Embed Size (px)
Citation preview
178 S o n n t a g , Bemspruchung der gescbh8eseden s o d e mch offenen Kegelschale & ~ ~ > r ~ ~ ~ ; ~ ~ ~
Die Berechnwg der Fehlerschranke fiir daa interpolative Verfahren nach (44) gestaltet sich etwas anders als bei G. Schulz angegeben, wenn man annimmt, daB die Rechnung rnit so vie1 Stellen durchgefiihrt ist, da0 Abrundungsfehler unberticksichtigt bleiben konnen und daL3 die Anfangswerte auch mit einem Polynom n-ten Grades (n= 4) berechnet werden. Zur Bsrechnung
d, = 1,06 10- * d, L= 1,92 * d4 = 2,98 * loTs
der Anfangswerte hat man nach (51) ...-
d , = 1,49 ' 10- *
Eine einmalige Iteration mil. Hilfe der Gleichungen (8 (72)) ergibt y, -= 3,02 10-a .
Nimmt man diesen Wert fiir 8 und die anderen Werte wie in der Arbeit von G. Schulz, so folgt fur das interpolative Verfahren nach (44)
1 5 3,02 - 10-8 * 2,99 + 1,97 104 = 2,06 *. . Die AhschBtzung (32) liefert mit denselben Werten wie oben:
also eine - wegen des kleinen AM-Wertes - ndr geringfUgig bessere Fehlerschranke.
nicht allgemein entscheiden, da es wesentlich davon abhangt, wie stark - und f sich im Integrationsbereich Bndern. Eingegangen: 23.9. 1948.
Die Frage, wieweit die Fehlerschranken von dem tatstichllchen Fehler abweichen, ltiBt sich
( z, y (z)) af 1 , aY
Beanspruchung der allgemeinen, geschlossenen sowie auch offenen Kegelschale durch Belastung ihrer Spitze ')
Von G. Sonntag in Vohburg (Donau) Es werden Bedingungag&hur~gen zur Ermittlung der B p n u n g e n i n einer allgemeinen biegunge-
The e o d i l i o v d equalions for the determination of the slreaada in general 6hin cone shba while loaded
f i e kqwtione condiliondes pour ddterminer lea tsmbns h n a des minces comes cbnipes, en gknAra1,
BXBO~RTCS ypamenm gnrr onpeqenems Hanpmcemii B ~ ~ S M O M ~ H T H O ~ ~ K O A Y C H O ~ ~ obonowce,
schlaffen Kegelschale abgeleilel fur e k e Belastung ihrer Spilze dnrch Krajle und Montente.
on lha lop wilh forcss and momenta are derivated.
&ant chargtka QUX cimea par d e forces et des momenta aoat dkhvkr.*
A a l ' p y X e H H O P B 8e BepUtE€le ORJI&IUI E MOMBHT&MU.
I. Ermittlung der Bedhguugsgleichungen $ 1 . Die Beziehung zwischen Spannungsfunkt ion und Spannung
Wir legen auf den Kegelmantel ein Koordinatensystem a, y mit seinem Ursprung s = 0 in die Kegelspite. Jeder Punkt ist d a m festgelegt durch seinen Abstand 3 von der Kegelspitze und dem Winkel p, den der Strahl a mit einer beliebig als p=O festgelegten Erzeugmden des in eine Ebene abgewickelten Kegelmantels einschlieat. Da der Kegelmantel als fiei von BuBeren Lasten angenommen wird, und nach Voraussetwng von der diinnen Schale keine Biegespan- nungen iibertragen werden konnen, muB bekanntlich die Tangentialspannung uy iiberall ver- schwinden.
Auf den einfachen Nachweis mit Hilfe dei Gleichgewichtsbedingungen an einem ddrch zwei benachbarte Mantelli4en und dam orthogonalea Trajektorien herausgeschnittenen Schalen- element sol1 hier verzichtet werden.
1) Evr die Anregung und F6rderung dieset Arbeit m6ohte ich mdm4 hoohverebrten Lehrer, Hema Prof. Dr. phil. L. F 6 p p 1 und Herra Prof. Dr. B. B a P 1 e mines verbindliohsten Dank aussp&en.
u ( p = o , . . . . . . . . . . . . . . . . . (1).

& ~ ~ ~ ; ~ ~ ~ ~ ~ ; 8 o n n t a g Beanspruchung der geeohlowenen sowie auch offenen Kegelwhale 179
Wie L. F o p p l [lJz) nachgewiesen hat und an Hand der Gleichgewichtsgleichungen leieht nachzuprufen ist, lassen sich die LHngsspannung a, und die Schubspannung T,$ durch
ausdriicken, wokin f i und f a Funktionen in y allein bedeuten. d bezeichnet die gleichmal3ige Wandsttirke der dilnnen Schale und cl, ct sind Konstanten.
. Die Funktion fi entspricht der Belastung der Kegelspitze durch eine Kraft, und der reine Langs- ~pannungszustand nimmt proportional mit I ab. Die von der Funktion fa bestimmten Spannungen sind umgekehrt proportional dem Quadrat des Abstandes s von der Kegelspitze, die durch ein Moment belastet wird [I]. Die Aufgabe, fur eine gegebene Belastung der Kegelspitze die Span- nungen zu ermitteln, ist im allgemeinen slatisch unbestimmt. Ihre Losung sol1 im foigenden aufgezeigt werden.
