Embed Size (px)
Citation preview

248 g . Buffer und E. Stein: Zur Plattenberechnung mittels finiter Elemente Ingenieur-Archiv
Zur Plattenberechnung mittels finiter Elemente Yon H. Buffer und E. Stein
Ubersichtt Vermehrt man die Freiheitsgrade eines Rechteckelements dadurch, dab man anstelle einer Ver- grSBerung der Knotenzahl an den vier Eckknoten zus/itzhch hShere Verschiebungs- und damit auch Kraft- grSl3en vorsieht, so ist eine geometrische Kontinuit/it erreichbar. Es wird gezeigt, dab auch in diesem Fall das iibliche Vorgehen -- Berechnung der Elementsteifigkeitsmatrizen und Aufstellung der Knotengleichgewichts- bedingungen -- formal beibehatten werden kann. ~qumerische Ergebnisse werden mitgeteilt.
Summary: If one increases the number of freedoms of a rectangular element by means of additional (higher) displacement- and therefore also force-quantities at the four edge-nodes instead of enlarging the number of nodes, one can receive a geometric continuity. It is shown that in this case the usual proceeding -- evaluation of the element-stiffness-matrices and stating the conditions of equilibrium at the nodes -- may formally be retained. Numerical examples are presented.
1. Einleitung. Unter dem Begriff ,,finite Elementmethoden" versteht man heute alle jene Verfahren, die auf eine Diskretisierung eines kontinuierlichen mechanischen Systems dadurch fiih- ten, dab man mit bereichsweise vorzugebenden Ansatzfunktionen arbeitet 1. Bei der Elementmethode im engeren Sinn [2] ist die Zald der Freiheitsgrade eines Elements durch die Zahl der jeweils in Be- t racht kommenden eigentlichen KraftgrSgen (Komponenten des Kraft- und des Momentenvektors) an den gew~ihlten Knoten bestimmt, Im allgemeinen ist es nicht mSglich, bei Beschr~inkung auf die eigentlichen KraftgrSBen eine vollst~indige geometrische Kontinuit~it zwischen den einzelnen Ele- menten zu erzielen, womit die Anwendung des Prinzips vom Minimum der gesamten potentiellen Energie nicht mehr zul~issig ist. Nimmt man allerdings innerhalb eines Elements Diskontinuitaten der Kriimmun..gen in Kauf, so erreicht man mit gewissen kinematischen Einschr~inkungen geome- trisch stetige Uberg~inge zu den Nachbarelementen, wie Clough u. Tocher [3] gezeigt haben.
Geometrisch kompatible Ans/itze fiir Rechteckelemente wurden yon Schaefer [4] sowie Bogner, Fox und Schmh [5] unter Verwendung sogenannter Hermitescher Interpolationspolynome ~ angegeben. Als Stiitzwerte des Verschiebungsansatzes treten hierbei die Plattendurchsenkung, die Neigungen in beiden Koordinatenrichtungen und die Verwindung an den Eckknoten (verallgemeinerte Knoten- verschiebungen) auf. Beh~ilt man die Elementmethode im engeren Sinn bei, so muB man zwangs- l~iufig die Yerwindungen (und damit die Drillmomente) an den Knotenpunkten null setzen. Dieser wenig befriedigende Weg wird in [5] beschritten. Von der Einschr~inkung verschwindender Knoten- verwindungen kann man sich frei machen, indem man neben den eigentlichen KraftgrSBen an den Eckknoten sog. hShere Kraftgr~gen, die weder eine resultierende Kraft noch ein resultierendes Moment besitzen, definiert. Bei dieser Elementmethode im weiteren Sinn ffihrt das iibliche Ver- fahren -- Berechnung der Element-Steifigkeitsmatrizen und Formulierung der Knoten-Gleichge- wichtsbedingungen - - zum richtigen Ergebnis im Sinne des Prinzips vom Minimum des Gesamt- potentials. Sie liegt der vorliegenden Arbeit zugrunde und steht bezfiglich des Ergebnisses im Ein- klang mit dem Vorgehen yon Schaefer [4], das auf einem globa!en Ritz-Prozeg mit den verallge- meinerten Knotenverschiebungen als Ritz-Parametern beruht. In der Schaeferschen Formulierung wird jedoch kein expliziter Gebrauch yon Steifigkeitsmatrizen gemacht; ebenso ist dort die Ein- fiihrung hfiherer KraftgrSBen entbehrlich. Demgegenfiber garantiert die Elementmethode im wei- teren Sinn die rechen- und programmtechnische Flexibilit~it, die besonders beim Einbau der Rand- bedingungen groBe Vorziige aufweist. Die (inneren) Schnittkr~fte an den Knoten folgen wie 5blich durch algebraische Mittelung der Schnittkrafte der benachbarten 4 Elemente.
Am ungenauesten fallen die auf gleiche Weise ermittelten Randschnittkrafte (bei kontinuierlich gestiitzten oder eingespannten R~indern) aus, da hier beispielsweise bei einem Randknoten hSch- stens zwei Werte gemittelt werden. Deswegen wird hier ein anderer Weg eingescMagen: Man setzt fiir den (unbekannten) u der Randschnittkr~ifte kubische Hermitesche Polynome an und ermittelt die Stiitzwerte auf Grund der vorher errechneten Kraftgrfigen an den Randknoten. Auf diese Weise gewinnt man bei einer relativ niedrigen Zahl yon Elementen bereits gute Ergebnisse.
1 Der Gedanke des bereichsweisen Vorgehens im Zusammenhang mit dem Ritzschen Verfahren stammt yon Courant. [1].
2 Sie ergeben sich aus den Lagrangeschen Interpolationspolynomen im Grenzfall zusammenfallender Nachbar- punkte und wurden bereits yon Lagrange benutzt.

39. Band 1970 H. Buffer und E. Stein: Zur Plattenberechnung mittels finiter Elemente 249
Hansteen [6], But l in u. Leckie [7] sowie Mason [8] verwendeten dieselben geometrisch kompa- dblen Verschiebungsansiitze. Infolge ihrer globalen Betrachtungsweise treten explizit weder hShere KraftgrSBen noch Element-Steifigkeitsmatrizen auf; dagegen findet sich dort eine globale Platten- steifigkeitsmatrix. Argyris , Fried u. Scharp f gaben in [9] eine Familie geometrisch kompatibler Plattenelemente an.
Die Verwendung geometrisch nicht kompatibler Ansiitze ist nut im Zusammenhang mit einem verallgemeinerten Variationsprinzip znl~issig, siehe Prager [10], Herrmann [11], Buf ler [12].
Eine andere bemerkenswerte finite Methode, die auf der kombinierten Anwendung des Prinzips der virtuellen Verschiebungen und des Prinzips der virtuellen Kriifte beruht, gab Giencke [13] an. Er zeigte insbesondere den Zusammenhang zwischen seinen Gleichungen und jenen, die sich durch (Jbersetzung der Differentialgleichungen des Kontinuums in finite Gleichungen ergeben.
2
~+ I
lz+l
r
Abb. 1. Bezeichnung der Knoten und Felder einer unterteilten Platte.
