Embed Size (px)
Citation preview

Uber die Urnwandlung (auch nichtlincarer) partieller Diff erentiabgl@ichungss!-stcmc
mit mehreren komplexen Variablen in Pntcg~odiffercntialg1eic.hungssystesMe
und deren Losung ilureh funktionalanalytiscle Methoden
Von KOLFGAXG TUTSCHKE in Ha1le;Berliii
(Eingegangen am 15. 5 . 1972)
Fiir die inhomogene CA~CHr-R,rEslAh’h’sche 1)iirtielle Differentid- gleichung
lafit sich iiii Gebiet G bekaiiiitlich (vgl. [i]) durch
explizit eine Liisung angeben. Wegen dieser expliziteii Darstellbarkeit einer Losung in Integralform kann man fur Losungen u? der Differentialgleichung
eine der Differentialglcichung gleichwertige Iiitegralgleichung
angeben, wobei cin eine beliebig zu wahlende holomorphe Funktion ist
Bei der Verwendung der Supremixnisnorni in1 Rauin der (in G) stetigen komplexwertigen Funktionen erweist sich &e dadurch gegebene eincin- deutige Zuordnung zwischen der Menge der Losungen W und der Menge X der in C: holomorphen und in G stetigen Funktionen als ein Hornoiomorphis- nius (betrachtet inan statt ( 2 ) Systeme fur m zu bestiminende Funktionen, MI sind W und ,E m-tupel). Eiii soleher Hornoiomorphisnius erinoglicht es, ztus Approximationssiitzen fiir holoinorphe Punktionen solche Satze fur Losungen von (3) zu gewinnen.
(vgl. [6l).

88 Tutschke, Um\vaiidlting partieller Differentialgleichungssysteme
Ziel der vorliegenden Arbeit ist es, fiir vollstandige Systeme der Form
j = 1, . . . , w , v = 1, . . . ~ p eiiieii ents1)recheiiden Hoinoioinorphisinus zwischen Losungen LL' = (wl ~ . . . ~ trTIl) und Funktionen @ = (Ql, . . . , Q m ) zu koiistruieren, wobei ciie 0, holoiiiorphe Fuiilitioiien in den (wesent'lichen) Varitiblen z , ~ . . . ~ zp sind. Die Gruiidlage fiir ciie Kanstruktion eines solchen Homoiomorphisnius ist eiiie esplizite Inteb'raldarstelluiig der Losung der inhoinogeiien ~ a r - c H r - ~ I E ~ r a r s s c ~ l e i i Differential8rleichung
iin Fall der vollstaiidigen Inteprierlxirkeit. Der Ghergaiig vain eiiimrin1,ligeii lioiiiplexen Fall ( 1 ) zuin mehr-
variabligen koinplexeii Fall (1) T\ eist ciiien Iniiizipiellen Uiiterschied gegeii- uber eiiieiii eiitsptechcnden rljergang roii einer reellen zu mehrereii reellen Ynr~ableii auf. Iin Fall des V~JllStalldl~ell reellen Systems
v = 1 . . . . ~ p . j = 1: . . . I ) ! , erfolgt die Zuordnuiig der Losung
lL = ( I [ , . . . . . !I,,J !
II j = 1 ( ; ( d ' , . . . . , .rt, ~ xl, - ~ . . . . J l l 1
$Ij = 9 j (.)p - I % . . . . . I * , ( )
/L> ( . r - , , , . . . . . ,V,,!, . # I , , , - 1 , . . . , . I . , , ) = '/ j (.:;. - 1 ~ . . . . XI,)
zu den diifriiigsduten y : (7, . . . . . 9 ,,,).
durch S1)ezinlieierung ctcr T-firial)leii :
( 6 )
(,-hif;Lugs~~ertprobleiii). Dies eriiioglicht ~ die Losuiig voii (5) auf die Losuiig voii p ~ A ~ ~ C H ~ ~ - ~ ' i O \ ~ ~ ~ ~ L E \ S I ~ . ~ J ~ ~ - ~ ~ S t e i i i e l i zurfickzuf~hreii (vgl. [?I), wobei bei jedeiii Schritt die di izahl der lionstant gelialtenen xu, T,, = : I : ~ , ~ , uin eins verriiigert n-ird.
Da in diesem Zusaiiiiiieiiliaii~ l x i ciem lioinplexen Sxstem (3) die Moglich- keit der Xpezialisieruiig cler I-Tnrial,leii i i icx l i t zur Verfiiguiig steht, mussen bei eiiier nacheinanrter erfolgendeii Behatidlung der T7arialsleii 5, , . . . , zl, alle zI ~ . . . ~ I,, voii voriilierein ills nieht spezialisiert angeseheii werden. 1)
Das fiihrt dnzu, c iaB
1) Dies ha t aiidererseits den Torteil. tL113 nicht nncligen-iesen n-erden triufi, dafi gewisse DiffereritialgleicliiiI~~~ii fiir alle Tariahlen\\-crte erfiill t sind, ~1-ei111 sie nur bei Spezialisierung .rp = x, - ,~ eiiiiger \'ariablcn erfiillt, Fiiid.
Tutschke, Umwandlung partieller Differentialgleichungssysteme 89
a) bei der expliziten Darstellung der Lsunog der inhomogenen CAUCHY- RIEsrANNschen Differentialgleichung (4) im Integranden der auftretenden Integrale auch die Ableitungen der g, bezuglich ~f auftreten, v, ,u = 1, . . . ~ p
b) bei der Losung der Systenie (3) Integro-Differentialgleichungen auf- treten.
Der Nachweis der eindeutigen Losbarkeit der hier auftretenden Integro- Differentialgleichung erfolgt mit Hilfe des B ~ ~ ~ c ~ s c h e n Fixpunktsatzes ; die rVIet.rik wird mit Hilfe der Supreniumsnorm definiert', wobei die Suprema nicht nur auf die Funktionswerte der w,, sondern auch auf deren Ableitungen bezuglich der Z: erstreckt werden.
(vgl. 14,
Das Hauptresultat der vorliegenden Arbeit ist : E<s gibt einen Hornoiomorph.ismus xwischen den Loszmgen
w = 7 f i ( z 1 , . . . , z P , z ~ + ~ , . . .,z,,,)
0 = 0 (XI, . . . , z,, z,,, , . . . , z J .
vollstdndiger Systeme (3) und in zI , . . . , z , holomorplien In-tupeln
Ini Fall reeller Systeine ( 5 ) reduziert sich dieser Homoioniorphisilus auf die durch (6) gegebene Zuordnungsvorschrift. Daher kann man sagen, dalS der zu konst,ruierende Hoinoioinorphismus fiir partielle komplexe Differentialgleichungssysteme die Rolle des Anfangwertprololeiiis iiber- niinrnt.
Die Konstruktion der Losurigen des nichtlinearen partiellen komplexen Differentinlgleichungssysteins (3) wird unter der Voraussetzung vorge- noinmen, daB gewisse partielle koinplexe Ableitungen der fjv existierell. Tt'ill man auch diese Ableit,uiigen iiii SOBOLEwschen Sinn suffassen z), so benotigt man zur Hei-leitung des Hauptresultates einige Aussagen uber die gleichmiilSige Approximation von in1 SoBoLEwschen Sinn differenzierbaren Funktionen durch klassisch differenzierbnre Fuiikt'ionen ; diese werden in 2. hergeleitet.
1. Eine explizite Darstellung der Losung der inhomogenen CaucHY-RIEimNNsehen Diff erentialgleiehung
fur Funktionen mehrerer komplexer Variabler
Es sei Gj em hesrhranktes (RIEMAN~-i~ie~3bares) Gebiet der z,.-Ebene, Ej bedeute die ganze 2,-Eloene. Das zweidiinensionale (R1~mfas~-)3lal3 von G, werde mit nz G, bezeichnet, diain (Gk) sei der Durchmesser von G,.
2 ) Man kann naturlich auch dann Losungen in: SoBoLEwschen Sinn von (3) betrachten, xvenn die f j Y stetige partielle Ableitungen im klassischeii Sinn besitzen.
In GI x . - - x Grll seien p koniplesmertigo Funktionen
vj = l/j (z1 I - . - 9 =,J ckfiniert : die folgciide Vnrnutiwctzung erfull~n sollen :
la GI x - - - >: O,, ~ i n d die yj eiiisclilieDlich ilimr geiiiiechtsn Ableitungen im ~ol~oLE~~-echel i Sinu Iiezuglicli z:, . . . . z; bis zur Ordnung p - 1 stetig. 3)
Daliei vcivstelit i i i i ~ i i hier iiiid iiii folgenden untor einer gemischten Ableitung u-tcr Ordnung cine eolche, bei der ulle u Differentiationen nach vci.schiedenen Viwiirblcii erfolgen.
Dann \roiulc!n Rtctigc Lbungeii (in1 Souormvwhen Siiin) doe CAUCHY- RxEJrixswchen prtiellcn Differeiitiiil~leichu~i~~u~-stenis (4) geaucht (p 2 2). Da dio g, -4l)leitungeii iiii SosoLE\\-schen Sinn iwziiglich dcr zz mindatens von erster Orclnung beuitzen, esiutieren dio zweiten Ableitungen von UI.
Aucli fiir die Ahleitungen im SonoLEwscheii 8inn gilt., dnD gemisohte Ab- leitungen zweiter Ordnuiig von cler DifferentiHtionsreihonfolgo unabhingig sind, wenn sie nur stctig Rind. DIU bedeutet: existiert wenigstens eine Liisung \-on (4), tm niuO
in ganz GI x . - . x G, sein. Die Gleichungcn (7) heiDen 1ntepbilitiit.s- Mingungen fur dax inhomogene CArclir-Rmmxxsche Sptem (1). Bind u' und B swei (utetige) Losungen yon (1): LK) gilt
?(IF - le) .. - -- . = o , v = 1, . . . , P I
;-* "r
d. 11. P urid 11' untewcheideii uich uiii cine (8tetige) Funktion @, die ah E'unkt.ion von s1 : . . . , z,, Iioloaiorph ist. Dtrs bedeutet : &lint man nur eine Gsung II' von (4): so Bind d le Lijsungcn 6 bekannt. Sie hahn die Form
mohoi @ eine stetige Funktion iHt. die ILL- Funktion voii zI , . . . , zp mgar (in GI x - - . x holoiilorph int. Uiiigckehrt siiid dio Integrierbarkeitebedin- gungen (5) auch hini-eichend fur die Existeiiz eiiier Liieung voii (4). Es gilt 4 ) :
1z = 11' -+ @:
En gcnilgt hicr mgar. dbleitungrn \-oil gj nech :; mit p + j zu betrenhten. +) \Vie uli;. nach Fe;.rigrtelliing inciiier drhrit bekannt wurde. hat (filr strenE F u d o -
kouwxe CcMete den C") nuvh T. )I. SPHliIIH iii [S] eiiie explisiteTlarntellunR der lrbsnng der komplex iiichdiruensionalrri iiilioniogrncn CA rcin--Ri inruan-when pertiellrn DiEurenthl- gleitliiingen engcgben. Dime Darrctrlluiig hat cine ~6llig andere Cmtdt nh die dnmh k t z 1 gegebrnc uiid benutzt ZUT Herlcitiiiig nueh n-rwntlich aiidere Hilfaniitkl. Wkhrond in [S] die rechten Seiten deR iiiliomOe\.ncn ~ . ' a r c ~ r - R r ~ r ~ \ ~ s - - S ~ ~ ~ n unbeschrihkt oft differenzierber win m k n , gcniigt hier die Exinteirz endlirh vieler Abldtungen und BLI
gcniigt, diem im Sonor.e\\.schen Sinn aufzafawwri.

Tutschke, Umwandlung partieller Diff'erentiaIg.leic1iungssysteme 91
Hierbei ist @ e k e in GI x . - >: G7L:,,stetige Punktion, d i e 511 GI x -: * x C,, als Funktion von z l , . . ., zp holomorph ist. W d e r bedeutet 27 , daJ i ibo. ullc voneinnnder verschiedenen Indexkornbinationcn vl, . . . , vA = I, . . . , p ( j e einmtnl) sumnier t w i rd . Die Bnriciblen i n z Integranden sind z,, f i i r v 7 v,. . . . , vi. uizd [,, f u r v = vi > . . . , vA.
Beispielsweise lautet die durch Satz 1 gegehene Darstellung voil
w (21 > . . . ? %)
im Fall p = 2 folgendermaBen:
GZ
- .) dE1 d971 d t z djl?
- z 2 -1 [/J[!+ (CI - XI) (L - z 2 ) ' GI C Z
Fur A = p = 2 ist also nur eine Indexkombination vI = 1, vq = 2 zu be- trachten. Verwendet inan statt dieser Y, = 2 , Y? = 1, so Iiiuft das d a r m f
ag, ag., az; hinnus, ~ durch $ zu ersetzen.
1
Dein Beweis vcm Satz 1 werden einige Hilfssiitze vornnpestellt. 5 )
Hilfssatz 1. Es sei G e in bescltranktes ( R I E N ~ N N - ~ ~ z ~ ~ ~ c ~ ~ . c s ) Gcbicf dcr z-Ebene, h in G definiert u n d stetig. 6) Dann ist die durcli
G _ _ _ _ _
5 ) Aus diesen ergibt sich auch, drtR die Reihenfolge der Doppel-Integrationen beliebig
6) Die Aussage des Hilfssatzes 1 gilt auch im Fall eines unbesthrwnkten Gebietes, 71 enn gen ahlt nerden kann.
das nneigentliche Integral mit den1 Integranden 1 h / fur G existiert.