$2. E r m i t t l u n g d e r SpannungsfunKtitionf, f u r d i e d u r c h K r a f t e a n i h r e r S p i t z e b e l a s l e t e Kege l scha le -
Schneidet man die Kegelschale langs einer Kurve 8 = const. auf, sp mu13 die aus den Span- nungen resultierende Kraft das Gleichgewicht zur Last $ herstellen.
Um diese Ekdingungen analy-lisch zu erfassen, denke man sich in die Kegelspitze ein recht- winkeliges z, y, z-Koordinatensystem gelegt, das zuntichst ganz willkiirlioh gerichtet sei. Be- zeichnet map mit t,, &,(, die von einer Mantellinie des Kegels und der $-, y- und z-Achse eingeschlossenen Winkel, SQ fordert das Gleichgewicht :
3a Za 2s
P - 0 v - 0 v - 0
mit P , = s b j a , * c o s ~ , . d y , . PU=s6/a , .cos( ,*d lp , P,= s b / u , * ~ ~ ~ c , d y , . . (3).
Darin ist 2 a der Keilwinkel des in eine Ebene abgewickelten Kegelmantels. Die Winkel (#, C, und 5; sind Fupktionen von y, die nach gewiihltem 5-, y, z-Koordinatensystem bei einer ge- gebenen Kegelschale eindeutig bestimmt sind. Fiir die weiteren Oberlegungen gentigt es, die auf die Achsenrichtung entfallenden Komponenten P,, P,,, P, der Last '$ fur sich zu betrachten, da der Gesamtspannungszustand durch Uberlagerung der aus diesen Lastkomponenten sich ergebenden Spannungen erhalten werden kann. Es werde die Untersuchung fur den jetzt als Einzelkraft betrachteten Lastenteil P, fortgesetzt. 1st a,(*) der Anteil der Spannung a,, der von der Last P, hervorgerufen wird, so lautet die Gleichgewichtsbedingung
P, = 6 8 /u,(=) . cos c, . dy, . . . . . . . . . . . . . (4a)
P,=c1/f1.C0Scady (4 b).
und nach Einsetzen von nach G1. (2), wobei fi = 0 zu setzen ist, folgt . . . . . . . . . . . . . . .
Die Integration ist hier wie in Zukunft immer uber 2 a zu erstrecken. Weiterhin darf die aus den Spannungen a,(=) resultierende Kraft keine Komponente senkrecht zur Last P, adweisen, was nach G1. (3) durch die Bedingung
. . . . . . . . . . 1 cos tV d v = 0, 1 a,(,) FOS <,dY = 0 * ( 5 )
. (6).
ausgedriickt wird. Druckt man in G1. (2) c, durch die Gleichgewichtsbedingung (4b) aus, so folgt:
Zur Vereinfachung lassen wir in Zukunft den Index an f fortfallen. Von den unendlich vielen Funktionen f und damit verknilpften Spannungszustanden, die die Stetigkeitsbedingung und die GI. (4) und (5 ) befriedigen, wird sich derjenige Spannungsverlauf einstellen, bei dem die Form- hderungsarbeit zu einem Minimum wird. In den Ausdruck fur die auf die Raumeinheit bezogene Formlnderungsarbeit [Z]
. . . . .(7) f
wird die Langsspannung nach G1. (6) eingesetet. Nach Zusammenfassung aller von y unab- blngigen Gr613en in den Beiwert c ist die Formanderungsarbeit in einem von den Schnitten -
*) Die &hlen in eokigen Ehmmern beziehen sioh auf das Sohrifttum. am Ende der Arbeit. 12'
8 = const. und 8 + d s = const. begrenzten Streifen durch
A===c . JP d l . . . . . . . . . . . . . . . (8) [If a b, d d * bestimmt.
Nach den Regeln der Varjationsrkhnung iindert man die Spannungsfunktion in seinem Verlauf ein wenig ab, indem eine i b lntervirll ven 13: 0 bis y- 2a ganz heliebige, aber stetige und endliehe mitdem sehr Heinen f7akt.w e mu&pliziette Funktion 7 (y) eu f hinzuaddiert fvird.
Bekanntlidh mul3 fiir dies 4eauchtie FuWioa f die partlelle Differentiation der variierten Formhderungsarbeit nach s far s~=O'verschwinden 13, S, 5943, und es folgt nach einfacher Rechnung t
GI. (9) mu8 ftir jede beliebige Wahl von 7 verschwindE..; diese Bedingung ist aber nur fiif
erifillt. GI. (10) .in (6) eingesetet gibt den Spannungsvqlauf qIb) fiir jede beliebige Kegelschale
als Funktion des Winkels C. an, den die Eneugende der'Kegehchale mit der BuDeren Last Pp ehschliellt ; 1
I f C o s C , d t P ' l f * 3 1 ' & ~ - - - f s d r p . / r l c q s i , d y , E Q . . . . . . . (9b
* (10) f = c . COB 5 . . . . . . . . . . . . . . . .
Die Rechnung m d e unter dw. zunikchst gtillschweigend vorausjpsetzten Erfiillung der GI. (5) durchgefikhrt,
Nach Einsetcen wn GI. (11) in GI. (5) foigen als weitere bdingungen die ersten beiden Gleichungen von (12). I
I c o s < , c o g C * d y = ~ , ~cns&cosC,dy==O, / c o a ~ ~ ; , s f t d ~ = O . . (12). Die dritte der GI. (12) wurde der Vpllatlndigkeit halber schon rnit angeschrieben. Sie erhellen, daD die Richtung des in die Kegelspitze gelegten rechtwinkeligen Koordinatensystems nicht will- kurtich gewrihlt werden darf. Durch eine einfache Betrachtung, die wir uns hier wohl sparen ktinhen, 1al3t sich nachweieen, da4 bei Vorhandensem von Symmetrieeljenen die gesuchten Ko- ordinatenachsen senkrecht auf diesen stehen mussen, um GI. (12) zu erfiillen. Da die Lage des Achsenkreuees durch zwei Richtungen bereits eindeutig bestimmt ist, genugt es immer zwei der GI. (12) zur Berechnung hinzuzuziehen, die dritte Gleichung ist dann auch erfullt, wovon man sich zur Kontrolle leicht iiberzeugen kann.