2. Ansatz fiir die Biegefliiche eines Rechteckelementes. Der gesamte Plattenbereich wird in g]eich groBe Einzelbereiche (Elemente) gem~iB Abb. 1 unterteilt. Die Knoten werden dutch den tiefgestellten Doppelindex m n (m Zeilennummer, n Spaltennummer), die Bereiche durch den einge- kiammerten hochgestellten Doppelindex (m n) gekennzeichnet. Man ben~tigt folgende vier in einem Spaltenvektor zusammengefaBte Hermi te -Po lynome
= = ] 0 - - / ~2 (3 - 2 ~) " (1)
Lh4(~)J L ~2(~_1)
Hierbei ist ~ die dimensionslose Koordinate # ~- Xa trod entsprechend ~ = y ; die Koordinaten ~,
beziehen sich j eweils auf einen Plattenbereich. Der bikubische Ansatz fiir die Biegefliiche im Bereich (m n) lautet nach Schaefer [4] 3
w(" ~)(~, ~) ~-- sT(f, ~) d( m n). (2)
In (2) bezeichnet d( m n) den Spaltenvektor aller im Bereich (m n) vorkommenden verallgemeinerten EckverschiebungsgrfBen (Element-Verschiebungsmatrix)
1 d( '~) = d . . . . +1 (3) d ~ = w' .
' lWl I d i n + i, ,,+ 1 L w "Jk t
Der Spaltenvektor d., ,, (Knoten-Verschiebungsmatrix) enthiiIt nur die verallgemeinerten Verschie- bungsgriiBen an der Stelle m n, nfimlich die u w, die (der Verschiebung dimensionsgleich
gemachten) Neigungen w ~ ~Lv a~v ,. 0zw = ~ - ; w ' - - ~ - und die Verwindung w = ~ 0 ~ ' die zugleich eine
VerzerrungsgrSf3e darstellt (s. (10)). Neben den bei der finiten Elementmethode im engeren Sinn ausschlieBlich betrachteten eigentlichen VerschiebungsgrSSen w, w', w" taucht hier die hfhere Ver- schiebungsgrSBe w" auf. Der Ansatz (2) lieBe sich durch Hinzunahme weiterer hfherer Verschie- bungsgr(iBen (w", w" usw.) unschwer erweitern, doch lohnt sich dieser Aufwand i. a. nicht, vgl. [8].
a Die transponierten Gr5Ben sind durch ein hochgestelltes T gekennzeichnet.

250 H. Buffer und E. Stein: Zur Plattenberechnung mittels finiter Elemente Ingenieur-Archiv
Der Spaltenvektor s(~, ~) besteht aus den 16 Produkten der Hermite-Polynome in beiden Koordi- natenrichtungen. Seine Elemente sind:
~(~, ~) = hff~) hj(~) (5) mit der Zuordnung:
ij 11 12 21 22 ] 13 ~ - - ~ - ~ - ~ - - - ~ -
]4 23 24 31 7 ! 8 ~
32 41
10 11
I I i I I I I
42
12
33
13
34 ' 4 ~
14
IV
44
~ 6
Die Aufspaltung yon s(~, ~7) in Untervektoren analog zu (3) lautet
r-s~(~, @ -[ SII(~, 7) I
S(~, ~)----- SIII(~'~) [ (6)
s~v(~, ~) J mit
"~'(~"~) = / ~(~' '~) / (7)
L~(~, ,~) J usw. Mit (3) und (6) l~iBt sich der Ansatz fiir die Biegefl/iche (2) auch auf folgende Weise darstellen:
IV w('~ ~)(~, ~) ----- Z sT(~ :, ~) dim "), (8)
wobei .1(~ n) .~(m n) .(~ ,~)
d} m~) = d . . . . n =(lm,~+l , ~III = d i n + t , , , aiv =d, , ,+i ,~+1. (9)
Die durch (2) bzw. (8) bereichsweise gegebenen Ansatzfunktionen erfiillen die geometrischen Uber- gangsbedingungen (Stetigkeit von w, w', w', w'" an den Bereichsgrenzen) vollst/indig, w/ihrend die hieraus abgeleiteten Biegemomente und Querkr/ifte Diskontinuit/iten aufweisen. Diese Diskontinui- ta ten ]iel]en sich dutch eine entsprechend e Erweiterung des Ansatzes (2) bzw. (8) vermeiden.
3. Die potentielle Energie. Der Spaltenvektor der Kriimmungen (Verzerrungsmatrix) im Bereich (m n), ~r n), ist im Rahmen der Kirchhoffschen Theorie mit den u gem/U] der kinematischen Gleichungen
ii ~11 w'(~, ~])!(m,~)l ~,(m.)(~, ,7) = -b~ w G 7) (lO)
2 ~-g w"G 7)
verkniipft. Mit (2) bzw. (8) ergibt sich: IV
~r n)(~, 7) = S(~, ~) d(" 'q = Z Sx(~, 7) d(j" ,0. (11)
Die Matrix S der Ordnung 3 • 16 beinhaltet die 4 Untermatrizen der Ordnung 3 • 4 :
S = [S, SII Sm Siv],
s~(~, ~l) =
die gegeben sind durch (12)
(z = ~, H, m , Iu (13)

39. Band 1970 I-I. Buffer und E. Stein: Zur Plattenberechnumg mittels finiter Elemente 251
Das Elastizitatsgesetz der anisotropen Plat te lautet fiir den Bereieh (m n) mit der Elastizit~itsmatrix E(~ n) ___ E(~,0 T
m(~") (~, ~) = E("") ~(~")(~, ~). 04)
Die Schni t tmomente m~, my, m~y sind hierbei im Spaltenvektor
F ~ m(--)(~, ~) = [ - , (~ , ~) [ (15)
zusammengefaBt, ihre Vorzeichen ergeben sich gemaB Abb. 2.
Abb. 2. Sehnittkr/ifte am infinitesimalen Plattenelement.
I m Fall der Isotropie gilt
E ( '~ ' q - - 1 2 ( 1 - - v 2) v 1 0 (16) 1 - - v
0 0 - ~ -
(E Elastizit~itsmodul, v Querdehnzahl, h Plat tendicke ; E, ~ und h diirfen auch yon ~ und ~7 abhangen). Die Form~inderungsenergie des Bereiehes (m n) errechnet sich zu
Einsetzen yon (11) liefert 1 1 Iv IV
2=I ,u=[
mit der modifizierten Element-Steif igkei tsmatr ix der Ol'dnung 16 X 16 4
K( ~,0 = a b f f ST(S, V) E(" ") S($, ~) d$ d~ = K( ~'0 T (19)
bzw. den 4 X 4 Matrizen
E ~ '~) = a b f f S[(~, ~) E("'O S,,($, )7) d~ dr] = I~}~,0. (20)
Die/~(~ ~) sind dabei Untermatr izen der Matrix K( re'O:
[ / ~ I I KII I I~I III /~IIg -] (,n ,r)
K(m n) = / K I I I KII ii /~ii iii /~ii iv / "
/ / { I I I I KIII II /~III IIi /~iii iv / L1~IV I /{iv ii /IrIV Iii /{iv iv _1
(21)
Das inhere Potential der gesamten deformierten Plat te betr/igt:
zrl = 22 ~m ~). (22) (~ ~)
Die Knoten-Verschiebungsmatr ix dmn erscheint in der Form~inderungsenergie derjenigen Be- reiche, denen der Knoten m n angeh6rt, also bei einem Innenknoten in vier, bei einem Randknoten
Vgl. Gleichung (43).
