Embed Size (px)
Citation preview
Antriebstechnik \ Antriebsautomatisierung \ Systemintegration \ Services
Handbuch
CCUApplikationsmodul „Buspositionierung“
Ausgabe 12/2010 17054818 / DE
2 Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD"
Inhaltsverzeichnis
Inhaltsverzeichnis1 Allgemeine Hinweise .......................................................................................... 3
1.1 Mängelhaftungsansprüche.......................................................................... 31.2 Haftungsausschluss.................................................................................... 31.3 Urheberrechtsvermerk ................................................................................ 31.4 Produktnamen und Warenzeichen.............................................................. 31.5 Mitgeltende Unterlagen............................................................................... 3
2 Sicherheitshinweise............................................................................................ 42.1 Allgemein .................................................................................................... 42.2 Zielgruppe ................................................................................................... 42.3 Bestimmungsgemäße Verwendung............................................................ 52.4 Bussysteme ................................................................................................ 5
3 Systembeschreibung.......................................................................................... 63.1 Anwendungsgebiet ..................................................................................... 63.2 Profil ............................................................................................................ 6
4 Projektierung ....................................................................................................... 74.1 Voraussetzungen ........................................................................................ 7
4.1.1 PC und Software.......................................................................... 74.1.2 Zulässige Gerätekombination ...................................................... 74.1.3 Korrekt projektierte Geräte ......................................................... 7
4.2 Prozessdatenbelegung ............................................................................... 74.2.1 Überblick...................................................................................... 74.2.2 Feldbus-Eingangsdaten (6 PD) ................................................... 84.2.3 Feldbus-Ausgangsdaten (6 PD) .................................................. 9
5 Inbetriebnahme ................................................................................................. 105.1 Voraussetzungen ...................................................................................... 105.2 Ablauf der Inbetriebnahme........................................................................ 115.3 Einzelachsmodul in die Achs-Konfiguration einfügen ............................... 125.4 Applikationsmodul "Buspositionierung 6 PD" einstellen............................ 13
5.4.1 Skalierungsparameter................................................................ 135.4.2 Systemgrenzen.......................................................................... 145.4.3 Überwachungen......................................................................... 165.4.4 Referenzfahrt ............................................................................. 195.4.5 Konfiguration beenden............................................................... 21
5.5 Konfiguration auf der SD-Karte der CCU speichern ................................. 22
6 Betrieb und Diagnose ....................................................................................... 23
7 Anhang............................................................................................................... 247.1 Belegung der Eingangsklemmen .............................................................. 24
Stichwortverzeichnis ........................................................................................ 25
Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD" 3
1MängelhaftungsansprücheAllgemeine Hinweise
1 Allgemeine Hinweise1.1 Mängelhaftungsansprüche
Die Einhaltung der vorliegenden Dokumentation ist die Voraussetzung für einenstörungsfreien Betrieb und die Erfüllung eventueller Mängelhaftungsansprüche. LesenSie deshalb zuerst die Dokumentationen, bevor Sie mit der Software und denangeschlossenen Geräten von SEW-EURODRIVE arbeiten!
Stellen Sie sicher, dass die Dokumentationen den Anlagen- und Betriebs-verantwortlichen, sowie Personen, die unter eigener Verantwortung an den Gerätenarbeiten, in einem leserlichen Zustand zugänglich gemacht werden.
1.2 HaftungsausschlussDie Beachtung der vorliegenden Dokumentation und der Dokumentationen zu denangeschlossenen Geräten von SEW-EURODRIVE ist Grundvoraussetzung für einensicheren Betrieb und für die Erreichung der angegebenen Produkteigenschaften undLeistungsmerkmale.
Für Personen-, Sach- oder Vermögensschäden, die wegen Nichtbeachtung derDokumentationen entstehen, übernimmt SEW-EURODRIVE keine Haftung. DieSachmängelhaftung ist in solchen Fällen ausgeschlossen.
1.3 Urheberrechtsvermerk© 2010 – SEW-EURODRIVE. Alle Rechte vorbehalten.
Jegliche – auch auszugsweise – Vervielfältigung, Bearbeitung, Verbreitung und sons-tige Verwertung sind verboten.
1.4 Produktnamen und WarenzeichenDie in dieser Dokumentation genannten Marken und Produktnamen sind Warenzeichenoder eingetragene Warenzeichen der jeweiligen Titelhalter.
1.5 Mitgeltende UnterlagenDie zu beachtenden "Mitgeltenden Unterlagen" entnehmen Sie der Dokumentation zurKonfigurations-Software "Application Configurator für CCU".
4 Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD"
2 AllgemeinSicherheitshinweise
2 Sicherheitshinweise2.1 Allgemein
Die folgenden grundsätzlichen Sicherheitshinweise dienen dazu, Personen- und Sach-schäden zu vermeiden. Der Betreiber muss sicherstellen, dass die grundsätzlichenSicherheitshinweise beachtet und eingehalten werden.
Vergewissern Sie sich, dass Anlagen- und Betriebsverantwortliche sowie Personen, dieunter eigener Verantwortung arbeiten, die Dokumentationen vollständig gelesen undverstanden haben. Bei Unklarheiten oder weiterem Informationsbedarf wenden Sie sichbitte an SEW-EURODRIVE.
Die folgenden Sicherheitshinweise beziehen sich auf den Einsatz der Software.Berücksichtigen Sie auch die ergänzenden Sicherheitshinweise in dieser Dokumenta-tion und in den Dokumentationen zu den angeschlossenen Geräten vonSEW-EURODRIVE.
Diese Dokumentation ersetzt nicht die ausführlichen Dokumentationen der an-geschlossenen Geräte! Die vorliegende Dokumentation setzt das Vorhandensein unddie Kenntnis der Dokumentationen zu allen angeschlossenen Geräten vonSEW-EURODRIVE voraus.
Niemals beschädigte Produkte installieren oder in Betrieb nehmen. Beschädigungenbitte umgehend beim Transportunternehmen reklamieren.
Während des Betriebs können die Geräte ihrer Schutzart entsprechend spannungs-führende, blanke gegebenenfalls auch bewegliche oder rotierende Teile sowie heißeOberflächen haben.
Bei unzulässigem Entfernen der erforderlichen Abdeckung, unsachgemäßem Einsatz,bei falscher Installation oder Bedienung, besteht die Gefahr von schweren Personen-oder Sachschäden. Weitere Informationen sind der Dokumentation zu entnehmen.
2.2 ZielgruppeAlle Arbeiten mit der eingesetzten Software dürfen ausschließlich von einer ausgebil-deten Fachkraft ausgeführt werden. Fachkraft im Sinne dieser Dokumentation sind Per-sonen, die über folgende Qualifikationen verfügen:
• Geeignete Unterweisung.
• Kenntnis dieser Dokumentation und der mitgeltenden Dokumentationen.
• SEW EURODRIVE empfiehlt zusätzlich Produktschulungen zu den Produkten, diemit dieser Software betrieben werden.
Alle mechanischen Arbeiten an den angeschlossenen Geräten dürfen ausschließlichvon einer ausgebildeten Fachkraft ausgeführt werden. Fachkraft im Sinne dieser Doku-mentation sind Personen, die mit Aufbau, mechanischer Installation, Störungsbehe-bung und Instandhaltung des Produkts vertraut sind und über folgende Qualifikationenverfügen:
• Ausbildung im Bereich Mechanik (beispielsweise als Mechaniker oder Mechatroni-ker) mit bestandener Abschlussprüfung.
• Kenntnis dieser Dokumentation und der mitgeltenden Dokumentationen.
Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD" 5
2Bestimmungsgemäße VerwendungSicherheitshinweise
Alle elektrotechnischen Arbeiten an den angeschlossenen Geräten dürfen ausschließ-lich von einer ausgebildeten Elektrofachkraft ausgeführt werden. Elektrofachkraft imSinne dieser Dokumentation sind Personen, die mit elektrischer Installation, Inbetrieb-nahme, Störungsbehebung und Instandhaltung des Produkts vertraut sind und über fol-gende Qualifikationen verfügen:
• Ausbildung im Bereich Elektrotechnik (beispielsweise Elektroniker oder Mechatroni-ker) mit bestandener Abschlussprüfung.
• Kenntnis dieser Dokumentation und der mitgeltenden Dokumentationen.
• Kenntnis der jeweils gültigen Sicherheitsvorschriften und Gesetze.
• Kenntnis der anderen in dieser Dokumentation genannten Normen, Richtlinien undGesetze.
Die genannten Personen müssen die betrieblich ausdrücklich erteilte Berechtigunghaben, Geräte, Systeme und Stromkreise gemäß den Standards der Sicherheitstechnikin Betrieb zu nehmen, zu programmieren, zu parametrieren, zu kennzeichnen und zuerden.
Alle Arbeiten in den übrigen Bereichen Transport, Lagerung, Betrieb und Entsorgungdürfen ausschließlich von Personen durchgeführt werden, die in geeigneter Weise un-terwiesen wurden.
2.3 Bestimmungsgemäße VerwendungSEW-EURODRIVE bietet verschiedene standardisierte Steuerungsprogramme, so ge-nannte Applikationsmodule an.
