
November 2007 Informationstag an der TU Wien 1
Überblick zu Überblick zu DymolaDymola und und ModelicaModelica
November 2007 Informationstag an der TU Wien 2
InhaltInhalt
• Dymola• Modelica• Modellieren mit Dymola• Modellbibliotheken• Simulieren mit Dymola• Dymola-Simulink-Interface• Neuigkeiten in Dymola und Modelica• Ergänzungen zu Dymola• Kommerzielle Bibliotheken
November 2007 Informationstag an der TU Wien 3
BAUSCHBAUSCH--GALL GmbHGALL GmbH
• Hans Gall und Dr. Ingrid Bausch-Gall seit 1981 selbständig
• Seit 1987 GmbH• Vertrieb von Simulationssoftware• Beratung im Simulationsumfeld• Projektarbeit• Schulungen
– Dymola, Spice, Simulink, Matlab

November 2007 Informationstag an der TU Wien 4
Dymola Dymola
• Dymola ist eine Software zur Modellierung und Simulation aus verschiedenen Ingenieurdisziplinen
• entwickelt von Dynasim AB in Schweden
• Vertrieb im deutschsprachigen Raum:Bausch-Gall GmbH
• Dymola versteht den offenen Sprachstandard Modelica

November 2007 Informationstag an der TU Wien 5
Die Firma Die Firma DynasimDynasim
• Entwickler von Dymola• gegründet 1992 von Dr. Hilding Elmqvist• Seit Juni 2006: Eigentümer Dassault Systèmes• Zusammenarbeit mit Wissenschaftlern • Einige Kunden
– weltweit, z.B.: Toyota, Volvo, Ford, GM, GDF– Deutschland, z.B.: ABB, Airbus, Audi, BASF, Behr, BMW,
Robert Bosch GmbH, Daimler, Hella, LfK, Siemens, ZF,Volkswagen, Universitäten und Forschungsinstitute
– Österreich, z.B.: AVL, Elin, MAGNA STEYR, Arsenal Research, TU Wien

November 2007 Informationstag an der TU Wien 6
Ziel von Ziel von Modelica Modelica und und DymolaDymola
Modellierung und Simulation physikalischer Systemedie aus Komponenten unterschiedlicher Fachgebiete bestehen. Z.B. ein detailliertes Fahrzeugmodell:• Fahrzeugdynamik – 3-D Mechanik• Antriebsstrang – 1-D Mechanik• Hydraulik• Verbrennung• Klimaanlage• Elektrische/elektronische Systeme, Steuergeräte, Busse
November 2007 Informationstag an der TU Wien 7
Modelica Modelica -- SprachstandardSprachstandard
• neue Methode– objektorientiertes Modellieren
– gleichungsorientiertes Modellieren
• austauschbare, standardisierte formale Sprache– zum Modellaustausch– Wiederverwendung von Modellierungswissen
• Modelica: Sprachdefinition, aktuell Version 3.0www.modelica.org
• Dymola: Software zur Modellierung und Simulation mitModelica
www.dynasim.com

November 2007 Informationstag an der TU Wien 8
ModelicaModelica Design GroupDesign Group
• Zusammenschluß von Simulationsexperten seit 1997• Ehrenamtlich, mehrere Treffen jährlich• Erstellung und Veröffentlichung der
Sprachdefinition• Pflege der Homepage: www.modelica.org• Homepage enthält
– viele Veröffentlichungen– freie Libraries
• Letzte Tagung: September 2006 in Wien• Nächste Tagung: 3.-4. März 2008 in Bielefeld

November 2007 Informationstag an der TU Wien 9
Ziele der Ziele der ModelicaModelica AssociationAssociation
• offene Sprachdefinition• objektorientierte Sprachen vereinheitlichen• Wiederverwendbarkeit der Modelle fördern• deklarative, d.h. mathematische Gleichungen statt
prozedurale Zuweisungen • Sprache soll effiziente Simulation unterstützen• zur Zeit Version 3.0 (in Dymola noch 2.2.1)• freie Bibliotheken auf der Modelica-Homepage
November 2007 Informationstag an der TU Wien 10
DymolaDymola--EntwicklungszieleEntwicklungsziele
• Software zur Modellierung komplexer Systeme • versteht Modelica fast vollständig• Modelle verschiedener Ingenieurdisziplinen• Verfügbarkeit der Modelle als Quellkode• homogenes Simulationsmodell• effiziente Simulation• Verkürzung der Entwicklungszeit• Schnittstellen zu Standardsoftware
November 2007 Informationstag an der TU Wien 11
AnwendungsbeispieleAnwendungsbeispiele
November 2007 Informationstag an der TU Wien 12
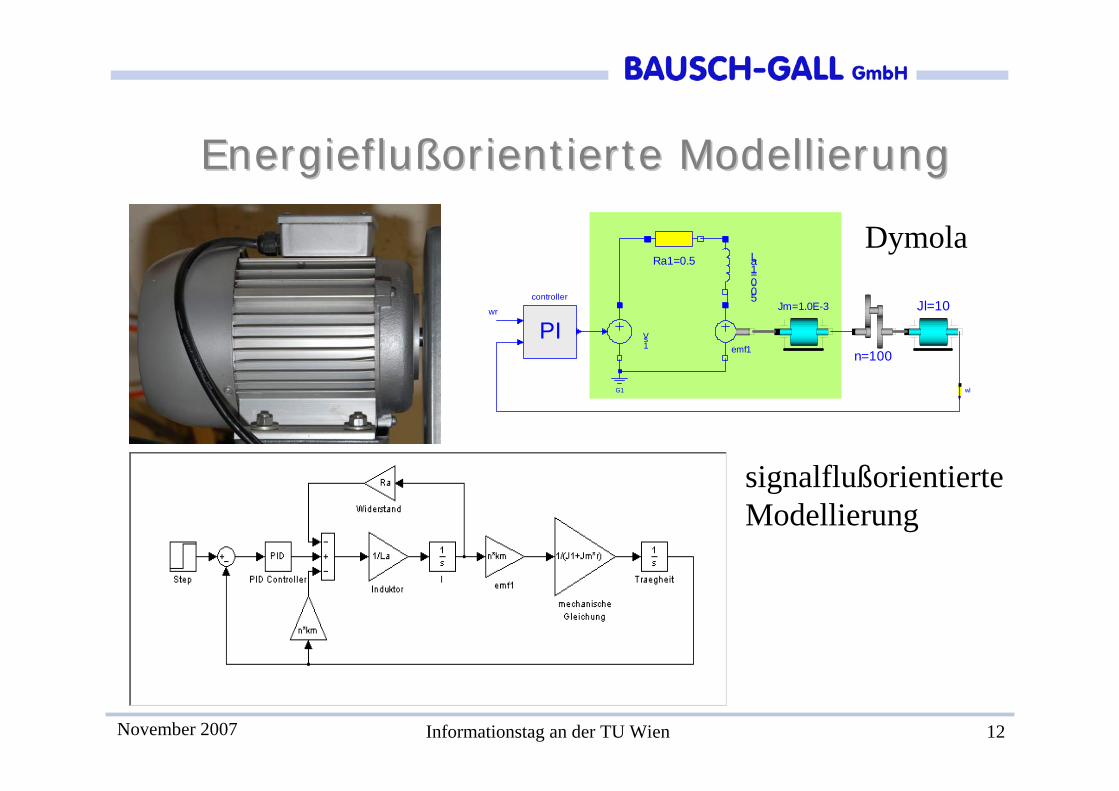
EnergieflußorientierteEnergieflußorientierte ModellierungModellierung
n=100
Jl=10
wl
controller
PI Vs1 emf1
La1=0.05
Ra1=0.5
G1
Jm=1.0E-3wr
signalflußorientierteModellierung
Dymola
November 2007 Informationstag an der TU Wien 13
Modellierung mit Modellierung mit DymolaDymola
Modellierung in Modelica bedeutet:• Gleichungen als Modellbasis• übliche Datenstrukturen und Programmierkonzepte• Felder und Matrizen, Operatoren• objektorientierte Struktur der Modelle
Klassen, Konnektoren, Blöcke• Einheiten (units), ab Dymola 7 auch Einheitenprüfung• Funktionen und Algorithmen• symbolische Manipulation der Gleichungen• Modellbibliotheken

November 2007 Informationstag an der TU Wien 14
DymolaDymola--ModellierungsfensterModellierungsfensterModellierungsfenster
Icon Layer: Definition der Graphik
Diagram Layer: Zusammenstellendes Modells
Documentation LayerHTML-Dokumentation einfügen
Equation Layer:Gleichungen als Modelica-Kode
Model Library Browser
Model Browser

