Embed Size (px)
Citation preview
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
������
6 Einführung in die Theorie gewöhnlicher Differentialgleichungen
6.1 Grundlagen Differentialgleichungen werden in vielen Anwendungen als mathematische Modelle physikalischer und anderer Systeme benötigt. Eine gewöhnliche Differentialgleichung (ODE) enthält eine oder mehrer Ableitungen einer unbekannten Funktion, die in der Theorie der gewöhnlichen Differentialgleichungen mit y(x) oder y(t) bezeichnet wird. Unser Ziel ist es, diese Funktionen aus einer gegebenen Gleichung zu bestimmen. Solch eine Gleichung kann die Funktion y, Ableitungen von y, gegebene Funktionen und Konstanten enthalten. Hier sind einige Beispiele: (6.1.1) ( )xsiny =′ (6.1.2) 0yx4y =′+′′ (6.1.3) xyyeyx x2 =′′+′
(6.1.4) 2
2232
dxyd
dxdy
1 =���
�
���
���
�
�+
Das Wort gewöhnlich unterscheide diese Gleichungen von partiellen Differentialglei-chungen (PDE), die wir später noch behandeln werden. Die unbekannte Funktion in einer partiellen Differentialgleichung hängt von zwei oder mehreren Variablen ab. Die einfachsten gewöhnlichen Differentialgleichung können gelöst werden, indem wir uns an mathematische Grundlagen erinnern. Wenn wir beispielsweise einen Stein fallen lassen, dann ist seine Beschleunigung
(6.1.5) 2
2
dtyd
y =′′ , (t ist die Zeit)
gleich der Beschleunigung der Erdanziehung g (eine Konstante). Somit ist eine gute Näherung für das Model des freien Falls (6.1.6) gy =′′ , da der Luftwiderstand in diesem Fall keinen großen Einfluss hat. Durch Integration erhalten wir die Momentangeschwindigkeit
(6.1.7) ( ) ( ) 0vtgtdtdy
ty +⋅==′
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
������
wobei v0 die Anfangsgeschwindigkeit ist (z.B., v0 = 0). Durch weiteres Integrieren erhalten wir den zurückgelegten Weg
(6.1.8) ( ) 002 ytvtg
21
ty +⋅+⋅= ,
wobei 0y der bereits zurückgelegte Weg zum Start-Zeitpunkt
t = 0 ist (z.B. 0y = 0). Definition 6.1.1: (i) Die Ordnung einer Differentialgleichung, ist die Ordnung der höchsten Ableitung, die in der Gleichung vorkommt.
(ii) Der Grad einer Differentialgleichung ist der Grad der höchsten Ableitung, die in der Gleichung vorkommt. Beispiel 6.1.1:
(i) sinxycosxdxdy =+ hat die Ordnung 1 und den Grad 1
(ii) 0dxdy
xydx
yd2
2
2
=��
�
�+ hat die Ordnung 2 und den Grad 1
(iii) 2
2232
dxyd
dxdy
1 =���
�
���
���
�
�+ hat die Ordnung 2 und den Grad 2.
Die allgemeine Form einer gewöhnlichen Differentialgleichung ist
(6.1.8) 0dx
yd,.......,
dxdy
y,x,F n
n
=���
�
�,
wobei F eine Funktion mit n + 2 Variablen ist. Eine solche Differentialgleichung heißt linear, falls F eine lineare Funktion der Variablen
n
n
dxyd
,.......,dxdy
y, ist.
Somit ist die allgemeine Form einer linearen Differentialgleichung n-ter Ordnung
(6.1.9) ( ) ( ) ( ) ( ) ( )xgyxadxdy
xa......dx
ydxa
dxyd
xa 011n
1n
1nn
n
n =++++ −
−
− ,
wobei ( )xan nicht identisch Null ist.
Abb. 6.1.1 Fallender Stein
y
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�����
Beispiel 6.1.2: Die Gleichung
32
2x
3
3
xdxdy
ydx
yde2
dxyd =++
ist wegen des Terms dxdy
y nicht linear.
Eine Gleichung der Form (6.1.8) heißt implizite gewöhnliche Differentialgleichung n-ter Ordnung. Falls die Gleichung (6.1.8) die spezielle Form
(6.1.10) ( )���
�
�== −
−
1n
1n
n
nn
dxyd
,.......,dxdy
y,x,fdx
ydy
besitzt, dann heißt (6.1.10) explizite gewöhnliche Differentialgleichung n-ter Ord-nung. Eine Lösung einer gegebenen Differentialgleichung (6.1.8) auf einem offen Interval-
le (a;b) ⊂ � ist eine Funktion y = f(x), die die Ableitungen ( ) ( )xdx
fddx
yd,...,xfy n
n
n
n
=′=′
hat und (6.1.8) für alle x ∈ (a;b) erfüllt. Manchmal kann eine Lösung einer Differenti-algleichung als eine Funktion auftreten, welche implizit in der Form (6.1.11) H(x,y) = 0 gegeben ist. Eine solche Lösung wird implizite Lösungen genannt (im Gegensatz zu einer expliziten Lösung y = f(x)). Beispiel 6.1.3: (i) Die Gleichung 2xyy =′ ist eine explizite ODE 1. Ordnung. Eine explizite Lösung für (-∞;∞) = � ist
( ) 2x12
xy+
−= .
(ii) Die Gleichung
( )( ) 0lnyyxyy25 =+′′+
ist eine implizite ODE 5. Ordnung. Eine Lösung für (-∞;∞) = � ist z.B. durch y(x) = 1 gegeben.
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�����
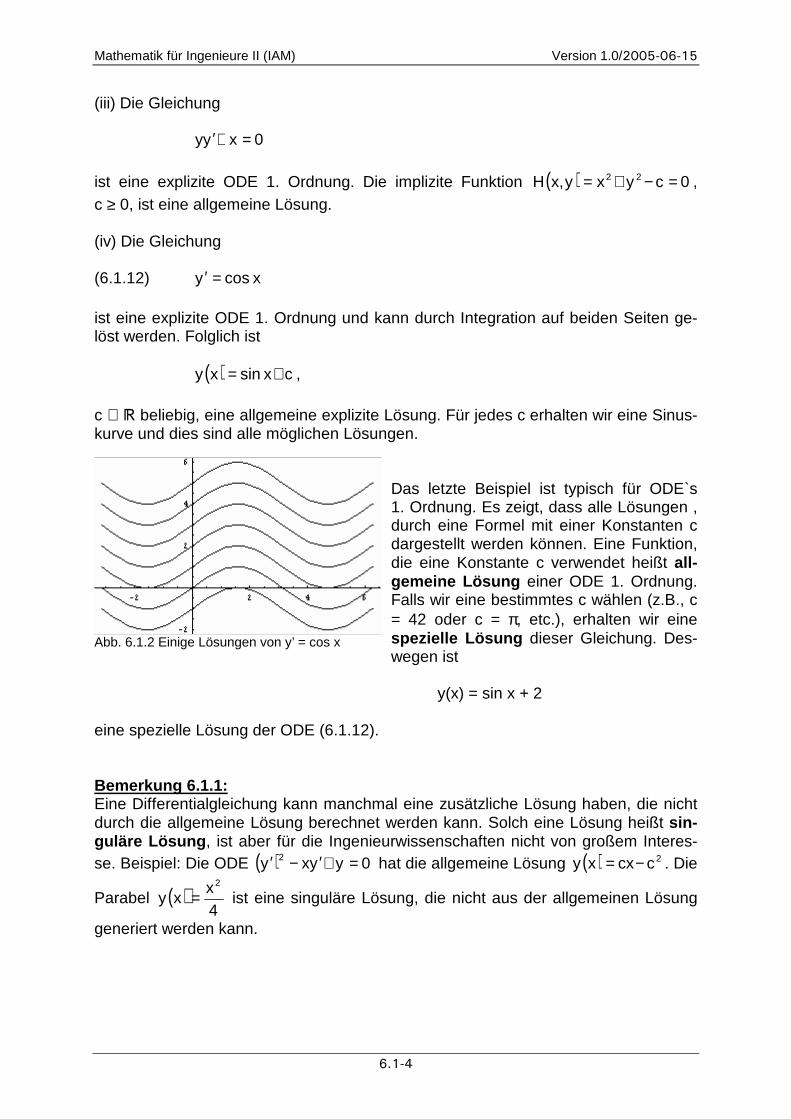
(iii) Die Gleichung 0xyy =+′ ist eine explizite ODE 1. Ordnung. Die implizite Funktion ( ) 0cyxyx,H 22 =−+= , c ≥ 0, ist eine allgemeine Lösung. (iv) Die Gleichung (6.1.12) xcosy =′ ist eine explizite ODE 1. Ordnung und kann durch Integration auf beiden Seiten ge-löst werden. Folglich ist ( ) cxsinxy += , c ∈ � beliebig, eine allgemeine explizite Lösung. Für jedes c erhalten wir eine Sinus-kurve und dies sind alle möglichen Lösungen.
Das letzte Beispiel ist typisch für ODE`s 1. Ordnung. Es zeigt, dass alle Lösungen , durch eine Formel mit einer Konstanten c dargestellt werden können. Eine Funktion, die eine Konstante c verwendet heißt all-gemeine Lösung einer ODE 1. Ordnung. Falls wir eine bestimmtes c wählen (z.B., c = 42 oder c = π, etc.), erhalten wir eine spezielle Lösung dieser Gleichung. Des-wegen ist
y(x) = sin x + 2 eine spezielle Lösung der ODE (6.1.12). Bemerkung 6.1.1: Eine Differentialgleichung kann manchmal eine zusätzliche Lösung haben, die nicht durch die allgemeine Lösung berechnet werden kann. Solch eine Lösung heißt sin-guläre Lösung, ist aber für die Ingenieurwissenschaften nicht von großem Interes-se. Beispiel: Die ODE ( ) 0yyxy 2 =+′−′ hat die allgemeine Lösung ( ) 2ccxxy −= . Die
Parabel ( )4x
xy2
= ist eine singuläre Lösung, die nicht aus der allgemeinen Lösung
generiert werden kann.
Abb. 6.1.2 Einige Lösungen von y’ = cos x

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
������
6.2 Gewöhnliche ODE erster Ordnung Gewöhnliche ODE erster Ordnung können implizit als
(6.2.1) 0dxdy
y,x,F =��
�
�
oder explizit als
(6.2.2) ( )yx,fdxdy
y ==′
geschrieben werden. Beispiel 6.2.1 (Radioaktiver Zerfall): Sei y(t) der Wert einer radioaktiven Substanz zur Zeit t. Die Änderungsrate ist dy/dt. Mit dem physikalischem Gesetz des radioaktiven Zerfalles erhalten wir die gewöhnli-che ODE erster Ordnung
(6.2.3) ydtdy �
−= ,
wobei λ > 0 die Zerfallskonstante ist, deren numerischer Wert für unterschiedliche radioaktive Substanzen bekannt ist. Da der Wert der Substanz positiv ist und mit der Zeit monoton fällt, ist dy/dt negativ. Die Gleichung (6.2.3) zeigt, dass die Ableitung einer Lösung y’ proportional zu y sein muss. Aus der Vorlesung Mathematik I wissen wir, dass die Exponentialfunktion die-se Eigenschaft hat. Daher ist (6.2.4) ( ) tcety �−= eine allgemeine Lösung von (6.2.3), wobei c eine beliebige Konstante ist. Da der physikalische Prozess eindeutig ist, müssen wir eine spezielle Lösung des Problems (6.2.3) finden. Nun hängt der Wert einer Substanz zur Zeit t von den An-fangswerten zur Zeit t = 0 ab. Sei y(0) = y0, dann erhalten wir: (6.2.5) ( ) 0ycce0y === ⋅− 0
�.
Somit ist ( ) t
0eyty�
−= eine spezielle Lösung zum Anfangswert y0. Beispiel 6.2.1 zeigt, dass wir eine eindeutige spezielle Lösung einer ODE erster Ord-nung durch eine Anfangsbedingung finden können.

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
������
Definition 6.2.1: Eine Differentialgleichung zusammen mit einer Anfangsbedingung heißt Anfangs-wertproblem (AWP).Für explizite ODE erster Ordnung haben sie die Form (6.2.4) ( ) ( ) 00 yxy,yx,fy ==′ , wobei x0 und y0 gegebene Werte sind. Unter Verwendung von t als unabhängige Va-riable können wir (6.2.4) schreiben als (6.2.7) ( ) ( ) 00 yty,yt,fy ==′ . Definition 6.2.2: Ein AWP y(xo) = y0 ist lokal lösbar, wenn ein ε > 0 existiert, so dass y = y(x) eine Lösung der Differentialgleichung auf dem Intervall (x0 - ε;x0 + ε) ist. Solch eine Funk-tion y heißt lokale Lösung. Ein Anfangswertproblem (AWP) ist wohl definiert, wenn (1) eine (lokale) Lösung existiert (Existenz) (2) es nur eine Lösung gibt (Eindeutigkeit) (3) die Lösung stetig vom Anfangswert abhängt; das heißt kleine Änderungen des
Anfangswertes führen zu kleinen Änderungen der Lösung. Im Folgenden betrachten wir das Problem eine allgemeine Lösung einer gegebenen Differentialgleichung zu finden. Dabei betrachten wir nur einige spezielle Typen sol-cher Gleichungen. 6.2.1 Separierbare Differentialgleichungen Angenommen die Funktion H(x,y) in der expliziten ODE erster Ordnung (6.2.1.1) ( )yx,Hy =′ kann geschrieben werden als
(6.2.1.2) ( ) ( )( ) ( ) 0≠= yg,ygxf
yx,H .
Also:
(6.2.1.3) ( )( )ygxf
y =′ .

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
������
Eine Gleichung vom Typ (6.2.1.3) heißt separierbar. Unter Verwendung von (6.2.1.3) können viele ODE erster Ordnung durch algebraische Umformung auf die Form (6.2.1.4) ( ) ( )xfyyg =′ reduziert werden. Um (6.2.1.3) zu lösen , integrieren wir beide Seiten von (6.2.1.4) bzgl. x und erhalten (6.2.1.5) ( )( ) ( ) ( ) =′ dxxfdxxyxyg .
Setzen wir voraus, dass f und g stetige Funktionen sind, so existieren beide Integrale in (6.2.1.5). Angenommen G ist eine Stammfunktion von g und F eine Stammfunkti-on von f. Dann erhalten wir (6.2.1.6) ( )( ) ( ) ( )( ) ( ) cxFxyGcxFcxyG 21 +=�+=+
da bekanntlich mit der Kettenregel ( )( )( ) ( )( ) ( ) ( )( ) ( )xyxygxyxyGxyG ′=′′=′ . Falls G umkehrbar und 1G− die Umkehrfunktion ist, dann folgt mit (6.2.1.6) : (6.2.1.7) ( ) ( )( )cxFGxy += −1 ist eine explizite allgemeine Lösung von (6.2.1.3). Andernfalls erhalten wir die implizite allgemeine Lösung (6.2.1.8) ( ) ( ) 0=−− cxFyG .
(6.2.1.8) Anleitung zum Lösen von ( )( )ygxf
y =′ :
Finde die Stammfunktionen F und G von f und g. Falls G umkehrbar ist, dann ist ( ) ( )( )cxFGxy += −1 eine explizite allgemeine Lösung. Andernfalls ist ( ) ( ) 0=−− cxFyG eine implizite allgemeine Lösung.

