Embed Size (px)
Citation preview

Werner Tober, Christoph Macek, Bernhard Geringer Institut für Fahrzeugantriebe und Automobiltechnik, Technische Universität Wien
Peter Nußbaumer, Thomas Wolbank Institut für Energiesysteme und elektrische Antriebe, Technische Universität Wien
Umrichtergespeiste Antriebe in elektrifizierten Fahrzeugen Anforderungen an die Regelung und Leistungsbestimmung
Kurzfassung Die Implementierung elektrischer Antriebe stellt die Automobilindustrie vor neue Herausforderungen. Diese Arbeit widmet sich der Regelung des elektrischen Antriebsstranges sowie den Randbedingungen und Anforderungen bei der messtechnischen Ermittlung der Antriebsleistung. Die Anforderungen an die Drehzahlvariabilität und die dynamische Belastung der E-Maschine führen zur Verwendung von modernen umrichtergespeisten Antrieben mit gepulster Spannung, welche im Vergleich zur sinusförmigen Anspeisung zu berücksichtigende Aspekte wie Totzeiten und Oberschwingungen mit sich bringen. Es werden die Herausforderungen an die Regelung aufgezeigt und Lösungsansätze vorgestellt. An die Ermittlung der Motorleistung und der dafür erforderliche Messtechnik werden gesonderte Anforderungen gestellt, welche in dieser Arbeit theoretisch untersucht und anhand von Messungen praktisch analysiert werden.
1. Einleitung Die Anforderungen an das Antriebssystem und dessen Regelung in einem Elektrofahrzeug führen zur Verwendung von Drehstrommaschinen, welche von einem Umrichter gespeist werden, um Drehzahlvariabilität zu garantieren. Die häufigste Variante ist die Verwendung von Spannungszwischenkreisumrichtern, welche direkt oder über einen DC/DC-Konverter von der Traktionsbatterie gespeist werden. Ein Vergleich der beiden Konzepte in Hinblick auf Effizienz ist in [1] zu finden. Um die hohen Ansprüche an Effizienz und damit Reichweite und Performance in der Elektromobilität zu erfüllen, ist es notwendig systeminhärente Nicht-Idealitäten des Frequenzumrichters zu kompensieren. Diese Nicht-Idealitäten haben einerseits Auswirkungen auf die Leistungsbestimmung am Umrichterausgang, welche für die Bewertung der Effizienz notwendig ist, andererseits werden die Performance der Antriebsregelung und die Effizienz an sich beeinflusst.
34. Internationales Wiener Motorensymposium 2013
- 371 -

2. Nicht-Idealitäten bei Spannungszwischenkreisumrichtern In diesem Kapitel sollen die auftretenden Nicht-Idealitäten bei Spannungszwischen-kreisumrichtern, wie sie im Traktionsantrieb von Elektrofahrzeugen verwendet werden, aufgezählt und beschrieben werden. Um diese Nicht-Idealitäten verstehen zu können, ist zunächst eine Erklärung der prinzipiellen Funktionsweise eines Spannungszwischenkreisumrichters, welcher mittels Pulsweitenmodulation (PWM) eine Spannung variabler Frequenz und Amplitude an die Maschine anlegen kann, zu geben. Abbildung 1 zeigt den prinzipiellen Aufbau eines typischen 3-phasigen Umrichters mit Spannungszwischenkreis.
Abbildung 1: Prinzipieller Aufbau eines Spannungszwischenkreisumrichters Die sechs eingezeichneten Schaltelemente (T1 bis T6) werden üblicherweise als MOSFET (Metall-Oxid-Halbleiter-Feldeffekttransistor) oder IGBT (Insulated Gate Bipolar Transistor) realisiert. Parallel zu den Transistoren befinden sich noch die Freilaufdioden. Durch gezieltes Schalten der acht möglichen Schaltzustände (sechs aktive, zwei inaktive) entsteht eine pulsförmige Spannung, deren Spannungszeitfläche der gewünschten Spannung entspricht. Die Frequenz, mit der die Schaltelemente angesteuert werden, liegt im Bereich von einigen Kilohertz bis wenige zehn Kilohertz. Der Zwischenkreiskondensator CZK auf der linken Seite der Abbildung wird bei Elektrofahrzeugen üblicherweise aus einer Batterie gespeist. Durch Nicht-Idealitäten des Umrichters beziehungsweise der darin eingebauten Halbleiter entspricht die wirklich angelegte Spannung (Ist-Spannung) nicht der gewünschten (Soll-Spannung). Ein Grund dafür sind die Spannungsabfälle an leitenden (eingeschalteten) Transistoren beziehungsweise an leitenden Freilaufdioden (Schleusenspannung). Außerdem muss verhindert werden, dass beide Schaltelemente in einem Brückenzweig (z.B. T1 und T4) gleichzeitig aktiv also eingeschaltet sind. Es muss deshalb eine Verzögerung zwischen Ausschalten des einen Schaltelements und Einschalten des anderen implementiert werden. Diese Zeitverzögerung wird auch als Umrichtertotzeit tTOT bezeichnet und liegt üblicherweise im Bereich weniger Mikrosekunden. In Abbildung 2 ist
34. Internationales Wiener Motorensymposium 2013
- 372 -

das Einschaltverhalten eines IGBTs dargestellt. Der zeitliche Verlauf der Kollektor-Emitter-Spannung vCE, des Kollektorstroms iC und der Gate-Emitter-Spannung vGE ist zu sehen. Es wird hierbei von der leitenden Freilaufdiode auf den IGBT kommutiert. Erst nach Erreichen der Schwellspannung zwischen Gate und Emitter beginnt der Transistor zu leiten. Dies bewirkt zusätzlich zur notwendigen Umrichtertotzeit eine Einschaltverzögerung ton. In Abbildung 2 liegt diese bei etwas mehr als 300 ns.
Abbildung 2: Kommutierungsvorgang von leitender Freilaufdiode auf den IGBT (Einschaltvorgang des IGBTs) [2]
Um eine Zerstörung der Leistungshalbleiter auszuschließen, ist ein Brückenkurzschluss in jedem Fall zu vermeiden. Das Einhalten der Umrichtertotzeit ist also unbedingt zu gewährleisten. Je nach Richtung des Stromflusses kommt es zu einer Verlängerung oder Verkürzung des angelegten Spannungspulses im Vergleich zum Sollwert. Dies wird schematisch in Abbildung 3 als stark vereinfachtes Prinzipbild (Darstellung nur eines Brückenzweiges) veranschaulicht. Die beiden oberen Diagramme stellen die Außenleiterspannung bei unterschiedlicher Stromrichtung, die unteren die Ansteuersignale der Transistoren T1 und T4 dar. Die Auswirkungen der Umrichtertotzeit werden auch in [3] und [4] diskutiert.
ton
34. Internationales Wiener Motorensymposium 2013
- 373 -

