Embed Size (px)
Citation preview
1954 Technology Drive, P.O. Box 4225 Peterborough, Ontario K9J 7B1 / Canada
Tel.: (705) 745-2431 Fax: (705) 741-0466 www.siemens.com/sensorsystems
Siemens Canada Limited Siemens Milltronics Process Instruments
AG012712 DE
Arbeit mit HART-Netzwerken
Gegenstand: Umsetzen eines störungsfreien HART-Netzwerkes Integration von HART-Geräten in das Leitsystem
Ausrüstung: Siemens HART-Instrument SIMATIC PDM oder PACTware
HART-Modem PC oder Laptop
Die folgenden Informationen wurden sorgfältig geprüft. Dennoch übernehmen wir keine ausdrückliche oder stillschweigende Gewährleistung für deren Genauigkeit oder Verwendbarkeit.
Übersicht HART ist ein Kommunikationsprotokoll für Feldgeräte. Es ist nicht nur weitverbreitet, sonder auch sehr bedienerfreundlich. Dennoch sollten HART-Anwender die Gestaltungsgrundsätze, Einschränkungen und Anschlusstips beachten, die in diesem Leitfaden aufgeführt sind. Was ist HART? Highway Addressable Remote Transducer (HART) ist ein Industrieprotokoll zum Ersatz des 4-20 mA Standards für Feldgeräte mit analogen Ein- und Ausgängen. Ziel ist:
die vorhandene 4-20 mA Verkabelung auszunutzen Geräte per Fernzugriff zu konfigurieren Geräte per Fernzugriff zu diagnostizieren die Übertragung mehrerer Variablen zu ermöglichen die Zulassung von Eigensicherheit der Multidrop-Betrieb von Geräten
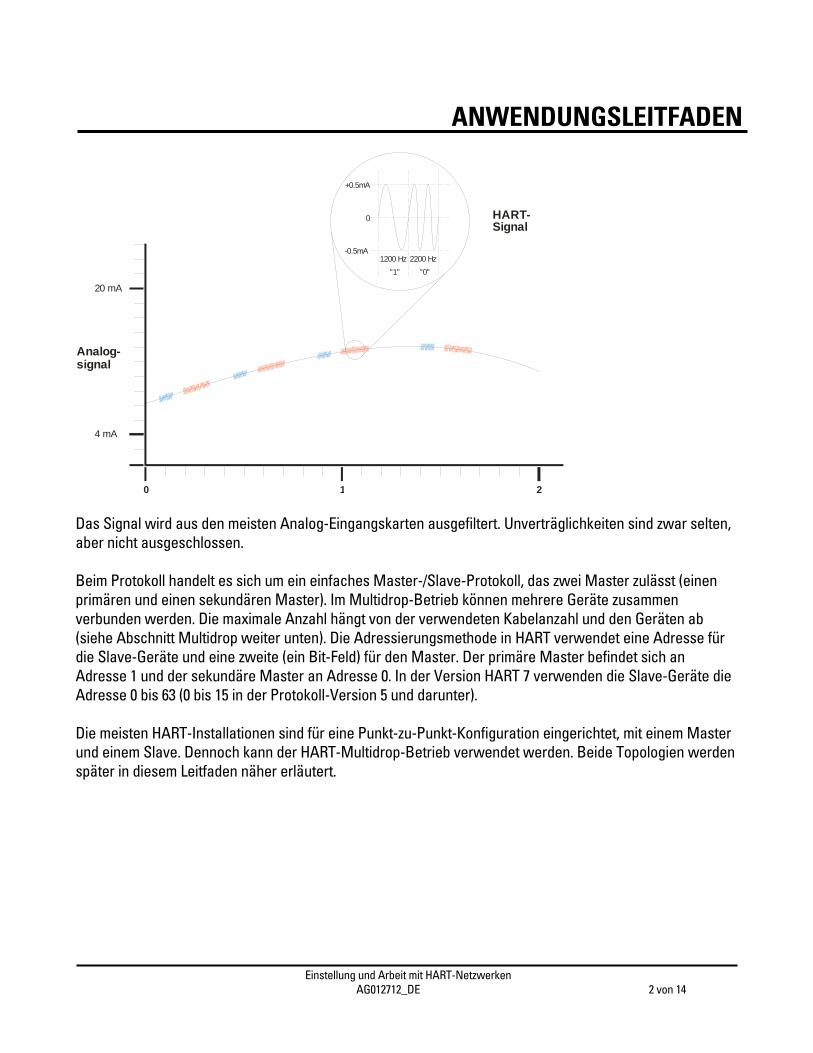
Zu diesem Zweck vereint HART analoge und digitale Kommunikation. Die Haupt-Prozessvariable wird über den Analogkanal übertragen. Alle anderen Daten werden über einen digitalen Kanal kommuniziert, der das Analogsignal nach dem Bell 202-Standard über Frequency Shift Keying (FSK) überlagert. Das Digitalsignal verwendet zwei verschiedene Frequenzfolgen, um ‚1’ und ‚0’ binär darzustellen. Eine ‚1’ wird mit einer Frequenzfolge von 1200 Hz und eine ‚0’ wird mit einer Frequenzfolge von 2200 Hz kodiert. Der Mittelwert der Folge beträgt Null, so dass das 4-20 mA Signal, das sich langsam bewegt, in der Regel nicht beeinträchtigt wird.
ANWENDUNGSLEITFADEN
Einstellung und Arbeit mit HART-Netzwerken AG012712_DE 2 von 14
ANWENDUNGSLEITFADEN
+0.5mA
-0.5mA
20 mA
4 mA
0 1 2
1200 Hz
"1"
2200 Hz
"0"
0
Analog-signal
HART-Signal
Das Signal wird aus den meisten Analog-Eingangskarten ausgefiltert. Unverträglichkeiten sind zwar selten, aber nicht ausgeschlossen. Beim Protokoll handelt es sich um ein einfaches Master-/Slave-Protokoll, das zwei Master zulässt (einen primären und einen sekundären Master). Im Multidrop-Betrieb können mehrere Geräte zusammen verbunden werden. Die maximale Anzahl hängt von der verwendeten Kabelanzahl und den Geräten ab (siehe Abschnitt Multidrop weiter unten). Die Adressierungsmethode in HART verwendet eine Adresse für die Slave-Geräte und eine zweite (ein Bit-Feld) für den Master. Der primäre Master befindet sich an Adresse 1 und der sekundäre Master an Adresse 0. In der Version HART 7 verwenden die Slave-Geräte die Adresse 0 bis 63 (0 bis 15 in der Protokoll-Version 5 und darunter). Die meisten HART-Installationen sind für eine Punkt-zu-Punkt-Konfiguration eingerichtet, mit einem Master und einem Slave. Dennoch kann der HART-Multidrop-Betrieb verwendet werden. Beide Topologien werden später in diesem Leitfaden näher erläutert.
