Embed Size (px)
Citation preview
Dynamik
Dynamik
• Beschreibung von Beschleunigung und Trajektorien, die sich aus den Gelenk- und Kontaktkräften ergeben
• Inverse Dynamik (inverse kinematics)
• Berechnung der notwendigen Kräfte um einer vorgegeben Trajektorie zu folgen
• Anwendung: Roboterkontrolle
• Direkte Dynamik / Vorwärtskinematik (forward kinematics)
• Berechnung der Trajektorien als Funktion der anliegenden Kräfte• Anwendung: Simulation
Spatial Vector Notation
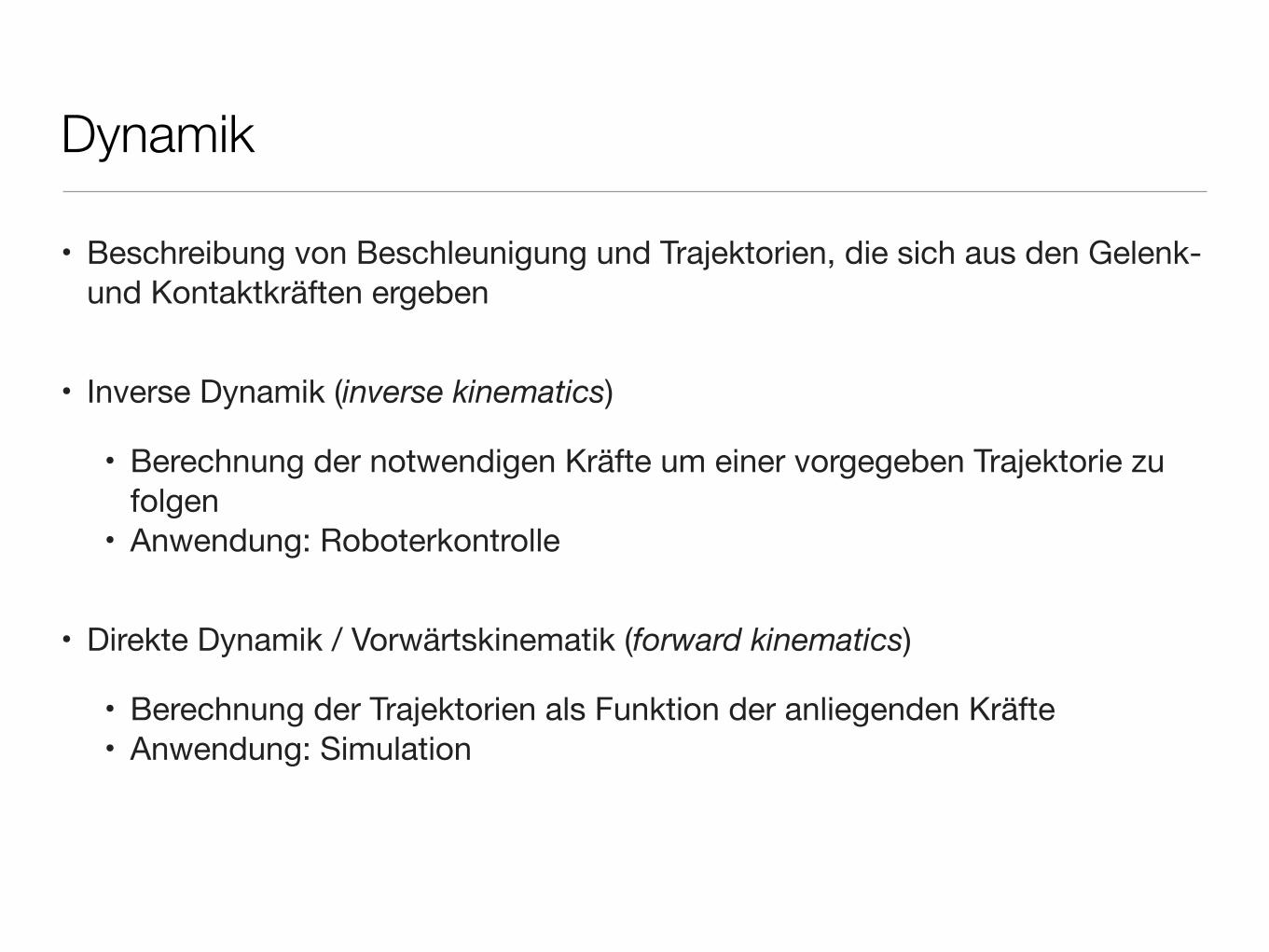
• Es gibt keinen einheitlichen Standard zur Beschreibung von Roboterdynamiken (3D Vektoren, 4x4 Matrizen, …)
• In dieser Vorlesung wird die spacial vector notation verwendet, weil sie eine kompakte Notation bietet. Dadurch braucht man auch weniger Gleichungen, weniger Berechnungen und ist weniger fehleranfällig
• Basisvektoren
v = (vx
, vy
, vz
)
v = xvx
+ yvy
+ zvz
x = (1, 0, 0)
y = (0, 1, 0)
z = (0, 0, 1)
v = (1, 2, 3)
= 1x + 2y + 3z
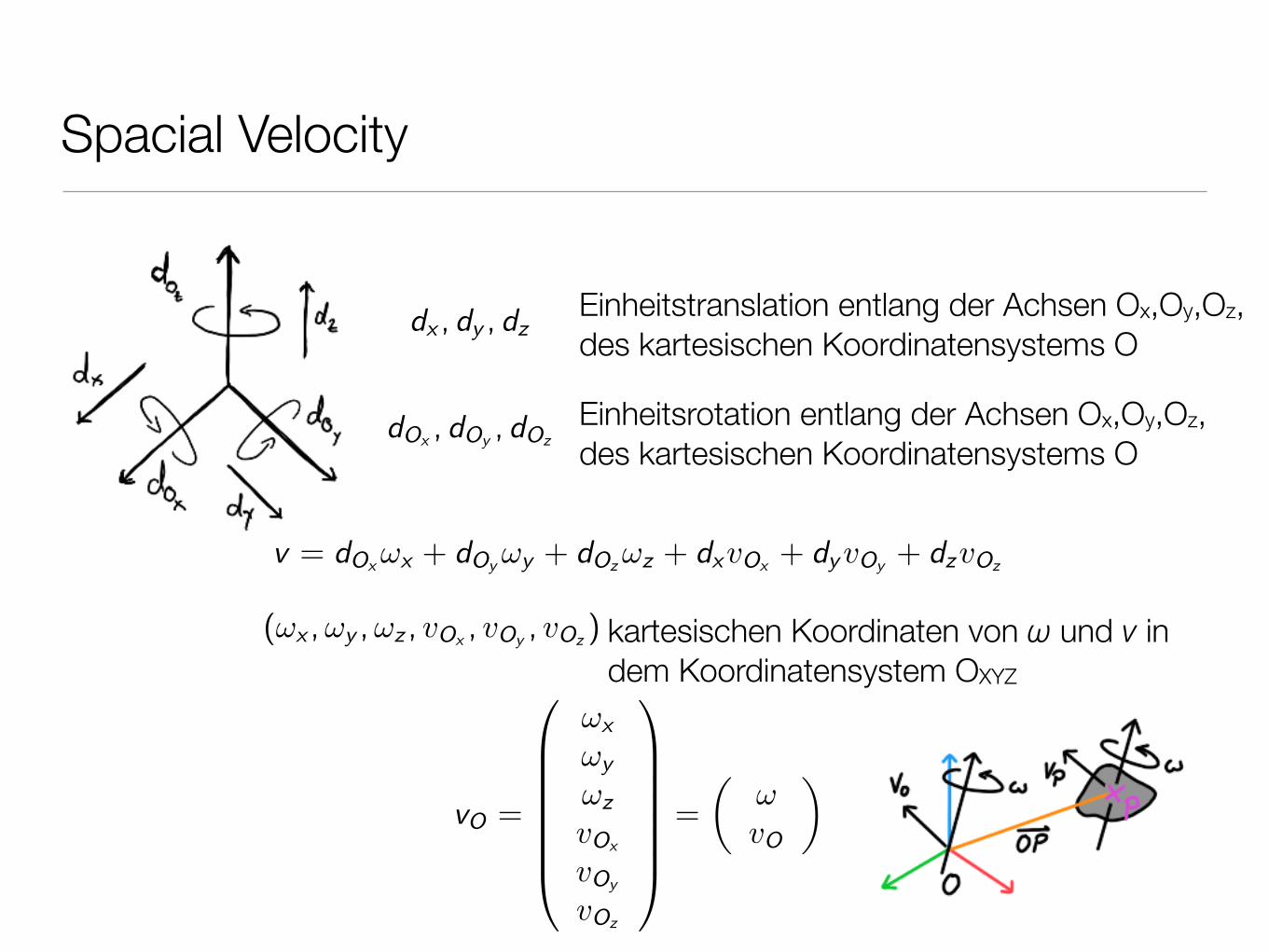
Spacial Velocity
dx
, dy
, dz
dOx , dOy , dOz
Einheitstranslation entlang der Achsen Ox,Oy,Oz, des kartesischen Koordinatensystems O
Einheitsrotation entlang der Achsen Ox,Oy,Oz, des kartesischen Koordinatensystems O
kartesischen Koordinaten von ω und v in dem Koordinatensystem OXYZ
v = dOx!x + dOy!y + dOz!z + dxvOx + dyvOy + dzvOz
(!x ,!y ,!z , vOx , vOy , vOz )
vO =
0
BBBBBB@
!x
!y
!z
vOx
vOy
vOz
1
CCCCCCA=
✓!vO
◆
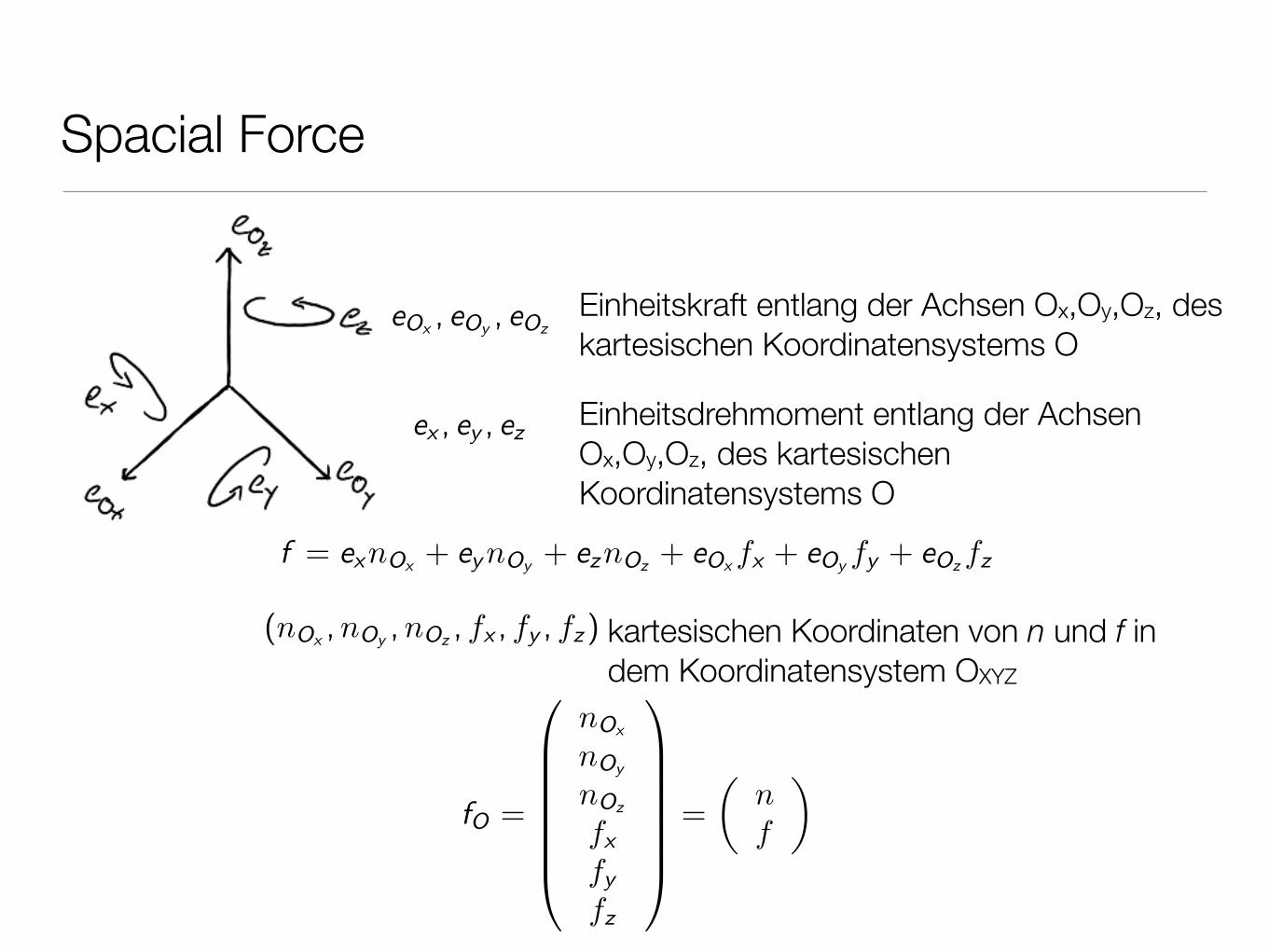
Spacial Force
Einheitskraft entlang der Achsen Ox,Oy,Oz, des kartesischen Koordinatensystems O
Einheitsdrehmoment entlang der Achsen Ox,Oy,Oz, des kartesischen Koordinatensystems O
kartesischen Koordinaten von n und f in dem Koordinatensystem OXYZ
eOx , eOy , eOz
ex
, ey
, ez
f = exnOx + eynOy + eznOz + eOxfx + eOy fy + eOzfz
(nOx ,nOy ,nOz , fx , fy , fz)
fO =
0
BBBBBB@
nOx
nOy
nOz
fxfyfz
1
CCCCCCA=
✓nf
◆
Rechenoperationen auf spacial vectors
• Addition:
Kräfte und Geschwindigkeiten lassen sich komponentenweise addieren und subtrahieren. Wenn f1 und f2 auf einen Körper wirken, dann ist die Gesamtkraft f = f1 + f2. Wenn sich ein Körper mit v1 bewegt und ein anderer mit v2, dann ist die relative Geschwindigkeit v = v1 - v2.