252 H. Buffer und E. Stein: Zur Plattenberechnung mittels finiter Elemente Ingenieur-Archiv
in zwei und bei einer einspringenden Ecke in drei Bereichen, bei einer ausspringenden Ecke dagegen nur in einem Bereich.
Als ~iuf3ere Kr~ifte kommen die Fl/ichenlasten p(m n)(~, ~) in den einzelnen Bereiehen und die Linienkr/ifte l~ings des Plat tenrandes (Linienlasten q(m,,) und Linienmomente ~(" ~) bzw. ~(y"* ~)) sowie
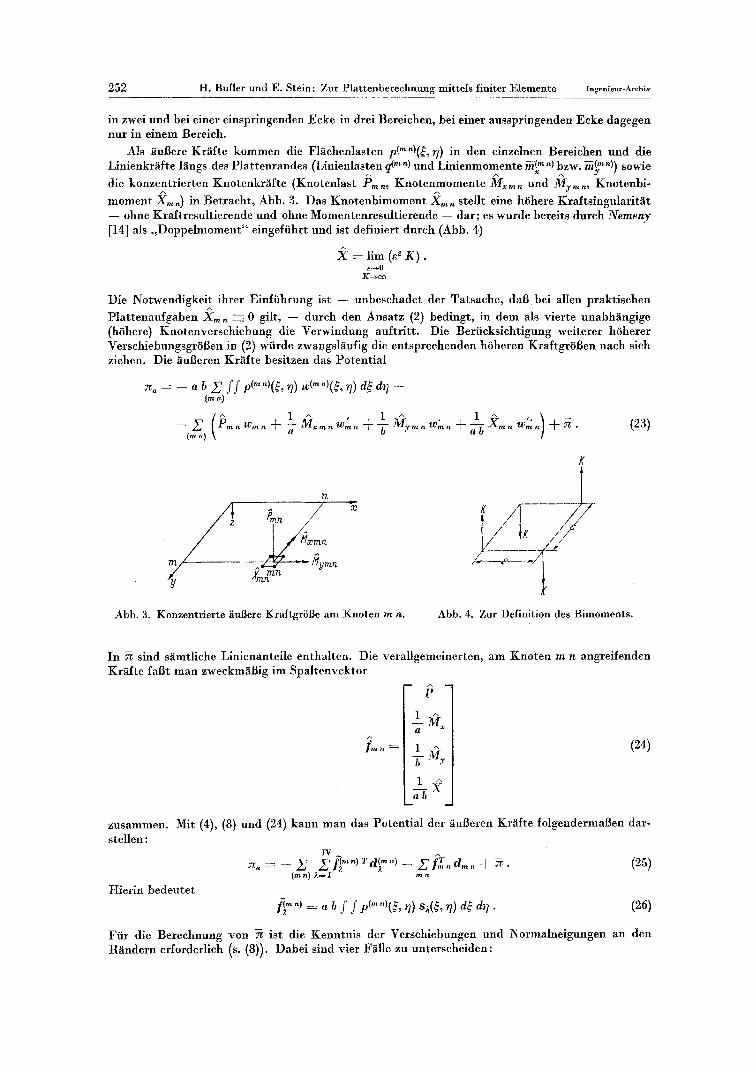
die konzentrierten Knotenkr/ifte (Knotenlast /3m,, Knotenmomente M x m n und My m n , Knotenbi- moment X~ =) in Betracht, Abb. 3. Das Knotenbimoment XT,, n stellt eine hfihere Kraftsingularit/ i t - - ohne Kraftresultierende und ohne Momentenresultierende - - dar; es wurde bereits durch Nemeny [14] als , ,Doppelmoment" eingefiihrt und ist definiert dutch (Abb. 4)
X7 = lim (~ K ) . ~-+0
K - ~ o o
Die Notwendigkeit ihrer Einfiihrung ist - - unbeschadet der Tatsache, d a b bei alien praktisehen Plat tenaufgaben X~n, ~ 0 gilt, - - dutch den Ansatz (2) bedingt, in dem als vierte unabh/ingige (hShere) Knotenverschiebung die Verwindung auftrit t . Die Beriicksichtigung weiterer h6herer Verschiebungsgrfil]en in (2) wiirde zwangsl~iufig die entsprechenden h~heren KraftgrSl3en nach sich ziehen. Die/iuf3eren Kraf te besitzen das Potential
~ = -- a b X f f p(m,,)(8, W) W(m-)(e, W) de d~ - -
( 1 - X ~ ' ~ , ~ + - g + y M y , . ~ w ; ~ , , + ~
(m '0 (23)
K
K
Abb. 3. Konzentrierte/iullere Kraftgr613e am Knoten m n. Abb. 4. Zur Definition des Bimoments.
In ~ sind s/imtliche Linienanteile enthalten. Die verallgemeinerten, am Knoten m n angreifenden Kr/ifte fal3t man zweckmaBig im Spal tenvektor
A ~Mx
1 s
Mit (4), (8) und (24) kann man das Potential der aul3eren Kr~fte folgendermaBen dar- zusammen. stellen:
Hierin bedeutet
I V
~~ = - S 2 ~ ? ~ m~ - s iZoa,oo + ~ . (25) (,,,,,) ,t= I ,,,,,
~,~ ,L) = a b f f p(m ,)(~, ~/) S~(e, ~) de dz I �9 (26)
Fiir die Bereehnung yon ~ ist die Kenntnis der Versehiebungen und Normalneigungen an den a a ~ a e r n erforderlich (s. (8)). Dabei sind vier Falle zu unterscheiden:
39, Band 1970 H. Buffer und E. Stein: Zur Plattenberechnung nfittels finiter Elemente 253
Rand 1 (links) eines Randelements (m n):
w( m ~)(0, *l) = hl(~) Wm,~ -ff h2(~) w;an q- ha(n) win+l,, q- ha(7) w~+~,., ~ (27a)
w'('~")( 0, V) = hz07) w~,,,~ + h2(v) w: , , + hz(,?) w~,,+l,. + h4(v) u,2+,,. ; J
Rand r (rechts) eines Randelements (m n):
w( m-)(1, ~) = hx(~) win,.+1 + hd~) Wm,,~+~ + G6~) W.,+I,.+~ + h,(7) Wm+,.,,+~, |~ (27b) w'("")O, ~) - h@) w;.,.+~ + h@) w;~,,,+~ + hd~) Wm+~,.+~ + h,(~) "G~,~ ; J
Rand o (oben) eines Rande]ements (m n):
w(mn)(~, 0) = h l (~) w . . . . Ju h2(~) Wren -~ h3(~ ) w . . . . +1 + h4(~) w;,~,,,+,, } (27c) w'(~")(~, 0) = ha(~) w;,,,, ~- hz(~) w2 . + h3(~ ) w;.,.+t -t- h4(~) w~,.+~ ;
Rand u (unten) elnes Randclements (mn):
w(mn)(~, 1) = h l (~) Wm+l, n ~- h2(~) "Wm+l, n ~- h3(~) Wm+l, n + l ~-- h4(~ ) win+l, n + l , } (27d) w'(mn)(~, 1) = h l (~) ~c;a+l ' n ~- h2(~) W;n+l, n -}- h3(~) tVm+I ,n+ l _L h4(~ ) W;n'q_l, n + l .