November 2007 Informationstag an der TU Wien 15
ModelicaModelica--BibliothekenBibliotheken• hierarchisch
• Komponenten lassen sich sinnvoll anordnen
• grosse Komponentenvielfalt
• offene Modelica-Bibliotheken enthalten z.B.:
- einfache Regelungstechnik (Blöcke)
- 1D-Mechanik (rotatorisch, translatorisch)
- Mehrkörpersysteme
- analoge und digitale Elektrik
- elektrische Maschinen
- einfache Pneumatik und Hydraulik
- Zustandsautomaten (State Graph)
November 2007 Informationstag an der TU Wien 16
ModelicaModelica--BibliothekenBibliotheken
• kommerzielle Bibliotheken für– Antriebsstränge (PowerTrain, DLR) – SmartElectricDrives (arsenal research)
• von der Firma Modelon (www.modelon.se)– Pneumatik– Hydraulik– Klimaanlagen (AirConditioning)– Fahrdynamik (VehicleDynamics)
• weitere Bibliotheken sind in der Entwicklung• viele freie Bibliotheken
www.modelica.org
November 2007 Informationstag an der TU Wien 17
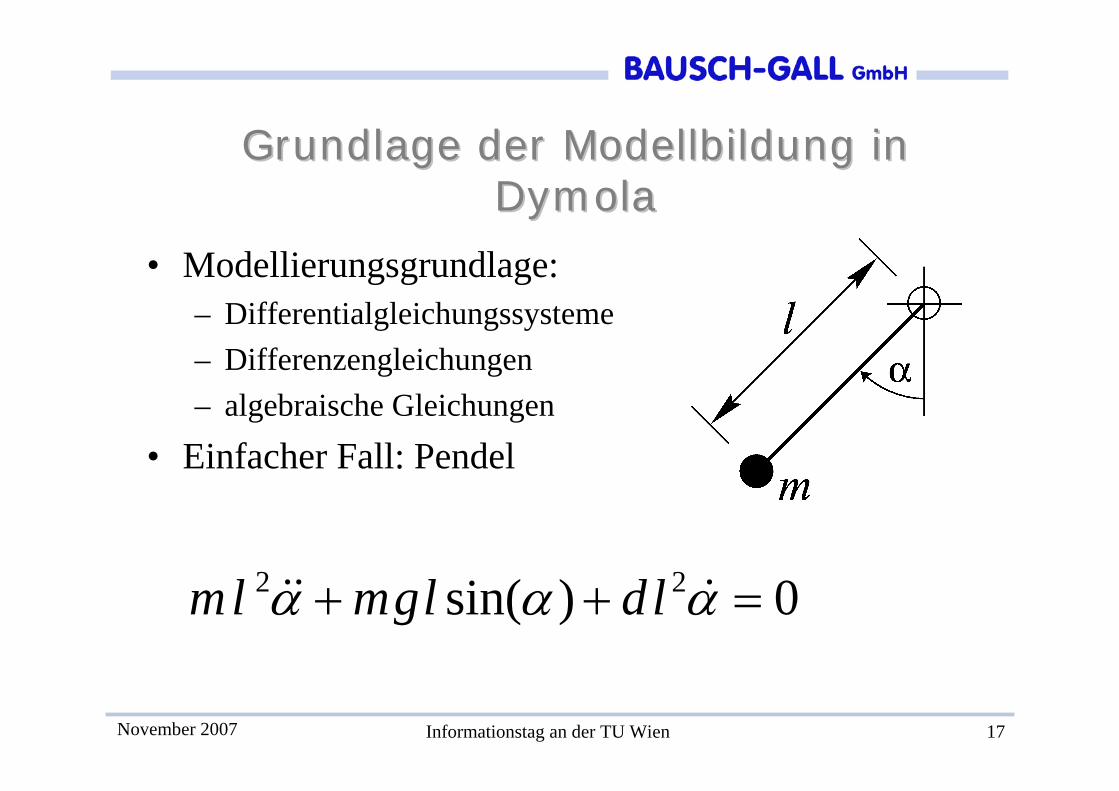
Grundlage der Modellbildung in Grundlage der Modellbildung in DymolaDymola
• Modellierungsgrundlage: – Differentialgleichungssysteme– Differenzengleichungen– algebraische Gleichungen
• Einfacher Fall: Pendel
0)sin( 22 =++ ααα &&& ldlgmlm
November 2007 Informationstag an der TU Wien 18
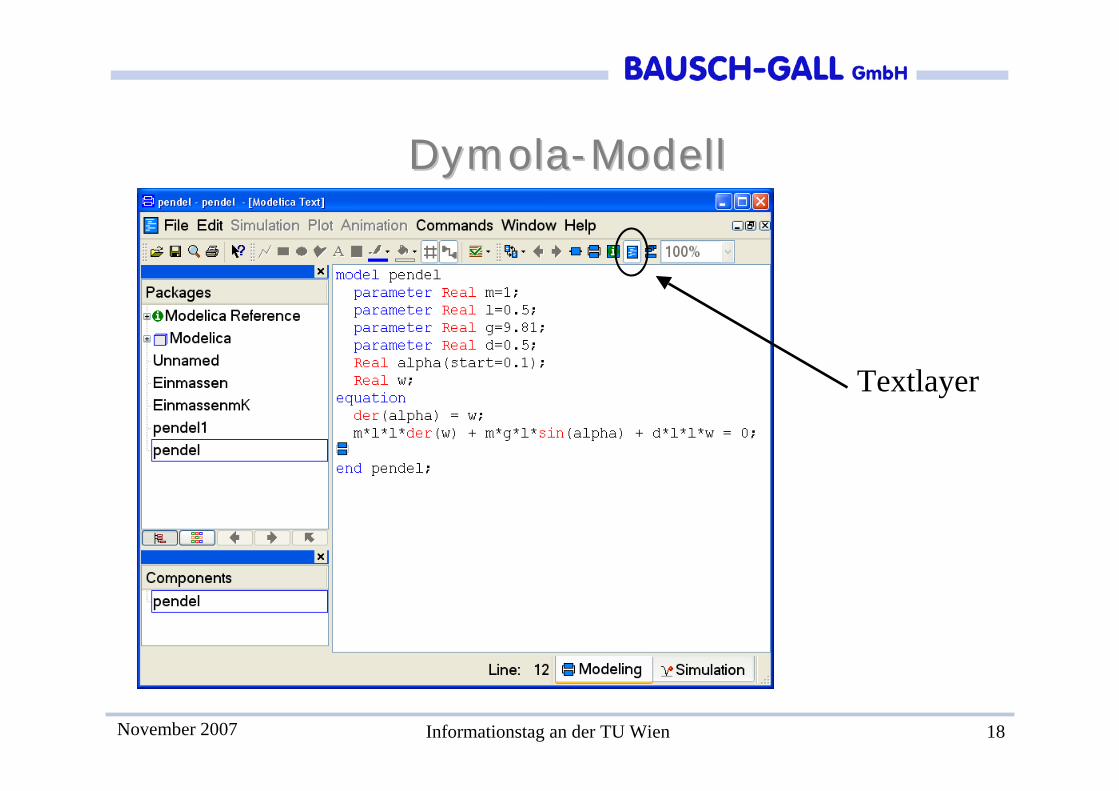
DymolaDymola--ModellModell
Textlayer
November 2007 Informationstag an der TU Wien 19
Modellierung Modellierung --ZusammenfassungZusammenfassung
• als sog. Objektdiagramme • physikalische Konnektoren• sinnvolle Graphik• HTML-Dokumentation• Beispiele:
– allgemeines Objektdiagramm– Objekt: Rotational Spring aus der Modelica Library
November 2007 Informationstag an der TU Wien 20
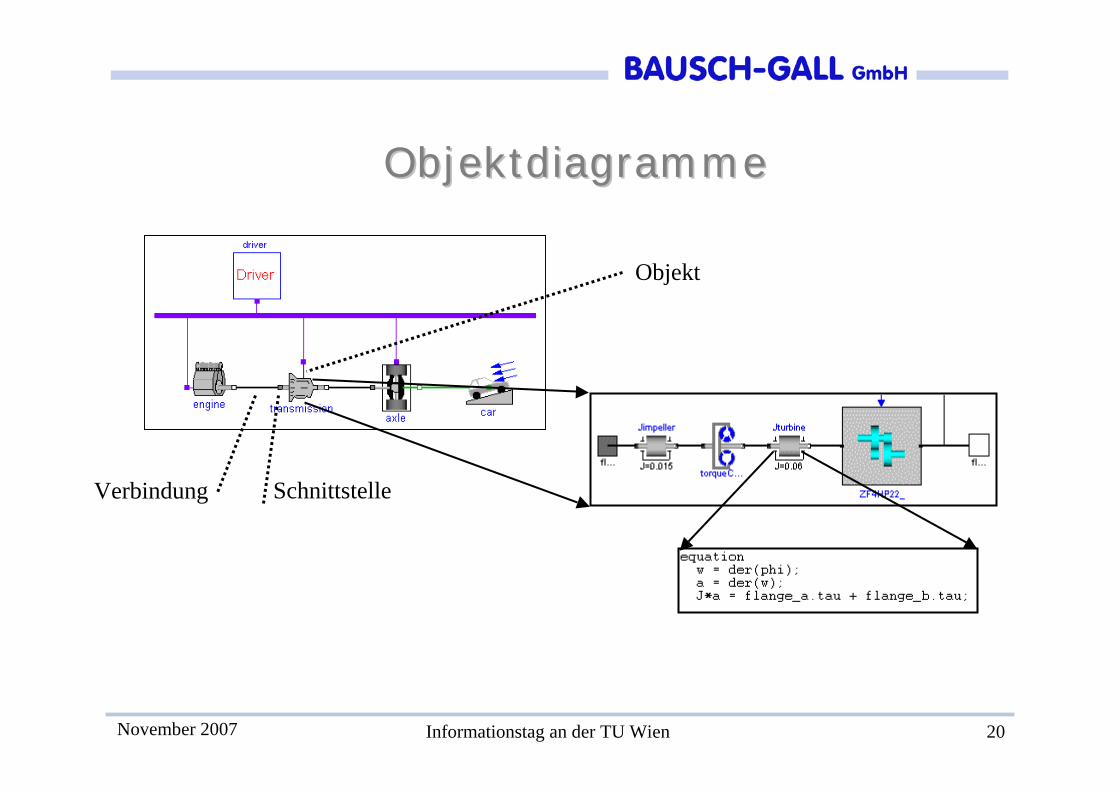
ObjektdiagrammeObjektdiagramme
Objekt
Verbindung Schnittstelle
November 2007 Informationstag an der TU Wien 21
ObjektdiagrammeObjektdiagramme
• jedes Icon repräsentiert ein physikalisches oder logisches Objekt
• Verbindungen stellen tatsächliche physikalische Verbindungen dar
• jedes Objekt wird hierarchisch erstellt oder durch Gleichungen beschrieben
• mit symbolischen Algorithmen, wird die ModelicaBeschreibung in die Zustandsform transformiert
dx/dt = f(t, x, u)y = g(t, x, u)
November 2007 Informationstag an der TU Wien 22
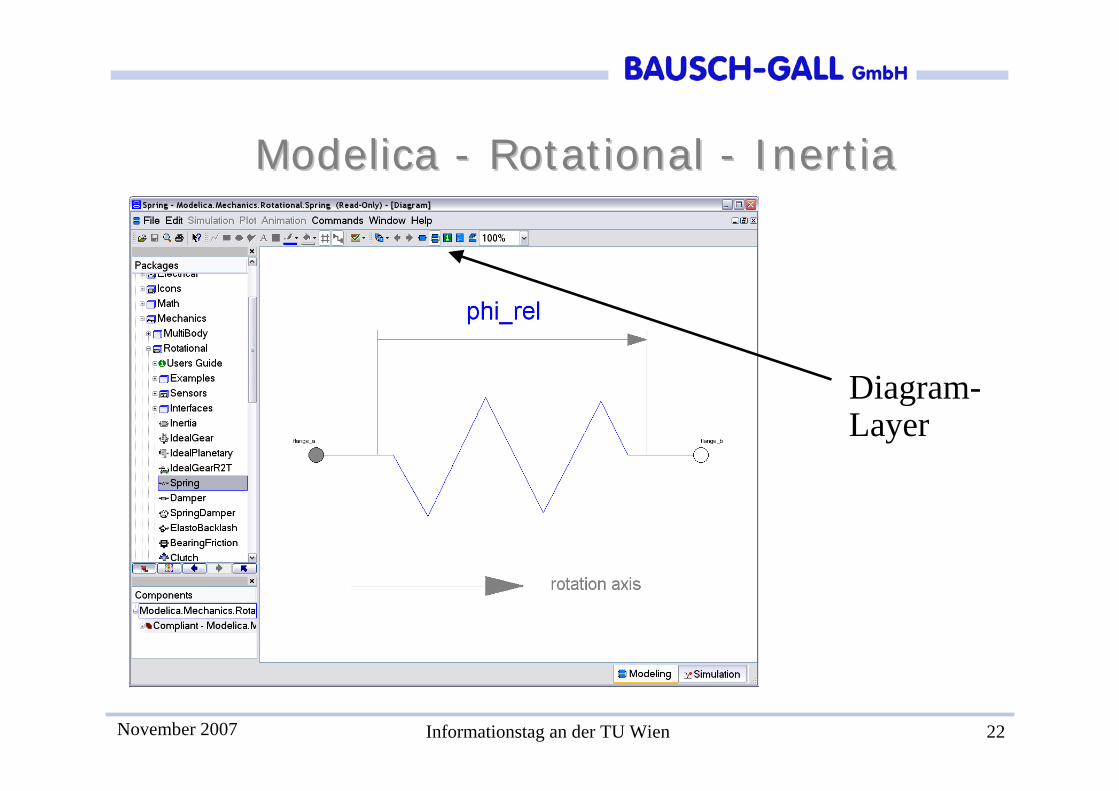
ModelicaModelica -- RotationalRotational -- InertiaInertia
Diagram-Layer
November 2007 Informationstag an der TU Wien 23
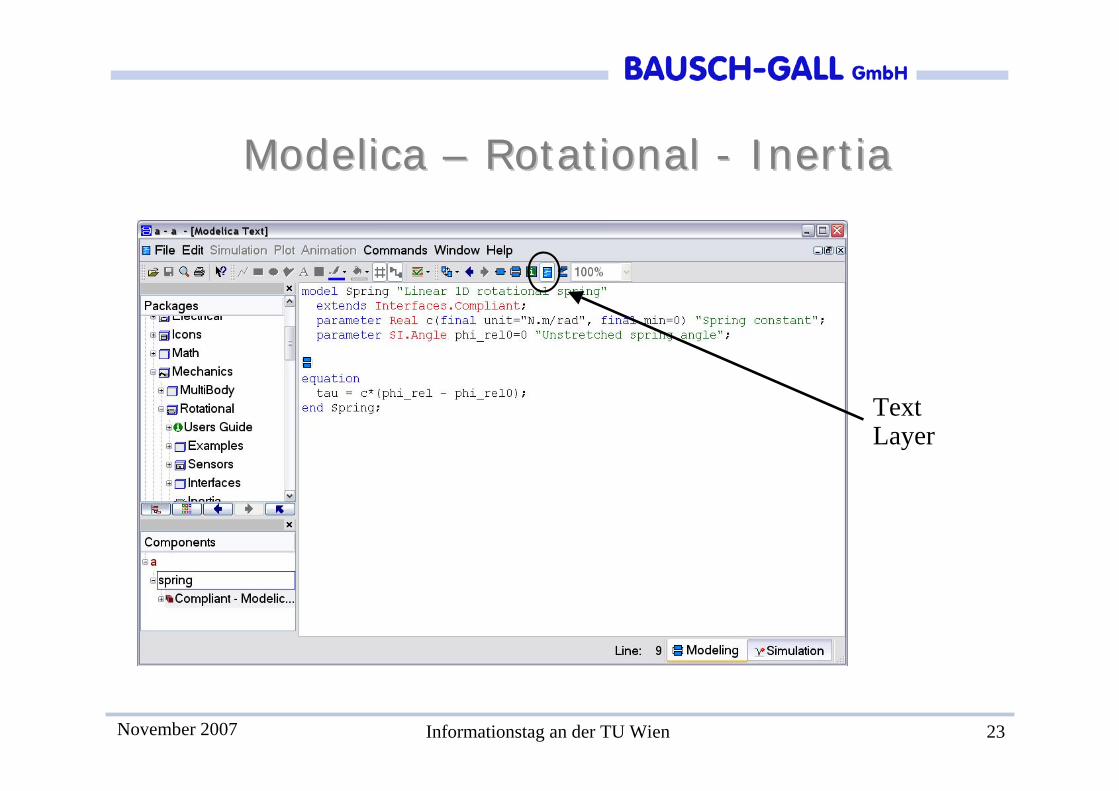
ModelicaModelica –– Rotational Rotational -- InertiaInertia
TextLayer
November 2007 Informationstag an der TU Wien 24
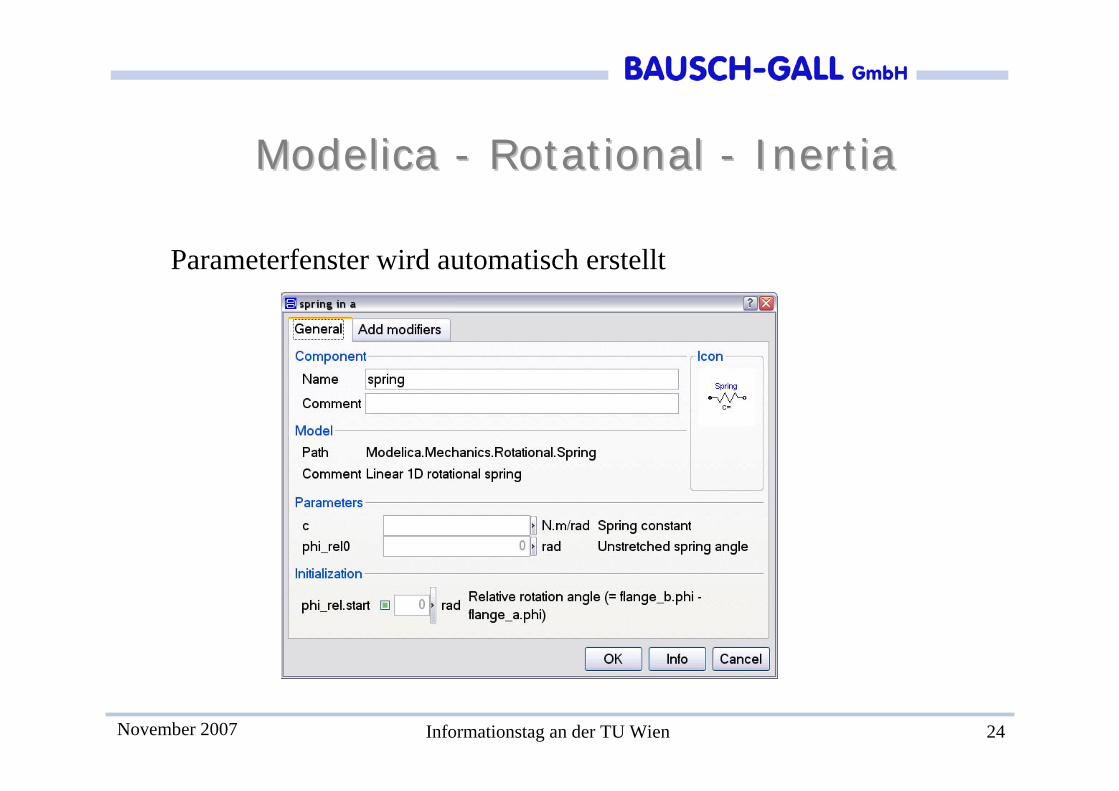
ModelicaModelica -- RotationalRotational -- InertiaInertia
Parameterfenster wird automatisch erstellt

November 2007 Informationstag an der TU Wien 25
ModelicaModelica –– RotationalRotational -- InertiaInertia
Beschreibungals HTML
November 2007 Informationstag an der TU Wien 26
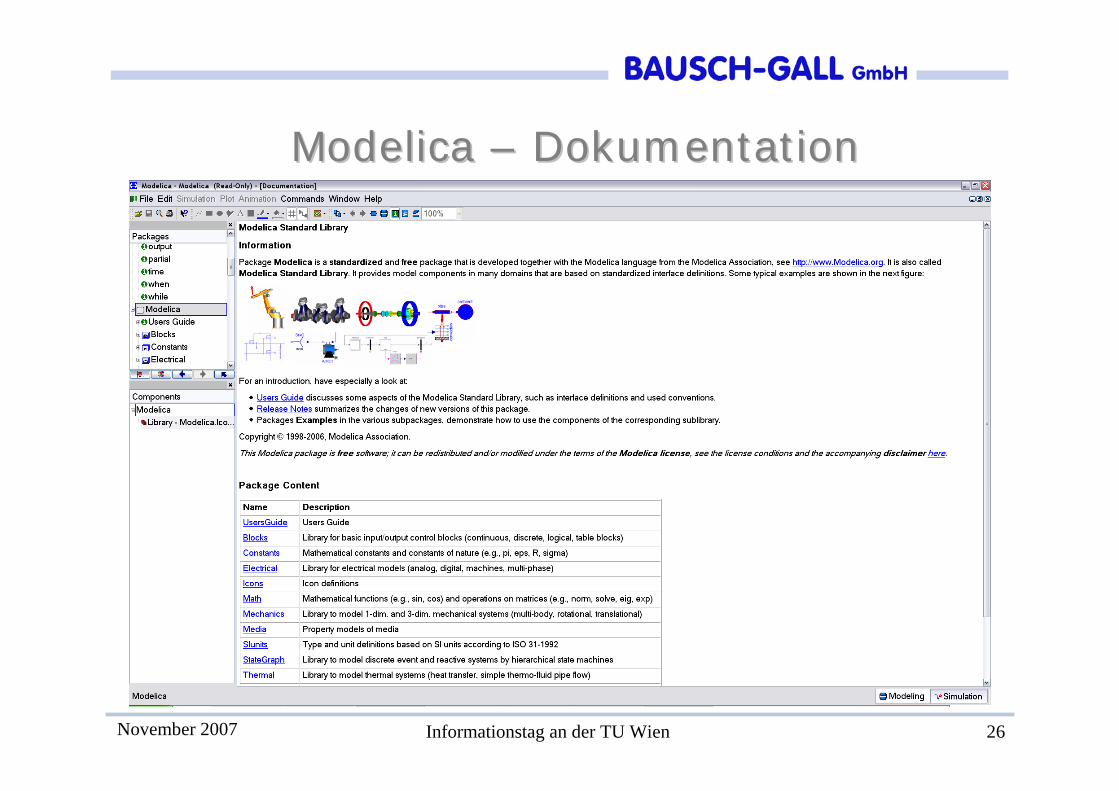
Modelica Modelica –– DokumentationDokumentation
November 2007 Informationstag an der TU Wien 27
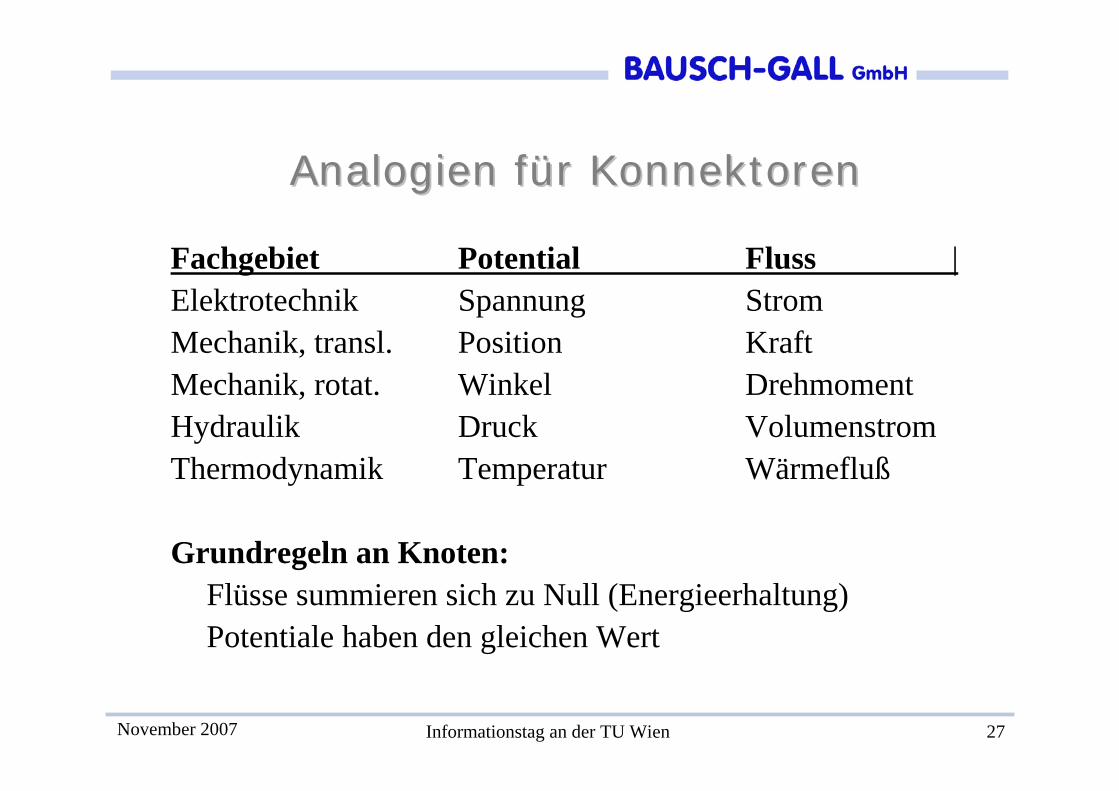
Analogien für Analogien für KonnektorenKonnektoren
Fachgebiet Potential Fluss | Elektrotechnik Spannung StromMechanik, transl. Position KraftMechanik, rotat. Winkel DrehmomentHydraulik Druck VolumenstromThermodynamik Temperatur Wärmefluß
Grundregeln an Knoten:Flüsse summieren sich zu Null (Energieerhaltung)Potentiale haben den gleichen Wert