• Skalarprodukt
Das Skalarprodukt ist nur zwischen Geschwindigkeits- und Kraftvektoren definiert und drückt die aufgewendete Arbeit aus (work)
m · f = mT f
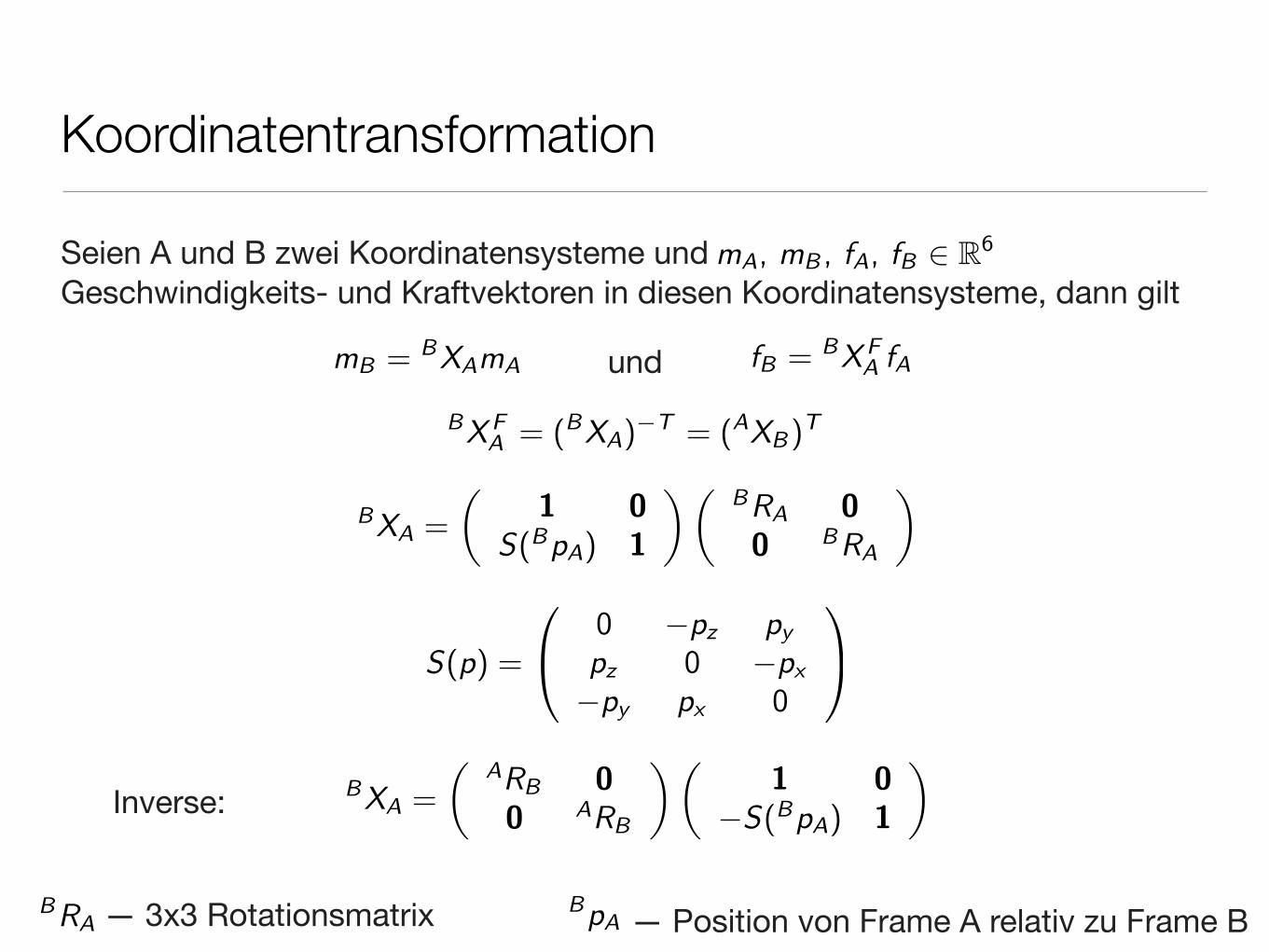
Koordinatentransformation
Seien A und B zwei Koordinatensysteme und Geschwindigkeits- und Kraftvektoren in diesen Koordinatensysteme, dann gilt
und
mA, mB , fA, fB 2 R6
mB = BXAmA fB = BX FA fA
BX FA = (BXA)
�T = (AXB)T
BXA =
✓1 0
S(BpA) 1
◆✓BRA 00 BRA
◆
BRABpA— 3x3 Rotationsmatrix — Position von Frame A relativ zu Frame B
S(p) =
0
@0 �p
z
py
pz
0 �px
�py
px
0
1
A
BXA =
✓ARB 00 ARB
◆✓1 0
�S(BpA) 1
◆Inverse:
Vektorprodukt
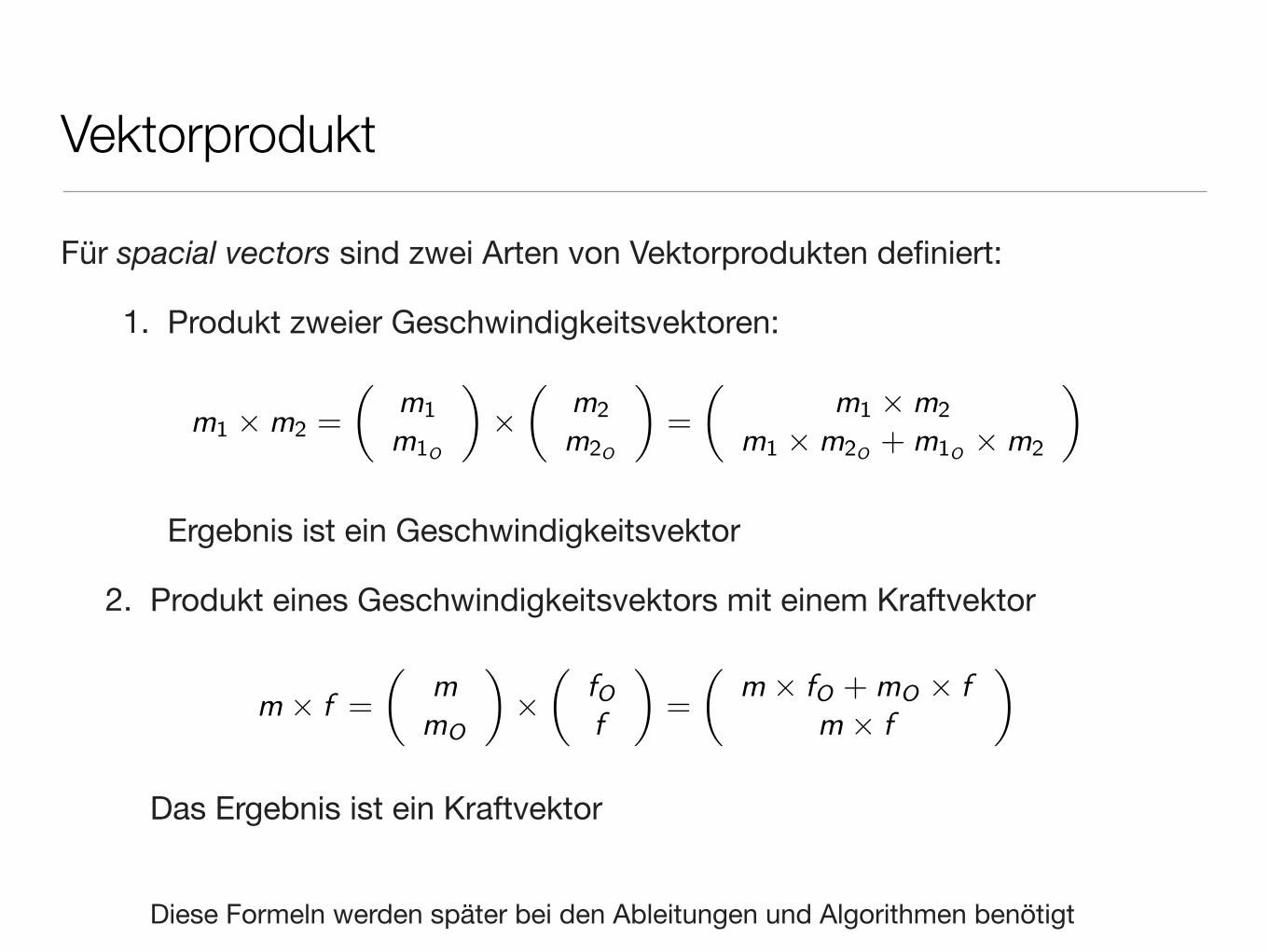
Für spacial vectors sind zwei Arten von Vektorprodukten definiert:
1. Produkt zweier Geschwindigkeitsvektoren:
Ergebnis ist ein Geschwindigkeitsvektor
2. Produkt eines Geschwindigkeitsvektors mit einem Kraftvektor
Das Ergebnis ist ein Kraftvektor
Diese Formeln werden später bei den Ableitungen und Algorithmen benötigt
m1 ⇥m2 =
✓m1
m1O
◆⇥
✓m2
m2O
◆=
✓m1 ⇥m2
m1 ⇥m2O +m1O ⇥m2
◆
m ⇥ f =
✓mmO
◆⇥
✓fOf
◆=
✓m ⇥ fO +mO ⇥ f
m ⇥ f
◆
Ableitungen
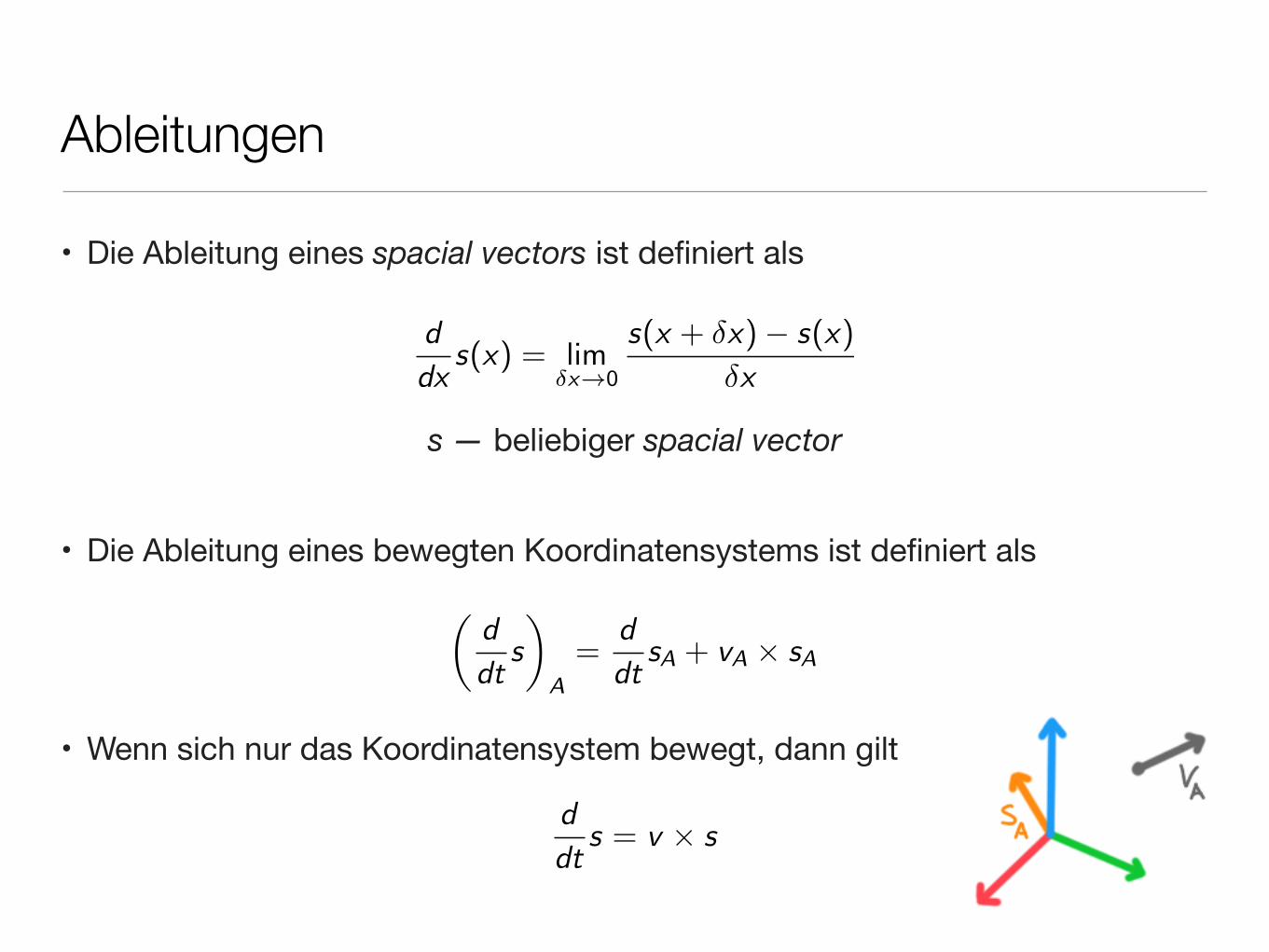
• Die Ableitung eines spacial vectors ist definiert als
• Die Ableitung eines bewegten Koordinatensystems ist definiert als
• Wenn sich nur das Koordinatensystem bewegt, dann gilt
d
dx
s(x) = lim�x!0
s(x + �x)� s(x)
�x
s — beliebiger spacial vector
✓d
dts
◆
A
=d
dtsA + vA ⇥ sA
d
dts = v ⇥ s
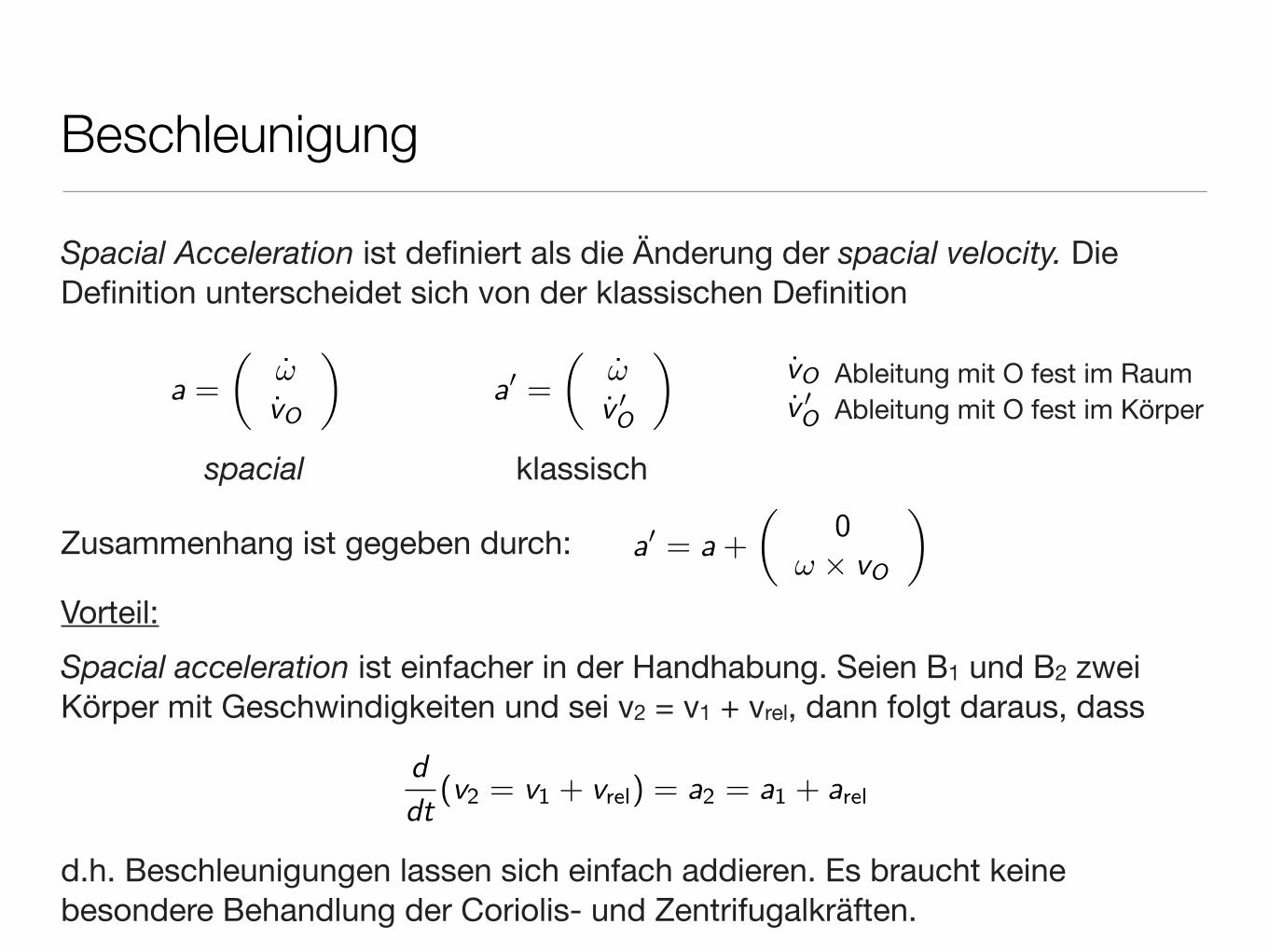
Spacial Acceleration ist definiert als die Änderung der spacial velocity. Die Definition unterscheidet sich von der klassischen Definition
Zusammenhang ist gegeben durch:
Vorteil:Spacial acceleration ist einfacher in der Handhabung. Seien B1 und B2 zwei Körper mit Geschwindigkeiten und sei v2 = v1 + vrel, dann folgt daraus, dass
d.h. Beschleunigungen lassen sich einfach addieren. Es braucht keine besondere Behandlung der Coriolis- und Zentrifugalkräften.
