Embed Size (px)
Citation preview
ABCA
BC7→
Affine AbbildungenDefinition und Anwendungsbeispiele
Prof. Dr. Andreas de Vries
Fachhochschule Südwestfalen, Standort Hagen
20. November 2018
1 / 30
Übersicht
1 EinführungMotivationMathematische VoraussetzungenDefinition
2 Fixpunkte affiner Abbildungen
3 AnwendungenTechnische ZeichnungenInformatikPhysik
4 Affine und lineare Abbildungen
5 Schlussbetrachtungen
6 Literatur
2 / 30
Einführung Motivation
Affine Abbildungen im Alltag?
Beispiel Sport: 3D-Spielanalyse
7→
https://www.youtube.com/watch?v=udfcdZsDsBE
3 / 30

Einführung Motivation
Affine Abbildungen im Alltag?
Beispiel Sport: 3D-Spielanalyse
7→
https://www.youtube.com/watch?v=udfcdZsDsBE
3 / 30
Einführung Mathematische Voraussetzungen
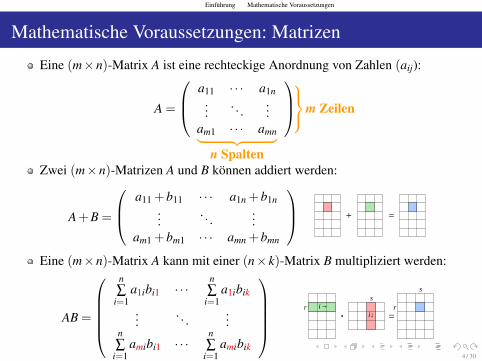
Mathematische Voraussetzungen: Matrizen
Eine (m×n)-Matrix A ist eine rechteckige Anordnung von Zahlen (aij):
A =
a11 · · · a1n...
. . ....
am1 · · · amn
︸ ︷︷ ︸
n Spalten
m Zeilen
Zwei (m×n)-Matrizen A und B können addiert werden:
A+B =
a11 +b11 · · · a1n +b1n...
. . ....
am1 +bm1 · · · amn +bmn
+ =
Eine (m×n)-Matrix A kann mit einer (n× k)-Matrix B multipliziert werden:
AB =
n∑
i=1a1ibi1 · · ·
n∑
i=1a1ibik
.... . .
...n∑
i=1amibi1 · · ·
n∑
i=1amibik
· =r
sr
s
i→i↓
4 / 30
Einführung Mathematische Voraussetzungen
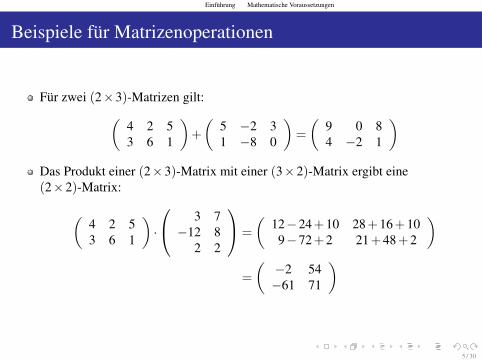
Beispiele für Matrizenoperationen
Für zwei (2×3)-Matrizen gilt:(4 2 53 6 1
)+
(5 −2 31 −8 0
)=
(9 0 84 −2 1
)Das Produkt einer (2×3)-Matrix mit einer (3×2)-Matrix ergibt eine(2×2)-Matrix:
(4 2 53 6 1
)·
3 7−12 8
2 2
=
(12−24+10 28+16+10
9−72+2 21+48+2
)
=
(−2 54−61 71
)
5 / 30
Einführung Mathematische Voraussetzungen
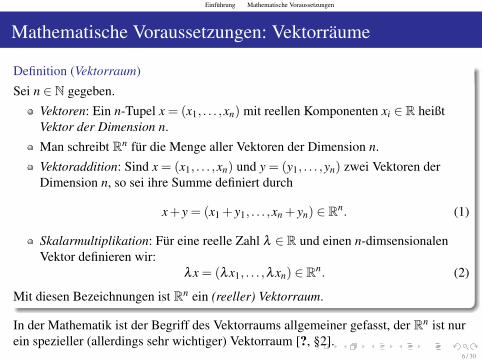
Mathematische Voraussetzungen: Vektorräume
Definition (Vektorraum)
Sei n ∈ N gegeben.Vektoren: Ein n-Tupel x = (x1, . . . ,xn) mit reellen Komponenten xi ∈ R heißtVektor der Dimension n.Man schreibt Rn für die Menge aller Vektoren der Dimension n.Vektoraddition: Sind x = (x1, . . . ,xn) und y = (y1, . . . ,yn) zwei Vektoren derDimension n, so sei ihre Summe definiert durch
x+ y = (x1 + y1, . . . ,xn + yn) ∈ Rn. (1)
Skalarmultiplikation: Für eine reelle Zahl λ ∈ R und einen n-dimsensionalenVektor definieren wir:
λx = (λx1, . . . ,λxn) ∈ Rn. (2)
Mit diesen Bezeichnungen ist Rn ein (reeller) Vektorraum.
