Embed Size (px)
Citation preview
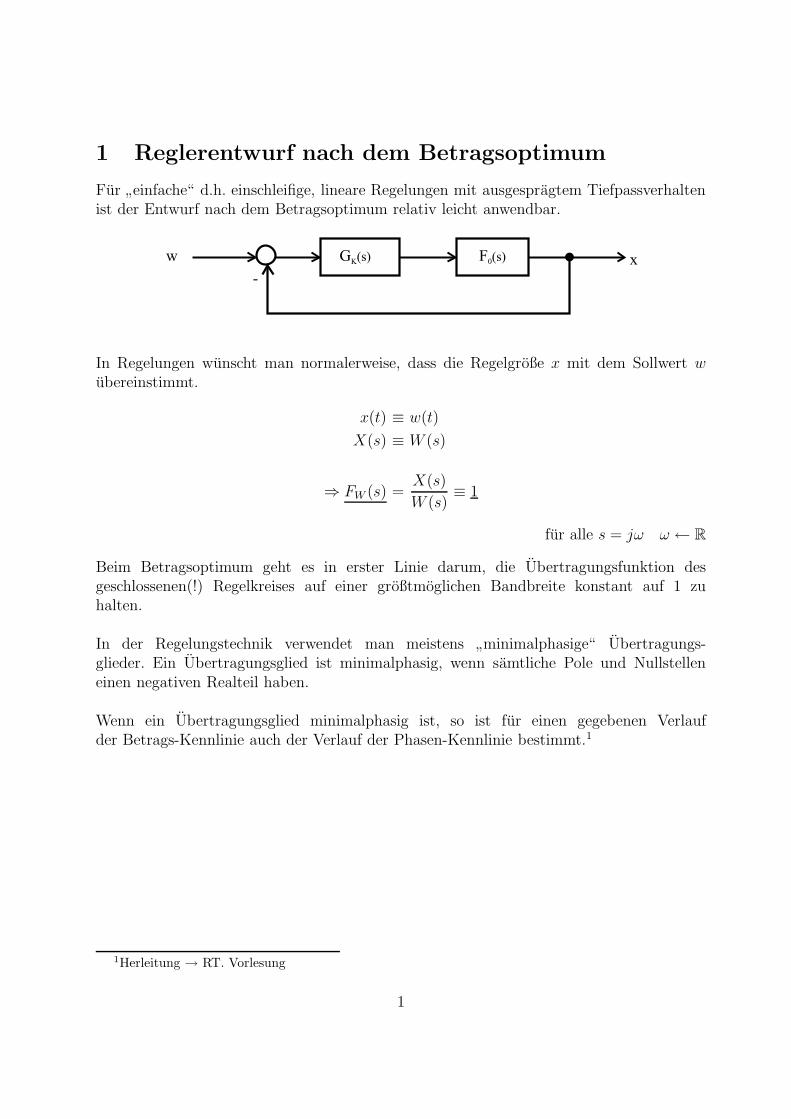
1 Reglerentwurf nach dem Betragsoptimum
Fur”einfache“ d.h. einschleifige, lineare Regelungen mit ausgespragtem Tiefpassverhalten
ist der Entwurf nach dem Betragsoptimum relativ leicht anwendbar.
GK(s) F0(s) xw
-
In Regelungen wunscht man normalerweise, dass die Regelgroße x mit dem Sollwert w
ubereinstimmt.
x(t) ≡ w(t)
X(s) ≡ W (s)
⇒ FW (s) =X(s)
W (s)≡ 1
fur alle s = jω ω ← R
Beim Betragsoptimum geht es in erster Linie darum, die Ubertragungsfunktion desgeschlossenen(!) Regelkreises auf einer großtmoglichen Bandbreite konstant auf 1 zuhalten.
In der Regelungstechnik verwendet man meistens”minimalphasige“ Ubertragungs-
glieder. Ein Ubertragungsglied ist minimalphasig, wenn samtliche Pole und Nullstelleneinen negativen Realteil haben.
Wenn ein Ubertragungsglied minimalphasig ist, so ist fur einen gegebenen Verlaufder Betrags-Kennlinie auch der Verlauf der Phasen-Kennlinie bestimmt.1
1Herleitung → RT. Vorlesung
1

Gegenbeispiel:
Allpaß: G(s) =1− Ts
1 + Ts
⇒ |G(jωs)| = 1
∠G(jωs) = −2 arctan(Tω)
Im{s}
Re{s}
PolNullstelle
1T
1T
-
Fur elektrische Umrichter oder Antriebe ist die Annahme eines minimalphasigen Systemsin der Regel zutreffend.
2
2 Regelung einer Strecke 2. Ordnung
2.1 Betragsoptimum
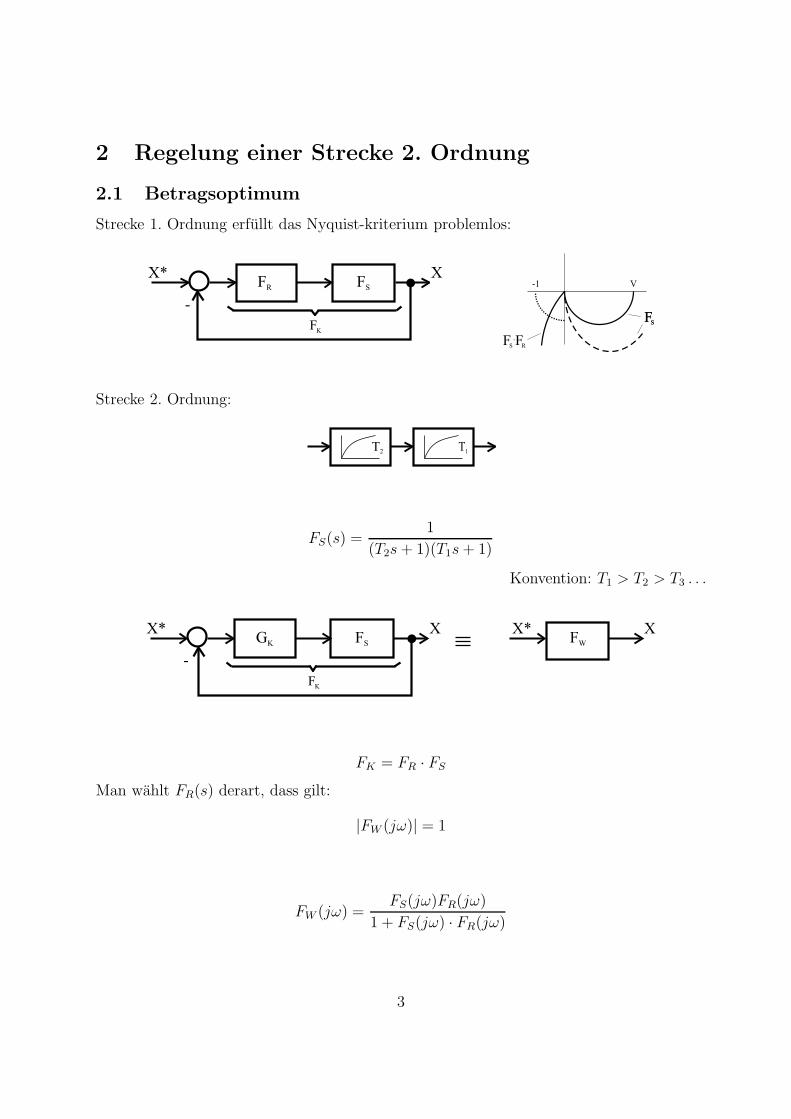
Strecke 1. Ordnung erfullt das Nyquist-kriterium problemlos:
-1 V
FS
FS
FSF
R
.
FR
FS
X*
-
X
FK
Strecke 2. Ordnung:
T2
T1
FS(s) =1
(T2s + 1)(T1s + 1)
Konvention: T1 > T2 > T3 . . .
GK
FS
X*
-
XF
W
XX*
FK
FK = FR · FS
Man wahlt FR(s) derart, dass gilt:
|FW (jω)| = 1
FW (jω) =FS(jω)FR(jω)
1 + FS(jω) · FR(jω)
3

Beispiel:Die Strecke FS(s) habe eine
”große“ Zeitkonstante T1 und mehrere kleine Zeitkonstanten
im Nenner
FS(s) =Ks
(1 + T1s)∏
(1 + Tvs)
≈ Ks
(1 + T1s)(1 + TEs)mit TE =
∑
ν
Tv
Gewahlt wird folgender PI-Regler:
FR(s) = KR
1 + T1s
T1s
vorausgesetzt, dass T1 > TE!
Gegenbeispiel: elektrische und mechanische Zeitkonstante eines Antriebes (hochdynamisch)sind ungefahr gleich ⇒ PI-Regler funktioniert nicht mehr.
⇒ FK(s) = FR(s) · F0(s)
=KR ·KS
sT1(1 + TEs)
FW (s) =FK(s)
1 + FK(s)=
KS ·KR
KS ·KR + T1s + TET1s2
Fur FW (s) = 1 ware x = x∗, was gewunscht wird.Fur ein minimalphasiges FW (s) folgt:
FW (s) = 1 aus |FW (jω)| = 1
FW (jω) =KS ·KR
KS ·KR + jωT1 + (jω)2Te · T1
|FW (jω)|2 =K2
S ·K2R
(KS ·KR − ω2TET1)2 + T 21 ω2
=K2
S ·K2R
K2S ·K2
R + ω4T 2ET 2
1 + ω2(T 21 − 2TET1KSKR)
4

fur kleine ω ist ω4T 2ET 2
1 ≈ 0
⇒ |FW (jω)|2 = 1 fur
ω2(T 21 − 2TET1KSKR) = 0
T1 = 2TEKSKR
KR = T1
2TEKS
dieser komplette geschlossene Regelkreis stellt im uberlagerten Regelkreis kein Stellgliedmit P-Verhalten fur alle Frequenzen, sondern eines mit VZ1-Verhalten dar.
