Embed Size (px)
Citation preview

Universität LeipzigFakultät für Mathematik und Informatik
Mathematisches Institut
Mittag-Leffler-Funktionen, fraktionale Infinitesimalrechnung
und deren Anwendung zur Beschreibung des viskoelastischen
Verhaltens von Beton
Diplomarbeit
Leipzig, Oktober 2016 vorgelegt vonMatthias HinzeMatrikel-Nr.: 1866054Studiengang: Mathematik-Diplom
Betreuender Hochschullehrer: Prof. Dr. Hans-Peter GittelMathematisches InstitutAbteilung Analysis

Vorwort
The mathematician’s best work is art, a high perfect art, as
daring as the most secret dreams of imagination, clear and
limpid. Mathematical genius and artistic genius touch one
another.GÖSTA MAGNUS MITTAG-LEFFLER
Die Idee zur Betrachtung von Ableitungen und Integralen beliebiger (nicht-ganzzahliger)Ordnung geht auf einen Briefwechsel zwischen LEIBNIZ und DE L’HOSPITAL aus dem17. Jahrhundert zurück [10, S. 3]. Seitdem ist eine umfassende mathematische Theoriezu diesem Thema, der fraktionalen Infinitesimalrechnung entstanden [26, 27, 30]. Beideren Entwicklung hat ein ebenso lange bekannter Typ spezieller Funktionen, die nachdem schwedischen Mathematiker MITTAG-LEFFLER benannt wurden, neue Bedeutungerlangt, was ebenfalls zu einer Erweiterung der diesbezüglichen mathematischen Theoriegeführt hat [16, 20, 23, 25, 28, 29]. In den vergangenen Jahrzehnten wurden auchweitreichende physikalische Anwendungen fraktionaler Infinitesimalrechnung, u.a. beider Beschreibung des viskoelastischen Verhaltens verschiedener Materialien gefunden[4, 32]. In dieser Arbeit soll ein Teil der Theorie zu fraktionaler Infinitesimalrechnung
und insbesondere zu MITTAG-LEFFLER-Funktionen dargelegt und zur Beschreibung desviskoelastischen Verhaltens des Baustoffes Beton verwendet werden. Die Idee zu dieserArbeit entstand in einem Praktikum bei der DBE TECHNOLOGY GmbH in Peine.Dabei wurde ein technischer Bericht [21] zur Erweiterung des Stoffmodells für Betonverfasst, auf dem der angewandte Teil dieser Arbeit basiert. Dieses Stoffmodell soll beimNachweis der Rissbeschränkung von sogenannten Massenbetonbauwerken in Endlagernfür kontaminierte Abfallstoffe Anwendung finden.
Die Arbeit besteht aus fünf Abschnitten. Im ersten Teil soll eine Erweiterung desStoffmodells von Beton im Kontext der Endlagerung von Abfallstoffen motiviert wer-den. Zudem werden einige physikalische Grundlagen zur Viskoelastizität beschrieben,bisherige Ansätze zur Modellierung dieses Phänomens vorgestellt sowie der fraktionaleAnsatz erläutert. Im zweiten Teil finden sich verschiedene mathematische Aspekte zurfraktionalen Infinitesimalrechnung. Dabei wird insbesondere auf Eigenschaften vonMITTAG-LEFFLER-Funktionen sowie die LAPLACE-Transformation und deren Verwen-dung zur Lösung fraktionaler Differentialgleichungen eingegangen. Zu diesem Problemwerden auch einige numerische Methoden vorgestellt und getestet. Anschließend wirdein fraktionales Teilstoffmodell der Viskoelastizität beschrieben und die Lösung der
II

Vorwort
zugehörigen linearen fraktionalen Differentialgleichung dargelegt. Die Ergebnissewerden dann im vorletzten Teil mit experimentellen Werten aus den KriechversuchenBGR 05019 [34], iBMB-10d [24], IfG 414-K-M2-1-56-8 [42] und IfG-M2-TCC 1, 2, 3, 5[43] sowie dem Relaxationsversuch BGR 05020 [35] verglichen um erste Aussagen überdie Eignung des fraktionalen Ansatzes bei der Anwendung auf Beton treffen zu können.Zudem werden auch die verschiedenen numerischen Methoden zur Lösung fraktionalerDifferentialgleichungen auf das fraktionale Modell aus dem dritten Abschnitt angewandt.Im letzten Teil werden schließlich die Ergebnisse dieser Arbeit zusammengefasst undein Ausblick auf Ansatzpunkte zur Weiterentwicklung des fraktionalen Stoffmodellsgegeben.
Ich möchte mich bei der DBE TECHNOLOGY GmbH und insbesondere bei ChristianLerch und Dr. Nina Müller-Hoeppe bedanken. Durch sie bin ich auf das Thema dieserArbeit gestoßen. Ich habe große Wertschätzung, Vertrauen und Unterstützung währendmeiner Zeit in diesem Unternehmen erhalten, welches ich dank des Engagements vonCarsten Schmidt kennenlernen durfte. Ich danke Prof. Dr. Hans-Peter Gittel für dieBetreuung dieser Arbeit und die vielen wichtigen Hinweise zu den mathematischenDetails sowie Maria Mateev und Franz Patzig für Denkanstöße und Kritiken. Schließlichmöchte ich mich bei meinen Eltern bedanken, die mir die Jahre meines Studiumsermöglicht und mich in jeder Situation unterstützt haben.
Leipzig, Oktober 2016 Matthias Hinze
III

Inhaltsverzeichnis
1 Physikalische Grundlagen 11.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Deformation und Spannung . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2.1 Herleitung von Verzerrungs- und Spannungstensor . . . . . . . . 11.2.2 Eigenschaften von Verzerrungs- und Spannungstensor . . . . . . 5
1.3 Kriechen und Relaxation . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4 Rheologische Modelle . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Aspekte der fraktionalen Infinitesimalrechnung 102.1 Gamma-Funktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.1 Grundlegende Eigenschaften . . . . . . . . . . . . . . . . . . . . 102.1.2 Monotonieverhalten der Gamma-Funktion Γ = Γ(x) für x > 0 . . 12
2.2 MITTAG-LEFFLER-Funktionen . . . . . . . . . . . . . . . . . . . . . . . 152.2.1 Historische Einordnung . . . . . . . . . . . . . . . . . . . . . . 152.2.2 Konvergenz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.2.3 Einige Spezialfälle . . . . . . . . . . . . . . . . . . . . . . . . . 172.2.4 Funktionalgleichungen und Rekursionsformeln . . . . . . . . . . 172.2.5 Integraldarstellung und asymptotisches Verhalten . . . . . . . . . 192.2.6 Eigenschaften der Funktion e(t) := Eα,β(−λtα) . . . . . . . . . 22
2.3 LAPLACE-Transformation . . . . . . . . . . . . . . . . . . . . . . . . . 292.3.1 Definition und Transformationsregeln . . . . . . . . . . . . . . . 292.3.2 Reihenentwicklung von LAPLACE-Transformierten . . . . . . . . 332.3.3 LAPLACE-Transformation der MITTAG-LEFFLER-Funktionen . . 34
2.4 Fraktionale Infinitesimalrechnung . . . . . . . . . . . . . . . . . . . . . 352.4.1 Fraktionale Integrale und Ableitungen . . . . . . . . . . . . . . . 362.4.2 Fraktionale Differentialgleichungen . . . . . . . . . . . . . . . . 442.4.3 Numerik fraktionaler Differentialgleichungen . . . . . . . . . . . 48
3 Fraktionales Stoffmodell 563.1 Kriechversuch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 573.2 Relaxationsversuch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4 Vergleich mit experimentellen Werten 614.1 Implementierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 614.2 Vorbereitung experimenteller Werte . . . . . . . . . . . . . . . . . . . . 634.3 Ergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.3.1 Kriechversuche . . . . . . . . . . . . . . . . . . . . . . . . . . . 654.3.2 Relaxationsversuch . . . . . . . . . . . . . . . . . . . . . . . . . 75
IV

Inhaltsverzeichnis
5 Resümee und Ausblick 78
Kurzzusammenfassung 80
Anhang iA Nomenklatur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iB MATLAB-Quellcode . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Literaturverzeichnis xii
Abbildungsverzeichnis xvi
Tabellenverzeichnis xvi
Quellcodeverzeichnis xvi
V

1 Physikalische Grundlagen
1.1 Motivation
Zur Abdichtung von Zugangsstrecken zu Einlagerungsbereichen von radioaktiven Abfäl-len werden Abdichtbauwerke aus Beton erstellt. Aufgrund ihrer Funktion ist für dieseBauwerke der Nachweis der Rissbeschränkung zu führen. Für den Nachweis der Riss-beschränkung wird ein Stoffmodell zur Beschreibung des Betonverhaltens benötigt. Indiesem Fall geht es speziell um ein Stoffmodell des Betons M2, welches um eine Kom-ponente erweitert werden soll, die das viskoelastische Verhalten des Baustoffs beschreibt.Dazu soll überprüft werden, ob der Einsatz von fraktionaler Infinitesimalrechnung, wel-cher in der Polymerforschung bereits Erfolge geliefert hat [5, 33], bei der Modellierunghilfreich sein kann.Unter Viskoelastizität ist ein zeitabhängiges elastisches Verhalten eines Stoffes zu verste-hen, das durch zeitlich verzögerte Umlagerungsvorgänge von Molekülen entsteht. Einewesentliche Aufgabe ist die Untersuchung der Dynamik von Stoffen mit dieser spezi-ellen Eigenschaft. Die kontinuumsmechanischen Grundlagen sowie die physikalischenModelle zur Beschreibung von Viskoelastizität sollen daher in diesem Abschnitt darge-legt werden.
1.2 Deformation und Spannung
1.2.1 Herleitung von Verzerrungs- und Spannungstensor
Zur Beschreibung der mechanischen Wirkung von Kräften auf materielle Körper spielendie Begriffe Deformation und Spannung eine wichtige Rolle. Die mathematische Formu-lierung dieser Phänomene (vgl. [17, 39]) soll in diesem Abschnitt erfolgen.Zunächst wird der materielle Körper als ein Gebiet Ω0 ⊂ R3 zum Zeitpunkt t0 aufgefasst.Nach einer Deformation des Körpers nimmt das System zum Zeitpunkt t > t0 ein anderesGebiet Ω ⊂ R3 ein. Ein materieller Punkt mit der Anfangsposition a ∈ Ω0 hat nach derDeformation die Position x ∈ Ωt. Daher kann die Deformation durch eine Abbildung
Φ : Ω0 → Ωt, a 7→ x
beschrieben werden, welche unter Annahme der Erhaltung der Materie bijektiv ist. Au-ßerdem sei angenommen, dass Φ ein C1-Diffeomorphismus ist. Desweiteren wird dieVerschiebung u eines materiellen Punktes definiert durch die Abbildung
u : a 7→ x− a = Φ(a)− a.
1

1 Physikalische Grundlagen
Betrachte im Folgenden wieder die Deformation Φ und deren Gradienten, den Deforma-
tionsgradiententensor
F = (Fij) =
(∂Φi
∂aj
)= ∇Φ.
Mittels der Definition von u erhält F die Form
F = ∇u+ I.
Der Deformationsgradiententensor beschreibt die Wirkung einer Deformation auf einenmateriellen Punkt. Zur genaueren Erläuterung betrachte man lokale Deformationen vonAbständen und Winkeln in der Umgebung eines Punktes. Seien zunächst a, a′ ∈ Ω0 undx = Φ(a), x′ = Φ(a′) deren Bilder unter Φ. Dann folgt mittels Taylor-Entwicklung
Φ(a′) = Φ(a) +∇Φ(a) · (a′ − a) + o(|a′ − a|).
Damit ergibt sichx′ − x = F · (a′ − a) + o(|a′ − a|).
Daraus erhalten wir für kleine Abstände |a′ − a| in erster Näherung
|x′ − x|2 ' (a′ − a)TFTF(a′ − a) oder |x′ − x| '[(a′ − a)TFTF(a′ − a)
] 12 .
Definiere hierbeiC := FTF.
Sei zu den bereits gegebenen Punkten in Ω0 noch a′′ ∈ Ω0 mit x′′ = Φ(a′′). Dann folgtnach analoger Herleitung (vgl. [39, S. 62])
cos[(x′′ − x), (x′ − x)] ' (a′′ − a)TC(a′ − a)
[(a′′ − a)TC(a′′ − a)]12 [(a′ − a)TC(a′ − a)]
12
.
Dadurch wird deutlich, dass die Deformation von Abständen und Winkeln lokal durcheine Bilinearform, welche durch C, den sogenannten rechten CAUCHY-GREEN-Tensor
definiert ist, beschrieben werden kann. Mittels der Verschiebung u erhält dieser Tensordie Form
C = (∇u+ I)T (∇u+ I) = I +∇u+∇uT +∇uT∇u. (1.1)
Bei der qualitativen Beschreibung der Deformation ist zwischen Starrkörperbewegung
(rigid body transformation) und Verzerrung zu unterscheiden. Starrkörperbewegungmeint eine Kombination aus Translation und Rotation des gesamten Körpers bei Erhal-tung der Abstände materieller Punkte. Dies ist genau dann der Fall, wenn C = I gilt.
2

1 Physikalische Grundlagen
Wenn sich allerdings die Abstände materieller Punkte bei der Deformation ändern, sprichtman von Verzerrung und definiert den Verzerrungstensor
X =1
2(C− I).
Es gilt X = 0 genau dann, wenn eine starre Deformation, d.h. lediglich eine Starrkörper-bewegung vorliegt [39, S.63]. Im Falle kleiner Verschiebungen, die in der Festkörperme-chanik häufig angenommen werden können, kann der letzte Term in (1.1) vernachlässigtwerden und es ergibt sich der linearisierte Verzerrungstensor
ε =1
2(∇u+∇uT ) (1.2)
[39, Kap. 5.1]. Dieser Tensor enthält auf der Diagonale (εii, i = 1, 2, 3) jeweils Deh-
nungen (positives Vorzeichen) bzw. Stauchungen (negatives Vorzeichen), d.h. die relativeLängenänderung in der jeweiligen Koordinatenrichtung durch die Deformation (gemes-sen in den Einheiten 1mm
m= 0, 1%). Die Komponenten außerhalb der Diagonale (εij ,
i, j = 1, 2, 3, i 6= j), bezeichnet als Gleitungen, entsprechen der Hälfte der Winkelän-derung zwischen zwei Ebenen des Materials, die vor der Deformation parallel zu derKoordinatenrichtung i bzw. j verliefen [17, Kap. 3.3].Die Spannung σ beschreibt eine wirkende Kraft auf eine Querschnittsfläche eines defor-mierbaren Körpers, welche sowohl extern durch Kräfte an der Oberfläche des Körpers alsauch intern (bspw. durch Eigengewicht) realisiert werden kann (relevante Größenordnungin der Einheit Megapascal (MPa): 1MPa = 1 N
mm2 ). Bei Betrachtung eines Flächenele-ments dAn innerhalb eines Körpers mit zugehörigem Normaleneinheitsvektor n und derdarauf wirkenden Kraft dFn erhält man den sogenannten Spannungsvektor
Tn =dFn
dAn.
Der Spannungsvektor entspricht der Spannung in dem Punkt bezüglich des durch n be-schriebenen Flächenelements. Zur vollständigen Beschreibung des Spannungszustandes
in einem Punkt sind alle denkbaren Spannungsvektoren zu berücksichtigen. Betrachte da-zu ein Volumenelement in kartesischen Koordinaten mit den Normaleneinheitsvektorene1, e2, e3 (Richtungen der Koordinatenachsen) der begrenzenden Flächen. Dann ist derSpannungszustand charakterisiert durch die Vektoren
T1 = σ11e1 + σ12e2 + σ13e3,
T2 = σ21e1 + σ22e2 + σ23e3,
T3 = σ31e1 + σ32e2 + σ33e3.
(1.3)
3

1 Physikalische Grundlagen
Die zugehörigen Koeffizienten σij , i, j = 1, 2, 3 ergeben dann den sogenannten Span-
nungstensor
σ =
σ11 σ12 σ13
σ21 σ22 σ23
σ31 σ32 σ33
. (1.4)
Dabei charakterisiert der erste Index i die Normale ei zu der Fläche, bezüglich welcherder Spannungsvektor Ti wirkt und der zweite Index j der Richtung ej der zugehörigenKomponente von Ti. Dementsprechend ist die Kraftwirkung bei den Diagonalelementenσii, i = 1, 2, 3 von (1.4) senkrecht zu den entsprechenden Flächen (Normalspannung).Positive Einträge entsprechen einer Zugspannung, negative Einträge einer Druckspan-
nung. Bei den Einträgen außerhalb der Diagonale von (1.4) (σij , i 6= j), den sogenanntenSchub- oder Tangentialspannungen ist die Kraftwirkung entsprechend parallel zur jewei-ligen Fläche. Ein Spannungstensor kann nun für jeden Raumpunkt x zum Zeitpunkt tverschieden sein. Man erhält also ein Spannungstensorfeld σ = σ(x, t). Bei gegebenemSpannungstensorfeld kann nun der Spannungsvektor Tn = Tn(x,n, t) in einem Punktx zum Zeitpunkt t bezüglich der Fläche mit der Normale n bestimmt werden. Dazu be-trachte ein tetragonales Volumenelement dVmit drei zueinander orthogonalen Flächen inden Schnittebenen der Koordinatenachsen und einer Fläche mit dem beliebigen Norma-lenvektor n. Im Kräftegleichgewicht und für dV → 0 erhält man
TndAn −T1dA1 −T2dA2 −T3dA3 = 0. (1.5)
Mithilfe der Beziehung
dAi = nidAn, ni = n · ei, i = 1, 2, 3
sowie (1.3) und (1.5) folgt dann
(Tn)i = σjinj, i = 1, 2, 3 ⇔ Tn = n · σ
[17, S. 12ff.]. Dies liefert zusammenfassend die folgende Aussage.
Aussage 1.1 (CAUCHY’sches Fundametaltheorem [1, S. 144]):Der Spannungsvektor Tn im Punkt x zum Zeitpunkt t bezüglich der Fläche mit der Nor-
malen n ist vollständig durch die drei Spannungsvektoren Ti, i = 1, 2, 3 bezüglich der
drei Koordinatenebenen, die sich gegenseititg in x durchdringen, bestimmt und es gilt der
lineare Zusammenhang
Tn(x,n, t) = σT (x, t) · n
4

1 Physikalische Grundlagen
zwischen dem von n abhängigen Spannungsvektor und dem von n unabhängigen Span-
nungstensor. Der Spannungszustand kann also vollständig entweder durch drei Span-
nungsvektoren Ti, i = 1, 2, 3 oder durch neun Spannungstensorkomponenten σij ,
i, j = 1, 2, 3 beschrieben werden.
1.2.2 Eigenschaften von Verzerrungs- und Spannungstensor
Der linearisierte Verzerrungstensor ε und der Spannungstensor σ sind beides symmetri-sche Tensoren. Dies folgt für ε per Definition (1.2) und aufgrund des Momentengleich-gewichts für σ. Aus Grundüberlegungen der linearen Algebra ist bekannt, dass reellesymmetrische Matrizen nur reelle Eigenwerte besitzen und bezüglich einer Orthogonalba-sis in Diagonalform zu transformieren sind. Aus physikalischer Sicht bedeutet dies, dassdurch Drehung des Koordinatensystems erreicht werden kann, dass nur Normalspannun-gen und keine Schubspannungen bzw. nur Dehnungen und Stauchungen aber keine Win-keländerungen bezüglich der Koordinaten des gedrehten Systems auftreten. Die zugehö-rige Transformation wird als Hauptachsentransformation bezeichnet und basiert auf derLösung eines Eigenwertproblems [18, Kap. 2.1]. Bei den Experimenten aus Abschnitt 4.2wurde das Koordinatensystem bzw. der Versuchsaufbau gerade so gewählt, dass die Ten-soren Diagonalgestalt haben.Nach Bestimmung der Hauptachsenform des Spannungstensors
σ =
σ1 0 0
0 σ2 0
0 0 σ3
wird dann in Anwendungsgebieten häufig zur weiteren Komplexitätsreduktion versucht,die drei Hauptspannungen σ1, σ2, σ3 in einer einzigen skalaren Größe zusammenzufas-sen, der sogenannten Vergleichsspannung. Dieser Wert soll neben der Vereinfachung derBeschreibung auch eine Auskunft über eine Maximalspannung geben, bei welcher einMaterial versagt. Sie kennzeichnet beispielsweise die Fließgrenze, also den Spannungs-wert, bei welchem die Verformung eines Materials irreversibel wird. Die Fließgrenze wirdfür Materialien häufig in einachsigen Versuchen bestimmt. Die Vergleichsspannung lie-fert also eine Möglichkeit, Spannungen aus einachsigen Versuchen mit Ergebnissen ausdreiachsigen Versuchen, also den Hauptspannungen σ1, σ2, σ3 in Beziehung zu setzen.Die Bestimmung einer Vergleichsspannung basiert dabei auf empirisch ermittelten Hy-pothesen [40, Abschn. 1]. Bei einigen der in Abschnitt 4.2 beschriebenen Experimentewurde die Vergleichsspannung nach VON MISES
σV =1√2
√(σ1 − σ2)2 + (σ1 − σ3)2 + (σ2 − σ3)2 (1.6)
5

1 Physikalische Grundlagen
ermittelt. Die Gleichung (1.6) basiert dabei auf der sogenanntenGestaltänderungsenergie-Hypothese, welche davon ausgeht, dass der Fließbeginnnur von dem Anteil des Spannungstensors abhängt, der eine Gestaltsänderung desMaterials (ohne Volumenänderung) hervorruft. Dieser Ansatz der Zerlegung einesTensors in einen volumenändernden und einen gestaltsändernden Anteil entsprichtaus mathematischer Sicht der Zerlegung in Kugeltensor und Deviator. Betrachte dazuallgemein einen Tensor S. Dann bezeichnet
SK =1
3tr(S)I
den Kugeltensor undSD = S− SK
den Deviator von S. Diese beiden Tensoren haben offensichtlich die Eigenschaften
tr(SK) = tr(S), tr(SD) = 0.
In Bezug auf ε beschreibt dies die Zerlegung der Verzerrung in eine reine isotrope Volu-menänderung εK und eine reine Gestaltsänderung bei konstantem Volumen εD. Analogerhält man für σ einen isotropen Spannungsanteil σK und eine Abweichung σD hiervon[18, Kap. 2.1]. Es stellt sich heraus, dass die Gesetze zur Beschreibung viskoelastischenVerhaltens bei isotropem Material (d.h. Materialverhalten unabhängig von der Richtung)getrennt für Volumen- und Gestaltsänderung vorliegen [18, Kap. 2.3.2]. Die physikali-schen Gesetze können also unabhängig voneinander für Kugeltensoren von Spannungund Verzerrung sowie Deviatorspannung und -verzerrung betrachtet werden. Diese Ei-genschaft der Zerlegung wird in Abschnitt 3 bei der Modellierung berücksichtigt und inAbschnitt 4.2 verwendet.
1.3 Kriechen und Relaxation
Die beiden viskoelastischen Eigenschaften von Beton, die in dieser Arbeit untersuchtwerden, sind Kriechen und Relaxation. Der Begriff Kriechen beschreibt die zeitabhän-gige Zunahme der Verformung eines Betons unter einer konstanten Dauerlast. Kriechenbasiert auf Gleitprozessen und Wasserumlagerungen in der Mikrostruktur des Materi-als und ist abhängig vom Hydratationsgrad des Zementsteins sowie dem Belastungsalter[2, Kap. 2.1 + 2.4]. Im später beschriebenen Modell wird zwischen Basis- und Über-
gangskriechen unterschieden. Mit dem Begriff des Übergangskriechens wird dabei dieanfänglich starke Abnahme der Deformationsrate nach einem instantanen Deformations-sprung beschrieben, während Basiskriechen durch das sich später einstellende stationäreVerhalten, d.h. eine zeitlich nahezu konstante Deformationsrate charakterisiert wird.
6