In der Mathematik ist der Begriff des Vektorraums allgemeiner gefasst, der Rn ist nurein spezieller (allerdings sehr wichtiger) Vektorraum [?, §2].
6 / 30
Einführung Definition
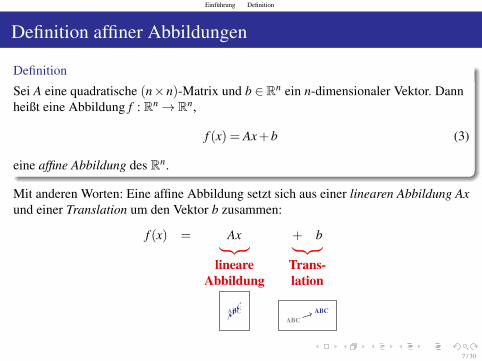
Definition affiner Abbildungen
Definition
Sei A eine quadratische (n×n)-Matrix und b ∈ Rn ein n-dimensionaler Vektor. Dannheißt eine Abbildung f : Rn→ Rn,
f (x) = Ax+b (3)
eine affine Abbildung des Rn.
Mit anderen Worten: Eine affine Abbildung setzt sich aus einer linearen Abbildung Axund einer Translation um den Vektor b zusammen:
f (x) = Ax + b︸ ︷︷ ︸lineare
Abbildung
︸ ︷︷ ︸Trans-lation
ABCA
BC
ABCABC
7 / 30
Einführung Definition
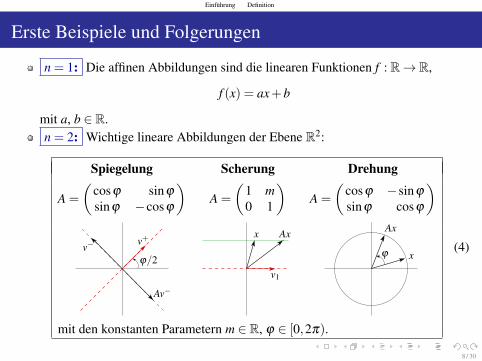
Erste Beispiele und Folgerungen
n = 1: Die affinen Abbildungen sind die linearen Funktionen f : R→ R,
f (x) = ax+b
mit a, b ∈ R.
n = 2: Wichtige lineare Abbildungen der Ebene R2:
Spiegelung Scherung Drehung
A =
(cosϕ sinϕ
sinϕ −cosϕ
)A =
(1 m0 1
)A =
(cosϕ −sinϕ
sinϕ cosϕ
)
v− v+
Av−
ϕ/2v1
x Ax
ϕ x
Ax
mit den konstanten Parametern m ∈ R, ϕ ∈ [0,2π).
(4)
8 / 30
Einführung Definition
Erste Beispiele und Folgerungen
n = 1: Die affinen Abbildungen sind die linearen Funktionen f : R→ R,
f (x) = ax+b
mit a, b ∈ R.n = 2: Wichtige lineare Abbildungen der Ebene R2:
Spiegelung Scherung Drehung
A =
(cosϕ sinϕ
sinϕ −cosϕ
)A =
(1 m0 1
)A =
(cosϕ −sinϕ
sinϕ cosϕ
)
v− v+
Av−
ϕ/2v1
x Ax
ϕ x
Ax
mit den konstanten Parametern m ∈ R, ϕ ∈ [0,2π).
(4)
8 / 30
Fixpunkte affiner Abbildungen
Übersicht
1 EinführungMotivationMathematische VoraussetzungenDefinition
2 Fixpunkte affiner Abbildungen
3 AnwendungenTechnische ZeichnungenInformatikPhysik
4 Affine und lineare Abbildungen
5 Schlussbetrachtungen
6 Literatur
9 / 30
Fixpunkte affiner Abbildungen
Fixpunkte
DefinitionFür eine allgemeine Abbildung f : X→ X einer beliebigen Menge in sich heißt einPunkt x ∈ X mit der Eigenschaft
x∗ = f (x∗) (5)
ein Fixpunkt.
Beispiel für n = 1: Eine affine Abbildung f (x) = ax+b mit a 6= 1 hat einenFixpunkt x∗ = b
1−a . Für a = 1 und b = 0 hat f eine Fixgerade R, für a = 1 undb 6= 0 dagegen hat f keinen Fixpunkt. (Warum?)
Beweis. Für a 6= 1 gilt x∗ = ax∗+b ⇐⇒ (1−a)x∗ = b ⇐⇒ x∗ = b1−a . Für
a = 1 und b = 0 ist ja f (x) = x, d.h. alle Punkte sind fix. Für a = 1 und b 6= 0dagegen müsste gelten x∗ = x∗+b ⇐⇒ 0 = b, was sich aber widerspräche;daher kann kein x∗ die Fixpunktgleichung erfüllen.
10 / 30
Fixpunkte affiner Abbildungen
Fixpunkte
DefinitionFür eine allgemeine Abbildung f : X→ X einer beliebigen Menge in sich heißt einPunkt x ∈ X mit der Eigenschaft
x∗ = f (x∗) (5)
ein Fixpunkt.