Danach ist die Last in diese Richtungen in P,, P# und P, zu zerlegen. Die Spannungsanteile a, (z), ~ ~ ( ~ 1 , us(I) werden aus GI. (11) nach entsprechender Vertauschung der Indices gefunden,
wonach sich der endgilltige Spannungsverlauf durch Superposition ergibt. Dieser Msungsgang kann auch ohne Einschrhkung auf die offe e Kegeischale angewandt werden, da bei einem Schnitt liings ein $ Erzeugenden keine inneren Krlfte frei werden.
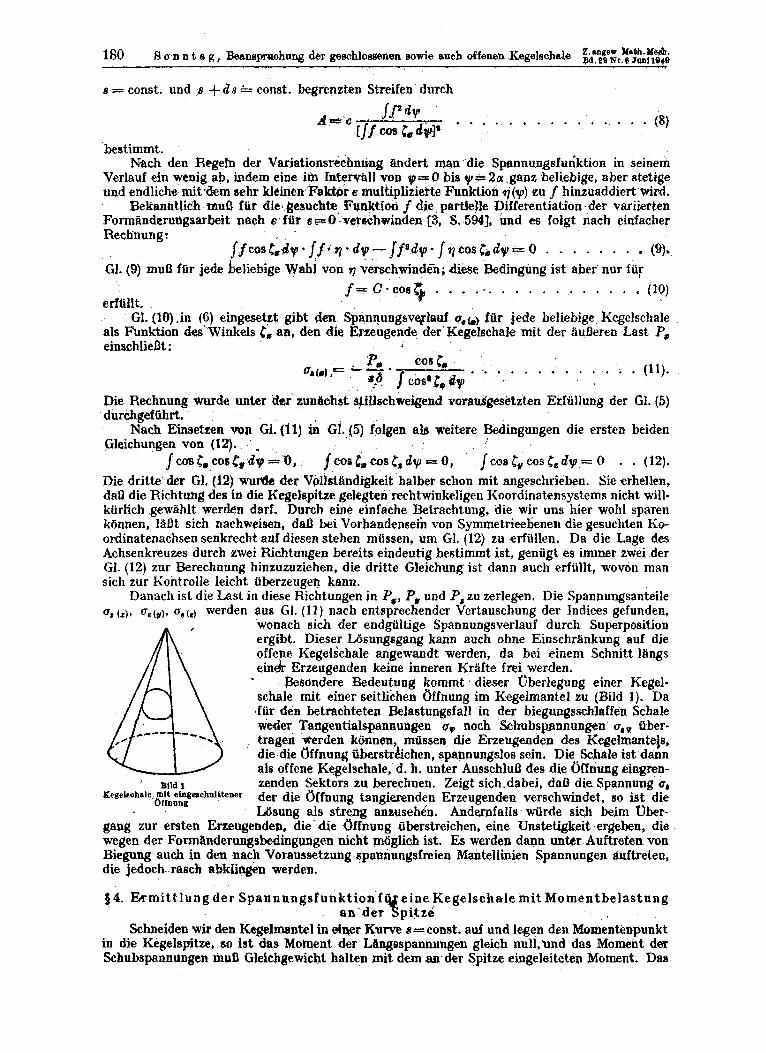
* Besondere Ekdeutung kommt dieser uberlegung einer Kegel- schale mit einer seitlichen offnung im Kegelmantel zu (Bild I ) . Da aftir den betrachteten Belastungsfall in der biegungsschlaffen Schale weder Taldgentialspanaungen v,, noch Schubspannungen a, iiber-
, tragen werden konnen, mrissen die Erzeugenden des Kegelmmtejs, die die Offnung iiberstrkichen, spannungslos sein, Die &hale ist dann als offene Regelsehale, d. h. unter Ausschlul3 des die danung eingren-
' Blld 1 zenden Sektors zu berechnen. Zeigt siqh.dabei, dab die Spannung u, O f l n O n g
Msung als streng anzusehdn. Anderafalls wiirde sich beim Uber- Kegelsohale mlt elnmahnlttener der die Offnung tangierenden Erzeugenden verschwindet, so ist die
gang zur ersten Ermugenden, die die Offnung iiberstreichen, eine Unstetigkeit ergeben, die wegen der Fomiinderungebedingungen nicht m(ig1ich ist. Es werden dann unter Auftreten von Biegung auch in den nach Voraussetzung spannungsfreien Mantellinien Spannungen guftretea, die jedoch rasch abklingen werden,
0 4. &mitt lung der Spannungsfunktion-f e ine Kegelscha-le mi t Momentbelastung an dm 5 pitze
Schneiden wir den Kegelmantel in dqer Kurve a=const. a d und legen den Momentenpunkt in die Kegelspitze, 80 ist dhs Moknent der Mngsspannungen gleich nul1,und das Moment der Schubspannungen mul3 Glelchgewicht halten mit dern der Spitze eingeleiteten Moment. Das
g. sngew.MSth.Yeah. Bd.LB Br, Juo,lB4B 181
'Momeat der Schubspannungen in bezug auf die mAchsen eines rechtwinkeligen a; y, z-KO- ordiria@systems, dessen Ursprung in dw Kegeispiw lie@, ist :
#wain e@# den Hebelarm der Kraft t;,, ds dp in bezug auf die aiAchse tredeutet. Die Inte- gration ist hier wie in Zukunft Qber den Keilwinkel 2 a der abgewickeltea.Kegelschab t u er- elx&en. Damit die Spannungen tS,qs), z , ~ ( ~ ) , z,,,(*) des in die I s,y, eAchsen zerlegten Momntenvektors superponiert .yerden k6nnen, muI3 das Achsenkreuz so gerkhtet sein, dell e. B. die Schubspannungen z,"(z) kein resaltierendes Moment in bezug auf die y-, z-Achsen
6 o n n t a g , &~,aspruchung det geachIo8eenen eowb Euoh offenen Kegeleohde
.M,=6BI$7C*.@s*qy . . . : . . . . . . . . . . \ U3),
adweisen, woraus folgt ; / .&= d S ' ~ T , , ( , ) . @ * * d ~ , ] t , v Q ) * @ , d ? f J = O , jT,,h,$-@gdtp=o . 7. (14).