Abbildung 3: Einfluss der Umrichtertotzeit auf die reale Spannungspulslänge bei positiver und negativer Stromrichtung
Zu erwähnen ist hierbei, dass eine mögliche Vorzeichenänderung des Stroms während der Pulsdauer nicht beachtet wurde. Da in umrichtergespeisten Antriebssystemen meist nur die Zwischenkreisspannung und nicht die Phasen- oder Außenleiterspannungen gemessen werden, führt die Abweichung der Ist- von der Soll-Spannung besonders im unteren Drehzahlbereich beispielweise bei Modellen zur drehgeberlosen Regelung des Antriebs zu Problemen und Fehlern. Allgemein gesagt, wird durch diese Abweichung die Qualität all jener Methoden, die zur Fluss-, Moment- oder Drehzahlbestimmung die Umrichterausgangsspannung benötigen, verschlechtert. Die gewünschte sinusförmige Spannung wird durch das Anlegen von Spannungspulsen mit derselben Spannungs-Zeitfläche durch den Umrichter erzeugt. Dieser Zusammenhang wird durch Abbildung 4 beispielhaft für die Pulsweitenmodulation (PWM, Unterschwingungsverfahren) erläutert. Sowohl in Literatur als auch in Anwendung sind weitere Verfahren zu finden. Auf diese soll aber in der vorliegenden Publikation nicht weiter eingegangen werden. Die blaue Kurve stellt die Soll-Spannung, der rechteckförmige
34. Internationales Wiener Motorensymposium 2013
- 374 -

Verlauf die idealisierte Ist-Spannung dar. Der Strom in der Statorwicklung der Maschine, die im Wesentlichen eine Induktivität darstellt, ist annähernd sinusförmig. Die Eigenschaft einer Induktivität bestimmt die zeitliche Änderungsrate des Stroms. Der Stromverlauf wird dadurch geglättet. Die Induktivität stellt damit für den Strom einen Tiefpass dar. Im Vergleich zum Netzbetrieb mit fixer Frequenz sind bei Umrichterbetrieb in den Amplitudenspektren der Ströme neben der dominanten Grundschwingung weitere Höher-Harmonische (Oberschwingungen) zu entdecken. Diese führen zu einer Verringerung des Leistungsfaktors und zu akustischen und elektromagnetischen Emissionen. [5]
Abbildung 4: Prinzip der PWM-Generierung Im Vergleich zur Netzspeisung von elektrischen Maschinen mit fixer Frequenz kommt es bei der Verwendung von Spannungszwischenkreisumrichtern aufgrund der pulsförmigen Spannung durch PWM-Erregung zu zusätzlichen Harmonischen im Strom (Stromrippel) und damit zu zusätzlichen Verlusten. [6]
34. Internationales Wiener Motorensymposium 2013
- 375 -

Wie in [7] beschrieben kann durch Erhöhung der Schaltfrequenz des Umrichters der Einfluss der Stromharmonischen und damit die dadurch verursachten Verluste verringert werden. Der Grund, der dahinter steht, ist, dass eine Erhöhung der Schaltfrequenz eine bessere Annäherung des Stroms an die gewünschte Sinusform mit Grundschwingungsfrequenz bedeutet. Allerdings muss dabei beachtet werden, dass eine Erhöhung der Schaltfrequenz auch eine Erhöhung der Schaltverluste mit sich bringt. Es muss daher bei der Auslegung des Antriebssystems eine Optimierung der Schaltfrequenz hinsichtlich reduzierter Verluste erfolgen.
3. Leistungsmessung bei umrichtergespeisten Drehstromantrieben Für die Bestimmung der Effizienz eines elektrischen Traktionsantriebs beziehungsweise des gesamten Elektrofahrzeugs ist es nötig, die Eingangs- und Ausgangsleistung der unterschiedlichen Komponenten, wie Umrichter, DC/DC und AC/DC Konverter, Nebenverbraucher und elektrische Maschine, zu bestimmen. Während die Leistungsmessung für Gleichgrößen und rein sinusförmige Wechselgrößen lange bekannt, erforscht und damit zuverlässig und mit hoher Genauigkeit (0,1 – 0,25 % [5]) realisierbar ist, stellt die Leistungsmessung bei nicht sinusförmigen Größen, wie es am Umrichterausgang der Fall ist, immer noch eine Herausforderung dar. Wattmeter, die üblicherweise für die Leistungsmessung bei sinusförmigen Größen eingesetzt werden, sind für die Messung bei konstanter Netzfrequenz ausgelegt und sind deshalb für den Einsatz am Umrichter nicht geeignet [8]. Gründe sind deren Bandbreite und dynamischer Frequenzgang [9]. Eine Möglichkeit die Verlustleistung des Antriebs oder des Umrichters zu messen ist die kalorimetrische Methode. Das Prinzip, welches dahinter steckt, ist, dass die stationäre Temperaturzunahme in einer isolierten Kammer proportional zur Verlustleistung des Geräts in dieser Kammer ist [8], [9]. Für Messungen an einem im Elektrofahrzeug verbauten Antrieb ist diese Methode offensichtlich nicht praktikabel. In modernen, digitalen Leistungsmessgeräten, welche auch für die Anwendung bei nicht-sinusförmigen Größen geeignet sind, werden die Momentanwerte der Spannungen und Ströme mit genügend hoher Abtastrate aufgezeichnet. Die mittlere Wirkleistung 𝑃 kann, wie in [8] beschrieben, über folgende Gleichung berechnet werden:
𝑃 =1𝑇 𝑢(𝑡) ∙ 𝑖(𝑡)𝑑𝑡𝑇
0 (1)
Die Größen 𝑢(𝑡) und 𝑖(𝑡) stellen dabei die Momentanwerte von Spannung und Strom dar, 𝑇 ist die Periodendauer dieser Größen. Die Momentanwerte von Spannung und Strom können nach [10] wie folgt angegeben werden.
𝑢(𝑡) = √2𝑈ℎsin (ℎ ∙ 2𝜋𝑓 ∙ 𝑡 − 𝛼ℎ)∞
ℎ=1
(2)
34. Internationales Wiener Motorensymposium 2013
- 376 -