Beispiel für n = 1: Eine affine Abbildung f (x) = ax+b mit a 6= 1 hat einenFixpunkt x∗ = b
1−a . Für a = 1 und b = 0 hat f eine Fixgerade R, für a = 1 undb 6= 0 dagegen hat f keinen Fixpunkt. (Warum?)
Beweis. Für a 6= 1 gilt x∗ = ax∗+b ⇐⇒ (1−a)x∗ = b ⇐⇒ x∗ = b1−a . Für
a = 1 und b = 0 ist ja f (x) = x, d.h. alle Punkte sind fix. Für a = 1 und b 6= 0dagegen müsste gelten x∗ = x∗+b ⇐⇒ 0 = b, was sich aber widerspräche;daher kann kein x∗ die Fixpunktgleichung erfüllen.
10 / 30
Fixpunkte affiner Abbildungen
Fixpunkte ebener affiner Abbildungen mit einer90◦-Drehung
n = 2: Eine affine Abbildung f (x) = Ax+b mit einer Drehung um 90◦ (ϕ = π
2 ):
A =
(0 −11 0
)hat immer einen Fixpunkt. Welchen?
Lösung. Die Fixpunktgleichung x = f (x) ist nun eine Matrizengleichung:(x1x2
)=
(0 −11 0
)(x1x2
)+
(b1b2
)=
(−x2
x1
)+
(b1b2
)
⇐⇒(
x1 + x2x2− x1
)=
(b1b2
)Umstellen der ersten Gleichung nach x2 und Einsetzen dieses Terms für x2 in diezweite Gleichung liefert x1 =
b1−b22 und damit x2 =
b1+b22 , also
x∗ =12
(b1−b2b1 +b2
)(Machen Sie die Probe f (x∗) = x∗!)
11 / 30
Fixpunkte affiner Abbildungen
Fixpunkte ebener affiner Abbildungen mit einer90◦-Drehung
n = 2: Eine affine Abbildung f (x) = Ax+b mit einer Drehung um 90◦ (ϕ = π
2 ):
A =
(0 −11 0
)hat immer einen Fixpunkt. Welchen?
Lösung. Die Fixpunktgleichung x = f (x) ist nun eine Matrizengleichung:(x1x2
)=
(0 −11 0
)(x1x2
)+
(b1b2
)=
(−x2
x1
)+
(b1b2
)
⇐⇒(
x1 + x2x2− x1
)=
(b1b2
)Umstellen der ersten Gleichung nach x2 und Einsetzen dieses Terms für x2 in diezweite Gleichung liefert x1 =
b1−b22 und damit x2 =
b1+b22 , also
x∗ =12
(b1−b2b1 +b2
)(Machen Sie die Probe f (x∗) = x∗!)
11 / 30
Fixpunkte affiner Abbildungen
Fixpunkte ebener affiner Abbildungen mit 180◦-Drehung
Eine ebene affine Abbildung f (x) = Ax+b mit einer Drehung um 180◦ (ϕ = π):
A =
(−1 0
0 −1
)hat immer einen Fixpunkt. Welchen? (https://www.youtube.com/watch?v=JeDk1r6puGQ)
Lösung. Die Fixpunktgleichung x = f (x) ist nun eine Matrizengleichung:(x1x2
)=
(−1 00 −1
)(x1x2
)+
(b1b2
)=
(−x1−x2
)+
(b1b2
)⇐⇒
(2x12x2
)=
(b1b2
)Daraus ergibt sich sofort x1 =
b12 und x2 =
b22 , also
x∗ =12
(b1b2
)(Machen Sie die Probe f (x∗) = x∗!)
12 / 30
Fixpunkte affiner Abbildungen
Fixpunkte ebener affiner Abbildungen mit Drehungen
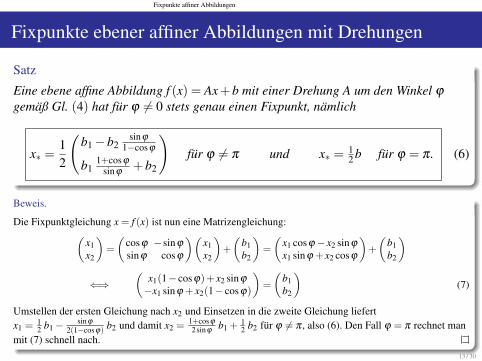
Satz
Eine ebene affine Abbildung f (x) = Ax+b mit einer Drehung A um den Winkel ϕ
gemäß Gl. (4) hat für ϕ 6= 0 stets genau einen Fixpunkt, nämlich
x∗ =12
(b1−b2
sinϕ
1−cosϕ
b11+cosϕ
sinϕ+b2
)für ϕ 6= π und x∗ = 1
2 b für ϕ = π . (6)
Beweis.
Die Fixpunktgleichung x = f (x) ist nun eine Matrizengleichung:(x1x2
)=
(cosϕ −sinϕ
sinϕ cosϕ
)(x1x2
)+
(b1b2
)=
(x1 cosϕ− x2 sinϕ
x1 sinϕ + x2 cosϕ
)+
(b1b2
)
⇐⇒(
x1(1− cosϕ)+ x2 sinϕ
−x1 sinϕ + x2(1− cosϕ)
)=
(b1b2
)(7)
Umstellen der ersten Gleichung nach x2 und Einsetzen in die zweite Gleichung liefertx1 =
12 b1− sinϕ
2(1−cosϕ) b2 und damit x2 =1+cosϕ
2sinϕb1 +
12 b2 für ϕ 6= π , also (6). Den Fall ϕ = π rechnet man
mit (7) schnell nach.