1 Physikalische Grundlagen
Unter Relaxation versteht man den zeitabhängigen Abfall der Spannung in einem Probe-körper bei konstanter Dehnung [2, Kap. 2.3]. Die Beschreibung der zeitlichen Entwick-lung dieser beiden Prozesse erfolgt auf der Basis von rheologischen Modellen, die imFolgenden vorgestellt werden.
1.4 Rheologische Modelle
Der Begriff Rheologie bezeichnet die Lehre vom Fließ- und Verformungsverhalten vonStoffen [18, Kap. 6.2.1]. Typischerweise wird zur Bestimmung dieses Verhaltens der Zu-sammenhang von Spannung und Verzerrung bei Kriechen und Relaxation in Experimen-ten untersucht. Die Modellierung der Zusammenhänge erfolgt durch zwei wesentlicheBausteine. Das HOOKE’sche Gesetz
σ(t) = Eε(t) (1.7)
dient der Beschreibung eines idealen elastischen Festkörpers (dargestellt durch eine Fe-der) und das NEWTON’sche Gesetz
σ(t) = ηdε(t)
dt(1.8)
wird zur Beschreibung einer idealen NEWTON’schen Flüssigkeit (dargestellt durch einenBremszylinder) verwendet. Hierbei sind die FedersteifigkeitE bzw. die Dämpferviskosität
η zeitlich konstante Größen. In dieser Form der beiden Gesetze wird zur Vereinfachungder eindimensionale Fall betrachtet. Daher sind Spannung und Verzerrung skalare undkeine tensoriellen Größen mehr. Dies kann durch Darstellung im Hauptachsensystem undbei bestimmten Versuchsbedingungen auch für einen dreidimensionalen Probekörper (s.Abschnitt 4.2) unter Annahme eines homogenen (d.h. gleiches Materialverhalten in je-dem Punkt) und isotropen (d.h. gleiches Materialverhalten unabhängig von der Richtung)Materials erreicht werden. Im allgemeinen Fall haben (1.7) und (1.8) die Form
σ(t) = Eε(t) bzw. σ(t) = ηd
dtε(t),
wobei E und η Tensoren 4. Stufe sind. Beide Gesetze entsprechen einer idealisierten Dar-stellung von Stoffen, wie sie in Realität nicht vorkommen, sodass viskoelastische Model-le durch Kombination von HOOKE’schen Federn und NEWTON’schen Dämpferelementenaufgestellt werden. Die einfachsten Modelle entstehen durch Parallel- bzw. Reihenschal-tung einer Feder mit meinem Dämpfer und werden als KELVIN- bzw. MAXWELL-Modell
bezeichnet [2, S. 26]. Bei Reihenschaltung zweier Elemente addieren sich die Dehnun-gen der Elemente zur Gesamtdehnung und die Spannung ist für beide gleich groß. Fürparallel geschaltete Elemente ist die Dehnung jeweils gleich groß und die Spannung der
7

1 Physikalische Grundlagen
einzelnen Elemente wird addiert. Damit erhält man zu der jeweiligen Modellskizze aus(1.7) und (1.8) eine zugehörige Differentialgleichung, die das Modell mathematisch be-schreibt. Das KELVIN-Modell
Bei Probeversion erstellt
Bei Probeversion erstellt
Bei Probeversion erstellt
dε(t)
dt+E
ηε(t) =
σ(t)
η(1.9)
liefert eine korrekte Beschreibung des Kriechverhaltens unter einer konstanten Dauerlast,sagt allerdings keinen Spannungsabfall bei konstanter Dehnung voraus, was dem Relaxa-tionsverhalten entspricht. Umgekehrt beschreibt das MAXWELL-Modell
Bei Probeversion erstellt
Bei Probeversion erstellt
Bei Probeversion erstellt
dε(t)
dt=
1
E
dσ(t)
dt+σ(t)
η(1.10)
das Relaxationsverhalten unter konstanter Dehnung richtig, ergibt allerdings eine kon-stante Dehnungsgeschwindigkeit unter konstanter Last, was den experimentellen Ergeb-nissen widerspricht. Einfache Erweiterungen dieser Modelle (u.a. ZENER- oder KELVIN-VOIGT-Modell) beschreiben Kriechverhalten und Relaxation zwar qualitativ allerdingsnicht gleichzeitig auch quantitativ in zufriedenstellendem Maße [27, S. 271], sodass i.A.ein Multi-Parameter-Ansatz der Form
n∑k=0
akdkσ(t)
dtk=
m∑k=0
bkdkε(t)
dtk(1.11)
gewählt werden muss. Dieser führt abgesehen von der Linearität zu komplizierten Dif-ferentialgleichungen hoher Ordnung und Schwierigkeiten bei der Lösung angewandterProbleme [27, S. 271].Ein anderer Ansatz zur Beschreibung des viskoelatischen Verhaltens von Stoffen ergibtsich aus der Betrachtung des Spannungs-Dehnungs-Verhaltens von Feder und Dämpfer-element in (1.7) und (1.8) aus mathematischer Sicht. Während das HOOKE’sche Modelldie Proportionalität von σ und ε zeigt, ergibt das NEWTON’sche Modell eine Proportio-nalität zwischen σ und der ersten Ableitung von ε. Für ein natürliches Material liegt esdaher nah, die Spannung σ proportional zu einer Ableitung der Dehnung ε vom Grad αmit 0 < α < 1 zu wählen, d.h.
σ(t) = p ·Dαε(t). (1.12)
8

1 Physikalische Grundlagen
Dabei sind p und die Ableitungsordnung αMaterialkonstanten. Die zugehörige mathema-tische Theorie zur Definition und Untersuchung solcher Ableitungen beliebiger Ordnungist unter dem Begriff der fraktionalen Infinitesimalrechnung bekannt und wird genauerin Abschnitt 2.4 beschrieben. Diese Idee wurde u.a. in [15] und [36] erstmals verwen-det. Anstelle von Feder und Dämpferelement werden dabei auch fraktionale Elemente
(in Zeichnungen gekennzeichnet durch eine Raute) in den rheologischen Modellen einge-führt. Auch hierbei ist eine Kombination mehrerer fraktionaler MAXWELL- und KELVIN-Elemente bspw. zur Beschreibung von Kriech- und Relaxationsverhalten möglich, sodassder allgemeine Modellansatz die folgende Form hat.
n∑k=0
akDαkσ(t) =
m∑k=0
bkDβkε(t) (1.13)
Allerdings, und das ist der entscheidende Vorteil gegenüber klassischen Modellen, hatsich bei Betrachtung experimenteller Ergebnisse zum viskoelastischen Verhalten von Po-lymeren gezeigt, dass ein Fünf-Parameter-Modell der Form
σ(t) + bDβσ(t) = E0ε(t) + E1Dαε(t) (1.14)
mit Parametern α, β, b, E0, E1 bereits sehr zufriedenstellende Ergebnisse liefert [4]. Zu-dem wurde der zunächst empirische Ansatz des fraktionalen Fünf-Parameter-Modells fürPolymere auch durch molekulartheoretische Erkenntnisse untermauert [3, S. 205ff.] undaußerdem gezeigt, dass für α = β die thermodynamischen Beschränkungen erfüllt sind[5, S. 138ff.]. Dies führt zu einem Vier-Parameter-Modell
σ(t) + bDασ(t) = E0ε(t) + E1Dαε(t). (1.15)
Basierend auf diesen Überlegungen wurde für die Beschreibung des viskoelastischen Ver-haltens von Beton ein rheologisches Modell gewählt, welches genauer in Abschnitt 3 dar-gelegt wird.
9

2 Aspekte der fraktionalen Infinitesimalrechnung
2.1 Gamma-Funktion
2.1.1 Grundlegende Eigenschaften
Die Gamma-Funktion Γ = Γ(z) ist eine Erweiterung der Fakultätsfunktion für beliebi-ge reelle und sogar komplexe Zahlen und spielt eine wichtige Rolle bei der Definitionvon fraktionalen Ableitungen und Integralen sowie der MITTAG-LEFFLER-Funktionen,welche später eingeführt werden. Sie ist nach EULER definiert durch
Γ(z) =
∫ ∞0
e−ttz−1dt, Re(z) > 0. (2.1)
Zum Nachweis der Konvergenz des Integrals in (2.1) für Re(z) > 0 betrachte man diefolgenden Aussagen.
• ∣∣tz−1e−t∣∣ =
∣∣∣∣∣∣tRe(z)−1 ti·Im(z)︸ ︷︷ ︸=ei·Im(z) ln(t)
e−t
∣∣∣∣∣∣ = tRe(z)−1e−t
• Für Re(z) ≥ 1 fällt e−t wesentlich schneller als tRe(z)−1 wächst. Also ist der Inte-grand für große t beschränkt.
• Für Re(z) ∈ (0, 1) ist der Integrand singulär in t = 0. Allerdings existiert dasuneigentliche Integral wegen
limτ0
∫ 1
τ
e−ttRe(z)−1dt ≤ limτ0
∫ 1
τ
tRe(z)−1dt =1
Re(z).
Insbesondere ist das Integral in (2.1) eine holomorphe Funktion.
Im Folgenden soll das Verhältnis der Gamma-Funktion zur Fakultät gezeigt werden.Durch partielle Integration erhält man
Γ(z + 1) =
∫ ∞0
tze−tdt =[−e−ttz
]∞0︸ ︷︷ ︸
=0
+ z
∫ ∞0
tz−1e−tdt = zΓ(z) (2.2)
und durch direkte Integration
Γ(1) =
∫ ∞0
e−tdt =[−e−t
]∞0
= 1. (2.3)
10

2 Aspekte der fraktionalen Infinitesimalrechnung
Anhand der Eigenschaften (2.2) und (2.3) ist insbesondere die Beziehung zur Fakultät-Funktion zu erkennen. Für n ∈ N folgt
Γ(n+ 1) = n!. (2.4)
Zum Nachweis weiterer Eigenschaften der Gamma-Funktionen sollen noch zwei weitereDarstellungen betrachtet werden. Der Zusammenhang aller drei Darstellungen wird bspw.in [37, S. 24ff.] gezeigt.
Γ(z) = limn→∞
nzn!
z(z + 1) · · · (z + n)(2.5)
1
Γ(z)= zeγz
∞∏n=1
(1 +
z
n
)e−
zn γ = lim
n→∞
(n∑k=1
1
k− ln(n)
)(2.6)
Dabei ist γ in (2.6) die EULER-MASCHERONI-Konstante. Die angegebene Darstellungkonvergiert gegen γ ≈ 0, 5772157 [37, S. 26]. Mithilfe von Gleichung (2.6) ergibt sichbeispielsweise die folgende Aussage.
Lemma 2.1:Für z ∈ C \ Z gilt
Γ(z)Γ(1− z) =π
sin(πz).
Beweis. Aus der Darstellung (2.6) ist zu erkennen, dass die Menge Z gerade die Verei-nigungsmenge der Nullstellen von 1
Γ(z)und 1
Γ(−z) darstellt und folglich die Singularitätenvon Γ(z) und Γ(−z) gerade durch die Menge Z gegeben sind. Für z /∈ Z folgt mit (2.6)
Γ(z)Γ(−z) =
[−z2
∞∏n=1
(1− z2
n2
)]−1
.
Durch Einsetzen von Γ(−z) in (2.2) erhalten wir
Γ(z)Γ(1− z) = z−1
∞∏n=1
(1− z2
n2
)−1
.
Mithilfe der Produktreihen-Darstellung der Sinus-Funktion
sin(πz) = πz
∞∏n=1
(1− z2
n2
)folgt schließlich die Behauptung.
11

2 Aspekte der fraktionalen Infinitesimalrechnung
Beispiel 2.2:Für z = 1
2folgt aus Lemma 2.1 Γ(1
2) =√π.
2.1.2 Monotonieverhalten der Gamma-Funktion Γ = Γ(x) für x > 0
Zur Beschreibung des Verhaltens der MITTAG-LEFFLER-Funktionen, welche im nächstenAbschnitt eingeführt werden, ist besonders das Verhalten der Gamma-Funktion für posi-tive reelle Argumente von Interesse. Betrachte also im Folgenden die Integraldarstellungder Gamma-Funktion
Γ(x) =
∫ ∞0
tx−1e−tdt, x > 0. (2.7)
Zur Untersuchung des Monotonieverhaltens von (2.7) werden die Ableitungen derGamma-Funktion betrachtet. Der Integrand in (2.7) ist stetig und positiv für t ∈ (0,∞).Damit folgt Γ(x) > 0 ∀x > 0. Der Graph von Γ befindet sich also im ersten Quadranten.Betrachte nun die Funktion
f(x, t) :=∂
∂xtx−1e−t = ln(t)tx−1e−t.
Offensichtlich ist f stetig. Sei x ∈ [a, b] für 0 < a < b <∞. Dann gilt:
|f(x, t)| ≤(ta−1 + tb−1
)| ln(t)|e−t =: g(t), t > 0.
Nun folgt die Konvergenz von∫∞
0g(t)dt aus der folgenden Rechnung.
∫ 1
0
ta−1| ln(t)|e−tdt ≤ −∫ 1
0
ta−1 ln(t)dt =
[−1
ata ln(t)
]1
0︸ ︷︷ ︸=0
+
∫ 1
0
1
ata−1dt =
1
a2
∫ ∞1
ta−1| ln(t)|e−tdt ≤∫ ∞
1
tae−tdt ≤∫ ∞
0
tdaee−tdt = dae!
Damit folgt die gleichmäßige Konvergenz von∫∞
0f(x, t)dt für x ∈ [a, b] und nach dem
Satz über die Differentiation uneigentlicher Parameterintegrale ergibt sich
Γ′(x) =
∫ ∞0
∂
∂xtx−1e−tdt =
∫ ∞0
ln(t)tx−1e−tdt, x > 0. (2.8)
Durch analoge Rechnung erhalten wir die zweite Ableitung der Gamma-Funktion
Γ′′(x) =
∫ ∞0
(ln(t))2tx−1e−tdt, x > 0. (2.9)
Aus der Positivität des Integranden in (2.9) folgt Γ′′(x) > 0 ∀x > 0. Demnach ist Γ′ einestreng monoton wachsende Funktion. Auf Grundlage dieser Erkenntnis wird im Folgen-
12

2 Aspekte der fraktionalen Infinitesimalrechnung
den das Verhalten von Γ = Γ(x) für x > 0 ermittelt (vgl. [19, S. 2f.]). Um das Verhaltenvon Γ für x→∞ zu bestimmen, betrachte die logarithmische Ableitung von (2.2)
Ψ(x+ 1) =1
x+ Ψ(x), Ψ(x) :=
d
dxln(Γ(x)) =
Γ′(x)
Γ(x). (2.10)
Dabei ist Ψ = Ψ(x) die sogenannte Digamma-Funktion. Für natürliche Argumente n ∈ Nin (2.10) folgt nun
Ψ(n+ 1) = Ψ(1) +n∑k=1
1
k.
Wegen der Divergenz der harmonischen Reihe folgt
Ψ(n)Γ(n) = Ψ(n)(n− 1)!n→∞−→ ∞.
Nun gilt per Definition Γ′(x) = Ψ(x)Γ(x). Da Γ′ monoton wachsend und für natür-liche Argumente n → ∞ divergiert, folgt lim
x→∞Γ′(x) = ∞. Weiterhin folgt aus (2.4)
Γ(2) = 1 < 2 = Γ(3). Demnach gilt Γ′(x) > 0 für x ∈ [2, 3] und da Γ′ monotonwachsend ist, sogar Γ′(x) > 0 für x ≥ 2. Dies ergibt wiederum:
Γ(x) ist monoton wachsend für x ≥ 2. (2.11)
Wegen (2.4) gilt außerdem limx→∞
Γ(x) =∞. Bezüglich des Verhaltens für x→ 0 betrachte
Γ(x) =
∫ ∞0
tx−1e−tdt ≥∫ 1
0
tx−1e−tdt ≥∫ 1
0
tx−1 1
edt =
1
e
[tx
x
]1
0
=1
ex
x→0−→∞
⇒ limx→0
Γ(x) =∞.
Da nach (2.3) und Beispiel 2.2 gilt Γ(12) =√π > 1 = Γ(1), folgt analog zur Überlegung
für (2.11):
Γ(x) ist monoton fallend für x ∈ (0, 1]. (2.12)
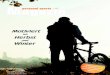
Wegen Γ(1) = 1 = Γ(2) liegt die Nullstelle von Γ′, also das Minimum von Γ in (1, 2).Der genaue Wert wurde in MATLAB numerisch ermittelt (Abbildung 2.1).
13

2 Aspekte der fraktionalen Infinitesimalrechnung
0 0.5 1 1.5 2 2.5 3 3.5 4x
-6
-4
-2
0
2
4
6
8
10
y
Γ(x)Γ'(x)
(1.46,0.89)
>> f=@(x) integral(@(t) log(t).*t.^(x-1).*exp(-t),0,inf);>> x=fzero(f,1.5)
x =
1.461632144968310
>> y=gamma(x)
y =
0.885603194410889
Abbildung 2.1: Graph der reellen Gamma-Funktion und ihrer Ableitung sowie Bestim-mung des Minimums mit MATLAB
14

2 Aspekte der fraktionalen Infinitesimalrechnung
2.2 MITTAG-LEFFLER-Funktionen
2.2.1 Historische Einordnung
Die sogenannten MITTAG-LEFFLER-Funktionen
Eα(z) :=∞∑k=0
zk
Γ(αk + 1), α ∈ R, α > 0, z ∈ C (2.13)
wurden ursprünglich von dem schwedischen Mathematiker GÖSTA MAGNUS MITTAG-LEFFLER zur Beschreibung der analytischen Fortsetzung von Potenzreihen außerhalbihres Konvergenzradius eingeführt [16, Kap. 2.1]. Genauer beschäftigte er sich mit derfolgenden Problematik.
Sei k0, k1, . . . eine Folge komplexer Zahlen mit der Eigenschaft
limν→∞|kν |1/ν =
1
r∈ R+.
Dann konvergiert die Reihe
FC(z) :=∞∑ν=0
kνzν
in Dr = z ∈ C : |z| < r und divergiert für |z| > r. FC(z) bestimmt eine eindeutige
analytische Funktion in Dr.
Welches ist das maximale Gebiet, in dem FC(z) eine eindeutige analytische Fortsetzung
FA(z) besitzt und welche analytische Darstellung besitzt der zugehörige Zweig?
MITTAG-LEFFLER konnte die Frage in seinen Studien beantworten. In einem ma-ximalen sternförmigen Gebiet besitzt die analytische Fortsetzung FA(z) von FC(z) dieForm
FA(z) = limα→1
∫ ∞0
e−ωFα(ωαz)dω
mit der Familie von Funktionen
Fα(z) :=∞∑ν=0
kνzν
Γ(ν · α + 1), α > 0.
Dadurch interessierte sich MITTAG-LEFFLER für die Eigenschaften von Fα(z) und un-tersuchte diese in der einfachsten Form mit kν ≡ 1 anhand der in (2.13) eingeführ-ten und später nach ihm benannten MITTAG-LEFFLER-Funktion Eα(z) in fünf aufein-anderfolgenden Arbeiten [16, Kap. 2.2]. Später wurden verschiedene Verallgemeinerun-gen von (2.13) mit mehreren Parametern beschrieben. Die einfachste Form, die in die-
15

2 Aspekte der fraktionalen Infinitesimalrechnung
sem Abschnitt vorrangig untersucht werden soll, bilden die zwei-parametrigen MITTAG-LEFFLER-Funktionen
Eα,β(z) =∞∑n=0
zn
Γ(nα + β), α, β ∈ R, α > 0, z ∈ C. (2.14)
Die Funktionen (2.14) wurden von WIMAN erstmals zur Nullstellenbestimmung von(2.13) eingesetzt [44]. Heute erhalten sie erneut Bedeutung in der fraktionalen Analysisbei der Beschreibung von Lösungen fraktionaler Differentialgleichungen. Im Folgendensollen daher einige Eigenschaften von (2.14) gezeigt werden, die mit β = 1 dann auto-matisch für (2.13) gelten.
2.2.2 Konvergenz
Die MITTAG-LEFFLER-Funktionen sind ganze Funktionen, d.h. die Reihendarstellungkonvergiert in der gesamten komplexen Zahlenebene. Um dies zu zeigen, betrachte mandie STIRLING-Approximation der Gamma-Funktion [37, S. 28f.]
Γ(x) =
√2π
x
(xe
)x(1 +O(x−1)), x→∞. (2.15)
Mithilfe dieser Näherung erhält man
limy→∞
Γ(y)
Γ(y + x)= lim
y→∞
√2πy
(ye
)y(1 +O( 1
y))√
2πy+x
(y+xe
)y+x(1 +O( 1
y+x))
= limy→∞
√y + x
y︸ ︷︷ ︸→1
ex(
y
y + x
)y︸ ︷︷ ︸→e−x
1
(y + x)x
= limy→∞
1
(y + x)x=
0 x > 0
1 x = 0
∞ x < 0
. (2.16)
Damit folgt aus dem Quotientenkriterium für (2.14)∣∣∣∣ Γ(αk + β)
Γ(α(k + 1) + β)z
∣∣∣∣ =
∣∣∣∣ Γ(αk + β)
Γ(αk + β + α)
∣∣∣∣ · |z| −→k→∞ 0 ∀z ∈ C, α > 0. (2.17)
Dies zeigt die Konvergenz von (2.14) in ganz C.
16

2 Aspekte der fraktionalen Infinitesimalrechnung
2.2.3 Einige Spezialfälle
Bei den zwei-parametrigen MITTAG-LEFFLER-Funktionen werden für bestimmte Werteder Parameter α, β Beziehungen zu anderen bekannten Funktionen deutlich. Dies soll dasnachfolgende Beispiel zeigen [29].
Beispiel 2.3:
a) E0(z) = 11−z , |z| < 1
b) E1,1(z) = E1(z) = ez
c) E1,2(z) = ez−1z
d) E2,1(z2) = E2(z2) = cosh(z)
e) E2,1(−z2) = E2(−z2) = cos(z)
f) E2,2(z2) = sinh(z)z
g) E2,2(−z2) = sin(z)z
Diese Zusammenhänge folgen leicht aus den Reihendarstellungen der jeweiligen Funk-tionen.
2.2.4 Funktionalgleichungen und Rekursionsformeln
Lemma 2.4:Es gelten folgende Formeln für z ∈ C,m ∈ N:
dm
dzmEm(zm) = Em(zm) (2.18)
Eα,β(z) = zEα,α+β(z) +1
Γ(β)(2.19)
d
dzEα,β(z) =
Eα,β−1(z)− (β − 1)Eα,β(z)
αz(2.20)
dm
dzm(zβ−1Eα,β(zα)) = zβ−m−1Eα,β−m(zα) (2.21)
[20, S. 3ff.]
Beweis. a)
dm
dzmEm(zm) =
dm
dzm
∞∑k=0
zmk
Γ(mk + 1)
=∞∑k=1
zmk−m
(mk)!
(mk)!
(mk −m)!j := k − 1
=∞∑j=0
zmj
(mj)!= Em(zm)
17

2 Aspekte der fraktionalen Infinitesimalrechnung
b)
Eα,β(z) =∞∑k=0
zk
Γ(αk + β)= z
∞∑j=0
zj
Γ(α(j + 1) + β)+
1
Γ(β)= zEα,α+β(z) +
1
Γ(β)
c)
Eα,β−1(z)− (β − 1)Eα,β(z)
αz=
1
αz
(∞∑k=0
zk
Γ(αk + β − 1)− (β − 1)
∞∑k=0
zk
Γ(αk + β)
)
=1
αz
(∞∑k=0
zk(αk + β − 1)
(αk + β − 1)Γ(αk + β − 1)
−(β − 1)∞∑k=0
zk
Γ(αk + β)
)
=1
αz
∞∑k=0
αkzk
Γ(αk + β)
=∞∑k=1
kzk−1
Γ(αk + β)= E ′α,β(z)
d) folgt aus c) per Induktion.
Da bei der Lösung fraktionaler Differentialgleichungen auch höhere Ableitungen derMITTAG-LEFFLER-Funktionen vorkommen, wurde basierend auf der dritten Formel inLemma 2.4 folgende Rekursionsformel gefunden.
Satz 2.5 (Ableitungen der MITTAG-LEFFLER-Funktionen):Seien k ∈ N, α > 0, β ∈ R sowie z ∈ C. Dann gilt
E(k)α,β(z) =
E(k−1)α,β−1(z)− (β − 1)E
(k−1)α,β (z)
αz− (k − 1)
E(k−1)α,β (z)
z.
Beweis. per Induktionk = 1: E ′α,β(z) =
Eα,β−1(z)−(β−1)Eα,β(z)
αzin Lemma 2.4 bewiesen.
18

2 Aspekte der fraktionalen Infinitesimalrechnung
k ⇒ k + 1:
E(k+1)α,β (z) =
d
dzE
(k)α,β(z)
=d
dz
(E
(k−1)α,β−1(z)− (β − 1)E
(k−1)α,β (z)
αz− (k − 1)
E(k−1)α,β (z)
z
)
=
(E
(k)α,β−1(z)− (β − 1)E
(k)α,β(z)
)αz − α
(E
(k−1)α,β−1(z)− (β − 1)E
(k−1)α,β (z)
)(αz)2
− (k − 1)E
(k)α,β(z)z − E(k−1)
α,β−1(z)
z2
=E
(k)α,β−1(z)− (β − 1)E
(k)α,β(z)
αz
− 1
z
(E
(k−1)α,β−1(z)− (β − 1)E
(k−1)α,β (z)
αz− (k − 1)
E(k−1)α,β (z)
z
)︸ ︷︷ ︸
=E(k)α,β(z)
− (k − 1)E
(k)α,β(z)
z
=E
(k)α,β−1(z)− (β − 1)E
(k)α,β(z)
αz− k
E(k)α,β(z)
z
2.2.5 Integraldarstellung und asymptotisches Verhalten
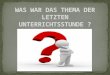
Zur Untersuchung des asymptotischen Verhaltens der MITTAG-LEFFLER-Funktionen istdie folgende Integraldarstellung aus [7, S. 210] sehr hilfreich. Die nachfolgende Betrach-tung des asymptotischen Verhaltens ist in ähnlicher Form in [7, S. 207f.] und [20, S. 6ff.]zu finden.
Satz 2.6:Die zwei-parametrigen MITTAG-LEFFLER-Funktionen werden durch das Integral
Eα,β(z) =1
2πi
∫C
tα−βet
tα − zdt (2.22)
beschrieben. Dabei beginnt und endet der Integrationsweg C bei−∞, verläuft entlang der
negativen reellen Achse und des Kreises |t| ≤ |z| 1α im positiven Sinne −π ≤ arg(t) ≤ π
und zurück entlang der negativen reellen Achse (Abbildung 2.2).
19