𝑖(𝑡) = √2𝐼ℎsin (ℎ ∙ 2𝜋𝑓 ∙ 𝑡 − 𝛽ℎ)∞
ℎ=1
(3)
Die Variablen 𝑈ℎ und 𝐼ℎ geben dabei die Effektivwerte der ℎ-ten Harmonischen von Spannung und Strom an. Die Phasenwinkel der ℎ-ten Harmonischen von Spannung und Strom sind 𝛼ℎ und 𝛽ℎ, 𝑓 die Grundschwingungsfrequenz. Für die Wirkleistung kann auch folgender Zusammenhang gewählt werden:
𝑃 = 𝑈ℎ𝐼ℎ𝑐𝑜𝑠 (𝛼ℎ − 𝛽ℎ)∞
ℎ=1
(4)
Die Definition der Wirkleistung nach Gleichung (1) und (4) ist für stationäre Vorgänge äquivalent. Für instationären Betrieb wird in [10] aber die direkte Verwendung von Gleichung (1) empfohlen. Die Definition der Scheinleistung 𝑆 ist folgende:
𝑆 = 𝑈ℎ2∞
ℎ=1
𝐼ℎ2∞
ℎ=1
(5)
Für nichtsinusförmige Größen ist die Definition der Scheinleistung nicht eindeutig. Es existieren mehrere unterschiedliche Definitionen. Hier soll nur jene nach Budeanu [11] angegeben werden. Sie ist entsprechend der Wirkleistung definiert.
𝑄 = 𝑈ℎ𝐼ℎsin (𝛼ℎ − 𝛽ℎ)∞
ℎ=1
(6)
In diesem Fall gilt aber der Zusammenhang 𝑆2 = 𝑃2 + 𝑄2 nicht. Die obigen Gleichungen gelten für kontinuierliche Werte. Moderne Leistungsmessgeräte arbeiten aber digital. Durch die zeitliche Diskretisierung bei der Analog-Digital-Wandlung wird in digitalen Leistungsmessgeräten Gleichung (1) folgendermaßen approximiert:
𝑃 =1𝑁 𝑢
𝑛𝑇𝑁 ∙ 𝑖
𝑛𝑇𝑁
𝑁−1
𝑛=0
(7)
Der Strom und die Spannung werden dabei 𝑁-mal je Periode äquidistant abgetastet. Die Summation muss dabei über eine ganze oder ein Vielfaches der Periodendauer erfolgen. Diese Messung und Berechnung nach Gleichung (7) muss für jede Phase durchgeführt werden. Die einzelnen Leistungen werden dann, wie in [12] beschrieben, addiert.
𝑃𝑔𝑒𝑠 = 𝑃1 + 𝑃2 + 𝑃3 (8) Um die höchste Genauigkeit zu erreichen sollte nach [8] immer die höchstmögliche Abtastrate verwendet werden. Die theoretisch unterste Grenze der Abtastrate wird durch
34. Internationales Wiener Motorensymposium 2013
- 377 -

das Shannon-Theorem bestimmt. Dieses sagt aus, dass die Abtastrate mindestens doppelt so groß wie die höchste interessierende Frequenz sein muss, um eine Rekonstruktion des Signals zu ermöglichen. Allerdings kann der Fehler je nach Abtastzeitpunkt zu groß sein. In [8] wird empfohlen, dass mindestens die vierfache Frequenz der höchsten vorkommenden Frequenzkomponente in Strom oder Spannung als Abtastrate gewählt wird. Die Untersuchungen in [5] zeigen allerdings, dass auch bei einer Abtastrate, die um einen Faktor fünf größer als die größte dominante Harmonische ist, keine korrekten Ergebnisse erzielt werden konnten. Bei dieser Art der Leistungsmessung muss nicht nur die Abtastrate ausreichend hoch sein, auch die nötige Bandbreite der verwendeten Sensoren und Spannungseingänge wird von den zu messenden Signalen bestimmt. In [8] wird für die Sensorik der Spannungsmessung eine Bandbreite von DC bis 100 kHz empfohlen. Die Grundschwingungsfrequenz bei elektrischen Traktionsantrieben liegt bei einigen hundert Hertz. Ein typischer Wert ist 250 Hz. Da bei hohen Wirkungsgraden die abgegebene Wirkleistung im Vergleich zur Verlustleistung sehr groß ist, haben bereits kleine absolute Fehler große Auswirkungen auf die Genauigkeit der Wirkungsgradberechnung. Die Messung der benötigten Größen muss daher sehr genau erfolgen. Nach [9] darf der Fehler bei der Messung nicht größer als 0,09 % sein um eine maximalen absoluten Fehler von 5 % bei der Bestimmung der Verluste zu erreichen. Um das Integral nach (1) beziehungsweise die Summenbildung nach (7) realisieren zu können, ist die genaue Kenntnis der Periodendauer der Grundschwingung notwendig. Da die Ausgangsspannung des Umrichters pulsförmig, der Strom aber aufgrund des induktiven Verhaltens der elektrischen Maschine annähernd sinusförmig ist, sollte der Strom als Quelle für die Frequenzbestimmung herangezogen werden. Die Integration beziehungsweise Summation könnte über eine einzelne Periode erfolgen. Wie in [12] beschrieben, sollte die Berechnung aber über mehrere Perioden ausgeführt und anschließend der Mittelwert gebildet werden. Bei hochdynamischen Änderungen der Drehzahl des Antriebs sollte die Anzahl der Perioden gering sein. Bei stationären Verhältnissen kann die Anzahl der verwendeten Perioden zur Berechnung der Leistung entsprechend größer gewählt werden. Die gewählte Bandbreite der Filter am Eingang der Spannungs- und Strommessung ist ein weiterer Parameter, der die Bestimmung der Leistung beeinflusst. Es sollten bei der Leistungsberechnung auch alle höheren Frequenzanteile beachtet werden. Wie schon weiter oben erwähnt, führt eine zu niedrige Abtastrate dazu, dass diese Frequenzanteile nicht mehr richtig erfasst werden. Genauso verhält es sich bei der Bandbreite der verwendeten Filter. Die Grenzfrequenz der Tiefpassfilter bei der Spannung sollte aufgrund der pulsförmigen Charakteristik möglichst hoch sein. Ein Faktor von 20 zwischen höchster Frequenz (PWM-Frequenz) und Grenzfrequenz des Filters erfüllt diese Bedingung. Dementsprechend sollte auch die Abtastrate um denselben Faktor höher sein. Da, wie bereits erwähnt, die Induktivität der Maschine als Tiefpass für den Strom wirkt, ist es zulässig, bei der Strommessung eine niedrigere Grenzfrequenz zu wählen.
34. Internationales Wiener Motorensymposium 2013
- 378 -