13 / 30
Fixpunkte affiner Abbildungen
Fixpunkte ebener affiner Abbildungen mit Drehungen
Satz
Eine ebene affine Abbildung f (x) = Ax+b mit einer Drehung A um den Winkel ϕ
gemäß Gl. (4) hat für ϕ 6= 0 stets genau einen Fixpunkt, nämlich
x∗ =12
(b1−b2
sinϕ
1−cosϕ
b11+cosϕ
sinϕ+b2
)für ϕ 6= π und x∗ = 1
2 b für ϕ = π . (6)
Beweis.
Die Fixpunktgleichung x = f (x) ist nun eine Matrizengleichung:(x1x2
)=
(cosϕ −sinϕ
sinϕ cosϕ
)(x1x2
)+
(b1b2
)=
(x1 cosϕ− x2 sinϕ
x1 sinϕ + x2 cosϕ
)+
(b1b2
)
⇐⇒(
x1(1− cosϕ)+ x2 sinϕ
−x1 sinϕ + x2(1− cosϕ)
)=
(b1b2
)(7)
Umstellen der ersten Gleichung nach x2 und Einsetzen in die zweite Gleichung liefertx1 =
12 b1− sinϕ
2(1−cosϕ) b2 und damit x2 =1+cosϕ
2sinϕb1 +
12 b2 für ϕ 6= π , also (6). Den Fall ϕ = π rechnet man
mit (7) schnell nach.13 / 30
Fixpunkte affiner Abbildungen
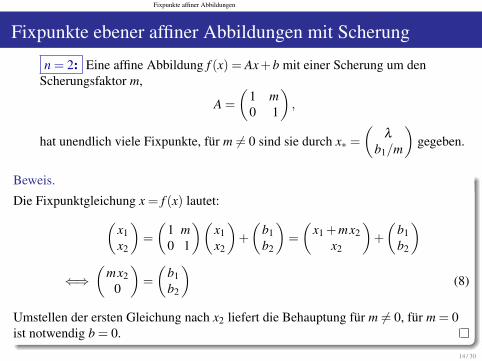
Fixpunkte ebener affiner Abbildungen mit Scherung
n = 2: Eine affine Abbildung f (x) = Ax+b mit einer Scherung um denScherungsfaktor m,
A =
(1 m0 1
),
hat unendlich viele Fixpunkte, für m 6= 0 sind sie durch x∗ =(
λ
b1/m
)gegeben.
Beweis.
Die Fixpunktgleichung x = f (x) lautet:(x1x2
)=
(1 m0 1
)(x1x2
)+
(b1b2
)=
(x1 +mx2
x2
)+
(b1b2
)⇐⇒
(mx2
0
)=
(b1b2
)(8)
Umstellen der ersten Gleichung nach x2 liefert die Behauptung für m 6= 0, für m = 0ist notwendig b = 0.
14 / 30
Fixpunkte affiner Abbildungen
Fixpunkte ebener affiner Abbildungen mit Scherung
n = 2: Eine affine Abbildung f (x) = Ax+b mit einer Scherung um denScherungsfaktor m,
A =
(1 m0 1
),
hat unendlich viele Fixpunkte, für m 6= 0 sind sie durch x∗ =(
λ
b1/m
)gegeben.
Beweis.
Die Fixpunktgleichung x = f (x) lautet:(x1x2
)=
(1 m0 1
)(x1x2
)+
(b1b2
)=
(x1 +mx2
x2
)+
(b1b2
)⇐⇒
(mx2
0
)=
(b1b2
)(8)
Umstellen der ersten Gleichung nach x2 liefert die Behauptung für m 6= 0, für m = 0ist notwendig b = 0.
14 / 30
Fixpunkte affiner Abbildungen
Fixpunkte ebener affiner Abbildungen mit Spiegelung ander Winkelhalbierenden
n = 2: Eine affine Abbildung f (x) = Ax+b mit einer Spiegelung um ϕ = π
2 ,
A =
(0 11 0
),
hat für bestimmte Translationsvektoren b unendlich viele Fixpunkte. Welche sind das und wie lautendie Fixpunkte?
Lösungen. Die Fixpunktgleichung x = f (x) ist wieder eine Matrizengleichung:(x1x2
)=
1√2
(0 11 0
)(x1x2
)+
(b1b2
)=
(x2x1
)+
(b1b2
)
⇐⇒(
x1− x2−x1 + x2
)=
(b1b2
)(9)
Umstellen der ersten Gleichung nach x2 ergibt x2 = x1−b1 und Einsetzen in die zweite Gleichungliefert −x1 +x1−b1 = b2 = −b1 = b2, also eine Festlegung der Richtung von b. Damit folgt, dass x1beliebig ist, aber x2 festlegt. Anders ausgedrückt:
x∗ =(
λ
λ −µ
)falls b = µ
(1−1
)für ein µ ∈ R. Ist b jedoch nicht derart darstellbar, so existiert auch kein Fixpunkt. Es gilt
Ab =
(0 11 0
)(µ
−µ
)=
(−µ
µ
), also Ab =−b.