Beschleunigung
a =
✓!vO
◆a0 =
✓!v 0O
◆
spacial klassisch
vOv 0O
Ableitung mit O fest im RaumAbleitung mit O fest im Körper
a0 = a+
✓0
! ⇥ vO
◆
d
dt(v2 = v1 + vrel) = a2 = a1 + arel
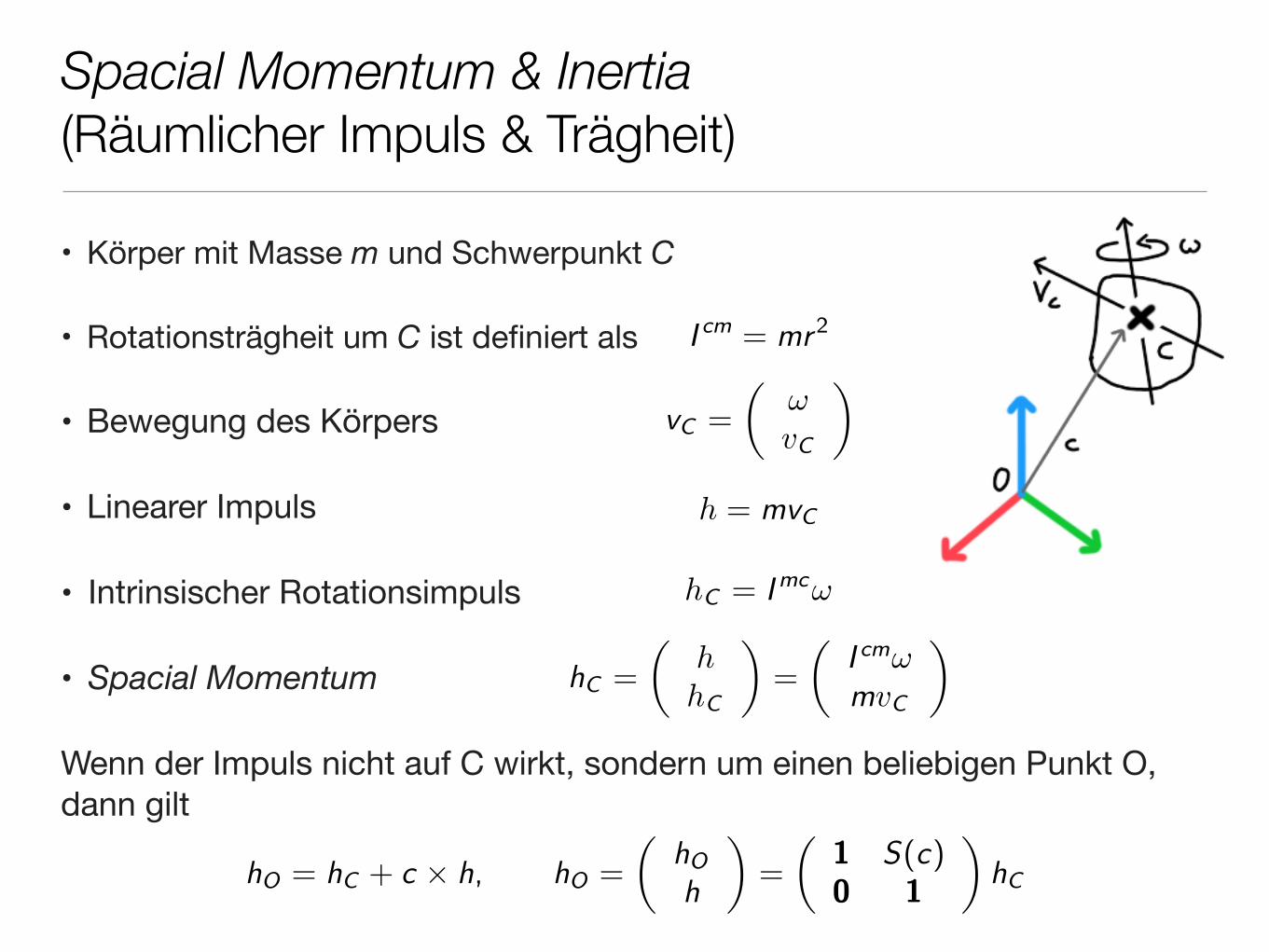
• Körper mit Masse m und Schwerpunkt C
• Rotationsträgheit um C ist definiert als
• Bewegung des Körpers
• Linearer Impuls
• Intrinsischer Rotationsimpuls
• Spacial Momentum
Wenn der Impuls nicht auf C wirkt, sondern um einen beliebigen Punkt O, dann gilt
h = mvC
hC = Imc!
Spacial Momentum & Inertia (Räumlicher Impuls & Trägheit)
vC =
✓!vC
◆
hC =
✓hhC
◆=
✓I cm!mvC
◆
hO = hC + c ⇥ h, hO =
✓hOh
◆=
✓1 S(c)0 1
◆hC
I cm = mr2
Spacial Inertia (Räumliche Trägheit)
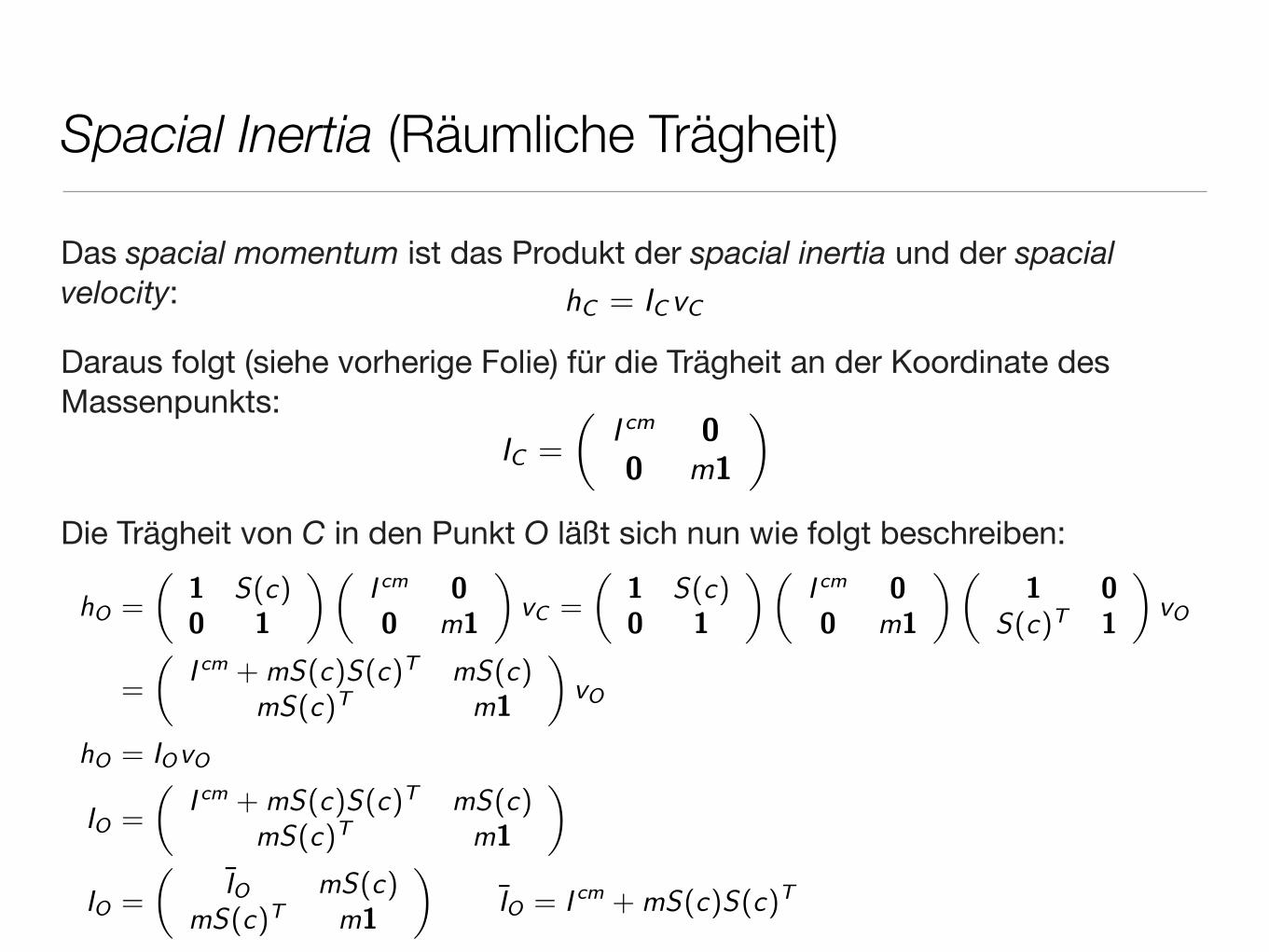
Das spacial momentum ist das Produkt der spacial inertia und der spacial velocity:
Daraus folgt (siehe vorherige Folie) für die Trägheit an der Koordinate des Massenpunkts:
Die Trägheit von C in den Punkt O läßt sich nun wie folgt beschreiben:
hC = ICvC
IC =
✓I cm 00 m1
◆
hO =
✓1 S(c)0 1
◆✓I cm 00 m1
◆vC =
✓1 S(c)0 1
◆✓I cm 00 m1
◆✓1 0
S(c)T 1
◆vO
=
✓I cm +mS(c)S(c)T mS(c)
mS(c)T m1
◆vO
hO = IOvO
IO =
✓I cm +mS(c)S(c)T mS(c)
mS(c)T m1
◆
IO =
✓IO mS(c)
mS(c)T m1
◆IO = I cm +mS(c)S(c)T
Spacial Inertia (Räumliche Trägheit)
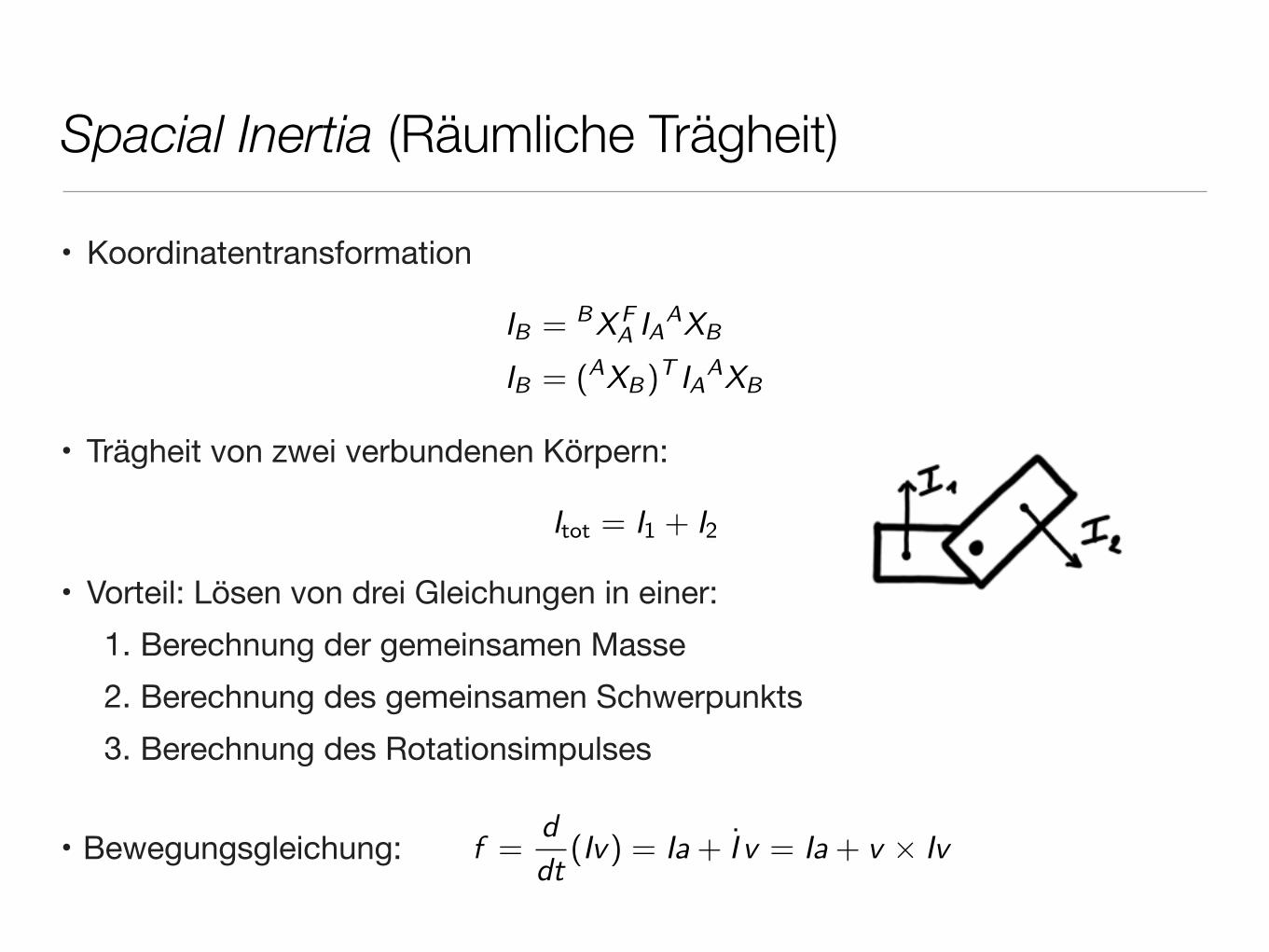
• Koordinatentransformation
• Trägheit von zwei verbundenen Körpern:
• Vorteil: Lösen von drei Gleichungen in einer:1. Berechnung der gemeinsamen Masse2. Berechnung des gemeinsamen Schwerpunkts3. Berechnung des Rotationsimpulses
• Bewegungsgleichung:
IB = BX FA IA
AXB
IB = (AXB)T IA
AXB
Itot
= I1
+ I2
f =d
dt(Iv) = Ia+ I v = Ia+ v ⇥ Iv
1. Verbindungsgraph
2. Gelenk- und Segmentparameter
3. Gelenkträgheitsparameter
4. Gelenkmodelle
• Ein Starrkörpermodell besteht aus vier Komponenten:
Verbindungsgraph:
Ein Verbindungsgraph ist ein ungerichteter Graph in dem die Segmente (Starrkörper) durch Knoten und die Gelenke durch die Kanten repräsentiert werden. Bei mobilen Roboter wird zusätzlich ein 6DOF Gelenk und eine weiteres Segment (Fixed Base) hinzugefügt.
