Embed Size (px)
Citation preview
Dekonvolution in der Mikroskopie
Bachelorarbeitzur Erlangung der akademischen Grade
Bachelor of Science sowie Bachelor of Arts
Westfälische Wilhelms-Universität MünsterFachbereich Mathematik und Informatik
Institut für Numerische und Angewandte Mathematik
Betreuung:
Prof. Dr. Martin BurgerDr. Christoph Brune
Eingereicht von:
Eva-Maria Brinkmann
Münster, Oktober 2012.

i
Abstract
Das Schärfen von verschwommenen oder verwackelten Bildern ist eine zentrale Auf-gabe der Bildverarbeitung, ermöglicht es doch die bessere Verwertung von sonst nichtausreichend aussagekräftigen Bildern. Genau dies ist das Ziel der Dekonvolution, ei-nem Werkzeug der Bildrestaurierung, das seit der Entwicklung der ersten Algorithmenin den 1980er-Jahren vor allem in der Lichtmikroskopie und der Astronomie von ent-scheidender Bedeutung ist, dem aber auch im Bereich der Fotobearbeitung eine immergrößere Aufmerksamkeit zuteil wird.
Diese Arbeit liefert einen Überblick über die geläufigsten Methoden der Dekonvoluti-on, wobei wir unser Augenmerk vor allem auf das Anwendungsgebiet der Mikroskopierichten. Nach der Einführung, die den Leser mit den optischen Grundlagen des Lichtmi-kroskops sowie den mathematischen Grundlagen der Fourier Analysis vertraut machtund somit der Motivation und dem Verständnis der weiteren Ausführungen dient, leitenwir verschiedene Algorithmen aus den zuvor erläuterten Modellen her. Abschließendwerden einige numerische Ergebnisse präsentiert, die wir aus der Anwendung des im-plementierten FB-EM-REG Algorithmus auf reale Daten erhalten.
ii
Inhaltsverzeichnis
1. Einleitung 1
2. Das Lichtmikroskop 32.1. Wie funktioniert eine Lupe? . . . . . . . . . . . . . . . . . . . . . . . . 32.2. Grundlegende Ideen zur Funktionsweise des Lichtmikroskops . . . . . . 52.3. Grenzen des Mikroskops . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3. Mathematische Grundlagen: Auszüge aus der Fourier Analysis 113.1. Die Fourier Transformation . . . . . . . . . . . . . . . . . . . . . . . . 113.2. Der Faltungsoperator . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.3. Diskretisierung des Faltungsproduktes . . . . . . . . . . . . . . . . . . 16
4. Modellierung des Prozesses der Verschlechterung der Bildqualität 174.1. Stetige Modellformulierung . . . . . . . . . . . . . . . . . . . . . . . . . 174.2. Diskrete Modellformulierung und Matrixnotation . . . . . . . . . . . . 20
5. Vorstellung der geläufigsten Dekonvolutionsalgorithmen 225.1. Lineare Methoden: Lineare kleinste Quadrate Methode, Tikhonov- und
Wiener-Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225.2. Nichtlineare Methoden: Jansson Van Cittert- und Gold-Algorithmus . . 265.3. Statistische Methoden . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5.3.1. Statistische Algorithmen ohne Glättungsfunktion . . . . . . . . 305.3.2. Statistische Algorithmen mit Glättungsfunktion . . . . . . . . . 32
6. Implementierung des FB-EM-REG Algorithmus 386.1. Erläuterung zur Implementierung des FB-EM-REG Algorithmus . . . . 386.2. Ergebnispräsentation und -diskussion . . . . . . . . . . . . . . . . . . . 40
7. Zusammenfassung und Ausblick 44
A. MATLAB-Programmcode I
Inhaltsverzeichnis iii
B. Numerische Ergebnisse (groß) III
Abbildungsverzeichnis a
Literaturverzeichnis b
1
1. Einleitung
Mit Erstaunen reagieren das Publikum und der Moderator auf der unternehmenseige-nen Adobe Konferenz ’MAX 2011’ auf die Photoshop Sneak: live vorgestellt wird derPrototyp eines Plug-Ins der Fotobearbeitungssoftware ’Photoshop’ zum ’Entwackeln’von Fotos (’image deblurring’). Ein stark ’verwackeltes’ Urlaubsbild (links) wird durchwenige Mausklicks in ein scharfes Foto (rechts) verwandelt.(vgl. [8]):
Abbildung 1.1.: Verwackeltes und geschärftes Foto (entnommen [8])
Möglich ist dies mithilfe eines speziellen Werkzeugs der Bildrestaurierung - der soge-nannten Dekovolution. Die Dekonvolution basiert auf der Idee, die Verzerrung (’blur’)eines Bildes mithilfe einer mathematischen Faltung zu modellieren. Durch die Invertie-rung der Faltung ist somit eine Schärfung des Bildes möglich.
Was in der privaten Massennutzung noch Zukunftsmusik ist, kommt in der Wissen-schaft bereits seit Jahren zur Anwendung:Bereits kurz nach den ersten Veröffentlichungen zur Umkehrung von Faltungsoperato-ren Mitte der 1970er-Jahre erkannte man das Potenzial der Dekonvolutionsalgorithmenim Zusammenhang der Bearbeitung von Daten der Astronomie. So wurde die Erfor-schung und Entwicklung der Dekonvolution in den frühen 1990er-Jahren durch die Not-wendigkeit der Restauration der optisch verzerrten Bilder des ’Hubble Space Telescope(HST)’ vorangetrieben bis das HST 1993 mit optischen Korrekturgläsern aufgerüstetwerden konnte. (vgl. [3], S.2)
1 Einleitung 2
Ein weiteres wichtiges Anwendungsgebiet der Dekonvolution ist die Lichtmikroskopieund hier insbesondere die Fluoreszenzmikroskopie:Schon seit Mitte der 1920er-Jahre kamen Fluoreszenzmikroskope in der biologisch-medizinischen Forschung zum Einsatz. (vgl. [20], 1920 - Fluoreszenz in der medizini-schen Forschung) Mit der Entwicklung des 3D-Fluoreszensmikroskops in den frühen1980er Jahren und der Einführung natürlicher Fluoreszenzfarbstoffe wie dem soge-nannten ’Grün Fluoreszierenden Protein (GFP)’ um den Jahrtausendwechsel sowieder Verbesserung der Sensitivität hochauflösender Detektoren gewann die Fluoreszenz-mikroskopie an Bedeutung. So ist es heute möglich lebende Zellen und Organismenüber eine lange Zeitspanne zu beobachten und dabei die Störungen der Zellaktivitätendurch die äußeren Einflüsse des Anregungslichts zu minimieren. (vgl. [17], S.202 f.)Beispielsweise wird mit dieser Methode der Zusammenhang zwischen der Calciumkon-zentration in einer Zelle und der Bewegung dieser Zelle untersucht. Als weiteres Beispielsei die mikroskopische Untersuchung des Verhaltens von eingefärbten Karzinomzellengenannt.Die durch ein Lichtmikoskop (z.B. ein Durchlicht- oder Fluoreszenzmikroskop) in Ver-bindung mit einem Aufnahmegerät entstandenen Daten können mithilfe der Dekonvo-lution bearbeitet werden. Dies entspricht quasi einer nachträglichen Verbesserung derAuflösung eines Lichtmikroskops (vgl. [17], S.203) und führt so zu einer höheren Bild-qualität, die eine genauere Analyse des betrachteten Objekts ermöglicht und somit diegroße Bedeutung dieses Bildbearbeitungswerkzeugs für die Mikroskopie begründet.
Ziel der vorliegenden Arbeit ist es, dem Leser eine allgemeine Einführung in die Technikder Dekonvolution im Bereich der Mikroskopie sowie einen Überblick über die geläu-figsten Algorithmen zu geben, ohne einen Anspruch auf Vollständigkeit zu erheben.Entsprechend beschäftigen wir uns zunächst mit der Funktionsweise und den Grenzendes Lichtmikroskops. Die Einführung der den Dekonvolutionsalgorithmen zugrunde-liegenden Modelle in Kapitel 4 setzt die Kenntnis einiger mathematischer Grundlagenvoraus, die in Kapitel 3 vorgestellt werden. Aus den Modellen leiten wir anschließend diegebräuchlichsten Algorithmen her und informieren über ihre Stärken und Schwächen.Um zu zeigen, wie die Dekonvolutionsalgorithmen in der Praxis wirken, implementierenwir in der Folge exemplarisch den zuletzt vorgestellten Algorithmus mithilfe der Soft-ware ’MATLAB’ des Unternehmens TheMathWorks Inc. und wenden dieses Programmauf mit einem Fluoreszenzmikroskop aufgenommene Originaldaten an.