15 / 30
Fixpunkte affiner Abbildungen
Fixpunkte ebener affiner Abbildungen mit Spiegelung ander Winkelhalbierenden
n = 2: Eine affine Abbildung f (x) = Ax+b mit einer Spiegelung um ϕ = π
2 ,
A =
(0 11 0
),
hat für bestimmte Translationsvektoren b unendlich viele Fixpunkte. Welche sind das und wie lautendie Fixpunkte?
Lösungen. Die Fixpunktgleichung x = f (x) ist wieder eine Matrizengleichung:(x1x2
)=
1√2
(0 11 0
)(x1x2
)+
(b1b2
)=
(x2x1
)+
(b1b2
)
⇐⇒(
x1− x2−x1 + x2
)=
(b1b2
)(9)
Umstellen der ersten Gleichung nach x2 ergibt x2 = x1−b1 und Einsetzen in die zweite Gleichungliefert −x1 +x1−b1 = b2 = −b1 = b2, also eine Festlegung der Richtung von b. Damit folgt, dass x1beliebig ist, aber x2 festlegt. Anders ausgedrückt:
x∗ =(
λ
λ −µ
)falls b = µ
(1−1
)für ein µ ∈ R. Ist b jedoch nicht derart darstellbar, so existiert auch kein Fixpunkt. Es gilt
Ab =
(0 11 0
)(µ
−µ
)=
(−µ
µ
), also Ab =−b.
15 / 30
Fixpunkte affiner Abbildungen
Fixpunkte ebener affiner Abbildungen mit SpiegelungSatz
Eine ebene affine Abbildung f (x) = Ax+b mit einer Spiegelung A um ϕ gemäß Gl. (4) hat unendlich vieleFixpunkte
x∗ =(
λ
b2/2
), wenn ϕ = b1 = 0, x∗ =
(−b1/2
λ
), wenn ϕ = π und b2 = 0, (10)
oder
x∗ =
(λ
1−cosϕ
sinϕ− µ
sinϕ
), wenn b = µ
(1
− 1+cosϕ
sinϕ
)für ein µ ∈ R (11)
(jeweils mit λ ∈ R). In all diesen Fällen gilt Ab =−b, für alle anderen Fälle existiert kein Fixpunkt.
Beweis.
Die Fixpunktgleichung x = f (x) ist wieder eine Matrizengleichung:(x1x2
)=
(cosϕ sinϕ
sinϕ −cosϕ
)(x1x2
)+
(b1b2
)=
(x1 cosϕ + x2 sinϕ
x1 sinϕ− x2 cosϕ
)+
(b1b2
)
⇐⇒(
x1(1− cosϕ)− x2 sinϕ
−x1 sinϕ + x2(1+ cosϕ)
)=
(b1b2
)(12)
Umstellen der ersten Gleichung nach x2 ergibt x2 = (x1(1− cosϕ)−b1)/sinϕ , und Einsetzen in die zweiteGleichung ergibt − b1(1+cosϕ)
sinϕ= b2, also eine Festlegung der Richtung von b. Daraus folgt (11). Für ϕ = 0
und ϕ = π ergibt (12) jeweils für beliebiges b direkt (10).16 / 30
Fixpunkte affiner Abbildungen
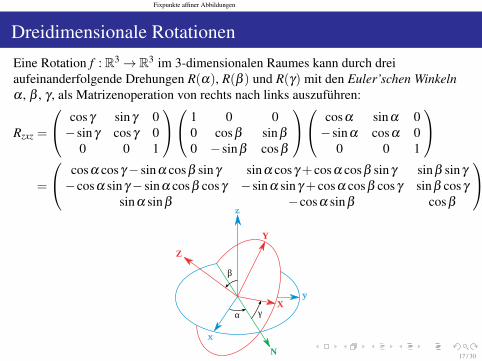
Dreidimensionale Rotationen
Eine Rotation f : R3→ R3 im 3-dimensionalen Raumes kann durch dreiaufeinanderfolgende Drehungen R(α), R(β ) und R(γ) mit den Euler’schen Winkelnα , β , γ , als Matrizenoperation von rechts nach links auszuführen:
Rzxz =
cosγ sinγ 0−sinγ cosγ 0
0 0 1
1 0 00 cosβ sinβ
0 −sinβ cosβ
cosα sinα 0−sinα cosα 0
0 0 1
=
cosα cosγ− sinα cosβ sinγ sinα cosγ + cosα cosβ sinγ sinβ sinγ
−cosα sinγ− sinα cosβ cosγ −sinα sinγ + cosα cosβ cosγ sinβ cosγ
sinα sinβ −cosα sinβ cosβ
N
x
y
z
Z
X
Y
α
β
γ
17 / 30
Anwendungen
Übersicht
1 EinführungMotivationMathematische VoraussetzungenDefinition
2 Fixpunkte affiner Abbildungen
3 AnwendungenTechnische ZeichnungenInformatikPhysik
4 Affine und lineare Abbildungen
5 Schlussbetrachtungen
6 Literatur
18 / 30
Anwendungen Technische Zeichnungen
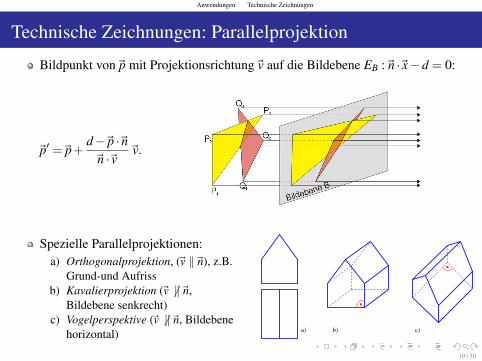
Technische Zeichnungen: Parallelprojektion
Bildpunkt von~p mit Projektionsrichtung~v auf die Bildebene EB :~n ·~x−d = 0:
~p′ =~p+d−~p ·~n~n ·~v
~v.
