Embed Size (px)
Citation preview
1
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 1
Kapitel 2: GewöhnlicheDifferentialgleichungen
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 2
2.1.(1) Beispiele
• 1. Beispiel: (der gute alte Kondensator nochmal)
• Wir betrachten eine RC-Serienschaltung sowie diespeisende Gleichspannungsquelle uq
• Gesucht wird der Verlauf derKondensatorspannung uc(t) beim Einschalten undAbschalten (siehe Tafelbild)
• Zwischen Strom und Spannung am Kondensatorgilt
dt
tduCti c )(
)( =
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 3
Woche 4
( )ti
cuqu
ru
crq uuu +=
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 4
Beispiel
• Ferner für die Summe aller Spannungen (2.Kirchhoff) beim Einschalten
• Damit erhalten wir einen Zusammenhangzwischen der Funktion uc(t) und ihrer erstenAbleitung
• Dies ist eine gewöhnliche, lineareDifferentialgleichung erster Ordnung
crq uuu +=
qcc
cr uudt
tduRCuu =+=+ )(
App.ico
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 5
Beispiel
• Die Lösung ergibt sich durch Ansatzfunktionanalytisch zu
• Beim Ausschalten gilt
• Mit den Lösungen (umgekehrter Stromfluss)
)1()( RC
t
qc eutu−
−=
RC
tq e
R
uti
)(
−=
0)( =+=+ c
ccr u
dt
tduRCuu
RC
t
qc eutu
)(−
= RC
tq e
R
uti
)(
−−=
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 6
Noch ‘n Beispiel
• 2. Beispiel: (Traktrix von Leibniz 1676) [3]: EineUhr liegt zur Zeit t=0 am Ort (0,a) und das Endeder Schnur im Ursprung.
• Gesucht ist die Kurve die die Uhr zurücklegt,wenn man entlang der y-Achse zieht.
• y’(x)<0 für alle x>0
• y(0)=a (Anfangsbedingung)
• Nichtlineare, gewöhnliche Differentialgleichung1. Ordnung
2
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 7
Bild dazu
y(x)
x
a
x-y(x)/y’(x)
Uhr
a
Tangentialer Zug
y
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 8
Beispiel
• Wir berechnen nach Pythagoras
• und erhalten eine Beziehung zwischen derFunktion y(x) und Ihrer ersten Ableitung
• Wir finden die Lösung durchVariablensubstitution oder mittels Maple
2
222
’y
yya +=
22 )(
)()(’
xya
xyxy
−−=
App.ico
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 9
Noch ‘n Beispiel• Beispiel 3: Wir betrachten das mathematische
Pendel der Länge L, wobei g dieErdbeschleunigung ist.
• Es gehorcht der Differentialgleichung
• Dies ist eine nichtlineare Differentialgleichung 2.Ordnung.
• Zur (einfachen) Lösung wird sie linearisiert
0sin2
2
=+ θθL
g
dt
d
02
2
=+ θθL
g
dt
d
App.ico
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 10
Bild dazu
( )l
l
l
y
F
F
h
T Θ⋅== sin ( ) Θ=Θ��
mlmg sin
��
ml
( )Θsinmgmg
Θ
y
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 11
2.1.2 Notation und Klassifikation
• Gewöhnliche Differentialgleichungen (ODEs)enthalten nur Ableitungen nach einer einzelnen,unabhängigen Variablen, z. B. x
• Sie werden im allgemeinen nach der höchstenAbleitung der gesuchten Lösungsfunktion y(x)aufgelöst, so dass
• Diese bestimmt die Ordnung der Dgl.
• Hierbei ist f gegeben und y(x) gesucht
),..,’’,’,,( )1()( −= nn yyyyxfy
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 12
Notation und Klassifikation
• Gewöhnliche Differentialgleichungen ersterOrdnung können in folgender Form geschriebenwerden
• Beispiel:
• wird gelöst von Funktionen der Form
),(’ yxfy =
2ydx
dy =
)(1
)(xC
xy−
=

3
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 13
Notation und Klassifikation
• Hierbei ist C eine Integrationskonstante
• Zu deren Bestimmung benötigen wir eineAnfangsbedingung, z. B.
• Bestimmt C=1
• Eine gewöhnliche Differentialgleichung 2.Ordnung ergibt sich zu
1)0( =y
)’,,(’’ yyxfy =
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 14
Notation und Klassifikation
• Ihre Lösung wird durch die beidenAnfangsbedingungen
• eindeutig bestimmt
• Durch Definition zusätzlicher Variablen kann dieDgl. in zwei Gleichungen erster Ordnungumgewandelt werden, mit
00 )( yxy = ’)(’ 00 yxy =
),,()(’
)()(’
212
21
yyxfxy
xyxy
==
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 15
Notation und Klassifikation
• Allgemein können Dgl. n-ter Ordnung in Systemevon Dgl. 1. Ordnung umgewandelt werden
• Die Lösung eines derartigen Systems enthält i.A. nfreie Integrationskonstanten
),..,,,()(’
),..,,,()(’
),..,,,()(’
121
12122
12111
−
−
−
=
==
nnn
n
n
yyyxfxy
yyyxfxy
yyyxfxy
�
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 16
Notation und Klassifikation
• Diese können durch die Anfangswertbedingung
• festgelegt werden.
• Probleme, bei denen die n Bedingungen fürdasselbe x0 gegeben sind, heissenAnfangswertprobleme (initial value problems)
• Probleme bei denen die Bedingungen aufverschiedene Stellen xi verteilt sind, heissenRandwertprobleme (boundary problems)
00 )( yy =x
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 17
Notation und Klassifikation
• Partielle Differentialgleichungen (PDEs)enthalten Ableitungen nach verschiedenenunabhängigen Variablen, z. B. x,t
• Beispiel: 1D-Diffusionsgleichung
2
2 ),(),(x
txuk
t
txu
∂∂=
∂∂
• Umwandlungen in Systeme 1. Ordnung sind bei numerischenIntegrationsverfahren von grosser Bedeutung
• PDEs sind von höchster praktischer Bedeutung und beschreibeneine Vielzahl technischer Phänomene (siehe Kapitel 3)
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 18
2.1.3 Richtungsfelder
• Die Differentialgleichung 1. Ordnung ist der Form
• Sie heisst linear, falls sich f wie folgt zerlegenlässt
• Eine Dgl. 1. Ordnung definiert eineTangentensteigung in jedem Punkt (x,y)
• Dieses Feld wird auch Richtungsfeld genannt
),( yxfdxdy =
)()( xbyxadxdy +=
4
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 19
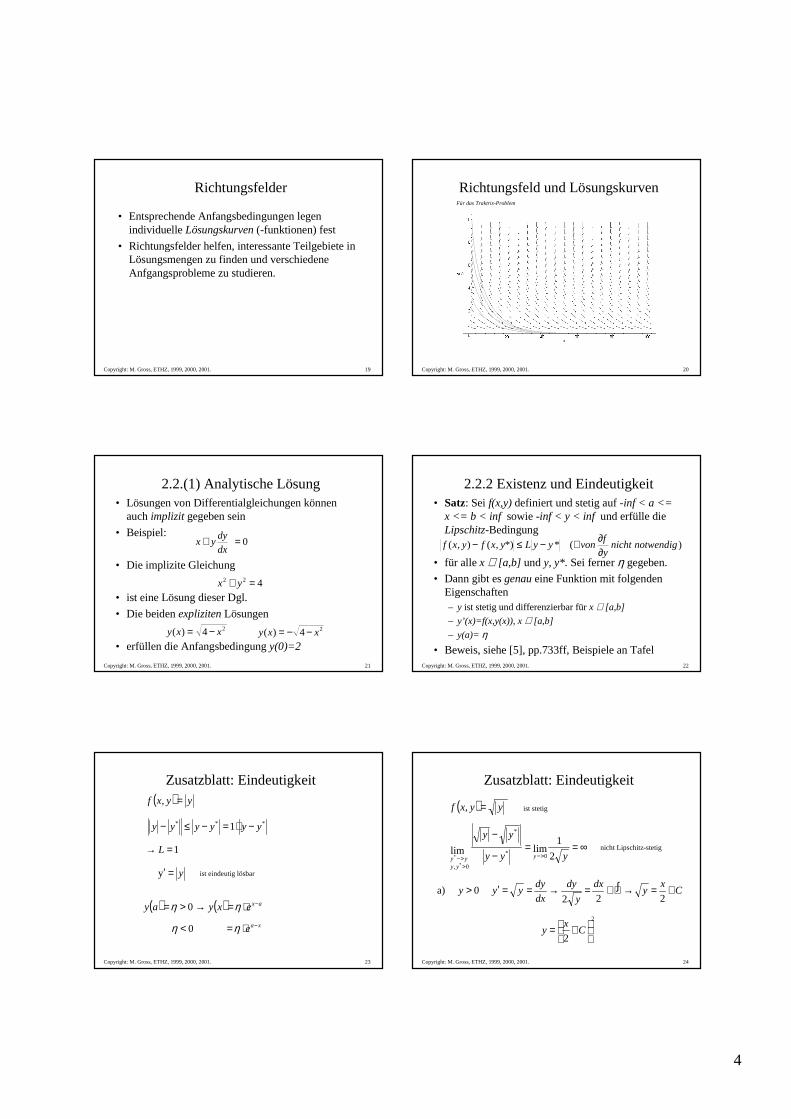
Richtungsfelder
• Entsprechende Anfangsbedingungen legenindividuelle Lösungskurven (-funktionen) fest
• Richtungsfelder helfen, interessante Teilgebiete inLösungsmengen zu finden und verschiedeneAnfgangsprobleme zu studieren.
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 20
Richtungsfeld und LösungskurvenFür das Traktrix-Problem
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 21
2.2.(1) Analytische Lösung• Lösungen von Differentialgleichungen können
auch implizit gegeben sein
• Beispiel:
• Die implizite Gleichung
• ist eine Lösung dieser Dgl.
• Die beiden expliziten Lösungen
• erfüllen die Anfangsbedingung y(0)=2
0=+dxdy
yx
422 =+ yx
24)( xxy −= 24)( xxy −−=
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 22
2.2.2 Existenz und Eindeutigkeit• Satz: Sei f(x,y) definiert und stetig auf -inf < a <=
x <= b < inf sowie -inf < y < inf und erfülle dieLipschitz-Bedingung
• für alle x ∈ [a,b] und y, y*. Sei ferner η gegeben.