Das Applikationsmodul "Buspositionierung" ist eine Einachsanwendung und wird ver-wendet, wenn variable Positionen mit unterschiedlichen Drehzahlen und Rampen ange-fahren werden.
Verwenden Sie die Geräte übergreifende Software "Application Configurator", um dieAchsen für das Applikationsmodul in Betrieb zu nehmen, zu konfigurieren und die fertigeKonfiguration auf den Controller zu übertragen.
2.4 BussystemeMit einem Bussystem ist es möglich, Frequenzumrichter und/oder Motorstarter in weitenGrenzen an die Anlagengegebenheiten anzupassen. Dadurch besteht die Gefahr, dassdie von außen nicht sichtbare Änderung der Parameter zu einem unerwarteten, abernicht unkontrollierten Systemverhalten führen kann.
6 Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD"
3 AnwendungsgebietSystembeschreibung
3 Systembeschreibung3.1 Anwendungsgebiet
Das Applikationsmodul "Buspositionierung" wird verwendet, wenn variable Positionenmit unterschiedlichen Drehzahlen und Rampen angefahren werden.
Die Positionierung erfolgt auf den angebauten Motorgeber oder optional auf einen ex-ternen Streckengeber. Es wird nur die lineare, absolute Positionierung unterstützt. Eskann mit Anwendereinheiten gearbeitet werden.
Es werden die folgenden Betriebsarten unterstützt:
• Tippen
• Referenzieren
• Positionieren
3.2 ProfilDas Applikationsmodul "Buspositionierung" hat das folgende Profil:
Profil Funktionsumfang
6 PD 6 Prozessdatenwörter, über die Position, Geschwindigkeit, Beschleunigung, Verzögerung gesteuert werden.
Pi
fkVA
Hz
n
Pi
fkVA
Hz
n
Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD" 7
4VoraussetzungenProjektierung
4 Projektierung4.1 Voraussetzungen4.1.1 PC und Software
Das Applikationsmodul ist Bestandteil der Konfigurations-Software "Application Confi-gurator".
Dementsprechend gelten die Systemvoraussetzungen des Application Configurators.Diese finden Sie in der Dokumentation "Konfigurations-Software Application Configura-tor für CCU".
4.1.2 Zulässige GerätekombinationDie Zuordnung der Umrichter zu der jeweiligen CCU (standard oder advanced) entneh-men Sie der Dokumentation zur Konfigurations-Software "Application Configurator fürCCU".
4.1.3 Korrekt projektierte Geräte Die richtige Projektierung und eine fehlerfreie Installation der Geräte sind Vorausset-zung für eine erfolgreiche Inbetriebnahme und den Betrieb der Applikationsmodule mit-hilfe des Application Configurators.
Ausführliche Projektierungshinweise finden Sie in der Dokumentation zu dem betref-fenden Gerät (siehe Kapitel "Mitgeltende Unterlagen").
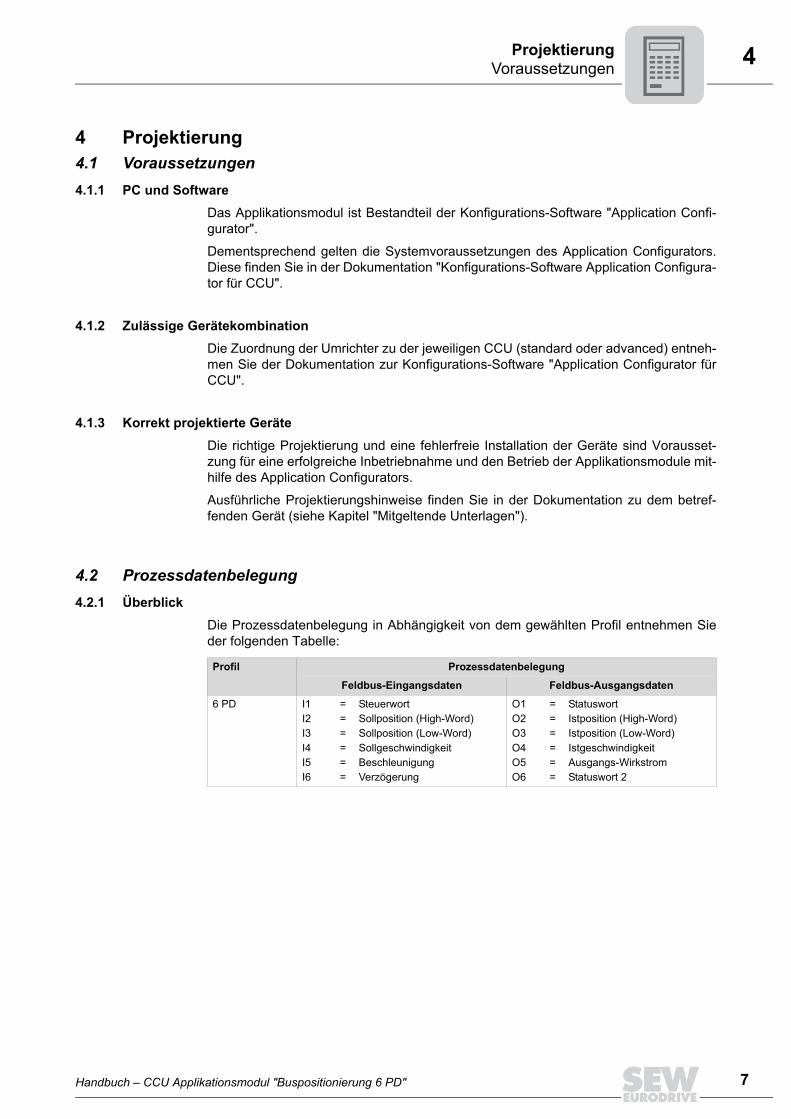
4.2 Prozessdatenbelegung4.2.1 Überblick
Die Prozessdatenbelegung in Abhängigkeit von dem gewählten Profil entnehmen Sieder folgenden Tabelle:
Profil Prozessdatenbelegung
Feldbus-Eingangsdaten Feldbus-Ausgangsdaten
6 PD I1 = SteuerwortI2 = Sollposition (High-Word)I3 = Sollposition (Low-Word)I4 = SollgeschwindigkeitI5 = BeschleunigungI6 = Verzögerung
O1 = StatuswortO2 = Istposition (High-Word)O3 = Istposition (Low-Word)O4 = IstgeschwindigkeitO5 = Ausgangs-WirkstromO6 = Statuswort 2
8 Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD"
4 ProzessdatenbelegungProjektierung
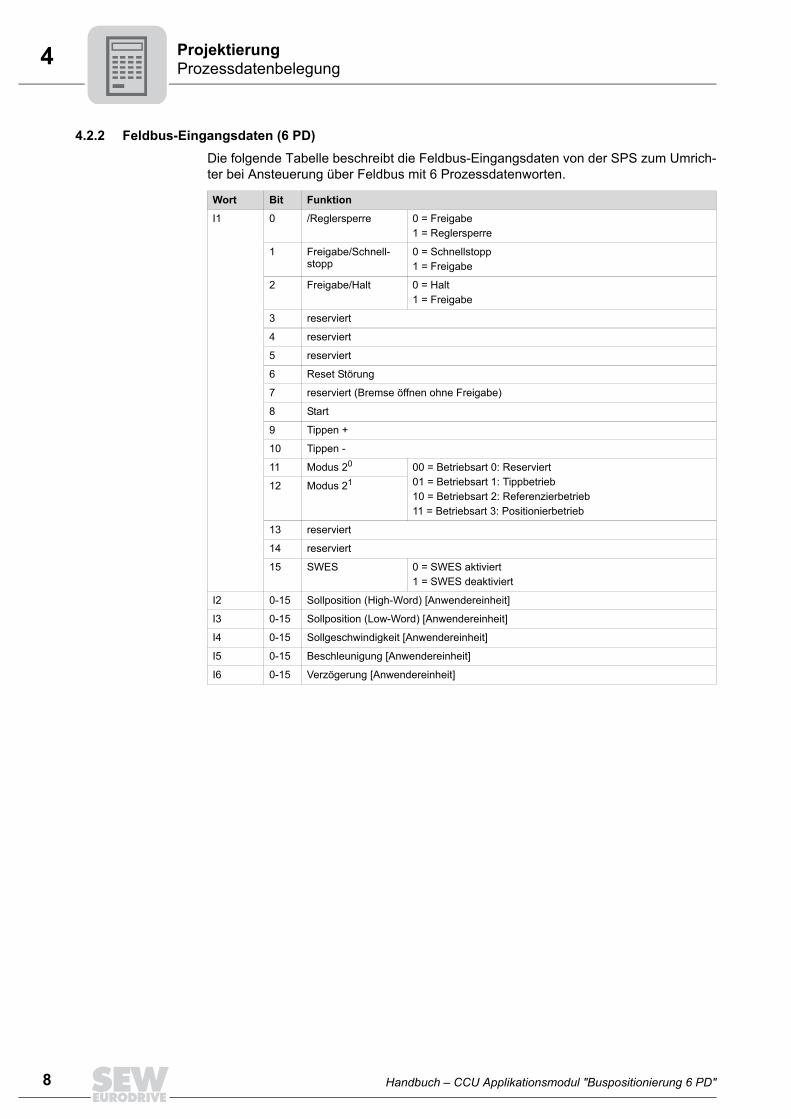
4.2.2 Feldbus-Eingangsdaten (6 PD)Die folgende Tabelle beschreibt die Feldbus-Eingangsdaten von der SPS zum Umrich-ter bei Ansteuerung über Feldbus mit 6 Prozessdatenworten.