92 Tuhehke, Urnwandlung partieller Differentialgleichungssysteme
in der gunzen z-Ebene definierte Funk t ion gleichmafiig stetig. 7 ) Es ist
I H(z?J - H(z1) I < E ,
wepan 1 z2 - zl I < t3 / 243 9 (sup 1 ? ~ 1 ) 3 mG
G ist.
Be w ei s. Wird
u1 = G n U , (ZJ, U2 = G n U 6 ( z 2 ) und
gesetzt, so ist
UZ\Ul
cla auI3erhalh U , ciie AbschBtzung 15 - z1 I 2 6 gilt. 1st dann
G, = G \ (0, U O?), so folgt aus (8) und (9)
G G6
Eine analoge Abschatzung gilt mit z 2 an Stelle 2 , .
Da fur 5 E G6 sowohl 15 - zl j 2 6 als auch I C - x 2 j 2 6 ist, ist
nnd also
7 ) Diese Aussage kann auch sofort aus der entsprechenden Aiissage fur Piinktionen h t L, (C) geschlosseii uerden (vgl. [l]), da aus der Stetigkeit von h in 12 auch die Zu- gehorigkeit zu LP(@ folgt. Da in dieser Arbeit aber stets statt Lp-Zugehorigkeit die Stetig- keit als Voraussetzung gefordert wird, solleri aucli alle Hilfsbetrachtar~geri auf dieser Grund- lage durchgcfiihrt werden. 1s t 6' unbeschrankt, so kann man die Stetigkeit von f1 = I I ( z ) ehenfalls zeigen, falls vorsusgesetzt wird, dsl3 dss uneigentliche Integral von 1 hj iiber G existiert. I n der Absclidtzung (1 1 ) ist dann KO mG durch J J I h 1 d t dy zu ersetzen.
c

Tutschke, Umwandlung partieller Differentialgleichungssgsteme 93
Nach Definition von H ( z ) ist,
I H(z2) - H(z1) 1
Beachtet man (10) mit z2 statt zl, (11) und nochmals (10) selbst, so ergiht sich
1 b2
IH(~2)-H(zl)j S ~ T C K , ~ + K , - I z . ~ - z ~ [ m G .
Sol1 die rechte Seite dieser Ungleichung kleiner als F sein, so mu13
gelten. Die im Zahler stehende Funktion von b nimnit bei b > 0 ihren groaten Wert fiir 6 = E J ~ n KO an. Setzt man dies in (12) ein, so ergibt sich die in Hilfssatz 1 angegebene Abschatzung fur 1 x2 - z1 1. Q. 0. d.
Hilfssatz 2. Ist h = h (xi ) . . . ) z,) in G, x * - - x G, stetig, so ist die durch
j = 1, . . . , k - 1, E + l , . . . , n. Nach Hilfssatz 1, angewandt auf die 2,-Ebene, ergibt sich:

94 Tutschke, T;'mn-andlung partieller Differentialgleichungaspteme
Der erste Suiniiiand auf der rechten Seite ron (14) ist kleiner ds E,
wenn
gewlhlt mird. Uni zu einer Abschatzung des zweiteii Summanden auf der rechten
Seite voii (14) zu kommen, beachte niaii die gleichmtil3ige Stetigkeit von A:
IZ, - Lo, I < &3;'243 9 9 3
11(21, - - - 9 Z f i - 1 , ; ~ : Z ~ . L I Y - - 3 Zn)
- 74 (201, * . . Y ZO,, - l , c,, zo*x.+1, - * 9 Z0#J I < EY v Ck E a,, fdls z, - zo, i2 < 62 ist, b geeignet gewiihlt.
l+li
Setzt man
sup j &. - 3,,k = R",
IH(z,, - - . I Zk-1, Z@,Y % + l Y - - - 9 z,) - H(Z01,. - . Y ZOJI
< & 2 z Ro:
:, E G,
so ist
falls It, - zoVl2 < b' ist. Q. e. d. V 9 k
Hilfssatz 3. Die Funktion (13) geHQgt in ga9iz
GI X * . . X Qk-i x E, x B k c l x . . ' x GI, der Absc7idtzu.ng
l . H ( z , , ... : z I t ) i 5B~ssupIkjdiain(G~). G
Beweis. In 8, aird ein beliebiger Puiikt zOk feat gewiihlt. Fur einen Punkt z, init 1%) - z , , ~ j 2 ditini (Gk) gilt
/Ck - ~,ix.; 5 ick - zo,j + ;Zoa - zk 1 j 3diam (a,), V 5,E Gk, also ist G, c {zk: ! Integration uber G, Polarkoordinateii mit. dem Zeiitruni z, eiiifuhrt,
- r, I < 3 diaiii (G,)) und soinit, mcnn man fur die
I H (2, . . . : zlJ 5 sup j k i - 3 diaiii (G,) * 2 n. G
Gilt. jz, - z , ,~ ! > f diniii (GJ; 80 ist
Dann gilt
: * ij, - z,: 2 lzk - zo,i - !Zk - zo,j > diain (Gk), V c, E Gk.
1 [ H ( Z l : . . . , Z l , ) i _(SU1) 7--- mGk.
G diaiii (4) Jedenftills ist .mG, 5 z (diain (G)))?, also
: H ( z l y . . . , s , J ~ _IsupiA~.zdiam(Gk). Q. e. d. 0

Tutschke, Urnwandlung partieller Differentialgleichuii~ssysteme 95
Hilfssatz 4. Es ist
wobei die Variablen von h
(‘1, ’ * ’ ) ‘k-I > c,, zh+ l , . . . > z l - 1, 5 ‘ 1 , zl+1 > . . > Z T L )
sind (k < I ) .
Beweis. Die Funktion H wird durch (13) definiert, analog sei
wobej
Kun ist
also ist der erste Suminarid auf der reehten Seite von (15) nicht grofier als
sup 1 h 1 . ( 2 x)2 6 diam (G,). G
Wendet iiiaii Hilfssatz 3 auf II, an, so crgibt sich, dttl3 der zweite Suiiiinand der rechten Seite von (15) nicht goner als
6 z sup [ A [ diarii (C,) * 2 z B G
8 ) Zur Vereinfechung der Schreibweise werden die Variablen weggelassen.

96 Tutschke. Urnv andlung partieller Differentialgleichungssysteme
sein kann. Insgesamt bedeutet das : n'bhlt man b hiiireichend klein, so unter- scheideii sich die Integrnle
beliebig weiiig voneinander. Im zweiten Integral knnn man aher die Inte- grationsreihenfolge vertnuschen. Q. e. d.
Beinerkung zu Hilfssatz 4. Die Aussage von Hilfssatz 4 gilt natiirlich auch dann, weiiii hei cter Iiitegratioii z. B. in der [,-Ebene die Singularitat
1 wegfallt .
i k - ' k
Hilfssatz 5. Bciitzt 1) be.:uglich z1 e i , i e (s te t ige) partielle Ableitung irn Sonomwschen Sinn, so cxistiert nuc11 f i i r II d i e pnrticlle Icowplcxe Ableitung bezuglich 21 t ind c~ g i l t " )
GI"
Beweis. Es set 9 = ~ ( 5 ~ ) euic in der gaiizen [,-Ebene definierte (un- beschraiikt oft diflerenzierlmre) Fuiiktion I"), deren Trager ganz in der (offenen JIenge) G, elithalten mi. Such Voraussetzung iiber ?L gilt (es sei etwa k < I)
(2,. ' . ., zh- 1. &., Z k T f , . . ., Z I - 1 , &, zz+1,. . ., Z I J dE1 - ~~ - . - _ _ ~ _ -
j - - q (' .cl) cz; GI
1 iVultipliziert inan iiiit , integriert inan iiber G, und vertauscht
dabei entsprechend der Bemerkung zu Hilfssatz 4 die Integrationsreihen- folge, so folgt
i g - Zh-
~- 9) Da die Bemerkung zu Hilfssatz 4 auch fur li = I zutrifft, gilt die Aussage von Hilfs-
satz 5 auch im Fall k = 1. 10) Es genhgt auch die Voraussetzung, daI3 die partiellen Ableitungen erster Ordnung
beziiglich 1 ; ~ und CP (im klassischen Sinn) existieren und stetig sind. Denn in diesem Fall lassen sich Kurvenintegrale in Doppelintegrale verwandeln.

Tutschke, Urnwandlung partieller Differentislgleichungssysteme 97
Beweis von Satz I (durch Induktion). Es sei bereits bewiesen, da13
(16) w ( z I , . - , x,) = @ k ( z 1 , . * . ) z k , z k + f , . f ., 212)
a"-l gvl (* * .)
@vl - * - a%,
x.- ________ (Li - Z V l ) ' * * (LA - zvl)
Losung der ersten Ic Differentialgleichungen (4), Y = 1, . . ., k, ist, wobei das stetige Qk als Funktion von xl, . . . , Zk holomorph ist. Wenn diese Funk- tion auch Losung der ( I c + 1)-ten Differentialgleichung (4) ist (Y = k + I), ergibt sich fur dSk die folgende Bedingung:
- g a @ k ( * . .) - (. . .) = _ ~ _ _ _ aw(. *)
%+I
_ _ - ~
az:+ i k + i
= 1 , . . ., k w ~ l CiyA
Lost man diese Gleichung nach 7 a@k auf, so gewinnt man aus ihr eine
Darstellung fur Qk mittels eines Doppelintegrals iiber G k + i und eine additiv hinzutretende Funktion @ k + l , die als Funktion von zk+i holomorph sein mu13 :
ax, + 1
d l k + l d q k t l -
c k + i - % + I
@ (. . .) = @ (. . .) - - g (. . .) k + l 7c (17) k k f l
% t i
k i aA g v , (. * .) - %=I C F P I . . c* . ., 91 J-/JJ. . j--z.qi;;; v2
=I, ..., k a k + l Gv1
d l v i ' ? 7 v 1 ' ' ' d t k + I '?k+ 1 ~ _ _ _ _ ~- ____ X
( c v i - z v l ) ' . ( c v ~ - z v ~ ) ( c k + l - x k + i ) '
Unter Berucksichtigung von Hilfssatz 2 folgt, da13 auch @k+l stetig ist. Schreibt man die Integrierbarkeitsbedingung ( 7 ) fur Y = v1 und p = k + 1 auf, so folgt
7 Math. Nachr. 1973, Bd. 58, H. 1-6
08 Tutschke, Umn-andlung partieller Differentialgleichungssysteme
also geht (17) iiber i n
I.
Hierbei wurcle der zn-cite Suiiinirtnd nuf der rechteii Seite von (17) mit 2 = 0 in die Suiiinie iiiit einbezogen.
Differenziert man die auf der rechteii Seite voii (18) stehende Sumnie partiell nach 5;. 1 5; ~ 111 < __ k , so ist folgende Fallunterscheidung vorzu- nehiiien ;
Fa& alle 1;. von p verschieden sind (dann mu13 i 5 k - I sein), so erhalt inan die Ableitung durch Differentiation des Integrandeii (nach Hilfssatz (5).
Falls ein 1;. gleich p ist (daiin niuB i. 2 1 sein), so wird (nach Hilfssatz 4) die Integrationsreiheiifolge so verandert daB zuletzt uber die p-Ebene integriert wircl. Sach der Differentiat.ioiisrege1 fiir das Doppelintegral
iuit cier Singu1:iritlt erhalt nian als Ableitung hezuglich z: dieses
aus 3. + 1 Doppelintegrstionen hesteheiiden Integrals ein nur &us 1 Doppel- integrationen hestehendes Integral ; es wird dabei die Integration iiber G, und im Integmnden die Singularitat
1
3 16 W } l I _ -
: p - Z}‘
weggelassen. Dafur koiiiiiit der Faktor - z hinzu. Iin Integranden steht eine Ableitung I.-ter Ordnung von g, I. I , wohei eine Differentiation bezuglich z ; erfolgt. Die Suinmationsiiidizes werdeii mit vI , . . . , v,- bezeichnet (da die vI, . . . , v1 voneiiiander verschiedeu seiii Inussen, gilt dssselbe von
Beachtet niaii schlieBlich, dsB Qjk insbesondere eine holomorphe Funk- v1, . . . , V 2 - l ) .
tion von z ist, so ergibt sich insgesanit

