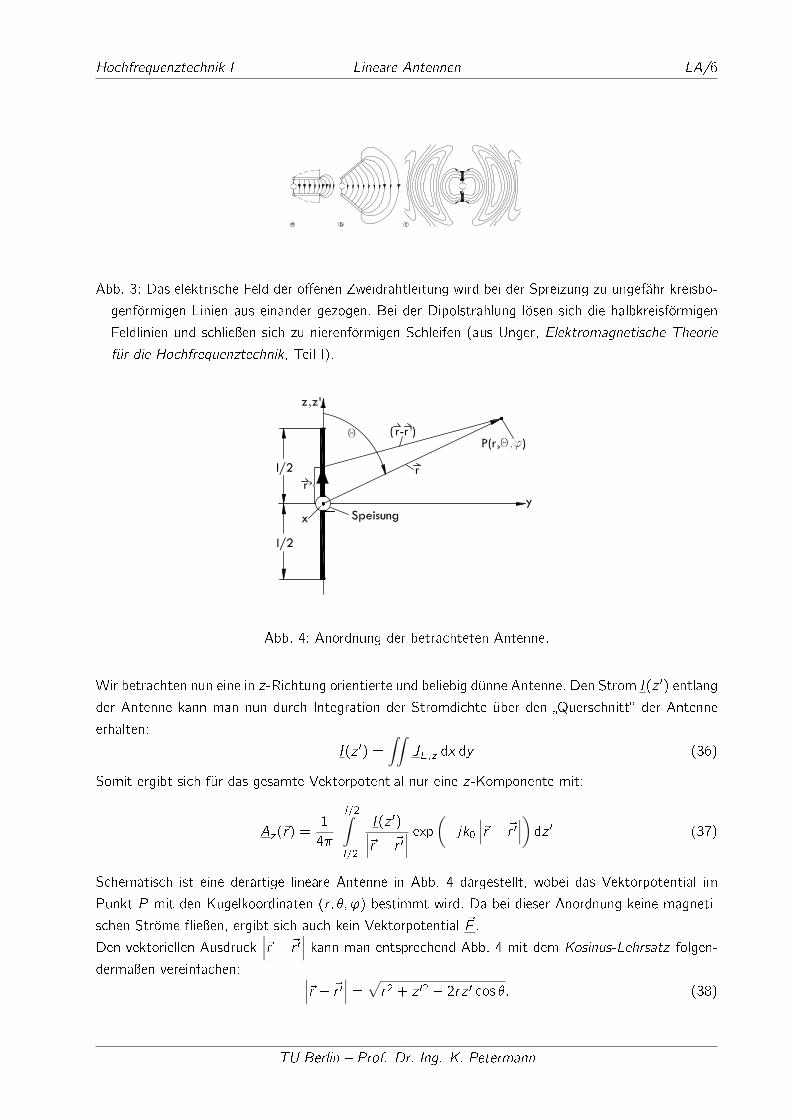
Hochfrequenztechnik I Lineare Antennen LA/6
Abb. 3: Das elektrische Feld der o�enen Zweidrahtleitung wird bei der Spreizung zu ungefähr kreisbo-
genförmigen Linien aus einander gezogen. Bei der Dipolstrahlung lösen sich die halbkreisförmigen
Feldlinien und schlieÿen sich zu nierenförmigen Schleifen (aus Unger, Elektromagnetische Theorie
für die Hochfrequenztechnik, Teil I).
Abb. 4: Anordnung der betrachteten Antenne.
Wir betrachten nun eine in z-Richtung orientierte und beliebig dünne Antenne. Den Strom I(z 0) entlang
der Antenne kann man nun durch Integration der Stromdichte über den �Querschnitt� der Antenne
erhalten:
I(z 0) =
∫∫JE;z dx dy (36)
Somit ergibt sich für das gesamte Vektorpotential nur eine z-Komponente mit:
Az(~r) =1
4�
l=2∫�l=2
I(z 0)∣∣∣~r � ~r 0∣∣∣ exp(�jk0
∣∣∣~r � ~r 0∣∣∣) dz 0 (37)
Schematisch ist eine derartige lineare Antenne in Abb. 4 dargestellt, wobei das Vektorpotential im
Punkt P mit den Kugelkoordinaten (r; �; ') bestimmt wird. Da bei dieser Anordnung keine magneti-
schen Ströme �ieÿen, ergibt sich auch kein Vektorpotential ~F .
Den vektoriellen Ausdruck∣∣∣~r � ~r 0∣∣∣ kann man entsprechend Abb. 4 mit dem Kosinus-Lehrsatz folgen-
dermaÿen vereinfachen: ∣∣∣~r � ~r 0∣∣∣ = √r2 + z 02 � 2rz 0 cos �; (38)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Lineare Antennen LA/7
wobei r = j~r j sich auf den Aufpunkt P bezieht, an dem man das Vektorpotential auswerten möchte,
und z 0 die Lage des betrachteten Stromelements auf der Antenne darstellt. Der Winkel � ist auf die
z-Achse bezogen und in Abb.4 dargestellt.
Im Folgenden soll insbesondere das Fernfeld der Antenne betrachtet werden. Dann gilt:
r � jz 0j und damit∣∣∣~r � ~r 0∣∣∣ � r � z 0 � cos �: (39)
In Gl. (37) lässt sich der Vorfaktor 1=j~r � ~r 0j � 1=r noch stärker vereinfachen als das Argument
der Exponentialfunktion, das die Phasenlage (nur im Bereich [�� : : : �]) der zu überlagernden Anteile
beein�usst und somit emp�ndlicher auf Approximationsfehler reagiert. Somit folgt aus Gl. (37) im
Fernfeld:
Az(~r) =exp(�jk0r)
4�r
l=2∫�l=2
I(z 0) exp(+jk0z0 cos �) dz 0 (40)
Mit dieser Gleichung lassen sich nun die Feldkomponenten im Fernfeld (r !1) in Kugelkoordinaten
berechnen. Wenn man in Gl. (40) k0 �cos � als �Orts�-Frequenz au�asst, enstpricht Gl. (40) genau einerFouriertransformation. Das Vektorpotential im Fernfeld ergibt sich damit aus der Fouriertransformier-
ten der Stromverteilung. Das magnetische Feld ergibt sich durch die Rotation des Vektorpotentials~A:
~H = r� ~A; (41)
wodurch sich lediglich eine '-Komponente ergibt:
H' = �Hx sin'+Hy cos' = �@Az@y
sin'� @Az@x
cos': (42)
Die beiden partiellen Ableitungen beschreiben im Fernfeld sehr einfache Ausdrücke:
@Az
@y = sin � sin'@A
z
@r +1
rcos � sin'
@Az
@�︸ ︷︷ ︸=0 für r!1
+1
r sin �cos'
@Az
@'︸ ︷︷ ︸=0
(43)
@Az
@x = sin � cos'@A
z
@r +1
rcos � cos'
@Az
@�︸ ︷︷ ︸=0 für r!1
� 1
r sin �sin'
@Az
@'︸ ︷︷ ︸=0
(44)
Die beiden Gl. (43) und (44) eingesetzt in Gl. (42) ergeben:
H' = � sin �@Az@r
� jk0 sin �Az : (45)
Die anderen beiden Komponenten des magnetischen Feldes verschwinden im Fernfeld: Hr = H� = 0.
Das elektrische Feld weist im Fernfeld im Wesentlichen auch nur noch eine Feldkomponente E� auf:
E� = H' � ZF0; wobei jEr j � jE�j; E' = 0 (46)
ZF0 ist dabei wieder der Feldwiderstand im freien Raum ZF0 =√�0="0 gemäÿ Gl. (EB 35).
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Lineare Antennen LA/8
3.2 Abstrahlung einer linearen Antenne
Die abgestrahlte Leistungsdichte wird durch den Poynting-Vektor ~S beschrieben. Im Fernfeld der
linearen Antenne ergibt sich eine radiale Komponente des Poynting-Vektors, die eine Abstrahlung von
der Antenne in den freien Raum beschreibt:
Sr =1
2E� �H�': (47)
Nach Einsetzen der berechneten Feldgröÿen aus Gl. (45) und (46) erhält man:
Sr =1
2sin2 �
k20� ZF0
(4�r)2
∣∣∣∣∣∣∣∣l=2∫
�l=2
I(z 0) exp(+jk0z0 cos �) dz 0
∣∣∣∣∣∣∣∣2
(48)
Die Stromverteilung auf einer linearen Antenne entspricht näherungsweise dem Stromverlauf auf einer
Leitung:
I(z 0) = I0 sin
k0[l
2� jz 0j
] (49)
Diese Stromverteilung ist in Abb. 5 für unterschiedliche Antennenlängen dargestellt. Mit Gl. (49)
relative Leistung [dB] in Bezug
auf die abgestrahlte Leistung in
Hauptstrahlrichtung
l = !0/4l = !0/2l = !0l = 3!0/2l = 2!0
Strom I
Abb. 5: Stromverteilung auf der linearen Antenne für verschiedene Längen l 2 [�04; �02; �0;
3�02; 2�0].
ergibt sich für den Integralausdruck in Gl. (48):
l=2∫�l=2
I(z 0) exp(+jk0z0 cos �) dz 0 = 2
l=2∫0
I0 sin(k0[l=2� jz 0j]) cos(k0z 0 cos �) dz 0
= 2I0cos([k0l=2] cos �)� cos(k0l=2)
k0 sin2 �
: (50)
TU Berlin � Prof. Dr.-Ing. K. Petermann
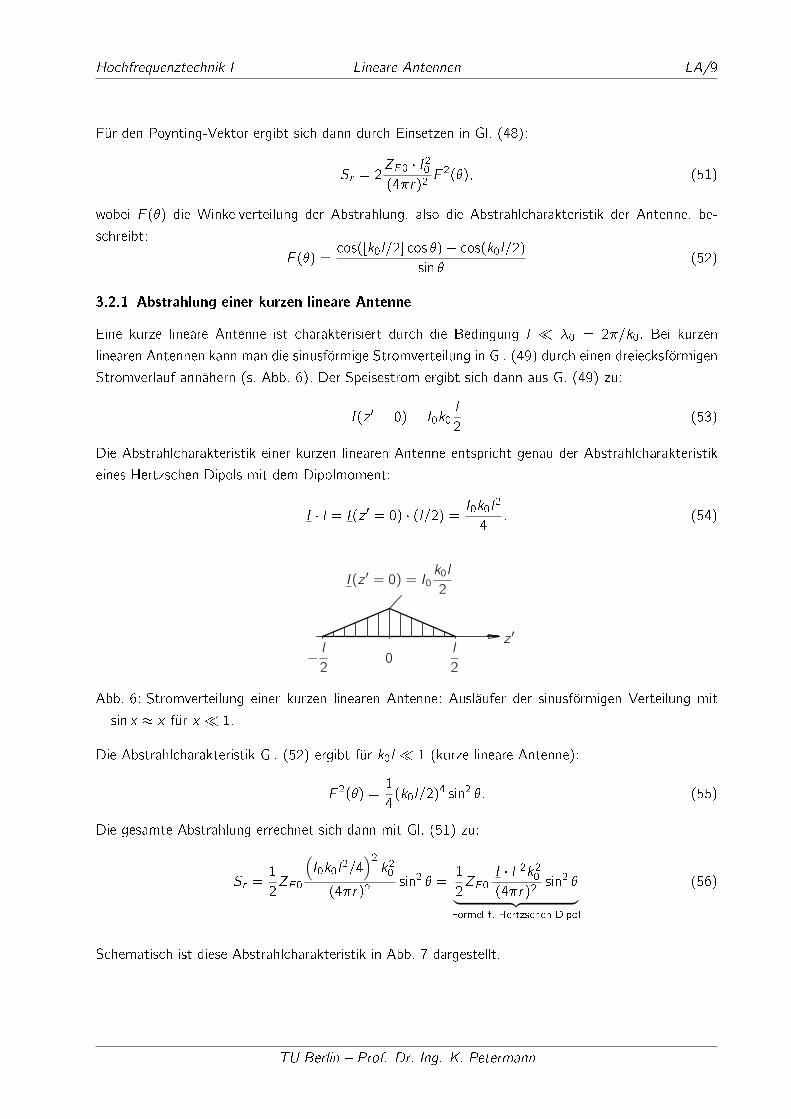
Hochfrequenztechnik I Lineare Antennen LA/9
Für den Poynting-Vektor ergibt sich dann durch Einsetzen in Gl. (48):
Sr = 2ZF0 � I20(4�r)2
F 2(�); (51)
wobei F (�) die Winkelverteilung der Abstrahlung, also die Abstrahlcharakteristik der Antenne, be-
schreibt:
F (�) =cos([k0l=2] cos �)� cos(k0l=2)
sin �(52)
3.2.1 Abstrahlung einer kurzen lineare Antenne
Eine kurze lineare Antenne ist charakterisiert durch die Bedingung l � �0 = 2�=k0. Bei kurzen
linearen Antennen kann man die sinusförmige Stromverteilung in Gl. (49) durch einen dreiecksförmigen
Stromverlauf annähern (s. Abb. 6). Der Speisestrom ergibt sich dann aus G. (49) zu:
I(z 0 = 0) = I0k0l
2(53)
Die Abstrahlcharakteristik einer kurzen linearen Antenne entspricht genau der Abstrahlcharakteristik
eines Hertzschen Dipols mit dem Dipolmoment:
I � l = I(z 0 = 0) � (l=2) = I0k0l2
4: (54)
I(z ! = 0) = I0k0l
2
!l
2
l
20
z !
Abb. 6: Stromverteilung einer kurzen linearen Antenne: Ausläufer der sinusförmigen Verteilung mit
sin x � x für x � 1.
Die Abstrahlcharakteristik Gl. (52) ergibt für k0l � 1 (kurze lineare Antenne):
F 2(�) =1
4(k0l=2)
4 sin2 �: (55)
Die gesamte Abstrahlung errechnet sich dann mit Gl. (51) zu:
Sr =1
2ZF0
(I0k0l
2=4)2k20
(4�r)2sin2 � =
1
2ZF0
jI � l j2k20
(4�r)2sin2 �︸ ︷︷ ︸
Formel f. Hertzschen Dipol
(56)
Schematisch ist diese Abstrahlcharakteristik in Abb. 7 dargestellt.
TU Berlin � Prof. Dr.-Ing. K. Petermann
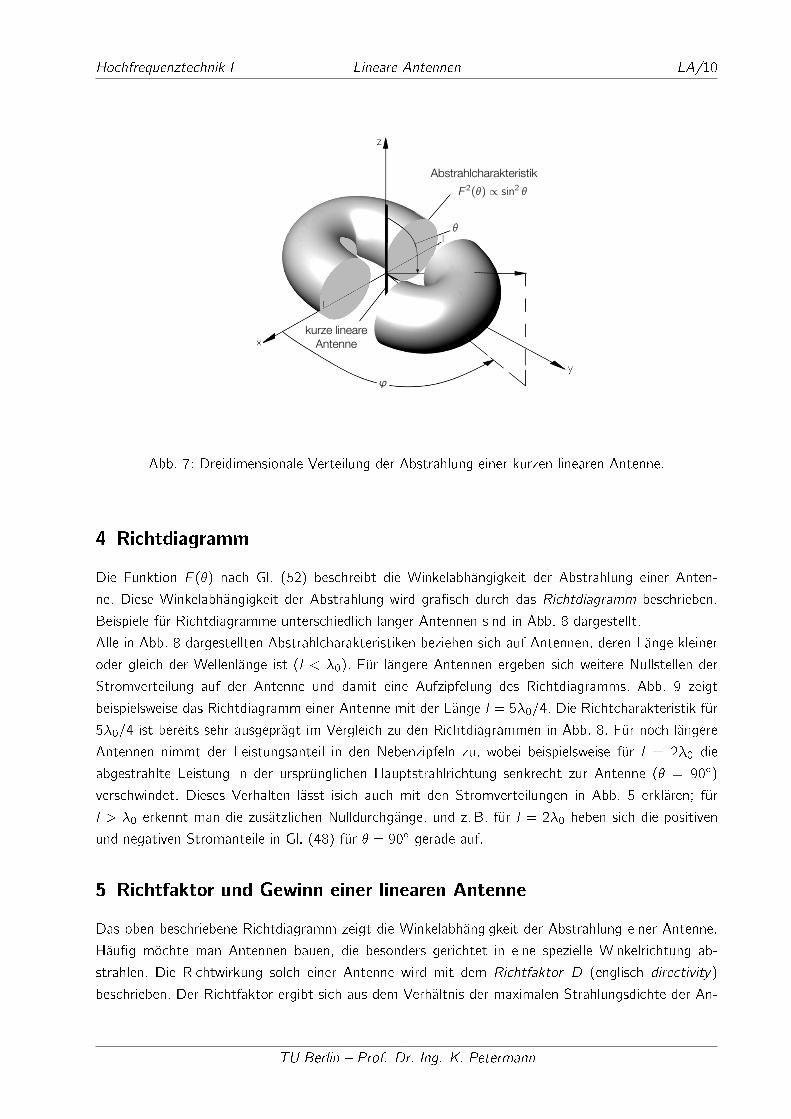
Hochfrequenztechnik I Lineare Antennen LA/10
F 2(!) ! sin2 !Abstrahlcharakteristik
kurze lineareAntenne
!
!
Abb. 7: Dreidimensionale Verteilung der Abstrahlung einer kurzen linearen Antenne.
4 Richtdiagramm
Die Funktion F (�) nach Gl. (52) beschreibt die Winkelabhängigkeit der Abstrahlung einer Anten-
ne. Diese Winkelabhängigkeit der Abstrahlung wird gra�sch durch das Richtdiagramm beschrieben.
Beispiele für Richtdiagramme unterschiedlich langer Antennen sind in Abb. 8 dargestellt.
Alle in Abb. 8 dargestellten Abstrahlcharakteristiken beziehen sich auf Antennen, deren Länge kleiner
oder gleich der Wellenlänge ist (l < �0). Für längere Antennen ergeben sich weitere Nullstellen der
Stromverteilung auf der Antenne und damit eine Aufzipfelung des Richtdiagramms. Abb. 9 zeigt
beispielsweise das Richtdiagramm einer Antenne mit der Länge l = 5�0=4. Die Richtcharakteristik für
5�0=4 ist bereits sehr ausgeprägt im Vergleich zu den Richtdiagrammen in Abb. 8. Für noch längere
Antennen nimmt der Leistungsanteil in den Nebenzipfeln zu, wobei beispielsweise für l = 2�0 die
abgestrahlte Leistung in der ursprünglichen Hauptstrahlrichtung senkrecht zur Antenne (� = 90�)
verschwindet. Dieses Verhalten lässt isich auch mit den Stromverteilungen in Abb. 5 erklären; für
l > �0 erkennt man die zusätzlichen Nulldurchgänge, und z. B. für l = 2�0 heben sich die positiven
und negativen Stromanteile in Gl. (48) für � = 90� gerade auf.
5 Richtfaktor und Gewinn einer linearen Antenne
Das oben beschriebene Richtdiagramm zeigt die Winkelabhängigkeit der Abstrahlung einer Antenne.
Häu�g möchte man Antennen bauen, die besonders gerichtet in eine spezielle Winkelrichtung ab-
strahlen. Die Richtwirkung solch einer Antenne wird mit dem Richtfaktor D (englisch directivity)
beschrieben. Der Richtfaktor ergibt sich aus dem Verhältnis der maximalen Strahlungsdichte der An-
TU Berlin � Prof. Dr.-Ing. K. Petermann
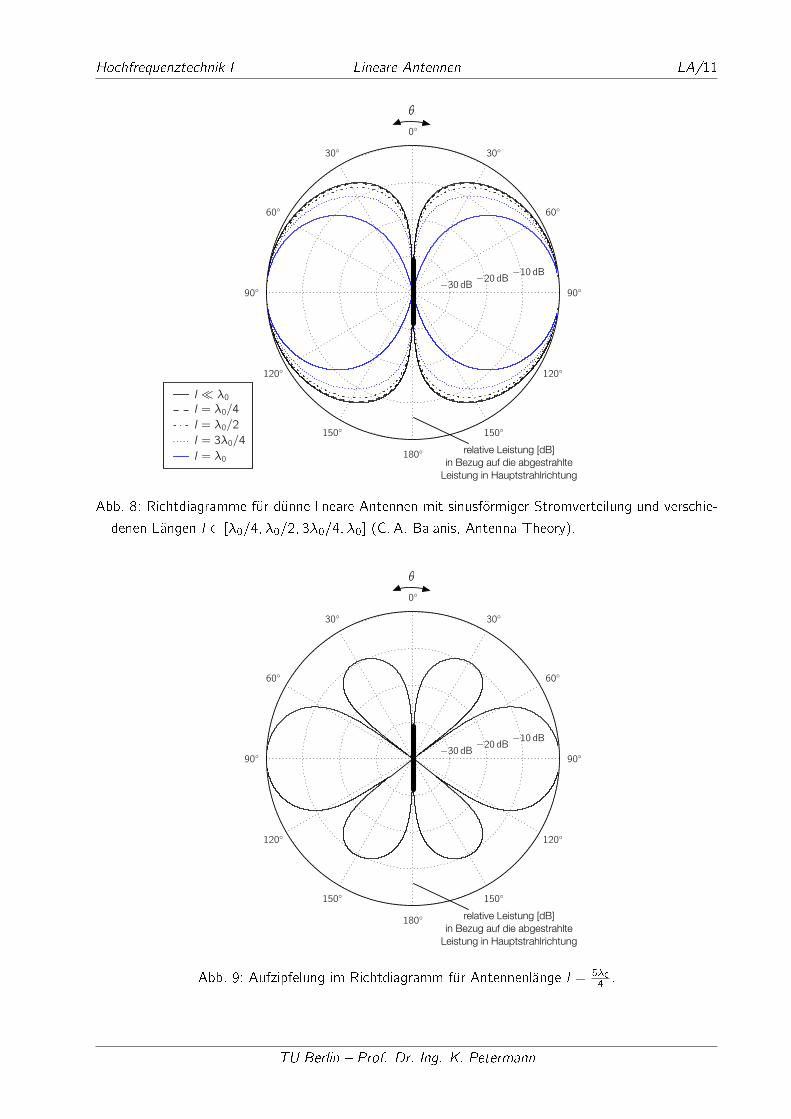
Hochfrequenztechnik I Lineare Antennen LA/11
90!
60!
30!
0!
30!
60!
90!
120!
150!
180!
150!
120!
!30 dB !20 dB!10 dB
l " !0l = !0/4l = !0/2l = 3!0/4
l = !0relative Leistung [dB]
in Bezug auf die abgestrahlteLeistung in Hauptstrahlrichtung
!
Abb. 8: Richtdiagramme für dünne lineare Antennen mit sinusförmiger Stromverteilung und verschie-
denen Längen l 2 [�0=4; �0=2; 3�0=4; �0] (C. A. Balanis, Antenna Theory).
90!
60!
30!
0!
30!
60!
90!
120!
150!
180!
150!
120!
!30 dB !20 dB!10 dB
relative Leistung [dB]in Bezug auf die abgestrahlte
Leistung in Hauptstrahlrichtung
!
Abb. 9: Aufzipfelung im Richtdiagramm für Antennenlänge l = 5�04.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Lineare Antennen LA/12
tenne in der Hauptstrahlrichtung bezogen auf eine Referenzantenne, die die gleiche Gesamtleistung
gleichmäÿig in alle Richtungen abstrahlt (isotroper Kugelstrahler).
D =Leistungsdichte der Antenne in Hauptstrahlrichtung
Leistungsdichte eines isotropen Kugelstrahlers
∣∣∣∣∣∣gleiche abgestr. Gesamtleistung
(57)
Die Leistungsdichte eines isotropen Kugelstrahlers ist in allen Richtungen
Sr =P
4�r2; (58)
wobei die gesamte abgestrahlte Leistung der zu beschreibenden Antenne allgemein durch Integration
über alle Raumrichtungen berechnet werden kann:
P =
2�∫0
�∫0
Sr (�; ')r2 sin � d� d' (59)
Für eine lineare Antenne ist die abgestrahlte Leistungsdichte unabhängig vom Winkel ', so dass sich
dann Gl. (59) reduziert zu:
P =
�∫0
Sr (�) � 2�r2 sin � d� (60)
Somit ergibt sich für den Richtfaktor einer linearen Antenne:
D =2 � F 2(�)
∣∣∣max∫ �
0F 2(�) sin � d�
(61)
Die von der Antenne abgestrahlte Leistung P unterscheidet sich von der Eingangsleistung Pe in die
Antenne auf Grund eventueller Antennenverluste (z. B. durch die endliche Leitfähigkeit des Antennen-
stabes), was sich durch den Antennenwirkungsgrad
�A =P
Pe(62)
beschreiben lässt. Man kann nun auch einen sog. Antennengewinn Giso einführen, der die maxima-
le abgestrahlte Leistungsdichte der realen (verlustbehafteten) Antenne auf die Leistungsdichte des
verlustfreien isotropen Kugelstrahlers bezieht. Giso hängt mit dem Richtfaktor D gemäÿ
Giso = �A �D (63)
zusammen, so dass für verlustfreie Antennen (�A = 1) Giso und D übereinstimmen.
5.1 Abhängigkeit des Richtfaktors von der Antennenlänge
Kurze lineare Antennen weisen die Abstrahlcharakteristik eines Hertzschen Dipols auf. Der Richtfaktor
einer solchen Antenne ergibt sich mit Gl. (55) und (61) zu:
D =3
2(64)
TU Berlin � Prof. Dr.-Ing. K. Petermann
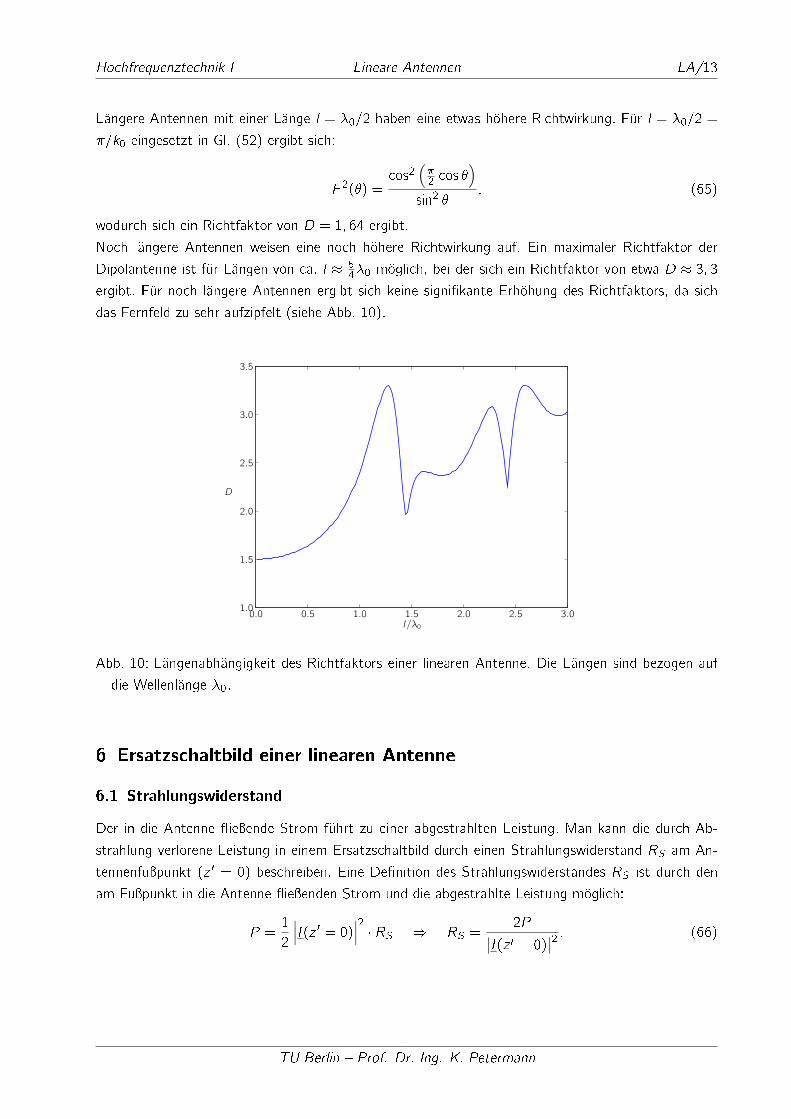
Hochfrequenztechnik I Lineare Antennen LA/13
Längere Antennen mit einer Länge l = �0=2 haben eine etwas höhere Richtwirkung. Für l = �0=2 =
�=k0 eingesetzt in Gl. (52) ergibt sich:
F 2(�) =cos2
(�2cos �
)sin2 �
; (65)
wodurch sich ein Richtfaktor von D = 1; 64 ergibt.
Noch längere Antennen weisen eine noch höhere Richtwirkung auf. Ein maximaler Richtfaktor der
Dipolantenne ist für Längen von ca. l � 5
4�0 möglich, bei der sich ein Richtfaktor von etwa D � 3; 3
ergibt. Für noch längere Antennen ergibt sich keine signi�kante Erhöhung des Richtfaktors, da sich
das Fernfeld zu sehr aufzipfelt (siehe Abb. 10).
0.0 0.5 1.0 1.5 2.0 2.5 3.0l /!0
1.0
1.5
2.0
2.5
3.0
3.5
DD
Abb. 10: Längenabhängigkeit des Richtfaktors einer linearen Antenne. Die Längen sind bezogen auf
die Wellenlänge �0.
6 Ersatzschaltbild einer linearen Antenne
6.1 Strahlungswiderstand
Der in die Antenne �ieÿende Strom führt zu einer abgestrahlten Leistung. Man kann die durch Ab-
strahlung verlorene Leistung in einem Ersatzschaltbild durch einen Strahlungswiderstand RS am An-
tennenfuÿpunkt (z 0 = 0) beschreiben. Eine De�nition des Strahlungswiderstandes RS ist durch den
am Fuÿpunkt in die Antenne �ieÿenden Strom und die abgestrahlte Leistung möglich:
P =1
2
∣∣∣I(z 0 = 0)∣∣∣2 � RS ) RS =
2P∣∣I(z 0 = 0)∣∣2 ; (66)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Lineare Antennen LA/14
wobei P die abgestrahlte Leistung gemäÿ Gl. (60) und I(z 0 = 0) den Strom am Fuÿpunkt der Antenne
gemäÿ Gl. (49) darstellen. Setzt man diese Gleichungen in Gl. (66) ein, erhält man:
RS =ZF0
2� sin2(k0l=2)
�∫0
F 2(�) sin � d� (67)
Gl. (67) gilt, solange die Stromverteilung auf der Antenne der einer verlustfreien Leitung entspricht.
Da reale Antennen Leistung abstrahlen, ist die Leitungsnäherung nicht mehr im strengen Sinne gültig.
Dennoch stellt Gl. (67) eine gute Näherung für kürzere Antennen mit l � �0=2 dar.
6.1.1 Beispiele von Strahlungswiderständen
1. Kurze lineare Antenne (l � �0=2): Mit der Abstrahlcharakteristik F 2(�) kurzer linearer Anten-
nen gemäÿ Gl. (55) und der De�nition des Strahlungswiderstands nach Gl. (67) ergibt sich ein
Strahlungswiderstand von:
RS =ZF06�
(k0l
2
)2
= 20 �(k0l
2
)2
= 20�2(l
�0
)2
(68)
Für sehr kleine Antennenlängen l � �0 ergeben sich wegen der Abhängigkeit (RS / (l=�0)2)
u. U. sehr kleine Strahlungswiderstände. Für l=�0 = 0; 1 (z. B. f = 100MHz, l = 30 cm) ergibt
sich ein noch sehr kleiner RS � 2, der sich nur schwer an z. B. eine 50-Leitung anpassen
lässt. Allein aus diesem Grund sind etwas längere Antennen wünschenswert, auch wenn sich der
Richtfaktor gemäÿ Abb. 10 noch kaum ändert.
2. �2-Dipol: Der �=2-Dipol stellt die wichtigste Dipolantenne dar. Mit l = �0=2 = �=k0 folgt aus Gl.
(52) bzw. (65) eingesetzt in Gl. (67):
RS � 0; 194 � ZF0 � 73; 2 (69)
Die Gröÿe dieses Strahlungswiderstandes liegt sehr nah an den Wellenwiderständen typischer
Leitungen, so dass eine Anpassung in der Regel einfach möglich ist.
6.2 Fuÿpunktimpedanz
Das komplette Ersatzschaltbild einer linearen Antenne ist in Abb. 11 dargestellt. Dabei gilt die Annah-
me, dass die gesamte von der Antenne aufgenommene Leistung im Strahlungswiderstand RS absorbiert
und somit abgestrahlt wird. Das entspricht dem Bild einer verlustfreien Antenne. Evtl. auftretende Ver-
luste müssten mit einem weiteren Widerstand berücksichtigt werden.
Nach Bild 11 ist die gesamte Fuÿpunktimpedanz der verlustfreien Antenne
Za = RS + jX (70)
und lässt sich au�assen als die Eingangsimpedanz einer verlustbehafteten, am Ende leerlaufenden
Leitung. Die Verluste haben ihren Ursprung dabei in der Leistungsabstrahlung der Antenne.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Lineare Antennen LA/15
I(z ! = 0)
I(z ! = 0) jX RS
Abb. 11: Ersatzschaltbild einer verlustlosen linearen Antenne.
Bei einer solchen verlustbehafteten Leitung verschwindet X für Leitungslängen entsprechend � � l =�=2; �; 3�=2 ähnlich zu Abb. 2 im Abschnitt SMI. Die Länge des Dipols l entspricht der doppelten
Leitungslänge, so dass
jX = 0 für l � �0
2; �0;
3�0
2: : : (71)
sein sollte. Abb. 12 zeigt Ortskurven für die Antennenimpedanz Za = RS + jX für zwei verschiedene
Schlankheitsgrade l=d (d ist der Durchmesser des Antennenstabes). Die Ortskurven zeigen nun die
Impedanz bei variierendem l bzw. variierender Frequenz.
Für sehr kleine l ergibt sich gemäÿ Gl. 67 ein sehr kleiner RS und kapazitives Verhalten (wie bei einer
kurzen leerlaufenden Leitung), während wir für l = �0=2 gemäÿ Gl. (69) ein RS � 73 und gemäÿ
Gl. (71) ein X � 0 (Resonanzverhalten wie bei einem Serienschwingkreis) erhalten.2 Für l > �0=2
wird X > 0 (induktives Verhalten), bis die nächste Resonanz X � 0 für l � �0 (Resonanzverhalten
eines Parallelschwingkreises) bei maximalem RS erreicht wird.3 In Abb. 12 wird weiterhin deutlich, dass
RS für l � �0 sehr stark von der Antennendicke abhängt und damit Gl. (67) nicht mehr anwendbar
wäre. In Gl. (66) und (67) würde RS ! 1 gehen für l = �0, da in der einfachen Leitungsnäherung
dann I(z 0 = 0) = 0 wird (vgl. auch Abb. 5). Tatsächlich ist aber wegen der Leistungsabstrahlung die
Stromverteilung nicht mehr wie in einer verlustfreien Leitung beschreibbar, wodurch die Unterschiede
erklärt werden können.
Die Antennendicke beein�usst in erheblicher Weise den Imaginärteil X der Antennenimpedanz, was
man einfach mit der geringeren gespeicherten elektrischen und magnetischen Energie bei einer dickeren
Antenne erklären kann, was dann auch zu einem kleineren jXj führt. Alternativ kann man sich auch
klarmachen, dass ein dickerer Leiter zu einem kleineren Induktivitätsbelag (und zu einem höheren
Kapazitätsbelag) führt, womit sich ebenfalls ein kleines jXj erklären lässt.
Beim �=2-Dipol ergibt sich der wichtige Spezialfall, dass die Fuÿpunktimpedanz nahezu unabhängig
von der Dicke des Antennenstabes fast ausschlieÿlich durch den Strahlungswiderstand RS nach Gl.
(67) gegeben ist.
2 Tatsächlich ergibt sich diese Resonanz nicht genau bei l = �0=2, sondern bei etwas kürzeren Antennenlängen.3 Bei genauerer Betrachtung tritt auch diese Resonanz bei etwas kürzeren Dipollängen auf.
TU Berlin � Prof. Dr.-Ing. K. Petermann
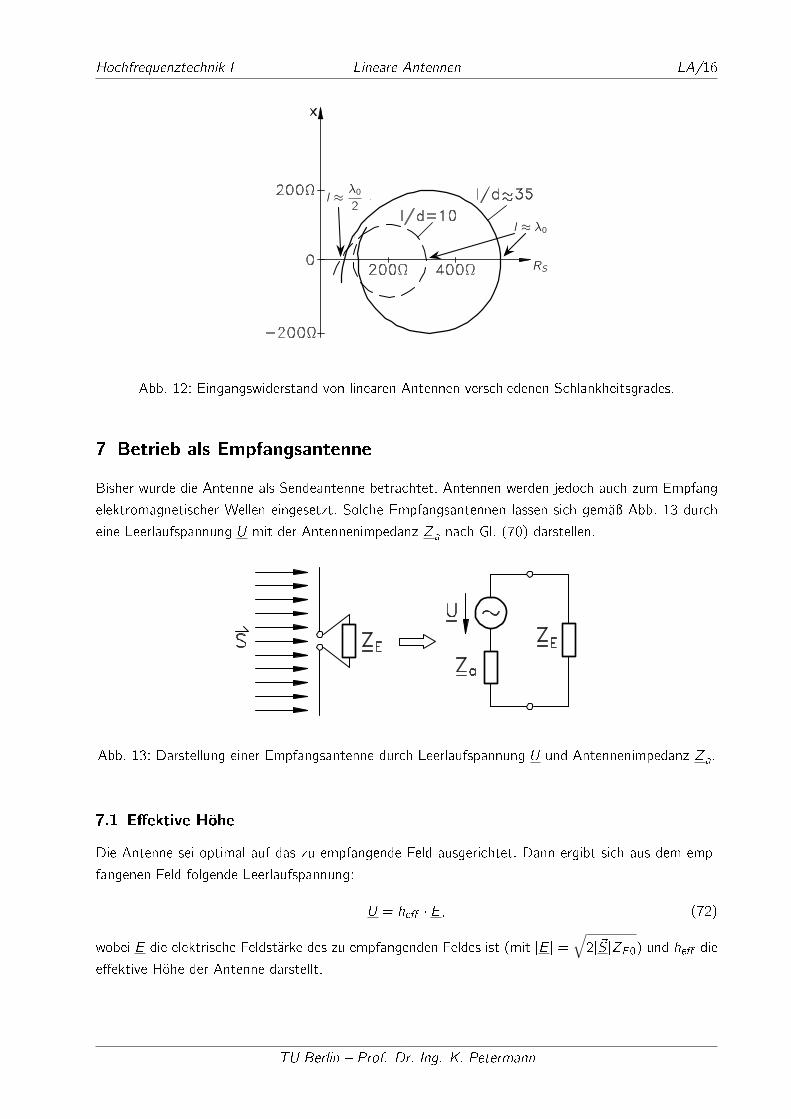
Hochfrequenztechnik I Lineare Antennen LA/16
l !!02
l ! !0
RS
Abb. 12: Eingangswiderstand von linearen Antennen verschiedenen Schlankheitsgrades.
7 Betrieb als Empfangsantenne
Bisher wurde die Antenne als Sendeantenne betrachtet. Antennen werden jedoch auch zum Empfang
elektromagnetischer Wellen eingesetzt. Solche Empfangsantennen lassen sich gemäÿ Abb. 13 durch
eine Leerlaufspannung U mit der Antennenimpedanz Za nach Gl. (70) darstellen.
Abb. 13: Darstellung einer Empfangsantenne durch Leerlaufspannung U und Antennenimpedanz Za.
7.1 E�ektive Höhe
Die Antenne sei optimal auf das zu empfangende Feld ausgerichtet. Dann ergibt sich aus dem emp-
fangenen Feld folgende Leerlaufspannung:
U = he� � E; (72)
wobei E die elektrische Feldstärke des zu empfangenden Feldes ist (mit jEj =√2j~SjZF0) und he� die
e�ektive Höhe der Antenne darstellt.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Lineare Antennen LA/17
Ohne Beweis gilt, dass für kurze lineare Antennen mit l � �0 die e�ektive Höhe durch die halbe An-
tennenlänge he� = l=2 gegeben ist, was unter Berücksichtigung der dreiecksförmigen Stromverteilung
in Abb. 6 auch plausibel erscheint.
7.2 Maximal abgebbare Leistung
Die maximal an der Impedanz ZE abgebbare Leistung PE erhält man für Leistungsanpassung ZE = Z�a.
Wenn man weiterhin eine verlustfreie Antenne voraussetzt, ergibt sich dann:
PE =jUj2
8<(Za)=jUj28RS
(73)
Mit Gl. (68) und (72) folgt:
PE =jhe� � Ej2
8RS=
1
2
jEj2(l2
)22�ZF0
3
(l�0
)2 =1
2
jEj2ZF0︸ ︷︷ ︸S
3�20
8�︸︷︷︸Aw
(74)
mit der Leistungsdichte S und Aw , wobei Aw die sog. Wirk�äche der Antenne beschreibt. Das ist
die Fläche, in der der ankommenden Welle Leistung entzogen wird. Für kurze lineare Antennen ist
Aw unabhängig von der Dipollänge und nur von der Wellenlänge der ankommenden Welle beein�usst,
zumindest solange de Antenne verlustfrei ist.
Für zu kurze Längen ist jedoch der Strahlungswiderstand RS auÿerordentlich klein, so dass einerseits
Ohmsche Verluste zu berücksichtigen sind und andererseits die Anpassung schwierig wird.
Das Verhältnis zwischen Wirk�äche und Gewinn � also zwischen Empfangs- und Sendeeigenschaften
der Antenne � lässt sich für verlustfreie kurze lineare Antennen mit Giso = D = 3
2schreiben:
Aw
Giso
=�20
4�: (75)
Auch wenn Gl. (75) für verlustfreie Antennen abgeleitet wurde, gilt sie auch für verlustbehaftete
Antennen, da der Antennenwirkungsgrad �A mit Giso = �A � D auch auf die Antennenwirk�äche
anwendbar ist.
8 System aus Sende- und Empfangsantenne
Bisher wurden die Antennen jeweils nur als Sende- oder als Empfangsantenne betrachtet. Nun soll
das Gesamtsystem wie in Abb. 14 betrachtet werden. Die beiden Antennen 1 und 2 seien an den
Generator bzw. an die Last angepasst. Die von Antenne 1 abgestrahlte Leistung sei PS, die von
Antenne 2 empfangene Leistung PE :
PE = Aw2 � S2 mit S2 = PS �Giso1
4�r2: (76)
Die Übertragungse�zienz als Verhältnis zwischen empfangener und gesendeter Leistung ist somit
gegeben als:PEPS
= Giso1 �Aw2
4�r2: (77)
TU Berlin � Prof. Dr.-Ing. K. Petermann
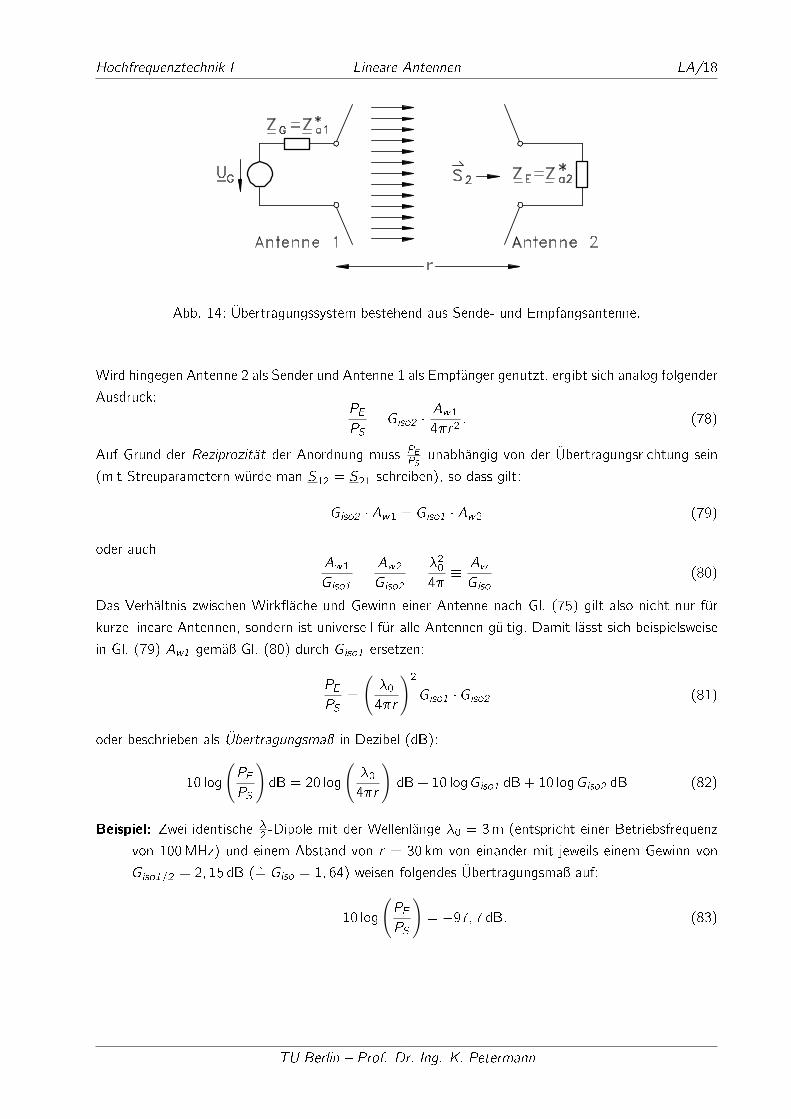
Hochfrequenztechnik I Lineare Antennen LA/18
Abb. 14: Übertragungssystem bestehend aus Sende- und Empfangsantenne.
Wird hingegen Antenne 2 als Sender und Antenne 1 als Empfänger genutzt, ergibt sich analog folgender
Ausdruck:PEPS
= Giso2 �Aw1
4�r2: (78)
Auf Grund der Reziprozität der Anordnung muss PEPS
unabhängig von der Übertragungsrichtung sein
(mit Streuparametern würde man S12 = S21 schreiben), so dass gilt:
Giso2 � Aw1 = Giso1 � Aw2 (79)
oder auchAw1
Giso1
=Aw2
Giso2
=�20
4�� Aw
Giso
(80)
Das Verhältnis zwischen Wirk�äche und Gewinn einer Antenne nach Gl. (75) gilt also nicht nur für
kurze lineare Antennen, sondern ist universell für alle Antennen gültig. Damit lässt sich beispielsweise
in Gl. (79) Aw1 gemäÿ Gl. (80) durch Giso1 ersetzen:
PEPS
=
(�0
4�r
)2
Giso1 � Giso2 (81)
oder beschrieben als Übertragungsmaÿ in Dezibel (dB):
10 log
(PEPS
)dB = 20 log
(�0
4�r
)dB+ 10 logGiso1 dB+ 10 logGiso2 dB (82)
Beispiel: Zwei identische �2-Dipole mit der Wellenlänge �0 = 3m (entspricht einer Betriebsfrequenz
von 100MHz) und einem Abstand von r = 30 km von einander mit jeweils einem Gewinn von
Giso1=2 = 2; 15 dB (= Giso = 1; 64) weisen folgendes Übertragungsmaÿ auf:
10 log
(PEPS
)= �97; 7 dB: (83)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Lineare Antennen LA/19
Abb. 15: 1. Fresnelzone.
8.1 Fresnelzone
Die oben genannten Gleichungen gelten nur für eine ideale Übertragung im freien Raum. Diese Be-
dingung entspricht näherungsweise der Annahme, dass sich innerhalb der sog. 1. Fresnelzone keine
Hindernisse be�nden dürfen.
Die 1. Fresnelzone ist in Abb. 15 skizziert und entspricht einem Rotationsellipsoiden, in dessen Brenn-
punkten sich jeweils Sender und Empfänger be�nden. Dieses Ellipsoid hat an der breitesten Stelle einen
Durchmesser vonp�0r , was für das obige Beispiel (�0 = 3m, r = 30 km) einem Durchmesser von
300m entspricht.
9 Alternative Antennenformen
Lineare Antennen gibt es auch in modi�zierten Ausführungsformen. Im Folgenden sollen einige Beispiele
vorgestellt werden.
9.1 Faltdipol
Den prinzipiellen Aufbau eines Faltdipols zeigt Abb. 16. Durch die gefaltete Form und die zwei dadurch
entstehenden parallelen Leitungselemente �ieÿt gegenüber einem normalen Dipol in jedem der beiden
Leiter nur der halbe Strom. Somit ergibt sich als Strahlungswiderstand RF des Faltdipols:
P =1
2
∣∣∣∣∣ I(z 0 = 0)
2
∣∣∣∣∣2
� RF =1
2jI(z 0 = 0)j2 � RS (84)
) RF = 4RS = 293 (85)
l =!02
I(z ! = 0)/2
I(z ! = 0)/2
Abb. 16: �2-Faltdipol.
Eine solche Antenne lässt sich vorteilhaft mit einer symmetrischen Leitung mit einem Leitungswellen-
widerstand ZL � 300 speisen, wobei derartige Wellenwiderstände bei symmetrischen Leitungen gut
zu realisieren sind.
TU Berlin � Prof. Dr.-Ing. K. Petermann
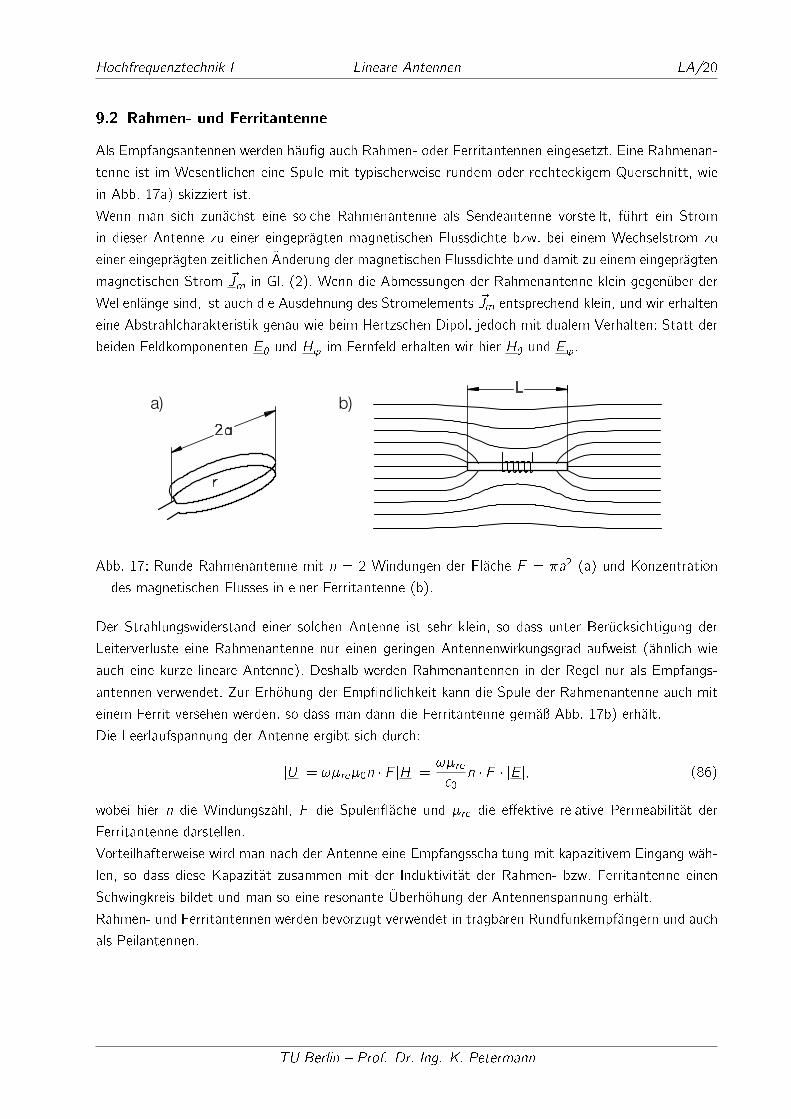
Hochfrequenztechnik I Lineare Antennen LA/20
9.2 Rahmen- und Ferritantenne
Als Empfangsantennen werden häu�g auch Rahmen- oder Ferritantennen eingesetzt. Eine Rahmenan-
tenne ist im Wesentlichen eine Spule mit typischerweise rundem oder rechteckigem Querschnitt, wie
in Abb. 17a) skizziert ist.
Wenn man sich zunächst eine solche Rahmenantenne als Sendeantenne vorstellt, führt ein Strom
in dieser Antenne zu einer eingeprägten magnetischen Flussdichte bzw. bei einem Wechselstrom zu
einer eingeprägten zeitlichen Änderung der magnetischen Flussdichte und damit zu einem eingeprägten
magnetischen Strom ~Jm in Gl. (2). Wenn die Abmessungen der Rahmenantenne klein gegenüber der
Wellenlänge sind, ist auch die Ausdehnung des Stromelements ~Jm entsprechend klein, und wir erhalten
eine Abstrahlcharakteristik genau wie beim Hertzschen Dipol, jedoch mit dualem Verhalten: Statt der
beiden Feldkomponenten E� und H' im Fernfeld erhalten wir hier H� und E'.
a) b)
Abb. 17: Runde Rahmenantenne mit n = 2 Windungen der Fläche F = �a2 (a) und Konzentration
des magnetischen Flusses in einer Ferritantenne (b).
Der Strahlungswiderstand einer solchen Antenne ist sehr klein, so dass unter Berücksichtigung der
Leiterverluste eine Rahmenantenne nur einen geringen Antennenwirkungsgrad aufweist (ähnlich wie
auch eine kurze lineare Antenne). Deshalb werden Rahmenantennen in der Regel nur als Empfangs-
antennen verwendet. Zur Erhöhung der Emp�ndlichkeit kann die Spule der Rahmenantenne auch mit
einem Ferrit versehen werden, so dass man dann die Ferritantenne gemäÿ Abb. 17b) erhält.
Die Leerlaufspannung der Antenne ergibt sich durch:
jUj = !�re�0n � F jHj = !�re
c0n � F � jEj; (86)
wobei hier n die Windungszahl, F die Spulen�äche und �re die e�ektive relative Permeabilität der
Ferritantenne darstellen.
Vorteilhafterweise wird man nach der Antenne eine Empfangsschaltung mit kapazitivem Eingang wäh-
len, so dass diese Kapazität zusammen mit der Induktivität der Rahmen- bzw. Ferritantenne einen
Schwingkreis bildet und man so eine resonante Überhöhung der Antennenspannung erhält.
Rahmen- und Ferritantennen werden bevorzugt verwendet in tragbaren Rundfunkempfängern und auch
als Peilantennen.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Lineare Antennen LA/21
10 Gruppenstrahler, Mehrfachantennen
Die Richtwirkung einer linearen Antenne ist begrenzt, wie beispielsweise Abb. 10 zeigt. Um höhere
Richtfaktoren zu erhalten, können mehrere lineare Antennen zu Antennengruppen zusammengefasst
werden.
10.1 Querstrahler
Wie wollen zuerst mit Abb. 18 annehmen, dass n lineare Antennen jeweils im Abstand d zu einer
Gruppenantenne zusammengefasst sind. Alle Einzelantennen sollen gleichphasig angeregt werden, so
dass sich dann als Hauptstrahlrichtung die x-Richtung in Abb. 18 ergibt; man spricht dann von einem
sog. Querstrahler.
x
!
Abb. 18: Querstrahler mit n Strahlelementen.
Das gesamte abgestrahlte Feld dieses Querstrahlers im Fernfeld lässt sich darstellen als Produkt des
Feldes des Einzelstrahlers multipliziert mit einem sog. Gruppenfaktor AF (engl. array factor), so dass
sich beispielsweise für H' im Fernfeld ergibt:
H' = AF �H'
∣∣∣∣∣∣Einzelstrahler
(87)
wobei der Gruppenfaktor für gleiche Anregung aller Antennenelemente (gleiche Amplitude und Phase)
durch (ohne Beweis, siehe z. B. C. A. Balanis, Antenna Theory, 3rd ed. 2005, S. 290�):
AF =sin(n2k0d sin
)sin(1
2k0d sin
) =sin(d�0�n sin
)sin(d�0� sin
) (88)
gegeben ist, woraus man den maximalen AF und damit die Hauptstrahlrichtung mit AF = n für = 0
erhält.
TU Berlin � Prof. Dr.-Ing. K. Petermann
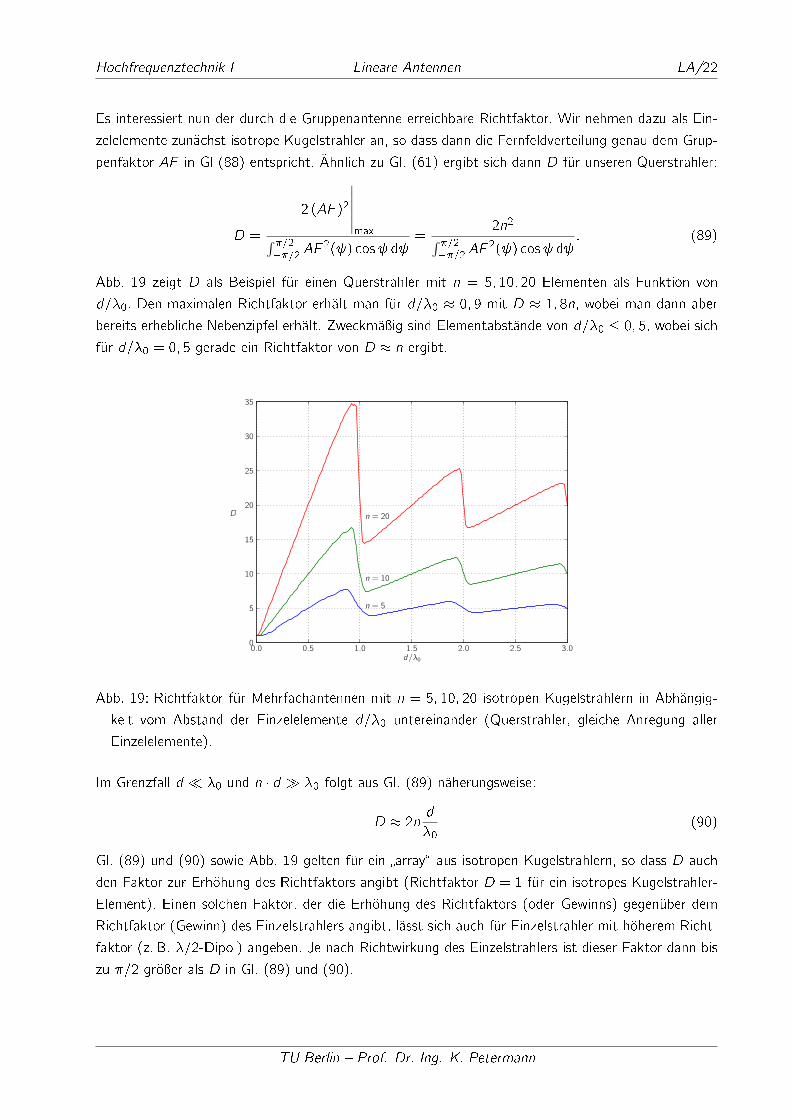
Hochfrequenztechnik I Lineare Antennen LA/22
Es interessiert nun der durch die Gruppenantenne erreichbare Richtfaktor. Wir nehmen dazu als Ein-
zelelemente zunächst isotrope Kugelstrahler an, so dass dann die Fernfeldverteilung genau dem Grup-
penfaktor AF in Gl (88) entspricht. Ähnlich zu Gl. (61) ergibt sich dann D für unseren Querstrahler:
D =
2 (AF )2
∣∣∣∣∣∣max∫ �=2
��=2 AF2( ) cos d
=2n2∫ �=2
��=2 AF2( ) cos d
: (89)
Abb. 19 zeigt D als Beispiel für einen Querstrahler mit n = 5; 10; 20 Elementen als Funktion von
d=�0. Den maximalen Richtfaktor erhält man für d=�0 � 0; 9 mit D � 1; 8n, wobei man dann aber
bereits erhebliche Nebenzipfel erhält. Zweckmäÿig sind Elementabstände von d=�0 � 0; 5, wobei sich
für d=�0 = 0; 5 gerade ein Richtfaktor von D � n ergibt.
0.0 0.5 1.0 1.5 2.0 2.5 3.0d/!0
0
5
10
15
20
25
30
35
D
n = 20
n = 10
n = 5
D
Abb. 19: Richtfaktor für Mehrfachantennen mit n = 5; 10; 20 isotropen Kugelstrahlern in Abhängig-
keit vom Abstand der Einzelelemente d=�0 untereinander (Querstrahler, gleiche Anregung aller
Einzelelemente).
Im Grenzfall d � �0 und n � d � �0 folgt aus Gl. (89) näherungsweise:
D � 2nd
�0(90)
Gl. (89) und (90) sowie Abb. 19 gelten für ein �array� aus isotropen Kugelstrahlern, so dass D auch
den Faktor zur Erhöhung des Richtfaktors angibt (Richtfaktor D = 1 für ein isotropes Kugelstrahler-
Element). Einen solchen Faktor, der die Erhöhung des Richtfaktors (oder Gewinns) gegenüber dem
Richtfaktor (Gewinn) des Einzelstrahlers angibt, lässt sich auch für Einzelstrahler mit höherem Richt-
faktor (z. B. �=2-Dipol) angeben. Je nach Richtwirkung des Einzelstrahlers ist dieser Faktor dann bis
zu �=2 gröÿer als D in Gl. (89) und (90).
TU Berlin � Prof. Dr.-Ing. K. Petermann
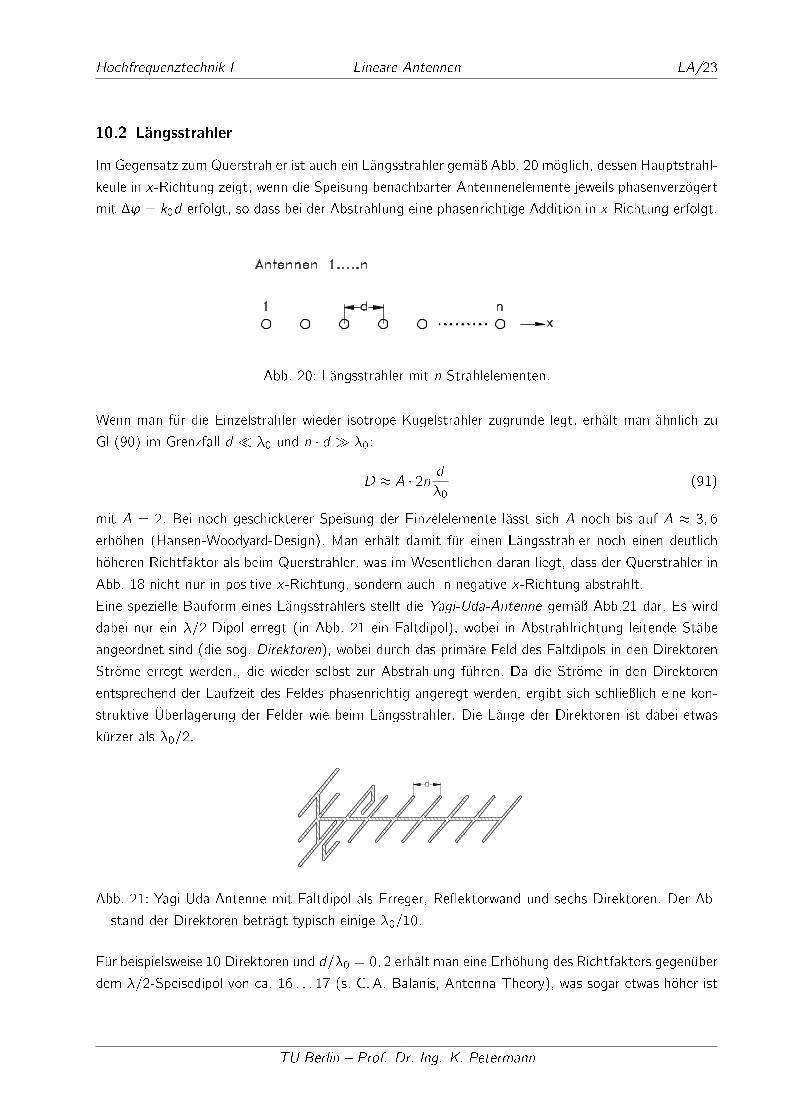
Hochfrequenztechnik I Lineare Antennen LA/23
10.2 Längsstrahler
Im Gegensatz zum Querstrahler ist auch ein Längsstrahler gemäÿ Abb. 20 möglich, dessen Hauptstrahl-
keule in x-Richtung zeigt, wenn die Speisung benachbarter Antennenelemente jeweils phasenverzögert
mit �' = k0d erfolgt, so dass bei der Abstrahlung eine phasenrichtige Addition in x-Richtung erfolgt.
Abb. 20: Längsstrahler mit n Strahlelementen.
Wenn man für die Einzelstrahler wieder isotrope Kugelstrahler zugrunde legt, erhält man ähnlich zu
Gl (90) im Grenzfall d � �0 und n � d � �0:
D � A � 2n d�0
(91)
mit A = 2. Bei noch geschickterer Speisung der Einzelelemente lässt sich A noch bis auf A � 3; 6
erhöhen (Hansen-Woodyard-Design). Man erhält damit für einen Längsstrahler noch einen deutlich
höheren Richtfaktor als beim Querstrahler, was im Wesentlichen daran liegt, dass der Querstrahler in
Abb. 18 nicht nur in positive x-Richtung, sondern auch in negative x-Richtung abstrahlt.
Eine spezielle Bauform eines Längsstrahlers stellt die Yagi-Uda-Antenne gemäÿ Abb.21 dar. Es wird
dabei nur ein �=2-Dipol erregt (in Abb. 21 ein Faltdipol), wobei in Abstrahlrichtung leitende Stäbe
angeordnet sind (die sog. Direktoren), wobei durch das primäre Feld des Faltdipols in den Direktoren
Ströme erregt werden., die wieder selbst zur Abstrahlung führen. Da die Ströme in den Direktoren
entsprechend der Laufzeit des Feldes phasenrichtig angeregt werden, ergibt sich schlieÿlich eine kon-
struktive Überlagerung der Felder wie beim Längsstrahler. Die Länge der Direktoren ist dabei etwas
kürzer als �0=2.
Abb. 21: Yagi-Uda-Antenne mit Faltdipol als Erreger, Re�ektorwand und sechs Direktoren. Der Ab-
stand der Direktoren beträgt typisch einige �0=10.
Für beispielsweise 10 Direktoren und d=�0 = 0; 2 erhält man eine Erhöhung des Richtfaktors gegenüber
dem �=2-Speisedipol von ca. 16 : : : 17 (s. C. A. Balanis, Antenna Theory), was sogar etwas höher ist
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Lineare Antennen LA/24
als Gl. (91) erwarten lässt, da die Ströme auf den Direktoren sich sehr ähnlich zum Hansen-Woodyard-
Design ergeben.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Antennen an Grenz�ächen GR/1
In den letzten Kapiteln wurde die Wellenausbreitung im freien Raum und die lineare Antenne betrachtet.
Hier soll nun genauer untersucht werden, wie sich Wellen an Grenz�ächen zwischen zwei Medien
verhalten und welche Auswirkungen das auf Antennen hat, die sich in der Nähe solcher Grenz�ächen
be�nden.
1 Stetigkeitsbedingungen an Grenz�ächen
In Abb. 1 ist eine Grenz�äche zwischen zwei Medien 1 und 2 skizziert, und wir wollen nun Aussagen
machen über die Stetigkeit der tangetialen und normalen Feldkomponenten.
a) b)
Abb. 1: a) Tangentiale Feldkomponenten ~Et und ~Ht sowie b) normale Feldkomponenten ~Bn und ~Dn.
Wir wollen zunächst annehmen, dass in der Grenz�äche keine magnetischen Flächenströme �ieÿen,
also in der Grenz�äche ~Jf m = 0 gilt:
1.1 Keine magnetischen Flächenströme ~Jf m = 0
Unter dieser Annahme müssen beim Übergang zwischen zwei Medien 1 und 2 mit unterschiedlichem
�, " die Tangentialkomponenten der elektrischen Feldstärke stetig übergehen:
~Et1
∣∣∣∣∣∣Grenz�äche
= ~Et2
∣∣∣∣∣∣Grenz�äche
(1)
Wegen
�r� ~E = j! ~B (2)
folgt aus Gl. (1) unmittelbar auch die Stetigkeit der Normalkomponente der magnetischen Flussdichte~B:
~Bn1
∣∣∣∣∣∣Grenz�äche
= ~Bn2
∣∣∣∣∣∣Grenz�äche
(3)
Im nächsten Schritt wollen wir annehmen, dass in der Grenz�äche keine elektrischen Flächenströme
�ieÿen, also in der Grenz�äche ~Jf = 0 gilt.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Antennen an Grenz�ächen GR/2
1.2 Keine elektrischen Flächenströme ~Jf = 0
In diesem Fall müssen die Tangentialkomponenten der magnetischen Feldstärke stetig sein
~Ht1
∣∣∣∣∣∣Grenz�äche
= ~Ht2
∣∣∣∣∣∣Grenz�äche
(4)
Wegen
r� ~H = j! ~D (5)
folgt aus Gl (3) dann auch die Stetigkeit der Normalkomponente von ~D:
~Dn1
∣∣∣∣∣∣Grenz�äche
= ~Dn2
∣∣∣∣∣∣Grenz�äche
(6)
Bei Grenz�ächen, bei denen sowohl ~Jf = 0 und ~Jf m = 0 gelten (z. B. Übergänge zwischen zwei
Dielektrika), müssen sowohl Gl. (1) und Gl. (4) und damit auch Gl. (3) und (6) erfüllt sein.
1.3 Randbedingungen an ideal elektrisch leitender Wand
Wenn man nun annimmt, dass das Medium 2 ein ideal elektrisch leitendes Metall sei, ergibt sich für
den Bereich 2 eine unendlich gute Leitfähigkeit � und damit eine unendlich hohe komplexe Dielektri-
zitätskonstante ":
� !1 ) "!1 (7)
An der Ober�äche eines solchen idealen elektrischen Leiters können Ströme �ieÿen, so dass dann~Jf 6= 0 wird. Es �ieÿen aber keine magnetischen Flächenströme, es gilt also ~Jf m = 0.
Damit gelten die Randbedingungen (1) und (3), aber nicht (4) und (6).
In einem idealen elektrischen Leiter muss das elektrische Feld verschwinden (ansonsten würde sich
wegen � !1 ein unendlich hoher Strom ergeben), so dass aus Gl (1)
~Et1
∣∣∣∣∣∣Grenz�äche
= 0 (8)
und damit aus Gl. (3)
~Bn1
∣∣∣∣∣∣Grenz�äche
= 0 (9)
und damit auch
~Hn1
∣∣∣∣∣∣Grenz�äche
= 0 (10)
folgt.
D. h. bei einer ideal elektrisch leitenden Wand verschwinden die Tangentialkomponenten der elektri-
schen und die Normalkomponenten der magnetischen Feldstärke.
TU Berlin � Prof. Dr.-Ing. K. Petermann
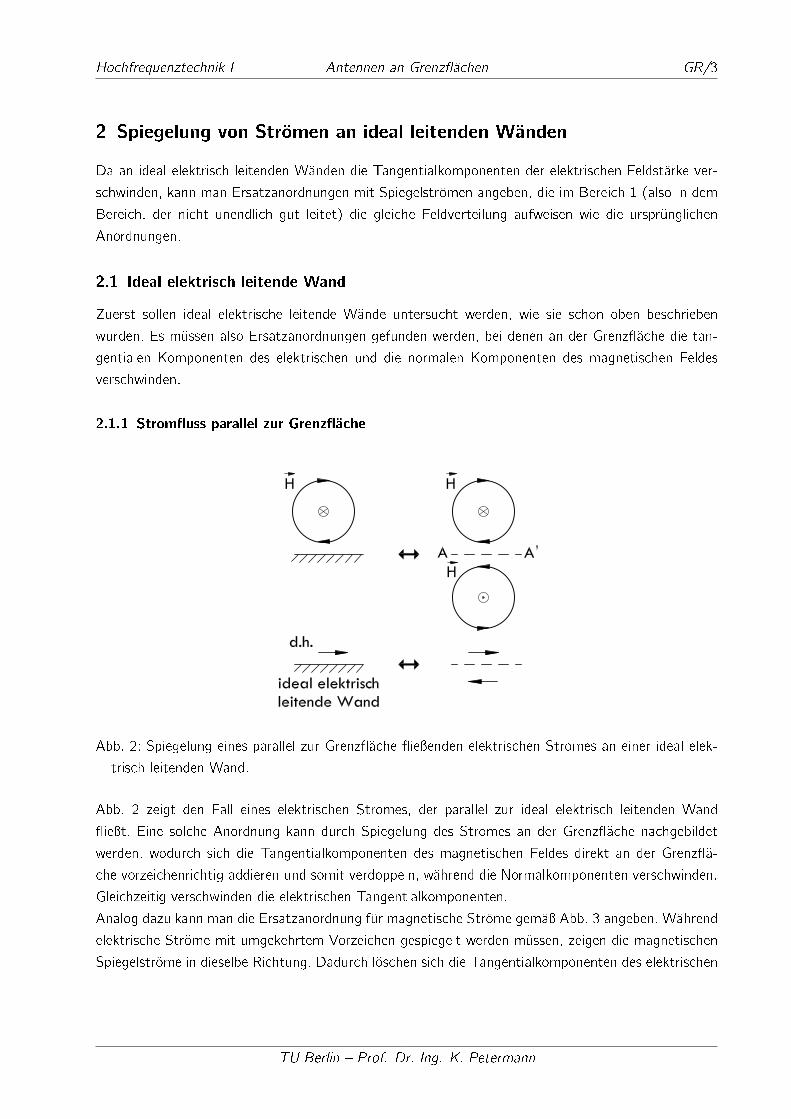
Hochfrequenztechnik I Antennen an Grenz�ächen GR/3
2 Spiegelung von Strömen an ideal leitenden Wänden
Da an ideal elektrisch leitenden Wänden die Tangentialkomponenten der elektrischen Feldstärke ver-
schwinden, kann man Ersatzanordnungen mit Spiegelströmen angeben, die im Bereich 1 (also in dem
Bereich, der nicht unendlich gut leitet) die gleiche Feldverteilung aufweisen wie die ursprünglichen
Anordnungen.
2.1 Ideal elektrisch leitende Wand
Zuerst sollen ideal elektrische leitende Wände untersucht werden, wie sie schon oben beschrieben
wurden. Es müssen also Ersatzanordnungen gefunden werden, bei denen an der Grenz�äche die tan-
gentialen Komponenten des elektrischen und die normalen Komponenten des magnetischen Feldes
verschwinden.
2.1.1 Strom�uss parallel zur Grenz�äche
Abb. 2: Spiegelung eines parallel zur Grenz�äche �ieÿenden elektrischen Stromes an einer ideal elek-
trisch leitenden Wand.
Abb. 2 zeigt den Fall eines elektrischen Stromes, der parallel zur ideal elektrisch leitenden Wand
�ieÿt. Eine solche Anordnung kann durch Spiegelung des Stromes an der Grenz�äche nachgebildet
werden, wodurch sich die Tangentialkomponenten des magnetischen Feldes direkt an der Grenz�ä-
che vorzeichenrichtig addieren und somit verdoppeln, während die Normalkomponenten verschwinden.
Gleichzeitig verschwinden die elektrischen Tangentialkomponenten.