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
������
Beispiel 6.2.1.1: (i) Wir lösen die Gleichung (6.2.1.9) 2y1y +=′ . Lösung:
In diesem Fall ist f(x) = 1 und ( )2y1
1yg
+= . ( ) xxF = und ( ) yarctanyG = sind
Stammfunktionen von f und g. Also ist ( ) ( )( ) ( )cxtancxFtanxy +=+= eine explizite allgemeine Lösung von (6.2.1.9). (ii) Wir lösen die Gleichung
(6.2.1.10) yx
dxdy 2
=
Lösung:
( ) 2xxf = und ( ) yyg = . Daher sind ( ) 3x31
xF = und ( ) 2y21
yG = die zugehörigen
Stammfunktionen. Implizite allgemeine Lösung von (6.2.1.10):
0c3x
2y 32
=−− .
(iii) Wir lösen das Anfangswertproblem (6.2.1.11) 0yx5y 24 =+′ , y(0) = 1. Lösung:
( ) 4x5xf −= und ( )2y
1yg = . Daher sind ( ) 5xxF −= und ( )
y1
yG −= die zugehörigen
Stammfunktionen. Somit ist
cx1
ycxy1
55
−=�+−=−
und
(6.2.1.12) ( ) 0cx,cx
1xy 5
5 ≠−−
= ,
ist eine explizite Lösung von (6.2.1.11). Mit der Anfangsbedingung y(0) = 1 erhalten wir:

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
���� �
( ) 1cc
1c0
10y1 5 −=�
−=
−== .
Also ist ( ) 1x,1x
1xy 5 −≠
+= , eine Lösung des Anfangswertproblems.
Beispiel 6.2.1.2 (Newtonsches Abkühlungsgesetz): Eine Kupferkugel wird auf eine Temperatur von 100°C aufgeheizt. Zur Zeit t = 0 wird diese in 30°C warmes Wasser getaucht. Nach 3 Minuten ist die Temperatur der Ku-gel auf 70°C reduziert worden. Wir möchten die Zeit berechnen, die die Kugel benö-tigt, um auf 31°C abzukühlen. Lösung:
Die zeitliche Änderungsrate dtdT
der Temperatur T der Kugel ist proportional zur Dif-
ferenz zwischen T und der Temperatur T0 des umgebenen Mediums (Newtonsches Gesetz der Kühlung). In Kupfer fließt die Wärme so schnell, dass wir annehmen können, dass die Temperatur in jedem Punkt der Kugel gleich ist. Wir erhalten somit die folgende Differentialgleichung erster Ordnung
(NLC) ( ) ( )( )0TtTktdtdT −=
die als
( )
( )( )Tgtf
TT1k
T
0
=
−
=′ ,
geschrieben werden kann, wobei f(t) = k und ( ) ( )0TT1
Tg−
= . Also ist die Gleichung
(NLC) separierbar und mit Anleitung 6.2.1.8 erhalten wir die implizite allgemeine Lösung ( ) 00 TT0,cktTTln >=−−− . Da ( ) ( )0TTlnTG −= und ( ) 0
T1 TeTG +=− , ist die explizite allgemeine Lösung gegeben durch ( ) 0
ktc0
ckt TeeTetT +=+= + 11 , die wir auch in der Form ( ) 0c,TcetT 0
kt >+= schreiben können.
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�������
Nun kommen wir auf unsere Kupferkugel zurück. Hier ist T0 = 30°C und die gegebe-nen Anfangsbedingungen T(0) = 100°C führt zu ( ) 10030ce0T 0 =+= . Daher ist c = 70 und somit erhalten wir die spezielle Lösung des AWP ( ) 3070 += ktetT .
Da T(3) = 70°C folgt 0.186570
3070ln
31
k −=��
�
� −= . Die negative Konstante k führt
dazu, dass dtdT
negativ ist. Das ist klar, da die Temperatur T abnimmt. Mit
( ) 22.78t701
lnt0.18653130e70tT t0.1865 =�=−�=+= − .
erhalten wir die Antwort auf unsere Frage. Die Kupferkugel hat nach ca. 23 Minuten eine Temperatur von 31°C. Bestimmte gewöhnliche ODE erster Ordnung, die nicht separierbar sind, können durch passende Substitutionen in separierbare ODE transformiert werden. Dies gilt zum Beispiel für Gleichungen der Form (6.2.1.13) ( ) 0b,cbyaxhy ≠++=′ , und
(6.2.1.14) ��
�
�=′xy
hy ,
wobei h eine gegebene Funktion von cbyax ++ bzw. xy
ist.
Eine ODE des Typs ( )cbyaxhy ++=′ kann durch die Substitution (6.2.1.15) ( ) ( ) cxbyaxxu ++= gelöst werden. Differentiation von (6.2.1.15) führt zu (6.2.1.16) ( ) ( )xybaxu ′+=′ . Mit (6.2.1.13) und (6.2.1.15) erhalten wir ( ) ( )( )xuhxy =′ und daher (6.2.1.17) ( ) ( )( )xuhbaxu ⋅+=′ . Gleichung (6.2.1.17) ist eine separierbare Gleichung der Form ( )uhbau ⋅+=′ . Wir setzen dazu

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�������
f(x) = 1 und ( ) ( )uhba1
ug⋅+
= .
Nun können wir die Anleitung (6.2.1.8) zum Lösen von (6.2.1.17) verwenden. Wenn die gefundene Lösung explizit ist, dann setzen wir u = u(x) in (6.2.1.15) ein und lösen diese Gleichung nach y auf, um die explizite allgemeine Lösung
(6.2.1.18) ( ) ( )0b,
bcaxxu
xy ≠−−= ,
der Gleichung (6.2.1.13) zu erhalten. Ist dagegen u eine implizierte Lösung von (6.2.1.17), dann ersetzt man u(x) durch
( ) cxbyax ++ , um eine implizierte Lösung der Gleichung (6.2.1.13) zu erhalten. (6.2.1.19) Anleitung zum Lösen von ( )cbyaxhy ++=′ :
Substituiere ( ) ( ) cxbyaxxu ++= , um eine separierbare Gleichung ( )( )ugxf
u =′ zu erhal-
ten. Dabei sind f und g passende Funktionen mit ( )( ) ( )uhbaugxf ⋅+= .
Finde die allgemeine Lösung u = u(x) der separierbaren Gleichung unter Verwen-dung der Anleitung (6.2.1.8). Durch Rücksubstitution folgt
( ) ( )0b,
bcaxxu
xy ≠−−= ,
falls u eine explizite Lösung ist. Andernfalls ersetzte in der impliziten Lösung u(x) durch cbyax ++ . Beispiel 6.2.1.3: Wir lösen die Gleichung yx2y −=′ . Lösung: Die Gleichung ist vom Typ ( )cbyaxhy ++=′ mit h(u) = u. Wir substituieren
( ) ( )xyx2xu −= , um die separierbare Gleichung u2u −=′ zu erhalten. Wir verwen-
den Anleitung (6.2.1.8) mit f(x) = -1 und ( )2u
1ug
−= . Damit erhalten wir:
(6.2.1.20) ( ) xxF −= und ( ) 2ulnuG −= .

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�������
Für u > 2 hat die Funktion ( ) ( )2ulnuG −= die Umkehrfunktion ( ) 2euG u1 +=− . Also ist in diesem Fall die allgemeine explizite Lösung der separierbaren Gleichung durch (6.2.1.21) ( ) ( ) 2ee2exu xccxF +=+= −+ gegeben. Da ec eine Konstante ist, können wir (6.2.1.21) auch schreiben als (6.2.1.22) ( ) 0c2,cexu x >+= − . Falls u < 2, dann ist ( ) ( )u2lnuG −= und ( ) 2euG u1 +−=− . Hier erhalten wir als allge-meine explizite Lösung (6.2.1.23) ( ) ( ) 2ee2exu xccxF +−=+−= −+ , die durch Umformung auch als (6.2.1.24) ( ) 0c2,cexu x <+= − . geschrieben werden kann. Somit ist die allgemeine explizite Lösung unseres Problems
( ) 2cex21
x22cexy x
x
−−=−
−+= −−
, x ∈ � und c∈ �.
Für c = 0 erhalten wir die Funktion ( ) 2x2xy −= , die ebenfalls eine Lösung der be-trachteten Gleichung ist.
Eine gewöhnliche Differentialgleichung des Typs ��
�
�=′xy
hy kann durch die
Substitution
(6.2.1.25) ( ) ( )xxy
xu = ⇔ ( ) ( )xxuxy =
gelöst werden. Differentiation von (6.2.1.25) führt zu (6.2.1.26) ( ) ( ) ( )xuxxu1xy ′+⋅=′ Da ( ) ( )( )xuhxy =′ , erhalten wir mit (6.2.1.24)
(6.2.1.27) ( ) ( )( ) ( )x
xuxuhxu
−=′ .

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
������
Gleichung (6.2.1.27) ist eine separierbare Gleichung der Form ( )
xuuh
u−=′ . Setzen
wir
( ) x1
xf = und ( ) ( ) uuh1
ug−
=
können wir wiederum Anleitung (6.2.1.8) anwenden, um (6.2.1.27) zu lösen. Falls u eine explizite Lösung dieser Gleichung ist, setzen wir die Lösung u = u(x) in (6.2.1.25) ein, um die Lösung des Ausgangsproblems (6.2.1.28) ( ) ( )xxuxy = . zu erhalten.
Falls u eine implizite Lösung ist, ersetzen wir u(x) durch ( )xxy
.
(6.2.1.29) Anleitung zum Lösen von ��
�
�=′xy
hy :
Substituiere ( ) ( )xxuxy = , um eine separierbare Gleichung der Form ( )( )ugxf
u =′ zu
erhalten. Dabei sind f und g passende Funktionen, so dass ( )( )
( )x
uuhugxf −= .
Finde die allgemeine Lösung u = u(x) der separierbaren Gleichung unter Verwen-dung der Anleitung (6.2.1.8). Durch Rücksubstitution folgt ( ) ( )xxuxy = , falls u eine explizite Lösung.
Andernfalls ersetzte in der impliziten Lösung u(x) durch xy
.
Beispiel 6.2.1.4: Wir lösen die ODE
22
33
xyyxyx
y++=′ .
Lösung: Es gilt:
(6.2.1.30) ( )
( ) ( ) ��
�
�=+
+=++=′
xy
hxyxy
1xyxyyxyx
y 2
3
22
33
,
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
������
wobei ( ) 2
3
uu1u
uh+
+= . Mit Anleitung (6.2.1.29) erhalten wir:
( )x1
xf = und ( ) ( ) 2
2
u1uu
uuh1
ug−+=
−= .
Mit einfachen algebraischen Operationen folgt:
(6.2.1.31) ( ) ( )( )( ) ( ) 1u
11
u1u
u1u1u1u
ug−
−−=−
=−+
+= .
Daher ist (6.2.1.32) ( ) 1ulnuuG −−−= und ( ) xlnxF = .
Somit gilt: (6.2.1.33) 0cxln1ulnu =−−−−−
ist die allgemeine implizite Lösung der separierbaren Gleichung ( )( )ugxf
u =′ .
Da ( ) ( )xxy
xu = folgt aus (6.2.1.33):
(6.2.1.34) 0cxln1xy
lnxy =++−+ .
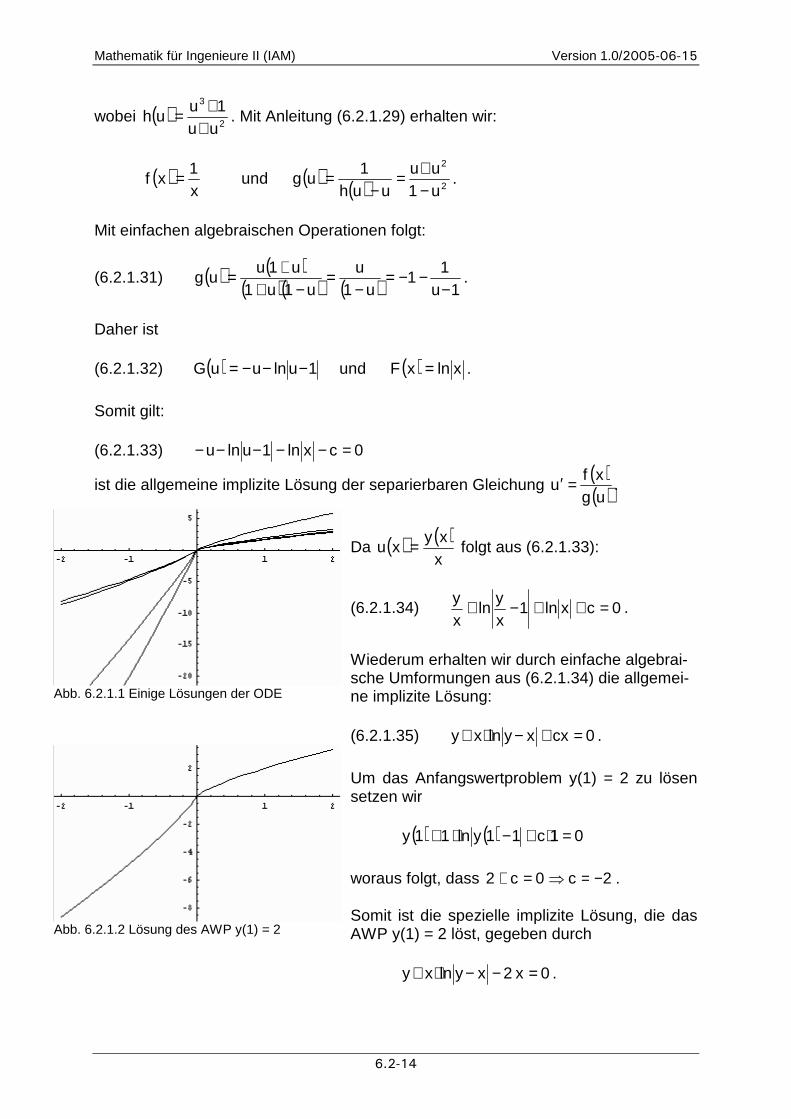
Wiederum erhalten wir durch einfache algebrai-sche Umformungen aus (6.2.1.34) die allgemei-ne implizite Lösung: (6.2.1.35) 0cxxylnxy =+−⋅+ .
Um das Anfangswertproblem y(1) = 2 zu lösen setzen wir
( ) ( ) 01c11yln11y =⋅+−⋅+
woraus folgt, dass 2c0c2 −=�=+ . Somit ist die spezielle implizite Lösung, die das AWP y(1) = 2 löst, gegeben durch 0x2xylnxy =−−⋅+ .
Abb. 6.2.1.1 Einige Lösungen der ODE
Abb. 6.2.1.2 Lösung des AWP y(1) = 2