• Dann gibt es genau eine Funktion mit folgendenEigenschaften– y ist stetig und differenzierbar für x ∈ [a,b]
– y’(x)=f(x,y(x)), x ∈ [a,b]
– y(a)= η• Beweis, siehe [5], pp.733ff, Beispiele an Tafel
)(**),(),( notwendignichty
fvonyyLyxfyxf
∂∂∃−≤−
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 23
Zusatzblatt: Eindeutigkeit( ) yyxf =,
*** 1 yyyyyy −⋅=−≤−
1=→ L
y=′y
( ) ( ) axexyay −⋅=→>= ηη 0
xae −⋅=< ηη 0
ist eindeutig lösbar
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 24
Zusatzblatt: Eindeutigkeit
( ) , yyxf =
∞==−
−
>−>−>
yyy
yy
yyyyy
2
1limlim
0*
*
0,
*
*
Cx
ydx
y
dy
dx
dyyy y +=→∫=→==′>
2220 a)
2
2
+= C
xy
ist stetig
nicht Lipschitz-stetig

5
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 25
Zusatzblatt: Eindeutigkeit
Cx
ydx
y
dy -yy b) y +−=−→∫−=
−−=′<
2220
2
2
+−= C
x-y
?0 c) y ≡
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 26
2.2.3 Lösungen mittels Taylorreihen
• Idee: Man entwickle die (unbekannte)Lösungsfunktion y(x) in eine Taylorreihe
• und bestimme die Koeffizienten für eine gegebeneAnfangsbedingung
• Durch Einsetzen in y’=f(x,y) erhalten wir
∑∞
=
−=0
00
)(
!)(
)()(i
ii
ixx
xyxy
00 )( yxy =
))(,()(’ 000 xyxfxy =
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 27
Lösungen mittels Taylorreihen
• Für y’’ erhalten wir durch Anwendung derverallgemeinerten Kettenregel (siehe Analysis)
• Hieraus lässt sich durch Einsetzen y’’(x0)berechnen
• y’’’ ergibt sich analog durch Ableiten von y’’
• Hieraus lässt sich y’’’(x0) ermitteln
• Kann beliebig fortgeführt werden
fffyffy yxyx +=+= ’’’
))(’),(,()(’’ 00020 xyxyxfxy =
’’’’’’’’’ 2 yyfyfyfyfyffy yyyyyxxyxyxx +++++=
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 28
Lösungen mittels Taylorreihen• Beispiel: Wir entwickeln die Lösung der Dgl.
• Die Taylorreihe wird zu
1)0(’ 22 =+= yyxy
• Grosser Nachteil dieser Methode ist, dass die partiellen Termedieser Entwicklung mit höheren Ableitungen immer komplexerwerden
1)0(’’ 22 =⇒+= yyxy
2)0(’’’22’’ =⇒+= yyyxy
8)0(’’’’’2’22’’’ 2 =⇒++= yyyyy
28)0(’’’6’’’2 )4()4( =⇒+= yyyyyy
�+++++= 432
!428
!38
!22
1)( xxxxxyApp.ico
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 29
Zusatzblatt: Taylorreihen
( ) ( )( ) ( ) f y’ xll
lxxl
==′=′==
21
21
1 x
y x
( ) ( ) lflfxyx yx 21 ′⋅+′⋅=′′=Φ′
yff yx ′+⋅= 1
( ) ( ) 1)( l yffx
xyx yx ′
′+∂∂=′′′=Φ ′′
2)( lyffy yx ′
′+∂∂+
( ) yyfy
yfy
yfx
fx yxyx ′⋅′
∂∂+′⋅
∂∂+′⋅
∂∂+
∂∂=
( ) ( ) ( )( ) , xyxfxyx =′=Φ
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 30
Zusatzblatt: Taylorreihenyyfyfyfyfyff yyyyxyxyxyxx ′⋅′⋅+′⋅+′⋅+′+′⋅+= )(
fffffffffff yyyxyxyxyxx ⋅+⋅+⋅++⋅+= 22
),(y :Bsp 22 yxfyx =+=′
yyxy ′+=′′ 2 2
yyyxyy ′+′++=′′′ 22 42 4 2
� �����y
yyxyy′′
′++′+= )22(22 2 2
( ) yyyyy ′′′+′′′= 26 4
yll
ylxl
′=′=′==
21
21
1
6
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 31
Zusatzblatt: Taylorreihen
( )),()( xyxfxy =′ ),...,( 1 nxxf
))(, ),(()( 1 tltlft n=Φ
∑=
′⋅=Φ′=>n
iinx tltltlft
i1
1 )())(, ),(()(
( ) ( )),()( xyxfxyx =′=Φ=>
( ) fyyffxyx yx =′′⋅+⋅=′′=Φ′ 1)(
( ) ylxyxl
lxttl
′=′==′==
22
11
)(
1)(
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 32
Zusatzblatt: Taylorreihen
( ) ( ) +⋅′⋅+∂∂=′′′=Φ ′′ 1)( yffx
xyx yx
( ) yyffy yx ′⋅′⋅+
∂∂
� �����yf
yyyyxyxyxyxx
y
fyfyffyffyff
′⋅
⋅′⋅+′⋅+′+⋅+′⋅+=2
2
fy =′mit
xf=∂
′∂
xy
und
yfy
=∂
′∂
y sowie
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 33
Zusatzblatt: Wann ist ?( )yxf
yx
y ,=−=′
( ) 20 ABder mit =y
yxx yy
xfy
yf ′==′=−= 2y
1
yx =− 24 Lösung
24 x
xy
−=′
( ) 22 44
4
xxy
−−+=′′
yffy yx ′⋅+⋅=′′ 1
yy
x
y′⋅+−= 2
1
( ) ( ) ( ) 2222
22
22
2
2 44
4
44
4
444
1
xxxx
xx
xx
x
x −−=
−−−+−=
−−−
−−=
xyy ′≠′′
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 34
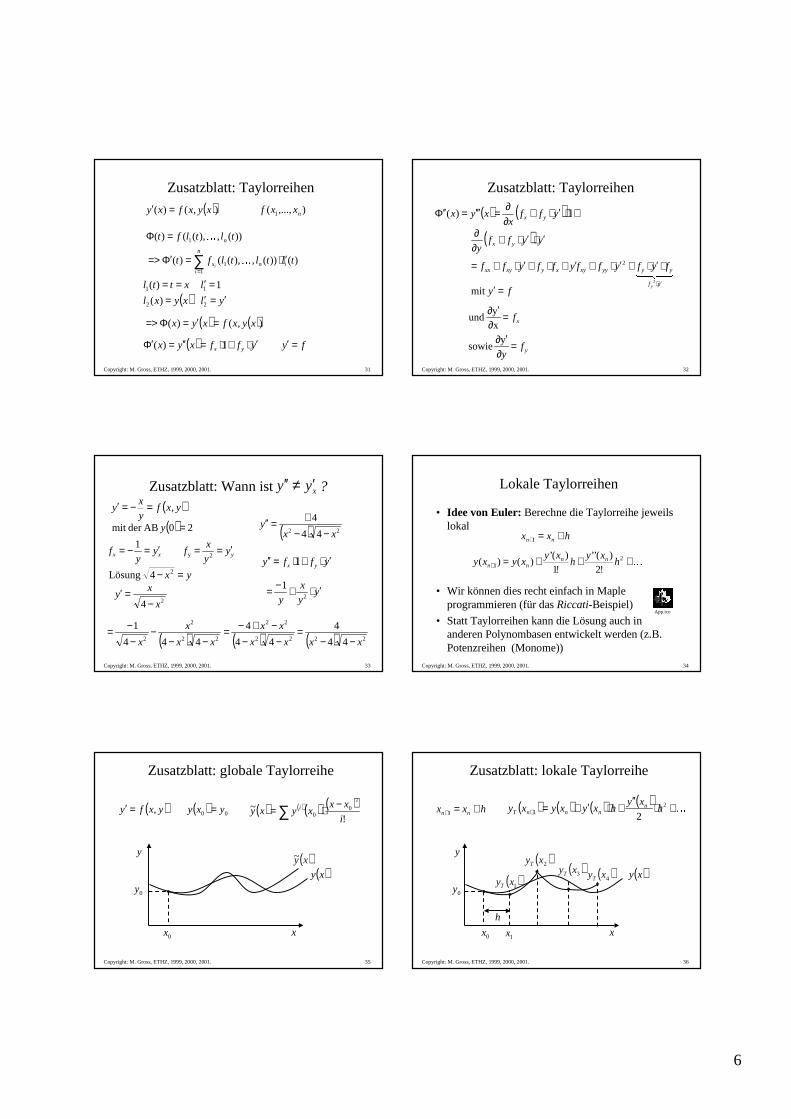
Lokale Taylorreihen
• Idee von Euler: Berechne die Taylorreihe jeweilslokal
• Wir können dies recht einfach in Mapleprogrammieren (für das Riccati-Beispiel)
• Statt Taylorreihen kann die Lösung auch inanderen Polynombasen entwickelt werden (z.B.Potenzreihen (Monome))
hxx nn +=+1
�+++=+2
1 !2)(’’
!1)(’
)()( hxy
hxy
xyxy nnnn
App.ico
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 35
Zusatzblatt: globale Taylorreihe
( )yxfy ,=′ ( ) 00 yxy = ( ) ( )( ) ( )!
~ 00 i
xxxyxy
ii −⋅= ∑
y
0y
x0x
( )xy
( )xy~
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 36
Zusatzblatt: lokale Taylorreihe
hxx nn +=+1( ) ( ) ( ) ( ) �+⋅
′′+⋅′+=+
21 2
hxy
hxyxyxy nnnnT
y
0y
x0x
( )xy
1x
( )1xyT
( )2xyT ( )3xyT ( )4xyT
h
7
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 37
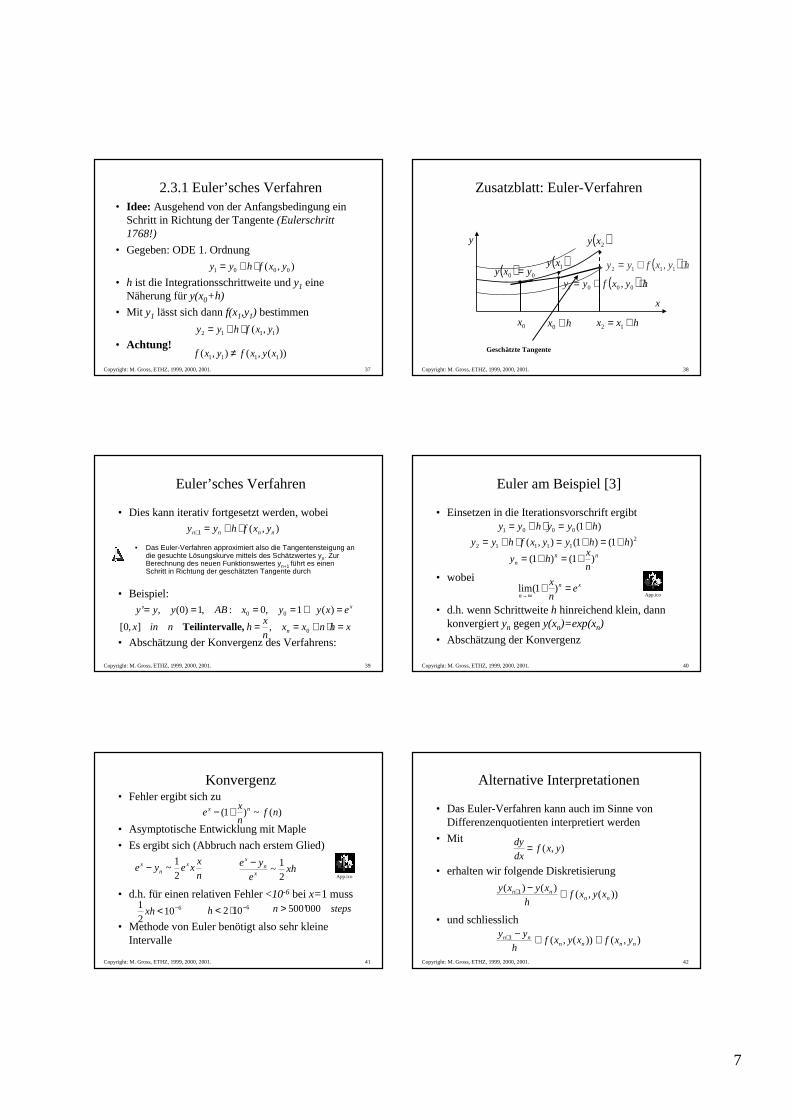
2.3.1 Euler’sches Verfahren• Idee: Ausgehend von der Anfangsbedingung ein
Schritt in Richtung der Tangente (Eulerschritt1768!)