Der Anteil 7r~" ~) betrfigt :
~ , n n) = -- b ,~; ~(m ")(0, ~) wO n n)(O, ~) d 7 - - ~a f < ~ ,,(o, ,) w. (o...(o. ,) , , (28)
und wird mit (27a) unter Beachtung dcr Zuordnung (9):
~},,, ,0 = _ [/~m .) T[~.,t. ) T] tdmq ~ , . . (29)
In entsprechender Weise erhfilt man:
--(ran) ]-#(mn) T i.(mn ) T] ['I ..... l-I ] 7~r ---- - - LIII / IV [dm+l,n.i_lj. (30)
In (29) und (30) bedeuten:
1 - 'en ,,)
b f ;L(o, 7) hd~) @ 0
1
0 1
b f ~(o,,j) h@) @ o
1
f <(o, 7)h~(~) d,j 0
- - 1 - - ( m n )
0 1
f m*(1,7)ha(7)d7 0
b f q~(a, ~) h~(~) @ 0
1
f <0,7 h~(n)dv 0
i(., ,,)
(m ,,) IV
- - 1 - - ( m n ) "
0 I
f <(o,,~) h3(~) e7 0
1
b f ~.(0, V) h4(~) dv 0
1
f <(o, 7)h~(7)e~ 0
- 1 - - ( m ,,)
f qx( 1, 7 ) ha(*]) &] o
1
f <(1, 7)h~(~) d~ 0
1
f ox(1, 7) h~(n) d7 0
1
0
(31)
254 H. Buffer und E. Stein: Zur Plattenbereehnung mittels finiter Elemente Ingenieur-Arehiv
Weiterhin folgt fiir die Anteile ~(0 m ~) und ~(~"~"):
Ldm, n+lj '
~ u - - L ~ / I I I 9 I V J [dm+l,n+l '
wobei
0
I
f ~y(~, o) h~(~) d~ 0
1 a
0
1 a
~- f ~(~, o) h~(~) d~ 0
f q,(~, 1) h~(~) d~ 0
1
a f 1) h2(~) d~ 0
1
0 1
y ( . • .) = I I I
[m n)
g ( . , , , ) . = I I
g(m,O = IV
(32)
(33)
1 m
0
1
f ~,(~, o) ~,,~(~) d~ 0
1
0 1
a -~- f ~y(~, o) h~(~) d~
0
l
0
1 a
o 1
iI
o
I,~ ,9 ]
I (m n)
(34)
Bei Beachtung yon (9) erkennt man, daft der erste Term auf der rechten Gleichungsseite von (25) fiir eii1en Innenknoten vier, fiir einei1 Randknoten zwei und fiir eine einspringende Ecke drei Bei- triige, fiir eine ausspringende Ecke dagegen nur einen Beitrag liefert. ~ enthMt fiir jeden Rand- knoten zwei Anteile. Die potentielle Energie siimtlicher ~iufterer Kriifte liiftt sich folglich auch in der iibersichtlichen Form
/ / i n
(Ira,, =~ 0 fiir II1nenki1oten) angeben, wobei z. B. fiir einen Innenknoten m n
~ "~( . . . . . . 1) _ ~ _ ? ~ i - - 1 , n) I ~ (m--1 . . . . 1) ( 3 6 ) "3- I I V
und z. B. fiir eii11ei1 Eekki1oten m n links oben
/ - ,~ = [~,~ -) + 9~ ,~ ,0 (37)
und fiir eii1en oberen Randknoten m n
- r (" ',.) (38) [m ,t = ~r; .... I) 7 ~[I
gilt. Die Elemei1te der S ~altenvektoren
1 " a
T ]
m
~" m rt
(39) In,~ =
- p -
)-M- a x
I - - ; %
a b t o r t m m
(40)

39. Band 1970 H. Buffer und E. Stein: Zur Plattenberechnung mittels finiter Elemente 255
kann man als die den kontinuierlichen F1/ichen- bzw. Linienkr/iften energetisch ~quivalenten veraI1- gemeinerten ~uBeren Knotenkr~fte deuten. I m allgemeinen pflegt man die Flachenkr~fte nut dutch
die statisch /iquivalenten Knotenlasten / 3 zu ersetzen und unterdriickt damit die fibrigen Ele- mente des Spaltenvektors (39), die insbesondere bei einer groben Netzteilung yon spiirbarem EinfluB sein kSnnen. Entsprechendes gilt ffir den Spal tenvektor ~ , der yon den Linienkr~iften an den R/indern herriihrt und folglich nur an den Randknoten definiert ist.
Der N~hernngsausdruck fiir das Gesamtpotent ia l der Plat te entsprechend dem Ansatz (2) lautet nunmehr mit (22), (18) und (35)
= T Z - Z [ f + f + f ]~,~ d ..... (41) ( , . ,0 .....
(~"'~) _~ 0 fiir lnnenknoten).
4. Aufstellung der Knotengleichungen. Charakteristisch fiir die finite Elementmethode ist die Betrachtung eines isolierten Plattenelements. I m Mittelpunkt steht dabei der Begriff der Steifig- kei tsmatr ix 5, die den Zusammenhang zwischen den Eckverschiebungen und den sie verursachenden Eckkr/iften herstellt. Bei der Elementmethode im engeren Sinn arbeitet man mit den eigentlichen Verschiebungs- und KraftgrSBen und kann die Freiheitsgrade eines Elements nur dnrch Einffigen yon Zwischenknoten vermehren; bei der im folgenden diskntierten Elemennnethode im weiteren Sinn wird dagegen die ErhShung der Zahl der Freiheitsgrade durch Einffihrung zus~tzlicher (hSherer) Verschiebungs- und KraftgrSBen an den Element-Eckknoten erreicht.
Der Spal tenvektor [(m,,) der an den 4 Eckpunkten eines Elements wirkenden verallgemeinerten KraftgrSBen wird nach Castigliano formal entsprechend der Vorschrift
i.(,o,,) = ~}'~ 0d(~ ~) (42)
definiert. Er hat dieselbe Ordnung wie d(z' '), n/imlich 16, und errechnet sich mit (18) zu
[('-,0 = / / ( , - , , ) d(" "). (43)
Die in (19) eingefiihrte Matrix K ( " ' ) wird modifizierte Steifigkeitsmatrix genannt, weil sie im Gegen- satz zur Steifigkeitsmatrix der Elementmethode im engeren Sinn auch die hSheren Verschiebungs- und KraftgrSl]en beriicksichtigt.