3
2. Das Lichtmikroskop
Wie eingangs erwähnt, sind Dekonvolutionsalgorithmen beispielsweise für das Schärfenvon Fotos interessant, die entweder durch eine Erschütterung der Kamera oder durcheine Bewegung des Objektes ’verwackelt’ wirken (’motion blur’). Insbesondere sind siejedoch in der Verarbeitung von Fotos, die mit einem stark vergrößernden Objektivaufgenommen wurden und von Bildern der astronomischen Teleskopie sowie der Licht-mikroskopie von großer Bedeutung.In den zuletzt genannten Anwendungsfeldern werden für das menschliche Auge in na-tura nicht erkennbare Objekte durch Linsensysteme vergrößert, um sie so sichtbar zumachen. Dieser Prozess wird im ersten Abschnitt dieses Kapitels anhand einer Lupe,des einfachsten Linsensystems und elementaren Bauteils eines jeden Lichtmikroskops,beschrieben. In der vorliegenden Arbeit werden wir den Schwerpunkt auf das Anwen-dungsgebiet der Lichtmikroskopie legen, denn dadurch können wir in der Folge einigevereinfachende Annahmen begründen. Im zweiten Abschnitt beschäftigen wir uns da-her skizzenhaft mit der Funktionsweise eines solchen Geräts. Um die Notwendigkeitder Entwicklung von Algorithmen zur Bildverbesserung in diesem Zusammenhang ein-zusehen, betrachten wir zum Ende des Kapitels die Grenzen des Mikroskops.
Als Quellen für dieses Kapitel seien die Bücher [9] und [6] sowie der Artikel [17] genannt.[9] bietet einen leichtverständlichen und anschaulichen Einstieg in die Geschichte, dieFunktionsweise und die Grenzen des Mikroskops, [6] liefert als physikalisches Lehrbuchexakte Definitionen und auf Gesetzen der Physik aufbauende Erläuterungen, während[17] den Zusammenhang zur Dekonvolution herstellt.
2.1. Wie funktioniert eine Lupe?
Wenn der Mensch einen Gegenstand sieht, wird aus optischer Perspektive durch dasvom Gegenstand reflektierte Licht ein Bild auf seine Netzhaut projiziert (vgl. Abb. 2.1(oben) auf Seite 4).
2 Das Lichtmikroskop 4
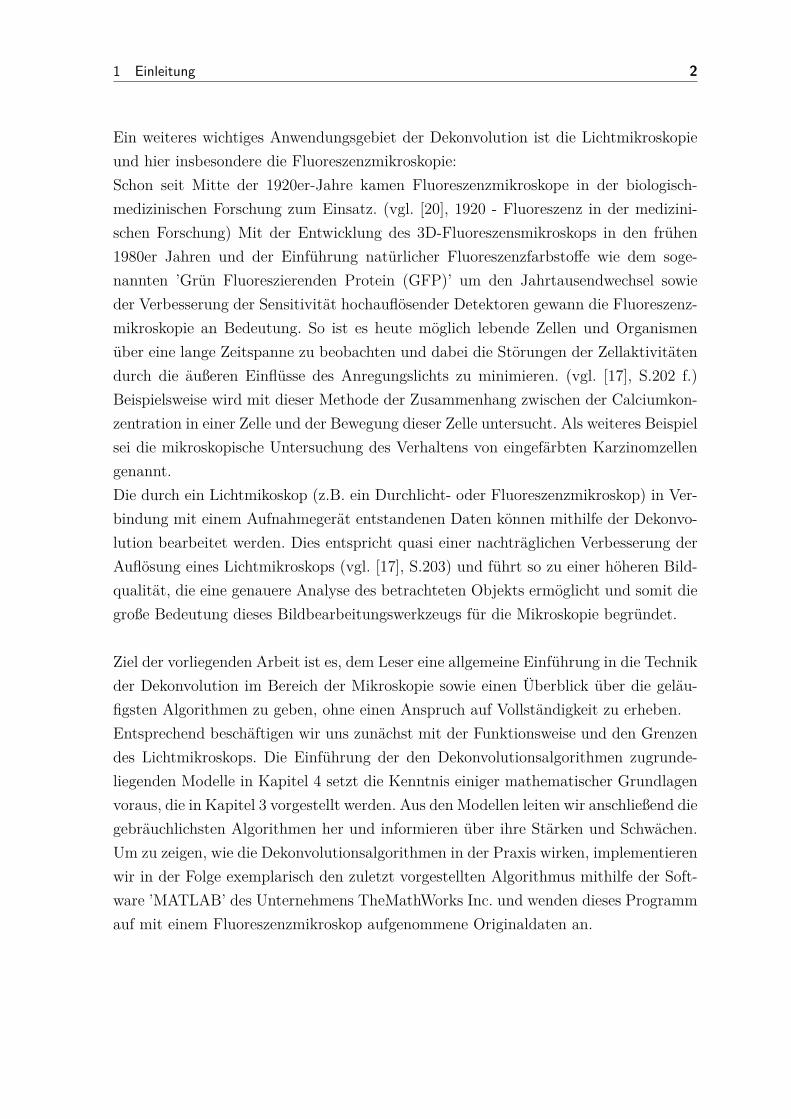
Um ein Objekt möglichst exakt und detailreich zu betrachten, ist es naheliegend, zu-nächst den Abstand zwischen Objekt und Auge zu verringern. Diese Strategie stößtjedoch schnell an ihre Grenzen, denn sobald das Objekt dem Auge näher ist als der so-genannte Nahpunkt, kann die Linse sich nicht länger anpassen und so das Auge scharfeinstellen und das Bild wird unscharf.1(vgl. [6], S.336 f.)Zielführender ist es daher eine Linse zwischen das Auge und das zu betrachtende Ob-jekt zu schieben, sodass der Abstand zwischen dem Auge und der Linse möglichst derBrennweite der Linse entspricht. 2 Durch die Brechung des Lichts beim Übergang voneinem Medium mit Dichte ρ1 in ein Medium mit einer anderen Dichte ρ2 erscheint unsdas Objekt in seiner Größe verändert. Soll wie hier eine Vergrößerung erzielt werden,ist eine bikonvexe Linse (eine Lupe) einzusetzen, weil in diesem Fall das Licht zur Lin-senmitte hin gebrochen wird. (vgl. Abb. 2.1 (unten))
Abbildung 2.1.: Funktionsweise der Lupe (entnommen [10], S.10)
Die Vergrößerungsleistung einer Lupe berechnet sich aus dem Quotienten von ’Norma-lem Sehabstand’ und der Brennweite der Lupe.
1Die Entfernung des Nahpunkts vom Auge liegt bei Jugendlichen bei rund 7 cm und nimmt mitsteigendem Alter zu, bis sie bei einem 60-Jährigen bei ca. 100 cm liegt. Häufig wird als Durch-schnittswert der ’Normale Sehabstand’ (25 cm) gewählt.
2Die Brennweite beschreibt den Abstand zwischen der Linse (bzw. genauer einer Hauptebene derLinse) und dem Brennpunkt, d.h. im Fall der Sammellinse dem Punkt, an dem sich verschiedenezuvor zur optischen Achse parallele Lichtstrahlen nach Durchlaufen der Linse schneiden. (vgl. [6],S. 258 und S. 284)
2 Das Lichtmikroskop 5
2.2. Grundlegende Ideen zur Funktionsweise desLichtmikroskops
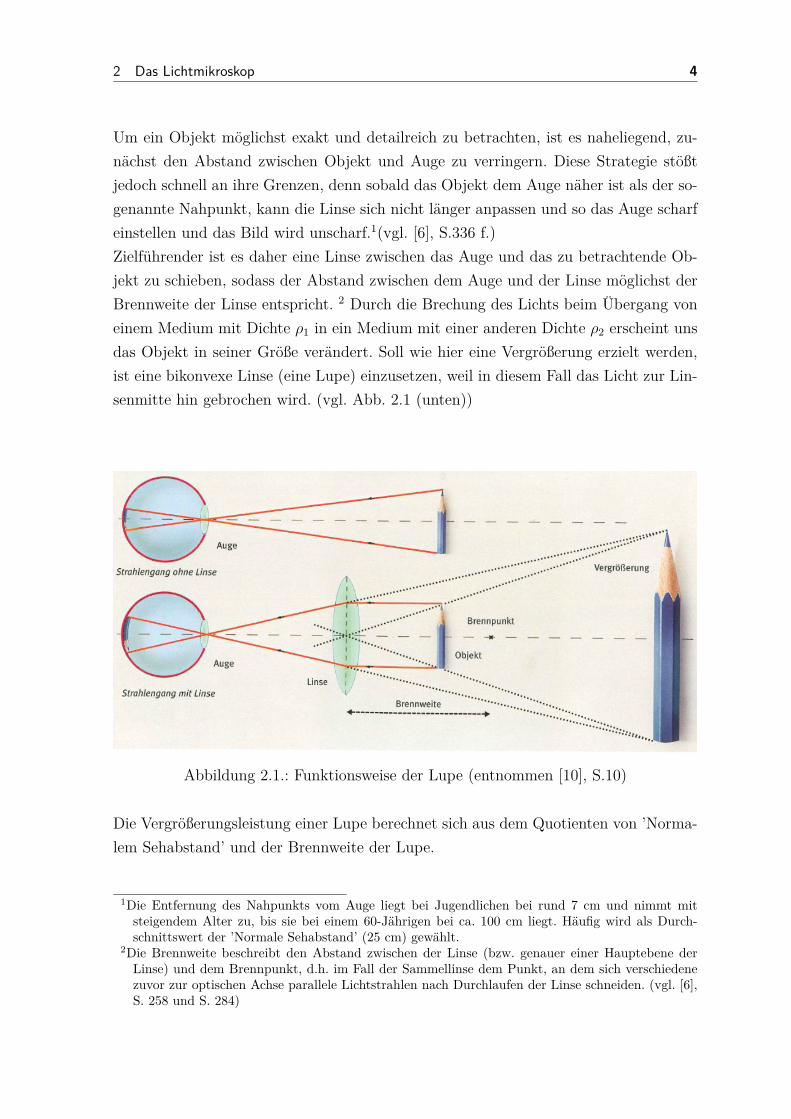
Die zuvor beschriebene optische Vergrößerung mithilfe einer Sammellinse wird unteranderem in Lichtmikroskopen eingesetzt. Deren Aufnahmen bilden einen der häufigstenEinsatzbereiche der Dekonvolutionsalgorithmen.Als Beispiel für ein Lichtmikroskop betrachten wir ein Durchlichtmikroskop und benen-nen und erläutern im Folgenden wesentliche Teile dieses optischen Systems.
(a) Längsschnitt(entnommen [18])
(b) VereinfachterStrahlengang(entnommen [9])
Abbildung 2.2.: Durchlichtmikroskop
Betrachten wir die Darstellung von un-ten nach oben, so befindet sich zunächsteine Lichtquelle unterhalb des Objekts.Das Licht tritt folglich durch das Objekthindurch, bevor es das Objektiv passiert.Die darüber liegende Aperturblende so-wie der Kondensor sorgen für eine Fokus-sierung des aus der Lichtquelle austreten-den Lichts auf das Objektiv um die opti-sche Achse. Das so gebündelte Licht trifftauf das Objekt, das in der Regel auf ei-nem Objektträger befestigt ist. Durch dasObjektiv und das Okular entsteht, wiebei der Lupe geschildert, ein zweifach ver-größertes Bild. In einem handelsüblichenDurchlichtmikroskop bestehen sowohl dasObjektiv als auch das Okular nicht aus ei-ner einzelnen Linse, sondern aus Linsensystemen, um Abbildungsfehler zu verringern.An dem Funktionsprinzip ändert dies jedoch nichts.Andere gängige Lichtmikroskop-Typen, die Bilder liefern, die anschließend mit Dekon-volutionsalgorithmen bearbeitet werden können, sind das Fluoreszenz- und das Konfo-kalmikroskop. In diesen Fällen erfolgt die Vergrößerung ebenfalls mithilfe von Linsen-systemen.Ferner können von einem Mikroskop mehrere Bilder aufgenommen werden, die nur inihrem Fokus entlang der optischen Achse variieren. Im Folgenden werden wir deshalbstets von dreidimensionalen Bildern ausgehen. Alle Ausführungen lassen sich leicht aufden zweidimensionalen Fall übertragen.
2 Das Lichtmikroskop 6
Um die Qualität eines Mikroskops zu beschreiben, unterscheiden wir Vergrößerung undAuflösung. Die Vergrößerungsleistung berechnet sich aus dem Produkt der Einzelver-größerungen von Objektiv und Okular. (vgl. Abschnitt 2.1, S. 4). Die Auflösungsgrenzebeschreibt den kleinstmöglichen Abstand zwischen zwei Punkten in der Objektebene,die in der Bildebene noch separat dargestellt werden können.Der deutsche Physiker Ernst Abbe (1840-1905) stellte fest, dass sich die maximale la-terale Auflösung, d.h. die maximale Auflösung in zwei Dimensionen, proportional zurWellenlänge λ und antiproportional zur sogenannten ’numerischen Apertur’ verhält.(vgl. [6], S.354)Die numerische Apertur ist dabei ein von Abbe eingeführtes Maß für die Lichtstärkedes Objektivs. Sie berechnet sich als Produkt des Brechungsindex n des Mediums zwi-schen dem zu betrachtenden Gegenstand und dem Objektiv, dem Immersionsmedium,und des Sinus des halben Öffnungswinkels α des Objektivs. Die numerische Aperturbeschreibt also, wie groß der Winkel zwischen der optischen Achse und einfallendenLichtstrahlen maximal sein darf, damit das Licht noch durch das Objektiv aufgenom-men werden kann. Als Beispiele für verschiedene Immersionsmedien mit ihren jewei-ligen Brechungsindizes seien hier Luft n = 1, 0, Wasser n = 1, 33 und Immersionsöln = 1, 516 genannt. Ist das Immersionsmedium beispielsweise Luft, so ergibt sich 1 alsmaximaler Wert der numerischen Apertur.Genauer ist die Auflösungsgrenze eines Mikroskops nach dem Rayleigh-Kriterium durchdie folgende Formel gegeben:
d = 1, 22λ2n sin(α) = 0, 61λ
NA, (2.1)
wobei λ und α wie oben definiert seien und NA die numerische Apertur sei. Der Wert0, 61 entspricht ungefähr der ersten Nullstelle der Funktion:
I(r) = I0 · (J1(2πr)πr
), (2.2)
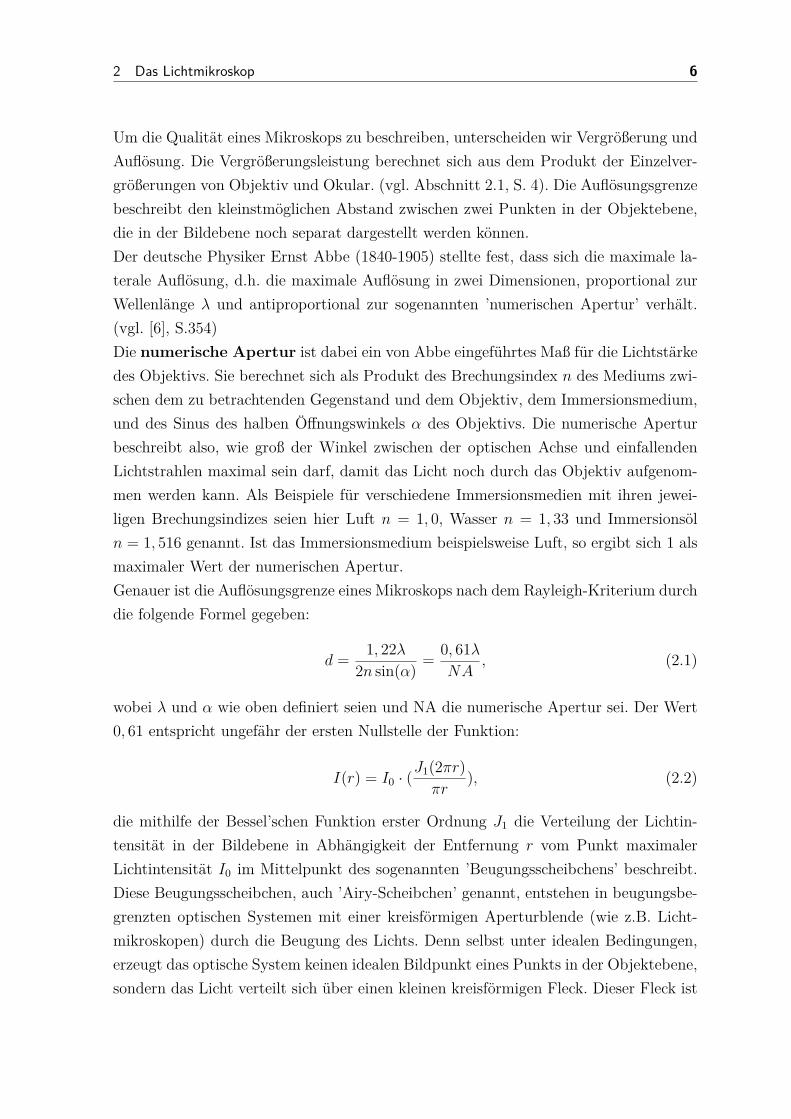
die mithilfe der Bessel’schen Funktion erster Ordnung J1 die Verteilung der Lichtin-tensität in der Bildebene in Abhängigkeit der Entfernung r vom Punkt maximalerLichtintensität I0 im Mittelpunkt des sogenannten ’Beugungsscheibchens’ beschreibt.Diese Beugungsscheibchen, auch ’Airy-Scheibchen’ genannt, entstehen in beugungsbe-grenzten optischen Systemen mit einer kreisförmigen Aperturblende (wie z.B. Licht-mikroskopen) durch die Beugung des Lichts. Denn selbst unter idealen Bedingungen,erzeugt das optische System keinen idealen Bildpunkt eines Punkts in der Objektebene,sondern das Licht verteilt sich über einen kleinen kreisförmigen Fleck. Dieser Fleck ist
2 Das Lichtmikroskop 7
gerade das Beugungsscheibchen, das von schwachen konzentrischen Kreisen umgebenist. (vgl. [6], S.368)
Abbildung 2.3.: Bild einer Punktquelle, (entnommen [17])
Das hier erkennbare Muster konzentrischer Kreise ist typisch für das Bild einer idealenPunktquelle. Es wird als ’Airy-Pattern’ bezeichnet.
2.3. Grenzen des Mikroskops
Nun stellt sich folgende Frage: Wieso hat sich ein Bildverarbeitungswerkzeug wie dieDekonvolution im Zusammenhang der Mikroskopie als sehr nützlich erwiesen? Um eineAntwort auf diese Frage zu finden, werden wir uns in diesem Abschnitt mit Grenzendes Lichtmikroskops beschäftigen.
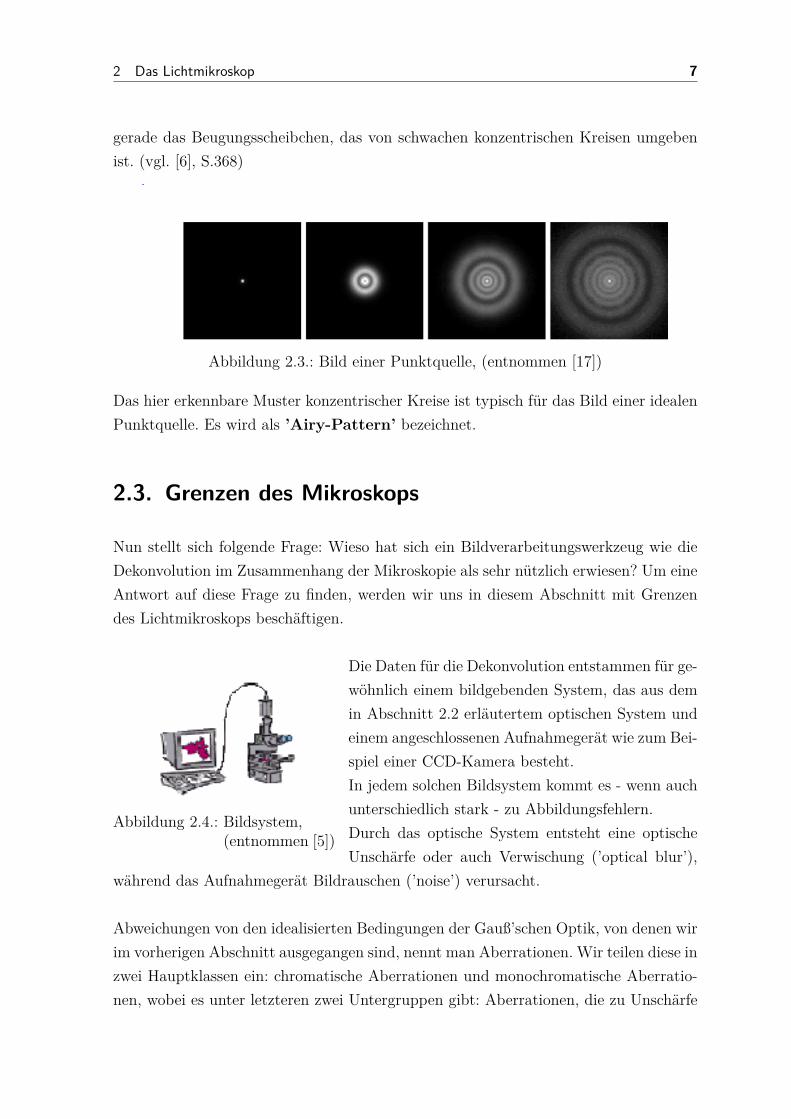
Abbildung 2.4.: Bildsystem,(entnommen [5])
Die Daten für die Dekonvolution entstammen für ge-wöhnlich einem bildgebenden System, das aus demin Abschnitt 2.2 erläutertem optischen System undeinem angeschlossenen Aufnahmegerät wie zum Bei-spiel einer CCD-Kamera besteht.In jedem solchen Bildsystem kommt es - wenn auchunterschiedlich stark - zu Abbildungsfehlern.Durch das optische System entsteht eine optischeUnschärfe oder auch Verwischung (’optical blur’),
während das Aufnahmegerät Bildrauschen (’noise’) verursacht.
Abweichungen von den idealisierten Bedingungen der Gauß’schen Optik, von denen wirim vorherigen Abschnitt ausgegangen sind, nennt man Aberrationen. Wir teilen diese inzwei Hauptklassen ein: chromatische Aberrationen und monochromatische Aberratio-nen, wobei es unter letzteren zwei Untergruppen gibt: Aberrationen, die zu Unschärfe
2 Das Lichtmikroskop 8
führen (z.B. sphärische Aberration, Koma und Astigmatismus) und Aberrationen, diezu Verformungen führen (z.B. Bildfeldwölbung und Verzeichnung). Eine Erläuterungdieser Bildfehler findet sich in [13], S.78 ff. Exemplarisch betrachten wir hier die chro-matische Aberration, die sphärische Aberration und die Verzeichnung.
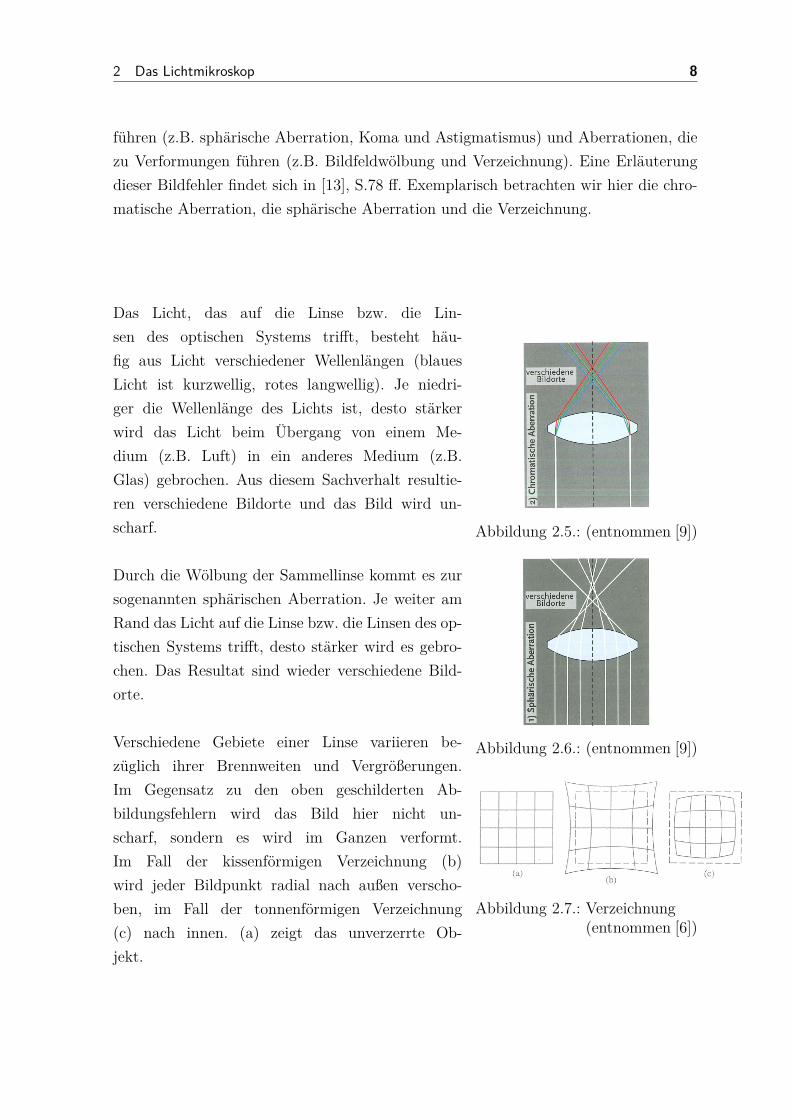
Abbildung 2.5.: (entnommen [9])
Abbildung 2.6.: (entnommen [9])
Abbildung 2.7.: Verzeichnung(entnommen [6])
Das Licht, das auf die Linse bzw. die Lin-sen des optischen Systems trifft, besteht häu-fig aus Licht verschiedener Wellenlängen (blauesLicht ist kurzwellig, rotes langwellig). Je niedri-ger die Wellenlänge des Lichts ist, desto stärkerwird das Licht beim Übergang von einem Me-dium (z.B. Luft) in ein anderes Medium (z.B.Glas) gebrochen. Aus diesem Sachverhalt resultie-ren verschiedene Bildorte und das Bild wird un-scharf.
Durch die Wölbung der Sammellinse kommt es zursogenannten sphärischen Aberration. Je weiter amRand das Licht auf die Linse bzw. die Linsen des op-tischen Systems trifft, desto stärker wird es gebro-chen. Das Resultat sind wieder verschiedene Bild-orte.
Verschiedene Gebiete einer Linse variieren be-züglich ihrer Brennweiten und Vergrößerungen.Im Gegensatz zu den oben geschilderten Ab-bildungsfehlern wird das Bild hier nicht un-scharf, sondern es wird im Ganzen verformt.Im Fall der kissenförmigen Verzeichnung (b)wird jeder Bildpunkt radial nach außen verscho-ben, im Fall der tonnenförmigen Verzeichnung(c) nach innen. (a) zeigt das unverzerrte Ob-jekt.
2 Das Lichtmikroskop 9
Durch geschickte Kombination von unterschiedlichen Linsen können die hier beschrie-benen Abbildungsfehler weitgehend ausgeglichen werden. Zum Beispiel lässt sich diechromatische Aberration mithilfe des von Ernst Abbe und Carl Zeiss entwickelten Apo-chromaten, eines Systems von Linsen aus verschiedenen Glassorten, zu einem großenTeil beheben. (vgl. [9], S.22 f.) Es ist jedoch nicht möglich, die hier geschilderten Ab-bildungsfehler vollständig zu beseitigen.
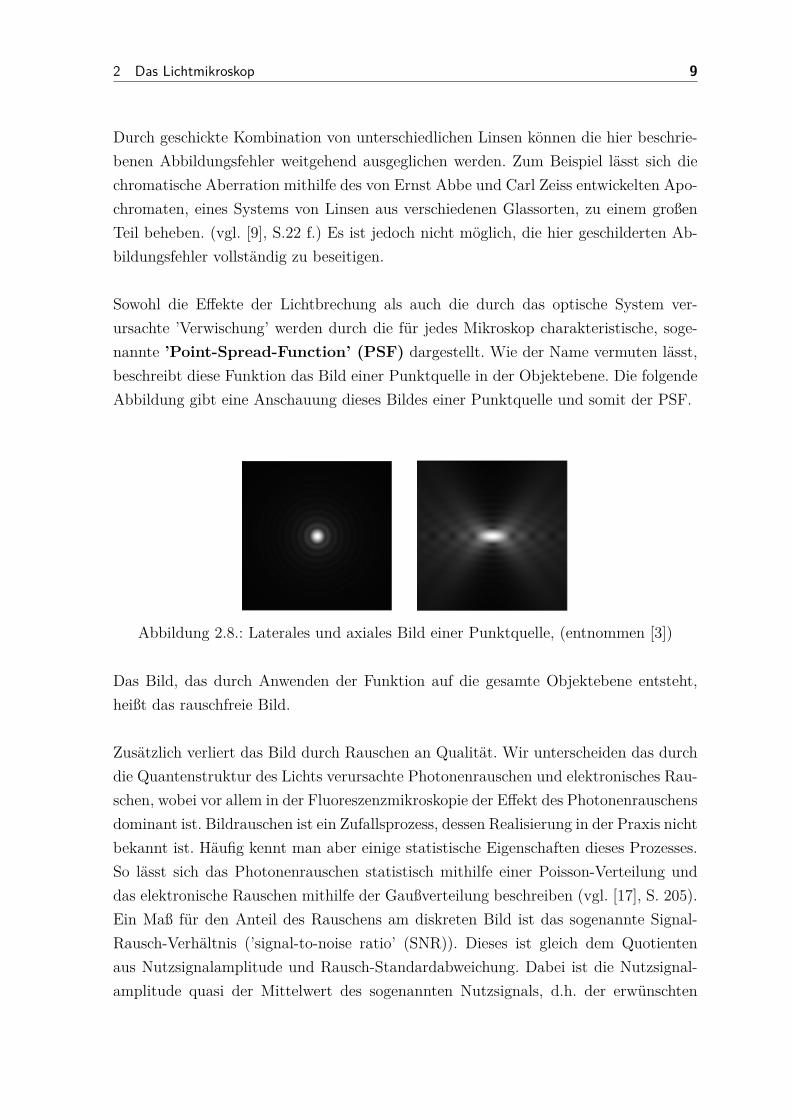
Sowohl die Effekte der Lichtbrechung als auch die durch das optische System ver-ursachte ’Verwischung’ werden durch die für jedes Mikroskop charakteristische, soge-nannte ’Point-Spread-Function’ (PSF) dargestellt. Wie der Name vermuten lässt,beschreibt diese Funktion das Bild einer Punktquelle in der Objektebene. Die folgendeAbbildung gibt eine Anschauung dieses Bildes einer Punktquelle und somit der PSF.
Abbildung 2.8.: Laterales und axiales Bild einer Punktquelle, (entnommen [3])
Das Bild, das durch Anwenden der Funktion auf die gesamte Objektebene entsteht,heißt das rauschfreie Bild.
Zusätzlich verliert das Bild durch Rauschen an Qualität. Wir unterscheiden das durchdie Quantenstruktur des Lichts verursachte Photonenrauschen und elektronisches Rau-schen, wobei vor allem in der Fluoreszenzmikroskopie der Effekt des Photonenrauschensdominant ist. Bildrauschen ist ein Zufallsprozess, dessen Realisierung in der Praxis nichtbekannt ist. Häufig kennt man aber einige statistische Eigenschaften dieses Prozesses.So lässt sich das Photonenrauschen statistisch mithilfe einer Poisson-Verteilung unddas elektronische Rauschen mithilfe der Gaußverteilung beschreiben (vgl. [17], S. 205).Ein Maß für den Anteil des Rauschens am diskreten Bild ist das sogenannte Signal-Rausch-Verhältnis (’signal-to-noise ratio’ (SNR)). Dieses ist gleich dem Quotientenaus Nutzsignalamplitude und Rausch-Standardabweichung. Dabei ist die Nutzsignal-amplitude quasi der Mittelwert des sogenannten Nutzsignals, d.h. der erwünschten

