Embed Size (px)
Citation preview
VN5610/VN5610A Ethernet/CAN InterfaceHandbuch
Version 2.2 | Deutsch
Impressum
Vector InformatikGmbHIngersheimer Straße 24D-70499 Stuttgart
Die in diesen Unterlagen enthaltenen Angaben und Daten können ohne vorherige Ankündigung geändert werden. Ohne ausdrücklicheschriftliche Genehmigung der Vector InformatikGmbH darf kein Teil dieser Unterlagen für irgendwelche Zwecke vervielfältigt oder übertra-gen werden, unabhängig davon, auf welche Art und Weise oder mit welchen Mitteln, elektronisch oder mechanisch, dies geschieht. Alletechnischen Angaben, Zeichnungen usw. unterliegen demGesetz zumSchutz desUrheberrechts.
© Copyright 2017, Vector InformatikGmbH. Alle Rechte vorbehalten.
Inhaltsverzeichnis
VN5610/VN5610A Handbuch Version 2.2 3
Inhaltsverzeichnis
1 Einführung 51.1 Zu diesem Handbuch 61.1.1 Zertifizierung 71.1.2 Gewährleistung 71.1.3 Warenzeichen 7
1.2 Wichtige Hinweise 81.2.1 Sicherheits- undGefahrenhinweise 81.2.1.1 Sach- und bestimmungsgemäßer Gebrauch 81.2.1.2 Gefahren 91.2.1.3 Haftungsausschluss 9
2 Gerätebeschreibung 102.1 Lieferumfang 11
2.2 Einführung 11
2.3 Zubehör 12
2.4 Anwendungsbeispiele 132.4.1 Standalone-Medien-Konverter 132.4.2 Transparente Ethernet-Überwachung 132.4.3 Restbussimulation 172.4.4 Diagnostics over IP 182.4.5 Avionics Full Duplex Switched Ethernet 19
2.5 VN5610 202.5.1 Anschlüsse Ethernet-Seite 202.5.2 Anschlüsse USB-Seite 212.5.3 LEDs 232.5.4 Technische Daten 24
2.6 VN5610A 262.6.1 Anschlüsse Ethernet-Seite 262.6.2 Anschlüsse USB-Seite 272.6.3 LEDs 292.6.4 Technische Daten 30
3 Erste Schritte 323.1 Treiberinstallation 33
3.2 Geräte-Konfiguration 35
3.3 Loop-Tests 37
3.4 Ethernet 37
Inhaltsverzeichnis
VN5610/VN5610A Handbuch Version 2.2 4
4 Vector Hardware Configuration 384.1 Allgemeine Informationen 39
4.2 Tool-Beschreibung 404.2.1 Einführung 404.2.2 Baumansicht 41
5 Zeitsynchronisation 445.1 Allgemeine Informationen 45
5.2 Software-Sync 47
5.3 Hardware-Sync 48

VN5610/VN5610A Handbuch Version 2.2 5
1 EinführungIn diesem Kapitel finden Sie die folgenden Informationen:
1.1 Zu diesem Handbuch 61.1.1 Zertifizierung 71.1.2 Gewährleistung 71.1.3 Warenzeichen 7
1.2 Wichtige Hinweise 81.2.1 Sicherheits- undGefahrenhinweise 8
1.1 Zu diesem Handbuch
VN5610/VN5610A Handbuch Version 2.2 6
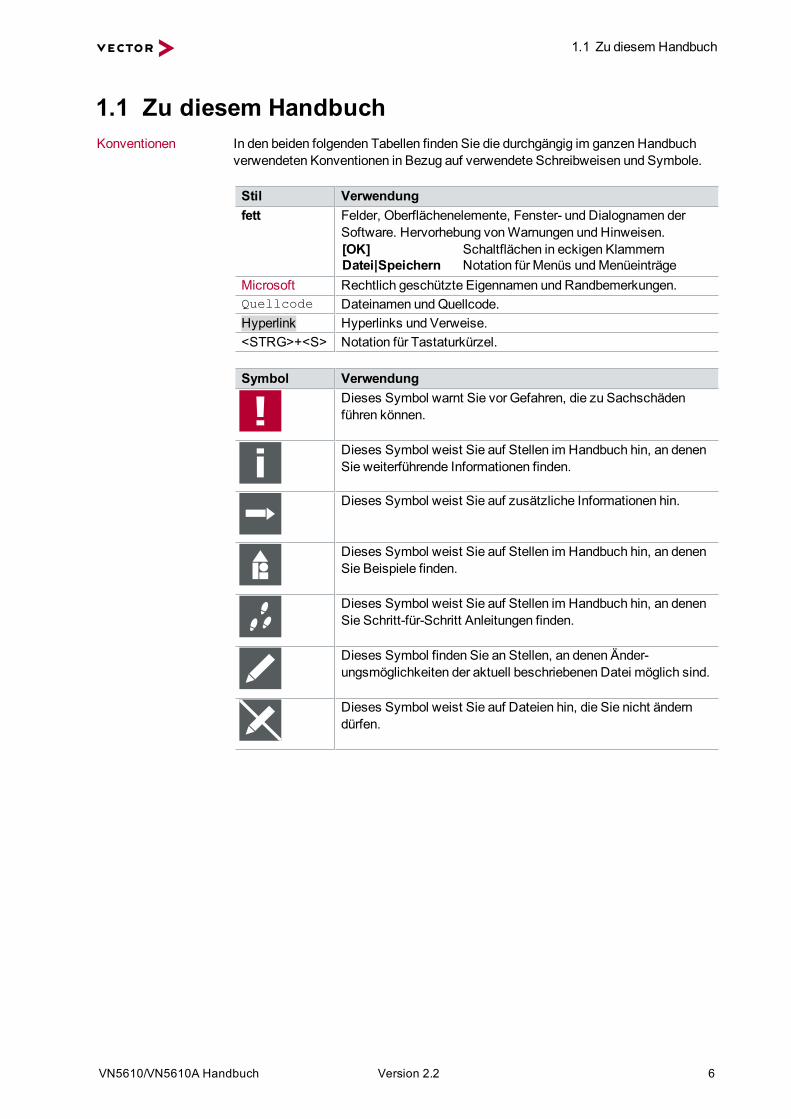
1.1 Zu diesem HandbuchKonventionen In den beiden folgenden Tabellen finden Sie die durchgängig im ganzen Handbuch
verwendeten Konventionen in Bezug auf verwendete Schreibweisen und Symbole.
Stil Verwendungfett Felder, Oberflächenelemente, Fenster- und Dialognamen der
Software. Hervorhebung vonWarnungen und Hinweisen.[OK]Datei|Speichern
Schaltflächen in eckigen KlammernNotation für Menüs undMenüeinträge
Microsoft Rechtlich geschützte Eigennamen und Randbemerkungen.Quellcode Dateinamen undQuellcode.Hyperlink Hyperlinks und Verweise.<STRG>+<S> Notation für Tastaturkürzel.
Symbol VerwendungDieses Symbol warnt Sie vor Gefahren, die zu Sachschädenführen können.
Dieses Symbol weist Sie auf Stellen im Handbuch hin, an denenSie weiterführende Informationen finden.
Dieses Symbol weist Sie auf zusätzliche Informationen hin.
Dieses Symbol weist Sie auf Stellen im Handbuch hin, an denenSie Beispiele finden.
Dieses Symbol weist Sie auf Stellen im Handbuch hin, an denenSie Schritt-für-Schritt Anleitungen finden.
Dieses Symbol finden Sie an Stellen, an denen Änder-ungsmöglichkeiten der aktuell beschriebenen Datei möglich sind.
Dieses Symbol weist Sie auf Dateien hin, die Sie nicht änderndürfen.
1.1 Zu diesem Handbuch
VN5610/VN5610A Handbuch Version 2.2 7
1.1.1 ZertifizierungQualitäts-managementsystem
Vector Informatik GmbH ist gemäß ISO 9001:2008 zertifiziert. Der ISO-Standard istein weltweit anerkannter Qualitätsstandard.
1.1.2 GewährleistungEinschränkung derGewährleistung
Wir behalten uns inhaltliche Änderungen der Dokumentation und der Software ohneAnkündigung vor. Die Vector Informatik GmbH übernimmt keine Haftung für dieRichtigkeit des Inhalts oder für Schäden, die sich aus demGebrauch der Dokumen-tation ergeben. Wir sind jederzeit dankbar für Hinweise auf Fehler oder für Verbes-serungsvorschläge, um Ihnen in Zukunft noch leistungsfähigere Produkte anbieten zukönnen.
1.1.3 WarenzeichenGeschützteWarenzeichen
Alle innerhalb der Dokumentation genannten und ggf. durch Dritte geschütztenMarken- undWarenzeichen unterliegen uneingeschränkt den Bestimmungen desjeweils gültigen Kennzeichenrechts und den Besitzrechten der jeweiligen einge-tragenen Eigentümer. Alle hier bezeichnetenWarenzeichen, Handelsnamen oderFirmennamen sind oder könnenWarenzeichen oder eingetrageneWarenzeichen ihrerjeweiligen Eigentümer sein. Alle Rechte, die hier nicht ausdrücklich gewährt werdensind vorbehalten. Aus dem Fehlen einer expliziten Kennzeichnung der in dieserDokumentation verwendetenWarenzeichen kann nicht geschlossen werden, dassein Name von den Rechten Dritter frei ist.
Windows, Windows 7, Windows 8.1, Windows 10sindWarenzeichen der Microsoft Corporation.

1.2 Wichtige Hinweise
VN5610/VN5610A Handbuch Version 2.2 8
1.2 Wichtige Hinweise
1.2.1 Sicherheits- und Gefahrenhinweise
Achtung!Um Personen- und Sachschäden zu vermeiden, müssen Sie vor der Installation unddem Einsatz dieses Interfaces die nachfolgenden Sicherheits- undGefah-renhinweise lesen und verstehen. Bewahren Sie diese Dokumentation (Handbuch)stets in der Nähe dieses Interfaces auf.
1.2.1.1 Sach- und bestimmungsgemäßer Gebrauch
Achtung!Das Interface ist für die Analyse, die Steuerung sowie für die anderweitige Beein-flussung von Regelsystemen und Steuergeräten bestimmt. Das umfasst unteranderem die BussystemeCAN, LIN, K-Line, MOST, FlexRay, Ethernet, BroadR-Reach oder ARINC 429.
Der Betrieb des Interfaces darf nur im geschlossen Zustand erfolgen. Insbesonderedürfen keine Leiterplatten sichtbar sein. Das Interface ist entsprechend den Anwei-sungen und Beschreibungen dieses Handbuchs einzusetzen. Dabei darf nur die da-für vorgesehene Stromversorgung, wie z. B. USB-powered, Netzteil, und das Origi-nalzubehör von Vector bzw. das von Vector freigegebene Zubehör verwendetwerden.
Das Interface ist ausschließlich für den Einsatz durch geeignetes Personalbestimmt, da der Gebrauch dieses Interfaces zu erheblichen Personen- undSachschäden führen kann. Deshalb dürfen nur solche Personen dieses Interfaceeinsetzen, welche diemöglichen Konsequenzen der Aktionenmit diesem Interfaceverstanden haben, speziell für den Umgangmit diesem Interface, den Bussys-temen und dem zu beeinflussenden System geschult worden sind und ausrei-chende Erfahrung im sicheren Umgangmit dem Interface erlangt haben.
Die notwendigen Kenntnisse zum Einsatz dieses Interfaces können bei Vector überinterne oder externe Seminare undWorkshops erworben werden. Darüber hinaus-gehende und Interface-spezifische Informationen wie z. B. „Known Issues“ sind aufder VectorWebseite unter www.vector.com in der „Vector KnowledgeBase“ verfüg-bar. Bitte informieren Sie sich dort vor dem Betrieb des Interfaces über aktualisierteHinweise.

1.2 Wichtige Hinweise
VN5610/VN5610A Handbuch Version 2.2 9
1.2.1.2 Gefahren
Achtung!Das Interface kann das Verhalten von Regelsystemen und Steuergeräten steuernund in anderweitigerWeise beeinflussen. Insbesondere durch Eingriffe in sicher-heitsrelevante Bereiche (z. B. durch Deaktivierung oder sonstigeManipulation derMotorsteuerung, des Lenk-, Airbag-, oder Bremssystems) und/oder Einsatz inöffentlichen Räumen (z. B. Straßenverkehr, Luftraum) können erhebliche Gefahrenfür Leib, Leben und Eigentum entstehen. Stellen Sie daher in jedem Fall eine gefahr-freie Verwendung sicher. Hierzu gehört unter anderem auch, dass das System, indem das Interface eingesetzt wird, jederzeit, insbesondere bei Auftreten vonFehlern oder Gefahren, in einen sicheren Zustand geführt werden kann (z. B. durchNot-Abschaltung).
Beachten Sie alle sicherheitstechnische Richtlinien und öffentlich-rechtlicheVorschriften, die für den Einsatz des Systems relevant sind. Zur Verminderung vonGefahren sollte das System vor dem Einsatz in öffentlichen Räumen auf einemnicht-öffentlich zugänglichen und für Testfahrten bestimmtenGelände erprobtwerden.
1.2.1.3 Haftungsausschluss
Achtung!Soweit das Interface nicht sach- oder bestimmungsgemäß eingesetzt wird,übernimmt Vector keine Gewährleistung oder Haftung für dadurch verursachteSchäden oder Fehler. Das Gleiche gilt für Schäden oder Fehler, die auf einermangelnden Schulung oder Erfahrung derjenigen Personen beruhen, die das Inter-face einsetzen.
VN5610/VN5610A Handbuch Version 2.2 10
2 GerätebeschreibungIn diesem Kapitel finden Sie die folgenden Informationen:
2.1 Lieferumfang 11
2.2 Einführung 11
2.3 Zubehör 12
2.4 Anwendungsbeispiele 132.4.1 Standalone-Medien-Konverter 132.4.2 Transparente Ethernet-Überwachung 132.4.3 Restbussimulation 172.4.4 Diagnostics over IP 182.4.5 Avionics Full Duplex Switched Ethernet 19
2.5 VN5610 202.5.1 Anschlüsse Ethernet-Seite 202.5.2 Anschlüsse USB-Seite 212.5.3 LEDs 232.5.4 Technische Daten 24
2.6 VN5610A 262.6.1 Anschlüsse Ethernet-Seite 262.6.2 Anschlüsse USB-Seite 272.6.3 LEDs 292.6.4 Technische Daten 30
2.1 Lieferumfang
VN5610/VN5610A Handbuch Version 2.2 11
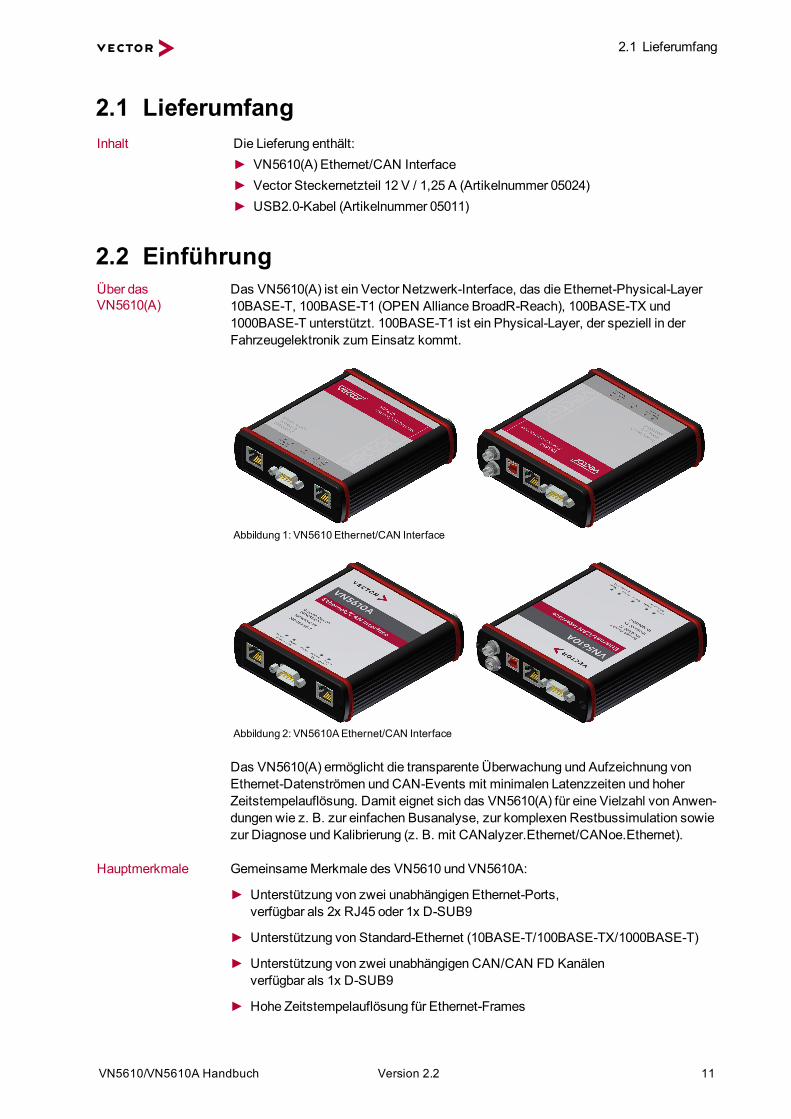
2.1 LieferumfangInhalt Die Lieferung enthält:
VN5610(A) Ethernet/CAN Interface Vector Steckernetzteil 12 V / 1,25 A (Artikelnummer 05024) USB2.0-Kabel (Artikelnummer 05011)
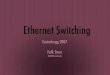
2.2 EinführungÜber dasVN5610(A)
Das VN5610(A) ist ein Vector Netzwerk-Interface, das die Ethernet-Physical-Layer10BASE-T, 100BASE-T1 (OPEN Alliance BroadR-Reach), 100BASE-TX und1000BASE-T unterstützt. 100BASE-T1 ist ein Physical-Layer, der speziell in derFahrzeugelektronik zum Einsatz kommt.
Abbildung 1: VN5610 Ethernet/CAN Interface
Abbildung 2: VN5610AEthernet/CAN Interface
Das VN5610(A) ermöglicht die transparente Überwachung und Aufzeichnung vonEthernet-Datenströmen und CAN-Events mit minimalen Latenzzeiten und hoherZeitstempelauflösung. Damit eignet sich das VN5610(A) für eine Vielzahl von Anwen-dungen wie z. B. zur einfachen Busanalyse, zur komplexen Restbussimulation sowiezur Diagnose und Kalibrierung (z. B. mit CANalyzer.Ethernet/CANoe.Ethernet).
Hauptmerkmale GemeinsameMerkmale des VN5610 und VN5610A:
Unterstützung von zwei unabhängigen Ethernet-Ports,verfügbar als 2x RJ45 oder 1x D-SUB9
Unterstützung von Standard-Ethernet (10BASE-T/100BASE-TX/1000BASE-T)
Unterstützung von zwei unabhängigen CAN/CAN FD Kanälenverfügbar als 1x D-SUB9
Hohe Zeitstempelauflösung für Ethernet-Frames
2.3 Zubehör
VN5610/VN5610A Handbuch Version 2.2 12
Hohe Zeitstempelauflösung für CAN/CAN FD Frames
Software- und Hardware-Zeitsynchronisationvonmehreren Vector Netzwerk-Interfaces
Internes Drei-Wege-Routing (In/Monitor/Out)
Robustheit, Stromversorgung und Temperaturbereichefür Automobil- und Industriezwecke ausgelegt
Unterschiede Unterschiede zwischen VN5610 und VN5610A:
VN5610
Unterstützung des BroadR-Reach Physical Layers
VN5610A
Unterstützung von 100BASE-T1 (OPEN Alliance BroadR-Reach)
Unterstützung eines digitalen Eingangs/Ausgangs (z. B. für DoIP Activation Line)
2.3 ZubehörVerweisInformationen über das verfügbare Zubehör finden Sie im separaten Zubehör-handbuch auf der Vector Driver Disk unter \Documentation\Accessories.
