Embed Size (px)
Citation preview
Ubungen zur Einfuhrung in die Lineare Algebra
und Geometrie
By Hans G. Feichtinger. April 2014
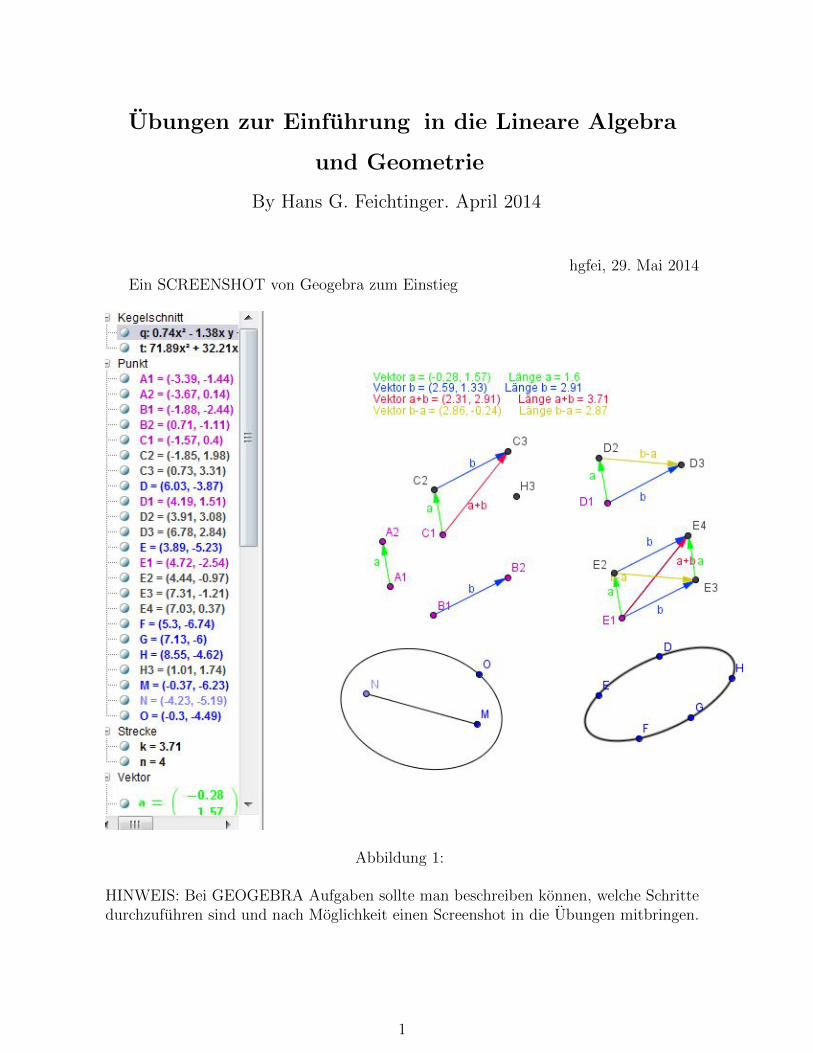
hgfei, 29. Mai 2014Ein SCREENSHOT von Geogebra zum Einstieg
Abbildung 1:
HINWEIS: Bei GEOGEBRA Aufgaben sollte man beschreiben konnen, welche Schrittedurchzufuhren sind und nach Moglichkeit einen Screenshot in die Ubungen mitbringen.
1

1. Installation von Geogebra und moglichst noch eines weiteren Matrix-Algebra Pro-grammes (siehe http://www.univie.ac.at/NuHAG/FEICOURS/ss14/LINALGIDEAS.pdffur diverse konkrete Vorschlage! Eventuell auch Download entsprechender Apps(werden immer wieder welche genannt) auf das eigene Smartphone!
2. Man experimentiere mit Geogebra, und bestimme durch die Angabe von 3 PunktenA,B,X “beliebige” (mit Hilfe der dymanischen Geometrie ist das moglich!) Paarevon Geraden, sodass deren (eindeutiger) Schnittpunkt genau der Punkt X ist.
3. Gegeben sei die erweiterte Systemmatrix.(1 3 42 4 6
)(1)
Man stelle die zugehorigen Geradengleichungen auf und bestimme den Schnitt-punkt der beiden Geraden (= Losungsmenge des Gleichungssystems).
4. Rechnen mit komplexen Zahlen, Polar-Koordinaten, inverse (mult.) Zahl, Zah-len auf dem Einheitskreis, Exponentialfunktion mit komplexen Exponenten, Eu-ler’sche Formel, Satz von Moivre, Einheitswurzeln, Winkelfunktionen cos(x) bzw.sin(x), Periodizitat,...
5. Man zeige, dass fur komplexe Zahlen z ∈ C, mit z 6= 0 gilt: z−1 = z ⇔ |z| = 1.
6. Man bestimme Absolutbetrag und inverses Element zu 4 + 3i(i =
√−1 ist hier die imaginare Einheit).
7. Es gibt auch endliche Korper, wie etwa die Restklassen modulo 5 (allgemeiner:nach einer Primzahl p ∈ N). Man bestimme die multiplikativen Inversen Elementezu 2 bzw. 4 modulo 5 (Restklassen modulo 5). [falls eine Zahl Teiler hat, habendie entsprechenden Restklassen Nullteiler, sind also sicher kein Korper.]
8. Man verifiziere durch Nachrechnen, dass die Matrix-Multiplikation der Matrix A =(a cb d
)mit dem Spaltenvektor [λ;µ] ∈ R2 genau die Linearkombination λa1 +
µa2 der Spalten a1, a2 von A ergibt. Insbesondere ergibt (in diesem Bespiel wieauch allgemein!) das Bild der Einheitsvektoren e1 = [1; 0] bzw. e2 = [0; 1] genaudie erste bzw. zweite Spalte von A.
9. Eine kleine Modellierungsaufgabe Die Abbildung, die dem jedem Punkt im R3 einenSchattenpunkt in der x−y-Ebene zuordnet, ist eine lineare Abbildung. Man bestim-me das Bild eines allgemeinen Punktes [x, y, z] bzw. die Matrix, die diese lineareAbbildung von R3 nach R2 realisiert. Konkret: Angenommen die Sonne scheintunter dem Winkel von 30◦ (uber der Standebene) und sie “unendlich weit weg” (inpositiver x-Richtung). Man bestimme den Schattenpunkt (in x− y-Koordinaten),den ein Punkt P = [x, y, z] ∈ R3 wirft.
10. Es sei eine einfache lineare Gleichung in 2 Variablen von der Form 3u + 4v = 7gegeben. Wie bestimmt man die zugehorige Gerade am einfachsten (rechnerischbzw. geometrisch), und welche Rolle spielen die Vorzeichen (hier zweimal positiv)fur die zugehorige Gerade? (betrachten Sie im Vergleich die Gleichung 3u−4v = 7).
2

