Embed Size (px)
Citation preview
Baubericht über ein aktives Kamera Stabilisierungssystem
WICHTIGE HINWEISE / HAFTUNGSAUSSCHLUSSDieses Dokument beschreibt, wie wir aus verschiedenen Komponenten ein aktives Stabilisierungssystem für eine Actionkamera gebaut haben. Wir haften für keinerlei Probleme oder Schäden, die bei einem eventuellen Nachbau entste-hen können. Ebenso können wir keinerlei Garantie für die Zuverlässigkeit der genannten Lieferanten und/oder deren Produkte übernehmen.
PROBLEME BEIM NACHBAU ODER BETRIEBWir können aus zeitlichen Gründen keine Unterstützung beim Nachbau oder Betrieb geben. Hilfestellung können hier eventuell die einschlägigen Modellbauforen, speziell die für Multikopter und FPV, geben.
FUNKTIONALITÄTUns leistet CALIMY gute Dienste bei Aufnahmen, die aus der Hand entstehen. Es werden zwei Achsen stabilsiert, was in Verbindung mit einem Handgri� und ein wenig Übung sehr ruhige Aufnahmen ermöglicht. CALIMY zu benutzen, während man selbst Sport treibt, ist aber illusorisch. Die maximalen Kompensationswinkel, die Stabilität des Systems und andere Ein�üsse wie harte Stöße oder Fahrtwind verbieten dies eigentlich.
QUALITÄTKritisch ist hier sicher das Gimbal aus China. Wir haben uns zwei bestellt, in der Ho�nung dass eines davon funktioniert. Es funktionieren sogar beide, aber man muss sich bewusst sein, dass es dafür nicht wirklich eine Garantie gibt. Falls es defekt wird, oder sogar defekt ankommt, wird sich ein Rückversand wegen der hohen Vesandkosten kaum lohnen. Auf der Platine sind zwei Drähte direkt an die Kontakte eines Prozessors gelötet - das funktioniert zwar, aber jeder Elektroniker wird bei diesem Anblick die Hände über dem Kopf zusammen schlagen. Allerdings muss man auch den Preis sehen, für den es hier kaum mal die Steuerelektronik zu kaufen gibt. Alleine die Mechanik und die Motoren sind das Geld eigentlich schon wert.
BENÖTIGTE KOMPONENTEN
Das System besteht aus folgenden Komponenten:
1) Brushless Gimbal & SteuerelektronikEin Brushless Gimbal ist eine Kamerahalterung, das üblicherweise an einem ferngesteuerten Multikopter verwendet wird. Durch eine Steuerlektronik mit entsprechenden Sensoren werden Brushless-Motoren in der Halterung so angetrieben, dass Bewegungen des Fluggeräts kompensiert werden und so ruhige Aufnahmen entstehen können. Wir haben folgendes Gimbal verwendet: http://www.goodluckbuy.com/dji-phantom-brushless-gimbal-came-ra-mount-w-motor-and-controller-for-gopro3-fpv-aerial-photography.html
Dieses Gimbal wurde fast komplett montiert und mit komplett verkabelter und eingebauter Elektronik geliefert. Lediglich die untere Basisplatte muss mit den mitgelieferten Silikondämpfern noch aufgesteckt werden. Bei der Bestellung haben wir UPS als Versandoption gewählt, da hier die Zollabwicklung meist problemlos funktioniert und die Lieferung innerhalb einer Woche erfolgte. Im Bestellprozess gab es an einer Stelle die Auswahlmöglichkeit, den deklarierten Warenwert in Prozent anzugeben. Hier haben wir 100% gewählt, damit das Paket korrekt deklariert wird und die Zollabfertigung korrekt und problemlos läuft. Einsparversuche durch niedrigere Deklaration sind nicht empfehlenswert, da solche Pakete fast immer am Zoll hängen bleiben. Bei einer korrekten Deklaration kostete uns das Gimbal mit UPS Versand, Zoll und Einfuh-rumsatzsteuer insgesamt ca. 105€.