Analog dazu kann man die Ersatzanordnung für magnetische Ströme gemäÿ Abb. 3 angeben. Während
elektrische Ströme mit umgekehrtem Vorzeichen gespiegelt werden müssen, zeigen die magnetischen
Spiegelströme in dieselbe Richtung. Dadurch löschen sich die Tangentialkomponenten des elektrischen
TU Berlin � Prof. Dr.-Ing. K. Petermann
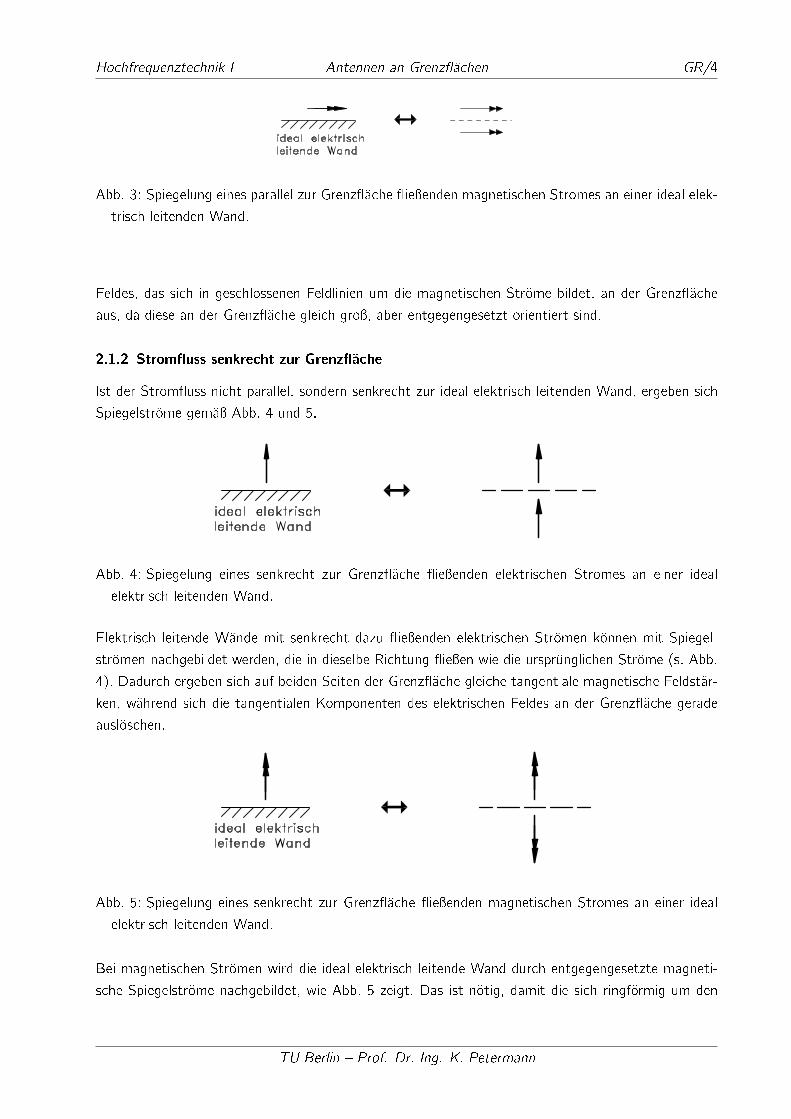
Hochfrequenztechnik I Antennen an Grenz�ächen GR/4
Abb. 3: Spiegelung eines parallel zur Grenz�äche �ieÿenden magnetischen Stromes an einer ideal elek-
trisch leitenden Wand.
Feldes, das sich in geschlossenen Feldlinien um die magnetischen Ströme bildet, an der Grenz�äche
aus, da diese an der Grenz�äche gleich groÿ, aber entgegengesetzt orientiert sind.
2.1.2 Strom�uss senkrecht zur Grenz�äche
Ist der Strom�uss nicht parallel, sondern senkrecht zur ideal elektrisch leitenden Wand, ergeben sich
Spiegelströme gemäÿ Abb. 4 und 5.
Abb. 4: Spiegelung eines senkrecht zur Grenz�äche �ieÿenden elektrischen Stromes an einer ideal
elektrisch leitenden Wand.
Elektrisch leitende Wände mit senkrecht dazu �ieÿenden elektrischen Strömen können mit Spiegel-
strömen nachgebildet werden, die in dieselbe Richtung �ieÿen wie die ursprünglichen Ströme (s. Abb.
4). Dadurch ergeben sich auf beiden Seiten der Grenz�äche gleiche tangentiale magnetische Feldstär-
ken, während sich die tangentialen Komponenten des elektrischen Feldes an der Grenz�äche gerade
auslöschen.
Abb. 5: Spiegelung eines senkrecht zur Grenz�äche �ieÿenden magnetischen Stromes an einer ideal
elektrisch leitenden Wand.
Bei magnetischen Strömen wird die ideal elektrisch leitende Wand durch entgegengesetzte magneti-
sche Spiegelströme nachgebildet, wie Abb. 5 zeigt. Das ist nötig, damit die sich ringförmig um den
TU Berlin � Prof. Dr.-Ing. K. Petermann
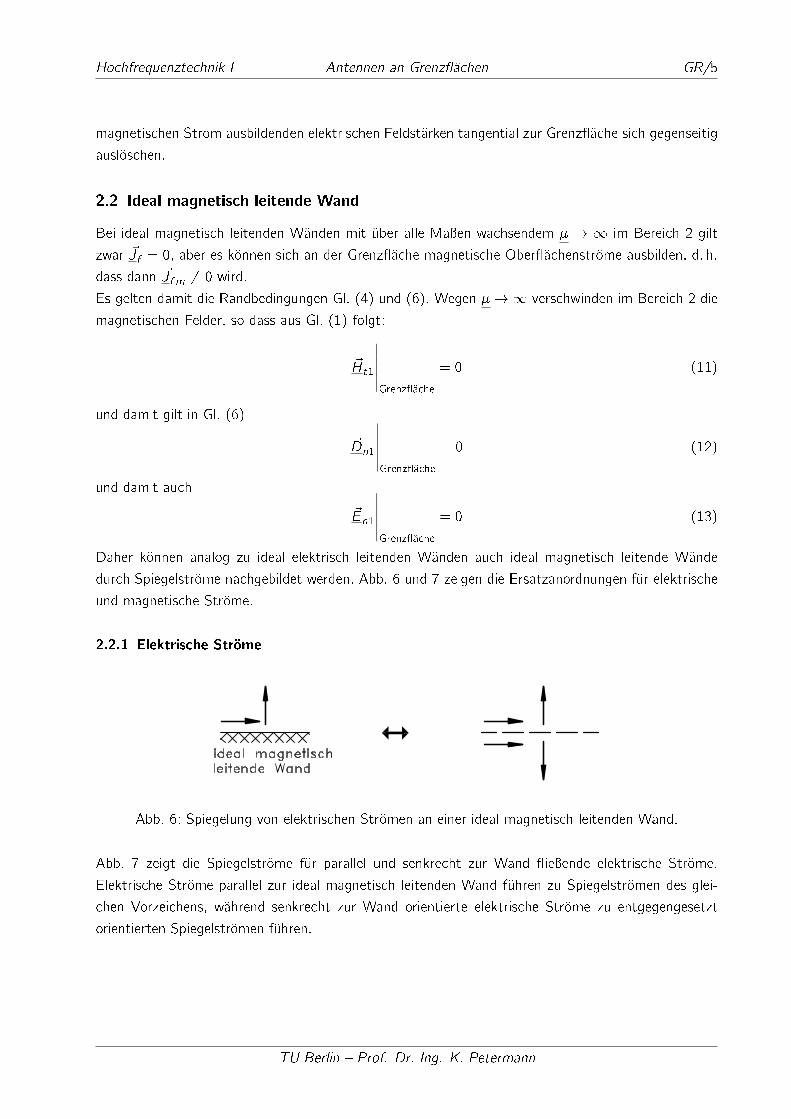
Hochfrequenztechnik I Antennen an Grenz�ächen GR/5
magnetischen Strom ausbildenden elektrischen Feldstärken tangential zur Grenz�äche sich gegenseitig
auslöschen.
2.2 Ideal magnetisch leitende Wand
Bei ideal magnetisch leitenden Wänden mit über alle Maÿen wachsendem � ! 1 im Bereich 2 gilt
zwar ~Jf = 0, aber es können sich an der Grenz�äche magnetische Ober�ächenströme ausbilden, d. h.
dass dann ~Jf m 6= 0 wird.
Es gelten damit die Randbedingungen Gl. (4) und (6). Wegen �!1 verschwinden im Bereich 2 die
magnetischen Felder, so dass aus Gl. (1) folgt:
~Ht1
∣∣∣∣∣∣Grenz�äche
= 0 (11)
und damit gilt in Gl. (6)
~Dn1
∣∣∣∣∣∣Grenz�äche
= 0 (12)
und damit auch
~En1
∣∣∣∣∣∣Grenz�äche
= 0 (13)
Daher können analog zu ideal elektrisch leitenden Wänden auch ideal magnetisch leitende Wände
durch Spiegelströme nachgebildet werden. Abb. 6 und 7 zeigen die Ersatzanordnungen für elektrische
und magnetische Ströme.
2.2.1 Elektrische Ströme
Abb. 6: Spiegelung von elektrischen Strömen an einer ideal magnetisch leitenden Wand.
Abb. 7 zeigt die Spiegelströme für parallel und senkrecht zur Wand �ieÿende elektrische Ströme.
Elektrische Ströme parallel zur ideal magnetisch leitenden Wand führen zu Spiegelströmen des glei-
chen Vorzeichens, während senkrecht zur Wand orientierte elektrische Ströme zu entgegengesetzt
orientierten Spiegelströmen führen.
TU Berlin � Prof. Dr.-Ing. K. Petermann
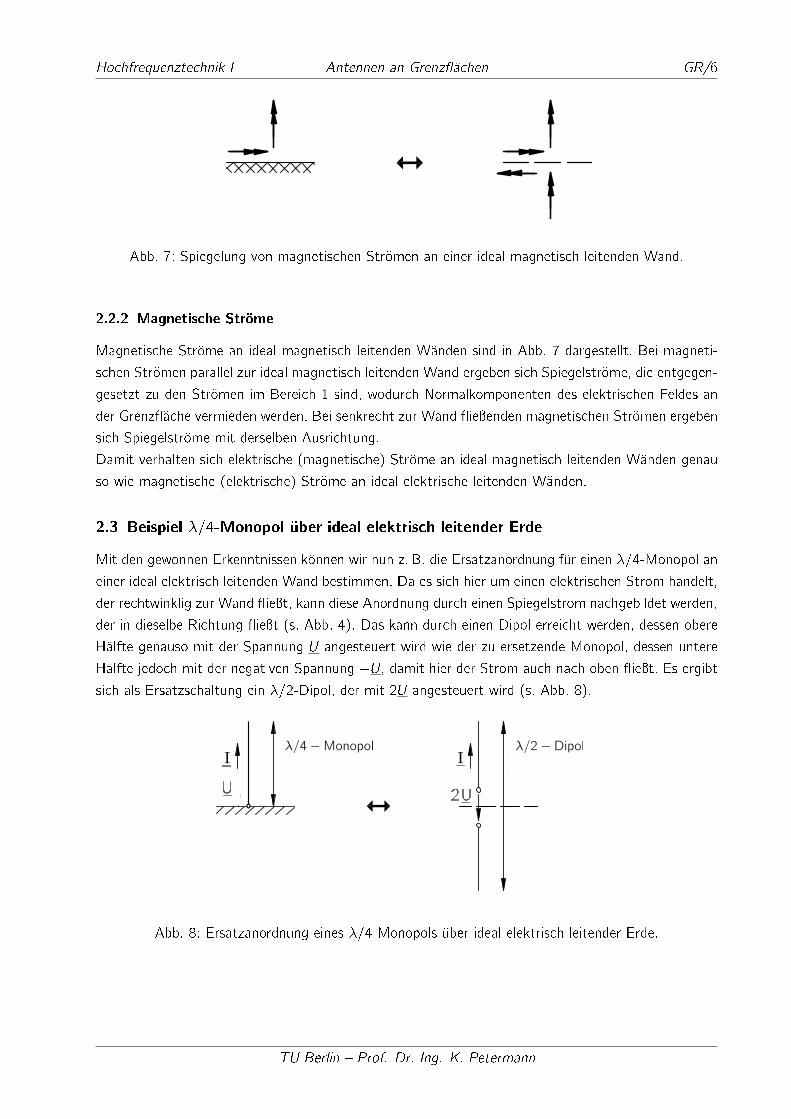
Hochfrequenztechnik I Antennen an Grenz�ächen GR/6
Abb. 7: Spiegelung von magnetischen Strömen an einer ideal magnetisch leitenden Wand.
2.2.2 Magnetische Ströme
Magnetische Ströme an ideal magnetisch leitenden Wänden sind in Abb. 7 dargestellt. Bei magneti-
schen Strömen parallel zur ideal magnetisch leitenden Wand ergeben sich Spiegelströme, die entgegen-
gesetzt zu den Strömen im Bereich 1 sind, wodurch Normalkomponenten des elektrischen Feldes an
der Grenz�äche vermieden werden. Bei senkrecht zur Wand �ieÿenden magnetischen Strömen ergeben
sich Spiegelströme mit derselben Ausrichtung.
Damit verhalten sich elektrische (magnetische) Ströme an ideal magnetisch leitenden Wänden genau
so wie magnetische (elektrische) Ströme an ideal elektrische leitenden Wänden.
2.3 Beispiel �=4-Monopol über ideal elektrisch leitender Erde
Mit den gewonnen Erkenntnissen können wir nun z. B. die Ersatzanordnung für einen �=4-Monopol an
einer ideal elektrisch leitenden Wand bestimmen. Da es sich hier um einen elektrischen Strom handelt,
der rechtwinklig zur Wand �ieÿt, kann diese Anordnung durch einen Spiegelstrom nachgebildet werden,
der in dieselbe Richtung �ieÿt (s. Abb. 4). Das kann durch einen Dipol erreicht werden, dessen obere
Hälfte genauso mit der Spannung U angesteuert wird wie der zu ersetzende Monopol, dessen untere
Hälfte jedoch mit der negativen Spannung �U, damit hier der Strom auch nach oben �ieÿt. Es ergibt
sich als Ersatzschaltung ein �=2-Dipol, der mit 2U angesteuert wird (s. Abb. 8).
!/4!Monopol !/2!Dipol
Abb. 8: Ersatzanordnung eines �=4-Monopols über ideal elektrisch leitender Erde.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Antennen an Grenz�ächen GR/7
Die Fuÿpunktimpedanz des �=4-Monopols ergibt sich zu
Za =U
I=1
2�
2U
I︸︷︷︸Za
∣∣∣∣∣∣�
2�Dipol
= 37 mit Za
∣∣∣∣∣∣�
2�Dipol
= 73; 2 (14)
Die Fuÿpunktimpedanz eines �=4-Monopols an einer ideal elektrisch leitenden Wand (wie z. B. in erster
Näherung die Erde) weist nur die Hälfte der Fuÿpunktimpedanz eines �=2-Dipols auf, der bezüglich
des oberen Halbraumes die gleiche Abstrahlcharakteristik hat.
TU Berlin � Prof. Dr.-Ing. K. Petermann
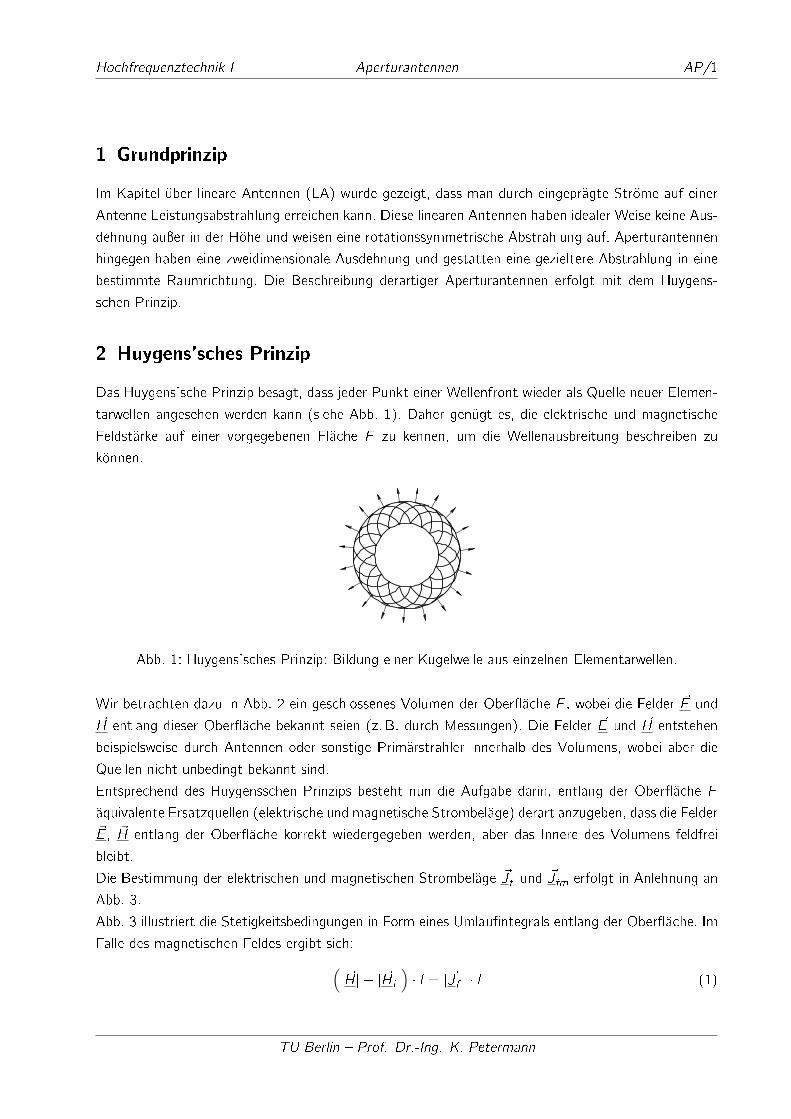
Hochfrequenztechnik I Aperturantennen AP/1
1 Grundprinzip
Im Kapitel über lineare Antennen (LA) wurde gezeigt, dass man durch eingeprägte Ströme auf einer
Antenne Leistungsabstrahlung erreichen kann. Diese linearen Antennen haben idealer Weise keine Aus-
dehnung auÿer in der Höhe und weisen eine rotationssymmetrische Abstrahlung auf. Aperturantennen
hingegen haben eine zweidimensionale Ausdehnung und gestatten eine gezieltere Abstrahlung in eine
bestimmte Raumrichtung. Die Beschreibung derartiger Aperturantennen erfolgt mit dem Huygens-
schen Prinzip.
2 Huygens'sches Prinzip
Das Huygens'sche Prinzip besagt, dass jeder Punkt einer Wellenfront wieder als Quelle neuer Elemen-
tarwellen angesehen werden kann (siehe Abb. 1). Daher genügt es, die elektrische und magnetische
Feldstärke auf einer vorgegebenen Fläche F zu kennen, um die Wellenausbreitung beschreiben zu
können.
Abb. 1: Huygens'sches Prinzip: Bildung einer Kugelwelle aus einzelnen Elementarwellen.
Wir betrachten dazu in Abb. 2 ein geschlossenes Volumen der Ober�äche F , wobei die Felder ~E und~H entlang dieser Ober�äche bekannt seien (z. B. durch Messungen). Die Felder ~E und ~H entstehen
beispielsweise durch Antennen oder sonstige Primärstrahler innerhalb des Volumens, wobei aber die
Quellen nicht unbedingt bekannt sind.
Entsprechend des Huygensschen Prinzips besteht nun die Aufgabe darin, entlang der Ober�äche F
äquivalente Ersatzquellen (elektrische und magnetische Strombeläge) derart anzugeben, dass die Felder~E, ~H entlang der Ober�äche korrekt wiedergegeben werden, aber das Innere des Volumens feldfrei
bleibt.
Die Bestimmung der elektrischen und magnetischen Strombeläge ~Jf und ~Jfm erfolgt in Anlehnung an
Abb. 3.
Abb. 3 illustriert die Stetigkeitsbedingungen in Form eines Umlau�ntegrals entlang der Ober�äche. Im
Falle des magnetischen Feldes ergibt sich:(j ~Hj � j ~Hi j
)� l = j~Jf j � l (1)
TU Berlin � Prof. Dr.-Ing. K. Petermann
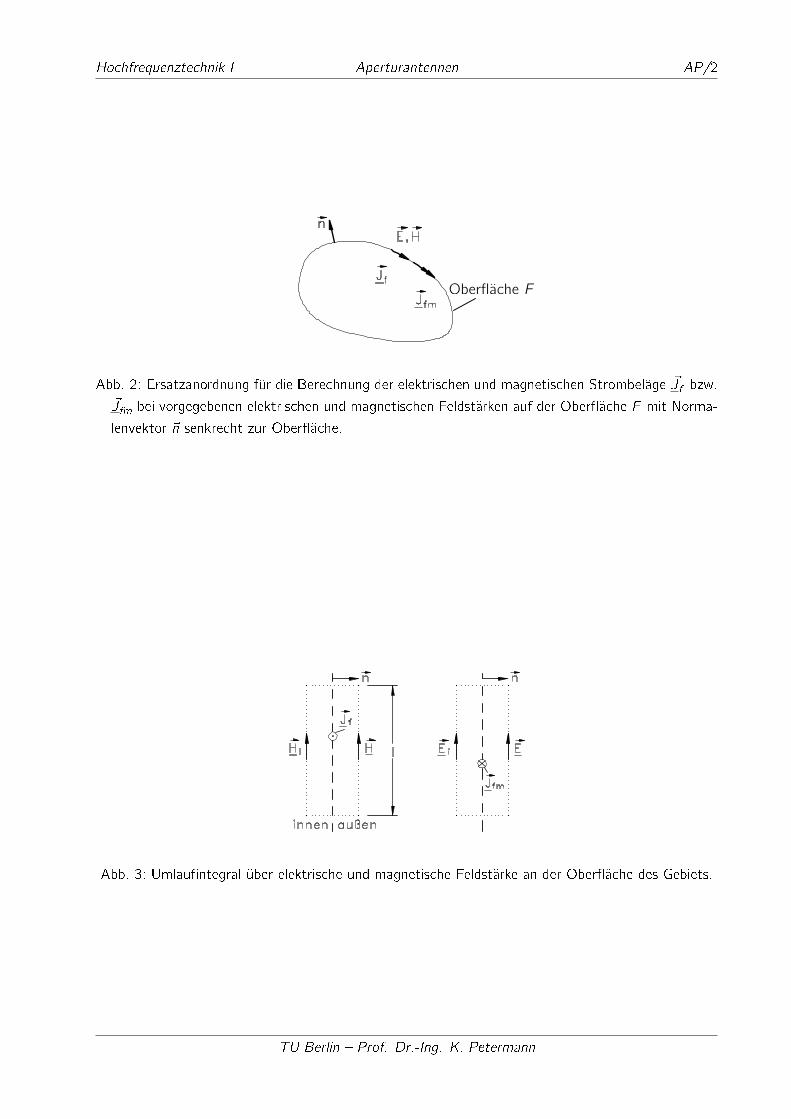
Hochfrequenztechnik I Aperturantennen AP/2
Oberfläche F
Abb. 2: Ersatzanordnung für die Berechnung der elektrischen und magnetischen Strombeläge ~Jf bzw.~Jfm bei vorgegebenen elektrischen und magnetischen Feldstärken auf der Ober�äche F mit Norma-
lenvektor ~n senkrecht zur Ober�äche.
Abb. 3: Umlau�ntegral über elektrische und magnetische Feldstärke an der Ober�äche des Gebiets.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Aperturantennen AP/3
Auf Grund der Feldfreiheit im Inneren ist ~Hi = 0. Analog dazu ergibt sich für die elektrische Feldstärke:(j~Ej � j~E i j
)� l = j~Jfmj � l (2)
Daher kann man bei gegebener Feldverteilung ~E und ~H entlang der Ober�äche F einen elektrischen~Jf und einen magnetischen Strombelag ~Jfm einführen mit:
~Jf = ~n � ~H mit der Dimension A/m (3)
~Jfm = �~n � ~E mit der Dimension V/m; (4)
wobei ~n der Einheitsnormalenvektor der Ober�äche F ist.
Die Strombeläge ~Jf und ~Jfm lassen sich nun als die neuen Quellen für die Wellenausbreitung au�as-
sen. Da das Innere des Gebiets mit der Ober�äche F ansatzgemäÿ feldfrei ist, kann innerhalb dieses
Volumens ein Medium mit beliebigem "; � angenommen werden.
3 Abstrahlung einer rechteckigen Apertur
Wir nehmen in Abb. 4 als einfaches Beispiel eine rechteckige Apertur mit der Breite a und der Höhe
b an. Diese Apertur fassen wir als Teil der Ober�äche F in Abb. 2 auf, so dass wir die Felder in dieser
Apertur durch äquivalente Quellen ~Jf und ~Jfm auf dieser Apertur beschreiben wollen.
Abb. 4: Ebene Welle in rechteckiger Apertur der Breite a und der Höhe b.
Die Felder auf der Apertur seien durch
~E = ~ez � Ez(y0; z 0) (5)
~H = ~ey �Hy (y0; z 0) (6)
gegeben.
Der Normalenvektor ~n in Abb. 2 zeigt in Abb. 4 in x-Richtung:
~n = ~ex ; (7)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Aperturantennen AP/4
so dass sich dann die äquivalenten Strombeläge ~Jf , ~Jfm in Gl. (3) und (4) ergeben zu:
~Jf = ~n � ~H = (~ex � ~ey )Hy (y0; z 0) = ~ez �Hy (y
0; z 0) (8)
~Jfm = �~n � ~E = �(~ex � ~ez)Ez(y0; z 0) = ~ey � Ez(y
0; z 0) (9)
In Analogie zu den Gl. (LA 30) und (LA 31) lassen sich dann daraus die Vektorpotentiale ~A und ~F mit
~A =1
4�
∫z 0
∫y 0
~Jf
j~r � ~r 0jexp
(�jk0j~r � ~r 0j
)dy 0 dz 0 (10)
~F =1
4�
∫z 0
∫y 0
~Jf m
j~r � ~r 0jexp
(�jk0j~r � ~r 0j
)dy 0 dz 0 (11)
und damit mit Gl. (LA 19) und (LA 20) auch ~E und ~H im gesamten Raum vor der Apertur in Abb. 4
für x > 0 bestimmen.
Die Lösung gemäÿ Gl. (10) und (11) setzt ein homogenes Medium mit " = "0 und � = �0 voraus.
Da das Innere des Volumens in Abb. 2 bzw. der Bereich hinter der Apertur in Abb. 4 de�nitionsgemäÿ
feldfrei ist, kann dort ein beliebiges Medium angenommen werden, also z. B. der freie Raum mit " = "0,
� = �0, so dass die Lösungen (10), (11) gerechtfertigt sind.
3.1 Einführung einer magnetisch leitenden Wand
Auf Grund der Feldfreiheit hinter der Apertur kann dort auch ein beliebiges anderes Material ange-
nommen werden, z. B. eine ideal magnetisch leitende Wand an der Stelle x = 0. Dadurch wird der
magnetische Strombelag ~Jfm kurzgeschlossen, und man muss nur noch den elektrischen Strombelag~Jf für das Feldproblem betrachten.
Als weitere Annahme gehen wir davon aus, dass die magnetisch leitende Wand bei x = 0 in y 0- und z 0-
Richtung unendlich ausgedehnt ist. Diese Annahme ist zulässig, wenn in der Ebene x = 0 für jy 0j > a=2
und jz 0j > b=2 die Feldkomponenten vernachlässigbar werden. Für diese Annahme beschränken wir
uns deshalb auf groÿe Aperturen mit a; b � �0, wenn die Abstrahlung im Wesentlichen in x-Richtung
erfolgt und in der Apertur Hy = �Ez=ZF0 gilt.
Nach der Spiegelung an der magnetisch leitenden Wand entspricht das Feldproblem einem Strombelag
von:~Jf ;gesamt = 2~Jf im freien Raum (12)
Das Vektorpotential ~A ist für x > 0 ähnlich zu Gl. (10) anzugeben:
~A =1
4�
∫z 0
∫y 0
~Jf ;gesamt∣∣∣~r � ~r 0∣∣∣ exp
(�jk0
∣∣∣~r � ~r 0∣∣∣) dy 0 dz 0 (13)
nur das jetzt ~F nach Gl. (11) entfällt und der Strombelag ~Jf ;gesamt doppelt so groÿ geworden ist.
Wegen Gl. (3) weist das Vektorpotential ~A ausschlieÿlich eine z-Komponente auf:
Az =1
2�
∫z 0
∫y 0
Hy (y0; z 0)∣∣∣~r � ~r 0∣∣∣ exp
(�jk0
∣∣∣~r � ~r 0∣∣∣) dy 0 dz 0 (14)
TU Berlin � Prof. Dr.-Ing. K. Petermann
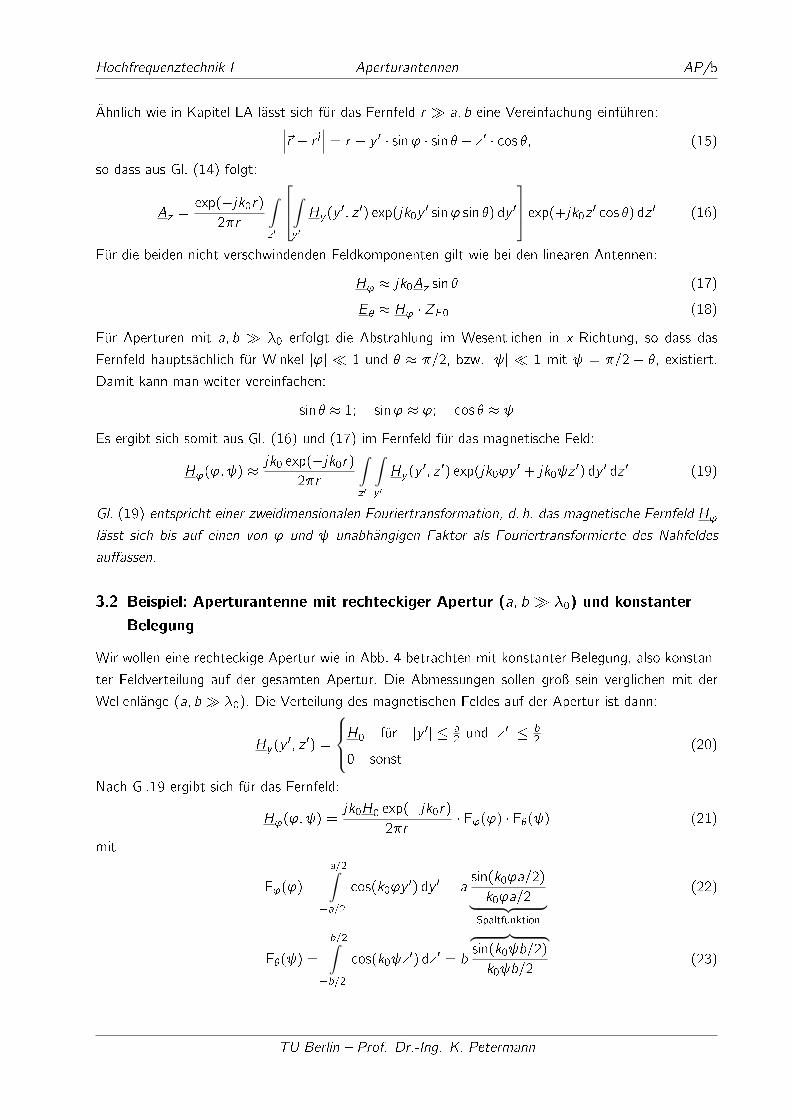
Hochfrequenztechnik I Aperturantennen AP/5
Ähnlich wie in Kapitel LA lässt sich für das Fernfeld r � a; b eine Vereinfachung einführen:∣∣∣~r � ~r 0∣∣∣ = r � y 0 � sin' � sin � � z 0 � cos �; (15)
so dass aus Gl. (14) folgt:
Az =exp(�jk0r)
2�r
∫z 0
∫y 0
Hy (y0; z 0) exp(jk0y
0 sin' sin �) dy 0
exp(+jk0z 0 cos �) dz 0 (16)
Für die beiden nicht verschwindenden Feldkomponenten gilt wie bei den linearen Antennen:
H' � jk0Az sin � (17)
E� � H' � ZF0 (18)
Für Aperturen mit a; b � �0 erfolgt die Abstrahlung im Wesentlichen in x-Richtung, so dass das
Fernfeld hauptsächlich für Winkel j'j � 1 und � � �=2, bzw. j j � 1 mit = �=2 � �, existiert.
Damit kann man weiter vereinfachen:
sin � � 1; sin' � '; cos � �
Es ergibt sich somit aus Gl. (16) und (17) im Fernfeld für das magnetische Feld:
H'('; ) �jk0 exp(�jk0r)
2�r
∫z 0
∫y 0
Hy (y0; z 0) exp(jk0'y
0 + jk0 z0) dy 0 dz 0 (19)
Gl. (19) entspricht einer zweidimensionalen Fouriertransformation, d. h. das magnetische Fernfeld H'
lässt sich bis auf einen von ' und unabhängigen Faktor als Fouriertransformierte des Nahfeldes
au�assen.
3.2 Beispiel: Aperturantenne mit rechteckiger Apertur (a; b � �0) und konstanter
Belegung
Wir wollen eine rechteckige Apertur wie in Abb. 4 betrachten mit konstanter Belegung, also konstan-
ter Feldverteilung auf der gesamten Apertur. Die Abmessungen sollen groÿ sein verglichen mit der
Wellenlänge (a; b � �0). Die Verteilung des magnetischen Feldes auf der Apertur ist dann:
Hy (y0; z 0) =
H0 für jy 0j � a2und jz 0j � b
2
0 sonst(20)
Nach Gl.19 ergibt sich für das Fernfeld:
H'('; ) =jk0H0 exp(�jk0r)
2�r� F'(') � F�( ) (21)
mit
F'(') =
a=2∫�a=2
cos(k0'y0) dy 0 = a
sin(k0'a=2)
k0'a=2︸ ︷︷ ︸Spaltfunktion
(22)
F�( ) =
b=2∫�b=2
cos(k0 z0) dz 0 = b
︷ ︸︸ ︷sin(k0 b=2)
k0 b=2(23)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Aperturantennen AP/6
Der Richtfaktor einer solchen Antenne berechnet sich analog zu Kapitel LA:
D =4�∣∣F'(' = 0) � F�( = 0)
∣∣2∫ ��� F
2' d' �
∫ �=2��=2 F
2
� d =
4� � a � b
�20
(24)
Die Wirk�äche ergibt sich dann bei Vernachlässigung der Verluste (D = Giso) zu
Aw =Giso
4��20 = a � b = A; (25)
d. h. für den Spezialfall einer konstanten Antennenbelegung ist die Antennenwirk�äche gleich der
geometrischen Fläche. Bei nicht konstanter Belegung wird die Antennenwirk�äche jedoch kleiner als
die geometrische Fläche. Typische Gröÿen sind Aw = [0; 5 : : : 0; 8] � A.
Beispiel: Für eine Antennenwirk�äche Aw = 0; 5m2 und eine Wellenlänge �0 = 3 cm oder f = 10GHz
weist die Aperturantenne einen Gewinn von Giso � 7000 (=38; 5 dBi) auf.
4 Ausführungsformen
Aperturantennen werden i. A. mit Parabolspiegeln wie in Abb. 5 realisiert. Für Parabeln gilt, dass die
Entfernungen 0A, 0B, 0C, 0D vom Brennpunkt auf die Gerade EE0 gleich groÿ sind. Es bildet sich so
eine Phasenfront entlang EE0 aus. Die Felder entlang EE0 führen dann, wie oben beschrieben, zu den
äquivalenten Strombelägen ~Jf und ~Jfm.
Abb. 5: Aperturantenne als Parabolspiegel.
Aperturantennen sind mit nahezu konstanter Belegung realisierbar. Allerdings werden häu�g die Rand-
bereiche der Apertur etwas weniger angeregt, um die Aufzipfelung des Fernfeldes (als Fouriertransfor-
mierte des Nahfeldes) zu verhindern.
Abb. 6 zeigt verschiedene technische Ausführungen von Aperturantennen.
TU Berlin � Prof. Dr.-Ing. K. Petermann
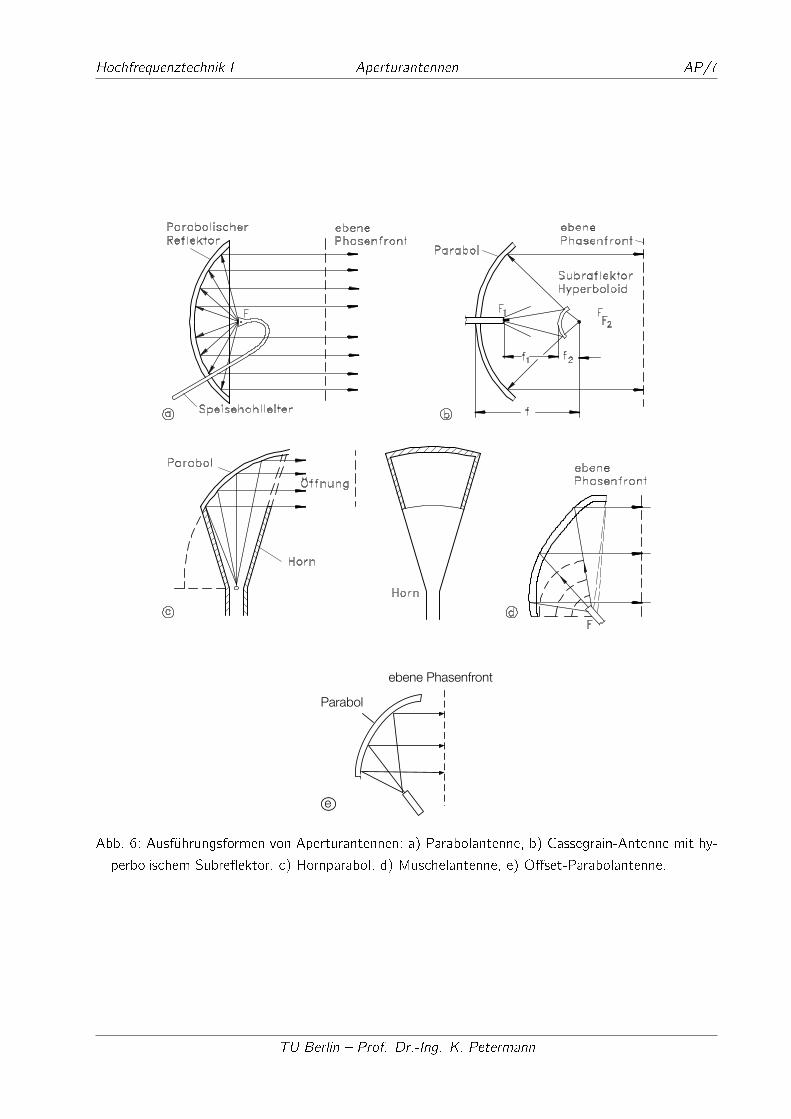
Hochfrequenztechnik I Aperturantennen AP/7
Parabol
ebene Phasenfront
e
Abb. 6: Ausführungsformen von Aperturantennen: a) Parabolantenne, b) Cassegrain-Antenne mit hy-
perbolischem Subre�ektor, c) Hornparabol, d) Muschelantenne, e) O�set-Parabolantenne.
TU Berlin � Prof. Dr.-Ing. K. Petermann
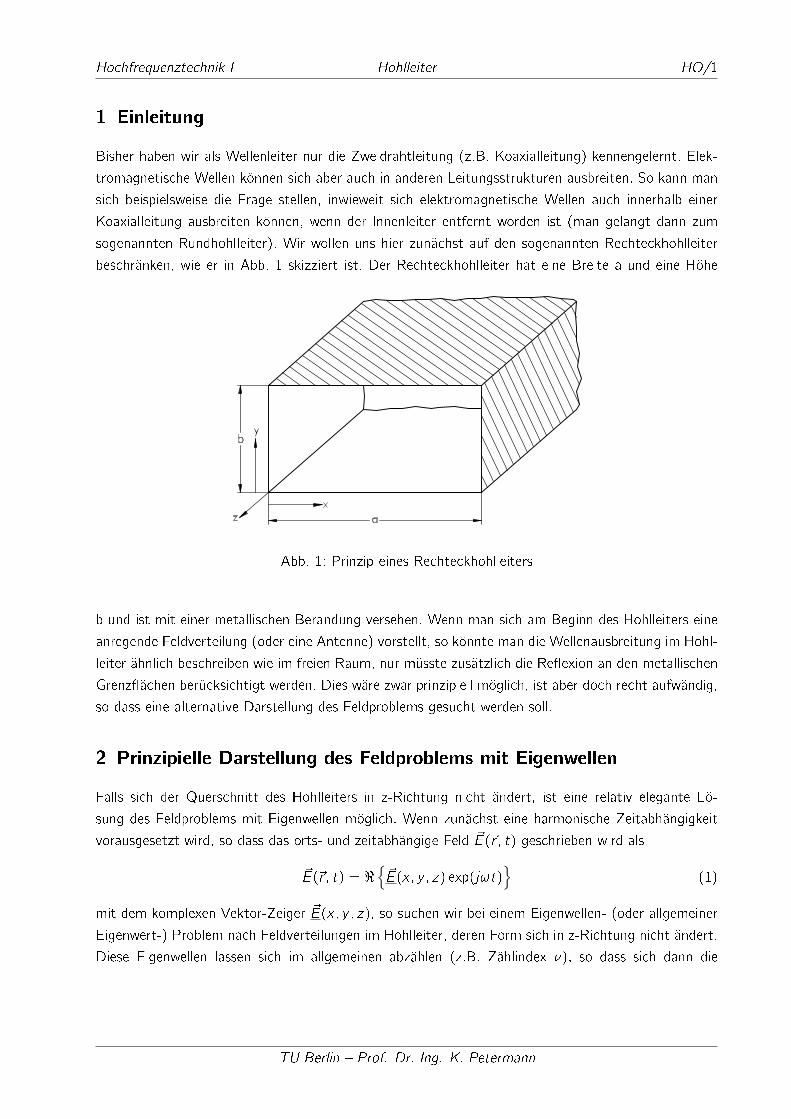
Hochfrequenztechnik I Hohlleiter HO/1
1 Einleitung
Bisher haben wir als Wellenleiter nur die Zweidrahtleitung (z.B. Koaxialleitung) kennengelernt. Elek-
tromagnetische Wellen können sich aber auch in anderen Leitungsstrukturen ausbreiten. So kann man
sich beispielsweise die Frage stellen, inwieweit sich elektromagnetische Wellen auch innerhalb einer
Koaxialleitung ausbreiten können, wenn der Innenleiter entfernt worden ist (man gelangt dann zum
sogenannten Rundhohlleiter). Wir wollen uns hier zunächst auf den sogenannten Rechteckhohlleiter
beschränken, wie er in Abb. 1 skizziert ist. Der Rechteckhohlleiter hat eine Breite a und eine Höhe
Abb. 1: Prinzip eines Rechteckhohlleiters
b und ist mit einer metallischen Berandung versehen. Wenn man sich am Beginn des Hohlleiters eine
anregende Feldverteilung (oder eine Antenne) vorstellt, so könnte man die Wellenausbreitung im Hohl-
leiter ähnlich beschreiben wie im freien Raum, nur müsste zusätzlich die Re�exion an den metallischen
Grenz�ächen berücksichtigt werden. Dies wäre zwar prinzipiell möglich, ist aber doch recht aufwändig,
so dass eine alternative Darstellung des Feldproblems gesucht werden soll.
2 Prinzipielle Darstellung des Feldproblems mit Eigenwellen
Falls sich der Querschnitt des Hohlleiters in z-Richtung nicht ändert, ist eine relativ elegante Lö-
sung des Feldproblems mit Eigenwellen möglich. Wenn zunächst eine harmonische Zeitabhängigkeit
vorausgesetzt wird, so dass das orts- und zeitabhängige Feld ~E(~r ; t) geschrieben wird als
~E(~r ; t) = <{~E(x; y ; z) exp(j!t)
}(1)
mit dem komplexen Vektor-Zeiger ~E(x; y ; z), so suchen wir bei einem Eigenwellen- (oder allgemeiner
Eigenwert-) Problem nach Feldverteilungen im Hohlleiter, deren Form sich in z-Richtung nicht ändert.
Diese Eigenwellen lassen sich im allgemeinen abzählen (z.B. Zählindex �), so dass sich dann die
TU Berlin � Prof. Dr.-Ing. K. Petermann
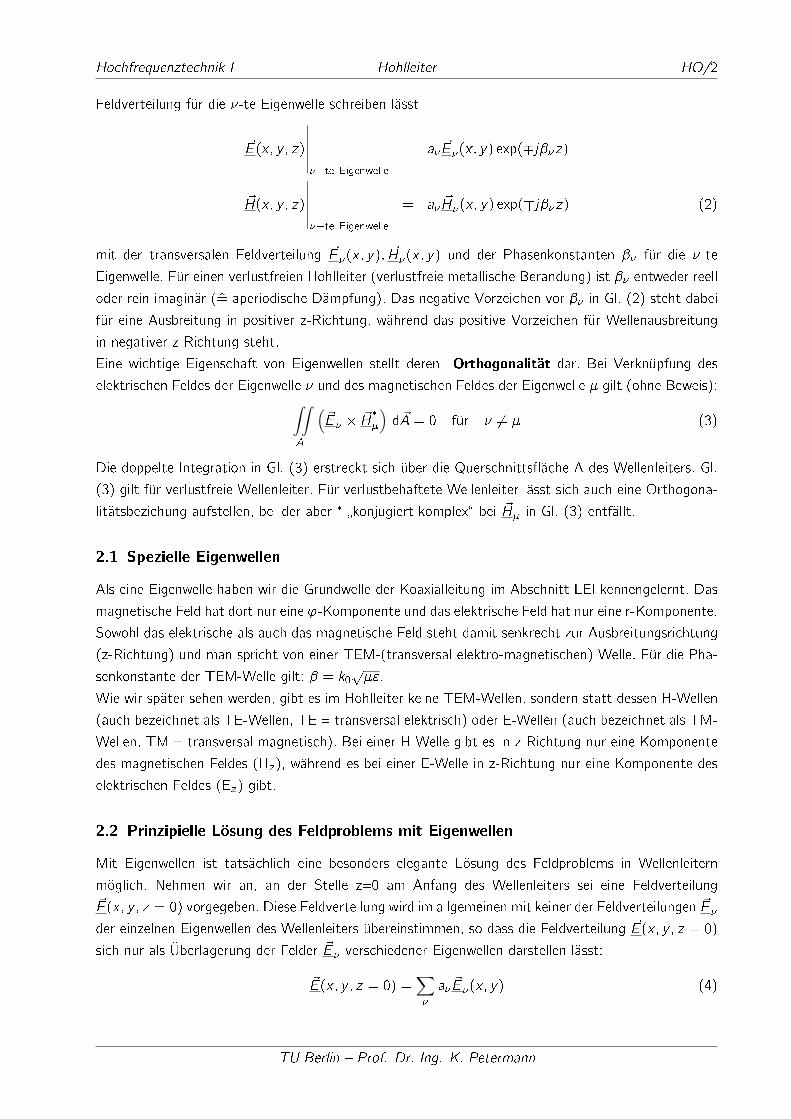
Hochfrequenztechnik I Hohlleiter HO/2
Feldverteilung für die �-te Eigenwelle schreiben lässt
~E(x; y ; z)
∣∣∣∣∣∣��te Eigenwelle
= a� ~E�(x; y) exp(�j��z)
~H(x; y ; z)
∣∣∣∣∣∣��te Eigenwelle
= a� ~H�(x; y) exp(�j��z) (2)
mit der transversalen Feldverteilung ~E�(x; y); ~H�(x; y) und der Phasenkonstanten �� für die �-te
Eigenwelle. Für einen verlustfreien Hohlleiter (verlustfreie metallische Berandung) ist �� entweder reell
oder rein imaginär (= aperiodische Dämpfung). Das negative Vorzeichen vor �� in Gl. (2) steht dabei
für eine Ausbreitung in positiver z-Richtung, während das positive Vorzeichen für Wellenausbreitung
in negativer z-Richtung steht.
Eine wichtige Eigenschaft von Eigenwellen stellt deren Orthogonalität dar. Bei Verknüpfung des
elektrischen Feldes der Eigenwelle � und des magnetischen Feldes der Eigenwelle � gilt (ohne Beweis):∫∫A
(~E� � ~H
�
�
)d~A = 0 für � 6= � (3)
Die doppelte Integration in Gl. (3) erstreckt sich über die Querschnitts�äche A des Wellenleiters. Gl.
(3) gilt für verlustfreie Wellenleiter. Für verlustbehaftete Wellenleiter lässt sich auch eine Orthogona-
litätsbeziehung aufstellen, bei der aber � �konjugiert komplex� bei ~H� in Gl. (3) entfällt.
2.1 Spezielle Eigenwellen
Als eine Eigenwelle haben wir die Grundwelle der Koaxialleitung im Abschnitt LEI kennengelernt. Das
magnetische Feld hat dort nur eine '-Komponente und das elektrische Feld hat nur eine r-Komponente.
Sowohl das elektrische als auch das magnetische Feld steht damit senkrecht zur Ausbreitungsrichtung
(z-Richtung) und man spricht von einer TEM-(transversal elektro-magnetischen) Welle. Für die Pha-
senkonstante der TEM-Welle gilt: � = k0p�".
Wie wir später sehen werden, gibt es im Hohlleiter keine TEM-Wellen, sondern statt dessen H-Wellen
(auch bezeichnet als TE-Wellen, TE = transversal elektrisch) oder E-Wellen (auch bezeichnet als TM-
Wellen, TM = transversal magnetisch). Bei einer H-Welle gibt es in z-Richtung nur eine Komponente
des magnetischen Feldes (Hz), während es bei einer E-Welle in z-Richtung nur eine Komponente des
elektrischen Feldes (Ez) gibt.
2.2 Prinzipielle Lösung des Feldproblems mit Eigenwellen
Mit Eigenwellen ist tatsächlich eine besonders elegante Lösung des Feldproblems in Wellenleitern
möglich. Nehmen wir an, an der Stelle z=0 am Anfang des Wellenleiters sei eine Feldverteilung~E(x; y ; z = 0) vorgegeben. Diese Feldverteilung wird im allgemeinen mit keiner der Feldverteilungen ~E�der einzelnen Eigenwellen des Wellenleiters übereinstimmen, so dass die Feldverteilung ~E(x; y ; z = 0)
sich nur als Überlagerung der Felder ~E� verschiedener Eigenwellen darstellen lässt:
~E(x; y ; z = 0) =∑�
a� ~E�(x; y) (4)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Hohlleiter HO/3
Die zunächst unbekannten Anregungskoe�zienten a� lassen sich in eleganter Weise unter Verwendung
der Orthogonalitätsbeziehung (3) bestimmen. Wenn man in Gl. (4) mit ~H�
� das Kreuzprodukt bildet
und über die Querschnitts�äche integriert, ergibt sich (Annahme: verlustfreier Wellenleiter)∫∫A
(~E(x; y ; z = 0)� ~H
�
�
)d~A =
∑�
a�
∫∫ (~E� � ~H
�
�
)d~A = a�
∫∫ (~E� � ~H
�
�
)d~A (5)
und damit für den Anregungskoe�zient:
a� =
∫∫ (~E(x; y ; z = 0)� ~H
�
�
)d~A∫∫ (
~E� � ~H�
�
)d~A
(6)
Bei Kenntnis des anregenden Feldes, der Eigenwellen sowie der Anregungskoe�zienten ist dann das
Feldproblem allgemein gelöst gemäÿ:
~E(x; y ; z) =∑�
a� ~E�(x; y) exp(�j��z) (7)
Die Darstellung ist noch insofern vereinfacht, dass in Gl. (7) nur das elektrische Feld und nur Ei-
genwellen mit Ausbreitung in positiver z-Richtung einbezogen wurden. Streng genommen muss auch
das magnetische Feld mit einbezogen werden, wobei sich dann auch Eigenwellen mit Ausbreitung in
negativer z-Richtung ergeben. Die grundsätzliche Vorgehensweise bleibt aber wie oben beschrieben.
3 Grundgleichungen zur Beschreibung der elektromagnetischen Felder
im Hohlleiter
Da sich innerhalb des Hohlleiters keine Quellen be�nden sollen, gelten die Maxwell'schen Gleichungen
für den quellenfreien Fall (~Jm = 0; ~JE = 0, vergl. Abschnnitt LA, Gl. (1), (2)).
r� ~H = j!" ~E (8)
�r� ~E = j!� ~H (9)
Weiterhin sollen nur Hohlleiter mit homogenem (d. h. ortsunabhängigen) "; � betrachtet werden, so
dass das elektrische bzw. magnetische Feld von den Vektorpotentialen ~A; ~F abgeleitet werden kann:
~H = r� ~A (10)
bzw.~E = �r� ~F (11)
oder, wenn sowohl das Vektorpotential ~A als auch ~F vorhanden ist, ergibt sich mit Gl. (8), (9) (vgl.
Abschnitt LA, Gl. (19), (20)):
~E = �r� ~F +1
j!"r� (r� ~A) (12)
~H = r� ~A+1
j!�r� (r� ~F ) (13)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Hohlleiter HO/4
wobei für die Vektorpotentiale ~A; ~F die Wellengleichungen
�~A+ k2 ~A = 0 (14)
�~F + k2 ~F = 0 (15)
mit k2 = !2�" gelten (vgl. Abschnitt LA, Gl. (8), (10)).
Es ist zunächst nicht o�ensichtlich, warum die Behandlung des Feldproblems durch die Einführung
der Vektorpotentiale ~A; ~F vereinfacht wird. Im allgemeinen hätten ~A; ~F jeweils 3 Komponenten, also
Ax ; Ay ; Az bzw. F x ; F y ; F z , d.h. insgesamt gibt es für die Vektorpotentiale 6 Komponenten. Die Ver-
einfachung durch die Einführung der Vektorpotentiale besteht nun darin, dass ein allgemeines quellen-
freies Feldproblem mit homogenem Dielektrikum mit nur 2 dieser 6 Komponenten beschrieben werden
kann (ohne Beweis). Die verbleibenden 4 Komponenten von ~A und ~F können dann zu Null gesetzt wer-
den. Damit kann das vollständige Feldproblem für die 6 Feldkomponenten Ex ; Ey ; Ez ; Hx ; Hy ; Hzmit nur 2 Komponenten der Vektorpotentiale beschrieben werden. Es können 2 beliebige kartesische
Komponenten von ~A; ~F gewählt werden, wobei die Wahl von der spezi�schen Problemstellung abhän-
gig gemacht werden kann. Für einen in z-Richtung ausgerichteten Hohlleiter wie z.B. in Abb. 1 ist es
üblich, die z-Komponenten der Vektorpotentiale ~A; ~F für die Feldberechnung heranzuziehen.
3.1 Feldbeschreibung mit der Komponente Az
Wir wollen zunächst untersuchen, welche Feldverteilungen sich nur mit der Komponente Az des Vek-
torpotentials beschreiben lassen. Dazu wird angesetzt
~F = 0 (16)
~A = ~ez E (17)
mit dem Einheitsvektor in z-Richtung ~ez . Für das verbleibende skalare Potential E gilt die Wellen-
gleichung
� E+ k2
E= 0 (18)
Die elektrischen und magnetischen Felder ergeben sich aus E wie folgt:
~H = r� ~A = �~ez �r E (19)
und damit
Hx =@
E
@y; Hy = �
@ E
@x; Hz = 0 (20)
Das elektrische Feld ergibt sich dann mit Gl. (8) zu
~E =1
j!"r� ~H =
1
j!"(r� ~H) (21)
Das transversale elektrische Feld ~Et =
Ex
Ey
lässt sich dann in eleganter Weise schreiben
~Et =
Ex
Ey
=1
j!"
@
@z
(rt E
)(22)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Hohlleiter HO/5
bzw.
Ex =1
j!"
@2 E
@x@z; Ey =
1
j!"
@2 E
@y@z(23)
und für
Ez = �1
j!"
(@2
E
@y2+@2
E
@x2
)(24)
was sich mit Gl. (18) auch schreiben lässt als
Ez =1
j!"
(@2
@z2+ k2
) E
(25)
Damit lassen sich mit dem skalaren Potential Enur Feldverteilungen beschreiben, bei denen für die
z-Komponente des magnetischen Feldes Hz = 0 gilt. Damit sind mit Ebereits E- (bzw. TM-) Wellen
beschreibbar, bei denen ja Hz=0 ist.
3.2 Feldbeschreibung mit der Komponente Fz
Wenn man den zu Gl. (16), (17) dualen Ansatz macht
~A = 0 (26)
~F = ~ez H (27)
gilt in Analogie zu Gl. (18) auch
� H+ k2
H= 0 (28)
und als Feldkomponenten ergeben sich
~E = �r� ~F = �~ez �r H (29)
bzw.
Ex = �@
H
@y; Ey =
@ H
@x; Ez = 0 (30)
Das magnetische Feld ergibt sich in dualer Weise zu Gl. (21) als
~H = � 1
j!�r� ~E = � 1
j!�
(r� ~E
)(31)
und damit für das transversale magnetische Feld
~Ht =
Hx
Hy
=1
j!�
@
@z
(rt H
)(32)
bzw.
Hx =1
j!�
@2 H
@x@z; Hy =
1
j!�
@2 H
@y@z(33)
Hz ergibt sich analog zu Gl. (25):
Hz =1
j!�
(@2
@z2+ k2
) H
(34)
Mit dem skalaren Potential Hlassen sich somit Feldverteilungen mit Ez = 0 und damit zum Beispiel
auch H- (bzw. TE-) Wellen darstellen.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Hohlleiter HO/6
4 Eigenwellen des Rechteckhohlleiters
Es sollen nun Eigenwellen des Rechteckhohlleiters gesucht werden, d.h. wir suchen nur Feldlösungen
entsprechend Gl. (2). Wir nehmen dabei ein verlustfreies Dielektrikum mit reellen " ! " und � ! �
und ideal elektrisch leitenden Wänden an.
4.1 H-Wellen
Zunächst suchen wir nach H-Wellen, d.h. nach Eigenwellen, bei denen Ez = 0 ist und die deshalb mit
der skalaren Potentialfunktion H(vgl. Gl. (27)) beschrieben werden können:
H(x; y ; z) = a� H;�(x; y) exp(�j��z) (35)
wobei � die �-te Eigenwelle kennzeichnet. Der einfachste Ansatz für H;�
(x; y) besteht in einem
Produktansatz:
H;�
(x; y) = X(x)Y (y) (36)
Wenn man die Wellengleichung für Haus Gl. (28) etwas anders schreibt
� H
H
+ k2 = 0 (37)
und Gl. (35), (36) einsetzt, ergibt sich
1
X
d2X
dx2+
1
Y
d2Y
dy2� �2� + k2 = 0 (38)
Da die Funktionen X(x) und Y(y) nur von x bzw. nur von y abhängen, müssen die Terme 1X
d2Xdx2
und1Y
d2Ydy2
jeweils konstant sein. D.h.
1
X
d2X
dx2= �k2x (39)
und
1
Y
d2Y
dy2= �k2y (40)
wobei die Konstanten (zunächst willkürlich) als �k2x und �k2y bezeichnet werden. Zur Lösung von Gl.
(38) müssen noch die Randbedingungen berücksichtigt werden, nämlich dass das tangentiale elektri-
sche Feld an der Hohlleiterberandung (ideal elektrisch leitend) verschwinden muss. Dazu muss gelten:
Ey = 0 bzw: dXdx = 0 mit x = 0; a (41)
Ex = 0 bzw: dYdy mit y = 0; b (42)
Allgemeiner lassen sich diese beiden Randbedingungen ausdrücken durch
@ H
@n= 0 (43)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Hohlleiter HO/7
wobei n die Normalenrichtung charakterisiert. Gl. (43) wird auch als Neumann-Randbedingung be-
zeichnet. Gl. (39) mit der Randbedingung (41) wird gelöst durch
X(x) = cos(kxx) mit kx = m�
a; m = 0; 1; 2; � � � (44)
und aus Gl. (40), (42) ergibt sich
Y (y) = cos(kyy) mit ky = n�
b; n = 0; 1; 2; � � � (45)
Weiterhin folgt aus Gl. (38)-(40) die sogenannte Separationsbedingung
k2 = k2x + k2y + �
2� (46)
kx ; ky und �� können dabei interpretiert werden als die Komponenten des Wellenvektors in x-, y- bzw.
z-Richtung (ähnlich wie bei ebenen Wellen, s. EB/6) Durch Kombination von Gl. (35), (36), (44),
(45) sind damit H-Wellen im Rechteckhohlleiter charakterisiert durch die Potentialfunktion
H= a� cos
(m�
x
a
)� cos
(n�y
b
)� exp(�j��z) (47)
wobei die Eigenwelle � durch die Ordnungszahlen m, n mit m = 0, 1, 2, 3 ... und n = 0, 1, 2, 3 ...
charakterisiert wird. Dabei ist allerdings die Kombination m=n=0 ausgeschlossen, da dann gemäÿ Gl.
(29)-(39) alle Feldkomponenten verschwinden würden. Die Eigenwellen werden im folgenden durch
die beiden Ordnungszahlen m, n charakterisiert, so dass wir die hier diskutierten H-Wellen als Hmn-
(bzw. TEmn-) Wellen bezeichnen und die Phasenkonstante ��=�mn sich ergibt gemäÿ
�m;n =√k2 � k2c (48)
mit der sogenannten Grenzwellenzahl kc mit
k2c = k2x + k2y =
(m�
a
)2
+
(n�
b
)2
(49)
Da die Wellenzahl k gegeben ist als k = !p�" = !=v (v-Phasengeschwidnigkeit einer ebenen Welle
im Dielektrikum mit "; �), lässt sich k auch als eine normierte Frequenz au�assen, so dass sich die
Phasenkonstante �mn auch schreiben lässt gemäÿ
�mn =1
v
√!2 � !2
c (50)
mit der Grenzfrequenz
!c =1p�"kc = vkc (51)
Für Frequenzen oberhalb dieser Grenzfrequenz !c ist �mn reell, die Eigenwelle ist also normal ausbrei-
tungsfähig, während für ! < !c �mn imaginär wird, was einer in z-Richtung aperiodisch gedämpften
Welle entspricht. Man kann nun die einzelnen Eigenwellen mit ihren Ordnungszahlen m, n bezüglich
ihrer Grenzfrequenzen sortieren. Wir setzen dazu wie in Abb. 1 a > b voraus. Explizit ergibt sich für
die Grenzfrequenz von Gl. (51) mit Gl. (49):
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Hohlleiter HO/8
!c = v
√(m�
a
)2
+
(n�
b
)2
(52)
bzw. fc = !c=2�
fc = v
√(m
2a
)2
+
(n
2b
)2
(53)
Alternativ lässt sich auch die Grenzwellenlänge �c = v=fc angeben:
�c = 1=
√(m
2a
)2
+
(n
2b
)2
(54)
Da die Ordnungszahlkombination m=n=0 ausgeschlossen ist, ergibt sich die kleinste Grenzfrequenz
für die H10-Welle (m=1, n=0) gemäÿ Gl. (53) zu
fc
∣∣∣∣∣∣10
=v
2a(55)
Die Wellen mit den nächst höheren Grenzfrequenzen sind die H20-Welle bzw. die H01-Welle mit den
Grenzfrequenzen
fc
∣∣∣∣∣∣20
=v
a= 2 � fc
∣∣∣∣∣∣10
(56)
und
fc
∣∣∣∣∣∣01
=v
2b(57)
Für den praktischen Einsatz eines Hohlleiters ist es wichtig, dass er für einen möglichst groÿen Fre-
quenzbereich einwellig ist, d.h. dass für einen möglichst groÿen Frequenzbereich nur eine Eigenwelle
mit einer reellen Phasenkonstanten existiert. Da alle anderen Eigenwellen dann exponentiell gedämpft
werden, wird bei einem längeren Hohlleiter nur diese eine Eigenwelle überleben mit ihrer eindeutig
de�nierten Feldverteilung.
Die H20-Welle hat gemäÿ Gl. (56) immer die doppelte Grenzfrequenz der H10-Welle, so dass bestenfalls
ein Rechteckhohlleiter mit einem Einwelligkeitsbereich über eine Oktave realisierbar ist. Um diesen
Einwelligkeitsbereich auch wirklich zu realisieren, muss die Grenzfrequenz der H01-Welle gröÿer (oder
gleich) sein als die Grenzfrequenz der H20-Welle, also:
fc
∣∣∣∣∣∣01
=v
2b� fc
∣∣∣∣∣∣20
=v
a(58)
bzw.
a � 2b (59)
d.h. der Hohlleiter muss mindestens doppelt so breit wie hoch sein.
TU Berlin � Prof. Dr.-Ing. K. Petermann
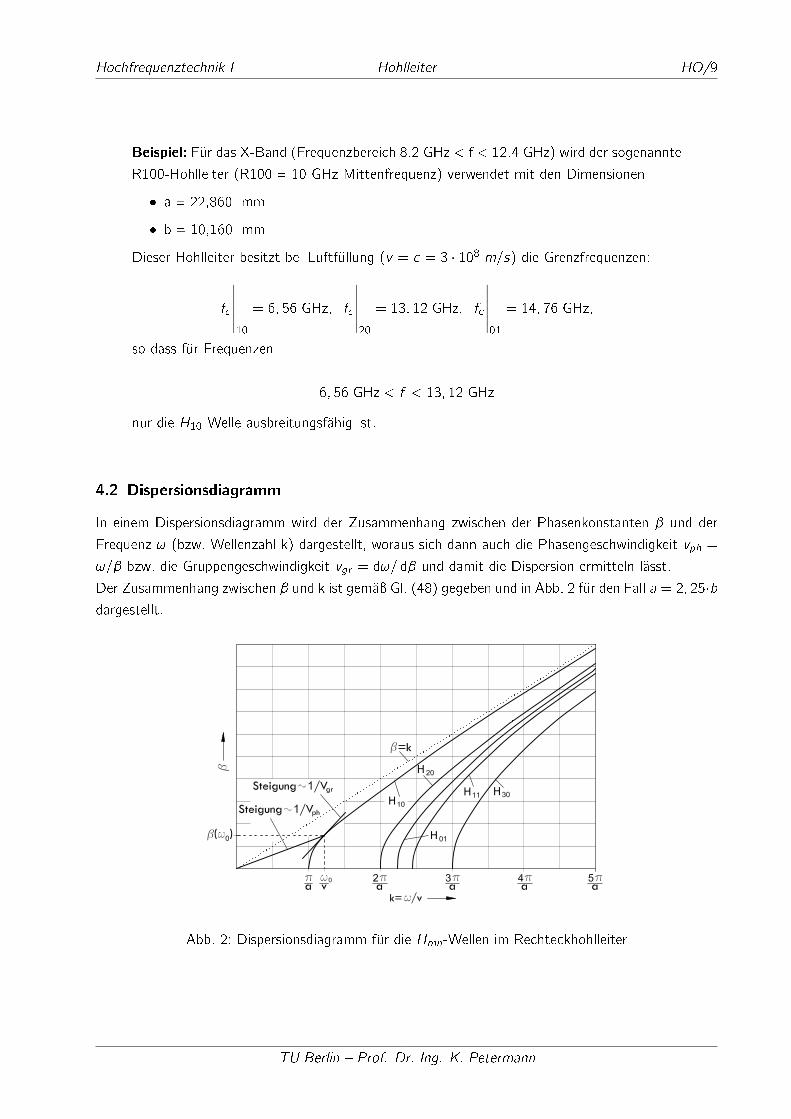
Hochfrequenztechnik I Hohlleiter HO/9
Beispiel: Für das X-Band (Frequenzbereich 8.2 GHz < f < 12.4 GHz) wird der sogenannte
R100-Hohlleiter (R100 = 10 GHz Mittenfrequenz) verwendet mit den Dimensionen
� a = 22,860 mm
� b = 10,160 mm
Dieser Hohlleiter besitzt bei Luftfüllung (v = c = 3 � 108 m=s) die Grenzfrequenzen:
fc
∣∣∣∣∣∣10
= 6; 56 GHz; fc
∣∣∣∣∣∣20
= 13; 12 GHz; fc
∣∣∣∣∣∣01
= 14; 76 GHz;
so dass für Frequenzen
6; 56 GHz < f < 13; 12 GHz
nur die H10-Welle ausbreitungsfähig ist.
4.2 Dispersionsdiagramm
In einem Dispersionsdiagramm wird der Zusammenhang zwischen der Phasenkonstanten � und der
Frequenz ! (bzw. Wellenzahl k) dargestellt, woraus sich dann auch die Phasengeschwindigkeit vph =
!=� bzw. die Gruppengeschwindigkeit vgr = d!= d� und damit die Dispersion ermitteln lässt.
Der Zusammenhang zwischen � und k ist gemäÿ Gl. (48) gegeben und in Abb. 2 für den Fall a = 2; 25�bdargestellt.
Abb. 2: Dispersionsdiagramm für die Hmn-Wellen im Rechteckhohlleiter
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Hohlleiter HO/10
Wenn man beispielsweise den Hohlleiter in Abb. 2 bei der Frequenz ! = !0 betreibt, so lassen sich aus
Abb. 2 anschaulich sowohl die Gruppen- als auch die Phasengeschwindigkeit der H10-Welle erkennen.
Formal ergeben sich Gruppen- und Phasengeschwindigkeit der Hmn-Welle aus Gl. (50) (Annahme
v = 1=p�" frequenzunabhängig):
vph =!
�mn=
v√1� (!c=!)2
(60)
vgr =d!
d�mn= v
√1� (!c=!)2 (61)
Das Produkt von Phasen- und Gruppengeschwindigkeit ist konstant:
vph � vgr = v2 (62)
Nahe der Grenzfrequenz (! ! !c) wird die Phasengeschwindigkeit unendlich , während die Grup-
pengeschwindigkeit gegen 0 geht. Für ! ! 1 hingegen nähern sich sowohl die Gruppen- als auch
Phasengeschwindigkeit dem Wert v an. Unterschiedliche Eigenwellen besitzen damit unterschiedliche
Gruppengeschwindigkeiten und damit unterschiedliche Signallaufzeiten durch den Hohlleiter. Auch um
diese unterschiedlichen Signallaufzeiten zu vermeiden, ist der Betrieb des Hohlleiters im einwelligen
Bereich erforderlich.
4.3 E-Wellen
Bisher haben wir nur die H-Wellen des Rechteckhohlleiters diskutiert. Mit den H-Wellen allein ist aber
noch keine vollständige Beschreibung des Feldproblems im Hohlleiter möglich. Dazu werden noch die
E-Wellen benötigt, bei denen in z-Richtung nur die Ez -Komponente exisitiert und Hz = 0 ist. Diese
E-Wellen lassen sich ableiten aus der skalaren Potentialfunktion E(vgl. Gl. (17)), wobei sich ähnlich
zu Gl. (35) für die �-te Eigenwelle schreiben lässt:
E(x; y ; z) = a� E;�(x; y) exp(�j��z) (63)
wieder mit einem Produktansatz
E;�
(x; y) = X(x)Y (y) (64)
wobei für X(x), Y(y) auch die Gl. (38)-(40) gelten. Auch bei E-Wellen muss das tangentiale elektrische
Feld an der Hohlleiterberandung verschwinden:
Ey = 0 für x = 0; a
Ex = 0 für y = 0; b
Ez = 0 für x = 0; a und y = 0; b
Diese Randbedingungen führen auf
E= 0 (65)
entlang der Hohlleiterberandung (Dirichlet-Problem). Konkret bedeutet dies
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Hohlleiter HO/11
X(x) = 0 mit x = 0; a (66)
Y (y) = 0 mit y = 0; b (67)
und damit für die Lösung von Gl. (39), (40):
X(x) = sin(kxx) für kx = m�
a;m = 1; 2; 3; ::: (68)
Y (y) = sin(kyy) für ky = n�
b; n = 1; 2; 3; ::: (69)
wobei auch die Separationsbedingung Gl. (46) gelten muss. Die E-Wellen werden ähnlich wie die H-
Wellen als Emn- (bzw. TMmn-) Wellen bezeichnet mit den Ordnungszahlen m, n. Der Unterschied zu
den Hmn-Wellen besteht darin, dass die Ordnungszahlen m, n > 1 sein müssen, da für m=0 oder n=0
Eund damit auch die Felder überall verschwinden würden.
Efür die Emn-Welle lautet dann mit Gl.
(63), (64), (68), (69) und � ! mn
E= amn sin
(m�
x
a
)� sin
(n�y
b
)� exp (�j�mnz) (70)
mit dem Anregungskoe�zient amn. Die Phasenkonstante �mn der Emn-Welle ist identisch zur Pha-
senkonstante der Hmn-Welle in Gl. (48). Damit sind auch die Grenzfrequenzen der Emn-Wellen mit
den Grenzfrequenzen der Hmn-Wellen identisch, wobei allerdings E0n-Wellen bzw. Em0-Wellen nicht
existieren. Die kleinste Grenzfrequenz hat deshalb die E11-Welle mit
fc
∣∣∣∣∣∣11
= v
√(1
2a
)2
+
(1
2b
)2
(71)
In einem Dispersionsdiagramm wie in Abb. 2 lassen sich auch die E-Wellen mit eintragen, wobei das
Dispersionsdiagramm der E11-Welle genau der H11-Welle entspricht. Da aber zur H10-Welle keine
entsprechende E10-Welle existiert, bleibt der oben diskutierte Einwelligkeitsbereich durch die E-Wellen
unbeein�usst.
Die Emn-Wellen besitzen die gleiche Phasenkonstante wie die Hmn-Wellen. Derartige Wellen mit glei-
cher Phasenkonstante bezeichnet man auch als entartete Eigenwellen, wobei eine beliebige Überlage-
rung entarteter Eigenwellen auch wieder einer Eigenwelle entspricht.
Die E- und H-Wellen des Rechteckleiters bilden ein vollständiges System, so dass durch Überlagerung
der Eigenwellen wie z.B. in Gl. (4) sich jede beliebige Feldverteilung darstellen lässt. Damit ist mit den
oben diskutierten Eigenwellen eine allgemeine Lösung des Feldproblems möglich.
4.4 Feldverteilungen im Rechteckhohlleiter
Mit den Potentialfunktionen Ebzw.
Hlassen sich gemäÿ Gl. (20)-(25) bzw. Gl. (30)-(34) alle
Feldkomponenten angeben, so dass damit das Feldproblem vollständig gelöst ist.
In Abb. 3 sind für einige Eigenwellen Feldbilder angegeben. Am wichtigsten ist die H10-Welle, da
in einem einwelligen Hohlleiter nur die H10-Welle ausbreitungsfähig ist. Interessant ist aber auch die
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Hohlleiter HO/12
2
Abb. 3: Feldbilder von Eigenwellen niedriger Ordnung in Rechteckhohlleiter
E11-Welle, deren Feldbild an das Feldbild der Koaxialleitung erinnert, nur dass der Innenleiter fehlt. Tat-
sächlich gibt es aber bei der E11-Welle im Zentrum des Hohlleiters eine relativ starke Ez -Komponente,
so dass der Leitungsstrom des Innenleiters der Koaxialleitung bei der E11-Welle durch den Verschie-
bungsstrom ersetzt wird.
Am wichtigsten ist aber die H10-Welle. Die Potentialfunktion Hergibt sich dann mit Gl. (47) mit
m=1, n=0, wobei wir eine sich in + z-Richtung ausbreitende Welle betrachten wollen:
H= � a
�Eo cos
(�x
a
)exp(�j�z) (72)
wobei die Konstante a� in (47) willkürlich zu �(a=�)E0 gewählt und die Indizierung bei der Phasen-
konstante � weggelassen wurde. Mit Gl. (30)-(34) ergeben sich dann
Ex = Ez = 0; Hy = 0 (73)
Ey = @ H@x = E0 sin
(�x
a
)exp(�j�z) (74)
Hx =1
j!�
@2 H
@x @z = � �
!�Ey = �
�
k
√"
�Ey (75)
Hz =1
j!�(k2 � �2)
H=
k2cj!�
H= j
kc
k
√"
�E0 cos(�
x
a) exp(�j�z) (76)
mit k = !p�" und kc = �=a für die H10-Welle. Ähnlich wie bei ebenen Wellen lassen sich auch bei
den Eigenwellen des Hohlleiters Wellenwiderstände angeben, indem die transversalen Feldkomponenten
miteinander verknüpft werden, so dass sich für die H10-Welle ergibt
Z(H)F =
Ey�Hx
=
√�
"
k
�=
ZF√1� (!c=!)2
(77)
wobei ZF =√�=" den Feldwellenwiderstand einer ebenen Welle darstellt und von Gl. (48)-(51)
TU Berlin � Prof. Dr.-Ing. K. Petermann
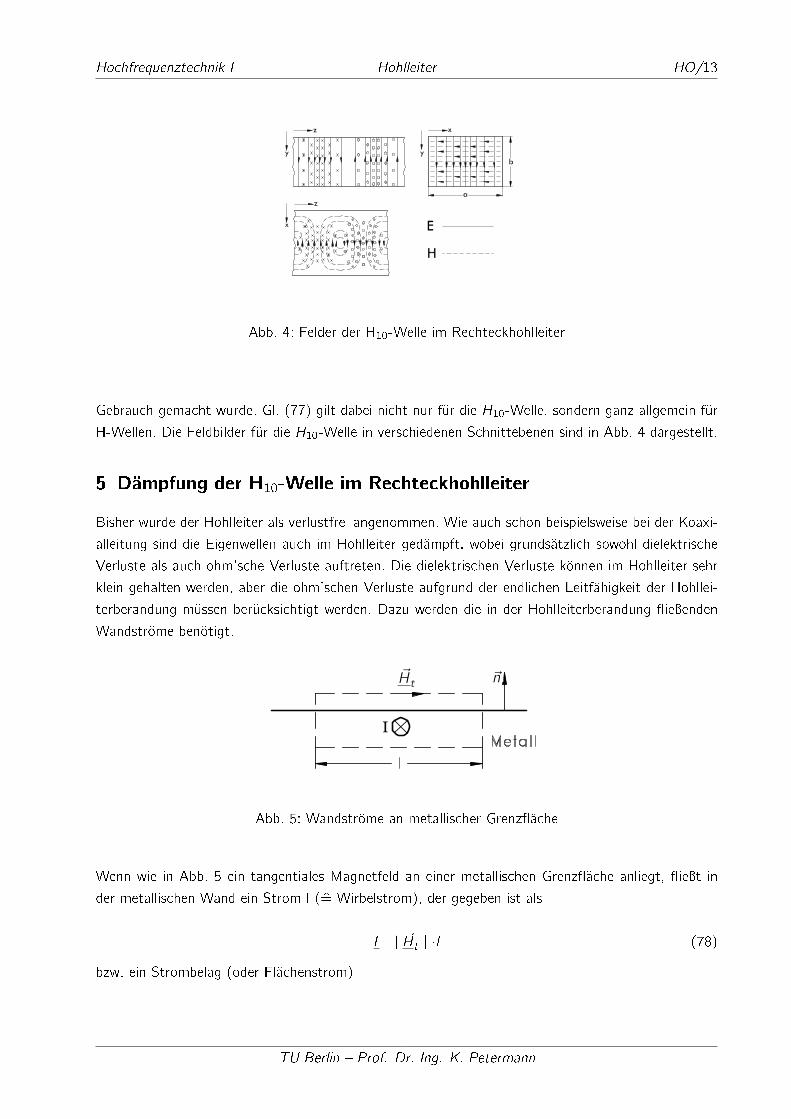
Hochfrequenztechnik I Hohlleiter HO/13
Abb. 4: Felder der H10-Welle im Rechteckhohlleiter
Gebrauch gemacht wurde. Gl. (77) gilt dabei nicht nur für die H10-Welle, sondern ganz allgemein für
H-Wellen. Die Feldbilder für die H10-Welle in verschiedenen Schnittebenen sind in Abb. 4 dargestellt.