2 Aspekte der fraktionalen Infinitesimalrechnung
Abbildung 2.2: Integrationsweg der Integraldarstellung der MITTAG-LEFFLER-Funktion
Beweis. Entwickle den Integranden von (2.22) in Potenzen von z. Dabei erhält man
tα−βet
tα − z=∞∑k=0
ett−(αk+β)zk. (2.23)
Verwendet man zusätzlich die Darstellung des Reziproken der Gamma-Funktion(HANKEL-Integral [6, S. 13])
1
Γ(z)=
1
2πi
∫C
ett−zdt, (2.24)
so folgt
1
2πi
∫C
tα−βet
tα − zdt =
1
2πi
∫C
∞∑k=0
ett−(αk+β)zkdt
=∞∑k=0
1
2πi
∫C
ett−(αk+β)dtzk
=∞∑k=0
zk
Γ(αk + β)= Eα,β(z).
Der Integrand in (2.22) hat einen Verzweigungspunkt in t = 0. Schlitzt man die kom-plexe Ebene entlang der negativen reellen Achse, so ist der Integrand bei Betrachtung desHauptzweiges von tα in der geschlitzten Ebene eindeutig. Der Integrand hat Pole an denStellen
tm = z1α e
2πimα , m ∈ N. (2.25)
In der geschlitzten Ebene befinden sich allerdings nur die Pole, welche die Bedingung
− απ < arg(z) + 2πm < απ (2.26)
20

2 Aspekte der fraktionalen Infinitesimalrechnung
erfüllen. Folglich liegen abhängig von arg(z) bαc oder bα+ 1c Pole innerhalb der KurveC.Zur Bestimmung des asymptotischen Verhaltens vonEα,β(z) betrachte zunächst |z| → ∞für z außerhalb des Sektors | arg(z)| ≤ απ
2. Pole des Integranden in (2.22), die (2.26) er-
füllen, liegen dann in der Halbebene Re(t) < 0. Deformiert man C so, dass die Poleaußerhalb dieser Kurve liegen und betrachtet folgende Darstellung der endlichen geome-trischen Reihe
tα
tα − z= −
N−1∑k=1
tkα
zk−(
1− tα
z
)−1tNα
zN, N ∈ N,
so folgt wegen der gleichmäßigen Beschränktheit von(1− tα
z
)−1 in |z| und t und beierneuter Verwendung des HANKEL-Integrals
Eα,β(z) = −N−1∑k=1
z−k
Γ(β − αk)+O
(|z|−N
),
|z| → ∞, | arg(−z)| < (1− α
2)π.
(2.27)
(Für α ≥ 2 ist die Aussage leer.)Im anderen Falle | arg(z)| ≤ απ
2gibt es mindestens einen Pol tm mit
− απ2≤ arg(z) + 2πm ≤ α
π
2. (2.28)
Diese Pole liegen in der Halbebene Re(t) ≥ 0. Deformiert man die Kurve C wie vorher,so liegen die Pole mit der Eigenschaft (2.28) innerhalb der Kurve und man erhält mithilfedes Residuensatzes
Eα,β(z) =1
α
∑m
t1−βm etm −N−1∑k=1
z−k
Γ(β − αk)+O
(|z|−N
),
|z| → ∞, | arg(z)| ≤ απ
2.
(2.29)
Im speziellen Falle α ∈ (0, 2) wird die Bedingung (2.28) lediglich für m = 0 erfüllt.Damit folgt insbesondere
Eα,β(z) =1
αz
1−βα exp(z
1α )−
N−1∑k=1
z−k
Γ(β − αk)+O
(|z|−N
),
0 < α < 2, |z| → ∞, | arg(z)| ≤ απ
2.
(2.30)
21

2 Aspekte der fraktionalen Infinitesimalrechnung
2.2.6 Eigenschaften der Funktion e(t) := Eα,β(−λtα)
Die modifizierten MITTAG-LEFFLER-Funktionen e : (0,∞)→ R definiert durch
e(t) := Eα,β(−λtα), α ∈ [0, 1], β ≥ α, λ > 0 (2.31)
spielen für die Lösung der fraktionalen Differentialgleichung zu dem später besproche-nen viskoelastischen Modell eine bedeutende Rolle. Wichtig ist hierbei das Verhalten vone = e(t) für t → 0 und t → ∞ sowie eine besondere Eigenschaft dieser Funktion, dievollständige Monotonie, welche zum Nachweis der Konvergenz der Lösung verwendetwird. Die Funktion e = e(t) hängt natürlich auch von α, β und λ ab. Diese Parameterwerden im Folgenden allerdings als fest angenommen.Betrachte zunächst die beiden asymptotischen Approximationen: Für kleine Zeiten t er-gibt sich aus der Reihendarstellung der MITTAG-LEFFLER-Funktionen
Eα,β(−λtα) =∞∑n=0
(−λ)ntαn
Γ(αn+ β).
Daraus erhält man in erster Näherung
e(t) =1
Γ(β)− λ tα
Γ(α + β)+O(t2α), t→ 0. (2.32)
Für große Zeiten wird die Reihendarstellung (2.27) aus [7] verwendet. Die erste Näherungliefert hierbei
e(t) =1
λ
t−α
Γ(β − α)+O(t−2α), t→∞. (2.33)
Insgesamt erhält man also die folgende asymptotische Entwicklung
e(t) =
1
Γ(β)− λ tα
Γ(α+β)+O(t2α) t→ 0
1λ
t−α
Γ(β−α)+O(t−2α) t→∞
. (2.34)
Im folgenden Teil soll die genannte Eigenschaft der vollständigen Monotonie für e = e(t)
nachgewiesen werden. Dazu betrachte man zunächst folgende Definitionen [31].
Definition 2.7:Die LAPLACE-Transformation eines Maßes µ auf [0,∞) ist definiert durch
Lµ(t) :=
∫[0,∞)
e−tτµ(dτ),
wenn dieses Integral konvergiert.
22

2 Aspekte der fraktionalen Infinitesimalrechnung
Bemerkung 2.8:Ein Maß µ auf [0,∞) ist endlich genau dann, wenn lim
t0Lµ(t) < ∞. Das Maß µ ist
durch seine LAPLACE-Transformation eindeutig bestimmt.
Definition 2.9:Eine Funktion f : (0,∞)→ R heißt:
a) vollständig monoton, falls f ∈ C∞(0,∞) und
(−1)nf (n)(t) ≥ 0 ∀n ∈ N0, t > 0, (2.35)
b) BERNSTEIN-Funktion, falls f ∈ C∞(0,∞), f(t) ≥ 0 ∀t > 0 und
(−1)n−1f (n)(t) ≥ 0 ∀n ∈ N, t > 0. (2.36)
Die Menge der vollständig monotonen Funktionen wird mit CM, die Menge der
BERNSTEIN-Funktionen mit BF bezeichnet.
Um die in Definition 2.9 angegebenen Eigenschaften für e = e(t) zu zeigen, benötigt mandie beiden folgenden Kriterien.
Satz 2.10 (BERNSTEIN):Sei f : (0,∞) → R eine vollständig monotone Funktion. Dann ist f die LAPLACE-
Transformation eines eindeutig bestimmten Maßes µ auf [0,∞), d.h. ∀t > 0
f(t) = Lµ(t) =
∫[0,∞)
e−tτµ(dτ).
Falls umgekehrt Lµ(t) <∞ ∀t > 0, dann ist t 7→ Lµ(t) vollständig monoton.
Beweis. Da für diese Arbeit nur die Umkehrung der Behauptung als Kriterium für voll-ständige Monotonie wichtig ist, soll an dieser Stelle nur der Beweis für diesen Teil desSatzes wie in [31, S. 3], wo auch der vollständige Beweis zu finden ist, geführt werden.Sei f(t) := Lµ(t). Sei t > 0 fest. Wähle ε ∈ (0, t). Wegen
tn = ε−n(εt)n ≤ n!ε−neεt ∀t > 0,
folgt ∫[0,∞)
tne−tτµ(dτ) ≤ n!
εn
∫[0,∞)
e−(t−ε)τµ(dτ) =n!
εnLµ(t− ε).
23

2 Aspekte der fraktionalen Infinitesimalrechnung
Damit folgt aus dem Satz über die Differenzierbarkeit von Parameterintegralen
(−1)nf (n)(t) = (−1)n∫
[0,∞)
dn
dtne−tτµ(dτ) =
∫[0,∞)
tne−tτµ(dτ) ≥ 0.
Bemerkung 2.11:Die letzte Formel im Beweis zeigt f (n)(t) 6= 0 ∀n ∈ N ∀t > 0, falls f ∈ CM und
f 6= const.
Lemma 2.12:
a) Die Menge CM ist ein konvexer Kegel, d.h.
af1 + bf2 ∈ CM ∀a, b ≥ 0, f1, f2 ∈ CM.
b) Seien f : (0,∞) → R positiv, f ∈ BF sowie g : (0,∞) → R, g ∈ CM. Dann ist
auch g f ∈ CM.
Beweis.
a) Die Aussage folgt direkt aus der Definition vollständig monotoner Funktionen.
(−1)n(af1 + bf2)(n)(t) = (−1)naf(n)1 (t) + (−1)nbf
(n)2 (t) ≥ 0
b) Betrachte die verallgemeinerte Kettenregel von FAÀ DI BRUNO
(g f)(n)(t) =∑
(m,i1,...,il)
n!
i1! · · · il!g(m)(f(t))
l∏j=1
(f (j)(t)
j!
)ij. (2.37)
Hierbei ist die Summation über alle l ∈ N und alle i1, ..., il ∈ N0 zu betrachten, sodass∑lj=1 j · ij = n und
∑lj=1 ij = m gelten. Sei nun f ∈ BF und g ∈ CM. Dann ist
g(f(t)) ≥ 0. Multipliziere (2.37) mit (−1)n und beachte n = m +∑l
j=1(j − 1) · ij .Da f ∈ BF und g ∈ CM, folgt, dass jeder Term in (2.37) nichtnegativ ist. Dies liefertg f ∈ CM [31, S. 27].
Mithilfe dieser Eigenschaften erhält man die vollständige Monotonie von e = e(t) in dreiSchritten.
24

2 Aspekte der fraktionalen Infinitesimalrechnung
Folgerung 2.13:
a) Die Abbildung t 7→ Eα(−t) ist für α ∈ [0, 1] in CM.
b) Die Abbildung t 7→ Eα,β(−t) ist für α ∈ [0, 1] und β ≥ α in CM.
c) Die Abbildung t 7→ λtα ist für λ > 0 und α ∈ [0, 1] in BF .Insgesamt folgt e ∈ CM für α ∈ [0, 1], β ≥ α, λ > 0.
Beweis.
a) Der Beweis ist ausführlich in [28] zu finden. Für α = 0 und α = 1 folgt die Behaup-tung sofort aus
E0(−t) =1
1 + t, E1(−t) = e−t.
Im Falle α ∈ (0, 1) wird die Integraldarstellung (2.22) verwendet und so umgeformt,dass Satz 2.10 angewendet werden kann. D.h. das Maß µ aus dem Satz wird explizitbestimmt zu
dµ(t)
dt=
1
πα
∞∑k=1
(−1)k−1
k!sin(παk)Γ(αk + 1)tk−1.
Damit folgt die vollständige Monotonie von Eα(−t) für α ∈ [0, 1].
b) Ein kurzer eleganter Beweis ist in [25] zu finden. Dazu werden die Gleichungen
Eα,α(−t) = −α ddtEα(−t), α ≥ 0, (2.38)
Eα,β(−t) =1
αΓ(β − α)
∫ 1
0
(1− s
1α
)β−α−1
Eα,α(−st)ds, β > α > 0 (2.39)
verwendet. (2.38) und (2.39) werden durch direkte Rechnung mithilfe der Reihendar-stellung der MITTAG-LEFFLER-Funktionen bewiesen. (2.38) liefert zusammen mit a)die vollständige Monotonie von Eα,α(−t). Dies führt gemeinsam mit (2.39) und
E0,β(−t) =
1
Γ(β)· 1
1+tβ > 0
0 β = 0
zur Behauptung.
25

2 Aspekte der fraktionalen Infinitesimalrechnung
c) Für α ∈ [0, 1], t > 0 erhält man
(−1)n−1 dn
dtntα = (−1)n−1α · (α− 1)︸ ︷︷ ︸
≤0
· · · (α− (n− 1))︸ ︷︷ ︸≤0︸ ︷︷ ︸
n−1 Faktoren
tα−n
= α · (1− α) · · · ((n− 1)− α)tα−n ≥ 0
Lemma 2.12a)⇒ t 7→ λtα ∈ BF .
Mit Lemma 2.12 b) und Teil b) dieser Folgerung erhält man letztlich
t 7→ Eα,β(−λtα) ∈ CM für α ∈ [0, 1], β ≥ α, λ > 0.
Bemerkung 2.14:Aus der vollständigen Monotonie von t 7→ Eα,β(−t) folgt mittels Kettenregel ins-
besondere
• E(n)α,β(−t) ≥ 0 ∀n ∈ N0, ∀t ≥ 0.
• t 7→ E(n)α,β(−t) ist monoton fallend ∀n ∈ N0.
• t 7→ E(n)α,β(−t) ist konvex ∀n ∈ N0.
Beweis.
• 0 ≤ (−1)n dn
dtnEα,β(−t) = (−1)n · (−1)nE
(n)α,β(−t) = E
(n)α,β(−t).
• ddtE
(n)α,β(−t) = −E(n+1)
α,β (−t)︸ ︷︷ ︸≥0
≤ 0.
• d2
dt2E
(n)α,β(−t) = (−1)2E
(n+2)α,β (−t)︸ ︷︷ ︸≥0
≥ 0.
Die soeben bewiesenen Eigenschaften sind gut anhand von Abbildung 2.3 zu erkennen.
26

2 Aspekte der fraktionalen Infinitesimalrechnung
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
2
2.5
3
3.5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
2
2.5
3
3.5
Abbildung 2.3: Graphen von Eα,1(−tα) (links oben) und Eα,2(−tα) (rechts oben) fürα = 1
4 (durchgezogene Linie), α = 12 (gestrichelte Linie), α = 3
4 (gepunktete Li-
nie) und α = 1 (punkt-gestrichelte Linie) sowie von E(n)0.5,1(−t0.5) (links unten) und
E(n)0.5,2(−t0.5) (rechts unten) für n = 0 (durchgezogene Linie), n = 1 (gestrichelte Li-
nie), n = 2 (gepunktete Linie) und n = 3 (punkt-gestrichelte Linie)
Folgerung 2.15 (Abschätzung für Ableitungen der MITTAG-LEFFLER-Funktionen):Für t ≥ 0, λ > 0, α ∈ [0, 1], β ≥ α gilt
E(n)α,β(−λtα) ≤ n!
Γ(αn+ β).
Beweis. Aus der vorherigen Bemerkung folgt auch, dass die Funktion t 7→ E(n)α,β(−λtα)
monoton fallend ist. Damit kann eine Abschätzung nach oben durch den Funktionswert ander Stelle t = 0 erfolgen. Mit der Reihendarstellung der MITTAG-LEFFLER-Funktionenerhält man
E(n)α,β(−λtα) ≤
∞∑j=0
(j + n)!
j!
xj
Γ(α(j + n) + β)
∣∣∣∣∣x=0
=n!
Γ(αn+ β).
27

2 Aspekte der fraktionalen Infinitesimalrechnung
Mithilfe von Folgerung 2.15 erhält man schließlich eine Konvergenzaussage über einespezielle Art von Reihen in Ableitungen von MITTAG-LEFFLER-Funktionen. Diese Rei-hen treten bei den Lösungen der fraktionalen Differentialgleichungen von dem viskoelas-tischen Modell in Abschnitt 3 auf. Die Einführung der angesprochenen Reihen und derKonvergenznachweis für alle Zeiten t > 0 finden sich in der nachfolgenden Aussage.
Aussage 2.16:Seien a, b, λ > 0. Dann konvergiert die Reihe
∞∑n=1
(−a)n1
n!
n∑k=0
(n
k
)bktα(n−k)+n−1E
(n)α,n−αk (−λtα) (2.40)
absolut für alle Zeiten t > 0.
Beweis. Für den Beweis der Konvergenz verwende das Majorantenkriterium für konver-gente Reihen. Dazu wird die Folge der Summanden von (2.40)
fn(t) := (−a)n1
n!
n∑k=0
(n
k
)bktα(n−k)+n−1E
(n)α,n−αk (−λtα)
absolut nach oben abgeschätzt. Aus Folgerung 2.15 ergibt sich
E(n)α,n−αk(−λt
α) ≤ n!
Γ(αn+ n− αk)=
n!
Γ(n+ α(n− k))für n ≥ α(k + 1).
Die Bedingung n ≥ α(k + 1) ist für k < n offensichtlich erfüllt. Für k = n giltn ≥ α(n + 1) bei festem α ∈ [0, 1) zumindest ab einem gewissen n = N0 > 0. Da-mit erhält man ∀n ≥ N0 ∀t > 0
|fn(t)| ≤ an1
n!
n∑k=0
(n
k
)bktα(n−k)+n−1 n!
Γ(n+ α(n− k)).
28

2 Aspekte der fraktionalen Infinitesimalrechnung
Für n ≥ 2 ist nach (2.11) gesichert, dass die Gamma-Funktion monoton wächst. Es folgtalso ∀n ≥ max2, N0 ∀t > 0
|fn(t)| ≤ an
Γ(n)tn−1
n∑k=0
(n
k
)bk (tα)n−k
=an
(n− 1)!tn−1 (b+ tα)n (Binomischer Lehrsatz)
= a (b+ tα)(abt+ at1+α)
n−1
(n− 1)!
⇒∑
n≥max2,N0
|fn(t)| ≤ a (b+ tα)∞∑n=1
(abt+ at1+α)n−1
(n− 1)!
= a (b+ tα) exp(abt+ at1+α).
Damit lässt sich (2.40) bis auf endlich viele Summanden absolut durch eine Exponential-funktion abschätzen. Dies liefert die absolute Konvergenz.
2.3 LAPLACE-Transformation
2.3.1 Definition und Transformationsregeln
Die LAPLACE-Transformation L und ihre Inversion L−1 sind Integraltransformationen,die u.a. zur Lösung von Differentialgleichungen mit konstanten Koeffizienten bzw. zu-gehörigen Anfangswertproblemen verwendet werden. Durch Anwendung der LAPLACE-Transformation können die Differentialgleichungen in algebraische Gleichungen über-führt und diese gelöst werden. Die inverse LAPLACE-Transformation liefert dann die Lö-sung des Problems. Die Nützlichkeit dieser Methode wird später bei der Anwendung auffraktionale Differentialgleichungen deutlich.
Definition 2.17:Sei f : [0,∞)→ C eine Funktion. Dann heißt
F (s) = Lf(t)(s) :=
∫ ∞0
f(t)e−stdt, s ∈ C
die LAPLACE-Transformation von f(t), falls das Integral existiert. F heißt LAPLACE-Transformierte der Funktion f .
Betrachte den komplexen Parameter s = σ + iω mit σ, ω ∈ R der LAPLACE-Transformierten F = F (s). Dann hat das LAPLACE-Integral die Form∫ ∞
0
f(t)e−stdt =
∫ ∞0
f(t)e−σte−iωtdt.
29

2 Aspekte der fraktionalen Infinitesimalrechnung
Wenn die Funktion g(t) := f(t)e−σt absolut integrierbar ist, dann existiert das LAPLACE-Integral, wie in der folgenden Abschätzung zu sehen ist.∣∣∣∣∫ ∞
0
f(t)e−stdt
∣∣∣∣ ≤ ∫ ∞0
|g(t)| ·∣∣e−iωt∣∣︸ ︷︷ ︸
=1
dt < +∞
Damit g = g(t) absolut integrierbar ist, darf f = f(t) nicht stärker ansteigen als ei-ne Exponentialfunktion. In diesem Falle kann mit geeignet gewähltem σ immer nochlimt→0
g(t) = 0 erreicht werden. Dies beweist die folgende Konvergenzaussage.
Aussage 2.18 (vgl. [41, S. 31]):Sei f : [0,∞) → C eine Funktion, die nicht stärker wächst als eine Exponentialfunkti-
on. Dann existiert für ein gewisses β ∈ R die LAPLACE-Transformierte F = F (s) für
Re(s) > β. Die Konvergenzabszisse β wird dabei von der Funktion f bestimmt.
Bemerkung 2.19:Die Menge K := s ∈ C : Re(s) > β entspricht der Teilmenge von C, in der das
LAPLACE-Integral konvergiert und wird daher als Konvergenzhalbebene bezeichnet. Nur
innerhalb der Konvergenzhalbebene stellt F (s) die LAPLACE-Transformierte von f(t)
dar, selbst wenn F auch außerhalb von K definiert ist.
Satz 2.20:Sei F die LAPLACE-Transformierte einer Funktion f : [0,∞)→ C. Dann ist die inverseLAPLACE-Transformation gegeben durch die komplexe Umkehrformel
f(t) = L−1F (s)(t) =1
2πi
∫ σ+i∞
σ−i∞estF (s)ds.
Dabei ist der Integrationsweg die vertikale Linie mit Re(s) = σ in der komplexen Ebene,
sodass σ größer ist als der Realteil aller Singularitäten von F .
Beweis. Vgl. [41, S. 34].Betrachte die LAPLACE-Transformation von f
F (s) =
∫ ∞0
f(t)e−stdt =
∫ ∞0
f(t)e−σte−iωtdt.
Damit ist F die FOURIER-Transformierte der Funktion f(t)e−σt (für t < 0 wird f ≡ 0
gesetzt) und man erhält mithilfe des FOURIER-Integrals
f(t)e−σt =1
2π
∫ ∞−∞
F (s)eiωtdω.
30

2 Aspekte der fraktionalen Infinitesimalrechnung
Durch Multiplikation mit e−σt und Substitution ds = idω folgt die Behauptung. Dabei istzu beachten, dass das Integral auch tatsächlich konvergiert, da mit σ > β gesichert ist,dass s in der Konvergenzhalbebene liegt.
LAPLACE- und inverse LAPLACE-Transformationen sind für viele Funktionen und Opera-toren auf Funktionen bereits bestimmt. Die in dieser Arbeit benötigten Transformationensind in folgendem Satz zusammengefasst.
Satz 2.21 (LAPLACE-Transformations-Regeln):Im Folgenden seien F (s) = Lf(t)(s), Fi(s) = Lfi(t)(s), ai ∈ C, i = 1, ..., n, n ∈ Nsowie α, β, a ∈ R mit α > −1. Dann gelten nachfolgende Transformations-Regeln.
a)n∑i=1
aifi(t)L−→
n∑i=1
aiFi(s). (2.41)
b) Sei f1(t) ∗ f2(t) =∫ t
0f1(τ)f2(t− τ)dτ die Faltung von f1 und f2. Dann gilt
F1(s) · F2(s)L−1
−→ f1(t) ∗ f2(t). (2.42)
c) Für Re(s) > 0 gilt
tnL−→ n!
sn+1, tα
L−→ Γ(α + 1)
sα+1. (2.43)
d) ∫ t
0
f(τ)dτL−→ F (s)
s. (2.44)
e) Sei die Funktion f so, dass ihre k-te Ableitung (k = 1, . . . , n) f (k)(t) für t > 0 existiert
und deren LAPLACE-Integrale∫∞
0f (k)(t)e−stdt konvergieren. Dann gilt
f (n)(t)L−→ snF (s)−
n−1∑k=0
sn−k−1f (k)(+0). (2.45)
Beweis. Vgl. [41, Kap. 4.3].
a)
n∑i=1
aifi(t)L−→∫ ∞
0
n∑i=1
aifi(t)e−stdt =
n∑i=1
ai
∫ ∞0
fi(t)e−stdt =
n∑i=1
aiFi(s).
31

