Embed Size (px)
Citation preview

ECODRIVE03Antrieb mit integrierter NC-Steuerung
und ParallelschnittstelleFunktionsbeschreibung: ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
mannesmannRexroth
engineering
IndramatRexroth
Über diese Dokumentation ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
ECODRIVE03
Antrieb mit Integrierter NC-Steuerung
und Parallelschnittstelle
Funktionsbeschreibung ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
• Schuber, z.B.: Schuber 21-01V-DE
• Grundlage: ELC 01VRS
• Dokumentennummer: 120-1000-B323-01/DE
Die vorliegende Dokumentation stellt die Funktionsbeschreibung derFirmware FWA-ECODR-ELC-01VRS dar.
Die Unterlage dient:
• Zur Beschreibung aller funktionellen Eigenschaften
Dokukennzeichnung bisherigerAusgaben
Stand Bemerkung
DOK-ECODR3-ELC-01VRS**-FK01-DE-P 4.00 Erstausgabe
Rexroth Indramat GmbH, 2000
Weitergabe sowie Vervielfältigung dieser Unterlage, Verwertung undMitteilung ihres Inhalts wird nicht gestattet, soweit nicht ausdrücklichzugestanden. Zuwiderhandlungen verpflichten zum Schadenersatz. AlleRechte für den Fall der Patenterteilung oder Gebrauchsmuster-Eintragung vorbehalten. (DIN 34-1)
Änderungen im Inhalt der Dokumentation und Liefermöglichkeiten derProdukte sind vorbehalten.
Rexroth Indramat GmbHBgm.-Dr.-Nebel-Str. 2 • D-97816 Lohr a. Main
Telefon 09352/40-0 • Tx 689421 • Fax 09352/40-4885
http://www.rexroth.com/indramat
Abt. ESV1 (JB)
Diese Dokumentation ist auf chlorfrei gebleichtem Papier gedruckt..
Titel
Art der Dokumentation
Dokumentations-Type
interner Ablagevermerk
Zweck der Dokumentation?
Änderungsverlauf
Schutzvermerk
Verbindlichkeit
Herausgeber
Hinweis
ECODRIVE03 ELC-01VRS Inhaltsverzeichnis I
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Inhaltsverzeichnis
1 Systemübersicht 1-1
1.1 ECODRIVE03 - die universelle Antriebslösung für die Automatisierung....................................... 1-1
1.2 ECODRIVE03 - eine Antriebsfamilie.............................................................................................. 1-1
1.3 Antriebsregelgeräte und Motore .................................................................................................... 1-2
1.4 Funktionsübersicht: FWA-ECODR3-ELC-01VRS-MS ................................................................... 1-3
Führungskommunikationsschnittstelle..................................................................................... 1-3
Unterstützte Motorarten ........................................................................................................... 1-3
Unterstützte Meßsysteme........................................................................................................ 1-3
Allgemeine Funktionen ............................................................................................................ 1-4
2 Sicherheitshinweise für elektrische Antriebe 2-1
2.1 Einleitung........................................................................................................................................ 2-1
2.2 Erläuterungen................................................................................................................................. 2-1
2.3 Gefahren durch falschen Gebrauch............................................................................................... 2-2
2.4 Allgemeines.................................................................................................................................... 2-3
2.5 Schutz gegen Berühren elektrischer Teile ..................................................................................... 2-4
2.6 Schutz durch Schutzkleinspannung (PELV) gegen elektrischen Schlag .................................. 2-6
2.7 Schutz vor gefährlichen Bewegungen ........................................................................................... 2-6
2.8 Schutz vor magnetischen und elektromagnetischen Feldern bei Betrieb und Montage................ 2-8
2.9 Schutz gegen Berühren heißer Teile ............................................................................................. 2-9
2.10 Schutz bei Handhabung und Montage......................................................................................... 2-10
2.11 Sicherheit beim Umgang mit Batterien ........................................................................................ 2-10
2.12 Schutz vor unter Druck stehenden Leitungen.............................................................................. 2-11
3 Allgemeine Hinweise zur Inbetriebnahme 3-1
3.1 Begriffserläuterungen..................................................................................................................... 3-1
Kommunikation ........................................................................................................................ 3-1
Datenspeicher.......................................................................................................................... 3-3
Betriebsarten............................................................................................................................ 3-3
Eingänge, Ausgänge, Merker .................................................................................................. 3-4
Warnung................................................................................................................................... 3-4
Fehler ....................................................................................................................................... 3-4
Basisparametersatz/Urladen.................................................................................................... 3-6
3.2 Inbetriebnahmeanleitung................................................................................................................ 3-7
Neuaufspielen der Firmware.................................................................................................... 3-7
3.3 Diagnosemöglichkeiten .................................................................................................................. 3-8
Übersicht der Diagnosemöglichkeiten ..................................................................................... 3-8
Antriebsinterne Diagnosebildung............................................................................................. 3-8
II Inhaltsverzeichnis ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Der Aufbau einer Diagnose...................................................................................................... 3-8
3.4 Sprachumschaltung ....................................................................................................................... 3-9
3.5 Firmware-Update mit dem Programm Dolfi ................................................................................... 3-9
Fehlermeldung im Firmwareloader ........................................................................................ 3-10
Weitere Probleme beim Firmwareladen ................................................................................ 3-13
3.6 Firmware-Update des Ecodrive ................................................................................................... 3-15
3.7 Firmware-Update im BTV04/05 ................................................................................................... 3-15
4 Motorkonfiguration 4-1
4.1 Eigenschaften der verschiedenen Motorarten ............................................................................... 4-1
Motorfeedback-Datenspeicher................................................................................................. 4-1
Temperaturüberwachung......................................................................................................... 4-2
Urladefunktion.......................................................................................................................... 4-2
4.2 Einstellung der Motorart ................................................................................................................. 4-2
Automatische Einstellung der Motorart bei Motoren mit Feedbackspeicher ........................... 4-2
4.3 Synchronmotoren........................................................................................................................... 4-3
4.4 Motorhaltebremse .......................................................................................................................... 4-3
Beteiligte Parameter ................................................................................................................ 4-3
Einstellung des Motorhaltebremsentyps.................................................................................. 4-4
Einstellung der maximalen Bremszeit...................................................................................... 4-6
ECO03--Anschluß der Motorhaltebremse ............................................................................... 4-6
5 Programmierung des Anwenderprogrammes 5-1
5.1 Übersicht aller Anwenderbefehle ................................................................................................... 5-1
5.2 Allgemeines.................................................................................................................................... 5-3
5.3 Programmeingabe.......................................................................................................................... 5-4
5.4 Start des Anwenderprogrammes ................................................................................................... 5-4
5.5 Stop des Anwenderprogrammes ................................................................................................... 5-4
5.6 Befehlsbeschreibung...................................................................................................................... 5-6
ACC - Beschleunigung ändern ................................................................................................ 5-6
AEA - Ausgang Ein / Aus ......................................................................................................... 5-7
AKN - Eingang abfragen .......................................................................................................... 5-7
AKP – Abfrage einer Eingabemaske ....................................................................................... 5-7
APE – Ausgänge parallel setzen ............................................................................................. 5-8
APJ – Ausgänge parallel setzen mit Programmverzweigung.................................................. 5-9
ATS – Ausgang abfragen....................................................................................................... 5-10
BAC – Sprung mit Stückzahlzählung..................................................................................... 5-11
BCA – Bedingter Sprung mit Ausgangsverknüpfung............................................................. 5-12
BCB – Bedingter Sprung mit binäerer Verknüpfung.............................................................. 5-12
BCD - Bedingter Sprung mit BCD-Verknüpfung.................................................................... 5-13
BCE – Bedingter Sprung mit Eingangsverknüpfung.............................................................. 5-14
BIC – Bedingter Sprung mit Sprungverteiler.......................................................................... 5-15
BIO - Bedingter Sprung mit I/O-Vergleich.............................................................................. 5-16
BMB - Sprung mit binärer Ausgangsverknüpfung ................................................................. 5-17
BPA - Bedingter Sprung bei Parallelausgang........................................................................ 5-17
BPE - Bedingter Sprung bei Paralleleingang......................................................................... 5-18
ECODRIVE03 ELC-01VRS Inhaltsverzeichnis III
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
BPT - Sprung bei Position erreicht ........................................................................................ 5-19
CID - Change Instruction Data............................................................................................... 5-19
CIO - Kopiere Eingang oder Ausgang nach Ausgang ........................................................... 5-20
CLA - Clear absolute Position................................................................................................ 5-21
CLC - Zähler löschen ............................................................................................................. 5-22
CON - Dauerlauf .................................................................................................................... 5-22
COU - Zählen......................................................................................................................... 5-23
CPL - Schleppabstand löschen.............................................................................................. 5-24
CST - Unterprogrammstack löschen ..................................................................................... 5-25
DEC - Verzögerung ändern (bremsen).................................................................................. 5-26
FAK - Multiplikationsfaktor für Vorschübe.............................................................................. 5-26
FOL - Folgeachse .................................................................................................................. 5-27
HOM - Homing (Referenzieren) ............................................................................................. 5-28
JMP - Unbedingter Sprung .................................................................................................... 5-29
JSR - Sprung zum Unterprogramm ....................................................................................... 5-29
JST - Unbedingter Sprung mit Sofort-Stopp .......................................................................... 5-30
JTK - Unbedingter Task-Sprung ............................................................................................ 5-30
MOM - Momentenbegrenzung............................................................................................... 5-31
NOP - Leerzeichen ................................................................................................................ 5-32
PBK - Positionierung abbrechen............................................................................................ 5-32
POA - Vorschub absolut ........................................................................................................ 5-33
POI - Vorschub inkremental................................................................................................... 5-34
PSA - Vorschub absolut mit Positionsquittung ...................................................................... 5-34
PSI - Vorschub inkremental mit Positionsquittung................................................................. 5-35
PST - Position Testen ............................................................................................................ 5-36
REF - Referenzpunkt anfahren, Suchlauf.............................................................................. 5-37
REP - Bedingter Sprung bei Suchwegüberschreitung bezogen auf den `REF´-Befehl......... 5-39
RSV - Restart-Vektor ............................................................................................................. 5-40
RTM - Rundtisch-Modus ........................................................................................................ 5-40
RTS - Rücksprung aus dem Unterprogramm ........................................................................ 5-41
SAC - Set Absolute Counter .................................................................................................. 5-42
SRM – Suche Referenzmarke ............................................................................................... 5-43
VCA - Geschwindigkeit ändern, mit der Positionsangabe der neuen Geschwindigkeit ........ 5-44
VCC - Geschwindigkeit ändern.............................................................................................. 5-45
VEO - Geschwindigkeits-Override ......................................................................................... 5-46
WAI - Wartezeit ...................................................................................................................... 5-48
6 Reserviert 6-1
6.1 In Vorbereitung............................................................................................................................... 6-1
7 Funktionen 7-1
7.1 Betriebsarten.................................................................................................................................. 7-1
7.2 Meßradbetrieb................................................................................................................................ 7-1
Beteiligte Parameter ................................................................................................................ 7-2
Funktionsweise ........................................................................................................................ 7-2
Diagnosemeldungen ................................................................................................................ 7-3
IV Inhaltsverzeichnis ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
7.3 Referenzieren................................................................................................................................. 7-3
Beteiligte Parameter ................................................................................................................ 7-4
Einstellung des Referenzfahr-Parameters............................................................................... 7-4
Übersicht über Art und Anordnung der Referenzmarken von nicht-absoluten Meßsystemen 7-5
Funktionsprinzip antriebsgef. Referenzieren bei nicht-absoluten Meßsystemen.................... 7-6
Funktionsablauf "Referenzieren" ............................................................................................. 7-6
Inbetriebnahme bei "Auswertung einer Referenzmarke /Referenzschalterflanke".................. 7-8
Inbetriebnahme bei "Auswertung abstandscodierter Referenzmarken"................................ 7-11
Starten, Unterbrechen und Beenden des Referenzieren" ..................................................... 7-14
Mögliche Fehlermeldungen beim "Referenzieren" ................................................................ 7-15
Anordnung des Referenzschalters ........................................................................................ 7-16
7.4 Override der Geschwindigkeit ...................................................................................................... 7-17
Override über Analogeingang................................................................................................ 7-17
Override über Gray-codierte Eingänge.................................................................................. 7-18
Override über Binär-codierte Eingänge ................................................................................. 7-19
7.5 Rundtisch ..................................................................................................................................... 7-19
7.6 Vektorprogrammierung ................................................................................................................ 7-19
Handvektor............................................................................................................................. 7-19
Interruptvektor........................................................................................................................ 7-20
7.7 Multi - Tasking.............................................................................................................................. 7-20
7.8 Folgeachse................................................................................................................................... 7-22
7.9 Regelkreiseinstellung ................................................................................................................... 7-23
Einstellung des Stromreglers ................................................................................................. 7-25
Einstellung des Geschwindigkeitsreglers .............................................................................. 7-25
Geschwindigkeitsregelkreisüberwachung.............................................................................. 7-30
Einstellung des Lagereglers................................................................................................... 7-30
Lageregelkreisüberwachung.................................................................................................. 7-31
Einstellung der Beschleunigungsvorsteuerung...................................................................... 7-32
7.10 Mechanische Daten ..................................................................................................................... 7-34
Mechanische Übersetzungselemente.................................................................................... 7-34
Modulofunktion....................................................................................................................... 7-35
7.11 Geber-Emulation .......................................................................................................................... 7-36
Aktivierung der Geberemulation ............................................................................................ 7-36
Funktionsprinzip: Inkrementalgeber-Emulation ..................................................................... 7-37
Diagnosemeldungen bei der Inkrementalgeber-Emulation ................................................... 7-39
Funktionsprinzip: Absolutgeber-Emulation ............................................................................ 7-39
8 Parameter 8-1
8.1 Grundlegendes............................................................................................................................... 8-3
8.2 Anlagenparameter.......................................................................................................................... 8-5
A100 Anwendungsart............................................................................................................. 8-5
A101 Vorschubkonstante....................................................................................................... 8-6
A102 Getriebe........................................................................................................................ 8-6
A103 Lagegrenzwert negativ ................................................................................................. 8-7
A104 Lagegrenzwert positiv................................................................................................... 8-7
A105 Modulowert ................................................................................................................... 8-8
ECODRIVE03 ELC-01VRS Inhaltsverzeichnis V
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
A106 Maximalgeschwindigkeit............................................................................................... 8-8
A107 Handgeschwindigkeit.................................................................................................... 8-9
A108 Beschleunigung bipolar ................................................................................................ 8-9
A109 Beschleunigung / Verzögerung .................................................................................... 8-9
A110 Ruckzeitkonstante bipolar .......................................................................................... 8-10
A111 Schaltschwelle............................................................................................................ 8-10
A112 reserviert Stillstandfenster .......................................................................................... 8-11
A113 Positionierfenster........................................................................................................ 8-11
A114 Vorsignal..................................................................................................................... 8-12
A115 Überwachung ............................................................................................................. 8-12
A116 Vorschubüberwachung............................................................................................... 8-13
A117 Überwachung Geberdifferenz .................................................................................... 8-14
A118 Absolutgeber Überwachungsfenster .......................................................................... 8-14
A119 Bestmögliche Stillsetzung .......................................................................................... 8-15
8.3 Funktionsparameter ..................................................................................................................... 8-16
AA00 Task 2 & 3 .................................................................................................................. 8-16
AA01 Hand-Vektor ............................................................................................................... 8-16
AA02 Interruptvektor ............................................................................................................ 8-17
AA03 reserviert Restart....................................................................................................... 8-17
AA04 Override ..................................................................................................................... 8-17
AA05 reserviert Elektr. Lüften........................................................................................... 8-18
AA06 reserviert Motorbremse............................................................................................ 8-18
AA07 Meßradbetrieb............................................................................................................ 8-18
AA08 Verschiedenes ........................................................................................................... 8-19
8.4 Allgemeine Parameter.................................................................................................................. 8-20
B000 Anzeige....................................................................................................................... 8-20
B001 Schnittstellenparameter.............................................................................................. 8-20
B002 Schnittstellenparameter.............................................................................................. 8-20
B003 Analog-Ausgang 1, Signalauswahl............................................................................. 8-21
B004 Analog-Ausgang 1, erweiterte Signalauswahl............................................................ 8-21
B005 Analog-Ausgang 1, Bewertung [1/10V] ...................................................................... 8-23
B006 Analog-Ausgang 2, Signalauswahl............................................................................. 8-24
B007 Analog-Ausgang 2, erweiterte Signalauswahl........................................................... 8-24
B008 Analog-Ausgang 2, Bewertung [1/10V] ...................................................................... 8-26
B009 Serielle Eingänge und Ausgänge .............................................................................. 8-27
B010 Systemsteuerung....................................................................................................... 8-28
8.5 Geberparameter........................................................................................................................... 8-29
C000 Arbeits-Polarität.......................................................................................................... 8-29
C001 Interface Geber 1 ( Motor )......................................................................................... 8-29
C002 Lagegeberart 1 ........................................................................................................... 8-30
C003 Auflösung Lagegeber 1 (Motor) ................................................................................. 8-30
C004 Interface Geber 2 ....................................................................................................... 8-31
C005 Lagegeberart 2 ........................................................................................................... 8-32
C006 Auflösung Geber 2 ..................................................................................................... 8-32
C007 Vorschubkonstante 2.................................................................................................. 8-33
C008 reserviert .................................................................................................................... 8-33
VI Inhaltsverzeichnis ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C009 Referenzfahr-Konfiguration ........................................................................................ 8-33
C010 Referenzieren............................................................................................................. 8-34
C011 Referenzmaß.............................................................................................................. 8-34
C012 Referenzschalter-Offset ............................................................................................. 8-34
C013 Abstandskodierte Referenzmaße............................................................................... 8-35
C014 Geberemulationsart.................................................................................................... 8-35
C015 Geber-Emulation Auflösung ....................................................................................... 8-36
C016 Referenzimpuls-Offset ............................................................................................... 8-36
8.6 Regelparameter ........................................................................................................................... 8-37
CR00 Stromregler-Proportionalverstärkung 1 ..................................................................... 8-37
CR01 Stromregler-Nachstellzeit 1 ....................................................................................... 8-37
CR02 Geschwindigkeitsregler-Proportionalverstärkung...................................................... 8-38
CR03 Geschwindigkeitsregler-Nachstellzeit........................................................................ 8-39
CR04 Drehzahlregler-Glättungszeitkonstante ..................................................................... 8-40
CR05 Sperrfrequenz Geschwindigkeitsregler...................................................................... 8-40
CR06 Bandbreite Sperrfilter Geschwindigkeitsregler .......................................................... 8-41
CR07 Kv-Faktor ................................................................................................................... 8-41
CR08 Verstärkung Beschleunigungsvorsteuerung.............................................................. 8-42
CR09 Schaltfrequenz........................................................................................................... 8-43
CR10 Lageistwert-Glättungszeitkonstante im Meßradbetrieb ............................................. 8-43
8.7 Motorparameter............................................................................................................................ 8-44
CM00 Motorart ..................................................................................................................... 8-44
CM01 Drehmoment/Kraft-Grenzwert bipolar ....................................................................... 8-44
CM02 Spitzenstrom / Stillstandsstrom Motor....................................................................... 8-45
CM03 Maximalgeschwindigkeit des Motors......................................................................... 8-45
CM04 Polpaarzahl/Polpaarweite ......................................................................................... 8-46
CM05 Drehmoment-/Kraft-Konstante .................................................................................. 8-46
CM06 Rotorträgheitsmoment............................................................................................... 8-47
CM07 Haltebremsentyp ....................................................................................................... 8-47
CM08 Haltebremsenstrom................................................................................................... 8-47
CM09 Motor-Temperatur ..................................................................................................... 8-48
8.8 Asynchron-Motorparameter ......................................................................................................... 8-49
CA00 Magnetisierungsstrom ............................................................................................... 8-49
CA01 Vormagnetisierungsfaktor.......................................................................................... 8-49
CA02 Schlupffaktor .............................................................................................................. 8-50
CA03 Schlupfanhebung....................................................................................................... 8-50
CA04 Kippstromgrenze........................................................................................................ 8-50
CA05 Feldregler Prop.verst. ................................................................................................ 8-51
CA06 Feldregler Nachstellzeit ............................................................................................. 8-51
CA07 Motorleerlaufspannung .............................................................................................. 8-51
CA08 Motormaximalspannung............................................................................................. 8-52
8.9 Parameterliste ELC...................................................................................................................... 8-53
9 Interface 9-1
9.1 Eingänge / Ausgänge / Merker ...................................................................................................... 9-1
Systemeingänge ...................................................................................................................... 9-1
ECODRIVE03 ELC-01VRS Inhaltsverzeichnis VII
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Systemausgänge ..................................................................................................................... 9-3
Programmierbare Eingänge/Ausgänge DKC21.3.................................................................... 9-4
Programmierbare Eingänge..................................................................................................... 9-4
Programmierbare Ausgänge.................................................................................................... 9-5
Merker ...................................................................................................................................... 9-5
9.2 Serielle Schnittstelle....................................................................................................................... 9-7
Übersicht .................................................................................................................................. 9-7
Kommunikation über RS232-Schnittstelle ............................................................................... 9-9
Kommunikation über RS485-Schnittstelle ............................................................................. 9-10
Übertragungsprotokolle.......................................................................................................... 9-10
ASCII-Protokoll ...................................................................................................................... 9-11
SIS-Protokoll .......................................................................................................................... 9-28
10 Führungskommunikation 10-1
10.1 Parallelinterface ........................................................................................................................... 10-1
11 Diagnosebeschreibung 11-1
11.1 Übersicht über Diagnosemöglichkeiten ....................................................................................... 11-1
Diagnosearten........................................................................................................................ 11-1
Aufbau einer Diagnose .......................................................................................................... 11-1
11.1 Fehlerdiagnosen .......................................................................................................................... 11-4
F208 UL Der Motortyp hat sich geändert............................................................................... 11-4
F209 PL Defaultwerte der Parameter laden .......................................................................... 11-4
F218 Verstärker-Übertemp.-Abschaltung .............................................................................. 11-5
F219 Motor-Übertemp.-Abschaltung ..................................................................................... 11-5
F220 Abschaltung wegen Bleederüberlast ............................................................................ 11-6
F221 Motor-Temp.überwachung defekt................................................................................. 11-7
F226 Unterspannung im Leistungsteil ................................................................................... 11-7
F228 Exzessive Regelabweichung........................................................................................ 11-7
F229 Fehler Geber 1: Quadrantenfehler ............................................................................... 11-8
F230 Max. Signalfrequenz für Geber 1 überschritten............................................................ 11-9
F234 E-Stop aktiviert ............................................................................................................. 11-9
F236 Exzessive Lageistwertdifferenz .................................................................................... 11-9
F237 Exzessive Lagesollwertdifferenz ................................................................................ 11-10
F242 Fehler Geber 2: Signalamplitude fehlerhaft................................................................ 11-10
F245 Fehler Geber 2: Quadrantenfehler ............................................................................. 11-12
F246 max. Signalfrequenz für Geber 2 überschritten.......................................................... 11-12
F248 Batterie-Unterspannung.............................................................................................. 11-12
F253 Inkrementalgeberemulator: Frequenz zu hoch........................................................... 11-13
F267 Hardware-Synchronisation fehlerhaft ......................................................................... 11-14
F276 Absolutgeber außerhalb des Überwachungsfensters ................................................ 11-14
F277 Strommessabgleich fehlerhaft .................................................................................... 11-15
F281 Netzausfall .................................................................................................................. 11-15
F386 Kein Betriebsbereit vom Netzteil ................................................................................ 11-15
F407 Fehler bei der Initialisierung ....................................................................................... 11-16
F408 Fataler Fehler der DIO1.1-Karte................................................................................. 11-16
VIII Inhaltsverzeichnis ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
F434 E-Stop aktiviert ........................................................................................................... 11-17
F629 Lagegrenzwert positiv überschritten........................................................................... 11-17
F630 Lagegrenzwert negativ überschritten ......................................................................... 11-18
F634 E-Stop aktiviert ........................................................................................................... 11-18
F643 Fahrbereichsendschalter positiv betätigt .................................................................... 11-19
F644 Fahrbereichsendschalter negativ betätigt................................................................... 11-19
F822 Fehler Geber 1: Signalamplitude fehlerhaft................................................................ 11-20
F860 Brückensicherung ....................................................................................................... 11-21
F870 +24Volt-Fehler ............................................................................................................ 11-21
F873 Spannung der Treiberstufen gestört........................................................................... 11-22
F878 Fehler im Drehzahlregelkreis...................................................................................... 11-22
F895 4kHz Signal fehlerhaft................................................................................................. 11-23
11.2 Warnungsdiagnosen .................................................................................................................. 11-24
E221 Warnung Motor-Temp.überwachung defekt............................................................... 11-24
E225 Motor-Überlast............................................................................................................ 11-24
E250 Verstärker Übertemp.-Vorwarnung ............................................................................ 11-25
E251 Motor Übertemp.-Vorwarnung.................................................................................... 11-26
E252 Bleeder-Vorwarnung................................................................................................... 11-26
E256 Momenten-Grenzwert = 0........................................................................................... 11-27
E257 Dauerstrombegrenzung aktiv ..................................................................................... 11-27
E259 Geschwindigkeitssollwertbegrenzung aktiv................................................................ 11-28
E261 Dauerstrombegrenzung Vorwarnung ......................................................................... 11-28
E263 Geschwindigkeitssollwert > Grenzwert A106 ............................................................. 11-28
E300 Prozessor-Watchdog.................................................................................................. 11-29
E825 Überspannung im Leistungsteil .................................................................................. 11-29
E826 Unterspannung im Leistungsteil ................................................................................. 11-30
11.3 Kommandodiagnosen ................................................................................................................ 11-30
C100 Umschaltvorbereitung Phase 2 nach 3 ...................................................................... 11-30
C200 Umschaltvorbereitung Phase 3 nach 4 ...................................................................... 11-30
C201 Parametersatz unvollständig...................................................................................... 11-31
C202 Parameter Grenzwertfehler........................................................................................ 11-31
C203 Parameter Umrechnungsfehler .................................................................................. 11-31
C204 Motorart Parameter CM00 fehlerhaft ......................................................................... 11-32
C207 Ladefehler LCA .......................................................................................................... 11-32
C210 Geber 2 erforderlich ................................................................................................... 11-32
C211 Ungültige Feedbackdaten .......................................................................................... 11-33
C212 Ungültige Verstärkerdaten ......................................................................................... 11-33
C213 Wichtung der Lagedaten fehlerhaft ............................................................................ 11-33
C214 Wichtung der Geschwindigkeitsdaten fehlerhaft........................................................ 11-34
C215 Wichtung der Beschleunigungsdaten fehlerhaft ........................................................ 11-34
C216 Wichtung der Drehmoment/Kraftdaten fehlerhaft ...................................................... 11-35
C217 Fehler beim Lesen der Daten Geber 1....................................................................... 11-35
C218 Fehler beim Lesen der Daten Geber 2....................................................................... 11-35
C220 Fehler bei der Initialisierung Geber 1 ......................................................................... 11-36
C221 Fehler bei Initialisierung Geber 2 ............................................................................... 11-37
C223 Eingabewert max. Verfahrbereich zu groß................................................................. 11-37
ECODRIVE03 ELC-01VRS Inhaltsverzeichnis IX
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C227 Modulo-Bereichs-Fehler ............................................................................................. 11-38
C228 Regelgerätetyp falsch................................................................................................. 11-38
C234 Geberkombination nicht möglich................................................................................ 11-38
C235 Lastseitiger Motorgeber nur bei Asynchronmotor ...................................................... 11-39
C236 Geber 1 erforderlich ................................................................................................... 11-39
C300 Absolutmaß setzen..................................................................................................... 11-39
C301 Absolutmaß setzen bei gesetzter RF nicht möglich................................................... 11-39
C302 Kein absolutes Meßsystem vorhanden...................................................................... 11-40
C400 Umschalten auf Parameterbetrieb ............................................................................. 11-40
C500 Reset, Fehler rücksetzen ........................................................................................... 11-40
C600 Kommando Antriebsgeführtes Referenzieren............................................................ 11-41
C601 Referenzieren nur mit Reglerfreigabe möglich .......................................................... 11-41
C602 Abstand Referenzschalter-Referenzmarke fehlerhaft................................................ 11-41
C604 Referenzieren mit Absolutmaßgeber nicht möglich ................................................... 11-41
C605 Referenziergeschwindigkeit zu groß .......................................................................... 11-42
C700 Urladen....................................................................................................................... 11-42
C701 Urladen bei Reglerfreigabe nicht möglich .................................................................. 11-43
C702 Keine Defaultparameter vorhanden ........................................................................... 11-43
C703 Default-Parameter ungültig ........................................................................................ 11-43
C704 Parameter nicht kopierbar .......................................................................................... 11-44
C705 Verriegelt mit Passwort .............................................................................................. 11-44
C800 Default-Parameter laden ............................................................................................ 11-44
C801 Parameter-Defaultwert fehlerhaft ............................................................................... 11-45
C802 Verriegelt mit Passwort .............................................................................................. 11-45
D300 Kommando Kommutierungseinstellung ..................................................................... 11-45
D301 Antrieb für Komm.einstellung nicht bereit .................................................................. 11-45
D302 Drehmoment/Kraft zu klein für Bewegung ................................................................. 11-46
D500 Kommando Markerposition erfassen ......................................................................... 11-46
D501 Kein inkrementelles Meßsystem ................................................................................ 11-47
11.4 Zustandsdiagnosen.................................................................................................................... 11-47
A002 Kommunikationsphase 2 ............................................................................................ 11-47
A003 Kommunikationsphase 3 ............................................................................................ 11-47
A010 Antrieb HALT .............................................................................................................. 11-47
A012 Steuer- und Leistungsteil betriebsbereit..................................................................... 11-48
A013 Bereit zur Leistungszuschaltung ................................................................................ 11-48
A102 Lageregelung mit Geber 1.......................................................................................... 11-48
A103 Lageregelung mit Geber 2.......................................................................................... 11-48
A104 Lageregelung schleppabstandsfrei, Geber 1 ............................................................. 11-49
A105 Lageregelung schleppabstandsfrei, Geber 2 ............................................................. 11-49
A800 Unbekannte Betriebsart.............................................................................................. 11-49
11.5 Diagnosen der Grundinitialisierung und bei fatalen Systemfehlern........................................... 11-50
Diagnoseanzeige: -0 ............................................................................................................ 11-50
Diagnoseanzeige: -1 ............................................................................................................ 11-50
Diagnoseanzeige: -2 ............................................................................................................ 11-50
Diagnoseanzeige: -3 ............................................................................................................ 11-50
Diagnoseanzeige: -4 ............................................................................................................ 11-50
X Inhaltsverzeichnis ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Diagnoseanzeige: -5 ............................................................................................................ 11-50
Diagnoseanzeige: -6 ............................................................................................................ 11-50
Diagnoseanzeige: Watchdog Diagnoseanzeige: E1 ...................................................... 11-50
Diagnoseanzeige: Watchdog Diagnoseanzeige: E2 .......................................................... 11-51
Diagnoseanzeige: Watchdog Diagnoseanzeige: E3 ......................................................... 11-51
Diagnoseanzeige: Watchdog Diagnoseanzeige: E4 ...................................................... 11-51
Diagnoseanzeige: Watchdog Diagnoseanzeige: E5 ...................................................... 11-51
11.6 Betriebszustände ....................................................................................................................... 11-52
bb ......................................................................................................................................... 11-52
Ab......................................................................................................................................... 11-52
AF......................................................................................................................................... 11-52
AH ........................................................................................................................................ 11-52
AU ........................................................................................................................................ 11-52
HA ........................................................................................................................................ 11-52
PA ........................................................................................................................................ 11-52
Jb ......................................................................................................................................... 11-52
JF ......................................................................................................................................... 11-52
P2......................................................................................................................................... 11-52
P3......................................................................................................................................... 11-53
P4......................................................................................................................................... 11-53
PL......................................................................................................................................... 11-53
UL......................................................................................................................................... 11-53
F- 0300 Ungültige I/O-Nummer im Befehlssatz.................................................................. 11-54
F- 0301 Zustand I/O im Befehl fehlerhaft............................................................................ 11-54
F- 0302 Befehlssatznummer zu groß ................................................................................. 11-54
F- 0304 Unbekannter Befehl............................................................................................... 11-54
F- 0305 Antrieb nicht absolut eingerichtet .......................................................................... 11-54
F- 0306 Überlauf der Vorschubstrecke............................................................................... 11-54
F- 0307 Datenverlust Parameter ........................................................................................ 11-54
F- 0308 Antriebstelegramm nicht gesendet........................................................................ 11-54
F- 0309 Masterdatentelegramm nicht bearbeitet................................................................ 11-54
F- 0310 Fehleingabe im Parameter .................................................................................... 11-54
F- 0311 Stack-Korrekturwert > 9......................................................................................... 11-54
F- 0312 Quittung eines Initialisierungsfehler und nicht im Parameter-Mode...................... 11-55
F- 0313 Sprungweite zu groß, BCB/BCD-Befehl................................................................ 11-55
F- 0314 Satzoffset zu groß beim BIC-Befehl ...................................................................... 11-55
F- 0315 BCB-Befehl : Auswahl fehlerhaft ........................................................................... 11-55
F- 0316 Echtzeitkommunikation Feldbus unterbrochen ..................................................... 11-55
F- 0317 Zyklischekommunikation Feldbus unterbrochen .................................................... 11-55
F- 0318 Falsche Achsnummer im NC-Befehl ...................................................................... 11-55
F- 0319 NC-Zykluszeit überschritten ................................................................................... 11-55
F- 0320 Systemfehler ( Firmwarefehler ) ............................................................................ 11-55
F- 0321 Ungültige Variablennummer im NC-Befehl ............................................................ 11-55
F-0200 Parameter und Automatikeingang gleichzeitig....................................................... 11-55
F-0201 Phasenumschaltung fehlerhaft............................................................................... 11-55
F-0203 Zielposition < Lagegrenzwert negativ..................................................................... 11-56
ECODRIVE03 ELC-01VRS Inhaltsverzeichnis XI
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
F- 0204 Zielposition > Lagegrenzwert positiv ..................................................................... 11-56
F- 0205 Stacküberlauf beim JSR-Befehl ............................................................................ 11-56
F- 0206 Stacküberlauf beim RTS-Befehl ............................................................................ 11-56
F- 0207 Ungültige Zieltask-Nummer................................................................................... 11-56
F- 0208 Promillewert im Befehl ACC > 999....................................................................... 11-56
F- 0209 Wert im FAK-Befehl ungültig ................................................................................. 11-56
F- 0210 Vorschubüberwachung.......................................................................................... 11-56
F- 0211 Drehmoment > 500% ............................................................................................ 11-56
F- 0212 Programm Run ohne Leistung .............................................................................. 11-56
E- 0213 Max.Differenz zwischen Motor und Meßradgeber zu groß................................... 11-56
F- 0214 Fehlerhafte BCD-Information ................................................................................ 11-57
F- 0215 Fehleingabe Folgefaktor........................................................................................ 11-57
F- 0216 Promillewert im Befehl > 999................................................................................. 11-57
F- 0217 HOM-Befehl nicht erlaubt ...................................................................................... 11-57
F- 0218 RTM-Befehl nicht erlaubt....................................................................................... 11-57
F- 0219 Variablenwert im NC-Befehl > zulässigem Eingabewert....................................... 11-57
F- 0220 Konstantenwert im NC-Befehl > zulässigem Eingabewert.................................... 11-57
E- 0100 Geschwindigkeit = 0 .............................................................................................. 11-58
E- 0102 Beide Tippeingänge gleichzeitig ........................................................................... 11-58
E- 0103 Hardwareausgänge überlastet .............................................................................. 11-58
E- 0104 Systemsteuerung mit BTV unterbrochen .............................................................. 11-58
E- 0105 Echtzeitkommunikation mit BTV unterbrochen ..................................................... 11-58
E- 0106 Tippen zurück nicht möglich.................................................................................. 11-58
E- 0107 Tippen vor nicht möglich ....................................................................................... 11-58
A- 0007 Stopp aktiv............................................................................................................. 11-58
A- 0008 Handvektorprogramm aktiv ................................................................................... 11-58
A- 0009 Funktion Unterbrechung aktiv ............................................................................... 11-58
12 Anschlüsse 12-1
12.1 DKC21.3 X210 ............................................................................................................................ 12-1
12.2 DKC21.3 X1 und X3................................................................................................................... 12-2
13 Visualisierung 13-1
13.1 BTV04 .......................................................................................................................................... 13-1
BTV04-Tastenbeschreibung .................................................................................................. 13-2
BTV04-Anzeigemenue........................................................................................................... 13-5
Hauptmenue........................................................................................................................... 13-6
Maschinenmenue................................................................................................................... 13-7
Eingabemenue....................................................................................................................... 13-9
Diagnose.............................................................................................................................. 13-11
Sonderanzeigen................................................................................................................... 13-13
14 Index 14-1
15 Kundenbetreuungsstellen - Sales & Service Facilities 15-1

XII Inhaltsverzeichnis ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
ECODRIVE03 ELC-01VRS Systemübersicht 1-1
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
1 Systemübersicht
1.1 ECODRIVE03 - die universelle Antriebslösung für dieAutomatisierung
Das universell einsetzbare Automatisierungssystem ECODRIVE03 isteine besonders wirtschaftliche Lösung für Steuerungs- undRegelungsaufgaben.
Das Servoantriebssystem ECODRIVE03 zeichnet sich aus durch:
• sehr breiten Einsatzbereich
• umfangreiche integrierte Funktionaliäten
• günstiges Preis- Leistungsverhältnis
Weitere Merkmale von ECODRIVE03 sind die einfache Montage undInstallation, die hohe Anlagenverfügbarkeit und das Einsparen vonSystemkomponenten.
ECODRIVE03 ist zur Realisierung einer Vielzahl von Antriebsaufgaben inunterschiedlichsten Anwendungen einsetzbar.
Typische Anwendungsbereiche sind:
• Druck- und Papierverarbeitungsmaschinen
• Handhabungssysteme
• Verpackungs- und Lebensmittelmaschinen
• Handling- und Montagesysteme
• Blechbearbeitung
1.2 ECODRIVE03 - eine Antriebsfamilie
Neben der hier dokumentierten Firmware FWA-ECODR3-ELC-01VRS-MSAntrieb mit integrierter NC-Steuerung und Parallelschnittstelle,existieren drei weitere anwendungsbezogene Firmwarevarianten:
• Antrieb mit integrierter NC-Steuerung und Profibus/Parallelinterface
• Antrieb für Werkzeugmaschinenanwendungen mit SERCOS-, Analog-und Parallelinterface
• Antrieb für die allgemeine Automatisierung mit SERCOS-, Analog- undParallelinterface
• Antrieb für die allgemeine Automatisierung mit Feldbusschnittstellen
FWA-ECODR3-ELC-01VRS-MS
FWA-ECODR3-FLP-0xVRS-MS
FWA-ECODR3-SMT-0xVRS-MS
FWA-ECODR3-SGP-0xVRS-MS
FWA-ECODR3-FGP-0xVRS-MS

1-2 Systemübersicht ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
1.3 Antriebsregelgeräte und Motore
Die ECODRIVE03 - Antriebsfamilie besteht aus 8 unterschiedlichenGeräten. Diese unterscheiden sich im wesentlichen darin, welcheSchnittstelle zur Maschinensteuerung (SPS, CNC) bereitgestellt wird. DieAntriebsregelgeräte sind in 3 Leistungsstufen, mit 40A, 100A und 200ASpitzenstrom verfügbar.
Für die ELC wird eine Schnittstelle unterstützt:
• DKC21.3 Parallel Interface 2
Für die FLP werden 2 unterschiedliche Schnittstellen unterstützt:
• DKC21.3 Parallel Interface 2
• DKC03.3 Profibus-DP Interface
Für die weiteren anwendungsbezogenen Firmwarevarianten
• DKC11.3 Analog Interface
• DKC01.3 Parallel Interface
• DKC02.3 SERCOS interface
• DKC03.3 Profibus-DP Interface
• DKC04.3 InterBus Interface
• DKC05.3 CANopen Interface
• DKC06.3 DeviceNet Interface
Mit der ECODRIVE03 Firmware können folgende Motorarten betriebenwerden.
• Synchronmotore für Standardanwendungen bis 48 Nm.
• Synchronmotore für erhöhte Anforderungen bis 64 Nm.
Abb. 1-1: Geräte und unterstützte Motore der ECODRIVE03-Familie
Zur Verfügung stehendeRegelgeräte
Unterstützte Motorarten
ECODRIVE03 ELC-01VRS Systemübersicht 1-3
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
1.4 Funktionsübersicht: FWA-ECODR3-ELC-01VRS-MS
FührungskommunikationsschnittstelleEs wird folgende Schnittstellen unterstützt:
• Parallel Interface 2 ( DKC 21.3 )
Unterstützte Motorarten• MKD • MHD• 2AD • ADF• 1MB • MBW• LAF • LAR• MKE• MBS (Rotativer
Synchronbausatzmotor)• LSF (Linearer
Synchronbausatzmotor)
Unterstützte Meßsysteme• HSF/LSF
• Resolver
• Sinusgeber mit 1Vss-Signalen
• Geber mit EnDat-Interface
• Resolver ohne Feedbackdatenspeicher
• Resolver ohne Feedbackdatenspeicher mit inkr. Sinusgeber
• Zahnradgeber mit 1Vss-Signalen
• Hall-Geber + Rechteckgeber
• Hall-Geber + Sinusgeber
• ECI-Geber
Welche Kombinationen möglich sind, wird in den Parametern C001 undC004 beschrieben.
1-4 Systemübersicht ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Allgemeine Funktionen
• 1 NC-Achse
• Einheiten in mm, inch und Grad definierbar
• Ketten-oder Absolutmaß programmierbar
• Geschwindigkeitsvorwahl in ‰ von Vmax
• Parameter
• Hand
• Automatik
NC
• 1000 Sätze Ablaufprogramm
• 3 NC-Task (quasi parallel)
• Unterprogrammverarbeitung
• 70 Merker
Seriell nach RS 232 C / RS 485
Programmierung ist über diese Schnittstelle möglich mit Hilfe eines
• ASCII-Protokoll
• SIS-Protokoll
Die Anwenderprogramme und Parameter werden in einem NOVRAMgespeichert.
Daten
Betriebsmodus
Programmdaten
RS-Schnittstelle
Datensicherheit
ECODRIVE03 ELC-01VRS Systemübersicht 1-5
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
• Umfangreiche Diagnosemöglichkeiten
• Basis-Parametersatz aktivierbar zum definierten Setzen derAntriebsparameter auf Defaultwerte.
• Fehlerspeicher und Betriebsstundenzähler
• Unterstützung von 2 Sprachen für die Parameternamen und -Befehlsnamen, sowie Diagnosen.
• Deutsch
• Englisch
• Auswertung optionaler (lastseitiger) Geber zur Lage- und/oderGeschwindigkeitsregelung
• Auswertung absoluter Meßsysteme
• Modulofunktion
• Parametrierbare Drehmomenten-/Kraft Begrenzung
• Strombegrenzung
• Verfahrbereichsbegrenzung:
über Verfahrbereichsgrenzschalter und/oder
Lagegrenzwerte
• Antriebsseitige Fehlerreaktion:
Fehlerreaktion "Rückzugsbewegung"
Bestmögliche Stillsetzung "Geschwindigkeits-Sollwertnullschaltung"
Bestmögliche Stillsetzung "Momentenfrei"
Bestmögliche Stillsetzung "Geschwindigkeits-Sollwertnullschaltung mit Rampe und Filter
Leistungsabschaltung im Fehlerfall
E-Stop-Funktion
• Regelkreiseinstellung
Urladefunktion (Feedbackdatenspeicher auslesen)
Beschleunigungsvorsteuerung
Geschwindigkeitsvorsteuerung
• Geschwindigkeitsregelkreisüberwachung
• Lageregelkreisüberwachung
• Antrieb Halt
Funktionen

1-6 Systemübersicht ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
• Referenzieren
• Absolutmaß setzen
• Analogausgabe
• Analogeingänge
• Oszilloskopfunktion
• Meßtasterfunktion
• Markerposition erfassen
• Geberemulation
Absolutgeberemulation (SSI-Format)
Inkrementalgeberemulation
ECODRIVE03 ELC-01VRS Sicherheitshinweise für elektrische Antriebe 2-1
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
2 Sicherheitshinweise für elektrische Antriebe
2.1 Einleitung
Folgende Hinweise sind vor der ersten Inbetriebnahme der Anlage zurVermeidung von Körperverletzungen und/oder Sachschäden zu lesen.Diese Sicherheitshinweise sind jederzeit einzuhalten.
Versuchen Sie nicht, dieses Gerät zu installieren oder in Betrieb zunehmen, bevor Sie nicht alle mitgelieferten Unterlagen sorgfältigdurchgelesen haben. Diese Sicherheitsinstruktionen und alle anderenBenutzerhinweise sind vor jeder Arbeit mit diesem Gerät durchzulesen.Sollten Ihnen keine Benutzerhinweise für das Gerät zur Verfügungstehen, wenden Sie sich an Ihren zuständigen Rexroth Indramat-Vertriebsrepräsentanten. Verlangen Sie die unverzügliche Übersendungdieser Unterlagen an den oder die Verantwortlichen für den sicherenBetrieb des Gerätes.
Bei Verkauf, Verleih und/oder anderweitiger Weitergabe des Gerätes sinddiese Sicherheitshinweise ebenfalls mitzugeben.
WARNUNG
Unsachgemäßer Umgang mit diesen Gerätenund Nichtbeachten der hier angegebenenWarnhinweise sowie unsachgemäße Eingriffe indie Sicherheitseinrichtung können zuSachschaden, Körperverletzung, elektrischemSchlag oder im Extremfall zum Tod führen.
2.2 Erläuterungen
Die Sicherheitshinweise beschreiben folgende Gefahrenklassen nachANSI:
Warnsymbol mit Signalwort Gefahrenklasse nach ANSIDie Gefahrenklasse beschreibt das Risiko beiNichtbeachten des Sicherheitshinweises:
GEFAHR
Tod oder schwere Körperverletzung werdeneintreten.
WARNUNG
Tod oder schwere Körperverletzung könneneintreten.
VORSICHT
Körperverletzung oder Sachschaden könneneintreten.
Abb. 2-1: Gefahrenstufen (nach ANSI)
2-2 Sicherheitshinweise für elektrische Antriebe ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
2.3 Gefahren durch falschen Gebrauch
GEFAHR
Hohe elektrische Spannung und hoherArbeitsstrom! Lebensgefahr oder schwereKörperverletzung durch elektrischen Schlag!
GEFAHR
Gefahrbringende Bewegungen! Lebensgefahr,schwere Körperverletzung oder Sachschadendurch unbeabsichtigte Bewegungen derMotoren!
WARNUNG
Hohe elektrische Spannung durch falschenAnschluß! Lebensgefahr oder Körperverletzungdurch elektrischen Schlag!
WARNUNG
Gesundheitsgefahr für Personen mitHerzschrittmachern, metallischen Implantatenund Hörgeräten in unmittelbarer Umgebungelektrischer Ausrüstungen!
VORSICHT
Heiße Oberflächen auf Gerätegehäuse möglich!Verletzungsgefahr! Verbrennungsgefahr!
VORSICHT
Verletzungsgefahr durch unsachgemäßeHandhabung! Körperverletzung durchQuetschen, Scheren, Schneiden, Stoßen oderunsachgemäße Handhabung von unter Druckstehenden Leitungen!
VORSICHT
Verletzungsgefahr durch unsachgemäßeHandhabung von Batterien!
ECODRIVE03 ELC-01VRS Sicherheitshinweise für elektrische Antriebe 2-3
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
2.4 Allgemeines
• Bei Schäden infolge von Nichtbeachtung der Warnhinweise in dieserBetriebsanleitung übernimmt die Rexroth Indramat GmbH keineHaftung.
• Vor der Inbetriebnahme sind die Betriebs-, Wartungs- undSicherheitshinweise durchzulesen. Wenn die Dokumentation in dervorliegenden Sprache nicht einwandfrei verstanden wird, bitte beimLieferant anfragen und diesen informieren.
• Der einwandfreie und sichere Betrieb dieses Gerätes setztsachgemäßen und fachgerechten Transport, Lagerung, Montage undInstallation sowie sorgfältige Bedienung und Instandhaltung voraus.
• Für den Umgang mit elektrischen Anlagen ausgebildetes undqualifiziertes Personal einsetzen:Nur entsprechend ausgebildetes und qualifiziertes Personal sollte andiesem Gerät oder in dessen Nähe arbeiten. Qualifiziert ist dasPersonal, wenn es mit Montage, Installation und Betrieb des Produktssowie mit allen Warnungen und Vorsichtsmaßnahmen gemäß dieserBetriebsanleitung ausreichend vertraut ist. Ferner ist es ausgebildet, unterwiesen oder berechtigt, Stromkreiseund Geräte gemäß den Bestimmungen der Sicherheitstechnik ein-und auszuschalten, zu erden und gemäß den Arbeitsanforderungenzweckmäßig zu kennzeichnen. Es muß eine angemesseneSicherheitsausrüstung besitzen und in erster Hilfe geschult sein.
• Nur vom Hersteller zugelassene Zubehör- und Ersatzteile verwenden.
• Es sind die Sicherheitsvorschriften und -bestimmungen des Landes, indem das Gerät zur Anwendung kommt, zu beachten.
• Die Geräte sind zum Einbau in Maschinen, die in gewerblichenBereichen eingesetzt werden, vorgesehen.
Europäische Länder: EG-Richtlinie 89/392/EWG (Maschinenrichtlinie)
• Die in der Produktdokumentation angegebenenUmgebungsbedingungen müssen eingehalten werden.
• Sicherheitsrelevante Anwendungen sind nicht zugelassen, sofern sienicht ausdrücklich und eindeutig in den Projektierungsunterlagenangegeben sind. Ausgeschlossen sind beispielsweise folgende Einsatz- undAnwendungsbereiche: Kranbau, Personen- und Lastenaufzüge,Einrichtungen und Fahrzeuge zur Personenbeförderung,Medizintechnik, Raffinerieanlagen, Transport gefährlicher Güter,Nuklearbereiche, Einsatz in hochfrequenzsensiblen Bereichen,Bergbau, Lebensmittelverarbeitung, Steuerung vonSchutzeinrichtungen (auch in Maschinen).
• Die Inbetriebnahme ist solange untersagt, bis festgestellt wurde, daßdie Maschine, in der die Produkte eingebaut sind, den nationalenBestimmungen und Sicherheitsregeln der Anwendung entsprechen.
• Der Betrieb ist nur bei Einhaltung der nationalen EMV-Vorschriften fürden vorliegenden Anwendungsfall erlaubt.
Die Hinweise für eine EMV-gerechte Installation sind derDokumentation "EMV bei AC-Antrieben und Steuerungen“ zuentnehmen.
Die Einhaltung der durch die nationalen Vorschriften gefordertenGrenzwerte liegt in der Verantwortung der Hersteller der Anlage oderMaschine.
2-4 Sicherheitshinweise für elektrische Antriebe ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Europäische Länder: EG-Richtlinie 89/336/EWG (EMV-Richtlinie).
USA: Siehe Nationale Vorschriften für Elektrik (NEC), NationaleVereinigung der Hersteller von elektrischen Anlagen (NEMA) sowieregionale Bauvorschriften. Der Betreiber hat alle oben genannten Punktejederzeit einzuhalten.
• Die technischen Daten, die Anschluß- und Installationsbedingungensind der Produktdokumentation zu entnehmen und unbedingteinzuhalten.
2.5 Schutz gegen Berühren elektrischer Teile
Hinweis: Dieser Abschnitt betrifft nur Geräte und Antriebskomponentenmit Spannungen über 50 Volt.
Werden Teile mit Spannungen größer 50 Volt berührt, können diese fürPersonen gefährlich werden und zu elektrischem Schlag führen. BeimBetrieb elektrischer Geräte stehen zwangsläufig bestimmte Teile dieserGeräte unter gefährlicher Spannung.
GEFAHR
Hohe elektrische Spannung! Lebensgefahr,Verletzungsgefahr durch elektrischen Schlagoder schwere Körperverletzung!⇒ Bedienung, Wartung und/oder Instandsetzung
dieses Gerätes darf nur durch für die Arbeit an odermit elektrischen Geräten ausgebildetes undqualifiziertes Personal erfolgen.
⇒ Die allgemeinen Errichtungs- und Sicherheits-vorschriften zu Arbeiten an Starkstromanlagenbeachten.
⇒ Vor dem Einschalten muß der feste Anschluß desSchutzleiters an allen elektrischen Gerätenentsprechend dem Anschlußplan hergestellt werden.
⇒ Ein Betrieb, auch für kurzzeitige Meß- undPrüfzwecke, ist nur mit fest angeschlossenemSchutzleiter an den dafür vorgesehenen Punkten derKomponenten erlaubt.
⇒ Vor dem Zugriff zu elektrischen Teilen mitSpannungen größer 50 Volt das Gerät vom Netzoder von der Spannungsquelle trennen. GegenWiedereinschalten sichern.
⇒ Bei elektrischen Antriebs- und Filterkomponenten zubeachten:Nach dem Ausschalten erst 5 Minuten Entladezeitder Kondensatoren abwarten, bevor auf die Gerätezugegriffen wird. Die Spannung der Kondensatorenvor Beginn der Arbeiten messen, um Gefährdungendurch Berührung auszuschließen.
⇒ Elektrische Anschlußstellen der Komponenten imeingeschalteten Zustand nicht berühren.
ECODRIVE03 ELC-01VRS Sicherheitshinweise für elektrische Antriebe 2-5
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
⇒ Vor dem Einschalten die dafür vorgesehenenAbdeckungen und Schutzvorrichtungen für denBerührschutz an den Geräten anbringen. Vor demEinschalten spannungsführende Teile sicherabdecken und schützen, um Berühren zu verhindern.⇒ Eine FI-Schutzeinrichtung (Fehlerstrom-Schutzeinrichtung) oder RCD kann für elektrischeAntriebe nicht eingesetzt werden! Der Schutz gegenindirektes Berühren muß auf andere Weisehergestellt werden, zum Beispiel durchÜberstromschutzeinrichtung entsprechend denrelevanten Normen.
⇒ Für Einbaugeräte ist der Schutz gegen direktesBerühren elektrischer Teile durch ein äußeresGehäuse, wie beispielsweise einen Schaltschrank,sicherzustellen.
Europäische Länder: entsprechend EN 50178/ 1998,Abschnitt 5.3.2.3.
USA: Siehe Nationale Vorschriften für Elektrik (NEC),Nationale Vereinigung der Hersteller von elektrischenAnlagen (NEMA) sowie regionale Bauvorschriften. DerBetreiber hat alle oben genannten Punkte jederzeiteinzuhalten.
Bei elektrischen Antriebs- und Filterkomponenten zu beachten:
GEFAHR
Hohe Gehäusespannung und hoherAbleitstrom! Lebensgefahr, Verletzungsgefahrdurch elektrischen Schlag!⇒ Vor dem Einschalten erst die elektrische Ausrüstung,
die Gehäuse aller elektrischen Geräte und Motorenmit dem Schutzleiter an den Erdungspunktenverbinden oder erden. Auch bei Kurzzeittests.
⇒ Den Schutzleiter der elektrischen Ausrüstung undder Geräte stets fest ans Versorgungsnetzanschließen. Der Ableitstrom ist größer als 3,5 mA.
⇒ Mindestens 10 mm2 Kupfer-Querschnitt für dieseSchutzleiterverbindung in seinem ganzen Verlaufverwenden!
⇒ Vor Inbetriebnahme, auch zu Versuchszwecken,stets den Schutzleiter anschließen oder mit Erdleiterverbinden. Auf dem Gehäuse können sonst hoheSpannungen auftreten, die elektrischen Schlagverursachen.
Europäische Länder: EN 50178 / 1998, Abschnitt 5.3.2.1.USA: Siehe Nationale Vorschriften für Elektrik (NEC),Nationale Vereinigung der Hersteller von elektrischenAnlagen (NEMA) sowie regionale Bauvorschriften. DerBetreiber hat alle oben genannten Punkte jederzeiteinzuhalten.
2-6 Sicherheitshinweise für elektrische Antriebe ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
2.6 Schutz durch Schutzkleinspannung (PELV) gegenelektrischen Schlag
Alle Anschlüsse und Klemmen mit Spannungen von 5 bis 50 Volt anRexroth Indramat Produkten sind Schutzkleinspannungen, dieentsprechend folgender Normen berührungssicher ausgeführt sind:
• international: IEC 60364-4-41
• Europäische Länder in der EU: EN 50178/1998, Abschnitt 5.2.8.1.
WARNUNG
Hohe elektrische Spannung durch falschenAnschluß! Lebensgefahr, Verletzungsgefahrdurch elektrischen Schlag!⇒ An alle Anschlüsse und Klemmen mit Spannungen
von 0 bis 50 Volt dürfen nur Geräte, elektrischeKomponenten und Leitungen angeschlossenwerden, die eine Schutzkleinspannung (PELV =Protective Extra Low Voltage) aufweisen.
⇒ Nur Spannungen und Stromkreise, die sichereTrennung zu gefährlichen Spannungen haben,anschließen. Sichere Trennung wird beispielsweisedurch Trenntransformatoren, sichere Optokoppleroder netzfreien Batteriebetrieb erreicht.
2.7 Schutz vor gefährlichen Bewegungen
Gefährliche Bewegungen können durch fehlerhafte Ansteuerung vonangeschlossenen Motoren verursacht werden. Die Ursachen könnenverschiedenster Art sein:
• unsaubere oder fehlerhafte Verdrahtung oder Verkabelung
• Fehler bei der Bedienung der Komponenten
• Fehler in den Meßwert- und Signalgebern
• defekte Komponenten
• Fehler in der Software
Diese Fehler können unmittelbar nach dem Einschalten oder nach einerunbestimmten Zeitdauer im Betrieb auftreten.
Die Überwachungen in den Antriebskomponenten schließen eineFehlfunktion in den angeschlossenen Antrieben weitestgehend aus. ImHinblick auf den Personenschutz, insbesondere der Gefahr derKörperverletzung und/oder Sachschaden, darf auf diesen Sachverhaltnicht allein vertraut werden. Bis zum Wirksamwerden der eingebautenÜberwachungen ist auf jeden Fall mit einer fehlerhaftenAntriebsbewegung zu rechnen, deren Maß von der Art der Steuerung unddes Betriebszustandes abhängen.
ECODRIVE03 ELC-01VRS Sicherheitshinweise für elektrische Antriebe 2-7
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
GEFAHR
Gefahrbringende Bewegungen! Lebensgefahr,Verletzungsgefahr, schwere Körperverletzungoder Sachschaden!⇒ Der Personenschutz ist aus den oben genannten
Gründen durch Überwachungen oder Maßnahmen,die anlagenseitig übergeordnet sind, sicherzustellen.Diese werden nach den spezifischen Gegebenheitender Anlage einer Gefahren- und Fehleranalyse vomAnlagenbauer vorgesehen. Die für die Anlagegeltenden Sicherheitsbestimmungen werden hierbeimit einbezogen. Durch Ausschalten, Umgehen oderfehlendes Aktivieren von Sicherheitseinrichtungenkönnen willkürliche Bewegungen der Maschine oderandere Fehlfunktionen auftreten.
Vermeidung von Unfällen, Körperverletzungund/oder Sachschaden:
⇒ Kein Aufenthalt im Bewegungsbereich der Maschineund Maschinenteile. Mögliche Maßnahmen gegenunbeabsichtigten Zugang von Personen:- Schutzzaun
- Schutzgitter
- Schutzabdeckung
- Lichtschranke
⇒ Ausreichende Festigkeit der Zäune undAbdeckungen gegen die maximal möglicheBewegungsenergie.
⇒ Not-Stop-Schalter leicht zugänglich in unmittelbarerNähe anordnen. Die Funktion der Not-Aus-Einrichtung vor der Inbetriebnahme prüfen. DasGerät bei Fehlfunktion des Not-Stop-Schalters nichtbetreiben.
⇒ Sicherung gegen unbeabsichtigten Anlauf durchFreischalten des Leistungsanschlusses der Antriebeüber Not-Aus-Kreis oder Verwenden einer sicherenAnlaufsperre.
⇒ Vor dem Zugriff oder Zutritt in den Gefahrenbereichdie Antriebe sicher zum Stillstand bringen.
⇒ Vertikale Achsen gegen Herabfallen oder Absinkennach Abschalten des Motors zusätzlich sichern, wiedurch:- mechanische Verriegelung der vertikalen Achse,
- externe Brems-/ Fang-/ Klemmeinrichtung oder
- ausreichenden Gewichtsausgleich der Achse.
Die serienmäßig gelieferte Motor-Haltebremse odereine externe, vom Antriebsregelgerät angesteuerteMotor-Haltebremse alleine ist nicht für denPersonenschutz geeignet!
⇒ Elektrische Ausrüstung über den Hauptschalterspannungsfrei schalten und gegen Wiederein-schalten sichern bei:- Wartungsarbeiten und Instandsetzung
- Reinigungsarbeiten
- langen Betriebsunterbrechungen
2-8 Sicherheitshinweise für elektrische Antriebe ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
⇒ Den Betrieb von Hochfrequenz-, Fernsteuer- undFunkgeräten in der Nähe der Geräteelektronik undderen Zuleitungen vermeiden. Wenn ein Gebrauchdieser Geräte unvermeidlich ist, vor derErstinbetriebnahme das System und die Anlage aufmögliche Fehlfunktionen in allen Gebrauchslagenprüfen. Im Bedarfsfalle ist eine spezielle EMV-Prüfung der Anlage notwendig.
2.8 Schutz vor magnetischen und elektromagnetischenFeldern bei Betrieb und Montage
Magnetische und elektromagnetische Felder, die in unmittelbarerUmgebung von stromführenden Leitern und Motor-Permanentmagnetenbestehen, können eine ernste Gefahr für Personen mitHerzschrittmachern, metallischen Implantaten und Hörgeräten darstellen.
WARNUNG
Gesundheitsgefahr für Personen mitHerzschrittmachern, metallischen Implantatenund Hörgeräten in unmittelbarer Umgebungelektrischer Ausrüstungen!⇒ Personen mit Herzschrittmachern und metallischen
Implantaten ist der Zugang zu folgenden Bereichenuntersagt:- Bereiche, in denen elektrische Geräte und Teile
montiert, betrieben oder in Betrieb genommenwerden.
- Bereiche, in denen Motorenteile mit Dauer-magneten gelagert, repariert oder montiert werden.
⇒ Besteht die Notwendigkeit für Träger vonHerzschrittmachern derartige Bereiche zu betreten,so ist das zuvor von einem Arzt zu entscheiden. DieStörfestigkeit von bereits oder künftig implantiertenHerzschrittmachern ist sehr unterschiedlich, somitbestehen keine allgemein gültigen Regeln.
⇒ Personen mit Metallimplantaten oder Metallsplitternsowie mit Hörgeräten haben vor dem Betreten der-artiger Bereiche einen Arzt zu befragen, da dort mitgesundheitlichen Beeinträchtigungen zu rechnen ist.
ECODRIVE03 ELC-01VRS Sicherheitshinweise für elektrische Antriebe 2-9
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
2.9 Schutz gegen Berühren heißer Teile
VORSICHT
Heiße Oberflächen auf Gerätegehäuse möglich!Verletzungsgefahr! Verbrennungsgefahr!⇒ Gehäuseoberfläche in der Nähe von heißen
Wärmequellen nicht berühren! Verbrennungsgefahr!⇒ Vor dem Zugriff Geräte erst 10 Minuten nach dem
Abschalten abkühlen lassen.⇒ Werden heiße Teile der Ausrüstung wie
Gerätegehäuse, in denen sich Kühlkörper undWiderstände befinden, berührt, kann das zuVerbrennungen führen!
2-10 Sicherheitshinweise für elektrische Antriebe ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
2.10 Schutz bei Handhabung und MontageHandhabung und Montage bestimmter Teile und Komponenten inungeeigneter Art und Weise kann unter ungünstigen Bedingungen zuVerletzungen führen.
VORSICHT
Verletzungsgefahr durch unsachgemäßeHandhabung! Körperverletzung durchQuetschen, Scheren, Schneiden, Stoßen!⇒ Die allgemeinen Errichtungs- und Sicherheits-
vorschriften zu Handhabung und Montage beachten.⇒ Geeignete Montage- und Transporteinrichtungen
verwenden.⇒ Einklemmungen und Quetschungen durch geeignete
Vorkehrungen vorbeugen.⇒ Nur geeignetes Werkzeug verwenden. Sofern vor-
geschrieben, Spezialwerkzeug benutzen.⇒ Hebeeinrichtungen und Werkzeuge fachgerecht
einsetzen.⇒ Wenn erforderlich, geeignete Schutzausstattungen
(zum Beispiel Schutzbrillen, Sicherheitsschuhe,Schutzhandschuhe) benutzen.
⇒ Nicht unter hängenden Lasten aufhalten.
⇒ Auslaufende Flüssigkeiten am Boden sofort wegenRutschgefahr beseitigen.
2.11 Sicherheit beim Umgang mit BatterienBatterien bestehen aus aktiven Chemikalien, die in einem festenGehäuse untergebracht sind. Unsachgemäßer Umgang kann daher zuVerletzungen oder Sachschäden führen.
VORSICHT
Verletzungsgefahr durch unsachgemäßeHandhabung!⇒ Nicht versuchen, leere Batterien durch Erhitzen oder
andere Methoden zu reaktivieren (Explosions- undÄtzungsgefahr).
⇒ Die Batterien dürfen nicht aufgeladen werden, weilsie dabei auslaufen oder explodieren können.
⇒ Batterien nicht ins Feuer werfen.
⇒ Batterien nicht auseinandernehmen.
⇒ In den Geräten eingebaute elektrische Bauteile nichtbeschädigen.
Hinweis: Umweltschutz und Entsorgung! Die im Produkt enthaltenenBatterien sind im Sinne der gesetzlichen Bestimmungen alsGefahrengut beim Transport im Land-, Luft- und Seeverkehranzusehen (Explosionsgefahr). Altbatterien getrennt vonanderem Abfall entsorgen. Die nationalen Bestimmungen imAufstellungsland beachten.
ECODRIVE03 ELC-01VRS Sicherheitshinweise für elektrische Antriebe 2-11
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
2.12 Schutz vor unter Druck stehenden Leitungen
Bestimmte Motoren (ADS, ADM, 1MB usw.) und Antriebsregelgerätekönnen entsprechend den Angaben in den Projektierungsunterlagen zumTeil mit extern zugeführten und unter Druck stehenden Medien wieDruckluft, Hydrauliköl, Kühlflüssigkeit und Kühlschmiermittel versorgtwerden. Unsachgemäßer Umgang mit externen Versorgungssystemen,Versorgungsleitungen oder Anschlüssen kann in diesen Fällen zuVerletzungen oder Sachschäden führen.
VORSICHT
Verletzungsgefahr durch unsachgemäße Hand-habung von unter Druck stehenden Leitungen!⇒ Nicht versuchen, unter Druck stehende Leitungen zu
trennen, zu öffnen oder zu kappen (Explosions-gefahr).
⇒ Betriebsvorschriften der jeweiligen Herstellerbeachten.
⇒ Bevor Leitungen demontiert werden, muß der Druckund das Medium (Luft oder Flüssigkeit) abgelassenwerden.
⇒ Geeignete Schutzausstattungen (zum BeispielSchutzbrillen, Sicherheitsschuhe, Schutzhand-schuhe) benutzen.
⇒ Ausgelaufene Flüssigkeiten am Boden sofortbeseitigen.
Hinweis: Umweltschutz und Entsorgung! Die für den Betrieb desProduktes verwendeten Medien können unter Umständennicht umweltverträglich sein. Umweltschädliche Mediengetrennt von anderem Abfall entsorgen. Die nationalenBestimmungen im Aufstellungsland beachten.

2-12 Sicherheitshinweise für elektrische Antriebe ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Notizen
ECODRIVE03 ELC-01VRS Allgemeine Hinweise zur Inbetriebnahme 3-1
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
3 Allgemeine Hinweise zur Inbetriebnahme
3.1 Begriffserläuterungen
Zum Verständnis der in diesem Dokument verwendeten Ausdrücke ist eshilfreich zunächst einige Begriffserläuterungen vorzunehmen.
Kommunikation
Visuelle AnzeigeDie auf dem auf dem Programmiermodul befindliche 2stellige 7-Segmentanzeige H1 Display gibt den aktuellen Zustand an. Dabei wirdunterschieden zwischen:
• Betriebszustand
• Warnungen
• Fehlern
Mit Hilfe des neben der Anzeige befindlichen S1-Tasters auf demProgrammiermodul können die Fehler quittiert werden.
Serielle SchnittstelleUm die Steuerung an die anlagenspezifischen Bedürfnisse anzupassen,müssen die Parameter und die Programme eingegeben werden. Dieserfolgt ausschließlich über die serielle Schnittstelle ( X2).
Rexroth Indramat stellt zwei Möglichkeiten zur Verfügung:
• PC-Programmierung mit MotionManger
• Visualisierungseinheit BTV04
S1-Taste ProgrammiermodulMit Hilfe der S1-Taste und den darunter befindlichen Adress-Schalterkönnen verschiedene Grundeinstellungen erzwungen werden.
Die Freischaltung der nachfolgenden Funktion erfolgt durch das Betätigender S1-Taste bei eingestellter Adresse 00. Die Funktionsfreigabe bleibtfür 1 Minute anstehen. Dies wird in der Anzeige durch ‚Ad‘ angezeigt.Nach Auswahl der Funktionsnummer und nach Bestätigen durch die S1-Taste, verschwindet die Anzeige , wenn die Funktion beendet wurde.
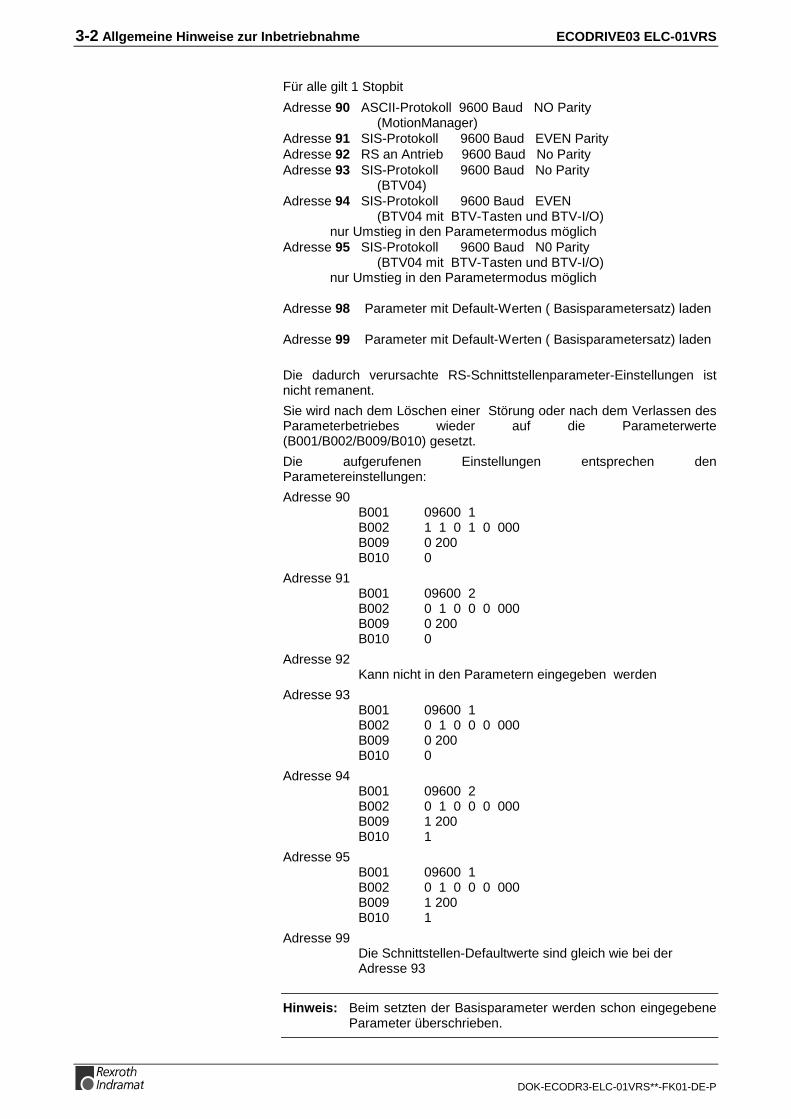
3-2 Allgemeine Hinweise zur Inbetriebnahme ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Für alle gilt 1 Stopbit
Adresse 90 ASCII-Protokoll 9600 Baud NO Parity (MotionManager)Adresse 91 SIS-Protokoll 9600 Baud EVEN ParityAdresse 92 RS an Antrieb 9600 Baud No ParityAdresse 93 SIS-Protokoll 9600 Baud No Parity (BTV04)Adresse 94 SIS-Protokoll 9600 Baud EVEN (BTV04 mit BTV-Tasten und BTV-I/O) nur Umstieg in den Parametermodus möglichAdresse 95 SIS-Protokoll 9600 Baud N0 Parity
(BTV04 mit BTV-Tasten und BTV-I/O)nur Umstieg in den Parametermodus möglich
Adresse 98 Parameter mit Default-Werten ( Basisparametersatz) laden
Adresse 99 Parameter mit Default-Werten ( Basisparametersatz) laden
Die dadurch verursachte RS-Schnittstellenparameter-Einstellungen istnicht remanent.
Sie wird nach dem Löschen einer Störung oder nach dem Verlassen desParameterbetriebes wieder auf die Parameterwerte(B001/B002/B009/B010) gesetzt.
Die aufgerufenen Einstellungen entsprechen denParametereinstellungen:
Adresse 90B001 09600 1B002 1 1 0 1 0 000B009 0 200B010 0
Adresse 91B001 09600 2B002 0 1 0 0 0 000B009 0 200B010 0
Adresse 92Kann nicht in den Parametern eingegeben werden
Adresse 93B001 09600 1B002 0 1 0 0 0 000B009 0 200B010 0
Adresse 94B001 09600 2B002 0 1 0 0 0 000B009 1 200B010 1
Adresse 95B001 09600 1B002 0 1 0 0 0 000B009 1 200B010 1
Adresse 99Die Schnittstellen-Defaultwerte sind gleich wie bei derAdresse 93
Hinweis: Beim setzten der Basisparameter werden schon eingegebeneParameter überschrieben.
ECODRIVE03 ELC-01VRS Allgemeine Hinweise zur Inbetriebnahme 3-3
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Datenspeicher
Nichtflüchtige SpeicherIm Antrieb sind verschiedene nicht flüchtige Datenspeicher vorhanden.
Darin werden folgende Betriebsdaten gespeichert
• Einstellung der Konfiguration
• Parameter
• Programme
• Remanente.Ausgänge
Die Pufferung erfolgt bei jedem Schreibzugriff auf das entsprechendeBetriebsdatum.
In folgenden Baugruppen sind nicht-flüchtige Speicher vorhanden
• Antriebsregelgerät
• Motorfeedback (optional)
• Programmiermodul
• Aufsteckmodul (Parallelinterface 2 :DIO)
BetriebsartenEs gibt drei Betriebsarten:
• Hand
• Automatik
• Parameter
Sie werden durch Systemeingänge DKC21.3 X210 oder über das BTV04vorgegeben
ParameterDer Antrieb zeigt dabei im H1-Display "PA".
Um Parameter einzugeben, muß in die Betriebsart Parameter geschaltetwerden. Beim Verlassen des Parameterbetriebes werden die Parameterüberprüft und eventuell Fehler angezeigt.
HandDer Antrieb zeigt dabei im H1-Display "HA".
Im Handbetrieb und aktiviertem Antrieb sind folgende Funktionen inBetrieb.
• Task3
oder möglich
• Tippen vor
• Tippen zurück
• Handvektor
• Referenzieren über programmierbarem Eingang ( Parameter C010 )
3-4 Allgemeine Hinweise zur Inbetriebnahme ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
AutomatikDer Antrieb zeigt dabei im H1-Display "AU".
Im Automatikbetrieb und aktiviertem Antrieb sind folgende Funktionen inBetrieb.
• Task 1
• Task 2
• Task 3
oder möglich
• Interruptvektor
Eingänge, Ausgänge, Merker
BezeichnungSystemeingänge: Es sind feste Funktionen definiert
Freie Eingänge : 1-10
Systemausgänge : Es sind feste Funktionen definiert
Freie Ausgänge : 1-8
Merker : alle Ausgänge > 9
Siehe auch : „Eingänge,Ausgänge,Merker Kapitel 9.1
Warnung
Warnungen führen nicht zu einerselbstätigen Abschaltung
In Abhängigkeit von Betriebsarten und Parametereinstellungenwerden eine Vielzahl von Überwachungen durchgeführt. Wird dabeiein Zustand erkannt, der den ordnungsgemäßen Betrieb noch zuläßt,aber im weiteren Verlauf zur Generierung eines Fehlers und damitzur selbstätigen Abschaltung des Antriebs führt, falls dieser Zustandweiter anhält, wird eine Warnung generiert.
Warnungsklassen
Warnungsklasse: Diagnose: Antriebsreaktion:
ohne Antriebsreaktion E2xx
E- 01xx
--
Abb. 3-1: Einteilung der Warnungsklassen
Warnungen lassen sich von extern nicht löschen.
FehlerIn Abhängigkeit von Betriebsarten und Parametereinstellungen werdeneine Vielzahl von Überwachungen durchgeführt. Wird dabei ein Zustanderkannt, der den ordnungsgemäßen Betrieb nicht mehr zuläßt, so wirdeine Fehlermeldung generiert.
ECODRIVE03 ELC-01VRS Allgemeine Hinweise zur Inbetriebnahme 3-5
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Fehlerklassen
Die Fehlerklasse ist aus derDiagnose ersichtlich
Fehler lassen sich in 4 verschiedene Fehlerklassen einteilen. Sieentscheidet über die Antriebsfehlerreaktion..
Fehlerklasse: Diagnose: Antriebsreaktion:
Fatal F8xx Momentenfreischaltung
Fahrbereich F6xxF- 03xx
Geschwindigkeitssollwert-nullschaltung
Schnittstelle F4xx laut eingestellter BestmöglicheStillsetzung Parameter A119
Nichtfatal F2xxF- 02xx
laut eingestellter BestmöglicheStillsetzung Parameter A119
Abb. 3-2: Einteilung der Fehlerklassen
AntriebsfehlerreaktionWird im Antrieb ein Fehlerzustand detektiert, so wird automatisch dieAusführung einer Antriebsfehlerreaktion gestartet, sofern sich der Antriebin Regelung befindet. Das H1-Display blinkt mit Fx / xx. DieAntriebsreaktion bei Schnittstellen- und Nichtfatalen Fehlern läßt sich mitA119, Bestmögliche Stillsetzung parametrieren. Am Ende jederFehlerreaktion schaltet sich der Antrieb momentenfrei.
Fehler löschen
Fehler müssen von externgelöscht werden
Fehler werden nicht selbsttätig gelöscht, sondern müssen durch:
Den Eingang X3/7
oder
Betätigen des Tasters "S1"
von extern gelöscht werden. Ist der Fehlerzustand noch vorhanden,so wird der Fehler sofort wieder detektiert.Zum Wieder-Einschalten des Antriebs ist eine positive Flanke aufdem Reglerfreigabesignal notwendig.
Fehler löschen bei gesetzter ReglerfreigabeTritt während des Betriebs mit gesetzter Reglerfreigabe ein Antriebsfehlerauf, so führt der Antrieb eine Fehlerreaktion durch. Am Ende jederFehlerreaktion deaktiviert sich der Antrieb selbstätig, d.h.die Endstufewird abgeschaltet, der Antrieb wechselt vom strombehafteten in denstromlosen Zustand.
Um den Antrieb wieder zu aktivieren, ist:
• der Fehler zu löschen
3-6 Allgemeine Hinweise zur Inbetriebnahme ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Basisparametersatz/Urladen
BasisparametersatzDie Parameter sind im Auslieferungszustand mit werksseitig festgelegtenBasiswerten beschrieben. Mit Hilfe der S1-Taste und derAdresseinstellung 99 kann die Funktion Basisparameter ladenaufgerufen werden. Der Basisparametersatz ist dabei so aufgebaut, daß
• alle optionalen Funktionen deaktiviert sind,
• Grenzwerte für Position deaktiviert sind,
• Grenzwerte für Moment/Kraft auf hohe Werte
• und Grenzwerte für Geschwindigkeit und Beschleunigung auf geringeWerte gesetzt werden.
• SIS-Protokoll 9600 Baud No Parity
Hinweis: Sollten vor diesem Funktionsaufruf schonMaschinenparameter gesetzt worden sein, so werden dieseunwiderruflich überschrieben.
Hinweis: Der Basisparametersatz gewährleistet nicht die Anpassungdes Antriebs an die Maschine, sowie nur in bestimmten Fällenan die angeschlossenen Motore und Meßsysteme. Dieentsprechenden Einstellungen müssen bei derErstinbetriebnahme der Achse vorgenommen werden!
Automatisches Ausführen der Funktion"Basisparametersatz laden"Die Antriebsfirmware befindet sich auf dem Programmiermodul. Erfolgtein Firmwaretausch auf eine andere nicht kompatible Firmware-Version,so erkennt dies der Antriebsregler beim nächsten Einschalten derSteuerspannung. In diesem Fall wird "PL" am Siebensegment-Displayangezeigt. Durch Drücken des Tasters "S1" wird der Basisparametersatzaktiviert.
Hinweis: Vorher vorhandene Parametereinstellungen gehen durchFirmwaretausch und anschließendes "Basisparametersatzladen" verloren. Soll dies bei einem Versionstausch verhindertwerden, sind vor dem Tausch die Parameter zu sichern undnach Tausch und Basisparametersatz laden wieder zu laden.
Hinweis: Solange der Antrieb "PL" anzeigt und das Kommando aktiv ist,ist keine Kommunikation über die serielle Schnittstellemöglich.
ECODRIVE03 ELC-01VRS Allgemeine Hinweise zur Inbetriebnahme 3-7
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
3.2 Inbetriebnahmeanleitung
Bei der ersten Inbetriebnahme sollte der Antrieb von der Mechanikgetrennt werden.
• Geräte und Kabel auf richtigen Typ prüfen
• Der Anschluß der Leistungsversorgung, Steuerspannung und desAntriebes mit dessen Feedback muß nach den Vorschriften in derDokumentation:Projektierung DOK-ECODR3-DKC**.3****-PRxx-DE-Perfolgen.
• Verdrahtung der Eingänge X3 und X210
• Anpassung der Schnittstellenparameter mit der S1-Taste
• Verdrahtung der Schnittstelle mit dem Bediengerät (PC oder BTV )
• Parameter anpassen an die Anlage
• Leistung einschalten
• Verfahren der Achse im Handbetrieb mit ‚Tippen‘
• Kontrollieren der Sicherheitseinrichtung der Anlage (Not-Aus, Fahrbereichsendschalter, u.s.w )
Arbeitet der Antrieb wie erwartet, kann die Leistung ausgeschaltet und derMotor an die Maschine gekoppelt werden. Danach sind noch folgendeArbeiten auszuführen, wenn die Anwendungsart dies erfordert:
• Absolutmaß setzten oder Referenzieren
• Lagegrenzwertparameter setzten
• Programme laden
• Bewegungsdynamik testen und gegebenenfalls mit denRegelungsparametern ( CRxx) anpassen.
• Parameter und Programm sichern.
Neuaufspielen der FirmwareBei einem neu ausgeliefertem Gerät ist die Firmware schon enthalten.Über den Status 19 kann die im Gerät befindliche Firmwareversion seriellausgelesen werden. Sollte eine andere Firmwareversion enthalten sein,so kann die korrekte Firmware mit Hilfe der Software DOLFI aufgespieltwerden.
Wurde eine neue Firmwareversion aufgespielt, erscheint beim nächstenEinschalten der Steuerspannung im H1-Display PL.. Durch Drücken desTasters „S1“ wird der Basisparametersatz aktiviert.
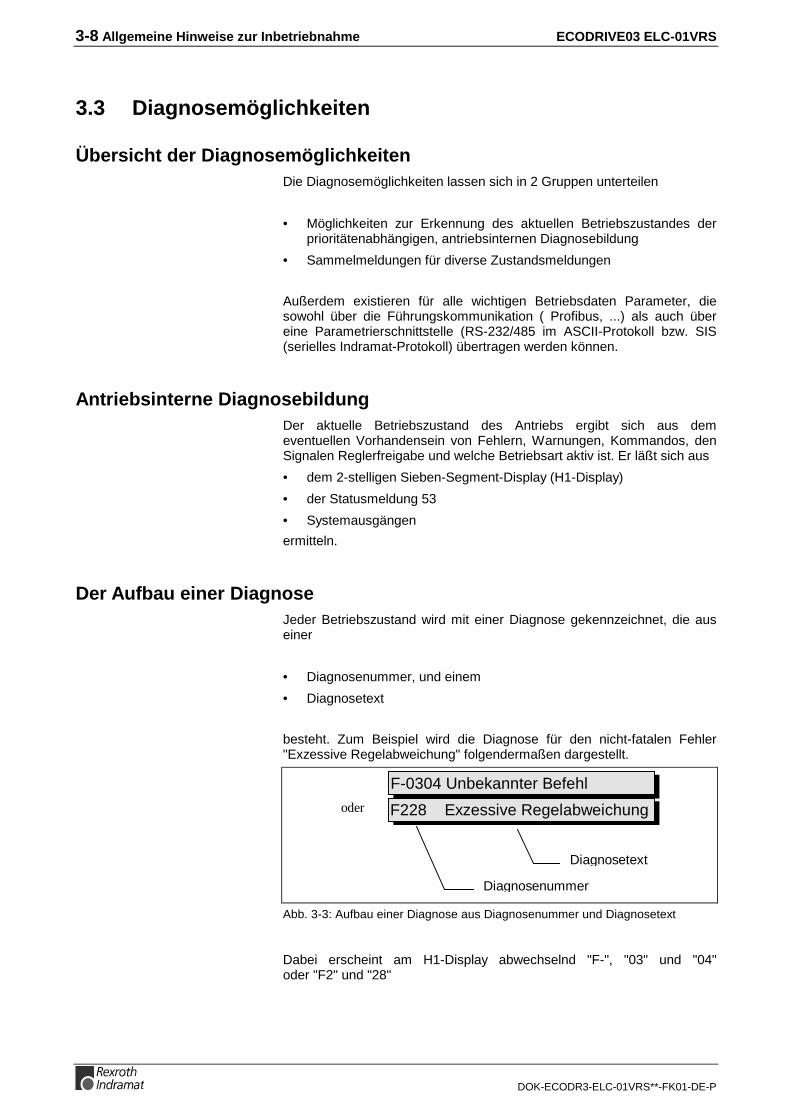
3-8 Allgemeine Hinweise zur Inbetriebnahme ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
3.3 Diagnosemöglichkeiten
Übersicht der DiagnosemöglichkeitenDie Diagnosemöglichkeiten lassen sich in 2 Gruppen unterteilen
• Möglichkeiten zur Erkennung des aktuellen Betriebszustandes derprioritätenabhängigen, antriebsinternen Diagnosebildung
• Sammelmeldungen für diverse Zustandsmeldungen
Außerdem existieren für alle wichtigen Betriebsdaten Parameter, diesowohl über die Führungskommunikation ( Profibus, ...) als auch übereine Parametrierschnittstelle (RS-232/485 im ASCII-Protokoll bzw. SIS(serielles Indramat-Protokoll) übertragen werden können.
Antriebsinterne DiagnosebildungDer aktuelle Betriebszustand des Antriebs ergibt sich aus demeventuellen Vorhandensein von Fehlern, Warnungen, Kommandos, denSignalen Reglerfreigabe und welche Betriebsart aktiv ist. Er läßt sich aus
• dem 2-stelligen Sieben-Segment-Display (H1-Display)
• der Statusmeldung 53
• Systemausgängen
ermitteln.
Der Aufbau einer DiagnoseJeder Betriebszustand wird mit einer Diagnose gekennzeichnet, die auseiner
• Diagnosenummer, und einem
• Diagnosetext
besteht. Zum Beispiel wird die Diagnose für den nicht-fatalen Fehler"Exzessive Regelabweichung" folgendermaßen dargestellt.
F228 Exzessive Regelabweichung
Diagnosenummer
Diagnosetext
F-0304 Unbekannter Befehl
oder
Abb. 3-3: Aufbau einer Diagnose aus Diagnosenummer und Diagnosetext
Dabei erscheint am H1-Display abwechselnd "F-", "03" und "04"oder "F2" und "28"
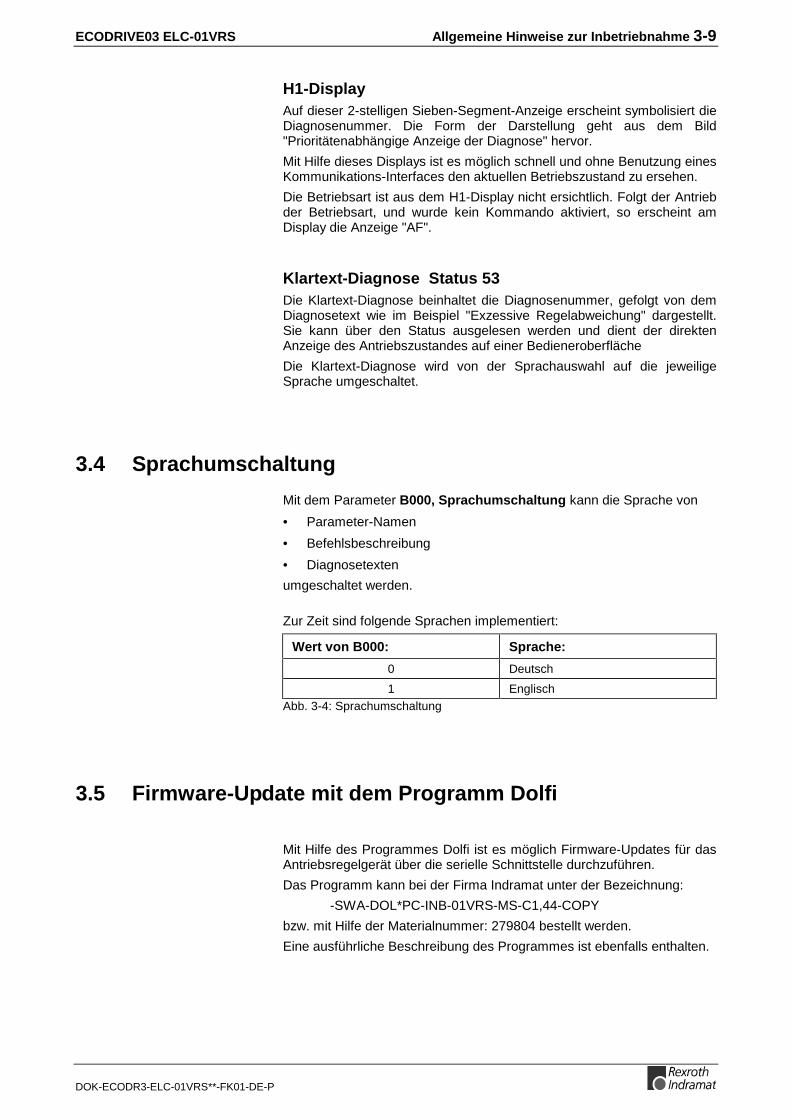
ECODRIVE03 ELC-01VRS Allgemeine Hinweise zur Inbetriebnahme 3-9
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
H1-DisplayAuf dieser 2-stelligen Sieben-Segment-Anzeige erscheint symbolisiert dieDiagnosenummer. Die Form der Darstellung geht aus dem Bild"Prioritätenabhängige Anzeige der Diagnose" hervor.
