Embed Size (px)
Citation preview

DISS. ETH Nr. 14099
Weiterentwicklung eines absoluten,
hochpräzisen und trackingfähigenDistanzmessers für industrielle Anwendungen
ABHANDLUNG
zur Erlangung des Titels
DOKTOR DER TECHNISCHEN WISSENSCHAFTEN
der
EIDGENÖSSISCHEN TECHNISCHEN HOCHSCHULE ZÜRICH
vorgelegt von
Raimund Loser
Dipl.-Ing., Technische Universität München
geboren am 23. September 1954
Fürstenfeldbruck, Deutschland
Angenommen im Auftrag von:
Prof. Dr.-Ing. Hilmar Ingensand, ETH Zürich, Referent
Prof. Dr.-Ing. Klaus Schnädelbach, TU München, Korreferent
2001

Zusammenfassung
Die Übersicht bezüglich der verschiedensten Methoden des Aufbaus eines Distanzmessers zeigt
die technischen Möglichkeiten der modernen Elektronik kurz auf. Ausgehend von dieser grund¬
sätzlichen Betrachtung werden die physikalischen Voraussetzungen der gewählten Methode der
Polarisationsmodulation eingehend beschrieben. Basierend auf dem speziellen Aufbau eines
Distanzmessers, der für die weiteren Untersuchungen als Funktionsmuster vorlag folgt eine
detaillierte Betrachtung des Instrumentenaufbaus. Die Analyse der Signalauswertung zur hoch¬
präzisen Messwerterfassung dient als Grundlage für die Weiterentwicklung zu einem trackingfä-
higen Distanzmesser. Der Entwurf einer speziellen Funktionsbeschreibung der Signalauswer¬
tung, die detaillierte Überprüfung durch praktische Messungen mit der Bestimmung aller Ein¬
flussfaktoren sowie die Ermittlung der erforderlichen Parameter zur Kompensation sind umfas¬
send beschrieben. Das Ziel eine möglichst effektive aber einfache und schnelle Methode zur
Distanznachführung zu erhalten, wird nachgewiesen. Die Arbeit enthält eine vollständige
Betrachtung der erzielbaren Systemgenauigkeit unter Einbezug der Zubehörteile und zeigt die
technischen Grenzen der angewandten Technologie zur Realisierung eines hochpräzisen absolut
messenden und trackingfähigen Distanzmessers auf.
Abstract
The overview of the diverse methods used to construct a distance meter briefly demonstrates the
technical possibilities of modern electronics. Starting from these basic concepts, the pre¬
conditions for the chosen method of modulated polarization is described in detail. Taking the
design of a particular distance meter, available as a working prototype for the research described
here, the method of construction is examined in more depth. The signal analysis leading to a
high-precision measurement forms the basis of a further development to a distance meter capa¬
ble of dynamic tracking. Detailed descriptions are given of a particular formulation of signal ana¬
lysis and its subsequent testing through practical measurement, including the determination of
factors influencing results and the derivation of compensating parameters. The objective of the
most effective but simple and fast method to track distance changes is demonstrated. The work
provides a complete review of the attainable system accuracy, taking also account of accessory
components. It further marks out the technical limits of the technology employed to implement a
high-precision, absolute measuring and tracking distance meter.

Inhaltsverzeichnis
1 Einleitung 1
2 Physikalische Grundlagen zur Distanzmessung 3
2.1 Polarisation des Lichtes 5
2.2 Effekt der Doppelbrechung an Kristallen 7
2.3 Polarisationsmodulation 8
2.4 Kompensation der Nebeneffekte der Polarisationsmodulation mit Kristallen 9
3 Prinzip der verwendeten Methode zur Entfernungsmessung 12
3.1 Der Versuch von H. FIZEAU 12
3.2 Moderner Aufbau des FIZEAU - Systems 12
3.3 Distanzbestimmung 14
4 Instrumentelle Voraussetzungen 17
4.1 Zielvorstellungen und Anforderungen 17
4.2 Grundmodule des Distanzmessers 18
4.3 Erweiterte Hardware zur Zielpunktverfolgung 24
5 Intensitätsfunktion und Signaldetektion 26
5.1 Theoretische Intensitätsfunktion des empfangenen Modulationssignals 26
5.2 Darstellung des Einflusses der verschiedenen Parameter 28
5.3 Bestimmung der Intensitätsfunktion 30
5.3.1 Messung der Signalintensität 31
5.3.2 Skalierung (Normierung) der Frequenzverstellung 33
5.3.3 Mathematische Beschreibung der gemessenen Signalintensität 34
5.3.4 Einfluss der Modulationsspannung und der Rest-Elliptizität 36
5.3.5 Variation der Messfrequenz (Frequenzabläge) 40
6 Konzeption des Messprogramms 43
6.1 Algorithmen zur genauen Distanzmessung 45
6.1.1 Nullstellensuche (Grobmessung) 45
6.1.2 Feinmessung und genaue Minimumdetektion 50
6.1.3 Methoden zur Distanzbestimmung 51
6.1.4 Programmaufbau zur genauen Distanzmessung 54
6.2 Lösungsansätze zur Distanznachführung bei Reflektorbewegungen 58
6.2.1 Extrapolation der Intensitätsfunktion 60
6.2.2 Nutzung der Bewegungsgleichung zur Reflektorverfolgung 62
6.2.3 Programmaufbau zur Verfolgung der Reflektorbewegung 65
7 Verschiedene Reflektortypen 67
7.1 Planspiegel 67
7.2 Cassegrain Reflektor 67
7.3 Tripelspiegel (Corner-Cube) 68
7.4 Tripelprisma (Glasreflektor) 70
7.5 Reflektor mit Kugelflächen (Cat's-Eye) 74
7.6 Neue Konstruktionsansätze 77
8 Genauigkeitabschätzung und Fehlereinflüsse 79
8.1 Einfluss der Atmosphäre 79
8.1.1 Bezugsbrechungsindex der Standardatmosphäre 79
8.1.2 Interpolationsformeln zur Berechnung des tatsächlichen
Brechungsindexes 81
8.2 Hardwarebedingte Grenzen des Messsystems 84
8.2.1 BandbreitedesModulators858.2.2KleinsterSynthesizerschritt898.2.3AnforderungenandenMessstrahl898.2.4ToleranzenderZentrierung918.3AbschätzungdererreichbareninnerenMessgenauigkeitbeistatischenMessungen92

8.4 Messung nach bewegten Zielen (im Tracking Mode) 94
8.4.1 Genauigkeit der Richtungsbeobachtung 94
8.4.2 Einfluss des Dopplereffekts 96
8.4.3 Einfluss der Zeitunsicherheit 97
9 Testmessungen und Diskussion der Messergebnisse 98
10 Zusammenfassung, Wertung und Ausblick 104

1 Einleitung
Moderne elektronische Distanzmesser haben einen Genauigkeitsstandard erreicht, der den
Anforderungen der überwiegenden Anzahl geodätischer Messaufgaben genügt. Nachdem sich
einige Messprinzipien etablieren konnten, bestimmten die Schlagworte "Minimierung" und
"Optimierung der Kosten" den Trend bei der Entwicklung elektrooptischer Distanzmessinstru¬
mente. Die Erfolge der Industrie bei der Minimierung von Volumen, Gewicht, Stromverbrauch,
Messzeit, Fehlerhäufigkeit und Preis Hessen den elektrooptischen Distanzmesser in den letzten
Jahren zu einem klassischen Instrument der geodätischen Messausrüstung werden.
Die Angebotspalette an Distanzmessern reicht von Instrumenten mit dm - Genauigkeiten im
10 km Messbereich für Messungen ohne Reflektoren (militärische Anwendungen) über Instru¬
mente mit mm - Genauigkeiten im 1000 m Messbereich bis zum 0.1 mm Genauigkeitsbereich des
Mekometer ME 5000 [Leica Geosystems].
Vor diesem Hintergrund stellt sich die Frage, in welcher Richtung die weitere Entwicklung elek¬
trooptischer Distanzmesser nützlich sowie wirtschaftlich sinnvoll ist und wo die momentanen
Grenzen der Technik liegen.
Aus den bisher mit dem ME 5000 gewonnenen Erfahrungen erscheint eine weitere Genauigkeits¬
steigerung bezüglich der inneren Messgenauigkeit ohne grössere Schwierigkeiten als realistisch.
Bei der Betrachtung der absolut erreichbaren Genauigkeit, beispielsweise für eine Entfernung
von 1000 m, zeigt sich hingegen eine Art "physikalischer Grenzwert" in Form der exakten
Bestimmung des Brechungsindexes der Atmosphäre entlang des Messweges: Eine Ungenauigkeit
bei der Erfassung der entlang des Messweges repräsentativen Temperaturvon0.1CoderdesrepräsentativenLuftdruckesvon0.3hPabeeinflusstdengemessenenDistanzwertumjeweils0.1ppm.GrundsätzlichbietensichzweiMöglichkeitenzurÜberwindungdieserSchrankean.EntwedergelingteineentsprechendgenaueundrepräsentativeErfassungundModellierungderatmosphä¬rischenParameterentlangdesMesswegesodereinverändertesMessprinziperlaubtdieElimina¬tiondesEinflussesderatmosphärischenParameter.FürbeideMethodengibteseinigeBeispiele,diefürdieallgemeineAnwendungbeiderDistanzmessungleidernochnichtgeeignetsind[Hen¬nésM.1994,IngensandH.,BöckemB.1997,MeierD.,LoserR.1988].DiesimultanzurDistanzmessungerfolgteBefliegungdesMesswegeszurErfassungderatmo¬sphärischenParametermitanschliessenderModellierungderAtmosphärewiebeidenvomSchweizerischenBundesamtfürLandestopographiedurchgeführtenStreckenmessungenimTestnetzTurthmann[SchneiderD.1990]istwirtschaftlichnurinAusnahmefällenvertretbar.EineandereMethode,dieErmittlungderintegralenTemperaturderAtmosphäremitUltra¬schallerbrachtezwardiegewünschtenResultate,kannjedochnurfürEntfernungenimNahbe¬reichbismax.50mgenutztwerden[SchwarzW.1985].DieDispersionsmethodezurEliminationdesEinflussesdesBrechungsindexes,wiesiemitdemTERRAMETER[GervaiseJ.1983],miteinemspeziellpräpariertenME3000[HübnerW.1985]odermiteinemanderenPrototypderFirmaKERN[MeierD.,LoserR.1988]angewandtwurde,beweisendietechnischeRealisierbarkeit.DieVerfügbarkeiteinerentsprechendenblauenLicht¬quelle,derStromverbrauch,diegrosseWärmeentwicklungunddiehohenAnforderungenandasAuflösungsvermögendesrotenundblauenMesssystemshabendieEntstehungeinesrelativvoluminösenundteurenInstrumentszurFolge.Darausresultiert,dassdieallgemeineAnwen¬dungderDispersionsmethodevorläufigwirtschaftlichzuaufwendigistundlediglicheinigenSpe-zialanwendungenvorbehaltenbleibt.DertechnischeFortschrittmitimmerleistungsfähigerenelektronischenBauteilenundKompo¬nentenbietettrotzderbeschriebenenEinschränkungeneineVielzahlvonMöglichkeitenzurWeiterentwicklungvonDistanzmessinstrumenten.1

Nachdem sich geodätische Winkelmessinstrumente und Triangulationsmethoden in den letzten
Jahren vermehrt auf dem Markt der industriellen Messtechnik etablierten, eröffnen sich in die¬
sem Bereich für Distanzmessinstrumente ebenfalls neue Anwendungsgebiete.
Aus den speziellen Anforderungen im Bereich der industriellen Messtechnik resultieren für
Distanzmesser folgende Entwicklungsschwerpunkte:
a) Hochgenaue Distanzmessung mit Standardabweichungen zwischen 10 um und
20 um im Nahbereich bis 100 m.
b) Schnelle Distanzmessungzu dynamischen Zielen, die eine Messfrequenz von
einigen 100 Hz erlaubt.
c) Genaue Distanzmessung im Bereich von wenigen 0.1 mm ohne Reflektoren (auf
Reflexfolien, metallische oder andere "semikooperative" Oberflächen).
Das Mekometerprinzip dient aufgrund der hohen Genauigkeit und des gegen Fehlereinflüsse
robusten Messverhaltens als ausgezeichnete Grundlage zur Lösung dieser Problemstellungen.
Zur Abschätzung der technischen und wirtschaftlichen Risiken führen Instrumentenhersteller
umfangreiche Analysen und Studien vor dem Beginn einer Entwicklung durch. Basierend auf
diesen Vorarbeiten werden Kriterien mit einer bestimmten Toleranzbreite aufgestellt, die
anschliessend als wichtige Entscheidungsgrundlage für den Start einer Neuentwicklung dienen.
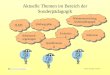
Auf diese Weise werden technische Funktionali¬
täten eines Instrumentariums einerAbschät¬zungdeswirtschaftlichenNutzensgegen¬übergestellt.AmvorliegendenBeispielwerdendieGenauigkeitunddieMessgeschwindigkeitbeimTrackingmitdengeschätztenWerten:Entwicklungskosten,Herstellkosten,AnzahlverkaufbarerSystemeinRelationgesetzt(vgl.Figur1.1).DiestrategischenEntwicklungsent¬scheidezwischenkonkurierendenVorschlägenerfolgenanhandderartigerGrundsatzüber¬legungenmitentsprechenderWirtschaftlich¬keitsberechnung.DieEntwicklungdesabsolu¬tenDistanzmesserszumEinsatzinKombina-Figur1.1:GraphischeDarstellungwichtigerEntwick-tionmitdemLaserTrackerzumLTD500kannlungsparameterdabeialsBeispielerwähntwerden.ZieldieserArbeitistdieUntersuchungdertechnischenMöglichkeitenundderGrenzendiesesMessprinzipszurEntwicklungeinesDistanzmessinstrumentariums,dasdenspeziellenAnforde¬rungenundBedürfnissenderIndustriegenügt.AuswirtschaftlichenGründenwirddabeiderAufbaueineseinheitlichenGrundmodulsangestrebt,obwohleinederartigeModularitätenormeAnsprücheandiegrundsätzlicheKonzeptiondesInstrumentesstellt.DieSchwerpunktea)undb)könnendeshalbgemeinsambetrachtetwerden.AufgrunddervollständigunterschiedlichenAnforderungenbezüglichReflexionsverhalten,SignaldetektionundderautomatischenFokussie-rungzurexaktenPunktdefinitionfindetdieForderungc)keineweitereBerücksichtigung.EinegewisseSchlüsselrollenehmenhingegendierichtigeTrennungunddasentsprechendeZusam¬menwirkenvonHardwareundinternerSoftwarebzw.FirmwaredesDistanzmessermodulsein.DieProgrammierungoderdieWahldesMessablaufes,dasFestlegenvonIntegrationszeitenoderdieSteuerungderLaserleistungsindnureinigeBeispieledafür.NebenderErarbeitungundBeschreibungdesInstrumentenkonzeptesumfasstdieseArbeiteinedifferenzierteGenauigkeits¬abschätzungfürdieverschiedenenEinsatzvariantendesDistanzmessmoduls.Anhandent¬sprechenderFunktionsmusteraufbautenerfolgtausserdemeineUntersuchungdertatsächlicherreichbarenMessgenauigkeit.AnalysederEntwicklungsparameter5/1->^^7Toleranzbreite4/Legende3Beispiel:1Genauigkeit0.01mm2Messfrequenz100Hz3Verkaufspreis20'000CHF4Entwicklungskosten3.8MioCHF5AnzahlSysteme150SystemeproJahr2

2 Physikalische Grundlagen zur Distanzmessung
Die Grundlage jeder elektronischen Distanzmessung bildet die Auswertung von Signalen, die
den Weg zwischen Instrumentenstandort und Zielpunkt durchlaufen haben. Jede Messung
beruht letztendlich auf der Detektion systematisch wiederkehrender und exakt definierter
Signalvariationen. Die verschiedenen Möglichkeiten moderner elektronischer Distanzmessung
und der Zusammenhang zwischen Reichweite und Genauigkeit sind in Figur 2.1 möglichst über¬
sichtlich dargestellt. Die interferometrische Entfernungsmessung nimmt dabei eine gewisse Son¬
derstellung ein, da lediglich relative Messungen möglich sind und die Welleneigenschaft des
Lichts direkt zur Distanzbestimmung genutzt wird. Diese Art der Entfernungsmessung ist seit
Jahren als genaueste Methode in vielen Bereichen der industriellen Anwendung etabliert und
eignet sich ausgezeichnet zur genauen Verfolgung von Bewegungen. Durch die Entwicklung
schneller Regel- und Nachführungsprozeduren in Laser Tracker Systemen konnte mittlerweile
auch die freie Beweglichkeit des Reflektors erreicht werden.
Abgesehen von neuesten Entwicklungsansätzen, die über synthetische erzeugte Frequenzen
absolut messende Interferometer zur Produktreife führen wollen, sind vier fundamental ver¬
schiedene Methoden bereits in Instrumenten verwirklicht. Diese physikalisch unterschiedlichen
Messprinzipien gehen alle vom gleichen Grundsatz aus. Sie basieren auf der systematischen
Beeinflussung (Modulation) der Tragerwellen zur Informationsübertragung undderdaraufabge¬stimmtenAuswertungdesEmpfangssignals(Detektion).Distanzmesser-TechnologiefürindustrielleAnwendungenSteigendeReichweiteaufgrundderMethodeSteigendeGenauigkeitMODULATIONS¬METHODENkeineModulationDETEKTIONS-METHODENSynthetischeFrequenzenInterfero-metneFrequenz¬modulation"Chirp"Interfero-metnePolarisations-modulationFrequenz-vergleichAmplituden¬modulationPhasennull-abgieichPulsmess¬verfahrenPhasen¬messungLaufzeit-messungMessungmitReflektoren:•ElektromkaufwandhateinenwichtigenEinflußaufdieGenauigkeit-MessmethodehatentscheidendenEinflußaufdieGenauigkeitundaufdieMessgeschwindigkeitMessgeschwindigkeitGenauigkeit>10000Msec<0.001mm>1000Msec0.02-0.1mm1000M/sec0.02-0.1mm10M/sec<0.02mm10M/sec<0.02mm>1000M/sec2-5mmFigur2.1:ÜbersichtderphysikalischenMethoden,diezurDistanzmessunggenutztwerden.NachdemmomentanenStandderTechnikeignensichdieverschiedenenVariantenhinsichtlichdenKriterieneinermöglichsthohenGenauigkeitundzurautomatischenReflektorverfolgung(Tracking),wiesieimBereichderindustriellenAnwendungenhäufiggefordertsind,unter¬schiedlichgut.DiewichtigstenEinflußfaktorensowieeineKurzbeschreibungdereinzelnenMethodensindnachfolgendintabellarischerFormkurzzusammengefaßt:3

Impulsmeßverfahren Der Meßstrahl durchläuft in Form von kurzen Licht¬
impulsen die zu messende Strecke zwischen Standpunkt
und Zielpunkt. Der eigentliche Distanzwert wird aufgrund
einer möglichst genauen Messung der Laufzeit der Licht¬
impulse bestimmt.
Vorteile: - Kurze Meßzeit
- Kurze Pulszeiten erlauben das Aussenden hoher Energie¬
pulse (Lasersicherheit bleibt trotz relativ hoher Leistung
gewährleistet)- Methode eignet sich zur Messung ohne Reflektoren
Nachteile: - Die erreichbare Genauigkeit ist durch die Auflösung der
Zeitmessung begrenzt (1 Piko Sekunde bedeutet eine
maximal erreichbare Distanzgenauigkeit in der Grö߬
enordnung von 2-6 mm)
- Relativ aufwendiger interner Meßweg (Kurzweg) z. B. in
einer Glasfaser
Amplitudenmodulation Durch das Anlegen elektrischer Wechselspannungen an die
Sendediode wird die Amplitude des ausgesandten Lichts
im Takt der Wechselspannung variiert. Die Bestimmungder vom Meßstrahl durchlaufenen Distanz erfolgt über die
Messung des Phasenwinkels (Vergleich ausgesandter mit
reflektierter Modulationswelle). Zur Sicherstellung einer
eindeutigen Messung müssen mehrere dieser Phasenmes¬
sungen mit unterschiedlichen Frequenzen kombiniert wer¬
den.
Vorteile: - Kostengünstige Methode
- Vielfach erprobte Technologie- Geringe Baugröße realisierbar
Nachteile: - Physikalische Trennung von Sende- und Empfangsoptikist notwendig
- Reagiert relativ empfindlich auf Streulicht
- Hoher Elektronikaufwand um hohe Genauigkeit zu errei¬
chen
Frequenzmodulation Diese Art der Modulation sieht eine kontinuierliche Verän¬
derung der Frequenz des Meßstrahls über einen großen
Bereich vor (z.B. >100 GHz). Die Überlagerung des reflek¬
tierten und des intern erzeugten Meßsignals führt zu einer
gut vergleichbaren Differenzfrequenz, deren Größe direkt
von der Distanz abhängt (Frequenzvergleich).
Vorteile: - Robustes Verfahren, unempfindlich gegen Streulicht
- Hohe Genauigkeit erreichbar
- Eignet sich zur Messung ohne Reflektoren
Nachteile: - Sehr großer Elektronikaufwand
- Spezielle Bestimmung des Maßstabs ist notwendig, mit
relativ aufwendigem internen Meßweg- Hohe Linearität und Gleichförmigkeit der Frequenzver¬
stellung sind erforderlich
4

Polarisationsmodulation Mit Hilfe eines optischen Kristalls und elektrischer Wech¬
selspannung wird die Polarisation des Meßstrahls syste¬
matisch verändert. Die Taktfrequenz der Wechselspan¬
nung kann innerhalb einer gewissen Bandbreite variiert
werden, damit ein Phasen-Nullabgleich zwischen ausge¬
sandtem und empfangenem Meßstrahl erfolgen kann.
Vorteile: - Identische Sende- und Empfangsoptik- Sehr gute und empfindliche Methode der Signaldetektion- Robustes Meßsystem- Sehr hohe Meßgenauigkeit erreichbar
Nachteile: - Aufwendige Hochfrequenztechnik- Kürzeste Meßdistanz ist durch die Bandbreite des Modu¬
lators limitiert
Das Mekometer ME5000 benutzt beispielsweise die eher selten angewandte Methode der Polari¬
sationsmodulation. Obwohl das Prinzip der Modulation durch Änderung der Polarisation bezüg¬
lich dem optischen Aufbau häufig als anspruchsvoll betrachtet wird, eignet es sich ausserordent¬
lich gut zur Realisierung eines robusten, einfachen und sehr präzisen Distanzmessers.
Der folgende Abschnitt beschreibt einige wichtige physikalische Grundlagen, auf denen diese Art
der Modulation und Demodulation des Lichtes beruhen. Ausgehend von der Eigenschaft der
Polarisation des Lichtes und der Erläuterung des Effektes der Doppelbrechung an Kristallen
erfolgt die Beschreibung der beim vorliegenden Meßprinzip angewandten Polarisationsmodula¬
tion. Zusätzlich wirddieMethodezurEliminationvonTemperatureffektenamModulationskri¬stallnähererläutert.2.1PolarisationdesLichtesDieTheorieüberelektromagnetischeWellen,vondeneneingewisser,fürdasmenschlicheAugesichtbarerWellenlängenbereichalsLichtbezeichnetwird,bildetdieGrundlagedernachfolgen¬denErläuterungen[Feynmanetal.1973,HechtE.,ZajacA.1980].DerEffektderPolarisationdesLichtesläßtsichanhanddeselektrischenFeldvektorsE,derineinerEbenesenkrechtzurAusbreitungsrichtungzdesLichtstrahlesliegt,beschreiben.DiegenaueOrientierungdiesesFeldvektorssetztsichausdenzweiKomponenteninRichtungExundRichtungEzusammen.BetrachtetmanmonochromatischesLicht,dannschwingtdaselektri¬scheFeldmiteinerbestimmtenFrequenz,aberdiePhasenlagederSchwingungkannfürdiebei¬denKomponentenExundEunterschiedlichsein.EsgeltenfolgendeGleichungen:Ex(z,t)=\-EQx•cos(kz-cat)(2.1)undEy(z,t)=j•EQy-cos(kz-(xa+e)(2.2)wobeiedierelativePhasendifferenzzwischendenbeidenWellendarstellt,diesichbeideinz-Richtungausbreiten.DurchdieVektoradditionfolgtausGleichung(2.3)derelektrischeFeld¬vektorEalsResultierende.5

E(z,t)=Ex(z,t)+E(z,t) (2.3)
Aus den verschiedenen relativen Phasendifferenzen der Wellen zwischen den Komponenten Ex
und Ey resultieren die einzelnen Polarisationsarten.
Für den Fall der Phasengleichheit (e = 0 oder ein ganzzahliges Vielfaches von ±2jt) breitet sich das
Licht linear polarisiert aus (vgl. Fig. 2.2). Gleiches gilt für eine Phasendifferenz von ±x, wobei
die Polarisationsrichtung um 90 gedreht ist. Es gilt folgende Gleichung:
E = (i- E0x ±j • EQy) cosfe - cor) (2.4)
Figur 2.2: Darstellung der linearen Polarisation. Figur 2.3: Darstellung der zirkulären Polarisation.
Ein anderer Spezialfall, zirkulär polarisiertes Licht liegt vor, wenn die beiden Einzelwellen
die gleiche Amplitude aufweisen und ihre relative Phasendifferenz e = -or/2 + 2mjt (mit
/n=0,±l,±2, ...)ist.
Die entsprechenden Formeln lauten dann:
Ex(z,t) = i-E0-cos(kz-(at) (2.5)
Ey(z,t) =j -E0- sin(kz-ox) (2.6)
E = E0- {i-cos(£z - cot) +j • sinfc -cor)}(2.7)
Dabeibleibtfestzuhalten,daßderBetragderAmplitudeimmerkonstantundgleichE0ist.DieRichtungvonEhingegenvariiertzeitabhängigundbleibtnichtaufeineeinzigeSchwingungs¬ebenebeschränkt.BetrachtetmandenresultierendenVektorinRichtungdernegativenz-Achse(d.h.,daßdieLichtwelledemBeobachterentgegenkommt),dannbeschreibtdieVektorspitzeeinenKreis(rechtszirkulärbeiderDrehungentgegendemUhrzeigersinn),wobeidieDrehrich¬tungvomganzzahligenVielfachen(m)derPhasendifferenzabhängt.DiezeitlicheVeränderungderPolarisationsrichtungwirdinFigur2.3dargestellt.
6

Figur 2.4: Darstellung der elliptischen Polarisation bei
einer Phasenverschiebung von 30 (n/6)-
«;6 ^ ^
S
J*'6>^_ »1«/§§§§? x
LAV*SC\ E
,\1"
eHa/
Im allgemeinen Fall, wenn die Phasendifferenz e (vgl. Gleichung 2.2) keinen der in den Sonder¬
fällen bereits beschriebenen Werte annimmt, breitet sich das Licht elliptisch polarisiert aus.
Für die elliptische Polarisation, die in Figur 2.3 mit e = 30 dargestellt ist, gelten die Gleichungen
2.1 und 2.2.
2.2 Effekt der Doppelbrechung an Kristallen
Die Polarisation des Lichtes unterliegt verschiedenen Einflüssen. Von besonderer Bedeutung
sind dabei Substanzen, die je nach Orientierung zur Polarisationsrichtung des auftreffenden
Lichtes unterschiedliche Brechungsindizes aufweisen. Dieser, als Doppelbrechung bezeichnete
Effekt entsteht durch die spezielle Molekularstruktur in derartigen Substanzen (Kristalle). Die
Elektronen dieser Substanzen reagieren in der als optische Achse bezeichneten Richtung anders
auf die Schwingungen, die durch das elektrische Feld der Lichtwelle verursacht werden, als in
der dazu senkrechten Richtung. Die senkrecht zur optischen Achse verlaufenden Lichtstrahlen
genügen dabei dem bekannten Brechungsgesetz. Lichtwellen, die entlang dieser Richtung ver¬
laufen werden als "ordinär" bezeichnet, ebenso wie der entsprechende Brechungsindex (nord) .
Parallel zuroptischenAchse("extraordinäre"Richtung)liegteinandererBrechungsindex(nexl)vor,derjenachSubstanzgrößeroderkleineralsinderordinärenRichtungseinkann.DieDarstellungderPolarisationdesLichtesanhandderbeidenKomponentendeselektrischenFeldvektorsExundEverdeutlichtdasVerhaltenderPolarisation,wennlinearpolarisiertesLichtineinembeliebigenWinkelzuroptischenAchseauftrifft(z.B.unter45).Figur2.5:WirkungsweisederX/2-Platte.Figur2.6:WirkungsweisederX/4-Platte.7

Ausgehend von gleicher Amplitude und gleicher Phasenlage der beiden Komponenten des polari¬
sierten Lichtes beim Eintritt in die Substanz unter einem Winkel von 45 zur optischen Achse,
breiten sich die x- und y-Schwingungen mit unterschiedlicher Geschwindigkeit aus. Das hat zur
Folge, daß sich die Phasendifferenz zwischen den beiden Schwingungsrichtungen proportional
zur Tiefe des Materials ändert. Beim Austritt des vorher linear polarisierten Lichtes aus einer
derartigen Substanz ist die Polarisation des Lichtes abhängig vom Unterschied der Brechungsin-
dices und von der Dicke des durchlaufenen Materials. Eine geeignet dicke Platte die eine
Phasenverschiebung von genau 180 (90 ) bewirkt, wird als X/2 - Platte (X./4 - Platte) bezeichnet.
Die Figuren 2.5 und 2.6 zeigen die Phasenverschiebung wie sie in einem derartigen Kristall
erfolgt sowie die Wirkung einer k/2 - Platte, die aus linear polarisiertem Licht wiederum linear
polarisiertes Licht erzeugt, das jedoch in einer um 90 gedrehten Ebene schwingt. Eine X/4 -
Platte erzeugt aus linear polarisiertem Licht zirkulär polarisiertes Licht (vgl. Figur 2.3 im
Abschnitt 2.1).
2.3 Polarisationsmodulation
Einige elektrooptische Kristalle zeigen eine weitere, für den Aufbau eines Modulators entscheid¬
ende Eigenschaft, den Pockels-Effekt. Dabei ändert sich das Verhältnis der Brechungsindices
zwischen den Kristallachsen durch das Anlegen elektrischer Spannung. Die geeignete Wechsel¬
spannung an einem derartigen Kristall bewirkt, daß die Polarisation des Lichtes im Takt der
Wechselspannung verändert wird, wenn das Licht den Kristall passiert. Figur 2.7 zeigt die Pola¬
risation des Lichtes einer Modulationswelle bei verschiedenen Phasenlagen.
Figur 2.7: Darstellung der Polarisation einer Modulationswelle bei verschiedenen Phasenlagen.
Die beiden zuerst benutzten und bekanntesten Kristallarten sind "Ammonium Dihydrogen Phos¬
phat" und "Potassium DihydrogenPhosphat".Nebendiesen,inderLiteraturimWiderspruchzudenchemischenFormelnhäufigmitADPundKDPbezeichnetenKristallengibteseinigeweitereKristallarten,diesichgrundsätzlichzumAufbaueinesPolarisationsmodulatorseignen.EinigedieserMaterialiensindindernachfolgendenTabellezusammengestellt:8

Name Chemische Formel
Ammonium Dihydrogen Phosphat (ADP) NHAWf>0)
Potassium Dihydrogen Phosphat (KDP) KH^O,
Lithium Tantalat LiTa03
Rubidium Diydrogen Phosphat RbH^04
Lithium Niobat LiNbO^
Barium Titanat BaTiOz
Ausschlaggebend für die tatsächliche Nutzung eines dieser Materialien in einem Modulator sind
ihre weiteren Eigenschaften. Als wichtigste Entscheidungskriterien gelten dabei die zur Modula¬
tion notwendige Spannung, das Verhältnis der Brechungsindizes der Kristalle, wenn keine
Spannung anliegt, sowie der Einfluß der Änderung der Kristalltemperatur auf die Brechungsin¬
dizes. Der große Nachteil, daß der KDP Kristall erst bei einer Spannung von mehreren 1000 Volt
ein optimales, zur Informationsübertragung nutzbares Modulationssignal erzeugt, mußte lange
Zeit in Kauf genommen werden. Die Nachteile anderer Kristalle wie beispielsweise deren
Temperatur- und Brechungseigenschaften waren lange Zeit weniger gut beherrschbar. Der
Kristall Lithium Tantalat beispielsweise weist bereits ohne jegliche Beeinflussung unterschied¬
liche Brechungsindizes auf und erzeugt durch die Veränderung der Kristalltemperatur um 1.2
Celsius eine vollständige Modulationswelle. Der enorme Vorteil, der sich aus der relativ geringen
Modulationsspannung von 100 - 200 Volt für den Modulatoraufbau ergibt, konnte folglich erst
durch die geeignete Kompensation dieser unerwünschten Nebeneffekte genutzt werden.
2.4 Kompensation der Nebeneffekte der Polarisationsmodulation mit
Kristallen
Die spezielle Molekularstruktur einiger Kristalle führt nicht nur beim Anlegen eines elektri¬
schen oder magnetischen Feldes, sondern auch bei der Erwärmung des Kristalls zurÄnderungderBrechungsindizes.DieserEffektüberlagertsichdereigentlichgewünschtenModulation.Figur2.8.a):DarstellungenderAuswirkungenaufdiePolarisationdesLichtsbeiidentischerAnordnungvonzweiKristallenimStrahlengang(Addi¬tion,keineKompensation).Indikatnx(n,n)Analysator9

Die Figuren 2.8.a) - 2.8.d) illustrieren die Auswirkungen verschiedener Instrumentenaufbauten
für den allgemeinen Fall unterschiedlicher Brechungsindices nonl und nexl (in der ordinären- und
extraordinäen Richtung). Dabei spielt die Ursache für die Unterschiede zwischen nord und nexl
(temperaturabhängig, moduliert oder grundsätzlich) bei diesem Kristall keine Rolle für die Wir¬
kungsweise der Aufbauten.
Die Figur 2.8.a) zeigt die Addition der Auswirkung der Brechungsindices auf die Polarisation,
wenn zwei identische Kristalle mit gleicher Orientierung im Strahlengang sind. Der nicht zur
Ausgangsrichtung parallele Lichtanteil der Polarisation gelangt durch den Analysator auf die
Empfängerdiode.
Figur 2.8.b):
Darstellung der Auswirkungen auf
die Polarisation des Lichts bei zwei
90 verdreht angeordneten Kristallen
imStrahlengang(Kompensation).esliegtkeine/WechselspannunganesgelangtkeinLichtaufdie!|nearEmpfangsdiodepolarisiertes/yC\f^))Indikatnx(n,n)e©Jgj3^xs655öoaC^Vj^'4l\f?$X6öXäJwx9AnalysatorfP^©Knsta"eshegtkeineWechselspannunganW^\P~ijWUrJ^^elliptischePolarisationy&KrislalllinearpolarisiertesLichtImGegensatzzumerstenFall(Figur2.8.a)kompensiertdieum90verdrehteAnordnungdeszweitenKristallsinFigur2.8.b)denEinflußderBrechungsindizes,danordundnexlbzw.nextundnordaddiertwerden.DiePolarisationsrichtungenvorundnachDurchlaufendesAufbaussindidentischundesgelangtkeinLichtaufdieEmpfängerdiode.Figur2.8.c):DarstellungderAuswirkungenaufdiePolarisationdesLichtsmitHilfeeinerX/2-PlatteundzweiidentischangeordnetenKristallenimStrah¬lengang(Kompensation).esliegtkeineWechselspannunganAnalysatorIndikatnx(n,n)nearpolansiertesKristallLicht\/2PlattelinearpolarisiertesLichtelliptischKnstallpolansiertesLichtDasgleicheResultatergibtsichausderinFigur2.8.c)dargestelltenAnordnung.Diek/2-PlattezwischendenbeidenKristallendrehtdiePolarisationsrichtungum180undsorgtfürdieVertau¬schungderwirksamenBrechungsindizes.DieOrientierungderKristalleindenFiguren2.8.a)und2.8.c)sindidentisch[Biszzo,M.R.1971,Fang-ShangChen1970].10

Figur 2.8.d):
Darstellung des gefalteten Strahlwe¬
ges mit nur einem Kristall zur
Modulation und Demodulation
sowie der Kompensation der Polari¬
sationseffekte mit Hilfe einer XIA -
Platte.
Die bisher beschriebenen Lösungen gehen von jeweils zwei völlig identischen Kristallen aus. Die
daraus resultierenden Nachteile wie doppelter Hardwareaufwand, aufwendige Justierung und
schwierige Herstellung genügend identischer Kristalle erforderten die Entwicklung eines modifi¬
zierten Aufbaus für den Einsatz zur Distanzmessung.
Bei einem Distanzmesser führt der Weg des modulierten Lichtes über die Reflexion am Zielpunkt
zurück zum Instrument. Durch die Ausnutzung dieses Strahlverlaufs konnte die Anordnung so
gewählt werden, daß die Kompensation der Polarisationseffekte in zwei Teilschritten erfolgt und
nur ein Kristall zur Modulation und Demodulation benötigt wird. Anstelle der Drehung der
Polarisationsrichtung mit Hilfe einer X/2 - Platte um 180 wird eine k/4 - Platte benutzt, die
sowohl die Polarisationsrichtung des ausgesandten Lichts als auch des reflektierten Lichts um
jeweils 90 verdreht und somit die Aufgabe der Elimination der Nebeneffekte übernimmt. Diese
Faltung des Meßstrahls über den Reflektor am Zielpunkt bietet den großen Vorteil, daß derselbe
Kristall zur Modulation und Demodulation verwendet werden kann. Der grundsätzliche Nach¬
teil, daß jede Reflexion die Polarisation geringfügig verschiebt wird durch besondere Beschich¬
tungen dieser optischen Flächen nahezu eliminiert. Abgesehen von diesem Einfluß der Refle¬
xionsschichten auf das Modulationssignal liegt ein idealer Systemaufbau vor. Der Kristall weist
bezüglich Ausgangspolarisation und Temperaturverhalten wirklich identische Eigenschaften auf
und ermöglicht eine optimale Kompensation dieser Nebeneffekte (vgl. Figur 2.8.d)). Der Polarisa¬
tionsstrahlteiler übernimmt dabei die Funktion des Analysators. Die spezielle Schicht in der
Diagonalen des Teilerwürfels läßt einerseits die Lichtanteile der einen Richtung nahezu vollstän¬
dig passieren (aus Richtung der Lichtquelle) und lenkt andererseits die Anteile der dazu senk¬
rechten Richtung um 90 ab (in Richtung der Empfangsdiode).
es liegt keine
Wechselspannung an
Indikatnx (n ,n
der Polansattonsstrahlteiler,derimWinkelvon45zumKnstallstehtwirktalsAnalysator11