2 Aspekte der fraktionalen Infinitesimalrechnung
b) Unter der Voraussetzung, dass die angegebenen Integrale der LAPLACE-Transformationen konvergieren, erhält man
f1(t) ∗ f2(t)L−→∫ ∞
0
[∫ t
0
f1(τ)f2(t− τ)dτ
]e−stdt
=
∫ ∞0
[∫ ∞0
f1(τ)f2(t− τ)θ(t− τ)dτ
]e−stdt.
Dabei ist θ = θ(t) die HEAVISIDE-Sprungfunktion
θ(t) =
1 t ≥ 0
0 t < 0. (2.46)
Da die Konvergenz der Integrale vorausgesetzt war, kann die Reihenfolge der Integra-tion nach Satz von FUBINI vertauscht werden und es folgt weiter durch Substitution
f1(t) ∗ f2(t)L−→∫ ∞
0
f1(τ)
[∫ ∞0
f2(t− τ)θ(t− τ)e−stdt
]dτ
=
∫ ∞0
f1(τ)[F2(s)e−sτ
]dτ
=F1(s) · F2(s).
c) Durch partielle Integration und wegen limt→∞
tne−st = 0 für Re(s) > 0 und ∀n ∈ Nergibt sich
tnL−→∫ ∞
0
tne−stdt
=
[tne−st
−s
]∞0︸ ︷︷ ︸
=0
+n
s
∫ ∞0
tn−1e−stdt = · · · = n!
sn
∫ ∞0
e−stdt
=n!
sn+1.
Die zweite Aussage folgt durch Substitution u = st und mithilfe der Integraldarstel-lung (2.1) der Gamma-Funktion.
tαL−→∫ ∞
0
tαe−stdt =
∫ ∞0
uα
sαe−u
1
sdu = s−(α+1)
∫ ∞0
uαe−udu =Γ(α + 1)
sα+1.
d) Wende den Faltungssatz b) auf f und 1 an (L1(t)(s) =∫∞
0e−stdt = 1
sfür
Re(s) > 0). ∫ t
0
f(τ)dτ = f(t) ∗ 1(t)L−→ F (s) · 1
s=F (s)
s
32

2 Aspekte der fraktionalen Infinitesimalrechnung
e) Induktion:n = 1: Mit partieller Integration erhält man∫ ∞
0
f ′(t)e−stdt = limτ0
([f(t)e−st
]∞τ
+ s
∫ ∞τ
f(t)e−stdt
)= sF (s)− f(+0).
n⇒ n+ 1: Angenommen, es gilt f (n)(t)L−→ snF (s)−
∑n−1k=0 s
n−k−1f (k)(+0). Dannfolgt ∫ ∞
0
f (n+1)(t)e−stdt = limτ0
([f (n)(t)e−st
]∞τ
+ s
∫ ∞τ
f (n)(t)e−stdt
)= sLf (n)(t)(s)− f (n)(+0)
= s ·
(snF (s)−
n−1∑k=0
sn−k−1f (k)(+0)
)− f (n)(+0)
= sn+1F (s)−n∑k=0
sn−kf (k)(+0).
Nach dem Prinzip der vollständigen Induktion folgt die Behauptung.
2.3.2 Reihenentwicklung von LAPLACE-Transformierten
Zur Gewinnung der Originalfunktion f(t) aus der LAPLACE-Transformierten F (s)
hat es sich als hilfreich erwiesen, die LAPLACE-Transformierte F (s) in eine Reihezu entwickeln F (s) =
∑∞n=0 Fn(s), wobei die inversen LAPLACE-Transformationen
L−1Fn(s)(t) = fn(t) der Summanden bekannt sind. Unter gewissen Voraussetzun-gen kann nun gliedweise invers transformiert werden, d.h. es gilt f(t) =
∑∞n=0 fn(t). Die
Voraussetzungen für dieses Verfahren sind in dem folgenden Satz [13, S. 113], welcherauch in Abschnitt 3 Anwendung findet, zusammengefasst.
Satz 2.22 (Allgemeiner Entwicklungssatz für LAPLACE-Transformationen):Eine Funktion F (s) sei als unendliche Reihe von LAPLACE-Transformierten in
Re(s) ≥ σ darstellbar durch
F (s) =∞∑n=0
Fn(s), L−1Fn(s)(t) = fn(t).
Dabei sollen alle Integrale∫ ∞0
fn(t)e−stdt = Fn(s), n = 0, 1, . . .
in der gemeinsamen Halbebene Re(s) ≥ σ existieren. Zusätzlich gelte:
33

2 Aspekte der fraktionalen Infinitesimalrechnung
a) Die Integrale ∫ ∞0
|fn(t)| e−stdt = Φn(s), n = 0, 1, . . .
existieren in der Halbebene Re(s) ≥ σ.
b) Die Reihe∞∑n=0
Φn(σ)
konvergiert.
Dann konvergiert∑∞
n=0 fn(t) sogar absolut gegen eine Funktion f(t) für fast alle t ≥ 0
und es ist Lf(t)(s) = F (s), d.h.
L−1
∞∑n=0
Fn(s)
(t) =
∞∑n=0
fn(t).
2.3.3 LAPLACE-Transformation der MITTAG-LEFFLER-Funktionen
Zur Lösung fraktionaler Differentialgleichungen mit konstanten Koeffizienten wird häufigdie LAPLACE-Transformation der MITTAG-LEFFLER-Funktionen bzw. deren Inversionbenötigt. Dies soll daher im Folgenden hergeleitet werden, wie in [27, S. 20ff.] beschrie-ben.
Lemma 2.23:Seien α, β > 0 sowie z ∈ C mit |z| < 1. Dann gilt∫ ∞
0
e−ttβ−1Eα,β (±ztα) dt =1
1∓ z. (2.47)
Beweis.∫ ∞0
e−ttβ−1Eα,β (±ztα) dt =
∫ ∞0
e−ttβ−1
∞∑k=0
(±z)ktαk
Γ(αk + β)dt
=∞∑k=0
(±z)k1
Γ(αk + β)
∫ ∞0
e−ttαk+β−1dt︸ ︷︷ ︸=Γ(αk+β)
=∞∑k=0
(±z)k =1
1∓ z(geometrische Reihe).
34

2 Aspekte der fraktionalen Infinitesimalrechnung
Satz 2.24:Seien α, β > 0, b ∈ C fest sowie s ∈ C mitRe(s) > |b| 1α . Dann erhält man die LAPLACE-
Transformation
Ltαk+β−1E(k)α,β(±btα)(s) =
k!sα−β
(sα ∓ b)k+1(2.48)
Beweis. Durch k-faches Ableiten nach z von (2.47) folgt∫ ∞0
e−ttαk+β−1E(k)α,β (±ztα) dt =
k!
(1∓ z)k+1, |z| < 1. (2.49)
Dann ergibt sich (2.48) durch Substitution p := st∫ ∞0
e−sttαk+β−1E(k)α,β (±btα) dt =
∫ ∞0
e−ppαk+β−1s−αk−β+1E(k)α,β
(± b
sαpα)dp
s
=sα−β
sα(k+1)
∫ ∞0
e−ppαk+β−1E(k)α,β
(± b
sαpα)dp
(2.49)=
sα−β
sα(k+1)
k!
(1∓ bsα
)k+1=
k!sα−β
(sα ∓ b)k+1.
2.4 Fraktionale Infinitesimalrechnung
Die fraktionale Infinitesimalrechnung beschäftigt sich mit der Theorie der Integrale undAbleitungen beliebiger Ordnung als Verallgemeinerung der Ableitung n-ter Ordnung undder n-fach iterierten Integrale (engl.: repeated integral) (n ∈ N). Die Geburt dieser Theoriewird auf einen Briefwechsel zwischen LEIBNIZ und DE L’HOSPITAL aus dem Jahr 1695zurückgeführt, in dem DE L’HOSPITAL die Frage „Was bedeutet dn
dxnf(x) für n = 1
2?“
stellte. Die explizite Frage nach n = 12
führte wohl zum Begriff der fraktionalen Ablei-
tung. In der heutigen Theorie sind die Ordnungen der Ableitungen allerdings nicht aufrationale Zahlen beschränkt, sondern beliebig (reell oder komplex) [10, S. 3].In diesem Abschnitt soll die Frage von DE L’HOSPITAL auf zwei verschiedene Wei-sen beantwortet werden (LEIBNIZ konnte lediglich einen Vorschlag für den Spezialfallf(x) = x liefern [10, S. 4]). Zwei mögliche Definitionen der fraktionalen Ableitung (nachRIEMANN-LIOUVILLE und CAPUTO) werden kurz zusammen mit einigen Eigenschafteneingeführt und die Vorzüge des Ableitungsbegriffs nach CAPUTO für die Anwendungauf physikalische Probleme beschrieben. Zudem werden Aussagen über die Existenz undEindeutigkeit von Lösungen einfacher linearer fraktionaler Differentialgleichungen, wiesie in Abschnitt 3 auftreten, getroffen. Weitere umfassendere Beschreibungen der Theoriefraktionaler Analysis finden sich u.a. in [10, 26, 27]. Abschließend werden einige nume-rische Verfahren zur Lösung fraktionaler Differentialgleichungen vorgestellt.
35

2 Aspekte der fraktionalen Infinitesimalrechnung
2.4.1 Fraktionale Integrale und Ableitungen
Bei der Entwicklung der fraktionalen Infinitesimalrechnung sind verschiedene Definitio-nen der Ableitungen und Integrale beliebiger Ordnung aufgetreten (vgl. [27, Kap. 2]). Inder mathematischen Theorie spielt vor allem die Definition nach RIEMANN und LIOU-VILLE eine bedeutende Rolle.
Definition 2.25 (RIEMANN-LIOUVILLE-Operatoren [10, Kap. 2]):Seien f ∈ L1[0, T ], t ∈ [0, T ] und α > 0. Dann ist das fraktionale RIEMANN-LIOUVILLE-Integral der Ordnung α von f gegeben durch
Jαf(t) :=1
Γ(α)
∫ t
0
(t− τ)α−1f(τ)dτ (2.50)
und die fraktionale RIEMANN-LIOUVILLE -Ableitung der Ordnung α von f gegeben
durch
Dαf(t) := DmJm−αf(t) =1
Γ(m− α)
dm
dtm
∫ t
0
f(τ)
(t− τ)α+1−mdτ, m− 1 ≤ α < m.
(2.51)
Im Falle α = 0 ist J0 = D0 = I die Identität.
Bemerkung 2.26:
1. Häufig wird in der Literatur bei der Definition fraktionaler Ableitungen ein weite-
rer Parameter angegeben, der die untere Integrationsgrenze bestimmt [10, 27]. In
der hier angegebenen Definition ist dieser Wert zu Null festgelegt. Dies hat prakti-
sche Gründe. In Anwendungssituationen werden häufig zeitabhängige Größen be-
trachtet und mithilfe von fraktionalen Ableitungen und Integralen das Verhalten von
Systemen unter gewissen Bedingungen beschrieben. In diesem Fall gibt die untere
Integrationsgrenze τ = 0 den Zeitpunkt an, ab dem die Geschichte des Systems
berücksichtigt wird bzw. bekannt ist. An dieser Stelle soll auch darauf aufmerksam
gemacht werden, dass die fraktionalen Differentialoperatoren im Gegensatz zu na-
türlichen Differentialoperatoren keinen lokalen Charakter besitzen. Dies macht sie
so wertvoll für die Beschreibung von Materialien mit Gedächtnis.
2. Der Operator Dm für m ∈ N meint die gewöhnliche m-te Ableitung, d.h.
Dm := dm
dtm. Die obige Definition sollte allerdings auch die Anforderung erfüllen,
dass die fraktionale Ableitung bei natürlicher Ordnung in den gewöhnlichen Ab-
leitungsbegriff übergeht. Dies wird neben einigen anderen Eigenschaften, die für
Ableitungen und Integrale natürlicher Ordnung bereits bekannt sind, in Satz 2.28
gezeigt.
36

2 Aspekte der fraktionalen Infinitesimalrechnung
Beispiel 2.27:Im Folgenden sind zwei einfache Beispiele zur Bestimmung der RIEMANN-LIOUVILLE-
Ableitung zu sehen.
a)
f(t) = k = const., α ∈ (0, 1)
RL0 Dαf(t) =
1
Γ(1− α)
d
dt
∫ t
0
k
(t− τ)αdτ
=k
Γ(1− α)
d
dt
[− 1
1− α(t− τ)1−α
]t0
=k
Γ(1− α)t−α
b)
f(t) = tβ, β > 0, α ∈ (0, 1)
RL0 Dαf(t) =
1
Γ(1− α)
d
dt
∫ t
0
τβ
(t− τ)αdτ s :=
τ
t
=1
Γ(1− α)
d
dt
(tβ−α+1
∫ 1
0
sβ
(1− s)αds
)=
1
Γ(1− α)
d
dttβ−α+1 Γ(β + 1)Γ(1− α)
Γ(β − α + 2)[6, 1.5 (1)+(5)]
=Γ(β + 1)
Γ(β − α + 1)tβ−α
Satz 2.28 (Eigenschaften von RIEMANN-LIOUVILLE-Operatoren [10, Kap. 2]):Seien α, β ≥ 0, m,n, p ∈ N, sodass m− 1 < α ≤ m, n > α und f ∈ L1 [0, T ].
a) JαJβf = Jα+βf fast überall in [0, T ]
b) JαJβf = JβJαf
c) DαJαf = f
d) Dαf = DnJn−αf
e) DpDαf = Dp+αf
f) Sei zusätzlich f ∈ Cp[0, T ]. Dann folgt
limγp
Dγf = Dpf
punktweise in (0,T].
37

2 Aspekte der fraktionalen Infinitesimalrechnung
Beweis.
a) Zunächst muss gezeigt werden, dass Jβf ∈ L1[0, T ] erfüllt ist. Dies folgt, da das frak-tionale RIEMANN-LIOUVILLE-Integral als Faltung zweier in R integrierbarer Funk-tionen darstellbar und damit integrierbar ist [10, Thm. 2.1]. Daher kann nachfolgendder Satz von FUBINI angewendet und später s = τ + u · (t − τ) substituiert werden,sodass gilt
JαJβf(t) =1
Γ(α)Γ(β)
∫ t
0
(t− s)α−1
∫ s
0
(s− τ)β−1f(τ)dτds
=1
Γ(α)Γ(β)
∫ t
0
f(τ)
∫ t
τ
(t− s)α−1(s− τ)β−1dsdτ
=1
Γ(α)Γ(β)
∫ t
0
f(τ)
∫ 1
0
[(t− τ)(1− u)]α−1[u(t− τ)]β−1(t− τ)dudτ
=1
Γ(α)Γ(β)
∫ 1
0
(1− u)α−1uβ−1du
∫ t
0
f(τ)(t− τ)α+β−1dτ
=1
Γ(α + β)
∫ t
0
f(τ)(t− τ)α+β−1dτ
= Jα+βf(t).
Im vorletzten Schritt wurde die Darstellung des EULER-Integrals erster Art[6, Kap. 1.5] verwendet.
b) folgt aus a).
c) Die Behauptung folgt bei natürlicher Ableitungsordnung aus dem Hauptsatz derDifferential- und Integralrechnung für α = 1 und für α ∈ N aufgrund derHalbgruppen-Eigenschaft vonD (für natürliche Ableitungsordnung) und J . Für α > 0
beliebig folgt dann
DαJαf = DmJm−αJαf = DmJmf = f.
d) Ähnlich wie in c) liefern die jeweiligen Halbgruppen-Eigenschaften für J und D
DnJn−α = DmDn−mJn−mJm−α = DmJm−α = Dα.
e) Dp+αf = Dp+mJp+m−(p+α)f = DpDmJm−αf = DpDαf.
f) Betrachte das Taylor-Polynom der Ordnung p− 1 von f
Tp−1[f ](t) =
p−1∑k=0
f (k)(0)
k!tk
38

2 Aspekte der fraktionalen Infinitesimalrechnung
und das zugehörige Restglied
Rp−1[f ](t) = f(t)− Tp−1[f ](t).
Dann folgt mit Beispiel 2.27 b)
Dγf(t)−Dpf(t) = DγTp−1[f ](t)−DpTp−1[f ](t)
+DγRp−1[f ](t)−DpRp−1[f ](t)
=
p−1∑k=0
f (k)(0)
Γ(k + 1− γ)tk−γ − 0
+DpJp−γRp−1[f ](t)−DpRp−1[f ](t).
Für γ p heben sich die beiden unteren Summanden auf und in dem ersten Sum-manden konvergieren die Argumente der Gamma-Funktion gegen nicht-positive gan-ze Zahlen, bei denen die Funktion z 7→ 1
Γ(z)Nullstellen bestitzt, wie leicht anhand der
Darstellung (2.6) zu sehen ist. Damit folgt die Behauptung.
Bemerkung 2.29:Die Halbgruppen-Eigenschaft der RIEMANN-LIOUVILLE-Integraloperatoren, die in
Satz 2.28 a) und b) gezeigt wurden, lassen sich nicht allgemein auf die RIEMANN-LIOUVILLE-Differentialoperatoren übertragen. Ebenso gelten c) und e) i.A. nicht bei Ver-
tauschen der Operatoren [10, S. 30+39].
In der Anwendung der Viskoelastizitätstheorie treten fraktionale Differentialgleichungenauf, die physikalisch interpretierbare Anfangswerte (d.h. f(0), f ′(0) etc.) beinhalten soll-ten. Die RIEMANN-LIOUVILLE-Definition der fraktionalen Ableitung führt jedoch zuAnfangswerten, welche die RIEMANN-LIOUVILLE-Ableitung an der Stelle t = 0 ent-halten [27, S. 78]. Dadurch wird diese Definition für die Anwendung in dieser Arbeitweniger von Interesse sein, sodass auf die Ausführung weiterer Eigenschaften verzichtetwird. Stattdessen soll das angesprochene Problem durch eine alternative Definition derfraktionalen Ableitung nach [8] gelöst werden.
Definition 2.30 (CAPUTO-Ableitung):Seien m ∈ N und f eine Funktion, sodass f (m) ∈ L1[0, T ]. Weiter seien α > 0 mit
m−1 < α ≤ m und t ∈ [0, T ]. Dann ist die fraktionale CAPUTO-Ableitung der Ordnung
α von f gegeben durch
Dα∗ f(t) := Jm−αDmf(t) =
1
Γ(m− α)
∫ t
0
f (m)(τ)
(t− τ)α+1−mdτ. (2.52)
39

2 Aspekte der fraktionalen Infinitesimalrechnung
Für α = 0 ist wieder D0∗ = I die Identität.
Zur Ableitung von Eigenschaften der CAPUTO-Ableitung soll der Zusammenhang zurRIEMANN-LIOUVILLE-Ableitung im folgenden Satz hergestellt werden.
Satz 2.31 (Zusammenhang von RIEMANN-LIOUVILLE- und CAPUTO-Ableitung):Seien m ∈ N, α ≥ 0, m − 1 < α ≤ m. Weiter sei die Funktion f so gewählt, dass Dαf
und Dα∗ f existieren. Dann gilt
Dα∗ f(t) = Dαf(t)−
m−1∑k=0
f (k)(0)
Γ(k + 1− α)tk−α. (2.53)
Beweis aus [10, S. 50ff.]. Betrachte wieder das Taylor-Polynom der Ordnung m− 1 vonf um 0
Tm−1[f ](t) =m−1∑k=0
f (k)(0)
k!tk.
Dann folgt aus Beispiel 2.27 b)
DαTm−1[f ](t) =m−1∑k=0
f (k)(0)
Γ(k + 1− α)tk−α.
Die Aussage des Satzes lässt sich also wie folgt umformen zu
Dα∗ f(t) = Dα [f(t)− Tm−1[f ](t)] .
Damit folgt
Dα [f(t)− Tm−1[f ](t)] = DmJm−α [f(t)− Tm−1[f ](t)]
=dm
dtm
∫ t
0
1
Γ(m− α)(t− τ)m−α−1 (f(τ)− Tm−1[f ](τ)) dτ.
(2.54)
Durch partielle Integration erhalten wir
Jm−α [f(t)− Tm−1[f ](t)] =
∫ t
0
1
Γ(m− α)(t− τ)m−α−1 (f(τ)− Tm−1[f ](τ)) dτ
= − 1
Γ(m− α + 1)
[(f(τ)− Tm−1[f ](τ))(t− τ)m−α
]t0
+1
Γ(m− α + 1)
∫ t
0
(Df(τ)−DTm−1[f ](τ))(t− τ)m−αdτ
= Jm−α+1D [f(τ)− Tm−1[f ](τ)] .
40

2 Aspekte der fraktionalen Infinitesimalrechnung
Durch m-fache Wiederholung dieses Schrittes und da Tm−1[f ] ein Polynom vom Gradm− 1 ist, folgt
Jm−α [f(t)− Tm−1[f ](t)] = J2m−αDm [f(t)− Tm−1[f ](t)]
= JmJm−αDmf(t).(2.55)
Einsetzen von (2.55) in (2.54) liefert schließlich
Dα [f(t)− Tm−1[f ](t)] = DmJmJm−αDmf(t) = Jm−αDmf(t) = Dα∗ f(t).
Folgerung 2.32:Seien f und α wie im vorigen Satz. Dann gilt
Dαf = Dα∗ f
genau dann, wenn
f (k)(0) = 0, k = 0, 1, . . . ,m− 1
erfüllt ist.
Beispiel 2.33:Zum Vergleich zur RIEMANN-LIOUVILLE-Ableitung wird die Ableitung nach CAPUTO
für die Funktionen aus Beispiel 2.27 bestimmt.
a)
f(t) = k = const., α ∈ (0, 1)
Dα∗ f(t) = 0
41

2 Aspekte der fraktionalen Infinitesimalrechnung
b)
f(t) = tβ, β > 0, β /∈ N, α ∈ (0, 1)
Dα∗ f(t) =
1
Γ(1− α)
∫ t
0
βτβ−1
(t− τ)αdτ s :=
τ
t
=β
Γ(1− α)tβ−α
∫ 1
0
sβ−1(1− s)−αds
=β
1− αtβ−α
Γ(β)Γ(1− α)
Γ(β − α + 1)[6, 1.5 (1)+(5)]
=Γ(β + 1)
Γ(β − α + 1)tβ−α
Im folgenden Satz werden noch einige Eigenschaften der fraktionalen CAPUTO-Ableitung zusammengefasst.
Satz 2.34 (Eigenschaften von CAPUTO-Differentialoperatoren):Seien α ≥ 0, m,n ∈ N, sodass m− 1 < α ≤ m.
a) Sei f ∈ C[0, T ]. Dann gilt Dα∗ J
αf = f.
b) Sei f ∈ Cn+m[0, T ]. Dann gilt Dα∗D
nf = Dn+α∗ f .
c) Sei f ∈ Cn[0, T ]. Dann ist limγn
Dγ∗f = Dnf .
Beweis.
a) Betrachte zunächst die Funktion t 7→ Jαf(t). Für k = 0, 1, . . . ,m − 1 ist α − k > 0
und es gilt
DkJαf = DkJkJα−k = Jα−k =⇒ Dk(Jαf)(0) = 0, k = 0, 1, . . . ,m− 1.
(2.56)
Damit sind die Bedingungen von Folgerung 2.32 erfüllt und es folgt mit der Aussagec) aus Satz 2.28
Dα∗ J
α = Dα∗ (Jαf) = DαJαf = f.
b) Dn+α∗ f = Jm+n−(n+α)Dm+nf = Jm−αDmDnf = Dα
∗Dnf.
c) Dγ∗f = Dγ[f − Tn−1[f ]] = Dγf −DγTn−1[f ] −→
γnDnf.
42

2 Aspekte der fraktionalen Infinitesimalrechnung
Aus den vorhergehenden Sätzen folgt schließlich noch eine wichtige Aussage bezüglichder Hintereinanderausführung fraktionaler CAPUTO-Ableitungen, die für die Herleitungder Differentialgleichung in Abschnitt 3 von Bedeutung ist.
Folgerung 2.35:Seien α ≥ 0, m,n ∈ N, sodass m− 1 < α ≤ m. Weiter sei f ∈ Cm+n[0, T ], sodass
f (k)(0) = 0, k = 0, 1, . . .m+ n− 1.
Dann gilt
DnDα∗ f = Dα
∗Dnf = Dn+α
∗ f.
Beweis. Aus Folgerung 2.32, Satz 2.28 e) und Satz 2.34 b) folgt
DnDα∗ f = DnDαf = Dn+αf = Dn+α
∗ f = Dα∗D
nf.
Abschließend sollen Vorzüge von Definition 2.30 anhand der LAPLACE-Transformationvon (2.52), welche zur Lösung fraktionaler Differentialgleichungen durchgeführt wird[27, S. 106], deutlich gemacht werden.
Satz 2.36 (LAPLACE-Transformation der fraktionalen CAPUTO-Ableitung):Seien f : [0,∞)→ R und σ > 0, sodass Lf(t)(s) für Re(s) > σ existiert. Weiter seien
α > 0 und m ∈ N, sodass α ∈ (m− 1,m). Dann gilt für Re(s) > σ
LDα∗ f(t)(s) = sαF (s)−
m−1∑k=0
sα−k−1f (k)(0), m− 1 < α ≤ m. (2.57)
Beweis. Unter Verwendung der Regeln (2.42), (2.43) sowie (2.45) erhält man
LDα∗ f(t)(s) = L
∫ t
0
f (m)(τ)(t− τ)m−α−1
Γ(m− α)dτ
(s)
= Lf (m)(t)
(s) · L
tm−α−1
Γ(m− α)
(s)
=
(smF (s)−
m−1∑k=0
sm−k−1f (k)(0)
)· sα−m
= sαF (s)−m−1∑k=0
sα−k−1f (k)(0).
43