2) Akku Wir haben den LiPo-Akku Graupner V-MAXX 30C3/450 (Graupner Artikel-Nr. 7604.3) für ca. 14 Euro + Versand verwendet. Im Prinzip kann aber jeder 11,1V Lipo verwendet werden, den man in seinem Unterbau unterbringt.
3) Ladegerät/BalancerLiPo Akkus benötigen spezielle Balancer-Ladegeräte. Wir verwenden den Graupner LiPo Balancer Charger 2-3S 12V/230V (Graupner Artikel-Nr. 6454) für ca. 20 Euro + Versand.
BENÖTIGTE KOMPONENTEN
4) Lipo-WächterIm Prinzip funktioniert das Gimbal bereits nach Anschluss des Akkus problemlos. Das Problem ist, dass die Elektronik den Akku komplett tiefentlädt, wenn man ihn nicht rechtzeitig (wenn das Gimbal nicht mehr richtig balanciert) abhängt, bzw. das Gimbal ausschaltet. Dadurch wird ein Lipo-Akku unbrauchbar beschädigt. Ein Lipo-Wächter überwacht die Spannung und schlägt Alarm, wenn die Mindestspannung erreicht wird. Wir haben diesen hier verwendet: www.ebay.de/itm/150974990902 // Kosten ca. 10 Euro.
5) ServotesterDer Servotester hat die Aufgabe, die Neigung der Kamera zu verstellen. Ohne diesen könnte man nur genau geradeaus �lmen - nicht nach oben oder unten, da das Gimbal jede entsprechende Bewegung kompensiert. Der Servotester verstellt praktisch den Nullpunkt der Neigung. Wir haben folgenden Servotester verwendet: http://www.ebay.de/itm/261191470131 // Kosten ca. 10€
6) SchalterDas Gimbal kann durch einfaches An- oder Abstecken des Akkus geschaltet werden. Der Stecker des Gimbals ist passend zur Buchse des oben beschriebenen Graupner Akkus. Komfortabler ist es natürlich, einen Schalter einzubauen, der eine Leitung des Stromversorgungskabels unterbricht.
7) Unterbau/Handgri�Das unter 1) beschriebende Gimbal besteht aus dem silbernen Oberteil des CALIMY. Das heißt, man benötigt noch einen entspechenden Unterbau mit Handgri�, in dem der Akku, der Lipo-Wächter, der Servotester und ggf. der Schalter Platz �nden.Für die Konstruktion eines solchen Unterbaus kann man gut Holz verwenden, wir haben aber eine Konstruktion aus Kunststo� aus einem 3D-Drucker verwendet. Wer sich keine eigene Konstruktion basteln möchte, kann sich per mail an [email protected] wenden, um ein Angebot für den Unterbau (3D Druck) mit Schalter zu bekommen - die Kapazitäten sind wegen der langen Druckzeiten aber begrenzt.Wenn man einen fertigen Unterbau und die anderen Komponenten hat, lässt sich das CALIMY in 20-30 Minuten montieren und in Betrieb nehmen.