November 2007 Informationstag an der TU Wien 28
KonnektorenKonnektoren
connector Flange_aSI.Angle phi "Absolute rotation angle of flange";flow SI.Torque tau "Cut torque in the flange";
end Flange_a;
connector Flange_bSI.Angle phi "Absolute rotation angle of flange";flow SI.Torque tau "Cut torque in the flange";
end Flange_b;

November 2007 Informationstag an der TU Wien 29
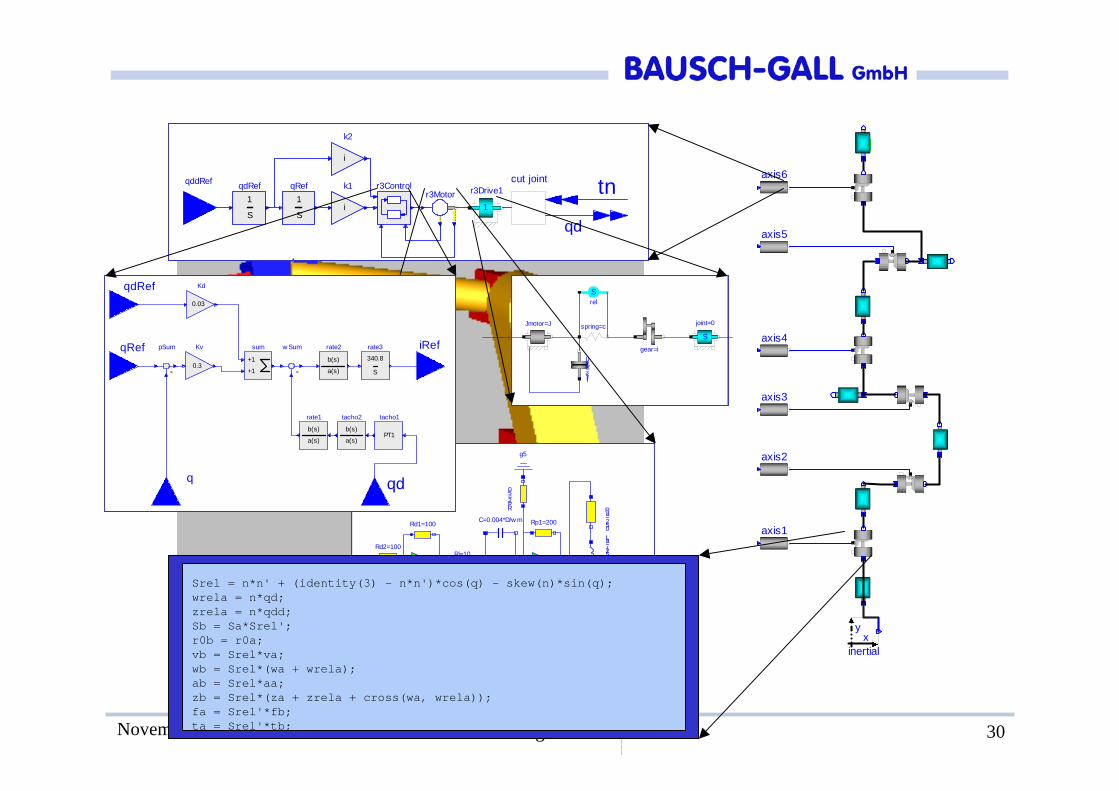
Modellierung aus ObjektenModellierung aus Objekten
• Objekte sind in Bibliotheken
• Modell aus Grundobjektenzusammengesetzt
• Diagramm erscheint im Modellierungsfenster
• Objekte parametrieren
• Hierarchie für große Modelle
November 2007 Informationstag an der TU Wien 30
inertialx
y
axis1
axis2
axis3
axis4
axis5
axis6r3Drive1
1r3Motor
r3ControlqdRef1
S
qRef1
S
k2
i
k1
i
qddRef cut joint
l
qd
tn
Jmotor=J
gear=i
spring=c
fric=Rv0
Srel
joint=0
S
Vs
-
+dif f
-
+pow er
emf
La=(250/(2*D*wm))
Ra=250
Rd2=100
C=0.004*D/w m
-
+OpI
Rd1=100
Ri=10
Rp1=200
Rp2=50
Rd4=100
hall2
Rd3=100
g1
g2
g3
hall1
g4
g5
rw
qd q
rate2
b(s)
a(s)
rate3
340.8
S
rate1
b(s)
a(s)
tacho1
PT1
Kd
0.03
w Sum
-
sum
+1
+1
pSum
-
Kv
0.3
tacho2
b(s)
a(s)
q qd
iRefqRef
qdRef
Srel = n*n' + (identity(3) - n*n')*cos(q) - skew(n)*sin(q);wrela = n*qd;zrela = n*qdd;Sb = Sa*Srel';r0b = r0a;vb = Srel*va;wb = Srel*(wa + wrela);ab = Srel*aa;zb = Srel*(za + zrela + cross(wa, wrela));fa = Srel'*fb;ta = Srel'*tb;

November 2007 Informationstag an der TU Wien 31
GetriebeGetriebe--ModellModell
planetary1=110/50
C4=0.12 C5=0.12
planetary2=110/50
C6=0.12
bearing2
C8=0.12
demultiplex
shaftS=2e-3S
planetary3=120/44
C11=0.12
shaftS1=2e-3S
C12=0.12
bearing1bearing4
Cou
rtesy
Toy
ota
Tecn
o-Se
rvic
e
Powertrain Library
November 2007 Informationstag an der TU Wien 32
Modellierung von Ereignissen (Modellierung von Ereignissen (eventevent))
• z. B. Schalter, Reibung, Schlupf• Strategie
– Integration bis zum Ereignis– unstetige Änderung durchführen– Integration neu starten– Werte werden 2x gespeichert, vor und nach dem Ereignis
November 2007 Informationstag an der TU Wien 33
Modellierung von EreignissenModellierung von Ereignissen
• Durch logische Ausdrücke, z.B.y = if u > 0 then 1 else –1
• Glätten (stetig)y = smooth(1, if u > 0 then 1 else –1)
• Event-Suche abschalteny = if noEvent(u > 0) then 1 else –1
November 2007 Informationstag an der TU Wien 34
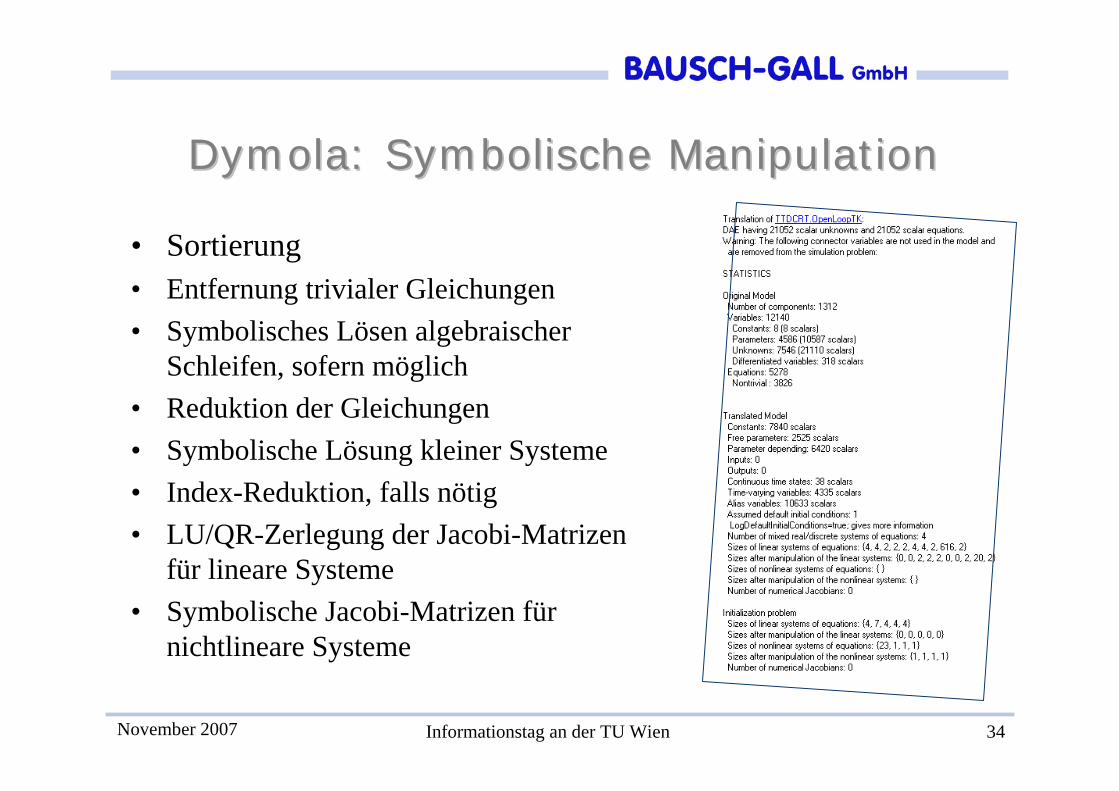
DymolaDymola: Symbolische Manipulation: Symbolische Manipulation
• Sortierung• Entfernung trivialer Gleichungen• Symbolisches Lösen algebraischer
Schleifen, sofern möglich• Reduktion der Gleichungen• Symbolische Lösung kleiner Systeme• Index-Reduktion, falls nötig• LU/QR-Zerlegung der Jacobi-Matrizen
für lineare Systeme• Symbolische Jacobi-Matrizen für
nichtlineare Systeme
November 2007 Informationstag an der TU Wien 35
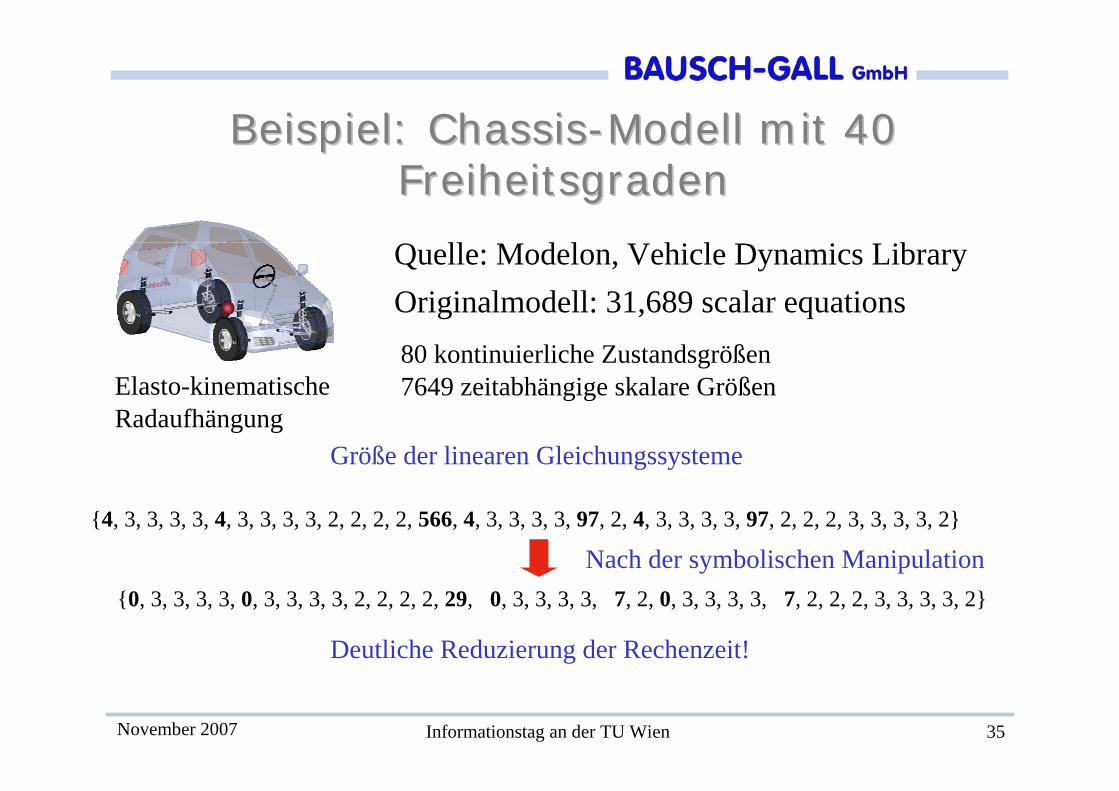
Beispiel: ChassisBeispiel: Chassis--Modell mit 40 Modell mit 40 FreiheitsgradenFreiheitsgraden
Elasto-kinematische Radaufhängung
80 kontinuierliche Zustandsgrößen7649 zeitabhängige skalare Größen
{4, 3, 3, 3, 3, 4, 3, 3, 3, 3, 2, 2, 2, 2, 566, 4, 3, 3, 3, 3, 97, 2, 4, 3, 3, 3, 3, 97, 2, 2, 2, 3, 3, 3, 3, 2}
{0, 3, 3, 3, 3, 0, 3, 3, 3, 3, 2, 2, 2, 2, 29, 0, 3, 3, 3, 3, 7, 2, 0, 3, 3, 3, 3, 7, 2, 2, 2, 3, 3, 3, 3, 2}
Größe der linearen Gleichungssysteme
Originalmodell: 31,689 scalar equations
Deutliche Reduzierung der Rechenzeit!
Nach der symbolischen Manipulation
Quelle: Modelon, Vehicle Dynamics Library
November 2007 Informationstag an der TU Wien 36
DymolaDymola -- ZusammenfassungZusammenfassung
• versteht und simuliert Modelle in der objektorientierten Sprache Modelica
• Modellierungs- und Simulationsfenster• Symbolische Manipulation• übersetzt in C-Code• Modelldokumentation in HTML, in gleicher Datei• automatische Extraktion der Modelldokumentation
November 2007 Informationstag an der TU Wien 37
SimulationSimulation
• Simulationsfenster• automatische Initialisierung• interaktive Studien• viele effiziente und aktuelle Integrationsverfahren• Plotmöglichkeit• Animation