2 Das Lichtmikroskop 10
Information über das Objekt bezüglich aller Punkte in der Bildebene, während dieStandardabweichung des Zufallsprozesses des Rauschens ein Maß für die Streuung derWerte um ihren Mittelwert ist. Je größer der Wert dieses Quotienten ist, desto wenigerverrauscht ist das Bild.
Die folgende Abbildung fasst die Erkenntnisse dieses Abschnitts anschaulich zusam-men:
Abbildung 2.9.: Wirkung von Bildfehlern, (entnommen [17])
A zeigt das ungestörte Bild. Das Objekt besteht aus fünf Kugeln mit abnehmendenDurchmessern, aber derselben Leuchtintensität. In B ist die PSF des Mikroskops darge-stellt. Der Längsschnitt durch das Objekt nach Faltung mit der PSF ist in C zu sehen.Im Vergleich zu C enthält E zusätzlich das Bildrauschen. Dieses ist unabhängig vonder optischen Unschärfe. Weiter halten wir fest, dass sich Bildfehler offenbar besondersgravierend bei vergleichsweise kleinen Objekten auswirken.
Dieser Abschnitt zeigt uns, dass eine Methode, die die Bildfehler ’rückgängig macht’,d.h., die versucht, jedem Lichtpunkt im Bild seinen ursprünglichen Ort zuzuordnen,im Zusammenhang der Mikroskopie notwendig erscheint. Eine solche Methode ist dieDekonvolution.

11
3. Mathematische Grundlagen:Auszüge aus der Fourier Analysis
Bevor wir mit der mathematischen Modellierung des gerade beschriebenen Prozessesder Verschlechterung der Bildqualität in einem Lichtmikroskop fortfahren, führen wirin diesem Kapitel einige grundlegende Definitionen und Sätze der Fourier-Analysis ein,die dem besseren Verständnis der späteren Kapitel dienen. Als wichtigste Quelle seihier [2] genannt.
3.1. Die Fourier Transformation
Wir beginnen dieses Kapitel mit der folgenden Definition, die eines der wichtigstenmathematischen Werkzeuge in der digitalen Bildverarbeitung charakterisiert.
Definition 3.1.Es seien f ∈ L1(Rn) eine integrierbare Funktion und x ∈ Rn.Dann ist die n-dimensionale Fourier-Transformierte von f definiert durch:
f(ω) =∫e−iω·xf(x)dx, (3.1)
wobei ω · x das Standardskalarprodukt im Rn ist.Ferner gilt folgende Umkehrformel
f(x) = 1(2π)n
∫eix·ωf(ω)dω, (3.2)
sofern dieses Integral existiert.
Die hier definierte kontinuierliche Fourier-Transformation ist eine Entwicklung derFunktion f . Setzen wir diese Beobachtung in den Zusammenhang der Bildverarbei-tung, so können wir die Fourier-Transformation wie folgt beschreiben: Ein Bild ist aus

3 Mathematische Grundlagen: Auszüge aus der Fourier Analysis 12
Grauwerten in jedem einzelnen Bildpunkt zusammengesetzt. Durch Anwendung derFourier-Transformation wird das Bild nun nicht mehr durch einzelne Grauwerte anden Bildpunkten, sondern durch Überlagerung periodischer Grauwertschwankungenbeschrieben (vgl. [16]).
Um später einige nützliche Eigenschaften des im Folgenden eingeführten Faltungsope-rators zu zeigen, benötigen wir
Satz 3.2.Sei f ∈ L2(Rn) die Fourier-Transformierte zu f wie in 3.1 definiert.Dann gilt die Parseval’sche Gleichung:
∫|f(x)|2 dx = 1
(2π)n∫ ∣∣∣f(x)
∣∣∣2 dω (3.3)
sowie die Verallgemeinerte Parseval’sche Gleichung:∫f(x)h∗(x)dx = 1
(2π)n∫f(ω)h∗(ω)dω, (3.4)
wobei * die komplexe Konjugation bezeichnet.(vgl. [2], S.21)
Bemerkung 3.3.Der Ausdruck
∫f(x)h∗(x)dx in der verallgemeinerten Parseval’schen Gleichung ent-
spricht dem Skalarprodukt der Funktionen f und h in L2, d.h. es gilt:
〈f, h〉 =∫f(x)h∗(x)dx (3.5)
Dieses Skalarprodukt induziert die folgende Norm:
〈f, f〉1/2 = ‖f‖ = (∫|f(x)|2 dx)1/2 (3.6)
Mit der so definierten Norm auf L2 erhalten wir:Definition 3.4.Seien f und h ∈ L2(Rn).
d(f, h) = ‖f − h‖ (3.7)
heißt der Abstand von f zu h.

3 Mathematische Grundlagen: Auszüge aus der Fourier Analysis 13
3.2. Der Faltungsoperator
Betrachten wir das Wort ’Dekonvolution’ aus dem Titel der Arbeit, so liegt es nahe,Dekonvolution als das Gegenteil oder mathematischer als die Umkehrung der Konvo-lution aufzufassen. Der Begriff der Konvolution stammt von dem lateinischen Wort’convolvere’ ab, das so viel bedeutet wie ’sich winden, zusammenrollen’. Im mathema-tischen Kontext beschreibt die Konvolution die mathematische Faltung (vgl. [1]). Diesewerden wir in diesem Abschnitt mitsamt einiger Eigenschaften einführen.
Definition 3.5.Seien f, k : Rn −→ C zwei Funktionen.Dann ist das Faltungsprodukt der Funktionen f und k im Rn definiert durch
g(x) = (k ∗ f)(x) =∫k(x− x′)f(x′)dx′, (3.8)
sofern dieses Integral existiert.
Betrachten wir noch einmal die im letzten Abschnitt eingeführte Fourier-Transforma-tion, so lässt sich im Kontext der mathematischen Faltung folgende Eigenschaft zeigen:
Satz 3.6. (Faltungssatz)Es sei g das Faltungsprodukt der Funktionen f und k, d.h.
g(x) = (k ∗ f)(x). (3.9)
Seien ferner k(ω) und f(ω) die Fourier-Transformierten von f und k und gelte k istbeschränkt und f ist quadratisch integrierbar.Dann gilt:
g(ω) = k(ω)f(ω) (3.10)
(vgl. [2], S.28),
d.h. die Fourier-Transformation übersetzt das Faltungsprodukt zweier Funktionen indas Produkt ihrer Fourier-Transformierten.

3 Mathematische Grundlagen: Auszüge aus der Fourier Analysis 14
Wir definieren fernerDefinition 3.7.Sei k eine beliebige, aber feste Funktion, deren Fourier-Transformierte k für alle ωbeschränkt ist.Wir betrachten das Faltungsprodukt dieser Funktion mit allen quadratisch integrierba-ren Funktionen.Dann ist durch
Af = k ∗ f =∫k(x− x′)f(x′)dx′ (3.11)
ein Integraloperator A auf L2 definiert, der sogenannte Faltungsoperator.
Mithilfe der Definition der Faltung (3.8), der Umkehrformel der Fourier-Transforma-tion (3.2) und des Faltungssatzes (3.10) erhalten wir folgende alternative Form desFaltungsoperators, die Umformungen von Gleichungen häufig vereinfachen kann.
Notation 3.8.Es gilt:
Af(x) = (k ∗ f)(x) (3.8)= g(x)(3.2)= 1
(2π)n∫g(ω)eix·ωdω
(3.10)= 1(2π)n
∫k(ω)f(ω)eix·ωdω
(3.12)
Die unterste dieser Gleichungen heißt die Spektraldarstellung des Faltungsope-rators.Für die Herleitung der Dekonvolutionsalgorithmen werden wir später außerdem folgen-de Definitionen benötigen:
Definition 3.9.Der adjungierte Faltungsoperator A∗ ist der eindeutig definierte Operator, sodassfür jedes Paar quadratisch integrierbarer Funktionen f, g : Rn −→ C gilt:
〈Af, g〉 = 〈f, A∗g〉, (3.13)
wobei das Skalarprodukt wie in (3.5) definiert ist.
Betrachten wir Gleichung (3.13) noch einmal genauer, so erhalten wir die Gleichheitmithilfe des eingeführten Skalarproduktes auf L2 (3.5), der Definition des Faltungsope-rators (3.11), der Verallgemeinerten Parseval’schen Gleichung (3.4) und des Faltungs-
3 Mathematische Grundlagen: Auszüge aus der Fourier Analysis 15
satzes (3.10):
〈Af, g〉 (3.5)=∫
(Af)(x)g∗(x)dx(3.11)=
∫(k ∗ f)(x)g∗(x)dx
(3.4)= 1(2π)n
∫ˆ(k ∗ f)(ω)g∗(ω)dω
(3.10)= 1(2π)n
∫k(ω)f(ω)g∗(ω)dω
= 1(2π)n
∫f(ω)[k∗(ω)g(ω)]∗dω
=∫f(x)(k∗ ∗ g)(x)dx = 〈f, A∗g〉
(3.14)
Aus den letzten Gleichungsumformungen erhalten wir:
Notation 3.10.
(A∗g)(x) =∫
(k∗ ∗ g)(x)dx
= 1(2π)n
∫k∗(ω)g(ω)eix·ωdω
(3.15)
Die obere Zeile heißt der Adjungierte Faltungsoperator, die untere die Spekt-raldarstellung des Adjungierten Operators.
Wir stellen nun noch zwei Eigenschaften des Faltungsoperators vor:
Satz 3.11. (Eigenschaften des Faltungsoperators)Sei Ω ein glattes und beschränktes Gebiet in Rn und sei A : L2(Ω) −→ L2(Ω) der inDefinition 3.7 beschriebene Faltungsoperator.Dann gilt:a) A ist linear,b) A ist beschränkt.Beweis.Zu a): Zeige: A(α1f
(1) + α2f(2)) = α1Af
(1) + α2Af(2)
A(α1f(1) + α2f
(2)) Def. 3.7 Faltungsop.= k ∗ (α1f(1) + α2f
(2))Def. 3.5 Faltung=
∫k(x− x′)(α1f
(1) + α2f(2))(x′)dx′
Lin. des Integrals= α1
∫k(x− x′)f (1)dx′
+ α2
∫k(x− x′)f (2)dx′
Def. 3.5, 3.7= α1Af(1) + α2Af
(2)
(3.16)
3 Mathematische Grundlagen: Auszüge aus der Fourier Analysis 16
Zu b): Zeige: ‖Af‖L2(Ω) ist endlich (d.h. das Integral existiert) bzw. ‖Af‖L2(Ω) ist durchein Vielfaches von ‖f‖L2(Ω) beschränkt.Wir betrachten dazu (‖Af‖L2(Ω))2:
(‖Af‖L2(Ω))2 Def. d. Norm=∫
Ω|(Af)(x)|2 dx
Def. v. A=∫
Ω[∫
Ωk(x− x′)f(x′)dx′]2dx
Cauchy-Schwarz Ungl.≤
∫Ω
[∫
Ω(k(x− x′))2dx′
∫Ω
(f(x′))2dx′]dxSatz v. Fubini=
∫Ω
[∫
Ω(k(x− x′))2dx]dx′
∫Ω
(f(x′))2dx′
Def. d. Norm= ‖A‖2L2(Ω×Ω)‖f‖2
L2(Ω)
(3.17)
Wurzelziehen auf beiden Seiten der Gleichung liefert:
‖Af‖L2(Ω) ≤ ‖A‖L2(Ω×Ω)‖f‖L2(Ω) (3.18)
=⇒ A ist beschränkt
2
Bemerkung 3.12. (Stetigkeit und Wohldefiniertheit des Faltungsoperators)Nach [11] folgt aus der Beschränktheit des Faltungsoperators A auch die Stetigkeit undWohldefiniertheit von A.
3.3. Diskretisierung des Faltungsproduktes
Das in der Regel an das Mikroskop angeschlossene Aufnahmegerät liefert ein diskre-tes Bild. Um dem Rechnung zu tragen, führen wir neben dem Faltungsprodukt zumAbschluss des Kapitels auch dessen Diskretisierung in Form des zyklischen Faltungs-produkts ein (vgl. [3], S.6).
Definition 3.13.Seien g und f zwei Vektoren der Länge M und sei K eine zyklische Blockmatrix.Dann ist das zyklische Faltungsprodukt gegeben durch
gm =M−1∑n=0
Km−nfn. (3.19)
17
4. Modellierung des Prozesses derVerschlechterung der Bildqualität
Erinnern wir uns an Kapitel 2, so können wir das Problem der Bild-Dekonvolutionwie folgt beschreiben: Ziel der Dekonvolution ist die Berechnung eines unbekanntenEingangsbildes mithilfe des gegebenen gestörten und verrauschten Bildes unter derVoraussetzung einer bekannten PSF.Ein Modell des Prozesses der Verschlechterung der Bildqualität in einem bildgebendenSystem muss also die folgenden Elemente enthalten:
• f : Eingangsbild (’input image’),
• a: gestörtes aber rauschfreies Bild
• g: gestörtes und verrauschtes Bild (’output/ acquired image’),
• k: bzw. h: Verschlechterung der Bildqualität durch optische Unschärfe und Ver-wischung dargestellt durch die PSF (’optical blur’),
• n: Verschlechterung der Bildqualität durch Bildrauschen (’noise’),
wobei f , a, g, k bzw. h und n jeweils von x, y und z abhängig sind.
In diesem Kapitel werden wir drei Modellformulierungen kennenlernen, die mit obigenElementen arbeiten. Sämtliche Dekonvolutionsalgorithmen, die wir im folgenden Ka-pitel herleiten werden, bauen auf diesen Modellen auf.
4.1. Stetige Modellformulierung
Wir betrachten zunächst den Fall stetiger Funktionen f , g, k und n.Dann wird die allgemeine Beziehung zwischen g und f für alle (x, y, z) ∈ Ω über einer