3 Prinzip der verwendeten Methode zur Entfernungsmes¬
sung
Das angewandte Meßprinzip geht auf die vom französischen Physiker H. FIZEAU im Jahr 1849
entwickelte Methode zurück. FIZEAU benutzte seinen Versuchsaufbau (vgl. Figur 3.1) zur
Bestimmung der Lichtgeschwindigkeit.
3.1 Der Versuch von H. FIZEAU
Über eine einfache Optik fokussierte FIZEAU Sonnenlicht auf einen halbdurchlässigen Spiegel
in die Ebene einer Zahnscheibe. An den Stellen der Zahnlücken konnte das Licht die Scheibe
passieren, während die Zähne den Austritt des Lichtes verhinderten. Durch die Rotation der
Zahnscheibe entstanden in Abhängigkeit von der Umdrehungszahl des Zahnrads Lichtimpulse.
Das auf diese Weise modulierte Licht wurde an einem 8.6 km entfernten Reflektor zurückgespie¬
gelt. FIZEAU erhöhte die Rotationsgeschwindigkeit des Zahnrads bis der reflektierte Lichtim¬
puls durch eine Zahnlücke wieder empfangen werden konnte. Zwischen der Laufzeit des Lichts
über den Messweg und der Bewegung des Zahnrads erfolgte ein Nullabgleich. Mit einem Zahn¬
rad von 720 Zähnen und der Umdrehungsgeschwindigkeit von 12.6 U/s (oder ganzzahligen Viel¬
fachen) berechnete FIZEAU die Lichtgeschwindigkeit mit c = 313000 km/s [Fizeau, H. 1849].
halbdurchlassiger
Spiegel
Lichtquelle (Sonne)
Sammeloptik
<!Betrachtu ngsoptik
ït :fl^R
Figur 3.1: Schematische Darstellung des Versuchsaufbaus von FIZEAU
zur Bestimmung der Lichtgeschwindigkeit.
Basierend auf diesem fundamentalen Messprinzip kann mit den heute verfügbaren technischen
Mitteln ein sehr genauer Distanzmesser realisiert werden. Der einfache mechanische Aufbau
wurde durch moderne Opto-Elektronik ersetzt [Meier D., Loser R., 1986].
3.2 Moderner Aufbau des FIZEAU - Systems
Ausgehend vom bereits grob skizzierten Messaufbau von FIZEAU enthält dieses Kapitel die
Beschreibung der Realisierung eines analogen Messaufbaus mit modernen technischen Bauteilen
und Hilfsmitteln.BasierendaufdenmitdemMekometerME5000gewonnenenErfahrungenundausgehendvondenerheblicherhöhtenAnforderungenergabensicheinigeentscheidendeVeränderungen.BezüglichderverwendetenKomponentenbeschränktsichderUnterschiedaufdenneuverwendetenoptischenIsolatorunddasWeglassenvonBlendeundSignalabschwächer.DieeinzelnenKomponentenhingegenwurdenhinsichtlichArbeitsbereich,Leistung,Geschwin-
12

digkeit und Baugrösse erheblich verändert.
Die Figur 3.2 zeigt den grundsätzlichen Aufbau von Mechanik, Optik und Elektronik des
FIZEAU-Systems.
Opt
Isolator
pol
Strahl-
teiler
O©0©
©
hI
Licht¬
detektor
Lock-In
Amplifier,
Wobbler
©
©
Sende- und
Empfangsoptik
B &
A/4-Platte
©«—1>
Frequenz-
Buchse
r i
Quarz,
Sythesizer
©Controller mit
A\D - Wandler ^ ^-
Daten-
Buchse
Figur 3.2: Schematische Darstellung des Funktionsmusteraufbaus.
Die Beschreibung des funktionalen Zusammenwirkens der einzelnen Bauteile lässt die relativ
einfache Realisierung des Fizeau-Prinzips erkennen.
Das vom Laser (1) ausgesandte, linear polarisierte Licht gelangt über einen optischen Isolator in
einen Polarisationsstrahlteiler (3). Die spezielle Beschichtung dieses Strahlteilers ermöglicht,
dass alle Polarisationsanteile einer Schwingungsrichtung den Strahlteiler direkt passieren kön¬
nen, während die Anteile in der dazu senkrechten Richtung um 90 abgelenkt werden. Durch den
entsprechenden Einbau des Strahlteilers kann das linear polarisierte Licht nahezu vollständig
(99.8%) zum Kristall gelangen, der sich im Modulator (4) befindet.
Mit Hilfe eines Resonanzschwingkreises wird im Modulator mit einer Frequenz zwischen 1332
MHz und 1425 MHz eine entsprechende Wechselspannung von ca. ± 120 Volt am Kristall ange¬
legt, der sich als Dielektrikum zwischen den Kondensatorplatten des Schwingkreises befindet.
Nach dem Passieren des Kristalls ist das Licht mit der jeweils angelegten Frequenz moduliert,
das heisst, die Polarisationsrichtung variiert in der aus Figur 2.6 ersichtlichen Weise.MitHilfederanschliessendangeordnetenX/4-Platte(6)erfolgteinePhasenverschiebungdesmoduliertenLichtesum90(DrehungderPolarisation).ÜberdiefolgendeOptik(5)gelangtdermöglichstpar¬alleleMessstrahl(Durchmesserca.8mm)zumReflektor.DerreflektierteStrahlpassiertsämt¬licheoptischenBauteileinumgekehrterRichtungunddieX/4-PlatteverschiebtdiePhasenlageumweitere90.ImModulatorerfolgteineweitereModulation(Demodulation)desreflektiertenMessstrahls.DasdemodulierteLichtgelangtnunzumPolarisationsstrahlteiler.DieRichtungderPolarisationdesdemoduliertenLichtshängthauptsächlichvonderDistanz,vonderModulationsfrequenzundvonderAusbreitungsgeschwindigkeitdesLichtesinderAtmosphäre(vomBrechungsindex)ab.EntsprechendseinerbereitserwähntenBeschichtungteiltderPolarisationsstrahlteilerdaspolarisierteLichtaufundlenktdenindereinenRichtungpolarisiertenAnteildesLichtesum13

90 auf den Lichtdetektor (7) um. Der Lichtanteil, der die gleiche Polarisationsrichtung aufweist
wie das vom Laser ausgesandte Licht, passiert den Strahlteiler ohne Ablenkung und wird im
optischen Isolator absorbiert, so dass der Laser nicht durch das reflektierte Licht beeinflusst
wird.
Der Lichtdetektor (Empfangsdiode) misst die Intensität des auftreffenden Lichts. Diese Mess¬
information dient als Eingangsgrösse eines Regelkreises, der mit Hilfe eines Synthesizers (8) die
am Kristall anliegende Frequenz verändert, bis am Lichtdetektor ein Intensitätsminimum
gemessen wird. Im Falle eines Intensitätsminimums am Detektor stimmt die Phasenlage des
ausgesandten und des reflektierten Lichts überein. Die Demodulation ergibt dann ausschliess¬
lich linear polarisiertes Licht, das die gleiche Polarisationsrichtung aufweist wie das ursprüng¬
lich vom Laser kommende Licht. Für die Distanzberechnung heisst das, dass bei einer Modula¬
tionsfrequenz, die zu einem Intensitätsminimum am Lichtdetektor führt, exakt ein ganzzahliges
Vielfaches (N) von Modulationshalbwellen den Messweg durchläuft.
Lichtmlensitat I
3 5 kHz Frequenz
7 kHz Frequenz
Frequenz f
Frequenzhub
Figur 3.3:
Schematische Darstellung der Minimadetek-
tion mit Hilfe der überlagerten Wobbeifre¬
quenz.
Die erreichbare Messgenauigkeit hängt neben der Art der Minimumsdetektion direkt von der
Genauigkeit ab, mit der die Frequenz bestimmt werden kann, die zu einem Signalminimum an
der Empfangsdiode führt. Zur möglichst exakten Minimumsbestimmung wird die Modula¬
tionsfrequenz durch den Wobbier (9) sinusförmig mit 3.5 kHz und einem in 255 Stufen software-
mässig einstellbaren Frequenzhub zusätzlich frequenzmoduliert (vgl. Figur 3.3). Im nicht abge¬
stimmten Fall werden die mit einer Frequenz von 3.5 kHz auftretenden Intensitätswerte im
Lock-In Verstärker gemessen und zu weiteren Berechnungen an den Controller weitergeleitet.
Der Controller (10) rechnet anhand dieser Informationen die neuen Einstellwerte des Synthesi¬
zers, der anschliessend die entsprechendeFrequenzzurModulationdesKristallserzeugt.DieseriterativeVorgangwirdsolangewiederholt,biseinMinimumvorliegtundderDetektorLichtmiteinerFrequenzvon7kHzempfängt,anstelleder3.5kHz.3.3DistanzbestimmungDieBestimmungderDistanzerfordertdieErmittlungvonmindestenszweiFrequenzenandenensicheineganzeAnzahlvonModulationshalbwellenaufdemMesswegbefindet.MitHilfederbekanntenDifferenzzwischendenWellenzahlenandiesenbeidenFrequenzpositionenwirddieEindeutigkeitderDistanzbestimmunggewährleistet.
14

Ausgehend von der Startfrequenz des Modulators wird durch die schrittweise Veränderung der
Frequenz die erste Minimumstelle detektiert und der entsprechende Frequenzwert gespeichert.
Mit
D Distanz
N0 Anzahl von Modulationshalbwellen (Wellenzahl)
c Lichtgeschwindigkeit
f0 Modulationsfrequenz
lässt sich die Distanz über die Gleichung
N0-c
berechnen, wobei dazu die Wellenzahl N0 bereits bekannt sein müsste (z.B. mit Hilfe eines genü¬
gend genau vorgegebenen Näherungswertes berechnet).
Im allgemeinen Fall liegt jedoch keine derartige Zusatzinformation vor. Aus diesem Grund muss
zusätzlich der Frequenzwert an der exakt nächsten Minimumstelle bestimmt werden. Über die¬
sen zweiten Frequenzwert/(0+d und der Kenntnis, dass die Frequenzdifferenzen zwischen zwei
benachbarten Nullstellen für eine Distanz immer gleich sind, können die Wellenzahlen über
einen einfachen Dreisatz berechnet werden. Es gilt:
N0=RNDÂ(/o+.-/o)(3.2)wobeiRNDdieRundungsfunktionbedeutet,dabekanntlicheineganzeAnzahlModulationshalb¬wellenaufdemMesswegseinmüssen.DieseRundungeliminiertgewisseMessunsicherheitendiesichbeispielsweiseausdemkleinstenFrequenzschrittoderderInstabilitätdesBrechungs¬indexesderAtmosphärewährendderMessungergeben.DurchEinsetzenderGleichung(3.2)inGleichung(3.1)istdieDistanzbestimmunggrundsätzlichmöglich.DajedochdieBestimmungderAnzahlModulationshalbwellenN0einerExtrapolationderFrequenzdifferenzA/0=(f0+i-f0)aufdieFrequenzf0entspricht,limitierteinGrenzwertdieEindeutigkeitderMessung.DasEinsetzenvon/0=1400MHz,dN=0.5sowied(Af0)-2,00Hz(kleinsterFrequenzschritt)indieGleichungA(A/ö)2dNo=777T2-dW<)<3-3'ergibtfürdieFrequenzdifferenzeinenGrenzwertvonA/0=0.91652MHz.MitHilfederGleichungen(3.1)und(3.2)folgtschliesslich,dassbeieinerDistanzvonD~160/ndieBasisfürdieExtrapolationzukleinwirdundweitereMessungenzureindeutigenDistanzbe¬stimmungerforderlichsind.AusdiesemGrundsiehtdieinterneSteuerungssoftwaredesDistanzmessersdieMessungenanweiterenMinimumstellenvor.DiegrobenFrequenzeinstel¬lungensowiedieAnzahlderübersprungenenMinimaklassensichausderFrequenzdifferenz/(o+i)~/ozweidirektbenachbarterMimimumpositionenberechnen.DieendgültigeFormelzurBestimmungderAnzahlModulationshalbwellen(JV0)aufdemMessweglautetsomit:N0=RND(/Wo)(3.4)ZureindeutigenBerechnungeinerDistanzohnedieVorgabevonNäherungswertenistdieBestimmungvonmindestenszweiFrequenzwertennotwendig,beideneneinSignalminimumvorliegt.ÜberdieFormeln(3.1)bis(3.4)kanndieDistanzfürbeideFrequenzstelleneinzelnmitanschliessenderMittelbildungberechnetwerden.15

DD,+Dk_\ c
2 2*2N0 Nk+k
JO Jk
(3.5)* ;
Mit N0 + k =Nk lautet die Formel zur Distanzberechnung aus den Frequenzwerten zweier beliebi¬
ger Minima/0 und/* :
rnd\äi\c rD{JÀ\+kicD
2/0 2 A
schliesslich:
4-fo-A
RND(^.Â+RND{^.f0 +lc.f^c4-A-Ä
*/o
D =
c\RNDU* '(/i+/o)+*-/o
4-fo-A(3.6)
16

4 Instrumentelle Voraussetzungen
Zu Beginn dieses Kapitels seien einige allgemeine Bemerkungen zur grundsätzlichen Problema¬
tik beim Bau eines derartigen Instrumentes gestattet. Trotz des relativ einfachen Instrumenten-
aufbaus werden an die sorgfältige Ausführung sowie das präzis aufeinander abgestimmte
Zusammenwirken der optischen, mechanischen und elektronischen Komponenten erhebliche
Anforderungen gestellt. Eines der Beispiele dafür ist die interne Führung des Lichtstrahls durch
den Kristall, der eine Grundfläche von 0.7 mm x 0.9 mm bei einer Höhe von 12 mm aufweist. Der
gesamte Lichtstrahl muss aus beiden Richtungen (ausgesandtes und empfangenes Licht) mög¬
lichst parallel und ohne Vignettierung durch den Kristall verlaufen, wobei der möglichst gleiche
Strahlweg im Kristall entscheidenden Einfluss auf die Genauigkeit der Messung hat. Die zusätz¬
lichen Effekte bezüglich Temperaturgradient und Feldstärke an unterschiedlichen Stellen im
Modulationskristall hätten unnötige Variationen des Messsignals zur Folge (vgl. Kapitel 8.3.2,
Figuren 8.3 und 8.4) und somit einen negativen Einfluss auf die erreichbare Messgenauigkeit.Ähnliche Forderungen gelten für den Einbau und die Justierung der k/4 - Platte, so dass die opti¬
sche Ausführung und Justierung einen grossen Teil der letztlich erreichbaren Genauigkeit
bestimmen. Der technischen Ausführung des Hochfrequenzteils kommt ähnliche Bedeutung zu.
4.1 Zielvorstellungen und Anforderungen
Die Weiterentwicklung des in den Grundzügen bereits im Mekometer ME 5000 realisierten
Messaufbaus [Meier D., Loser R., 1986] soll sich besonders auf zwei Schwerpunkte konzentrieren.
Einer dieser Schwerpunkte wird durch eine weitere Steigerung der Messgenauigkeit sowie eine
wesentlicheErhöhungderMessgeschwindigkeitaufstatischeZielerepräsentiert.UmfassendeUntersuchungenobundmitwelchemModellansatzsichdiesesMessprinzipzurMessungaufbewegteZieleeignet(Trackingfähigkeit)stelltendenzweitenEntwicklungsschwerpunktdar.DieZiel-undWunschvorgabendereinfachenSpezifikationslistebasierenteilweiseauftechnischrealisierbarenGrössenordnungen.AndererseitsstellenphysikalischenGrössenwiebeispiels¬weisedieGeschwindigkeitswertedesfreienFallseinezusätzlicheHerausforderungdar.AlsEnt¬wicklungszieledienenfolgendeLeistungsmerkmale:a)Messgenauigkeitvono=lym±0.1•10"6•Db)AuflösungsvermögendesMesssystemsvon\\xmauf5mc)Messbereich2m<messbareDistanz<1000md)DauereinervollständigenMessung<1se)MessungaufeinbewegtesZiel(Reflektor)f)GeschwindigkeitderReflektorbewegungimTrackingModetechnischerreichbaresZiel:1Wunsch:9.8-g)maximaleBeschleunigungwertederReflektorbewegungimTrackingModetechnischerreichbaresZiel:9.8-^-(lg)Wunsch:8-9.8-^-(8g)h)möglichstkompakteBauweisedesInstruments17

Diese relativ hochgesteckten Ziele sind mit vertretbaren Kosten nur sehr schwer zu erreichen.
Für die Analyse der technischen Möglichkeiten bieten die Zielvorstellungen jedoch eine sinnvolle
und gute Grundlage. Die Entscheidung, inwieweit die technischen Möglichkeiten in ein serienrei¬
fes Produkt überführt werden können, basiert einerseits auf den Kostenabschätzungen, die aus
der technischen Analyse ableitbar sind sowie auf einer entsprechenden Marktanalyse.
Die Aufgabenstellung besteht aus zwei Teilen, der Forderung nach einer genauen, schnellen
Messung im Bereich zwischen 2 m und 1000 m und der Forderung, nach bewegten Zielen messen
zu können. Da beide Entwicklungsziele von einander abhängen, müssen gewisse Prioritätsregeln
aufgestellt und eingehalten werden. Im vorliegenden Fall wurde bestimmt, dass der erste Teil
(Genauigkeit) vorrangige Bedeutung hat, aber der Einfluss aller Entscheidungen während der
Entwicklung im Hinblick auf die Messung nach bewegten Zielen zu überprüfen ist. Als erster
Schritt wurde ein Funktionsmuster aufgebaut, das bereits einige wesentliche Verbesserungen
gegenüber dem Mekometer ME 5000 aufweist und mit dessen Hilfe erste technische Abklä¬
rungen möglich waren. Alle Untersuchungen und Messungen dieser Arbeit erfolgten mit diesem
Funktionsmusteraufbau. Aus diesem Grund sind alle wichtigen Detailkomponenten des Funk¬
tionsmusters beschrieben. Die zusätzlich geplanten Änderungen und Verbesserungen einzelner
Module (z.B. Synthesizer und Controller) des endgültigen Distanzmessers werden zusätzlich
erläutert.
Die gegenüber dem Mekometer ME 5000 bereits erfolgten technischen Veränderungen des Funk¬
tionsmusteraufbaus sind:
1. Die Erhöhung der Modulationsfrequenz von ca. 500 MHz beim Mekometer ME 5000 auf ca.
1300 MHz bis 1400 MHz hat die Reduzierung der Modulationswellenlänge von ca. 0.60 m auf
ca. 0.22 m zur Folge. Damit kann bei gleicher Schrittweite der Frequenzverstellung eine
höhere Auflösung erzielt werden. Die Entscheidung ausgerechnet diesen Hochfrequenzbereich
zu wählen, liegt in der Tatsache begründet, dass aus anderen Anwendungsgebieten eine Viel¬
zahl günstiger und hochwertiger Elektronikbauteile erhältlich sind. 2.AufgrunddergefordertenMessgeschwindigkeitunddesanderenArbeitsbereichswurdeeinneuerSynthesizerentwickelt,dereinerseits40xschnellereinschwingtundandererseits4xkleinerist.ImvorliegendenFunktionsmusteraufbaubeträgtseineEinschwingzeitca.3-5ms.DerkleinsteFrequenzschrittdiesesSynthesizersliegtbei317.46Hz,wasca.0.25ppment¬spricht.3.UnterdenverändertenVoraussetzungenwarausserdemdieEntwicklungeinesneuenModu¬latorserforderlich,derebenfallsimverändertenFrequenzbereicharbeitetunddessenBand¬breite(von1332MHzbis1425MHz)wesentlicherhöhtwurde,umdieMessungkurzerEntfer¬nungenzugewährleisten.MitdemvorliegendenFunktionsmustersindeindeutigeMessungenaufEntfernungen>3.2moderbeiVorgabeeinesNäherungswertes>1.6mmöglich(vgl.Kapi¬tel8.2.1,Tabellen8.1und8.4).4.2GrundmoduledesDistanzmessersAufbauundFunktionsweisedesSynthesizersEinesderHauptkriterien,daseineEignungdesSynthesizersfürhochgenaueMessungenbestimmt,istdiekleinstemöglicheSchrittweitederFrequenzverstellung.JekleinereinFre¬quenzschritt,umsobesseristdietheoretischeAuflösungdesMesssystems.FürdeninternenAufbaudesSynthesizersbedeutetdas,dassbeimPhasenvergleichebenfallssehrkleineFrequenzwertevorliegen.ImWiderspruchdazustehtdieForderungnacheinemsehrschnellenSynthesizermitentspre-18

chend kurzer Einschwingszeit nach einer Frequenzverstellung. Der interne Synthesizeraufbau
erfordert in diesem Fall einen relativ grossen Frequenzwert beim Phasenvergleich.
Im Funktionsmuster konnte dieser Widerspruch durch den Aufbau eines zweiteiligen Synthesi¬
zers gelöst werden. Die Wirkungsweise entspricht dem Prinzip eines Nonius, dessen einzelne
Teilstrichabstände ebenfalls relativ gross sind im Vergleich zur kleinsten ablesbaren Mass¬
einheit. Die beiden Synthesizerteile laufen, verglichen mit der kleinsten Schrittweite der Synthe¬
sizerverstellung bei den relativ hohen Frequenzen von 40.0 kHz und 39.68254 kHz. Durch die
Schaltungsanordnung ergibt die gegenläufige Veränderung der Teiler in den beiden Schaltkrei¬
sen den kleinsten verstellbaren Frequenzschritt von 317.46 Hz (Differenz beider Frequenzwerte).
Der Aufbau des Synthesizers ("Analogtechnik") ist in Figur 4.1 schematisch dargestellt.
/^~~\Teiler
125
Teiler
2
'
Phasen-
vergleich
40 00000 kHz
\ (VCO )
/\
•
w
f1Verstarker
1a N1b\
-f VCO \1n —
V J
Mutter
Oszillator
10 MHz
V
Teiler
126
Teiler
2
Phasen
vergleich
39 68254 kHz> _J_6A
'
Mischer
y
f2
Verstarker
N2a
N
2b
Tief
pass
N2 • 12r=
(f -f)2 1
V
N2
y
Figur 4.1: SchematischeDarstellungdesSynthesizeraufbaus(analogeVarianteeinesSynthesizers)DieFunktionsweisedesSynthesizersberuhtaufderKopplungvonzweiSchaltkreisen.DieseKopplungwirddurchdenspeziellenEinbaueinesMischers,derauszweiEingangsfrequenzen/,und/2sowohldieSumme/,+/2alsauchdieDifferenz/,-/2erzeugt,realisiert.AusgehendvonderFrequenzdesMutteroszillatorsvon10MHzverringernzwei,festeingebauteTeilerstufen(1/125und1/2)dieFrequenzaufexakt40kHz(flr).Diese40kHzdienenalsRefe¬renzfürdenPhasenvergleichdeserstenSchaltkreises.EinRegelverstärker,eininternerOszilla¬tor(VCOvoltagecontrolledoscillator)sowieeinespeziellprogrammierbareTeilerstufeNl(beste¬hendausJV,aundNfi)schliessendenerstenSchaltkreis.DerinterneOszillatorarbeitetjenachEinstellungderprogrammierbarenTeilerstufe(DualModuloTeiler)beieinerFrequenzumca.900MHz,diesichausN]•flrberechnetundals/anderVerbindungzumzweitenSchaltkreis(Mischer)anliegt.DerUnterschieddeszweitenSchaltkreisesbetriffteinerseitsdiespezielleIntegrationdesMischerszurKopplungderbeidenSchaltkreiseundandererseitsdieanderenKennzahlendereinzelnenKomponenten.AufgrunddesgeringfügiganderenTeilungsverhältnisses(1/126und1/2)entstehtausder10MHzFrequenzdesMutteroszillatorsdieveränderteReferenzfrequenz(ß,)von39.68254kHzfürdenPhasenvergleich.DernachdemVerstärkerangeordneteinterneOszillator(VCO)arbeitetbeidereigentlichenModulationsfrequenzinderGrössenordnungvonca.1300MHzundbetreibtmitsei¬nerLeistungdenModulator.GleichzeitigistderVCOmitdemMischer(Eingang/),derdiebei-19

den Schaltkreise koppelt, verbunden. Am Ausgang des Mischers wird nun die Differenz /2-/j mit
der programmierbaren Teilerstufe N2 verbunden, während die Summe f2 +/, mit Hilfe eines Tief¬
passfilters (TP) entfernt wird. Nach dem programmierbaren Teiler N2 schliesst die Verbindung
zum Phasenvergleich den zweiten Schaltkreis.
Die seit kurzem am Markt verfügbaren monolithischen Bauteile erlauben eine weitere Verbesse¬
rung und eine Vereinfachung des Aufbaus eines Synthesizer in "Digitaltechnik". Mit Hilfe dieser,
als NCO (numeric controlled oscillator) bezeichneten Bausteine können wesentlich kleinere Fre¬
quenzschritte realisiert werden [Rupp A. 1990]. Ausserdem entfällt der Aufbau einer zweiteiligen
Synthesizerschaltung, was zu einer Reduktion der Programmiergeschwindigkeit des Synthesi¬
zers führt. In Figur 4.2 ist ein möglicher Synthesizeraufbau mit einem Schaltkreis und der
Benutzung eines NCO schematisch dargestellt.
/^\Mutter¬
oszillator
10 MHz
NCO TeilerPhasen¬
vergleich
\3 6 MHz
bis 4 MHz
-iVf,„
/\ vcu 1
V7Verstarker
Teiler
Figur 4.2: Schematische Darstellung eines verbesserten Synthesieeraufbaus (digitale Variante eines Synthesizers)
Die 10 MHz Frequenz des Mutteroszillators liegt am NCO an, der daraus in Schritten von
0.16 • 10-6 Hz jede beliebige Frequenz bis 4 MHz erzeugen kann. Im vorgeschlagenen Aufbau für
den Distanzmesser werden Frequenzen zwischen 3.6 MHz und 4 MHz benötigt, die der Control¬
ler individuell einstellen (programmieren) kann. Die jeweils vom NCO erzeugte Frequenz liegt
an einem herkömmlichen Regelkreis, bestehend aus:
- einer Teilerstufe,
- einem Phasenvergleicher,- einem Verstärker,
-demVCO(Modulator)und-einerzweitenTeilerstufean.DerVCOdiesesSchaltkreisesarbeitetineinemBereichzwischen1350MHzund1500MHz.DiebeidenTeilerstufendesRegelkreisessindfestprogrammiertundändernihreTeilungsver¬hältnissenicht,sodassaus4MHzamEingangeineFrequenzvon1500MHzamVCOentsteht.EntsprechenddiesemVerhältnisvon1500/4werdenVeränderungendervomNCOabgegebenenFrequenzzurModulationdesKristallsübersetzt.DerhoheAuflösungsfaktordesNCOermög¬lichtaufdieseWeiseeinenkleinstenFrequenzschrittvon0.16•106•1500/4=6•105Hz.RealisierungdesModulatorsMechanischbestehtderModulatorauseinemTopfandessenBodenflächeeinStempeldenKri¬stallmittelsFederkraftfesthält(vgl.Figur4.3).DieBodenflächedesTopfesundderStempelrea¬lisierendieKondensatorplatten,währendderKristallsichalsDielektrikumdazwischenbefindetundaufdieseWeisederSpannungundFrequenzdesSchwingkreisesausgesetztist.DieDiffe¬renzzwischendemInnendurchmesserdesTopfesunddemAussendurchmesserdesStempels,dieelektrischvoneinanderisoliertseinmüssen,bestimmtdieInduktivitätunddamitdiemaximaleSchwingkreisfrequenz.20

Stempel
phasengleiche Ruckkopplung
"angekoppelte"
Sonde
Hochfrequenz
Schwingkreis
Überlagerung der
Wobbeifrequenz am
Schaltungseingang
Figur 4.4: Schematische Darstellung der Modulator¬
schaltung
Figur 4.3: MechanischerAufbau des Modulators
Die elektrische Wirkung des Modulatoraufbaus (VCO) liegt darin, mit Hilfe einer Spannungsän¬
derung eine Frequenzänderung zu realisieren. Die Figur 4.4 zeigt das elektrische Schema der
Modulatorschaltung, einen sogenannten Colpitts Oszillator vom Typ Clapp [Kovacs F. 1977]. Den
aktiven Teil der Schaltung bildet ein Transistor, der als Verstärker (Power Amplifier) dient und
die Schaltung in drei Teile gliedert.
Am ersten Teil, zwischen Emitter E und Basis B des Transistors liegt die Steuerspannung UEB
an. Im zweiten Teil, zwischen Kollektor C und Basis B des Transistors ist der Hochfrequenz-
Schwingkreis realisiert. Die in Serie geschalteten Glieder des Schwingkreises bewirken im
Resonanzfall eine Spannungsüberhöhung und erzeugen damit die zur Modulation des Kristalls
notwendige Hochfrequenzleistung (HF-Leistung).
Die phasengleiche Rückkopplung (oder Mitkopplung) zwischen Kollektor C und Emitter E des
Transistors bildet den dritten Teil der Schaltung. Phasengleich bedeutet in diesem Zusammen¬
hang, dass eine Spannungserhöhung am Eingang eine gleichsinnige Reaktion am Ausgang
auslöst, also eine Oszillation ermöglicht.
Bei entsprechender Abstimmung des Systems wird durch die Beeinflussung der Spannung UEB
eine Veränderung der Frequenz des Schwingkreises bei entsprechender HF-Leistung optimal
gewährleistet.
Ein geringer Teil der Leistung des HF-Schwingkreises wird durch die berührungslose "Ankopp-
lung" einer Sonde zurSchliessungdesRegelkreisesabgeleitet.DieserAnschlussdientausserdemzurKontrolledertatsächlicherzeugtenHochfrequenzundzurMessungderanliegendenModu¬lationsspannung.AusdemBlickwinkeldeselektronischenSchaltungsaufbausistderModulatorvollständigindenSynthesizerintegriert,denndieModulatorschaltung(Figur4.4)entsprichtdemVCOderSynthe¬sizerschaltung.BeimzweiteiligenSynthesizerdesFunktionsmusteraufbausbetrifftdasdenVCOdeszweitenSchaltkreises(höhereFrequenz).VonentscheidenderBedeutungfürdasFunk¬tionierendesgesamtenSchaltungsaufbausistdieReaktionszeitderRegelschleifezwischendemPhasenvergleich,demVerstärker,demModulator(VCO),demTeilerunddemneuerlichenPha¬senvergleich.DieEinschwingzeit(Regelzeit)desSynthesizersbeträgtmomentanca.3-5ms.InnerhalbdieserZeitspannefindeteinegewisseGlättungderSignalestatt.DiebesondereWich¬tigkeitderzeitlichenVerhältnissewirdimZusammenhangmitFrequenzüberlagerungzur21

genauen Minimumdetektion (Wobbeifrequenz) deutlich. Die Wobbeifrequenz von 3.5 kHz liegt an
der Verbindung zwischen Verstärker und VCO (Modulator) an, sodass der Kristall mit der ent¬
sprechenden Frequenz moduliert wird. Die Wobbeifrequenz ist nun wesentlich höher als die
Reaktionszeit der Regelung, die diese schnellen Änderungen nicht bemerkt. Die überlagerte
Wobbeifrequenz hat folglich keinen Einfluss auf das Einschwingen des Synthesizers und auf den
Regelkreis.
Aufbau des Controllers
Die Auslegung des Controllers entscheidet über die Leistungsfähigkeit des gesamten Messsy¬
stems. Der Controller des Funktionsmusters wurde ursprünglich für die Steuerung eines
Distanzmessers basierend auf dem Mekometer ME 5000 Prinzip, mit Messzeiten im Bereich von
einigen Sekunden, ausgelegt. Die Figur 4.5 zeigt das Blockdiagramm des Controlleraufbaus.
I 11
RAM
8 KB
EPROM
32 KBSelect
138
SAB 8053G
Synthesizer
Anschluß
Adress
Bus
i
Laich
575
J !!
DS1210
Buffer
Batt
Wandler
TTL/V24
D/A
Wandler
PM7524
1—
L_ RS 232 JInput
LLOutput PC
Figur 4.5: Controller - Blockschema des Funktionsmusters
Als Rechnerbaustein des Funktionsmusters dient der SAB 80535 von Siemens, der als EPROM
Version eingesetzt wird. Ein zusätzliches, externes RAM enthält die gerätespezifischen Daten,
die aufgrund einer eigenen Stromversorgung permanent gesichert bleiben. Neben der Program¬
mierung und Steuerung der Synthesizereinstellung übernimmt der Mikroprozessor die Erzeu¬
gung des Modulationssignales sowie der Abtast-Samples für den A/D Wandler. Als externe Ver¬
bindung zur Ein- und Ausgabe von Befehlen und Resultaten enthält der Controller eine RS232
(V24) Schnittstelle.
Die Abschätzung der speziellen zeitlichen Erfordernisse für die Verfolgung eines Zielpunktes
gepaart mit den Messerfahrungen des ME 5000 und des Funktionsmusters führten zur Aufstel¬
lung folgender Anforderungen aneinenneuenControlleraufbau:AbtastungdesanalogenMesssignalsamLichtdetektor,wobeimindestens20AbtastzyklenzursicherenAussageüberdieFlankenlagedesSignalsnotwendigsind.KorrekturdesSynthesizersentsprechenddemFlankenverlauf(Schrittvorwärtsoderrück¬wärts),dersichausderMesssignalauswertungergibt.Imeinzelnenbedeutetdaseine32BitAdditionoderSubtraktionsowiedienotwendigenAktionenzurErzeugungdesSynthe¬sizerformats(ShiftrechtsoderShiftlinks).ErzeugenvonzweiimHintergrundablaufendenSampleSignalenmiteinerPeriodendauervon578usundeiner180Phasenverschiebung.ErzeugeneinesimHintergrundablaufendenModulationssignalsmiteinerPeriodendauervon287us.AusdementsprechendenRechtecksignalwirdanschliessendmitHilfedesD/AWandlerseinSinussignalgeneriert.
22

Mindestens zwei- bis dreimalige Ausführung mehrerer Synthesizerverstellungen zur Mini-
mabestimmung sowie die Berechnung der Distanzwerte anhand der Minimumfrequenzen
und Wellenzahlen (Multiplikationen, Divisionen und Additionen von 32 Bit Zahlen) in
weniger als 1 Sekunde.
Überwachung der seriellen Schnittstelle (Interrupt) und Auslösung entsprechender Aktio¬
nen beim Eintreffen von Tasks mit höherer Priorität. Daraus ergibt sich der Aufbau einer
Multitask Verwaltung.
Berücksichtigung der speziellen Zeitanforderungen für die Zielverfolgung und Bewältigung
einer entsprechend grossen Datenmenge.
Der nachfolgend vorgeschlagene Aufbau des Controllers stellt einen Kompromiss zwischen noch
vertretbaren Kosten und erreichbarer Geschwindigkeit dar. Mit dem in Figur 4.6 skizzierten
Aufbau kann ein entsprechend schnelles System realisiert werden, das die Verwirklichung eines
Konzepts zur Zielpunktverfolgung ermöglicht.
Data
Memory
64 KB
Progr
Memory
64KBCPU
80C166
Siemens
Datenbus Synthesizer Daten
Adressbus Control Wrap
-—— Adress Daten
3450 Hz
100 Hz
—— Laser ON/OFFOszillator
40 MHz Modulations-Signal
Datenbus Amplituden-Signal
Bus
Select
Laser Dioden Treiber
* Meß-Signal
-« VCO Signal \ HF Power
Config
Memory
EEPROM
t'
I 1
Reset
CPU
t 11 !
Schnittst
LED
1 j
Trigger
LED
Blende
LED
Filter
LEDti l ! 1 I
RS 232
Converter
RS 485
Converter
LAN
Converter
Meß -
Trigger
Blende
ON/OFF
Filter
ON/OFF
Power
Supply
11 11 I I 1
!
Figur 4.6: Blockschema eines neuen Controlleraufbaus zur schnellen Messung.
Die vielfältigen Aufgaben des zentralen Mikroprozessors (80C166 CPU) lassen sich grob in vier
Hauptfunktionsbereiche gliedern. Der erste Funktionsbereich betrifft das interne Daten- und
Programmanagement des Controllers, das die Kommunikation mit den verschiedenenMemory¬bereichensowiedieNutzungderinternenResourcen(z.B.Oszillator)gewährleistet.DerzweiteTeilumfasstdenInformationsaustauschmitanderenSystemen,alsodieSchnittstellenzurDatenübertragung.EssindeinRS232,einRS485undeinLANDatenausgangsowieeinespe¬zielleTriggerleitungzurdirektenAuslösungeinerMessungbzw.zumSendenundEmpfangenvonStartimpulsenvorgesehen.DerDatenaustauschübereinedieserLeitungenwirddurchdasLeuchteneinerLEDfürdenBenutzerzusätzlichgekennzeichnet.DerdritteAufgabenbereichdesControllers,derdieSteuerungeinigerinternerDistanzmesserfunktionen(Blende,Filteretc.)enthält,zeigtdenentsprechendenBetriebszustandebenfallsmitHilfevonLED'san.DerwichtigsteundzeitkritischsteTeilderControllerfunktionenbetrifftdieAnsteuerungunddenDatenaustauschmitdemHochfrequenzteil.DerMikroprozessorgeneriertdieWobbeifre¬quenzunddieHubeinstellung,diedereigentlichenSynthesizerfrequenzüberlagertwerden.ÜberdenDatenbusunddenentsprechendenDigital-AnalogWandler(D/A)könnenverschiedeneHub¬werteundAbtastsamplessowiedieEinstellungderLaserintensitätdigitalgeregeltunddenjeweiligenMessverhältnissenangepasstwerden.DieProgrammierungdesSynthesizers23

(Frequenzeinstellung) und die Abfrage der eingestellten Synthesizerwerte erfolgt über einen
8-BIT Datenbus, während verschiedene Kontroileitungen zur weiteren Steuerung und Kontrolle
des Synthesizers dienen. Die gemessenen Werte des Hochfrequenzteils (Mess-Signal, VCO-Signal
und HF-Power) werden über speziell abgeschirmte koaxiale Leitungen zum Mikroprozessor über¬
tragen, dessen interner 10-BIT A/D Wandler die Werte digitalisiert. Die unterschiedlichen Pro-
gammodule des Mikroprozessors, die den gesamten Ablauf der Messungen steuern, können
anschliessend auf die digitalisierten Werte zugreifen und die weiteren Aktionen einleiten.
Erste Testmessungen und Extrapolationen ergaben, dass die Signalabtastung mit 20 Messungen
innerhalb 1 Millisekunde abgeschlossen sein wird. Die Zeitabschätzung für eine Signalabtastung
bei zusätzlicher Frequenzverstellung lässt einen Durchschnittswert von 10 Millisekunden erwar¬
ten. Die Leistungsfähigkeit dieses Controllerentwurfs lässt unter günstigen Bedingungen ca. 5
vollständige Distanzmessungen pro Sekunde erwarten.
Diese Ausführungen verdeutlichen, dass eine optimierte Steuersoftware zu einer enormen Lei¬
stungssteigerung beitragen kann. Das Soft- bzw. Firmwarekonzept ist folglich einer der Haupt¬
ansatzpunkte zur Lösung der Zeitproblematik.
4.3 Erweiterte Hardware zur Zielpunktverfolgung
Aus der Forderung, nach bewegten Zielen messen zu können, resultiert als erste Erkenntnis,
dass eine kontinuierliche Anzielung und Verfolgung des Reflektors erfolgen muss. Zu diesem
Zweck muss ein Regelmechanismus aufgebaut werden, der ein schnelles und entsprechend
genaues Winkelmesssystem, eine Signaldetektion und die dazu benötigten motorischen Antriebe
enthält. Zur Lösung dieser Problematik soll der beim Laser Tracking System SMART 310 [Rie¬
mensperger M., Gottwald R. 1990] eingesetzte und bereits erprobte Hardwareaufbau verwendet
werden. ImRahmendieserArbeiterfolgtlediglicheinegrundsätzlicheBeschreibungdiesesAuf¬baussowieeineAbschätzungdererreichbarenGenauigkeit.Y-AchseReflektor(CATSEYE)halbdurchlassigerSpiegelFigur4.7a:SchematischeDarstellungdesMessaufbauszurNachregelungderVisurrichtungbeiexaktangezieltemReflektor.DerzurDistanzmessungausgesandteodereinzusätzlichindenoptischenStrahlengangeinge¬koppelterMessstrahlrealisiertdieVisurlinie.MitHilfeeinesentsprechendenReflektorsamZielpunktgelangtdieserMessstrahlindieSendeoptikdesInstrumentszurück.Einteildurchläs¬sigerSpiegelermöglichtdieAuskopplungeinesgewissenLichtanteils.DiespeziellenPolarisa¬tionsverhältnisseunddierichtigeLagedesSpiegelsinnerhalbdesStrahlengangsmüssendabeibesondersberücksichtigtwerden.ZurLagedetektiondiesesreflektiertenLichtswirdesaufeinepositionsempfindlicheDiodeabgebildet(vgl.Figuren4.7aund4.7b).DieserPositionsdetektor(Diode)bestehtauszweiverschiedenenMessebenen(Schichten),dieeinlokales,orthogonalesKoordinatensystembilden.DasauftreffendeLichterzeugtjenachLagedesLichtschwerpunktes24

unterschiedliche Spannungswerte an der Diode, die als Steuergrössen der Regelung und zur
Richtungsmessung dienen. Die Figur 4.7a stellt den abgestimmten Fall dar, wenn die Visurlinie
und der Reflektormittelpunkt übereinstimmen. Die Auslenkung um dx und dy in Figur 4.7b
entsteht, sobald sich die Reflektormitte aus der Visurlinie bewegt. Dann wird einerseits der
Nachführungsalgorithmus gestartet und andererseits erfolgt die Berechnung der wahren Visurli¬
nie (Korrektur der Winkelmesswerte zum Reflektorzentrum)
Y - Achse
Meßpunkt
dx
>-
X - Achse
Reflektor (CATS EYE)
dy^' ^~-~J*\^* paralleler
if&Klö] Lichtstrahl
Positions - ^^*Detektor (PSD) ^^^^
Distanz -
halbdurchlassiger
Spiegel
Me3strahl
Figur 4.7b:
Schematische Darstellung des Messaufbaus
sur Nachregelung der Visurrichtung bei
nicht exakt angezieltem Reflektor.
Die Messwerte dx und dy werden zusammen mit den Distanzinformationen in einem speziellen
Regelprozessor in Verstellwerte der Schrittmotoren umgerechnet, die für die Strahlnachführung
sorgen. Dieser sehr schnelle Regelmechanismus des SMART 310 Messsystems erlaubt momentan
die Reflektorverfolgung der Bewegung mit einer Geschwindigkeit von 4 m/s in lateraler Richtung
bei Entfernungen > 1 m und von 6 m/s in longitudinaler Richtung.
25