11. Man analysiere (am besten geometrisch mit Hilfe von Geogebra) die folgende Si-
tuation. Geben drei Punkt, A,B,C und D = C +−→BA. Kann es sein, dass die
beiden Geraden durch A,B bzw. C,D genau einen gemeinsamen Punkt haben?
12. Gegen sei eine quadratische Polynomfunktion der Form p(x) := ax2 + bx+ c. unddie folgenden 4 Gleichungen: p(1) = −2, p(2) = −1, p′(0) = −5, p′(2) = 3. Manbestimme p(x) (es gibt dazu verschiedene Wege).
13. Es sei p(x) wie oben, nun mit den Angaben: p(x) sei eine gerade Funktion, mitp(2) = 0 und p′(1) = 6. Ist p(x) daraus eindeutig bestimmbar?
14. Man stelle die 2×2-Matrizen auf, welche eine Drehung um 60◦ im math. positivenbzw. im Uhrzeiger Sinn reprasentieren, und verifiziere das sie zueinander inverssind, d.h. dass ihr Produkt die Einheitsmatrix ist.
15. Man demonstriere (mit Hilfe des vorigen Beispiels) dass die Multiplikation einerbeliebigen komplexen Zahl der Form a+ib, a, b ∈ R mit der Zahl cos(60)+isin(60)die Zahl c+ id ergibt, welche auch durch Matrix-Multiplikation des Spaltenvektors[a; b] mit der oben angegebenen Matrix A ergibt, d.h. [c; d] = A∗ [a; b], oder andersausgedruckt, der Punkt P = (a, b) wird durch Drehung um 60◦ im math. positivenSinne auf Q = (c, d) abgebildet.
16. Man demonstriere mit Hilfe von Geogebra, dass Streckungen mit Drehungen ver-tauschen. Man kann dazu zwei zufallig gewahlte Paramter wahlen (z.B. Streckungum den Faktor 1.7 und Drehung um 43◦ im Uhrzeigersinn, oder was Ihnen soeinfallt, kann auch ein abstraktes Argument sein, das ware noch besser). Danachstelle man die entsprechenden Matrizen auf und uberprufe anhand der Matrix-Multiplikation diese Vertauschungsregel. Ist das Ergebnis uberraschend?
17. Man bestimme die 2× 2-Matrizen die die folgenden linearen Abbildungen von R2
nach R2 realisieren
(a) Spieglung an der x− Achse(b) Spiegelung am Nullpunkt: [x, y] 7→ [−x,−y];
(c) Spiegelung an der ersten Mediane;
Was bedeutet es, wenn man eine Spiegelung zweimal anwendet, und welche Eigen-schaft der zugehorigen Matrizen ergibt sich daraus?
18. Die Abbildung, die jeder komplexen Zahl ϕ : a+ib ∈ C die 2× 2-Matrix
(a −bb a
)zuordnet ist nicht nur bijektiv und linear, sondern auch mit der Multiplikation ver-traglich (Nachweis!), d.h. es gilt
ϕ((a+ ib)(c+ id)) = ϕ(a+ ib) ∗ ϕ(c+ id)
(mit Matrix-Multiplikation auf der rechten Seite).
3

19. Man identifiziere die Matrizen der Bauart mit Dreh-Streckungen, d.h. mit derKombination einer Drehmatrix mit einer Streckungsmatrix (passend gewahlte Ma-trix). Diese Zerlegung ist eindeutig und steht in enger Beziehung zur Polarzerle-gung von komplexen Zahlen! Zur Beweisfuhrung betrachte man die Ergebnisse vonBeispiel 18 oben.
20. Man bestimme die Inverse Matrix zu einer Matrix
(a −bb a
)(wobei man auf-
grund der vorhergehenden Beispiele vermuten kann, dass die Inverse Matrix vonahnlicher Gestalt ist!)
21. Man zeige unter Benutzung der allgemeinen Formel fur Matrix-Matrix-Multiplikation,dass bezuglich der Transposition gilt
(A ∗B)t = Bt ∗At,
soferne die Dimension passen (Domino-Regel).
22. Man zeige, dass die Zusammensetzung von zwei linearen Abbildungen wieder einelineare Abbildung ist (also z.B. T1 : Rn → Rm und T2 : Rm → Rp, zeige dassT := T2 ◦ T1 ebenfalls linear ist!).
23. Man zeige, dass fur jede quadratische, reelle Matrix gilt: (At ∗A)t = At ∗A. WennAt = A gilt (d.h. wenn A symmetrisch ist), dann gilt auch At∗A = A∗At (solcheMatrizen heissen normal). Gilt auch die Umkehrung?
24. Man uberprufe durch Nachrechnen anhand einer allgemeinen 3×3-Matrix dass diebeiden folgenden Operationen den gleichen Effekt haben:(i) Addieren das λ-Fache der ersten Zeile zur zweiten Zeile; bzw.(ii) Multiplizieren von links mit einer sog. Elementar- Matrix E , welche auf derHauptdiagonale lauter Einsen hat und in der Position (2, 1) den Wert λ hat. DieseMatrix entsteht auf “analoge Weise” aus der 3 × 3-Einheitsmatrix! Welches all-gemeine Prinzip steckt dahinter (wenn es sich nicht um die ersten beiden Zeilenhandeln wurde?).
25. Beispiele zur Anwendung der Gauss bzw. Gauss-Jordan Elimination, anhand ein-facher 2× 2 oder 3× 3-Gleichungs Systeme, wie etwa
3x+ 4y = 7; 2x− y = 1;x+ 3y = 4;
Sie konnen ein selbstgewahltes Beispiel prasentieren, aber erklaren, wie sie es zu-sammengestellt haben.
26. Man zeige, dass jede Orthonormalbasis im R2, d.h. jedes Paar (~u1, ~u2) von zu-einander senkrecht stehenden Vektoren der Lange 1 (bis auf die Orientierung)durch Anwendung einer Drehung aus der Standard Basis (~e1,~e2) hervorgeht. DerNachweis soll rechnerisch (nicht rein geometrisch) erfolgen, unter Verwendungdes Skalarproduktes, d.h. die Voraussetzung ist 〈~u1, ~u2〉 = 0. zur Erinnerung:
〈~x, ~y〉 =∑n
k=1 xkyk erfullt z.B. Rechenregeln wie
〈c~x + ~z, ~y〉 = c〈~x, ~y〉+ 〈~z, ~y〉
4

Anwendung finden konnen.
27. (Fortsetzung) Es sei~x = c1~u1 + c2~u2, c1, c2 ∈ R. (2)
Man zeige (geometrisch und rechnerisch), dass die Lange des Vektors ~x gleich√c21 + c22 ist, wobei man die Lange (manche sagen auch der Absolutbetrag, weil
es in der komplexen Ebene ist) durch das Skalarprodukt berechnet werden kann:‖x‖ =
√〈x,x〉.
28. Man erklare geometrisch (bzw. unter Verwendung von GEOGEBRA) wie maneinen vorgegebenen Vektor ~x in der Form (2) darstellen kann, wenn das Orthonor-malsystem ~u1, ~u2 gegeben ist.
Weiters sei eine beliebige Gerade in der Ebene gegeben (wie auch immer, durch2 Punkte, oder durch y = kx + d, etc.). Man zeige, dass bei passender Wahl derVektoren (~u1, ~u2) die Gerade durch durch die Eigenschaft, dass fur festes c1 ∈ Rgilt: ~x = c1~u1 + c~u2, fur ein c ∈ R charakterisiert werden kann [Es geht bei diesemBeispiel vor allem um das Einuben von Terminologie und die Fahigkeit, Geradenin der Ebene auf unterschiedliche Weisen darzustellen.]. Alternativ: Die Geradebesteht aus allen Punkten P der Ebene R2 mit
〈~x, ~u1〉 = c1.
29. Uberzeugen Sie sich durch Nachrechnen, dass das Matrix-Matrix Produkt auf derMenge der 2× 2-Matrize assoziativ ist (es ist naheliegend die drei involvierten Ma-trizen mit insgesamt 12 passend gewahlten Buchstaben allgemein zu beschreiben,also ! nicht nur ein konkretes Beispiel zu geben, sondern im Sinne eines Beweiseszu argumentieren).
30. Gegeben die Punkte P = [3, 1,−2], Q = [2,−1,−2] und R = [0, 2, 5] bestimmeman die Gleichung der Ebene die durch diese drei Punkte festgelegt ist.
31. Gibt es einen Punkt P in der Ebene zur Gleichung 3x+4y+5z = 12, sodass die Ge-rade im R3 mit Parameterdarstellung g : P +λ[1, 2, 1] in dieser Ebene gelegen ist?(Begrundung der Antwort, vermutlich gibt es diverse mogliche Argumentationen,die auch diskutiert werden sollen).
32. Man bestimme die allgemeine Losung des folgenden linearen Gleichungssystems
x+ 2y + 3z = 6, 2x− y + z = 2, y + 4z + 3x = 8, z + x = 2.
Eine Losung ist [1;1;1] sein!
5