4 Modellierung des Prozesses der Verschlechterung der Bildqualität 18
passenden Bildregion1 Ω durch den folgenden Ausdruck dargestellt:
g(x, y, z) = n(∫ ∫ ∫
f(x′, y′, z′)k(x, y, z, x′, y′, z′)dx′dy′dz′) (4.1)
Dabei beschreibt n(a) den Zufallsprozess des Verrauschens des Bildes. In späteren Ka-piteln ist n durch eine Poisson- oder durch eine Gaußverteilung charakterisiert.
Das Anwendungsgebiet der Mikroskopie erlaubt es uns im Folgenden von dem einfachs-ten Verzerrungsmodell auszugehen, d.h. wir werden davon ausgehen, dass die PSF desMikroskops verschiebungsinvariant ist. Diese Verschiebungsinvarianz ist in der Realitätnicht immer gegeben. Betrachtet man beispielsweise ein Objekt, sodass der Fokus desMikroskops tief im Inneren des Objekts liegt, so durchquert das Licht, bevor es dasObjektiv erreicht, verschiedene Lagen, die durch unterschiedliche Brechungsindizes zusphärischen Aberrationen (vlg. Kapitel 2.3 auf Seite 8) führen, die die Verschiebungsin-varianz insbesondere in Richtung der z-Achse brechen. Soll also ein Objekt untersuchtwerden, das eine gewisse Dicke überschreitet (ca. 20 µm), muss das Mikroskop zuvorfür verschiedene z-Werte charakterisiert und die PSF entsprechend angepasst werden.Ist dies geschehen, so kann die Verschiebungsinvarianz vorausgesetzt werden.Betrachten wir unter dieser Annahme noch einmal (4.1), so können wir
k(x, y, z, x′, y′, z′) = h(x− x′, y − y′, z − z′) (4.2)
setzen und erhalten damit folgendes klassisches dreidimensionales Faltungsintegral:
g(x, y, z) = n(∫ ∫ ∫
f(x′, y′, z′)h(x− x′, y − y′, z − z′)dx′dy′dz′)Faltung (3.8)= n(h(x, y, z) ∗ f(x, y, z)) = n(a(x, y, z))
(4.3)
wobei h die PSF des Mikroskops sei.Durch Anwendung des Faltungssatzes (3.10) auf das rauschfreie Bild a erhalten wir diefolgende Darstellung im Fourierraum:
a(u, v, w) = H(u, v, w)f(u, v, w), (4.4)
wobei a, H und f die Fourier-Transformierten (vgl. 3.1) von a, h und f in 3D seien. Hist die sogenannte optische Übertragungsfunktion (’optical transfer function’).
1Wir können auch jeweils über den ganzen Raum der reellen Zahlen integrieren, wenn wir g und kaußerhalb von Ω gleich Null setzen, um zu realisieren, dass das Integral nur über Ω ausgewertetwird.

4 Modellierung des Prozesses der Verschlechterung der Bildqualität 19
Exkurs. Schlechtgestelltheit der DekonvolutionBetrachten wir noch einmal das zu Beginn des Kapitels geschilderte Ziel der Dekonvo-lution: Unter der Annahme eines linearen Bildgebungsprozesses handelt es sich bei derBerechnung eines unbekannten Eingangsbildes mithilfe des gegebenen verrauschten Bil-des unter der Voraussetzung einer bekannten PSF um ein lineares inverses Problem.Lineare inverse Probleme sind aufgrund eines Informationsverlustes im Vergleich zudem zugehörigen direkten Problem typischerweise schlecht-gestellt.
Definition 4.1.Nach Hadamard heißt ein mathematisches Problem korrekt-gestellt, wenn für belie-bige Daten eine eindeutige Lösung existiert, die stetig von den Daten abhängt. Ist einedieser Bedingungen nicht erfüllt, so heißt das Problem schlecht-gestellt.
Mit dieser Definition folgt, dass das lineare inverse Problem der Dekonvolution fürbestimmte Daten keine Lösung besitzt, oder falls es eine Lösung besitzt, diese Lösungdurch Fehlerfortpflanzung sehr stark verfälscht sein kann.Betrachten wir dazu das rauschfreie Bild
a(x, y, z) = h(x, y, z) ∗ f(x, y, z), (4.5)
so wissen wir nach dem Faltungssatz (3.10), dass gilt:
a(u, v, w) = H(u, v, w)f(u, v, w)
⇐⇒ f(u, v, w) = a(u, v, w)H(u, v, w) .
(4.6)
Sei der Faltungskern h nun beispielsweise eine Gaußkurve, so ist dessen Fourier-Trans-formierte H eine Gaußkurve mit invertierter Halbwertsbreite (vgl. [12]). Aus (4.6) istersichtlich, dass zum Beispiel bei dieser Wahl von h, kleinere Messfehler bei der Er-fassung von g insbesondere in Bereichen hoher Frequenz, zu großen Fehlern bei derBerechnung des Eingangsbildes führen. Denn hohe Frequenzen entsprechen großen Ar-gumenten im Fourierraum, sodass H dort nahe Null ist.Aus dieser Beobachtung folgt zum einen, dass wir in der Folge nach Näherungslösungensuchen werden und zum anderen, dass wir die Menge der Näherungslösungen mithilfezusätzlicher Informationen (’a-priori Information’) einschränken müssen.(vgl. [2], S.75 ff.)

4 Modellierung des Prozesses der Verschlechterung der Bildqualität 20
4.2. Diskrete Modellformulierung und Matrixnotation
Wenden wir nun das zyklische Faltungsprodukt (3.19) auf das zuvor vorgestellte stetigeModell an, so erhalten wir aus (4.3) die diskrete Modellformulierung:
Definition 4.2.
gm = n(∑l
Hl−mfl) = n(am), (4.7)
wobei m = (x, y, z) gelte und die diskrete PSF H normiert sei (vgl. [3], S.6), d.h. esgelte ∑
m
Hm = 1. (4.8)
Gleichung (4.7) ist die sogenannte klassische Abbildungsgleichung.
Wir führen ferner ein:Notation 4.3.
g = n(Hf), (4.9)
wobei f und g Vektoren der Größe M und H eine zyklische Blockmatrix sei. Hierbeihandelt es sich um die Matrixnotation der Modellierung des Prozesses der Ver-schlechterung der Bildqualität.
Exkurs. Schlechtkonditioniertheit des diskreten ProblemsDie hier eingeführte diskrete Version des linearen inversen und schlecht-gestellten Pro-blems der Dekonvolution ist in der Regel schlecht-konditioniert. Um diese Behaup-tung zu stützen, diskutieren wir, wie sich kleine Fehler bei der Erfassung des gestörtenrauschfreien Bildes a bei der Berechnung des Eingangsbildes f fortpflanzen und führendazu nach [11] folgende Definition ein:
Definition 4.4.Eine numerische Aufgabe heißt gut konditioniert, falls kleine Änderungen der Ein-gabedaten zu kleinen Änderungen der Lösung führen; sonst heißt das Problem schlechtkonditioniert.
Sei δa eine (kleine) Abweichung eines diskreten rauschfreien Bildes a = Hf . Dann istdie entsprechende Abweichung der Lösung f durch δf = H−1δa gegeben.

4 Modellierung des Prozesses der Verschlechterung der Bildqualität 21
Der relative Fehler von f in Abhängigkeit des relativen Fehlers von a lässt sich mithilfeder sogenannten Konditionszahl α beschreiben:
‖δf‖‖f‖
≤ α‖δa‖‖a‖
(4.10)
Ist diese Konditionszahl α klein, so ist das Problem gut konditioniert, sonst schlechtkonditioniert.Die Konditionszahl einer Matrix A ist nach [11], S. 21 gegeben durch:
cond(A) = ‖A‖‖A−1‖, (4.11)
wobei ‖ · ‖ die natürliche Matrixnorm sei, d.h.
‖A‖ = max‖x‖=1
‖Ax‖ =: Amax (4.12)
Ferner gilt:
‖A−1‖ = max‖x‖=1
‖A−1x‖ = max‖Ay‖=1
‖y‖ = ( min‖x‖=1
‖Ax‖)−1 =: Amin (4.13)
Wir erhalten damit für die Kondition der Matrix H:
cond(H) = Hmax
Hmin
(4.14)
Sei der Faltungskern h nun beispielsweise wieder eine Gaußkurve und somit H einezyklische Blockmatrix, die den Verlauf von h diskret approximiert, so ist ersichtlich:
1. Bei der Diskretisierung eines schlecht gestellten Problems, kann die Konditions-zahl α sehr groß oder sogar extrem groß werden.
2. Je genauer die Diskretisierung des linearen inversen und schlecht-gestellten ste-tigen Problems ist, desto größer ist die Konditionszahl des zugehörigen diskretenProblems.
(vgl. [2], Kapitel 4, S.82 ff.)
Die diskrete Version des Dekonvolutionsproblems ist damit entweder mit einem im-mensen Informationsverlust verbunden oder schlecht-konditioniert.
22
5. Vorstellung der geläufigstenDekonvolutionsalgorithmen
Aufbauend auf die im letzten Kapitel vorgestellten Modellformulierungen, wenden wiruns nun verschiedenen Dekonvolutionsalgorithmen zu. Diese teilen wir nach [14] in diedrei Klassen ’Lineare Methoden’, ’Nichtlineare Methoden’ sowie ’Statistische Metho-den’ ein.Wir werden jeweils zunächst die Idee der Methode vorstellen, anschließend den Algo-rithmus aus einer der Modellformulierungen herleiten und abschließend seine Vor- undNachteile diskutieren.
5.1. Lineare Methoden: Lineare kleinste QuadrateMethode, Tikhonov- und Wiener-Filter
Als erstes beschäftigen wir uns mit einem Algorithmus, der auf der Modellierung inMatrixnotation basiert. Um die numerischen Berechnungen zu vereinfachen, gehen wirin diesem Abschnitt davon aus, dass es sich bei dem Bildrauschen um additives elektro-nisches Rauschen handelt, das folglich durch eine Gaußverteilung beschrieben werdenkann. Wir erhalten damit aus (4.9):
g = (Hf) + n, (5.1)
wobei f , g und n Vektoren der Größe M und H eine zyklische, normierte Blockmatrixsei.

5 Vorstellung der geläufigsten Dekonvolutionsalgorithmen 23
Die Idee ist nun, eine Näherung f des Eingangsbildes f zu finden, sodass der quadrati-sche Abstand (3.7) zwischen dem gemessenen gestörten Bild g und seiner theoretischenFormulierung in Abhängigkeit von f (vgl. (4.9)) minimiert wird. Wir suchen folglichdasjenige f , für das gilt:
‖g− ((Hf) + n)‖2 = ‖g− (Hf)− n‖2 ≤ ‖g− (Hf)‖2 − ‖n‖2 = minimum (5.2)
Unter der vereinfachenden Annahme, dass ‖n‖2 klein und daher zu vernachlässigen ist,müssen wir also eine Lösung des folgenden Minimierungsproblems ermitteln:
minf
Φ(f) = minf‖g− (Hf)‖2 (5.3)
Definition 5.1.Jede Lösung, die das Minimierungsproblem (5.3) löst, heißt kleinste Quadrate Lö-sung. Der Name leitet sich aus der diskreten Version des Problems her, bei der einesolche Lösung die Summe der Quadrate der Differenz von g und (Hf) minimiert.
Um eine Lösung des Minimierungsproblems zu finden, berechnen wir die erste Ablei-tung von Φ nach f und setzen diese gleich dem Nullvektor:
∂
∂fi(Φ(f)) = ∂
∂fi(M∑j=1
(M∑k=1
hjkfk − gj)2)
Kettenregel=M∑j=1
hji2(M∑k=1
hjkfk − gj)
= 2[(M∑j=1
hjiM∑k=1
hjkfk)− (M∑j=1
hjigj)]
= 2[HTHf −HTg]i!= 0
(5.4)
Aus dieser Umformung folgt HTHf = HTg und wir erhalten damit:
f = (HTH)−1HTg (5.5)
Wir haben somit die sogenannte lineare kleinste Quadrate Methode hergeleitet.In der Praxis hat sich leider gezeigt, dass eine wie in (5.5) charakterisierte Lösung faus physikalischer Sicht aufgrund der Schlechtkonditioniertheit des diskreten Problems(vgl. Kapitel 4.2 auf Seite 20 f.) häufig inakzeptabel ist, weil die Konditionszahl bedingt

5 Vorstellung der geläufigsten Dekonvolutionsalgorithmen 24
durch den Minimalwert der optischen Übertragungsfunktion H extrem groß werdenkann.
Fügen wir daher dem obigen Minimierungsproblem
minf‖g− (Hf)‖2 (5.6)
eine Nebenbedingung hinzu, so erhalten wir einen flexibleren Ansatz.Dazu definieren wir:Definition 5.2.Sei f eine quadratisch integrierbare Funktion.Dann nennen wir das Quadrat der L2-Norm:
E2(f) = ‖f‖2 =∫|f(x)|2dx (5.7)
die Energie von f.
Sei nun Q ein linearer Operator, der der folgenden Bedingung unterliegt:
E2(Qf) = ‖Qf‖2 ≤ C (5.8)
Dieses Minimierungsproblem mit Nebenbedingung kann mithilfe von Lagrange-Multi-plikatoren gelöst werden, indem wir die Zielfunktion
Ψ(f , λ) = ‖g− (Hf)‖2 + λ‖Qf‖2 (5.9)
minimieren, wobei der Lagrange-Multiplikator λ ein Regularisierungsparameter und Qeine Glättungsfunktion (’penalty function’) ist. Q dämpft die Artefakte, die durch dasBildrauschen entstehen, während λ für eine Balance zwischen einer hohen Übereinstim-mung mit den Daten und der Stabilisierung des Ergebnisses zuständig ist.Zur Minimierung setzen wir die partiellen Ableitungen von Ψ(f , λ) gleich Null underhalten:
1. ∂∂fi
(Ψ(f , λ)) = ∂∂fi
(‖g− (Hf)‖2 + λ‖Qf‖2) != 0
2. ∂∂λ
(Ψ(f , λ)) = ‖Qf‖2 != 0 =⇒ ‖Qf‖2 ≤ C