Zusammenfassung:
Man wahlt den Regler FR(s) so:
• dass die großten Nennerzeitkonstanten der Strecke kompensiert werden.
ACHTUNG! Voraussetzung: 1 dominante Zeitkonstante!
• dass die Ubertragungsfunktion des geschlossenen Kreises uber weite Bereiche derFrequenzachse konstant bleibt.
|FW (jω)| = 1
Es gilt immer:
FW (jω) =F0(jω)GK(jω)
1 + F0(jω)GK(jω)
Analytische Losung fur den PI-Regler:
FK = V · Tis + 1
Tis· 1
(T2s + 1)(T1s + 1); Ti = T1
FK =1
TiKs(T2s + 1); TiK =
Ti
V
FW =FK
1 + FK
=ZN
1 + ZN
=Z
Z + N
FW =1
TiKT2s2 + TiKs + 1=
1(
sω0
)2
+ 2D sω0
+ 1
5
ω0 =1√
TiKT2
2D
ω0= TiK
D =1
2
TiK√TiKT2
=1
2
√
TiK
T2
=1
2
√2
TiK = 2T2 =Ti
V=
T1
V
⇓
V = T1
2T2Ti = T1
↪→ entsprechend T2 ≡ TE
V ≡ KR ·KS
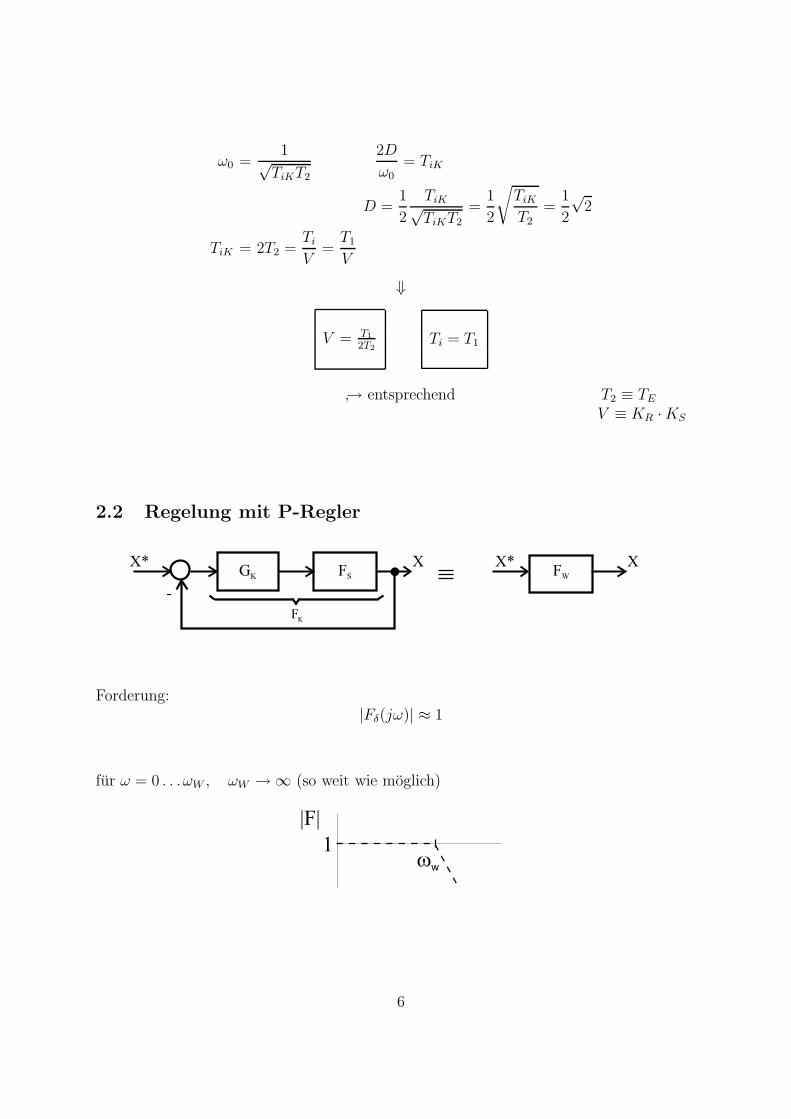
2.2 Regelung mit P-Regler
GK
FS
X*
-
XF
W
XX*
FK
Forderung:|Fδ(jω)| ≈ 1
fur ω = 0 . . . ωW , ωW →∞ (so weit wie moglich)
|F|
1w
w
6
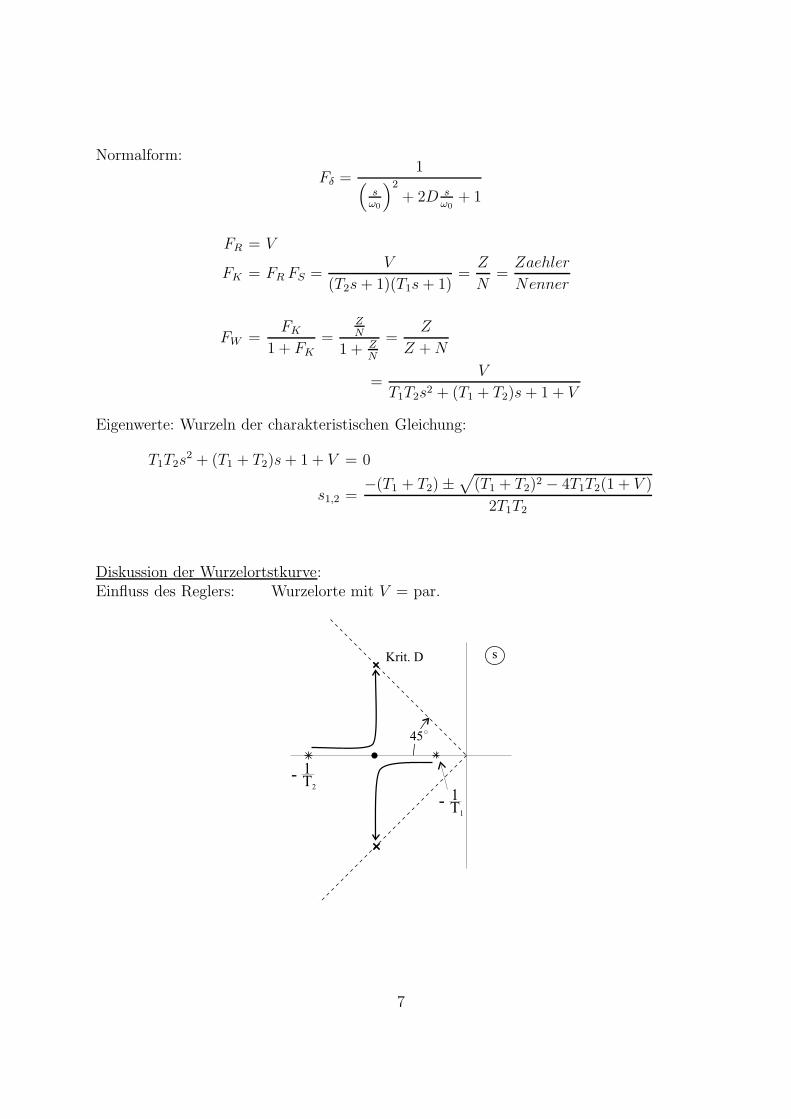
Normalform:
Fδ =1
(s
ω0
)2
+ 2D sω0
+ 1
FR = V
FK = FR FS =V
(T2s + 1)(T1s + 1)=
Z
N=
Zaehler
Nenner
FW =FK
1 + FK
=ZN
1 + ZN
=Z
Z + N
=V
T1T2s2 + (T1 + T2)s + 1 + V
Eigenwerte: Wurzeln der charakteristischen Gleichung:
T1T2s2 + (T1 + T2)s + 1 + V = 0
s1,2 =−(T1 + T2)±
√
(T1 + T2)2 − 4T1T2(1 + V )
2T1T2
Diskussion der Wurzelortstkurve:Einfluss des Reglers: Wurzelorte mit V = par.
1T
1
-
1T
2
-
Krit. D s
45
7

charakteristische Punkte:
• V = 0: s1 = − 1T1
s2 = − 1T2
•√
(T1 + T2)2 − 4 · T1T2(1 + V ) = 0: s1 = s2 = −12
(1T1
+ 1T2
)
entspricht einem reel-
len Mittelwert (±√)
• sonst: Konjugiert komplex
Folgerungen: (P-Regler)
• Kreis immer abs. stabil
• mit wachsendem V wird Dampfung geringer
• je weiter T1, T2 auseinanderliegen, desto großer muss V sein, um eine ausreichendeDynamik fur den geschlossenen Regelkreis zu erreichen (kritische Dampfung).
1T1
-1T2
-
sK ss
1
s2
W
durch eine Regelung
Ein optimierter Regler ergibt eine gute Position der Eigenwerte des geschlossenen Regel-kreises.