Rechnen mit Skalarprodukt und ONBs
33. Fur jede Richtungsvektor u ∈ Rn, (d.h. mit ‖u‖ :=√∑n
k=1 |xk|2 = 1) gilt: Dielineare Abbildung Pu : x 7→ 〈x,u〉u definiert eine Projektion von x auf die Gerade(durch 0) die von u aufgespannt wird. Es ist also zu zeigen, dass P 2
u = Pu giltund dass Pu(u) = u gilt. Weiters gilt, dass fur jedes x ∈ Rn gilt:
x− Pux ⊥ Pux,
also mit anderen Worten: es ist eine orthogonale Projektion.
34. (a) Man zeige, dass fur eine relle m× n-Matrix U gilt: die Matrix-GleichungU ∗Ut = Im gleichwertig mit der Identitat
~x =n∑
k=1
〈~x, ~uk〉~uk, ∀~x ∈ Rm
ist (wir werden noch sehen, dass das nur moglich ist, wenn n ≥ m gilt).
(b) Man argumentiere, warum andererseits ist die geometrische Eigenschaft derSpalten (~uk) von U ein Orthonormalsystem in Rn bilden (d.h. dass sie paarweisezueinander senkrecht stehen und normiert sind), gleichbedeutend ist mit Gultigkeitder einfachen algebraischen Gleichung Ut ∗U = In. 1
35. Man zeige, unter Verwendung der Parameterdarstellung einer Geraden im Rn,dass eine lineare Abbildung T : Rn → Rm im Allgemeinen wieder auf eine Geradeabbbildet. Was sind die Ausnahmefalle? Wie sehen die Bilder von Rechtecken (inallgemeiner Lage) in R2 aus (d.h. n = 2 = m). Allenfalls betrachten Sie konkreteSpezialfalle.
Freiwillige Zusatzfrage zur Diskussion:Gilt in dem Spezialfall die Umkehrung, d.h. muss eine (bijektive) Abbildung R2 →R2 linear sein, um Geraden in Geraden abzubilden (Argument oder Gegenbeispiel).
Rechnen mit Matrizen und Invertieren
36. Man zeige, dass die 3× 3-Matrizen der Bauart
A =
a b 0c d 00 0 1
bzw.
a 0 b0 1 0c 0 d
(3)
mit ad − bc = 1 eine Gruppe bilden, und bestimme die inversen Elemente (bzgl.Matrix-Multiplikation). Geometrische Deutung der besonderen Form? (kann in derVorlesung leider erst spater diskutiert werden)
1In der Vorlesung wird bald besprochen werden, dass fur diese Gleichung notwendiger-weise gilt n ≤ m. Im Falle m = n folgt die Gleichwertigkeit der beiden Paare von Eigenschaften ausder Eindeutigkeit des inversen Elements in einer Gruppe und wird separat (in der Vorlesung) diskutiert!
6
37. Die Systemmatrix eines linearen Gleichungssystems sie durch,
A =
0 3 3 42 6 4 21 9 7 47 0 7 6−1 −3 −1 4
(4)
Man bestimme eine Zeilenstufenform, wobei man bedenke, dass die Aufgabe durchfruhzeitiges Vertauschen von Zeilen (nach eigenem Ermessen!) zu unterschiedlichenZwischenergebnissen fuhren kann. Aber hangt sich das Endergebnis von dergewahlten Abfolge der Schritte ab? [Vergleich mit KollegInnen!]
38. Man bestimme fur k ∈ Z die inverse Matrix zur Matrix M := [1, k; 0, 1] (oderausgeschrieben) (
1 k0 1
)(5)
und zeige, dass diese Matrizen eine Gruppe bilden. Analoges gilt fur die Matrizender Form (
1 0k 1
)(6)
39. Man bestimme die Gleichung des Bildes des Einheitskreises unter der Matrix
M =
(1 20 1
)(7)
Hinweis: Die Bildmenge besteht aus denjenigen Punkten in R2 welche unter M−1
auf den Einheitskreis abgebildet werden.
40. Man stelle fest, unter welchen Voraussetzungen man die inverse Matrix fur eineMatrix der Form 1 0 a
0 1 b0 0 c
(8)
finden kann.
Es wird empfohlen anhand eines kleinen OCTAVE (oder MATLAB, oder schrift-lichen) Experiments, etwa von der Form >> A = eye(3); A(:,3) = rand(3,1);
inv(A) bzw: >> A = eye(3); A(:,2) = 0.1 * rand(3,1); inv(A) allgemei-ne Vermutungen uber die Invertierbarkeit derartig strukturierter Matrizen auf2, indenen eine Spalte, beispielsweise die letzte Spalte, durch Zufallswerte ersetzt wird.
41. Man zeige, dass eine Matrix genau dann eine Permutation π, d.h. eine bijekti-ve Abbildung der (Index-)Menge {k|1 ≤ k ≤ n} induziert, wenn in jeder Zeileund Spalte (abgesehen von lauter Nullen) genau ein Einser steht. Weiters zeigeman, dass die inverse Matrix genau die transponierte Matrix ist (allenfalls anhandvon Beispielen, idealerweise in Indexschreibweise). Weiter zeige man, dass dieseMatrizen eine Gruppe bilden.
2Die Diskussion steht im Zusammenhang mit dem Austauschsatz von Steinitz.
7

42. Man zeige, dass fur die Matrix
A =
1 4 72 5 83 6 9
(9)
Zeilenraum und Spaltenraum ubereinstimmen. (z.B. indem man zeigt, dass alleZeilenvektoren im Spaltenraum liegen, etc.).
43. Welche 2 × 2-Matrizen (mindestens zwei verschiedene sind gefragt, wieviel konn-ten es sein?) fuhrt das Standard-Gitter Z × Z ⊂ R2 in ein hexagonales Gitteruber? (Erganzung: gemeint ist das Bienenwabenmuster, allerdings MITMittelpunkten). Ansonsten muss man zwei Matrizen auf das Standard-Gitteranwenden und die Vereinigung von zwei Gittern bilden, aber das ist ein wenigkomplizierter!
Abbildung 2:
44. Das Kreuzprodukt ist eine Besonderheit des R3, fur die es in anderen Dimensionennichts Entsprechendes gibt (deshalb wird es nur hier im Rahmen der Ubungenbehandelt!). Fur ~u,~v ∈ R3 definiert man das Kreuzprodukt von ~u,~v als
~u× ~v =
u2v3 − u3v2u3v1 − u1v3u1v2 − u2v1
. (10)
Das Kreuzprodukt wird auch als außeres Produkt oder als Vektorprodukt bezeich-net. Man verifiziere, dass ~u×~v stets senkrecht auf die von ~u und ~v erzeugte Ebenestehen (Ausnahmefalle?).
8