Abbildung 5: Zeitlicher Verlauf des Stroms in Phase U bei konstanter Drehzahländerung von 0 auf Nenndrehzahl mit annäherndem Nennmoment
Die hohe Dynamik von modernen drehzahlvariablen Antrieben macht die Berechnung der Grundschwingungsleistung zu einer großen Herausforderung. Da die Drehzahl elektrischer Drehstrommaschinen direkt über die Polpaarzahl mit der elektrischen Frequenz zusammenhängt und somit eine rasche Änderung der Drehzahl eine ebenso rasche Änderung der elektrischen Frequenz bedeutet, kann es bei hochdynamischem Betrieb dazu kommen, dass sich die elektrische Frequenz während der Periodendauer, die zur Berechnung der Leistung herangezogen wird, ändert. Dies lässt sich am besten an einem Beispiel veranschaulichen. Moderne Antriebssysteme können problemlos innerhalb einer Sekunde Nenndrehzahl erreichen. Der Strom in Phase U bei einem Hochlauf von Stillsand auf Nenndrehzahl mit Nennmoment ist in Abbildung 5 dargestellt. Bei den abgebildeten Daten handelt es sich um eine Messung an einem 8 kW Antrieb mit einer 2-poligen Asynchronmaschine und einer Nennfrequenz von 50 Hz. Die Speisung erfolgt über einen Spannungszwischenkreisumrichter. Die Abbildung zeigt klar, dass die Bestimmung der Frequenz der Grundschwingung bei dynamischem Betrieb sehr kompliziert ist. Da sich die Frequenz während einer Periode deutlich ändert, werden die genaue Berechnung und auch die Definition der Grundschwingungsleistung erschwert. Die elektrische Statorfrequenz von Traktionsantrieben in der Elektromobilität liegt im Bereich von wenigen hundert Hertz. Im folgenden Beispiel wurde die elektrische Frequenz bei Nenndrehzahl zu 300 Hz gewählt. Es könnte nun angenommen werden, dass bei einem Traktionsantrieb in der Elektromobilität solche hochdynamischen Beschleunigungsvorgänge aufgrund der Trägheit des zu beschleunigenden Fahrzeugs keinen real wichtigen Betriebszustand darstellen. Allerdings kommt es auch bei Elektrofahrzeugen zu raschen Drehzahländerungen innerhalb der Grundschwingungsperiode. Zur Veranschaulichung soll wieder ein Beispiel gegeben werden. Es wird ein Beschleunigungsvorgang von 0 auf 100 km/h angenommen. Die Beschleunigung wird als konstant angesehen und ist nach 16 Sekunden beendet. Die elektrische Frequenz des Traktionsmotors soll bei 100 km/h 230 Hz betragen. Abbildung
34. Internationales Wiener Motorensymposium 2013
- 379 -

6 zeigt den ersten Ausschnitt der Grundschwingung beim Anfahren des Elektrofahrzeugs beispielhaft.
Abbildung 6: Grundschwingung des Phasenstroms bei konstanter Beschleunigung von 0 auf 100km/h in 16s; Ausschnitt über 0.3s
Die obigen Beispiele haben gezeigt, dass es bei dynamischen Vorgängen schwierig ist, die Frequenz der Grundschwingung zu bestimmen. Aufgrund der pulsförmigen Charakteristik der vom Umrichter erzeugten Spannung ist die Abtastrate sehr wichtig für die genaue Berechnung der Leistung. Die in Abbildung 7 dargestellten Messungen zeigen die Außenleiterspannung zwischen den Phasen U und V.
Abbildung 7: Außenleiterspannung der Phasen U und V bei unterschiedlicher Abtrastrate
34. Internationales Wiener Motorensymposium 2013
- 380 -

Die gewünschte Spannung wird mit einem Spannungszwischenkreisumrichter durch PWM-Ansteuerung mit einer Frequenz von 5kHz erzeugt. Die Graphik zeigt einen Ausschnitt der Außenleiterspannung über drei PWM-Perioden (600 µs). Die 2-polige Maschine wird bei dieser Messung mit 30 % der Nennfrequenz von 50 Hz im Leerlauf betrieben. Die blaue Kurve wurde mit einer Abtastrate von 500 kHz aufgezeichnet. Der tatsächliche Spannungsverlauf (graue Kurve; aufgezeichnet mit 2,5 MHz) wird für diese Abtastrate sehr gut abgebildet. Die beiden anderen Kurven zeigen jeweils den Verlauf bei einer Abtastrate von 25kHz aber unterschiedlichen Triggerzeitpunkten der Messung. Die Abbildung zeigt klar, dass eine hohe Abtastrate unumgänglich für die korrekte Leistungsberechnung ist. Während bei der roten Kurve keine der Spannungspulse erfasst werden, werden bei der grünen Kurve trotz äquivalenter Abtastrate die Spannungspulse zumindest teilweise erfasst. Eine Abtastrate von nur 25 kHz wäre in dieser Applikation zu wenig. Auch ein Vergleich der berechneten Mittelwerte der Spannung während der abgebildeten Zeitspanne ergibt, trotz gleicher Abtastrate sehr unterschiedliche Ergebnisse. Der wahre Mittelwert während der abgebildeten Zeitspanne ergibt sich zu 80,26 V und für eine Abtastrate von 500 kHz zu 79,55 V. Für die rote Kurve hingegen ergibt sich der Mittelwert zu -5 V. Der Mittelwert der grünen Kurve liegt wieder in derselben Größenordnung wie der wahre Mittelwert bei 86,67 V, obwohl die Abtastrate äquivalent bei 25 kHz liegt. Eine Fourieranalyse der zu messenden Daten, kann helfen die benötigte Abtastrate und Grenzfrequenz der verwendeten Filter zu bestimmen. Der Vollständigkeit halber zeigt Abbildung 8 noch den zur Messung in Abbildung 7 zugehörigen Stromverlauf in Phase U.
Abbildung 8: Strom in Phase U bei unterschiedlicher Abtrastrate
34. Internationales Wiener Motorensymposium 2013
- 381 -

Dieser Vergleich der Strommessung mit unterschiedlicher Abtastrate zeigt, dass der Stromverlauf auch bei verringerter Abtastrate sehr gut abgebildet wird. Dies bedeutet auch, dass eine geringere Grenzfrequenz des Tiefpassfilters verwendet werden kann. Der Zeitverlauf des Stroms in Abbildung 8 stellt nur einen kleinen Ausschnitt einer Grundschwingung dar. Die Grundschwingung selbst wird durch die schwarze Kurve dargestellt. Der zackige Verlauf entsteht durch die Schalthandlungen des Umrichters und wird auch als Stromrippel bezeichnet.
4. Kompensation von Nicht-Idealitäten des Spannungszwischenkreis-umrichters
In Kapitel 2 wurde bereits erläutert, welche Probleme Nicht-Idealitäten, wie sie bei Umrichterspeisung von Traktionsantriebe auftreten, für die Regelung und Effizienz mit sich bringen. In diesem Kapitel sollen Ideen präsentiert werden, wie eine dieser Nicht-Idealitäten – die Umrichtertotzeit – kompensiert werden kann, um die Regelungseigenschaften speziell mechanisch sensorloser Verfahren zu verbessern. Wie schon zuvor erwähnt, führt die Umrichtertotzeit zu einer Abweichung der Ist- von der Soll-Spannung. Der genaue Wert der Spannung wird aber oft zur Fluss-, Moment- oder Drehzahlbestimmung benötigt. Eine Messung der Phasen- oder Außenleiterspannung ist aber nur schwierig und nicht kostengünstig realisierbar. Eine Kompensation der Umrichtertotzeit führt daher unmittelbar zu einer Verbesserung der Regelung. Abbildung 3 zeigt die Auswirkungen der Umrichtertotzeit bei unterschiedlicher Stromrichtung. Die Kenntnis der Stromrichtung, der gewünschten Spannung und der Schaltfolgen, sowie der Totzeit des verwendeten Umrichters ermöglicht es, die Auswirkungen dieser Nicht-Idealität zu verringern. Wie beispielsweise in [13] beschrieben, kann dies über eine intelligente Adaption der Schaltimpulse bewerkstelligt werden. Dabei wird der Soll-Schaltzeitpunkt aufgrund der Kenntnis der gewünschten Spannung und der derzeitigen Stromrichtung bei Wirksamkeit der Umrichtertotzeit verschoben. Durch diese Veränderung der idealen Schaltzeitpunkte kommt es zu einer Annäherung des realen Spannungspulses zum Geforderten. Ist die Stromrichtung positiv beispielsweise in Phase U und soll der untere Transistor T4 aus- und der obere Transistor T1 eingeschaltet (entspricht einer Kommutierung von Diode D4 (parallel zu T4) auf den Transistor T1) werden, muss der Impuls für diese Schalthandlung um die Dauer der Totzeit früher an den Treiberbaustein der jeweiligen Halbbrücke des Spannungszwischenkreisumrichters geleitetet werden. Bei negativer Stromrichtung und Kommutierung von oberer Diode D1 (parallel zu Transistor T1) auf unteren Transistor T4 (Ausschalten von T1 und Einschalten von T4) muss der Ausschaltimpuls ebenfalls um die Dauer der Totzeit früher angelegt werden. Zu beachten ist hierbei noch eine Änderung der Stromrichtung während des Schaltimpulses. Bei Kenntnis der transienten wirksamen Induktivität kann abgeschätzt werden, ob dies der Fall ist. Vorteilhaft hierbei ist, dass die genaue Kenntnis des Nulldurchgangs des Stromes nicht nötig ist. Mit dieser Adaption kann das reale Verhalten des Umrichters an das Ideale angenähert werden.
34. Internationales Wiener Motorensymposium 2013
- 382 -