November 2007 Informationstag an der TU Wien 38
SimulationSimulation
• Skripts für vorbereitete Experimente • Linearisierung der Modelle• Real-time Hardware-in-the-loop Simulation• Schnittstelle zu MATLAB zur Datenauswertung• Modell-Schnittstelle zu Simulink
November 2007 Informationstag an der TU Wien 39
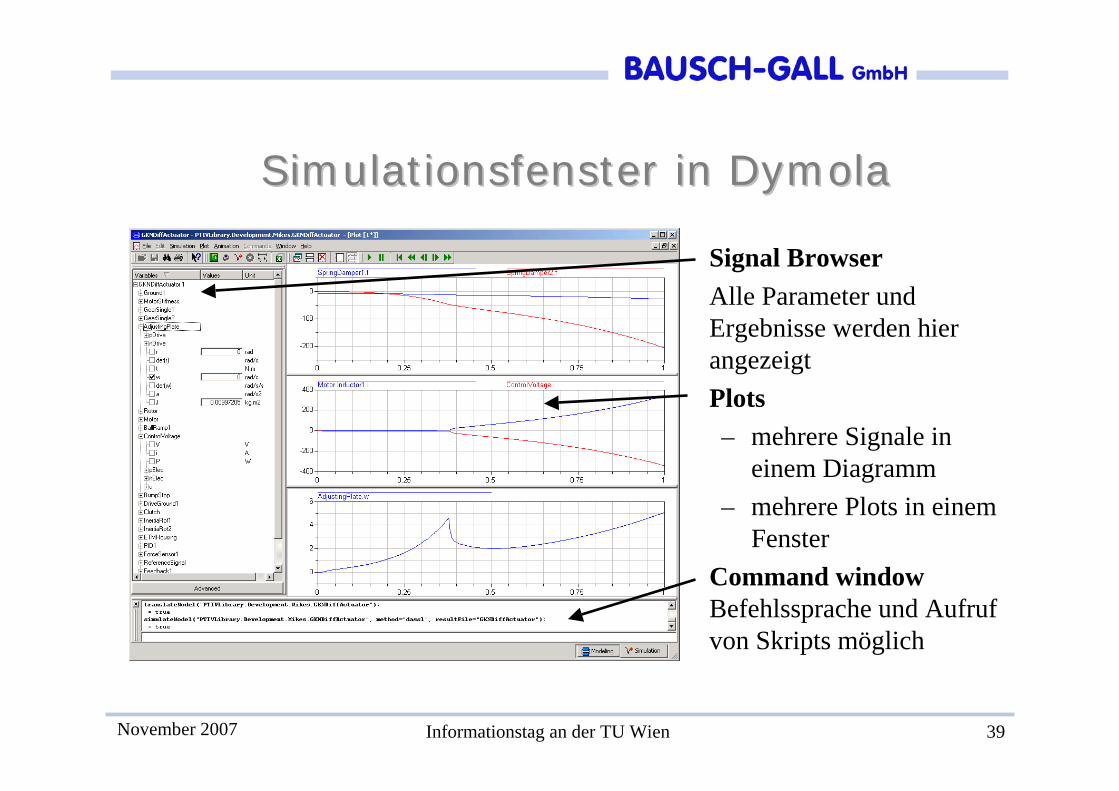
Simulationsfenster in Simulationsfenster in DymolaDymola
Signal BrowserAlle Parameter und Ergebnisse werden hierangezeigtPlots– mehrere Signale in
einem Diagramm– mehrere Plots in einem
FensterCommand windowBefehlssprache und Aufrufvon Skripts möglich
November 2007 Informationstag an der TU Wien 40
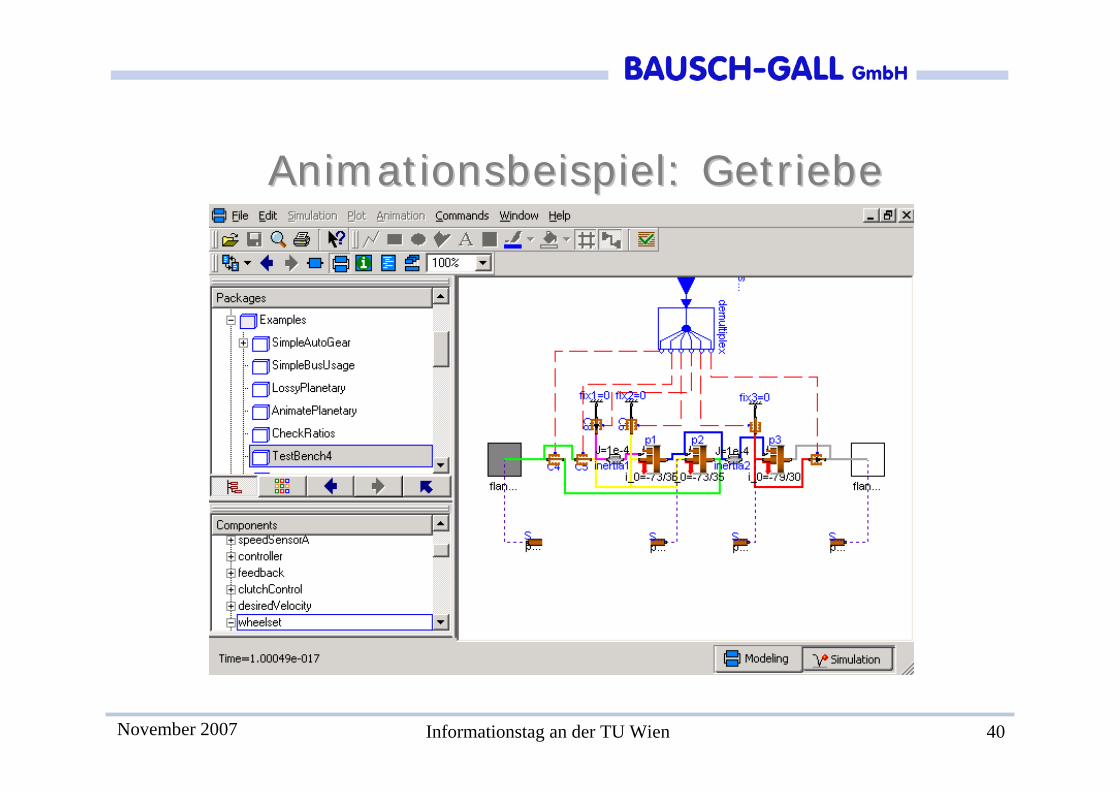
Animationsbeispiel: GetriebeAnimationsbeispiel: Getriebe
November 2007 Informationstag an der TU Wien 41
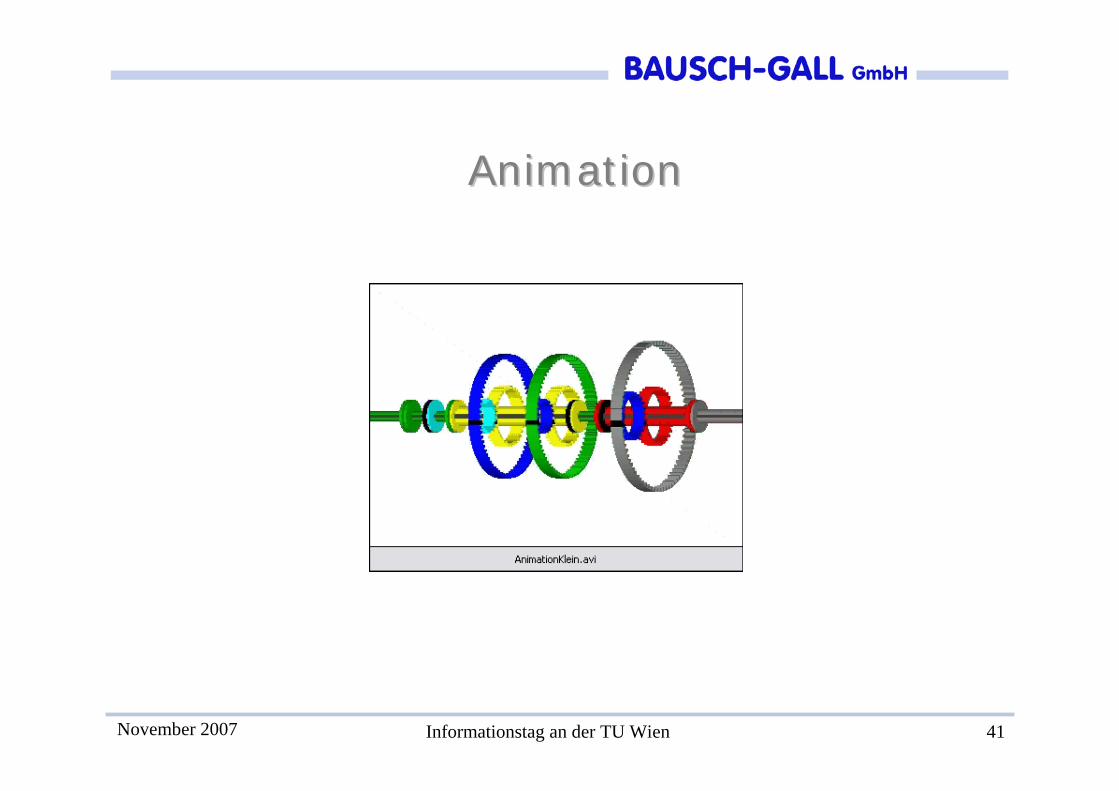
AnimationAnimation
November 2007 Informationstag an der TU Wien 42
DymolaDymola Experiment Experiment SkriptfileSkriptfile
• Ablaufsteuerung• Parametervariationen• Plotmöglichkeiten• Modelica Syntax• benutzerdefinierte Funktionen
November 2007 Informationstag an der TU Wien 43
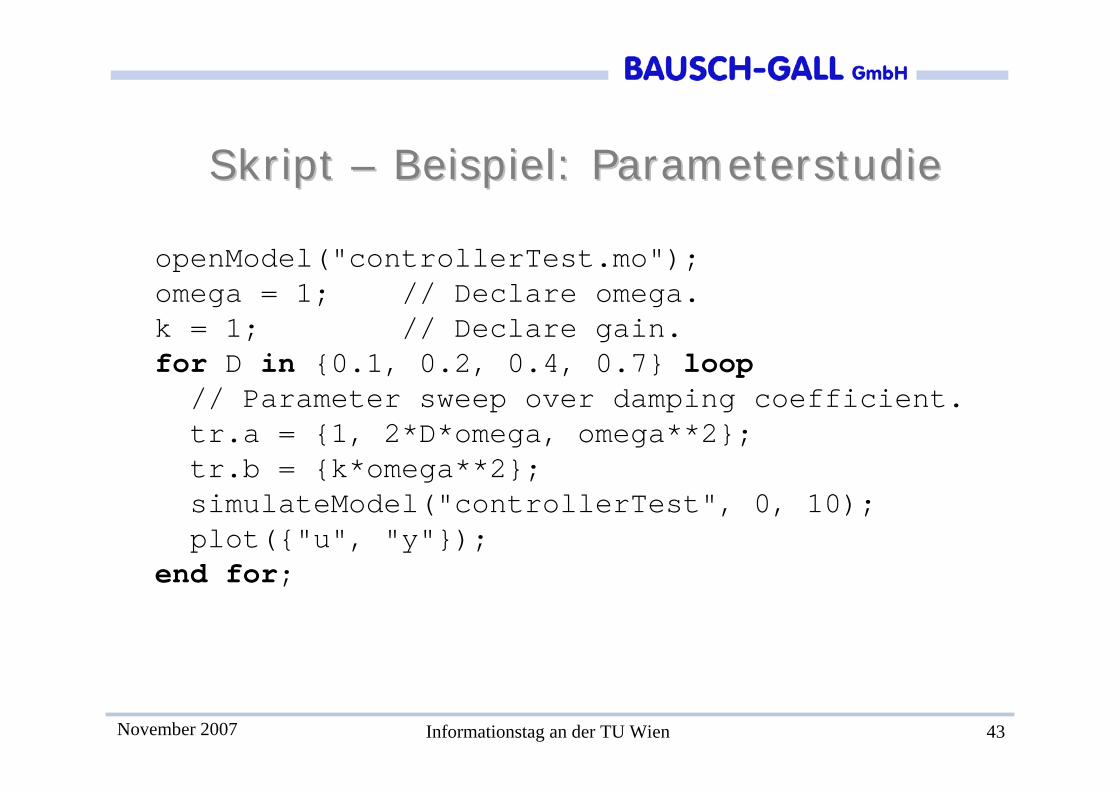
SkriptSkript –– BeispielBeispiel: : ParameterstudieParameterstudie
openModel("controllerTest.mo");omega = 1; // Declare omega.k = 1; // Declare gain.for D in {0.1, 0.2, 0.4, 0.7} loop
// Parameter sweep over damping coefficient.tr.a = {1, 2*D*omega, omega**2}; tr.b = {k*omega**2}; simulateModel("controllerTest", 0, 10); plot({"u", "y"});
end for;
November 2007 Informationstag an der TU Wien 44
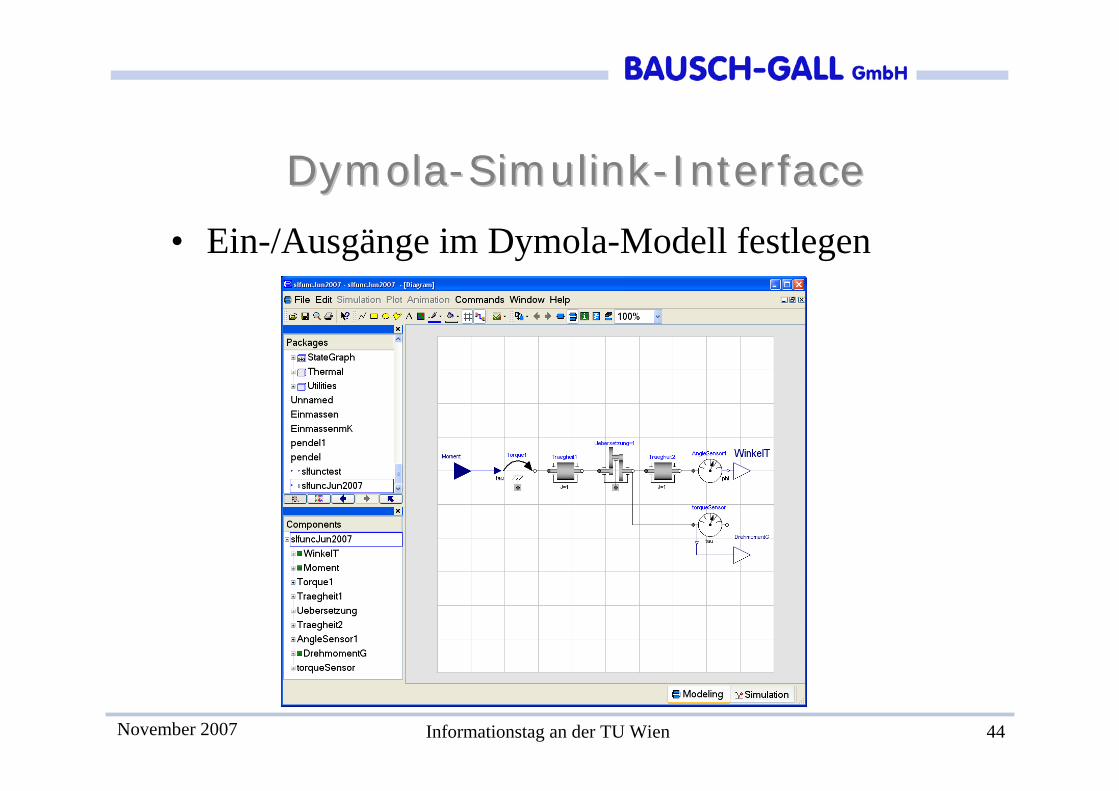
DymolaDymola--SimulinkSimulink--InterfaceInterface
• Ein-/Ausgänge im Dymola-Modell festlegen
November 2007 Informationstag an der TU Wien 45
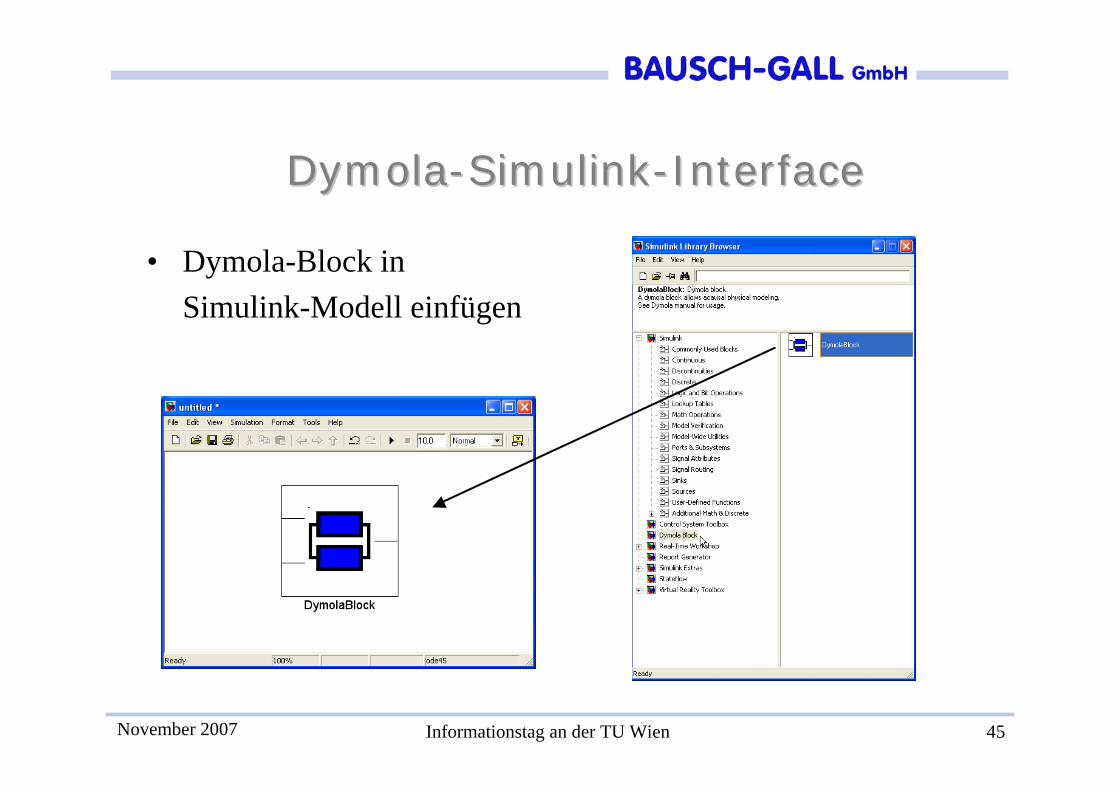
DymolaDymola--SimulinkSimulink--InterfaceInterface
• Dymola-Block in Simulink-Modell einfügen
November 2007 Informationstag an der TU Wien 46
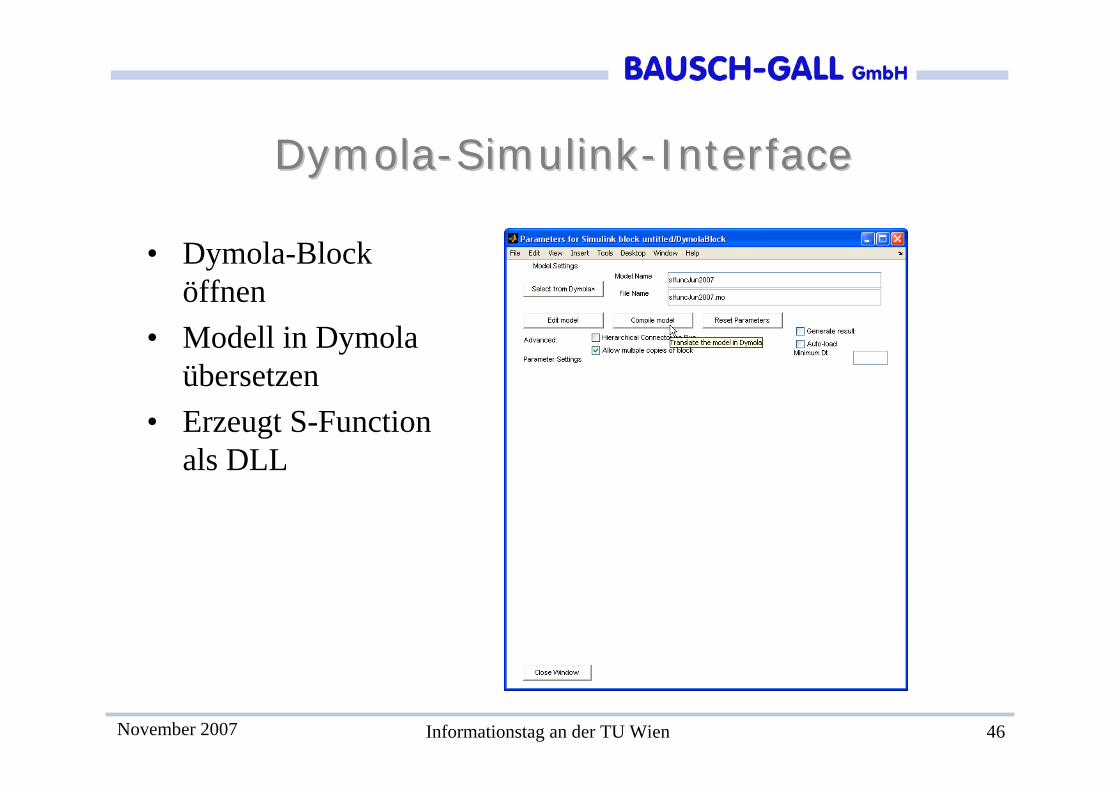
DymolaDymola--SimulinkSimulink--InterfaceInterface
• Dymola-Blocköffnen
• Modell in Dymolaübersetzen
• Erzeugt S-Functionals DLL
November 2007 Informationstag an der TU Wien 47
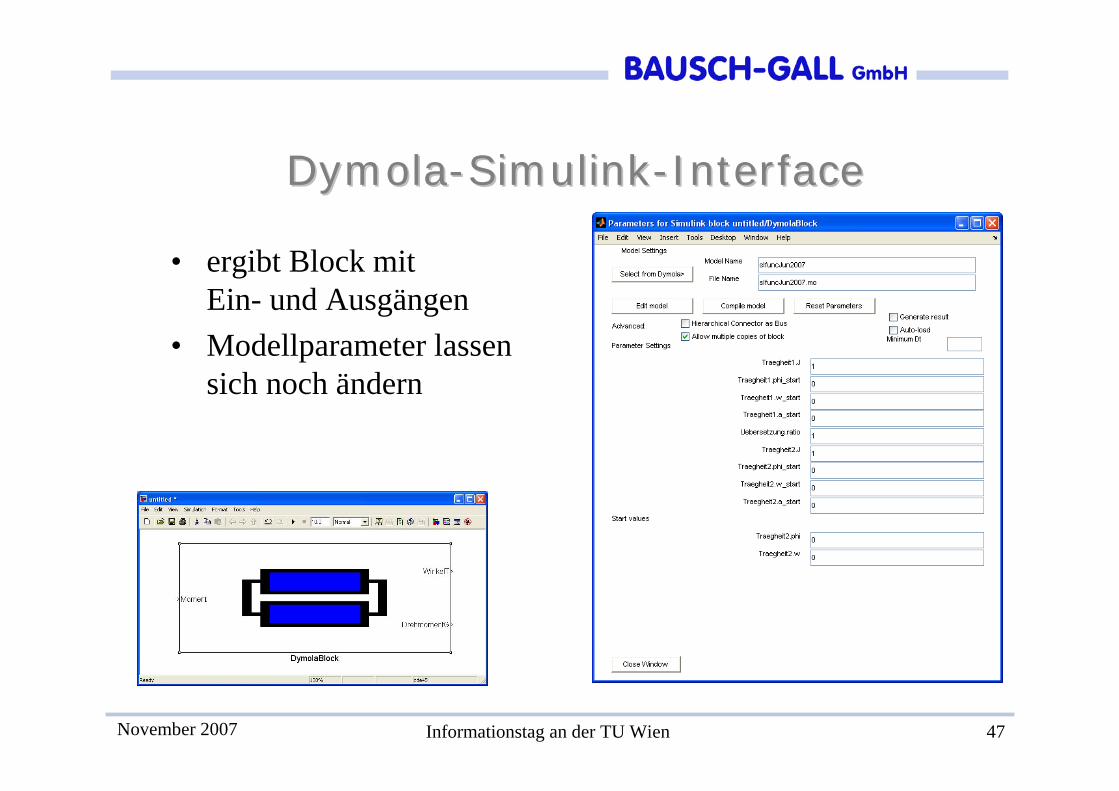
DymolaDymola--SimulinkSimulink--InterfaceInterface
• ergibt Block mit Ein- und Ausgängen
• Modellparameter lassensich noch ändern
November 2007 Informationstag an der TU Wien 48
Dymola Dymola 6.2 (7.0?) Neuigkeiten6.2 (7.0?) Neuigkeiten
• Verbesserung des graphischen Editors• Anzeige von Einheiten• Einheitenprüfung möglich• Modelica 3 wird weitgehend unterstützt• Verbesserung der Simulink-Schnittstelle