5 Intensitätsfunktion und Signaldetektion
5.1 Theoretische Intensitätsfunktion des empfangenen Modula¬
tionssignals
Die grundsätzlichen Formeln zur mathematischen Beschreibung der benutzten Polarisationsmo¬
dulation und Signalintensität sind aus [Froome K., Bradsell R. 1966] und [Bolsakov V. et al.,
1985] bekannt.
Das Prinzip der Polarisationsmodulation beruht auf der Variation der Orientierung der Polarisa¬
tionsrichtung (vgl. Kap. 2), wobei die Phasenverschiebung (Orientierungsänderung) der Polarisa
tion als Messgrösse dient. Die Phasenverschiebung 9 des modulierten Signals in bezug auf die
Orientierung der Polarisation vor der Modulation lässt sich beschreiben durch:
„
2%Vsinfatf ) (5.1)
wobei folgende Vereinbarungen gelten:
8 Phasenverschiebung
D Distanz
V Modulationsspannung
Vm Halbwellen(verschiebungs)- Spannung
ro Modulationsfrequenz 2jt/
Xmnd Modulationswellenlänge
z zusätzliche Rest-Elliptizität (nicht ideale Komponenten)
lm momentane Intensität (Hochfrequenz moduliert)
I0 maximale Intensitätsamplitude
/ am Detektor gemessene, gemittelte Lichtintensität
Nachdem das modulierte Signal vom Zielpunkt,dersichimAbstandDbefindet,zumKristallzurückkehrt,ergibtsichfolgendePhasenverschiebung8D:2%VsinV2&„^Cut+-2D'Snod(5.2)/DieerneuteModulation(Demodulation)desSignalsamKristallundderAnsatzeinerzusätz¬lichenRest-Elliptizitätz,dieaufgrundnichtganzidealeroptischerKomponenten(z.B.Reflektor¬flächen,Strahlteiler,X/4-Platteetc..)auftretenkann,ergibteinePhasenverschiebungQDDemvon:^DDemysin2%cof+-2D|+sin(ü«)+z(5.3)DieamDetektorauftreffendeSignalintensitätbeträgt:Im=/0-sin'(5.4)SetztmanschliesslichdieGleichung(5.3)in(5.4)einundintegriertübereineModulationspe¬riode,dannergibtsich:TJoT2\%Vsincot+2%2D+sin(tor)+\\dt(5.5)DieGleichung(5.5)kanninmehrerenSchrittenumgeformtwerden,dassletztendlicheineeinfa¬chereFunktionentsteht.26

Schritt 1: Anwendung von sincc + sinß = 2- sin—• cos er¬
führt zu:
T ~2-
141 0/°sin2 — -2sin
f 2 it 2 D \ ( 2ir 2 D \cor + — cur z
,
rJo 70S'ni y
2-xVsin cor +-
2-x-D
K•cos
mod y
2-x-D
V ^mod 7
+ff*
Schritt 2: Einsetzten von sin2 a = r (1 - cos 2a)
ergibt:
ri I0--\l-cos2r2xV f
2-x-D(üt+—; | -COS
2-Ji-Z) z
+2
y mod J^J
\
dt
ri
TJo ^2U-C0SUxV '
—-—•sin
2-%-D03t -\ ; | • COS +z
\ mod }
dt
Schritt 3: Umformung mit cos(a + ß) = cosa-cosß-sina-sinß
führt zu:
ri I0--{l-[cosAxV
(
sin 03t+-
2-x-D
AxV
•cos
V' *mod J
fsin
2-x-D
Kmod J J
•cosz
V «
2-x-Dsinl (üt H— | • cos
mod
'2-x-D^
\ mod )
sinz]}cft
ri%rl 1 (AxV
.
(7„(r-7'cos —rr-• sin| cat +
2 2 l K„m \
2-jt-D 2-^-D
V ''-mod
+--sin2
4itF/
•sin cor +-2-x-D
\
K•cos
mod )
2-x-D
\ ^mod JJ
sinz }eft
Schritt 4: Zusammenfassen der Konstanten jc = y-' cos ^— ergibt:
'
= ?/. '•'1 1
2~2cosz • cos x
• sin C0/+-2-x-D
1+--sinz -sin2
<x>t+-2-x-D
\}dt
mod / J
Die Gleichung (5.5) lässt sich unter Verwendung der Besselfunktion l.ter Art O.ter Ordnung
l r*
J0(x) =— cos(r • sinf)<AJtyo
umformen zu:
,11 ,J
1
fI=I0\----cosz-J0(x) +-Jo
1
rr= 2" 1 f ( 2-x-D
.-I0---smz -sin je -sin\ (üt H—
7 Jo 2 II Àdt
mod //
h hr / \
^o= ^-^-cosz -/„UJ+^-sinz
•- j sinL* tof +-2-x-D
VK
dt
27

Die optische Qualität des Systemaufbaus gewährleistet, dass z klein ist und der letzte Teil dieser
Gleichung vernachlässigt werden kann. Die Intensitätsfunktion ist durch die Gleichung (5.6) in
folgender Weise beschrieben:
1=1, -• cosz -Jn '
2°
2itF- • cos (5.6)
5.2 Darstellung des Einflusses der verschiedenen Parameter
Die am Detektor gemessene Lichtintensität / ist in den Figuren 5.1a -5.1c als Funktion der Mess¬
distanz (analog zur Frequenz) in Abhängigkeit der verschiedenen Parameter und Einflussgrös-
sen dargestellt. Der im vorliegenden Distanzmesseraufbau benutzte Kristall weist als
Halbwellen(verschiebe)- Spannung einen Wert von Vm = \93Volt auf (Kristallkonstante). Zur
Abschätzung der Systemeinflüsse wird als weitere konstante Grösse der Gleichung (5.6) eine
Modulationswellenlängevonk=0.21684amangesetzt,waseinemFrequenzwertvon/=1394.383721M/feentspricht.DieAuswirkungenvonVariationenderSystemkomponentenaufdieSignalintensitätsindanhandausgewählterBeispielegraphischillustriert(vgl.unterschiedlicheKurvenindenFigu¬ren5.1a)-5.1c)).DieModulationsspannungVsowiedieRest-Elliptizitätzsinddabeidieentschei¬dendenParameter,diegeringenSchwankungaufgrunddesSystemaufbausunterliegen.Wäh¬rendVeränderungenderModulationsspannungVimmechanischenundelektronischenAufbaudesModulatorsbegründetsind,wirkenUnzulänglichkeitenderoptischenBauteileaufdiePolari¬sationundführenzugeringfügigenVariationenderRest-Elliptizitätz.1.00.8o.s0.40.20.0ModulationskurvenmitunterschiedlichenModulationsspannungen0.0>*\X\/7*t^W'7yâ11//\_IXV^i'/K••Viil/•i:\«Sf/\w»/0.050.16DistanzdifferenzenV=120VoltV=80VoltV=150VoltV=193VoltFigur5.1a):DarstellungdergemessenenIntensitätsver¬teilungenfürunterschiedlicheModulationsspannungenVübereineDistanzverschiebungvon0.21684mDerVerlaufdereinzelnenKurvenzeigteinigewichtigeMerkmalederPolarisationsmodulationnachdemFIZEAU-Prinzip.BesondersentscheidendfürdieerreichbareGenauigkeitistdiestabilePositiondesMinimumsbeidenunterschiedlichenModulationsspannungenunddiedamitverbundeneStabilitätderDistanz-bzw.Frequenzwerte.Figur5.1astelltnebendemNormwertvonV=\2QVoltverschiedeneextremeWertederModulationsspannunggraphischdar.ObwohldieKurveneinensehrunterschiedlichenVerlaufaufweisenbleibtdiePositionderMinimainbezugaufdenDistanzwert(bzw.Frequenzwert)identisch.
28

Figur 5.1b):
Darstellung der gemessenen Intensitätsver-
teilungen für unterschiedliche
Rest-Elliptizitäten z über eine Distanzver¬
schiebung von 0.21684 m
Anmerkungen zur Rest-EUiptizität
Der zweite Parameter, die Rest-Elliptizität z kann in zweifacher Hinsicht von Bedeutung sein.
Einerseits ist es wichtig, dass dieser Parameter nicht zur Verschiebung der Minimumposition
führt. Andererseits darf die Rest-Elliptizität den in Kapitel 2.4 beschriebenen Aufbau zur
Kompensation der Nebeneffekte am Kristall nicht negativ beeinflussen. Zum besseren Verständ¬
nis des gesamten Sachverhaltes sind an dieser Stelle einige zusätzliche Erläuterungen bezüglich
der Rest-Elliptizität z notwendig, die an optischen Komponenten des Systemaufbaus entsteht. Im
Detail bedeutet das, dass die Polarisationsrichtung des reflektierten Lichts durch die Art der
Reflexion geringfügig verändert wird, sodass die als Polarisationsfilter eingesetzten optischen
Elemente scheinbar nicht optimal ausgerichtet bzw. orientiert sind. Grundsätzlich beeinflusst
jede Reflexion die Polarisationsrichtung des reflektierten Lichts. Der gesamte optische Aufbau
des Distanzmessers berücksichtigt diesen Effekt und der Strahlengang wird diesbezüglich opti¬
miert. Eine der entscheidenden Massnahmen zur Minimierung dieses Einflusses stellt die
richtige Beschichtung und Vergütung der Reflexionsflächen dar, zumal der Betrag einer Ver¬
schiebung der Polarisationsrichtung vom Auftreffwinkel des Laserstrahls auf die Reflexionsflä¬
che beeinflusst werden kann. Nicht entsprechend vergütete Spiegel undReflektorenkönnenfolglichjenachAusrichtungzumStrahleinegewisseVeränderungderPolarisationsrichtungzurFolgehaben.DieinFigur5.lbdargestelltenunterschiedlichenRestelliptizitätenzhabenkeinenEinflussaufLagedesjeweiligenMinimums.DievorliegendeGraphikweistdieseVeränderungenderPolari¬sationvonbiszuz=1.0472radauf,waseinerÄnderungderPolarisationsrichtungvon60°ent¬spricht.TrotzdiesereindeutigenErkenntniswirdzurVermeidungdessekundärenEinflussesaufdieKompensationvonNebeneffektendieBeschichtungderrelevantenOptikbauteileopti¬miert.DurcheineentsprechendeVergütungderoptischenBauteilebleibtdieRest-ElliptizitätzinderSerienherstellungohneSchwierigkeitenkleinerals1°oderz<Q.QllradundfolglichohneAuswirkungaufdasMessergebnis.ModulationskurvenmitunterschiedlichenRestelliptizitäten0.050.16Distanzdifferenzenz=0z=30z=45z-60
29

Modulationskurven mit unterschiedlichen
Modulationsspannungen und Restellipttzitaten
-45
= 150 Volt
0.05 0.16
Distanzdifferenzen
Figur 5.1c):
Darstellung dergemessenen Intensitätsver¬
teilungen für unterschiedliche Kombinatio¬
nen der Modulationsspannungen Vsowie
der Restelliptizität z über eine Distanzver¬
schiebung von 0.21684 m
In Figur 5.1c sind die Auswirkungen für den Fall dargestellt, dass die beiden Parameter
Modulationsspannung und Rest-Elliptizität gleichzeitig erheblich von den Normalwerten
V=l20Volt undz = 0.0l75rad abweichen.
Als wichtigste Erkenntnis aus dieser Betrachtung bleibt festzuhalten, dass lediglich eine wesent¬
lich zu grosse Modulationsspannung zu kritischen Situationen führen kann. In diesem Fall tritt
ein zusätzliches Nebenminimum (relatives Minimum) auf, das zu groben Messfehlern führen
könnte. Durch entsprechende Justierung lässt sich diese Situation jedoch relativ einfach vermei¬
den.
Die Steigerung der Genauigkeit mit Hilfe einer entsprechenden Interpolation des Empfangssig¬
nals in der Umgebung des Minimums erweist sich hingegen als schwierig, da sich in der Nähe
der Minima die Form der Intensitätskurve in Abhängigkeit der verschiedenen Parameter verän¬
dert. Für die in der Zielvorgabe geforderte Genauigkeit ist eine Interpolation nicht notwendig,
aber der Wunsch nach einer Beschleunigung des Messablaufs sowie die Messung nach bewegten
Zielen erfordert die Kenntnis der Gradienten der Intensitätsfunktion in der Umgebung der
Minimumstellen.
Im Kapitel 6.2.1 erfolgt deshalb noch eine eingehende Diskussion über die Möglichkeiten zur
Nutzung der Intensitätsfunktion.
5.3 Bestimmung der Intensitätsfunktion
Ausgehend von den theoretischen Überlegungen zur Intensitätsfunktion(vgl.Kap.5.1)behan¬deltdiesesKapiteldasErgebniseinererstentechnischenUmsetzunganhandderspezifischenMerkmaledesvorliegendenFunktionsmusteraufbaus.DieBeschreibungdesMessvorgangeszurAbtastungderSignalstärkeunddermathematischeAnsatzzurBestimmungderIntensitäts¬funktiondienenalsGrundlagefüreineWeiterentwicklung.EinenweiterenwichtigenMeilen¬steinstelltdieAbschätzungderEinflüsseeinzelnerParametersowiederenVerifikationauf¬grundpraktischerUntersuchungdar.AufdieseWeiseerfolgtdiedetaillierteAnalysederIntensi¬tätsfunktionzurVorbereitungdereigentlichenAnwendungzurReflektorverfolgung.Dieletzt¬endlicheNutzungderIntensitätsfunktionzurExtrapolationderFrequenzwertederMinimumstelleaufgrundeinereinzelnenBeobachtungwirdinKapitel6.2genauerdiskutiert.30

5.3.1 Messung der Signalintensität
Die Messung der Signalintensität beruht auf der bereits im Kapitel 3.2 kurz skizzierten Differen¬
zenmessung. Die eigentlich wirksame Messfrequenz f wird dabei durch zwei andere Frequenz¬
werte ersetzt, die jeweils den exakt gleichen Betrag grösser (f+Afl bzw. kleiner if- A/) als die
Messfrequenz sind. Mit Hilfe eines Controllerbefehls besteht die Möglichkeit, 256 verschiedene
Werte dieser Frequenzablagen (Frequenzhub) einzustellen. Diese wirklich entscheidende Neue¬
rung ermöglicht die optimale Anpassung und Steuerung der Minimumdetektion in Abhängigkeit
von Distanz und Modulatoreigenheiten. Im Vergleich dazu kennt das ME 5000 lediglich 4 Ein¬
stellungen des Frequenzhubs, die im Zusammenhang mit dem Entfernungsbereichen:
very low range = ±61.0 kHz
low range = ± 35.0 kHz
high range = ± 6.7 kHz
und very high range = ±2.6 kHz
gesetzt werden können.
Die beiden Frequenzwerte des Frequenzhubs werden beim vorliegenden Funktionsmuster im
Takt der sogenannten Wobbeifrequenz von 3.5 kHz verstellt. Diese etwas kompliziert scheinende
Verkettung verschiedener Frequenzen (vgl. Figur 3.3) ermöglicht eine, von Signalschwankungen
weitgehend unabhängige Minimumdetektion. Ausserdem umfasst die Beobachtung eines "einzel¬
nen Messwertes" die Mittelbildung aus 20 Wobbelvergleichen, die aufgrund der Reaktions- und
Antwortzeiten des elektronischen Funktionsmusteraufbaus ineinerZeitspannevonca.18.2mserfolgen.DieAnzahlderbenutztenWobbelvergleichekannübereinenControllerbefehlgesetztwerden.2Sample-Abtastung[]•1Sample-Abtastung[]X80PhasendifferenzfAtf+A*Intensrtatint_2der2AbtastungI11SampIIInt7Samplelfit_1Differenz(lnt_1lnt_2)=IntSzxL^_eingestellteFrequenztwennlnt>0istdannistdieFrequenz(großeralsdieFrequenzanderMinimumpositionFigur5.2a:SchematischeDarstellungderInten¬sitätsmessung(SampleAbtastung),wenndereingestellteFrequenzwertgrösseralsdieFrequenzanderMinimumpositionist.31

t
\
it f + ù.1 Sample
lnt_l
A / Sample
lnl_2
Intensität int_2
i\ LiDifferenz (lnt_1-lnt_2) = Int
v / Intensität lnt_1
der 2 Abtastung \ ß der 1 Abtastung \ lnt=0
t t wenn lnt=0 ist I
dann ist die Frequenz f
eingestellte Frequenz t der Minimumposition
eingestellt
Figur 5.2b:
Schematische Darstellung der Inten¬
sitätsmessung (Sample Abtastung),
wenn der eingestellte Frequenzwert
exakt der Frequenz an der Mini¬
mumposition entspricht.
n n n samp|e
f 4! 1* 4< 11 11 11 -.-î
\ fSample
lnt_2
l\.
/,Differenz (lnt_1 lnt_2) = Int
Intensität mt_2 \ Lider 2 Abtastung \ / Intensität lnt_1 0 II !f der 1 Abtastung 1
! Î ^\ y^
lnt<0
wenn lnt<0 ist jeingestellte Frequenz f
dann ist die Frequenz f
kleiner als die Frequenz
an der Minimumposition
Figur 5.2c:
Schematische Darstellung der Inten¬
sitätsmessung (Sample Abtastung),
wenn der eingestellte Frequenzwert
kleiner als die Frequenz an der
Minimumposition ist.
Die Erfassung der Signalintensität erfolgt über eine spezielle Schaltung, die zwei phasenverscho¬
bene Sample-Abtastungen der Signalintensität an der Empfängerdiode im Takt der Wobbeifre¬
quenz realisiert. Der Offset bezüglich der Phasenlage der Wobbeifrequenz und die Phasenver¬
schiebungzwischendenbeidenSample-AbtastungenwerdenwährenddesEichvorgangesgesetzt,sodassdiebeidenSample-AbtastungenmitdenZeitpunktenderEinstellungderFrequenzenf-Afund/+A/übereinstimmen(vgl.Figuren5.2).GleichzeitiggewährleistetdieelektronischeSchaltungdasSummierenderbeijederSample-AbtastungerfasstenIntensitäts¬werteinzweigetrennteZähler.EntsprechenddergesetztenAnzahlvonWobbelvergleichenwerdendiebeidenZählerwertegelesen,subtrahiertundimA/DWandlerdigitalisiert.DerDifferenzwertentsprichtschliesslichdemMesswertbeidereingestelltenFrequenzf.Der8BitA/DWandlererreichtschonbeieinemZahlenwertvon255seinenSättigungswert,sodassdiegemessenenDifferenzwertezwischen255und-255variieren.DasVorzeichenresul¬tiertdabeiausdemanalogenVergleichinnerhalbderelektronischenSchaltung.AufgrunddererforderlichenMessgenauigkeitistdasFunktionsmustersoaufgebaut,dassesbeigeeigneterWahldesFrequenzhubsinderUmgebungderExtrema(Minimum-undMaximumposition)sehrempfindlichreagiert.ÜberweiteFrequenzbereichezwischendenExtremwertenliefertderA/DWandlerfolglichnurseineMaximalwerte(vgl.Figur5.4).ZurÜberprüfung,wiegenaudietatsächlicheIntensitätsverteilungdesEmpfangssignalesdentheoretischzuerwartendenWertenentspricht,wareinesystematischeUntersuchungnotwendig.FürmehrereDistanzenwurdeeineVielzahlverschiedenerFrequenzwerteentlangdesModula-
32

tionsbereichs eingestellt. Als erster Schritt der Auswertung ist die Einführung einer Skalierung
bzw. Normierung der Frequenzverstellungen notwendig, damit die distanzabhängigen Mess¬
werte vergleichbar sind.
5.3.2 Skalierung (Normierung) der Frequenzverstellung
Im Kapitel 5.1 und 5.2 wurden die theoretische Intensitätsfunktion sowie die einzelnen Einfluss¬
parameter bereits beschrieben. Das Glied 2-D/kmod in der Gleichung (5.6) verdeutlicht die Abhän¬
gigkeit zwischen der Signalintensität /, der Distanz D und der Modulationswellenlänge Xmod. Die
Beziehung zur Frequenz /, dem eigentlichen Messwert, beschreibt die Formel
/(5.7)
und die Gleichung (3.1). Die Abhängigkeit der Frequenzverstellung A/ von der Distanz, kann am
Beispiel der Differenz zwischen den Frequenzwerten von zwei aufeinander folgenden Minimum¬
positionen dargestellt werden. Die Umstellung der Gleichung (3.1) nach der Wellenzahl N0 ergibt:
Wn =2-D-f0
(5.8)
Setzt man für die gleiche Distanz D die um 1 erhöhte Wellenzahl N0+l an, ergibt die Gleichung
(5.8)
N0+\ =
2-D-f0+l(5.9)
wobei/0+1 der Frequenzwert an der nächsten Minimumposition ist. Durch Einsetzen von (5.8) in
(5.9) folgt:
2-Z?-/0[i_2-Z3-/fl+1ccZusammengefasstundumgestelltnachderFrequenzdifferenzf0+,-/„ergibtsich:c(/o+1-/o)=2-D(5.10)DurchEinsetzenverschiedenerDistanzwerteinGleichung(5.10)wirddeutlich,dassdieFre¬quenzdifferenzkleinereWerteannimmt,jegrösserdieMessdistanzDist.DieseAbhängigkeitvonderDistanzgiltfüralleFrequenzdifferenzen(AbständezweierbenachbarterMinimumposi¬tionen).DerfunktionaleZusammenhangistinFigur5.3dargestellt.FrequenzdifferenzenzwischenzweiMinimainAbhängigkeitvonderDistanzFrequenzdifferenzenDistanzwertein[m]Figur5.3:SchematischeDarstellungderAbhängigkeitzwischenDistanzundderFrequenzdifferenzzweierbenachbarterMinima.33

Das bedeutet, dass die Extrapolation des Frequenzwertes einer Minimumposition aufgrund einer
gemessenen Signalintensität nur über die Kenntnis der Distanz möglich ist. Eine allgemeine,
über den gesamten Messbereich des Distanzmessers gültige Funktion zur Minimabestimmung
aus Signalintensitäten erfordert folglich eine distanzabhängige Normierung bzw. Skalierung der
Frequenzverstellung. Die in Gleichung (5.10) dargestellte Differenz zwischen zwei aufeinander
folgenden Minima /0+1 -f0 bietet sich als einheitliche Bezugsbasis an. Mit
NS = Normalschritt [dimensionslos]
fm„ve - gemessener Frequenzabstand zur Minimumposition
/o+i -/o= distanzabhängige Frequenzdifferenz zwischen zwei aufeinander folgenden
Minima
SK = 6 • 103 (Skalierungsfaktor, der Zahlen in der Grössenordnung erzeugt, wie sie
mit dem A/D Wandler gemessen werden) [dimensionslos]
beschreibt der Ansatz
NS=J^i-.SK (5.11)/o+i /o
eine mögliche Normierungsfunktion,wobeiderAusdruck/0+j—f0durchc/(2-D)ersetztwerdenkann.BeiderdarausfolgendenGleichungNS=Love'2'D-SK(5.12)cdiezurUmrechnungvongemessenenFrequenzdifferenzeneinerbestimmtenDistanzinNormal¬schrittedient,mussdiegemesseneFrequenzdifferenzAfinHzeingesetztwerden.DieumgekehrteBerechnungvonFrequenzdifferenzenfmoveausNormalschrittenkannüberdieFormel:'~*=NS-2^SK(5-13)erfolgen.DieindenFormeln(5.11-5.13)definiertenNormalschrittebildeneineNormeinheitundermögli¬chendenAnsatzeinerFunktionfürdiegemessenenSignalintensitäten,diedenVergleichvonMessungenverschiedenerDistanzenerlaubt.5.3.3MathematischeBeschreibungdergemessenenSignalintensitätDieinKapitel5.3.1beschriebeneWobbeifrequenzermöglichteinedirekteDifferenzenmessungdesEmpfangssignalsderA/DWandlerliefertfürjedeeingestellteFrequenzpositioneinenMess¬wert(inklusivedesVorzeichens).DieseMesswertedesA/DWandlersentsprechendenjeweiligenDifferenzenderSignalintensität.InFigur5.4sinddiegemessenenDifferenzenderSignalintensi¬tät(A/DWandler-Werte)füreineMessdistanzvonD=5.31264müberdengesamtenModulator¬bereichdargestellt.EntlangderAbszissesindimdargestelltenBeispielanstellevonFrequenz¬wertenNormalschritteaufgetragen,worausdieAnzahldernormiertenSchrittverstellungenzwi¬schenzweiMinimumpositionenersichtlichwird.34

Figur 5.4:
Schematische Darstellung der gemessenen
A ID Wandler Werte (Differenzen der Sig¬
nalintensität) bei einer Entfernung
von 5.31264 m.
Die BESSELFUNKTION (Gleichung 5.6) beschreibt die theoretische Verteilung der Signal¬
intensität. Zur Vereinfachung der mathematischen Beschreibung liesse sich diese Funktion in
erster Näherung durch eine COS - Funktion darstellen. Beschränkt sich die Betrachtung auf die
Umgebung der Minimumposition approximiert eine parabolische Funktion
y =a0+a1 -x +az-x2 (5.14)
0000
die Intensitätsverteilung am besten. Durch die spezielle Differenzenmethode (Wobbelvergleich)
entsprechen die gemessenen Intensitätswerte jedoch der ersten Ableitung der Intensitätsfunk¬
tion. In den Wertebereichen um die Minimum- und Maximumpositionen genügen die Messwerte
folglich der Geradengleichung
y' = ai+2-a2-x (5.15)
Bezogen auf die vorliegende Problemstellung werden die Werte der gemessenen
Signalintensität /, mit der y - Richtung und die gemessenen Frequenzwerte / mit der
x - Richtung gleichgesetzt. Der Nulldurchgang der Geradengleichung durch die x - Achse
beschreibt die Position eines Minimums oder eines Maximums. Der konstante Anteil der Glei¬
chung bleibt ohne Bedeutung und verschwindet, während das Vorzeichen der Geradensteigung m
zur Unterscheidung zwischen Minimumposition (positives Vorzeichen) und Maximumposition
(negatives Vorzeichen)dient.FürdiepraktischeBestimmungderGeradengleichunganeinerdiskretenMinimumpositionsindmindestenszweiWertepaare(/,/)unddieAnzahlnormierterFrequenzschritte(Normalschritte)zwischendenbeidenMesspositionennotwendig.NachAuflösungderGeradengleichungkannanhandderSteigungderGeradenmvomgemessenenIntensitätswertaufdieMinimumpositionextrapoliertwerden.DiegültigeGleichunglautetsomit:I=m-NS(5.16)DieBenutzungdernormiertenFrequenzverstellungmitdenNormalschrittenalsEinheitgewährleistetimIdealfall,dassalleMesswerteinnerhalbdergültigenWertebereicheeinereinzigenGeradengleichunggenügen,unabhängigvonderDistanz.DiegültigenWertebereichesinddurchdasAuflösungsvermögendesA/DWandlersbestimmtundumfassendieUmgebungderMinimumpositionen.BeieinersinnvollenEinstellungdesFrequenzhubsundbeipositivemSteigungsfaktormdefinierendieA/DWandler-Wertezwischen-190und190diemaximalenGrenzenderWertebereicheamFunktionsmusteraufbau.35Intensität1[inA/DWandlerEinheiten]Arbeitsbereichdes600A/DWandlersca16MHz4O0-SaltigungsbereichdesA/DWandlers-rMaximumO-200/\/LJ\Maximum400MinimabeiMinimabeiMinimabei-60013553MHz13835MHz14117MHz2OO040006000800010OOO12O0014000Normalschntte
NS

Das bisher betrachtete Modell sieht die Elimination der Distanzabhängigkeit vor, setzt aber
sonst ideale Bedingungen voraus, die aufgrund der technischen Gegebenheiten nicht zu erwarten
sind. Ziel der nachfolgenden Untersuchungen ist es, Abweichungen des Systemaufbaus von den
idealen Theorievorstellungen zu bestimmen und ein Modell zur Kalibrierung zu entwickeln.
Intensitatswerte
[m A/D Wandler Einheiten]
gemessene
Intensitats -
Funktionen
bei- 1:
Frequenzverstellung [in NS3
50 100 150 200
Figur 5.5:
Darstellung der gemessenen Intensitätsver¬
teilungen in der Umgebung der drei Mini¬
mumpositionen bei einer Entfernung von
5.31264 m.
Die Intensitätsmessung an den drei Minimumpositionen im Modulatorbereich bei der Entfer¬
nung von D = 5.31264 m zeigen unterschiedliche Steigungen (vgl. Figur 5.5). Aus diesem Grund
muss der tatsächliche Einfluss der Modulationsspannung und der Restelliptizität, deren Auswir¬
kung aus den Simulationsrechnungen (vgl. Kapitel 5.2) ersichtlich sind, gemessen werden.
5.3.4 Einfluss der Modulationsspannung und der Rest-Elliptizität
Die Fertigungstoleranzen für den Aufbau und die Justierung des Distanzmessers beschränken
die mögliche Variation der Modulationsspannung und der Rest-Elliptizität. Während der Abstim¬
mung des Modulators wird insbesondere auf die Vermeidung einer Übermodulation, die bei zu
hoher Modulationsspannung entsteht, geachtet. Das heisst, dass keine zusätzlichen (scheinba¬
ren) Zwischenminima auftreten dürfen, die bei der Minimadetektion zu falschen Ergebnissen
führen könnten. Aufgrund dieser Toleranzeinschränkungen variieren die beiden Einflussgrössen
nur in gewissen Grenzen. Aus der Simulationsrechnung in Kapitel 5.2 und den Figuren 5.1a bis
5.1c wird ersichtlich, dass alle Figuren exakt die gleiche Minimumposition aufweisen. Die beiden
Parameter haben folglich keinen Einfluss auf die normale Distanzmessung. In der Umgebung
der Minimumposition zeigen jedoch alle Beispiele einen unterschiedlichen Kurvenverlauf mit
verschiedenen Krümmungsverhältnissen. Für den Ansatz der Geradengleichung zur Extrapola¬
tion des Minimums ändert sich dadurchdieSteigungderGeraden.AufgrundderähnlichenAus¬wirkungvonVeränderungenkönnendieEinflüssevonModulationsspannungundRest-Elliptizitätnichtdirektsepariertwerden.WiebereitsimKapitel5.1.3kurzerwähntentstehtdieRest-ElliptizitätdurchnichtoptimalgefertigteundjustierteoptischeBauteile.InnerhalbdesInstrumentariumsbleibendieseBau¬teileunabhängigvonderMessungimmerkonstant.LediglichdieReflexionseigenschaftenunter¬schiedlicherReflektorensindmöglicherweiseverschieden.IndiesemZusammenhangseiaufdieBeschreibungderunterschiedlichenReflektortyen(Kapitel7)unddieNotwendigkeitderrichti¬genBeschichtungverwiesen.36

Die Modulation des Laserlichts im Kristall funktioniert nur innerhalb eines bestimmten Span¬
nungsbereichs, der von der Kristallart abhängt. Aus diesem Grund ist die Kontrolle der im HF-
Schwingkreis erzeugten Modulationsspannung über den gesamten Modulationsbereich notwen¬
dig. Am ME 5000 konnte der entsprechende Wert über einen Controllerbefehl digital erfasst wer¬
den. Am Funktionsmuster wurde diese Funktion aus Zeitgründen noch nicht implementiert. Es
existiert lediglich ein Messpunkt, der den analogen Abgriff der Spannungswerte ermöglicht. Auf¬
grund der individuellen Resonanzeigenschaften des HF-Schwingkreises bleibt die Modu¬
lationsspannung über den ganzen Modulatorbereich nicht konstant. Das bedeutet, dass sich das
Krümmungsverhalten der Intensitätsfunktion und somit die Steigung der Geradengleichung in
Abhängigkeit von der Messposition (Messfrequenz) geringfügig ändert. Am vorliegenden Funk¬
tionsmuster wurde mit Hilfe eines Spektrumanalysers die in Figur 5.6 dargestellte Verteilung
der Hochfrequenzleistung gemessen, um daraus die Modulationsspannung zu ermitteln.
Leistung
[in dB]
r
\ca
1 dB
""" \y^
\ -t
r
\"
1450
Frequenz
[in MHz]
Figur 5.6:
Darstellung der am Funktionsmuster
gemessenen Hochfrequenzleistung aus der
sich die Modulationsspannung berechnen
lässt.
Die im Abstand von 1 MHz über den gesamten Modulationsbereich ermittelten Werte zeigen
einen Unterschied von maximal 1 dB. Die Einheit [dB] ist durch den 10-fachen Logarithmus des
Leistungsverhältnisses iPxIP^) definiert. Es gilt folglich:
l[dB] = 10-log (5.17)
Für das vorliegende Funktionsmuster ergibtsichausGleichung(5.17)einWertvon:PxTT=1.1220Dasbedeutet,dassdiegemesseneLeistungsdifferenzvon1dBeinerÄnderungderModu¬lationsspannungvon12.2%entspricht.BezogenaufeinemittlereModulationsspannungvonVh=120VoltvariiertdieSpannungzwischendemmaximalenundminimalenWertum14.64Volt.37

Der graphische Abgriff der Modulationsspannungen an den drei Minimumpositionen der Distanz
D = 5.31264 m mit Hilfe des Spektrumanalysers ergab folgende Differenzen gegenüber der mitt¬
leren Minimumposition bei 1383 MHz:
AVim = -9.3[Volt]
AVun = 2.4[Volt]
Die Festlegung des Vorzeichens der Spannungsdifferenz erfolgte im Hinblick auf eine Addition
der Verbesserung. Es gilt die Regel:
AV = V - V (AV =V -V )
(Spannungswert Vf an der momentanen Frequenzposition minus Bezugsspannung Vb)Der funktionale Zusammenhang zwischen den Spannungsunterschieden und der gesuchten
Steigung m der Geradengleichung lässt sich mit Hilfe der Gleichung(5.6)eindeutigbestimmen.DurchdasEinsetzenderStartwerteVm=193Voltk=0.21684m/0+1=1383.518413MHz/0=1355.263175MHzfstep=0.02031746MHzfhub=4.0MHzkönnendietheoretischenIntensitätswerteanalogzudenMessungeninderUmgebungderMinimumpositionberechnetwerden.ExaktunterdenidentischenBedingungenwiesiefüreinedirekteMessungvorlagenerfolgteeineBerechnungdertheoretischzumessendenWerte.ImeinzelnenumfasstdasdieBestim¬mungderMesspositionenentsprechenddemFrequenzhub,dieBerechnungderIntensitätswerteandiesenStellenunddieDifferenzenbildungderkorrespondierendenIntensitäten.DieGleichung(5.6)erreichtMinimalwerte,wennderAusdruckcos(2•%•DIX)=0wird.DieseBedin¬gungisterfüllt,wennD=--X+--N-X(5.18)42gilt.EntsprechenddenpraktischenGegebenheiten(Entfernung,ArbeitsbereichdesAD-Wandlers,Hubweiteetc.)erfolgtedieBerechnungdertheoretischenWerteaninsgesamt70Messpositionen,gleichmässigumdasMinimumverteilt.AusgehendvonderMinimumpositiondf=(3/4)•XlassensichfürbeideHubstellungendl,unddr,dereigentlichenMesspositiondieFrequenzwertemitdenjeweiligenIntensitätswerteberechnen.DieStartwerte(Frequenzen)derMessungberechnensichausderGleichung:dlü=df-^--U-35•fstep-U(5.19a)dr0=df+^--U-35-fstep-U(5.19b)wobeiUzurUmrechnungzwischenDistanz-undFrequenzeinheitendient.Esgilt:DieFormelnzurBerechnungderverschiedenenMesspositionen(i=0...70)lauten:38

dl, — dl0 + i • /step • U
dr, - dr0 + i • fstep • U
(5.21a)
(5.216)
Das Einsetzen der Werte dl, und dr, in die Gleichung (5.6) liefert eine Liste von Intensitätswerten
//, und Ir„ deren Differenzen der beobachteten Intensitätsfunktion entsprechen. Mit den Formeln:
I=Ir-Il,
F.=i-NS-35-NS
(5.22)
(5.23)
und der Gleichung (5.12), in die für
D = 5.31267m
/, = 20317.46Hz
und die Lichtgeschwindigkeit c0 eingehen, können die zur direkten Messung analogen Werte¬
paare ermittelt werden.
Zur Ermittlung des unterschiedlichen Einflusses der Modulationsspannung V wurden die Inten¬
sitätswerte durch den Ansatz von V = 110; 115; 120 und 125 Volt berechnet. Zum Vergleich mit
den tatsächlichen Messwerten des in Figur 5.5 dargestellten Beispiels erfolgt die Gleichsetzung
der gemessenen Intensitätswerte des A/D-Wandlers bei 1383 MHz mit den bei 120 Volt berechne¬
ten Werten. Aus zwei, möglichst weit auseinanderliegenden Intensitätswertepaaren wird einFaktorIfak--3250.177zurUmrechnungderMasseinheitenderSimulationsrechnungbestimmt.DerAnsatzeinerRegressionsgeradeermöglichtschliesslichdieErmittlungunterschiedlicherSteigungswertefürdieeinzelnenSimulationsrechnungenbeidenverschiedenenSpannungen.berechneteSteigungengemesseneSteigungenBezeichnungSteigungBezeichnungSteigungbei110Voltmsp_\\Qbei115Voltws/p_115bei120Voltms/,_120bei125VoltmspJ.2S1.2151.3171.4221.530bei1355MHzmmsbei1383MHzm]mbei1411MHzw14111.111.422.14DieverschiedenenSteigungenbeideneinzelnenSpannungenverhaltensichnahezulinear.EsergibtsicheinFaktorvons=0.0210Steigungsänderungpro1VoltSpannungsänderung.DieErmittlungderGeradensteigungandermomentaneingestelltenFrequenzpositionmfauf¬grundderSpannungsunterschiedekannschliesslichüberdieGleichung:m,=mh+shVf(5.24)erfolgen.DieentsprechendeBerechnungderSteigungenfürdiebeidenMinimumpositionenbei1355MHzundbei1411MHzausdenSpannungsdifferenzenundmitHilfederBezugssteigungbei1383MHzbrachtefolgendesErgebnis:39