Dynamisches Modell für Starrkörper (Rigid-Bodies)
Verbindungsgraph
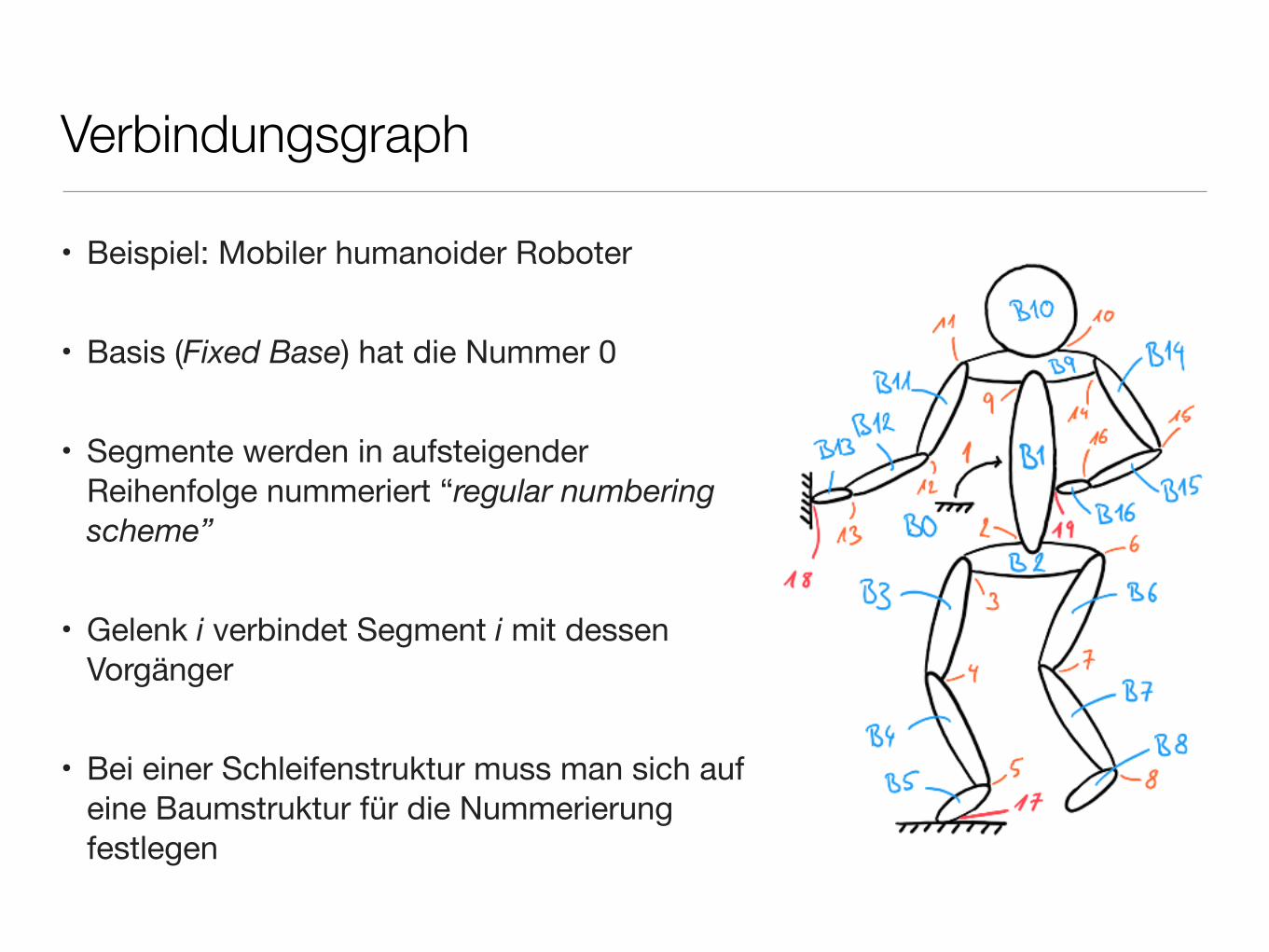
• Beispiel: Mobiler humanoider Roboter
• Basis (Fixed Base) hat die Nummer 0
• Segmente werden in aufsteigender Reihenfolge nummeriert “regular numbering scheme”
• Gelenk i verbindet Segment i mit dessen Vorgänger
• Bei einer Schleifenstruktur muss man sich auf eine Baumstruktur für die Nummerierung festlegen
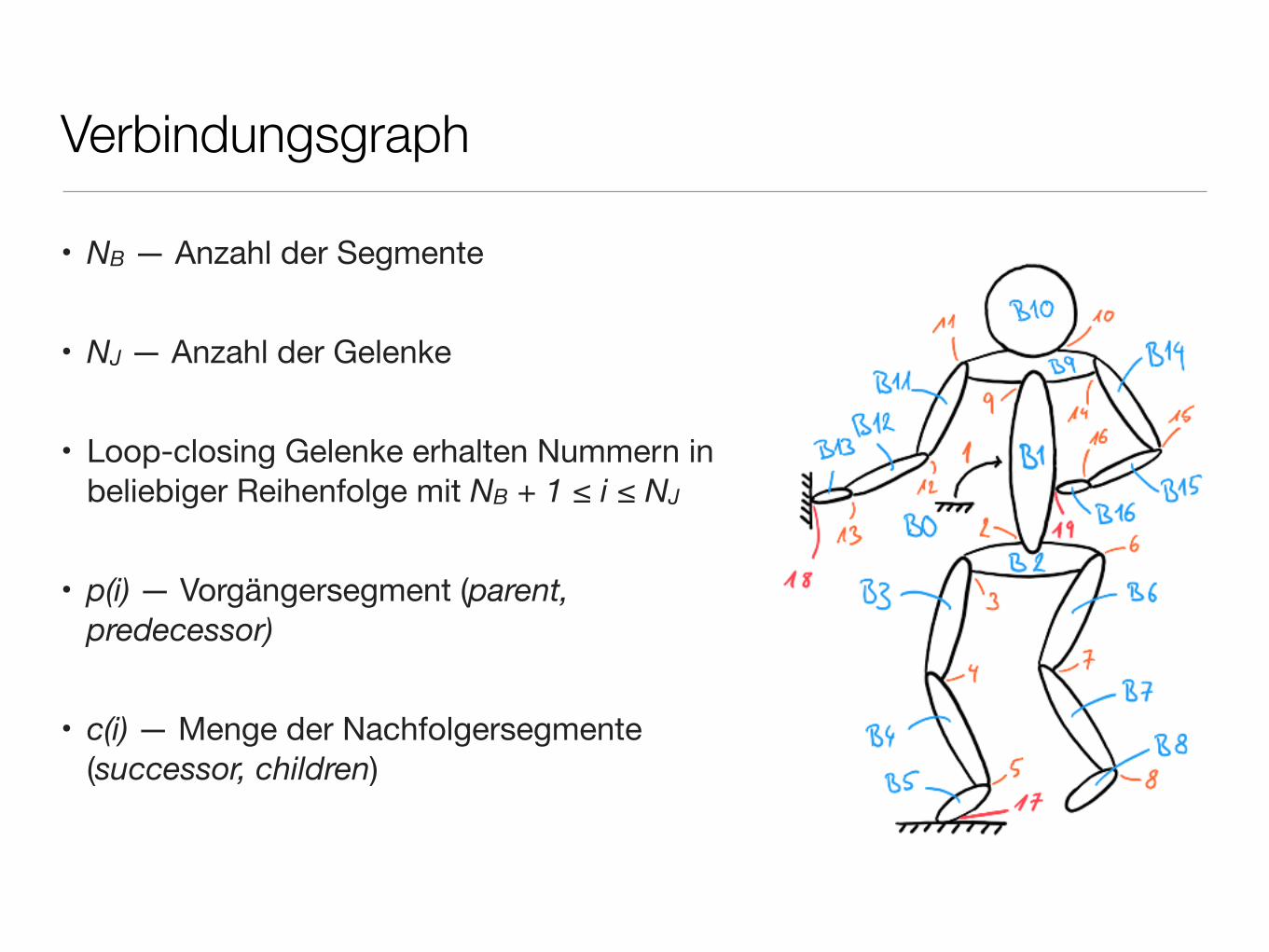
Verbindungsgraph
• NB — Anzahl der Segmente
• NJ — Anzahl der Gelenke
• Loop-closing Gelenke erhalten Nummern in beliebiger Reihenfolge mit NB + 1 ≤ i ≤ NJ
• p(i) — Vorgängersegment (parent, predecessor)
• c(i) — Menge der Nachfolgersegmente (successor, children)
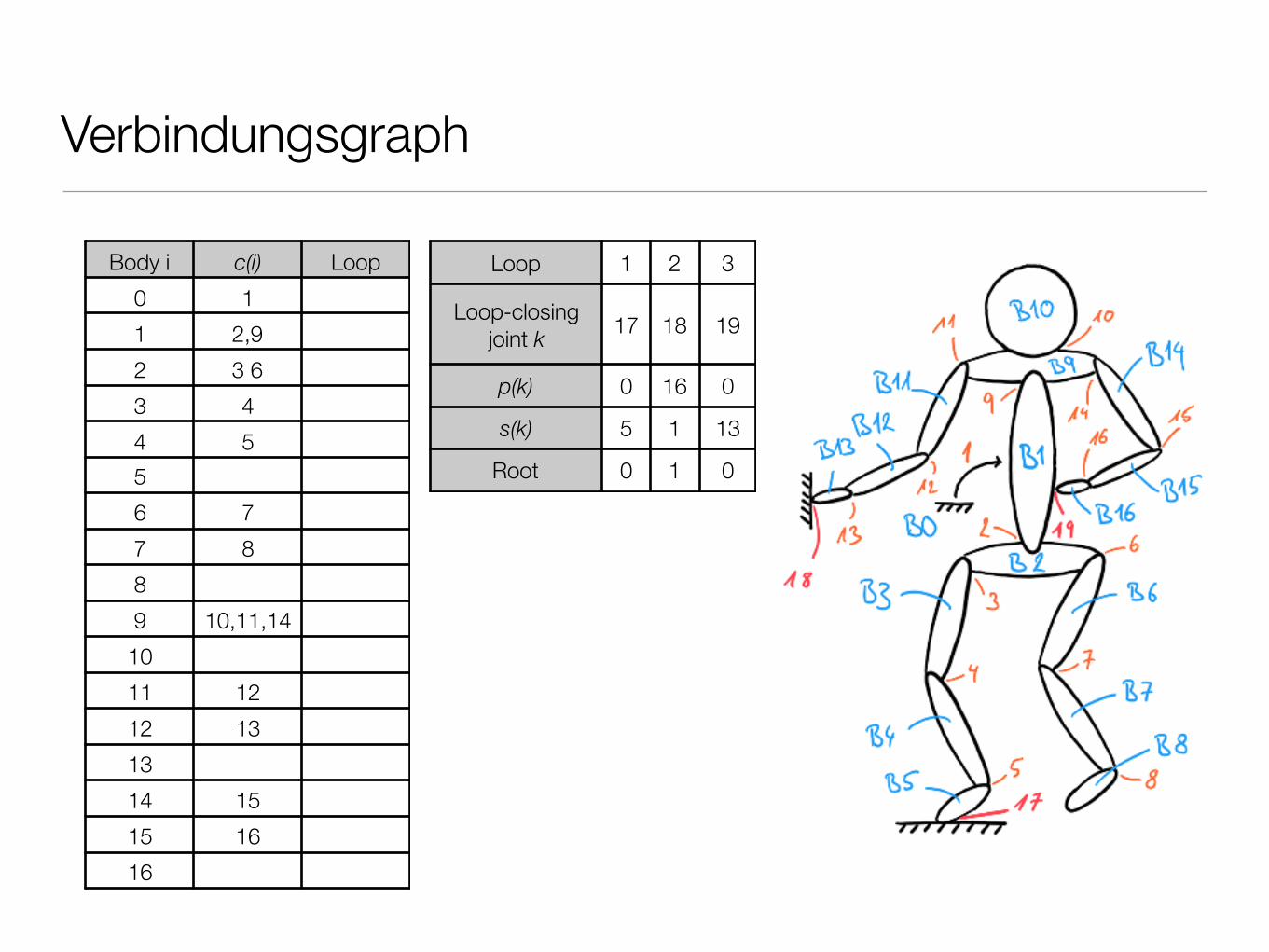
Verbindungsgraph
Body i c(i) Loop0 11 2,92 3 63 44 556 77 889 10,11,141011 1212 131314 1515 1616
Loop 1 2 3
Loop-closing joint k 17 18 19
p(k) 0 16 0
s(k) 5 1 13
Root 0 1 0
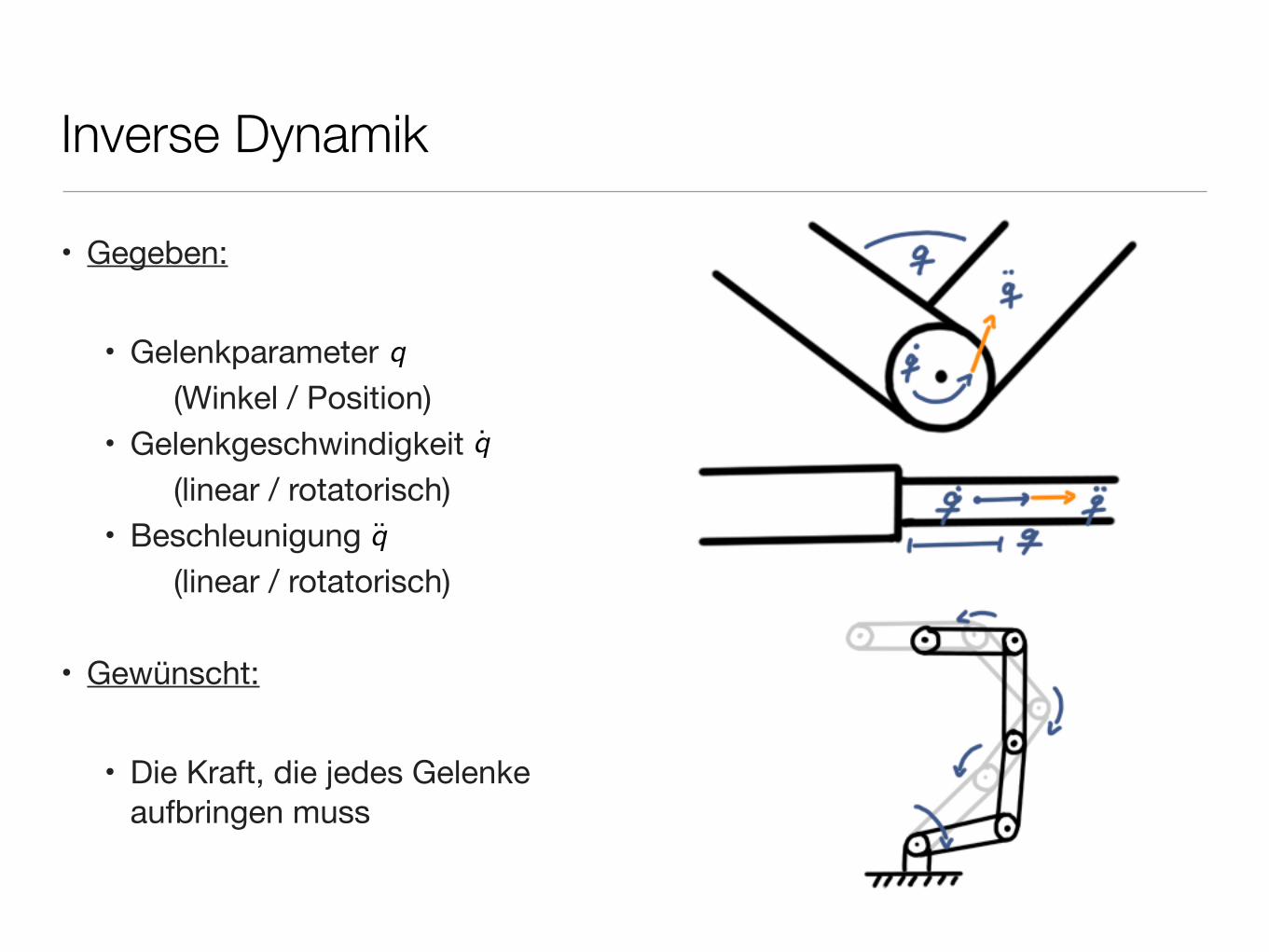
Inverse Dynamik
• Gegeben:
• Gelenkparameter(Winkel / Position)
• Gelenkgeschwindigkeit(linear / rotatorisch)
• Beschleunigung(linear / rotatorisch)
• Gewünscht:
• Die Kraft, die jedes Gelenke aufbringen muss
q
q
q