Einstellung und Arbeit mit HART-Netzwerken AG012712_DE 3 von 14
ANWENDUNGSLEITFADEN
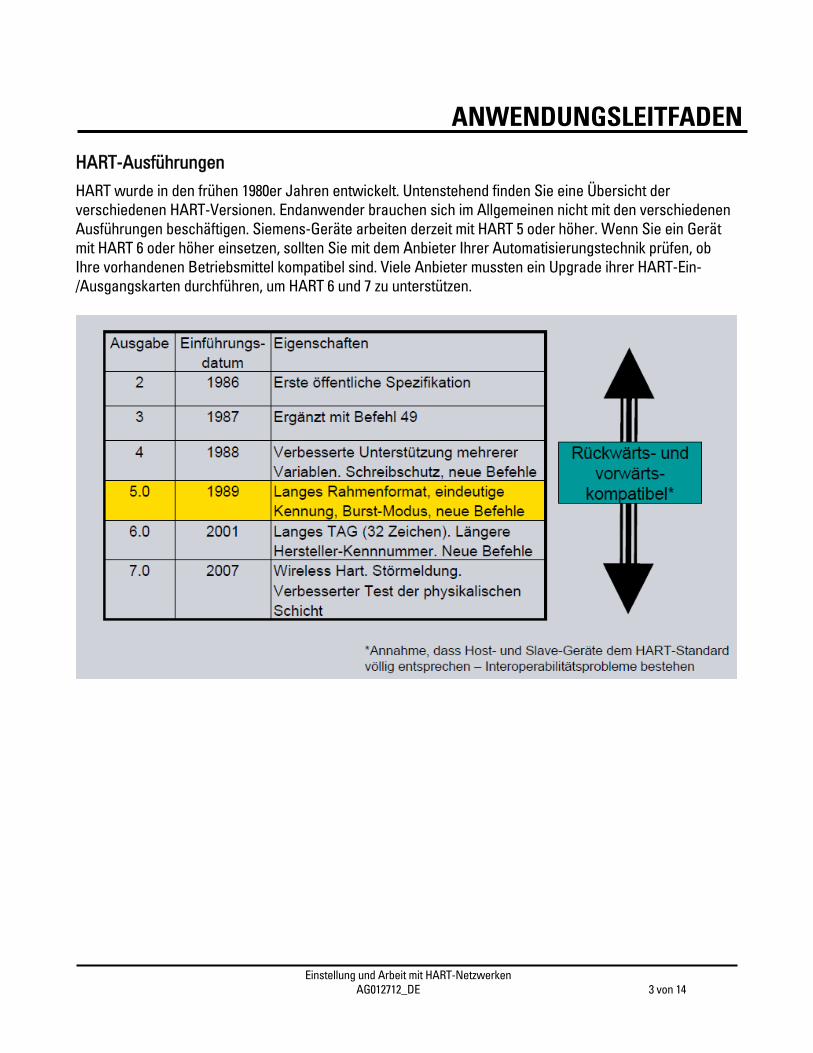
HART-Ausführungen HART wurde in den frühen 1980er Jahren entwickelt. Untenstehend finden Sie eine Übersicht der verschiedenen HART-Versionen. Endanwender brauchen sich im Allgemeinen nicht mit den verschiedenen Ausführungen beschäftigen. Siemens-Geräte arbeiten derzeit mit HART 5 oder höher. Wenn Sie ein Gerät mit HART 6 oder höher einsetzen, sollten Sie mit dem Anbieter Ihrer Automatisierungstechnik prüfen, ob Ihre vorhandenen Betriebsmittel kompatibel sind. Viele Anbieter mussten ein Upgrade ihrer HART-Ein-/Ausgangskarten durchführen, um HART 6 und 7 zu unterstützen.
Einstellung und Arbeit mit HART-Netzwerken AG012712_DE 4 von 14
ANWENDUNGSLEITFADEN
Gestaltungsgrundsätze Obwohl HART-Netzwerke sehr einfach zusammenzusetzen sind, sollten Sie einige Gestaltungsgrundsätze beachten:
Minimaler Schleifenwiderstand: Damit die HART-Kommunikation stattfinden kann, muss der Schleifenwiderstand mindestens 250 Ohm betragen. In den meisten HART-Ein-/Ausgangskarten ist dieser Widerstand integriert. Bei Einsatz eines HART-Modems müssen jedoch die Kabellänge und der Kabelwiderstand bekannt sein, um zu bestimmen, ob ein Widerstand hinzugefügt werden muss oder nicht. Bei kurzen Kabellängen von weniger als 100 Meter müssen Sie vermutlich einen Widerstand von 250 Ohm einfügen.
Maximaler RC-Wert: Für eine einwandfreie HART-Kommunikation muss der RC-Wert des Kabels
weniger als 65 μs betragen. Der RC-Wert entspricht dem Gesamtwiderstand der Leitung multipliziert mit der Gesamtkapazität. Im ersten Grundsatz wird der Mindestwiderstand und hier der maximale Wert festgelegt. In beiden Fällen gilt: je komplexer das Netzwerk, desto schwieriger und desto wichtiger ist diese Berechnung. Wenn es sich jedoch um eine Punkt-zu-Punkt-Verbindung mit einer Kabellänge von weniger als 100 Metern handelt, ist dies unbedeutend.
Minimale Betriebsspannung: Für alle HART-Geräte gilt eine minimal erforderliche Spannung, damit
das Gerät funktionsfähig ist. Dieser Wert ist für alle Geräte unterschiedlich. Erhält das Gerät nicht die erforderliche Spannung, wird es nicht betrieben. Wenn der Schleifenwiderstand zu groß ist, kann das Gerät bei Schwachstrom zwar starten, aber sobald die Primärvariable bei hohen Strömen zu rechnen beginnt, erhöht sich der Spannungsabfall in der Schleife und das Gerät schaltet ab. Diese Regel setzt wie die RC-Regel oben einen Maximalwert für den Schleifenwiderstand fest.
Kabel: Die Kabelwahl spielt eine wichtige Rolle. Wie die beiden ersten Regeln schon sagen hat der
verwendete Kabeltyp einen Einfluss auf den Schleifenwiderstand und den RC-Wert. Für sehr kurze Strecken ist HART mit fast allen Kabeltypen verträglich. Mit steigendem Abstand wird jedoch auch die Kabelwahl immer wichtiger. Je besser also das Kabel, desto besser die Störfestigkeit. In der Regel ist es empfehlenswert, mit einem geschirmten Kabel mit verdrilltem Aderpaar versuchsweise die Rechnungen durchzuführen, bevor Sie das Kabel kaufen und installieren. Speziell für HART ausgelegte Kabel sind ebenfalls zu empfehlen. Belden 3105A ist ein Beispiel dafür.