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�������
6.2.2 Exakte Differentialgleichung Wir erinnern uns (s. Definition 3.6.4), dass für eine stetig partiell differenzierbare Funktion ( )yx,uu = das totale Differential gegeben ist durch
(6.2.2.1) [ ]dydx,udyyu
dxxu
du ⋅∇=∂∂+
∂∂= .
Aus (6.2.2.1) folgt, dass für konstante Funktionen ( ) constantcyx,u == gelten muss: du = 0. Woraus wir sofort schließen können:
(6.2.2.2) 0=∂∂+
∂∂
dyyu
dxxu
.
Durch algebraische Umformungen erhalten wir aus (6.2.2.2) folgende ODE:
(6.2.2.3)
yuxu
dxdy
y
∂∂∂∂
−==′ .
Beispiel 6.2.2.1: Sei ( ) cyxxyx,u 32 =+= , dann erhalten wir:
( ) 0dyyx3dxxy21dyyu
dxxu
du 223 =++=∂∂+
∂∂= .
Also ist ( ) cyxxyx,u 32 =+= die implizite allgemeine Lösung der ODE erster Ord-nung
22
3
yx3xy21
y+−=′ .
Definition 6.2.2.1: Wir betrachten eine gewöhnliche Differentialgleichung der Form (6.2.2.3) ( ) ( ) 0dyyx,Ndxyx,M =+ , die äquivalent zur Gleichung
(6.2.2.4) ( )( )yx,N
yx,Mdxdy
y −==′ ist.
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�������
Eine solche ODE heißt total oder exakt, falls das Vektorfeld
( ) ( ) ( )( )yx,N,yx,Myx, =v konservativ ist. Das heißt, falls eine Potentialfunktion u existiert, so dass (6.2.2.5) ( ) ( ) ( ) ( )( )yx,N,yx,Myx,uyx, =∇=v oder, in der Schreibweise des totalen Differentials, falls (6.2.2.6) NdyMdxdu += . Bemerkung 6.2.2.1: Mit Theorem 5.6.2 ist eine ODE der Form (6.2.2.3) exakt, falls der Wertebereich D von M und N einfach zusammenhängend ist, die Funktionen M und N stetig partiell differenzierbar sind und die Bedingung
(6.2.2.7) xN
yM
∂∂=
∂∂
erfüllt ist. Die Idee eine exakte ODE zu lösen die folgende. Angenommen die Gleichung
(6.2.2.8) ( )( )yx,N
yx,My −=′
ist exakt, dann existiert eine Funktion ( )yx,uu = , so dass
(6.2.2.9) Mxu =
∂∂
und
(6.2.2.10) Nyu =
∂∂
.
Diese Funktion u kann durch die im vorhergehenden Kapitel erläuterten Methoden (s. Beispiel 3.6.4) gefunden werden. Im Folgenden zeigen wir noch einmal einen sy-stematischen Weg, um die Funktion u zu finden: Aus (6.2.2.9) erhalten wir durch Integration bzgl. x (6.2.2.11) ( ) ( ) ( )yKxdyx,Myx,u += .
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�������
In dieser Integration ist y eine Konstante und deshalb ist K(y) die zu y gehörende Integrationskonstante. Um K(y) zu bestimmen, leiten wir (6.2.2.11) nun hinsichtlich y
ab und vergleichen diese Ableitung mit (6.2.2.10), um dy
Kd zu erhalten. Durch Inte-
gration von dy
Kd nach y erhalten wir K. Jetzt verwenden wir (6.2.2.10) und
integrieren diese Funktion bzgl. y. Damit folgt: (6.2.2.12) ( ) ( ) ( )xLydyx,Nyx,u += .
Um L(x) zu bestimmen leiten wir (6.2.2.12) hinsichtlich x ab und verwenden (6.2.2.9)
um dx
Ld zu erhalten. Also erhalten wir durch Integration L.
Beachte: Diese Methode liefert die allgemeine Lösung einer exakten Differentialglei-chung in impliziter Form ( ) cyx,u = , aber nicht in expliziter Form y = f(x). Manchmal ist es möglich, eine explizite Funktion durch Lösen der Gleichung ( ) cyx,u = hinsicht-lich y zu finden. (6.2.2.13) Anleitung zum Lösen von ( ) ( ) 0=+′ yx,Myyx,N :
1.Schritt: Auf Exaktheit testen: ( ) ( )yx,xN
yx,yM
∂∂=
∂∂
für alle (x,y) ∈ D, D ist ein-
fach zusammenhängend. 2. Schritt: Finde die Potentialfunktion ( )yx,uu = mit ( ) ( ) ( )( )yx,N,yx,Myx,u =∇ 3. Schritt: Implizite Lösung ( ) cyx,u = . Falls möglich, lösen der Gleichung hin-
sichtlich y, um eine explizite Lösung zu finden. Beispiel 6.2.2.2: (i) Wir lösen das Anfangswertproblem (6.2.2.14) ( ) 0yxy2xy2 2 =′++ , y(0) = 1. Lösung: Setze ( ) xy2yx,M = , ( ) 2xy2yx,N += und D = �2. 1. Schritt:
D = �2 ist einfach zusammenhängend und ( ) ( )yx,xN
x2yx,yM
∂∂==
∂∂
.

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�������
2. Schritt: Wir berechnen die Potentialfunktion:
( ) ( )yKyxyx,u 2 += , ( ) ( ) ( ) 222 yyKxy2yKxyx,yu =�+=′+=
∂∂
,
( ) ( ) ( ) 0xLxLyyxyx,u 22 =�++= . Also ( ) 22 yyxyx,u += . 3. Schritt: Allgemeine implizite Lösung ( ) cyyxyx,u 22 =+= . Da ( ) 10,1u = ist die spezielle im-plizite Lösung für das Anfangswertproblem durch (6.2.2.15) ( ) 1yyxyx,u 22 =+= gegeben. Da (6.2.2.15) eine quadratische Gleichung ist, erhalten wir als die explizite Lösung
( ) ( )24 x4x21
xy −+= , x ∈ �.
Die zweite Lösung ( ) ( )24 x4x21
xy −+−= ist ungültig wegen der Anfangsbedingung
y(0) = 1. (ii) Wir lösen das Anfangswertproblem (6.2.2.16) ( ) ( ) 0dycosxy2xsindxsinxycosxsinxy2 22 =⋅−+⋅+⋅⋅ , y(0) = 3.
Lösung: Hier ist wieder D = �2. Als Funktionen M und N erhalten wir diesmal: ( ) sinxycosxsinxy2yx,M 2+⋅⋅= und ( ) cosxy2xsinyx,N 2 ⋅−= . 1. Schritt: D = �2 ist einfach zusammenhängend und es gilt:
( ) ( )yx,xN
sinxy2cosxsinx2yx,yM
∂∂=⋅+⋅=
∂∂
.
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
����� �
Also ist die gegeben Gleichung exakt. Daher existiert eine Funktion u(x,y), so dass
(6.2.2.17) ( ) sinxycosxsinxy2yx,xu 2+⋅⋅=
∂∂
und
(6.2.2.18) ( ) ycosx2xsinyx,yu 2 −=
∂∂
.
2. Schritt: Durch Integration von (6.2.2.17) bzgl. x folgt k(y)cosxyxysiny)u(x, 22 +−= . Differenzieren wir diese Funktion bzgl. y so erhalten wir mit (6.2.2.18): cosxy2xsin(y)Kcosxy2xsin 22 ⋅−=′+⋅− ; d.h., ( ) 0yK =′ und deshalb ( ) 1cyK = . Nun integrieren wir (6.2.2.18) bzgl. y und er-halten (x)Lcosxyxysiny)u(x, 22 +−= . Differentiation dieser Funktion bzgl. x und Verwenden von (6.2.2.17)liefert:
( ) sinxycosxsinxy2xLsinxycosxsinxy2 22 +⋅⋅=′++⋅⋅ ; d.h., ( ) 0xL =′ und somit ( ) 2cxL = . 3. Schritt: Die allgemeine implizite Lösung der gegebenen Gleichung ist ccccosxyxsinyy)u(x, 21
22 =++−⋅= , was nach Zusammenfassen der Konstanten als ccosxyxsiny 22 =−⋅ geschrieben werden kann. Durch Verwendung der Anfangsbedingung y(0) = 3 erhalten wir:
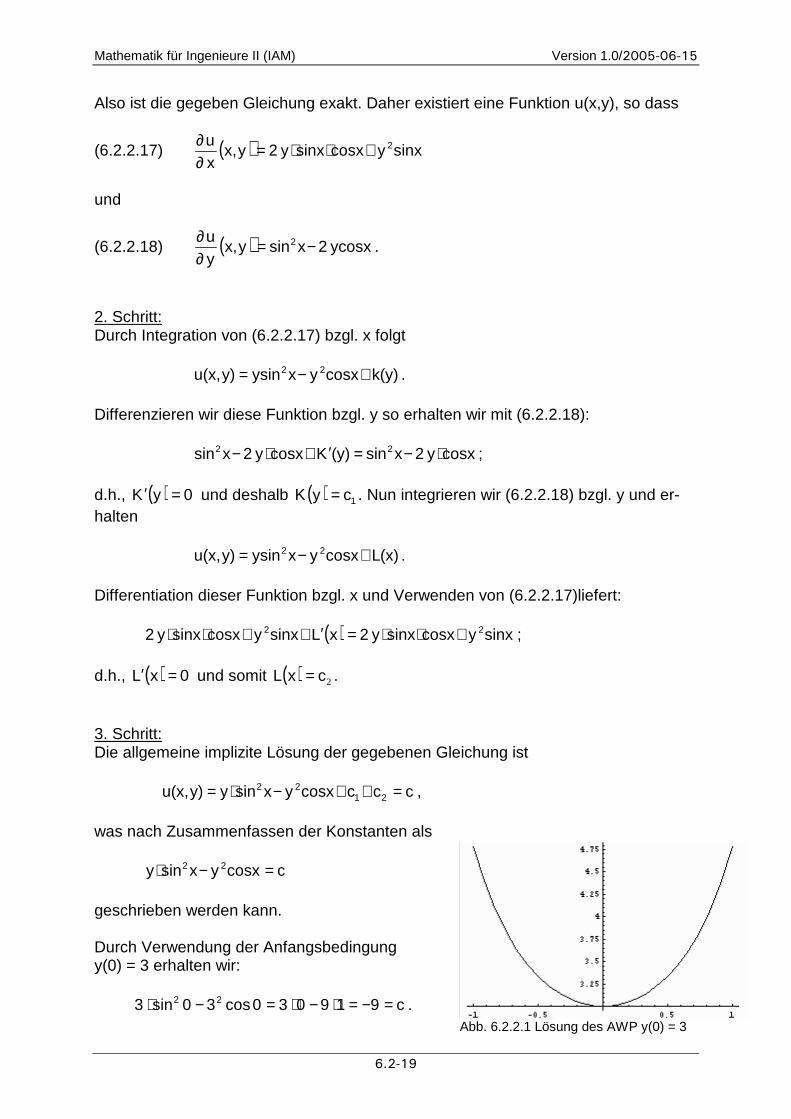
c919030cos30sin3 22 =−=⋅−⋅=−⋅ . Abb. 6.2.2.1 Lösung des AWP y(0) = 3
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�������
Daher ist 9xsinycosxy 22 =⋅− die spezielle implizite Lösung des AWP. Eine explizite Lösung des AWP ist durch
( ) ( ) ( ) ( ) ( )( ) [ ]598531.59853;1.x,xcos36+xsin+xsinxsec21
xy 42 −∈=
gegeben (Überprüfen Sie das!). Dabei ist der Sekans die Kehrwertfunktion des Kosi-
nus; also ( ) ( )xcosxsec
1= .
(iii) Brechen Sie das beschriebene Lösungsverfahren ab, falls die Gleichung nicht exakt ist. Wir betrachten dazu die Gleichung (6.2.2.19) 0xdyydx =− .
Hier ist ( ) yyx,M = und ( ) xyx,N −= und daher ( ) 1yx,yM =
∂∂
, aber ( ) 1yx,xN −=
∂∂
.
Also ist die Gleichung (6.2.2.19) nicht exakt und deshalb funktioniert unser Methode, wie wir nun zeigen werden, nicht. Durch Integration bzgl. x erhalten wir: ( ) ( ) ( ) +=+= yKxyyKdxyx,My)u(x, .
Also:
( ) ( ) ( ) x2yKxyKxyx,yu −=′�−=′+=
∂∂
.
Das ist aber nicht möglich, da K(y) nur von y abhängen kann.
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�������
6.2.3 Integrierende Faktoren Wir betrachten eine nicht-exakte Gleichung der Form (6.2.3.1) ( ) ( ) 0dyyx,Ndxyx,M =+ , Die Idee in diesem Abschnitt ist, eine passende Funktion F(x,y) ≠ 0 zu finden, so dass die neue Gleichung (6.2.3.2) ( ) ( ) ( ) ( ) 0dyyx,Nyx,Fdxyx,Myx,F =⋅+⋅ exakt ist. Eine solche Gleichung kann dann durch die in Abschnitt 6.2.2 vorgestellte Methode gelöst werden kann. Beachte: Die Gleichung (6.2.3.1) und (6.2.3.2) haben dieselbe Lösung, da F(x,y) ≠ 0. Definition 6.2.3.1: Die Differentialgleichung ( ) ( ) 0dyyx,Ndxyx,M =+ sei nicht exakt. Eine Funktion F(x,y) ≠ 0 heißt integrierender Faktor (IF) der Diffe-rentialgleichung (6.2.3.3), falls die neue Gleichung ( ) ( ) ( ) ( ) 0dyyx,Nyx,Fdxyx,Myx,F =⋅+⋅ eine exakte Differentialgleichung ist. Bemerkung 6.2.3.1: Die Anzahl der integrierenden Faktoren einer Gleichung kann unendlich sein. Im Folgenden betrachten wir einige einfache Beispiele. Beispiel 6.2.3.1: Die Differentialgleichung (6.2.3.4) 0xdyydx =− ist nicht exakt (s. Beispiel 6.2.2.2(iii)),hat aber einen integrierenden Faktor, nämlich
( ) 2x1
yx,F = .
Mit diesen integrierenden Faktoren erhalten wir die neue Gleichung