November 2007 Informationstag an der TU Wien 49
Einige Neuigkeiten in Einige Neuigkeiten in Modelica Modelica 3.03.0
• Bereinigung der Sprachdefinition• Modelle müssen „locally balanced“ sein, d.h. die
Zahl der Gleichungen und Unbekannten muss gleich sein
• Klarere Sprachdefinition • „built-in“-Operatoren erzeugen keine Events mehr• Elementweise Operatoren wie in MATLAB• Weitere „annotations“• Neue Attribute • Sh. www.modelica.org
November 2007 Informationstag an der TU Wien 50
Ergänzungen zuErgänzungen zu Dymola Dymola
• Automatisierte Parameterstudien• Kalibrierung von Parametern• Optimierung• 3D-Visualisierung• Verschlüsselung der Modelle• Schnittstelle zu Versionsverwaltungsprogrammen
November 2007 Informationstag an der TU Wien 51
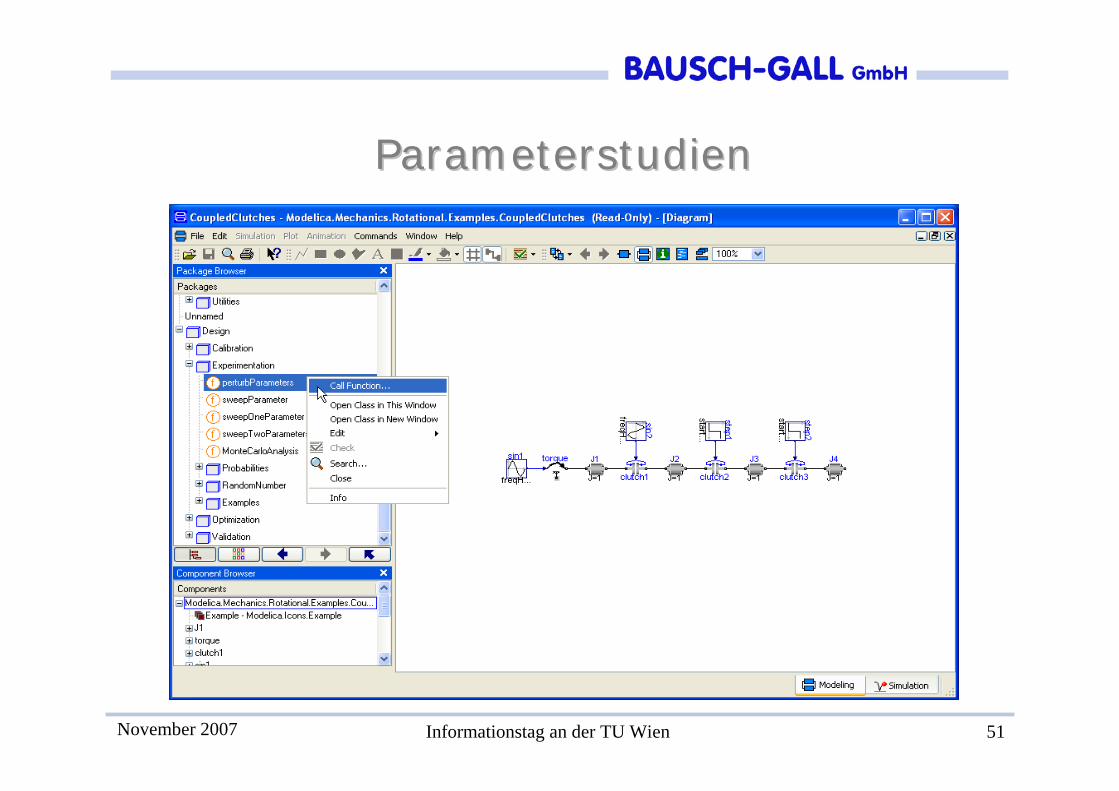
ParameterstudienParameterstudien

November 2007 Informationstag an der TU Wien 52
ParameterstudienParameterstudien
November 2007 Informationstag an der TU Wien 53
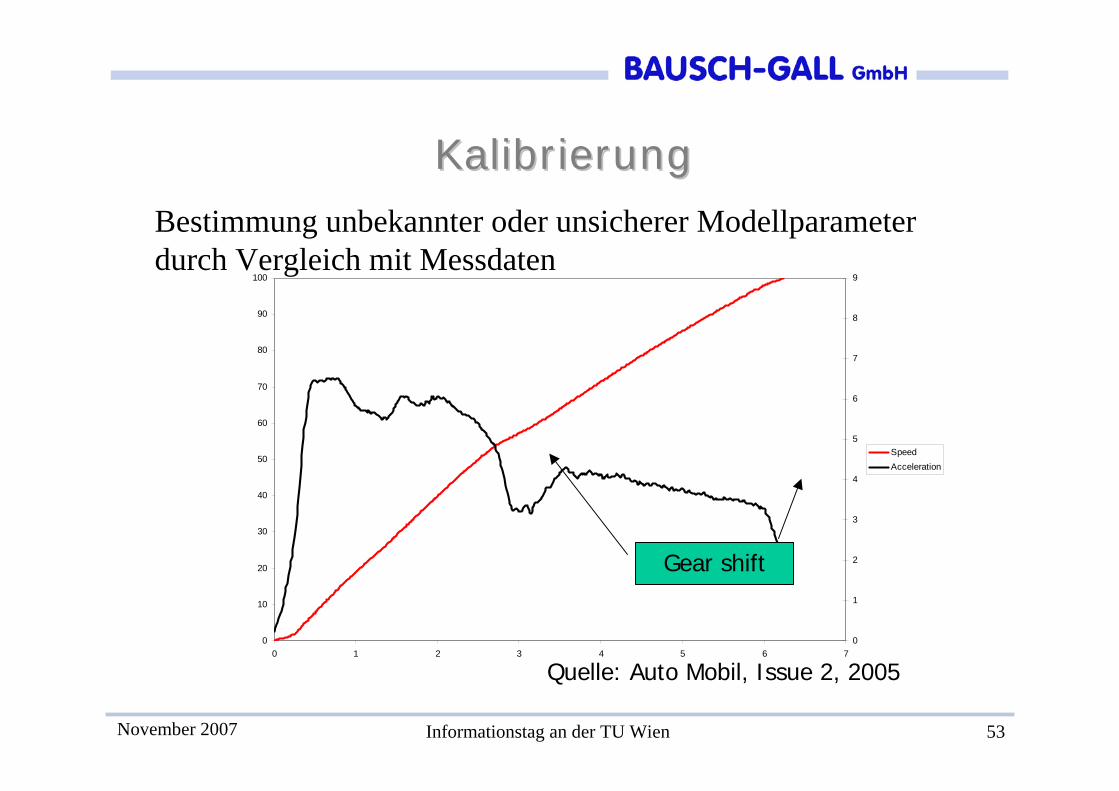
KalibrierungKalibrierung
0
10
20
30
40
50
60
70
80
90
100
0 1 2 3 4 5 6 70
1
2
3
4
5
6
7
8
9
SpeedAcceleration
Gear shift
Quelle: Auto Mobil, Issue 2, 2005
Acceleration (BMW 645i)Bestimmung unbekannter oder unsicherer Modellparameterdurch Vergleich mit Messdaten