Spannungsversorgung: Es gibt Anforderungen an die Spannungsversorgung. Alle industriellen
Spannungsversorgungen von Siemens erfüllen die HART-Anforderungen und die meisten industriellen Spannungsversorgungen ebenso. Dennoch sollten Sie dies vor der Installation überprüfen. Für die Spannungsversorgung gilt:
Maximale Welligkeit (47 ... 125 Hz) = 0,2V p-p Maximales Rauschen (500 Hz ... 10 kHz) = 1,2 mV rms Reihenimpedanz (500 Hz ... 10 kHz) = 10 Ohm
Einstellung und Arbeit mit HART-Netzwerken AG012712_DE 5 von 14
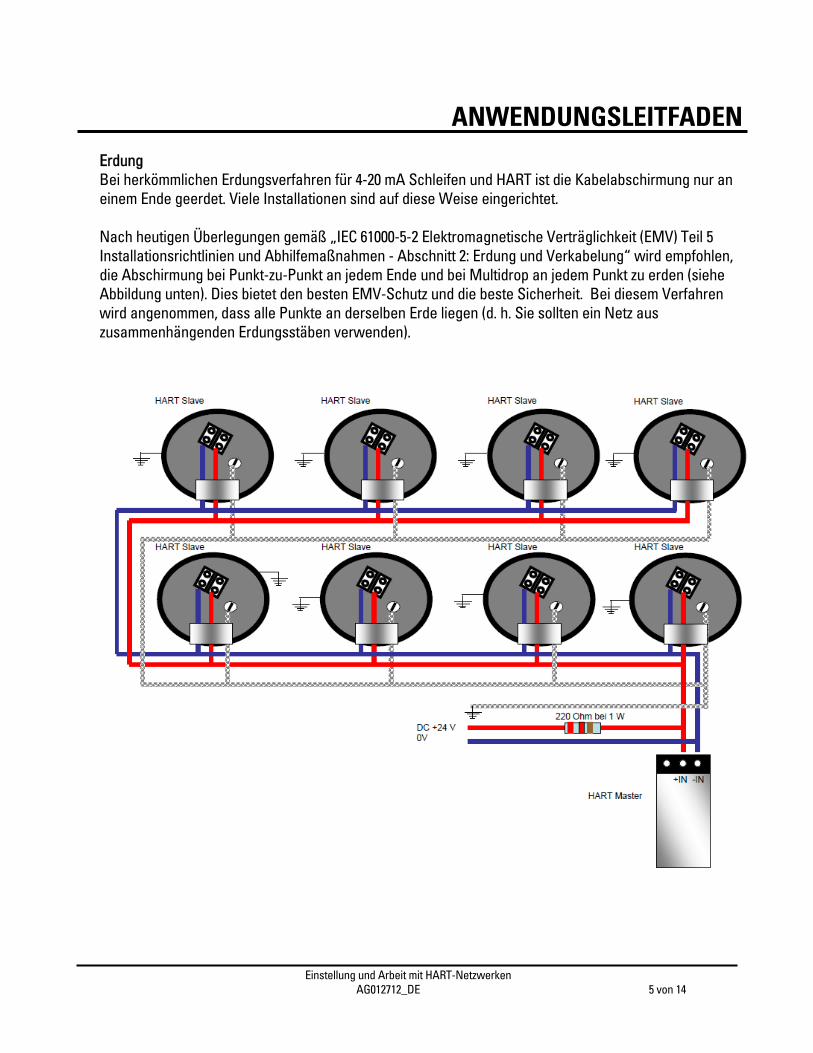
ANWENDUNGSLEITFADENErdung Bei herkömmlichen Erdungsverfahren für 4-20 mA Schleifen und HART ist die Kabelabschirmung nur an einem Ende geerdet. Viele Installationen sind auf diese Weise eingerichtet. Nach heutigen Überlegungen gemäß „IEC 61000-5-2 Elektromagnetische Verträglichkeit (EMV) Teil 5 Installationsrichtlinien und Abhilfemaßnahmen - Abschnitt 2: Erdung und Verkabelung“ wird empfohlen, die Abschirmung bei Punkt-zu-Punkt an jedem Ende und bei Multidrop an jedem Punkt zu erden (siehe Abbildung unten). Dies bietet den besten EMV-Schutz und die beste Sicherheit. Bei diesem Verfahren wird angenommen, dass alle Punkte an derselben Erde liegen (d. h. Sie sollten ein Netz aus zusammenhängenden Erdungsstäben verwenden).
Einstellung und Arbeit mit HART-Netzwerken AG012712_DE 6 von 14
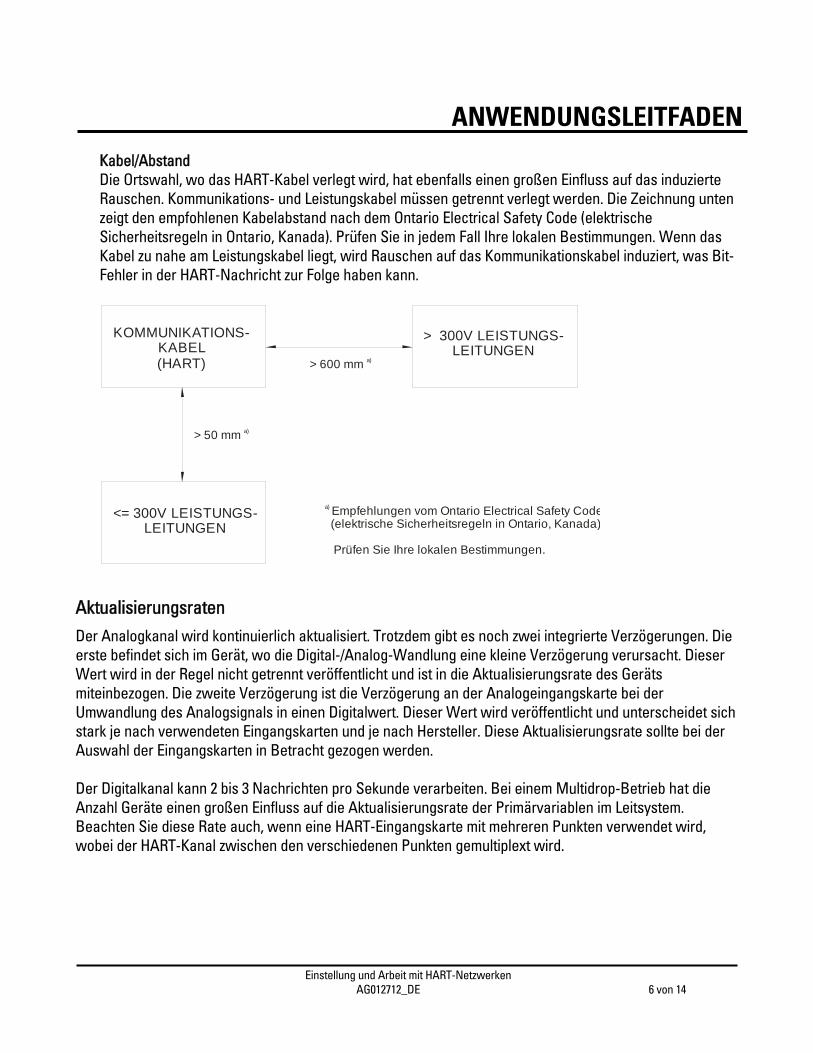
ANWENDUNGSLEITFADENKabel/Abstand Die Ortswahl, wo das HART-Kabel verlegt wird, hat ebenfalls einen großen Einfluss auf das induzierte Rauschen. Kommunikations- und Leistungskabel müssen getrennt verlegt werden. Die Zeichnung unten zeigt den empfohlenen Kabelabstand nach dem Ontario Electrical Safety Code (elektrische Sicherheitsregeln in Ontario, Kanada). Prüfen Sie in jedem Fall Ihre lokalen Bestimmungen. Wenn das Kabel zu nahe am Leistungskabel liegt, wird Rauschen auf das Kommunikationskabel induziert, was Bit-Fehler in der HART-Nachricht zur Folge haben kann.