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�������
(6.2.3.5) 0dyx1
dxxy
2 =− ,
die als
(6.2.3.6) 0xy
yx1
2 =��
�
�−+′ .
geschrieben werden kann. Es ist einfach zu zeigen, dass (6.2.3.4) eine exakte Diffe-rentialgleichung ist und dass
( )xy
yx,u −=
die zugehörige Potentialfunktion ist mit
( ) 0dyx1
dxxy
dyxy
ydx
xy
xyx,du 2 =−=�
�
�
�−∂∂+�
�
�
�−∂∂= .
Folglich ist ( ) cxy
yx,u =−= eine implizite allgemeine Lösung der Gleichung (6.2.3.5)
und ebenso von Gleichung (6.2.3.4). Die explizite allgemeine Lösung ist durch y(x) = -cx gegeben. Das sind Geraden durch den Ursprung.
Andere integrierende Faktoren der Gleichung (6.2.3.4) sind xy1
,y1
2 und
22 yx1+
da
���
�
�=−yx
ddyyx
dxyy
22 , ���
�
�=−yx
lnddyxyx
dxxyy
und
���
�
�−=+
−+ y
xarctanddy
yxx
dxyx
y2222
.
Alle diese Lösungen sind ebenfalls Geraden durch den Ursprung. Andere integrie-rende Faktoren ändern die allgemeine Lösung einer Gleichung nicht. Beispiel 6.2.3.2: Die Differentialgleichung (6.2.3.7) ( ) ( ) 0dyycosxydxysin2 22 =⋅+ hat einen integrierenden Faktor von ( ) 3xxF = . Multiplikation mit diesem integrieren-den Faktoren ergibt die neue Gleichung (6.2.3.8) ( ) ( ) 0dyycosyxdxysinx2 2423 =⋅+ .
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
������
Diese Gleichung ist exakt und die Potentialfunktion ist ( ) ( )24 ysinxyx,u = . Also ist die allgemeine implizite Lösung von (6.2.3.7) gegeben durch ( ) cysinx 24 = . Der integrierende Faktor kann im einfacheren Fall durch Betrachten der Gleichung oder nach einigen Versuchen gefunden werden. Im Folgenden sind zwei Regeln an-gegeben, um den integrierenden Faktor von Gleichungen spezieller Form zu lösen. Regel (6.2.3.9): Falls die Gleichung (6.2.3.1) 0=+ dyy)N(x,dxy)M(x, nicht exakt ist und
PxN
yM
N1 =��
�
�
�
∂∂−
∂∂
ist,
wobei P eine Funktion von x ist, nur dann hat (6.2.3.1) einen integrierenden Faktor ( )( ) = dxxPexpF(x) .
Regel (6.2.3.10): Falls die Gleichung (6.2.3.1) 0=+ dyy)N(x,dxy)M(x, nicht exakt ist und
QyM
xN
M1 =��
�
�
�
∂∂−
∂∂
ist,
wobei Q eine Funktion von y ist, nur dann hat (6.2.3.1) einen integrierenden Faktor ( )( ) = dyyQexpF(y) .
Beispiel 6.2.3.2: (i) Wir lösen die Differentialgleichung ( ) 0xydy2dxy2x2-x 22 =++ Lösung: In diesem Fall
( ) ( ) ( ) ( ) ( )xPx1
y2y4xy21
yx,xN
yx,yM
yx,N1 ==−=��
�
�
�
∂∂−
∂∂
.

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
������
Somit ist
( ) xlnxexpdxx1
expF(x) ==��
�
�=
ein integrierender Faktor. Durch Multiplizieren der gegebenen Gleichung mit x, erhal-ten wir ( ) 0ydyx2dxxy2x2-x 2223 =++ . Diese Gleichung ist exakt (überprüfen) und die allgemeine implizite Lösung ist cyx12x8-x3 2234 =+ . (ii) Wir betrachten die Gleichung ( ) ( ) 0dyycosxydxysin2 22 =⋅+ Lösung: Hier ist
( ) ( ) ( ) ( ) ( ) ( )( ) ( )xPx3
yycosyycos4yxycos
1yx,
xN
yx,yM
yx,N1 22
2 ==−=���
�
�
∂∂−
∂∂
Deshalb ist
( ) 3xlnx3expdxx3
expF(x) =⋅=��
�
�=
ein integrierender Faktor. (iii) Wir lösen das Anfangswertproblem ( ) 0dyx3y4xydx2 2 =++ , y(0.5) = -1.5. Mit Regel (6.2.3.10) erhalten wir:
( ) ( ) ( ) ( ) ( )yQy2
x2x6xy21
yx,yM
yx,xN
yx,M1 ==−=��
�
�
�
∂∂−
∂∂
.
Also ist
( ) 2ylny2expdyy2
expF(y) =⋅=���
�
�=

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�������
ein integrierender Faktor. Multiplizieren der gegebenen Gleichung mit y2, führt zur exakten Differentialgleichung
( ) 0dyyx3y4dxxy2 2233 =++ , mit der allgemeine implizite Lösung cyxy 324 =+ . Damit erhalten wir als implizite spezielle Lösung unseres AWP 4.9275yxy 324 =+

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�������
6.2.4 Lineare Differentialgleichungen erster Ordnung Eine ODE erster Ordnung heißt linear, wenn sie in der Form
(6.2.4.1) ( ) ( ) ( )ba;x,xQyxPdxdy ∈=+
geschrieben werden kann, wobei P(x) und Q(x) gegebenen Funktionen von x sind. Falls die Funktion Q auf der rechten Seite der Gleichung identisch Null ist, dann heißt die Gleichung (6.2.4.1) homogen, andernfalls wird sie inhomogen genannt. Für die homogene Gleichung
(6.2.4.2) ( ) ( )ba;x0,yxPdxdy ∈=+
ist es sehr leicht eine allgemeine Lösung zu finden. Durch Separation der Variablen folgt die Gleichung
(6.2.4.3) ( )xPyy −=
′.
Folglich ist ( ) cdxxPyln +−= und somit ist die
allgemeine Lösung der homogene Gleichung ( ) 0yxPy =+′ :
(6.2.4.4) ( ) ( ) =− dxxP
cexy . In Gleichung (6.2.4.4) können wir auch c = 0 setzen, um die triviale Lösung y(x) = 0 zu erhalten. Um die inhomogene Gleichung zu lösen, verwenden wir einen integrierenden Faktor, der nur von x abhängt. Wir schreiben Gleichung (6.2.4.1) in der Form (6.2.4.5) ( ) ( )( ) 0dydxxQyxP =+− . Das ist die bekannte Form 0=+ dyy)N(x,dxy)M(x, , wobei ( ) ( )xQyxPy)M(x, −= und
1y)N(x, = . Da
( ) ( ) ( ) ( )xPyx,xN
yx,yM
yx,N1 =��
�
�
�
∂∂−
∂∂
,
hat Gleichung (6.2.4.5) mit Regel (6.2.3.9) einen integrierenden Faktor; nämlich
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�������
(6.2.4.5) ( ) ( ) =dxxP
exF . Durch Multiplizieren der inhomogenen Gleichung (6.2.4.1) mit F und mit Hilfe der Produktregel erhalten wir:
(6.2.4.6) ( ) ( )( ) ( ) ( ) ( )xQeye
dxd
yxPyedxxPdxxPdxxP =�
�
�
� =+′ .
Integration bzgl. x liefert:
(6.2.4.7) ( ) ( ) ( ) cdxxQeye
dxxPdxxP+ = .
Also
(6.2.4.8) ( ) ( ) ( ) ( ) ��
�
� + = −
cdxxQeexydxxPdxxP
.
Sei H(x) die Stammfunktion von P(x), das heißt ( ) ( ) = dxxPxH . Dann ist die
Allgemeine Lösung der inhomogene Gleichung ( ) ( )xQyxPy =+′ : (6.2.4.9) ( ) ( ) ( ) ( )( )cdxxQeexy xHxH +⋅=
− ,
wobei ( ) ( ) = dxxPxH .
Dies stellt die allgemeine Lösung einer linearen Gleichung erster Ordnung in Form eines Integrals dar. Die Wahl der Integrationskonstante in ( ) dxxP spielt keine Rol-
le. Falls die Integral in (6.2.4.9) nicht elementar lösbar sind, dann müssen numeri-sche Methoden für Integrale angewendet werden. Beachte: Falls in (6.2.4.9) Q(x) = 0, erhalten wir (6.2.4.4). Beispiel 6.2.4.1: Wir lösen die linearen ODE x2eyy =−′ . Lösung: Hier ist P(x) = -1 und ( ) x2exQ = . Also ist ( ) xdx1xH −=−= und mit (6.2.4.9) erhal-
ten wir als allgemeine Lösung

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�������
( ) ( ) x2xx2xx ececdxeeexy +=+⋅= − .
Gewisse nicht-lineare Differentialgleichungen können auf lineare Gleichungen redu-ziert werden. Eine dieser Gleichungen ist die Bernoulli Gleichung
(6.2.4.10) ( ) ( ) ( )ba;x,yxQyxPdxdy � ∈=+ , wobei α eine reelle Zahl ist.
Falls α = 0 oder α = 1, ist die Gleichung (6.2.4.10) linear. Andernfalls ist sie nichtli-near. In diesem Fall setzen wir (6.2.4.11) ( ) ( )( ) �1xyxu −= . Durch Differentiation von (6.2.4.11) erhalten wir (6.2.4.12) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( )( )xyxPxQ�1xyxy�1xu
�1�
−− −−=′−=′ . Da ( ) ( )( ) �1xyxu −= , folgt die Gleichung (6.2.4.13) ( ) ( ) ( ) ( ) ( )( )xuxPxQ�1xu −−=′ die als lineare Gleichung (6.2.4.14) ( ) ( ) ( ) ( ) ( ) ( )xQ�1xuxP�1xu −=−+′ geschrieben werden kann. Durch Lösen dieser Gleichung für die abhängige Variable u erhalten wir mit (6.2.4.11) die Lösung der Bernoulli-Gleichung; die da lautet:
(6.2.4.15) ( ) ( )( ) �11
xuxy −= . Beispiel 6.2.4.2 (Bernoulli Gleichung, Verhulst Gleichung, Logistiches Populationsmodell): Wir lösen eine spezielle Bernoulli Gleichung, die als Verhulst Gleichung bekannt ist: (6.2.4.16) 2byayy −=−′ , wobei a und b positive Konstanten sind. Lösung: In diesem Fall ist α = 2, so dass ( ) ( )xyxu 1−= . Somit ist (6.2.4.17) ( ) ( ) bxauxu =+′ die zugeordnete inhomogene lineare Gleichung und wir erhalten die allgemeine Lö-sung
(6.2.4.18) ( ) ( )ab
cecdxbeexu axaxax +=+= −− .
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
����� �
Durch Rücksubstitution ist die allgemeine Lösung von (6.2.4.16) gegeben durch:
(6.2.4.19) ( ) ( ) bacea
xu1
xyax +
== − .
Mit (6.2.4.16) folgt sofort, dass y(x) = 0 auch eine Lösung ist. Gleichung (6.2.4.19) heißt Gesetz des logistisches Populationswachstums, wobei x die Zeit ist.

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�����
6.3 Lineare ODE zweiter Ordnung Im Folgenden betrachten wir Differentialgleichungen zweiter Ordnung. Eine gewöhn-liche Differentialgleichung zweiter Ordnung heißt linear falls sie in der Form (6.3.1) ( ) ( ) ( ) ( )ba;x,xRyxQyxPy ∈=+′+′′ geschrieben werden kann, wobei P(x), Q(x) und R(x) gegebenen Funktionen von x sind. Andernfalls wird sie nicht-linear genannt. Bemerkung 6.3.1: (i) Falls der erste Term in einer ODE zweiter Ordnung von der Form ( )yxF ′′ ist, müs-sen wir beide Seiten der Gleichung durch F(x) teilen, um die Standardform (6.3.1) zu erhalten. (ii) Falls ( ) ( )ba;x0,xR ∈∀= , wird (6.3.1) zu (6.3.2) ( ) ( ) ( )ba;x0,yxQyxPy ∈=+′+′′ . (6.3.2) heißt homogene Gleichung im Gegensatz zur inhomogenen Glei-chung.(6.3.1). Die Funktionen P und Q in (6.3.1) und (6.3.2) heißen Koeffizienten der Gleichung. Beispiel 6.3.1: (i) ( ) ( )ba;x,exsinxy42y x ∈=+′′ − , ist eine inhomogene lineare Gleichung zweiter Ordnung. (ii) ( )( ) ( )ba;x0,yxyeyxsin1 2x ∈=+′+′′− , ist eine homogene lineare Gleichung zwei-ter Ordnung, die nicht die Standardform (6.3.2) hat. Theorem 6.3.1: Angenommen y1 und y2 sind Lösungen der homogenen linearen Gleichung (6.3.2), dann ist
2211 ycycy += , wobei c1 und c2 beliebige reelle Konstanten sind, ebenfalls eine Lösung der Glei-chung (6.3.2). Beweis: Sei y1 und y2 Lösungen von (6.3.2), dann gilt:

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�����
( ) ( )( ) ( )( )
( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )( )
0.0c0c
yxQyxPycyxQyxPyc
ycxQycxQycxPycxPycyc
ycycxQycycxPycyc
1
22221111
221122112211
221122112211
=⋅+⋅=
+′+′′++′+′′=
++′+′+′′+′′=
++′++″+
2
Folglich ist y eine Lösung von (6.3.2). Wir erinnern uns: Die allgemeine Lösung einer ODE erster Ordnung enthielt nur eine Konstante c. Um die spezielle Lösung mit einem bestimmten Wert für c zu erhalten, benötigten wir für das Anfangswertproblem nur eine Bedingung; nämlich ( ) 00 yxy = . Für eine homogene ODE zweiter Ordnung hat eine allgemeine Lösung die Form (6.3.3) 2211 ycycy += , was eine Linearkombination der zwei so genannten fundamentalen Basislösungen y1 und y2 ist. Ein Anfangswertproblem (AWP) besteht nun aus einer Gleichung zweiter Ordnung und zwei Anfangsbedingungen (6.3.4) ( ) ( ) 1000 yxy,yxy =′= . Die erste Bedingung schreibt den Funktionswert der Lösung im Punkt x0 ∈ (a;b) und die zweite deren Ableitung (Steigung der Kurve) im selben Punkt vor. Mit (6.3.4) erhalten wir die spezielle Lösung mit bestimmten Werten c1 und c2. Definition 6.3.1: Zwei Lösungen y1 und y2 einer homogenen linearen ODE zweiter Ordnung mit steti-gen Koeffizienten vom Typ (6.3.2) heißen Basisfunktionen oder Basislösungen, falls die Wronski-Determinante W(y1,y2) (Wronski, Polnischer Mathematiker, 1778-1853), definiert durch
( ) 122121
2121 yyyy
yy
yydety,yW ′−′=��
�
�
�
′′= ,
ungleich Null ist. Bemerkung 6.3.1: (i) Zwei Basislösungen y1 und y2 einer homogenen Gleichung (6.3.2) werden auch linear unabhängig genannt. Das bedeutet, dass die Gleichung
0ycyc 2211 =+
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�����
nur die triviale Lösung 0cc 21 == hat. (ii) Falls ( ) ( )( ) 0xy,xyW 0201 = für ( )ba;x0 ∈ , dann sind y1 und y2 linear abhängig und daher keine Basislösungen. (iii) Ferner kann gezeigt werden: Falls ( ) ( )( ) 0xy,xyW 0201 = für ( )ba;x0 ∈ , dann ist
0W ≡ ; d.h. ( ) ( )( ) ( )ba;x0,xy,xyW 21 ∈∀= . Wenn also ein ( )ba;x0 ∈ existiert mit
( ) ( )( ) 0xy,xyW 0201 ≠ , dann sind y1 und y2 linear unabhängig auf (a;b) und somit Ba-sislösungen. 6.3.1 Homogene lineare Gleichungen mit konstanten Koeffizienten In diesem Abschnitt zeigen wir, wie homogene Gleichungen mit konstanten Koeffi-zienten a und b der Form (6.3.1.1) 0byyay =+′+′′ gelöst werden können. Diese Gleichungen haben interessante Anwendungen, spe-ziell im Zusammenhang mit mechanischen und elektrischen Schwingungen. Die Idee Gleichungen vom Typ (6.3.2) zu lösen ist, die Funktionen (6.3.1.2) ( ) �
xexy = , wobei
� eine beliebige Konstante ist, als Lösung auszuprobieren.
Als erste und zweite Ableitung von (6.3.1.2) erhalten wir: (6.3.1.3) ( ) �
x�exy =′ und ( ) �
x2e�
xy =′′ . Setzen wir (6.3.1.2) und (6.3.1.3) in Gleichung (6.3.1.1) ein, so folgt: (6.3.1.4) ( ) 0eba
�� �x2 =++ .
Die Funktion in (6.3.1.2) ist eine Lösung der Gleichung (6.3.1.1), falls
� eine Lösung
der quadratischen Gleichung (6.3.1.5) 0ba�� 2 =++ ist. Die Gleichung (6.3.1.5) heißt charakteristische Gleichung der homogenen Gleichung (6.3.1.1). Ihre Wurzeln sind
(6.3.1.6) ( )b4aa21� 2
1 −+−= und ( )b4aa21� 2
2 −−−= .

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
����
Damit gilt: ( ) x
�1
1exy = , ( ) x�
22exy = und ( ) x
�2
x�
121 ececxy +=
sind Lösungen der Gleichung (6.3.1.1). Mit (6.3.1.6) sehen wir sofort, dass die Lö-sung einer homogenen linearen Gleichung vom Vorzeichen der Diskriminante
b4aD 2 −= abhängen. Folgende drei Fälle sind möglich: Fall I: Es gibt zwei reelle Wurzeln, falls 0b4aD 2 >−= . Fall II: Es gibt eine reelle Wurzel, falls 0b4aD 2 =−= . Fall III: Es gibt komplex konjugierte Wurzeln, falls 0b4aD 2 <−= . Fall I: 0b4aD 2 >−= (Zwei unterschiedliche reelle Wurzeln 1
� und 2
�)
Die Lösung ( ) x
�1
1exy = und ( ) x�
22exy = sind linear unabhängig, da
( ) ( )( ) ( ) ( ) 0e��
e�
e�
eedetxy,xyW x
��
0
12x�
2x
�
1
x�
x�
2121
21
21
≠−=���
�
�= +
≠�����
.
Somit ist die zugehörige allgemeine Lösung gegeben durch (6.3.1.7) ( ) x
�
2x
�
121 ececxy += ,
wobei ( )b4aa21� 2
1 −+−= und ( )b4aa21� 2
2 −−−= .
Beispiel 6.3.1.1: (i) Wir lösen die Gleichung
0y8y2y =−′+′′ . Lösung: Charakteristische Gleichung mit Lösungen: 4
�2,
�08
�2
�21
2 −==�=−+ . Fundamentale Basislösungen der Gleichung: ( ) x2
1 exy = , ( ) x42 exy −= .

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
����
Allgemeine Lösung der Gleichung:
( ) x42
x21 ececxy −+= , c1, c2 ∈ �.
(ii) Wir lösen das AWP ( ) ( ) 50y4,0y0,y2yy −=′==−′+′′ . Lösung: Charakteristische Gleichung mit Lösungen: 2
�1,
�02
��21
2 −==�=−+ . Fundamentale Basislösungen der Gleichung: ( ) x
1 exy = , ( ) x22 exy −= .
Allgemeine Lösung der Gleichung:
( ) x22
x1 ececxy −+= , c1, c2 ∈ �.
Spezielle Lösung:
( )( ) .cc0y
4cc0y
21
21
52 −=−=′=+=
Folglich ist 1c1 = , 3c2 = und ( ) x2x e3exy −+= die Lösung des AWP.
Fall II: 0b4aD 2 =−= (Doppelte reelle Wurzel 2a�
−= )
Wie erhalten zunächst nur eine Lösung; nämlich:
(6.3.1.8) ( ) x2a
1 exy−
= . Um eine zweite Lösung zu finden, die wir für eine Basis brauchen, setzen wir
(6.3.1.9) ( ) ( ) ( ) ( ) x2a
12 excxyxcxy−
== und versuchen eine Funktion c(x) zu finden, so dass y2 Lösung der Gleichung (6.3.1.1) wird. Diese Methode heißt Variation der Konstanten. Mit der Produkt- und Kettenregel erhalten wir als Ableitungen von (6.3.1.9):

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�����
(6.3.1.10) ( ) ( ) ( ) x2
ax
2
a
2 exc2a
excxy−−
−′=′
(6.3.1.11) ( ) ( ) ( ) ( ) x2a2x
2a
x2a
2 exc4a
excaexcxy−−−
+′−′′=′′ .
Setzen wir (6.3.1.8), (6.3.1.10) und (6.3.1.11) in Gleichung (6.3.1.1) ein, so folgt:
( ) ( ) ( ) ( ) ( ) ( ) 0exbcexc2a
xcaexc4a
xcaxcx
2a
x2a
x2a2
=+��
�
� −′+���
�
�+′−′′
−−−.
Division durch x
2a
e−
ergibt:
( ) ( ) ( ) ( ) ( ) ( ) 0xbcxc2a
xcaxc4a
xcaxc2
=+��
�
� −′+���
�
�+′−′′
� ( ) ( ) ( ) ( ) ( ) ( ) 0xbcxc4a2
xcaxc4a
xcaxc22
=+−′++′−′′
� ( ) ( ) ( ) 0xbcxc4a
xc2
=+−′′
� ( ) ( ) ( ) 0xcb4a41
xc 2 =−−′′
� ( ) 0xc =′′ , da ( ) 0b4a2 =− . Folglich erhalten wir für c(x) eine sehr einfache Differentialgleichung zweiter Ord-nung. Durch zweimaliges Integrieren folgt (6.3.1.12) ( ) 21 cxcxc += . Um eine zweite unabhängige Basislösung zu erhalten, können wir ( ) xxc = nehmen. Fundamentale Basislösungen:
(6.3.1.13) ( ) x2a
1 exy−
= , ( ) x2a
2 xexy−
= . Die Wronski-Determinante ist in diesem Fall
( ) ( )( ) 0exy,xyW ax
21 ≠= − . Folglich ist die zugehörige allgemeine Lösung gegeben durch
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�����
(6.3.1.14) ( ) ( ) x2a
21 exccxy−
+= . Beispiel 6.3.1.2: Wir lösen die Gleichung
0y16y8y =+′−′′ . Lösung: Charakteristische Gleichung mit Lösungen: 4
��016
�8
�21
2 ==�=+− . Fundamentale Basislösungen der Gleichung: ( ) x4
1 exy = , ( ) x42 xexy = .
Allgemeine Lösung der Gleichung:
( ) x42
x41 xececxy += , c1, c2 ∈ �.
Fall III: 0b4aD 2 <−= (komplexe Wurzeln 1
� und 2
�)
Die charakteristische Gleichung hat die komplex konjugierten Wurzeln
(6.3.1.15) j �a21�
1 +−= und j �a21�
2 −−= ,
wobei 2a41
b� −= .
Die Basisfunktionen sind nun
(6.3.1.16) ( )xj �
2a
1 exy��
�
� +−= , ( )
xj �2a
2 exy��
�
� −−=
mit komplexer Wronski-Determinante ( ) ( )( ) 0≠⋅−= − ax
21 e�2jxy,xyW . Mit der Euler’schen Formel (6.3.1.17) zsinjzcose jz ⋅±=± können wir die komplexe Basis in eine reelle Basis umwandeln. Dazu schreiben wir die allgemeine Lösung wie folgt:

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�����
(6.3.1.18)
( )
( )
( ) ( )( ) ( ) ( )( )[ ]
( ) ( ) ( ) ( )[ ]� xcoscc� xsinccje
� xsinj� xcosc� xsinj� xcosce
ecece
eeceecececxy
2121
x2a
21
x2a
j �2
j �1
x2a
j �x2a
2j �x
2a
1
xj �2a
2
xj �2a
1
++−=
⋅−+⋅+=
+=
+=+=
−
−
−−
−−−��
�
� −−��
�
� +−
xx
xx
Wir setzen ( )211 ccA −= , ( )212 ccA += und erhalten mit (6.3.1.18):
(6.3.1.19) ( ) ( ) ( )[ ]� xcosA� xsinjAexy 21
x2a
+=−
. Da der reelle Teil und der imaginäre Teil einer komplexen Lösung, ebenfalls Lösun-gen der Differentialgleichung sind, ergeben sich folgende Lösungen:
(6.3.1.20) ( ) ( )� xsinexyx
2a
1 ⋅=−
und ( ) ( )� xcosexyx
2a
2 ⋅=−
. Die Wronski-Determinante dieser Lösungen ist ( ) ( )( ) 0≠⋅−= −ax
21 e�xy,xyW . Die Lösungen in (6.1.3.20) sind also linear unabhängig und somit reelle Basislösun-gen der Differentialgleichung (6.3.2). Allgemeine Lösung:
(6.3.1.21) ( ) ( ) ( ) ( ) ( )( )� xcosc� xsince� xcosec� xsinecxy 21
x2a
x2a
2
x2a
1 +=⋅+⋅=−−−
. Beispiel 6.3.1.3: (i) Wir lösen die Gleichung
0y13y4y =+′+′′ . Lösung: Charakteristische Gleichung mit Lösungen: ( )3�j,32
�j,32
�013
�4
�
212 =−−=+−=�=++ .
Fundamentale Basis der Gleichung: ( ) ( )x3sinexy x2
1 ⋅= − , ( ) ( )x3cosexy x22 ⋅= − .