• Gegeben: ODE 1. Ordnung
• h ist die Integrationsschrittweite und y1 eineNäherung für y(x0+h)
• Mit y1 lässt sich dann f(x1,y1) bestimmen
• Achtung!
),( 0001 yxfhyy ⋅+=
),( 1112 yxfhyy ⋅+=
))(,(),( 1111 xyxfyxf ≠Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 38
Zusatzblatt: Euler-Verfahren
( ) hyxfyy ⋅+= 1112 ,
y
x
( ) 00 yxy =
0x hxx += 12hx +0
( ) hyxfyy ⋅+= 0001 ,
( )1xy
( )2xy
Geschätzte Tangente
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 39
Euler’sches Verfahren
• Dies kann iterativ fortgesetzt werden, wobei
• Beispiel:
• Abschätzung der Konvergenz des Verfahrens:
),(1 nnnn yxfhyy ⋅+=+
• Das Euler-Verfahren approximiert also die Tangentensteigung andie gesuchte Lösungskurve mittels des Schätzwertes yn. ZurBerechnung des neuen Funktionswertes yn+1 führt es einenSchritt in Richtung der geschätzten Tangente durch
xexyyxAByyy =⇒==== )(1,0:,1)0(,’ 00
xhnxxn
xhninx n =⋅+== 0,],0[ alle,Teilinterv
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 40
Euler am Beispiel [3]
• Einsetzen in die Iterationsvorschrift ergibt
• wobei
• d.h. wenn Schrittweite h hinreichend klein, dannkonvergiert yn gegen y(xn)=exp(xn)
• Abschätzung der Konvergenz
)1(0001 hyyhyy +=⋅+=2
11112 )1()1(),( hhyyxfhyy +=+=⋅+=nn
n n
xhy )1()1( +=+=
xn
ne
n
x =+∞→
)1(limApp.ico
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 41
Konvergenz• Fehler ergibt sich zu
• Asymptotische Entwicklung mit Maple
• Es ergibt sich (Abbruch nach erstem Glied)
• d.h. für einen relativen Fehler <10-6 bei x=1 muss
• Methode von Euler benötigt also sehr kleineIntervalle
)(~)1( nfn
xe nx +−
App.icon
xxeye x
nx
21
~− xhe
yex
nx
21
~−
61021 −<xh 6102 −⋅<h stepsn 000’500>
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 42
Alternative Interpretationen
• Das Euler-Verfahren kann auch im Sinne vonDifferenzenquotienten interpretiert werden
• Mit
• erhalten wir folgende Diskretisierung
• und schliesslich
),( yxfdx
dy =
))(,()()( 1
nnnn xyxf
h
xyxy ≅−+
),())(,(1nnnn
nn yxfxyxfh
yy ≅≅−+
8
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 43
Alternative Interpretationen
• Oder auch im Sinne der bereits behandeltenIntegrationsregeln
• bzw.
• hierbei die Funktion f(x,y) als konstantangenommen f(xn,y(xn)) und das Integral durch einRechteck approximiert
∫∫++
=11
),(’n
n
n
n
x
x
x
x
dxyxfdxy
∫+
+=+
1
),()()( 1
n
n
x
xnn dxyxfxyxy
)),(()()( 1 nnnn yxfhxyxy +=+
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 44
Zusatzblatt: Euler als Integration von f
y
x
ny′
nx 1+nx
( )( )nn xyxf ,
( )yxf ,
Geschlossene Mittelpunktregel
‘
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 45
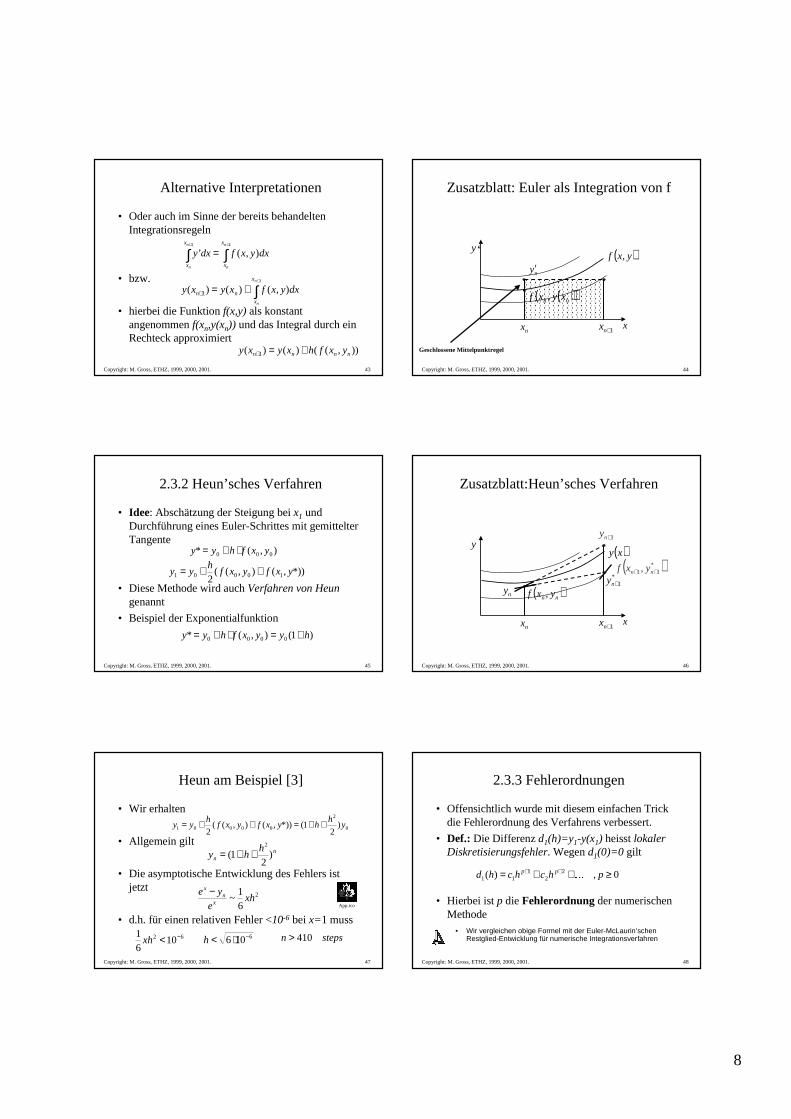
2.3.2 Heun’sches Verfahren
• Idee: Abschätzung der Steigung bei x1 undDurchführung eines Euler-Schrittes mit gemittelterTangente
• Diese Methode wird auch Verfahren von Heungenannt
• Beispiel der Exponentialfunktion
),(* 000 yxfhyy ⋅+=
*)),(),((2 10001 yxfyxfh
yy ++=
)1(),(* 0000 hyyxfhyy +=⋅+=
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 46
Zusatzblatt:Heun’sches Verfahren
y
x
( )xy
ny
nx 1+nx
*1+ny
1+ny
( )*11, ++ nn yxf
( )nn yxf ,
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 47
Heun am Beispiel [3]
• Wir erhalten
• Allgemein gilt
• Die asymptotische Entwicklung des Fehlers istjetzt
• d.h. für einen relativen Fehler <10-6 bei x=1 muss
0
2
00001 )2
1(*)),(),((2
yh
hyxfyxfh
yy ++=++=
nn
hhy )
21(
2
++=
2
61
~ xhe
yex
nx −
62 1061 −<xh 6106 −⋅<h stepsn 410>
App.ico
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 48
2.3.3 Fehlerordnungen
• Offensichtlich wurde mit diesem einfachen Trickdie Fehlerordnung des Verfahrens verbessert.
• Def.: Die Differenz d1(h)=y1-y(x1) heisst lokalerDiskretisierungsfehler. Wegen d1(0)=0 gilt
• Hierbei ist p die Fehlerordnung der numerischenMethode
0, )( 22
111 ≥++= ++ phchchd pp �
• Wir vergleichen obige Formel mit der Euler-McLaurin’schenRestglied-Entwicklung für numerische Integrationsverfahren

9
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 49
Fehlerordnung des Euler-Verfahrens
• Der Fehler des Euler-Verfahrens kann wie folgtberechnet werden
• Mittels Taylorreihen-Entwicklung (global) vony(x0+h) folgt
• d.h. die Fehlerordnung des Euler-Verfahrens istp=1
)(’)(),( 000001 xhyxyyxfhyy +=⋅+=
)()(’’2
)()(’’2
)(’)(
)(’)()(
30
23
0
2
00
0001
hOxyh
hOxyh
xhyxy
xhyxyhxyy
−−=
+++
−+=+−
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 50
Globaler Fehler
• Def: Die Differenz dn(h)=yn-y(x) heisst globalerDiskretisierungsfehler, d.h. er beschreibt denFehler bei x=x0+nh
• Man kann zeigen, dass
• Konsequenz: Gegeben yh und yh/2 (mitSchrittweiten h und h/2 integriert
)()()()( 1++=−= pppnn hOhxexyyhd
ph hyy ≈− p
p
h
hyy
22/ ≈−
• Bei Halbierung der Schrittweite nimmt der Fehler also um 2-p ab.