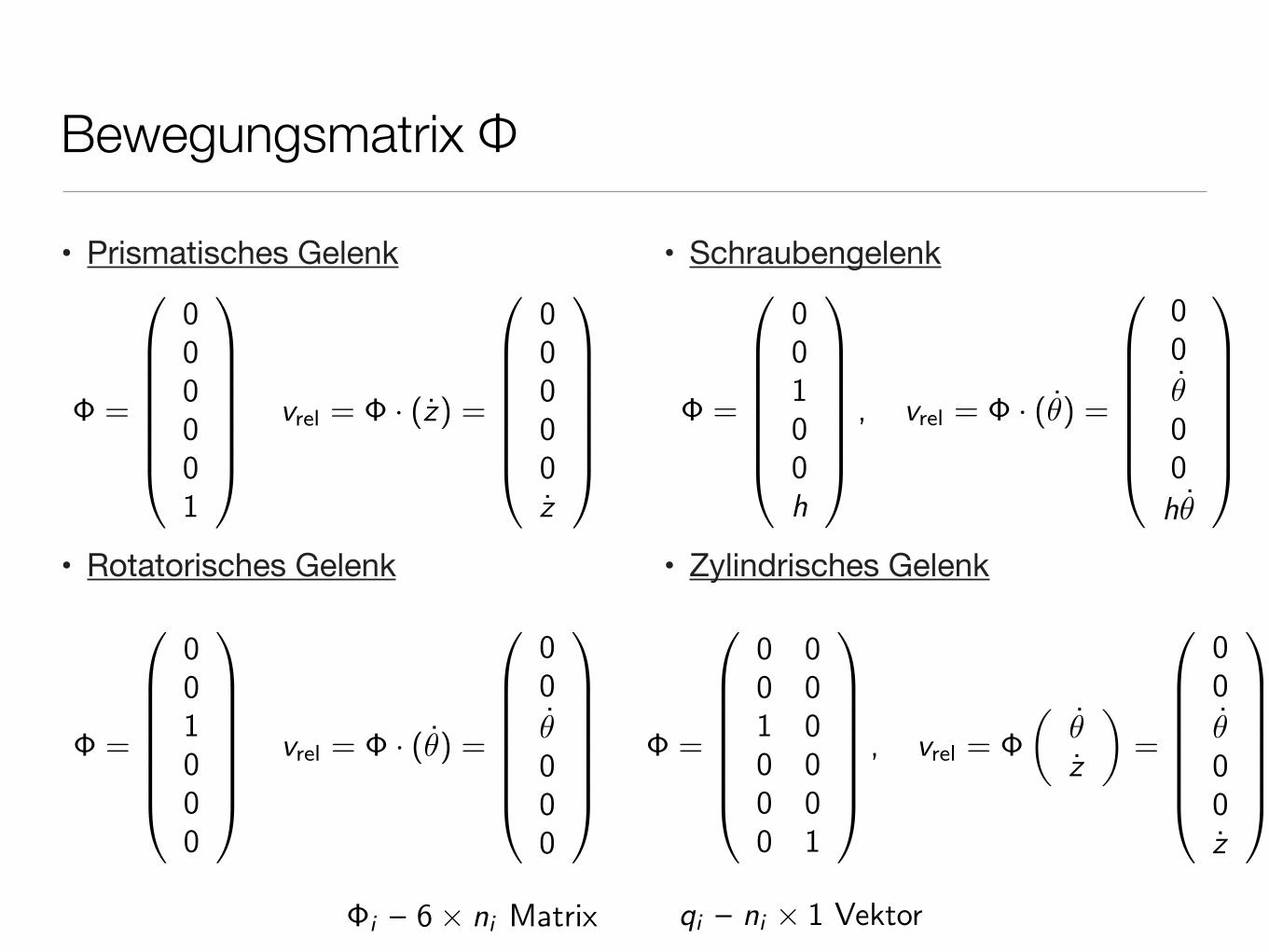
• Prismatisches Gelenk
• Rotatorisches Gelenk
• Schraubengelenk
• Zylindrisches Gelenk
Bewegungsmatrix Φ
� =
0
BBBBBB@
000001
1
CCCCCCAvrel = � · (z) =
0
BBBBBB@
00000z
1
CCCCCCA
� =
0
BBBBBB@
001000
1
CCCCCCAvrel = � · (✓) =
0
BBBBBB@
00✓000
1
CCCCCCA
� =
0
BBBBBB@
00100h
1
CCCCCCA, vrel = � · (✓) =
0
BBBBBB@
00✓00h✓
1
CCCCCCA
� =
0
BBBBBB@
0 00 01 00 00 00 1
1
CCCCCCA, vrel = �
✓✓z
◆=
0
BBBBBB@
00✓00z
1
CCCCCCA
�i – 6⇥ ni Matrix
qi – ni ⇥ 1 Vektor
• Die Beschleunigung ergibt sich aus der Ableitung der Geschwindigkeit
Beschleunigung
a =�v
�t
arel = �q + �
� =��
�t+ v ⇥ �
��
�tmeistens= 0
v ⇥ � = diag(v)⇥ �
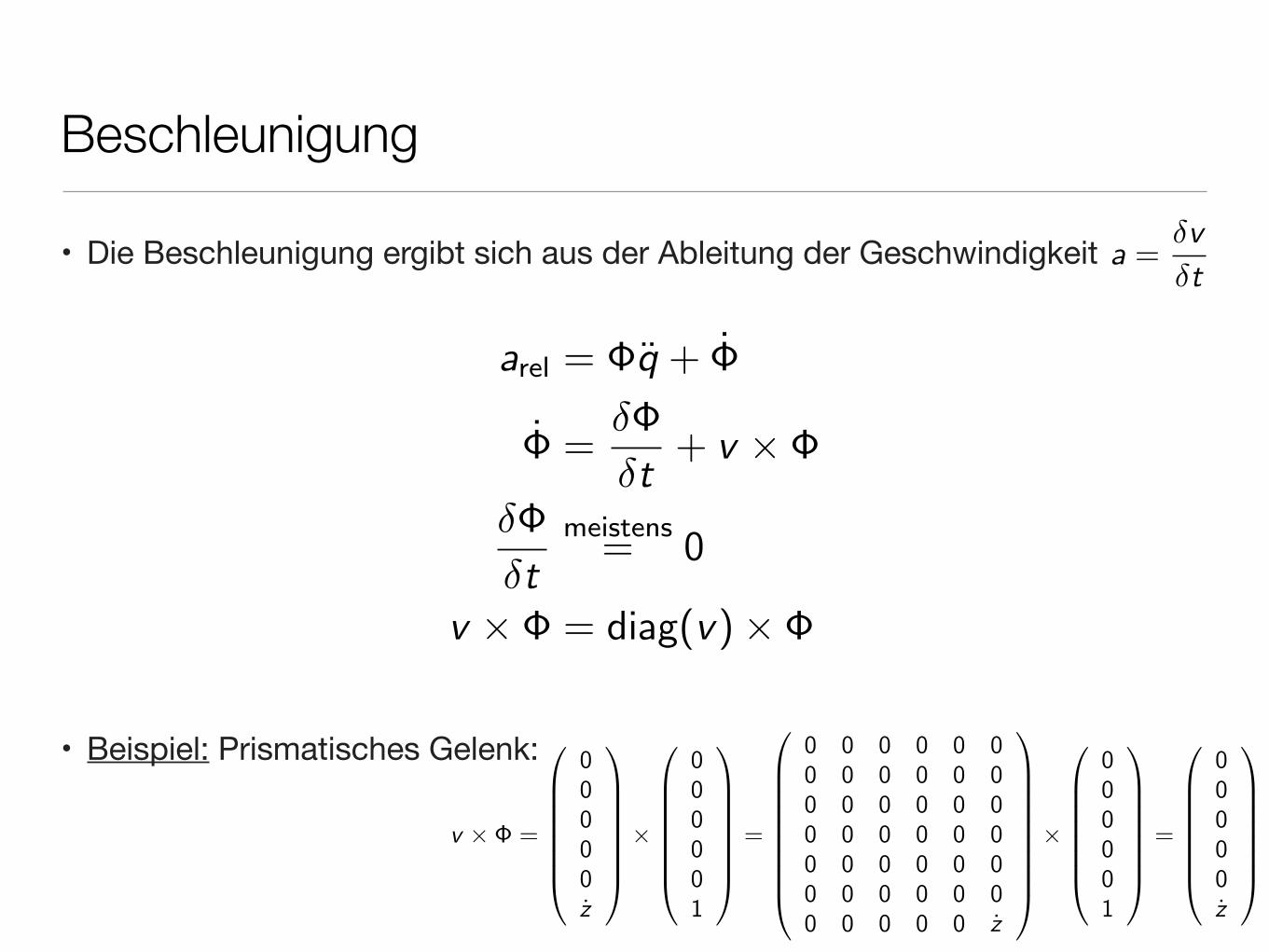
• Die Beschleunigung ergibt sich aus der Ableitung der Geschwindigkeit
• Beispiel: Prismatisches Gelenk:
Beschleunigung
a =�v
�t
arel = �q + �
� =��
�t+ v ⇥ �
��
�tmeistens= 0
v ⇥ � = diag(v)⇥ �
v ⇥ � =
0
BBBBBB@
00000z
1
CCCCCCA⇥
0
BBBBBB@
000001
1
CCCCCCA=
0
BBBBBBBB@
0 0 0 0 0 00 0 0 0 0 00 0 0 0 0 00 0 0 0 0 00 0 0 0 0 00 0 0 0 0 00 0 0 0 0 z
1
CCCCCCCCA
⇥
0
BBBBBB@
000001
1
CCCCCCA=
0
BBBBBB@
00000z
1
CCCCCCA
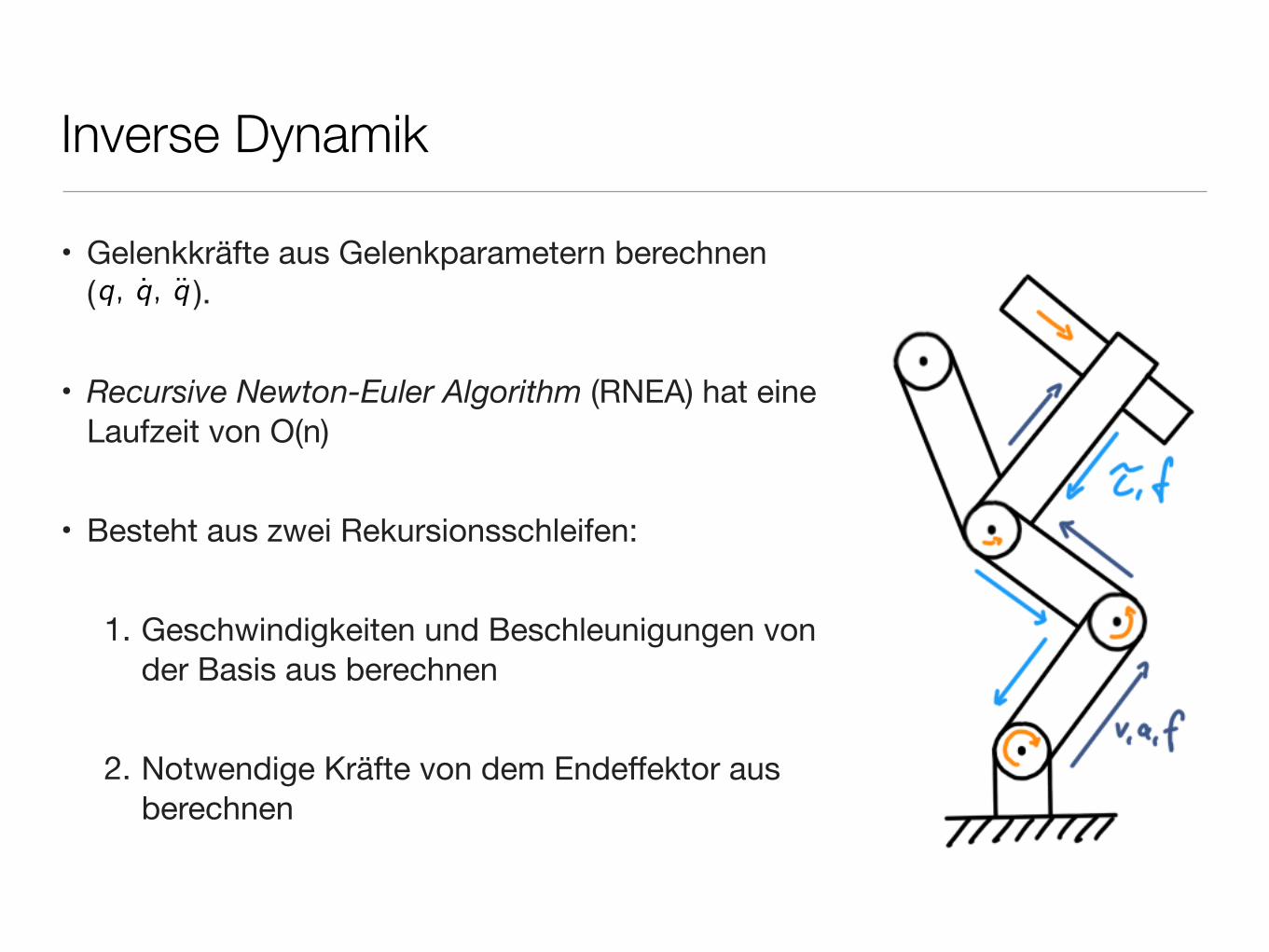
Inverse Dynamik
• Gelenkkräfte aus Gelenkparametern berechnen ( ).