Wort Bit Funktion
I1 0 /Reglersperre 0 = Freigabe1 = Reglersperre
1 Freigabe/Schnell-stopp
0 = Schnellstopp1 = Freigabe
2 Freigabe/Halt 0 = Halt1 = Freigabe
3 reserviert
4 reserviert
5 reserviert
6 Reset Störung
7 reserviert (Bremse öffnen ohne Freigabe)
8 Start
9 Tippen +
10 Tippen -
11 Modus 20 00 = Betriebsart 0: Reserviert01 = Betriebsart 1: Tippbetrieb10 = Betriebsart 2: Referenzierbetrieb11 = Betriebsart 3: Positionierbetrieb
12 Modus 21
13 reserviert
14 reserviert
15 SWES 0 = SWES aktiviert1 = SWES deaktiviert
I2 0-15 Sollposition (High-Word) [Anwendereinheit]
I3 0-15 Sollposition (Low-Word) [Anwendereinheit]
I4 0-15 Sollgeschwindigkeit [Anwendereinheit]
I5 0-15 Beschleunigung [Anwendereinheit]
I6 0-15 Verzögerung [Anwendereinheit]
Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD" 9
4ProzessdatenbelegungProjektierung
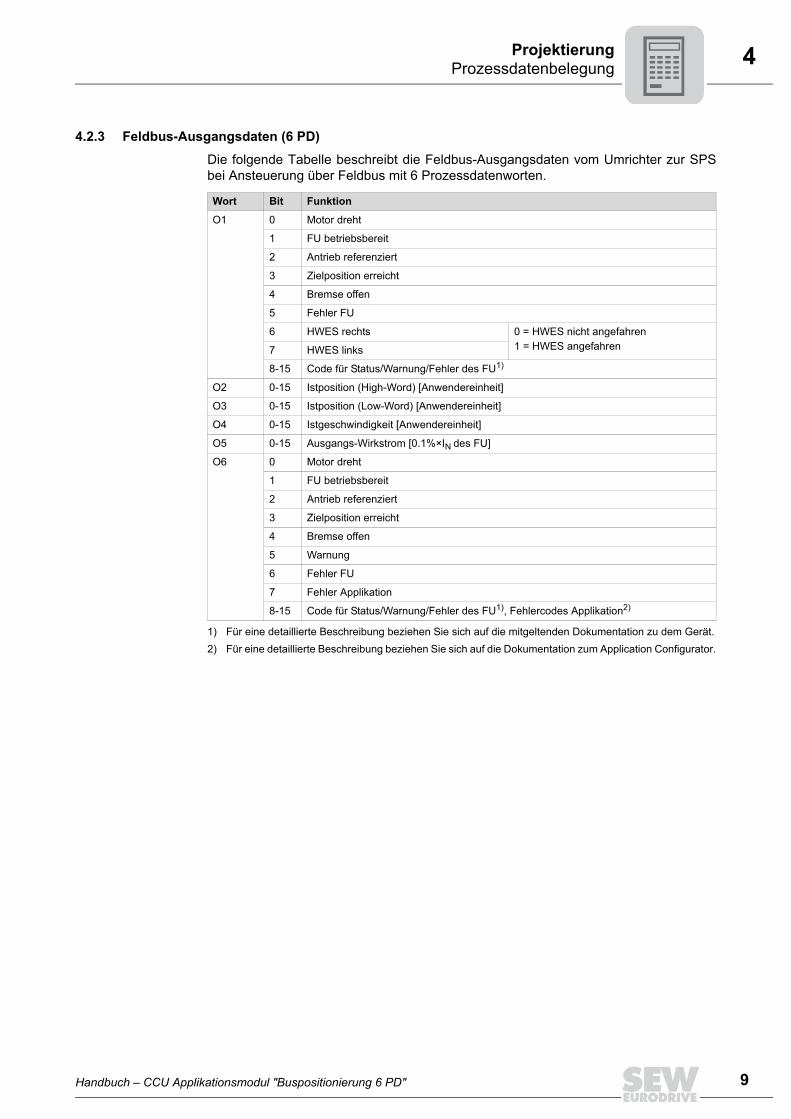
4.2.3 Feldbus-Ausgangsdaten (6 PD)
Die folgende Tabelle beschreibt die Feldbus-Ausgangsdaten vom Umrichter zur SPSbei Ansteuerung über Feldbus mit 6 Prozessdatenworten.
Wort Bit Funktion
O1 0 Motor dreht
1 FU betriebsbereit
2 Antrieb referenziert
3 Zielposition erreicht
4 Bremse offen
5 Fehler FU
6 HWES rechts 0 = HWES nicht angefahren1 = HWES angefahren7 HWES links
8-15 Code für Status/Warnung/Fehler des FU1)
1) Für eine detaillierte Beschreibung beziehen Sie sich auf die mitgeltenden Dokumentation zu dem Gerät.
O2 0-15 Istposition (High-Word) [Anwendereinheit]
O3 0-15 Istposition (Low-Word) [Anwendereinheit]
O4 0-15 Istgeschwindigkeit [Anwendereinheit]
O5 0-15 Ausgangs-Wirkstrom [0.1%×IN des FU]
O6 0 Motor dreht
1 FU betriebsbereit
2 Antrieb referenziert
3 Zielposition erreicht
4 Bremse offen
5 Warnung
6 Fehler FU
7 Fehler Applikation
8-15 Code für Status/Warnung/Fehler des FU1), Fehlercodes Applikation2)
2) Für eine detaillierte Beschreibung beziehen Sie sich auf die Dokumentation zum Application Configurator.
10 Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD"
5 VoraussetzungenInbetriebnahme
5 Inbetriebnahme5.1 Voraussetzungen
Überprüfen Sie die Installation der Umrichter, den Anschluss der Geber und die Instal-lation des Controllers.
Installationshinweise finden Sie der Dokumentation zu den betreffenden Geräten (siehe"Mitgeltende Unterlagen") und im Anhang der Dokumentation zur Konfigurations-Soft-ware "Application Configurator für CCU".
BenötigteSoftware-Tools
Für die Inbetriebnahme benötigen Sie die Engineering-SoftwareMOVITOOLS® MotionStudio. Im Lieferumfang ist der Technologieeditor "Drive Startupfor MOVI-PLC®" und der Application Configurator enthalten.
Den Technologieeditor "Drive Startup for MOVI-PLC®" benötigen Sie, um die Umrich-ter vorzubereiten (Motorinbetriebnahme) und die Kommunikation mit dem Controllerherzustellen.
Den Application Configurator benötigen Sie, um die Achsen für das Applikationsmo-dul einzufügen und anschließend das Applikationsmodul einzustellen.
Die nachfolgende Darstellung zeigt Ihnen Schritt für Schritt den gesamten Ablauf.
00
I
Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD" 11
5Ablauf der InbetriebnahmeInbetriebnahme
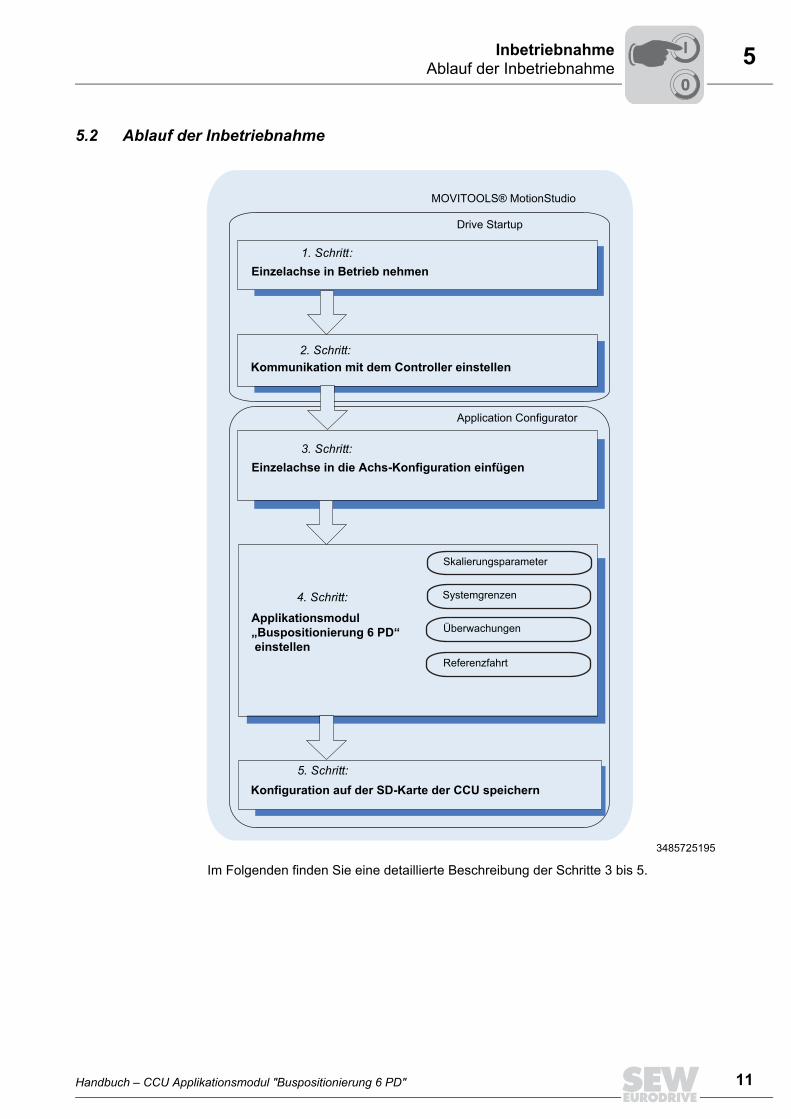
5.2 Ablauf der Inbetriebnahme
Im Folgenden finden Sie eine detaillierte Beschreibung der Schritte 3 bis 5.