Mit Hilfe dieses Displays ist es möglich schnell und ohne Benutzung einesKommunikations-Interfaces den aktuellen Betriebszustand zu ersehen.
Die Betriebsart ist aus dem H1-Display nicht ersichtlich. Folgt der Antriebder Betriebsart, und wurde kein Kommando aktiviert, so erscheint amDisplay die Anzeige "AF".
Klartext-Diagnose Status 53Die Klartext-Diagnose beinhaltet die Diagnosenummer, gefolgt von demDiagnosetext wie im Beispiel "Exzessive Regelabweichung" dargestellt.Sie kann über den Status ausgelesen werden und dient der direktenAnzeige des Antriebszustandes auf einer Bedieneroberfläche
Die Klartext-Diagnose wird von der Sprachauswahl auf die jeweiligeSprache umgeschaltet.
3.4 Sprachumschaltung
Mit dem Parameter B000, Sprachumschaltung kann die Sprache von
• Parameter-Namen
• Befehlsbeschreibung
• Diagnosetexten
umgeschaltet werden.
Zur Zeit sind folgende Sprachen implementiert:
Wert von B000: Sprache:
0 Deutsch
1 EnglischAbb. 3-4: Sprachumschaltung
3.5 Firmware-Update mit dem Programm Dolfi
Mit Hilfe des Programmes Dolfi ist es möglich Firmware-Updates für dasAntriebsregelgerät über die serielle Schnittstelle durchzuführen.
Das Programm kann bei der Firma Indramat unter der Bezeichnung:
-SWA-DOL*PC-INB-01VRS-MS-C1,44-COPY
bzw. mit Hilfe der Materialnummer: 279804 bestellt werden.
Eine ausführliche Beschreibung des Programmes ist ebenfalls enthalten.
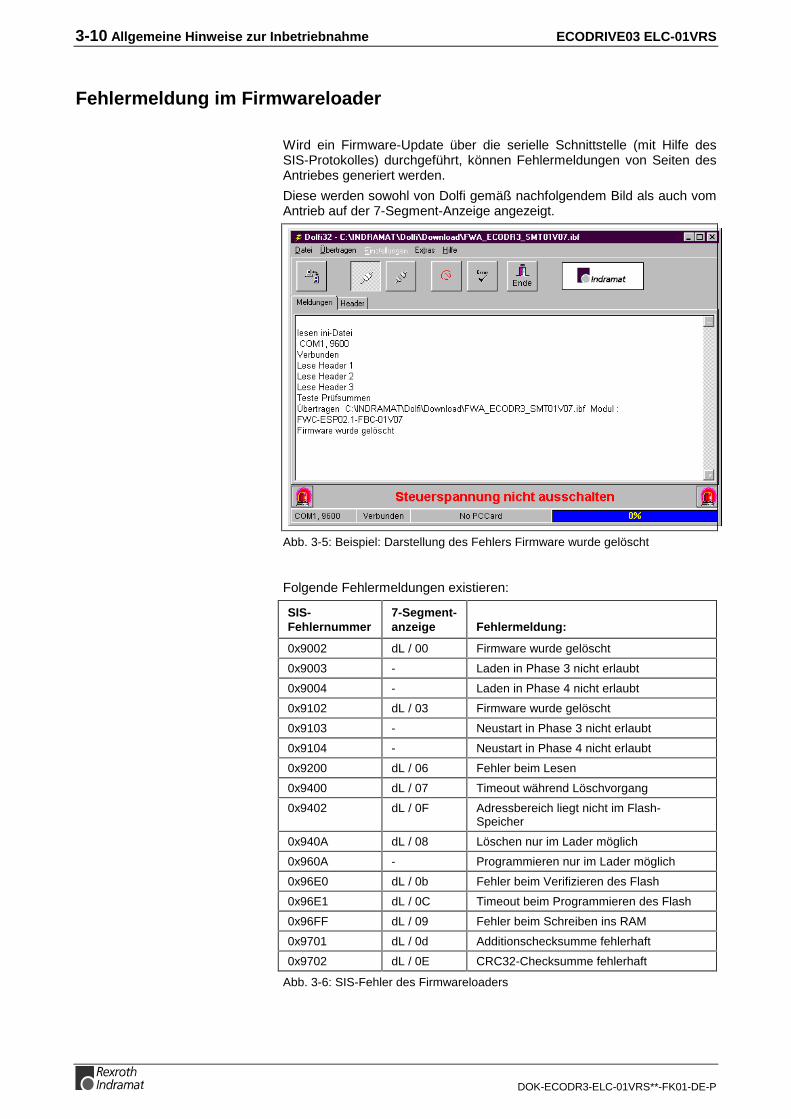
3-10 Allgemeine Hinweise zur Inbetriebnahme ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Fehlermeldung im Firmwareloader
Wird ein Firmware-Update über die serielle Schnittstelle (mit Hilfe desSIS-Protokolles) durchgeführt, können Fehlermeldungen von Seiten desAntriebes generiert werden.
Diese werden sowohl von Dolfi gemäß nachfolgendem Bild als auch vomAntrieb auf der 7-Segment-Anzeige angezeigt.
Abb. 3-5: Beispiel: Darstellung des Fehlers Firmware wurde gelöscht
Folgende Fehlermeldungen existieren:
SIS-Fehlernummer
7-Segment-anzeige Fehlermeldung:
0x9002 dL / 00 Firmware wurde gelöscht
0x9003 - Laden in Phase 3 nicht erlaubt
0x9004 - Laden in Phase 4 nicht erlaubt
0x9102 dL / 03 Firmware wurde gelöscht
0x9103 - Neustart in Phase 3 nicht erlaubt
0x9104 - Neustart in Phase 4 nicht erlaubt
0x9200 dL / 06 Fehler beim Lesen
0x9400 dL / 07 Timeout während Löschvorgang
0x9402 dL / 0F Adressbereich liegt nicht im Flash-Speicher
0x940A dL / 08 Löschen nur im Lader möglich
0x960A - Programmieren nur im Lader möglich
0x96E0 dL / 0b Fehler beim Verifizieren des Flash
0x96E1 dL / 0C Timeout beim Programmieren des Flash
0x96FF dL / 09 Fehler beim Schreiben ins RAM
0x9701 dL / 0d Additionschecksumme fehlerhaft
0x9702 dL / 0E CRC32-Checksumme fehlerhaft
Abb. 3-6: SIS-Fehler des Firmwareloaders
ECODRIVE03 ELC-01VRS Allgemeine Hinweise zur Inbetriebnahme 3-11
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Hinweis: Wird das Updaten der Firmware durchgeführt, wird an der 7-Segmentanzeige des Antriebes "dL" angezeigt.
0x9002 (dL / 00) Firmware wurde gelöscht
a) Es soll das Modul FBC-Bootkernel oder FIL-Firmwareloaderprogrammiert werden.
Es läuft die Firmware FIL, diese oder der Bootkernel sollgetauscht werden. Hierzu muß der Befehl "Shutdown,Antriebsfirmware“ gesendet werden, d.h. der Controller soll vomModul FIL in das Modul ELC (FLP), FGP, SGP oder SMTwechseln. Beim Umschalten wird geprüft, ob dieAdditionschecksumme des Moduls ELC (FLP), FGP,SGP oderSMT richtig ist, um sicherzustellen, daß das Modul richtigprogrammiert wurde und ausführbar ist. DieseChecksummenüberprüfung ist fehlgeschlagen.
b) Es soll das Modul ELC (FLP), FGP, SGP oder SMT programmiertwerden.
Es läuft die Firmware ELC (FLP), FGP, SGP oder SMT diese sollgetauscht werden. Hierzu muß der Befehl "Shutdown, Loader“gesendet werden, d.h. der Controller soll vom Modul ELC (FLP),FGP, SGP oder SMT in das Modul FIL wechseln. BeimUmschalten wird geprüft, ob die Additionschecksumme desModuls FIL richtig ist, um sicherzustellen, daß das Modul richtigprogrammiert wurde und ausführbar ist. DieseChecksummenüberprüfung ist fehlgeschlagen.
zu a)
Es muß vor dem Modul FIL das Modul ELC (FLP), FGP, SGPoder SMT programmiert werden.
zu b)
Es muß vor dem Modul ELC (FLP), FGP, SGP oder SMT dasModul FIL programmiert werden.
0x9003 Laden in Phase 3 nicht erlaubt
Der Antrieb befindet sich in Hand oder Automatikbetrieb und es soll fürden Firmwaretausch in den Firmwareloader gewechselt werden. DieseOperation ist nur im Parameterbetrieb möglich.
Antrieb in den Parameterbetrieb schalten.
0x9004 Laden in Phase 4 nicht erlaubt
Der Antrieb befindet sich in Hand oder Automatikbetrieb und es soll fürden Firmwaretausch in den Firmwareloader gewechselt werden. DieseOperation ist nur im Parameterbetrieb möglich.
Antrieb in den Parameterbetrieb schalten.
0x9102 (dL / 03) Firmware wurde gelöscht
Nach einem Firmwaretausch soll die Antriebsfirmware wieder gestartetwerden. Hierbei wurde das Modul ELC (FLP), FGP, SGP oder SMT nichtvollständig programmiert (Additionschecksummenüberprüfung istfehlgeschlagen).
Das Modul ELC (FLP), FGP, SGP oder SMT erneut programmieren.
Beschreibung:
Fehlerbehebung:
Beschreibung:
Fehlerbehebung:
Beschreibung:
Fehlerbehebung:
Beschreibung:
Fehlerbehebung:
3-12 Allgemeine Hinweise zur Inbetriebnahme ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
0x9103 Neustart in Phase 3 nicht erlaubt
Der Antrieb befindet sich in Phase 3 und die Antriebsfirmware soll neugestartet werden. Diese Operation ist nur im Parameterbetrieb möglich.
Antrieb in den Parameterbetrieb schalten.
0x9104 Neustart in Phase 4 nicht erlaubt
Der Antrieb befindet sich in Phase 4 (Hand/Automatik) und dieAntriebsfirmware soll neu gestartet werden. Diese Operation ist nur imParameterbetrieb möglich.
Antrieb in den Parameterbetrieb schalten.
0x9200 (dL / 06) Fehler beim Lesen
Es soll aus einem Speicherbaustein gelesen werden. Hierbei ist einFehler aufgetreten.
Adressbereich im *.ibf-File überprüfen. Ist der Adressbereich in Ordnung,d. h. an der Adresse ist wirklich ein Speicherbaustein vorhanden, so kannder Fehler nur durch das Tauschen des Firmwaremoduls ESF02.1beseitigt werden.
0x9400 (dL / 07) Timeout während Löschvorgang
Während dem Löschen eines Flash ist ein Fehler aufgetreten.
Löschbefehl wiederholen. Tritt der Fehler weiterhin auf, kann er nur durchdas Tauschen des Firmwaremoduls ESF02.1 beseitigt werden.
0x9402 (dL / 0F) Adressbereich liegt nicht im Flash
Es soll ein Adressbereich gelöscht werden, der nicht im Flash liegt.
Adressbereich im SIS-Dienst korrigieren bzw. Adressbereich im *.ibf-Fileüberprüfen.
0x940A Löschen nur im Lader möglich
Es läuft die Antriebsfirmware und es soll ein Flash gelöscht werden.
In den Firmwareloader wechseln.
0x96E0 (dL / 0b) Fehler beim Verifizieren des Flash
Während dem Programmiervorgang ist ein Fehler aufgetreten. EineSpeicherzelle im Flash konnte nicht erfolgreich beschrieben werden.
Vor dem Programmierbefehl muß das Flash gelöscht werden. Tritt derFehler weiterhin auf, kann er nur durch das Tauschen desFirmwaremoduls ESF02.1 beseitigt werden.
Beschreibung:
Fehlerbehebung:
Beschreibung:
Fehlerbehebung:
Beschreibung:
Fehlerbehebung:
Beschreibung:
Fehlerbehebung:
Beschreibung:
Fehlerbehebung:
Beschreibung:
Fehlerbehebung:
Beschreibung:
Fehlerbehebung:
ECODRIVE03 ELC-01VRS Allgemeine Hinweise zur Inbetriebnahme 3-13
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
0x96E1 (dL / 0C) Timeout beim Programmieren des Flash
Während dem Programmiervorgang ist ein Timeout aufgetreten. EineSpeicherzelle im Flash konnte nicht beschrieben werden.
Programmierbefehl wiederholt. Tritt der Fehler weiterhin auf, kann er nurdurch das Tauschen des Firmwaremoduls ESF02.1 beseitigt werden.
0x96FF (dL / 09) Fehler beim Schreiben ins RAM
Während dem Programmiervorgang ist ein Fehler aufgetreten. EineSpeicherzelle im RAM konnte nicht beschrieben werden.
Überprüfen, ob die Zieladresse im RAM liegt. Tritt der Fehler weiterhinauf, kann er nur durch das Tauschen des Firmwaremoduls ESF02.1beseitigt werden.
0x9701 (dL / 0d) Additionschecksumme fehlerhaft
Am Ende des Updates eines Firmwaremoduls wird die programmierteAdditionschecksumme überprüft. Diese Überprüfung ist fehlgeschlagen.
Das Modul erneut programmieren, Checksumme des Quellfiles (*.ibf)überprüfen.
0x9702 (dL / 0e) CRC32-Checksumme fehlerhaft
Am Ende des Updates eines Firmwaremoduls wird die programmierteCRC32-Checksumme überprüft. Diese Überprüfung ist fehlgeschlagen.
Das Modul erneut programmieren, Checksumme des Quellfiles (*.ibf)überprüfen.
Weitere Probleme beim Firmwareladen
Das Programmieren eines Moduls wurde abgebrochen
Störungen auf der seriellen Schnittstelle können zum Abbruch derÜbertragung führen.
Wurde der Ladevorgang für das FBC-Modul abgebrochen, darf das Gerätnicht ausgeschaltet werden. Dieses Modul ist für das Starten derFirmware verantwortlich und somit unbedingt notwendig.
Ein nicht vollständig programmiertes Modul kann einfach erneutprogrammiert werden (ibf-Datei öffnen, Übertragen-Button drücken, im"Send-Fenster“ Module einzeln anwählen und mit überspringen dasrichtige Modul suchen. Anschließend Senden-Button drücken).
Nach dem Einschalten des Gerätes steht dL im Display
Der letzte Programmiervorgang mit Dolfi wurde nicht richtig beendet.
Um den Firmwareloader zu verlassen, müssen ein bzw. alle Module einer*.ibf Datei mit Dolfi programmiert werden. Durch das anschließendeDrücken des Trennen-Button wird die Antriebsfirmware gestartet.
Beschreibung:
Fehlerbehebung:
Beschreibung:
Fehlerbehebung:
Beschreibung:
Fehlerbehebung:
Beschreibung:
Fehlerbehebung:
3-14 Allgemeine Hinweise zur Inbetriebnahme ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Mit Dolfi kann keine Verbindung hergestellt werdena)
Im Parameter B001 wurde eine andere Baudrate wie in Dolfi eingestellt.
B001, Baud-Rate RS-232/485:
Mögliche Baudrate [Baud]
09600
19200
Empfohlen wird, daß der Parameter B001 für den "Verbinden-Vorgang“auf 09600 Baud) eingestellt wird. Die Baudrate für den Download kann inDolfi auf einen anderen Wert gesetzt werden.
Wurde das Programmieren eines Moduls abgebrochen (z. B. durchStörungen auf der seriellen Schnittstelle), ist im DKC noch die Baudratefür den Download eingestellt. Damit Dolfi die Verbindung wiederherstellen kann, muß die Verbinden-Baudrate auf den selben Wertgestellt werden, mit dem der letztet Download erfolgt ist.
Wurde das Gerät neu eingeschaltet und im Display steht dL, ist immereine Baudrate von 9600 Baud eingestellt.
b) Die Empfänger- und Geräteadresse ist nicht identisch mit der amRegler über die Schalter S2 und S3 eingestellten Adresse
c) Paritätsprüfung im Parameter B001 : Die Parität muß auf keine odergerade Parität eingestellt sein
Dolfi kann die ibf-Datei nicht öffnen
Beim Öffnen der ibf-Datei meldet Dolfi "Falsches ibf-Format“.
Die ibf-Datei wurde mit einem anderen Release erstellt und das ibf-Format hat sich gegeüber der verwendeten Dolfiversion geändert.
Damit die Datei geöffnet werden kann, muß die richtige Version von Dolfiverwendet werden. Diese kann beim Hersteller erfragt werden.
Dolfi meldet Timeout
Während der Übertragung der ibf-Datei werden Timeout-Meldungenangezeigt. Verantwortlich hierfür können Störungen auf der seriellenVerbindung sein oder ein deaktivierter Com-Schnittstellen-FIFO.
Dieser kann wie folgt aktiviert werden:
Windows 95:
Start Einstellungen → Systemsteuerung → System → Geräte-ManagerAnschlüsse (COM und LPT) → COM-Anschluß (COMx) →Anschlußeinstellungen → Erweitert
FIFO aktivieren, Standarteinstellung verwenden
Windows NT:
Start → Einstellungen → Systemsteuerung → Anschlüsse → COMx →Einstellungen → Erweitert
FIFO aktivieren
Auswahl der Download-Baudrate
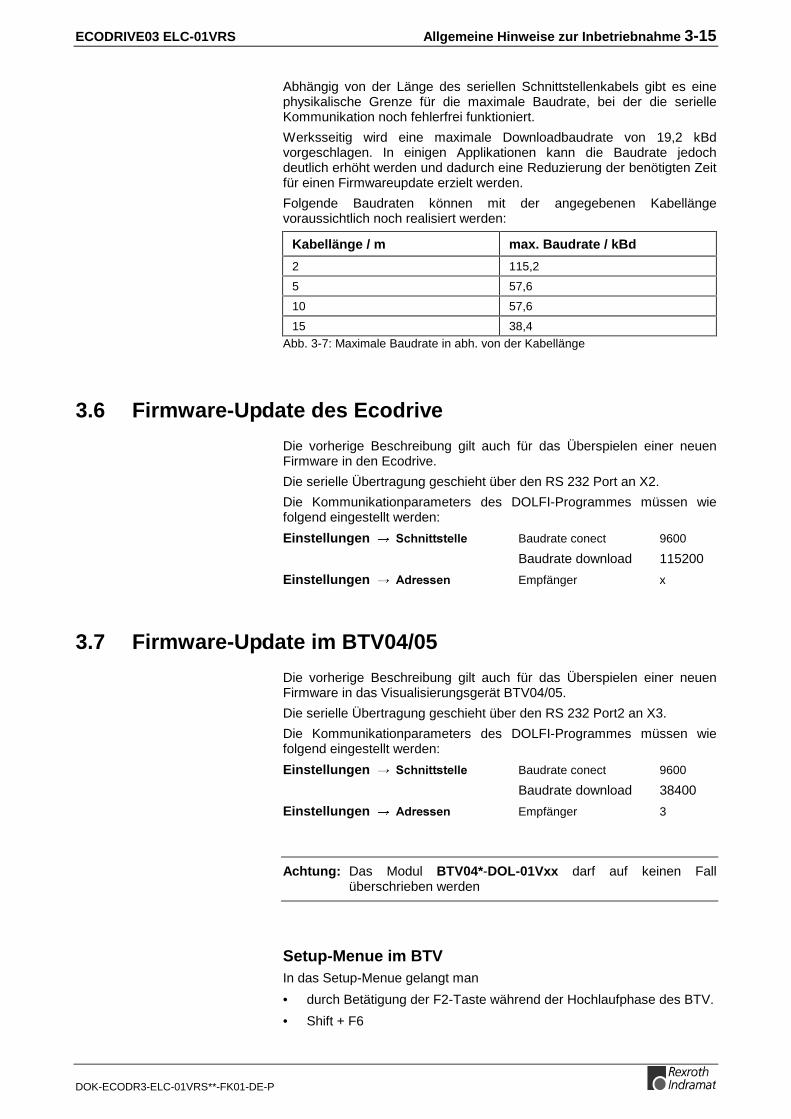
ECODRIVE03 ELC-01VRS Allgemeine Hinweise zur Inbetriebnahme 3-15
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Abhängig von der Länge des seriellen Schnittstellenkabels gibt es einephysikalische Grenze für die maximale Baudrate, bei der die serielleKommunikation noch fehlerfrei funktioniert.
Werksseitig wird eine maximale Downloadbaudrate von 19,2 kBdvorgeschlagen. In einigen Applikationen kann die Baudrate jedochdeutlich erhöht werden und dadurch eine Reduzierung der benötigten Zeitfür einen Firmwareupdate erzielt werden.
Folgende Baudraten können mit der angegebenen Kabellängevoraussichtlich noch realisiert werden:
Kabellänge / m max. Baudrate / kBd
2 115,2
5 57,6
10 57,6
15 38,4Abb. 3-7: Maximale Baudrate in abh. von der Kabellänge
3.6 Firmware-Update des Ecodrive
Die vorherige Beschreibung gilt auch für das Überspielen einer neuenFirmware in den Ecodrive.
Die serielle Übertragung geschieht über den RS 232 Port an X2.
Die Kommunikationparameters des DOLFI-Programmes müssen wiefolgend eingestellt werden:
Einstellungen ��6FKQLWWVWHOOH Baudrate conect 9600
Baudrate download 115200
Einstellungen ��$GUHVVHQ Empfänger x
3.7 Firmware-Update im BTV04/05
Die vorherige Beschreibung gilt auch für das Überspielen einer neuenFirmware in das Visualisierungsgerät BTV04/05.
Die serielle Übertragung geschieht über den RS 232 Port2 an X3.
Die Kommunikationparameters des DOLFI-Programmes müssen wiefolgend eingestellt werden:
Einstellungen ��6FKQLWWVWHOOH Baudrate conect 9600
Baudrate download 38400
Einstellungen ��$GUHVVHQ Empfänger 3
Achtung: Das Modul BTV04*-DOL-01Vxx darf auf keinen Fallüberschrieben werden
Setup-Menue im BTVIn das Setup-Menue gelangt man
• durch Betätigung der F2-Taste während der Hochlaufphase des BTV.
• Shift + F6
3-16 Allgemeine Hinweise zur Inbetriebnahme ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Durch F1 Serial Port Parameter und danach F3 Serial Port 2 kommt manin das Setup-Menue für Port 2
Die Einstellung
Address: 3Baudrate: 9600Parity: offProtocol: ASCII +SISAnswer Delay: 0Timeout (ms): 400Retry: 2Group No.: 0Max Unit: 0
Sind diese Daten eingestellt so kann die Eingabeebene durch ESCverlassen werden. Durch F3 Save Values and Reboot werden die Datenabgespeichert.
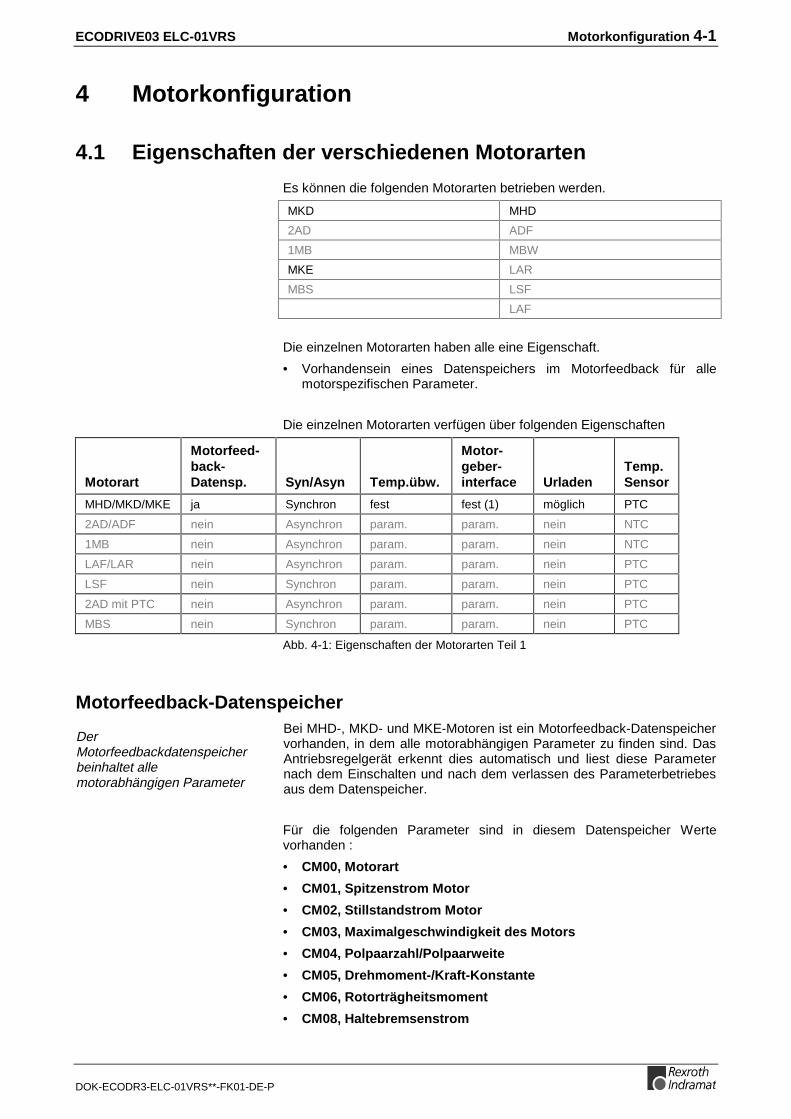
ECODRIVE03 ELC-01VRS Motorkonfiguration 4-1
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
4 Motorkonfiguration
4.1 Eigenschaften der verschiedenen Motorarten
Es können die folgenden Motorarten betrieben werden.
MKD MHD
2AD ADF
1MB MBW
MKE LAR
MBS LSF
LAF
Die einzelnen Motorarten haben alle eine Eigenschaft.
• Vorhandensein eines Datenspeichers im Motorfeedback für allemotorspezifischen Parameter.
Die einzelnen Motorarten verfügen über folgenden Eigenschaften
Motorart
Motorfeed-back-Datensp. Syn/Asyn Temp.übw.
Motor-geber-interface Urladen
Temp.Sensor
MHD/MKD/MKE ja Synchron fest fest (1) möglich PTC
2AD/ADF nein Asynchron param. param. nein NTC
1MB nein Asynchron param. param. nein NTC
LAF/LAR nein Asynchron param. param. nein PTC
LSF nein Synchron param. param. nein PTC
2AD mit PTC nein Asynchron param. param. nein PTC
MBS nein Synchron param. param. nein PTC
Abb. 4-1: Eigenschaften der Motorarten Teil 1
Motorfeedback-Datenspeicher
DerMotorfeedbackdatenspeicherbeinhaltet allemotorabhängigen Parameter
Bei MHD-, MKD- und MKE-Motoren ist ein Motorfeedback-Datenspeichervorhanden, in dem alle motorabhängigen Parameter zu finden sind. DasAntriebsregelgerät erkennt dies automatisch und liest diese Parameternach dem Einschalten und nach dem verlassen des Parameterbetriebesaus dem Datenspeicher.
Für die folgenden Parameter sind in diesem Datenspeicher Wertevorhanden :
• CM00, Motorart
• CM01, Spitzenstrom Motor
• CM02, Stillstandstrom Motor
• CM03, Maximalgeschwindigkeit des Motors
• CM04, Polpaarzahl/Polpaarweite
• CM05, Drehmoment-/Kraft-Konstante
• CM06, Rotorträgheitsmoment
• CM08, Haltebremsenstrom
4-2 Motorkonfiguration ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Temperaturüberwachung
Bei MHD-,MKD- und MKE-Motoren ist Abschaltschwelleder Motortemperatur-überwachung fest eingestellt
Zur Überwachung der Motortemperatur existieren die Parameter
Motor-Warntemperatur
Motor-Abschalttemperatur
Bei MHD-, MKD- und MKE- Motoren sind die Parameter auf folgendeWerte eingestellt und nicht änderbar:
Motor-Warntemperatur = 145,0°C
Motor-Abschalttemperatur = 155,0°C
Das Antriebsregelgerät überwacht die Funktionsfähigkeit derMotortemperaturüberwachung. Werden Unstimmigkeiten erkannt( Temperatur sinkt unter –10° Celsius) wird die Warnung E221 WarnungMotor-Temp.überwachung defekt für 30 Sekunden ausgegeben.Danach wird die Fehlermeldung F221 Fehler Motor-Temp.überwachung defekt generiert.
UrladefunktionMHD-, MKD- und MKE-Motoren besitzen Datenspeicher in ihrenFeedbacks. In diesen sind nicht nur alle motorabhängigen Parametervorhanden, sondern auch ein Satz von Default-Regel-Parametern.
Mit der Funktion Urladen werden diese aktiviert.
4.2 Einstellung der Motorart
Die Einstellung der Motorart erfolgt:
• in Abhängigkeit vom verwendeten Motor
• automatisch durch Auslesen des Motorfeedbackspeichers oder
Die Einstellung der Motorart sollte am Beginn der Inbetriebnahmedurchgeführt werden, da abhängig von der Motorart Antriebsfunktionenbeeinflusst werden.
Automatische Einstellung der Motorart bei Motoren mitFeedbackspeicher
MHD-, MKD- und MKE-Motoren besitzen einen Motorfeedback-Datenspeicher, in dem unter anderem auch der Motortyp abgelegt ist.Das Antriebsregelgerät erkennt diese Motorarten automatisch und eswerden folgende Aktionen durchgeführt :
• der Wert des Parameters CM00, Motorart wird auf denentsprechenden Wert gesetzt und schreibgeschützt.
• der Wert des Parameters C001, Interface Geber 1 wird auf den fürdie jeweilige Motorart definierten Wert gesetzt.
• alle motorabhängigen Parameter werden aus dem Motorfeedback-Datenspeicher gelesen..
• der Wert von, Motor-Warntemperatur wird auf 145,0°C und Motor-Abschalttemperatur wird auf 155,0°C gesetzt.
ECODRIVE03 ELC-01VRS Motorkonfiguration 4-3
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
• der Wert von Parameter CM07, Haltebremsentyp wird auf "0“gesetzt. Der Wert von Haltebremsen-Verzugszeit wird auf 150 msecgesetzt
Dieser Vorgang wird sofort nach dem Einschalten durchgeführt. Dort wirddie Kommando-Fehlermeldung C204 Motorart fehlerhaft generiert wird ,falls in Parameter CM00, Motorart MHD-, MKD oder MKE-Motorangewählt ist , aber die entsprechende Zeichenfolge nicht imMotorfeedback-Datenspeicher gefunden wird.
4.3 Synchronmotoren
Mit dieser Antriebsfirmware können sowohl INDRAMAT-Gehäusemotorendes Typs
• MHD-,
• MKD- und MKE-Motore
betrieben werden, als auch rotative und lineare Synchronbausatzmotoredes Typs MBS und LSF. Bei INDRAMAT-Gehäusemotoren sind Stator,Rotor, Lager und Feedback fertig im Gehäuse montiert. Sie besitzeneinen Motorfeedback-Datenspeicher, in dem
• Motor-Parameter
• Motorfeedback-Parameter,
• synchronmotorspezifische Parameter, sowie
• Defaultregelparameter
vorhanden sind. Diese Motoren werden von der Firmware erkannt und dieentsprechenden Einstellungen automatisch vorgenommen. Werksseitigwurde bei diesen Motoren der Abgleich zwischen der physikalischenRotorposition und der vom Feedback gelieferten Position bereitsdurchgeführt. Der daraus resultierende Offset ist im ParameterKommutierungs-Offset im Motorfeedback-Datenspeicher abgelegt(synchronmotorspezifische Parameter). INDRAMAT-Gehäusemotorensind werksseitig betriebsbereit konfiguriert und können somit ohneweitere motorspezifische Einstellungen in Betrieb genommen werden.
4.4 Motorhaltebremse
Es kann über einen im Antriebsregler eingebauten potentialfreien Kontakteine Motorhaltebremse angeschlossen werden. Diese dient dazuungewollte Achsbewegungen bei abgeschalteter Reglerfreigabe zuverhindern. (z.B. bei Vertikalachsen ohne Gewichtsausgleich)
Hinweis: Die Haltebremse von Rexroth Indramat Gehäusemotoren desTyps MHD und MKD ist nicht als Betriebsbremse ausgelegt.Sie ist nach ca. 20 000 Motorumdrehungen bei geschlossenerBremse verschlissen.
Beteiligte ParameterFolgende Parameter werden in Verbindung mit der Motorhaltebremseverwendet:
• A119, Maximale Bremszeit
• CM07, Haltebremsentyp
• Haltebremsen-Verzugszeit ( immer 150ms)
Automatische Erkennung undParametrierung von INDRAMAT-
Gehäusemotoren (MHD- undMKD-Motore)
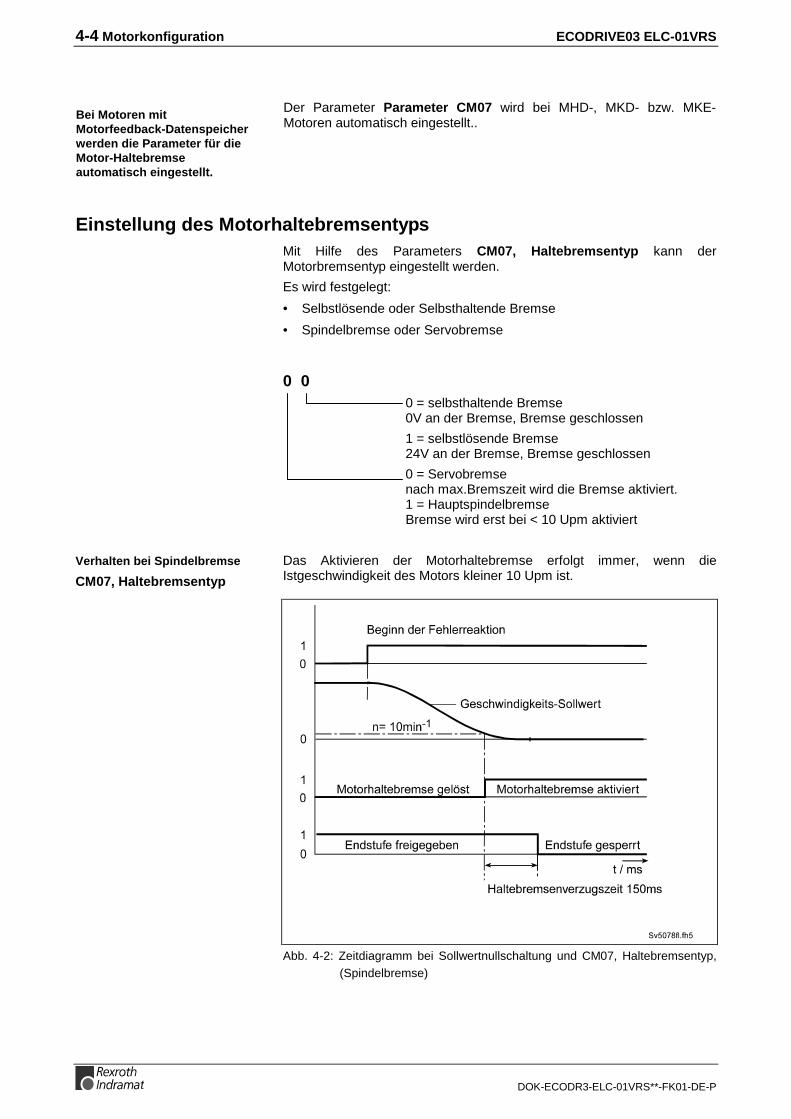
4-4 Motorkonfiguration ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Bei Motoren mitMotorfeedback-Datenspeicherwerden die Parameter für dieMotor-Haltebremseautomatisch eingestellt.
Der Parameter Parameter CM07 wird bei MHD-, MKD- bzw. MKE-Motoren automatisch eingestellt..
Einstellung des MotorhaltebremsentypsMit Hilfe des Parameters CM07, Haltebremsentyp kann derMotorbremsentyp eingestellt werden.
Es wird festgelegt:
• Selbstlösende oder Selbsthaltende Bremse
• Spindelbremse oder Servobremse
0 00 = selbsthaltende Bremse0V an der Bremse, Bremse geschlossen
1 = selbstlösende Bremse24V an der Bremse, Bremse geschlossen
0 = Servobremsenach max.Bremszeit wird die Bremse aktiviert.1 = HauptspindelbremseBremse wird erst bei < 10 Upm aktiviert
Das Aktivieren der Motorhaltebremse erfolgt immer, wenn dieIstgeschwindigkeit des Motors kleiner 10 Upm ist.
Abb. 4-2: Zeitdiagramm bei Sollwertnullschaltung und CM07, Haltebremsentyp,(Spindelbremse)
Verhalten bei Spindelbremse
CM07, Haltebremsentyp
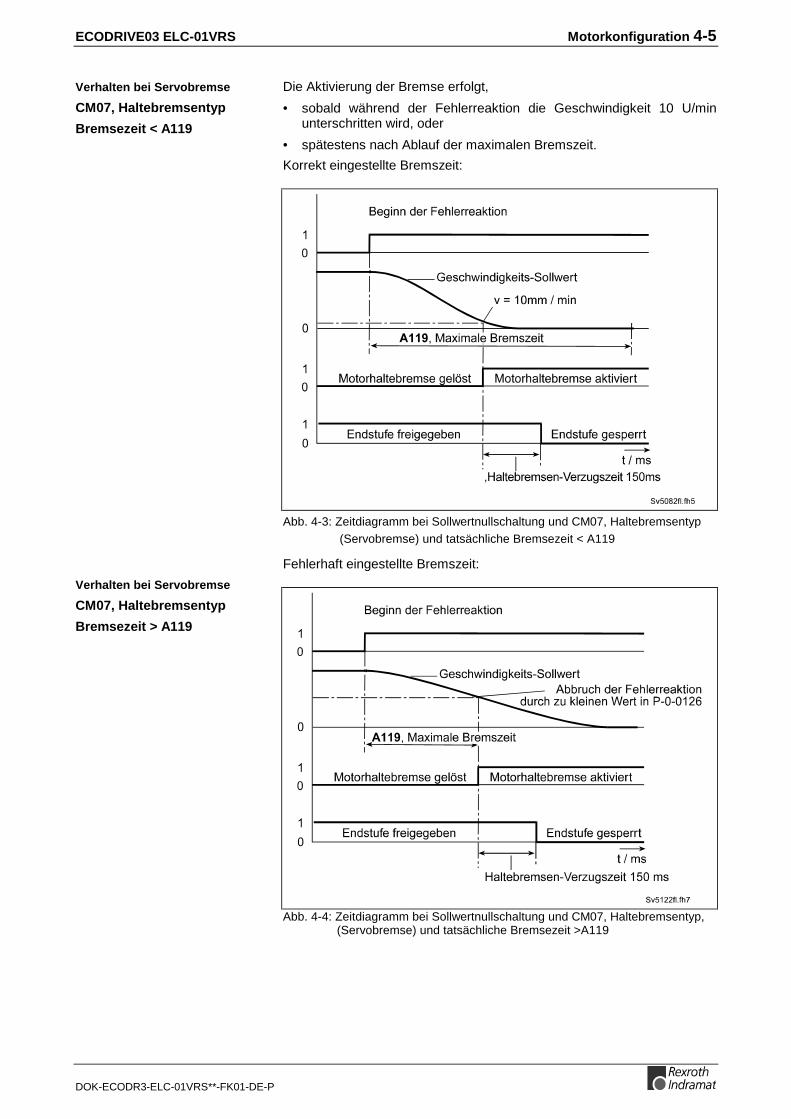
ECODRIVE03 ELC-01VRS Motorkonfiguration 4-5
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Die Aktivierung der Bremse erfolgt,
• sobald während der Fehlerreaktion die Geschwindigkeit 10 U/minunterschritten wird, oder
• spätestens nach Ablauf der maximalen Bremszeit.
Korrekt eingestellte Bremszeit:
Abb. 4-3: Zeitdiagramm bei Sollwertnullschaltung und CM07, Haltebremsentyp(Servobremse) und tatsächliche Bremsezeit < A119
Fehlerhaft eingestellte Bremszeit:
Abb. 4-4: Zeitdiagramm bei Sollwertnullschaltung und CM07, Haltebremsentyp,(Servobremse) und tatsächliche Bremsezeit >A119
Verhalten bei Servobremse
CM07, Haltebremsentyp
Bremsezeit < A119
Verhalten bei Servobremse
CM07, Haltebremsentyp
Bremsezeit > A119
4-6 Motorkonfiguration ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Einstellung der maximalen BremszeitDie Maximale Bremszeit dient zur Überwachung der Bremszeit undsorgt für die Aktivierung der Motorhaltebremse, falls die theoretischeBremszeit aufgrund eines Fehlers wesentlich überschritten wird.
Das Aktivieren der Motorhaltebremse erfolgt, wenn die in A119,Maximale Bremszeit festgelegte Zeit seit Beginn der Fehlerreaktionabgelaufen ist.
Hinweis: Der Wert in A119, maximale Bremszeit muß so eingestelltwerden, daß der Antrieb aus maximaler Geschwindigkeit beigrößtmöglichem Trägheitsmoment und Lastkräften sicher zumStillstand kommen kann.
ACHTUNG
Ist der Wert in A119, Maximale Bremszeit zu kleineingestellt, so wird die Fehlerreaktion abgebrochen unddie Motorhaltebremse bei einer Geschwindigkeit größer10 upm aktiviert. Dies führt auf Dauer zur Schädigungder Bremse !
ECO03--Anschluß der Motorhaltebremsesiehe Projektierungsunterlagen
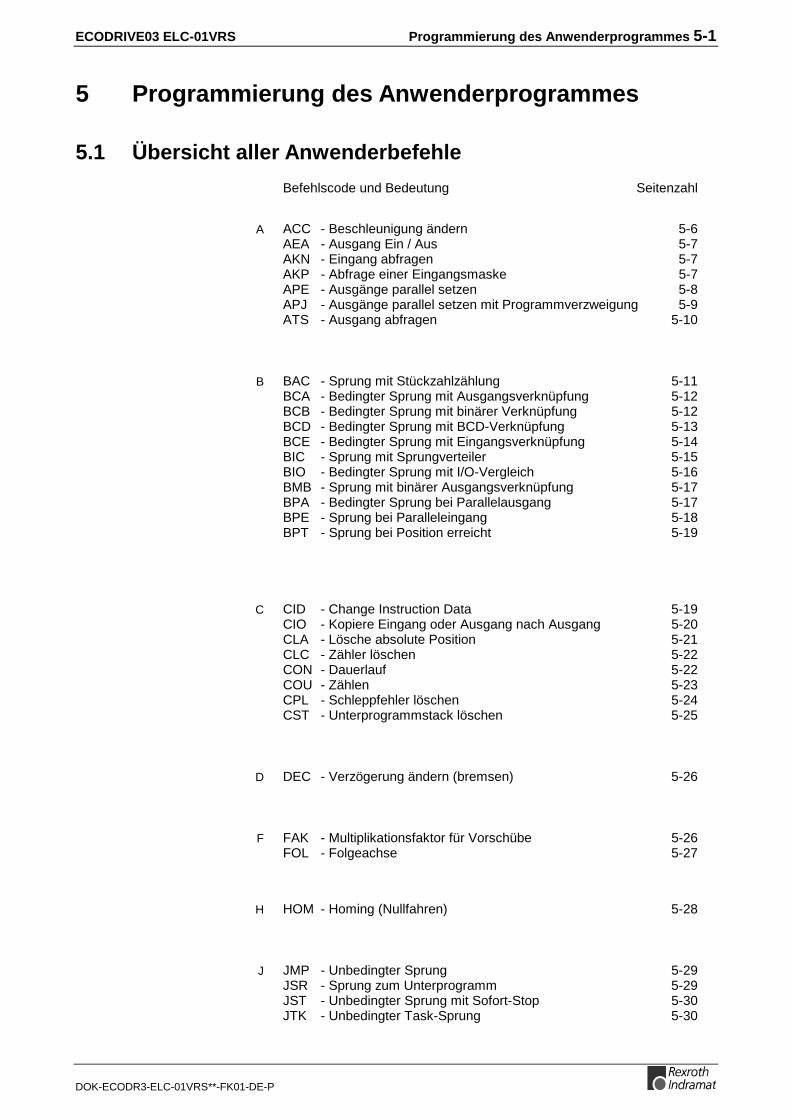
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-1
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
5 Programmierung des Anwenderprogrammes
5.1 Übersicht aller Anwenderbefehle
Befehlscode und Bedeutung Seitenzahl
ACC - Beschleunigung ändern 5-6AEA - Ausgang Ein / Aus 5-7AKN - Eingang abfragen 5-7AKP - Abfrage einer Eingangsmaske 5-7APE - Ausgänge parallel setzen 5-8APJ - Ausgänge parallel setzen mit Programmverzweigung 5-9ATS - Ausgang abfragen 5-10
BAC - Sprung mit Stückzahlzählung 5-11BCA - Bedingter Sprung mit Ausgangsverknüpfung 5-12BCB - Bedingter Sprung mit binärer Verknüpfung 5-12BCD - Bedingter Sprung mit BCD-Verknüpfung 5-13BCE - Bedingter Sprung mit Eingangsverknüpfung 5-14BIC - Sprung mit Sprungverteiler 5-15BIO - Bedingter Sprung mit I/O-Vergleich 5-16BMB - Sprung mit binärer Ausgangsverknüpfung 5-17BPA - Bedingter Sprung bei Parallelausgang 5-17BPE - Sprung bei Paralleleingang 5-18BPT - Sprung bei Position erreicht 5-19
CID - Change Instruction Data 5-19CIO - Kopiere Eingang oder Ausgang nach Ausgang 5-20CLA - Lösche absolute Position 5-21CLC - Zähler löschen 5-22CON - Dauerlauf 5-22COU - Zählen 5-23CPL - Schleppfehler löschen 5-24CST - Unterprogrammstack löschen 5-25
DEC - Verzögerung ändern (bremsen) 5-26
FAK - Multiplikationsfaktor für Vorschübe 5-26FOL - Folgeachse 5-27
HOM - Homing (Nullfahren) 5-28
JMP - Unbedingter Sprung 5-29JSR - Sprung zum Unterprogramm 5-29JST - Unbedingter Sprung mit Sofort-Stop 5-30JTK - Unbedingter Task-Sprung 5-30
A
B
C
D
F
H
J
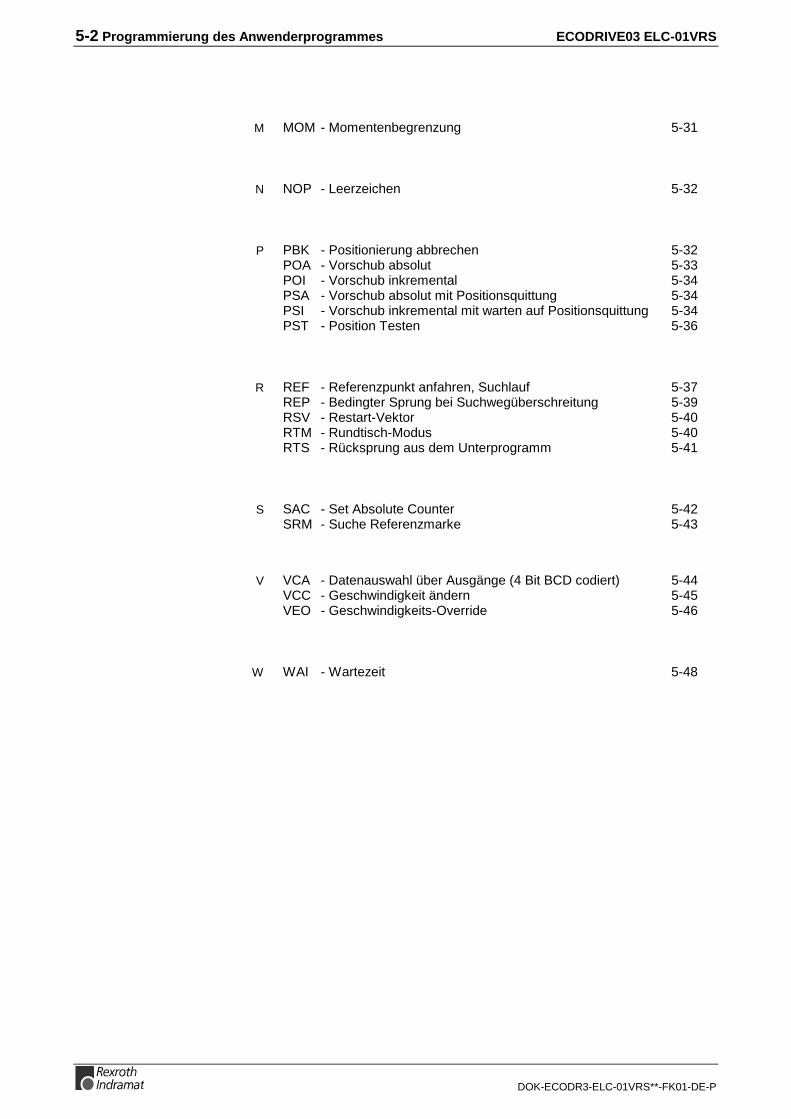
5-2 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
MOM - Momentenbegrenzung 5-31
NOP - Leerzeichen 5-32
PBK - Positionierung abbrechen 5-32POA - Vorschub absolut 5-33POI - Vorschub inkremental 5-34PSA - Vorschub absolut mit Positionsquittung 5-34PSI - Vorschub inkremental mit warten auf Positionsquittung 5-34PST - Position Testen 5-36
REF - Referenzpunkt anfahren, Suchlauf 5-37REP - Bedingter Sprung bei Suchwegüberschreitung 5-39RSV - Restart-Vektor 5-40RTM - Rundtisch-Modus 5-40RTS - Rücksprung aus dem Unterprogramm 5-41
SAC - Set Absolute Counter 5-42SRM - Suche Referenzmarke 5-43
VCA - Datenauswahl über Ausgänge (4 Bit BCD codiert) 5-44VCC - Geschwindigkeit ändern 5-45VEO - Geschwindigkeits-Override 5-46
WAI - Wartezeit 5-48
M
N
P
R
S
V
W
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-3
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
5.2 Allgemeines
Die Grundprogrammierung ist fest vorgegeben und somit dem äußerenZugriff des Anwenders entzogen.
Die Programmiersprache für das Anwenderprogramm besteht aus einemder Programmiersprache BASIC ähnlichem Code, der speziell hierfürentwickelt wurde.
Das Anwenderprogramm kann einen maximalen Umfang von 1000Programmsätzen bzw. Befehlen haben. In jedem Programmsatz wird nur1 Befehl abgelegt.
Bei der Programmierung ist jede 4-stellige Programmnummer zwischen`0000´ und `0999´ erlaubt.
Das Anwenderprogramm kann über die serielle Schnittstelle eingelesenwerden.
Die Programmeingabe kann in jeder Betriebsart erfolgen . Ein laufendesProgramm muß nicht unterbrochen werden.
Die Bearbeitungszeit für einen Satz beträgt bei den meisten Befehlengenau wie die Zykluszeit 2ms.
Danach wird der Satz mit der um eins erhöhten Satznummer bearbeitet(es sei denn, es handelt sich um einen Sprungbefehl). Dieser Vorgangwird im Verlauf der Beschreibung mit `unmittelbarer Satzfortschaltung´bezeichnet.
Bei Befehlen in denen auf das Eintreffen eines Ereignisses gewartet wird,verlängert sich die Bearbeitungszeit immer um die Zykluszeit bis dasErgebnis eingetreten ist.
5-4 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
5.3 Programmeingabe
Für die Programmeingabe über die serielle Schnittstelle kann jederComputer, der über eine RS232C- oder RS485-Schnittstelle verfügt,verwendet werden.
Die Aktivierung und Einstellung der seriellen Schnittstelle erfolgt imParameter B001 und B002. Eine Defaulteinstellung kann über dasProgrammiermodule erfolgen, so daß eine sichere Kommunikationaufgebaut werden kann.
Die Schnittstellenbehandlung und das verwendete Übertragungsformat istin Kapitel 9.2 beschrieben.
5.4 Start des Anwenderprogrammes
Ein Start des Anwenderprogrammes ist nur in der Betriebsart `Automatik´möglich. Eine Ausnahme ist der `Handvektor´
Die Programmstartadresse wird nach jedem Betriebsartenwechsel oderNeueinschalten der ELC für Task 1 auf `0000´ festgelegt. DieStartadressen für Task 2 und Task 3 stehen in dem Parametern AA00.
Das Programm in Task 3 läuft übergeordnet in jeder Betriebsart (jedochnicht bei Parametermodus) und wird nicht durch die Eingänge `Start´ oder`Sofort Stop´ beeinflußt.
Der Programmstart von Task 1 und Task2 erfolgt über den Eingang`Start´ .
5.5 Stop des Anwenderprogrammes
Der Programmablauf kann jederzeit wieder angehalten werden. Dazustehen 2 Möglichkeiten zur Verfügung:
1) Programmstop von extern mittels Eingang `Sofort-Stop´
2) Programmstop per Anwenderbefehl `JST´
Wenn nach einem derartigen Stop die Betriebsart nicht gewechseltwurde, fährt das Programm nach einem Start an der unterbrochenenStelle fort.
Des weiteren bestehen 2 Möglichkeiten das Anwenderprogramm zuunterbrechen. Im Gegensatz zum Programmstop ist nach dem Wegfallder Unterbrechungsursache kein Start erforderlich, d.h., derProgrammablauf setzt sich an der unterbrochenen Stelle fort.
1) Programmunterbrechung mittels Signal am Eingang `Unterbrechung´
2) Programmunterbrechung mittels Signal am Eingang `Vorschubüberwachung´
Siehe dazu auch unter Kapitel 8 Parameter A116

ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-5
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Bei einer Störungsmeldung wird das Anwenderprogramm in Task 1, 2,immer gestoppt. Eine Fortführung des Programmes ist nach Beseitigungder Störung nur bei Programmsatz `0000´ für Task 1, 2 bei dem imParameter AA00 definierten Programmsatz möglich.
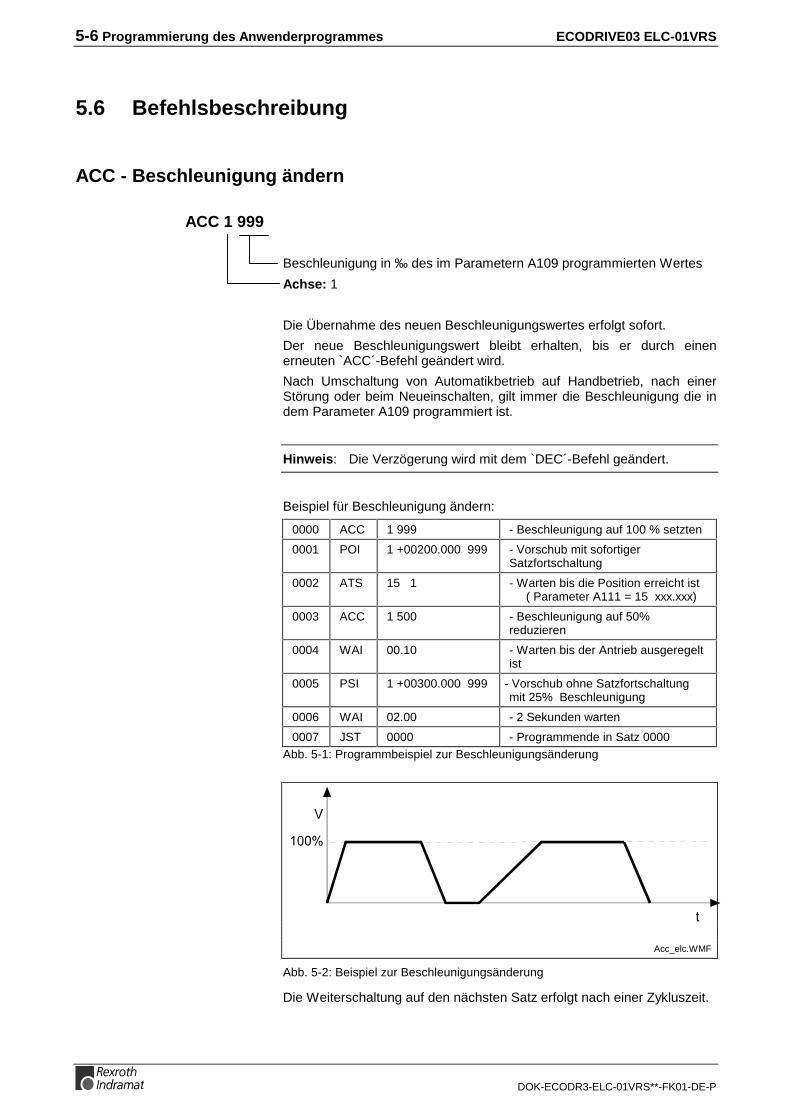
5-6 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
5.6 Befehlsbeschreibung
ACC - Beschleunigung ändern
Beschleunigung in ‰ des im Parametern A109 programmierten Wertes
Achse: 1
Die Übernahme des neuen Beschleunigungswertes erfolgt sofort.
Der neue Beschleunigungswert bleibt erhalten, bis er durch einenerneuten `ACC´-Befehl geändert wird.
Nach Umschaltung von Automatikbetrieb auf Handbetrieb, nach einerStörung oder beim Neueinschalten, gilt immer die Beschleunigung die indem Parameter A109 programmiert ist.
Hinweis: Die Verzögerung wird mit dem `DEC´-Befehl geändert.
Beispiel für Beschleunigung ändern:
0000 ACC 1 999 - Beschleunigung auf 100 % setzten
0001 POI 1 +00200.000 999 - Vorschub mit sofortigerSatzfortschaltung
0002 ATS 15 1 - Warten bis die Position erreicht ist ( Parameter A111 = 15 xxx.xxx)
0003 ACC 1 500 - Beschleunigung auf 50%reduzieren
0004 WAI 00.10 - Warten bis der Antrieb ausgeregeltist
0005 PSI 1 +00300.000 999 - Vorschub ohne Satzfortschaltungmit 25% Beschleunigung
0006 WAI 02.00 - 2 Sekunden warten
0007 JST 0000 - Programmende in Satz 0000Abb. 5-1: Programmbeispiel zur Beschleunigungsänderung
Acc_elc.WMF
Abb. 5-2: Beispiel zur Beschleunigungsänderung
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
ACC 1 999
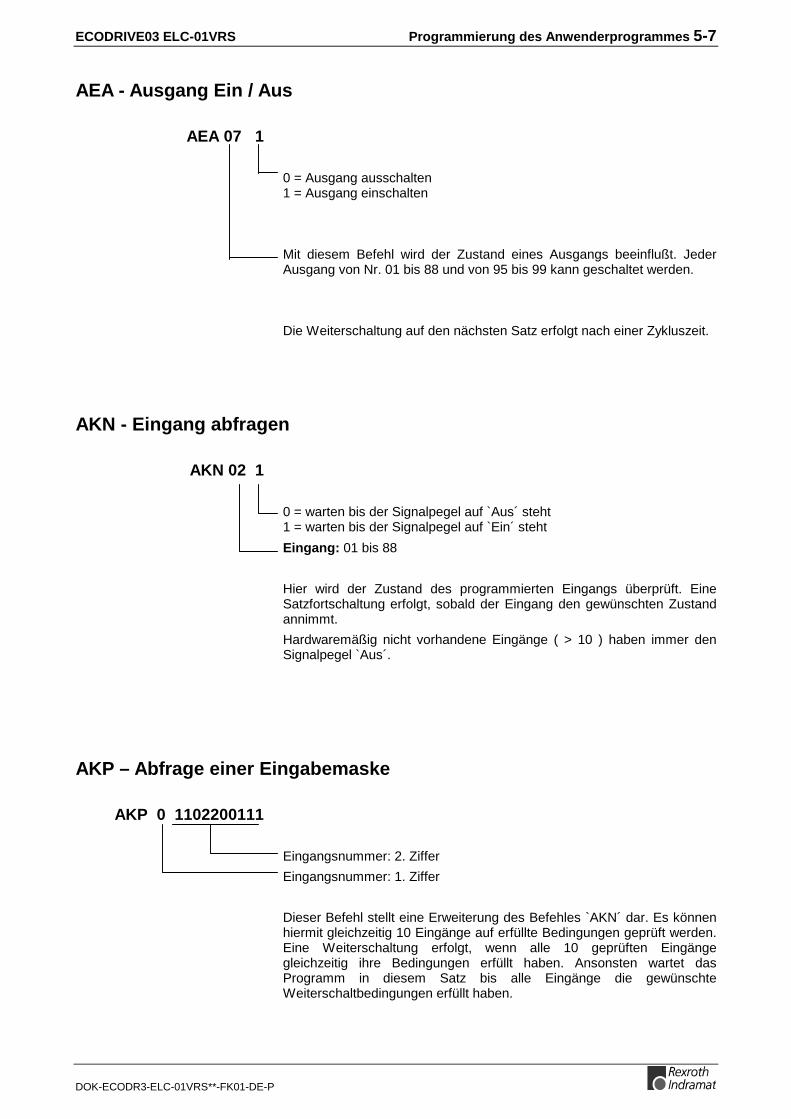
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-7
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
AEA - Ausgang Ein / Aus
0 = Ausgang ausschalten1 = Ausgang einschalten
Mit diesem Befehl wird der Zustand eines Ausgangs beeinflußt. JederAusgang von Nr. 01 bis 88 und von 95 bis 99 kann geschaltet werden.
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
AKN - Eingang abfragen
0 = warten bis der Signalpegel auf `Aus´ steht1 = warten bis der Signalpegel auf `Ein´ steht
Eingang: 01 bis 88
Hier wird der Zustand des programmierten Eingangs überprüft. EineSatzfortschaltung erfolgt, sobald der Eingang den gewünschten Zustandannimmt.
Hardwaremäßig nicht vorhandene Eingänge ( > 10 ) haben immer denSignalpegel `Aus´.
AKP – Abfrage einer Eingabemaske
Eingangsnummer: 2. Ziffer
Eingangsnummer: 1. Ziffer
Dieser Befehl stellt eine Erweiterung des Befehles `AKN´ dar. Es könnenhiermit gleichzeitig 10 Eingänge auf erfüllte Bedingungen geprüft werden.Eine Weiterschaltung erfolgt, wenn alle 10 geprüften Eingängegleichzeitig ihre Bedingungen erfüllt haben. Ansonsten wartet dasProgramm in diesem Satz bis alle Eingänge die gewünschteWeiterschaltbedingungen erfüllt haben.
AEA 07 1
AKN 02 1
AKP 0 1102200111
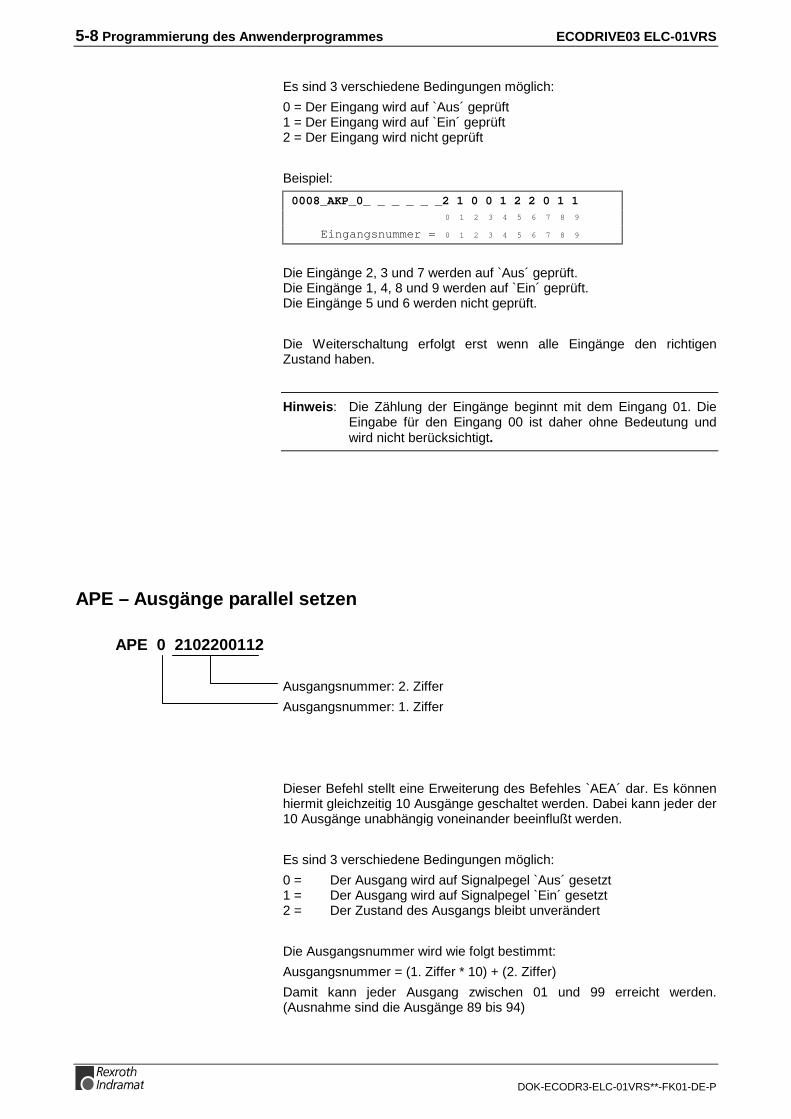
5-8 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Es sind 3 verschiedene Bedingungen möglich:
0 = Der Eingang wird auf `Aus´ geprüft1 = Der Eingang wird auf `Ein´ geprüft2 = Der Eingang wird nicht geprüft
Beispiel:
0008_AKP_0_ _ _ _ _ _2 1 0 0 1 2 2 0 1 1 0 1 2 3 4 5 6 7 8 9
Eingangsnummer = 0 1 2 3 4 5 6 7 8 9
Die Eingänge 2, 3 und 7 werden auf `Aus´ geprüft.Die Eingänge 1, 4, 8 und 9 werden auf `Ein´ geprüft.Die Eingänge 5 und 6 werden nicht geprüft.
Die Weiterschaltung erfolgt erst wenn alle Eingänge den richtigenZustand haben.
Hinweis: Die Zählung der Eingänge beginnt mit dem Eingang 01. DieEingabe für den Eingang 00 ist daher ohne Bedeutung undwird nicht berücksichtigt.
APE – Ausgänge parallel setzen
Ausgangsnummer: 2. Ziffer
Ausgangsnummer: 1. Ziffer
Dieser Befehl stellt eine Erweiterung des Befehles `AEA´ dar. Es könnenhiermit gleichzeitig 10 Ausgänge geschaltet werden. Dabei kann jeder der10 Ausgänge unabhängig voneinander beeinflußt werden.
Es sind 3 verschiedene Bedingungen möglich:
0 = Der Ausgang wird auf Signalpegel `Aus´ gesetzt1 = Der Ausgang wird auf Signalpegel `Ein´ gesetzt2 = Der Zustand des Ausgangs bleibt unverändert
Die Ausgangsnummer wird wie folgt bestimmt:
Ausgangsnummer = (1. Ziffer * 10) + (2. Ziffer)
Damit kann jeder Ausgang zwischen 01 und 99 erreicht werden.(Ausnahme sind die Ausgänge 89 bis 94)
APE 0 2102200112
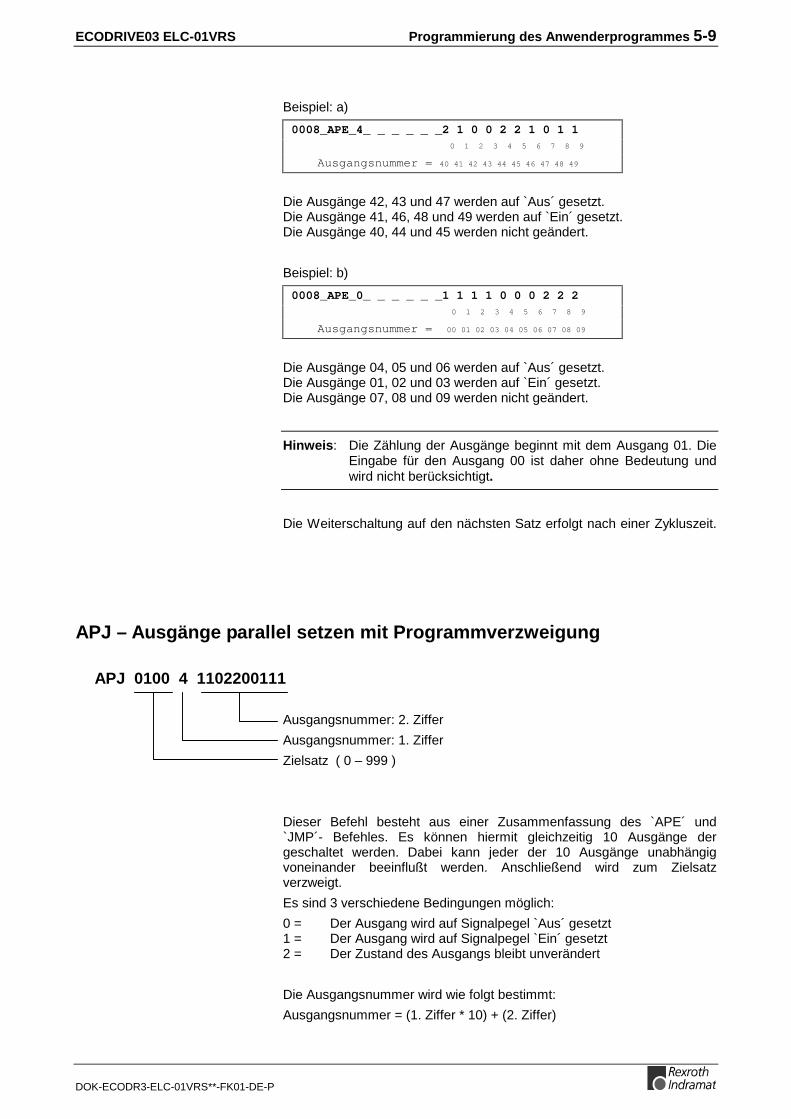
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-9
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Beispiel: a)
0008_APE_4_ _ _ _ _ _2 1 0 0 2 2 1 0 1 1 0 1 2 3 4 5 6 7 8 9
Ausgangsnummer = 40 41 42 43 44 45 46 47 48 49
Die Ausgänge 42, 43 und 47 werden auf `Aus´ gesetzt.Die Ausgänge 41, 46, 48 und 49 werden auf `Ein´ gesetzt.Die Ausgänge 40, 44 und 45 werden nicht geändert.
Beispiel: b)
0008_APE_0_ _ _ _ _ _1 1 1 1 0 0 0 2 2 2 0 1 2 3 4 5 6 7 8 9
Ausgangsnummer = 00 01 02 03 04 05 06 07 08 09
Die Ausgänge 04, 05 und 06 werden auf `Aus´ gesetzt.Die Ausgänge 01, 02 und 03 werden auf `Ein´ gesetzt.Die Ausgänge 07, 08 und 09 werden nicht geändert.
Hinweis: Die Zählung der Ausgänge beginnt mit dem Ausgang 01. DieEingabe für den Ausgang 00 ist daher ohne Bedeutung undwird nicht berücksichtigt.
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
APJ – Ausgänge parallel setzen mit Programmverzweigung
Ausgangsnummer: 2. Ziffer
Ausgangsnummer: 1. Ziffer
Zielsatz ( 0 – 999 )
Dieser Befehl besteht aus einer Zusammenfassung des `APE´ und`JMP´- Befehles. Es können hiermit gleichzeitig 10 Ausgänge dergeschaltet werden. Dabei kann jeder der 10 Ausgänge unabhängigvoneinander beeinflußt werden. Anschließend wird zum Zielsatzverzweigt.
Es sind 3 verschiedene Bedingungen möglich:
0 = Der Ausgang wird auf Signalpegel `Aus´ gesetzt1 = Der Ausgang wird auf Signalpegel `Ein´ gesetzt2 = Der Zustand des Ausgangs bleibt unverändert
Die Ausgangsnummer wird wie folgt bestimmt:
Ausgangsnummer = (1. Ziffer * 10) + (2. Ziffer)
APJ 0100 4 1102200111
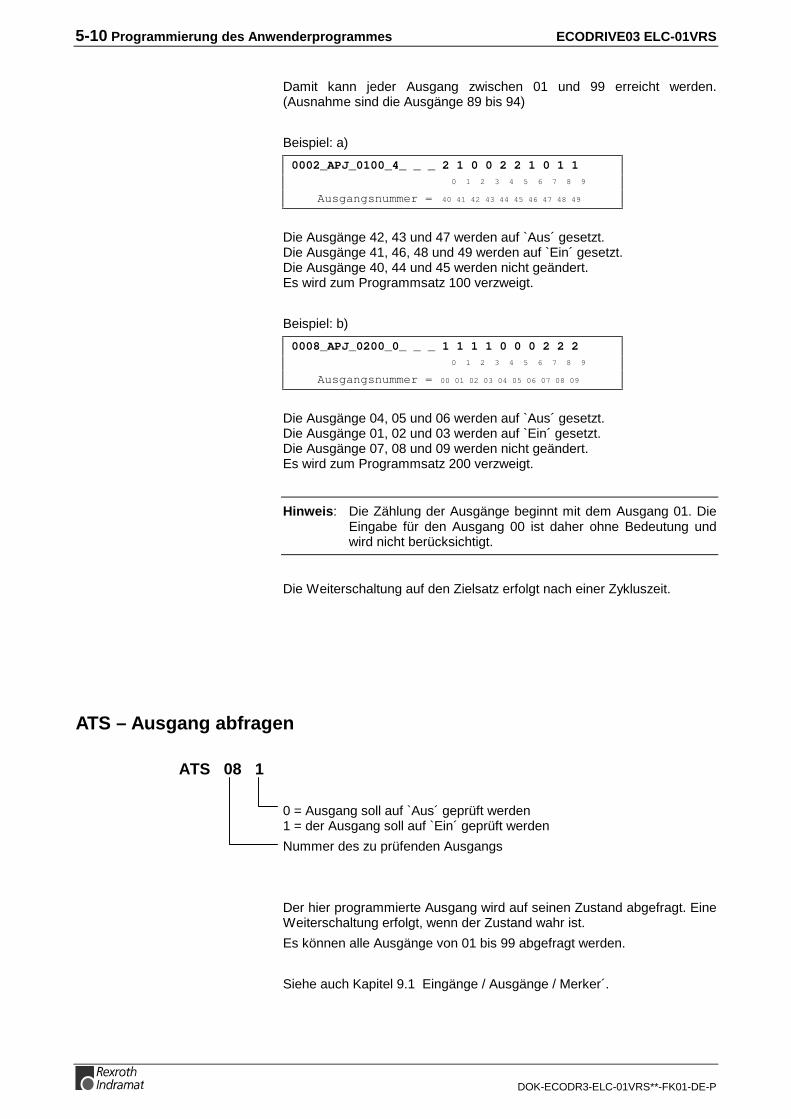
5-10 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Damit kann jeder Ausgang zwischen 01 und 99 erreicht werden.(Ausnahme sind die Ausgänge 89 bis 94)
Beispiel: a)
0002_APJ_0100_4_ _ _ 2 1 0 0 2 2 1 0 1 1 0 1 2 3 4 5 6 7 8 9
Ausgangsnummer = 40 41 42 43 44 45 46 47 48 49
Die Ausgänge 42, 43 und 47 werden auf `Aus´ gesetzt.Die Ausgänge 41, 46, 48 und 49 werden auf `Ein´ gesetzt.Die Ausgänge 40, 44 und 45 werden nicht geändert.Es wird zum Programmsatz 100 verzweigt.
Beispiel: b)
0008_APJ_0200_0_ _ _ 1 1 1 1 0 0 0 2 2 2 0 1 2 3 4 5 6 7 8 9
Ausgangsnummer = 00 01 02 03 04 05 06 07 08 09
Die Ausgänge 04, 05 und 06 werden auf `Aus´ gesetzt.Die Ausgänge 01, 02 und 03 werden auf `Ein´ gesetzt.Die Ausgänge 07, 08 und 09 werden nicht geändert.Es wird zum Programmsatz 200 verzweigt.
Hinweis: Die Zählung der Ausgänge beginnt mit dem Ausgang 01. DieEingabe für den Ausgang 00 ist daher ohne Bedeutung undwird nicht berücksichtigt.
Die Weiterschaltung auf den Zielsatz erfolgt nach einer Zykluszeit.
ATS – Ausgang abfragen
0 = Ausgang soll auf `Aus´ geprüft werden1 = der Ausgang soll auf `Ein´ geprüft werden
Nummer des zu prüfenden Ausgangs
Der hier programmierte Ausgang wird auf seinen Zustand abgefragt. EineWeiterschaltung erfolgt, wenn der Zustand wahr ist.
Es können alle Ausgänge von 01 bis 99 abgefragt werden.
Siehe auch Kapitel 9.1 Eingänge / Ausgänge / Merker´.
ATS 08 1
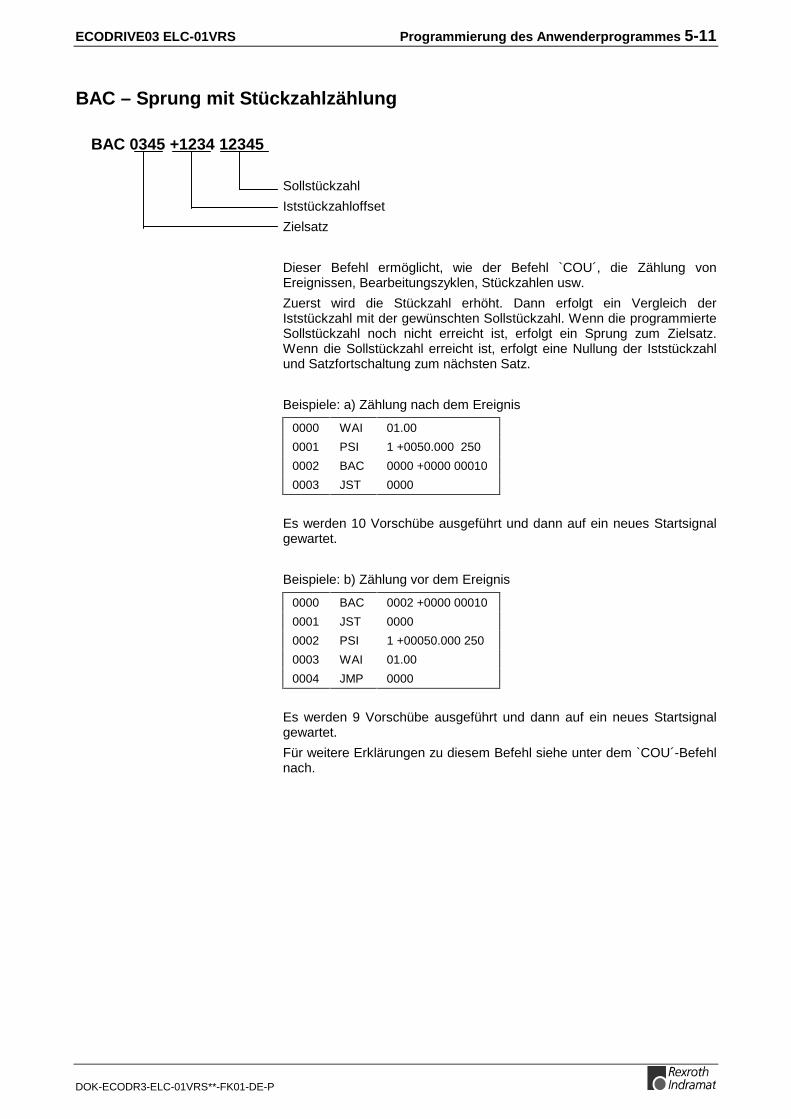
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-11
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
BAC – Sprung mit Stückzahlzählung
Sollstückzahl
Iststückzahloffset
Zielsatz
Dieser Befehl ermöglicht, wie der Befehl `COU´, die Zählung vonEreignissen, Bearbeitungszyklen, Stückzahlen usw.
Zuerst wird die Stückzahl erhöht. Dann erfolgt ein Vergleich derIststückzahl mit der gewünschten Sollstückzahl. Wenn die programmierteSollstückzahl noch nicht erreicht ist, erfolgt ein Sprung zum Zielsatz.Wenn die Sollstückzahl erreicht ist, erfolgt eine Nullung der Iststückzahlund Satzfortschaltung zum nächsten Satz.
Beispiele: a) Zählung nach dem Ereignis
0000 WAI 01.00
0001 PSI 1 +0050.000 250
0002 BAC 0000 +0000 00010
0003 JST 0000
Es werden 10 Vorschübe ausgeführt und dann auf ein neues Startsignalgewartet.
Beispiele: b) Zählung vor dem Ereignis
0000 BAC 0002 +0000 00010
0001 JST 0000
0002 PSI 1 +00050.000 250
0003 WAI 01.00
0004 JMP 0000
Es werden 9 Vorschübe ausgeführt und dann auf ein neues Startsignalgewartet.
Für weitere Erklärungen zu diesem Befehl siehe unter dem `COU´-Befehlnach.
BAC 0345 +1234 12345
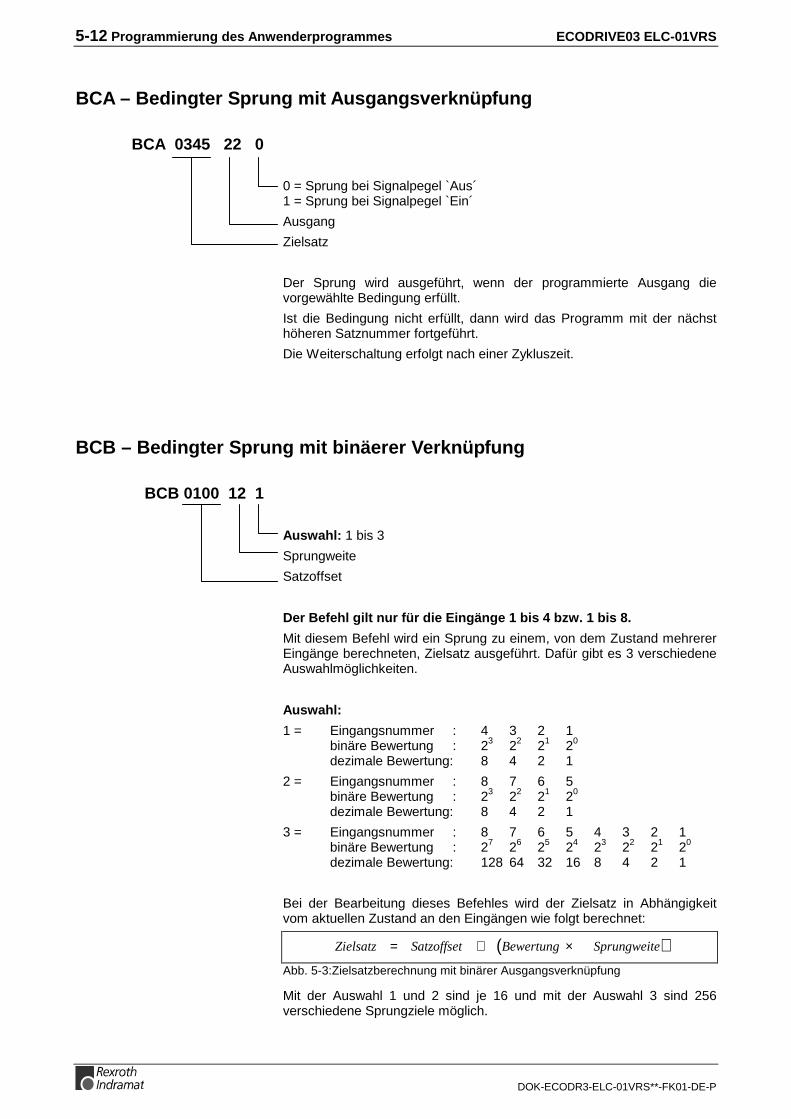
5-12 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
BCA – Bedingter Sprung mit Ausgangsverknüpfung
0 = Sprung bei Signalpegel `Aus´1 = Sprung bei Signalpegel `Ein´
Ausgang
Zielsatz
Der Sprung wird ausgeführt, wenn der programmierte Ausgang dievorgewählte Bedingung erfüllt.
Ist die Bedingung nicht erfüllt, dann wird das Programm mit der nächsthöheren Satznummer fortgeführt.
Die Weiterschaltung erfolgt nach einer Zykluszeit.
BCB – Bedingter Sprung mit binäerer Verknüpfung
Auswahl: 1 bis 3
Sprungweite
Satzoffset
Der Befehl gilt nur für die Eingänge 1 bis 4 bzw. 1 bis 8.
Mit diesem Befehl wird ein Sprung zu einem, von dem Zustand mehrererEingänge berechneten, Zielsatz ausgeführt. Dafür gibt es 3 verschiedeneAuswahlmöglichkeiten.
Auswahl:
1 = Eingangsnummer : 4 3 2 1binäre Bewertung : 23 22 21 20
dezimale Bewertung: 8 4 2 1
2 = Eingangsnummer : 8 7 6 5binäre Bewertung : 23 22 21 20
dezimale Bewertung: 8 4 2 1
3 = Eingangsnummer : 8 7 6 5 4 3 2 1binäre Bewertung : 27 26 25 24 23 22 21 20
dezimale Bewertung: 128 64 32 16 8 4 2 1
Bei der Bearbeitung dieses Befehles wird der Zielsatz in Abhängigkeitvom aktuellen Zustand an den Eingängen wie folgt berechnet:
( )Zielsatz Satzoffset Bewertung Sprungweite= + ×
Abb. 5-3:Zielsatzberechnung mit binärer Ausgangsverknüpfung
Mit der Auswahl 1 und 2 sind je 16 und mit der Auswahl 3 sind 256verschiedene Sprungziele möglich.
BCA 0345 22 0
BCB 0100 12 1
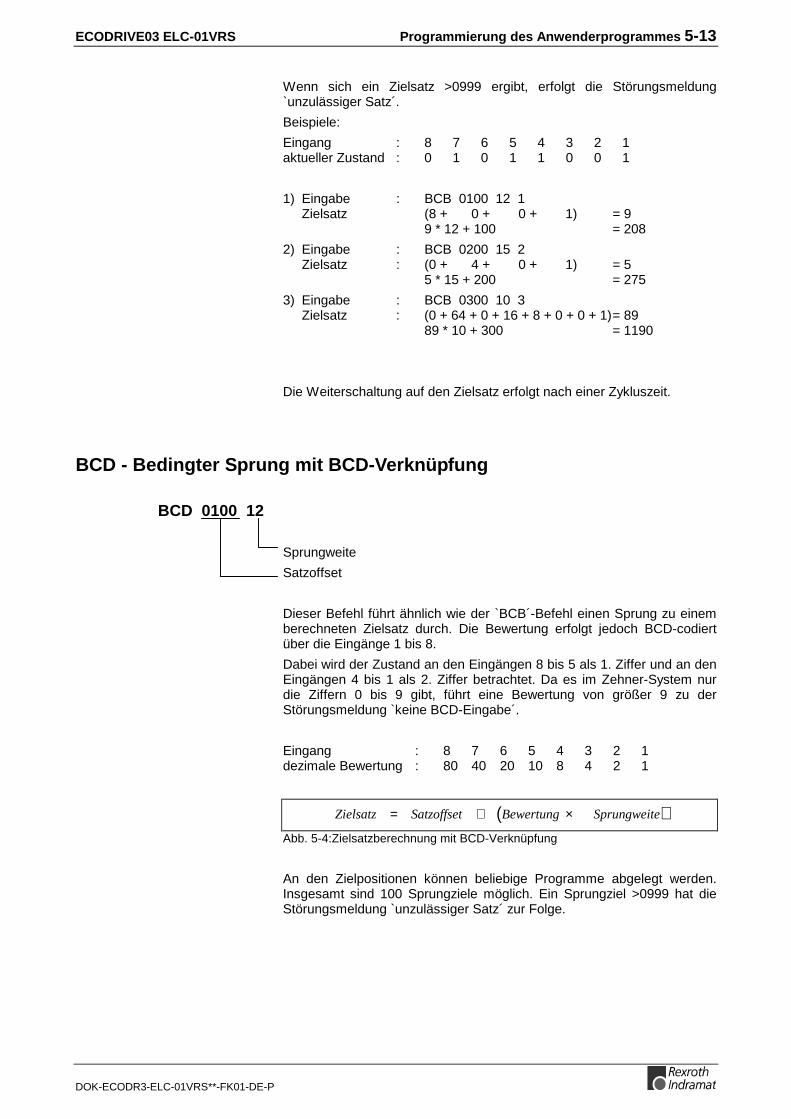
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-13
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Wenn sich ein Zielsatz >0999 ergibt, erfolgt die Störungsmeldung`unzulässiger Satz´.
Beispiele:
Eingang : 8 7 6 5 4 3 2 1aktueller Zustand : 0 1 0 1 1 0 0 1
1) Eingabe : BCB 0100 12 1Zielsatz (8 + 0 + 0 + 1) = 9
9 * 12 + 100 = 208
2) Eingabe : BCB 0200 15 2Zielsatz : (0 + 4 + 0 + 1) = 5
5 * 15 + 200 = 275
3) Eingabe : BCB 0300 10 3Zielsatz : (0 + 64 + 0 + 16 + 8 + 0 + 0 + 1)= 89
89 * 10 + 300 = 1190
Die Weiterschaltung auf den Zielsatz erfolgt nach einer Zykluszeit.