Spezielle Parallelprojektionen:a) Orthogonalprojektion, (~v ‖~n), z.B.
Grund-und Aufrissb) Kavalierprojektion (~v 6 ‖~n,
Bildebene senkrecht)c) Vogelperspektive (~v 6 ‖~n, Bildebene
horizontal) c)b)a)
19 / 30
Anwendungen Informatik
Informatik: SVG (Vektorgraphik)
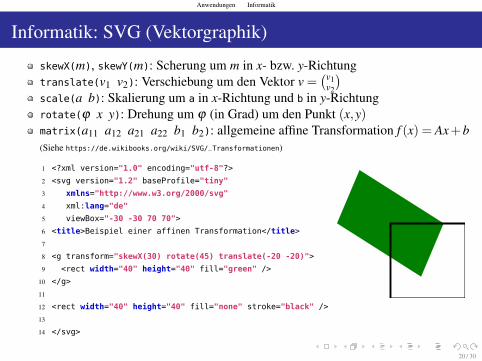
skewX(m), skewY(m): Scherung um m in x- bzw. y-Richtungtranslate(v1 v2): Verschiebung um den Vektor v =
(v1v2
)scale(a b): Skalierung um a in x-Richtung und b in y-Richtungrotate(ϕ x y): Drehung um ϕ (in Grad) um den Punkt (x,y)matrix(a11 a12 a21 a22 b1 b2): allgemeine affine Transformation f (x) = Ax+b(Siehe https://de.wikibooks.org/wiki/SVG/_Transformationen)
1 <?xml version="1.0" encoding="utf-8"?>
2 <svg version="1.2" baseProfile="tiny"
3 xmlns="http://www.w3.org/2000/svg"
4 xml:lang="de"
5 viewBox="-30 -30 70 70">
6 <title>Beispiel einer affinen Transformation</title>
7
8 <g transform="skewX(30) rotate(45) translate(-20 -20)">
9 <rect width="40" height="40" fill="green" />
10 </g>
11
12 <rect width="40" height="40" fill="none" stroke="black" />
13
14 </svg>
20 / 30
Anwendungen Informatik
Informatik: SVG (Vektorgraphik)
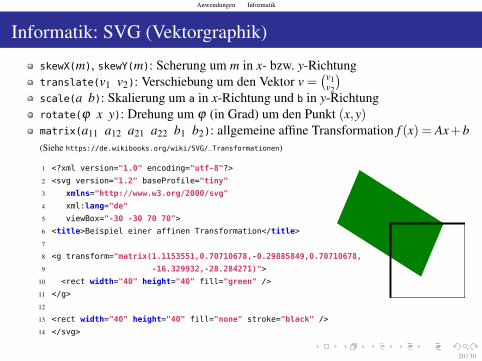
skewX(m), skewY(m): Scherung um m in x- bzw. y-Richtungtranslate(v1 v2): Verschiebung um den Vektor v =
(v1v2
)scale(a b): Skalierung um a in x-Richtung und b in y-Richtungrotate(ϕ x y): Drehung um ϕ (in Grad) um den Punkt (x,y)matrix(a11 a12 a21 a22 b1 b2): allgemeine affine Transformation f (x) = Ax+b(Siehe https://de.wikibooks.org/wiki/SVG/_Transformationen)
1 <?xml version="1.0" encoding="utf-8"?>
2 <svg version="1.2" baseProfile="tiny"
3 xmlns="http://www.w3.org/2000/svg"
4 xml:lang="de"
5 viewBox="-30 -30 70 70">
6 <title>Beispiel einer affinen Transformation</title>
7
8 <g transform="matrix(1.1153551,0.70710678,-0.29885849,0.70710678,
9 -16.329932,-28.284271)">
10 <rect width="40" height="40" fill="green" />
11 </g>
12
13 <rect width="40" height="40" fill="none" stroke="black" />
14 </svg>
20 / 30
Anwendungen Informatik
Computergrafik: Fraktale
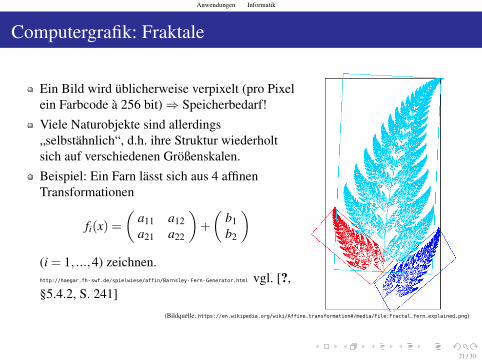