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 51
Fehlerordnung der Heun’schen Methode
• Der Fehler des Heun’schen Verfahrens wird amBeispiel der Exponentialfunktion verdeutlicht
• Wir erhalten also (globaler Fehler)
• Lokaler Fehler berechnet sich zu
• womit p=2
nn
hhy )
21(
2
++=
�+−=−= 32
86)()( h
xeh
xexyyhd
xx
nn
432
!41
!31
)2
1()( hhh
hhy +=++−
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 52
Vergleich mit Integration
• Man vergleiche lokalen und globalen Fehler mit denFehlerbetrachtungen bei der numerischen Quadratur.
• Lokaler Fehler: Fehler der einfachen Regel• Globaler Fehler: Fehler der zusammengesetzten Regel
• Auch hier lag die globale Fehlerordnung um eine Potenz in hniedriger, als der lokale Fehler.
• Beispiel: Mittelpunktregel: quadratische Präzision(Fehlerordnung) bei einfacher Regel, lineare Fehlerordnung beizusammengesetzter Regel.
• Vgl. Euler und Heun• Fazit: Euler ist schlechter als Mittelpunktregel
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 53
2.4.1 Heun als Prädiktor-Korrektor
• Dieses Verfahren wird oft auch als Prädiktor-Korrektor-Methode bezeichnet
• Gegeben:
• 1. Prädiktionsschritt: Schätze die Steigung amrechtsseitigen Intervallrand
• 2. Korrekturschritt:
• Diese Methode kann durch Verwendung mehrererEinzelschritte verallgemeinert werden.
),( 1002 hkyhxfk ++=
)(2 2101 kkh
yy ++=
),( 001 yxfk =
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 54
Zusatzblatt: Heun als Prädiktor-Korrektor
y
x
( )xy
ny
nx 1+nx
*1+ny
1+ny
( )*11, ++ nn yxf
( )nn yxf ,
10
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 55
Runge-Kutta-Verfahren [1], [2]
• Derartige Verallgmeinerungen nennt manexplizite, s-stufige Runge-Kutta Methoden.
• Runge-Kutta Methoden sind Einschrittverfahren,d.h. sie benötigen jeweils nur Informationen ander Stelle xn zur Berechnung des Funktionswertesan der Stelle xn+1.
• Mehrschrittverfahren verwenden die berechnetenFunktionswerte an den Stellen xn, xn-1, …
• Sie können über Integrationsregeln (Lagrange-Polynome) hergeleitet werden (Adams-Bashforth-Moulton)
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 56
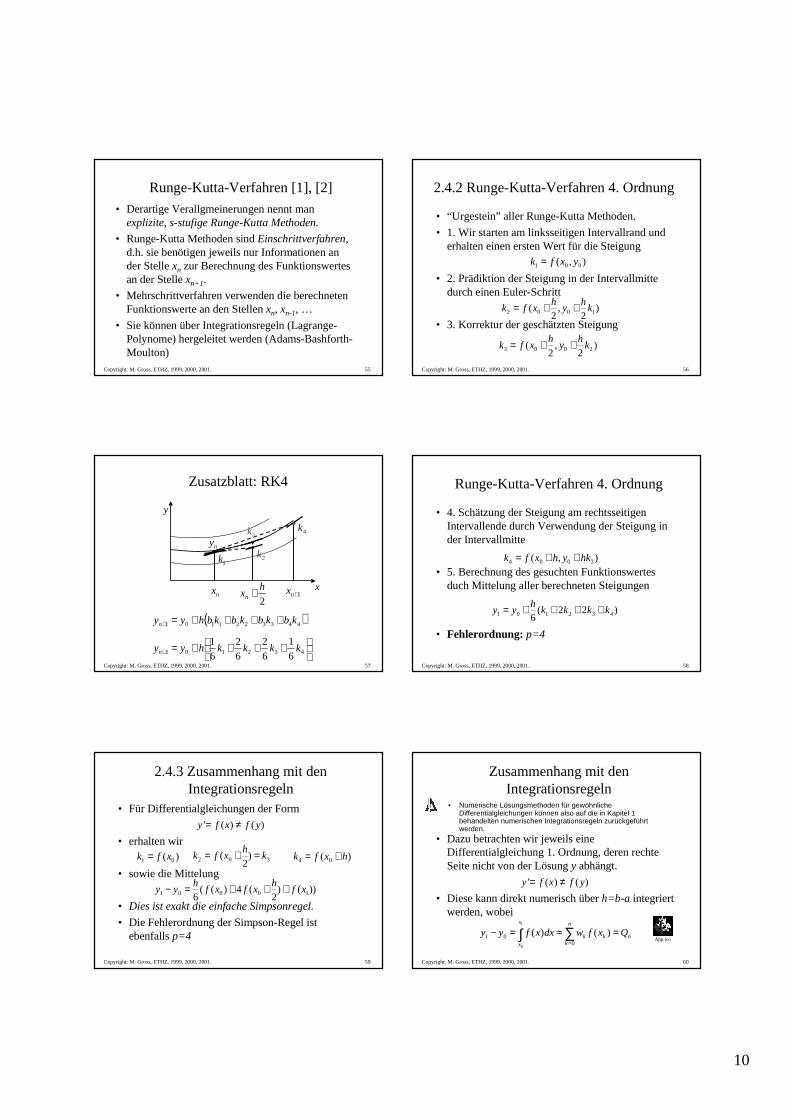
2.4.2 Runge-Kutta-Verfahren 4. Ordnung
• “Urgestein” aller Runge-Kutta Methoden.
• 1. Wir starten am linksseitigen Intervallrand underhalten einen ersten Wert für die Steigung
• 2. Prädiktion der Steigung in der Intervallmittedurch einen Euler-Schritt
• 3. Korrektur der geschätzten Steigung
),( 001 yxfk =
)2
,2
( 1002 kh
yh
xfk ++=
)2
,2
( 2003 kh
yh
xfk ++=
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 57
Zusatzblatt: RK4
y
x
ny
nx 1+nx
2k
2
hxn +
1k
3k 4k
( )4433221101 kbkbkbkbhyyn ++++=+
++++=+ 432101 6
1
6
2
6
2
6
1kkkkhyyn
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 58
Runge-Kutta-Verfahren 4. Ordnung
• 4. Schätzung der Steigung am rechtsseitigenIntervallende durch Verwendung der Steigung inder Intervallmitte
• 5. Berechnung des gesuchten Funktionswertesduch Mittelung aller berechneten Steigungen
• Fehlerordnung: p=4
),( 3004 hkyhxfk ++=
)22(6 432101 kkkkh
yy ++++=
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 59
2.4.3 Zusammenhang mit denIntegrationsregeln
• Für Differentialgleichungen der Form
• erhalten wir
• sowie die Mittelung
• Dies ist exakt die einfache Simpsonregel.
• Die Fehlerordnung der Simpson-Regel istebenfalls p=4
)()(’ yfxfy ≠=
))()2
(4)((6 10001 xf
hxfxf
hyy +++=−
)( 01 xfk = 302 )2
( kh
xfk =+= )( 04 hxfk +=
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 60
Zusammenhang mit denIntegrationsregeln
• Dazu betrachten wir jeweils eineDifferentialgleichung 1. Ordnung, deren rechteSeite nicht von der Lösung y abhängt.
• Diese kann direkt numerisch über h=b-a integriertwerden, wobei
)()(’ yfxfy ≠=
• Numerische Lösungsmethoden für gewöhnlicheDifferentialgleichungen können also auf die in Kapitel 1behandelten numerischen Integrationsregeln zurückgeführtwerden.
n
n
kkk
x
x
Qxfwdxxfyy =≈=− ∑∫=0
01 )()(1
0
App.ico
11
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 61
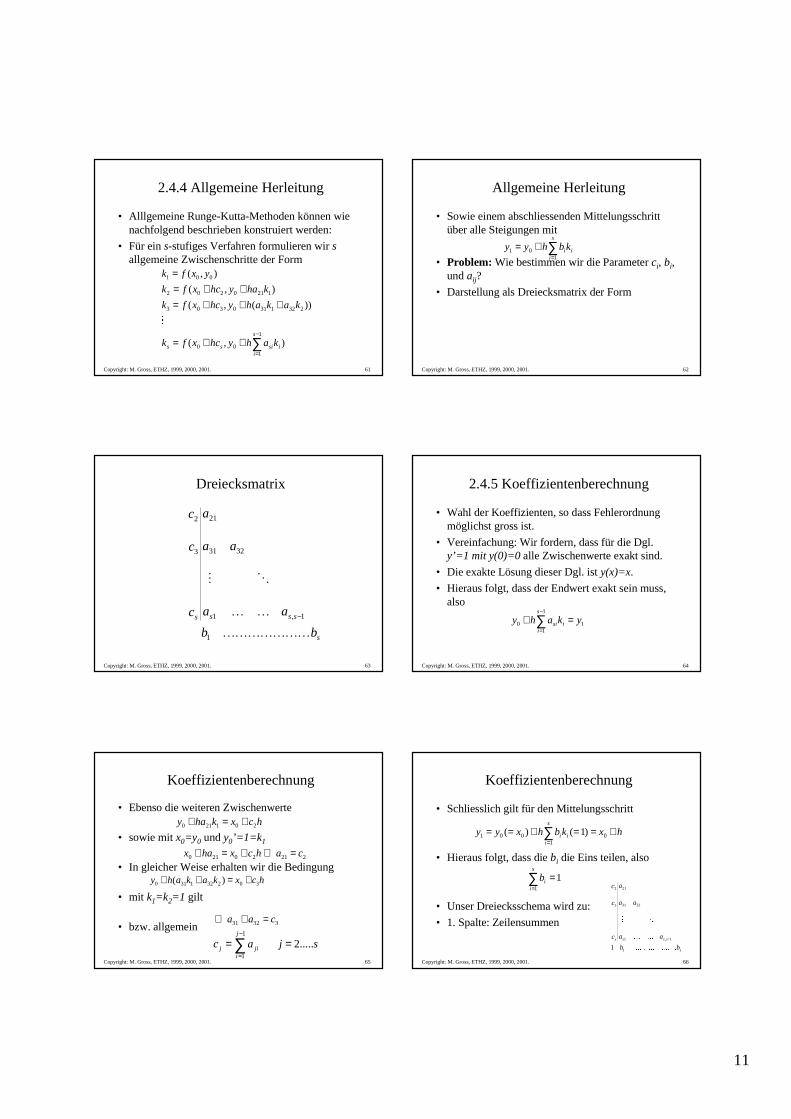
2.4.4 Allgemeine Herleitung
• Alllgemeine Runge-Kutta-Methoden können wienachfolgend beschrieben konstruiert werden:
• Für ein s-stufiges Verfahren formulieren wir sallgemeine Zwischenschritte der Form
),(
))(,(
),(
),(
1
100
2321310303
1210202
001
∑−
=++=
+++=++=
=
s
iisiss kahyhcxfk
kakahyhcxfk
khayhcxfk
yxfk
�
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 62
Allgemeine Herleitung
• Sowie einem abschliessenden Mittelungsschrittüber alle Steigungen mit
• Problem: Wie bestimmen wir die Parameter ci, bi,und aij?