BCD - Bedingter Sprung mit BCD-Verknüpfung
Sprungweite
Satzoffset
Dieser Befehl führt ähnlich wie der `BCB´-Befehl einen Sprung zu einemberechneten Zielsatz durch. Die Bewertung erfolgt jedoch BCD-codiertüber die Eingänge 1 bis 8.
Dabei wird der Zustand an den Eingängen 8 bis 5 als 1. Ziffer und an denEingängen 4 bis 1 als 2. Ziffer betrachtet. Da es im Zehner-System nurdie Ziffern 0 bis 9 gibt, führt eine Bewertung von größer 9 zu derStörungsmeldung `keine BCD-Eingabe´.
Eingang : 8 7 6 5 4 3 2 1dezimale Bewertung : 80 40 20 10 8 4 2 1
( )Zielsatz Satzoffset Bewertung Sprungweite= + ×
Abb. 5-4:Zielsatzberechnung mit BCD-Verknüpfung
An den Zielpositionen können beliebige Programme abgelegt werden.Insgesamt sind 100 Sprungziele möglich. Ein Sprungziel >0999 hat dieStörungsmeldung `unzulässiger Satz´ zur Folge.
BCD 0100 12
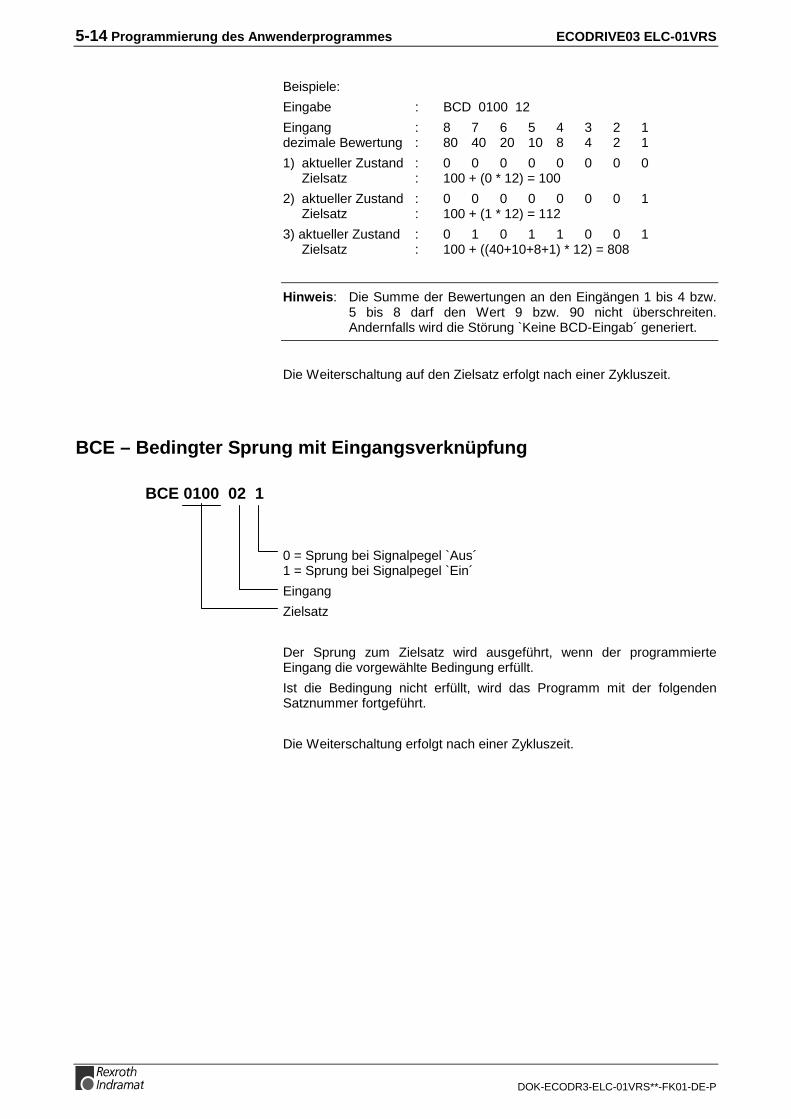
5-14 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Beispiele:
Eingabe : BCD 0100 12
Eingang : 8 7 6 5 4 3 2 1dezimale Bewertung : 80 40 20 10 8 4 2 1
1) aktueller Zustand : 0 0 0 0 0 0 0 0Zielsatz : 100 + (0 * 12) = 100
2) aktueller Zustand : 0 0 0 0 0 0 0 1Zielsatz : 100 + (1 * 12) = 112
3) aktueller Zustand : 0 1 0 1 1 0 0 1Zielsatz : 100 + ((40+10+8+1) * 12) = 808
Hinweis: Die Summe der Bewertungen an den Eingängen 1 bis 4 bzw.5 bis 8 darf den Wert 9 bzw. 90 nicht überschreiten.Andernfalls wird die Störung `Keine BCD-Eingab´ generiert.
Die Weiterschaltung auf den Zielsatz erfolgt nach einer Zykluszeit.
BCE – Bedingter Sprung mit Eingangsverknüpfung
0 = Sprung bei Signalpegel `Aus´ 1 = Sprung bei Signalpegel `Ein´
Eingang
Zielsatz
Der Sprung zum Zielsatz wird ausgeführt, wenn der programmierteEingang die vorgewählte Bedingung erfüllt.
Ist die Bedingung nicht erfüllt, wird das Programm mit der folgendenSatznummer fortgeführt.
Die Weiterschaltung erfolgt nach einer Zykluszeit.
BCE 0100 02 1
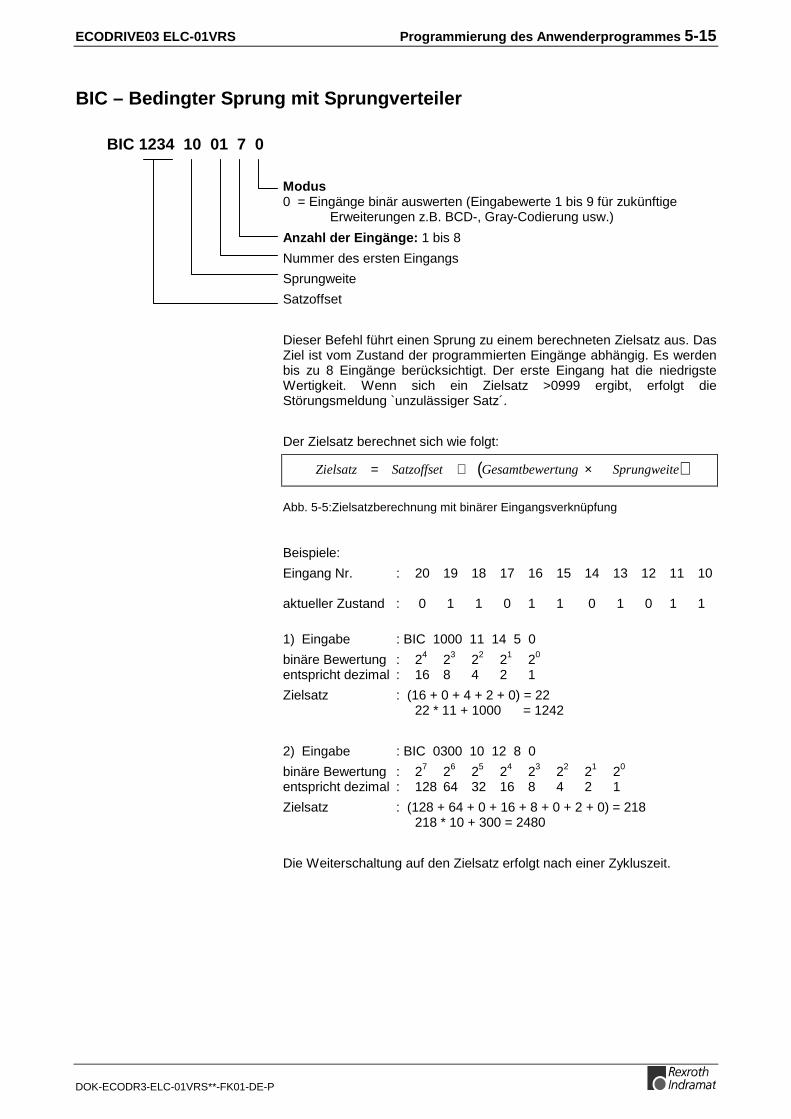
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-15
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
BIC – Bedingter Sprung mit Sprungverteiler
Modus0 = Eingänge binär auswerten (Eingabewerte 1 bis 9 für zukünftige
Erweiterungen z.B. BCD-, Gray-Codierung usw.)
Anzahl der Eingänge: 1 bis 8
Nummer des ersten Eingangs
Sprungweite
Satzoffset
Dieser Befehl führt einen Sprung zu einem berechneten Zielsatz aus. DasZiel ist vom Zustand der programmierten Eingänge abhängig. Es werdenbis zu 8 Eingänge berücksichtigt. Der erste Eingang hat die niedrigsteWertigkeit. Wenn sich ein Zielsatz >0999 ergibt, erfolgt dieStörungsmeldung `unzulässiger Satz´.
Der Zielsatz berechnet sich wie folgt:
( )Zielsatz Satzoffset Gesamtbewertung Sprungweite= + ×
Abb. 5-5:Zielsatzberechnung mit binärer Eingangsverknüpfung
Beispiele:
Eingang Nr. : 20 19 18 17 16 15 14 13 12 11 10
aktueller Zustand : 0 1 1 0 1 1 0 1 0 1 1
1) Eingabe : BIC 1000 11 14 5 0
binäre Bewertung : 24 23 22 21 20
entspricht dezimal : 16 8 4 2 1
Zielsatz : (16 + 0 + 4 + 2 + 0) = 2222 * 11 + 1000 = 1242
2) Eingabe : BIC 0300 10 12 8 0
binäre Bewertung : 27 26 25 24 23 22 21 20
entspricht dezimal : 128 64 32 16 8 4 2 1
Zielsatz : (128 + 64 + 0 + 16 + 8 + 0 + 2 + 0) = 218218 * 10 + 300 = 2480
Die Weiterschaltung auf den Zielsatz erfolgt nach einer Zykluszeit.
BIC 1234 10 01 7 0
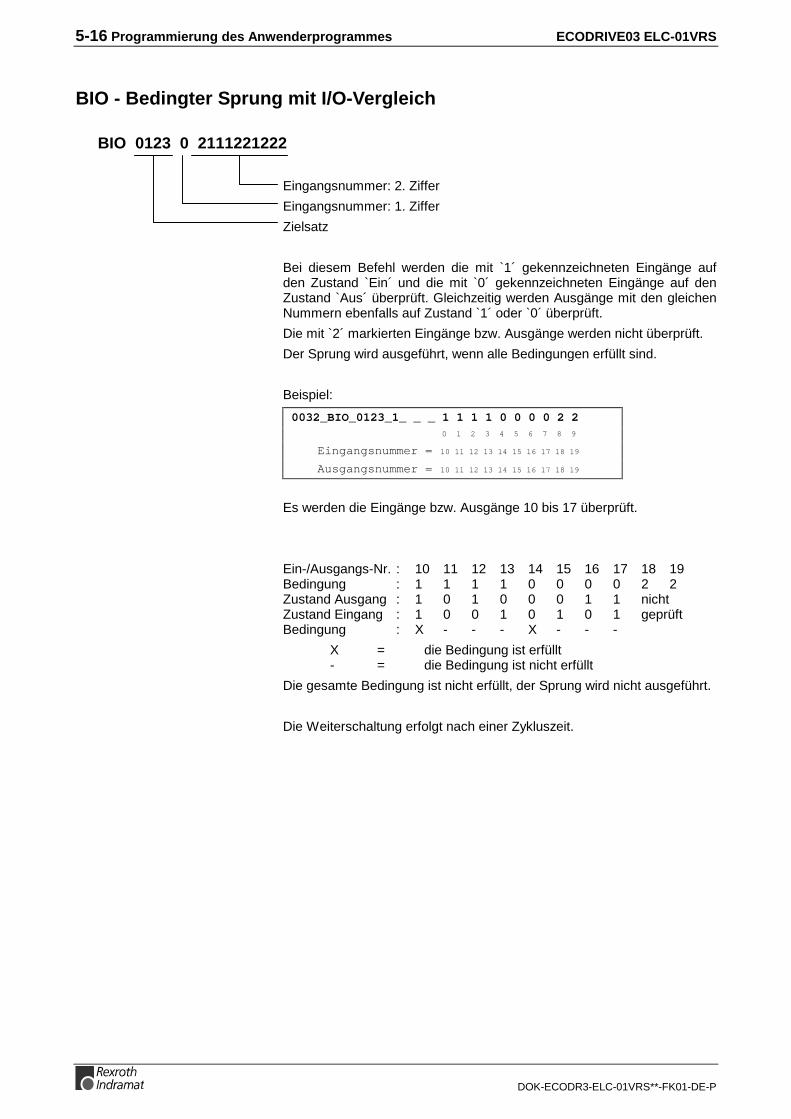
5-16 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
BIO - Bedingter Sprung mit I/O-Vergleich
Eingangsnummer: 2. Ziffer
Eingangsnummer: 1. Ziffer
Zielsatz
Bei diesem Befehl werden die mit `1´ gekennzeichneten Eingänge aufden Zustand `Ein´ und die mit `0´ gekennzeichneten Eingänge auf denZustand `Aus´ überprüft. Gleichzeitig werden Ausgänge mit den gleichenNummern ebenfalls auf Zustand `1´ oder `0´ überprüft.
Die mit `2´ markierten Eingänge bzw. Ausgänge werden nicht überprüft.
Der Sprung wird ausgeführt, wenn alle Bedingungen erfüllt sind.
Beispiel:
0032_BIO_0123_1_ _ _ 1 1 1 1 0 0 0 0 2 2 0 1 2 3 4 5 6 7 8 9
Eingangsnummer = 10 11 12 13 14 15 16 17 18 19
Ausgangsnummer = 10 11 12 13 14 15 16 17 18 19
Es werden die Eingänge bzw. Ausgänge 10 bis 17 überprüft.
Ein-/Ausgangs-Nr. : 10 11 12 13 14 15 16 17 18 19Bedingung : 1 1 1 1 0 0 0 0 2 2Zustand Ausgang : 1 0 1 0 0 0 1 1 nichtZustand Eingang : 1 0 0 1 0 1 0 1 geprüftBedingung : X - - - X - - -
X = die Bedingung ist erfüllt- = die Bedingung ist nicht erfüllt
Die gesamte Bedingung ist nicht erfüllt, der Sprung wird nicht ausgeführt.
Die Weiterschaltung erfolgt nach einer Zykluszeit.
BIO 0123 0 2111221222
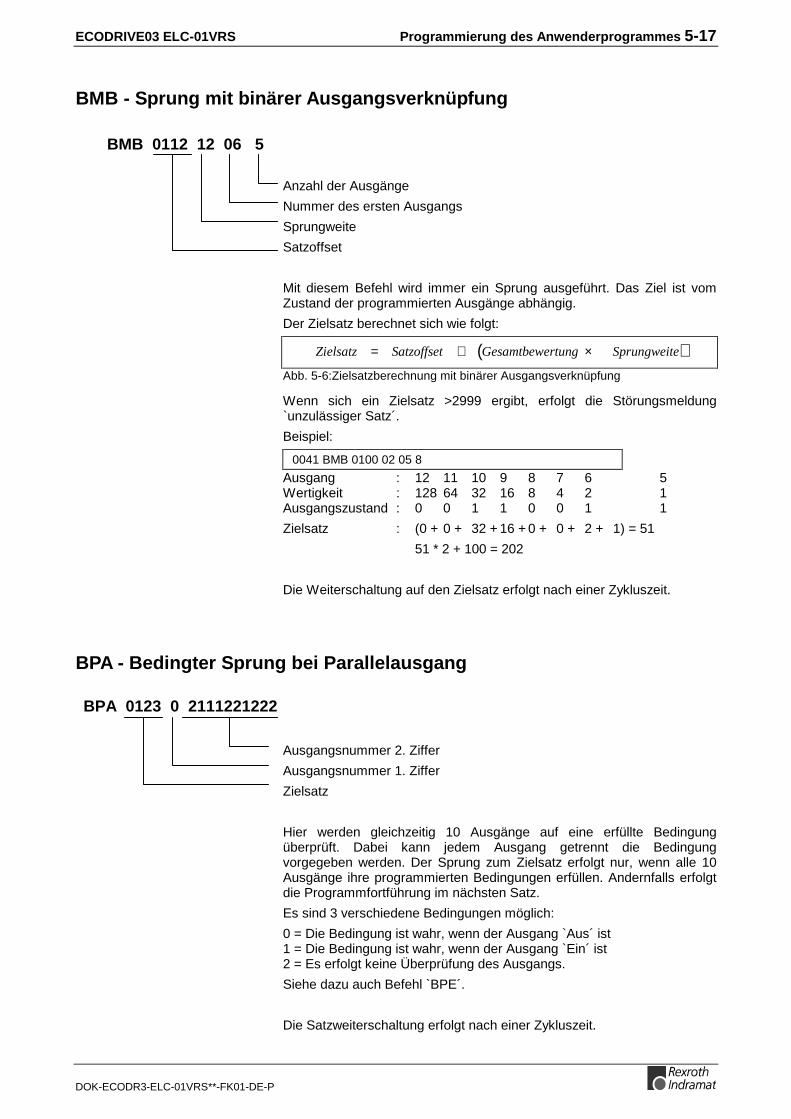
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-17
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
BMB - Sprung mit binärer Ausgangsverknüpfung
Anzahl der Ausgänge
Nummer des ersten Ausgangs
Sprungweite
Satzoffset
Mit diesem Befehl wird immer ein Sprung ausgeführt. Das Ziel ist vomZustand der programmierten Ausgänge abhängig.
Der Zielsatz berechnet sich wie folgt:
( )Zielsatz Satzoffset Gesamtbewertung Sprungweite= + ×
Abb. 5-6:Zielsatzberechnung mit binärer Ausgangsverknüpfung
Wenn sich ein Zielsatz >2999 ergibt, erfolgt die Störungsmeldung`unzulässiger Satz´.
Beispiel:
0041 BMB 0100 02 05 8
Ausgang : 12 11 10 9 8 7 6 5Wertigkeit : 128 64 32 16 8 4 2 1Ausgangszustand : 0 0 1 1 0 0 1 1
Zielsatz : (0 + 0 + 32 + 16 + 0 + 0 + 2 + 1) = 51
51 * 2 + 100 = 202
Die Weiterschaltung auf den Zielsatz erfolgt nach einer Zykluszeit.
BPA - Bedingter Sprung bei Parallelausgang
Ausgangsnummer 2. Ziffer
Ausgangsnummer 1. Ziffer
Zielsatz
Hier werden gleichzeitig 10 Ausgänge auf eine erfüllte Bedingungüberprüft. Dabei kann jedem Ausgang getrennt die Bedingungvorgegeben werden. Der Sprung zum Zielsatz erfolgt nur, wenn alle 10Ausgänge ihre programmierten Bedingungen erfüllen. Andernfalls erfolgtdie Programmfortführung im nächsten Satz.
Es sind 3 verschiedene Bedingungen möglich:
0 = Die Bedingung ist wahr, wenn der Ausgang `Aus´ ist1 = Die Bedingung ist wahr, wenn der Ausgang `Ein´ ist2 = Es erfolgt keine Überprüfung des Ausgangs.
Siehe dazu auch Befehl `BPE´.
Die Satzweiterschaltung erfolgt nach einer Zykluszeit.
BMB 0112 12 06 5
BPA 0123 0 2111221222
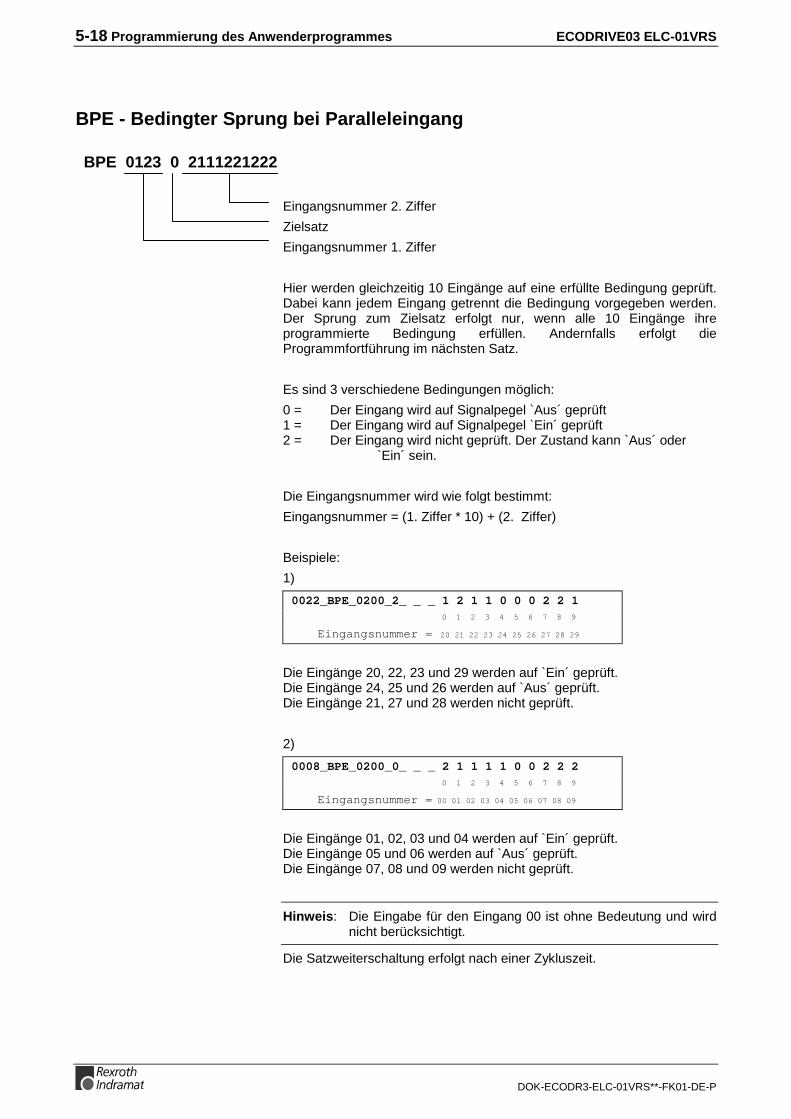
5-18 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
BPE - Bedingter Sprung bei Paralleleingang
Eingangsnummer 2. Ziffer
Zielsatz
Eingangsnummer 1. Ziffer
Hier werden gleichzeitig 10 Eingänge auf eine erfüllte Bedingung geprüft.Dabei kann jedem Eingang getrennt die Bedingung vorgegeben werden.Der Sprung zum Zielsatz erfolgt nur, wenn alle 10 Eingänge ihreprogrammierte Bedingung erfüllen. Andernfalls erfolgt dieProgrammfortführung im nächsten Satz.
Es sind 3 verschiedene Bedingungen möglich:
0 = Der Eingang wird auf Signalpegel `Aus´ geprüft1 = Der Eingang wird auf Signalpegel `Ein´ geprüft2 = Der Eingang wird nicht geprüft. Der Zustand kann `Aus´ oder
`Ein´ sein.
Die Eingangsnummer wird wie folgt bestimmt:
Eingangsnummer = (1. Ziffer * 10) + (2. Ziffer)
Beispiele:
1)
0022_BPE_0200_2_ _ _ 1 2 1 1 0 0 0 2 2 1 0 1 2 3 4 5 6 7 8 9
Eingangsnummer = 20 21 22 23 24 25 26 27 28 29
Die Eingänge 20, 22, 23 und 29 werden auf `Ein´ geprüft.Die Eingänge 24, 25 und 26 werden auf `Aus´ geprüft.Die Eingänge 21, 27 und 28 werden nicht geprüft.
2)
0008_BPE_0200_0_ _ _ 2 1 1 1 1 0 0 2 2 2 0 1 2 3 4 5 6 7 8 9
Eingangsnummer = 00 01 02 03 04 05 06 07 08 09
Die Eingänge 01, 02, 03 und 04 werden auf `Ein´ geprüft.Die Eingänge 05 und 06 werden auf `Aus´ geprüft.Die Eingänge 07, 08 und 09 werden nicht geprüft.
Hinweis: Die Eingabe für den Eingang 00 ist ohne Bedeutung und wirdnicht berücksichtigt.
Die Satzweiterschaltung erfolgt nach einer Zykluszeit.
BPE 0123 0 2111221222
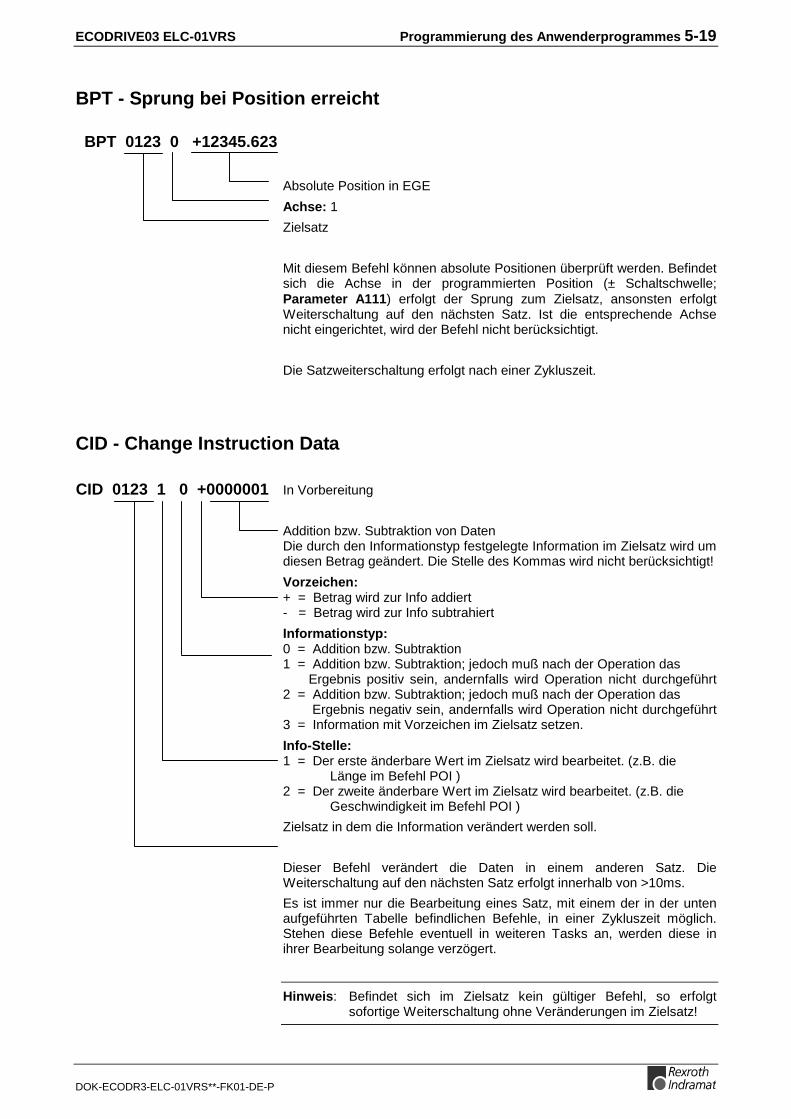
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-19
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
BPT - Sprung bei Position erreicht
Absolute Position in EGE
Achse: 1
Zielsatz
Mit diesem Befehl können absolute Positionen überprüft werden. Befindetsich die Achse in der programmierten Position (± Schaltschwelle;Parameter A111) erfolgt der Sprung zum Zielsatz, ansonsten erfolgtWeiterschaltung auf den nächsten Satz. Ist die entsprechende Achsenicht eingerichtet, wird der Befehl nicht berücksichtigt.
Die Satzweiterschaltung erfolgt nach einer Zykluszeit.
CID - Change Instruction Data
In Vorbereitung
Addition bzw. Subtraktion von DatenDie durch den Informationstyp festgelegte Information im Zielsatz wird umdiesen Betrag geändert. Die Stelle des Kommas wird nicht berücksichtigt!
Vorzeichen:+ = Betrag wird zur Info addiert- = Betrag wird zur Info subtrahiert
Informationstyp:0 = Addition bzw. Subtraktion1 = Addition bzw. Subtraktion; jedoch muß nach der Operation das Ergebnis positiv sein, andernfalls wird Operation nicht durchgeführt2 = Addition bzw. Subtraktion; jedoch muß nach der Operation das Ergebnis negativ sein, andernfalls wird Operation nicht durchgeführt3 = Information mit Vorzeichen im Zielsatz setzen.
Info-Stelle:1 = Der erste änderbare Wert im Zielsatz wird bearbeitet. (z.B. die
Länge im Befehl POI )2 = Der zweite änderbare Wert im Zielsatz wird bearbeitet. (z.B. die
Geschwindigkeit im Befehl POI )
Zielsatz in dem die Information verändert werden soll.
Dieser Befehl verändert die Daten in einem anderen Satz. DieWeiterschaltung auf den nächsten Satz erfolgt innerhalb von >10ms.
Es ist immer nur die Bearbeitung eines Satz, mit einem der in der untenaufgeführten Tabelle befindlichen Befehle, in einer Zykluszeit möglich.Stehen diese Befehle eventuell in weiteren Tasks an, werden diese inihrer Bearbeitung solange verzögert.
Hinweis: Befindet sich im Zielsatz kein gültiger Befehl, so erfolgtsofortige Weiterschaltung ohne Veränderungen im Zielsatz!
BPT 0123 0 +12345.623
CID 0123 1 0 +0000001
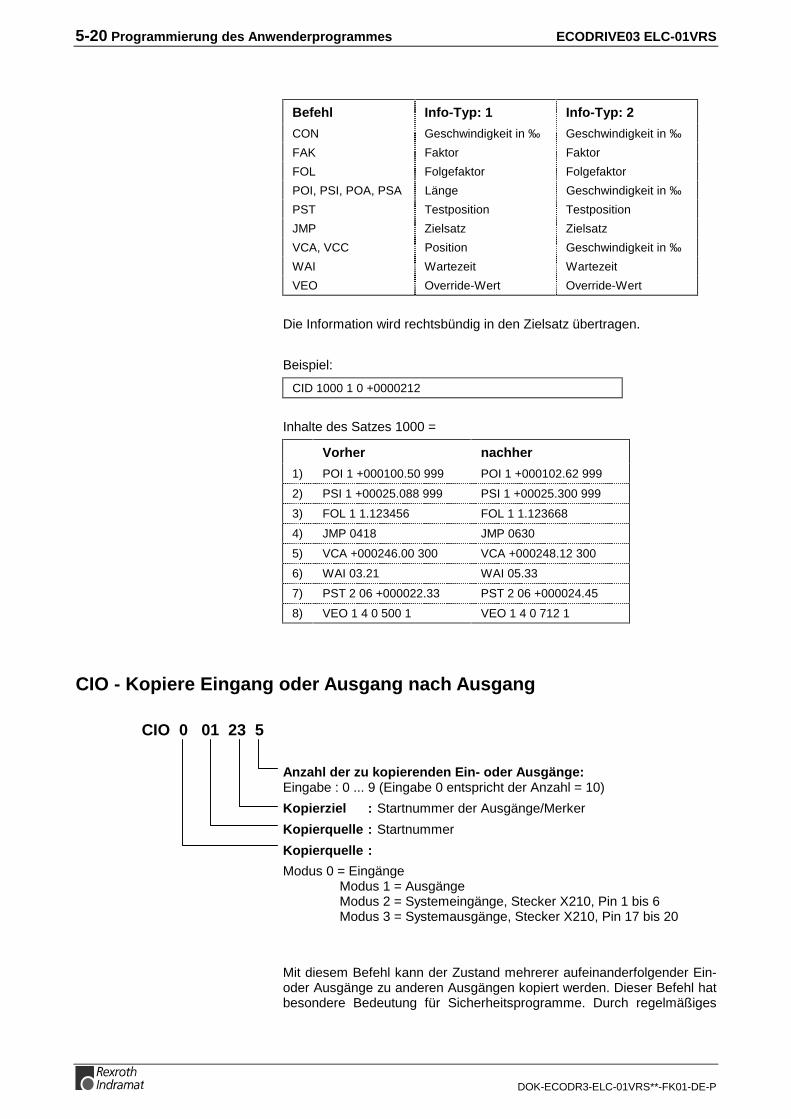
5-20 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Befehl Info-Typ: 1 Info-Typ: 2
CON Geschwindigkeit in ‰ Geschwindigkeit in ‰
FAK Faktor Faktor
FOL Folgefaktor Folgefaktor
POI, PSI, POA, PSA Länge Geschwindigkeit in ‰
PST Testposition Testposition
JMP Zielsatz Zielsatz
VCA, VCC Position Geschwindigkeit in ‰
WAI Wartezeit Wartezeit
VEO Override-Wert Override-Wert
Die Information wird rechtsbündig in den Zielsatz übertragen.
Beispiel:
CID 1000 1 0 +0000212
Inhalte des Satzes 1000 =
Vorher nachher
1) POI 1 +000100.50 999 POI 1 +000102.62 999
2) PSI 1 +00025.088 999 PSI 1 +00025.300 999
3) FOL 1 1.123456 FOL 1 1.123668
4) JMP 0418 JMP 0630
5) VCA +000246.00 300 VCA +000248.12 300
6) WAI 03.21 WAI 05.33
7) PST 2 06 +000022.33 PST 2 06 +000024.45
8) VEO 1 4 0 500 1 VEO 1 4 0 712 1
CIO - Kopiere Eingang oder Ausgang nach Ausgang
Anzahl der zu kopierenden Ein- oder Ausgänge:Eingabe : 0 ... 9 (Eingabe 0 entspricht der Anzahl = 10)
Kopierziel : Startnummer der Ausgänge/Merker
Kopierquelle : Startnummer
Kopierquelle :
Modus 0 = EingängeModus 1 = AusgängeModus 2 = Systemeingänge, Stecker X210, Pin 1 bis 6Modus 3 = Systemausgänge, Stecker X210, Pin 17 bis 20
Mit diesem Befehl kann der Zustand mehrerer aufeinanderfolgender Ein-oder Ausgänge zu anderen Ausgängen kopiert werden. Dieser Befehl hatbesondere Bedeutung für Sicherheitsprogramme. Durch regelmäßiges
CIO 0 01 23 5
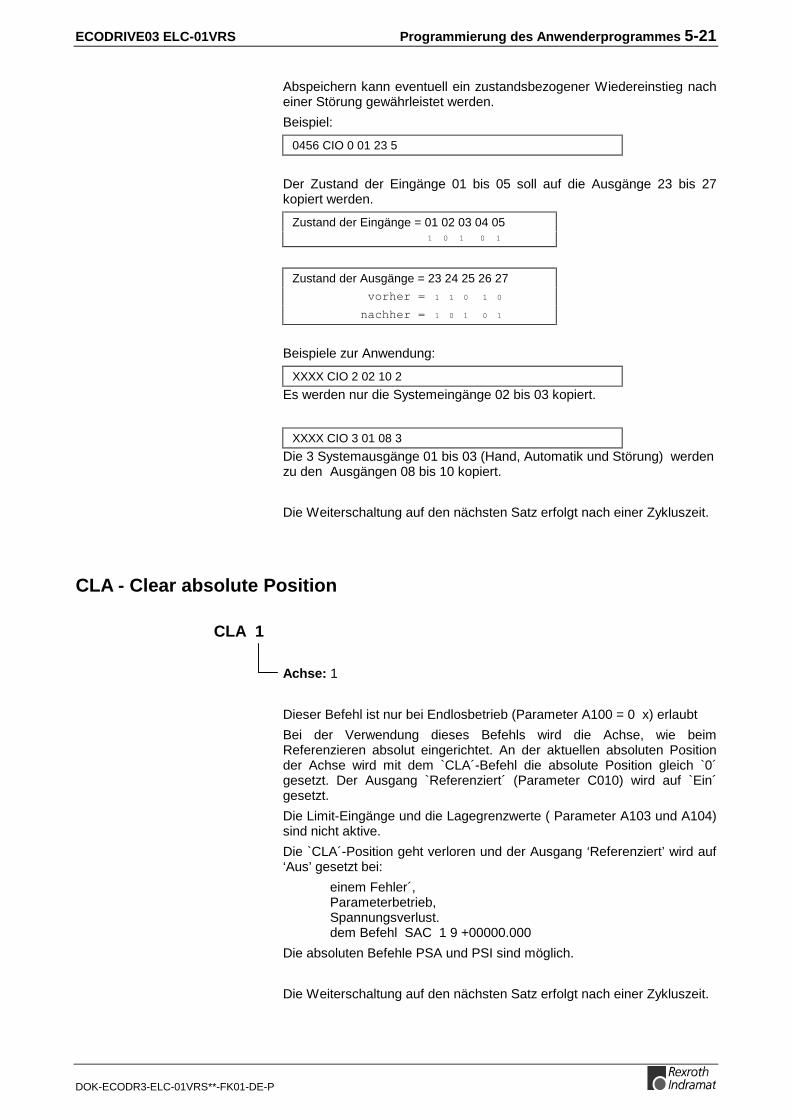
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-21
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Abspeichern kann eventuell ein zustandsbezogener Wiedereinstieg nacheiner Störung gewährleistet werden.
Beispiel:
0456 CIO 0 01 23 5
Der Zustand der Eingänge 01 bis 05 soll auf die Ausgänge 23 bis 27kopiert werden.
Zustand der Eingänge = 01 02 03 04 05 1 0 1 0 1
Zustand der Ausgänge = 23 24 25 26 27
vorher = 1 1 0 1 0
nachher = 1 0 1 0 1
Beispiele zur Anwendung:
XXXX CIO 2 02 10 2
Es werden nur die Systemeingänge 02 bis 03 kopiert.
XXXX CIO 3 01 08 3
Die 3 Systemausgänge 01 bis 03 (Hand, Automatik und Störung) werdenzu den Ausgängen 08 bis 10 kopiert.
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
CLA - Clear absolute Position
Achse: 1
Dieser Befehl ist nur bei Endlosbetrieb (Parameter A100 = 0 x) erlaubt
Bei der Verwendung dieses Befehls wird die Achse, wie beimReferenzieren absolut eingerichtet. An der aktuellen absoluten Positionder Achse wird mit dem `CLA´-Befehl die absolute Position gleich `0´gesetzt. Der Ausgang `Referenziert´ (Parameter C010) wird auf `Ein´gesetzt.
Die Limit-Eingänge und die Lagegrenzwerte ( Parameter A103 und A104)sind nicht aktive.
Die `CLA´-Position geht verloren und der Ausgang ‘Referenziert’ wird auf‘Aus’ gesetzt bei:
einem Fehler´,Parameterbetrieb,Spannungsverlust.dem Befehl SAC 1 9 +00000.000
Die absoluten Befehle PSA und PSI sind möglich.
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
CLA 1
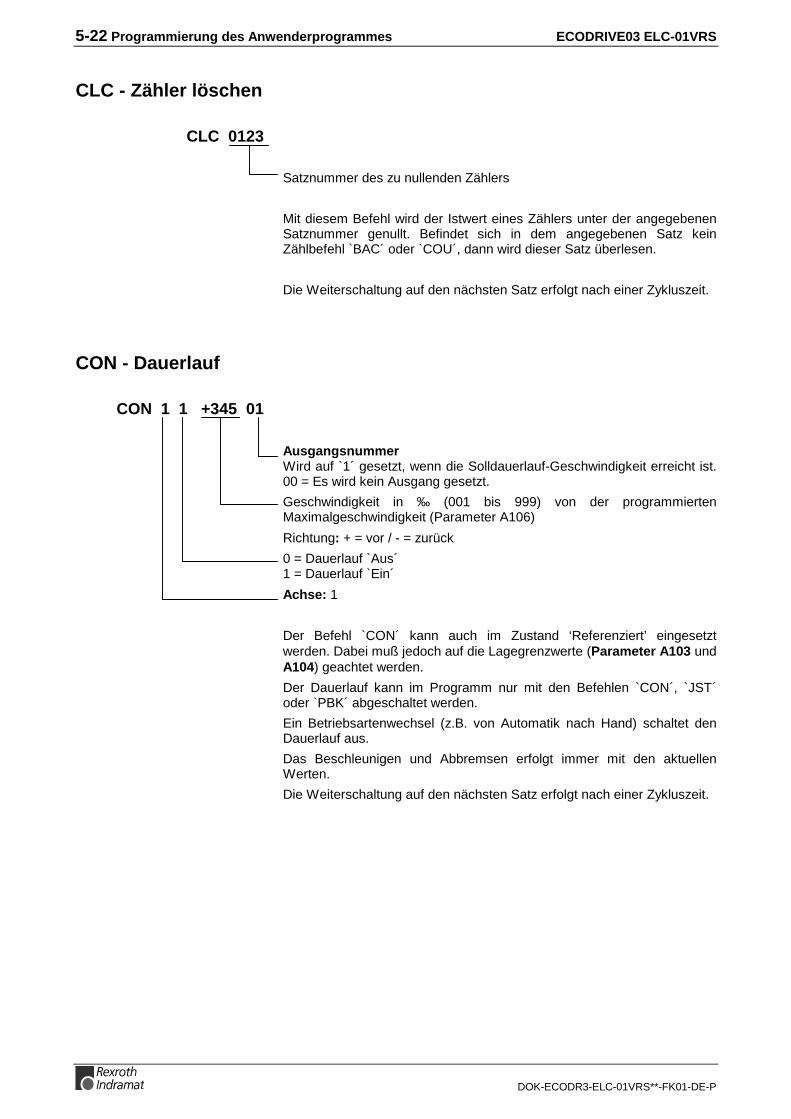
5-22 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
CLC - Zähler löschen
Satznummer des zu nullenden Zählers
Mit diesem Befehl wird der Istwert eines Zählers unter der angegebenenSatznummer genullt. Befindet sich in dem angegebenen Satz keinZählbefehl `BAC´ oder `COU´, dann wird dieser Satz überlesen.
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
CON - Dauerlauf
AusgangsnummerWird auf `1´ gesetzt, wenn die Solldauerlauf-Geschwindigkeit erreicht ist.00 = Es wird kein Ausgang gesetzt.
Geschwindigkeit in ‰ (001 bis 999) von der programmiertenMaximalgeschwindigkeit (Parameter A106)
Richtung: + = vor / - = zurück
0 = Dauerlauf `Aus´1 = Dauerlauf `Ein´
Achse: 1
Der Befehl `CON´ kann auch im Zustand ‘Referenziert’ eingesetztwerden. Dabei muß jedoch auf die Lagegrenzwerte (Parameter A103 undA104) geachtet werden.
Der Dauerlauf kann im Programm nur mit den Befehlen `CON´, `JST´oder `PBK´ abgeschaltet werden.
Ein Betriebsartenwechsel (z.B. von Automatik nach Hand) schaltet denDauerlauf aus.
Das Beschleunigen und Abbremsen erfolgt immer mit den aktuellenWerten.
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
CLC 0123
CON 1 1 +345 01
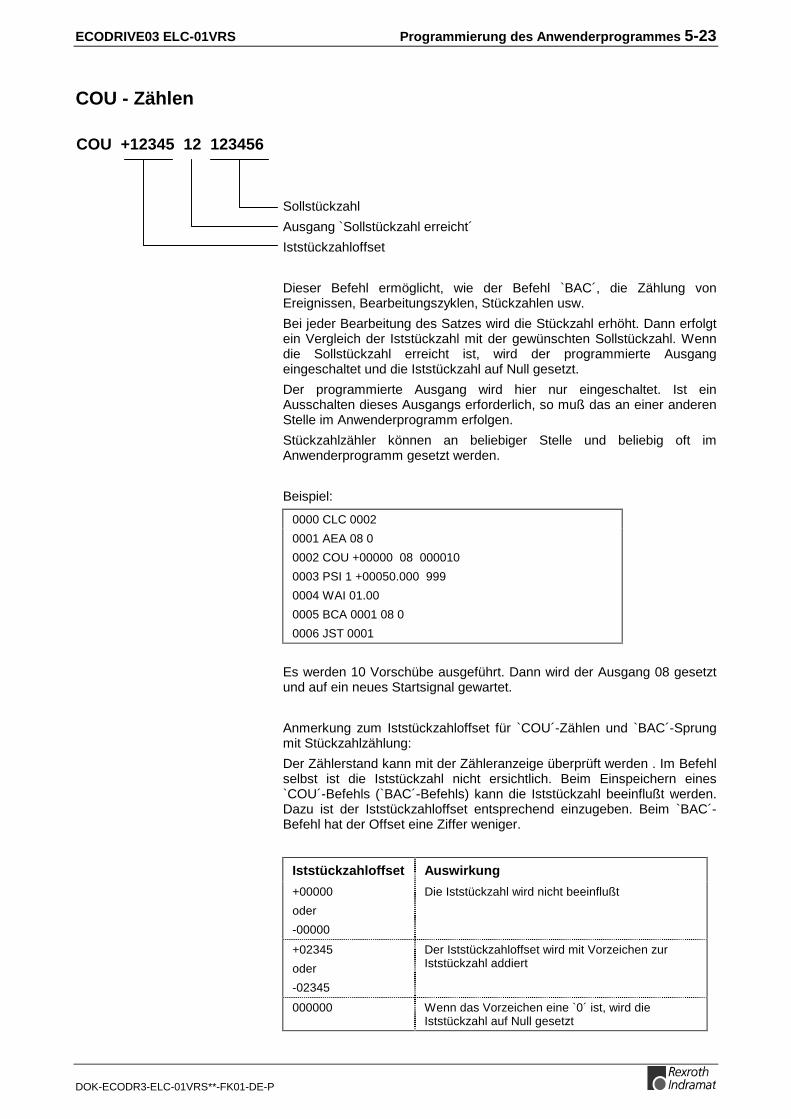
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-23
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
COU - Zählen
Sollstückzahl
Ausgang `Sollstückzahl erreicht´
Iststückzahloffset
Dieser Befehl ermöglicht, wie der Befehl `BAC´, die Zählung vonEreignissen, Bearbeitungszyklen, Stückzahlen usw.
Bei jeder Bearbeitung des Satzes wird die Stückzahl erhöht. Dann erfolgtein Vergleich der Iststückzahl mit der gewünschten Sollstückzahl. Wenndie Sollstückzahl erreicht ist, wird der programmierte Ausgangeingeschaltet und die Iststückzahl auf Null gesetzt.
Der programmierte Ausgang wird hier nur eingeschaltet. Ist einAusschalten dieses Ausgangs erforderlich, so muß das an einer anderenStelle im Anwenderprogramm erfolgen.
Stückzahlzähler können an beliebiger Stelle und beliebig oft imAnwenderprogramm gesetzt werden.
Beispiel:
0000 CLC 0002
0001 AEA 08 0
0002 COU +00000 08 000010
0003 PSI 1 +00050.000 999
0004 WAI 01.00
0005 BCA 0001 08 0
0006 JST 0001
Es werden 10 Vorschübe ausgeführt. Dann wird der Ausgang 08 gesetztund auf ein neues Startsignal gewartet.
Anmerkung zum Iststückzahloffset für `COU´-Zählen und `BAC´-Sprungmit Stückzahlzählung:
Der Zählerstand kann mit der Zähleranzeige überprüft werden . Im Befehlselbst ist die Iststückzahl nicht ersichtlich. Beim Einspeichern eines`COU´-Befehls (`BAC´-Befehls) kann die Iststückzahl beeinflußt werden.Dazu ist der Iststückzahloffset entsprechend einzugeben. Beim `BAC´-Befehl hat der Offset eine Ziffer weniger.
Iststückzahloffset Auswirkung
+00000
oder
-00000
Die Iststückzahl wird nicht beeinflußt
+02345
oder
-02345
Der Iststückzahloffset wird mit Vorzeichen zurIststückzahl addiert
000000 Wenn das Vorzeichen eine `0´ ist, wird dieIststückzahl auf Null gesetzt
COU +12345 12 123456
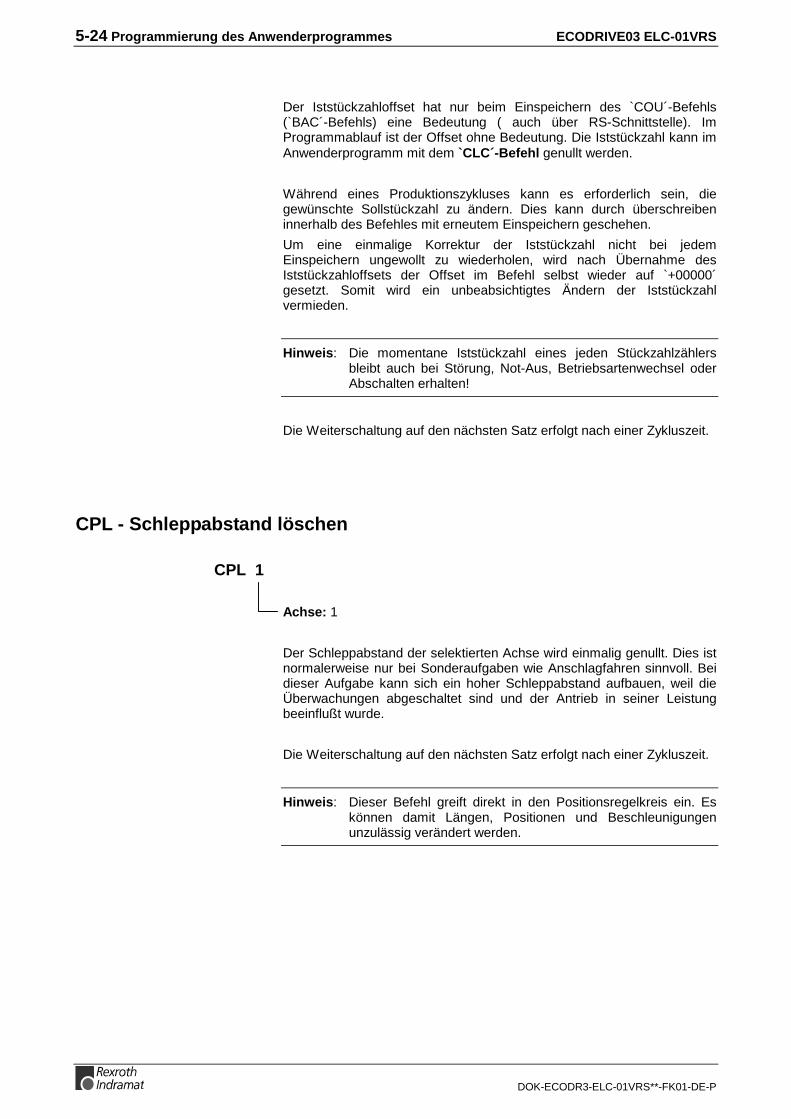
5-24 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Der Iststückzahloffset hat nur beim Einspeichern des `COU´-Befehls(`BAC´-Befehls) eine Bedeutung ( auch über RS-Schnittstelle). ImProgrammablauf ist der Offset ohne Bedeutung. Die Iststückzahl kann imAnwenderprogramm mit dem `CLC´-Befehl genullt werden.
Während eines Produktionszykluses kann es erforderlich sein, diegewünschte Sollstückzahl zu ändern. Dies kann durch überschreibeninnerhalb des Befehles mit erneutem Einspeichern geschehen.
Um eine einmalige Korrektur der Iststückzahl nicht bei jedemEinspeichern ungewollt zu wiederholen, wird nach Übernahme desIststückzahloffsets der Offset im Befehl selbst wieder auf `+00000´gesetzt. Somit wird ein unbeabsichtigtes Ändern der Iststückzahlvermieden.
Hinweis: Die momentane Iststückzahl eines jeden Stückzahlzählersbleibt auch bei Störung, Not-Aus, Betriebsartenwechsel oderAbschalten erhalten!
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
CPL - Schleppabstand löschen
Achse: 1
Der Schleppabstand der selektierten Achse wird einmalig genullt. Dies istnormalerweise nur bei Sonderaufgaben wie Anschlagfahren sinnvoll. Beidieser Aufgabe kann sich ein hoher Schleppabstand aufbauen, weil dieÜberwachungen abgeschaltet sind und der Antrieb in seiner Leistungbeeinflußt wurde.
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
Hinweis: Dieser Befehl greift direkt in den Positionsregelkreis ein. Eskönnen damit Längen, Positionen und Beschleunigungenunzulässig verändert werden.
CPL 1
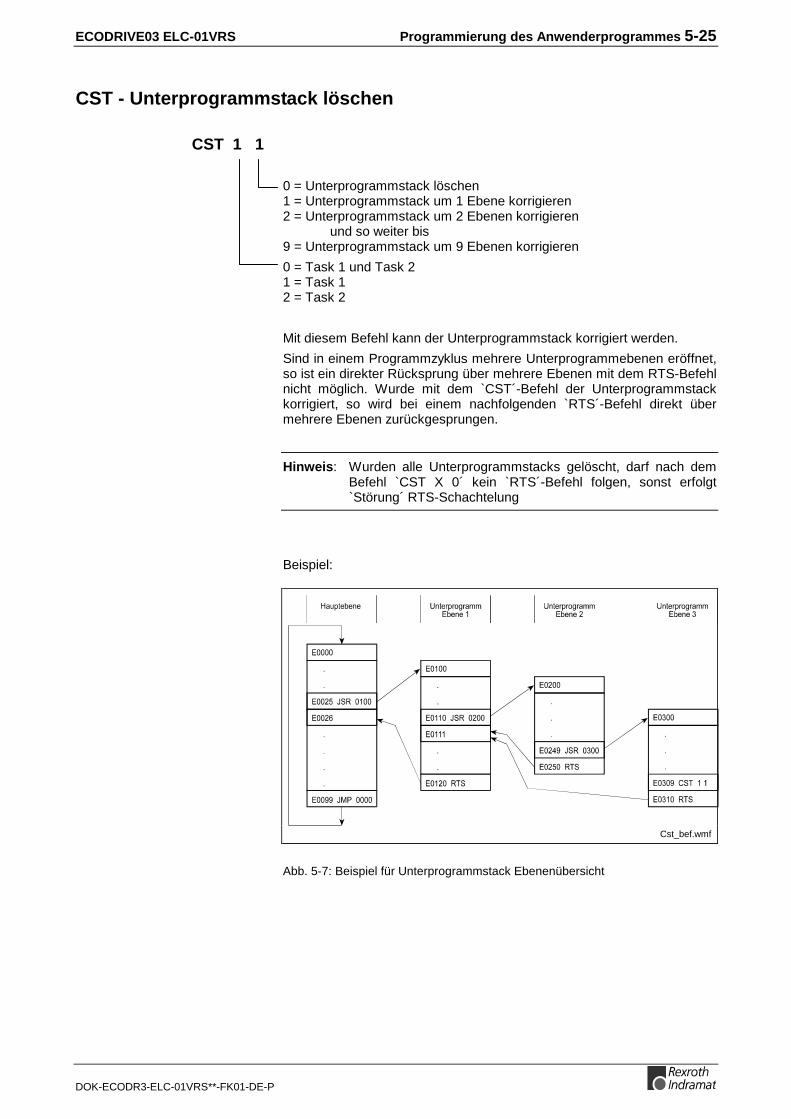
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-25
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
CST - Unterprogrammstack löschen
0 = Unterprogrammstack löschen1 = Unterprogrammstack um 1 Ebene korrigieren2 = Unterprogrammstack um 2 Ebenen korrigieren
und so weiter bis9 = Unterprogrammstack um 9 Ebenen korrigieren
0 = Task 1 und Task 21 = Task 12 = Task 2
Mit diesem Befehl kann der Unterprogrammstack korrigiert werden.
Sind in einem Programmzyklus mehrere Unterprogrammebenen eröffnet,so ist ein direkter Rücksprung über mehrere Ebenen mit dem RTS-Befehlnicht möglich. Wurde mit dem `CST´-Befehl der Unterprogrammstackkorrigiert, so wird bei einem nachfolgenden `RTS´-Befehl direkt übermehrere Ebenen zurückgesprungen.
Hinweis: Wurden alle Unterprogrammstacks gelöscht, darf nach demBefehl `CST X 0´ kein `RTS´-Befehl folgen, sonst erfolgt`Störung´ RTS-Schachtelung
Beispiel:
Cst_bef.wmf
Abb. 5-7: Beispiel für Unterprogrammstack Ebenenübersicht
CST 1 1
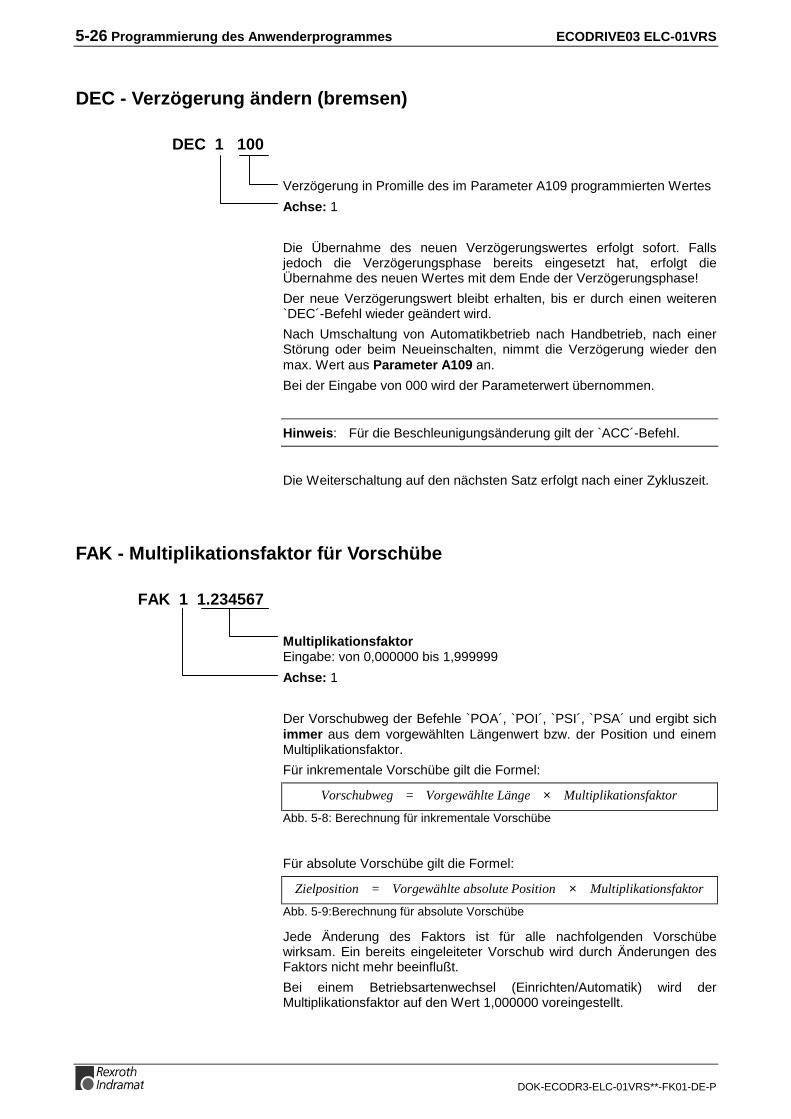
5-26 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
DEC - Verzögerung ändern (bremsen)
Verzögerung in Promille des im Parameter A109 programmierten Wertes
Achse: 1
Die Übernahme des neuen Verzögerungswertes erfolgt sofort. Fallsjedoch die Verzögerungsphase bereits eingesetzt hat, erfolgt dieÜbernahme des neuen Wertes mit dem Ende der Verzögerungsphase!
Der neue Verzögerungswert bleibt erhalten, bis er durch einen weiteren`DEC´-Befehl wieder geändert wird.
Nach Umschaltung von Automatikbetrieb nach Handbetrieb, nach einerStörung oder beim Neueinschalten, nimmt die Verzögerung wieder denmax. Wert aus Parameter A109 an.
Bei der Eingabe von 000 wird der Parameterwert übernommen.
Hinweis: Für die Beschleunigungsänderung gilt der `ACC´-Befehl.
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
FAK - Multiplikationsfaktor für Vorschübe
MultiplikationsfaktorEingabe: von 0,000000 bis 1,999999
Achse: 1
Der Vorschubweg der Befehle `POA´, `POI´, `PSI´, `PSA´ und ergibt sichimmer aus dem vorgewählten Längenwert bzw. der Position und einemMultiplikationsfaktor.
Für inkrementale Vorschübe gilt die Formel:
Vorschubweg = Vorgewählte Länge Multiplikationsfaktor×
Abb. 5-8: Berechnung für inkrementale Vorschübe
Für absolute Vorschübe gilt die Formel:
Zielpositi = Vorgewählte absolute Position Multiplikationsfaktoron ×
Abb. 5-9:Berechnung für absolute Vorschübe
Jede Änderung des Faktors ist für alle nachfolgenden Vorschübewirksam. Ein bereits eingeleiteter Vorschub wird durch Änderungen desFaktors nicht mehr beeinflußt.
Bei einem Betriebsartenwechsel (Einrichten/Automatik) wird derMultiplikationsfaktor auf den Wert 1,000000 voreingestellt.
DEC 1 100
FAK 1 1.234567
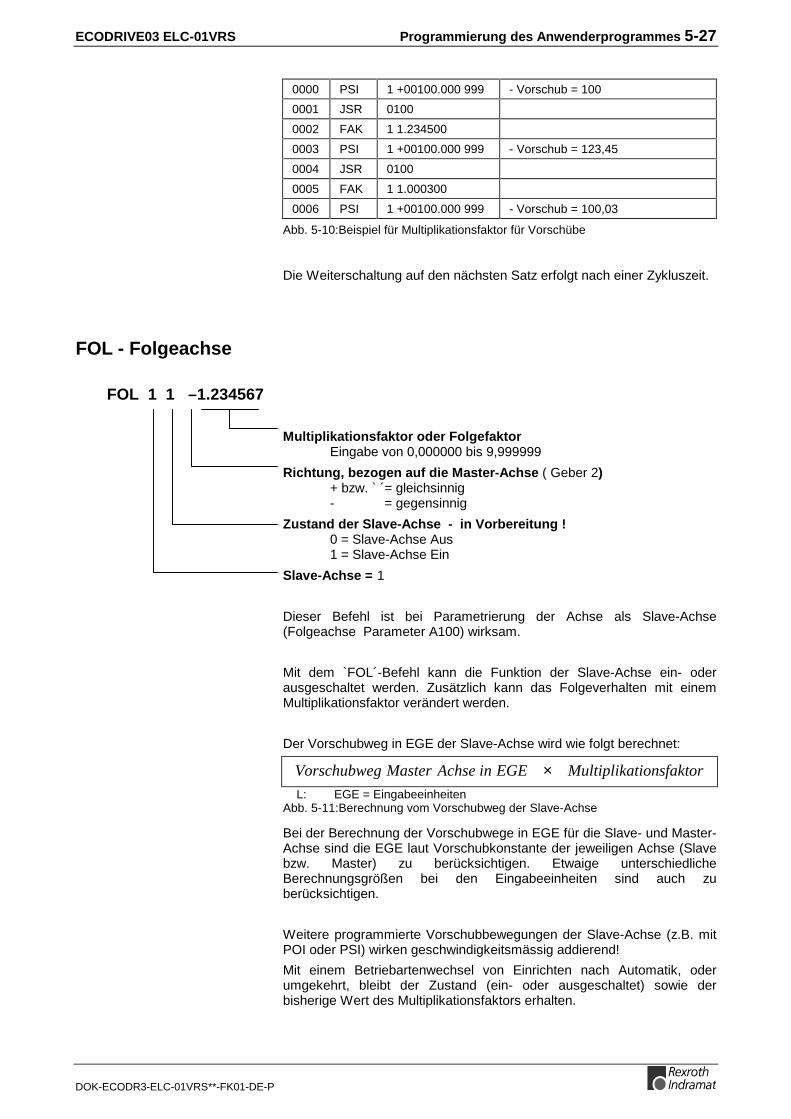
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-27
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
0000 PSI 1 +00100.000 999 - Vorschub = 100
0001 JSR 0100
0002 FAK 1 1.234500
0003 PSI 1 +00100.000 999 - Vorschub = 123,45
0004 JSR 0100
0005 FAK 1 1.000300
0006 PSI 1 +00100.000 999 - Vorschub = 100,03
Abb. 5-10:Beispiel für Multiplikationsfaktor für Vorschübe
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
FOL - Folgeachse
Multiplikationsfaktor oder FolgefaktorEingabe von 0,000000 bis 9,999999
Richtung, bezogen auf die Master-Achse ( Geber 2)+ bzw. ` ´= gleichsinnig- = gegensinnig
Zustand der Slave-Achse - in Vorbereitung !0 = Slave-Achse Aus1 = Slave-Achse Ein
Slave-Achse = 1
Dieser Befehl ist bei Parametrierung der Achse als Slave-Achse(Folgeachse Parameter A100) wirksam.
Mit dem `FOL´-Befehl kann die Funktion der Slave-Achse ein- oderausgeschaltet werden. Zusätzlich kann das Folgeverhalten mit einemMultiplikationsfaktor verändert werden.
Der Vorschubweg in EGE der Slave-Achse wird wie folgt berechnet:
Vorschubweg Master Achse in EGE Multiplikationsfaktor×L: EGE = Eingabeeinheiten
Abb. 5-11:Berechnung vom Vorschubweg der Slave-Achse
Bei der Berechnung der Vorschubwege in EGE für die Slave- und Master-Achse sind die EGE laut Vorschubkonstante der jeweiligen Achse (Slavebzw. Master) zu berücksichtigen. Etwaige unterschiedlicheBerechnungsgrößen bei den Eingabeeinheiten sind auch zuberücksichtigen.
Weitere programmierte Vorschubbewegungen der Slave-Achse (z.B. mitPOI oder PSI) wirken geschwindigkeitsmässig addierend!
Mit einem Betriebartenwechsel von Einrichten nach Automatik, oderumgekehrt, bleibt der Zustand (ein- oder ausgeschaltet) sowie derbisherige Wert des Multiplikationsfaktors erhalten.
FOL 1 1 –1.234567
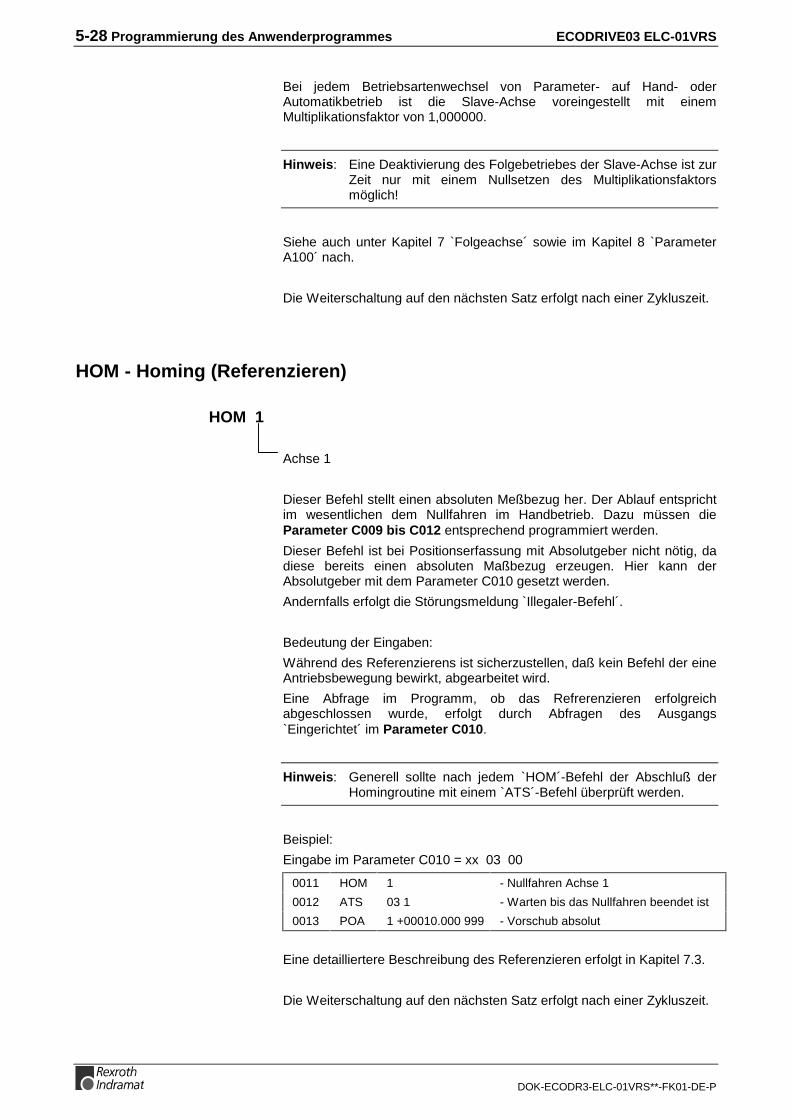
5-28 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Bei jedem Betriebsartenwechsel von Parameter- auf Hand- oderAutomatikbetrieb ist die Slave-Achse voreingestellt mit einemMultiplikationsfaktor von 1,000000.
Hinweis: Eine Deaktivierung des Folgebetriebes der Slave-Achse ist zurZeit nur mit einem Nullsetzen des Multiplikationsfaktorsmöglich!
Siehe auch unter Kapitel 7 `Folgeachse´ sowie im Kapitel 8 `ParameterA100´ nach.
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
HOM - Homing (Referenzieren)
Achse 1
Dieser Befehl stellt einen absoluten Meßbezug her. Der Ablauf entsprichtim wesentlichen dem Nullfahren im Handbetrieb. Dazu müssen dieParameter C009 bis C012 entsprechend programmiert werden.
Dieser Befehl ist bei Positionserfassung mit Absolutgeber nicht nötig, dadiese bereits einen absoluten Maßbezug erzeugen. Hier kann derAbsolutgeber mit dem Parameter C010 gesetzt werden.
Andernfalls erfolgt die Störungsmeldung `Illegaler-Befehl´.
Bedeutung der Eingaben:
Während des Referenzierens ist sicherzustellen, daß kein Befehl der eineAntriebsbewegung bewirkt, abgearbeitet wird.
Eine Abfrage im Programm, ob das Refrerenzieren erfolgreichabgeschlossen wurde, erfolgt durch Abfragen des Ausgangs`Eingerichtet´ im Parameter C010.
Hinweis: Generell sollte nach jedem `HOM´-Befehl der Abschluß derHomingroutine mit einem `ATS´-Befehl überprüft werden.
Beispiel:
Eingabe im Parameter C010 = xx 03 00
0011 HOM 1 - Nullfahren Achse 1
0012 ATS 03 1 - Warten bis das Nullfahren beendet ist
0013 POA 1 +00010.000 999 - Vorschub absolut
Eine detailliertere Beschreibung des Referenzieren erfolgt in Kapitel 7.3.
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
HOM 1
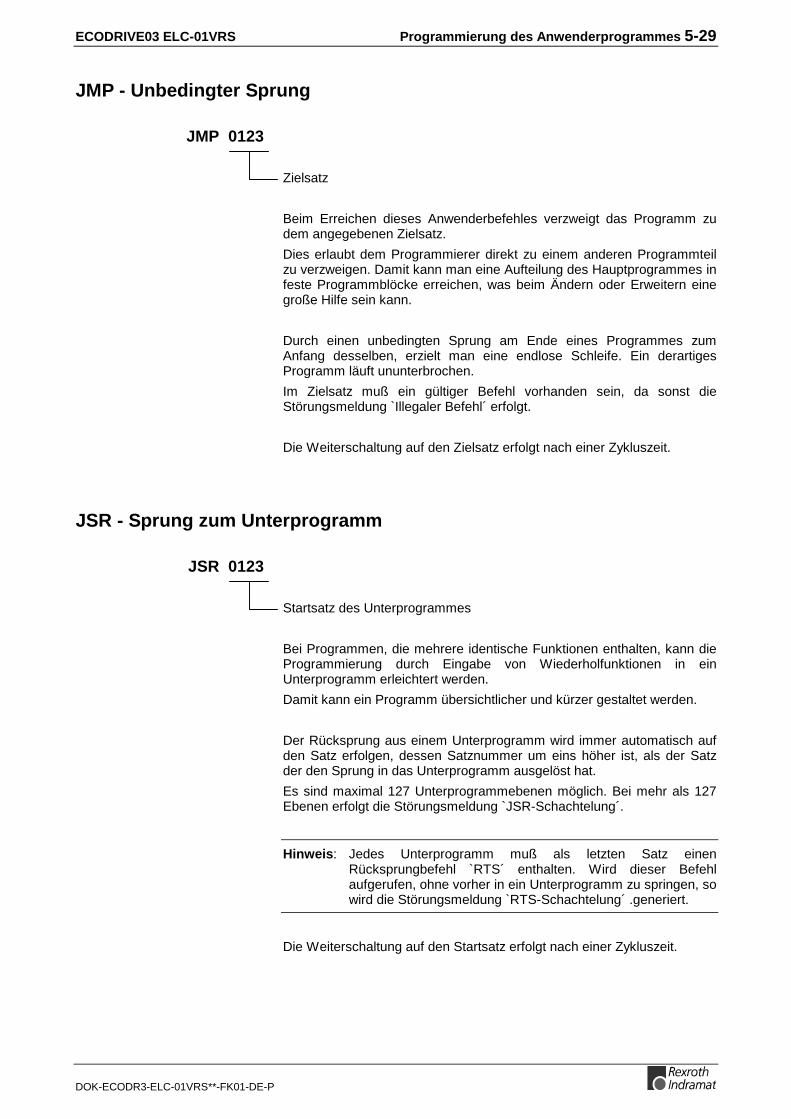
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-29
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
JMP - Unbedingter Sprung
Zielsatz
Beim Erreichen dieses Anwenderbefehles verzweigt das Programm zudem angegebenen Zielsatz.
Dies erlaubt dem Programmierer direkt zu einem anderen Programmteilzu verzweigen. Damit kann man eine Aufteilung des Hauptprogrammes infeste Programmblöcke erreichen, was beim Ändern oder Erweitern einegroße Hilfe sein kann.
Durch einen unbedingten Sprung am Ende eines Programmes zumAnfang desselben, erzielt man eine endlose Schleife. Ein derartigesProgramm läuft ununterbrochen.
Im Zielsatz muß ein gültiger Befehl vorhanden sein, da sonst dieStörungsmeldung `Illegaler Befehl´ erfolgt.
Die Weiterschaltung auf den Zielsatz erfolgt nach einer Zykluszeit.
JSR - Sprung zum Unterprogramm
Startsatz des Unterprogrammes
Bei Programmen, die mehrere identische Funktionen enthalten, kann dieProgrammierung durch Eingabe von Wiederholfunktionen in einUnterprogramm erleichtert werden.
Damit kann ein Programm übersichtlicher und kürzer gestaltet werden.
Der Rücksprung aus einem Unterprogramm wird immer automatisch aufden Satz erfolgen, dessen Satznummer um eins höher ist, als der Satzder den Sprung in das Unterprogramm ausgelöst hat.
Es sind maximal 127 Unterprogrammebenen möglich. Bei mehr als 127Ebenen erfolgt die Störungsmeldung `JSR-Schachtelung´.
Hinweis: Jedes Unterprogramm muß als letzten Satz einenRücksprungbefehl `RTS´ enthalten. Wird dieser Befehlaufgerufen, ohne vorher in ein Unterprogramm zu springen, sowird die Störungsmeldung `RTS-Schachtelung´ .generiert.
Die Weiterschaltung auf den Startsatz erfolgt nach einer Zykluszeit.
JMP 0123
JSR 0123
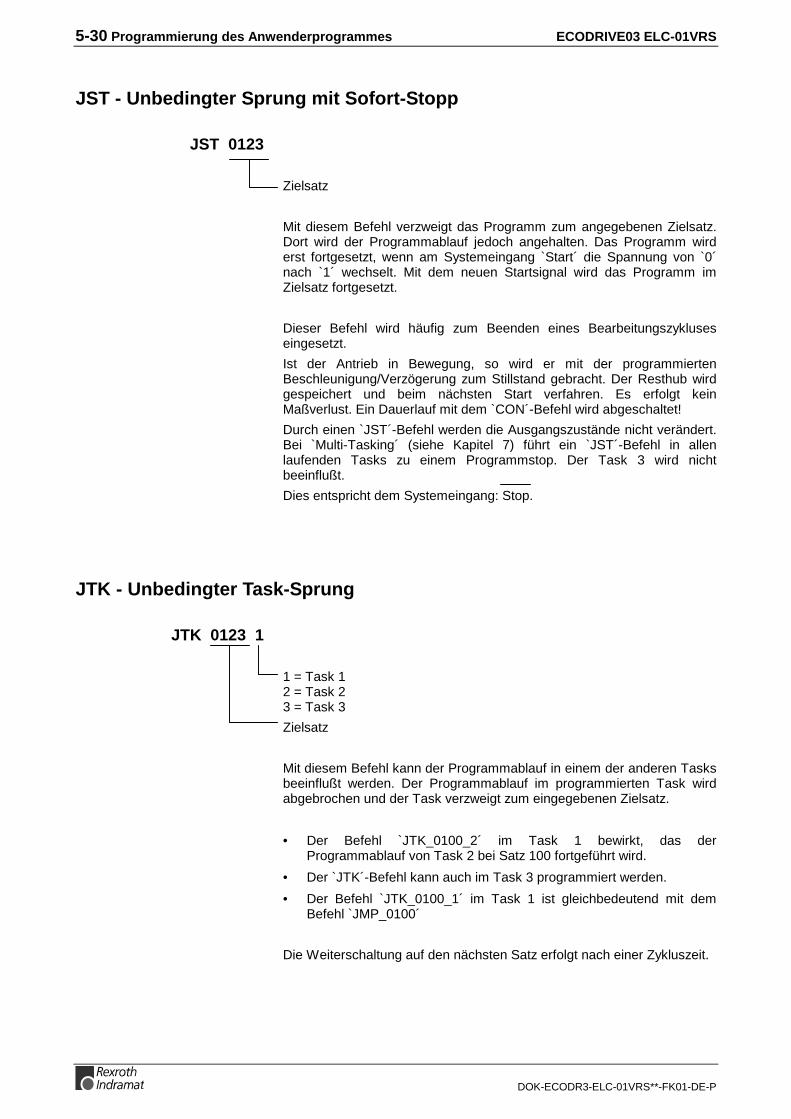
5-30 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
JST - Unbedingter Sprung mit Sofort-Stopp
Zielsatz
Mit diesem Befehl verzweigt das Programm zum angegebenen Zielsatz.Dort wird der Programmablauf jedoch angehalten. Das Programm wirderst fortgesetzt, wenn am Systemeingang `Start´ die Spannung von `0´nach `1´ wechselt. Mit dem neuen Startsignal wird das Programm imZielsatz fortgesetzt.
Dieser Befehl wird häufig zum Beenden eines Bearbeitungszykluseseingesetzt.
Ist der Antrieb in Bewegung, so wird er mit der programmiertenBeschleunigung/Verzögerung zum Stillstand gebracht. Der Resthub wirdgespeichert und beim nächsten Start verfahren. Es erfolgt keinMaßverlust. Ein Dauerlauf mit dem `CON´-Befehl wird abgeschaltet!
Durch einen `JST´-Befehl werden die Ausgangszustände nicht verändert.Bei `Multi-Tasking´ (siehe Kapitel 7) führt ein `JST´-Befehl in allenlaufenden Tasks zu einem Programmstop. Der Task 3 wird nichtbeeinflußt.
Dies entspricht dem Systemeingang: Stop.
JTK - Unbedingter Task-Sprung
1 = Task 12 = Task 23 = Task 3
Zielsatz
Mit diesem Befehl kann der Programmablauf in einem der anderen Tasksbeeinflußt werden. Der Programmablauf im programmierten Task wirdabgebrochen und der Task verzweigt zum eingegebenen Zielsatz.
• Der Befehl `JTK_0100_2´ im Task 1 bewirkt, das derProgrammablauf von Task 2 bei Satz 100 fortgeführt wird.
• Der `JTK´-Befehl kann auch im Task 3 programmiert werden.
• Der Befehl `JTK_0100_1´ im Task 1 ist gleichbedeutend mit demBefehl `JMP_0100´
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
JST 0123
JTK 0123 1
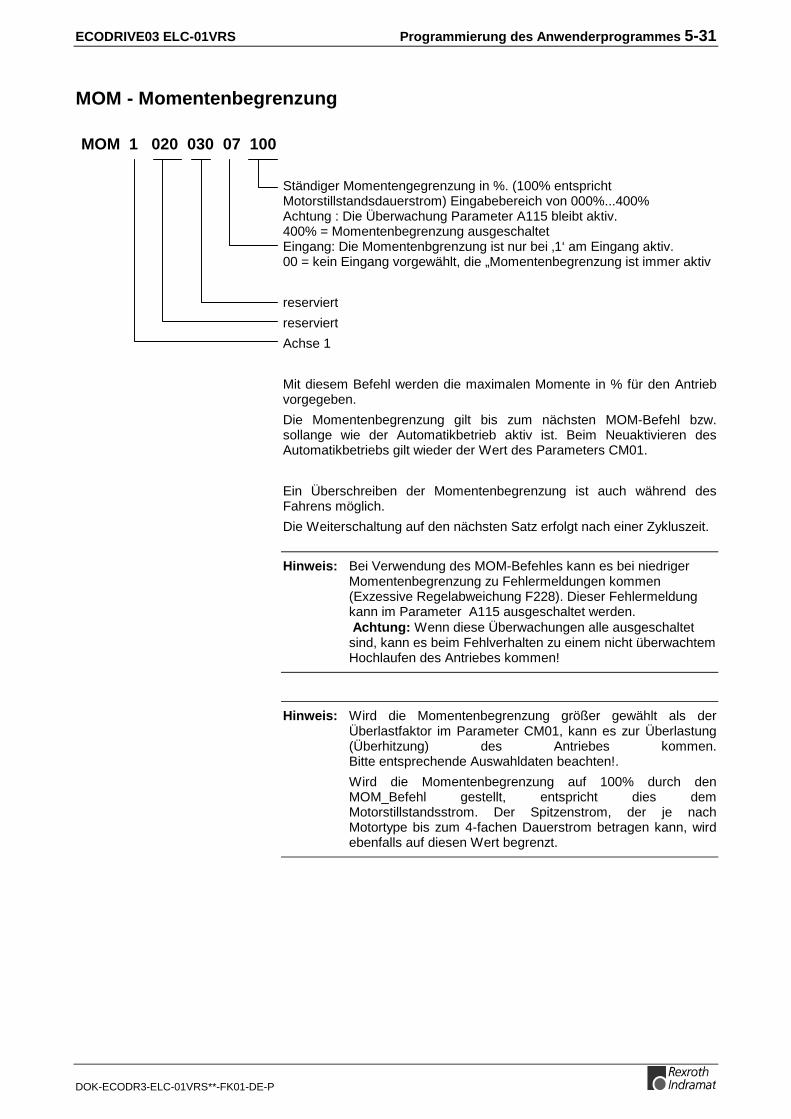
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-31
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
MOM - Momentenbegrenzung
Ständiger Momentengegrenzung in %. (100% entsprichtMotorstillstandsdauerstrom) Eingabebereich von 000%...400%Achtung : Die Überwachung Parameter A115 bleibt aktiv.400% = Momentenbegrenzung ausgeschaltetEingang: Die Momentenbgrenzung ist nur bei ‚1‘ am Eingang aktiv.00 = kein Eingang vorgewählt, die „Momentenbegrenzung ist immer aktiv
reserviert
reserviert
Achse 1
Mit diesem Befehl werden die maximalen Momente in % für den Antriebvorgegeben.
Die Momentenbegrenzung gilt bis zum nächsten MOM-Befehl bzw.sollange wie der Automatikbetrieb aktiv ist. Beim Neuaktivieren desAutomatikbetriebs gilt wieder der Wert des Parameters CM01.
Ein Überschreiben der Momentenbegrenzung ist auch während desFahrens möglich.
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
Hinweis: Bei Verwendung des MOM-Befehles kann es bei niedrigerMomentenbegrenzung zu Fehlermeldungen kommen(Exzessive Regelabweichung F228). Dieser Fehlermeldungkann im Parameter A115 ausgeschaltet werden. Achtung: Wenn diese Überwachungen alle ausgeschaltetsind, kann es beim Fehlverhalten zu einem nicht überwachtemHochlaufen des Antriebes kommen!
Hinweis: Wird die Momentenbegrenzung größer gewählt als derÜberlastfaktor im Parameter CM01, kann es zur Überlastung(Überhitzung) des Antriebes kommen.Bitte entsprechende Auswahldaten beachten!.
Wird die Momentenbegrenzung auf 100% durch denMOM_Befehl gestellt, entspricht dies demMotorstillstandsstrom. Der Spitzenstrom, der je nachMotortype bis zum 4-fachen Dauerstrom betragen kann, wirdebenfalls auf diesen Wert begrenzt.
MOM 1 020 030 07 100
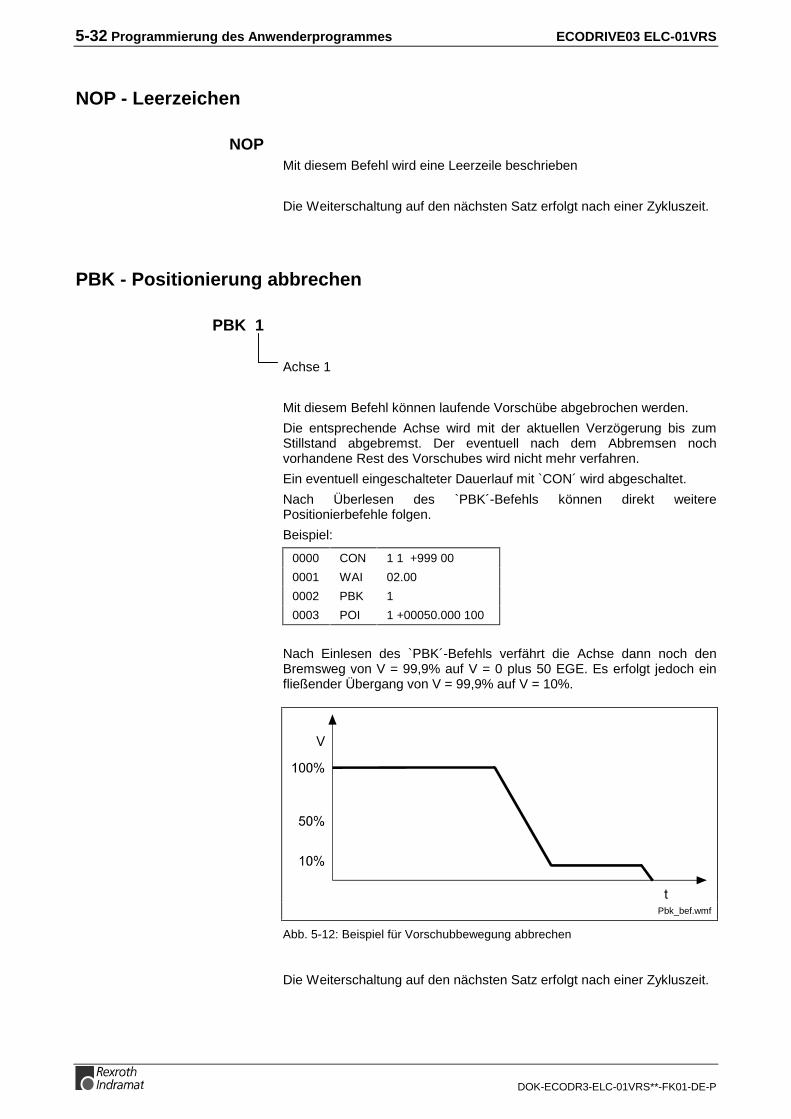
5-32 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
NOP - Leerzeichen
Mit diesem Befehl wird eine Leerzeile beschrieben
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
PBK - Positionierung abbrechen
Achse 1
Mit diesem Befehl können laufende Vorschübe abgebrochen werden.
Die entsprechende Achse wird mit der aktuellen Verzögerung bis zumStillstand abgebremst. Der eventuell nach dem Abbremsen nochvorhandene Rest des Vorschubes wird nicht mehr verfahren.
Ein eventuell eingeschalteter Dauerlauf mit `CON´ wird abgeschaltet.
Nach Überlesen des `PBK´-Befehls können direkt weiterePositionierbefehle folgen.
Beispiel:
0000 CON 1 1 +999 00
0001 WAI 02.00
0002 PBK 1
0003 POI 1 +00050.000 100
Nach Einlesen des `PBK´-Befehls verfährt die Achse dann noch denBremsweg von V = 99,9% auf V = 0 plus 50 EGE. Es erfolgt jedoch einfließender Übergang von V = 99,9% auf V = 10%.
Pbk_bef.wmf
Abb. 5-12: Beispiel für Vorschubbewegung abbrechen
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
NOP
PBK 1
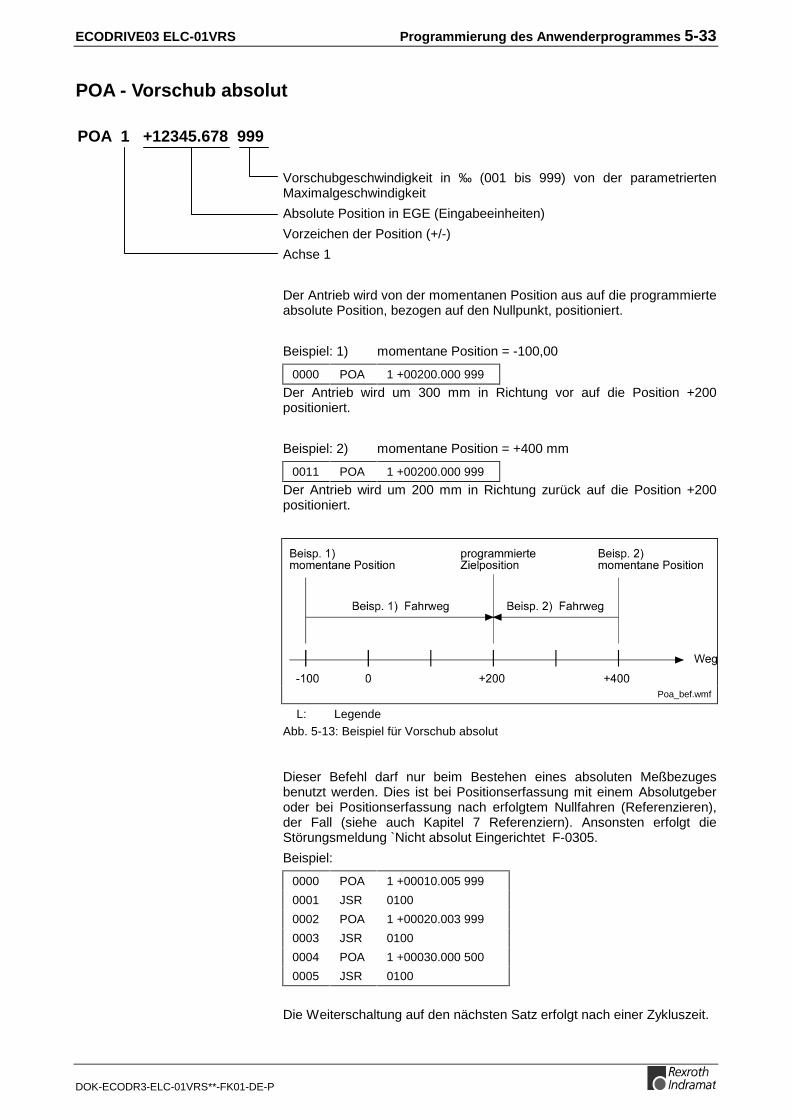
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-33
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
POA - Vorschub absolut
Vorschubgeschwindigkeit in ‰ (001 bis 999) von der parametriertenMaximalgeschwindigkeit
Absolute Position in EGE (Eingabeeinheiten)
Vorzeichen der Position (+/-)
Achse 1
Der Antrieb wird von der momentanen Position aus auf die programmierteabsolute Position, bezogen auf den Nullpunkt, positioniert.