2.4 Anwendungsbeispiele
VN5610/VN5610A Handbuch Version 2.2 13
2.4 Anwendungsbeispiele
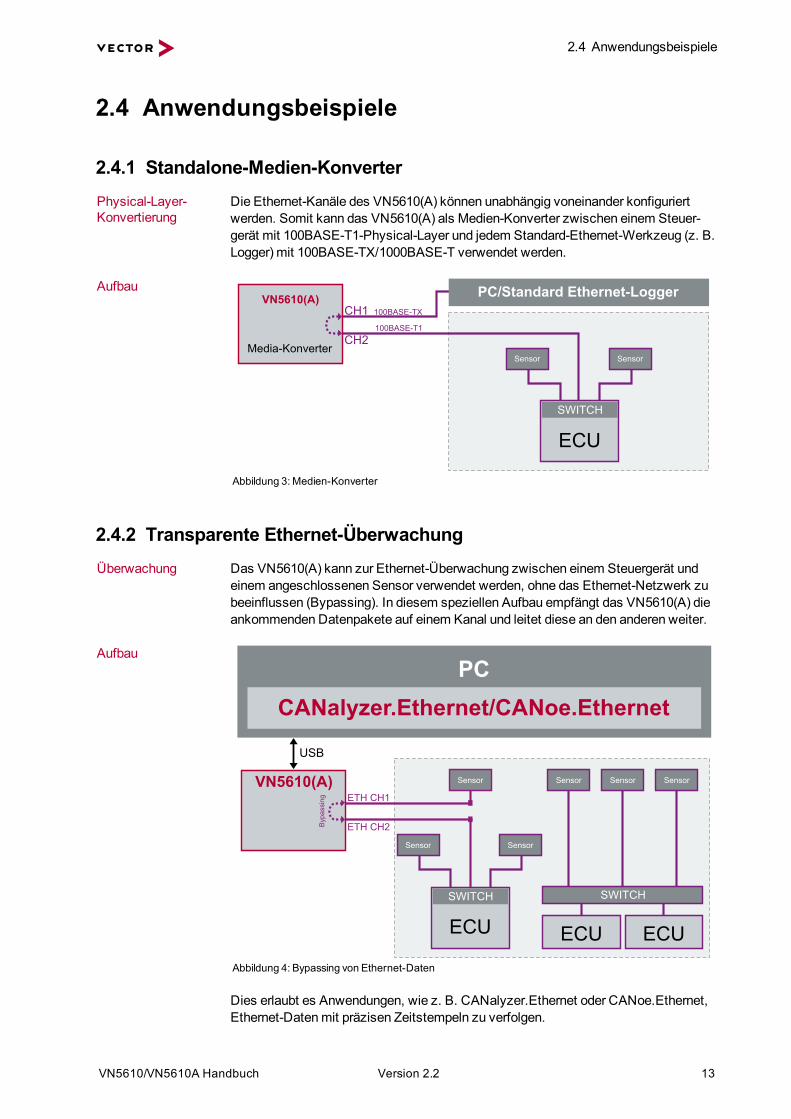
2.4.1 Standalone-Medien-KonverterPhysical-Layer-Konvertierung
Die Ethernet-Kanäle des VN5610(A) können unabhängig voneinander konfiguriertwerden. Somit kann das VN5610(A) als Medien-Konverter zwischen einem Steuer-gerät mit 100BASE-T1-Physical-Layer und jedem Standard-Ethernet-Werkzeug (z. B.Logger) mit 100BASE-TX/1000BASE-T verwendet werden.
Aufbau
CH1VN5610(A)
CH2Media-Konverter
PC/Standard Ethernet-Logger100BASE-TX
100BASE-T1
SensorSensor
ECU
SWITCH
Abbildung 3: Medien-Konverter
2.4.2 Transparente Ethernet-ÜberwachungÜberwachung Das VN5610(A) kann zur Ethernet-Überwachung zwischen einem Steuergerät und
einem angeschlossenen Sensor verwendet werden, ohne das Ethernet-Netzwerk zubeeinflussen (Bypassing). In diesem speziellen Aufbau empfängt das VN5610(A) dieankommenden Datenpakete auf einem Kanal und leitet diese an den anderen weiter.
Aufbau
ETH CH1
PC
USB
CANalyzer.Ethernet/CANoe.Ethernet
VN5610(A)
ETH CH2
Sensor
Byp
assi
ng
Sensor
ECUECU
Sensor Sensor Sensor
SWITCH
Sensor
ECU
SWITCH
Abbildung 4: Bypassing von Ethernet-Daten
Dies erlaubt es Anwendungen, wie z. B. CANalyzer.Ethernet oder CANoe.Ethernet,Ethernet-Datenmit präzisen Zeitstempeln zu verfolgen.
2.4 Anwendungsbeispiele
VN5610/VN5610A Handbuch Version 2.2 14
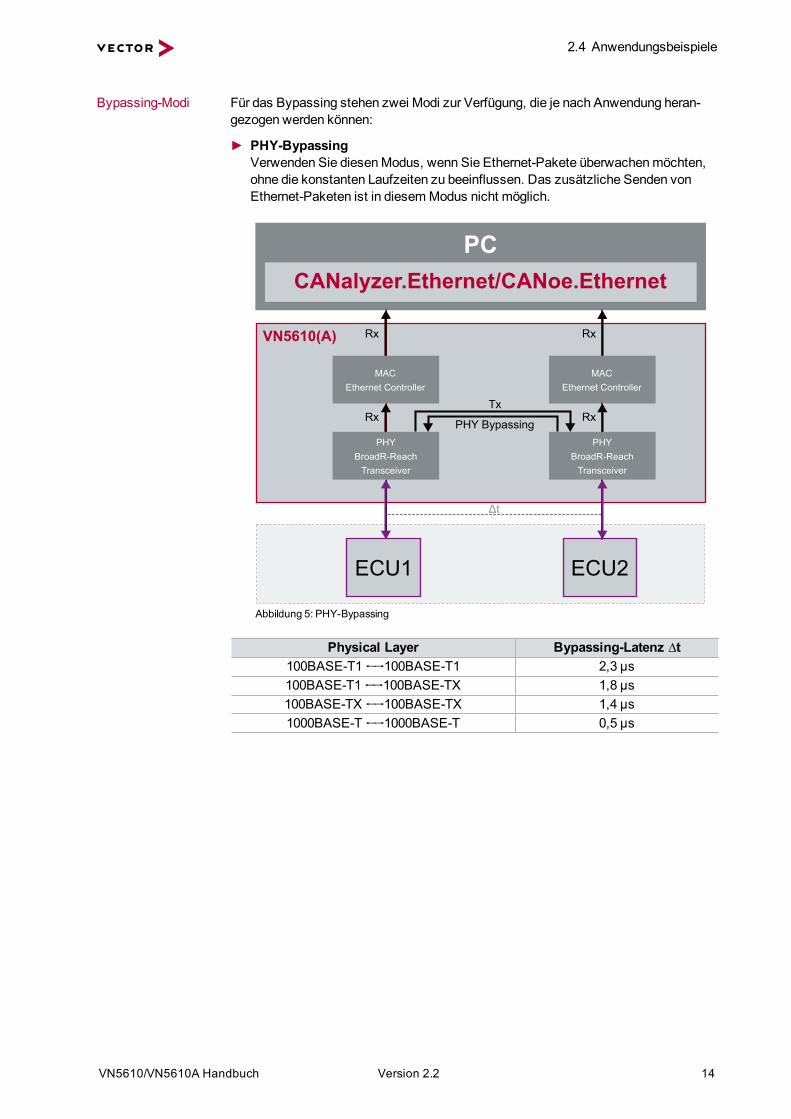
Bypassing-Modi Für das Bypassing stehen zwei Modi zur Verfügung, die je nach Anwendung heran-gezogen werden können:
PHY-BypassingVerwenden Sie diesenModus, wenn Sie Ethernet-Pakete überwachenmöchten,ohne die konstanten Laufzeiten zu beeinflussen. Das zusätzliche Senden vonEthernet-Paketen ist in diesemModus nicht möglich.
VN5610(A)
ECU1
MACEthernet Controller
PHYBroadR-Reach
Transceiver
Rx
MACEthernet Controller
PHYBroadR-Reach
Transceiver
ECU2
RxPHY Bypassing
Δt
PCCANalyzer.Ethernet/CANoe.Ethernet
Rx Rx
Tx
Abbildung 5: PHY-Bypassing
Physical Layer Bypassing-Latenz ∆t100BASE-T1 100BASE-T1 2,3 µs100BASE-T1 100BASE-TX 1,8 µs100BASE-TX 100BASE-TX 1,4 µs1000BASE-T 1000BASE-T 0,5 µs
2.4 Anwendungsbeispiele
VN5610/VN5610A Handbuch Version 2.2 15
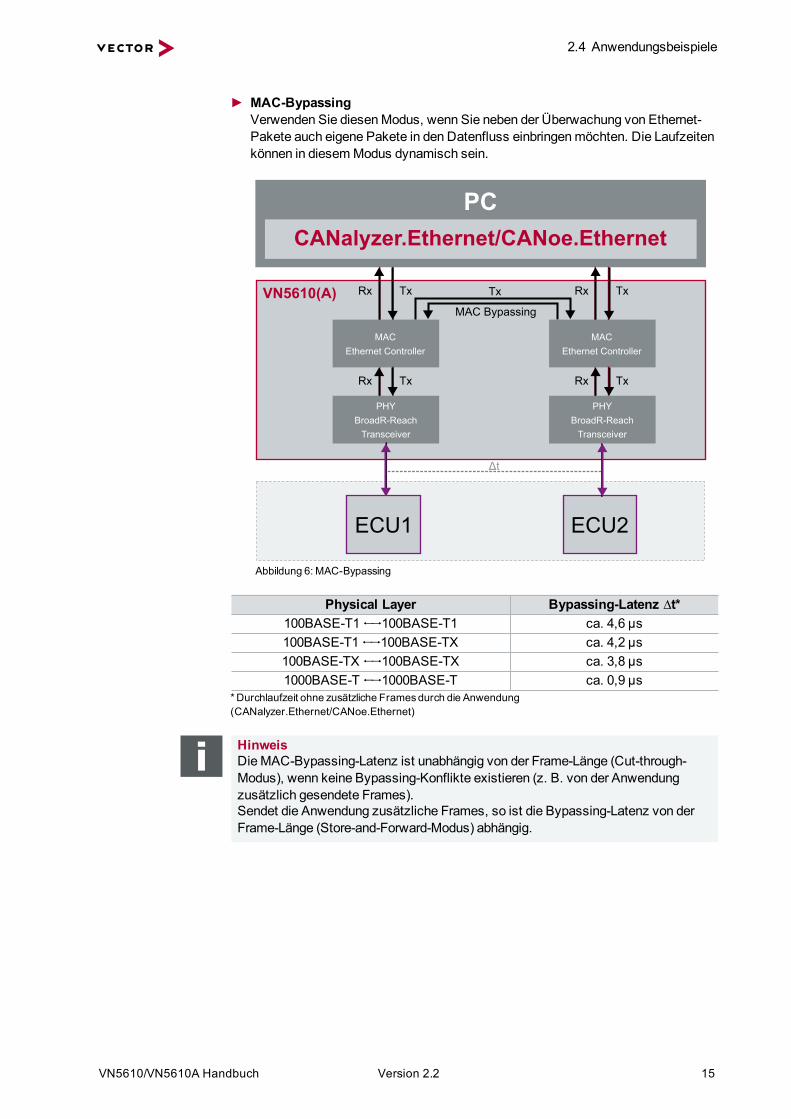
MAC-BypassingVerwenden Sie diesenModus, wenn Sie neben der Überwachung von Ethernet-Pakete auch eigene Pakete in den Datenfluss einbringenmöchten. Die Laufzeitenkönnen in diesemModus dynamisch sein.
VN5610(A)
MACEthernet Controller
PHYBroadR-Reach
Transceiver
Rx
MAC Bypassing
PCCANalyzer.Ethernet/CANoe.Ethernet
Rx Tx
ECU1 ECU2
Δt
Tx
MACEthernet Controller
PHYBroadR-Reach
Transceiver
Rx
Rx Tx
Tx Tx
Abbildung 6: MAC-Bypassing
Physical Layer Bypassing-Latenz ∆t*100BASE-T1 100BASE-T1 ca. 4,6 µs100BASE-T1 100BASE-TX ca. 4,2 µs100BASE-TX 100BASE-TX ca. 3,8 µs1000BASE-T 1000BASE-T ca. 0,9 µs
* Durchlaufzeit ohne zusätzliche Framesdurch die Anwendung(CANalyzer.Ethernet/CANoe.Ethernet)
HinweisDieMAC-Bypassing-Latenz ist unabhängig von der Frame-Länge (Cut-through-Modus), wenn keine Bypassing-Konflikte existieren (z. B. von der Anwendungzusätzlich gesendete Frames).Sendet die Anwendung zusätzliche Frames, so ist die Bypassing-Latenz von derFrame-Länge (Store-and-Forward-Modus) abhängig.
2.4 Anwendungsbeispiele
VN5610/VN5610A Handbuch Version 2.2 16
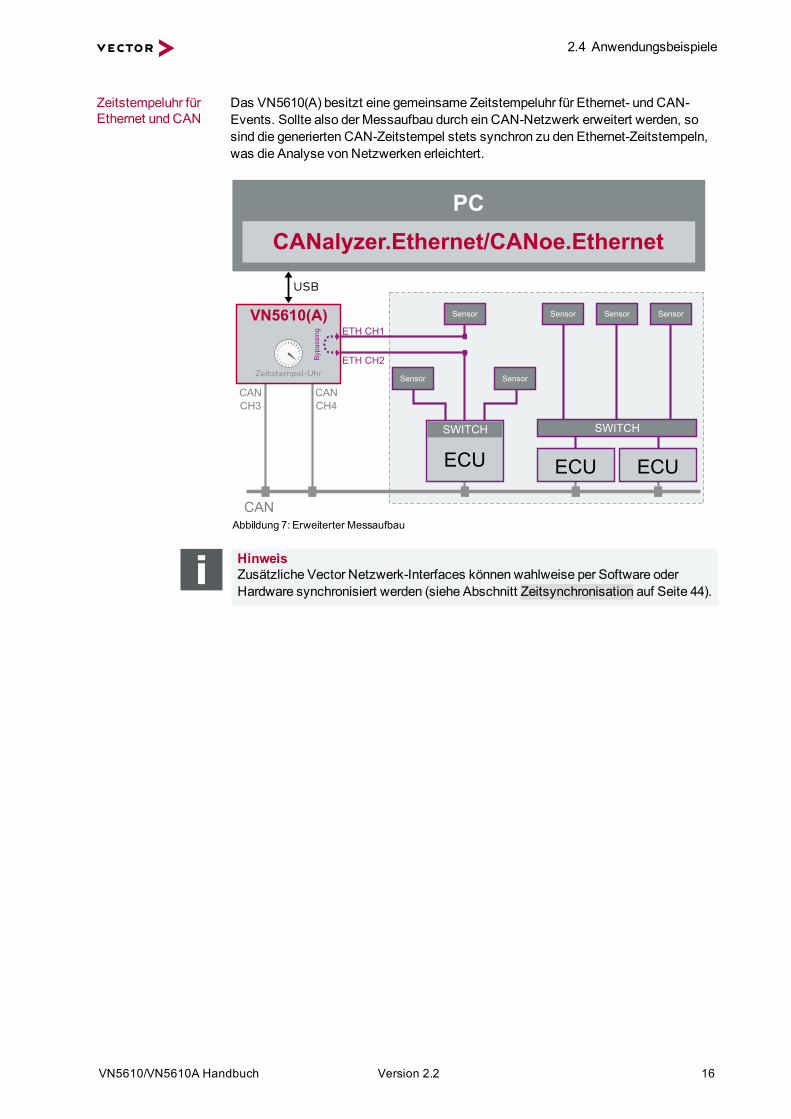
Zeitstempeluhr fürEthernet und CAN
Das VN5610(A) besitzt eine gemeinsame Zeitstempeluhr für Ethernet- und CAN-Events. Sollte also der Messaufbau durch ein CAN-Netzwerk erweitert werden, sosind die generierten CAN-Zeitstempel stets synchron zu den Ethernet-Zeitstempeln,was die Analyse von Netzwerken erleichtert.
ETH CH1
PC
CANalyzer.Ethernet/CANoe.Ethernet
ETH CH2
Sensor
Sensor
Sensor Sensor Sensor
Sensor
CAN
VN5610(A)B
ypas
sing
Zeitstempel-Uhr
USB
CANCH3
CANCH4
ECUECU
SWITCH
ECU
SWITCH
Abbildung 7: Erweiterter Messaufbau
HinweisZusätzliche Vector Netzwerk-Interfaces können wahlweise per Software oderHardware synchronisiert werden (siehe Abschnitt Zeitsynchronisation auf Seite 44).
2.4 Anwendungsbeispiele
VN5610/VN5610A Handbuch Version 2.2 17
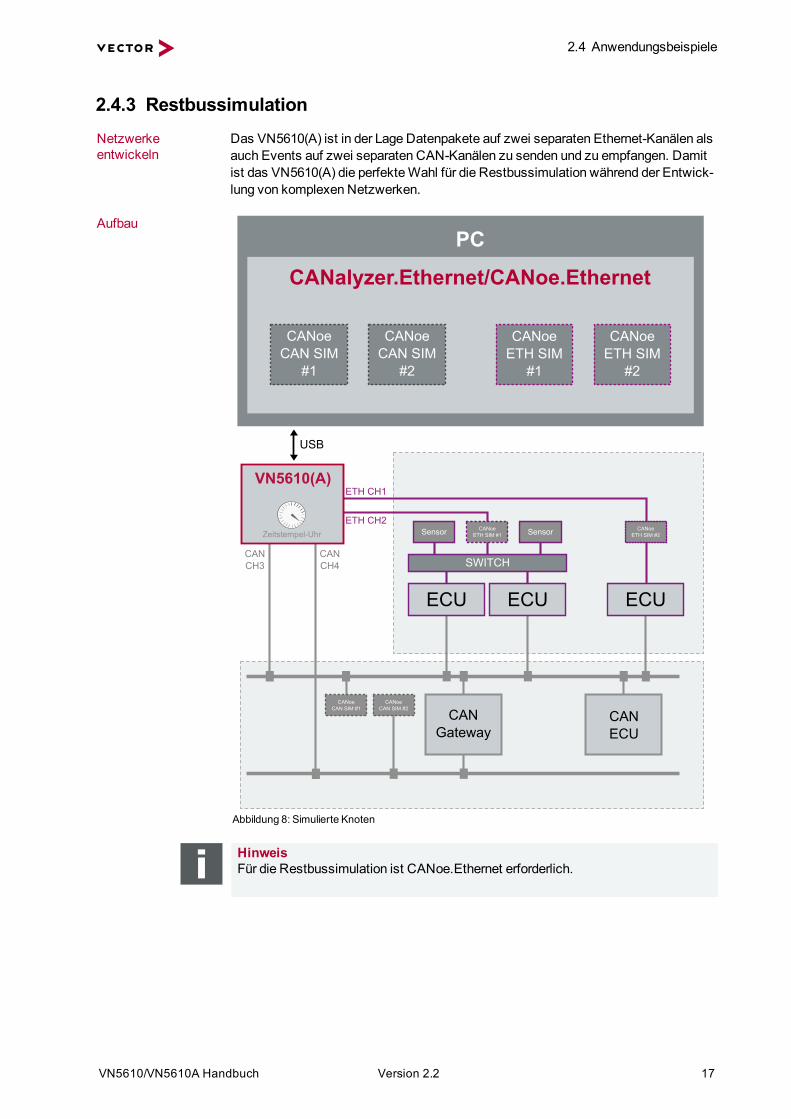
2.4.3 RestbussimulationNetzwerkeentwickeln
Das VN5610(A) ist in der Lage Datenpakete auf zwei separaten Ethernet-Kanälen alsauch Events auf zwei separaten CAN-Kanälen zu senden und zu empfangen. Damitist das VN5610(A) die perfekteWahl für die Restbussimulation während der Entwick-lung von komplexen Netzwerken.