• Darstellung als Dreiecksmatrix der Form
∑=
+=s
iiikbhyy
101
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 63
Dreiecksmatrix
s
ssss
bb
aa
aa
a
c
c
c
KKKKKKK
KK
OM
1
1,1
3231
21
3
2
−
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 64
2.4.5 Koeffizientenberechnung
• Wahl der Koeffizienten, so dass Fehlerordnungmöglichst gross ist.
• Vereinfachung: Wir fordern, dass für die Dgl.y’=1 mit y(0)=0 alle Zwischenwerte exakt sind.
• Die exakte Lösung dieser Dgl. ist y(x)=x.
• Hieraus folgt, dass der Endwert exakt sein muss,also
1
1
10 ykahy
s
iisi =+ ∑
−
=
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 65
Koeffizientenberechnung
• Ebenso die weiteren Zwischenwerte
• sowie mit x0=y0 und y0’=1=k1
• In gleicher Weise erhalten wir die Bedingung
• mit k1=k2=1 gilt
• bzw. allgemein
hcxkhay 201210 +=+
22120210 cahcxhax =⇒+=+
hcxkakahy 302321310 )( +=++
33231 caa =+⇒
sjacj
ijij .....2
1
1
== ∑−
=Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 66
Koeffizientenberechnung
• Schliesslich gilt für den Mittelungsschritt
• Hieraus folgt, dass die bi die Eins teilen, also
• Unser Dreiecksschema wird zu:
• 1. Spalte: Zeilensummen
hxkbhxyys
iii +==+== ∑
=0
1001 )1()(
11
=∑=
s
iib
s
ssss
bb
aa
aa
a
c
c
c
���������
��
1
1,1
3231
21
3
2
1−
12
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 67
Koeffizientenberechnung
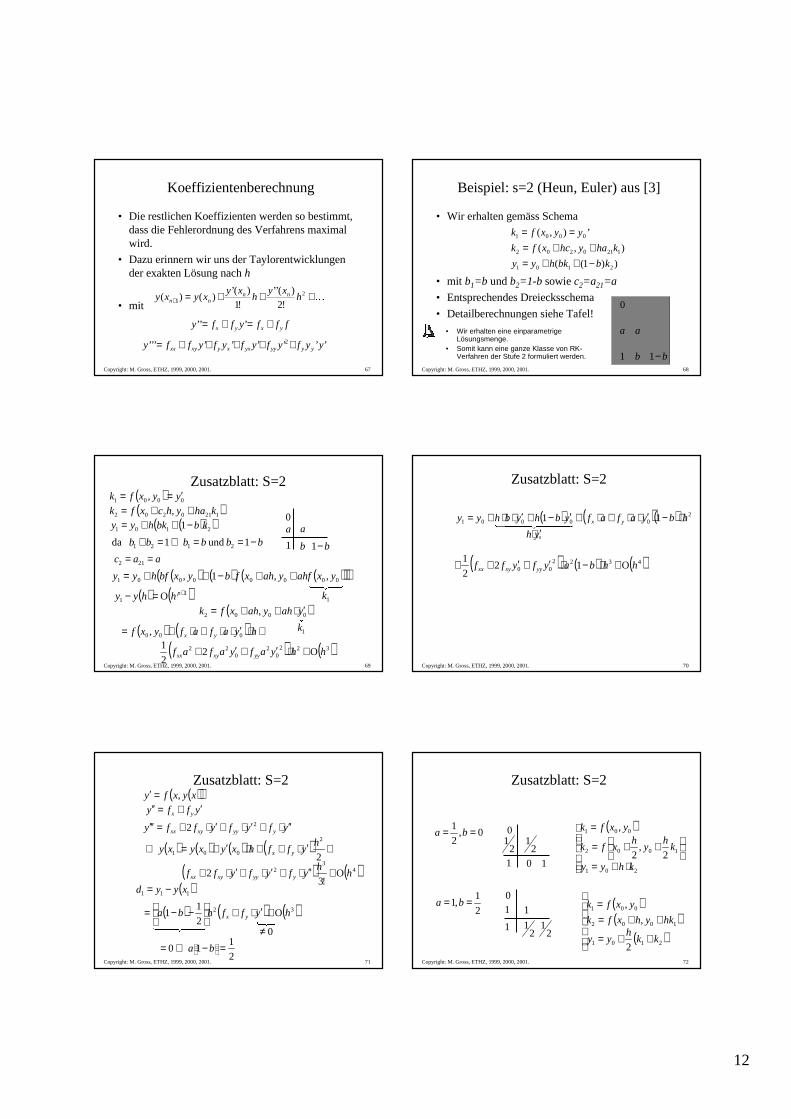
• Die restlichen Koeffizienten werden so bestimmt,dass die Fehlerordnung des Verfahrens maximalwird.
• Dazu erinnern wir uns der Taylorentwicklungender exakten Lösung nach h
• mit�+++=+
21 !2
)(’’!1
)(’)()( h
xyh
xyxyxy nn
nn
fffyffy yxyx +=+= ’’’
’’’’’’’’’ 2 yyfyfyfyfyffy yyyyyxxyxyxx +++++=
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 68
Beispiel: s=2 (Heun, Euler) aus [3]
• Wir erhalten gemäss Schema
• mit b1=b und b2=1-b sowie c2=a21=a
• Entsprechendes Dreiecksschema
• Detailberechnungen siehe Tafel!
))1((
),(
’),(
2101
1210202
0001
kbbkhyy
khayhcxfk
yyxfk
−++=++=
==
bb
aa
−11
0
• Wir erhalten eine einparametrigeLösungsmenge.
• Somit kann eine ganze Klasse von RK-Verfahren der Stufe 2 formuliert werden.
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 69
Zusatzblatt: S=2( ) 0001 , yyxfk ′==( )1210202 , khayhcxfk ++=
( )( )2101 1 kbbkhyy −++=
bbbbbb −==⇒=+ 1 und 1 da 2121
aac == 212
( ) ( ) ( )( )( )00000001 ,,1, yxahfyahxfbyxbfhyy ++−++=
( )0002 , yahyahxfk ′⋅++=
( ) ( ) +⋅′⋅⋅+⋅+= hyafafyxf yx 000 ,
( ) ( )3220
20
22 O22
1hhyafyafaf yyxyxx +⋅′+′+
�������1k
�1k
a
b
a
b−1
0
1
( ) ( )11 O +=− phhyy
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 70
Zusatzblatt: S=2
( ) ( )( ) 200001 11
0
hbyafaf
yh
ybhybhyy yx ⋅−′⋅⋅+⋅+′⋅
′−+′⋅⋅+= ! "#
( ) ( ) ( )432200 O12
2
1hhbayfyff yyxyxx +⋅−⋅′+′++
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 71
Zusatzblatt: S=2
( ) ( ) ( ) ( ) +′⋅++⋅′+=⇒2
2
001
hyffhxyxyxy yx
( )111 xyyd −=
( ) ( ) ( )32 O2
11 hyffhba yx +′⋅+
−−=
$$&%$$(')
( ) ( )43
2 O!3
2 hh
yfyfyff yyyxyxx +′′⋅+′⋅+′⋅+
2
110 =−⇒=
ba
*0≠
( )( )xyxfy ,=′yffy yx ′+=′′
yfyfyffy yyyxyxx ′′⋅+′⋅+′⋅+=′′′ 22
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 72
Zusatzblatt: S=2
21
0
21
1
0
1
21
1 10
12
1
0,2
1 == ba
2
1,1 == ba
( )
⋅+=
++=
=
201
1002
001
2,
2
,
khyy
kh
yh
xfk
yxfk
( )( )
( )
++=
++==
2101
1002
001
2
,
,
kkh
yy
hkyhxfk
yxfk
13
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 73
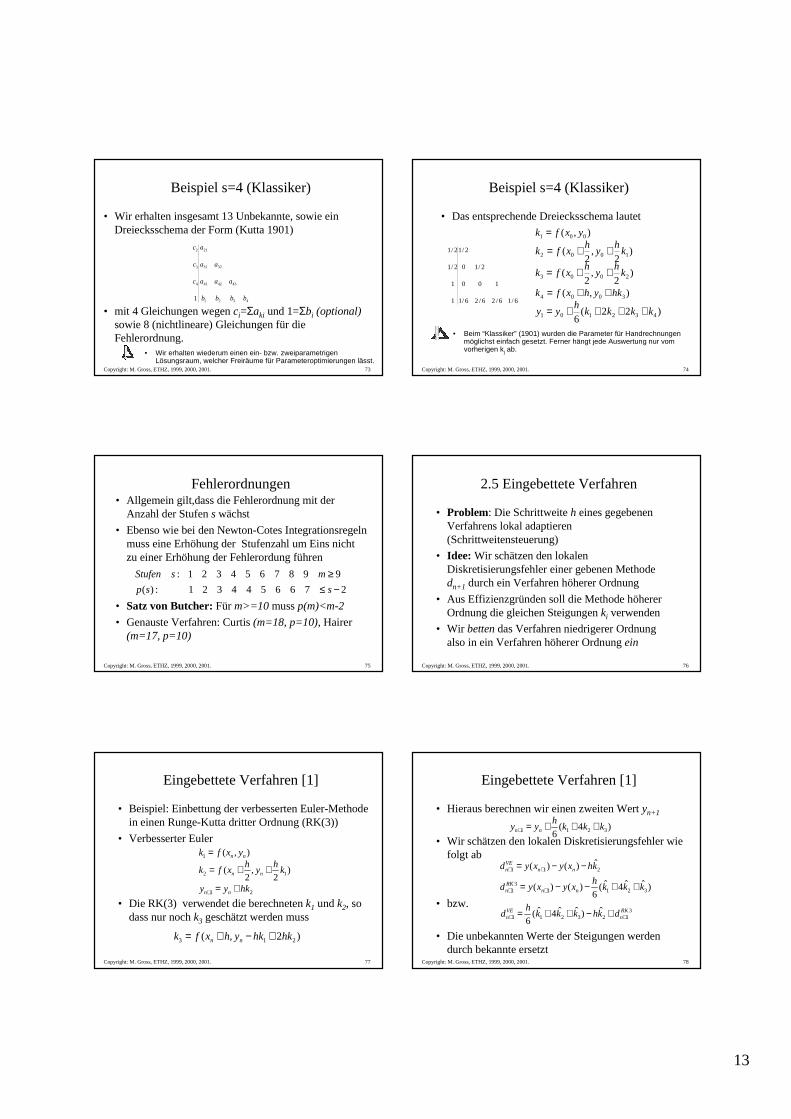
Beispiel s=4 (Klassiker)
• Wir erhalten insgesamt 13 Unbekannte, sowie einDreiecksschema der Form (Kutta 1901)
• mit 4 Gleichungen wegen ci=Σaki und 1=Σbi (optional)sowie 8 (nichtlineare) Gleichungen für dieFehlerordnung.