Bezugssteigung Verbesserung berechnete
Steigung
gemessene
Steigung
mb=mUfa Am, = s AVf mher. mgem.
1.42
1.42
0.0210.(-9.3) = -0.20
0.0210«(+2.4) = +0.05
1.22
1.47
1.11
2.14
Der Vergleich zwischen berechneter und gemessener Steigung verdeutlicht, dass das aufgestellte
Modell zur Herleitung der Steigung an der Minimumposition nicht ausreicht.
Genauere Untersuchungen des Funktionsmusteraufbaus zeigten eine Abhängigkeit der Hub¬
weite der Wobbeifrequenz von der eingestellten Messposition.
5.3.5 Variation der Messfrequenz (Frequenzablage)
Die Überlagerung der Wobbeifrequenz dient wie bereits erwähnt zur besseren und genaueren
Detektion der Minimumposition. Die zu diesem Zweck benutzte Frequenzablage bzw. Hubweite
hat keinen direkten Einfluss auf die Messgenauigkeit. Die kritischen Grenzen für die Eignung
einer bestimmten Hubweite wird durch die distanzabhängige Frequenzdifferenz zwischen zwei
aufeinanderfolgenden Minimumpositionen bestimmt. Falls die Hubweite zu gross wird, sodass
der Frequenzhub die Intensitätsmessung aus der Umgebung verschiedener Minima erfasst,
besteht die Gefahr eines groben Messfehlers. Im umgekehrten Fall, wenn die Hubweite zu klein
ist, wird das Messsystem wesentlich langsamer, unempfindlich und deshalb ungenauer. Bei der
richtigen Abstufung der möglichen Hubweiten entsteht ein relativ grosser Überlappungsbereichund die einzelnen Einstellungen können ohne Probleme weit über die angegebenen
Bereichs¬grenzenhinausbetriebenwerden.AusdiesemGrundgenügendievierHubeinstellungenbeimMekometerME5000,umdengesamtenMessbereichabzudecken.WährendimMekometerME5000dievierHubeinstellungenhardwaremässigrealisiertsindunddiejeweiligeEinstellungüberdenganzenModulationsbereichkonstantbleibt,gestattetderveränderteHardwareaufbaudesFunktionsmustersdiedigitaleEinstellungvon256Hubweiten.NachdemdieBerücksichtigungdesEinflussesderModulationsspannungaufdietatsächlichgemesseneIntensitätsverteilunginderUmgebungeinerMinimumpositionnichtdaserwarteteResultaterbrachte,wurdendasVerhaltenderHubweitenäheruntersucht.IneinererstenTestreihewurdebeigleichbleibenderFrequenz(Messposition)dieEinstellungderHubweiteverändert.DieMessungenergabenerwartungsgemässeinenlinearenZusammenhangzwischendeneingestelltenWertenunddertatsächlichenÄnderungderHubweite.DieweiterenTestreihenumfasstendieMessungderHubweiteinAbhängigkeitvondereinge¬stelltenFrequenz.MitHilfeeinesSpektrumanalyserswurdebeigleichbleibenderHubeinstellungdietatsächlicheHubweiteinAbständenvon1MHzüberdengesamtenModulationsbereichgemessen.DieHubweitevariiertrechterheblichundnahmWertezwischen1.6MHzund5.2MHzan.DieunerwarteteErkenntnis,dasssichdieeingestellteHubweitederWobbeifrequenzinAbhän¬gigkeitvonderModulationsfrequenzändert,konnteseitensderElektronikerdurchdenspeziel¬lenSchaltungsaufbaumitHilfedesTransistorserklärtwerden.DieVariationdergemessenenHubweitenentsprichtderKennliniedeseingebautenTransistors,dieinFigur5.7dargestelltist.DurchdieunterschiedlicheSteigungderKennliniehabengleicheÄnderungenderSteuerspan¬nungunterschiedlicheAuswirkungenaufdenFrequenzhubzurFolge.DiesefürdienormaleMessungunbedeutendeErkenntniswirktsichaufdieerwünschteNutzungderSignalintensitätzurpräzisenExtrapolationaufdieFrequenzderMinimumpositionnachtei¬ligausundkompliziertdengesamtenMessablauf.
40

Figur 5.7:
Kennlinie des im HF-Schwingkreis
benutzten Transistors
Die Beobachtung der Hubweite bei den Frequenzen 1355 MHz, 1383 MHz und 1411 MHz ergab
folgende Werte:
fhuhn^ 3.3 MHz
/*«*,„,= 3.5 MHz
fhuhun = 5.0 MHz
Die Ermittlung des Einflusses unterschiedlicher Hubweiten auf die Intensitätsfunktion erfolgte
wiederum durch eine Simulationsrechnung. Analog zu dem Ansatz verschiedener Modulations¬
spannungen können die Berechnungen der Intensitätswerte für verschiedene Hubweiten durch¬
geführt werden. Ausgehend von einer Modulationsspannung V = 120 Volt wurden die Intensi¬
tätswerte nach den Gleichungen (5.18)-(5.23) und (5.6) in 1 MHz Abständen für Hubweiten
flmbi =1 MHz bis 5 MHz berechnet. Es ergaben sich folgende Steigungen der Geradengleichung:
berechnete Steigungen
Bezeichnung Steigung
bei 1 MHz m,
hub 1
0.400
bei 2 MHz m,Jhuh 2
0.782
bei 3 MHz m,
hub Î
1.127
bei 4 MHz mr
hub 4
1.422
bei 5 MHz mrhub_5
1.655
Die verschiedenen Steigungen bei den einzelnen Hubweiten verhalten sich nicht vollständig
linear. Aus allen Messungen ergibt sich ein Korrelationskoeffizient von k = 0.9956 und ein mittle¬
rer Faktor von Fh = 0.3339 Steigungsänderung pro 1 MHz Hubweitenänderung.
Spannung U
[in Volt]
41

Obwohl der lineare Ansatz nur näherungsweise gilt, genügt er für eine erste Abschätzung, inwie¬
fern sich das Modell der Intensitätsverteilung dadurch verbessert. Die Verbesserung der
Geradensteigung Am^Hi aufgrund der unterschiedlichen Hubweiten berechnet sich aus:
*m/hub=Fh-Afhuh/ (5.25)
Die entsprechende Verbesserung der berechneten Steigungen für die beiden Minimumpositionen
bei 1355 MHz und bei 1411 MHz aufgrund der ermittelten Hubweiten brachte folgendes Ergeb¬
nis:
berechnete
Steigung
Hub - Verbesserung verbesserte
Steigung
gemessene
Steigung
mher ^//.„„^•A/Lv mverb gem
1.22
1.47
0.3339«(-0.2) = -0.07
0.3339«(+1.5) = +0.50
1.15
1.97
1.11
2.14
Unter Berücksichtigung der Näherungen zeigt der Vergleich zwischen verbesserter und gemesse¬
ner Steigung eine recht gute Übereinstimmung und bestätigt die Richtigkeit des erweiterten
Modells.
Während die Modulationsspannung digital erfasst und deren Einfluss auf die Steigung einfach
berücksichtigt werden kann, bereitet die Verbesserung aufgrund der differierenden Hubweiten
erheblich mehr Probleme, da eine genaue Erfassung sehr aufwendig wäre und ein linearer
Verbesserungsansatz möglicherweise nicht ausreicht. Eine naheliegende Alternative istdieMes¬sungbeiidentischenHubweiten.MitHilfeeinerfürjedeFrequenzpositionindividuelleinstellba¬renHubweite[Hw=1..256]könntendiegleichenMessbedingungengeschaffenwerden,ohnedieNotwendigkeiteinerspäterenVerbesserungderIntensitätswerte.AlsEinstellgrundlagekanneineEichtabelledienen,diebeispielsweiseinMHzAbständendieDifferenzenderEinstellwerteinbezugaufeineEichfrequenzenthält.DieseMethodehatausser¬demeinenzeitlichenVorteil,dadieHubeinstellungwesentlichschnellerrealisiertwerdenkannalseinenachträglicheVerbesserung.ZurErfassungallernotwendigenEichdatenistdieErstel¬lungeinerautomatischenKalibrierungsroutineunumgänglich.DermodulareAufbaudasgrund¬sätzlicheKonzepteinesProgrammpakets,dasalleAspektederDistanzmesserfunktionenberück¬sichtigtwirdinKapitel6näherbetrachtet.AlsersteGrundlagefürdieweiterenMessungenundVersuchereichtedieeinfacheErfassungeinerderartigenEichtabellemitdemSpektrumanalyseraus.DiebeidenerstenSpaltenderTabelleenthaltendenFrequenzwertunddieandieserPositiongemesseneHubweiteinMHz.InderdrittenSpaltesinddieSollwertederHubeinstellungaufge¬listet,diezueinemidentischenFrequenzhubführen.AlsBezugsfrequenzwurdedieEinstellungbei1355MHzgewählt.DievierteSpaltezeigtdienotwendigenEinStellungsverbesserungen(SollDifferenz),bezogenaufdenWertbei1355MHz.42

Frequenz Hub Soll Soll
in MHz in MHz Wert Diff.
in Hw in Hw
1384 3.5 41 -2
1385 3.5 41 -2
1386 3.5 41 -2
1387 3.6 40 -3
1388 3.7 40 -3
1389 3.7 40 -3
1390 3.7 40 -3
1391 3.8 39 -4
1392 3.8 39 -4
1393 3.9 37 -6
1394 3.9 37 -6
1395 3.9 37 -6
1396 3.9 37 -6
1397 3.9 36 -7
1398 3.9 36 -7
1399 4.0 35 -8
1400 4.0 35 -8
1401 4.0 35 -8
1402 4.1 33 -10
1403 4.1 33 -10
1404 4.2 32 -11
1405 4.2 32 -11
1406 4.3 32 -11
1407 4.4 31 -12
1408 4.5 30 -13
1409 4.6 29 -14
1410 4.8 27 -16
1411 5.0 26 -17
1412 5.0 26 -17
1413 5.0 26 -17
1414 5.0 26 -17
1415 5.1 24 -19
1416 5.2 24 -19
1417 4.5 30 -13
1418 3.0 48 +5
1419 3.0 48 +5
1420 3.1 47 +4
1421 3.1 47 +4
1422 3.2 47 +4
1423 3.3 45 +7
1424 3.4 45 +7
Frequenz Hub Soll Soll
in MHz in MHz Wert Diff.
in Hw in Hw
1342 2.4 59 +16
1343 2.0 72 +29
1344 1.7 84 +41
1345 1.6 89 +46
1346 1.7 86 +43
1347 1.9 79 +36
1348 2.0 72 +29
1349 2.2 65 +22
1350 2.5 59 +16
1351 2.8 52 +9
1352 3.0 47 +4
1353 3.1 47 +4
1354 3.2 44 +1
1355 3.3 43 0
1356 3.4 42 -1
1357 3.5 42 -1
1358 3.6 41 -2
1359 3.6 41 -2
1360 3.6 41 -2
1361 3.6 41 -2
1362 3.6 41 -2
1363 3.7 40 -3
1364 3.7 40 -3
1365 3.7 40 -3
1366 3.7 40 -3
1367 3.7 40 -3
1368 3.7 40 -3
1369 3.8 39 -4
1370 3.8 39 -4
1371 3.3 43 0
1372 3.3 43 0
1373 3.3 43 0
1374 3.3 43 0
1375 3.3 43 0
1376 3.3 43 0
1377 3.3 45 +2
1378 3.3 45+213793.345+213803.543013813.543013823.542-113833.542
-1

6 Konzeption des Messprogramms
Die Forderung, möglichst schnelle Messzeiten ohne Genauigkeitsverlust zu erreichen, erfordert
den Einsatz eines leistungsfähigen Prozessors und die Erarbeitung eines neuen Konzepts für den
Aufbau des Programms im Mikroprozessor des Instruments. Dieses Programm dient zur Steue¬
rung des Messablaufs und zur Ausführung sämtlicher Berechnungen, von der Distanzbestim¬
mung bis zur Berechnung der einzelnen Verstellschritte des Synthesizers. Es besteht aus ver¬
schiedenen Programmzweigen und Modulen, die je nach Benutzervorgabe abgearbeitet werden.
Der Aufbau der Software des Mikroprozessors sieht eine strikte hierarchische Einteilung der ein¬
zelnen Programmteile nach folgendem Schema vor:
Externe Ansteuerung
einzelne Befehle und Programm Module
Messung nach bewegten Zielen
Programm zur genauen Distanzmessung
Basisfunktionen der Distanzmesser Software
Externes CPU - Management
Internes CPU - Management
Das CPU-Management enthält dabei die elementaren Funktionen des Mikroprozessors, wobei
zwischen der Verwaltung und Steuerung der digitalen Einheiten (intern) und der analogen
Einheiten (extern) unterschieden wird.
Das Interne CPU-Management umfasst einerseits den Betrieb des 256 kByte grossen Speicher¬
bereichs der Mikroprozessorplatine, der aus:
- einem 64 kByte grossen Programm Memory,- einem ebenfalls 64 kByte grossen Data Memory,
- 4-16 kByte sowie
- 2-32 kByte Device Memory
besteht. Die speziell entwickelte Chip Select und die Bus Select Logik stellen dabei die exakte
Adress- und Datenflussverwaltung sicher und gewährleisten die richtige Speicherbewirtschaf¬
tung. Andererseits werden im Rahmen des Internen CPU-Managements die verschiedenen
Kommunikationsleitungen (RS232, RS485, LAN und Trigger Leitung) und ein spezieller Power
Fail Baustein (Reset Logik) zur Verhinderung Undefinierter Mikroprozessorzustände, betrieben.
Die Aufgaben des Externen CPU-Managements sind:
- die Steuerung des Hochfrequenzteils,
- die Erfassung der verschiedenen Messsignale,- die Steuerung von Laser Diode, Blende und Filter,
- die Verbindung zum Power Supply sowie
- der Betrieb einer Analog Test Einheit zu Servicezwecken.
44

Die Verbindung zum Hochfrequenzteil ist dabei von besonderer Bedeutung, zumal keinerlei
Störungen auf die übrige Elektronik übertragen werden dürfen. Die Steuerfunktionen umfassen
im einzelnen die Vorgabe einer Modulationsfrequenz von 3450 Hz (Wobbeifrequenz), einer
Modulationsfrequenz von 100 Hz (Amplitudenmodulation zur Ausrichtung des Instrumentes
nach der Signalintensität) und die Einstellung der Synthesizerfrequenz. Das Erfassen des
Messsignals, des VCO-Signals, des HF-Power-Signals (Modulationsspannung) und die Abfrage
der Synthesizerfrequenz realisieren die umgekehrte Verbindung zum Hochfrequenzteil.
Den grössten Umfang weist die Klasse der Basisfunktionen auf, in der einige Funktionen bereits
wieder zu Modulen zusammengefasst sind. Durch die softwaremässige Implementation der Ein¬
stellung des Frequenzhubs und die veränderten Anforderungen bezüglich Geschwindigkeit und
Minimadetektion erweiterte sich die Anzahl der Funktionen gegenüber dem Mekometer
ME 5000 erheblich. Einige wichtige Basisfunktionen sind nachfolgend aufgelistet:
- Initialisierung,- Eichung des Modulatorbereichs (Modulationsspannung und Hubweite),
- Detektion der momentan anliegenden Modulationsspannung,- Setzen verschiedener Messparameter,
- Einstellung des Frequenzhubs,- Einstellung eines bestimmten Frequenzschrittes,
- Einstellung einer bestimmten Modulationsfrequenz,
- Ausführung einer einzelnen Signalbeobachtung mit Flankendetektion,
- Berechnung des nächsten Frequenzschrittes- Suche des nächsten Minimums,
- Suche einer negativen Flanke,
- Berechnung des Minimums aus den Intensitätsdaten,
- Berechnung eines optimalen Frequenzhubs,- Einstellung der Integrationszeit (Anzahl einzelner Signalbeobachtungen),- Grobmessung,
- genaue Feinmessung,
- Berechnung weiterer Minima und
- Berechnung der Distanz.
Einzelne dieser Funktionen, die für das Verständnis des Programmablaufs und zur Erklärung
der genauen Funktionsweise des Distanzmessers wichtig erscheinen, werden in den folgenden
Kapiteln noch näher beschrieben.
6.1 Algorithmen zur genauen Distanzmessung
Die Methoden und Prinzipien zur Erfassung der physikalischen Gegebenheiten während der ein¬
zelnen Programmschritte bilden die wichtigsten Grundlagen für das Verständnis der Funktions¬
weise des praktisch realisierten Instrumentenaufbaus. Aus diesem Grund sind die verschiedenen
Methoden der wichtigsten Funktionen näher behandelt. Die Beschreibung des gesamten Pro¬
grammaufbaus basiert auf diesen Kenntnissen und bildet somit den letzten Abschnitt dieses
Kapitels, während die Methoden der Nullstellensuche (Grobmessung), der einzelnen Feinmes¬
sung, diegenaueMinimumdetektionsowiedieDistanzbestimmungvorgängigerläutertwerden.
45

6.1.1 Nullstellensuche (Grobmessung)
Einfache Methode
Eine erste, im Funktionsmuster bereits realisierte Variante der Nullstellensuche basiert auf
einer kontinuierlichen Abtastung des gesamten Modulatorbereichs vor jeder Distanzmessung.
Einige Systemparameter werden während dieser Eichmessung als Startwerte für die eigentliche
Grobmessung erfasst. Die erhaltenen Informationen dienen im Verlauf der Nullstellensuche
dazu, die fallende Flanke des Intensitätssignals möglichst sicher und schnell zu erreichen. Je
nach Güte dieser Einstellung wird die Frequenz so lange erhöht (Vorwärtssuche mit gleichblei¬
benden Frequenzschritten), bis die gesuchte fallende Flanke erreicht ist. Das weitere Heranta¬
sten an das Minimum beginnt mit Paketen von jeweils 5 Frequenzschritten mit entsprechender
Messung, die je nach Signalintensität und Position zum Minimum geringfügig vergrössert bzw.
verkleinert werden. Die erste Minimumfrequenz der groben Nullstellensuche ist erreicht, sobald
die doppelte Wobbeifrequenz detektiert wird (vgl. Kapitel 5.3.1) und die Frequenz gespeichert ist.
Basierend auf den Informationen der Eichmessung beginnt die Grobsuche der zweiten Minimum¬
frequenz durch die entsprechend grosse Verstellung der Synthesizerfrequenz, bis die nächste
fallende Flanke erreicht und die erneute Ermittlung der Minimumfrequenz die grobe Nullstel¬
lensuche beendet.
Diese Methode wurde beim Funktionsmusteraufbau angewandt und erprobt. Durch die vorgän¬
gig notwendige Eichmessung und die sehr vorsichtige Frequenzverstellung während der Minima-
suche erweist sie sich zwar als sicher ist aber nicht besonders schnell.
Optimierte Methode
Die Aufgabenstellung für eine schnelle Funktion zur Nullstellensuche sieht vor, die bezüglich der
Startfrequenz nächst grössere Frequenz zu finden, bei der die empfangene Signalintensität einen
Minimalwert annimmt. Die Problematik dieser Aufgabe liegt einerseits in der Notwendigkeit, die
exakt nächste Frequenzposition zu finden und andererseits die Verstellung der Frequenzen wäh¬
rend dem Suchvorgang in möglichst grossen Schritten zu realisieren, um den Zeitaufwand zu
minimieren.
Eine MethodezuroptimalenFrequenzverstellungmussfolglichdieeindeutigemathematischeBerechnungderjeweiligenSchrittweiteermöglichenunddieMessungenderSignalintensitätnachjederFrequenzverstellungsollalsAbbruch-oderÄnderungskriteriumdesBerechnungsal¬gorithmusdienen.LediglichdieinpraktischenMessungenauftretendenSignalschwankungenundUngenauigkeitenerforderndieBerücksichtigungeinergewissenSicherheitstoleranz(z.B.5%desFrequenzschrittesfürjedeMessung).DieÜberlegungengehenvondergrösstenzumessendenDistanzaus,daindiesemFalldieFre¬quenzdifferenzzwischenzweiaufeinanderfolgendenMinimaamkleinstenist.DerersteFre¬quenzschrittdarffolglichkeinesfallsgrösseralsdiehalbeFrequenzdifferenzbeidergrösstenmessbarenDifferenzsein.ImallgemeinenFallhängtdiemaximalmessbareDistanzvomklein¬stenFrequenzschrittunddereinkalkuliertenSicherheitab.DieentsprechendeDefinitionkönntezumBeispielvorsehen,dassdieFrequenzdifferenzdergrösstenmessbarenDistanz5malgrös¬serseinmussalsderkleinsteFrequenzschritt.DieNutzungbekannterInformationen,wiebeispielsweisedieRANGEEinstellung,verkürzenundoptimierendenAlgorithmus,demfolgendeÜberlegungenundFormelnzugrundeliegen:a)DiehalbeFrequenzdifferenzzwischenzweiMinimadergrösstenzumessendenDistanzdientalsBerechnungsgrundlage.DieBerechnungenderFrequenzschrittebeziehensichaufdie
46

wirksame Modulationswellenlänge, wobei zwei Sicherheitstoleranzen a und b berücksichtigt
werden. Als erster Schritt lassen sich zwei "Sicherheitsfaktoren" sa und sh berechnen, die wäh¬
rend der Nullstellensuche für die Kontrolle der Frequenzschrittänderung zuständig sind.
und
^ = 1-°-ioo (6A)
mit a und b in [%], wobei der Wertebereich von 0 < a, b < 25% gilt, je nach erforderlicher Sicher¬
heit.
Im allgemeinen sind mehrere Frequenzverstellungen bis zum Auffinden einer Minimumstelle
notwendig. Eine optimierte Suche erfordert die Anpassung (Erhöhung) der Schrittweiten vor
jeder neuen Frequenzeinstellung und Messung. Aus diesem Grund sehen die nachfolgenden
Formeln eine Laufvariable [/] vor, die für jeden Durchgang erhöht wird. Die Abbruchkriterien
des Suchlaufes basieren auf der Messung der Signalintensität / und sind nachfolgend detail¬
lierter beschrieben.
b) Die Umstellung der Gleichung (3.1) nach der Frequenz erlaubt die Berechnung der Frequenz
bei bekannter Wellenzahl N und Distanz D.
N -c
Das Setzen vonN = 1 ergibt die Frequenz einer wirksamen Modulationswellenlänge der einge¬
setzten Distanz D (Betrag der Frequenzdifferenz zwischen zwei Minima dieser Distanz).DasEinsetzendermaximalmessbarenDistanzDmiXunddieMultiplikationderGleichung(6.2)mitdeninGleichung(6.1)definiertenSicherheitsfaktorensaund^führtzuzweiFrequenzwertenfhwVLndfhlgll.DerUnterschiedzwischendiesenbeidenFrequenzwertenentsprichtdemkleinstenFrequenzschrittzureindeutigenSuchedernächstenMinimumfrequenz.2-D„Ji]undf^V]=2^jrvs"(6-3)DerzulässigeFrequenzschrittresultiertaus:cf,jn=fhlJi]-fhw[i]=,nr/1•(sh-sa)(6.4)47

c) Ausgehend von diesem ersten, relativ kleinen Frequenzschritt soll in Abhängigkeit vom Mess¬
resultat nach der Frequenzverstellung ein neuer, etwas grösserer Frequenzschritt berechnet
werden. Die Sicherstellung einer kontinuierlichen Vergrösserung der Schrittweiten ohne Lük-
ken erfolgt durch die Gleichsetzung von
/aJ'+!]=/*«*['] <6-5>
Für die anderen relevanten Werte ergibt sich dann
D-li+l] = 2-(fJ+Lvm)-s« (6-6)
W+1]=ziàiïîYs> (67)
Durch die Erhöhung von /' um jeweils 1 vor jeder Frequenzverstellung können immer grössere
Werte der Frequenzverstellung (Gleichungen 6.4 - 6.7) berechnet werden.
Die Toleranzbreiten, die aus den Prozentangaben von a und b resultieren lassen sich nach den
Formeln:
tolhJi]=fhJ^-fhJi] (6.8)
und
KJ']=/a«a 7^.-0.5) (6.9)
berechnen.
In der Abbildung 6.1 ist der Effekt dieses Berechnungsalgorithmus graphisch dargestellt.
Als Abbruchkriterien für die VergrösserungderFrequenzschrittedienendieminimalmessbareDistanzDmm,dievomjeweilsneuberechnetenZ)maxnichtunterschrittenwerdendarfunddasErgebnisderzwischenjedemneuenDurchlaufnotwendigenMessungderSignalintensität/.DasErgebnisderIntensitätsmessung,daszumAbbruchderSchrittvergrösserungderFrequenz¬verstellungführt,hängtjenachPositionvonverschiedenenAbbruchkriterienab.DurchdieangestrebtehoheEmpfindlichkeitliefertderA/D-WandlerübereinenrelativgrossenFrequenz¬bereichzwischendenMinimakeineaussagekräftigenMesswerte(derA/D-Wandlerbefindetsichin"Sättigung"vgl.Abbildung6.2).AusdiesemGrundwerdenfolgendeKriterienfüreinenAbbruchdefiniert:1.SobalddienegativeFlankedergemessenenIntensitätsverteilungerreichtistunddiegemesse¬nenA/D-WandlerwertegleichzeitiginnerhalbdesnumerischeindeutigenMessbereichsliegen,kannderAlgorithmuszurstetigenErhöhungderFrequenzverstellungabgebrochenwerden.2.WennzwareinenegativeFlankederIntensitätsverteilungvorlag,aberdieMesswertenichtimnumerischeindeutigenMessbereichliegen,mussderAlgorithmusderimmergrösserenFre¬quenzverstellungfortgeführtwerden,bisdernumerischeindeutigeMessbereicherreichtwird(positivodernegativ).FührteineFrequenzverstellungsofortindennumerischnichteindeuti¬genMessbereichderpositivenFlanke,dannmussderAlgorithmusebenfallsabgebrochenwer¬den.IndiesemFallistderhalbeBetragdesletztenFrequenzschrittesinumgekehrterRichtung
48

auszuführen. Diese Aktion der Halbierung der Frequenzschritte und der Umkehrung der Such¬
richtung, eventuell der alternierenden Suche ist solange fortzusetzen, bis die Intensitäts¬
messung zu numerisch eindeutigen Messwerten führt.
In Figur 6.1 soll die Relationen zwischen
- Modulationswellenlänge (in Abhängigkeit von der Distanz),
- Schrittweite der Frequenzverstellung und
- den variabel ansetzbaren Sicherheitstoleranzen a und b
dargestellt werden. Die gesuchte Minimumposition steht in keinem Zusammenhang zur skiz¬
zierte Modulationswellenlänge. Diese Skizzen dienen ausschliesslich zur Veranschaulichung der
Frequenzschrittweite im Verhältnis zur Wellenlänge und zu den Sicherheitstoleranzen. Inner¬
halb des Messprogrammes sollten die Sicherheitstoleranzen a und b als definierbare Parameter
eingeführt werden. Während der Systemerprobung kann durch die Veränderung dieser Toleranz¬
parameter eine Optimierung erfolgen.
J-^jl^- Sicherheitstoleranz a
M
C
Q
^\ Frequenzschritte
\ \ Modulationswellenlange\\ bei der Distanz D
Sicherheitstoleranz a \ \
\ \ Sicherheitstoleranz b
Modulationswellenlange [Schrittweite der Frequenz]
Figur 6.1:
Wirkungsweise des Algorith¬
mus der zur Berechnung der
unterschiedlichen Frequenz¬
schritte während der Nullstel¬
lensuche dient.
Liegen schliesslich numerisch eindeutige Messwerte vor, dann kann durch die Verstellung der
Frequenz um einen wesentlich geringeren Frequenzschritt ein weiterer Intensitätswert ermittelt
werden. Aus den beiden Messwerten lässt sich eine Geradengleichung ansetzen, mit deren Hilfe
auf die Frequenz der Minimumstelle extrapoliert werden kann. Weitere Messpunkte stabilisie¬
ren die Extrapolationsgerade und sind unbedingt anzustreben.
Dieser letzte Schritt der Minimumsuche kann auch vom numerisch eindeutigen Bereich der
positiven Flanke aus begonnen werden, wenn im Verlauf der Nullstellensuche das Minimum
bereits übersprungen wurde (wenn der Fall 2. des Abbruchkriteriums erfüllt war).
49

Sattigungsbereich des
A/D - Wandlers
fallende Flanke
Signal-Maximum
Differenzenfunktion (1 Ableitung) der
Intensitatsverteilung (vgl Figur 5 1 a)
Funktionsverlauf der
am A\D - Wandler
gemessenen Werte
Figur 6.2:
Darstellung der A ID Wandler
Messungen.
6.1.2 Feinmessung und genaue Minimumdetektion
Der Frequenzwert der jeweiligen Minimumposition, der aufgrund der Nullstellensuche bereits in
guter Näherung bekannt ist, dient als Einstellwert für die Feinmessung. Einige andere Parame¬
ter wie beispielsweise die Hubweite werden ebenfalls entsprechend gesetzt. Grundsätzlich ist der
Frequenzwert der Minimumposition genau dann eindeutig eingestellt, wenn die Empfangselek¬
tronik die doppelte Wobbeifrequenz detektiert (vgl. doppelte Sample Rate in Figur 5.2.b). Die
Signalschwankungen aufgrund des atmosphärischen Einflusses und die hoch gesteckten
Genauigkeitsanforderungen an das Messergebnis lassen mehrere Einzelmessung mit anschlies¬
send statistischer Auswertung sinnvoll erscheinen. Bei entsprechender Verteilung der Messposi¬
tionen in der näheren Umgebung des tatsächlichen Minimums trägt die zusätzliche Einbezie¬
hung der Intensitätsverteilung um das Minimum zu einer Verbesserung der Messresultate bei.
Eine Feinmessung findet folglich bei einem vorgegebenen Intensitätswert in der Nähe der eigent¬
lichen Minimumposition statt und setzt sich aus mehreren Signalabtastungen zusammen. Die
genaue Minimumdetektion resultiert schliesslich aus einer einfachen Mittelbildung mehrerer
Feinmessungen, die abwechselnd auf beiden Seiten des Minimums (bei grösseren und kleineren
Frequenzen) erfolgen.
Die Speicherung verschiedenster Daten im Konfigurations Memory der CPU ermöglicht die
nachträgliche Einflussnahme auf den Messablauf durch den Benutzer. Folgende Messparameter
zur Änderung des Ablaufs der genauen Minimumdetektion stehen zur Verfügung:
1. Anzahl der Signalabtastungen emmdX für eine Feinmessung 2.VorgabedesAbstandsrastersderFeinmessungenemdiuvondereigentlichenMinimumstelle.3.AnzahlderFeinmessungenfüreinegenaueMinimumdetektionemsm,wobeimindestens2Feinmessungennotwendigsind.BeiderVorgabeeinerungeradenAnzahlvonFeinmessun¬genfüreineMinimumdetektionerfolgtanderpositivenFlanke(grössereFrequenzalsanderMinimumposition)eineMessungmehr.Durchdie"gewichtete"MittelbildungbleibtdierichtigeBerechnungderMinimumfrequenzgewährleistet.4.DieDefinitionderzulässigenToleranzwertefüreineeinzelneFeinmessungtolemundfürdiegenaueMinimumdetektiontolsmistebenfallsvorgesehen.DievorgesehenenDefaultParameterlauten:50

e/wmax =128 Abtastungen
emd,M = 5 A/D-Wandlereinheiten
emsm = 4 Feinmessungen
tolem = 0.3 A/D-Wandlereinheiten
tolsm = 0.2 A/D-Wandlereinheiten
Mit diesen Standardwerten lässt sich der Ablauf einer genauen Minimumdetektion in folgender
Weise zusammenfassen:
Ausgehend vom Frequenzwert, der aus der Nullstellensuche resultierte, wird abwech¬
selnd der Intensitätswert aus 128 Einzelabtastungen gemessen und die Modula¬
tionsfrequenz schrittweise verändert (erhöht). Sobald der erste Intensitätswert des Mess¬
rasters (emdKl der positiven Flanke) mit der geforderten Genauigkeit von ± tolem erreicht
wird, ist die erste Feinmessung abgeschlossen und die eingestellte Frequenz wird regis¬
triert. Zur zweiten Feinmessung wird der Vorgang mit umgekehrter Frequenzverstellung
wiederholt, bis der erste Intensitätswert entsprechend dem Abstandsraster (emdlU) an der
negativen Flanke gemessen wird. Nach der Registrierung der eingestellten Frequenz
erfolgen die nächsten beiden Feinmessungen, die eine Registrierung der Frequenzen für
die Intensitätswerte der positiven und negativen Flanke an der, um eine weitere Raste¬
reinheit ± emäM verschobenen Position vorsehen. Aus den 4 Frequenzwerten der Feinmes¬
sung wird durch einfache Mittelbildung der Frequenzwert der genauen Minimumposition
berechnet (Intensitätswert = 0 A/D-Wandlereinheiten).
6.1.3 Methoden zur Distanzbestimmung
Die minimale Anzahl von Messungen zur Bestimmung der Distanz sieht eine Nullstellensuche
zur näherungsweisen Ermittlung eines ersten Minimums und anschliessend eine genaue Mini¬
mumsdetektion durch die entsprechendenFeinmessungenvor.AusgehendvondieserFrequenzerfolgteinezweiteNullstellensuchesowiedienotwendigenFeinmessungenzurBestimmungderFrequenzanderexaktnächstenMinimumsposition.PrinzipiellgenügendieFrequenzwertezweierMinimapositionenunddieWellenzahldifferenzzwischendenbeidenMinimazurDistanz¬berechnungnachdenFormeln3.1-3.6.DieAbschätzunginGleichung3.3beweistallerdings,dassfürgrössereDistanzendirektbenachbarteMinimapositionen(Wellenzahldifferenzgleich1)zureindeutigenBerechnungderDistanznichtausreichenunddieFrequenzdifferenzzwischenzweiaufeinanderfolgendenMinimadurchZusatzmessungengenauerbestimmtwerdenmuss.FürrelativkurzeEntfernungen(>50m),diebeiindustriellenAnwendungenhäufigzumessensind,dienenentsprechendeZusatzmessungenzurSteigerungderGenauigkeit.BasierendaufderFrequenzdifferenzzwischenzweidirektaufeinanderfolgendenMinima,diesichausderimmernotwendigenMinimalmessungergibt,könnendieFrequenzwerteweitererMinimapositionennäherungsweiseberechnetwerden.NachdergenauenMinimumsdetektionandiesenStellentragendiegemessenenFrequenzwertezurgenauerenBerechnungderFrequenz¬differenzundletztlichderDistanzbei.GrundsätzlichsindfolgendeMethodenzurgenauenMessungvorstellbarundteilweisebereitsrealisiert.MekometermethodeDieeinfachsteMethodederMessungwurdebeimMekometerME5000angewandt.AusgehendvonderFrequenzdifferenzdererstenbeidenMinima,diebeisehrkurzenEntfernungen(<20m)bereitszurDistanzbestimmungausreichen,werdenbeigrösserenEntfernungenweitereMinimagesucht.Maximalwerden3MinimazurDistanzberechnungbenutzt,diesichmöglichstüberdengesamtenArbeitsbereichdesModulatorsverteilen.ImAllgemeinfallwirdnachderErmittlung
51

der Frequenzdifferenz zwischen den ersten beiden Minima eine Minimumsfrequenz am oberen
Ende des Modulatorbereichs vorausberechnet, eingestellt und gemessen. Falls die Eindeutigkeit
der Vorausberechnung eines Minimums nahe der oberen Bereichsgrenze des Modulators auf¬
grund zu grosser Distanz nicht sichergestellt ist, dienen weitere Grobmessungen an eindeutig
berechenbaren Minimastellen als Stabilisierungsmessungen. Nach der Feinmessung nahe der
oberen Bereichsgrenze des Modulator kann die Frequenzdifferenz zwischen zwei benachbarten
Minima am genauesten berechnet werden. Zur endgültigen Distanzbestimmung erfolgt eine wei¬
tere Feinmessung in der Mitte des Modulatorbereichs. Aus den gemessenen Frequenzwerten am
Anfang (/0), in der Mitte (fm) und am Ende (/,) des Modulatorbereichs werden dann mit Hilfe der
entsprechenden Modulationshalbwellen (JV0 ,N„ und Nx ) und der Formel (3.1) die einzelnen
Distanzwerte berechnet. Der endgültige Distanzwert ergibt sich schliesslich durch Mittelbildung.
Neben dieser im ME 5000 realisierten einfachen Methode wurde für den Prototyp des
Zweifarbeninstruments ein erweitertes Programm zur Steuerung und Messung realisiert.
Sprungverfahren
Die Erweiterung des Verfahrens zur Distanzbestimmung gegenüber der beim Mekometer
ME 5000 angewandten Methode erfolgt durch die wesentlich erhöhte Anzahl von Messungen. Die
Anzahl der zur Berechnung bestimmten Minima kann vor Beginn der Messungen individuell
festgelegt werden. Nach Erhalt der ersten Frequenzwerte aus den Messungen am Anfang und
Ende des Modulatorbandes wird der Frequenzbereich entsprechend unterteilt. Die weiteren Mes¬
sungen werden anschliessend vom Rand des messbaren Frequenzbereiches her alternierend von
beiden Seiten zur Mitte hin durchgeführt. Durch die gleichmässige Verteilung der Messwerte fin¬
det eine Mittelbildung über die gesamte Modulationsbandbreite statt. Das alternierende Sprin¬
gen von beiden Seiten des messbaren Frequenzbereiches soll zur Verbesserung desletztlichberechnetenDistanzwertesbeitragen,daVeränderungenderUmgebungsbedingungensystema¬tischüberdenMessbereichverteiltwerden.BesondersbeilängerenMesszeitenundbeilangenDistanzen,wiesiefüreinZweifarbenmessgerätsinnvollsind,kannsichdieseMassnahmepositivauswirken.DieDistanzberechnungerfolgt,abgesehenvonderhöherenAnzahlMessungen,ana¬logzurvorgängigbeschriebenenMekometermethode.DererstmalsimexternenSteuerprogrammPROMEKOzumBetriebdesMekometersME5000benutzteAnsatzeinerlinearenRegressionführtzurOptimierungdieserMessmethode.RegressionsansatzDiegraphischeDarstellungdesZusammenhangszwischendenFrequenzmessungenandenMinimapositionenunddenDifferenzwertenderAnzahlvonModulationswelleninFigur6.3ver¬deutlicht,dasseinelineareRegressiondiemathematischeBeschreibungdiesesSachverhaltesdarstellt.AusdenMessungenresultierendieeinzelnenFrequenzenfnunddieDifferenzwertederAnzahlvonModulationswellenaufdemMessweg,diealsOrdnungszahlen/bezeichnetsind.ZurBerech¬nungderDistanzgiltgrundsätzlichGleichung3.1.MitHilfederÜberbestimmungdurchdiemehrfacheMessungbeiverschiedenenFrequenzenanunterschiedlichenMinimakanndasErgebnisanhandeinerAusgleichungberechnetwerden.DurchdenAnsatzderOrdnungszahlenialsX-WerteundderentsprechendenFrequenzen/„alsY-Wertegeltendienachfolgendbeschrie¬benenAusgleichungsformeln.52