5 Dämpfung der H10-Welle im Rechteckhohlleiter
Bisher wurde der Hohlleiter als verlustfrei angenommen. Wie auch schon beispielsweise bei der Koaxi-
alleitung sind die Eigenwellen auch im Hohlleiter gedämpft, wobei grundsätzlich sowohl dielektrische
Verluste als auch ohm'sche Verluste auftreten. Die dielektrischen Verluste können im Hohlleiter sehr
klein gehalten werden, aber die ohm'schen Verluste aufgrund der endlichen Leitfähigkeit der Hohllei-
terberandung müssen berücksichtigt werden. Dazu werden die in der Hohlleiterberandung �ieÿenden
Wandströme benötigt.
!Ht !n
Abb. 5: Wandströme an metallischer Grenz�äche
Wenn wie in Abb. 5 ein tangentiales Magnetfeld an einer metallischen Grenz�äche anliegt, �ieÿt in
der metallischen Wand ein Strom I (= Wirbelstrom), der gegeben ist als
I =j ~Ht j �l (78)
bzw. ein Strombelag (oder Flächenstrom)
TU Berlin � Prof. Dr.-Ing. K. Petermann
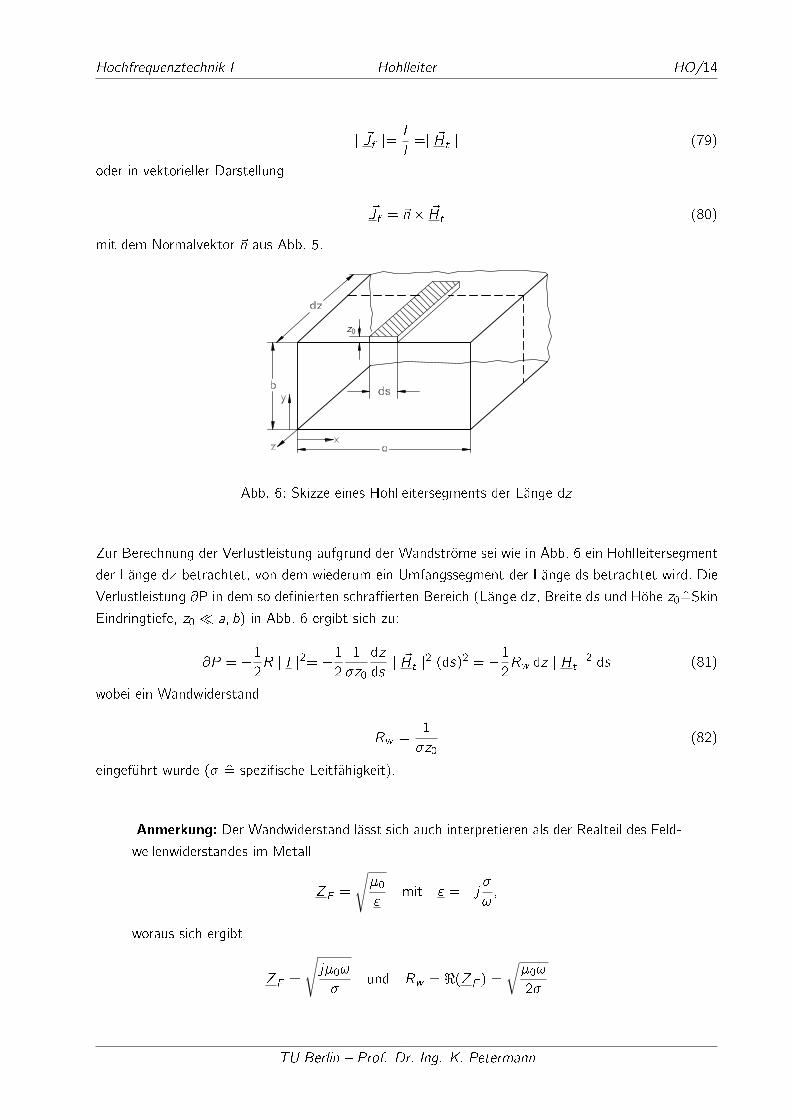
Hochfrequenztechnik I Hohlleiter HO/14
j ~Jf j=I
l=j ~Ht j (79)
oder in vektorieller Darstellung
~Jf = ~n � ~Ht (80)
mit dem Normalvektor ~n aus Abb. 5.
z0
Abb. 6: Skizze eines Hohlleitersegments der Länge dz
Zur Berechnung der Verlustleistung aufgrund der Wandströme sei wie in Abb. 6 ein Hohlleitersegment
der Länge dz betrachtet, von dem wiederum ein Umfangssegment der Länge ds betrachtet wird. Die
Verlustleistung @P in dem so de�nierten schra�erten Bereich (Länge dz , Breite ds und Höhe z0=Skin
Eindringtiefe, z0 � a; b) in Abb. 6 ergibt sich zu:
@P = �1
2R j I j2= �1
2
1
�z0
dz
dsj ~Ht j2 (ds)2 = �
1
2Rw dz j Ht j2 ds (81)
wobei ein Wandwiderstand
Rw =1
�z0(82)
eingeführt wurde (� = spezi�sche Leitfähigkeit).
Anmerkung: Der Wandwiderstand lässt sich auch interpretieren als der Realteil des Feld-
wellenwiderstandes im Metall
ZF =
√�0
"mit " = �j �
!;
woraus sich ergibt
ZF =
√j�0!
�und Rw = <(ZF ) =
√�0!
2�
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Hohlleiter HO/15
in Übereinstimmung mit Gl. (82).
Als Zahlenwert gilt für die Skin-Eindringtiefe bei Kupfer:
z0 = 2; 1�m√f =GHz
(83)
und damit für den Wandwiderstand
Rw = 8; 3 � 10�3 �√f =GHz (84)
Die gesamte Verlustleistung dP im Wegelement dz ergibt sich aus @P in Gl. (81), integriert über den
Umfang des Hohlleiters
dP =
∮@P = �1
2Rw dz
∮j ~Ht j2 ds (85)
Diese Verlustleistung ist zu beziehen auf die geführte Leistung P im Hohlleiter:
P =1
2
∫∫A
<(~E � ~H
�
)d~A (86)
Die Dämpfungskonstante � ergibt sich als Realteil der Ausbreitungskonstante entsprechend
~E � exp(�j�z � �z) (87)
woraus für die transportierte Leistung P(z)�j ~E j2 folgt:
P (z) = P0 exp(�2�z) (88)
woraus sich ergibt
dP
dz= �2�P (89)
und damit:
� =1
2
dPdz
P(90)
Mit dP/dz aus Gl. (85) und P aus Gl. (86) folgt schlieÿlich
� =1
2Rw
∮ j ~Ht j2 ds∫∫A<
(~E � ~H
�
)dA
(91)
Wenn man Gl. (91) für die H10-Welle mit den Feldkomponenten gemäÿ Gl. (73)-(76) auswertet, ergibt
sich schlieÿlich
∮j ~Ht j2 ds = 2
a∫0
(j Hx j2 + j Hz j2
)dx + 2
b∫0
j Hz j2∣∣∣∣∣∣x=0;a
dy
=1
Z2F
j E0 j2(a +
2b!2c
!2
)(92)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Hohlleiter HO/16
sowie
∫∫A
<(~E � ~H�
)d ~A =ab j E0 j2
4ZF
√1� (!c=!)2 (93)
woraus schlieÿlich folgt:
� =Rw
ZF
1=b + (2=a)(!c=!)2√
1� (!c=!)2(94)
� hat die Dimension 1/m . Um die Dämpfung in dB/m zu erhalten, ist der Wert mit 8,69 (=20/ln(10))
zu multiplizieren.
Beispiel:
Für einen luftgefüllten Hohlleiter (ZF =√�0="0 = 120�) mit a=2b und ! = 1:5!c (Betrieb in der
Mitte des Einwelligkeitsbereichs) folgt aus (93):
� = 3; 88Rw
aZF=33; 7dB
Rw
aZF(95)
woraus beispielsweise für einen luftgefüllten R58-Hohlleiter (a=40.386 mm) mit Cu-Berandung und
damit Rw von Gl. (84) folgt
�(f = 1; 5 � fc = 5; 57 GHz) = 0; 044dBm
(96)
Im Vergleich zu normalen Koaxialleitungen ist dieser Wert relativ gering, wobei allerdings die Koaxial-
leitung normalerweise einen sehr viel geringeren Querschnitt aufweist. Die Ohm'schen Verluste einer
Koaxialleitung gemäÿ S. LEI/8 können in ähnlicher Form wie in Gl. (94) geschrieben werden
� =1
2
1
z0�
2�
ZF ln(Dd
) ( 1
�D+
1
�d
)(97)
wobei die Verluste minimal werden für D=d = 3; 6 mit
� = 3; 6Rw
D � ZF (98)
mit dem Auÿendurchmesser D der Koaxialleitung. Bei gleicher Dimension sind damit die Verluste
von Koaxialleitung und Hohlleiter ähnlich. Tatsächlich kann aber bei gegebener Arbeitsfrequenz der
Hohlleiter erheblich gröÿer sein als die Koaxialleitung (siehe auch die folgende Diskussion der Grenz-
frequenzen der Koaxialleitung) und weiterhin entfallen die dielektrischen Verluste, so dass praktisch
die Hohlleiterdämpfung deutlich niedriger als die Dämpfung von Koaxialkabeln bei jeweils der gleichen
Arbeitsfrequenz ist.
Anmerkung:
Die obige Methodik zur Berechnung der Leitungsverluste ist nur gültig, solange nicht
verschiedene Eigenwellen mit der gleichen Phasenkonstante existieren (Entartungsfall).
Die obige Methodik kann daher angewandt werden für Hm0- oder H0n-Wellen, nicht aber
TU Berlin � Prof. Dr.-Ing. K. Petermann
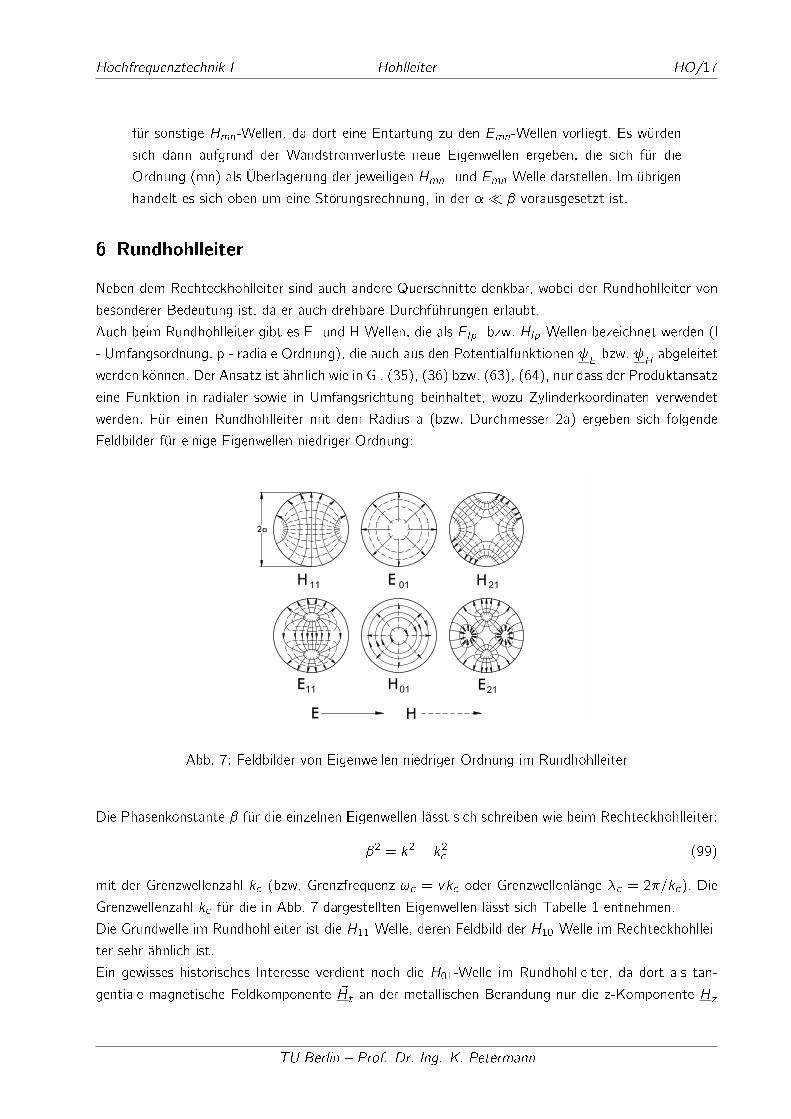
Hochfrequenztechnik I Hohlleiter HO/17
für sonstige Hmn-Wellen, da dort eine Entartung zu den Emn-Wellen vorliegt. Es würden
sich dann aufgrund der Wandstromverluste neue Eigenwellen ergeben, die sich für die
Ordnung (mn) als Überlagerung der jeweiligen Hmn- und Emn-Welle darstellen. Im übrigen
handelt es sich oben um eine Störungsrechnung, in der �� � vorausgesetzt ist.
6 Rundhohlleiter
Neben dem Rechteckhohlleiter sind auch andere Querschnitte denkbar, wobei der Rundhohlleiter von
besonderer Bedeutung ist, da er auch drehbare Durchführungen erlaubt.
Auch beim Rundhohlleiter gibt es E- und H-Wellen, die als Elp- bzw. Hlp-Wellen bezeichnet werden (l
- Umfangsordnung, p - radiale Ordnung), die auch aus den Potentialfunktionen Ebzw.
Habgeleitet
werden können. Der Ansatz ist ähnlich wie in Gl. (35), (36) bzw. (63), (64), nur dass der Produktansatz
eine Funktion in radialer sowie in Umfangsrichtung beinhaltet, wozu Zylinderkoordinaten verwendet
werden. Für einen Rundhohlleiter mit dem Radius a (bzw. Durchmesser 2a) ergeben sich folgende
Feldbilder für einige Eigenwellen niedriger Ordnung:
Abb. 7: Feldbilder von Eigenwellen niedriger Ordnung im Rundhohlleiter
Die Phasenkonstante � für die einzelnen Eigenwellen lässt sich schreiben wie beim Rechteckhohlleiter:
�2 = k2 � k2c (99)
mit der Grenzwellenzahl kc (bzw. Grenzfrequenz !c = vkc oder Grenzwellenlänge �c = 2�=kc). Die
Grenzwellenzahl kc für die in Abb. 7 dargestellten Eigenwellen lässt sich Tabelle 1 entnehmen.
Die Grundwelle im Rundhohlleiter ist die H11-Welle, deren Feldbild der H10-Welle im Rechteckhohllei-
ter sehr ähnlich ist.
Ein gewisses historisches Interesse verdient noch die H01-Welle im Rundhohlleiter, da dort als tan-
gentiale magnetische Feldkomponente ~Ht an der metallischen Berandung nur die z-Komponente Hz
TU Berlin � Prof. Dr.-Ing. K. Petermann
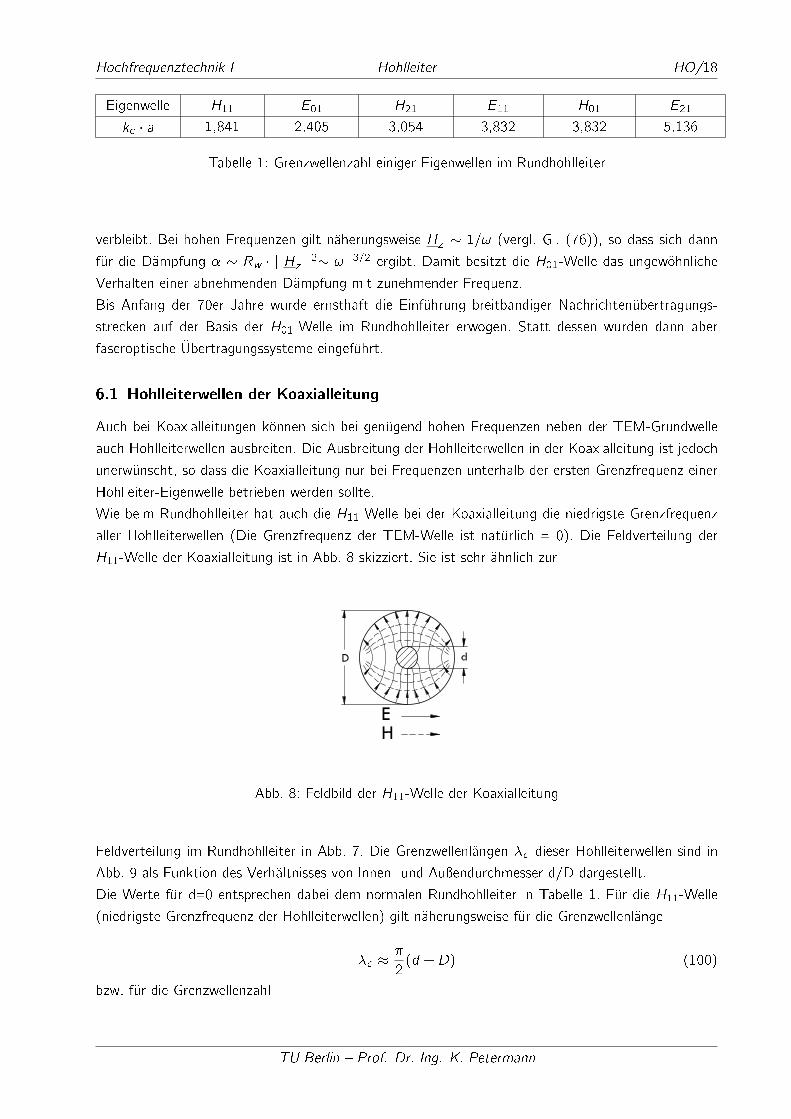
Hochfrequenztechnik I Hohlleiter HO/18
Eigenwelle H11 E01 H21 E11 H01 E21
kc � a 1,841 2,405 3,054 3,832 3,832 5,136
Tabelle 1: Grenzwellenzahl einiger Eigenwellen im Rundhohlleiter
verbleibt. Bei hohen Frequenzen gilt näherungsweise Hz � 1=! (vergl. Gl. (76)), so dass sich dann
für die Dämpfung � � Rw � j Hz j2� !�3=2 ergibt. Damit besitzt die H01-Welle das ungewöhnliche
Verhalten einer abnehmenden Dämpfung mit zunehmender Frequenz.
Bis Anfang der 70er Jahre wurde ernsthaft die Einführung breitbandiger Nachrichtenübertragungs-
strecken auf der Basis der H01-Welle im Rundhohlleiter erwogen. Statt dessen wurden dann aber
faseroptische Übertragungssysteme eingeführt.
6.1 Hohlleiterwellen der Koaxialleitung
Auch bei Koaxialleitungen können sich bei genügend hohen Frequenzen neben der TEM-Grundwelle
auch Hohlleiterwellen ausbreiten. Die Ausbreitung der Hohlleiterwellen in der Koaxialleitung ist jedoch
unerwünscht, so dass die Koaxialleitung nur bei Frequenzen unterhalb der ersten Grenzfrequenz einer
Hohlleiter-Eigenwelle betrieben werden sollte.
Wie beim Rundhohlleiter hat auch die H11-Welle bei der Koaxialleitung die niedrigste Grenzfrequenz
aller Hohlleiterwellen (Die Grenzfrequenz der TEM-Welle ist natürlich = 0). Die Feldverteilung der
H11-Welle der Koaxialleitung ist in Abb. 8 skizziert. Sie ist sehr ähnlich zur
Abb. 8: Feldbild der H11-Welle der Koaxialleitung
Feldverteilung im Rundhohlleiter in Abb. 7. Die Grenzwellenlängen �c dieser Hohlleiterwellen sind in
Abb. 9 als Funktion des Verhältnisses von Innen- und Auÿendurchmesser d/D dargestellt.
Die Werte für d=0 entsprechen dabei dem normalen Rundhohlleiter in Tabelle 1. Für die H11-Welle
(niedrigste Grenzfrequenz der Hohlleiterwellen) gilt näherungsweise für die Grenzwellenlänge
�c � �
2(d +D) (100)
bzw. für die Grenzwellenzahl
TU Berlin � Prof. Dr.-Ing. K. Petermann
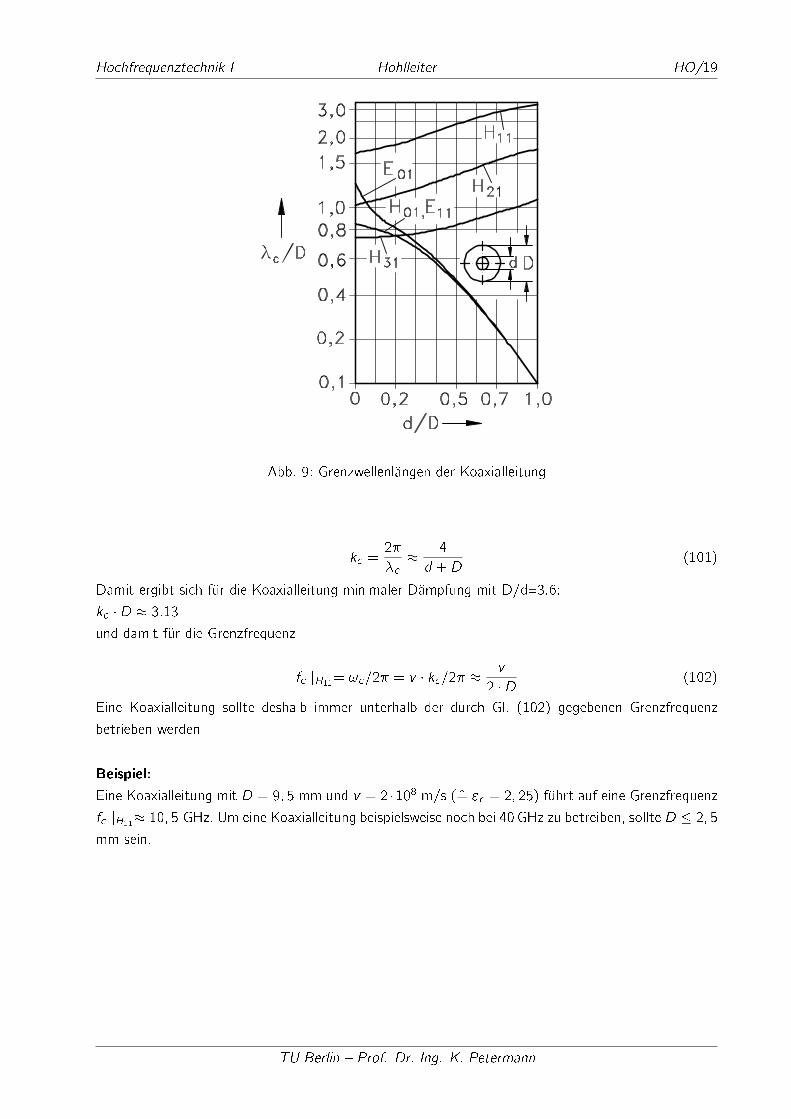
Hochfrequenztechnik I Hohlleiter HO/19
Abb. 9: Grenzwellenlängen der Koaxialleitung
kc =2�
�c� 4
d +D(101)
Damit ergibt sich für die Koaxialleitung minimaler Dämpfung mit D/d=3.6:
kc �D � 3:13
und damit für die Grenzfrequenz
fc jH11= !c=2� = v � kc=2� � v
2 �D (102)
Eine Koaxialleitung sollte deshalb immer unterhalb der durch Gl. (102) gegebenen Grenzfrequenz
betrieben werden
Beispiel:
Eine Koaxialleitung mit D = 9; 5 mm und v = 2 �108 m/s (= "r = 2; 25) führt auf eine Grenzfrequenz
fc jH11� 10; 5 GHz. Um eine Koaxialleitung beispielsweise noch bei 40GHz zu betreiben, sollteD � 2; 5
mm sein.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Hohlleitersysteme und Wellenleiterverzeigungen HS/1
1 Normierte Wellenamplituden in Hohlleitern
Auch bei Hohlleitern ist es zweckmäÿig, normierte leistungsbezogene Wellenamplituden a, b ähnlich
wie bei den Zweidrahtleitungen einzuführen. Es wird der Rechteckhohlleiter mit der H10-Welle und
den transversalen Feldkomponenten Ey und Hx betrachtet. Die von der Welle (mit Ausbreitung in
+z-Richtung) geführte Leistung P+ ergibt sich aus der Integration des Poynting-Vektors über die
Querschnitts�äche des Hohlleiters als
P+ =1
2
b∫y=0
a∫x=0
�Ey �H�
x dx dy (1)
Wenn man nun die Feldkomponenten Ey und Hx als Funktion der geführten Leistung P+ darstellen
will, so sind die Feldkomponenten proportional zupP+, so dass sich das transversale elektrische und
magnetische Feld der H10-Welle darstellen lässt mit normierten Feldern ey und hx als:
Ey =p2P+ey exp(�j�z) (2)
Hx =p2P+hx exp(�j�z) (3)
mit
ey =
√2Z
(H)F
absin
(�x
a
)(4)
hx = �√√√√ 2
abZ(H)F
sin
(�x
a
); (5)
wobei Z(H)F den Feldwellenwiderstand der H10-Welle mit Z(H)
F = �Ey=Hx bezeichnet. Die Vorfaktoren
in Gl. (4) und (5) sind so gewählt worden, dass einerseits Gl. (1) erfüllt ist und andererseits auch
Z(H)F = �ey=hx . Die Normierung der Feldkomponenten ey und hx drückt sich darin aus, dass
b∫y=0
a∫x=0
�eyhx dx dy = 1 (6)
gilt. Die hinlaufende Welle lässt sich auch durch die leistungsbezogene Wellenamplitude
a(z) =p2P+ exp(�j�z) (7)
beschreiben, dass sich statt Gl. (2) und (3) ergibt:
Ey = a(z)ey (8)
Hx = a(z)hx (9)
Entsprechend lässt sich die rücklaufende Welle (Ausbreitungsrichtung in �z-Richtung) mit der geführ-
ten Leistung P� durch die Wellenamplitude b(z)
b(z) =p2P� exp(+j�z) (10)
TU Berlin � Prof. Dr.-Ing. K. Petermann
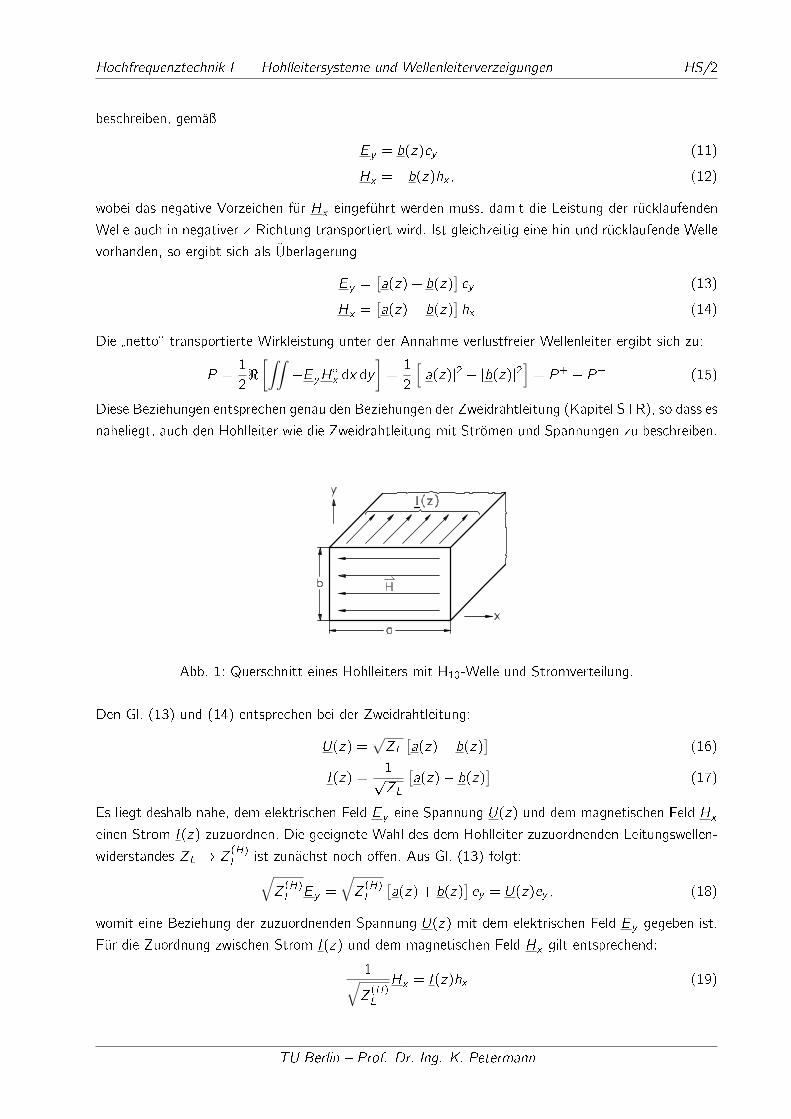
Hochfrequenztechnik I Hohlleitersysteme und Wellenleiterverzeigungen HS/2
beschreiben, gemäÿ
Ey = b(z)ey (11)
Hx = �b(z)hx ; (12)
wobei das negative Vorzeichen für Hx eingeführt werden muss, damit die Leistung der rücklaufenden
Welle auch in negativer z-Richtung transportiert wird. Ist gleichzeitig eine hin-und rücklaufende Welle
vorhanden, so ergibt sich als Überlagerung
Ey =[a(z) + b(z)
]ey (13)
Hx =[a(z)� b(z)
]hx (14)
Die �netto� transportierte Wirkleistung unter der Annahme verlustfreier Wellenleiter ergibt sich zu:
P =1
2<[∫∫
�EyH�
x dx dy
]=
1
2
[ja(z)j2 � jb(z)j2
]= P+ � P� (15)
Diese Beziehungen entsprechen genau den Beziehungen der Zweidrahtleitung (Kapitel STR), so dass es
naheliegt, auch den Hohlleiter wie die Zweidrahtleitung mit Strömen und Spannungen zu beschreiben.
Abb. 1: Querschnitt eines Hohlleiters mit H10-Welle und Stromverteilung.
Den Gl. (13) und (14) entsprechen bei der Zweidrahtleitung:
U(z) =√ZL
[a(z) + b(z)
](16)
I(z) =1pZL
[a(z)� b(z)
](17)
Es liegt deshalb nahe, dem elektrischen Feld Ey eine Spannung U(z) und dem magnetischen Feld Hx
einen Strom I(z) zuzuordnen. Die geeignete Wahl des dem Hohlleiter zuzuordnenden Leitungswellen-
widerstandes ZL ! Z(H)L ist zunächst noch o�en. Aus Gl. (13) folgt:√
Z(H)L Ey =
√Z(H)L
[a(z) + b(z)
]ey = U(z)ey ; (18)
womit eine Beziehung der zuzuordnenden Spannung U(z) mit dem elektrischen Feld Ey gegeben ist.
Für die Zuordnung zwischen Strom I(z) und dem magnetischen Feld Hx gilt entsprechend:
1√Z(H)L
Hx = I(z)hx (19)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Hohlleitersysteme und Wellenleiterverzeigungen HS/3
Auf diese Weise lassen sich die transversalen Felder der H10-Welle durch Ströme und Spannungen
ersetzen, wobei durch die hier gewählte Systematik sichergestellt ist, dass die transportierte Leistung
P gemäÿ Gl. (15) durch P = 1=2 � <(UI�) beschrieben wird. Der e�ektive Leitungswellenwiderstand
Z(H)L wird nun so festgelegt, dass I(z) gerade dem in den Hohlleiterbreitseiten �ieÿenden Strom in
axialer Richtung entspricht, d. h.
I(z) =
a∫0
�Hx dx = I(z)
√Z(H)L
a∫0
�hx dx: (20)
Mit Gl. (5) ergibt sich dann:
Z(H)L =
�2b
8aZ(H)F =
�2b
8a
ZF√1� (fc=f )2
mit ZF =
√�
": (21)
Beispiel: Die H10-Welle in einem Rechteckwellenleiter mit a = 2b, � = �0 und " = "0 wird betrieben
bei f = 1; 5fc . Es ergibt sich dann ein Leitungswellenwiderstand von Z(H)L = 312.
Da wir nun einen Hohlleiter genauso beschreiben können wie eine Zweidrahtleitung, lässt sich auch für
den Hohlleiter ein Leitungsersatzschaltbild (Kapitel LEI) angeben. Ein in�nitesimal langes Leitungs-
stück der Länge dz lässt sich prinzipiell beschreiben gemäÿ Abb. 2 mit dem Längsreaktanzbelag X 0
(!L0 bei der Zweidrahtleitung) und dem Queradmittanzbelag Y 0 (!C0 bei der Zweidrahtleitung).
Abb. 2: Allgemeines Ersatzschaltbild eines in�nitesimal kurzen Leitungsstücks.
Es gelten
Z(H)L =
√X 0
Y 0und � =
pX 0Y 0; (22)
so dass sich mit Z(H)L nach Gl. (21) und � =
p�"√!2 � !2
c ergibt:
X 0 = Z(H)L � � = !
�2�b
8a(23)
Y 0 =�
Z(H)L
=8"a
�2b
(! � !2
c
!
)(24)
Damit lässt sich das Leitungsersatzschaltbild für die H10-Welle des Rechteckhohlleiters angeben gemäÿ
Abb. 3
Die Resonanzfrequenz des Schwingkreises Lp, C0 dz entspricht dabei gerade der Grenzfrequenz fc der
H10-Welle.
TU Berlin � Prof. Dr.-Ing. K. Petermann
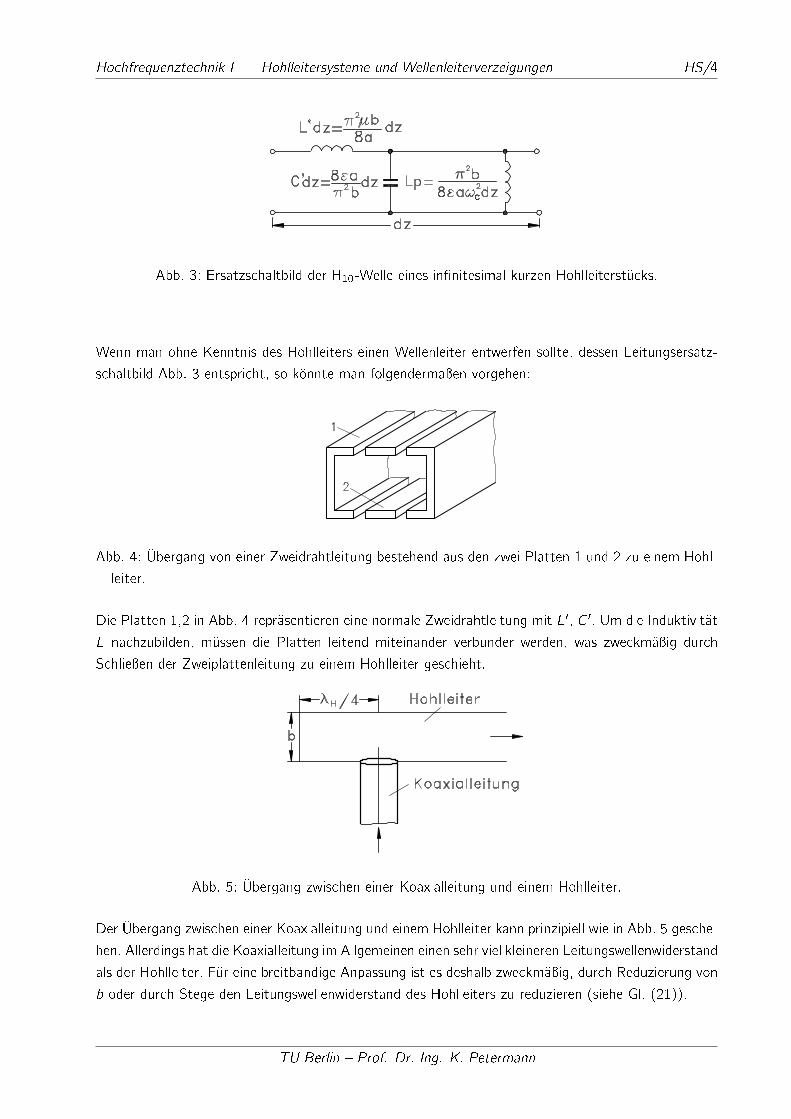
Hochfrequenztechnik I Hohlleitersysteme und Wellenleiterverzeigungen HS/4
Abb. 3: Ersatzschaltbild der H10-Welle eines in�nitesimal kurzen Hohlleiterstücks.
Wenn man ohne Kenntnis des Hohlleiters einen Wellenleiter entwerfen sollte, dessen Leitungsersatz-
schaltbild Abb. 3 entspricht, so könnte man folgendermaÿen vorgehen:
Abb. 4: Übergang von einer Zweidrahtleitung bestehend aus den zwei Platten 1 und 2 zu einem Hohl-
leiter.
Die Platten 1,2 in Abb. 4 repräsentieren eine normale Zweidrahtleitung mit L0, C0. Um die Induktivität
L nachzubilden, müssen die Platten leitend miteinander verbunder werden, was zweckmäÿig durch
Schlieÿen der Zweiplattenleitung zu einem Hohlleiter geschieht.
Abb. 5: Übergang zwischen einer Koaxialleitung und einem Hohlleiter.
Der Übergang zwischen einer Koaxialleitung und einem Hohlleiter kann prinzipiell wie in Abb. 5 gesche-
hen. Allerdings hat die Koaxialleitung im Allgemeinen einen sehr viel kleineren Leitungswellenwiderstand
als der Hohlleiter. Für eine breitbandige Anpassung ist es deshalb zweckmäÿig, durch Reduzierung von
b oder durch Stege den Leitungswellenwiderstand des Hohlleiters zu reduzieren (siehe Gl. (21)).
TU Berlin � Prof. Dr.-Ing. K. Petermann
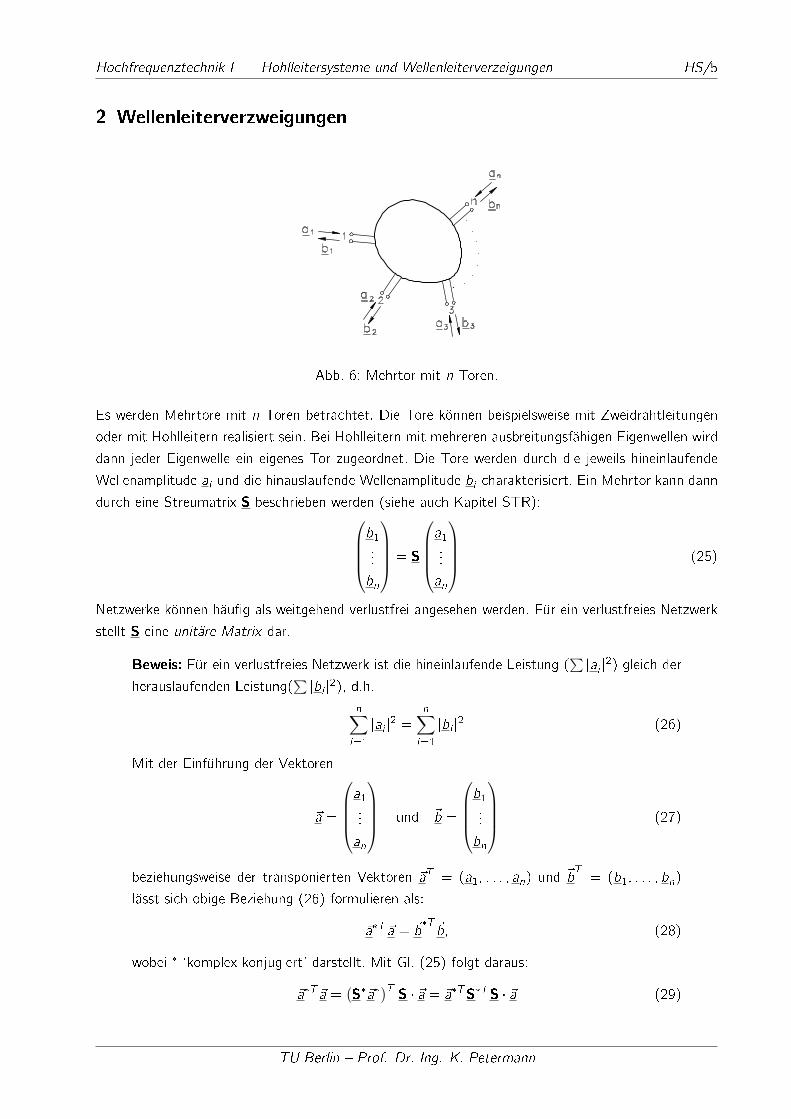
Hochfrequenztechnik I Hohlleitersysteme und Wellenleiterverzeigungen HS/5
2 Wellenleiterverzweigungen
Abb. 6: Mehrtor mit n Toren.
Es werden Mehrtore mit n Toren betrachtet. Die Tore können beispielsweise mit Zweidrahtleitungen
oder mit Hohlleitern realisiert sein. Bei Hohlleitern mit mehreren ausbreitungsfähigen Eigenwellen wird
dann jeder Eigenwelle ein eigenes Tor zugeordnet. Die Tore werden durch die jeweils hineinlaufende
Wellenamplitude ai und die hinauslaufende Wellenamplitude bi charakterisiert. Ein Mehrtor kann dann
durch eine Streumatrix S beschrieben werden (siehe auch Kapitel STR):b1...
bn
= S
a1...
an
(25)
Netzwerke können häu�g als weitgehend verlustfrei angesehen werden. Für ein verlustfreies Netzwerk
stellt S eine unitäre Matrix dar.
Beweis: Für ein verlustfreies Netzwerk ist die hineinlaufende Leistung (∑ jai j2) gleich der
herauslaufenden Leistung(∑ jbi j2), d.h.
n∑i=1
jai j2 =n∑
i=1
jbi j2 (26)
Mit der Einführung der Vektoren
~a =
a1...
an
und ~b =
b1...
bn
(27)
beziehungsweise der transponierten Vektoren ~aT = (a1; : : : ; an) und ~bT
= (b1; : : : ; bn)
lässt sich obige Beziehung (26) formulieren als:
~a�T ~a = ~b�T~b; (28)
wobei � `komplex konjugiert' darstellt. Mit Gl. (25) folgt daraus:
~a�T ~a =(S�~a�)TS � ~a = ~a�TS�TS � ~a (29)
TU Berlin � Prof. Dr.-Ing. K. Petermann
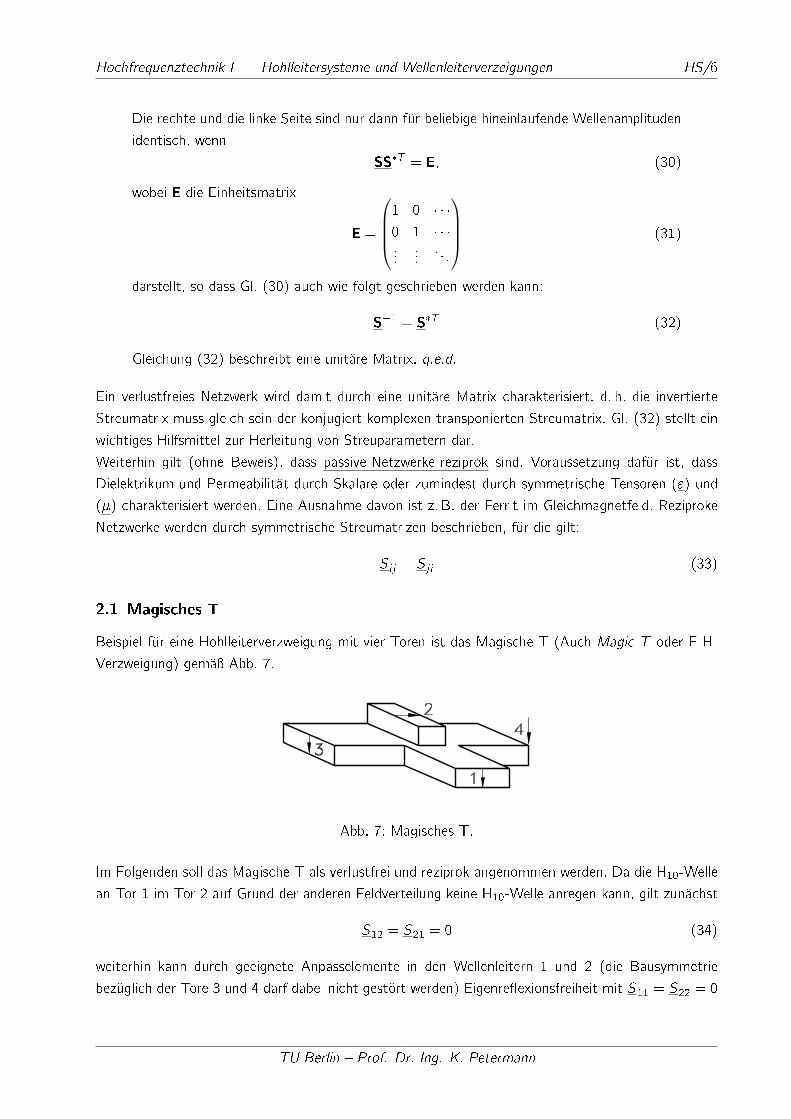
Hochfrequenztechnik I Hohlleitersysteme und Wellenleiterverzeigungen HS/6
Die rechte und die linke Seite sind nur dann für beliebige hineinlaufende Wellenamplituden
identisch, wenn
SS�T = E; (30)
wobei E die Einheitsmatrix
E =
1 0 � � �0 1 � � �...
.... . .
(31)
darstellt, so dass Gl. (30) auch wie folgt geschrieben werden kann:
S�1 = S
�T (32)
Gleichung (32) beschreibt eine unitäre Matrix. q.e.d.
Ein verlustfreies Netzwerk wird damit durch eine unitäre Matrix charakterisiert, d. h. die invertierte
Streumatrix muss gleich sein der konjugiert komplexen transponierten Streumatrix. Gl. (32) stellt ein
wichtiges Hilfsmittel zur Herleitung von Streuparametern dar.
Weiterhin gilt (ohne Beweis), dass passive Netzwerke reziprok sind. Voraussetzung dafür ist, dass
Dielektrikum und Permeabilität durch Skalare oder zumindest durch symmetrische Tensoren (") und
(�) charakterisiert werden. Eine Ausnahme davon ist z. B. der Ferrit im Gleichmagnetfeld. Reziproke
Netzwerke werden durch symmetrische Streumatrizen beschrieben, für die gilt:
Si j = Sj i (33)
2.1 Magisches T
Beispiel für eine Hohlleiterverzweigung mit vier Toren ist das Magische T (Auch Magic T oder E-H-
Verzweigung) gemäÿ Abb. 7.
Abb. 7: Magisches T.
Im Folgenden soll das Magische T als verlustfrei und reziprok angenommen werden. Da die H10-Welle
an Tor 1 im Tor 2 auf Grund der anderen Feldverteilung keine H10-Welle anregen kann, gilt zunächst
S12 = S21 = 0 (34)
weiterhin kann durch geeignete Anpasselemente in den Wellenleitern 1 und 2 (die Bausymmetrie
bezüglich der Tore 3 und 4 darf dabei nicht gestört werden) Eigenre�exionsfreiheit mit S11 = S22 = 0
TU Berlin � Prof. Dr.-Ing. K. Petermann
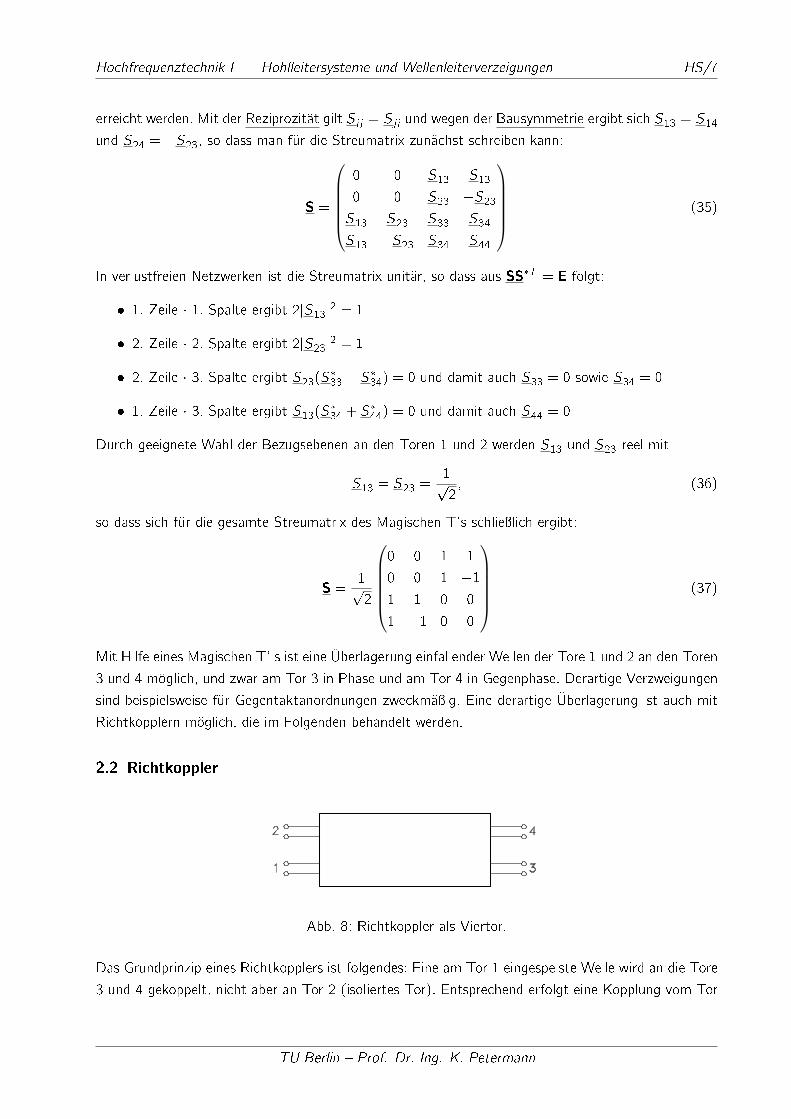
Hochfrequenztechnik I Hohlleitersysteme und Wellenleiterverzeigungen HS/7
erreicht werden. Mit der Reziprozität gilt Si j = Sj i und wegen der Bausymmetrie ergibt sich S13 = S14
und S24 = �S23, so dass man für die Streumatrix zunächst schreiben kann:
S =
0 0 S13 S13
0 0 S23 �S23
S13 S23 S33 S34
S13 �S23 S34 S44
(35)
In verlustfreien Netzwerken ist die Streumatrix unitär, so dass aus SS�T = E folgt:
� 1. Zeile � 1. Spalte ergibt 2jS13j2 = 1
� 2. Zeile � 2. Spalte ergibt 2jS23j2 = 1
� 2. Zeile � 3. Spalte ergibt S23(S�
33 � S�
34) = 0 und damit auch S33 = 0 sowie S34 = 0
� 1. Zeile � 3. Spalte ergibt S13(S�
34 + S�
44) = 0 und damit auch S44 = 0
Durch geeignete Wahl der Bezugsebenen an den Toren 1 und 2 werden S13 und S23 reel mit
S13 = S23 =1p2; (36)
so dass sich für die gesamte Streumatrix des Magischen T's schlieÿlich ergibt:
S =1p2
0 0 1 1
0 0 1 �11 1 0 0
1 �1 0 0
(37)
Mit Hilfe eines Magischen T' s ist eine Überlagerung einfallender Wellen der Tore 1 und 2 an den Toren
3 und 4 möglich, und zwar am Tor 3 in Phase und am Tor 4 in Gegenphase. Derartige Verzweigungen
sind beispielsweise für Gegentaktanordnungen zweckmäÿig. Eine derartige Überlagerung ist auch mit
Richtkopplern möglich, die im Folgenden behandelt werden.
2.2 Richtkoppler
Abb. 8: Richtkoppler als Viertor.
Das Grundprinzip eines Richtkopplers ist folgendes: Eine am Tor 1 eingespeiste Welle wird an die Tore
3 und 4 gekoppelt, nicht aber an Tor 2 (isoliertes Tor). Entsprechend erfolgt eine Kopplung vom Tor
TU Berlin � Prof. Dr.-Ing. K. Petermann
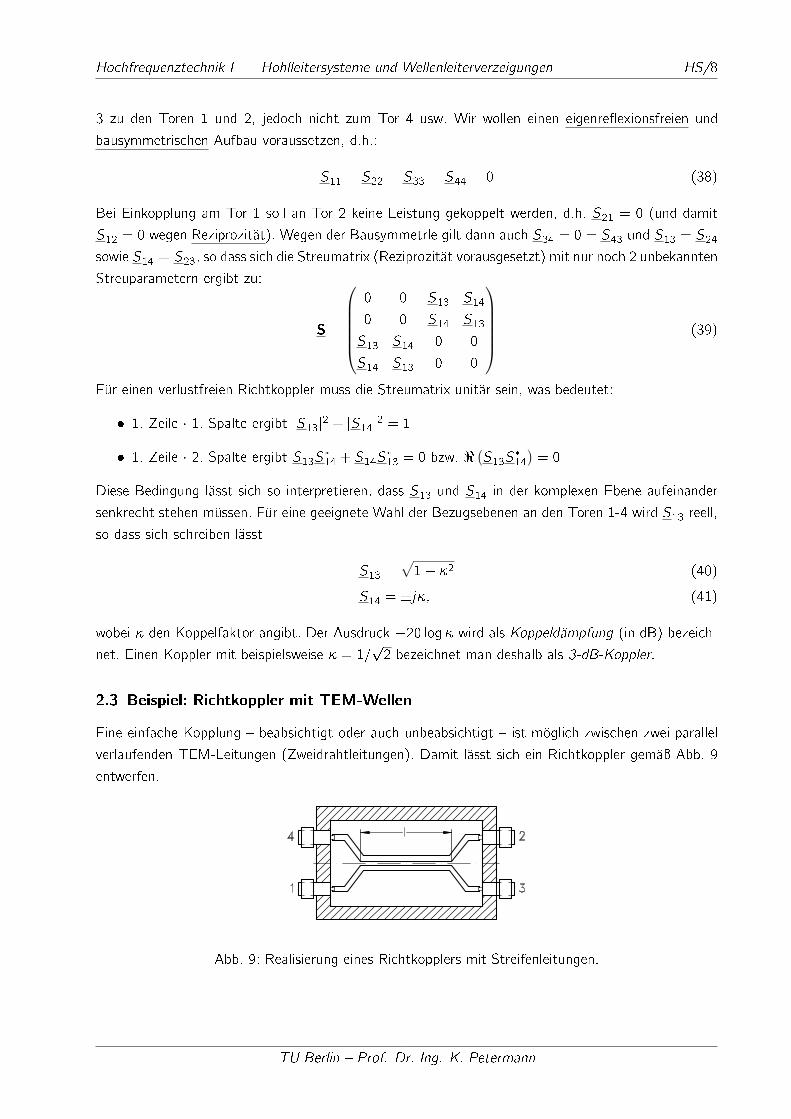
Hochfrequenztechnik I Hohlleitersysteme und Wellenleiterverzeigungen HS/8
3 zu den Toren 1 und 2, jedoch nicht zum Tor 4 usw. Wir wollen einen eigenre�exionsfreien und
bausymmetrischen Aufbau voraussetzen, d.h.:
S11 = S22 = S33 = S44 = 0 (38)
Bei Einkopplung am Tor 1 soll an Tor 2 keine Leistung gekoppelt werden, d.h. S21 = 0 (und damit
S12 = 0 wegen Reziprozität). Wegen der Bausymmetrle gilt dann auch S34 = 0 = S43 und S13 = S24
sowie S14 = S23, so dass sich die Streumatrix (Reziprozität vorausgesetzt) mit nur noch 2 unbekannten
Streuparametern ergibt zu:
S =
0 0 S13 S14
0 0 S14 S13
S13 S14 0 0
S14 S13 0 0
(39)
Für einen verlustfreien Richtkoppler muss die Streumatrix unitär sein, was bedeutet:
� 1. Zeile � 1. Spalte ergibt jS13j2 + jS14j2 = 1
� 1. Zeile � 2. Spalte ergibt S13S�
14 + S14S�
13 = 0 bzw. < (S13S�
14
)= 0
Diese Bedingung lässt sich so interpretieren, dass S13 und S14 in der komplexen Ebene aufeinander
senkrecht stehen müssen. Für eine geeignete Wahl der Bezugsebenen an den Toren 1-4 wird S13 reell,
so dass sich schreiben lässt
S13 =√1� �2 (40)
S14 = �j�; (41)
wobei � den Koppelfaktor angibt. Der Ausdruck �20 log� wird als Koppeldämpfung (in dB) bezeich-
net. Einen Koppler mit beispielsweise � = 1=p2 bezeichnet man deshalb als 3-dB-Koppler.
2.3 Beispiel: Richtkoppler mit TEM-Wellen
Eine einfache Kopplung � beabsichtigt oder auch unbeabsichtigt � ist möglich zwischen zwei parallel
verlaufenden TEM-Leitungen (Zweidrahtleitungen). Damit lässt sich ein Richtkoppler gemäÿ Abb. 9
entwerfen.
Abb. 9: Realisierung eines Richtkopplers mit Streifenleitungen.
TU Berlin � Prof. Dr.-Ing. K. Petermann
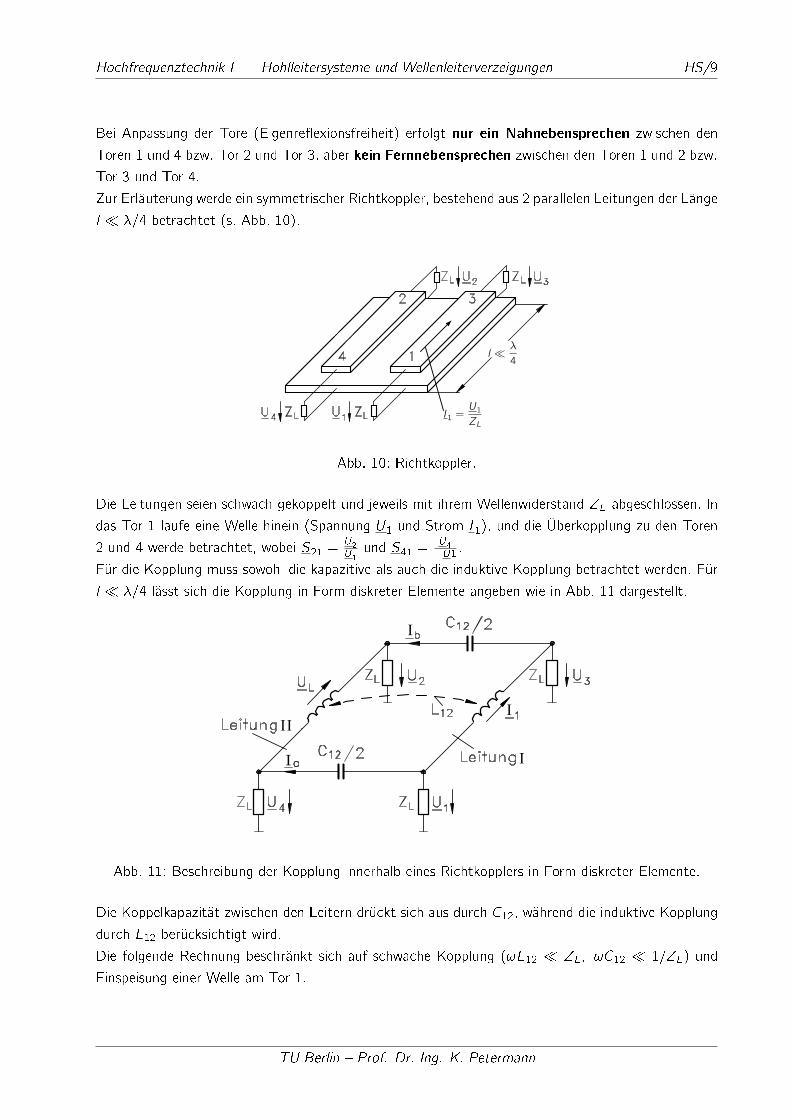
Hochfrequenztechnik I Hohlleitersysteme und Wellenleiterverzeigungen HS/9
Bei Anpassung der Tore (Eigenre�exionsfreiheit) erfolgt nur ein Nahnebensprechen zwischen den
Toren 1 und 4 bzw. Tor 2 und Tor 3, aber kein Fernnebensprechen zwischen den Toren 1 und 2 bzw.
Tor 3 und Tor 4.
Zur Erläuterung werde ein symmetrischer Richtkoppler, bestehend aus 2 parallelen Leitungen der Länge
l � �=4 betrachtet (s. Abb. 10).
l !!
4
I1 =U1ZL
Abb. 10: Richtkoppler.
Die Leitungen seien schwach gekoppelt und jeweils mit ihrem Wellenwiderstand ZL abgeschlossen. In
das Tor 1 laufe eine Welle hinein (Spannung U1 und Strom I1), und die Überkopplung zu den Toren
2 und 4 werde betrachtet, wobei S21 =U2
U1
und S41 =U4
�U1 .
Für die Kopplung muss sowohl die kapazitive als auch die induktive Kopplung betrachtet werden. Für
l � �=4 lässt sich die Kopplung in Form diskreter Elemente angeben wie in Abb. 11 dargestellt.
Abb. 11: Beschreibung der Kopplung innerhalb eines Richtkopplers in Form diskreter Elemente.
Die Koppelkapazität zwischen den Leitern drückt sich aus durch C12, während die induktive Kopplung
durch L12 berücksichtigt wird.
Die folgende Rechnung beschränkt sich auf schwache Kopplung (!L12 � ZL; !C12 � 1=ZL) und
Einspeisung einer Welle am Tor 1.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Hohlleitersysteme und Wellenleiterverzeigungen HS/10
Auf Grund des Stromes I1 = U1=ZL wird in der Leitung II eine Spannung
UL = j!L12I1 = j!L12U1
ZL
(42)
induziert. Auf Grund der kapazitiven (schwachen) Kopplung ergeben sich die Ströme
Ia = j!C12
2U1 (43)
Ib = j!C12
2U3 (44)
Damit ergeben sich schlieÿlich die Spannungen an den Toren 2 und 4:
U2 = (Ia + Ib)ZL
2� UL
2=
U1
2
j! [C12ZL �L12
ZL
] (45)
U4 = (Ia + Ib)ZL
2+
UL
2=
U1
2
j! [C12ZL +L12
ZL
] (46)
wobei wegen der kurzen Leitung noch von U1 � U3 Gebrauch gemacht wurde.
Die kapazitive und die induktive Kopplung sind voneinander abhängig. Insbesondere gilt bei TEM-
Leitungen mit homogenem Dielektrikum um die Leiter in Abb. 10(ohne Beweis):
L12
C12= Z2
L (47)
und damit U2=U1 = 0 (kein Fernnebensprechen), was auch bei längeren Leitungen und stärkerer
Kopplung gilt. Für das Nahnebensprechen gilt damit
U4
U1
= S41 = j!C12 � ZL (48)
Gl. (48) gilt nur bei schwacher Kopplung zwischen kurzen Leitungen. Der allgemeinere Fall lässt sich
behandeln mit der Theorie der Mehrfachleitungen.
S41 =j�L sin(�l)√
1� �2L cos(�l) + j sin(�l)mit �L =
C0
12
C0
1 + C0
12
; (49)
wobei C0
12 den Belag der Koppelkapazität und C0
1 den normalen Kapazitätsbelag der Leitung I bezeich-
net. Die maximale Überkopplung ergibt sich zu S41 = �L für � � l = �=2 (entspricht einer Koppellänge
von l = �=4). Für kleine Koppellängen und geringe Kopplung reduziert sich Gl. (49) mit C12 = C0
12 � lzu Gl. (48).
Andere Leitungsrealisierungsmöglichkeiten speziell für 3-dB-Koppler (auch bezeichnet als 90�-Hybride)
sind beispielsweise der Branchline-Koppler (s. Abb. 12a)) und der Lange-Koppler (s. Abb. 12b)).
Mit Leitungen können auch Strukturen aufgebaut werden, deren Streumatrix einem Magischen T
entspricht (180�-Hybrid, s. Abb. 13).
TU Berlin � Prof. Dr.-Ing. K. Petermann
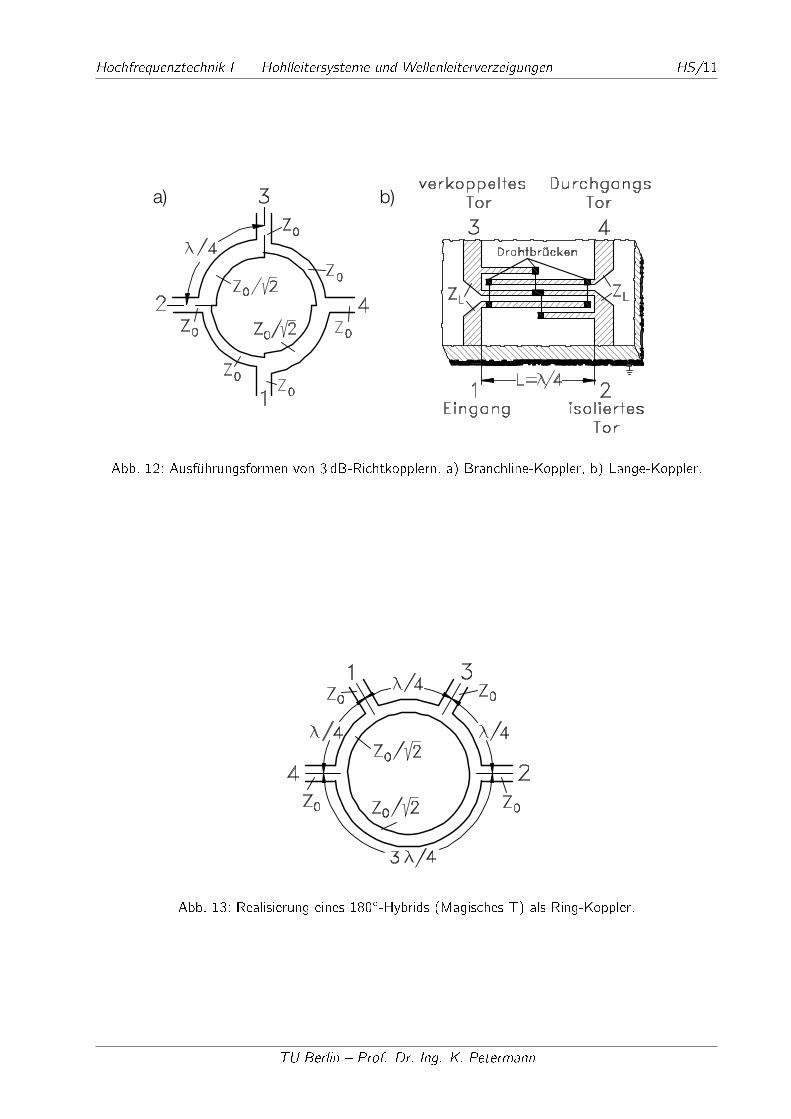
Hochfrequenztechnik I Hohlleitersysteme und Wellenleiterverzeigungen HS/11
a) b)
Abb. 12: Ausführungsformen von 3 dB-Richtkopplern. a) Branchline-Koppler, b) Lange-Koppler.
Abb. 13: Realisierung eines 180�-Hybrids (Magisches T) als Ring-Koppler.
TU Berlin � Prof. Dr.-Ing. K. Petermann
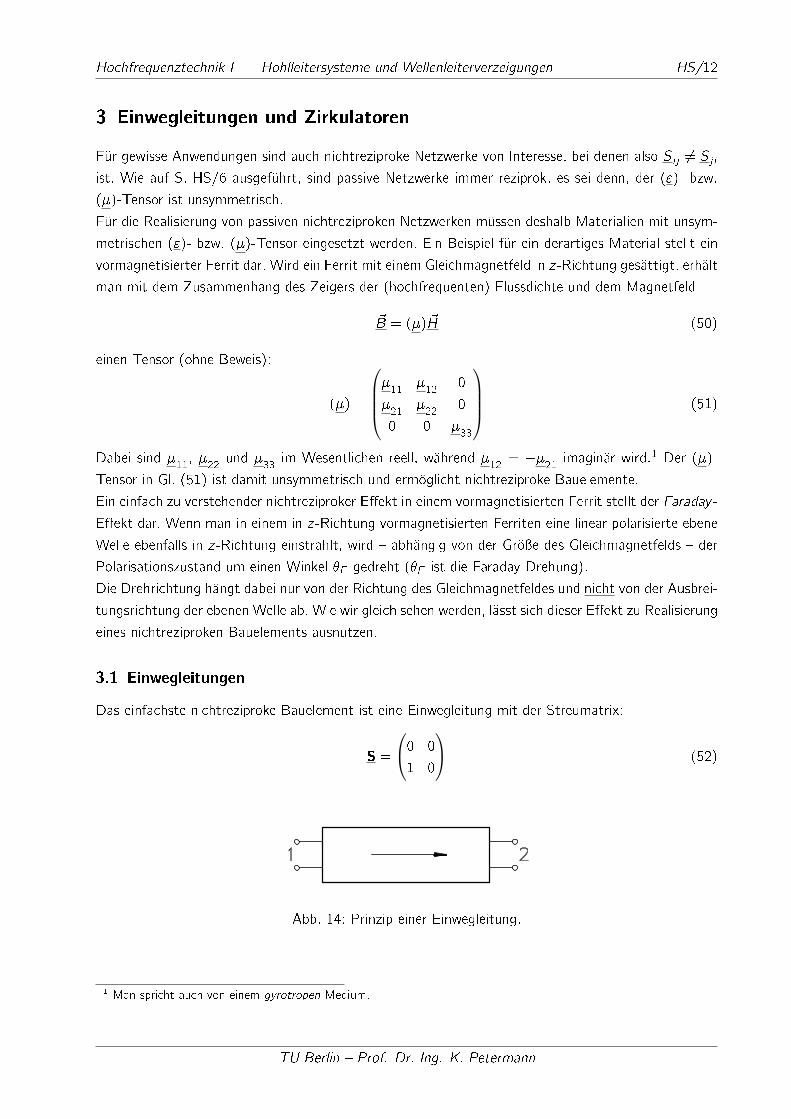
Hochfrequenztechnik I Hohlleitersysteme und Wellenleiterverzeigungen HS/12
3 Einwegleitungen und Zirkulatoren
Für gewisse Anwendungen sind auch nichtreziproke Netzwerke von Interesse, bei denen also Si j 6= Sj i
ist. Wie auf S. HS/6 ausgeführt, sind passive Netzwerke immer reziprok, es sei denn, der (")- bzw.
(�)-Tensor ist unsymmetrisch.
Für die Realisierung von passiven nichtreziproken Netzwerken müssen deshalb Materialien mit unsym-
metrischen (")- bzw. (�)-Tensor eingesetzt werden. Ein Beispiel für ein derartiges Material stellt ein
vormagnetisierter Ferrit dar. Wird ein Ferrit mit einem Gleichmagnetfeld in z-Richtung gesättigt, erhält
man mit dem Zusammenhang des Zeigers der (hochfrequenten) Flussdichte und dem Magnetfeld
~B = (�) ~H (50)
einen Tensor (ohne Beweis):
(�) =
�11
�12
0
�21
�22
0
0 0 �33
(51)
Dabei sind �11, �
22und �
33im Wesentlichen reell, während �
12= ��
21imaginär wird.1 Der (�)-
Tensor in Gl. (51) ist damit unsymmetrisch und ermöglicht nichtreziproke Bauelemente.
Ein einfach zu verstehender nichtreziproker E�ekt in einem vormagnetisierten Ferrit stellt der Faraday -
E�ekt dar. Wenn man in einem in z-Richtung vormagnetisierten Ferriten eine linear polarisierte ebene
Welle ebenfalls in z-Richtung einstrahlt, wird � abhängig von der Gröÿe des Gleichmagnetfelds � der
Polarisationszustand um einen Winkel �F gedreht (�F ist die Faraday-Drehung).
Die Drehrichtung hängt dabei nur von der Richtung des Gleichmagnetfeldes und nicht von der Ausbrei-
tungsrichtung der ebenen Welle ab. Wie wir gleich sehen werden, lässt sich dieser E�ekt zu Realisierung
eines nichtreziproken Bauelements ausnutzen.
3.1 Einwegleitungen
Das einfachste nichtreziproke Bauelement ist eine Einwegleitung mit der Streumatrix:
S =
0 0
1 0
(52)
Abb. 14: Prinzip einer Einwegleitung.
1 Man spricht auch von einem gyrotropen Medium.
TU Berlin � Prof. Dr.-Ing. K. Petermann
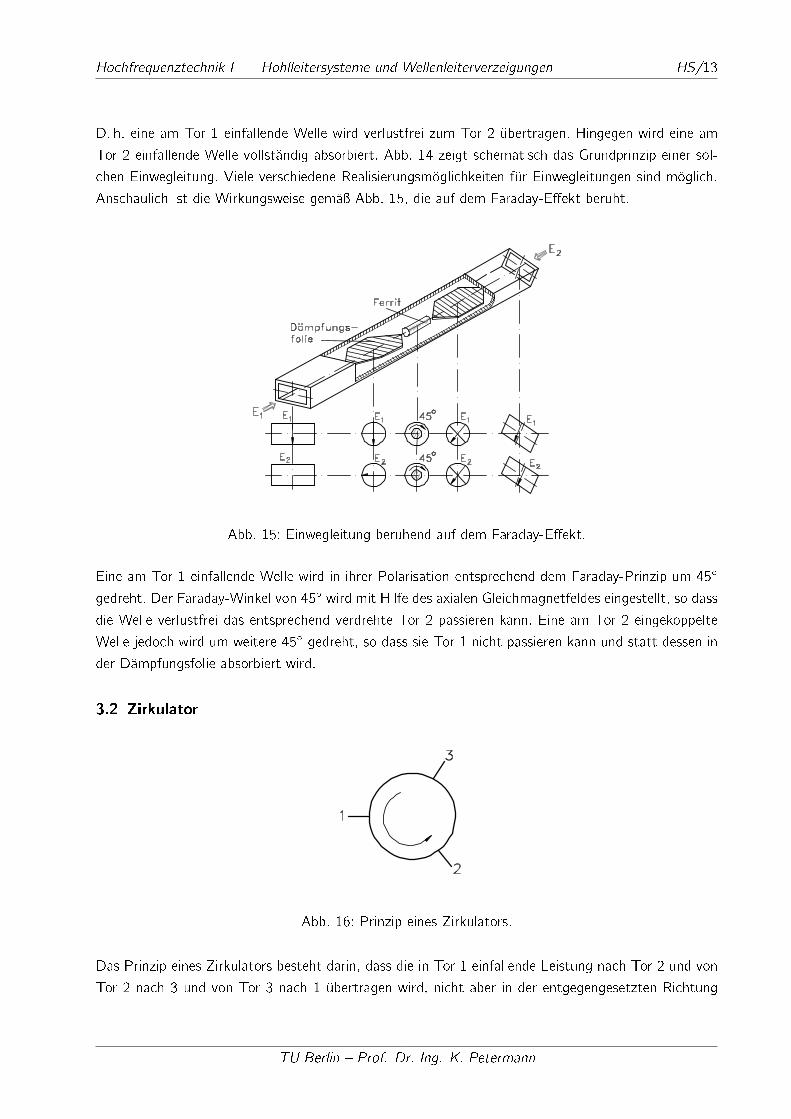
Hochfrequenztechnik I Hohlleitersysteme und Wellenleiterverzeigungen HS/13
D. h. eine am Tor 1 einfallende Welle wird verlustfrei zum Tor 2 übertragen. Hingegen wird eine am
Tor 2 einfallende Welle vollständig absorbiert. Abb. 14 zeigt schematisch das Grundprinzip einer sol-
chen Einwegleitung. Viele verschiedene Realisierungsmöglichkeiten für Einwegleitungen sind möglich.