KOMMUNIKATIONS-KABEL(HART)
<= 300V LEISTUNGS-LEITUNGEN
> 300V LEISTUNGS-LEITUNGEN
> 50 mm a)
> 600 mm a)
a) Empfehlungen vom Ontario Electrical Safety Code (elektrische Sicherheitsregeln in Ontario, Kanada)
Prüfen Sie Ihre lokalen Bestimmungen.
Aktualisierungsraten Der Analogkanal wird kontinuierlich aktualisiert. Trotzdem gibt es noch zwei integrierte Verzögerungen. Die erste befindet sich im Gerät, wo die Digital-/Analog-Wandlung eine kleine Verzögerung verursacht. Dieser Wert wird in der Regel nicht getrennt veröffentlicht und ist in die Aktualisierungsrate des Geräts miteinbezogen. Die zweite Verzögerung ist die Verzögerung an der Analogeingangskarte bei der Umwandlung des Analogsignals in einen Digitalwert. Dieser Wert wird veröffentlicht und unterscheidet sich stark je nach verwendeten Eingangskarten und je nach Hersteller. Diese Aktualisierungsrate sollte bei der Auswahl der Eingangskarten in Betracht gezogen werden. Der Digitalkanal kann 2 bis 3 Nachrichten pro Sekunde verarbeiten. Bei einem Multidrop-Betrieb hat die Anzahl Geräte einen großen Einfluss auf die Aktualisierungsrate der Primärvariablen im Leitsystem. Beachten Sie diese Rate auch, wenn eine HART-Eingangskarte mit mehreren Punkten verwendet wird, wobei der HART-Kanal zwischen den verschiedenen Punkten gemultiplext wird.
Einstellung und Arbeit mit HART-Netzwerken AG012712_DE 7 von 14
ANWENDUNGSLEITFADEN
Punkt-zu-Punkt-Topologie Die Punkt-zu-Punkt-Topologie ist die gängigste Art, HART-Geräte mit Leitsystemen zu verbinden. Wie bereits in den Gestaltungsgrundsätzen erwähnt müssen mehrere Größen berücksichtigt werden:
minimaler Schleifenwiderstand maximaler RC-Wert minimale Betriebsspannung
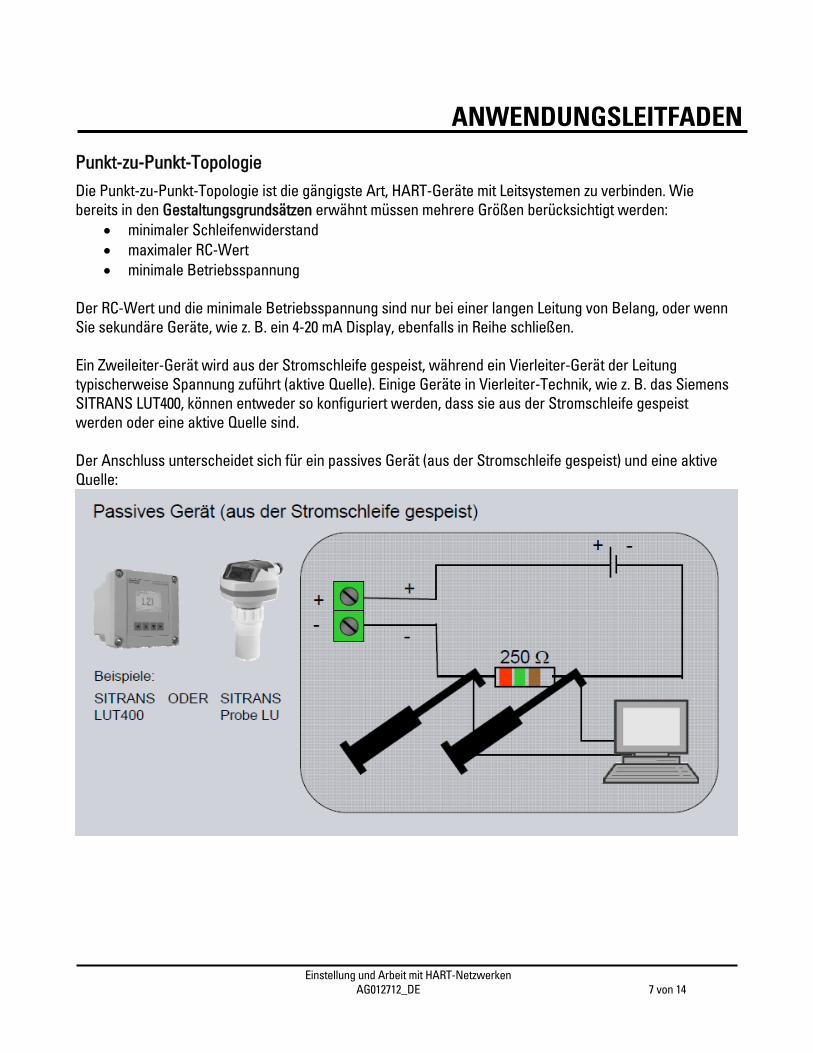
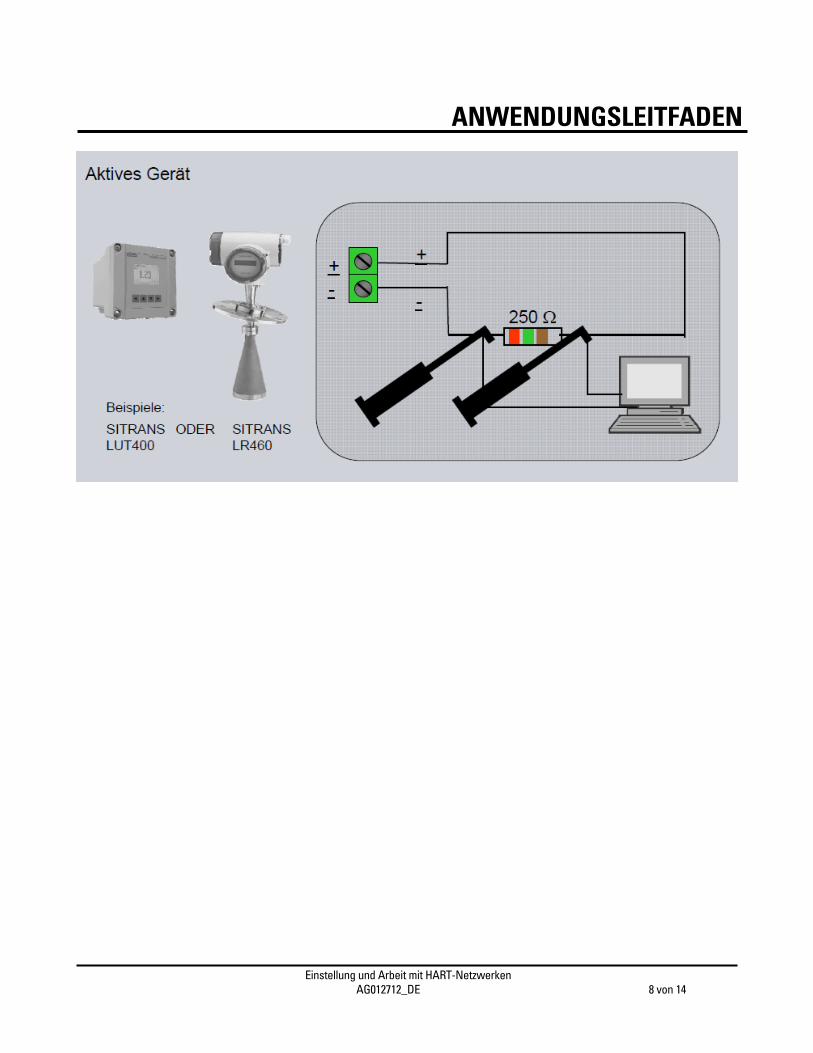
Der RC-Wert und die minimale Betriebsspannung sind nur bei einer langen Leitung von Belang, oder wenn Sie sekundäre Geräte, wie z. B. ein 4-20 mA Display, ebenfalls in Reihe schließen. Ein Zweileiter-Gerät wird aus der Stromschleife gespeist, während ein Vierleiter-Gerät der Leitung typischerweise Spannung zuführt (aktive Quelle). Einige Geräte in Vierleiter-Technik, wie z. B. das Siemens SITRANS LUT400, können entweder so konfiguriert werden, dass sie aus der Stromschleife gespeist werden oder eine aktive Quelle sind. Der Anschluss unterscheidet sich für ein passives Gerät (aus der Stromschleife gespeist) und eine aktive Quelle:
Einstellung und Arbeit mit HART-Netzwerken AG012712_DE 8 von 14
ANWENDUNGSLEITFADEN
Einstellung und Arbeit mit HART-Netzwerken AG012712_DE 9 von 14
ANWENDUNGSLEITFADEN
Multidrop-Topologie Multidrop-Topologien sind nicht so gang und gäbe wie Punkt-zu-Punkt, haben jedoch in bestimmten Anwendungen an Beliebtheit gewonnen. Im Zusammenhang mit HART bereitet Multidrop zwei Schwierigkeiten:
o Die Aktualisierungsrate ist sehr langsam o Ein Netzwerk-Entwurf ist erforderlich
Wie im Abschnitt Aktualisierungsraten erwähnt beträgt die Kommunikationsrate für HART-Nachrichten etwa zwei pro Sekunde. Bei einer Multidrop-Verbindung von HART-Geräten steht der Analogkanal nicht mehr für die Prozessvariable zur Verfügung, so dass der Digitalkanal verwendet werden muss. Wenn Sie zwei Geräte im Multidrop-Betrieb anschließen, beträgt die Aktualisierungsrate einmal pro Sekunde. Je höher die Anzahl Geräte, desto höher die Aktualisierungsrate. In vielen Applikationen ist dies nicht annehmbar, außer in bestimmten, nicht zeitkritischen Anwendungen. In diesen Fällen ist der HART-Multidrop-Betrieb geeignet. Die HART-Adressierungsmethode erlaubt Geräten ab der Version HART 6 eine Adresse zwischen 0 und 63 anzunehmen. Frühere Versionen von HART (bis Version 5) ließen nur Adressen von 0 bis 15 zu. Trotzdem ist es für praktische Zwecke aus Design-Gründen und aufgrund der tatsächlichen Bürden schwierig, mehr als 8 Geräte über Multidrop zu verbinden. Am besten ist es, die Adressierung im Bereich 0 bis 15 zu verwenden. Beachten Sie beim Entwurf eines HART-Multidrop-Netzwerks:
o die elektrischen Eigenschaften des verwendeten Kabels o den Anlaufstrom aller Geräte o den Beharrungsstrom aller Geräte o die minimale Anlaufspannung aller Geräte o die Spannungsquelle aller verwendeter Geräte (aus der Stromschleife gespeist oder aktive
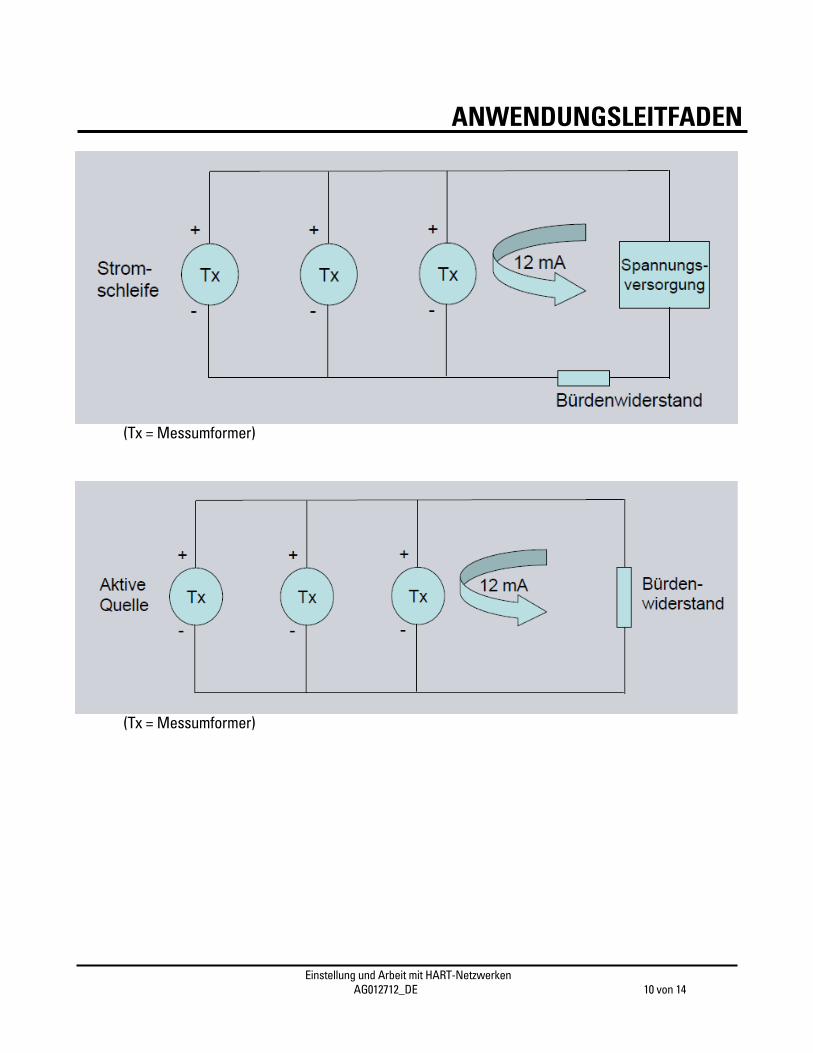
Quelle) HINWEIS: Bei Einsatz von SIMATIC PDM in einem HART-Multidrop-Netzwerk ist jeweils nur die Ansicht eines einzelnen Geräts möglich. Die Verkabelung unterscheidet sich stark, je nachdem ob alle Geräte aus der Stromschleife gespeist, aktive Quelle oder eine Kombination daraus sind. Untenstehend finden Sie die jeweiligen Anschlusszeichnungen.