2 Aspekte der fraktionalen Infinitesimalrechnung
In (2.57) sind nun die Werte von f und deren Ableitungen an der Stelle t = 0 enthalten,für die eine physikalische Interpretation existiert. Daher wird im weiteren Verlauf diesesAbschnitts und für die Modellbildung im nächsten Abschnitt nur noch der fraktionaleAbleitungsbegriff nach CAPUTO verwendet.
2.4.2 Fraktionale Differentialgleichungen
Zur Lösung fraktionaler Differentialgleichungen existiert eine umfassende Theorie (vgl.u.a. [26] und [27]). An dieser Stelle soll lediglich auf die Existenz und Eindeutigkeit derLösung linearer fraktionaler Differentialgleichungen mit konstanten Koeffizienten (wieim Modell verwendet) eingegangen werden. Betrachte zum Einstieg die konstruktivenBeweise der folgenden relativ speziellen Probleme.
Lemma 2.37:Sei g ∈ C[0, T ] für ein T > 0. Dann hat das Anfangswertproblem
Dα∗ f(t) = g(t) m− 1 < α ≤ m
f (k)(0) = f(k)0 k = 0, ...,m− 1
(2.58)
genau eine Lösung f(t) ∈ L1(0, T ).
Beweis.
• Existenz: Dα∗ f(t) = g(t)
L−→(2.57)
sαF (s)−m−1∑k=0
f (k)(0)sα−k−1 = G(s)
F (s) = G(s)s−α +m−1∑k=0
f(k)0 s−k−1
L−1
−→(2.41),(2.42),(2.43)
f(t) =1
Γ(α)
∫ t
0
(t− τ)α−1g(τ)dτ +m−1∑k=0
f(k)0
k!tk
• Eindeutigkeit: Angenommen, es gäbe zwei Lösungen f1(t), f2(t). Betrachteh(t) := f1(t)− f2(t). Dann erfüllt h das Anfangswertproblem
Dα∗ h(t) = 0 m− 1 < α ≤ m
h(k)(0) = 0 k = 0, ...,m− 1.
44

2 Aspekte der fraktionalen Infinitesimalrechnung
Damit folgt dann
L−→ sαH(s)−m−1∑k=0
h(k)︸︷︷︸=0 ∀k
(0)sα−k−1 = 0
=⇒ H(s) ≡ 0
=⇒ h(t) = 0 f.ü. in (0, T )
=⇒ f1 = f2 f.ü. in (0, T ).
Lemma 2.38 (vgl. [10] Th. 7.1):Seien α ∈ (0, 1), λ ∈ R sowie g ∈ C[0, T ] für ein T > 0. Dann hat das Anfangswertpro-
blem Dα∗ f(t) = λf(t) + g(t)
f(0) = f0
(2.59)
genau eine Lösung f(t) ∈ L1(0, T ).
Beweis.
• Existenz: Mittels Laplace-Transformation sowie (2.41), (2.42), (2.45) und Satz 2.24folgt
Dα∗ f(t) = λf(t) + g(t)
L−→ sαF (s)− f0sα−1 = λF (s) +G(s)
F (s) = f0sα−1
sα − λ+G(s)
1
sα − λL−1
−→ f(t) = f0Eα(λtα) +
∫ t
0
g(t− τ)τα−1Eα,α(λτα)dτ.
• Eindeutigkeit: Angenommen, es gäbe zwei Lösungen f1(t), f2(t). Betrachteh(t) := f1(t)− f2(t). Dann erfüllt h das Anfangswertproblem
Dα∗ h(t) = λh(t)
h(0) = 0.
45

2 Aspekte der fraktionalen Infinitesimalrechnung
Damit folgt dann
L−→ sαH(s)− h(0)︸︷︷︸=0
sα−1 = λH(s)
=⇒H(s) = 0 f.ü.
=⇒h(t) = 0 f.ü. in (0, T )
=⇒f1 = f2 f.ü. in (0, T ).
Bemerkung 2.39:Für den Grenzfall α→ 1 reduziert sich die Lösung von (2.79) zur bekannten Formel
f(t) = f0eλt +
∫ t
0
eλ(t−τ)g(τ)dτ.
Das Anfangswertproblem in dem nachfolgend untersuchten Modell besitzt eine ähnlicheForm wie das Problem in (2.79). Lediglich die inverse Laplace-Transformation ist etwasschwieriger. Lemma 2.38 zeigt allerdings den grundlegenden Lösungsweg für fraktio-nale Differentialgleichungen mit konstanten Koeffizienten durch Nutzung der Laplace-Tansformation-Methode. Die in den Lemmata angegebenen Spezialfälle sollen schließlichin dem folgenden allgemeinen Existenz- und Eindeutigkeitssatz verallgemeinert werden.
Satz 2.40 (Existenz- und Eindeutigkeitssatz zur Lösung fraktionaler Anfangswertproble-me [10, Kap. 6.1+6.2]):Seien α > 0 und m ∈ N, sodass α ∈ (m − 1,m). Weiter seien f (0)
0 , . . . , f(m−1)0 ∈ R,
K > 0 und h∗ > 0. Definiere
G :=
(t, f) : t ∈ [0, h∗],
∣∣∣∣∣f −m−1∑k=0
tk
k!f
(k)0
∣∣∣∣∣ ≤ K
.
Sei g : G → R stetig und erfülle eine LIPSCHITZ-Bedingung bezüglich der zweiten
Variable, d.h.
|g(t, f1)− g(t, f2)| ≤ L|f1 − f2|
für eine Konstante L unabhängig von t, f1, f2. Definiere weiterhin M := sup(t,f)∈G
|g(t, f)|
und
h :=
h∗ M = 0
min
h∗,(KΓ(n+1)
M
) 1n
sonst
.
46

2 Aspekte der fraktionalen Infinitesimalrechnung
Dann existiert genau eine Lösung f ∈ C[0, h] des AnfangswertproblemsDα∗ f(t) = g(t, f(t))
f (k)(0) = f(k)0 , k = 0, . . . ,m− 1
. (2.60)
Hierzu benötigen wir noch die folgende Aussage.
Lemma 2.41 ([10, Lemma 6.2]):Angenommen, es gelten die Voraussetzungen des obigen Satzes und es existiert eine Lö-
sung des Anfangswertproblems (2.60). Dann ist f ∈ C[0, h] genau dann eine Lösung von
(2.60), wenn f der nicht-linearen VOLTERRA-Integralgleichung 2. Art
f(t) =m−1∑k=0
f(k)0
k!tk +
1
Γ(α)
∫ t
0
(t− τ)α−1g(τ, f(τ))dτ (2.61)
genügt.
Beweis. Sei zunächst f eine Lösung von (2.61). Dann folgt mit den Anfangsbedingungenvon (2.60)
f(t) =m−1∑k=0
f (k)(0)
k!tk︸ ︷︷ ︸
=Tm−1[f ](t)
+ Jαg(·, f(·))(t).
Anwenden von Dα∗ auf beide Seiten und Satz 2.34 a) ergeben
Dα∗ f(t) = Dα
∗Tm−1[f ](t) +Dα∗ J
αg(·, f(·))(t)
= Jm−αDmTm−1[f ](t)︸ ︷︷ ︸=0
+ g(t, f(t)).
Sei andererseits f eine Lösung des Anfangswertproblems (2.60), dann gilt
g(t, f(t)) = Dα∗ f(t) = Dα[f(t)− Tm−1[f ](t)]
= DmJm−α[f(t)− Tm−1[f ](t)].
Da die verwendeten Funktionen stetig sind, kann beidseitig der Operator Jm angewendetwerden und es folgt
Jmg(·, f(·))(t) = Jm−α[f(t)− Tm−1[f ](t)] + q(t).
Dabei ist q ein Polynom höchstens vom Grad m − 1. Wegen der Stetigkeit vont 7→ g(t, f(t)) hat Jmg(·, f(·))(t) eine mindestens m-fache Nullstelle in t = 0. Dies
47

2 Aspekte der fraktionalen Infinitesimalrechnung
gilt nach Konstruktion auch für f(t)−Tm−1[f ](t), also auch für Jm−α[f(t)−Tm−1[f ](t)]
und damit auch für q. Damit folgt q ≡ 0 und Anwenden von Dm−α ergibt schließlich
f(t)− Tm−1[f ](t) = Dm−αJmg(·, f(·))(t) = D1Jα−(m−1)Jmg(·, f(·))(t)
= D1J1+αg(·, f(·))(t) = Jαg(·, f(·))(t).
Durch Einsetzen der Anfangswerte folgt (2.61).
Beweis von Satz 2.40 (Idee). Dieser Satz entspricht einer fraktionalen Variante des be-kannten klassischen Satzes für gewöhnliche Differentialgleichungen von PICARD-LINDELÖF. Dabei wird Lemma 2.41 verwendet. Hierzu wird für den OperatorA, definiertdurch
(Af)(t) =m−1∑k=0
f(k)0
k!tk +
1
Γ(α)
∫ t
0
(t− τ)α−1g(τ, f(τ))dτ,
das FixpunktproblemAf = f
betrachtet. Mithilfe der Fixpunktsätze von SCHAUDER und WEISSINGER
[10, Appendix D.2] als Verallgemeinerungen des BANACH’schen Fixpunktsatzeswerden dann Existenz und Eindeutigkeit der Lösung des Fixpunktproblems gezeigt.
2.4.3 Numerik fraktionaler Differentialgleichungen
In diesem Abschnitt werden drei verschiedene numerische Methoden zur Lösung linearerfraktionaler Differentialgleichungen mit konstanten Koeffizienten vorgestellt und die zu-gehörigen Fehlerabschätzungen unter gewissen Bedingungen angegeben. Anhand einigerBeispiele zu fraktionalen Differentialgleichungen mit bekannten analytischen Lösungenwerden diese Methoden getestet und verglichen. Zudem werden sie in Abschnitt 4 auchauf das Modell in Abschnitt 3 angewendet.
GRÜNWALD-LETNIKOV-Näherung erster Odnung Die nachfolgend beschriebenenumerische Methode ist entnommen aus [27, Kap. 7] und basiert auf einer weiteren Defi-nition der fraktionalen Ableitung nach GRÜNWALD-LETNIKOV
DαGLf(t) = lim
h→0h−α
b thc∑
j=0
(−1)j(α
j
)f(t− jh), α > 0. (2.62)
48

2 Aspekte der fraktionalen Infinitesimalrechnung
Diese Definition ist eine direkte Verallgemeinerung der bekannten Formel für gewöhnli-che Ableitungen
dn
dtnf(t) = lim
h→0h−n
n∑j=0
(−1)j(n
j
)f(t− jh), n ∈ N.
Seien 0 < α < n, f(t) (n− 1)-mal stetig differenzierbar in [a, T ] und f (n)(t) integrierbarin [a, T ]. Dann existieren die fraktionale Ableitung nach RIEMANN-LIOUVILLE Dαf(t)
und GRÜNWALD-LETNIKOV DαGLf(t) und stimmen überein [27, S. 75]. Zudem stimmt
die fraktionale Ableitung nach CAPUTO Dα∗ f(t) mit der nach RIEMANN-LIOUVILLE
Dαf(t) für homogene Anfangswerte f (k)(0) = 0, k = 0, 1, . . . , n−1 nach Folgerung 2.32überein. Folglich ist die Definition (2.62) unter den genannten Voraussetzungen auch zurBeschreibung von CAPUTO-Ableitungen gültig. Für kleine Zeitschritte h wird die ge-wöhnliche erste Ableitung f ′(t) einer Funktion f(t) für ein festes t durch
f ′(t) =f(t)− f(t− h)
h(2.63)
approximiert. Ebenso kann die fraktionale Ableitung für t = nh, n ∈ N durch
Dα∗ f(t) = h−α
n∑j=0
w(α)j f(t− jh), w
(α)j = (−1)j
(α
j
)(2.64)
näherungsweise bestimmt werden. Dabei gilt, wie in [27, Kap. 7.4] gezeigt wurde, für imPunkt 0 analytische Funktionen f im Konvergenzbereich ihrer Reihendarstellung
f ′(t)− f ′(t) = O(h), Dα∗ f(t)− Dα
∗ f(t) = O(h) (h→ 0).
Aus (2.63) und (2.64) kann für eine lineare fraktionale Differentialgleichung mit konstan-ten Koeffizienten ein rekursives Zeitschrittverfahren abgeleitet werden. Dabei werden dieWerte w(α)
j in (2.64) durch folgende Rekursionsformel ermittelt.
Lemma 2.42:Die Koeffizienten w(α)
j , α > 0, j ∈ N0 sind rekursiv gegeben durch
w(α)0 = 1, w
(α)j =
(1− α + 1
j
)w
(α)j−1, j = 1, 2, 3, . . .
49

2 Aspekte der fraktionalen Infinitesimalrechnung
Beweis.
w(α)0 = (−1)0
(α
0
)w
(α)j = (−1)j
(α
j
)= (−1)j
α(α− 1) · · · · · (α− (j − 1))
j!
= (−1)j−1α(α− 1) · · · · · (α− (j − 2))
(j − 1)!·(−α− (j − 1)
j
)=
(1− α + 1
j
)w
(α)j−1
Alternativ können die w(α)j , α > 0, j ∈ N0 basierend auf der Darstellung
(1− z)α =∞∑j=0
(−1)j(α
j
)zj =
∞∑j=0
w(α)j zj
durch inverse FOURIER-Transformation
w(α)j =
1
2πi
∫ 2π
0
fα(ϕ)eikϕdϕ, fα(ϕ) = (1− e−iϕ)α (2.65)
(implementiert als Fast FOURIER Tansformation) bestimmt werden [27, Kap. 7.5].
Prädiktor-Korrektor-Methode Die Idee dieser Methode basiert auf der Eigenschaft,dass das Anfangswertproblem
Dα∗ f(t) = K(t, f(t)) m− 1 < α ≤ m,
f (k)(0) = f(k)0 k = 0, 1, . . . ,m− 1
(2.66)
äquivalent zu der VOLTERRA-Integralgleichung
f(t) =
dαe−1∑k=0
f(k)0
tk
k!+
1
Γ(α)
∫ t
0
(t− τ)α−1K(τ, f(τ))dτ (2.67)
ist, wie in Lemma 2.41 gezeigt wurde. Zur Lösung der Gleichung (2.67) wird das folgendePrädiktor-Korrektor-Verfahren aus [11] als Verallgemeinerung der klassischen ADAMS-BASHFORTH-MOULTON-Methode basierend auf Trapez-Quadratur-Formeln der Integra-tion unter Annahme diskreter Zeiten tnn=0,...,N ⊂ [0, T ] mit Schrittweite h in N = bT
hc
Zeitschritten, d.h. tn = nh, n = 0, . . . , N verwendet. Dabei wird zunächst das Integral in(2.67) in eine Summe von Integralen über kleine Zeitbereiche zerlegt und diese mithilfeder Produkt-Trapez-Quadratur-Formel approximiert durch
f(tn+1) =
dαe−1∑k=0
f(k)0
tkn+1
k!+
hα
Γ(α + 2)
n+1∑j=0
aj,n+1K(tj, f(tj)). (2.68)
50

2 Aspekte der fraktionalen Infinitesimalrechnung
Hierbei haben die Koeffizienten aj,n+1, j = 0, . . . , n+ 1 die Form
aj,n+1 =
nα+1 − (n− α)(n+ 1)α j = 0,
(n− j + 2)α+1 + (n− j)α+1 − 2(n− j + 1)α+1 1 ≤ j ≤ n,
1 j = n+ 1.
Aufgrund des letzten Summanden auf der rechten Seite kann (2.68) i.A. nicht expli-zit nach f(tn+1) aufgelöst werden. Stattdessen wird der Wert mithilfe der Produkt-Rechteckregel näherungsweise bestimmt. Es folgt die Prädiktor-Formel
fp(tn+1) =
dαe−1∑k=0
f(k)0
tkn+1
k!+
1
Γ(α)
n∑j=0
bj,n+1K(tj, f(tj)) (2.69)
mit den Koeffizienten
bj,n+1 =hα
α((n+ 1− j)α − (n− j)α).
Bei einer Implementierung der Methode wird für jeden Zeitschritt (2.69) bestimmt undder ermittelte Wert in die Korrektor-Formel
f(tn+1) =
dαe−1∑k=0
f(k)0
tkn+1
k!+
hα
Γ(α + 2)K(tn+1, f
p(tn+1))
+hα
Γ(α + 2)
n∑j=0
aj,n+1K(tj, f(tj))
(2.70)
eingesetzt. Für die damit bestimmte Näherungslösung von (2.67) wird in [11, S. 8] diefolgende Fehlerabschätzung angegeben
maxj=0,1,...,N
∣∣∣f(tj)− f(tj)∣∣∣ = O(hp), p = min(2, 1 + α), (h→ 0).
Zur Anwendung dieses Verfahrens auf allgmeinere lineare fraktionale Differentialglei-chungen mit mehreren fraktionalen Termen wird die Gleichung analog zu gewöhnli-chen Differentialgleichungen höherer Ordnung in ein System fraktionaler Differential-gleichungen der Form (2.66) überführt. Dies führt im fraktionalen Fall i.A. noch zu ei-nigen Problemen. Die Details dazu sind in [11, Kap. 4] zu finden. Ein Beispiel zu derÜberführung in ein System fraktionaler Differentialgleichungen und der Anwendung derPrädiktor-Korrektor-Methode wird in Abschnitt 4 bezogen auf (3.5) angegeben.
51

2 Aspekte der fraktionalen Infinitesimalrechnung
Faltungsquadratur Die folgende Methode aus [12, 22] dient zur numerischen Lösungspeziell von fraktionalen Anfangswertproblemen der Form
Dα∗ f(t)−
∑lj=1 cjD
βj∗ f(t) = g(t) 0 < t ≤ T,
f (k)(0) = f(k)0 , k = 0, . . . ,m− 1 m− 1 < α ≤ m
(2.71)
mit α > βj und cj ∈ R, j = 1, . . . , l. Zur Vereinfachung seien nachfolgend homogeneAnfangsbedingungen, d.h. f (k)(0) = 0, k = 0, . . . ,m−1 angenommen. Durch LAPLACE-Transformation der Differentialgleichung in (2.71) ergibt sich
F (s) =1
sα −∑l
j=1 cjsβj︸ ︷︷ ︸
=:Λ(s)
·G(s). (2.72)
Die Lösung des Problems erhalten wir durch inverse LAPLACE-Transformation nach(2.42) in Form eines Faltungsintegrals
f(t) =
∫ t
0
λ(τ)g(t− τ)dτ, (2.73)
wobei die inverse LAPLACE-Transformation λ von Λ allgemein schwierig zu bestimmenist. Betrachte daher die LAPLACE-Inversionsformel (ähnlich wie in Satz 2.20)
λ(t) =1
2πi
∫Γ
estΛ(s)ds.
Für eine Funktion Λ, die analytisch im Sektor | arg(s− c)| < π− ϕ mit ϕ < π2, c ∈ R ist
und dort die Bedingung
|Λ(s)| ≤M · |s|−γ, M <∞, γ > 0
erfüllt, kann der Integrationsweg Γ innerhalb dieses Sektors von ∞ · e−i(π−ϕ) nach∞ · ei(π−ϕ) gewählt werden [22, S. 130]. Durch Einsetzen dieser Formel in das Faltungs-integral und Vertauschen der Integrationsreihenfolge erhalten wir∫ t
0
f(τ)g(t− τ)dτ =1
2πi
∫Γ
Λ(s)
∫ t
0
esτg(t− τ)dτds. (2.74)
Durch einfache Rechnung kann überprüft werden, dass das innere Integral die Lösung desAnfangswertproblems
y′(t) = sy(t) + g(t)
y(0) = 0
52

2 Aspekte der fraktionalen Infinitesimalrechnung
ist. Dieses Anfangswertproblem kann näherungsweise durch lineare Zeitschrittverfahrenbeschrieben werden. Betrachte dazu wieder äquidistante Zeitpunkte tn = nh in [0, T ],n = 0, 1, ..., bT
hc mit dem Zeitschritt h. Die einfachste Möglichkeit eines solchen Verfah-
rens hat die Form
y0 = 0,yn − yn−1
h= syn + g(nh), n = 1, 2, . . . bT
hc
mit yn = y(nh) (Rückwärtsdifferenzen). Multiplikation dieser Gleichung mit ζn undSummation über alle n liefert
(1− ζ)︸ ︷︷ ︸=:δ(ζ)
y(ζ) = h(sy(ζ) + g(ζ)) =⇒ y(ζ) =
(δ(ζ)
h− s)−1
g(ζ) (2.75)
mit den formalen Reihen y(ζ) =∑∞
n=0 ynζn und g(ζ) =
∑∞n=0 g(nh)ζn. Durch Einset-
zen von (2.75) in (2.74) und mithilfe der CAUCHY’schen Integralformel folgt
1
2πi
∫Γ
Λ(s) =
(δ(ζ)
h− s)−1
g(ζ)ds = Λ
(δ(ζ)
h
)g(ζ).
Dieser Ausdruck ist auch für Rückwärts-Differenzen-Methoden höherer Ordnung, gege-ben durch δ(ζ), sinnvoll [22, S. 131], beispielsweise für
δ(ζ) =
p∑i=1
1
i(1− ζ)i, p ≤ 6. (2.76)
Bezeichnet man die Reihendarstellung von Λ(δ(ζ)h
)mit
Λ
(δ(ζ)
h
)=∞∑n=0
wn(h)ζn,
so folgt mithilfe der CAUCHY-Produkt-Formel
f(tn) =n∑k=0
wk(h)g((n− k)h). (2.77)
Dabei werden die Gewichte wk(h), k = 0, 1, 2, . . . , bThc durch Fast FOURIER Transfor-
mation aus Λ(δ(ζ)h
)approximiert. Für diese Näherung wird in [22, Thm. 5.2] noch nach-
folgende Fehlerabschätzung bewiesen. Bei gegebener rechter Seite g(t) von (2.71) mithomogenen Anfangsbedingungen f (k)(0) = 0, k = 0, . . . ,m − 1 und g(t) = tγ−1g(t),
53

2 Aspekte der fraktionalen Infinitesimalrechnung
sodass γ ∈ (0, 1) und g(t) ∈ Cp[0, T ] mit der Ordnung p aus der Differenzen-Methode(2.76), gilt
∣∣∣f(tn)− f(tn)∣∣∣ ≤ Cnα−1hα−1+γ 0 < γ ≤ p,
Cnα−1+γ−phα−1+γ p ≤ γ.
Dabei ist C für ein hinreichend kleines h0 unabhängig von h ∈ (0, h0] undn ∈ 1, 2, . . . , bT
hc.
Numerische Beispiele Die GRÜNWALD-LETNIKOV-Näherung (GLN), die Prädiktor-Korrektor-Methode mit einfacher Korrektoriteration (PKM) und die Faltungsquadraturmit p = 2 (FQ) wurden jeweils in MATLAB implementiert und anhand zweier Beispieleaus [12, Kap. 5] mit bekannten analytischen Lösungen für unterschiedliche Schrittweitenh getestet. Die unten angegebenen Fehler wurden dabei ermittelt durch
error =∣∣∣f(t)− f(t)
∣∣∣ .Beispiel 2.43:
a) Betrachte das AnfangswertproblemD
1/2∗ f(t) + f(t) = t2 + 2
Γ( 52
)t32
f(0) = 0(2.78)
mit der analytischen Lösung f(t) = t2. Dann liefern die oben angegebenen numeri-
schen Verfahren für t = 1 folgende Ergebnisse.
h error GLN error PKM error FQ
0, 1 0, 0275 0, 0203 0, 0014
0, 05 0, 0138 0, 0063 3, 58 · 10−4
0, 025 0, 0069 0, 0021 8, 93 · 10−5
0, 0125 0, 0035 0, 0007 2, 27 · 10−5
Tabelle 2.1: Fehler bei der numerischen Lösung des fraktionalen AWP (2.78) durchGRÜNWALD-LETNIKOV-Näherung (GLN), Prädiktor-Korrektor-Methode mit einfacherKorrektoriteration (PKM) und Faltungsquadratur mit p = 2 (FQ)
54

2 Aspekte der fraktionalen Infinitesimalrechnung
b) Für das AnfangswertproblemD2f(t) +D
3/2∗ f(t) + f(t) = t+ 1
f(0) = 1
f ′(0) = 1
(2.79)
lautet die analytische Lösung f(t) = t + 1. Die numerischen Lösungen ergeben für
t = 5 die unten angegebenen Abweichungen.
h error GLN error PKM error FQ
0, 1 0, 4445 0, 0064 8, 9 · 10−16
0, 05 0, 5302 0, 0022 4, 4 · 10−15
0, 025 0, 6719 7, 79 · 10−4 3, 6 · 10−15
0, 0125 0, 8912 2, 73 · 10−4 7, 1 · 10−15
Tabelle 2.2: Fehler bei der numerischen Lösung des fraktionalen AWP (2.79) durchGRÜNWALD-LETNIKOV-Näherung (GLN), Prädiktor-Korrektor-Methode mit einfacherKorrektoriteration (PKM) und Faltungsquadratur mit p = 2 (FQ)
In Beispiel 2.43 a) ergeben sich aus Tabelle 2.1 die weiter oben beschriebenen Fehlerter-me
errorGLN = O(h), errorPKM = O(h32 ), errorFQ = O(h2), (h→ 0).
In Beispiel 2.43 b) liefert die Prädiktor-Korrektor-Methode wieder den erwarteten Feh-lerterm errorPKM = O(h
32 ), (h → 0) und bei der Faltungsquadratur zeigen sich sogar
für alle Schrittweiten ähnliche Fehler in der Größenordnung der Maschinengenauigkeit.Bei der Implementierung der GRÜNWALD-LETNIKOV-Näherung scheint allerdings eineInstabilität vorzuliegen, deren Ursache noch nicht geklärt werden konnte. Insgesamt emp-fehlen die Beispiele eher die Nutzung der Faltungsquadratur und des Prädiktor-Korrektor-Verfahrens.
55