5 Vorstellung der geläufigsten Dekonvolutionsalgorithmen 25
Betrachten wir die erste Gleichung genauer, so folgt:
∂
∂fi(Ψ(f , λ)) Definition von Ψ= ∂
∂fi(‖g− (Hf)‖2 + λ‖Qf‖2)
Definition der Norm= ∂
∂fi(M∑j=1
(M∑k=1
hjkfk − gj)2) + ∂
∂fi(λ
M∑j=1
(M∑k=1
qjkfk)2)
Kettenregel=M∑j=1
hji2(M∑k=1
hjkfk − gj) + λM∑j=1
qji2(M∑k=1
qjkfk)
= 2[(M∑j=1
hjiM∑k=1
hjkfk)− (M∑j=1
hjigj)]
+ 2[λ(M∑j=1
qjiM∑k=1
qjkfk)]
= 2[HTHf −HTg + λQTQf ]i= 2[(HTH + λQTQ)f −HTg]i!= 0
(5.10)
Aus dieser Umformung erhalten wir (HTH + λQTQ)f = HTg und damit:
f = (HTH + λQTQ)−1HTg (5.11)
Dies ist der sogenannte Tikhonov Filter, der auch mithilfe der Theorie bedingterWahrscheinlichkeiten nach Bayes hergeleitet werden kann. Zum Ende des Kapitels imAbschnitt über statistische Algorithmen werden wir auf diese Lösung zurückkommen.Erinnern wir uns an das in Kapitel 2 eingeführte Signal-Rausch-Verhältnis (’signal-to-noise ratio’ (SNR)) als Maß für den Anteil des Rauschens am Bild. Sei C gleich demProdukt des Kehrwerts des SNR und der Einheitsmatrix , d.h.
C =(Rausch-Standardabweichung
Nutzsignalamplitude
)1 · IM , (5.12)
wobei IM die Einheitsmatrix im RM sei.Setzen wir nun λ gleich 1 und QTQ gleich C so erhalten wir aus Gleichung (5.11)folgende Lösung des Minimierungsproblems:
f = (HTH + 1 · C)−1HTg (5.13)
1Leider ist der Wert des Signal-Rausch-Verhältnisses in der Praxis häufig nicht bekannt. In der Regelwird C daher gleich einer Konstante zwischen 0.001 und 0.1 gesetzt.
5 Vorstellung der geläufigsten Dekonvolutionsalgorithmen 26
Übertragen wir diese Gleichung in den Fourierraum, so haben wir den bekannten Wie-ner Invert Filter aus dem diskreten Modell in Matrixnotation hergeleitet:
f(u, v, w) = H∗(u, v, w)|H(u, v, w)|2 + C
g(u, v, w), (5.14)
wobeiH∗ die komplex konjugierte Matrix zuH und |H(u, v, w)|2 = H∗(u, v, w)H(u, v, w)sei.
Die hier vorgestellten Methoden zur Bildrestaurierung erfordern nur eine vergleichs-weise geringe Rechnerleistung. Allerdings sind die Lösungen häufig schlecht kondi-tioniert und somit sehr stark verfälscht, auch wenn der Tikhonov Filter diesbezüg-lich eine Verbesserung gegenüber der linearen kleinste Quadrate Methode darstellt,weil die Konditionszahl nicht länger beliebig groß werden kann (für den Nenner gilt:(HTH + λQTQ)min ≥ (λQTQ)min > 0). Ferner sind sie instabil bezüglich einer feh-lerhaften PSF, denn schon kleine Fehler bei der Bestimmung dieser Funktion führenzu größeren Artefakten bei der Berechnung des Eingangsbildes. Zuletzt sei angemerkt,dass die hier vorgestellten Algorithmen manchmal eine negative Lösung liefern.(vgl. [14], S.37 f.)
5.2. Nichtlineare Methoden: Jansson Van Cittert- undGold-Algorithmus
Insbesondere für dieses letzte Problem der obigen Algorithmenklasse liefern die in die-sem Abschnitt vorgestellten Methoden eine Lösung, indem sie die Nebenbedingungeiner positiven Lösung hinzufügen.
Beide Algorithmen dieses Abschnitts haben die klassische Abbildungsgleichung (4.7)unter Vernachlässigung des Bildrauschens als Ausgangspunkt. Wir beginnen also mit:
gm =∑l
Hl−mfl = am, (5.15)
wobei m = (x, y, z) sei.

5 Vorstellung der geläufigsten Dekonvolutionsalgorithmen 27
Zuerst beschäftigen wir uns mit dem sogenannten ’Jansson Van Cittert Algorith-mus’. Wenden wir dazu zunächst einige leichte Äquivalenzumformungen auf Gleichung(5.15) an:
gm =∑l
Hl−mfl
Subtraktion von am⇐⇒ 0 = gm −∑l
Hl−mfl
Potenzieren mit p⇐⇒ 0 = (gm −∑l
Hl−mfl)p
(5.16)
Wir berechnen also das Fehlerbild zwischen dem theoretischen diskreten Bild in Ab-hängigkeit von f und dem aufgenommenen gestörten Bild g und potenzieren diesesanschließend mit p.Um die Nebenbedingung der Nichtnegativität sicherzustellen und übermäßig helle Licht-Intensitäten zu verhindern, multiplizieren wir dieses potenzierte Fehlerbild mit einerGewichtsfunktion wm, die über einem Band positiver Intensitäten definiert ist (vgl.[14], S.38). Addition von fm auf beiden Seiten der Gleichung liefert:
fm = fm + wm(gm −∑l
Hl−mfl)p (5.17)
Hieraus erhalten wir folgende Iterationsvorschrift: f (0)
m = gm
f (k+1)m = f (k)
m + wm(gm −∑lHl−mf
(k)l )p
(5.18)
Um die neue Approximation fk+1m zu erhalten, addieren wir also den gewichteten Fehler
und die im vorangegangenen Iterationsschritt berechnete Approximation fkm.
Wir kommen nun zum sogenannten ’Gold-Algorithmus’. Wiederum aufbauend aufGleichung (5.15) führen wir einige einfache Umformungen durch:
gm =∑l
Hl−mfl
Division durch am⇐⇒ 1 = gm∑lHl−mfl
Potenzieren mit p⇐⇒ 1 = ( gm∑lHl−mfl
)p
Multiplikation mit fm⇐⇒ fm = fm · (gm∑
lHl−mfl)p
(5.19)
5 Vorstellung der geläufigsten Dekonvolutionsalgorithmen 28
Aus dieser Gleichung können wir die folgende Iterationsvorschrift herleiten:
f (0)m = gm
f (k+1)m = f (k)
m · ( gm∑lHl−mf
(k)l
)p(5.20)
Die Nichtnegativitätsbedingung ist hier stets erfüllt, denn mit f 0m ist auch fk+1
m alsProdukt positiver Zahlen positiv.Für p = 1 erhält man aus Gleichung (5.20) die sogenannte Gold-Formel.
Die in diesem Absatz vorgestellten iterativen Dekonvolutionsmethoden bilden, wie obenerwähnt, eine Möglichkeit einige Probleme der linearen Methoden zu beheben. Aller-dings konvergieren beide Algorithmen nur langsam und liefern sehr schlechte Ergeb-nisse, wenn die Qualität der Bilder stark durch Rauschen beeinträchtigt ist, da dasBildrauschen vernachlässigt wird. (vgl. [17], S.228)
5.3. Statistische Methoden
Die Algorithmen, die wir in diesem Abschnitt kennenlernen werden, basieren auf derdiskreten Matrixnotation.Wie schon im letzten Abschnitt suchen wir auch hier eine Approximation des Ein-gangsbildes, indem wir eine Iteration durchführen. Während wir das Bildrauschen zu-vor jedoch vernachlässigt haben, werden wir es nun explizit einbeziehen und auf seinezufällige Natur eingehen.Wir fassen dazu das Eingangsbild f und das gestörte und verrauschte Bild g als Rea-lisierungen von Zufallsprozessen auf, wobei f vollständige Informationen bereithält,aber nicht beobachtbar ist und g beobachtbar ist, aber nur unvollständige Informa-tionen zur Verfügung stellt. (vgl. [14], S.38 f.) Wie bei inversen Problemen üblich,ist die Idee nun, das Informationsdefizit bezüglich g auszugleichen, indem man soge-nannte ’a-priori’ Informationen über das unbekannte Eingangsbild f nutzt. Weil wirf als Realisierung eines Zufallsprozesses bzw. einer Zufallsvariablen F betrachten, istin diesem Zusammenhang die ’a-priori’ Information die WahrscheinlichkeitsverteilungP(F = f) = PF (f) dieser Zufallsvariablen. Nun suchen wir die Approximation f desEingangsbildes, die unter der Voraussetzung eines bekannten gestörten und verrausch-ten Bildes am wahrscheinlichsten eintritt, d.h. wir suchen dasjenige f , für das diebedingte Wahrscheinlichkeit PF (f |g) maximal wird.

5 Vorstellung der geläufigsten Dekonvolutionsalgorithmen 29
Aus der Stochastik kennen wir für bedingte Wahrscheinlichkeiten den Satz von Bayes:
PF (f |g) = PG(g|f)PF (f)PG(g) (5.21)
Bezüglich der Wahl der Wahrscheinlichkeitsverteilung PF (f) ist folgende Annahmenach [3], S.9 üblich: F ist ein Markov-Netzwerk (’Markov random field’ (MRF)) oderein Gibbs-Netzwerk (’Gibbs random field’). Letzteres wird durch folgende Wahrschein-lichkeitsverteilung beschrieben:
PF (f) = 1Ze−λΩ(f), (5.22)
wobei λ ein Regularisierungsparameter und Ω eine gegebene Glättungsfunktion (’pen-alty function’) seien, die dieselben Funktionen erfüllen wie zuvor (vgl. Kapitel 5.2 aufSeite 24).Nach dem Satz von Hammersley-Clifford ist jedes Markov-Netzwerk äquivalent zu ei-nem geeigneten Gibbs-Netzwerk (vgl. [3], S.9) und wir können daher Gleichung (5.22)als die allgemeine Form von PF (f) betrachten.Wir suchen daher das Maximum einer Funktion der Form:
ψ(f) =PG(g|f) 1
Ze−λΩ(f)
PG(g) (5.23)
Statt diesen Term bezüglich f zu maximieren, können wir den negativen Logarithmusdes Zählers von ψ(f) minimieren, weil PG(g) unabhängig von f ist. Vernachlässigen wirferner die Nomierungskonstante 1/Z, weil sie ebenfalls unabhängig von f ist, so erhaltenwir eine Zielfunktion der Form:
Ψ(f, λ) = −ln(PG(g|f)e−λΩ(f))Logarithmengesetze= −ln(PG(g|f)) + (−ln(e−λΩ(f)))
= −ln(PG(g|f)) + λΩ(f)
= L(g, f) + λΩ(f)
,
(5.24)
wobei L(g, f) die sogenannte ’Maximum Likelihood Schätzfunktion’ sei.
In der Folge werden wir Algorithmen aus zwei Gruppen von statistischen Methodenvorstellen: Algorithmen ohne Glättungsfunktion (Ω = 0) und Algorithmen mit Glät-tungsfunktion (Ω 6= 0).

5 Vorstellung der geläufigsten Dekonvolutionsalgorithmen 30
5.3.1. Statistische Algorithmen ohne Glättungsfunktion
Für die Ausführungen in diesem Abschnitt diente [17], S. 229 f. als wesentliche Quelle.Wie bereits zuvor erwähnt, besteht das Bildrauschen in dem Anwendungsgebiet derMikroskopie vor allem aus Photonenrauschen. Dieses Photonenrauschen setzt sich auszwei Teilen zusammen: Ein erster Teil entsteht durch die von dem zu betrachtendenObjekt ausgehende Strahlung. Dieses kann durch eine Poisson-verteilte Zufallsvariablemit Erwartungswert Hf beschrieben werden. Der zweite Teil entsteht durch das soge-nannte Grundrauschen (’background emission’), das das Rauschen eines Gerätesohne Nutzsignal beschreibt. Dieses kann beispielsweise durch eine Emission von Pho-tonen durch die Atmosphäre entstehen. Im Falle des Fluoreszenzmikroskops entstehtdas Grundrauschen vor allem durch Auto-Fluoreszenz und Reflektion des Anregungs-lichts. Auch das Grundrauschen kann mithilfe einer Poisson-verteilten Zufallsvariablenmit Erwartungswert b beschrieben werden. b kann zum Beispiel durch die Aufnahmevon ’dunklen Bildern’ oder durch einen Vergleich des berechneten und des aufgenomme-nen verrauschten und gestörten Bildes bestimmt werden. Unter der Annahme, dass dasdurch das Objekt verursachte Rauschen und das Grundrauschen stochastisch unabhän-gig sind, kann das Bildrauschen insgesamt durch eine Poisson-verteilte Zufallsvariablemit Erwartungswert (Hf + b) beschrieben werden. (vgl. [3], S.6)
Allgemein ist die Poissonverteilung zum Parameter µ gegeben durch:
PPois(x|µ) = µxe−µ
x! (5.25)
Diese Gleichung beschreibt die Wahrscheinlichkeit einen verrauschten Wert x unter ei-nem gegebenen rauschfreien Erwartungswert µ zu erhalten.Das gestörte und verrauschte diskrete Bild g ist aus Pixeln zusammengesetzt, die sto-chastisch unabhängig voneinander sind. Die Gesamtwahrscheinlichkeit PPois(g|f) ergibtsich daher als Produkt der Einzelwahrscheinlichkeiten.Unter der Annahme, dass der Erwartungswert des gestörten und verrauschten Bildesgleich Hf + b ist, ergibt sich:
PPois(g|f) = PPois(g|(Hf + b)) =∏m
(Hf + b)gmm e−(Hf+b)m
gm! (5.26)
Wollen wir nun das Maximum von PPois(g|f) bezüglich f bestimmen, so können wiralternativ auch das Minimum des negativen Logarithmus der Gleichung suchen.

5 Vorstellung der geläufigsten Dekonvolutionsalgorithmen 31
Der negative Logarithmus von PPois(g|f), die sogenannte Log-Likelihood-Funktion,ist gegeben durch:
LPois(g|f) = −ln(PPois(g|f))Logarithmengesetze= −(
∑m
gmln((Hf + b)m)− (Hf + b)m − ln(gm!))
=∑m
(Hf + b)m − gmln((Hf + b)m) + ln(gm!)
(5.27)
Um das Minimum der Log-Likelihood-Funktion bezüglich f zu bestimmen, bilden wirbei festem g die Ableitung nach fm und setzen diese gleich Null. Dabei sei die 1 in derfolgenden Umformung ein Vektor der Länge M, der nur aus Einsen besteht.
∂LPois(g|f)∂fm
(5.27)= ∂
∂fm(∑m
(Hf + b)m − gmln((Hf + b)m) + ln(gm!))
= ∂
∂f(1T · (Hf + b)− gT ln(Hf + b) + 1T · (ln(g!)))
= ∂
∂f(1T · (Hf + b)− (ln(Hf + b))Tg + 1T · (ln(g!)))
= 1T ·H −HT g
(Hf + b)∑mHm=1 (vgl. (4.7))
= 1−HT g
(Hf + b) = 1−∑l
(Hm−lgl
(Hf + b)l) != 0
(5.28)
Durch einfache Rechenoperationen erhalten wir:
1−∑l
(Hm−lgl
(Hf + b)l) = 0
Addition von∑
(Hm−l gl(Hf+b)l
)⇐⇒ 1 =
∑l
(Hm−lgl
(Hf + b)l)
Potenzieren mit p⇐⇒ 1 =∑l
(Hm−lgl
(Hf + b)l)p
Multiplikation mit fm⇐⇒ fm = fm∑l
(Hm−lgl
(Hf + b)l)p
(5.29)
Daraus ergibt sich die folgende Iterationsvorschrift zur Berechnung von f :f (0)m = gm
f (k+1)m = f (k)
m
∑l(Hm−l( gl∑
nHl−nf
(k)n +bn
))p⇐⇒
f(0) = g
f (k+1) = f (k)HT ( gHx(k)+b))
p
(5.30)Dies ist der sogenannte Maximum-Likelihood-Estimation(MLE)-Algorithmus.
5 Vorstellung der geläufigsten Dekonvolutionsalgorithmen 32
Die obige Iteration garantiert die Nichtnegativität der Approximation f in allen Kom-ponenten m für alle k, weil mit f (0)
m = gm auch alle anderen Glieder der rekursivenFolge (f (k)
m )k positiv sind.Für p = 1 ist (5.30) gleich dem bekannten Richardson-Lucy(RL)-Algorithmus.
Die Maximum-Likelihood-Estimation-Algorithmen haben sich insbesondere bei der Be-arbeitung von stark verrauschten Bildern im Vergleich zu den einfacheren Algorithmen,die wir zu Beginn des Kapitels kennengelernt haben, als sehr effektiv erwiesen. Aller-dings kann die Wahl Ω ≡ 0 zu Artefakten führen. In diesem Fall sollte das gestörte undverrauschte Bild g zuvor mit einem Gauß- oder Wiener-Filter geglättet werden. Außer-dem konvergieren die hier vorgestellten Methoden nur sehr langsam. In der Regel sindzwischen 50 und 1000 Iterationen notwendig, um ein brauchbares Ergebnis zu erzielen.Zwar lässt sich die Konvergenzgeschwindigkeit erhöhen, wenn wir p > 1 wählen, dochdamit geht auch eine größere Instabilität der Konvergenz einher.
5.3.2. Statistische Algorithmen mit Glättungsfunktion
Alternativ können wir die Konvergenzgeschwindigkeit der Maximum-Likelihood-Esti-mation-Algorithmen erhöhen und den Problemen der Instabilität der Konvergenz be-gegnen, indem wir Ω 6= 0 wählen.
Tikhonov- bzw. Wiener Filter
Um die numerischen Berechnungen zu erleichtern, nehmen wir nun an, dass das Bildrau-schen durch eine Gaußverteilung beschrieben wird. Der Anteil des Bildrauschens, derdurch die von dem zu betrachtenden Objekt ausgehende Strahlung verursacht wird,kann dann mithilfe einer Gauß-verteilten Zufallsvariable mit Erwartungswert Hf = a
dargestellt werden. Unter obiger Annahme können wir das Grundrauschen in der Folgevernachlässigen, weil wir es im Vorhinein von dem gestörten und verrauschten Bildsubtrahieren können, um die Daten zu bereinigen.Die Gaußverteilung zum Parameter µ mit Standardabweichung σ ist allgemein durchdie folgende Wahrscheinlichkeitsverteilung gegeben:
PGauß(x|µ) = 1√2πσ2
e−(x−µ)2
2σ2 (5.31)