Der Spal tenvektor [(~") kann analog zu (3) Elements (m n) zugeordnet sind, zerlegt werden:
[(,,~,,) = j im, (44)
L/,o~ ~,,,+~
in 4 Untervektoren, die den Eckpunkten des
- p
a
/(,,,,0 1 ~ = ~ M z
1 ~ x
(45)
~,(" ") ~Ar(" '0 Dabei ist Pk("~ '0 die Eckkraf t . . . . ~ k t und ~,y~l sind die Eckmomente , X(~ ") ist das Eckbimoment am Knoten k l des Elements (m n). I m einzelnen ergibt sich f/Jr die Eckkr/ifte an einem Innen- knoten m n beziiglich der daran angrenzenden vier Elemente
(,.-1 ,,-1) ~ (,=-1 n) 0 ( . . . . . . 1) 0~!.~,,) f(m- ~, ,~- 2) ~Jri ' ~:z i '
= ~d,,~ f(m~'yI''O= f( . . . . . . 1)__ ZZ f(~,,)__ (46) ~ m n ~ ~ d m ,~ " - , n n ~ d m ,~ ' . r n t t ~ d m n "
Die Bedingung ffir das Gleichgewicht dieser Element-Eckkr/ if te mit den /iuBeren Kraf ten an der- selben Stelle (/~,~ nach (24) und [m,~ nach (39)) laute~
A
f!,7: ~ .... ,) + l'~m-~,,O + f~ , , - 1 ) + f , . . , ) = i , +fro,,. (47)
5 Neben dem hier betrachteten Verschiebungsgr/~Benverfatlren mit den KnotenverschiebungsgriSBen als Unbekamlten gibt es das KraftgrSflenverfahren und gemischte Verfahren; letztere beruhen auf verallge- meinerten Variationsprinzipien [10], [12].

256 H. Buffer und E. Stein: Zur Plattenberechnung mittels finiter Elemente Ingenieur-Archiv
Wiihrend die ersten drei Gleichungen in (47) das Krafte- und Momentengleichgewicht zum Ausdruck bringen, bezieht sich die vierte Gleichung auf die Bilanz der Bimomente.
Gleichnng (47) ftihrt mi t (46) zu
(~r~ ~-~ . . . . ~) + ~z( m- ~' ") + ~z(~"* . . . . ~) + z~ '~ ~)) -- ( [ + ]) .... = 0 (48)
Zu beachten ist, dab das Gleichungssystem (48) nut fiir die Knoten mit unbekannten din, t anzu- schreiben ist. Dieses Ergebnis steht im Einklang mit jenem, das sich auf Grund des global auf die Gesamtplat te angewandten Prinzips vom Minimum des Gesamtpotentials mit den Knotenverschie- bungen als Ritz -Parametern ergibt, niimlich mit ~ r / ~ d . , . = 0 ~. Diese tSbereinstimmung ist eine Folge der dutch die Hinzunahme der hsheren Eckverschiebungsgrtil3en in (2) erreichten geometrischen Zul/~ssigkeit des Verschiebungsansatzes. Dami t ist nachgewiesen, dab die Befolgung des -- zumindest in der Elementmethode im urspriinglichen Sinn - - iiblichen Weges (Berechnung der Element- Steifigkeitsmatrizen und Formulierung der Knoten-Gleichgewichtsbedingungen) zum richtigen Ergebnis im Sinne des Prinzips vom Minimum des Gesamtpotentials fiihrt.
Da ein Randknoten nur zwei und eine einspringende Ecke nur drei Bereichen sowie eine aus- springende Ecke nur einem Bereich angehSrt, reduzieren sich die Energieanteile in (48) entsprechend.
Die yon den Randtermen ] z . herriihrenden Anteile sind j edoch zus/itzlich zu beriicksichtigen. l m einzelnen ergibt sich ffir die in der Gleichgewichtsbedingung (47) benf t ig ten Spaltenvektoren
der Element-Eckkr~ifte nach (46) bei Beachtung yon (3), (44) und (21):
m m-l 'n-1) K ( " - ~ ' " - l ) d =-~, . - t - IVlIt . . . . . i~- IV*V 0 ' " '1 n : I V I m--1 . . . . 1 - ~ I ~ r ~ I I l ' n - 1 } d , i ~ ( m - l , n - 1 ) d , /~ (m--1 . . . . 1 ) d "1
= i t ( . . . . I, n) j ]F2-(m-- 1, n) .1 12-(m -- 1, n) / [(,.-1,.) l(~"~'~-~'")d,. 1 n ~ - ' ' I l l I I " m - - l , n § ~1-attlIIIII . . . . - ~ " ~ I l I I V dm, n ~ [ , " - ' / (49)
[~,,, - - l) rz( . . . . 1)d , K ( . . . . . . 1).it K( ....... 1). 1 12( . . . . . . 1).it ~ - l t l I I re, n--1 T I I I I t~Vmn-4- I I I I I t e m + l , n - - 1 -1- l l l l I V t % n + l , n ; ]
[(,. ,,) ram-) .~ ..(~.) -- --(.~-) -- ~ . = . . ~ . . . . # . ~ . a . . . . +~ + ~ m a. ,§ + K ~ ') d , . + ~ , . + ~ . J
Aus den fiir alle maBgebenden Knoten angeschriebenen Gleichgewiehtsbedingungen (47) folgen s/imtliche (verallgemeinerten) Knotenverschiebungen. Die Schni t tmomente ergeben sich aus (14) mit (11). Die Querkrafte sind:
q ( ~ - , , ) ( ~ , ~ ) - ~ + ~y ,
Ffir die effektiven Querkr/ifte gilt: (,.,,)
*~(,.,t) ~_ q(mn) _[_ I ora;y ~ ~ - - @ '
q(m,)(~,~) __ ~m(~")~y + ~,n(~,")v~x . (50)
1 = q!'~") + ~Y (51)
An den Elementgrenzen liegen Diskontinuit~iten tier Biegemomente und Querkrafte vor; man bildet wie iiblich das algebraische Mittel an den Knoten.
5. Ermitflung der Randschnittgri~Ben. Die in (35) vorkommenden Krfifte f~,, sind stets einge-
priigt. Die Kriifte ~ . . und/~. , , sind nur bei einem freien Rand eingepr/igt und damit bekannt . Beim e i n g e s p a n n t e n Rand lassen sich die Randbedingungen auf Grund des Ansatzes (2)
exakt erfiillen. Die ~, , . sind bier Reaktionskr/ifte. Ublicherweise berechnet man die Randschnit t- grSl3en an den Randknoten gem/il3 (14) und (51) und mit tel t sie. Dieses Vorgehen ist insofern relativ ungenau, als das algebraische Mittel nur yon jeweils hSchstens zwei Werten gebildet wird, im Gegensatz zu den lnnenknoten, wo jeweils 4 Werte gemittelt werden. Daher wird hier ein anderer Weg vorgeschlagen: Aus den Knotengleichungen (Gleichgewichtsbedingungen) ftir die Randknoten
ermittel t nmn die Spaltenvektoren ] . , . und kann hieraus mit guter N/iherung auf den Verlauf der Reaktionskrafte =(~") bzw. q(y"*") und - ( " 0 ~ " ") ~/~ - m~ bzw. schlieBenL
Man setzt fiir den Verlauf der Randschnittgr~Ben zweckm/il3ig die gleichen Hermite-Polynome h~ nach (1) an wie fiir die Verschiebungen: Fiir einen zwischen den Randknoten m n und m, n + l liegenden Abschnit t erh/dt man dann z. B.