3 Fraktionales Stoffmodell
Zur Beschreibung des viskoelastischen Verhaltens von Beton wurde als rheologischesModell eine modifizierte Version des Vier-Parameter-Modells in (1.15) gewählt, welchesin Abbildung 3.1 zu sehen ist. Die Kombination eines MAXWELL-Elements mit einemfraktionalen KELVIN-Element stellt dabei eine additive Zerlegung in Basiskriechen in-klusive der spontanen Elastizität (MAXWELL-Element) und Übergangskriechen (fraktio-nales KELVIN-Element) dar. Zudem findet eine Unterteilung in deviatorischen und iso-
tropen Anteil statt. Dies wird durch Parallelschaltung zweier solcher Modelle realisiert(Abbildung 3.2).
Abbildung 3.1: Modellansatz Abbildung 3.2: Viskoeffekte: isotroperund deviatorischer Anteil
Das Modell in Abbildung 3.1 führt zu den Gleichungen
ε = εs1 + εd + εKelvin, εKelvin = εs2 = εf ,
σ = σs1 = σd = σKelvin, σKelvin = σs2 + σf .(3.1)
Dabei stehen die Indizes s, d, f für Feder, Dämpfer und fraktionales Element. Für dieeinzelnen Komponenten des Modells gelten nach (1.7), (1.8) und (1.12)
εs1 =σs1E1
, εs2 =σs2E2
, D1εd =σdη, σf = pDα
∗ εf . (3.2)
Durch Ableiten der Gleichungen in (3.1) und mit (3.2) erhält man wiederum
pD1Dα∗ εKelvin = D1σ − E2D
1εKelvin, (3.3)
D1εKelvin = D1ε− D1σ
E1
− σ
η. (3.4)
Um (3.4) in (3.3) einsetzen zu können, muss D1Dα∗ εKelvin = Dα
∗D1εKelvin gelten. Dies
ist nach Folgerung 2.35 erfüllt, falls D1εKelvin(0) = εKelvin(0) = 0 gilt. Die hier betrach-
56

3 Fraktionales Stoffmodell
teten Experimente genügen dieser Bedingung, da die Versuchskonfiguration im Gleich-gewicht ist, sodass die Deformation und deren Geschwindigkeit zu Beginn verschwindet.Dies führt schließlich zu der fraktionalen Differentialgleichung
pD1+α∗ ε+ E2D
1ε =p
E1
D1+α∗ σ +
E1 + E2
E1
D1σ +p
ηDα∗ σ +
E2
ησ (3.5)
mit homogenen Anfangswerten, d.h.
ε(0) = D1ε(0) = 0, σ(0) = D1σ(0) = 0. (3.6)
Das durch (3.5) und (3.6) gegebene fraktionale Anfangswertproblem wird in den folgen-den Abschnitten durch LAPLACE-Transformation nach (2.41) und (2.57) in eine alge-braische Gleichung überführt. Dabei sind ε∗(s) = Lε(t)(s) und σ∗(s) = Lσ(t)(s)die LAPLACE-Transformierten von ε = ε(t) bzw. σ = σ(t). Durch Lösung der al-gebraischen Gleichungen im LAPLACE-Raum und deren geschickte inverse LAPLACE-Transformation werden nachfolgend Lösungen des Anfangswertproblems bei gegebenemSpannungsverlauf σ = σ(t) (Kriechversuch) bzw. Dehnungsverlauf ε = ε(t) (Relaxati-onsversuch) angegeben.
3.1 Kriechversuch
Sei zunächst σ = σ(t) ein vorgegebener zeitlicher Spannungsverlauf. Setze
ε(t) = ε(t)− σ(t)
E1
. (3.7)
Durch Einsetzen von (3.7) in (3.5) erhalten wir die vereinfachte fraktionale Differential-gleichung
pD1+α∗ ε+ E2D
1ε = D1σ +p
ηDα∗ σ +
E2
ησ. (3.8)
LAPLACE-Transformation von (3.8) und Umstellen nach ε∗ liefert den Ausdruck
ε∗(s) =
(1
p
1
sα + E2p−1+
1
η
sα−1
sα + E2p−1+E2
ηp
s−1
sα + E2p−1
)︸ ︷︷ ︸
=:µ∗(s)
σ∗(s). (3.9)
Die inverse LAPLACE-Transformation von (3.9) ergibt sich aus Satz 2.24 und mit (3.7)folgt
ε(t) =1
E1
σ(t) +
∫ t
0
µ(τ)σ(t− τ)dτ,
µ(t) =1
ptα−1Eα,α
(−E2
ptα)
+1
ηEα,1
(−E2
ptα)
+E2
ηptαEα,1+α
(−E2
ptα).
(3.10)
57

3 Fraktionales Stoffmodell
In (3.10) ist µ(t) = L−1µ∗(s)(t) die invers LAPLACE-Transformierte von µ∗ = µ∗(s).Beim Betrachten der Gleichung von µ = µ(t) wird eine Singularität des ersten Sum-manden in t = 0 deutlich. Unter Verwendung der asymptotischen Näherung (2.34) derMITTAG-LEFFLER-Funktionen folgt für t→ 0
µ(t) =1
ptα−1
(1
Γ(α)+O(tα)
)(t→ 0)
=1
p
t−1+α
Γ(α)+O(t−1+2α) (t→ 0).
(3.11)
Damit ist µ für α > 0 integrierbar und die Lösung ε = ε(t) existiert für alle Zeiten, wennσ = σ(t) entsprechend gewählt wird. (In der Modellierung wird σ stückweise konstantoder linear sein, sodass bei der Integration keine Probleme auftreten.)
3.2 Relaxationsversuch
In ähnlicher Weise, jedoch analytisch etwas anspruchsvoller kann man bei gegebenemzeitlichen Verlauf der Dehnung ε = ε(t) die Spannung σ = σ(t) bestimmen. Aus (3.5)erhält man durch LAPLACE-Transformation und Umstellen nach σ∗ = σ∗(s)
σ∗(s) =as1+α + bs
cs1+α + ds+ esα + f︸ ︷︷ ︸=:ν∗(s)
ε∗(s)(3.12)
mit den Parametern
a = p, b = E2, c =p
E1
,
d =E1 + E2
E1
, e =p
η, f =
E2
η.
(3.13)
58

3 Fraktionales Stoffmodell
Zur Bestimmung der inversen LAPLACE-Transformation von ν∗ = ν∗(s) betrachte mandie Umformung (vgl. [27, S. 156f.])
ν∗(s) =as1+α + bs
cs1+α + ds· 1
1 + esα+fcs1+α+ds
=ac−1sα + bc−1
sα + c−1d· 1
1−(− c−1esα−1+fc−1s−1
sα+c−1d
)=ac−1sα + bc−1
sα + c−1d
∞∑n=0
(−1)n(c−1esα−1 + fc−1s−1
sα + c−1d
)n=∞∑n=0
(−1)nac−1sα + bc−1
(sα + c−1d)n+1
(c−1esα−1 + fc−1s−1
)n=∞∑n=0
(−1)nac−1sα + bc−1
(sα + c−1d)n+1
n∑k=0
(n
k
)(ec
)ksk(α−1)
(f
c
)n−ks−(n−k)
=∞∑n=0
(−fc
)n n∑k=0
(n
k
)(e
f
)ka
c
sαk−n+α
(sα + c−1d)n+1
+∞∑n=0
(−fc
)n n∑k=0
(n
k
)(e
f
)kb
c
sαk−n
(sα + c−1d)n+1
=a
c
(1− c−1d
sα + c−1d
)+∞∑n=1
(−fc
)n n∑k=0
(n
k
)(e
f
)ka
c
sαk−n+α
(sα + c−1d)n+1
+b
c
1
sα + c−1d+∞∑n=1
(−fc
)n n∑k=0
(n
k
)(e
f
)kb
c
sαk−n
(sα + c−1d)n+1 .
(3.14)
Die Konvergenz der in (3.14) gegebenen geometrischen Reihe ist gesichert für∣∣∣∣c−1esα−1 + fc−1s−1
sα + c−1d
∣∣∣∣ < 1.
Wegen ∣∣∣∣c−1esα−1 + fc−1s−1
sα + c−1d
∣∣∣∣ = O(
1
Re(s)
)(s→∞)
kann die Konvergenzbedingung erfüllt werden, falls Re(s) nur groß genug ist. Die inverseLAPLACE-Transformation der einzelnen Summanden erhält man wiederum aus Satz 2.24.Nach Satz 2.22 kann die Transformation dann gliedweise erfolgen. Damit folgt für dieinverse LAPLACE-Transformation ν = ν(t) von ν∗ = ν∗(s) und (3.12)
59

3 Fraktionales Stoffmodell
σ(t) =a
cε(t) +
∫ t
0
ν(τ)ε(t− τ)dτ
ν(t) =a
c
∞∑n=1
(−fc
)n1
n!
n∑k=0
(n
k
)(e
f
)ktα(n−k)+n−1E
(n)α,n−αk
(−dctα)
+b
c
∞∑n=1
(−fc
)n1
n!
n∑k=0
(n
k
)(e
f
)ktα(n−k+1)+n−1E
(n)α,n−α(k−1)
(−dctα)
+bc− adc2
tα−1Eα,α
(−dctα).
(3.15)
Die Konvergenz der Reihen in (3.15) folgt explizit aus Aussage 2.16. Außerdem ergibtSatz 2.22 wegen der absoluten Konvergenz von (3.14) auch die Konvergenz von (3.15)und sichert zudem, dass die Reihendarstellung von ν auch tatsächlich die inverse LA-PLACE-Transformation der Reihendarstellung von ν∗ in (3.14) ist.Bezüglich der Integrierbarkeit von ν müssen die Singularitäten in t = 0 betrachtet wer-den. Solche Singularitäten treten allerdings lediglich bei dem letzten Summanden von νauf. Dabei folgt mit (2.34)
ν(t) =bc− adc2
tα−1
(1
Γ(α)+O(tα)
)(t→ 0)
=bc− adc2
t−1+α
Γ(α)+O(t−1+2α) (t→ 0).
(3.16)
Folglich ist ν für α > 0 integrierbar und die Lösung σ = σ(t) existiert für alle Zeiten,wenn ε = ε(t) entsprechend gewählt wird. (Auch ε wird im Modell stückweise konstantoder linear sein.)
60

4 Vergleich mit experimentellen Werten
Um den Wert des oben beschriebenen Modells einschätzen zu können, wurden expe-rimentelle Ergebnisse aus den Kriechversuchen BGR 05019 [34], iBMB-10d [24], IfG414-K-M2-1-56-8 [42] und IfG-M2-TCC 1, 2, 3, 5 [43] sowie aus dem Relaxationsver-such BGR 05020 [35] verwendet. Die Modell-Implementierung, deren Anwendung aufdie gegebenen Daten sowie eine Auswertung der Ergebnisse werden nachfolgend vorge-nommen.
4.1 Implementierung
Die Gleichungen (3.10) und (3.15) wurden mithilfe von MATLAB implementiert um dieErgebnisse der Modellierung mit experimentellen Werten aus Kriech- und Relaxations-versuchen zu vergleichen. Der eigenständig implementierte Code ist im Anhang zu finden.Bei der Umsetzung sind folgende Dinge zu beachten:
- Die in den Experimenten realisierten Spannungsstufen bei den Kriechversuchen wur-den bei der Implementierung als Zusammensetzung von HEAVISIDE-Sprungfunktionendargestellt, da die Zeitintervalle der Spannungserhöhung zwischen zwei Stufen im Ver-hältnis zur Gesamtversuchszeit relativ kurz waren. Bei dem betrachteten Relaxations-versuch waren die Übergangszeiten zwischen den einzelnen Stufen konstanter Deh-nung deutlich höher. Daher wurde der zeitliche Dehnungsverlauf als Zusammensetzungstückweise linearer bzw. konstanter Funktionen approximiert.
- Zur numerischen Bestimmung der Funktionswerte der MITTAG-LEFFLER-Funktionenwurde die Funktion ml.m beschrieben in [14] verwendet. Die Ableitungen derMITTAG-LEFFLER-Funktionen wurden durch die in Satz 2.5 angegebene Rekursions-formel bestimmt. Diese Formel wurde in deriveml.m implementiert.
- In der Funktion eps_modell.m kann unter Vorgabe einer beliebigen Funktion fürσ(t) zu einem Array t von Zeitpunkten sowie der Parameter α, E1, E2, p, η der zeit-liche Verlauf ε(t) bestimmt werden. Zur numerischen Integration wurde hierbei dieMATLAB-Funktion integral.m verwendet. Da die Funktion µ eine schwache Sin-gularität in 0 besitzt (vgl. (3.11)), musste bei der Implementierung des Integrals eineMethode zur Integration mit Singularitäten (vgl. [38, Kap. 3.7 (3)]) verwendet werden.Dabei wird das Integral folgendermaßen aufgespalten.∫ t
0
µ(τ)σ(t− τ)dτ =
∫ δ
0
µ(τ)σ(t− τ)dτ +
∫ t
δ
µ1(τ)σ(t− τ)dτ δ > 0
Bei dem zweiten Summanden auf der rechten Seite liegt die Singularität außerhalb desIntegrationsintervalls und es muss bei der numerischen Integration keine Besonderheit
61

4 Vergleich mit experimentellen Werten
beachtet werden. Beim ersten Summanden wird einerseits berücksichtigt, dass σ eineStufenfunktion ist und in den gegebenen Experimenten für hinreichend kleines δ gilt
σ(t− τ) = σ(t) ∀τ ∈ (0, δ).
Andererseits kann µ für kleine δ mithilfe von (2.14) durch (3.11) abgeschätzt werden.∫ δ
0
µ(τ)σ(t− τ)dτ = σ(t)
∫ δ
0
(1
p
τ−1+α
Γ(α)+O(τ−1+2α)
)dτ
= σ(t)
(1
p
δα
Γ(1 + α)+O(δ2α)
)Die in den Kriechversuchen gegebenen Spannungen σ = σ(t) und die ermittelten Para-meterwerte für p aus den Kurvenanpassungen liefern
1
p
σ(t)
Γ(1 + α)≤ 10−3d−α ∀t > 0 ∀α ∈ (0, 1).
Weiterhin wurden für den Parameter α in allen Anpassungen Werte von α > 2 · 10−1
ermittelt. In der Implementierung wurde δ = 1 · 10−10d als untere Integrationsgrenzegesetzt. Damit liegt der Wert von
∫ δ0µ(t)σ(t−τ)dτ in der Größenordnung 10−5, sodass∫ δ
0µ(t)σ(t− τ)dτ vernachlässigt werden kann.
Des Weiteren wurden zwei numerische Verfahren aus Abschnitt 2.4.3 zur Lösung von(3.5) in Anwendung auf Kriechversuche in eps_num_wfft.m und eps_num_pc.mimplementiert und mit den Ergebnissen von eps_modell.m verglichen.
- In der Funktion sigma_modell.m kann unter Vorgabe einer Funktion ε = ε(t) undeines Arrays t von Zeiten sowie der gleichen Parameter α, E1, E2, p, η das Modell einerRelaxationskurve σ(t) ermittelt werden. Für die Integration ist dabei dieselbe Näherungwie in eps_modell.m anwendbar. Zudem wurde versucht, die in (3.15) befindlichenunendlichen Reihen durch endliche Summen bis zu einem gewissen Reihenglied abzu-schätzen. Aufgrund der hohen Rechenzeit konnte allerdings nur eine Näherung bis zumReihenglied N = 2 bestimmt werden. Die damit errechneten Werte werden mit den Er-gebnissen der Methoden aus Abschnitt 2.4.3 verglichen, die in sigma_num_wfft.m,sigma_num_pc.m und sigma_num_cq.m implementiert wurden.
- Die MATLAB-Funktion lsqcurvefit.m wurde zur Parameterbestimmung von α,E1, E2, p, η durch nichtlineare Kleinste-Quadrate-Anpassung des Modells an experi-mentelle Ergebnisse aus den Kriechversuchen verwendet und die gefundenen Parame-terwerte auf den Relaxationsversuch angewandt. Bei der Parameteranpassung wurdendie experimentellen Werte der Deformation sowie der Deformationsgeschwindigkeitaus allen angegebenen Kriechversuchen berücksichtigt.
62

4 Vergleich mit experimentellen Werten
4.2 Vorbereitung experimenteller Werte
Die experimentellen Werte aus den Kriechversuchen BGR 05019, iBMB-10d, IfG 414-K-M2-1-56-8 und dem Relaxationsversuch BGR 05020 wurden zunächst zur besserenVerwertbarkeit an eine glatte Funktion angepasst. Das Ziel war dabei eine geglättete Be-schreibung des gemessenen Verlaufs, ohne dabei durch die Modellwahl großen Einflussauf das gemessene Verhalten zu nehmen. Im Anschluss wurden die angepassten Mess-werte dem Modell entsprechend vorbereitet, wie nachfolgend beschrieben wird.In den BGR-Versuchen wurde auf das Versuchsmaterial ein bekannter axialsymmetri-scher Manteldruck pc (in der x1−x2−Ebene) sowie ein Axialdruck pax (in x3−Richtung)ausgeübt. Dies entspricht den zugehörigen Spannungswerten
σc = −pc, σax = −pax. (4.1)
Der sich ergebende Spannungstensor hat dann die Form
σ =
σc 0 0
0 σc 0
0 0 σax
. (4.2)
Das fraktionale Modell kann nun einzeln auf den isotropen Spannungsanteil σK und dieDeviatorspannung σD (Abbildung 3.2), die sich wie folgt bestimmen lassen, angewandtwerden.
σK =1
3(2σc + σax) σD = σ − σKI =
1
3(σc − σax)
1 0 0
0 1 0
0 0 −2
(4.3)
Die im Experiment ermittelten Spannungswerte sind dabei σK sowie die Vergleichs-
spannung nach VON MISES σV = |σc − σax|, die sich aus σD ergibt.
Analog erhält man für die Anteile εK und εD des Verzerrungstensors
ε =
εr 0 0
0 εr 0
0 0 εax
(4.4)
mit der Radialdehnung εr und der Axialdehnung εax
εK = 2εr + εax, εD = ε− 1
3εKI =
1
3(εr − εax)
1 0 0
0 1 0
0 0 −2
. (4.5)
63

4 Vergleich mit experimentellen Werten
Bei den betrachteten Versuchen wurden allerdings nur die Werte von εax und nicht von εrbestimmt. Für den Kriechversuch BGR 05019 werden (4.3) und (4.5) in (3.10) eingesetztund man erhält die beiden Gleichungen
2εr(t) + εax(t) =σK(t)
E1
+
∫ t
0
µ(τ)σK(t− τ)dτ, (4.6)
εr(t)− εax(t) =σV (t)
E1
+
∫ t
0
µ(τ)σV (t− τ)dτ. (4.7)
Aus (4.6) und (4.7) lässt sich εr eliminieren und es folgt
εax(t) =1
3
(σK(t)− 2σV (t)
E1
+
∫ t
0
µ(τ)(σK(t− τ)− 2σV (t− τ))dτ
). (4.8)
Analog setzt man beim Relaxationsversuch (4.3) und (4.5) in (3.15) ein. Im Versuch BGR05020 ist σc = 0. Dadurch vereinfachen sich die Gleichungen und man erhält nach Eli-minierung von εr
σax(t) =9
7
(E1εax(t) +
∫ t
0
ν(t)εax(t− τ)dτ
). (4.9)
Demzufolge können die Wertepaare (εax(t),σK(t)−2σV (t)
3) bzw. (σax(t),
97εax(t)) auch in
die numerischen Methoden aus Abschnitt 2.4.3 angewandt auf (3.5) eingesetzt werden.Die IfG-Kriechversuche sind isotrope Druck- (IfG 414-K-M2-1-56-8) bzw. Zugversuche(IfG-M2-TCC), bei denen die prozentuale Volumendehnung εV bestimmt wurde. Dabeihat der Verzerrungstensor die Form
ε =
εax 0 0
0 εax 0
0 0 εax
, εax =1
3εV .
Die für die Versuche angegebene Spannung σ ist dabei für alle Raumrichtungen gleichgroß, sodass εax in die Gleichung (3.10) eingesetzt werden kann.Bei dem uniaxialen Zugversuch iBMB-10d können die angegebenen Messwerte der Deh-nung ε schließlich direkt in (3.10) eingesetzt werden, da sich die Spannungs- und Verzer-rungstensoren in diesem Versuch zu skalaren Größen vereinfachen.
64

4 Vergleich mit experimentellen Werten
4.3 Ergebnisse
4.3.1 Kriechversuche
Bei der Bestimmung der Parameter des fraktionalen Modells aus der Anpassung an dieangegebenen Kriechversuche wurden die Werte
α = 0, 4870, E1 = 5, 9580GPa, E2 = 3, 7671GPa,
p = 36, 2191GPa · dα, η = 6, 7521 · 103GPa · d(4.10)
ermittelt. Beim Einsetzen dieser Parameter in (3.10) bzw. in eps_modell.m wurdenzeitliche Dehnungsverläufe berechnet, deren Anstiege für alle betrachteten Kriechver-suche gute Übereinstimmungen mit den experimentellen Ergebnissen zeigen. Im Nach-hinein wurde für die einzelnen Versuche der Parameter E1, der lediglich eine Verschie-bung der Dehnungs-Zeit-Diagramme bezüglich der Ordniate bewirkt, neu angepasst. Inder nachfolgenden Tabelle sind die ermittelten Werte für E1 zusammen mit dem jewei-ligen wirksamen Betonalter teff zu Versuchsbeginn dargestellt. Bei der Bestimmung deswirksamen Betonalters wird berücksichtigt, dass die Hydratation des Betons bei höhe-ren Lagerungstemperaturen schneller erfolgt. Das wirksame Betonalter entspricht gera-de dann dem wahren Betonalter, wenn der Beton durchgängig bei 20C gelagert wurde[2, S. 9 + S. 60].
Versuch teff [d] E1 [GPa]
iBMB-10d 10 2,85IfG-414-K-M2-1-56-8 56 14,4
IfG-M2-TCC 1 + 2 ca. 600 15,3IfG-M2-TCC 3 + 5 ca. 600 3,5
BGR 05019 ca. 800 6,35
Tabelle 4.1: Parameterwerte von E1 für die Kriechversuche in Abängigkeit vom Betonalter
Wünschenswert wäre ein erkennbarer Zusammenhang zwischen wirksamem Betonalterund dem Wert von E1. Dieser ist allerdings anhand der gegebenen Werte nicht zu erken-nen, da in Anwendung des fraktionalen Modells selbst Versuche des gleichen wirksamenAlters stark unterschiedliche Werte in E1 aufweisen. Basierend auf der Hydratation vonBeton wird eine Zunahme der Steifigkeit E1 bei höherem wirksamen Betonhalter zu Ver-suchsbeginn erwartet. Diese Entwicklung ist in den ersten drei Zeilen in Tabelle 4.1 auchzu sehen. Eine Ursache für die niedrigeren Werte von E1 in den beiden letzten Zeilender Tabelle könnte bei den unterschiedlichen Versuchsbedingungen liegen. Während dieBetonproben bei den Versuchen iBMB-10d und IfG-414-K-M2-56-8 im Labor gemischtwurden, sind die IfG-TCC- und BGR-Versuche an Bohrkernen aus Versuchsbauwerken
65

4 Vergleich mit experimentellen Werten
durchgeführt worden. Die Größe der Maschinen zur Betonherstellung untertage führt da-bei zu einer stärkeren Heterogenität des Versuchsmaterials und einer ortsabhängigen Stei-figkeit des Betons innerhalb des Bauwerks, während unter Laborbedingungen deutlichkleinere, homogenere Proben hergestellt werden können.Die Graphen des zeitlichen Dehnungs- und Dehnungsgeschwindigkeitsverlaufs aus Ex-periment und Modell werden für die einzelnen Kriechversuche in den Abb. 4.1 - 4.5 ge-genübergestellt. Bei den IfG-M2-TCC-Versuchen ist noch zu beachten, dass die Versuche1 und 2 bzw. 3 und 5 jeweils mit gleichem Spannungsverlauf bei Beton gleichen Altersdurchgeführt wurden, sodass für die zeitlichen Dehnungsverläufe jeweils Mittelwerte derErgebnissen aus 1 und 2 bzw. 3 und 5 betrachtet werden.
66

4 Vergleich mit experimentellen Werten
0 1 2 3 4 5 6 7 8 9 10t [d]
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
0 1 2 3 4 5 6 7 8 9 10t [d]
10-3
10-2
10-1
100
101
·d)]
Abbildung 4.1: Dehnung (oben) und Dehnungsgeschwindigkeit (unten) über der Zeit fürexperimentelle Ergebnisse aus dem Versuch iBMB-10d (gepunktete Linie) und der Para-meteranpassung des fraktionalen Modells für E1 = 2, 85GPa (durchgezogene Linie)
67