Far My und M, sind die Indices entspreehend zu vertauschen. Die GI. (2), worin jetztfi= 0 zu setzen ist, lauten in Verbindung mit G1. (14)
worin Striche an f. partielle Differentiation nach yt bedeuteh. Die gleiche Variation der Form- bnderungsarbeit wie in $ 2 Ziihrt auf die Gleichung
wobei auf die Indices mf un&@ veizichtet wucde. r ] ist die bcliebige Variatfonsfunktion und 8, G der 'Elastizitiits- bzw. Schubmodul. Damit g nicht .in s-'ner Ableitung q' auftritt, integrieren
I f i ' * Q?Q = Ifq'$" - jf'',] drp und auoerdem zweckmal3ig If'* dy = rf]!a - Iff - dy Bei einer geschlossenen Kegelschale, d. h. jede Kurve 8 = const. lHuft in sich zurtick, verschwinden die eckigen Klarnmern in Gl. (17) wegen der Stetigkeitsbedingung, und es folgt filr die erste Klammer in GI. (16a)
wir partiell: 7 . . . . . . . . . . . (17). 1
Flir beliebige zulassige Funktionen 7 ist G1. (16) erfiillt, wenn oder @ = C,f= C 2 f " . . . . . . . . (18)
gesetzt wird, wie man sich dnrch Einsetzen in GI. (16) sofort iiberzeugt. Q, = C,f = const. gilt fiir die gerade Kreiskegelschale mit in ihrer Symmetrieachse liegendem Momentenvektor. Die Bedingung des zweiten Ansatzes c f =f" ist fiir f = sin Itp + cos Acy erfiillts). Es muB nun die Kegelschale aufgesucht werden, bei der sich der Hebelarm s @ der Schubspannung tIP in bezug auf den Vektor des an der Kegelspitze eingeleiteten Momebtes M mit cos 1~ oder sin l y t Bndert. Das ist wieder die gerade Kreiskegelschale und mar mit zu seiner Symmetrieachse senkrechtem Momentenvektor. Es ist anscheinend nur in diesem Falle mbglich, Mschen dem Hebelarm der Schubkraft, der bei einer mit ihrer Momentbelast ung gegebenqn Kegelschale eindeutig bestimmt ist, und der Schubspannung unter Anwendung obigar Variation eine Beziehung abwleiten. Hierbei mu13 wegen GI. (14) eine Achse des Koordinatensystems, in dessen Rickungen ein beliebig gegebener Momentenvektor zu zerlegen ist, rnit der Symmetrieachse des Kreiskegels zusammen- tallen.
Wahrend bei der Belastung der Kegelspitze durch Kr€ifte das angewandte Verfahren eine eindeutige strenge Lijsung des Spannungszustandes fur jede beliebige Kegelschale angSbt, ffihrt es bei Momentbelastung nur bei der geraden Kreiskegelschale zum Ziel.
Zur Auffindung des Spannungszustandes bei der allgemeinen Kegelschale mit Moment- belastung ihrer Spitze konnp als Ntiherungsverfahren filr die Schubspannung ein den Rand- bedingungen genugender Ansatz gemacht wwden, etwa in Form einer Fourierreihe, deren Kon- ptanten so zu bestirnmen sind, dal3 die Forminderungsarbeit zum Minimum wird Dieses Ver- fahren ist nur zu empfehlen, wenn mit Sicherheit eine gleichpnlflige Schubspannungsvryteilung Pber die Schalensthrke zu erwarten ist. Wird z. B. eine auf Torsion beanspruchte Kegelschale JBlngs einer Erteugenden aufgesclinitten, 80 bildet sich eine Spapungsverteilung aus, bei det die Lschubspannung nicht mehr iiber die Sthrke des Kegelmantels konstant ist, sondern ganz im Gegenteil, sie wechselt sogar ihre fichtung. 4Xu-m ist obiges Berechnungsverfahren unbrauchbar und es mtissen andere Wege beschritten werden, auf die hier nicht naher eingegangen werden soll.
*) Die mrbelfunktion noheidet am, da fth rie keim atefig in pioh tutU6klaufende Kegelform &&f,
@ = C, .f = const.