45. Man verifiziere, dass die Lange des Vektors ~u×~v durch folgende Identitat bestimmtwerden kann:
‖~u× ~v‖2 = ‖~u‖2‖~v‖2 − 〈~u,~v〉2.Hinweis (kein Beweis gefordert): Da der Absolutbetrag (d.h. die Norm von ~u× ~v)stets gleich der Flache das von diesen beiden Vektoren aufgespannten Parallelgramsist, ist das Kreuzprodukt auch dafur nutzlich (AHS, 6.Klasse).
46. Man beschreibe, wie man mit Hilfe von Kreuzprodukt und Skalarprodukt dasVolumen einer durch 4 Punkte im R3 gegebenen Pyramide bestimmen kann.
47. Gegeben sei eine Ebene in R3, durch die Gleichung
2x+ 3y + 4z = 9.
Man bestimme die Schnittpunkte dieser Ebene mit den drei Achsen, sowie eineParameterdarstellung der Ebene. Welche Koordinaten hat der Punkt (1, 1, 1) indieser Parameterdarstellung?
48. Geben sie eine Normalvektordarstellung der Form n1x+ n2y + n3z = c der Ebene
E = {~x ∈ R3 | ~x = (5, 3,−4) + u · (2, 3,−4) + v · (5, 3, 0), u, v ∈ R}
49. Wahlen Sie selber einen Punkt P = (p, q) mit ganz-zahligen Koordinaten in Z×Z inder Ebene und stellen sie dann zwei Geraden auf, die durch diesen Punkt gehen unddurch ganzzahlige Gleichungen der Form a1,1x+ a1,2y = b1 bzw. a2,1x+ a2,2y = b2gegeben sind. Eine davon sei steigend und die andere fallend. Bezeichnen sie dieentsprechenden Zeilenvektoren der erweiterten Systemmatrix mit ~z1 bzw. ~z2 ∈ R3.Wie sieht dann das Gleichungssystem mit 4 Gleichungen aus, wenn der dritte bzw.vierte Zeilenvektor wie folgt gegeben sind: ~z3 := ~z1 + ~z2, ~z4 := −3~z1 + 2~z2 Waskann man uber die entsprechenden Geraden sagen?
50. (ebenfalls Buch der 6-ten Klasse AHS) Gegeben sind die Ebenen: E1 : 2x−y+3z =7;E2 : −x+y+2z = −2;E3 : 4x−2y+6z = 8;E4 : x−y−2z−−1;E5 : 3x−2y+z =6;E6 = −3x+ 3y + 6y = 3.
Man stelle fest welche der folgenden Durchschnittsmengen leer sind: Eii∩Ejj∩Ekk
mit (der Reihe nach den Indexfolgen)
[ii, jj, kk] = [1, 2, 3], [1, 3, 5], [2, 4, 6], [1, 2, 5], [4, 5, 6], [2, 3, 5], [1, 4, 5], [3, 5, 6].
Wie kann man OCTAVE oder MATLAB (darf verwendent werden!) zu Hilfe neh-men, um diese Frage schnell und zuverlaßlich zu beantworten.
Eingabe der (erweiterten Systemmatrix):
>> H(1,:) = [2,-1,3,7];
>> H(2,:) = [-1,1,2,-2];
>> H(3,:) = [4,-2,6,8];
>> H(4,:) = [1,-1,-2,-1];
>> H(5,:) = [3,-2,1,6];
>> H(6,:) = [-3,3,6,3];
9