4321
434241
3231
21
4
3
2
1 bbbb
aaa
aa
a
c
c
c
• Wir erhalten wiederum einen ein- bzw. zweiparametrigenLösungsraum, welcher Freiräume für Parameteroptimierungen lässt.
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 74
Beispiel s=4 (Klassiker)
• Das entsprechende Dreiecksschema lautet
6/16/26/26/1
100
2/10
2/1
1
1
2/1
2/1
),( 001 yxfk =
)2
,2
( 1002 kh
yh
xfk ++=
)2
,2
( 2003 kh
yh
xfk ++=
),( 3004 hkyhxfk ++=
)22(6 432101 kkkkh
yy ++++=
• Beim “Klassiker” (1901) wurden die Parameter für Handrechnungenmöglichst einfach gesetzt. Ferner hängt jede Auswertung nur vomvorherigen kj ab.
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 75
Fehlerordnungen• Allgemein gilt,dass die Fehlerordnung mit der
Anzahl der Stufen s wächst
• Ebenso wie bei den Newton-Cotes Integrationsregelnmuss eine Erhöhung der Stufenzahl um Eins nichtzu einer Erhöhung der Fehlerordung führen
• Satz von Butcher: Für m>=10 muss p(m)<m-2
• Genauste Verfahren: Curtis (m=18, p=10), Hairer(m=17, p=10)
2766544321:)(
9987654321:
−≤≥ssp
msStufen
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 76
2.5 Eingebettete Verfahren
• Problem: Die Schrittweite h eines gegebenenVerfahrens lokal adaptieren(Schrittweitensteuerung)
• Idee: Wir schätzen den lokalenDiskretisierungsfehler einer gebenen Methodedn+1 durch ein Verfahren höherer Ordnung
• Aus Effizienzgründen soll die Methode höhererOrdnung die gleichen Steigungen ki verwenden
• Wir betten das Verfahren niedrigerer Ordnungalso in ein Verfahren höherer Ordnung ein
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 77
Eingebettete Verfahren [1]
• Beispiel: Einbettung der verbesserten Euler-Methodein einen Runge-Kutta dritter Ordnung (RK(3))
• Verbesserter Euler
• Die RK(3) verwendet die berechneten k1 und k2, sodass nur noch k3 geschätzt werden muss
),(1 nn yxfk =
)2
,2
( 12 kh
yh
xfk nn ++=
21 hkyy nn +=+
)2,( 213 hkhkyhxfk nn +−+=
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 78
Eingebettete Verfahren [1]
• Hieraus berechnen wir einen zweiten Wert yn+1
• Wir schätzen den lokalen Diskretisierungsfehler wiefolgt ab
• bzw.
• Die unbekannten Werte der Steigungen werdendurch bekannte ersetzt
)4(6 3211 kkkh
yy nn +++=+
211ˆ)()( khxyxyd nn
VEn −−= ++
)ˆˆ4ˆ(6
)()( 32113
1 kkkh
xyxyd nnRKn ++−−= ++
3123211
ˆ)ˆˆ4ˆ(6
RKn
VEn dkhkkk
hd ++ +−++=
14
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 79
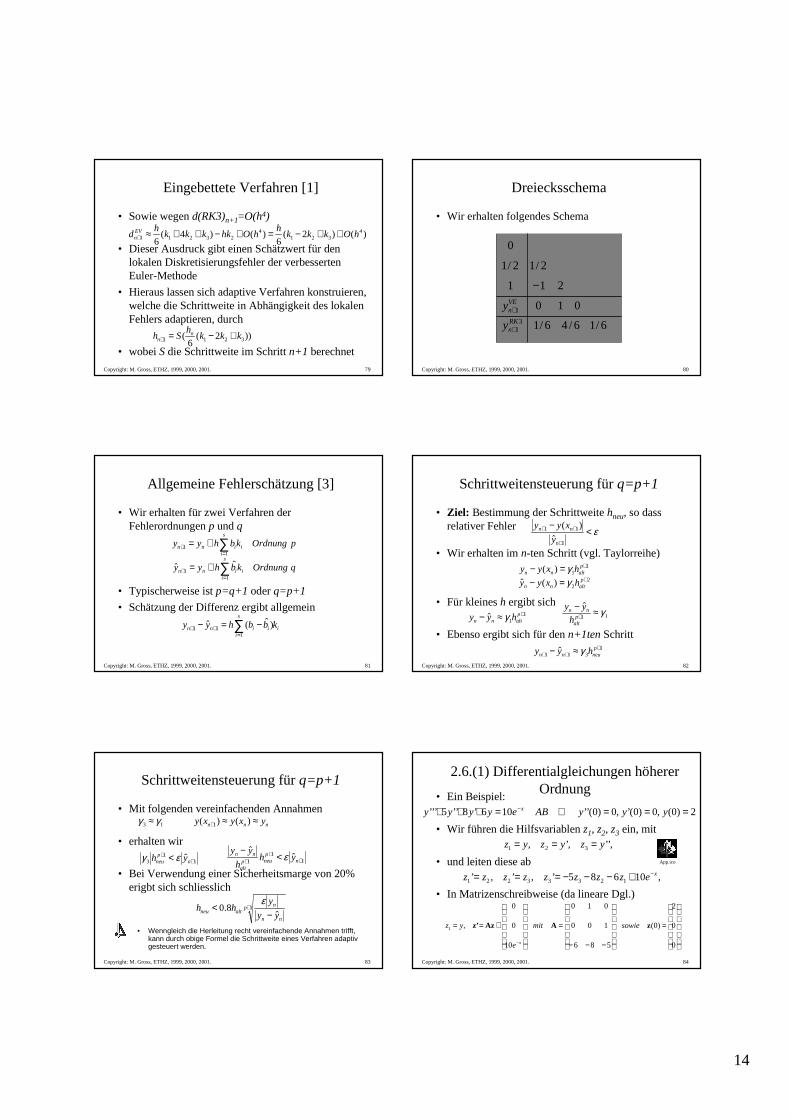
Eingebettete Verfahren [1]
• Sowie wegen d(RK3)n+1=O(h4)
• Dieser Ausdruck gibt einen Schätzwert für denlokalen Diskretisierungsfehler der verbessertenEuler-Methode
• Hieraus lassen sich adaptive Verfahren konstruieren,welche die Schrittweite in Abhängigkeit des lokalenFehlers adaptieren, durch
• wobei S die Schrittweite im Schritt n+1 berechnet
)()2(6
)()4(6
4321
423211 hOkkk
hhOhkkkk
hd EV
n ++−=+−++≈+
))2(6
( 3211 kkkh
Sh nn +−=+
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 80
Dreiecksschema
• Wir erhalten folgendes Schema
6/16/46/1
010
211
2/12/1
0
31
1
RKn
VEn
y
y
+
+
−
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 81
Allgemeine Fehlerschätzung [3]
• Wir erhalten für zwei Verfahren derFehlerordnungen p und q
• Typischerweise ist p=q+1 oder q=p+1
• Schätzung der Differenz ergibt allgemein
pOrdnungkbhyy i
s
iinn ∑
=+ +=
11
qOrdnungkbhyy i
s
iinn ∑
=+ +=
11
ˆˆ
i
s
iiinn kbbhyy ∑
=++ −=−
111 )ˆ(ˆ
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 82
Schrittweitensteuerung für q=p+1
• Ziel: Bestimmung der Schrittweite hneu, so dassrelativer Fehler
• Wir erhalten im n-ten Schritt (vgl. Taylorreihe)
• Für kleines h ergibt sich
• Ebenso ergibt sich für den n+1ten Schritt
11)( +=− p
altnn hxyy γ2
2)(ˆ +=− paltnn hxyy γ
11ˆ +≈− p
altnn hyy γ 11
ˆ γ≈−+p
alt
nn
h
yy
1311 ˆ +
++ ≈− pneunn hyy γ
ε<−
+
++
1
11
ˆ
)(
n
nn
y
xyy
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 83
Schrittweitensteuerung für q=p+1
• Mit folgenden vereinfachenden Annahmen
• erhalten wir
• Bei Verwendung einer Sicherheitsmarge von 20%erigbt sich schliesslich
13 γγ ≈ nnn yxyxy ≈≈+ )()( 1
11
3 ˆ ++ < n
pneu yh εγ 1
11
ˆˆ
++
+ <−
np
neupalt
nn yhh
yyε
1
ˆ8.0 +
−< p
nn
naltneu yy
yhh
ε
• Wenngleich die Herleitung recht vereinfachende Annahmen trifft,kann durch obige Formel die Schrittweite eines Verfahren adaptivgesteuert werden.
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 84
2.6.(1) Differentialgleichungen höhererOrdnung
• Ein Beispiel:
• Wir führen die Hilfsvariablen z1, z2, z3 ein, mit
• und leiten diese ab
• In Matrizenschreibweise (da lineare Dgl.)
2)0(,0)0(’,0)0(’’106’8’’5’’’ ===⇒=+++ − yyyABeyyyy x
,’’,’, 321 yzyzyz ===
,10685’,’,’ 12333221xezzzzzzzz −+−−−===
App.ico
=
−−−
=
+==
− 0
0
2
)0(
586
100
010
10
0
0
,1 zAAzz’ sowiemit
e
yz
x

15
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 85
2.6.2 Beispiel: Masse-Feder
• Wir betrachten die Differentialgleichung eineseinfachen Masse-Feder-Systems
• mit der Masse m, der Dämpfung d, derFedersteifigkeit c, sowie der Gravitation g
• Wir lösen nach der Beschleunigung auf underhalten
• sowie Geschwindigkeit v und Beschleunigung a
mgtcxtxdtxm =++ )()()( +++
),,()()()( xxtftxm
ctx
m
dgtx ,,,, =−−=
)()()()( txtatxtv --- ==Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 86
Beispiel: Masse-Feder
• Anfangsbedingungen
• Umformulierung in ein System 1. Ordnung durchEinführen der Hilfsvariablen
• Das System lautet nun00200121 )()()()()()( vtxxtxmittxtxtxtx ==== .