qy [m "3(~) = q(Y~")(~' 0) = q~ ~ . h~(~) + ~)m. hd~ ) + ~y ~, .+1 h~(~) + ~" . . . . +1 h~(~), (52)
~ y [,--](~) = ~ T ' 0 ( ~ ' 0) ---- ~ y ~ ~ hl(~ ) + ~) ,~ , h2(~ ) + ~ y ~, .+1 hz(~) -~ my . . . . +~ h4(~) . (53)
- ~ Bei der globalen Betrachtungsweise treten die hSheren KraftgrSl~en nieht explizit in Erseheinung. ])as elementweise Vorgehen hat indessen den u grSBerer Anschauliehkeit nnd giinstigerer Programmierbarkeit.
7 Auf analoge Weise lassen sieh aueh die inneren SchnittgrSBen 1/ings der dutch Innenknoten fiihrenden Linien x = konst und y ~ konst berechnen.

39. Band 1970 H. Buffer und E. Stein: Zur Plattenbereehnung mittels finiter Elemente 257
Durch diese Darstellung erreicht man einen stetigen Verlauf der RandschnittgrSgen, wobei die Stiitzwerte ~y m. und ~zm- die Randschnittgr6Ben im Knoten m n und die Werte ~y ~ . und N~ ~ ,~ die Ableitungen in Richtung des Randes sin& Diese unbekannten Stiitzwerte errechnen sich auf Grund der fiir alle Randknoten angeschriebenen Knotengleichungen (Gleichgewichtsbedingungen). Hierzu ist die Auswertung der Integrale (31) und (34) erforderlich. Ira einzelnen ergibt sich:
[~") = F 1 q . . . . + F 2 q ~ , . + ~ , ,~ + F a m . . . . . + Fam.,~+1 . . . . ] /
1~=) = F5 qx~,~ + FG q.,~+l,,~ + F T m . ~ . + Fs m ~=+l , . , / i
= F~ q . . . . . +1 + ~ q~,~+~.,~+~ + F~ m~,,,,,~+~ + ~m~.~+~,,~+i, I II i
[('~ q ....... +1 q.,,~+~,,~+, F~ ..... ~1 Fs ~_~_~,.+~ I + F + +
(54)
9~7 ") = G5 qy,,,. +
g("") = G1 qy~+1,~ IH
g(.~n) = G5 qym+l,,~ IV I-Iierin bedeuten
G6 qy . . . . . +1 Jr- G7 ~J% ...... ~- Gs ~}~y . . . . . + 1 , /
f @ G~. qym+t, ,~+1 + Ga mz,.+l, ,~ + G4 m z m+1,,~+1,
q- G~ qy,,,+1,n+l -k GT my ,.-,,-1, ,~ -k Gsmzm+l , .+ l .
(55)
l; ] q ~ ~ ~ = Lb a~ =,d' m ~ ~ , , = , ( 5 6 ) Ns
Ferner ist
qz ,~ . = qr ., ~J ' m.y ~ ,~ = . (57)
I: 11 o-1 - o-1 L~: ?J [": %~' H2~_I LH~ LH~I H~2J
[!. F ~ = , F 6 = , F 7 = 1 ~ , F s = a ,
H041 H04~ J lt~ 48 HI4J LH41 H42_] LH4a H44J
LH~I H~_I LH~ H~A
Gs= H~I ~ g~3 H44| 0 ' G6= 0 ~ J ' GT= H31 H32' G s = Haa Ha4 "
0 0 LH41 H42_] LH~3 H . A
(59)
Itierin sind die H U die Integrale i
H , j = Uj~ = f h,(~) h~(~) d$ , 0
18
(60)

258 H. Buffer und E Stein: Zur Plattenberechnung mittels finiter Elemente Ingenleur-Archiv
die in folgender Tabelle zusammengestellt sind:
Hij. 420 1 4
156 22 54
--13
2 3
2] 54 13
1~ 156 -- --22
--13 -- 3 --22
4
Fiir einen oberen Randknoten m n lauten die Gleichgewichtsbedingungen entsprechend zu (47)
[(~n~rt--l) Jf_ [(mmn n) = [rn,t -~ [mn, -~- [,nt,,~ ( 6 1 )
Bei kontinuierlieher Einspanmmg gilt { ~ 0; ferner ist [ auf Grund yon (26) und (39) bekannt. ~qaeh der LSsung der Hauptaufgabe (Ermitt lung aller Knotenverschiebungen aus den Gleieh- gewlchtsbedingungen ffir s~imtliche Innenknoten) erh~ilt man iiber die Elementsteifigkeitsmatrizen nach (43) die Elementeekkr/ifte [ ! ~ n-,) und [(~").
Aus (61) ist dann jf~. zu bereehnen. Andererseits 1/iBt s i c h / ~ , dureh die unbekannten Stiitz- grSBen der Auflagerreaktionen nach (38) und (55) ausdriieken:
[ z . = y~'~"' "-~) + 9 ~ '") = G5 qy . . . . ~ + (G~ + G6) qy, . , , + G~ qy ..... +~ +
~- G T ~ t y . . . . 1 + (G3 + Gs)~tymn + G a m y . . . . +1. (62)
Mit (59) bemerkt man~ dab sich zwei entkoppelte Gleichungspaare fiir die qy,~,~ und ~rt) ..... ergeben.
6. Darstellung mit Hilfe yon Inzidenzmatrizen. Fiir die praktische Berechnung ist die Einffihrung yon Inzidenzmatrizen s zur Strukturbeschreibung der Systeme vorteilhaft. Dabei nimmt man eine getrennte Numerierung yon Knoten und Elementen vor, Abb. 5.
Die Gesamtheit aller unbekannten Knotenverschiebungen 3 faBt man im Spaltenvektor d zusammen
8 8 d = [ d ] 2 �9 (63) (5; f~)
I~) lo 11 _ _ _ 12
(8) Ig) Der Spaltenvektor d(k) (entspreehend (3)) aller im Element (k) 13 (7) 7q i15 18 vorkommenden Eckverschiebungen ergibt sich mit der Inzi- 77 17o) 17# ( 7 2 ) denzmatrix j(k) d er Ordnung 16 • 4 m (m Knotenzahl) zu:
18 i lg z0 d(k) = j(k) d (64) r
Das Potential der inneren Kr/ifte aller Elemente lautet dann Abb. 5. Bezeichnung der Knoten und mit (22) und (18) Felder bei Darstellung mit Hilfe yon
1 d T K d " (65) Inzidenzmatrizen. ~ : 2 - 1 d T ( ~_~ j(~) T K(k) j (k) d : \(k)
In (65) ist K : I~ T die Gesamtsteifigkeitsmatrix:
K = ,_V j(k) T K(k) j (k) . (66) (~)
Fiir das Potential der fiuBeren Krfifte folgt gem/iB (25) sowie (29), (30) und (32), (33) mit Beriick- sichtigung yon (64):
7g~ = -- ([ ~- [ - ~ / ) T d . (67) Hierin bedeuten
sowie (vgl. (26))
(68)
(69)
~k) = a b f f p(k)($, n) s($, ~7) d~ d H . (70) s Boolesche Matrizen.