Tutschke, Urnwandlung partieller Differentialgleichiirigssystenie 99
d L l d%., a - - d L - i d%n- l d&+i dt7k.t-1 x ~ - - - - - ~ - ~ - ~ . K”i - ZVJ - - * - %AJ ( L + l - Z k + I )
Hierbei hedeutet Z*@, daI3 bei der Sumrnation der Wert p fur die Indizes auszulasseii ist. Die zu einem il gehorenden Bestandteile der zweiten Suniiiie auf der rechten Seite von (19) heben sich niit den zu il - 1 gehoreiideii Beatanclteilen der ersteii Suninic auf. Also ist Qktl auch holoinorphe Funk- tion von z p , 1 s p 5 k . Damit ist Ok+, insgesanit holomorphe Funktion von zl,. . .,
Die Darstelluiig (17) der Funktion cDk mit Hilfe der Funktion Ok+ wird jetzt in (16) eingesetzt. Nan erhalt dann die entsprechende Darstellung von 70 init k + 1 an Stelle voii k . Dahei lieferii die auf der rechten Seite von (17) stehendeii Integrale alle die Summanden, die fur Y ~ + ~ = k + 1 erforderlich sind.
Q. e. d. SchlieIjlich sei noch darauf hingewiesen, daI3 in (4) einige zf ( Y = 1, . . . , p )
durch z , ersetzt werden konnen. D a m gilt Satz I unverandert, wenn man in (7) und der in Satz 1 stehenden Summe diese x , durch zf und analog [ ,
durch [f ersetzt. Die Funktion @ mull als Funktion eines solchen z, anti- holomorph sein.
2. Approximationssatze fur komplexwertige Funktionen mehrerer komplexer Variabler mit stetigen partiellen komplexen Ableitungen
im SoBoLEwschen Sinn
Ziel dieses Abschnittes ist es, fur in 8, x * - - x 8,, definierte komplex- wertige Funktionen f von n koinplexen Variablen in einern konipakten Teil von G, x * - - x G,, gleichzeitig die Funktion f und q der partiellen komplexen SoBoLEwschen Ableitungen
q 5 n, gleichmaBig durch eiiie Folge klassisch differenzierbarer Funktionen fk und deren entsprechenden Ableitungen
7’
100 Tutschke, Umwandlung partieller Differentialgleichungssysteme
zu approximieren. Als Nebenresultat wird sich ergeben, daB im Fall der Holomorphie von f in einigen Variable11 zi, i + j , , . . ., j q , auch die f k in diesen Variablen holomorph gewahlt werden konnen.
Derartige Approximationen benotigt man (wie auch schon in der Theorie von Funktionen einer komplexen Variablen, vgl. [I]), urn durch Grenziibergang aus Differentiationsformeln fur klassisch differenzierbare Funktionen auch deren Gultigkeit fur Funktionen mit SOBOLEW-Ab-
leitungen zu erschlieBen. Im komplex-eindimensionalen Fall besteht der Grundgedanke der Approximation im folgenden :
Sollen f u n d !f gleichmafiig approximiert werden, so wird zunachst
&e als stetig vcrausgesetzte Funktion gleichmafiig durch gewisse
Funktionen p , (z. B. Polynome) approximiert. 1st
cz Zf dz
so konvergieren auch die f k ,
gleichmafiig gegen f. Die Funktion @ ist als holomorphe Funktion klassisch differenzierbar, fur die durch das Doppelintegral in ( 2 1) definierte Funktion gilt dies geeigneter Voraussetzung iiber den Rand des Gebietes nach einem Satz iiber Differenzierbarkeitseigenschaften solcher Doppelintegrale (vgl.
Um bei Funktionen niehrerer komplexer Variabler die p partiellen komplexen Ableitungen erster Ordnung (SO) gleichzeitig gleichmaBig zu approximieren, approximiert man zuniichst die gemischte Ableitung
P I , Kap. I, 9 8).
P f
gleichmafiig und schliefit induktiv auf die Ableitungen erster Ordnung (20) und f selbst zuriick. Bei diesem induktiven Zuruckschliefien stellt man Ableitungen (k - l)-ter Ordnung mittels Ableitungen k-ter Ordnung dar, etwa
im Integranden ist dabei die Variable z j k durch tjk ersetzt. Die Funktion @ ist holomorph als Funktion von z j k . Urn also aus einer Approximation der

Tutschke, Umwandlung partieller Differentialgleichungssysteme I01
Ableitungen k-ter Ordnung auf die von Ableitungen ( k - 1)-ter Ordnung ZuruckzuschlieBen, braucht man Approximationssatze fur die Funktionen @, die in einer Variablen holomorph sind, durch klassisch differenzierbare Funktionen, die in derselben Variablen holomorph aind 11). Solche Aus- sagen werden mit den eigentlich beabsichtigten Satzen (mittels Induktion) gekoppelt bewiesen.
Die beabsichtigten Approximationen beziehen sich auf kompakte Teile KO von G, x * - x G,. 1st KO ein derartiges Kompaktum, so gibt es zu- nachst Kompakta Ki in der zj-Ebene, K j c Gi, so dal3
K O c K = K , x - - * x K , c G ist. Zu jedem K j werden bei beliebig gewahltem 1 weitere 1 Kompakta Kj;”’ c Gj gewahlt, so daB
K j c In t K‘j” K p c IntK(i+l), Kf) c G
j p = h’y x . . . x K i ) ,
Y = 1 7 . . . ) 1 - 1 ,
gilt. Setzt man
so erhalt man das folgende Ergebnis :
Milfssatz 6. Mun kunn xwischen das gegebene Kompaktum K und
G = G 1 x * * * x G ,
beliebig viele Kompukta K(’), . . ., KCZ) so xwischenschalten, d a , jedes Kom- paktum gunz im Inneren des nachfolgenden enthulten ist.
Anders formuliert: Geht man K(’) aus, so erhalt man durch Z-maligen Ubergang zu einem jm Innern liegenden Kompaktum schlieBlich ein Kom- paktum K , x - - x K,, das das gegebene Kompaktum KO noch ganz enthdt. Betrachtet man also an Stelle von K , so kann man trotz beliebig-oft-maligen Uberganges zu im Innern gelegenen Teilkompakta noch ganz KO erfassen. Aus beweistechnischen Griinden werden die KY) so ge- wahlt, daB die Randkurven holderstetige Darstellungen besitzen und da13 jede in Kc”) gegebene stetige Funktion in ein I@”) ganz enthaltendes ab- geschlossenes Interval1 stetig fortgesetzt werden kann. 12)
Fur beliebig zu wahlende kompakte Teilmengen KO c G! gelten die beiden folgenden Approximationssatze:
11) Aus dcr Holomorphie von @ als Funktion von zik folgt nur, dal3 die partiellen db-
12) K!Y+ 1 ) kann man z. B. durch Betrachtung endlicher Uberdeckungen aus A’?) ge- leitungen beziiglich xfk und yir im klassischen Sinn existieren.
winnen. 3

102 Tutschke, Uninsndlun,a partieller Differentialgleirhungssysteme
Satz 2. Die Funktion f sei in G1 x * - x G,, stelig und sol1 bezugkich 2: , . . . . z:q stetige gemischte SoBoLEwAbkitungen bis zar Ordnung q be- sitma. Dann gibt es xu jedew Konzpaktum K,, c G, >: - * * x G,, ei?ze Folgc in denz beliebig gewuhlten Konipaktuin
h ' = K , x . . . xK , , . K O C K C G I x * * * xG,,,
definierter Funktionen f k mi t (klnssisclte~t) stetigen Ableifungcn erster Orclnung, so duJ3 in K 3 KO gil t
Unter deli gleichen Voraussetzungeii wie 1)ei Satz 2 gilt
Satz 3. Ist f ~ 1 1 ~ 9 Funkt ion von zL1, . . .. z holo~710rpl~, so konnen die fk so gewalzlt iverden, d i i j sie ebenfrills als Funkt ion von X , ~ , . . . , z holomorpli sind, wohei die zIv. Y = 1. . . . . 11. in offenen Mengen laufen, die in Riv enthalten sind. 13)
Yurch Herniiziehuiig eines von I. S. VEKL-A angegebenen Bcispiels einer iiii SoRoLm\-schen Sinn bezdghch z* part iell komplex differenzierbaren Funktion, die nicht iiii klassischen Sinn differenzierhar ist (vgl. [ 11, Kap. 111, 5 1) ergibt sich:
LY
%
Die Funktion
ist eiiie stetige Funktion init stetigen gemischten SOBoLE\\r-A\)leitungeii beziiglich z:i, . . . , zP his zur Ordnung p , ohne dalJ die pm-tiellen Ableitungen (auch niclit erster Ordnung) in1 kl ischen 8inn existieren. Dieses Beispiel zeigt, dd3 die Funktionen, die i i x h Sntz 2 npproximiert werden konnen, niclit etwa selbst schoii klnssisch differenzierhare Funktion sein rnussen.
Zuni Beweis der Satze S und 3 siiid ~iocli einige weitere Hilfslnetrach- tungen erforderlicli.
Hilfssatz 7. Die Funkt ion f 3ei i n I{("+') = 1 x * + * x K:;-;-l) be- ziiglich xk .und yk sfet ig dif ferenrierbrir, R : ~ +- i yk = z k . Bei belipbig gezuuhltem CL, 0 < v. 5 1, ist &inn f cds Fzcn&ion coy& zk in
' P
,?+I) x . . . x IT',";) x 1;:) x I$:;) x * - * x ,y,
1{(4 = Jq) x . . . x I{'"' cllso auch in
i l
Ii) Genau forniuliert sind die fk fur zP E K p , ,// $I i,, . . ., i,, als Funktionen von z 2 , , . . . , z l P in I n t Kj:) >; . . . x Irit Ki1) holomorpli.
P

Tutschke, Urnwandlung partieller Differentialgleichungssystenie 103
e k e cr-HoLDER-stetige Funktion. i)ie HOLDER-lionstante kunn dubei uibd abhangig von z l , . . . , z ~ - ~ , z & + ~ , . . . , x , gewaldt werden.
Beweis. Der positive Mindestabstand von K',") vom Rand voii lit+') sei &. Sind z; , 2; zwei Punkte von K$", dereii Abstand kleiner als
6 = min (do, 1)
sei, so liegt ihre Verbindungsstrecke ganz in .Kv+i). Nach dem Mittelwert- satz der Differentialrechnung - angewandt auf Re [ f ] und I m [ f ] - gilt, wenii C1 eine Schraiike der Betrage von
ii Re [ f ] ii I m [ f ] ii Re [ f ] ii Im [ f ] ___
%x, ' Zx, ' 2% ' ZYk
i f ( 2 1 , . . - 3 % - I , z;, % + I , . . .> zJ
5 2 Ci I x; - z;' I + 2 Cl I y; - 31' 1 5 4 C1 j 2; - xg 1 .
in ganz K("+') ist,
I ,
- f ( X l , ' . . ) z & l , z k , i ; k + l , . . ., z n ) i I,
1st der Abstand von z; und &' grol3er oder gleich 6, so gilt, weiin C2 eiiie Schranke von I f / in K(*'+') ist, wegen
1 1 ___ I-- [& z;.'(= - 6" die Abschatzung
Damit ergiht Rich, daB eine zugehorige HOLDER-Iionstante durch 2
inax (4 c,, a. c?) gegeben wid. Q. e. d.
stetige (klassische) pcirtielle Able i tungen bezuglich aller x,,, y,, besitzen. Duim ist d ie durch
Hilfssatz 8. Dic Funktion f = f(q, . . . , ZJ sol1 i n
If:)
definierte Funktion in K(") stetig. 14)
14) Hier und im folgeiiden bedeutet (2,. . . ., lk, . . .) den Punkt ("I , . . . I zk-l, Cn., Z k + f . . - ., 2-)
usw.

104 Tutschke, 17mu aiidlung partieller Diffeerentialgleichungssysteme
Beweis. Es sei b0 der positive Jliiidestabstand zwischen K@” und dem Rand voii h”’ I). D a m seien (zl , . . . , z,J und (zoI , . . . , z0,J zwei Punkte von h””). dereii Abstaiid kleiner als 6, sel, woraus folgt, daIj auch die ganze Verbindurigsstrecke der beiden Puiikte in I<(’+‘) liegt. 1st G3 eine Schranke der Betrage der prtiellen Ahleitungen bcziiglicli x,,, y, (Y + I c ) von Real- uiid Iniaginarteil 5-on f i n IT(”+’). so ist clalier
r (22) I f ( Z I , . . .. Ck. . . .) - f ( z o 1 , ’ * f > 5I;, . . .) I 5 -” C%1 2 ( i xLL - yop I T Y, - ~ 0 , ~ 11 - 4 C3 2 i
I )
P T k
i‘+k - zo,, ’ .
1st 6 > 0 eine noch geeignet zu w-lhleiide Zahl, so sei
&) I;, a
wobei Kt)6 RUS K Y entsteht, indeni man urn z und zo die 8-Umgebungen auslaljt.
Nach Hilfssatz 7 ist f a h Funktion von zg in K‘,) eine U-HOLDER-Stetige Funktion, also gilt, weiin H e eine zugehorige HOLDER-Konstante ist,
/ f ( Z l , . . - , = ) ; , . . . ) - - f ( Z I , . . . , 5 , ) / 5 H e I C k - Z k \ Q *
Daher ist zunlchst, wenri
l i , = K ( , ‘ ) n U 6 ( z k ) , US=K(,‘)nUa(zOk) und ! C k - z k 1 = r
gesetzt werden 15),
r, p sind Polarkoordinaten in der Ck-Ebene niit den1 Zentruni zk.

Tutschke, Urnwandlung partieller Differentialgleichungssysteme 105
also insgesamt
+fk(xl>. . * 9 ZOk). . .) - f ( z O 1 , * * - > Z O k ) . . .) (ck - 'Ok)'
k, 6
Beachtet man (22), so kann man den ersten und letzten Summanden von (24) zusammen abschatzen durch
Nach Hilfssatz 7 ergibt sich fur den dritten Summanden von (24) die obere Schranke
1 - H a m K t ) [ zk - zOk l u , 6 2
(26)
wobei H E eine (von z l , . . . , Z g - 1 , x k c l , . . . , x, unabhangige) HOLDER-Kon- stante ist. Um schliel3lich noch den zweiten und vierten Summanden abzuschatzen, beachte man
1
(ck - Z 0 k ) 2
- ('k $- 'Ok) ('k - '0k) f c k ( Z k - __ XOb) - ~
1 _ _ _ _ - - -
(ck - Z k ) 2 ( c k - z k ) 2 ( c k - '%k)'
Wahlt man C, so, dal3
I c k l 5 CI, 7 c k E Kr)