• Recursive Newton-Euler Algorithm (RNEA) hat eine Laufzeit von O(n)
• Besteht aus zwei Rekursionsschleifen:
1. Geschwindigkeiten und Beschleunigungen von der Basis aus berechnen
2. Notwendige Kräfte von dem Endeffektor aus berechnen
q, q, q
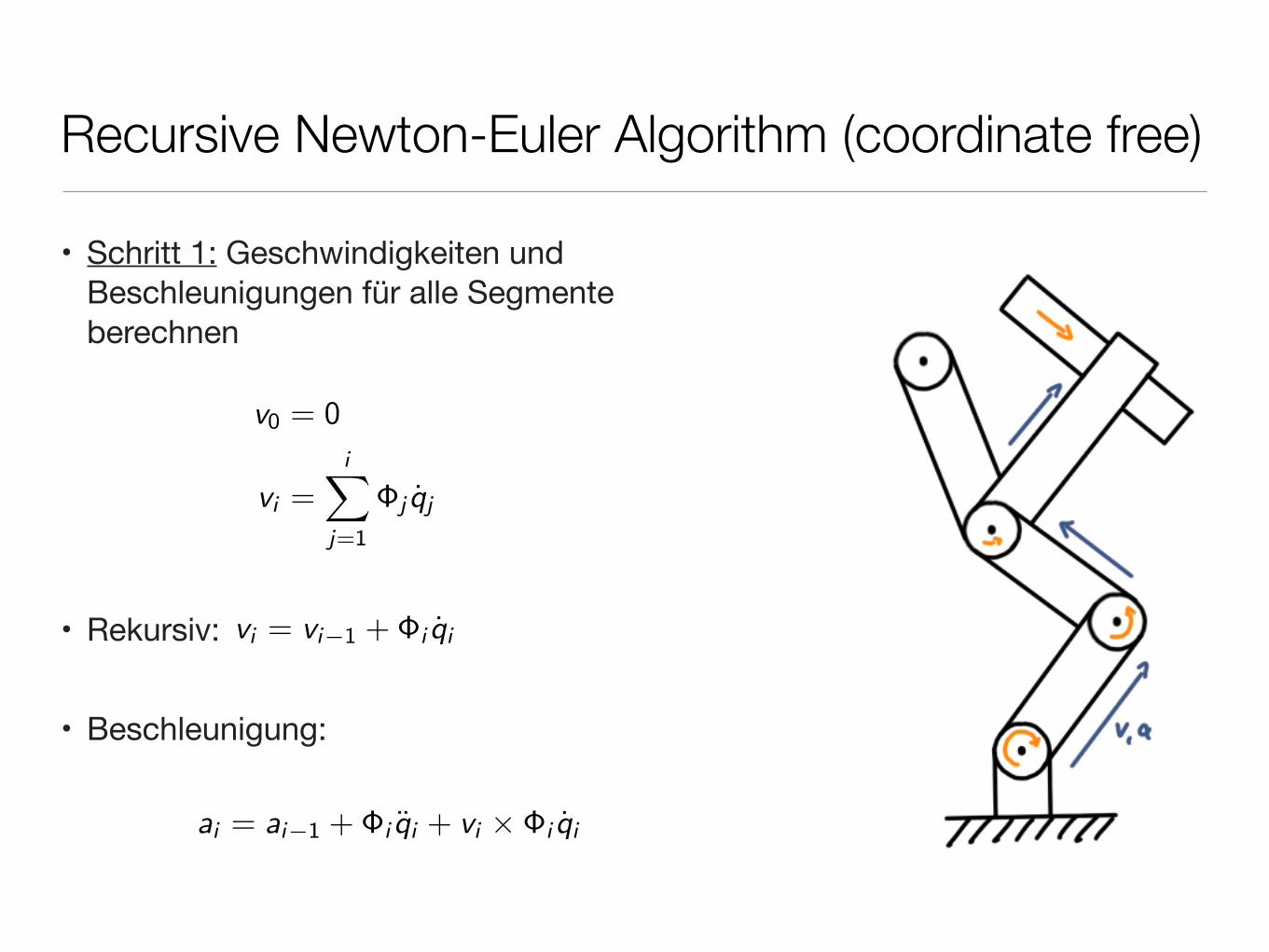
Recursive Newton-Euler Algorithm (coordinate free)
• Schritt 1: Geschwindigkeiten und Beschleunigungen für alle Segmente berechnen
• Rekursiv:
• Beschleunigung:
v0 = 0
vi =iX
j=1
�j qj
vi = vi�1 + �i qi
ai = ai�1 + �i qi + vi ⇥ �i qi
Recursive Newton-Euler Algorithm (coordinate free)
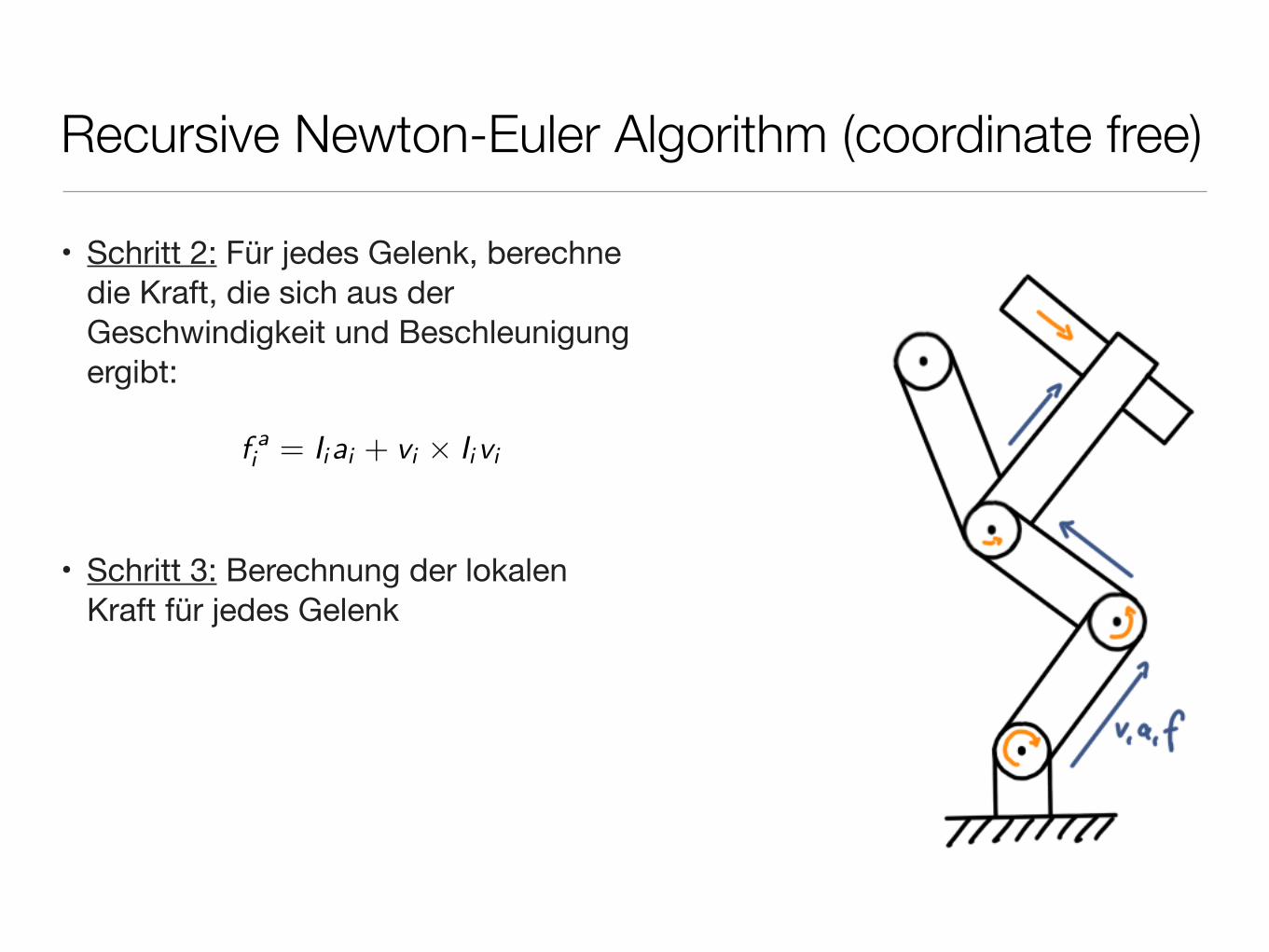
• Schritt 2: Für jedes Gelenk, berechne die Kraft, die sich aus der Geschwindigkeit und Beschleunigung ergibt:
• Schritt 3: Berechnung der lokalen Kraft für jedes Gelenk
f ai = Iiai + vi ⇥ Iivi
Recursive Newton-Euler Algorithm (coordinate free)
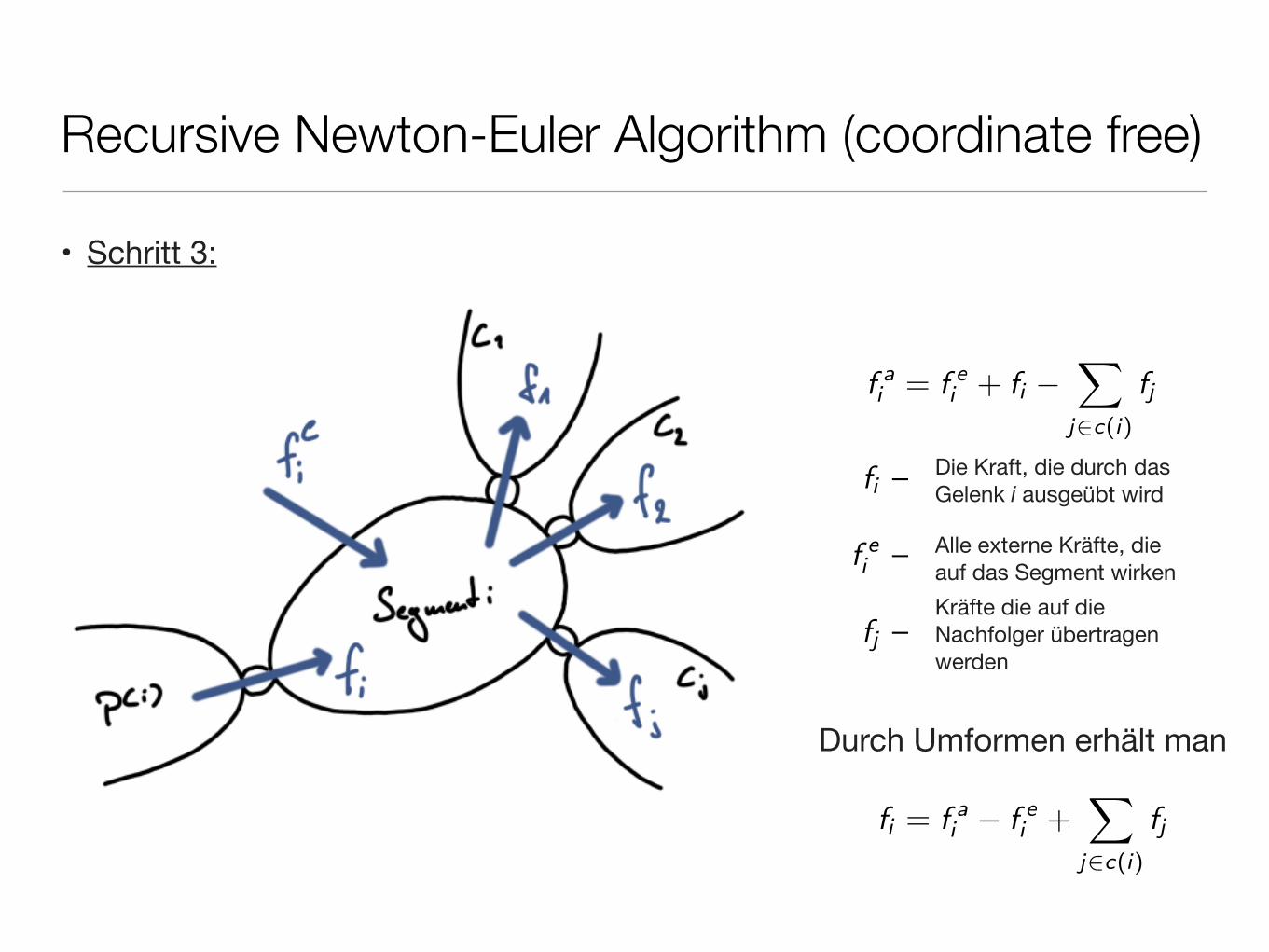
• Schritt 3:
f ai = f ei + fi �X
j2c(i)
fj
Die Kraft, die durch das Gelenk i ausgeübt wird
Alle externe Kräfte, die auf das Segment wirken
fi –
f ei –
fj –Kräfte die auf die Nachfolger übertragen werden
fi = f ai � f ei +X
j2c(i)
fj
Durch Umformen erhält man
Recursive Newton-Euler Algorithm (coordinate free)
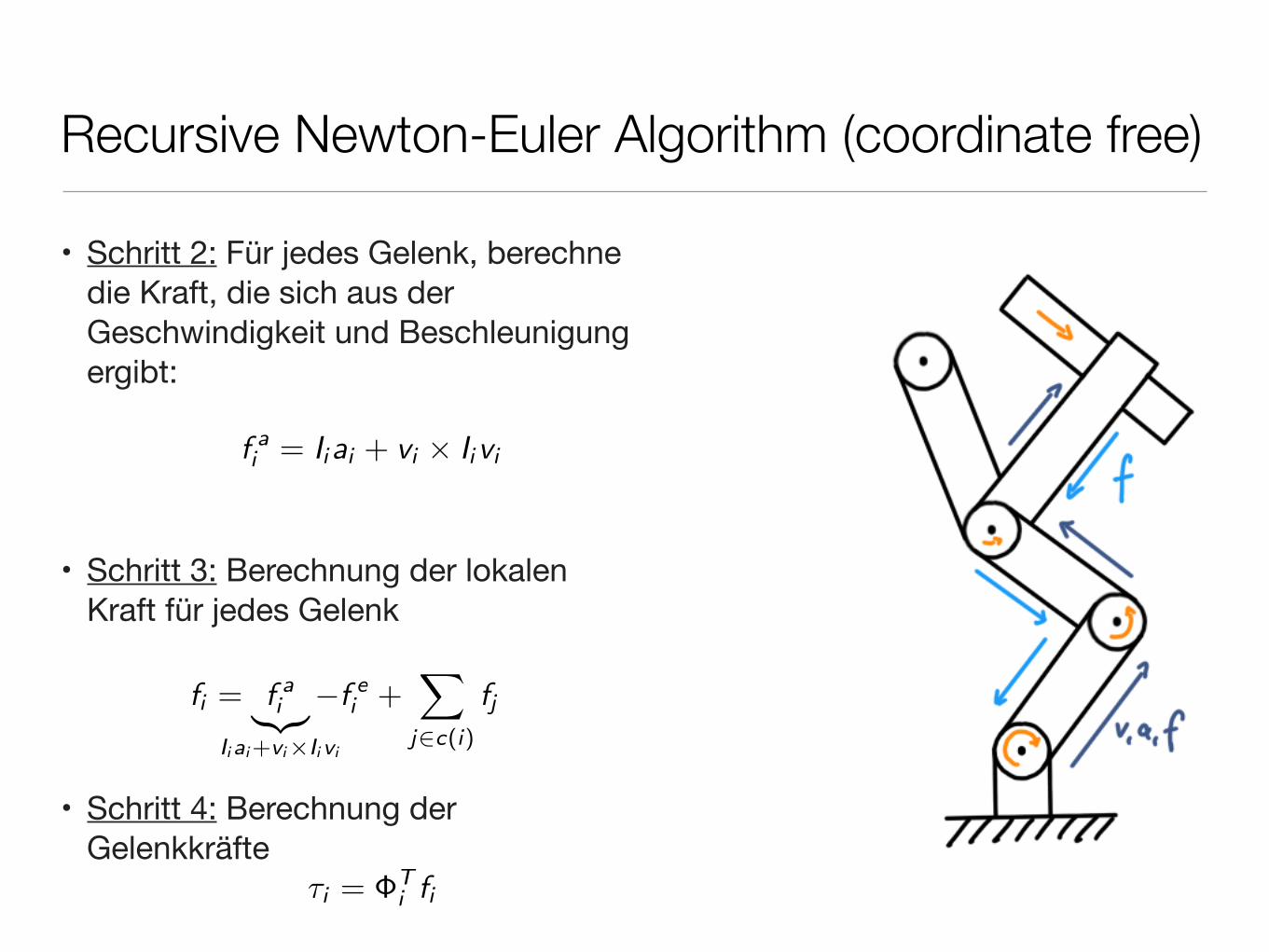
• Schritt 2: Für jedes Gelenk, berechne die Kraft, die sich aus der Geschwindigkeit und Beschleunigung ergibt:
• Schritt 3: Berechnung der lokalen Kraft für jedes Gelenk
• Schritt 4: Berechnung der Gelenkkräfte
f ai = Iiai + vi ⇥ Iivi
⌧i = �Ti fi
fi = f ai|{z}Ii ai+vi⇥Ii vi
�f ei +X
j2c(i)
fj
Recursive Newton-Euler Algorithm (coordinate free)
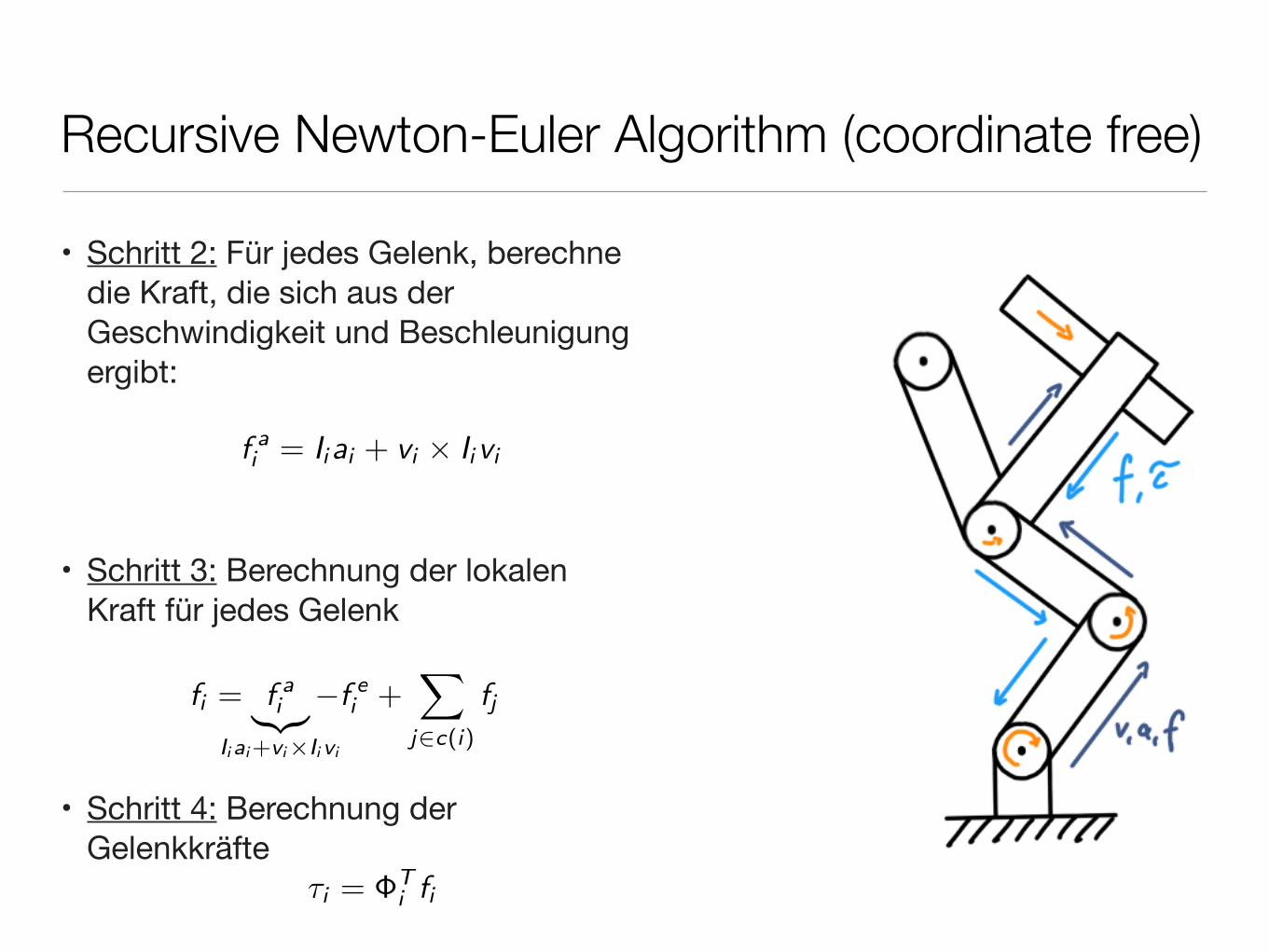