Anschaulich ist die Wirkungsweise gemäÿ Abb. 15, die auf dem Faraday-E�ekt beruht.
Abb. 15: Einwegleitung beruhend auf dem Faraday-E�ekt.
Eine am Tor 1 einfallende Welle wird in ihrer Polarisation entsprechend dem Faraday-Prinzip um 45�
gedreht. Der Faraday-Winkel von 45� wird mit Hilfe des axialen Gleichmagnetfeldes eingestellt, so dass
die Welle verlustfrei das entsprechend verdrehte Tor 2 passieren kann. Eine am Tor 2 eingekoppelte
Welle jedoch wird um weitere 45� gedreht, so dass sie Tor 1 nicht passieren kann und statt dessen in
der Dämpfungsfolie absorbiert wird.
3.2 Zirkulator
Abb. 16: Prinzip eines Zirkulators.
Das Prinzip eines Zirkulators besteht darin, dass die in Tor 1 einfallende Leistung nach Tor 2 und von
Tor 2 nach 3 und von Tor 3 nach 1 übertragen wird, nicht aber in der entgegengesetzten Richtung
TU Berlin � Prof. Dr.-Ing. K. Petermann
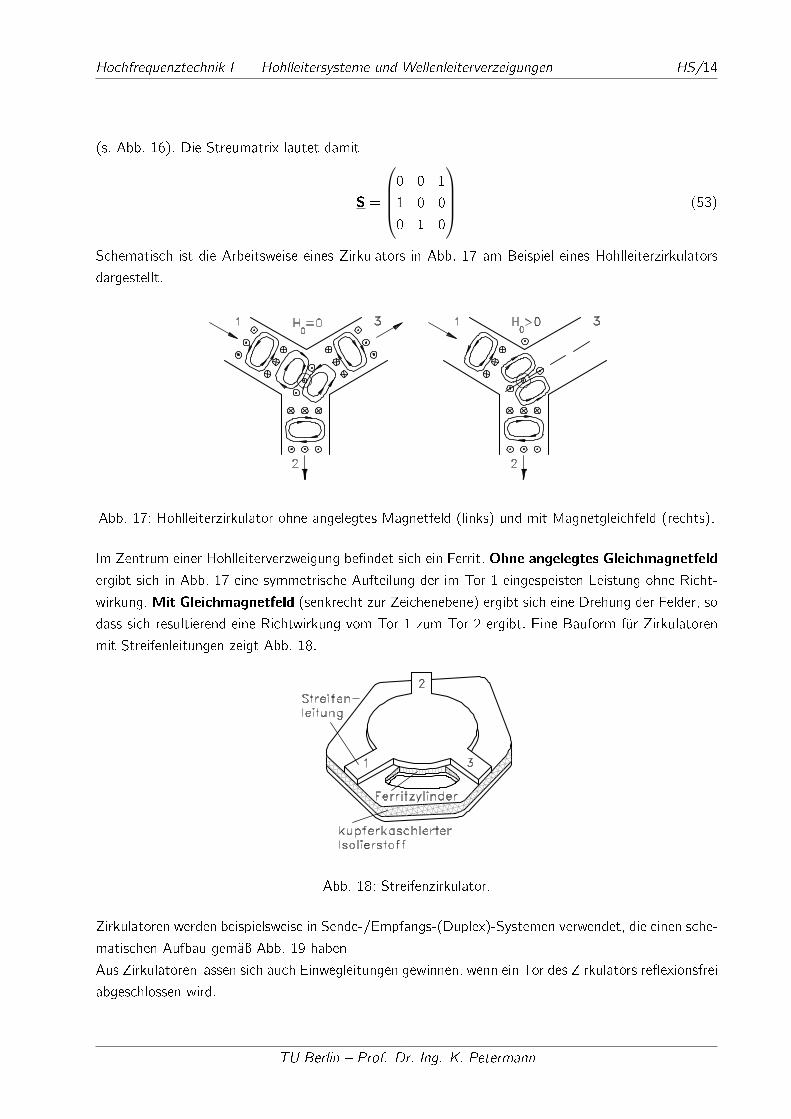
Hochfrequenztechnik I Hohlleitersysteme und Wellenleiterverzeigungen HS/14
(s. Abb. 16). Die Streumatrix lautet damit
S =
0 0 1
1 0 0
0 1 0
(53)
Schematisch ist die Arbeitsweise eines Zirkulators in Abb. 17 am Beispiel eines Hohlleiterzirkulators
dargestellt.
Abb. 17: Hohlleiterzirkulator ohne angelegtes Magnetfeld (links) und mit Magnetgleichfeld (rechts).
Im Zentrum einer Hohlleiterverzweigung be�ndet sich ein Ferrit. Ohne angelegtes Gleichmagnetfeld
ergibt sich in Abb. 17 eine symmetrische Aufteilung der im Tor 1 eingespeisten Leistung ohne Richt-
wirkung. Mit Gleichmagnetfeld (senkrecht zur Zeichenebene) ergibt sich eine Drehung der Felder, so
dass sich resultierend eine Richtwirkung vom Tor 1 zum Tor 2 ergibt. Eine Bauform für Zirkulatoren
mit Streifenleitungen zeigt Abb. 18.
Abb. 18: Streifenzirkulator.
Zirkulatoren werden beispielsweise in Sende-/Empfangs-(Duplex)-Systemen verwendet, die einen sche-
matischen Aufbau gemäÿ Abb. 19 haben
Aus Zirkulatoren lassen sich auch Einwegleitungen gewinnen, wenn ein Tor des Zirkulators re�exionsfrei
abgeschlossen wird.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Hohlleitersysteme und Wellenleiterverzeigungen HS/15
Abb. 19: Schematischer Aufbau eines Sende-/Empfangs-(Duplex)-Systems.
TU Berlin � Prof. Dr.-Ing. K. Petermann
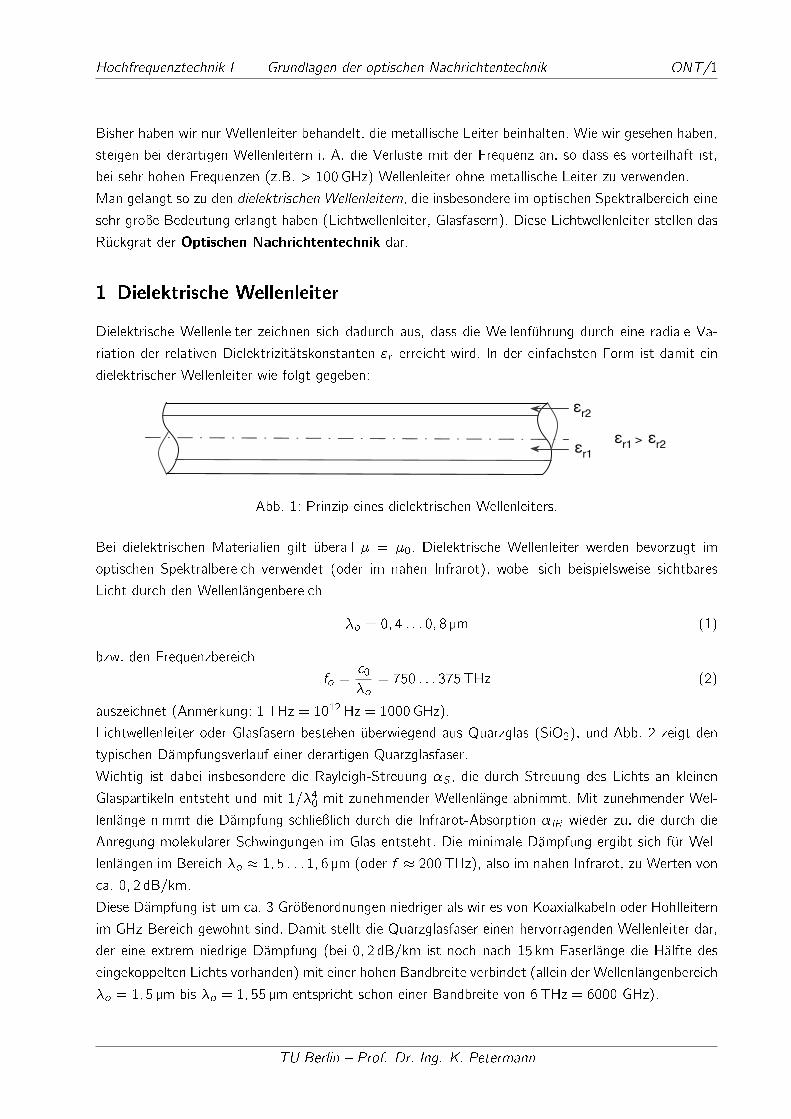
Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/1
Bisher haben wir nur Wellenleiter behandelt, die metallische Leiter beinhalten. Wie wir gesehen haben,
steigen bei derartigen Wellenleitern i. A. die Verluste mit der Frequenz an, so dass es vorteilhaft ist,
bei sehr hohen Frequenzen (z.B. > 100GHz) Wellenleiter ohne metallische Leiter zu verwenden.
Man gelangt so zu den dielektrischen Wellenleitern, die insbesondere im optischen Spektralbereich eine
sehr groÿe Bedeutung erlangt haben (Lichtwellenleiter, Glasfasern). Diese Lichtwellenleiter stellen das
Rückgrat der Optischen Nachrichtentechnik dar.
1 Dielektrische Wellenleiter
Dielektrische Wellenleiter zeichnen sich dadurch aus, dass die Wellenführung durch eine radiale Va-
riation der relativen Dielektrizitätskonstanten "r erreicht wird. In der einfachsten Form ist damit ein
dielektrischer Wellenleiter wie folgt gegeben:
r1ε r1ε >
r2ε
r2ε
Abb. 1: Prinzip eines dielektrischen Wellenleiters.
Bei dielektrischen Materialien gilt überall � = �0. Dielektrische Wellenleiter werden bevorzugt im
optischen Spektralbereich verwendet (oder im nahen Infrarot), wobei sich beispielsweise sichtbares
Licht durch den Wellenlängenbereich
�o = 0; 4 : : : 0; 8 µm (1)
bzw. den Frequenzbereich
fo =c0
�o= 750 : : : 375THz (2)
auszeichnet (Anmerkung: 1THz = 1012Hz = 1000GHz).
Lichtwellenleiter oder Glasfasern bestehen überwiegend aus Quarzglas (SiO2), und Abb. 2 zeigt den
typischen Dämpfungsverlauf einer derartigen Quarzglasfaser.
Wichtig ist dabei insbesondere die Rayleigh-Streuung �S, die durch Streuung des Lichts an kleinen
Glaspartikeln entsteht und mit 1=�40 mit zunehmender Wellenlänge abnimmt. Mit zunehmender Wel-
lenlänge nimmt die Dämpfung schlieÿlich durch die Infrarot-Absorption �IR wieder zu, die durch die
Anregung molekularer Schwingungen im Glas entsteht. Die minimale Dämpfung ergibt sich für Wel-
lenlängen im Bereich �o � 1; 5 : : : 1; 6 µm (oder f � 200THz), also im nahen Infrarot, zu Werten von
ca. 0; 2 dB/km.
Diese Dämpfung ist um ca. 3 Gröÿenordnungen niedriger als wir es von Koaxialkabeln oder Hohlleitern
im GHz-Bereich gewohnt sind. Damit stellt die Quarzglasfaser einen hervorragenden Wellenleiter dar,
der eine extrem niedrige Dämpfung (bei 0; 2 dB/km ist noch nach 15 km Faserlänge die Hälfte des
eingekoppelten Lichts vorhanden) mit einer hohen Bandbreite verbindet (allein der Wellenlängenbereich
�o = 1; 5 µm bis �o = 1; 55 µm entspricht schon einer Bandbreite von 6THz = 6000 GHz).
TU Berlin � Prof. Dr.-Ing. K. Petermann
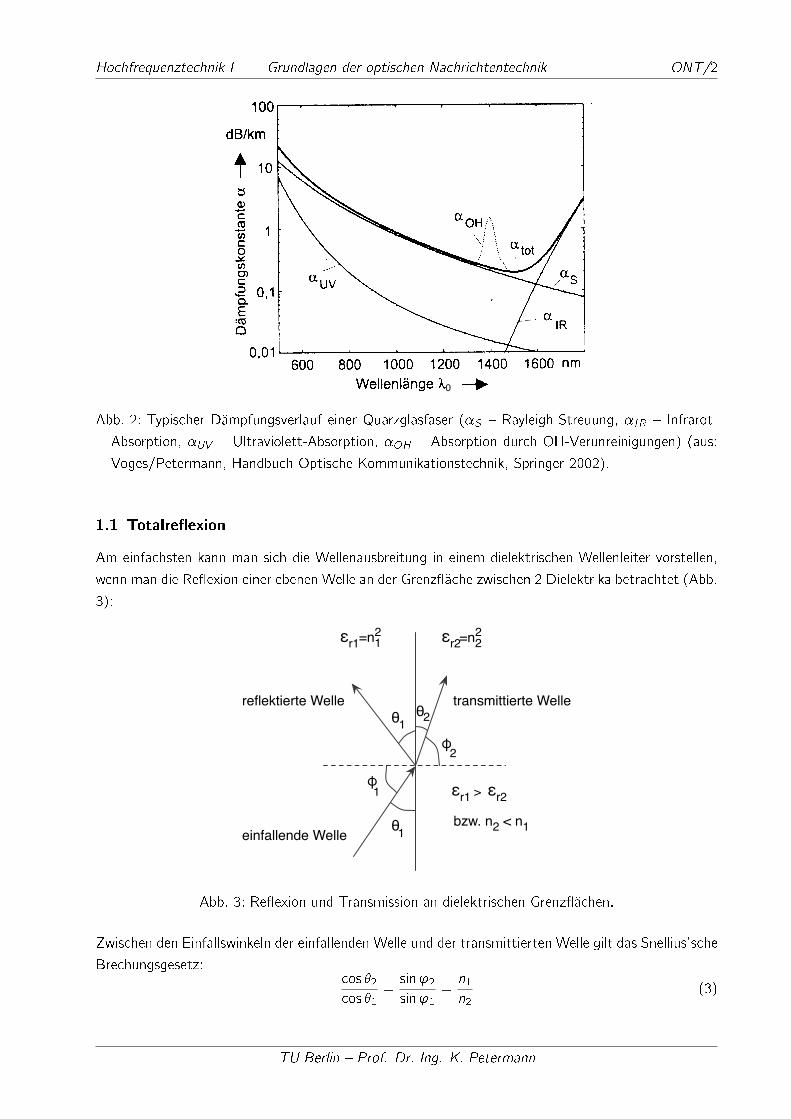
Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/2
0
Abb. 2: Typischer Dämpfungsverlauf einer Quarzglasfaser (�S � Rayleigh-Streuung, �IR � Infrarot-
Absorption, �UV � Ultraviolett-Absorption, �OH � Absorption durch OH-Verunreinigungen) (aus:
Voges/Petermann, Handbuch Optische Kommunikationstechnik, Springer 2002).
1.1 Totalre�exion
Am einfachsten kann man sich die Wellenausbreitung in einem dielektrischen Wellenleiter vorstellen,
wenn man die Re�exion einer ebenen Welle an der Grenz�äche zwischen 2 Dielektrika betrachtet (Abb.
3):
r1ε > r2εbzw. n2 < n1
r1ε =n12
r2ε =n22
φ
θ
θ θ
φ
1
1
1 2
2
transmittierte Wellereflektierte Welle
einfallende Welle
Abb. 3: Re�exion und Transmission an dielektrischen Grenz�ächen.
Zwischen den Einfallswinkeln der einfallenden Welle und der transmittierten Welle gilt das Snellius'sche
Brechungsgesetz:cos �2
cos �1=
sin'2
sin'1
=n1
n2(3)
TU Berlin � Prof. Dr.-Ing. K. Petermann
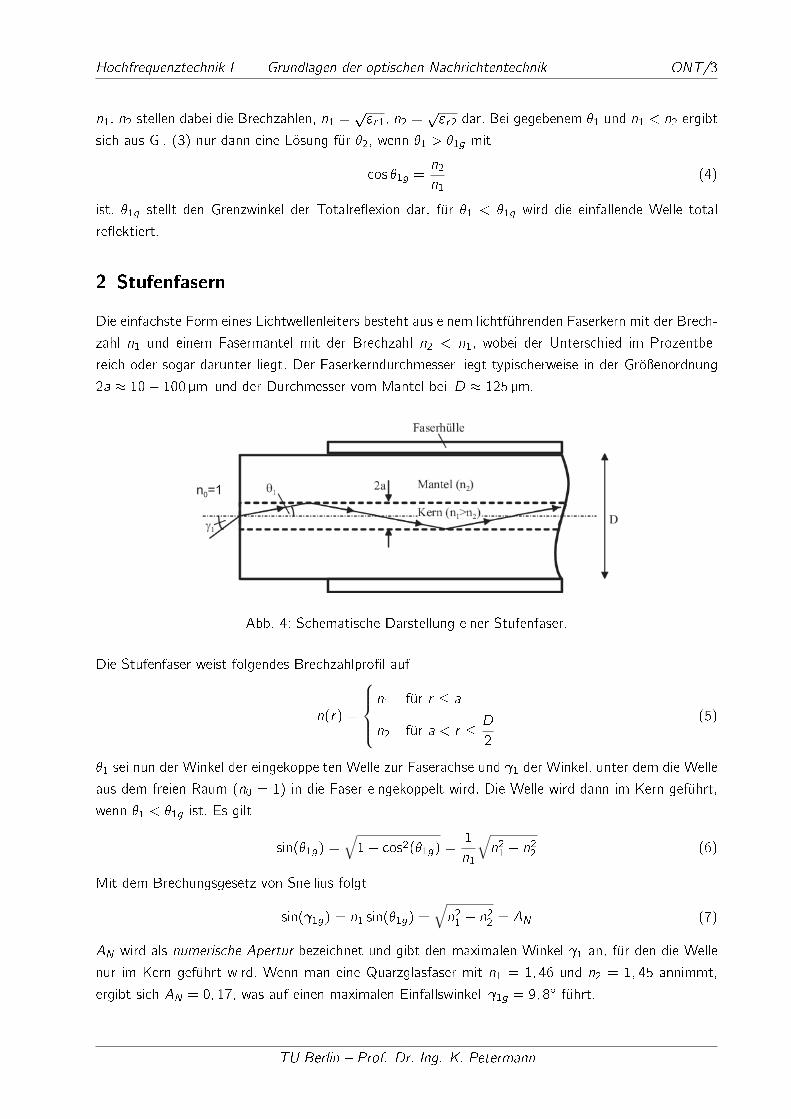
Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/3
n1, n2 stellen dabei die Brechzahlen, n1 =p"r1, n2 =
p"r2 dar. Bei gegebenem �1 und n1 < n2 ergibt
sich aus Gl. (3) nur dann eine Lösung für �2, wenn �1 > �1g mit
cos �1g =n2
n1(4)
ist. �1g stellt den Grenzwinkel der Totalre�exion dar, für �1 < �1g wird die einfallende Welle total
re�ektiert.
2 Stufenfasern
Die einfachste Form eines Lichtwellenleiters besteht aus einem lichtführenden Faserkern mit der Brech-
zahl n1 und einem Fasermantel mit der Brechzahl n2 < n1, wobei der Unterschied im Prozentbe-
reich oder sogar darunter liegt. Der Faserkerndurchmesser liegt typischerweise in der Gröÿenordnung
2a � 10� 100 µm und der Durchmesser vom Mantel bei D � 125 µm.
��� �
Abb. 4: Schematische Darstellung einer Stufenfaser.
Die Stufenfaser weist folgendes Brechzahlpro�l auf
n(r) =
n1 für r � a
n2 für a < r � D
2
(5)
�1 sei nun der Winkel der eingekoppelten Welle zur Faserachse und 1 der Winkel, unter dem die Welle
aus dem freien Raum (n0 = 1) in die Faser eingekoppelt wird. Die Welle wird dann im Kern geführt,
wenn �1 < �1g ist. Es gilt
sin(�1g) =√1� cos2(�1g) =
1
n1
√n21 � n22 (6)
Mit dem Brechungsgesetz von Snellius folgt
sin( 1g) = n1 sin(�1g) =√n21 � n22 = AN (7)
AN wird als numerische Apertur bezeichnet und gibt den maximalen Winkel 1 an, für den die Welle
nur im Kern geführt wird. Wenn man eine Quarzglasfaser mit n1 = 1; 46 und n2 = 1; 45 annimmt,
ergibt sich AN = 0; 17, was auf einen maximalen Einfallswinkel 1g = 9; 8� führt.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/4
2.1 Eigenwellen in schwach führenden Stufenfasern
Die Strahlenbetrachtung in Abb. 4 gilt eigentlich nur im Grenzfall �o ! 0. Zur genaueren Analyse
der Wellenausbreitung in dielektrischen Wellenleitern ist es ähnlich wie beim Hohlleiter erforderlich, die
ausbreitungsfähigen Eigenwellen zu bestimmen.
Die Brechzahlunterschiede zwischen Faserkern und -mantel sind in Glasfasern in der Regel sehr gering,
so dassn1 � n2n1
� 1 (8)
gilt. Man spricht dann von einer schwach führenden Faser. Bei Gültigkeit von Gl. (8) lassen sich dann
die Eigenwellen näherungsweise als so genannte LP-Wellen (linear polarisierte Wellen) beschreiben.
So lässt sich dann beispielsweise eine in transversaler Richtung linear polarisierte Welle annehmen mit
einer elektrischen Feldverteilung:
Ex = (r; ') exp(�j�z) (9)
mit der Phasenkonstanten � (Annahme: verlustfreier Wellenleiter) und Ey � 0.
Zunächst soll die Gröÿenordnung von � abgeschätzt werden. Aus der Strahlenbetrachtung in Abb. 4
folgt
� = k0n1 cos(�1) (10)
Für die geführte Welle ist 0 < �1 < �1g, daher ist
k0n2 < � < k0n1 (11)
Für die Feldkomponente Ex gilt die Wellengleichung (vgl. Gl. EB (25)) sowohl im Kern als auch im
Mantel.
4Ex + k20n
2i Ex = 0 (12)
mit i = 1; 2 . Es folgt aus Gl. (9)@2Ex
@z2= ��2Ex (13)
und damit erhält man aus Gl. (12) die Wellengleichung
4tEx +(k20n
2i � �2
)Ex = 0 (14)
mit dem transversalen Laplace-Operator
4t =@2
@x2+@2
@y2=
1
r
@
@r
(r@
@r
)+
1
r2@2
@'2(15)
Wenn man die skalare Feldfunktion (r; ') aus Gl. (9) im Faserkern und -mantel jeweils schreibt als
(r; ') =
1(r; ') für r � a 2(r; ') für r > a ;
(16)
ergibt sich dann für die Wellengleichung (14):
4t 1 +(k20n
21 � �2
) 1 = 0; r � a
4t 2 �(�2 � k20n22
) 2 = 0; r > a
(17)
Die Lösung von Gl. (17) führt zu den Eigenwellen der Stufenfaser, wobei noch die Randbedingungen
berücksichtigt werden müssen.
TU Berlin � Prof. Dr.-Ing. K. Petermann
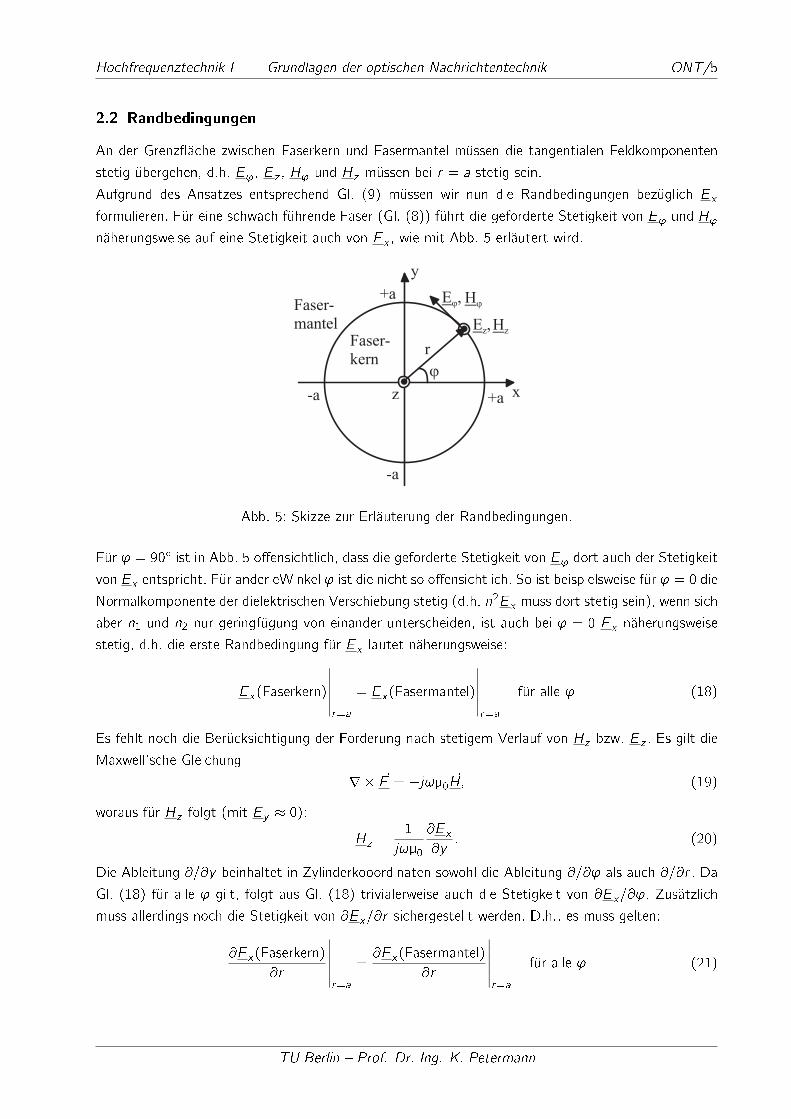
Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/5
2.2 Randbedingungen
An der Grenz�äche zwischen Faserkern und Fasermantel müssen die tangentialen Feldkomponenten
stetig übergehen, d.h. E', Ez , H' und Hz müssen bei r = a stetig sein.
Aufgrund des Ansatzes entsprechend Gl. (9) müssen wir nun die Randbedingungen bezüglich Ex
formulieren. Für eine schwach führende Faser (Gl. (8)) führt die geforderte Stetigkeit von E' und H'
näherungsweise auf eine Stetigkeit auch von Ex , wie mit Abb. 5 erläutert wird.
�
�
�
�
�
��� �
�
� � � � �
�
�
� � � �
� � � �
� � � �
� � � � �
Abb. 5: Skizze zur Erläuterung der Randbedingungen.
Für ' = 90� ist in Abb. 5 o�ensichtlich, dass die geforderte Stetigkeit von E' dort auch der Stetigkeit
von Ex entspricht. Für ander eWinkel ' ist die nicht so o�ensichtlich. So ist beispielsweise für ' = 0 die
Normalkomponente der dielektrischen Verschiebung stetig (d.h. n2Ex muss dort stetig sein), wenn sich
aber n1 und n2 nur geringfügung von einander unterscheiden, ist auch bei ' = 0 Ex näherungsweise
stetig, d.h. die erste Randbedingung für Ex lautet näherungsweise:
Ex(Faserkern)
∣∣∣∣∣∣r=a
= Ex(Fasermantel)
∣∣∣∣∣∣r=a
für alle ' (18)
Es fehlt noch die Berücksichtigung der Forderung nach stetigem Verlauf von Hz bzw. Ez . Es gilt die
Maxwell'sche Gleichung
r� ~E = �j!µ0 ~H; (19)
woraus für Hz folgt (mit Ey � 0):
Hz =1
j!µ0
@Ex
@y: (20)
Die Ableitung @=@y beinhaltet in Zylinderkooordinaten sowohl die Ableitung @=@' als auch @=@r . Da
Gl. (18) für alle ' gilt, folgt aus Gl. (18) trivialerweise auch die Stetigkeit von @Ex=@'. Zusätzlich
muss allerdings noch die Stetigkeit von @Ex=@r sichergestellt werden. D.h., es muss gelten:
@Ex(Faserkern)
@r
∣∣∣∣∣∣r=a
=@Ex(Fasermantel)
@r
∣∣∣∣∣∣r=a
für alle ' (21)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/6
Damit sind Hz (und Ez , wie auch leicht gezeigt werden kann) an der Grenz�äche zwischen Faserkern
und -mantel stetig.
Damit stellen Gl. (18) und (21) die bezüglich Ex zu erfüllenden Randbedingungen dar. Für die skalare
Feldfunktion (r; ') aus Gl. (9) und (16) heiÿt das:
1
∣∣∣∣∣∣r=a
= 2
∣∣∣∣∣∣r=a
(22)
@ 1
@r
∣∣∣∣∣∣r=a
=@ 2
@r
∣∣∣∣∣∣r=a
: (23)
2.3 Berechnung der Eigenwellen
Zunächst werden folgende Normierungen eingeführt:
Faserparameter: V = k0a√n21 � n22 = k0 � a � AN (24)
Normierte Ausbreitungskonstante: B =
�2
k20
� n22n21 � n22
=
(�k0� n2
)�(�k0+ n2
)(n1 � n2) � (n1 + n2) �
�k0� n2
n1 � n2 (25)
Kernparameter: u = Vp1� B = a
√k20n
21 � �2 (26)
Mantelparameter: v = VpB = a
√�2 � k20n22 (27)
V 2 = u2 + v2 (28)
Setzt man diese Normierungen in Gl. (17) ein, so erhält man
a24t 1 + u2 1 = 0 für r � a (29)
a24t 2 � v2 2 = 0 für r � a (30)
Die Lösungen von Gl. (29) führen zu einem oszillierenden Verhalten im Faserkern, während die Lösun-
gen von Gl. (30) zu exponentiell abklingenden Feldern im Fasermantel führen. Konkret ergibt sich:
1(r; ') = A1Jl
(ru
a
){cos(l � ')sin(l � ')
}(31)
2(r; ') = A2Kl
(rv
a
){cos(l � ')sin(l � ')
}(32)
Dabei ist Jl eine Besselfunktion und Kl eine modi�zierte Hankelfunktion ganzzahliger Ordnung.
Aus den Randbedingungen Gl. (22) und (23) folgt:
A1Jl(u) = A2Kl(v) (33)
A1u
aJ 0l (u) = A2
v
aK0
l (v); (34)
TU Berlin � Prof. Dr.-Ing. K. Petermann
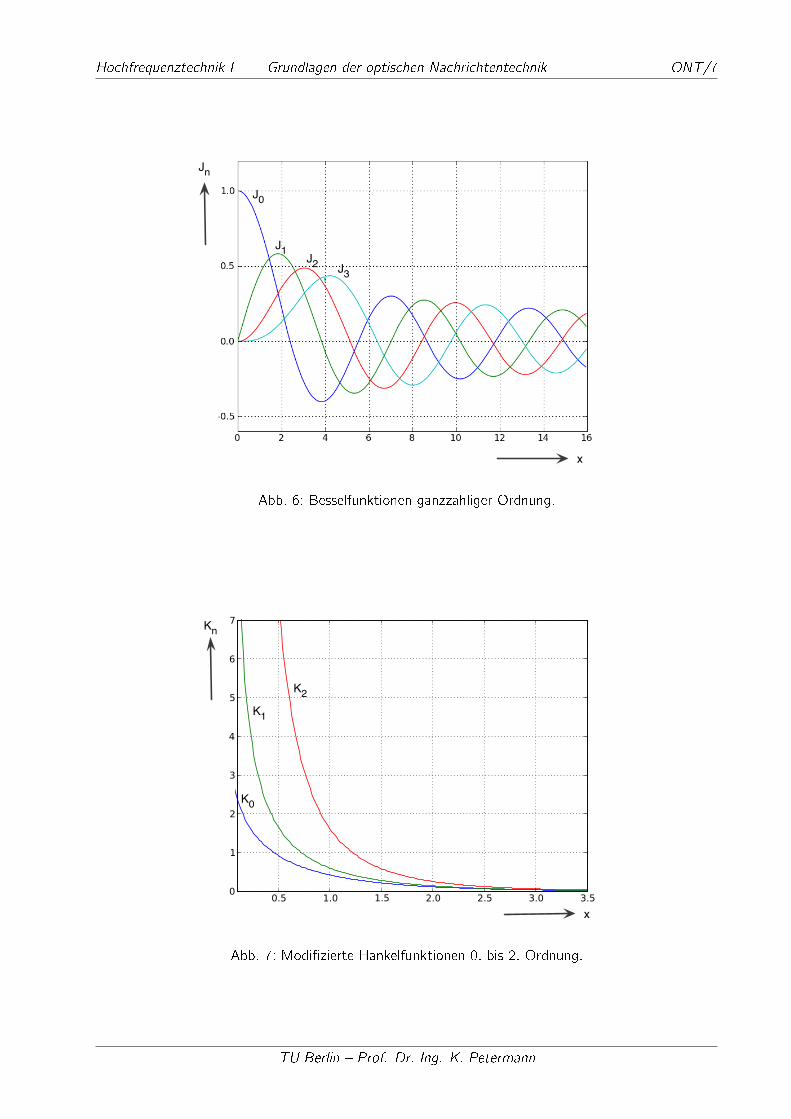
Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/7
x
Jn
J0
J1J2 J3
Abb. 6: Besselfunktionen ganzzahliger Ordnung.
x
Kn
K1
K0
K2
Abb. 7: Modi�zierte Hankelfunktionen 0. bis 2. Ordnung.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/8
wobei J 0l = dJl(x)= dx und K0
l = dKl(x)= dx bezeichnen.
Dividiert man nun beide Gleichungen durcheinander, so erhält man die charakteristische Gleichung zur
Bestimmung der Phasenkonstanten � (u und v enthalten nur � als Unbekannte).
u � J 0l (u)Jl(u)
=v �K0
l (v)
Kl(v)(35)
Für vorgegebenes V und vorgegebene Umfangsordnung l kann die Ausbreitungskonstante aus Gl.
(35) numerisch bestimmt werden. Die Gleichung hat im allgemeinen mehrere Lösungen, die mit p =
1; 2; 3::: nummeriert werden. p bezeichnet dabei die Anzahl der Feldextrema in radialer Richtung. Daher
wird die Bezeichnung LPlp-Welle mit der Umfangsordnung l und der radialen Ordnung p gewählt.
(Feldverteilungen einiger LPlp-Wellen sind in Abb. 8 dargestellt.)
Mit vorgegebener Dimensionierung (a; �0; n1; n2) der Faser folgt V , damit kann aus Gl. (35) u und v
bestimmt werden. Daraus ergibt sich mit Gl. (26) und Gl. (27) � und mit Gl. (31) und Gl. (32) auch
die Feldverteilung (r; '). Die Lösung von Gl. (35) ist in Abb. 9 dargestellt. Sie zeigt die normierte
Phasenkonstante B ( vergl. Gl. (25)) als Funktion von V .
Wie man aus Abb. 9 erkennt, ist für genügend kleine V < 2; 405 nur noch die LP01-Welle ausbrei-
tungsfähig.
Das bedeutet, dass für einen Faserparameter
V < 2; 405 (36)
eine einmodige Faser vorliegt (allerdings ist die dann verbleibende LP01-Welle noch in 2 Polarisationen
(Ex und Ey ) ausbreitungsfähig). Normalerweise wird ein Faserparameter V > 1; 5 gewählt, da die
Welle sonst zu schwach auf den Faserkern konzentriert ist.
Als Beispiel sei eine Faser folgendermaÿen dimensioniert:
Faserdurchmesser: 2a = 8 µm
Relative Brechzahldi�erenz: � =n1 � n2n1
= 3 � 10�3
Numerische Apertur: AN = 0; 116
Faserparameter: V = 2; 9µm�
Mit dieser Faser wäre ein einwelliger Betrieb also für Wellenlängen 1; 2 µm < � < 1; 9 µm möglich.
(r) des LP01-Grundmodes wird häu�g durch eine Gauÿverteilung angenähert:
(r) = A0 exp
(� r
2
w2
): (37)
w entspricht hierbei dem Fleckradius. Bei einer Stufenfaser mit V > 1; 2 ist wa� 0; 65+ 1;619
V 3=2 +2;879V 6 .
Mit steigendem V nimmt also der Fleckradius ab. Dies entspricht einer zunehmenden Konzentration
des Feldes auf den Faserkern.
TU Berlin � Prof. Dr.-Ing. K. Petermann
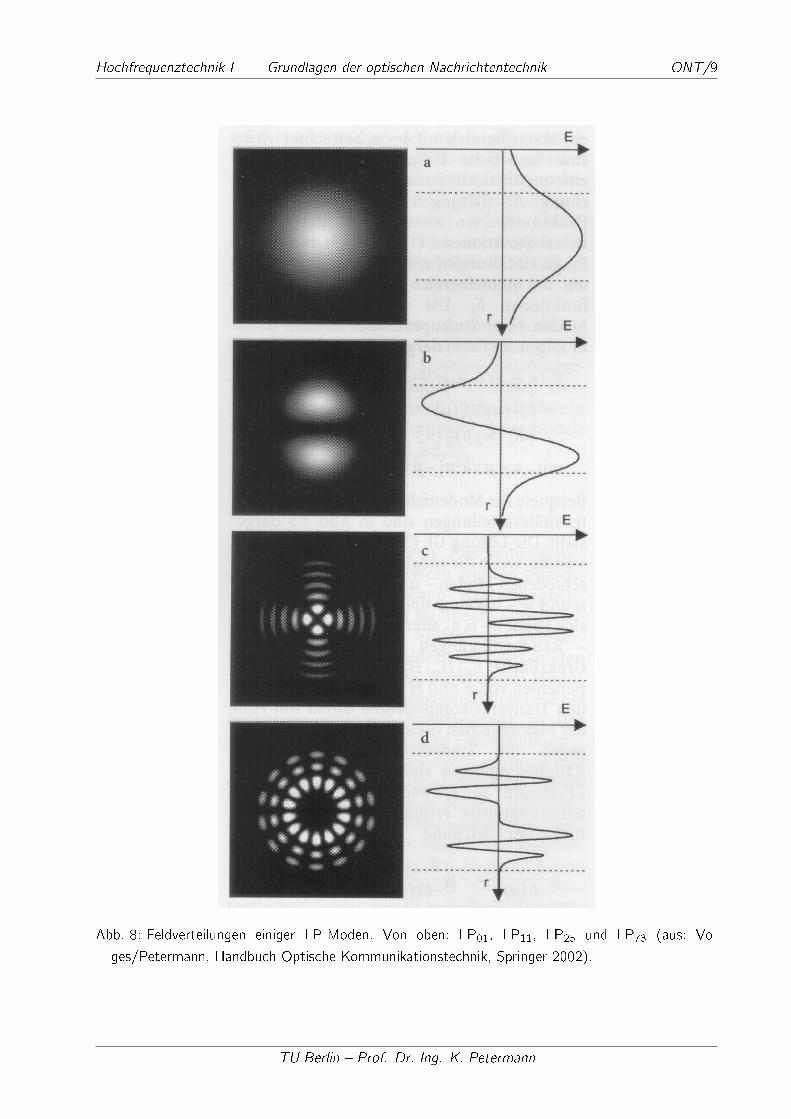
Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/9
Abb. 8: Feldverteilungen einiger LP-Moden. Von oben: LP01, LP11, LP25 und LP73 (aus: Vo-
ges/Petermann, Handbuch Optische Kommunikationstechnik, Springer 2002).
TU Berlin � Prof. Dr.-Ing. K. Petermann
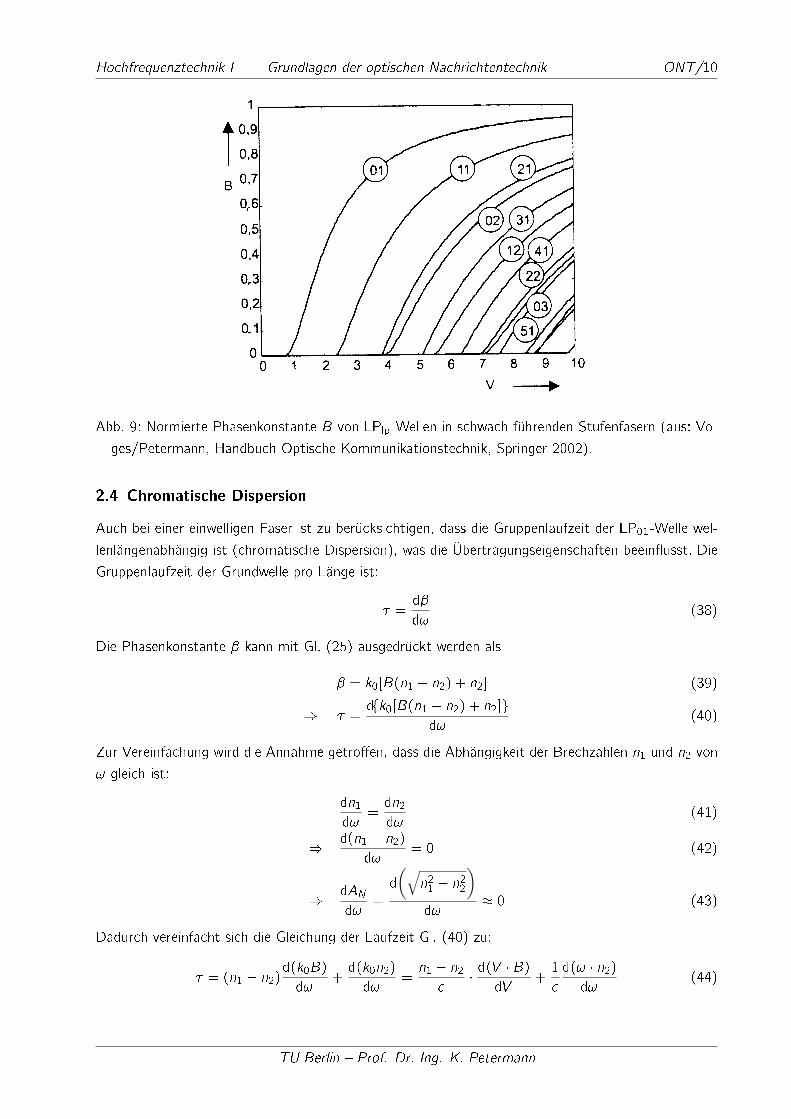
Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/10
Abb. 9: Normierte Phasenkonstante B von LPlp-Wellen in schwach führenden Stufenfasern (aus: Vo-
ges/Petermann, Handbuch Optische Kommunikationstechnik, Springer 2002).
2.4 Chromatische Dispersion
Auch bei einer einwelligen Faser ist zu berücksichtigen, dass die Gruppenlaufzeit der LP01-Welle wel-
lenlängenabhängig ist (chromatische Dispersion), was die Übertragungseigenschaften beein�usst. Die
Gruppenlaufzeit der Grundwelle pro Länge ist:
� =d�
d!(38)
Die Phasenkonstante � kann mit Gl. (25) ausgedrückt werden als
� = k0[B(n1 � n2) + n2] (39)
) � =dfk0[B(n1 � n2) + n2]g
d!(40)
Zur Vereinfachung wird die Annahme getro�en, dass die Abhängigkeit der Brechzahlen n1 und n2 von
! gleich ist:
dn1
d!=
dn2
d!(41)
) d(n1 � n2)d!
= 0 (42)
) dANd!
=
d
(√n21 � n22
)d!
� 0 (43)
Dadurch vereinfacht sich die Gleichung der Laufzeit Gl. (40) zu:
� = (n1 � n2)d(k0B)d!
+d(k0n2)
d!=n1 � n2c
� d(V � B)dV
+1
c
d(! � n2)d!
(44)
TU Berlin � Prof. Dr.-Ing. K. Petermann
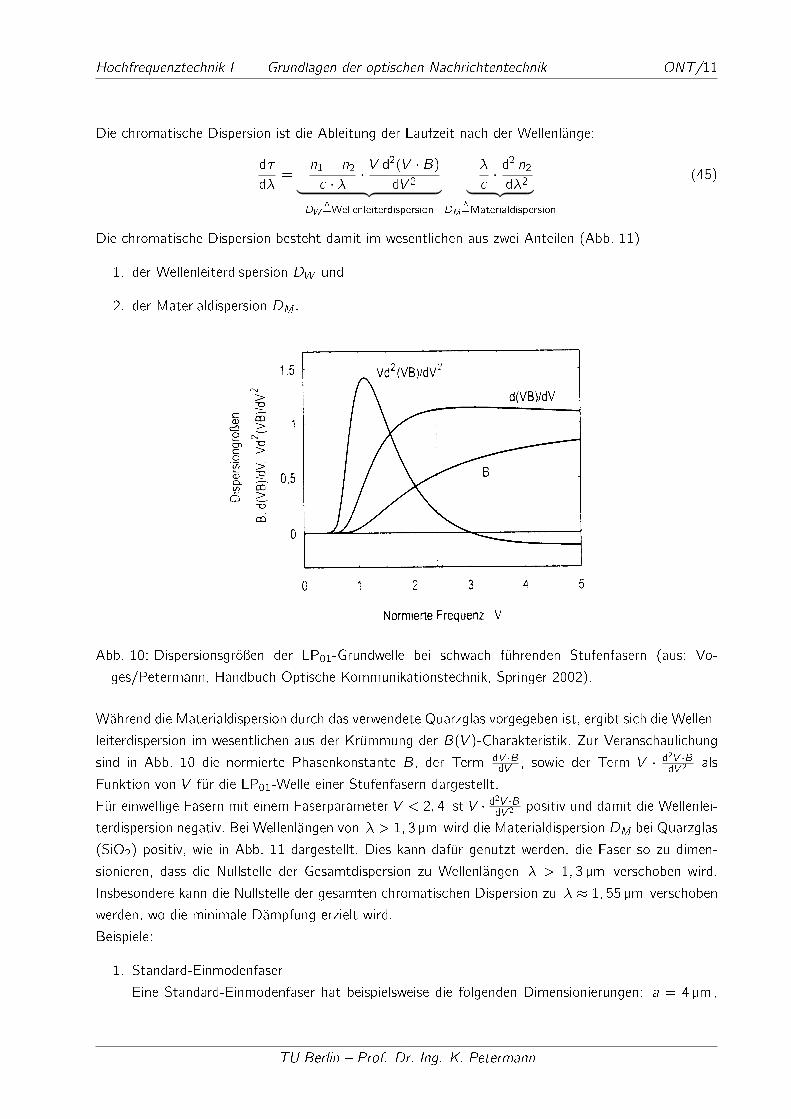
Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/11
Die chromatische Dispersion ist die Ableitung der Laufzeit nach der Wellenlänge:
d�
d�= �n1 � n2
c � � � V d2(V � B)dV 2︸ ︷︷ ︸
DW^
=Wellenleiterdispersion
��c� d
2 n2
d�2︸ ︷︷ ︸DM
^
=Materialdispersion
(45)
Die chromatische Dispersion besteht damit im wesentlichen aus zwei Anteilen (Abb. 11)
1. der Wellenleiterdispersion DW und
2. der Materialdispersion DM .
Abb. 10: Dispersionsgröÿen der LP01-Grundwelle bei schwach führenden Stufenfasern (aus: Vo-
ges/Petermann, Handbuch Optische Kommunikationstechnik, Springer 2002).
Während die Materialdispersion durch das verwendete Quarzglas vorgegeben ist, ergibt sich die Wellen-
leiterdispersion im wesentlichen aus der Krümmung der B(V )-Charakteristik. Zur Veranschaulichung
sind in Abb. 10 die normierte Phasenkonstante B, der Term dV �BdV
, sowie der Term V � d2V �BdV 2 als
Funktion von V für die LP01-Welle einer Stufenfasern dargestellt.
Für einwellige Fasern mit einem Faserparameter V < 2; 4 ist V � d2V �BdV 2 positiv und damit die Wellenlei-
terdispersion negativ. Bei Wellenlängen von � > 1; 3 µm wird die Materialdispersion DM bei Quarzglas
(SiO2) positiv, wie in Abb. 11 dargestellt. Dies kann dafür genutzt werden, die Faser so zu dimen-
sionieren, dass die Nullstelle der Gesamtdispersion zu Wellenlängen � > 1; 3 µm verschoben wird.
Insbesondere kann die Nullstelle der gesamten chromatischen Dispersion zu � � 1; 55 µm verschoben
werden, wo die minimale Dämpfung erzielt wird.
Beispiele:
1. Standard-Einmodenfaser
Eine Standard-Einmodenfaser hat beispielsweise die folgenden Dimensionierungen: a = 4 µm ,
TU Berlin � Prof. Dr.-Ing. K. Petermann
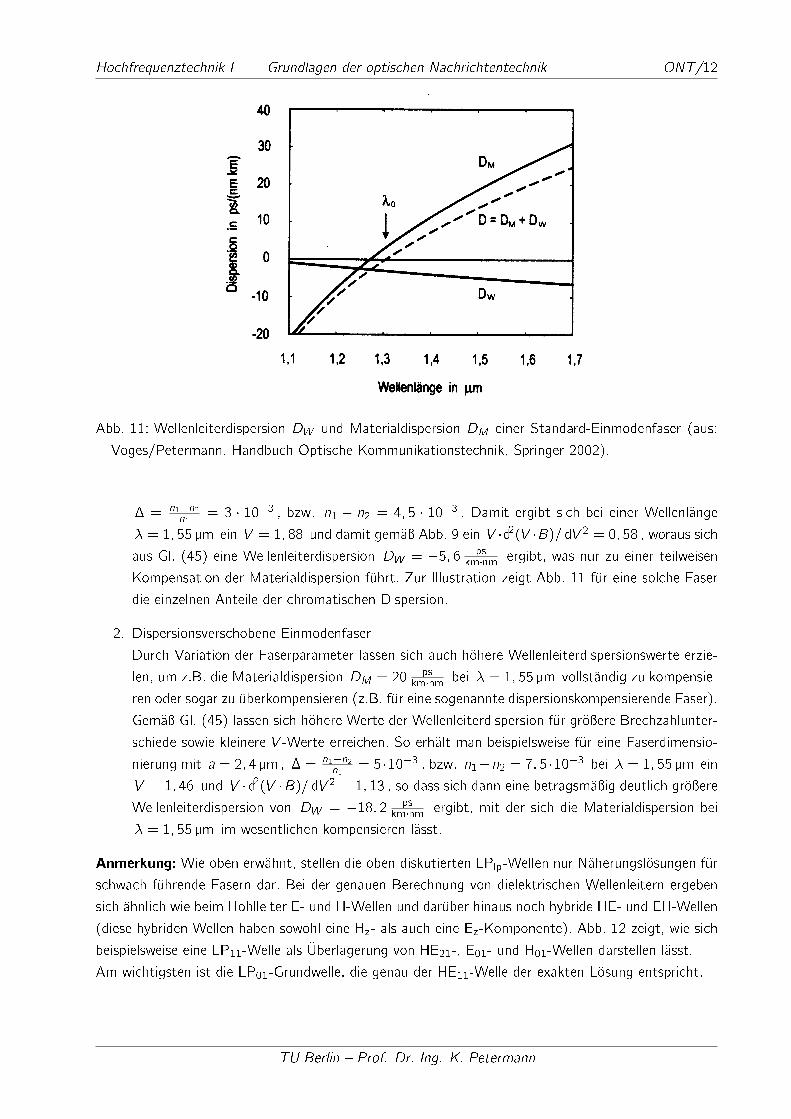
Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/12
Abb. 11: Wellenleiterdispersion DW und Materialdispersion DM einer Standard-Einmodenfaser (aus:
Voges/Petermann, Handbuch Optische Kommunikationstechnik, Springer 2002).
� = n1�n2n1
= 3 � 10�3 , bzw. n1 � n2 = 4; 5 � 10�3 . Damit ergibt sich bei einer Wellenlänge
� = 1; 55 µm ein V = 1; 88 und damit gemäÿ Abb. 9 ein V �d2(V �B)= dV 2 = 0; 58 , woraus sich
aus Gl. (45) eine Wellenleiterdispersion DW = �5; 6 pskm�nm
ergibt, was nur zu einer teilweisen
Kompensation der Materialdispersion führt. Zur Illustration zeigt Abb. 11 für eine solche Faser
die einzelnen Anteile der chromatischen Dispersion.
2. Dispersionsverschobene Einmodenfaser
Durch Variation der Faserparameter lassen sich auch höhere Wellenleiterdispersionswerte erzie-
len, um z.B. die Materialdispersion DM = 20 pskm�nm
bei � = 1; 55 µm vollständig zu kompensie-
ren oder sogar zu überkompensieren (z.B. für eine sogenannte dispersionskompensierende Faser).
Gemäÿ Gl. (45) lassen sich höhere Werte der Wellenleiterdispersion für gröÿere Brechzahlunter-
schiede sowie kleinere V -Werte erreichen. So erhält man beispielsweise für eine Faserdimensio-
nierung mit a = 2; 4 µm , � = n1�n2n1
= 5 �10�3 , bzw. n1�n2 = 7; 5 �10�3 bei � = 1; 55 µm ein
V = 1; 46 und V �d2(V �B)= dV 2 = 1; 13 , so dass sich dann eine betragsmäÿig deutlich gröÿere
Wellenleiterdispersion von DW = �18; 2 pskm�nm
ergibt, mit der sich die Materialdispersion bei
� = 1; 55 µm im wesentlichen kompensieren lässt.
Anmerkung: Wie oben erwähnt, stellen die oben diskutierten LPlp-Wellen nur Näherungslösungen für
schwach führende Fasern dar. Bei der genauen Berechnung von dielektrischen Wellenleitern ergeben
sich ähnlich wie beim Hohlleiter E- und H-Wellen und darüber hinaus noch hybride HE- und EH-Wellen
(diese hybriden Wellen haben sowohl eine Hz- als auch eine Ez-Komponente). Abb. 12 zeigt, wie sich
beispielsweise eine LP11-Welle als Überlagerung von HE21-, E01- und H01-Wellen darstellen lässt.
Am wichtigsten ist die LP01-Grundwelle, die genau der HE11-Welle der exakten Lösung entspricht.
TU Berlin � Prof. Dr.-Ing. K. Petermann
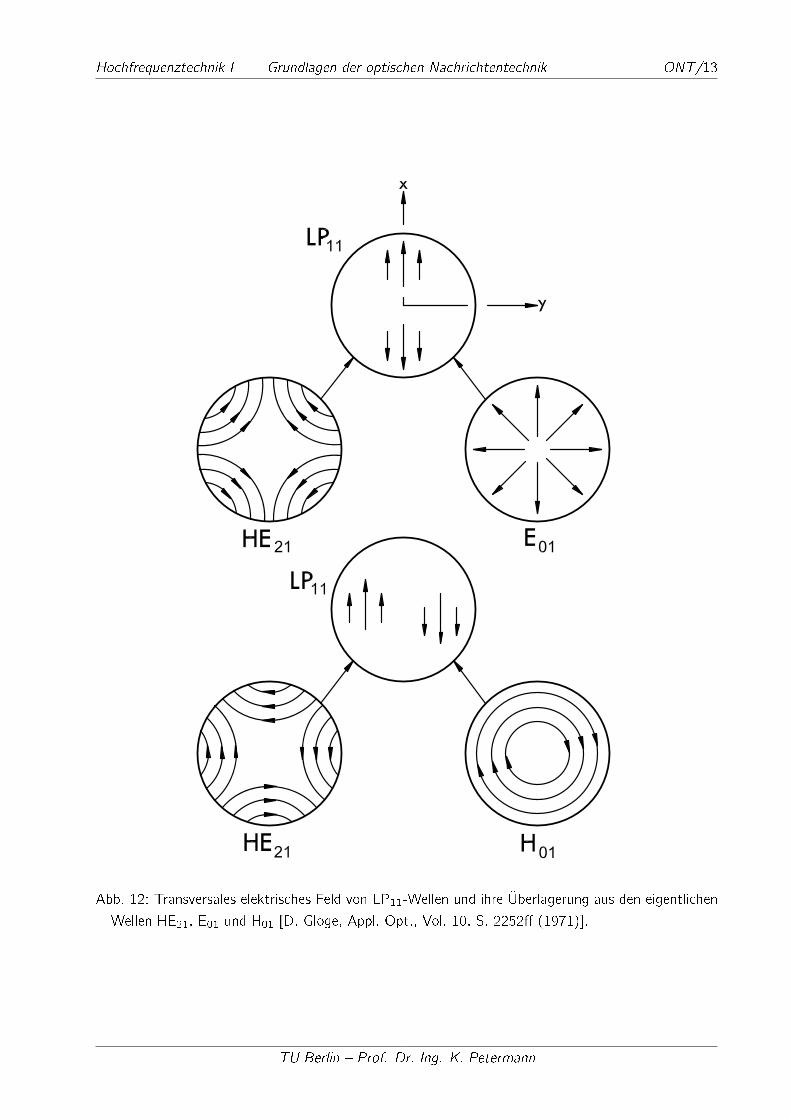
Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/13
Abb. 12: Transversales elektrisches Feld von LP11-Wellen und ihre Überlagerung aus den eigentlichen
Wellen HE21, E01 und H01 [D. Gloge, Appl. Opt., Vol. 10, S. 2252� (1971)].
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/14
3 Gradientenfaser
Eine Einmodenfaser stellt ein nahezu ideales Übertragungsmedium dar, wegen der Forderung nach
kleinem V entsprechend Gl. (36) entspricht dies aber der Forderung nach kleinem Kerndurchmesser
2a und/oder einer kleinen numerischen Apertur AN . Dies erschwert die Licht-Einkopplung in derartige
Fasern sowie die Realisierung von Fasersteckern bzw. -spleiÿen.
Insbesondere für Kurzstreckensysteme oder die Gebäudeverkabelung ist es deshalb wünschenswert,
Vielmodenfasern mit gröÿerem Kerndurchmesser und/oder höherer numerischer Apertur zu verwenden.
Abb. 3 zeigt noch einmal den Strahlenverlauf in einer Stufenfaser. Es ist o�ensichtlich, dass die Laufzeit
der Wellen (bzw. Strahlen) mit zunehmendem �1 zunimmt. Wenn man die Laufzeitdi�erenz zwischen
dem schnellsten (�1 = 0) und dem langsamsten (�1 = �g) Strahl einer Faser der Länge L berechnet,
ergibt sich näherungsweise
�t =L
2c0n1A2N : (46)
Für eine typische Faser mit AN = 0; 2 und n1 = 1; 46 ergibt sich ein �t=L = 45 ns/km, was bei
einer Übertragungslänge von L = 1 km und binärer Übertragung nur noch eine Übertragung von ca.
20Mb/s zulässt.
Ein Trick besteht darin, statt eines Stufenpro�ls ein sog. Gradientenpro�l für den Brechzahlverlauf
wie in Abb. 3 zu verwenden:
��
��
��
����
��
��
��
��
��
��
����
� � � � � � � � � � � � � � � � � � � �
Abb. 13: Strahlverlauf in a) einer Stufenfaser und b) einer Gradientenfaser.
In der Gradientenfaser gelangen die Strahlen mit höherem �1 in Bereiche mit kleinerer Brechzahl
und werden damit schneller. Durch geeignete Wahl eines Brechzahlpro�ls n(r) können sich gröÿere
Weglänge und die erreichte höhere Geschwindigkeit entlang des Strahlweges gerade aufheben. Der
Brechzahlverlauf einer Gradientenfaser wird häu�g beschrieben durch das sog. Potenzpro�l (power-
law pro�le)
n2(r) =
n21
(1� 2�
[r
a
]g)für r � a
n21(1� 2�) = n22 für r > a
(47)
mit dem Pro�lexponenten g. Beispielsweise wird mit g = 2 das parabolische Brechzahlpro�l und mit
g !1 das Stufenpro�l beschrieben.
TU Berlin � Prof. Dr.-Ing. K. Petermann
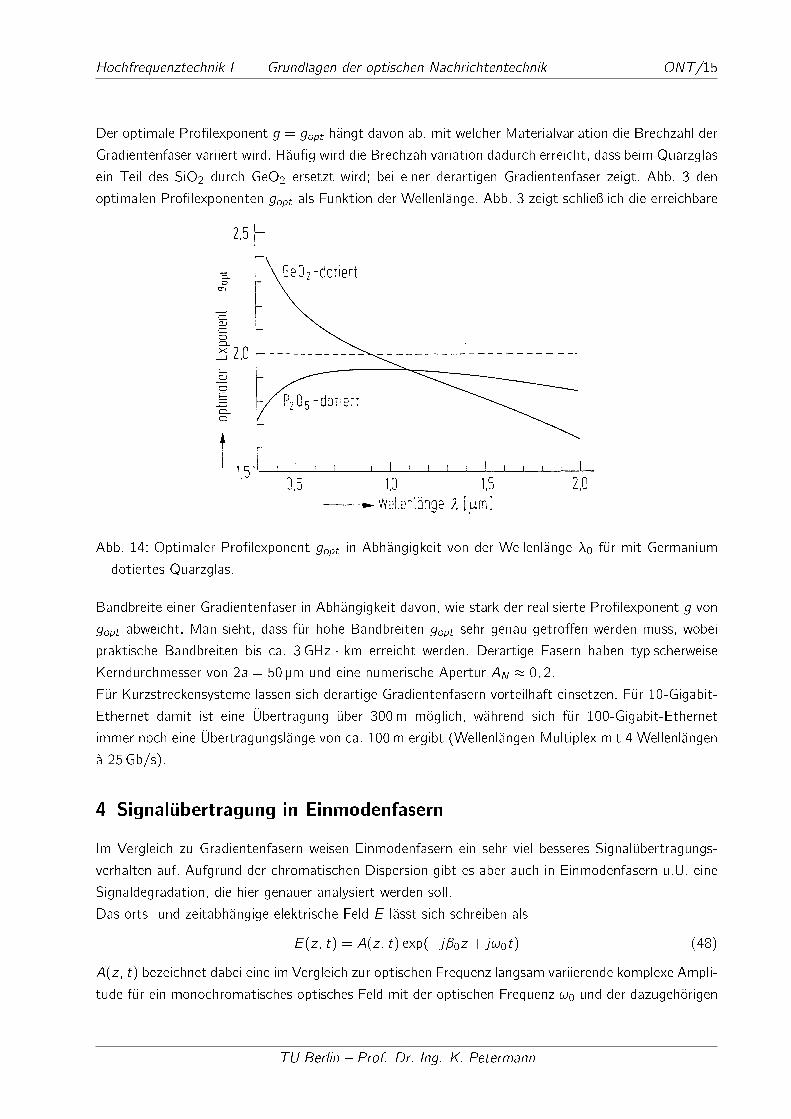
Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/15
Der optimale Pro�lexponent g = gopt hängt davon ab, mit welcher Materialvariation die Brechzahl der
Gradientenfaser variiert wird. Häu�g wird die Brechzahlvariation dadurch erreicht, dass beim Quarzglas
ein Teil des SiO2 durch GeO2 ersetzt wird; bei einer derartigen Gradientenfaser zeigt. Abb. 3 den
optimalen Pro�lexponenten gopt als Funktion der Wellenlänge. Abb. 3 zeigt schlieÿlich die erreichbare
Abb. 14: Optimaler Pro�lexponent gopt in Abhängigkeit von der Wellenlänge �0 für mit Germanium
dotiertes Quarzglas.
Bandbreite einer Gradientenfaser in Abhängigkeit davon, wie stark der realisierte Pro�lexponent g von
gopt abweicht. Man sieht, dass für hohe Bandbreiten gopt sehr genau getro�en werden muss, wobei
praktische Bandbreiten bis ca. 3GHz � km erreicht werden. Derartige Fasern haben typischerweise
Kerndurchmesser von 2a = 50 µm und eine numerische Apertur AN � 0; 2.
Für Kurzstreckensysteme lassen sich derartige Gradientenfasern vorteilhaft einsetzen. Für 10-Gigabit-
Ethernet damit ist eine Übertragung über 300m möglich, während sich für 100-Gigabit-Ethernet
immer noch eine Übertragungslänge von ca. 100m ergibt (Wellenlängen-Multiplex mit 4 Wellenlängen
à 25Gb/s).
4 Signalübertragung in Einmodenfasern
Im Vergleich zu Gradientenfasern weisen Einmodenfasern ein sehr viel besseres Signalübertragungs-
verhalten auf. Aufgrund der chromatischen Dispersion gibt es aber auch in Einmodenfasern u.U. eine
Signaldegradation, die hier genauer analysiert werden soll.
Das orts- und zeitabhängige elektrische Feld E lässt sich schreiben als
E(z; t) = A(z; t) exp(�j�0z + j!0t) (48)
A(z; t) bezeichnet dabei eine im Vergleich zur optischen Frequenz langsam variierende komplexe Ampli-
tude für ein monochromatisches optisches Feld mit der optischen Frequenz !0 und der dazugehörigen
TU Berlin � Prof. Dr.-Ing. K. Petermann
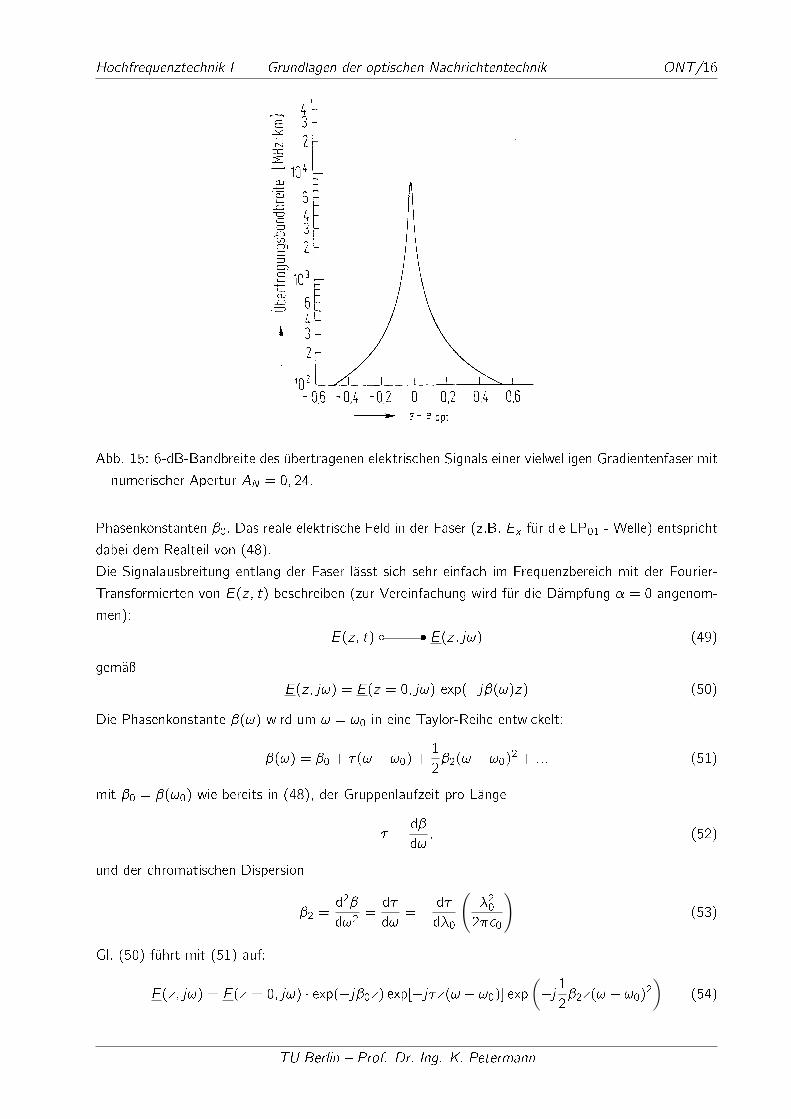
Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/16
Abb. 15: 6-dB-Bandbreite des übertragenen elektrischen Signals einer vielwelligen Gradientenfaser mit
numerischer Apertur AN = 0; 24.
Phasenkonstanten �0. Das reale elektrische Feld in der Faser (z.B. Ex für die LP01 - Welle) entspricht
dabei dem Realteil von (48).
Die Signalausbreitung entlang der Faser lässt sich sehr einfach im Frequenzbereich mit der Fourier-
Transformierten von E(z; t) beschreiben (zur Vereinfachung wird für die Dämpfung � = 0 angenom-
men):
E(z; t) � � E(z; j!) (49)
gemäÿ
E(z; j!) = E(z = 0; j!) exp(�j�(!)z) (50)
Die Phasenkonstante �(!) wird um ! = !0 in eine Taylor-Reihe entwickelt:
�(!) = �0 + �(! � !0) + 1
2�2(! � !0)2 + ::: (51)
mit �0 = �(!0) wie bereits in (48), der Gruppenlaufzeit pro Länge
� =d�
d!; (52)
und der chromatischen Dispersion
�2 =d2�
d!2=
d�
d!= � d�
d�0
(�202�c0
)(53)
Gl. (50) führt mit (51) auf:
E(z; j!) = E(z = 0; j!) � exp(�j�0z) exp[�j�z(! � !0)] exp(�j 1
2�2z(! � !0)2
)(54)
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/17
Mit Gl. (54) ist die Signalausbreitung prinzipiell vollständig beschrieben. Uns interessiert jedoch die
Signalausbreitung bezüglich der Amplitudenfunktion A(z; t), wobei es zweckmäÿig ist, eine retardierte
Zeitachse (t 0 = t � � � z) einzuführen, da die Gruppenlaufzeit des Signals im wesentlichen durch
� � z gegeben ist. Für die Amplitudenfunktion wird nun eine Fouriertransformierte mit t = t 0 + � � zeingeführt:
A(z; t 0 + � � z) � � A(z; j) (55)
wobei die Frequenz der Di�erenz zwischen ! des Feldes in Gl. (49)-(51) und !0, d.h. = !�!0,entspricht.
Ähnlich zu Gl. (54) ergibt sich:
A(z; j) = A(z = 0; j) exp
(�j 1
2�2z
2
)(56)
Gl. (56) lässt sich als Di�erentialgleichung schreiben,
@A(z; j)
@z= A(z; j)
(�j 1
2�2
2
)(57)
Mit der retardierten Zeitachse t � t � �z und @=@t = j lässt sich (57) in den Zeitbereich transfor-
mieren:@A(z; t)
@z= j
�2
2
@2A(z; t)
@t2(58)
Die Kenntnis der Signalform A(z; t) an der Stelle z ermöglicht damit die Berechnung der Signalform
an der Stelle (z + �z).
Im Prinzip ist bereits mit der Gl. (56) die Signalübertragung entlang der Faser mit chromatischer
Dispersion vollständig beschrieben. Wenn am Faseranfang (z = 0) das Signal bekannt ist, ist auch
dessen Fourier-Transformation A(z = 0; j) bekannt, woraus sich dann A(z; j) bei beliebigem z
ergibt. Daraus ergibt sich dann durch Fourier-Rücktransformation A(z; t).
4.1 Übertragung eines Gauÿ'schen Pulses
Die Gauÿfunktion hat die Eigenschaft, dass auch deren Fourier-Transformierte wieder eine Gauÿfunk-
tion darstellt (vgl. Abschnitt S). Bei einem Gauÿförmigen Spektrum A(z = 0; j) ergibt sich wegen
Gl. (57) für alle z wieder ein Gauÿförmiges Spektrum, so dass es naheliegend ist, die Ausbreitung eines
Gauÿförmigen Pulses entlang einer dispersiven Faser zu analysieren. Die komplexe Amplitude A(z; t)
sei so normiert, dass für die optische Leistung P in der Faser
P (z; t) = jA(z; t)j2 (59)
gilt. Für z = 0 sei
P (z = 0; t) = P0 exp(�[t=t0]2
)(60)
und damit für die komplexe Amplitude
A(z = 0; t) =√P0 exp
(�1
2
[t
t0
]2)exp
(j'(t)
)(61)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/18
mit einer eventuellen zusätzlichen Phasenmodulation '(t). Beispielsweise führt die Modulation eines
Halbleiterlasers (aber auch von sonstigen externen Modulatoren) nicht nur zu einer Leistungsmodu-
lation, sondern auch zu einer Modulation der optischen Frequenz (chirp). Dies liegt daran, dass sich
bei einer Modulation der optischen Verstärkung auch die Brechzahl innerhalb des Halbleiterlasers und
damit die optische Emissionsfrequenz ändert. Dies lässt sich durch einen Parameter
�ch =�n0
�n00(62)
beschreiben, der die Kopplung zwischen einer Variation des Imaginärteils und des Realteils der Brech-
zahl beschreibt. Für eine Lasermodulation gilt (siehe z.B. K. Petermann, �Laser diode modulation and
noise�, Kluwer Academic 1991):
d'
dt= 2�(�(t)� �0) = �ch
2
(1
P
dP
dt
)(63)
woraus für den Gauÿförmigen Puls von Gl.(60) folgt:
d'
dt= �
(�ch=t
20
)t (64)
bzw.
'(t) = ��ch2
(t=t0)2 (65)
so dass sich die komplexe Amplitude gemäÿ Gl.(61) ergibt zu
A(z = 0; t) =√P0 exp
(�1
2(t=t0)
2(1 + j�ch)
)(66)
A(z; t) ergibt sich dann gemäÿ Gl.(57),(58).
Wie oben diskutiert bleibt die Gauÿ'sche Pulsform bei Ausbreitung entlang der Faser erhalten:
P (z; t) � exp(�[t=t1(z)]2
); (67)
wobei die Fourier-Transformation von Gl (66) mit Gl. (56) schlieÿlich auf
t1(z) = t0
√√√√(1� �ch�2zt20
)2
+
(�2z
t20
)2
(68)
führt. Abb. 16 zeigt den Verlauf der Pulsbreite für �2 < 0 (wie bei einer Standardfaser mit � =
1; 55 µm, dort ist �2 � �20 ps2=km). LD bezeichnet dabei die sog. Dispersionslänge:
LD = t20=j�2j: (69)
Ohne �Chirp� (�ch = 0) ergibt sich eine monotone Pulsverbreiterung, während sich für �ch � �2 > 0
auch eine Pulsverschmälerung ergeben kann. Aufgrund der Pulsverbreiterung eines Gauÿ-Pulses lässt
sich die maximal mögliche Übertragungsrate abschätzen.
TU Berlin � Prof. Dr.-Ing. K. Petermann
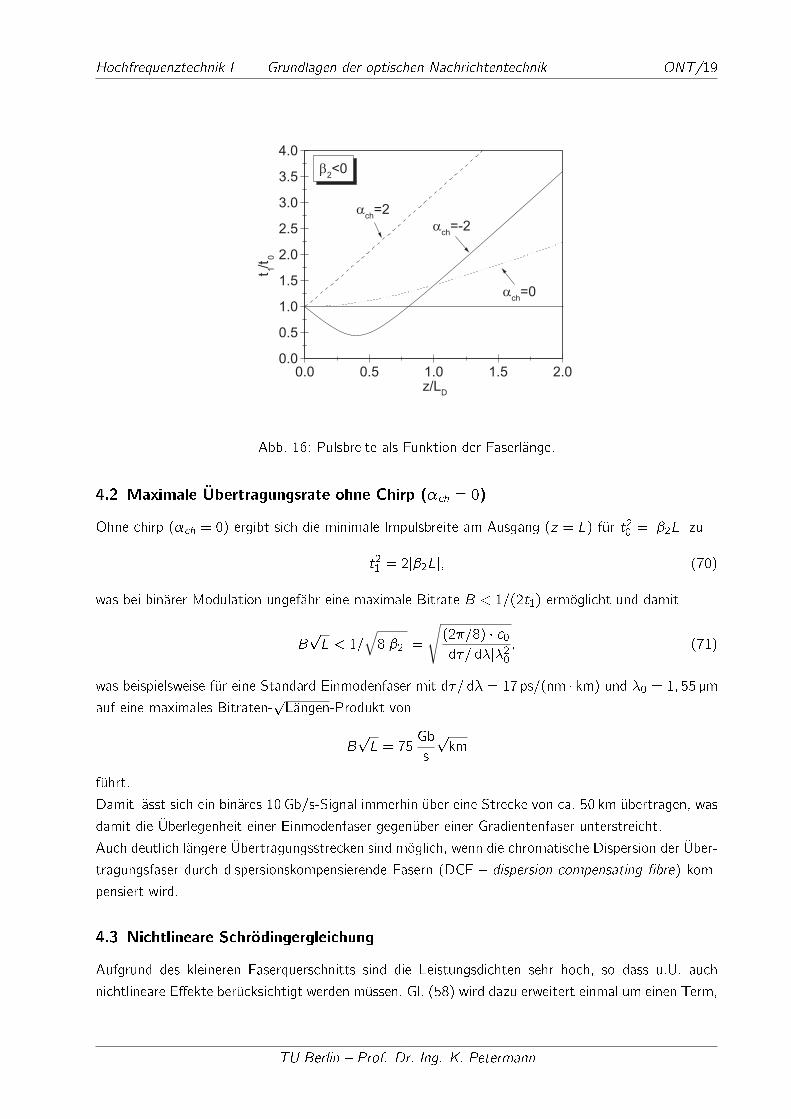
Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/19
��� ��� ��� ��� ������
���
���
���
���
���
���
���
������
����
��� �����
����
� ��� �
Abb. 16: Pulsbreite als Funktion der Faserlänge.