Beispiel: 1) momentane Position = -100,00
0000 POA 1 +00200.000 999
Der Antrieb wird um 300 mm in Richtung vor auf die Position +200positioniert.
Beispiel: 2) momentane Position = +400 mm
0011 POA 1 +00200.000 999
Der Antrieb wird um 200 mm in Richtung zurück auf die Position +200positioniert.
Poa_bef.wmf
L: Legende Abb. 5-13: Beispiel für Vorschub absolut
Dieser Befehl darf nur beim Bestehen eines absoluten Meßbezugesbenutzt werden. Dies ist bei Positionserfassung mit einem Absolutgeberoder bei Positionserfassung nach erfolgtem Nullfahren (Referenzieren),der Fall (siehe auch Kapitel 7 Referenziern). Ansonsten erfolgt dieStörungsmeldung `Nicht absolut Eingerichtet F-0305.
Beispiel:
0000 POA 1 +00010.005 999
0001 JSR 0100
0002 POA 1 +00020.003 999
0003 JSR 0100
0004 POA 1 +00030.000 500
0005 JSR 0100
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
POA 1 +12345.678 999
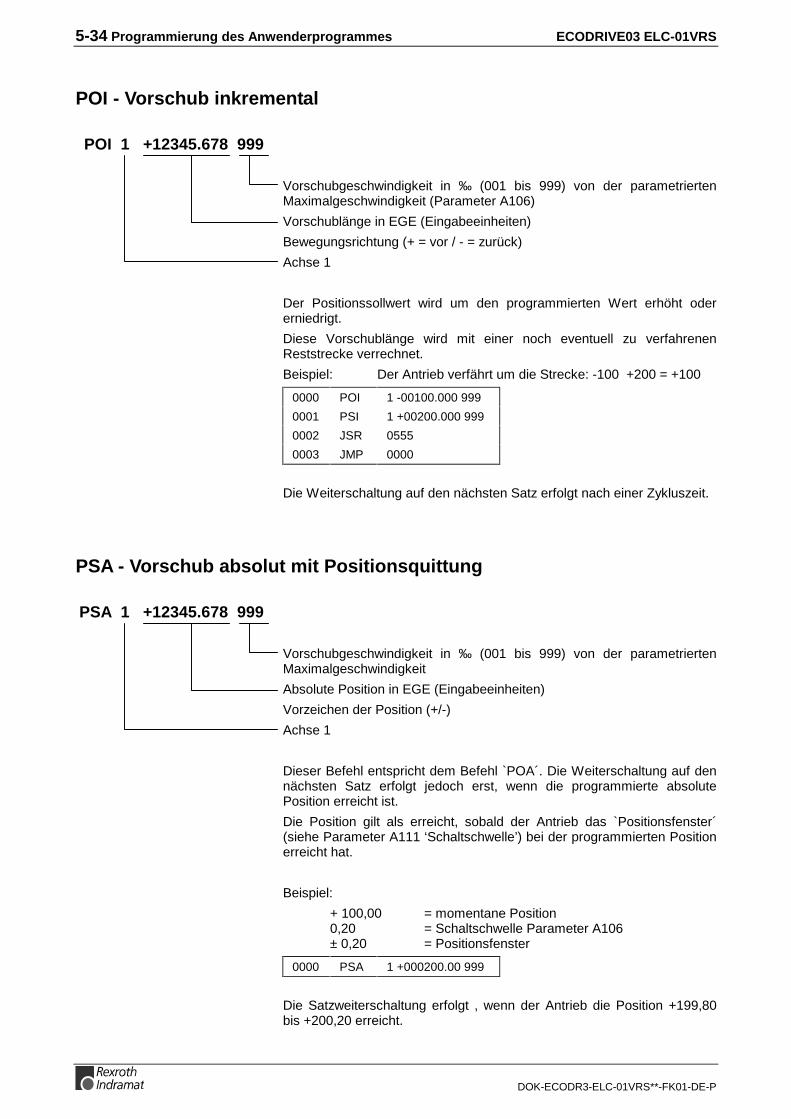
5-34 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
POI - Vorschub inkremental
Vorschubgeschwindigkeit in ‰ (001 bis 999) von der parametriertenMaximalgeschwindigkeit (Parameter A106)
Vorschublänge in EGE (Eingabeeinheiten)
Bewegungsrichtung (+ = vor / - = zurück)
Achse 1
Der Positionssollwert wird um den programmierten Wert erhöht odererniedrigt.
Diese Vorschublänge wird mit einer noch eventuell zu verfahrenenReststrecke verrechnet.
Beispiel: Der Antrieb verfährt um die Strecke: -100 +200 = +100
0000 POI 1 -00100.000 999
0001 PSI 1 +00200.000 999
0002 JSR 0555
0003 JMP 0000
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
PSA - Vorschub absolut mit Positionsquittung
Vorschubgeschwindigkeit in ‰ (001 bis 999) von der parametriertenMaximalgeschwindigkeit
Absolute Position in EGE (Eingabeeinheiten)
Vorzeichen der Position (+/-)
Achse 1
Dieser Befehl entspricht dem Befehl `POA´. Die Weiterschaltung auf dennächsten Satz erfolgt jedoch erst, wenn die programmierte absolutePosition erreicht ist.
Die Position gilt als erreicht, sobald der Antrieb das `Positionsfenster´(siehe Parameter A111 ‘Schaltschwelle’) bei der programmierten Positionerreicht hat.
Beispiel:
+ 100,00 = momentane Position0,20 = Schaltschwelle Parameter A106± 0,20 = Positionsfenster
0000 PSA 1 +000200.00 999
Die Satzweiterschaltung erfolgt , wenn der Antrieb die Position +199,80bis +200,20 erreicht.
POI 1 +12345.678 999
PSA 1 +12345.678 999
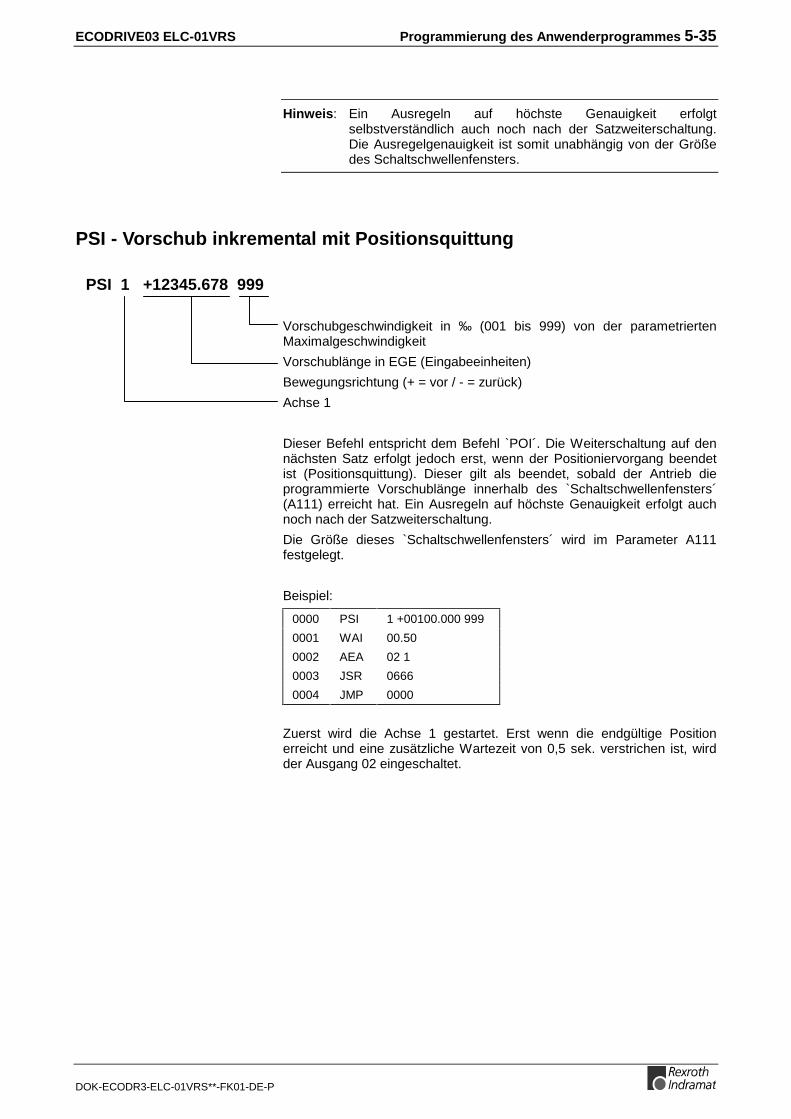
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-35
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Hinweis: Ein Ausregeln auf höchste Genauigkeit erfolgtselbstverständlich auch noch nach der Satzweiterschaltung.Die Ausregelgenauigkeit ist somit unabhängig von der Größedes Schaltschwellenfensters.
PSI - Vorschub inkremental mit Positionsquittung
Vorschubgeschwindigkeit in ‰ (001 bis 999) von der parametriertenMaximalgeschwindigkeit
Vorschublänge in EGE (Eingabeeinheiten)
Bewegungsrichtung (+ = vor / - = zurück)
Achse 1
Dieser Befehl entspricht dem Befehl `POI´. Die Weiterschaltung auf dennächsten Satz erfolgt jedoch erst, wenn der Positioniervorgang beendetist (Positionsquittung). Dieser gilt als beendet, sobald der Antrieb dieprogrammierte Vorschublänge innerhalb des `Schaltschwellenfensters´(A111) erreicht hat. Ein Ausregeln auf höchste Genauigkeit erfolgt auchnoch nach der Satzweiterschaltung.
Die Größe dieses `Schaltschwellenfensters´ wird im Parameter A111festgelegt.
Beispiel:
0000 PSI 1 +00100.000 999
0001 WAI 00.50
0002 AEA 02 1
0003 JSR 0666
0004 JMP 0000
Zuerst wird die Achse 1 gestartet. Erst wenn die endgültige Positionerreicht und eine zusätzliche Wartezeit von 0,5 sek. verstrichen ist, wirdder Ausgang 02 eingeschaltet.
PSI 1 +12345.678 999
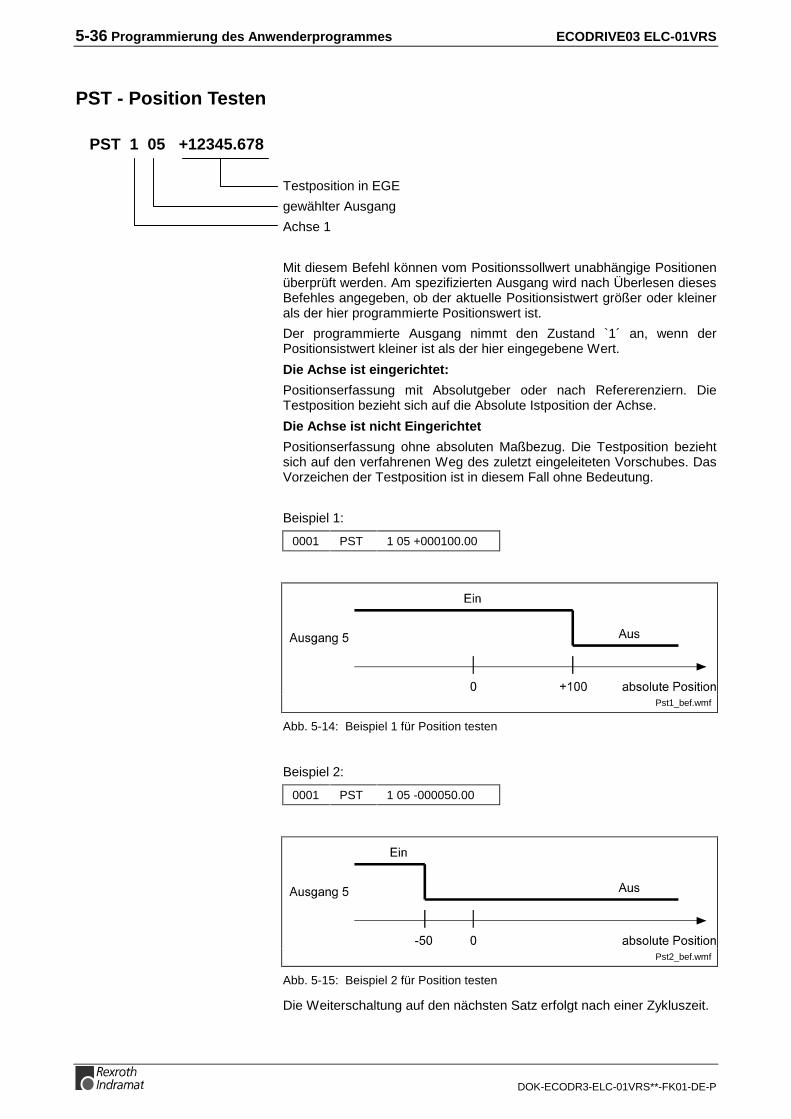
5-36 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
PST - Position Testen
Testposition in EGE
gewählter Ausgang
Achse 1
Mit diesem Befehl können vom Positionssollwert unabhängige Positionenüberprüft werden. Am spezifizierten Ausgang wird nach Überlesen diesesBefehles angegeben, ob der aktuelle Positionsistwert größer oder kleinerals der hier programmierte Positionswert ist.
Der programmierte Ausgang nimmt den Zustand `1´ an, wenn derPositionsistwert kleiner ist als der hier eingegebene Wert.
Die Achse ist eingerichtet:
Positionserfassung mit Absolutgeber oder nach Refererenziern. DieTestposition bezieht sich auf die Absolute Istposition der Achse.
Die Achse ist nicht Eingerichtet
Positionserfassung ohne absoluten Maßbezug. Die Testposition beziehtsich auf den verfahrenen Weg des zuletzt eingeleiteten Vorschubes. DasVorzeichen der Testposition ist in diesem Fall ohne Bedeutung.
Beispiel 1:
0001 PST 1 05 +000100.00
Pst1_bef.wmf
Abb. 5-14: Beispiel 1 für Position testen
Beispiel 2:
0001 PST 1 05 -000050.00
Pst2_bef.wmf
Abb. 5-15: Beispiel 2 für Position testen
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
PST 1 05 +12345.678
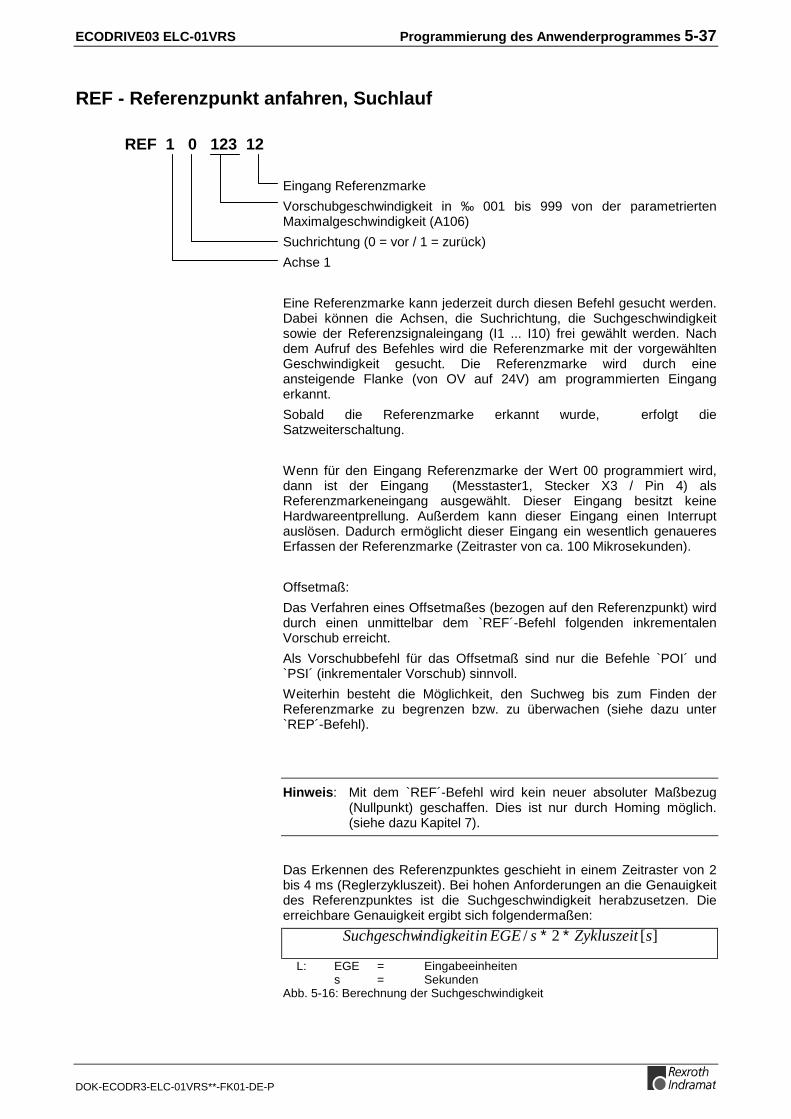
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-37
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
REF - Referenzpunkt anfahren, Suchlauf
Eingang Referenzmarke
Vorschubgeschwindigkeit in ‰ 001 bis 999 von der parametriertenMaximalgeschwindigkeit (A106)
Suchrichtung (0 = vor / 1 = zurück)
Achse 1
Eine Referenzmarke kann jederzeit durch diesen Befehl gesucht werden.Dabei können die Achsen, die Suchrichtung, die Suchgeschwindigkeitsowie der Referenzsignaleingang (I1 ... I10) frei gewählt werden. Nachdem Aufruf des Befehles wird die Referenzmarke mit der vorgewähltenGeschwindigkeit gesucht. Die Referenzmarke wird durch eineansteigende Flanke (von OV auf 24V) am programmierten Eingangerkannt.
Sobald die Referenzmarke erkannt wurde, erfolgt dieSatzweiterschaltung.
Wenn für den Eingang Referenzmarke der Wert 00 programmiert wird,dann ist der Eingang (Messtaster1, Stecker X3 / Pin 4) alsReferenzmarkeneingang ausgewählt. Dieser Eingang besitzt keineHardwareentprellung. Außerdem kann dieser Eingang einen Interruptauslösen. Dadurch ermöglicht dieser Eingang ein wesentlich genaueresErfassen der Referenzmarke (Zeitraster von ca. 100 Mikrosekunden).
Offsetmaß:
Das Verfahren eines Offsetmaßes (bezogen auf den Referenzpunkt) wirddurch einen unmittelbar dem `REF´-Befehl folgenden inkrementalenVorschub erreicht.
Als Vorschubbefehl für das Offsetmaß sind nur die Befehle `POI´ und`PSI´ (inkrementaler Vorschub) sinnvoll.
Weiterhin besteht die Möglichkeit, den Suchweg bis zum Finden derReferenzmarke zu begrenzen bzw. zu überwachen (siehe dazu unter`REP´-Befehl).
Hinweis: Mit dem `REF´-Befehl wird kein neuer absoluter Maßbezug(Nullpunkt) geschaffen. Dies ist nur durch Homing möglich.(siehe dazu Kapitel 7).
Das Erkennen des Referenzpunktes geschieht in einem Zeitraster von 2bis 4 ms (Reglerzykluszeit). Bei hohen Anforderungen an die Genauigkeitdes Referenzpunktes ist die Suchgeschwindigkeit herabzusetzen. Dieerreichbare Genauigkeit ergibt sich folgendermaßen:
][2/ sZykluszeitsEGEinindigkeitSuchgeschw ∗∗
L: EGE = Eingabeeinheitens = Sekunden
Abb. 5-16: Berechnung der Suchgeschwindigkeit
REF 1 0 123 12
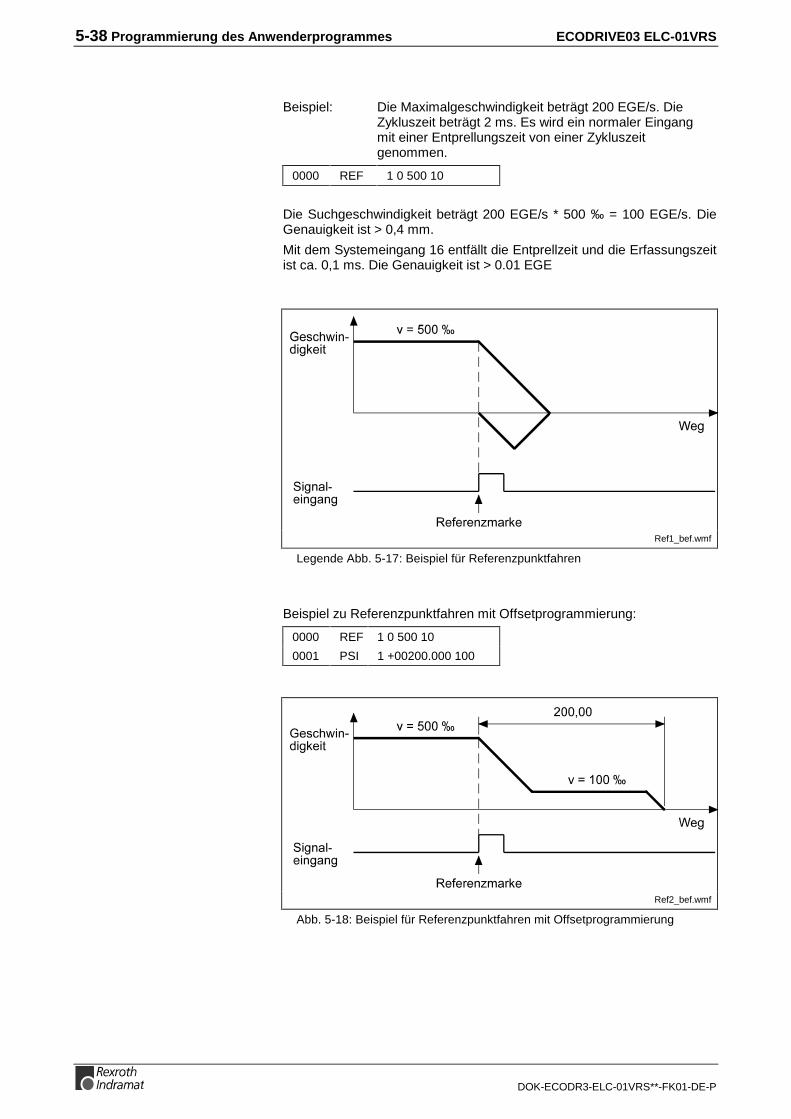
5-38 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Beispiel: Die Maximalgeschwindigkeit beträgt 200 EGE/s. Die Zykluszeit beträgt 2 ms. Es wird ein normaler Eingang mit einer Entprellungszeit von einer Zykluszeit genommen.
0000 REF 1 0 500 10
Die Suchgeschwindigkeit beträgt 200 EGE/s * 500 ‰ = 100 EGE/s. DieGenauigkeit ist > 0,4 mm.
Mit dem Systemeingang 16 entfällt die Entprellzeit und die Erfassungszeitist ca. 0,1 ms. Die Genauigkeit ist > 0.01 EGE
Ref1_bef.wmf
Legende Abb. 5-17: Beispiel für Referenzpunktfahren
Beispiel zu Referenzpunktfahren mit Offsetprogrammierung:
0000 REF 1 0 500 10
0001 PSI 1 +00200.000 100
Ref2_bef.wmf
Abb. 5-18: Beispiel für Referenzpunktfahren mit Offsetprogrammierung
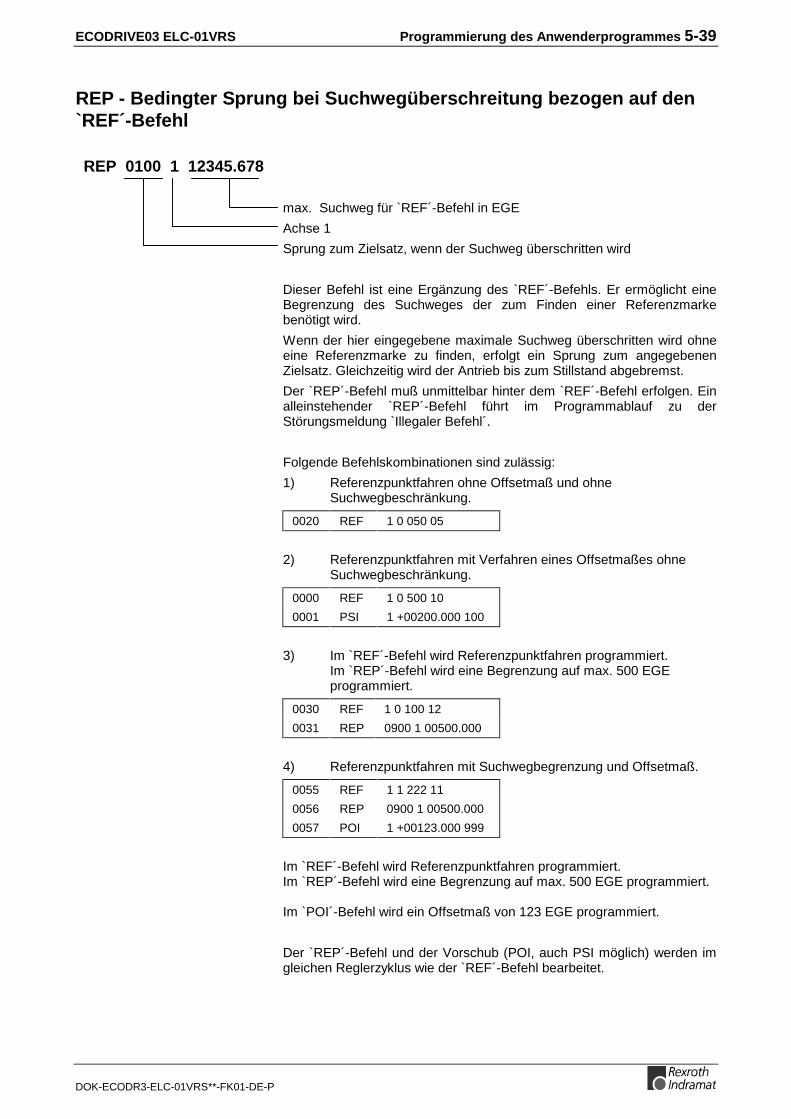
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-39
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
REP - Bedingter Sprung bei Suchwegüberschreitung bezogen auf den`REF´-Befehl
max. Suchweg für `REF´-Befehl in EGE
Achse 1
Sprung zum Zielsatz, wenn der Suchweg überschritten wird
Dieser Befehl ist eine Ergänzung des `REF´-Befehls. Er ermöglicht eineBegrenzung des Suchweges der zum Finden einer Referenzmarkebenötigt wird.
Wenn der hier eingegebene maximale Suchweg überschritten wird ohneeine Referenzmarke zu finden, erfolgt ein Sprung zum angegebenenZielsatz. Gleichzeitig wird der Antrieb bis zum Stillstand abgebremst.
Der `REP´-Befehl muß unmittelbar hinter dem `REF´-Befehl erfolgen. Einalleinstehender `REP´-Befehl führt im Programmablauf zu derStörungsmeldung `Illegaler Befehl´.
Folgende Befehlskombinationen sind zulässig:
1) Referenzpunktfahren ohne Offsetmaß und ohne Suchwegbeschränkung.
0020 REF 1 0 050 05
2) Referenzpunktfahren mit Verfahren eines Offsetmaßes ohne Suchwegbeschränkung.
0000 REF 1 0 500 10
0001 PSI 1 +00200.000 100
3) Im `REF´-Befehl wird Referenzpunktfahren programmiert. Im `REP´-Befehl wird eine Begrenzung auf max. 500 EGE programmiert.
0030 REF 1 0 100 12
0031 REP 0900 1 00500.000
4) Referenzpunktfahren mit Suchwegbegrenzung und Offsetmaß.
0055 REF 1 1 222 11
0056 REP 0900 1 00500.000
0057 POI 1 +00123.000 999
Im `REF´-Befehl wird Referenzpunktfahren programmiert.Im `REP´-Befehl wird eine Begrenzung auf max. 500 EGE programmiert.
Im `POI´-Befehl wird ein Offsetmaß von 123 EGE programmiert.
Der `REP´-Befehl und der Vorschub (POI, auch PSI möglich) werden imgleichen Reglerzyklus wie der `REF´-Befehl bearbeitet.
REP 0100 1 12345.678
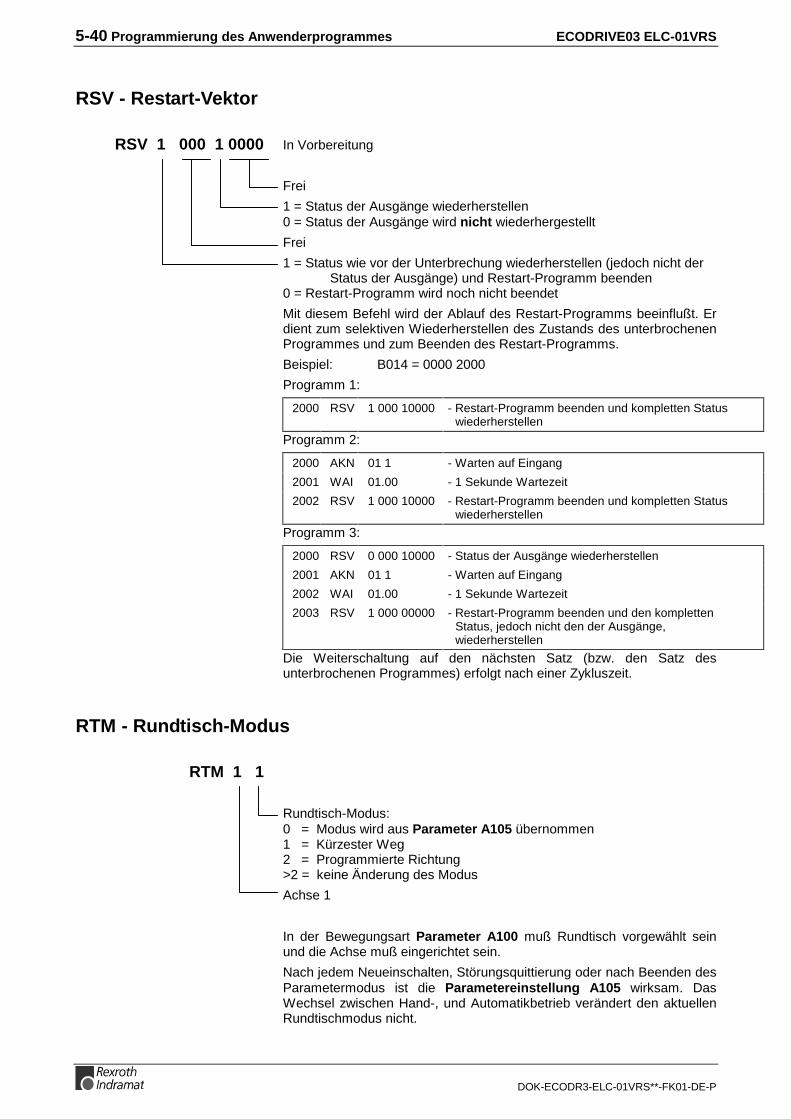
5-40 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
RSV - Restart-Vektor
In Vorbereitung
Frei
1 = Status der Ausgänge wiederherstellen0 = Status der Ausgänge wird nicht wiederhergestellt
Frei
1 = Status wie vor der Unterbrechung wiederherstellen (jedoch nicht der Status der Ausgänge) und Restart-Programm beenden
0 = Restart-Programm wird noch nicht beendet
Mit diesem Befehl wird der Ablauf des Restart-Programms beeinflußt. Erdient zum selektiven Wiederherstellen des Zustands des unterbrochenenProgrammes und zum Beenden des Restart-Programms.
Beispiel: B014 = 0000 2000
Programm 1:
2000 RSV 1 000 10000 - Restart-Programm beenden und kompletten Statuswiederherstellen
Programm 2:
2000 AKN 01 1 - Warten auf Eingang
2001 WAI 01.00 - 1 Sekunde Wartezeit
2002 RSV 1 000 10000 - Restart-Programm beenden und kompletten Statuswiederherstellen
Programm 3:
2000 RSV 0 000 10000 - Status der Ausgänge wiederherstellen
2001 AKN 01 1 - Warten auf Eingang
2002 WAI 01.00 - 1 Sekunde Wartezeit
2003 RSV 1 000 00000 - Restart-Programm beenden und den komplettenStatus, jedoch nicht den der Ausgänge,wiederherstellen
Die Weiterschaltung auf den nächsten Satz (bzw. den Satz desunterbrochenen Programmes) erfolgt nach einer Zykluszeit.
RTM - Rundtisch-Modus
Rundtisch-Modus: 0 = Modus wird aus Parameter A105 übernommen1 = Kürzester Weg2 = Programmierte Richtung>2 = keine Änderung des Modus
Achse 1
In der Bewegungsart Parameter A100 muß Rundtisch vorgewählt seinund die Achse muß eingerichtet sein.
Nach jedem Neueinschalten, Störungsquittierung oder nach Beenden desParametermodus ist die Parametereinstellung A105 wirksam. DasWechsel zwischen Hand-, und Automatikbetrieb verändert den aktuellenRundtischmodus nicht.
RSV 1 000 1 0000
RTM 1 1
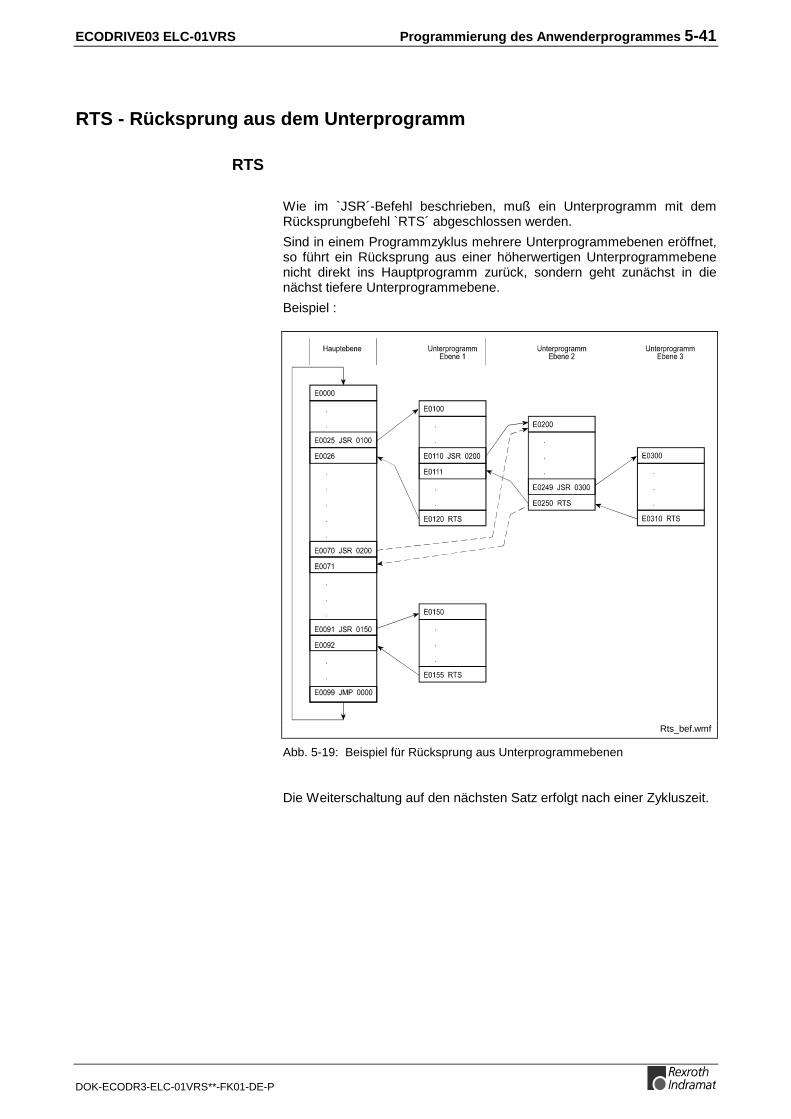
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-41
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
RTS - Rücksprung aus dem Unterprogramm
Wie im `JSR´-Befehl beschrieben, muß ein Unterprogramm mit demRücksprungbefehl `RTS´ abgeschlossen werden.
Sind in einem Programmzyklus mehrere Unterprogrammebenen eröffnet,so führt ein Rücksprung aus einer höherwertigen Unterprogrammebenenicht direkt ins Hauptprogramm zurück, sondern geht zunächst in dienächst tiefere Unterprogrammebene.
Beispiel :
Rts_bef.wmf
Abb. 5-19: Beispiel für Rücksprung aus Unterprogrammebenen
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
RTS
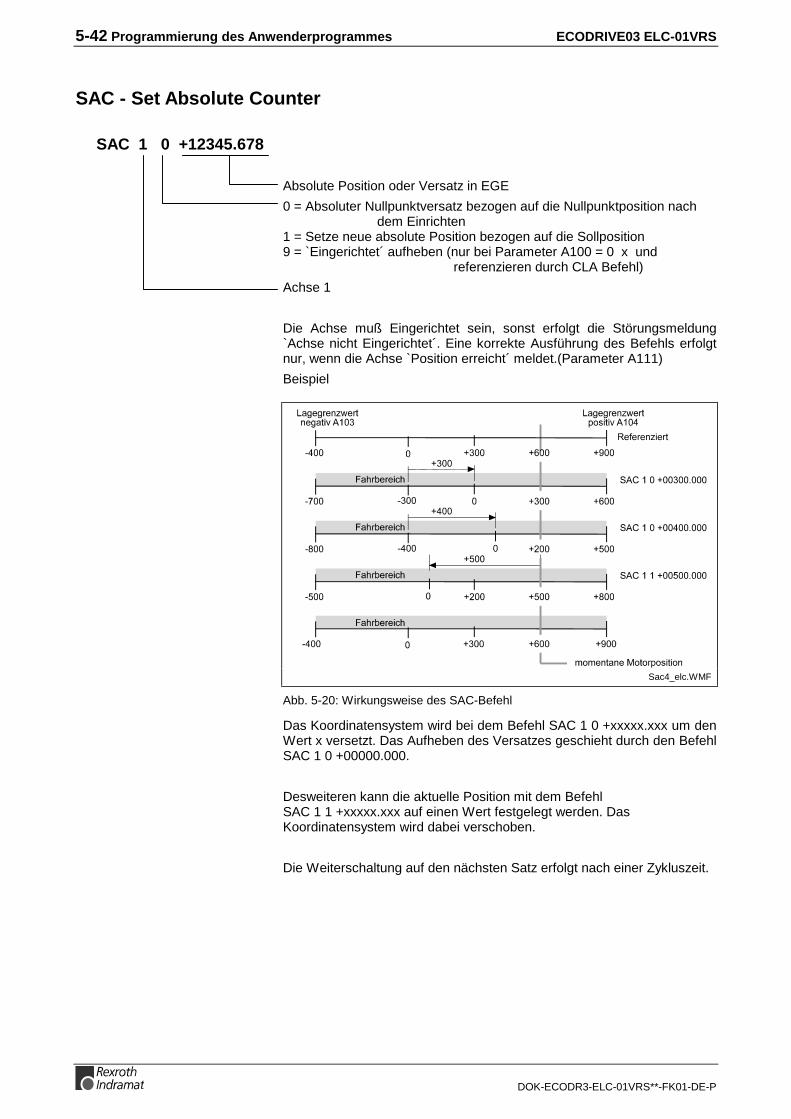
5-42 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
SAC - Set Absolute Counter
Absolute Position oder Versatz in EGE
0 = Absoluter Nullpunktversatz bezogen auf die Nullpunktposition nach dem Einrichten1 = Setze neue absolute Position bezogen auf die Sollposition9 = `Eingerichtet´ aufheben (nur bei Parameter A100 = 0 x und referenzieren durch CLA Befehl)
Achse 1
Die Achse muß Eingerichtet sein, sonst erfolgt die Störungsmeldung`Achse nicht Eingerichtet´. Eine korrekte Ausführung des Befehls erfolgtnur, wenn die Achse `Position erreicht´ meldet.(Parameter A111)
Beispiel
Sac4_elc.WMF
Abb. 5-20: Wirkungsweise des SAC-Befehl
Das Koordinatensystem wird bei dem Befehl SAC 1 0 +xxxxx.xxx um denWert x versetzt. Das Aufheben des Versatzes geschieht durch den BefehlSAC 1 0 +00000.000.
Desweiteren kann die aktuelle Position mit dem BefehlSAC 1 1 +xxxxx.xxx auf einen Wert festgelegt werden. DasKoordinatensystem wird dabei verschoben.
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
SAC 1 0 +12345.678
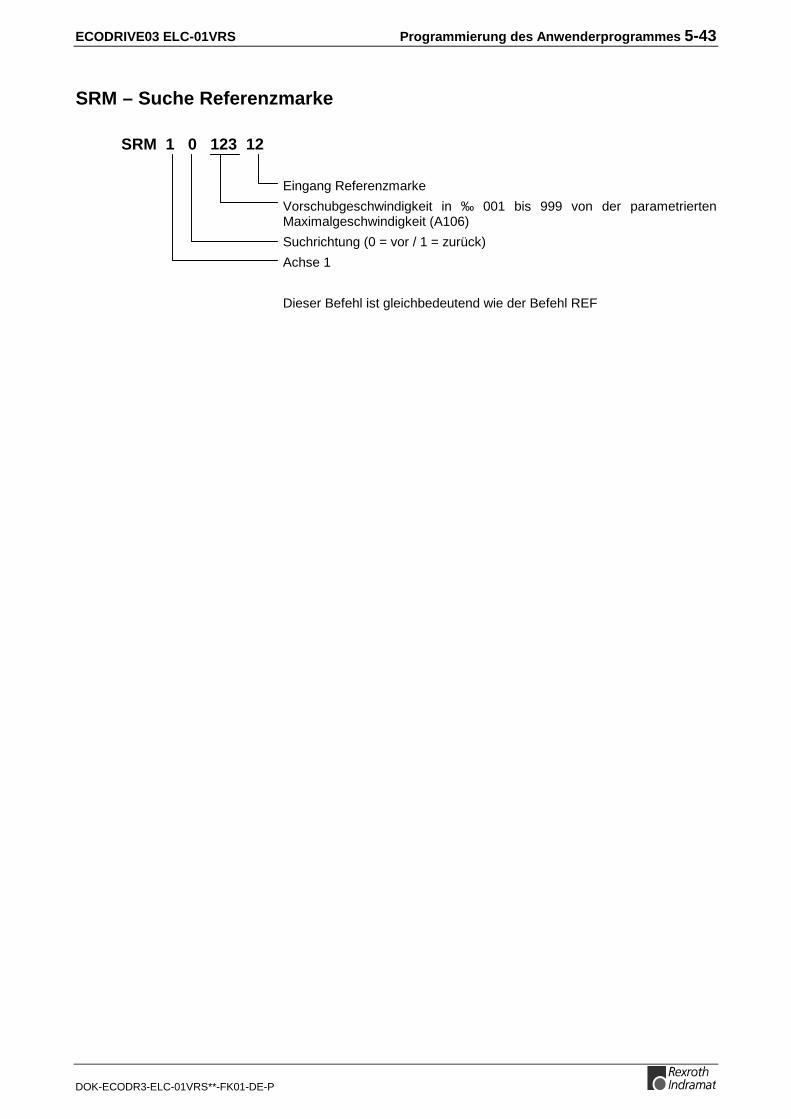
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-43
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
SRM – Suche Referenzmarke
Eingang Referenzmarke
Vorschubgeschwindigkeit in ‰ 001 bis 999 von der parametriertenMaximalgeschwindigkeit (A106)
Suchrichtung (0 = vor / 1 = zurück)
Achse 1
Dieser Befehl ist gleichbedeutend wie der Befehl REF
SRM 1 0 123 12
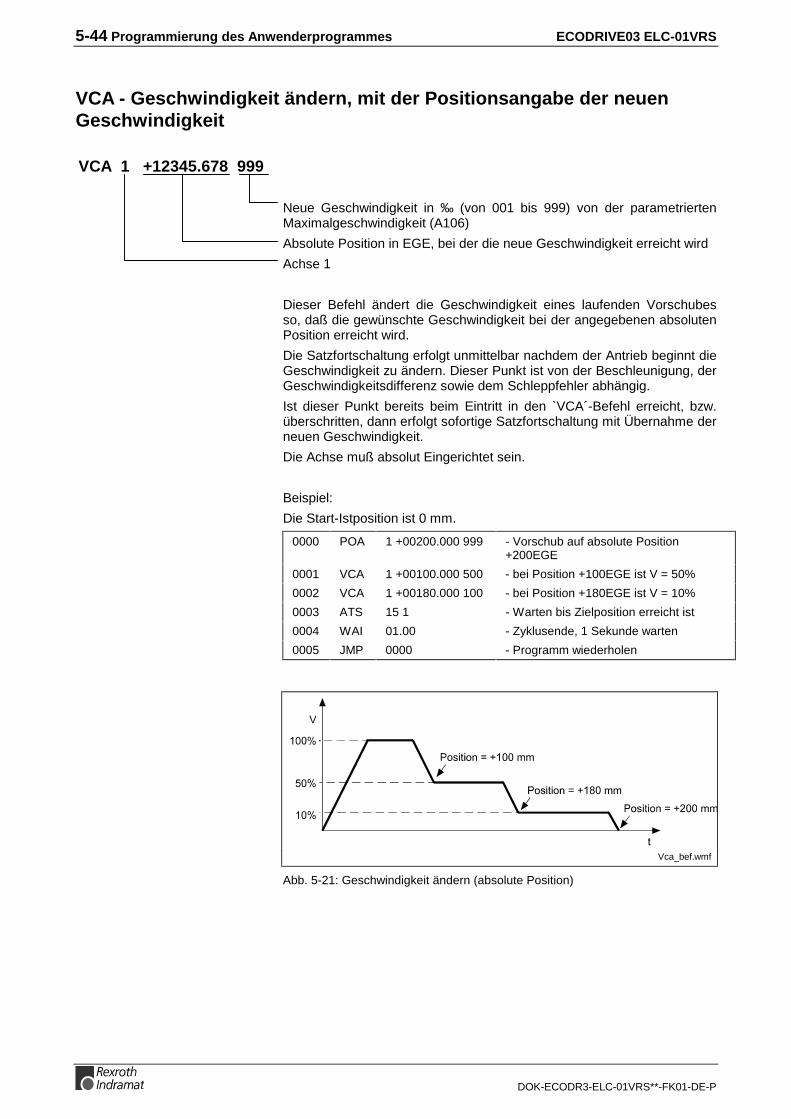
5-44 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
VCA - Geschwindigkeit ändern, mit der Positionsangabe der neuenGeschwindigkeit
Neue Geschwindigkeit in ‰ (von 001 bis 999) von der parametriertenMaximalgeschwindigkeit (A106)
Absolute Position in EGE, bei der die neue Geschwindigkeit erreicht wird
Achse 1
Dieser Befehl ändert die Geschwindigkeit eines laufenden Vorschubesso, daß die gewünschte Geschwindigkeit bei der angegebenen absolutenPosition erreicht wird.
Die Satzfortschaltung erfolgt unmittelbar nachdem der Antrieb beginnt dieGeschwindigkeit zu ändern. Dieser Punkt ist von der Beschleunigung, derGeschwindigkeitsdifferenz sowie dem Schleppfehler abhängig.
Ist dieser Punkt bereits beim Eintritt in den `VCA´-Befehl erreicht, bzw.überschritten, dann erfolgt sofortige Satzfortschaltung mit Übernahme derneuen Geschwindigkeit.
Die Achse muß absolut Eingerichtet sein.
Beispiel:
Die Start-Istposition ist 0 mm.
0000 POA 1 +00200.000 999 - Vorschub auf absolute Position+200EGE
0001 VCA 1 +00100.000 500 - bei Position +100EGE ist V = 50%
0002 VCA 1 +00180.000 100 - bei Position +180EGE ist V = 10%
0003 ATS 15 1 - Warten bis Zielposition erreicht ist
0004 WAI 01.00 - Zyklusende, 1 Sekunde warten
0005 JMP 0000 - Programm wiederholen
Vca_bef.wmf
Abb. 5-21: Geschwindigkeit ändern (absolute Position)
VCA 1 +12345.678 999
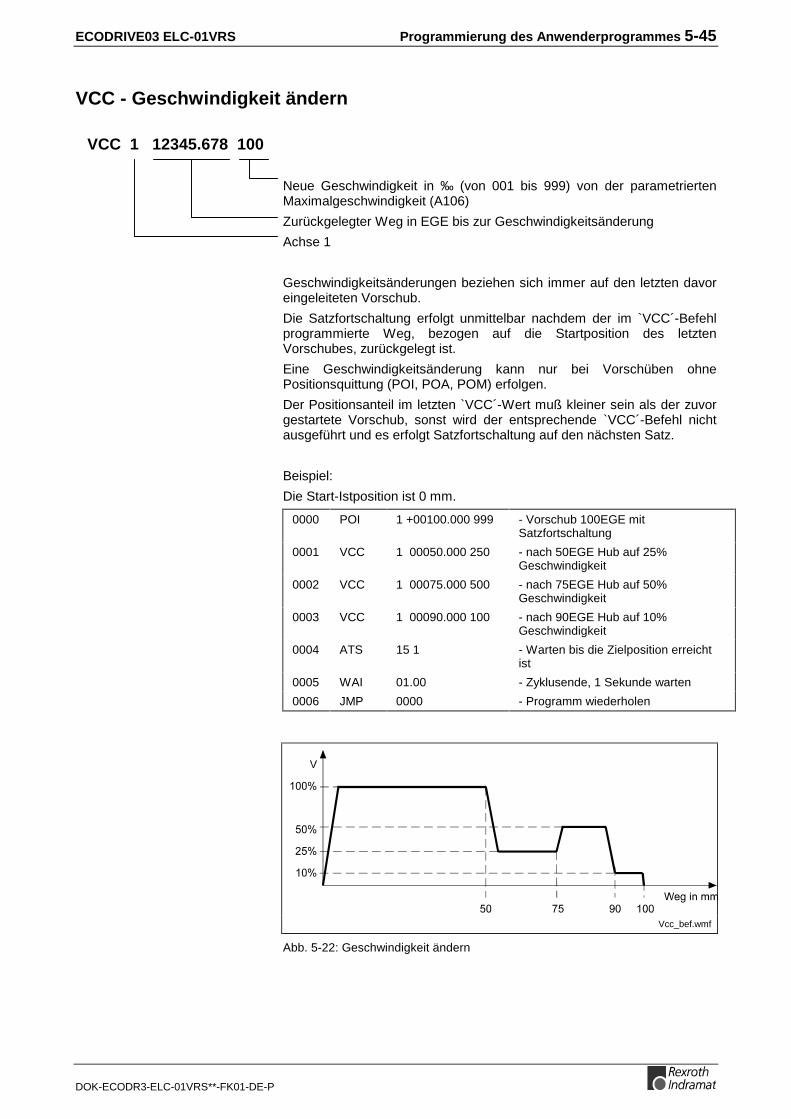
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-45
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
VCC - Geschwindigkeit ändern
Neue Geschwindigkeit in ‰ (von 001 bis 999) von der parametriertenMaximalgeschwindigkeit (A106)
Zurückgelegter Weg in EGE bis zur Geschwindigkeitsänderung
Achse 1
Geschwindigkeitsänderungen beziehen sich immer auf den letzten davoreingeleiteten Vorschub.
Die Satzfortschaltung erfolgt unmittelbar nachdem der im `VCC´-Befehlprogrammierte Weg, bezogen auf die Startposition des letztenVorschubes, zurückgelegt ist.
Eine Geschwindigkeitsänderung kann nur bei Vorschüben ohnePositionsquittung (POI, POA, POM) erfolgen.
Der Positionsanteil im letzten `VCC´-Wert muß kleiner sein als der zuvorgestartete Vorschub, sonst wird der entsprechende `VCC´-Befehl nichtausgeführt und es erfolgt Satzfortschaltung auf den nächsten Satz.
Beispiel:
Die Start-Istposition ist 0 mm.
0000 POI 1 +00100.000 999 - Vorschub 100EGE mitSatzfortschaltung
0001 VCC 1 00050.000 250 - nach 50EGE Hub auf 25%Geschwindigkeit
0002 VCC 1 00075.000 500 - nach 75EGE Hub auf 50%Geschwindigkeit
0003 VCC 1 00090.000 100 - nach 90EGE Hub auf 10%Geschwindigkeit
0004 ATS 15 1 - Warten bis die Zielposition erreichtist
0005 WAI 01.00 - Zyklusende, 1 Sekunde warten
0006 JMP 0000 - Programm wiederholen
Vcc_bef.wmf
Abb. 5-22: Geschwindigkeit ändern
VCC 1 12345.678 100
5-46 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
VEO - Geschwindigkeits-Override
Funktion0 = Override als Faktor1 = Override als Begrenzung
Dieser Wert hat nur bei Modus 4 und 6 eine BedeutungOverride-Wert in ‰ (von 001 bis 999)
0 = Override-Wert in jedem Reglerzyklus (2 bis 4 Millisekunden) neu einlesen
1 = Override-Wert nur einmal beim Aufruf des Befehls lesen
Modus Override - Wertvorgabe0 = Override abgeschaltet, bzw. wie in Parameter AA04 programmiert1 = Analogwert 0...+10 Volt am Analogeingang 12 = Binärwert an den Eingängen 01 bis 07 (Wertigkeit siehe Kap. 7.4)3 = Gray-code an den Eingängen 04 bis 07 (Wertigkeit siehe Kap. 7.4)4 = Override-Wert aus VEO-Befehl (s.o.)
Achse 1
Dieser Befehl führt zu einer Reduzierung der Geschwindigkeit allerprogrammierten Verfahrbefehle.
Bei der Funktion `Override als Faktor´ wird der Override-Wert mit derprogrammierten Geschwindigkeit aus den Befehlen multipliziert.
Bei `Override als Begrenzung´ wird der Override-Wert mit derprogrammierten Geschwindigkeit aus dem Parameter Vmax (Param.A106) multipliziert und begrenzt damit die Geschwindigkeit. DieAktivierung einer Override-Funktion mit dem `VEO´-Befehl hat Vorranggegenüber einer eventuellen Aktivierung in Parameter AA04.
Ein einmal aufgerufener `VEO´-Befehl gilt für alle folgenden Bewegungenbis er aufgehoben wird. Siehe dazu die Beispiele auf den nächstenSeiten.
Jeglicher Betriebsartenwechsel zwischen Automatik und Einrichten hebtdie Override-Funktion durch den `VEO´-Befehl wieder auf. Wird der VEOBefehl in Task 3 verwendet, so gelten die Werte auch im Handbetrieb.
Die Weiterschaltung auf den nächsten Satz erfolgt nach einer Zykluszeit.
VEO 1 1 0 500 1
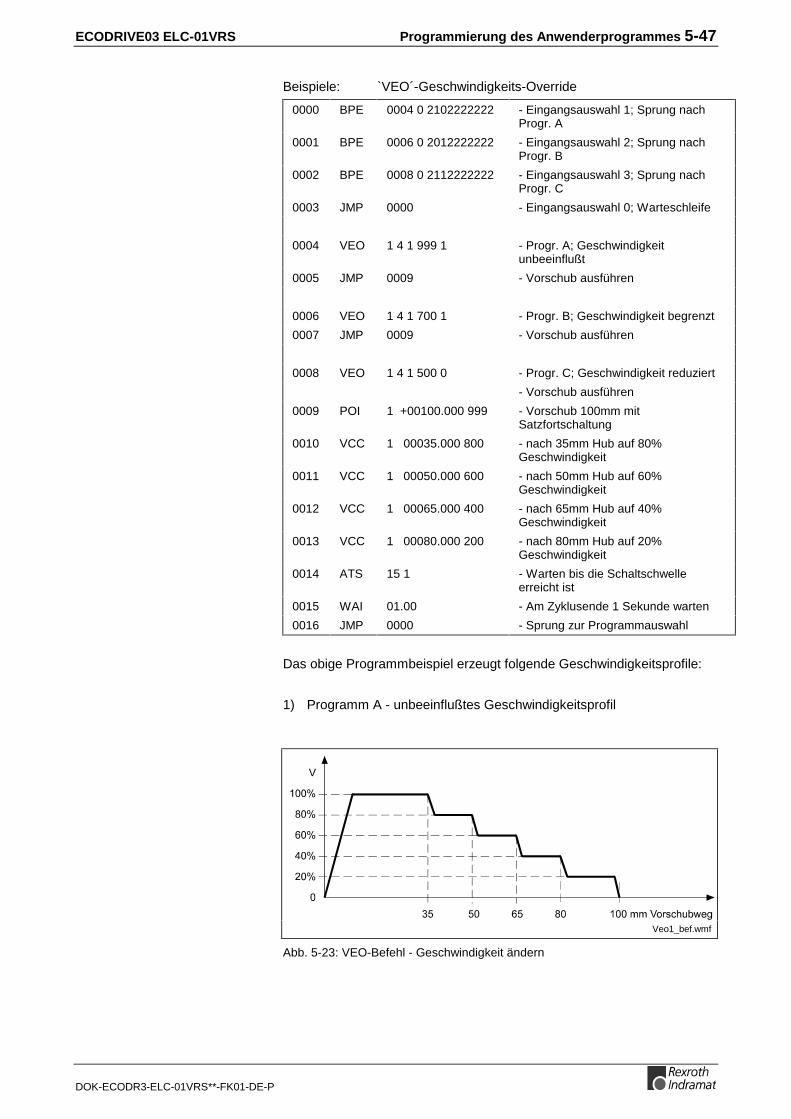
ECODRIVE03 ELC-01VRS Programmierung des Anwenderprogrammes 5-47
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Beispiele: `VEO´-Geschwindigkeits-Override
0000 BPE 0004 0 2102222222 - Eingangsauswahl 1; Sprung nachProgr. A
0001 BPE 0006 0 2012222222 - Eingangsauswahl 2; Sprung nachProgr. B
0002 BPE 0008 0 2112222222 - Eingangsauswahl 3; Sprung nachProgr. C
0003 JMP 0000 - Eingangsauswahl 0; Warteschleife
0004 VEO 1 4 1 999 1 - Progr. A; Geschwindigkeitunbeeinflußt
0005 JMP 0009 - Vorschub ausführen
0006 VEO 1 4 1 700 1 - Progr. B; Geschwindigkeit begrenzt
0007 JMP 0009 - Vorschub ausführen
0008 VEO 1 4 1 500 0 - Progr. C; Geschwindigkeit reduziert
- Vorschub ausführen
0009 POI 1 +00100.000 999 - Vorschub 100mm mitSatzfortschaltung
0010 VCC 1 00035.000 800 - nach 35mm Hub auf 80%Geschwindigkeit
0011 VCC 1 00050.000 600 - nach 50mm Hub auf 60%Geschwindigkeit
0012 VCC 1 00065.000 400 - nach 65mm Hub auf 40%Geschwindigkeit
0013 VCC 1 00080.000 200 - nach 80mm Hub auf 20%Geschwindigkeit
0014 ATS 15 1 - Warten bis die Schaltschwelleerreicht ist
0015 WAI 01.00 - Am Zyklusende 1 Sekunde warten
0016 JMP 0000 - Sprung zur Programmauswahl
Das obige Programmbeispiel erzeugt folgende Geschwindigkeitsprofile:
1) Programm A - unbeeinflußtes Geschwindigkeitsprofil
Veo1_bef.wmf
Abb. 5-23: VEO-Befehl - Geschwindigkeit ändern
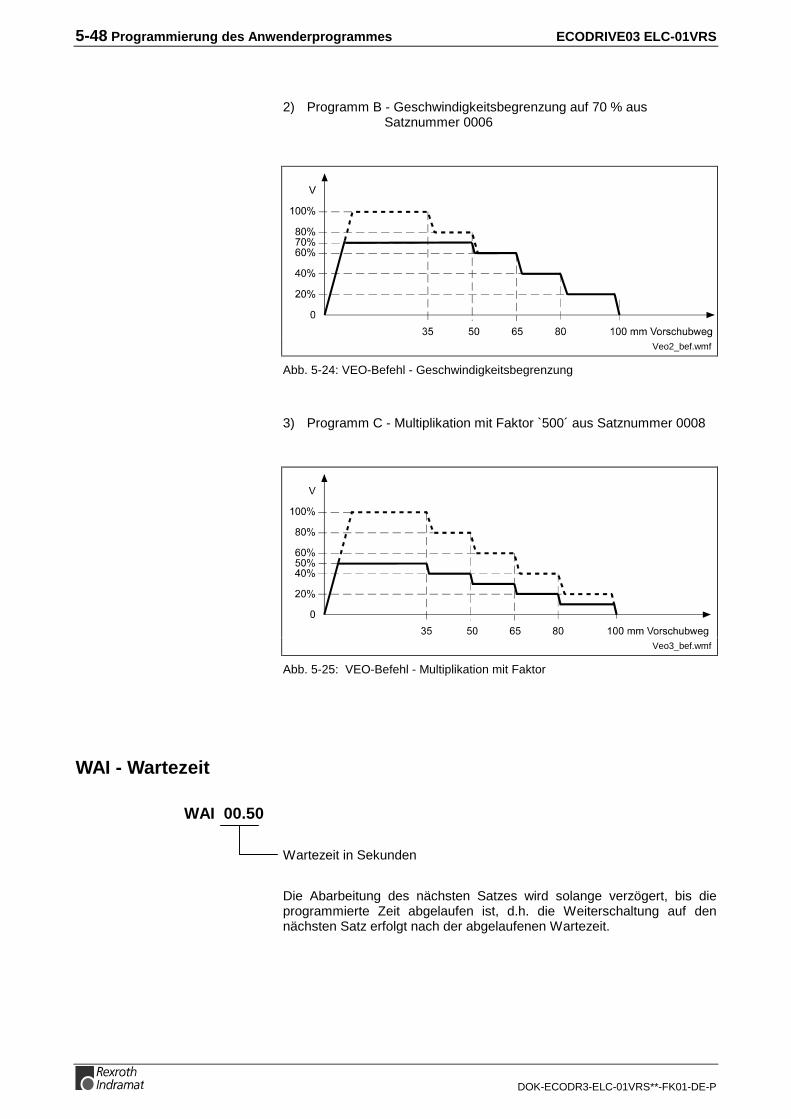
5-48 Programmierung des Anwenderprogrammes ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
2) Programm B - Geschwindigkeitsbegrenzung auf 70 % aus Satznummer 0006
Veo2_bef.wmf
Abb. 5-24: VEO-Befehl - Geschwindigkeitsbegrenzung
3) Programm C - Multiplikation mit Faktor `500´ aus Satznummer 0008
Veo3_bef.wmf
Abb. 5-25: VEO-Befehl - Multiplikation mit Faktor
WAI - Wartezeit
Wartezeit in Sekunden
Die Abarbeitung des nächsten Satzes wird solange verzögert, bis dieprogrammierte Zeit abgelaufen ist, d.h. die Weiterschaltung auf dennächsten Satz erfolgt nach der abgelaufenen Wartezeit.
WAI 00.50
ECODRIVE03 ELC-01VRS Reserviert 6-1
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
6 Reserviert
6.1 In Vorbereitung

6-2 Reserviert ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Notizen
ECODRIVE03 ELC-01VRS Funktionen 7-1
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
7 Funktionen
7.1 Betriebsarten
ParameterbetriebNur in dieser Betriebsart ist es möglich die Parameter zu programmieren.Beim Verlassen der Betriebsart werden die Parameter in ihremZusammenhang überprüft und getestet.
Im Parameterbetrieb wird die Leistung ausgeschaltet und alle Taskgestoppt. Die Ausgänge und nicht remanenten Merker werden gelöscht.
HandbetriebDer Handbetrieb liegt an, wenn kein Störung, Parameter oderAutomatikbetrieb vorliegt. Er dient hauptsächlich um die Achse mit Hilfeder Funktion Tippen vor (Jog+) oder Tippen zurück ( Jog-) zu bewegen.
Der Task
• NC Task 3
arbeitet. Außerdem können folgende Funktionen aufgerufen werden.
• Referenzieren
• Hand-Vektor
• Unterbrechung
• Vorschubüberwachung
AutomatikbetriebIm Automatikbetrieb können die beiden NC-Task 1 und 2 durch das Start-Kommando aktiviert werden.
Bis auf die Funktionen Tippen und Handvektor sind alle Funktionenmöglich.
7.2 Meßradbetrieb
Mit Walzenvorschub-Antrieben wird Material befördert, das späterbearbeitet wird (z.B. Blech schneiden). Der Motorgeber ist dabei nichtzum Messen von Materiallängen geeignet, wenn Schlupf zwischenMaterial und Antrieb auftritt. In solchen Fällen kann ein optionaler Geber,der Messradgeber, eingesetzt werden. Dieser hat im Idealfall eine nicht-schlupfbehaftete Verbindung zum Material, so daß Teillängen genaugemessen werden können.
VORSICHT
Wenn der Messradgeber keinen Kontakt zum Materialhat
Der Lageregelkreis ist über Geber 2 offen. D.h. derAntrieb bewegt sich unkontrolliert.
⇒ Kommando Messradbetrieb nur starten, wenn derGeber 2 mit dem Material verbunden ist.
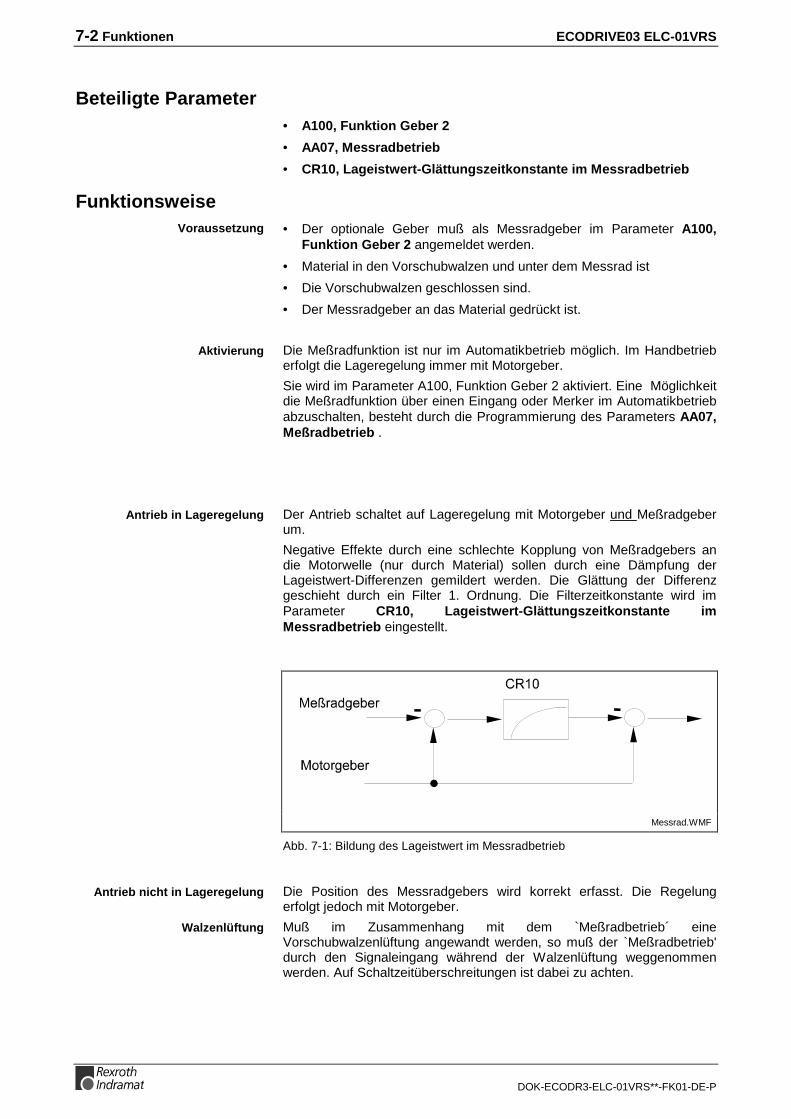
7-2 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Beteiligte Parameter• A100, Funktion Geber 2
• AA07, Messradbetrieb
• CR10, Lageistwert-Glättungszeitkonstante im Messradbetrieb
Funktionsweise• Der optionale Geber muß als Messradgeber im Parameter A100,
Funktion Geber 2 angemeldet werden.
• Material in den Vorschubwalzen und unter dem Messrad ist
• Die Vorschubwalzen geschlossen sind.
• Der Messradgeber an das Material gedrückt ist.
Die Meßradfunktion ist nur im Automatikbetrieb möglich. Im Handbetrieberfolgt die Lageregelung immer mit Motorgeber.
Sie wird im Parameter A100, Funktion Geber 2 aktiviert. Eine Möglichkeitdie Meßradfunktion über einen Eingang oder Merker im Automatikbetriebabzuschalten, besteht durch die Programmierung des Parameters AA07,Meßradbetrieb .
Der Antrieb schaltet auf Lageregelung mit Motorgeber und Meßradgeberum.
Negative Effekte durch eine schlechte Kopplung von Meßradgebers andie Motorwelle (nur durch Material) sollen durch eine Dämpfung derLageistwert-Differenzen gemildert werden. Die Glättung der Differenzgeschieht durch ein Filter 1. Ordnung. Die Filterzeitkonstante wird imParameter CR10, Lageistwert-Glättungszeitkonstante imMessradbetrieb eingestellt.
Messrad.WMF
Abb. 7-1: Bildung des Lageistwert im Messradbetrieb
Die Position des Messradgebers wird korrekt erfasst. Die Regelungerfolgt jedoch mit Motorgeber.
Muß im Zusammenhang mit dem `Meßradbetrieb´ eineVorschubwalzenlüftung angewandt werden, so muß der `Meßradbetrieb'durch den Signaleingang während der Walzenlüftung weggenommenwerden. Auf Schaltzeitüberschreitungen ist dabei zu achten.
Voraussetzung
Aktivierung
Antrieb in Lageregelung
Antrieb nicht in Lageregelung
Walzenlüftung
ECODRIVE03 ELC-01VRS Funktionen 7-3
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Parametrierung des Messradgebers
Hinweis: Beim Einsatz eines Meßradgebers ist eineDifferenzüberwachung aktivierbar. Dies erfolgt mit Hilfesdes Parameters A117, Überwachung Geberdifferenz.
Die Parametrierung eines Messradgebers erfolgt mit Hilfe der Parameter:
• C007, Vorschubkonstante 2
• C005, Lagegeberart 2
• C006, Geber 2 Auflösung
DiagnosemeldungenIn Verbindung mit dem Kommando Messradbetrieb kann folgendeFehlermeldung generiert werden:
• D801 Messradbetrieb nicht möglich
7.3 Referenzieren
Der Lageistwert des zu referenzierenden Meßsystems bildet einKoordinatensystem bezüglich der Maschinenachse. DiesesKoordinatensystem stimmt nach der Initialisierung des Antriebs nicht mitdem Maschinenkoordinatensystem überein, sofern nichtAbsolutwertgeber verwendet werden.
Das Referenzieren dient somit:
• bei nicht-absoluten Meßsystemen zur Herstellung derÜbereinstimmung zwischen Antriebsmeßsystem undMaschinenkoordinatensystem
• bei absoluten Meßsystemen zum Fahren auf den Referenzpunkt
Referenzieren bedeutet, daß sich der Antrieb selbständig, unterEinhaltung der parametrierten Referenzfahrgeschwindigkeit undReferenzfahrbeschleunigung, Lagesollwerte erzeugt um die zumReferenzieren notwendigen Antriebsbewegungen durchzuführen.
Hinweis: Die Funktion kann wahlweise für den Motorgeber oder denoptionalen Geber durchgeführt werden.
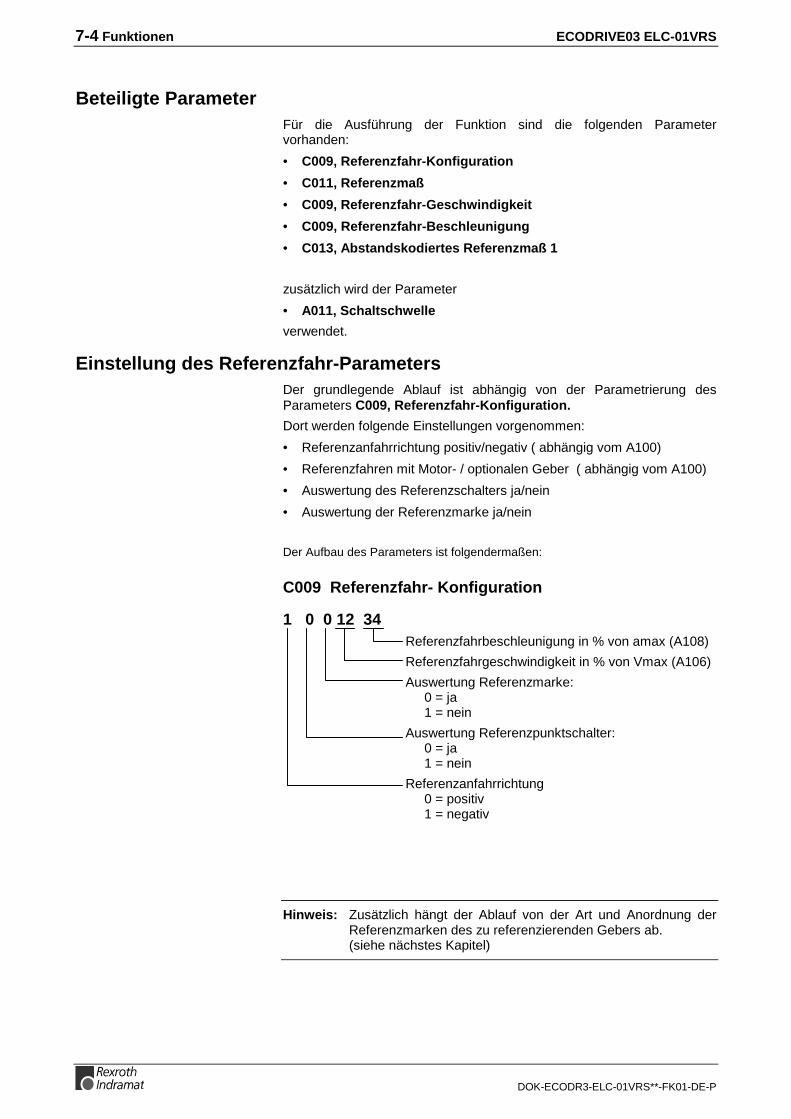
7-4 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Beteiligte Parameter Für die Ausführung der Funktion sind die folgenden Parametervorhanden:
• C009, Referenzfahr-Konfiguration
• C011, Referenzmaß
• C009, Referenzfahr-Geschwindigkeit
• C009, Referenzfahr-Beschleunigung
• C013, Abstandskodiertes Referenzmaß 1
zusätzlich wird der Parameter
• A011, Schaltschwelle
verwendet.
Einstellung des Referenzfahr-Parameters Der grundlegende Ablauf ist abhängig von der Parametrierung desParameters C009, Referenzfahr-Konfiguration.
Dort werden folgende Einstellungen vorgenommen:
• Referenzanfahrrichtung positiv/negativ ( abhängig vom A100)
• Referenzfahren mit Motor- / optionalen Geber ( abhängig vom A100)
• Auswertung des Referenzschalters ja/nein
• Auswertung der Referenzmarke ja/nein
Der Aufbau des Parameters ist folgendermaßen:
C009 Referenzfahr- Konfiguration
1 0 0 12 34Referenzfahrbeschleunigung in % von amax (A108)
Referenzfahrgeschwindigkeit in % von Vmax (A106)
Auswertung Referenzmarke:0 = ja1 = nein
Auswertung Referenzpunktschalter:0 = ja1 = nein
Referenzanfahrrichtung0 = positiv1 = negativ
Hinweis: Zusätzlich hängt der Ablauf von der Art und Anordnung derReferenzmarken des zu referenzierenden Gebers ab.(siehe nächstes Kapitel)
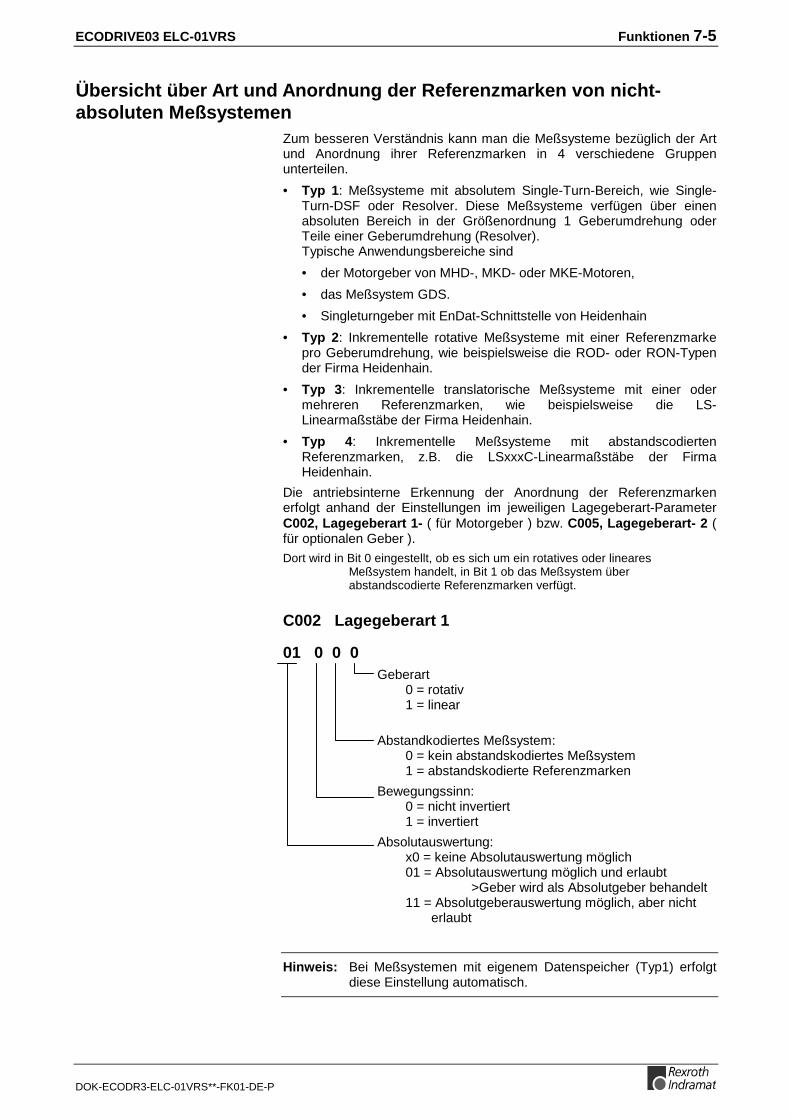
ECODRIVE03 ELC-01VRS Funktionen 7-5
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Übersicht über Art und Anordnung der Referenzmarken von nicht-absoluten Meßsystemen
Zum besseren Verständnis kann man die Meßsysteme bezüglich der Artund Anordnung ihrer Referenzmarken in 4 verschiedene Gruppenunterteilen.
• Typ 1: Meßsysteme mit absolutem Single-Turn-Bereich, wie Single-Turn-DSF oder Resolver. Diese Meßsysteme verfügen über einenabsoluten Bereich in der Größenordnung 1 Geberumdrehung oderTeile einer Geberumdrehung (Resolver).Typische Anwendungsbereiche sind
• der Motorgeber von MHD-, MKD- oder MKE-Motoren,
• das Meßsystem GDS.
• Singleturngeber mit EnDat-Schnittstelle von Heidenhain
• Typ 2: Inkrementelle rotative Meßsysteme mit einer Referenzmarkepro Geberumdrehung, wie beispielsweise die ROD- oder RON-Typender Firma Heidenhain.
• Typ 3: Inkrementelle translatorische Meßsysteme mit einer odermehreren Referenzmarken, wie beispielsweise die LS-Linearmaßstäbe der Firma Heidenhain.
• Typ 4: Inkrementelle Meßsysteme mit abstandscodiertenReferenzmarken, z.B. die LSxxxC-Linearmaßstäbe der FirmaHeidenhain.
Die antriebsinterne Erkennung der Anordnung der Referenzmarkenerfolgt anhand der Einstellungen im jeweiligen Lagegeberart-ParameterC002, Lagegeberart 1- ( für Motorgeber ) bzw. C005, Lagegeberart- 2 (für optionalen Geber ).
Dort wird in Bit 0 eingestellt, ob es sich um ein rotatives oder linearesMeßsystem handelt, in Bit 1 ob das Meßsystem überabstandscodierte Referenzmarken verfügt.
C002 Lagegeberart 1
01 0 0 0Geberart
0 = rotativ1 = linear
Abstandkodiertes Meßsystem:0 = kein abstandskodiertes Meßsystem1 = abstandskodierte Referenzmarken
Bewegungssinn:0 = nicht invertiert1 = invertiert
Absolutauswertung:x0 = keine Absolutauswertung möglich01 = Absolutauswertung möglich und erlaubt
>Geber wird als Absolutgeber behandelt11 = Absolutgeberauswertung möglich, aber nicht erlaubt
Hinweis: Bei Meßsystemen mit eigenem Datenspeicher (Typ1) erfolgtdiese Einstellung automatisch.
7-6 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Funktionsprinzip antriebsgef. Referenzieren bei nicht-absolutenMeßsystemen
Zur Herstellung der Übereinstimmung zwischen Antriebs(Meßsystem)-und Maschinenkoordinatensystem ist es notwendig, daß der Antriebmöglichst genau die Information über seine relative Position innerhalb desMaschinenkoordinatensystems kennt. Der Antrieb erhält dieseInformation durch Erfassung von Referenzschalterflanke und/oderReferenzmarke.
Hinweis: Die ausschließliche Auswertung des Referenzschalters istnicht zu empfehlen, da die Erfassung der Position derReferenzschalterflanke, im Gegensatz zur Erfassung derReferenzmarke, nur mit reduzierter Genauigkeit erfolgt!
Der Abgleich der Koordinatensysteme erfolgt durch Vergleich vongewünschter Istposition an einem bestimmten Punkt imMaschinenkoordinatensystem und tatsächlicher Istposition ("altes"Antriebskoordinatensystem). Es müssen dabei die Fälle "Auswertungeiner Referenzmarke /Referenzschalterflanke" (Typ 1..3) und"Auswertung abstandscodierter Referenzmarken" unterschieden werden.
• Im Fall "Auswertung einer Referenzmarke /Referenzschalterflanke" istder "bestimmte" Punkt im Koordinatensystem der sogenannteReferenzpunkt. Die gewünschte Istposition an diesem Punkt wird überdie Parameter C011, Referenzmaß 1 angegeben. Die physikalischePosition des Referenzpunktes ergibt sich durch die Position derReferenzmarke Nach dem Erfassen der Referenzmarke kennt derAntrieb die Position dieser Marke und damit auch die desReferenzpunkt im "alten" Antriebskoordinatensystem. Die gewünschtePosition im neuen maschinennullpunktbezogenen Koordinatensystemwird im Parameter C011, Referenzmaß 1 mitgeteilt.
• Im Fall "Auswertung abstandscodierter Referenzmarken " ist der"bestimmte" Punkt der Nullpunkt (Position der 1. Referenzmarke) desabstandscodierten Meßsystems. Durch Erfassung derPositionsdifferenz zweier benachbarter Referenzmarken kann diePosition der 1. Referenzmarke im "alten" Antriebskoordinatensystembestimmt werden. Die gewünschte Istposition an diesem Punkt wirddefiniert durch die Position der 1. Referenzmarke imMaschinenkoordinatensystem an diesem Punkt plus dem Wert inC011, Referenzmaß
In beiden Fällen wird die Differenz zwischen den beidenKoordinatensystemen auf das "alte" Antriebskoordinatensystemaufaddiert. Die beiden Koordinatensysteme stimmen dann überein.
Funktionsablauf "Referenzieren" Das Sollwertprofil ist abhängig von den Parametern:
• C009, Referenzfahr-Geschwindigkeit
• C009, Referenzfahr-Beschleunigung.
Definition des Referenzpunktes
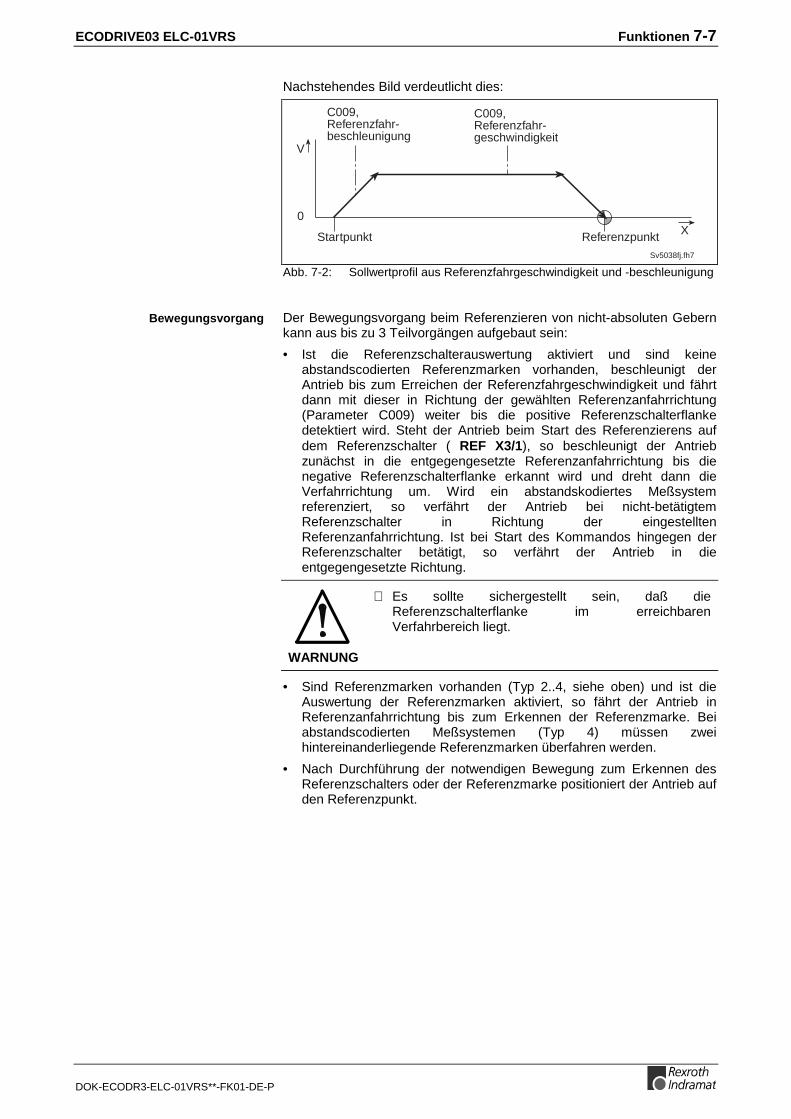
ECODRIVE03 ELC-01VRS Funktionen 7-7
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Nachstehendes Bild verdeutlicht dies:
0
V
Sv5038fj.fh7
X
C009,Referenzfahr-beschleunigung
Startpunkt Referenzpunkt
C009,Referenzfahr-geschwindigkeit
Abb. 7-2: Sollwertprofil aus Referenzfahrgeschwindigkeit und -beschleunigung
Der Bewegungsvorgang beim Referenzieren von nicht-absoluten Gebernkann aus bis zu 3 Teilvorgängen aufgebaut sein:
• Ist die Referenzschalterauswertung aktiviert und sind keineabstandscodierten Referenzmarken vorhanden, beschleunigt derAntrieb bis zum Erreichen der Referenzfahrgeschwindigkeit und fährtdann mit dieser in Richtung der gewählten Referenzanfahrrichtung(Parameter C009) weiter bis die positive Referenzschalterflankedetektiert wird. Steht der Antrieb beim Start des Referenzierens aufdem Referenzschalter ( REF X3/1), so beschleunigt der Antriebzunächst in die entgegengesetzte Referenzanfahrrichtung bis dienegative Referenzschalterflanke erkannt wird und dreht dann dieVerfahrrichtung um. Wird ein abstandskodiertes Meßsystemreferenziert, so verfährt der Antrieb bei nicht-betätigtemReferenzschalter in Richtung der eingestelltenReferenzanfahrrichtung. Ist bei Start des Kommandos hingegen derReferenzschalter betätigt, so verfährt der Antrieb in dieentgegengesetzte Richtung.
WARNUNG
⇒ Es sollte sichergestellt sein, daß dieReferenzschalterflanke im erreichbarenVerfahrbereich liegt.
• Sind Referenzmarken vorhanden (Typ 2..4, siehe oben) und ist die
Auswertung der Referenzmarken aktiviert, so fährt der Antrieb inReferenzanfahrrichtung bis zum Erkennen der Referenzmarke. Beiabstandscodierten Meßsystemen (Typ 4) müssen zweihintereinanderliegende Referenzmarken überfahren werden.
• Nach Durchführung der notwendigen Bewegung zum Erkennen desReferenzschalters oder der Referenzmarke positioniert der Antrieb aufden Referenzpunkt.