AufbauPC
CANalyzer.Ethernet/CANoe.Ethernet
CANECU
CANCH3
CANCH4
ETH CH1
ETH CH2
VN5610(A)
Zeitstempel-Uhr
ECUECU
Sensor CANoeETH SIM #1 Sensor
SWITCH
CANoe ETH SIM
#1
CANoe ETH SIM
#2
CANoe CAN SIM
#2
CANoe CAN SIM
#1
ECU
CANoeETH SIM #2
CANGateway
CANoeCAN SIM #1
CANoeCAN SIM #2
USB
Abbildung 8: Simulierte Knoten
HinweisFür die Restbussimulation ist CANoe.Ethernet erforderlich.
2.4 Anwendungsbeispiele
VN5610/VN5610A Handbuch Version 2.2 18
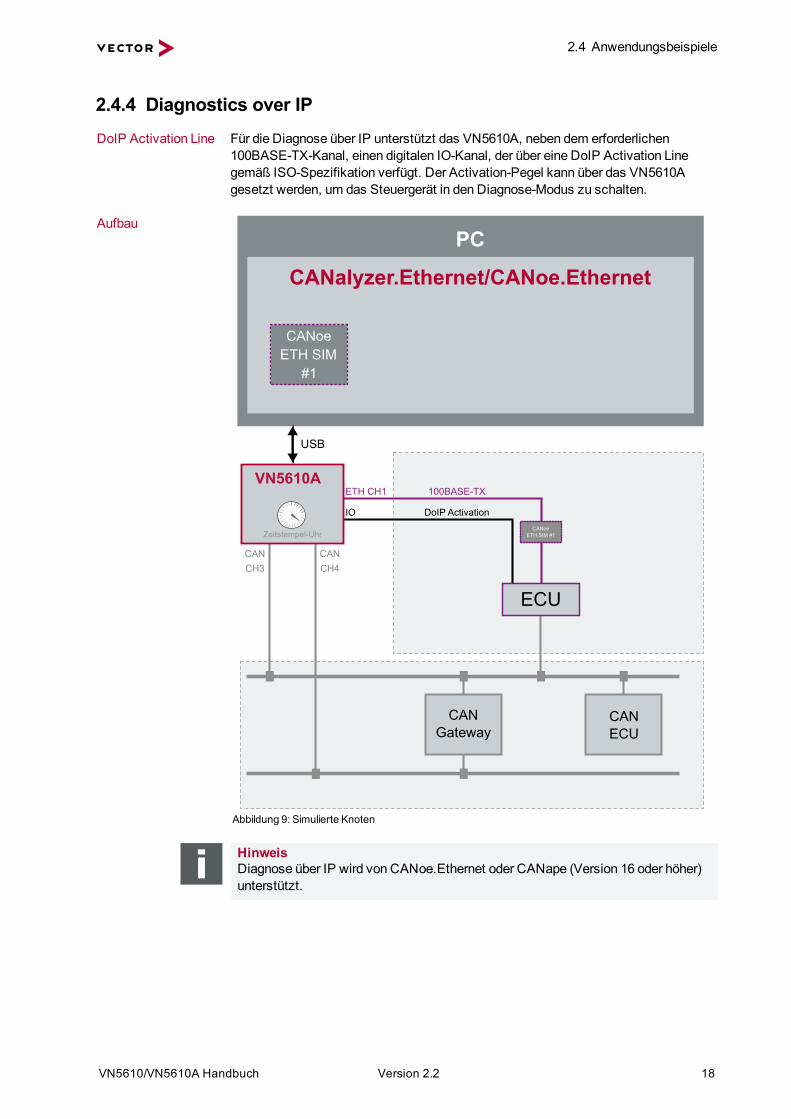
2.4.4 Diagnostics over IPDoIP Activation Line Für die Diagnose über IP unterstützt das VN5610A, neben dem erforderlichen
100BASE-TX-Kanal, einen digitalen IO-Kanal, der über eine DoIP Activation Linegemäß ISO-Spezifikation verfügt. Der Activation-Pegel kann über das VN5610Agesetzt werden, um das Steuergerät in den Diagnose-Modus zu schalten.
AufbauPC
CANalyzer.Ethernet/CANoe.Ethernet
CANECU
CANCH3
CANCH4
ETH CH1VN5610A
Zeitstempel-Uhr
CANoe ETH SIM
#1
ECU
CANoeETH SIM #1
CANGateway
USB
IO
100BASE-TX
DoIP Activation
Abbildung 9: Simulierte Knoten
HinweisDiagnose über IP wird von CANoe.Ethernet oder CANape (Version 16 oder höher)unterstützt.
2.4 Anwendungsbeispiele
VN5610/VN5610A Handbuch Version 2.2 19
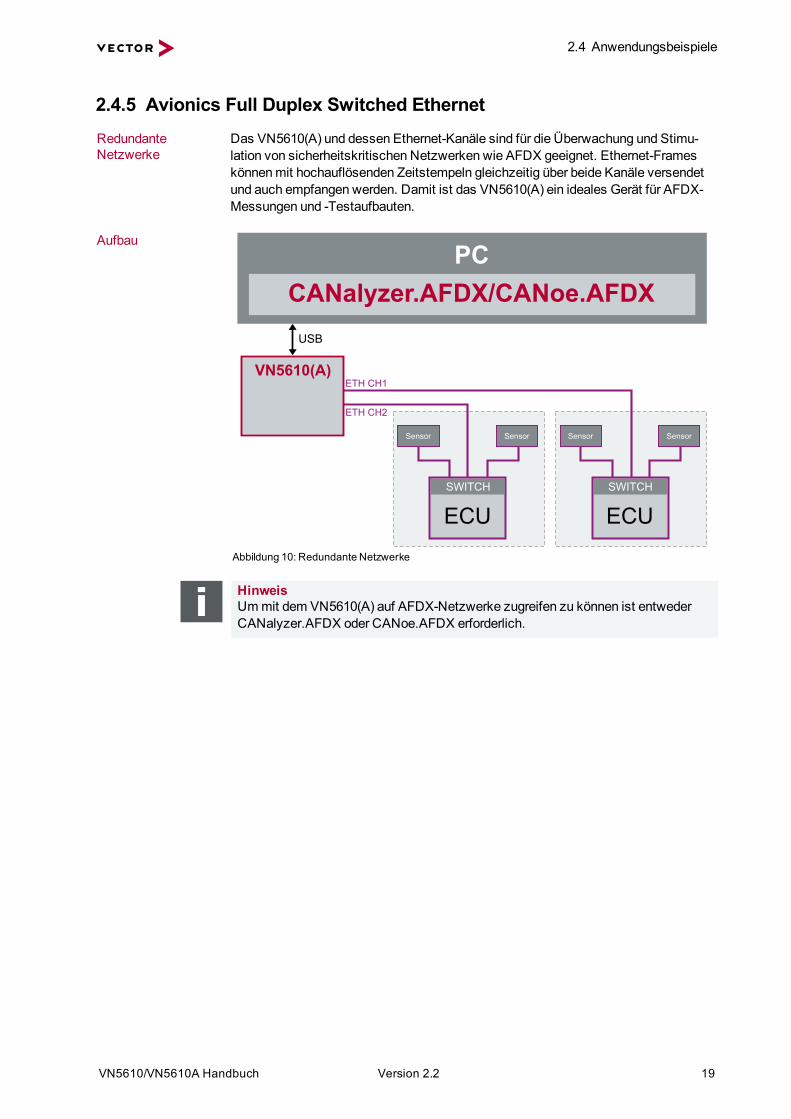
2.4.5 Avionics Full Duplex Switched EthernetRedundanteNetzwerke
Das VN5610(A) und dessen Ethernet-Kanäle sind für die Überwachung und Stimu-lation von sicherheitskritischen Netzwerken wie AFDX geeignet. Ethernet-Frameskönnenmit hochauflösenden Zeitstempeln gleichzeitig über beide Kanäle versendetund auch empfangen werden. Damit ist das VN5610(A) ein ideales Gerät für AFDX-Messungen und -Testaufbauten.
Aufbau
Sensor Sensor
PC
USB
CANalyzer.AFDX/CANoe.AFDX
ETH CH1
ETH CH2
ECU
SWITCH
Sensor Sensor
ECU
SWITCH
VN5610(A)
Abbildung 10: Redundante Netzwerke
HinweisUmmit dem VN5610(A) auf AFDX-Netzwerke zugreifen zu können ist entwederCANalyzer.AFDX oder CANoe.AFDX erforderlich.
2.5 VN5610
VN5610/VN5610A Handbuch Version 2.2 20
2.5 VN5610
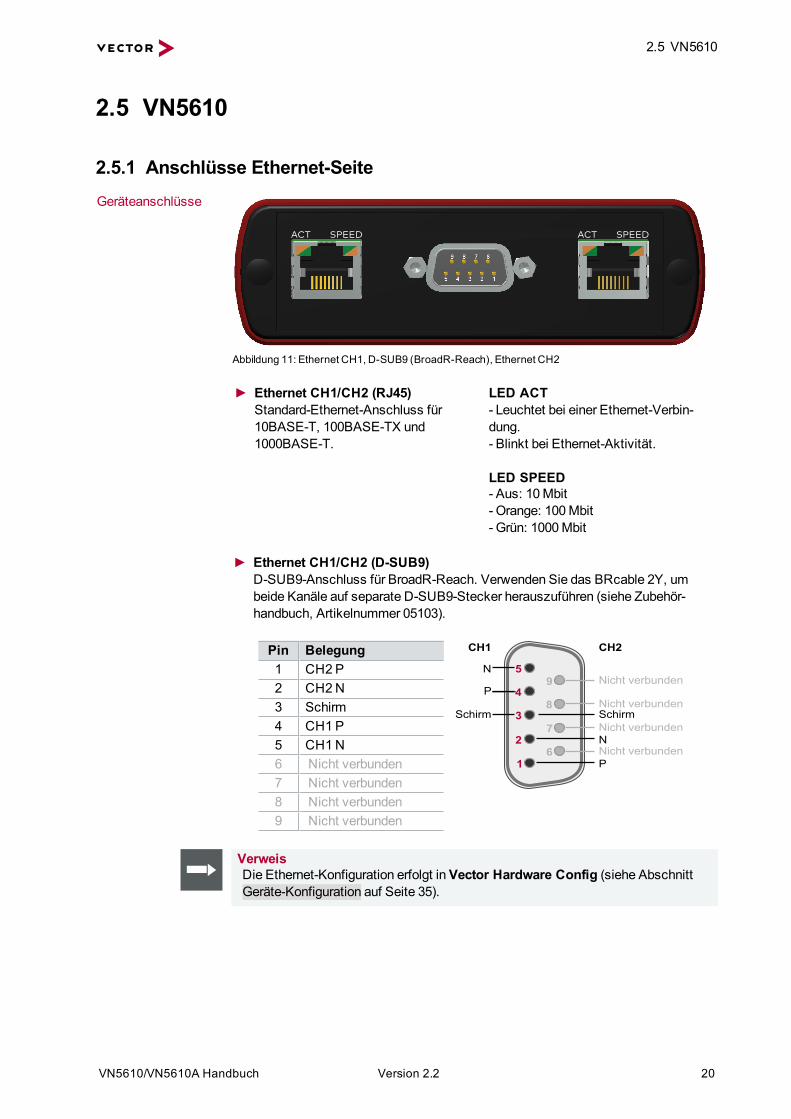
2.5.1 Anschlüsse Ethernet-SeiteGeräteanschlüsse
ACT SPEED ACT SPEED
Abbildung 11: Ethernet CH1, D-SUB9 (BroadR-Reach), Ethernet CH2
Ethernet CH1/CH2 (RJ45)Standard-Ethernet-Anschluss für10BASE-T, 100BASE-TX und1000BASE-T.
LED ACT- Leuchtet bei einer Ethernet-Verbin-dung.- Blinkt bei Ethernet-Aktivität.
LED SPEED- Aus: 10Mbit- Orange: 100Mbit- Grün: 1000Mbit
Ethernet CH1/CH2 (D-SUB9)D-SUB9-Anschluss für BroadR-Reach. Verwenden Sie das BRcable 2Y, umbeide Kanäle auf separate D-SUB9-Stecker herauszuführen (siehe Zubehör-handbuch, Artikelnummer 05103).
Pin Belegung1 CH2 P2 CH2N3 Schirm4 CH1 P5 CH1N6 Nicht verbunden7 Nicht verbunden8 Nicht verbunden9 Nicht verbunden
5
4
3
2
16
7
8
9N
P
Schirm
CH1 CH2
Nicht verbunden
Nicht verbunden
Nicht verbunden
Nicht verbundenP
N
Schirm
VerweisDie Ethernet-Konfiguration erfolgt inVector Hardware Config (siehe AbschnittGeräte-Konfiguration auf Seite 35).
2.5 VN5610
VN5610/VN5610A Handbuch Version 2.2 21
2.5.2 Anschlüsse USB-SeiteGeräteanschlüsse
ACT SPEED
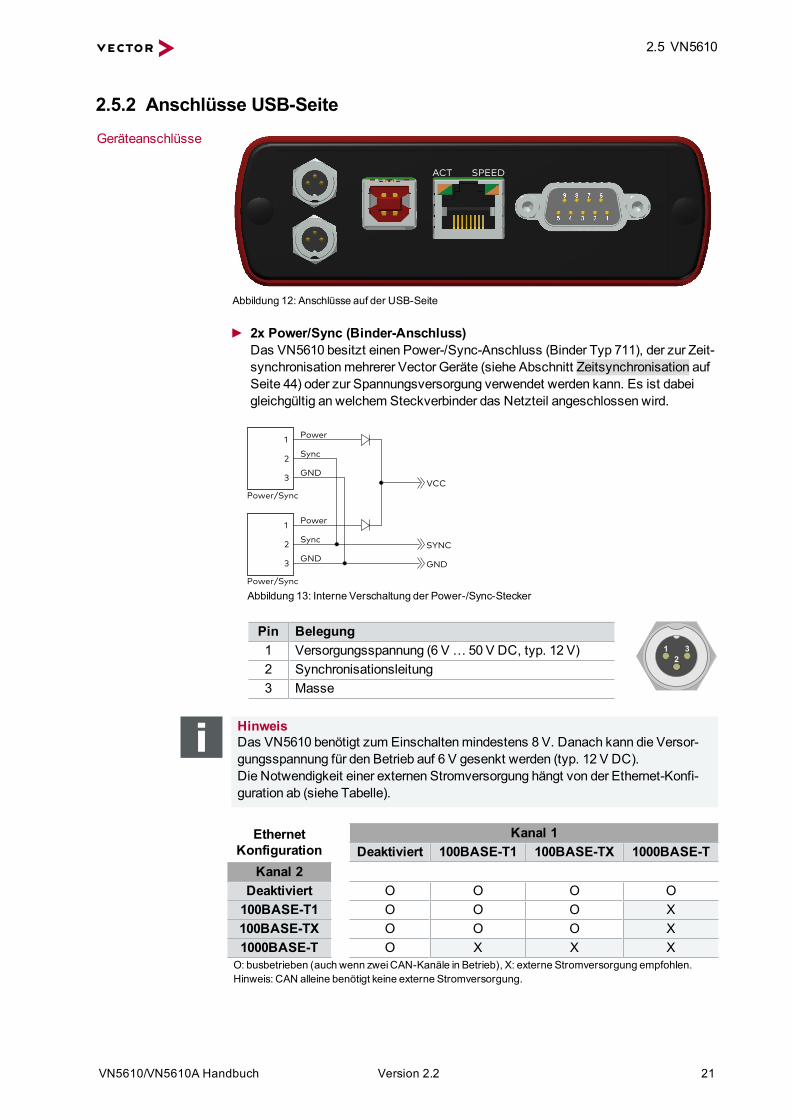
Abbildung 12: Anschlüsse auf der USB-Seite
2x Power/Sync (Binder-Anschluss)Das VN5610 besitzt einen Power-/Sync-Anschluss (Binder Typ 711), der zur Zeit-synchronisationmehrerer Vector Geräte (siehe Abschnitt Zeitsynchronisation aufSeite 44) oder zur Spannungsversorgung verwendet werden kann. Es ist dabeigleichgültig an welchem Steckverbinder das Netzteil angeschlossen wird.
VCC
1
2
3
Power1
2
3
Sync
GND
Sync
GND
Power/Sync
Power/Sync
SYNC
GND
Power
Abbildung 13: Interne Verschaltung der Power-/Sync-Stecker
Pin Belegung1 Versorgungsspannung (6 V…50 V DC, typ. 12 V)2 Synchronisationsleitung3 Masse
312
HinweisDas VN5610 benötigt zum Einschaltenmindestens 8 V. Danach kann die Versor-gungsspannung für den Betrieb auf 6 V gesenkt werden (typ. 12 V DC).Die Notwendigkeit einer externen Stromversorgung hängt von der Ethernet-Konfi-guration ab (siehe Tabelle).
EthernetKonfiguration
Kanal 1Deaktiviert 100BASE-T1 100BASE-TX 1000BASE-T
Kanal 2Deaktiviert O O O O100BASE-T1 O O O X100BASE-TX O O O X1000BASE-T O X X X
O: busbetrieben (auch wenn zweiCAN-Kanäle in Betrieb), X: externe Stromversorgung empfohlen.Hinweis: CAN alleine benötigt keine externe Stromversorgung.
2.5 VN5610
VN5610/VN5610A Handbuch Version 2.2 22
USBVerbinden Sie Ihren PC und das VN5610 über diesen USB-Anschluss, um dasGerät zu installieren und zusammenmit Messapplikationen (CANoe, CANalyzer)nutzen zu können. Verwenden Sie hierzu das mitgelieferte und USB2.0-konformeUSB-Kabel (USB-Verlängerungskabel können Störungen zwischen PC und demGerät verursachen). Betreiben Sie das Gerät direkt am USB-Anschluss des PCsbzw. an einem USB-Hubmit eigener Stromversorgung (self-powered). Das Gerätkann auch über diesen Anschluss betrieben werden.
Host (Ethernet)Host-Anschluss. Für zukünftige Anwendungen reserviert.