3485725195
1. Schritt:Einzelachse in Betrieb nehmen
2. Schritt:Kommunikation mit dem Controller einstellen
3. Schritt:Einzelachse in die Achs-Konfiguration einfügen
Drive Startup
MOVITOOLS® MotionStudio
Application Configurator
4. Schritt:
Applikationsmodul „Buspositionierung 6 PD“ einstellen
Skalierungsparameter
Systemgrenzen
Überwachungen
5. Schritt:Konfiguration auf der SD-Karte der CCU speichern
Referenzfahrt
00
I
12 Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD"
5 Einzelachsmodul in die Achs-Konfiguration einfügenInbetriebnahme
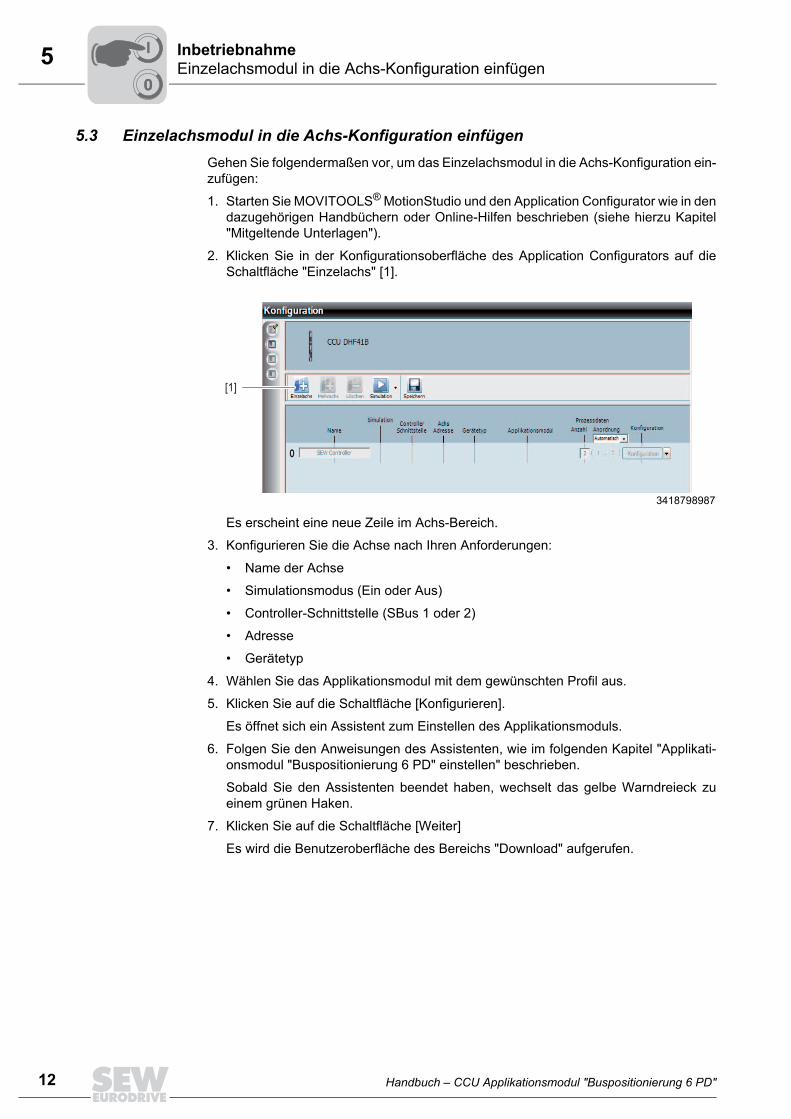
5.3 Einzelachsmodul in die Achs-Konfiguration einfügenGehen Sie folgendermaßen vor, um das Einzelachsmodul in die Achs-Konfiguration ein-zufügen:
1. Starten Sie MOVITOOLS® MotionStudio und den Application Configurator wie in dendazugehörigen Handbüchern oder Online-Hilfen beschrieben (siehe hierzu Kapitel"Mitgeltende Unterlagen").
2. Klicken Sie in der Konfigurationsoberfläche des Application Configurators auf dieSchaltfläche "Einzelachs" [1].
Es erscheint eine neue Zeile im Achs-Bereich.
3. Konfigurieren Sie die Achse nach Ihren Anforderungen:
• Name der Achse
• Simulationsmodus (Ein oder Aus)
• Controller-Schnittstelle (SBus 1 oder 2)
• Adresse
• Gerätetyp
4. Wählen Sie das Applikationsmodul mit dem gewünschten Profil aus.
5. Klicken Sie auf die Schaltfläche [Konfigurieren].
Es öffnet sich ein Assistent zum Einstellen des Applikationsmoduls.
6. Folgen Sie den Anweisungen des Assistenten, wie im folgenden Kapitel "Applikati-onsmodul "Buspositionierung 6 PD" einstellen" beschrieben.
Sobald Sie den Assistenten beendet haben, wechselt das gelbe Warndreieck zueinem grünen Haken.
7. Klicken Sie auf die Schaltfläche [Weiter]
Es wird die Benutzeroberfläche des Bereichs "Download" aufgerufen.
3418798987
[1]
00
I
Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD" 13
5Applikationsmodul "Buspositionierung 6 PD" einstellenInbetriebnahme
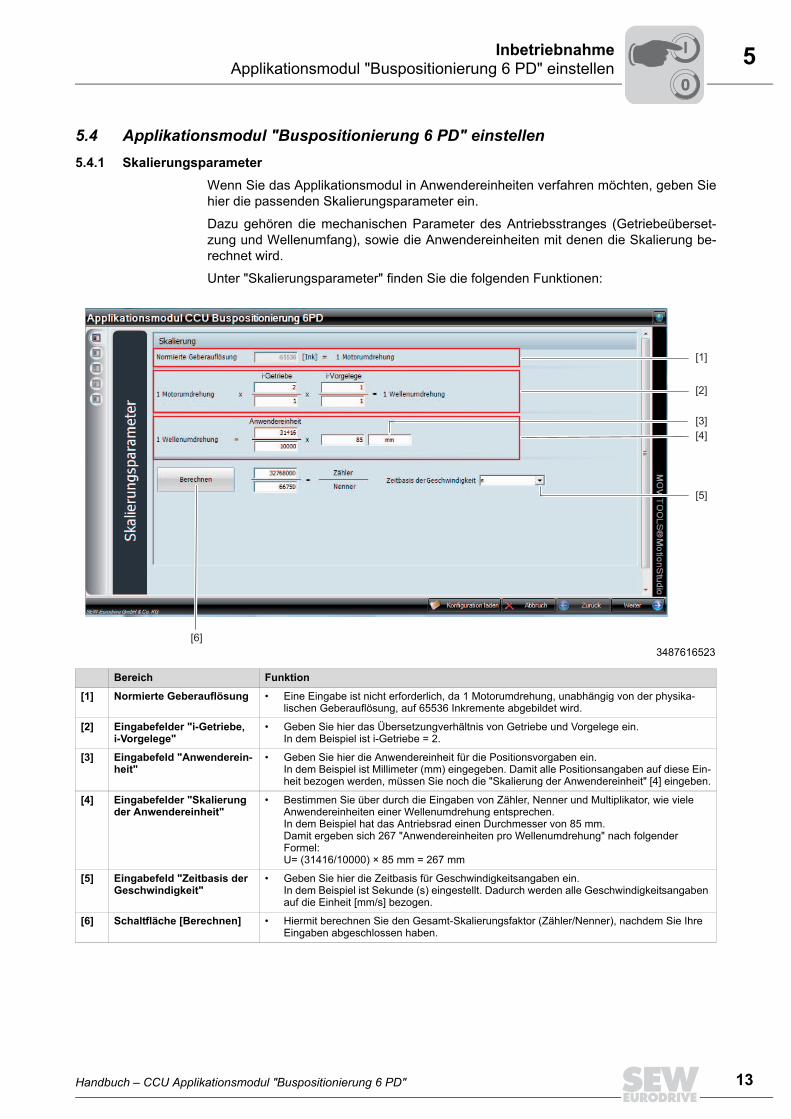
5.4 Applikationsmodul "Buspositionierung 6 PD" einstellen5.4.1 Skalierungsparameter
Wenn Sie das Applikationsmodul in Anwendereinheiten verfahren möchten, geben Siehier die passenden Skalierungsparameter ein.