5 Vorstellung der geläufigsten Dekonvolutionsalgorithmen 33
Wie zuvor die Poissonverteilung beschreibt nun diese Gleichung die Wahrscheinlichkeiteinen verrauschten Wert x unter einem gegebenen rauschfreien Erwartungswert µ zuerhalten.Das gestörte und verrauschte diskrete Bild g ist nach wie vor aus Pixeln zusammen-gesetzt, die stochastisch unabhängig voneinander sind somit ergibt sich auch hier dieGesamtwahrscheinlichkeit PGauß(g|f) als Produkt der Einzelwahrscheinlichkeiten.Wir erhalten:
PGauß(g|f) = PGauß(g|a) =∏
PGauß(gm|am)
=∏m
1√2πσ2
e−(gm−am)2
2σ2 = ( 1√2πσ2
)M∏m
e−(gm−am)2
2σ2(5.32)
Mit dieser Gleichung können wir die Log-Likelihood-Funktion zu PGauß(g|f) bestim-men:
LGauß(g|f) = −ln(PGauß(g|f))
= −Mln( 1√2πσ2
) +∑m
−(gm − am)2
2σ2
= −Mln( 1√2πσ2
) + 12σ2
∑m
(gm − am)2
= M(ln(√
2πσ2)− ln(1)) + 12σ2‖ g − a‖
2
= M(ln(√
2πσ2)− ln(1)) + 12σ2‖ g −Hf‖
2
(5.33)
Nun könnten wir diese Funktion (bzw. äquivalent eine Funktion der Form:
ψ(f) = ‖ g −Hf‖ 2, (5.34)
weil die restlichen Terme unabhängig von f sind) bezüglich f minimieren um das f zubestimmen, für das PGauß(g|f) maximal ist. Wir hätten dann den MLE-Algorithmusfür die Gaußverteilung hergeleitet. Weil jedoch im Anwendungsgebiet der Mikroskopie,wie bereits erläutert, das Photonenrauschen dominant ist, erscheint der zuvor herge-leitete MLE-Algorithmus für die Poissonverteilung in der Praxis geeigneter.Wir nutzen stattdessen die Dichtefunktion der Gaußverteilung PGauß(f) zur Regulari-sierung und erhalten damit die quadratische Glättungsfunktion:
Ω(f) = PGauß(f) = ‖ Qf‖ 2 (5.35)

5 Vorstellung der geläufigsten Dekonvolutionsalgorithmen 34
Wir suchen also dasjenige f , das die folgende quadratische Funktion minimiert:
ΨGauß(f , λ) = ‖g− (Hf)‖2 + λ‖Qf‖2 (5.36)
Diese Funktion kennen wir schon aus Abschnitt 5.1 auf Seite 24 und wir wissen daher,dass die direkte Minimierung den Tikhonov- bzw. den Wiener-Invert-Filter (mit denentsprechenden Problemen) liefert.
One-Step-Late-Algorithmus und Split-Gradient Method
Wir wollen uns nun mit weiteren statistischen Algorithmen mit Glättungsfunktionbeschäftigen. Dabei beziehen wir uns zunächst vor allem auf [3].Als Ansatz wählen wir wieder die Minimierung der Zielfunktion (5.24), wobei wir wie inAbschnitt 5.3.1 davon ausgehen, dass das Bildrauschen eine Realisierung einer Poisson-verteilten Zufallsvariablen ist, d.h. wir suchen das Minimum der Funktion:
ΨPois(f, λ) = LPois(g|f) + λΩ(f) (5.37)
Wir bestimmen dazu die Ableitung von ΨPois(f, λ) bezüglich f und setzen diese gleichNull, wobei wir die Ableitung von LPois(g|f) bezüglich f bereits in Abschnitt 5.3.1 aufSeite 31 berechnet haben. Wir nehmen im Folgenden stets an, dass Ω(f) differenzierbarist.
∂ΨPois(f, λ)∂f
(5.37)= ∂LPois(g|f)∂f
+ λ∂Ω(f)∂f
(5.28)= 1−HT g
(Hf + b) + λ∇Ω(f)
!= 0
(5.38)
Durch einige einfache Rechenoperationen erhalten wir:
1−HT g
(Hf + b) + λ∇Ω(f) = 0
Addition von HT g(Hf+b)⇐⇒ 1 + λ∇Ω(f) = HT g
(Hf + b)Division durch 1 + λ∇fΩ(f)⇐⇒ 1 = 1
1 + λ∇Ω(f)HT g
(Hf + b)Multiplikation mit f⇐⇒ f = f
1 + λ∇Ω(f)HT g
(Hf + b)
(5.39)

5 Vorstellung der geläufigsten Dekonvolutionsalgorithmen 35
Aus dieser Gleichung können wir die folgende Iterationsvorschrift ablesen:f
(0) = g
f (k+1) = f (k)
1+λ∇Ω(f (k))HT g
(Hf (k)+b)
(5.40)
Dies ist der sogenannte ’one-step-late(OSL)-Algorithmus’. Er hat sich als stabilbezüglich Poissonrauschen unterschiedlicher Stärken erwiesen. Allerdings ist die physi-kalisch sinnvolle Nebenbedingung der Nichtnegativität der Approximation f im Falleeines negativen Gradienten nur für kleine Werte von λ erfüllt.Die sogenannte split-gradient method (SGM) beinhaltet gegenüber dem OSL-Algorithmus nur eine geringfügige Veränderung, die jedoch dazu führt, dass die Nicht-negativität der Lösung in jedem Iterationsschritt garantiert ist. Die Methode basiertauf der Idee, den Gradienten der Glättungsfunktion Ω in einen positiven Teil U undeinen negativen Teil V zu zerlegen, d.h. wir setzen:
−∇Ω(f) = U(f)− V (f)⇐⇒ ∇Ω(f) = V (f)− U(f), (5.41)
wobei U(f) ≥ 0 und V (f) ≥ 0 für alle f ≥ 0 gelte.Aus Gleichung (5.38) ergibt sich damit:
∂ΨPois(f, λ)∂f
(5.38)= 1−HT g
(Hf + b) + λ(V (f)− U(f))
!= 0(5.42)
Wenden wir einige einfache Rechenoperationen auf diese Gleichung an, so erhalten wir:
1−HT g
(Hf + b) + λ(V (f)− U(f)) = 0
Addition von HT g(Hf+b) und λU(f)⇐⇒ 1 + λV (f) = HT g
(Hf + b) + λU(f)
Division durch 1 + λV (f)⇐⇒ 1 = 11 + λV (f)H
T g
(Hf + b) + λU(f)
Multiplikation mit f⇐⇒ f = f
1 + λV (f)HT g
(Hf + b) + λU(f)
(5.43)
Diese Gleichung können wir wie folgt iterativ schreiben:f (0) = g
f (k+1) = f (k)
1+λV (f (k))HT g
(H ¯f (k)+b)+ λU(f (k))
(5.44)
5 Vorstellung der geläufigsten Dekonvolutionsalgorithmen 36
FB-EM-REG Algorithmus
Bei allen bisher vorgestellten iterativen Algorithmen war die Iteration explizit gegeben,d.h. die neue Approximation f (k+1) hing stets nur von zuvor gegebenen Werten odervon der letzten Approximation f (k) ab. Hiervon werden wir nun abweichen. WichtigsteQuelle für diesen letzten Abschnitt des Kapitels ist [15], Kapitel 4.4.1.Betrachten wir erneut Gleichung (5.38):
1−HT g
(Hf + b) + λ∇Ω(f) != 0 (5.45)
Die Idee des in der Folge erläuterten speziellen ’forward-backward-splitting(FB)-Al-gorithmus’ ist es, klassische RL-Algorithmus Schritte und Schritte zur Glättung desBildes alternieren zu lassen. Dazu werten wir den nichtlokalen Term, der den OperatorH enthält, in f (k) aus, den lokalen Term, der ∇Ω enthält, jedoch in f (k+1).Wir erhalten daher:
1−HT g
(Hf (k) + b) + λ∇Ω(f (k+1)) != 0 (5.46)
Die Approximation der 1 in Gleichung (5.46) durch f (k+1)
f (k) , die sinnvoll erscheint, fallsdie Iteration konvergiert, liefert:
f (k+1)
f (k) −HT g
(Hf (k) + b) + λ∇Ω(f (k+1)) = 0
Multiplikation mit f (k)⇐⇒ f (k+1) − f (k)HT g
(Hf (k) + b) + λf (k)∇Ω(f (k+1)) = 0
⇐⇒ f (k+1) = f (k)HT g
(Hf (k) + b) − λf(k)∇Ω(f (k+1))
(5.47)
Die so definierte Iteration ist semi-implizit. Betrachten wir die letzte Zeile der Äqui-valenzumformung (5.47) genauer, so erkennen wir, dass es sich bei dem ersten Termrechts des Gleichheitszeichens um einen einzelnen Schritt des RL-Algorithmus handelt.Wir erhalten daher folgende verschachtelte zwei-Halbschritt-Iteration:
f (0) = g
f (k+ 12 ) = f (k)HT g
(Hf (k)+b)
f (k+1) = f (k+ 12 ) − λf (k)∇Ω(f (k+1))
(5.48)
Dies ist der sogenannte ’FB-EM-REG-Algorithmus.Nach [15], S.51 ist die Nichtnegativitätsbedingung hier für alle k erfüllt.

5 Vorstellung der geläufigsten Dekonvolutionsalgorithmen 37
Der zweite Halbschritt in (5.48) ist äquivalent zur Lösung des folgenden konvexenVariationsproblems:
f (k+1) = minf
12
∫ (f − f (k+ 12 ))2
f (k) + λΩ(f) (5.49)
Um die Äquivalenz zu zeigen, berechnen wir die Richtungsableitung nach v, wobei vbeliebig, aber fest sei, und setzen diese gleich Null.Wir setzen dazu:
ϕ(t) := F (f (k+1) + tv) = 12
∫ (f (k+1) + tv − f (k+ 12 ))2
f (k) + λΩ(f (k+1) + tv) (5.50)
Dann gilt:
ϕ′(t)|t=0!= 0
Kettenregel⇐⇒ (2 · 12
∫ (f (k+1) + tv − f (k+ 12 ))
f (k) · v + λ∇Ω(f (k+1) + tv) · v)|t=0 = 0
⇐⇒ [∫ (f (k+1) − f (k+ 1
2 ))f (k) + λ∇Ω(f (k+1))] · v = 0
(5.51)
Weil obige Gleichung für beliebig, aber feste v erfüllt sein soll, ist dies äquivalent zu:
(f (k+1) − f (k+ 12 ))
f (k) + λ∇Ω(f (k+1)) = 0
Multiplikation mit f (k)⇐⇒ f (k+1) − f (k+ 1
2 ) + λf (k)∇Ω(f (k+1)) = 0
⇐⇒ f (k+1) = f (k+ 12 ) − λf (k)∇Ω(f (k+1))
(5.52)
Wir haben so die behauptete Äquivalenz gezeigt.Nach [15], S.49 ff. kann das konvexe Variationsproblem mithilfe von Methoden derkonvexen Analysis auch für singuläre, d.h. insbesondere nicht im klassischen Sinn dif-ferenzierbare Glättungsfunktionen Ω gelöst werden.
38
6. Implementierung des FB-EM-REGAlgorithmus
In Kapitel 5 haben wir in der Theorie verschiedene Dekonvolutionsalgorithmen ken-nengelernt. Um einen Eindruck der numerischen Ergebnisse zu vermitteln, die dieseAlgorithmen in der Praxis liefern, werden wir nun exemplarisch den zuletzt vorgestell-ten FB-EM-REG Algorithmus auf reale Daten anwenden.
Im ersten Teil dieses Kapitels erläutern wir, wie ein auf der Iterationsvorschriftf (0) = g
f (k+ 12 ) = f (k)HT g
(Hf (k)+b)
f (k+1) = f (k+ 12 ) − λf (k)∇Ω(f (k+1))
(6.1)
basierendes MATLAB-Programm geschrieben werden kann.Der exakte MATLAB-Programmcode ist in Anhang A dieser Arbeit zu finden.Im zweiten Teil der Arbeit werden wir dann einige Ergebnisse präsentieren und dis-kutieren, die man durch Anwendung des MATLAB-Programms auf zwei verschiedenereale Datensätze mithilfe einer geeigneten Parameterwahl erhält.
6.1. Erläuterung zur Implementierung des FB-EM-REGAlgorithmus
1. Daten einlesen:In unserem Fall sind die Daten als .mat-Dateien gegeben. Diese müssen zunächstgeladen werden. Anschließend erfolgt der Zugriff auf die gespeicherten Bilder. DasBild, das in der Folge bearbeitet werden soll, wird der Variable ’img’ zugeordnet.
6 Implementierung des FB-EM-REG Algorithmus 39
2. PSF bestimmen:In den vorherigen Kapiteln sind wir stets davon ausgegangen, dass die PSF alsbekannt vorausgesetzt werden kann. Ist die PSF wie in unserem Fall nicht ge-geben, muss zunächst eine PSF geschätzt werden. Wir werden davon ausgehen,dass der Faltungskern eine Gaußkurve (’gaussian’) ist. Diese ist von den Para-metern ’hsize’ und ’sigma’ abhängig; ’sigma’ entspricht der Standardabweichungder Gaußverteilung und ’hsize’ ist ein Maß für die Anzahl der Pixel, über diegemittelt wird (entspricht etwa dem Erwartungswert). Diese Parameter solltenca. im Verhältnis 1:3 gewählt werden. Wir definieren dann die PSF über dieMATLAB-Funktion ’fspecial’.
3. Startwerte festlegen:Sei ’lucy’ in der Folge die aktuelle Version des bearbeiteten Bildes. Wir setzen’lucy’ zu Beginn gleich einer Einheitsmatrix der Größe des zu bearbeitendenBildes (’img’).
4. Gewichtsfunktion und Parameter festlegen:Wir definieren eine Gewichtsfunktion ’weight’ über die MATLAB-Funktion ’im-filter’.Außerdem müssen wir einige Parameter für den Regularisierungsschritt festlegen(vgl. [15], MATLAB-Funktion wL2_TV_ALM(dataP, algP, q, h, v, nonnegative))
• ′dataP ′ ist über die Funktion ′get_img_spec(img)′ festgelegt.
• ′algP.alpha′ entspricht dem Regularisierungsparameter und muss durch Aus-probieren so angepasst werden, dass ein möglichst aussagekräftiges Ergebnisentsteht.
• ′algP.regAccur′ legt fest, bis zu welcher Toleranz die Regularisierungsfunk-tion konvergieren soll.
• ′algP.mu_v′ und ′algP.mu_tilde_u′ sind zwei innere Parameter des Regu-larisierungsschritts, die zunächst beliebig gewählt werden können, weil sieohnehin optimiert werden. Die Wahl dieser Parameter hat allerdings einenEinfluss auf die Geschwindigkeit des Algorithmus.
• ′v′ bezeichnet den Gradienten der gesuchten Lösungsapproximation undwird zunächst gleich einem leeren Vektor gesetzt.
• ′nonnegative′ kann auf ′true′ oder ′false′ gesetzt werden. Durch die Wahl′true′ ist die Nichtnegativitätsbedingung sichergestellt.
6 Implementierung des FB-EM-REG Algorithmus 40
Zuletzt legen wir durch ’NUMIT’ die Anzahl der Iterationen des FB-EM-REGAlgorithmus fest, die durchgeführt werden sollen.
5. Iteration:Die Iteration besteht aus zwei Halbschritten:
• Im ersten Halbschritt wird zur Berechnung von f (k+ 12 ) auf der Basis der
Iteration (5.30) ein einzelner Schritt des RL-Algorithmus durchgeführt.
• Im zweiten Teil berechnen wir f (k+1) mithilfe der FunktionwL2_TV_ALM(dataP, algP, q, h, v, nonnegative),die wir aus [15] übernehmen.
6. Ausgabe:Das Programm soll das bearbeitete Bild nach dem letzten Iterationsschritt(f (′NUMIT ′))anzeigen
7. Vergleich mit ’deconvlucy’:Zum Vergleich lassen wir auch das Ergebnis des MATLAB-Befehls ’deconvlucy’angewendet auf das Ursprungsbild (’img’) anzeigen.
6.2. Ergebnispräsentation und -diskussion
In diesem Abschnitt beschäftigen wir uns anhand zweier ausgewählter Beispiele mitden numerischen Ergebnissen des obigen Programms bei Anwendung auf reale Daten.Alle Abbildungen dieses Abschnitts finden sich noch einmal in vergrößerter Form inAnhang B.
Zunächst betrachten wir einen 2D-Schnitt durch den dreidimensionalen Datensatz Pe-ritoneum 2-2-6. Es handelt sich um den Tiefenschnitt z = 18. Zu sehen ist die Endothel-wand (Teil der Gefäßwand) eines Mäusehodens. Die Daten wurden mit einem Laser-Scanning-Mikroskop (LSM) aufgenommen und von Stefan Butz, Max-Planck Institutfür Molekulare Biomedizin Münster, zur Verfügung gestellt.