8) SilikonhaftmatteDiese kleinen Haftmatten werden üblicherweise benutzt, um z.B. Handys rutschfest auf dem Armaturenbrett zu befestigen. Wir verwenden ein Stück davon um die Kamera auf dem Gimbal zu befestigen. So lange das Teil sauber ist, haftet die Kamera nach festem Andrücken sehr gut darauf, aber wenn man sicher gehen will, sollte man die Kamera mit einem Klett- oder Gummiband zusätzlich sichern. Wir haben diese hier verwendet:www.ebay.de/itm/121148141534 // Kosten ca. 2,50 Euro
Baubericht über ein aktives Kamera Stabilisierungssystem
INBETRIEBNAHME DES GIMBALS
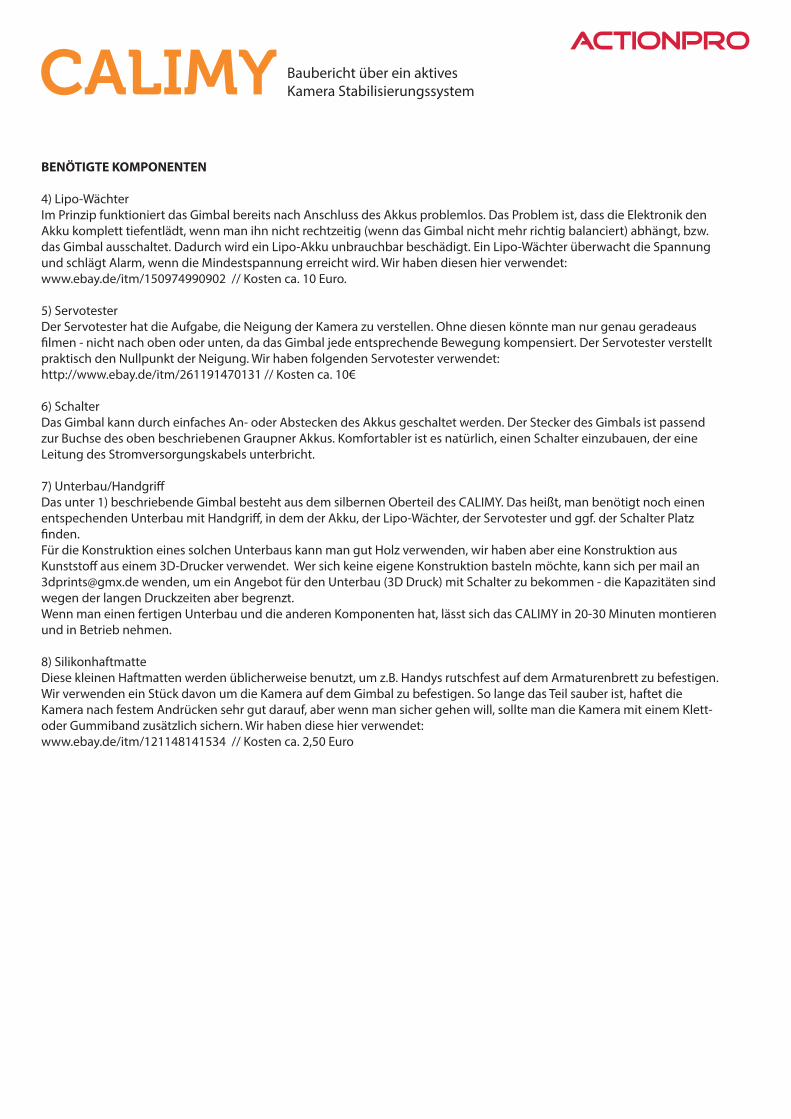
Das Gimbal kommt wie bereits erwähnt fast fertig montiert und mit verkabelter Elektronik aus China. Allerdings wird es an einem Multikopter eigentlich hängend verwendet - wir stellen es aber auf den Kopf. Dadurch wird eine kleine Umbaumaß-nahme notwendig, da durch die Drehung auf den Kopf der Sensor für seitlichen Bewegungen (Rollachse) verkehrt herum steht und das Gimbal nicht funktionieren würde. Um das zu umgehen, muss der Motor für die Nickachse (der neben der Kamera) auf die andere Seite gedreht werden. Dies geht allerdings nur, wenn man die Basisplatte (unter der Kamera) dazu abschraubt und nach dem Drehen wieder anschraubt. Die beiden entsprechenden Schrauben sind unten markiert. Das Gimbal muss dann wie unten abgebildet aussehen.