0 1 9 i i+1 Ordnungszahlen
Wellenzahlen
Figur 6.3:
Graphische Darstellung der Ausgleichung
der verschiedenen Messungen während einer
Distanzbestimmung.
Der Ansatz geht von einer fehlerfreien Abszisse aus (ganzzahlige Ordnungszahlen). Die Verbes¬
serungsgleichungen lauten dann:
v/i=A+B-i-fl (6.10)
Die Auflösung der Normalgleichungen führt nach [WolfH., 1975] bei gleich genauen Beobachtun¬
gen zu:
A =
B =
m •[i 2] -[/]•['•/]
DET
n• [i •/]-['] m
DET
(6.11)
(6.12)
mit
DET = n-[i2]-[i]2
Anmerkungen:- Für die Ausgleichung wurden Formeln mit Summengliedern zur fortlaufenden Berechnung im
Mikroprozessor des Distanzmessers gewählt. Auf diese Weise stehen die Ergebnisse inklusive
einer Genauigkeitsabschätzung jederzeit zur Verfügung ohne alle Einzelwerte speichern zu
müssen.
- Die numerisch eindeutige Lösung dieses Ausgleichungsansatzes ist nur gewährleistet, solange
die Anzahl der gültigen Stellen (numerische Kapazitätsgrenze) des benutzten Rechners nicht
überschritten wird. Das bedeutet, dass die Frequenzwerte/„ um einen Startwert reduziert und
in MHz eingegeben werden sollten. Der Startwert muss anschliessend zum Ergebnis der jewei¬
ligen Berechnung wieder addiert werden.
Die richtige Interpretation der ausgeglichenen Parameter der Regressionsgerade ermöglicht die
Berechnung des eigentlichen Distanzwertes. Die Steigung B der Regressionsgerade entspricht
der Frequenzänderung pro Ordnungszahleneinheit. Da die Ordnungszahlen praktisch nur zur
Zählung derMinimawährendderMessungdienen,entsprichtBder"ausgeglichenen"Frequenz¬differenzA/zwischenzweiaufeinanderfolgendenMinima.DerY-AchsenabschnittAistderaus-
53

geglichene Frequenzwert bezüglich der Ordnungszahl / = 0. Bezogen auf die absolute Anzahl von
Modulationswellen N0, die sich bei der vorliegenden Distanz auf dem Messweg befinden, ent¬
spricht A dem ausgeglichenen Frequenzwert f0 an der ersten Minimumsposition. NQ lässt sich
über die Formel:
berechnen, während sich die Distanz aus der Gleichung 3.1 ergibt.
Aus Gründen der Vollständigkeit und zur Abschätzung der Genauigkeiten sind die Formeln:
A/£5 Arar Anr~W°=\1^2r m'=m°'ViïEÏ m°=m^DËf
ebenfalls angegeben.
6.1.4 Programmaufbau zur genauen Distanzmessung
Das Programm zur genauen Distanzmessung baut auf den Basisfunktionen sowie auf den Funk¬
tionen des CPU-Managements auf, die teilweise zu neuen Modulen zusammengefasst werden.
Vor der Darstellung eines möglichen Programmaufbaus und der wichtigsten Programmteile
anhand von Flussdiagrammen sind einige Funktionen zu beschreiben, die insbesondere während
der Einschaltprozedur ablaufen.
Modulatorbereich eichen
Im Abstand von 1 MHz werden alle möglichen Frequenzwerte des Modulators sequentiell einge¬
stellt, wobei zu jeder Einstellung der gemessene Wert der Modulationsspannung in einem tempo¬
rär reservierten Speicherbereich registriert wird. Anschliessend erfolgt der Vergleich der gespei¬
cherten Werte mit zwei vorgegebenen Grenzwerten der Modulationsspannung zur Festlegung
der beiden Modulationsbereiche(Normaler-undErweiterterModulationsbereich).DieseVer¬gleichsfunktionstelltdabeisicher,dassinnerhalbdesjeweiligenBereichskeinSpannungswertunterhalbdesjeweiligenGrenzwertesliegtundtatsächlichermitteltenFrequenzwertegespei¬chertwerden.MitdemEndederEichfunktionwerdenalletemporärgespeichertenSpannungs¬wertegelöscht,sodassdieserSpeicherplatzwiederzurVerfügungsteht.AlsKalibrierparameterbleibenlediglichdieFrequenzwertederbeidenMessbereichegespeichert.GleichzeitigwirddieStartfrequenzdeserweitertenFrequenzbereicheseingestellt.HubweitekalibrierenDieabsoluteBestimmungdestatsächlichenFrequenzhubswäreelektronischsehraufwendigundistpraktischnichtdurchführbar,sodassdiefürdieExtrapolationderSignalintensitätnot¬wendigeInformationenausrelativenBeobachtungengewonnenwerdenmüssen.VordiesemHin¬tergrundkanndieMessungderAbhängigkeitderHubweitederWobbeifrequenzvonderPositioninnerhalbdesModulationsbereichsnichtdirektwährendeinerDistanzmessungerfolgen,zumaldafürdieWobbeifrequenzabgeschaltetwerdenmüsste.DienotwendigenInformationenkönnenfolglichnurübereinevorherigeKalibrierungbestimmtwerden.DieKalibrierungsmessungentsprichtderAufnahmederKennliniedesTransistors,dermitdemResonanzschwingkreisdesModulatorsgekoppeltist.DieMesswerterfassungerfolgtin1MHzSchrittenbeiausgeschaltetemWobbeihub,analogzurEichungdesModulatorbereichs.DieamTransistorbeideneinzelnenFrequenzwertengemessenenSteuerspannungenwerdenalsKali-54

brierwerte in ein entsprechend grosses Array gespeichert. Das Krümmungsverhalten dieser
Kennlinie erlaubt eine genügend genaue Interpolation und Berechnung der tatsächlichen Hub¬
weite (vgl. Kapitel 5.3.5).
Zielmode einstellen
Durch den Aufruf dieser speziellen Funktion wird im Hochfrequenzteil ein zusätzliches Messsi¬
gnal erzeugt, das eine klassische Intensitätsmodulation des Laserlichts bewirkt. Durch das Aus¬
senden dieses Signals erhält der Benutzer die Möglichkeit, eine optimale Zielung zum Reflektor
vorzunehmen. Zur besseren Visualisierung der empfangenen Signalintensität kann dem Benut¬
zer eine LCD-Zeile oder ein analoges Zeigerinstrument als Zielindikator dienen. Beim Auslösen
einer Distanzmessung wird das Aussenden dieses Signals eingestellt.
NameProzess, der als weiteres Unterprogramm
noch gesondert beschrieben ist.
Name Beschreibung eines einzelnen Prozesses,
der ausgeführt wird.
Darstellung einer Entscheidungsposition,
die als Programmverzweigung dient.
Manuelles Eingreifen durch eine Aktion
des Benutzers.
Anzeige Anzeige eines Programmresultates.
Figur 6.4:
Legende zu den nachfolgend dargestellten Flussdiagrammen.
55

Normalmessung
Einschaltprozedur
Distanzmesser
initialisieren
Modulatorbereich
eichen
Hubweite
kalibrieren
Zielmode
einstellen
Messung
auslosen
Startaktionen
ausfuhren
Nächste Nullstelle suchen
(Grobmessung)
Distanz
berechnen
Resultat
anzeigen
Figur 6.5:
Flussdiagramm einer einfachen Distammessung (Normalmessung)
56

Nächste Nullstelle suchen (Grobmessung)
Startwerte setzen
1 Messwert
erfassen
Frequenzschritt
berechnen
weitere Werte
erfassen
Nullstelle
berechnen
Ergebnis
ausgeben
Figur 6.6:
Flussdiagramm, das die Suche der nächsten Nullstelle beschreibt (Grobmessung)
57

Genaue Nullstellenbestimmung (Feinmessung)
Frequenzwert
setzen
Frequenz
verstellen
Fehlermeldung
Minimum
verschoben
Figur 6.7:
Flussdiagramm, das die genaue Minimumsbestimmung beschreibt (Feinmessung).
6.2 Lösungsansätze zur Distanznachführung bei Reflektorbewegungen
Die Verfolgung eines bewegten Zieles erfordert in jedem Fall einen speziellen Aufbau zur Rich¬
tungsverfolgung wie sie im Kapitel 4.3 angedeutet wurde. Die nachfolgende Beschreibung der
Lösungsansätze beschränkt sich ausschliesslich auf die kontinuierliche Nachfuhrung der
Distanzmessung (Tracking) mit entsprechender Genauigkeit. Diese kontinuierlich gemessenen
Distanzwerte gehen ebenso wie die gemessenen Richtungsablagen als Rohdaten in den über¬
geordneten Regelalgorithmus ein, der die 3-dimensionale Verfolgung des Zielpunktes sicherstellt.
Je nach Methode wird für die kontinuierliche Distanzmessung ein zweiter Regelkreislauf not¬
wendig.
58

Die Lösung der Problematik bei der Distanzmessung nach bewegten Zielen lässt sich durch ver¬
schiedene Ansätze realisieren. Für alle Varianten ist vor dem Start einer Reflektorbewegung
eine genaue Normalmessung auszuführen. Eine Unterbrechung des Messstrahls während der
Messung führt zur Beendigung der Verfolgungsmessung, wobei die Dauer der Unterbrechung je
nach Methode und Bewegungsgeschwindigkeit unterschiedlich lang sein darf.
Lösung 1: Zählung der Minimumsdurchsänge
Die einfachste Methode bedarf praktisch keines zusätzlichen Hardwareaufwandes und sieht
nach einer Normalmessung die Vorgabe eines Beobachtungsrasters und die Bewegungsrichtung
des Reflektors vor. Das bedeutet, dass Bewegungen, die entlang des Messstrahls erfolgen, in defi¬
nierten Abständen eine Messwerterfassung auslösen. Die Bewegungsrichtung legt fest, ob der
Reflektor vom Instrumentenstandpunkt entfernt oder auf ihn zubewegt werden soll. Der
Distanzmesser stellt dazu die Frequenz entsprechend dem vorgegebenen Raster ein und
beobachtet (zählt) lediglich den Nulldurchgang. Zum Zeitpunkt des Nulldurchgangs löst er dann
über ein Triggersignal die Registrierung der Winkelwerte aus. Auf diese Weise könnten die
Raumkoordinaten im gewählten Rasterabstand vom Instrumentenstandpunkt aus beobachtet
werden. Die grundsätzliche Problematik bei dieser Lösung liegt in der Einschränkung, nur ein
distanzabhängiges Raster (Kugelschalen um den Standpunkt) beobachten zu können. Die seitli¬
chen (horizontale und vertikale) Bewegungen innerhalb eines Rasterschrittes sind bei dieser
Lösung nicht detektierbar. Ein entsprechend kleiner Rasterabstand wird wegen seiner funktio¬
nalen Abhängigkeit von der Bewegungsgeschwindigkeit des Reflektors und der Geschwindigkeit
des Distanzmessers kritisch. Der Aufwand fürdieBerechnungundNachführungderverschie¬denstenEinflussparameterundvorallemdieProblematikderDetektioneinerRichtungsände¬runglässtdieseLösungalsnichtoptimalerscheinen.Lösung2:KontinuierlicheFreauenznachführung(Trackingmessung)DiesezweiteMethodebenötigteinenentsprechendschnellenSynthesizerundbasiertaufderkontinuierlichenFrequenznachführung,damiteineständigeMessunginderUmgebungeinesMinimumsmöglichist.DieMethodeistsehrrechenintensiv,bedarfentsprechenderSignal¬korrekturenundsiehtdieBerechnungderDistanzzujedemZeitpunktanhandvonBewegungs¬gleichungenvor.BeidieserMethodemusseineReihevonNebenbedingungenbeachtetwerden.BasierendaufdervorgängigenNormalmessungbeiruhendemReflektor,startetderVerfolgungs¬algorithmusmitderkontinuierlichenBeobachtungdesEmpfangssignalsaneinerNullstellemög¬lichstinderMittedesModulatorbereichs.ZusammenmitdenWertenderSignalintensitätwirdderZeitpunktderBeobachtungmöglichstgenauregistriert.ÜberdenAnsatzderIntensitäts¬funktioninderUmgebungeinerNullstelleundmitHilfederInformationenausdervorgängigenNormalmessunglässtsicheineBewegungdesReflektors,dieBewegungsrichtungsowiedieGeschwindigkeitderReflektorbewegungbestimmen.DieBewegungsgleichungunddieMessin¬formationen(Frequenzwert,Modulationsspannung,Signalintensität,Zeit,Geschwindigkeit,FunktionderSignalintensität,DauerfürdieEinstellungeinerneuenFrequenz,LängederModulationshalbwellenundAnzahlderModulationshalbwellen)liefernanschliessendallePara¬meterzurVorausberechnung(Prädiktion)dernächstenMessposition.DieProblematikdieserMethodeliegteinerseitsinderÄnderungderBerechnungsgrundlage(Modulationswellenlänge)durchdieEinstellungverschiedenerFrequenzpositionenunddurchdensichständigänderndenAbstandzwischenzweibenachbartenMinimaaufgrundderDistanzänderung.AndererseitsistangesichtsdesnotwendigenZeitaufwandeszurEinstellungderverschiedenenFrequenzpositio¬nenundfürdieunterschiedlichenBerechnungendiemaximalerreichbareBewegungsgeschwin¬digkeitbesonderskritisch.DiemathematischenZusammenhängesowieeineentsprechendeAbschätzungderkritischenWertesindinKapitel(8.4)näherbeschrieben.59

Lösung 3: Kombination des hochnräzisen Distanzmessers mit einem Interferometer
Die genaueste und zweifellos schnellste Methode benötigt noch zusätzlichen Hardwareaufwand,
da die Auslegung des gesamten Distanzmessers auf diese Art der Lösung abgestimmt sein muss.
Diese Methode soll hier aus Gründen der Vollständigkeit kurz erwähnt werden. Sie beruht auf
der "Absolutmessung" durch das FIZEAU-System (Normalmessung) und der anschliessenden
Verfolgung der Reflektorbewegung mit Hilfe der Interferometrie analog zum Laser Tracker
Messsystem. Mit entsprechend genauem Distanzmesser lässt sich dadurch die Anfangsdistanz
der Interferometermessung zu jedem beliebigen Zeitpunkt neu bestimmen. Die Unterbrechung
des Messstrahls, die bei einem Interferometer einen völligen Neustart mit erneuter Verschie¬
bung des Reflektors entlang der zu messenden Strecke erfordert, kann auf diese Weise einfach
umgangen werden. Der Instrumentenaufbau sieht vor, den HeNe-Laser einerseits als Träger¬
lichtquelle des FIZEAU-Systems zu benutzen oder alternativ die Modulation auszuschalten und
ein herkömmliches Einwellen-Interferometer zur Zählung von Interferenzdurchgängen zu reali¬
sieren. Die Bedingung an den grundsätzlichen Aufbau ist, dass ein stabilisierter HeNe-Laser als
Lichtquelle verwendet wird. Da zur Erzeugung von Interferenzen kohärentes Licht benötigt
wird, eignen sich momentan am Markt erhältliche Laserdioden zur Zeit noch nicht. Die Kohä¬
renzlänge der verfügbaren Laserdioden sowie deren Stabilisierung genügen den Anforderungen
der Interferometrie insbesondere auf Distanzen > 10 m nicht. Der im Funktionsmuster verwen¬
dete kompaktere Aufbau kann folglich nur für die beiden ersten Varianten genutzt werden. Die
jederzeit während der Reflektorbewegung verfügbare Ablesung mit Interferometergenauigkeit
und die damit erreichbareGeschwindigkeit,sowiedergeringeBerechnungsaufwandimDistanz¬messersinddieStärkenderLösung3.DieLaser-TrackerHardwarekanndabeialsGrundgerätdienen,dasdenvollständigenInterferometeraufbauunddieRegelungzurReflektorverfolgungbereitsenthält.DiegeeigneteKombinationderbeidenMessmethoden(Laser-TrackerundDistanzmesser)wirddurcheinenentsprechendenAufbauderProgrammstrukturderinternenMikroprozessorprogrammegewährleistet.Obwohlder3.LösungsvorschlagdenamehestenzurealisierendenWegdarstellt,liegtdenfol¬gendentheoretischenAbhandlungenunddenweiterenUntersuchungendieserArbeitder2.Lösungsvorschlagzugrunde.ErstellteinerseitseineallgemeingültigeLösungdarundliefertandererseitssehrumfangreicheInformationenüberdieLeistungsfähigkeitunddieGrenzendesFIZEAU-Prinzips.DieerarbeitetenResultatekönnengleichzeitigalsersteGrundlagenzurEnt¬wicklungeineskompakterenundkostengünstigerenAufbauszurabsolutendynamischenMes¬sungdienen.6.2.1ExtrapolationderIntensitätsfunktionDieRealisierungdes2.LösungsansatzesbasiertaufderNutzungderIntensitätsfunktion.AusderMessungmitderWobbeifrequenzergebensichdieStützwertederIntensitätsgeradeninAbhängigkeitvondereingestelltenFrequenz(vgl.Kapitel5.3).LiegendienotwendigenParame¬terdieserGeradengleichungvor,kannderNulldurchgangderGeradenundsomitderFrequenz¬wertderMinimumpositioneinfachberechnetwerden.InKapitel5.3wurdena)dieModulationsspannung,b)dieHubweitederWobbeifrequenzundc)dievorliegendeMessdistanzalsdiedreientscheidendenEinflussgrössenaufdieParameterderIntensitätsgeradenbereitsdiskutiert.WenndieIntensitätsgeradenunzurBestimmungderDistanzbzw.desFrequenzwertesaneinerMinimumpositiongenutztwerdensoll,müssendieseEinflussgrössenbekanntsein.DiedirekteMessungderwirksamenModulationsspannung(VerhältniszahlVIVm)andereinge¬stelltenFrequenzbereitetgrundsätzlichkeineProbleme,obwohldasamvorliegendenFunk-60

tionsmuster noch nicht möglich ist. Für die nachfolgenden Messungen zur Überprüfung der auf¬
gestellten Theorie zur Trackingmessung wurde zwischen den einmal über der gesamten Band¬
breite des Modulators erfassten Werten interpoliert (in Figur 5.5 dargestellt).
Die Variation der tatsächlichen Hubweite der Wobbeifrequenz in Abhängigkeit von der einge¬
stellten Frequenz kann durch eine vorgängige Kalibrierungsmessung berücksichtigt werden. Das
in Kapitel 5.3.5 erarbeitete Modell der Berücksichtigung der für diesen Effekt verantwortlichen
Kennlinie des Transistors im Modulationsschwingkreis, sieht die Benutzung einer Kalibrierta¬
belle vor (vgl. Tabelle 5.1). Diese Tabelle enthält die Werte (Spalte Soll Werte) zur digitalen Ein¬
stellung der Hubweite am Funktionsmuster, sodass die während der Messung tatsächlich wirk¬
same Hubweite über den gesamten Modulatorbereich gleich ist.
Das grösste Problem stellt die Forderung dar, dass die Messdistanz zur exakten Bestimmung der
Steigung der Intensitätsgeraden bekannt sein muss (vgl. Kapitel 5.3.2). Das Ergebnis der
Distanzmessung zum Reflektor im statischen Zustand liegt zwar als Startwert vor, aber aus der
Bewegung des Reflektors resultiert eine Distanzänderung.
Anhand des bereits bekannten Messbeispiels lässt sich dieser Sachverhalt näher erläutern. Auf¬grunddervorgängigenNormalmessungsindalleParameterderGleichungen5.8-5.13bereitsbekannt.ImAnschlussandieNormalmessungbzw.vorBeginnderTrackingmessungwirdfürdievorliegendeDistanzimBereichderStartfrequenz(MinimumpositionmöglichstinderMittedesModulatorbereichs)dieSteigungderIntensitätsgeradendirektgemessen.MitentsprechendeingestelltenInstrumentenparameternerfolgtzudiesemZweckdieBeobachtunghinreichendvielerStützstellen,ausdenenanschliessenddieParameterderIntensitätsgeradenalszusätzli¬cheStartinformationfüreineTrackingmessungberechnetwerden.DieStartwertedesMessbeispielslauten:DistanzD=5.312633mMinimumfrequenz/„=1383.518413MHzWellenzahlN=49FrequenzdifferenzA/=(f0+]-f0)=28.234587MHzFrequenzschrittfstep=20317.46HzGeradensteigungm=1.42TrittwährendderTrackingmessungdurchdieBewegungdesReflektorsnuneineDistanz¬änderungauf,wirdbeigleichbleibenderModulationsfrequenzeinveränderterIntensitätswertgemessen.DurchdieUmstellungderGleichungen5.16und5.11zu:NS=—(6.16)mVo+i~/o),.kanndieFrequenzverschiebungaufgrundderIntensitätsmessungextrapoliertwerden.Dasbedeutet,dassdieReflektorverschiebung(Distanzänderung)eineumfmoveveränderteFrequenzderMinimumpositionzurFolgehat.ÜberdieGleichung/.=/o+/«(6.18)unddasEinsetzenvon/anstellevon/0indieGleichung(3.1)lässtsichschliesslichderveränderteDistanzwertinAbhängigkeitvomgemessenenIntensitätswertherleiten.ExplizitdargestelltlautetdieGleichungfürdieDistanzberechnung:
61

neu
N0-c
2-(/o + 44
2- [fo+-nr
!
N0-c
/„ »i Sf+/(/„+, /„)
N0-c -m • SK
2-f0-m-SK + 2-I-Af(6.19)
Das eigentliche Problem an dieser Berechnung ist in der Gleichung (6.17) begründet, denn
/o+i -/o = A/ ist aufgrund der veränderten Distanz lediglich als sehr guter Näherungswert zu
betrachten. Die tatsächliche Frequenzdifferenz A/„e„ lässt sich durch das Einsetzen der neu
berechneten Distanz Dneu in die Gleichung (3.1) einfach berechnen, wenn N0 = 1 gesetzt wird.
4/^=^- (6.20)C Unt;u
Die Abschätzung des Einflusses der veränderten Frequenzdifferenz auf die Distanzbestimmung
lässt sich aus der Ableitung der Gleichung (6.19) nach A/ bestimmen.
Nn-c -m -SK-2-IdD = • dAf (6.21)
(2-f0-m-SK + 2-I-Aßz
Zur expliziten Berechnung von dD wird als Verschiebung der Frequenzdifferenz aufgrund der
geänderten DistanzdAfdieDifferenzzwischenAfneuundA/benutzt.UnterderAnnahmeeinergemessenenIntensitätsdifferenzvonbeispielsweise/=120[180]A/DWandler-EinheitenunddenobenaufgeführtenStartwertendesMessbeispielsführtdieAbschät¬zungdesEinflussesderReflektorverschiebungzufolgendenResultaten:DistanzDmu=5.311015m[5.310252m]DistanzdifferenzdD=-0.465•10~6m[-1.027-10"6m]wobeiderVerschiebebetragdesReflektors1.6mm[2.4mm]aufgrunddesangesetztenIntensi¬tätsmesswertesdenverändertenWertderDistanzDneuergibt.DieMessunsicherheitderDistanzaufgrundderverändertenFrequenzdifferenzdAfdiewegenderReflektorverschiebungentstand,istmitdD=0.465um[1.027um]vernachlässigbarklein,zumaldieangesetztenIntensitätswertedasRandgebietdesMessbereichsrepräsentieren.DieseAbschätzungzeigt,dasseinehinreichendgenaueExtrapolationdesFrequenzwertesderMinimumpositionausdenMessungenderSignalintensitätmöglichist.EinewichtigeVorausset¬zungfüreinekontinuierlicheMessfolgeüberdieseExtrapolationbleibtjedochdieständigeVerbesserungundNachkalkulationjederMessung.62

6.2.2 Nutzung der Bewegungsgleichung zur Reflektorverfolgung
Die Abschätzungen im Kapitel 6.2.1 zeigen, dass die Bestimmung der Frequenz der Minimumpo¬
sition anhand einer Extrapolation der Intensitätsfunktion mit der erforderlichen Genauigkeit
möglich ist. Als Folgerung ergibt sich unter Berücksichtigung der entsprechenden Rahmenbedin¬
gungen die Möglichkeit, die gesuchte Entfernung zum Reflektor auch ohne die exakte Einstel¬
lung der richtigen Minimumfrequenz bestimmen zu können. Analog zur rechnerischen Verbesse¬
rung der Richtungsmessung bei Laser Tracker Systemen bildet diese Erkenntnis die Basis für
eine Nachführung der Distanzmessung (Tracking der Distanzmessung) mit dem vorliegenden
Messprinzip.
Vor der Bewegung des Reflektors erfolgt eine normale Distanzmessung sowie die Bestimmung
der Intensitätsgeraden bei entsprechender Einstellung der Instrumentenparameter. Die Stei¬
gung der Intensitätsgeraden m und die Normierung der Frequenzschritte bei der vorliegenden
Distanz D0 sind bekannt. Ausgehend von einer genau auf eine Minimumposition gestellten Fre¬
quenz/„, die möglichst in der Mitte der Modulationsbandbreite liegt, beginnt die Trackingmes-
sung. Die Controllersoftware desDistanzmessersführtdabeikontinuierlichundimdefiniertenZeitraster,zumBeispieljedeMillisekundeeineMessungderIntensitätswerteaus.BeiruhendemReflektorsowiegenauaufeineMinimumpositiongestellterFrequenzergibtdieMessungeinenIntensitätsdifferenzwertvon1=0.DieersteMessungnachdemStartderReflektorbewegunglieferteinenvonNullverschiedenenIntensitätswert(/*0).FürdieBerechnungderDistanzwirddergemesseneIntensitätswertindieGleichungen(6.19)eingesetzt.DieveränderteReflektorpositionbewirktausserdemeineÄnderungdesFrequenzabstandeszwischenzweibenachbartenMinima.TrotzderAbschätzungmitHilfederGleichung(6.21)erscheinendieNachführungdesFrequenzabstandesAfneusowiedieerneuteBerechnungderDistanzDneumitHilfederGleichungen(6.20)und(6.19)alssinnvoll.EinemehrmaligeIterationistnichtnotwendig.AusderumgestelltenGleichung(3.1)N0-cf,=275-(6-22)undderumgestelltenGleichung(6.18)fmove=ft-fo(6-23)lässtsichdieFrequenzverschiebungfmmeberechnen.MitdiesemFrequenzwertundderausGlei¬chung(6.20)resultierendentatsächlichenFrequenzdifferenzAflieukannüberdieumgeformteGleichung(6.17)NS,=^-SK(6.24)JneudieneueWeiteeinesNormalschrittesNStalsneueBasiszurExtrapolationderIntensitätswerteberechnetwerden.GrundsätzlichgenügtdieAusführungdersoebenbeschriebenenAbfolgederBerechnungenzurkontinuierlichenBestimmungallernotwendigenGleichungsgrössen.DieweiterenMessungensindbeibewegtemReflektorjedochnurmöglich,solangesichdieFrequenzdertatsächlichen63

Minimumposition von der eingestellten Messfrequenz nur geringfügig unterscheidet. Das bedeu¬
tet, dass die Frequenzeinstellung ebenfalls einer kontinuierlichen Nachfuhrung unterliegt. Im
Prinzip könnte die jeweils fur den Zeitpunkt t berechnete Frequenz als neue Frequenzeinstellung
fur die Messung zum Zeitpunkt t +1 ausreichen. In diesem Fall wurde die eingestellte Frequenz
gegenüber der tatsachlichen Situation jeweils eine Messepoche zurückliegen. Aufgrund der spe¬
ziellen instrumentellen Einschränkungen wie z. B.:
- die Bandbreite der Frequenzeinstellung- die mathematische Funktion in der Umgebung der Minimumposition in Kombination mit der
- Bewegungsgeschwindigkeit des Reflektors
ist eine exaktere Vorausberechnung der zu erwartenden Frequenzwerte erforderlich.
Fur eine schnelle Nachfuhrung der eingestellten Frequenz und die nachtragliche Verbesserung
aller relevanten Werte dieser Bestimmungsgleichung ist zusätzlich die Entwicklung eines ent¬
sprechenden Modells notwendig. Sobald die Verschiebung des Reflektors einen Betrag annimmt,
der über die Extrapolation der Minimumposition hinaus eine völlig neue Frequenzeinstellung
durch den Synthesizer erfordert, müssen die bis zu diesem Zeitpunkt ermittelten Informationen
zur Vorausberechnung der neuen Frequenzeinstellung genutzt werden. Die Verschiebung der
Frequenz der Minimumposition zwischen zwei Messzeitpunkten kann entsprechend dem Weg-
Zeit-Gesetz in Geschwindigkeits- und Beschleunigungsanteilen ausgedrucktwerden.AlsGrund¬voraussetzungwerdenkontinuierlicheVerhaltnissevorausgesetzt.Dasbedeutet,dassdiegemes¬senenWertederletztenBeobachtungsepochefurdienächsteEpochealsgleichbleibendangenom¬menwerden.AusdiesenidentischenEingangsgrossenlassensichsehrguteNäherungswertezurSteuerungdesDistanzmessablaufsvorausberechnen,solangedieZeitintervallezwischenzweiMessungenhinreichendkleinsind.ZurRealisierungdiesesModellansatzessinddieWertevonmindestensdreiMessepochenalsBerechnungsgrundlagenotwendig.EineVereinfachungderBerechnungergibtdurchdieEinstellungeinesdefiniertenZeitrasterszurMessungderIntensi-tatswerte,zumBeispieldurchaquidistanteZeitintervalleimMillisekundentakt.AllgemeinlasstsichdieFrequenz-ZeitBeziehungalsquadratischeZeitgleichungausdrucken,mitderFrequenzanderMinimumpositionalsgesuchterGrosse.DerAnsatznachTaylorergibt:wobeifolgendeVereinbarungengelten:FrequenzwertanderMinimumpositionzumZeitpunkt(t-l)FrequenzwertanderMinimumpositionzumZeitpunkttZeitdifferenzseitderletztenMessunglineareFrequenzanderungzumZeitpunkt(t-l)quadratischeFrequenzanderungzumZeitpunkt(t-l)BeizeitlichkonstantenMessabstanden,alsomitaquidistantenStutzstellenergibtsichmitHilfederDifferenzenverfahrenausdernumerischenMathematik[StiefelE.1962,AbramowitzM.,SegunI.1968,Schnädelbach1998]64Ai)_/=(v)=WJ,i=

e/
et),., mW-.-/-2)
und
o )t-\ yotji-2
At
&
'
v< -1 X - 2'a,
'
y < - 2 /< - v
Af2
A/
•W-i-2-/_2 + W 0
Durch das Einsetzen in Gleichung (6.25) mit einem zeitlichen Intervall von At = 1 resultiert:
y;=/-,+2-(3-/-.-4-y;-2+^)
«2-(5-/_1-4-/_2+/_3) (6.26)
Dieser Gleichungsansatz beschreibt die Verschiebung der Frequenzwerte allgemein und lediglich
bei der ersten Bewegung des Reflektors aus der Ruheposition tritt die Besonderheit auf, dass die
Frequenzwerte der letzten Messepochen alle gleich sind/ , =/_2 =/_,.
6.2.3 Programmaufbau zur Verfolgung der Reflektorbewegung
Der im Kapitel 6.2.2 beschriebene Ansatz, eine funktionale Beziehung zwischen dem ermittelten
Frequenzwert einer Minimumsposition und den allgemeinen Bewegungsgleichungen der Kine¬
matik herzustellen, lässt auf den ersten Blick die Anwendung der Kaiman-Filter-Technik zur
einfachen Bewältigung der kinematischen Vorgänge als sinnvoll erscheinen. Die konkret vorlie¬
gende Problematik der Reflektorverfolgung weist eine Reihe der Rahmenbedingungen für die
Anwendung dieses mathematischen Ansatzes auf. Aus einer diskreten Messwerterfassung
könnte einerseits die Zustandsschätzung der Systemparameter bis zur Gegenwart erfolgen (Fil¬
terung) und andererseits sind mit dem gewählten mathematischen Ansatz diezuerwartendenWertedernächstenEpochevorhersagbar(Prädiktion).NahezualleerforderlichenVoraussetzun¬gen,vondermathematischenSystembeschreibungmitderentsprechendenFehlerschätzungbiszurRealisierungdesrekursivenGleichungsansatzessindgegeben[SchrickK.W.1977].Alseinzi¬gesProblemtrittdiesichständigänderndeBasisdesGleichungssystemsauf.DurchdiemitderDistanzänderungverbundeneVariationderFrequenzabständezweierMinimawirdeinekonti¬nuierlicheNachführungderSkalierung(Normierung)derIntensitätsgeraden,diealsGrundlagezurExtrapolationdernächstenMinimumpositiondient,notwendig.EindurchgängigerAnsatzerscheintvordemHintergrundderzujederMessepocheabsolutbeobachtbarenMessgrössealszuaufwendig.DieMessgrösseistalsabsolutbeobachtbarbezeichnet,weildasdarausgewonneneResultatnichtvondenvorgängigerfasstenMessungenabhängtundausjedemeinzelnenMess¬werteinunabhängigerDistanzwertbestimmtwerdenkann.BasierendaufdenErfahrungenmitdemRegelalgorithmusdesLaserTrackerSystemszurReflektorverfolgungversprichtdiesequen¬tielleAuswertungeineeinfachereaberbeiweitemgenügendgenaueLösung.GemeinsammitdenRichtungsbeobachtungeneinesTrackingsystemslässtderAnsatzeinerent¬sprechendenAusgleichungzurGlättungdererfasstenBahnkurveimRaumdurchausnocheineVerbesserungerwarten,soferndiephysikalischenRahmenbedingungenausdenBewegungsglei¬chungenalsGrundlagedienen.65

Der nachfolgend skizzierte Programmablauf beschreibt lediglich die automatische Regelung und
Steuerung des Distanzmesserteiles zur Reflektorverfolgung. Die in Laser Tracker Systemen
realisierte transversale Nachführung des Zielstrahls (vgl. Kapitel 4.3) bzw. eine vollständige 3D-
Bahnverfolgung im Raum wird dabei nicht berücksichtigt.
Dynamische Messung (auf bewegten Reflektor)
Distanzmessung ausführen
Minimum Modulatormitte
einstellen
Steigung der
Intensitätsfuntkion messen
ÏStartparameter setzen
J.Messwerte erfassen
L
//!-..*,_. \ nein / FehlermeldungA/D Wert ^> ^/
\ Strahl verloren
Distanz- und Frequenz¬
werte berechnen
1Vorausberechnung
erwarteter Parameter
LDistanzwert
anzeigen
Messwerte
speichern
Frequenzwert
setzen
Messung beenden,
Return
Figur 6.7:
Flussdiagramm, das den Messablaufbei bewegtem Refelktor beschreibt (Dynamische Messung).
66

7 Verschiedene Reflektortypen
Die spezielle Ausnutzung der Reflexion von Wellen bildet die fundamentale Grundvoraussetzung
zur elektrooptischen Distanzmessung. Grundsätzlich gilt, dass an der Grenzfläche zwischen zwei
verschiedenen Stoffen eine Reflexion der Wellen entsteht. Die Form und Beschaffenheit dieser
Grenzflächen sowie die vorhandenen Materialien beeinflussen die Reflexion dabei entscheidend.
Die optimale Nutzung dieser physikalischen Eigenschaft der Wellenausbreitung führte zum Auf¬
bau entsprechender Reflektorkonstruktionen. Die unveränderte Reflexion der Wellenfront in sich
selbst mit geringst möglichem Intensitätsverlust stellt dabei die wichtigste Anforderung seitens
der Distanzmessung dar.
Reflektoren verschiedenster Konstruktionen mit unterschiedlichsten Ausführungen sind mittler¬
weile bekannt und werden je nach Anwendungsgebiet eingesetzt. Auf einige der Reflektortypen
wird nachfolgend etwas näher eingegangen, wobei die Einsatzhäufigkeit sowie neue Konstruk¬
tionsansätze kurz angespochen werden. Im Mittelpunkt des Interesses an den verschiedenen
Reflektorarten steht jedoch eindeutig deren Eignung für industrielle Anwendungen. Insbeson¬
dere die Zielpunktverfolgung (Tracking), die Genauigkeit der Reflektorausrichtung bzw. ein mög¬
lichst grosser Öffnungswinkel bei kleinster Baugrösse aber stabilem und möglichst präzis gefer¬
tigtem Aufbau stellen die wichtigsten Kriterien dar.
7.1 Planspiegel
Der Planspiegel (Autokollimationsspiegel), der lediglich die Kriterien der möglichst genauen
Ebenheit der Reflexionsfläche erfüllen muss, eignet sich zwar grundsätzlich zur Distanzmes¬
sung, aber die Einhaltung der erforderlichen Zusatzkriterien erschweren den Einsatz dieses
Reflektortypes erheblich. Im allgemeinen bereitet die Herstellung der Reflexionsfläche mit einer
Ebenheitstoleranz von < X/10 keine technischen Probleme. Die fundamentale Voraussetzung der
genauen Ausrichtung des Spiegels senkrecht zum Strahl des Distanzmessers lässt sich zwar für
einzelne Messungen realisieren, aber auf längere Entfernungen und bei kurzen Messzeiten ent¬
stehen entscheidende Nachteile. Aufgrund der Forderung nach einer genauen Ausrichtung ist
der PlanspiegelzurTrackingmessunghingegenvollkommenungeeignet.7.2CassegrainReflektorDerCassegrainReflektoristimVergleichzumPlanspiegeleinanderesExtrem,daersichvorallemzurMessungaufgrosseEntfernungeneignet.DerkonstruktiveAufbaudiesesReflektorsistanalogzueinerParabolantenne,mitdemUnterschied,dasssichimFokuspunkteinkleinerPlanspiegelbefindet.DieserPlanspiegelbewirktgemeinsammitderparabolischenFormdererstenReflexionsflächedieexakteReflexiondesankommendenMessstrahlesinsich.SchondiesekurzeBeschreibunglässteinenkomplexenAufbaumitsehrhoheninnerenStabilitätsanforde¬rungenundentsprechendgeringenFertigung-undJustiertoleranzenerwarten.Gervaise(1983)zeigtdenzumTerrametergehörendenReflektordieserBauart,dereinembesserenastronomi¬schenFernrohrgleicht.DurcheineentsprechendminituarisierteKonstruktionwärezwarsicher¬lichaucheineleichtereAusführungdiesesReflektortypsrealisierbar,aberdiegrundsätzlichenRahmenbedingungenbliebenbestehen.DiedarausresultierendenEinschränkungeninsbeson¬deredieunhandlicheBaugrösseunddieAnforderungderrelativgenauenAusrichtungdesReflektorslassendiesenReflektortypalsungeeignetfürindustrielleAnwendungenundzurauto¬matischenZielpunktverfolgungerscheinen.
67

7.3 Tripelspiegel (Corner-Cube)
Ein Corner Cube besteht aus drei, sehr genau gefertigten Planspiegeln, die rechtwinklig zuein¬
ander montiert sind. Bei entsprechend genauer Montage dieses Corner Cubes reflektiert er den
Messstrahl parallel zu sich selbst. Neben der Ebenheitstoleranz von < À/10, deren Einhaltung
dem heutigen Stand der Technik entspricht, erweist sich das Zusammenfügen der Teilspiegel als
besonders kritisch. Unter Benutzung einer, mit notwendiger Winkeltoleranz gefertigten Scha¬
blone (Gegenstück), können die drei Planspiegel zueinander ausgerichtet werden. Die techni¬
schen Probleme liegen in erster Linie in der Kittung dieser Planspiegel. Einerseits muss die Kitt¬
schicht gleichmässig und beständig sein, ohne Beeinflussung der Winkel des Spiegelverbundes
aufgrund von Temperaturänderungen. Andererseits sind möglichst kleine Kanten an den Kitt¬
stellen erforderlich, damit ein optimales Reflexionsverhalten des Corner Cubes erzielt wird und
eine homogene Intensitätsverteilung des reflektierten Lichtes vorliegt.
Die Polarisationsmodulation des Distanzmessers erfordert im Zusammenhang mit den Refie-
xionseigenschaften noch eine spezielle Beschichtung der Spiegeloberflächen, damit keine syste¬
matischen Fehler entstehen.
Reflektor in Kugelform
3 Planspiegel
montiert zu einer Wurfelecke
zentriert in der Messkugel
Figur 7.1:
Schematische Darstellung eines Corner
Cube Reflektors
Grundsätzlich lassen sich diese Rahmenbedingungen mit entsprechendem Aufwand fertigungs¬
technisch beherrschen. Die stabile Fassung der vorgefertigten Spiegelecke hingegen erfordert
sehr spezielles Fachwissen und einen entsprechenden Fertigungsprozess. Es darf kein Zwang auf
die drei Spiegelflächen und deren Verbindung ausgeübt werden, der die Winkelgenauigkeit
beeinflusst. Gleichzeitig muss die Verbindung der vorgefertigten Spiegelecke zur Fassung ausrei¬
chend stabil gestaltet werden. Die exakte und hinreichend genaue Zentrierung des Spiegelver¬
bundes darf ausserdem keine Abhängigkeit von Temperaturschwankungen aufweisen, die zur
VeränderungderReflexionseigenschaftendesReflektorsführen.EinepraktischeBeschränkungstelltdermaximaleEinfallswinkeldesCorner-Cubesdar,derinderGrössenordnungvonungefähr20°inbezugaufdieräumlicheWinkelhalbierendederdreiSpiegelflächenliegt.DiebeliebigeOrientierungdesReflektorsinnerhalbdiesesToleranzbereichsdesEinfallswinkelszeigtkeinenentscheidendenEinflussaufdieMessgenauigkeit.Testmessungen,beideneneinReflektorindefiniertenWinkelngegenüberderStrahlrichtungverdrehtwurde,zeigen,dassdiegemessenenDistanzenkeinesignifikanteAbhängigkeitvomDrehwinkelaufweisen(vgl.Figur7.2).DerCorner-CubeerweistsichfolglichalsgutgeeigneterReflektorzurZielpunktverfolgung.ImNormalfallkanndieReflektorbewegungproblemlosmitentsprechendgenauerAusrichtungerfol¬gen,dasgiltauchfüreinemanuelleReflektorverschiebung,dieeineinigermassengeübterBenutzersicherausführenkann,ohnebeiderZielpunktverfolgungdenMessstrahlzuverlieren.68