November 2007 Informationstag an der TU Wien 54
KalibrierungKalibrierung
Messdaten• CSV-Dateien• MATLAB-MAT-Files V4
Daten vorbereiten, z.B.• Daten filtern • Daten begrenzen• Trend entfernen
November 2007 Informationstag an der TU Wien 55
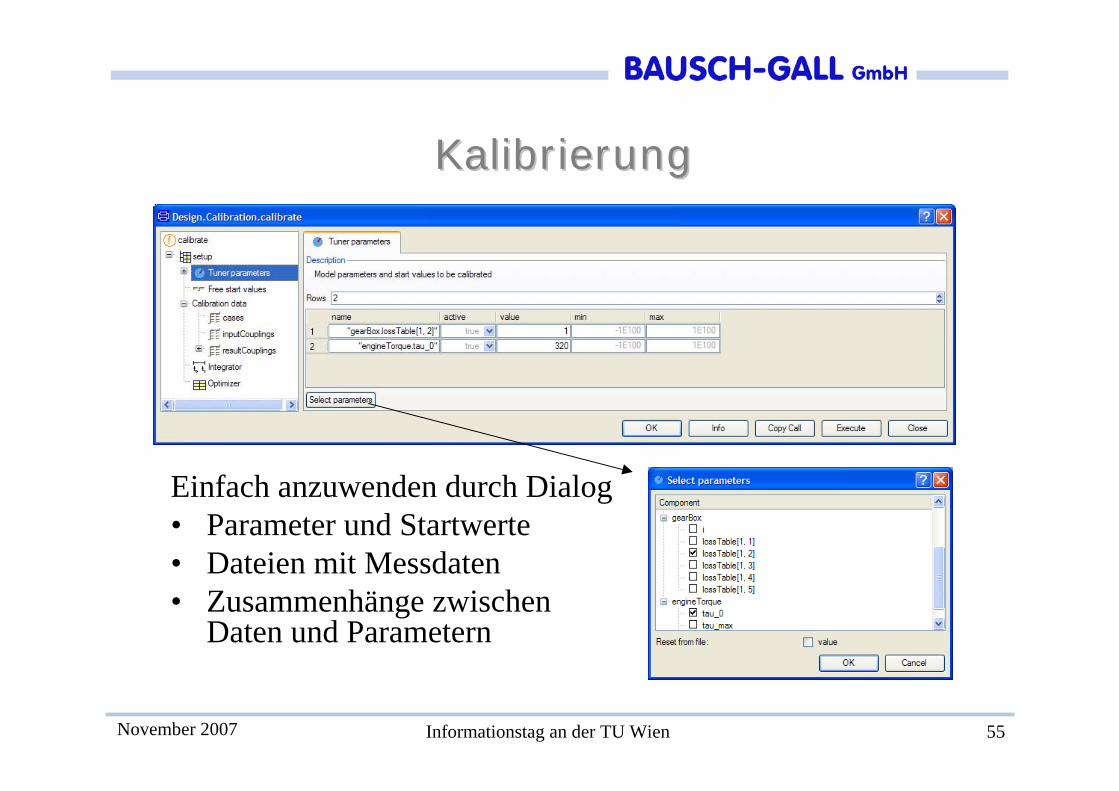
KalibrierungKalibrierung
Einfach anzuwenden durch Dialog• Parameter und Startwerte• Dateien mit Messdaten• Zusammenhänge zwischen
Daten und Parametern

November 2007 Informationstag an der TU Wien 56
KalibrierungKalibrierung
Nach der Kalibrierung
Startwerte
4 5 63.0
3.5
4.0
4.5
5.0
5.5Case 1 (used for Validation)
Reference carBody.der(v)Calibration carBody.der(v)
4 5 63.2
3.4
3.6
3.8
4.0
4.2
4.4Case 1 (used for Calibration)
Reference carBody.der(v)Calibration carBody.der(v)
November 2007 Informationstag an der TU Wien 57
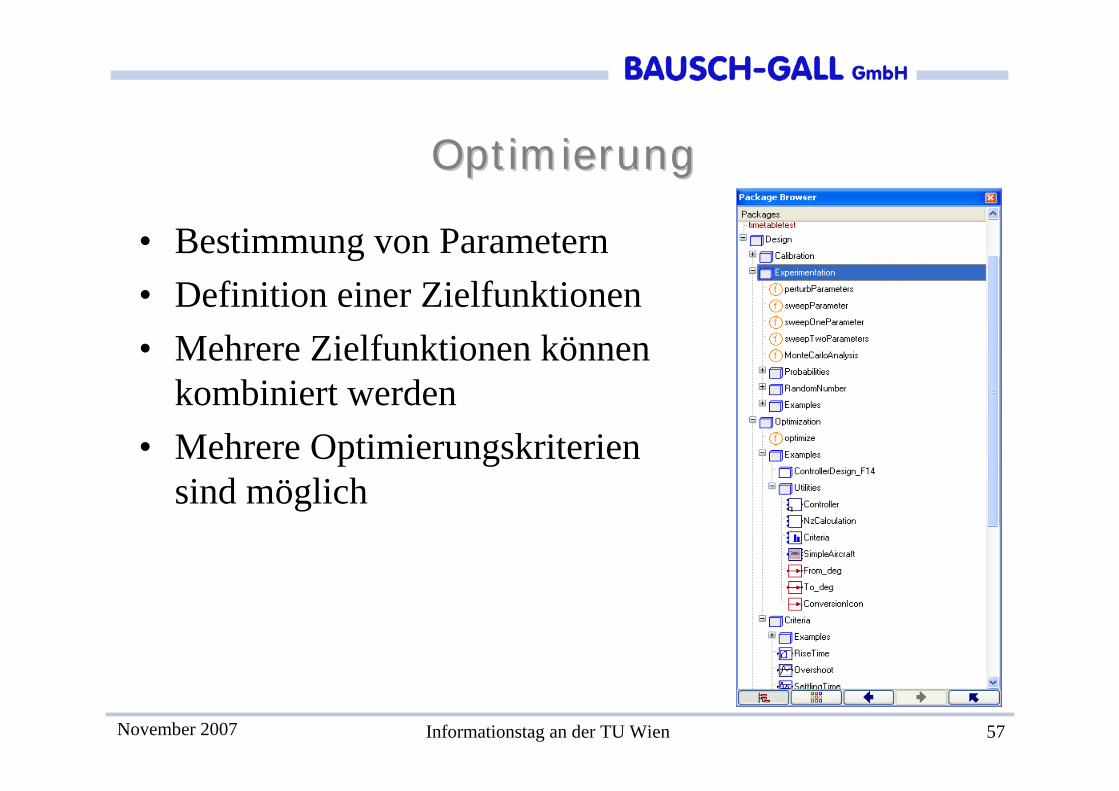
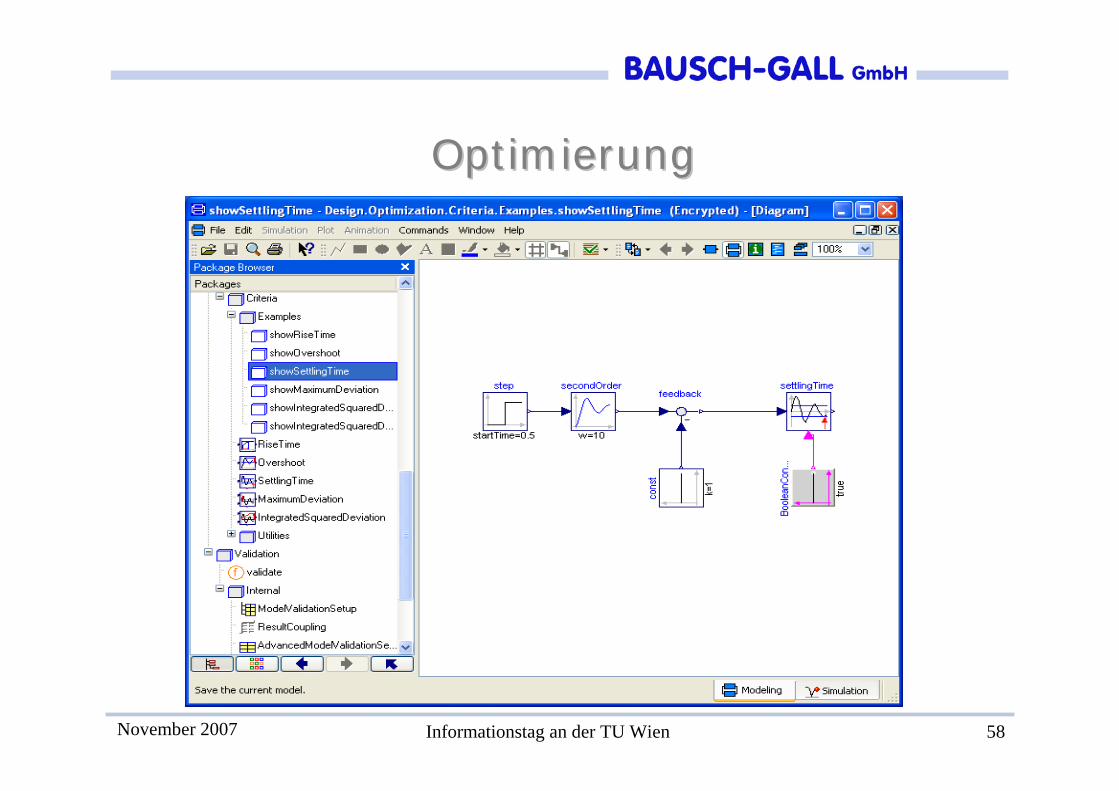
OptimierungOptimierung
• Bestimmung von Parametern• Definition einer Zielfunktionen• Mehrere Zielfunktionen können
kombiniert werden• Mehrere Optimierungskriterien
sind möglich
November 2007 Informationstag an der TU Wien 58
OptimierungOptimierung
November 2007 Informationstag an der TU Wien 59
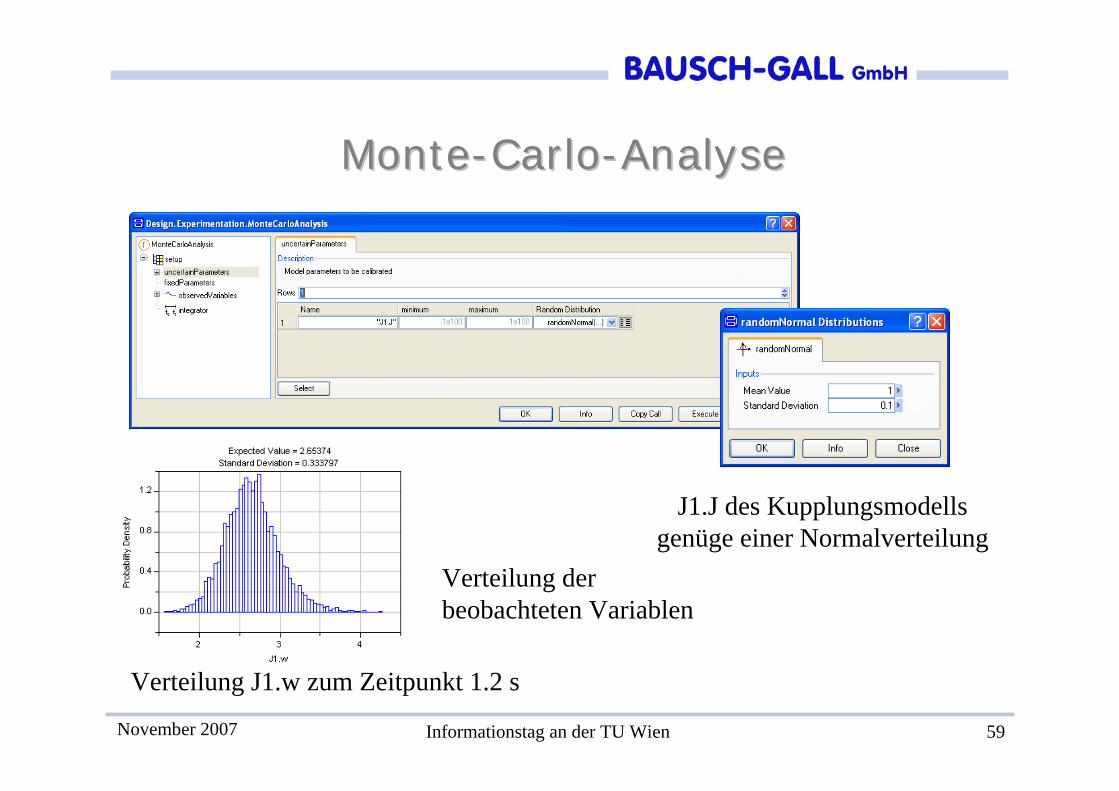
MonteMonte--CarloCarlo--AnalyseAnalyse
J1.J des Kupplungsmodellsgenüge einer Normalverteilung
Verteilung der beobachteten Variablen
Verteilung J1.w zum Zeitpunkt 1.2 s
November 2007 Informationstag an der TU Wien 60
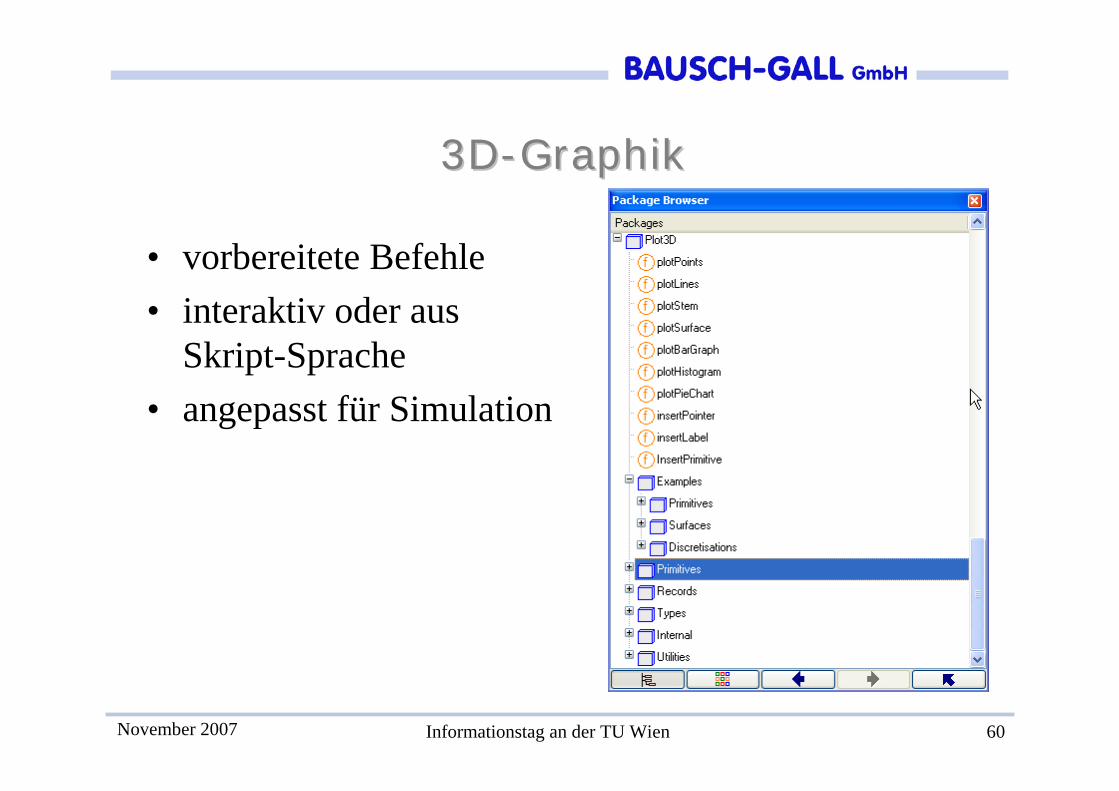
3D3D--GraphikGraphik
• vorbereitete Befehle• interaktiv oder aus
Skript-Sprache• angepasst für Simulation
November 2007 Informationstag an der TU Wien 61
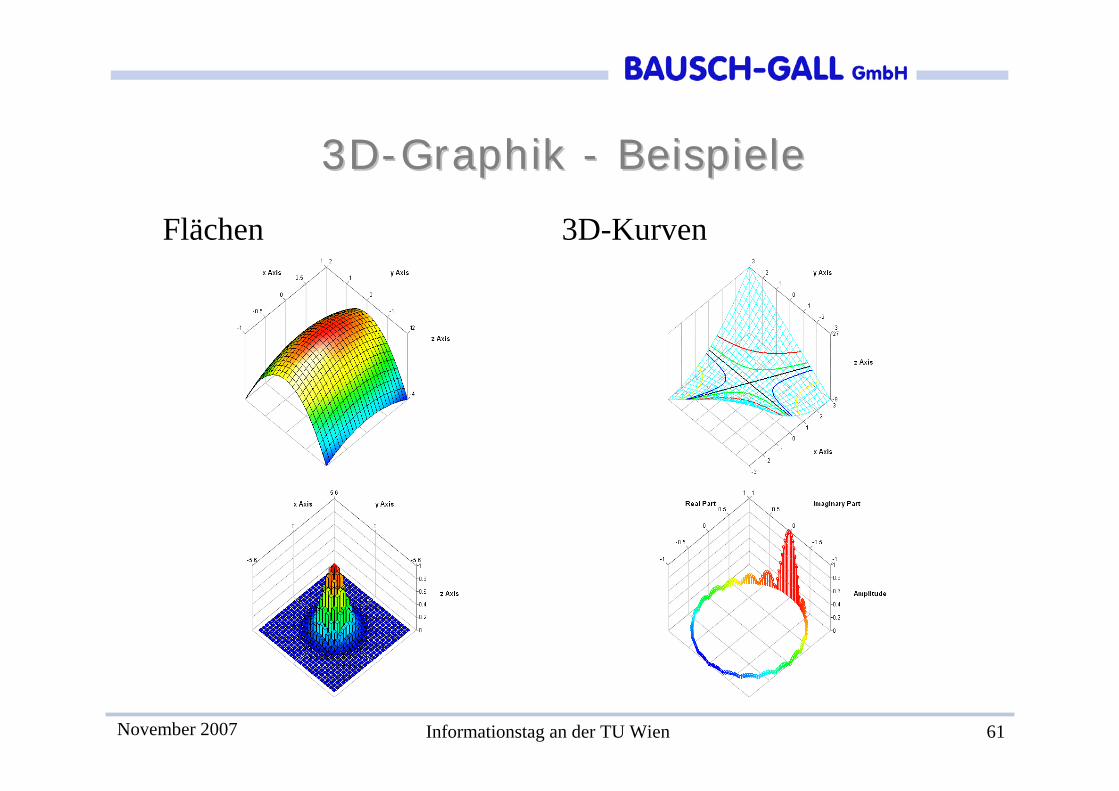
3D3D--Graphik Graphik -- BeispieleBeispiele
Flächen 3D-Kurven
November 2007 Informationstag an der TU Wien 62
Weitere EigenschaftenWeitere Eigenschaften
• Verschlüsselung der Modelle – Encryption speichert Modelle binär ab– Scrambling entfernt vertrauliche Struktur und Daten
• Modellverwaltung (Model Management)– Einbindung in übliche Versions-Verwaltungsprogramme
CVS (current version systems) und SVN (subversion systems)
• Komfortable Erstellung eigener GUIs• Verbesserung der Scripting-Sprache (MOS-Files)
November 2007 Informationstag an der TU Wien 63
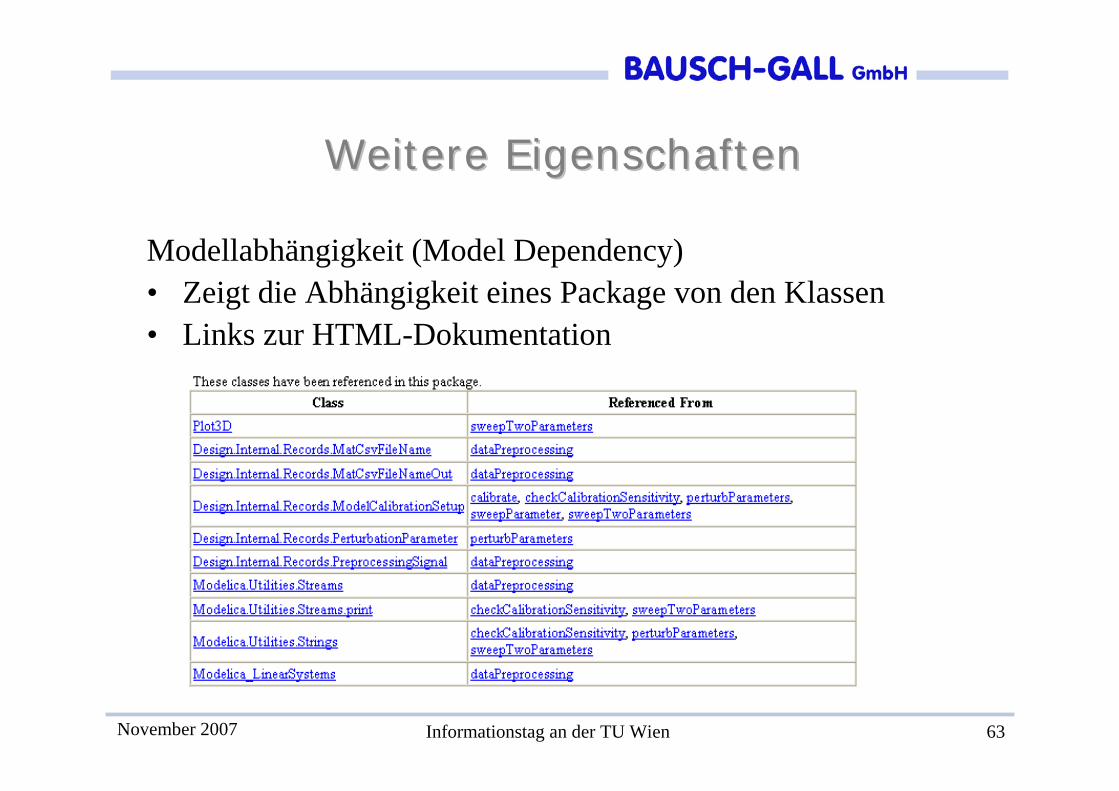
Weitere EigenschaftenWeitere Eigenschaften
Modellabhängigkeit (Model Dependency)• Zeigt die Abhängigkeit eines Package von den Klassen• Links zur HTML-Dokumentation