Bewegungsvorgang
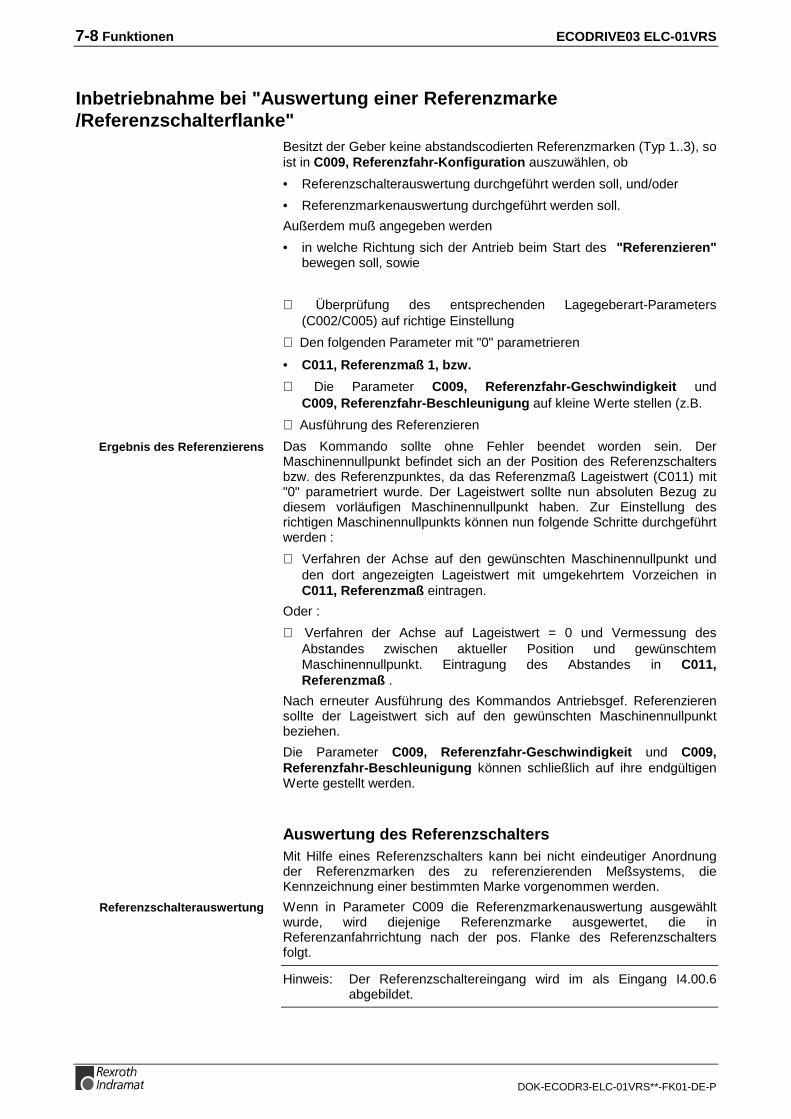
7-8 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Inbetriebnahme bei "Auswertung einer Referenzmarke/Referenzschalterflanke"
Besitzt der Geber keine abstandscodierten Referenzmarken (Typ 1..3), soist in C009, Referenzfahr-Konfiguration auszuwählen, ob
• Referenzschalterauswertung durchgeführt werden soll, und/oder
• Referenzmarkenauswertung durchgeführt werden soll.
Außerdem muß angegeben werden
• in welche Richtung sich der Antrieb beim Start des "Referenzieren"bewegen soll, sowie
⇒ Überprüfung des entsprechenden Lagegeberart-Parameters(C002/C005) auf richtige Einstellung
⇒ Den folgenden Parameter mit "0" parametrieren
• C011, Referenzmaß 1, bzw.
⇒ Die Parameter C009, Referenzfahr-Geschwindigkeit undC009, Referenzfahr-Beschleunigung auf kleine Werte stellen (z.B.
⇒ Ausführung des Referenzieren
Das Kommando sollte ohne Fehler beendet worden sein. DerMaschinennullpunkt befindet sich an der Position des Referenzschaltersbzw. des Referenzpunktes, da das Referenzmaß Lageistwert (C011) mit"0" parametriert wurde. Der Lageistwert sollte nun absoluten Bezug zudiesem vorläufigen Maschinennullpunkt haben. Zur Einstellung desrichtigen Maschinennullpunkts können nun folgende Schritte durchgeführtwerden :
⇒ Verfahren der Achse auf den gewünschten Maschinennullpunkt undden dort angezeigten Lageistwert mit umgekehrtem Vorzeichen inC011, Referenzmaß eintragen.
Oder :
⇒ Verfahren der Achse auf Lageistwert = 0 und Vermessung desAbstandes zwischen aktueller Position und gewünschtemMaschinennullpunkt. Eintragung des Abstandes in C011,Referenzmaß .
Nach erneuter Ausführung des Kommandos Antriebsgef. Referenzierensollte der Lageistwert sich auf den gewünschten Maschinennullpunktbeziehen.
Die Parameter C009, Referenzfahr-Geschwindigkeit und C009,Referenzfahr-Beschleunigung können schließlich auf ihre endgültigenWerte gestellt werden.
Auswertung des Referenzschalters Mit Hilfe eines Referenzschalters kann bei nicht eindeutiger Anordnungder Referenzmarken des zu referenzierenden Meßsystems, dieKennzeichnung einer bestimmten Marke vorgenommen werden.
Wenn in Parameter C009 die Referenzmarkenauswertung ausgewähltwurde, wird diejenige Referenzmarke ausgewertet, die inReferenzanfahrrichtung nach der pos. Flanke des Referenzschaltersfolgt.
Hinweis: Der Referenzschaltereingang wird im als Eingang I4.00.6abgebildet.
Ergebnis des Referenzierens
Referenzschalterauswertung
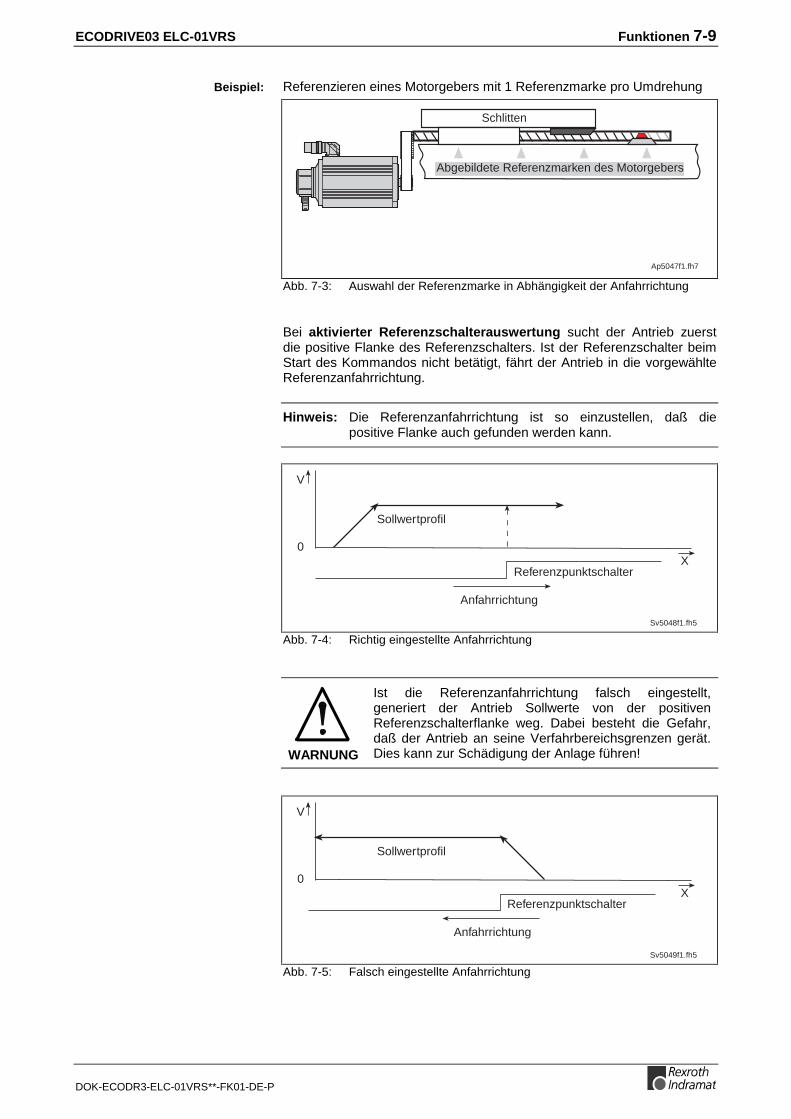
ECODRIVE03 ELC-01VRS Funktionen 7-9
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Referenzieren eines Motorgebers mit 1 Referenzmarke pro Umdrehung
Schlitten
Ap5047f1.fh7
Abgebildete Referenzmarken des Motorgebers
Abb. 7-3: Auswahl der Referenzmarke in Abhängigkeit der Anfahrrichtung
Bei aktivierter Referenzschalterauswertung sucht der Antrieb zuerstdie positive Flanke des Referenzschalters. Ist der Referenzschalter beimStart des Kommandos nicht betätigt, fährt der Antrieb in die vorgewählteReferenzanfahrrichtung.
Hinweis: Die Referenzanfahrrichtung ist so einzustellen, daß diepositive Flanke auch gefunden werden kann.
0
V
Sv5048f1.fh5
XReferenzpunktschalter
Sollwertprofil
Anfahrrichtung
Abb. 7-4: Richtig eingestellte Anfahrrichtung
WARNUNG
Ist die Referenzanfahrrichtung falsch eingestellt,generiert der Antrieb Sollwerte von der positivenReferenzschalterflanke weg. Dabei besteht die Gefahr,daß der Antrieb an seine Verfahrbereichsgrenzen gerät.Dies kann zur Schädigung der Anlage führen!
0
V
Sv5049f1.fh5
XReferenzpunktschalter
Sollwertprofil
Anfahrrichtung
Abb. 7-5: Falsch eingestellte Anfahrrichtung
Beispiel:
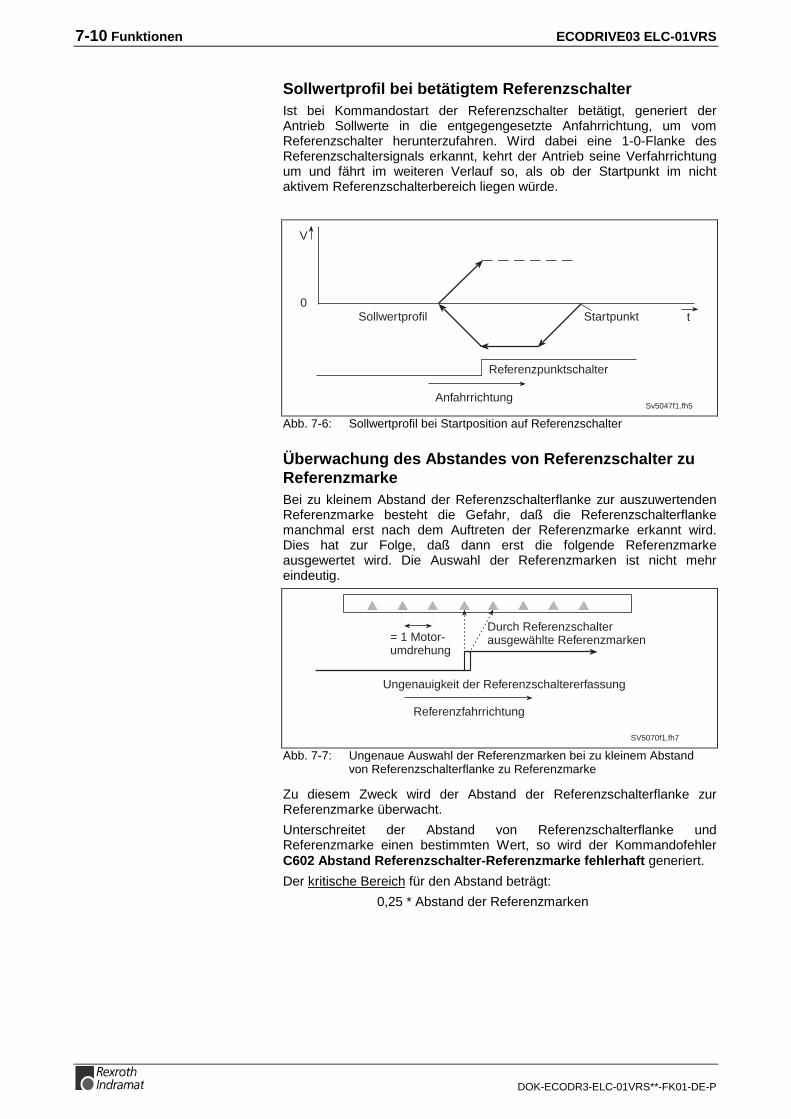
7-10 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Sollwertprofil bei betätigtem Referenzschalter Ist bei Kommandostart der Referenzschalter betätigt, generiert derAntrieb Sollwerte in die entgegengesetzte Anfahrrichtung, um vomReferenzschalter herunterzufahren. Wird dabei eine 1-0-Flanke desReferenzschaltersignals erkannt, kehrt der Antrieb seine Verfahrrichtungum und fährt im weiteren Verlauf so, als ob der Startpunkt im nichtaktivem Referenzschalterbereich liegen würde.
0
V
Sv5047f1.fh5
t
Referenzpunktschalter
Sollwertprofil
Anfahrrichtung
Startpunkt
Abb. 7-6: Sollwertprofil bei Startposition auf Referenzschalter
Überwachung des Abstandes von Referenzschalter zuReferenzmarke Bei zu kleinem Abstand der Referenzschalterflanke zur auszuwertendenReferenzmarke besteht die Gefahr, daß die Referenzschalterflankemanchmal erst nach dem Auftreten der Referenzmarke erkannt wird.Dies hat zur Folge, daß dann erst die folgende Referenzmarkeausgewertet wird. Die Auswahl der Referenzmarken ist nicht mehreindeutig.
SV5070f1.fh7
Durch Referenzschalterausgewählte Referenzmarken
Ungenauigkeit der Referenzschaltererfassung
= 1 Motor-umdrehung
Referenzfahrrichtung
Abb. 7-7: Ungenaue Auswahl der Referenzmarken bei zu kleinem Abstandvon Referenzschalterflanke zu Referenzmarke
Zu diesem Zweck wird der Abstand der Referenzschalterflanke zurReferenzmarke überwacht.
Unterschreitet der Abstand von Referenzschalterflanke undReferenzmarke einen bestimmten Wert, so wird der KommandofehlerC602 Abstand Referenzschalter-Referenzmarke fehlerhaft generiert.
Der kritische Bereich für den Abstand beträgt:
0,25 * Abstand der Referenzmarken
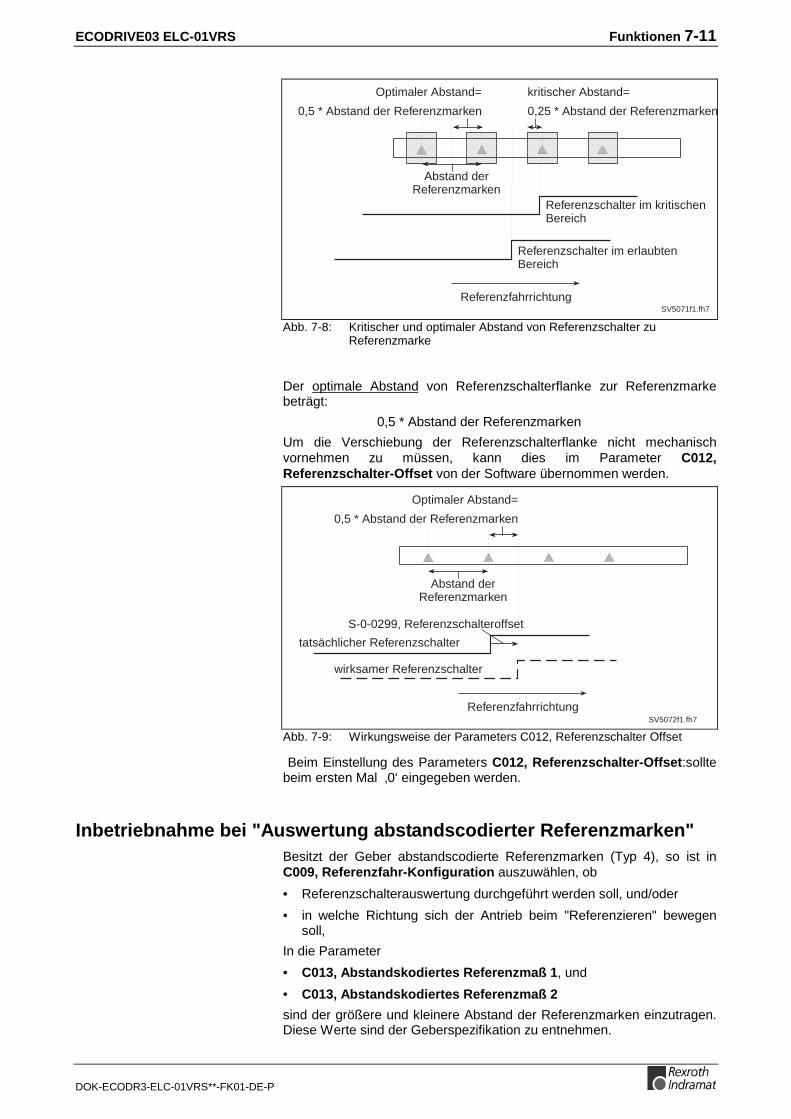
ECODRIVE03 ELC-01VRS Funktionen 7-11
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
SV5071f1.fh7
Optimaler Abstand=
0,5 * Abstand der Referenzmarken
Abstand derReferenzmarken
kritischer Abstand=
0,25 * Abstand der Referenzmarken
Referenzschalter im kritischenBereich
Referenzschalter im erlaubtenBereich
Referenzfahrrichtung
Abb. 7-8: Kritischer und optimaler Abstand von Referenzschalter zuReferenzmarke
Der optimale Abstand von Referenzschalterflanke zur Referenzmarkebeträgt:
0,5 * Abstand der Referenzmarken
Um die Verschiebung der Referenzschalterflanke nicht mechanischvornehmen zu müssen, kann dies im Parameter C012,Referenzschalter-Offset von der Software übernommen werden.
SV5072f1.fh7
Optimaler Abstand=
0,5 * Abstand der Referenzmarken
Abstand derReferenzmarken
Referenzfahrrichtung
tatsächlicher Referenzschalter
wirksamer Referenzschalter
S-0-0299, Referenzschalteroffset
Abb. 7-9: Wirkungsweise der Parameters C012, Referenzschalter Offset
Beim Einstellung des Parameters C012, Referenzschalter-Offset:solltebeim ersten Mal ‚0‘ eingegeben werden.
Inbetriebnahme bei "Auswertung abstandscodierter Referenzmarken" Besitzt der Geber abstandscodierte Referenzmarken (Typ 4), so ist inC009, Referenzfahr-Konfiguration auszuwählen, ob
• Referenzschalterauswertung durchgeführt werden soll, und/oder
• in welche Richtung sich der Antrieb beim "Referenzieren" bewegensoll,
In die Parameter
• C013, Abstandskodiertes Referenzmaß 1 , und
• C013, Abstandskodiertes Referenzmaß 2
sind der größere und kleinere Abstand der Referenzmarken einzutragen.Diese Werte sind der Geberspezifikation zu entnehmen.
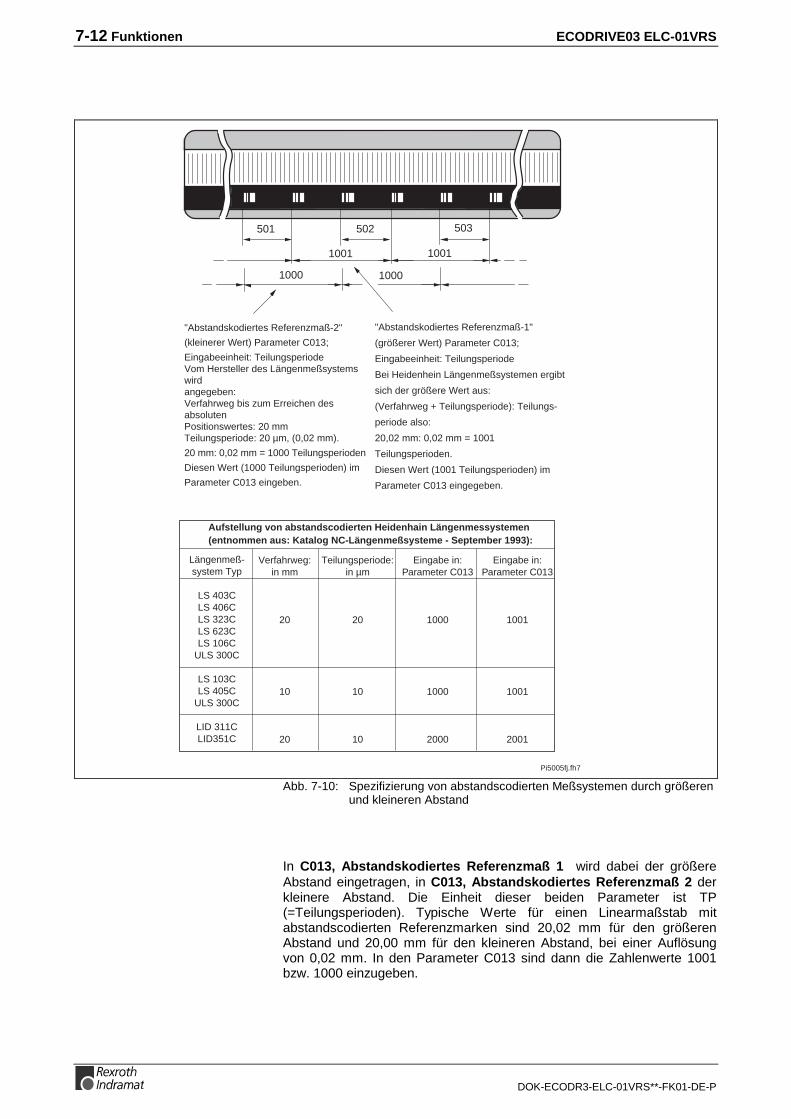
7-12 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Pi5005fj.fh7
501 502 503
1001 1001
1000
"Abstandskodiertes Referenzmaß-2"
(kleinerer Wert) Parameter C013;
Eingabeeinheit: TeilungsperiodeVom Hersteller des Längenmeßsystemswirdangegeben:Verfahrweg bis zum Erreichen desabsolutenPositionswertes: 20 mmTeilungsperiode: 20 µm, (0,02 mm).
20 mm: 0,02 mm = 1000 Teilungsperioden
Diesen Wert (1000 Teilungsperioden) im
Parameter C013 eingeben.
"Abstandskodiertes Referenzmaß-1"
(größerer Wert) Parameter C013;
Eingabeeinheit: Teilungsperiode
Bei Heidenhein Längenmeßsystemen ergibt
sich der größere Wert aus:
(Verfahrweg + Teilungsperiode): Teilungs-
periode also:
20,02 mm: 0,02 mm = 1001
Teilungsperioden.
Diesen Wert (1001 Teilungsperioden) im
Parameter C013 eingegeben.
1000
Aufstellung von abstandscodierten Heidenhain Längenmessystemen(entnommen aus: Katalog NC-Längenmeßsysteme - September 1993):
Längenmeß-system Typ
LS 403CLS 406CLS 323CLS 623CLS 106C
ULS 300C
LS 103CLS 405C
ULS 300C
LID 311CLID351C
Verfahrweg:in mm
20
10
20
Teilungsperiode:in µm
20
10
10
Eingabe in:Parameter C013
1000
1000
2000
Eingabe in:Parameter C013
1001
1001
2001
Abb. 7-10: Spezifizierung von abstandscodierten Meßsystemen durch größerenund kleineren Abstand
In C013, Abstandskodiertes Referenzmaß 1 wird dabei der größereAbstand eingetragen, in C013, Abstandskodiertes Referenzmaß 2 derkleinere Abstand. Die Einheit dieser beiden Parameter ist TP(=Teilungsperioden). Typische Werte für einen Linearmaßstab mitabstandscodierten Referenzmarken sind 20,02 mm für den größerenAbstand und 20,00 mm für den kleineren Abstand, bei einer Auflösungvon 0,02 mm. In den Parameter C013 sind dann die Zahlenwerte 1001bzw. 1000 einzugeben.
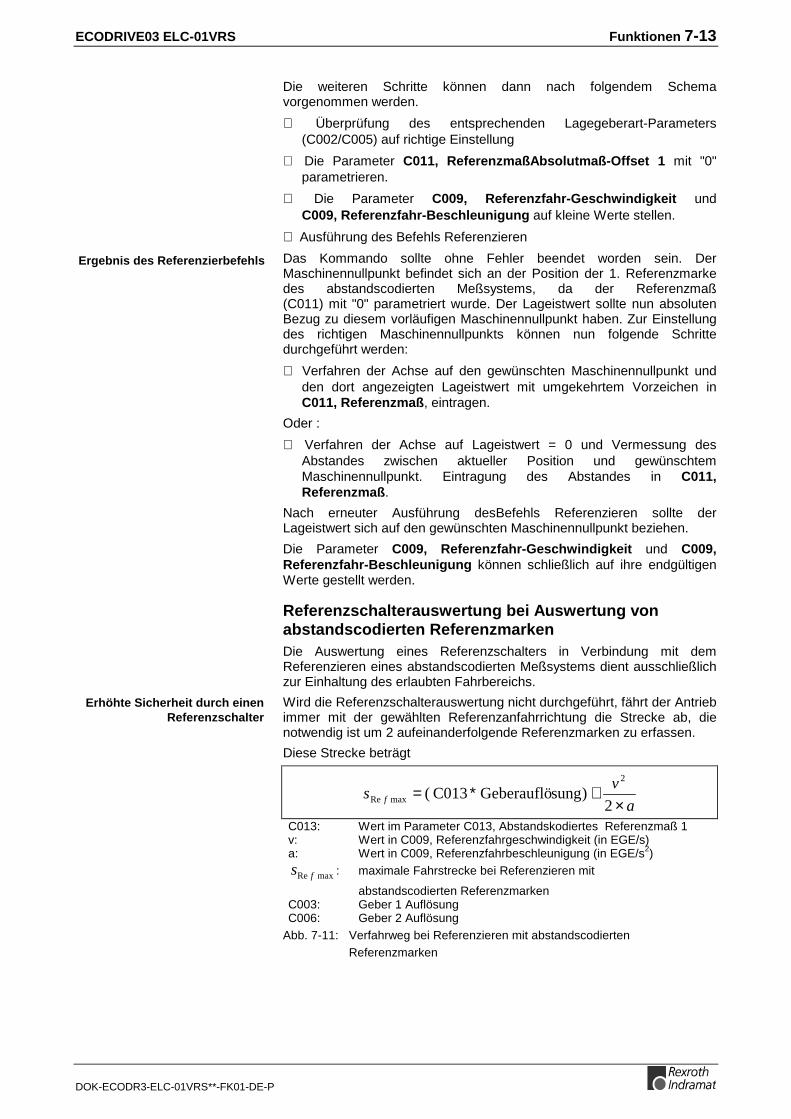
ECODRIVE03 ELC-01VRS Funktionen 7-13
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Die weiteren Schritte können dann nach folgendem Schemavorgenommen werden.
⇒ Überprüfung des entsprechenden Lagegeberart-Parameters(C002/C005) auf richtige Einstellung
⇒ Die Parameter C011, ReferenzmaßAbsolutmaß-Offset 1 mit "0"parametrieren.
⇒ Die Parameter C009, Referenzfahr-Geschwindigkeit undC009, Referenzfahr-Beschleunigung auf kleine Werte stellen.
⇒ Ausführung des Befehls Referenzieren
Das Kommando sollte ohne Fehler beendet worden sein. DerMaschinennullpunkt befindet sich an der Position der 1. Referenzmarkedes abstandscodierten Meßsystems, da der Referenzmaß(C011) mit "0" parametriert wurde. Der Lageistwert sollte nun absolutenBezug zu diesem vorläufigen Maschinennullpunkt haben. Zur Einstellungdes richtigen Maschinennullpunkts können nun folgende Schrittedurchgeführt werden:
⇒ Verfahren der Achse auf den gewünschten Maschinennullpunkt undden dort angezeigten Lageistwert mit umgekehrtem Vorzeichen inC011, Referenzmaß , eintragen.
Oder :
⇒ Verfahren der Achse auf Lageistwert = 0 und Vermessung desAbstandes zwischen aktueller Position und gewünschtemMaschinennullpunkt. Eintragung des Abstandes in C011,Referenzmaß .
Nach erneuter Ausführung desBefehls Referenzieren sollte derLageistwert sich auf den gewünschten Maschinennullpunkt beziehen.
Die Parameter C009, Referenzfahr-Geschwindigkeit und C009,Referenzfahr-Beschleunigung können schließlich auf ihre endgültigenWerte gestellt werden.
Referenzschalterauswertung bei Auswertung vonabstandscodierten Referenzmarken Die Auswertung eines Referenzschalters in Verbindung mit demReferenzieren eines abstandscodierten Meßsystems dient ausschließlichzur Einhaltung des erlaubten Fahrbereichs.
Wird die Referenzschalterauswertung nicht durchgeführt, fährt der Antriebimmer mit der gewählten Referenzanfahrrichtung die Strecke ab, dienotwendig ist um 2 aufeinanderfolgende Referenzmarken zu erfassen.
Diese Strecke beträgt
a
vs f ×
+∗=2
)sungGeberauflöC013 (2
maxRe
C013: Wert im Parameter C013, Abstandskodiertes Referenzmaß 1v: Wert in C009, Referenzfahrgeschwindigkeit (in EGE/s)a: Wert in C009, Referenzfahrbeschleunigung (in EGE/s2)s fRe max : maximale Fahrstrecke bei Referenzieren mit
abstandscodierten ReferenzmarkenC003: Geber 1 AuflösungC006: Geber 2 Auflösung
Abb. 7-11: Verfahrweg bei Referenzieren mit abstandscodiertenReferenzmarken
Ergebnis des Referenzierbefehls
Erhöhte Sicherheit durch einenReferenzschalter
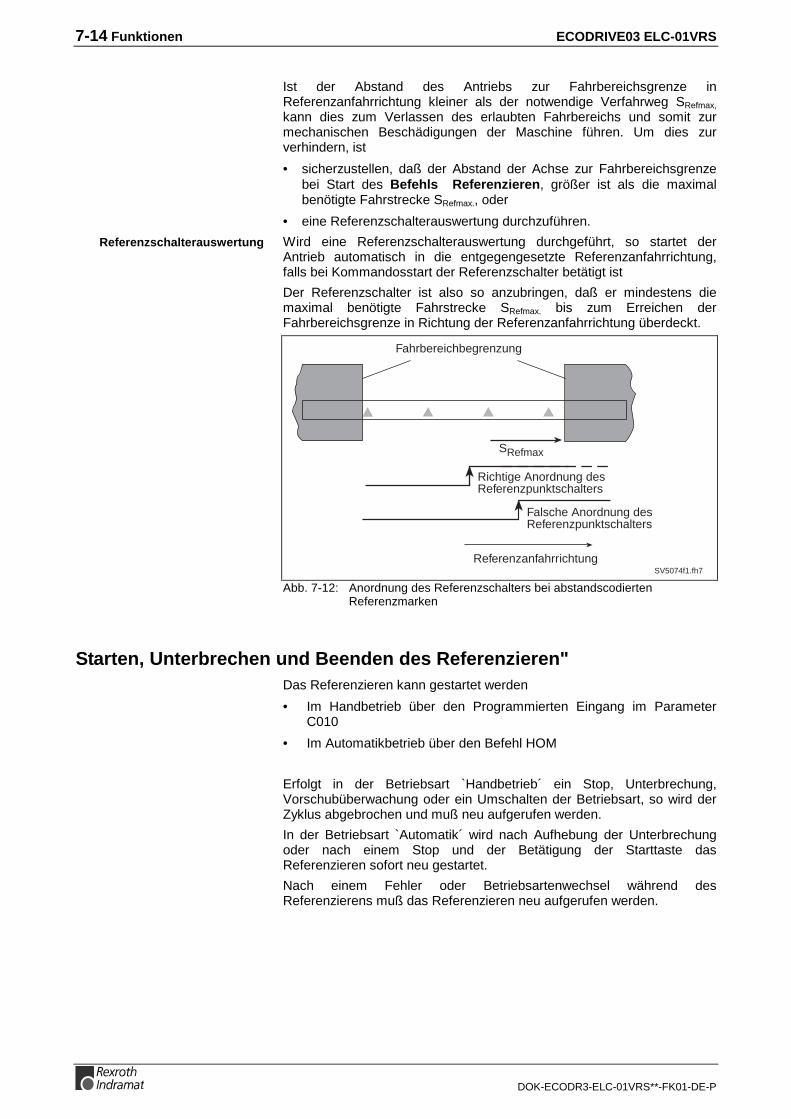
7-14 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Ist der Abstand des Antriebs zur Fahrbereichsgrenze inReferenzanfahrrichtung kleiner als der notwendige Verfahrweg SRefmax,
kann dies zum Verlassen des erlaubten Fahrbereichs und somit zurmechanischen Beschädigungen der Maschine führen. Um dies zurverhindern, ist
• sicherzustellen, daß der Abstand der Achse zur Fahrbereichsgrenzebei Start des Befehls Referenzieren, größer ist als die maximalbenötigte Fahrstrecke SRefmax., oder
• eine Referenzschalterauswertung durchzuführen.
Wird eine Referenzschalterauswertung durchgeführt, so startet derAntrieb automatisch in die entgegengesetzte Referenzanfahrrichtung,falls bei Kommandosstart der Referenzschalter betätigt ist
Der Referenzschalter ist also so anzubringen, daß er mindestens diemaximal benötigte Fahrstrecke SRefmax. bis zum Erreichen derFahrbereichsgrenze in Richtung der Referenzanfahrrichtung überdeckt.
SV5074f1.fh7Referenzanfahrrichtung
Falsche Anordnung desReferenzpunktschalters
Richtige Anordnung desReferenzpunktschalters
Fahrbereichbegrenzung
SRefmax
Abb. 7-12: Anordnung des Referenzschalters bei abstandscodiertenReferenzmarken
Starten, Unterbrechen und Beenden des Referenzieren" Das Referenzieren kann gestartet werden
• Im Handbetrieb über den Programmierten Eingang im ParameterC010
• Im Automatikbetrieb über den Befehl HOM
Erfolgt in der Betriebsart `Handbetrieb´ ein Stop, Unterbrechung,Vorschubüberwachung oder ein Umschalten der Betriebsart, so wird derZyklus abgebrochen und muß neu aufgerufen werden.
In der Betriebsart `Automatik´ wird nach Aufhebung der Unterbrechungoder nach einem Stop und der Betätigung der Starttaste dasReferenzieren sofort neu gestartet.
Nach einem Fehler oder Betriebsartenwechsel während desReferenzierens muß das Referenzieren neu aufgerufen werden.
Referenzschalterauswertung
ECODRIVE03 ELC-01VRS Funktionen 7-15
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Mögliche Fehlermeldungen beim "Referenzieren"
Während der Ausführung des Referenzierens können folgendeKommandofehler auftreten
• C601 Referenzieren nur mit Reglerfreigabe möglichBeim Starten des Befehls war die Reglerfreigabe nicht gesetzt
• C602 Abstand Referenzschalter-Referenzmarke fehlerhaftDer Abstand zwischen Referenzschalter und Referenzmarke ist zuklein,siehe Kapitel: "Überwachung des Abstandes von Referenzschalter zuReferenzmarke"
• C604 Referenzieren mit Absolutmaßgeber nicht möglichDer zu referenzierende Geber ist ein Absolutgeber. Das "Referenzieren" wurde gestartet, ohne vorher das Kommando"Absolutmaß setzen" zu starten.(siehe Parameter C010 "Absolutmaß setzen")
• C606 Referenzmarkenerkennung fehlerhaft Bei Inkrementalgebern wird durch die Erfassung der Referenzmarkeder aktuelle Lageistwert ermittelt. Während des Suchens derReferenzmarke beim Referenziervorgang wird die zurückgelegteFahrstrecke überwacht. Wird die zurückgelegte Fahrstrecke größerals der berechnete Weg, der zur Erfassung einer Referenzmarkemaximal notwendig ist, so wird die Fehlermeldung C606Referenzmarkenerkennung fehlerhaft erzeugt. Die Überwachungwird bei folgenden Gebertypen durchgeführt:
• Rotative Inkrementalgeber: Die maximale Fahrstrecke beträgt 1Geberumdrehung.
• Abstandscodierte Meßsysteme: Die maximale Fahrstrecke istdurch C013, Abstandskodiertes Referenzmaß 1 definiert.
Die Ursache für diese Fehlermeldung kann sein:
• Keine Erkennung der Referenzmarken möglich (durch Kabelbruch,Geberdefekt, usw.)
• C013, Abstandskodiertes Referenzmaß 1 falsch parametriert
• F-0217, HOM-Befehl nicht erlaubt . Parameter A100 Bewegungsart =0oderParameter C002/C005 Absolutauswertung = 01
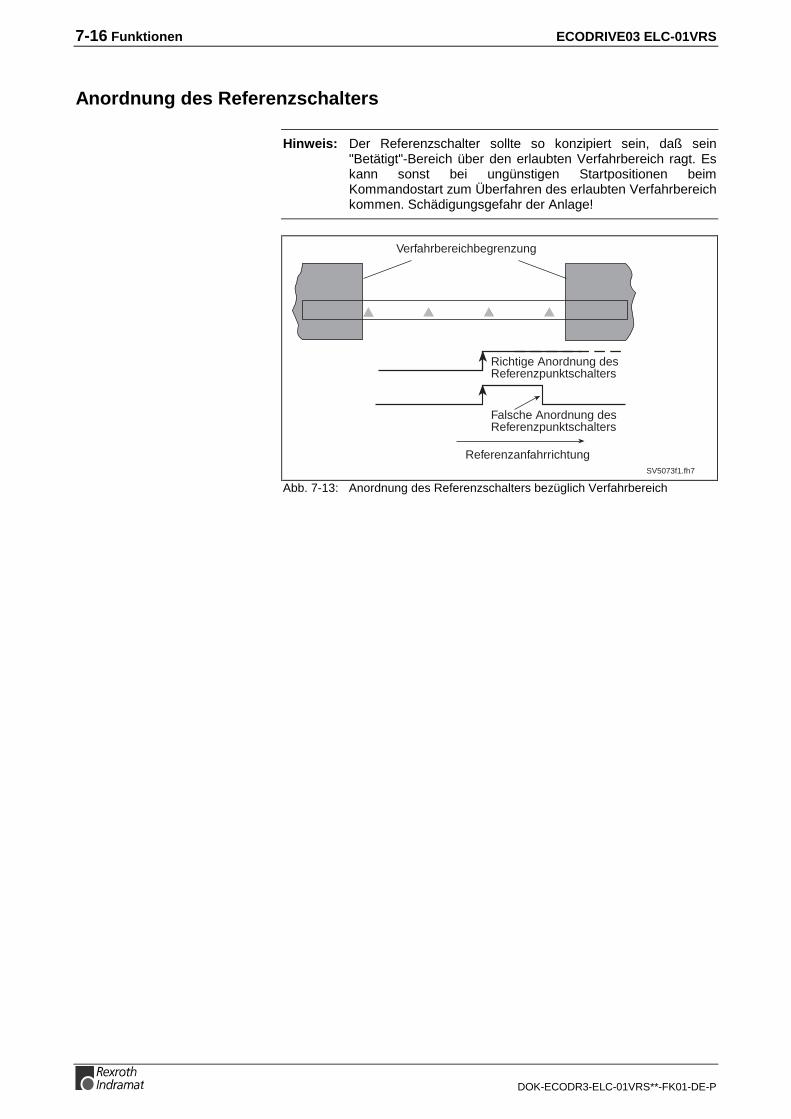
7-16 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Anordnung des Referenzschalters
Hinweis: Der Referenzschalter sollte so konzipiert sein, daß sein"Betätigt"-Bereich über den erlaubten Verfahrbereich ragt. Eskann sonst bei ungünstigen Startpositionen beimKommandostart zum Überfahren des erlaubten Verfahrbereichkommen. Schädigungsgefahr der Anlage!
SV5073f1.fh7
Referenzanfahrrichtung
Falsche Anordnung desReferenzpunktschalters
Richtige Anordnung desReferenzpunktschalters
Verfahrbereichbegrenzung
Abb. 7-13: Anordnung des Referenzschalters bezüglich Verfahrbereich
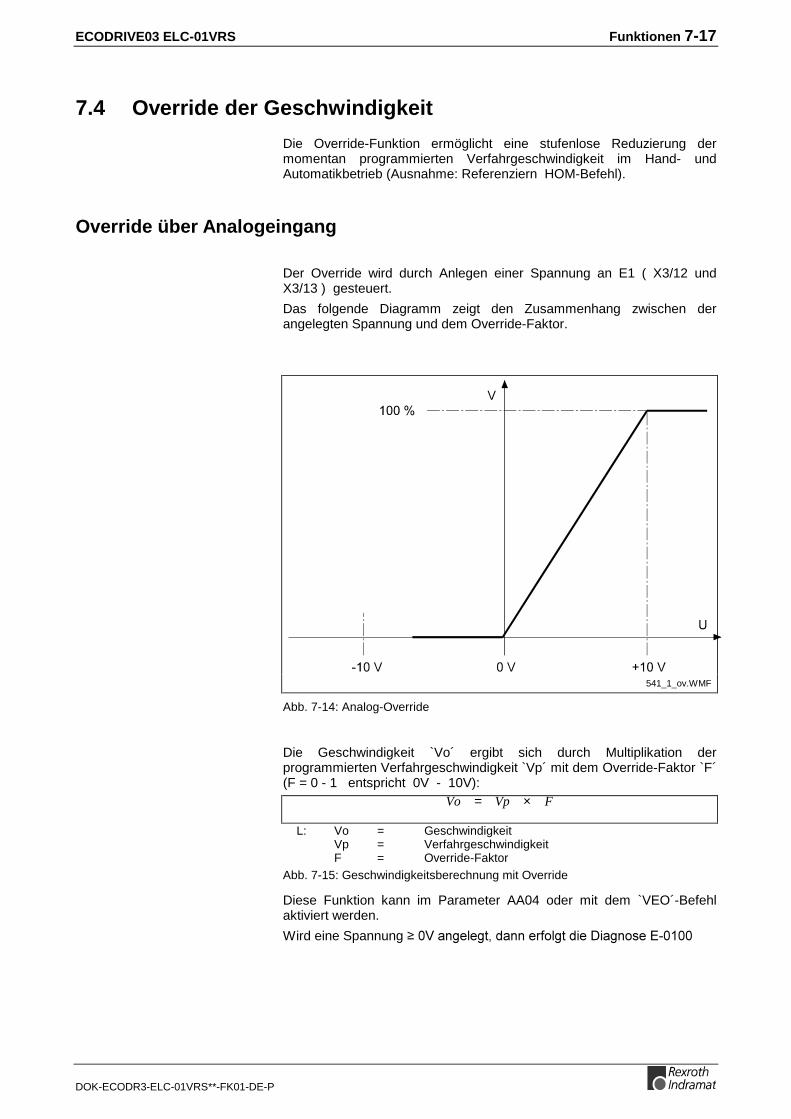
ECODRIVE03 ELC-01VRS Funktionen 7-17
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
7.4 Override der Geschwindigkeit
Die Override-Funktion ermöglicht eine stufenlose Reduzierung dermomentan programmierten Verfahrgeschwindigkeit im Hand- undAutomatikbetrieb (Ausnahme: Referenziern HOM-Befehl).
Override über Analogeingang
Der Override wird durch Anlegen einer Spannung an E1 ( X3/12 undX3/13 ) gesteuert.
Das folgende Diagramm zeigt den Zusammenhang zwischen derangelegten Spannung und dem Override-Faktor.
541_1_ov.WMF
Abb. 7-14: Analog-Override
Die Geschwindigkeit `Vo´ ergibt sich durch Multiplikation derprogrammierten Verfahrgeschwindigkeit `Vp´ mit dem Override-Faktor `F´(F = 0 - 1 entspricht 0V - 10V):
Vo Vp F= ×
L: Vo = GeschwindigkeitVp = VerfahrgeschwindigkeitF = Override-Faktor
Abb. 7-15: Geschwindigkeitsberechnung mit Override
Diese Funktion kann im Parameter AA04 oder mit dem `VEO´-Befehlaktiviert werden.
Wird eine Spannung ���9�DQJHOHJW��GDQQ�HUIROJW�GLH�'LDJQRVH�(�����
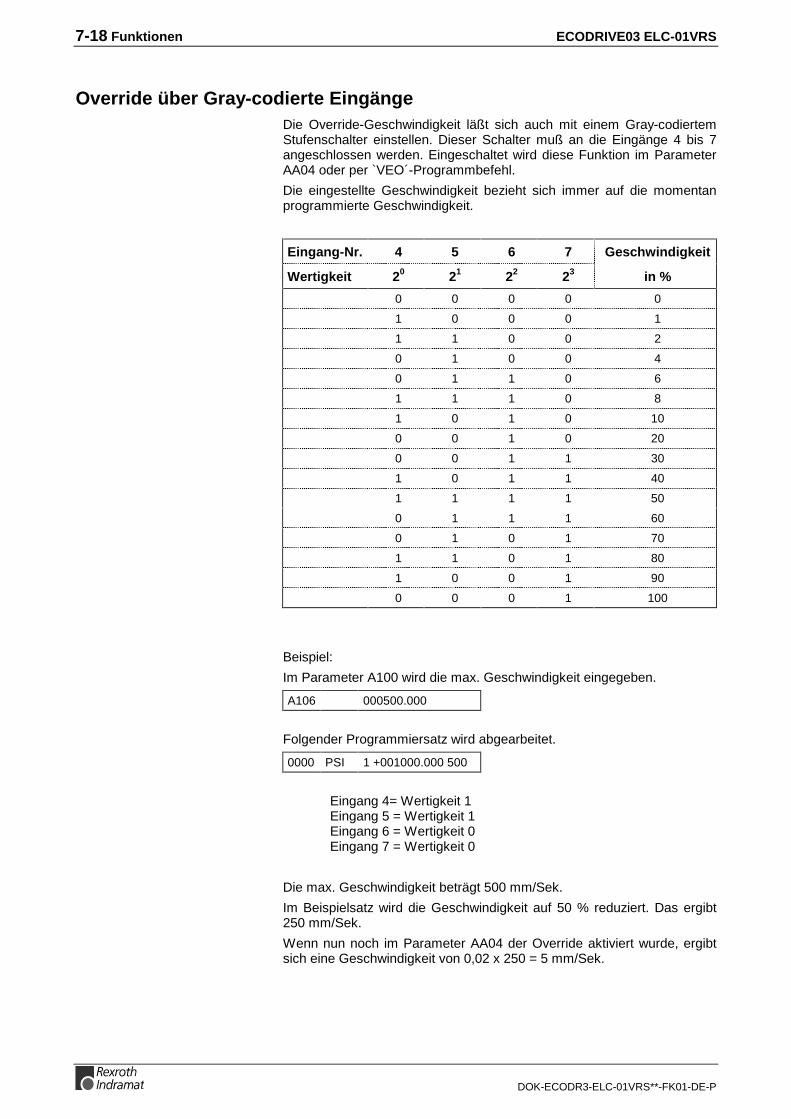
7-18 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Override über Gray-codierte EingängeDie Override-Geschwindigkeit läßt sich auch mit einem Gray-codiertemStufenschalter einstellen. Dieser Schalter muß an die Eingänge 4 bis 7angeschlossen werden. Eingeschaltet wird diese Funktion im ParameterAA04 oder per `VEO´-Programmbefehl.
Die eingestellte Geschwindigkeit bezieht sich immer auf die momentanprogrammierte Geschwindigkeit.
Eingang-Nr. 4 5 6 7 Geschwindigkeit
Wertigkeit 20 21 22 23 in %
0 0 0 0 0
1 0 0 0 1
1 1 0 0 2
0 1 0 0 4
0 1 1 0 6
1 1 1 0 8
1 0 1 0 10
0 0 1 0 20
0 0 1 1 30
1 0 1 1 40
1 1 1 1 50
0 1 1 1 60
0 1 0 1 70
1 1 0 1 80
1 0 0 1 90
0 0 0 1 100
Beispiel:
Im Parameter A100 wird die max. Geschwindigkeit eingegeben.
A106 000500.000
Folgender Programmiersatz wird abgearbeitet.
0000 PSI 1 +001000.000 500
Eingang 4= Wertigkeit 1Eingang 5 = Wertigkeit 1Eingang 6 = Wertigkeit 0Eingang 7 = Wertigkeit 0
Die max. Geschwindigkeit beträgt 500 mm/Sek.
Im Beispielsatz wird die Geschwindigkeit auf 50 % reduziert. Das ergibt250 mm/Sek.
Wenn nun noch im Parameter AA04 der Override aktiviert wurde, ergibtsich eine Geschwindigkeit von 0,02 x 250 = 5 mm/Sek.
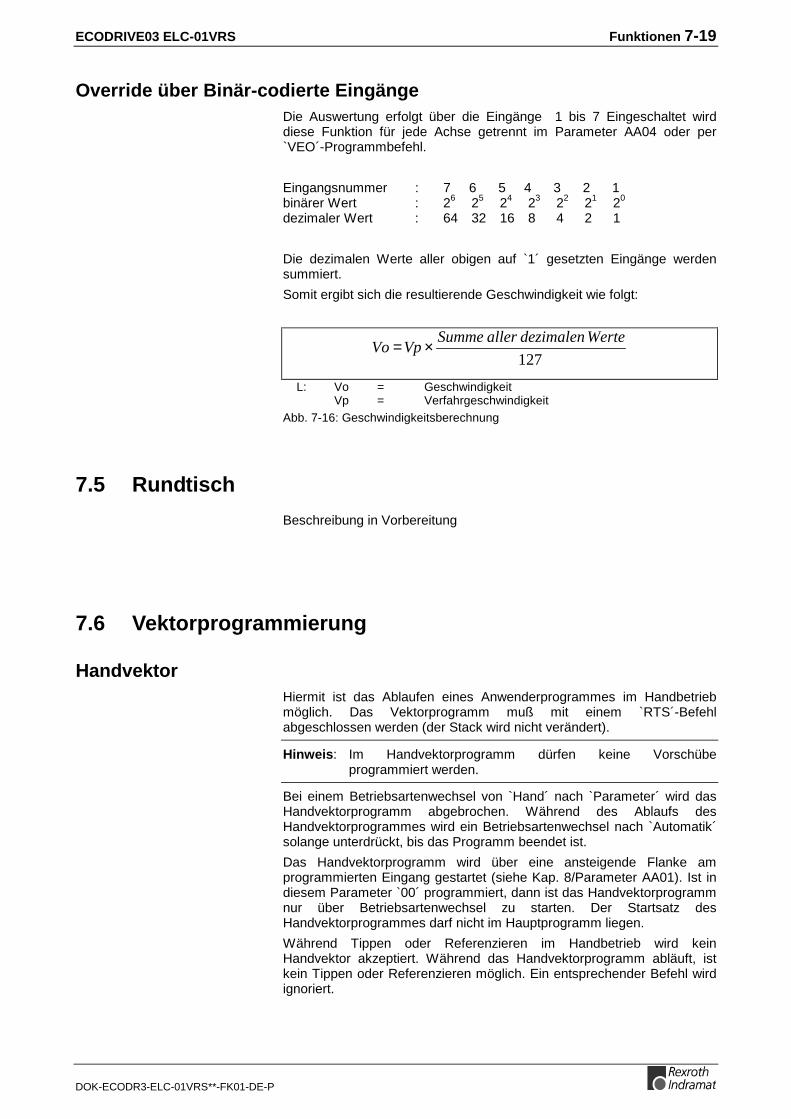
ECODRIVE03 ELC-01VRS Funktionen 7-19
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Override über Binär-codierte EingängeDie Auswertung erfolgt über die Eingänge 1 bis 7 Eingeschaltet wirddiese Funktion für jede Achse getrennt im Parameter AA04 oder per`VEO´-Programmbefehl.
Eingangsnummer : 7 6 5 4 3 2 1binärer Wert : 26 25 24 23 22 21 20
dezimaler Wert : 64 32 16 8 4 2 1
Die dezimalen Werte aller obigen auf `1´ gesetzten Eingänge werdensummiert.
Somit ergibt sich die resultierende Geschwindigkeit wie folgt:
127
WertedezimalenallerSummeVpVo ×=
L: Vo = GeschwindigkeitVp = Verfahrgeschwindigkeit
Abb. 7-16: Geschwindigkeitsberechnung
7.5 Rundtisch
Beschreibung in Vorbereitung
7.6 Vektorprogrammierung
HandvektorHiermit ist das Ablaufen eines Anwenderprogrammes im Handbetriebmöglich. Das Vektorprogramm muß mit einem `RTS´-Befehlabgeschlossen werden (der Stack wird nicht verändert).
Hinweis: Im Handvektorprogramm dürfen keine Vorschübeprogrammiert werden.
Bei einem Betriebsartenwechsel von `Hand´ nach `Parameter´ wird dasHandvektorprogramm abgebrochen. Während des Ablaufs desHandvektorprogrammes wird ein Betriebsartenwechsel nach `Automatik´solange unterdrückt, bis das Programm beendet ist.
Das Handvektorprogramm wird über eine ansteigende Flanke amprogrammierten Eingang gestartet (siehe Kap. 8/Parameter AA01). Ist indiesem Parameter `00´ programmiert, dann ist das Handvektorprogrammnur über Betriebsartenwechsel zu starten. Der Startsatz desHandvektorprogrammes darf nicht im Hauptprogramm liegen.
Während Tippen oder Referenzieren im Handbetrieb wird keinHandvektor akzeptiert. Während das Handvektorprogramm abläuft, istkein Tippen oder Referenzieren möglich. Ein entsprechender Befehl wirdignoriert.
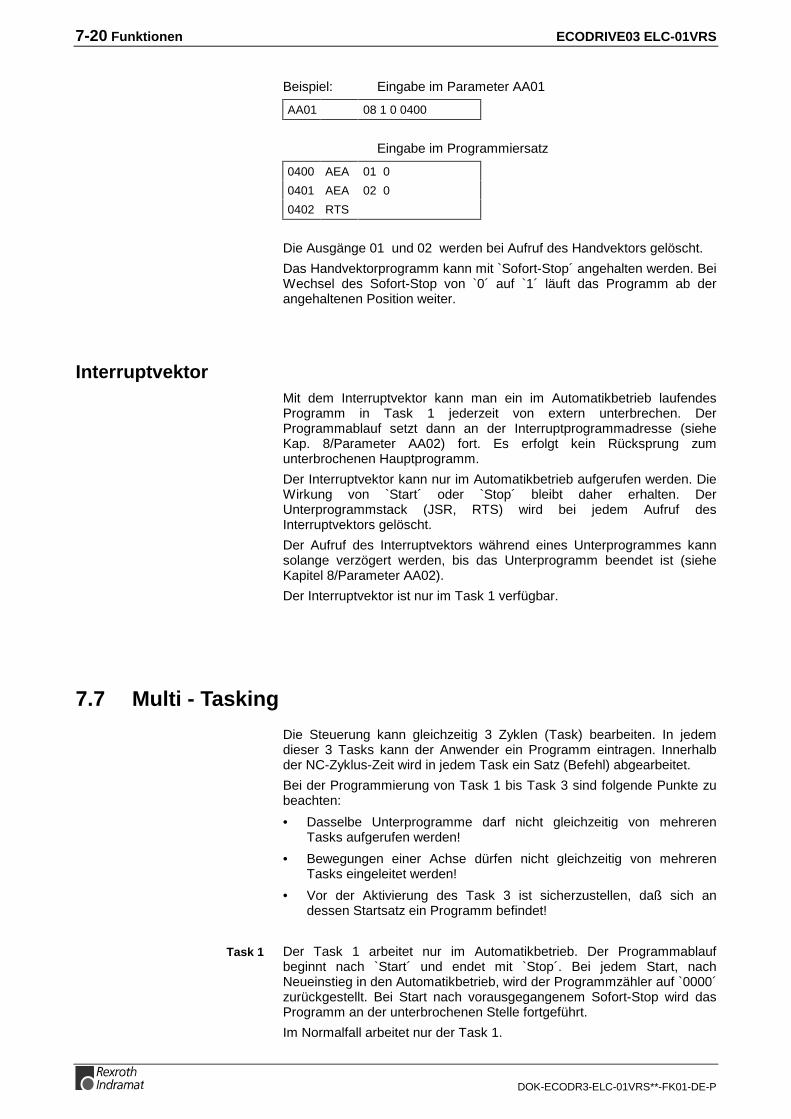
7-20 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Beispiel: Eingabe im Parameter AA01
AA01 08 1 0 0400
Eingabe im Programmiersatz
0400 AEA 01 0
0401 AEA 02 0
0402 RTS
Die Ausgänge 01 und 02 werden bei Aufruf des Handvektors gelöscht.
Das Handvektorprogramm kann mit `Sofort-Stop´ angehalten werden. BeiWechsel des Sofort-Stop von `0´ auf `1´ läuft das Programm ab derangehaltenen Position weiter.
InterruptvektorMit dem Interruptvektor kann man ein im Automatikbetrieb laufendesProgramm in Task 1 jederzeit von extern unterbrechen. DerProgrammablauf setzt dann an der Interruptprogrammadresse (sieheKap. 8/Parameter AA02) fort. Es erfolgt kein Rücksprung zumunterbrochenen Hauptprogramm.
Der Interruptvektor kann nur im Automatikbetrieb aufgerufen werden. DieWirkung von `Start´ oder `Stop´ bleibt daher erhalten. DerUnterprogrammstack (JSR, RTS) wird bei jedem Aufruf desInterruptvektors gelöscht.
Der Aufruf des Interruptvektors während eines Unterprogrammes kannsolange verzögert werden, bis das Unterprogramm beendet ist (sieheKapitel 8/Parameter AA02).
Der Interruptvektor ist nur im Task 1 verfügbar.
7.7 Multi - Tasking
Die Steuerung kann gleichzeitig 3 Zyklen (Task) bearbeiten. In jedemdieser 3 Tasks kann der Anwender ein Programm eintragen. Innerhalbder NC-Zyklus-Zeit wird in jedem Task ein Satz (Befehl) abgearbeitet.
Bei der Programmierung von Task 1 bis Task 3 sind folgende Punkte zubeachten:
• Dasselbe Unterprogramme darf nicht gleichzeitig von mehrerenTasks aufgerufen werden!
• Bewegungen einer Achse dürfen nicht gleichzeitig von mehrerenTasks eingeleitet werden!
• Vor der Aktivierung des Task 3 ist sicherzustellen, daß sich andessen Startsatz ein Programm befindet!
Der Task 1 arbeitet nur im Automatikbetrieb. Der Programmablaufbeginnt nach `Start´ und endet mit `Stop´. Bei jedem Start, nachNeueinstieg in den Automatikbetrieb, wird der Programmzähler auf `0000´zurückgestellt. Bei Start nach vorausgegangenem Sofort-Stop wird dasProgramm an der unterbrochenen Stelle fortgeführt.
Im Normalfall arbeitet nur der Task 1.
Task 1
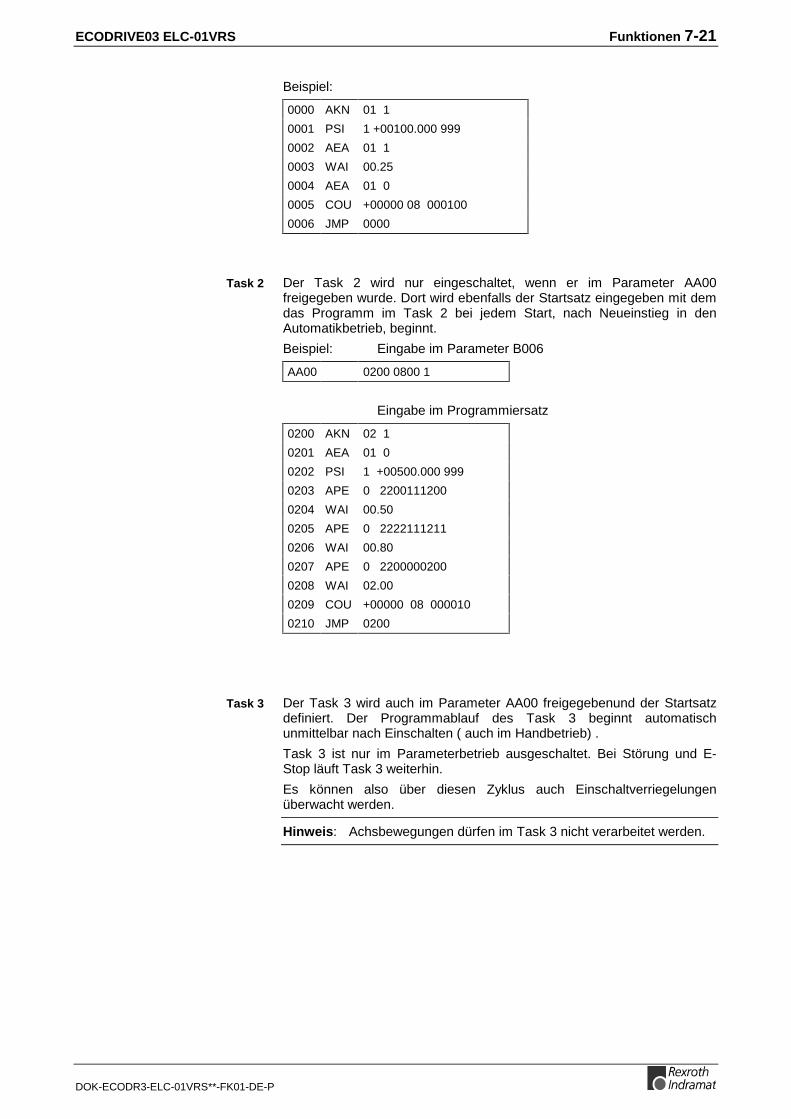
ECODRIVE03 ELC-01VRS Funktionen 7-21
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Beispiel:
0000 AKN 01 1
0001 PSI 1 +00100.000 999
0002 AEA 01 1
0003 WAI 00.25
0004 AEA 01 0
0005 COU +00000 08 000100
0006 JMP 0000
Der Task 2 wird nur eingeschaltet, wenn er im Parameter AA00freigegeben wurde. Dort wird ebenfalls der Startsatz eingegeben mit demdas Programm im Task 2 bei jedem Start, nach Neueinstieg in denAutomatikbetrieb, beginnt.
Beispiel: Eingabe im Parameter B006
AA00 0200 0800 1
Eingabe im Programmiersatz
0200 AKN 02 1
0201 AEA 01 0
0202 PSI 1 +00500.000 999
0203 APE 0 2200111200
0204 WAI 00.50
0205 APE 0 2222111211
0206 WAI 00.80
0207 APE 0 2200000200
0208 WAI 02.00
0209 COU +00000 08 000010
0210 JMP 0200
Der Task 3 wird auch im Parameter AA00 freigegebenund der Startsatzdefiniert. Der Programmablauf des Task 3 beginnt automatischunmittelbar nach Einschalten ( auch im Handbetrieb) .
Task 3 ist nur im Parameterbetrieb ausgeschaltet. Bei Störung und E-Stop läuft Task 3 weiterhin.
Es können also über diesen Zyklus auch Einschaltverriegelungenüberwacht werden.
Hinweis: Achsbewegungen dürfen im Task 3 nicht verarbeitet werden.
Task 2
Task 3
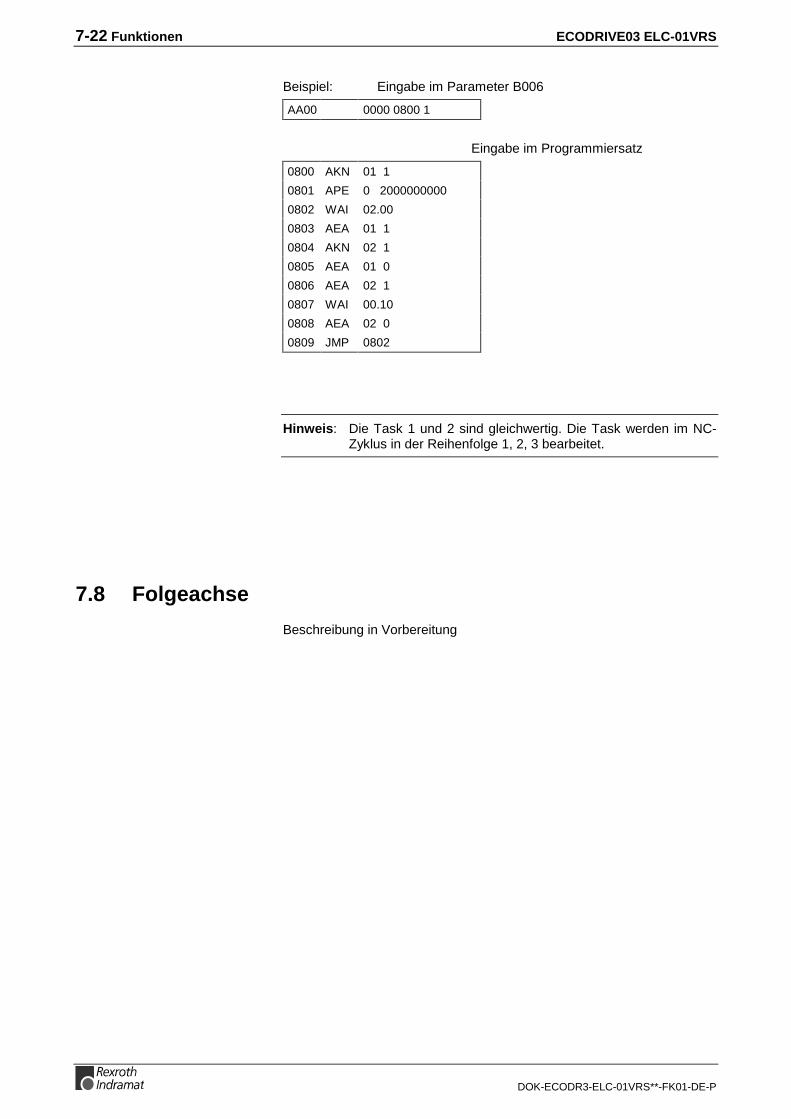
7-22 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Beispiel: Eingabe im Parameter B006
AA00 0000 0800 1
Eingabe im Programmiersatz
0800 AKN 01 1
0801 APE 0 2000000000
0802 WAI 02.00
0803 AEA 01 1
0804 AKN 02 1
0805 AEA 01 0
0806 AEA 02 1
0807 WAI 00.10
0808 AEA 02 0
0809 JMP 0802
Hinweis: Die Task 1 und 2 sind gleichwertig. Die Task werden im NC-Zyklus in der Reihenfolge 1, 2, 3 bearbeitet.
7.8 Folgeachse
Beschreibung in Vorbereitung
ECODRIVE03 ELC-01VRS Funktionen 7-23
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
7.9 Regelkreiseinstellung
Die Regelkreiseinstellungen in einem digitalen Antriebsregelgerät habeneine wesentliche Bedeutung für die Eigenschaften der Servoachse.
Eine "Optimierung" derReglereinstellungen ist imallgemeinen nicht erforderlich!
Die Festlegung der Regelkreiseinstellung erfordert viel Sachkenntnis. Ausdiesem Grund stehen für alle digitalen Rexroth Indramat Antriebeanwendungsspezifische Reglerparameter zur Verfügung. DieseParameter sind entweder im Motorfeedback-Datenspeicher enthalten undkönnen durch Urladen aktiviert werden (bei MHD, MKD und MKE-Motoren) oder sind über die Parametrieroberfläche einzugeben.(siehe auch Kapitel: Urladen")
In Ausnahmefällen kann es dennoch notwendig werden, dieRegelkreiseinstellungen anwendungsspezifisch vorzunehmen. Für dieseFälle sind im folgenden einige einfache, wesentliche Grundregeln für dieEinstellung von Regelkreisparametern dargelegt.
In jedem Fall sind die angegebenen Methoden nur als Richtlinie zu sehen,die zu einer robusten Reglereinstellung führen. Im Einzelfall könnenanwendungsseitige Aspekte abweichende Einstellungen erfordern.
Die Regelkreisstruktur besteht aus einem kaskadierten Lage-,Geschwindigkeits- und Drehmoment/Kraftregler. In Abhängigkeit derverwendeten Betriebsart kann nur der Momentenregelkreis bzw. nur derMomenten- und Geschwindigkeitsregelkreis wirken. Die Reglerstruktur istfolgendermaßen aufgebaut.
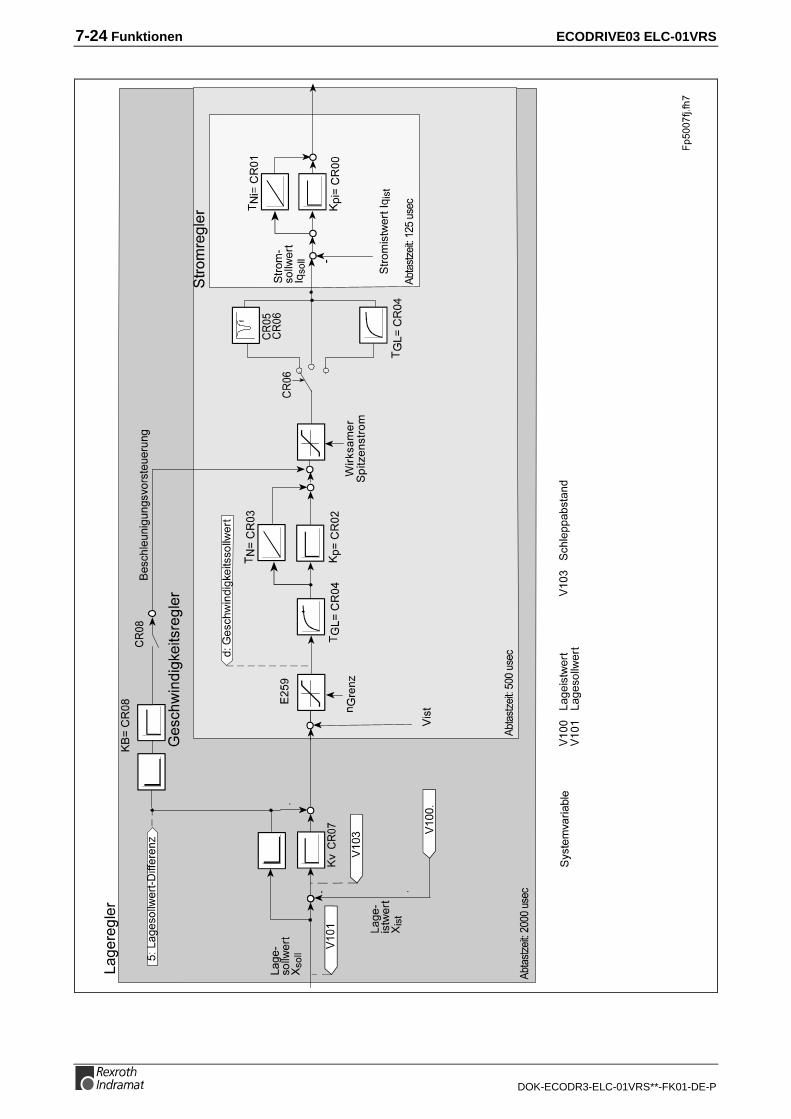
7-24 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
ECODRIVE03 ELC-01VRS Funktionen 7-25
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Einstellung des StromreglersDie Parametrierung des Stromregelkreises wird von Rexroth Indramatvorgegeben und ist nicht anwendungsspezifisch einzustellen. Diewerksseitig definierten Parameterwerte werden bei MKD/MHD-Motorendurch das Kommando Urladen aktiviert oder sind aus denMotordatenblatt zu entnehmen.Die Parametrierung des Stromreglers erfolgt über die Parameter
• CR00, Stromregler-Proportionalverstärkung 1
• CR01, Stromregler-Nachstellzeit 1
WARNUNG
Veränderung der von Rexroth Indramat definiertenWertekann zur Schädigung des Motors und desAntriebsregelgerätes führen
⇒ Veränderungen der Stromregler-Parameter sind nichtzulässig
Einstellung des Geschwindigkeitsreglers
Stromregler muß korrekt eingestellt sein.
Zur Einstellung des Geschwindigkeitsreglers dienen die Parameter
• CR02, Geschwindigkeitsregler-Proportionalverstärkung
• CR03, Geschwindigkeitsregler-Nachstellzeit
• CR04, Glättungszeitkonstante
sowie die Parameter
• CR05, Sperrfrequenz Geschwindigkeitsregler
• CR06, Bandbreite Sperrfilter Geschwindigkeitsregler
Die Einstellung kann erfolgen durch:
• einmaliges Ausführen der Funktion Urladen
• nachfolgend beschriebenes Verfahren
Vorbereitungen zur Einstellung desGeschwindigkeitsreglersUm die Einstellung des Geschwindigkeitsreglers durchführen zu können,sind eine Reihe von Vorbereitungen zu treffen:
• Die Maschinenmechanik muß in ihrer endgültigen Ausführungaufgebaut sein, um Originalverhältnisse bei derParameterbestimmung zu haben.
• Das Antriebsregelgerät muß vorschriftsgemäß angeschlossen sein.
• Funktion der Sicherheitsendschalter muß überprüft sein (fallsvorhanden)
Voraussetzung:
7-26 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Die Reglerparametrierung muß für den Beginn derParameterbestimmung wie folgt gewählt werden:
CR02, Geschwindigkeitsregler-Proportionalverstärkung =Standardwert des angeschlossenen Motors.
CR03, Geschwindigkeitsregler-Nachstellzeit = 6500 ms (kein I-Anteil)
CR04, Glättungszeitkonstante = Minimalwert (= 500µs)
CR06, Bandbreite Sperrfilter Geschwindigkeitsregler = 0 Hz(deaktiviert)
Bestimmung der kritischen Proportionalverstärkung undderGlättungszeitkonstante• Den Antrieb nach Zuschalten der Reglerfreigabe mit kleiner
Geschwindigkeit bewegen lassen. (Rotative Motore: 10...20Upm;Linear-Motore: 1...2 m/min)
• CR02, Geschwindigkeitsregler-Proportionalverstärkung solangeerhöhen, bis instabiles Verhalten (Dauerschwingung) auftritt.
• Frequenz der Schwingung durch oszilloskopieren derIstgeschwindigkeit (siehe auch Kapitel: "Analogausgabe") erfassen.Wenn die Frequenz der Schwingung wesentlich höher als 500Hz ist,ist der Parameter CR04, Glättungszeitkonstante solange zuerhöhen, bis die Schwingung abklingt. Danach ist CR02,Geschwindigkeitsregler-Proportionalverstärkung weiter zuerhöhen, bis erneut Instabilität auftritt.
• CR02, Geschwindigkeitsregler-Proportionalverstärkung solangereduzieren, bis die Schwingung selbsttätig abklingt.
Der so gefundene Wert ist die "kritische Geschwindigkeitsregler-Proportionalverstärkung"
Bestimmung der kritischen Nachstellzeit• CR02, Geschwindigkeitsregler-Proportionalverstärkung = 0.5 x
kritische Proportionalverstärkung einstellen.
• CR03, Geschwindigkeitsregler-Nachstellzeit solange erniedrigen,bis instabiles Verhalten auftritt.
• CR03, Geschwindigkeitsregler-Nachstellzeit solange erhöhen, bisDauerschwingung abklingt.
Der so gefundene Wert entspricht der "kritischen Nachstellzeit".
Festlegung der Drehzahlregler-EinstellungAus den ermittelten kritischen Werten läßt sich eine Reglereinstellungableiten, die folgende Merkmale besitzt:
• Unabhängigkeit gegenüber Veränderungen an der Achse, daausreichender Abstand zur Stabilitätsgrenzen.
• Sichere Reproduzierbarkeit der Eigenschaften in Serienmaschinen.
In der untenstehenden Tabelle sind einige der häufigstenAnwendungsarten und die entsprechende Ausprägung derRegelkreiseinstellung dargestellt.
Starteinstellungen
ECODRIVE03 ELC-01VRS Funktionen 7-27
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Anwendungsart:Drehzahlregler-Proportionalverstärkung:
Drehzahlregler-Nachstellzeit: Bemerkung:
Vorschubachse anStandard-Werkzeug-maschine
Kp = 0,5 x Kpkrit Tn = 2 x Tnkrit
Gute Laststeifigkeit undgutes Führungsverhalten
Vorschubachse anPerforiermaschine oderNippelmaschine
Kp = 0,8 x Kpkrit Tn = 0
HoheProportionalverstärkung;kein I-Anteil, um kurzeEinschwingzeiten zuerreichen.
Vorschubantrieb anmitlaufenden Trenn-einrichtungen
Kp = 0,5 x Kpkrit Tn = 0 relative undynamischeReglereinstellung ohne I-Anteil, um Verspannungendes zu trennenden Gutesmit der Trenneinrichtung zuvermeiden.
Abb. 7-17: Kennzeichen Drehzahlreglereinstellungen
Filterung mechanischer ResonanzschwingungenDie Antriebe sind in der Lage, Schwingungen die sich aufgrund desAntriebsstranges zwischen Motor und Achs- bzw. Spindelmechanikeinstellen, schmalbandig zu unterdrücken. Hierdurch ist gesteigerteAntriebsdynamik bei guter Stabilität erreichbar.
Bei verwindungssteifer Antriebsmechanik wird das mechanische SystemRotor-Antriebsstrang-Last durch Lage- bzw. Drehzahlrückführung imgeschlossenen Regelkreis zu mechanischen Schwingungen angeregt.Dieses als "Zwei-Massen-Schwinger" bezeichnete Verhalten liegt meistim Frequenzbereich von 400-800Hz, abhängig von der Steifigkeit derMechanik und der räumlichen Ausdehnung des Systems.
Dieses "Zwei-Massen-Schwingen" hat meist eine deutlicheResonanzfrequenz, die durch ein im Antrieb eingebautes Sperrfilterselektiv unterdrückt werden kann.
Bei Unterdrückung der mechanischen Resonanzfrequenz läßt sich dieDynamik des Drehzahlregelkreises, als auch des Lageregelkreisesgegenüber der Regelung ohne das Sperrfilter wesentlich verbessern.
Dies führt zu höherer Konturtreue und kleineren Zykluszeiten fürPositioniervorgänge bei ausreichendem Abstand zur Stabilitätsgrenze.
Das Filter kann in Sperrfrequenz und Bandbreite eingestellt werden. DieSperrfrequenz wird am stärksten gedämpft, die Bandbreite legt denFrequenzbereich fest, bei dem die Dämpfung kleiner -3dB ist. GrößereBandbreite führt zu geringerer Dämpfung der Sperrfrequenz! ZurEinstellungen dieser beiden Größen dienen die Parameter
• CR05, Sperrfrequenz Geschwindigkeitsregler
• CR06, Bandbreite Sperrfilter Geschwindigkeitsregler
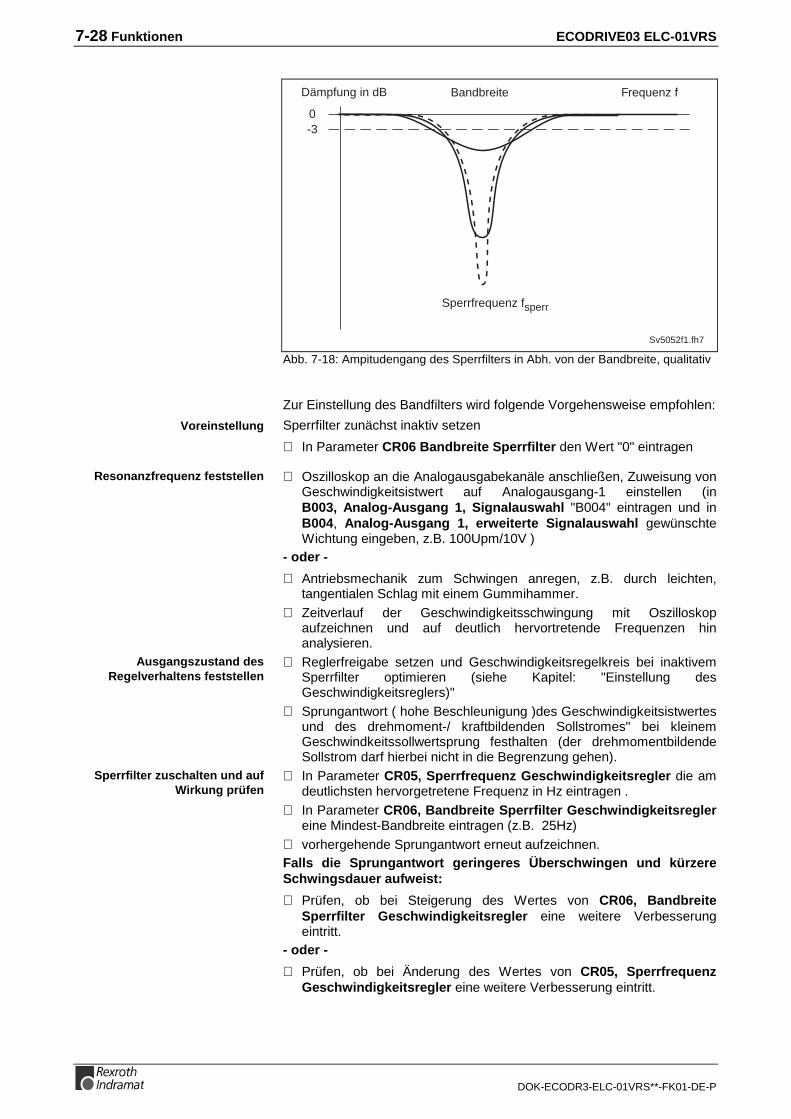
7-28 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Sv5052f1.fh7
Sperrfrequenz fsperr
0-3
Dämpfung in dB Frequenz fBandbreite
Abb. 7-18: Ampitudengang des Sperrfilters in Abh. von der Bandbreite, qualitativ
Zur Einstellung des Bandfilters wird folgende Vorgehensweise empfohlen:
Sperrfilter zunächst inaktiv setzen
⇒ In Parameter CR06 Bandbreite Sperrfilter den Wert "0" eintragen
⇒ Oszilloskop an die Analogausgabekanäle anschließen, Zuweisung vonGeschwindigkeitsistwert auf Analogausgang-1 einstellen (inB003, Analog-Ausgang 1, Signalauswahl "B004" eintragen und inB004, Analog-Ausgang 1, erweiterte Signalauswahl gewünschteWichtung eingeben, z.B. 100Upm/10V )
- oder -
⇒ Antriebsmechanik zum Schwingen anregen, z.B. durch leichten,tangentialen Schlag mit einem Gummihammer.
⇒ Zeitverlauf der Geschwindigkeitsschwingung mit Oszilloskopaufzeichnen und auf deutlich hervortretende Frequenzen hinanalysieren.
⇒ Reglerfreigabe setzen und Geschwindigkeitsregelkreis bei inaktivemSperrfilter optimieren (siehe Kapitel: "Einstellung desGeschwindigkeitsreglers)"
⇒ Sprungantwort ( hohe Beschleunigung )des Geschwindigkeitsistwertesund des drehmoment-/ kraftbildenden Sollstromes" bei kleinemGeschwindkeitssollwertsprung festhalten (der drehmomentbildendeSollstrom darf hierbei nicht in die Begrenzung gehen).
⇒ In Parameter CR05, Sperrfrequenz Geschwindigkeitsregler die amdeutlichsten hervorgetretene Frequenz in Hz eintragen .
⇒ In Parameter CR06, Bandbreite Sperrfilter Geschwindigkeitsreglereine Mindest-Bandbreite eintragen (z.B. 25Hz)
⇒ vorhergehende Sprungantwort erneut aufzeichnen.Falls die Sprungantwort geringeres Überschwingen und kürzereSchwingsdauer aufweist:
⇒ Prüfen, ob bei Steigerung des Wertes von CR06, BandbreiteSperrfilter Geschwindigkeitsregler eine weitere Verbesserungeintritt.
- oder -
⇒ Prüfen, ob bei Änderung des Wertes von CR05, SperrfrequenzGeschwindigkeitsregler eine weitere Verbesserung eintritt.
Voreinstellung
Resonanzfrequenz feststellen
Ausgangszustand desRegelverhaltens feststellen
Sperrfilter zuschalten und aufWirkung prüfen
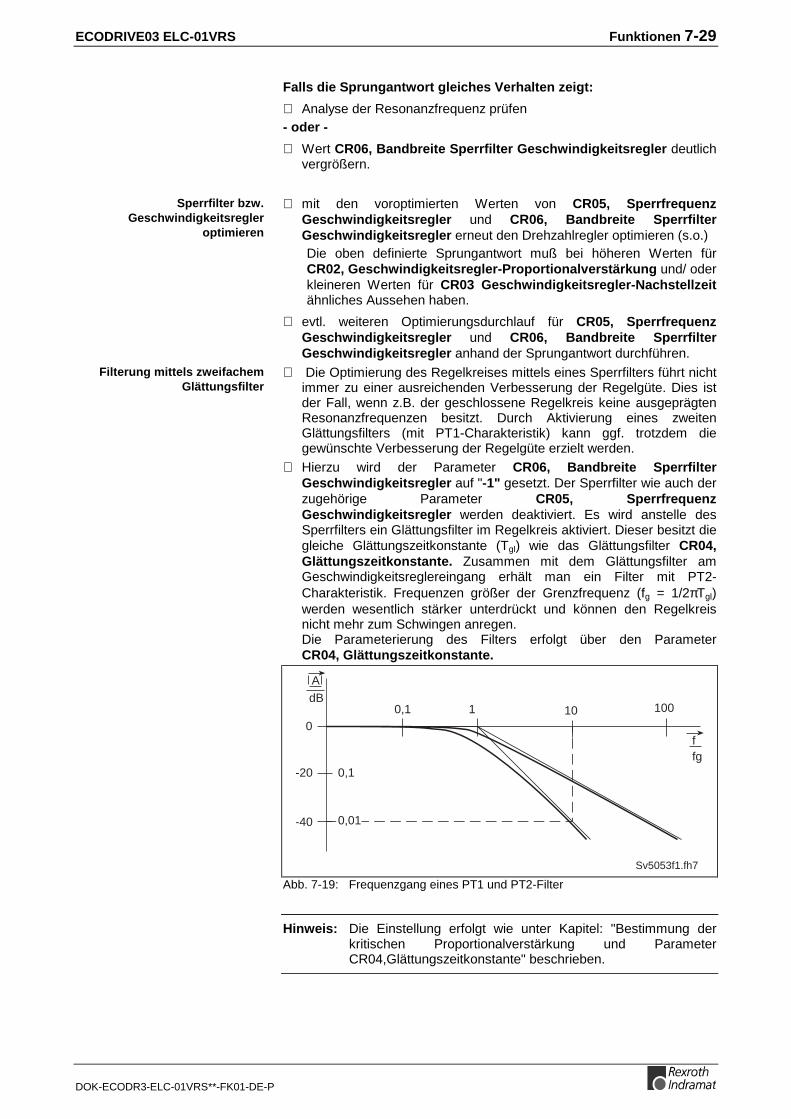
ECODRIVE03 ELC-01VRS Funktionen 7-29
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Falls die Sprungantwort gleiches Verhalten zeigt:
⇒ Analyse der Resonanzfrequenz prüfen- oder -
⇒ Wert CR06, Bandbreite Sperrfilter Geschwindigkeitsregler deutlichvergrößern.
⇒ mit den voroptimierten Werten von CR05, SperrfrequenzGeschwindigkeitsregler und CR06, Bandbreite SperrfilterGeschwindigkeitsregler erneut den Drehzahlregler optimieren (s.o.)Die oben definierte Sprungantwort muß bei höheren Werten fürCR02, Geschwindigkeitsregler-Proportionalverstärkung und/ oderkleineren Werten für CR03 Geschwindigkeitsregler-Nachstellzeit ähnliches Aussehen haben.
⇒ evtl. weiteren Optimierungsdurchlauf für CR05, SperrfrequenzGeschwindigkeitsregler und CR06, Bandbreite SperrfilterGeschwindigkeitsregler anhand der Sprungantwort durchführen.
⇒ Die Optimierung des Regelkreises mittels eines Sperrfilters führt nichtimmer zu einer ausreichenden Verbesserung der Regelgüte. Dies istder Fall, wenn z.B. der geschlossene Regelkreis keine ausgeprägtenResonanzfrequenzen besitzt. Durch Aktivierung eines zweitenGlättungsfilters (mit PT1-Charakteristik) kann ggf. trotzdem diegewünschte Verbesserung der Regelgüte erzielt werden.
⇒ Hierzu wird der Parameter CR06, Bandbreite SperrfilterGeschwindigkeitsregler auf "-1" gesetzt. Der Sperrfilter wie auch derzugehörige Parameter CR05, SperrfrequenzGeschwindigkeitsregler werden deaktiviert. Es wird anstelle desSperrfilters ein Glättungsfilter im Regelkreis aktiviert. Dieser besitzt diegleiche Glättungszeitkonstante (Tgl) wie das Glättungsfilter CR04,Glättungszeitkonstante. Zusammen mit dem Glättungsfilter amGeschwindigkeitsreglereingang erhält man ein Filter mit PT2-Charakteristik. Frequenzen größer der Grenzfrequenz (fg = 1/2πTgl)werden wesentlich stärker unterdrückt und können den Regelkreisnicht mehr zum Schwingen anregen.Die Parameterierung des Filters erfolgt über den ParameterCR04, Glättungszeitkonstante.
0,1 10
-40
0
100
-20
1
0,1
0,01
f
Sv5053f1.fh7
fg
A
dB
Abb. 7-19: Frequenzgang eines PT1 und PT2-Filter
Hinweis: Die Einstellung erfolgt wie unter Kapitel: "Bestimmung derkritischen Proportionalverstärkung und ParameterCR04,Glättungszeitkonstante" beschrieben.
Sperrfilter bzw.Geschwindigkeitsregler
optimieren
Filterung mittels zweifachemGlättungsfilter
7-30 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
GeschwindigkeitsregelkreisüberwachungErkennt die Geschwindigkeitsregelkreisüberwachung einen Fehler imGeschwindigkeitsregelkreis, wird der Fehler
• F878 Fehler im Drehzahlregelkreis
eingetragen.