Distanzfehler TBR (Air Path Corner Cube)
Soll-Werte und Test Résulte
0020
0 015
i 0010
-0 005
-0 015
-0020
s? ii.
1 X
)°
6 o
!0
'
10 0 10
Eintrittswinkel in Weg)
x Soll-Werte o Testresultate
Figur 7.2:
Distanzfehler in Abhängigkeit vom Strahlern
tnttswinkel (Theoretischer Sollwert und
gemessene Testresultate)
Fur industrielle Anwendungen insbesondere im Zusammenhang mit der Laser-Tracker-
Technologie hat sich der Einbau des Corner-Cubes in eine Kugelform analog der Taylor-Hobson-
Zielkugel sehr bewahrt. Diese häufig auch unter dem Begriff SMR ("spherical mounted reflector")
bekannten Reflektoren sind fur verschiedene Aufgaben in unterschiedlichen Durchmessern
erhältlich. Bei entsprechender Zentrierung bezieht sich der Messpunkt auf das Kugelzentrum,
wobei fur den Distanzmesser darauf geachtet wird, dass die Additionskonstante bezüglich dem
Kugelzentrum immer gleich Null wird. Die Herstelltoleranzen der Kugel bezuglich Rundheit und
Durchmesser bereiten keine grossen Schwierigkeiten und liegen im Bereich von wenigen um, fur
spezielle Anwendungen können bei etwas grosserem Aufwand sogar Genauigkeiten der Kugel¬
form von < 1 um erreicht werden. Die gesamte Problematik der Reduktion der Messwerte um den
Radius der Messkugel ist im Bereich der industriellen Anwendungen von den Tastkugeldurch¬
messern der Koordinatenmessmaschinen her bestens bekannt und kann entsprechend berück¬
sichtigt werden. Im Rahmen der Laser Tracker Entwicklung entstand eine spezielle Reflektor¬
aufnahme (Oberflachenreflektor), die aufgrund einer gezielten Strahlablenkung die Messwerte in
direktem Bezug zur Objektoberflache erfasst.
Reflektor
Abstand d
Abstand d
virtueller Punkt
Figur 7.3a):
Schematischer Aufbau eines Oberflächenre
ßektors
Oberflächenreflektor
In Figur 7.3a) und 7.3b) ist diese spezielle Reflektoraufnahme dargestellt.Ineinemgemeinsa¬menGehäuse(nichtgezeigt),sindeinPlanspiegel,einReflektor(CornerCubeReflektor)sowieeineauswechselbareTastspitzeindefinierterPositionzueinanderfestmontiert.DerLaserstrahldesDistanzmesserswirdnunvomPlanspiegelaufdenReflektorumgelenktundinsichreflek¬tiert.DergeometrischgenaudefinierteAufbaudesGehäusesgewahrleistet,dassdasEndederTastspitzemitdemvirtuellenMesspunktübereinstimmt.DieMessungüberdenumgelenkten69

Strahlweg ist identisch mit der Distanz zum virtuellen Messpunkt. Durch entsprechende Aus¬
führung und Auswahl der unterschiedlichen Tastspitzen können teilweise verdeckte Punkte,
Bohrlöcher oder auch direkte Oberflächenpunkte (Tastspitze ohne Tastkugel) erfasst werden.
Figur 7.3b):
3D Darstellung eines Oberflächenreflektors
7.4 Tripelprisma (Glasreflektor)
Der zur elektrooptischen Distanzmessung am häufigsten eingesetzte Reflektortyp ist das Tripel¬
prisma. Aus diesem Grund existieren bereits eine Vielzahl von Beschreibungen und Veröffentli¬
chungen, die sich unter anderem mit den Effekten und Einflüssen des Tripelprismas auf die
Distanzmessung befassen [Pauli, W. (1969); Maurer, W. (1983), DalcherA. (1983), Loser R. u.a.
(1991) und MarkendorfA (1998)]. Nachfolgend sollen lediglich die wichtigsten Aspekte und For¬
meln über den Einfluss des Prismas auf die Distanzmessung diskutiert werden. Das besondere
Interesse gilt dabei den Auswirkungen auf die Messung im Hinblick auf die kontinuierliche
Nachführung des Messstrahles zum Zentrum des Prismas.
Stehachse
Prisma verschwenkt
Figur 7.4:
Skizze des geometrischen Strahlenganges in einem Tri¬
pelprisma mit ideal gelagertem Drehpunkt q (Skizze aus
Loser u.a. 1991)
Figur 7.5:
vereinfachte Skizze der geometrischen Strahlwegver
besserungen am Glasreflektor (Tripelprisma)
70

Ein wichtiger Schritt im Bereich der Reflektoroptimierung erfolgte in Kombination mit der
Entwicklung der Mekometer Instrumente. Die relativ hohen Genauigkeitsanforderungen im
0.1 mm Bereich erforderten auch seitens der Reflektorzentrierung erhöhten Aufwand. Teil dieser
Aufwände betraf die optimale Positionierung und konstruktive Lagerung des Drehzentrums des
Tripelprismas. Ausgehend vom Brechungsindex des verwendeten Glases und der exakten Aus¬
messung der Prismenhöhen erfolgte für jeden einzelnen Reflektor die präzise Justierung des
Drehzentrums des Prismas (vgl. Fig. 7.4).
Für industrielle Anwendungen insbesondere bei der Reflektorverfolgung entstehen etwas spe¬
zielle Verhältnisse. Durch die ständige Nachführung versucht der Regelmechanismus den
Distanzmesserstrahl immer im Reflektorzentrum zu halten. Sobald der identische Laserstrahl
sowohl zur Distanzmessung alsauchzurRichtungsmessungverwendetwird,sinddielateralenAbweichungenebenfallszubeachten.DiegeometrischenVerhältnissesindineinemerstenSchrittinFigur7.5vereinfachtdargestellt.DieseDarstellunggehtvoneinemDrehzentrumQaus,dassichexaktinderSpitzedesGlaspris¬masbefindet.EineVerdrehungdesPrismasumdenWinkela(Eintrittswinkel)verlängertdeneinfachenStrahlwegimPrismageometrischauf:u(7.1)cosßDieÄnderungdesgemessenenDistanzwertesAD'setztsichimdargestelltenFallauseinerVer¬längerungdesGlaswegesAlPnsmaundeinerReduktiondesWegesausserhalbdesPrismasAlLußzusammen:^Pr,ma=(l'-h)-nG,ai(7.2)A/ia/,=/'-cos(a-ß)-A(7.3)AD'=A/P-AI,„^^PnunuLuftAD'=W-h)-«0fas-/'-cos(a-ß)-hdurchEinsetzenvon(7.1)folgt:h)__h_cosß)"0tecosßAD'HZZ7E~h\'"o/a!_777H'cos*a~ß'~/lAD'=h1|cos(a-ß)cosß"j'"01"'cosß(7.4)DiekontinuierlicheAusrichtungdesMessstrahlesaufdasReflektorzentrumergibteineÄnde¬rungderQuerverschiebungAR'inanalogerWeise.FürdievereinfachteDarstellunginFigur(7.5)folgt:A/?'=/'-sin(a-ß)(7.5)mitGleichung(7.1)folgt:AR'=--sin(a-ß)(7.6)cosßDieeigentlichinteressanteRichtungsänderungergibtsichschliesslichausdemQuotientenderQuerverschiebungzurDistanz.71

Eine Verallgemeinerung des Modellansatzes ergibt sich aus der veränderten Position des
Prismendrehzentrums Q. Figur 7.5 skizziert die Erweiterungen der Gleichungen (7.4) und (7.6)
um die Anteile AQDnl bzw. AQRwht die zur Minimierung der jeweiligen Fehlerteile bei vergrösser-
tem Schwenkbereich des Reflektors führen.
Figur 7.6:
Skizze der geometrischen Strahlwegver¬
besserungen unter Berücksichtigung des
optimierten Drehzentrums Q des Prismas
Die allgemeine Gleichung für die Distanzdifferenz AD bei verdrehtem Prisma ergibt sich aus:
mit
folgt die Gleichung:
AD=h
AD=AD'-AQDM
^Qdm ~ (A ~q)-(h -q) -cosGc
A(2d,« = (A-<?)•(!-cos a)
1 ] cos(a-ß)
cosß" J'"Gta cosß— (h —q) • (1 -cosa)
(7.7)
(7.8)
In analoger Weise folgt für den allgemeinen Ansatz der gesamten Querabweichung:
mit
A/?=A#'-AQ^,
AQR,ch, =(h-q)-sin(a) (7.9)
ergibt sich schliesslich die Gleichung für A# :
AR =
cosßsin(a-ß)-(A -q) -sin(a)
(7.10)DieGleichungen(7.8)und(7.10)oderdieFormeln(7.4)und(7.6)fürdenvereinfachtenFall(h=q),zeigendendirektenEinflussderPrismenhöhehunddesStrahleintrittswinkelsaaufdieMesswerte.Eswirddeutlich,dassnebendergutenAusrichtungdesReflektorseinmöglichstkleinerReflektordiegeringstenFehlereinflüsseaufweist.72

Für industrielle Anwendungen, die keine besonderen Anforderungen an die Reichweite der
Distanzmessungen stellen, bedeutet eine Optimierung des Tripelprismas gleichzeitig eine Mini¬
mierung des Durchmessers. Aus diesem Grund entstand im Zusammenhang mit dem Laser
Tracker der sogenannte Tooling-Ball-Reflektor (TBR), dessen Kugelgehäuse einen Aussendurch-
messer von 12.7 mm (0.5 inch) aufweist. Auch bei diesem Reflektor wurde auf die optimale
Justierung des Kugelzentrums in bezug auf die richtige Position des Drehpunktes im Glaskörper
geachtet, damit eine Minimierung der systematischen Messfehler aufgrund des nicht orthogonal
auf der Prismenvorderfläche auftreffenden Messstrahls erfolgt.
Für diesen Reflektortyp, der eine Prismenhöhe von 6 mm aufweist, sind die theoretisch berech¬
neten Fehlerwerte sowohl der Distanzmessung als auch der Richtungsmessung aus der graphi¬
schen Darstellungen (Figur 7.7 und Figur 7.8) ersichtlich.
Theoretische Abweichung in Distanzrichtung mit
Tooling Ball Glasreflektor
0100
0 800
EE 0 600
ö)c
g 0 400
ä>s
< 0 200
0 000
rTh
50 40 30 20 10 0 10 20 30 40 9
Eitritiswmkel [Grad]
D
Figur 7.7:
Diagramm der theoretischen Fehlereinflüsse in Strahl¬
richtung (Distamanteil) bei verschwenktem Reflektor.
Theoretische Abweichung in lateraler Richtung mit
Tooling Ball Reflektor (Glasprisma)
0600
040010200Bg100003C§-0200<0400-0600|i!;150-4030201001020304050Eintnttswinkel[Grad]Figur7.8:DiagrammdertheoretischenFehlereinflüsseinlateralerRichtung(Winkelanteil)beiverschwenktemReflektor.Distanzabweichung-TBRmitGlaspnsmaTheoretischeWerteundTestResultateEintrittswinkel[Grad]-TestResultateFigur7.9:VergleichzwischengemessenenDistanzenmitdentheo¬retischermitteltenDistanzwertenbeiunterschiedlichenAuftreffwikelndesMessstrahlsLateraleAbweichung-TBRmitGlaspnsmaTheoretischeWerteundTestResultateEintnttswmkel[Grad]Figur7.10:VergleichzwischengemessenenRichtungsabweichungmitdentheoretischermitteltenWertenbeiunterschiedlichenAuftreffwikelndesMessstrahlsMiteinemderartigenTooling-Ball-ReflektorwurdeneineReihevonMessungenausgeführt.DerMessaufbausaheinerelativeinfacheHalterungmitentsprechendeinfachenStrichmarkierungenvor.AnhanddieserMarkierungenkonntederReflektormiteinerGenauigkeitvonca.0.5°inIntervallenvon5°zumDistanzmesserausgerichtetwerden.DieseMessreiheergabeineguteÜbereinstimmungzwischendentheoretischerwartetenunddengemessenenWerten.DieErgeb¬nissesindindenFiguren7.9und7.10graphischdargestellt.73

7.5 Reflektor mit Kugelflächen (Cat's-Eye)
Eine völlig andere Art des Reflektoraufbaus, der von seiner technischen Ausfuhrung einem opti¬
schen Linsensystem gleicht, ist ein Reflektor mit Kugelflachen, ein sogenanntes Cat's-Eye (Zür¬
cher u.a. 1995). Die Besonderheit dieses Reflektors liegt in dem relativ grossen Abstrahlwinkel,
der ± 60° in allen Richtungen betragt.
Im Prinzip besteht ein Cat's-Eye aus zwei Kugel-
halften mit unterschiedlichen Radien mit dem
Brechungsindex n der verwendeten Glassorte.
Die vordere Halbkugel mit kleinerem Durchmes¬
ser fokussiert parallel eintretende Strahlenbun-
del auf die Aussenflache der hinteren Halbkugel.
Diese, mit einer Spiegelschicht versehene Aus¬
senflache reflektiert die auftreffende Lichtenergie
parallel zum Eintrittsstrahl zur Lichtquelle
zurück.
In erster Näherung gilt folgende Beziehung:
Grundsatzlich kann der Eintrittswinkel des
Lichtstrahles nach allen Richtungen um bis zu
Figur 7.11: Schematische Darstellung eines Cat's-Eye 60° von der gemeinsamen Achse der Halbkugeln
Reflektors abweichen. Die Eintrittshohe h (halber Durch¬
messer des auftreffenden Strahles) ist die zweite,
fur die Messung entscheidende Grosse.
Ein normales Cat's-Eye hat sphärische Aberration, wie jede herkömmliche Sammellinse. Das
heisst, dass nur achsnah einfallende Strahlen die Bildebene im Brennpunkt schneiden und die
Bedingung der parallelen Reflexion im Cat's-Eye vollständig erfüllen. Achsfernere Strahlen
schneiden die Achse vor dem Brennpunkt und werden anschliessend von der im Brennpunkt
liegenden Kugelflache reflektiert. Die wieder austretendenStrahlenscheinenvoneinemhinterderReflexionsflacheliegendenAchsenschnittpunktzukommenundwerdenvonderEintrittsfla¬chezukonvergentenStrahlengebrochen.DieseEigenschaftbegrenztdenzurMessungnutzba¬renStrahldurchmesser.DurchdieVerringerungdesAbstandesdzwischenEintrittsflacheundReflexionsflachewirderreicht,dassStrahlenineinembestimmtenAbstandzurKugelachse(Einfallshoheh)parallelaustreten.AlsFolgedieserVeränderungderHalbkugeltretenStrahlenmitgeringererEinfallshohekonvergent,solchemitgrossererEinfallshohedivergentausdemCat's-Eyeaus.DernutzbareStrahldurchmesserkanndurchdieseMassnahmevergrossertwer¬den.AnstellevonStrahlenkannauchvoneinerWellenfrontgesprochenwerden,dieindiesemFallvomCat's-Eyeinnenkonkavundaussenkonvexreflektiertwird.DiebeschriebeneVerfor¬mungderWellenfront,dieaufgrundderFertigungstoleranzenentsteht,darfeinenbestimmtenGrenzwertnichtüberschreiten.BeieinerÜberschreitungderWellenfrontverformunggenügtdasModulationssignalderreflektiertenWellenfrontnichtmehrzurAuswertungdesDistanzmesser¬signals.BeieinemGrenzwertvon±1/2WellenlangendifferenzundeinemgrossenHalbkugel¬durchmesservon60mmbetragtderzurModulationnutzbareDurchmesserbereichungefähr6mm.1»td—>_)rVr1r2*74

Ad = - Ad = 0 Ad = +
\
r1«
tr
2
I V»
_,
^
//
^
\\
Ausbreitungsrichtung der Wellenfront
Figur 7.12: Schematische Darstellung der Ausbreitung der an einem Cat's-Eye reflektierten Wellenfront
Die Vergrösserung des zur Modulation nutzbaren Durchmesserbereichs, der durch die Verkür¬
zung des Scheitelabstandes der Halbkugeln des Cat's-Eyes entsteht, zeigt jedoch einen anderen
Nachteil. Auf grössere Distanz (z.B. 10 m) weist das reflektierte Signal eine ringförmige Energie¬
verteilung auf. Die maximale Strahlintensität ist dann nicht im Zentrum sondern entlang eines
Ringes um den Strahlmittelpunkt. Dieser Effekt kann je nach Abstand des Intensitätsmaximums
vom Strahlzentrum zu Störungen des Regelmechanismuses führen, da zur automatischen Posi¬
tionierung des Strahlmittelpunktes auf das Reflektorzentrum eine Gauß'sche Intensitatsvertei-
lung vorausgesetzt wird.
Die Minimierung oder Behebung der beschriebenen Fehlerquellen (negative sphärische Aberra¬
tion) gelingt, wenn ein radialsymmetrischer Gradient des Brechungsindexes durch den Aufbau
verschiedener Kugelschalen realisiert werden kann (US Patent 4'889'409, 1966). Laut Zürcher
u.a. (1995) muss mindestens die vordere Halbkugel zweilinsig aufgebaut sein. Analog zu einem
zweilinsigen Achromat sieht diese Konstruktion anstelle einer Einzellinse eine höherbrechende
Aussenlinse und eine niedrigbrechende Innenlinse vor. Damit das System in einem begrenzten
Winkelbereich für alle Richtungen gleiche Eigenschaften aufweist, müssen die Wirkflächen
(Brechungs- und Reflexionsflächen) konzentrisch sein. Das vordere äussere Teil ist folglich eine
konzentrische Kalotte, während der innere Teil mit dem niedrigeren Brechungsindex praktisch
eine kleinere Halbkugel darstellt. Als zusätzliche Bedingung müssen die hintere, reflektierende
Halbkugel und die vordere kleinere Halbkugel den gleichen Brechungsindex aufweisen, damit
der Übergang nicht zu einer zusätzlichen optischen Wirkfläche wird. Dieser dreilinsige System¬
aufbau vermeidet den Nachteil der ringförmigen Intensitätsverteilung auf grössere Entfernun¬
gen, da achsnahe Strahlen parallel reflektiert werden, während die äusseren Strahlen divergie¬
ren (vgl. Figur 7.13).
75

Figur 7.13: Schematische Darstellung der Ausbreitung der reflektierten Wellenfront an einem Cat's-Eye mit einem radial¬
symmetrischen Brechungsindexgradienten
Trotz der nahezu vollständigen Beseitigung des Einflusses der Brechungsindizes durch die opti¬
mierte optische Berechnung und Anpassung der Radien in Abhängigkeit der vorhandenen Glas¬
schmelzen bleibt die Forderung nach höchster Fertigungsgenauigkeit bestehen. Die Linsendik-
ken als wichtigste Einflussgrösse werden durch den gezielten Einbau eines kleinen Glasplätt-
chens mit identischem Brechungsindex zwischen den beiden Halbkugeln abgestimmt. Aus einer
Anzahl unterschiedlich dicker planparalleler Glasplättchen wird aufgrund von interferometri-
schen Messungen während des Justierungs- und Fertigungsprozesses das Plättchen mit der opti¬
malen Dicke zum Einbau ausgewählt.
Neben den einzelnen Glasdicken beeinflussen
die Zentrier- oder Kipptoleranzen die Güte des
optischen Systems, sodass die interfero-
metrische Messung auch zur Justierung des
Systems von entscheidender Bedeutung ist.
Eine exzentrische Montage zwischen vorderer
und hinterer Halbkugel führt zwar in der ersten
Ordnung bei axialem Strahlverlauf zu keinem
Fehler, aber bei der Ausnutzung des möglichen
Gebrauchswinkels wirkt ein Zentrierfehler defo-
kussierend auf das optische System.
Eine nicht vollständig konzentrisch gefertigte
Figur 7.14: Schnittdarstellung eines Cat's-Eye Auf- Kalotte zieht bei der Ausnutzung des
baus mit radialsymmetrischen Bre- Gebrauchswinkels eine in meridialer und sagit-
chungsgradienten und Abstimmung- taler Richtung unterschiedliche optische Defor-
splättchen zur Fehlerminimierung mierung der Wellenfront nach sich. Dieser
Effekt ist mit dem Astigmatismus von Linsensy¬
stemen vergleichbar.
Abstimmungsplattchen /Kittschicht
Glaser mit identischem \ //
Brechungsindex \f
76

7.6 Neue Konstruktionsansätze
Die Überlegungen für weitere Konstruktionen optischer Reflektoren basieren auf unterschied¬
lichsten Ansätzen. Obwohl die meisten Konstruktionen noch nicht oder nur mit zum Teil erhebli¬
chen Einschränkungen im Bereich der industriellen Messtechnik einsetzbar sind, erscheinen ver¬
schiedene Ansätze durchaus interessant und erwähnenswert. Der Antrieb für derartigen Ent¬
wicklungen basiert besonders auf der Forderung nach Automatisierung der Vermessungsarbei¬
ten mit dem vordringlichen Bedürfnis eines möglichst von allen denkbaren Positionen aus
anzielbaren und verfolgbaren Reflektors. Die nachfolgenden Beschreibungen der einzelnen
Reflektortypen enthalten eine kurze Funktionsbeschreibung inklusive einer einfachen Bewer¬
tung in bezug auf die Einsatzmöglichkeiten für industrielle Anwendungen.
Das 360s1 Prisma
Dieser Reflektortyp besteht eigentlich aus einem Verbund von 6 Tripelprismen. Die Rückseiten
(Reflexionsflächen) der einzelnen Prismen werden mit einer speziellen Spiegelschicht bedampft,
ehe sie zu einem regulären Verbund zusammengekittet werden. Die Spitzen der einzelnen Glas¬
pyramiden treffen sich in einem gemeinsamen Zentrumspunkt.
Die regulär im Handel befindlichen Reflektoren dieser Art eignen sich aus mehreren Gründen
nur für geodätische Anwendungen. Allein aus den wirtschaftlich sinnvollen Toleranzen für die
Herstellung dieses Prismenverbundes resultieren Unsicherheiten im 0.1 mm Bereich. Speziell
die Höhen der Einzelprismen, von der Frontfläche bis zum Zentrumspunkt unterliegen dabei
sehr hohen Genauigkeitsanforderungen. Distanzmesser für geodätische Anwendungen (vorwie¬
gend längere Messdistanzen) weisen im allgemeinen einen wesentlich grösseren Strahldurch¬
messer auf, sodass mehrere Einzelprismen einen Beitrag zum reflektierten Licht des Mess¬
strahlsleisten.DerentscheidendeUnterschiedbetrifftdenRegelmechanismusderRichtungs¬nachführung,derindiesemFalleinspeziellesReflexionsmusterauswertenmussundnichteinemEinzelstrahlfolgenkann.BasierendaufdieserMusterdetektionkönntendannentspre¬chendeVerbesserungenderRichtungsmessungaufgrundderbereitseingehendbeschriebenenAbhängigkeitvomEinfallswinkeldesLaserstrahlsinbezugaufdasZentrumdes360°Prismaserfolgen.GlaskusrelmiteinemBrechunsrsindexn=2TheoretischerscheinteinReflektor,derauseinerGlaskugelmitdemBrechungsindexn=2bestehtalseinesehrinteressanteAlternative.DieProblematikeinesderartigenReflektorsliegthauptsächlichindensehrschlechtenReflexionseigenschaften.EinerseitsmüssendieAussenflä-chendenvomDistanzmesserausgesandtenStrahlindenReflektoreintretenlassenundanderer¬seitssolltedieRückseitederKugel,diealsReflexionsflächewirkt,verspiegeltsein.FallsdieganzeReflexionswirkungnuraufdieEigenschaftenderTotalreflexioninderGlaskugelaufge¬bautist,reichtdieIntensitätdesreflektiertenSignalszurDistanzmessungnichtaus.VersuchemiteinerspeziellenBedampfungderAussenflächeeinerKugel,dienurjedeszweiteFlächenele¬menteineswabenartigenMustersbeschichten,brachtenbishernichtdiegewünschtenErgeb¬nisse.DiesertheoretischeeinfacheLösungsansatzHesssichaufgrundtechnologischerBeschrän¬kungenbishernichtrealisieren.NichtlineareOptikalsReflexionselementDieherkömmlichenoptischenGlassortenundMedienunterscheidensichhauptsächlichauf¬grundderBrechungsindizes,desGewichtesunddurchdieEignungalsoptischeElementefürunterschiedlicheWellenlängen,wobeidiegrundsätzlichenGesetzmässigkeitenderStrahlenoptikgültigbleiben.EinigeoptischeElementereagierenuntergewissenVoraussetzungenhingegenvölligandersalsherkömmlicheGläser.EinerstesBeispielstelltderzurModulationverwendeteKristalldar,ergehörtzurGruppenichtlinearerOptik.UnterdemOberbegriff"PhaseConjuga-77

tion" beschreiben Guiliano (1981) und Lisson (1989) die Ausnutzung nichtlinearer Optik zur
Reflexion eines Lichtstrahls in sich selbst, obwohl die verwendeten Reflexionsflächen nicht in
herkömmlicher Weise ausgerichtet sind. Derartige, teilweise neu entwickelte Materialien wie
beispielsweise Barium-Titanat oder Tungstenbronze-Verbindungen (Strontium-Barium-Niobate)
weisen laut Lisson (1989) Eigenschaften auf, die in Zukunft Optik-Konstruktionen revolutionie¬
ren könnten.
Am Beispiel eines Alignment-Aufbaus beschreibt Lisson (1989) die Wirkungsweise dieser ausge¬
wählten Materialien. Die Erzeugung des gewünschten Effektes, dass auftreffendes Licht unab¬
hängig von der Auftreffrichtung in sich selbst reflektiert wird, erfolgt durch gezielte Zufuhr elek¬
trischer Energie. Über den Energieaufwand, das Temperaturverhalten, die Beeinflussung der
Polarisation und die Eindringtiefe des Strahles in das Material (Abhängigkeit der Additionskon¬
stante) gibt es keine Anhaltspunkte. Momentan scheinen die entsprechenden Aufbauten noch zu
umfangreich für einen praktischen Einsatz anstelle eines herkömmlichen Reflektors zu sein. Die
Möglichkeiten dieser neuen Technologie und Methodik sollten speziell verfolgt werden, damit sie
im Rahmen messtechnischer Anwendungen einsetzbar werden, sobald die Grundlagenforschung
ein entsprechendes Stadium erreicht hat.
78

8 Genauigkeitabschätzung und Fehlereinflüsse
8.1 Einfluss der Atmosphäre
Die Atmosphäre der Erde hat unterschiedliche Auswirkung auf eine Reihe von physikalischen
Gesetzmässigkeiten. Die Nutzung von Lichtwellen zur Entfernungsmessung in der Atmosphäre
unterliegt diesen physikalischen Gesetzen ebenfalls. In einer Vielzahl von technischen Untersu¬
chungen und Abhandlungen wurde versucht, ein möglichst einfaches aber allgemein gültiges
Verbesserungsmodell zur Ausbreitung von Lichtwellen in der Atmosphäre zu definieren. Im Rah¬
men dieser Arbeit werden lediglich die wichtigsten Grundlagen diskutiert und angesprochen, die
für das allgemeine Verständnis hier als bedeutend erscheinen. Das umfasst einerseits die Herlei¬
tung des Bezugsbrechungsindexes für die Standardatmosphäre bei der benutzten Wellenlänge
und andererseits die entsprechenden Formeln zur Korrektur der Messungen bei beliebig von der
Standardatmosphäre abweichenden Messbedingungen.
8.1.1 Bezugsbrechungsindex der Standardatmosphäre
Die meteorologischen Konditionen und die Zusammensetzung der als Standardatmosphäre
bezeichneten Atmosphärenbedingungen sind in internationalen Normen festgelegt (DIN/ISO
2533, 1975) und (WMO-No.188.TP94, 1966). In diesen Normen ist die Standardatmosphäre defi¬
niert durch:
eine Temperatur von ts = 15 °C [TS=288.15°K]einen Luftdruck von ps = 760 Torr [1013.25 hPa]
einen Partialdruck des Wasserdampfes von pWasser = 0 Torr (trockene Luft)
und einen Kohlendioxidgehalt von C02 = 0.03%
Als Bezugs- und Berechnungsgrösse des Distanzmessers soll nicht mit der Lichtgeschwindigkeit
im Vakuum c0=299'792.458 km/s gerechnet werden, sondern mit der Lichtgeschwindigkeit in der
oben beschriebenen Standardatmosphäre. Falls nun Lichtwellen zur Distanzmessung genutzt
werden, erweist sich neben den atmosphärischen Parametern (Temperatur, Luftdruck, Feuchte,
C02-Gehalt),diebenutzteWellenlängealsweitererEinflussfaktor.Deichl(1984)setztsichinseinemArtikelmitdervonderIUGG(1963)empfohlenenFormelzurBerechnungdesBrechungsindexesdetailliertauseinanderunderläutert,dasssichallebekann¬tenFormelnaufden,vonBarrellundSears(1939)empirischermitteltenMassstabzurückführenlassen.MittlerweilesindgenauereFormelsystemealsdieimmernochgültigeFestlegungderIUGGbekannt.EineumfassendeGegenüberstellungdieserFormelnwurdevonHübner(1985)veröffentlicht.IndenvergangenenJahrenfandenfürdiePräzisionsdistanzmessungenhaupt¬sächlichdieFormelnvon(Edlen1966)und(Owens1967)Verwendung.AufdieUnterschiededieserwichtigstenFormelnwirdimRahmenderKorrektur,dieaufgrunddervonderStandard¬atmosphäreunterschiedlichenBedingungenwährendderMessung(vgl.Kapitel8.1.2)notwendigsind,kurzeingegangen.ZurBerechnungdesBrechungsindexesderStandardatmosphärensbzw.derimDistanzmessereinprogrammierbarenLichtgeschwindigkeitderStandardatmosphärecswurdedieFormelvonEdlen(1966)alsGrundlagebenutzt.EdlenberücksichtigtefürdieHerlei¬tungseinerInterpolationsformel(1966)nebendenMessungenvonBarrelundSears(1939)einigeneuereMessreihenundgibtalsGeltungsbereichseinerInterpolationsformeln5°C<t<30°C0Torr<p<800Torr0.18um<À<2.1uman.InZahlenausgedrücktlautetdievonEdlen(1966)aufgestellteDispersionsformelfürdieStandardatmosphäre:79

(.-l)r-108 = 8342.13+2406°3;+ 159972 (8.1)s
(130 -a2) (38.9-a2)
oder allgemein:
(n~l)-108=A+—?— +-£-£ (8.2)(b - ol) (c - &)
wobei zwischen der Wellenlänge X und der Wellenzahl o folgende Beziehung gilt:
a = - [um-1]^Vakuum
Zusätzlich ist bei dem Ansatz zur Berechnung des Wertes des Brechungsindexes zu beachten,
dass bei moduliertem Licht aufgrund von Überlagerungseffekten bei der Ausbreitung in der
Atmosphäre (in der Dispersion des Lichts begründet) von der Gruppenlichtgeschwindigkeit aus¬
gegangen werden muss. Es gilt:
dvphaseGruppe Phase \
Durch v = cJn mit c0 = Lichtgeschwindigkeit im Vakuum, ergibt der Übergang von der Geschwin¬
digkeit auf den Brechungsindex folgende Formel:
Gruppe Phase i
n =n — k•
dnPhiKe
dk
bzw.
j Phase
nOruPPe=nPha,e+a.Ondo
Durch die Ableitung der allgemeinen Formel (8.2) nach o erhält man für den Gruppenbrechungs¬
index:
nc"w =„«»«»+202f B C ^
(b-a2f (c-a2)210
8(8.3)
Für die hier benutzte Wellenlänge vonX=0.820umergebensichfürdieStandardatmosphärederPhasenbrechungsindexnPhase=1.000274918165undderGruppenbrechungsindexnGruppe=1.000279591323ÜberdieFormel:-GruppeGruppelässtsichschliesslichdieGruppenlichtgeschwindigkeitinderStandardatmosphärezuCoruppe=299708.6622km/sberechnen.80

8.1.2 Interpolationsformeln zur Berechnung des tatsächlichen Brechungsindexes
Die Formeln zur Berechnung der Distanzwerte aus den Messungen benutzen die im Kapitel 8.1.1
bestimmten Werte nGruppe bzw. cGruppe die sich auf die Standardatmosphäre beziehen. Zur Ermitt¬
lung der wahren Entfernungen zwischen Instrument und Reflektor sind hingegen die tatsächli¬
chen atmosphärischen Verhältnisse entlang des Messwegs zum Zeitpunkt der Messung entschei¬
dend. Aus diesem Grund entstanden eine Reihe verschiedener Interpolationsformeln, von denen
im Anschluss die beiden für Präzisionsdistanzmessungen wichtigsten Ansätze (Edlen 1966) und
(Owens 1967) kurz dargestellt werden sollen. Neben der möglichst genauen Berechnung mit
Hilfe einer dieser Formeln ist ausserdem eine genügend genaue Erfassung der meteorologischen
Parameter entlang des Messweges erforderlich. Diese grundsätzliche Problematik, insbesondere
die Ermittlung der richtigen Temperatur zeigt sich im industriellen Umfeld trotz der geringeren
Distanzen als ebenso kritisch wie bei geodätischen Anwendungen, zumal die Erwartungen an die
Genauigkeiten der Distanzmessung wesentlich höher liegen. Der Einfluss der einzelnen atmo¬
sphärischen Parameter lässt sich an folgenden Abschätzungen einfach erkennen:
Temperatur um 1°C = 9.6 um auf 10 m Distanz
Luftdruck um 1 Torr = 3.8 um auf 10 m Distanz
Luftfeuchtigkeit um 10 % = 0.7 um auf 10 m Distanz
Obwohl die Luftfeuchtigkeit (Partialdruck des Wasserdampfes) den geringsten Einfluss auf die
Messungen hat, berücksichtigen die nachfolgenden Formeln diese Einflussgrösse, damit mög¬
lichst keine systematischen Fehler die Messungen verfälschen.
Die gebräuchlichste Bestimmung der Luftfeuchtigkeit, insbesondere für genaue Messungen kann
mit Hilfe eines Aspirations-Psychrometers erfolgen. Mit der dabei ermittelten "trockenen" und"feuchten"TemperaturkannüberdieSprung'schePsychrometerformelderPartialdruckdesWasserdampfesbestimmtwerden.Esgilt:e=£._C.fr-,-)-4wobeifürdieseunddienachfolgendenFormelndieDefinitionengelten:t=Trockentemperaturt'=Feuchttemperatura=7.5("überWasser")9.5("überEis")b=237.3("überWasser")265.5("überEis")c=0.6609(BerechnunginTorr)C=0.5("überWasser")0.43("überEis")E'=Sättigungsdampfdruckbei(f)E=Sättigungsdampfdruckbei(t)e=PartialdruckdesWasserdampfesDieBerechnungvonE'kannüberdieempirischermittelteFormelvonMagnus-Tetensdurchge¬führtwerden.Sielautet:£'=10Vi+'>Wirdanstellevont\derWertfür"trockene"TemperaturindieseFormeleingesetzt,dannergibtsichderWertEfürdenSättigungsdampfdruck.81

Eine andere, weniger aufwendige Methode, den Dampfdruck zu bestimmen, ergibt sich durch die
Benutzung eines Hygrometers, mit dem die relative Luftfeuchtigkeit in % gemessen wird. Die
Formel:
*=|.100
gibt den funktionalen Zusammenhang zwischen dem Partialdruck des Wasserdampfes und der
relativen Luftfeuchtigkeit R [in %] an.
Neben der etwas auf Umwegen ermittelten Luftfeuchtigkeit sind die Temperatur und der Luft¬
druck als wichtigere Einflussgrössen grundsätzlich einfacher zu messen, obwohl die Bestimmung
aller Parameter im Prinzip entlang des Messweges erfolgen müsste.
Edlen (1966) entwickelte seine Interpolationsformel des Brechungsindexes in Abhängigkeit vom
Luftdruck und der Temperatur (n - \)lp, ausgehend von der trockenen Standardatmosphäre, die in
den bereits angegebenen Bereichen von 5°C bis 30°C und 0 Torr bis 800 Torr gilt. Die Formel
lautet:
(«-l)s 1 +/> • (0.817 - 0.0133 - /) • 106
.„ ,<"-1w=^ P i
'
•8-4
*" A l+a-t
wobei für den Dichtefaktor der Standardatmosphäre Ds = 720.755 gilt und mit a = 1/273.15 der Aus¬
dehnungskoeffizient des idealen Gases angesetzt wird.OhnespezielleVorkehrungenliefertdieMessungdesLuftdruckesmiteinemBarometereinenWertfürdiemomentanherrschendenAtmosphärenbedingungen,alsoenthältdieserMesswertaucheinengewissenAnteilfürdenPartialdruckdesWasserdampfes(Luftfeuchtigkeit).DieAbschätzungenvonEdlen(1966)ergebenfürdenFeuchteanteilamBrechungsindexinAbhän¬gigkeitvonderWellenzahl«ase=-Pf(5.7224-0.0457•a2)•10~8(8.5)AuchbeidiesemAnsatzmussfürdieBenutzungmitmoduliertemLichtvomGruppenbrechungs¬indexausgegangenwerden.DasbedeutetfolgendeErweiterungen:dnnaseGruppePhase,_/nf"=nf+amit1'dadn,-rL=2-(-0.0457)-o-10"doergibtsich:nf=-pf-(5.7224-0.0457-o2-a-0.0914•a)108nf=-pf-(5.7224-0.1371•o2)10~8nf=-pf-5.5185-10~8(8.6)82

Als Einschränkungen für den Feuchtigkeitsanteil gibt Edlen an: "This equation is valid for condi¬
tions not deviating too much from t = 20°C,p = 760 torr and/?/-= 10 torr". Zusammengefasst lau¬
tet die Interpolationsformel von Edlen (1966) für eine Wellenlänge von X = 0.820 (im schliesslich:
,[279.591323 1 +p- (0.817-0.0133 -t) • 10~6
n n ,. n i i«-« ,° -n
n«=li-Ü5T-'- 1+0.0036610-, 0.05519.^-10(8.7)
Die relativ ungenauen Aussage von Edlen (1966) über den Geltungsbereich des Anteils der
Feuchtigkeit belegt, dass unter extremen Bedingungen (hohe Temperaturen bei hoher Luftfeuch¬
tigkeit) signifikante Fehler entstehen können. Zur Abdeckung dieser extremeren Bedingungen
werden zusätzlich die von Owens (1967) erarbeiteten Formeln kurz diskutiert. Owens (1967), der
ebenfalls von der Standardatmosphäre ausgeht, gibt zu seiner generellen Formel noch eine ver¬
einfachte Formel "simplified formula" an. Grundsätzlich gelten beide dieser Formeln in den
Bereichen:
250°K < T < 330°K (-23°C < t < 47°C)
0 hPa < P < 4050 hPa (0 Torr < p < 3038 Torr)
0.23 um < X < 2.06 um
Der Unterschied zwischen den beiden Formeln besteht in der Berücksichtigung desEinflussesdesC02-GehaltesderAtmosphäre,wobeidievereinfachteFormelkeinespeziellenKoeffizienteninAbhängigkeitvomPartialdruckdesKohlendioxidsaufweist.DienachfolgendeBeschreibungderInterpolationsformelbehandeltnurdievereinfachteFormelvonOwens(1967).DerVerzichtaufdiespezielleBerücksichtigungdesC02-GehaltesliegtinderpraktischenAnwendungbegrün¬det.DertatsächlicheC02-GehaltderAtmosphäreistseltenbekanntunddergesamteEinflussderC02-VariationenaufdieStreckenmessungistkleinerals5-108,waseinemFehlereinflussvonwenigerals0.05umauf10mDistanzentspricht.AlsAlternativestündehöchstensdieMessungderGaszusammensetzungderAtmosphärezurVerfügung.IndiesemFallwäremiteinemRefraktometerdirektderRefraktionskoeffizientderAtmosphärezumessen,wasunterdenübli¬chenatmosphärischenBedingungeneinenentschiedenzugrossenAufwandbedeutet.Owens(1967)gehtvonderAufteilungdestatsächlichgemessenenLuftdruckesPindieeinzelnenPartialdrückeaus:PD=PartialdruckdertrockenenLuftPw=PartialdruckdesWasserdampfesundpc02=PartialdruckdesKohlendioxidsP=PD+Pw+Pœ,(8.8)DievereinfachteFormelvonOwens(1967)vernachlässigtnundiedifferenzierteBetrachtungvonPC02unddermitdemBarometergemesseneLuftdruckrepräsentiertdenGesamtdruckP.DiemathematischeindeutigeLösungderGleichung(8.8)ergibtmitderAnnahmePC02=OhPafürdenPartialdruckdertrockenenLuftPD:P=P-PrDrrWImUnterschiedzuderFormelvonEdlen(1966),dieeinedirektesEinsetzendesgemessenenLuftdruckeserlaubt,mussbeidenFormelnvonOwens(1967)derumdenPartialdruckdesWas¬serdampfesreduzierteDruckwertPDindieInterpolationsformeleingesetztwerden.83