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�����
Allgemeine Lösung der Gleichung: ( ) ( ) ( )( )x3coscx3sincexy 21
x2 += − . (ii) Wir lösen das AWP
( ) ( ) 50y1,0y0,y5y2y =′==+′+′′ . Lösung: Charakteristische Gleichung mit Lösung: ( )2�j,21
�j,21
�05
�2
�
212 =−−=+−=�=++ .
Fundamentale Basislösungen der Gleichung: ( ) ( )xsinexy x
1 2⋅= − , ( ) ( )x2cosexy x2 ⋅= − .
Allgemeine Lösung der Gleichung: ( ) ( ) ( )( )x2coscx2sincexy 21
x += − . Spezielle Lösung:
( )( ) 5.1c20y
1c0y
1
2
=−=′==
Folglich 3c1 = , 1c2 = und ( ) ( ) ( )( )x2cosx2sin3exy x += − ist die Lösung des AWPs. Dies vervollständig die Diskussion aller drei Fälle. Wir fassen die Ergebnisse in der folgenden Tabelle zusammen: (6.3.1.22) Allgemeine Lösung der homogenen linearen Gleichung zweiter Ord-nung mit konstantem Koeffizienten 0byyay =+′+′′ .
Fall Wurzel Basislösung Allgemeine Lösung I
Unterschiedliche reelle Wurzeln 1
�, 2
�:
( )b4aa21� 2
1 −+−= ,
( )b4aa21� 2
2 −−−=
( ) x
�
11exy = ,
( ) x�
22exy =
( ) x�
2x
�
121 ececxy +=
II
Reelle Doppelwurzel
2a�
−=
( ) x2a
1 exy−
= ,
( ) x2a
2 xexy−
=
( ) ( ) x2a
21 exccxy−
+=
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
��� �
III
Komplexe Wurzeln
1
�, 2
�:
j �a21�
1 +−= ,
j �a21�
2 −−= ,
wobei 2a41
b� −=
( ) ( )� xsinexyx
2a
1 ⋅=−
( ) ( )� xcosexyx
2a
2 ⋅=−
( ) ( )
( )� xcosec
� xsinecxy
x2a
2
x2a
1
⋅+
⋅=−
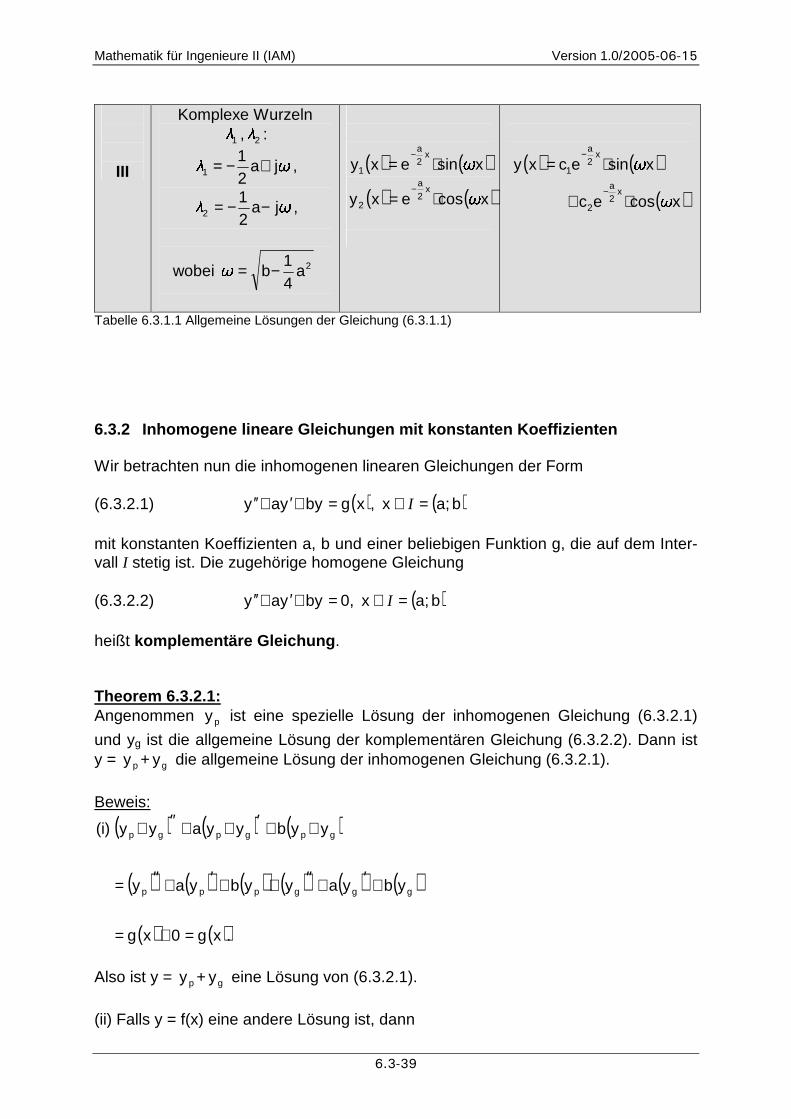
−
Tabelle 6.3.1.1 Allgemeine Lösungen der Gleichung (6.3.1.1) 6.3.2 Inhomogene lineare Gleichungen mit konstanten Koeffizienten Wir betrachten nun die inhomogenen linearen Gleichungen der Form (6.3.2.1) ( ) ( )ba;x,xgbyyay =∈=+′+′′ I mit konstanten Koeffizienten a, b und einer beliebigen Funktion g, die auf dem Inter-vall I stetig ist. Die zugehörige homogene Gleichung (6.3.2.2) ( )ba;x0,byyay =∈=+′+′′ I heißt komplementäre Gleichung. Theorem 6.3.2.1: Angenommen py ist eine spezielle Lösung der inhomogenen Gleichung (6.3.2.1)
und yg ist die allgemeine Lösung der komplementären Gleichung (6.3.2.2). Dann ist y = py + gy die allgemeine Lösung der inhomogenen Gleichung (6.3.2.1).
Beweis:
( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ).xg0xg
ybyayybyay
yybyyayy
gggppp
gpgpgp
=+=
+′+″++′+″=
++′++″+(i)
Also ist y = py + gy eine Lösung von (6.3.2.1).
(ii) Falls y = f(x) eine andere Lösung ist, dann

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�����
( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) 0.xgxg
ybyayybyay
yybyyayy
ppp
ppp
=−=
+′+″−+′+″=
−+′−+″−
Folglich ist y - py eine Lösung der komplementären Gleichung und daher ist
y - py = gy für ein gy , was wir zu beweisen hatten.
Mit Theorem 6.3.2.1 erhalten wir die folgende Anleitung, um eine inhomogene Diffe-rentialgleichung mit konstanten Koeffizienten zu lösen: (i) Finde die allgemeine Lösung gy der komplementären Gleichung (benutze dazu
Tabelle 6.3.1.1). (ii) Finde eine spezielle Lösung py der inhomogenen Gleichung.
(iii) Die allgemeine Lösung des inhomogenen Problems ist dann y = py + gy .
Beispiel 6.3.2.1: Löse die Differentialgleichung (6.3.2.3) 3x4x6y4y −=−′′ . Lösung: Durch „genaues Hinschauen“ finden wir heraus, dass ( ) 3
p xxy = eine spezielle Lö-
sung der Gleichung (6.3.2.3) ist. Die komplementäre Gleichung 0y4y =−′′ hat die
allgemeine Lösung ( ) x22
x21g ececxy −+= . Also hat die Gleichung (6.3.2.3) die allge-
meine Lösung ( ) 3x22
x21 xececxy ++= − .
Falls eine spezielle Lösung der inhomogenen Gleichung nicht durch „genaues Hin-schauen“ gefunden werden kann, ist oft folgende Technik, die Variation der Para-meter genannt wird, sehr hilfreich. (6.3.2.4) Variation der Parameter: Falls 2211 ycycy += die allgemeine Lösung der komplementären Gleichung (6.3.2.2) ist, dann ist ( ) ( ) ( ) ( ) ( )xyxvxyxuxy 21 += ,

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�����
eine spezielle Lösung der inhomogenen Gleichung (6.3.2.1), wobei u und v das fol-gende Gleichungssystem erfüllen: ( ) ( ) ( ) ( ) 0xyxvxyxu 21 =′+′ ( ) ( ) ( ) ( ) ( )xgxyxvxyxu 21 =′′+′′ . Beispiel 6.3.2.2: Wir lösen der Differentialgleichung (6.3.2.5) xcotyy =+′′ . Lösung: Die komplementäre Gleichung ist 0yy =+′′ mit der zugehörigen charakteristischen
Gleichung 01� 2 =+ , die die Wurzeln j± hat. Folglich ist die allgemeine Lösung des
homogenen Problems ( ) ( ) ( )xcoscxsincxy 21g += . Das Gleichungssystem in (6.3.2.4)
ist daher durch ( ) ( ) 0xcosvxsinu =′+′ ( ) ( ) xcotxsinvxcosu =′−′ gegeben. Durch algebraische Operationen erhalten wir:
(6.3.2.6) ( )( )xsinxcos
vu ′−=′
und
(6.3.2.7) ( )( )( )xcosxsin
vxcosxcot
u ′+=′ .
Mit (6.3.2.6) und (6.3.2.7) folgt:
(6.3.2.8) ( )( )
( )( ) ( )xcos
xcotxsinxcos
vxcosxsin
v =′+′ .
Folglich ( ) ( )xcosxv −=′ und ( ) ( ) ( )xsinxcscxu −=′ . Integration dieser Ausdrücke er-gibt (ohne die integrierenden Konstanten):
( ) ( )xsinxv −= , ( ) ( )xcosxcotxcsclnxu +−= .
Somit erhalten wir die spezielle Lösung:
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�����
( ) ( ) ( ) ( ) ( ) ( )xcosxsinxcosxsinxcotxcsclnxsinxy p −+−⋅=
� ( ) ( ) xcotxcsclnxsinxy p −⋅= .
Allgemeine Lösung unseres Problems: ( ) ( ) ( ) ( ) xcotxcsclnxsinxcoscxsincxy 21 −⋅++= .
Im Folgenden sind vier Regeln zum Lösen einer inhomogenen ODE zweiter Ordnung mit konstanten Koeffizienten der Form (6.3.1.1) angegeben. Mehr Informationen über dieses Thema findet man in Büchern der Höheren Mathematik oder natürlich in speziellen Büchern zur Theorie der Differentialgleichungen. (6.3.2.9)Verfahren für spezielle Lösungen: (i) Falls � xebyyay =+′+′′ , und
(a) β keine Wurzel der charakteristischen Gleichung 0ba�� 2 =++ ist, dann gibt es
eine spezielle Lösung der Form ( )�
xp Aexy = .
(b) β eine einfache Wurzel der charakteristischen Gleichung 0ba�� 2 =++ ist, dann
gibt es eine spezielle Lösung der Form ( )�
xp eAxxy ⋅= .
(c) β eine doppelte Wurzel der charakteristischen Gleichung 0ba�� 2 =++ ist, dann
gibt es eine spezielle Lösung der Form ( )�
x2p eAxxy ⋅= .
(ii) Falls
�xxebyyay =+′+′′ , und β keine Wurzel der charakteristischen Gleichung
0ba�� 2 =++ ist, dann gibt es eine spezielle Lösung der Form ( ) ( )
�x
p eBxAxy += .
(iii) Falls entweder ( )� xsinebyyay
�x ⋅=+′+′′ oder ( )� xcosebyyay
�x ⋅=+′+′′ und die
komplexe Zahl β+jα keine Lösung der charakteristischen Gleichung 0ba�� 2 =++
ist, dann gibt es eine spezielle Lösung der Form ( ) ( ) ( )� xsinBe� xcosAexy�
x�
xp ⋅+⋅= .
(iv) Falls ( )xPbyyay n=+′+′′ , und ( )xPn eine Polynom n-ten Grades ist, dann exi-stiert eine Lösung der Form: ( ) ( )xQxy np = , falls 0b ≠ ; ( ) ( )xQxxy np ⋅= , falls
0b0,a =≠ ; ( ) ( )xQxxy n2
p ⋅= , falls 0b0,a == .
Beispiel 6.3.2.3: (i) Wir lösen die Gleichung (6.3.2.10) 1x14x12y24y10y 2 ++=−′+′′ . Lösung: Die komplementäre Gleichung ist 0y24y10y =−′+′′ mit der zugehörigen charakteri-
stischen Gleichung 024�
10� 2 =−+ , welche die Wurzeln 2
�12,
�21 =−= besitzt.

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
����
Folglich ist die allgemeine Lösung der homogenen Gleichung ( ) x22
x121g ececxy += − .
Wir verwenden (6.3.2.9)(iv), um eine spezielle Lösung zu finden. Wir setzen (6.3.2.11) ( ) 01
22p axaxaxy ++= ,
da 0b ≠ . Als Ableitungen erhalten wir: (6.3.2.12) ( ) 12p axa2xy +=′ und ( ) 2p a2xy =′′ .
Setzen wir das in (6.3.2.10) ein, so erhalten wir durch Koeffizientenvergleich das lineare System:
(6.3.2.13) ��
��
�
=++−=+−=−
12aa10a24
14a20a24
12a24
210
21
2
,
das die folgende Lösung hat:
(6.3.2.14) 21
a1,a,21
a 012 −=−=−= .
Folglich ist die allgemeine Lösung des inhomogenen Problems (6.3.2.10):
( )21
xx21
ececxy 2x22
x121 −−−+= − .
(ii) Wir lösen die Gleichung (6.3.2.15) x4xey18y3y =−′−′′ . Lösung: Die komplementäre Gleichung ist 0y18y3y =−′−′′ mit der zugehörigen charakteri-
stischen Gleichung 018�
3� 2 =−− , welche die Wurzeln 3
�6,
�21 −== hat. Folglich
ist die allgemeine Lösung der homogenen Gleichung ( ) x32
x61g ececxy −+= . Wir be-
nutzen (6.3.2.9)(ii), um eine spezielle Lösung zu finden. Dazu setzen wir (6.3.2.16) ( ) ( ) x4
p eBxAxy += ,
da 4 keine Wurzel der charakteristischen Gleichung ist. Wir erhalten als Ableitungen: (6.3.2.17) ( ) ( ) x4
p eBBx4A4xy ++=′ und ( ) ( ) x4p eB8Bx16A16xy ++=′′ .
Durch Einsetzen von (6.3.2.16) und (6.3.2.17) in (6.3.2.15) erhalten wir die einfache Gleichung:

Mathematik für Ingenieure II (IAM) Version 1.0/�����������
����
( )xB141B5A14 +=+− , die für alle x ∈ � gelten muss. Somit ist ( ) ( ) x4
p eBxAxy += eine Lösung, vorausge-
setzt 0B5A14 =+− und 0B141 =+ . Daher ist eine spezielle Lösung unseres Problems gegeben durch
( ) x4p ex
141
1965
xy ��
�
� −−= .
Also ist die allgemeine Lösung unseres Problems
( ) x4x32
x61 ex
141
1965
ececxy ��
�
� +−+= − .
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�����
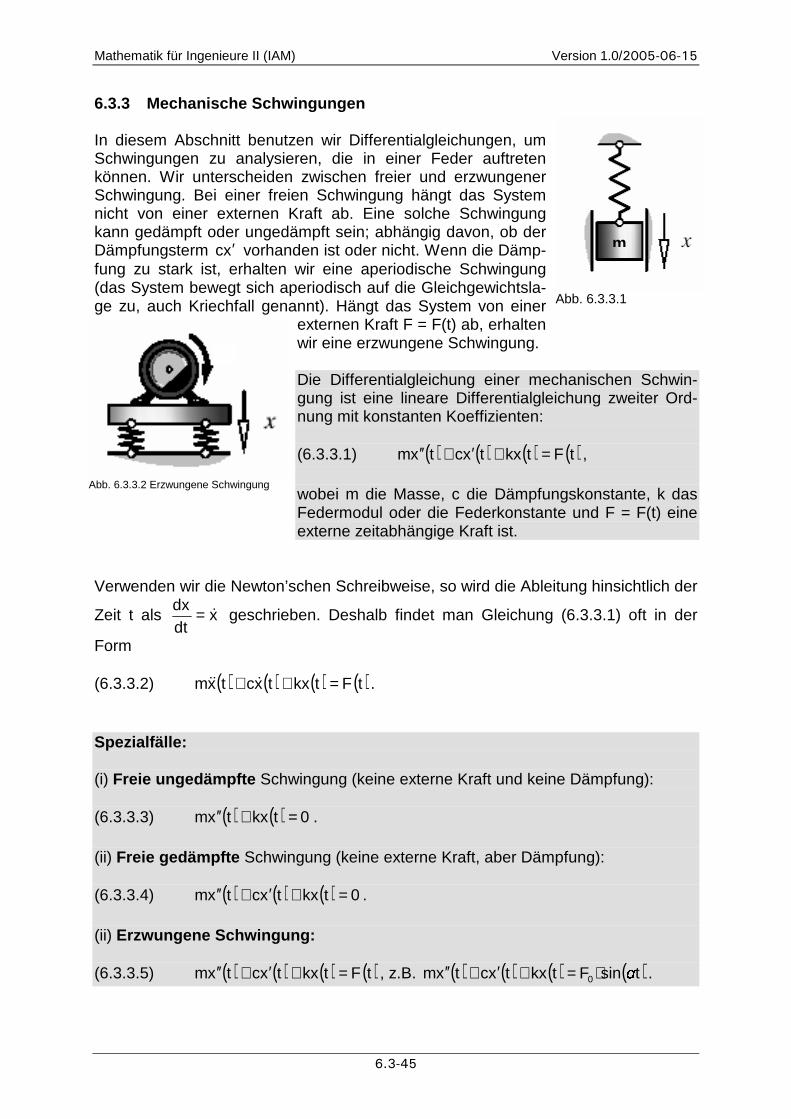
6.3.3 Mechanische Schwingungen In diesem Abschnitt benutzen wir Differentialgleichungen, um Schwingungen zu analysieren, die in einer Feder auftreten können. Wir unterscheiden zwischen freier und erzwungener Schwingung. Bei einer freien Schwingung hängt das System nicht von einer externen Kraft ab. Eine solche Schwingung kann gedämpft oder ungedämpft sein; abhängig davon, ob der Dämpfungsterm xc ′ vorhanden ist oder nicht. Wenn die Dämp-fung zu stark ist, erhalten wir eine aperiodische Schwingung (das System bewegt sich aperiodisch auf die Gleichgewichtsla-ge zu, auch Kriechfall genannt). Hängt das System von einer
externen Kraft F = F(t) ab, erhalten wir eine erzwungene Schwingung. Die Differentialgleichung einer mechanischen Schwin-gung ist eine lineare Differentialgleichung zweiter Ord-nung mit konstanten Koeffizienten: (6.3.3.1) ( ) ( ) ( ) ( )tFtkxtxctxm =+′+′′ , wobei m die Masse, c die Dämpfungskonstante, k das Federmodul oder die Federkonstante und F = F(t) eine externe zeitabhängige Kraft ist.
Verwenden wir die Newton’schen Schreibweise, so wird die Ableitung hinsichtlich der
Zeit t als xdtdx
�= geschrieben. Deshalb findet man Gleichung (6.3.3.1) oft in der
Form (6.3.3.2) ( ) ( ) ( ) ( )tFtkxtxctxm =++ ��� . Spezialfälle: (i) Freie ungedämpfte Schwingung (keine externe Kraft und keine Dämpfung): (6.3.3.3) ( ) ( ) 0tkxtxm =+′′ . (ii) Freie gedämpfte Schwingung (keine externe Kraft, aber Dämpfung): (6.3.3.4) ( ) ( ) ( ) 0tkxtxctxm =+′+′′ . (ii) Erzwungene Schwingung: (6.3.3.5) ( ) ( ) ( ) ( )tFtkxtxctxm =+′+′′ , z.B. ( ) ( ) ( ) ( )� tsinFtkxtxctxm 0 ⋅=+′+′′ .
Abb. 6.3.3.1
Abb. 6.3.3.2 Erzwungene Schwingung
m
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�����
Freie ungedämpfte Schwingung: Es ist üblich, die Gleichung der freien ungedämpften Schwingung in der Form (6.3.3.6) ( ) ( ) 0tx�tx 2 =+′′
zu schreiben, wobei mk� 2 = . Die zugehörige charakteristische Gleichung ist nun
0�� 22 =+
mit den konjugiert komplexen Lösungen j ��
1 = und j ��2 −= hat. Somit erhalten
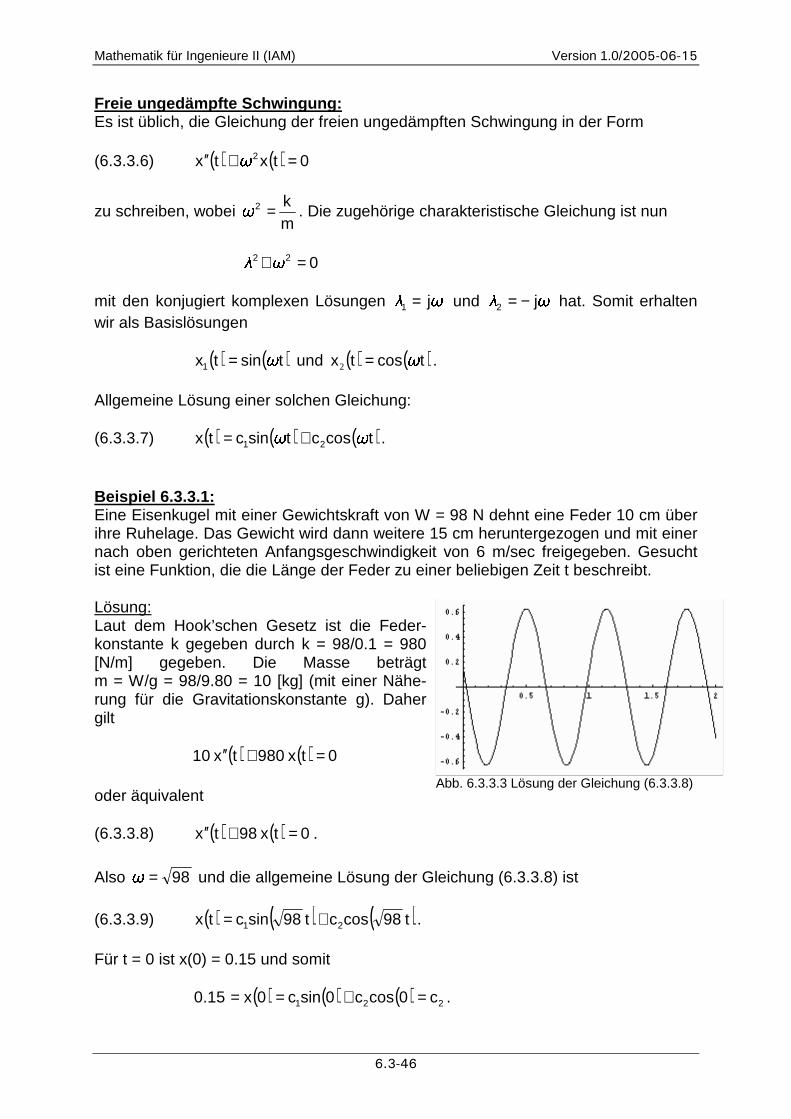
wir als Basislösungen ( ) ( )� tsintx1 = und ( ) ( )� tcostx =2 . Allgemeine Lösung einer solchen Gleichung: (6.3.3.7) ( ) ( ) ( )� tcosc� tsinctx 21 += . Beispiel 6.3.3.1: Eine Eisenkugel mit einer Gewichtskraft von W = 98 N dehnt eine Feder 10 cm über ihre Ruhelage. Das Gewicht wird dann weitere 15 cm heruntergezogen und mit einer nach oben gerichteten Anfangsgeschwindigkeit von 6 m/sec freigegeben. Gesucht ist eine Funktion, die die Länge der Feder zu einer beliebigen Zeit t beschreibt. Lösung: Laut dem Hook’schen Gesetz ist die Feder-konstante k gegeben durch k = 98/0.1 = 980 [N/m] gegeben. Die Masse beträgt m = W/g = 98/9.80 = 10 [kg] (mit einer Nähe-rung für die Gravitationskonstante g). Daher gilt
( ) ( ) 0tx980tx10 =+′′ oder äquivalent (6.3.3.8) ( ) ( ) 0tx98tx =+′′ . Also 98� = und die allgemeine Lösung der Gleichung (6.3.3.8) ist (6.3.3.9) ( ) ( ) ( )t98cosct98sinctx 21 += . Für t = 0 ist x(0) = 0.15 und somit ( ) ( ) ( ) 221 c0cosc0sinc0x0.15 =+== .
Abb. 6.3.3.3 Lösung der Gleichung (6.3.3.8)
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�����
Da
( ) ( ) ( )t98sinc98t98cosc98tdtdx
21 −=
und ( ) 60dtdx −= , erhalten wir
( ) ( ) ( ) 121 c980sinc980cosc980dtdx
6 =−==− .
� 98
6c1 −= .
Federlänge zur Zeit t:
( ) ( ) ( )t98sin98
6t98cos0.15tx −⋅=
Bemerkung 6.3.3.1: Mit den Additionstheoremen erhalten wir:
(i) ( )AB
tan�
,�
xcosBAxBsinxAcos 22 =−+=+
(ii) ( )BA
tan�
,�
xsinBAxBsinxAcos 22 =++=+
Daher kann die allgemeine Lösung der Gleichung (6.3.3.6) geschrieben werden als (6.3.3.10) ( ) ( )�� tcosCtx −⋅= ,
wobei 2
122
21 c
c�tan,ccC =+= ,
oder als (6.3.3.11) ( ) ( )�� tsinCtx +⋅= ,
wobei 1
222
21 c
c�tan,ccC =+= .
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
�����
Freie gedämpfte Schwingung: Die Differentialgleichung einer freien gedämpften Schwingung lautet (6.3.3.12) ( ) ( ) ( ) 0tkxtxctxm =+′+′′
oder mit mc
p2 = und mk� 2 =
(6.3.3.13) ( ) ( ) ( ) 0tx�txp2tx 2 =+′+′′ . Die Wurzeln der charakteristischen Gleichung 0�p
�2
� 22 =++ sind
(6.3.3.14) 221
�pp�
−+−= und 222