5. Messtechnik Die Strommessung kann prinzipiell direkt oder indirekt erfolgen. Die direkte Messung über einen Shunt wird in Abbildung 9 dargestellt. Der zu messende Primärstrom Ip fließt dabei über einen Widerstand (Shunt). Die am Widerstand anliegende Spannung VM ist eine zum Messstrom Ip direkt proportionale Größe. Damit wurden auch bereits die Nachteile dieser Methode beschrieben. Der zusätzliche Widerstand führt zu einer Verlustleistung und damit zu einer direkten Beeinflussung der Messgröße. Zudem ist der Shunt galvanisch mit dem zu messenden Kreis verbunden.
Abbildung 9: Direkte Strommessung Die indirekte Strommessung erfolgt galvanisch getrennt über die Bestimmung des, durch den zu messenden Strom, erzeugten Magnetfeldes. Die am häufigsten verwendeten Ansätze werden in Tabelle 1 zusammengefasst. Im Weiteren werden die einzelnen Methoden erörtert und die Unterschiede im Hinblick auf den geeigneten Messeinsatz dargelegt.
Indirekte Strommessung Flusskonzentration Flusskompensation Halleffekt Ja Nein Ja Nein Ja Nein
Direktabbildender Stromwandler x x x
Kompensations-Stromwandler x x x
Präzisions-Stromwandler x x x
Rogowski-Spule x x x
Tabelle 1: Indirekte Strommessung Grundlegend wird in Stromwandler mit und ohne Flusskonzentration unterschieden. Das Prinzip der Flusskonzentration wird zur Bündelung und damit Verstärkung des kleinen erzeugten Magnetfeldes genutzt. In Entwicklung befindliche Stromsensoren ohne Flusskonzentration, wie sie beispielsweise in [14] vorgestellt werden, unterliegen keinen Bandbreitenbeschränkungen durch den Magnetfeldkonzentrator.
Shunt [Ω] Ip
VM
Ip… zu messender Primärstrom VM… Spannung am Shunt
34. Internationales Wiener Motorensymposium 2013
- 383 -

Direktabbildender Stromwandler Das Funktionsprinzip des direktabbildenden Stromwandlers wird in Abbildung 10 wiedergegeben. Das, durch den zu messenden Primärstrom Ip, im Flusskonzentrator (Eisenring) verursachte Magnetfeld wird um den Hallgenerator (Halbleitermetallplättchen, linearer Magnetfeldsensor) konzentriert. Dieser wird von einem konstanten Steuerstrom Ic durchflossen. Die bewegten elektrischen Ladungsträger (Ic) werden dem senkrecht zur Stromrichtung verlaufenden Magnetfeld H ausgesetzt. Die dabei entstehende Lorentz-Kraft wirkt in Querrichtung auf die bewegten elektrischen Ladungsträger (Ic) und führt zu einem Potentialunterschied an den Rändern der Hallsonde. Dieser Potentialunterschied wird als Hallspannung VH gemessen. Das Ausgangssignal ist eine verstärkte Hallspannung VOUT und ist im linearen Bereich des Flusskonzentrators proportional zum Primärstrom Ip. Im hochdynamischen Wechselstrombetrieb führen insbesondere Ummagnetisierungsverluste zu erhöhten Ungenauigkeiten in der Messung [15].
Abbildung 10: Direktabbildender Stromwandler [15], [modifiziert] Kompensations-Stromwandler Der Kompensations-Stromwandler, wiedergegeben in Abbildung 11, löst den Nachteil der Ummagnetisierung des direktabbildenden Stromwandlers dahingehend, dass am Flusskonzentrator (Eisenring) eine Sekundärspule angebracht wird, welche einen, dem durch den zu messenden Primärstrom Ip induzierten magnetischen Fluss Ψp, entgegengesetzten magnetischen Fluss Ψs generiert. Der dafür erforderliche Strom Is ist dabei proportional zur Hallspannung VH. Der gesamte magnetische Fluss im System ist gleich Null. Als Messgröße für den Primärstrom Ip dient der proportionale Sekundärstrom Is. Durch die Anbringung eines Bürdenwiderstandes RM wird ein Spannungssignal VOUT als Messgröße zur Verfügung gestellt [15].
Ip… zu messender Primärstrom Ic… Steuerstrom Bp… durch Ip induzierte magnetische Flussdichte
VH
VOUT
VH… Hallspannung VOUT… Ausgangsspannung B… magnetische Flussdichte
B=Bp
34. Internationales Wiener Motorensymposium 2013
- 384 -

Abbildung 11: Kompensations-Stromwandler [15], [modifiziert] Präzisions-Stromwandler Der Präzisions-Stromwandler nutzt ebenfalls das Prinzip der Flusskonzentration und -kompensation, verzichtet dabei aber auf den Hallsensor zur Bestimmung des, durch den Primärstrom Ip induzierten, magnetischen Flusses. Wie in Abbildung 12 dargestellt, kommt dieses Messprinzip ohne verlustbehafteten Luftspalt im Flusskonzentrator aus. Der in Spule „1“ durch den magnetischen Fluss Ψp (des Primärstroms Ip) induzierte magnetische Fluss Ψ1 wird durch einen Kompensationsstrom (des Verstärkers) in Spule „2“ ausgeglichen (Gegendurchflutung). Zudem liefert der Nullflussdetektor (Symmetriedetektor) mithilfe eines kleinen Rechtecksignals bei Gleichstrom bis Niederfrequenz dem Verstärker ein Korrektursignal, falls sich der primär- und sekundärseitige magnetische Fluss nicht aufheben und zwischen den Sensorspulen „3“ und „4“ ein Offset vorliegt [15].
Abbildung 12: Kompensations-Stromwandler [15], [modifiziert]
Ip… zu messender Primärstrom Ic… Steuerstrom Is… Sekundärstrom RM… Bürdenwiderstandes
Bp
Sekundärspule
VH
VH… Hallspannung VOUT… Ausgangsspannung Bp… durch Ip induzierte magnetische Flussdichte Bs… durch Is induzierte magnetische Flussdichte
Bs
VOUT
RM… Bürdenwiderstand VOUT… Ausgangsspannung
VOUT
Ip… zu messender Primärstrom IC… Kompensationsstrom
RM 1
2 IC
3
4
Verstärker
34. Internationales Wiener Motorensymposium 2013
- 385 -