==
−−=
=
0
0021
12
2
2
1 x),,(f)()(
)(
)(
)()(x
v
xsowiexxt
txm
ctx
m
dg
tx
tx
txt /
//
0000 )()( vtxxtx == 0
• Der Vektor x wird oft auch State-Vektor genannt. Er beschreibtden Einschwingvorgang des Systems in den Ruhezustand(steady state)
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 87
Beispiel: Euler Verfahren
• Variante 1: Standard-Euler Verfahren
• Der Schritt von n nach n+1 ergibt sich zu
• Variante 2: Wir verbessern das Verfahren imSinne der Heun’schen Methode
• Dazu kann der mit einem Euler-Schritt geschätzteWert der Zustandsvariablen x2 verwendet werden
−−+
+=
= +
++
)(x )(
1)(
2)(
2
)(2
)(1
)1(2
)1(11)(n
nnn
nn
n
n
xm
cx
m
dghx
hxx
x
x
App.ico
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 88
Beispiel: Verbesserung von Euler• Auf das System übertragen bedeutet dies
• Eine Entwicklung von x1 nach h ergibt sich durchEinsetzen
−−+
+=
=
+
+
++
)(x )(
1)(
2)(
2
)1(2
)(1
)1(2
)1(11)(n
nnn
nn
n
n
xm
cx
m
dghx
hxx
x
x
• Wir führen zunächst eine Schätzung der Zustandsvariablen x2(Geschwindigkeit) durch, die wir dann zur Berechnung des neuenWertes für die Zustandsvariable x1(Position) verwenden.
• Wir erhalten durch diesen einfachen Trick ein Verfahren höhererFehlerordnung
)(
))((
)(1
)(2
2)(2
)(1
)(1
)(2
)(2
)(1
)1(1
nnnn
nnnnn
xm
cx
m
dghhxx
xm
cx
m
dghxhxx
−−++=
−−++=+
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 89
Beispiel: Weitere Verbesserung
• Verfahren in 3 Schritten:
• 1. Berechnung einer Schätzung von x1 durchEuler-Schritt in die Intervallmitte
• 2. Schätzung von x2 durch Euler-Schritt übergesamte Intervallbreite und Verwendung von
)(2
)(1
*)(1 2
nnn xh
xx +=App.ico
)( *)(1
)(2
)(2
)1(2
nnnn xm
cx
m
dghxx −−+=+
*)(1
nx
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 90
Beispiel: Numerische Lösungen
• 3. Schätzung von x1 am rechten Intervallranddurch Sprung von h/2 nach h
• Die Zustandsvariable x1 wird also mit der halbenIntervallbreite gerechnet
• Eine Entwicklung nach h ergibt
)1(2
*)(1
)1(1 2
++ += nnn xh
xx
App.ico
)(2
3)(
1)(
2
2)(
2)(
1)1(
1
)(2
2)(
1)(
2)(
2)1(
2
4)(
22
2)(
nnnnnn
nnnnn
xh
mc
xmc
xmd
gh
xh
xx
xh
mc
xmc
xmd
ghxx
−+−−++=
−+−−+=
+
+
16
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 91
2.7.(1) Stabilität - inhärente Instabilität
• Problem: Manche Differentialgleichungen sindsehr empfindlich gegenüber kleinen Aenderungender Anfangsbedingungen
• Beispiel: [1] Betrachte die allgemeine Dgl. derForm
• Wir erhalten eine homogene sowie einepartikuläre Lösung
)(’))((’ xFxFyy +−= λ 00 )( yxy =
)( 0xxh ey −= λ )(xFyp =
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 92
Inhärente Instabilität
• Zusammengesetzt erhalten wir als Lösung
• Konkret für
• sowie λ = 10 lautet die Dgl.
• sowie deren Lösung
)0(0)0(,1
)( 2
2
Fyx
xxF ==
+=
)())(()( )(00
0 xFexFyxy xx +−= −λ
( )222
2
1
2)
1)((10)(’
x
x
x
xxyxy
++
+−=
2
2
1)(
x
xxy
+=
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 93
Inhärente Instabilität
• In diesem Falle entfällt die Exponentialfunktion inder Lösung aufgrund der AB
• Dagegen erhalten wir bei leicht geänderter AB
• die Lösungsfunktion
710)0( −== εy
( )2
210
1)(
x
xexy x
++= ε
• Eine kleine Änderung der AB führt also zu einer grossenAenderung in der Lösungsfunktion
• Die Lösung verhält sich wie die exakte Lösung einesbenachbarten Problems
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 94
Inhärente Instabilität
• Die Differentialgleichung ist in diesem Falleschlecht konditioniert
• Wir sprechen von inhärenter Instabilität
• Die Näherungswerte für die Lösung entfernen sichüblicherweise exponentiell vom exakten Wert
• Diese Form der Instabilität ist unabhängig von dergewählten Berechnungsmethode
• Man muss Ihr mit Verfahren möglichst hoherFehlerordnung und Rechengenauigkeit begegnen
App.ico
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 95
2.7.2 Absolute Stabilität
• Problem: Bei bestimmten Differentialgleichungenmuss die Schrittweite sehr sorgsam gewähltwerden
• Beispiel: [1] Betrachte die homogeneDifferentialgleichung der Form
• Diese wird gelöst von
• Wir untersuchen zwei klassische, explizitenumerische Lösungsverfahren
CR ∈∈== λλλ oderyxyxy 1)0()()(’
xexy λ=)(
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 96
Absolute Stabilität
• Euler: Dieser liefert die folgendeIterationsvorschrift
•
• Runge-Kutta(4): Nach Einsetzen undUmrechnung ergibt sich
• Der Multiplikator F stellt eineTaylorreihenentwicklung für ehλ bis zum 4. Glieddar.
1)1()1( 001
1 =+=+=+= ++ yyhyhyhyy n
nnnn λλλ
1)()2462
1( 0
443322
1 ==++++=+ yyhFyhhh
hy nnn λλλλλ
17
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 97
Absolute Stabilität
• Beispiel: Verhalten des Euler bei λ = -10 undh=0.2
• Wir erhalten ein instabiles (alternierendesVerhalten)
• Die Schrittweite ist offenbar zu gross gewählt.
• Allgemein liefert hλ>0 mit λ>0 qualitativ richtigeErgebnisse
nnnn yyyy −=⋅−=+ 2.0101
• Viele Vorgänge in den Naturwissenschaften sind jedochexponentiell abklingend (λ<0) und können daher zu instabilemVerhalten der Dgl. führen.
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 98
Absolute Stabilität
• Bei λ<0 muss also für ein gegebenes Verfahren
• damit die Näherungslösung ebenfalls exponentiellabklingt
• Diese Bedingung ist für RK(4) wegen
• nicht erfüllt.
• In der Natur sind die Abklingvorgänge oftmals mitOszillationen verbunden (siehe Masse-Feder)
1)( <λhF
∞=−∞→
)(lim λλ
hFh
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 99
Absolute Stabilität
• Dies führt zu komplexwertigen λ• Insbesondere gilt für die komplexwertige Lösung
•
• Jedoch auch hier muss für Re(λ)<0 gelten, dass
1)( <λhF
0)Re(11 <<=+ λλλ füremityey hn
hn
• Stabilitätsgebiete werden oft in der komplexen Ebene gezeichnet.Wir verwenden Maple.
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 100
Absolute Stabilität• Definition: Für ein Einschrittverfahren, welches
für die Testaufgabe y’=λy mit y(0)=1 auf eineVorschrift
führt, heisst die Menge
Gebiet der absoluten Stabilität.
• Insbesondere bei Differentialgleichungssystemenmuss für jeden Eigenwert λi die Bedingung
• erfüllt sein.
nn yhFy )(1 λ=+
{ }1)(: <∈= µµ FB C
App.ico
Bh i ∈λ
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 101
2.7.3 Implizite Lösungsverfahren
• Idee: Wir verbessern die Stabilität durch impliziteLösungsverfahren
• Hierbei taucht der zu berechnende Wert yn+1 auchauf der rechten Seite der Dgl. auf
• Impliziter Euler:
• Dieser Ansatz führt zu einer i. A. nichtlinearenBestimmungsgleichung für yn+1
• Deren Lösung kann u. U. recht aufwendig undnicht eindeutig sein.
),( 111 +++ += nnnn yxhfyy
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 102
Implizite Lösungsverfahren
• Lösung für unsere Testaufgabe zur Berechnungdes Stabilitätsgebietes
• Daraus ergibt sich
• Das Stabilitätsgebiet des Verfahrens umfasst diegesamte linke Halbebene und erlaubt damit grosseSchrittweiten
11 ++ += nnn yhyy λ
λh
yy n
n −=+ 11
λλ
hhF
−=
11
)(App.ico
18
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 103
2.8.(1) Steife Differentialgleichungen
• Die Anfälligkeit eines Differentialgleichungssystemsfür die beschriebenen Instabilitäten wird durch diesogenannte Steifheit charakterisiert.
• Für lineare Systeme wird die Steifheit wie folgtdefiniert:
• Wir schreiben das System in Matrixform App.ico
)()()(’ xxx bAyy +=
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 104
Steife Differentialgleichungen
• Definition: Die Steifheit S des linearenDifferentialgleichungssystems ist der Quotient derBeträge der absolut grössten und absolut kleinstenRealteile der Eigenwerte der Systemmatrix A.
• Steife Dgl.: S>103
App.ico)Re(min/)Re(max: ii
ii
S λλ=
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 105
2.8.2 Nichtlineare Systeme
• Das Problem der Steifheit existiert ausgeprägt beinichtlinearen Dgl.-Systemen.
• Wir schreiben sie in der Form
• Zur Untersuchung der Steifheit betrachten wir daslokale Verhalten der exakten Lösung y(x) in derUmgebung von xn.
• Als Anfangsbedingung wählen wir y(xn)=yn (vgl.lokaler Fehler).
))(,()(’ xxx yfy =
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 106
Nichtlineare Systeme
• Die gesuchte Funktion wird nun angesetzt als
• Eingesetzt in das Differentialgleichungssystemergibt für die i-te Gleichung
• sowie nach Linearisierung
• In Matrixschreibweise erhalten wir das lokallinearisierte System der Form
)()( xx n zyy +=
))(,),(),(),(()(’ 2211 xzyxzyxzyxxxfxz mmnnnnnii +++−+= 1
)(),(),(
)(),()(’1
xzy
xf
x
xfxxxfxz j
m
j j
nninninnnii ∑
= ∂∂+
∂∂−+≈ yy
y
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 107
Nichtlineare Systeme0zgfzJz’ =−++= )()()()()( nnnn xxxxxx
),(21
2
2
2
1
2
1
2
1
1
1
:)(
nnxm
mmm
m
m
n
y
f
y
f
y
f
yf
yf
yf
yf
yf
yf
x
y
J
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
2
332
2
=
)(
)(
)(
)(2
1
xz
xz
xz
x
m
4z
=
),(
),(
),(
2
1
nnm
nn
nn
xf
xf
xf
y
y
y
fn 4
),(
2
1
)(
nnx
m
n
x
f
xfxf
x
y
g
∂∂
∂∂∂∂
= 4
• Die Steifheit wird nun analog durch die Eigenwerte der Jacobi-Matrix charakterisiert.