182 6 o n n t 8 g , Bemepruchung der gesohloaaenen eowk auch offenen lCegdechde ~ ~ ~ ~ ; ~ ~ ~ ~ l ~ i
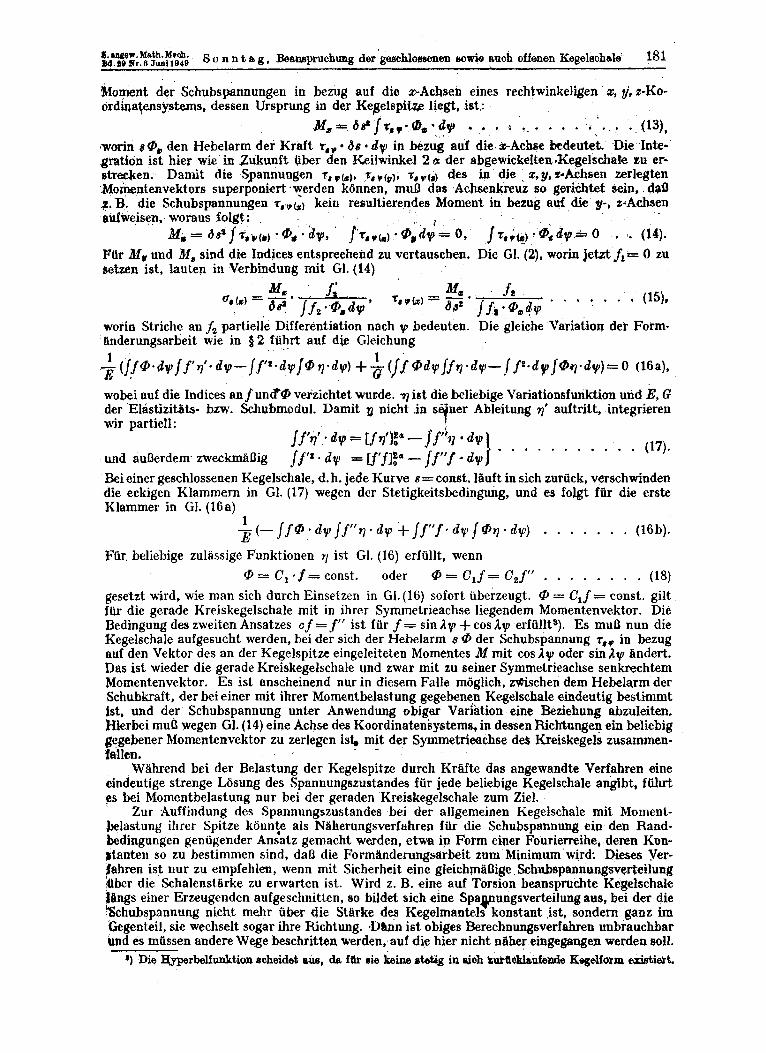
iI. Beispiele 8 4. Die el l ipt ische Kegelschale bei Belastung ih re r Spi tze d u r c h Kriifte Legt man den Koordinatenanfangspunkt eines z-ya-Koordinatensystems in die Kegel-
spitze und sorgt ferner wegen GI. (12) dafur, da0 die s-z-Ebene und die y-a-Ebene Symmetrie- ebenen des Kegels sind, so lautet die Gleichung dieses Kegels (s. Bild 2):
i
J x
Btld 2. Blllptische Kegelsehale
Blld 8. Dle geometrlsehe Bectehuotq rwlschen den Wlnkeln
d ~ , 6~ U d dS
P1 und & sind die Winkel, die an der klei- nen und gronen Halbachse der Ellipse von der Erzeugenden und dey z-Achse einge- schlossen werden. Schreibt man GI. (19) in Zylinderkoordinaten 2, r, fp um, und be- zeichnet den von einer Erzeugenden des Kegels und der z-Achse eingeschlossenen Winkel mit B, 60 , fdgt (Bild 2):
tge /3 = tg"s . . (20), 1 -&2 COS2 fp
worin E~ = tga '' - tg2 " die numeriscce Exzentrizitiit bedeutet. Es &* B, I . -
ist of t leichier, den Spannungszustand als Funktion von fp als vom Winkel w auszudriicken. Zwischen diesen Winkeln besteht. wie man au5 dem rechtwinkligen Dreieck A B C (Bild 3) abliest, bei der all-
gemeinen Kegelschale die Beziehung: ( 8 . dp)' + ( r . dF)2 = (6 . dy)' . . . . . . . . . . . . (21).
Eine einfache Umformung der G1. (21) ergibt mit r = s sin /3 in Anwendung auf die elliptische Kegelschale nach G1. (20)
(22). tg2 B z tg2 Bz E4 sin2 97 cos2 tp . . . %= l/I-&2eos'fp+tg'p, +(1-&2cOs2fp +tg2Bz)2 (1 -&2COS2V)
Betrachtet man zunachst cine Last P, in Richtung der z-Achse, so wird der von einer Erzeugenden und der Last eingeschlossene Winkel Cz identisch mit p. Der Spannungszustand a#(,) ist dann nach Einsetzen von cos 5, als Funktion von g~ durch G1. (11) eindeutig bestimmt
pz cos c, U,(d = - sf= ..
cos25t* --a9 dW dp,
P = o
I Unter Anwendung von GL (20) wird cos (, durch q ausgedriickt:
rnit a = 1 -&acos2fp.
c)ffnuogswinkel 2p, und G1. (23) vereinfacht sich tu f i r = #& wird E = 0, die elliptische Kegelschale geht in eine Kreiskegelschale iiber vom
- -- pz (a), p, cos 6, . . . . . . . . sdn sin 2 s or(,) = - -
jacosi 8 sin gdp, P=-0
wie man auch auf einfacherern Wege finden kann.