Rogowski-Spule Die Rogowski-Spule nutzt den Effekt, dass durch einen Wechselstrom Ip in einer Induktionsspule eine Spannung v(t) induziert wird, die zum Strom Ip proportional ist. Aufgrund des Entfallens des ferromagnetischen Kerns wird die Messung nicht durch nichtlineare Einflüsse des Eisenkerns beeinflusst. Das Messverfahren ermöglicht jedoch nur die Messung von Wechselströmen [16].
Abbildung 13: Rogowski-Spule [16], [modifiziert] Stromsensorauswahl Für die Sensorauswahl sind, abhängig vom Einsatzgebiet, unterschiedliche Kriterien von Bedeutung. Für die Vermessung von elektrifizierten Fahrzeugen zählt unter anderem die Sensorgröße zu den wesentlichen Kriterien, da vor allem am bewegten Fahrzeug nur wenig Raum zur Sensorapplikation zur Verfügung steht. Tabelle 2 fasst wesentliche Auswahlkriterien zusammen. Es kann festgestellt werden, dass der Präzisions-Stromwandler durch seine hohe Messgenauigkeit und Linearität, bei gleichzeitig kurzer Ansprechzeit, die im Obigen ausgeführten Ansprüche erfüllt.
Indirekte Stromsensoren
Direktabbildender Stromwandler
Kompensations-Stromwandler
Präzisions-Stromwandler
Rogowski-Spule (PRiME)
Messbereich 0 - 15 kA 0 - 15 kA 0 - 600 A 0 - 400 A
Bandbreite 0 - 25 kHz 0 - 200 kHz 0 - 100 kHz (bis 1 MHz
[17]) 10 Hz - 6 kHz
Messgenauigkeit +/- 1,5 % +/- 0,5 % +/- 0,0002 % +/- 0,5%
Linearität +/- 0,5 % +/- 0,1 % +/- 0,0001 % +/- 0,2%
Ansprechzeit < 3 - 7 μs < 1 μs < 1 μs 2 - 10 μs
Besonderheiten
Großer Messbereich
Geringer Leistungsbedarf Kleine Bauweise
Kostengünstig
Großer Messbereich
Höhere Messgenauigkeit
Kurze Ansprechzeit
Höchste Genauigkeit
Hohe Linearität
Kurze Ansprechzeit
Einfache Applikation
Geringes Gewicht
Nur Wechselstrom
Tabelle 2: Eigenschaften indirekter Stromsensoren [15], [18], [19]
v(t)
Ip
Ip… zu messender Primärstrom v(t)… induzierte Spannung
34. Internationales Wiener Motorensymposium 2013
- 386 -

Wie ebenso ausgeführt, ist aufgrund der pulsförmigen Charakteristik der vom Umrichter erzeugten Spannung die genaue Erfassung von Strom und Spannung für die Leistungsberechnung sehr wichtig. Zur Anwendung kommen hierfür Hochspannungsmessverstärker mit galvanisch getrennten Spannungseingängen. Die Vermessung aktuell am Markt verfügbarer bzw. in [20] untersuchter Fahrzeuge erfordert einen Messbereich bis +/- 800 V. Bandbreiten bis 2 MHz und Filterfrequenzen bis 2 MHz (Filtercharakteristik Butterworth oder Bessel) sind darstellbar. Die Messgenauigkeit ist mit +/- 0,05 % anzuführen [21]. Datenlogger mit Samplerate von bis zu 500 kSample sind für die entsprechend genaue Erfassung erforderlich.
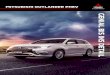
6. Analyse von Messergebnissen In diesem Kapitel soll darauf aufmerksam gemacht werden, wie sich unterschiedliche Messparameter auf die Leistungsberechnung an einem Elektrofahrzeug auswirken können. Dafür werden im Speziellen Ergebnisse herangezogen, welche aus einer Messreihe an einem Elektrofahrzeug am Institut für Fahrzeugantriebe und Automobiltechnik (IFA) heraus entstanden. Analysiert wurden alle drei Außenleiterspannungen an der dreiphasigen Maschine U-12, U-23 und U-31. Zusätzlich erfolgte mit Hilfe von Strommessgeräten auf Basis der Flusskompensation die Messung der Ströme in den Phasen 1 und 2. Durch die Bestimmung dieser fünf Größen können durch unterschiedliche Messschaltungen, z.B. in Aronschaltung, die Leistungswerte berechnet werden. Dabei untersucht dieses Kapitel eventuell auftretende Messfehler aufgrund von unterschiedlichen Abtastraten. Als erstes beschreibt Abbildung 14 den Verlauf der Außenleiterspannung U-12.
Abbildung 14: Außenleiterspannung U-12
34. Internationales Wiener Motorensymposium 2013
- 387 -

Gezeigt wird dabei ein Zeitfenster von 1,2 Millisekunden um den Zeitpunkt von 1,8 Sekunden. Aufgrund der hohen Taktfrequenz des Umrichters ist ein derart kurzes Intervall notwendig, um die einzelnen Pulse zu erkennen. Dargestellt wird die gemessene Spannung mit einer Abtastfrequenz von 400 kHz in rot und zusätzlich mit 20 kHz in grün. Dabei erfasst die Messung mit höherer Auflösung auch die Spannungsspitzen an den oberen Halbschwingungen, welche durch die Schaltimpulse am Frequenzumrichter gewollt mit Pulsweitenmodulation erzeugt werden. Infolge dieser Spannungspulse ergibt sich über eine Impulsperiode ein positiver Wert des Flächenintegrals und bestimmt den jeweiligen Wert der resultierenden Grundschwingung. An den Maximalwerten dieser Pulse lässt sich auch die Zwischenkreisspannung ablesen, welche auf Strangwerte rückgerechnet werden müsste. Das Signal mit einer Abtastung von 20 kHz erfasst die beschriebenen Spannungspulse nicht und kann die wichtige Information nicht abbilden. Dadurch ergibt sich ein Flächenintegral einer Impulsperiode von nahezu Null und verfälscht den tatsächlichen Wert sehr stark. Die für die Leistungsberechnung wichtigen Messwerte der Spannung U-12 zur Bestimmung der Leistung weichen somit stärker ab als mit 400 kHz aufgelöst. Den Verlauf der Außenleiterspannung U-23 zeigt Abbildung 15.
Abbildung 15: Außenleiterspannung U-23
In dieser Darstellung ist die Spannung mit einer Abtastrate von 400 kHz in rot eingezeichnet und jene Spannung, aufgelöst mit 20 kHz, erfolgt in grün. Zu erkennen sind die symmetrisch um null Volt gelegenen Spannungspulse. An den negativen Spannungswerten sind jedoch die Flächen größer als im positiven Bereich, wodurch sich ein leicht negativer Wert des Flächenintegrals über eine PWM-Periode ergibt. Bei der 20 kHz Abtastung gehen diese Informationen wieder verloren. Das Flächenintegral des grünen Verlaufes ergibt einen Wert nahe bei null und stimmt mit den tatsächlichen Daten nicht überein. Die dritte und letzte gemessene Spannung wird in Abbildung 16 dargestellt.
34. Internationales Wiener Motorensymposium 2013
- 388 -