106
ist, so ist
Tutschke, Umwandlung partieller Differentialgleichiingssysteme
1st Cz wieder wie beim Beweis von Hilfssatz 7 eine Schranke von I f i , so sind die Betrage vom zweiten und vierten Summanden zusammen nicht grol3er sls
(27) 8
6'. - c2 C'* mhp 1 Zk - ZOk 1 .
Nun ist
(28) I E ( z i 7 . 1 * 7 ' 1 % ) - E ( ~ 0 1 , . . ., zon)l
5 I E (21 > . 2 zn) - E, (21 9 . . z,J I + lEd(z~ , . . . , zn ) - -Ed (zOI , . . . , zun ) l
+ I E, (201 . . . ~ 0 ~ ~ ) - E (201 , . . . , ~ 0 , ~ ) 1 . Bei Beachtung von (25), (26), ( 2 7 ) und zweimaliger Anwendung ~ 7 0 1 1 (23) folgt nach (28)
(29) IE(z, , . . . , zn) - E ( z O , . . . . , z0,J I 5 2
Bei vorgegebenem E > 0 wird 6 zunachst so gewahlt, dnIj
ist. Liegt dann ( z , , . . . , z!,) in einer hinreichend kleinen Umgebung von (aol, . . . , z , , , , ) , so ist n u r h der zweite Suminand aiif der rechton Seite von
(29) kleiner als -. Q. e. d.
Besitzt die Punktion h = h ( z , , . . . , z,, ) in K('+') (klassische) stetige
E
2
partielle Ableitungen iiach allen T,, , y,, so besitzt die Funktion
#) B
zunachst nach nllen r,,, y,, Y =k k, (klassische) stetige partielle Ableitungen, die man durch die Differentiation unter dem Integral erhiilt. Dies ergibt
Tutschke, Urnwandlung partieller Differentialgleichungssysteme I07
sich z. B. im Fall der partiellen Differentiation bezuglich xi wegeii
h(zoi + A x i , z ~ , . . Ch, . . - ) - ~ ( X O I , 2 2 , . * . , <k, * * * ) ____ Ax1
dF,(zo,, 2 2 , . . . , Ck, . . .) - ah(xol+6 - d q , 2 2 , . . ., Ck, . . .) _ _ _ _ ~ _ _ _ - ___-- ___ 2x1 8x1
8h(zo,, 2 2 , . . - , [ a , . . 3x1
-~ . ~~~~ -.). 0 < 6 < 1 ,
ah
2x1 und der gleichmafllgen Stetjgkeit von - . In Verallgemeinerung eines
Differentiationssatzes der komplex-eindimensionalen Theorie (vgl. [I], Kap. I, 5 8) gilt:
Hilfssatz 9. Es sol1 h in K("+') stetige partielle Ableitungen erster Ordnung i m klassischen Sinn besitzen. D a m besitzt H in K(") auch beziiglich xk, yk stetige partielle Ableitungen erster Ordnung im klassischen Siniz. Dabei ist
Beweis. Nach Hilfssatz 7 ist h bei festgehaltenen
' 1 , . . . ) z k - l , z / , $ f 1 7 . . . ) ' 9 ,
in K(kY) eiiie K-HOLDERStetige Funktion, also ergeben sich nach den bereits erwahnten Untersuchungen ([l], Kap. I, § 8) die in Hilfssatz 8 behaupteterl Darstellungen der partiellen Ableitungen. Es ist
I$'
Die Stetigkeit des ersten Summanden folgt nach Hilfssatz 8, die des zweiteil unmittelbar aus [I], Kap. I, 5 8, da der Integrand iin zweiten Integral

108 Tutschke, Urnwandlung partieller Differentialgleichungssysteme
auf der rechten Seite der letzten Gleichung von den Parametern
21 . . . . , Z& 1 , Z k + f , . . . , z,, i-H 2H ?Xk ?LJk
unabhbngig ist. Also sind --, -- stetig. Q . e. d.
Es sei f eine in IT(””) definierte stetige Funktion mit stetigen SOBOLEW- Ableitungcn bezuglich 2:‘. ci = 1. . . . , q. Mit .C, werde die Bestimmungs-
x K(”“) bezeichnet. Setzt man flache des Polyzylinders K:’lA1) x . 4
ZP
so wird dadurch in In t K(”+‘). also insbesondere in I<(”), eine Funktion g definiert. If$) c b e r diese Funktion gilt :
Hilfssatz 10. Besitzt f i n K(”+’) beziiglich z* , p = 1, . . ., q, stetige SOBO- LEw-Ableitungen, so besitzt g i n Int IT(”+‘) stetige SoBoLEw-Ableitungen be- ziiglich der z: , p = 1, . . . , q , und diese werden durch
(31)
gegebe n.
3P
- c act, - ’ ’ drip
(Ti, - z,J * . * (L” - Xi,) _ _ - ~ _ _ _ . % ( Z l > . . . > Z I J - - +“l,.’ 1 - -
22; ( 2 z i ) p c SP
Beweis. 1st v = y (z],,) eine 111 I<:uA‘) definierte Funktion mit
suppy c Illt K y ) , so gilt
und integriert man __ - 1 1
Jiultipliziert man init ___ ( 2 jz i)” (Ci, - z , , ) * - (ti, - Z i p )
iiber S, , so folgt durch Yertauschung der Integrationsreihenfolge 15)
Jw
16) Diese Funktion ist sogar fur 22. E K;; 7 I), E. =+ i, , . . . , i,, definiert. Die Variablen der im Integranden stehenden Funktion sind 22. fur A + i , , . . . , i, und [a fur A = i, , . . . , i,.
17) Die Integration uber K ! v + ~ ) kann man wegen suppp c K!v+lj auffassen als Inte-
gration uber ein endliches Intervallnetz. 7P Tc

Tutschke, Umwandlung partieller Differentialgleichungssysteme 109
Das bedeutet, daB die durch (31) dargestellte Funktion tatsachlich die partielle komplexe Ableitung von g beziiglich 2; im SOBOLEwschen Sinn ist Um die Stetigkeit dieser Funktion zu beweisen, bezeichne man zunachst mit (zi, . . ., ci1, . . .) denjenigen Punkt des C", bei dem fur il = i,, . . ., i, die Variable z, durch r, ersetzt wurde. Dann gilt
Beachtet man, da13 wegen derr vorausgesetzten Stetigkeit in K@"" die
Funktion - beschrankt und gleichmafiig stetig ist, so knnn man hieraus
Q. e. d. die Stetigkeit von ~ in In t K('+') ablesen. 18)
Die Funktion g, die durch (30) definiert wird, und ihre Ableitungen
af az;
ag a$ - it
- ag .- die durch (31) gegeben werden, sind (in In t @+I)) holomorphe &* ' Funktionen von zil, 1 = 1, . ~ ., p . Nun stimmen f und g uberein, falls f selbst holomorphe Funktion von zil , . . . , z, ist. Damit ergibt sich in diesem Fall aus Hilfssatz 10 die folgende Aussage:
p = 1) . . ., q, stetige SOBOLEW- Ableitungen und ist f als Funktion der zi,, 1 = 1, . . . , p , holomorph, so sind
die SoBoLEw-Ableitungen ~ holomorphe Funktionen der z i l , 1 = 1, . . . , p .
JP
P
Hilfssatz 11. Besitzt f beziiglich z?: 3/r'
af azf
JP
18) Wird 6 > 0 so klein gewahlt, da13 alle zi, mit Izi, - zoi I < 6 in I n t K!"+f) liegen, so ist die durch 1 = 11
1 ____ (Ti, - ZiJ . * . (Ti, - Zip)
. , Tip) E S,, j z . - zoi I I 61 definierte Funktion in {(5-il, . . ., Cip, zil, . . . , zip) : (Ci,, . . ', a - stetig und 8Jso auch gleichmaaig stetig.

110 Tutschke, Um~vvsndlung partieller Differentialgleichungssysteme
JTie bereits siigegeben wurde, solleii die Satze 2 und 3 gemeiiisam be- wiesen werden. Dieser geineinsame Beweis mird so erfolgen, da13 man aus der Gultigkeit von Satz 3 bei Approximation \-on q - 1 Ableitungen darauf schlieaen n-ird, daB die Ausssge voii Satz 2 beziiglich der Approximatioil von q partiellen kom1)lesen Ableitungen gilt. Urn hieraus nuf die Gultigkeit voii Satz 3 such bei Approxiination 1-011 q Ableitungen schlieBen zu kijnnen, wrd tier nachfolgencle Hilfssatz herangezogen :
Hilfssatz 12. D i e Fi inkf ioiz f sci inh’(’-’’.stetig u n d sol1 beziigliclz z z , . . . , z* JP
stetige SosoLF,\\--Ableitzingcn besitzcw. il’eiter sei bckrrnnt, daJ ?nun f und die S ~ ~ ~ ~ ~ n - - A b l e i t z i i z g e n beziiglich :: . p = 1, . . . , q, in I<(”+‘) gleichnzafiig dzirch Fiinktionciaf, rrpp’.O.“)?iiercnlicrnia. d i e beziiglich der x, , yj,,, p = 1, . . ., q, stetige klnssi.schf L4bleifuiigen bci i t z e n solle?a :
i
t L
Dunn gilt: Setzt i m i n zzisutzlich comics, dciJ f nls Funktion von
zz, , . . . . z ( i n Int I<(”- I)) ‘11
holomorph i s f , so knnn ~ c i n in h?”) stetige Funktionen ,fk ?nit sfetigen klas- sischen Ableitungen beziiylich x j U . yl , ,u == 1, . . . , y. so angeben, dnfi gilt:
C l k
CZ* 11) die und die :- .Ci )br l holomorphe Funktionen von
3 L‘
Z * , ’ . . . . z ‘Y .
Beweis. Es sei 8, wieder die Bestiiiirnungsflache von
q - 1 ) x . . . x K(”-‘). ‘lJ
Da f als Funktion der zt i , , R = 1, . . . , p , holomorph ist, gilt
Mit Hilfe der vorgegebenen f k werden die f k wie folgt definiert :

Tatschke, Urnwandlung partieller Differentialgleicliungss~steme I11
Da A?”) vom Rand von Kc”+‘) einen positiven Mindestabstand 6, > 0 hat, gilt
(34) Nach Voraussetzung gilt fk 3 f in @‘+I), also inshesondere auf S, . Damit folgt aus (33) unci ( 3 2 ) , daB
i n K(”’ gilt.
( p = 1 , . . .>(I)
- Z L Y ] 2 do, ztl E R$ can E q+‘).
i, 2 f
Aus ( 3 2 ) und (33) folgt durch Anwendung von Hilfssatz 10 weiterhin
_ _ +--
I” J P
p = 1 , . . ., q, in j p + l ) , also inshesondere auf S,, folgt, ?f, ilf ?zj* -+ h? ’
hiereus, daB auch
gilt. Die Holomorphie als Funktion von zii , . . . , xi, liest inen fiir f k aus
Q. e. d. h f k
(33), fur - - aus ( 3 5 ) ab. 2zt
J P
Aussage und Beweis von Hilfssatz 12 gelteu auch in der folgenden Form :
Sf Sol1 i: gGichmuJig approxim,iert werden und ist f als Funktion von
ZJP, p = 1, , . ., r , antiholonaorph, so kann erreicht werden, daJ die approxi- mierenden fk aueh antiholomorphe Funktionen von z - sind. Dazu sei S,,, die Bestimmungsflache von
K!“+ 1) x . . . x jp+ 1) x K‘”+ 1) x . . . x @;+I).
f ( Z 1 3 * . - 9 Xn)
ti ZP 31
Wegen der vorausgesetzten Antiholomorphie geht (32) iiber in

112 Tutschke, Cniwandlung part ieller Differentialgleichungssysteme
Die f, werden dann durch ein (33) entsprechendes Integral uber Sp-? defi- niert. Die f h sind dann antiholomorphe Funktionen der zji, . . . , z . Fur 1 5 p 5 T werden die Ableitungen bezuglich z* durch ein ahnliches Integral uber 8p+7 gegeben, wobei nur ([t' - 27 ) durch ([* - Z X )z zu ersetzen ist.
Dasselbe trifft fur die Darstellung von zu. Wegen fk 2 f folgt dann
Jr '
JP
9P 3 s
2f CZj
11
i j k rf auch (in einem kompakten Teil) :-- 2 - -.
tz?: zzp 'P JP
Beweis der Satze 2 und 3. Es werde (Induktionsvoraussetzung) an- genommen, daB die Satze 2 und 3 bereits bewiesen seien, falls neben der Funktion maximal q - 1 Ableitungen, q 2 1, gleichmaoig zu approxi- mieren sind. Es ist dann zu zeigen, daB es auch moglich ist, gleichzeitig eine Funktion f und q prtielle komplexe Ableitungen
zu approximieren (in einem im Innern liegenden kompakten Teil). Aus- gangspunkt dieser Approximation ist eine gleichmaBige Approximation der als stetig vorausgesetzten q-ten gemischten Ableitung von f beziiglich Zil, . . ., 2 .
&9 .
Die gl&) kann man z. B. d s Polynome in allen Variablen x i , x ; " , . . . , z,, Z:
EQ f wahlen, wie man sieht, wenn man -~~ in ein abgeschlossenes In-
&:i: 'I . . . 22;
tervall stetig fortsetzt und auf diesen der, mrEIERSTRASSSchen Approxi- mationssatz anwendet.
Urn aus diesen Funktionen g t ) schlieBlich Funktionen zu finden, die das gestellte Approximationsproblein losen, werden die folgenden Hilfs- funktionen @'), 1 (= 1 5 q, eingefuhrt:
Die Funktionen @(') sind stetig und als Funktionen von zil holomorph. Da nach Voraussetzung die gemischten SoBoLEw-Ableitungen von f be-

Tutschke, Urnwandlung partieller Differentialgleichungssysteme 113
zuglich z: , . . . , z? bis einschlieBlich zur Ordnung q existieren, existieren im SoBoLEwschen Sinn zumindest fur 1 5 15 q - 1 die partiellen Ab- leitungen der @(" bezuglich z z , 1 + 1 I_ e 5 q, und sind stetig. Unter Beachtung noch zu ermittelrider Zusatzbedingungen werdsn die @('I durch klassisch differenzierhare Funktionen die ebenfdls holomorph in zil sein sollen, approximiert :
Jq
@) s' @W* ( 3 7 ) Mit Hilfe dieser Punktionen @f) werden die Funktionen gf) wie folgt rekursiv definiert :
Beachtet man Hilfssatz 9, so sieht man, daB die gf) nach allen reellen Variablen IC, , y, stetige partielle Ableituiigen erster Ordnung besitzen. Da die Funktionen @iz) holomorph in zir sind, gilt
aCD.'yz, , . . . , zn) +- az;
Durch eine zweite, dazwischengeschaltete Induktion wird jetzt gezeigt, daB bei geeigneter Wahl der @g) fur jedes I die folgende Aussage gilt:
I + 1 5 e 5 q. Diese Induktion wird nach fallendem 1 gefuhrt : 8 Math. Nachr. 1973, Bd. 55, H. 1-6

114 Tntsclike. U1nwandlung pnrtieller Differentialgleichungssysterne
Aiigenoiiiiiien, die Xussage (42) treffe fur I zu. Dann folgt durch Ver- gleich von (36) und (38) bei Berucksichtigung von (37), da13 zunachst
gi1t:Analog folgt durch Vergleich voii (40), ( i l ) , menn die @kz) die Zusatz- forderung
J P J P
erfiillen, da13
gilt. Die Aussage (45) gilt aber auch fur e = I , denn aus (38) folgt durch partielle koinplexe Differentiation
Das bedeutet,: Uiiterwirft inan die K a h l cter @?) den q - I Nebenbedin- gungen (44), so folgen aus (43) die Aussagen (43) und (45) - letztere gilt auch fur e = I -, d. h. die Konvergenzbediiigungeii (42) reproduzieren sich fur 1 - 1.
Da die @")nur fur 1 5 1 5 q zu betrachten sind, sind nach (44) hochstens q - 1 Ableituiigeii zu approxiinieren. Die Bedingungen (37) und (44) kanii man also nach Sxtz 3, der entsprechend der Induktionsvoraussetzung 19) bis zu maxiiiial q - 1 Ableituilgen gilt, erfiillen.
Schreibt inan (42) fur 1 = 0 auf, so ergibt sich
also kann man die in Satz 2 postulierte Approximation von f und q par- tiellen komplexen Ableitungen durch die 951') realisieren. Nsch Hilfssatz 12 gilt dann aber auch Satz 3 bei ,4pproximation von q partielleii komplexen Ableitungen erster Ordnung. Q. e. d.
Bemerkung 1 zu den Satzen 2 und 3. Durch die Substitution z t = fiy erhalt man die Satze 2 und 3 auch in der folgenden Form: Man kann durch klstssisch differenzierbare Funktionen fk eine SoBOLEw-differenzierbare
19) Hier ist die erstgenannte Induktion nach der Anzshl q der zu approximierenden Ableitungen gemeint.