• Schritt 2: Für jedes Gelenk, berechne die Kraft, die sich aus der Geschwindigkeit und Beschleunigung ergibt:
• Schritt 3: Berechnung der lokalen Kraft für jedes Gelenk
• Schritt 4: Berechnung der Gelenkkräfte
f ai = Iiai + vi ⇥ Iivi
⌧i = �Ti fi
fi = f ai|{z}Ii ai+vi⇥Ii vi
�f ei +X
j2c(i)
fj
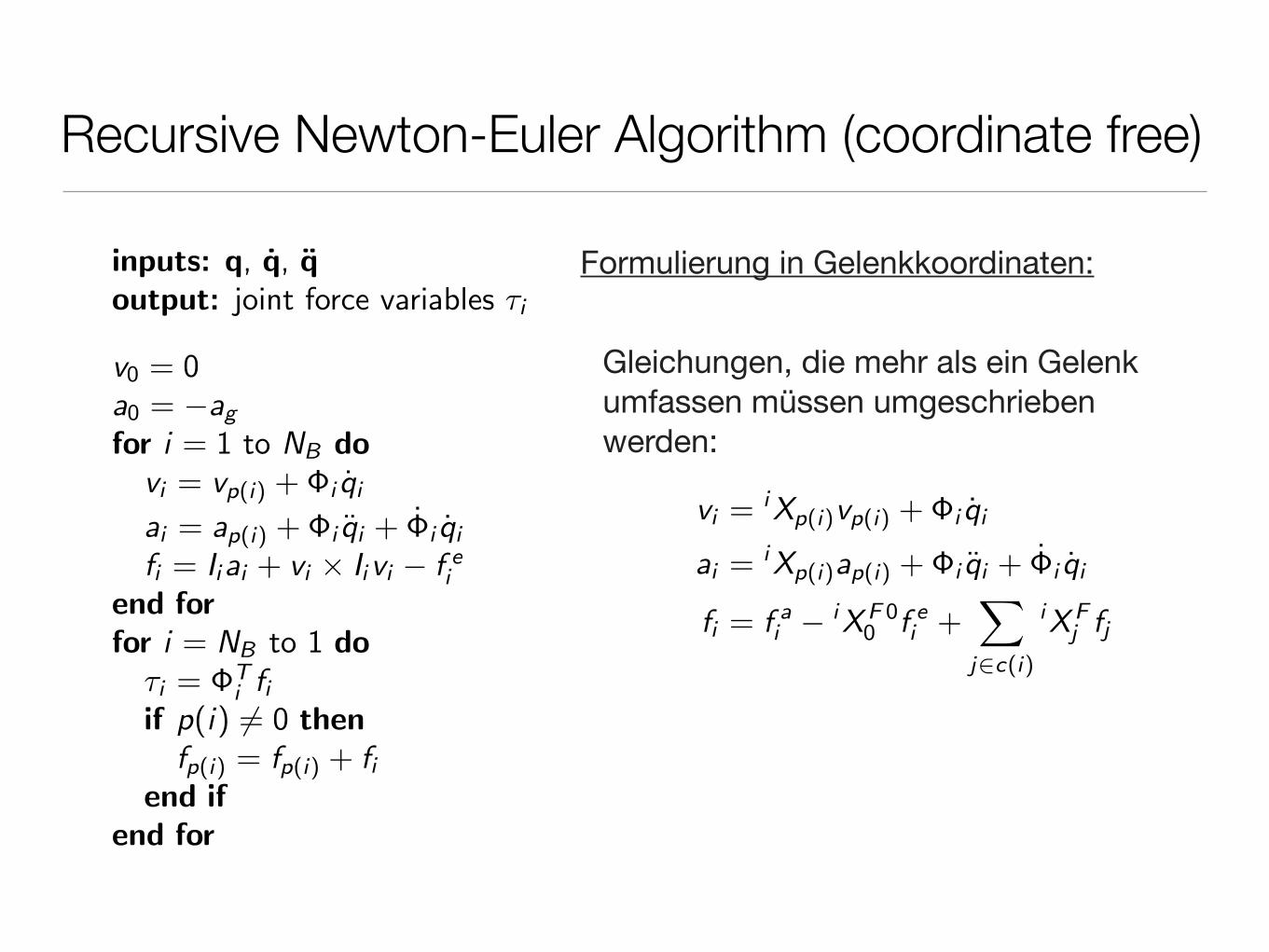
Formulierung in Gelenkkoordinaten:
Gleichungen, die mehr als ein Gelenk umfassen müssen umgeschrieben werden:
vi =iXp(i)vp(i) + �i qi
ai =iXp(i)ap(i) + �i qi + �i qi
fi = f ai � iX F0
0f ei +X
j2c(i)
iX Fj fj
Recursive Newton-Euler Algorithm (coordinate free)
inputs: q, q, q
output: joint force variables ⌧i
v0 = 0
a0 = �agfor i = 1 to NB do
vi = vp(i) + �i qiai = ap(i) + �i qi + ˙
�i qifi = Iiai + vi ⇥ Iivi � f ei
end for
for i = NB to 1 do
⌧i = �
Ti fi
if p(i) 6= 0 then
fp(i) = fp(i) + fiend if
end for
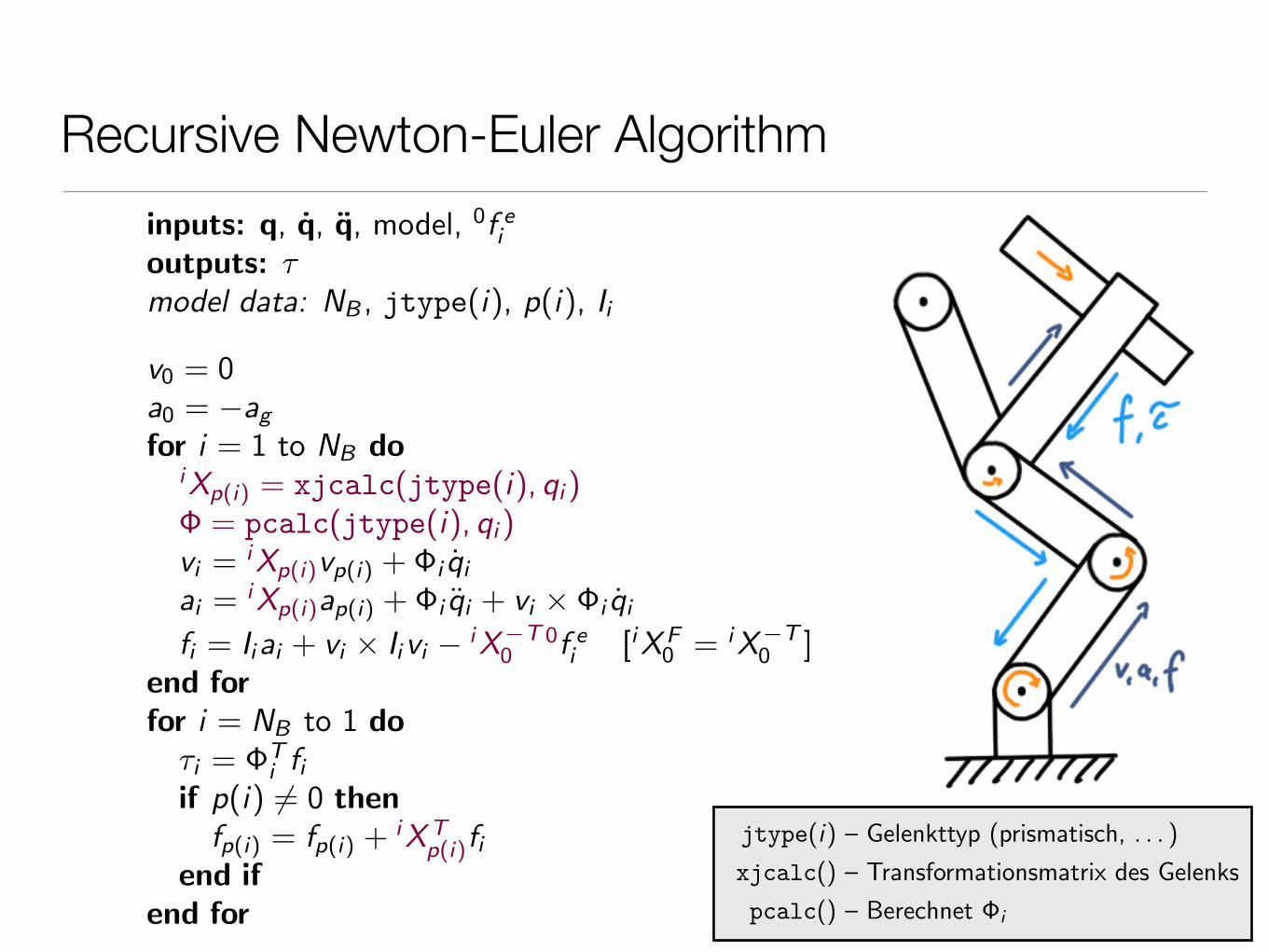
inputs: q, q, q, model,
0f
ei
outputs: ⌧model data: NB , jtype(i), p(i), Ii
v0 = 0
a0 = �ag
for i = 1 to NB do
iXp(i) = xjcalc(jtype(i), qi )
� = pcalc(jtype(i), qi )
vi =iXp(i)vp(i) + �i qi
ai =iXp(i)ap(i) + �i qi + vi ⇥ �i qi
fi = Iiai + vi ⇥ Iivi � iX
�T0
0f
ei [
iX
F0 =
iX
�T0 ]
end for
for i = NB to 1 do
⌧i = �
Ti fi
if p(i) 6= 0 then
fp(i) = fp(i) +iX
Tp(i)fi
end if
end for
Recursive Newton-Euler Algorithm
jtype(i) – Gelenkttyp (prismatisch, . . . )
xjcalc() – Transformationsmatrix des Gelenks
pcalc() – Berechnet �i
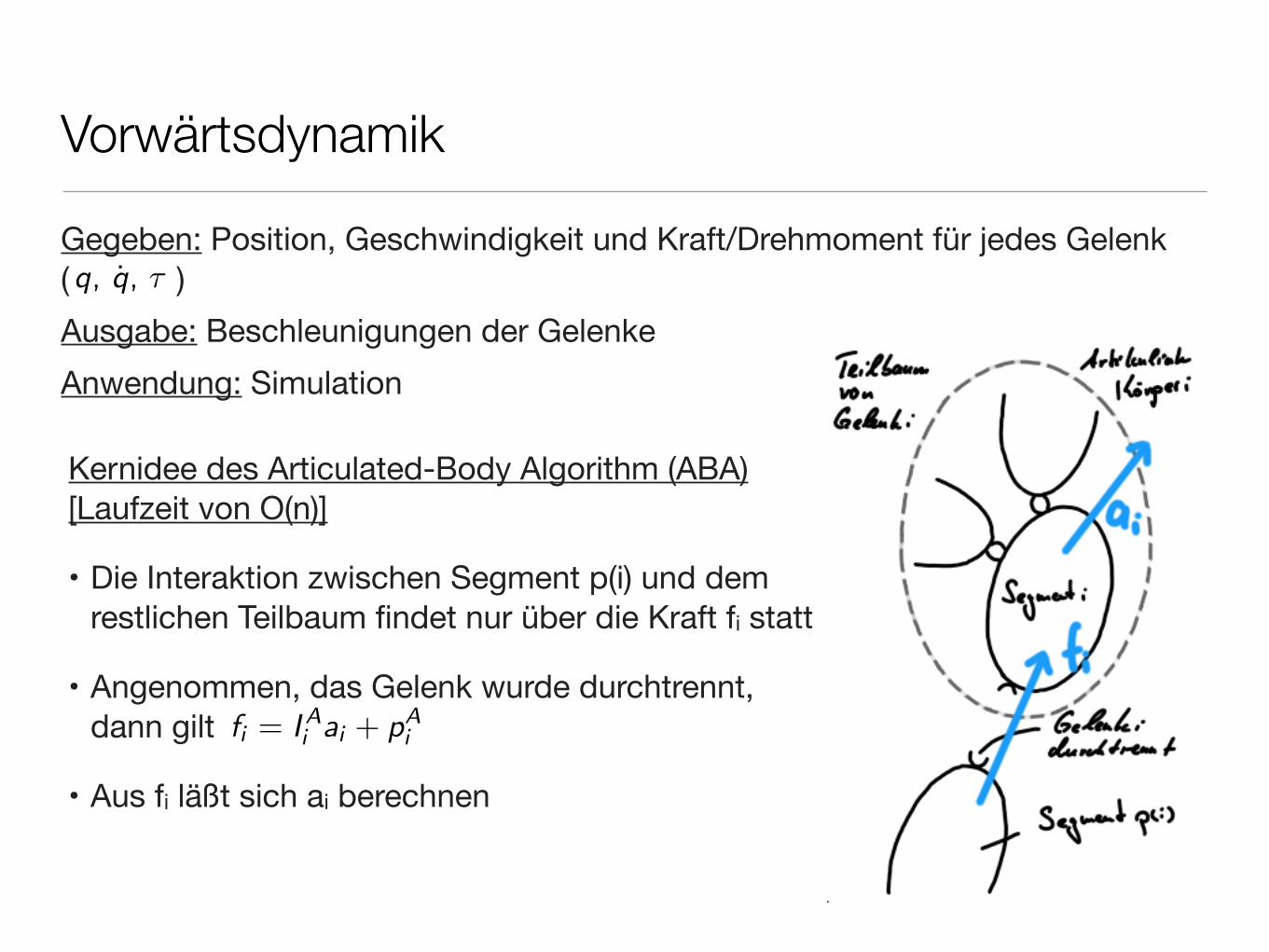
Vorwärtsdynamik
Gegeben: Position, Geschwindigkeit und Kraft/Drehmoment für jedes Gelenk ( )Ausgabe: Beschleunigungen der GelenkeAnwendung: Simulation
Kernidee des Articulated-Body Algorithm (ABA) [Laufzeit von O(n)]
• Die Interaktion zwischen Segment p(i) und dem restlichen Teilbaum findet nur über die Kraft fi statt