8
Reglerdimensionierungnur ein Parameter: V
T1T2s2 + (T1 + T2)s + 1 + V = 0
s1,2 =−(T1 + T2)±
√
(T1 + T2)2 − 4T1T2(1 + V )
2T1T2
• 1. Weg2
s1,2 =−(T1 + T2)±
√
(T1 + T2)2 − 4T1T2(1 + V )
2T1T2
Re(s1)!= Im(s1)→ 45◦ nur der Zahler von s1,2 wird betrachtet:
⇒ (T1 + T2)2 = −(T1 + T2)
2 + 4T1T2(1 + V )
1 + V =2(T1 + T2)
2
4T1T2
V =T 2
1 + T 22
2T1T2
• 2. Weg3 Normalform: ⇒ ein Glied ist 1
FW =V
V +1T1T2
V +1s2 + T1+T2
V +1s + 1
=VW
(s
ω0
)2
+ 2D sω0
+ 1
VW =V
V + 1
ω0 =
√
V + 1
T1T2
2D
ω0=
T1 + T2
v + 1⇓
D =1
2
T1 + T2√
T1T2(V + 1)
fur steigendes V gilt:
– ω0 →∞– D → 0
– VW → 1
2ublich (aperiodische Dampfung)3Betragsoptimum
9

Mit dem Betragsoptimum gilt:
2D2 = 1
⇒ D =1
2
√2
w00,5
1
1
22
( )qD
1
Kritische Dampfung:
1. ITAE }
erfullt2. Betragsoptimum
vorgegeben:
D = Dkrit. =1
2
√2 =
1
2
T1 + T2√
T1T2(V + 1)
(T1 + T2)2
2T1T2= V + 1
V =(T1 + T2)
2
2T1T2− 1 =
T 21 + T 2
2
2T1T2
zum Beispiel:
T1 = 4T2
V =16 + 1
8=
17
8≈ 2
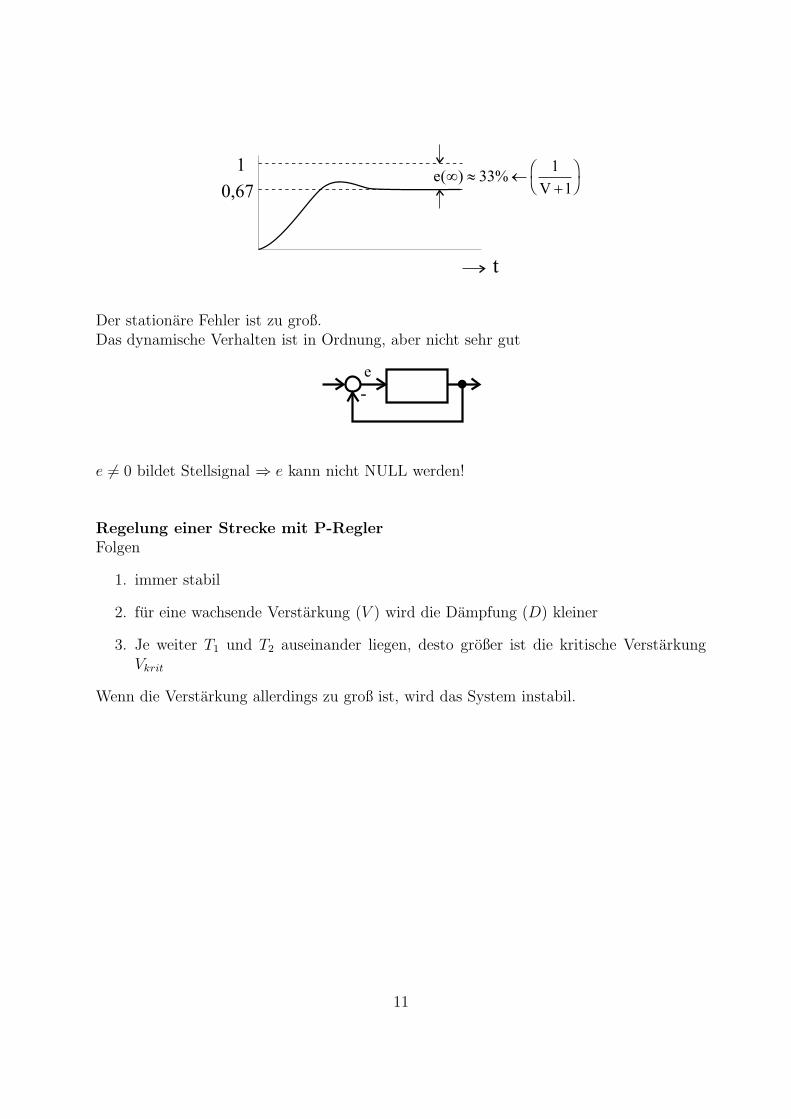
VW =V
V + 1=
2
3
10
0,67
1
t
eV
( )¥ » ¬
+
FH
IK33%
1
1
Der stationare Fehler ist zu groß.Das dynamische Verhalten ist in Ordnung, aber nicht sehr gut
e
-
e 6= 0 bildet Stellsignal ⇒ e kann nicht NULL werden!
Regelung einer Strecke mit P-Regler
Folgen
1. immer stabil
2. fur eine wachsende Verstarkung (V ) wird die Dampfung (D) kleiner
3. Je weiter T1 und T2 auseinander liegen, desto großer ist die kritische VerstarkungVkrit
Wenn die Verstarkung allerdings zu groß ist, wird das System instabil.
11
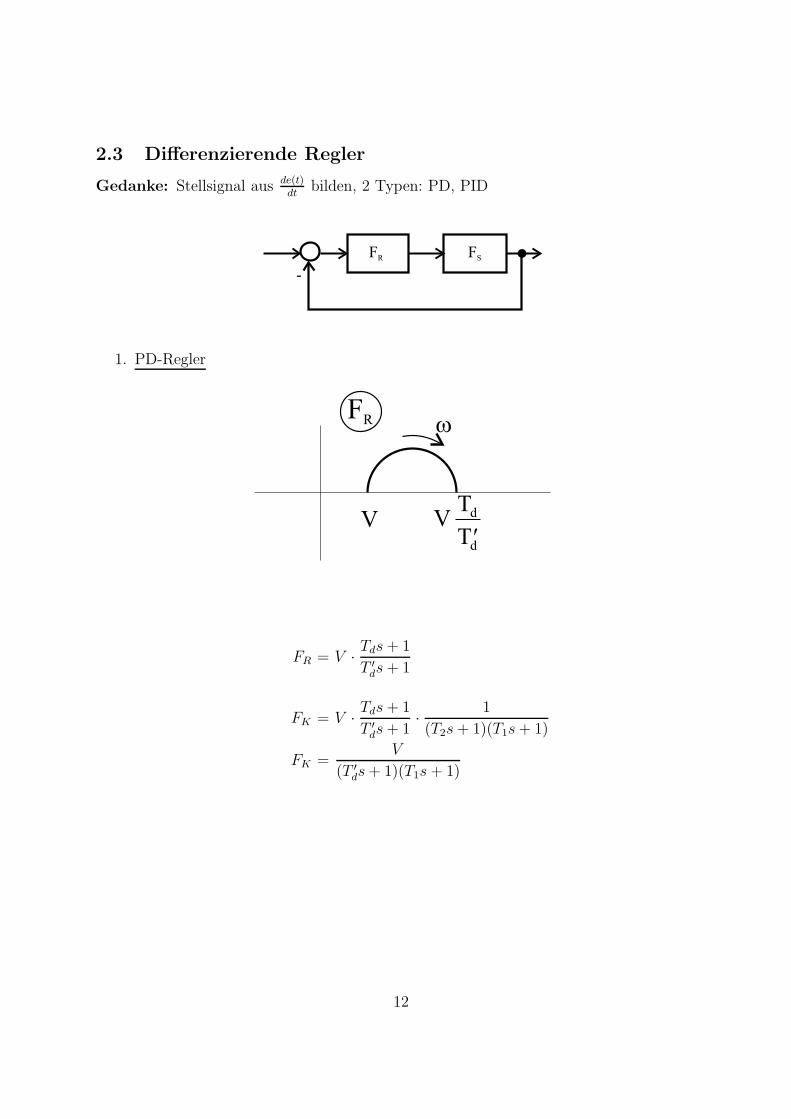
2.3 Differenzierende Regler
Gedanke: Stellsignal aus de(t)dt
bilden, 2 Typen: PD, PID
FR
FS
-
1. PD-Regler
FR
V VT
T
d
d¢
w
FR = V · Tds + 1
T ′
ds + 1
FK = V · Tds + 1
T ′
ds + 1· 1
(T2s + 1)(T1s + 1)
FK =V
(T ′
ds + 1)(T1s + 1)
12
1T
1
-1T
2
-
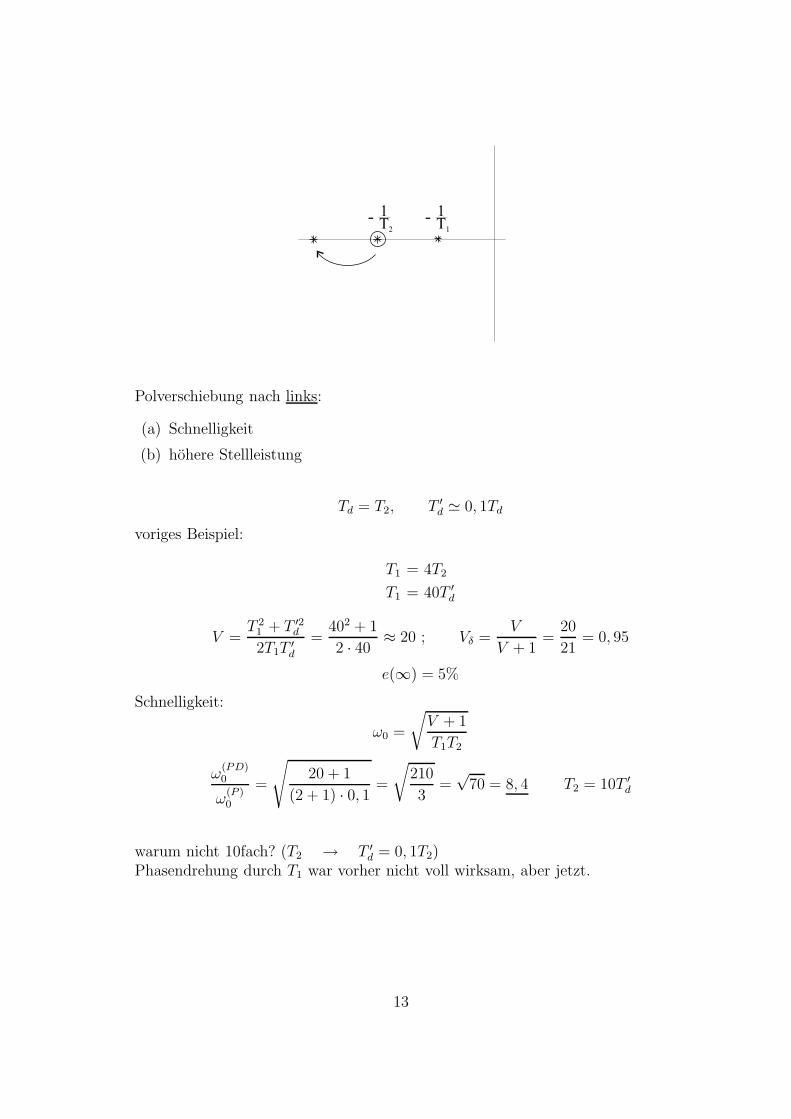
Polverschiebung nach links:
(a) Schnelligkeit
(b) hohere Stellleistung
Td = T2, T ′
d ' 0, 1Td
voriges Beispiel:
T1 = 4T2
T1 = 40T ′
d
V =T 2
1 + T ′2d
2T1T′
d
=402 + 1
2 · 40≈ 20 ; Vδ =
V
V + 1=
20
21= 0, 95
e(∞) = 5%
Schnelligkeit:
ω0 =
√
V + 1
T1T2
ω(PD)0
ω(P )0
=
√
20 + 1
(2 + 1) · 0, 1 =
√
210
3=√
70 = 8, 4 T2 = 10T ′
d
warum nicht 10fach? (T2 → T ′
d = 0, 1T2)Phasendrehung durch T1 war vorher nicht voll wirksam, aber jetzt.