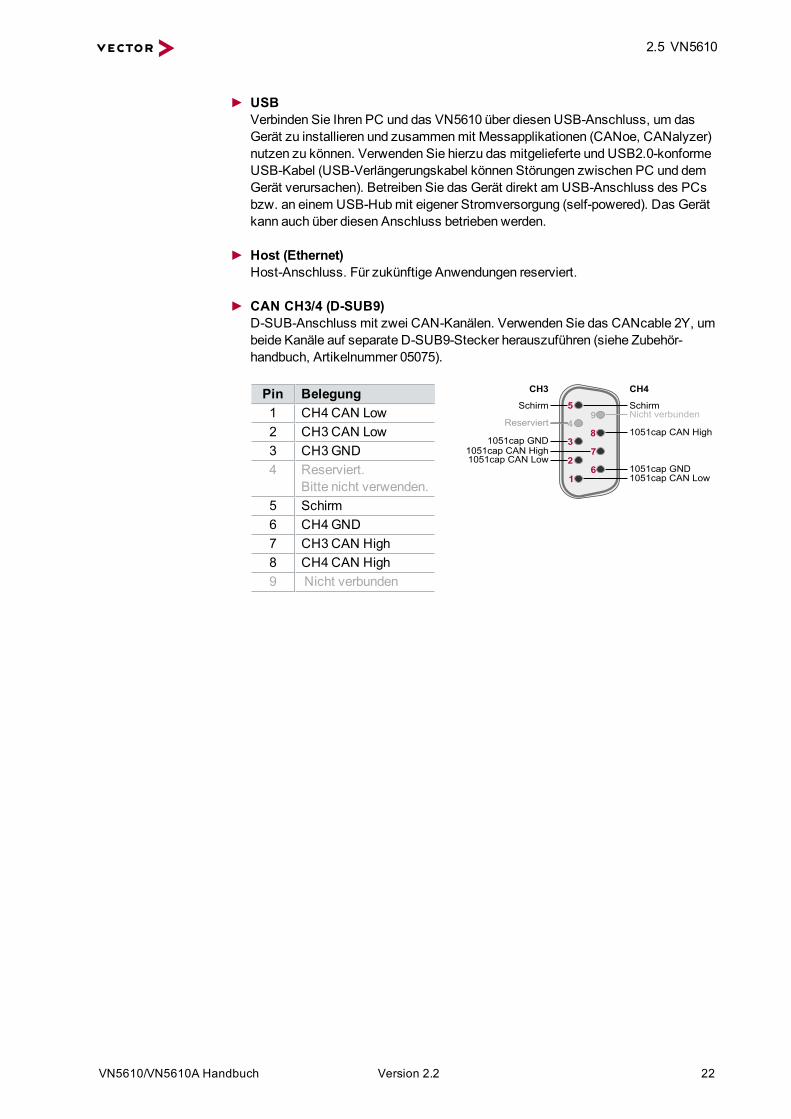
CAN CH3/4 (D-SUB9)D-SUB-Anschluss mit zwei CAN-Kanälen. Verwenden Sie das CANcable 2Y, umbeide Kanäle auf separate D-SUB9-Stecker herauszuführen (siehe Zubehör-handbuch, Artikelnummer 05075).
Pin Belegung1 CH4CAN Low2 CH3CAN Low3 CH3GND4 Reserviert.
Bitte nicht verwenden.5 Schirm6 CH4GND7 CH3CAN High8 CH4CAN High9 Nicht verbunden
5
4
3
2
16
7
8
9Schirm
Reserviert1051cap CAN High
1051cap GND
1051cap CAN Low
1051cap CAN Low1051cap GND
1051cap CAN High
Schirm
CH3 CH4
Nicht verbunden
2.5 VN5610
VN5610/VN5610A Handbuch Version 2.2 23
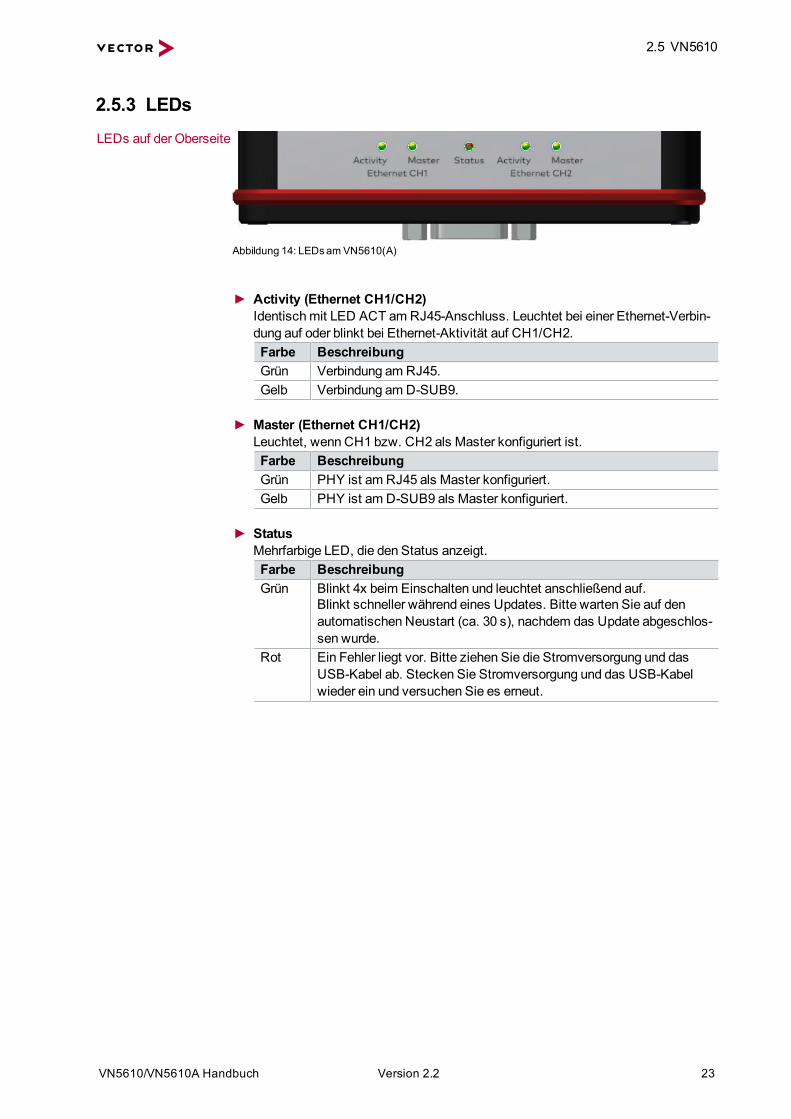
2.5.3 LEDsLEDs auf der Oberseite
Abbildung 14: LEDsamVN5610(A)
Activity (Ethernet CH1/CH2)Identischmit LED ACT am RJ45-Anschluss. Leuchtet bei einer Ethernet-Verbin-dung auf oder blinkt bei Ethernet-Aktivität auf CH1/CH2.Farbe BeschreibungGrün Verbindung am RJ45.Gelb Verbindung am D-SUB9.
Master (Ethernet CH1/CH2)Leuchtet, wenn CH1 bzw. CH2 als Master konfiguriert ist.Farbe BeschreibungGrün PHY ist am RJ45 als Master konfiguriert.Gelb PHY ist am D-SUB9 als Master konfiguriert.
StatusMehrfarbige LED, die den Status anzeigt.Farbe BeschreibungGrün Blinkt 4x beim Einschalten und leuchtet anschließend auf.
Blinkt schneller während eines Updates. Bitte warten Sie auf denautomatischen Neustart (ca. 30 s), nachdem das Update abgeschlos-sen wurde.
Rot Ein Fehler liegt vor. Bitte ziehen Sie die Stromversorgung und dasUSB-Kabel ab. Stecken Sie Stromversorgung und das USB-Kabelwieder ein und versuchen Sie es erneut.
2.5 VN5610
VN5610/VN5610A Handbuch Version 2.2 24
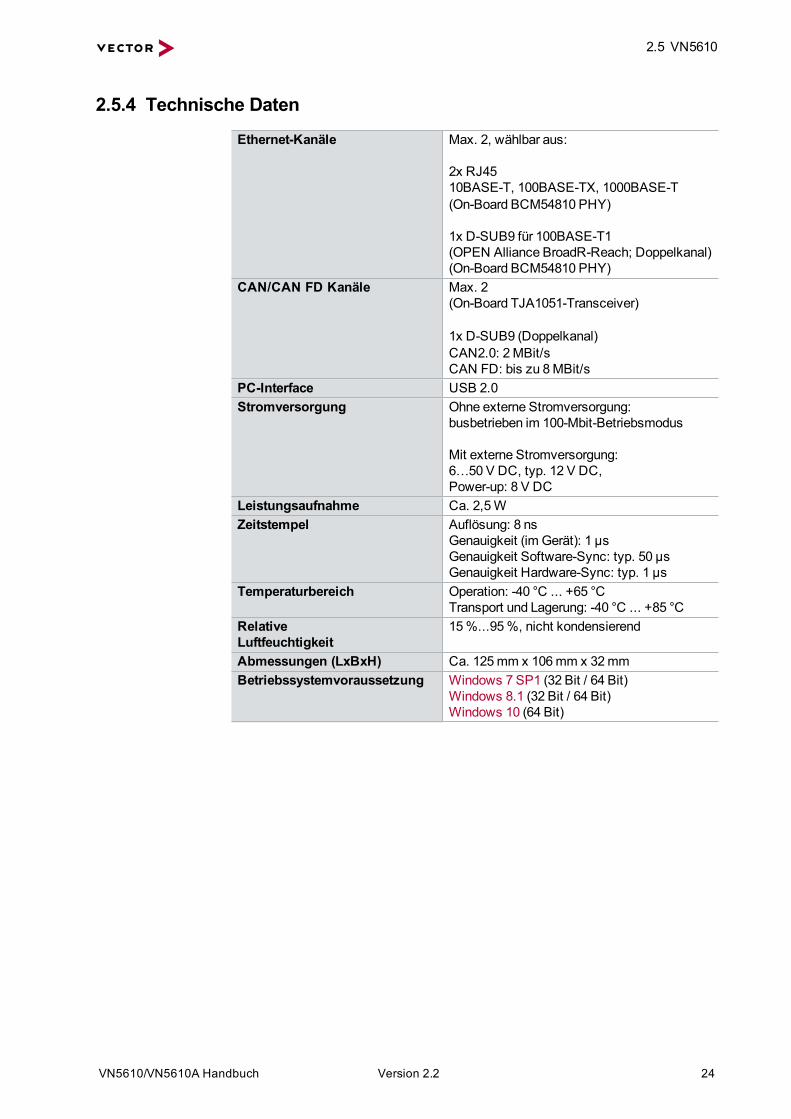
2.5.4 Technische Daten
Ethernet-Kanäle Max. 2, wählbar aus:
2x RJ4510BASE-T, 100BASE-TX, 1000BASE-T(On-Board BCM54810 PHY)
1x D-SUB9 für 100BASE-T1(OPEN Alliance BroadR-Reach; Doppelkanal)(On-Board BCM54810 PHY)
CAN/CAN FD Kanäle Max. 2(On-Board TJA1051-Transceiver)
1x D-SUB9 (Doppelkanal)CAN2.0: 2MBit/sCAN FD: bis zu 8MBit/s
PC-Interface USB 2.0Stromversorgung Ohne externe Stromversorgung:
busbetrieben im 100-Mbit-Betriebsmodus
Mit externe Stromversorgung:6…50 V DC, typ. 12 V DC,Power-up: 8 V DC
Leistungsaufnahme Ca. 2,5WZeitstempel Auflösung: 8 ns
Genauigkeit (im Gerät): 1 µsGenauigkeit Software-Sync: typ. 50 µsGenauigkeit Hardware-Sync: typ. 1 µs
Temperaturbereich Operation: -40 °C ... +65 °CTransport und Lagerung: -40 °C ... +85 °C
RelativeLuftfeuchtigkeit
15%...95%, nicht kondensierend
Abmessungen (LxBxH) Ca. 125mm x 106mm x 32mmBetriebssystemvoraussetzung Windows 7 SP1 (32 Bit / 64 Bit)
Windows 8.1 (32 Bit / 64 Bit)Windows 10 (64 Bit)
2.5 VN5610
VN5610/VN5610A Handbuch Version 2.2 25
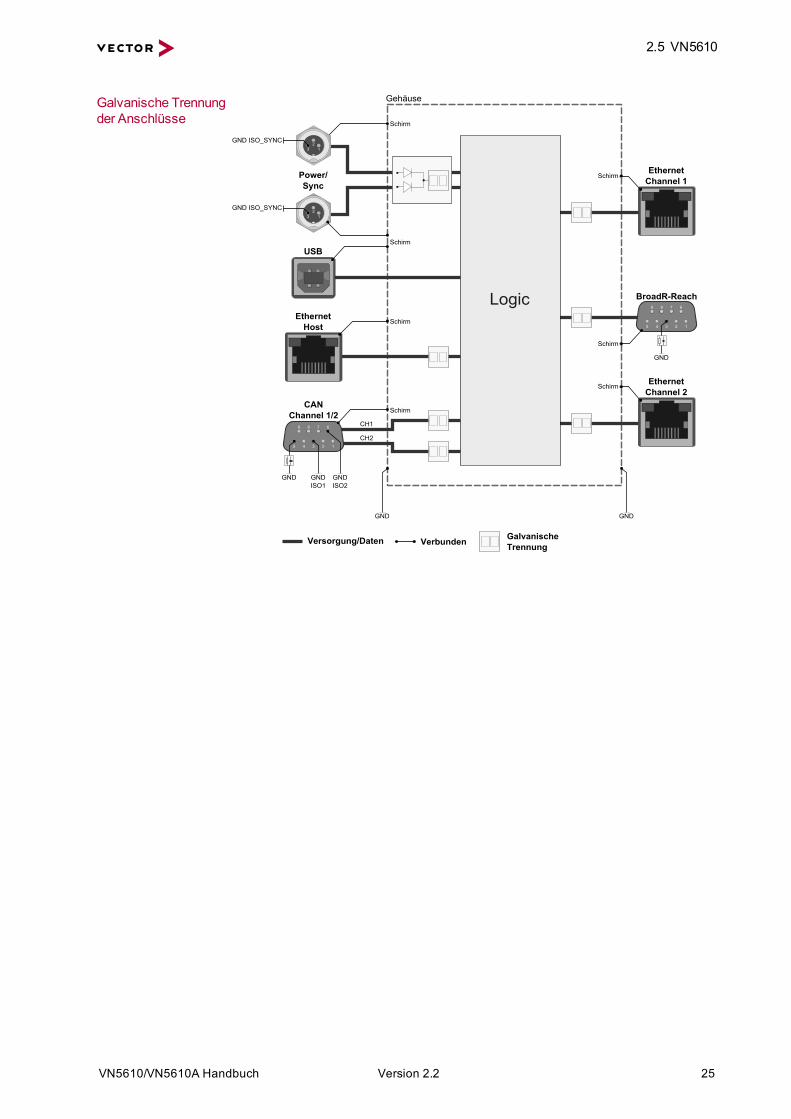
Galvanische Trennungder Anschlüsse
Power/Sync
USB
Gehäuse
EthernetTChannelT1
12345
6789
BroadR-Reach
EthernetTChannelT2
3 12
Logic
12345
6789
CANChannelT1/2
GNDISO1
GNDHISO_SYNC
GND
GND GNDISO2
GND
GND
EthernetTHost
3 12
GNDHISO_SYNC
GalvanischeTrennung
Versorgung/Daten Verbunden
Schirm
Schirm
Schirm
Schirm
Schirm
Schirm
Schirm
CH1
CH2
2.6 VN5610A
VN5610/VN5610A Handbuch Version 2.2 26
2.6 VN5610A
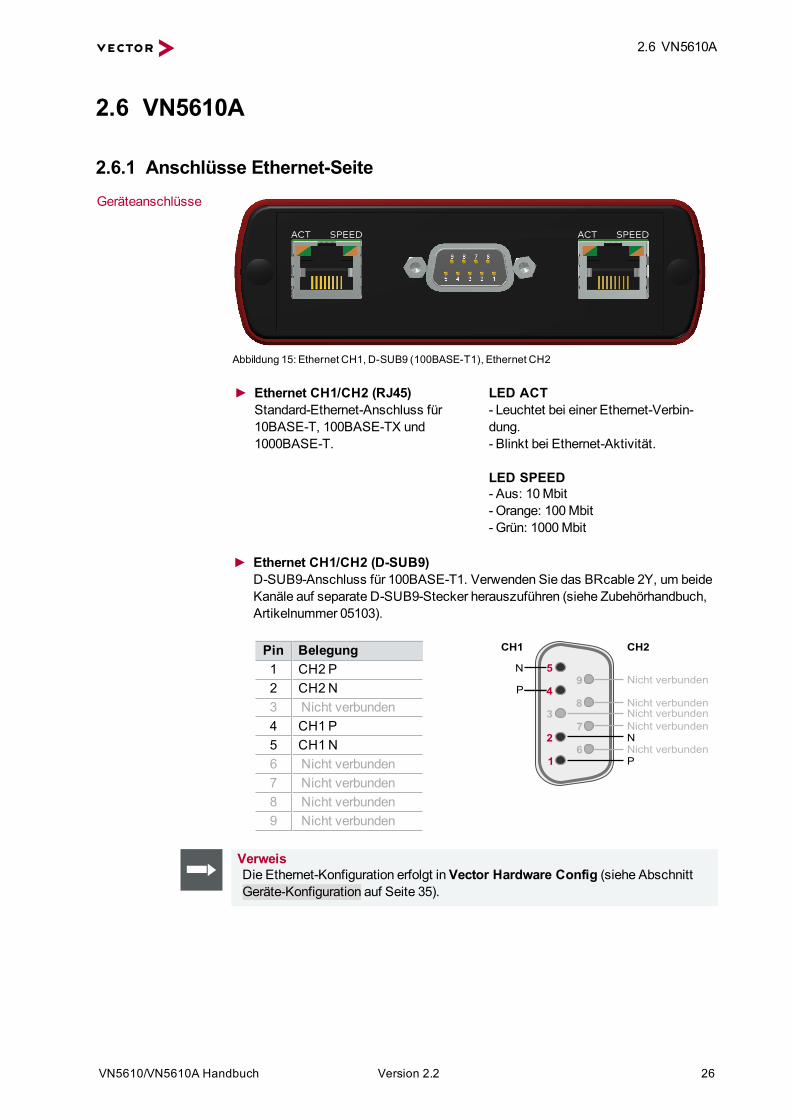
2.6.1 Anschlüsse Ethernet-SeiteGeräteanschlüsse
ACT SPEED ACT SPEED
Abbildung 15: Ethernet CH1, D-SUB9 (100BASE-T1), Ethernet CH2
Ethernet CH1/CH2 (RJ45)Standard-Ethernet-Anschluss für10BASE-T, 100BASE-TX und1000BASE-T.
LED ACT- Leuchtet bei einer Ethernet-Verbin-dung.- Blinkt bei Ethernet-Aktivität.
LED SPEED- Aus: 10Mbit- Orange: 100Mbit- Grün: 1000Mbit
Ethernet CH1/CH2 (D-SUB9)D-SUB9-Anschluss für 100BASE-T1. Verwenden Sie das BRcable 2Y, um beideKanäle auf separate D-SUB9-Stecker herauszuführen (siehe Zubehörhandbuch,Artikelnummer 05103).
Pin Belegung1 CH2 P2 CH2N3 Nicht verbunden4 CH1 P5 CH1N6 Nicht verbunden7 Nicht verbunden8 Nicht verbunden9 Nicht verbunden
5
4
3
2
16
7
8
9N
P
CH1 CH2
Nicht verbunden
P
N
Nicht verbundenNicht verbundenNicht verbunden
Nicht verbunden
VerweisDie Ethernet-Konfiguration erfolgt inVector Hardware Config (siehe AbschnittGeräte-Konfiguration auf Seite 35).