Einstellung und Arbeit mit HART-Netzwerken AG012712_DE 10 von 14
ANWENDUNGSLEITFADEN
(Tx = Messumformer)
(Tx = Messumformer)
Einstellung und Arbeit mit HART-Netzwerken AG012712_DE 11 von 14
ANWENDUNGSLEITFADEN
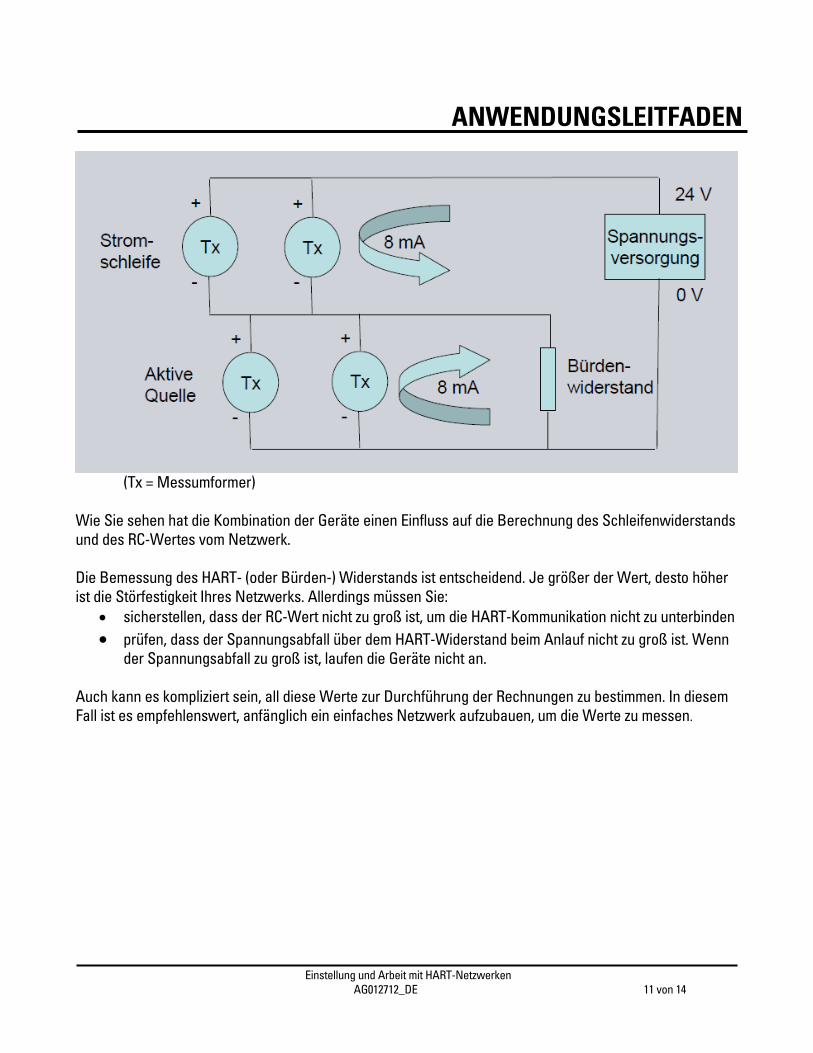
(Tx = Messumformer) Wie Sie sehen hat die Kombination der Geräte einen Einfluss auf die Berechnung des Schleifenwiderstands und des RC-Wertes vom Netzwerk. Die Bemessung des HART- (oder Bürden-) Widerstands ist entscheidend. Je größer der Wert, desto höher ist die Störfestigkeit Ihres Netzwerks. Allerdings müssen Sie:
sicherstellen, dass der RC-Wert nicht zu groß ist, um die HART-Kommunikation nicht zu unterbinden prüfen, dass der Spannungsabfall über dem HART-Widerstand beim Anlauf nicht zu groß ist. Wenn
der Spannungsabfall zu groß ist, laufen die Geräte nicht an. Auch kann es kompliziert sein, all diese Werte zur Durchführung der Rechnungen zu bestimmen. In diesem Fall ist es empfehlenswert, anfänglich ein einfaches Netzwerk aufzubauen, um die Werte zu messen.
Einstellung und Arbeit mit HART-Netzwerken AG012712_DE 12 von 14
ANWENDUNGSLEITFADEN
Integration von HART-Geräten in das Leitsystem Es gibt verschiedene Integrationsstufen von HART-Geräten in das Leitsystem. Die meisten HART-Geräte sind an 4-20 mA Karten angeschlossen, weshalb das Leitsystem über keine Informationen zu den Geräten verfügt. Die einzige Art, um auf die Gerätedaten zuzugreifen, besteht darin, eine Punkt-zu-Punkt-Verbindung zwischen dem Gerät und einem HART-Modem aufzubauen. Die nächste Integrationsstufe ist die Verwendung einer HART-Karte oder eines HART-Multiplexers, die einen einfachen Zugriff auf die Informationen gewährleisten. Hier stehen wiederum mehrere Optionen zur Auswahl. Die einfachste Option ist die Verwendung des HART-Kanals zur Konfiguration und einer Diagnosesoftware, wie z. B. SIMATIC PDM, zur Kommunikation mit den Geräten. Zur Ausnutzung aller Vorteile von HART sollte in die Programmierungszeit investiert werden, um die Statusinformationen zu erhalten. HART bietet die folgenden Statusinformationen:
1. ‘Command Status Bytes’; wird in jeder HART-Antwortnachricht zurückgesendet 2. ‘Additional Device Status’; wird mit HART-Befehl 48 zurückgesendet 3. ‘Extended Device Status Codes’ und ‘Device Variable Status’; wird mit HART-Befehl 9
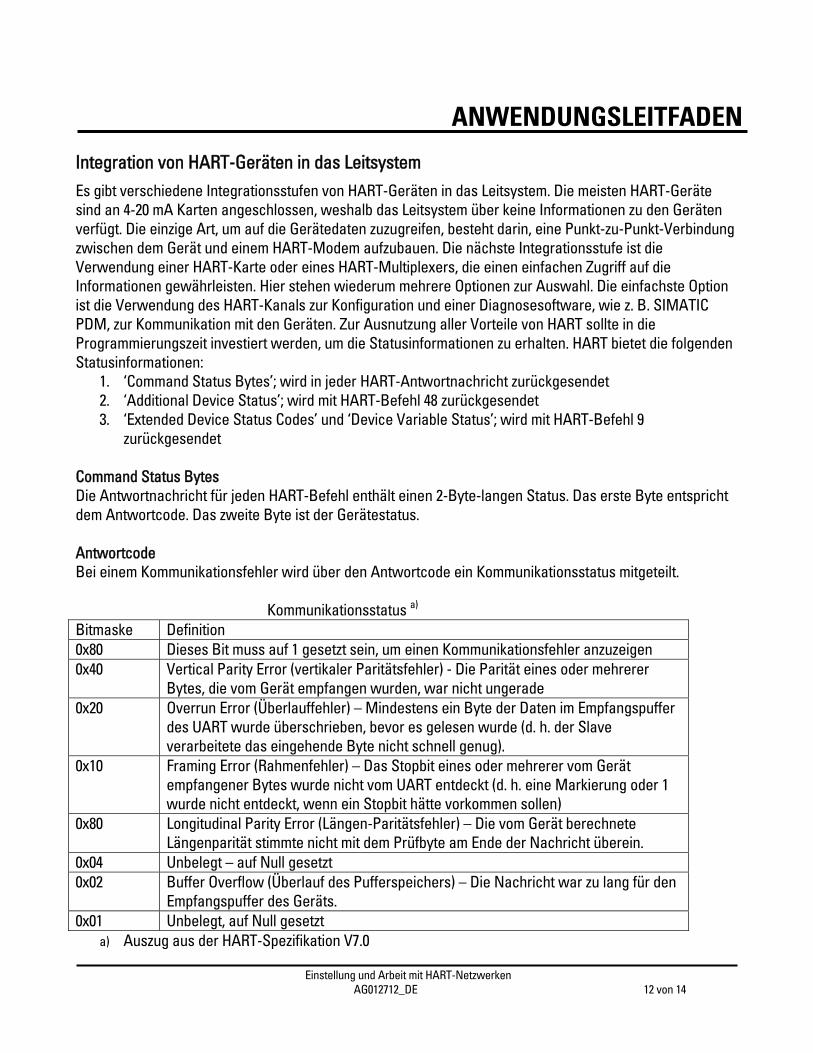
zurückgesendet Command Status Bytes Die Antwortnachricht für jeden HART-Befehl enthält einen 2-Byte-langen Status. Das erste Byte entspricht dem Antwortcode. Das zweite Byte ist der Gerätestatus. Antwortcode Bei einem Kommunikationsfehler wird über den Antwortcode ein Kommunikationsstatus mitgeteilt. Kommunikationsstatus a) Bitmaske Definition 0x80 Dieses Bit muss auf 1 gesetzt sein, um einen Kommunikationsfehler anzuzeigen 0x40 Vertical Parity Error (vertikaler Paritätsfehler) - Die Parität eines oder mehrerer
Bytes, die vom Gerät empfangen wurden, war nicht ungerade 0x20 Overrun Error (Überlauffehler) – Mindestens ein Byte der Daten im Empfangspuffer
des UART wurde überschrieben, bevor es gelesen wurde (d. h. der Slave verarbeitete das eingehende Byte nicht schnell genug).