Die vereinfachte Interpolationsformel von Owens (1967) für den Gruppenbrechungsindex lautet:
(« -1) • 108 =(130 + a2) (38.9+ a2)
2371.34+ 683'939.7-- ^-+ 4547.3
(130-a2)2 (38.9-a2)2
+ [6487.31 +174.174 • a2-3.55750 • a4 +0.61957 • a6]-D
ön
(8.9)
wobei DD dem Dichtefaktor der trockenen Luft mit 0.03% C02-Gehalt und Dw dem Dichtefaktor
des Wasserdampfes entsprechen. Diese Dichtefaktoren lassen sich über folgende Gleichungen
berechnen:
und
Dn l+Pr 57.90 .1(rs_9.3250-10^025844 (8.10)
D„ =
y'{1 +p» '[1 + (37 ' 10~4) 'p»] '
'
.,„, 2.23366 710.792 7.75141 • 104
-2.37321• 10
3
+ —+ (8.11)
wobei T in "Kelvin, PD und Pw in hPa erforderlich sind.
Für die benutzte Wellenlänge von X = 0.820 (am ergibt sich mit der Beziehung o = l/X durch das
Zusammenfassen der Gleichungen (8.9), (8.10) und (8.11) folgende Interpolationsformel:
(« -D-106 =79.47681667- 1+P,^^ ,^8
9.3250-10"4 0.2584457.90-10
8+ —
+ 67.40512872-y-- {1 +Pw [1 + (3.7 • 10-4) -Pw
^ _ „,2.23366 710.792 7.75141 • 104
-2.37321 • 10 +— ;—+ ; (8.12)
8.2 Hardwarebedingte Grenzen des Messsystems
Innerhalb dieses Abschnittes sollen nicht die elektronischenundphysikalischenGrenzenderein¬zelnenBauteilebeschriebenwerden,sondernlediglichihreAuswirkungenaufSpezifikationendesDistanzmessers.ZurGenauigkeitbzw.zudenToleranzwertendermechanischenZentrierungsowohlamStandpunktalsauchamZielpunkterfolgtinnerhalbdiesesKapitelsebenfallseinekurzeAbschätzung.GenauigkeitsgrenzenundspezifischevomverwendetenReflektortypabhängigeFehlereinflüssesindimKapitel7speziellbehandelt.8.2.1BandbreitedesModulatorsDerelektronischeSchaltungsaufbaudesModulatorskanndieErzeugungderfürdieModulationnotwendigenWechselspannungnurfüreinenbestimmtenFrequenzbereichgewährleisten.Die¬seralsBandbreitedesModulatorsbezeichneteBereichzwischendenbeidennocheinstellbaren
84

Grenzfrequenzen schränkt den Messbereich für kurze Entfernungen ein und beeinflusst so die
Spezifikationen des Instruments. Zur Erläuterung der Zusammenhänge wird von der mittleren
Frequenz des Modulators (1380 MHz) ausgegangen und die Modulationswellenlänge für diese
Frequenz berechnet. Es gilt die Formel:
k =
(2-f)(8.13)
Setzt man zur Abschätzung die Lichtgeschwindigkeit c0 und eine mittlere Frequenz von
/= 1380MHz
in die Gleichung (8.13) ein, so folgt die wirksame Modulationswellenlänge zu
K. :0.108...OT.
Die Multiplikation dieser bei 1380 MHz gültigen Modulationswellenlänge mit verschiedenen
Wellenzahlen N ergibt eine Liste von Distanzwerten, die an dieser Frequenzstelle ein Minimum
aufweisen.
Die Umstellung der Gleichung (3.6) und das Einsetzen von k = 1 ermöglicht die Berechnung der
Frequenzwerte der benachbarten Minima. Die umgestellte Formel lautet:
/.=c-Wo+ !)•/„
(4-D-f0-c-N0)(8.14)
Die nachfolgende Tabelle zeigt die entsprechenden Werte für die Wellenzahlen von: N = 10 bis
N = 35
Aus dieser Tabelle ist ersichtlich, dass beim vorliegenden Modulator beide Nachbarminima erst
ab N = 30 mit absoluter SicherheitinnerhalbdeseinstellbarenFrequenzbandesliegen.DerAnsatzdermittlerenFrequenzdesModulatorsstelltinbezugaufMessbarkeitohneZusatzinfor¬mationdenungünstigstenFalldar.DabeireichtbeizukurzenEntfernungendienotwendigeBandbreitezurFrequenzverstellungnichtaus,weildiezentralePositiondererstenMinimum¬stelledieBandbreitedesModulatorspraktischhalbiert.DienachfolgendeAbbildung(Figur8.1)verdeutlichtdieVerhältnissegraphisch.ikBandbreitedesModulators1oominimaleModulations¬spannung/außerhalbderModulatorBandbreiteFrequenzdiffernzFrequenzf^—zwischenzweiMinimapositonenFigur8.1:DarstellungdesungünstigstenFalles,indemeineMinimumpositionexaktinderMittedesModulatorbereichesliegtundkeineZusatsinformationenbekanntsind.85

Distanz No f(-\) /o /, Af=/,-/«
in [m] in [MHz] in [MHz] in [MHz] in [MHz]
1.08696 10 1242.0 1380.0 1518.0 138.0
1.19565 11 1254.5 1380.0 1505.5 125.5
1.30435 12 1265.0 1380.0 1495.0 115.0
1.41304 13 1273.8 1380.0 1486.2 106.2
1.52174 14 1281.4 1380.0 1478.6 98.6
1.63043 15 1288.0 1380.0 1472.0 92.0
1.73913 16 1293.8 1380.0 1466.3 86.3
1.84783 17 1298.8 1380.0 1461.2 81.2
1.95652 18 1303.3 1380.0 1456.7 76.7
2.06522 19 1307.4 1380.0 1452.6 72.6
2.17391 20 1311.0 1380.0 1449.0 69.0
2.28261 21 1314.3 1380.0 1445.7 65.7
2.39130 22 1317.3 1380.0 1442.7 62.7
2.50000 23 1320.0 1380.0 1440.0 60.0
2.60870 24 1322.5 1380.0 1437.5 57.5
2.71739 25 1324.8 1380.0 1435.2 55.2
2.82609 26 1326.9 1380.0 1433.1 53.1
2.93478 27 1328.9 1380.0 1431.1 51.1
3.04348 28 1330.7 1380.0 1429.3 49.3
3.15217 29 1332.4 1380.0 1427.6 47.6
3.26087 30 1334.0 1380.0 1426.0 46.0
3.36957 31 1335.5 1380.0 1424.5 44.5
3.47826 32 1336.8 1380.0 1423.1 43.1
3.58696 33 1338.2 1380.0 1421.8 41.8
3.69565 34 1339.4 1380.0 1420.6 40.6
3.80435 35 1340.6 1380.0 1419.4 39.4
Tabelle 8.1: Frequenzen und Frequenzdifferenzen von benachbarten Minimumpositionen bei kurzen Entfernungen1 - 3.8 m zur Abschätzung der notwendigen Bandbreite des Modulators.
Figur 8.2:
Darstellung des ungünstigsten Falles, in
dem ein Näherungswert der Distanz
bekannt ist und die Frequenzwerte der
Minima an den Rändern der Bandbreite
des Modulators liegen.
Bandbreite des
Modulators
minimale
Modulations¬
spannung
kein Minima innerhalb
der Modulatorbandbreite
Frequenzdiffernz zwischen zwei
Minimapositonen

Falls fur kurze Distanzen Näherungswerte eingegeben werden können, ändert sich der Mess¬
bereich entsprechend, da nur eine Nullstelle innerhalb der Modulatorbandbreite liegen muss.
Fur die Ermittlung der Distanzen, die trotz Vorgabe eines Näherungswertes nicht messbar sind,
stellt nicht die mittlere Frequenz den ungunstigsten Fall dar, sondern die beiden Grenzfrequen¬
zen des Modulators.
Fur die Distanzen mit den Minimastellen an den Grenzfrequenzen sind die Nachbarfrequenzen
fur die Werte von N = 10 bis N = 20 berechnet.
Distanz N0 /<-i)
in [m] in [MHz]
1.12360 10 1468.5
1.23596 11 1456.4
1.34831 12 1446.3
1.46067 13 1437.7
1.57303 14 1430.4
1.68539 15 1424.0
1.79775 16 1418.4
1.91011 17 1413.5
2.02247 18 1409.2
2.13483 19 1405.3
2.24719 20 1401.8
Distanz N0 /< »
in [m] in [MHz]
1.05263 10 1282.5
1.15789 11 1295.5
1.26316 12 1306.3
1.36842 13 1315.4
1.47368 14 1323.2
1.57895 15 1330.0
1.68421 16 1335.9
1.78947 17 1341.2
1.89474 18 1345.8
2.00000 19 1350.0
2.10526 20 1353.8
Tabelle 8.2:
Mit der unteren Grenzfrequenz (1331 MHz) des
Modulators berechnete Distanzwerte
Tabelle 8.3:
Mit der oberen Grenzfrequenz (1425 MHz) des
Modulators berechnete Distanzwerte
Fur den vorhandenen Funktionsmusteraufbau, dessen Grenzfrequenzen des Modulators bei 1332
MHz und 1425 MHz liegen, beschreiben die nachfolgenden Tabellen 8.4 und 8.5 die Bereiche, die
eine Messung der Distanz ermöglichen.
a) mit bekanntem Näherungswert
Die nebenan aufgelistete Tabelle (8.4) zeigt die
Distanzbereiche, bei denen die Bestimmung
einer Distanz unter Vorgabe eines Nähe¬
rungswertes möglich ist. Wahrend fur kürzere
Distanzen die Beobachtungsfenster immer
kleinerwerden,könnenalleEntfernungen,diegrosserals1.68...msindohneProblemebeobachtetwerden,soferndieNäherungswertemiteinerGenauigkeitvonbesseralsca.0.02mbekanntsind.vonbisDistanzDistanzin[m]in[m]1.052631.123601.157891.235961.263161.348311.368421.460671.473681.573031.578951.685391.684211.797751.789471.91011Tabelle8.4:UnterVorgabeeinesNäherungswertesmessbareDistanzen
87

b) ohne Angabe eines Näherungswertes
Die nebenan aufgelistete Tabelle (8.5) zeigt die
Distanzbereiche, bei denen eine eindeutige
Bestimmung der Distanz ohne Vorgabe eines
Näherungswertes möglich ist. Das bedeutet,
dass mindestens zwei Minima innerhalb der
Bandbreite des Modulators liegen müssen. Die
aufgelisteten Werte fuhren die vorherige
Tabelle (8.4) fort, aber ohne die Vorgabe von
Näherungswerten entstehen Messlucken. Die
eindeutig messbaren Bereiche werden immer
ein klein wenig grosser, bis oberhalb von 3.26...
m alle Entfernungen ohne Einschränkung
gemessen werden können.
von bis
Distanz Distanz
in [m] in [m]
1.68421 1.68539
1.78947 1.79775
1.89474 1.91011
2.00000 2.02247
2.10526 2.13483
2.21053 2.24719
2.31579 2.35955
2.42105 2.47191
2.52632 2.58427
2.63158 2.69663
2.73684 2.80899
2.84211 2.92135
2.94737 3.03371
3.05263 3.14607
3.15789 3.25843
3.26316 3.37079
3.36842 3.48315
3.47368 3.59551
Tabelle 8.5: Eindeutig, ohne Naherungwertvorgabe messbare Entfernungen
Die exakte Angabe von Messfenstern bleibt trotz der eindeutigen Berechnungsmoglichkeit pro¬
blematisch, da der elektronische und mechanische Aufbau des Modulators die Grenzen des
Modulationsbereichs nicht mit ausreichender Sicherheit garantieren kann. Die relativ geringen
Instabilitäten spielen fur die Messung keine Rolle. Bei jedem Einschalten des Messmodus erfolgt
eine Ausmessung des gesamten Modulationsbereichs sowie die Ermittlung der Grenzfrequenzen
des Modulators, wobei ein entsprechendes Sicherheitsmasseingehaltenwird,sodassjederzeiteinegenugendeModulationsleistungvorliegt.DieModulationsfrequenzundsomitdieexakteLagedesModulationsbereichshatgrundsatzlichkeinenEinflussaufdieMessergebnisseoderdieGenauigkeit.EsspieltfolglichkeineRolle,beiwelcherAnzahlvonModulationshalbwelleneinMinimumermitteltwird.DasMessprinzipberuhtvielmehraufder,fureineDistanzimmergleichenFrequenzdifferenzzwischenzweiMinimas.DieBerechnungvonzweiBeispielenanhandderGleichung(8.14)sollendieseFeststellungverdeutlichen:Beispiel1Beispiel2/o=1380MHzX=0.108...mN=18D=1.95652/,=1456.6...MHzA/=76.6...MHz/o=460MHzX=0.326...mN=6D=1.95652/,=536.6...MHzA/=76.6...MHzWieerwartetergebensichidentischeWertefurdieDistanzundFrequenzdifferenz.
88

8.2.2 Kleinster Synthesizerschritt
Der kleinste Synthesizerschritt beeinflusst die Grundauflösung des Messsystems. Setzt man den
kleinsten Synthesizerschritt dfmm = 317.46//z des vorliegenden Funktionsmusters in Relation zur
Messfrequenz/0, ergibt sich daraus das Mass für die Genauigkeit mf, mit der die jeweilige Fre¬
quenz eingestellt werden kann. Ausgehend von der unteren Grenzfrequenz des Modula¬
tionsbereichs lassen sich folgende Zahlenwerte abschätzen:
dfmm_ 317.46
/0 1332000000mj
=
-T=
i«ww»=> mia 0.24ppm
Das entspricht einer Grundgenauigkeit von 2.5 um in einer Entfernung von 10 m, wobei die
Interpolation des Empfangsignals eine weitere Genauigkeitssteigerung ermöglicht, sofern die
Signalverhältnisse sich dazu eignen. Im Kapitel 6.1.2 sind die entsprechenden Voraussetzungen
und Massnahmen zur Feinmessung näher beschrieben.
Eine grundsätzlich andere und künftig sicher angewandte Methode zeichnet sich durch die
Benutzung der in Kapitel 4.2 kurz beschriebenen NCO (numeric controlled oscillators) ab. Mit
Hilfe dieser Elektronikbausteine können beliebig kleine Frequenzschritte erzeugt werden, so
dass diesbezüglich keine relevante Einschränkung der erreichbaren Genauigkeit mehr vorliegt.
8.2.3 Anforderungen an den Messstrahl
Die optische Justierung des gesamten Strahlverlaufs und die Güte der verwendeten OptikteilesinddiewichtigstenKriterienzurErzielungdermaximalenGenauigkeitdesMessprinzips.GuteQualitätimBereichderabbildendenOptikverbessertzwargrundsätzlichdiemesstechnischenVoraussetzungenjedesoptischenInstrumentariums,aberspeziellbeidieserMethodemitderAuswertungderPolarisationsmodualtionbeeinflusstsiedieletztlicherzielbareMessgenauigkeitentscheidend.DiegrössteSorgfaltspflichtgiltdabeidergeometrischenJustierungdesStrahlsamModulations¬kristall.DiegeringeAusdehnungdesKristalls,dereinerQuadratsäulemitderGrundfläche1mm2undeinerHöhevon10mmentspricht,erschwertdieseArbeitnochzusätzlich.DerStrahlselbstmussfolglicheinenwesentlichkleinerenDurchmesseraufweisenundmöglichstparallelzudenAussenflächendenKristalldurchqueren.DieKombinationmitdenweiterenwichtigenBauteilen,demPolarisationsstrahlteilerundderXIA-Plattemussletztlichdazuführen,dassderreflektierteStrahlmöglichstexaktdenumgekehrtenWegdurchdenKristallnimmt.NebenderStrahlformbeeinflusseneinerseitsdieAusrichtungderXIA-Platteundandererseitsdiepolari¬sierendeWirkungallerReflexionsschichtendenMessstrahl(vgl.Figur2.7.d)inKapitel2.4).FürdieoptischenSchichtenunddieGütederXIA-PlattegibtesmöglichstkleineFertigungstoleran¬zwerte,abereineobjektiveBeurteilungundQuantifizierungderJustierqualitätistwährenddesAufbausdesInstrumentspraktischnichtmöglich.DenAufschlussüberdieindiesemBereichtatsächlicherzielbareFertigungsqualitätliefernerstdieDistanzmessungenmitdemnahezufer¬tigenInstrument.DieindenFiguren8.3und8.4dargestelltenMessreihenzeigenzweiverschiedeneJustierzu¬ständeaneinunddemselbenInstrumentenaufbau.89

Dauermessung ber 45 Minuten
= erster Messwert
Figur 8.3: Kontinuierliche Distanzmessung über 45 Minuten bei nicht optimaljustierter Optik.
Dauermessung ber 45 Minuten
0 00 0 05 0 10
* = erster Messwert
0 40 0 45 0 50
Messzeit in Minuten
Figur 8.4: Kontinuierliche Distanzmessung über 45 Minuten bei optimaljustierter Optik.
Die Begründung für diese relativ starken Fehlereffekte liegt unter anderem an den thermischen
Eigenschaften des Kristalls, der nicht nur in Abhängigkeit der Modulationsspannung, sondern
auch aufgrund einer Temperaturänderung von 1.2° Celsius eine vollständige Modulationswelle
erzeugt. Durch die Energiezufuhr am Kristall aufgrund der angelegten Modulationsspannung
erwärmt sich der Kristall stetig, wobei gewisse Temperaturgradienten unvermeidlich sind. Falls
der reflektierte Strahl nicht den identischen Weg wie der ausgesandte Strahl zurücklegt, führt
die ungleichmässige Erwärmung des Kristalls zu einer systematischen Distanzvariation. Die
zeitliche Abfolge der Distanzänderungen (Schwingungsdauer) verlängert sich dabei stetig (vgl.
Figur 8.3). Beginnend mit starken Temperaturänderungen während der ersten 2 - 3 Minuten, die
sich als einzelne Spitzen in der Graphik äussern, bis hin zu einer eindeutigen Schwingung mit
einer Periodenlänge von ca. 15 Minuten am Ende der Messreihe. Verglichen mit dem Verhalten
der Distanzmessung bei optimal justiertem Strahlengang, wie er in Figur 8.4 vorliegt, folgt, dass
eine sorgfältige optische Justierung die Bandbreite der Distanzvariation praktisch um einen
90

Faktor 2 bis 3 reduziert. Als Folge dieser technischen Grenzen hängt die letztlich erzielbare
Messgenauigkeit sehr von den individuellen Fertigkeiten und der Erfahrung des jeweiligen Mon¬
teurs ab.
8.2.4 Toleranzen der Zentrierung
Der mechanische Aufbau sowohl des Instruments als auch am Zielpunkt stellt einen nicht zu
unterschätzenden Einflussfaktor dar. Die letztlich erreichbare Genauigkeit bezüglich der Zen¬
trierung hängt einerseits von der reproduzierbaren Positionierung des Instruments und Reflek¬
tors ab und andererseits von der Stabilität des jeweiligen Aufbaus insbesondere von der Ausfüh¬
rung der drehenden Lager.
Wie in Kapitel 7 bereits erwähnt, etablierten sich im Bereich industrieller Anwendungen Kugel¬
fassungen verschiedenster Durchmesser als Reflektoraufnahmen. Die Vorteile der Kugelform lie¬
gen in den einfach herstellbaren Aufnahmepunkten begründet, die eine eindeutige und reprodu¬
zierbare Positionierung und Ausrichtung der Reflektoren ermöglichen. Von leicht konischen Boh¬
rungen bis zum vertikal befestigten Magnethalter mit einfacher Dreipunktauflage eignen sich
alle Aufnahmepunkte und ermöglichen eine Positioniergenauigkeit im um - Bereich, sofern die
Genauigkeit (Rundheit) Kugelform sichergestellt ist. Mit modernen Bearbeitungsmethoden kann
diese Kugelform auf Werte < 1 um genau hergestellt werden. Für die jeweiligen Reflektortypen
existieren Montagewerkzeuge und Montageverfahren, die eine Zentrierung der Reflektoren mit
einer Genauigkeit von < 5 um garantieren. Zur Einhaltung dieser sehr engen Toleranzen sind
während des Zentriervorganges individuelle Messungen der verschiedenen Reflektorgeometrien
notwendig.
Die grössten Unsicherheiten bezüglich der geometrischen Genauigkeiten ergeben sich letztend¬
lich aus dem möglichst sorgfältigen Umgang mit diesem wichtigen Bestandteil des Vermessungs¬
systems im täglichen Gebrauch. Einfache und kurze Messungen zur Überprüfung des Instru¬
mentariums bleiben deshalb Bestandteil einer guten Messkampagne [MarkendorfA., 1988, Dold
J. und MarkendorfA. 1988].
Der zweiteTeil,dieStabilitätundeindeutigeReproduzierbarkeitderbeweglichenunddrehen¬denAchsenundLagerunterliegtgrundsätzlichdengleichenKriterien.ModerneFertigungsme¬thodenwerdenimmeröfterdurchausgeklügelteMethodenderFehlermodellierungmitent¬sprechenderVerbesserungssoftwareunterstützt.BeimodernenLaser-Tracking-Systemenwärenz.B.dieerzielbarenGenauigkeitenohnederartigenModellansätze[LoserR.,1993]entwedertechnischnichterreichbaroderunbezahlbar.Zusammenfassendlässtsichfeststellen,dasseinWertvon<10umalsToleranzgrenzefürdieZentriergenauigkeitsichererreichbarerscheint.8.3AbschätzungdererreichbareninnerenMessgenauigkeitbeistati¬schenMessungenAbgesehenvondeninKapitel8.1und8.2beschriebenenEinschränkungendesMesssystemskanndieerreichbareMessgenauigkeitdurchdieAnwendunggeeigneterMethodenundAlgorith¬mennocherheblichbeeinflusstwerden.Imallgemeinengiltes,einenoptimalenKompromisszwischenderaufgewandtenMesszeitundderdurchweitereEinzelmessungennocherreichbarenSteigerungderGenauigkeitzufinden.NachfolgendwerdenfüralleMessungs-undBerechnungsschritteeinerNormalmessungeinigestatistischeAngabenschrittweiseaufgelistet.NachWolf(1975)geltengrundsätzlichfolgendeFormeln:91

a) für eine einfache arithmetische Mittelbildung:
m
mL=~r (8.14)
b) zur Berechnung eines Differenzwertes aus zwei gleichgenauen Beobachtungen:
md=m^2 (8.15)
c) zur Berechnung eines Quotienten aus zwei unterschiedlich genauen Beobachtungen:
-v/Hn"=q V T \L*j
(8.16)
d) das totale Differential zur Berechnung der Standabweichung aus einer Funktion:
mD = ^M2N+MJ (8.17)
wobei die Gleichungen
x* iN'C
I f2f
aufgrund der Funktion zur Distanzberechung gelten.
Für die Genauigkeitsabschätzung einer Normalmessung können die Formeln (8.14 - 8.17) ent¬
sprechend angewandt werden. Den Ausgangspunkt bildet die Feinmessung an einer Minimums¬
position.
Basierend auf einer Reihe von Versuchsmessungen erwiesen sich für eine Feinmessung zur
Ermittlung der Minimumsposition 5 Einzelmessungen als optimal. Zur Bestimmung der Stan¬
dardabweichung einer Feinmessung, die aus einer einfachen arithmetischen Mittelbildung resul¬
tiert, kommt folglich Gleichung (8.14) zur Anwendung. Benutzt man das bereits in Kapitel 6.2.1
verwendete Beispiel mit
Distanz D= 5.312633 m
Minimumfrequenz /„= 1383.518413 MHz
Wellenzahl N = 49
FrequenzdifferenzA/=(/0+1-/„)=28.234587MHzdannkannfürdenvorliegendenInstrumentenaufbaulediglichderkleinsteSynthesizerschrittvon317.46HzalstheoretischerreichbaresGenauigkeitsmassangenommenwerden.DieBerech¬nungeinerStandardabweichungaufgrundvonMehrfachmessungenkannindiesemFallnichtangesetztwerden(keineZufallsverteilungsondernQuantisierungseffekt)einederartigeGenauigkeitsberechnungwäreerstbeiwesentlichbessererAuflösung(kleinerenFrequenzschrit¬ten)möglich.Folglichgilt:m/=317.46HzAuszweibenachbartenFeinmessungenwirdzuerstdieFrequenzdifferenzberechnetunddurchdieAnwendungvonGleichung8.15ergibtsichfürdieFrequenzdifferenzeineStandardabwei-92

chung von:
md = 317.5Hz • V2 = 449Hz.
Zur Bestimmung der Standardabweichung von N (Anzahl Modulationswellen) findet Gleichung
(8.16) Anwendung. Es ergibt sich:
/ -l(317.5HzY (449HzY
, ,,
Obwohl der Wert mN sehr klein zu sein scheint liegt darin rein fehlertheoretisch behandelt die
grösste Unsicherheit, da über die Zahl N extrapoliert wird. Diese Extrapolation dient jedoch nur
dazu, die absolute "Integerzahl" sicherzustellen. Durch die physikalische Gesetzmässigkeit, dass
bei der vorliegenden Frequenz (Minimumposition) eindeutig eine ganze Anzahl Modulationswel¬
len auf dem Messweg sind, wird praktisch ein Sollwert für N eingeführt. Würde für das
vorliegende Beispiel trotzdem ein Genauigkeitsmass mit einer Unsicherheit von N berechnet,
ergäbe sich beim gewählten Beispiel für die Entfernung von D = 5.312633 m ein Wert für die
Standardabweichung von mD = 15.9 um.
Die einfachste Methode wäre, N aufgrund der physikalischen Forderung als fehlerfrei anzuneh¬
men und lediglich die Unsicherheit der Feinmessung als Fehlermass zu benutzen. Vergleicht
man diesen Wert von mf=2>\1.5Hz mit dem Einfluss des kleinsten Synthesizerschrittes und
betrachtet die Auswirkung auf die Distanzmessung, dann kann die Distanz auf ca. 1 ppm genau
bestimmt werden.
Durch die Bestimmung der DistanzausmehrerenMinimumpositionenlässtsichnocheineweitereGenauigkeitssteigerungerreichen.Abschliessendbleibtzubemerken,dassdieInformationderAbweichungderberechnetenWel¬lenzahlNvoneiner"Integerzahl"alsinternesKontrollkriteriuminnerhalbdesDistanzmesser¬programmsbenutztwerdensollte.ImFalledesÜberschreitenseinerzulässigenToleranzgrenzekönnendannautomatischGegenmassnahmen,bishinzumStopdesMessablaufesergriffenwerden.8.4MessungnachbewegtenZielen(imTrackingMode)FürdieMessungnachbewegtenZielenwirdeineweitereDimensionvonEinflussgrössenaufdieerreichbareMessgenauigkeiteingeführt.NebenderDistanzmessgenauigkeitspielendieZeitmes¬sungunddiegenaueRichtungsverfolgungeineebensoentscheidendeRolle.EsentstehteineArt"Bewegungsunschärfe",diesichbeispielsweisedurchdenEinflussdesDopplereffektsoderdurchdieIntegrationszeitenderMesswerterfassungäussert.MitdennachfolgendenkurzenBetrach¬tungenzurRichtungsbeobachtung,derAuswirkungendesDopplereffektsundderAbschätzungdesEinflussesderZeitgenauigkeitbeiverschiedenenGeschwindigkeitensinddiewichtigstenFaktorenabgedeckt.ZurAbschätzungderEinflussgrössenwurdeneinerseitsAnnahmengetroffenundandererseitsMessungeneinesLaser-Trackersbenutzt.BesondersfürdieRichtungsbeobachtungenwarendieErfahrungs-undMesswertedesLaser-TrackersvonBedeutung.DienachfolgendenAusführun¬genenthaltenlediglichdiewichtigstenAspekteundGrundlagenzurVervollständigungderArbeit.ZurDurchführungeinerdetaillierterenBetrachtungwäreeinentsprechenderSystem¬aufbauzuerstellen.93

8.4.1 Genauigkeit der Richtungsbeobachtung
Zur Abschätzung der Richtungsgenauigkeit wird von dem in Kapitel 4.3 beschriebenen Aufbau
des Regelkreises am Laser-Tracker ausgegangen. Durch die Auskopplung des vom Reflektor
zurückkehrenden Messstrahles auf einen zweiachsigen Positionsdetektor liegen die fundamenta¬
len messtechnischen Voraussetzung vor. Die am Positionsdetektor erfassten Messwerte werden
dabei einerseits in Motorschritte zur automatischen Nachführung der Ziellinie und andererseits
zur Berechnung der Verbesserungswerte für die letzte Messepoche verwendet. Neben der Kennt¬
nis der Distanzinformation zur richtigen Berechnung der Koordinatenwerte des Zielpunktes
spielt die Messgenauigkeit am Positionsdetektor eine entscheidende Rolle.
Die Messung am Positionsdetektor beruht auf der Integration über die vom auftreffenden Licht
erzeugten elektrischen Werte und der Bestimmung des daraus resultierenden Schwerpunktes.
Bereits diese kurze Beschreibung verdeutlicht, dass eine möglichst fehlerfreieoptischeAbbil¬dungdesLichtstrahlszugewährleistenist.Vorausgesetzt,dieoptischeAbbildungerlaubteinegenügendempfindlicheDetektiondesabgebildetenLichtpunktes,dannentscheidetdieModellie¬rungderbekanntenParametereineszweidimensionalenKoordinatenmesssystemsüberdieerreichbareMessgenauigkeit.Imeinzelnensindzumodellieren:-zweiVerschiebungsbeträgedesNullpunktes(xn,yn)inRichtungderbeidenlokalenKoor¬dinatenachsen,-zweiunterschiedlicheMassstabsfaktoren(sx,sy)entlangderbeidenKoordinatenachsen,-einParameter,derdieRechtwinkligkeitderKoordinatenachsenzueinanderbeschreibtsowie-einweitererWinkelwert(Rotationß),derdieOrientierungzumübergeordnetenWinkel¬messsystem(x<->Hz,y<->V)herstellt,DieGrössenordnungderjeweiligenParameterlässtsichhauptsächlichdurchdenmechanischgeometrischenAufbaubeeinflussen.AusdiesemGrundkanneinehinreichendgenaueBestim¬mungdereinzelnenWerteerstamnahezufertigenSystemerfolgen.AndererseitsbleibendieeinmalbestimmtenWertekonstant,solangedieoptischmechanischeStabilitätgewährleistetist.ZureindeutigenBestimmungderModellparameterwurdeeinzweiachsigerautomatischerVer¬schiebeschlittenmitentsprechenderSoftwareansteuerungzurobjektivenundautomatischenMessungentwickelt.XYPosition0.6j0.40.2¥*[XImm]o.oi-m—|—m-\II—|—«h-0.2ifm-0.4-0.6I-0.6-0.4-0.20.00.20.40.6Y[mm]Figur8.5:Figur8.6:DarstellungdermitdemReflektorabgefahrenenPositio-DarstellungdergemessenenDistanzabweichungennenzurParameterbestimmung94

Zur Kalibrierung bzw. zur Parameterbestimmung wird der Retroreflektor am beweglichen Teil
des Verschiebeschlittens befestigt, der anschliessend den gesamten Messbereich des Positionsde¬
tektors mäanderförmig abfährt und an 25 Positionen Messungen durchführt (vgl. Figur 8.5).
Diese Prozedur wird aus Kontrollgründen und aufgrund der unterschiedlich wirksamen Messbe¬
reiche am Detektor in verschiedenen Entfernungen wiederholt. In Figur 8.6 sind typische
Resultate der Distanzabweichungen einer derartigen Kalibrierungsmessung als dreidimensiona¬
les Modell dargestellt. Es zeigte sich, dass die Genauigkeit dieser Parameterbestimmung den
Anforderungen längstens genügt, denn die Positionierungsgenauigkeit des Messsystems hängt
nahezu ausschliesslich von der Stabilität des elektrischen Nullpunktes ab. Die erweiterte Funk¬
tion dieses Messsystems, die Messung der Strahlauslenkung vom Reflektorzentrum als Ergän¬
zung der Winkelbeobachtung wird praktisch nur dann wirksam, wenn eine Reflektorbewegung
vorliegt. Als problematisch erweist sich dabei die Ermittlung der eigentlichen Messgenauigkeit,
zumal eine entsprechend genaue Beschreibung der Reflektorbahn vorliegen muss. Gleichzeitig
beeinflusst der RegelmechanismusinklusiveallerauftretenderKräfteundFriktionendiekonti¬nuierlichePositionsbestimmungwährenddesBewegungsvorganges.DieeinfachsteundletztendlichsehrgenaueMethodeeinesvordefiniertenBewegungsablaufsergibtsichausderBeobachtungeinesmechanischenDreharms.BeientsprechendsorgfältigermechanischerAusführung(Gewichtsausgleich,Lagergenauigkeitetc.)beschreibteineUmdre¬hungeineexakteKreisbahnimRaum.ObwohleineAnalysederFehleranteilenichteindeutignachdeneinzelnenMesssystemengetrenntmöglichist,liefertdieAuswertungderMessresultateeineAussageüberdieGenauigkeitdesGesamtsystems.DieAbweichungenderMessungenvoneineridealenKreisbahnsindinFigur8.7erkennbar.AusdemebenfallsdargestelltenHistogramm,daseineklassischeNormalverteilungaufweist,ergibtsichbeieinerWahrscheinlichkeitvon95%eineKoordinatengenauigkeitvonungefähr6-7ppm(basierendaufdenAbweichungenderMesswertezumausgleichendenKreis).Umge¬rechnetinWinkelwertefolgtdarausfürdieHorizontal-undVertikalwinkeljeweilseinGenauig-keitsmassvon<1".DieseWerteenthalteneinerseitsdieUngenauigkeitendesGesamtsystems,andererseitsjedochauchdieUnzulänglichkeitenderMechanikunddesRegelmechanismusins¬gesamt.DeviationtocircleBandwidth+/-O.Q33Sensorno.DateFile40£21.-07-1998S4D6B1.DATSTATISTICSNoofPoints:989Dist.toBB:1098nnBBRadius:550.033nnStandardDeviation2signaualue=O.OOSnnnax+deuiationnax—deviation+0.008nn-O.OIOnnlO-rHistogran°-L\IIIlJ-30-20-lOIIIIIOJ.O2030PPM
95

Figur 8.7: Beispiel einer "Ball-Bar" Auswertung (LTD500 Prüf- & Kalibrieranweisung (1995)) mit der Darstellung der
Messwerte, dem Histogramm der Abweichungen gegenüber dem ausgleichenden Kreis und der statistischen
Auswertung.
8.4.2 Einfluss des Dopplereffekts
Die Bewegung des Reflektors mit einer bestimmten Geschwindigkeit v, bewirkt, dass am Reflek¬
tor eine andere Geschwindigkeit messbar wird als sie am Sender abgeschickt wurde. Die Eigen¬
schaft der Reflexion verändert die Betrachtung im Gesamtsystem lediglich um einen Faktor
zwei, nicht aber den Sachverhalt der Reflektorbewegung. Diese Tatsache erhält eine entschei¬
dende Bedeutung, weil die Theorie zwischen den beiden Fällen, bewegter Empfänger und
bewegte Sendequelle unterscheidet [Dobrinski et al, 1984]. Es gelten folgende Formeln:
Jv ~V0 1±-| (8.18)v
c
oder
mit
A/v=±/0-7 (8.19)
fv = veränderter Frequenzwert am Empfänger
/0 = ausgesandte Frequenz
A/v = Verschiebungsbetrag der Frequenz
v, = Geschwindigkeit der Reflektorbewegung
c = Ausbreitungsgeschwindigkeit der modulierten Lichtwelle
wobei das positive Zeichen im Falle der Annäherung des Reflektors gilt, während bei wachsender
Entfernung des Reflektors das negative Zeichen der Gleichung Gültigkeit hat. Am Beispiel von
zwei unterschiedlichen Geschwindigkeiten
v, = 1 m/s mit /„ = 1'400 MHz
v2 = 6 m/s
werden folgende Frequenzverschiebungen abgeschätzt:
A/V1 = 4.7 Hz und A/„2 = 28 Hz. Berücksichtigt man, dass beide Werte aufgrund der Reflexion noch
verdoppelt werden müssen und vergleicht diese Zahlen mitderAbschätzungdeskleinstenSyn¬thesizerschrittes(vgl.Kap.8.2.2),dannresultierenausdemDopplereffektDistanzunsicherhei¬tenvonca.ADV]=0.009ppmbzw.ADV2=0.05ppm.AusdiesersehrgrobenAbschätzungwirddeutlich,dasssichspezielleVorkehrungenaufgrunddesDopplereffektsfürdenvorliegendenGeschwindigkeitsbereicherübrigen.FüreinezusätzlicherelativistischeBetrachtungmitdarausfolgenderVerschiebungderLichtgeschwindigkeitbestehtebenfallskeineVeranlassung,daerstbeiGeschwindigkeitenvonca.30km/sVerschiebungenderTrägerwellenlängeinderGrössenordnungvon0.005(imentstehen.8.4.3EinflussderZeitunsicherheitDieZeithatimZusammenhangmitderMessungaufeinbewegtesZielindoppelterHinsichteinenEinfluss.ZumeinenverändertsichdasSignalwährenddesMesswertabgriffes.Esentstehteinegewisse"Bewegungsunschärfe"oderandersausgedrückteineSignalintegrationüberdieBewegung.ZumanderenfolgtausderUnsicherheitdesZeittakteseineentsprechendeUnge-nauigkeitaufgrundderAuswirkungaufdieSynchronisationderMesswerte.DieVerrechnungderWinkel-undDistanzwertegehtvonvollkommenidentischenMesszeitpunktenaus.Derfunk-96

tionale Zusammenhang zwischen der Bewegung und dem zurückgelegten Weg ist denkbar ein¬
fach, sodass zur Veranschaulichung der Verweis auf das in Figur 8.8 dargestellte Diagramm ver¬
wiesen wird.
Verschiebungsbetrag in Abhängigkeit der Zeitverzogerung
80
In
£ 60Ç
CTc
1 "0
În
<
20
1 /
/
/
/
)•
•-
A
0 100 ms
0 030 ms
0 010 ms
0 005 ms
0 001 ms
1/
/
/
i' -_——>("""
i'
,---.--
—""'*
Oi £*-> >
, ,
( 1 2 3 4 5 t
Geschwindigkeit [m/s]
Figur 8.8:
Diagramm zur Darstellung der Abhangig
keit zwischen der Geschwindigkeit und des
zurückgelegten Weges
Die Nutzung der Kaiman-Filter-Technik zur mathematischen Modellierung scheidet im vorlie¬
genden Fall aufgrund der sich mit jeder Messung ändernden Bezugsbasis aus [Schrick K. W.,
1977]. In den Kapiteln 6.2.2 und 6.2.3 wurde eine entsprechende Losung erarbeitet und disku¬
tiert.
Als akzeptable und technisch mit vernunftigem Aufwand realisierbare Zeitkonstanten können
fur die Dauer einer Signalabtastung und einer Synchronisationsunsicherheit ein Wert von
Afs = 5 us und fur den Messtakt wahrend der Bewegung At„ = 0.1 ms angesetzt werden. Aus
diesen Werten resultieren bei einer maximalen Bewegungsgeschwindigkeit des Reflektors von
1 m/s Distanzanderungen von AD,5 = 5 um wahrend einer Signalabtastung, wobei der minimale
Abstand zwischen zwei Messwerterfassungen bei M>lm =0.1 mm liegt.
97