Ursachen für das Auslösen der ÜberwachungDie Geschwindigkeitsregelkreisüberwachung ist dafür ausgelegt beiFehler, die zu einem falschen Drehsinn des Motormomentes führen,auszulösen. Hierbei bestehen prinzipiell folgende Möglichkeiten:
• Verpolung beim Motoranschluß
• falscher Kommutierungswinkel
• Störungen im Geschwindigkeitsgeber
Hinweis: Damit ist ein Durchgehen des Motors der sogenannte"Runaway-Effekt" verhindert.
Kriterien für das Auslösen der ÜberwachungDamit es zum Auslösen der Geschwindigkeitsregelkreisüberwachungkommt müssen folgende Kriterien erfüllt sein:
• der Stromsollwert wird auf Wirksamer Spitzenstrom begrenzt.
• der Motor beschleunigt in die falsche Richtung
• der Geschwindigkeitsistwert > 0,0125*nMax ist
Einstellung des LagereglersStrom- und Geschwindigkeitsregler müssen korrekt eingestellt sein.
Zur Einstellung des Lagereglers dient der Parameter
• CR07, Lageregler Kv-Faktor
Dieser ist durch einmaliges Durchführen der Funktion Urladeneinzustellen oder durch nachfolgend beschriebenes Verfahren zuermitteln.
Vorbereitungen zur Einstellung des LageregelkreisesUm die Einstellung des Lagereglers durchführen zu können, sind eineReihe von Vorbereitungen zu treffen:
• Die Maschinenmechanik muß in ihrer endgültigen Ausführungaufgebaut sein, um Originalverhältnisse bei derParameterbestimmung zu haben.
• Das Antriebsregelgerät muß vorschriftsgemäß angeschlossen sein.
• Funktion der Sicherheitsendschalter muß überprüft sein (fallsvorhanden)
• Antrieb in einer Betriebsart betreiben, bei der der Lageregelkreis imAntrieb geschlossen wird (Lageregelung).
• Der unterlagerte Drehzahlregler muß vorschriftsmäßig eingestellt sein.Als Startwert für den Kv-Faktor sollte ein relativ niedriger Wert gewähltwerden. (Kv = 1)
• Bei der Ermittlung der Lagereglerparameter darf keineKompensationsfunktion aktiv sein.
Voraussetzung:
ECODRIVE03 ELC-01VRS Funktionen 7-31
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Bestimmung der kritischen Lageregler-Verstärkung• Achse mit kleiner Geschwindigkeit, z.B. über Tipp-Funktion der
angeschlossenen NC-Steuerung verfahren (Rotative Motore:10...20Upm; Linear-Motore: 1...2 m/min).
• Kv-Faktor solange erhöhen, bis Instabilität auftritt.
• Kv-Faktor solange reduzieren, bis die Dauerschwingung selbstständigabklingt.
Der so ermittelte Kv-Faktor ist die "kritische Lageregelkreis-Verstärkung".
Festlegung der Lageregler-EinstellungIn den meisten Anwendungsfällen ist eine Lageregler-Einstellung imBereich von 50 ... 80% der kritischen Lageregelkreis-Verstärkung sinnvoll.Das heißt:
CR07, Lageregler Kv-Faktor = 0,5 ... 0,8 x Kvkrit
LageregelkreisüberwachungUm Fehlfunktionen innerhalb des Lageregelkreises diagnostizieren zukönnen, gibt es die Lageregelkreisüberwachung.
Ursachen für das Auslösen der Lageregelkreisüberwachung können sein:
• Überschreitung des Drehmoment- bzw. Beschleunigungsvermögensdes Antriebs
• Blockieren der Achsmechanik
• Störungen im Lagegeber
Zur Einstellung und Diagnose der Überwachungsfunktion existieren diebeider Parameter:
• A115, Überwachungsfenster
Erkennt die Lageregelkreisüberwachung einen Fehler im Lageregelkreis,wird der Fehler
• F228 Exzessive Regelabweichung
generiert.
Prinzipielle Wirkungsweise derLageregelkreisüberwachungZur Überwachung des Lageregelkreises wird während desgeschlossenen Lageregelkreises im Antrieb ein Modellageistwertmitgeführt, der nur von dem vorgebenen Lagesollwertprofil, sowie deneingestellten Regelkreis-Parametern abhängt. Dieser Modellageistwertwird dauernd mit dem tatsächlichen, als Istwert in die Regelungeingehenden Lageistwert verglichen.
Ist die Abweichung für 8 ms größer als A115, Überwachungsfenster,wird der Fehler F228 Exzessive Regelabweichung generiert.
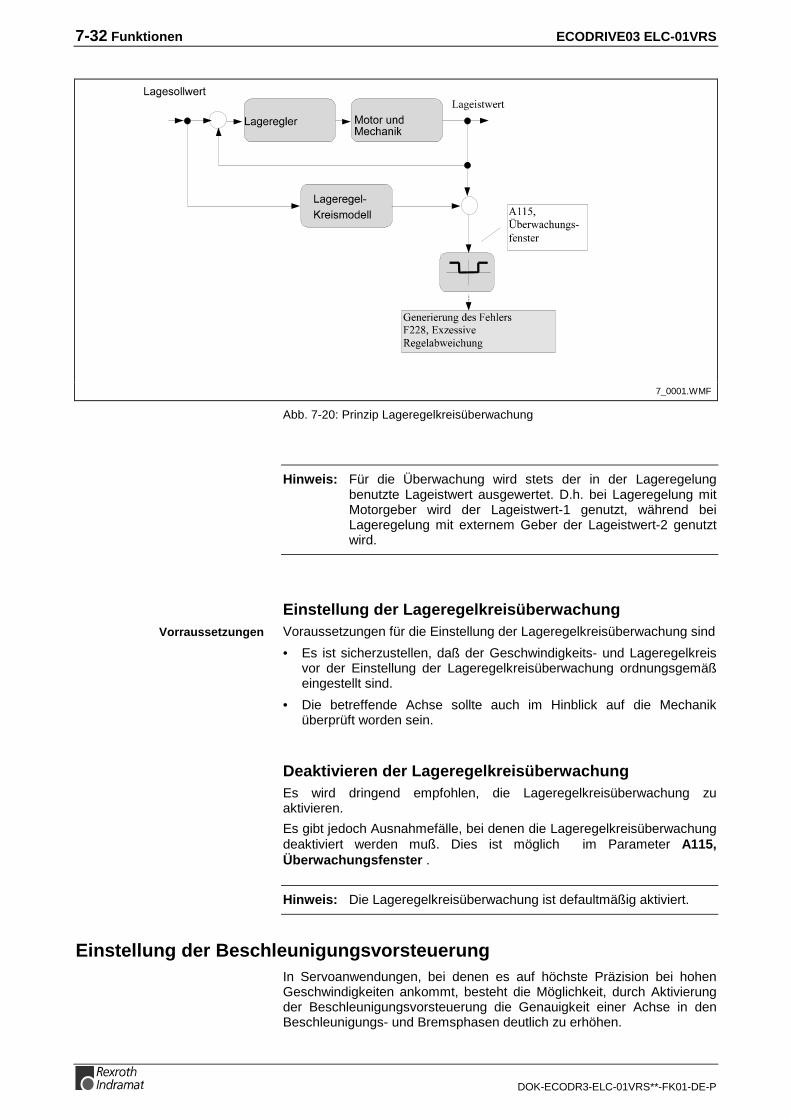
7-32 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
7_0001.WMF
Abb. 7-20: Prinzip Lageregelkreisüberwachung
Hinweis: Für die Überwachung wird stets der in der Lageregelungbenutzte Lageistwert ausgewertet. D.h. bei Lageregelung mitMotorgeber wird der Lageistwert-1 genutzt, während beiLageregelung mit externem Geber der Lageistwert-2 genutztwird.
Einstellung der LageregelkreisüberwachungVoraussetzungen für die Einstellung der Lageregelkreisüberwachung sind
• Es ist sicherzustellen, daß der Geschwindigkeits- und Lageregelkreisvor der Einstellung der Lageregelkreisüberwachung ordnungsgemäßeingestellt sind.
• Die betreffende Achse sollte auch im Hinblick auf die Mechaniküberprüft worden sein.
Deaktivieren der LageregelkreisüberwachungEs wird dringend empfohlen, die Lageregelkreisüberwachung zuaktivieren.
Es gibt jedoch Ausnahmefälle, bei denen die Lageregelkreisüberwachungdeaktiviert werden muß. Dies ist möglich im Parameter A115,Überwachungsfenster .
Hinweis: Die Lageregelkreisüberwachung ist defaultmäßig aktiviert.
Einstellung der BeschleunigungsvorsteuerungIn Servoanwendungen, bei denen es auf höchste Präzision bei hohenGeschwindigkeiten ankommt, besteht die Möglichkeit, durch Aktivierungder Beschleunigungsvorsteuerung die Genauigkeit einer Achse in denBeschleunigungs- und Bremsphasen deutlich zu erhöhen.
Vorraussetzungen
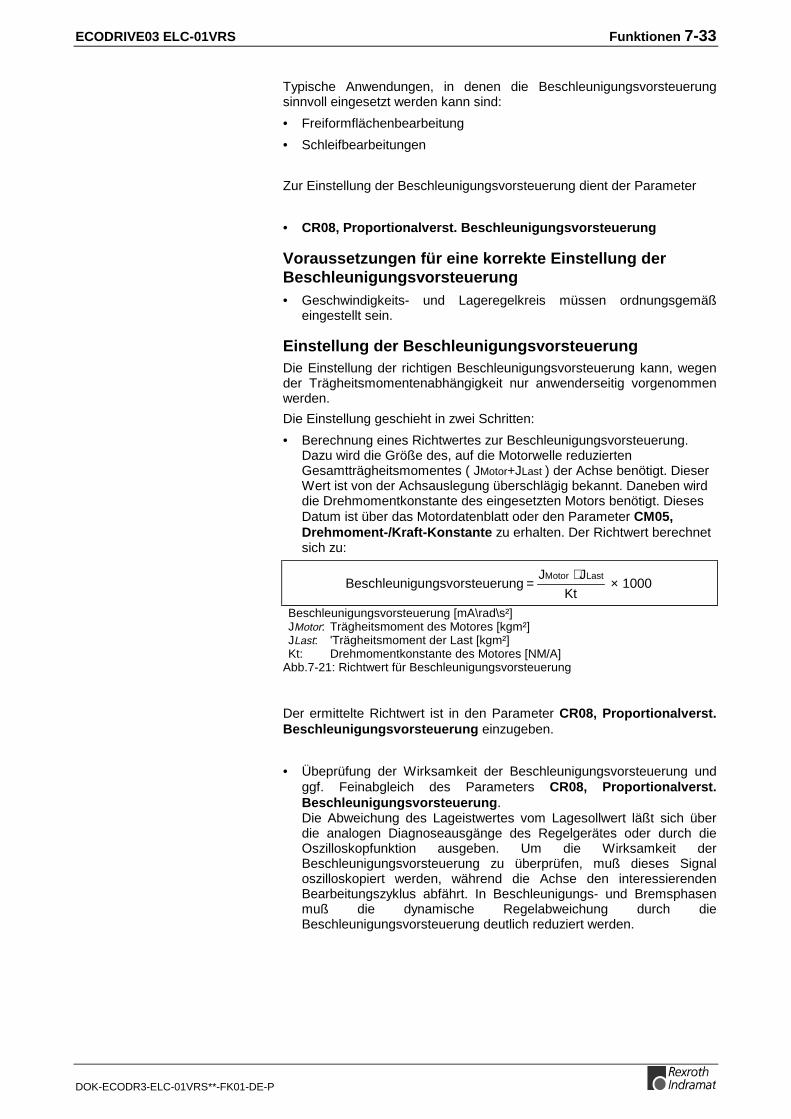
ECODRIVE03 ELC-01VRS Funktionen 7-33
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Typische Anwendungen, in denen die Beschleunigungsvorsteuerungsinnvoll eingesetzt werden kann sind:
• Freiformflächenbearbeitung
• Schleifbearbeitungen
Zur Einstellung der Beschleunigungsvorsteuerung dient der Parameter
• CR08, Proportionalverst. Beschleunigungsvorsteuerung
Voraussetzungen für eine korrekte Einstellung derBeschleunigungsvorsteuerung• Geschwindigkeits- und Lageregelkreis müssen ordnungsgemäß
eingestellt sein.
Einstellung der BeschleunigungsvorsteuerungDie Einstellung der richtigen Beschleunigungsvorsteuerung kann, wegender Trägheitsmomentenabhängigkeit nur anwenderseitig vorgenommenwerden.
Die Einstellung geschieht in zwei Schritten:
• Berechnung eines Richtwertes zur Beschleunigungsvorsteuerung.Dazu wird die Größe des, auf die Motorwelle reduziertenGesamtträgheitsmomentes ( JMotor+JLast ) der Achse benötigt. DieserWert ist von der Achsauslegung überschlägig bekannt. Daneben wirddie Drehmomentkonstante des eingesetzten Motors benötigt. DiesesDatum ist über das Motordatenblatt oder den Parameter CM05,Drehmoment-/Kraft-Konstante zu erhalten. Der Richtwert berechnetsich zu:
BeschleunigungsvorsteuerungJ J
KtLast
=+
×Motor
1000
Beschleunigungsvorsteuerung [mA\rad\s²]JMotor: Trägheitsmoment des Motores [kgm²]JLast: 'Trägheitsmoment der Last [kgm²]Kt: Drehmomentkonstante des Motores [NM/A]
Abb.7-21: Richtwert für Beschleunigungsvorsteuerung
Der ermittelte Richtwert ist in den Parameter CR08, Proportionalverst.Beschleunigungsvorsteuerung einzugeben.
• Übeprüfung der Wirksamkeit der Beschleunigungsvorsteuerung undggf. Feinabgleich des Parameters CR08, Proportionalverst.Beschleunigungsvorsteuerung.Die Abweichung des Lageistwertes vom Lagesollwert läßt sich überdie analogen Diagnoseausgänge des Regelgerätes oder durch dieOszilloskopfunktion ausgeben. Um die Wirksamkeit derBeschleunigungsvorsteuerung zu überprüfen, muß dieses Signaloszilloskopiert werden, während die Achse den interessierendenBearbeitungszyklus abfährt. In Beschleunigungs- und Bremsphasenmuß die dynamische Regelabweichung durch dieBeschleunigungsvorsteuerung deutlich reduziert werden.
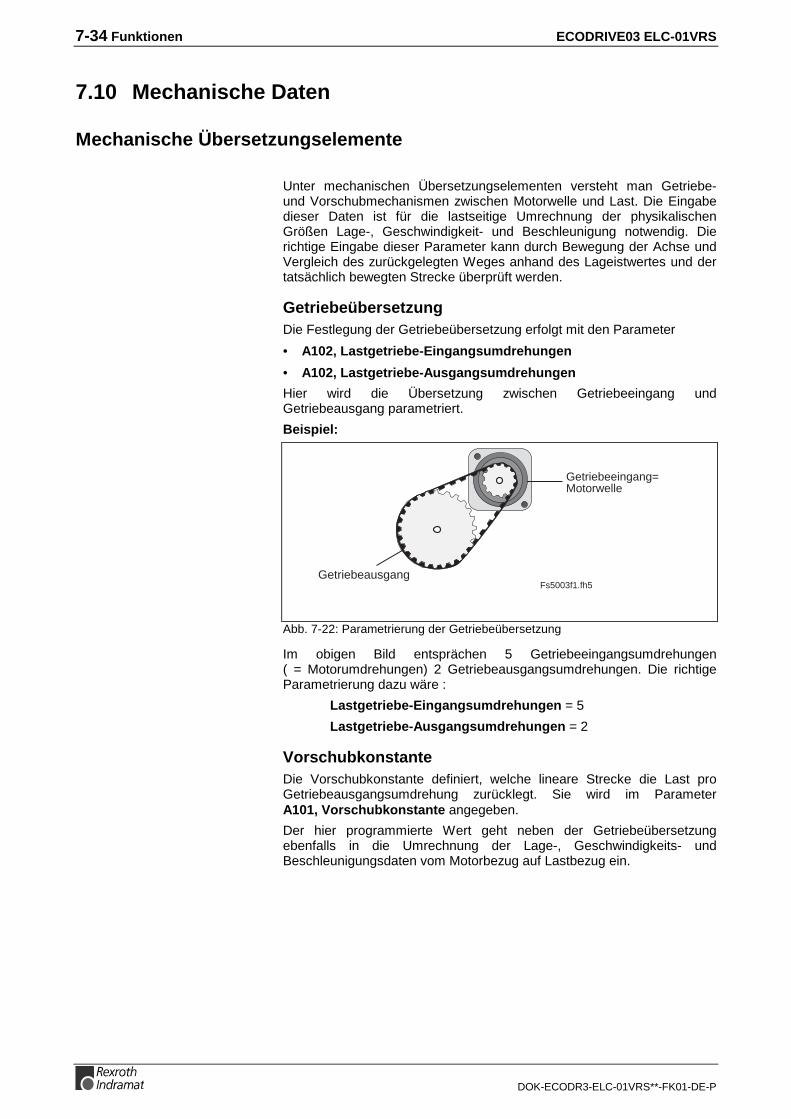
7-34 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
7.10 Mechanische Daten
Mechanische Übersetzungselemente
Unter mechanischen Übersetzungselementen versteht man Getriebe-und Vorschubmechanismen zwischen Motorwelle und Last. Die Eingabedieser Daten ist für die lastseitige Umrechnung der physikalischenGrößen Lage-, Geschwindigkeit- und Beschleunigung notwendig. Dierichtige Eingabe dieser Parameter kann durch Bewegung der Achse undVergleich des zurückgelegten Weges anhand des Lageistwertes und dertatsächlich bewegten Strecke überprüft werden.
GetriebeübersetzungDie Festlegung der Getriebeübersetzung erfolgt mit den Parameter
• A102, Lastgetriebe-Eingangsumdrehungen
• A102, Lastgetriebe-Ausgangsumdrehungen
Hier wird die Übersetzung zwischen Getriebeeingang undGetriebeausgang parametriert.
Beispiel:
Fs5003f1.fh5
Getriebeeingang=Motorwelle
Getriebeausgang
Abb. 7-22: Parametrierung der Getriebeübersetzung
Im obigen Bild entsprächen 5 Getriebeeingangsumdrehungen( = Motorumdrehungen) 2 Getriebeausgangsumdrehungen. Die richtigeParametrierung dazu wäre :
Lastgetriebe-Eingangsumdrehungen = 5
Lastgetriebe-Ausgangsumdrehungen = 2
VorschubkonstanteDie Vorschubkonstante definiert, welche lineare Strecke die Last proGetriebeausgangsumdrehung zurücklegt. Sie wird im ParameterA101, Vorschubkonstante angegeben.
Der hier programmierte Wert geht neben der Getriebeübersetzungebenfalls in die Umrechnung der Lage-, Geschwindigkeits- undBeschleunigungsdaten vom Motorbezug auf Lastbezug ein.
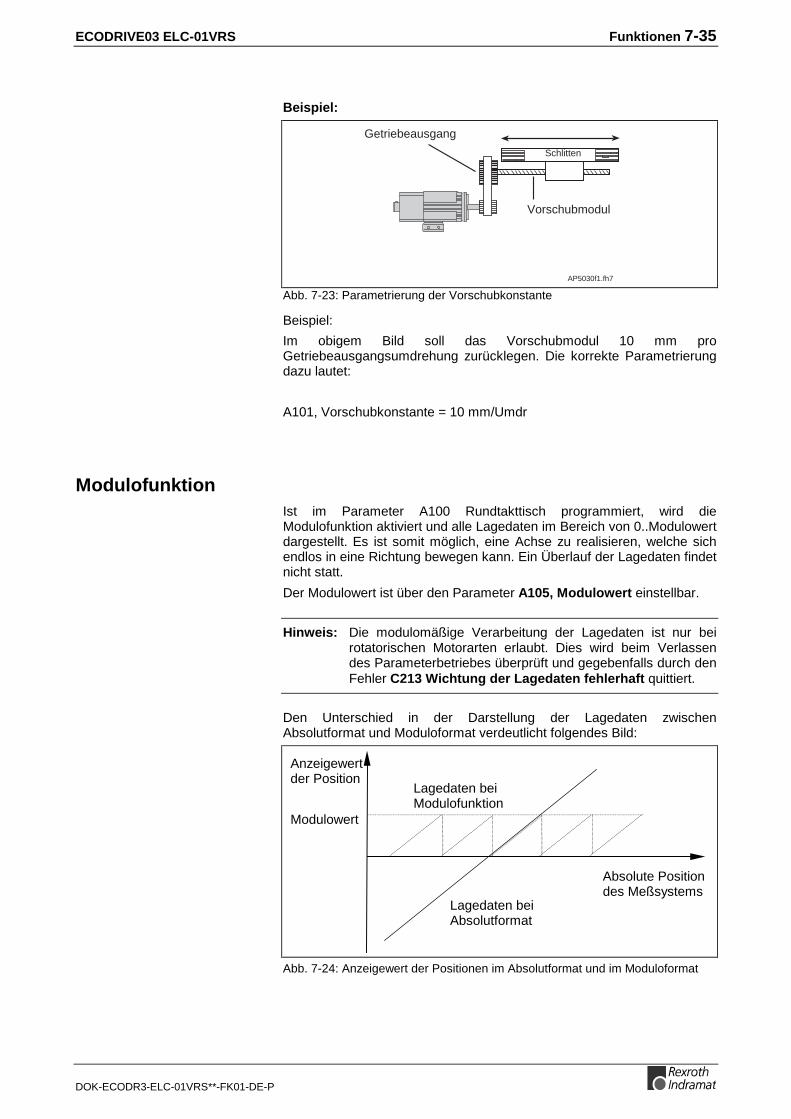
ECODRIVE03 ELC-01VRS Funktionen 7-35
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Beispiel:
AP5030f1.fh7
Getriebeausgang
Vorschubmodul
Schlitten
Abb. 7-23: Parametrierung der Vorschubkonstante
Beispiel:
Im obigem Bild soll das Vorschubmodul 10 mm proGetriebeausgangsumdrehung zurücklegen. Die korrekte Parametrierungdazu lautet:
A101, Vorschubkonstante = 10 mm/Umdr
ModulofunktionIst im Parameter A100 Rundtakttisch programmiert, wird dieModulofunktion aktiviert und alle Lagedaten im Bereich von 0..Modulowertdargestellt. Es ist somit möglich, eine Achse zu realisieren, welche sichendlos in eine Richtung bewegen kann. Ein Überlauf der Lagedaten findetnicht statt.
Der Modulowert ist über den Parameter A105, Modulowert einstellbar.
Hinweis: Die modulomäßige Verarbeitung der Lagedaten ist nur beirotatorischen Motorarten erlaubt. Dies wird beim Verlassendes Parameterbetriebes überprüft und gegebenfalls durch denFehler C213 Wichtung der Lagedaten fehlerhaft quittiert.
Den Unterschied in der Darstellung der Lagedaten zwischenAbsolutformat und Moduloformat verdeutlicht folgendes Bild:
Anzeigewertder Position
Modulowert
Lagedaten beiModulofunktion
Lagedaten beiAbsolutformat
Absolute Positiondes Meßsystems
Abb. 7-24: Anzeigewert der Positionen im Absolutformat und im Moduloformat
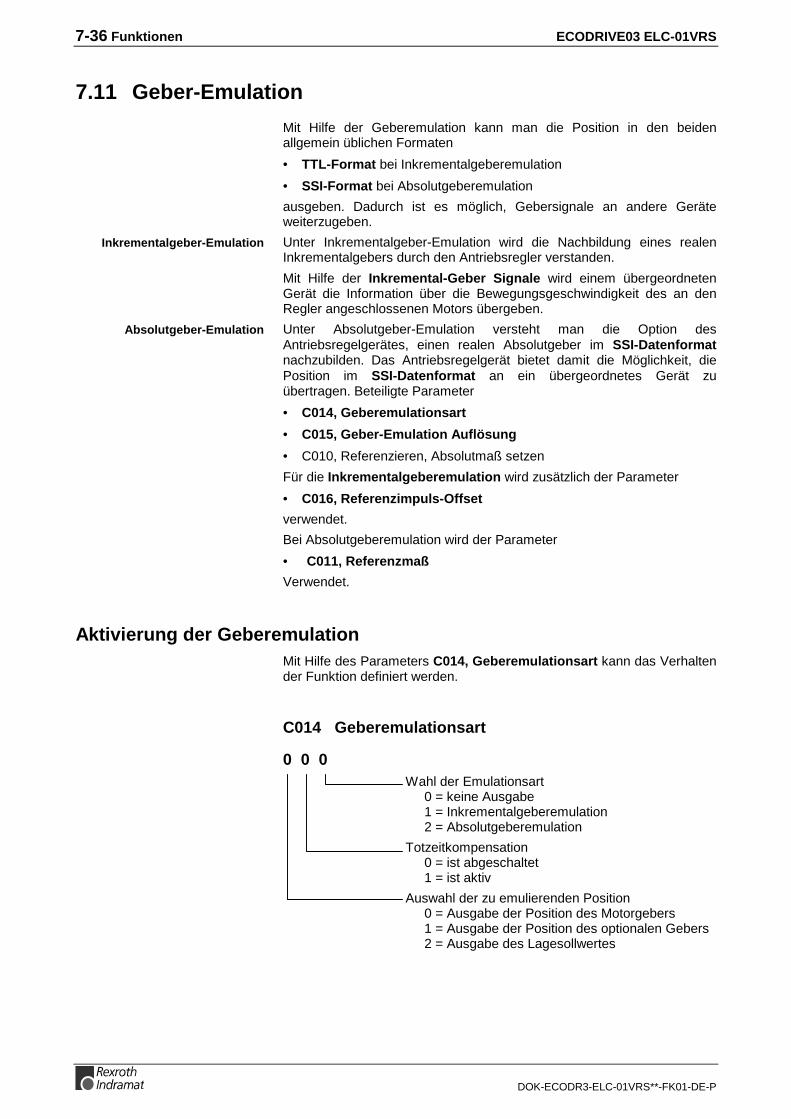
7-36 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
7.11 Geber-Emulation
Mit Hilfe der Geberemulation kann man die Position in den beidenallgemein üblichen Formaten
• TTL-Format bei Inkrementalgeberemulation
• SSI-Format bei Absolutgeberemulation
ausgeben. Dadurch ist es möglich, Gebersignale an andere Geräteweiterzugeben.
Unter Inkrementalgeber-Emulation wird die Nachbildung eines realenInkrementalgebers durch den Antriebsregler verstanden.
Mit Hilfe der Inkremental-Geber Signale wird einem übergeordnetenGerät die Information über die Bewegungsgeschwindigkeit des an denRegler angeschlossenen Motors übergeben.
Unter Absolutgeber-Emulation versteht man die Option desAntriebsregelgerätes, einen realen Absolutgeber im SSI-Datenformatnachzubilden. Das Antriebsregelgerät bietet damit die Möglichkeit, diePosition im SSI-Datenformat an ein übergeordnetes Gerät zuübertragen. Beteiligte Parameter
• C014, Geberemulationsart
• C015, Geber-Emulation Auflösung
• C010, Referenzieren, Absolutmaß setzen
Für die Inkrementalgeberemulation wird zusätzlich der Parameter
• C016, Referenzimpuls-Offset
verwendet.
Bei Absolutgeberemulation wird der Parameter
• C011, Referenzmaß
Verwendet.
Aktivierung der GeberemulationMit Hilfe des Parameters C014, Geberemulationsart kann das Verhaltender Funktion definiert werden.
C014 Geberemulationsart
0 0 0Wahl der Emulationsart
0 = keine Ausgabe1 = Inkrementalgeberemulation2 = Absolutgeberemulation
Totzeitkompensation0 = ist abgeschaltet1 = ist aktiv
Auswahl der zu emulierenden Position0 = Ausgabe der Position des Motorgebers1 = Ausgabe der Position des optionalen Gebers2 = Ausgabe des Lagesollwertes
Inkrementalgeber-Emulation
Absolutgeber-Emulation
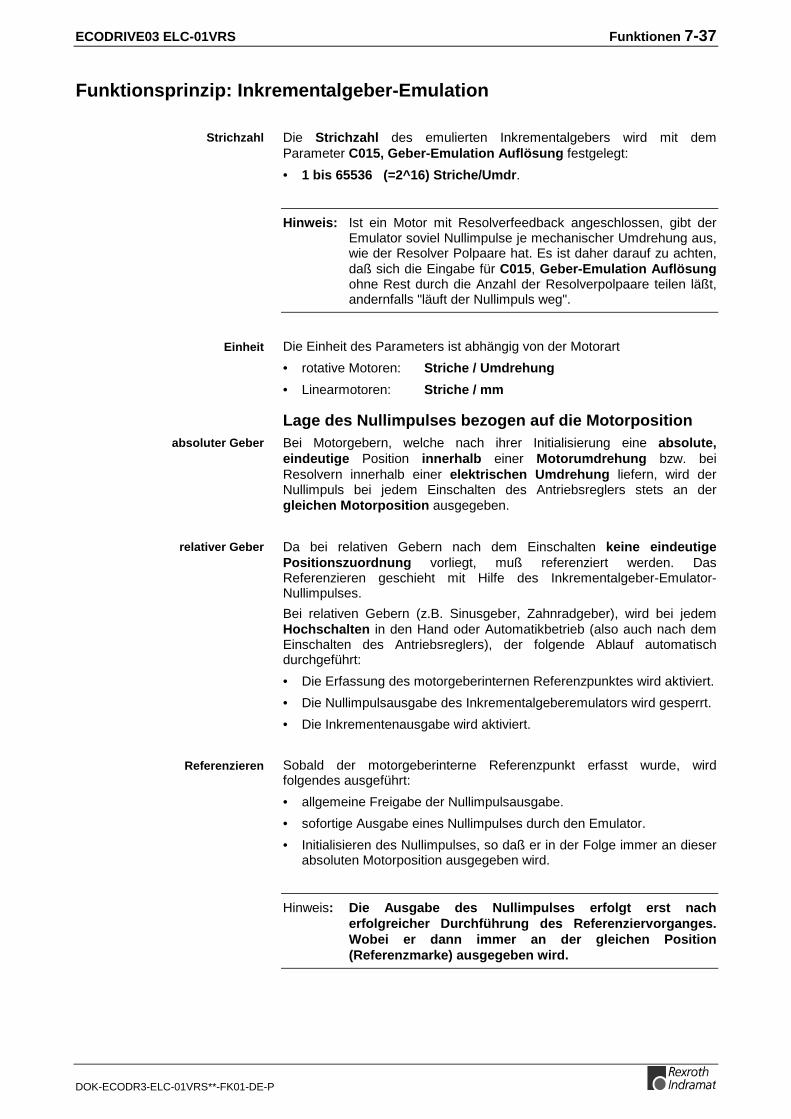
ECODRIVE03 ELC-01VRS Funktionen 7-37
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Funktionsprinzip: Inkrementalgeber-Emulation
Die Strichzahl des emulierten Inkrementalgebers wird mit demParameter C015, Geber-Emulation Auflösung festgelegt:
• 1 bis 65536 (=2^16) Striche/Umdr .
Hinweis: Ist ein Motor mit Resolverfeedback angeschlossen, gibt derEmulator soviel Nullimpulse je mechanischer Umdrehung aus,wie der Resolver Polpaare hat. Es ist daher darauf zu achten,daß sich die Eingabe für C015, Geber-Emulation Auflösungohne Rest durch die Anzahl der Resolverpolpaare teilen läßt,andernfalls "läuft der Nullimpuls weg".
Die Einheit des Parameters ist abhängig von der Motorart
• rotative Motoren: Striche / Umdrehung
• Linearmotoren: Striche / mm
Lage des Nullimpulses bezogen auf die MotorpositionBei Motorgebern, welche nach ihrer Initialisierung eine absolute,eindeutige Position innerhalb einer Motorumdrehung bzw. beiResolvern innerhalb einer elektrischen Umdrehung liefern, wird derNullimpuls bei jedem Einschalten des Antriebsreglers stets an dergleichen Motorposition ausgegeben.
Da bei relativen Gebern nach dem Einschalten keine eindeutigePositionszuordnung vorliegt, muß referenziert werden. DasReferenzieren geschieht mit Hilfe des Inkrementalgeber-Emulator-Nullimpulses.
Bei relativen Gebern (z.B. Sinusgeber, Zahnradgeber), wird bei jedemHochschalten in den Hand oder Automatikbetrieb (also auch nach demEinschalten des Antriebsreglers), der folgende Ablauf automatischdurchgeführt:
• Die Erfassung des motorgeberinternen Referenzpunktes wird aktiviert.
• Die Nullimpulsausgabe des Inkrementalgeberemulators wird gesperrt.
• Die Inkrementenausgabe wird aktiviert.
Sobald der motorgeberinterne Referenzpunkt erfasst wurde, wirdfolgendes ausgeführt:
• allgemeine Freigabe der Nullimpulsausgabe.
• sofortige Ausgabe eines Nullimpulses durch den Emulator.
• Initialisieren des Nullimpulses, so daß er in der Folge immer an dieserabsoluten Motorposition ausgegeben wird.
Hinweis: Die Ausgabe des Nullimpulses erfolgt erst nacherfolgreicher Durchführung des Referenziervorganges.Wobei er dann immer an der gleichen Position(Referenzmarke) ausgegeben wird.
Strichzahl
Einheit
absoluter Geber
relativer Geber
Referenzieren
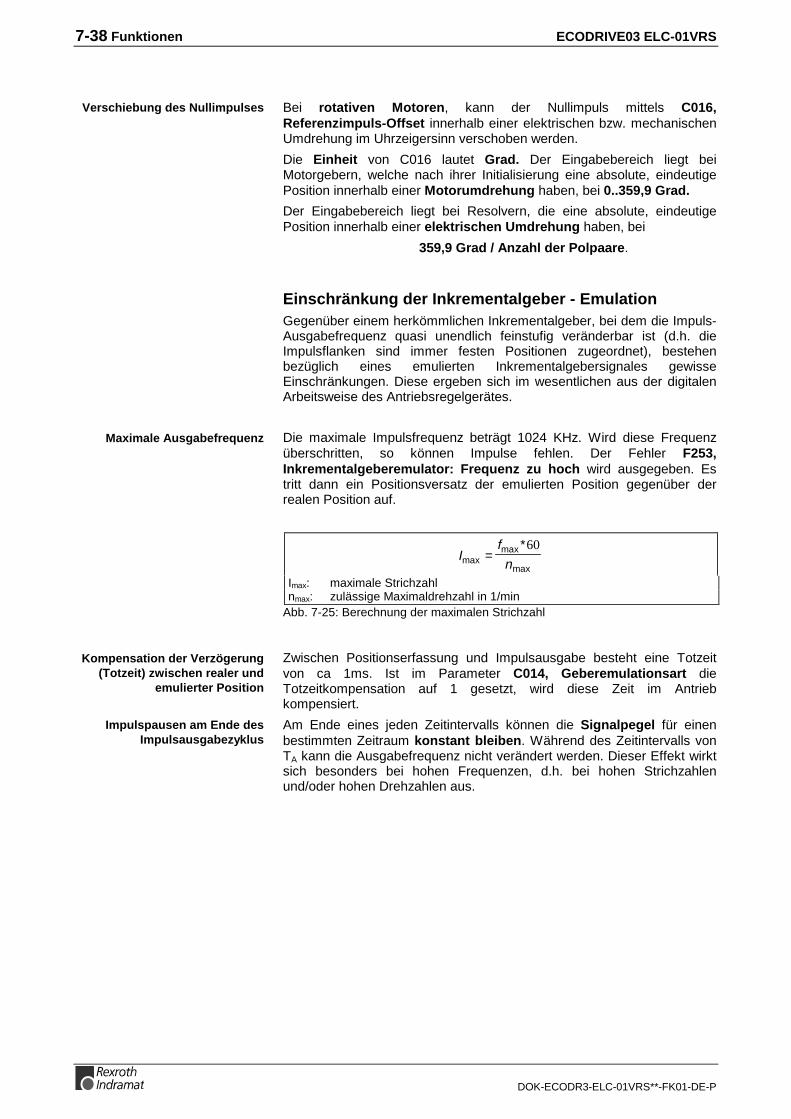
7-38 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Bei rotativen Motoren, kann der Nullimpuls mittels C016,Referenzimpuls-Offset innerhalb einer elektrischen bzw. mechanischenUmdrehung im Uhrzeigersinn verschoben werden.
Die Einheit von C016 lautet Grad. Der Eingabebereich liegt beiMotorgebern, welche nach ihrer Initialisierung eine absolute, eindeutigePosition innerhalb einer Motorumdrehung haben, bei 0..359,9 Grad.
Der Eingabebereich liegt bei Resolvern, die eine absolute, eindeutigePosition innerhalb einer elektrischen Umdrehung haben, bei
359,9 Grad / Anzahl der Polpaare.
Einschränkung der Inkrementalgeber - EmulationGegenüber einem herkömmlichen Inkrementalgeber, bei dem die Impuls-Ausgabefrequenz quasi unendlich feinstufig veränderbar ist (d.h. dieImpulsflanken sind immer festen Positionen zugeordnet), bestehenbezüglich eines emulierten Inkrementalgebersignales gewisseEinschränkungen. Diese ergeben sich im wesentlichen aus der digitalenArbeitsweise des Antriebsregelgerätes.
Die maximale Impulsfrequenz beträgt 1024 KHz. Wird diese Frequenzüberschritten, so können Impulse fehlen. Der Fehler F253,Inkrementalgeberemulator: Frequenz zu hoch wird ausgegeben. Estritt dann ein Positionsversatz der emulierten Position gegenüber derrealen Position auf.
If
nmaxmax
max=
∗60
Imax: maximale Strichzahlnmax: zulässige Maximaldrehzahl in 1/min
Abb. 7-25: Berechnung der maximalen Strichzahl
Zwischen Positionserfassung und Impulsausgabe besteht eine Totzeitvon ca 1ms. Ist im Parameter C014, Geberemulationsart dieTotzeitkompensation auf 1 gesetzt, wird diese Zeit im Antriebkompensiert.
Am Ende eines jeden Zeitintervalls können die Signalpegel für einenbestimmten Zeitraum konstant bleiben. Während des Zeitintervalls vonTA kann die Ausgabefrequenz nicht verändert werden. Dieser Effekt wirktsich besonders bei hohen Frequenzen, d.h. bei hohen Strichzahlenund/oder hohen Drehzahlen aus.
Verschiebung des Nullimpulses
Maximale Ausgabefrequenz
Kompensation der Verzögerung(Totzeit) zwischen realer und
emulierter Position
Impulspausen am Ende desImpulsausgabezyklus
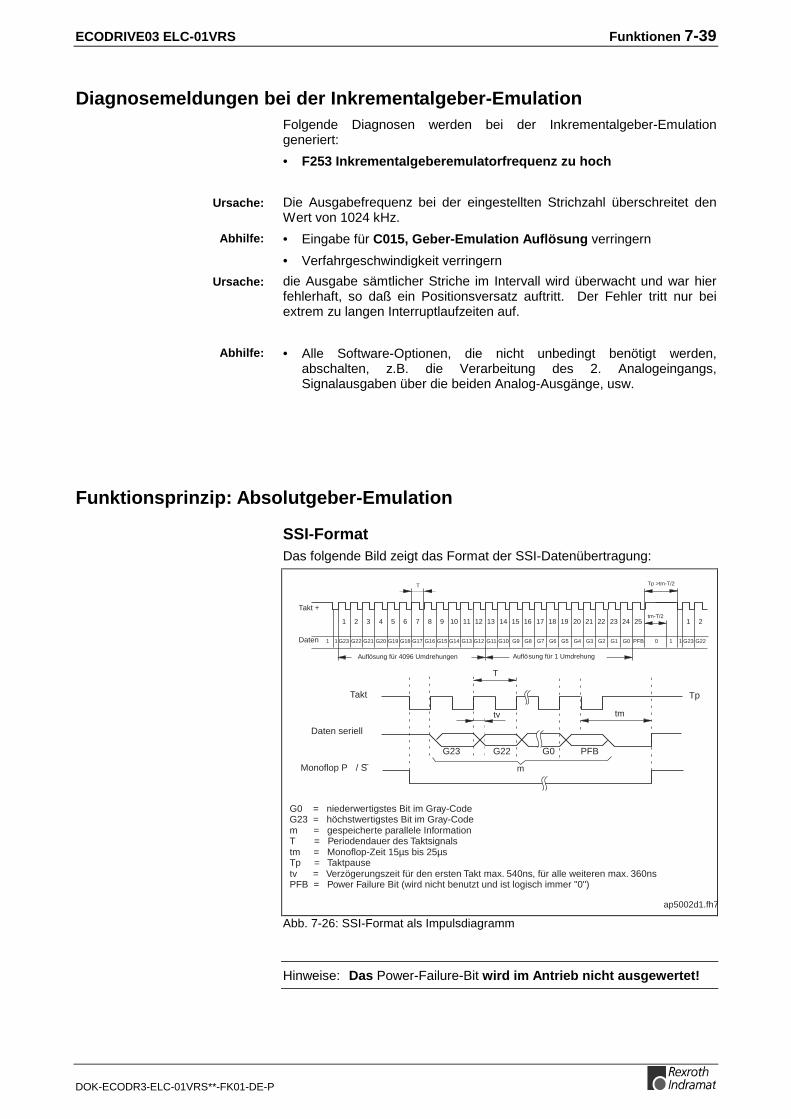
ECODRIVE03 ELC-01VRS Funktionen 7-39
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Diagnosemeldungen bei der Inkrementalgeber-EmulationFolgende Diagnosen werden bei der Inkrementalgeber-Emulationgeneriert:
• F253 Inkrementalgeberemulatorfrequenz zu hoch
Die Ausgabefrequenz bei der eingestellten Strichzahl überschreitet denWert von 1024 kHz.
• Eingabe für C015, Geber-Emulation Auflösung verringern
• Verfahrgeschwindigkeit verringern
die Ausgabe sämtlicher Striche im Intervall wird überwacht und war hierfehlerhaft, so daß ein Positionsversatz auftritt. Der Fehler tritt nur beiextrem zu langen Interruptlaufzeiten auf.
• Alle Software-Optionen, die nicht unbedingt benötigt werden,abschalten, z.B. die Verarbeitung des 2. Analogeingangs,Signalausgaben über die beiden Analog-Ausgänge, usw.
Funktionsprinzip: Absolutgeber-Emulation
SSI-FormatDas folgende Bild zeigt das Format der SSI-Datenübertragung:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
G23 G22 G21 G20 G19 G18 G17 G16 G15 G14 G13 G12 G11 G10 G9 G8 G7 G6 G5 G4 G3 G2 G1 G0
25
PFB 0 111
Takt +tm-T/2
T
Daten
1 2
G23 G221
Takt
Daten seriell
Monoflop P / S
G23 G22 G0 PFB
tm
T
m
tv
Tp
ap5002d1.fh7
G0 = niederwertigstes Bit im Gray-CodeG23 = höchstwertigstes Bit im Gray-Codem = gespeicherte parallele InformationT = Periodendauer des Taktsignalstm = Monoflop-Zeit 15µs bis 25µsTp = Taktpausetv = Verzögerungszeit für den ersten Takt max. 540ns, für alle weiteren max. 360nsPFB = Power Failure Bit (wird nicht benutzt und ist logisch immer "0")
Tp >tm-T/2
Auflösung für 1 UmdrehungAuflösung für 4096 Umdrehungen
Abb. 7-26: SSI-Format als Impulsdiagramm
Hinweise: Das Power-Failure-Bit wird im Antrieb nicht ausgewertet!
Ursache:
Abhilfe:
Ursache:
Abhilfe:
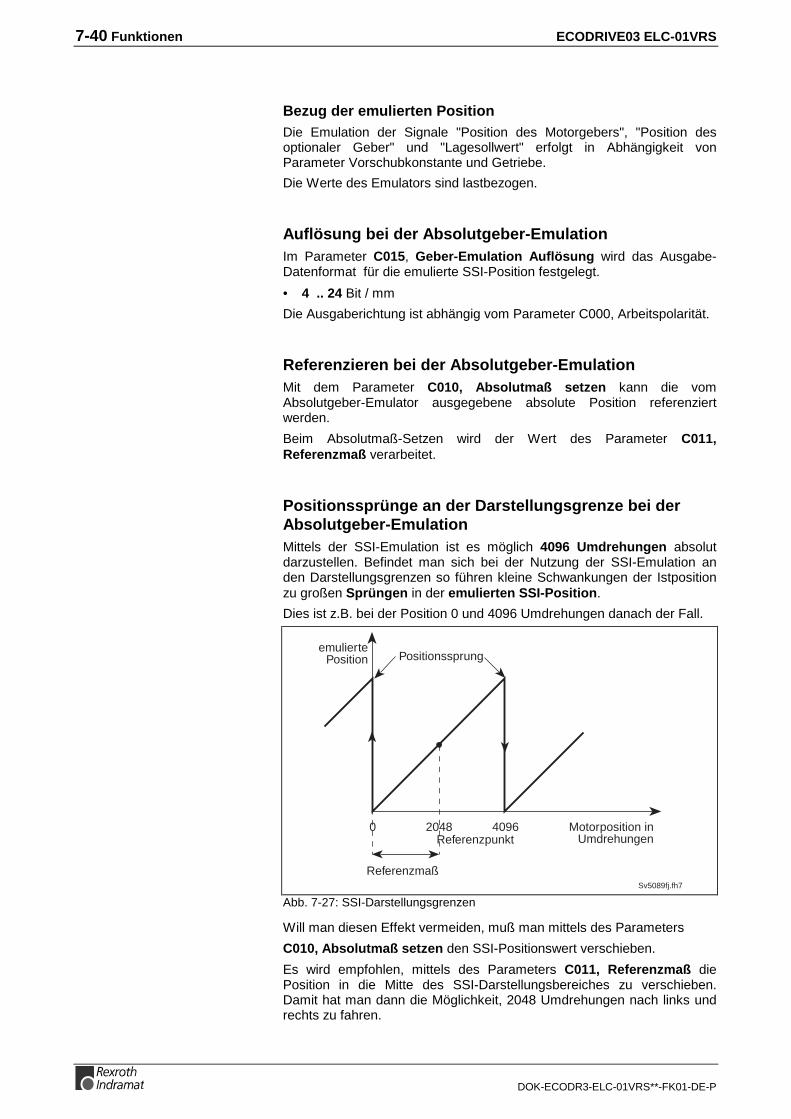
7-40 Funktionen ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Bezug der emulierten PositionDie Emulation der Signale "Position des Motorgebers", "Position desoptionaler Geber" und "Lagesollwert" erfolgt in Abhängigkeit vonParameter Vorschubkonstante und Getriebe.
Die Werte des Emulators sind lastbezogen.
Auflösung bei der Absolutgeber-EmulationIm Parameter C015, Geber-Emulation Auflösung wird das Ausgabe-Datenformat für die emulierte SSI-Position festgelegt.
• 4 .. 24 Bit / mm
Die Ausgaberichtung ist abhängig vom Parameter C000, Arbeitspolarität.
Referenzieren bei der Absolutgeber-EmulationMit dem Parameter C010, Absolutmaß setzen kann die vomAbsolutgeber-Emulator ausgegebene absolute Position referenziertwerden.
Beim Absolutmaß-Setzen wird der Wert des Parameter C011,Referenzmaß verarbeitet.
Positionssprünge an der Darstellungsgrenze bei derAbsolutgeber-EmulationMittels der SSI-Emulation ist es möglich 4096 Umdrehungen absolutdarzustellen. Befindet man sich bei der Nutzung der SSI-Emulation anden Darstellungsgrenzen so führen kleine Schwankungen der Istpositionzu großen Sprüngen in der emulierten SSI-Position .
Dies ist z.B. bei der Position 0 und 4096 Umdrehungen danach der Fall.
Sv5089fj.fh7
Motorposition inUmdrehungen
emuliertePosition
2048 40960
Positionssprung
Referenzmaß
Referenzpunkt
Abb. 7-27: SSI-Darstellungsgrenzen
Will man diesen Effekt vermeiden, muß man mittels des Parameters
C010, Absolutmaß setzen den SSI-Positionswert verschieben.
Es wird empfohlen, mittels des Parameters C011, Referenzmaß diePosition in die Mitte des SSI-Darstellungsbereiches zu verschieben.Damit hat man dann die Möglichkeit, 2048 Umdrehungen nach links undrechts zu fahren.
ECODRIVE03 ELC-01VRS Parameter 8-1
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
8 Parameter
8 PARAMETER ......................................................................................... 8-1
8.1 GRUNDLEGENDES............................................................................... 8-38.2 ANLAGENPARAMETER........................................................................ 8-5
A100 Anwendungsart .............................................................................. 8-5A101 Vorschubkonstante......................................................................... 8-6A102 Getriebe ......................................................................................... 8-6A103 Lagegrenzwert negativ................................................................... 8-7A104 Lagegrenzwert positiv.................................................................... 8-7A105 Modulowert.................................................................................... 8-8A106 Maximalgeschwindigkeit ............................................................... 8-8A107 Handgeschwindigkeit..................................................................... 8-9A108 Beschleunigung bipolar ................................................................. 8-9A109 Beschleunigung / Verzögerung ...................................................... 8-9A110 Ruckzeitkonstante bipolar............................................................ 8-10A111 Schaltschwelle.............................................................................. 8-10A112 reserviert Stillstandfenster........................................................... 8-11A113 Positionierfenster......................................................................... 8-11A114 Vorsignal ..................................................................................... 8-12A115 Überwachung............................................................................... 8-12A116 Vorschubüberwachung ................................................................ 8-13A117 Überwachung Geberdifferenz...................................................... 8-14A118 Absolutgeber Überwachungsfenster ............................................ 8-14A119 Bestmögliche Stillsetzung ............................................................ 8-15
8.3 FUNKTIONSPARAMETER ................................................................... 8-16AA00 Task 2 & 3 ................................................................................... 8-16AA01 Hand-Vektor ................................................................................ 8-16AA02 Interruptvektor ............................................................................ 8-17AA03 reserviert Restart........................................................................ 8-17AA04 Override ...................................................................................... 8-17AA05 reserviert Elektr. Lüften............................................................ 8-18AA06 reserviert Motorbremse............................................................. 8-18AA07 Meßradbetrieb............................................................................. 8-18AA08 Verschiedenes.............................................................................. 8-19
8.4 ALLGEMEINE PARAMETER ............................................................... 8-20B000 Anzeige......................................................................................... 8-20B001 Schnittstellenparameter ............................................................... 8-20B002 Schnittstellenparameter ............................................................... 8-20B003 Analog-Ausgang 1, Signalauswahl.............................................. 8-21B004 Analog-Ausgang 1, erweiterte Signalauswahl............................. 8-21B005 Analog-Ausgang 1, Bewertung [1/10V] ...................................... 8-23B006 Analog-Ausgang 2, Signalauswahl.............................................. 8-24B007 Analog-Ausgang 2, erweiterte Signalauswahl............................ 8-24B008 Analog-Ausgang 2, Bewertung [1/10V] ...................................... 8-26B009 Serielle Eingänge und Ausgänge ................................................ 8-27B010 Systemsteuerung ......................................................................... 8-28
8.5 GEBERPARAMETER .......................................................................... 8-29C000 Arbeits-Polarität.......................................................................... 8-29C001 Interface Geber 1 ( Motor ) ......................................................... 8-29C002 Lagegeberart 1 ............................................................................ 8-30C003 Auflösung Lagegeber 1 (Motor) .................................................. 8-30C004 Interface Geber 2......................................................................... 8-31C005 Lagegeberart 2 ............................................................................ 8-32C006 Auflösung Geber 2....................................................................... 8-32C007 Vorschubkonstante 2 ................................................................... 8-33C008 reserviert...................................................................................... 8-33C009 Referenzfahr-Konfiguration......................................................... 8-33C010 Referenzieren............................................................................... 8-34
8-2 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C011 Referenzmaß ................................................................................ 8-34C012 Referenzschalter-Offset................................................................ 8-34C013 Abstandskodierte Referenzmaße.................................................. 8-35C014 Geberemulationsart ..................................................................... 8-35C015 Geber-Emulation Auflösung ........................................................ 8-36C016 Referenzimpuls-Offset.................................................................. 8-36
8.6 REGELPARAMETER........................................................................... 8-37CR00 Stromregler-Proportionalverstärkung 1 ..................................... 8-37CR01 Stromregler-Nachstellzeit 1......................................................... 8-37CR02 Geschwindigkeitsregler-Proportionalverstärkung...................... 8-38CR03 Geschwindigkeitsregler-Nachstellzeit ......................................... 8-39CR04 Drehzahlregler-Glättungszeitkonstante ...................................... 8-40CR05 Sperrfrequenz Geschwindigkeitsregler ....................................... 8-40CR06 Bandbreite Sperrfilter Geschwindigkeitsregler........................... 8-41CR07 Kv-Faktor .................................................................................... 8-41CR08 Verstärkung Beschleunigungsvorsteuerung ................................ 8-42CR09 Schaltfrequenz............................................................................. 8-43CR10 Lageistwert-Glättungszeitkonstante im Meßradbetrieb .............. 8-43
8.7 MOTORPARAMETER ......................................................................... 8-44CM00 Motorart ..................................................................................... 8-44CM01 Drehmoment/Kraft-Grenzwert bipolar....................................... 8-44CM02 Spitzenstrom / Stillstandsstrom Motor........................................ 8-45CM03 Maximalgeschwindigkeit des Motors ......................................... 8-45CM04 Polpaarzahl/Polpaarweite.......................................................... 8-46CM05 Drehmoment-/Kraft-Konstante................................................... 8-46CM06 Rotorträgheitsmoment ................................................................ 8-47CM07 Haltebremsentyp......................................................................... 8-47CM08 Haltebremsenstrom .................................................................... 8-47CM09 Motor-Temperatur...................................................................... 8-48
8.8 ASYNCHRON-MOTORPARAMETER.................................................... 8-49CA00 Magnetisierungsstrom................................................................. 8-49CA01 Vormagnetisierungsfaktor........................................................... 8-49CA02 Schlupffaktor ............................................................................... 8-50CA03 Schlupfanhebung......................................................................... 8-50CA04 Kippstromgrenze ......................................................................... 8-50CA05 Feldregler Prop.verst. ................................................................. 8-51CA06 Feldregler Nachstellzeit .............................................................. 8-51CA07 Motorleerlaufspannung............................................................... 8-51CA08 Motormaximalspannung ............................................................. 8-52
8.9 PARAMETERLISTE ELC .................................................................... 8-53
ECODRIVE03 ELC-01VRS Parameter 8-3
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
8.1 Grundlegendes
In diesem Kapitel werden die Parameter beschrieben. Sie dienen zurFestlegung und zur Anpassung der Anlagenkomponenten und zumaktivieren von festgeschriebenen Funktionsabläufen. Sie können, bis aufdie CR-Parameter, nur im Parameterbetrieb über die seriell Schnittstellegeändert werden. Nach Verlassen des Parameterbetriebes werden dieParameter überwacht und bei fehlerhaften Parametern wird eineDiagnose ausgegeben.
Um eine bessere Übersicht zu haben sind die Parameter in 7 Blöckeaufgeteilt:
Parameterblock Blockkennung Parameternummer
Anlagenparameter A1 00 bis 19
Funktionsparameter AA 00 bis 08
Allgemeine Parameter B0 00 bis 10
Geberparameter C0 00 bis 16
Reglerparameter CR 00 bis 10
Motorparameter CM 00 bis 09
Asynchron-Motorparameter CA 00 bis 08
Abb. 8-1: Parameterblöcke
Reglerparameter CR
Diese Parameter sind über die serielle Schnittstelle auch im Hand oderAutomatikbetrieb änderbar.
Motorparameter CM
Diese Parameter werden bei den Motoren mit Feedbackspeicher beimUrladen gesetzt.
Asynchron-Motorparameter CA
Diese Parameter haben bei den Motoren mit Feedbackspeicher keineBedeutung.
Eingabeeinheiten
Die Eingabeeinheit wird im Parameter A101 Vorschubkonstantefestgelegt. Die Vorschubkonstante ist definiert als das verfahrenetranslatorische Wegmaß bei einer Umdrehung der Getriebe-

8-4 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Abtriebswelle. Die Eingabe kann in einer beliebigen Dimension erfolgenund wird im folgenden als Eingabeeinheit (EGE) bezeichnet.
Wichtig ist, daß alle anderen Maßeingaben sich ebenfalls auf dieseEinheit beziehen.
z.B. EGE [mm]
so wird die Geschwindigkeit in EGE/sec also mm/sec
eingegeben oder dargestellt.
EGE [inch]
so wird die Geschwindigkeit in EGE/sec also inch/sec eingegeben oder dargestellt.
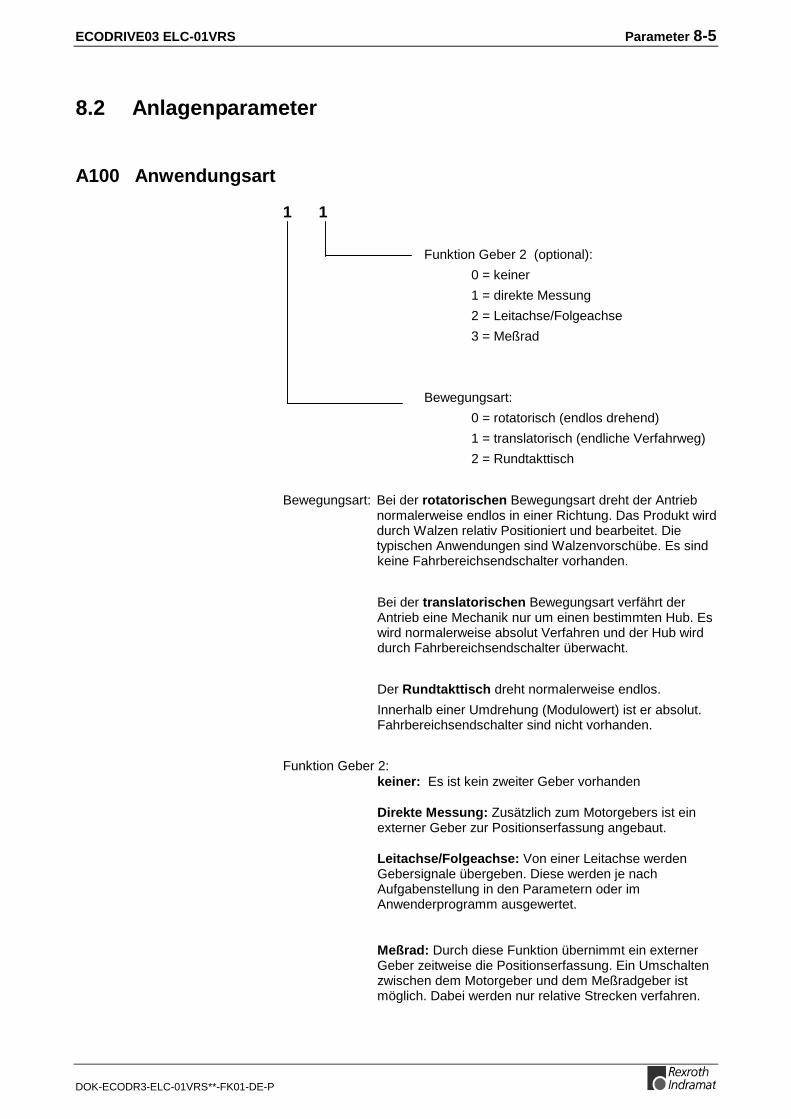
ECODRIVE03 ELC-01VRS Parameter 8-5
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
8.2 Anlagenparameter
A100 Anwendungsart
1 1
Funktion Geber 2 (optional):
0 = keiner
1 = direkte Messung
2 = Leitachse/Folgeachse
3 = Meßrad
Bewegungsart:
0 = rotatorisch (endlos drehend)
1 = translatorisch (endliche Verfahrweg)
2 = Rundtakttisch
Bewegungsart: Bei der rotatorischen Bewegungsart dreht der Antriebnormalerweise endlos in einer Richtung. Das Produkt wirddurch Walzen relativ Positioniert und bearbeitet. Dietypischen Anwendungen sind Walzenvorschübe. Es sind keine Fahrbereichsendschalter vorhanden.
Bei der translatorischen Bewegungsart verfährt derAntrieb eine Mechanik nur um einen bestimmten Hub. Eswird normalerweise absolut Verfahren und der Hub wirddurch Fahrbereichsendschalter überwacht.
Der Rundtakttisch dreht normalerweise endlos.
Innerhalb einer Umdrehung (Modulowert) ist er absolut.Fahrbereichsendschalter sind nicht vorhanden.
Funktion Geber 2:keiner: Es ist kein zweiter Geber vorhanden
Direkte Messung: Zusätzlich zum Motorgebers ist einexterner Geber zur Positionserfassung angebaut.
Leitachse/Folgeachse: Von einer Leitachse werdenGebersignale übergeben. Diese werden je nachAufgabenstellung in den Parametern oder imAnwenderprogramm ausgewertet.
Meßrad: Durch diese Funktion übernimmt ein externerGeber zeitweise die Positionserfassung. Ein Umschaltenzwischen dem Motorgeber und dem Meßradgeber istmöglich. Dabei werden nur relative Strecken verfahren.
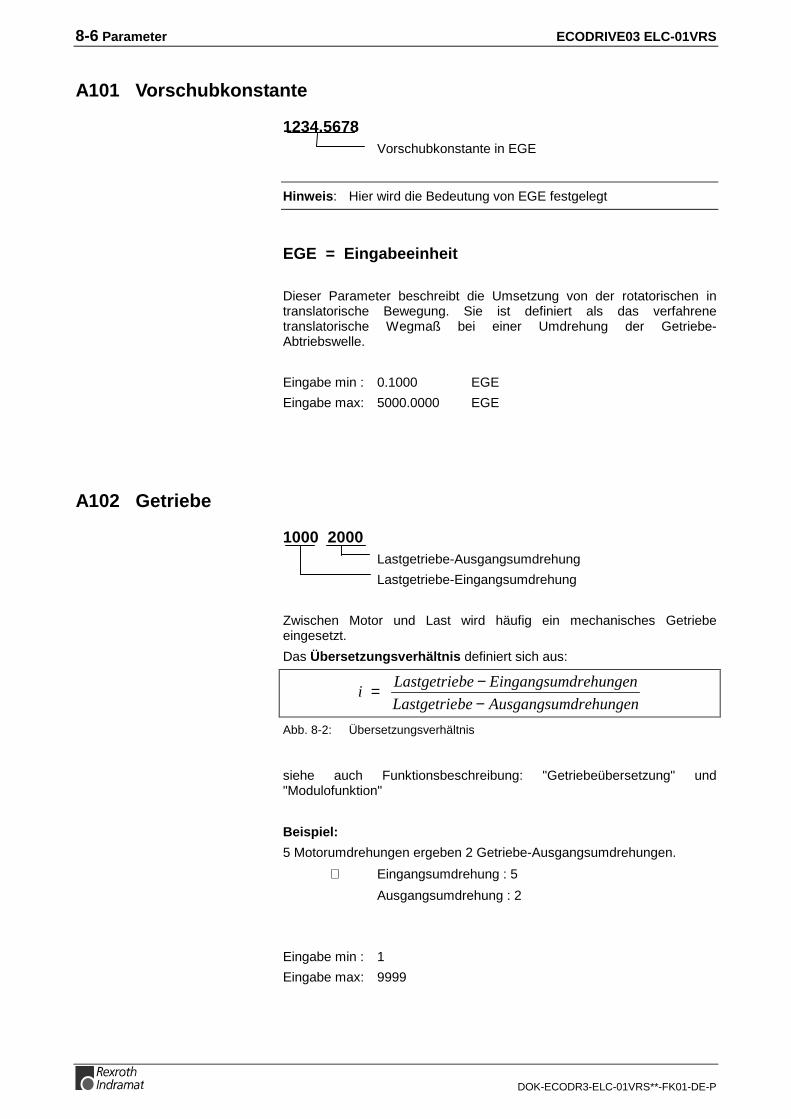
8-6 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
A101 Vorschubkonstante
1234.5678Vorschubkonstante in EGE
Hinweis: Hier wird die Bedeutung von EGE festgelegt
EGE = Eingabeeinheit
Dieser Parameter beschreibt die Umsetzung von der rotatorischen intranslatorische Bewegung. Sie ist definiert als das verfahrenetranslatorische Wegmaß bei einer Umdrehung der Getriebe-Abtriebswelle.
Eingabe min : 0.1000 EGE
Eingabe max: 5000.0000 EGE
A102 Getriebe
1000 2000Lastgetriebe-Ausgangsumdrehung
Lastgetriebe-Eingangsumdrehung
Zwischen Motor und Last wird häufig ein mechanisches Getriebeeingesetzt.
Das Übersetzungsverhältnis definiert sich aus:
drehungenAusgangsumbeLastgetrie
drehungenEingangsumbeLastgetriei
−−=
Abb. 8-2: Übersetzungsverhältnis
siehe auch Funktionsbeschreibung: "Getriebeübersetzung" und"Modulofunktion"
Beispiel:
5 Motorumdrehungen ergeben 2 Getriebe-Ausgangsumdrehungen.
⇒ Eingangsumdrehung : 5
Ausgangsumdrehung : 2
Eingabe min : 1
Eingabe max: 9999
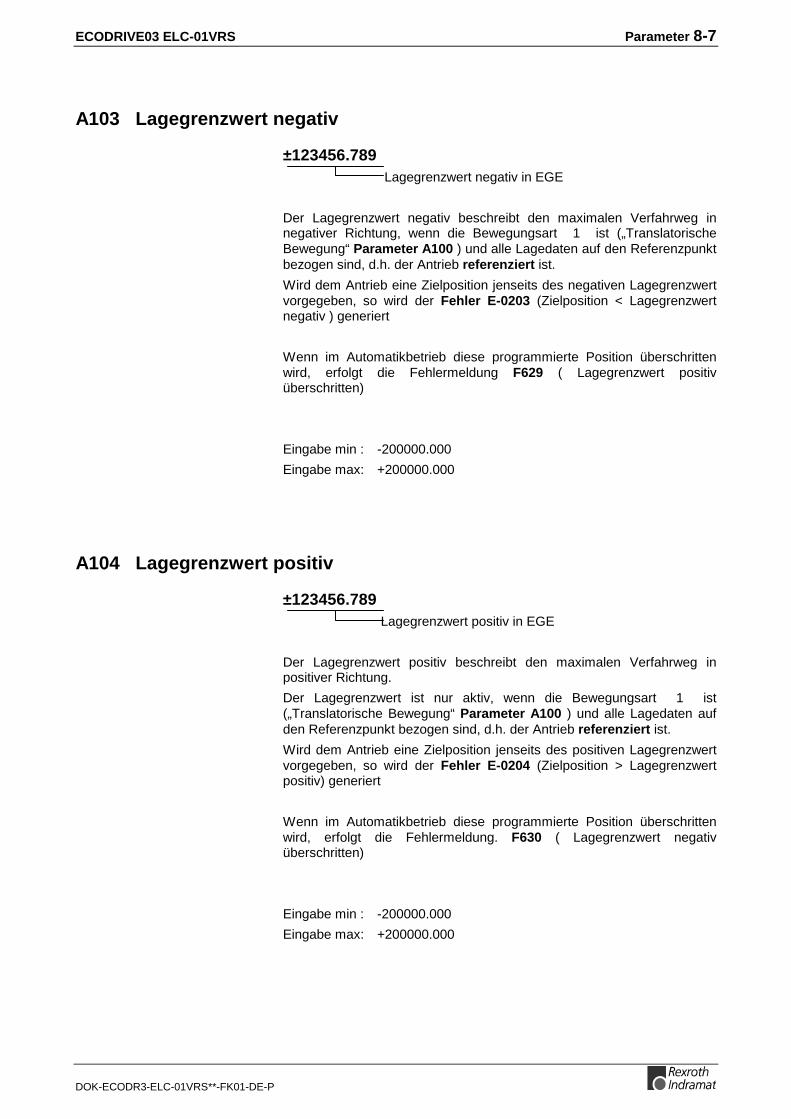
ECODRIVE03 ELC-01VRS Parameter 8-7
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
A103 Lagegrenzwert negativ
±123456.789 Lagegrenzwert negativ in EGE
Der Lagegrenzwert negativ beschreibt den maximalen Verfahrweg innegativer Richtung, wenn die Bewegungsart 1 ist („TranslatorischeBewegung“ Parameter A100 ) und alle Lagedaten auf den Referenzpunktbezogen sind, d.h. der Antrieb referenziert ist.
Wird dem Antrieb eine Zielposition jenseits des negativen Lagegrenzwertvorgegeben, so wird der Fehler E-0203 (Zielposition < Lagegrenzwertnegativ ) generiert
Wenn im Automatikbetrieb diese programmierte Position überschrittenwird, erfolgt die Fehlermeldung F629 ( Lagegrenzwert positivüberschritten)
Eingabe min : -200000.000
Eingabe max: +200000.000
A104 Lagegrenzwert positiv
±123456.789 Lagegrenzwert positiv in EGE
Der Lagegrenzwert positiv beschreibt den maximalen Verfahrweg inpositiver Richtung.
Der Lagegrenzwert ist nur aktiv, wenn die Bewegungsart 1 ist(„Translatorische Bewegung“ Parameter A100 ) und alle Lagedaten aufden Referenzpunkt bezogen sind, d.h. der Antrieb referenziert ist.
Wird dem Antrieb eine Zielposition jenseits des positiven Lagegrenzwertvorgegeben, so wird der Fehler E-0204 (Zielposition > Lagegrenzwertpositiv) generiert
Wenn im Automatikbetrieb diese programmierte Position überschrittenwird, erfolgt die Fehlermeldung. F630 ( Lagegrenzwert negativüberschritten)
Eingabe min : -200000.000
Eingabe max: +200000.000
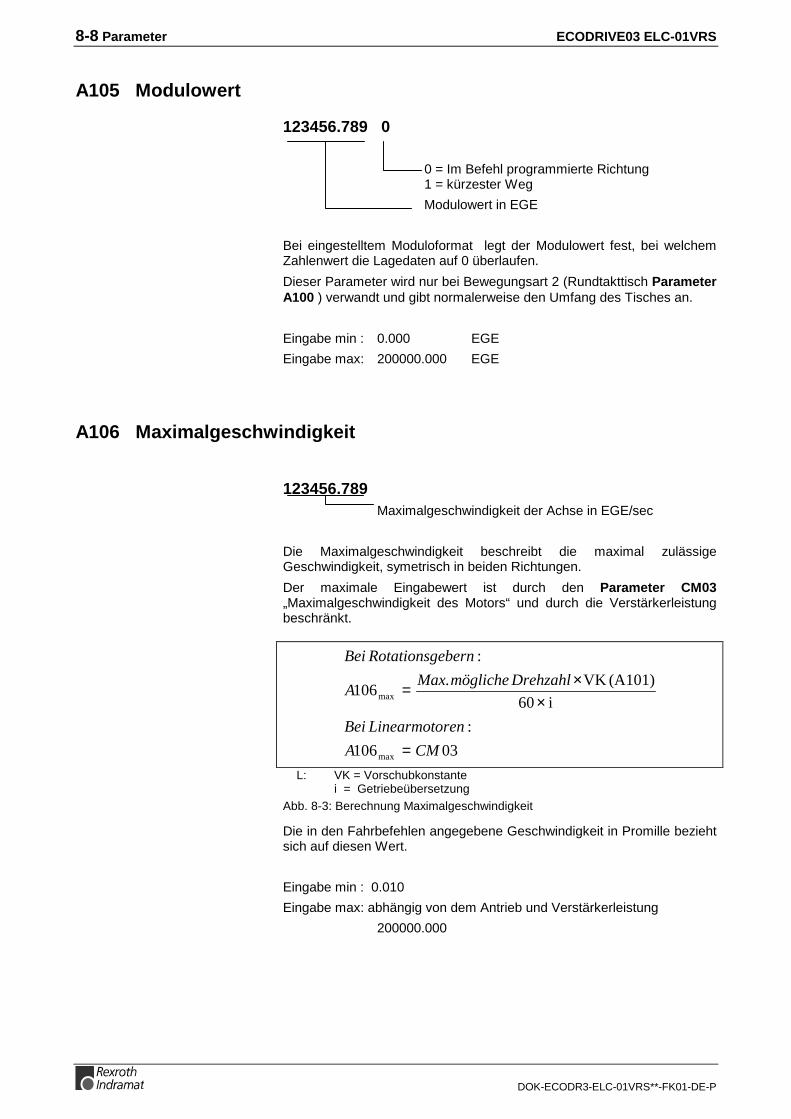
8-8 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
A105 Modulowert
123456.789 0
0 = Im Befehl programmierte Richtung1 = kürzester Weg
Modulowert in EGE
Bei eingestelltem Moduloformat legt der Modulowert fest, bei welchemZahlenwert die Lagedaten auf 0 überlaufen.
Dieser Parameter wird nur bei Bewegungsart 2 (Rundtakttisch ParameterA100 ) verwandt und gibt normalerweise den Umfang des Tisches an.
Eingabe min : 0.000 EGE
Eingabe max: 200000.000 EGE
A106 Maximalgeschwindigkeit
123456.789Maximalgeschwindigkeit der Achse in EGE/sec
Die Maximalgeschwindigkeit beschreibt die maximal zulässigeGeschwindigkeit, symetrisch in beiden Richtungen.
Der maximale Eingabewert ist durch den Parameter CM03„Maximalgeschwindigkeit des Motors“ und durch die Verstärkerleistungbeschränkt.
03106
:
i60
(A101)VK.106
:
max
max
CMA
renLinearmotoBei
DrehzahlmöglicheMaxA
ebernRotationsgBei
=
××=
L: VK = Vorschubkonstantei = Getriebeübersetzung
Abb. 8-3: Berechnung Maximalgeschwindigkeit
Die in den Fahrbefehlen angegebene Geschwindigkeit in Promille beziehtsich auf diesen Wert.
Eingabe min : 0.010
Eingabe max: abhängig von dem Antrieb und Verstärkerleistung
200000.000
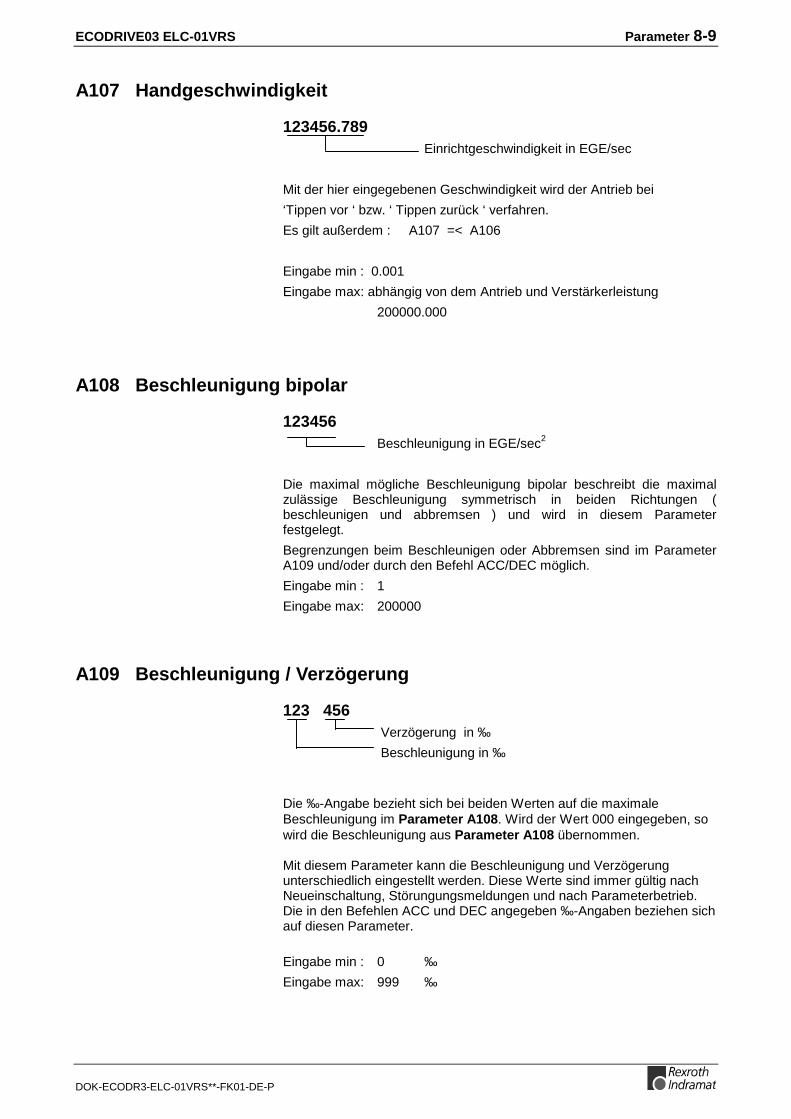
ECODRIVE03 ELC-01VRS Parameter 8-9
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
A107 Handgeschwindigkeit
123456.789Einrichtgeschwindigkeit in EGE/sec
Mit der hier eingegebenen Geschwindigkeit wird der Antrieb bei
‘Tippen vor ‘ bzw. ‘ Tippen zurück ‘ verfahren.
Es gilt außerdem : A107 =< A106
Eingabe min : 0.001
Eingabe max: abhängig von dem Antrieb und Verstärkerleistung
200000.000
A108 Beschleunigung bipolar
123456Beschleunigung in EGE/sec2
Die maximal mögliche Beschleunigung bipolar beschreibt die maximalzulässige Beschleunigung symmetrisch in beiden Richtungen (beschleunigen und abbremsen ) und wird in diesem Parameterfestgelegt.
Begrenzungen beim Beschleunigen oder Abbremsen sind im ParameterA109 und/oder durch den Befehl ACC/DEC möglich.
Eingabe min : 1
Eingabe max: 200000
A109 Beschleunigung / Verzögerung
123 456 Verzögerung in ‰
Beschleunigung in ‰
Die ‰-Angabe bezieht sich bei beiden Werten auf die maximaleBeschleunigung im Parameter A108. Wird der Wert 000 eingegeben, sowird die Beschleunigung aus Parameter A108 übernommen.
Mit diesem Parameter kann die Beschleunigung und Verzögerungunterschiedlich eingestellt werden. Diese Werte sind immer gültig nachNeueinschaltung, Störungungsmeldungen und nach Parameterbetrieb.Die in den Befehlen ACC und DEC angegeben ‰-Angaben beziehen sichauf diesen Parameter.
Eingabe min : 0 ‰
Eingabe max: 999 ‰
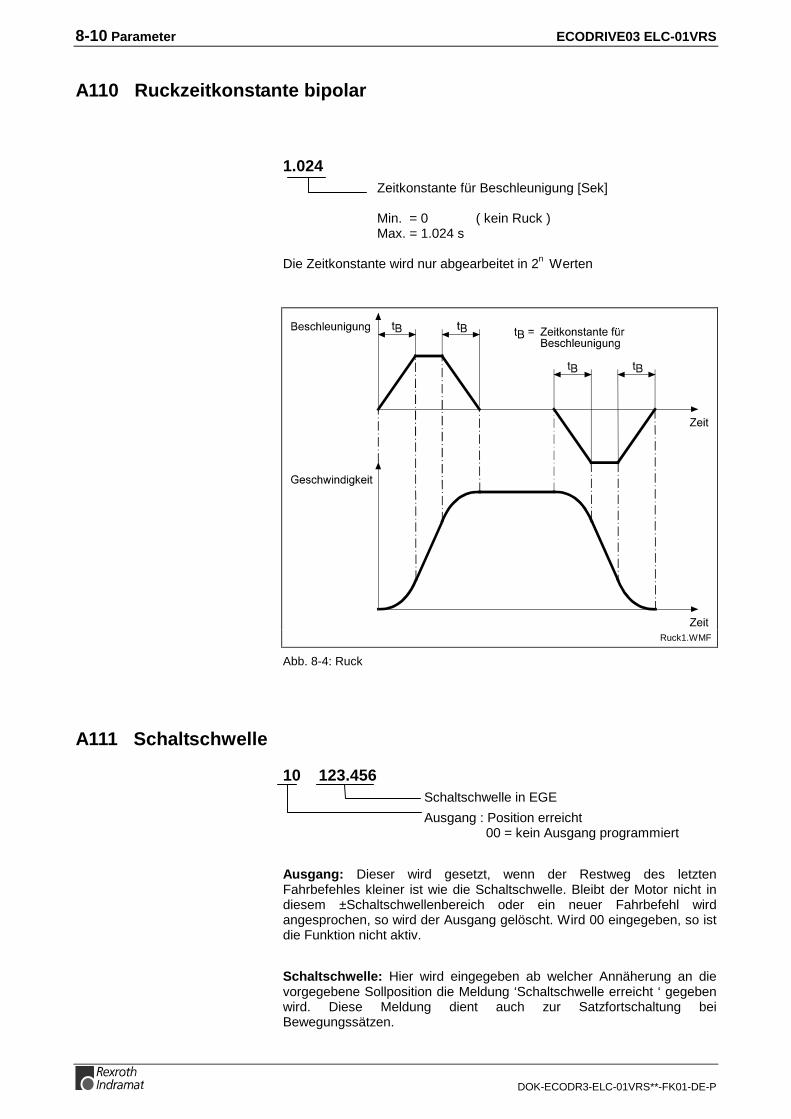
8-10 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
A110 Ruckzeitkonstante bipolar
1.024Zeitkonstante für Beschleunigung [Sek]
Min. = 0 ( kein Ruck )Max. = 1.024 s
Die Zeitkonstante wird nur abgearbeitet in 2n Werten
Ruck1.WMF
Abb. 8-4: Ruck
A111 Schaltschwelle
10 123.456Schaltschwelle in EGE
Ausgang : Position erreicht 00 = kein Ausgang programmiert
Ausgang: Dieser wird gesetzt, wenn der Restweg des letztenFahrbefehles kleiner ist wie die Schaltschwelle. Bleibt der Motor nicht indiesem ±Schaltschwellenbereich oder ein neuer Fahrbefehl wirdangesprochen, so wird der Ausgang gelöscht. Wird 00 eingegeben, so istdie Funktion nicht aktiv.
Schaltschwelle: Hier wird eingegeben ab welcher Annäherung an dievorgegebene Sollposition die Meldung ‘Schaltschwelle erreicht ‘ gegebenwird. Diese Meldung dient auch zur Satzfortschaltung beiBewegungssätzen.
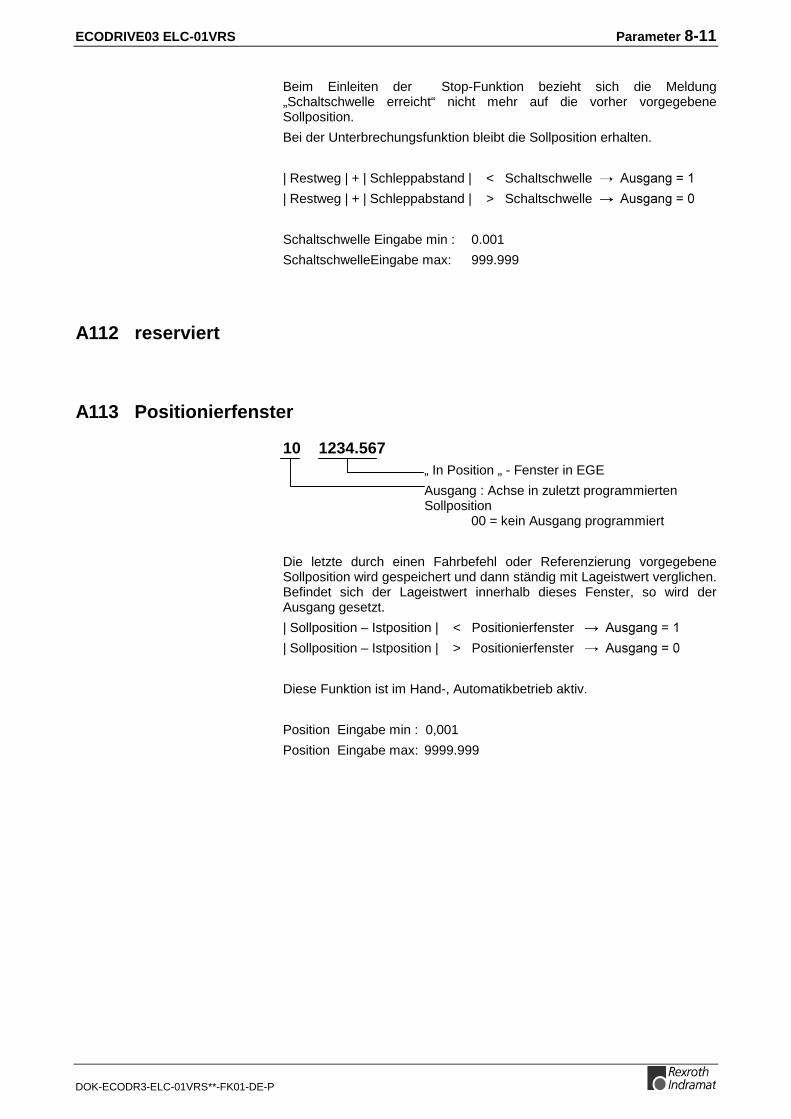
ECODRIVE03 ELC-01VRS Parameter 8-11
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Beim Einleiten der Stop-Funktion bezieht sich die Meldung„Schaltschwelle erreicht“ nicht mehr auf die vorher vorgegebeneSollposition.
Bei der Unterbrechungsfunktion bleibt die Sollposition erhalten.
| Restweg | + | Schleppabstand | < Schaltschwelle ��$XVJDQJ� ��
| Restweg | + | Schleppabstand | > Schaltschwelle ��$XVJDQJ� ��
Schaltschwelle Eingabe min : 0.001
SchaltschwelleEingabe max: 999.999
A112 reserviert Stillstandfenster
A113 Positionierfenster
10 1234.567„ In Position „ - Fenster in EGE
Ausgang : Achse in zuletzt programmiertenSollposition 00 = kein Ausgang programmiert
Die letzte durch einen Fahrbefehl oder Referenzierung vorgegebeneSollposition wird gespeichert und dann ständig mit Lageistwert verglichen.Befindet sich der Lageistwert innerhalb dieses Fenster, so wird derAusgang gesetzt.
| Sollposition – Istposition | < Positionierfenster ��$XVJDQJ� ��
| Sollposition – Istposition | > Positionierfenster ��$XVJDQJ� ��
Diese Funktion ist im Hand-, Automatikbetrieb aktiv.
Position Eingabe min : 0,001
Position Eingabe max: 9999.999
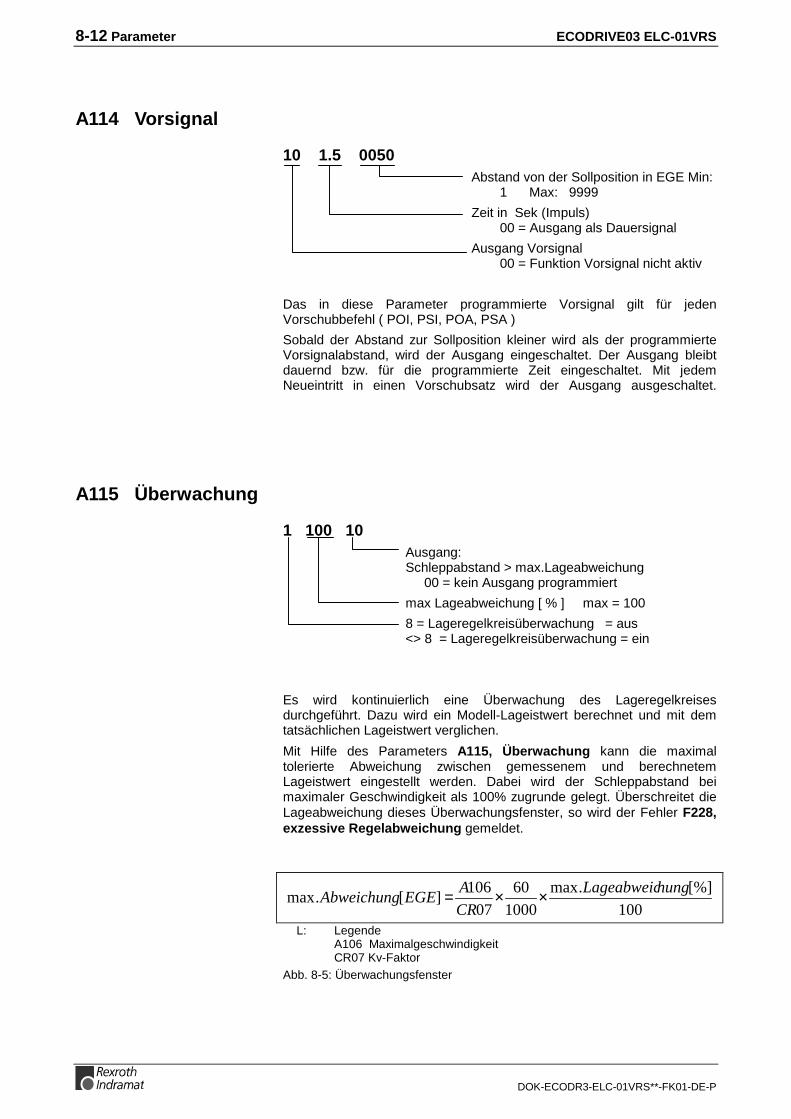
8-12 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
A114 Vorsignal
10 1.5 0050Abstand von der Sollposition in EGE Min:
1 Max: 9999
Zeit in Sek (Impuls)00 = Ausgang als Dauersignal
Ausgang Vorsignal00 = Funktion Vorsignal nicht aktiv
Das in diese Parameter programmierte Vorsignal gilt für jedenVorschubbefehl ( POI, PSI, POA, PSA )
Sobald der Abstand zur Sollposition kleiner wird als der programmierteVorsignalabstand, wird der Ausgang eingeschaltet. Der Ausgang bleibtdauernd bzw. für die programmierte Zeit eingeschaltet. Mit jedemNeueintritt in einen Vorschubsatz wird der Ausgang ausgeschaltet.
A115 Überwachung
1 100 10Ausgang:Schleppabstand > max.Lageabweichung
00 = kein Ausgang programmiert
max Lageabweichung [ % ] max = 100
8 = Lageregelkreisüberwachung = aus<> 8 = Lageregelkreisüberwachung = ein
Es wird kontinuierlich eine Überwachung des Lageregelkreisesdurchgeführt. Dazu wird ein Modell-Lageistwert berechnet und mit demtatsächlichen Lageistwert verglichen.