Abbildung 16: Außenleiterspannung U-31
Dabei stellt die rote Kurve die Außenleiterspannung U-31 mit einer Abtastrate von 400 kHz dar. Die grüne Kurve ist das Ergebnis aus der Messung mit einer Abtastrate von 20 kHz. Die durch den Umrichter generierten Pulse führen zu einem negativen Wert der resultierenden Grundschwingung. Auch hier zeigt sich, dass eine zu geringe Abtastung zum Verlust von wichtigen Daten führt. Die Flächenintegrale beider Kurven weichen stark voneinander ab und führen bei dem mit 20 kHz abgetasteten Signal zu einem Wert nahe null. In diesem Beispiel würden die mit 20 kHz Abtastung gemessenen Spannungswerte der resultierenden Grundschwingung zu einer viel ungenaueren Berechnung der Leistung führen als mit 400 kHz. In Tabelle 3 sind die Ergebnisse noch einmal zusammengefasst. Folgend aus diesen Erkenntnissen werden nun die beiden vermessenen Phasenströme interpretiert. Beginnend mit dem Strom der Phase 1 dargestellt in Abbildung 17. Gezeigt wird der Stromverlauf in der Phase 1 um den Zeitpunkt von 1,8 Sekunden. Das Zeitintervall wird bewusst gleich wie bei den Spannungen gewählt, um das träge Verhalten dieser Größe aufgrund der Induktivität der Maschine zu zeigen. Es ist somit nur ein kleiner Bereich einer Stromgrundschwingung, welche sich gerade im Anstieg befindet, zu erkennen. Zusätzlich erzeugen die Schalthandlungen des Umrichters Oberschwingungen im Stromverlauf, welche am Sägezahnmuster sichtbar sind. Die rote Kurve ist das Ergebnis der Messung mit einer Abtastrate von 400 kHz. Die grüne Linie zeigt den Stromverlauf abgetastet mit 20 kHz. Festzustellen ist, dass dabei die Abweichungen viel geringer ausfallen als bei der vorhin beschriebenen Spannungsmessung. Die Differenzen, aufgelistet in Tabelle 3, bewegen sich im einstelligen Bereich.
34. Internationales Wiener Motorensymposium 2013
- 389 -

Abbildung17: Strom Phase 1
Außerdem zeigt Abbildung 18 noch den Strom in Phase 2.
Abbildung 18: Strom Phase 2
Es wurde dabei derselbe Zeitbereich gewählt, wodurch man im Gegensatz zu Phase 1 den hier abfallenden Bereich der Stromgrundschwingung erkennt. Gezeigt wird in rot die Messkurve mit einer Abtastung von 400 kHz und in grün jene mit 20 kHz.
34. Internationales Wiener Motorensymposium 2013
- 390 -

Aufgrund der viel geringeren Signaldynamik als bei den Spannungssignalen, genügt es bei der Strommessung eine geringere Abtastung zu wählen, um Signale für eine sinnvolle Leistungsmessung bereit zu stellen. Der Vorteil der höheren Abtastung liegt hier eher beim Erkennen von Oberschwingungen als beim Detektieren des hinreichenden Signalverlaufes zur Leistungsermittlung an sich. Zusammengefasst werden die Abweichungen über eine PWM-Periode der Flächenintegrale der Spannungen bzw. die Fehlerquadrate (Root-Mean-Square-Deviation abgekürzt RMSD) der Ströme beider Abtastraten in Tabelle 3.
Tabelle 3: Abweichung über eine PWM-Periode
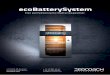
Dabei treten bei den Spannungen Differenzen von ca. 100% auf und bei den Strömen bleiben die Abweichungen im einstelligen Amperebereich. Aus diesen Ergebnissen kann geschlossen werden, dass bei der Bestimmung von Spannungen unbedingt auf eine korrekte Einstellung der Abtastrate geachtet werden muss, welche sich an der Schaltfrequenz des Frequenzumrichters orientieren sollte. Zur Messung von Strömen kann die Einstellung der Abtastfrequenz auf Grund der hohen Induktivität der elektrischen Antriebsmaschine geringer ausfallen als zur Spannungsmessung. Ferner soll noch das Verhalten am Fahrzeug gezeigt werden, welches sich aufgrund eines Beschleunigungsvorganges beginnend mit der Geschwindigkeit null ergibt. Eine äußerst aussagekräftige Größe hierfür ist der Strom. Um diesen Anlaufvorgang, welcher somit einen transienten Zustand abbildet, zu veranschaulichen, zeigt Abbildung 19 zwei Phasenströme während dieses Ablaufes.
Spannung U-12 Spannung U-23 Spannung U-31 Strom 1 Strom 2101,65 100,30 117,26 5,14 2,91
Abweichungen Spannunszeitfläche [%] RMSD [A]
34. Internationales Wiener Motorensymposium 2013
- 391 -

Abbildung 19: Ströme während des Anlaufs
Dabei sind die unterschiedlichen Ströme in grün und rot eingezeichnet. Diese Darstellung verdeutlicht nicht nur das stetige Ansteigen der Grundschwingungsfrequenz beider Größen sondern auch deren Amplituden. Die Periodendauer bleibt dadurch nicht konstant und muss immer wieder neu berechnet werden. Wie in Kapitel 3 bereits erwähnt, ist es sinnvoll die Leistungsberechnung an die Grundschwingung der Ströme zu koppeln, was jedoch in dynamischen Beschleunigungsvorgängen zusätzliche Herausforderungen bedingt. Die Grundschwingung in den Strömen ist im Gegensatz zu jener in den Spannungen jedoch klar erkennbar und sollte daher als Frequenzquelle bei der Leistungsberechnung eingesetzt werden.
7. Zusammenfassung Diese Arbeit befasst sich mit den Herausforderungen der Leistungsbestimmung an Fahrzeugen mit elektrischen Traktionsantrieben. Der derzeitige Trend zu alternativen Antriebskonzepten, welche insbesondere Elektrofahrzeuge sein können, treibt die Entwicklung weiter voran und verlangt nach genauen Lösungsansätzen zur Leistungsbestimmung und folglich Wirkungsgraderfassungen. Um den Energieverbrauch und damit die Effizienz sowie die Emissionen ermitteln und mit herkömmlichen Antriebskonzepten vergleichen zu können, ist die genaue Leistungs- sowie Wirkungsgradbestimmung unumgänglich und für die Fahrzeugentwicklung in Richtung gesteigerter Effizienz enorm wichtig. Dies gilt sowohl für den Traktionsantrieb in Elektro- und Hybridfahrzeugen als auch für Nebenverbraucher wie beispielsweise der Kompressor der Klimaanlage, etc. Die Probleme, die dabei auftreten können, beziehungsweise auf welche Aspekte geachtet werden muss, wurden erläutert. Die Berechnung der Leistung erfolgt nach diskreter Abtastung von Spannungen und Strömen der Maschine. Als Periodendauer ist die Grundfrequenz des Stromes
34. Internationales Wiener Motorensymposium 2013
- 392 -