Ein Bild wird üblicherweise verpixelt (pro Pixelein Farbcode à 256 bit)⇒ Speicherbedarf!Viele Naturobjekte sind allerdings„selbstähnlich“, d.h. ihre Struktur wiederholtsich auf verschiedenen Größenskalen.Beispiel: Ein Farn lässt sich aus 4 affinenTransformationen
fi(x) =(
a11 a12a21 a22
)+
(b1b2
)(i = 1, ...,4) zeichnen.http://haegar.fh-swf.de/spielwiese/affin/Barnsley-Fern-Generator.html vgl. [?,§5.4.2, S. 241]
(Bildquelle: https://en.wikipedia.org/wiki/Affine_transformation#/media/File:Fractal_fern_explained.png)
21 / 30
Anwendungen Physik
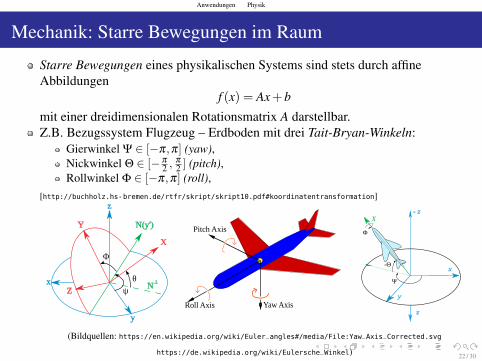
Mechanik: Starre Bewegungen im Raum
Starre Bewegungen eines physikalischen Systems sind stets durch affineAbbildungen
f (x) = Ax+b
mit einer dreidimensionalen Rotationsmatrix A darstellbar.Z.B. Bezugssystem Flugzeug – Erdboden mit drei Tait-Bryan-Winkeln:
Gierwinkel Ψ ∈ [−π,π] (yaw),Nickwinkel Θ ∈ [− π
2 ,π
2 ] (pitch),Rollwinkel Φ ∈ [−π,π] (roll),
[http://buchholz.hs-bremen.de/rtfr/skript/skript10.pdf#koordinatentransformation]
x
y
z
N(y')
NT
X
Y
Z ψ
θ
Φ
Yaw AxisRoll Axis
Pitch Axis
x
y
- z
Ψ
-Θ
X
Φ
z
(Bildquellen: https://en.wikipedia.org/wiki/Euler_angles#/media/File:Yaw_Axis_Corrected.svg
https://de.wikipedia.org/wiki/Eulersche_Winkel) 22 / 30
Affine und lineare Abbildungen
Übersicht
1 EinführungMotivationMathematische VoraussetzungenDefinition
2 Fixpunkte affiner Abbildungen
3 AnwendungenTechnische ZeichnungenInformatikPhysik
4 Affine und lineare Abbildungen
5 Schlussbetrachtungen
6 Literatur
23 / 30
Affine und lineare Abbildungen
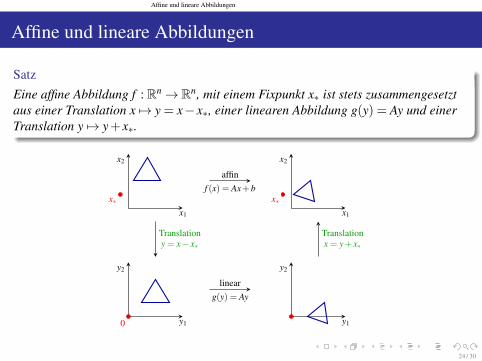
Affine und lineare Abbildungen
SatzEine affine Abbildung f : Rn→ Rn, mit einem Fixpunkt x∗ ist stets zusammengesetztaus einer Translation x 7→ y = x− x∗, einer linearen Abbildung g(y) = Ay und einerTranslation y 7→ y+ x∗.
x2
x1
x∗
affinf (x) = Ax+b
x2
x1
x∗
Translationy = x− x∗
y2
y10
linearg(y) = Ay
y2
y1
Translationx = y+ x∗
24 / 30
Affine und lineare Abbildungen
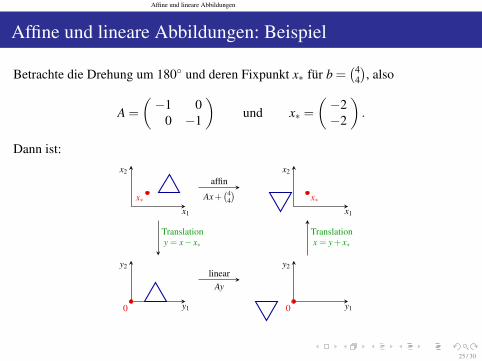
Affine und lineare Abbildungen: Beispiel
Betrachte die Drehung um 180◦ und deren Fixpunkt x∗ für b =(4
4
), also
A =
(−1 0
0 −1
)und x∗ =
(−2−2
).