• Die Steifheit ist nun eine Funktion von xn und ändert damitwährend der numerischen Integration.
• Somit kann die Schrittweite h expliziter Verfahren in jedem Schrittneu bestimmt werden.
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 108
2.9.(1) Randwertprobleme [1], [3]
• Randwertproblem: Vorgabe der Bedingungen zurFestlegung einer Lösung an verschiedenen Stellenx1, x2, ...,xn.
• Oftmals auch an den Intervallrändern a,b, wobei x in[a,b].
• Für das System
• schreiben wir die Randbedingungen in der Form
• mit i=1,...,n
))()(’ xx,x yf(y =
)]()(),(),()(),([ 2121 bybybyayayayR nni 55
19
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 109
Randwertprobleme
• Die Differentialgleichung muss also zumindest 2.Ordnung sein
• Beispiel:
• Typische Randbedingung
• Alternativ auch Angabe von Steigungen möglich
• Randbedingungen können auch in allgemeiner,nichtlinearer Form vorliegen
))(’),(,()(’’ xyxyxfxy =
ba ybyyay == )()(
βα == )(’)(’ byay
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 110
Randwertprobleme
• Definition: Eine Randwertaufgabe heisst linear,wenn sowohl die zugehörige Differentialgleichung,als auch die Randbedingungen linear sind.
• So kann die Lösung eindeutig, mehrdeutig odernicht existent sein
• Beispiel:
• Ausarbeitung an Tafel!
• Für allgemeine Randwertaufgaben ist weder die Existenz, nochdie Eindeutigkeit einer Lösung gewährleistet
1’’ =+ yy
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 111
Zusatzblatt: Beispiel
1=+′′ yy
parthom yyy +=
( ) ( ) 1sincos 21 ++= xx αα
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 112
Zusatzblatt: Beispiel
( ) 12
00 =
= π
,yy :1 Fall
0 ,111
01 einsetzen 21
2
1 =−=
=+=+
→→ αααα
( ) ( )xxy cos1 −=→
( ) 1)(00 == π,y y:2 Fall
11 ,01 11 =−=+→ αα
( ) ( ) 200 == π,yy :3 Fall
21 ,01 11 =−=+→ αα1 1 −=→α
( ) ( ) ( )xx -x y sincos1 2+=⇒
beliebig mit 2 ℜ∈αlösbarnicht →
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 113
Zusatzblatt: Beispiel
( ) ( )( )2
0100 2 π<<=′= b, by,y :4 Fall
( ) ( )( ) 1cossin 22 =+ bb α
( ) ( ) ( )xxxy sincos11 21 +−=→−=
( )( ) Lösungen 2
cos
sin12
−±=
b
bα
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 114
Zusatzblatt: Beispiel
( ) ( )( ) 000 y,y =′= π :5 Fall
( ) ( ) ( )xxx y sincos1 21 α++=
( ) ( ) ( )xxxy cossin 21 αα +−=′
101 1) 11 −=→=+ αα0 2) 2 =α
( ) ( )x -xy cos1 =
20
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 115
Lösungsmethoden
• Wir unterscheiden 3 wichtige Klassen vonLösungsmethoden:– Analytische Methoden für lineare Randwertprobleme
– Shooting-Methoden (siehe Uebungen)
– Finite Differenzen Methoden
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 116
2.9.2 Analytische Lösung
• Idee: Entwicklung der Lösungsfunktion y(x) alsLinearkombination geeigneter Ansatzfunktionen
• Beispiel: Wir betrachten das folgendeRandwertproblem
• mit
• Wir definieren einen linearen Operator L fürzweimal stetig differenzierbare Funktionen y(x)
∑∞
==
1
)()(i
ii xcxy φ
)()()(’’ xfxqyxpy =+−
0)(’0)0( == πyy
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 117
Analytische Lösung• mit
• Gesucht ist also der inverse Operator (dieUmkehrabbildung), so dass
• Wir betrachten das zugehörige Eigenwertproblem
• Bei bekannten Eigenwerten λi sowie denEigenfunktionen φi
• Wir schreiben f als Linearkombination der φi
)()( xfxLy =
)()( 1 xfLxy −=
yLy λ=
∑∞
==
1
)()(i
ii xaxf φ
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 118
Analytische Lösung
• bei bekannten Koeffizienten ai erhalten wir diegesuchte Lösungsfunktion
• da
• Die Koeffizienten der Eigenfunktionen unseresBeispiels entsprechen der Fourierkoeffizienten einerFourier-Reihenentwicklung.
∑∞
==
1
)()(i
ii
i xa
xy φλ
)()()()()(111
xfxaxa
xLa
xLyi
iii
iii
i
ii
i
i ∑∑∑∞
=
∞
=
∞
===== φφλ
λφ
λ
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 119
Analytische Lösung
• für
• erhalten wir
• für das Beispiel wählen wir folgende Ansatzfunktion
• Eingesetzt erhalten wir
• oder
0)0()sin()( =⇒= ykxxφ)cos()(’ kxkx =φ
6,2,1,21
0)(’ =−=⇒= iikπφ
0)sin()sin()sin(2 =−+ kxkxqkxpk λ
yLy λ=
)()()(’’ xxqxp λφφφ =+−
0)sin()( 2 =−+ kxqpk λCopyright: M. Gross, ETHZ, 1999, 2000, 2001. 120
Analytische Lösung
• Hieraus ergeben sich die Eigenwerte undEigenfunktionen
• L2-Norm der Eigenfunktionen
• Die normierte Eigenfunktionen sind orthonormal
)21
sin()( xixi
−=φqipi +
−=
2
21λ
∫ ===π πφφφφ0
22
2)(,)(
2dxxx iiiLi
)21
sin(2
)(ˆ xixi
−=
πφ ijji δφφ =,

21
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 121
Analytische Lösung
• Bei gegebenem Randwertproblem berechnen wir dieFourierkoeffizienten ai mit
• und erhalten
• sowie die gesuchte Lösungsfunktion y(x)
∫==π
φφ0
)(ˆ)(ˆ, dxxxffa iii
∑∑∞
=
∞
=
−==
11
)21
sin(2
)(ˆ)(i
ii
ii xiaxaxfπ
φ
∑∑∞
=
∞
=
−
+
−
==1
21
)21
sin(2
21
)(ˆ)(i
i
ii
i
i xi
qip
ax
axy
πφ
λ
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 122
Analytische Lösung
• Praktische Berechnungen mit dieser Methode könnensehr mühsam sein
• (glatte) Näherungslösung durch Abschneidenhochfrequenter Anteile
• Der Approximationsfehler ergibt sich zu
∑=
=N
ii
i
i xa
xy1
)(ˆ)(~ φλ
∑∑∑∞
+=
∞
+=
∞
+=
==−1
2
11
2)(ˆ,)(ˆ)(~)(
Ni i
i
Nii
i
i
Nii
i
i ax
ax
axyxy
λφ
λφ
λ
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 123
2.9.3 Finite Differenzen
• Wir betrachten die allgemeinere Dgl.
• Diskretisierung der Gleichung durch Ersetzen derAbleitungen durch zentrale Differenzen ersterOrdnung (Kap. 3, [1])
)()()()(
)( xfxyxqdx
xdyxp
dxd =+
− 0)(’0)0( == πyy
h
hxy
hxy
xy)
2()
2(
)(’−−+
≈
hh
hxyxyhxp
hxyhxyh
xpxyxp
)()()
2(
)()()
2(
))’(’)((
−−−−−++≈
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 124
Finite Differenzen
• Mit xn=nh und yn=y(xn) können wir folgendeBeziehung für jedes xn aufstellen
• Die Gleichung gilt für alle inneren Punkte n=1,..,N-1
• Wir betrachten die Randbedingungen:
• Linksseitig:
• Zur Einhaltung der rechtsseitigen Randbedingungbetrachten wir zwei Varianten
)()())(2
())(2
(1
112 nnnnnnnnn xfyxqyyh
xpyyh
xph
=+
−−−−+− −+
00)0( 0 =⇒= yy
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 125
Finite Differenzen
• Variante 1: finite Differenz am rechten Rand fixieren
• Variante 2: Zusätzlichen (virtuellen) Punkt yN+1
einfügen
11 0)(’0)(’ −
− =⇒=−≈⇒= NNNN yy
h
yyyy ππ
1111 0
2)(’0)(’ −+
−+ =⇒=−≈⇒= NNNN yy
h
yyyy ππ
• Vorteil von Variante 2 ist, dass die Differentialgleichung auch fürn=N formuliert werden kann (eine zusätzliche Gleichung)
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 126
Finite Differenzen
• Beispiel: Wir betrachten den Spezialfall p=1 und q=0(eindimensionale Poisson-Gleichung)
• Variante 1: yN=yN-1
• Für alle inneren Punkte xn, n=1,..,N-2 erhalten wir
• bzw. für n=N-1
)()(
2
2
xfdx
xyd =−
( ) nnnnn fxfyyyh
==+−− +− )(21
112
( ) 11212 )(1
−−−− ==+−− NNNN fxfyyh
22
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 127
Finite Differenzen
• In Matrixschreibweise erhalten wir das folgendeGleichungssystem
• Gleichungssystem mit N-1 Unbekannten -> Solve
=
−
−
−
−
−− 1
2
1
1
2
1
110
12
1
012
NN f
f
f
y
y
y
77
8
99
799
8
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 128
Finite Differenzen• Variante 2: yN+1=yN-1
• Für n=N erhalten wir folgende Relation
• und damit die folgende Matrix
( ) ( ) NNNNNNN fxfyyh
yyyh
==−−=+−− −+− )(221
21
12112
=
−
−
−
−
NN f
f
f
y
y
y
::
;
<<
:<<;
2
1
2
1
220
12
1
012
Copyright: M. Gross, ETHZ, 1999, 2000, 2001. 129
Finite Differenzen
• Das Gleichungssystem hat nun die Dimension N
• Variante 2 ist vorzuziehen, da derDiskretisierungsfehler am rechten Rand O(h2) ist.
• Dagegen liefert Variante 1 einen linearen Fehler O(h)
• Berechnungen dazu: Siehe Maple-Sheet
App.ico
• Die finite Differenzenmethode kann auch auf nichtlineareRandwertprobleme angewandt werden.
• Hier muss ein nichtlineares Gleichungssystem in den Variablenyn mittels entsprechender Methoden (Newton o.ä.) gelöstwerden.