H =
2 −1 3 7−1 1 2 −24 −2 6 81 −1 −2 −13 −2 1 6−3 3 6 3
(11)
Was “tut” der folgende MATLAB/OCTAVE Code?
for ii=1:6; for jj=1:6; for kk=1:6; RH = rref(H([ii,jj,kk],:));
if RH(3,4)-RH(3,3)==1; disp(num2str([ii,jj,kk]));end; end;end;end;
Inwieferne ist der folgende Code besser (was ist der Unterschied)?
>> for ii=1:6; for jj=ii+1:6; for kk=jj+1:6;
RH = rref(H([ii,jj,kk],:));if RH(3,4)-RH(3,3) ==1;
disp(num2str([ii,jj,kk])); end; end;end; end;
KOMMENTAR vom 5.5.2014, nach den Ubungen: dieses Programm beruck-sichtigt nur die Falle, in denen die erste und die zweite Eben voneinander linearunabhangige Normalvektoren haben, d.h. die Falle, in denen sich die beiden erst-nummerierten Ebenen in einer Geraden schneiden, welche sich aber NICHT mit derdritt-genannten Ebene schneidet, d.h. die Schnittgerade ist parallel (also disjunkt)zur dritten Ebene! Ob in der konkreten Situation andere Falle (wie z.B. disjunk-te erste und zweite Ebenen auftreten wurde beim schnellen Zusammenstellen desBeispiels nicht bedacht!
Erganzender Code:
for jj=1:6; for kk = jj+1 : 6;
R = rref(H([jj;kk],:));
if sum(abs(R(2,1:3))) == 0;
disp(num2str([jj,kk])); R,
end; end; end;
ergibt, dass nur E4 und E6 gleich sind, alle Paare parallel aber disjunkt (und zwar1 3, 2 4, 2 6, 5, bzw. 4 6). Sorry, hgfei. (5.5.2014)
51. NEU (vgl. Skriptum) Gegeben seien zwei invertierbare Matrizen A bzw. B, als
A =
4 2 41 3 12 4 3
, B =
6 2 24 3 −26 4 −1
(12)
Man bestimme die A sowie die B-Koordinaten des Vektors v = [−2; 2;−1] , sowiedie Basis-Wechsel Matrix, die aus den A-Koordinaten die B-Koordinaten einesVektors macht (kann zur Probe auf die fur v bestimmten Koordinatenvektorenangewendet werden).
10
Zur Kontrolle: das Ergebnis sollte sein: 1.0000 0.0000 0.0000−1.0000 1.0000 1.00000.0000 0.0000 1.0000
(13)
Kommentar (26.04.): Die Spalten der Matrizen A bzw. B sind je-weils ein System von drei Vektoren im R3, und die Koordinaten vonz ∈ R3 sind die eindeutig bestimmten Koeffizienten, die z als Linear-Kombination dieser Spalten darstellen!
52. Bestimmen Sie die Gleichung der Ebene, die den Eckpunkt P = [1, 1, 1] des Wurfels[−1, 1]3 ⊂ R3 enthalt, und die senkrecht auf die Raumdiagonale steht, die durchP und das Zentrum des Wurfels geht. Welche lineare Abbildung R3 → R3 drehtP in die x− z-Ebene. Was sind die Koordinaten des gedrehten Punktes (er sei Qgenannt), und wie lautet die Gleichung der gedrehten Ebene?
53. *(ev. gestrichen, falls in der Vorlesung gemacht!)Wenn die Achsenpunkte einer Ebene E im R3 mit a, b bzw. c gegeben sind (d.h. derDurchschnitt der Ebene mit der x, y bzw. z-Achse), wie lautet dann die Gleichungder Ebene im R3 und wie lauten die Gleichunge der Schnittgeraden von E mitder xy, der xz bzw. der yz-Ebene. [Hinweis: Vorsicht bei der Wahl der Buchstabenzur Beschreibung der Ebene!]
54. Es sei M eine linear unabhangige Menge von Vektoren im Km. Man erklare, warumdann jede Teilmenge von M ebenfalls linear unabhangig ist. Weiter zeige man, dassfur jeden Vektor v, der nicht zur linearen Hulle LH(M) gehort, auch die MengeM ′ := M ∪{v} eine linear unabhangige Menge ist. Weiters zeige man, wie man aufdiese Weise eine Basis von Km finden kann, die eine vorgegebene linear unabhangigeMenge M enthalt. [wird vermutlich in der Vorlesung behandelt!]
55. Es sei R eine obere Dreiecksmatrix, mit Diagonaleintragungen die alle von Nullverschieden sind. Man zeige, dass eine solche Matrix (einfach) invertierbar ist.Gleiches gilt fur untere Dreiecksmatrizen bzw. fur Matrizen, die sich als Produktsolcher Dreiecksmatrizen darstellen lassen (vgl. LU-Zerlegung invertierbarer Ma-trizen).
56. Man zeige, dass die Menge der invertierbaren oberen Dreiecksmatrizen mit einerHauptdiagonale, die aus lauter Einsern besteht, eine Gruppe bildet (analog zumFall von derart gebauten 2× 2-Matrizen, siehe fruhere Beispiel). Welche Gruppen-operation ist da gemeint?
57. Man fuhre in OCTAVE (mit variablen Parametern, d.h. statt 1000,5 bzw. 3 ver-wende man andere naturliche Zahlen) folgende Rechnung durch:
for jj=1:1000; A=rand(5,3)*rand(3,5); rk(jj) = rank(A);end;min(rk)
beschreibe das Ergebnis und versuche zu erklaren, was es bedeutet (und warumes auch aus theoretische Sicht wenigstens plausibel ist, welches Ergebnis in derallgemeinen Situation zu erwarten ist!).
11
58. Gegeben zwei Ebenen E1 bzw. E2 im R3 in Parameterform (d.h. jeweils ein PunktP1 bzw. P2, und zwei Vektoren). Wie kann man feststellen, ob diese beiden (affinen)Ebenen identisch sind. Welche Ansatze gibt es (jedenfalls zwei verschiedene Wegesollten skizziert werden) um diese Frage zu beantworten. Teil der Aufgabe istauch zu uberlegen, wie man selbst ein numerisches Beispiel in diesem Kontextzusammenstellen konnte!
59. Gegeben eine Gerade im R3, mit der Parameterdarstellung g : (1, 0, 1) + λ[1; 2; 3].Wie lautet die Gleichung einer Geraden, die durch denselben Punkt P = (1, 0, 1)und gleichzeitig normal zu g steht. Uberlegen Sie einerseits, wie man ohne vielAufwand ein einfaches, konkretes (numerisches) Beispiel bekommen kann, bzw.anderersetis, wie man allgemein (geometrisch) solche Geraden beschreiben kann(ohne es im Detail auszufuhren).
60. Es sei F : x 7→ A ∗ x + b0 eine (affine) Abbildung von Rn nach Rn, wobei A einenicht-singulare (d.h. invertierbare) n× n-Matrix sei. Man zeige, dass F bijektivist und dass die inverse Abbildung ebenfalls eine affine Abbildung ist, d.h. vongleicher Bauart ist.
61. Es sei F eine affine Abbildung wie im vorigen Beispiel. Hat man endliche vielePunkt Pk im Rn, beschrieben durch Ortsvektoren vk, 1 ≤ k ≤ s, so entspricht ihrSchwerpunkt S dem Ortsvektor (1/s)
∑sk=1 vk. Man zeige, dass der Schwerpunkt
der Bildpunkte F (vk) (bzw. F (Pk)) das Bild des Schwerpunktes S ist, d.h. dassgilt: F (S) = (1/s)
∑sk=1 F (vk). (leicht umformuliert am 10.5., hgfei).
62. Man zeige, dass die ganzzahlige Matrix
A =
(2 −1−1 1
)(14)
die interessante Eigenschaft hat, dass A(Z2) = Z2 ist, d.h. das Gitter, das sich alsMenge der Bildpunkte von Z2 unter der Abbildung x 7→ A ∗ x ergibt, ist wiederZ2. Welcher Punkt wird auf [2, 1] bzw. auf [4, 5] abgebildet?
63. Die Spiegelung an der Ebene (durch 0) der Form 2x+ y+ 2z = 0 mit normiertemNormalvektor von der Form ~n = · · · · · · kann beschrieben werden als
~x 7→ ~x− 2〈~x, ~n〉~n. Man stelle die Matrix zu dieser linearen Abbildung auf.
64. Die Matrix
H =1
9
8 −2 −2−2 5 −4−2 −4 5
(15)
ist ebenfalls die Matrix zu einer PROJEKTIONSMATRIX Man finde eineBeschreibung der Ebene, auf die projeziert wird. Hinweis: x gehort zu dieser Ebenegenau dann, wenn (H−Id3)(x) = 0 gilt, d.h. wenn x im Nullraum einer (anderen)Matrix liegt. Alternative Betrachtungsweise: Was passiert mit dem Normalvektor?
12
HINWEIS (bzw. Korrektur): die richtige Angabe, mit dem Text “Spiegelungsma-trix”, hatte mit der Angabe der folgenden Matrix S arbeiten sollen:
S =
7 −4 −4−4 1 −8−4 −8 1
(16)
Hier konnte man genauso fragen: Wie bestimmt man die Spiegelungsebene entwe-der in Form einer Parameterdarstellung oder durch Berechnung des (eines) Nor-malvektors!
Rechnen mit Polynomfunktionen
65. Man zeige, dass die drei Polynomfunktionen (t − 1)2, (t − 1), 1 (verschobene Mo-nome) eine Basis fur den Raum aller quadratischen Polynomfunktionen P2(R)ist, indem man zeigt, dass sich jede quadratische Polynomfunktion in eindeutiger!Weise als Linear- Kombination geschrieben werden kann (und naturlich ist jedemogliche Linearkomb. eine quadratische Pol.Fkt.!). Empfehlung: Gegebenp(x) = ax2 + bx + c suche man Koeffizienten u, v, w im Grundkorper (R oder C),sodass p(x) = u(x− 1)2 + v(x− 1) + w gilt.
66. Aufstellen von Matrizen zu linearen Operationen zwischen verschiedenen Raumenvon Polynomfunktionen (typischerweise quadratisch bzw. kubisch), bzgl. er mono-mialen Basis, d.h. 1, t, t2, t3 oder (MATLAB Ordnung) t2, t, 1.
Typisches Beispiel: Man zeige, dass die Abbildung p(t) 7→ p′(t)(t + 3) bzgl. dieserBasen in P3(R) bzw. P2(R) nicht invertierbar sind, indem man die entspre-chenden Matrizen aufstellt. (Neu: 6.5.2014! Korrektur 10.5.). Was kann man uberp(t) 7→ (p(t) · (t+ 3))′ sagen?
67. Man stelle die Matrix auf, welche die lineare (z.z.!) Abbildung p(t) 7→ p(t − 1)(Rechtsverschiebung des Graphen von p(t)) beschreibt, fur den Raum der kubi-schen Polynomfunktionen P3(R). (wird ev. gestrichen, wenn/weil in der Vorlesunggemacht);
68. Vandermonde Matrix fur quadratische (ev. kubische) Polynome an konkreten Bei-spielen aufstellen, und zwar fur die Werte −1, 0, 1, 2 bzw. 0, 1, 2, 3. Der entspre-chende OCTAVE/MATLAB Befehl lautet >> vander([a,b,c,d]), .
Konkret zeige man, dass fur drei verschiedene komplexe Zahlen z1, z2, z3 die ent-sprechende Vandermonde-Matrix invertierbar ist:
V :=
z21 z1 1z22 z2 1z23 z3 1
(17)
Hinweis: Die Invertierbarkeit der Matrix hangt nicht von der Reihenfolge der Spal-ten ab, d.h. es ist auch moglich, die Spalten zu vertauschen (?warum) bevor man
13
die Gauss-Elimination startet. Genauer: Warum ist eine Matrix genau dann inver-tierbar, wenn eine Variante der Matrix invertierbar ist, die durch Vertauschen vonSpalten entstanden ist. ist.
69. Es sei A ein invertierbare n× n-Matrix, d.h. die Spalten von A seien eine Basisfur Cn und U,V seien zwei unitare Matrizen (d.h. U−1 = U′); Dann ist das zuA ∗ V bzw. U ∗A biorthogonale System von der Form B ∗ V bzw. U ∗B, mitB = (A−1)′. Wie sieht das Biorthogonalsystem zu U ∗A ∗V aus?
70. Ist ein quadratisches Polynom eindeutig durch folgende 3 Werte gegeben :[p(1), p′(2),
∫ 1
0p(t)dt]? Wenn ja, wie kann man das Polynom aus diesen Werten
rekonstruieren (bzw. welche Polynome sind allenfalls nicht rekonstruierbar)?
71. Man stelle fest, welche (lineare) Bedingungen man an den Vektor b stellen muss,damit das Gleichungssystem H∗x = b losbar ist, und wie sieht dann die allgemeineLosung aus? 1 −3 −7 9
0 1 5 −31 −2 −2 6
(18)
72. Eine reelle n× n-Matrix A heißt magisches Quadrat der Ordnung n, wenn gilt:Alle Zeilensumme wie Spaltensummen, ebenso wie die beiden Diagonalsummennehmen den gleichen Wert an. Beispielsweise ist
MAG =
4 9 23 5 78 1 6
(19)
ein (ganzzahliges) magisches Quadrat der Ordnung 3 mit Summe 15. Es sei Vn dieTeilmenge aller magischen Quadrate, und Wn die Teilmenge davon, mit Summe0. Man zeige dass beides Teilraume des Vektorraumes aller n× n-Matrizen sind.
73. (*special) Man bestimme die Dimension der Raume W3 bzw. V3.Hinweis: Man identifiziere jede 3 × 3-Matrix mit dem entspechenden Vektor inR9 (in “naturlicher Reihenfolge, also [a1,1, a2,1, a3,1, a1,2, a2,2, a3,2, a1,3, a2,3, a3,3] undschreibe die entsprechenden Bedingungen an quadratische Matrizen in der Formeines Gleichungssystems. Es ist durchaus erlaubt, OCTAVE zu verwenden, um kon-krete Rechnungen zu realisieren. Es muss nur beschrieben werden, welche Martrixwie verwendet wurde und was dabei herauskam!).
74. Man zeige, dass die Matrix
IV =1
6
−1 3 −3 13 −6 3 0−2 −3 6 −10 6 0 0
(20)
die Inverse der Vandermonde-Matrix zu den Stellen −1, 0, 1, 2 bzgl. der monomia-len Basis M4 := {t3, t2, t1, t0} (wie in MATLAB/OCTAVE ublich), also zu
14