E.angew.kbth. Me&. maBB Nr.8 Junl 194e S o n n t a g, Bwmpruobung der gesohloamnen mwie auch offenen Kegeleohale 183
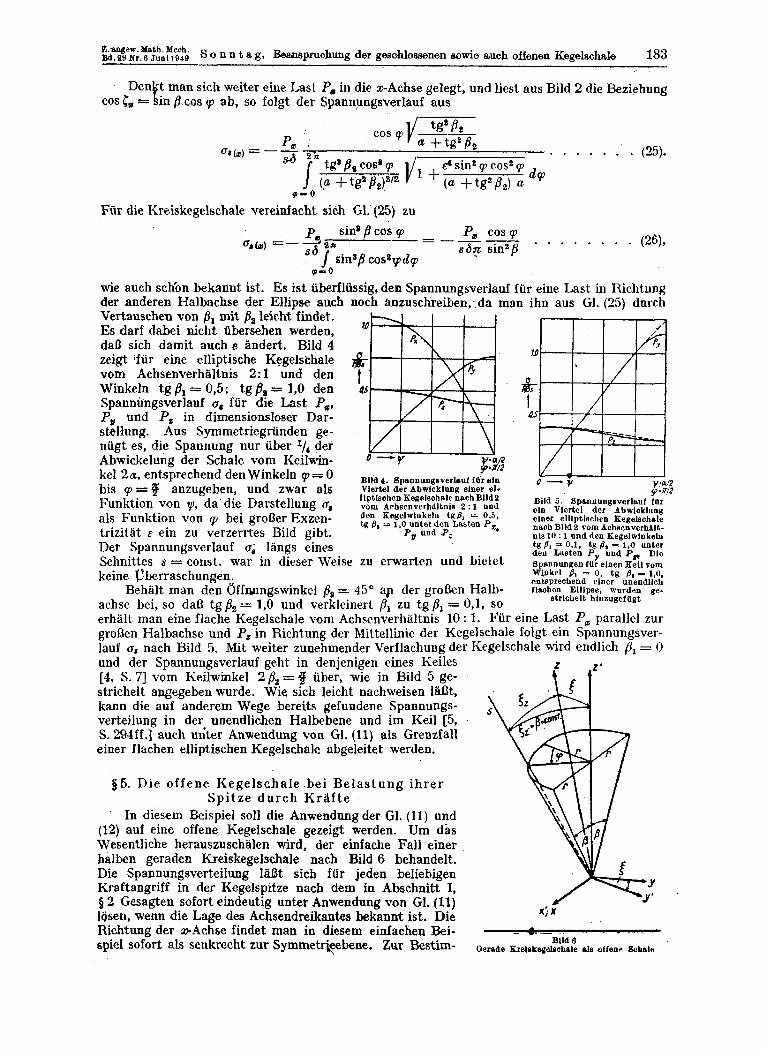
t man sich weiter eine Last P, in die x-Achse gelegt, und liest aus Bild 2 die Beziehung 8 cos 9 ab, so folgt der Spannungsverlauf aus
. . . . . . (25).
Fur die Kreiskegelschale vereinfacht sich G1. (25) zu P, cosp, . . . . 1 . . I (26), -- _--- p, sin*Bcos ip
%b) =-- sdn sinap
wie auch sch’on bekannt ist. Es ist iiberflussig, den Spannungsverlauf fur eine Last in Richtung der anderen Halbachse der Ellipse auch noch anzuschreiben,-da man ihn aus G1. (25) dnrch Vertauschen von mit pa leicht findet. Es darf dabei nicht tibersehen werden, daJ3 sich damit auch t3 Pndert. Bild 4 zeigt ifiir eine elliptische Kegelschale & vom Achsenverhliltnis 2:l und den Winkeln tgb1 = 0,5; tgp, = 1,O den as Spannungsverlauf fijr die Last Ps, Py und P, in dimensionsloser Dar- stellung. Aus Symmetriegriinden ge- ntigt es, die Spannung nur uber l{, der Abwickelung der Schale vom Keilwin- kel 2 a, entsprechend den Winkeln 9 = 0 Bjld &. spennungsverlau( ftlr eln bis q = 8 anzugeben, und zwar als Vlertel der Abnloklung elner el- Funktion von y, da die Darstellung u, vorn AohsenvorhUltnls 2 : 1 und
s6 jwSin8p CoS%pdp, I - 0
llptlsahen Kegelsohale nach Blld2 Bild 5 . ~ p a n n u n g s v e r ~ u ~ fur oln Vlertol dcr dbwloklung
als Funktion von p bei grol3er Exzen- trizitiit E ein zu verzerrtes Bild gibt.
ti;, F;,t:d”,’$’&2&8t; 2;; Py und P8
doer elllptlschen Eegeleahele nach Blld 2 vom Aohsonverhillt- nls 10 : 1 and den Kegelwlnkeln ts B, = 0,1, tg 19, = 1.0 unter den Lssteo P,, und P,, Dlo
entsprecbend olner unendllcb
strichelt hlneugofilgt
Der Spannungsverlauf a, langs eines Schnittes s = const. war in dieser Weise zu erwarten und bietet B~Rnnun~enlllrelnenKellvom keine uberraschungen.