4.2 Maximale Übertragungsrate ohne Chirp (�ch = 0)
Ohne chirp (�ch = 0) ergibt sich die minimale Impulsbreite am Ausgang (z = L) für t20 = j�2Lj zu
t21 = 2j�2Lj; (70)
was bei binärer Modulation ungefähr eine maximale Bitrate B < 1=(2t1) ermöglicht und damit
BpL < 1=
√8j�2j =
√(2�=8) � c0j d�= d�j�20
; (71)
was beispielsweise für eine Standard-Einmodenfaser mit d�= d� = 17 ps=(nm � km) und �0 = 1; 55 µm
auf eine maximales Bitraten-pLängen-Produkt von
BpL = 75
Gb
s
pkm
führt.
Damit lässt sich ein binäres 10Gb/s-Signal immerhin über eine Strecke von ca. 50 km übertragen, was
damit die Überlegenheit einer Einmodenfaser gegenüber einer Gradientenfaser unterstreicht.
Auch deutlich längere Übertragungsstrecken sind möglich, wenn die chromatische Dispersion der Über-
tragungsfaser durch dispersionskompensierende Fasern (DCF � dispersion-compensating �bre) kom-
pensiert wird.
4.3 Nichtlineare Schrödingergleichung
Aufgrund des kleineren Faserquerschnitts sind die Leistungsdichten sehr hoch, so dass u.U. auch
nichtlineare E�ekte berücksichtigt werden müssen. Gl. (58) wird dazu erweitert einmal um einen Term,
TU Berlin � Prof. Dr.-Ing. K. Petermann
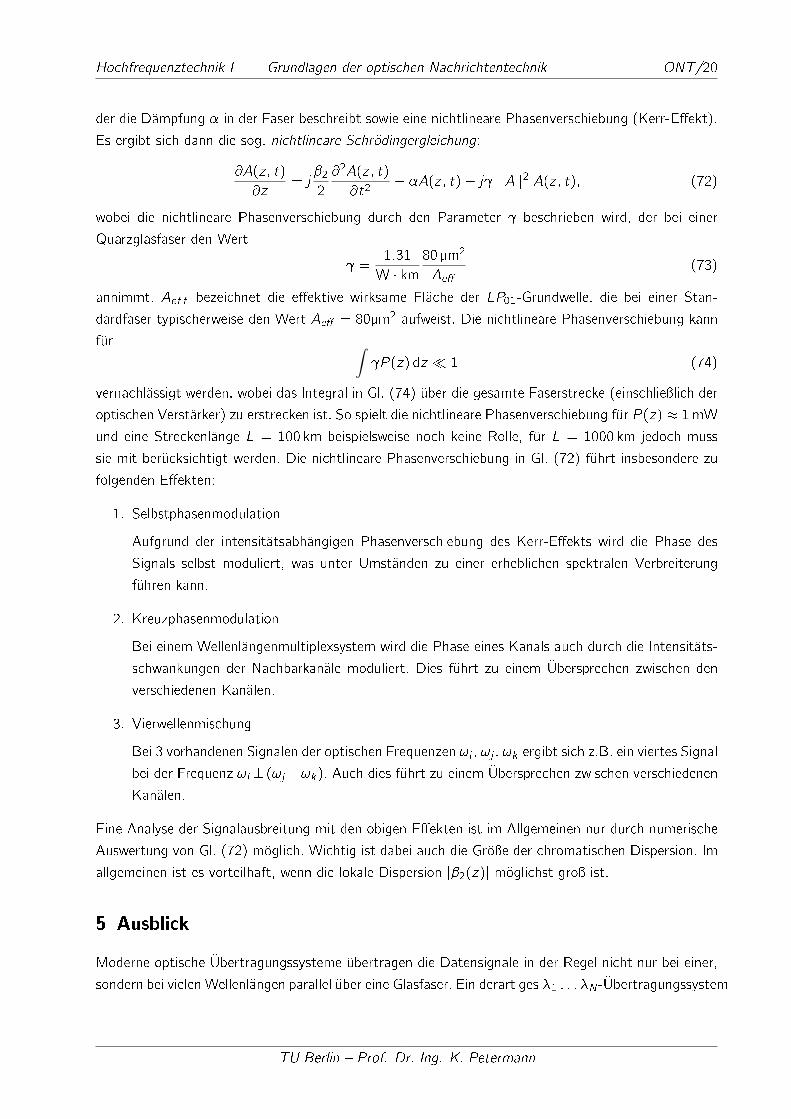
Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/20
der die Dämpfung � in der Faser beschreibt sowie eine nichtlineare Phasenverschiebung (Kerr-E�ekt).
Es ergibt sich dann die sog. nichtlineare Schrödingergleichung:
@A(z; t)
@z= j
�2
2
@2A(z; t)
@t2� �A(z; t)� j j A j2 A(z; t); (72)
wobei die nichtlineare Phasenverschiebung durch den Parameter beschrieben wird, der bei einer
Quarzglasfaser den Wert
=1:31
W � km80 µm2
Ae�
(73)
annimmt. Aef f bezeichnet die e�ektive wirksame Fläche der LP01-Grundwelle, die bei einer Stan-
dardfaser typischerweise den Wert Ae� = 80µm2 aufweist. Die nichtlineare Phasenverschiebung kann
für ∫ P (z) dz � 1 (74)
vernachlässigt werden, wobei das Integral in Gl. (74) über die gesamte Faserstrecke (einschlieÿlich der
optischen Verstärker) zu erstrecken ist. So spielt die nichtlineare Phasenverschiebung für P (z) � 1mW
und eine Streckenlänge L = 100 km beispielsweise noch keine Rolle, für L = 1000 km jedoch muss
sie mit berücksichtigt werden. Die nichtlineare Phasenverschiebung in Gl. (72) führt insbesondere zu
folgenden E�ekten:
1. Selbstphasenmodulation
Aufgrund der intensitätsabhängigen Phasenverschiebung des Kerr-E�ekts wird die Phase des
Signals selbst moduliert, was unter Umständen zu einer erheblichen spektralen Verbreiterung
führen kann.
2. Kreuzphasenmodulation
Bei einem Wellenlängenmultiplexsystem wird die Phase eines Kanals auch durch die Intensitäts-
schwankungen der Nachbarkanäle moduliert. Dies führt zu einem Übersprechen zwischen den
verschiedenen Kanälen.
3. Vierwellenmischung
Bei 3 vorhandenen Signalen der optischen Frequenzen !i , !j , !k ergibt sich z.B. ein viertes Signal
bei der Frequenz !i � (!j �!k). Auch dies führt zu einem Übersprechen zwischen verschiedenen
Kanälen.
Eine Analyse der Signalausbreitung mit den obigen E�ekten ist im Allgemeinen nur durch numerische
Auswertung von Gl. (72) möglich. Wichtig ist dabei auch die Gröÿe der chromatischen Dispersion. Im
allgemeinen ist es vorteilhaft, wenn die lokale Dispersion j�2(z)j möglichst groÿ ist.
5 Ausblick
Moderne optische Übertragungssysteme übertragen die Datensignale in der Regel nicht nur bei einer,
sondern bei vielen Wellenlängen parallel über eine Glasfaser. Ein derartiges �1 : : : �N-Übertragungssystem
TU Berlin � Prof. Dr.-Ing. K. Petermann
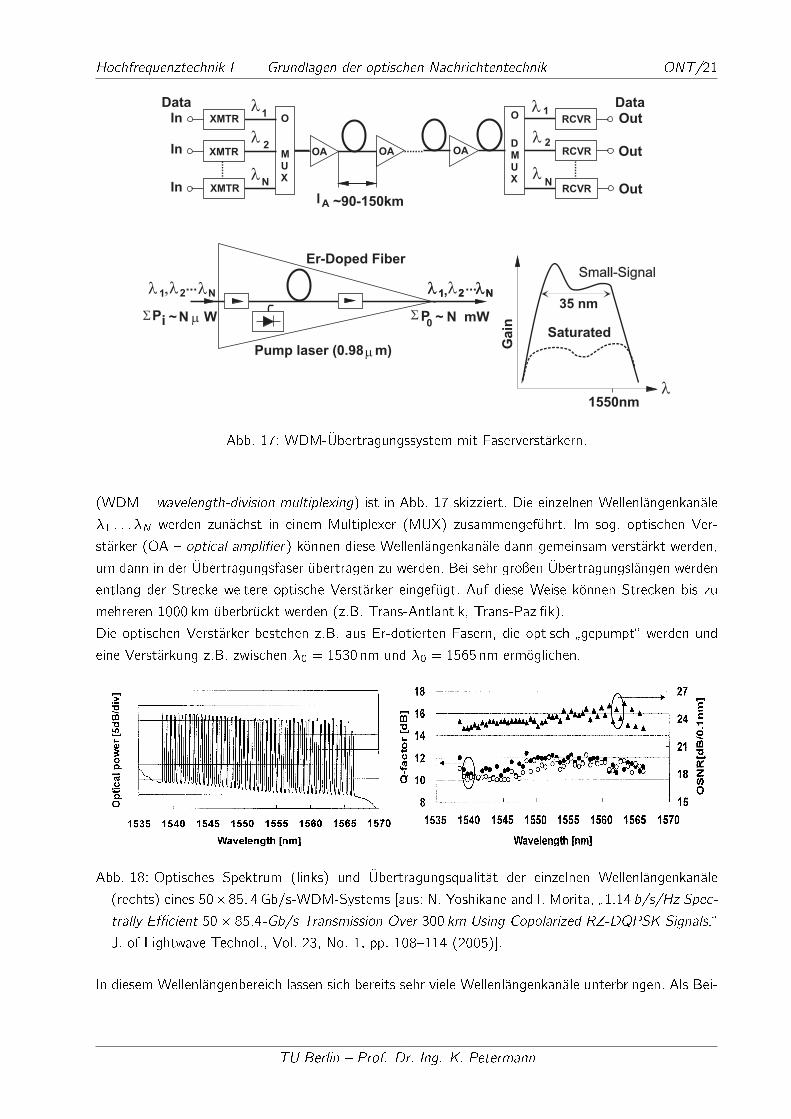
Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/21
����
����
����
�
��������������
� � �
�
���
����
����
����
� � ��
��
��
���
���
���
�
�
�
�
�
�
�
�
���������
� �
�
�
�
����� ��
������ � !�"�#�$����%
����&
'!�(� )�*+, !
�
��
�� �� ���� � ��
�����&� ���
###
�
###-
�����������
. ��! � )
������
/ +�
�
�+0����
Abb. 17: WDM-Übertragungssystem mit Faserverstärkern.
(WDM � wavelength-division multiplexing) ist in Abb. 17 skizziert. Die einzelnen Wellenlängenkanäle
�1 : : : �N werden zunächst in einem Multiplexer (MUX) zusammengeführt. Im sog. optischen Ver-
stärker (OA � optical ampli�er) können diese Wellenlängenkanäle dann gemeinsam verstärkt werden,
um dann in der Übertragungsfaser übertragen zu werden. Bei sehr groÿen Übertragungslängen werden
entlang der Strecke weitere optische Verstärker eingefügt. Auf diese Weise können Strecken bis zu
mehreren 1000 km überbrückt werden (z.B. Trans-Antlantik, Trans-Pazi�k).
Die optischen Verstärker bestehen z.B. aus Er-dotierten Fasern, die optisch �gepumpt� werden und
eine Verstärkung z.B. zwischen �0 = 1530 nm und �0 = 1565 nm ermöglichen.
YOSHIKANE AND MORITA: 1.14 b/s/Hz SPECTRALLY EFFICIENT 50 85.4-Gb/s TRANSMISSION OVER 300 km 113
Fig. 8. Signal waveforms of ch26 after 300-km transmission. (a) BeforeMZDI, (b) constructive port, (c) destructive port, and (d) after double-balancedreceiver.
Fig. 9. Optical spectrum after 300-km transmission (CW light).
EDFA repeaters. In this experiment, the optically prefilteredRZ-DQPSK signal can improve the spectral efficiency dras-
Fig. 10. -factor and OSNR after 300-km transmission. (Open circles:In-phase component; filled dots: Quadrature component).
tically in a single polarization and leads to 4-Tb/s capacity trans-mission with only the 27.6-nm bandwidth.
ACKNOWLEDGMENT
The authors would like to thank T. Asami, M. Suzuki, Y.Nagao, and N. Edagawa of KDDI R&D Laboratories for theircontinued encouragement.
REFERENCES
[1] T. Ito, T. Ono, Y. Yano, K. Fukuchi, H. Yamazaki, M. Yamaguchi, andK. Emura, “Feasibility study on over 1 bit/s/Hz high spectral efficiencyWDM with optical duobinary coding and polarization interleave multi-plexing,” in Proc. 1997 Optical Fiber Conf. (OFC’97), Dallas, TX, 1997,Paper TuJ1, pp. 43–45.
[2] H. Sotobayashi, W. Chujo, and K. Kitayama, “1.6 bit/s/Hz, 6.4 Tbit/sOCDM/WDM (4 OCDM 40 WDM 40 Gbit/s) transmission exper-iment,” in Proc. ECOC 2001, Amsterdam, The Netherlands, Sep. 2001,PD.M.1.3, pp. 6–7.
[3] S. Bigo, Y. Frignac, G. Charlet, W. Idler, S. Borne, H. Gross, R. Dischler,W. Poehlmann, P. Tran, C. Simonneau, D. Bayart, G. Veith, A. Jourdan,and J. P. Hamaide, “10.2 Tbit/s (256 42.7 Gbit/s PDM/WDM) trans-mission over 100 km TeraLight™ fiber with 1.28 bit/s/Hz spectral effi-ciency,” presented at the 2001 Optical Fiber Conf. (OFC’01), Anaheim,CA, Mar. 2001, PD25-1.
[4] C. Davidson, L. Liu, A. Lucero, B. Bakhshi, P. Corbett, H. Zhang, Y.Cai, M. Nissov, A. Pilipetskii, and N. Bergano, “Polarization trackingreceiver demonstration over transoceanic distance,” in Proc. 2003 Op-tical Fiber Conf. (OFC’03), Atlanta, GA, Mar. 2003, TuF3, pp. 179–180.
[5] Y. Yamada, H. Taga, Y. Kurosawa, and K. Goto, “Transmission exper-iment of 106% spectral efficiency over 2276 km utilizing polarizationand sideband interleaved VSB (PSI-VSB),” in Proc. ECOC 2003, Ri-mini, Italy, Sep. 2003, Th2.3.2, pp. 964–965.
[6] C. Wree, N. Hecker-Denschlag, E. Gottwald, P. Krummrich, J. Leib-rich, E. Schmidt, B. Lankl, and W. Rosenkranz, “High spectral efficiency1.6-b/s/Hz transmission (8 40-Gb/s with a 25-GHz Grid) over 200-kmSSMF using RZ-DQPSK and polarization multiplexing,” IEEE Photon.Technol. Lett., vol. 15, pp. 1303–1305, Sep. 2003.
[7] P. S. Cho, G. Harston, C. J. Kerr, A. S. Greenblatt, A. Kaplan, Y. Achiam,G. Levy-Yurista, M. Margalit, Y. Gross, and J. B. Khurgin, “Investigationof 2-b/s/Hz 40-Gb/s DWDM transmission over 4 100-km SMF-28fiber using RZ-DQPSK and polarization multiplexing,” IEEE Photon.Technol. Lett., vol. 16, pp. 656–658, Feb. 2004.
[8] Y. Zhu, K. Cordina, N. Jolley, R. Feced, H. Kee, R. Rickard, and A. Had-jifotiou, “1.6 bit/s/Hz orthogonally polarized CSRZ-DQPSK transmis-sion of 8 40 Gbit/s over 320 km NDSF,” presented at the OFC 2004,Los Angeles, CA, Feb. 2004, TuF1.
[9] T. Ito, K. Fukuchi, K. Sekiya, D. Ogasawara, R. Ohhira, and T. Ono, “6.4Tb/s (160 40 Gb/s) WDM transmission experiment with 0.8 bit/s/Hzspectral efficiency,” presented at the ECOC 2000, Munich, Germany,Sep. 2000, PD1.1.
[10] A. H. Gnauck, G. Raybon, S. Chandrasekhar, J. Leuthold, C. Doerr, L.Stulz, and E. Burrows, “25 40-Gb/s copolarized DPSK transmissionover 12 100-km NZDF with 50-GHz channel spacing,” IEEE Photon.Technol. Lett., vol. 15, pp. 467–469, Mar. 2003.
YOSHIKANE AND MORITA: 1.14 b/s/Hz SPECTRALLY EFFICIENT 50 85.4-Gb/s TRANSMISSION OVER 300 km 113
Fig. 8. Signal waveforms of ch26 after 300-km transmission. (a) BeforeMZDI, (b) constructive port, (c) destructive port, and (d) after double-balancedreceiver.
Fig. 9. Optical spectrum after 300-km transmission (CW light).
EDFA repeaters. In this experiment, the optically prefilteredRZ-DQPSK signal can improve the spectral efficiency dras-
Fig. 10. -factor and OSNR after 300-km transmission. (Open circles:In-phase component; filled dots: Quadrature component).
tically in a single polarization and leads to 4-Tb/s capacity trans-mission with only the 27.6-nm bandwidth.
ACKNOWLEDGMENT
The authors would like to thank T. Asami, M. Suzuki, Y.Nagao, and N. Edagawa of KDDI R&D Laboratories for theircontinued encouragement.
REFERENCES
[1] T. Ito, T. Ono, Y. Yano, K. Fukuchi, H. Yamazaki, M. Yamaguchi, andK. Emura, “Feasibility study on over 1 bit/s/Hz high spectral efficiencyWDM with optical duobinary coding and polarization interleave multi-plexing,” in Proc. 1997 Optical Fiber Conf. (OFC’97), Dallas, TX, 1997,Paper TuJ1, pp. 43–45.
[2] H. Sotobayashi, W. Chujo, and K. Kitayama, “1.6 bit/s/Hz, 6.4 Tbit/sOCDM/WDM (4 OCDM 40 WDM 40 Gbit/s) transmission exper-iment,” in Proc. ECOC 2001, Amsterdam, The Netherlands, Sep. 2001,PD.M.1.3, pp. 6–7.
[3] S. Bigo, Y. Frignac, G. Charlet, W. Idler, S. Borne, H. Gross, R. Dischler,W. Poehlmann, P. Tran, C. Simonneau, D. Bayart, G. Veith, A. Jourdan,and J. P. Hamaide, “10.2 Tbit/s (256 42.7 Gbit/s PDM/WDM) trans-mission over 100 km TeraLight™ fiber with 1.28 bit/s/Hz spectral effi-ciency,” presented at the 2001 Optical Fiber Conf. (OFC’01), Anaheim,CA, Mar. 2001, PD25-1.
[4] C. Davidson, L. Liu, A. Lucero, B. Bakhshi, P. Corbett, H. Zhang, Y.Cai, M. Nissov, A. Pilipetskii, and N. Bergano, “Polarization trackingreceiver demonstration over transoceanic distance,” in Proc. 2003 Op-tical Fiber Conf. (OFC’03), Atlanta, GA, Mar. 2003, TuF3, pp. 179–180.
[5] Y. Yamada, H. Taga, Y. Kurosawa, and K. Goto, “Transmission exper-iment of 106% spectral efficiency over 2276 km utilizing polarizationand sideband interleaved VSB (PSI-VSB),” in Proc. ECOC 2003, Ri-mini, Italy, Sep. 2003, Th2.3.2, pp. 964–965.
[6] C. Wree, N. Hecker-Denschlag, E. Gottwald, P. Krummrich, J. Leib-rich, E. Schmidt, B. Lankl, and W. Rosenkranz, “High spectral efficiency1.6-b/s/Hz transmission (8 40-Gb/s with a 25-GHz Grid) over 200-kmSSMF using RZ-DQPSK and polarization multiplexing,” IEEE Photon.Technol. Lett., vol. 15, pp. 1303–1305, Sep. 2003.
[7] P. S. Cho, G. Harston, C. J. Kerr, A. S. Greenblatt, A. Kaplan, Y. Achiam,G. Levy-Yurista, M. Margalit, Y. Gross, and J. B. Khurgin, “Investigationof 2-b/s/Hz 40-Gb/s DWDM transmission over 4 100-km SMF-28fiber using RZ-DQPSK and polarization multiplexing,” IEEE Photon.Technol. Lett., vol. 16, pp. 656–658, Feb. 2004.
[8] Y. Zhu, K. Cordina, N. Jolley, R. Feced, H. Kee, R. Rickard, and A. Had-jifotiou, “1.6 bit/s/Hz orthogonally polarized CSRZ-DQPSK transmis-sion of 8 40 Gbit/s over 320 km NDSF,” presented at the OFC 2004,Los Angeles, CA, Feb. 2004, TuF1.
[9] T. Ito, K. Fukuchi, K. Sekiya, D. Ogasawara, R. Ohhira, and T. Ono, “6.4Tb/s (160 40 Gb/s) WDM transmission experiment with 0.8 bit/s/Hzspectral efficiency,” presented at the ECOC 2000, Munich, Germany,Sep. 2000, PD1.1.
[10] A. H. Gnauck, G. Raybon, S. Chandrasekhar, J. Leuthold, C. Doerr, L.Stulz, and E. Burrows, “25 40-Gb/s copolarized DPSK transmissionover 12 100-km NZDF with 50-GHz channel spacing,” IEEE Photon.Technol. Lett., vol. 15, pp. 467–469, Mar. 2003.
Abb. 18: Optisches Spektrum (links) und Übertragungsqualität der einzelnen Wellenlängenkanäle
(rechts) eines 50�85; 4Gb/s-WDM-Systems [aus: N. Yoshikane and I. Morita, �1:14 b/s/Hz Spec-
trally E�cient 50� 85:4-Gb/s Transmission Over 300 km Using Copolarized RZ-DQPSK Signals,�
J. of Lightwave Technol., Vol. 23, No. 1, pp. 108�114 (2005)].
In diesem Wellenlängenbereich lassen sich bereits sehr viele Wellenlängenkanäle unterbringen. Als Bei-
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Grundlagen der optischen Nachrichtentechnik ONT/22
spiel zeigt Abb. 18 die Übertragung von 50 Wellenlängenkanälen mit je 85; 4Gb/s. Damit ist die
Machbarkeit der Übertragung von hohen Datenraten > 1Tb/s (1Tb=s = 1000Gb=s) über Einmo-
denfasern gezeigt.
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Signaldarstellung im Zeit- und Frequenzbereich S/1
1 Harmonische Signale
Zeitabhängige Gröÿen, wie z. B. Spannung, Strom oder Feld, sind häu�g harmonische Gröÿen. Solche
sinus- oder kosinusförmigen Signale lassen sich auch durch komplexe Zeiger darstellen. Ein harmoni-
sches Spannungssignal lässt sich beispielsweise folgendermaÿen schreiben:
u(t) = U0 cos(!t + ') = <(U exp(j!t)) (1)
mit dem komplexen Zeiger
U = U0 exp(j') (2)
Sind die zu untersuchenden Signale nicht harmonisch, so lassen sich diese durch eine Überlagerung
mehrerer harmonischer Signale gemäÿ der Fourieranalyse darstellen.
2 Periodische, nicht harmonische Signale
Periodische Signale wiederholen sich nach einer bestimmten Zeit, der Periode �
u(t) = u(t � �) (3)
Ein Beispiel für ein derartiges Signal zeigt Abb. 1. Solche Signale lassen sich in Form einer Fourierreihe
darstellen:
u(t) =+1∑
�=�1
U� � exp(j � � � !0t) mit !0 =2�
�(4)
Hierbei sind die Koe�zienten U� die zunächst unbekannten Fourierkoe�zienten. Nach Multiplikation
von Gl. (4) mit exp(�j�!0t) und anschlieÿender Integration von t = ��=2 bis t = �=2 ergibt sich:
�=2∫��=2
u(t) exp(�j�!0t) dt =+1∑
�=�1
U�
�=2∫��=2
exp(j(� � �)!0t) dt
︸ ︷︷ ︸= 0 für � 6= �
= � für � = �
= U� � � (5)
aus Gl. (5) folgt
U� =1
�
�=2∫��=2
u(t) exp(�j�!0t) dt (6)
Für reelle Signale u(t) folgt aus Gl. (6), dass U� = U�v , so dass man auch schreiben kann:
u(t) = <
1∑�=1
2U� exp(j�!0t)
+ U0 (7)
Für ein harmonisches Signal wie in Gl. (1) verbleibt nur U� mit � = 1, so dass dann U = 2U1 gilt.
TU Berlin � Prof. Dr.-Ing. K. Petermann
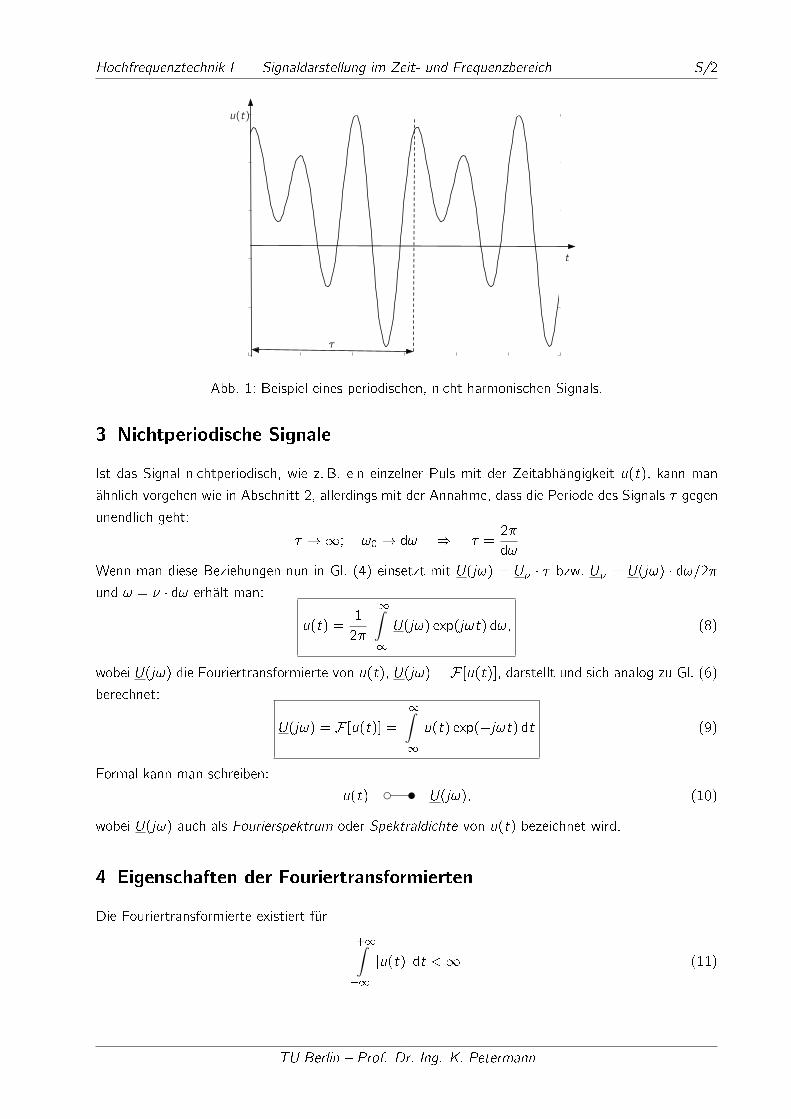
Hochfrequenztechnik I Signaldarstellung im Zeit- und Frequenzbereich S/2
u(t)
!
t
Abb. 1: Beispiel eines periodischen, nicht harmonischen Signals.
3 Nichtperiodische Signale
Ist das Signal nichtperiodisch, wie z. B. ein einzelner Puls mit der Zeitabhängigkeit u(t), kann man
ähnlich vorgehen wie in Abschnitt 2, allerdings mit der Annahme, dass die Periode des Signals � gegen
unendlich geht:
� !1; !0 ! d! ) � =2�
d!
Wenn man diese Beziehungen nun in Gl. (4) einsetzt mit U(j!) = U� � � bzw. U� = U(j!) � d!=2�
und ! = � � d! erhält man:
u(t) =1
2�
1∫�1
U(j!) exp(j!t) d!; (8)
wobei U(j!) die Fouriertransformierte von u(t), U(j!) = F [u(t)], darstellt und sich analog zu Gl. (6)
berechnet:
U(j!) = F [u(t)] =
1∫�1
u(t) exp(�j!t) dt (9)
Formal kann man schreiben:
u(t) d t U(j!); (10)
wobei U(j!) auch als Fourierspektrum oder Spektraldichte von u(t) bezeichnet wird.
4 Eigenschaften der Fouriertransformierten
Die Fouriertransformierte existiert für
+1∫�1
ju(t)j dt <1 (11)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Signaldarstellung im Zeit- und Frequenzbereich S/3
Diese Bedingung ist hinreichend, jedoch nicht notwendig. Eine weitere Bedingung ist
+1∫�1
ju(t)j2 dt <1; (12)
was eine endliche Energie des Signals u(t) impliziert.
Die Fouriertransformation ist der Laplace-Transformation ähnlich:
L[u(t)] =
1∫0
u(t) exp(�s � t) dt mit s = � + j! (13)
Im Gegensatz zur Fouriertransformation berücksichtigt die Laplace-Transformation das Signal nur für
positive Zeitpunkte t � 0, konvergiert aber wegen � > 0 unter weniger einschränkenden Bedingungen.
Beide Transformationen werden in der Hochfrequenztechnik verwendet:
Laplace-Transformation ist zweckmäÿig für die Berechnung von Einschaltvorgängen.
Fouriertransformation ist zweckmäÿig für Signale, die für negative Zeitpunkte t < 0 nicht verschwin-
den.
Wir wollen im Folgenden nur die Fouriertransformation betrachten. Wenn das Signal die Bedingungen
Gl. (11) und (12) erfüllt, ist es wahlweise im Zeitbereich als u(t) oder im Frequenzbereich als U(j!)
darstellbar. Dann gelten u. a. folgende Beziehungen:
Linearität
u(t) d t U(j!)
v(t) d t V (j!)=) a � u(t) + b � v(t) d t a � U(j!) + b � V (j!) (14)
Maÿstabsänderung
u(a � t) d t 1
jajU
(j!
a
)mit a 2 R; a 6= 0 (15)
zeitliche Verschiebung
u(t � t0) d t U(j!) exp(�j!t0) (16)
Frequenzverschiebung
u(t) exp(j!0t) d t U[j(! � !0)] (17)
Amplitudenmodulation
u(t) cos(!0t) d t 1
2
{U[j(! � !0)] + U[j(! + !0)]
}(18)
Ableitungdu(t)
dtd t j! � U(j!) (19)
n-fache Ableitungdnu(t)
dtnd t (j!)n � U(j!) (20)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Signaldarstellung im Zeit- und Frequenzbereich S/4
Unter Verwendung von Gl. (20) lässt sich eine Di�erentialgleichung im Zeitbereich in eine algebraische
Gleichung im Frequenzbereich transformieren:
Ableitung im Frequenzbereich
t � u(t) d t jdU(j!)
d!(21)
Faltung
u(t) � v(t) =
1∫�1
u(�)v(t � �) d� d t U(j!)V (j!) (22)
Hierbei beschreibt � das Symbol für die Faltung. Gl. (22) lässt sich durch direkte Anwendung
der De�nition der Fouriertransformation beweisen:
F [u(t) � v(t)] =
1∫�1
1∫�1
u(�)v(t � �) d�
� exp(�j!t) dtNach Vertauschung der Reihenfolge der Integration erhält man:
F [u(t) � v(t)] =
1∫�1
1∫�1
v(t � �) � exp(�j!t) dt
u(�) d�Nun substituiert man t 0 = t � � bzw. dt 0 = dt:
F [u(t) � v(t)] =
1∫�1
1∫�1
v(t 0) � exp(�j!t 0) � exp(�j!�) dt 0
u(�) d�=
1∫�1
v(t 0) � exp(�j!t 0) dt 0
︸ ︷︷ ︸
V (j!)
�
1∫�1
u(�) � exp(�j!�) d�
︸ ︷︷ ︸
U(j!)
= V (j!) � U(j!)
5 Autokorrelationsfunktion (AKF)
Die Autokorrelationsfunktion beschreibt die Korrelation zwischen dem Signal zum Zeitpunkt t 0 = �
und zum Zeitpunkt t 0 = � � t, ausgedrückt durch das Produkt u(�) � u(� � t).
Bei starker Korrelation ist u(�)�u(��t) � u2(�) � u2(��t), bei geringer Korrelation verschwindet
u(�) � u(� � t) im Mittel. Die Korrelation ist abhängig von t.
Die Autokorrelationsfunktion ist folgendermaÿen de�niert:
Ru(t) =
1∫�1
u(�) � u(� � t) d� (23)
= u(t) � u(�t) d t U(j!)U(�j!) = jU(j!)j2︸ ︷︷ ︸für reelles u(t)
(24)
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Signaldarstellung im Zeit- und Frequenzbereich S/5
Die Fouriertransformierte der AKF entspricht somit der spektralen Energiedichte des Signals u(t). Aus
Gl. (8) und (24) folgt für t = 0:
Ru(t = 0) =
1∫�1
u2(�) d� =1
2�
1∫�1
jU(j!)j2 d! =
1∫�1
jU(j!)j2 df mit f =!
2�(25)
Gl. (25) entspricht dem Parsevalschen Theorem.
Die Gesamtenergie∫u2(t) dt eines Signals lässt sich somit sowohl im Zeitbereich als auch im Fre-
quenzbereich darstellen. Daher bezeichnet man jU(j!)j2 auch als �spektrale Energiedichte�.
TU Berlin � Prof. Dr.-Ing. K. Petermann
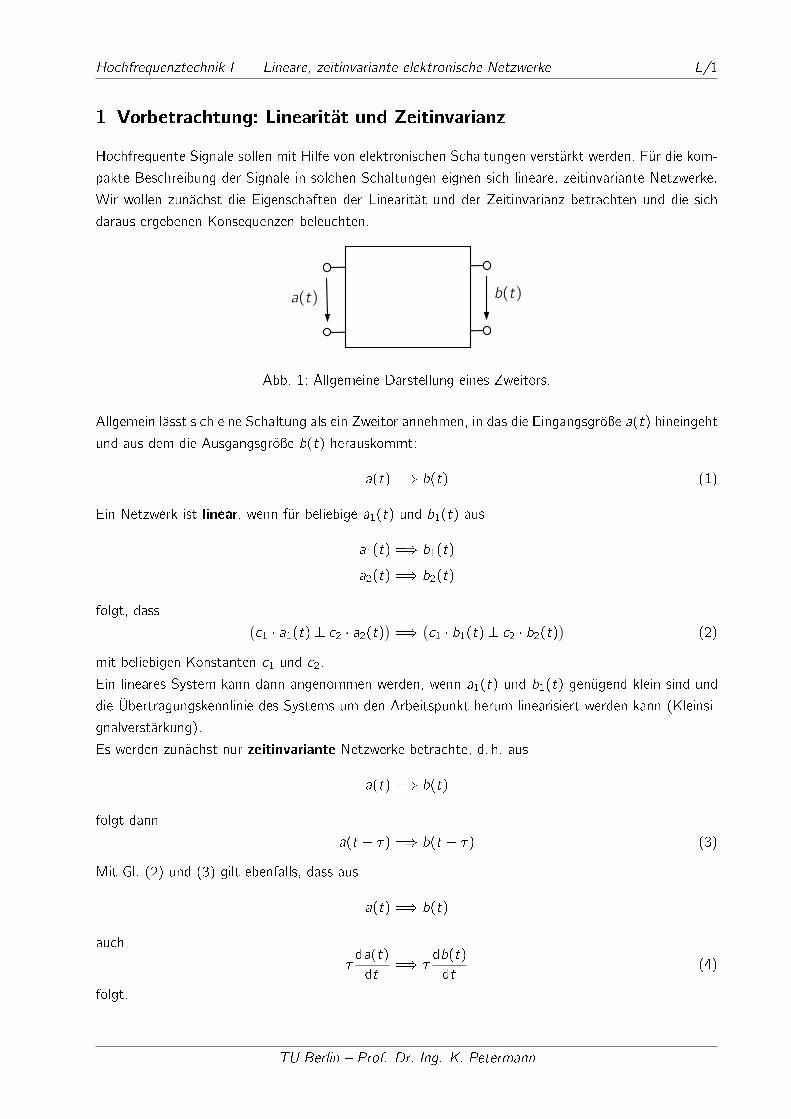
Hochfrequenztechnik I Lineare, zeitinvariante elektronische Netzwerke L/1
1 Vorbetrachtung: Linearität und Zeitinvarianz
Hochfrequente Signale sollen mit Hilfe von elektronischen Schaltungen verstärkt werden. Für die kom-
pakte Beschreibung der Signale in solchen Schaltungen eignen sich lineare, zeitinvariante Netzwerke.
Wir wollen zunächst die Eigenschaften der Linearität und der Zeitinvarianz betrachten und die sich
daraus ergebenen Konsequenzen beleuchten.
b(t)a(t)
Abb. 1: Allgemeine Darstellung eines Zweitors.
Allgemein lässt sich eine Schaltung als ein Zweitor annehmen, in das die Eingangsgröÿe a(t) hineingeht
und aus dem die Ausgangsgröÿe b(t) herauskommt:
a(t) =) b(t) (1)
Ein Netzwerk ist linear, wenn für beliebige a1(t) und b1(t) aus
a1(t) =) b1(t)
a2(t) =) b2(t)
folgt, dass (c1 � a1(t)� c2 � a2(t)
)=) (
c1 � b1(t)� c2 � b2(t))
(2)
mit beliebigen Konstanten c1 und c2.
Ein lineares System kann dann angenommen werden, wenn a1(t) und b1(t) genügend klein sind und
die Übertragungskennlinie des Systems um den Arbeitspunkt herum linearisiert werden kann (Kleinsi-
gnalverstärkung).
Es werden zunächst nur zeitinvariante Netzwerke betrachte, d. h. aus
a(t) =) b(t)
folgt dann
a(t � �) =) b(t � �) (3)
Mit Gl. (2) und (3) gilt ebenfalls, dass aus
a(t) =) b(t)
auch
�da(t)
dt=) �
db(t)
dt(4)
folgt.
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Lineare, zeitinvariante elektronische Netzwerke L/2
Gl. (4) ist sofort ersichtlich aus folgendem Zusammenhang:
da(t)
dt=
a(t + dt)� a(t)
dt=) b(t + dt)� b(t)
dt=
db(t)
dt(5)
Wenn wir als Eingangsgröÿe ein harmonisches Signal mit a(t) = < (A exp(j!t))annehmen, folgt
daraus:
a(t) = � 1
!2
d2a(t)
dt2=) b(t) = � 1
!2
d2b(t)
dt2(6)
Die Di�erentialgleichung für b(t) führt damit wieder auf ein harmonisches Signal
b(t) = < (B exp(j!t)); (7)
weshalb sich eine Übertragungsfunktion G(j!) im Frequenzbereich de�nieren lässt
G(j!) =B
A(8)
und die Übertragungseigenschaften eines linearen, zeitinvarianten Netzwerkes im Frequenzbereich mit
Hilfe der Fourieranalyse betrachtet werden können:
a(t) d t A(j!)
b(t) d t B(j!)
Für die Übertragungsfunktion ergibt sich somit
G(j!) =B(j!)
A(j!)(9)
2 Zweitor- und Vierpoldarstellung
Bisher wurden allgemeine Eingangs- und Ausgangsgröÿen betrachtet. Nun wollen wir an Ein- und
Ausgang Spannungen und Ströme annehmen.
Ströme I und Spannungen U setzen sich im Allgemeinen zusammen aus einem Gleich- und einem
Wechselanteil:
I(t) = I0 + i(t) (10)
U(t) = U0 + u(t) (11)
Solange i(t) und u(t) genügend klein sind, kann man einen linearen Zusammenhang zwischen beiden
Gröÿen annehmen (Linearisierung der Kennlinie um den Arbeitspunkt U0, I0).
Da wir im Folgenden nur die Wechselanteile betrachten wollen, beschreiben wir diese Gröÿen mit den
komplexen Zeigern I und U wie in Abb. 2.
Harmonische Signale lassen sich direkt mit komplexen Zeigern beschreiben. Bei allgemeiner Zeit-
abhängigkeit entsprechen die Zeiger den Fouriertransformierten von Strom und Spannung. Für die
Beschreibung eines Zweitors mit Zeigern gibt es verschiedene Darstellungsformen, von denen einige
im Folgenden vergestellt werden sollen.
TU Berlin � Prof. Dr.-Ing. K. Petermann
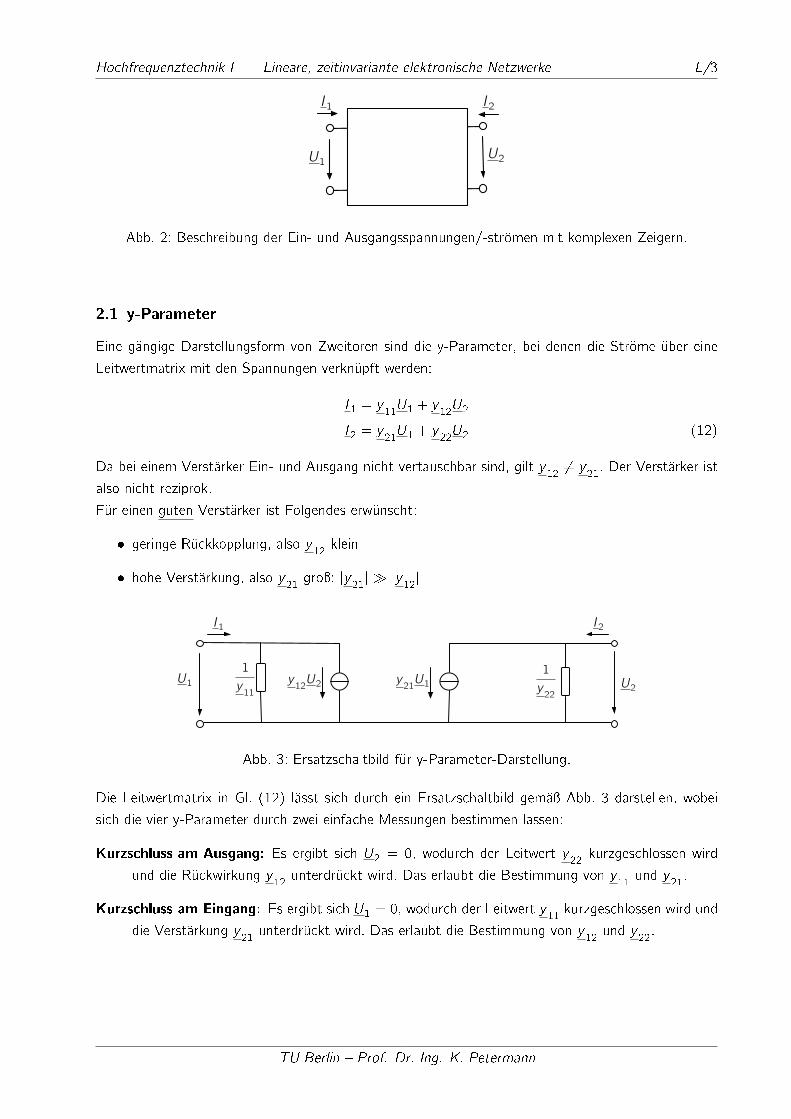
Hochfrequenztechnik I Lineare, zeitinvariante elektronische Netzwerke L/3
I1 I2
U2U1
Abb. 2: Beschreibung der Ein- und Ausgangsspannungen/-strömen mit komplexen Zeigern.
2.1 y-Parameter
Eine gängige Darstellungsform von Zweitoren sind die y-Parameter, bei denen die Ströme über eine
Leitwertmatrix mit den Spannungen verknüpft werden:
I1 = y11U1 + y
12U2
I2 = y21U1 + y
22U2 (12)
Da bei einem Verstärker Ein- und Ausgang nicht vertauschbar sind, gilt y126= y
21. Der Verstärker ist
also nicht reziprok.
Für einen guten Verstärker ist Folgendes erwünscht:
� geringe Rückkopplung, also y12
klein
� hohe Verstärkung, also y21
groÿ: jy21j � jy
12j
U1 U2
I2I1
y21U1y
12U2
1
y22
1
y11
Abb. 3: Ersatzschaltbild für y-Parameter-Darstellung.
Die Leitwertmatrix in Gl. (12) lässt sich durch ein Ersatzschaltbild gemäÿ Abb. 3 darstellen, wobei
sich die vier y-Parameter durch zwei einfache Messungen bestimmen lassen:
Kurzschluss am Ausgang: Es ergibt sich U2 = 0, wodurch der Leitwert y22
kurzgeschlossen wird
und die Rückwirkung y12
unterdrückt wird. Das erlaubt die Bestimmung von y11
und y21.
Kurzschluss am Eingang: Es ergibt sich U1 = 0, wodurch der Leitwert y11
kurzgeschlossen wird und
die Verstärkung y21
unterdrückt wird. Das erlaubt die Bestimmung von y12
und y22.
TU Berlin � Prof. Dr.-Ing. K. Petermann
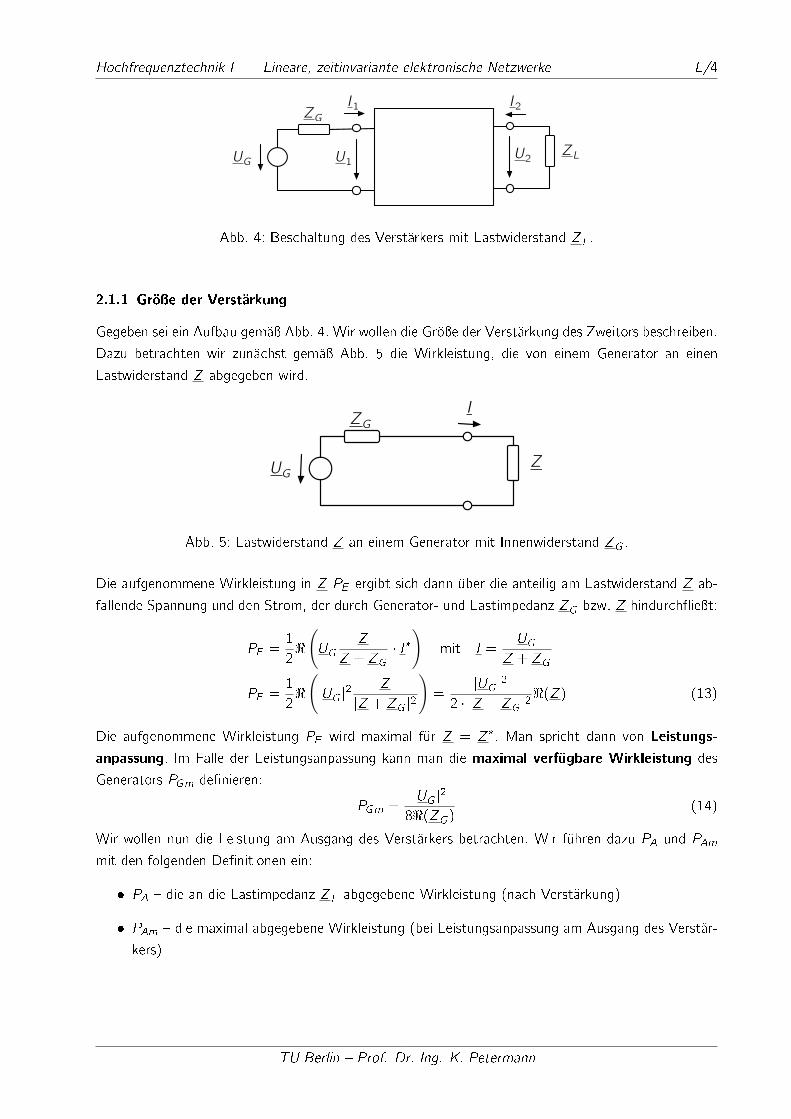
Hochfrequenztechnik I Lineare, zeitinvariante elektronische Netzwerke L/4
UG
ZGI1 I2
U2U1ZL
Abb. 4: Beschaltung des Verstärkers mit Lastwiderstand ZL.
2.1.1 Gröÿe der Verstärkung
Gegeben sei ein Aufbau gemäÿ Abb. 4. Wir wollen die Gröÿe der Verstärkung des Zweitors beschreiben.
Dazu betrachten wir zunächst gemäÿ Abb. 5 die Wirkleistung, die von einem Generator an einen
Lastwiderstand Z abgegeben wird.
UG
ZGI
Z
Abb. 5: Lastwiderstand Z an einem Generator mit Innenwiderstand ZG .
Die aufgenommene Wirkleistung in Z PE ergibt sich dann über die anteilig am Lastwiderstand Z ab-
fallende Spannung und den Strom, der durch Generator- und Lastimpedanz ZG bzw. Z hindurch�ieÿt:
PE =1
2<(UG
Z
Z + ZG
� I�)
mit I =UG
Z + ZG
PE =1
2<(jUG j2
Z
jZ + ZG j2)=
jUG j22 � jZ + ZG j2
<(Z) (13)
Die aufgenommene Wirkleistung PE wird maximal für Z = Z�. Man spricht dann von Leistungs-
anpassung. Im Falle der Leistungsanpassung kann man die maximal verfügbare Wirkleistung des
Generators PGm de�nieren:
PGm =jUG j2
8<(ZG)(14)
Wir wollen nun die Leistung am Ausgang des Verstärkers betrachten. Wir führen dazu PA und PAm
mit den folgenden De�nitionen ein:
� PA � die an die Lastimpedanz ZL abgegebene Wirkleistung (nach Verstärkung)
� PAm � die maximal abgegebene Wirkleistung (bei Leistungsanpassung am Ausgang des Verstär-
kers)
TU Berlin � Prof. Dr.-Ing. K. Petermann
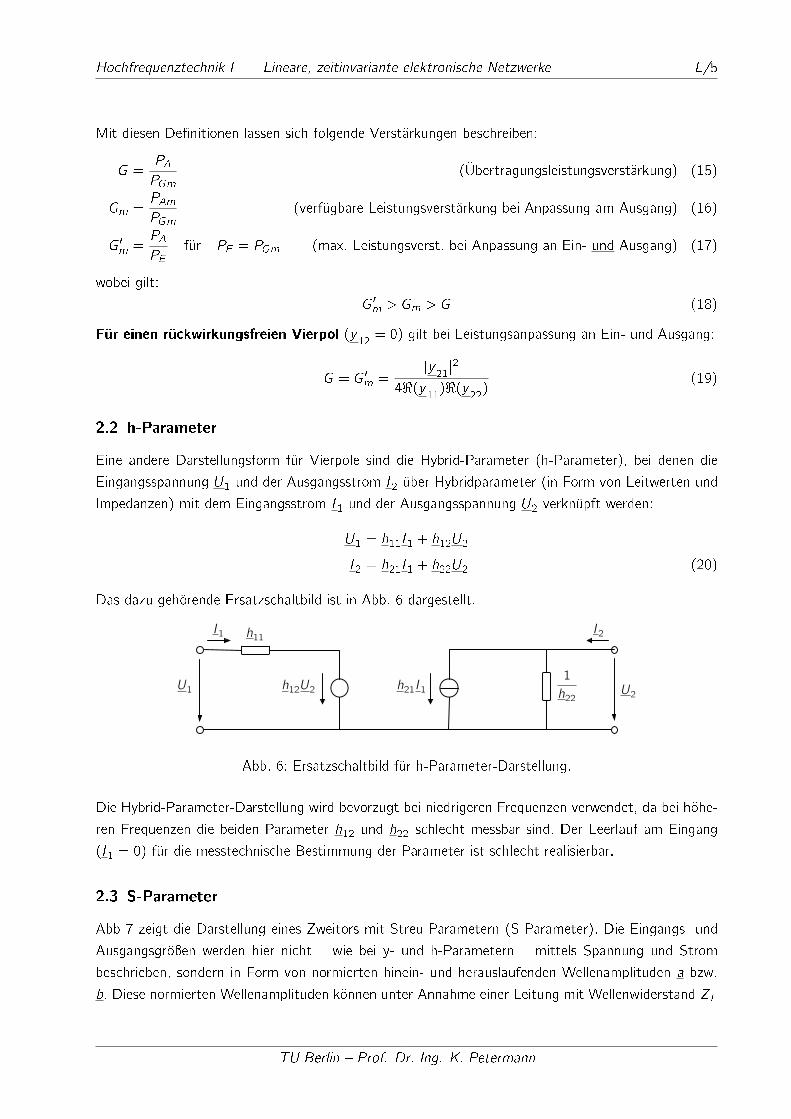
Hochfrequenztechnik I Lineare, zeitinvariante elektronische Netzwerke L/5
Mit diesen De�nitionen lassen sich folgende Verstärkungen beschreiben:
G =PAPGm
(Übertragungsleistungsverstärkung) (15)
Gm =PAmPGm
(verfügbare Leistungsverstärkung bei Anpassung am Ausgang) (16)
G0
m =PAPE
für PE = PGm (max. Leistungsverst. bei Anpassung an Ein- und Ausgang) (17)
wobei gilt:
G0
m > Gm > G (18)
Für einen rückwirkungsfreien Vierpol (y12
= 0) gilt bei Leistungsanpassung an Ein- und Ausgang:
G = G0
m =jy
21j2
4<(y11)<(y
22)
(19)
2.2 h-Parameter
Eine andere Darstellungsform für Vierpole sind die Hybrid-Parameter (h-Parameter), bei denen die
Eingangsspannung U1 und der Ausgangsstrom I2 über Hybridparameter (in Form von Leitwerten und
Impedanzen) mit dem Eingangsstrom I1 und der Ausgangsspannung U2 verknüpft werden:
U1 = h11I1 + h12U2
I2 = h21I1 + h22U2 (20)
Das dazu gehörende Ersatzschaltbild ist in Abb. 6 dargestellt.
U1 U2
I2I1 h11
1
h22h21I1h12U2
Abb. 6: Ersatzschaltbild für h-Parameter-Darstellung.
Die Hybrid-Parameter-Darstellung wird bevorzugt bei niedrigeren Frequenzen verwendet, da bei höhe-
ren Frequenzen die beiden Parameter h12 und h22 schlecht messbar sind. Der Leerlauf am Eingang
(I1 = 0) für die messtechnische Bestimmung der Parameter ist schlecht realisierbar.
2.3 S-Parameter
Abb 7 zeigt die Darstellung eines Zweitors mit Streu-Parametern (S-Parameter). Die Eingangs- und
Ausgangsgröÿen werden hier nicht � wie bei y- und h-Parametern � mittels Spannung und Strom
beschrieben, sondern in Form von normierten hinein- und herauslaufenden Wellenamplituden a bzw.
b. Diese normierten Wellenamplituden können unter Annahme einer Leitung mit Wellenwiderstand ZL
TU Berlin � Prof. Dr.-Ing. K. Petermann
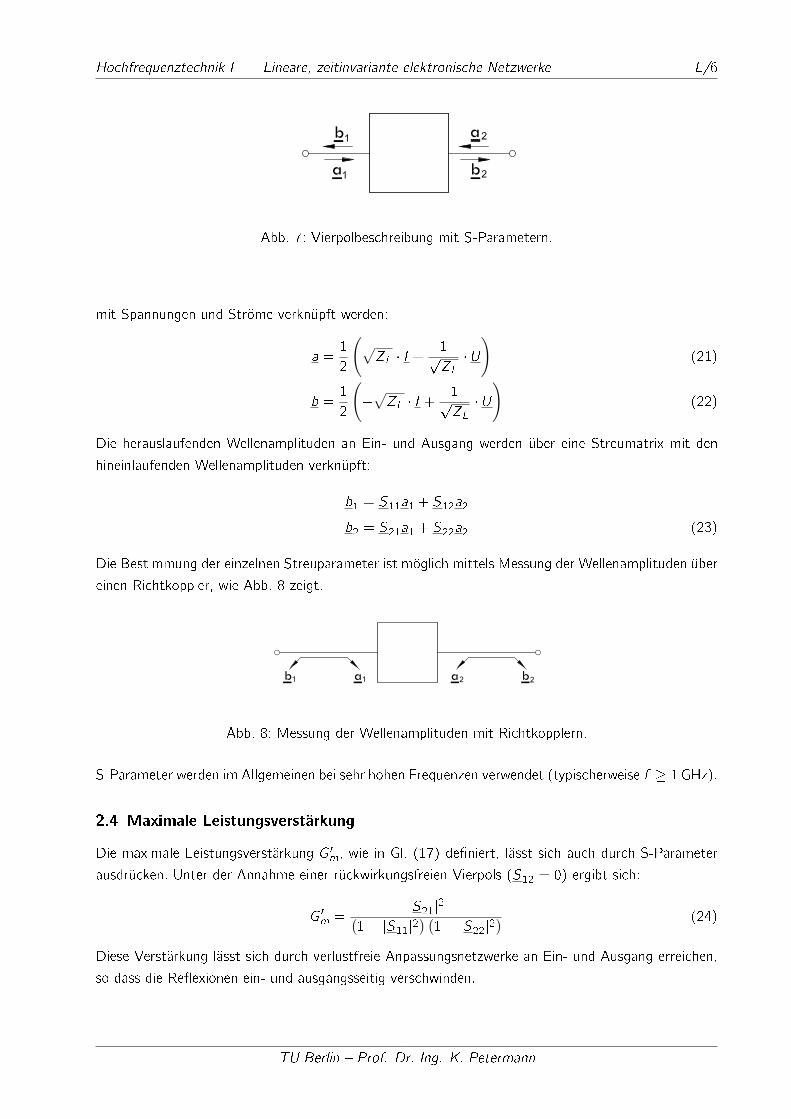
Hochfrequenztechnik I Lineare, zeitinvariante elektronische Netzwerke L/6
Abb. 7: Vierpolbeschreibung mit S-Parametern.
mit Spannungen und Ströme verknüpft werden:
a =1
2
(√ZL � I +
1pZL
� U)
(21)
b =1
2
(�√ZL � I +
1pZL
� U)
(22)
Die herauslaufenden Wellenamplituden an Ein- und Ausgang werden über eine Streumatrix mit den
hineinlaufenden Wellenamplituden verknüpft:
b1 = S11a1 + S12a2
b2 = S21a1 + S22a2 (23)
Die Bestimmung der einzelnen Streuparameter ist möglich mittels Messung der Wellenamplituden über
einen Richtkoppler, wie Abb. 8 zeigt.
Abb. 8: Messung der Wellenamplituden mit Richtkopplern.
S-Parameter werden im Allgemeinen bei sehr hohen Frequenzen verwendet (typischerweise f � 1GHz).
2.4 Maximale Leistungsverstärkung
Die maximale Leistungsverstärkung G0
m, wie in Gl. (17) de�niert, lässt sich auch durch S-Parameter
ausdrücken. Unter der Annahme einer rückwirkungsfreien Vierpols (S12 = 0) ergibt sich:
G0
m =jS21j2(
1� jS11j2) (1� jS22j2
) (24)
Diese Verstärkung lässt sich durch verlustfreie Anpassungsnetzwerke an Ein- und Ausgang erreichen,
so dass die Re�exionen ein- und ausgangsseitig verschwinden.
TU Berlin � Prof. Dr.-Ing. K. Petermann
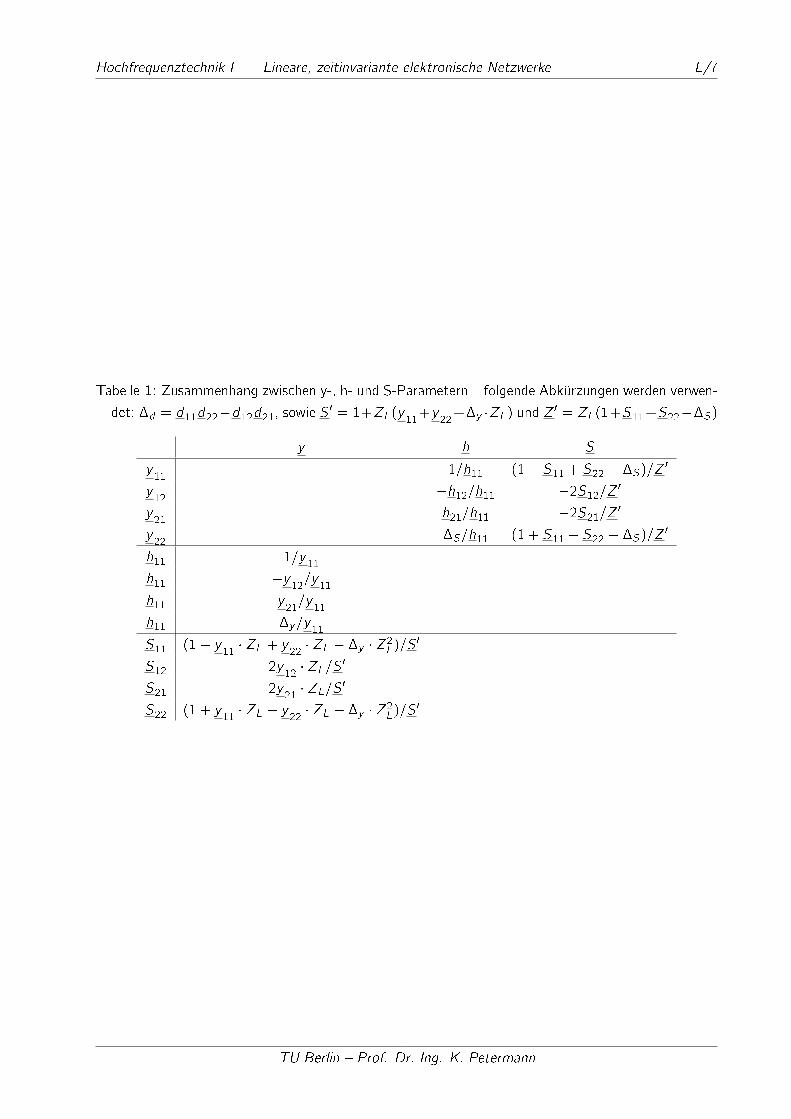
Hochfrequenztechnik I Lineare, zeitinvariante elektronische Netzwerke L/7
Tabelle 1: Zusammenhang zwischen y-, h- und S-Parametern � folgende Abkürzungen werden verwen-
det: �d = d11d22�d12d21, sowie S0 = 1+ZL(y11+y
22+�y �ZL) und Z0 = ZL(1+S11+S22��S)
y h S
y11
1=h11 (1� S11 + S22 � �S)=Z0
y12
�h12=h11 �2S12=Z0
y21
h21=h11 �2S21=Z0
y22
�S=h11 (1 + S11 � S22 � �S)=Z0
h11 1=y11
h11 �y12=y
11
h11 y21=y
11
h11 �y=y11S11 (1� y
11� ZL + y
22� ZL � �y � Z2
L)=S0
S12 �2y12� ZL=S0
S21 �2y21� ZL=S0
S22 (1 + y11� ZL � y
22� ZL � �y � Z2
L)=S0
TU Berlin � Prof. Dr.-Ing. K. Petermann
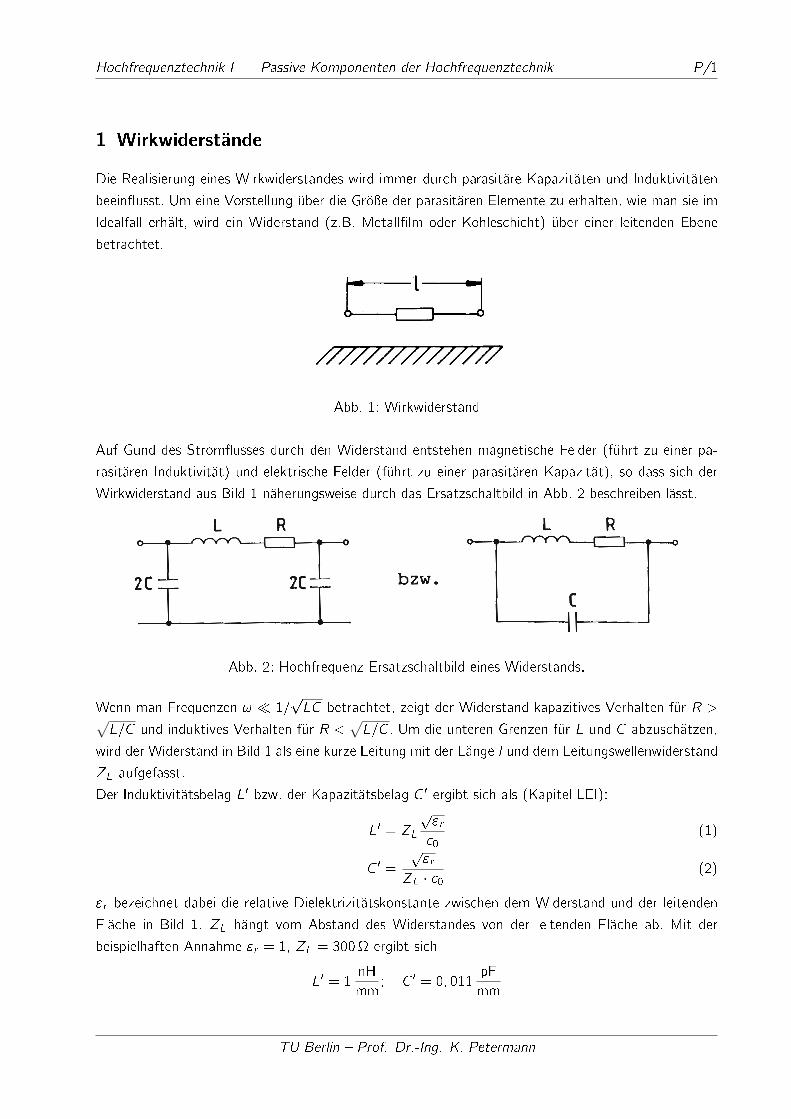
Hochfrequenztechnik I Passive Komponenten der Hochfrequenztechnik P/1
1 Wirkwiderstände
Die Realisierung eines Wirkwiderstandes wird immer durch parasitäre Kapazitäten und Induktivitäten
beein�usst. Um eine Vorstellung über die Gröÿe der parasitären Elemente zu erhalten, wie man sie im
Idealfall erhält, wird ein Widerstand (z.B. Metall�lm oder Kohleschicht) über einer leitenden Ebene
betrachtet.
Abb. 1: Wirkwiderstand
Auf Gund des Strom�usses durch den Widerstand entstehen magnetische Felder (führt zu einer pa-
rasitären Induktivität) und elektrische Felder (führt zu einer parasitären Kapazität), so dass sich der
Wirkwiderstand aus Bild 1 näherungsweise durch das Ersatzschaltbild in Abb. 2 beschreiben lässt.
Hochfrequenztechnik I P/1
Passive Komponenten der Hochfrequenztechnik
Wirkwiderstände
Die Realisierung eines Wirkwiderstandes wird immer durch para-sitäre Kapazitäten und Induktivitäten beeinflußt. Um eine Vor-stellung über die Größe der parasitären Elemente zu erhalten, wie man sie im Idealfall erhält, wird ein Widerstand (z.B. Metallfilm oder Kohleschicht) über einer leitenden Ebene betrachtet.
[ Bild 1
////7/7////////
Aufgrund des Stromflusses durch den Widerstand entstehen ma-gnetische Felder (führt zu einer parasitären Induktivität) und elektrische Felder (führt zu einer parasitären Kapazität), so daß sich der Wirkwiderstand aus Bild 1 näherungsweise durch folgendes Ersatzschaltbild beschreiben läßt:
L R L R
bzw. Bild 2
c
Wenn man Frequenzen w « 1/JLC betrachtet, zeigt der Widerstand kapazitives Verhalten für R > JL/C und induktives Verhalten für R < JL/C. Um die unteren Grenzen für L und C abzuschätzen, wird der Widerstand in Bild 1 als eine kurze Leitung mit der Länge I und dem Leitungswellenwiderstand Zo aufgefaßt.
Der Induktivitätsbelag L' bzw. der Kapazitätsbelag C' ergibt sich als (HF I, Abschnitt LEI):
L' = Zo J!r/c ( 1 )
C' = J!r/(Zo . c) (2 )
!r bezeichnet dabei die relative Dielektrizitätskonstante zwischen dem Widerstand und der leitenden Fläche in Bild 1. Zo hängt vorn Abstand des Widerstandes von der leitenden Fläche ab. Mit der bei-spielhaften Annahme !r = 1, Zo = 300 n ergibt sich
L' = 1 nH/mm C' = 0,011 pF/mm
so daß sich bei einer Bauteillänge I = 1 cm eine parasitäre Induktivität L = L' . I = 10 nH ergeben würde. Diese parasitäre Induktivität hat bei einer Frequenz von 1 GHz einen Blind-widerstand von immerhin ungefähr 60 n. Aus Bild 2 würde sich eine
Abb. 2: Hochfrequenz-Ersatzschaltbild eines Widerstands.
Wenn man Frequenzen ! � 1=pLC betrachtet, zeigt der Widerstand kapazitives Verhalten für R >√
L=C und induktives Verhalten für R <√L=C. Um die unteren Grenzen für L und C abzuschätzen,
wird der Widerstand in Bild 1 als eine kurze Leitung mit der Länge l und dem Leitungswellenwiderstand
ZL aufgefasst.
Der Induktivitätsbelag L0 bzw. der Kapazitätsbelag C0 ergibt sich als (Kapitel LEI):
L0 = ZL
p"r
c0(1)
C0 =
p"r
ZL � c0(2)
"r bezeichnet dabei die relative Dielektrizitätskonstante zwischen dem Widerstand und der leitenden
Fläche in Bild 1. ZL hängt vom Abstand des Widerstandes von der leitenden Fläche ab. Mit der
beispielhaften Annahme "r = 1, ZL = 300 ergibt sich
L0 = 1nH
mm; C0 = 0; 011
pF
mm
TU Berlin � Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik I Passive Komponenten der Hochfrequenztechnik P/2
so dass sich bei einer Bauteillänge l = 1 cm eine parasitäre Induktivität L = L0 � l = 10 nH ergeben
würde. Diese parasitäre Induktivität hat bei einer Frequenz von 1GHz einen Blindwiderstand von
immerhin ungefähr 60. Aus Bild 2 würde sich eine parasitäre Kapazität C = C0 � l=4 ergeben, was
allerdings unrealistisch kleine Werte ergibt. Erreichbar sind parasitäre Kapazitäten C � 0; 1 : : : 0; 5 pF.
Je mehr sich der gewünschte Widerstand R von√L=C unterscheidet, desto schwieriger ist seine
Realisierung bei hohen Frequenzen. Widerstände in der Gröÿenordnung von√L=C (typischerweise
R � 50) lassen sich ohne gröÿere Probleme bis ca. 1GHz realisieren, darüber hinaus geschieht die
Realisierung mit geeigneten verlustbehafteten Leitungselementen. Da allein ein Zuleitungsdraht eine
Induktivität von ca. 1 nH pro mm Zuleitungslänge bewirkt, sind Montagetechniken ohne Zuleitungs-
drähte vorteilhaft (z.B. SMD � Surface Mounting Device).
2 Kondensatoren
Auch Kondensatoren sind nicht ideal realisierbar. Auch hier ist (unter anderem) die unvermeidliche
Zuleitungsinduktivität zu berücksichtigen, so dass man statt des Kondensators eigentlich einen Seri-
enschwingkreis erhält.
Beispiel: Ein Kondensator mit einer Kapazität von 1 nF und einer Zuleitungsinduktivität von 10 nH
(z.B. 10mm Zuleitungsdraht) besitzt eine Resonanzfrequenz fr = 1=(2�pLC) = 50MHz. Der Kon-
densator wirkt also nur unterhalb dieser Frequenz als Kapazität.
3 Induktivitäten
Wird eine Induktivität in Form einer Spule realisiert, so ist neben der Induktivität auch die Kapazität
zu berücksichtigen, die sich zwischen den einzelnen Windungen ergibt. Damit stellt eine Spule eigent-
lich einen Parallelschwingkreis dar. Die sich ergebende, unerwünschte Kapazität hängt stark von der
gewählten Wickeltechnik ab. Es ist besonders schädlich, wenn Leiter nach mehreren Windungen (oder
auch als Zuleitungen) eng benachbart verlaufen.
4 Piezoelektrische Resonatoren, insbesondere Schwingquarze
Be�ndet sich zwischen zwei Elektroden ein piezoelektrisches Material, können durch Anlegen einer
Wechselspannung an die Elektroden mechanische Schwingungen angeregt werden. Das bekannteste
piezoelektrische Material für derartige Anwendungen ist Quarz (Si02), deshalb auch die Bezeichnung
Schwingquarz.
Im Allgemeinen können verschiedene mechanische Schwingungen mit ihrer jeweiligen Resonanzfre-
quenz angeregt werden. Verschiedene Schwingungsformen sind dabei denkbar, z.B. Biegeschwingun-
gen, Längsschwingungen, Flächenscherschwingungen, Dickenscherschwingungen.
Für Schwingquarze mit höheren Schwingfrequenzen werden die Dickenscherschwingungen ausgenutzt.
Für die Grundwelle entspricht dann d in Bild 3 ungefähr der halben akustischen Wellenlänge, so dass
TU Berlin � Prof. Dr.-Ing. K. Petermann
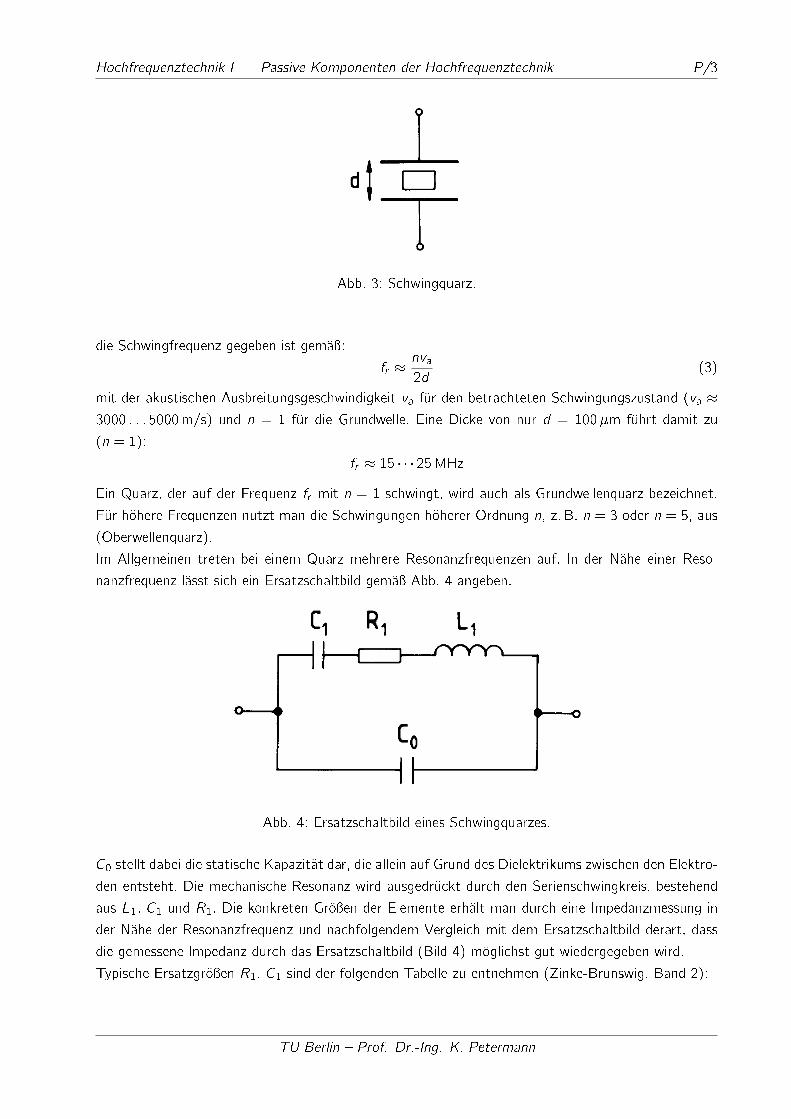
Hochfrequenztechnik I Passive Komponenten der Hochfrequenztechnik P/3
Abb. 3: Schwingquarz.
die Schwingfrequenz gegeben ist gemäÿ:
fr �nva
2d(3)
mit der akustischen Ausbreitungsgeschwindigkeit va für den betrachteten Schwingungszustand (va �3000 : : : 5000m/s) und n = 1 für die Grundwelle. Eine Dicke von nur d = 100�m führt damit zu
(n = 1):
fr � 15 � � � 25MHz
Ein Quarz, der auf der Frequenz fr mit n = 1 schwingt, wird auch als Grundwellenquarz bezeichnet.
Für höhere Frequenzen nutzt man die Schwingungen höherer Ordnung n, z. B. n = 3 oder n = 5, aus
(Oberwellenquarz).
Im Allgemeinen treten bei einem Quarz mehrere Resonanzfrequenzen auf. In der Nähe einer Reso-
nanzfrequenz lässt sich ein Ersatzschaltbild gemäÿ Abb. 4 angeben.
Abb. 4: Ersatzschaltbild eines Schwingquarzes.
C0 stellt dabei die statische Kapazität dar, die allein auf Grund des Dielektrikums zwischen den Elektro-
den entsteht. Die mechanische Resonanz wird ausgedrückt durch den Serienschwingkreis, bestehend
aus L1, C1 und R1. Die konkreten Gröÿen der Elemente erhält man durch eine Impedanzmessung in
der Nähe der Resonanzfrequenz und nachfolgendem Vergleich mit dem Ersatzschaltbild derart, dass
die gemessene Impedanz durch das Ersatzschaltbild (Bild 4) möglichst gut wiedergegeben wird.