�pp�
−−−= . Die folgenden drei Möglichkeiten können auftreten: Fall I 0�p 22 >− → stark gedämpfte Schwingung:
Mit Tabelle 6.3.1.1 ist die allgemeine Lösung
(6.3.3.14) ( ) ��
�� += −−−− t�p
2t�p
1pt 2222
ececetx
In diesem Fall gilt:
mk4c0m4
mk4c�p 22
222 >�>−=− .
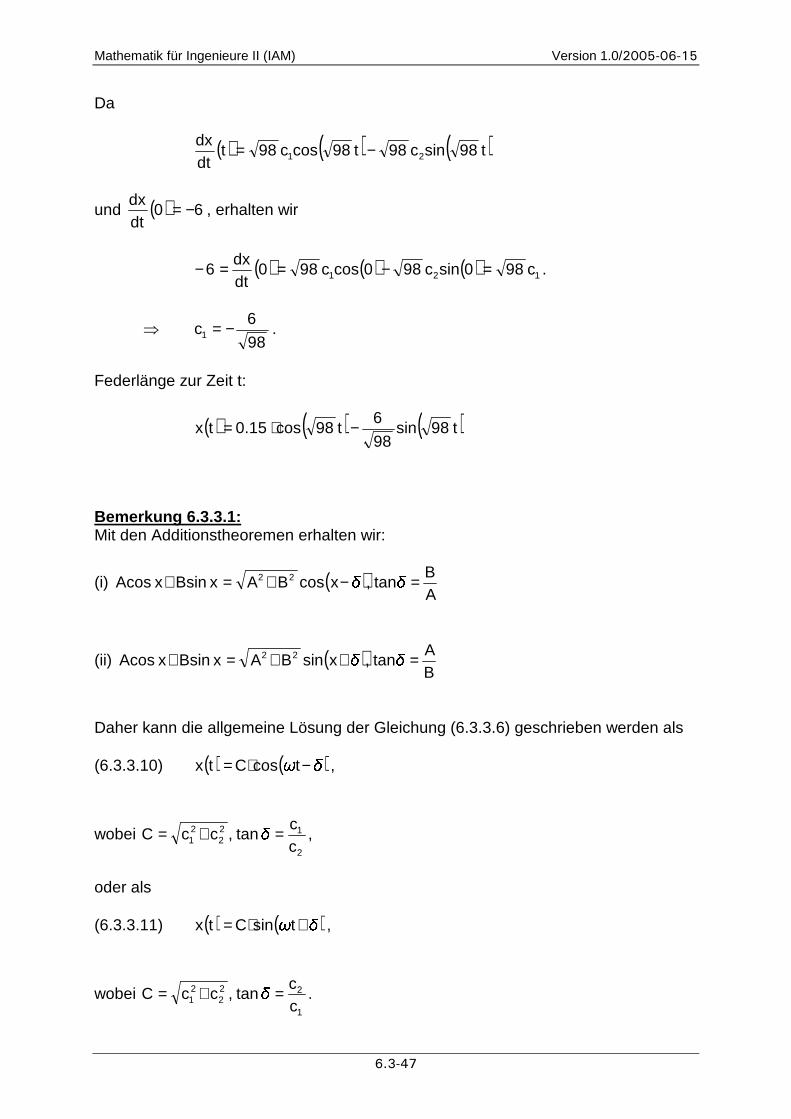
Die Dämpfungskonstante c ist groß im Ver-gleich zur Federkonstanten k; d.h., die Dämp-fungskraft dominiert die Rückstellkraft der Fe-der und das Gewicht kehrt schnell (asympto-tisch) in die Gleichgewichtsposition zurück. Diese Situation liegt vor, wenn das Dämp-fungsmedium eine hohe Viskosität hat, wie es z.B. bei schwerem Öl oder Fett der Fall ist. Die Art und Weise in der sich x Null annähert, hängt von der Konstante c1 und c2 ab und somit von den Anfangsbedingungen. Falls beide Konstanten positiv sind, hat der Graph im All-gemeinen die Form wie in Abb. 6.3.3.4(i). Bei unterschiedlichen Vorzeichen, hat der Graph
das in Abb. 6.3.3.4(ii) gezeigte Aussehen.
Abb. 6.3.3.4 Stark gedämpfte Schwingung
(i)
(ii)
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
��� �
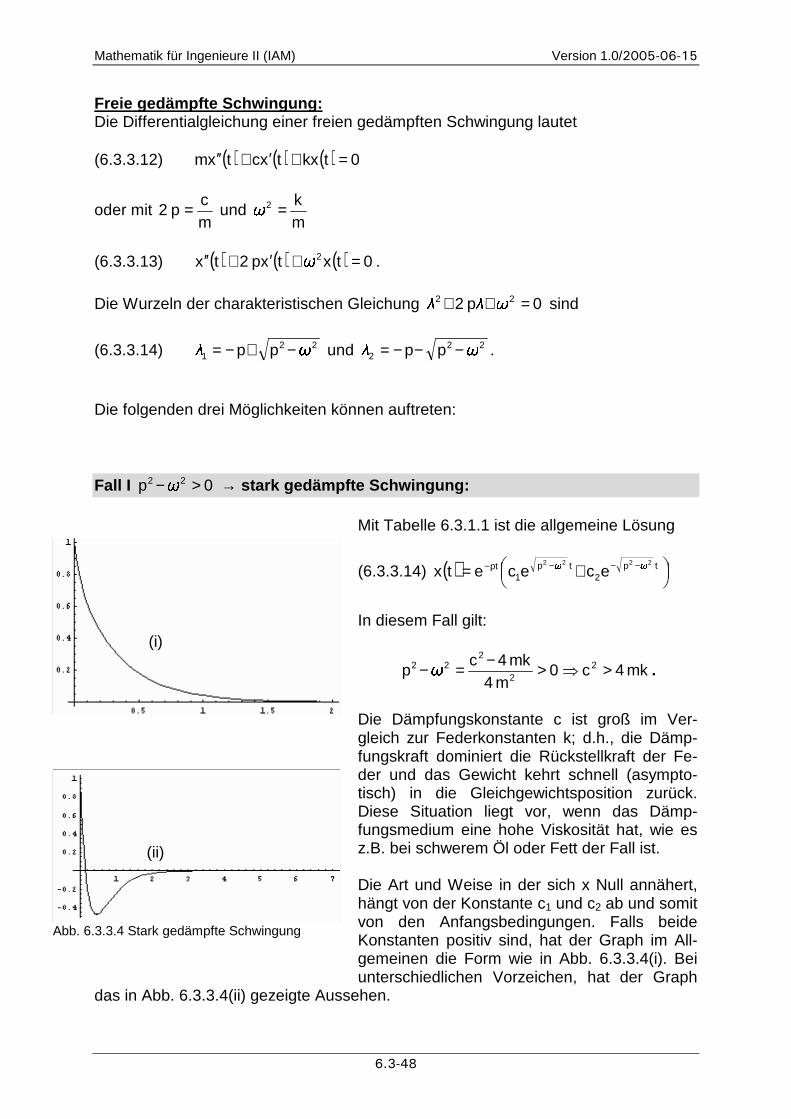
Fall II 0�p 22 =− → kritisch gedämpft (aperiodischer Grenzfall): In diesem Fall hat die charakteristische Gleichung die doppelte Wurzel –p und mit Tabelle 6.3.1.1 erhalten wir die allgemeine Lösung (6.3.3.15) ( ) ( )tccetx 21
pt += − . Der typische Graph einer Lösung ist in Abb. 6.3.3.5 skizziert und ist dem Graphen in Abb. 6.3.3.4(i) ähnlich. Jede Abnahme der Dämpfungskraft führt jetzt zu einer oszil-lierenden Bewegung, die in Fall III diskutiert wird.
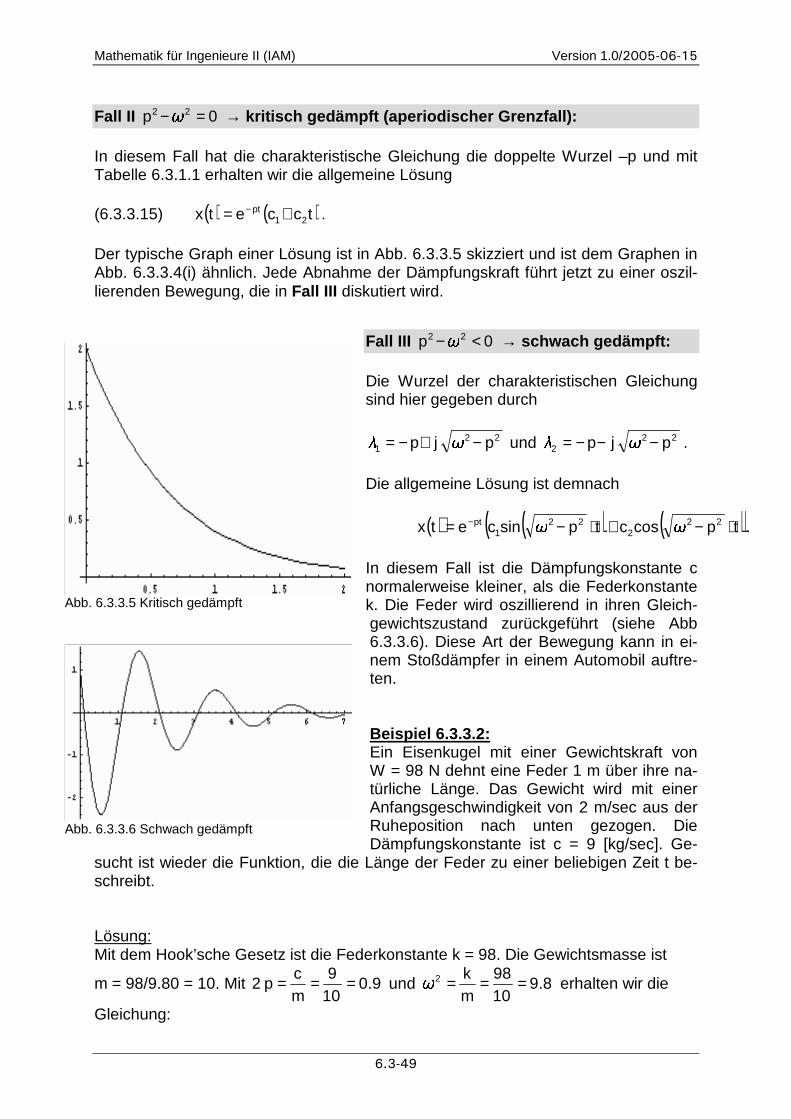
Fall III 0�p 22 <− → schwach gedämpft: Die Wurzel der charakteristischen Gleichung sind hier gegeben durch
221 p�jp
�−+−= und 22
2 p�jp�
−−−= . Die allgemeine Lösung ist demnach
( ) ( ) ( )( ).tp�cosctp�sincetx 222
221
pt ⋅−+⋅−= −
In diesem Fall ist die Dämpfungskonstante c normalerweise kleiner, als die Federkonstante k. Die Feder wird oszillierend in ihren Gleich-gewichtszustand zurückgeführt (siehe Abb 6.3.3.6). Diese Art der Bewegung kann in ei-nem Stoßdämpfer in einem Automobil auftre-ten. Beispiel 6.3.3.2: Ein Eisenkugel mit einer Gewichtskraft von W = 98 N dehnt eine Feder 1 m über ihre na-türliche Länge. Das Gewicht wird mit einer Anfangsgeschwindigkeit von 2 m/sec aus der Ruheposition nach unten gezogen. Die Dämpfungskonstante ist c = 9 [kg/sec]. Ge-
sucht ist wieder die Funktion, die die Länge der Feder zu einer beliebigen Zeit t be-schreibt. Lösung: Mit dem Hook’sche Gesetz ist die Federkonstante k = 98. Die Gewichtsmasse ist
m = 98/9.80 = 10. Mit 0.9109
mc
p2 === und 9.81098
mk� 2 === erhalten wir die
Gleichung:
Abb. 6.3.3.5 Kritisch gedämpft
Abb. 6.3.3.6 Schwach gedämpft
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
������
(6.3.3.16) ( ) ( ) ( ) 0tx9.8tx0.9tx =+′+′′ . Die Wurzel der charakteristischen Gleichung 09.8
�0.9
� 2 =++ sind j..
�1 097983450 +−= und j..
�2 097983450 −−= . Also ist die Bewegung schwach
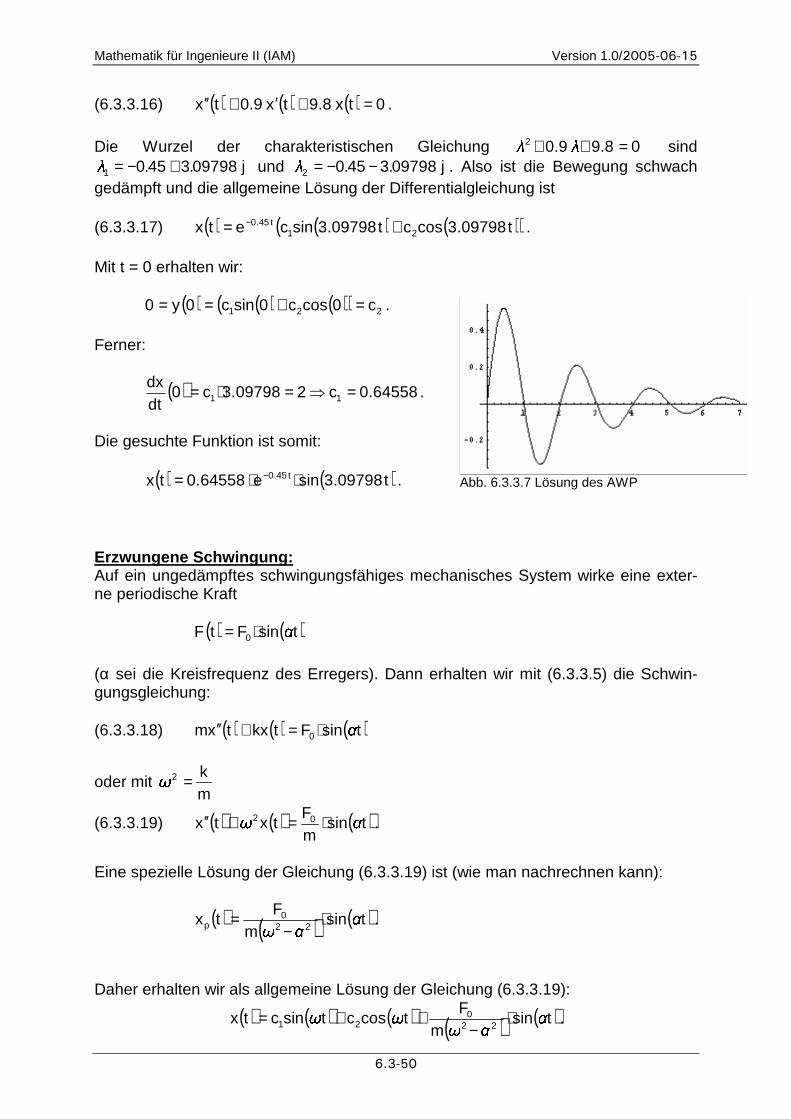
gedämpft und die allgemeine Lösung der Differentialgleichung ist (6.3.3.17) ( ) ( ) ( )( )t.cosct.sincetx 21
t. 097983097983450 += − . Mit t = 0 erhalten wir: ( ) ( ) ( )( ) 221 c0cosc0sinc0y0 =+== . Ferner:
( ) 6455802097983 .c.c0dtdx
11 =�=⋅= .
Die gesuchte Funktion ist somit: ( ) ( )t.sine.tx t. 097983645580 450 ⋅⋅= − . Erzwungene Schwingung: Auf ein ungedämpftes schwingungsfähiges mechanisches System wirke eine exter-ne periodische Kraft
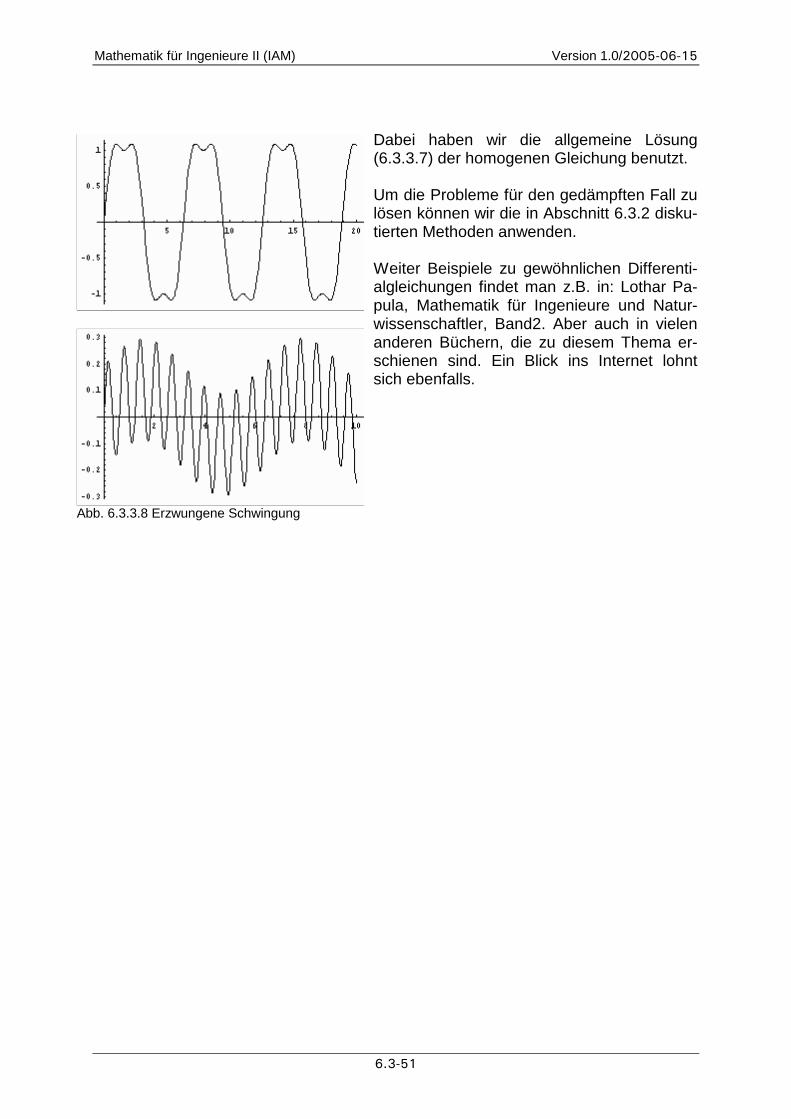
( ) ( )� tsinFtF 0 ⋅= (α sei die Kreisfrequenz des Erregers). Dann erhalten wir mit (6.3.3.5) die Schwin-gungsgleichung: (6.3.3.18) ( ) ( ) ( )� tsinFtkxtxm 0 ⋅=+′′
oder mit mk� 2 =
(6.3.3.19) ( ) ( ) ( )� tsinmF
tx�tx 02 ⋅=+′′ .
Eine spezielle Lösung der Gleichung (6.3.3.19) ist (wie man nachrechnen kann):
( ) ( ) ( )� tsin��mF
tx22
0p ⋅
−= .
Daher erhalten wir als allgemeine Lösung der Gleichung (6.3.3.19):
( ) ( ) ( ) ( ) ( )� tsin��mF� tcosc� tsinctx
220
21 ⋅−
++= .
Abb. 6.3.3.7 Lösung des AWP
Mathematik für Ingenieure II (IAM) Version 1.0/�����������
������
Dabei haben wir die allgemeine Lösung (6.3.3.7) der homogenen Gleichung benutzt. Um die Probleme für den gedämpften Fall zu lösen können wir die in Abschnitt 6.3.2 disku-tierten Methoden anwenden. Weiter Beispiele zu gewöhnlichen Differenti-algleichungen findet man z.B. in: Lothar Pa-pula, Mathematik für Ingenieure und Natur-wissenschaftler, Band2. Aber auch in vielen anderen Büchern, die zu diesem Thema er-schienen sind. Ein Blick ins Internet lohnt sich ebenfalls.
Abb. 6.3.3.8 Erzwungene Schwingung