Behalt man den offmngswinkel on = 45” ap der gronen Halb- flaobon Ellipse, warden ge-
achse bei, so daB tg P2 = 1,0 und verklcinert Pl zu tg = 0,1, so erhalt man eine flache Kegelschale vom Achsenverhaltnis 10 : 1. Fur eine Last P, parallel zur groljen Halbachse und P, in Richtung der Mittellhie der Kegelschale folgt ein Spannungsver- lauf at nach Bild 5. Mit weiter zunehmender Verflachung der Kegelschale endlich #I1 = 0 und der Spannungsverlauf geht in denjenigen eines Keiles [4, S. 71 vom Keilwjinkel 2@,=$ uber, wie in Bild 5 ge- strichelt angegeben wurde. Wie sich leicht nachweisen lallt, kann die auf anderem Wege bereits gefundene Spannungs- verteilung in der unendlichen Halbebene und im Keil [5, S. 294ff.3 auch un’ter Anwendung von GI. (11) als Grenzfall einer flachen elliptischen Kegelschale abgeleitet werden.
WlPkol 01 = 0, tg 6, p 1,O.
$ 5 . Die o f f e n e Kegelschale bei Be la s tung i h r e r Spi tze d u r c h K r l f t e
In diesem Beispiel sol1 die Anwendung der G1. (11) und (12) auf eine offene Kegelschale gezeigt werden. Urn das Wesentliche herauszuschalen wird, der einfache Fall einer halben geraden Kreiskegelschale nach Bild 6 behandelt. Die Spannungsverteilung lmt sich fiir jeden beliebigen Kraftangriff in der Kegelspitze nach dem in Abschnitt I, 8 2 Gesagten sofort eindeutig unter Anwendung von G1. (11) Iijsen, wenn die Lage des Achsendreikanh bekannt ist. Die Richtung der SAchse findet man in diesem einfachen Bei- spiel sofort als seokrecht zur Symmetr@bene. Zur Bestim-
x i x 1 - ___
Blld 6 Oerade &&*kegelsobale &la offene &hale

184 k'z;y;kzi mu& der Richtung der y- und z-Achse liest man nnter Anwendung des Cosinussatzes f i i r Kugeldreieoke aus Bild 6 ab:
8 o n n tea g , Bea4epruohung der geaohloesenen eowie mch offenen Ugelschde
I
cosC,= cosficosE +sinfirintemp, 1 CDS t,, = COS pain 6 -&I @ COS EGO8 ?,
r ' 8
womit nach G1. (12) p i t by= - Cly folgt!
und damit t c t g 2 E = - c t g p - T t g f l 9r IG (27). . . . . . . . . . . . . . 2
Ftir Mit der eindeutigen Bestimmung der Lage des Achsenkreum hqt man nun die Richtungen
gefunden, in die die ah der Kegelspitw'angreifende Last ZII zerlegen ist, urn den Spannungs- verlauf nach G1. (11) berechnen zu bnnen, worauf hier verzichtet werden 8011, urn Wieder- hohungen zu ,verraeiden.
$6. Die g e r a d e . X r e i s k e g ~ l s c b a l e m i t Momeatbe las tuag ihrer S p i k e = const. sind aus, Syrnmetrie-
$sih&n wr zwei Belastungslglle zu unterscheiden. Im ersten Fall' liegt der Momentenvektor in der Symmetrieachse, im meiten Fall steht er senkrecht EU ihr und geht hach Voraussetzung durch die Kegdspitze. Greift das Moment fiir einen gegebenen Belastungsfall in anderer Weise an der Spitze an, so 3st es in oMge zwei Richtungen zu zerlegen und die Spannungen sind in bekannter Weise wu superponieren. Lie@ der Momentenvektor in der Symmetrieachse des kegels, so kann man die Spapnungeg mfort anschreiben:
= 45'. fol& am GI. {) 6 - 26".
Bei der geraden Kreigkegelschale vom Kegelwipkel 2
- f a,=--f 85' ,a- 8'8.2nsin'p' bs3 * C -M
-'f - c2 ' = O . . . . . . . . (28). S,teht der Momentenvektor senkrecht auf der Symmetrieachse des Kreiskegels, 80 ist der
Spannungszustand nach 9 3 GI. (18) durch den Ansatz fa = c, cos Ay = (0 eindeutig hstimmt. Betrachtet man gild 2, worin entsprechend einem geraden Kreiskegel &=& w setzen ist, und liegt der Momentenvektor in der x-Achse, so i@ das Moment der Schubspannung in bezug auf diese Achse
d M = zrv~&COsp8COS~*8dp mit Cos@C~stp=Q>. 8 1c n I a a bap=cons t . i s t , g i & p = - y = - y ~ a n d esfolgen.mitf ,=@,=cos/?cos-ydie
Spannungen 7c 2sin-y n
M . a k 6 a sin 2$ sin
2 m - y J %a== -q-; Q, -- 9 -- (29). hi a . . . . . . . .
8 7, Die e l l ip t i sche Kegklschale m i t Mome,ntbel&stuag i h r e r Spi tzc Es sol1 in diesem J3eispiel das in t 3 angegebene Ngherungsverfahren angewandt werden.
Eine elliptische Kegelschale nach Bild 2 wird durch ein Torsionsmoment 'belastet m d m a r lie@ der Momentenvektor in der z-Achse. Der einfache Ansatz
rnit yu= 0 an der kleinen Achse der Ellipse genbgt .a#n Rsndbedingungen und er wird ftir eine elliptische Kegelmhale mit niclit' 2u q;ro&r Exuentrizitgt eine befnedigende NlheruDgdBwng liefem, andewnfalls ist die Hinzunahme weiterer Glieder der Rei4e erforderlich. Die hier durcb- geftihrte Rechnung Weht sich auf den einfaehen Fdi e i w eliiptiscben Kegelschale-die nicht zu sehr von einer geraden Kreiskegelscbale abweicht,.etwa bia zu einem Achsenterhtiltnis 2:l.