November 2007 Informationstag an der TU Wien 64
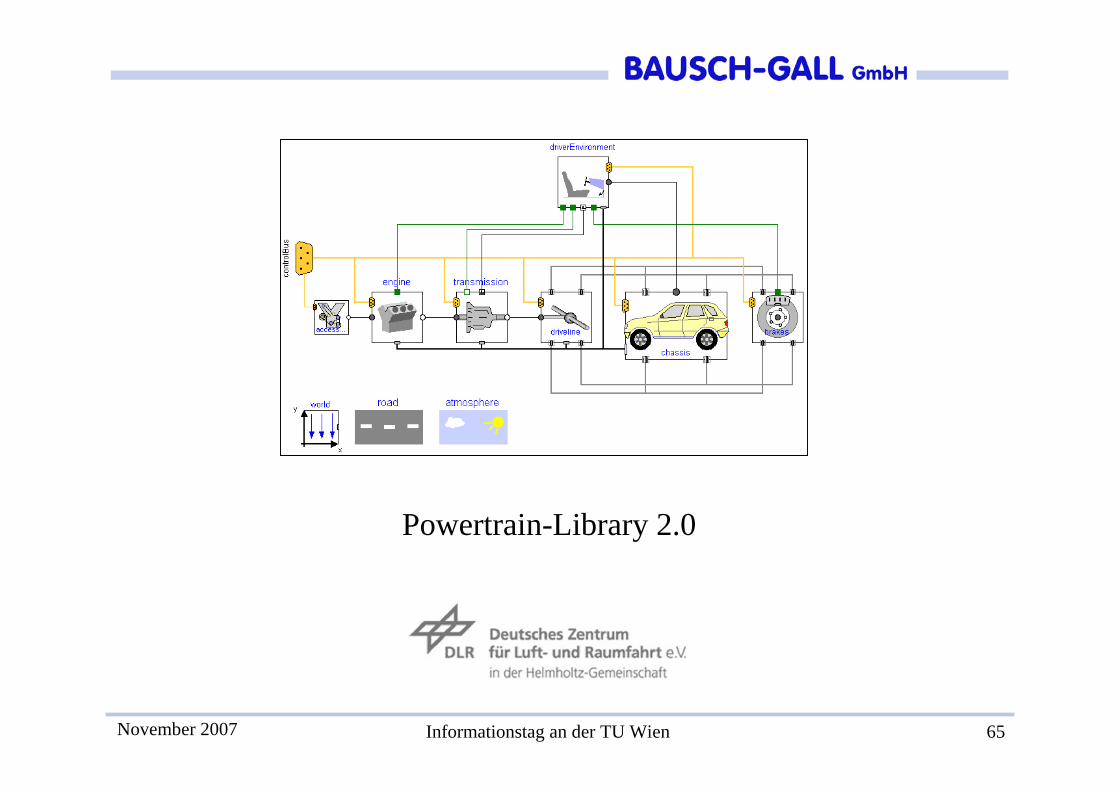
Neue BibliothekenNeue Bibliotheken
• Powertrain-Library Version 2.0, angekündigt• Flexible Bodies Library, angekündigt• Smart Electric Drives Library• Vehicle Dynamics Library
November 2007 Informationstag an der TU Wien 65
Powertrain-Library 2.0

November 2007 Informationstag an der TU Wien 66
• Wesentliche neue Version• 70 Komponenten• Längsdynamik• Standard- und Planetengetriebe mit
Verlusten, Kupplungen mit Reibung• Flexible Antriebsstrangmodelle• Arbeitet mit der 3D Vehicle
Dynamics Library
November 2007 Informationstag an der TU Wien 67
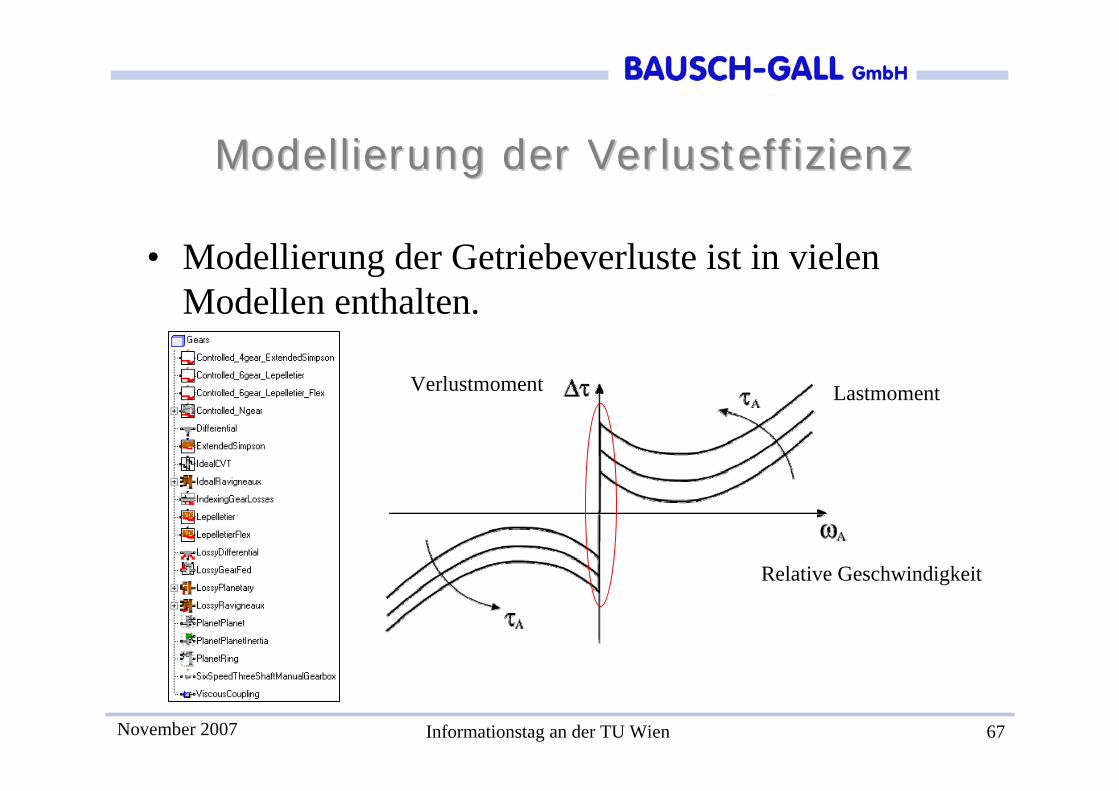
Modellierung der VerlusteffizienzModellierung der Verlusteffizienz
• Modellierung der Getriebeverluste ist in vielen Modellen enthalten.
Relative Geschwindigkeit
LastmomentVerlustmoment
November 2007 Informationstag an der TU Wien 68
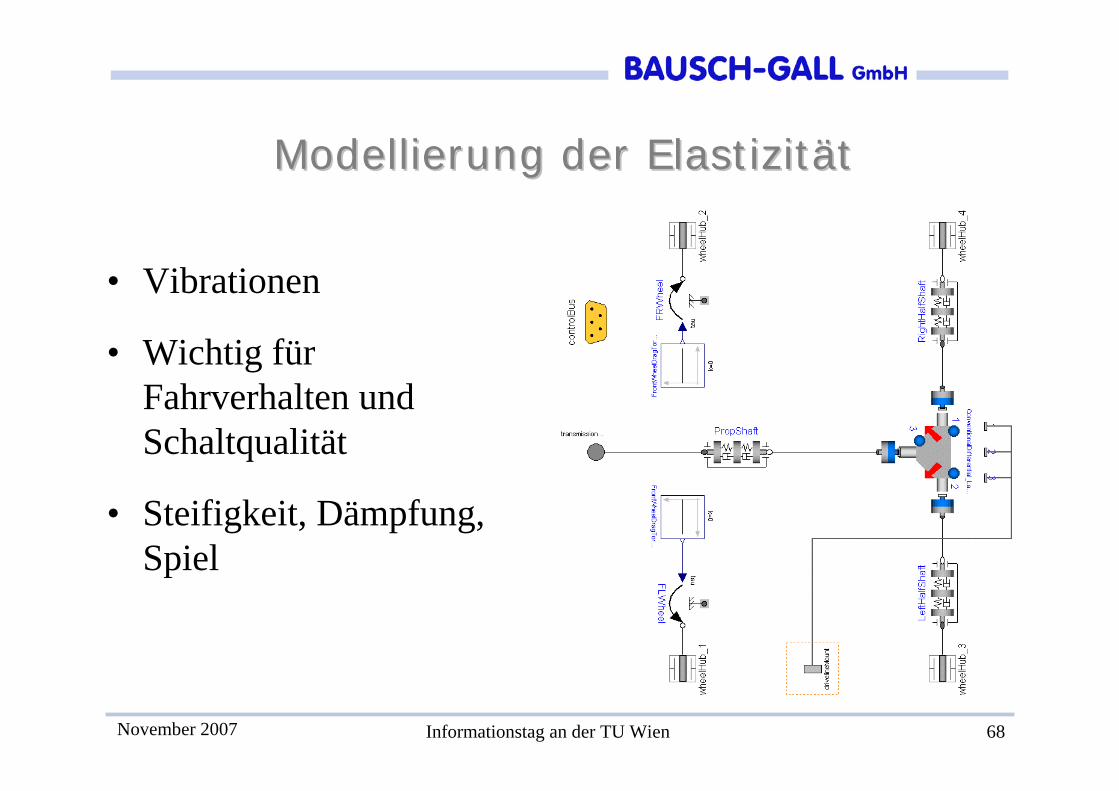
Modellierung der ElastizitätModellierung der Elastizität
• Vibrationen
• Wichtig für Fahrverhalten und Schaltqualität
• Steifigkeit, Dämpfung, Spiel
November 2007 Informationstag an der TU Wien 69
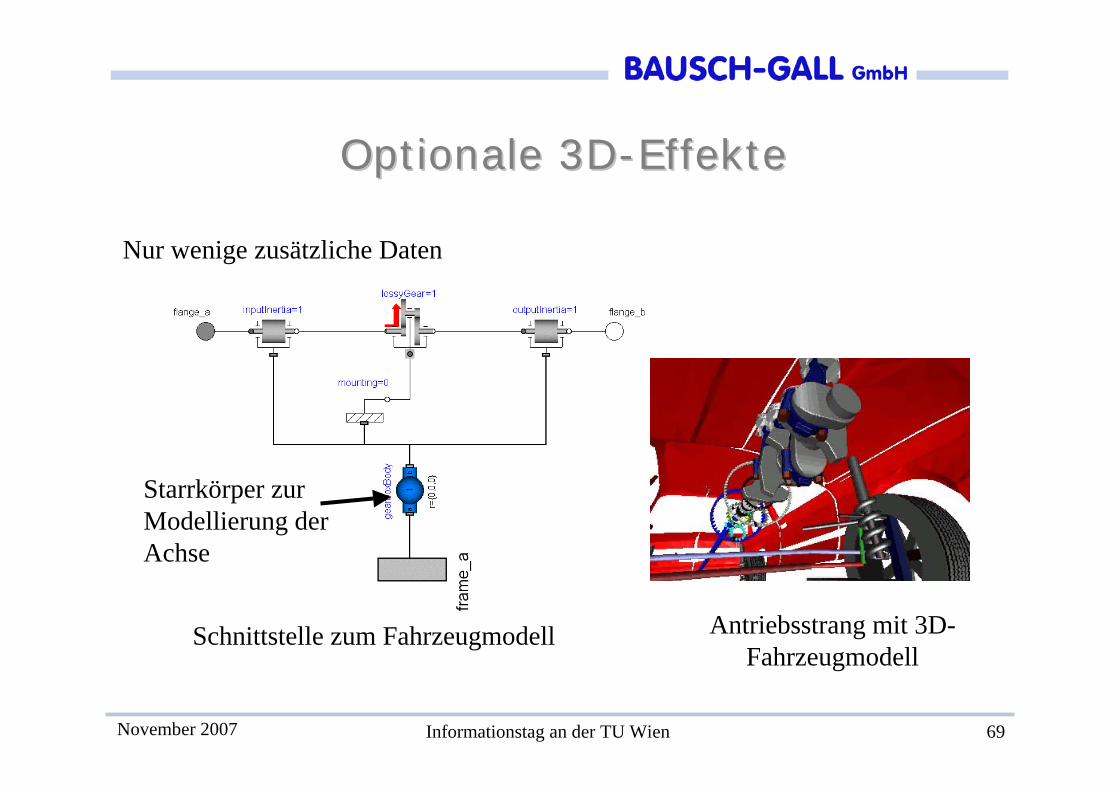
Optionale 3DOptionale 3D--EffekteEffekte
Nur wenige zusätzliche Daten
Schnittstelle zum Fahrzeugmodell
Starrkörper zur Modellierung der Achse
Antriebsstrang mit 3D-Fahrzeugmodell
November 2007 Informationstag an der TU Wien 70
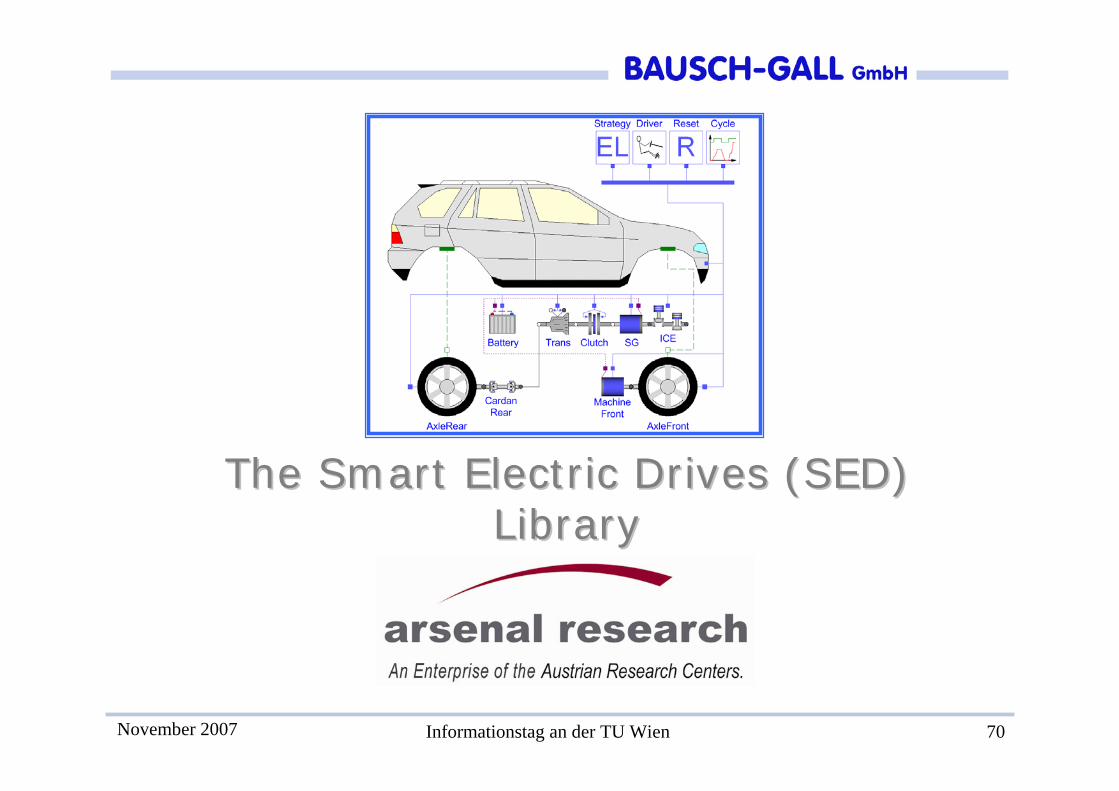
The Smart Electric Drives (SED) The Smart Electric Drives (SED) LibraryLibrary
November 2007 Informationstag an der TU Wien 71
Anwendungen im AutomobilbereichAnwendungen im Automobilbereich
• Simulation des vollständigen elektrischen Antriebssystems, einschließlich alternativer Antriebskonzepte
• Minimaler Verbrauch durch Zuschaltung elektrischer Antriebskomponenten
• Elektrische Leistung im Fahrzeug
• Entwicklung und Optimierung der Regelstrategien
November 2007 Informationstag an der TU Wien 72
Smart Electric Drives (SED) LibrarySmart Electric Drives (SED) Library• Komponenten, z.B.
– Asynchronmaschinen, Permanentmagnet-Synchronmaschinen, weitere Gleichstrommaschinen
– Regelungen: Feldorientierte Regelungen, bürstenloser Gleichstrommotor
– Stromrichter, verschiedene Abstraktionstiefen– Konverter, Energiequellen (Batterien, Brennstoffzellen)
• Anwendungen, z.B.– Hybrid Elektrische Fahrzeuge (HEV) zusammen mit der Powertrain
Library– Starter-Generatorkonzepte– Elektrisch angetriebene Wasserpumpe– Elektrisch angetriebene Ölpumpe– Elektrisch angetriebene Klimanlage– Quasi stationäre Anwendungen