Dazu gehören die mechanischen Parameter des Antriebsstranges (Getriebeüberset-zung und Wellenumfang), sowie die Anwendereinheiten mit denen die Skalierung be-rechnet wird.
Unter "Skalierungsparameter" finden Sie die folgenden Funktionen:
3487616523
Bereich Funktion
[1] Normierte Geberauflösung • Eine Eingabe ist nicht erforderlich, da 1 Motorumdrehung, unabhängig von der physika-lischen Geberauflösung, auf 65536 Inkremente abgebildet wird.
[2] Eingabefelder "i-Getriebe, i-Vorgelege"
• Geben Sie hier das Übersetzungverhältnis von Getriebe und Vorgelege ein.In dem Beispiel ist i-Getriebe = 2.
[3] Eingabefeld "Anwenderein-heit"
• Geben Sie hier die Anwendereinheit für die Positionsvorgaben ein.In dem Beispiel ist Millimeter (mm) eingegeben. Damit alle Positionsangaben auf diese Ein-heit bezogen werden, müssen Sie noch die "Skalierung der Anwendereinheit" [4] eingeben.
[4] Eingabefelder "Skalierung der Anwendereinheit"
• Bestimmen Sie über durch die Eingaben von Zähler, Nenner und Multiplikator, wie viele Anwendereinheiten einer Wellenumdrehung entsprechen.In dem Beispiel hat das Antriebsrad einen Durchmesser von 85 mm.Damit ergeben sich 267 "Anwendereinheiten pro Wellenumdrehung" nach folgender Formel:U= (31416/10000) × 85 mm = 267 mm
[5] Eingabefeld "Zeitbasis der Geschwindigkeit"
• Geben Sie hier die Zeitbasis für Geschwindigkeitsangaben ein.In dem Beispiel ist Sekunde (s) eingestellt. Dadurch werden alle Geschwindigkeitsangaben auf die Einheit [mm/s] bezogen.
[6] Schaltfläche [Berechnen] • Hiermit berechnen Sie den Gesamt-Skalierungsfaktor (Zähler/Nenner), nachdem Sie Ihre Eingaben abgeschlossen haben.
[3]
[6]
[5]
[2]
[1]
[4]
00
I
14 Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD"
5 Applikationsmodul "Buspositionierung 6 PD" einstellenInbetriebnahme
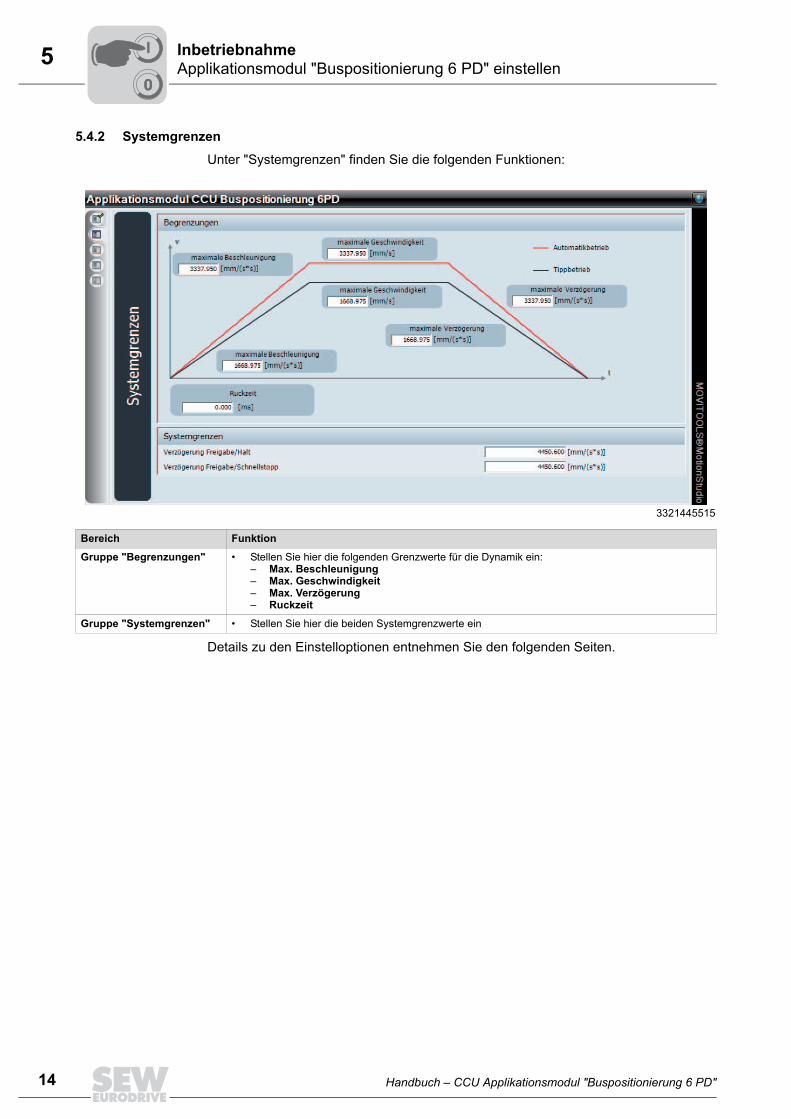
5.4.2 Systemgrenzen
Unter "Systemgrenzen" finden Sie die folgenden Funktionen:
Details zu den Einstelloptionen entnehmen Sie den folgenden Seiten.
3321445515
Bereich Funktion
Gruppe "Begrenzungen" • Stellen Sie hier die folgenden Grenzwerte für die Dynamik ein:– Max. Beschleunigung– Max. Geschwindigkeit– Max. Verzögerung– Ruckzeit
Gruppe "Systemgrenzen" • Stellen Sie hier die beiden Systemgrenzwerte ein
00
I
Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD" 15
5Applikationsmodul "Buspositionierung 6 PD" einstellenInbetriebnahme
Begrenzungen Sie haben die folgenden Einstelloptionen:
• Max. Beschleunigung• Max. Geschwindigkeit• Max. Verzögerung
Diese 3 Werte können unabhängig für den Tippbetrieb und den Positionierbetriebeingestellt werden. Sie begrenzen die Dynamikparameter, die über den Feldbus vor-gegeben werden.
• RuckzeitDie Begrenzung des Rucks (> 0 ms) bewirkt eine Schonung der Mechanik durch einsanfteres Beschleunigungs- und Verzögerungsverhalten. Die Begrenzung desRucks ist in allen Betriebsarten aktiv.
Systemgrenzen Die Verzögerungen werden aktiv, wenn im Steuerwort das Bit 1 / Bit 2 einen bestimmtenZustand annimmt.
• Freigabe / SchnellstopSteuerwort: Bit 1 = "FALSE"
• Freigabe / StopSteuerwort: Bit 2= "FALSE"
HINWEIS• Stellen Sie sicher, dass für die max. Beschleunigung, die max. Geschwindigkeit
und die max. Verzögerung Werte (≠ 0) zugewiesen sind.
00
I
16 Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD"
5 Applikationsmodul "Buspositionierung 6 PD" einstellenInbetriebnahme
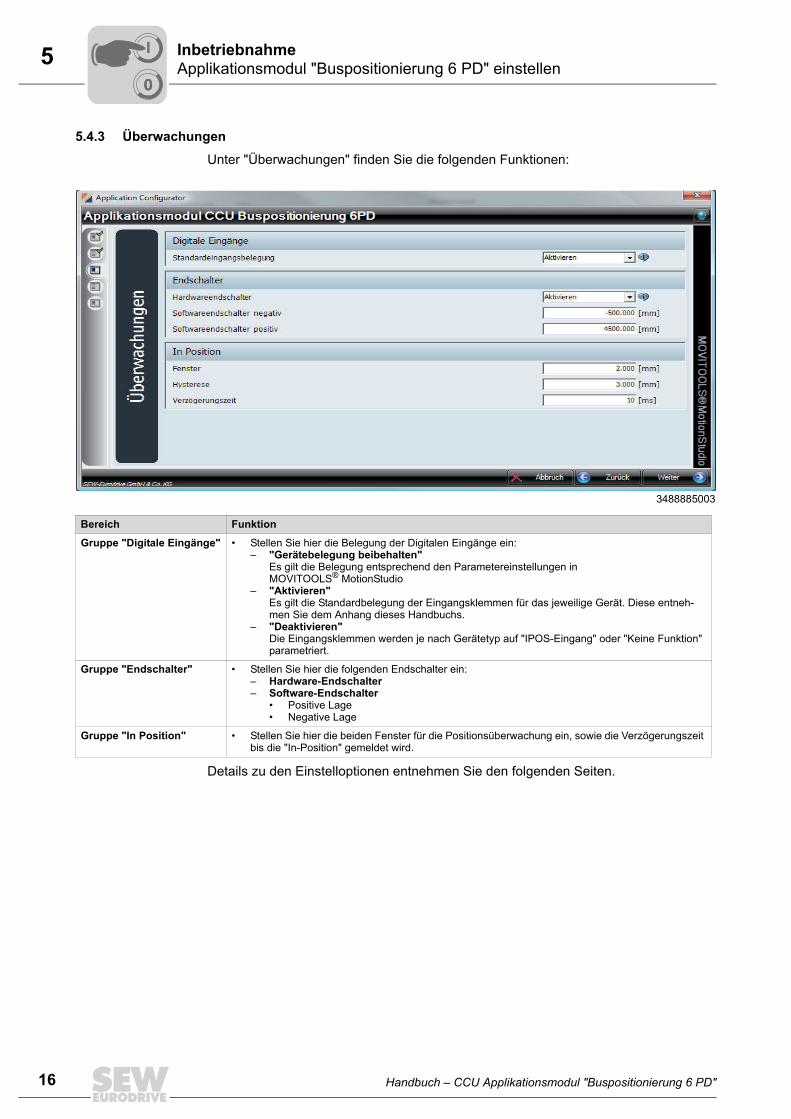
5.4.3 Überwachungen
Unter "Überwachungen" finden Sie die folgenden Funktionen:
Details zu den Einstelloptionen entnehmen Sie den folgenden Seiten.