2.6 VN5610A
VN5610/VN5610A Handbuch Version 2.2 27
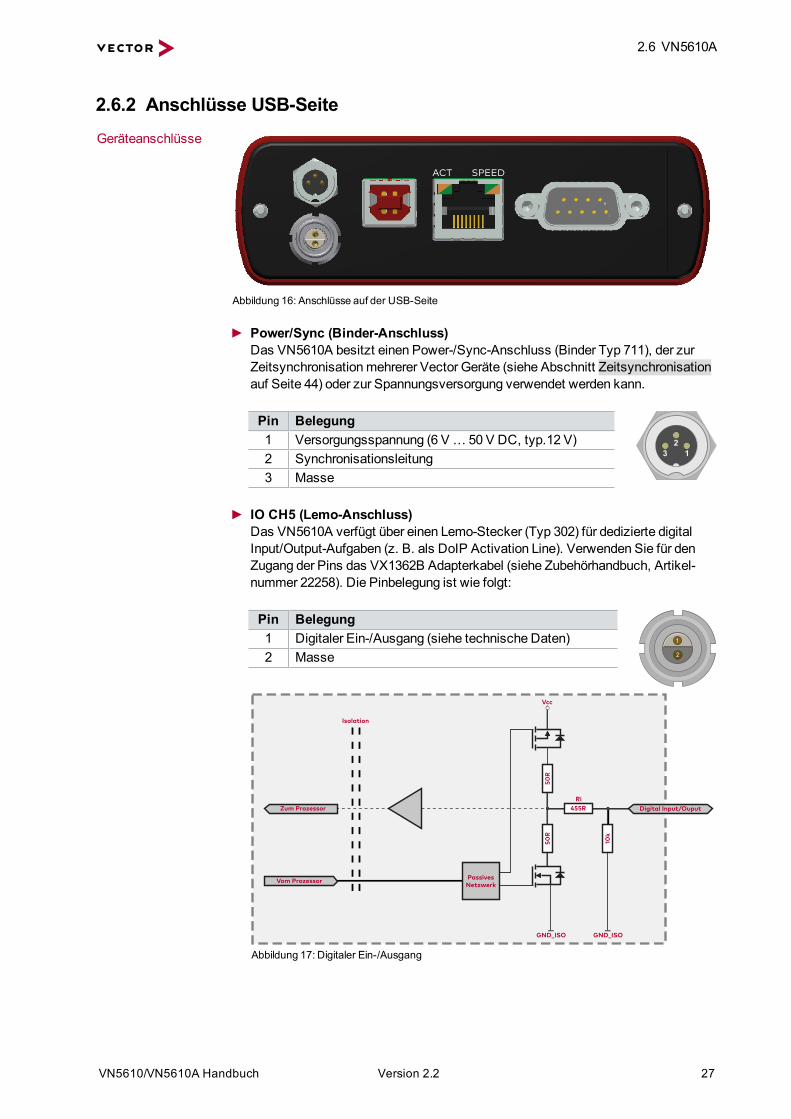
2.6.2 Anschlüsse USB-SeiteGeräteanschlüsse
ACT SPEED
Abbildung 16: Anschlüsse auf der USB-Seite
Power/Sync (Binder-Anschluss)Das VN5610A besitzt einen Power-/Sync-Anschluss (Binder Typ 711), der zurZeitsynchronisationmehrerer Vector Geräte (siehe Abschnitt Zeitsynchronisationauf Seite 44) oder zur Spannungsversorgung verwendet werden kann.
Pin Belegung1 Versorgungsspannung (6 V…50 V DC, typ.12 V)2 Synchronisationsleitung3 Masse
3 12
IO CH5 (Lemo-Anschluss)Das VN5610A verfügt über einen Lemo-Stecker (Typ 302) für dedizierte digitalInput/Output-Aufgaben (z. B. als DoIP Activation Line). Verwenden Sie für denZugang der Pins das VX1362B Adapterkabel (siehe Zubehörhandbuch, Artikel-nummer 22258). Die Pinbelegung ist wie folgt:
Pin Belegung1 Digitaler Ein-/Ausgang (siehe technische Daten)2 Masse
1
2
Digital Input/Ouput
Isolation
455RRi
50R
50R
Vcc
GND_ISO
PassivesNetzwerkVom Prozessor
Zum Prozessor
GND_ISO
10k
Abbildung 17: Digitaler Ein-/Ausgang
2.6 VN5610A
VN5610/VN5610A Handbuch Version 2.2 28
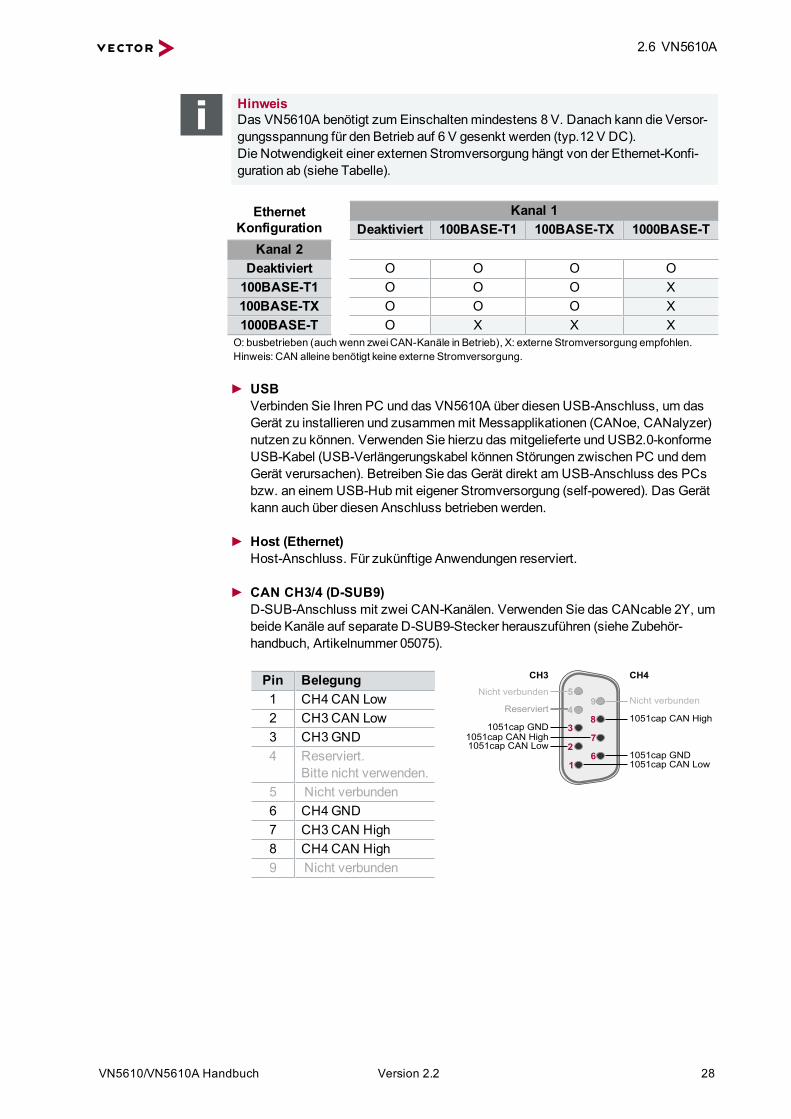
HinweisDas VN5610A benötigt zum Einschaltenmindestens 8 V. Danach kann die Versor-gungsspannung für den Betrieb auf 6 V gesenkt werden (typ.12 V DC).Die Notwendigkeit einer externen Stromversorgung hängt von der Ethernet-Konfi-guration ab (siehe Tabelle).
EthernetKonfiguration
Kanal 1Deaktiviert 100BASE-T1 100BASE-TX 1000BASE-T
Kanal 2Deaktiviert O O O O100BASE-T1 O O O X100BASE-TX O O O X1000BASE-T O X X X
O: busbetrieben (auch wenn zweiCAN-Kanäle in Betrieb), X: externe Stromversorgung empfohlen.Hinweis: CAN alleine benötigt keine externe Stromversorgung.
USBVerbinden Sie Ihren PC und das VN5610A über diesen USB-Anschluss, um dasGerät zu installieren und zusammenmit Messapplikationen (CANoe, CANalyzer)nutzen zu können. Verwenden Sie hierzu das mitgelieferte und USB2.0-konformeUSB-Kabel (USB-Verlängerungskabel können Störungen zwischen PC und demGerät verursachen). Betreiben Sie das Gerät direkt am USB-Anschluss des PCsbzw. an einem USB-Hubmit eigener Stromversorgung (self-powered). Das Gerätkann auch über diesen Anschluss betrieben werden.
Host (Ethernet)Host-Anschluss. Für zukünftige Anwendungen reserviert.
CAN CH3/4 (D-SUB9)D-SUB-Anschluss mit zwei CAN-Kanälen. Verwenden Sie das CANcable 2Y, umbeide Kanäle auf separate D-SUB9-Stecker herauszuführen (siehe Zubehör-handbuch, Artikelnummer 05075).
Pin Belegung1 CH4CAN Low2 CH3CAN Low3 CH3GND4 Reserviert.
Bitte nicht verwenden.5 Nicht verbunden6 CH4GND7 CH3CAN High8 CH4CAN High9 Nicht verbunden
5
4
3
2
16
7
8
9Nicht verbunden
Reserviert1051cap CAN High
1051cap GND
1051cap CAN Low
1051cap CAN Low1051cap GND
1051cap CAN High
CH3 CH4
Nicht verbunden
2.6 VN5610A
VN5610/VN5610A Handbuch Version 2.2 29
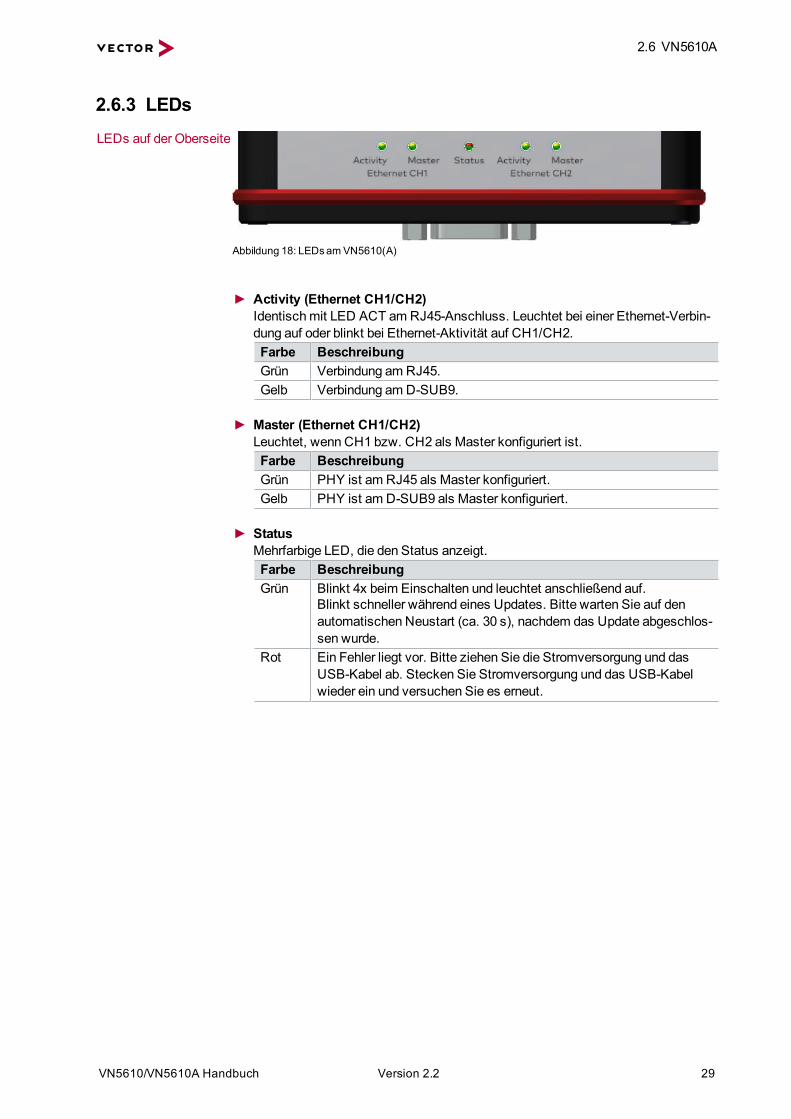
2.6.3 LEDsLEDs auf der Oberseite
Abbildung 18: LEDsamVN5610(A)
Activity (Ethernet CH1/CH2)Identischmit LED ACT am RJ45-Anschluss. Leuchtet bei einer Ethernet-Verbin-dung auf oder blinkt bei Ethernet-Aktivität auf CH1/CH2.Farbe BeschreibungGrün Verbindung am RJ45.Gelb Verbindung am D-SUB9.
Master (Ethernet CH1/CH2)Leuchtet, wenn CH1 bzw. CH2 als Master konfiguriert ist.Farbe BeschreibungGrün PHY ist am RJ45 als Master konfiguriert.Gelb PHY ist am D-SUB9 als Master konfiguriert.
StatusMehrfarbige LED, die den Status anzeigt.Farbe BeschreibungGrün Blinkt 4x beim Einschalten und leuchtet anschließend auf.
Blinkt schneller während eines Updates. Bitte warten Sie auf denautomatischen Neustart (ca. 30 s), nachdem das Update abgeschlos-sen wurde.
Rot Ein Fehler liegt vor. Bitte ziehen Sie die Stromversorgung und dasUSB-Kabel ab. Stecken Sie Stromversorgung und das USB-Kabelwieder ein und versuchen Sie es erneut.
2.6 VN5610A
VN5610/VN5610A Handbuch Version 2.2 30
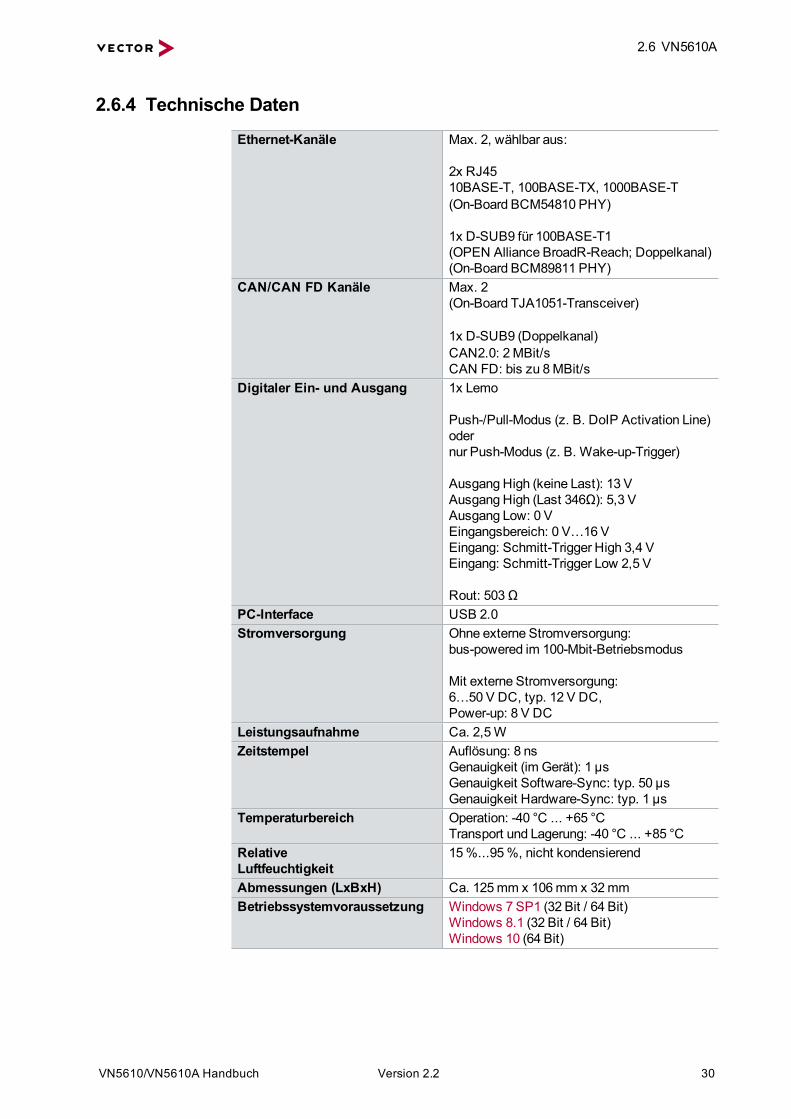
2.6.4 Technische Daten
Ethernet-Kanäle Max. 2, wählbar aus:
2x RJ4510BASE-T, 100BASE-TX, 1000BASE-T(On-Board BCM54810 PHY)
1x D-SUB9 für 100BASE-T1(OPEN Alliance BroadR-Reach; Doppelkanal)(On-Board BCM89811 PHY)
CAN/CAN FD Kanäle Max. 2(On-Board TJA1051-Transceiver)
1x D-SUB9 (Doppelkanal)CAN2.0: 2MBit/sCAN FD: bis zu 8MBit/s
Digitaler Ein- und Ausgang 1x Lemo
Push-/Pull-Modus (z. B. DoIP Activation Line)odernur Push-Modus (z. B. Wake-up-Trigger)
Ausgang High (keine Last): 13 VAusgang High (Last 346Ω): 5,3 VAusgang Low: 0 VEingangsbereich: 0 V…16 VEingang: Schmitt-Trigger High 3,4 VEingang: Schmitt-Trigger Low 2,5 V
Rout: 503 ΩPC-Interface USB 2.0Stromversorgung Ohne externe Stromversorgung:
bus-powered im 100-Mbit-Betriebsmodus
Mit externe Stromversorgung:6…50 V DC, typ. 12 V DC,Power-up: 8 V DC
Leistungsaufnahme Ca. 2,5WZeitstempel Auflösung: 8 ns
Genauigkeit (im Gerät): 1 µsGenauigkeit Software-Sync: typ. 50 µsGenauigkeit Hardware-Sync: typ. 1 µs
Temperaturbereich Operation: -40 °C ... +65 °CTransport und Lagerung: -40 °C ... +85 °C
RelativeLuftfeuchtigkeit
15%...95%, nicht kondensierend
Abmessungen (LxBxH) Ca. 125mm x 106mm x 32mmBetriebssystemvoraussetzung Windows 7 SP1 (32 Bit / 64 Bit)
Windows 8.1 (32 Bit / 64 Bit)Windows 10 (64 Bit)
2.6 VN5610A
VN5610/VN5610A Handbuch Version 2.2 31
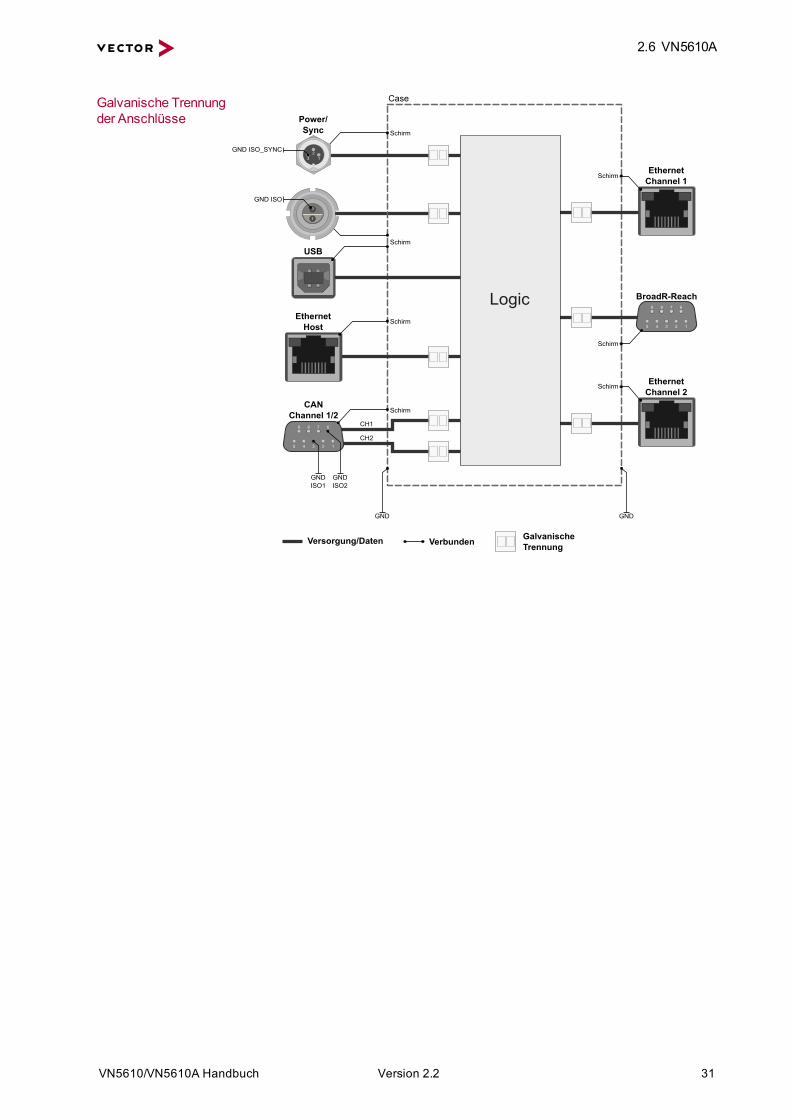
Galvanische Trennungder Anschlüsse Power/
Sync
USB
Case
Ethernet Channel 1
12345
6789
BroadR-Reach
Ethernet Channel 2
Logic
12345
6789
CANChannel 1/2
GNDISO1
GND ISO
GND
GNDISO2
GND
Ethernet Host
3 12
GND ISO_SYNC
GalvanischeTrennung
Versorgung/Daten Verbunden
Schirm
Schirm
Schirm
Schirm
Schirm
Schirm
Schirm
CH1
CH2
1
2
2.6 VN5610A
VN5610/VN5610A Handbuch Version 2.2 32
3 Erste SchritteIn diesem Kapitel finden Sie die folgenden Informationen:
3.1 Treiberinstallation 33
3.2 Geräte-Konfiguration 35
3.3 Loop-Tests 37
3.4 Ethernet 37
3.1 Treiberinstallation
VN5610/VN5610A Handbuch Version 2.2 33
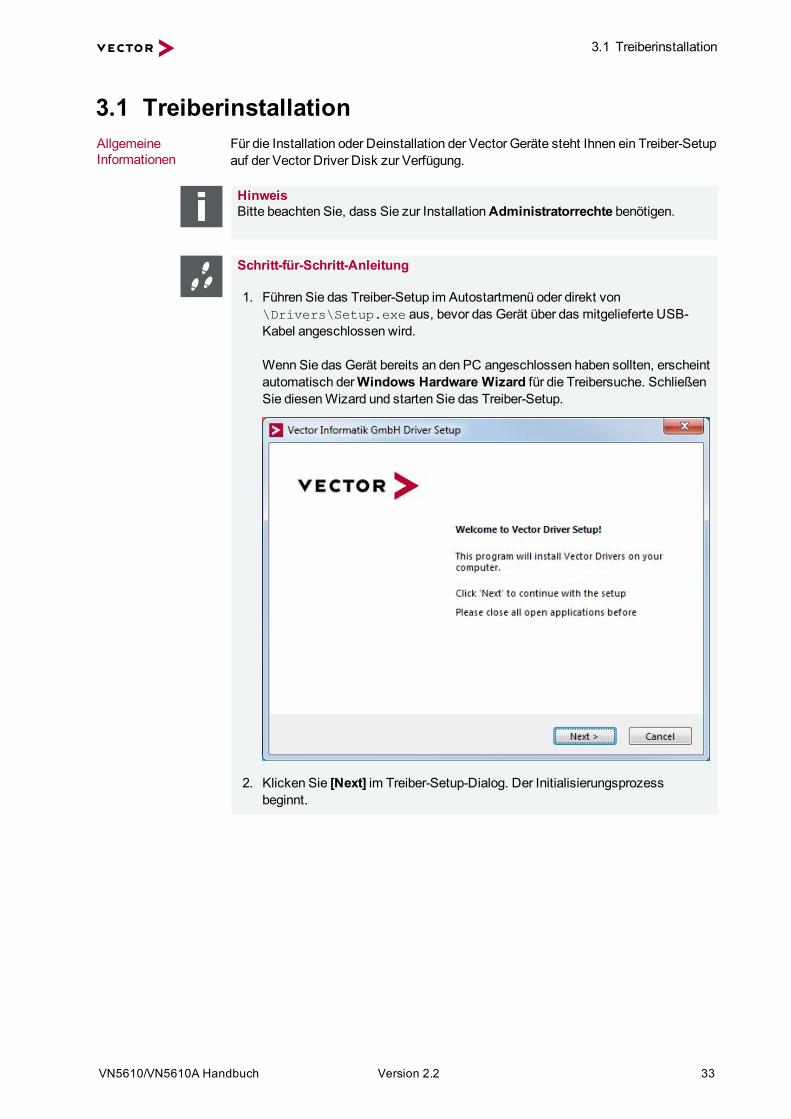
3.1 TreiberinstallationAllgemeineInformationen
Für die Installation oder Deinstallation der Vector Geräte steht Ihnen ein Treiber-Setupauf der Vector Driver Disk zur Verfügung.