Tutschke, Urnwandlung pertieller DifTerentislgleichungssysteme 115
Funktion so approximieren, daR gilt :
I m Fall von Satz 3 sind f und die f k holomorphe Funktionen gewisser Variabler. Auch diese Voraussetzung kann man dahingehend ablndern, da13 f (und dann auch f,) als Funktion gewisser Variabler antiholomorph ist.
Bemerkung 2 zu den Satzen 2 und 3. Die gleichmaoige Approximation af af
az+ aq" - ~ erforderte den Ubergang zu von f und den Ableitungen -, . . . , J 1
einem im Innern liegenden Teilkompaktum. Die entscheidende Beweis- stelle, die &e Beschrankung auf ejn Teilkompaktum erzwang, war der Beweis von Hilfssatz 12. Die Notwendigkeit, zum Teilkompaktum uber- zugehen, bezog sich aber nur auf die Variablen, bezuglich der eine Ableitung gleichmaBig approximiert werden soll. 20) Das bedeutet : Man braucht bei der Formulierung der Satze 2 und 3 nur in denjenigen zj-Ebenen zu einem
im Innern liegenden Teilkompaktum uberzugehen, fur die ,. oder -~ gleicli- maoig approximiert werden soll.
Als Anwendung wird gezeigt, da13 sich durch Satz 2 Differentiations- regeln fur klassisch differenzierbare Funktionen auf Funktionen init partiellen SoBoLEw-Ableitungen iibertrageii lassen. 21) Zunachst gilt
z,* (bzw. zj) gilt d ie Produktregel.
af Sf "7 2zj
Hilfssatz 13. Fur Funktionen mit stetiger SoBoLEw-Ableitung bexiiglich
Beweis. 1st pl = p(zj), so werde das Kompaktum in der zj-Ebene, in ag a27
dem f , g, a$ und -~ gleichmail3jg approximiert werden, so gewahlt, da13
es supp pl ganz enthalt. Aus der Produktregel fur klassische Differen- tiationen folgt dann
woraus durch Grenzubergang die entsprechende Relation fur f, g folgt. Q. e. d.
20) Dasselbe trifft fur Hilfssatz 7 zu, der nur auf diejenigen Ebenen angewandt zu werden braucht, fur die zugehorige Ableitungen approximiert werden sollen.
21) Auch fur komplexwertige Funktionen einer komplexen Variablen werden Regeln fur die SoBoLEw-Differentiation durch Approximation der SoBoLEw-differenzierbaren Funktion durch klassisch differenzierbare Funktionen bewiesen (vgl. [l], Kap. I 0, 10)- 8.

Auf dhnliclie Weise liilJt sich auch zeigen, da13 fiir Funktionen mit, stetiger SOBOLE\\--ALleitung die Kettenregel gilt :
f = f ( 2 , . . . . ~ 2, , . . . . . ~ L ( ' , J
sei in G, x = . . x G,, x G y - * . x ciefiniert., die wL, scien in GI x - * x G,, definicrt, der Kertex-orrxt voii 7rl, soll in einem in lilt, (7;: enthaltenen Kom- paktum liegen. Dann lie@ (zuiiiindcst ljei hinreichend grol3eni k ) auch der JVertevorrat (gleichiiiiil3ig) ~~1)l)r~)xiniiei~eiider h. in eineiii in In t (7; ent- haltenen Konipalituni K:: .
1st 7 = p ( z j ) eine (einmal stetig differcnzierlmre) Funktion init
sulq) q c Iiit Gj.
c l r l ( so xrcrden die 2cL1 utid die i sI; in eiiieiii I<oinlmktum Kj ,
supl' (r c K j c Illt G j . i;to/"c
gleichmauig ciurcli die klassisch ctiffereazierl)areii w!! li bzw. F2 f: approxi-
gleichrndfiig approxiniiert . Diese Approximation sol1 in
G, x * * x G,-l x K, ><
K:" c Illt fT;, h'; c Illt c:;
x . . . x G7, x Xy x * . * x PA erfolgen, n-obei
gelteii soll. 1st die Funktion f lioloiiiorph als Punktion von w I , . . . , w,,, so ksnn man nach der Beiiierliuiig zu Hilfssatz 12 auch die fk als holo- morphe Funktionen voii ZL', . . . . , 7~~~~ wiihlen.
Also gilt i f h . (21, . . ., z ,L , Z C , B ( 2 ] . . . . . z , , ) , . . . ) ZL' , ,k ( (21 , . . . ) Z J )
tz?' J
?f,(. * .) ?fk(* - .) i l c < L k ( 5 1 , . . . , zJ J .z. -I- F it(.,, k J
- - CZl'
Schreibt ~nan bei T'erwendung der Fuiiktion p: diese Differentiations- aussage in iiitegraler Form auf und fuhrt inim den Grenzubergang k -+ 00
durch, so erhalt inan die aiialoge Relation fur die f, wlr an Stelle von fk, wpk. Dsmit ist gezeigt :
Hilfssatz 14. a) Besitzt f = f ( z 1 , . . . , z,, z u I , . . ., wm) stetige SOBOLEW- Ahleitungen hezuglich xj uizd u : ~ , , . . , zcm,
Tutschke, Umwandlung partieller Differentialgleicliu~~gssysteme 117
b) id f holomorphe P u n k t i o n v o n wl, . . ., w, t d sincl c ) d i e wp = w, (z I , . . ., zn) im S o B o m w s c h e n Xinn stetig bexiiglich x,*
D i e zusammengesetzte F u n k t i o n differenzierbar, so g i l t :
f = f (21 , * . . > z,, w1 (z1 I . -, ZJ, . . -, w,, (Xi, . . . , X J )
2f (- * -) af (. * .) aw,
ZZ3' P dw, 3
besitzt e ine stetige S o s o m w - A b l e i t u n g beziiglich z, ; diese ist gleich
+c-7,,,.
3. Vollstandig integrierbare partielle komplexe Diff erentialgleichungssysteme
1st w = (wl, . . ., w,) eine Losung von (3), so gewinnt man durch Anwendung von Satz 1 ein Integro-Differentialgleichungssystem, deiii w zu geniigen hat :
(46 ) W j k , 9 . . .,z,J= @ j h > . . ., x p , z p + l , . . . , z n )
Hierbei sind die Qj geeignet zu waihlende Funktionen, die in z I , . . . , z p holomorph sind; in die iin Integranden stehenden Funktionen sind die pup dabei als Funktionen der zi bzw. C,, , . . . , 5, einzusetzen; es ist also
f j v l = f j y i ( ~ l > . * * > C,, . - * , z n , w I ( z I , . - * ) C V z , . * . > zn ) , . . . )
W,@I, . . ., L,, . - .J,?J), d. h. fur z P 1 , . . ., zVL werden die 1ntegrationsvariab.en c V l , . . ., c,, ein- gesetzt.
Die in (46) auftretenden partiellen Ableitungen
bedeuten, daB die Zusammensetzung der fj., mit den w p = wp (zI , . . . , z,) partiell nach z : ~ , . . . , z; zu differenzieren ist; im Unterschied werden die entsprechenden partiellen Ableitungen von
f j v i = f j V l (21 9 . . . , z,, w1, * . * 2 Wm)

118 Tutschke. Gninandluiig partieller Differentialgleichungssysteme
pk2 . . . iZ'" "i.
bezeichnet . Die Herleitung des Integro-Differeiitialgleichuiigssystems (46) ist a n
Differenzierbarkeitseigenscliaften der rechten Seiteiifj,,i gebunden. Urn diese sicherzustellen und uni deli durcli die rechten Seiten von (46) definierten 1ntegro-niffctrentialo~)erator funbtionalaiinlytisch behandeln zu konnen, sollen iiber die fjy die folgenden T-oraussetzungen gemacht werden :
1. Bezeichnet Ctollr die lioniplexe w,-Ebene, so seien die
fjlr = f j y (21, . . . , z , , ; z('J > . . . ! wpfL) in Gl x * * - x G,, x CzFl x - - - x Cu,f12 defiiiiert und stetig.
den22)) die fjy als holomorph vorausgesetzt. 2 . Als Funktioii der ?,up werden (zundchst, aus beweist'echnisehen Griin-
3. Die fjy und ihre SoBOLE~~-Ableituiigeii beziiglich
ZCI, . . . , to,, 2;: . . . z;,
G, X .
P J f j " ( 2 , , . . . , z / L , u', , . . . , ?l!?J I ~
bis einschliel3lich zur Ordnung p - 1 seien in
* x G,# x Cnctl x * . * c,,,, stetig, betraglich durch K beschrankt 2'3),
< K , - - ____ &, . . . iZ? &(', , . . iU', I -
21 11 3 1 'a ~
und sie sollen einer in 8, X - *
bezuglich zcl, . . . , ZL->>& geniigen: X G,, gleichinafiigen LmsCHITz-Bedingung
,,,) ?.+O fjy ( z , , . . ., x , , 2 0 1 , . . . , W,)J _ _ ~ ~ - -~ __ ix? . . . ZzT iw.. . . aw.
2 1 '1 3 1 3 , 1)1
5 L c 1 GLi - ti*{( I , v ( Z 1 ~ . . . . z,J E B , x * * . x qz. (' = 1
Dabei braucht also nur 0 5 1. + o 5 j:, - 1 zu sein; weit,er ksnn voraus- gesetzt werden, daB alle i,, . . . , i , voneiiiniider verschieden sind.
2?) Dadurch erreiclit man, daB bei der Diffeientiatioii der Zusaniinensetzung f]" (q, . . . ) Z n . 2c1(q, . . .. ZJ. . . ., 7(',(.31. . . ., Zn))
P W ]
"24 ' bezuglicli einem :* iiur h e Ableitungeri iiiclit aber die a w g auftreten.
23) Diese Voraussetzung hat beir eistechnischen Charakter. Alle herziileitenden Aussagen gelten auch ohne diese roraussetzung. aucli ddnn, iwiin die fiy nirht fur alle Z O ~ , . . ., w, definiert sind. Die genannte Voraussetzung n ird jcdoch geinacht. urn iiicht von den eigent- lichen Gesichtspunkten durcli die andernfalls erforderliclieri Zusatze bei der Formulierung der Satze und Beireise abzulenken.
Tutschke, Umwandlung partieller Differentialgleichungssysteme 119
Durch Verweiidung von Hilfssatz 14 folgt aus diesen Voraussetzungen : 1st w Losung von (3), ist w stetig und besitzt w stetige SoBoLEw-Ab-
leitungen erster Ordnung, so existieren auch alle gemischten SOBOLEW- Ableituiigen von w bezuglich zf , . . . ) z,* bis einschliefllich zur p-ten Ord- nung. Diese Tatsache legt nahe, Losungen von (3) in der Menge 3 aller m-tupel w = (wI , . . . , w,?J mit den folgenden Eigenschaften zu suchen :
I. Die wj seien in GI x - - * x G, definierte stetige komplexwertige Funktionen.
2. Bis einschliel3lich zur Ordnung p - 1 sollen die gemischten partiellen komplexen Ableitungen der wj im SoBoLEwschen Sinn bezuglich Z: , . . . , Z: existieren und stetig sein.
Um zu einer allgemeinen Losbarkeitsaussage zu kommen (das ist im Fall des Systems (3) &e Konstruktion eines Homoiomorphismus zwischen Losungen und holomorphen Funktionen), mu13 man, wie das auch im Fall reeller partieller Differentialgleichungssysteme mit mehreren Variablen der Fall ist, eine geeignete Zusatzbedingung an die rechten Seiten des Systems (3) stellen. Um zu dieser zu kommen, beachte man, daD sich fur eine Losung w von (3) aus
62 wj a a - f . - - - ___- a ~ ; Iv a ~ ; a~; 82; ax; a ~ ,
- a 2 wi
- Y f j p -
wegen
die Relation
ergibt. Hierbei ist in die fj, fur w, = w, ( z , , . . . ) zn) einzusetzen. Gilt (48) nicht nur fur jede Losung, sondern sogar fur jedes w E 3, so heil3t das System (3) beziiglich 32 vollstandig integrierbar.
Lafit man ubrigens die Forderung (47) weg, so ergeben sich an Stelle der Relation (48) neue Differentialgleichungen fur die wG = wG(zl , . . . , zJ7
in denen die Ableitungen , -- auftreten (vgl. Anmerkung 2 2 ) . Dies
zeigt, daB die Forderung (47) an die fj nicht ausschlieBlich beweistech- nische Bedeutung hat.
Da man auch die Ableitungen der f J y betrachten mul3, werden einige Aussagen uber die Ableitungen der fjv benotigt, die fur vollstandig inte- grierbare Differentialgleichungssysteme gelten und die sich demzufolge &us
awa awG 22, az,
120 Tutschke, Umwmdlung partleller Differentialgleichuxigssysteme
(48) ergeben werclen. Zunachst erhalt nian - auch fur nicht vollstiindig integrierbare Systenie - init Hilfe von Hilfssatz 14, wenn in die&, beliebige Funktionen u; = it, ( z l , . . . , z l L ) iiiit zc E 8 eiiigesetzt werden:
Hilfssatz 15. Die Ableitung
ist e ine X u m m e U ~ L S ProduktejL con part ie t ien Bblei tui igen der f l y beziiglich
z;, , . . . zl , . Dabei ist i u jedein Sunmunden die Gesumtordwung der Diffe- rent iut ioueu bezuglich z:, , . . . , 2,;. gleich 2, ulzd e.s t re fen hochstens Ab- lei tungen der Ordnung i. - 1 C O I L w nuf.
z , ~ * , . . . , zx wl, . . . , w7,& u n d pcv t ie l len Abte i tunge~a der wP beziiglich I / ’
S n n 1st. falls w eine Losung von (3) ist,
Andernfalls ergibt sic11
wobei die F,,, Funktioilen \-on z I . . . . , z , ~ slid. Ersetzt niaii in der Ab- leitung (-19) die partiellen Ahleitungen der tclt durch f,,, + F,,, bzw. deren Ahleitungen. so folgt :
Abgeselieii r o n eitier Litiearkoin1)tnatioii der F,,, und deren partiellen Ahleitungen } ) i s hochstens zur Orclnung 1, - 1 ist die Ahleitutig (49) gleich einer Suninie taus Ableitungen der f , , , (dabei sind die Ableitungsordnungen iiiitidesteiis 0 und hochstens 2.). Unt die beschriehene Gleichheit formelmaljig erfassen zii konnen, wird definiert :
Xind I),, li2 Ftinktio?ze?z con zI. . . . . sli i ind i c I , . . . , t i* , lc , so bedeute die Jqu iuuZex
l t l 7 d u j lzl - i l l gleich c iner Lineccr~o, ,~bintr t ion der FA,, u n d deren Able i tungen b i s hochstens z u r r-ten O r d n u n g sind. Die Koeffizienten dieser Linearkornbi- nation konnen dabei selbst noch 17011 den FIIL uiid ihren Ableitungen ab- hangen. JIithin ist gezeigt :
Able i tungen der f , , i sind.