13
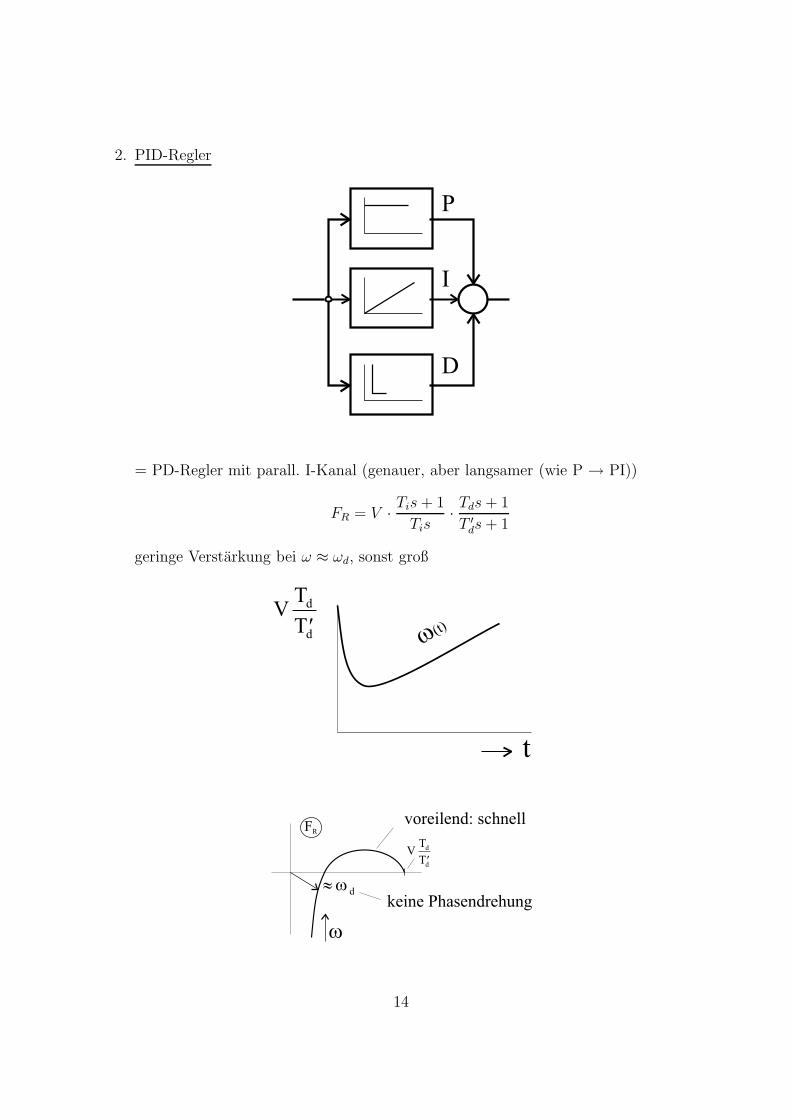
2. PID-Regler
P
I
D
= PD-Regler mit parall. I-Kanal (genauer, aber langsamer (wie P → PI))
FR = V · Tis + 1
Tis· Tds + 1
T ′
ds + 1
geringe Verstarkung bei ω ≈ ωd, sonst groß
t
VT
T
d
d¢ w(t)
FR
VT
T
d
d¢
» w d
keine Phasendrehung
w
voreilend: schnell
14
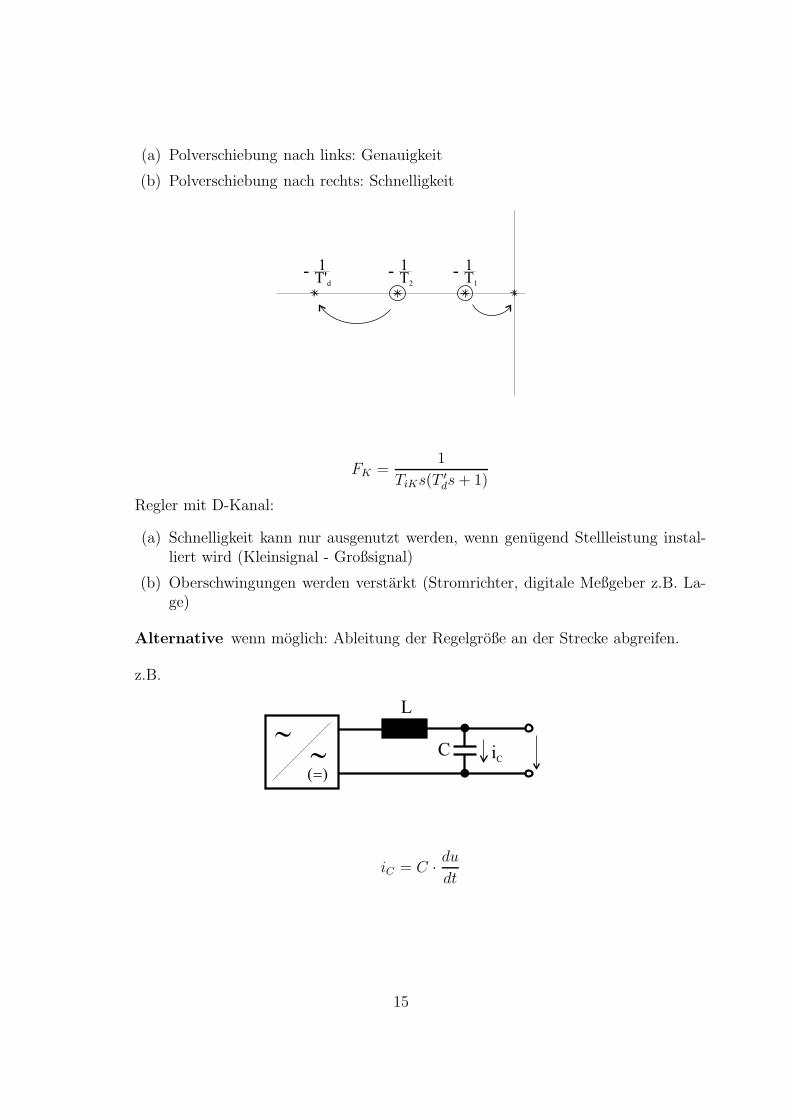
(a) Polverschiebung nach links: Genauigkeit
(b) Polverschiebung nach rechts: Schnelligkeit
1T
1
-1T
2
-1T'
d
-
FK =1
TiKs(T ′
ds + 1)
Regler mit D-Kanal:
(a) Schnelligkeit kann nur ausgenutzt werden, wenn genugend Stellleistung instal-liert wird (Kleinsignal - Großsignal)
(b) Oberschwingungen werden verstarkt (Stromrichter, digitale Meßgeber z.B. La-ge)
Alternative wenn moglich: Ableitung der Regelgroße an der Strecke abgreifen.
z.B.