VV = vander(-1:2) == vander([-1,0,1,2]);
75. Man uberprufe stichprobenartig (2 selbst- gewahlte Spalten), dass die Spalten-vektoren genau die Koeffizienten der Lagrange Interpolationspolynome fur diesekonkrete Folge z = −1, 0, 1, 2 sind (diese Faktum ist naturlich kein Zufall undbestatigt, warum die Existenz der Lagrange Int.Polynome die Invertierbarkeit derVandermonde Matrizen garantiert!)
76. Man zeige, dass die Menge (!Korrektur beim zweiten Polynom, war 2x2)
M = {x3 + 2x2 + 7; 2x3 − 6x2 + 4;−x+ 3, x+ 1}
eine Basis fur P3(R) bilden.
77. Man bestimme die Koeffizienten des Polynoms 1 + x + x2 + x3 in dieser Basis.(Auch hier wird es als legitim betrachtet, das Problem auf Papier soweit in Formzu bringen, dass die effektive Berechnung des Ergebnisses in OCTAVE realisiertwird. Wichtig ist aber, dass erklart werden kann, warum und was gerechnet wurde!)
78. Hier geht es um den Vektorraum M2,2 der reellen 2× 2-Matrizen. Man zeige, dassdie folgenden Abbildungen linear sind bzw. bestimme den jeweiligen Kern derangegebenen linearen Abbildungen auf M2,2: Dabei verwenden wir die kompakteMATLAB Schreibweise, d.h. M = [1, 3; 2, 4] entspricht einer zeilenweise Angabe(GeoGebra M: 1,3,2,4); es sei stets A = [a, b; c, d]. Falls T invertierbar ist, bestim-me/beschreibe man T−1:
(1)T (A) = [a, 0; 0, d]; (2)T (A) = [a, c; b, d]; (3)T (A) = [d,−b;−c, a];
79. Gegeben seien von p(t) ∈ P2(R) die Integrale Ik :=∫ k
k−1 p(t)dt, fur k = 0, 1, 2.Ist daraus p(t) berechenbar? Wenn ja: welches Polynom hat die Werte Ik = k furk = 0, 1, 2. (Zusatzpunkt, falls eine entsprechende Frage fur P3(R) beantwortetwerden kann, oder selbst-erstellte Varianten der Aufgabenstellung!)
80. Man beschreibe die Menge aller 3×3-Matrizen A, die mit der zyklischen Verschie-bungsmatrix (Permutationsmatrix P zur zyklischen Permutation 1→ 2→ 3→ 1)vertauschen, d.h. welche A ∗ P = P ∗A erfullen.
Weiters zeige man, dass diese Matrizen einen Teilraum aller 3× 3 Matrizen bildenund bestimme sein Dimension.
15