0x10 Framing Error (Rahmenfehler) – Das Stopbit eines oder mehrerer vom Gerät empfangener Bytes wurde nicht vom UART entdeckt (d. h. eine Markierung oder 1 wurde nicht entdeckt, wenn ein Stopbit hätte vorkommen sollen)
0x80 Longitudinal Parity Error (Längen-Paritätsfehler) – Die vom Gerät berechnete Längenparität stimmte nicht mit dem Prüfbyte am Ende der Nachricht überein.
0x04 Unbelegt – auf Null gesetzt 0x02 Buffer Overflow (Überlauf des Pufferspeichers) – Die Nachricht war zu lang für den
Empfangspuffer des Geräts. 0x01 Unbelegt, auf Null gesetzt
a) Auszug aus der HART-Spezifikation V7.0
Einstellung und Arbeit mit HART-Netzwerken AG012712_DE 13 von 14
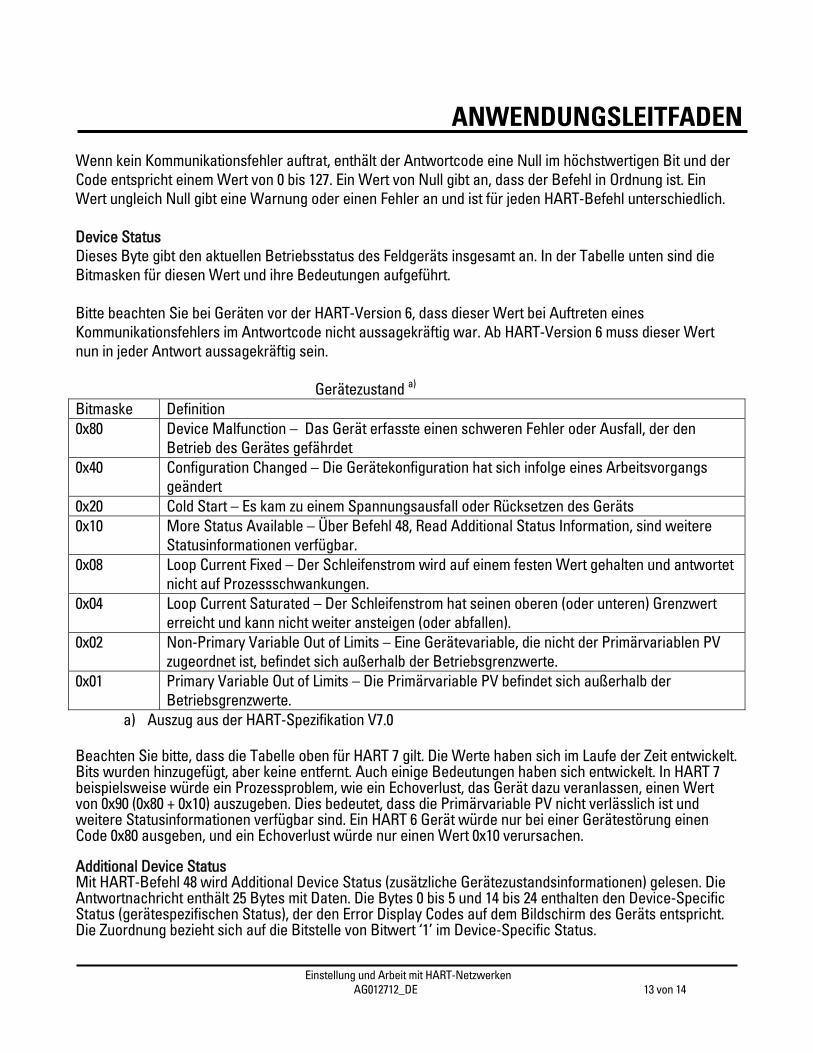
ANWENDUNGSLEITFADENWenn kein Kommunikationsfehler auftrat, enthält der Antwortcode eine Null im höchstwertigen Bit und der Code entspricht einem Wert von 0 bis 127. Ein Wert von Null gibt an, dass der Befehl in Ordnung ist. Ein Wert ungleich Null gibt eine Warnung oder einen Fehler an und ist für jeden HART-Befehl unterschiedlich. Device Status Dieses Byte gibt den aktuellen Betriebsstatus des Feldgeräts insgesamt an. In der Tabelle unten sind die Bitmasken für diesen Wert und ihre Bedeutungen aufgeführt. Bitte beachten Sie bei Geräten vor der HART-Version 6, dass dieser Wert bei Auftreten eines Kommunikationsfehlers im Antwortcode nicht aussagekräftig war. Ab HART-Version 6 muss dieser Wert nun in jeder Antwort aussagekräftig sein. Gerätezustand a) Bitmaske Definition 0x80 Device Malfunction – Das Gerät erfasste einen schweren Fehler oder Ausfall, der den
Betrieb des Gerätes gefährdet 0x40 Configuration Changed – Die Gerätekonfiguration hat sich infolge eines Arbeitsvorgangs
geändert 0x20 Cold Start – Es kam zu einem Spannungsausfall oder Rücksetzen des Geräts 0x10 More Status Available – Über Befehl 48, Read Additional Status Information, sind weitere
Statusinformationen verfügbar. 0x08 Loop Current Fixed – Der Schleifenstrom wird auf einem festen Wert gehalten und antwortet
nicht auf Prozessschwankungen. 0x04 Loop Current Saturated – Der Schleifenstrom hat seinen oberen (oder unteren) Grenzwert
erreicht und kann nicht weiter ansteigen (oder abfallen). 0x02 Non-Primary Variable Out of Limits – Eine Gerätevariable, die nicht der Primärvariablen PV
zugeordnet ist, befindet sich außerhalb der Betriebsgrenzwerte. 0x01 Primary Variable Out of Limits – Die Primärvariable PV befindet sich außerhalb der
Betriebsgrenzwerte. a) Auszug aus der HART-Spezifikation V7.0
Beachten Sie bitte, dass die Tabelle oben für HART 7 gilt. Die Werte haben sich im Laufe der Zeit entwickelt. Bits wurden hinzugefügt, aber keine entfernt. Auch einige Bedeutungen haben sich entwickelt. In HART 7 beispielsweise würde ein Prozessproblem, wie ein Echoverlust, das Gerät dazu veranlassen, einen Wert von 0x90 (0x80 + 0x10) auszugeben. Dies bedeutet, dass die Primärvariable PV nicht verlässlich ist und weitere Statusinformationen verfügbar sind. Ein HART 6 Gerät würde nur bei einer Gerätestörung einen Code 0x80 ausgeben, und ein Echoverlust würde nur einen Wert 0x10 verursachen. Additional Device Status Mit HART-Befehl 48 wird Additional Device Status (zusätzliche Gerätezustandsinformationen) gelesen. Die Antwortnachricht enthält 25 Bytes mit Daten. Die Bytes 0 bis 5 und 14 bis 24 enthalten den Device-Specific Status (gerätespezifischen Status), der den Error Display Codes auf dem Bildschirm des Geräts entspricht. Die Zuordnung bezieht sich auf die Bitstelle von Bitwert ‘1’ im Device-Specific Status.