39. Band 1970 H. Buffer und E. Stein: Zur Plattenberechnung mittels finiter Elemente 259
Der yon den Randlinienlasten herriihrende Anteil j~ wird wie folgt erfaSt. Man definiert einen Spaltenvektor aller Randkrafte [R
f f = ~ i ~) ~ -H"(1) ~ g~) ~ ~1~ "(~) ~ . . . ,~(I>H~ ~i~ 1) ~J (71)
sowie den Spaltenvektor der doppelt vorkommenden Verschiebungsgr6Ben aller Randknoten da
[dl d~ d2 . . . e/T]. (72)
Diese Randverschiebungsmatrix errechnet sich fiber eine neue Inzidenzmatrix dR aus d gem/iB
dR = JR d . (73)
Damit ergibt sich fiir das Potential der Randkr/ifte
wobei IT __ [ ~ j ~ . (75)
Die Knotengleichgewichtsbedingungen folgen symbolisch aus
~(~ + ~~ - - 0 ~ a
und ]iefern mit (65) nnd (67) das ]ineare inhomogene Gleichnngssystem
K d -- (f @/" @I) -- 0 (76)
fiir s/imtliehe unbekannten Knotenversehiebungen. Das entsprechende homogene Gleichungssystem ffir die Platteneigenschwingungen erh/ilt man
aus (76), indem man anstelle der eingepr/igten Krfifte die d L 4 1 e m b e r t s c h e n Tragheitskrafte
= -- 2~/d = o0~3~d, [ = o0 ~ ~ / d ~ f = c02h-~d (77)
einfiihrt. Hierin bedeuten ]l/I, M und ,~/die entspreehenden Massonmatrizen fiir punkt-, flfichen- und linienf6rmige Yerteilnng der Massen bzw. Massentrfigheltsmomente sowie co die Eigenkreis- frequenz. Es folgt
[K - - co 2 ( M -t- 2Q + _M)] d ----- 0 . (78)
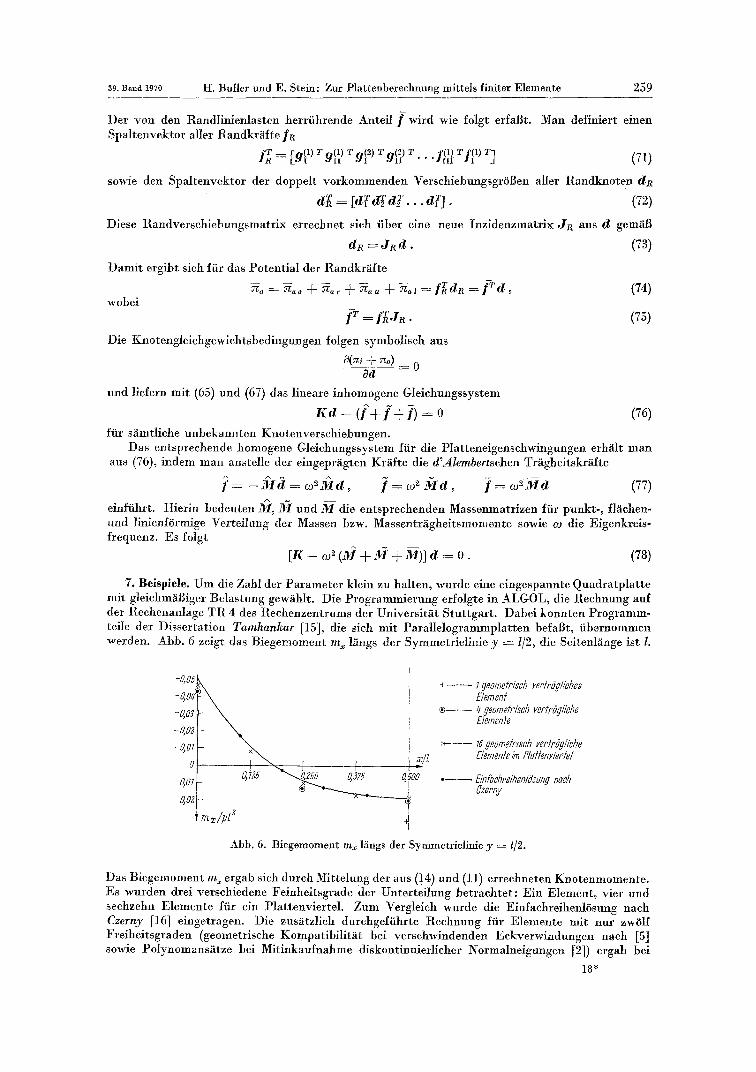
7. Beispiele. Um die Zahl der Parameter klein zu halten, wurde eine eingespannte Quadratplatte nlit gleichm~il3iger Belastung gew~hlt. Die Programmierung erfolgte in ALGOL~ die Rechnung auf der Rechenanlage TR 4 des Rechenzentrums der Universit~t Stuttgart. Dabei konnten Programm- teile der Dissertation T a m h a n k a r [15], die sich mit Parallelogrammplatten befaBt, iibernommen werden. Abb. 6 zeigt das Biegemoment m slangs der Symmetrietinie y = 1/2, die Seitenlange ist L
-o,o~\
-o,o'k ol [ \ i -+ ~-/~
+ . . . . 7 geomelriseh verlr@hches Elemenl
~ - - - . - - ~ geomelrisch verlr~gh'che Elemenle
• 75 geome/risch verlr@h'ehe E/emenle im Plallenw~rlel
�9 ~ E/ns nach Czernj
Abb. 6. Biegemoment mx 1/ings der Symmetrielinie y = 1/2.