heranzuziehen. Zur genauen Analyse ist eine Abtastrate von etwa dem 20-fachen der maximalen Schaltfrequenz des Umrichters einzustellen. Gerade die Regelung durch umrichtergespeiste Maschinen führt zu Problemen, welche bei konstanter Netzfrequenz nicht entstehen. Durch die gepulsten Spannungsausgänge an den Umrichtern entsteht ein breites Oberschwingungsspektrum und führt zu unerwünschten Verlusten, welche durch eine Erhöhung der Schaltfrequenz jedoch reduziert werden können. Außerdem werden die gewünschten Außenleiterspannungen aufgrund unumgänglicher Totzeiten am Umrichter nicht genau erreicht. Für Verfahren der sensorlosen (keine Verwendung von Sensoren zur direkten Rotorlage- oder Drehzahlerfassung) Fluss-, Drehzahl- oder Positionsbestimmung ist die genaue Kenntnis der Spannung aber oft essentiell. Kompensationsmaßnahmen der Umrichtertotzeit können diese Verfahren erheblich verbessern. Auch in der Fahrzeugentwicklung sind solche sensorlose Regelungsverfahren oft gewünscht, um Vorteile der erhöhten Ausfallssicherheit, Kosten- und Platzersparnis (kein zusätzlicher Lagegeber oder Drehzahlmesser) ausnützen zu können. Außerdem kann ein sensorloses Regelungsverfahren als Backup-System bei sicherheitskritischen Anwendungen eingesetzt werden. Diese Arbeit verschafft einen Überblick über bestehende Stromsensorik und vergleicht direkte mit indirekter Strommessung. Abschließend verdeutlichen Messergebnisse die Ansprüche an die Leistungsermittlung und unterstreichen die Wichtigkeit richtig eingestellter Parameter.
8. Literatur [1] J. Estima und A. Marques Cardoso, „Efficiency Analysis of Drive Train Topologies
Applied to Electric/Hybrid Vehicles,“ IEEE Transactions on Vehicular Technology, Bd. 61, Nr. 3, pp. 1021-1031, März 2012.
[2] A. Wintrich, U. Nicolai, W. Tursky und T. Reimann, Application Manual Power Semiconductors, Ilmenau: ISLE Verlag, 2011.
[3] S. Bolognani, L. Peretti und M. Zigliotto, „Inverter Non-Idealities Override by Repetitive Control,“ in IEEE International Electric Machines & Drives Conference, IEMDC, 2007.
[4] T. Batzel und M. Comanescu, „Instantaneous voltage measurement in PWM voltage source inverters,“ in International Aegean Conference on Electrical Machines and Power Electronics, ACEMP, 2007.
[5] A. J. Domijan, D. Czarkowski und J. Johnson, „Power measurements of variable speed motors,“ in Industry Applications Conference, IAS Annual Meeting, 1997.
[6] D. Holmes und T. Lipo, Pulse Width Modulation for Power Converters:Principles and Practice, Wiley-IEEE Press, 2003.
[7] W. Hassan und B. Wang, „Efficiency optimization of PMSM based drive system,“ in 7th International Power Electronics and Motion Control Conference (IPEMC), 2012.
[8] S. Mukherjee, R. Hoft und J. McCormick, „Digital measurements of the efficiency of inverter-induction machines,“ IEEE Transactions on Industry Applications, Bd. 26, Nr. 5, pp. 872-879, Sep./Oct. 1990.
[9] C. Xiao, G. Chen und W. Odendaal, „Overview of Power Loss Measurement
34. Internationales Wiener Motorensymposium 2013
- 393 -

Techniques in Power Electronics Systems,“ IEEE Transactions on Industry Applications, Bd. 43, Nr. 3, pp. 657-664, May/June 2007.
[10] D. Gallo, C. Landi, N. Pasquino und N. Polese, „A New Methodological Approach to Quality Assurance of Energy Meters Under Nonsinusoidal Conditions,“ IEEE Transactions on Instrumentation and Measurement, Bd. 56, Nr. 5, pp. 1694-1702, Okt. 2007.
[11] C. Budeanu, Reactive and fictitious powers, Rumanian National Institute, No. 2, 1927. [12] X. Gong, H. Lu, O. Flek, L. Wei, G. Morris, R. Lukaszewski und S. Zhang,
„Measurement of a variable frequency drive loss and efficiency using both calorimeter and powermeter,“ in IEEE International Symposium on Industrial Electronics (ISIE), 2012.
[13] T. Wolbank, M. Vogelsberger und M. Riepler, „Identification and compensation of inverter dead-time effect on zero speed sensorless control of AC machines based on voltage pulse injection,“ in Power Electronics Specialists Conference, PESC, 2008.
[14] W. Granig und H. Witschnig, „Integrierte Sensor-Technologien für die Elektro-Mobilität,“ in 8. VDI-Tagung Innovative Fahrzeugantriebe, Dresden, 2012.
[15] LEM, Galvanisch getrennte Strom- und Spannungswandler, Genf: LEM Unternehmens-Kommunikation, 1996.
[16] W. Rogowski und W. Steinhaus, „Die Messung der magnetischen Spannung,“ in Archiv für Elektrotechnik, 1. Band, 4. Heft, Springer Verlag, 1912, pp. 141-150.
[17] Dewetron, Datenblatt High Precision Current Transducers, Graz: DEWETRON GmbH, 2012.
[18] LEM, Strom- und Spannungswandler für industrielle Anwendungen, Genf: LEM International SA, 2001.
[19] LEM, Galvanisch getrennte Strom- und Spannungswandler, 3. Auflage, Genf: LEM Components, 2006.
[20] W. Tober, Batterieelektrische Fahrzeuge in der Praxis - Kosten, Reichweite, Umwelt, Komfort (2. erweiterte und korrigierte Auflage), Wien: TU-Wien, Institut für Fahrzeugantriebe und Automobiltechnik, 2012.
[21] Dewetron, Datenblatt Isolated high voltage module, Graz: DEWETRON GmbH, 2012.
34. Internationales Wiener Motorensymposium 2013
- 394 -