L
( )=
»
»C iC
iC = C · du
dt
15
-
x*
-
x
Tdx
dt
T
hat FK(s) wie bei Regelung mit PID-Reglerx∗ wird aber nicht vom Regler differenziert
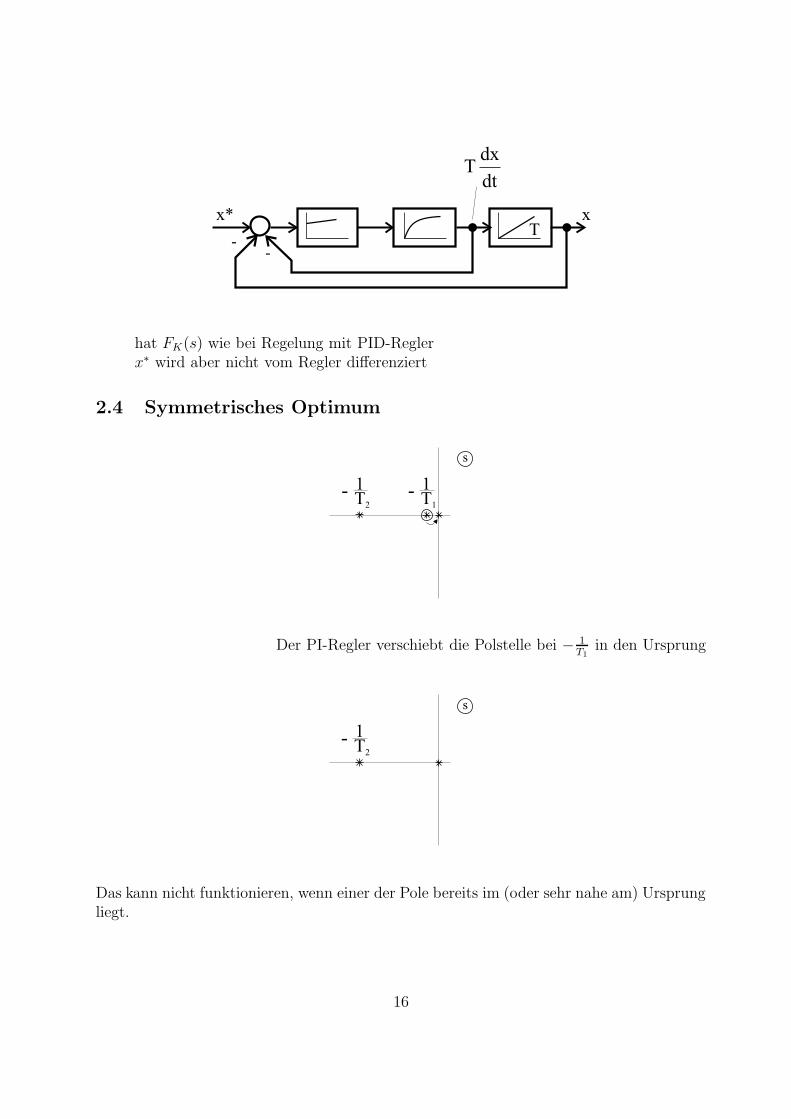
2.4 Symmetrisches Optimum
1T
1
-1T
2
-
s
Der PI-Regler verschiebt die Polstelle bei − 1T1
in den Ursprung
1T
2
-
s
Das kann nicht funktionieren, wenn einer der Pole bereits im (oder sehr nahe am) Ursprungliegt.
16
1
Ti
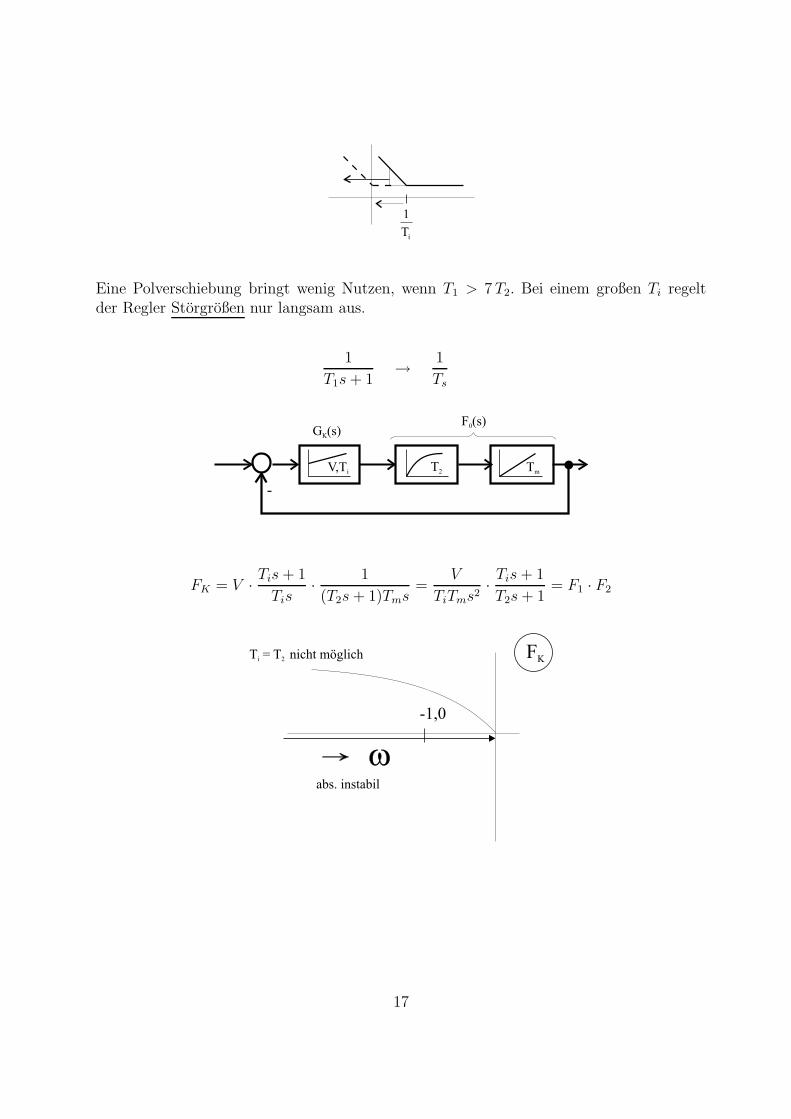
Eine Polverschiebung bringt wenig Nutzen, wenn T1 > 7 T2. Bei einem großen Ti regeltder Regler Storgroßen nur langsam aus.
1
T1s + 1→ 1
Ts
-
V,Ti T2 Tm
G (s)K
F (s)0
FK = V · Tis + 1
Tis· 1
(T2s + 1)Tms=
V
TiTms2· Tis + 1
T2s + 1= F1 · F2
FK
-1,0
T = T nicht möglichi 2
abs. instabil
17
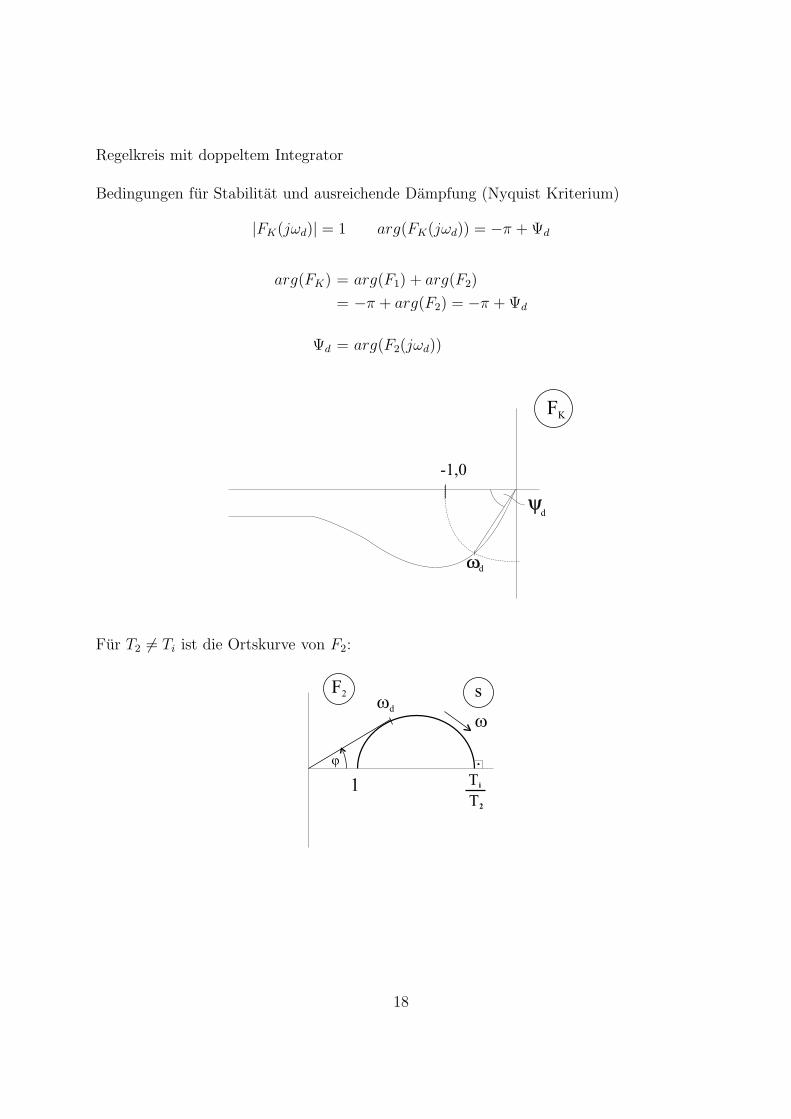
Regelkreis mit doppeltem Integrator
Bedingungen fur Stabilitat und ausreichende Dampfung (Nyquist Kriterium)
|FK(jωd)| = 1 arg(FK(jωd)) = −π + Ψd
arg(FK) = arg(F1) + arg(F2)
= −π + arg(F2) = −π + Ψd
Ψd = arg(F2(jωd))
FK
-1,0
d
d
Fur T2 6= Ti ist die Ortskurve von F2:
F2 s
wd
w
1
j
T2
Ti
18

Forderung: Ti → min fur ϕ = Ψd, sonst langsames Storverhaltend.h. ϕ = arg(F2) → max.