81. (modifizerte/genauere Version, 26.05.) Die Menge der reellwertigen Stufenfunk-tionen, d.h. der Funktionen, die nur endlich viele reelle Werte auf TeilintervallenIj = [aj, bj) von R annehmen.
Es wird also angenommen, dass es eine endliche Folge von Intervallen Ij gibt so-dass f(x) = αj ∀x ∈ Ij gilt, fur 1 ≤ j ≤ r, fur irgendwelche reellen Werte αj.Mein konnte auch sagen, dass dies die endlichen Linear-Kombinationen der soge-nannten box-car Funktionen sind, bzw. der Indikator-Funktionen der (halboffenen)Intervalle Ij.
Klarerweise ist diese Menge eine Teilmenge des Vektorraums aller reellen Funk-tionen. Verifizieren Sie, dass dies Menge bzgl. der Addition von Funktionen abge-schlossen ist, und klarerweise ebenso bzgl. skalarer Multiplikation, d.h. ein Teil-raum des Vektorraumes aller reellen Funktionen ist. (Zusatzbemerkung: Sogar diepunktweise Multiplikation, definiert
(f · g)(x) := f(x) · g(x)
ist moglich und macht diese Menge zu einer multiplikativen Halbgruppe.)
82. Man stelle die Matrix fur die 2 zusammengesetzten linearen Abbildung P3(R)→P3(R) auf, gegeben durch S1 : p(t)→ [(2t−1)·p(t)]′ bzw. S2 : p(t)→ (2t−1)·p(t)′indem man die Matrizen fur die Teilabbildungen T1 : p(t)→ p′(t) bzw. T2 : p(t)→(2t− 1) · p(t) auftstellt.
83. Eine Moglichkeit, die Matrix einer linearen Abbildung bezuglich einer allgemei-nen Basis direkt (aus der Definition) zu bestimmen, soll am folgenden Beispielillustriert/studiert werden.3
Es sei T : R3 → R3, gegeben durch
T (~x) = [3x1 + x3, x1 + x2,−x1 − x2 + 3x3],
und die Basis B von R3 bestehe aus den Spalten der Matrix B, bestimmen Siemittels Gauss-Elimination [T ]B:
B =
1 1 21 2 11 3 1
(21)
84. Gegeben zwei Vektoren ~u, ~v in R3, von gleicher Lange (o.B.d.A. von Lange 1), findeman eine Matrix, welche ~u in ~v berfuhrt. Wieviele solcher Matrizen gibt es, undwas kann man geometrisch uber all diese Matrizen sagen (d.h. worin unterscheidensie sich (bloß)).
3Das Beispiel soll dazu anregen, die im Skriptum beschriebenen Verfahren entweder in einem anderenLicht zu sehen oder durch alternative Sichtweisen besser zu durchleuchten.
16
85. Gegeben ein Gleichungssystem mit 3 Gleichungen und drei Variablen, vom Rang2 (nehmen wir der Einfachheit halber an, dass die ersten beiden Zeilenvektorennicht Vielfache voneinander sind, dass aber der dritte Zeilenvektor eine Linear-kombination der ersten beiden Zeilen ist). Man zeige dann, dass die rechte Seiteder dritten Gleichung auf eindeutige Weise so festgelegt werden kann, dass dasGleichungssystem konsistent wird (was bedeutet das geometrisch, vgl. Aufg. 50)
Zusatz (freiwillig): Wie kann man diese Aufgabe (wenn die erweiterte Systemma-trix A schon in OCTAVE vorliegt) mit wenig Aufwand in OCTAVE (und einerTeilueberlegung auf Papier) beantworten? Beachte: OCTAVE erlaubt keine unbe-stimmten Ansatz, d.h. nicht die Durchfuhrung der Gauss-Elimination mit Symbo-len! 1 4 7
2 5 83 6 9
(22)
86. Man beschreibe den Differenziationsoperator D : p(t) 7→ p′(t) auf P3(R) auf zweiArten, namlich mit Hilfe der aufsteigenden bzw. absteigenden Monialbases M3 ={1, t, t2, t3} bzw. M 3 = {t3, t2, t1, t0}. Man verifizieren anhand dieses konkretenBeispiels dass diese beiden Matrizen, also [D]M3={1,t,t2,t3} bzw. [D]M 3={t3,t2,t1,t0}durch Konjugation mit der Basis-Wechsel-Matrix ineinander ubergefuhrt werdenkonnen.
87. Man beschreibe die Spiegelung an der 2-ten Mediane in R2 (Graph von x 7→ −x)einerseits direkt in der Standard-Basis, andererseits in der gedrehten Einheitsbasis(45◦ im oder gegen den Uhrzeigersinn!), und verifiziere die allgemeinen Formelnzum Basiswechsel zwischen den beiden Basen an dem konkreten Spezialfall.
88. Man uberlege, wie sich die Vandermonde Matrix fur ein Tripel z1, z2, z3 andert,wenn man einerseits die Reihenfolge der Punkte aendert, oder andererseits von derabsteigenden zur (klassichen) aufsteigenden Monomialbbasis M2 wechselt. Manbeschreibe das durch Matrix-Multiplikation mit geeigneten Matrizen (von linksbzw. rechts).
89. Man berechne die Inverse der Vandermonde-Matrix zur Folge −1, 0, 1 1 −1 10 0 11 1 1
(23)
und vergleiche das Ergebnis mit den Koeffizienten der entsprechenden LagrangeInterpolationspolynome.
90. Man beschreibe den Rechts-Shift Operator auf P2(R): T1 : p(t) 7→ p(t− 1) in derBasis der Lagrange Interpolationspolynome zu den Punkten z = −1, 0, 1.
17

91. Es sei U eine orthogonale 3×3-Matrix (z.B. Rotation um die z-Achse um 45◦), und~n ein Normalvektor einer Ebene E1 durch den Ursprung (z.B. ~n = [2; 1; 2]), und~h = U ∗ ~n, und E2 sei die entsprechende Ebene mit Normalvektor ~h. Wie verhal-ten sich die Matrizen zur Spiegelung an E1 (in Standard-Koordinaten) zu der Be-schreibung der Spiegelung an E2 in U-Koordinaten? (oder waren U′-Koordinatenangebracht?).
92. Man zeige, dass die folgenden 5 Punkte (deren Koordinaten die Spalten der fol-genden Matrix seien) 0.0000 0.0000 2.0000 2.0000 1.0000
0.0000 1.4142 0.0000 1.4142 2.12130.0000 1.4142 0.0000 1.4142 2.1213
(24)
in einer Ebene und bestimme die Flache des von diesen 5 Punkten aufgespann-ten Funfeckes in der (gemeinsamen) Ebene (Hinweis: es kann hilfreich sein, sichdie Situation geometrisch vorzustellen bzw. geometrische Sachverhalte zu Rate zuziehen).
93. Bestimmen Sie die allgemeine Losung des inhomogenen linearen Gleichungssystemsmit erweiterter Systemmatrix
1 5 9 13 72 6 10 14 83 7 11 15 94 8 12 16 10
(25)
Wie gross ist der Losungsraum (ein affiner Teilraum). Was ist der Rang dieserMatrix und wie sieht eine Basis des Losungsraumes des homog. LGLS aus.
94. Zeigen Sie, dass die Matrix H4 denselben Nullraum hat wie ihre Transponierte:
H4 :=
1 5 9 132 6 10 143 7 11 154 8 12 16
(26)
95. (*) Zeigen Sie, dass die Abbildung
p(t) 7→ [p(2), p′(1),
∫ 1
−1p(t)dt]
von P2(R) (quadr. Pol. Fkt.) nach R linear ist.Uberprufe, ob sie invertierbar ist.
96. Gegeben die Information, dass fur eine Matrix A gilt: A ∗ x = [2; 4; 2] hat dieallgemeine Losung x = [2; 0, 0] + c [1; 1; 0] + d[0; 0; 1]. Kann man daraus die Matrixbestimmen? Jedenfalls bestimme man das Format und den Rang der Matrix.
18
97. Es sei T eine lineare Abbildung welche fur eine gegebene Basis B Form hat: untereDreiecks
A =
1 0 0∗ 1 0∗ ∗ 1
(27)
Zeigen Sie, dass dann auch die Matrix Darstellung bzgl. der Basis C := [b3,b2,b1]eine untere Dreiecksmatrix ist. Als Hinweis: die Basis-Wechsel-Matrix ist einfach(?Begrundung): 0 0 1
0 1 01 0 0
(28)
98. Gegeben sei die reduzierte Zeilenstufenform RA der Matrix A, sowie die PivotSpaltenvektoren B, von denen bekannt sei, dass sie die Spaltennummern [1, 2, 4]tragen mogen. Man rekonstruiere die Matrix A:
RA =
1 0 2 0 −10 1 −1 0 20 0 0 1 30 0 0 0 00 0 0 0 0
(29)
B =
3 5 23 1 21 1 52 2 50 1 0
(30)
Was ist der Rang der Matrix und was ist eine Basis des Nullraumes von A (wievielvon der gegebenen Information braucht man, um die letzte Frage zu beantworten)?
99. Es sei B = {b1, · · · ,bn} eine Basis des Vektorraumes V . Und I1 bzw. I2 sei einePartition der Indexmenge {k, 1 ≤ k ≤ n}. Weiters seien Wj die linearen Hullender Teilmengen Mj := {bk | k ∈ Ij}, fur j = 1, 2.
Zeigen Sie, dass jedes Element v ∈ V eindeutig in eine Summe zweier Elementezerlegt der Form v = w1 + w2 zerlegt werden kann, mit wi ∈Wi. Man schreibtin dieser Situation V = W1 ⊕W2 and sagt: V ist die direkte Summe der beidenTeilraume W1 und W2.
100. Seien umgekehrt zwei Teilraume W1 und W2 von V gegeben, mit W1∩W2 = {0}und dim(W1)+dim(W2) = dim(V ). Dann gibt es auch eine Basis B fur V sodassdie beiden Raume auf die angegebene Art (voriges Beispiel) zustande kommen.
19