November 2007 Informationstag an der TU Wien 73
BeispielBeispiel: : Gesamtsimulation einesGesamtsimulation eines HybridHybrid--ElektrischenElektrischen--FahrzeugsFahrzeugs
mit Allradantrieb
November 2007 Informationstag an der TU Wien 74
Vehicle Dynamics Vehicle Dynamics LibraryLibrary
www.modelon.se

November 2007 Informationstag an der TU Wien 75
Vehicle Dynamics Vehicle Dynamics Library: InhaltLibrary: Inhalt
• große Anzahl von Chassis- und Fahrwerksmodellen
• Schnittstelle zu gängigen Reifenmodellen• 3D-Straßenmodelle• Fahrermodelle für geschlossenen und offenen
Regelkreis• elementarer Antriebsstrang• Schnittstellen zur Powertrain und Transmission
Library• Motormodelle• Bremssysteme• Aerodynamik• Beispiele und Beispielexperimente
November 2007 Informationstag an der TU Wien 76
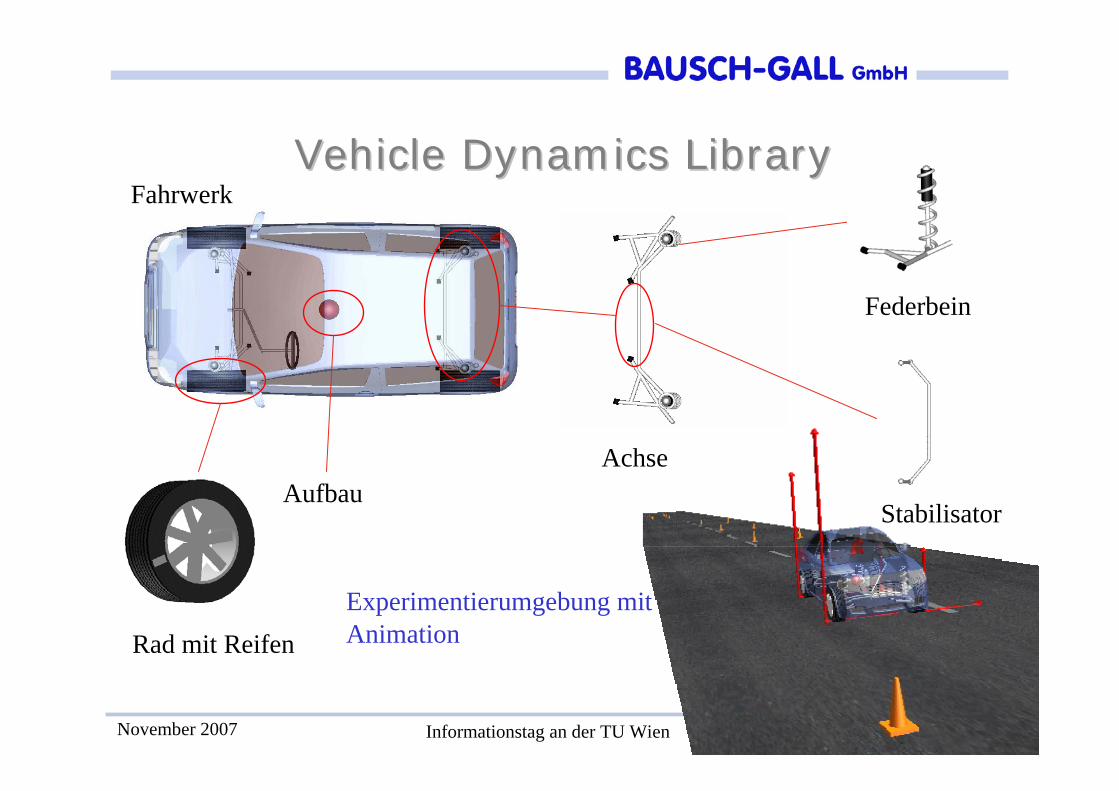
Vehicle Dynamics Vehicle Dynamics LibraryLibrary
Rad mit Reifen
Stabilisator
Achse
Fahrwerk
Aufbau
Experimentierumgebung mitAnimation
Federbein
November 2007 Informationstag an der TU Wien 77
Transmission LibraryTransmission Library
November 2007 Informationstag an der TU Wien 78
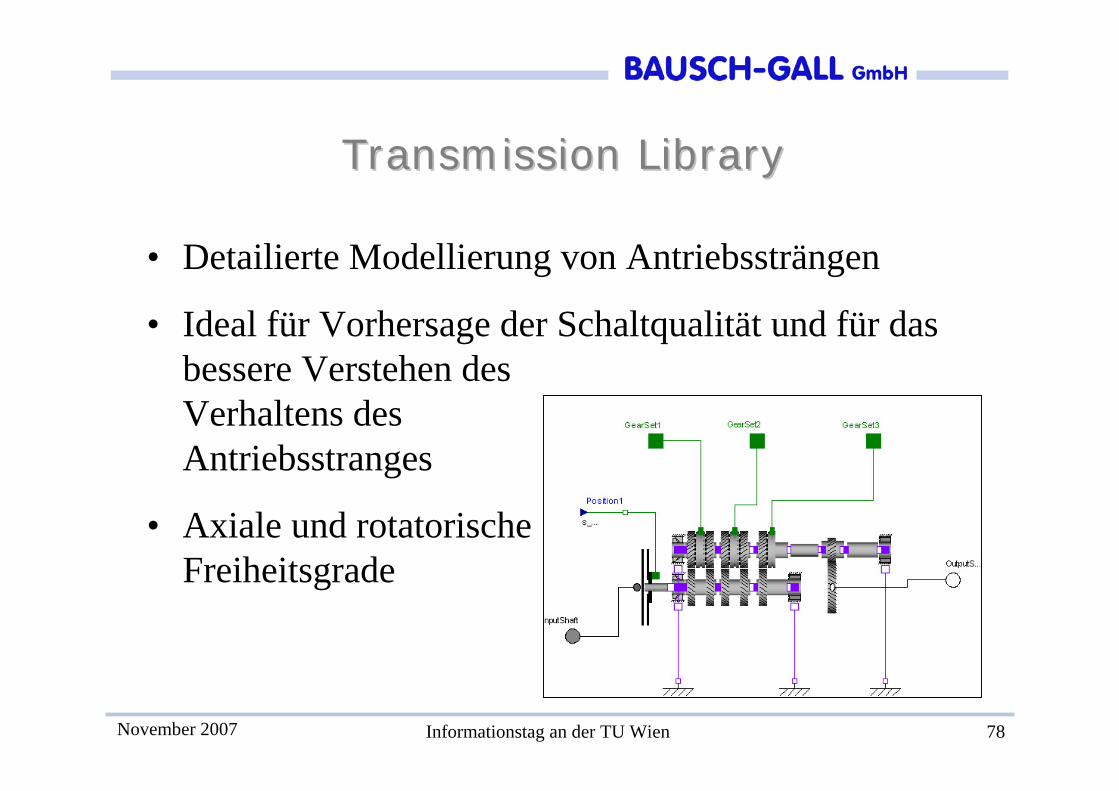
Transmission LibraryTransmission Library
• Detailierte Modellierung von Antriebssträngen
• Ideal für Vorhersage der Schaltqualität und für das bessere Verstehen des Verhaltens des Antriebsstranges
• Axiale und rotatorische Freiheitsgrade
November 2007 Informationstag an der TU Wien 79
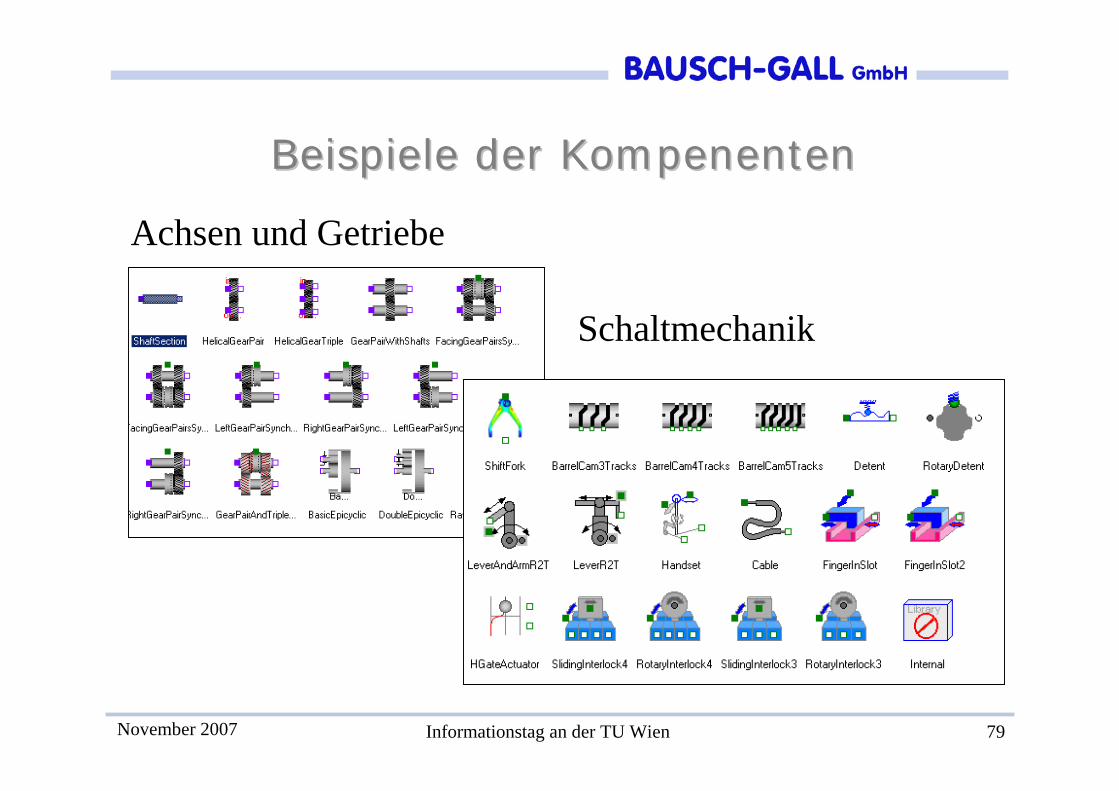
Beispiele der KompenentenBeispiele der Kompenenten
Achsen und Getriebe
Schaltmechanik
November 2007 Informationstag an der TU Wien 80
LiteraturLiteratur
• Principles of Object Oriented Modeling and Simulation with Modelica von Michael Tiller2002, Kluwer Academic Publisher; ISBN 0-7923-7367-7
• Principles of Object-Oriented Modeling and Simulation with Modelica 2.1von Peter Fritzson2004, IEEE Press, John Wiley&Sons, Inc. ISBN 0_471-47163-1
• Objektorientierte Modellierung von Antriebssystemen von Martin OtterKapitel 20 in „Elektrische Antriebe – Regelung von Antriebssystemen“ von D. Schröder, 2. Auflage, 2001, Springer-Verlag
• Modelica 2.2 Specification, sh. www.modelica.org/documents• Veröffentlichungen der Modelica Konferenzen der Jahre 200, 2002, 2003
und 2005 sh. www.modelica.org , dort unter den jeweiligen Konferenzen
November 2007 Informationstag an der TU Wien 81
ZusammenfassungZusammenfassung
• Modelica soll (de-facto) Sprach-Standard werden• Dymola (Software) unterstützt Modelica voll• viele Experten arbeiten an Modelica mit• freie Bibliotheken stehen auf der Modelica-Homepage zur
Verfügung• einige werden mit Dymola geliefert• zusätzliche Bibliotheken können erworben werden• Homepages:
www.dynasim.comwww.modelica.orgwww.bausch-gall.de
Recommended

