Tutschke, Urnwandlung partieller Diffwentialgleichungssysterne 121
Bemerkung. Sind alle i,, . . . , i, voneinander verschieden, so treten in der Linearkombination, uin die sich die Ableitung (49) und 2 po . - p , unterscheiden, iiur gemischte Ableitungen der FPi auf. Ferner tritt keirie Ableitung ejnes F,, nach Z: auf.
Hilfssatz 17. Es sei
Bemeis (durch Induktion). Es ist
Unter Beachtung der Induktionsvoraussetzung folgt dann
Q. e. d. Unniittelbar aus der Definition der Aquivalenz folgt
Hilfssatz 18.
Zur Vereinfachung der Schreibweise werden die Variablexi w, , . . . , wqn init z : + ~ , . . . , z : + ~ ~ ~ bezeichnet. Da die Ableitung einer in zcj, . . . , tr7p1 holomorphen Funktion bezuglich dieser Variablen wieder eine holomorphe Funktion ist, folgt unter Berucksichtigung von Hilfssatz 11, dal3
bei jeder Wahl von 0, , . . . , os (1 von wi, . . ., w , sind.
oI 5 n + m) holomorphe Funktionen
Hilfssatz 19. Piir 1 5 1, k 5 n gil t

122 Tutschke, Vniwanclliing partieller Differentialgleichungssysteme
Pi : f r - n , , a,, .
r,o 5s ?E - 1 sz 5 7 1 - ),1
Fur ein vollstandig integrierbares System gilt die Relation (48), die man jetzt auch kiirzer in der Forin
schreihen kann. Insbesondere ist also
Damit sieht man, dd3 die rechte Seite r o n ( 5 3 ) in k und I symmetrisch ist. Q. e. d.
Als Beispiele zu Hilfssatz 19 werden die folgenden drei Spezialfalle angegeben :

Tutschke, Umwandlung partieller Differentialgleichungssysteme 123
SchlieBlich gilt noch die folgende Aussage, mit deren Hilfe im nachsten Abschnitt gezeigt werden wird, da13 Losungen der Integro-Differential- gleichung auch Losungen des partiellen Differentialgleichungssystems sind :
Hilfssatz 20. Ist vI, . . ., Y, eine Permutation von p l , . . ., p,, so ist
Beweis. Zunachst gilt
2 a a a a 2 az*
_ _ . . . ~ - - ~ - _ _ _ - * * ~ -fii..) + * * . . az; ax; az; azf 21. - 3
Nach Hilfssatz 16 gibt es eine Produktsumme S von Ableitungen der f,,, so daB
ist. Nun ist
Wegen (56) konnen nach Hilfssatz 18 erster und dritter Summand auf der rechten Seite von (57 ) im Sinn der Aquivalenz = durch 0 ersetzt werden. Beachtet man die Hilfssiitze 16 und 17, so folgt, da13 der zweite Summand auf der rechten Seite von ( 5 7 ) im Sinn der Aquivdenz = durch 0 ersetzt werden kann. Damit gilt fur den durch ( 5 7 ) gegebenen Ausdruck insgesaint
r - s - 2
r - s - 4
F=5 0 . r - s - 2
Beachtet man nochmals Hilfssatz 18, der folgt fur den entsprechenden Summanden auf der rechten Seite von ( 5 5 ) , daB erry2 0 ist. Dasselbe gilt
121 Tutschke, Vmwandlung partieller DiITerentialgleichungssysteme
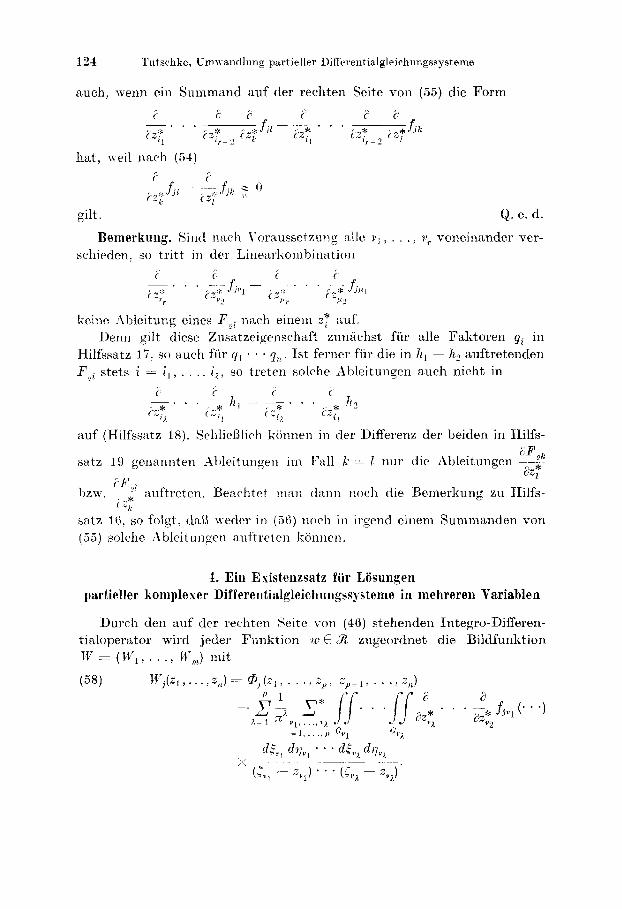
auch, wenn ein Suiiiinaiid auf cier rechten Seite voii (55) die Form
i ? ? c' i ? i i2.* iz? f . J h -. . .
' r - 2 i z c iZ" ;2;
2 1 ' r - 3
hat, neil nach (34)
gilt. Q. e. d.
Beinerkung. S i d iiatli Voraussetzung nllt! i t i , . . . , vr voneinander ver- schieden: so tritt in cier Linearlioinhin a t ' 1011
keine -4bleitung eines FUi nach einein 3, auf. Denn gilt diese Zusatzeigeiischaft zuiidchst fiir alle Faktoren qi in
Hilfssatz 17; so auch fiir qI . . . 8, ' . 1st ferner fiir die in 7d1 - h2 auftretenden Ppi stets i + i l , . . . ~ i , , so treteii solche Ableitungen auch nicht in
auf (Hilfssatz IS) . SchliclSlich koniien in der Uifferenz der beiden in Hilfs- iF,k satz 19 genannten A1)leitungen 1111 Fall E = 1 nur die Ableitungen 2 2 t
auftreten. Beachtet nii i i i tiann nocli die Benierlmng zu Hilfs- iF,I 11zw. i;" k
sntz 16. so folgt. claB wecicr 111 (56) nocli in irgeiid eiiieni Suninianden von (55) solche Ableitnngen aiiftreteii 1;onlien.
1. Eiii Esisteiizsatz fiir Losiirigeri partieller kompleser DiffereiitialgleichmigssgsteIlre in mehreren Variablen
Durcli deli auf der rechteii Seite von (46) stehendeii Integro-Differen- tialoperstor wrd jeder Funktion tc E 3 zugeordnet die Bildfunktion IV = (W,, . . . , IT,/$) llllt ( 5 8 ) IV](Z,, . . . . z J = 0, (21, . . "y. * I " y i l , . . . , Z)J
a - I e;, s* [/. . .*/-Jc;;, * . . 7z* -~ f J V I (. * )
Y 1 ' . , t ) . V 2 = 1, . 1) c:,l G"A

Tutschke, Urnwandlung partieller Differentialgleichungssysteme 125
Dieser Integraloperator wird also durch /,-fache Doppelintegrale definiert, in deren Integranden nur Ableitungen bis zur Ordnung A - 1 auftreten, die beziiglich der z: sogar gemischt sind.
Fiir solche A-fachen Doppelintegrale gilt :
HilPssatz 21. Die gernisclzten Ableitungen bezuglich z;", . . . , bis ein- schlieJlich zur Ordnung p - 1 elcistieren iqn S m o m w s c k e n S i n n und sind stetig.
Beweis. Erfolgen bei s (5 p - 1) partiellen Differentiationen des f-fachen Doppelintegrals (r Differentiationen nsch Variablen, iiber die auch integriert wird, so wird aus dem A-fachen Doppelintegral ein (1 - a)-faches. Da nur geinischte Ableitungen betrachtet werden, mu13 A + ( s - G ) 5 p sein. Im Integranderi ded (3, - 0)-fachen Doppelintegrals stehen Ab- leitungen24), deren Ordnung hochstens
(A - 1) 4 (s - (r) 5 p - 1
ist. Nach den Voraussetzungen iiber die fj,, und iiber w sind diese stetig, also ist nach Hilfssakz 2 auch das Integral stetig (die Anwendung von Hilfssatz 2 entfallt, wenn sich alle Integrationen gegen Differentiationen aufheben). Q . e. d.
Durch Verwendung von Hilfssatz 21 folgt
Hilfssatz 22. Der Integro-Differentialoperator ( 5 8 ) bildet 32 in sich ab. 1st w Losung des Systems ( 3 ) , so ist
aw . Wendet man Hilfssatz 15 auf -3 = f j y (. . .) an, so sieht man, daB auch
fur die gemischten partiellen Ableitungen von w beziiglich z:, . . . , zf bis einschlieBlich zur Ordnung p - 1 von der speziellen Losung unabhiingige Schranken angegeben werden konnen. Also gilt
az:
Hilfssatz 23. Es gibt e in Ro > 0, so daJ
i s t f u r a l l e j = l , . . . , m u n d a l l e 3 L m i t 1 ~ A ~ p - 1 . Das Ziel der nachfolgenden Uiitersuchungen besteht darin, den Integro-
Differentialoperator auf der rechten Seite von (58) bei Verwendung einer geeigneten Metrik in CR als kontrshierendeii Operator zu erkennen. Urn
2 4 ) Man beachte Hilfssatz 5.