HinweisBitte beachten Sie, dass Sie zur InstallationAdministratorrechte benötigen.
Schritt-für-Schritt-Anleitung
1. Führen Sie das Treiber-Setup im Autostartmenü oder direkt von\Drivers\Setup.exe aus, bevor das Gerät über das mitgelieferte USB-Kabel angeschlossen wird.
Wenn Sie das Gerät bereits an den PC angeschlossen haben sollten, erscheintautomatisch derWindows Hardware Wizard für die Treibersuche. SchließenSie diesenWizard und starten Sie das Treiber-Setup.
2. Klicken Sie [Next] im Treiber-Setup-Dialog. Der Initialisierungsprozessbeginnt.
3.1 Treiberinstallation
VN5610/VN5610A Handbuch Version 2.2 34
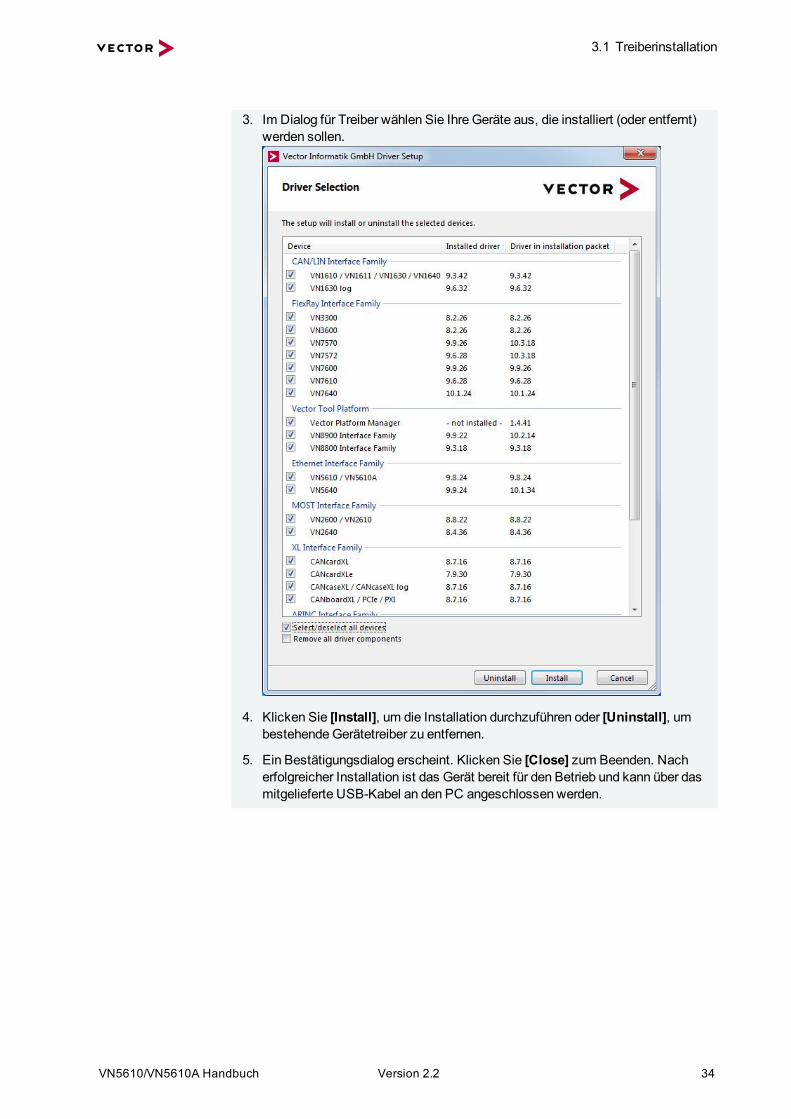
3. Im Dialog für Treiber wählen Sie Ihre Geräte aus, die installiert (oder entfernt)werden sollen.
4. Klicken Sie [Install], um die Installation durchzuführen oder [Uninstall], umbestehendeGerätetreiber zu entfernen.
5. Ein Bestätigungsdialog erscheint. Klicken Sie [Close] zum Beenden. Nacherfolgreicher Installation ist das Gerät bereit für den Betrieb und kann über dasmitgelieferte USB-Kabel an den PC angeschlossen werden.
3.2 Geräte-Konfiguration
VN5610/VN5610A Handbuch Version 2.2 35
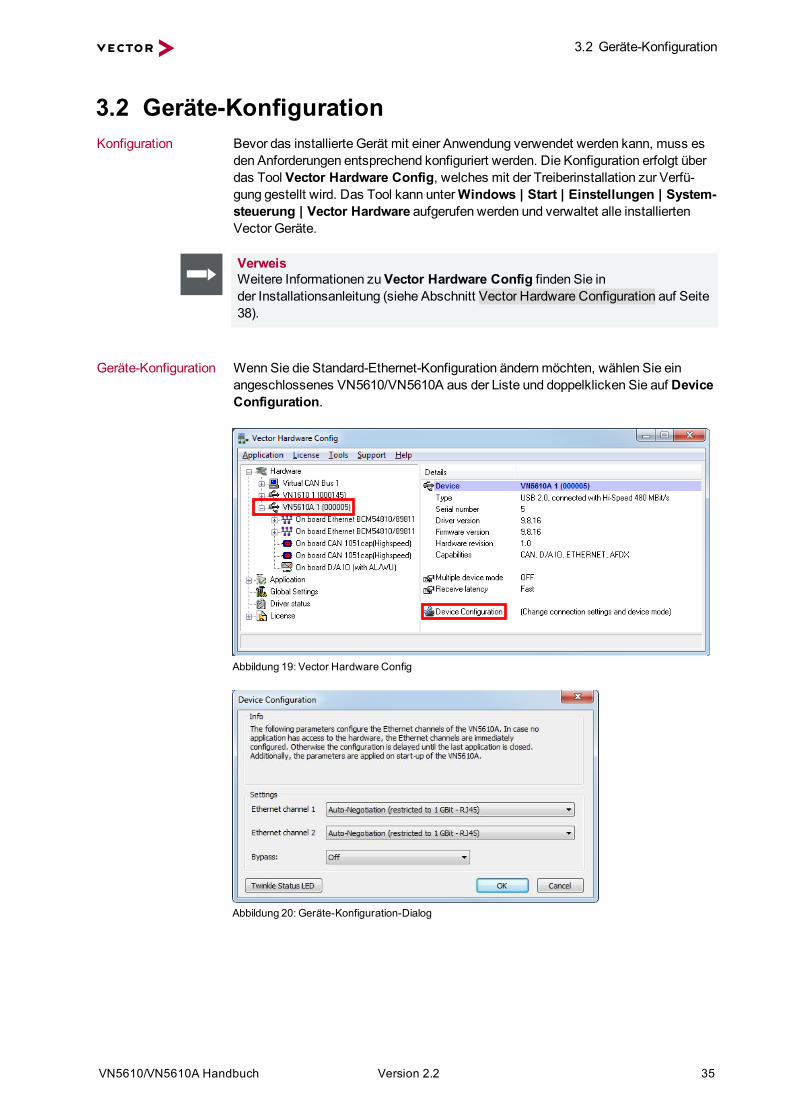
3.2 Geräte-KonfigurationKonfiguration Bevor das installierte Gerät mit einer Anwendung verwendet werden kann, muss es
den Anforderungen entsprechend konfiguriert werden. Die Konfiguration erfolgt überdas Tool Vector Hardware Config, welches mit der Treiberinstallation zur Verfü-gung gestellt wird. Das Tool kann unterWindows | Start | Einstellungen | System-steuerung | Vector Hardware aufgerufen werden und verwaltet alle installiertenVector Geräte.
VerweisWeitere Informationen zuVector Hardware Config finden Sie inder Installationsanleitung (siehe Abschnitt Vector Hardware Configuration auf Seite38).
Geräte-Konfiguration Wenn Sie die Standard-Ethernet-Konfiguration ändernmöchten, wählen Sie einangeschlossenes VN5610/VN5610A aus der Liste und doppelklicken Sie auf DeviceConfiguration.
Abbildung 19: Vector Hardware Config
Abbildung 20: Geräte-Konfiguration-Dialog
3.2 Geräte-Konfiguration
VN5610/VN5610A Handbuch Version 2.2 36
HinweisUm einen funktionierenden Ethernet-Link zwischen dem VN5610/VN5610A undeinem anderen Ethernet-Gerät aufzubauen, muss die Auto-Negotiation in beidenGeräten aktiviert werden.
Alternativ können beide Gerätemanuell mit denselben Parametern konfiguriertwerden (nur Full-Duplex-Modus).
Bitte beachten Sie, dass der Ethernet-Link im Half-Duplex-Modus läuft, wenn einGerät die Auto-Negotiation nutzt, während das anderemanuell konfiguriert ist. DasVN5610/VN5610A unterstützt nur den Full-Duplex-Modus.
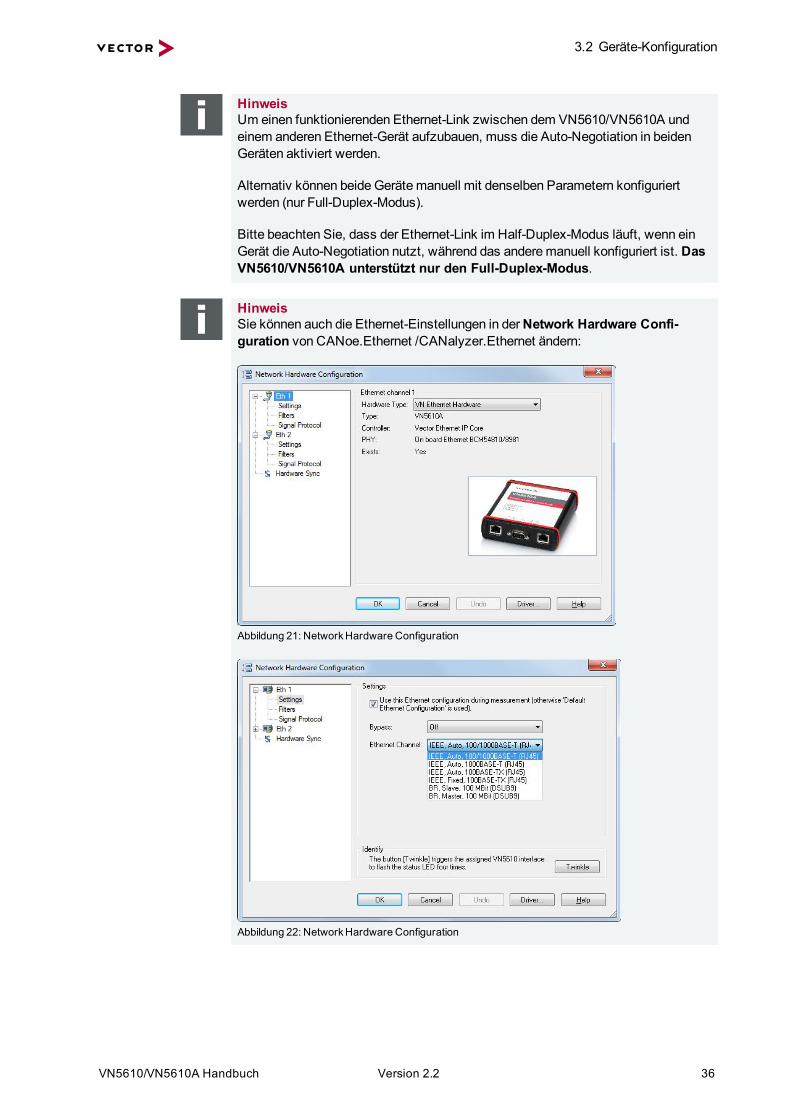
HinweisSie können auch die Ethernet-Einstellungen in derNetwork Hardware Confi-guration von CANoe.Ethernet /CANalyzer.Ethernet ändern:
Abbildung 21: NetworkHardware Configuration
Abbildung 22: NetworkHardware Configuration
3.3 Loop-Tests
VN5610/VN5610A Handbuch Version 2.2 37
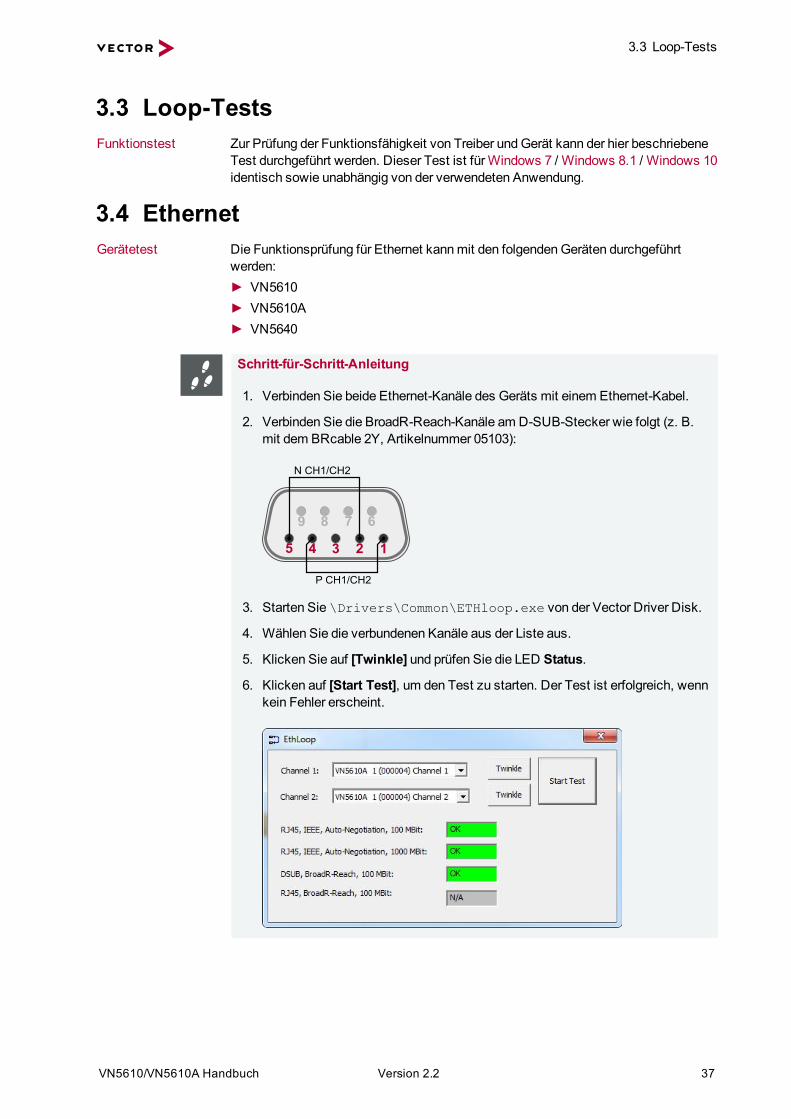
3.3 Loop-TestsFunktionstest Zur Prüfung der Funktionsfähigkeit von Treiber undGerät kann der hier beschriebene
Test durchgeführt werden. Dieser Test ist fürWindows 7 / Windows 8.1 / Windows 10identisch sowie unabhängig von der verwendeten Anwendung.