F2(s) =Tis + 1
T2s + 1
F2(jω) =1 + jωTi
1 + jωT2=
Ti
T2·
1Ti
+ jω
1T2
+ jω
φ = arg(F2) = arctan ωTi − arctan ωT2
1T
1
-
1T
i
-
w
+-
fur jedes ω ist der Winkel positiv!
dφ
dω|ω=ωd
=Ti
1 + ω2dT
2i
+−T2
1 + ω2dT
22
!= 0 (Maximum!)
Ti(1 + ω2dT
22 )− T2(1 + ω2
dT2i ) = 0
Ti − T2 − (Ti − T2)ω2dTiT2 = 0
ω2dTiT2 = 1
ωd =1
√
TiT2
19

gesucht: Ti
geschlossene Losung
Ψd = arg(F2)
Ψd = arctan ωdTi − arctan ωdT2
Ψd = arctan
√Ti
T2− arctan
√T2
Ti
Weg: Ti aus vorgegebenen. Ψd berechnen, dann V bestimmen.Wie berechne ich Ti aus Ψ (← vorgegeben)?
1
a
b
y
T2
Ti
a =1
2
(Ti
T2− 1
)
b = a + 1 =1
2
(Ti
T2+ 1
)
sin Ψ =a
b=
Ti
T2
− 1Ti
T2
+ 1
(Ti
T2
)
sin Ψ + sin Ψ =Ti
T2
− 1
(Ti
T2 − 1
)
(sin Ψ− 1) = −(1 + sin Ψ)
Ti
T2=
1 + sin Ψ
1− sin Ψ
Ti = T2
1 + sin Ψ
1 − sin Ψ
20
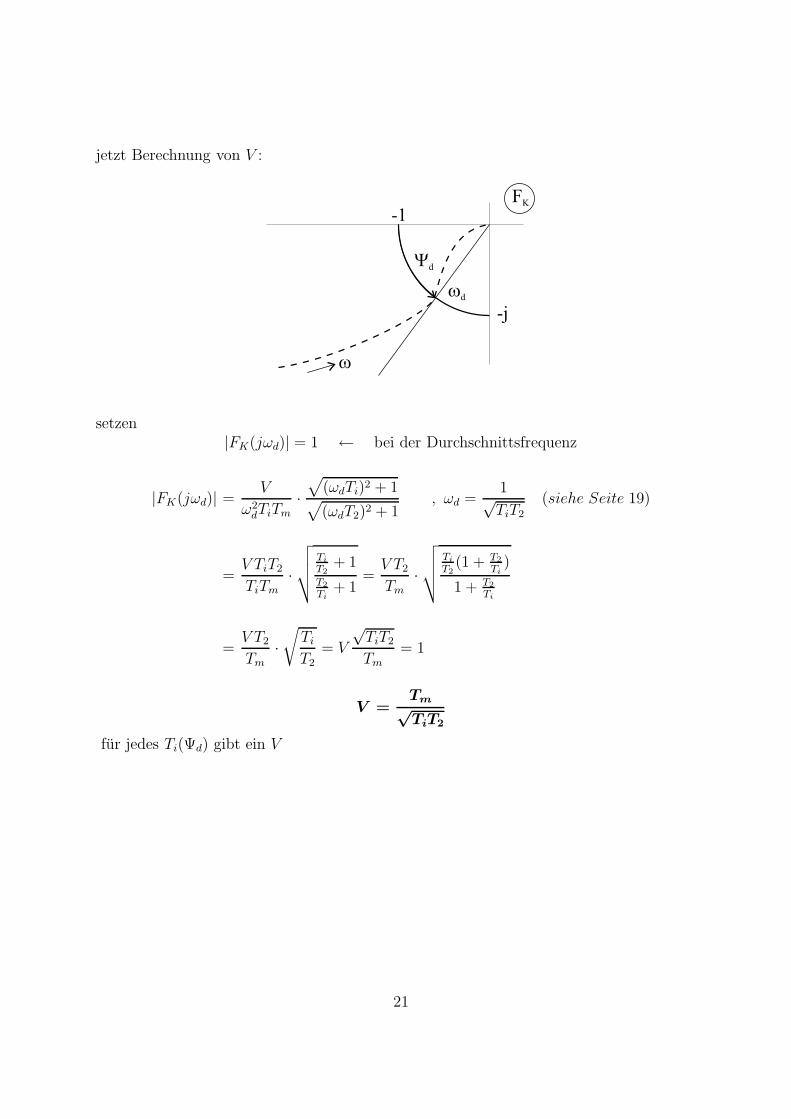
jetzt Berechnung von V :
FK
-1
-j
wd
w
Yd
setzen|FK(jωd)| = 1 ← bei der Durchschnittsfrequenz
|FK(jωd)| =V
ω2dTiTm
·√
(ωdTi)2 + 1√
(ωdT2)2 + 1, ωd =
1√TiT2
(siehe Seite 19)
=V TiT2
TiTm
·
√√√√
Ti
T2
+ 1T2
Ti+ 1
=V T2
Tm
·
√√√√
Ti
T2
(1 + T2
Ti)
1 + T2
Ti
=V T2
Tm
·√
Ti
T2= V
√TiT2
Tm
= 1
V =Tm
√