Typische Ersatzgröÿen R1, C1 sind der folgenden Tabelle zu entnehmen (Zinke-Brunswig, Band 2):
TU Berlin � Prof. Dr.-Ing. K. Petermann
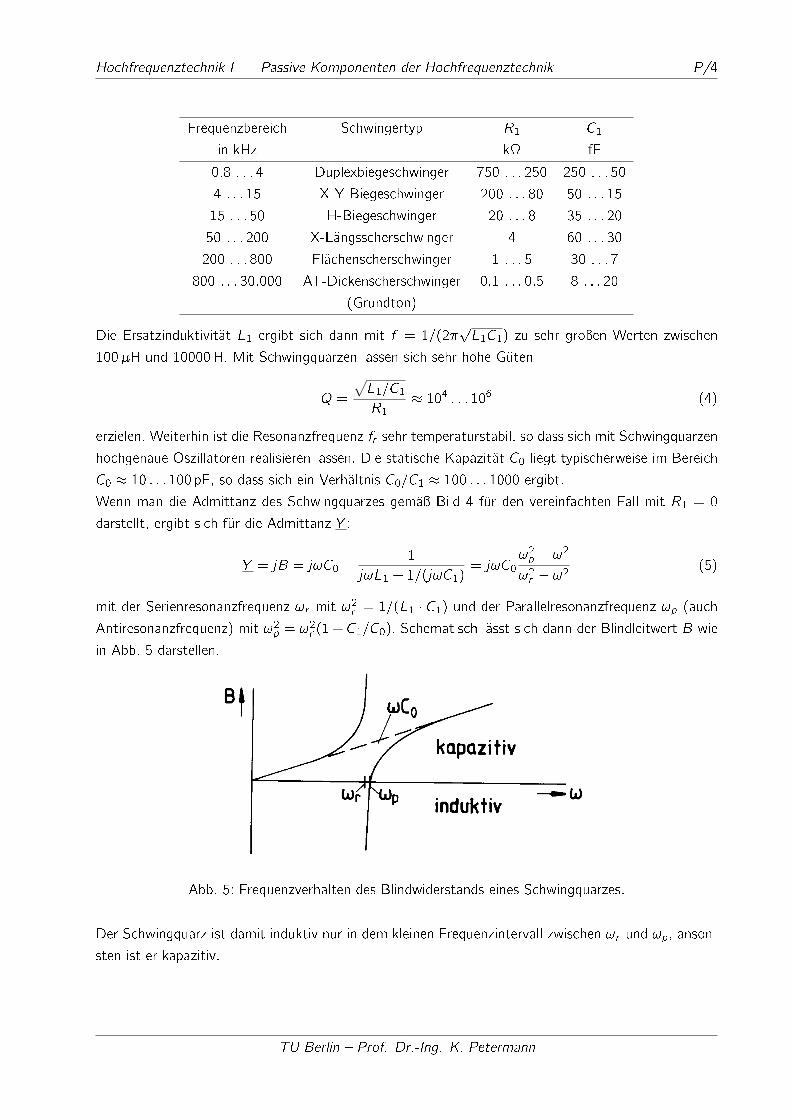
Hochfrequenztechnik I Passive Komponenten der Hochfrequenztechnik P/4
Frequenzbereich Schwingertyp R1 C1
in kHz k fF
0,8 . . . 4 Duplexbiegeschwinger 750 . . . 250 250 . . . 50
4 . . . 15 X-Y-Biegeschwinger 200 . . . 80 50 . . . 15
15 . . . 50 H-Biegeschwinger 20 . . . 8 35 . . . 20
50 . . . 200 X-Längsscherschwinger 4 60 . . . 30
200 . . . 800 Flächenscherschwinger 1 . . . 5 30 . . . 7
800 . . . 30.000 AT-Dickenscherschwinger 0,1 . . . 0,5 8 . . . 20
(Grundton)
Die Ersatzinduktivität L1 ergibt sich dann mit f = 1=(2�pL1C1) zu sehr groÿen Werten zwischen
100�H und 10000H. Mit Schwingquarzen lassen sich sehr hohe Güten
Q =
√L1=C1
R1
� 104 : : : 106 (4)
erzielen. Weiterhin ist die Resonanzfrequenz fr sehr temperaturstabil, so dass sich mit Schwingquarzen
hochgenaue Oszillatoren realisieren lassen. Die statische Kapazität C0 liegt typischerweise im Bereich
C0 � 10 : : : 100 pF, so dass sich ein Verhältnis C0=C1 � 100 : : : 1000 ergibt.
Wenn man die Admittanz des Schwingquarzes gemäÿ Bild 4 für den vereinfachten Fall mit R1 = 0
darstellt, ergibt sich für die Admittanz Y :
Y = jB = j!C0 +1
j!L1 + 1=(j!C1)= j!C0
!2p � !2
!2r � !2
(5)
mit der Serienresonanzfrequenz !r mit !2r = 1=(L1 � C1) und der Parallelresonanzfrequenz !p (auch
Antiresonanzfrequenz) mit !2p = !2
r (1 +C1=C0). Schematisch lässt sich dann der Blindleitwert B wie
in Abb. 5 darstellen.
Abb. 5: Frequenzverhalten des Blindwiderstands eines Schwingquarzes.
Der Schwingquarz ist damit induktiv nur in dem kleinen Frequenzintervall zwischen !r und !p, anson-
sten ist er kapazitiv.
TU Berlin � Prof. Dr.-Ing. K. Petermann
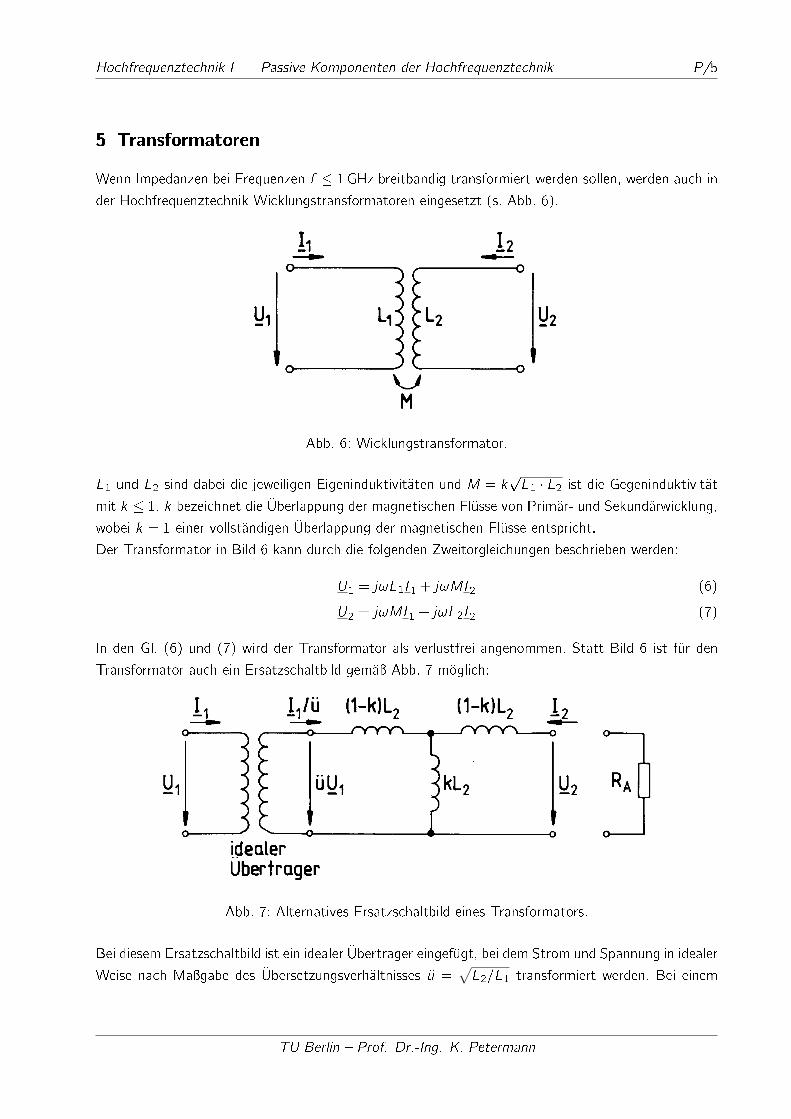
Hochfrequenztechnik I Passive Komponenten der Hochfrequenztechnik P/5
5 Transformatoren
Wenn Impedanzen bei Frequenzen f � 1GHz breitbandig transformiert werden sollen, werden auch in
der Hochfrequenztechnik Wicklungstransformatoren eingesetzt (s. Abb. 6).
Abb. 6: Wicklungstransformator.
L1 und L2 sind dabei die jeweiligen Eigeninduktivitäten und M = kpL1 � L2 ist die Gegeninduktivität
mit k � 1. k bezeichnet die Überlappung der magnetischen Flüsse von Primär- und Sekundärwicklung,
wobei k = 1 einer vollständigen Überlappung der magnetischen Flüsse entspricht.
Der Transformator in Bild 6 kann durch die folgenden Zweitorgleichungen beschrieben werden:
U1 = j!L1I1 + j!MI2 (6)
U2 = j!MI1 + j!L2I2 (7)
In den Gl. (6) und (7) wird der Transformator als verlustfrei angenommen. Statt Bild 6 ist für den
Transformator auch ein Ersatzschaltbild gemäÿ Abb. 7 möglich:
Abb. 7: Alternatives Ersatzschaltbild eines Transformators.
Bei diesem Ersatzschaltbild ist ein idealer Übertrager eingefügt, bei dem Strom und Spannung in idealer
Weise nach Maÿgabe des Übersetzungsverhältnisses �u =√L2=L1 transformiert werden. Bei einem
TU Berlin � Prof. Dr.-Ing. K. Petermann
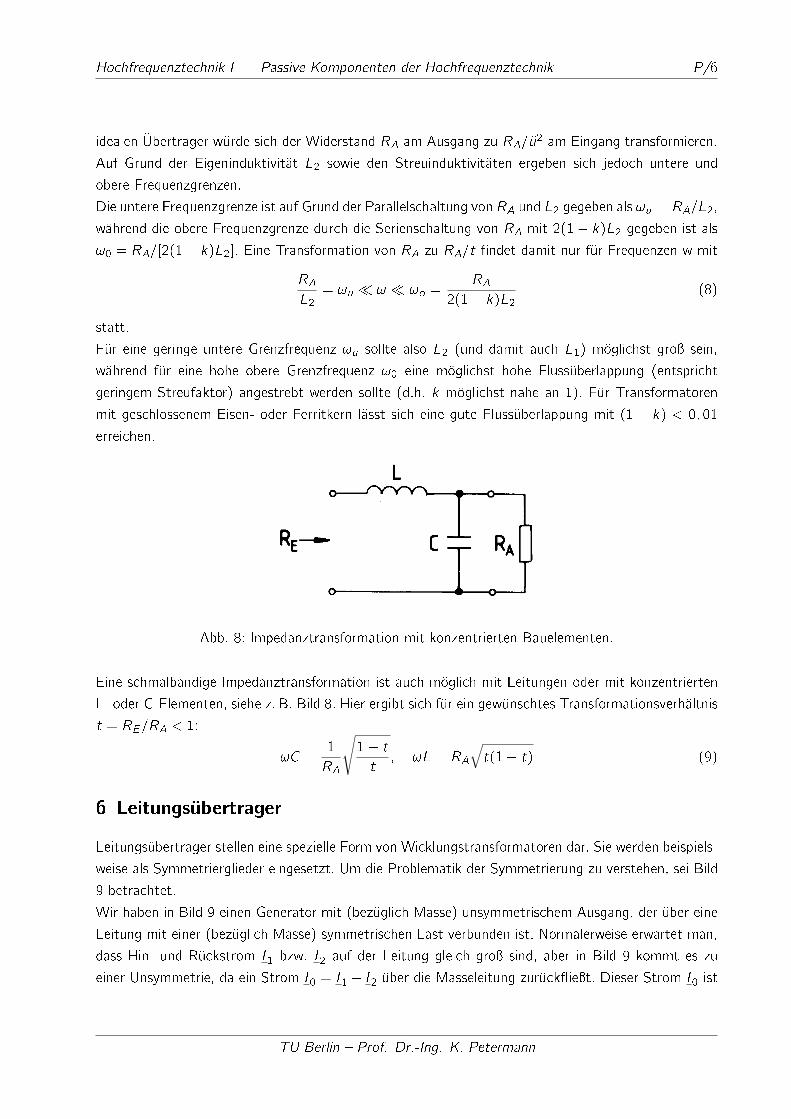
Hochfrequenztechnik I Passive Komponenten der Hochfrequenztechnik P/6
idealen Übertrager würde sich der Widerstand RA am Ausgang zu RA=�u2 am Eingang transformieren.
Auf Grund der Eigeninduktivität L2 sowie den Streuinduktivitäten ergeben sich jedoch untere und
obere Frequenzgrenzen.
Die untere Frequenzgrenze ist auf Grund der Parallelschaltung von RA und L2 gegeben als !u = RA=L2,
während die obere Frequenzgrenze durch die Serienschaltung von RA mit 2(1� k)L2 gegeben ist als
!0 = RA=[2(1� k)L2]. Eine Transformation von RA zu RA=t �ndet damit nur für Frequenzen w mit
RA
L2= !u � ! � !o =
RA
2(1� k)L2(8)
statt.
Für eine geringe untere Grenzfrequenz !u sollte also L2 (und damit auch L1) möglichst groÿ sein,
während für eine hohe obere Grenzfrequenz !0 eine möglichst hohe Flussüberlappung (entspricht
geringem Streufaktor) angestrebt werden sollte (d.h. k möglichst nahe an 1). Für Transformatoren
mit geschlossenem Eisen- oder Ferritkern lässt sich eine gute Flussüberlappung mit (1 � k) < 0; 01
erreichen.
Abb. 8: Impedanztransformation mit konzentrierten Bauelementen.
Eine schmalbandige Impedanztransformation ist auch möglich mit Leitungen oder mit konzentrierten
L- oder C-Elementen, siehe z. B. Bild 8. Hier ergibt sich für ein gewünschtes Transformationsverhältnis
t = RE=RA < 1:
!C =1
RA
√1� t
t; !L = RA
√t(1� t) (9)
6 Leitungsübertrager
Leitungsübertrager stellen eine spezielle Form von Wicklungstransformatoren dar. Sie werden beispiels-
weise als Symmetrierglieder eingesetzt. Um die Problematik der Symmetrierung zu verstehen, sei Bild
9 betrachtet.
Wir haben in Bild 9 einen Generator mit (bezüglich Masse) unsymmetrischem Ausgang, der über eine
Leitung mit einer (bezüglich Masse) symmetrischen Last verbunden ist. Normalerweise erwartet man,
dass Hin- und Rückstrom I1 bzw. I2 auf der Leitung gleich groÿ sind, aber in Bild 9 kommt es zu
einer Unsymmetrie, da ein Strom I0 = I1 � I2 über die Masseleitung zurück�ieÿt. Dieser Strom I0 ist
TU Berlin � Prof. Dr.-Ing. K. Petermann
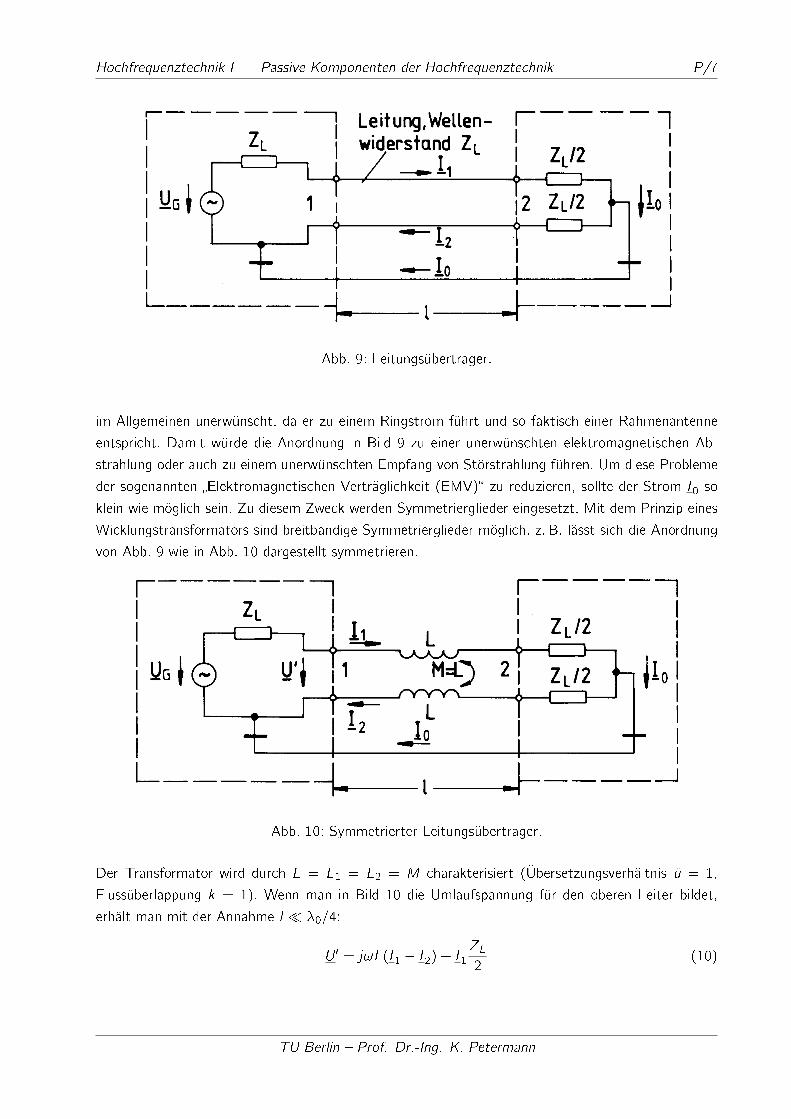
Hochfrequenztechnik I Passive Komponenten der Hochfrequenztechnik P/7
Abb. 9: Leitungsübertrager.
im Allgemeinen unerwünscht, da er zu einem Ringstrom führt und so faktisch einer Rahmenantenne
entspricht. Damit würde die Anordnung in Bild 9 zu einer unerwünschten elektromagnetischen Ab-
strahlung oder auch zu einem unerwünschten Empfang von Störstrahlung führen. Um diese Probleme
der sogenannten �Elektromagnetischen Verträglichkeit (EMV)� zu reduzieren, sollte der Strom I0 so
klein wie möglich sein. Zu diesem Zweck werden Symmetrierglieder eingesetzt. Mit dem Prinzip eines
Wicklungstransformators sind breitbandige Symmetrierglieder möglich, z. B. lässt sich die Anordnung
von Abb. 9 wie in Abb. 10 dargestellt symmetrieren.
Abb. 10: Symmetrierter Leitungsübertrager.
Der Transformator wird durch L = L1 = L2 = M charakterisiert (Übersetzungsverhältnis �u = 1,
Flussüberlappung k = 1). Wenn man in Bild 10 die Umlaufspannung für den oberen Leiter bildet,
erhält man mit der Annahme l � �0=4:
U 0 = j!L(I1 � I2) + I1ZL
2(10)
TU Berlin � Prof. Dr.-Ing. K. Petermann
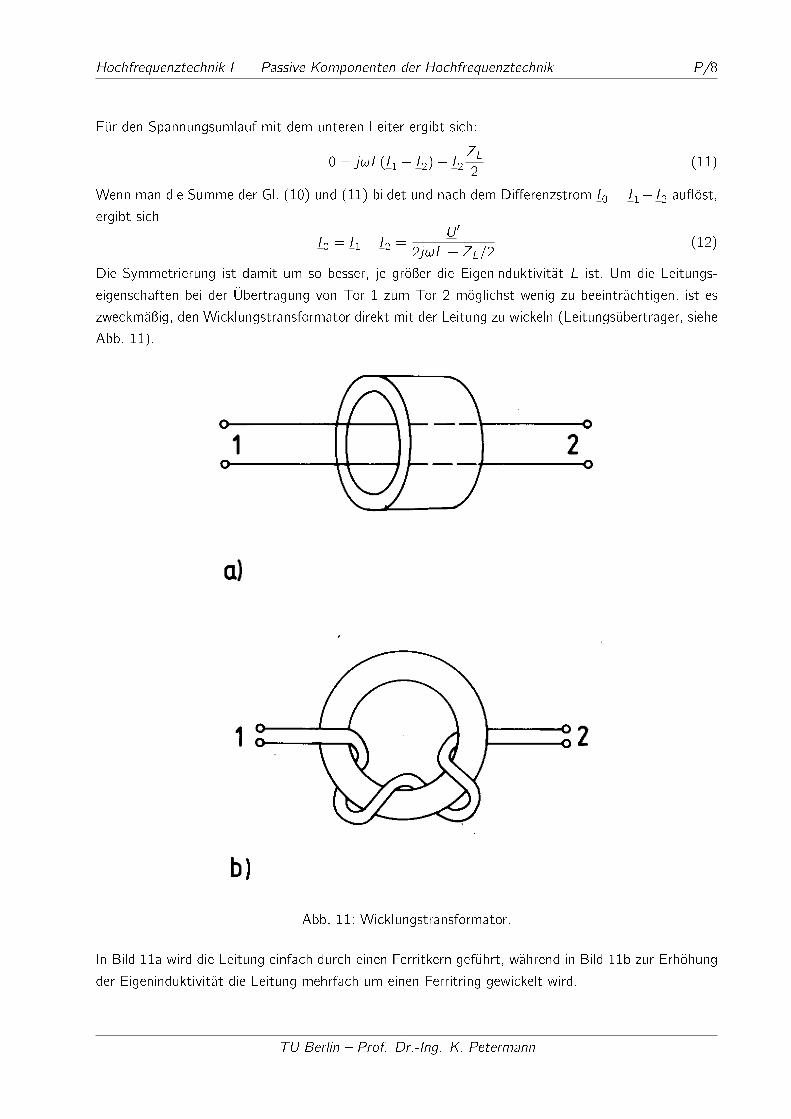
Hochfrequenztechnik I Passive Komponenten der Hochfrequenztechnik P/8
Für den Spannungsumlauf mit dem unteren Leiter ergibt sich:
0 = j!L(I1 � I2)� I2ZL
2(11)
Wenn man die Summe der Gl. (10) und (11) bildet und nach dem Di�erenzstrom I0 = I1� I2 au�öst,
ergibt sich
I0 = I1 � I2 =U 0
2j!L+ ZL=2(12)
Die Symmetrierung ist damit um so besser, je gröÿer die Eigeninduktivität L ist. Um die Leitungs-
eigenschaften bei der Übertragung von Tor 1 zum Tor 2 möglichst wenig zu beeinträchtigen, ist es
zweckmäÿig, den Wicklungstransformator direkt mit der Leitung zu wickeln (Leitungsübertrager, siehe
Abb. 11).
Abb. 11: Wicklungstransformator.
In Bild 11a wird die Leitung einfach durch einen Ferritkern geführt, während in Bild 11b zur Erhöhung
der Eigeninduktivität die Leitung mehrfach um einen Ferritring gewickelt wird.
TU Berlin � Prof. Dr.-Ing. K. Petermann
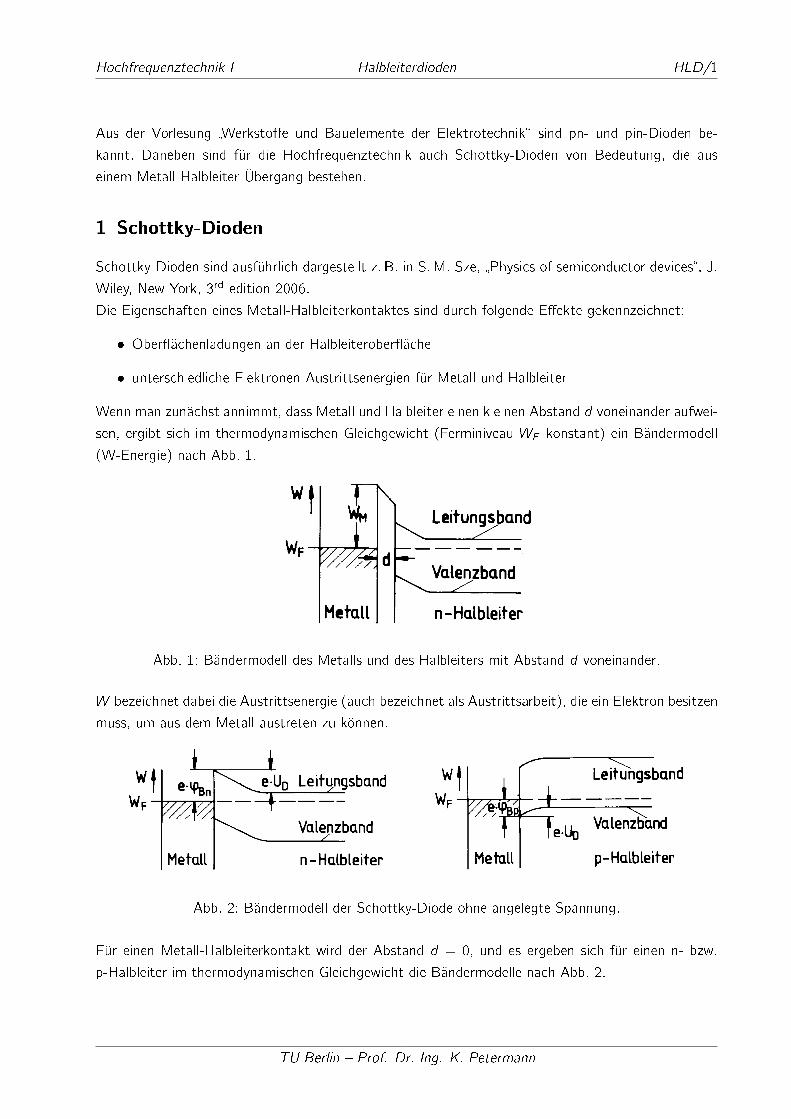
Hochfrequenztechnik I Halbleiterdioden HLD/1
Aus der Vorlesung �Werksto�e und Bauelemente der Elektrotechnik� sind pn- und pin-Dioden be-
kannt. Daneben sind für die Hochfrequenztechnik auch Schottky-Dioden von Bedeutung, die aus
einem Metall-Halbleiter-Übergang bestehen.
1 Schottky-Dioden
Schottky-Dioden sind ausführlich dargestellt z. B. in S.M. Sze, �Physics of semiconductor devices�, J.
Wiley, New York, 3rd edition 2006.
Die Eigenschaften eines Metall-Halbleiterkontaktes sind durch folgende E�ekte gekennzeichnet:
� Ober�ächenladungen an der Halbleiterober�äche
� unterschiedliche Elektronen-Austrittsenergien für Metall und Halbleiter
Wenn man zunächst annimmt, dass Metall und Halbleiter einen kleinen Abstand d voneinander aufwei-
sen, ergibt sich im thermodynamischen Gleichgewicht (Ferminiveau WF konstant) ein Bändermodell
(W-Energie) nach Abb. 1.
Abb. 1: Bändermodell des Metalls und des Halbleiters mit Abstand d voneinander.
W bezeichnet dabei die Austrittsenergie (auch bezeichnet als Austrittsarbeit), die ein Elektron besitzen
muss, um aus dem Metall austreten zu können.
Abb. 2: Bändermodell der Schottky-Diode ohne angelegte Spannung.
Für einen Metall-Halbleiterkontakt wird der Abstand d = 0, und es ergeben sich für einen n- bzw.
p-Halbleiter im thermodynamischen Gleichgewicht die Bändermodelle nach Abb. 2.
TU Berlin � Prof. Dr.-Ing. K. Petermann
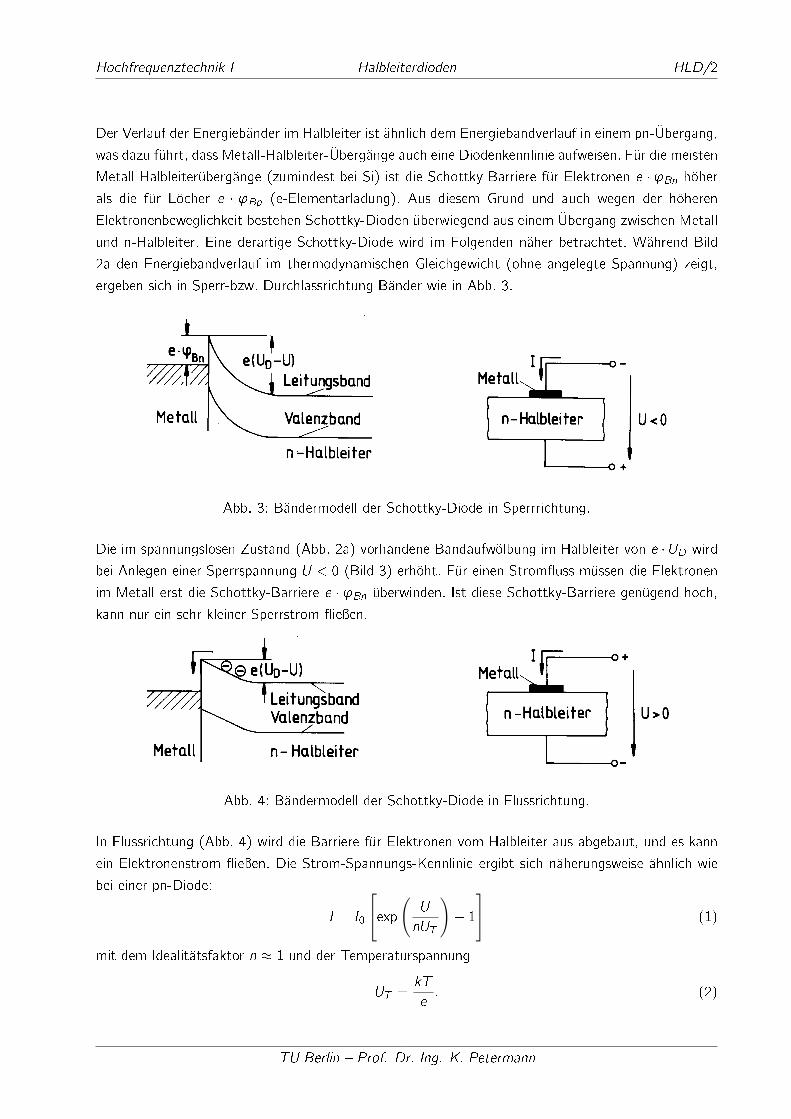
Hochfrequenztechnik I Halbleiterdioden HLD/2
Der Verlauf der Energiebänder im Halbleiter ist ähnlich dem Energiebandverlauf in einem pn-Übergang,
was dazu führt, dass Metall-Halbleiter-Übergänge auch eine Diodenkennlinie aufweisen. Für die meisten
Metall-Halbleiterübergänge (zumindest bei Si) ist die Schottky-Barriere für Elektronen e � 'Bn höher
als die für Löcher e � 'Bp (e-Elementarladung). Aus diesem Grund und auch wegen der höheren
Elektronenbeweglichkeit bestehen Schottky-Dioden überwiegend aus einem Übergang zwischen Metall
und n-Halbleiter. Eine derartige Schottky-Diode wird im Folgenden näher betrachtet. Während Bild
2a den Energiebandverlauf im thermodynamischen Gleichgewicht (ohne angelegte Spannung) zeigt,
ergeben sich in Sperr-bzw. Durchlassrichtung Bänder wie in Abb. 3.
Abb. 3: Bändermodell der Schottky-Diode in Sperrrichtung.
Die im spannungslosen Zustand (Abb. 2a) vorhandene Bandaufwölbung im Halbleiter von e � UD wird
bei Anlegen einer Sperrspannung U < 0 (Bild 3) erhöht. Für einen Strom�uss müssen die Elektronen
im Metall erst die Schottky-Barriere e � 'Bn überwinden. Ist diese Schottky-Barriere genügend hoch,
kann nur ein sehr kleiner Sperrstrom �ieÿen.
Abb. 4: Bändermodell der Schottky-Diode in Flussrichtung.
In Flussrichtung (Abb. 4) wird die Barriere für Elektronen vom Halbleiter aus abgebaut, und es kann
ein Elektronenstrom �ieÿen. Die Strom-Spannungs-Kennlinie ergibt sich näherungsweise ähnlich wie
bei einer pn-Diode:
I = I0
exp( U
nUT
)� 1
(1)
mit dem Idealitätsfaktor n � 1 und der Temperaturspannung
UT =kT
e: (2)
TU Berlin � Prof. Dr.-Ing. K. Petermann
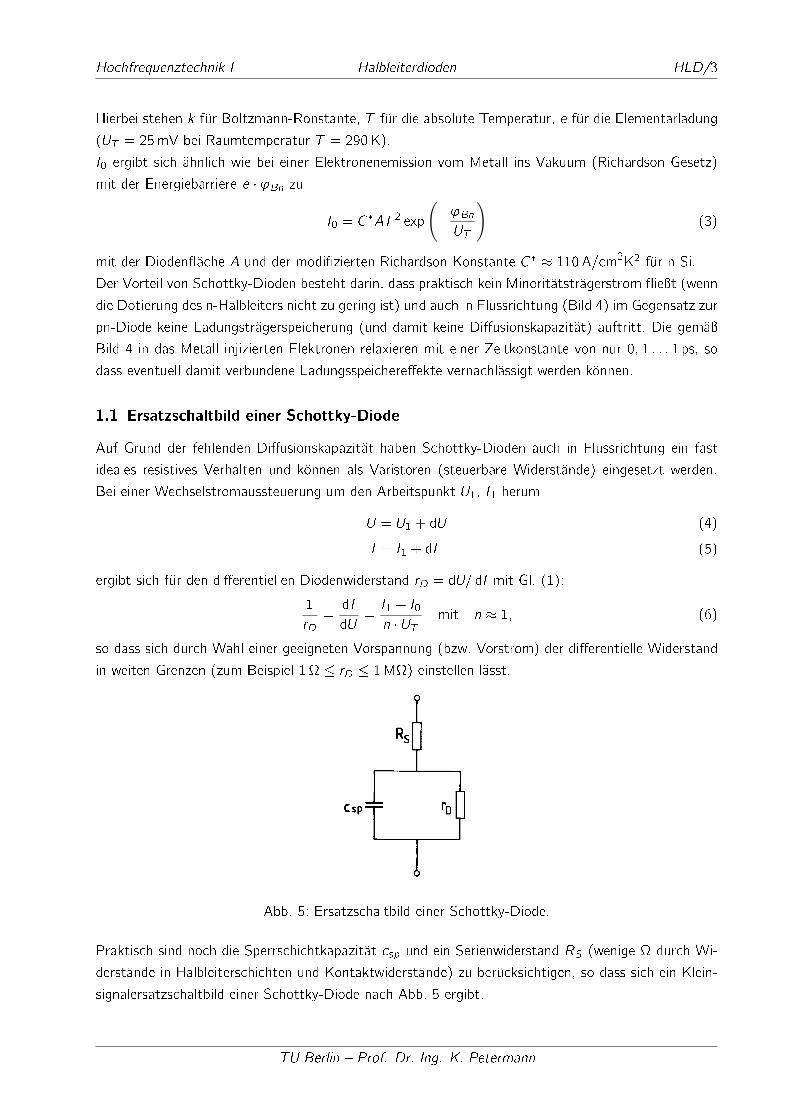
Hochfrequenztechnik I Halbleiterdioden HLD/3
Hierbei stehen k für Boltzmann-Ronstante, T für die absolute Temperatur, e für die Elementarladung
(UT = 25mV bei Raumtemperatur T = 290K).
I0 ergibt sich ähnlich wie bei einer Elektronenemission vom Metall ins Vakuum (Richardson Gesetz)
mit der Energiebarriere e � 'Bn zu
I0 = C�AT 2 exp
(�'Bn
UT
)(3)
mit der Dioden�äche A und der modi�zierten Richardson-Konstante C� � 110A=cm2K2 für n-Si.
Der Vorteil von Schottky-Dioden besteht darin, dass praktisch kein Minoritätsträgerstrom �ieÿt (wenn
die Dotierung des n-Halbleiters nicht zu gering ist) und auch in Flussrichtung (Bild 4) im Gegensatz zur
pn-Diode keine Ladungsträgerspeicherung (und damit keine Di�usionskapazität) auftritt. Die gemäÿ
Bild 4 in das Metall injizierten Elektronen relaxieren mit einer Zeitkonstante von nur 0; 1 : : : 1 ps, so
dass eventuell damit verbundene Ladungsspeichere�ekte vernachlässigt werden können.
1.1 Ersatzschaltbild einer Schottky-Diode
Auf Grund der fehlenden Di�usionskapazität haben Schottky-Dioden auch in Flussrichtung ein fast
ideales resistives Verhalten und können als Varistoren (steuerbare Widerstände) eingesetzt werden.
Bei einer Wechselstromaussteuerung um den Arbeitspunkt U1, I1 herum
U = U1 + dU (4)
I = I1 + dI (5)
ergibt sich für den di�erentiellen Diodenwiderstand rD = dU= dI mit Gl. (1):
1
rD=
dI
dU=I1 + I0
n � UTmit n � 1; (6)
so dass sich durch Wahl einer geeigneten Vorspannung (bzw. Vorstrom) der di�erentielle Widerstand
in weiten Grenzen (zum Beispiel 1 � rD � 1M) einstellen lässt.
Abb. 5: Ersatzschaltbild einer Schottky-Diode.
Praktisch sind noch die Sperrschichtkapazität csp und ein Serienwiderstand RS (wenige durch Wi-
derstände in Halbleiterschichten und Kontaktwiderstände) zu berücksichtigen, so dass sich ein Klein-
signalersatzschaltbild einer Schottky-Diode nach Abb. 5 ergibt.
TU Berlin � Prof. Dr.-Ing. K. Petermann
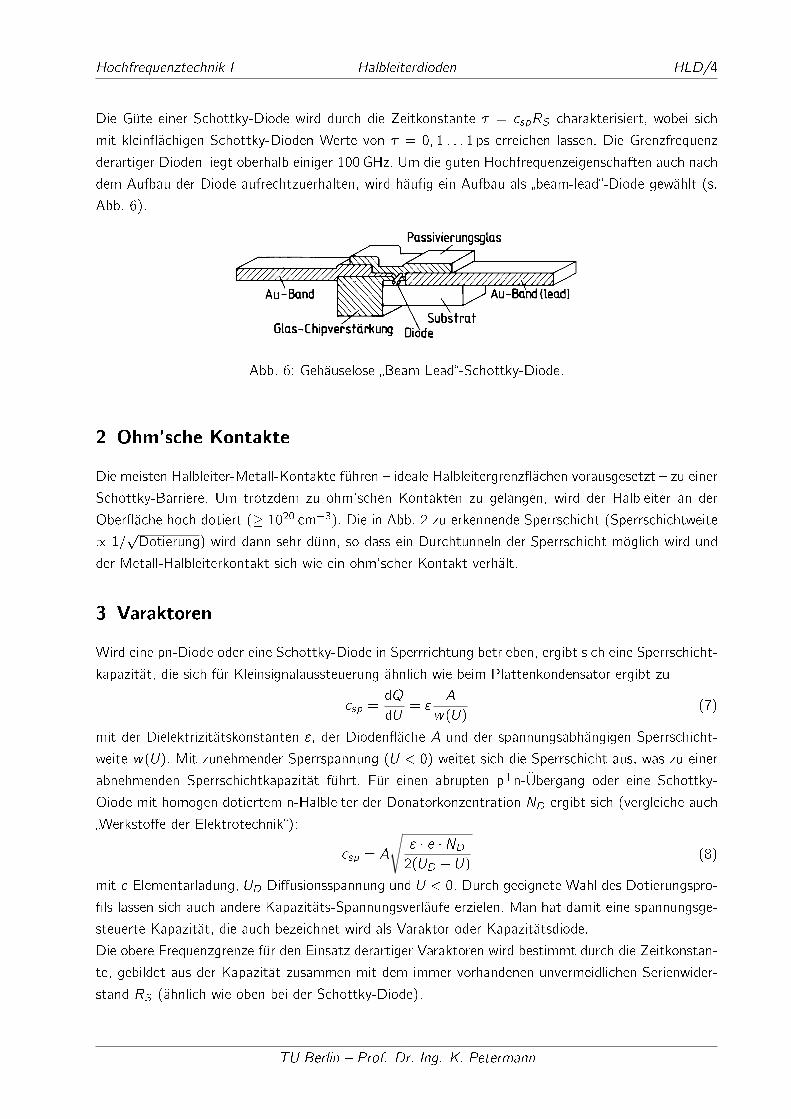
Hochfrequenztechnik I Halbleiterdioden HLD/4
Die Güte einer Schottky-Diode wird durch die Zeitkonstante � = cspRS charakterisiert, wobei sich
mit klein�ächigen Schottky-Dioden Werte von � = 0; 1 : : : 1 ps erreichen lassen. Die Grenzfrequenz
derartiger Dioden liegt oberhalb einiger 100GHz. Um die guten Hochfrequenzeigenschaften auch nach
dem Aufbau der Diode aufrechtzuerhalten, wird häu�g ein Aufbau als �beam-lead�-Diode gewählt (s.
Abb. 6).
Abb. 6: Gehäuselose �Beam Lead�-Schottky-Diode.
2 Ohm'sche Kontakte
Die meisten Halbleiter-Metall-Kontakte führen � ideale Halbleitergrenz�ächen vorausgesetzt � zu einer
Schottky-Barriere. Um trotzdem zu ohm'schen Kontakten zu gelangen, wird der Halbleiter an der
Ober�äche hoch dotiert (� 1020 cm�3). Die in Abb. 2 zu erkennende Sperrschicht (Sperrschichtweite
/ 1=pDotierung) wird dann sehr dünn, so dass ein Durchtunneln der Sperrschicht möglich wird und
der Metall-Halbleiterkontakt sich wie ein ohm'scher Kontakt verhält.
3 Varaktoren
Wird eine pn-Diode oder eine Schottky-Diode in Sperrrichtung betrieben, ergibt sich eine Sperrschicht-
kapazität, die sich für Kleinsignalaussteuerung ähnlich wie beim Plattenkondensator ergibt zu
csp =dQ
dU= "
A
w(U)(7)
mit der Dielektrizitätskonstanten ", der Dioden�äche A und der spannungsabhängigen Sperrschicht-
weite w(U). Mit zunehmender Sperrspannung (U < 0) weitet sich die Sperrschicht aus, was zu einer
abnehmenden Sperrschichtkapazität führt. Für einen abrupten p+n-Übergang oder eine Schottky-
Oiode mit homogen dotiertem n-Halbleiter der Donatorkonzentration ND ergibt sich (vergleiche auch
�Werksto�e der Elektrotechnik�):
csp = A
√" � e � ND
2(UD � U)(8)
mit e Elementarladung, UD Di�usionsspannung und U < 0. Durch geeignete Wahl des Dotierungspro-
�ls lassen sich auch andere Kapazitäts-Spannungsverläufe erzielen. Man hat damit eine spannungsge-
steuerte Kapazität, die auch bezeichnet wird als Varaktor oder Kapazitätsdiode.
Die obere Frequenzgrenze für den Einsatz derartiger Varaktoren wird bestimmt durch die Zeitkonstan-
te, gebildet aus der Kapazität zusammen mit dem immer vorhandenen unvermeidlichen Serienwider-
stand RS (ähnlich wie oben bei der Schottky-Diode).
TU Berlin � Prof. Dr.-Ing. K. Petermann
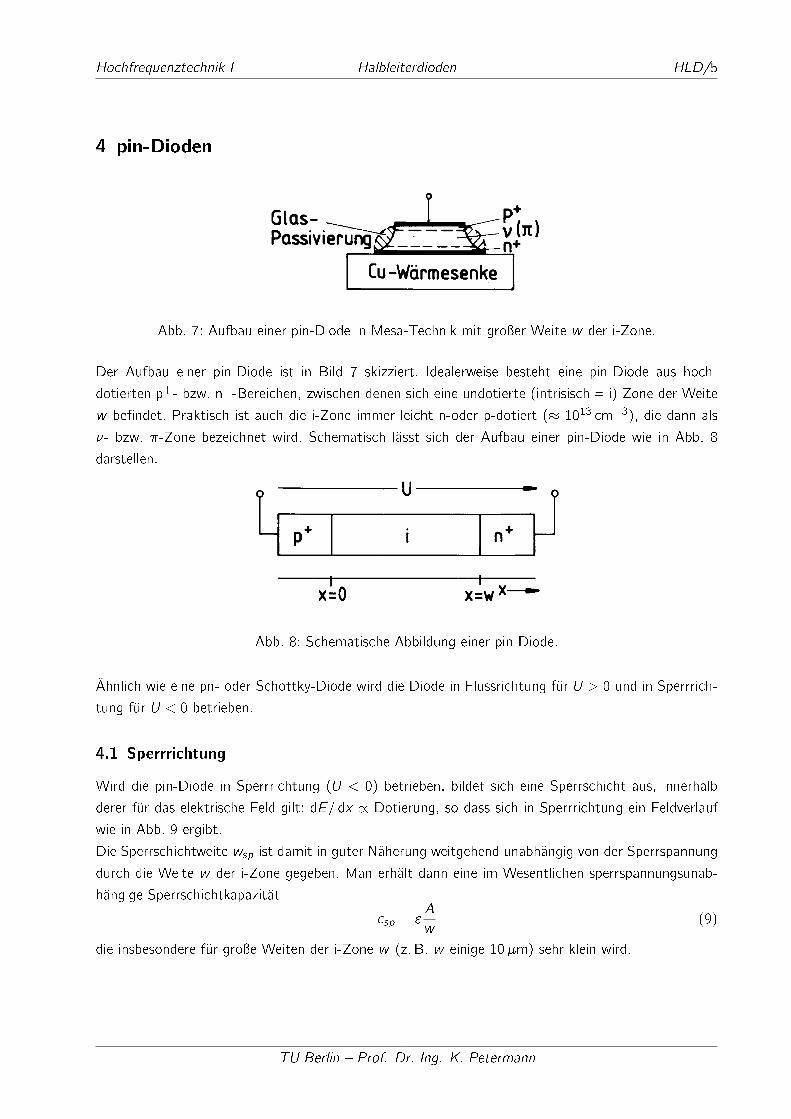
Hochfrequenztechnik I Halbleiterdioden HLD/5
4 pin-Dioden
Abb. 7: Aufbau einer pin-Diode in Mesa-Technik mit groÿer Weite w der i-Zone.
Der Aufbau einer pin-Diode ist in Bild 7 skizziert. Idealerweise besteht eine pin-Diode aus hoch-
dotierten p+- bzw. n+-Bereichen, zwischen denen sich eine undotierte (intrisisch = i) Zone der Weite
w be�ndet. Praktisch ist auch die i-Zone immer leicht n-oder p-dotiert (� 1013 cm�3), die dann als
�- bzw. �-Zone bezeichnet wird. Schematisch lässt sich der Aufbau einer pin-Diode wie in Abb. 8
darstellen.
Abb. 8: Schematische Abbildung einer pin-Diode.
Ähnlich wie eine pn- oder Schottky-Diode wird die Diode in Flussrichtung für U > 0 und in Sperrrich-
tung für U < 0 betrieben.
4.1 Sperrrichtung
Wird die pin-Diode in Sperrrichtung (U < 0) betrieben, bildet sich eine Sperrschicht aus, innerhalb
derer für das elektrische Feld gilt: dE= dx / Dotierung, so dass sich in Sperrrichtung ein Feldverlauf
wie in Abb. 9 ergibt.
Die Sperrschichtweite wsp ist damit in guter Näherung weitgehend unabhängig von der Sperrspannung
durch die Weite w der i-Zone gegeben. Man erhält dann eine im Wesentlichen sperrspannungsunab-
hängige Sperrschichtkapazität
csp = "A
w(9)
die insbesondere für groÿe Weiten der i-Zone w (z. B. w einige 10�m) sehr klein wird.
TU Berlin � Prof. Dr.-Ing. K. Petermann
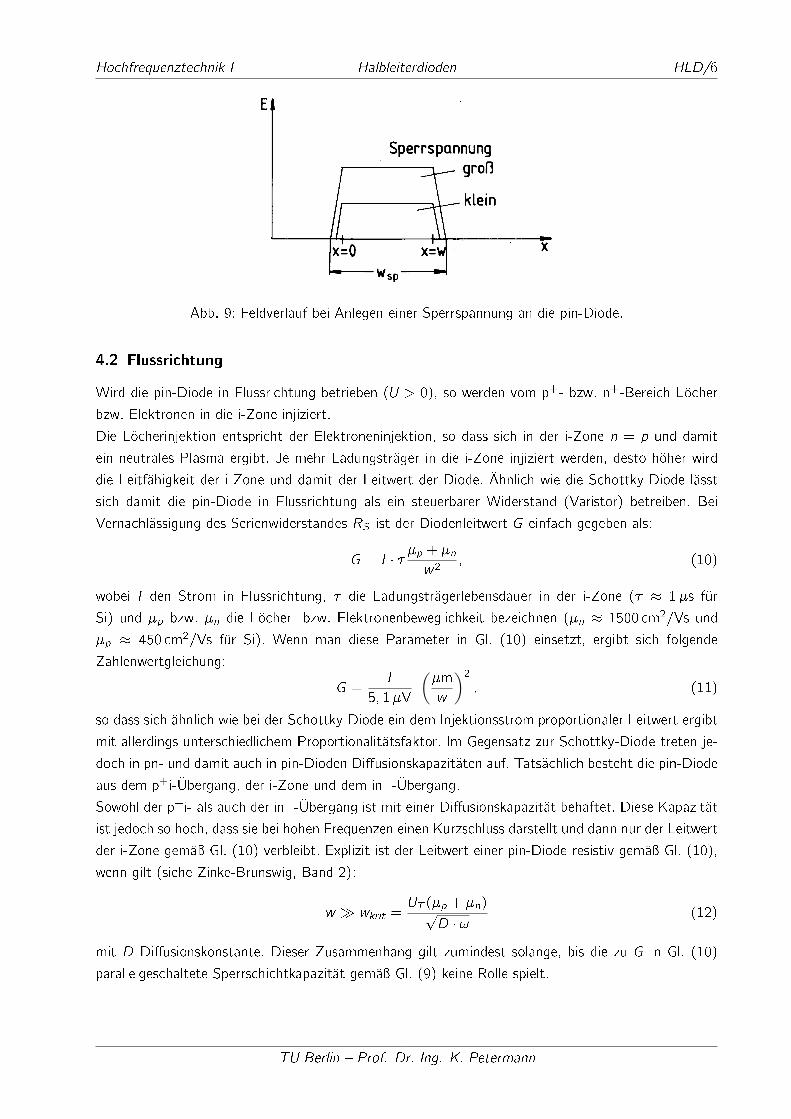
Hochfrequenztechnik I Halbleiterdioden HLD/6
Abb. 9: Feldverlauf bei Anlegen einer Sperrspannung an die pin-Diode.
4.2 Flussrichtung
Wird die pin-Diode in Flussrichtung betrieben (U > 0), so werden vom p+- bzw. n+-Bereich Löcher
bzw. Elektronen in die i-Zone injiziert.
Die Löcherinjektion entspricht der Elektroneninjektion, so dass sich in der i-Zone n = p und damit
ein neutrales Plasma ergibt. Je mehr Ladungsträger in die i-Zone injiziert werden, desto höher wird
die Leitfähigkeit der i-Zone und damit der Leitwert der Diode. Ähnlich wie die Schottky-Diode lässt
sich damit die pin-Diode in Flussrichtung als ein steuerbarer Widerstand (Varistor) betreiben. Bei
Vernachlässigung des Serienwiderstandes RS ist der Diodenleitwert G einfach gegeben als:
G = I � � �p + �n
w2; (10)
wobei I den Strom in Flussrichtung, � die Ladungsträgerlebensdauer in der i-Zone (� � 1�s für
Si) und �p bzw. �n die Löcher- bzw. Elektronenbeweglichkeit bezeichnen (�n � 1500 cm2/Vs und
�p � 450 cm2/Vs für Si). Wenn man diese Parameter in Gl. (10) einsetzt, ergibt sich folgende
Zahlenwertgleichung:
G =I
5; 1�V
(�m
w
)2; (11)
so dass sich ähnlich wie bei der Schottky-Diode ein dem Injektionsstrom proportionaler Leitwert ergibt
mit allerdings unterschiedlichem Proportionalitätsfaktor. Im Gegensatz zur Schottky-Diode treten je-
doch in pn- und damit auch in pin-Dioden Di�usionskapazitäten auf. Tatsächlich besteht die pin-Diode
aus dem p+i-Übergang, der i-Zone und dem in+-Übergang.
Sowohl der p+i- als auch der in+-Übergang ist mit einer Di�usionskapazität behaftet. Diese Kapazität
ist jedoch so hoch, dass sie bei hohen Frequenzen einen Kurzschluss darstellt und dann nur der Leitwert
der i-Zone gemäÿ Gl. (10) verbleibt. Explizit ist der Leitwert einer pin-Diode resistiv gemäÿ Gl. (10),
wenn gilt (siehe Zinke-Brunswig, Band 2):
w � wkrit =UT (�p + �n)p
D � ! (12)
mit D Di�usionskonstante. Dieser Zusammenhang gilt zumindest solange, bis die zu G in Gl. (10)
parallelgeschaltete Sperrschichtkapazität gemäÿ Gl. (9) keine Rolle spielt.
TU Berlin � Prof. Dr.-Ing. K. Petermann
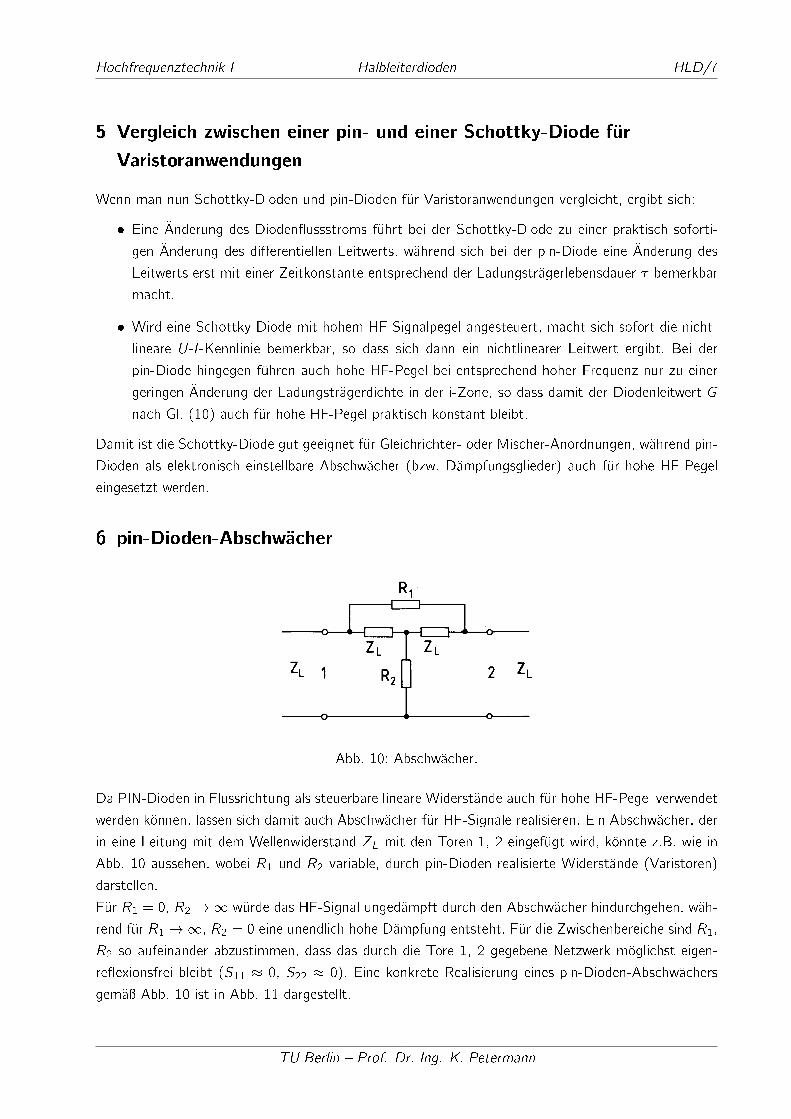
Hochfrequenztechnik I Halbleiterdioden HLD/7
5 Vergleich zwischen einer pin- und einer Schottky-Diode für
Varistoranwendungen
Wenn man nun Schottky-Dioden und pin-Dioden für Varistoranwendungen vergleicht, ergibt sich:
� Eine Änderung des Dioden�ussstroms führt bei der Schottky-Diode zu einer praktisch soforti-
gen Änderung des di�erentiellen Leitwerts, während sich bei der pin-Diode eine Änderung des
Leitwerts erst mit einer Zeitkonstante entsprechend der Ladungsträgerlebensdauer � bemerkbar
macht.
� Wird eine Schottky-Diode mit hohem HF-Signalpegel angesteuert, macht sich sofort die nicht-
lineare U-I-Kennlinie bemerkbar, so dass sich dann ein nichtlinearer Leitwert ergibt. Bei der
pin-Diode hingegen führen auch hohe HF-Pegel bei entsprechend hoher Frequenz nur zu einer
geringen Änderung der Ladungsträgerdichte in der i-Zone, so dass damit der Diodenleitwert G
nach Gl. (10) auch für hohe HF-Pegel praktisch konstant bleibt.
Damit ist die Schottky-Diode gut geeignet für Gleichrichter- oder Mischer-Anordnungen, während pin-
Dioden als elektronisch einstellbare Abschwächer (bzw. Dämpfungsglieder) auch für hohe HF-Pegel
eingesetzt werden.
6 pin-Dioden-Abschwächer
Abb. 10: Abschwächer.
Da PIN-Dioden in Flussrichtung als steuerbare lineare Widerstände auch für hohe HF-Pegel verwendet
werden können, lassen sich damit auch Abschwächer für HF-Signale realisieren. Ein Abschwächer, der
in eine Leitung mit dem Wellenwiderstand ZL mit den Toren 1, 2 eingefügt wird, könnte z.B. wie in
Abb. 10 aussehen, wobei R1 und R2 variable, durch pin-Dioden realisierte Widerstände (Varistoren)
darstellen.
Für R1 = 0, R2 !1 würde das HF-Signal ungedämpft durch den Abschwächer hindurchgehen, wäh-
rend für R1 !1, R2 = 0 eine unendlich hohe Dämpfung entsteht. Für die Zwischenbereiche sind R1,
R2 so aufeinander abzustimmen, dass das durch die Tore 1, 2 gegebene Netzwerk möglichst eigen-
re�exionsfrei bleibt (S11 � 0, S22 � 0). Eine konkrete Realisierung eines pin-Dioden-Abschwächers
gemäÿ Abb. 10 ist in Abb. 11 dargestellt.
TU Berlin � Prof. Dr.-Ing. K. Petermann
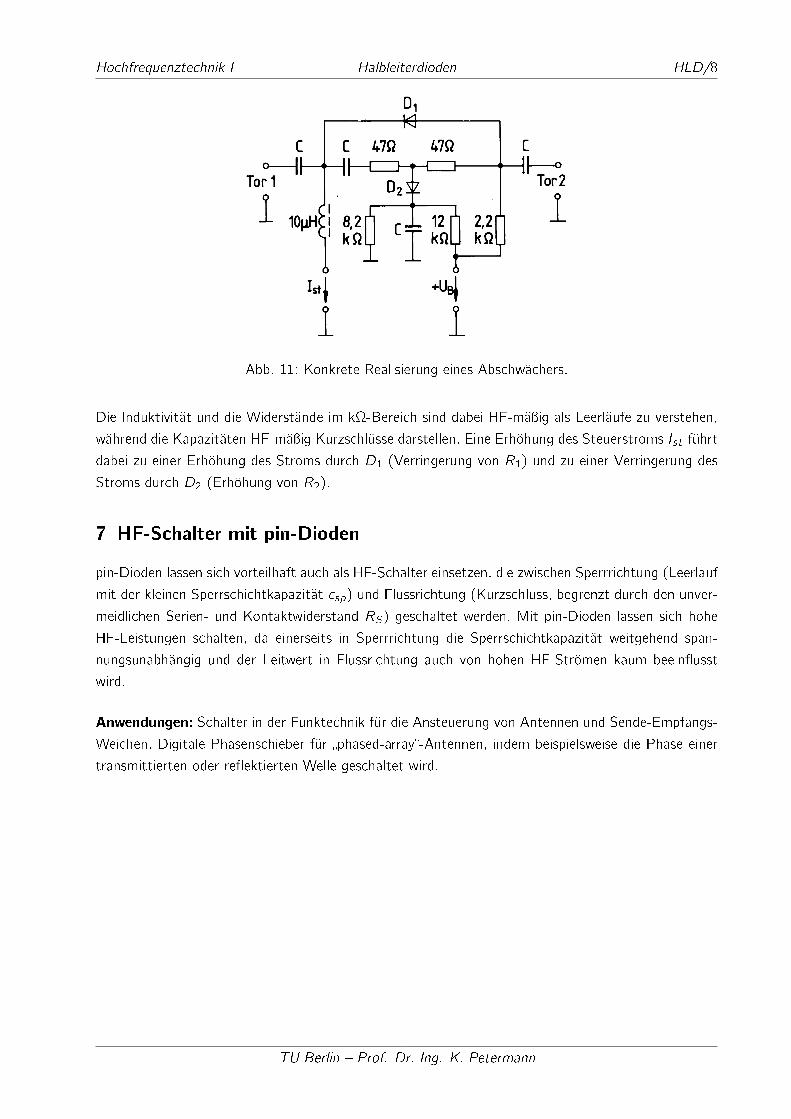
Hochfrequenztechnik I Halbleiterdioden HLD/8
Abb. 11: Konkrete Realisierung eines Abschwächers.
Die Induktivität und die Widerstände im k-Bereich sind dabei HF-mäÿig als Leerläufe zu verstehen,
während die Kapazitäten HF-mäÿig Kurzschlüsse darstellen. Eine Erhöhung des Steuerstroms Ist führt
dabei zu einer Erhöhung des Stroms durch D1 (Verringerung von R1) und zu einer Verringerung des
Stroms durch D2 (Erhöhung von R2).
7 HF-Schalter mit pin-Dioden
pin-Dioden lassen sich vorteilhaft auch als HF-Schalter einsetzen, die zwischen Sperrrichtung (Leerlauf
mit der kleinen Sperrschichtkapazität csp) und Flussrichtung (Kurzschluss, begrenzt durch den unver-
meidlichen Serien- und Kontaktwiderstand RS) geschaltet werden. Mit pin-Dioden lassen sich hohe
HF-Leistungen schalten, da einerseits in Sperrrichtung die Sperrschichtkapazität weitgehend span-
nungsunabhängig und der Leitwert in Flussrichtung auch von hohen HF-Strömen kaum beein�usst
wird.
Anwendungen: Schalter in der Funktechnik für die Ansteuerung von Antennen und Sende-Empfangs-
Weichen. Digitale Phasenschieber für �phased-array�-Antennen, indem beispielsweise die Phase einer
transmittierten oder re�ektierten Welle geschaltet wird.
TU Berlin � Prof. Dr.-Ing. K. Petermann
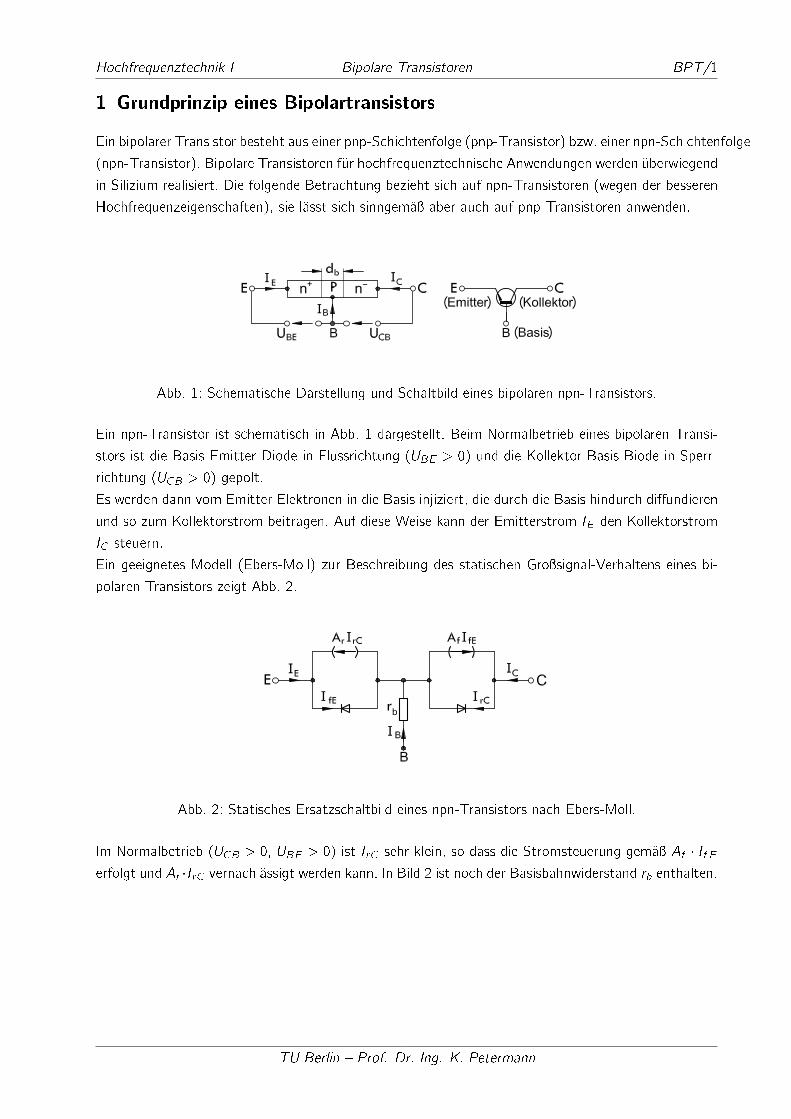
Hochfrequenztechnik I Bipolare Transistoren BPT/1
1 Grundprinzip eines Bipolartransistors
Ein bipolarer Transistor besteht aus einer pnp-Schichtenfolge (pnp-Transistor) bzw. einer npn-Schichtenfolge
(npn-Transistor). Bipolare Transistoren für hochfrequenztechnische Anwendungen werden überwiegend
in Silizium realisiert. Die folgende Betrachtung bezieht sich auf npn-Transistoren (wegen der besseren
Hochfrequenzeigenschaften), sie lässt sich sinngemäÿ aber auch auf pnp-Transistoren anwenden.
Abb. 1: Schematische Darstellung und Schaltbild eines bipolaren npn-Transistors.
Ein npn-Transistor ist schematisch in Abb. 1 dargestellt. Beim Normalbetrieb eines bipolaren Transi-
stors ist die Basis-Emitter-Diode in Flussrichtung (UBE > 0) und die Kollektor-Basis-Biode in Sperr-
richtung (UCB > 0) gepolt.
Es werden dann vom Emitter Elektronen in die Basis injiziert, die durch die Basis hindurch di�undieren
und so zum Kollektorstrom beitragen. Auf diese Weise kann der Emitterstrom IE den Kollektorstrom
IC steuern.
Ein geeignetes Modell (Ebers-Moll) zur Beschreibung des statischen Groÿsignal-Verhaltens eines bi-
polaren Transistors zeigt Abb. 2.
Abb. 2: Statisches Ersatzschaltbild eines npn-Transistors nach Ebers-Moll.
Im Normalbetrieb (UCB > 0, UBE > 0) ist IrC sehr klein, so dass die Stromsteuerung gemäÿ Af � If E
erfolgt und Ar �IrC vernachlässigt werden kann. In Bild 2 ist noch der Basisbahnwiderstand rb enthalten.
TU Berlin � Prof. Dr.-Ing. K. Petermann
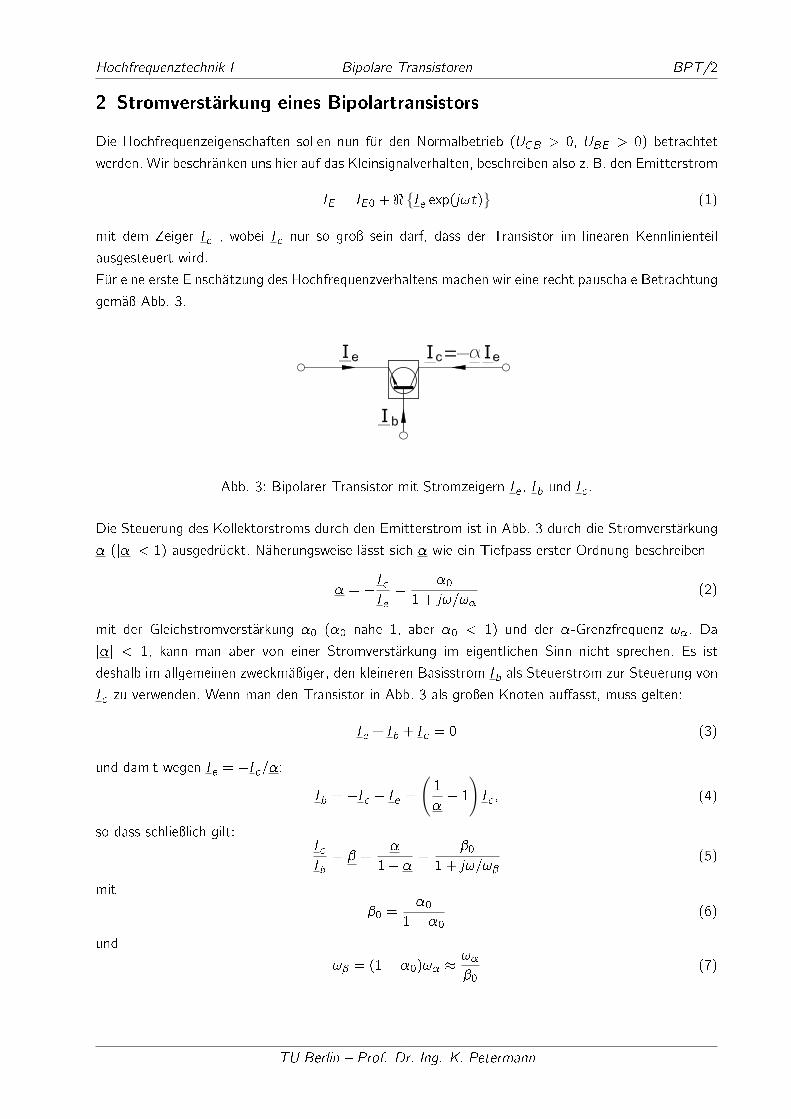
Hochfrequenztechnik I Bipolare Transistoren BPT/2
2 Stromverstärkung eines Bipolartransistors
Die Hochfrequenzeigenschaften sollen nun für den Normalbetrieb (UCB > 0, UBE > 0) betrachtet
werden. Wir beschränken uns hier auf das Kleinsignalverhalten, beschreiben also z. B. den Emitterstrom
IE = IE0 + <{Ie exp(j!t)
}(1)
mit dem Zeiger Ie , wobei Ie nur so groÿ sein darf, dass der Transistor im linearen Kennlinienteil
ausgesteuert wird.
Für eine erste Einschätzung des Hochfrequenzverhaltens machen wir eine recht pauschale Betrachtung
gemäÿ Abb. 3.
Abb. 3: Bipolarer Transistor mit Stromzeigern Ie , Ib und Ic .
Die Steuerung des Kollektorstroms durch den Emitterstrom ist in Abb. 3 durch die Stromverstärkung
� (j�j < 1) ausgedrückt. Näherungsweise lässt sich � wie ein Tiefpass erster Ordnung beschreiben
� = �IcIe
=�0
1 + j!=!�(2)
mit der Gleichstromverstärkung �0 (�0 nahe 1, aber �0 < 1) und der �-Grenzfrequenz !�. Da
j�j < 1, kann man aber von einer Stromverstärkung im eigentlichen Sinn nicht sprechen. Es ist
deshalb im allgemeinen zweckmäÿiger, den kleineren Basisstrom Ib als Steuerstrom zur Steuerung von
Ic zu verwenden. Wenn man den Transistor in Abb. 3 als groÿen Knoten au�asst, muss gelten:
Ie + Ib + Ic = 0 (3)
und damit wegen Ie = �Ic=�:
Ib = �Ic � Ie =
(1
�� 1
)Ic ; (4)
so dass schlieÿlich gilt:IcIb
= � =�
1� �=
�0
1 + j!=!�(5)
mit
�0 =�0
1� �0(6)
und
!� = (1� �0)!� �!�
�0(7)
TU Berlin � Prof. Dr.-Ing. K. Petermann
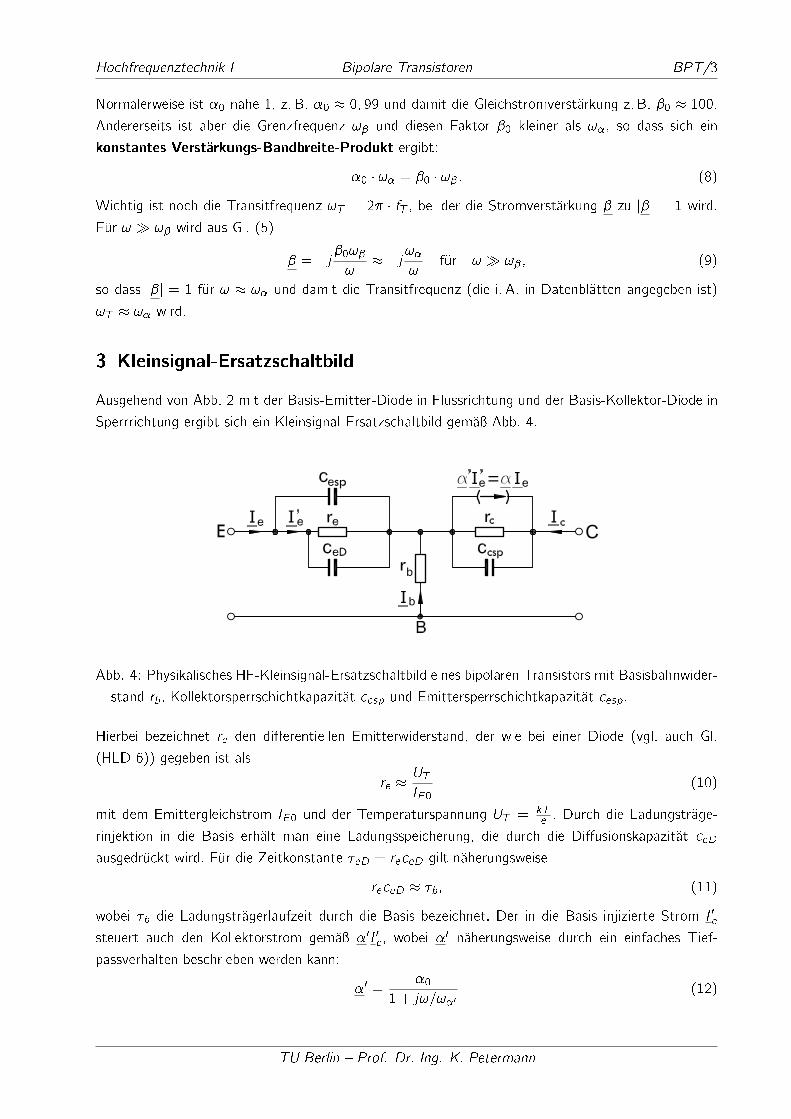
Hochfrequenztechnik I Bipolare Transistoren BPT/3
Normalerweise ist �0 nahe 1, z. B. �0 � 0; 99 und damit die Gleichstromverstärkung z. B. �0 � 100.
Andererseits ist aber die Grenzfrequenz !� und diesen Faktor �0 kleiner als !�, so dass sich ein
konstantes Verstärkungs-Bandbreite-Produkt ergibt:
�0 � !� = �0 � !�: (8)
Wichtig ist noch die Transitfrequenz !T = 2� � fT , bei der die Stromverstärkung � zu j�j = 1 wird.
Für ! � !� wird aus Gl. (5)
� = �j�0!�!
� �j!�
!für ! � !�; (9)
so dass j�j = 1 für ! � !� und damit die Transitfrequenz (die i. A. in Datenblätten angegeben ist)
!T � !� wird.
3 Kleinsignal-Ersatzschaltbild
Ausgehend von Abb. 2 mit der Basis-Emitter-Diode in Flussrichtung und der Basis-Kollektor-Diode in
Sperrrichtung ergibt sich ein Kleinsignal-Ersatzschaltbild gemäÿ Abb. 4.
Abb. 4: Physikalisches HF-Kleinsignal-Ersatzschaltbild eines bipolaren Transistors mit Basisbahnwider-
stand rb, Kollektorsperrschichtkapazität ccsp und Emittersperrschichtkapazität cesp.
Hierbei bezeichnet re den di�erentiellen Emitterwiderstand, der wie bei einer Diode (vgl. auch Gl.