126 Tntschke, TJmwandlnng partieller DiEerentialgleichungssysteme
unnotige Voraussetzungen an die LrPscHmz-Konstante L und die Schranke K zu vermeiden, empfiehlt es sich. eine Variablentransformation der Form
(59) x z , = Z , , v = l . . . . , p
niit konstanteni x durchzufuhren. Dabei wird x 3 1 spater geeignet gewahlt werden. Das Differentialgleichungssysteni (3) geht dam in
uber, wenn
- - f,,, (2, , . . ’ , z,, z p - 1 , . . . , z,, , Z f ‘ 1 , . . . , 20*J
gesetzt wird. Sind Gj = GI (21, . . . . z,, z ~ - ~ , . . . , z,J in Z,, . . ., 2, holomorphe
Funktionen, so betrachtet inan an Xtelle des Integro-Differentialoperators (58) jetzt den Integro-Differentialoperator
(60) TI.;.21,. . .,z,, zz,*i. . . ’ > zJ = &j(Zl , . . .,2,, X p + l , . . ., 2%)
dabei sind (2, die den Gebieten Gp in der 2,-Ebene entsprechenden Gebiete. Bei der Definition dieses Integro-Differentialoperatores beachte man,
da13 in c* uber jede Indexkombination v l , . . . , v A , die man bei der Defi- nition von (60) fur jeden Sunimandeii wilkiirlich festzulegen hat, genau einmal sumniiert wird. Da im Hilfssatz 20 nur die dquiva lenzTs , nicht Gleichheit steht, ksnn die gewahlte Anordnung v l , . . . , vA nicht beliebig permutiert werden. 1st 20 eine gegebene Losung von (3), so ist w Fixelement des Integro-Differentisloperators (60) init geeignet gewahlten $jj; in diesem Fall kann vl , . . . , 11;. durch eine Perniutation ersetzt werden.
Da
gilt, ist K bei jeder M7ahl von x 2 1 auch eine Schranke fur die Betrage aller zu betrachtenden partiellen Ableitungen der f j v . Analog folgt aus
Tutschke, Urnwandlung partieller Differentialgleichungssysteme 127
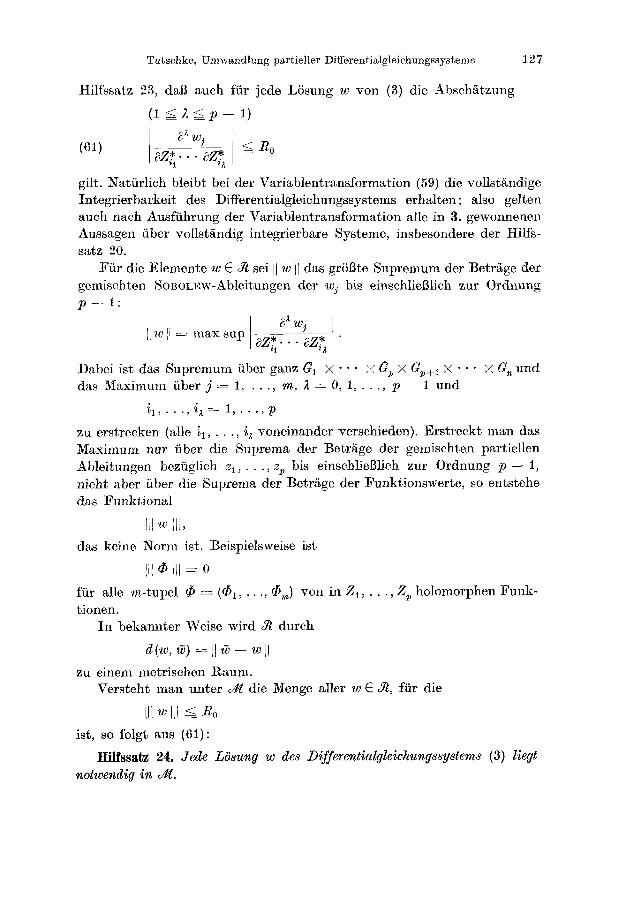
Hilfssatz 23, da13 auch fiir jede Losung w von (3) die Abschatzung
( I S A S P - 1 )
gilt. Naturlich bleibt bei der Variablentransforniation (59) &e vollstandige Integrierbarkeit des Differentialgleichungssystems erhalten; also gelten auch nach Ausfuhrung der Variablentransformation alle in 3. gewonnenen Aussagen uber vollstiindig integrierbare Systeme, insbesondere der Hilfs- satz 20.
Fur die Elemente w E 32 sei I ( w ( 1 das grol3te Supremum der Betrage der gemischten SosoLEw-Ableitungen der wj bis einschlieSlich zur Ordnung p - I:
j j w / I = max sup
Dabei ist das Supremum iiber ganz Gl x - * * x G, x G,+l x - - x G% und das Maximum uber j = 1, . . ., rn, 1 = 0 , 1 , . . ., p - 1 und
i,, . . . ) i, = 1, . . . , p
zu erstrecken (alle i,, . . ., i, voneinander verschieden). Erstreckt man das Maximum nur iiber die Suprema der Betrage der gemischten partiellen Ableitungen bezuglich xi, . . . , zp bis einschliefilich zur Ordnung p - I, nicht aber uber die Suprema der Betrage der Funkt,ionswerte, so entstehe das Funktional
I l l w I l l )
Ill 6 Ill = 0
das keine Norm ist. Beispielsweise ist
fur alle m-tupel @ = (@,, . . ., Gm) von in Z,, . . . , Z p holomorphen Funk- tionen.
I n bekannter Weise wird A durch
d(w , 6 ) = Ij 6 - w 1 ) zu einem metrischen Raum.
Versteht man unter A die Menge aller w E 3, fur die
Ill w !!! 5 Ro ist, so folgt aus (61):
notwendig in A. Hilfssatz 24. Jede Losung w des D~fferentialgEeiehzcngssystems (3) liegt
128 Tnhchke, Umwandlung prtieller Differentialg\eichungesyeteme
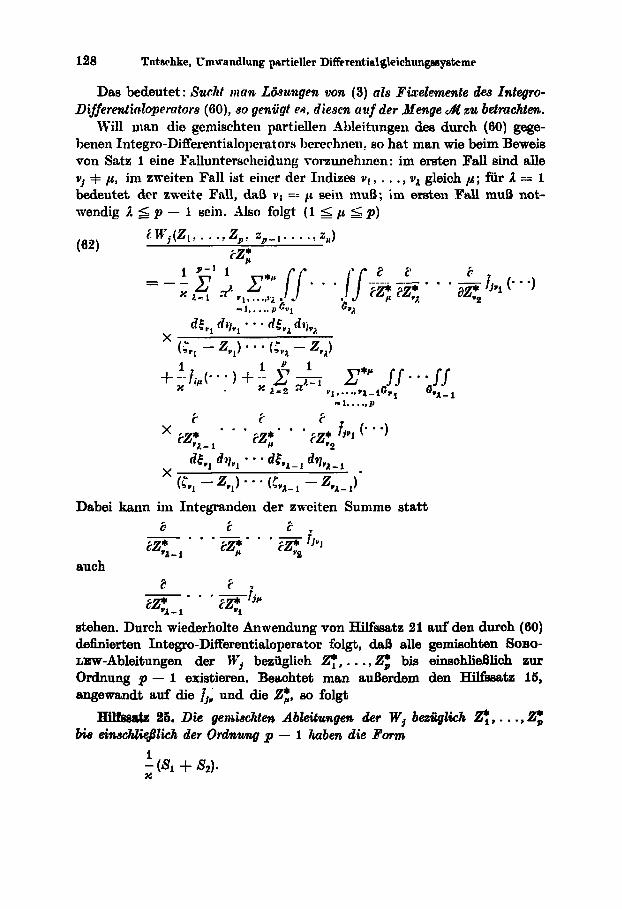
Das bedeutet : Sudt man Liieimgen von ( 3 ) als Fizelemente de8 Integro- Di,ferentinlopemtors (60): 80 genugt e8, diesen auf dcr Nenge A? zu betraciitm.
Will nmn die geiiiischteii partiellen Sbleitungea des durch (60) gege- lmmn Integro-Differentialopernt ors l~ererl~neti: so hat man wie beim Beweis von Satz 1 eine Palluntersrheidung wwzuneh1ne.n: im eraten Fall sind alle vj + p, iin zweiten Fall ist eiiier der Indizeg v I , . . . , Q, gleich p ; fur A == 1 bedeutet dcr zaeite Fall, daB u I == p sein iiiuD; im ersten F d muD not.- mendig i. 5 p - 1 schi. Also folgt (1 5 p 5 p )
.. 1. . . . . ) I
euch P
stehen. Durch wiederholte Anwendung von Hilfssatz 21 auf den dwch (60) definierten Integro-Differentialoperator folgt, da9 alle gemischten SOBO- LEw-Ableitungen der Wj beziiglich q, . . . , bis einschlieJ3lich zur Ordnung p - 1 oxistieren. Beachtet men euJ3erdem den Hilfaaatz 15, engewandt auf die j j , und die Z:, so folgt
Hilfssata 2b. Die geniisdten Ableitunqen der W, beziiglicii @, . . . ,Zg bis eielrk$3l.ieh der Ordnung p - 1 huben die Porn

Tutschke, Uinwandlung partieller Differentialgleichungssysteme 129
Dabei ist Si eine Produktsumme aus Ableitungen der f j v und (gemischten) Ableitungen der wl, = wp(Z,, . . ., Z,, z ~ + ~ , . . ., 2%). Der zweite Summand S2 sind mehrfache Doppelintegrale iiber solche Produktsummen.
Die Betrage der Ableitungen der f i v lassen sich durch K , die Betrage der Ableitungen der wp fur w E A durch Ro abschatzen. Also gilt
Hilfssatz 26. Fur 1 5 1 5 p - 1 gilt fur w E A
1 5 - (GI (K, R,) + C2 ( K , Ro, diam (G,), . . . , diam ((7,))).
x
Dabei wird die zweite Konstante f u r hinreichend klein gewahlte diam ((2,) be- liebig klein.
Neben dem Bild W = (Wl) . . . , W J von w E A bei der durch den Integro-Differentialoperator (60) definierten Abbildung betrachte man das Bild p = (PI ) . . . , mm) von 6 E A. Dann gilt Hilfssatz 25 auch fur die Ableitungen der Wj mit entsprechenden Summen Sl, S2, also folgt
Diese Darstellung gilt auch fur mj - Wj, weil sich bei der Differenzbildung die holomorphen Funktionen &j in (60) herausheben; dabei treten die Summen Sl, 8, nicht auf. Nun sei Pi - * P, ein Summand von S , , Pi . . P, der entsprechende Summand von 8, oder es seien Pi - * - P,, Pi * - P , die Integranden einander entsprechender Summanden von S2 bzw. f12. I n der Differenz Pi * - * pj - Pi - - * P, kann man weitere Summanden so da- zwischenschalten, da13 beim nbergang von einem Summanden zu dem nachsten sich nur ein Faktor andert:
p , p $ . . . p , - p i . . . + (PI - * - P, Pk+i P,+, ' . * P,
- P, - - ' P , P,+, P,+, * ' ' P,) + * ' *.
- . . . -
1st Pk eine Ableitung von wj, so gilt
1st P, eine Ableitung eines f j v , so gilt, da die f jv eine LIPSCHITz-Bedingung erfullen,
1 pk - Pk 1 5 d(2z, w).
[ P k - P k [ ~ L ~ ( 6 , - w l s m L d ( 6 , w ) . /1
Da man wieder die&, und ihre Ableitungen durch K und die Ableitungen der wi wegen w E A durch R, abschatzen kann, erhalt man folgende Aus- sage, die auch fur iz = 0 gilt, da (63) auch fur 1 = 0 richtig ist: 9 Math. Nachr. 1973, Bd. 58, H. 1-6

so liefert (67) eiiie Iiitegrrddarstellun# fiir F,,(. Nun kann man die Sum- manden aus erster und zweiter Summe TOIZ (62) paarweise zusammen- fasseii. Wendet nian Hilfssatz 2 0 (nac ,h cbergaiig zu den gv) an, so kann man die Integrarideri der eiiiaiider entsl)recliendeii Summanden ersetzeri durch eine Linearkoiiihiiititioii der Fl/‘ uiid ilirer Ahleitungen bis hochstens zur Ordnung p - 2 . D:ther gilt
Hilfssatz 88. Dip F,,, g m i i g c n d e m I?zfegro-~if~ereiztinlgleichungssystem
wobei die L!:, . , , . Linearko,nbiib(ifio?~e?z der Fop niit iliren A b l e i f u n g e n bis hochstens xur O i d n u n g 2. - 1 sind; die h-oeffizienten dieser L i n e a r k o m b i - na t ionen sind dble i tungen der f o p oder wieder d ie F,, und i k r e Ablei tungen.
25) Redingungen fur die Existenz yon Fixelementen nerden weiter unten angegeben.

Tatschke, Umwandlung partieller Differentialgleichungssysteiiie 131
Es sei 3 i ~ . - ~ die Menge der m, p-Matrizen F , deren Elemente F,, stetige Funktionen niit stetigen gemischten SOnOLER-Ableitungeii bezuglich Zf ~ . . . ,Z; his einschlieBlich zur Ordnung p - 2 sein sollen. Hierbei und
bei der nachfolgenden Maximierung werden die Ableitungen ’ 2 nicht
betrachtet, auch nicht hohere Ableitungen, bei deneti eine Differentiation nach 2: erfolgt. Dies ist inoglich, weil i n den LFl., . y1 diese Ableitungen nicht :tuftreten. 2(i) Durch das maximale Supremum dieser Ableitmungen wird in 35 eine Norm
6F. 22;
/ I F ii3 definiert .
Aus ( 6 5 ) folgt eine Darstellung der Fjp uiid ihrer gemischten Ableitungen bezuglich Z:, . . . , 2; his zur Ordnung p - 2 durch Ableitungen der ,fjy
his zur Ordnung p - 2 und Ableitungen der wj bis zur Ordnung p - 1.
Letztere sind ebenfalls gemischt, da die Ableitungen -’” nicht be-
trachtet zu werden brauchen. Daher gilt, weiin R,; in Abhangigkeit von K O und k’ geeignet gewahlt wird und J Z Z ~ die Menge aller F E 323 mit
aF. 62;
1 1 F 113 5 R6 bedeutet:
Hilfssatz 29. w E JH 3 F E Jd5. Bei fester Wahl von w E A wird durch die rechte Seite von (66) ein
Integro-Differentialoperator definiert, der jedem Element F E 3s das Bildeleinent’ H iiiit
= 1,. . ..P
zuordnet. Dieser Integro-Differentialoperator heiBt der zum Operator (60) ussoziierte.
Bildet man (tinter Auslczssung der Differentiation bezuglich 2;) die ge- mischten partiellen Ableitungen der Hjhh eiiischlielJlich zur Ordnung p - 2, so folgt analog zu Hilfssatz 2 5 :
26) Man beachte die Bemerkung zii Hilfssatz 90. 9.