TiT2
fur jedes Ti(Ψd) gibt ein V
21
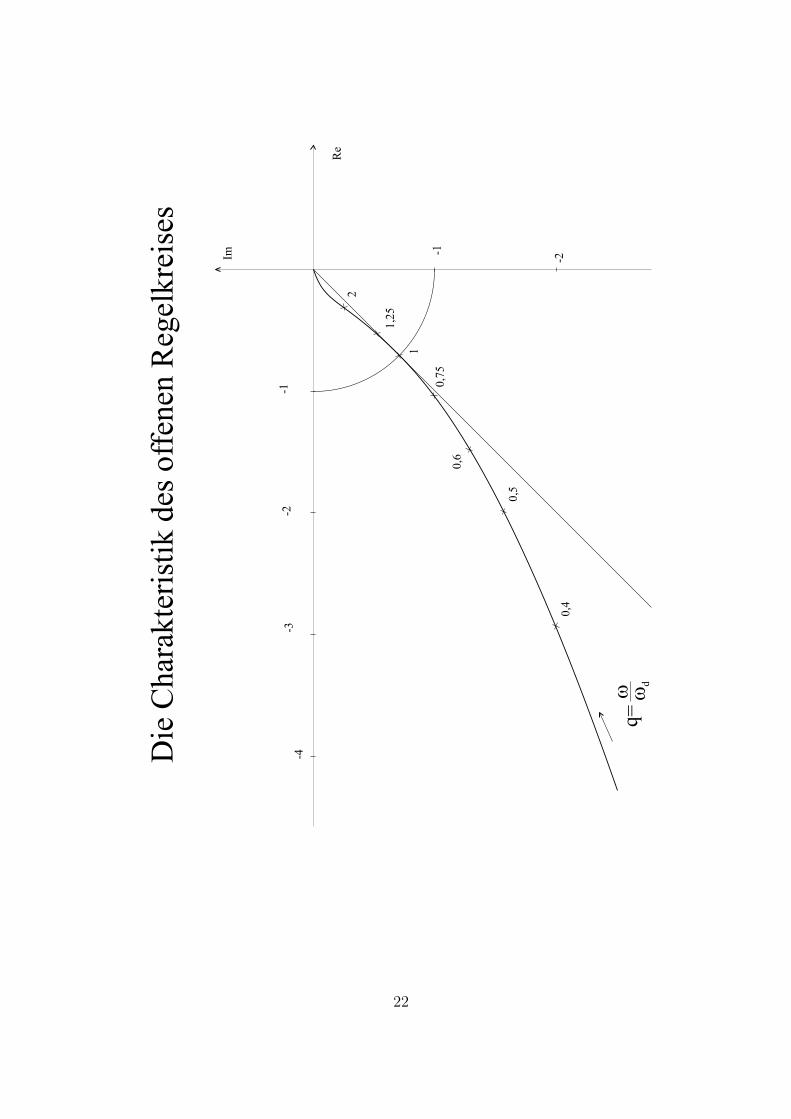
Re
Im
-1-2
-3-4
-1
-2
2
1,2
5
1
0,7
5
0,6
0,5
0,4
q=
w wd
Die
Char
akte
rist
ik d
es o
ffen
en R
egel
kre
ises
22
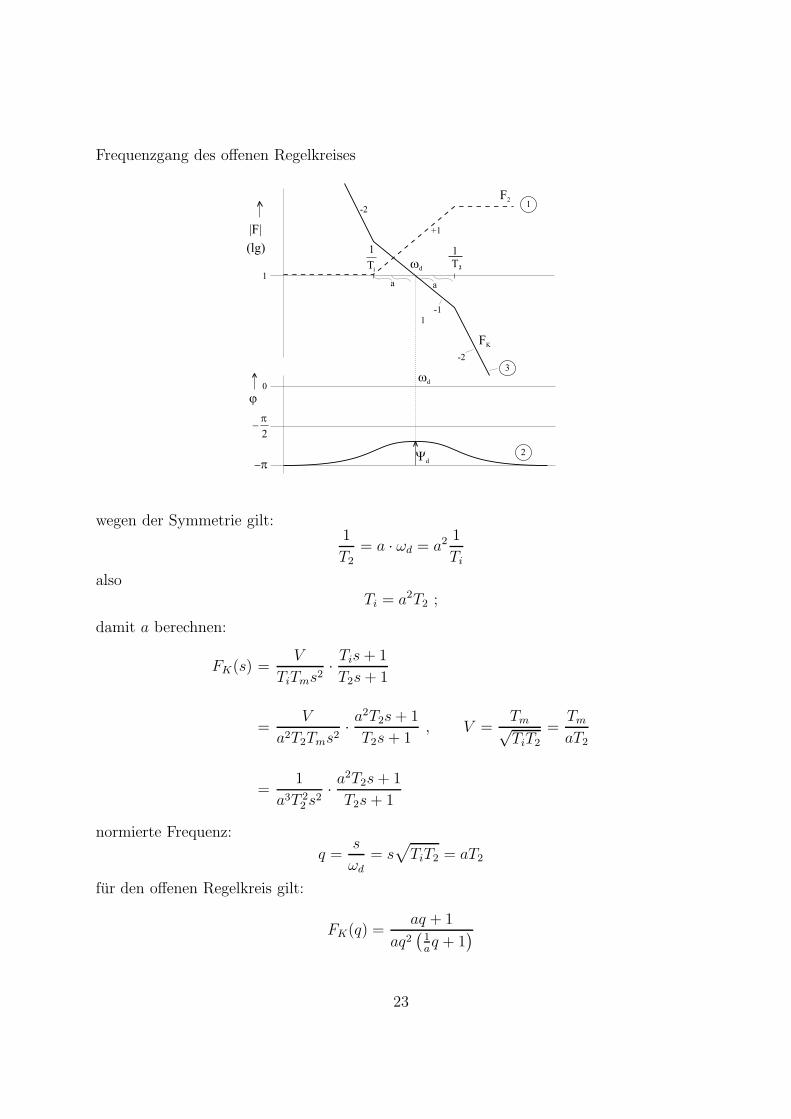
Frequenzgang des offenen Regelkreises
1
(lg)
|F|
a a
+1
-1
-23
1-2
FK
wd
F2
j0
-pYd
2
wd
-p
2
1
Ti
1
T2
1
wegen der Symmetrie gilt:1
T2
= a · ωd = a2 1
Ti
alsoTi = a2T2 ;
damit a berechnen:
FK(s) =V
TiTms2· Tis + 1
T2s + 1
=V
a2T2Tms2· a
2T2s + 1
T2s + 1, V =
Tm√TiT2
=Tm
aT2
=1
a3T 22 s2· a
2T2s + 1
T2s + 1
normierte Frequenz:
q =s
ωd
= s√
TiT2 = aT2
fur den offenen Regelkreis gilt:
FK(q) =aq + 1
aq2(
1aq + 1
)
23
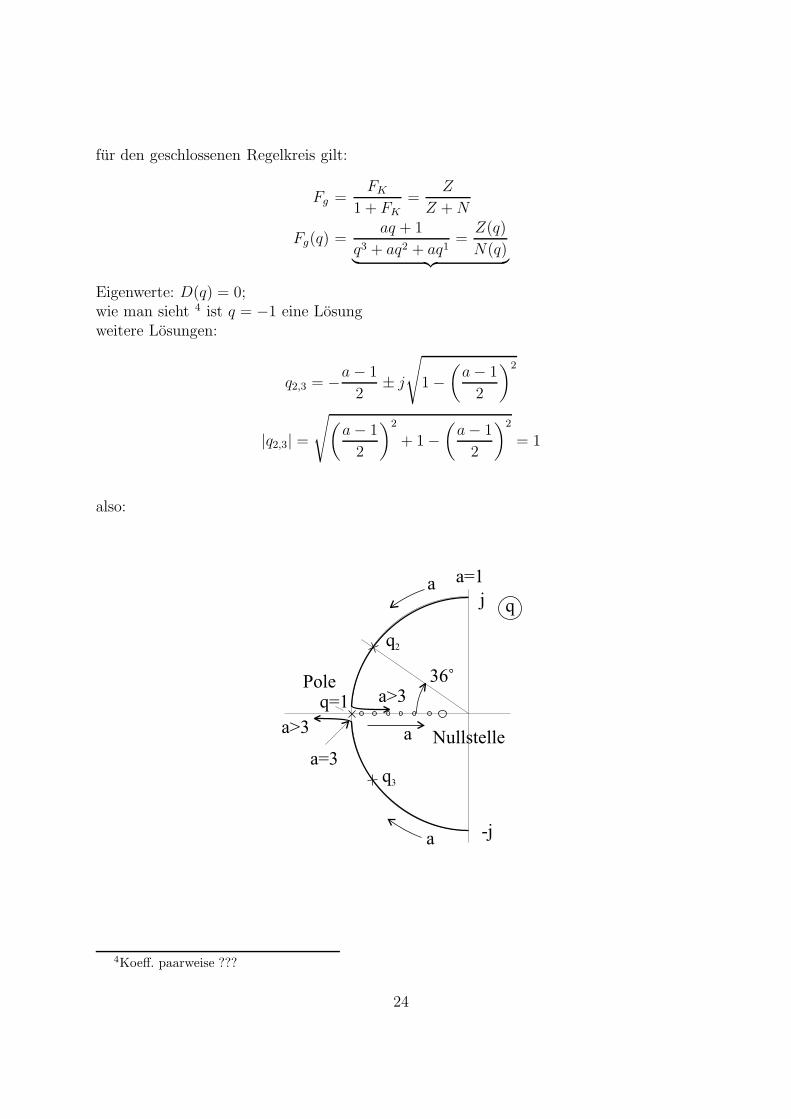
fur den geschlossenen Regelkreis gilt:
Fg =FK
1 + FK
=Z
Z + N
Fg(q) =aq + 1
q3 + aq2 + aq1=
Z(q)
N(q)︸ ︷︷ ︸
Eigenwerte: D(q) = 0;wie man sieht 4 ist q = −1 eine Losungweitere Losungen:
q2,3 = −a− 1
2± j
√
1−(
a− 1
2
)2
|q2,3| =
√(
a− 1
2
)2
+ 1−(
a− 1
2
)2
= 1
also:
a -j
q3
a Nullstelle
a>3
q2
a a=1
j q
a=3
a>3
q=1Pole 36
4Koeff. paarweise ???
24
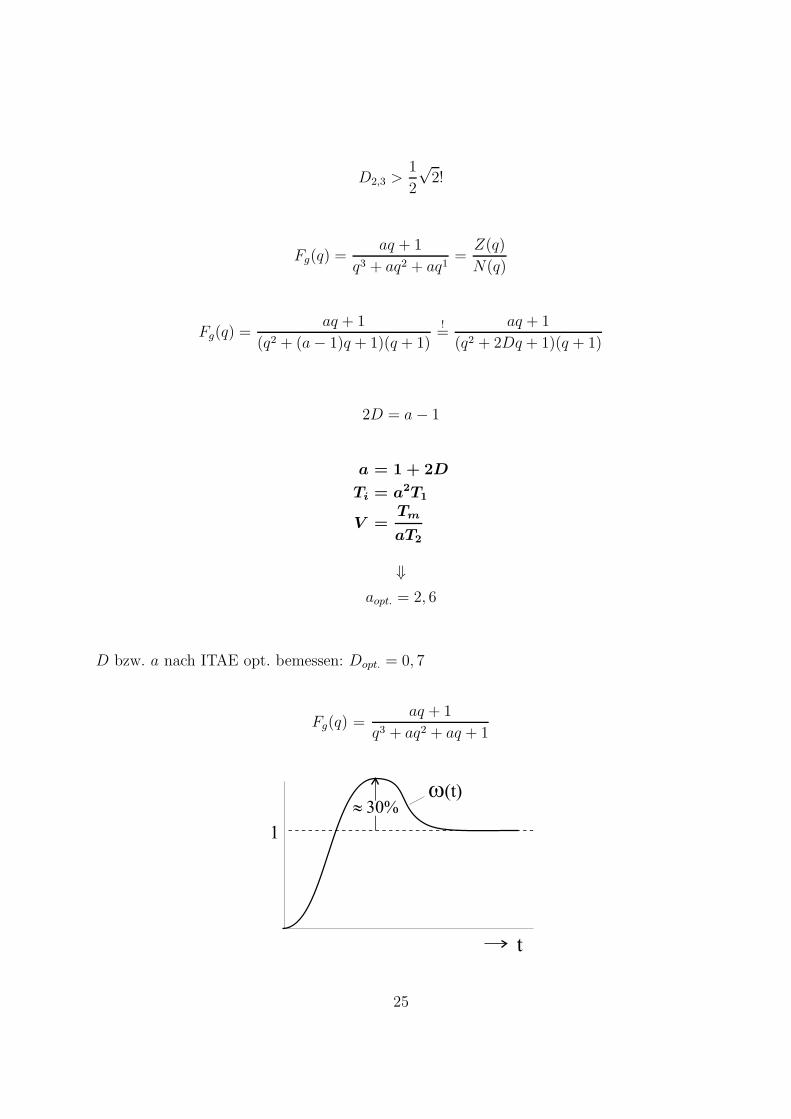
D2,3 >1
2
√2!