Mit Hilfe des Parameters A115, Überwachung kann die maximaltolerierte Abweichung zwischen gemessenem und berechnetemLageistwert eingestellt werden. Dabei wird der Schleppabstand beimaximaler Geschwindigkeit als 100% zugrunde gelegt. Überschreitet dieLageabweichung dieses Überwachungsfenster, so wird der Fehler F228,exzessive Regelabweichung gemeldet.
100
[%].max
1000
60
07
106][.max
hungLageabweic
CR
AEGEAbweichung ××=
L: Legende A106 MaximalgeschwindigkeitCR07 Kv-Faktor
Abb. 8-5: Überwachungsfenster
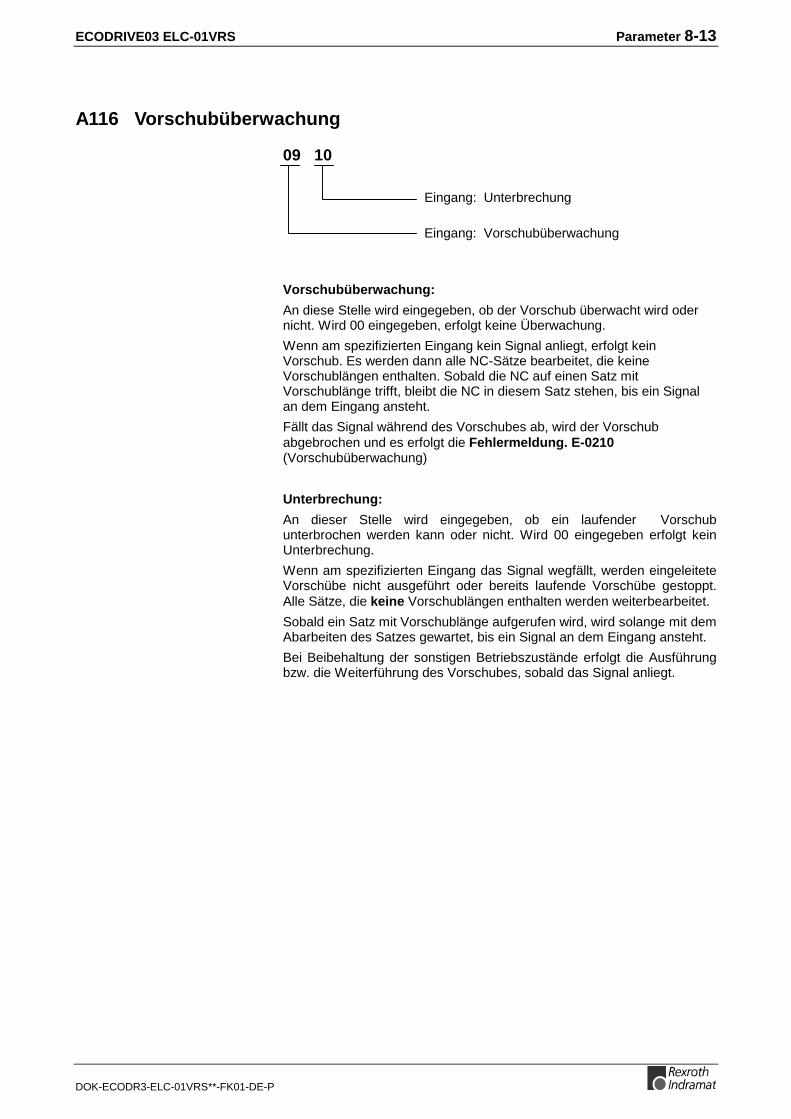
ECODRIVE03 ELC-01VRS Parameter 8-13
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
A116 Vorschubüberwachung
09 10
Eingang: Unterbrechung
Eingang: Vorschubüberwachung
Vorschubüberwachung:
An diese Stelle wird eingegeben, ob der Vorschub überwacht wird odernicht. Wird 00 eingegeben, erfolgt keine Überwachung.
Wenn am spezifizierten Eingang kein Signal anliegt, erfolgt keinVorschub. Es werden dann alle NC-Sätze bearbeitet, die keineVorschublängen enthalten. Sobald die NC auf einen Satz mitVorschublänge trifft, bleibt die NC in diesem Satz stehen, bis ein Signalan dem Eingang ansteht.
Fällt das Signal während des Vorschubes ab, wird der Vorschubabgebrochen und es erfolgt die Fehlermeldung. E-0210(Vorschubüberwachung)
Unterbrechung:
An dieser Stelle wird eingegeben, ob ein laufender Vorschubunterbrochen werden kann oder nicht. Wird 00 eingegeben erfolgt keinUnterbrechung.
Wenn am spezifizierten Eingang das Signal wegfällt, werden eingeleiteteVorschübe nicht ausgeführt oder bereits laufende Vorschübe gestoppt.Alle Sätze, die keine Vorschublängen enthalten werden weiterbearbeitet.
Sobald ein Satz mit Vorschublänge aufgerufen wird, wird solange mit demAbarbeiten des Satzes gewartet, bis ein Signal an dem Eingang ansteht.
Bei Beibehaltung der sonstigen Betriebszustände erfolgt die Ausführungbzw. die Weiterführung des Vorschubes, sobald das Signal anliegt.
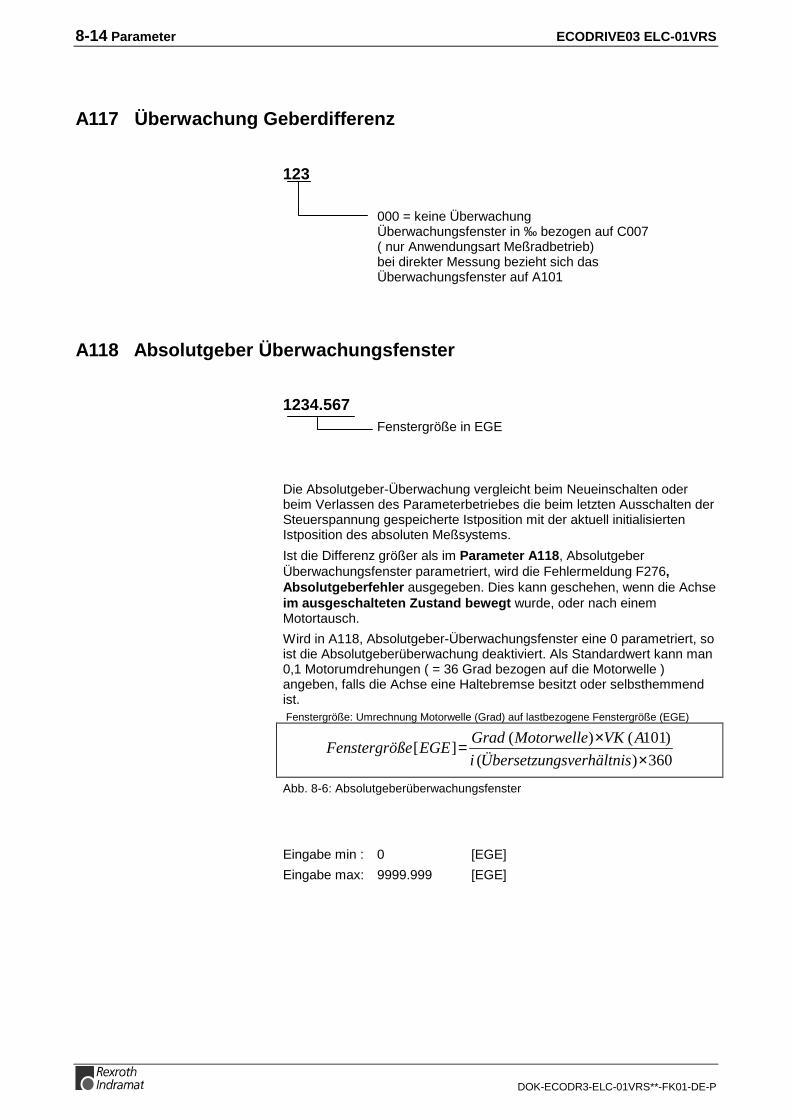
8-14 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
A117 Überwachung Geberdifferenz
123
000 = keine ÜberwachungÜberwachungsfenster in ‰ bezogen auf C007( nur Anwendungsart Meßradbetrieb)bei direkter Messung bezieht sich dasÜberwachungsfenster auf A101
A118 Absolutgeber Überwachungsfenster
1234.567Fenstergröße in EGE
Die Absolutgeber-Überwachung vergleicht beim Neueinschalten oderbeim Verlassen des Parameterbetriebes die beim letzten Ausschalten derSteuerspannung gespeicherte Istposition mit der aktuell initialisiertenIstposition des absoluten Meßsystems.
Ist die Differenz größer als im Parameter A118, AbsolutgeberÜberwachungsfenster parametriert, wird die Fehlermeldung F276,Absolutgeberfehler ausgegeben. Dies kann geschehen, wenn die Achseim ausgeschalteten Zustand bewegt wurde, oder nach einemMotortausch.
Wird in A118, Absolutgeber-Überwachungsfenster eine 0 parametriert, soist die Absolutgeberüberwachung deaktiviert. Als Standardwert kann man0,1 Motorumdrehungen ( = 36 Grad bezogen auf die Motorwelle )angeben, falls die Achse eine Haltebremse besitzt oder selbsthemmendist. Fenstergröße: Umrechnung Motorwelle (Grad) auf lastbezogene Fenstergröße (EGE)
360)(
)101()(][
××=
isgsverhältnÜbersetzuni
AVKMotorwelleGradEGEßeFenstergrö
Abb. 8-6: Absolutgeberüberwachungsfenster
Eingabe min : 0 [EGE]
Eingabe max: 9999.999 [EGE]
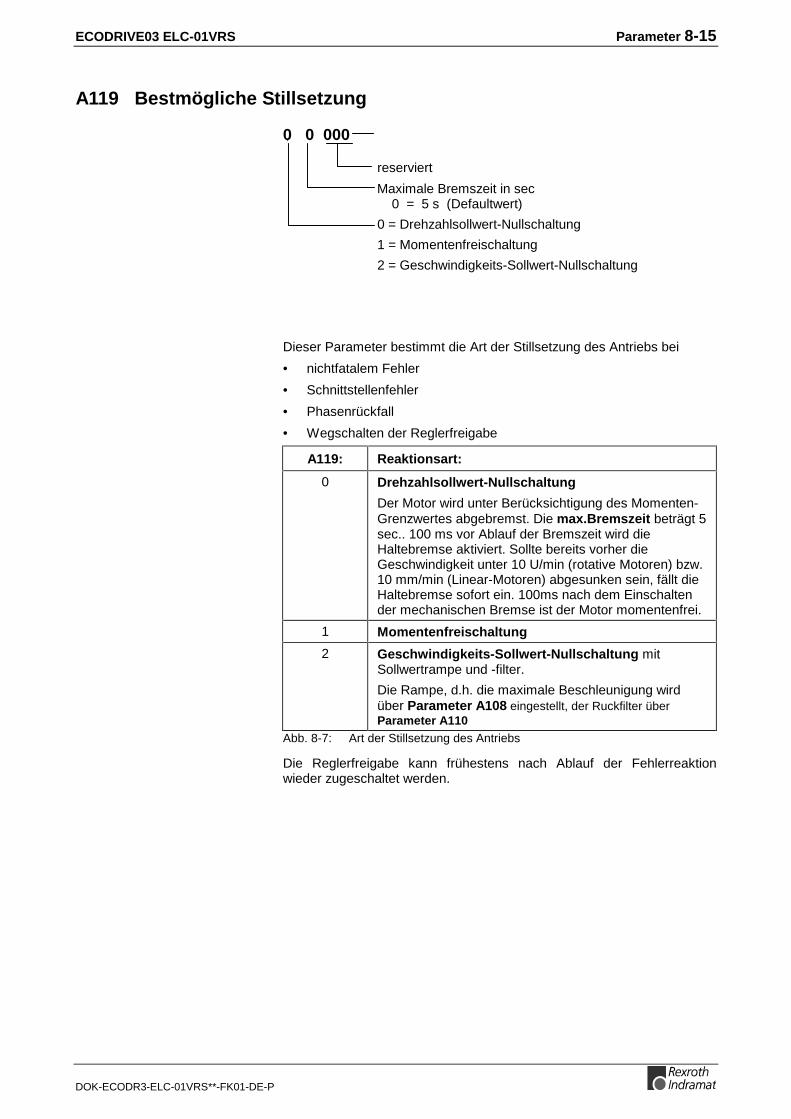
ECODRIVE03 ELC-01VRS Parameter 8-15
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
A119 Bestmögliche Stillsetzung
0 0 000
reserviert P-0-0256Maximale Bremszeit in sec
0 = 5 s (Defaultwert)
0 = Drehzahlsollwert-Nullschaltung
1 = Momentenfreischaltung
2 = Geschwindigkeits-Sollwert-Nullschaltung
Dieser Parameter bestimmt die Art der Stillsetzung des Antriebs bei
• nichtfatalem Fehler
• Schnittstellenfehler
• Phasenrückfall
• Wegschalten der Reglerfreigabe
A119: Reaktionsart:
0 Drehzahlsollwert-Nullschaltung
Der Motor wird unter Berücksichtigung des Momenten-Grenzwertes abgebremst. Die max.Bremszeit beträgt 5sec.. 100 ms vor Ablauf der Bremszeit wird dieHaltebremse aktiviert. Sollte bereits vorher dieGeschwindigkeit unter 10 U/min (rotative Motoren) bzw.10 mm/min (Linear-Motoren) abgesunken sein, fällt dieHaltebremse sofort ein. 100ms nach dem Einschaltender mechanischen Bremse ist der Motor momentenfrei.
1 Momentenfreischaltung
2 Geschwindigkeits-Sollwert-Nullschaltung mitSollwertrampe und -filter.
Die Rampe, d.h. die maximale Beschleunigung wirdüber Parameter A108 eingestellt, der Ruckfilter überParameter A110
Abb. 8-7: Art der Stillsetzung des Antriebs
Die Reglerfreigabe kann frühestens nach Ablauf der Fehlerreaktionwieder zugeschaltet werden.
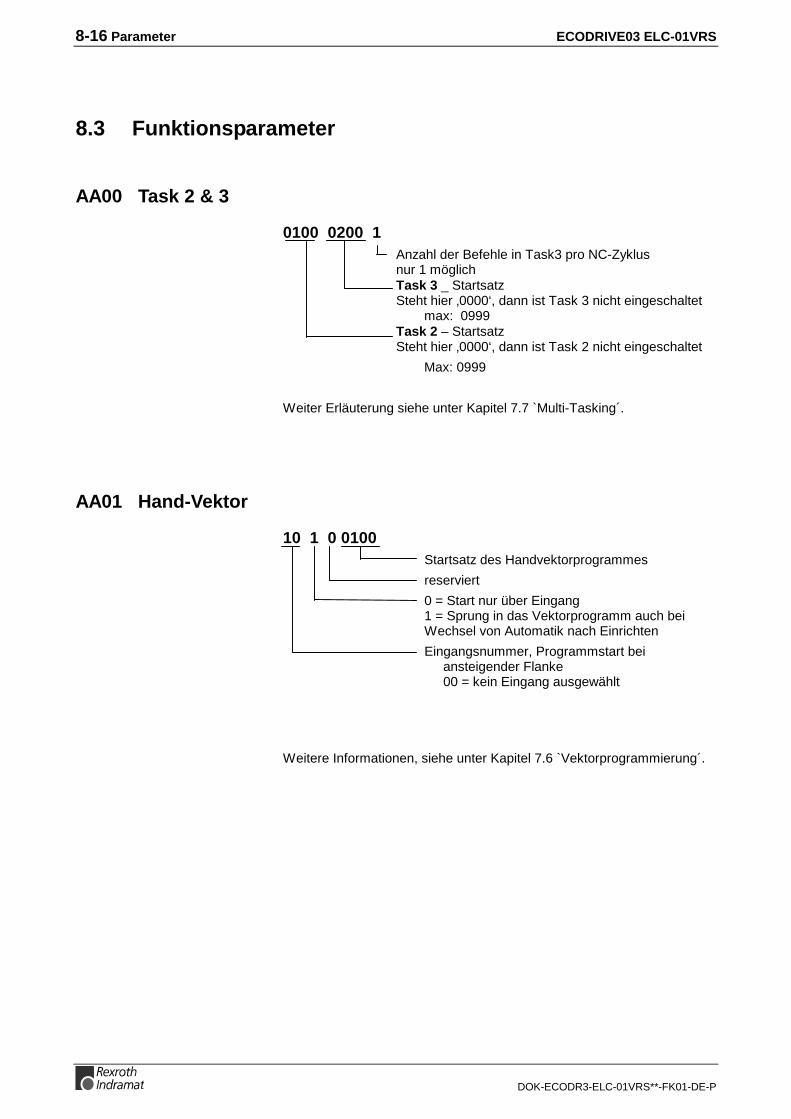
8-16 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
8.3 Funktionsparameter
AA00 Task 2 & 3
0100 0200 1Anzahl der Befehle in Task3 pro NC-Zyklusnur 1 möglichTask 3 _ StartsatzSteht hier ‚0000‘, dann ist Task 3 nicht eingeschaltet max: 0999Task 2 – StartsatzSteht hier ‚0000‘, dann ist Task 2 nicht eingeschaltet
Max: 0999
Weiter Erläuterung siehe unter Kapitel 7.7 `Multi-Tasking´.
AA01 Hand-Vektor
10 1 0 0100Startsatz des Handvektorprogrammes
reserviert
0 = Start nur über Eingang1 = Sprung in das Vektorprogramm auch beiWechsel von Automatik nach Einrichten
Eingangsnummer, Programmstart beiansteigender Flanke00 = kein Eingang ausgewählt
Weitere Informationen, siehe unter Kapitel 7.6 `Vektorprogrammierung´.
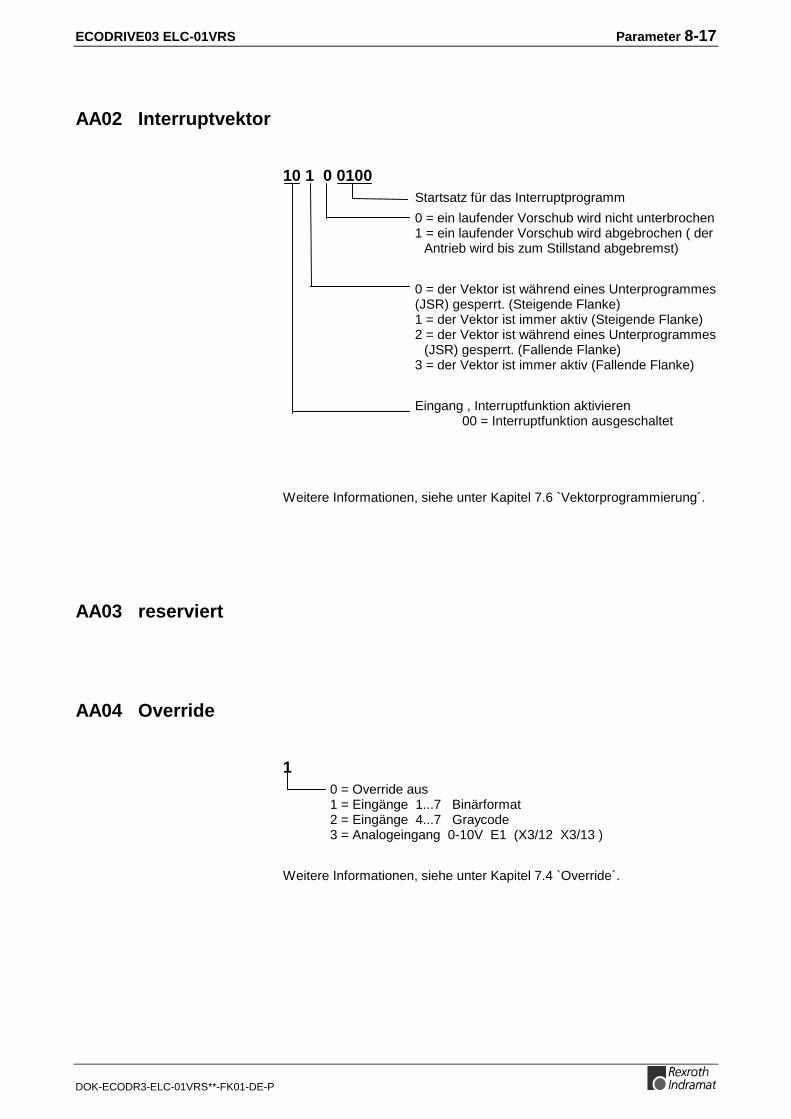
ECODRIVE03 ELC-01VRS Parameter 8-17
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
AA02 Interruptvektor
10 1 0 0100Startsatz für das Interruptprogramm
0 = ein laufender Vorschub wird nicht unterbrochen1 = ein laufender Vorschub wird abgebrochen ( der
Antrieb wird bis zum Stillstand abgebremst)
0 = der Vektor ist während eines Unterprogrammes(JSR) gesperrt. (Steigende Flanke)1 = der Vektor ist immer aktiv (Steigende Flanke)2 = der Vektor ist während eines Unterprogrammes
(JSR) gesperrt. (Fallende Flanke)3 = der Vektor ist immer aktiv (Fallende Flanke)
Eingang , Interruptfunktion aktivieren00 = Interruptfunktion ausgeschaltet
Weitere Informationen, siehe unter Kapitel 7.6 `Vektorprogrammierung´.
AA03 reserviert Restart
AA04 Override
10 = Override aus1 = Eingänge 1...7 Binärformat2 = Eingänge 4...7 Graycode3 = Analogeingang 0-10V E1 (X3/12 X3/13 )
Weitere Informationen, siehe unter Kapitel 7.4 `Override´.
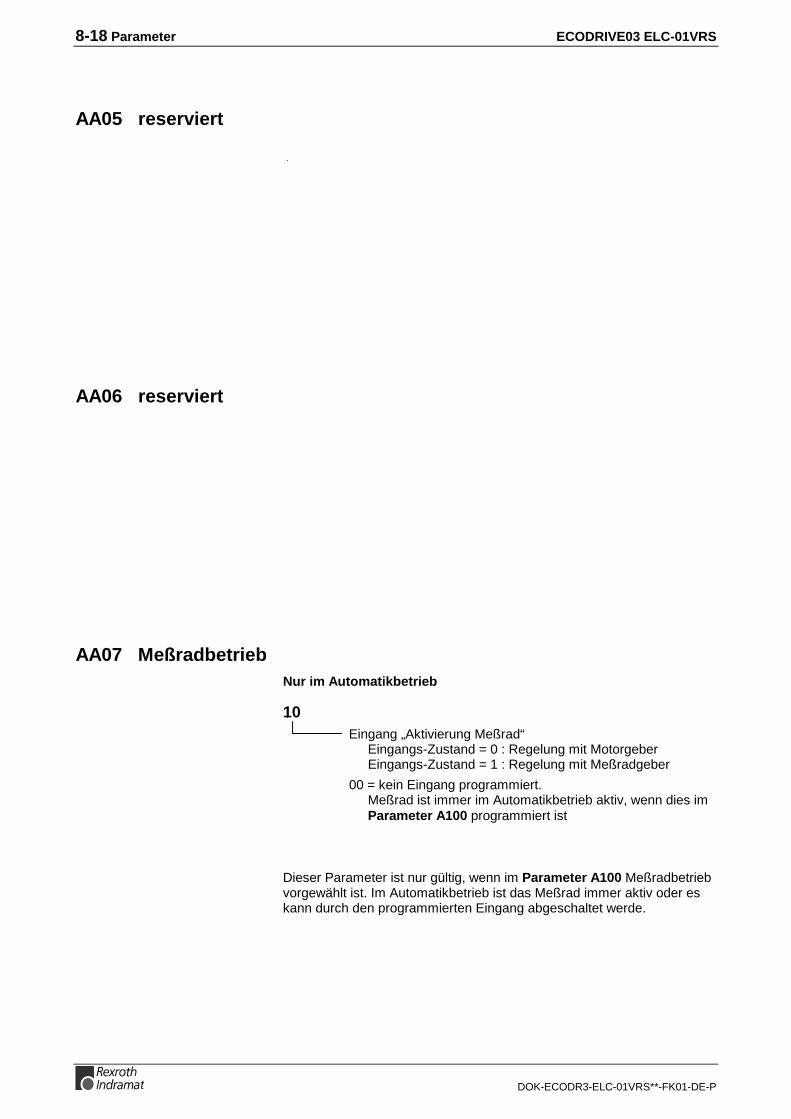
8-18 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
AA05 reserviert Elektr. Lüften
05 06Ausgang: Elektrisches Lüften aktiv
Eingang: Elektrisches Lüften aktivieren
Weitere Informationen, siehe unter Kapitel 5.6 `elektrisches Lüften´.
AA06 reserviert Motorbremse
08 08Ausgang: Motorbremse gelüftet
Eingang: Motorbremse lüften
Weitere Informationen, siehe unter Kapitel 5.6 `Vektorprogrammierung´.
AA07 MeßradbetriebNur im Automatikbetrieb
10Eingang „Aktivierung Meßrad“
Eingangs-Zustand = 0 : Regelung mit MotorgeberEingangs-Zustand = 1 : Regelung mit Meßradgeber
00 = kein Eingang programmiert.Meßrad ist immer im Automatikbetrieb aktiv, wenn dies imParameter A100 programmiert ist
Dieser Parameter ist nur gültig, wenn im Parameter A100 Meßradbetriebvorgewählt ist. Im Automatikbetrieb ist das Meßrad immer aktiv oder eskann durch den programmierten Eingang abgeschaltet werde.

ECODRIVE03 ELC-01VRS Parameter 8-19
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
AA08 Verschiedenes
09 10Ausgang : Parameter aktiv
Ausgang: Programmierte Geschwindigkeiterreicht00 = kein Ausgang programmiert
Der Ausgang zeigt an, ob der Parameterbetrieb aktiv ist .
Wird an diesen Stellen 00 eingegeben, so ist kein Ausgang ausgewählt
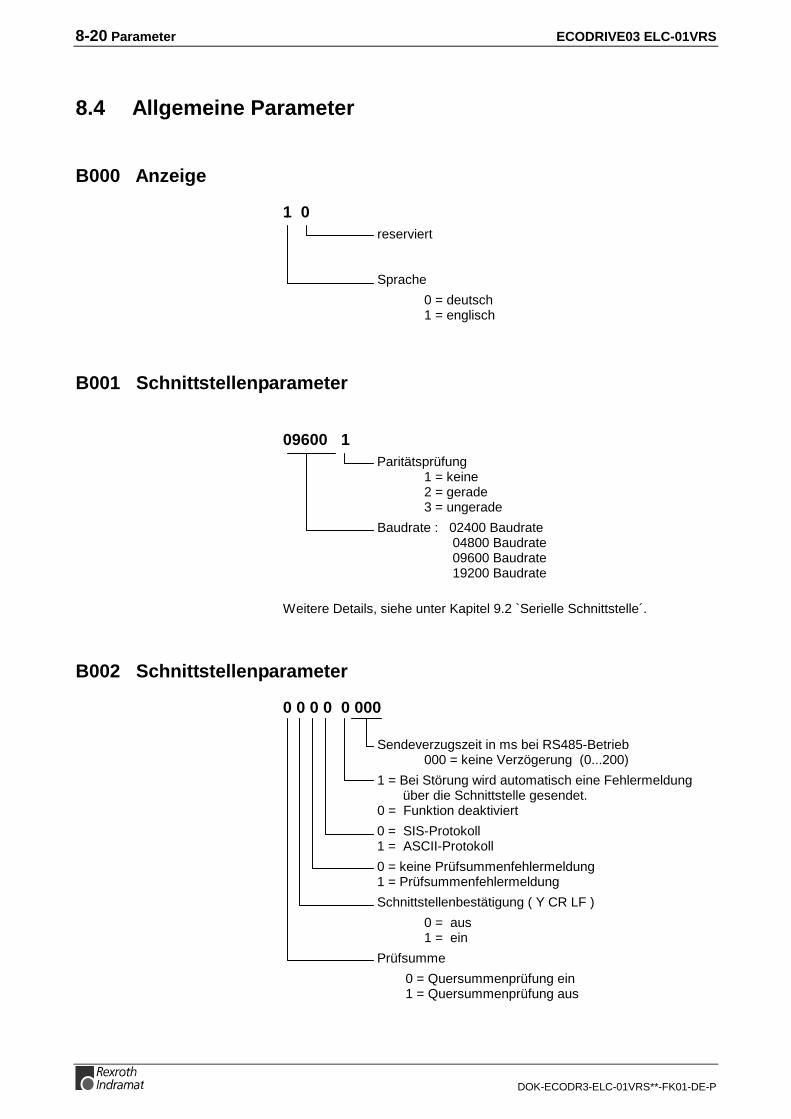
8-20 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
8.4 Allgemeine Parameter
B000 Anzeige
1 0reserviert Einspeicherverbot für Programme 0 = Einspeichern erlaubt 1 = Einspeichern nicht erlaubtSprache
0 = deutsch1 = englisch
B001 Schnittstellenparameter
09600 1Paritätsprüfung
1 = keine2 = gerade3 = ungerade
Baudrate : 02400 Baudrate04800 Baudrate09600 Baudrate19200 Baudrate
Weitere Details, siehe unter Kapitel 9.2 `Serielle Schnittstelle´.
B002 Schnittstellenparameter
0 0 0 0 0 000
Sendeverzugszeit in ms bei RS485-Betrieb000 = keine Verzögerung (0...200)
1 = Bei Störung wird automatisch eine Fehlermeldung über die Schnittstelle gesendet.0 = Funktion deaktiviert
0 = SIS-ProtokollSt 1 = ASCII-Protokoll
0 = keine Prüfsummenfehlermeldung1 = Prüfsummenfehlermeldung
Schnittstellenbestätigung ( Y CR LF )
0 = aus1 = ein
Prüfsumme
0 = Quersummenprüfung ein1 = Quersummenprüfung aus
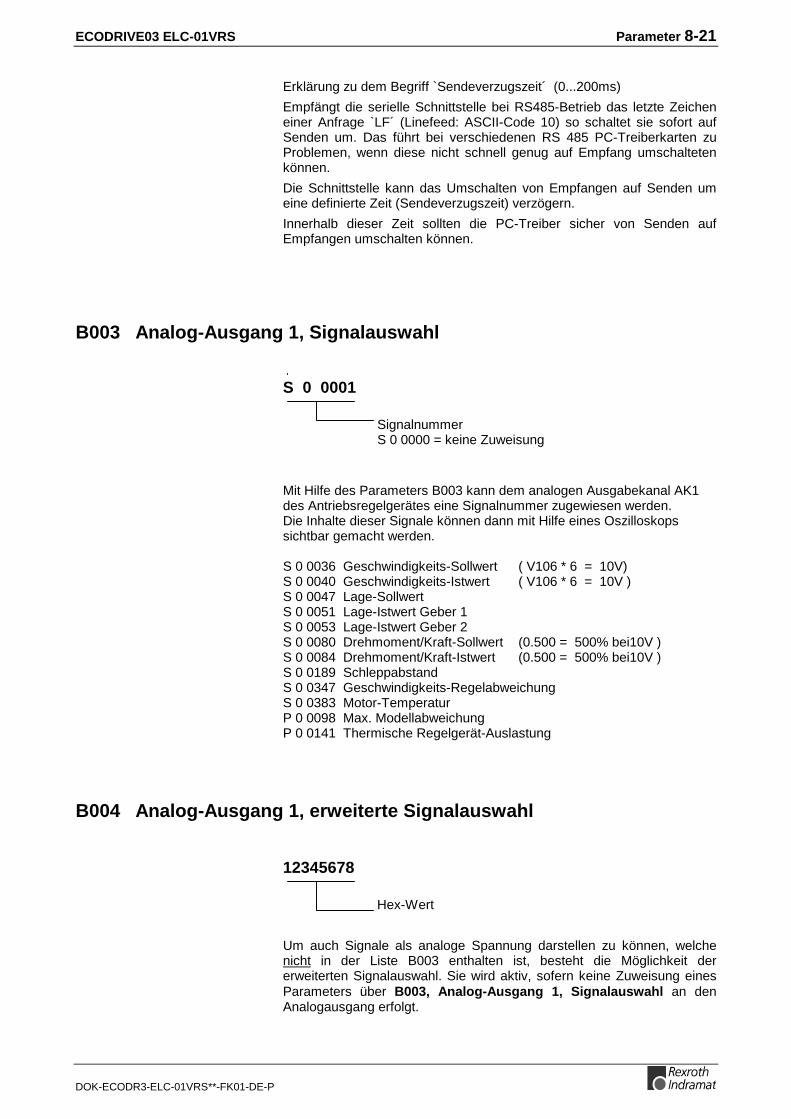
ECODRIVE03 ELC-01VRS Parameter 8-21
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Erklärung zu dem Begriff `Sendeverzugszeit´ (0...200ms)
Empfängt die serielle Schnittstelle bei RS485-Betrieb das letzte Zeicheneiner Anfrage `LF´ (Linefeed: ASCII-Code 10) so schaltet sie sofort aufSenden um. Das führt bei verschiedenen RS 485 PC-Treiberkarten zuProblemen, wenn diese nicht schnell genug auf Empfang umschaltetenkönnen.
Die Schnittstelle kann das Umschalten von Empfangen auf Senden umeine definierte Zeit (Sendeverzugszeit) verzögern.
Innerhalb dieser Zeit sollten die PC-Treiber sicher von Senden aufEmpfangen umschalten können.
B003 Analog-Ausgang 1, Signalauswahl
S 0 0001
SignalnummerS 0 0000 = keine Zuweisung
Mit Hilfe des Parameters B003 kann dem analogen Ausgabekanal AK1des Antriebsregelgerätes eine Signalnummer zugewiesen werden.Die Inhalte dieser Signale können dann mit Hilfe eines Oszilloskopssichtbar gemacht werden.
S 0 0036 Geschwindigkeits-Sollwert ( V106 * 6 = 10V)S 0 0040 Geschwindigkeits-Istwert ( V106 * 6 = 10V )S 0 0047 Lage-SollwertS 0 0051 Lage-Istwert Geber 1S 0 0053 Lage-Istwert Geber 2S 0 0080 Drehmoment/Kraft-Sollwert (0.500 = 500% bei10V )S 0 0084 Drehmoment/Kraft-Istwert (0.500 = 500% bei10V )S 0 0189 SchleppabstandS 0 0347 Geschwindigkeits-RegelabweichungS 0 0383 Motor-TemperaturP 0 0098 Max. ModellabweichungP 0 0141 Thermische Regelgerät-Auslastung
B004 Analog-Ausgang 1, erweiterte Signalauswahl
12345678
Hex-Wert
Um auch Signale als analoge Spannung darstellen zu können, welchenicht in der Liste B003 enthalten ist, besteht die Möglichkeit dererweiterten Signalauswahl. Sie wird aktiv, sofern keine Zuweisung einesParameters über B003, Analog-Ausgang 1, Signalauswahl an denAnalogausgang erfolgt.
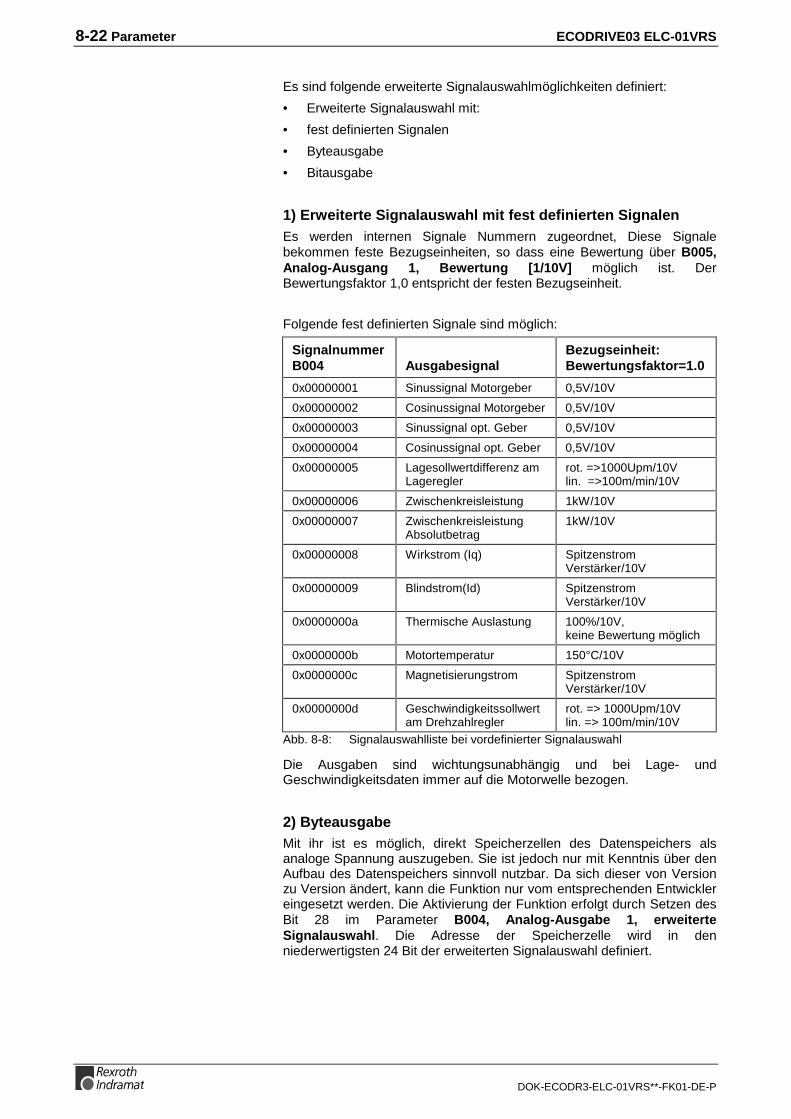
8-22 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Es sind folgende erweiterte Signalauswahlmöglichkeiten definiert:
• Erweiterte Signalauswahl mit:
• fest definierten Signalen
• Byteausgabe
• Bitausgabe
1) Erweiterte Signalauswahl mit fest definierten SignalenEs werden internen Signale Nummern zugeordnet, Diese Signalebekommen feste Bezugseinheiten, so dass eine Bewertung über B005,Analog-Ausgang 1, Bewertung [1/10V] möglich ist. DerBewertungsfaktor 1,0 entspricht der festen Bezugseinheit.
Folgende fest definierten Signale sind möglich:
SignalnummerB004 Ausgabesignal
Bezugseinheit:Bewertungsfaktor=1.0
0x00000001 Sinussignal Motorgeber 0,5V/10V
0x00000002 Cosinussignal Motorgeber 0,5V/10V
0x00000003 Sinussignal opt. Geber 0,5V/10V
0x00000004 Cosinussignal opt. Geber 0,5V/10V
0x00000005 Lagesollwertdifferenz amLageregler
rot. =>1000Upm/10Vlin. =>100m/min/10V
0x00000006 Zwischenkreisleistung 1kW/10V
0x00000007 ZwischenkreisleistungAbsolutbetrag
1kW/10V
0x00000008 Wirkstrom (Iq) SpitzenstromVerstärker/10V
0x00000009 Blindstrom(Id) SpitzenstromVerstärker/10V
0x0000000a Thermische Auslastung 100%/10V,keine Bewertung möglich
0x0000000b Motortemperatur 150°C/10V
0x0000000c Magnetisierungstrom SpitzenstromVerstärker/10V
0x0000000d Geschwindigkeitssollwertam Drehzahlregler
rot. => 1000Upm/10Vlin. => 100m/min/10V
Abb. 8-8: Signalauswahlliste bei vordefinierter Signalauswahl
Die Ausgaben sind wichtungsunabhängig und bei Lage- undGeschwindigkeitsdaten immer auf die Motorwelle bezogen.
2) ByteausgabeMit ihr ist es möglich, direkt Speicherzellen des Datenspeichers alsanaloge Spannung auszugeben. Sie ist jedoch nur mit Kenntnis über denAufbau des Datenspeichers sinnvoll nutzbar. Da sich dieser von Versionzu Version ändert, kann die Funktion nur vom entsprechenden Entwicklereingesetzt werden. Die Aktivierung der Funktion erfolgt durch Setzen desBit 28 im Parameter B004, Analog-Ausgabe 1, erweiterteSignalauswahl. Die Adresse der Speicherzelle wird in denniederwertigsten 24 Bit der erweiterten Signalauswahl definiert.
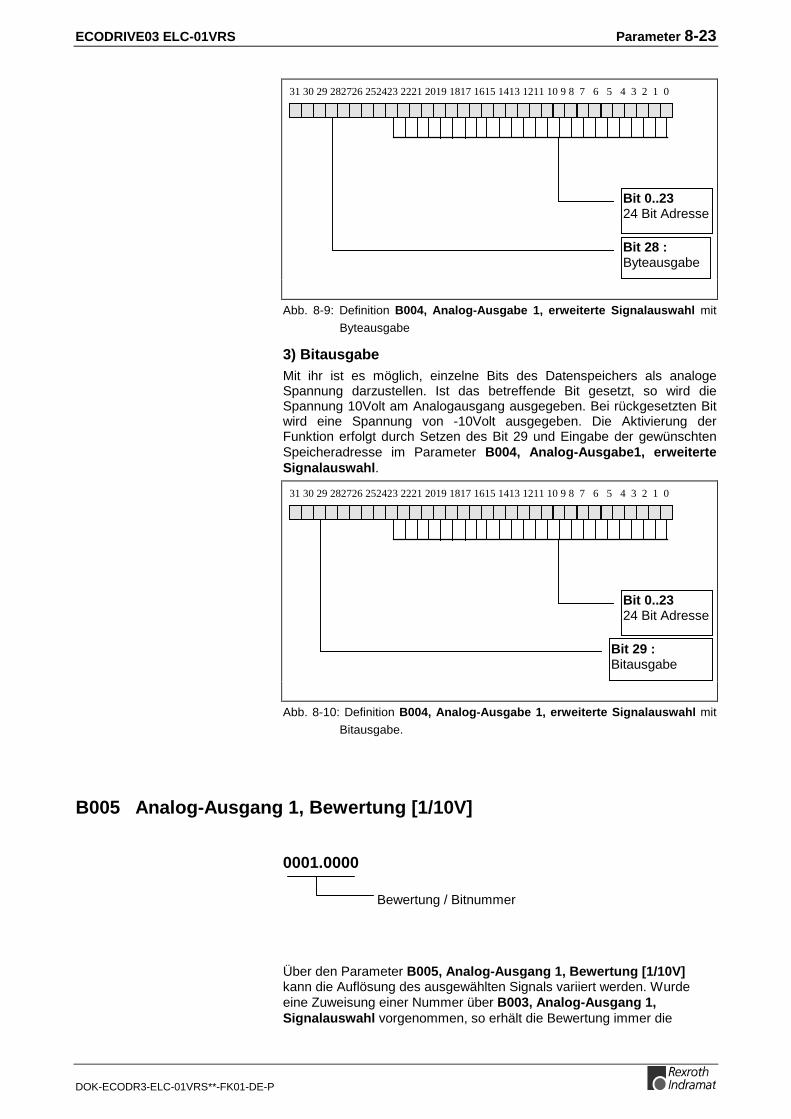
ECODRIVE03 ELC-01VRS Parameter 8-23
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
31 30 29 282726 252423 2221 2019 1817 1615 1413 1211 10 9 8 7 6 5 4 3 2 1 0
Bit 28 :Byteausgabe
Bit 0..2324 Bit Adresse
Abb. 8-9: Definition B004, Analog-Ausgabe 1, erweiterte Signalauswahl mit
Byteausgabe
3) BitausgabeMit ihr ist es möglich, einzelne Bits des Datenspeichers als analogeSpannung darzustellen. Ist das betreffende Bit gesetzt, so wird dieSpannung 10Volt am Analogausgang ausgegeben. Bei rückgesetzten Bitwird eine Spannung von -10Volt ausgegeben. Die Aktivierung derFunktion erfolgt durch Setzen des Bit 29 und Eingabe der gewünschtenSpeicheradresse im Parameter B004, Analog-Ausgabe1, erweiterteSignalauswahl.
31 30 29 282726 252423 2221 2019 1817 1615 1413 1211 10 9 8 7 6 5 4 3 2 1 0
Bit 0..2324 Bit Adresse
Bit 29 :Bitausgabe
Abb. 8-10: Definition B004, Analog-Ausgabe 1, erweiterte Signalauswahl mit
Bitausgabe.
B005 Analog-Ausgang 1, Bewertung [1/10V]
0001.0000
Bewertung / Bitnummer
Über den Parameter B005, Analog-Ausgang 1, Bewertung [1/10V]kann die Auflösung des ausgewählten Signals variiert werden. Wurdeeine Zuweisung einer Nummer über B003, Analog-Ausgang 1,Signalauswahl vorgenommen, so erhält die Bewertung immer die
8-24 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Einheit des Parameters mit der zugewiesenen ID-Nummer. Bei derAusgabe von vordefinierten Signalen ist die Bewertung als Dezimalfaktormit 4 Nachkommastellen definiert. Sie hat einen festen Bezug mit festdefinierter Einheit. Bei der Bit-und Byteausgabe definiert die Bewertungdas niederwertigste Bit, welches zur Ausgabe kommen soll. Die Eingabeerfolgt dezimal ohne Nachkommastellen.
B006 Analog-Ausgang 2, Signalauswahl
S 0 0001
SignalnummerS 0 0000 = keine Zuweisung
Mit Hilfe des Parameters B006 kann dem analogen Ausgabekanal AK2des Antriebsregelgerätes eine Signalnummer zugewiesen werden.Die Inhalte dieser Signale können dann mit Hilfe eines Oszilloskopssichtbar gemacht werden.
S 0 0036 Geschwindigkeits-Sollwert ( V106 * 6 = 10V)S 0 0040 Geschwindigkeits-Istwert ( V106 * 6 = 10V)S 0 0047 Lage-SollwertS 0 0051 Lage-Istwert Geber 1S 0 0053 Lage-Istwert Geber 2S 0 0080 Drehmoment/Kraft-Sollwert (0.500 = 500% bei10V )S 0 0084 Drehmoment/Kraft-Istwert (0.500 = 500% bei10V )S 0 0189 SchleppabstandS 0 0347 Geschwindigkeits-RegelabweichungS 0 0383 Motor-TemperaturP 0 0098 Max. ModellabweichungP 0 0141 Thermische Regelgerät-Auslastung
B007 Analog-Ausgang 2, erweiterte Signalauswahl
12345678
Hex-Wert
Um auch Signale als analoge Spannung darstellen zu können, welchenicht in der Liste B006 enthalten ist, besteht die Möglichkeit dererweiterten Signalauswahl. Sie wird aktiv, sofern keine Zuweisung einesParameters über B006, Analog-Ausgang 2, Signalauswahl an denAnalogausgang erfolgt.
Es sind folgende erweiterte Signalauswahlmöglichkeiten definiert:
• Erweiterte Signalauswahl mit fest definierten Signalen
• Byteausgabe
• Bitausgabe
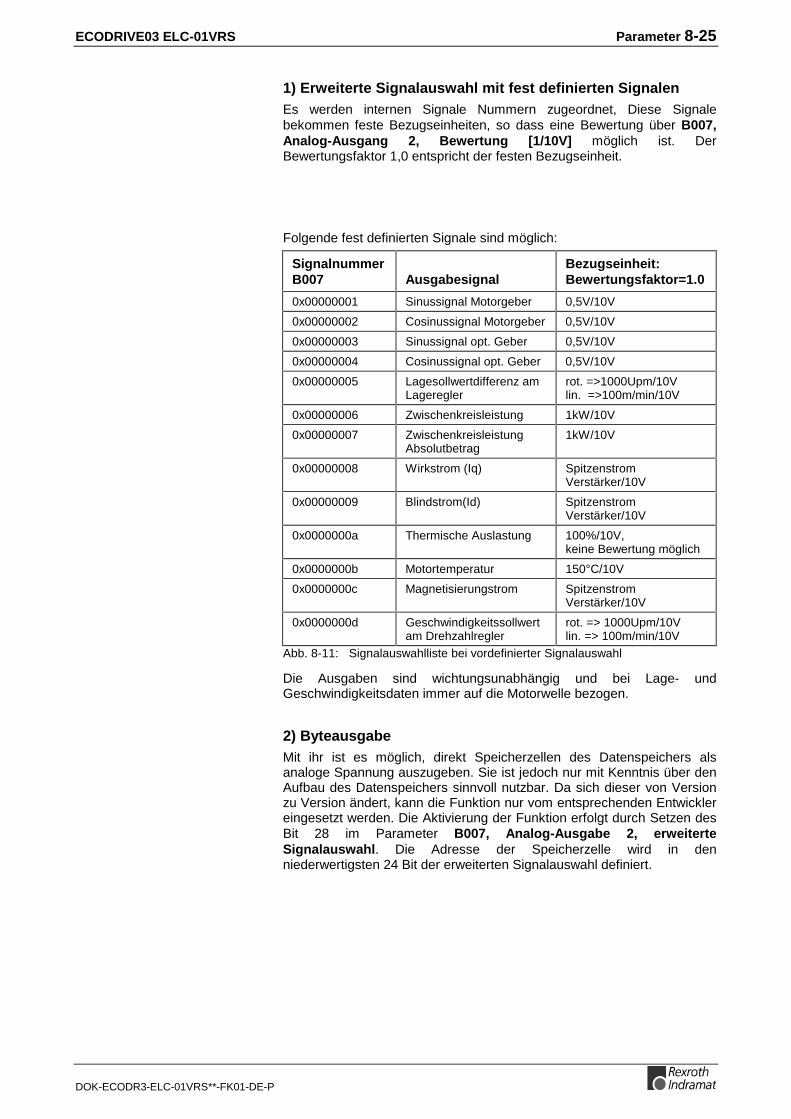
ECODRIVE03 ELC-01VRS Parameter 8-25
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
1) Erweiterte Signalauswahl mit fest definierten SignalenEs werden internen Signale Nummern zugeordnet, Diese Signalebekommen feste Bezugseinheiten, so dass eine Bewertung über B007,Analog-Ausgang 2, Bewertung [1/10V] möglich ist. DerBewertungsfaktor 1,0 entspricht der festen Bezugseinheit.
Folgende fest definierten Signale sind möglich:
SignalnummerB007 Ausgabesignal
Bezugseinheit:Bewertungsfaktor=1.0
0x00000001 Sinussignal Motorgeber 0,5V/10V
0x00000002 Cosinussignal Motorgeber 0,5V/10V
0x00000003 Sinussignal opt. Geber 0,5V/10V
0x00000004 Cosinussignal opt. Geber 0,5V/10V
0x00000005 Lagesollwertdifferenz amLageregler
rot. =>1000Upm/10Vlin. =>100m/min/10V
0x00000006 Zwischenkreisleistung 1kW/10V
0x00000007 ZwischenkreisleistungAbsolutbetrag
1kW/10V
0x00000008 Wirkstrom (Iq) SpitzenstromVerstärker/10V
0x00000009 Blindstrom(Id) SpitzenstromVerstärker/10V
0x0000000a Thermische Auslastung 100%/10V,keine Bewertung möglich
0x0000000b Motortemperatur 150°C/10V
0x0000000c Magnetisierungstrom SpitzenstromVerstärker/10V
0x0000000d Geschwindigkeitssollwertam Drehzahlregler
rot. => 1000Upm/10Vlin. => 100m/min/10V
Abb. 8-11: Signalauswahlliste bei vordefinierter Signalauswahl
Die Ausgaben sind wichtungsunabhängig und bei Lage- undGeschwindigkeitsdaten immer auf die Motorwelle bezogen.
2) ByteausgabeMit ihr ist es möglich, direkt Speicherzellen des Datenspeichers alsanaloge Spannung auszugeben. Sie ist jedoch nur mit Kenntnis über denAufbau des Datenspeichers sinnvoll nutzbar. Da sich dieser von Versionzu Version ändert, kann die Funktion nur vom entsprechenden Entwicklereingesetzt werden. Die Aktivierung der Funktion erfolgt durch Setzen desBit 28 im Parameter B007, Analog-Ausgabe 2, erweiterteSignalauswahl. Die Adresse der Speicherzelle wird in denniederwertigsten 24 Bit der erweiterten Signalauswahl definiert.
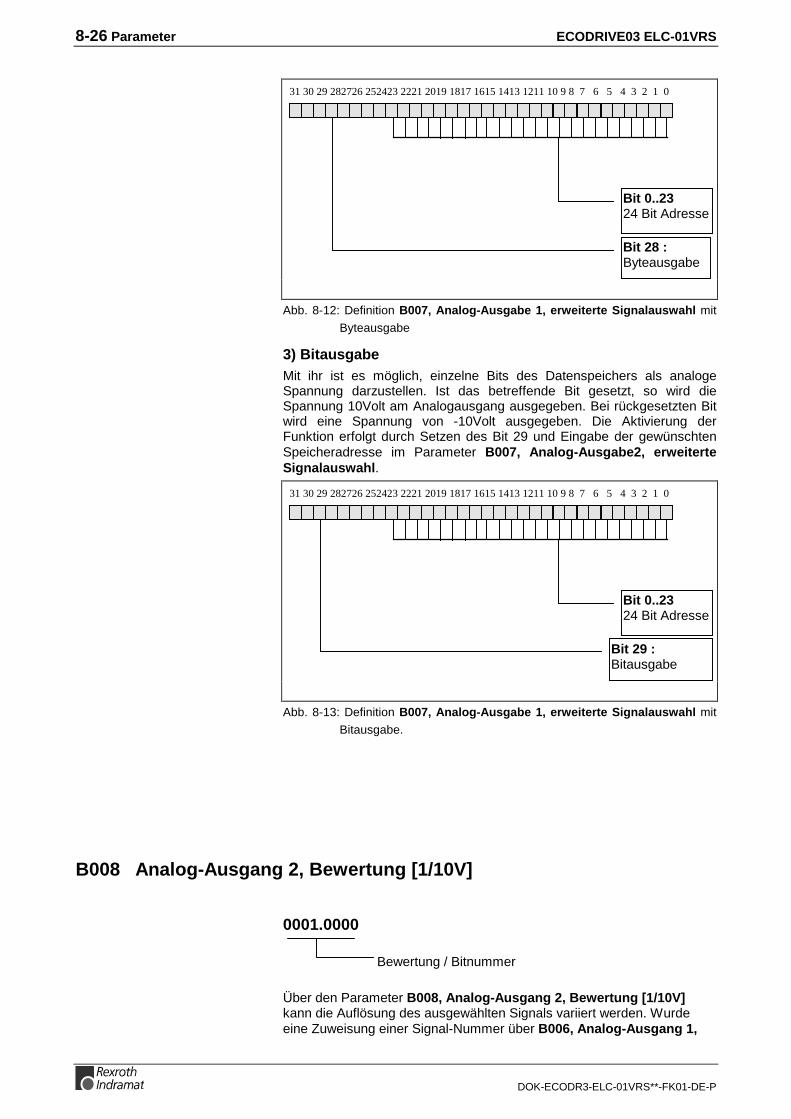
8-26 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
31 30 29 282726 252423 2221 2019 1817 1615 1413 1211 10 9 8 7 6 5 4 3 2 1 0
Bit 28 :Byteausgabe
Bit 0..2324 Bit Adresse
Abb. 8-12: Definition B007, Analog-Ausgabe 1, erweiterte Signalauswahl mit
Byteausgabe
3) BitausgabeMit ihr ist es möglich, einzelne Bits des Datenspeichers als analogeSpannung darzustellen. Ist das betreffende Bit gesetzt, so wird dieSpannung 10Volt am Analogausgang ausgegeben. Bei rückgesetzten Bitwird eine Spannung von -10Volt ausgegeben. Die Aktivierung derFunktion erfolgt durch Setzen des Bit 29 und Eingabe der gewünschtenSpeicheradresse im Parameter B007, Analog-Ausgabe2, erweiterteSignalauswahl.
31 30 29 282726 252423 2221 2019 1817 1615 1413 1211 10 9 8 7 6 5 4 3 2 1 0
Bit 0..2324 Bit Adresse
Bit 29 :Bitausgabe
Abb. 8-13: Definition B007, Analog-Ausgabe 1, erweiterte Signalauswahl mit
Bitausgabe.
B008 Analog-Ausgang 2, Bewertung [1/10V]
0001.0000
Bewertung / Bitnummer
Über den Parameter B008, Analog-Ausgang 2, Bewertung [1/10V]kann die Auflösung des ausgewählten Signals variiert werden. Wurdeeine Zuweisung einer Signal-Nummer über B006, Analog-Ausgang 1,
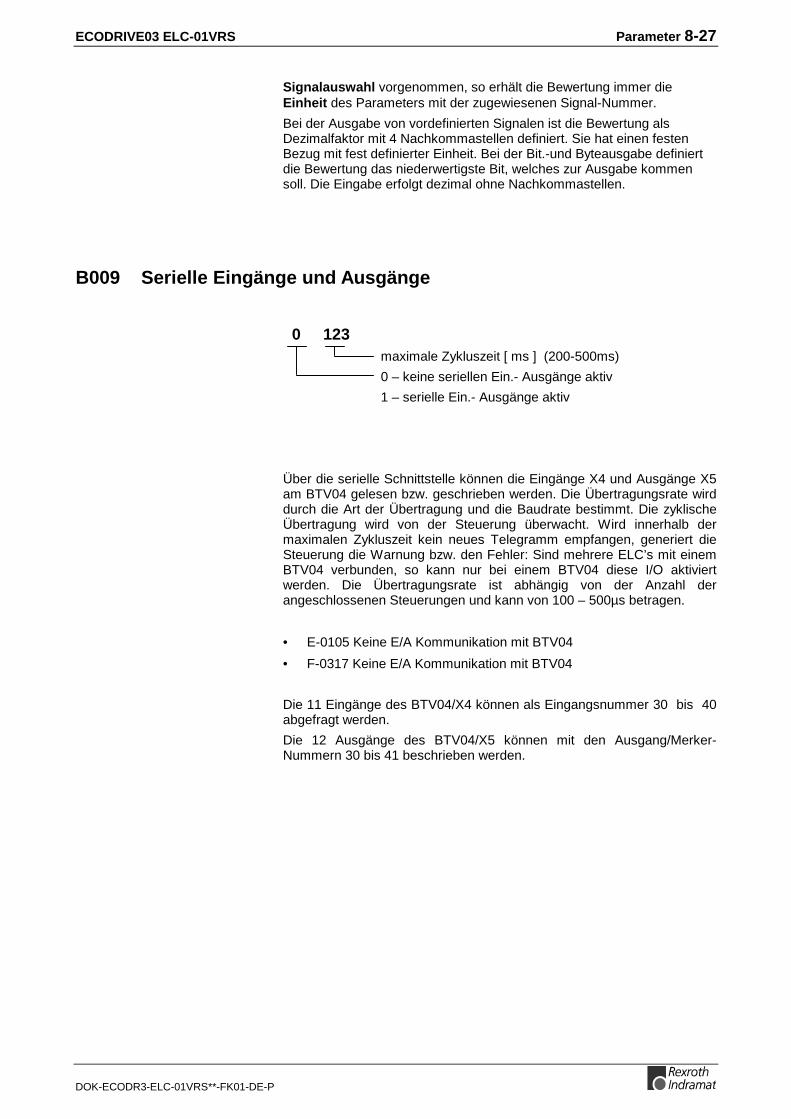
ECODRIVE03 ELC-01VRS Parameter 8-27
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Signalauswahl vorgenommen, so erhält die Bewertung immer dieEinheit des Parameters mit der zugewiesenen Signal-Nummer.
Bei der Ausgabe von vordefinierten Signalen ist die Bewertung alsDezimalfaktor mit 4 Nachkommastellen definiert. Sie hat einen festenBezug mit fest definierter Einheit. Bei der Bit.-und Byteausgabe definiertdie Bewertung das niederwertigste Bit, welches zur Ausgabe kommensoll. Die Eingabe erfolgt dezimal ohne Nachkommastellen.
B009 Serielle Eingänge und Ausgänge
0 123 maximale Zykluszeit [ ms ] (200-500ms)
0 – keine seriellen Ein.- Ausgänge aktiv
1 – serielle Ein.- Ausgänge aktiv
Über die serielle Schnittstelle können die Eingänge X4 und Ausgänge X5am BTV04 gelesen bzw. geschrieben werden. Die Übertragungsrate wirddurch die Art der Übertragung und die Baudrate bestimmt. Die zyklischeÜbertragung wird von der Steuerung überwacht. Wird innerhalb dermaximalen Zykluszeit kein neues Telegramm empfangen, generiert dieSteuerung die Warnung bzw. den Fehler: Sind mehrere ELC’s mit einemBTV04 verbunden, so kann nur bei einem BTV04 diese I/O aktiviertwerden. Die Übertragungsrate ist abhängig von der Anzahl derangeschlossenen Steuerungen und kann von 100 – 500µs betragen.
• E-0105 Keine E/A Kommunikation mit BTV04
• F-0317 Keine E/A Kommunikation mit BTV04
Die 11 Eingänge des BTV04/X4 können als Eingangsnummer 30 bis 40abgefragt werden.
Die 12 Ausgänge des BTV04/X5 können mit den Ausgang/Merker-Nummern 30 bis 41 beschrieben werden.
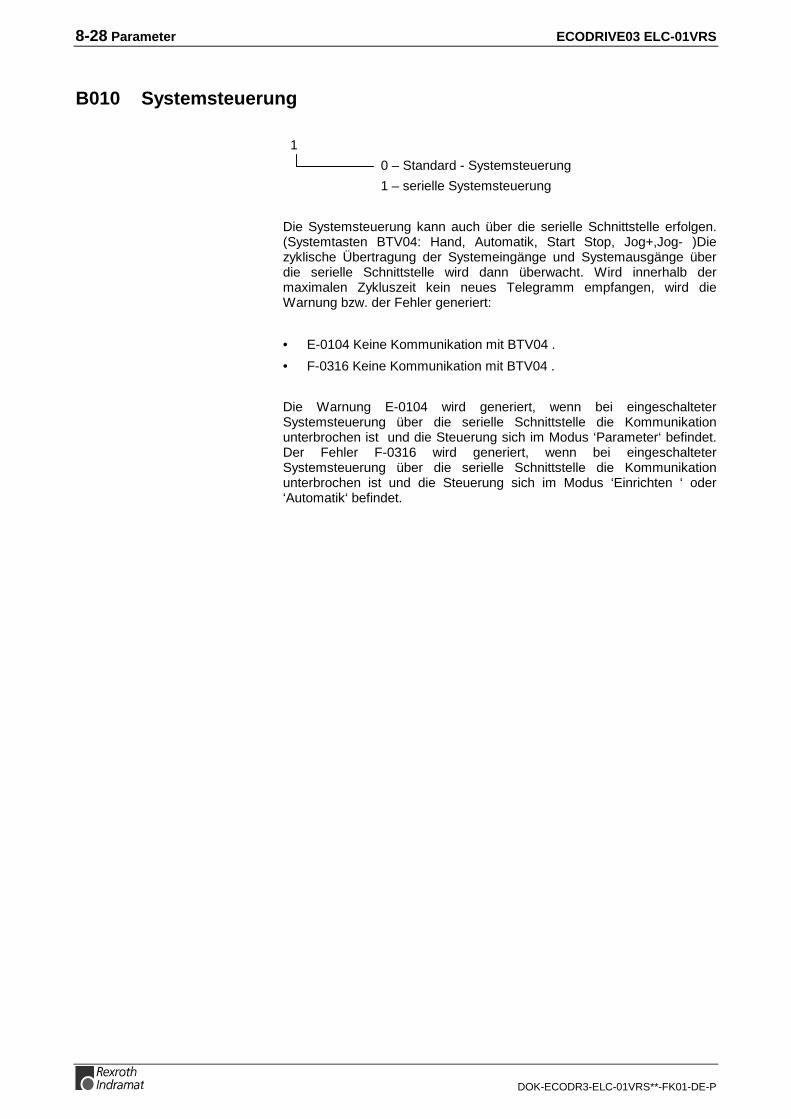
8-28 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
B010 Systemsteuerung
1
0 – Standard - Systemsteuerung
1 – serielle Systemsteuerung
Die Systemsteuerung kann auch über die serielle Schnittstelle erfolgen.(Systemtasten BTV04: Hand, Automatik, Start Stop, Jog+,Jog- )Diezyklische Übertragung der Systemeingänge und Systemausgänge überdie serielle Schnittstelle wird dann überwacht. Wird innerhalb dermaximalen Zykluszeit kein neues Telegramm empfangen, wird dieWarnung bzw. der Fehler generiert:
• E-0104 Keine Kommunikation mit BTV04 .
• F-0316 Keine Kommunikation mit BTV04 .
Die Warnung E-0104 wird generiert, wenn bei eingeschalteterSystemsteuerung über die serielle Schnittstelle die Kommunikationunterbrochen ist und die Steuerung sich im Modus ‘Parameter‘ befindet.Der Fehler F-0316 wird generiert, wenn bei eingeschalteterSystemsteuerung über die serielle Schnittstelle die Kommunikationunterbrochen ist und die Steuerung sich im Modus ‘Einrichten ‘ oder‘Automatik‘ befindet.
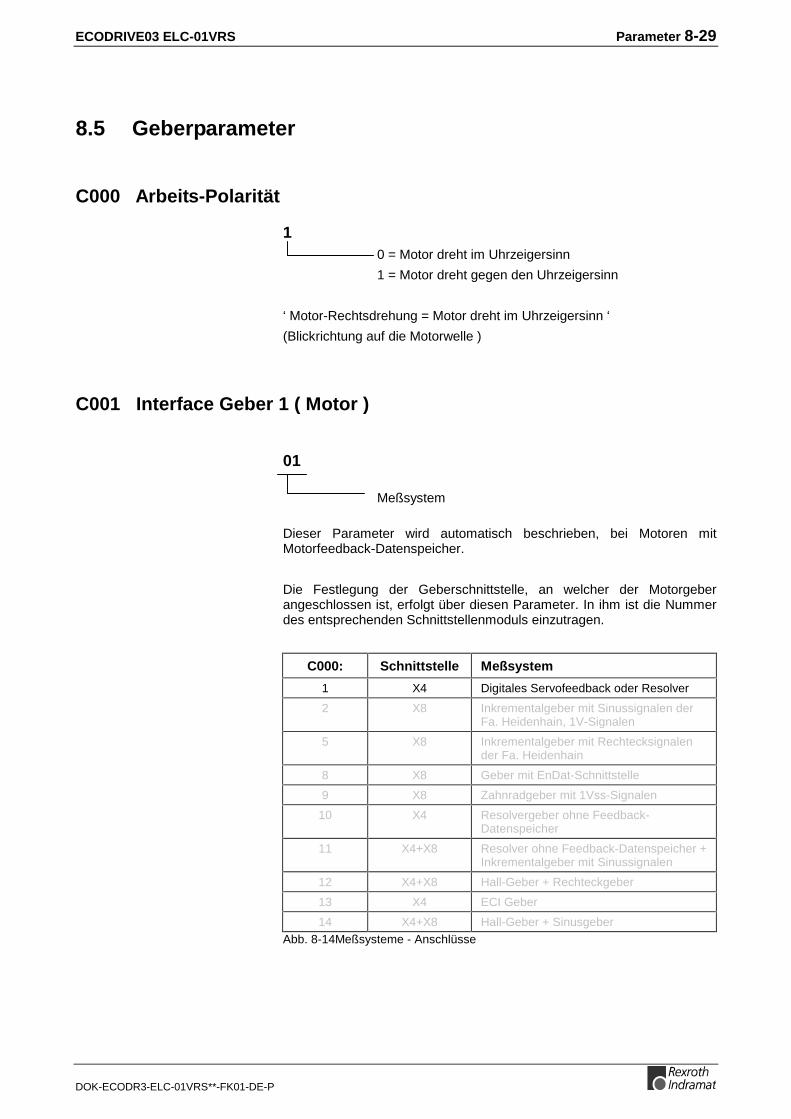
ECODRIVE03 ELC-01VRS Parameter 8-29
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
8.5 Geberparameter
C000 Arbeits-Polarität
10 = Motor dreht im Uhrzeigersinn
1 = Motor dreht gegen den Uhrzeigersinn
‘ Motor-Rechtsdrehung = Motor dreht im Uhrzeigersinn ‘
(Blickrichtung auf die Motorwelle )
C001 Interface Geber 1 ( Motor )
01
Meßsystem
Dieser Parameter wird automatisch beschrieben, bei Motoren mitMotorfeedback-Datenspeicher.
Die Festlegung der Geberschnittstelle, an welcher der Motorgeberangeschlossen ist, erfolgt über diesen Parameter. In ihm ist die Nummerdes entsprechenden Schnittstellenmoduls einzutragen.
C000: Schnittstelle Meßsystem
1 X4 Digitales Servofeedback oder Resolver
2 X8 Inkrementalgeber mit Sinussignalen derFa. Heidenhain, 1V-Signalen
5 X8 Inkrementalgeber mit Rechtecksignalender Fa. Heidenhain
8 X8 Geber mit EnDat-Schnittstelle
9 X8 Zahnradgeber mit 1Vss-Signalen
10 X4 Resolvergeber ohne Feedback-Datenspeicher
11 X4+X8 Resolver ohne Feedback-Datenspeicher +Inkrementalgeber mit Sinussignalen
12 X4+X8 Hall-Geber + Rechteckgeber
13 X4 ECI Geber
14 X4+X8 Hall-Geber + SinusgeberAbb. 8-14Meßsysteme - Anschlüsse
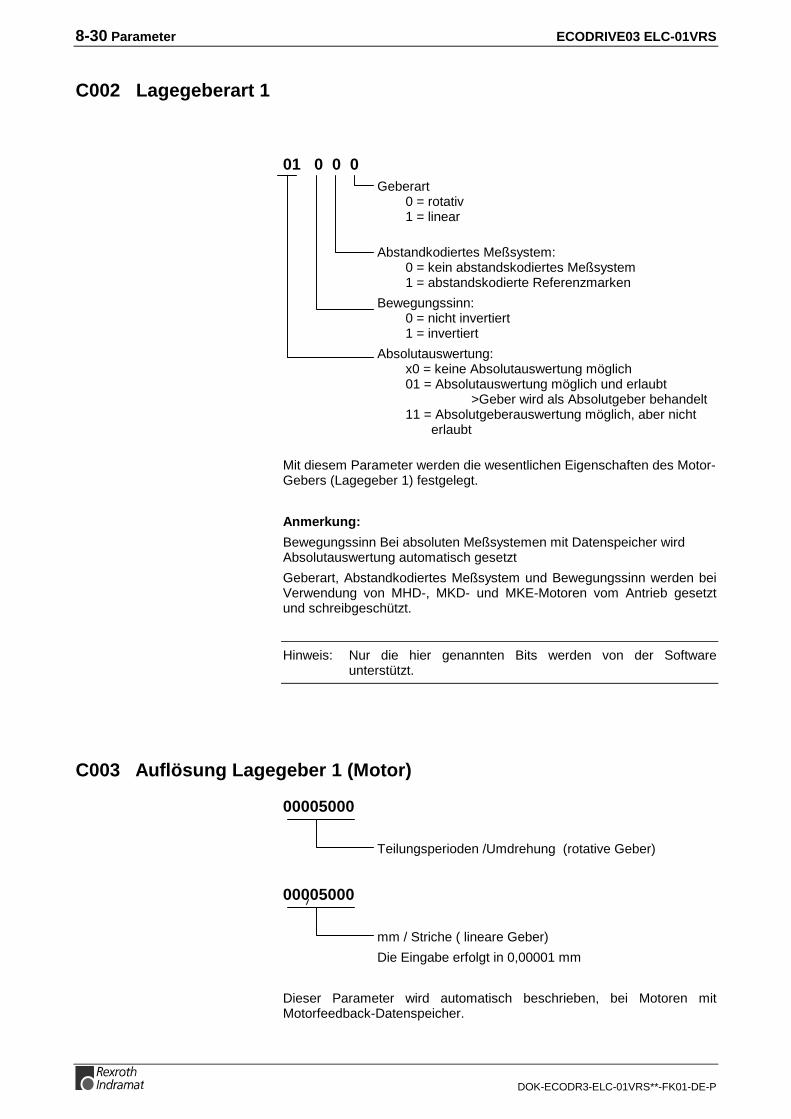
8-30 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C002 Lagegeberart 1
01 0 0 0Geberart
0 = rotativ1 = linear
Abstandkodiertes Meßsystem:0 = kein abstandskodiertes Meßsystem1 = abstandskodierte Referenzmarken
Bewegungssinn:0 = nicht invertiert1 = invertiert
Absolutauswertung:x0 = keine Absolutauswertung möglich01 = Absolutauswertung möglich und erlaubt
>Geber wird als Absolutgeber behandelt11 = Absolutgeberauswertung möglich, aber nicht erlaubt
Mit diesem Parameter werden die wesentlichen Eigenschaften des Motor-Gebers (Lagegeber 1) festgelegt.
Anmerkung:
Bewegungssinn Bei absoluten Meßsystemen mit Datenspeicher wirdAbsolutauswertung automatisch gesetzt
Geberart, Abstandkodiertes Meßsystem und Bewegungssinn werden beiVerwendung von MHD-, MKD- und MKE-Motoren vom Antrieb gesetztund schreibgeschützt.
Hinweis: Nur die hier genannten Bits werden von der Softwareunterstützt.
C003 Auflösung Lagegeber 1 (Motor)
00005000
Teilungsperioden /Umdrehung (rotative Geber)
00005000
mm / Striche ( lineare Geber)
Die Eingabe erfolgt in 0,00001 mm
Dieser Parameter wird automatisch beschrieben, bei Motoren mitMotorfeedback-Datenspeicher.
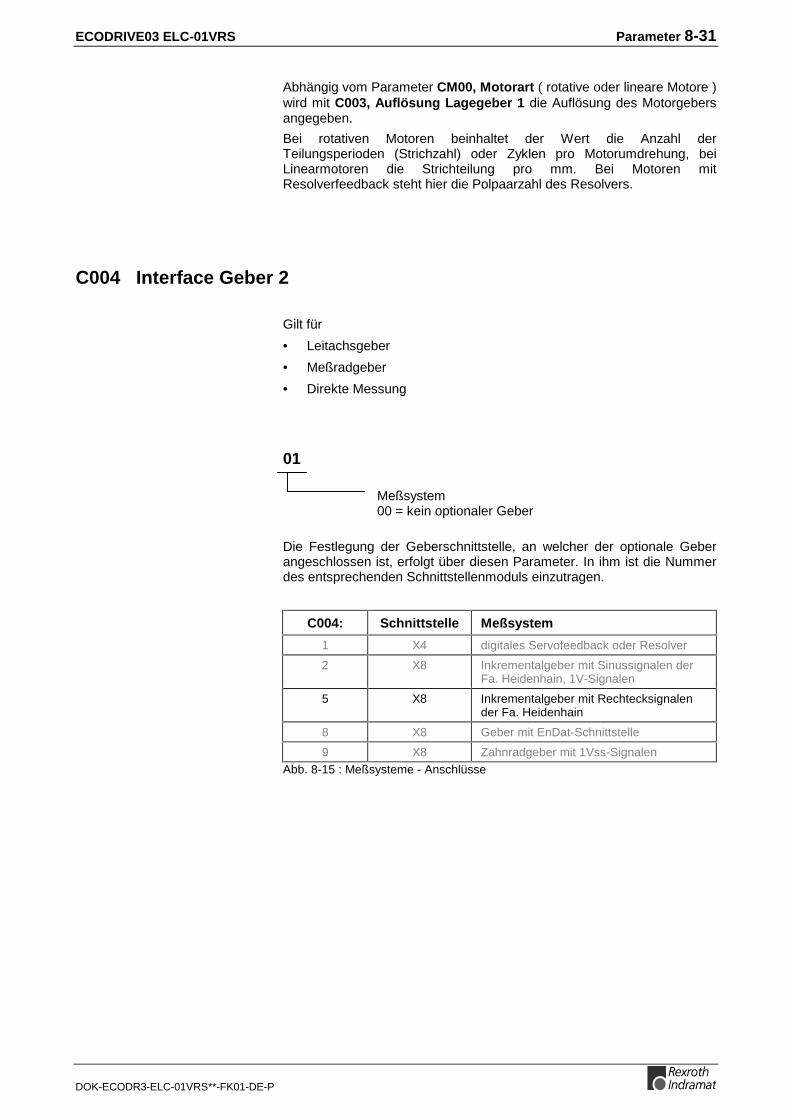
ECODRIVE03 ELC-01VRS Parameter 8-31
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Abhängig vom Parameter CM00, Motorart ( rotative oder lineare Motore )wird mit C003, Auflösung Lagegeber 1 die Auflösung des Motorgebersangegeben.
Bei rotativen Motoren beinhaltet der Wert die Anzahl derTeilungsperioden (Strichzahl) oder Zyklen pro Motorumdrehung, beiLinearmotoren die Strichteilung pro mm. Bei Motoren mitResolverfeedback steht hier die Polpaarzahl des Resolvers.
C004 Interface Geber 2
Gilt für
• Leitachsgeber
• Meßradgeber
• Direkte Messung
01
Meßsystem00 = kein optionaler Geber
Die Festlegung der Geberschnittstelle, an welcher der optionale Geberangeschlossen ist, erfolgt über diesen Parameter. In ihm ist die Nummerdes entsprechenden Schnittstellenmoduls einzutragen.
C004: Schnittstelle Meßsystem
1 X4 digitales Servofeedback oder Resolver
2 X8 Inkrementalgeber mit Sinussignalen derFa. Heidenhain, 1V-Signalen
5 X8 Inkrementalgeber mit Rechtecksignalender Fa. Heidenhain
8 X8 Geber mit EnDat-Schnittstelle
9 X8 Zahnradgeber mit 1Vss-SignalenAbb. 8-15 : Meßsysteme - Anschlüsse
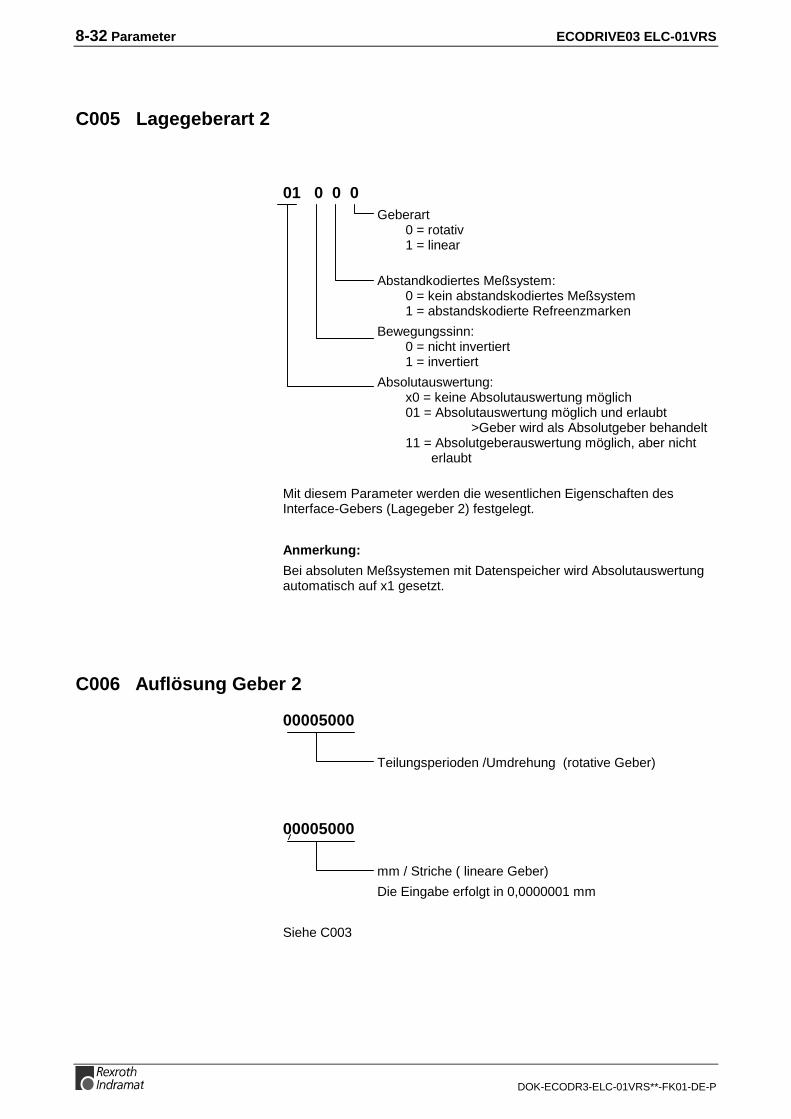
8-32 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C005 Lagegeberart 2
01 0 0 0Geberart
0 = rotativ1 = linear
Abstandkodiertes Meßsystem:0 = kein abstandskodiertes Meßsystem1 = abstandskodierte Refreenzmarken
Bewegungssinn:0 = nicht invertiert1 = invertiert
Absolutauswertung:x0 = keine Absolutauswertung möglich01 = Absolutauswertung möglich und erlaubt
>Geber wird als Absolutgeber behandelt11 = Absolutgeberauswertung möglich, aber nicht erlaubt
Mit diesem Parameter werden die wesentlichen Eigenschaften desInterface-Gebers (Lagegeber 2) festgelegt.
Anmerkung:
Bei absoluten Meßsystemen mit Datenspeicher wird Absolutauswertungautomatisch auf x1 gesetzt.
C006 Auflösung Geber 2
00005000
Teilungsperioden /Umdrehung (rotative Geber)
00005000
mm / Striche ( lineare Geber)
Die Eingabe erfolgt in 0,0000001 mm
Siehe C003
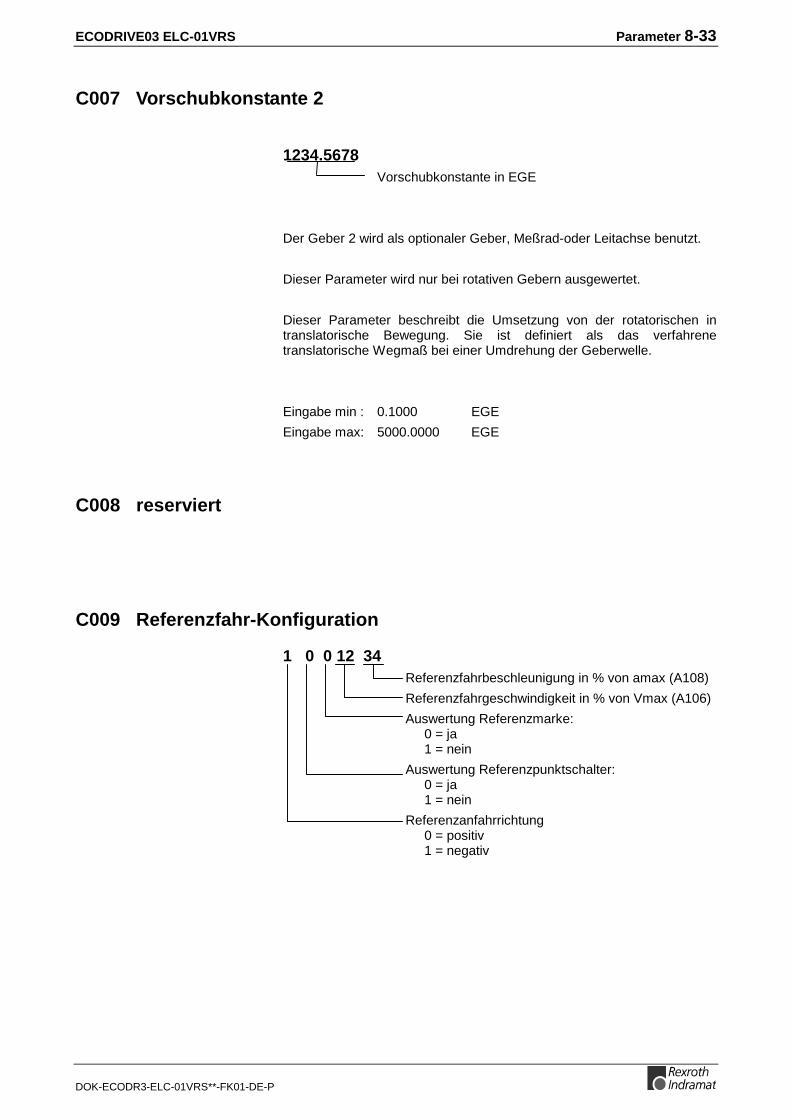
ECODRIVE03 ELC-01VRS Parameter 8-33
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C007 Vorschubkonstante 2
1234.5678Vorschubkonstante in EGE
Der Geber 2 wird als optionaler Geber, Meßrad-oder Leitachse benutzt.
Dieser Parameter wird nur bei rotativen Gebern ausgewertet.
Dieser Parameter beschreibt die Umsetzung von der rotatorischen intranslatorische Bewegung. Sie ist definiert als das verfahrenetranslatorische Wegmaß bei einer Umdrehung der Geberwelle.
Eingabe min : 0.1000 EGE
Eingabe max: 5000.0000 EGE
C008 reserviert
C009 Referenzfahr-Konfiguration
1 0 0 12 34Referenzfahrbeschleunigung in % von amax (A108)
Referenzfahrgeschwindigkeit in % von Vmax (A106)
Auswertung Referenzmarke:0 = ja1 = nein
Auswertung Referenzpunktschalter:0 = ja1 = nein
Referenzanfahrrichtung0 = positiv1 = negativ
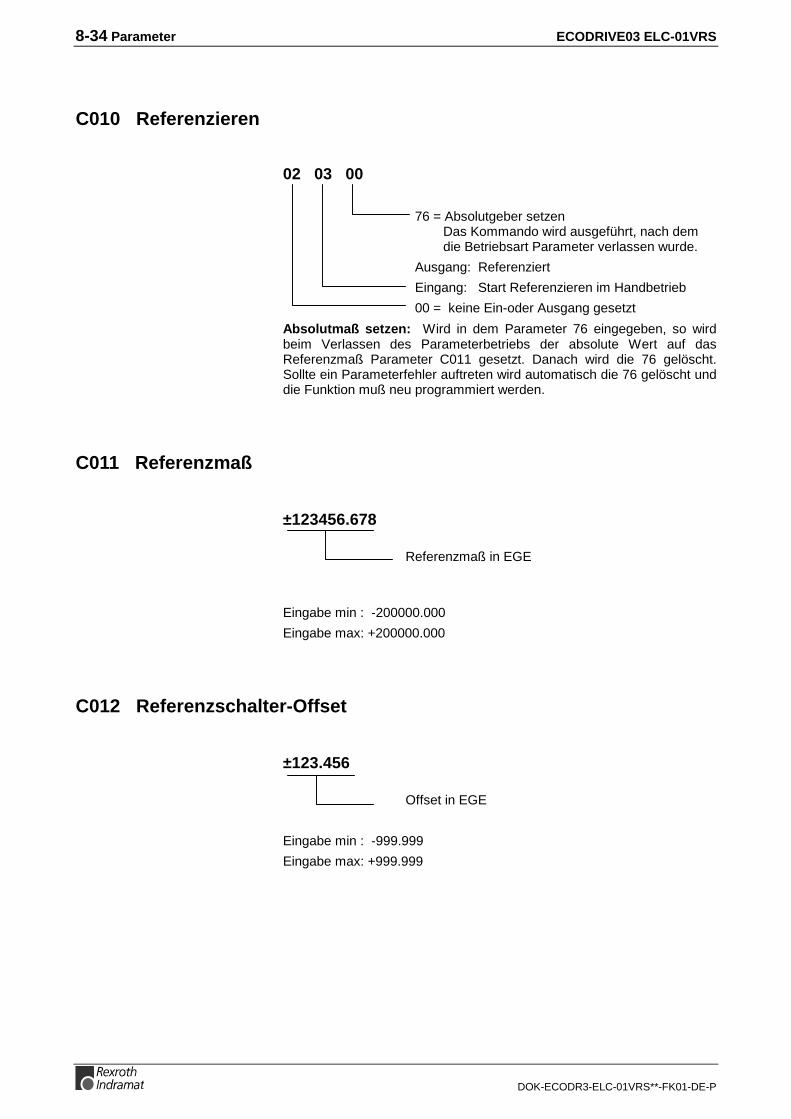
8-34 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C010 Referenzieren
02 03 00
76 = Absolutgeber setzenDas Kommando wird ausgeführt, nach demdie Betriebsart Parameter verlassen wurde.
Ausgang: Referenziert
Eingang: Start Referenzieren im Handbetrieb
00 = keine Ein-oder Ausgang gesetzt
Absolutmaß setzen: Wird in dem Parameter 76 eingegeben, so wirdbeim Verlassen des Parameterbetriebs der absolute Wert auf dasReferenzmaß Parameter C011 gesetzt. Danach wird die 76 gelöscht.Sollte ein Parameterfehler auftreten wird automatisch die 76 gelöscht unddie Funktion muß neu programmiert werden.