Vor Inbetriebnahme des Gimbals muss unbedingt die Kamera installiert werden, damit die Mechanik des Gimbals ausba-lanciert ist. Wir haben für die Montage einfach ein Stück Silikonhaftmatte verwendet. Die Kamera muss so positioniert werden, dass sie bei ausgeschaltetem Gimbal nicht nach links/rechts oder vorne/hinten kippt, sondern gut ausbalanciert ist. Bei der Actionpro X7 steht die Vorderkante dann etwa 2mm vorne über die Basisplatte und die Kamera ist seitlich etwa 3mm vom Arm entfernt. Die ideale Position hängt aber von der Kamera und dem verwendeten Befestigungszubehör ab.
Man muss darauf achten, dass die Motor- und Sensorelektronikkabel nicht die Bewegungsfreiheit behindern - insbesonde-re das Kabel der Sensorelektronik (unter dem Kameraschlitten) sollte seitlich weg gehen und nicht unten an der Basisplatte au�iegen. Gegebenenfalls das Kabel mit etwas Heißkleber entsprechend zusätzlich am Kameraschlitten �xieren.
So vorbereitet und ausgerichtet kann das Gimbal auf den Unterbau gesteckt und die Kamera einigermaßen gerade ausgerichtet werden. Dann kann am rot/schwarzen Kabel das Akku angesteckt werden - dabei sollte das Gimbal fest au�iegen und noch nicht frei in der Hand gehalten werden. Nach einer kurzen Initialisierung und ein paar Bewegungen sollte die Kamera dann gerade stehen und entsprechende Bewegungen vom System kompensiert werden.
Baubericht über ein aktives Kamera Stabilisierungssystem

OPTION SERVOTESTER, LIPO-WÄCHTER UND SCHALTER
Der Lipo-Wächter wird an den weißen Balancer-Stecker des Akkus gesteckt. Sobald eine der drei Zellen die Mindestspan-nung unterschreitet, schlägt er laut Alarm und das Akku muss abgesteckt bzw. das Gimbal ausgeschaltet werden um eine Tiefentladung und Beschädigung des Akkus zu vermeiden.
Einen Schalter schleift man einfach in das rote Stromversorgungskabel ein. Dazu muss man das Kabel durchtrennen und an den Schalter löten.
Den noch freien schwarzen Stecker des Gimbals steckt man am Servotester an. Dieser sollte beim Einschalten ungefähr auf den Wert 4 eingestellt sein, damit die Kamera geradeaus schaut. Außerdem muss seine Betriebsart auf „Manual“ stehen.
ANS EINGEMACHTEAuch wenn der chinesische Lieferant des Gimbals (1) keinerlei Dokumentation mitliefert, haben wir dennoch herausgefun-den, dass das Gimbal kompatibel mit dem Alexmos Simple Brushless Gimbal Controller zu sein scheint. Die unter http://www.simplebgc.com/eng/downloads/ verfügbare Version 2.0b3 der entsprechenden Software war bei uns in der Lage, den Controller anzusprechen und entsprechende Einstellungen an der Stellkraft usw. vorzunehmen. Auch konnten wir den Controller neu kalibrieren, als die seitliche Neigung einmal um ein paar Grad verstellt war.
Wie gesagt, geht es hier aber wirklich ans Eingemachte und man muss sich mit der ganzen Thematik gründlich auseinan-dersetzen um mit der Software wirklich Verbesserungen an der Leistung des Gimbals zu erzielen. Informationen �ndet man in entsprechenden Foren, die aber meist englischsprachig sind. Wir können auch hier keinerlei Support bieten.
Baubericht über ein aktives Kamera Stabilisierungssystem









![Bedienungsanleitung DE für Kamera · Bedienungsanleitung für Kamera [DE] / Bedieningshandleiding van de camera [NL] Bedienungsanleitung für Kamera Bedieningshandleiding van de](https://img.pdfslide.org/doc/110x75/5d4c6d4188c99356718bb248/bedienungsanleitung-de-fuer-kamera-bedienungsanleitung-fuer-kamera-de-bedieningshandleiding.jpg)