Fg(q) =aq + 1
q3 + aq2 + aq1=
Z(q)
N(q)
Fg(q) =aq + 1
(q2 + (a− 1)q + 1)(q + 1)
!=
aq + 1
(q2 + 2Dq + 1)(q + 1)
2D = a− 1
a = 1 + 2D
Ti = a2T1
V =Tm
aT2
⇓aopt. = 2, 6
D bzw. a nach ITAE opt. bemessen: Dopt. = 0, 7
Fg(q) =aq + 1
q3 + aq2 + aq + 1
1
t
w(t)» 30%
25
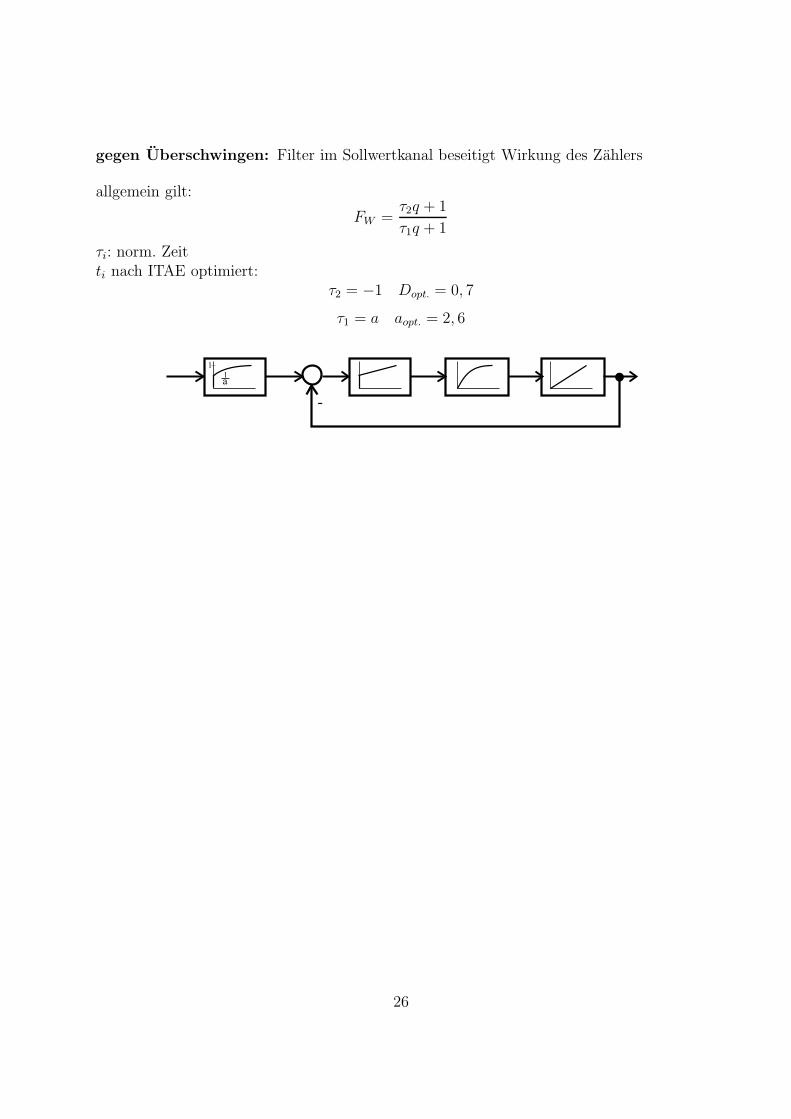
gegen Uberschwingen: Filter im Sollwertkanal beseitigt Wirkung des Zahlers
allgemein gilt:
FW =τ2q + 1
τ1q + 1
τi: norm. Zeitti nach ITAE optimiert:
τ2 = −1 Dopt. = 0, 7
τ1 = a aopt. = 2, 6
-
1
1
a
26
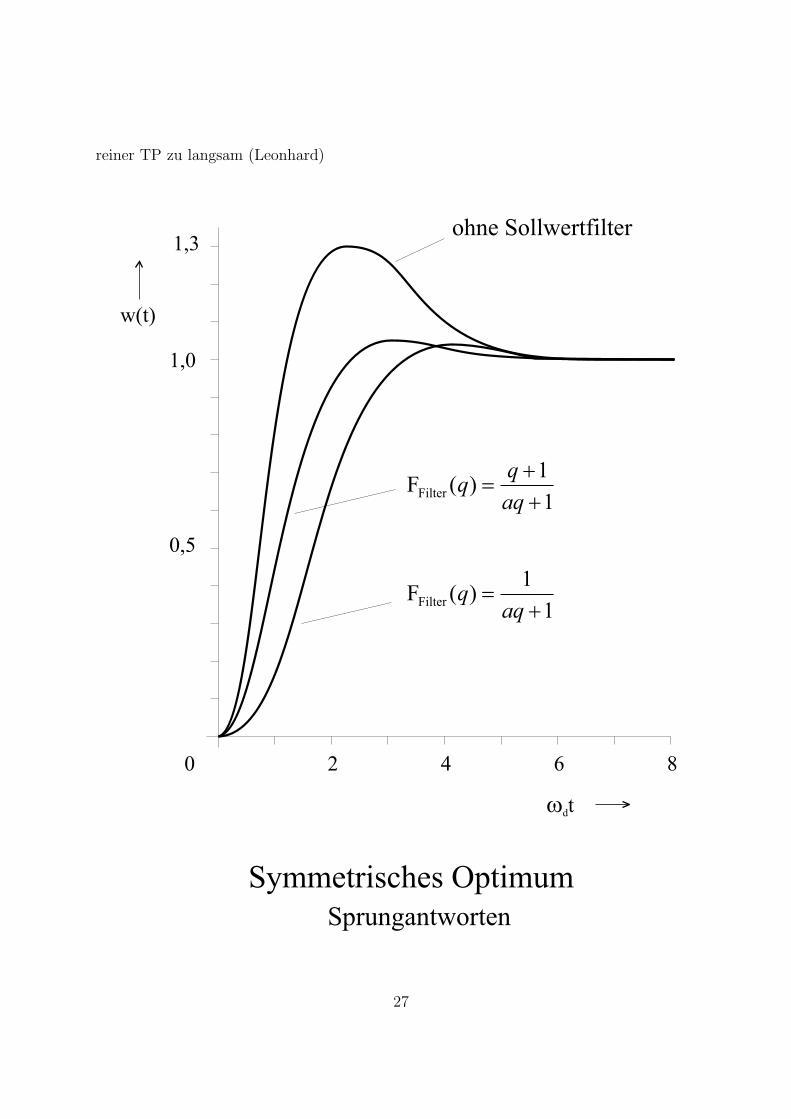
reiner TP zu langsam (Leonhard)
0 2 4 6 8
wdt
0,5
1,0
1,3
w(t)
ohne Sollwertfilter
FFilter ( )qq
aq=
+
+
1
1
FFilter ( )qaq
=
+
1
1
Symmetrisches Optimum
Sprungantworten
27
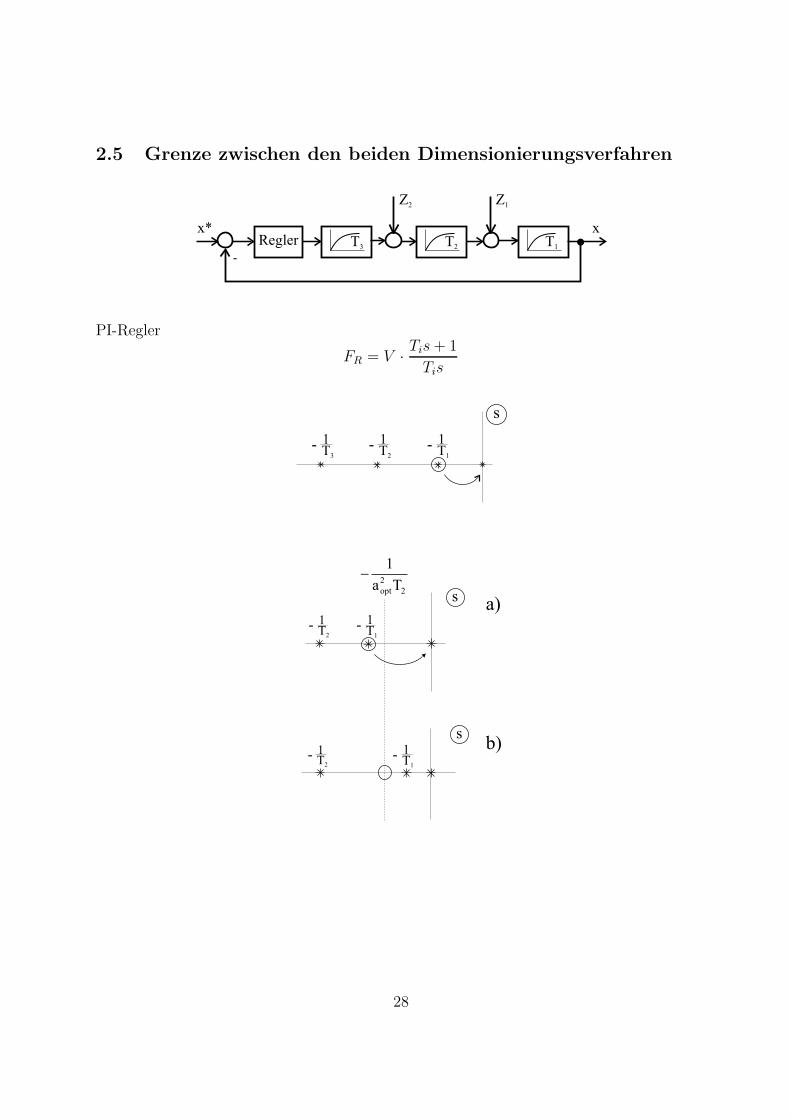
2.5 Grenze zwischen den beiden Dimensionierungsverfahren
-
Regler T1T2T3
Z1Z2
xx*
PI-Regler
FR = V · Tis + 1
Tis
1T
1
-1T
2
-1T
3
-
s
1T1
-1T2
-
s
1T2
- 1T1
-
s
-
1
a Topt
2
2
a)
b)
28

a) BetragsoptimumT1 < a2
opt.T2
b) Symm. Opt.T1 > a2
opt.T2
aopt. = 2, 6
a2opt. = 6 . . . 7 = 6, 75
29





