(HLD 6)) gegeben ist als
re �UTIE0
(10)
mit dem Emittergleichstrom IE0 und der Temperaturspannung UT = kTe. Durch die Ladungsträge-
rinjektion in die Basis erhält man eine Ladungsspeicherung, die durch die Di�usionskapazität ceD
ausgedrückt wird. Für die Zeitkonstante �eD = receD gilt näherungsweise
receD � �b; (11)
wobei �b die Ladungsträgerlaufzeit durch die Basis bezeichnet. Der in die Basis injizierte Strom I 0e
steuert auch den Kollektorstrom gemäÿ �0I 0e , wobei �0 näherungsweise durch ein einfaches Tief-
passverhalten beschrieben werden kann:
�0 =�0
1 + j!=!�0
(12)
TU Berlin � Prof. Dr.-Ing. K. Petermann
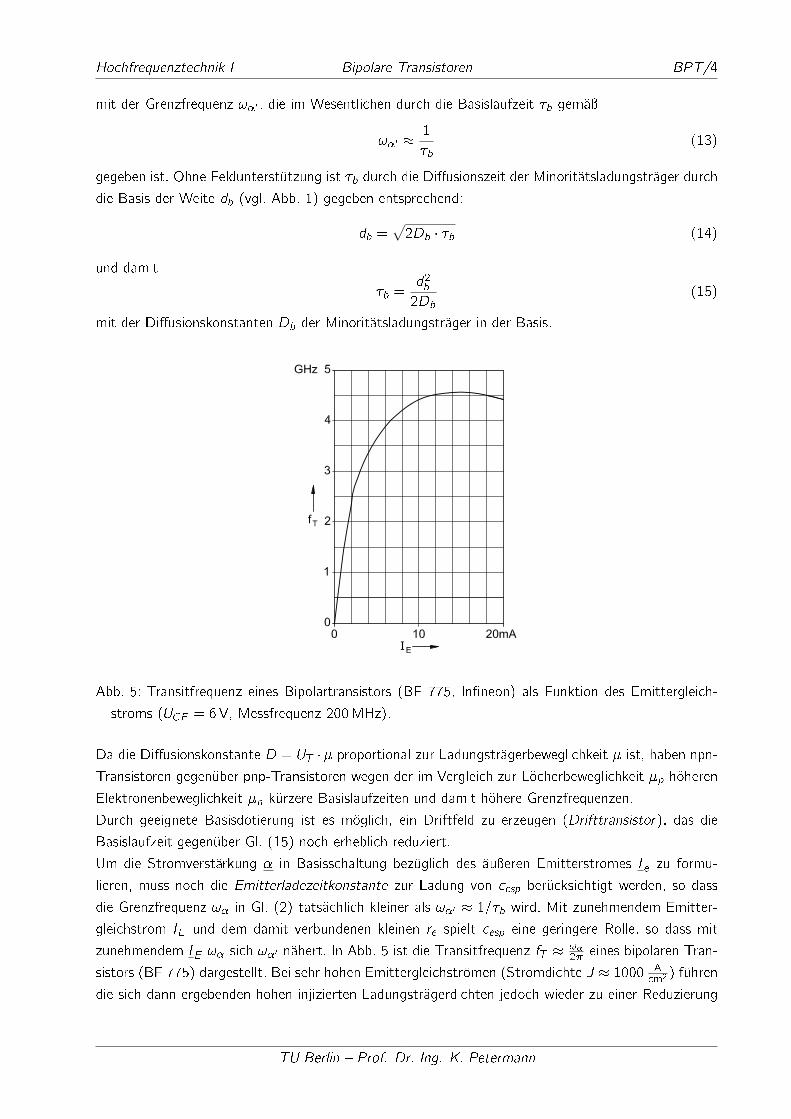
Hochfrequenztechnik I Bipolare Transistoren BPT/4
mit der Grenzfrequenz !�0 , die im Wesentlichen durch die Basislaufzeit �b gemäÿ
!�0 �1
�b(13)
gegeben ist. Ohne Feldunterstützung ist �b durch die Di�usionszeit der Minoritätsladungsträger durch
die Basis der Weite db (vgl. Abb. 1) gegeben entsprechend:
db =√2Db � �b (14)
und damit
�b =d2b2Db
(15)
mit der Di�usionskonstanten Db der Minoritätsladungsträger in der Basis.
Abb. 5: Transitfrequenz eines Bipolartransistors (BF 775, In�neon) als Funktion des Emittergleich-
stroms (UCE = 6V, Messfrequenz 200MHz).
Da die Di�usionskonstante D = UT �� proportional zur Ladungsträgerbeweglichkeit � ist, haben npn-
Transistoren gegenüber pnp-Transistoren wegen der im Vergleich zur Löcherbeweglichkeit �p höheren
Elektronenbeweglichkeit �n kürzere Basislaufzeiten und damit höhere Grenzfrequenzen.
Durch geeignete Basisdotierung ist es möglich, ein Driftfeld zu erzeugen (Drifttransistor), das die
Basislaufzeit gegenüber Gl. (15) noch erheblich reduziert.
Um die Stromverstärkung � in Basisschaltung bezüglich des äuÿeren Emitterstromes Ie zu formu-
lieren, muss noch die Emitterladezeitkonstante zur Ladung von cesp berücksichtigt werden, so dass
die Grenzfrequenz !� in Gl. (2) tatsächlich kleiner als !�0 � 1=�b wird. Mit zunehmendem Emitter-
gleichstrom IE und dem damit verbundenen kleinen re spielt cesp eine geringere Rolle, so dass mit
zunehmendem IE !� sich !�0 nähert. In Abb. 5 ist die Transitfrequenz fT �!�
2�eines bipolaren Tran-
sistors (BF 775) dargestellt. Bei sehr hohen Emittergleichströmen (Stromdichte J � 1000 A
cm2 ) führen
die sich dann ergebenden hohen injizierten Ladungsträgerdichten jedoch wieder zu einer Reduzierung
TU Berlin � Prof. Dr.-Ing. K. Petermann
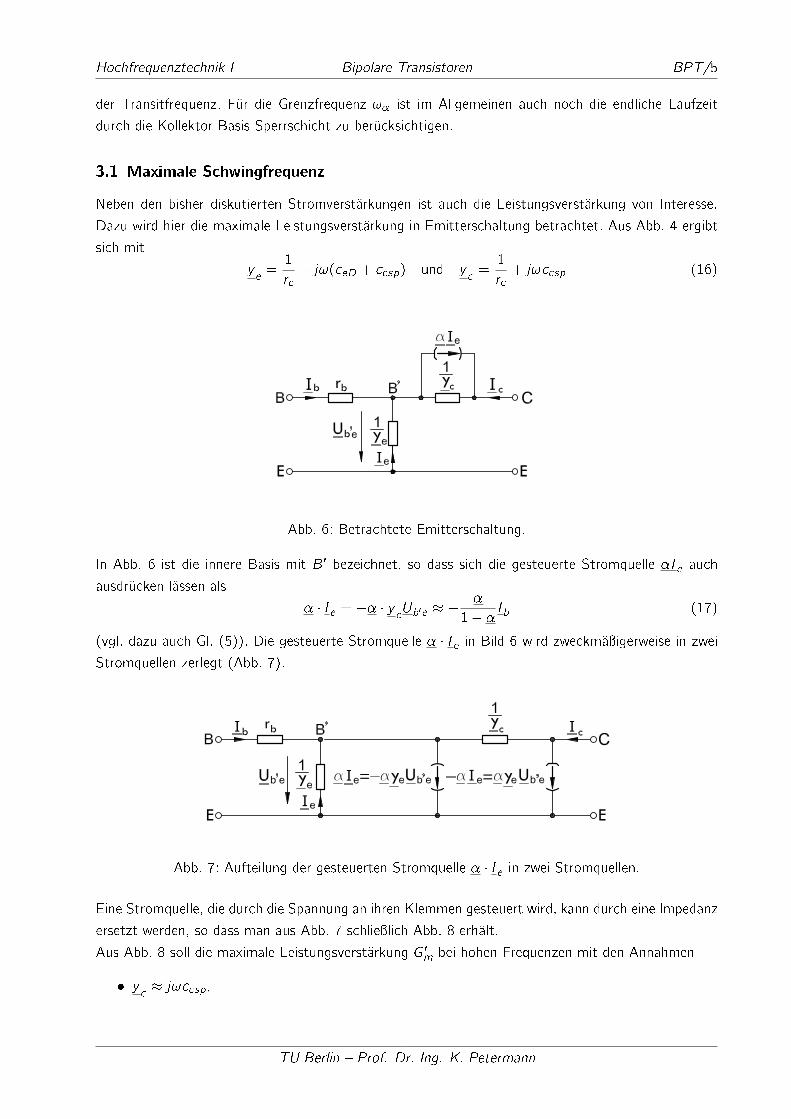
Hochfrequenztechnik I Bipolare Transistoren BPT/5
der Transitfrequenz. Für die Grenzfrequenz !� ist im Allgemeinen auch noch die endliche Laufzeit
durch die Kollektor-Basis-Sperrschicht zu berücksichtigen.
3.1 Maximale Schwingfrequenz
Neben den bisher diskutierten Stromverstärkungen ist auch die Leistungsverstärkung von Interesse.
Dazu wird hier die maximale Leistungsverstärkung in Emitterschaltung betrachtet. Aus Abb. 4 ergibt
sich mit
ye=
1
re+ j!(ceD + cesp) und y
c=
1
rc+ j!ccsp (16)
Abb. 6: Betrachtete Emitterschaltung.
In Abb. 6 ist die innere Basis mit B0 bezeichnet, so dass sich die gesteuerte Stromquelle �Ie auch
ausdrücken lässen als
� � Ie = �� � y eUb0e � ��
1� �Ib (17)
(vgl. dazu auch Gl. (5)). Die gesteuerte Stromquelle � � Ie in Bild 6 wird zweckmäÿigerweise in zwei
Stromquellen zerlegt (Abb. 7).
Abb. 7: Aufteilung der gesteuerten Stromquelle � � Ie in zwei Stromquellen.
Eine Stromquelle, die durch die Spannung an ihren Klemmen gesteuert wird, kann durch eine Impedanz
ersetzt werden, so dass man aus Abb. 7 schlieÿlich Abb. 8 erhält.
Aus Abb. 8 soll die maximale Leistungsverstärkung G0
m bei hohen Frequenzen mit den Annahmen
� yc� j!ccsp,
TU Berlin � Prof. Dr.-Ing. K. Petermann
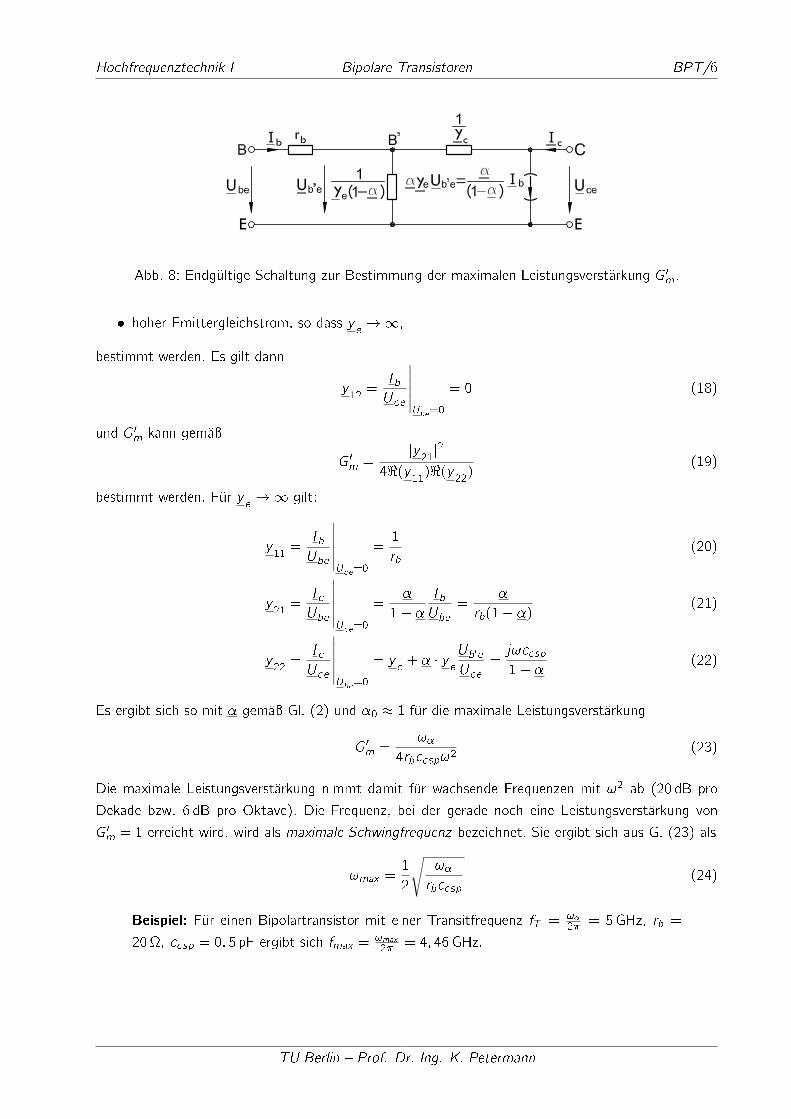
Hochfrequenztechnik I Bipolare Transistoren BPT/6
Abb. 8: Endgültige Schaltung zur Bestimmung der maximalen Leistungsverstärkung G0
m.
� hoher Emittergleichstrom, so dass ye!1,
bestimmt werden. Es gilt dann
y12
=IbUce
∣∣∣∣∣∣Ube=0
= 0 (18)
und G0
m kann gemäÿ
G0
m =jy21j2
4<(y11)<(y
22)
(19)
bestimmt werden. Für ye!1 gilt:
y11
=IbUbe
∣∣∣∣∣∣Uce=0
=1
rb(20)
y21
=IcUbe
∣∣∣∣∣∣Uce=0
=�
1� �
IbUbe
=�
rb(1� �)(21)
y22
=IcUce
∣∣∣∣∣∣Ube=0
= yc+ � � y
e
Ub0e
Uce
=j!ccsp
1� �(22)
Es ergibt sich so mit � gemäÿ Gl. (2) und �0 � 1 für die maximale Leistungsverstärkung
G0
m =!�
4rbccsp!2(23)
Die maximale Leistungsverstärkung nimmt damit für wachsende Frequenzen mit !2 ab (20 dB pro
Dekade bzw. 6 dB pro Oktave). Die Frequenz, bei der gerade noch eine Leistungsverstärkung von
G0
m = 1 erreicht wird, wird als maximale Schwingfrequenz bezeichnet. Sie ergibt sich aus G. (23) als
!max =1
2
√!�
rbccsp(24)
Beispiel: Für einen Bipolartransistor mit einer Transitfrequenz fT = !�
2�= 5GHz, rb =
20, ccsp = 0; 5 pF ergibt sich fmax =!max2�
= 4; 46GHz.
TU Berlin � Prof. Dr.-Ing. K. Petermann
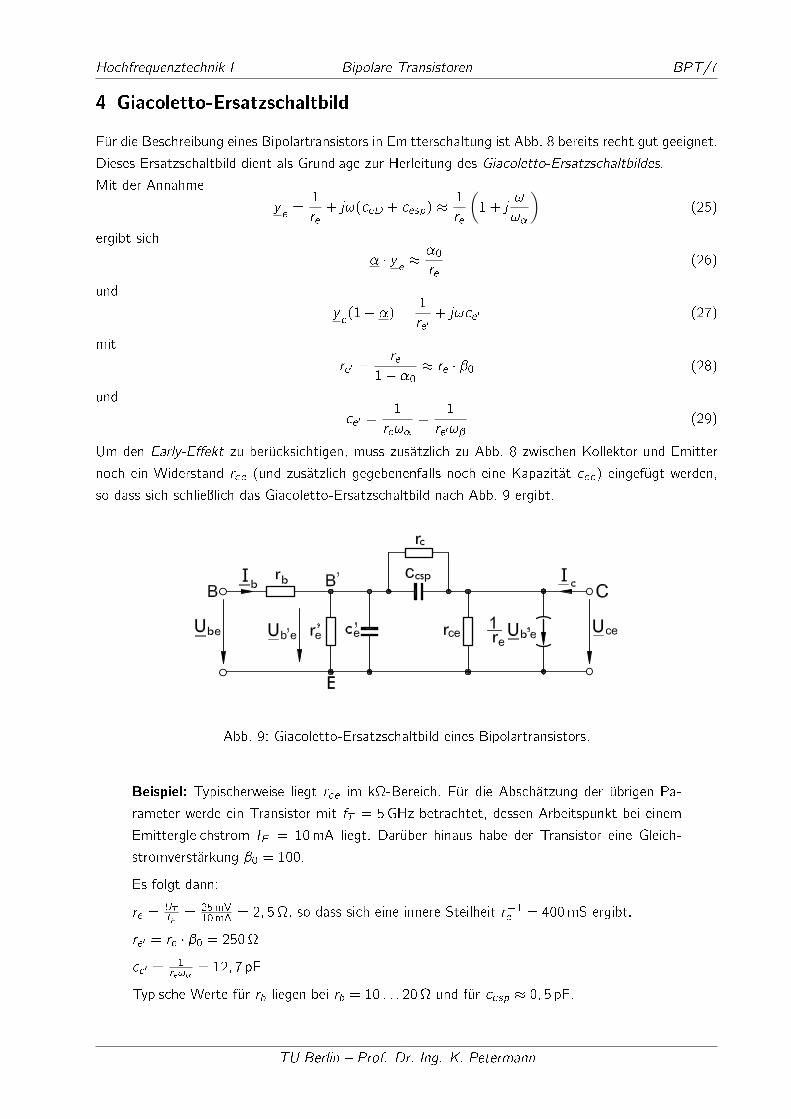
Hochfrequenztechnik I Bipolare Transistoren BPT/7
4 Giacoletto-Ersatzschaltbild
Für die Beschreibung eines Bipolartransistors in Emitterschaltung ist Abb. 8 bereits recht gut geeignet.
Dieses Ersatzschaltbild dient als Grundlage zur Herleitung des Giacoletto-Ersatzschaltbildes.
Mit der Annahme
ye=
1
re+ j!(ceD + cesp) �
1
re
(1 + j
!
!�
)(25)
ergibt sich
� � ye�
�0
re(26)
und
ye(1� �) =
1
re 0
+ j!ce 0 (27)
mit
re 0 =re
1� �0� re � �0 (28)
und
ce 0 =1
re!�=
1
re 0!�(29)
Um den Early-E�ekt zu berücksichtigen, muss zusätzlich zu Abb. 8 zwischen Kollektor und Emitter
noch ein Widerstand rce (und zusätzlich gegebenenfalls noch eine Kapazität cce) eingefügt werden,
so dass sich schlieÿlich das Giacoletto-Ersatzschaltbild nach Abb. 9 ergibt.
Abb. 9: Giacoletto-Ersatzschaltbild eines Bipolartransistors.
Beispiel: Typischerweise liegt rce im k-Bereich. Für die Abschätzung der übrigen Pa-
rameter werde ein Transistor mit fT = 5GHz betrachtet, dessen Arbeitspunkt bei einem
Emittergleichstrom IE = 10mA liegt. Darüber hinaus habe der Transistor eine Gleich-
stromverstärkung �0 = 100.
Es folgt dann:
re =UTIE
= 25mV
10mA= 2; 5, so dass sich eine innere Steilheit r�1e = 400mS ergibt.
re 0 = re � �0 = 250
ce 0 = 1
re!�= 12; 7 pF
Typische Werte für rb liegen bei rb = 10 : : : 20 und für ccsp � 0; 5 pF.
TU Berlin � Prof. Dr.-Ing. K. Petermann
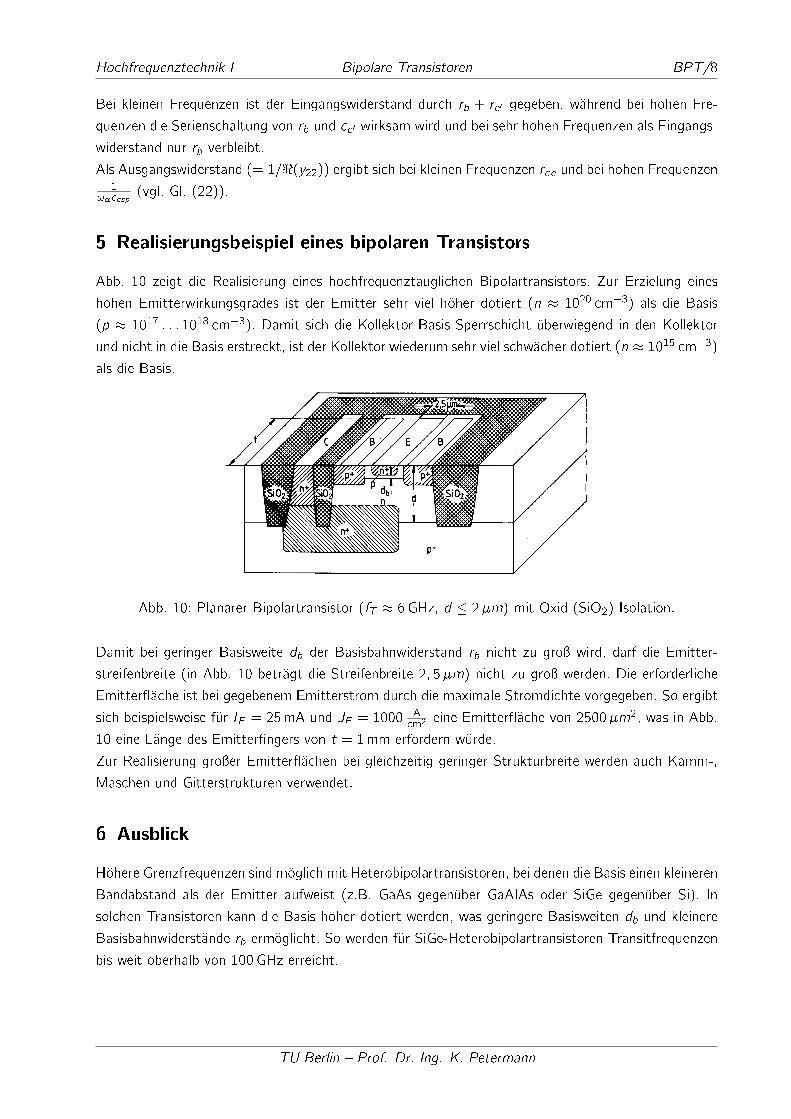
Hochfrequenztechnik I Bipolare Transistoren BPT/8
Bei kleinen Frequenzen ist der Eingangswiderstand durch rb + re 0 gegeben, während bei hohen Fre-
quenzen die Serienschaltung von rb und ce 0 wirksam wird und bei sehr hohen Frequenzen als Eingangs-
widerstand nur rb verbleibt.
Als Ausgangswiderstand (= 1=<(y22)) ergibt sich bei kleinen Frequenzen rce und bei hohen Frequenzen1
!�ccsp(vgl. Gl. (22)).
5 Realisierungsbeispiel eines bipolaren Transistors
Abb. 10 zeigt die Realisierung eines hochfrequenztauglichen Bipolartransistors. Zur Erzielung eines
hohen Emitterwirkungsgrades ist der Emitter sehr viel höher dotiert (n � 1020 cm�3) als die Basis
(p � 1017 : : : 1018 cm�3). Damit sich die Kollektor-Basis-Sperrschicht überwiegend in den Kollektor
und nicht in die Basis erstreckt, ist der Kollektor wiederum sehr viel schwächer dotiert (n � 1015 cm�3)
als die Basis.
Abb. 10: Planarer Bipolartransistor (fT � 6GHz, d � 2�m) mit Oxid (SiO2)-Isolation.
Damit bei geringer Basisweite db der Basisbahnwiderstand rb nicht zu groÿ wird, darf die Emitter-
streifenbreite (in Abb. 10 beträgt die Streifenbreite 2; 5�m) nicht zu groÿ werden. Die erforderliche
Emitter�äche ist bei gegebenem Emitterstrom durch die maximale Stromdichte vorgegeben. So ergibt
sich beispielsweise für IE = 25mA und JE = 1000 A
cm2 eine Emitter�äche von 2500�m2, was in Abb.
10 eine Länge des Emitter�ngers von t = 1mm erfordern würde.
Zur Realisierung groÿer Emitter�ächen bei gleichzeitig geringer Strukturbreite werden auch Kamm-,
Maschen-und Gitterstrukturen verwendet.
6 Ausblick
Höhere Grenzfrequenzen sind möglich mit Heterobipolartransistoren, bei denen die Basis einen kleineren
Bandabstand als der Emitter aufweist (z.B. GaAs gegenüber GaAIAs oder SiGe gegenüber Si). In
solchen Transistoren kann die Basis höher dotiert werden, was geringere Basisweiten db und kleinere
Basisbahnwiderstände rb ermöglicht. So werden für SiGe-Heterobipolartransistoren Transitfrequenzen
bis weit oberhalb von 100GHz erreicht.
TU Berlin � Prof. Dr.-Ing. K. Petermann
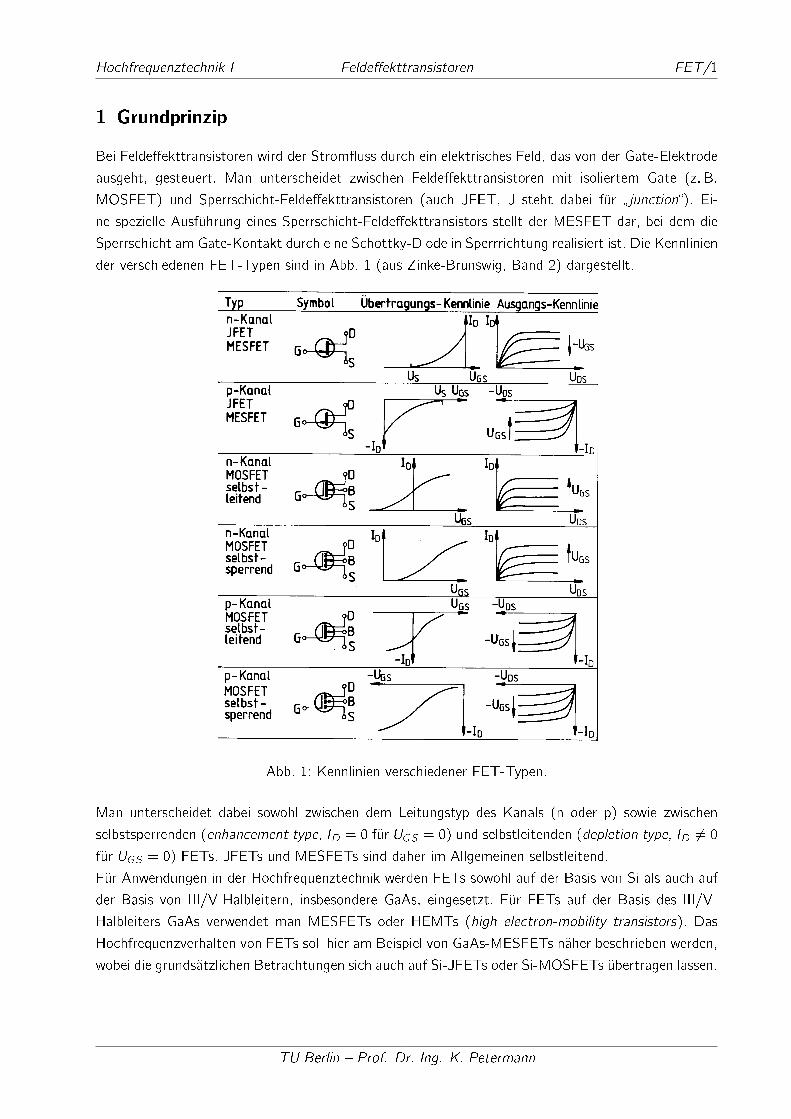
Hochfrequenztechnik I Felde�ekttransistoren FET/1
1 Grundprinzip
Bei Felde�ekttransistoren wird der Strom�uss durch ein elektrisches Feld, das von der Gate-Elektrode
ausgeht, gesteuert. Man unterscheidet zwischen Felde�ekttransistoren mit isoliertem Gate (z. B.
MOSFET) und Sperrschicht-Felde�ekttransistoren (auch JFET, J steht dabei für � junction�). Ei-
ne spezielle Ausführung eines Sperrschicht-Felde�ekttransistors stellt der MESFET dar, bei dem die
Sperrschicht am Gate-Kontakt durch eine Schottky-Diode in Sperrrichtung realisiert ist. Die Kennlinien
der verschiedenen FET-Typen sind in Abb. 1 (aus Zinke-Brunswig, Band 2) dargestellt.
Abb. 1: Kennlinien verschiedener FET-Typen.
Man unterscheidet dabei sowohl zwischen dem Leitungstyp des Kanals (n oder p) sowie zwischen
selbstsperrenden (enhancement type, ID = 0 für UGS = 0) und selbstleitenden (depletion type, ID 6= 0
für UGS = 0) FETs. JFETs und MESFETs sind daher im Allgemeinen selbstleitend.
Für Anwendungen in der Hochfrequenztechnik werden FETs sowohl auf der Basis von Si als auch auf
der Basis von III/V-Halbleitern, insbesondere GaAs, eingesetzt. Für FETs auf der Basis des III/V-
Halbleiters GaAs verwendet man MESFETs oder HEMTs (high electron-mobility transistors). Das
Hochfrequenzverhalten von FETs soll hier am Beispiel von GaAs-MESFETs näher beschrieben werden,
wobei die grundsätzlichen Betrachtungen sich auch auf Si-JFETs oder Si-MOSFETs übertragen lassen.
TU Berlin � Prof. Dr.-Ing. K. Petermann
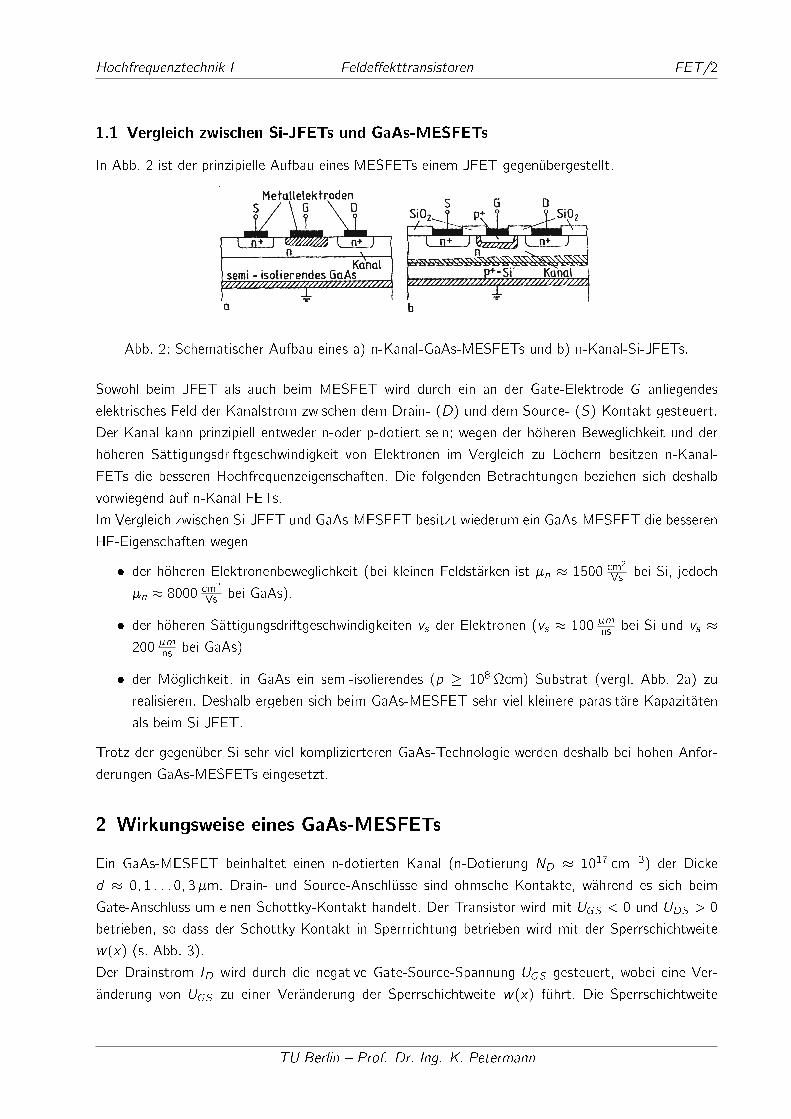
Hochfrequenztechnik I Felde�ekttransistoren FET/2
1.1 Vergleich zwischen Si-JFETs und GaAs-MESFETs
In Abb. 2 ist der prinzipielle Aufbau eines MESFETs einem JFET gegenübergestellt.
Hochfrequenztechnik I FET/2
Vergleich zwischen Si-JFETs und GaAs-MESFETs
In Bild 2 ist der prinzipielle Aufbau eines MESFETs einem JFET gegenübergestellt.
Metallelektroden G o
S / \ G \ 0
Ka"nal semi - isolierendes GaAs
-=-a b
Bild 2: a) schematischer Aufbau eines n-Kanal GaAs MESFETs b) schematischer Aufbau eines n-Kanal si JFETs
Sowohl beim JFET als auch beim MESFET wird durch ein an der Gate-Elektrode G anliegendes elektrisches Feld der Kanalstrom zwischen dem Drain-(D) und dem Source-(S) Kontakt gesteuert. Der Kanal kann prinzipiell entweder n- oder p-dotiert sein; wegen der höheren Beweglichkeit und der höheren Sättigungsdriftgeschwindigkeit von Elektronen im Vergleich zu Löchern besitzen n-Kanal FETs die besseren Hochfrequenzeigenschaften. Die folgenden Betrachtungen beziehen sich deshalb vorwiegend auf n-Kanal FETs.
Im Vergleich zwischen Si-JFET und GaAs-MESFET besitzt wiederum ein GaAs-MESFET die besseren HF-Eigenschaften wegen
1) der höheren (bei kleinen
ist 1500 cm /(Vs) bei si gegenüber 8000 cm /(Vs) bei GaAs).
2) der höheren Sättigungsdriftgeschwindigkeiten V der Elektronen (v 100 bei si und V 200
s
bei GaAs)
s s
3) der Möglichkeit, in GaAs ein semi-isolierendes 108 n cm) Substrat (vergi. Bild 2a) zu realisieren. Deshalb ergeben sich beim GaAs-MESFET sehr viel kleinere parasitäre Kapazi-täten als beim Si-JfET.
Trotz der gegenüber si sehr viel komplizierteren GaAs-Technologie werden deshalb bei sehr hohen Frequenzen GaAs-MESFETs eingesetzt.
Abb. 2: Schematischer Aufbau eines a) n-Kanal-GaAs-MESFETs und b) n-Kanal-Si-JFETs.
Sowohl beim JFET als auch beim MESFET wird durch ein an der Gate-Elektrode G anliegendes
elektrisches Feld der Kanalstrom zwischen dem Drain- (D) und dem Source- (S) Kontakt gesteuert.
Der Kanal kann prinzipiell entweder n-oder p-dotiert sein; wegen der höheren Beweglichkeit und der
höheren Sättigungsdriftgeschwindigkeit von Elektronen im Vergleich zu Löchern besitzen n-Kanal-
FETs die besseren Hochfrequenzeigenschaften. Die folgenden Betrachtungen beziehen sich deshalb
vorwiegend auf n-Kanal FETs.
Im Vergleich zwischen Si-JFET und GaAs-MESFET besitzt wiederum ein GaAs-MESFET die besseren
HF-Eigenschaften wegen
� der höheren Elektronenbeweglichkeit (bei kleinen Feldstärken ist �n � 1500 cm2
Vsbei Si, jedoch
�n � 8000 cm2
Vsbei GaAs).
� der höheren Sättigungsdriftgeschwindigkeiten vs der Elektronen (vs � 100 �mns
bei Si und vs �
200 �mns
bei GaAs)
� der Möglichkeit, in GaAs ein semi-isolierendes (p � 108cm) Substrat (vergl. Abb. 2a) zu
realisieren. Deshalb ergeben sich beim GaAs-MESFET sehr viel kleinere parasitäre Kapazitäten
als beim Si-JFET.
Trotz der gegenüber Si sehr viel komplizierteren GaAs-Technologie werden deshalb bei hohen Anfor-
derungen GaAs-MESFETs eingesetzt.
2 Wirkungsweise eines GaAs-MESFETs
Ein GaAs-MESFET beinhaltet einen n-dotierten Kanal (n-Dotierung ND � 1017 cm�3) der Dicke
d � 0; 1 : : : 0; 3�m. Drain- und Source-Anschlüsse sind ohmsche Kontakte, während es sich beim
Gate-Anschluss um einen Schottky-Kontakt handelt. Der Transistor wird mit UGS < 0 und UDS > 0
betrieben, so dass der Schottky-Kontakt in Sperrrichtung betrieben wird mit der Sperrschichtweite
w(x) (s. Abb. 3).
Der Drainstrom ID wird durch die negative Gate-Source-Spannung UGS gesteuert, wobei eine Ver-
änderung von UGS zu einer Veränderung der Sperrschichtweite w(x) führt. Die Sperrschichtweite
TU Berlin � Prof. Dr.-Ing. K. Petermann
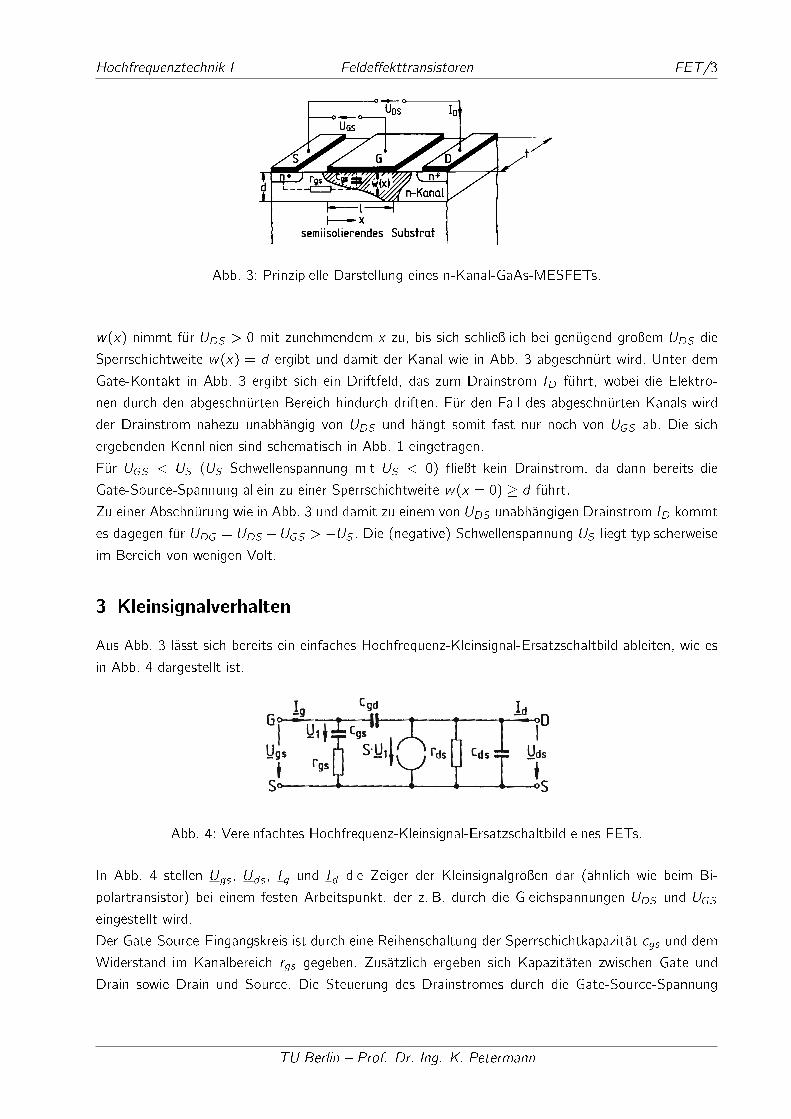
Hochfrequenztechnik I Felde�ekttransistoren FET/3
Abb. 3: Prinzipielle Darstellung eines n-Kanal-GaAs-MESFETs.
w(x) nimmt für UDS > 0 mit zunehmendem x zu, bis sich schlieÿlich bei genügend groÿem UDS die
Sperrschichtweite w(x) = d ergibt und damit der Kanal wie in Abb. 3 abgeschnürt wird. Unter dem
Gate-Kontakt in Abb. 3 ergibt sich ein Driftfeld, das zum Drainstrom ID führt, wobei die Elektro-
nen durch den abgeschnürten Bereich hindurch driften. Für den Fall des abgeschnürten Kanals wird
der Drainstrom nahezu unabhängig von UDS und hängt somit fast nur noch von UGS ab. Die sich
ergebenden Kennlinien sind schematisch in Abb. 1 eingetragen.
Für UGS < US (US Schwellenspannung mit US < 0) �ieÿt kein Drainstrom, da dann bereits die
Gate-Source-Spannung allein zu einer Sperrschichtweite w(x = 0) � d führt.
Zu einer Abschnürung wie in Abb. 3 und damit zu einem von UDS unabhängigen Drainstrom ID kommt
es dagegen für UDG = UDS �UGS > �US. Die (negative) Schwellenspannung US liegt typischerweise
im Bereich von wenigen Volt.
3 Kleinsignalverhalten
Aus Abb. 3 lässt sich bereits ein einfaches Hochfrequenz-Kleinsignal-Ersatzschaltbild ableiten, wie es
in Abb. 4 dargestellt ist.
Hochfrequenztechnik I FET/4
Ig Cgd Id
-0 I 1 , .L. Cgs • I
!Jgs 5·.!:}, Cds !Jds
rgst t 5 5
Bild 4: Vereinfachtes Hochfrequenz-Kleinsignal-Ersatzschaltbild eines FETs
In Bild 4 stellen U s' !Io.s ' I , .!(j die Zeiger der Kleinsignal-größen dar (ähnlich=gwie beim bei einem festen Arbeitspunkt, der z.B. durch die Gleichspannungen UDSUGS ' eingestellt wird.
Der Gate-source-Eingangskreis ist durch eine Reihenschaltung der Sperrschichtkapazität und dem Widerstand im Kanalbereichc gs r
qSgegeben. Zusätzlich ergeben sich Kapazitäten zwischen Gate und Drain sowie Drain und Source. Die Steuerung des Drainstromes durch die Gate-Source-Spannung wird durch die Steilheit S beschrieben, wobei die eigentliche Steuerung durch die Spannung an der Sperrschicht und damit durch erfolgt. Wenn man in Bild loben einen parabolischen Zusammenhang zwischen UGS und 10 voraussetzt, ergibt sich für die steilheit:
2 S = - .j'--=--- (1)
I DSSIUsl 10 I
mit der Schwellenspannung US' dem Drain-Gleichstrom 10 und dem Drain-Sättigungsstrom (für = 0) FeldeffekttransistorenUGS I DSS • besitzen im allgemeinen kleinere Steilheiten als Bipolar-transistoren.
Das Kleinsignal-Ersatzschaltbild nach Bild 4 stellt bereits eine recht gute Beschreibung des inneren FETs dar. Eine verbesserte HF-Beschreibung ergibt Bild 5:
Rn LD ld 0
!J.gs !J.ds
5 5
Bild 5: Kleinsignal-Ersatzschaltbild eines MESFET
Abb. 4: Vereinfachtes Hochfrequenz-Kleinsignal-Ersatzschaltbild eines FETs.
In Abb. 4 stellen Ugs , Uds , Ig und Id die Zeiger der Kleinsignalgröÿen dar (ähnlich wie beim Bi-
polartransistor) bei einem festen Arbeitspunkt, der z. B. durch die Gleichspannungen UDS und UGS
eingestellt wird.
Der Gate-Source-Eingangskreis ist durch eine Reihenschaltung der Sperrschichtkapazität cgs und dem
Widerstand im Kanalbereich rgs gegeben. Zusätzlich ergeben sich Kapazitäten zwischen Gate und
Drain sowie Drain und Source. Die Steuerung des Drainstromes durch die Gate-Source-Spannung
TU Berlin � Prof. Dr.-Ing. K. Petermann
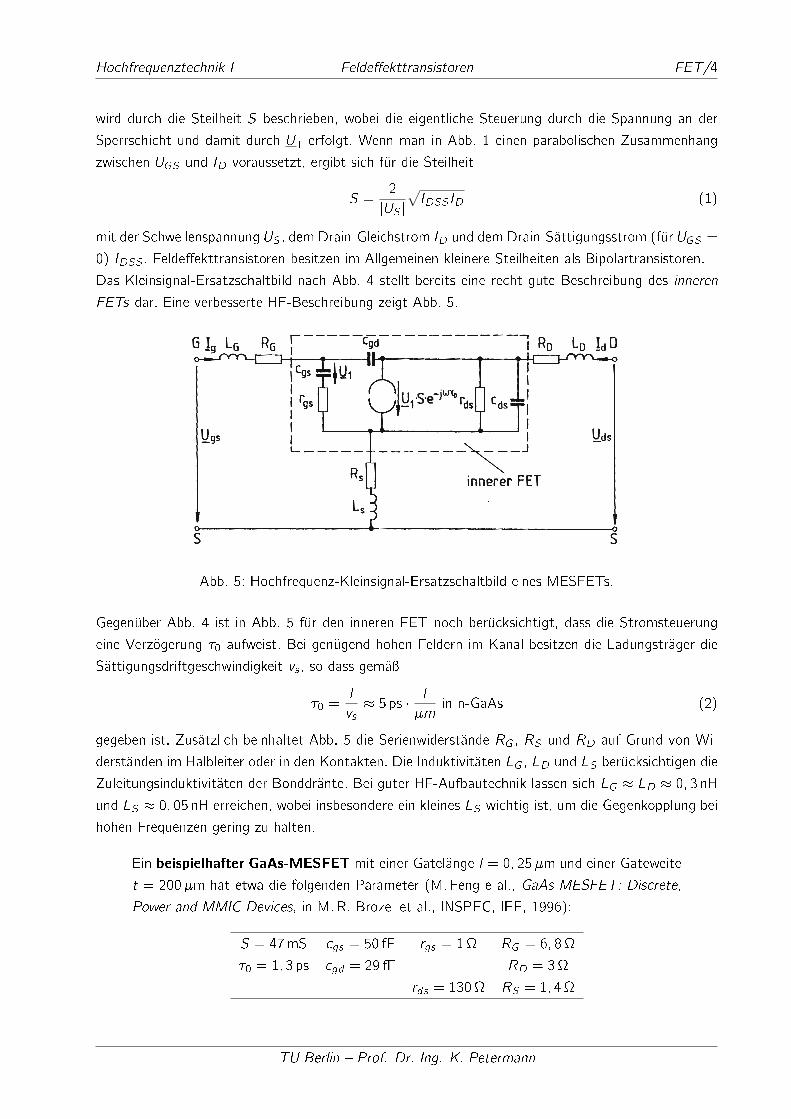
Hochfrequenztechnik I Felde�ekttransistoren FET/4
wird durch die Steilheit S beschrieben, wobei die eigentliche Steuerung durch die Spannung an der
Sperrschicht und damit durch U1 erfolgt. Wenn man in Abb. 1 einen parabolischen Zusammenhang
zwischen UGS und ID voraussetzt, ergibt sich für die Steilheit
S =2
jUSj
√IDSSID (1)
mit der Schwellenspannung US, dem Drain-Gleichstrom ID und dem Drain-Sättigungsstrom (für UGS =
0) IDSS. Felde�ekttransistoren besitzen im Allgemeinen kleinere Steilheiten als Bipolartransistoren.
Das Kleinsignal-Ersatzschaltbild nach Abb. 4 stellt bereits eine recht gute Beschreibung des inneren
FETs dar. Eine verbesserte HF-Beschreibung zeigt Abb. 5.
Hochfrequenztechnik I FET/4
Ig Cgd Id
-0 I 1 , .L. Cgs • I
!Jgs 5·.!:}, Cds !Jds
rgst t 5 5
Bild 4: Vereinfachtes Hochfrequenz-Kleinsignal-Ersatzschaltbild eines FETs
In Bild 4 stellen U s' !Io.s ' I , .!(j die Zeiger der Kleinsignal-größen dar (ähnlich=gwie beim bei einem festen Arbeitspunkt, der z.B. durch die Gleichspannungen UDSUGS ' eingestellt wird.
Der Gate-source-Eingangskreis ist durch eine Reihenschaltung der Sperrschichtkapazität und dem Widerstand im Kanalbereichc gs r
qSgegeben. Zusätzlich ergeben sich Kapazitäten zwischen Gate und Drain sowie Drain und Source. Die Steuerung des Drainstromes durch die Gate-Source-Spannung wird durch die Steilheit S beschrieben, wobei die eigentliche Steuerung durch die Spannung an der Sperrschicht und damit durch erfolgt. Wenn man in Bild loben einen parabolischen Zusammenhang zwischen UGS und 10 voraussetzt, ergibt sich für die steilheit:
2 S = - .j'--=--- (1)
I DSSIUsl 10 I
mit der Schwellenspannung US' dem Drain-Gleichstrom 10 und dem Drain-Sättigungsstrom (für = 0) FeldeffekttransistorenUGS I DSS • besitzen im allgemeinen kleinere Steilheiten als Bipolar-transistoren.
Das Kleinsignal-Ersatzschaltbild nach Bild 4 stellt bereits eine recht gute Beschreibung des inneren FETs dar. Eine verbesserte HF-Beschreibung ergibt Bild 5:
Rn LD ld 0
!J.gs !J.ds
5 5
Bild 5: Kleinsignal-Ersatzschaltbild eines MESFET
Abb. 5: Hochfrequenz-Kleinsignal-Ersatzschaltbild eines MESFETs.
Gegenüber Abb. 4 ist in Abb. 5 für den inneren FET noch berücksichtigt, dass die Stromsteuerung
eine Verzögerung �0 aufweist. Bei genügend hohen Feldern im Kanal besitzen die Ladungsträger die
Sättigungsdriftgeschwindigkeit vs , so dass gemäÿ
�0 =l
vs� 5 ps �
l
�min n-GaAs (2)
gegeben ist. Zusätzlich beinhaltet Abb. 5 die Serienwiderstände RG , RS und RD auf Grund von Wi-
derständen im Halbleiter oder in den Kontakten. Die Induktivitäten LG , LD und LS berücksichtigen die
Zuleitungsinduktivitäten der Bonddränte. Bei guter HF-Aufbautechnik lassen sich LG � LD � 0; 3 nH
und LS � 0; 05 nH erreichen, wobei insbesondere ein kleines LS wichtig ist, um die Gegenkopplung bei
hohen Frequenzen gering zu halten.
Ein beispielhafter GaAs-MESFET mit einer Gatelänge l = 0; 25�m und einer Gateweite
t = 200�m hat etwa die folgenden Parameter (M. Feng e al., GaAs MESFET: Discrete,
Power and MMIC Devices, in M. R. Brozel et al., INSPEC, IEE, 1996):
S = 47mS cgs = 50 fF rgs = 1 RG = 6; 8
�0 = 1; 3 ps cgd = 29 fF RD = 3
rds = 130 RS = 1; 4
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Felde�ekttransistoren FET/5
4 Grenzfrequenzen
4.1 Transitfrequenz
Wie beim Bipolartransistor gibt es auch beim FET eine Transitfrequenz, bei der die Stromverstärkung
zu 1 wird. Für die Kurzschluss-StromverstärkungIdIgjUds=0
gilt bei Vernachlässigung von cgd nach Bild
4 (bzw. auch näherungsweise nach Bild 5)∣∣∣∣∣ IdIg∣∣∣∣∣Uds=0
=S
!cgs; (3)
wobei die Stromverstärkung bei der Transitfrequenz ! = !T mit
!T =S
cgs(4)
zu Eins wird.
Beispielsweise ergibt sich für den oben angegebenen Transistor ein fT = !T2�
� 150GHz,
was einen typischen Wert für GaAs-MESFETs mit einer Gatelänge l = 0; 25�m darstellt.
Für kürzere Gatelängen lassen sich gemäÿ fT / l�x mit x � 1 für kurze Gatelängen 1
noch höhere Transitfrequenzen erreichen.
4.2 Grenzfrequenz der Leistungsverstärkung
Bei kleinen Frequenzen erfolgt die Steuerung eines FETs leistungslos, bei höheren Frequenzen jedoch
spielt der Leistungsverbrauch z. B. in rgs eine zunehmende Rolle, so dass die erreichbare Leistungsver-
stärkung mit zunehmender Frequenz abnimmt.
Wenn man zunächst vom vereinfachten Ersatzschaltbild (Bild 4) ausgeht und die Rückwirkungskapazi-
tät cgd vernachlässigt bzw. kompensiert (erreichbar durch Parallelschalung einer Induktivität zwischen
G und D, auch unilateraler oder rückwirkungsfreier Gewinn), ergeben sich die y-Parameter:
y11
=Ig
Ugs
∣∣∣∣∣∣Uds=0
=j!cgs
1 + j!cgs rgs(5)
y21
=Id
Ugs
∣∣∣∣∣∣Uds=0
=S � U1
Ugs
=S
1 + j!cgs rgs(6)
y22
=Id
Uds
∣∣∣∣∣∣Ugs=0
=1
rds+ j!cds (7)
y12
=Ig
Uds
∣∣∣∣∣∣Ugs=0
= 0 wegen cgd!= 0 (8)
und damit die maximale Leistungsverstärkung G0
m nach Gl. (L 16) (hier eigentlich unilateraler oder
rückwirkungsfreier Gewinn)
G0
m =jy21j2
4<(y11)<(y
22)=
(fmax
f
)2(9)
1 Für gröÿere Gatelängen ist x � 2.
TU Berlin � Prof. Dr.-Ing. K. Petermann
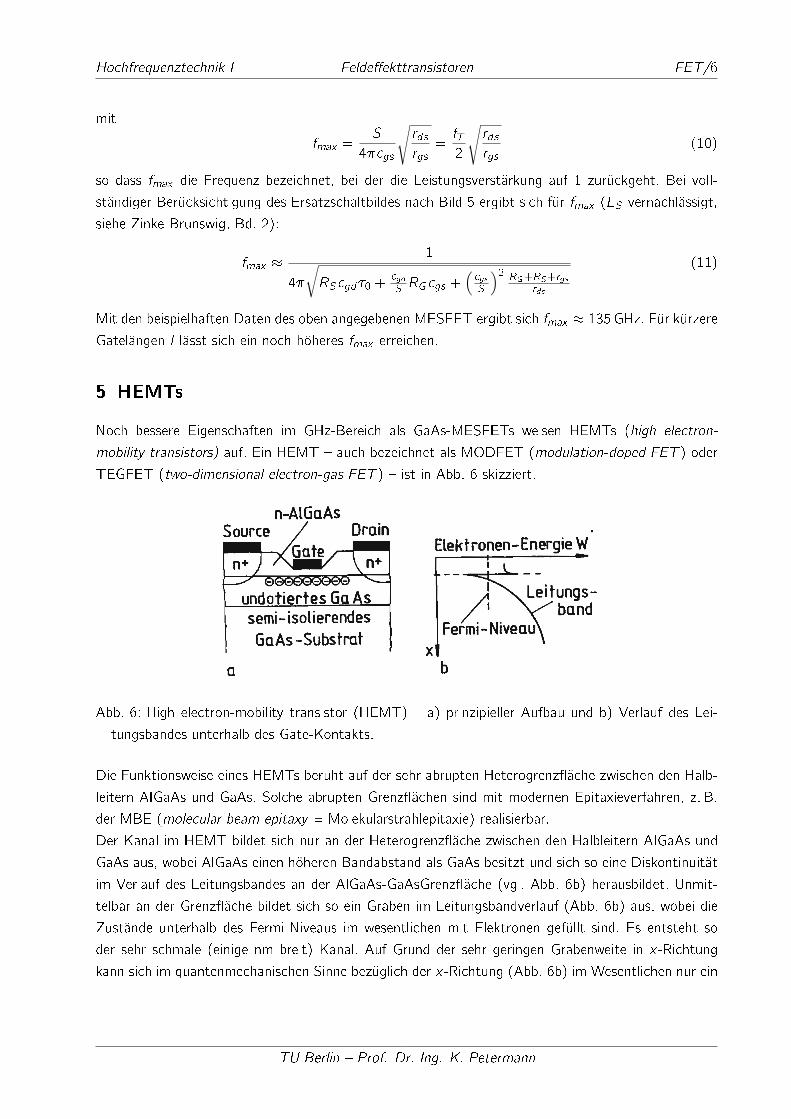
Hochfrequenztechnik I Felde�ekttransistoren FET/6
mit
fmax =S
4�cgs
√rds
rgs=
fT
2
√rds
rgs(10)
so dass fmax die Frequenz bezeichnet, bei der die Leistungsverstärkung auf 1 zurückgeht. Bei voll-
ständiger Berücksichtigung des Ersatzschaltbildes nach Bild 5 ergibt sich für fmax (LS vernachlässigt,
siehe Zinke-Brunswig, Bd. 2):
fmax �1
4�
√RScgd�0 +
cgdSRGcgs +
(cgsS
)2 RG+RS+rgsrds
(11)
Mit den beispielhaften Daten des oben angegebenen MESFET ergibt sich fmax � 135GHz. Für kürzere
Gatelängen l lässt sich ein noch höheres fmax erreichen.
5 HEMTs
Noch bessere Eigenschaften im GHz-Bereich als GaAs-MESFETs weisen HEMTs (high electron-
mobility transistors) auf. Ein HEMT � auch bezeichnet als MODFET (modulation-doped FET ) oder
TEGFET (two-dimensional electron-gas FET ) � ist in Abb. 6 skizziert.
Hochfrequenztechnik I FET/7
Leistungs-FETs
FETs weisen eine im Vergleich zu Bipolartransistoren bessere thermische Stabilität auf, so daß sich FETs auch für Anwendungen hoher Leistung eignen. Zur Erzielung einer großen Gateweite t für höhere Ströme und gleichzeitig kleinem RG werden ähnlich wie beim Bipolartransistor , Kamm- und Maschenstrukturen mit parallel geschalteten Gates verwendet. Ungefähr erzielbare Ausgangs-leistungen (Stand 1984, Zinke-Brunswig, Band 2) zeigt Bild 6
2 ,102
8 "-
6 '\.4 \
2 \.
\ , \:;108
06 1\ C1' 4c
2
CI) • \
1 CI) 8 ,
.!!.§ t • GaAs-MESFET -CI)
2 C1'
.6 Si - Bi polar-:::J
's!.
o ;i- I I <:(
10-1
4 6 10-1 2 4 681 2 4 6810 2
Frequenz [ GHz] -Bild 6: Erreichbare Ausgangsleistungen für Si-FETs, si-
Bipolartransistoren und GaAs-MESFETs in Abhängigkeit der Frequenz (Stand 1984, Zinke-Brunswig, Band 2)
HEMTs
Noch bessere Eigenschaften im GHz-Bereich als GaAs-MESFETs weisen HEMTs (high glectron mobility :transistors) auf. Ein HEMT - auch bezeichnet als MODFET (modulation goped FET) oder TEGFET (:two-dimensional glectron gas FET) - ist in Bild 7 skizziert:
Elektronen-Energie W ,I -
I undatiertes Ga As "Lei!ungs-
semi - isoIierendes Fermi· N°· Y band- IveauGaAs -Substrat
x a b
Bild 7: High electron mobility transistor (HEMT) a) prinzipielle struktur b) Verlauf des Leitungsbandes unterhalb des Gate-Kontaktes
Die Funktionsweise eines HEMTs beruht auf der sehr abrupten Heterogrenzfläche zwischen den Halbleitern AIGaAs und GaAs. Solche
Abb. 6: High electron-mobility transistor (HEMT) � a) prinzipieller Aufbau und b) Verlauf des Lei-
tungsbandes unterhalb des Gate-Kontakts.
Die Funktionsweise eines HEMTs beruht auf der sehr abrupten Heterogrenz�äche zwischen den Halb-
leitern AIGaAs und GaAs. Solche abrupten Grenz�ächen sind mit modernen Epitaxieverfahren, z. B.
der MBE (molecular beam epitaxy = Molekularstrahlepitaxie) realisierbar.
Der Kanal im HEMT bildet sich nur an der Heterogrenz�äche zwischen den Halbleitern AIGaAs und
GaAs aus, wobei AlGaAs einen höheren Bandabstand als GaAs besitzt und sich so eine Diskontinuität
im Verlauf des Leitungsbandes an der AlGaAs-GaAsGrenz�äche (vgl. Abb. 6b) herausbildet. Unmit-
telbar an der Grenz�äche bildet sich so ein Graben im Leitungsbandverlauf (Abb. 6b) aus, wobei die
Zustände unterhalb des Fermi-Niveaus im wesentlichen mit Elektronen gefüllt sind. Es entsteht so
der sehr schmale (einige nm breit) Kanal. Auf Grund der sehr geringen Grabenweite in x-Richtung
kann sich im quantenmechanischen Sinne bezüglich der x-Richtung (Abb. 6b) im Wesentlichen nur ein
TU Berlin � Prof. Dr.-Ing. K. Petermann

Hochfrequenztechnik I Felde�ekttransistoren FET/7
Elektronenzustand ausbilden, so dass man statt des normalerweise drei-dimensionalen Elektronenga-
ses nur ein zwei-dimensionales Elektronengas im Kanal erhält. Dieses zwei-dimensionale Elektronengas
zeichnet sich durch hohe Beweglichkeit und hohe Sättigungsdriftgeschwindigkeiten aus.
Die sich ergebende Transitfrequenz fT ist beim HEMT ungefähr doppelt so groÿ wie beim GaAs-
MESFET gleicher Gatelänge. Es werden auch sehr hohe Grenzfrequenzen fmax für die Leistungsver-
stärkung erzielt. Mit speziellen HEMT-Strukturen sind für eine Gatelänge l = 0; 25�m Werte von
fmax � 350GHz erzielt worden.
TU Berlin � Prof. Dr.-Ing. K. Petermann
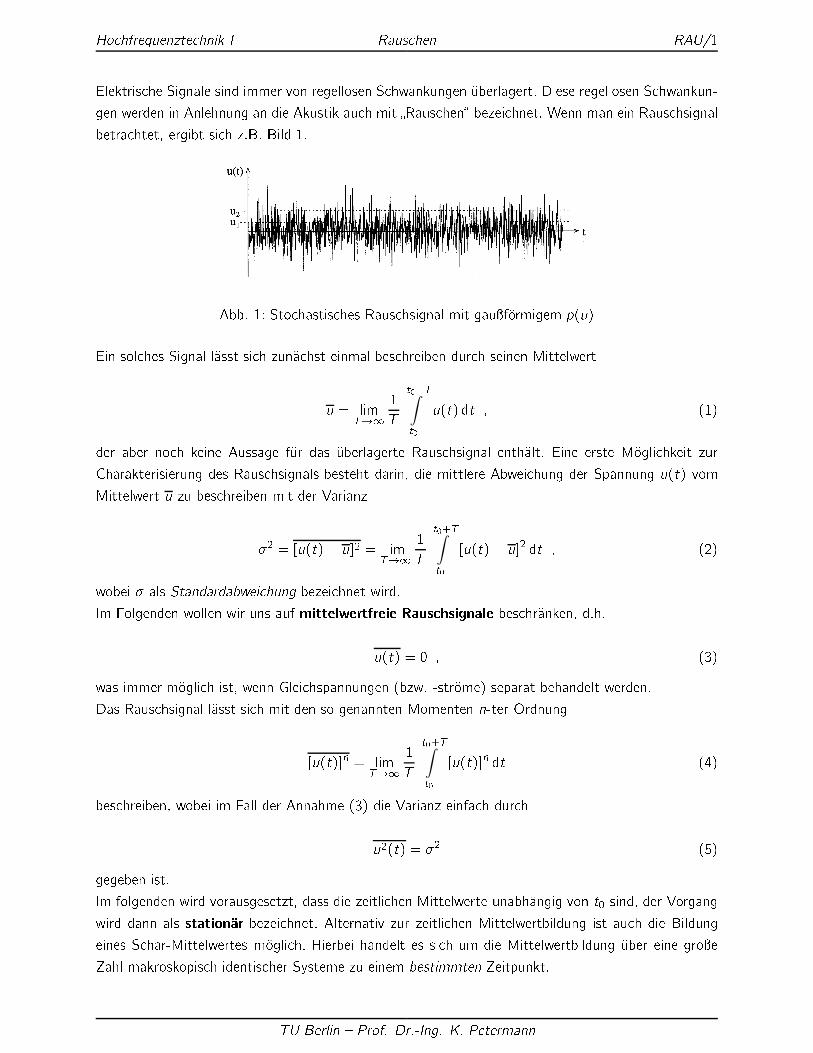
�������������� � � ������ �����
��������� �� ���� ��� ����� ��� �� ������ �������� �� ������ ���� ���� �� ������ ���������
�� ������ �� �������� �� ��� ������ ��� ��� �������� ���������� ��� ��� ��� ����� ���
���������! �� ��� �� ��"� "��� ��
���� �# ��������� ����� ��� ��� ��$%&��� �� ����
��� ���� �� ��� �'� �� ���'�� ������ ��������� ���� ����� (���������
� � ������
�
�
����∫��
���� �� � )�*
��� ���� ��� ����� ��� � %�� �� ������ ���� ����� ��� ����'��� ���� ���� (& ������� ���
+�������������� �� ����� ��� ������ �����! ��� �������� �������� ��� �,����� ���� ���
(��������� � �� ��������� ��� ��� -������
�� � ����� �� � ������
�
�
����∫��
����� �� �� � ).*
����� � �� ����������� ��� ��������� �����
/� 0�� ����� ������ ��� �� ��% ��������������� �� ������� ����'����! ����
���� � � � )1*
�� ����� �& ��� ��! ���� 2����,����� �� )���� ���&��* �,���� ��������� �������
�� ����� ��� �'� �� ��� ��� � �������� (������� ����� 3�����
����� � ������
�
�
����∫��
����� �� )4*
���������! ����� �� 0��� ��� ������� )1* ��� -������ ���%�� ����
����� � �� )5*
� ���� ���
/� %�� ����� ���� ����� �����! �� ��� ��������� (���������� �����'� � ��� �� ���! ��� -�� ��
���� ���� �� �������� ���������� ���������� ��� ��������� (��������������� �� ��� ��� "�����
���� �����(���������� �& ���� 6������ ������� � �� �� ��� (��������������� ���� ���� ��$�
7��� �������,�� ��������� �8���� �� ����� ���� ���� 7���,�����
�� ���� � ���! "�!#��! $! ������
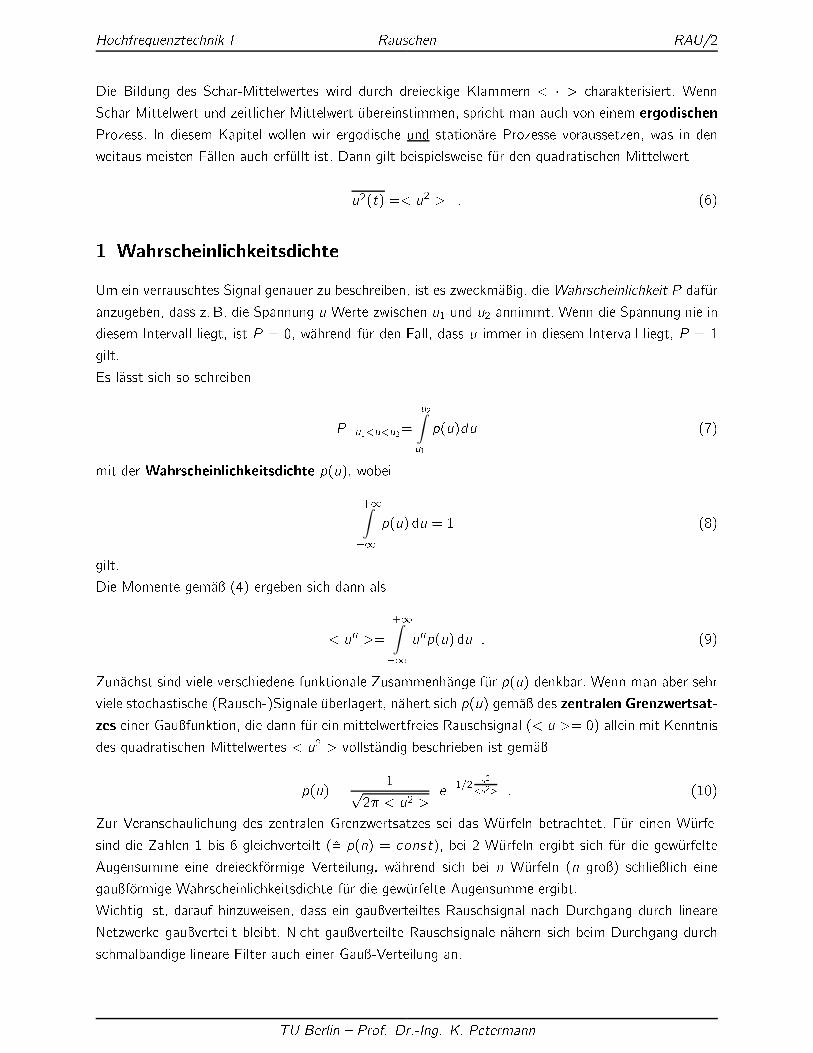
�������������� � � ������ ����.
��� "����� �� �����(���������� ���� ���� ������� � 9������� � � �������������� ��������(��������� ��� ��������� (��������� �������������! ,���� ��� ��� ��� ����� ������� ���
:����� /� ����� 9�,���� ������ ��� �� ����� ��� ������'�� :����� ����������! �� �� ���
������ ������ 0'���� ��� ��%���� ��� ���� ��� ���,������� %�� ��� ;���������� (���������
����� �� �� )<*
� ������������� ���� �
=� ��� ��������� �� ��� ������ �� ���������! �� � �����'$� ! ���%������� � ���� � � ��%��
���� ����! �� �� "� ��� �,����� � ���� ������ �� ��� �� �������� ��� ��� �,����� ��� ��
����� /�������� ��� �! �� � � �! �'����� %�� ��� 0���! �� � ����� �� ����� /�������� ��� �! � � �
����
� �'� �� � �������
� ���������
��∫��
������ )>*
��� ��� ���� ������ �������� ��� ����! �����
��∫��
���� �� � � )?*
����
��� (������ ��'$ )4* �� ���� �� ���� ��
� �� �
��∫��
������ �� )@*
7��'�� ��� ����� ���������� %���������� 7�������'� � %�� ���� �������� ��� ��� ���� ���
����� �������� )�����*�� ���� ������ ���! �'���� �� ���� ��'$ �� �������� ������������
��� ����� 2��$%�������! ��� ���� %�� ��� ����������%���� ����� ��� �� � � �� ������ ��� 9������
�� ;���������� (���������� � �� �����'��� ��������� �� ��'$
���� ���
� � �� ����� ��
���� )�A*
7�� -������������ �� ��������� 2������������ �� �� ��%��� ���������� 0�� ����� ��%��
��� ��� 7����� � �� < ������������ )BC ���� � �����*! ��� . ��%��� �� ��� �� %�� ��� ����%����
�� ������ ���� ������%&��� � -�������� ! �'����� �� ��� � ��%��� )� ��$* ����$��� ����
��$%&��� � ������������������� %�� ��� ����%���� �� ������ �� ����
���� ��! �����% ����������! �� ��� ��$��������� ����� ��� ��� ���� �� ���� �������
D�������� ��$�������� ������� D��� ��$��������� ����� ���� �'���� �� ���� ���� �� ����
��������� � ������� 0����� ��� ����� 2��$�-�������� ���
�� ���� � ���! "�!#��! $! ������
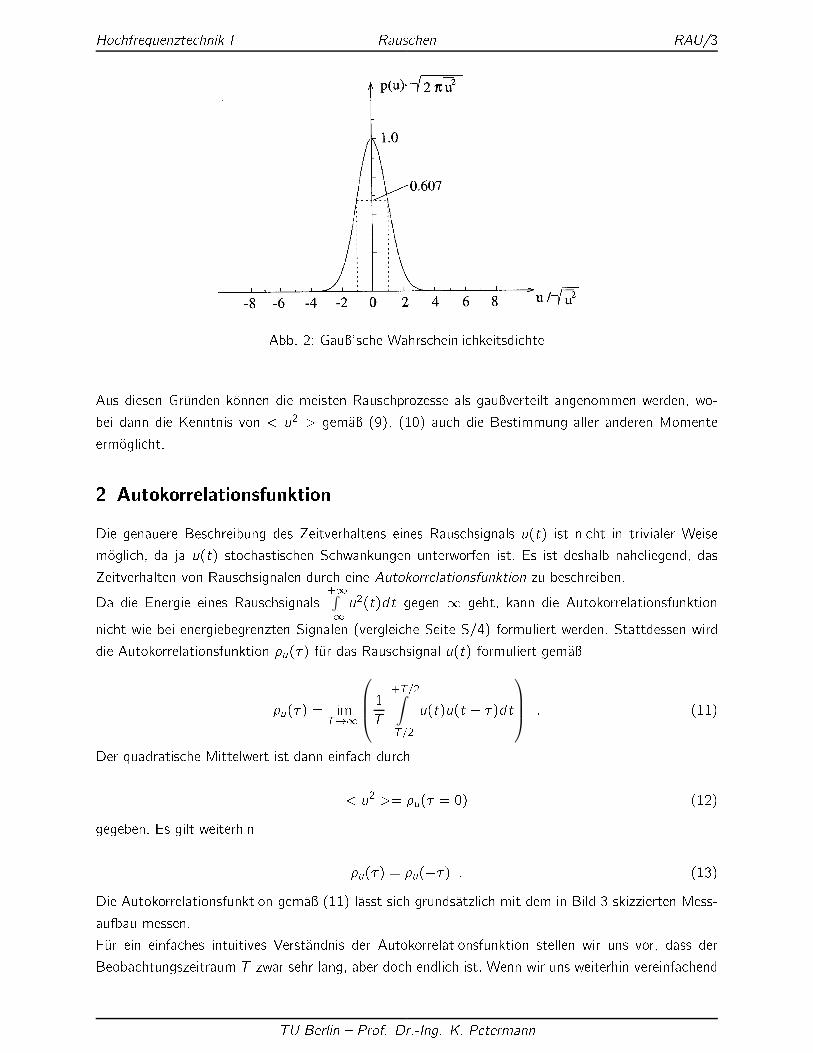
�������������� � � ������ ����1
���� .# 2��$E�� �������������������
�� ����� 2������ �&���� ��� ������ ����,����� �� ��$�������� �� ������� ������! ���
��� ���� ��� 9������ ��� � �� ��'$ )@*! )�A* ��� ��� "������� ����� ������� (������
���& �����
� �� �������� ����� �
��� ������� "�������� �� 7������������ ���� ����� ��� ���� �� ���� �� ��������� ���
�& ���! �� F� ���� ��������� �������� �� ��������%�� ��� � �� ������ ������� ���! ��
7������������ ��� ����� ����� ���� ���� ����������� ����� � �� ����������
�� ��� ���� �� ���� ����� �����∫��
������� � �� � ���! ���� ��� ���������������%�������
���� ��� ��� ���� ���� ������� �� ����� )��� ����� ����� �G4* %��������� ������� ��������� ����
��� ���������������%������� ����� %�� �� ����� ��� ���� %��������� ��'$
����� � ������
⎛⎜⎜⎝ �
�
����∫����
������� � ����
⎞⎟⎟⎠ )��*
��� ;��������� (��������� �� ���� ���%�� ����
� �� � ���� � �� )�.*
� ����� � ��� ���������
����� � ������ )�1*
��� ���������������%������� ��'$ )��* �'� �� ����'����� ��� ��� �� "��� 1 ���������� (��
��%��� �����
0�� ��� ���%��� ��������� -���'���� ��� ���������������%������� ������ ��� �� ���! �� ���
"�������� �������� � ���� ��� ��� ! ���� ��� ������ ��� ��� ��� �� ��������� ������%�����
�� ���� � ���! "�!#��! $! ������
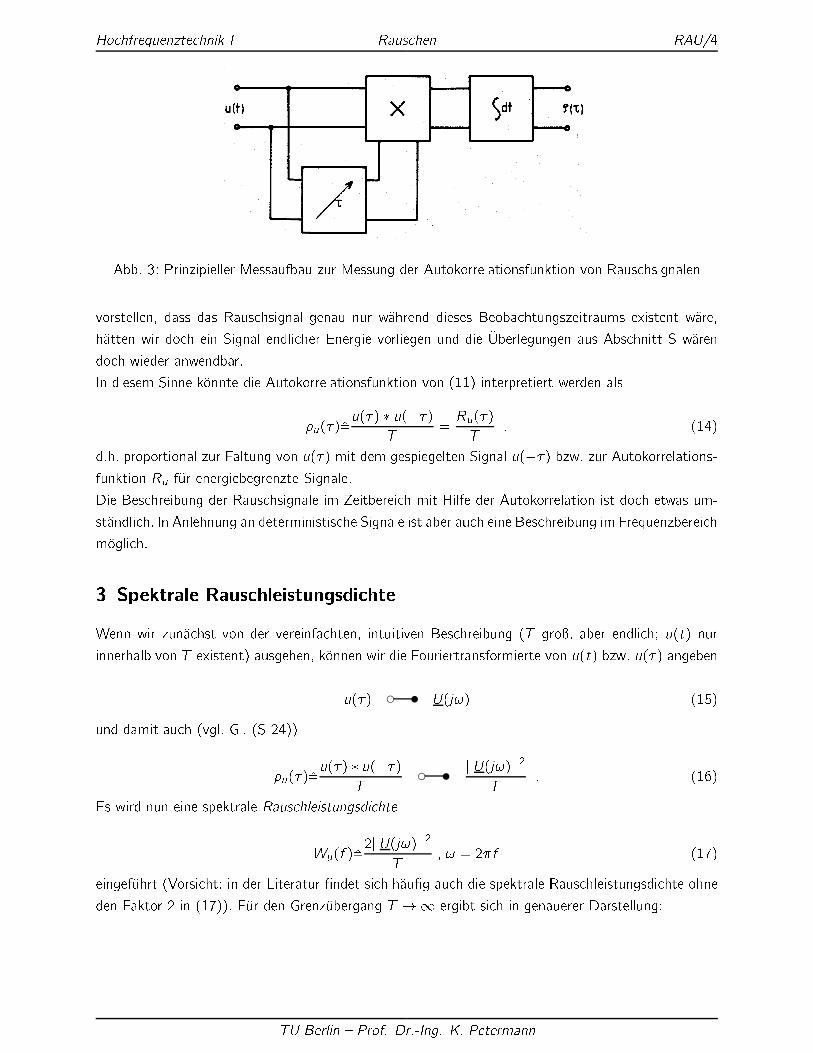
�������������� � � ������ ����4
���� 1# :�����,������ (���%��� ��� (��� ��� ���������������%������� ��� ����� �����
���������! �� �� ����� ��� ���� ��� �'����� ���� "�������� �������� �H����� �'��!