3.4 EthernetGerätetest Die Funktionsprüfung für Ethernet kannmit den folgendenGeräten durchgeführt
werden: VN5610 VN5610A VN5640
Schritt-für-Schritt-Anleitung
1. Verbinden Sie beide Ethernet-Kanäle des Geräts mit einem Ethernet-Kabel.
2. Verbinden Sie die BroadR-Reach-Kanäle am D-SUB-Stecker wie folgt (z. B.mit dem BRcable 2Y, Artikelnummer 05103):
6789
P CH1/CH2
N CH1/CH2
5 4 3 2 1
3. Starten Sie \Drivers\Common\ETHloop.exe von der Vector Driver Disk.
4. Wählen Sie die verbundenen Kanäle aus der Liste aus.
5. Klicken Sie auf [Twinkle] und prüfen Sie die LED Status.
6. Klicken auf [Start Test], um den Test zu starten. Der Test ist erfolgreich, wennkein Fehler erscheint.
VN5610/VN5610A Handbuch Version 2.2 38
4 Vector Hardware ConfigurationIn diesem Kapitel finden Sie die folgenden Informationen:
4.1 Allgemeine Informationen 39
4.2 Tool-Beschreibung 404.2.1 Einführung 404.2.2 Baumansicht 41
4.1 Allgemeine Informationen
VN5610/VN5610A Handbuch Version 2.2 39
4.1 Allgemeine InformationenVector HardwareConfig starten
Nach der erfolgreichen Installation der Treiber finden Sie in der Systemsteuerung(siehe unten) die KonfigurationsanwendungVector Hardware. Sie gibt verschiedeneInformationen über die angeschlossenen und installierten Vector Geräte wieder.Zudem erlaubt die Anwendung, Einstellungen an diesenGeräten vorzunehmen.
Abbildung 23: Icon in der Systemsteuerung
SystemsteuerungWindows 7
Kategorie-AnsichtWindows Start | Systemsteuerung | Hardware und Sound,klicken Sie anschließend auf Vector Hardware.
Symbol-AnsichtWindows Start | Systemsteuerung,klicken Sie anschließend auf Vector Hardware.
SystemsteuerungWindows 8.1
Kategorie-Ansicht<Windows-Taste>+<X> | Systemsteuerung | Hardware und Sound,klicken Sie anschließend auf Vector Hardware.
Symbol-Ansicht<Windows-Taste>+<X> | Systemsteuerung,klicken Sie anschließend auf Vector Hardware.
SystemsteuerungWindows 10
Kategorie-Ansicht<Windows-Taste>+<X> | Systemsteuerung | Hardware und Sound,klicken Sie anschließend auf Vector Hardware.
Symbol-Ansicht<Windows-Taste>+<X> | Systemsteuerung,klicken Sie anschließend auf Vector Hardware.
4.2 Tool-Beschreibung
VN5610/VN5610A Handbuch Version 2.2 40
4.2 Tool-Beschreibung
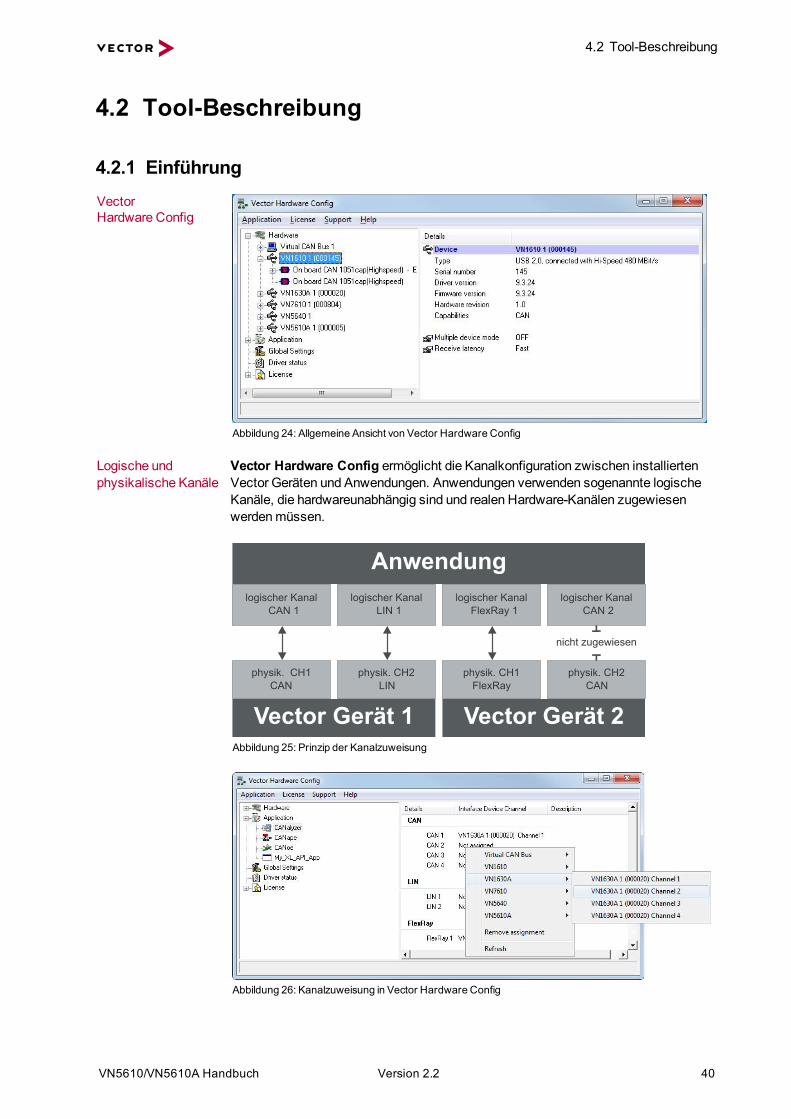
4.2.1 EinführungVectorHardware Config
Abbildung 24: Allgemeine Ansicht von Vector Hardware Config
Logische undphysikalische Kanäle
Vector Hardware Config ermöglicht die Kanalkonfiguration zwischen installiertenVector Geräten und Anwendungen. Anwendungen verwenden sogenannte logischeKanäle, die hardwareunabhängig sind und realen Hardware-Kanälen zugewiesenwerdenmüssen.
physik. CH1CAN
physik. CH2LIN
Vector Gerät 1 Vector Gerät 2
physik. CH1FlexRay
physik. CH2CAN
nicht zugewiesen
logischer KanalCAN 1
Anwendunglogischer Kanal
LIN 1logical channel
CAN 1
logischer KanalFlexRay 1
logischer KanalCAN 2
Abbildung 25: Prinzip der Kanalzuweisung
Abbildung 26: Kanalzuweisung in Vector Hardware Config
4.2 Tool-Beschreibung
VN5610/VN5610A Handbuch Version 2.2 41
4.2.2 BaumansichtZugriff aufVector Geräte
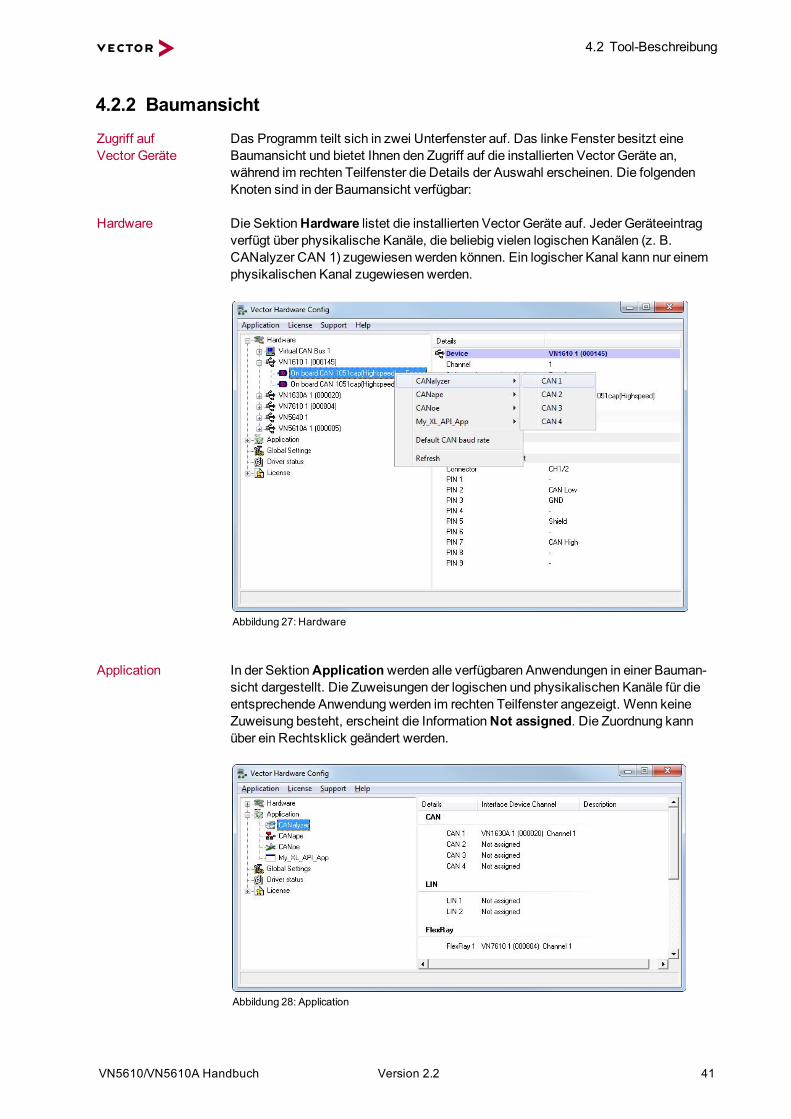
Das Programm teilt sich in zwei Unterfenster auf. Das linke Fenster besitzt eineBaumansicht und bietet Ihnen den Zugriff auf die installierten Vector Geräte an,während im rechten Teilfenster die Details der Auswahl erscheinen. Die folgendenKnoten sind in der Baumansicht verfügbar:
Hardware Die SektionHardware listet die installierten Vector Geräte auf. Jeder Geräteeintragverfügt über physikalische Kanäle, die beliebig vielen logischen Kanälen (z. B.CANalyzer CAN 1) zugewiesen werden können. Ein logischer Kanal kann nur einemphysikalischen Kanal zugewiesen werden.
Abbildung 27: Hardware
Application In der SektionApplicationwerden alle verfügbaren Anwendungen in einer Bauman-sicht dargestellt. Die Zuweisungen der logischen und physikalischen Kanäle für dieentsprechende Anwendung werden im rechten Teilfenster angezeigt. Wenn keineZuweisung besteht, erscheint die InformationNot assigned. Die Zuordnung kannüber ein Rechtsklick geändert werden.
Abbildung 28: Application
4.2 Tool-Beschreibung
VN5610/VN5610A Handbuch Version 2.2 42
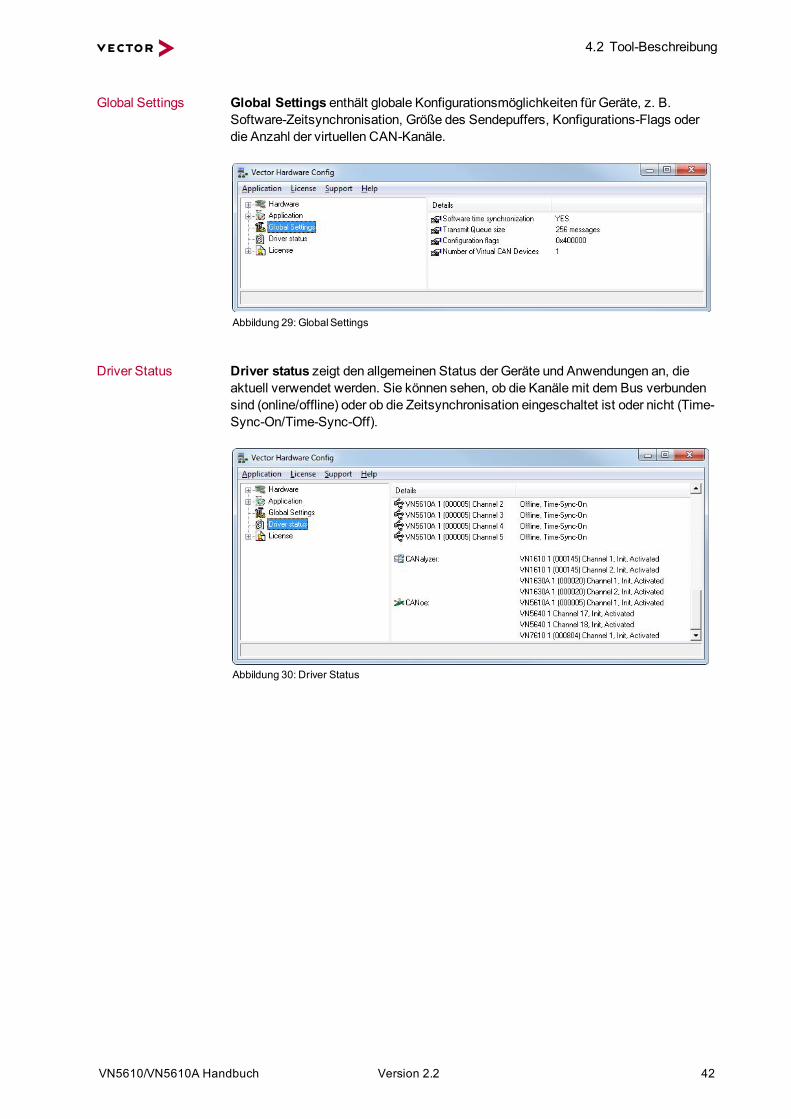
Global Settings Global Settings enthält globale Konfigurationsmöglichkeiten für Geräte, z. B.Software-Zeitsynchronisation, Größe des Sendepuffers, Konfigurations-Flags oderdie Anzahl der virtuellen CAN-Kanäle.
Abbildung 29: GlobalSettings
Driver Status Driver status zeigt den allgemeinen Status der Geräte und Anwendungen an, dieaktuell verwendet werden. Sie können sehen, ob die Kanälemit dem Bus verbundensind (online/offline) oder ob die Zeitsynchronisation eingeschaltet ist oder nicht (Time-Sync-On/Time-Sync-Off).
Abbildung 30: Driver Status
4.2 Tool-Beschreibung
VN5610/VN5610A Handbuch Version 2.2 43
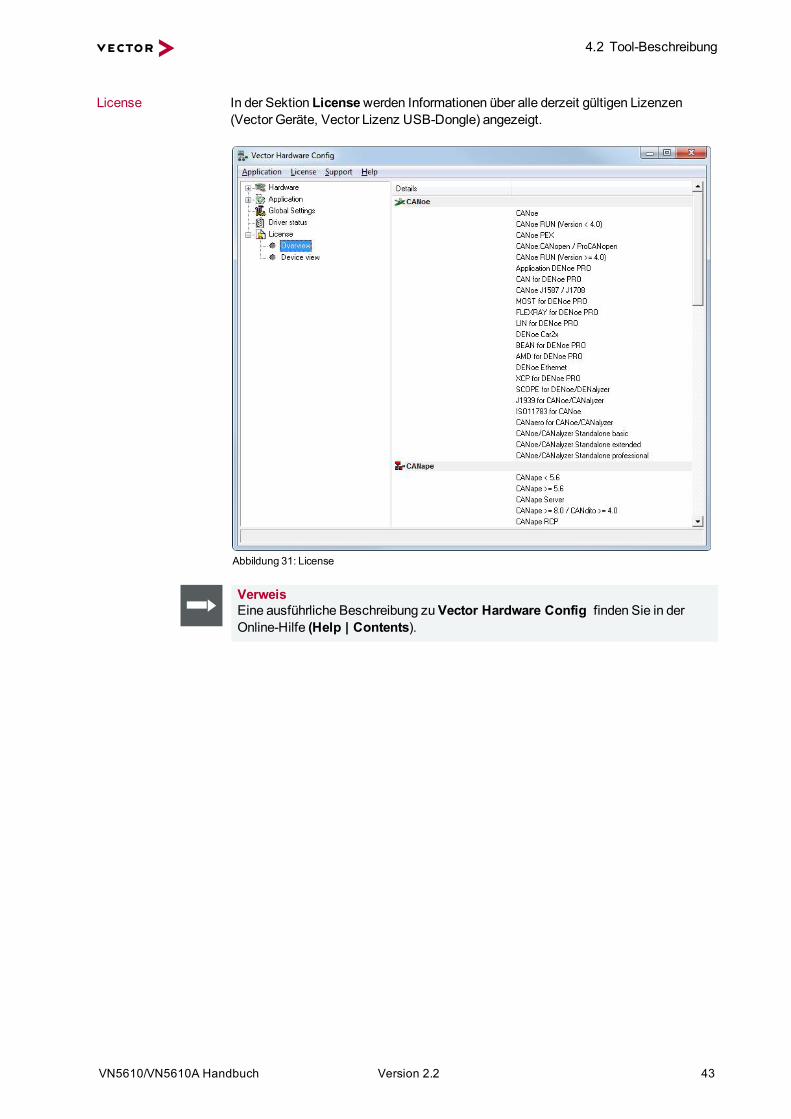
License In der Sektion Licensewerden Informationen über alle derzeit gültigen Lizenzen(Vector Geräte, Vector Lizenz USB-Dongle) angezeigt.
Abbildung 31: License
VerweisEine ausführliche Beschreibung zuVector Hardware Config finden Sie in derOnline-Hilfe (Help | Contents).