6 Implementierung des FB-EM-REG Algorithmus 41
In der folgenden Grafik befindet sich links das Originalbild, in der Mitte eine Rekon-struktion nach 50 Iterationen mit dem Regularisierungsparameter α = 5e − 4 undrechts eine Rekonstruktion nach 50 Iterationen mit dem Regularisierungsparameterα = 2e − 4. In beiden Fällen wurde als Varianz der Gaußverteilung sigma = 1 undfür die Toleranz der Konvergenz der Regularisierungsfunktion algP.regAccur = 1e− 6gewählt.
Abbildung 6.1.: Von links nach rechts: Vom LSM aufgenommenes Originalbild, Rekon-struktion mit alpha = 5e− 4 und Rekonstruktion mit alpha = 2e− 4
Das Originalbild ist erkennbar durch Bildrauschen beeinträchtigt und die Kanten sindunscharf. So ist eine Abgrenzung zwischen Objekt und Hintergrund in einigen Bildbe-reichen nahezu unmöglich.Im Vergleich zum Originalbild ist das Bildrauschen auf dem mittleren Bild deutlich ge-dämpft. Eine Unterscheidung zwischen Objekt und Hintergrund ist so leichter möglich,allerdings wirken die Ränder der Strukturen nach wie vor nicht ausreichend scharf. Indem rechten Bild ist das Bildrauschen etwas weniger gedämpft als in dem mittlerenBild, jedoch ist diesbezüglich immer noch eine Verbesserung gegenüber dem Original-bild zu erkennen. Insgesamt sind die Kanten in diesem Bild im Vergleich zu den beidenanderen Bildern deutlich schärfer, sodass insbesondere in der Mitte des Bildes Einzel-heiten besser zu erkennen sind.Insgesamt entsprechen diese Ergebnisse unseren Erwartungen: Durch eine geeigneteParameterwahl erzielen wir mithilfe des Dekonvolutionsalgorithmus eine Verbesserungder Bildqualität, die eine genauere Analyse ermöglicht. Des Weiteren dämpft die Glät-tungsfunktion die entstehenden Artefakte und das Bildrauschen, wirkt aber auch einerSchärfung der Kanten durch Entfaltung entgegen.
6 Implementierung des FB-EM-REG Algorithmus 42
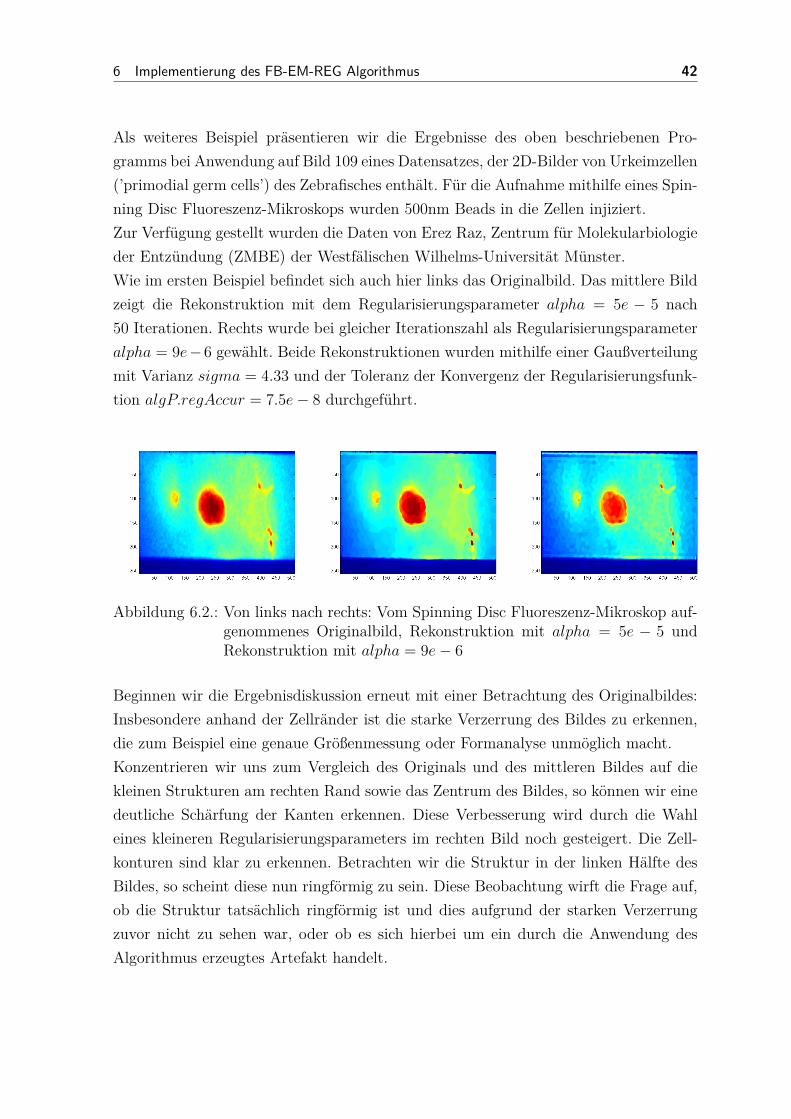
Als weiteres Beispiel präsentieren wir die Ergebnisse des oben beschriebenen Pro-gramms bei Anwendung auf Bild 109 eines Datensatzes, der 2D-Bilder von Urkeimzellen(’primodial germ cells’) des Zebrafisches enthält. Für die Aufnahme mithilfe eines Spin-ning Disc Fluoreszenz-Mikroskops wurden 500nm Beads in die Zellen injiziert.Zur Verfügung gestellt wurden die Daten von Erez Raz, Zentrum für Molekularbiologieder Entzündung (ZMBE) der Westfälischen Wilhelms-Universität Münster.Wie im ersten Beispiel befindet sich auch hier links das Originalbild. Das mittlere Bildzeigt die Rekonstruktion mit dem Regularisierungsparameter alpha = 5e − 5 nach50 Iterationen. Rechts wurde bei gleicher Iterationszahl als Regularisierungsparameteralpha = 9e−6 gewählt. Beide Rekonstruktionen wurden mithilfe einer Gaußverteilungmit Varianz sigma = 4.33 und der Toleranz der Konvergenz der Regularisierungsfunk-tion algP.regAccur = 7.5e− 8 durchgeführt.
Abbildung 6.2.: Von links nach rechts: Vom Spinning Disc Fluoreszenz-Mikroskop auf-genommenes Originalbild, Rekonstruktion mit alpha = 5e − 5 undRekonstruktion mit alpha = 9e− 6
Beginnen wir die Ergebnisdiskussion erneut mit einer Betrachtung des Originalbildes:Insbesondere anhand der Zellränder ist die starke Verzerrung des Bildes zu erkennen,die zum Beispiel eine genaue Größenmessung oder Formanalyse unmöglich macht.Konzentrieren wir uns zum Vergleich des Originals und des mittleren Bildes auf diekleinen Strukturen am rechten Rand sowie das Zentrum des Bildes, so können wir einedeutliche Schärfung der Kanten erkennen. Diese Verbesserung wird durch die Wahleines kleineren Regularisierungsparameters im rechten Bild noch gesteigert. Die Zell-konturen sind klar zu erkennen. Betrachten wir die Struktur in der linken Hälfte desBildes, so scheint diese nun ringförmig zu sein. Diese Beobachtung wirft die Frage auf,ob die Struktur tatsächlich ringförmig ist und dies aufgrund der starken Verzerrungzuvor nicht zu sehen war, oder ob es sich hierbei um ein durch die Anwendung desAlgorithmus erzeugtes Artefakt handelt.

6 Implementierung des FB-EM-REG Algorithmus 43
Um dieser Frage auf den Grund zu gehen, verringern wir bei gleicher Wahl des Regu-larisierungsparameters (alpha = 9e− 6) den Wert der Varianz sigma und vergleichendie erzielten Ergebnisse:
Abbildung 6.3.: Von links nach rechts: Rekonstruktion mit sigma = 4.33, sigma = 3.33und sigma = 2.66
Auch wenn wir die Varianz mit sigma = 3.33 (mittleres Bild) deutlich kleiner als zuvorwählen, scheint die linke Struktur bei genauem Hinsehen ringförmig zu sein. Erst beieinem noch kleineren Wert der Varianz (sigma = 2.66) ist die Ringstruktur nicht mehrzu erkennen. Da in diesem Fall die Konturen aller im Bild enthaltenen Strukturen imVergleich zu der ganz linken Rekonstruktion deutlich an Schärfe und somit an Aussa-gekraft verlieren, lässt sich vermuten, dass die linke Struktur tatsächlich ringförmig ist.Insgesamt entsprechen die Ergebnisse auch hier unseren Erwartungen.
44
7. Zusammenfassung und Ausblick
Was ist am Ende dieser Arbeit festzuhalten?Wir haben festgestellt, dass das Werkzeug der Dekonvolution auch für die Bearbeitungvon Fotos von Interesse ist, derzeit jedoch insbesondere im Bereich der optischen Te-leskopie sowie der Lichtmikroskopie zur Anwendung kommt. Zentrales Element beiderSysteme sind konvexe Linsen, die durch die Brechung des Lichts beim Übergang zwi-schen Medien unterschiedlicher Dichte eine vergrößernde Wirkung haben, aber auchAbbildungsfehler erzeugen.Durch eine Betrachtung der Funktionsweise von Lichtmikroskopen am Beispiel desDurchlichtmikroskops sowie einiger typischer Abbildungsfehler konnten wir die Ziel-setzung der Dekonvolution erarbeiten: Die Dekonvolutionsalgorithmen sollen aus dembekannten gestörten Bild das unbekannte Eingangsbild berechnen, wobei wir davonausgehen, dass die Point-Spread-Function (PSF), die das Bild eines jeden Punktes derObjektebene und somit die Verzerrung des Bildes beschreibt, bekannt ist. Dies ent-spricht einer Schärfung des Bildes bzw. der in ihm enthaltenen Kanten. Die Qualitätdes gestörten Bildes ist häufig zusätzlich durch Rauschen beeinträchtigt. Wird diesesBildrauschen nicht explizit in den Algorithmus einbezogen, kann dies zu Artefakten füh-ren. Kombiniert man die Entfaltung hingegen mit einer Glättungsfunktion, so dämpftdiese die entstehenden Artefakte, wirkt aber auch der Schärfung der Kanten entgegen.Die Glättungsfunktion sollte deshalb mit einem Regularisierungsparameter gewichtetwerden, der eine Balance zwischen diesen zwei Effekten schafft.Wir haben eine Auswahl der bekanntesten - meist kommerziell erhältlichen - Dekonvo-lutionsalgorithmen ohne und mit Glättungsfunktion aus den zuvor vorgestellten Mo-dellformulierungen hergeleitet.Ein Vergleich dieser Algorithmen fällt in Anbetracht der Frage nach der Wahl des Ver-gleichskriteriums schwer: Ist die Schärfe des Ausgabebildes, die Konvergenzgeschwin-digkeit bzw. der Rechenaufwand oder die Robustheit gegenüber Artefakten entschei-dend? Eine allgemeine Antwort auf diese Frage zu geben, ist derzeit unmöglich; viel-mehr sollte der Algorithmus auf die individuellen Anforderungen des zu bearbeitendenProjekts abgestimmt werden.
7 Zusammenfassung und Ausblick 45
Betrachten wir beispielsweise den Bereich der Fotobearbeitung im privaten Sektor. Hiersollte der Rechenaufwand nicht zu hoch und die Konvergenzgeschwindigkeit nicht zugering sein, so dass die Software mit einem Standard-PC in angemessener Zeit ein fürden Kunden ansprechendes Ergebnis liefert. Im wissenschaftlichen Bereich dürfte in derRegel die Schärfe des Bildes sowie die Robustheit gegenüber Artefakten von größererBedeutung sein, um eine möglichst genaue Analyse zu ermöglichen.In Kapitel 6 haben wir außerdem gesehen, wie entscheidend eine möglichst exakteBestimmung (bzw. Schätzung) der PSF sowie eine gute Wahl des Regularisierungspa-rameters für das Ergebnis der Dekonvolution sind.
In Anbetracht der Entwicklung der ersten Dekonvolutionsalgorithmen vor gut 25 Jah-ren, lässt sich dieses Forschungsgebiet insgesamt als vergleichsweise jung bezeichnen.Die oben aufgezählten Vergleichskriterien (Bildschärfe und -genauigkeit, Konvergenzge-schwindigkeit, Rechenaufwand und Robustheit gegenüber Artefakten) liefern allesamtAnsatzpunkte für eine Optimierung oder Weiterentwicklung der bestehenden Verfah-ren bzw. die Konstruktion neuer Algorithmen.Werfen wir nun noch einen Blick auf die voraussichtliche Entwicklung der Nachfragevon Software zur Dekonvolution: Am 26.Juli diesen Jahres nahmen in Namibia Wis-senschaftler das derzeit größte optische Teleskop in Betrieb. (vgl. [7]) Schon im Junihatte die Europäische Südsternwarte ESO den Entschluss bekannt gegeben, ein nochgrößeres Teleskop in Chile zu bauen, das im nächsten Jahrzehnt seine Arbeit aufneh-men soll. (vgl. [4]) Wertet man diese Neubauten sowie die beständige Forschung an derWeiterentwicklung von Lichtmikroskopen als Indizien für einen auch in der Zukunfthohen Bedarf an Ausrüstung für die Bearbeitung astronomischer und biomedizinischerFragestellungen, so ist davon auszugehen, dass auch die Dekonvolution zur Schärfungder von diesen Instrumenten aufgenommenen Daten von großem Interesse bleiben wird.Denken wir zum Abschluss der Arbeit an den Anfang zurück, so könnte die Nachfragedurch eine stärkere Nutzung im privaten Sektor sogar noch weiter anwachsen.