9 Testmessungen und Diskussion der Messergebnisse
Die Herleitung und Entwicklung der gesamten Theorie über die Nutzung der Intensitätsfunktion
(vgl. Kapitel 5, 6 und 8) erforderte bereits eine umfangreiche Messkampagne mit einer Vielzahl
von speziellen Einzelmessungen. Aus diesem Grund bleibt zum Abschluss lediglich die Verifika¬
tion der klassischen Messungen einer Distanzmesseruntersuchung. Im einzelnen umfasst das die
Bestimmung der Additionskonstante, Vergleichsmessungen auf einer Interferometerbahn zur
Überprüfung eines zyklischen Fehlers und Messungen zur Bestimmung des Massstabsfaktors.
Einige Kontroll- und Simulationsmessungen bezüglich der Extrapolation der Intensitätsfunk¬
tion, die zur Reflektorverfolgung genutzt werden musste, wurden ebenfalls ausgeführt. Aufgrund
des sehr einfachen Prototypaufbaus mit den limitierten Geschwindigkeitseigenschaften und der
völlig fehlenden Richtungsverfolgung konnten hierfür lediglich sehr rudimentäre Basismessun¬
gen zum prinzipiellen Nachweis der Theorie erfolgen.
Bestimmung der Additionskonstanten
Die verwendete Methode der Modulation definiert die Additionskonstante durch die geometri¬
sche Lage des Kristalls. Einer der Vorteile dieser Modulationsart ist die Stabilität der Additions¬
konstanten, denn die Vorderfläche des Kristalls in Bezug zur Drehachse bleibt geometrisch am
selben Ort, solangedieoptisch-mechanischeJustierungsichnichtverändert.ZureinfachenBestimmungderAdditionskonstantewurdenzweiStreckenimMessraumausgewählt,diegenü¬gendexaktentlangeinerLinieliegen.BestimmungderAdditionskonstanteo--o-*\Figur9.1:SchematischeDarstellungderStreckezurBestimmungderAdditionskonstanteMitdemPrototypdesDistanzmesserswurdensowohldiebeidenEinzelstreckenalsauchdieGesamtstreckegemessen.AusdemVergleichderbeidenEinzelstreckenmitGesamtstreckeergibtsichdieAdditionskonstantezu:Add=S3-(5,+52](9.1)ZurmöglichstgenauenundeindeutigenBestimmungderAdditionskontantewurdenjeweils5Messreihenzuje20EinzelmessungenfüralleStreckendurchgeführt.Mitdiesemsystemati¬schenRhythmusdesMessablaufessolltengeringeRestschwankungenderDistanzmessung(vgl.Kap.8.2.3)gemitteltwerden.Tabelle9.1:Strecke1Strecke2Strecke3TabellemitdenMesswertenderzurBestimmungderAdditionskonstante13941.722mm13941.714mm13941.736mm13941.734mm13941.705mm9701.798mm9701.823mm9701.821mm9701.794mm9701.813mm23478.478mm23478.459mm23478.456mm23478.464mm23478.489mmMittelwerte13941.722mm9701.810mm23478.470mm98

Messwert Strecke 1 = 13941.722 mm
Messwert Strecke 2 = 9701.810 mm
Strecke 1 + Strecke 2 = 23643.532 mm
Messwert Strecke 3 = 23478.470 mm
Strecke 1 + Strecke 2 = 23643.532 mm
Additionskonstante = - 165.062 mm
Bei genauerer Betrachtung des Prototypaufbaus scheint ein Wert für die Additionskonstante in
der Grössenordnung von - 165 mm als durchaus plausibel. In Bild 9.1 wird der erste Teil des
Strahlweges nach dem Modulator mit der seitlichen Einkopplung des Messstrahls erkennbar.
Besonders zu beachten ist die Orientierung des Prismas im Objektiv, denn der seitlich eingekop¬
pelte Strahl wird zunächst in Richtung des Okulars abgelenkt. Die Umkehrung des Messstrahls
wird durch eine planparallele Platte vor der Fokussierung des Fernrohres gewährleistet. Diese
künstliche Faltung des Messstrahles ermöglicht die Erzeugung einer optimaleren Strahlführung
und Strahlaufweitung
Die Bilder 9.1 bis 9.3 illustrieren den gesamten Prototypenaufbau und sollen zum besseren Ver¬
ständnis beitragen.
Bild 9.1: Frontansicht des Prototypen
99

Bild 9.2: Seitenansicht des Prototypen
Bild 9.3: Seitliche Vorderansicht des Prototypen
100

Bestimmung des Massstabsfaktors
Der Prototypaufbau weist in bezug auf die Massstabsbestimmung eine kleine Besonderheit auf,
denn im Hilfsprogramm zur Ermittlung des Distanzwertes wurde anstelle der tatsächlichen
Lichtgeschwindigkeit für die Standardatmosphäre ein Näherungswert von c,, = 300'000 km/s ver¬
wendet. Die Messwerte müssen folglich zuerst auf die Standardatmosphäre bezogen werden. Es
gilt folgende Beziehung:
A= —-c, (9.2)Si
Gemäss den in Kapitel 8.1 beschriebenen Formeln über den Einfluss der Atmosphäre ergibt sich
daraus ein erster Massstabsfaktor von:
/«,=— = 0.999028874
Als eigentlich entscheidendes Element zur Bestimmung des Massstabes wirkt die ausgesandte
Modulationsfrequenz, die im Synthesizer aus dem Quarzoszillator generiert wird. Die direkten
Messungen der Frequenz am Ausgang des Synthesizer wiesen am Prototyp die recht hohe Abwei¬
chung von 194.7 ppm auf, aber die nachfolgenden Vergleichsmessungen mit dem Interferometer
bestätigen diesen Wert. Die Berücksichtigung dieses Frequenzwertes erfolgt nach der Formel:
Dverh=Dgem- (1-0.0001947) (9.3)
Nach der Positionierung des Instruments in exakter Verlängerung zur Interferometerbahn konn¬
ten die Messungen auf den Verschiebeschlitten gleichzeitig aus entgegengesetzter Richtung vor¬
genommen werden. Der Vorteil dieser Methode liegt in der optimierten Montage der Reflektoren
des Interferometers und des Distanzmessers. Durch die Befestigung auf gleicher Höhe und ohne
verstärkenden Hebelarm waren Fehlereinflüssen nach dem Abbe'schen Prinzip vermeidbar.
Die atmosphärischen Bedingungen im Messlaborerwiesensichalssehrkonstantundstabil,sodassidealeVoraussetzungenfürInstrumentenuntersuchungenvorlagen.DieMessungenwurdenunterfolgendenmeteorologischenVerhältnissendurchgeführt:Temperaturt=21.5°CLuftdruckp=971.0hPaLuftfeuchteR=50%Brechungsindexn=1.00001813ÜbereineVerschiebestreckevon150mmwurdenalle30mmMessblöckevonjeweils20Einzelmessungenausgeführt.AndenMittelwertenwurdenanschliessendallevorgängigbeschriebenenKorrekturen(MassstabfaktorenundMeteorologie)angebracht.DieeinzelnenWertesindindernachfolgendenTabelle9.2aufgelistet,wobeidieAnzahlderNachkommastellenderrohenundkorrigiertenMesswerteauf3Dezimalstellengerundetsind,umkeineunreali¬stischeAuflösungzusuggerieren.DiegesamteÜbersichtstabellewurdeauseinerExcel-Tabelleübernommen,sodassdieinterneZahlengenauigkeitdieBerechnungenderdargestelltenWerteimZusammenhangmitdenInterferometerwertenauf4Dezimalstellenerlaubt.DieAbweichungenderkorrigiertenMesswertezudenInterferometerwertensindausserdeminAbbildung9.1graphischdargestellt.101

rohe korrigierte Interfero- Summe Differenz
Messwerte Messwerte meterwerte IFM + DM zum Mittel
in [mm] in [mm] in [mm] in [mm] in [^im]
5974.296 5802.378 0.0000 5802.379 -1.3
5673.954 5502.381 300.0010 5802.381 1.2
5373.607 5202.379 599.9996 5802.378 -1.9
5073.265 4902.381 899.9997 5802.381 0.7
4772.921 4602.382 1200.0000 5802.381 1.4
4472.575 4302.381 1500.0002 5802.380 0.4
Tabelle 9.2: Gemessene und berechnete Werte des Vergleichs zwischen Interferometer und Distanzmesser
Bild 9.4: Ansicht der Interferometerbahn
Die sehr gute Übereinstimmung zwischen den Interferometermessungen und den Resultaten des
Distanzmessers darf nicht über die, mit dem Prototyp momentan erreichbare Genauigkeit hin¬
wegtäuschen. Diese Messwerte weisen zwar das grundsätzlich vorhandene Potential des Messsy¬
stems nach, aber sie konnten nur durch eine entsprechende Beobachtungssystematik erzeugt
werden.
102

Vergleich Interferometer mit Distamzmesser
Figur 9.1:
Schematische Darstellung der Differenzen
zwischen Interferometer und Distanzmesser
Beobachtungen zur Ermittlung eines zyklischen Fehlers
Zusätzlich zu den Vergleichsmessungen mit dem Interferometer fanden an einer optischen Bank
im Messraum weitere Kontrollmessungen statt. Die relativ einfache Schiene dieser optischen
Bank ist über Konsolenhalterungen an einer Wand befestigt, weist eine Gesamtlänge von knapp
23 m auf und ist hinreichend gut ausgerichtet. Als Vergleichsnormal wurde in diesem Fall das
Interferometer eines kalibrierten Laser-Trackers verwendet. Die Messungen verliefen analog zu
den Vergleichen mit dem Interferometer. An der Rückseite des Reflektorgehäuses des Distanz¬
messers befand sich ein kleiner Magnethalter als Aufnahme für einen Tooling-Ball-Reflektor des
Laser-Trackers. Dieser Kombinationsreflektor wurde fest mit einem Reiter der optischen Bank
verbunden. Auf diese Weise konnten entlang der Schiene Messungen in beliebigen Entfernungen
durchgeführt werden. Die Resultate zeigen keinerlei Hinweise auf eine Systematik und ein
zyklischer Fehler ist wie erwartet nicht nachweisbar.
Bestimmung der Minimumsposition aus der Intensitätsmessung
Der ebenfalls mit diesem Aufbau simulierte Vergleich zwischen der mit dem Laser-Tracker
gemessenen Reflektorverschiebung und den aufgrund der Extrapolation der Intensitätsvertei¬
lung bestimmten Minimumsposition erbrachte keine weiteren Erkenntnisse.
Die Messungen beruhten auf der Vorausberechnung vorgegebener Bewegungen. Das bedeutet,
dass für einen fingierten Bewegungsablauf des Reflektors im 0.1 msZeittaktdieVerschiebebe¬trägevorausberechnetundanhandderMessungmitdemLaser-Trackerseingestelltwurden.OhnesofortigeNachführungderFrequenzkonntederDistanzmessereineentsprechendeVer¬schiebungaufgrundderIntensitätsmessungdetektieren.Dasheisst,dassdieAnwendungderentwickeltenFormelnmitdengemessenenWertenmitdenvorgegebenenPositionenderReflek¬torbewegungübereinstimmen.MitHilfeeinesexternenSimulationsprogrammswurdenanschliessenddieFrequenzderMinimumposition,derentsprechendeDistanzwert,dieParame¬terderBewegungsgleichungunddieFrequenzanderwahrscheinlichnächstenMinimums¬positionberechnet.DieAbtastungdesIntensitätswertesamDistanzmessererfolgtedabeimitderkleinsteneinstellbarenZeiteinheitvon10.24ms,diesichaus20Einzelwerterfassungenvonjeweils0.512mszusammensetzt.AbgesehenvongeringenStreuungenderDistanzwerte,diewenigerals5^mbetrugen,konntenkeineAbweichungenzudenMessungendesLaser-Trackersbeobachtetwerden.Eszeigtesich,dassdieSimulationderBewegungmitdenvorausberechnetenVerschiebebeträgenzwarmöglichwar,aberdieAnnahmendieserArt"Zeitlupenmessung"erscheinenetwaszuidealisiert.Bewe¬gungenwährenddereigentlichenMesswerterfassungkonntenaufdieseWeiseleidernichtsimuliertwerden.DieMessungenmitdemstatischenSystemlassenfolglichnichtgenügendguteAufschlüsseüberdasdynamischeVerhaltendesDistanzmesserszu.-Senesl5001000Entfernungeninmm1500103

10 Zusammenfassung, Wertung und Ausblick
Vor dem Hintergrund der physikalisch bedingten Grenzen erweitert der technologische Fort¬
schritt das Potential zur Verbesserung von Methoden und Systemen der geodätischen Messtech¬
nik kontinuierlich und in immer kürzeren Zeitzyklen. Für einzelne Messsysteme bedeutet das
die Möglichkeit zu einem erheblichen Ausbau der Leistungsfähigkeit. Am Beispiel des "Mekome-
ter Messprinzips" beweist die vorliegende Arbeit, wie mit einem bereits seit über zehn Jahren
bewährtem und in der Fachwelt anerkanntem Messsystem durch leistungsfähigere elektronische
Bauteile und Komponenten eine weitere Steigerung der Genauigkeit um eine Grössenordnung
erreicht werden kann. Zusätzlich erlauben die erweiterten technischen Möglichkeiten gepaart
mit neuen Lösungsansätzen eine deutliche Erweiterung der Funktionalität im Bereich der
Reflektorverfolgung.
Die Grundlage bildet der im Prinzip identische Aufbau des Mekometer Messsystems, der durch
seine einfache Realisierung besticht. Die Frequenz /0 der Lichtmodulation wird dabei auf die zu
messende Distanz abgestimmt, bis sich exakt ein ganzzahliges Vielfaches N0 der Modulationswel¬
lenlänge auf dem Messweg befindet. Die Bestimmung des tatsächlichen Wertes von N0 erfolgt
über eine zweite Abstimmung der Frequenz/0+1, während sich der Distanzwert anschliessend mit
Hilfe der Gleichung 3.1 berechnen lässt.
Bei der Realisierung des Systems wurde versucht, alle fundamentalen Vorteile des Systemauf¬
baus beizubehalten. So bildet eine Lichtquelle ohne weitere elektronische Beeinflussung die
monochromatische Trägerlichtwelle des Messstrahls. Die Überlagerung der zur Distanzmessung
notwendigen Information (Modulation) erfolgt vollständigunabhängigineinemKristall,derBestandteileinesHF-Schwingkreisesist.DiebewährteMethodederPolarisationsmodulationimKristallstelltdabeieinederGrundvoraussetzungenzumeinfachenErreichendersehrhohenGenauigkeitsanforderungendar.DieBesonderheitdieserMethodeliegtinderspeziellenFormdesInformationstransportesbegründet.EntlangdesMesswegesentstehenpraktischkeineuner¬wünschtenStörgrössenundEffekte,diealszusätzlichpolarisierenddieModulationunddamitdieSignaldetektionbeeinflussenkönnen.AufgrundderEigenschaftendespolarisiertenLichtesbereitetdieexaktidentischeStrahlführungzwischenausgesandtemundreflektiertemStrahlsowiederenTrennungdurcheinePolarisationsstrahlteilerzurDetektiondesEmpfangssignaleskeinerleiProbleme.UnerwünschteNebeneffektedurchverschiedeneStrahlwegekönnendeshalbvonBeginnaneliminiertwerden.AufderEmpfängerseitewirddieextremeEmpfindlichkeitundZuverlässigkeitderSignaldetektiondurchdieÜberlagerungeinerWobbeifrequenz(Differenzen¬methode)gewährleistet.MitdemPhasennullabgleich,dasheisst,dassbeijederMessungidenti¬scheSignalverhältnisseanalysiertwerdenmüssen,wurdeeinzusätzlichesPhasenmesssystemalsweitereFehlerquellepraktischvermieden.DasSystementhältvielmehreineinterneZuver¬lässigkeitskontrolleaufgrundderphysikalischenGesetzmässigkeit,dassdieWellenzahlN,zurBerechnungderDistanzeinemIntegerwertentsprechenmuss.WieaufgrundumfangreicherMessungenersichtlichwird,lassensichmitdemvorliegendenSystembeigutenBedingungenaufkurzenEntfernungenzwischen2mund20mproblemlosäussereGenauigkeitenderDistanzmessungimBereichvon10^imbis15(imerreichen.DiegesamteProblematikderGenauigkeitundGeschwindigkeitdesMesssystemsliegtfolglichinderHochfrequenzelektronik,imoptisch-mechanischenAufbaudesModulatorsunddertechni¬schenUmsetzungderFrequenzstabilitätbegründet.DieUntersuchungenamPrototypinstru¬mentundweiteretheoretischeBetrachtungenzeigendieMöglichkeitendesmodernenDesignsdesMesssystemsauf.NebendiesengrundlegendenGesichtspunktengaltdasHauptaugenmerkderArbeitenderIntensitätsfunktiondesEmpfangssignalesinderUmgebungeinerMinimumpo¬sition.DurcheineReihedetaillierterMessungenkonntederfunktionaleZusammenhangzwi¬schenModulationsspannung,WobbeihubundFrequenzwertinnerhalbdesModulatorbereichsempirischerarbeitetwerden.DerHochfrequenzschwingkreiszurSignalmodulationzeigtdabei
104

eine eindeutige Abhängigkeit von der Kennlinie des im Schwingkreis benutzten Transistors. Mit
Hilfe einer Kalibrierungsfunktion, die automatisch in Abhängigkeit von definierten Zeitinterval¬
len eine interne Wertetabelle immer auf dem aktuellen Stand hält, gelingt es, für jede Stelle im
Modulatorbereich identische Verhältnisse zur Signaldetektion zu schaffen. Über die direkte Mes¬
sung der Modulationsspannung an der momentanen Messposition und die geeignete Einstellung
der Hubweite der Wobbeifrequenz aufgrund der aktuellen Daten aus der Wertetabelle können
die gemessenen Intensitätswerte im Arbeitsbereich der Wandlerelektronik durch eine Geraden¬
funktion beschrieben werden (Intensitätswert als Funktion der Frequenz). Alle drei Einflussgrös-
sen, Kennlinie des Transistors, Modulationsspannung und Hubweite der Wobbeifrequenz sind
ausschliesslich von der Position im Modulatorbereich abhängig und bewirken eine Änderung der
Geradensteigung.
Wesentlich problematischer erweist sich die Abhängigkeit der Geradenfunktion von der jewei¬
ligen Messdistanz, denn je länger die zu messenden Entfernungen, um so mehr Minima befinden
sich im Modulatorbereich, was letztlich zu grösseren Werten der Geradensteigung führt. In die¬
ser einfachen Beschreibung liegt bereits ein Lösungsansatz zum Erhalt einer distanzunabhängi¬
gen Intensitätsfunktion verborgen. Die Normierung der Intensitätsfunktion in bezug auf den
Abstand zweier benachbarter Minima löst das Problem grundsätzlich. Lediglich für die weitere
Nutzung der Intensitätsfunktion bei der Modellbildung zur Verfolgung eines bewegten Reflek¬
tors ergeben sich dadurch etwas aufwendigere Berechnungsformeln und umfangreichere Aus¬
wertungen.
Ein wichtiger Teil der vorliegenden Arbeit behandelt die Entwicklung einer Methode zur auto¬
matischen Reflektorverfolgung. Basierend auf den Kenntnissen über die Intensitätsfunktion inderUmgebungeinerMinimumpositiongelangderAufbaueinerMethodezurExtrapolationderFrequenzderMinimumpositionzujedemMesszeitpunkt.MitHilfederallgemeinenBewegungs¬gleichungen,diealsFunktionderFrequenzwerteangesetztwurden,konnteeinModellentwik-keltwerden,dassowohldieBerechnungdesDistanzwerteszujedembisherigenMesszeitpunkt,alsaucheineVorhersagederMinimumpositionundderSignalverhältnissezumnächstenMess¬zeitpunkterlaubt.TrotzderständigerforderlichenNachführungderBerechnungsbasis(Normie¬rungderIntensitätsfunktionaufgrundderÄnderungdesFrequenzabstandeszwischenzweiMinima)kanneineeindeutigeFrequenz-undDistanzberichtigungerfolgen.LediglichdiePara¬metervorhersagefürdienächsteMessepocheunterliegtdenUnsicherheitendesModellansatzes.MitdenGleichungen(6.22-6.29)wurdedieMessungnacheinembewegtenReflektorsimuliertundmitdenbekanntenVerstellwertenalsSolldatenverglichen.DieAbweichungenzwischendenSollwertenunddengemessenenWertenlagenimDistanzbereichvon2m-20mineinerGrös-senordnungvonAD<20um.DieAussagekraftderermitteltenGenauigkeitswertebleibtjedochsehreingeschränkt,daspezielldieUnzulänglichkeitendieserArtder"Zeitlupenmessung"mitdemnichtsimulierbarenEinflussdesZeitverhaltenswährendderSignaldetektionbeibewegtemZielkeinegesichertenRückschlüsseaufdastatsächlicheMessverhaltenzulassen.MitdiesenMessungenkonntelediglicheineAbschätzungderzuerwartendenGrössenordnungderMessge¬nauigkeiterfolgen.Ausserdemwaresmöglich,dieprinzipielleRealisierbarkeitderMessmethodebeientsprechenderUmsetzungdesSystemaufbausnachzuweisen.AufderGrundlagederkontinuierlichenErweiterungdertechnischenMöglichkeitenlassensichzweifelloseineReihekleinererVerbesserungeneinführen.BesondersaufdemGebietderMinia¬turisierungundderGeschwindigkeitssteigerungderelektronischenBauteileliegtnocheinPotentialfürVerbesserungenverborgen.HauptsächlichdurcheinewesentlicheErhöhungderGeschwindigkeitbesondersdesSynthesizerskönntendieGrenzendesvorliegendenMesssystemszusätzlichverschobenwerden.EineweitereVerbesserungdesSystemaufbauswäreimBereichdesModulatorswünschenswert.DietechnischenVoraussetzungenzurAusdehnungderBand¬breitedesModulatorssindmittlerweilevorhanden.DiedamitverbundeneErweiterungdesMessbereichsaufkürzereEntfernungenwärefolglichebenfallsgegeben,wenndiewirtschaftli¬chenÜberlegungendieRealisierungeinesderartigenTrackingsystemszulassen.
105

Zu einem gewissen Teil wurden Vorschläge und Ideen der vorliegenden Arbeit bereits praktisch
umgesetzt. Die im Kapitel 6.3 vorgeschlagene Lösung, den absolut messenden Distanzmessers
nach dem Mekometer Messprinzip in das relativ messende Laser-Tracking-System zu integrie¬
ren, wurde mittlerweile realisiert. Ein grosser Teil der beschriebenen technischen Lösung des
vorliegenden Prototypaufbaus zur statischen Messung der Initialisierungsdistanz für das Inter¬
ferometer im Laser-Tracker (LTD 500) konnte direkt umgesetzt werden. In diesem Zusammen¬
hang wurde besonderer Wert auf die Kompensation des Einflusses, den die unterschiedlichen
Stellungen des Trackingspiegels auf die Polarisation ausüben, gelegt. Grundsätzlich beeinflusst
jede Spiegelschicht die Polarisation des Lichtes. Durch spezielle Beschichtungen der Spiegelflä¬
chen und durch gleichbleibende Reflexionsrichtung innerhalb eines festen Systemaufbaus kön¬
nen diese Einflüsse auf eine unkritische Grössenordnung reduziert werden. Eine der Besonder¬
heiten des Laser-Tracker-Aufbaus ist nun gerade ein beweglicher Spiegel, der den Messstrahl in
Abhängigkeit der Reflektorposition unterschiedlich reflektiert. Folglich ändert sich damit auch
die Polarisationsrichtung des Messstrahls in Abhängigkeit von der Spiegelstellung.Mit Hilfe eines speziellen Modulatoraufbaus gelang es schliesslich, synthetische Signalverände¬
rungen zu erzeugen, die dem Einfluss verschiedener Spiegelstellungen auf die Polarisationsrich¬
tung des Messstrahls entsprechen.
Analog dem Einfluss auf das polarisierte Licht durch verschiedene Spiegelstellungen über den
gesamten Vollkreis werden diese Signale für eine diskrete Anzahl künstlich erzeugt. Während
jeder Einzelmessung findet eine Überlagerung dieser Signale mit den tatsächlichen Messsigna¬len statt, was einer Art Integration über alle möglichen Spiegelstellungen gleichzusetzen ist. Auf
diese Weise wird der überwiegende Teil des Spiegeleinflusses kompensiert und eine Abhängig¬keit der Distanzmessung von der Spiegelstellung liegt nicht vor.
Bereits dieses Beispiel verdeutlicht,dasskontinuierlichneueVerbesserungenmöglichsind.ZiehtmandierasanteEntwicklungderletzten20Jahre,vomerstenelektronischenTheodolitüberdieGPS-TechnologiebiszurTracking-FunktionalitätmodernerMesssystemeinBetracht,dannerscheinendieneuestenTendenzenundTrendsweitwenigerutopischalszwangsläufigangenommenwird.MeinerMeinungnachzeichnensicheinigewirklichzukunftsträchtigeEnt¬wicklungsrichtungenab.FürgeodätischeAnwendungenwerdendieMethodenderschnellenTrackingmessungundderautomatischenZielpunktverfolgungweiterverfeinertundvorangetriebenwerden.DasZieleinervölligautomatisiertenTotalstationohneausgebildetesBedienungspersonalmitnureinemFach¬mannamOrtdesInteresses(Zielpunkt)rücktimmernäher.ImBereichderindustriellenAnwendungengewinnendiereflektorlosenMessmethodenzuneh¬mendanBedeutung.SobalddieinerstentechnischenAnsätzenbereitsvorhandenenMethodenderDistanzmessungohneReflektorenGenauigkeitenvonwenigen0.01mmzulassen,rückeneinerseitsdieMessgeschwindigkeitundandererseitsdieZielpunktdefinitionbzw.dieAuswer¬tungdergemessenenOberflächenindenMittelpunktdesInteresses.Esistzuerwarten,dassinnerhalbwenigerJahrehochgenaueOberflächenscannermiteinemArbeitsbereichvonbiszu20mentstehenwerden.DerEinsatzvonCCD-TechnologiezurVermessungvonObjektenwirddurchdieKombinationbzw.direkteIntegrationeinesDistanzmessermodulszujedemPixeleinewirklichräumlicheEchtzeiterfassunggrössererObjektevonnureinemStandortausermögli¬chen.106

Literaturverzeichnis
ABRAMOWITZ, M.; SEGUN, A I, [1968]: Handbook of Mathematical Functions with Formulas, Graphs and Mathemati¬
cal Tables. Dover Publications, Inc., New York
AESCHLIMANN, H.; STOCKER, R. [1975]: Geratefehler von elektro-optischen Distanzmessern Vermessung-
Mensuration, Band 2/75, S. 36 - 44
BEST, R. [1987] Handbuch der analogen und digitalen Filtertechnik. 2. Auflage, AT Verlag Aarau, Stuttgart
BIAZZO, M.R. [1971]: Fabrication of a Lithium Tantalate Temperature-Stabilized Optical Modulator. Applied Optics,
Band 10, Nr. 5, S. 1016 - 1021
BIRK, R. [1998]: Persönliche Mitteilungen aus dem Fachbereich Chemie.
BOLSAKOV, V.D.; DEUMLICH, F.; GOLUGEV, A.N.; VASILEV, V.P. [1985]: Elektronische Streckenmessung. Gemein-
schaftsauflage VEB Verlag fur Bauwesen, Berlin und Verlag Nedra, Moskau
BRONSTEIN, I.N.; SEMEDJAJEW, K.A. [1976]: Taschenbuch der Mathematik. 16 Auflage, Verlag H.Deutsch, Zurich
1976
DEICHL, K. [1984]. Der Brechungsindex fur Licht und Mikrowellen. AVN, Band 91, Nr 3, S. 85 -100
DOBRINSKI, P.; KRAKAU, G.; VOGEL, A. [1984]- Physik fur Ingenieure, 6 Auflage, B.G Teubner, Stuttgart
DOLD, J.; MARKENDORF, A. [1998]' Expression of measurement uncertainty for Laser Tracker based on distance mea¬
surements. CMSC Conference, St. Louis, July 1998
EDLEN, B. [1953]: The Dispersion of Air. Journal of the Optical SocietyofAmerica,Band43,Nr.5,S.339-344EDLEN,B.[1965]:TheRefractiveIndexofAirMetrologia,Band2,Nr.2,S.71-80FA.TRICOM(Freismg,Deutschland)[1990]:DDS-DerDirekteDigitaleFrequenz-Synthesizer.Mikrowellen&HFMagazin,Band16,Nr.1,S.41-43FANG-SHANGCHEN[1970]:ModulatorsforOpticalCommunications.ProceedingsoftheIEEE,Band58,Nr.10,S.1440-1457FEYNMAN,R.P.;LEIGHTON,R.B.;SANDS,M[1973].TheFeynmanLecturesonPhysicsBILINGUAAusgabedeutsch/englisch,BandI,Teil2,MainlyMechanics,RadiationsandHeat,ROldenbourgVerlag,MünchenundAddison-WesleyPublishingCompany,IneFIZEAU,H.[1849]:Suruneexpériencerelativeàlavitessedepropagationdelalumière.CR.hebd.Acad.Sei.Pans,Nr.29,S.90FROOME,K.D.;BRADSELL,R.H.[1966].Anewmethodforthemeasurementofdistancesupto5000ftbymeansofamodulatedlightbeam.JournalofScientificInstruments,Band43,Nr3,S.129-133FROOME,K.D.[1985].ANewMethodeforAssessingtheAtmosphericRefractivityCorrectioninOpticalEDMSurveyReview,Band28,Nr.216,S89-95GERVAISE,J.[1983]:FirstresultsofthegeodeticmeasurementscarriedoutwiththeTerrameter,two-wavelengthelec¬tronicdistancemeasurementinstrumentSchriftenreiheWissenschaftlicherStudiengangVermessungswesen,HochschulederBundeswehr,München,Nr.11,S.213-230GIULANO,CR.;[1981]:Applicationsofopticalphaseconjugation.PhysicsToday,April1981,S.27-35HECHT,E.,ZAJAC,A.[1980].Optics.Addison-WesleyPublishingCompany,Inc.HENNES,M.[1995]:EntwicklungeinesMeßsystemszurErmittlungvonTurbulenzparameterndeAtmosphärefurAnwendungeninderGeodäsie.DissertationanderRheinischenFriednch-Wilhelms-Universitat,Bonn,DGK,ReiheC,Heft438HUBNER,W.[1985]:ZurAusnutzungderDispersionfurdieelektromagnetischeStreckenmessung.Dissertation,Mün¬chen,DGK,ReiheC,Heft310INGENSAND,HBOCKEM,B.[1997].AHigh-AccuracyAlignmentSystemBasedontheDispersionEffect.FifthInter¬nationalWorkshoponAccelaratorAlignment,Argonne,II,USAKALMAN,R.E.,BUCY,R.S.[1961]:NewResultsinLinearFilteringandPredictionTheory.JournalofBasicEnginee¬ring,Trans.AmericanSocietyofMechanicalEngineering,Reihe83D,S95-108KALMAN,R.E.[I960]:ANewApproachtoLinearFilteringandPredictionProblemsJournalofBasicEngineering,Trans.AmericanSocietyofMechanicalEngineering,Reihe82D,S.34-45KOVACS,F[1977]-HochfrequenzanwendungenvonHalbleiter-BauelementenFranzis-VerlagMünchen,1977LISSON,J.B.[1989]:Phase-cojugatmgdevicedetecsalignmenterrors.LaserFocusWorld,April1989,S139-148LOSER,R.,MEIER,D.,MUNCH,K.H.;SCHWARZ,W.[1991]:DasFunktionsprinzipdesMekometerME5000.Allge¬meineVermessungs-Nachrichten,Band10/91,S.324-345LOSER,R.[1993]:Laser-Tracking-systemfur3D-MessungenbewegterObjekte,tm-TechnischesMessen60(1993),ROldenbourgVerlag,Heft5/93,S.198-202LOSER,R.;MEIER,D.;SCHOLIAN,T.[1990]:InstrumentationsoftheNinetiesFirstInternationalWorkshoponAcce¬laratorAlignment,Stanford,Ca.,S.184-199MARKENDORF,A.[1998]:TheInfluenceoftheToolingBallReflectorontheAccuracyofLaserTrackerMeasurements:TheoryandPracticalTests.LaserTrackerSeminaratBoeing,RentonWA,January1998107

MAURER, W. [1983]: Em Interferometrisches Meßverfahren zur Bestimmung vonStrichverbesserungen an eingebauten
Theodohtkreisen. Dissertation, München 1983
MEIER, D.; LOSER, R. [1986]: Das Mekometer ME 5000 - Ein neuer Prazisionsdistanzmesser. Allgemeine Vermessungs-
Nachrichten, Band 5/85, S. 82 - 90
MEIER, D.; LOSER, R. [1988]. Versuche mit einem Zwei-Farben-Distanzmesser Beitrag zumX. Internationalen Kurs
fur Ingenieurvermessung, München, Dummler Verlag, Bonn
N N. [1966]: International Meteorological Tables (WMO-No. 188. TP 94). World Meteorological Organization,Geneva - Switzerland 1966
N.N. [1979]: Normalatmosphare DIN ISO 2533. Normenstelle Luftfahrt (NL) im DIN Deutschen Institut fur Normung
e.V., Dezember 1979
N.N [1990]: Numerisch gesteuerte Oszillatoren, die direkte digitale Frequenzsynthese. Stanford Telecommunications
OWENS, J.C.; [1967]: Optical Refractive Index of Air: Dependence on Pressure, Temperature and Composition. Applied
Optics, Band 6, Nr. 1, S. 51 - 59
PAULI, W. [1969]. Vorteile eines kippbaren Reflektors bei der elektrooptischen Streckenmessung. Vermessungstechnik,Band 17, Nr. 11, S. 412-415
RIEMENSPERGER, M.; GOTTWALD, R. [1990]. KERN SMART 310 - Leica's Approach th High Precision Dynamic 3D
Coordinate Determination. Second International Workshop on Accelarator Alignment, Hamburg
RUEGER, J. M. [1998]: Refractive Index Fromula for Electro-Optical Distance Measurement. Commision 5, XXI FIG
Congress, Brighton 1998, S. 191 - 208
RUPP, A. [1990]: Frequenzsynthese mit numerisch gesteuerten Oszillatoren. Elektronik, Heft 14, S. 81 - 88
SCHERER, M. [1982]' Entwicklung eines weitreichenden Prazisionsdistanzmessers als Grundlage fur ein Mehrwellenge¬
rat Dissertation an der Rheinischen Friednch-Wilhelm-Umversitat, Bonn, DGK, Reihe C, Heft 272
SCHIRMER, W.; SCHNADELBACH,K.[1987]:ASB-gesteuerteMeßprogrammefurdasKERNMekometerME5000.UnveröffentlichteProgrammbeschreibungen,GeodätischesInstitutTUMünchenSCHNADELBACH,K.[1998]:PersönlicheMitteilungenzurNumerischenMathematikSCHNEIDER,D[1990]:DreidimensionalesTestnetzTurthmannTeil1,SchweizerischeGeodätischeKommission,Geo¬dätischeGeophysikalischeArbeitenSchweiz1985-1990,Band45SCHRICK,K.W.[1977]:AnwendungenderKalman-Filter-Techmk-AnleitungundBeispiele,R.OldenbourgVerlag,München,Wien1977SCHWARZ,W.[1985]:ZurErmittlungderintegralenTemperaturderAtmosphäremitUltraschallfurRefraktionsbe¬stimmungenimNahbereich.Dissertation.VeröffentlichungdesGeodätischenInstitutsderRheinisch-WestfälischenTechnischenHochschuleAachen,Heft38STIEFEL,E.[1962]:EinfuhrungindienumerischeMathematik.B.G.TeubnerVerlagsgesellschaft,Stuttgart1962WOLF,H.[1975]:Ausgleichungsrechnung-FormelnzurpraktischenAnwendungDummlerVerlag,Bonn1975WOLF,H.[1979]:AusgleichungsrechnungII-AufgabenundBeispielezurpraktischenAnwendung.DummlerVerlag,Bonn1975ZÜRCHER,W.;LOSER,R.;KYLE,SA[1995]Improvedreflectorforinterferometrictrackinginthreedimensions.Opti¬calEngineering,Band34,Nr.9,S.2740-2743108

Lebenslauf
1960-1966
1966-1968
1968-1971
1971 -1972
Loser Raimund
Hornsteinweg 2/1
D-79713 Bad Säckingen0049 / 7761 / 59391 (Privat)
Leica AG
Mönchmattweg 5
CH-5035 Unterentfelden
062 / 7376800 (Büro)
Persönliche Angaben
Familienstand:
Staatsangehörigkeit:
Konfession:
Alter:
Geburtsort:
verheiratet, 2 Kinder
deutsch
römisch-katholisch
46 Jahre
Fürstenfeldbruck
Ausbildung
Volksschule
Wildenroth / Deutschland
Staatliche Realschule (ohne Abschluss)FürstenfeldbruckI Deutschland
SIEMENS AG und Berufsschule für FeinmechanikerBerufslehre als Feinmechaniker
München / Deutschland
Berufstätigkeit
SIEMENS AG
Anstellung als Feinmechaniker in einer LaborwerkstätteMünchen I Deutschland

1975-1976
1970-1973
1973-1975
1976-1981
1981 -1982
1982-1991
seit 1991
Wehr-/Ersatzdienst
Grundwehrdienst (15 Monate,)Instandsetzungs-Ausbildungskompanie 11/8 (Waffenmechaniker)Mittenwald / Deutschland
Weitere Ausbildung (2. Bildungsweg)
Staatliche Berufsaufbauschule
2 Jahre berufsbegleitend im Abendunterricht
1 Jahr Vollzeitunterricht
Abschluss: Fachschulreife
München / Deutschland
Staatliche Berufsoberschule
Abschluss: Fachgebundene Hochschulreife
München / Deutschland
Technische Universität München
Abschluss als Diplomingenieur für Vermessungswesen (Geodäsie)München / Deutschland
Berufstätigkeit
ADIA interim
Zeitarbeitsvertrag als Überbrückung bis zur Erledigung der Ausländerformalitäten inder Schweiz.
Kombination genormeter Rohrleitungen zu Sicherheitsleitungen (Doppelrohre).Tunnel- und Deformationsvermessung beim Münchner U-Bahn Bau.
München / Deutschland
KERN & Co AG (1988-1990 Wild Leite AG, später LEICA AG)Arbeitsvertrag als Wissenschaltlicher Mitarbeiter in der Forschungs- und
Entwicklungsabteilung mit den Schwerpunkten Instrumenten- und
Softwareentwicklung.Aarau / Schweiz
LEICA AG
Leiter des Bereichs Entwicklung und Technik und Mitglied der Geschäftsleitung derGeschäftseinheit Photogrammetrie und Metrologie der Firma LEICA AG in
Unterentfelden. Der Bereich Entwicklung und Technik umfasste 30-40 Mitarbeiter,von denen sich ca. 50% mit der Entwicklung von Firm- und Software befassen. Fünfdieser Mitarbeiter sind in unserer Tochtergesellschaft in Atlanta (USA) beschäftigt.Unterentfelden / Schweiz