�'���� ��� ��� ��� �� ��� �������� ���� �� ������ �� ��� ��� I����� �� �� �� ������� � �'���
��� ������ ����������
/� ����� ����� �&���� ��� ���������������%������� ��� ���� �����,������� ������ ��
�����BC���� � �����
�������
�� )�4*
���� ,��,�������� ��� 0����� ��� ���� ��� ��� �,�� ����� �� ��� ����� ���� ��� ����������������%������� �� %�� ���� ���� ������ �� �����
��� "�������� ��� ����� ���� �� 7��������� ��� 6��%� ��� ��������������� �� ��� ���� ���
�'������ /� �������� �� ������������� �� ���� �� ���� ��� ���� "�������� �� 0��;����������
�& ����
� ���� ���� ��������� ������ �
��� ��� ���'�� ��� ��� ������%�����! ���������� "�������� )� ��$! ���� ������J ���� ���
��������� ��� � �H�����* �� ����! �&���� ��� ��� 0����������%�������� ��� ���� ���� ���� �� ����
���� � � ����� )�5*
��� ����� ��� )� �� 2�� )� .4**
�����BC���� � �����
�� �
� ����� ���
)�<*
� ���� ��� ���� ,������� ������� ����� ����
���� �BC�� ����� ��
�! � � � � )�>*
��� �%���� )-�����# �� ��� K�������� L���� �� �'�L ��� ��� ,������� ���������� ����� ����
��� 0����� . �� )�>**� 0�� ��� 2�������� �� � �� �� ��� �� �� �������� ��������� #
�� ���� � ���! "�!#��! $! ������
�������������� � � ������ ����5
���� � � ������
�
�
∣∣∣∣∣∣∣∣����∫����
��������� � ��
∣∣∣∣∣∣∣∣�
)�?*
��� 7��������� ������ ��� ,�������� ���������� ����� ���� � ��� ��� ����������������
%������� ����� �� ���� �� �������� �� )�>* ���� ���� 0����������%�������� � ����#
������ � � ���� � )�@*
��%��������� �� ���� �� ��� % ���#$� ��� �#����� ��#
���� � � �
��∫��
����������� �
�∫�
���������� � ���� ).A*
����� ��
��∫��
���� ������ �
�∫�
���� ������ � ���� ).�*
(�� )�.*!).�* �'� �� ����� %�� ��� ;���������� (��������� ������� ) ����&������� �������*#
� �� � ���� � �� �
�∫�
���� ��� )..*
����� �� ��� ;��������� (��������� ��� ������ �� 0��;���������� %������������ ��� ,�������
���������� ����� �� ���� ������ �����,���������! ������ ��� ��� "����� %�� �� �������� �
;������ � �� �� ��� 0��;������������� �� �������������� ������ ���� ��� ,������� ��������
��� ����� ��� ������ ��� �� ��� 0���
���� � ��� ��
��).1*
��������! ����� � � �� ��� "����� ��� �������� ;������ �� ��� 0��;������������� ��
���������
� ���� ����� �� ����������� ����� ����� �� ������
�� ��������� ��� )����%��� ������* D������� ��� ��� I������ �� %������� ����� ��'$ "���
4�
0�� ����� ���� ��� ,�����,���� ������� � ,������� -�������� �� ���� � �������� �,�����%'��� ��������
��� ��"�
���� � � �����! ���$� ������
���� � � ��� ! ��� ��������
�� ���� � ���! "�!#��! $! ������

�������������� � � ������ ����<
���� 4# K������ D������� ��� ����,����� ����� �� ��� ��
�� ��� ��� �� ,����� ����� ���� ���� ��� (�$ ��� ��� I������ �� %������� ����� ��� ���
�� ����,����� ������
(�� ����� -����� )������� ��� ����J "�������� �������� � ��$! ���� ������! ���� �H������
��� ��������� ��� � * ���� �� ������ ����� 0����������%�������� ������� ������ ��������� ���
������ �� �������� D��������� ��%�� � ���� ��� ��� �� ������ ��� ��� �������������� �� ������
�� ������ �� ��� =� �� ��� ����� ����� ���%���� �� ��� �������������� �� �����! �� ���
"������� ��� ,�������� ���������� ����� )�>* ��� ��� "���� ��� ��� �� ���������� ��� ���
:��� ���� "���� ���
��� I������ �� ��� ��� �� ��� �� �� �� "��� 4 �� � ���� ��
������
������� ����� ).4*
����
������������������
� ��������� ).5*
����� %�� ��� ,�������� K����� ������ %�� �
����� � ��� ��
�
��� �������� �� ��
�
��� �������� ����� � ).<*
(�� )..* �'� �� ���� �� �������� ;������ �� �� �� ��������#
� ��� �
�∫�
����� � �� �
�∫�
�������� ����� ��� ).>*
0��� ����� ��� ����������� "���,�$L���� ��� ��� (�����%��;���� �� ��'$
����� � ��� �
⎧⎨⎩ � %�� �� � ��� � �� ��
� ���).?*
��������! �� ��� ��
� ��� �
��� ��∫��� ��
����� ��� ������� � �� ).@*
7�� ����� �� �� �������� ;������ �� 0������� �� ,��,�������� ��� "��������� �� ! ��� ���
������� ������ ��� (�$ ��� ��� ).@* ���� (��� ��� � ��� ��� ��� (& �������! �������
��� ����� ��� ��������� �� )��"� ��� ����� �,����������8����* ��� ,������� ���������� �����
�� ��� �� � ��� ����� �� ���������
�� ���� � ���! "�!#��! $! ������
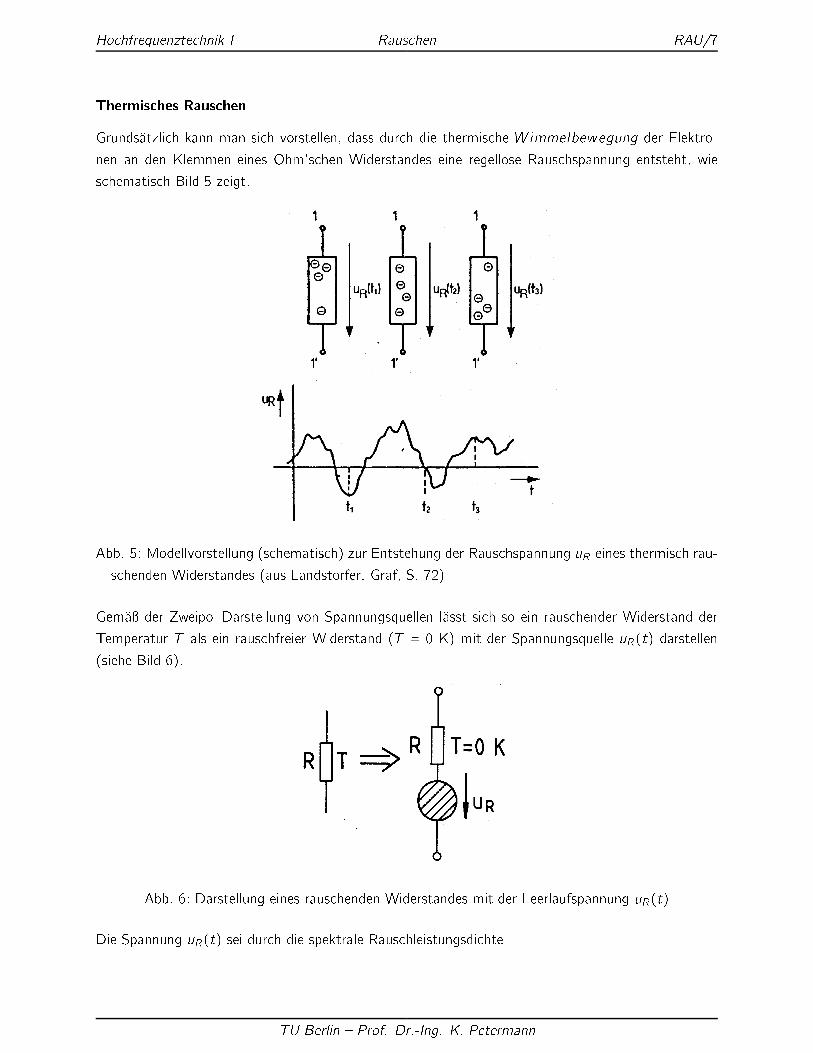
�������������� � � ������ ����>
������� ��� �� ���
2����'����� ���� ��� �� ���������! �� ���� ��� �������� �������� �!��! ��� ��������
��� �� ��� 9������ ���� 3��E��� ��������� ���� �� ����� ����,����� �������! ���
������� "��� 5 ��� ��
���� 5# (�������������� )�������* ��� �������� ��� ����,����� �� ���� ������� ����
������ ��������� )�� K������%��! 2��%! �� >.*
2��'$ ��� 7���,������������ ��� �,����� ;������ �'� �� � ��� ��������� �������� ���
M��,������ � �� ��� ����%����� �������� )� C A 9* ��� ��� �,����� ;����� ����� ���������
)���� "��� <*�
���� <# ��������� ���� ��������� ��������� ��� ��� K������%,����� �����
��� �,����� ����� �� ���� ��� ,������� ���������� �����
�� ���� � ���! "�!#��! $! ������
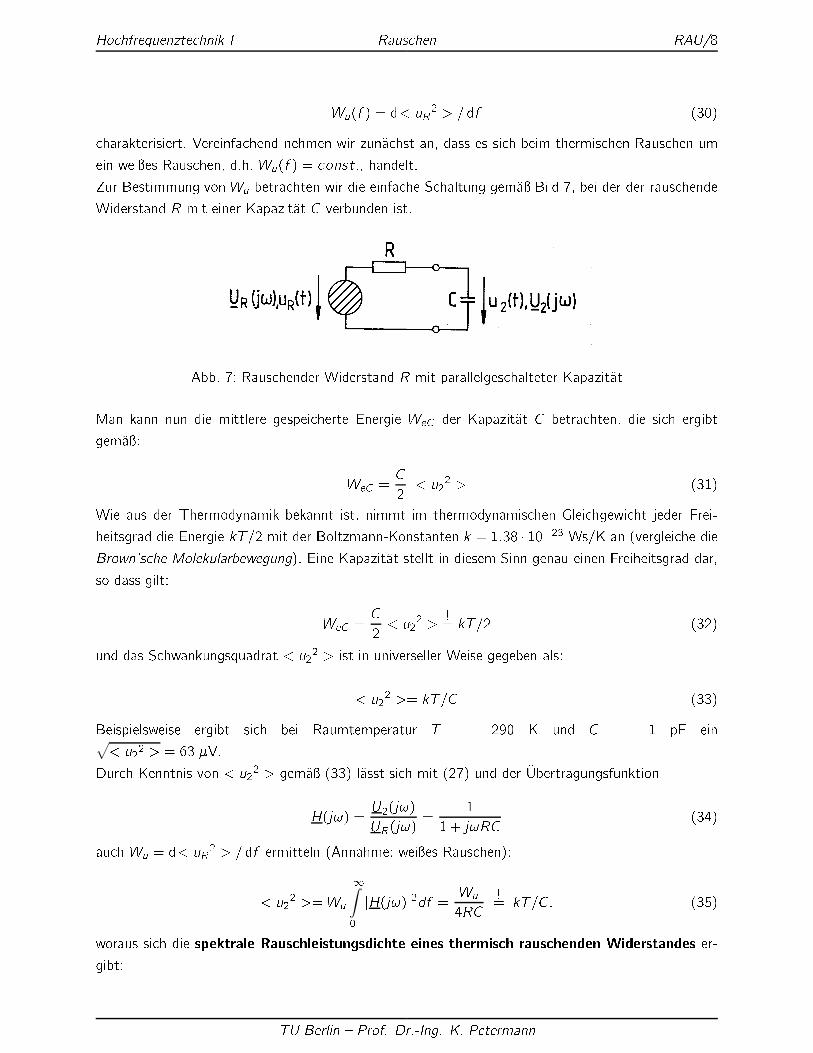
�������������� � � ������ ����?
���� � � �� ��� � �� )1A*
�������������� -�����%����� ������ ��� ���'�� ��! �� � �� ���� ��������� ������ ��
��� ���$� ������! ���� ���� � � �����! ��������
7�� "������� ��� �� ��������� ��� ��� ���%��� ������� ��'$ "��� >! ��� ��� ��� ��������
�������� � ��� ����� 9�,����'� " ��������� ���
���� ># ��������� �������� � ��� ,������� ��������� 9�,����'�
(�� ���� ��� ��� �������� �,������� ���� �� � � ��� 9�,����'� " ���������! ��� �� �� ���
��'$#
� � �"
�� ��
� )1�*
�� �� ��� M������8����� ������� ��! ����� �� �������8������� 2���� ����� F���� 0����
���� ��� ��� ���� �� #��� ��� ��� "���������9�������� # � ��� � ����� G9 �� )��� ����� �������'���� (�������������*� ���� 9�,����'� ����� �� ����� ���� ���� ����� 0������� ��� ���!
� �� ���#
� � �"
�� ��
� �� #��� )1.*
��� �� �������� ;������ � ��� �� �� ����������� ��� � ���� ��#
� ��� � #��" )11*
"��,������� �� ��� �� ��� �������,������ � � ��� 9 ��� " � � ,0 ���√� ��� � �� $-�
���� 9������ ��� � ��� ��'$ )11* �'� �� ��� ).>* ��� ��� I������ �� %�������
����� �������
�������
�
� � ���")14*
��� �� � �� ��� � �� ��������� )�������# ���$� ������*#
� ��� � ��
�∫�
���������� ���
�"
�� #��"� )15*
����� �� ��� �������� �� ������������ ��� ����� ������� � ��� ������ ����������� ���
���#
�� ���� � ���! "�!#��! $! ������
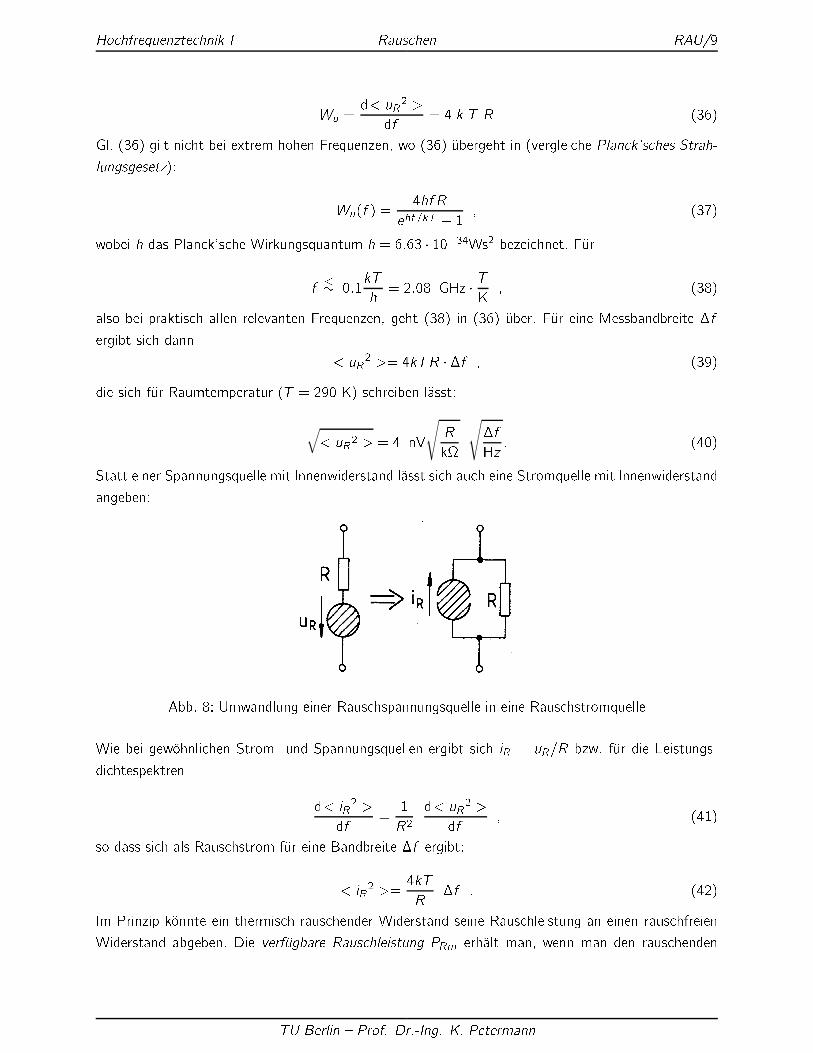
�������������� � � ������ ����@
�� ��� ��
�
��� # � � )1<*
2�� )1<* ��� ���� ��� �H���� ����� 0��;������! �� )1<* ���� ��� �� )��� ����� ����'����� �����#
���������*#
���� � � %� �
�� ��� � �� )1>*
����� % �� :����E�� ����� ;������ % � ��� � ����� � ���������� 0��
��� ��
#�
%� ��� 26� � �
9� )1?*
��� ��� ,������ ����� ���������� 0��;������! ��� )1?* �� )1<* ����� 0�� ���� (����������� ��
�� ��� �� ����
� ��� � #�� � �� � )1@*
��� �� %�� �������,������ �� � ��� 9* ������� �'�#
√� ��
� � �-
√�
��
√��
6& )4A*
����� ����� �,����� ;����� ��� /������������� �'� �� ��� ���� �����;����� ��� /�������������
�� ����#
���� ?# =�������� ����� ����,����� ;����� �� ���� ��������;�����
�� ��� ��&������� ������ ��� �,����� ;������ �� ��� �� �� � ���� ���� %�� ��� K����� �
�����,������
�� ���
���
�
��
�� ���
��� )4�*
� �� �� �� �������� %�� ���� "��������� �� �� ���#
� ��� �
#�
��� )4.*
/� :�����, �&���� ��� ������� ��������� �������� ���� ���������� �� ����� ����%�����
�������� �� ����� ��� &���)����� ������� ��� ��� ���'�� ���! ���� ��� ��� ���������
�� ���� � ���! "�!#��! $! ������

�������������� � � ������ �����A
�������� � )��"� �� "��� <* ��� ����� K����������� � �������� ��� ���%� ���� ����������
��������� ����� "��������� �� �� ��� �� ��� )1@* ��#
��� �� ��
�
�� #� � �� � )41*
����� �� %�� � � ��� 9 �� ���#
��� � � ����� � ��6�BC � �� �"�G6� )44*
����� �������
D���� ��� ��������� ������ �� �� ������������ ��� ����� �� ���������� �� �����
������� �������! �� ��� ����� �������,�� N��$����� ����� ��� ��������� ������
��,��� ��� ���������� ���� ������� � �����'$� ! ������ �� ����������� �����'� � �� 7�����
��%�������
��� �����N� ���� �� �� ��� "����' �� ��� ��������� K���� ;������ )����������* �������!
����� ��� �������� �������� �� ����� �����N�
� ��� � � � %��� �����∫��
%��� � � )45*
%���� )���������������� *� ��� 7���������% %��� �'� � ����� ��� ��%��� �� ����������� "������
���� ��� ��� ����� ����� ���� ����� �� ��� ��� �� I����� ���� ���� ��� ��������� K���� �
;������
���� �∑�
� � % �� � ��� � )4<*
����� ��� 7���,���� �� ��� 7���,���� �� ��%������ �� F������ �� K���� ;���� ��������������
��� ��� �������,��� �� ���'$� ��%������! �� ��� �� �� �� "��� @� ���� �� -�������� )"��,���#
�����N� �� (������� ���� "�������� �� �� ��������� ������*
� �� �O��������! �� ��� I����� ���� ��� �������,��� �� "��� @� �� ����� ������ ,��%�����
2�������� %����! �'����� �� "��� @� ��� ��������� ������! �� �����������! ��%������
"��� ����������� ���� ��� ����� ��! �� ��� 7���,����� �� ����������� �����'� � ��� )����
��� ���������� ���� ���� �����������*� ��� ����� �����N� ����� ��% ���� ������� ��� �����
������ �� (������� )����� ��� �� ����������� ����� D����* ���� ��� ��� ������������� ����
2��������� ��� K���� ��' ��� �� 6����������� �� �������� � ��� �����N� ���� ������ �� ��� �����
��� ��� ������������
7�� "������� ��� ,�������� ���������� ����� �� ����������� ��������� ��� �� "��� @�
��� ��$�� 7������� � ��� ' �������,����� 0�� ��� :��%��� %�� � ������ ��� ��� ����E0�������
��� ��! � �� ���� ��� ������ ���� ����
���� ��∑
���
� � �� � ��� )4>*
�� ���� � ���! "�!#��! $! ������
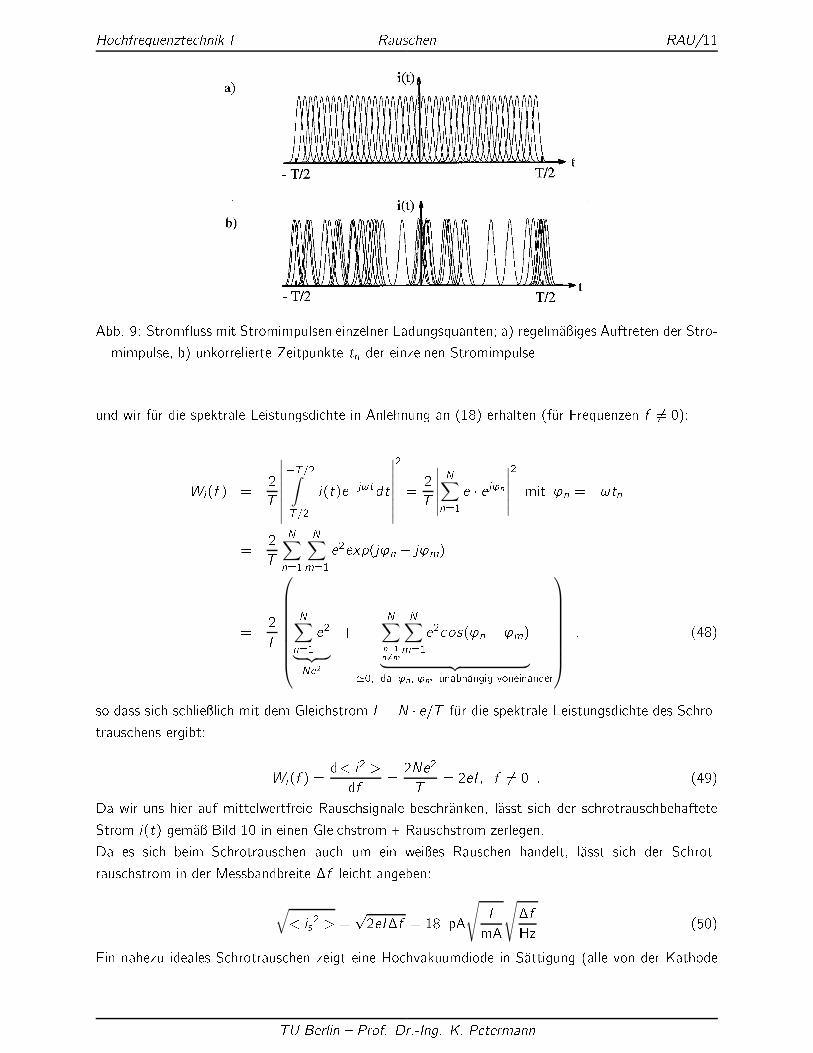
�������������� � � ������ ������
���� @# �����N� ��� �������,���� ��������� K���� ;������J �* �� ���'$� � ��%������ ��� �����
���,���! �* ������������� 7���,����� �� ��� ��������� �������,���
��� ��� %�� ��� ,������� K����� ����� �� �������� �� )�?* �������� )%�� 0��;������ � � �*#
���� � ��
�
∣∣∣∣∣∣∣∣����∫����
����������
∣∣∣∣∣∣∣∣�
��
�
∣∣∣∣∣∣�∑
���
� � � ���
∣∣∣∣∣∣�
��� (� � ����
��
�
�∑���
�∑���
���)���(� � �(��
��
�
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎝
�∑���
��
︸ ︷︷ ︸� �
��∑���
� ���
�∑���
������(� � (��
︸ ︷︷ ︸��� �� ��� �� ��������� ��������
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎠
� )4?*
� �� �� ����$��� ��� ��� 2�������� * � ' � ��� %�� ��� ,������� K����� ����� �� ������������ �� ���#
���� � ��� ��
���
�'��
�� ��*� � � � )4@*
�� ��� �� ���� ��% ����������%���� ����� ���� ����'����! �'� �� ��� ������������%����
����� ���� ��'$ "��� �A �� ����� 2�������� P �������� ����� ���
�� � �� ���� ����������� ��� �� ��� ���$� ������ �������! �'� �� ��� ������
�������� �� ��� (����������� �� ����� �� ����#
√� ��
� ����*�� � �� ,�
√*
��
√��
6�)5A*
��� ������ ������ ����������� ��� � ���� 6������������� �� �'��� �� )���� ��� ��� 9������
�� ���� � ���! "�!#��! $! ������
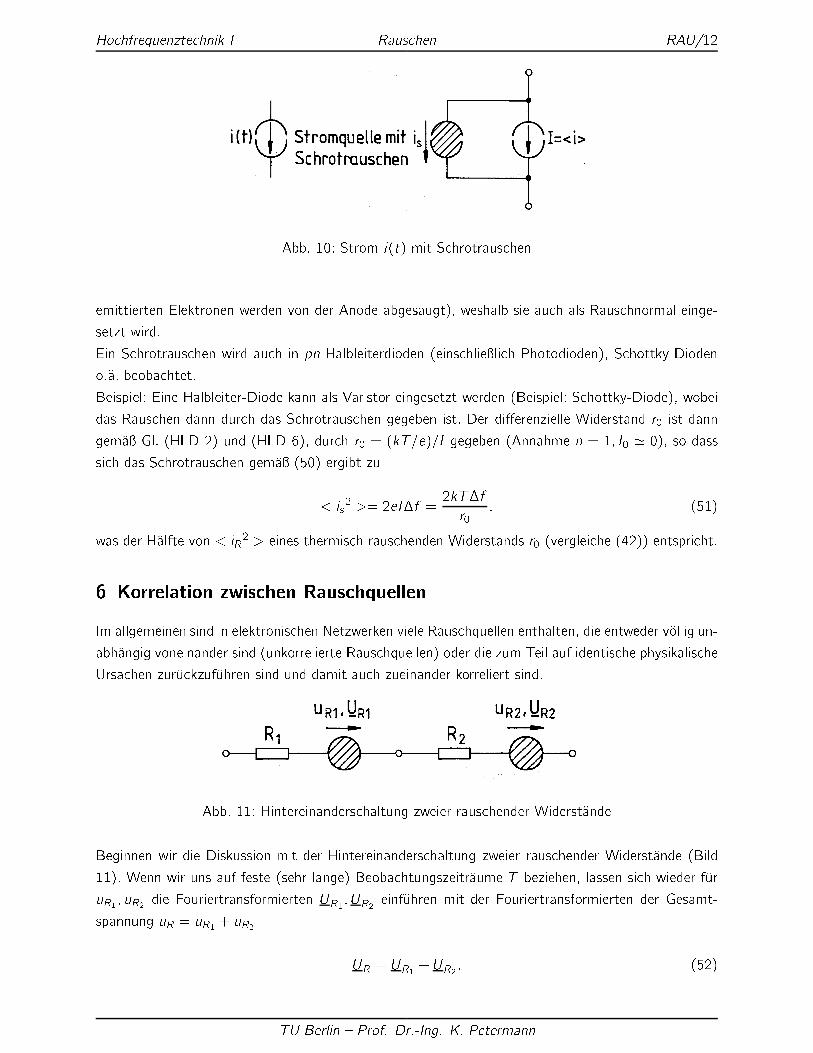
�������������� � � ������ �����.
���� �A# ����� ���� ��� �����������
����������� ���������� ������ ��� ��� ����� �� ��� �*! ������ �� ��� �� ���������� ��� ��
���� �����
��� ����������� ���� ��� �� ���6��������������� )�������$��� :����������*! ������8�������
��'� ����������
"��,���# ���� 6��������������� ���� �� -������ ��� ����� ������ )"��,���# ������8������*! �����
�� ������ ���� ���� �� ����������� � ���� ��� ��� ��O���������� �������� +� �� ����
��'$ 2�� )6K� .* ��� )6K� <*! ���� +� � �#�����* � ���� )������� � � �� *� �*! � ��
�� �� ����������� ��'$ )5A* �� ��� ��
� ��� � ��*�� �
�#���
+�� )5�*
�� ��� 6'�%�� ��� � ��� ���� ������� ��������� �������� +� )��� ����� )4.** ���,�����
! "������ � ������ ������#�����
/� ��� ������� ��� �� ������������ D��������� ����� ����;������ ���������! ��� �������� �&��� ���
���'� � ����������� ��� )������������� ����;������* ���� ��� ��� M��� ��% �������� ,�8�������
=����� �������%����� ��� ��� ����� ��� ���������� ���������� ����
���� ��# 6������������������� ������ ��������� �����'���
"� ����� ��� ��� ������� ��� ��� 6������������������� ������ ��������� �����'��� )"���
��*� ��� ��� �� ��% %��� )��� ��� �* "�������� �����'��� � ��������! ���� �� ������ %��
���� ���
��� 0����������%��������� ���� ���
���%����� ��� ��� 0����������%��������� ��� 2�����
,����� �� � ���� ���
�� � ���� ���
� )5.*
�� ���� � ���! "�!#��! $! ������

�������������� � � ������ �����1
����� �� %�� ��� ,������� ���������� ����� �� ���#
�� ���
��BC�
�
∣∣∣���� ���
∣∣∣� ��
�
(∣∣∣���
∣∣∣� � ∣∣∣���
∣∣∣� � ��(���
���
�
)) )51*
��� 9���������� ������ ��� ����;������ ���� �� :������ ������
�! ����� �� ��� ������������
��� ����;������ %�� �� :������ ������
� ������� ��������� :���� �� ����! � �� ��� �����
(������� ���� ���� �� ���������� 0��;������ ��
������
� � � )54*
�� ���� /� "��,��� ��� "��� �� ��� ��� ����;������ �������� ������������! � �� �� ��� )51*
�� ���
�� ���
���
�� ����
���
�� ����
��� #��� � #��� � #� ��� ���� )55*
��� �������� ;������� �������� �� ���%�� ��� �� ����,����� ��� 6�������������������
��� �� ��� �� �� ��� �� ���%�� ��� ����,����� ���� ��������� ��� �����
(��������� �H����� �'� �� ��� 9���������� ��������� ��� ��� 9����,������
� ���� � � ������
�
�
⎛⎜⎜⎝
����∫����
���������� ��
⎞⎟⎟⎠⎛⎜⎜⎝
����∫����
���������� ��
⎞⎟⎟⎠ BC �
����
���
� )5<*
���� ��� 9���������������%�������
��� � ������
�
�
����∫����
���������
�� � ����� )5>*
����� ��� ��� � �� ���� ��� 0����������%�������� ����������� ������,%� ���#
������� Æ �� ���� � � )5?*
� �� �� ����� )51* ������� �'�#
�� ���
����� ���
�
���
�� ����
��� �� (� ���� �
) )5@*
� �� �'�L ����������! ��� ����,����� ��� ���� ��� 0����������%�������� � �� �� ����� ��
� �� �������������� ������ � ��� ���� ����� �����'��� ������������ ������ � ��� �� ����� ��#
� �� � � ��� � � ��� � � ��� � # � �� � )<A*
����� # ����� 9�������������� ���������
��� 9���������� � ��� ��� �'� �� � �������#
� ��� ��� � # �� ���� � )<�*
�� ���� � ���! "�!#��! $! ������
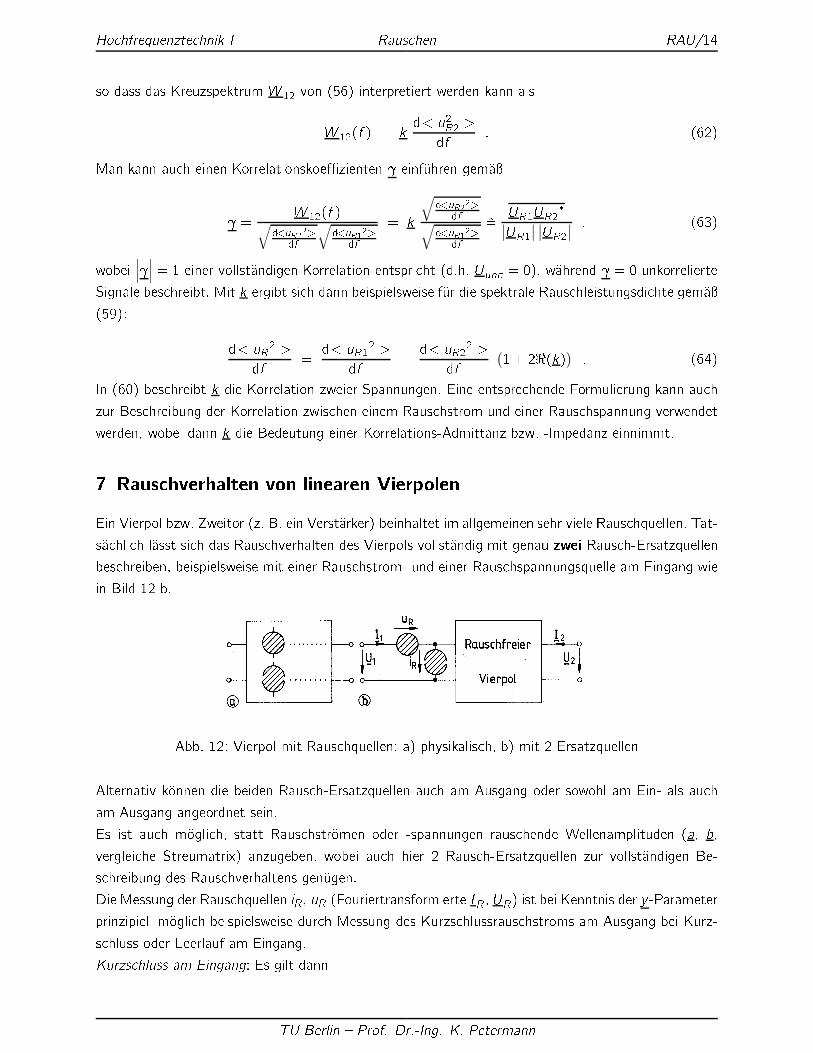
�������������� � � ������ �����4
� �� �� 9����,������ � �� ��� )5<* �����,������� ������ ���� ��
� ���� � � #�� ����
�� )<.*
(�� ���� ��� ����� 9�������������Q������� , ���%����� ��'$
, �� ���� �√
������
√������
� #
√������
√������
BC������
�∣∣���
∣∣ ∣∣���
∣∣ )<1*
�����∣∣∣,∣∣∣ � � ����� �����'��� �� 9���������� ���,���� )���� ���� � �*! �'����� , � � �������������
�� ���� ��������� (�� # �� ��� �� ���� ���,������� %�� ��� ,������� ���������� ����� ��'$
)5@*#
�� ���
���
�� ����
���
�� ����
��
(� � ���#�) )<4*
/� )<A* �������� # ��� 9���������� ������ �,����� ��� ���� ���,������� 0���������� ���� ���
��� "�������� ��� 9���������� ������ ����� �������� ��� ����� ����,����� ���������
������! ����� ���� # ��� "������� ����� 9�������������������� ���� �/�,����� ���������
$ ������������ � �� ����� %������
��� -���,�� ���� 7������ )�� "� ��� -���'����* ���������� �� ��� ������� ��� ����� ����;������� M���
'���� �'� �� �� ������������� �� -���,�� �����'��� ��� ���� ���� ����������;������
���������! ���,������� ��� ����� ��������� ��� ����� ����,����� ;����� �� ��� �� ���
�� "��� �. ��
���� �.# -���,�� ��� ����;������# �* ,�8������! �* ��� . �����;������
���������� �&���� ��� ������ ����������;������ ��� �� �� �� ���� ����� �� ���� �� ���
�� �� �� �� ������� ����
� �� ��� �& ���! ���� ������&��� ���� �,����� �� �������� �������,������� )-! �!
��� ����� ����������H* ���� ����! ����� ��� ���� . ����������;������ ��� �����'��� �� "��
������� �� ������������� ��� ���
��� (��� ��� ����;������ ��! �� )0����������%�������� *�! ��* �� ��� 9������ ��� . �:��������
,�����,���� �& ��� ���,������� ���� (��� �� 9�������������� �� �� �� ��� 9����
��� ���� K������% �� ��� �� �
$�������� �� * ���# � ��� ����
�� ���� � ���! "�!#��! $! ������
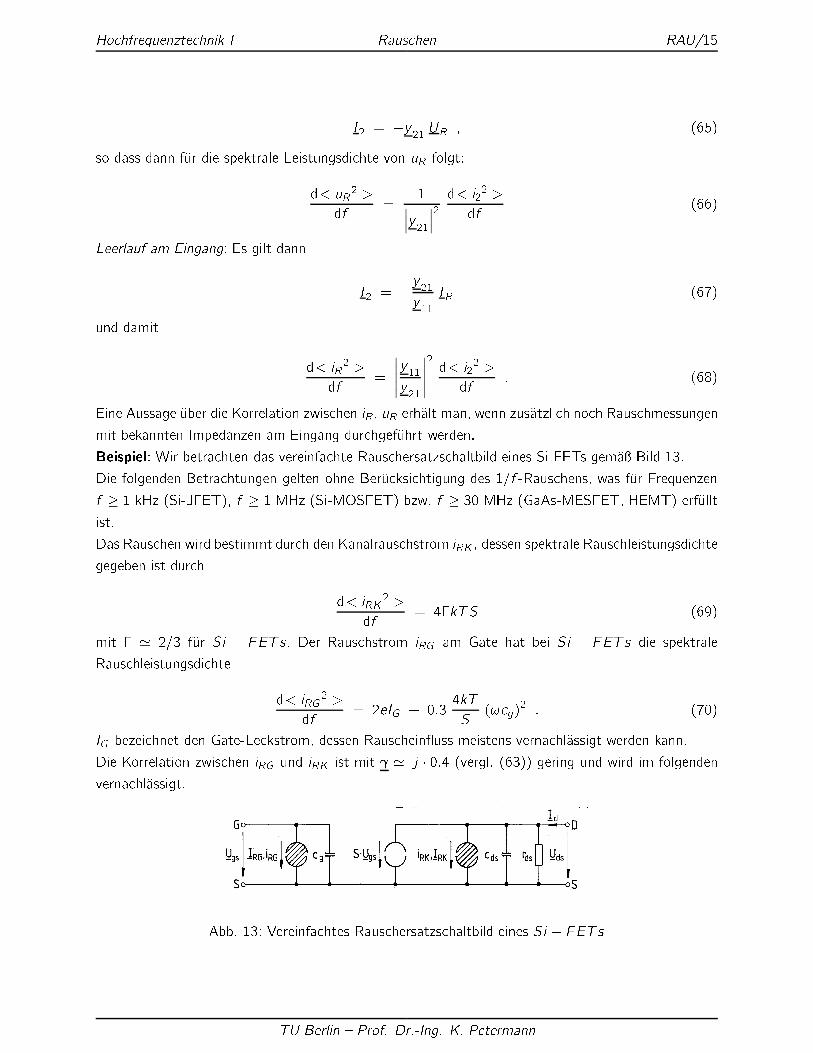
�������������� � � ������ �����5
*� � �.���� � )<5*
� �� ���� %�� ��� ,������� K����� ����� ��� �� %�� �#
�� ���
���
�∣∣∣.��
∣∣∣��� ��
�
��)<<*
+������ �� * ���# � ��� ����
*� � �.��.��
*� )<>*
��� �����
�� ���
���
∣∣∣∣∣.��.��
∣∣∣∣∣��� ��
�
�� )<?*
���� ��� � ���� ��� 9���������� ������ ��! �� ���'�� ���! ���� ��'����� ��� �������� ��
��� ��������� /�,������� �� ��� �� ���� �%���� �������
��������# �� ��������� �� ������%���� ����������������� ���� ���0�M ��'$ "��� �1�
��� %�� ����� "�������� �� ����� ���� "�������� �� �� ��� �������! �� %�� 0��;������
� � �6� )���R0�M*! � � (6� )���(3�0�M* ���� � �� (6� )2���(��0�M! 6�(M* ��%����
���
�� ������ ���� ������� ���� ��� 9������������ ���! ���� ,������� ���������� �����
� ���� �� ����
�� ����
��� �#�/ )<@*
��� � ��� %�� /� � 01��� ��� �������� ��� �� 2��� ��� ��� /� � 01�� ��� ,�������
���������� �����
�� ����
��� ��*� � ��
#�
/�����
� )>A*
*� ��������� ��� 2����K������! ���� �������N� ������ �������'� � ������ �����
��� 9���������� ������ ��� ��� ��� �� ��� , � � � )��� �� )<1** ���� ��� ���� �� %�� ������������'� ��
���� �1# -�����%���� ����������������� ���� /� � 01��
�� ���� � ���! "�!#��! $! ������

�������������� � � ������ �����<
���� �4# �� "��� �1 ����%�������� ������������
=� ��� ��������� �� "��� �.� �� ���� ��! �� ��� ��������;����� ��� ��� "��� �1 �� ��� ����
�� ����%������� ������! ����� �� ���� �� "��� �4 ��� ����;������ ���! ��� ������ �� ����! ��
����� %�� 9������ �� ��� K������% �� ��� �� �� �� �� �� ��� ����� 9�����������
���� ��� �� "��� �1 �� ����
=� �� ��� "������ �1 ��� �4 ��� ������ 9�������������� �� �� �� %�� 9������ ��
��� �� �� ��'��������! �� �����#
��� � � �
/*�� )>�*
��� ����� )��� �� )<@**#
�� ����
���
�#�
/ )>.*
=� ��� ��� K������% �� ��� �� ��� ������ 9�������������� �� �� �� �� ��� "������
�1 ��� �4 ������������! �� �����
*�� � � ����/
*�� )>1*
��� ����� %�� ��� ,������� ���������� �����
�� ����
���
(���/
)� �� ����
��� �
#�
/�����
� )>4*
��� ,������� ���������� ����� �� ������ �������� �� ��� ��
�� � ��� � ��� �� ���� � ���� ���� )9���������� ������ ��� ��� ��� ���� ��� �������
�'� �*#
�� ���
���
�� ����
���
�� ����
��� ��� � ��
#�
/
(���)�
� )>5*
����� ��� ���N� ��� *� �� )>A* �������'� � ������
�� ��� ��� ��� ��% ��� ����� ,�8������� ��������� �������%����� ���! ��� �� �����'���
����������� ����������� ��� 9���������� ������ ��� ������ �������� �� ��� ��� �'� ��
'����� ��� �� )<A* ������� ��
*� � *�� � 2 ��� ��� � )><*
�� ���� � ���! "�!#��! $! ������
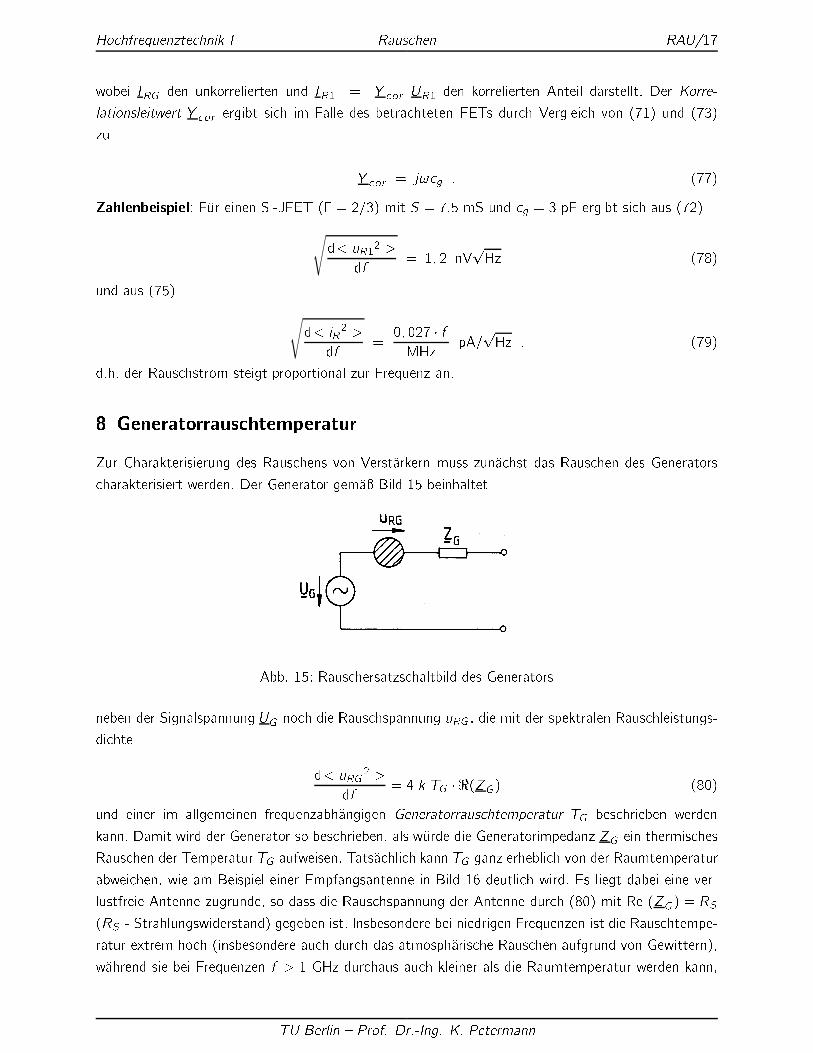
�������������� � � ������ �����>
����� *�� ��� �������������� ��� *�� � 2 ��� ��� ��� ������������ ������ ��������� ��� $����#
��� ���� ����� 2 ��� �� ��� �� �� 0���� �� ����������� 0�M ���� -�� ���� ��� )>�* ��� )>1*
��
2 ��� � ���� )>>*
�������������# 0�� ����� ���R0�M �� � ���� ��� / � �� �� ��� �� � � ,0 �� ��� �� �� )>.*
√�� ���
�
��� �� � �-
�6� )>?*
��� �� )>5*
√�� ��
�
���
�� ��� � �(6�
,���6� � )>@*
���� ��� �������� ��� � ,��,�������� ��� 0��;���� ���
& '���� �������� �(���� ��
7�� +�������������� �� ������ ��� -���'����� �� ���'�� �� ������ �� 2��������
������������� ������� ��� 2�������� ��'$ "��� �5 ����������
���� �5# ����������������� �� 2��������
����� ��� �� ���,����� �� ��� ��� ����,����� ��� ! ��� ��� ��� ,�������� ���������� �
�����
�� ����
��� # �� � ��3�� )?A*
��� ����� �� ��� ������� %��;�������'� � �� ,���������������-����� �� ��������� ������
����� ����� ���� ��� 2�������� � ���������! �� ����� ��� 2����������,����� 3� ��� ��������
������ ��� M��,������ �� ��%������ M��'���� ���� �� ��� �������� ��� ��� �������,������
��������! ��� �� "��,��� ����� ��,%�� ������� �� "��� �< ������� ����� � ��� � ����� ���� ����
���%���� ������� �� �����! � �� ��� ����,����� ��� ������� ���� )?A* ��� �� �3�� � ��
)�� � �������� ���������* � ���� ��� /��������� ��� ������ �� 0��;������ �� ��� �������,��
����� �H���� ��� )���������� ��� ���� �� ����,�'���� ������ ��% ���� ��� 2��������*!
�'����� �� ��� 0��;������ � � 26� ������ ��� ������� �� ��� �������,������ ������ ����!
�� ���� � ���! "�!#��! $! ������
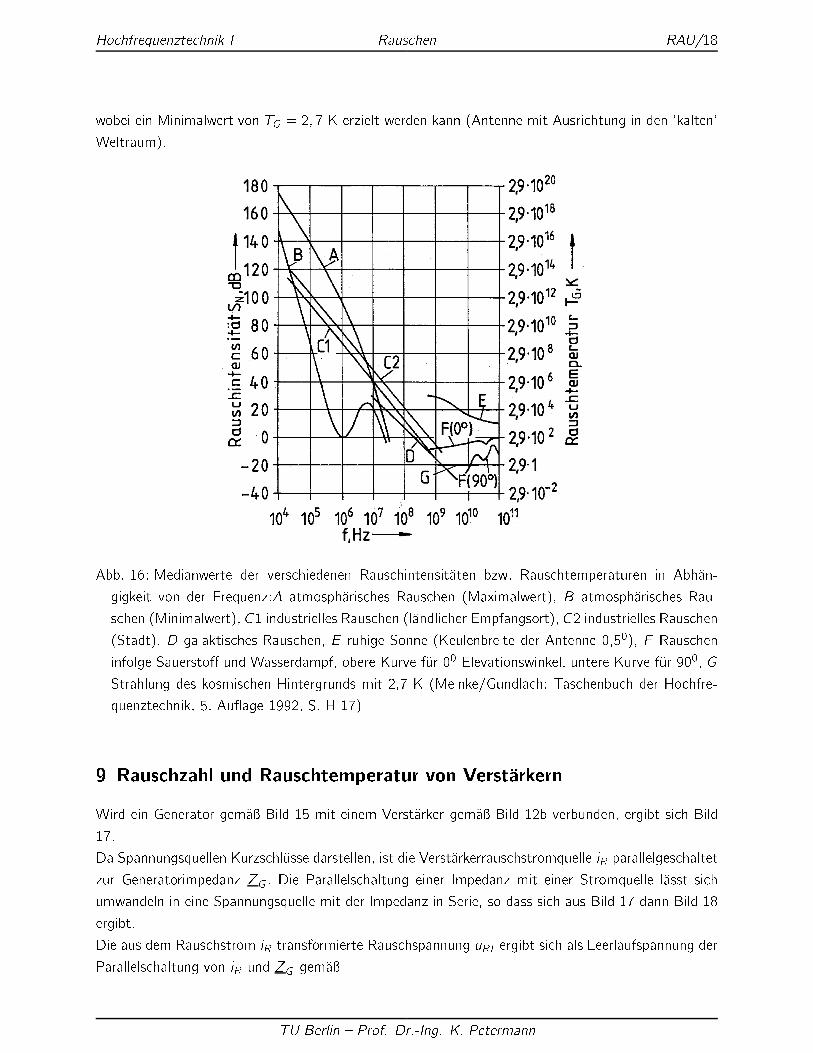
�������������� � � ������ �����?
����� ��� (���������� ��� �� � �� � 9 ������� ������ ���� )������� ��� �������� �� ��� E������E
�������*�
���� �<# (���������� ��� ����������� �����������'��� ���� �������,�������� �� ���'��
� ���� ��� ��� 0��;����#4 ����,�'���� ������ )(�H��������*! 5 ����,�'���� ����
��� )(����������*! "� ����������� ������ )�'������� ��,%�� ���*! "� ����������� ������
)�����*� 6 �������� ������! 1 ���� � ����� )9����������� ��� ������� A!5�*! 0 ������
��%�� � �������O ��� ������,%! ����� 9���� %�� A� ���������������! ������ 9���� %�� @A�! 7
�������� �� ������� 6����� ���� ��� .!> 9 )(�����G2������# M������� ��� 6��%���
;����������! 5� ��N� � �@@.! �� 6 �>*
) ���������� �� ������ �(���� �� �� %��� *����
��� ��� 2�������� ��'$ "��� �5 ��� ����� -���'���� ��'$ "��� �.� ���������! �� ��� �� "���
�>�
�� �,����� ;������ 9������� ���������! �� ��� -���'������������;����� �� ,������� �������
��� 2����������,����� 3�� ��� :������������� ����� /�,����� ��� ����� �����;����� �'� ��
��������� �� ���� �,����� ;����� ��� ��� /�,����� �� �����! � �� �� �� "��� �> ���� "��� �?
�� ����
��� �� ��� �������� �� ����%�������� ����,����� �� �� ��� �� �� K������%,����� ���
:������������� ��� �� ��� 3� ��'$
�� ���� � ���! "�!#��! $! ������
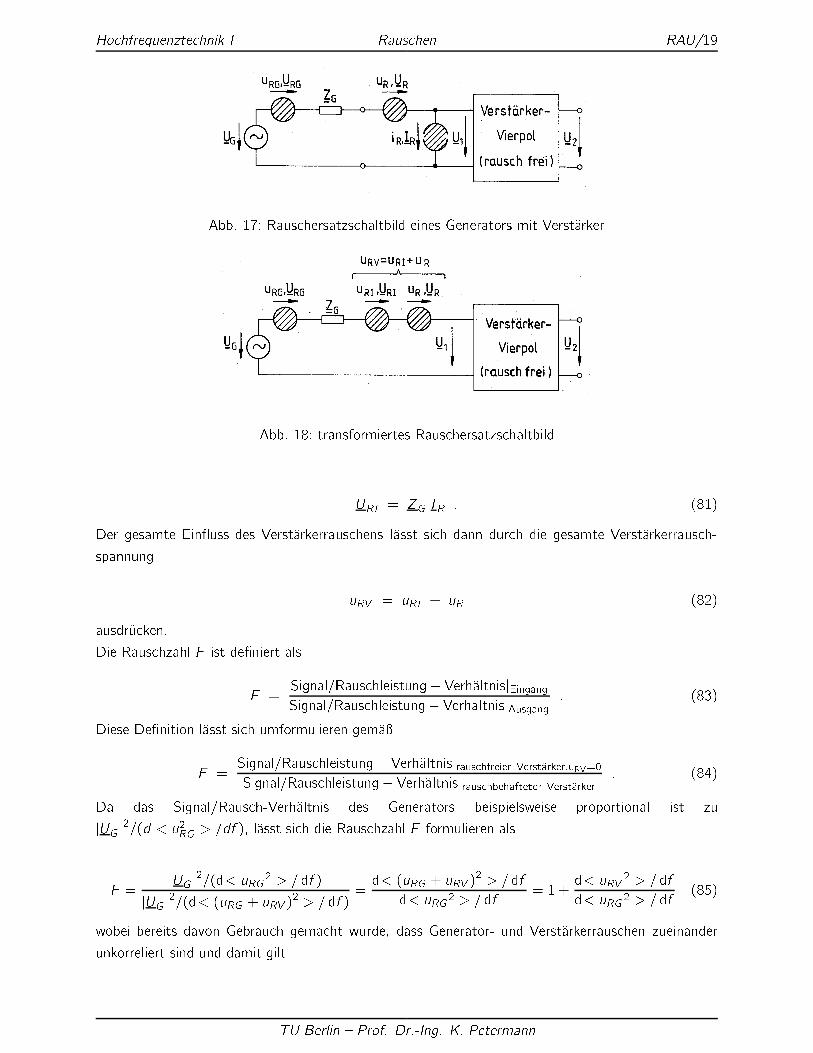
�������������� � � ������ �����@
���� �># ����������������� ���� 2�������� ��� -���'����
���� �?# ����%�������� �����������������
�� � 3� *� )?�*
��� ����� ���N� �� -���'���������� �'� �� ���� ���� ��� ����� -���'���������
,�����
��! � �� � �� )?.*
���������
��� �������� 0 �� ��L����� ��
0 ������������ !�"��#���� $"%!&��#������ �� ����������� !�"��#���� $"%!&��#������� ��
)?1*
���� ��L������ �'� �� ��%���������� ��'$
0 ������������ !�"��#���� $"%!&��#���������������� �����������������
����������� !�"��#���� $"%!&��#�������������������� �����������
)?4*
�� �� �� ���G�����-���'���� �� 2�������� ���,������� ,��,�������� �� ��
��� ����� � ���� ��� �! �'� �� ��� �������� 0 %���������� ��
0 ���� ������ ���
� � �� �
��� ������ ���� � ��! �� � �� �
��� ���� � ��! �
� � ��
�� ���� � ��
� ���� ��!
� � ��
�� ���� � ��
)?5*
����� ������ ����� 2������ ����� �����! �� 2��������� ��� -���'���������� ����������
������������ ��� ��� ����� ���
�� ���� � ���! "�!#��! $! ������

�������������� � � ������ ����.A
�� ���� � ��! ��
���
�� ����
���
�� ��!�
�� )?<*
���������� ��� �������� ���� �'�L ��� ���� .������������� 0" � 0 � � ��� �%�����
(�� ��� ,�������� ���������� ����� �� 2�������� ��� )?A* �'� �� %�� ��� �������� 0 ��
)?5* ��� �������#
0 � ���� ��!
� ���
#����3�� )?>*
��� �������� �� ����� ��� ��� �������,������ �� 2�������� ���'� � ! ������ ����� ���
"��� ���,������ �� � ���� ��� ��! ����� 0 �� ��� ������� ��% �� � �� )�� S �������,������
�� � ���9* ���� �� ����� ��� �������� 0 ���� �� ��� ������� �� �" ��'$
0#$ � �� � � �0 ��" )??*
�� � ���� ) ��� ������ ��� �� ������$ ���������*� ���� ����������� ������������� �� ���
��! ���� �� -���'���������� '����� ��� �� ������ �� 2�������� �� )?A* ��'$
�� ��!�
��� #�! ��3�� )?@*
��� ��� /����0������������-����� �! ��������� ����� ��� 7��������� ������ ��� -���'��
����������,������ ��� ��� �������� �� ���� ��'$ )?>* ���%�� ��
0 � � ��!
��)@A*
� ����� ���� �������� ��� ��"� 0#$C1�" )��"* )"��� # �� � �� � ��� 9* �� ���� �������
������� ����� -���'�����������,������ �! � ��� 9 )�! � �� 9*�
�+ �������������
7�� "������� ��� ��������! ��"� ��� )?>*! �� �� ��� -���,������ �&$�� ��� �� ��� -���'��
������,����� ��! ���� ����� 0����������%�������� ��! �� ��������! ����� �� ��� )?�*! )?.*
�� ���#
��! � �� � *� 3� )@�*
/� �������� �� )?5* ��� � � ��!� ��� � ∣∣��!
∣∣� ���� � � ���� ��� � ∣∣���
∣∣� �'� �� ����������� 0 ��� �������
0 � � �
∣∣��!
∣∣�∣∣���
∣∣� � � �
∣∣*�∣∣�∣∣���
∣∣� ∣∣3� � ���*�∣∣� )@.*
��� 9���������� ������ *� ��� �� ���� '����� ��� �� )><* ���� ����� 9������������������ 2 ���
��'$
*� � *��� � 2 ��� � �� )@1*
�� ���� � ���! "�!#��! $! ������

�������������� � � ������ ����.�
��� ��� �������������� ������ *��� �� ������� �������� ������ ��� -�����%���� ��� ����������
��� K������� 7! �� � ��� "�������� ��� �� ���� ��� �������� ���� � ��� "�������� ��� ��
��� �%����#
∣∣*�∣∣� � �� ���
��� # �� 7! )@4*
∣∣��
∣∣� � �� ���
��� # �� �� )@5*
�������� ���
∣∣���
∣∣� � �� ����
��� # �� ��3�� � )@<*
�� ��� �������� ��% �� 2�������������� ��� �������,������ �� � �� ���� �� ������ ����
����� ���� �� )@.*#
0 � � �7!
��3��
∣∣3� � ���*�∣∣� )@>*
��� �������� �� ����� ���'� � ��� ��� 2����������,����� 3� � ���� ���'� � ���� ��� ��� 2��
���������,����� �'� �� ��� ����� %���������� �� ��� 0���
0 � 0��� �7!
��3��
∣∣∣3� �3�%�
∣∣∣� )@?*
��� ��� ��������� �������� 0��� ��� 3� � 3�%� � D�� �������,�������� ��� "���� ;������� ��
)@>*!)@?* ���%��� ��� -�� ���� ��� ��������� M���� )���� ����� *#
∣∣∣3�%�
∣∣∣ �
√∣∣��
∣∣��∣∣*�∣∣� �√���7! )@@*
��3�%�� � ������*�� � �⎛⎝���*�
�∣∣*�∣∣�⎞⎠ � ��2 ��� � � ���7! )�AA*
D�� �������� ��� )@@*!)�AA* �� )@?* %���� ��� -�� ���� ��� )@>* ����$��� ��� ��������� �����
����
0��� � � � �(����2 ��� � � 7! ��3�%��
) )�A�*
��� ��������� �� )@?* ���� �������! �� 2����������,������� ������ �������� �� ��� 3��
����� ���� 9����! ������� �������� ��! ��� ������ ������! ��� ���,������� �� "��� �@ �������
�����
��� �������� �������� ���� %�� ��� 2����������,����� 3� � 3�%� �������! ��� ,���� ���� ���
��� ������-����� ��� �,������ 2����������,����� %�� ������,��� �� �� ��� ������� ���
��� K����� ��,��� ���������� /��������� %�� ��� �� ��%�� ���� �� ��� ������,���
����� �� �� ��� K����� ��,��� �
=� ������,��� �� ��������! ����� ��� 2�������� ��� ����� ������%����� M���%������������
� ����%������� ������! �� �� ����$��� 3� � 3�%� �� ����
�� ���� � ���! "�!#��! $! ������
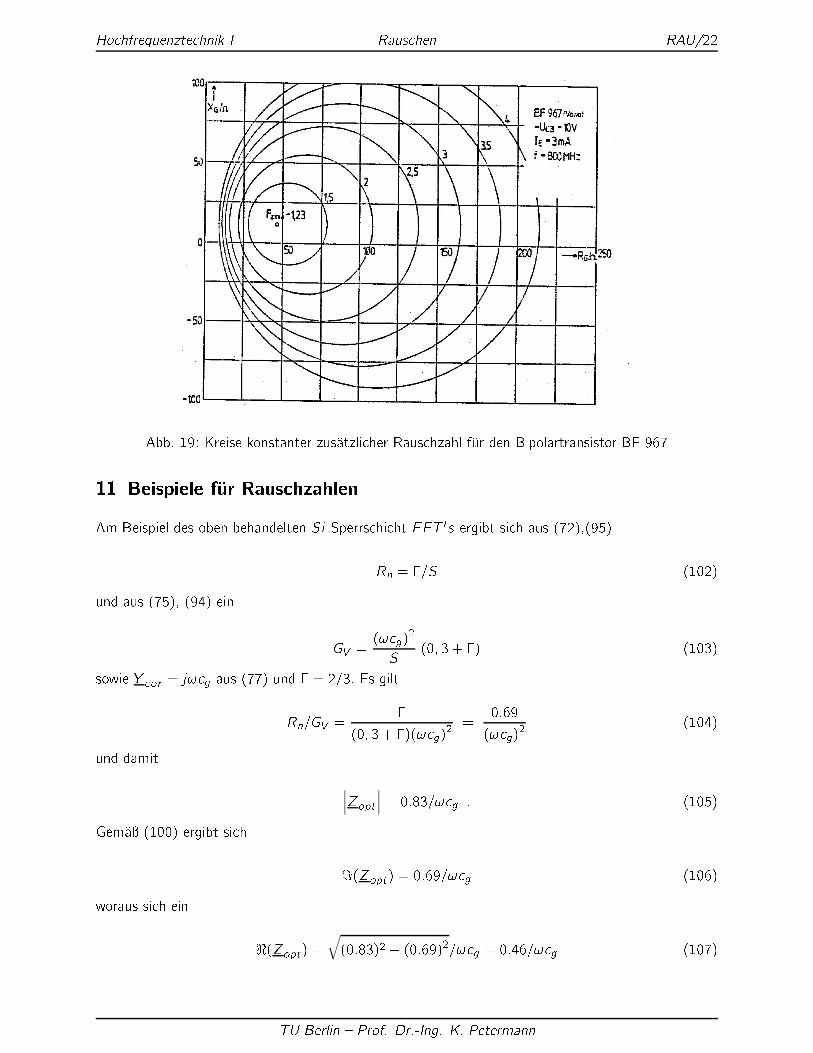
�������������� � � ������ ����..
���� �@# 9���� ��������� ��'������� �������� %�� ��� "�,������������ "0 @<>
�� ,������ �-� �����������
�� "��,��� �� ���� ����������� /���,��������01� �� �� ��� �� �� )>.*!)@5*
�� � ��/ )�A.*
��� �� )>5*! )@4* ���
7! ������
�
/��� � � �� )�A1*
���� 2 ��� � ���� �� )>>* ��� � � ���� � ���
���7! ��
��� � � ��������
����
������
)�A4*
��� �����
∣∣∣3�%�
∣∣∣ � ������� )�A5*
2��'$ )�AA* �� ��� ��
��3�%�� � ������� )�A<*
����� �� ���
��3�%�� �
√������ � ���������� � � ����� )�A>*
�� ���� � ���! "�!#��! $! ������
�������������� � � ������ ����.1
�� ���� ��� �������� �������� ���'�� ��� ���� ��� � � ��� �� )�A�*#
0��� � � ���
� �
���
/��� �� ��� )�A?*
����� ��
0��� � � � ���� ��� )�A@*
��� ��� M�����%��;���� �� �� 0�M )2�� 0�M )1** �� ����
2�� )�A@* ��� %�� ����,��������0�M� 0�� 2���(��0�M ����� ���� ������ "������� �� )����
����� ��"� 7����G"����� ! "��� .*! ���� ��� ����'������ ��� �! �� ��� �������� ���
����������� �� �������� ���! ������ ���������
0�� "�,�������������� ��� ����� 0��;������ �� ��� �� �'����� ���� %�� ���� �������� ��������
)6� 0����# M�� ���� ,��%������ �% (������� M�������J /��� M�������� �� ������� �����!
(��� �@<<! �� 1.@�14�*
0��� � � %�� �√� � ��%� )��A*
���
% �+&+
�� ��� �� )���*
"��,���# 0�� ����� 60�"�,�����M������� ��� /' � ���� �+ � �� ��� +& � � � ��� �� � �� 267
�� ��� �� ��� � � � 26� ���
0��� � �� BC �� �" )��.*
��� �������� �� ����� ������� �&$�� �� ��� ����� 0�M ��� ������ �� )��� �� )�A@**�
�� ���������� �������. ������ %������
� �� ��� ��������! ����������%����� -���,�� ���������! ��� �� ��% �������,������ �� ��L�����
��� �� �� ��� �� ���� -���,�� ��� 2�������� ��� ��� �������,������ �� � �� ��L����!
�� ��� �� ��� �� �� �� ) ���� ��� �� ��� �� * ��'$ )4.* ���� ���%� ���� ���������� ���
��� � #���� � ��� ���%� ���� ���������� ���� ��� ���� �� ����������%���� D������� ����
���������� ��� ���%� ���� �� ��������� ���� F���� ��������� ��� (�$ ��� ��� ���%� ����� K����� �
����'���� 7��7� � ��! � �� �� ��� -����������� �� �� ���G���������� ����'�����
��� ��� �� ��� �� �� ���%�� ���� ��� ��������
0 � ��7� )��1*
��������� �'�� ��� �������� ���� ����������%����� �������� D������� �� ��� �� ���%���� ���
��� ��� -������� ���� D������� ������,%��
�� ���� � ���! "�!#��! $! ������

�������������� � � ������ ����.4
�� / ������������ �� ���������� %������
2��'$ "��� .A ���� . �������������� �������� -���'��������,��� ���������� ��� �������� 0���� ��� ���%� ���� K����� ����'���� �� ����� -���,�� ��� ����� ��% ��� 2����������,����� 3�
���� ��! �'����� ��� �������� 0� �� ������� -���'����
���� .A# 6������������������� ������ -���'��������,���
��% ���� 2����������,����� 3(! ���,������ ��� �� �� ��,����� �� ����� -���'����! �� ���
������ ���
=� ��� �������� ��'$ )?1* �� ���������! �������� ��� ���'�� ��� �� ��������� �( �� ���
�� �
�( � 7� 7����� )��4*
��� ��� ���%� ����� �� ��������� �� 2�������� ���� 0�� ��� ���%� ���� ���������� �� ��� ��
�� -���'���� . ���� ��� ���'��
���� � 0� � 7�� ��� )��5*
��� ��� ���%� ����� ���������� ��� �� 2�������� ��� ��� �������,������ �� � �� )�����
���,������*! ��� � #���� �
0�� ��� ���������� �� �� �� �(� ��� ����
�(� � 7� ����� � �"��! )��<*
����� �"� �� 7���������� �� -���'���� . ��������#
�"� � �0� � �� ��� )��>*
������ ��� ��� ���%� ����� ���������� ��� � #���� � 0�� �(� ��� )��<* �� ��� �� ����#
�(� � 7� 7�� ��� �0� � �0� � ���7��� � )��?*
� �� �� �� ����� ��������
0� � � 0� �0� � �
7��)��@*
�� ���� � ���! "�!#��! $! ������
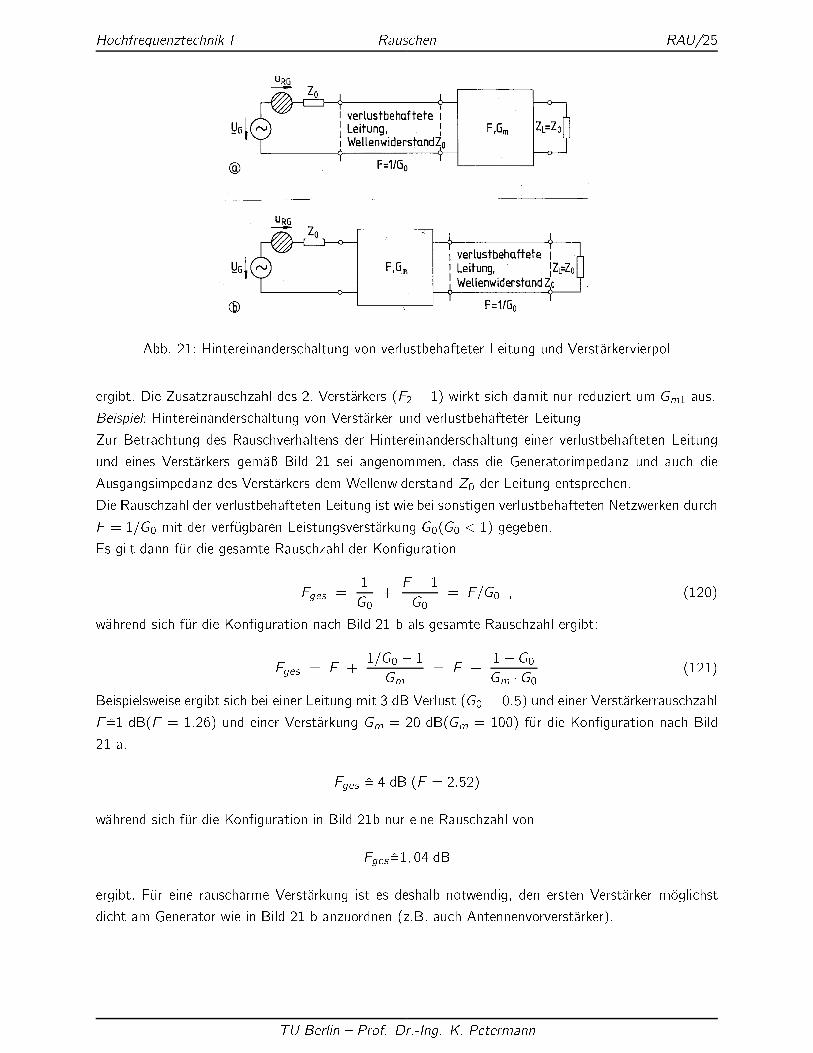
�������������� � � ������ ����.5
���� .�# 6������������������� ��� ����������%����� K����� ��� -���'��������,��
�� ���� ��� 7������������ �� .� -���'���� �0� � �� ����� �� ����� ��� ��������� �� 7�� ���
�� �- ��# 6������������������� ��� -���'���� ��� ����������%����� K�����
7�� "�������� �� ������������� ��� 6������������������� ����� ����������%����� K�����
��� ���� -���'���� ��'$ "��� .� �� �� �������! �� ��� 2����������,����� ��� ��� ���
�� �� ��,����� �� -���'���� ��� �������������� 3� ��� K����� ���,������
��� �������� ��� ����������%����� K����� �� ��� ��� ���� �� ����������%����� D��������� ����
0 � ��7� ��� ��� ���%� ����� K����� ����'���� 7��7� � �� � �����
� ��� ���� %�� ��� ����� �������� ��� 9��L �������
0� � ��
7��0 � �
7�� 0�7� � )�.A*
�'����� �� %�� ��� 9��L ������� ��� "��� .� � �� ����� �������� �� ���#
0� � � 0 ���7� � �
7�� 0 �
�� 7�
7� � 7�)�.�*
"��,������� �� ��� �� ��� ����� K����� ��� 1 �" -����� �7� � ��� ��� ����� -���'������������
0 BC� �"�0 � ���� ��� ����� -���'���� 7� � �� �"�7� � ���� %�� ��� 9��L ������� ��� "���
.� ��
0� � BC �" �0 � ����
�'����� �� %�� ��� 9��L ������� �� "��� .�� ��� ���� �������� ���
0� � BC�� � �"
�� ���� 0�� ���� �������� -���'���� �� � ������ �������� ! ��� ����� -���'���� �& ����
���� �� 2�������� ��� �� "��� .� � ���������� )��"� ��� ���������������'����*�
�� ���� � ���! "�!#��! $! ������

�������������� � � ������ ����.<
�� ����
"������� ��� 3�%� ��� 0��� ��'$ )@@* �� )�A�*#
7�� "������� ��� 3�%� ��� 0��� ��� )@>* ��� )@?* ����������� �� ��� ������� ��� ��������
��� )@>* %���� ��%#
0 � � �7!
��3��
(∣∣3�
∣∣� �∣∣��
∣∣��∣∣*�∣∣� � � � �3�����*���
))�..*
��� �������� ��� )@?* �� ���#
0 � 0��� �7!
��3��
(∣∣3�
∣∣� � ∣∣∣3�%�
∣∣∣� � � ��3� 3�
�%��
))�.1*
�� )�..*! )�.1* %�� ���� 3� �������� ���������� 0 �� ���� ����! �� ��� �� ���'�� �� ���
-�� ���� ��� )�..*! )�.1*
∣∣∣3�%�
∣∣∣� �∣∣��
∣∣��∣∣*�∣∣� ���
7!� )�.4*
��� �� )@@*� 0�� ��� ������������� M���� %���� �� 2��������� ��� )�..*! )�.1* ��%#
� �7!
��3��� � (3��
�
��*�
�
)� 0��� �
7!
��3��� �(3�3
�
�%�
) )�.5*
(��
� (3���
��*�
�
)� � (3�
) � (���*�)� � (3�
)� (���*�)
���
�(3�3
�
�%�
)� � (3�
) � (3�%�
)� � (3�
) � (3�%�
)%�� � �� )�.5*#
� � �7! �(���*�
)� �7!
��3��
� �3�������*��
� 0��� � �7! ��3�%��� �7!��3��
��3��� �3�%�� )�.<*
��� 2��������� �� F����� ������ M��� ��% ��� ������ ��� ������ ����� ��� )�.<* �� ���
� �3�%�� � �� ����*�� )�.>*
���,������ )�AA*� ��� ������������� M���� �� )�.<* %����� ��%
0��� � � � �7!
(��3�%�� � �����*��
)� )�.?*
��� ���*� � ��*�
��∣∣*�∣∣� � 2 ���� ����7! )��� �� )@1*�)@5** �� ��� �� ����$��� )�A�*�
�� ���� � ���! "�!#��! $! ������













![Joural r eurologie eurochirurgie und schiatrie - kup.at · maß an generalisierter Atrophie gefunden [19]. Interessanterweise finden sich auch bei Patienten mit bipolarer affektiver](https://img.pdfslide.org/doc/110x75/5e115f7971b33a3fa113b925/joural-r-eurologie-eurochirurgie-und-schiatrie-kupat-ma-an-generalisierter.jpg)