Dann ist:x2
x1
x∗
affin
Ax+(4
4
)x2
x1
x∗
Translationy = x− x∗
y2
y10
linearAy
y2
y10
Translationx = y+ x∗
25 / 30
Affine und lineare Abbildungen
Affine Abbildungen und ihre Rolle heute
Der „interessante“ Teil einer affinen Abbildung ist durch die lineare Abbildunggegeben.⇒ Man betrachtet in der Höheren Mathematik und in Wissenschaft und Technik kaum
noch affine Abbildungen, sondern vorwiegend lineare Abbildungen.
Lineare Abbildungen im Rn lassen sich effizient durch quadratische Matrizendarstellen.Mit quadratischen Matrizen kann man wie mit Zahlen „rechnen”, also
Summen A+B,Produkte AB,und (oft) Quotienten A−1
bilden.⇒ Matrizen bilden eine sog. Algebra.⇒ Lineare Abbildungen sind Bestandteil der Linearen Algebra.
Affine Abbildungen sind heute ein spezielles Kapitel der Linearen Algebra und wer-den in Studium und Wissenschaft nur am Rande erwähnt. Dennoch sind sie, wie diegesamte Geometrie, oft Ursache und Anwendungsfeld algebraischer Betrachtungen.
26 / 30
Schlussbetrachtungen
Übersicht
1 EinführungMotivationMathematische VoraussetzungenDefinition
2 Fixpunkte affiner Abbildungen
3 AnwendungenTechnische ZeichnungenInformatikPhysik
4 Affine und lineare Abbildungen
5 Schlussbetrachtungen
6 Literatur
27 / 30
Schlussbetrachtungen
Zusammenfassung
Eine affine Abbildung f : Rn→ Rn ist gegeben durch eine (n×n)-Matrix A undeinen Verschiebungsvektor b ∈ Rn:
f (x) = Ax + b︸ ︷︷ ︸lineare
Abbildung
︸ ︷︷ ︸Trans-lation
ABCA
BC
ABCABC
Beispiele für affine Abbildungen: Drehstreckungen, Spiegelungen, ScherungenAffine Abbildungen können einen Fixpunkt x∗ = f (x∗) haben, im3-Dimensionalen z.B. die Punkte auf der Rotationsachse oder auf derSpiegelfläche.Sie haben vielfältige Anwendung in Technik, Physik, Informatik, SportQuadratische Matrizen bilden eine Algebra, d.h. man kann mit ihnen „rechnen“.Affine Abbildungen sind heute Teil der Linearen Algebra.
28 / 30
Schlussbetrachtungen
Und zum Schluss ...
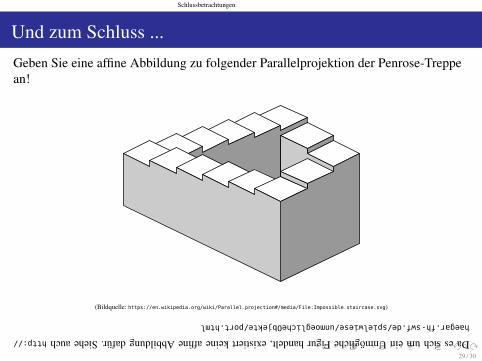
Geben Sie eine affine Abbildung zu folgender Parallelprojektion der Penrose-Treppean!
(Bildquelle: https://en.wikipedia.org/wiki/Parallel_projection#/media/File:Impossible_staircase.svg)
DaessichumeinUnmöglicheFigurhandelt,existiertkeineaffineAbbildungdafür.Sieheauchhttp://
haegar.fh-swf.de/spielwiese/unmoeglicheObjekte/port.html
29 / 30
Literatur
30 / 30














![Bilanzanalyse Druckvorlage.ppt [Schreibgeschützt]tbw-ma.verbundstudium.de/faecher/documents/Bilanzanalyse... · Ziel der Bilanzanalyse Erkenntnisziel ist, einen möglichst umfassenden](https://img.pdfslide.org/doc/110x75/5b16f3977f8b9a4e6b8b85cc/bilanzanalyse-schreibgeschuetzttbw-maverbundstudiumdefaecherdocumentsbilanzanalyse.jpg)



![Info TBW 2013 uhe ohne.pptx [Schreibgeschützt] · 2013. 5. 13. · 1 DAS VERBUNDSTUDIUM Prof. Dr.-Ing. Gerd Uhe Hochschule Bochum 11. Mai 2013 Bachelor Wirtschaftsingenieurwesen](https://img.pdfslide.org/doc/110x75/6104da50c3f730548c0742a9/info-tbw-2013-uhe-ohnepptx-schreibgeschtzt-2013-5-13-1-das-verbundstudium.jpg)









![Hessen [HTV] Baden-Württemberg [TBW] Das Infomagazin … · Georgiana Barbu dominieren die Hauptgruppe A-Latein bei der TBW-Trophy in diesem Jahr. ... Hgr II A-Latein: Eugen Demburg/Daria](https://img.pdfslide.org/doc/110x75/5b14d5097f8b9a4e2c8c23ec/hessen-htv-baden-wuerttemberg-tbw-das-infomagazin-georgiana-barbu-dominieren.jpg)