4 Vergleich mit experimentellen Werten
0 10 20 30 40 50 60 70 80t [d]
-0.5
-0.45
-0.4
-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0 10 20 30 40 50 60 70 80t [d]
-102
-101
-100
-10-1
-10-2
-10-3
·d)]
Abbildung 4.2: Dehnung (oben) und Dehnungsgeschwindigkeit (unten) über der Zeit fürexperimentelle Ergebnisse aus dem Versuch IfG 414-K-M2-1-56-8 (gepunktete Linie)und der Parameteranpassung des fraktionalen Modells für E1 = 14, 4GPa (durchgezo-gene Linie)
68

4 Vergleich mit experimentellen Werten
0 10 20 30 40 50 60 70 80 90 100t [d]
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0 10 20 30 40 50 60 70 80 90 100t [d]
10-4
10-3
10-2
10-1
100
101
102
·d)]
0 10 20 30 40 50 60 70 80 90 100t [d]
10-4
10-3
10-2
10-1
100
101
102
·d)]
Abbildung 4.3: Dehnung (oben) und Dehnungsgeschwindigkeit (unten links TCC 1, rechtsTCC 2) über der Zeit für experimentelle Ergebnisse aus den Versuchen IfG-M2-TCC1 und 2 (gepunktete Linie) und der Parameteranpassung des fraktionalen Modells fürE1 = 15, 3GPa (durchgezogene Linie)
69

4 Vergleich mit experimentellen Werten
0 20 40 60 80 100 120 140 160t [d]
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 20 40 60 80 100 120 140 160t [d]
10-5
10-4
10-3
10-2
10-1
100
101
102
·d)]
0 20 40 60 80 100 120 140 160t [d]
10-5
10-4
10-3
10-2
10-1
100
101
102
·d)]
Abbildung 4.4: Dehnung (oben) und Dehnungsgeschwindigkeit (unten links TCC 3, rechtsTCC 5) über der Zeit für experimentelle Ergebnisse aus den Versuchen IfG-M2-TCC3 und 5 (gepunktete Linie) und der Parameteranpassung des fraktionalen Modells fürE1 = 3, 5GPa (durchgezogene Linie)
70

4 Vergleich mit experimentellen Werten
0 100 200 300 400 500 600t [d]
0
1
2
3
4
5
6
0 100 200 300 400 500 600t [d]
10-4
10-3
10-2
10-1
100
101
102
·d)]
Abbildung 4.5: Dehnung (oben) und Dehnungsgeschwindigkeit (unten) über der Zeit fürexperimentelle Ergebnisse aus dem Versuch BGR 05019 (gepunktete Linie) und der Pa-rameteranpassung des fraktionalen Modells für E1 = 6, 35GPa (durchgezogene Linie)
71

4 Vergleich mit experimentellen Werten
Insgesamt stimmen die experimentellen Ergebnisse mit dem Modell bezüglich E1 ausTabelle 4.1 und den restlichen Parametern aus (4.10) für alle Kriechversuche gut überein.Zur genaueren Analyse werden die mittlere absolute Abweichung ∆abs und die mittlererelative Abweichung ∆rel für die einzelnen Versuche in Tabelle 4.2 betrachtet.
Versuch ∆abs [mm/m] ∆rel [%]
iBMB-10d 0,0154 10,24IfG-414-K-M2-1-56-8 0,0307 12,81
IfG-M2-TCC 1 + 2 0,0150 6,37IfG-M2-TCC 3 + 5 0,0613 11,56
BGR 05019 0,0970 14,97
Tabelle 4.2: Absolute und relative Abweichung bei der Anpassung des Modells an dieKriechversuche bezüglich des zeitlichen Dehnungsverlaufs
Die experimentellen Werte der IfG-M2-TCC-Versuche wurden ohne vorherige Glättungverwendet. Es sind in Abbildung 4.3 und 4.4 gute Anpassungen des Modells an die Deh-nungsverläufe zu erkennen, allerdings fluktuieren die ermittelten Dehnungsgeschwindig-keiten sehr stark um das Modellergebnis. Um einen Vergleich des fraktionalen Modellszu den klassischen rheologischen Modellen herzustellen, wurde für den Dehnungsverlaufdes Versuchs BGR 05019 auch eine Parameteranpassung für ein Modell mit einem klas-sischen Dämpferelement mit Viskosität η′ anstelle des fraktionalen Elementes im KEL-VIN-Teil durchgeführt. Dabei wurden die Parameter
E1 = 5, 7320GPa, E2 = 7, 6978GPa,
η = 3, 4914 · 103GPa · d, η′ = 11, 8069GPa · d(4.11)
ermittelt. Die zugehörige Kurvenanpassung ist in Abbildung 4.6 zu sehen. Dabei ergebensich Abweichungen zu den experimentellen Daten von
∆abs = 0, 1557mm/m ∆rel = 9, 79%.
Diese Abweichungen liegen in der gleichen Größenordnung wie die Abweichungen desfraktionalen Modells von den Versuchsdaten aus BGR 05019. Allerdings ist in Abbil-dung 4.6 eine qualitativ deutlich schlechtere Anpassung der Dehnungsgeschwindigkeitim Vergleich zu Abbildung 4.5 zu erkennen.
72

4 Vergleich mit experimentellen Werten
0 100 200 300 400 500 600t [d]
0
1
2
3
4
5
6
0 100 200 300 400 500 600t [d]
10-4
10-3
10-2
10-1
100
101
102
·d)]
Abbildung 4.6: Dehnung (oben) und Dehnungsgeschwindigkeit (unten) über der Zeit fürexperimentelle Ergebnisse aus dem Versuch BGR 05019 (gepunktete Linie) und der Pa-rameteranpassung des klassischen Modells (durchgezogene Linie)
73

4 Vergleich mit experimentellen Werten
Zur Evaluation der numerischen Verfahren aus Abschnitt 2.4.3 werden diese bezüglichder Parameter (4.10) und des Spannungsverlaufs aus dem Versuch BGR 05019 ausge-wertet und mit den Ergebnissen der Berechnung mittels eps_modell.m verglichen. Zuden einzelnen Verfahren werden nachfolgend noch einige Bemerkungen gemacht. DieGRÜNWALD-LETNIKOV-Näherung liefert bei Anwendung auf (3.5) die Gleichung
ph−(1+α)
n∑j=0
w(1+α)j ε(t− jh) + E2
ε(t)− ε(t− h)
h
=p
E1
h−(1+α)
n∑j=0
w(1+α)j σ(t− jh) +
E1 + E2
E1
· σ(t)− σ(t− h)
h
+p
ηh−α
n∑j=0
w(α)j σ(t− jh) +
E2
ησ(t).
(4.12)
Betrachtet wird nun der bei Kriechversuchen gegebene Spannungsverlauf σ = σ(t) zuden diskreten Zeiten tkk=0,...,N ⊂ [0, T ] mit Schrittweite h in N = bT
hc Zeitschritten,
d.h. tk = kh, k = 0, . . . , N . Dann erhält man aus (4.12) durch Umstellen die Werteεk := ε(tk) der Dehnung nach dem k-ten Zeitschritt (k = 0, . . . , N ) durch
ε0 = ε1 = ε(0),
εk =1
p+ E2hα
[−p
k∑j=1
w(1+α)j εk−j + E2h
αεk−1 +p
E1
k∑j=0
w(1+α)j σ((k − j)h)
+E1 + E2
E1
hα(σ(kh)− σ((k − 1)h) +p
ηh
k∑j=0
w(α)j σ((k − j)h) +
E2
ηh1+ασ(kh)
],
k = 2, . . . , N.
(4.13)
Das Verfahren (4.13) ist in der Funktion eps_num_wfft.m implementiert. Des Wei-teren wurde das Prädiktor-Korrektor-Verfahren zur Anwendung auf (3.5) zur Ermittlungvon Kriechkurven in eps_num_pc.m implementiert. Dazu musste (3.5) noch in das fol-gende fraktionale Differentialgleichungssystem überführt werden.
D1ε1 = ε2 ε1(0) = 0,
Dα∗ ε2 = 1
p
(pE1D1+α∗ σ + E1+E2
E1D1σ + p
ηDα∗ σ + E2
ησ − E2ε2
)ε2(0) = 0
(4.14)
Die Gleichungen in (4.14) haben die Form (2.66) und können sukzessiv mittels (2.70)gelöst werden. Man erhält schließlich die numerische Lösung ε = ε1.Die beiden angegebenen Verfahren wurden auf den Versuch BGR 05019 angewandt.Die zugehörigen Ergebnisse sind in Abbildung 4.7 zu sehen. Dabei ist eine deutlicheÜbereinstimmung mit den Ergebnissen basierend auf (3.10) zu beobachten. Hierbei muss
74

4 Vergleich mit experimentellen Werten
allerdings erwähnt werden, dass beide Verfahren sehr stark von der Schrittweite h ab-hängig sind. Wird die Schrittweite zu klein gewählt, so kommt es ab einem gewissenZeitpunkt zum Abflachen der Kurven gegenüber den Modell-Ergebnissen. Dies ist mög-licherweise auf Auslöschung in (4.13) und (2.70) zurückzuführen. Zudem erzielt dieGRÜNWAD-LETNIKOV-Näherung für Schrittweiten h > 0, 1d bei Vorgabe von Anfangs-werten ε(0) > 0 bessere Ergebnisse. Die Wahl der Anfangswerte erfolgt jedoch lediglichim Sinne einer guten Anpassung und folgt keinem physikalischen Prinzip.
0 100 200 300 400 500 600t [d]
0
1
2
3
4
5
6
modell
pc 1,5
wfft 0,5
pc 0,5
wfft 0,05
Abbildung 4.7: Vergleich der Ergebnisse der Methoden zur numerischen Lösung von(3.5) (GRÜNWALD-LETNIKOV-Methode [h = 0, 5d rot; h = 0, 05d gelb], Prädiktor-Korrektor-Verfahren [h = 1, 5d grün; h = 0, 5d blau]) mit dem Modell-Ergebnis[schwarz] in Anwendung auf den Versuch BGR 05019
4.3.2 Relaxationsversuch
Die Parameter aus (4.10) wurden als Grundlage für den Vergleich der verschiedenen Be-rechnungsverfahren mit den experimentellen Ergebnissen aus dem RelaxationsversuchBGR 05020 verwendet. Für die Anwendbarkeit des Prädiktor-Korrektor-Verfahrens wares allerdings notwendig, die Ableitungsordnung α geringfügig zu verändern [11, Kap. 4].
75

4 Vergleich mit experimentellen Werten
Daher wurde für die nachfolgend beschriebenen Berechnungen α = 0, 5 gewählt. ZurAnwendung der GRÜNWALD-LETNIKOV-Näherung wird (4.12) überführt in
σ0 = σ1 = σ(0)
σk =1
pη + (E1 + E2)ηhα + pE1h+ E1E2h1+α
·
[pE1η
k∑j=0
w(α)j ε((k − j)h) + ηE1E2h
α(ε(kh)− ε((k − 1)h))
−pηk∑j=1
w(α)j σk−j + (E1 + E2)ηhασk−1 − pE1
k∑j=1
w(α)j σk−j
]k = 2, . . . , N.
(4.15)
Dabei repräsentiert σk := σ(tk) den Spannungswert nach dem k-ten Zeitschritt(k = 0, . . . , N ). Dieses Verfahren ist in der Funktion sigma_num_wfft.m implemen-tiert. Zur Anwendung des Prädiktor-Korrektor-Verfahrens wurde (3.5) in das fraktionaleDifferentialgleichungssystem
D1/2∗ σ1 = σ2 σ1(0) = 0,
D1/2∗ σ2 = σ3 σ2(0) = 0,
D1/2∗ σ3 = −E1E2
pησ1 − E1
ησ2 − E1+E2
pσ3 + E1D
3/2∗ ε+ E1E2
pD1ε σ3(0) = 0
(4.16)
überführt und dieses durch Anwendung von (2.70) in sig_num_pc.m gelöst. Schließ-lich wurde auch die Faltungsquadratur für die Relaxation in sig_num_cq.m program-miert. Dabei ergeben sich aus (3.5) die Funktionen g und Λ in (2.71) bzw. (2.72) zu
g(t) = pD1+α∗ ε(t) + E2D
1ε(t),
Λ(s) =1
pE1s1+α + E1+E2
E1s+ p
ηsα + E2
η
(4.17)
und es wurde für das lineare Zeitschrittverfahren δ die Ordnung p = 2 gewählt. Die Er-gebnisse dieser drei Methoden sowie von sigma_modell.m in Anwendung auf denDehnungsverlauf aus dem Versuch BGR 05020 sind in Abbildung 4.8 gegenübergestellt.Zudem sind zum Vergleich die experimentellen Ergebnisse aus BGR 05020 mit ange-geben. Dabei wird deutlich, dass die Ergebnisse von sigma_modell.m trotz der Nä-herung der Reihendarstellung (3.15) der Lösung sehr gut mit den Ergebnissen der dreianderen Methoden übereinstimmen. Die Prädiktor-Korrektor-Methode und die Faltungs-quadratur verhalten sich abhängig von der Schrittweite in etwa gleich. Für h = 0, 5d
gibt es dabei die beste Übereinstimmung mit den anderen Methoden. Für h < 0, 5d
kommt es ähnlich wie bei den Methoden für die Kriechversuche zur starken Abflachung
76

4 Vergleich mit experimentellen Werten
der Kurven und für h > 0, 5d gibt es gute Übereinstimmungen mit den anderen Metho-den in Bereichen konstanter Dehnung. Allerdings werden die Spannungsspitzen bei denDehnungssprüngen unterschätzt. Die GRÜNWALD-LETNIKOV-Näherung zeigt die besteÜbereinstimmung mit der Modell-Implementierung, allerdings auch hier nur bei Vorga-be gewisser Anfangswerte σ(0) > 0. Betrachtet man die experimentellen Ergebnisse ausBGR 05020, so werden doch deutlichere Abweichungen zu den Berechnungsverfahrenmit den Parametern (4.10) mit der Änderung α = 0, 5 deutlich. Diese Abweichungen tre-ten jedoch vor allem bei der Höhe der Spannungssprünge auf, wohingegen die Anstiegein den Bereichen konstanter Dehnung gute Übereinstimmungen mit den Ergebnissen ausBGR 05020 zeigen.
0 10 20 30 40 50 60 70 80 90 100t [d]
-5
0
5
10
15
20
25
30
σ [M
Pa]
σ05020σmodellσpcσcqσwfft
Abbildung 4.8: Vergleich der Ergebnisse der Methoden zur numerischen Lösung von (3.5)(GRÜNWALD-LETNIKOV-Methode [h = 0, 2d gelb], Prädiktor-Korrektor-Verfahren[h = 0, 5d grün], Faltungsquadratur [h = 0, 5d rot]) mit dem Modell-Ergebnis[schwarz] sowie den experimentellen Werten [gepunktet] bzgl. des Versuchs BGR 05020
77

5 Resümee und Ausblick
Auf der Grundlage physikalischer Überlegungen wurde ein rheologisches Modell zurBeschreibung des viskoelastischen Verhaltens von Beton unter Nutzung fraktionalerInfinitesimalrechnung entwickelt. Dabei wurden einige Aussagen zur Theorie frak-tionaler Integrale und Ableitungen zusammengestellt. Insbeondere zur Theorie derMITTAG-LEFFLER-Funktionen wurde neben bekannten Sätzen und Eigenschaften aucheine Aussage zur Bestimmung höherer Ableitungen dieser Funktionen (Satz 2.5) undeine Konvergenzaussage zu einer speziellen Form von unendlichen Reihen in MITTAG-LEFFLER-Funktionen (Aussage 2.16) getroffen und dabei umfassend die Eigenschaft dervollständigen Monotonie der modifizierten MITTAG-LEFFLER-Funktion e = e(t) heraus-gearbeitet. Ein großer Bestandteil der vorliegenden Arbeit war dann die Anwendung dertheoretischen Ergebnisse auf die fraktionale Differentialgleichung (3.5). Die Aufstellungdieser Gleichung erfolgte unter Berücksichtigung rheologischer Gesetzmäßigkeiten undzu deren analytischer Lösung wurde die LAPLACE-Transformation-Methode umfassendstudiert. Desweiteren wurden drei numerische Lösungsmethoden dargestellt und imple-mentiert.
Im praktischen Teil der Arbeit wurde das entwickelte Modell mit experimentellenDaten aus Zug- und Druckversuchen am Beton M2 verglichen. Die Ergebnisse emp-fehlen durchaus ein weiteres Verfolgen des fraktionalen Ansatzes zur Beschreibungdes viskoelastischen Verhaltens von Beton. Dazu bedarf es weiterer Vergleiche expe-rimenteller Daten mit den Modellergebnissen unter Berücksichtigung des wirksamenBetonalters zu Versuchsbeginn sowie der Zeitskala der Versuchsdauer. Zudem müssendie numerischen Methoden weiter evaluiert und die Abhängigkeit ihrer Ergebnisse vonden Versuchsdaten bestimmt werden.
Weiterhin ist zu untersuchen, welches Potential in der Anpassung des bisherigenModells steckt. Der Parameter E1 wurde bereits als altersabhängige Größe eingeführt.Ein möglicher Ansatz wäre die Annahme eines ebenfalls zeitabhängigen Parametersη, da sich dieser wie auch E1 bei vielen experimentellen Ergebnissen aus Kriech- undRelaxationsversuchen als vom Betonalter abhängige Größe gezeigt hat. Eine Darstellungdieser beiden Größen alsE1 = E1(t) und η = η(t) führt zu einer veränderten fraktionalenDifferentialgleichung mit zeitabhängigen Koeffizienten. Auch für diesen Fall existierteine Lösungstheorie und wieder ist der Einsatz numerischer Lösungsmethoden zuprüfen. Jedoch entstehen bereits beim Aufstellen der Differentialgleichung Probleme,da eine fraktionale LEIBNIZ-Regel [10, S.59] angewandt werden muss. Eine andereMöglichkeit wäre die Einführung einer zeitabhängigen Ableitungsordnung α zur Berück-sichtigung des Betonalters. Auch zu fraktionalen Differentialgleichungen mit variabler
78

5 Resümee und Ausblick
Ableitungsordnung gibt es bereits theoretische Ansätze (vgl. [9], [30]). Die Ergebnisseeines modifizierten viskoelastischen Modells sind dann in das gesamte Stoffmodellzu integrieren. Dabei ist u.U. auch eine Temperaturabhängigkeit des viskoelastischenVerhaltens zu berücksichtigen. Um das allgemeine Spannungs-Dehnungsverhalten vonBeton beschreiben zu können und über die Spezialfälle des Kriechens und der Relaxationhinauszugehen, ist ein Finite-Elemente-Modell aufzustellen und zu implementieren. Dieswurde für Polymere bereits in [4] sowie [32] erfolgreich durchgeführt.
79

Kurzzusammenfassung
In dieser Arbeit wird ein rheologisches Modell zur Beschreibung des viskoelastischenVerhaltens von Beton unter Anwendung fraktionaler Infinitesimalrechnung vorgestellt.Es soll später in ein Gesamtstoffmodell für den Salzbeton M2 integriert werden um denNachweis der Rissbeschränkung des Betons zu führen und den Einbau in Endlagern fürAbfallstoffe in tiefen geologischen Schichten sichern.Das Modell wird unter physikalischen Gesichtspunkten motiviert und zugehörige theo-retische Resultate der fraktionalen Analysis zusammengestellt. Dabei wird insbeson-dere auf Eigenschaften der MITTAG-LEFFLER-Funktionen eingegangen. Diese tretenbei der Lösung fraktionaler Differentialgleichungen unter Verwendung von LAPLACE-Transformationen auf. Diese Lösungstheorie wird zur analytischen Lösung einer fraktio-nalen Differentialgleichung bezüglich des oben genannten Modells verwendet. Zudemwerden auch numerische Lösungsmöglichkeiten beschrieben und angewandt. Die Ergeb-nisse werden mit experimentellen Daten aus sogenannten Kriech- und Relaxationsver-suchen bezüglich des Betons M2 verglichen und dadurch die Tragfähigkeit des Modellssowie der zugehörigen mathematischen Methoden eingeschätzt.
80

Anhang
A Nomenklatur
An dieser Stelle werden die in der Arbeit verwendeten Symbole mit ihrer typischen Ver-wendung aufgelistet.
VariableTypische Variable in den verwendeten Funktionen:
• t [Zeit, Integrationsvariable]
• s [Variable im LAPLACE-Raum]
• τ [Integrationsvariable]
• h [Schrittweite in num. Verfahren]
• α, β, γ [Ordnung fraktionaler Ablei-tungen]
Vektoren und Tensoren
• a, x [Vektoren]
• F,C,T sowie I (Einheitstensor), σ (Spannungstensor) und ε (linearisierter Verzer-rungstensor) [Tensoren und insbesondere Matrizen]
Funktionen
• f, g, h, λ, µ, ε, ν, σ [typische Symbole für Funktionen]
• F,G,H,Λ, µ∗, ε∗, ν∗, σ∗ [zugehörige Laplace-Transformierte]]
• b·c [Floor-Funktion, bxc = maxz ∈ Z : z ≤ x]
• d·e [Ceiling-Funktion, dxe = minz ∈ Z : z ≥ x]
• Γ [Gamma-Funktion]
• Eα [MITTAG-LEFFLER-Funktion der Ordnung α]
• Eα,β [zwei-parametrige MITTAG-LEFFLER-Funktion]
• e [modifizierte MITTAG-LEFFLER-Funktion, e(t) = Eα,β(λtα),α ∈ [0, 1], β ≥ α, λ > 0]
• o,O [LANDAU-Symbole]f ∈ o(g) (x→ a)⇔ lim
x→a
∣∣∣f(x)g(x)
∣∣∣ = 0
f ∈ O(g) (x→ a)⇔ limx→a
∣∣∣f(x)g(x)
∣∣∣ = const. <∞
• tr [Spur eines Tensors]
• Tj[f ], Rj[f ] [Taylor-Polynom bzw. Restglied vom Grad j entwickelt um 0]
i

Anhang
Mengen
• C[a, b] [Menge aller im Intervall [a, b] stetigen Funktionen]
• Ck[a, b] [Menge aller im Intervall [a, b] k-fach stetig differenzierbaren Funktionen]
• L1[a, b] [Menge aller über [a, b] integrierbarer Funktionen]
• N [Menge der natürlichen Zahlen]
• N0 = N ∪ 0
• R [Menge der reellen Zahlen]
• R+ [Menge der strikt positiven reellen Zahlen]
• Z [Menge der ganzen Zahlen]
• Dr = x ∈ C : |x| ≤ r
• CM [Menge der vollständig monotonen Funktionen]
• BF [Menge der BERNSTEIN-Funktionen]
Operatoren
• Dn [n ∈ N, n-facher Differentialoperator Dnf(t) = f (n)(t)]
• Dα [α ∈ R+, fraktionaler RIEMANN-LIOUVILLE-Differentialoperator]
• Dα∗ [α ∈ R+, fraktionaler CAPUTO-Differentialoperator]
• DαGL [α ∈ R+, fraktionaler GRÜNWALD-LETNIKOV-Differentialoperator]
• Jα [fraktionales RIEMANN-LIOUVILLE-Integral]
• L,L−1 [LAPLACE- und inverse LAPLACE-Transformation]
ii

Anhang
B MATLAB-Quellcode
Quellcode 1: eps_modell.m
1 function eps = eps_modell(t,sigma,alpha,E_1,E_2,p,eta)
2 %Funktion zur Bestimmung des zeitlichen Dehnungsverlaufs
eps=epsilon(t)
3 %aus dem fraktionalen Modell (Gleichung (3.10)) zu den Zeiten t
4 %bei bekannter Spannungsfunktion sigma=sigma(t)
5 %mit gegebenen Parametern alpha, E_1, E_2, p, eta
6
7 %untere Integrationsgrenze
8 a = 1e-10;
9
10 %Berechnung der Funktionswerte von mu nach (3.10) mithilfe der
Funktion
11 %ml.m von R. Garrappa (MATLAB File Exchange 48154)
12 mu = @(s) 1/p.*s.^(alpha-1).*ml(-E_2/p.*s.^alpha,alpha,alpha)...
13 +1./eta.*ml(-E_2/p.*s.^alpha,alpha,1)...
14 +E_2./(eta.*p).*s.^alpha...
15 .*ml(-E_2/p.*s.^alpha,alpha,1+alpha);
16
17
18 %%%%% Fortschrittsanzeige
19 q = waitbar(0,’Please wait...’);
20 %%%%%
21
22 %numerische Integration
23 eps=zeros(1,length(t));
24 integrand = @(s,T) mu(s).*sigma(T-s);
25 for k = 1:length(t)
26 eps(k) = sigma(t(k))./E_1...
27 + integral(@(s) integrand(s,t(k)),a,t(k));
28 %%%%%
29 waitbar(k/length(t),q,sprintf(’Loading...%.2f%%’,k/length(t)*100));
30 %%%%%
31 end
32
33 %Funktions-Plot
34 plot(t,eps);
35 %%%%%
36 delete(q)
iii