• Angenommen, das Gelenk wurde durchtrennt, dann gilt
• Aus fi läßt sich ai berechnen
q, q, ⌧
fi = IAi ai + pAi
Aus folgt
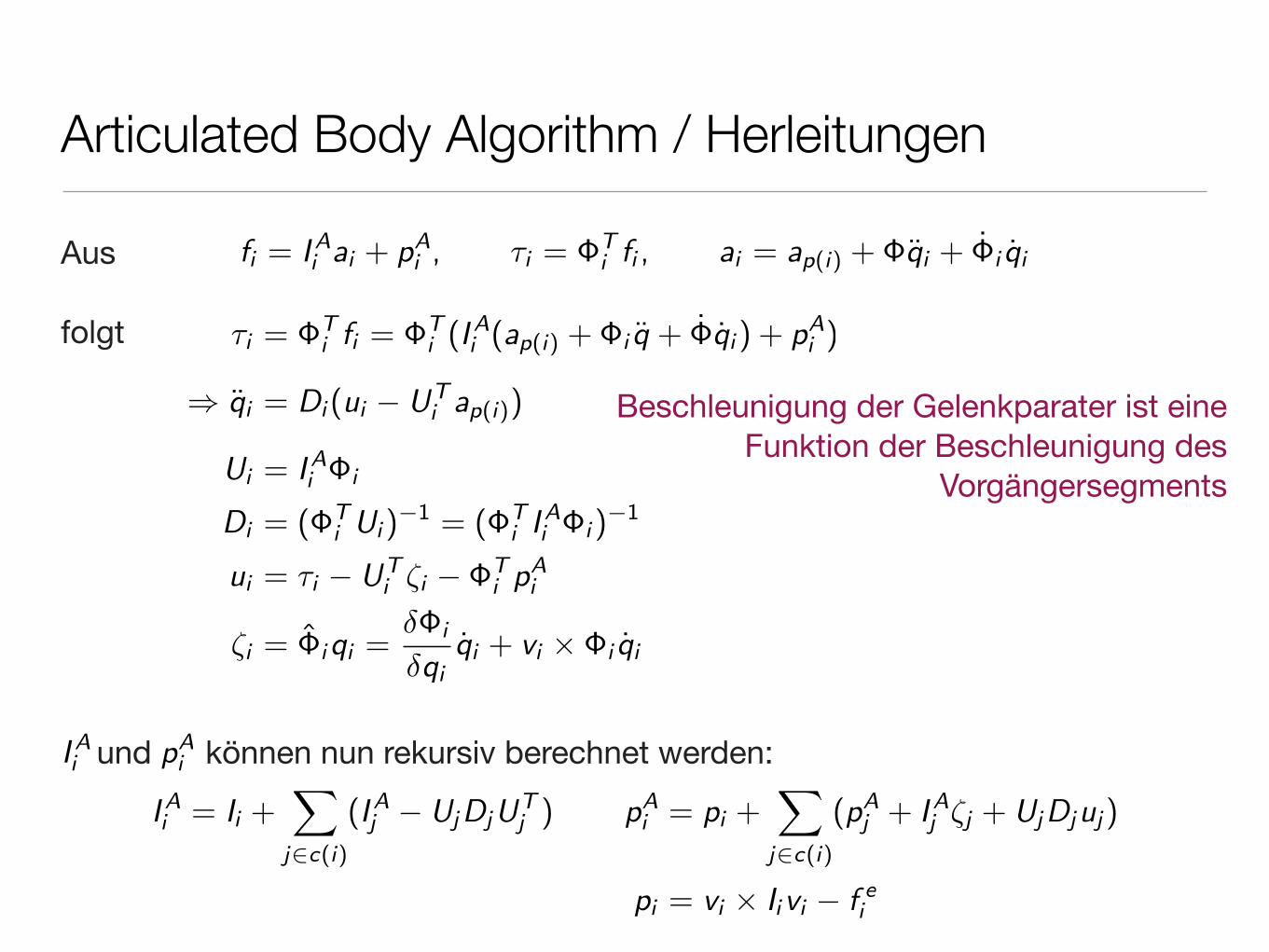
und können nun rekursiv berechnet werden:
IAi = Ii +X
j2c(i)
(IAj � UjDjUTj ) pAi = pi +
X
j2c(i)
(pAj + IAj ⇣j + UjDjuj)
pi = vi ⇥ Iivi � f ei
Articulated Body Algorithm / Herleitungen
fi = IAi ai + pAi , ⌧i = �Ti fi , ai = ap(i) + �qi + �i qi
⌧i = �Ti fi = �T
i (IAi (ap(i) + �i q + �qi ) + pAi )
) qi = Di (ui � UTi ap(i))
Ui = IAi �i
Di = (�Ti Ui )
�1 = (�Ti I
Ai �i )
�1
ui = ⌧i � UTi ⇣i � �T
i pAi
⇣i = �iqi =��i
�qiqi + vi ⇥ �i qi
IAi pAi
Beschleunigung der Gelenkparater ist eine Funktion der Beschleunigung des
Vorgängersegments
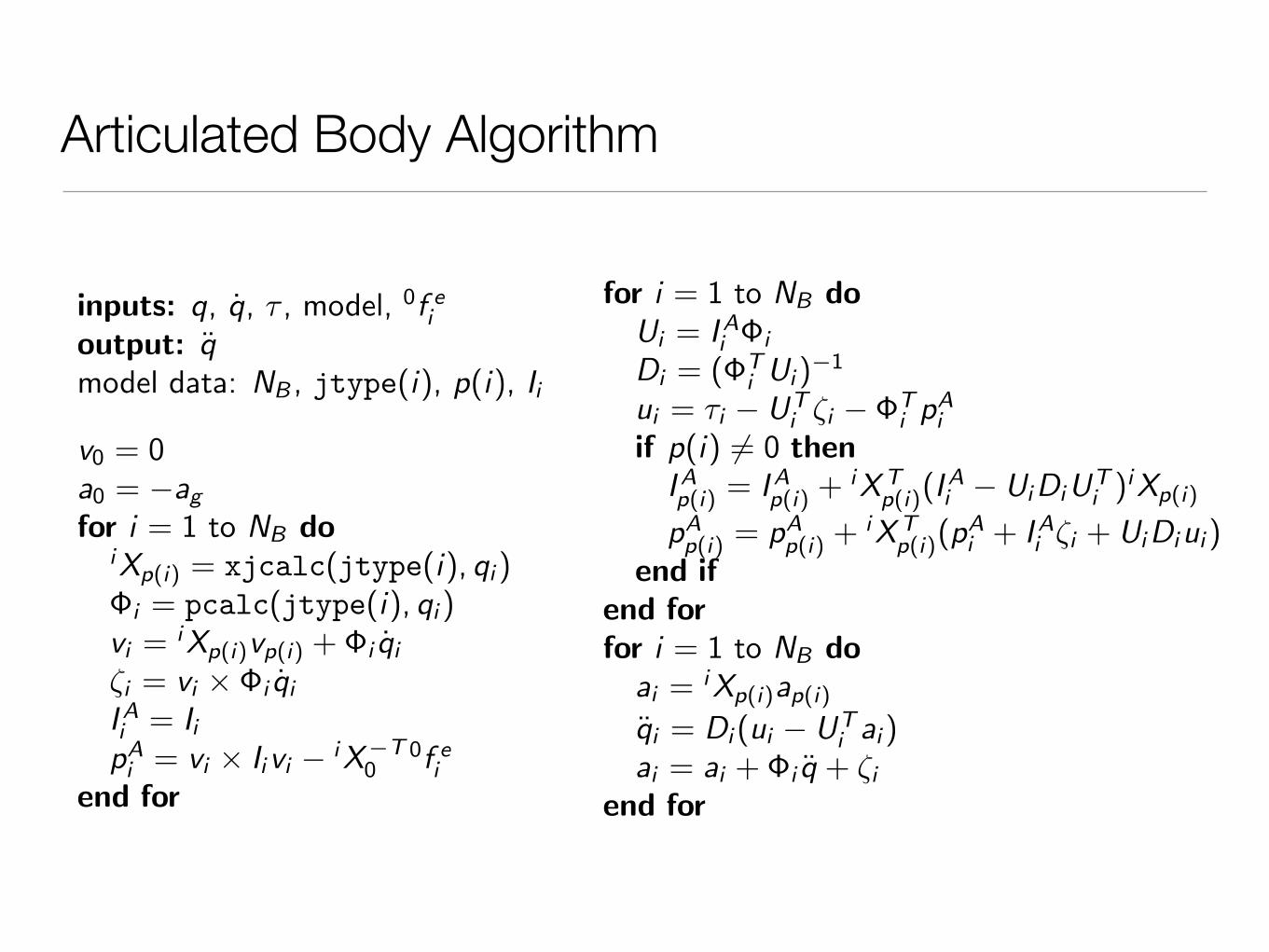
Articulated Body Algorithm
inputs: q, q, ⌧ , model,
0f eioutput: qmodel data: NB , jtype(i), p(i), Ii
v0 = 0
a0 = �agfor i = 1 to NB do
iXp(i) = xjcalc(jtype(i), qi )�i = pcalc(jtype(i), qi )vi = iXp(i)vp(i) + �i qi⇣i = vi ⇥ �i qiIAi = IipAi = vi ⇥ Iivi � iX�T
00f ei
end for
for i = 1 to NB do
Ui = IAi �i
Di = (�
Ti Ui )
�1
ui = ⌧i � UTi ⇣i � �
Ti p
Ai
if p(i) 6= 0 then
IAp(i) = IAp(i) +iXT
p(i)(IAi � UiDiUT
i )
iXp(i)
pAp(i) = pAp(i) +iXT
p(i)(pAi + IAi ⇣i + UiDiui )
end if
end for
for i = 1 to NB do
ai = iXp(i)ap(i)qi = Di (ui � UT
i ai )ai = ai + �i q + ⇣i
end for


![Blockpraktikum [0.7ex] Zeitreihenanalyse mit R · Hinweise zum Praktikum Gliederung 1 HinweisezumPraktikum 2 ProgrammstartundRUmgebung 3 Datenstrukturen Vektoren Datentabellen Matrizen](https://img.pdfslide.org/doc/110x75/5ba0719a09d3f2fb538c980f/blockpraktikum-07ex-zeitreihenanalyse-mit-r-hinweise-zum-praktikum-gliederung.jpg)