3488885003
Bereich Funktion
Gruppe "Digitale Eingänge" • Stellen Sie hier die Belegung der Digitalen Eingänge ein:– "Gerätebelegung beibehalten"
Es gilt die Belegung entsprechend den Parametereinstellungen in MOVITOOLS® MotionStudio
– "Aktivieren" Es gilt die Standardbelegung der Eingangsklemmen für das jeweilige Gerät. Diese entneh-men Sie dem Anhang dieses Handbuchs.
– "Deaktivieren" Die Eingangsklemmen werden je nach Gerätetyp auf "IPOS-Eingang" oder "Keine Funktion" parametriert.
Gruppe "Endschalter" • Stellen Sie hier die folgenden Endschalter ein:– Hardware-Endschalter– Software-Endschalter
• Positive Lage• Negative Lage
Gruppe "In Position" • Stellen Sie hier die beiden Fenster für die Positionsüberwachung ein, sowie die Verzögerungszeit bis die "In-Position" gemeldet wird.
00
I
Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD" 17
5Applikationsmodul "Buspositionierung 6 PD" einstellenInbetriebnahme
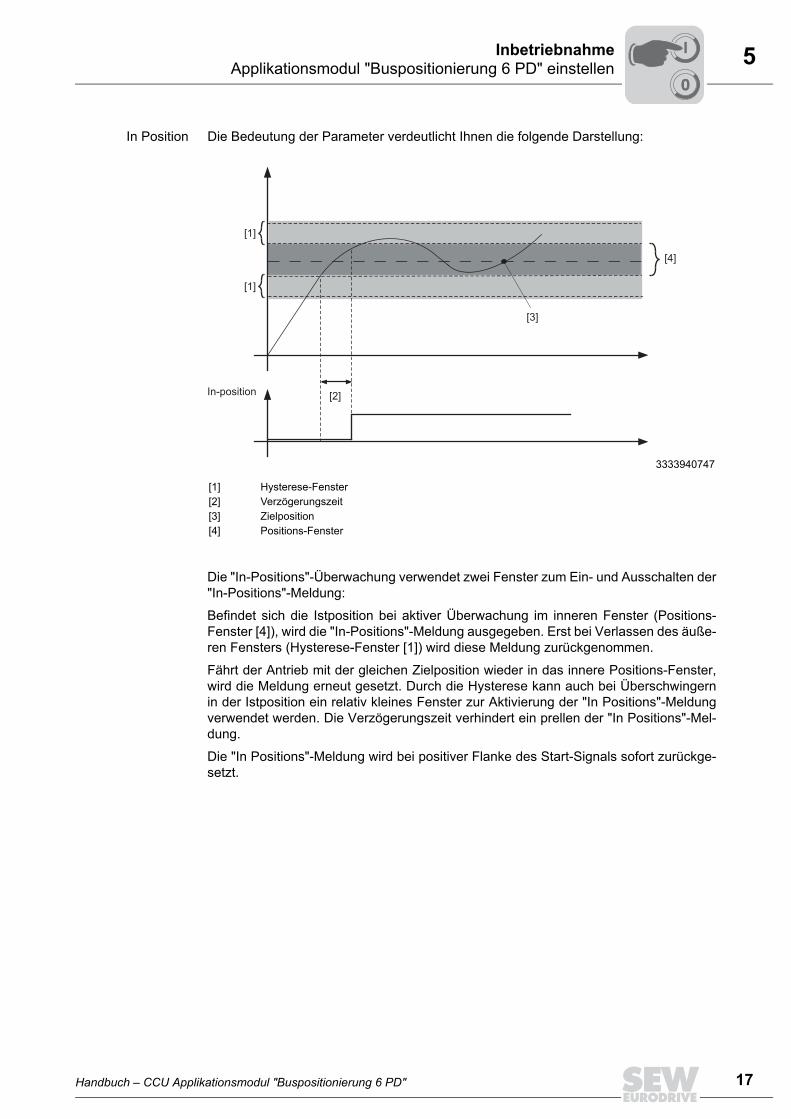
In Position Die Bedeutung der Parameter verdeutlicht Ihnen die folgende Darstellung:
Die "In-Positions"-Überwachung verwendet zwei Fenster zum Ein- und Ausschalten der"In-Positions"-Meldung:
Befindet sich die Istposition bei aktiver Überwachung im inneren Fenster (Positions-Fenster [4]), wird die "In-Positions"-Meldung ausgegeben. Erst bei Verlassen des äuße-ren Fensters (Hysterese-Fenster [1]) wird diese Meldung zurückgenommen.
Fährt der Antrieb mit der gleichen Zielposition wieder in das innere Positions-Fenster,wird die Meldung erneut gesetzt. Durch die Hysterese kann auch bei Überschwingernin der Istposition ein relativ kleines Fenster zur Aktivierung der "In Positions"-Meldungverwendet werden. Die Verzögerungszeit verhindert ein prellen der "In Positions"-Mel-dung.
Die "In Positions"-Meldung wird bei positiver Flanke des Start-Signals sofort zurückge-setzt.
3333940747
[1] Hysterese-Fenster[2] Verzögerungszeit[3] Zielposition[4] Positions-Fenster
[1]
[2]
[3]
[4]
In-position
[1]
00
I
18 Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD"
5 Applikationsmodul "Buspositionierung 6 PD" einstellenInbetriebnahme
Endschalter Hardware-Endschalter• "Gerätebelegung beibehalten"
Es gilt die Belegung entsprechend den Parametereinstellungen inMOVITOOLS® MotionStudio
• "Aktivieren":
Aktiviert die Überwachung der positiven und negativen Endbegrenzungen mit Hilfevon Hardware-Endschaltern.
Die Belegung der Eingangsklemmen mit den Hardware-Endschaltern ist geräteab-hängig. Sie finden Sie im Anhang dieses Handbuchs.
• "Deaktivieren":
Deaktiviert die Überwachung.
Die Eingangsklemmen werden, je nach Gerätetyp, auf "IPOS-Eingang" oder "KeineFunktion" parametriert.
Bei Verwendung der Hardware-Endschalter müssen diese aus Gründen der Draht-bruchsicherheit als Öffnerkontakte ausgeführt sein (Low = Endbegrenzung ange-fahren). Die Hardware-Endschalter liegen im Verfahrbereich hinter den Software-End-schaltern, sofern diese verwendet werden.
Verhalten beim Anfahren eines Hardware-Endschalters:
Die Achse verzögert mit dem Wert der für "Freigabe/Schnellstopp" eingestellt ist und derUmrichter meldet den Fehler "Hardware-Endschalter angefahren" (F29). Nach einemFehler-Reset, wird der Hardware-Endschalter mit der Freifahr-Geschwindigkeit (Refe-renzgeschwindigkeit 2) freigefahren und der Fehler gelöscht. Die Freifahr-Geschwindig-keit wird mit dem Wert für "Freigabe/Schnellstopp" verzögert und beschleunigt.
Software-EndschalterEin Wert (≠0) in dem jeweiligen Feld aktiviert die Überwachung der positiven und nega-tiven Endbegrenzungen mit Hilfe von Software-Endschaltern. Der zulässige Verfahrbe-reich wird über die positiven und negativen Begrenzungen definiert. Die Software-End-schalter liegen im Verfahrbereich vor den Hardware-Endschaltern, sofern diese ver-wendet werden.
Verhalten beim Anfahren eines Software-Endschalters:
Beim Überschreiten der Position eines Software-Endschalters im Betriebsmodus “Tip-pen“ oder “Positionieren“ wird die Achse mit der Verzögerung "Freigabe/Schnellstopp"angehalten. Es wird der Applikationsfehler "Software-Endschalter rechts angefahren"(F32) oder "Software-Endschalter links angefahren" (F33) ausgegeben. Mit einem “Feh-ler-Reset“ und einer Vorgabe der Achsbewegung in Richtung des zulässigen Verfahr-bereichs wird der Software-Endschalter freigefahren und der Fehler gelöscht. Es gilt dieGeschwindigkeit, Beschleunigung und Verzögerung der angewählten Betriebsart.