E,u1$8r.LIath. Bech. Bd, 88 Nr.6 Jun, ,949 S o n n t a g , Beanspruchung der geschl&enen wwie such offeben Kegelschale . 185
Das Gleichgewicht verlangt: 1 tOv * @# ~9- 6 d y = - M, und es folgt in Anwendung auf 2 a
(P-0 GI. (30) mit co = bl/bb. ?c n I t
oo 2 -sin - 2 y . (31). - M 1 +cocos-2yJ a M a a
; a,=- . P h l a t rv= - J (1 + c o c ~ - 2 v ) @ & It '" J(l +cocos--2y " 1 a &#dy. Y = O a
Y - 0
co ist in iiblicher Weise aus der Minimalbedingung der Fordnderunggarbeit zu bestirnmen.
Wird zur Vereinfachung die Poissonsche Konstante Y = - = 0 gesetzt, womit also gie Quer-
dehnung vernachlassigt wird, so ist E = 2 G, und die einfache Differentiation der Formhnderungs- arbeit nach der Konstanlen co ergibt nach einigen Umforrnungen
1 m
* a c 0 s ~ 2 y . @ ~ d l p It
' 1 (32). Q - 0 . . . . . . . . . . . Pa -2 Go = - JL- - + a 5 e n
v - 0
j @'dV U2 P O 0
, Bei der geraden Kreiskegelxhale i d Qjt=consf., damit wird das Integral 1 cos g 2 y - h s d v gleich
null, und c, verschwindet, wie zu erwarten war. Das Moment der Schubspannung zaV in bezug anf die e-Achse liest man aus Bild 3 ab:
dM sr,,, 8120s ys inps 'dy , wobei c o B y s i n ~ = @ s = s i n a # $ ~ . ,
Far eine elliptische Kegelschale vom AchfenverhBlfnis 2 : 1 uhd den Kegelwinkeln tg PI = 0,5; tg pz E 1,0 ergibt die Ausrechnmg der GI. (32) co = 0,12, und es zeigt sich nach G1. (311, daD die maximale Schubspannung zIv an der kleinen Halbachse der Ellipse auftritt, und mar ist sje bei unserem Beispiel urn 27% groljer als an der grofien Halbachse. Die grolje Beanspruchung nach Mal3gabe derHauptschubspannung t~ = findet man an einem der Punkte, fur die dtHld cy verschwindet
a dY
d t H bo41c , [122~,s inA2~.cosi12y,-(1 +c0cosA2yjsinA2y] x d W 2 6 82 ffJ;/d + t:v U
sin rZ 2 y [cO(A2-l) cos L2y-11 = 0
-= mit L = -. Es folgt '
. . . . . . . . . . . 1 (33).
Welclie Werte der Auflosung der GI. (33) ein Maximum Jiefern, findet man leicht durch pin- setzen in ZE.
kleinen Achse, ty= 0 und a Eine maximale Beanspruchung licgt fur c,, [(:y-- 11 S 1 an vor; ist der Wert 2 1, so findet man den Ort von zarnaX aus cos - y = l/co -
U I(Y- l l . 111. Zusammenfassung
Bei der allgemeinen Kegelschale mit Belastung ihrer Spitze durch Krafte treten nur Ungs - qpannungen auf, die in verhaltnismtiiljig einfacher Weise eindeutig bestimmt werden konnen. 3)as Rechnungsverfahren kann ohne Einschrankung auf eine offene Kegelschale, d. h. bei der keine in sich zuriicklaufende Schnittkurve s = const. existiert, tibertragen werden. Besondere Be- deutung kommt .dieser Erkenntnis in Anwendung auf eine Kegelschale mit eingeschnittener Offnung zu, da die die Offnung uberstreichende Mantelstrahlen im allgemeinen naherungsweise als spannungsfrei angeselien werden konnen.,
Bei Momentbelastung der Kegelspit ze sind die Verhhltnisse vicl komplizicrter. Kine ein- deutige Losung in geschlossener Form war nur bei der geraden Kreiskegelschale moglich. FGr anders gestaltete Kegelschalen wird ein in vielen Fallen befricdigendes Naherungsverfiren an- gegeben. Verschiedene Beispiele zeigeri die Anwendung der Losungsverfahren,
IV. Scbrifttum [l] L. F 6 p p 1: Die sohiefe Kreiskegelechele bei ewei Beanapruah9aut.a. Z. sngew. Mabh. Me&. (Prandtl-
[2] A. F 6 p p 1: Vorlesnngen fiber technische Meohanik. Bd. 3. x n c h e n und Berlin: R. Oldenbourg 1992. [3] H or t - T h o 4 a: Die Differentialgleichungngen der Technik und Phpik. 8. Auflage. Leipaig: A. Barth
[4] L. F 6 p p 1: Aufgaben bus teohniacher Meohmik, Oberetufe. Mtinchen-BerHh: R. Oldenbourg 1832. 161 A. und L. F 6 p p I: Drang uud Zwang, aim h6hem Feetigbitalehre ftir Ingenieme. Bd. 1. 3. Auflage.
Feetaohrift). * 1939.
Munchen-Berlin: R. Oldenbourg 194l.





