VN5610/VN5610A Handbuch Version 2.2 44
5 ZeitsynchronisationIn diesem Kapitel finden Sie die folgenden Informationen:
5.1 Allgemeine Informationen 45
5.2 Software-Sync 47
5.3 Hardware-Sync 48
5.1 Allgemeine Informationen
VN5610/VN5610A Handbuch Version 2.2 45
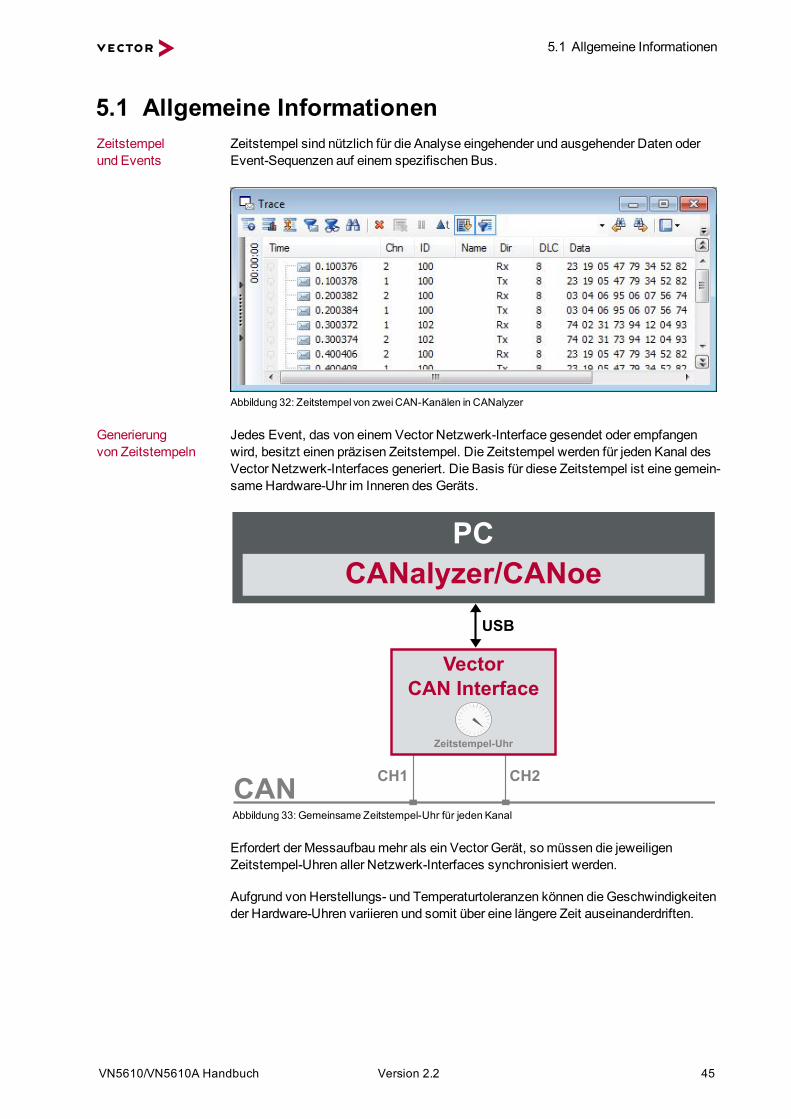
5.1 Allgemeine InformationenZeitstempelund Events
Zeitstempel sind nützlich für die Analyse eingehender und ausgehender Daten oderEvent-Sequenzen auf einem spezifischen Bus.
Abbildung 32: Zeitstempel von zweiCAN-Kanälen in CANalyzer
Generierungvon Zeitstempeln
Jedes Event, das von einem Vector Netzwerk-Interface gesendet oder empfangenwird, besitzt einen präzisen Zeitstempel. Die Zeitstempel werden für jeden Kanal desVector Netzwerk-Interfaces generiert. Die Basis für diese Zeitstempel ist eine gemein-sameHardware-Uhr im Inneren des Geräts.
CAN
VectorCAN Interface
CH1 CH2
Zeitstempel-Uhr
PCCANalyzer/CANoe
USB
Abbildung 33: Gemeinsame Zeitstempel-Uhr für jeden Kanal
Erfordert der Messaufbaumehr als ein Vector Gerät, somüssen die jeweiligenZeitstempel-Uhren aller Netzwerk-Interfaces synchronisiert werden.
Aufgrund von Herstellungs- und Temperaturtoleranzen können die Geschwindigkeitender Hardware-Uhren variieren und somit über eine längere Zeit auseinanderdriften.
5.1 Allgemeine Informationen
VN5610/VN5610A Handbuch Version 2.2 46
CAN
FlexRay
VectorCAN Interface
CH1 CH2Zeitstempel-Uhr
PC
VectorFR Interface
CHA CHBZeitstempel-Uhr
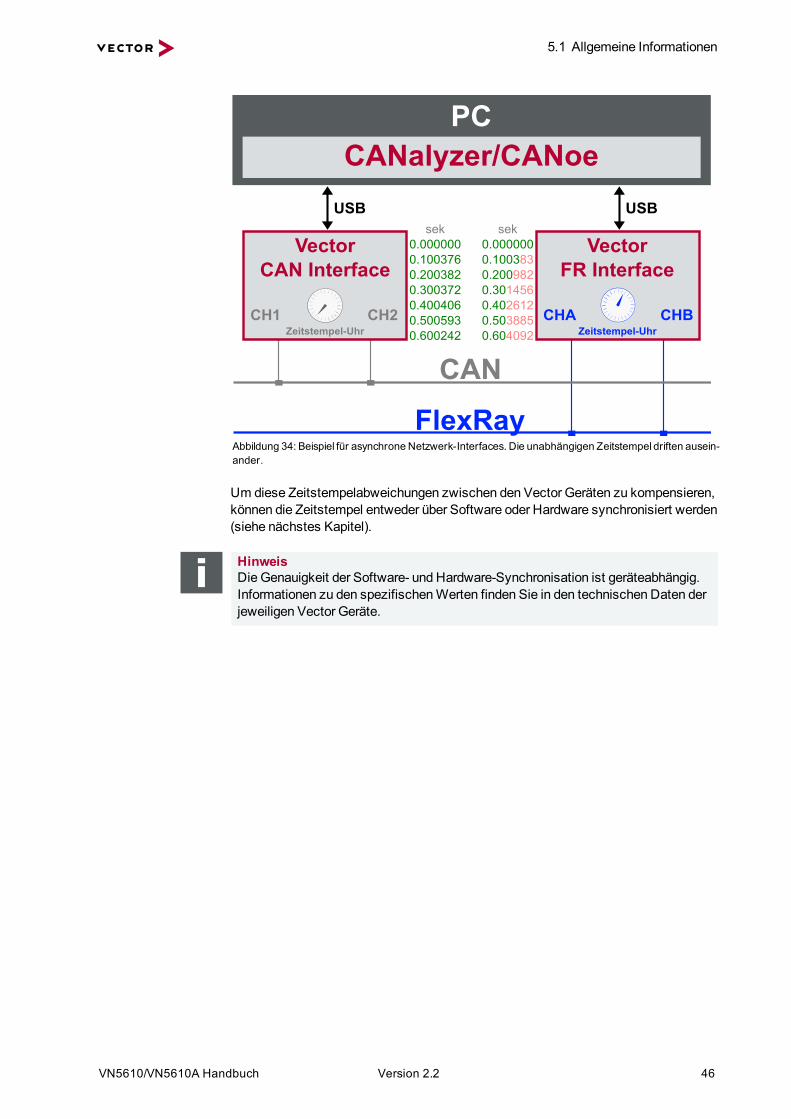
sek0.0000000.1003760.2003820.3003720.4004060.5005930.600242
sek0.0000000.1003830.2009820.3014560.4026120.5038850.604092
CANalyzer/CANoeUSB USB
Abbildung 34: Beispiel für asynchrone Netzwerk-Interfaces. Die unabhängigen Zeitstempel driften ausein-ander.
Um diese Zeitstempelabweichungen zwischen den Vector Geräten zu kompensieren,können die Zeitstempel entweder über Software oder Hardware synchronisiert werden(siehe nächstes Kapitel).
HinweisDie Genauigkeit der Software- und Hardware-Synchronisation ist geräteabhängig.Informationen zu den spezifischenWerten finden Sie in den technischen Daten derjeweiligen Vector Geräte.
5.2 Software-Sync
VN5610/VN5610A Handbuch Version 2.2 47
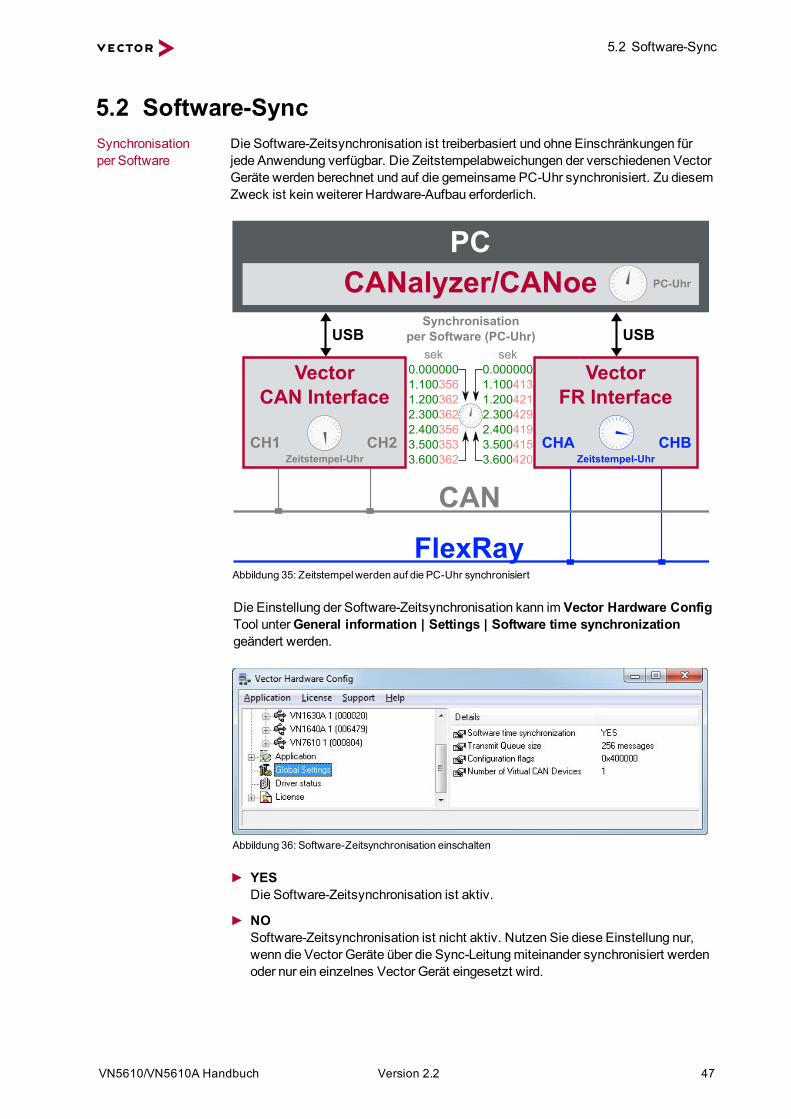
5.2 Software-SyncSynchronisationper Software
Die Software-Zeitsynchronisation ist treiberbasiert und ohne Einschränkungen fürjede Anwendung verfügbar. Die Zeitstempelabweichungen der verschiedenen VectorGeräte werden berechnet und auf die gemeinsame PC-Uhr synchronisiert. Zu diesemZweck ist kein weiterer Hardware-Aufbau erforderlich.
CAN
FlexRay
VectorCAN Interface
CH1 CH2Zeitstempel-Uhr
VectorFR Interface
CHA CHBZeitstempel-Uhr
Synchronisationper Software (PC-Uhr)
sek0.0000001.1003561.2003622.3003622.4003563.5003533.600362
PC
sek0.0000001.1004131.2004212.3004292.4004193.5004153.600420
PC-UhrCANalyzer/CANoeUSB USB
Abbildung 35: Zeitstempelwerden auf die PC-Uhr synchronisiert
Die Einstellung der Software-Zeitsynchronisation kann im Vector Hardware ConfigTool unterGeneral information | Settings | Software time synchronizationgeändert werden.
Abbildung 36: Software-Zeitsynchronisation einschalten
YESDie Software-Zeitsynchronisation ist aktiv.
NOSoftware-Zeitsynchronisation ist nicht aktiv. Nutzen Sie diese Einstellung nur,wenn die Vector Geräte über die Sync-Leitungmiteinander synchronisiert werdenoder nur ein einzelnes Vector Gerät eingesetzt wird.
5.3 Hardware-Sync
VN5610/VN5610A Handbuch Version 2.2 48
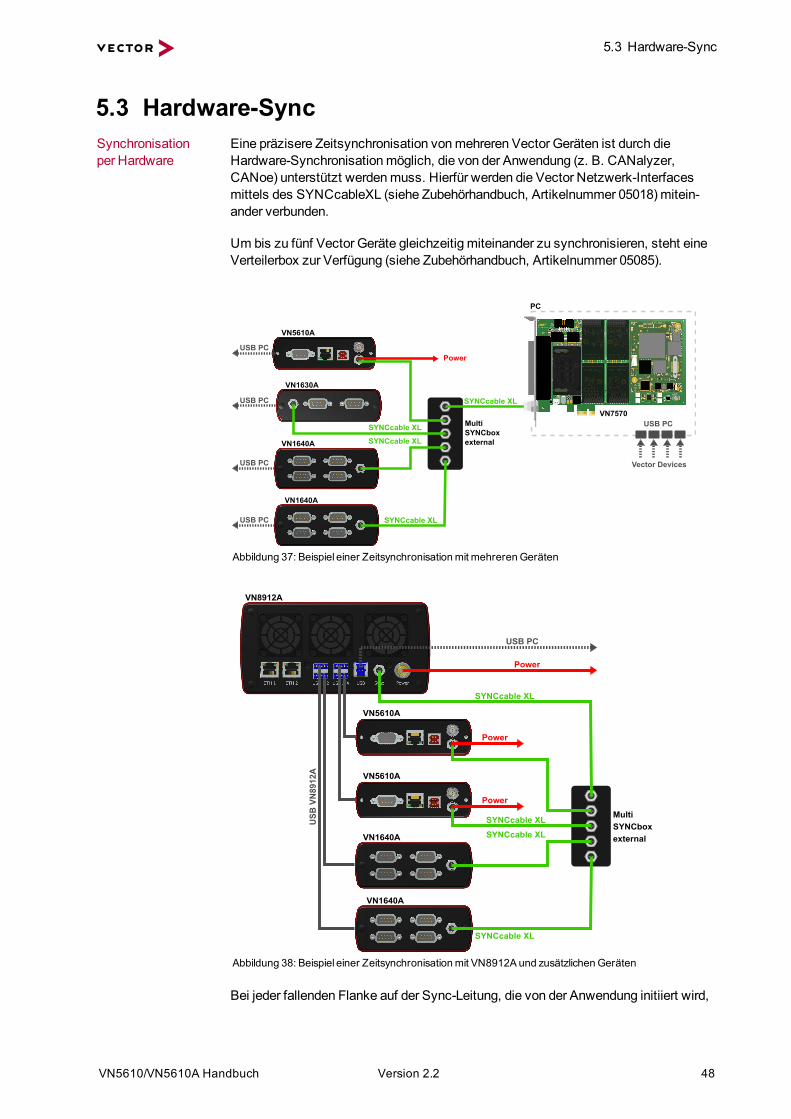
5.3 Hardware-SyncSynchronisationper Hardware
Eine präzisere Zeitsynchronisation vonmehreren Vector Geräten ist durch dieHardware-Synchronisationmöglich, die von der Anwendung (z. B. CANalyzer,CANoe) unterstützt werdenmuss. Hierfür werden die Vector Netzwerk-Interfacesmittels des SYNCcableXL (siehe Zubehörhandbuch, Artikelnummer 05018) mitein-ander verbunden.
Um bis zu fünf Vector Geräte gleichzeitig miteinander zu synchronisieren, steht eineVerteilerbox zur Verfügung (siehe Zubehörhandbuch, Artikelnummer 05085).
VN1630A
VN5610A
VN1640A
Multi SYNCbox external
VN1640A
USB PC
PC
VN7570
SYNCcable XL
SYNCcable XL
SYNCcable XL
SYNCcable XL
USB PC
Vector Devices
USB PC
USB PC
USB PC
Power
Abbildung 37: Beispiel einer Zeitsynchronisationmit mehrerenGeräten
VN5610A
VN8912A
Power
VN5610A
VN1640A
Multi SYNCbox external
VN1640A
USB
VN
8912
A
USB PC
SYNCcable XLSYNCcable XL
SYNCcable XL
SYNCcable XL
Power
Power
Abbildung 38: Beispiel einer Zeitsynchronisationmit VN8912A und zusätzlichenGeräten
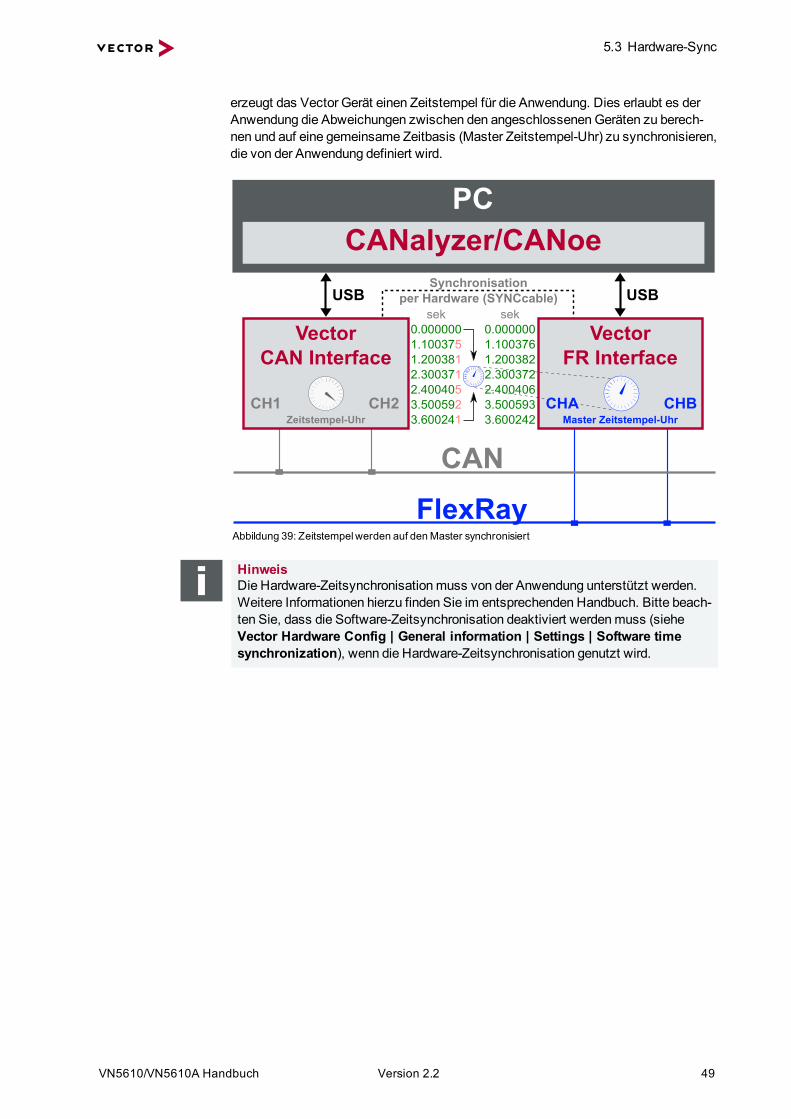
Bei jeder fallenden Flanke auf der Sync-Leitung, die von der Anwendung initiiert wird,
5.3 Hardware-Sync
VN5610/VN5610A Handbuch Version 2.2 49
erzeugt das Vector Gerät einen Zeitstempel für die Anwendung. Dies erlaubt es derAnwendung die Abweichungen zwischen den angeschlossenenGeräten zu berech-nen und auf eine gemeinsame Zeitbasis (Master Zeitstempel-Uhr) zu synchronisieren,die von der Anwendung definiert wird.
CANalyzer/CANoe
CAN
FlexRay
VectorCAN Interface
CH2Zeitstempel-Uhr
USB
VectorFR Interface
CHBMaster Zeitstempel-Uhr
Synchronisationper Hardware (SYNCcable)
sek0.0000001.1003751.2003812.3003712.4004053.5005923.600241
CH1 CHA
sek0.0000001.1003761.2003822.3003722.4004063.5005933.600242
PC
USB
Abbildung 39: Zeitstempelwerden auf denMaster synchronisiert
HinweisDie Hardware-Zeitsynchronisationmuss von der Anwendung unterstützt werden.Weitere Informationen hierzu finden Sie im entsprechenden Handbuch. Bitte beach-ten Sie, dass die Software-Zeitsynchronisation deaktiviert werdenmuss (sieheVector Hardware Config | General information | Settings | Software timesynchronization), wenn die Hardware-Zeitsynchronisation genutzt wird.
Mehr Informationen
Besuchen Sie unsere Website für:NewsProdukteDemo-SoftwareSupportTrainings undWorkshopsKontaktadressen
www.vector.com