00
I
Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD" 19
5Applikationsmodul "Buspositionierung 6 PD" einstellenInbetriebnahme
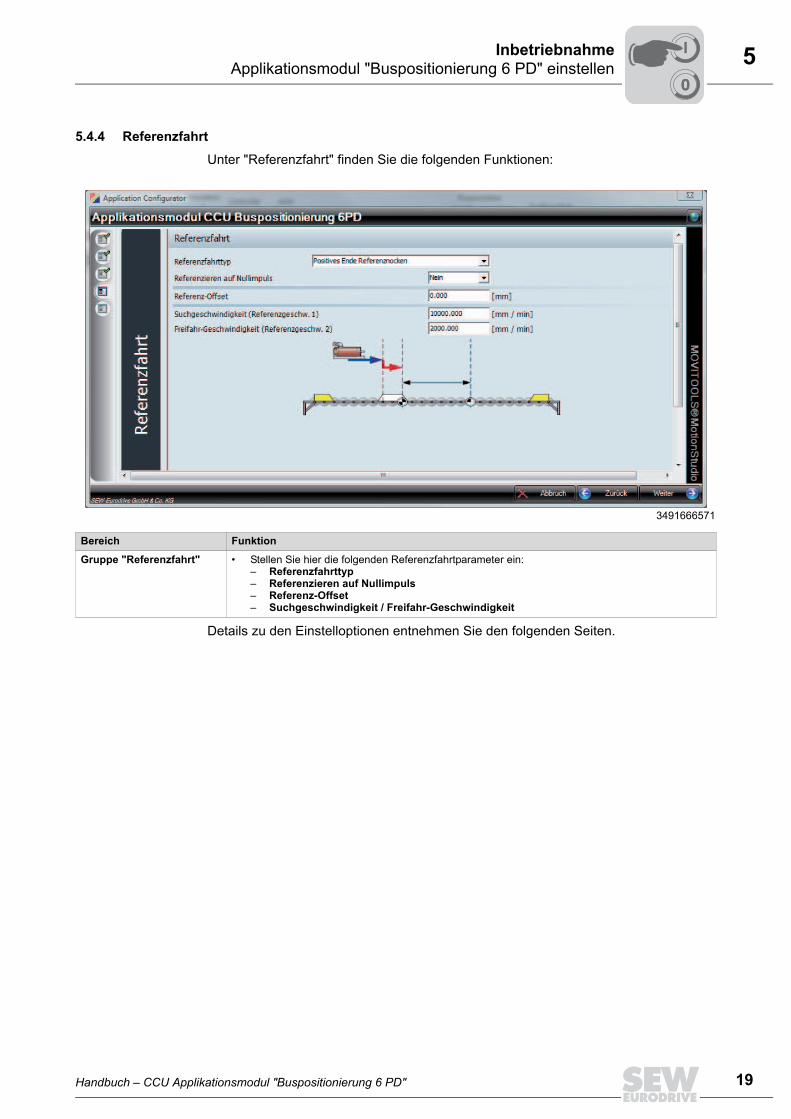
5.4.4 Referenzfahrt
Unter "Referenzfahrt" finden Sie die folgenden Funktionen:
Details zu den Einstelloptionen entnehmen Sie den folgenden Seiten.
3491666571
Bereich Funktion
Gruppe "Referenzfahrt" • Stellen Sie hier die folgenden Referenzfahrtparameter ein:– Referenzfahrttyp– Referenzieren auf Nullimpuls– Referenz-Offset– Suchgeschwindigkeit / Freifahr-Geschwindigkeit
00
I
20 Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD"
5 Applikationsmodul "Buspositionierung 6 PD" einstellenInbetriebnahme
Referenzfahrtpara-meter
Sie haben die folgenden Einstelloptionen:
• ReferenzfahrttypMit dem Referenzfahrttyp legen Sie fest wie die Referenzfahrt durchgeführt werdensoll. Es stehen je nach verwendetem Gerät unterschiedliche Referenzfahrtypen zurVerfügung. Das Verhalten entnehmen Sie der Dokumentation zu dem betreffendenGerät.
• Referenzieren auf Nullimpuls– Ja: aktiv
– Nein: inaktiv
• Referenz-OffsetAusgehend von dem Referenzpunkt, den Sie nach der Referenzfahrt gefunden ha-ben, können Sie mit dem Referenz-Offset den Maschinennullpunkt verschieben.
Der neue Maschinennullpunkt errechnet sich nach der folgenden Formel.
Maschinennullpunkt = Referenzpunkt - Referenz-OffsetDie Angabe des Referenzoffsets erfolgt in Anwendereinheiten.
• Suchgeschwindigkeit / Freifahr-GeschwindigkeitWird bei einer Referenzfahrt auf einen Referenznocken gefahren, so fährt der An-trieb mit der Suchgeschwindigkeit auf den Referenznocken zu und mit derFreifahr-Geschwindigkeit wieder vom Referenznocken weg.
Die Achse beschleunigt und verzögert mit dem Wert der für "Freigabe/Schnellstopp"eingestellt ist.
Die Angabe der Geschwindigkeiten erfolgt in Anwendereinheiten
00
I
Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD" 21
5Applikationsmodul "Buspositionierung 6 PD" einstellenInbetriebnahme
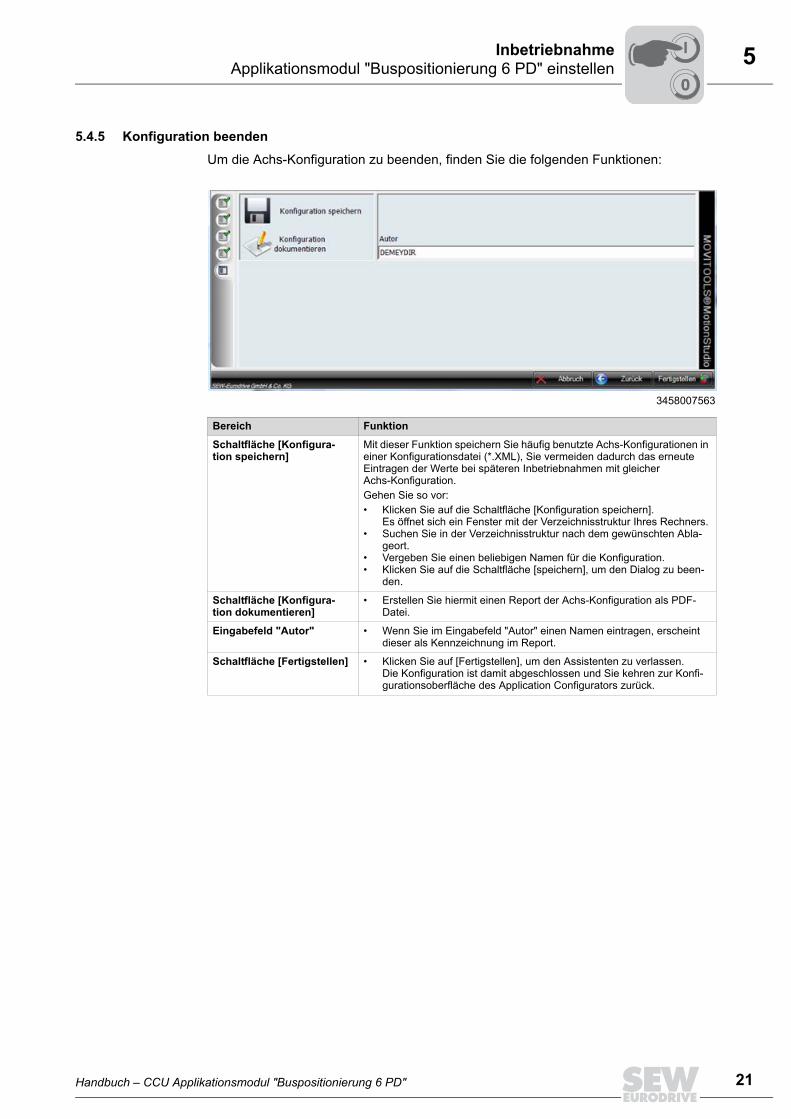
5.4.5 Konfiguration beenden
Um die Achs-Konfiguration zu beenden, finden Sie die folgenden Funktionen:
3458007563
Bereich Funktion
Schaltfläche [Konfigura-tion speichern]
Mit dieser Funktion speichern Sie häufig benutzte Achs-Konfigurationen in einer Konfigurationsdatei (*.XML), Sie vermeiden dadurch das erneute Eintragen der Werte bei späteren Inbetriebnahmen mit gleicher Achs-Konfiguration.Gehen Sie so vor:• Klicken Sie auf die Schaltfläche [Konfiguration speichern].
Es öffnet sich ein Fenster mit der Verzeichnisstruktur Ihres Rechners.• Suchen Sie in der Verzeichnisstruktur nach dem gewünschten Abla-
geort. • Vergeben Sie einen beliebigen Namen für die Konfiguration. • Klicken Sie auf die Schaltfläche [speichern], um den Dialog zu been-
den.