I
A. MATLAB-Programmcode
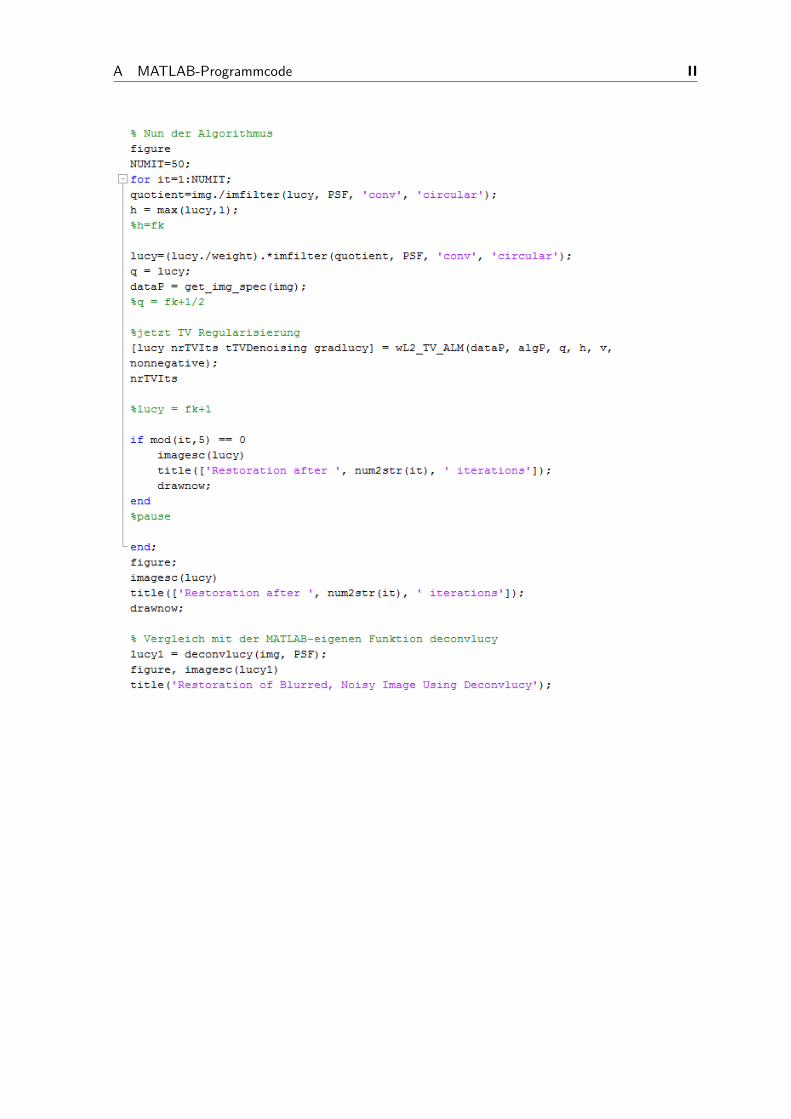
A MATLAB-Programmcode II
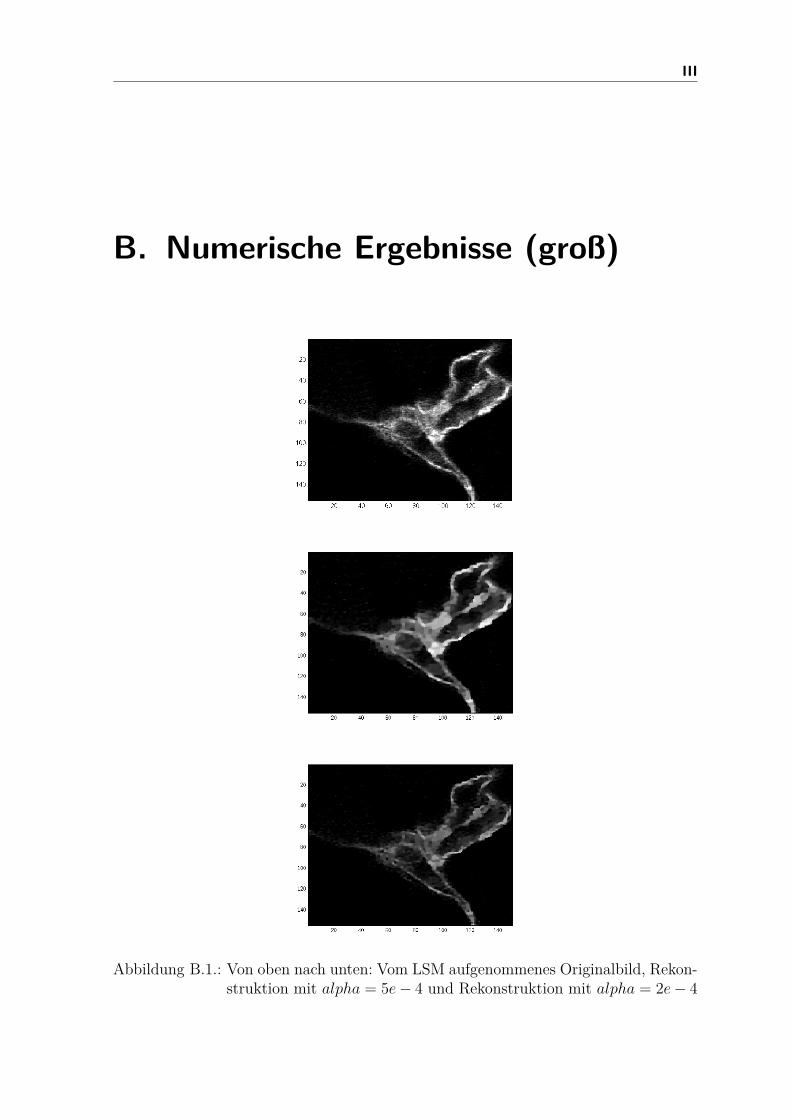
III
B. Numerische Ergebnisse (groß)
Abbildung B.1.: Von oben nach unten: Vom LSM aufgenommenes Originalbild, Rekon-struktion mit alpha = 5e− 4 und Rekonstruktion mit alpha = 2e− 4
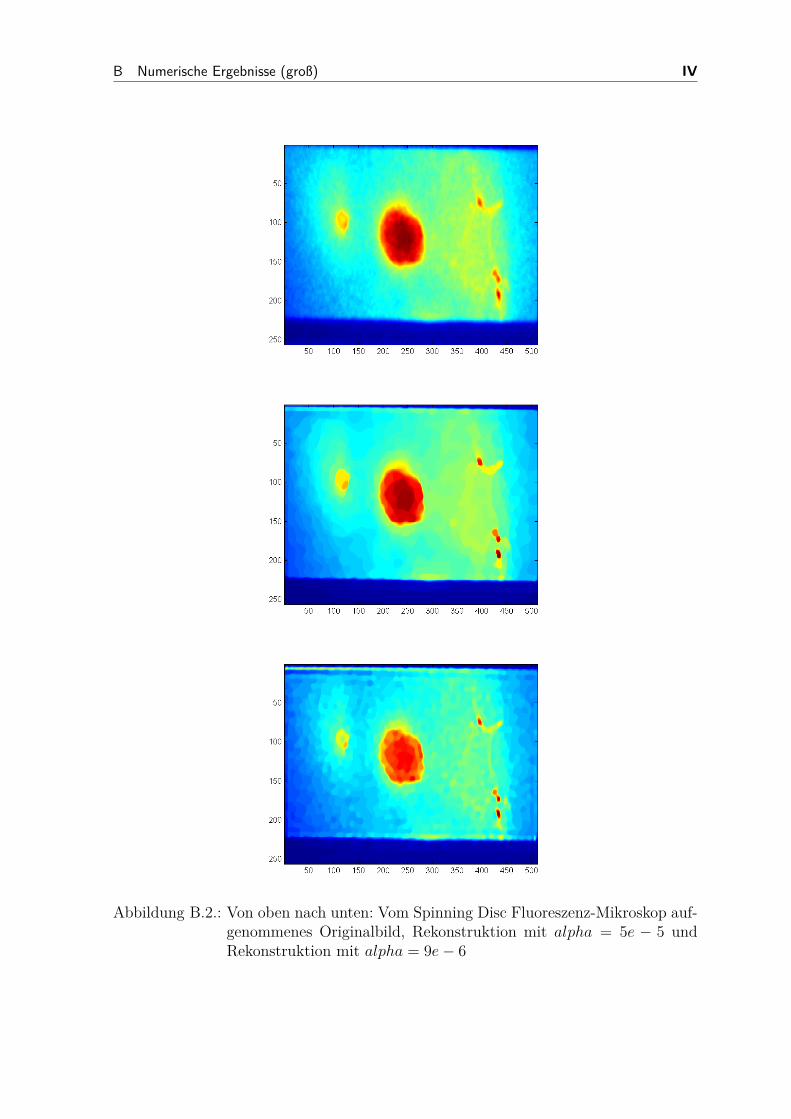
B Numerische Ergebnisse (groß) IV
Abbildung B.2.: Von oben nach unten: Vom Spinning Disc Fluoreszenz-Mikroskop auf-genommenes Originalbild, Rekonstruktion mit alpha = 5e − 5 undRekonstruktion mit alpha = 9e− 6
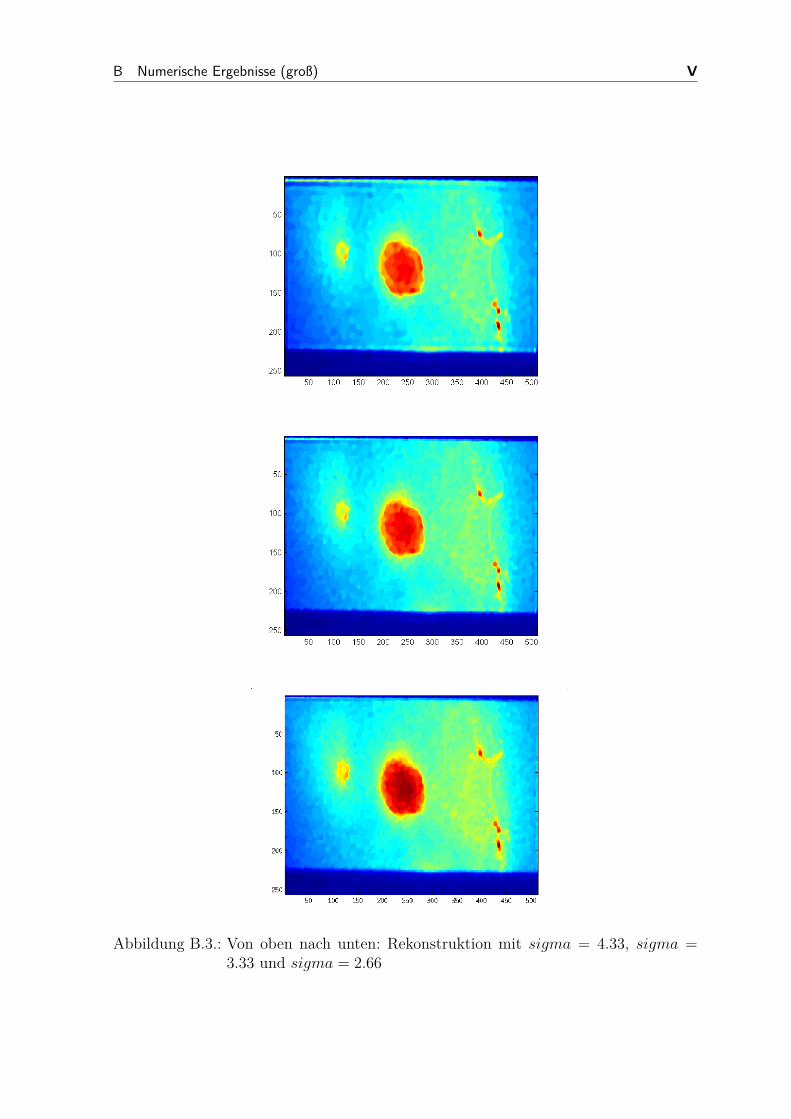
B Numerische Ergebnisse (groß) V
Abbildung B.3.: Von oben nach unten: Rekonstruktion mit sigma = 4.33, sigma =3.33 und sigma = 2.66
a
Abbildungsverzeichnis
1.1. Verwackeltes und geschärftes Urlaubsfoto . . . . . . . . . . . . . . . . . 1
2.1. Funktionsweise der Lupe . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2. Durchlichtmikroskop . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.3. Bild einer Punktquelle . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.4. Bildsystem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.5. Chromatische Aberration . . . . . . . . . . . . . . . . . . . . . . . . . . 82.6. Sphärische Aberration . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.7. Verzeichnung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.8. Laterales und axiales Bild einer Punktquelle . . . . . . . . . . . . . . . 92.9. Wirkung von Bildfehlern . . . . . . . . . . . . . . . . . . . . . . . . . . 10
6.1. numerische Ergebnisse: Peritoneum . . . . . . . . . . . . . . . . . . . . 416.2. numerische Ergebnisse: Urkeimzelle eines Zebrafisches I . . . . . . . . . 426.3. numerische Ergebnisse: Urkeimzelle eines Zebrafisches II . . . . . . . . 43
B.1. numerische Ergebnisse: Peritoneum (groß) . . . . . . . . . . . . . . . . IIIB.2. numerische Ergebnisse: Urkeimzelle eines Zebrafisches I (groß) . . . . . IVB.3. numerische Ergebnisse: Urkeimzelle eines Zebrafisches II (groß) . . . . . V
b
Literaturverzeichnis
[1] D. Baer, M. Wermke, G. Drosdowski, and A. Klosa, editors. Duden - Fremdwör-terbuch. Dudenverlag, Mannheim, 7th edition, 2001. 13
[2] M. Bertero and P. Boccacci. Introduction to Inverse Problems in Imaging. Instituteof Physics Pub., Bristol, 1st edition, 1998. 11, 12, 13, 19, 21
[3] M. Bertero, P. Boccacci, G. Desiderà, and G Vicidomini. Image deblurring withpoisson data: from cells to galaxies. Inverse Problems, 25(3), 12 2009. 1, 9, 16,20, 29, 30, 34
[4] Europäische Südsternwarte (European Southern Observatory - ESO).Die ESO beschließt Bau des weltgrößten optischen Teleskops. Presse-mitteilung ’eso1225de’, ESO Homepage, 6 2012. Im Web verfügbar:http://www.eso.org/public/germany/news/eso1225/. 45
[5] M. Fischer-Michely. DISKUS. Mikroskopische Diskussion. Grundmodul. Mikro-skop + Kamera. Durchlichtmirkoskop mit 3-Chip Live-Kamera. Im Web verfüg-bar: http://www.hilgers.com/Module/GM_Mikro.htm. 7
[6] E. Hecht. Optik. Oldenbourg Wissenschaftsverlag, München, 5th edition, 2009. 3,4, 6, 7, 8
[7] D. Horns. Weltgrößtes Spiegelteleskop nimmt Betrieb auf. UHH Newsletterder Universität Hamburg, 8 2012. Im Web verfügbar: http://www.uni-hamburg.de/newsletter/Weltgroesstes-Spiegelteleskop-nimmt-Betrieb-auf.html.45
[8] Adobe System Inc. MAX 2011 Sneak Peek - Image Deblurring. Adobe TV, 2011.ImWeb verfügbar: http://tv.adobe.com/watch/max-2011-sneak-peeks/max-2011-sneak-peek-image-deblurring/. 1
[9] B. Kremer. Das große Kosmos-Buch der Mikroskopie. Franckh-Kosmos Verlag,Stuttgart, 2010. 3, 5, 8, 9
Literaturverzeichnis c
[10] R. Köthe. Was ist Was. Band 8. Das Mikroskop. Tessloff Verlag, Nürnberg, 2003.4
[11] M. Ohlberger. Einführung in die Numerische Mathematik. Vor-lesung im SoSe 2010. Im Web verfügbar: http://wwwmath.uni-muenster.de/num/Vorlesungen/Numerik1_SS10/Script/skriptum.pdf. 16,20, 21
[12] J. I. Pascual. Experimentalphysik III. 1 Optics. 5F - Fourier Optik + Fou-rier Transf. of a Gauss function. Im Web verfügbar: http://users.physik.fu-berlin.de/ pascual/Vorlesung/WS08/slides/WS08-07%20EPIII%20-%20L1f.pdf.19
[13] E. Puts. Leica M Objektive. Ihre Seele und ihre Ge-heimnisse. 2002. Im Web verfügbar: http://de.leica-camera.com/assets/file/download.php?filename=file_140.pdf. 8
[14] P. Sarder and A. Nehorai. Deconvolution methods for 3-d fluorescence microscopyimages. IEEE Signal Processing Magazine, pages 32–45, 5 2006. 22, 26, 27, 28
[15] A. Sawatzky. (Nonlocal) Total Variation in Medical Imaging. PhD thesis,Westfälische Wilhelms-Universität Münster, Münster, 2011. Im Web verfügbar:http://wwwmath.uni-muenster.de/num/publications/2011/Saw11/diss.pdf. 36,37, 39, 40
[16] U. Schimpf. Fourieranalyse mikroskaliger Temperaturfluktuationen derWasseroberfläche. Master’s thesis, Ruprecht-Karls-Universität Heidel-berg, Heidelberg, 5 1996. Im Web verfügbar: http://klimt.iwr.uni-heidelberg.de/PublicFG/ProjectB/CFT/dipluschimpf/diplom.html. 12
[17] J.-B. Sibarita. Deconvolution microscopy. Advances in Biochemical Engineering/Biotechnology, 95:201–243, 2005. 2, 3, 7, 9, 10, 28, 30
[18] User: Tomia. Microscope without text. Lizenziert unter CC-BY-2.5. 5
[19] G. Vicidomini, P. Boccacci, A. Diaspro, and M. Bertero. Application of the split-gradient method to 3D image deconvolution in fluorescence microscopy. Journalof Microscopy, 234(1):47–61, 4 2009.
[20] M. Zölffel. 100 Jahre Fluoreszenzmikroskopie von Carl Zeiss. Zeiss Homepa-ge, 2009. Im Web verfügbar: http://www.zeiss.de/c12567be00459794/Contents-Frame/9505a9039d06720ec12574eb00507155. 2
Eidesstattliche Erklärung
Hiermit versichere ich, Eva-Maria Brinkmann, dass ich die vorliegende Arbeit selbst-ständig verfasst und keine anderen als die angegebenen Quellen und Hilfsmittel verwen-det habe. Gedanklich, inhaltlich oder wörtlich Übernommenes habe ich durch Angabevon Herkunft und Text oder Anmerkung belegt bzw. kenntlich gemacht. Dies gilt ingleicher Weise für Bilder, Tabellen, Zeichnungen und Skizzen, die nicht von mir selbsterstellt wurden.
Alle auf der CD beigefügten Programme sind von mir selbst programmiert worden.
Münster, 11. Januar 2013.Eva-Maria Brinkmann



![MikroskopieTrends '14 Mikroskopie entlang des Spektrums file[ Mikroskopie entlang des Spektrums ] Von der Licht- zur Röntgen und Elektronenmikroskopie Röntgenmikroskope ermöglichen](https://img.pdfslide.org/doc/110x75/5e052168bf0b8f2b8451038e/mikroskopietrends-14-mikroskopie-entlang-des-spektrums-mikroskopie-entlang-des.jpg)