Anhang
Quellcode 2: w_fft.m
1 function w = w_fft(alpha,N)
2 %Funktion zur Bestimmung der Koeffizienten fuer die
Gruenwald-Letnikov-
3 %Naeherung mittels Fast Fourier Transformation
4
5 n = 0:N;
6 phi = 2*pi.*n./N;
7 y = (1-exp(-1i.*phi)).^alpha;
8 w=real(ifft(y));
9 end
Quellcode 3: eps_num_wfft.m
1 function eps =
eps_num_wfft(t_end,sig,alpha,E_1,E_2,p,eta,eps_0,h)
2 %Funktion zur Bestimmung des zeitlichen Dehnungsverlaufs
eps=epsilon(t)
3 %basierend auf der Gruenwald-Letnikov-Naeherung (Gleichung
(4.14))
4 %zu den Zeiten t mit Schrittweite h
5 %bei bekannter Spannungsfunktion sigma=sigma(t)
6 %mit gegebenen Parametern alpha, E_1, E_2, p, eta und
Anfangswert eps_0
7
8 %%%%% Fortschrittsanzeige
9 q = waitbar(0,’Please wait...’);
10 %%%%%
11
12 %Zeitschritte
13 t=0:h:t_end;
14 %n = floor(t_end/h);
15
16 %Fourier-Koeffizienten
17 w_1 = w_fft(1+alpha,1e6);
18 w_2 = w_fft(alpha,1e6);
19
20 eps = zeros(size(t));
21 %Anfangswerte
22 eps(1) = eps_0;
23 eps(2) = eps_0;
24
iv

Anhang
25 for k = 2:length(t)-1
26 eps(k+1) = (-p*sum(w_1(2:k+1).*eps(k-(0:(k-1))))...
27 +E_2*h^alpha*eps(k)...
28 +p/E_1*sum(w_1(1:k+1).*sig((k-(0:k)).*h))...
29 +(E_1+E_2)/E_1*h^alpha*(sig(k*h)-sig((k-1)*h))...
30 +p/eta*h*sum(w_2(1:k+1).*sig((k-0:k).*h))...
31 +E_2/eta*h^(1+alpha)*sig(k*h))...
32 /(p+E_2*h^alpha);
33 %%%%%
34 waitbar(k/length(t),q,sprintf(’Loading...%.2f%%’,k/length(t)*100));
35 %%%%%
36 end
37 plot(t,eps);
38 delete(q)
Quellcode 4: predcorfrac2.m
1 function f = predcorfrac2(t,alpha,K,f_0,h)
2 %Algorithmus zur numerischen Loesung des fraktionalen AWP
3 %D^alpha(f(t))=K(t,f(t)) mit Vektor von AW f_0(k)=f^(k)(0) im
Intervall
4 %[0,t] mit Schrittweite h nach Gleichung (2.69) + (2.70)
5
6 n=floor(t/h);
7 m=ceil(alpha);
8
9 a=zeros(1,n);
10 b=zeros(1,n);
11 for k=1:n
12 b(k) = k^alpha-(k-1)^alpha;
13 a(k) = (k+1)^(alpha+1)-2*k^(alpha+1)+(k-1)^(alpha+1);
14 end
15
16 f=zeros(length(f_0),n+1);
17 f(:,1)=f_0;
18
19 for j=1:n
20 p = sum((j*h).^(0:m-1).*f_0./factorial(0:m-1),2)...
21 +h^alpha/gamma(alpha+1).*(K(1:j,f(:,1:j))*b(j-(0:j-1))’);
22
23 f(:,j+1) = sum((j*h).^(0:m-1).*f_0./factorial(0:m-1),2)...
24 +h^alpha/gamma(alpha+2).*(K(j+1,p)+((j-1)^(alpha+1)...
v

Anhang
25 -(j-1-alpha)*j^alpha).*K(1,f(:,1))...
26 +K(2:j,f(:,2:j))*a(j-(1:j-1))’);
27 end
Quellcode 5: eps_num_pc.m
1 function eps1 = eps_num_pc(t,sigma,alpha,E_1,E_2,p,eta,h)
2 %Funktion zur Bestimmung des zeitlichen Dehnungsverlaufs
eps=epsilon(t)
3 %basierend auf der Praediktor-Korrektor-Methode bzgl. Gleichung
(4.15)
4 %zu den Zeiten t mit Schrittweite h
5 %bei bekannter Spannungsfunktion sigma=sigma(t)
6 %mit gegebenen Parametern alpha, E_1, E_2, p, eta
7
8 n=floor(t/h);
9 s=0:h:n*h;
10 %Bestimmung der fraktionalen Ableitung durch
Gruenwald-Letnikov-Naeherung
11 %mittels der Funktion fderiv.m von A. Manurung (MATLAB File
Exchange 52587)
12 A=fderiv(sigma(s),1+alpha,1000,h);
13 B=fderiv(sigma(s),1,1000,h);
14 C=fderiv(sigma(s),alpha,1000,h);
15
16 K=@(t,f) 1/E_1*A(t)+(E_1+E_2)/(E_1*p)*B(t)...
17 +1/eta*C(t)+E_2/(eta*p)*sigma((t-1).*h)-E_2/p.*f;
18
19 eps2=predcorfrac2(t,alpha,K,0,h);
20 eps1=zeros(size(s));
21 eps1(1)=0;
22 for k=2:length(s)
23 eps1(k)=trapz(s(1:k),eps2(1:k));
24 end
25 plot(s,eps1);
Quellcode 6: deriveml.m
1 function d = deriveml(z,alpha,beta,n)
2 %Funktion zur Bestimmung der Ableitung von natuerlicher Ordnung
n der
3 %zwei-parametrigen Mittag-Leffler-Funktion ml(z,alpha,beta)
nach der
vi

Anhang
4 %Rekursionsformel aus Satz 2.5
5
6 if n < 0
7 printf(’Fehler: Die Ableitungsordnung muss ganzzahlig
nicht-negativ sein’);
8 return
9 elseif n == 0
10 d = ml(z,alpha,beta);
11 elseif n == 1
12 d = (ml(z,alpha,beta-1) -
(beta-1).*ml(z,alpha,beta))./(alpha.*z);
13 else
14 d= (deriveml(z,alpha,beta-1,n-1) - (beta-1).*
deriveml(z,alpha,beta,n-1))./(alpha.*z)...
15 - (n-1).*deriveml(z,alpha,beta,n-1)./z;
16 end
Quellcode 7: sigma_modell.m
1 function sigma = sigma_modell(t,eps,alpha,E_1,E_2,p,eta)
2 %Funktion zur Bestimmung des zeitlichen Spannungsverlaufs
sigma=sigma(t)
3 %aus dem fraktionalen Modell (Gleichung (3.15)) zu den Zeiten t
4 %bei bekannter Dehnungsfunktion eps=epsilon(t)
5 %mit gegebenen Parametern alpha, E_1, E_2, p, eta
6
7 %untere Integrationsgrenze
8 a = 1e-10;
9
10 %Ordnung der Reihenentwicklung
11 N = 2;
12
13 %Berechnung der Funktionswerte von nu nach (3.15) mithilfe der
Funktion
14 %ml.m (MATLAB File Exchange 48154) und deriveml.m
15 Y_1 = @(s) 0;
16 Y_2 = @(s) 0;
17 for n = 1:N
18 X_1 = @(s) 0;
19 X_2 = @(s) 0;
20
21 for k = 0:n
vii

Anhang
22 X_1 = @(s) X_1(s)...
23 +nchoosek(n,k)*((p/E_2)^k).*s.^(alpha*(n-k)+n-1)...
24 .*deriveml(-(E_1+E_2)/p.*s.^alpha,alpha,n-alpha*k,n);
25 X_2 = @(s) X_2(s)...
26 +nchoosek(n,k)*((p/E_2)^k).*s.^(alpha*(n-k+1)+n-1)...
27 .*deriveml(-(E_1+E_2)/p.*s.^alpha,alpha,n-alpha*(k-1),n);
28 end
29 Y_1 = @(s)
Y_1(s)+((-E_1*E_2/(eta*p))^n)/factorial(n).*X_1(s);
30 Y_2 = @(s)
Y_2(s)+((-E_1*E_2/(eta*p))^n)/factorial(n).*X_2(s);
31 end
32
33 nu = @(s) E_1.*(Y_1(s) - E_1/p.*s.^(alpha-1)...
34 .*ml(-(E_1+E_2)/p.*s.^alpha,alpha,alpha)) +
E_1*E_2/p.*Y_2(s);
35
36 %%%%% Fortschrittsanzeige
37 p = waitbar(0,’Please wait...’);
38 %%%%%
39
40 %numerische Integration
41 sigma=zeros(1,length(t));
42 integrand = @(s,T) nu(s).*eps(T-s);
43 for k = 1:length(t)
44 sigma(k) = eps(t(k)).*E_1...
45 + integral(@(s)integrand(s,t(k)),a,t(k));
46 %%%%%
47 waitbar(k/length(t),p,sprintf(’Loading...%.2f%%’,k/length(t)*100));
48 %%%%%
49 end
50
51 %Funktions-Plot
52 plot(t,sigma);
53 %%%%%
54 delete(p)
Quellcode 8: sigma_num_wfft.m
1 function sig =
sigma_num_wfft(t_end,eps,alpha,E_1,E_2,p,eta,sig_0,h)
viii

Anhang
2 %Funktion zur Bestimmung des zeitlichen Spannungsverlaufs
sigma=sigma(t)
3 %basierend auf der Gruenwald-Letnikov Naeherung (4.16)
4 %zu den Zeiten t mit Schrittweite h mit gegebenem
5 %Anfangswert sig_0=sig(0) bei bekannter Dehnungsfunktion
eps=epsilon(t)
6 %mit gegebenen Parametern alpha, E_1, E_2, p, eta
7
8 %%%%% Fortschrittsanzeige
9 q = waitbar(0,’Please wait...’);
10 %%%%%
11
12 %Zeitschritte
13 t=0:h:t_end;
14 %n = floor(t_end/h);
15
16 %Fourier-Koeffizienten
17 w_1 = w_fft(1+alpha,1e6);
18 w_2 = w_fft(alpha,1e6);
19
20 sig = zeros(size(t));
21 %Anfangswerte
22 sig(1) = sig_0;
23 sig(2) = sig_0;
24
25 for k = 2:length(t)-1
26 sig(k+1) =
(p*E_1*eta*sum(w_1(1:(k+1)).*eps((k-(0:k)).*h))...
27 +E_1*E_2*eta*h^alpha*(eps(k*h)-eps((k-1)*h))...
28 -p*eta*sum(w_1(2:(k+1)).*sig(k-(0:(k-1))))...
29 +(E_1+E_2)*eta*h^alpha*sig(k)...
30 -p*E_1*h*sum(w_2(2:(k+1)).*sig(k-(0:(k-1)))))...
31 /(p*eta+(E_1+E_2)*eta*h^alpha...
32 +p*E_1*h+E_1*E_2*h^(1+alpha));
33 %%%%%
34 waitbar(k/length(t),q,sprintf(’Loading...%.2f%%’,k/length(t)*100));
35 %%%%%
36 end
37 plot(t,sig);
38 delete(q)
ix

Anhang
Quellcode 9: sigma_num_pc.m
1 function sig=sigma_num_pc(t,eps,alpha,E_1,E_2,p,eta,h)
2 %Funktion zur Bestimmung des zeitlichen Spannungsverlaufs
sig=sigma(t)
3 %basierend auf der Praediktor-Korrektor-Methode bzgl. Gleichung
(4.17)
4 %zu den Zeiten t mit Schrittweite h
5 %bei bekannter Spannungsfunktion sigma=sigma(t)
6 %mit gegebenen Parametern alpha, E_1, E_2, p, eta
7
8 s=0:h:t;
9
10 %Bestimmung der fraktionalen Ableitung durch
Gruenwald-Letnikov-Naeherung
11 %mittels der Funktion fderiv.m von A. Manurung (MATLAB File
Exchange 52587)
12 A=fderiv(eps(s),1+alpha,1000,h);
13 B=fderiv(eps(s),1,1000,h);
14
15 K=@(x,f)
[f(2,:);f(3,:);-E_1*E_2/(eta*p).*f(1,:)-E_1/eta.*f(2,:)...
16 -(E_1+E_2)/p.*f(3,:)+E_1.*A(x)+E_1*E_2/p.*B(x)];
17 sig=predcorfrac2(t,alpha,K,[0;0;0],h);
18 plot(s,sig(1,:));
Quellcode 10: sigma_num_cq.m
1 function sig=sigma_num_cq(t_end,eps,alpha,E_1,E_2,p,eta,h)
2 %Funktion zur Bestimmung des zeitlichen Spannungsverlaufs
sig=sigma(t)
3 %basierend auf der Faltungsquadratur bzgl. der Gleichungen
(4.18)
4 %zu den Zeiten t mit Schrittweite h
5 %bei bekannter Spannungsfunktion sigma=sigma(t)
6 %mit gegebenen Parametern alpha, E_1, E_2, p, eta
7
8 t=0:h:t_end;
9
10 %Anzahl der Summanden fuer Fourier-Reihen-Entwicklung
11 N=1e6;
12
x

Anhang
13 %Bestimmung der fraktionalen Ableitung durch
Gruenwald-Letnikov-Naeherung
14 %mittels der Funktion fgl_deriv.m von J. Hadida (MATLAB File
Exchange 45982)
15 g = p.*fgl_deriv(1+alpha,eps(t),h)+E_2.*fgl_deriv(1,eps(t),h);
16 Lamb = @(x) (p/E_1.*x.^(1+alpha)...
17 +(E_1+E_2)/E_1.*x+p/eta.*x.^alpha+E_2/eta).^(-1);
18 d=@(x) (1-x)+(1-x).^2./2+(1-x).^3./3;
19 y = Lamb(d(exp(2*pi*1i.*(0:N-1)./N))./h)./N;
20 w = real(fft(y));
21 sig=zeros(size(t));
22 for n=1:length(t)
23 sig(n)=sum(w(1:n).*g(n+1-(1:n)));
24 end
25
26 plot(t,sig);
xi

Literaturverzeichnis
[1] H. Altenbach. Kontinuumsmechanik. Einführung in die materialunabhängigen und
materialabhängigen Gleichungen. 3., überarb. Aufl. 2015. Berlin, Heidelberg:Springer Vieweg, 2015, XIV, 340 S. 41 Abb.
[2] I. Anders. „Stoffgesetz zur Beschreibung des Kriech- und Relaxationsverhaltensjunger normal- und hochfester Betone“. Diss. Karlsruhe: Zugl.: Karlsruhe KITDiss. 2012., 2013.
[3] R. L. Bagley und P. J. Torvik. „A theoretical basis for the application of fractionalcalculus to viscoelasticity“. In: Journal of Rheology (1978-present) 27.3 (1983),S. 201–210.
[4] R. L. Bagley und P. J. Torvik. „Fractional calculus in the transient analysis of vis-coelastically damped structures“. In: AIAA Journal 23.6 (1985), S. 918 –925.
[5] R. L. Bagley und P. J. Torvik. „On the fractional calculus model of viscoelasticbehavior“. In: Journal of Rheology (1978-present) 30.1 (1986), S. 133–155.
[6] H. Bateman und A. Erdelyi. Higher transcendental functions, Vol. 1. 1953.
[7] H. Bateman und A. Erdelyi. Higher Transcendental Functions, Vol. 3: Elliptic and
Automorphic Functions, Lamé and Mathieu Functions. 1955.
[8] M. Caputo. „Linear models of dissipation whose Q is almost frequency indepen-dent“. In: Annals of Geophysics 19 (1966), S. 383 –393.
[9] C. F. M. Coimbra. „Mechanics with variable-order differential operators“. In: An-
nalen der Physik 12.11-12 (2003), S. 692–703.
[10] K. Diethelm. The analysis of fractional differential equations : An application-
oriented exposition using differential operators of caputo type. Berlin: Springer,2010, VIII, 247 S.
[11] K. Diethelm, N. J. Ford und A. D. Freed. „A predictor-corrector approach for thenumerical solution of fractional differential equations“. In: Nonlinear Dynamics
29.1-4 (2002), S. 3–22.
[12] K. Diethelm und Y. Luchko. „Numerical solution of linear multi-term initial valueproblems of fractional order“. In: J. Comput. Anal. Appl. 6.3 (2004), S. 243–263.
xii

Literaturverzeichnis
[13] G. Doetsch. Anleitung zum praktischen Gebrauch der Laplace-Transformation.München: Oldenbourg, 1956.
[14] R. Garrappa. „Numerical evaluation of two and three parameter Mittag-Lefflerfunctions“. In: SIAM Journal on Numerical Analysis 53.3 (2015), S. 1350–1369.
[15] A. N. Gerasimov. „A generalization of linear laws of deformation and its applica-tion to problems of internal friction“. In: Akad. Nauk SSSR. Prikl. Mat. Meh 12(1948), S. 251–260.
[16] R. Gorenflo, Hrsg. Mittag-Leffler functions, related topics and applications . Ber-lin: Springer, 2014, XIV, 443 S.
[17] P. L. Gould. Introduction to linear elasticity . 2. Aufl. New York: Springer, 1989,XII, 159 S.
[18] D. Gross. Technische Mechanik 4 Hydromechanik, Elemente der Höheren Mecha-
nik, Numerische Methoden. Hrsg. von W. Hauger. 9., aktualisierte Aufl. 2014. Ber-lin, Heidelberg: Springer Vieweg, 2014, XI, 503 S.
[19] W. F. Hammond. About the Gamma Function. http://www.albany.edu/~hammond/gellmu/examples/gamma.pdf. 1995.
[20] H. J. Haubold, A. M. Mathai und R. K. Saxena. „Mittag-Leffler Functions andTheir Applications“. In: Journal of Applied Mathematics 2011 (2011).
[21] M. Hinze. Zur Nutzung fraktionaler Infinitesimalrechnung bei der Beschreibung
des viskoelastischen Verhaltens von Beton. Techn. Ber. DBE TECHNOLOGYGmbH, 2016.
[22] C. Lubich. „Convolution quadrature and discretized operaional calculus. I“. In:Numerische Mathematik 52.2 (1988), S. 129–145.
[23] F. Mainardi. „On some properties of the Mittag-Leffler function Eα(−tα), comple-tely monotone for t > 0 with 0 < α < 1“. In: Discrete and Continuous Dynamical
Systems Series B 19.7 (2014), S. 2267–2278.
[24] R. Mauke und D. Laske. Stilllegung Endlager Morsleben - Verfüllen von Strecken
mit hohen Anforderungen - Bauzustände für horizontale Strecken (ergänzende Un-
tersuchungen zum Nachweis der Rissbeschränkung im Salzbeton und Nachweis-
konzept für das südliche Wetterrollloch). Planfeststellungsverfahren zur Stillle-
xiii

Literaturverzeichnis
gung des Endlagers für radioaktive Abfälle Morsleben - Verfahrensunterlage P255.Techn. Ber. Salzgitter: Bundesamt für Strahlenschutz, 2007.
[25] K. S. Miller u. a. „A note on the complete monotonicity of the generalized Mittag-Leffler function“. In: Real Analysis Exchange 23.2 (1999), S. 753–756.
[26] K. B. Oldham. The fractional calculus: Theory and applications of differentiation
and integration to arbitrary order. Hrsg. von J. Spanier. New York [u.a.]: Acad.Pr., 1974, XIII, 234 S.
[27] I. Podlubny. Fractional differential equations. An introduction to fractional deri-
vatives, fractional differential equations, to methods of their solution and some of
their applications. San Diego: Academic Press, c 1999.
[28] H. Pollard. „The completely monotonic character of the Mittag-Leffler functi-on Eα(−x)“. In: Bulletin of the American Mathematical Society 54.12 (1948),S. 1115–1116.
[29] S. Rogosin. „The Role of the Mittag-Leffler Function in Fractional Modeling“. In:Mathematics 3.2 (2015), S. 368–381.
[30] S. G. Samko und B. Ross. „Integration and differentiation to a variable fractionalorder“. In: Integral Transforms and Special Functions 1.4 (1993), S. 277–300.
[31] R. L. Schilling, R. Song und Z. Vondracek. Bernstein functions: theory and appli-
cations. Bd. 37. Walter de Gruyter, 2012.
[32] A. Schmidt und L. Gaul. „Parameter Identification and FE Implementation of aViscoelastic Constitutive Equation Using Fractional Derivatives“. In: Proc. Appl.
Math. Mech. 1.1 (2002).
[33] A. Schmidt, S. Oexl und L. Gaul. „Modellierung des viskoelastischen Werk-stoffverhaltens von Kunststoffen mit fraktionalen Zeitableitungen“. In: CAD-FEM
User’s Meeting, Friedrichshafen. 2002.
[34] O. Schulze. Thermomechanisches und hydraulisches Verhalten von Salzgestein.Techn. Ber. BGR Hannover, 2006.
[35] O. Schulze. Relaxations-Versuche an Salzbeton. E-mail: [email protected][30.10.2012]. 2012.
[36] G. W. Scott Blair. „The role of psychophysics in rheology“. In: Journal of Colloid
Science 2.1 (1947), S. 21–32.
xiv

Literaturverzeichnis
[37] N. Sieber. Spezielle Funktionen. Hrsg. von H.-J. Sebastian. 2., durchges. Aufl.Leipzig: Teubner, 1980, 136 S.
[38] J. Stoer. Numerische Mathematik. 7., neubearb. und erw. Aufl. Bd. 1. Berlin: Sprin-ger, 1994, XI, 367 S.
[39] R. Temam und A. Miranville. Mathematical modeling in continuum mechanics .
Cambridge [u.a.]: Cambridge University Press, 2001, XIII, 288 S.
[40] E. Ulrich. „Über das Problem der Vergleichsspannungen in der Festigkeitslehre“.In: Forschung auf dem Gebiet des Ingenieurwesens 25.4 (1959), S. 106–114.
[41] H. Weber, Hrsg. Laplace-Transformation Grundlagen - Fourierreihen und Fourier-
integral - Anwendungen. 8. Auflage. Wiesbaden: Vieweg+Teubner, 2007.
[42] D. Weise und D. Brückner. Untersuchung des Kompaktionsverhaltens von Salzbe-
ton M2. Techn. Ber. unveröffentlicht. Leipzig: Institut für Gebirgsmechanik.
[43] D. Weise, D. Naumann und W. Bodenstein. Laborbericht zu gesteinsmechanischen
Untersuchungen an Bohrkernen aus dem Abdichtbauwerk im Steinsalz im ERAM.Techn. Ber. unveröffentlicht. Leipzig: Institut für Gebirgsmechanik.
[44] A. Wiman. „Über die Nullstellen der Funktionen Ea(x)“. In: Acta Mathematica
29.1 (1905), S. 217–234.
xv

Abbildungsverzeichnis
2.1 Gamma-Funktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.2 Integrationsweg MITTAG-LEFFLER-Funktion . . . . . . . . . . . . . . . 202.3 Modifizierte MITTAG-LEFFLER-Funktion e(t) und deren Ableitungen in
Abhängigkeit von α . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.1 Modellansatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 563.2 Teilstoffmodell: Viskoeffekte . . . . . . . . . . . . . . . . . . . . . . . . 564.1 Parameteranpassung iBMB-10d . . . . . . . . . . . . . . . . . . . . . . 674.2 Parameteranpassung IfG 414-K-M2-1-56-8 . . . . . . . . . . . . . . . . 684.3 Parameteranpassung IfG-M2-TCC 1 und 2 . . . . . . . . . . . . . . . . . 694.4 Parameteranpassung IfG-M2-TCC 3 und 5 . . . . . . . . . . . . . . . . . 704.5 Parameteranpassung BGR 05019 . . . . . . . . . . . . . . . . . . . . . . 714.6 Parameteranpassung eines klassischen Modells an BGR 05019 . . . . . . 734.7 Vergleich numerischer Methoden bzgl. BGR 05019 . . . . . . . . . . . . 754.8 Vergleich numerischer Methoden bzgl. BGR 05020 . . . . . . . . . . . . 77
Tabellenverzeichnis
2.1 Fehler bei der numerischen Lösung fraktionaler AWP I . . . . . . . . . . 542.2 Fehler bei der numerischen Lösung fraktionaler AWP II . . . . . . . . . . 554.1 Parameterwerte von E1 für die Kriechversuche in Abängigkeit vom Be-
tonalter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 654.2 Fehleranalyse zur Parameteranpassung Kriechversuche . . . . . . . . . . 72
Quellcodeverzeichnis
1 eps_modell.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii2 w_fft.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv3 eps_num_wfft.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv4 predcorfrac2.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . v5 eps_num_pc.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vi6 deriveml.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vi7 sigma_modell.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii8 sigma_num_wfft.m . . . . . . . . . . . . . . . . . . . . . . . . . . . viii9 sigma_num_pc.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix10 sigma_num_cq.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . x
xvi

Erklärung
Ich versichere, dass ich die vorliegende Arbeit selbstständig und nur unter Verwendungder angegebenen Quellen und Hilfsmittel angefertigt habe, insbesondere sind wörtlicheoder sinngemäße Zitate als solche gekennzeichnet. Mir ist bekannt, dass Zuwiderhand-lung auch nachträglich zur Aberkennung des Abschlusses führen kann.
Ort Datum Unterschrift