Schaltfläche [Konfigura-tion dokumentieren]
• Erstellen Sie hiermit einen Report der Achs-Konfiguration als PDF-Datei.
Eingabefeld "Autor" • Wenn Sie im Eingabefeld "Autor" einen Namen eintragen, erscheint dieser als Kennzeichnung im Report.
Schaltfläche [Fertigstellen] • Klicken Sie auf [Fertigstellen], um den Assistenten zu verlassen. Die Konfiguration ist damit abgeschlossen und Sie kehren zur Konfi-gurationsoberfläche des Application Configurators zurück.
00
I
22 Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD"
5 Konfiguration auf der SD-Karte der CCU speichernInbetriebnahme
5.5 Konfiguration auf der SD-Karte der CCU speichern
Mit dem Application Configurator können Sie die Achs-Konfiguration desApplikationsmoduls auf der SD-Karte der CCU speichern. Details hierzu entnehmen Sieder Dokumentation zu dem Application Configurator
Gehen Sie zum Speichern der Konfiguration folgendermaßen vor:
1. Führen Sie die Achs-Konfiguration durch.
2. Öffnen Sie den Bereich "Download".
3. Klicken Sie auf die Schaltfläche [Download], um die Konfiguration auf der SD-Karteder CCU zu speichern.
4. Um die neuen Konfigurationsdaten nach dem Download zu verarbeiten, muss dieCCU neu gestartet werden. Daher erfolgt vor dem Speichern der Konfiguration eineentsprechende Abfrage.
5. Wenn Download und Neustart der CCU erfolgreich waren, gelangen Sie wieder aufdie Startseite.
VORSICHT!Download bei laufender Anlage.
Körperverletzung und Beschädigung der Anlage.• Anlage in sicheren Zustand bringen.
Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD" 23
6Betrieb und Diagnose
6 Betrieb und Diagnose
Die Funktionen für den Betrieb und die Diagnose des Applikationsmoduls sind in derKonfigurations-Software "Application Configurator" integriert und werden daraus aufge-rufen.
Daher finden Sie eine detaillierte Vorgehensweise in der Dokumentation (Handbuchoder Online-Hilfe) des Application Configurators.
00
I
24 Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD"
7 Belegung der EingangsklemmenAnhang
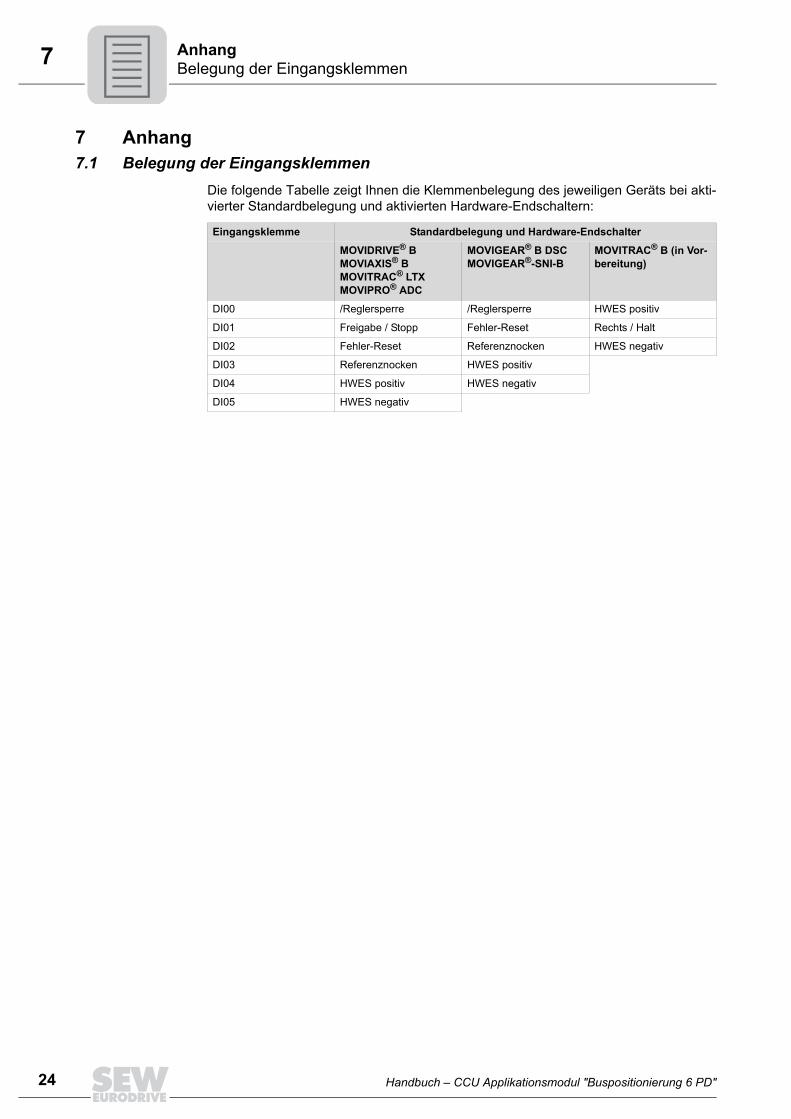
7 Anhang7.1 Belegung der Eingangsklemmen
Die folgende Tabelle zeigt Ihnen die Klemmenbelegung des jeweiligen Geräts bei akti-vierter Standardbelegung und aktivierten Hardware-Endschaltern:
Eingangsklemme Standardbelegung und Hardware-Endschalter
MOVIDRIVE® BMOVIAXIS® BMOVITRAC® LTXMOVIPRO® ADC
MOVIGEAR® B DSCMOVIGEAR®-SNI-B
MOVITRAC® B (in Vor-bereitung)
DI00 /Reglersperre /Reglersperre HWES positiv
DI01 Freigabe / Stopp Fehler-Reset Rechts / Halt
DI02 Fehler-Reset Referenznocken HWES negativ
DI03 Referenznocken HWES positiv
DI04 HWES positiv HWES negativ
DI05 HWES negativ
Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD" 25
Stichwortverzeichnis
Stichwortverzeichnis
AAchsen einfügen ....................................................12Änderung von Parametern in Bussystemen.............5Anwender, typisch....................................................4Application Configurator.........................................12Applikationsmodul einstellen..................................12Applikationsmodul, Merkmale (Allgemeines) ...........6
BBegrenzung............................................................14Belegung der Eingangsklemmen, geräteabhängig 24Belegung Prozessdaten...........................................7Bussystem ...............................................................5
DDrive Startup ..........................................................11Dynamikwerte, Maximalwerte ................................14
EEinfügen von Achsen .............................................12Eingangsklemmen, geräteabhängige Belegung ....24Endschalter, Überwachung..............................16, 18Engineering-Software ..............................................7
FFeldbus-Ausgangsdaten ..........................................7Feldbus-Eingangsdaten ...........................................7Feldbus, unkontrolliertes Systemverhalten ..............5Freifahrtgeschwindigkeit ........................................20
GGefahr durch Änderung von Parametern.................5Getriebeübersetzung, Skalierungsparameter ........13Grenzwerte, Maximalwerte ....................................14
HHaftung ....................................................................3Haftungsausschluss.................................................3Hardware-Endschalter ...........................................18Hardware-Voraussetzungen ....................................7
IInbetriebnahme
Ablauf.................................................................11Voraussetzungen ...............................................10
KKonfiguration
Application Configurator ....................................12Einzelachsen .....................................................12
MMängelhaftung .........................................................3Maximalwerte, Systemgrenzen..............................14mitgeltende Unterlagen............................................3MOVITOOLS® MotionStudio ...................................7
NNutzer, typisch .........................................................4
PPositionsüberwachung, Überwachung ..................16Produktnamen .........................................................3Prozessdaten
Buspositionierung 6PD ........................................7
RReferenzfahrtparameter.........................................19
SSachmängelhaftung.................................................3Sicherheitshinweise .................................................4
Allgemeine ...........................................................4Skalierungsparameter............................................13Software
Beschreibung.......................................................6Merkmale .............................................................6Voraussetzungen.................................................7Vorteile, Nutzen ...................................................6
Software-Endschalter ............................................18Suchgeschwindigkeit .............................................20Systemgrenzen, Maximalwerte..............................14
UÜberwachungen.....................................................16Unterlagen, mitgeltende...........................................3Urheberrechtsvermerk .............................................3
VVerwendung, bestimmungsgemäße ........................5Voraussetzungen, Inbetriebnahme........................10

26 Handbuch – CCU Applikationsmodul "Buspositionierung 6 PD"
Stichwortverzeichnis
WWarenzeichen ..........................................................3
ZZielgruppe................................................................4
SEW-EURODRIVE—Driving the world
SEW-EURODRIVEDriving the world
www.sew-eurodrive.com
SEW-EURODRIVE GmbH & Co KGP.O. Box 3023D-76642 Bruchsal/GermanyPhone +49 7251 75-0Fax +49 7251 [email protected]





