Material zum Uben oder fur spater
• (Nachdenkaufgabe) Was kann man uber den Rang der Matrizen A ∗B und B ∗A sagen. Ist der Rang immer gleich? Wenn ja, warum, und wenn nein: was istverschiedenen Gegenbeispielen gemeinsam? (vgl. Beispiel 82).
• Uberprufen Sie, dass die Matrix 3 −4 −34 3 −45 0 5
(31)
eine Orthogonalsystem von ganzzahligen Vektoren darstellt (versuchen Sie auch,ein paar ahnlich gebaute alternative Beispiele zu “erfinden”), und bestimmen Siedie Projektion des Punktes [−1, 2, 3] auf die Ebene mit der Gleichung 3x + 4y +5z = 0, und was ist der Abstand von dieser Ebene. Ist der Abstand zur Ebene3x + 4y + 5z = −2 großer? (mittels geometrischer Uberlegung kann man dieseletzte Frage ohne langes Rechnen beantworten!)
• Wie muss eine affine Transformation der Form t 7→ ϕ(t) := α · t + β aussehen,damit sie die folgende Eigenschaft hat:
Fur festes k seien Lj, 0 ≤ j ≤ k die k + 1 Lagrange Interpolationspolynome zurFolge zj = j, 0 ≤ j ≤ k vom Grad k, welche durch die Transformation ϕ∗(p(t)) :=p(ϕ(t)) in die Lagrange Interpolationspolynome fur eine vorgegebene arithmetischeProgression der Form a, a+ b, a+ 2b, · · · , a+ kb darstellen.
Hintergrund: Ziel wird es letztendlich sein, zu verstehen, dass die direkte Berech-nung der Lagrange Interpolations-Polynome fur diese arithmetische Progressiondasselbe Ergebnis gibt wie die zur linearen Abbildung ϕ∗ gehorige (durch eineMatrix beschreibbare) lineare Abbildung, angewendet auf die Koeffizienten derLagrange-Interpolationspolynome.
• (in dieselbe Richtung): Man verifiziere (zunachst anhand eines einfachen, selbst-gewahlten Beispiels, am besten jede/r ein eigenes), dass die inverse Matrix derVandermonde Matrix gerade die Koeffizienten der Lagrange Interpolationspolyno-me sind! (zunachst einmal rein experimentell; auch wenn es allgemein beweisbarist, ist diese Art des Zugangs vielleicht einpragsamer).
20

4.5.2014 and later!
Wir vermutlich in der Vorlesung vorgefuhrt!
• Man schreibe ein kleines MATLAB/OCTAVE Programm, dessen input ein PunktS und eine Ebene, z.B. gegeben durch drei Punkte P,Q,R seien, und als output(Ergebnis) sollen (i) der Abstand des Punktes S von der Ebene, (ii) die Gleichungder Ebene moglichst in ganzzahligen Koordinaten (wenn all Punkte ganzzahligeKoordinaten haben!), und zuletzt der normierte Normalvektor ausgegeben werden!
• Gegeben sie eine nicht auf die x− y-Ebene senkrecht stehende Ebene in R3, durcheine Gleichung der Form
E := {~x ∈ R2 | ax+ by + cx = 0.}
Man bestimme die orthogonale Projektion PE von R3 auf diese Ebene (als Matrix).Sie konnen das Beispiel anhand eines einfachen, selbstgewahlten konkreten Bespielszuerst selbst entwickeln (z.B. [a, b, c] = [2, 1,−2]) und dann daraus das allgemeinePrinzip entwickeln.
Konkret bestimme man die Projektion eines Punktes (beispielsweise P = (4,−1, 3)auf diese Ebene).
• Man zeige: Wenn eine reelle n× n-Matrix P eine orthogonale Projektion definiert,d.h.wenn P ∗ P = P = Pt, dann hat auch Idn − P dieselben zwei Eigenschaften.Welche Interpretation kann man der Projektion (Idn − P) geben, falls n = 3 istund P die orthogonale Projektion auf eine Gerade durch den Ursprung ist, also
~x 7→ 〈~x, ~n〉~n
fur einen normierten Richtungsvektor (der bis auf das Vorzeichen eindeutig ist, aberdas spielt keine Rolle, weil das in der obigen Formel ohnehin zweimal vorkommt,und (−1)(−1) = 1! gilt). Vgl. Beispiel (33).
• (ein Klassiker, AHS, 6.Klasse, Vektorrechnung) Gegeben seien zwei windschiefeGeraden im R3. Man bestimmt ihren Abstand (und zwar genauer: Man bestimmezwei Punkte auf den jeweiligen Geraden, die zueinander diesen Minimalabstandrealisieren). Zusatz: Kann es sein, dass dieses Punktepaar nicht eindeutig bestimmtist (d.h. dass es zwei verschiedene Punktepaare gibt, die beide den Minimalabstandrealisieren).
Konnten Sie das ganze algorithmisch beschrieben, so dass es “im Prinzip” (oderganz konkret) in MATLAB implementierbar ware (oder in GeoGebra [3D])???
• Basis-Wechsel im Rn, Zusammenfassung:Fur den Fall V = Rn sind die Basen gleichbedeutend mit den invertierbarenn× n-Matrizen, genauer, eine Basis ist eine Kollektion von n linear unabhangigenVektoren in Rn, die man in der Form [~b1, · · · , ~bn] in eine Matrix B schreiben kann.Hat man also zwei Basen B und C , so hat man de facto zwei n× n-Matrizen Bund C.
21

Die B-Koordinaten eines Vektors ~v ∈ Rn sind durch den Koeffizientenvektor ~x ∈Rn (das ist sozusagen eine andere Kopie, es ist Kn fur K = R, oder der Zielbereichder Koeffizientenabbildung ΦB : V → Kn!), welcher die Linear-Kombinations-Darstellung von ~v ermoglicht, also fur den gilt (praktisch gesprochen): ~v = B ∗ ~x.In anderen Worten:
[~v]B = ~x = B−1 ∗ ~v
. Analog gilt ~y = [~v]C genau dann wenn ~v = C ∗ ~y gilt.
Somit ist der Ubergang von [~v]B auf [~v]C durch die Matrix H := (C−1 ∗ B)realisiert, denn es gilt offenbar
[~v]C = C−1 ∗ (B ∗ ~x) = H ∗ [~v]B,
oder in anderen Worten
[IdRn ]C←↩B = H = C−1 ∗B.
22

1. Kann man p(t) ∈ P2(R) aus den Werten p′′(a), p′(b), p(c) fur beliebige Stellena, b, c ∈ R rekonstruieren?
2. Die folgende Matrix beschreibt eine Drehstreckung in einer Ebene bzw. mit einerAchse. 1 0 −1
0 1 01 0 1
(32)
Wie findet man die Achse (welche invariant unter dieser linearen Abbildung ist)?
3. UNVERBINDLICH: Man zeige, dass fur jede Nullstelle λ eines Polynoms p(t) vomGrad k gilt: p(t) = (t− λ) · q(t) fur ein Polynom q(t) vom Grad k − 1.Ansatz: p(t) = p(t)− p(λ), termweise aufgeschrieben, kombiniert mit der Tatsachedass man fur jedes j ∈ N tj − λj durch (t− λ) ohne Rest dividieren kann.
4. (ein anspruchsvolleres Beispiel) Durch Experimentieren mit kleinen Dimensionen(n = 2, 3, 4) bzw. durch allgemein Uberlegung stelle man fest, dass fur jede Ord-nung gilt: eine Polynomfunktion p(t) ∈ Pk(R) kann (d.h. eindeutig) aus der folge
von k + 1 Integralen, und zwar∫ j
j−1 p(t)dt, 1 ≤ j ≤ k + 1 rekonstruiert werden! Esgilt sogar noch allgemeiner: es genugt, fur irgendein a ∈ R und irgendein b > 0 dieIntegrale‘ der Form
∫ a+jb
a+(j−1)b p(t)dt, 1 ≤ j ≤ k + 1 zu kennen. Hinweis: Es besteht
eine gewisse Ahnlichkeit zur Situation der Vandermonde Matrix!
23





