132 Tntschke, Cmwandlnng particller Differentialgleichungssysteme
Hilfssatz 30. F u r 0 5 il 5 p - 2 gilt
zcobei SI eine Produktsumme aus Ableitungen der f,, u n d der FT,, bis hochstens xur Ordnung p - 2 und SL Integrale uber solche Produktsummen bedeuten. 27)
Dabei werden in die f,, und ihre Ableitungen fest gewuhlte Funkt ionen
eingesetzt ,
operator den Raum 3i3 in sich ahbildet.
w, = w, (21, . . . . z, , 2, + , . . . . , z,J Aus Hilfssatz 30 folgt zunachst , daB der assoziierte Integro-Differential-
I n Analogie zu Hilfssatz 26 gilt Hilfssatz 31. F u r 0 5 3. 5 p - 2 und F E .,zZrT gilt
2” H, ?z; * * * ?ZE ‘
1 5 - (C;(K, I?;) + C,(K, R6, diarn (el), . . . , diam (G,))) .
1st B das durch den assoziierten Operator entworfene Bild von P E A$, it
so erhalt man analog zu (63)
wobei s,, 8, die entsprechenden zu E gehorenden Summen sind. Wieder durch Zwischenschaltung von Summen folgt 28), wenn
d 3 ( P , F) = jl E - F I ist :
Hilfssatz 32. dx ( H , H )
5 1
( Ci ( K , R:,) + C, (I<, Ri , diam (GI 1, . . . , diam (G,))) d 3 ( E , F ) .
Nun sei 0 < x < 1 beliehig vorgegeben. Dann wird x so gewahlt, daB it
&e folgenden vier Cngleichungen gelten :
2:) Es gilt Hilfssatz 21 niit p - 2 an Stelle von p - 1. 28) Man beachte, da13 wegen z ~ * ~ = u ~ ~ ( Z ~ , . . ., Z,, z p f l . . . ., zn) die fag jetzt Funktionen
von ZI, . . ., Z,, z p + l , . . ., z , allein sind.

Tutschke, Umwandlung partieller Differentialgleichungssysteme 133
1 1 - C5(K, Rh) 5 - Rh, x 2 1 U - C,(K, Ri) 5 -. it 2
Dariach werden die G, so verkleinert, daB die weiteren vier Ungleichungen gelten 29) :
I 1 - C2 ( K , R,, diain (GI), . . ., diam (G,)) 5 - R,, x 2 (68)
1 U - C, (X, R,, L, diam (GI), . . . , diam (e,)) 5 -, x 2 1 1 -~ Cl, ( K , R;, diam (GI), . . . , diam (G,)) 5 - R;, x 2 1 U
~ C, ( K , R;, diam (el), . . . , diam (e,)) 5 -. x 2
Unter den Voraussetzungen (67), ( G 8 ) gilt:
Hilfssatz 33. Der Integro-Differentialoperator ist in A kontrahierend und bildet Jt in sich ab. Der assoziierte Operator ist i n A 3 kontrahierend und bildet Ax in sich ab.
Da Konvergenz in R auf gleichmiiljige Konvergenz von Folgen stetiger Funktionen hinauslauft, ist 3'2 vollstandig und A abgeschlossen. Dabei hat man lediglich zu beachten, daB die Grenzfunktion einer Folge SoBoLEuwhe Ableitung einer anderen Grenzfunktion ist, wenn dieselbe Aussage fur die approximierenden Funktionen zutrifft. Analog ist 3'23 vollstandig und abgeschlossen.
Eei Vorgabe der @j gibt es, da der Operator (60) kontrahierend jst, genau ein Fixelement w, das in 2M gelegen ist. Mit Hilfe von (65) wird diesem Fixelement w das Element F E A3 zugeordnet. Nach Hilfssatz 28 ist F ein Fixelement des assoziierten Integro-Differentialoperators. Da der assoziierte Operator nach Hilfssatz 33 kontrahierend ist, besitzt er in Ax nur ein einziges Fixelement. Andererseits sind
Fj, = 0
eine Losung von (66), es muD also notwendig Fjp = 0 und nach ( 6 5 )
8Wj 1 - = - f j p 82,. x
_-
sein. Rechnet man in die 2,-Ebenen zuriick, so ist damit gezeigt:
29) Da sich bei VergroBerung von x auch die Durchmesser der G,, vergroBern, mu8 man zuerst x wahlen und danach die Durchmesser der G, beschranken.

134 Tutschke, Umwandlung partieller Differentialgleichungssysteme
Satz 4. Bei Vorgabe der in z l , . . . , zp holomorphen Funktionen
Qj = Qj ( z , , . . ., z p , z,,, , . . ., X * )
gibt es, wenn die Durchmesser von G3 , . . . , G?, unterhalb gewisser 8 c k w n X . c n liegen, genau eine Losung w des (vollstandig integrierbaren) Systems (3) , die auch Pixelenaent des Integro-Differentialoperotors (58) ist.
5. Der Homoiomorphismus zwischen Liisungon und holomorphen Funktionen
Gegeben sei eiri vollstiindig integrierbares System (3) in dein Gebiet G I x - - - x Gp x G, + x * * * x G, , wobei die Durchmesser von G, , . . . , Gp den zur Gultigkeit von Satz 4 erforderlichen Beschriinkungen unterliegen. mTie in 4. sei 3’ der Raum aller w = (w, . . . . , w , ~ ) , die stetig sind uiid stetige gemischte SoRoLEw-Ableitungen bezuglich 2 7 , . . . , z: bis einschlieB1ic.h zur Ordnung p - 1 hesitzen. Die Metrik wird in 3 wie in 4. n:~ch Ubergnng in die 2,-Ebeneii, p = 1, . . . , p berechnet. Weiter sei W c 3 der Rauni dler Losungen, X die Menge aller in G, x . * + x G,, stetigen Funktionen, die als Funktionen voii z L , . . . , z p in Gi x 4
Sind @, 0’ E Jf vorgegeben uiid to, w’ E W die nacli Sutz 4 zugehorigen Losungen, so gilt nach (64), weil sich durch Differentiation die holo- inorpheii Eunktioiien 6, ds’ J”) hcrausheben, und wenn iiiaii beachtet, dal3 w, IU’ Fixeleinente sind :
x Gp holornorph sind.
Da 70 bzw. 2.0‘ Pixelerneiita zu ds lozw. ds’ sind, ist’ (vgl. (58))
( Y O )
wobei der Betrag der Differenz der Werte der beideii aus (60) herruhrenden Integro-Differentialoperatoren unter Verwendung von (84) (fur 3, = 0) ab- geschatzt worden ist. Aus (70) folgt zunachst
1 zo;. - wj I 5 d (6, @’) + M d (w’, w),
I w; - wj I 5 I $1 - 6j I + M d(u1’, m),
weiter gilt diese Abschiitzung auch fur das Supreinuni urid zusaiiinien niit (69) folgt
also d ( d , w) :< d(@’ , &) + M d ( d , z c ) ,
1 l - a
d(w‘, w) -- d(Q’ , @) (71 )
- - 30) Die Funktionen @, Qi’ eritstelien aus @, @’ durch Umrechnung in die 2,-Ebenen.
Tutschke, Umwandlung partieller Differentialgleichungssysteme 135
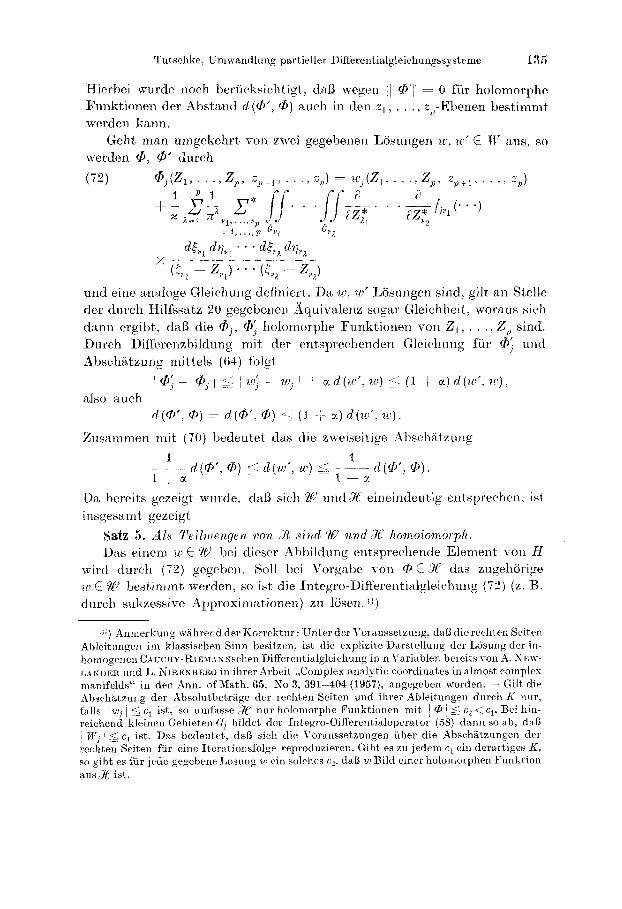
Hierhei murde iioch berucksichtigt, da13 wegen 1 1 1 @lil = 0 fur holornorphe Funktionen tier Abstand d ( @ ' , @) auch in den zI . . . . , s,-Ebenen bestinimt werden kann.
Geht man uingekehrt voii zwei gegebeneii Lijsungen zc, z r ' E It' aus, so werden @, @' durch
( 7 2 ) @JZp . . . , z, , Z Y L l . . . . , Z J = ?(;.(Zi, . . . . q), z p , l , . . . , ")
und eine analoge Gleichuiig definiert. Da zv, 7 r ' Losungen sind, gilt an St.elle dor durch Hilfssatz 20 gegebenen Aquivalenz sogar Gleichlieit, woraus sich dann ergibt, da13 die @j, @; holoinorphe Funktionen von 2 , ~ . . . , Z,, sind. Durch Differenzhildung mit der entsprechenden Gleichuiig fur @; uiid Abschiitzung mittels (64) folgt
also auch I q - 6i j 5 j zc; - zoj 1 + K d (zc', 2") 5 (1 4- a) cl (w' . ?A*) ~
d ( @ ' , @) = d(@J'> @) 5; (1 4- .) d ( U l ' > z v ) .
Zusammen niit ( 7 0 ) bedeutet das die zweiseitige Almhiitzuiig 1 1
l + K 1-c! d(@' , @) 5 a ( ? / , 10) " --- (I(@'. @).
Da bereits gezeigt wuide, daB sich %' und JL eineindeutig eiitsprechen, 1st
insgesanit gezeigt Satz 5 . Als T e i l m e n g e n von 32 aind 5% zcnd 3L homoicrnwph. Das eineni w E ?&' bei dieser L4hb~ldung eiitsprecliende Element von H
xvird durch ( 5 2 ) gegeben. Sol1 h i Vorgnhe %on @ E JC das zugehorige 26' E 71) l.)estimnit werden, so 1st die Iiitegro-Di~fereiltinlgleiclluilg (7.3) (z B durch sukzessive Bppr'Oxi1i':Ltioneii) zu losen. 3 1 )
:;I) Aiiiiierkung nahreiid der Iiorrcktm : Unter der T'oraosset,ziing. daI3 die recliten Seit,cii Ableitungert im lrlassischen Sirin besitzen, ist clir explizite Darstellung der Losung der in - homogenen CaucHY-RrERI-~~NSchen niffereiitialgleiehung in n Variablen bereits von A . SF,\\--
L.i:iDER und I,. NIRENRERG i n ihrer Arbeit ,,Complex analytic coordinates in almost compks inanifelds" in den Ann. of Math. 65. h'o 3, 391-404 (1957), angegeben morden. - Gilt die Abschatzung der Absolutbetriige der rechten Seiten und ilirer Ableitungen durch K 11111'.
falls 1 uvi 1 5 ci ist,, so unifasse Jf nur lioloniorphe Funkt,ionen init 1 @ j 5 c j < cl. Bei hin- reiehcrid kleinen Gebieten Gj bildet der Integro-Oifferent,ialoperator (58) darin so ab, da8
1 Wf I 5 c, ist. Das bcdeutet, da.8 sich die Vorsussetzungen iiber die Abschatzungcn der recliten Seiten fiir eine Iterntionsfolge reproduzieren. Gibt es zii jedem c, ein derartiges K , so gibt es f<ir jrde gegebene LSsuiip UJ cin solclics c2 . daO I I I Bild einer Iioloiiiorpheii Funktion ausi7e ist.
136 Tutschke, Urnwandlung partieller Differentialgleichungssysteme
Literatur
[I] PI. H. B~tiy.4, 06ohqeHHbIe aHamTmeciiIre djy111i41111. IvIocma 1959. [Z] E. GOURSAT, L e p n s sur l’integration des bquations aux der ides partielles du premier
ordre. 2. Cd., Paris 1931. [3] L. HORNASDER, -111 introduction to complex a.nalysis in several variables. Princeton-
Toronto-London 1967. [4] \I-. TVTSCHKE, Das charakteristische Problem fur pseudoholomorphe Funktionen-
systenie, die Ldsungen rollstiindiger (auch nichtlinearer) partieller Differentialglei- chungssystenie erster Ordnung niit partiellen koinplexen Ableitungen sind. Beitrage zur .Inalysis 1, 21-27 (1971).
[5] -, Stnmmfunktionen komplexwertiger Funktionen. Sitzungsberichte d. Saichs. Akad. d. n’iss. zu Leipzig, Jlath.-nat. Khsse, Bd. 109, Heft 2 (1970).
[6] -, c b e r Fixpunktmethoden in der Tlieorie partieller koniplexer Differentialgleichungen (in1 Drucli).
[’i] r. If. ~ e H 1 ; I l H . IIHTerpaXbHOe IIpt?~CTaB;reHIIe @ y H I i y I I ~ B CTpOrO IICeBpO-BbIIIyHJIbIX O6ZRCTHX If II~lH2W&f2HIIFI K ~ a a ~ ~ Y f 2 . & i T . C6OpHIIK 8p (124), 300-308 (1970).





