Einstellung und Arbeit mit HART-Netzwerken AG012712_DE 14 von 14
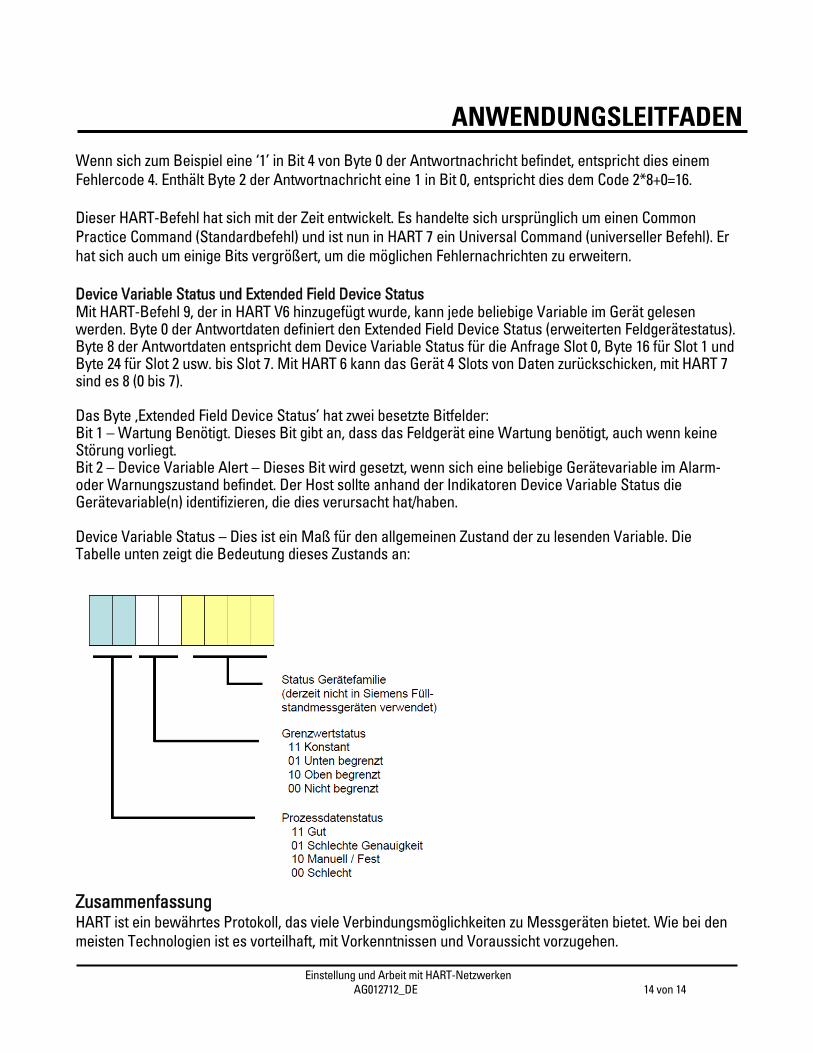
ANWENDUNGSLEITFADENWenn sich zum Beispiel eine ‘1’ in Bit 4 von Byte 0 der Antwortnachricht befindet, entspricht dies einem Fehlercode 4. Enthält Byte 2 der Antwortnachricht eine 1 in Bit 0, entspricht dies dem Code 2*8+0=16. Dieser HART-Befehl hat sich mit der Zeit entwickelt. Es handelte sich ursprünglich um einen Common Practice Command (Standardbefehl) und ist nun in HART 7 ein Universal Command (universeller Befehl). Er hat sich auch um einige Bits vergrößert, um die möglichen Fehlernachrichten zu erweitern. Device Variable Status und Extended Field Device Status Mit HART-Befehl 9, der in HART V6 hinzugefügt wurde, kann jede beliebige Variable im Gerät gelesen werden. Byte 0 der Antwortdaten definiert den Extended Field Device Status (erweiterten Feldgerätestatus). Byte 8 der Antwortdaten entspricht dem Device Variable Status für die Anfrage Slot 0, Byte 16 für Slot 1 und Byte 24 für Slot 2 usw. bis Slot 7. Mit HART 6 kann das Gerät 4 Slots von Daten zurückschicken, mit HART 7 sind es 8 (0 bis 7). Das Byte ‚Extended Field Device Status’ hat zwei besetzte Bitfelder: Bit 1 – Wartung Benötigt. Dieses Bit gibt an, dass das Feldgerät eine Wartung benötigt, auch wenn keine Störung vorliegt. Bit 2 – Device Variable Alert – Dieses Bit wird gesetzt, wenn sich eine beliebige Gerätevariable im Alarm- oder Warnungszustand befindet. Der Host sollte anhand der Indikatoren Device Variable Status die Gerätevariable(n) identifizieren, die dies verursacht hat/haben. Device Variable Status – Dies ist ein Maß für den allgemeinen Zustand der zu lesenden Variable. Die Tabelle unten zeigt die Bedeutung dieses Zustands an:
Zusammenfassung HART ist ein bewährtes Protokoll, das viele Verbindungsmöglichkeiten zu Messgeräten bietet. Wie bei den meisten Technologien ist es vorteilhaft, mit Vorkenntnissen und Voraussicht vorzugehen.





