Das Biegenmment m~ ergab sich dureh Mittehmg der aus (!4) und (11) errechneten Knotenmomente. Es wurden drei verschiedene Feinheitsgrade der Unterteilung betrachtet: Ein EIenlent, vier und secbzehn Elemente ffir ein Plattenviertel. Zum Vergleich wurde die Einfachreihenl6sung nach C z e r n y [16] eingetragen. Die zus/itzlich durchgefiihrte Rechnung fiir Elemente mit nur zwalf Freiheitsgraden (geometrische Kompatibilitat bei verschwindenden Eckverwindungen nach [5] sowie Polynomans~itze bei Mitinkaufnahme diskontinuierlicher Normalneigungen [2]) ergab bei
18"
260 H. Buffer uud E Stein: Zur Plattenberechnung mittels fiuiter Elemente lngenleur-Archlv
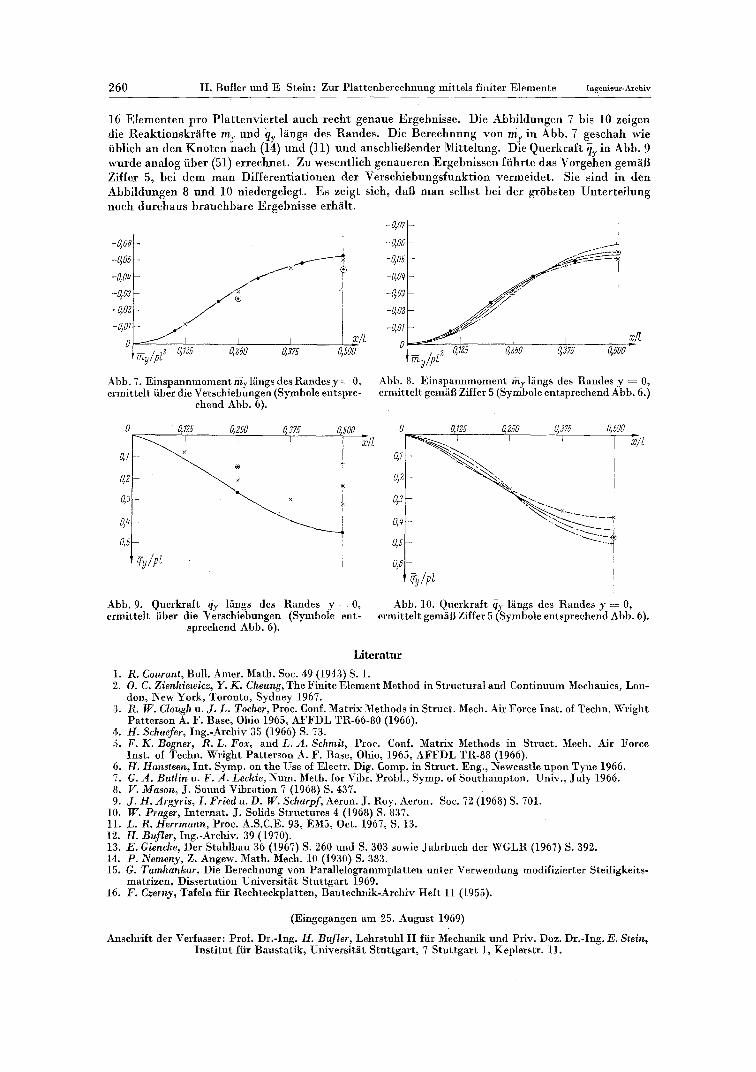
16 Elementen pro Pla t tenvier te l auch recht genaue Ergebnisse. Die Abbi ldungen 7 bis 10 zeigen die Reaktionskr/ if te ~y und ~ langs des Randes. Die Berechnuug yon ~y in Abb. 7 geschah wie fiblich an den Knoten nach (J~4) und (11) und anschlieBender Mittelung. Die Querkraft ~y in Abb. 9 wurde analog fiber (51) errechnet. Zu wesentlich genaueren Ergebnissen ftihrte das Vorgehen gem/iB Ziffer 5, bei dem man Differentiat ionen der Verschiebungsfunktion vermeidet . Sie sind in den Abbi ldungen 8 und 10 niedergelegt. Es zeigt sich, dab man selbst bei der grfibsten Untertei lung noch durchaus brauchbare Ergebnisse erhalt .
-go8 -o,05
-a,o+
-o, o3
-o, o2
-a, ol
v i ~I/S 0,7:5
l
4g~ 4s~ 4soo
- a, o z - I
-o,00 - { -o,05 - "~-'-:4f+
-a, oo - f -o, aa
-o, oa j/ -0,010 ~ s ' . " I z/Z
~y/pga a, v5 gem 0,37~ 0,500
Abb. 8. Einspannmoment s 1/ings des Randes y = 0, ermittelt gem/iB Ziffer 5 (Symbole entsprechend Abb. 6.)
Abb. 7. Einspannmoment my 1/ings des Randes y = 0, ermittelt tiber die Verschiebungen (Symbole entspre-
chend Abb. 6).
41
o,z
o,3
o,+ o,5
g125 0,250 O,,?Y5 a,500 O - '< . . . ' ' (
I o,~
t o,3 E go
y/pz r o,5
0,TZ~ g2~O 0,37~ 0,50O ~ . i h I
/pz
Abb. 9. Querkraft ~/y l/lugs des Randes y = 0, ermittelt tiber die Verschiebungen (Symbole eut-
sprechend Abb. 6).
Abb. 10. Querkraft qy l/lugs des Randes y = 0, ermittelt gem/il~ Ziffer 5 (Symbole entsprechend Abb. 6).
L i t e r a t u r
1. R. Courant, Bull. Amer. Math. Soc. 49 (1943) S. 1. 2. 0. C. Zienkiewicz, Y. K. Cheung, The Finite Element Method in Structural and Continuum Mechanics, Lon-
don, New York, Toronto, Sydney 1967. 3. R. W. Clough u. J. L. Tocher, Proc. Conf. Matrix Methods in Struct. Mech. Air Force Inst. of Techn. Wright
Patterson A. F. Base, Ohio 1965, AFFDL TR-66-80 (1966). 4. H. Schaefer, Ing.-Archiv 35 (1966) S. 73. 5. F. K. Bogner, R. L. Fox, and L. A. Schmit, Proc. Conf. Matrix Methods in Struct. Mech. Air Force
Inst. of Techn. Wright Patterson A. F. Base, Ohio, 1965, AFFDL TR-88 (1966). 6. H. Hansteen, Int. Syrup. on the Use of Eleetr. Dig. Comp. in Struet. Eng., Newcastle upon Tyne 1966. 7. G.A. Butlin u. F. A. Lechie, ~Num. Meth. for Vibr. Probl., Syrup. of Southampton. Univ., July 1966. 8. V. Mason, J. Sound Vibration 7 (1968) S. 437. 9. J. H. Argyris, I. Fried u. D. W. Scharpf, Aeron. J. Roy. Aeron. Soc. 72 (i968) S. 701.
10. IV. Prager, Internat. J. Solids Structures 4 (1968) S. 837. 11. L. R. Herrmann, Proc. A.S.C.E. 93, EM5, Oct. 1967, S. 13. 12. H. Buffer, Ing.-Arehiv. 39 (1970). 13. E. Giencke, Der Stahlbau 36 (1967) S. 260 und S. 303 sowie Jahrbueh der WGLR (1967) S. 392. 14. P. Nemeny, Z. Angew. Math. Mech. 10 (1930) S. 383. 15. G. Tamhankar, Die Berechnung yon Parallelogrammplatten unter Verwendung modifizierter Steifigkeits-
matrizen, Dissertation Universit~it Stuttgart 1969. 16. F. Czerny, Tafeln ftir Reehteckplatten, Bautechnik-Arehiv Heft 11 (1955).
(Eingegangen am 25. August 1969)
Anschrift der Verfasser: Prof. Dr.-Ing. H. Buffer, Lehrstuhl I I fiir Mechanik und Priv. Doz. Dr.-Ing. E. Stein, Institut ftir Baustatik, Universit/it Stuttgart, 7 Stuttgart 1, Keplerstr. 11.





