C011 Referenzmaß
±123456.678
Referenzmaß in EGE
Eingabe min : -200000.000
Eingabe max: +200000.000
C012 Referenzschalter-Offset
±123.456
Offset in EGE
Eingabe min : -999.999
Eingabe max: +999.999
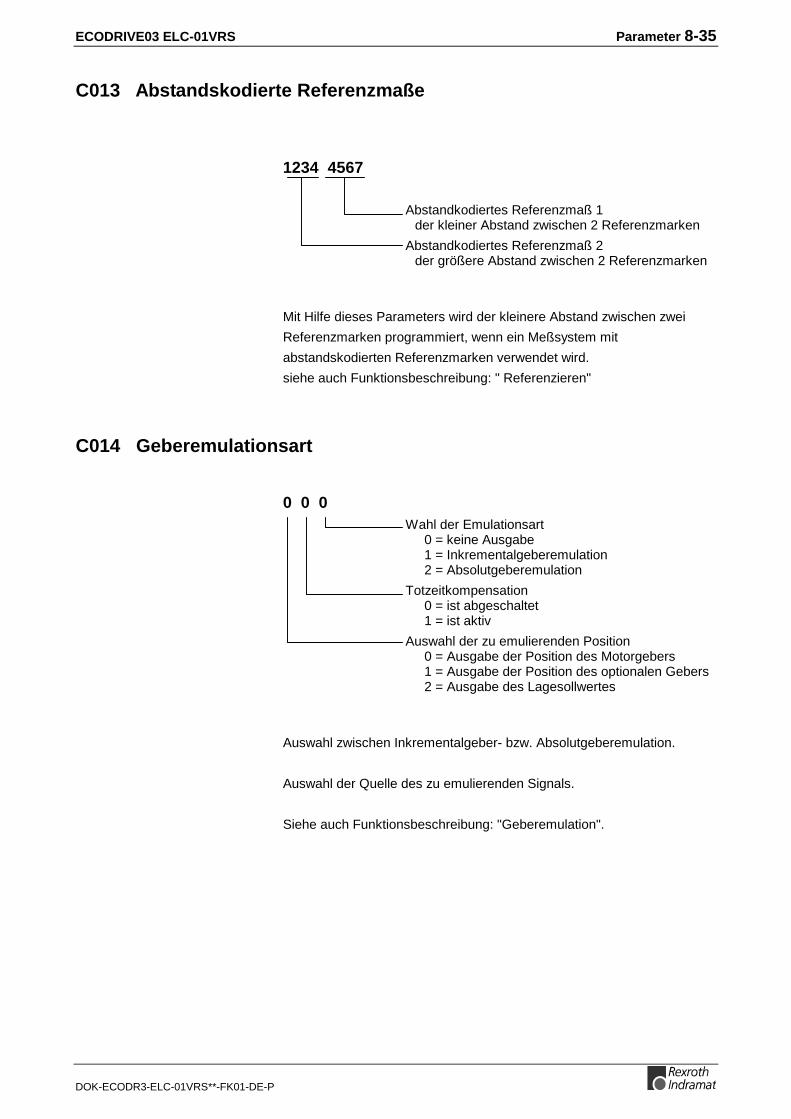
ECODRIVE03 ELC-01VRS Parameter 8-35
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C013 Abstandskodierte Referenzmaße
1234 4567
Abstandkodiertes Referenzmaß 1der kleiner Abstand zwischen 2 Referenzmarken
Abstandkodiertes Referenzmaß 2der größere Abstand zwischen 2 Referenzmarken
Mit Hilfe dieses Parameters wird der kleinere Abstand zwischen zwei
Referenzmarken programmiert, wenn ein Meßsystem mit
abstandskodierten Referenzmarken verwendet wird.
siehe auch Funktionsbeschreibung: " Referenzieren"
C014 Geberemulationsart
0 0 0Wahl der Emulationsart
0 = keine Ausgabe1 = Inkrementalgeberemulation2 = Absolutgeberemulation
Totzeitkompensation0 = ist abgeschaltet1 = ist aktiv
Auswahl der zu emulierenden Position0 = Ausgabe der Position des Motorgebers1 = Ausgabe der Position des optionalen Gebers2 = Ausgabe des Lagesollwertes
Auswahl zwischen Inkrementalgeber- bzw. Absolutgeberemulation.
Auswahl der Quelle des zu emulierenden Signals.
Siehe auch Funktionsbeschreibung: "Geberemulation".
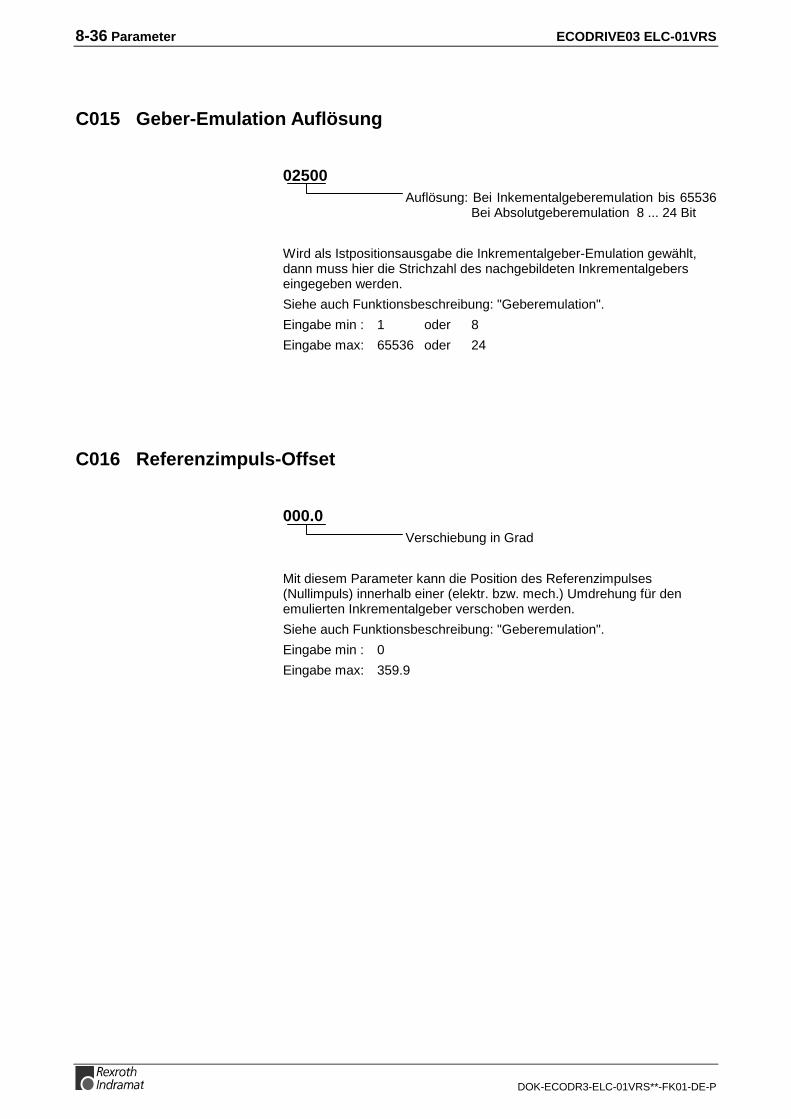
8-36 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C015 Geber-Emulation Auflösung
02500Auflösung: Bei Inkementalgeberemulation bis 65536
Bei Absolutgeberemulation 8 ... 24 Bit
Wird als Istpositionsausgabe die Inkrementalgeber-Emulation gewählt,dann muss hier die Strichzahl des nachgebildeten Inkrementalgeberseingegeben werden.
Siehe auch Funktionsbeschreibung: "Geberemulation".
Eingabe min : 1 oder 8
Eingabe max: 65536 oder 24
C016 Referenzimpuls-Offset
000.0Verschiebung in Grad
Mit diesem Parameter kann die Position des Referenzimpulses(Nullimpuls) innerhalb einer (elektr. bzw. mech.) Umdrehung für denemulierten Inkrementalgeber verschoben werden.
Siehe auch Funktionsbeschreibung: "Geberemulation".
Eingabe min : 0
Eingabe max: 359.9
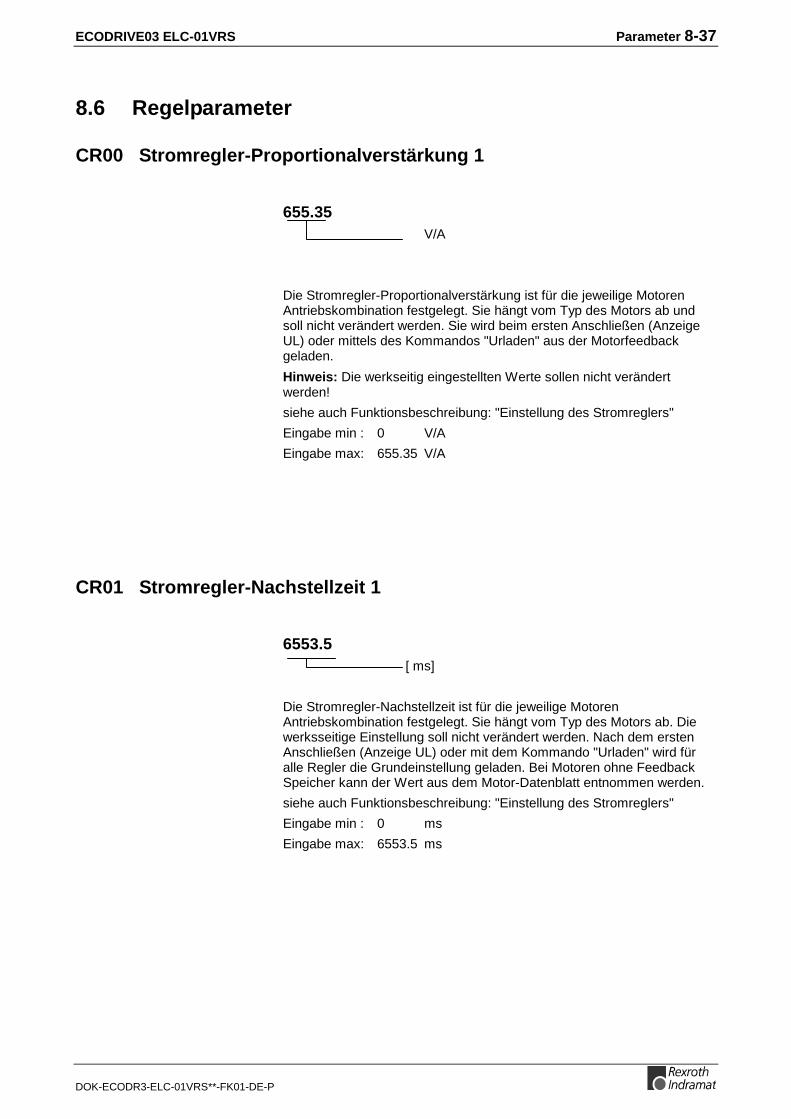
ECODRIVE03 ELC-01VRS Parameter 8-37
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
8.6 Regelparameter
CR00 Stromregler-Proportionalverstärkung 1
655.35V/A
Die Stromregler-Proportionalverstärkung ist für die jeweilige MotorenAntriebskombination festgelegt. Sie hängt vom Typ des Motors ab undsoll nicht verändert werden. Sie wird beim ersten Anschließen (AnzeigeUL) oder mittels des Kommandos "Urladen" aus der Motorfeedbackgeladen.
Hinweis: Die werkseitig eingestellten Werte sollen nicht verändertwerden!
siehe auch Funktionsbeschreibung: "Einstellung des Stromreglers"
Eingabe min : 0 V/A
Eingabe max: 655.35 V/A
CR01 Stromregler-Nachstellzeit 1
6553.5[ ms]
Die Stromregler-Nachstellzeit ist für die jeweilige MotorenAntriebskombination festgelegt. Sie hängt vom Typ des Motors ab. Diewerksseitige Einstellung soll nicht verändert werden. Nach dem erstenAnschließen (Anzeige UL) oder mit dem Kommando "Urladen" wird füralle Regler die Grundeinstellung geladen. Bei Motoren ohne FeedbackSpeicher kann der Wert aus dem Motor-Datenblatt entnommen werden.
siehe auch Funktionsbeschreibung: "Einstellung des Stromreglers"
Eingabe min : 0 ms
Eingabe max: 6553.5 ms
8-38 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
CR02 Geschwindigkeitsregler-Proportionalverstärkung
6553.5As/rad (Amin/m)
Der Parameter beinhaltet den Wert für die Proportionalverstärkung desGeschwindigkeitsreglers.
Die Einheit der Proportionalverstärkung ist abhängig von derangeschlossenen Motorart.
Einheit:
Motorart: Einheit:
Rotativer Motor: A•s / rad
Linearer Motor: A•min / m
Abb. 8-16: Einheiten für die Geschw.regler-Prop.verstärkung je nach Motorart
Mit Hilfe des Kommandos "Urladen" besteht die Möglichkeit, einenDefault-Wert für diesen Parameter zu laden, sofern ein Motor mitMotorfeedback-Datenspeicher vorhanden ist. ( CM00, Motorart: 1 oder5 ).
Siehe auch Funktionsbeschreibung: "Einstellung desGeschwindigkeitsreglers".
Eingabe min : 0 As/rad (Amin/m)
Eingabe max: 6553.5 As/rad (Amin/m)
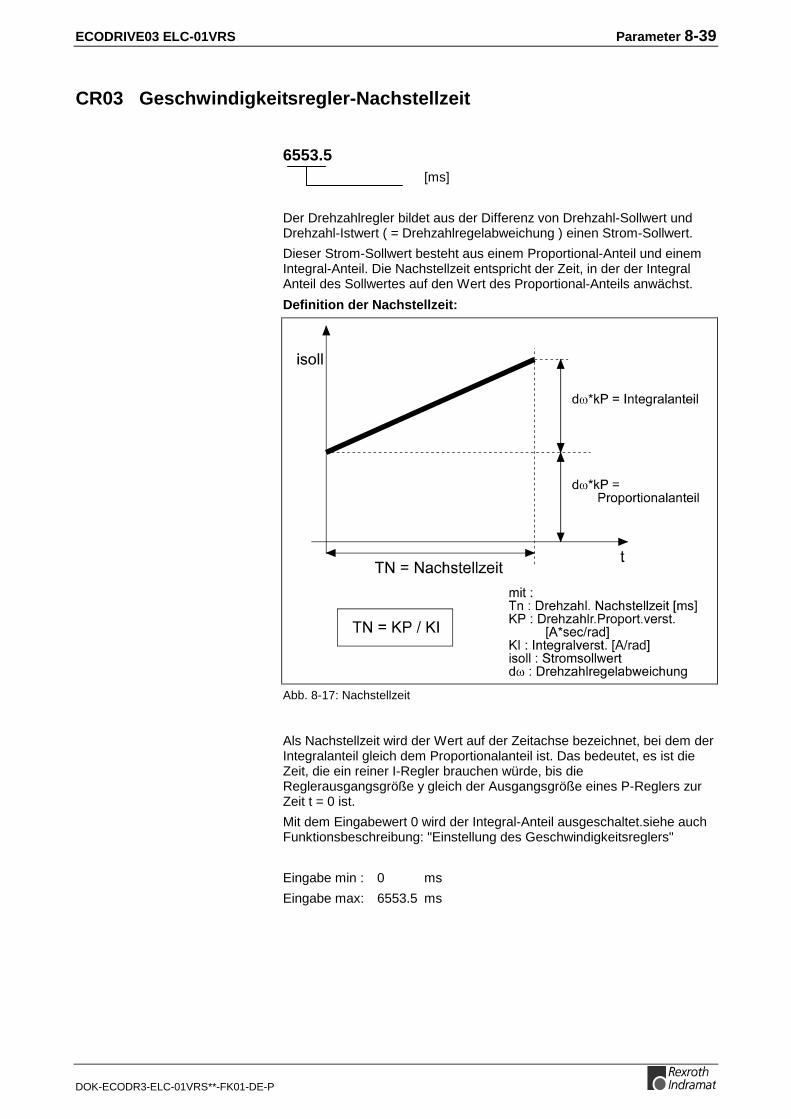
ECODRIVE03 ELC-01VRS Parameter 8-39
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
CR03 Geschwindigkeitsregler-Nachstellzeit
6553.5[ms]
Der Drehzahlregler bildet aus der Differenz von Drehzahl-Sollwert undDrehzahl-Istwert ( = Drehzahlregelabweichung ) einen Strom-Sollwert.
Dieser Strom-Sollwert besteht aus einem Proportional-Anteil und einemIntegral-Anteil. Die Nachstellzeit entspricht der Zeit, in der der IntegralAnteil des Sollwertes auf den Wert des Proportional-Anteils anwächst.
Definition der Nachstellzeit:
Abb. 8-17: Nachstellzeit
Als Nachstellzeit wird der Wert auf der Zeitachse bezeichnet, bei dem derIntegralanteil gleich dem Proportionalanteil ist. Das bedeutet, es ist dieZeit, die ein reiner I-Regler brauchen würde, bis dieReglerausgangsgröße y gleich der Ausgangsgröße eines P-Reglers zurZeit t = 0 ist.
Mit dem Eingabewert 0 wird der Integral-Anteil ausgeschaltet.siehe auchFunktionsbeschreibung: "Einstellung des Geschwindigkeitsreglers"
Eingabe min : 0 ms
Eingabe max: 6553.5 ms
8-40 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
CR04 Drehzahlregler-Glättungszeitkonstante
00500[µs]00000 = Funktion abgschaltet
Die in diesem Parameter aktivierbare Zeitkonstante wirkt imGeschwindigkeitsregler und ist zur Unterdrückung vonQuantisierungseffekten und zur Begrenzung der Bandbreite desGeschwindigkeitsregelkreises geeignet. Die Grenzfrequenz ergibt sichaus der Glättungszeitkonstante T durch die Beziehung
f g =⋅ ⋅
1
2 π Τ
Durch Eingabe des minimalen Eingabewertes oder ‘ 0 ‘ wird der Filterabgeschaltet.
siehe auch Funktionsbeschreibung: "Einstellung desGeschwindigkeitsreglers"
Eingabe min : 0 µsEingabe max: 65500 µs
CR05 Sperrfrequenz Geschwindigkeitsregler
900Frequenz [Hz]
Zur Unterdrückung der mechanischen Resonanzfrequenz läßt sich am
Ausgang des Geschwindigkeitsreglers ein Bandfilter aktivieren. Dieses
wird durch die beiden Parameter CR06, Sperrfrequenz
Geschwindigkeitsregler und CR06, Bandbreite Sperrfilter
Geschwindigkeitsregler parametriert.
In CR05, Sperrfrequenz Geschwindigkeitsregler wird dabei die
Frequenz angegeben, die am stärksten gedämpft wird.
Siehe auch Funktionsbeschreibung: "Filterung mechanischer
Resonanzschwingungen".
Eingabe min : 50 HzEingabe max: 950 Hz
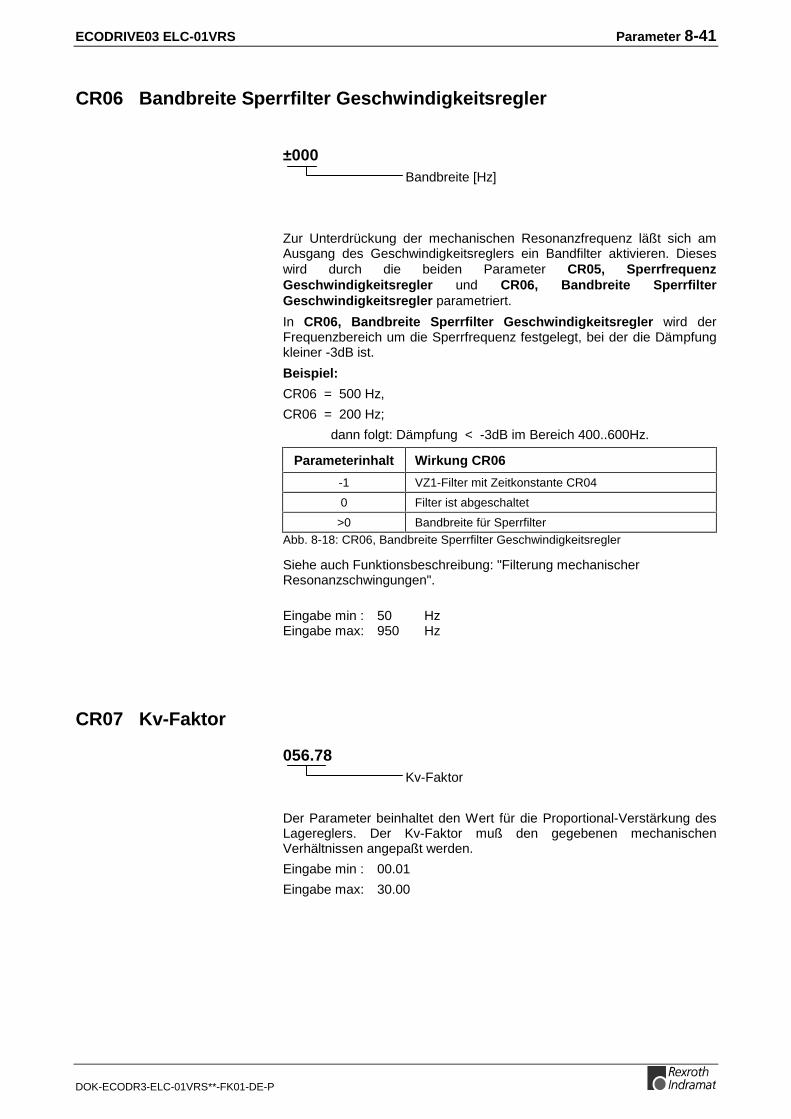
ECODRIVE03 ELC-01VRS Parameter 8-41
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
CR06 Bandbreite Sperrfilter Geschwindigkeitsregler
±000Bandbreite [Hz]
Zur Unterdrückung der mechanischen Resonanzfrequenz läßt sich amAusgang des Geschwindigkeitsreglers ein Bandfilter aktivieren. Dieseswird durch die beiden Parameter CR05, SperrfrequenzGeschwindigkeitsregler und CR06, Bandbreite SperrfilterGeschwindigkeitsregler parametriert.
In CR06, Bandbreite Sperrfilter Geschwindigkeitsregler wird derFrequenzbereich um die Sperrfrequenz festgelegt, bei der die Dämpfungkleiner -3dB ist.
Beispiel:
CR06 = 500 Hz,
CR06 = 200 Hz;
dann folgt: Dämpfung < -3dB im Bereich 400..600Hz.
Parameterinhalt Wirkung CR06
-1 VZ1-Filter mit Zeitkonstante CR04
0 Filter ist abgeschaltet
>0 Bandbreite für SperrfilterAbb. 8-18: CR06, Bandbreite Sperrfilter Geschwindigkeitsregler
Siehe auch Funktionsbeschreibung: "Filterung mechanischerResonanzschwingungen".
Eingabe min : 50 HzEingabe max: 950 Hz
CR07 Kv-Faktor
056.78Kv-Faktor
Der Parameter beinhaltet den Wert für die Proportional-Verstärkung desLagereglers. Der Kv-Faktor muß den gegebenen mechanischenVerhältnissen angepaßt werden.
Eingabe min : 00.01
Eingabe max: 30.00
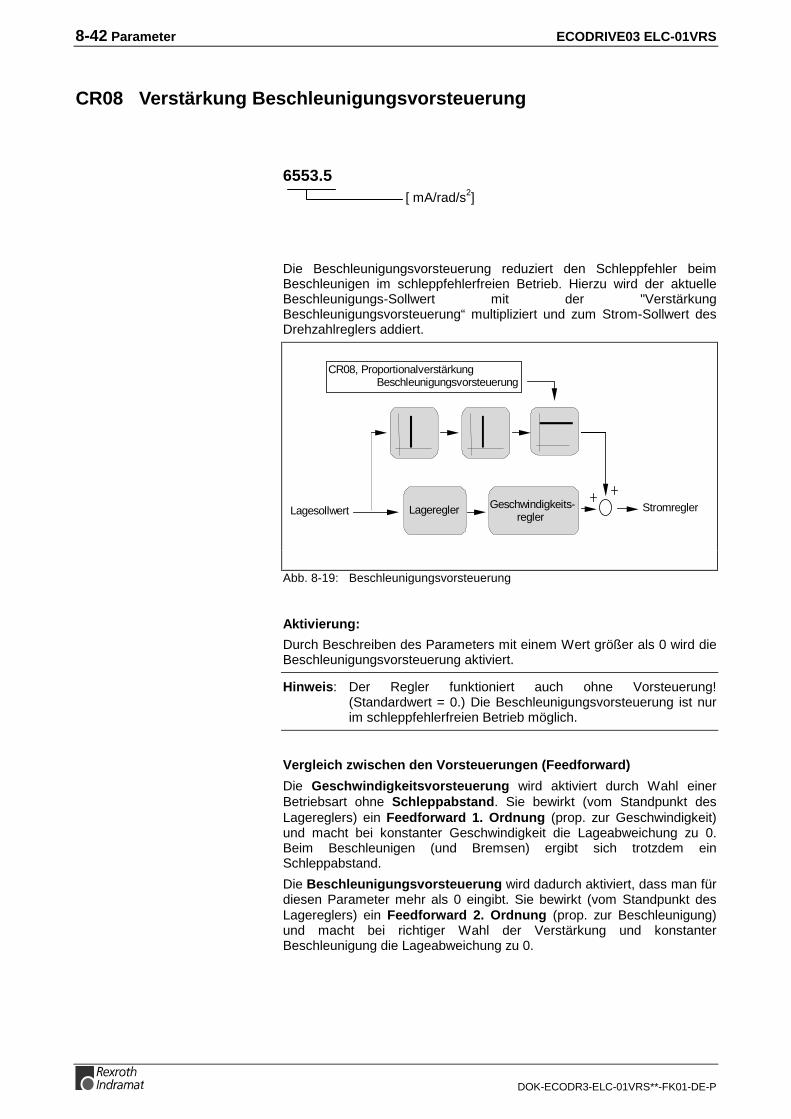
8-42 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
CR08 Verstärkung Beschleunigungsvorsteuerung
6553.5[ mA/rad/s2]
Die Beschleunigungsvorsteuerung reduziert den Schleppfehler beimBeschleunigen im schleppfehlerfreien Betrieb. Hierzu wird der aktuelleBeschleunigungs-Sollwert mit der "VerstärkungBeschleunigungsvorsteuerung“ multipliziert und zum Strom-Sollwert desDrehzahlreglers addiert.
Lagesollwert Stromregler
CR08, Proportionalverstärkung Beschleunigungsvorsteuerung
Lageregler Geschwindigkeits- regler
Abb. 8-19: Beschleunigungsvorsteuerung
Aktivierung:
Durch Beschreiben des Parameters mit einem Wert größer als 0 wird dieBeschleunigungsvorsteuerung aktiviert.
Hinweis: Der Regler funktioniert auch ohne Vorsteuerung!(Standardwert = 0.) Die Beschleunigungsvorsteuerung ist nurim schleppfehlerfreien Betrieb möglich.
Vergleich zwischen den Vorsteuerungen (Feedforward)
Die Geschwindigkeitsvorsteuerung wird aktiviert durch Wahl einerBetriebsart ohne Schleppabstand. Sie bewirkt (vom Standpunkt desLagereglers) ein Feedforward 1. Ordnung (prop. zur Geschwindigkeit)und macht bei konstanter Geschwindigkeit die Lageabweichung zu 0.Beim Beschleunigen (und Bremsen) ergibt sich trotzdem einSchleppabstand.
Die Beschleunigungsvorsteuerung wird dadurch aktiviert, dass man fürdiesen Parameter mehr als 0 eingibt. Sie bewirkt (vom Standpunkt desLagereglers) ein Feedforward 2. Ordnung (prop. zur Beschleunigung)und macht bei richtiger Wahl der Verstärkung und konstanterBeschleunigung die Lageabweichung zu 0.
ECODRIVE03 ELC-01VRS Parameter 8-43
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Eingabe-Richtwert:
( )( ) 1000*Nm/AkonstanteDrehmoment
kgmomentTrägheitsmCR08
2
=
Das Trägheitsmoment ist das gesamte von Rotor und reflektiertem Last-Trägheitsmoment.
Der Faktor 1000 wird wegen der Einheit mA benötigt.Abb. 8-20: Beschleunigungsvorsteuerung Prop.verst.
Siehe auch Funktionsbeschreibung: "Einstellung derBeschleunigungsvorsteuerung".
Eingabe min : 0 mA/rad/s2
Eingabe max: 6553.5 mA/rad/s2
CR09 Schaltfrequenz
4[kHz]
Mit diesem Parameter kann die Schaltfrequenz des Pulswechselrichtersauf die Werte 4 kHz und 8 kHz eingestellt werden.
Dieser Parameter ist nicht online änderbar.
Eingabe min : 4 kHz
Eingabe max: 8 kHz
CR10 Lageistwert-Glättungszeitkonstante im Meßradbetrieb
056.78Glättungszeitkonstante in ms
•
Bei aktivem Messradbetrieb wird der Lageregelkreis mit der Summe aus
• Lageistwert 1 (Motorgeber ) und der
• gefilterten Differenz von Lageistwert 2 und Lageistwert 1
geschlossen. Die Zeitkonstante des verwendeten Filters wird durchdiesen Parameter festgelegt.
Durch die Dämpfung der Lageistwert-Differenzen sollen negative Effektedurch eine schlechte Kopplung von Geber 2 an die Motorwelle (z.B. durchAbheben des Messrads vom Material) gemildert werden.
Die Endposition wird allein durch den Lageistwert 2 festgelegt.
Siehe auch Funktionsbeschreibung: Messradbetrieb.
Bei dem Eingabewert = 0 wirkt nur das Meßrad.
Eingabe min : 000.00
Eingabe max: 327.67
8-44 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
8.7 Motorparameter
CM00 Motorart
1Motorart
Mit diesem Parameter wird die angeschlossene Motorart ausgewählt. Eswerden folgende Motorarten unterstützt:
• 1: MHD
• 2: 2AD / 1MB mit NTC-Temperatursensor
• 3: LSF
• 4: LAR / LAF
• 5: MKD / MKE
• 6: 2AD / 1MB mit PTC-Temperatursensor
• 7: Synchroner Bausatzmotor
Eingabe min : 1
Eingabe max: 7
CM01 Drehmoment/Kraft-Grenzwert bipolar
100[%]
Dieser Parameter beschreibt das maximal zulässige Drehmoment,symmetrisch in beiden Richtungen. Er stellt damit sicher, dass das für dieAnwendung zulässige maximale Spitzenmoment auch dann nichtüberschritten wird, wenn im Befehl MOM der Drehmomenten/Kraftwertbeliebig hoch eingestellt wird.
Die Bewertung bezieht sich auf den Motorstillstandsstrom
Eingabe min : 1 %
Eingabe max: 500 %
ECODRIVE03 ELC-01VRS Parameter 8-45
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
CM02 Spitzenstrom / Stillstandsstrom Motor
0010.0 0010.0Stillstandsstrom [A]
Spitzenstrom [A]
Der "Spitzenstrom Motor" beschreibt den maximalen Strom, der im Motorkurzzeitig fließen kann, ohne dass der Motor zerstört wird.
Ist der Spitzenstrom des Motors kleiner als der Spitzenstrom desVerstärkers, so wird der maximal ausgegebene Strom automatisch aufden Spitzenstrom des Motors begrenzt.
Dieser Wert ist bei MHD-, MKD- und MKE-Motoren im Motor-Feedbackgespeichert und wird beim ersten Einschalten des Regelgerätes von dortgeladen. Bei anderen Motorarten muss der Wert aus dem Datenblattentnommen werden.
Eingabe min : 0.1 A
Eingabe max: 500.0 A
Der "Stillstandsdauerstrom Motor" ist der Strom, bei dem der Motor dasStillstandsdrehmoment gemäß Motordatenblatt dauernd entwickelt.Dieser Wert ist bei und MHD-, MKD- und MKE-Motoren im MotorFeedback gespeichert und wird beim ersten Einschalten desRegelgerätes von dort geladen. Bei anderen Motorarten muss der Wertaus dem Datenblatt entnommen werden.
Alle Drehmoment-/Kraftdaten beziehen sich auf diesenMotorstillstandsstrom = 100% .
Eingabe min : 0.1 A
Eingabe max: 500.0 A
CM03 Maximalgeschwindigkeit des Motors
10500.000Umdr./min bei Rotationsmotorenm/min bei Linearmotoren
Die Maximaldrehzahl des Motors soll nicht überschritten werden.Sie wirktauch begrenzend auf den Parameter A106, GeschwindigkeitsGrenzwert, bipolar.
Dieser Wert ist bei MHD-, MKD- und MKE-Motoren im Motor-Feedbackgespeichert und wird beim ersten Einschalten des Regelgerätes von dortgeladen. Bei anderen Motorarten muss der Wert aus dem Datenblattentnommen werden.
8-46 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
In Momenten-Regelung führt eine Überschreitung der MaximalGeschwindigkeit um 12,5% zur Momentenfreischaltung und derFehlermeldung F879, Geschwindigkeitsgrenzwert überschritten .
Eingabe min : 0
Eingabe max: 99999.999
CM04 Polpaarzahl/Polpaarweite
0003Poolpaarzahl
Bei rotativen Motoren wird hier die Anzahl der Polpaare proMotorumdrehung angegeben.Bei Linearmotoren ist hier die Längeeines Pol-Paares anzugeben. Dieser Wert ist bei Motoren mitMotorfeedback-Datenspeicher, z.B. MKD, dort abgelegt und muss somitnicht angegeben werden.Siehe auch Funktionsbeschreibung:Motorfeedback-Datenspeicher"
CM05 Drehmoment-/Kraft-Konstante
000.20[NM/A]
Die Drehmoment-/Kraft-Konstante gibt an, welches Antriebsmoment bzw.welche Kraft der Motor bei einem bestimmten Wirkstrom abgibt. BeiSynchronmotoren ist der Wert ausschließlich von der Motorkonstruktionabhängig.
Bei Asynchronmotoren gilt dieser Wert so lange, wie der Motor nicht imFeldschwächbereich betrieben wird.
Bei MHD-, MKD- und MKE -Motoren ist der Wert im Feedbackspeicherabgelegt und kann nicht verändert werden.
Eingabe min : 0,01 NM/AEingabe max: 655,35 NM/A
ECODRIVE03 ELC-01VRS Parameter 8-47
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
CM06 Rotorträgheitsmoment
0.00003[Kgm2]
Dieser Parameter gibt das Trägheitsmoment des Rotors ohne Last anund ist bei Motoren mit Feedbackspeicher (z.B. MKD) im Feedbackgesichert.
Eingabe min : 0.00001
Eingabe max: 1.00000
CM07 Haltebremsentyp
0 00 = selbsthaltende Bremse0V an der Bremse, Bremse geschlossen
1 = selbstlösende Bremse24V an der Bremse, Bremse geschlossen
0 = Servobremsenach max.Bremszeit wird die Bremse aktiviert.1 = HauptspindelbremseBremse wird erst bei < 10 Upm aktiviert
In diesem Parameter wird bei Verwendung einer Haltebremse festgelegt,ob es sich um eine selbsthaltende oder selbstlüftende Bremsehandelt. Wird ein MHD- oder MKD-Motor verwendet, so ist dieHaltebremse, falls vorhanden, eine selbsthaltende. Das Bit 0 dabeiautomatisch auf 0 gesetzt. Bei Verwendung von anderen Motorartenmuss dieses Bit bei der Inbetriebnahme eingegeben werden.
CM08 Haltebremsenstrom
010.000[A]
Dieser Parameter zeigt an, wieviel Strom die Haltebremse imangeschlossenen Motor braucht.
Eingabe min : 0
Eingabe max: 500.000

8-48 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
CM09 Motor-Temperatur
145 155
Motor-Abschalttemperatur
Motor-Warntemperatur
ECODRIVE03 ELC-01VRS Parameter 8-49
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
8.8 Asynchron-Motorparameter
CA00 Magnetisierungsstrom
010.000[A]
In diesen Parameter wird der von Indramat festgelegte Nenn- oder Servo-Magnetisierungsstrom für Asynchronmotoren eingegeben. Dertatsächlich fließende Magnetisierungsstrom ist zusätzlich vomVormagnetisierungsfaktor abhängig.
Bei Synchronmotoren, z.B. MKD, wird dieser Parameter automatisch auf0 gesetzt.
Eingabe min : 0 A
Eingabe max: 500.000 A (maximal jedoch Spitzenstrom Verstärker)
CA01 Vormagnetisierungsfaktor
100[%]
Der Vormagnetisierungsfaktor dient zum applikationsabhängigenAbsenken des Servo-Magnetisierungsstroms. Er bestimmt zusammen mitdem Parameter CA00, Magnetisierungsstrom denMagnetisierungsstrom des Motors.
Wirksamer Magnetisierungsstrom =
Magnetisierungsstrom • Vormagnetisierungsfaktor
Bei 100 % Vormagnetisierungsfaktor fließt im Motor der Servo-Magnetisierungsstrom, so dass sich im Grunddrehzahlbereich ein demmomentenbildenten Strom proportionales Drehmoment ergibt.
Eingabe min : 25 %Eingabe max: 100 %
8-50 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
CA02 Schlupffaktor
010.00[Hz/100A]
Der Schlupffaktor ist der wichtigste Parameter für Asynchronmotoren. Ergibt die Rotorfrequenz in Abhängigkeit vom drehmomentbildenden Stroman. Je niedriger die Rotorzeitkonstante ist, desto höher ist derSchlupffaktor.
Der Parameter wird von Indramat motorspezifisch festgelegt.
Eingabe min : 1 Hz/100A
Eingabe max: 500,00 Hz/100A
CA03 Schlupfanhebung
1.50[1/100K]
Im Asynchron-Motor ändert sich der Rotorwiderstand und damit dieRotorzeitkonstante mit der Temperatur. Dies wird durch dieSchlupfanhebung kompensiert.
Der Faktor Schlupfanhebung pro 100K ist motorspezifisch und wird vonIndramat für jeden Motor festgelegt.
Eingabe min : 1.00 1/100K
Eingabe max: 3.00 1/100K
CA04 Kippstromgrenze
01000[A/Vmin]
Mit der Kippstromgrenze wird der Spitzenstrom des Motors bei hohenDrehzahlen auf sinnvolle Werte begrenzt. Höhere Ströme führen nicht zumehr Wellenleistung, sondern nur zu höheren Verlusten.
Die Kippstromgrenze wird von Indramat festgelegt. Wird 0 eingegeben, istdie Begrenzung nicht aktiv.
Eingabe min : 0 A/Vmin
Eingabe max: 65535 A/Vmin
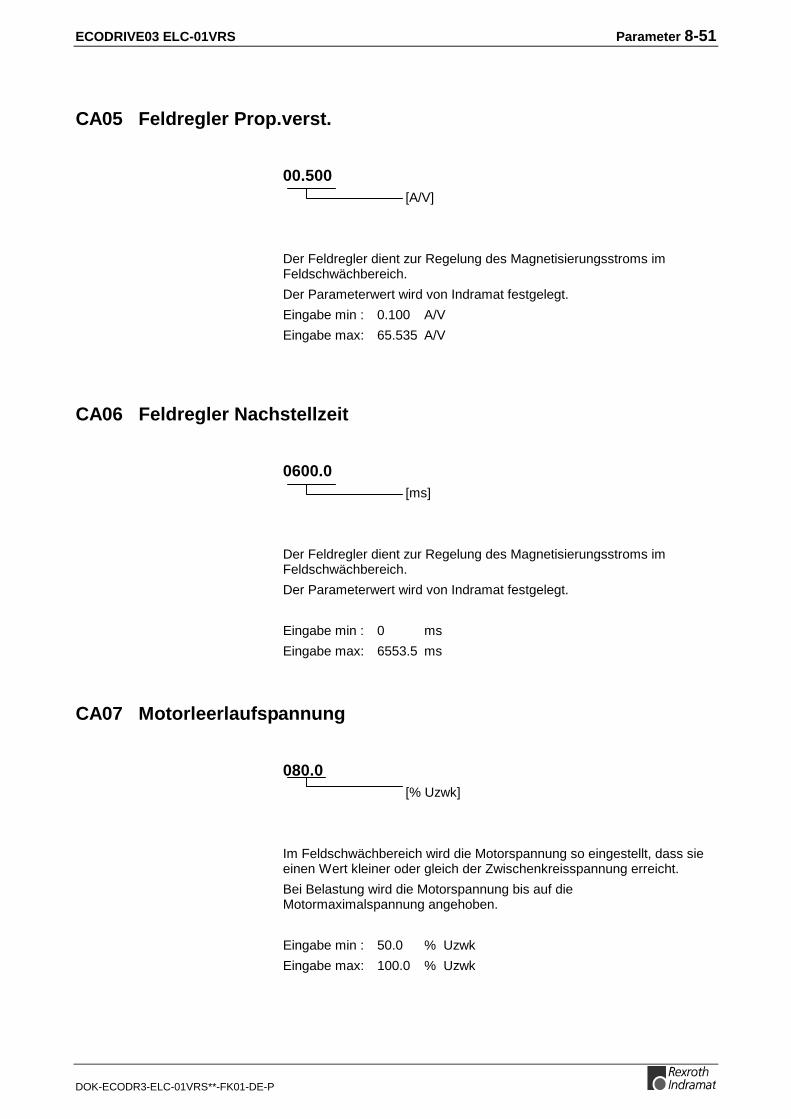
ECODRIVE03 ELC-01VRS Parameter 8-51
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
CA05 Feldregler Prop.verst.
00.500[A/V]
Der Feldregler dient zur Regelung des Magnetisierungsstroms imFeldschwächbereich.
Der Parameterwert wird von Indramat festgelegt.
Eingabe min : 0.100 A/V
Eingabe max: 65.535 A/V
CA06 Feldregler Nachstellzeit
0600.0[ms]
Der Feldregler dient zur Regelung des Magnetisierungsstroms imFeldschwächbereich.
Der Parameterwert wird von Indramat festgelegt.
Eingabe min : 0 ms
Eingabe max: 6553.5 ms
CA07 Motorleerlaufspannung
080.0[% Uzwk]
Im Feldschwächbereich wird die Motorspannung so eingestellt, dass sieeinen Wert kleiner oder gleich der Zwischenkreisspannung erreicht.
Bei Belastung wird die Motorspannung bis auf dieMotormaximalspannung angehoben.
Eingabe min : 50.0 % Uzwk
Eingabe max: 100.0 % Uzwk
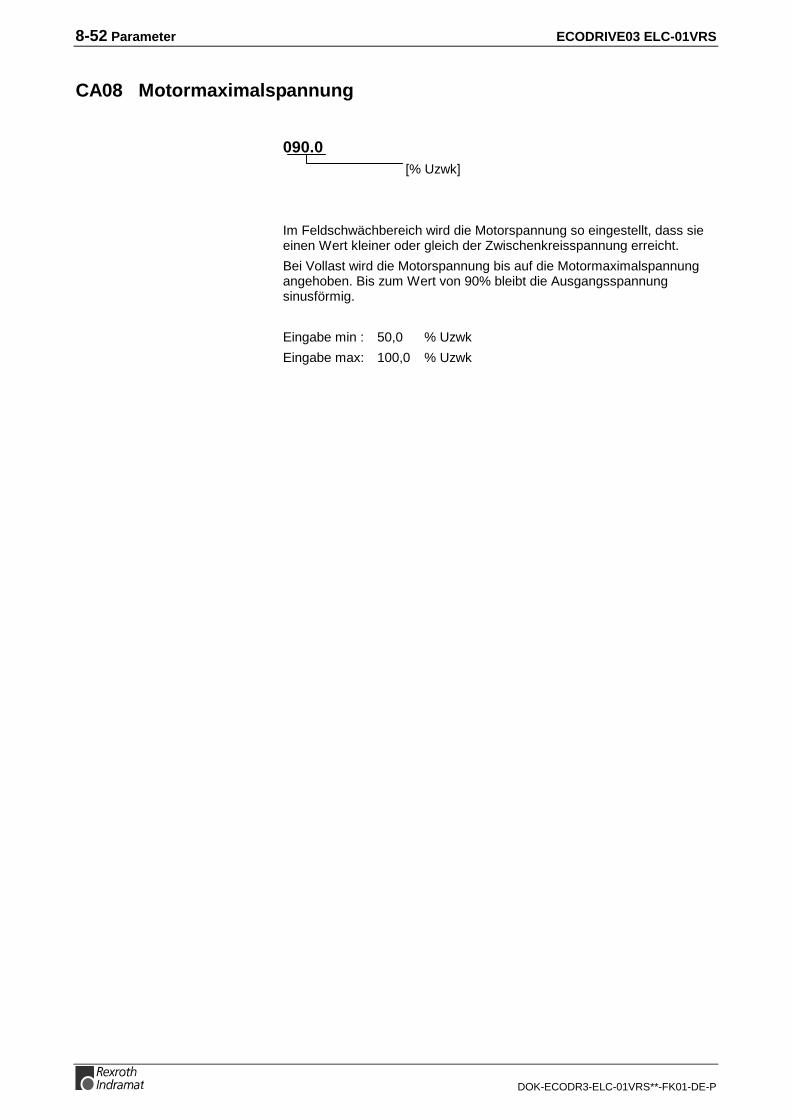
8-52 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
CA08 Motormaximalspannung
090.0[% Uzwk]
Im Feldschwächbereich wird die Motorspannung so eingestellt, dass sieeinen Wert kleiner oder gleich der Zwischenkreisspannung erreicht.
Bei Vollast wird die Motorspannung bis auf die Motormaximalspannungangehoben. Bis zum Wert von 90% bleibt die Ausgangsspannungsinusförmig.
Eingabe min : 50,0 % Uzwk
Eingabe max: 100,0 % Uzwk
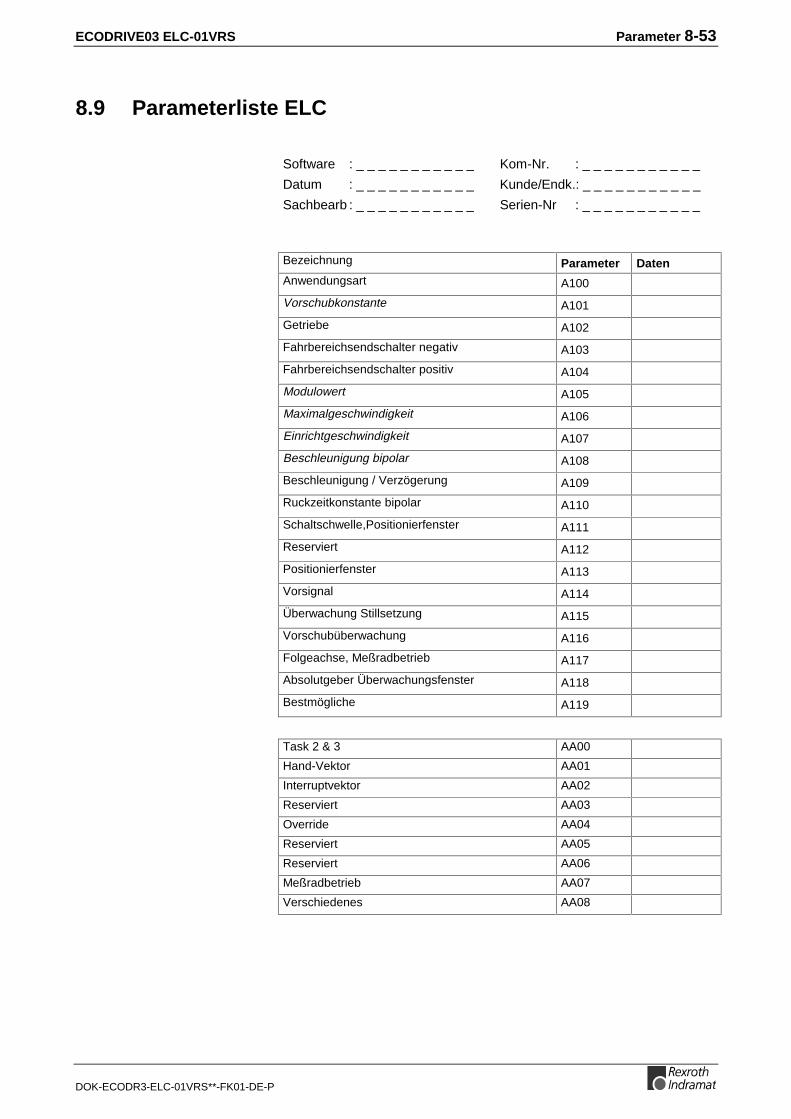
ECODRIVE03 ELC-01VRS Parameter 8-53
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
8.9 Parameterliste ELC
Software : _ _ _ _ _ _ _ _ _ _ _ Kom-Nr. : _ _ _ _ _ _ _ _ _ _ _
Datum : _ _ _ _ _ _ _ _ _ _ _ Kunde/Endk.: _ _ _ _ _ _ _ _ _ _ _
Sachbearb : _ _ _ _ _ _ _ _ _ _ _ Serien-Nr : _ _ _ _ _ _ _ _ _ _ _
Bezeichnung Parameter DatenAnwendungsart A100
Vorschubkonstante A101
Getriebe A102
Fahrbereichsendschalter negativ A103
Fahrbereichsendschalter positiv A104
Modulowert A105
Maximalgeschwindigkeit A106
Einrichtgeschwindigkeit A107
Beschleunigung bipolar A108
Beschleunigung / Verzögerung A109
Ruckzeitkonstante bipolar A110
Schaltschwelle,Positionierfenster A111
Reserviert A112
Positionierfenster A113
Vorsignal A114
Überwachung Stillsetzung A115
Vorschubüberwachung A116
Folgeachse, Meßradbetrieb A117
Absolutgeber Überwachungsfenster A118
Bestmögliche A119
Task 2 & 3 AA00
Hand-Vektor AA01
Interruptvektor AA02
Reserviert AA03
Override AA04
Reserviert AA05
Reserviert AA06
Meßradbetrieb AA07
Verschiedenes AA08
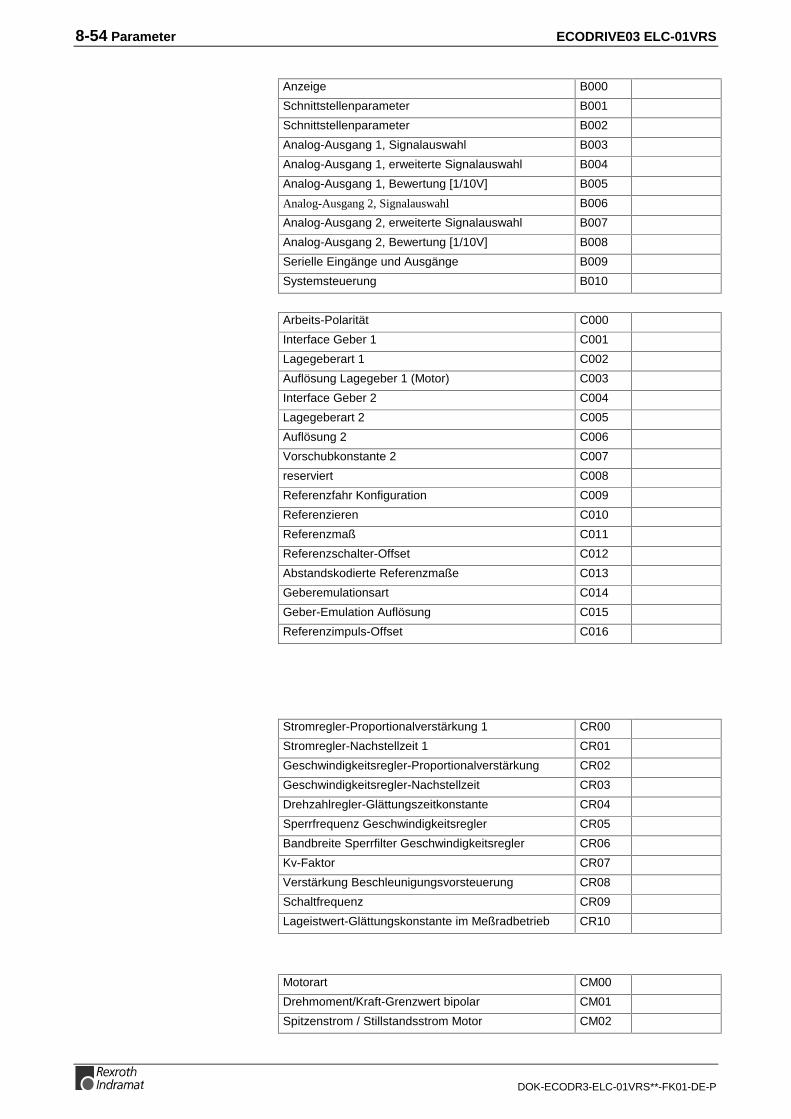
8-54 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Anzeige B000
Schnittstellenparameter B001
Schnittstellenparameter B002
Analog-Ausgang 1, Signalauswahl B003
Analog-Ausgang 1, erweiterte Signalauswahl B004
Analog-Ausgang 1, Bewertung [1/10V] B005
Analog-Ausgang 2, Signalauswahl B006
Analog-Ausgang 2, erweiterte Signalauswahl B007
Analog-Ausgang 2, Bewertung [1/10V] B008
Serielle Eingänge und Ausgänge B009
Systemsteuerung B010
Arbeits-Polarität C000
Interface Geber 1 C001
Lagegeberart 1 C002
Auflösung Lagegeber 1 (Motor) C003
Interface Geber 2 C004
Lagegeberart 2 C005
Auflösung 2 C006
Vorschubkonstante 2 C007
reserviert C008
Referenzfahr Konfiguration C009
Referenzieren C010
Referenzmaß C011
Referenzschalter-Offset C012
Abstandskodierte Referenzmaße C013
Geberemulationsart C014
Geber-Emulation Auflösung C015
Referenzimpuls-Offset C016
Stromregler-Proportionalverstärkung 1 CR00
Stromregler-Nachstellzeit 1 CR01
Geschwindigkeitsregler-Proportionalverstärkung CR02
Geschwindigkeitsregler-Nachstellzeit CR03
Drehzahlregler-Glättungszeitkonstante CR04
Sperrfrequenz Geschwindigkeitsregler CR05
Bandbreite Sperrfilter Geschwindigkeitsregler CR06
Kv-Faktor CR07
Verstärkung Beschleunigungsvorsteuerung CR08
Schaltfrequenz CR09
Lageistwert-Glättungskonstante im Meßradbetrieb CR10
Motorart CM00
Drehmoment/Kraft-Grenzwert bipolar CM01
Spitzenstrom / Stillstandsstrom Motor CM02
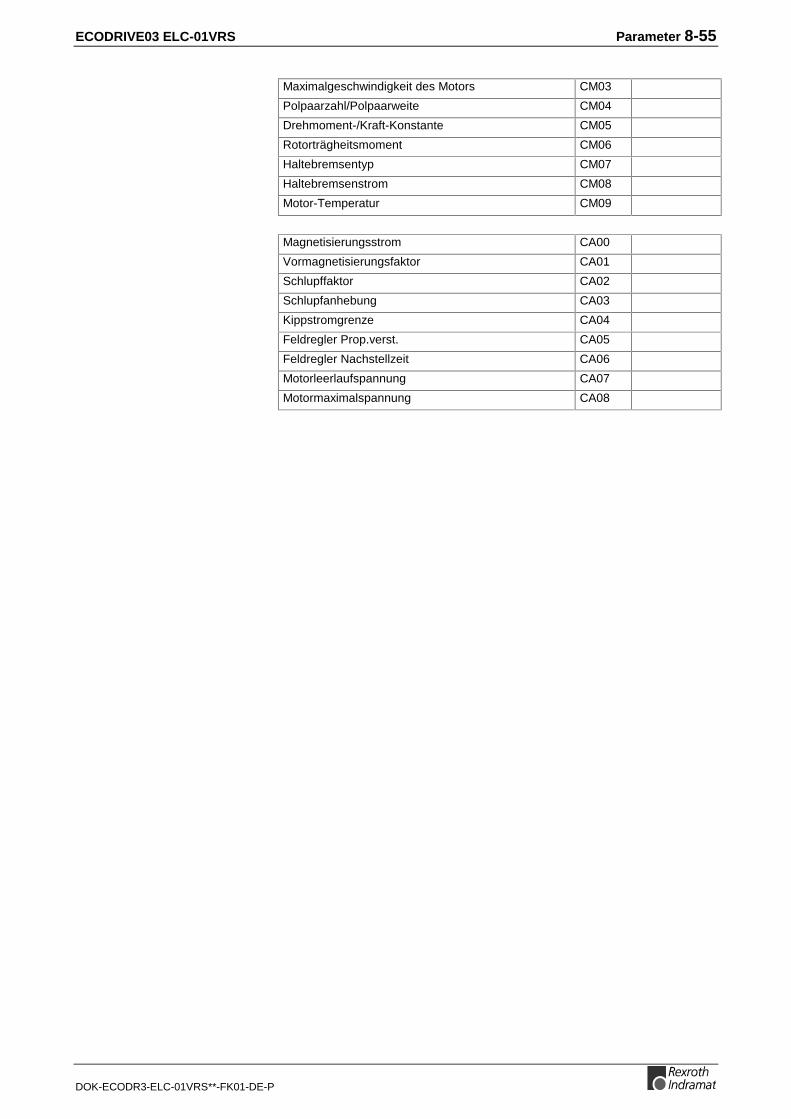
ECODRIVE03 ELC-01VRS Parameter 8-55
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Maximalgeschwindigkeit des Motors CM03
Polpaarzahl/Polpaarweite CM04
Drehmoment-/Kraft-Konstante CM05
Rotorträgheitsmoment CM06
Haltebremsentyp CM07
Haltebremsenstrom CM08
Motor-Temperatur CM09
Magnetisierungsstrom CA00
Vormagnetisierungsfaktor CA01
Schlupffaktor CA02
Schlupfanhebung CA03
Kippstromgrenze CA04
Feldregler Prop.verst. CA05
Feldregler Nachstellzeit CA06
Motorleerlaufspannung CA07
Motormaximalspannung CA08

8-56 Parameter ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Notizen
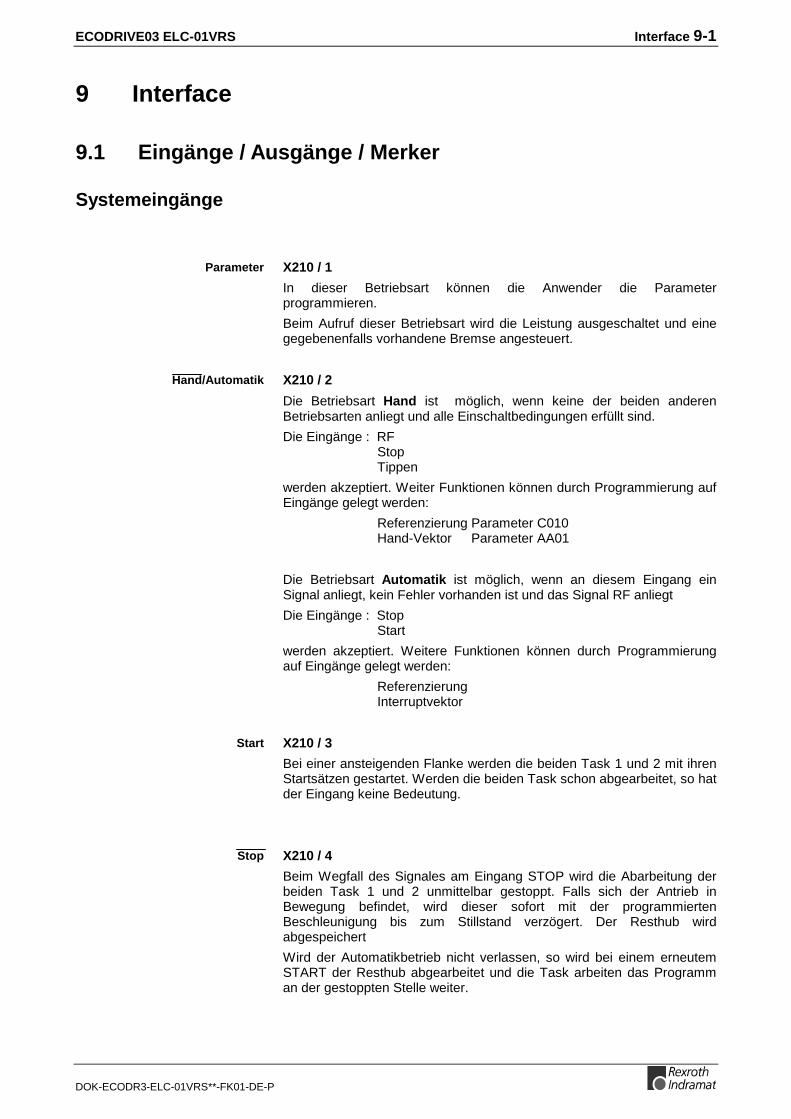
ECODRIVE03 ELC-01VRS Interface 9-1
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
9 Interface
9.1 Eingänge / Ausgänge / Merker
Systemeingänge
X210 / 1
In dieser Betriebsart können die Anwender die Parameterprogrammieren.
Beim Aufruf dieser Betriebsart wird die Leistung ausgeschaltet und einegegebenenfalls vorhandene Bremse angesteuert.
X210 / 2
Die Betriebsart Hand ist möglich, wenn keine der beiden anderenBetriebsarten anliegt und alle Einschaltbedingungen erfüllt sind.
Die Eingänge : RFStopTippen
werden akzeptiert. Weiter Funktionen können durch Programmierung aufEingänge gelegt werden:
Referenzierung Parameter C010Hand-Vektor Parameter AA01
Die Betriebsart Automatik ist möglich, wenn an diesem Eingang einSignal anliegt, kein Fehler vorhanden ist und das Signal RF anliegt
Die Eingänge : StopStart
werden akzeptiert. Weitere Funktionen können durch Programmierungauf Eingänge gelegt werden:
ReferenzierungInterruptvektor
X210 / 3
Bei einer ansteigenden Flanke werden die beiden Task 1 und 2 mit ihrenStartsätzen gestartet. Werden die beiden Task schon abgearbeitet, so hatder Eingang keine Bedeutung.
X210 / 4
Beim Wegfall des Signales am Eingang STOP wird die Abarbeitung derbeiden Task 1 und 2 unmittelbar gestoppt. Falls sich der Antrieb inBewegung befindet, wird dieser sofort mit der programmiertenBeschleunigung bis zum Stillstand verzögert. Der Resthub wirdabgespeichert
Wird der Automatikbetrieb nicht verlassen, so wird bei einem erneutemSTART der Resthub abgearbeitet und die Task arbeiten das Programman der gestoppten Stelle weiter.
Parameter
Hand/Automatik
Start
Stop
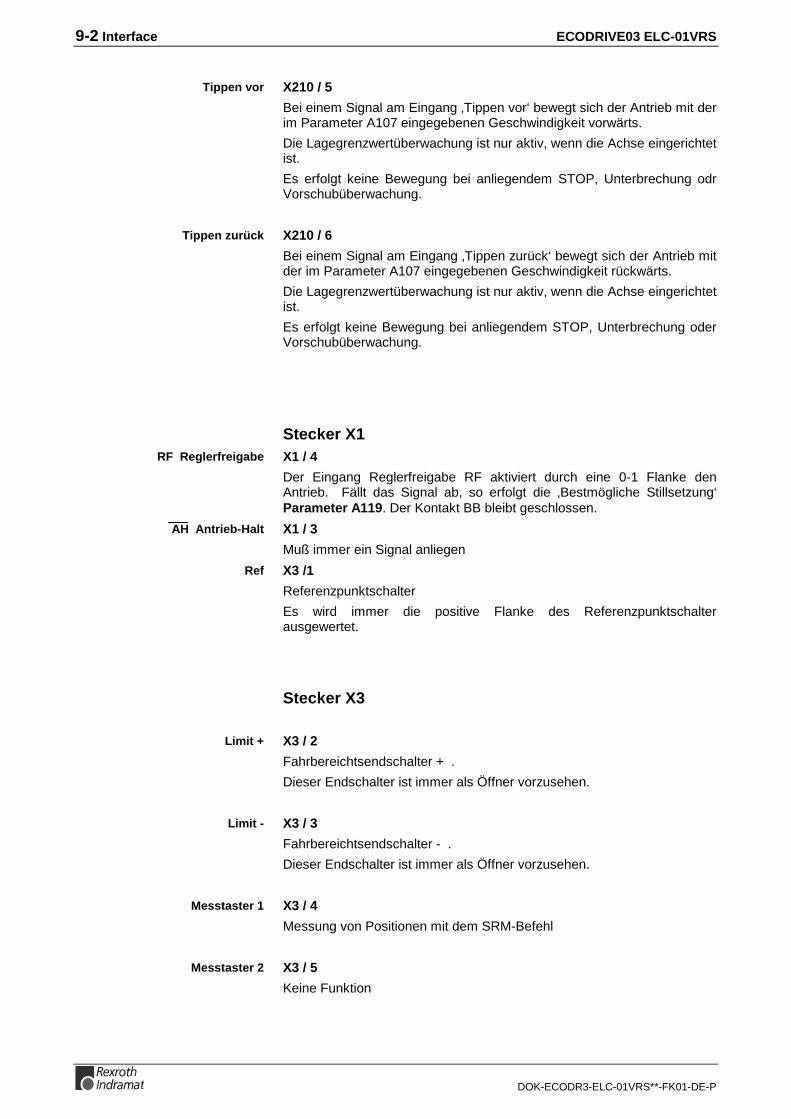
9-2 Interface ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
X210 / 5
Bei einem Signal am Eingang ‚Tippen vor‘ bewegt sich der Antrieb mit derim Parameter A107 eingegebenen Geschwindigkeit vorwärts.
Die Lagegrenzwertüberwachung ist nur aktiv, wenn die Achse eingerichtetist.
Es erfolgt keine Bewegung bei anliegendem STOP, Unterbrechung odrVorschubüberwachung.
X210 / 6
Bei einem Signal am Eingang ‚Tippen zurück‘ bewegt sich der Antrieb mitder im Parameter A107 eingegebenen Geschwindigkeit rückwärts.
Die Lagegrenzwertüberwachung ist nur aktiv, wenn die Achse eingerichtetist.
Es erfolgt keine Bewegung bei anliegendem STOP, Unterbrechung oderVorschubüberwachung.
Stecker X1X1 / 4
Der Eingang Reglerfreigabe RF aktiviert durch eine 0-1 Flanke denAntrieb. Fällt das Signal ab, so erfolgt die ‚Bestmögliche Stillsetzung‘Parameter A119. Der Kontakt BB bleibt geschlossen.
X1 / 3
Muß immer ein Signal anliegen
X3 /1
Referenzpunktschalter
Es wird immer die positive Flanke des Referenzpunktschalterausgewertet.
Stecker X3
X3 / 2
Fahrbereichtsendschalter + .
Dieser Endschalter ist immer als Öffner vorzusehen.
X3 / 3
Fahrbereichtsendschalter - .
Dieser Endschalter ist immer als Öffner vorzusehen.
X3 / 4
Messung von Positionen mit dem SRM-Befehl
X3 / 5
Keine Funktion
Tippen vor
Tippen zurück
RF Reglerfreigabe
AH Antrieb-Halt
Ref
Limit +
Limit -
Messtaster 1
Messtaster 2
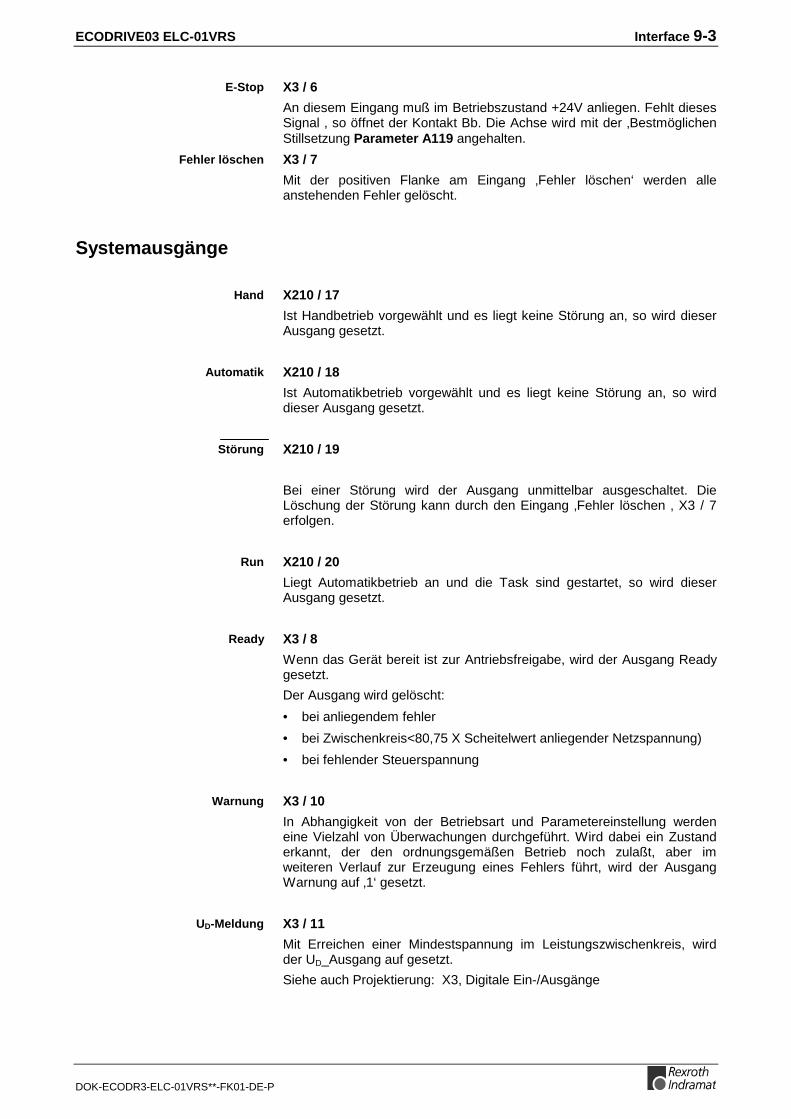
ECODRIVE03 ELC-01VRS Interface 9-3
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
X3 / 6
An diesem Eingang muß im Betriebszustand +24V anliegen. Fehlt diesesSignal , so öffnet der Kontakt Bb. Die Achse wird mit der ‚BestmöglichenStillsetzung Parameter A119 angehalten.
X3 / 7
Mit der positiven Flanke am Eingang ‚Fehler löschen‘ werden alleanstehenden Fehler gelöscht.
Systemausgänge
X210 / 17
Ist Handbetrieb vorgewählt und es liegt keine Störung an, so wird dieserAusgang gesetzt.
X210 / 18
Ist Automatikbetrieb vorgewählt und es liegt keine Störung an, so wirddieser Ausgang gesetzt.
X210 / 19
Bei einer Störung wird der Ausgang unmittelbar ausgeschaltet. DieLöschung der Störung kann durch den Eingang ‚Fehler löschen ‚ X3 / 7erfolgen.
X210 / 20
Liegt Automatikbetrieb an und die Task sind gestartet, so wird dieserAusgang gesetzt.
X3 / 8
Wenn das Gerät bereit ist zur Antriebsfreigabe, wird der Ausgang Readygesetzt.
Der Ausgang wird gelöscht:
• bei anliegendem fehler
• bei Zwischenkreis<80,75 X Scheitelwert anliegender Netzspannung)
• bei fehlender Steuerspannung
X3 / 10
In Abhangigkeit von der Betriebsart und Parametereinstellung werdeneine Vielzahl von Überwachungen durchgeführt. Wird dabei ein Zustanderkannt, der den ordnungsgemäßen Betrieb noch zulaßt, aber imweiteren Verlauf zur Erzeugung eines Fehlers führt, wird der AusgangWarnung auf ‚1‘ gesetzt.
X3 / 11
Mit Erreichen einer Mindestspannung im Leistungszwischenkreis, wirdder UD_Ausgang auf gesetzt.
Siehe auch Projektierung: X3, Digitale Ein-/Ausgänge
E-Stop
Fehler löschen
Hand
Automatik
Störung
Run
Ready
Warnung
UD-Meldung
9-4 Interface ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Programmierbare Eingänge/Ausgänge DKC21.3
EingängeEingänge 01 bis 10 Stecker X210 / Pin Nr.: 07 bis 16
Es stehen damit 10 Eingänge zur Verfügung.
Die Eingänge sind im Anwenderprogramm frei programmierbar.
Desweiteren können diese programmierbaren Eingänge für verschiedeneFunktionen , die in den Parametern aktiviert wurden, benutzt werden.
AusgängeAusgänge 01 bis 08 Stecker X210 / Pin Nr.: 21 bis 28
Es stehen 8 Ausgänge zur Verfügung.
Alle Ausgänge sind in allen NC-Task frei programmierbar.
Desweiteren können diese freiprogrammierbaren Ausgänge fürverschiedene Funktionen benutzt werden.
Systemeingänge und Ausgänge vom BTV04 bedienenWird der Parameter B010 auf 1 und der Parameter B009 auf 1 xxxgesetzt, so werden die Betriebsarten und Jog-Tasten gültig.
Achtung: Die Systemausgänge beim DKC21.3 haben nicht mehr dieFunktionen !
Die System Ein-und Ausgänge des DKC21.3 auf dem Stecker X210werden nicht mehr abgefragt oder gesetzt.
Die Tasten:
PARASTARTAUTOSTOPJOG+JOG-
Sind nun aktiviert.
Die Eingänge BTV04/X4 und die Ausgänge BTV04/05 können dannmitbenutzt werden.
Siehe auch Parmeterbeschreibung B009 und B010 Kapitel 8
Programmierbare Eingänge
Eingänge 01 bis 10 Stecker X210 / Pin Nr.: 07 bis 16
Es stehen die Eingänge 01 bis 10 zur Verfügung.
Die Eingänge sind im Anwenderprogramm frei programmierbar.
Desweiteren können diese programmierbaren Eingänge für verschiedeneFunktionen , die in den Parametern aktiviert wurden, benutzt werden.
ECODRIVE03 ELC-01VRS Interface 9-5
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Programmierbare Ausgänge
Ausgänge / Merker 01 bis 08 Stecker X210 / Pin Nr.: 21 bis 28
Es stehen die Ausgänge 01 bis 08 zur Verfügung.
Hinweis: Ausgang Nr. 01 ist identisch mit Merker Nr. 01
Alle Ausgänge sind im Anwenderprogramm frei programmierbar.
Desweiteren können diese freiprogrammierbaren Ausgänge fürverschiedene Funktionen benutzt werden.
Zu den oben genannten hardwaremäßig vorhandenen Ausgängenkönnen alle Ausgänge bis Nr. 99 als Merker benutzt werden.
Hinweis: Die Merker Nr. 89 bis 99 sind einer festen Funktionzugeordnet.
MerkerDie ELC verfügt über freiprogrammierbare Hardwareausgänge sowieüber freiprogrammierbare Softwareausgänge.
Diese Softwareausgänge werden als `Merker´ bezeichnet.
Die `Merker´ werden in den Befehlen als Ausgänge angesprochen.
Die programmierten Ausgänge und Merker werden von der ELCunterschiedlich behandelt.
Die Ausgänge bzw. Merker werden gelöscht bei einem Neueinschaltender ELC oder mit einer Störung.
Die Merker werden gelöscht bei einem Neueinschalten der ELC.
Die Merker werden nicht gelöscht.
Diese Merker werden von der Firmware bearbeitet und können vomAnwender nur abgefragt werden!
Merker 89: `1´ bei Betriebsart `Hand´
Merker 90: `1´ bei Betriebsart `Automatik´
Merker 91: Reserviert (immer = `0´)
Merker 92: Reserviert (immer = `0´)
Merker 93: `1´ bei Warnungen
Merker 94: `1´ bei Störungen
Ausgang / Merker: 01 bis 72
Ausgang / Merker: 73 bis 80
Ausgang / Merker: 81 bis 88
Ausgang / Merker: 89 bis 94
9-6 Interface ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Die Merker 95 und 96 werden genullt bei einem Neueinschalten der ELC,einer Störung. Nach einem Restart werden beide Merker auf ihren altenZustand gesetzt.
Mit dem Merker 95 kann die Positionsüberwachungsfehlermeldung perAnwenderprogramm deaktiviert werden:
Merker 95: `0´ = Fehlermeldung der Positionsüberwachung für Achse 1 aktiv, oder wie in Parameter A115definiert.
`1´ = Fehlermeldung der Positionsüberwachung für Achse 1 abgeschaltet.
Merker 96: Reserviert (frei programmierbar)
Die Ausgänge bzw. Merker werden gelöscht bei einem Neueinschaltender ELC oder mit einer Störung.
Die Merker werden bei Spannungsausfall und Störung gelöscht.
Merker 97: Reserviert (frei programmierbar)
Merker 98: `1´ bewirkt eine Unterbrechung der Achse 1
Merker 99: Reserviert (frei programmierbar)
Der Merker 98 kann vom Programm gesetzt werden und bewirken damiteine Unterbrechung wie auch bei Parameter A116 beschrieben.
Hinweis: Eine Unterbrechung ist aufgehoben, wenn der Merker auf 0 istund ein eventuell programmierter Eingang `Unterbrechung´auf 24V liegt!
Ausgang / Merker: 95 bis 96
Ausgang / Merker: 97 bis 99
ECODRIVE03 ELC-01VRS Interface 9-7
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
9.2 Serielle Schnittstelle
ÜbersichtDas Antriebsregelgerät besitzt eine serielle Schnittstelle. Die Schnittstelledient zum Programmieren des Antriebes. Mit Hilfe der Schnittstellekönnen:
• Parameter
• Programm
• Statusinformationen
• Kommandos
ausgetauscht werden.
Diese Parameter und Programme sind satznummernorientiert undkönnen nur einzeln übertragen werden.
Die Schnittstelle kann wahlweise im
• RS232-Modus oder im
• RS485-Modus
betrieben werden.
Es werden jeweils 3 unterschiedliche Protokolle unterstützt:
• Indramat SIS-Protokoll Die Nutzdaten werden im INTEL-Format übertragen
• ASCII-Protokoll
deren Aufbau in einem folgenden Abschnitt noch genauer erläutert wird.
• IDS-Protokoll (RS232)
Übertragung von dem Indramat-Dekadenschalter
Eine Einstellung der Antriebsadresse ist nur im Fall der Kommunikationüber den RS485-Bus ( z.B. BTV04) zwingend erforderlich.
Schnittstellenmodus
Schnittstellenprotokoll
Einstellung der Antriebsadresse
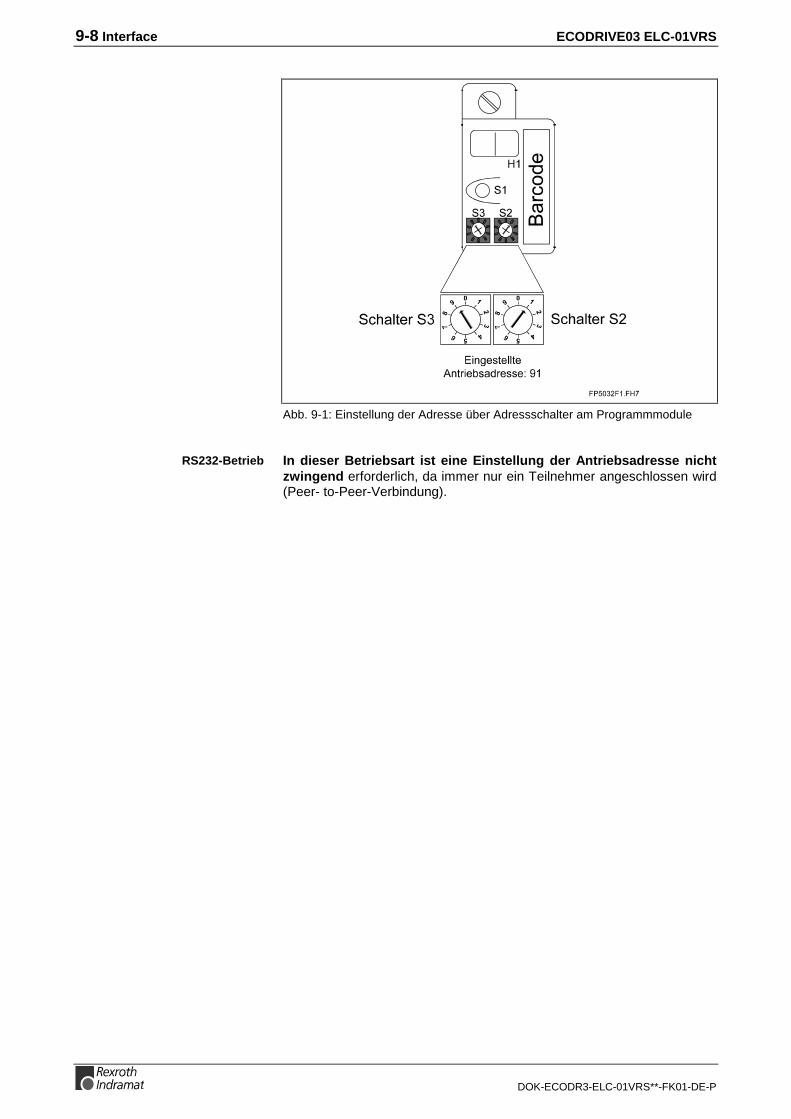
9-8 Interface ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Abb. 9-1: Einstellung der Adresse über Adressschalter am Programmmodule
In dieser Betriebsart ist eine Einstellung der Antriebsadresse nichtzwingend erforderlich, da immer nur ein Teilnehmer angeschlossen wird(Peer- to-Peer-Verbindung).
RS232-Betrieb
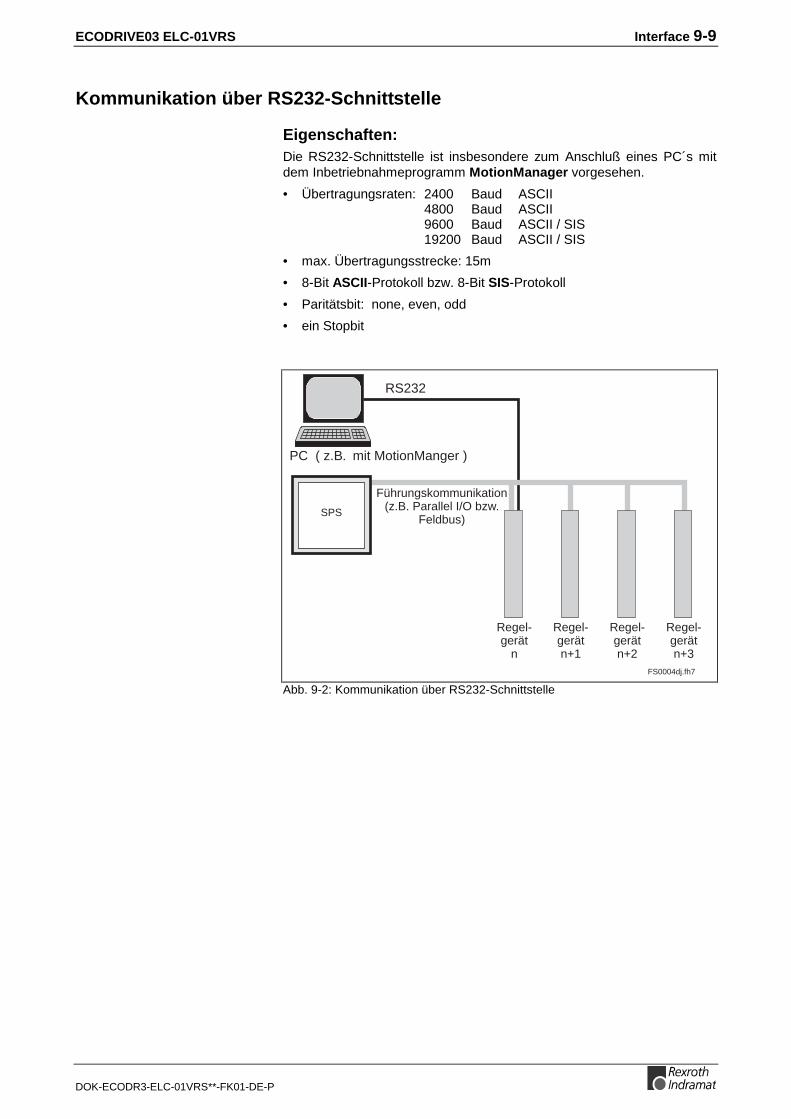
ECODRIVE03 ELC-01VRS Interface 9-9
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Kommunikation über RS232-Schnittstelle
Eigenschaften:Die RS232-Schnittstelle ist insbesondere zum Anschluß eines PC´s mitdem Inbetriebnahmeprogramm MotionManager vorgesehen.
• Übertragungsraten: 2400 Baud ASCII 4800 Baud ASCII 9600 Baud ASCII / SIS 19200 Baud ASCII / SIS
• max. Übertragungsstrecke: 15m
• 8-Bit ASCII-Protokoll bzw. 8-Bit SIS-Protokoll
• Paritätsbit: none, even, odd
• ein Stopbit
PC ( z.B. mit MotionManger )
RS232
FS0004dj.fh7
SPS
Regel-gerät
n
Regel-gerätn+1
Regel-gerätn+2
Regel-gerätn+3
Führungskommunikation(z.B. Parallel I/O bzw.
Feldbus)
Abb. 9-2: Kommunikation über RS232-Schnittstelle
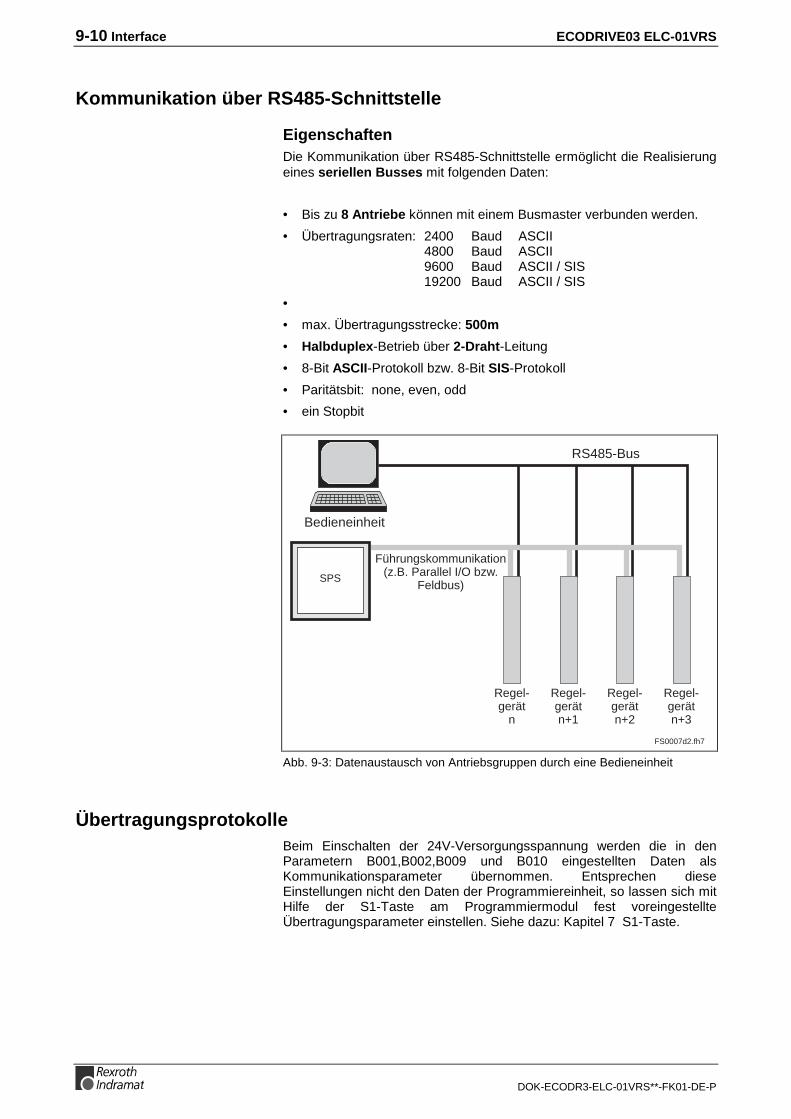
9-10 Interface ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Kommunikation über RS485-Schnittstelle
EigenschaftenDie Kommunikation über RS485-Schnittstelle ermöglicht die Realisierungeines seriellen Busses mit folgenden Daten:
• Bis zu 8 Antriebe können mit einem Busmaster verbunden werden.
• Übertragungsraten: 2400 Baud ASCII 4800 Baud ASCII 9600 Baud ASCII / SIS 19200 Baud ASCII / SIS
•
• max. Übertragungsstrecke: 500m
• Halbduplex-Betrieb über 2-Draht-Leitung
• 8-Bit ASCII-Protokoll bzw. 8-Bit SIS-Protokoll
• Paritätsbit: none, even, odd
• ein Stopbit
FS0007d2.fh7
Bedieneinheit
RS485-Bus
SPS
Führungskommunikation(z.B. Parallel I/O bzw.
Feldbus)
Regel-gerät
n
Regel-gerätn+1
Regel-gerätn+2
Regel-gerätn+3
Abb. 9-3: Datenaustausch von Antriebsgruppen durch eine Bedieneinheit
ÜbertragungsprotokolleBeim Einschalten der 24V-Versorgungsspannung werden die in denParametern B001,B002,B009 und B010 eingestellten Daten alsKommunikationsparameter übernommen. Entsprechen dieseEinstellungen nicht den Daten der Programmiereinheit, so lassen sich mitHilfe der S1-Taste am Programmiermodul fest voreingestellteÜbertragungsparameter einstellen. Siehe dazu: Kapitel 7 S1-Taste.
ECODRIVE03 ELC-01VRS Interface 9-11
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
ASCII-Protokoll
Das erste Steuerzeichen kennzeichnet den Beginn einerDatenübertragung:
1) ? Hexadezimal 3F / Zeichen für Datenabfrage
Empfängt die Steuerung ein `?´, so wird die durch die folgenden Zeichenangeforderte Information (Programmsatz, Parameter, Statusmeldung)über die RS-Schnittstelle ausgegeben.
2) # Hexadezimal 23 / Zeichen für Satzübertragung NC, Parameter, Logik-Task, Variable
Empfängt die Steuerung ein `#´, so werden die folgenden Zeichen an derentsprechenden Satznummer in den Programmspeicher eingelesen.
3) ! Hexadezimal 21
Empfängt die Steuerung ein `!´, so werden die folgenden Zeichen alsSteuerkommando aufgefaßt.
4) : Hexadezimal 3A
Doppelpunkt für Pollingabfrage.
s Dieses Zeichen kennzeichnet die Stationsnummer. Das `s´ ist je nach Betriebsmodus durch ein entsprechendes
Zeichen zu ersetzen.
1) Beim RS232C-Betriebsmodus ist das `s´ durch ein Leerzeichen zu ersetzen. Ein anderes Zeichen wird nicht akzeptiert.
2) Beim RS485-Betrieb ist das `s´ durch die jeweilige Stationsnummer(1 ... 9 ; A ...W) zu ersetzen. Stimmt diese Nummer nicht mit der aufdem Programmiermodul eingestellten Nummer überein, so erfolgtkeine Reaktion auf die empfangenen Daten.
Ist `s´ ein Leerzeichen, dann ist diese Information für alle Teilnehmer am Bus relevant.
Das dritte Zeichen kennzeichnet den Informationstyp:
1) N Hexadezimal 4E / Zeichen für Satznummer
Die dem `N´ folgende Information wird als Programmsatz interpretiert.
2) K Hexadezimal 4B / Zeichen für Parameter
Die dem `K´ folgende Information wird als Parameter interpretiert.
3) X Hexadezimal 58 / Kennzeichen für Status
Die dem `P´ folgende Information wird als Logik-Task-Satz interpretiert.
4) C Hexadezimal 43 / Zeichen für Kommandos
Die dem `C´ folgende Information wird als Kommando interpretiert.
Erstes Steuerzeichen imDatenstring:
Zweites Steuerzeichen imDatenstring:
Drittes Steuerzeichen:
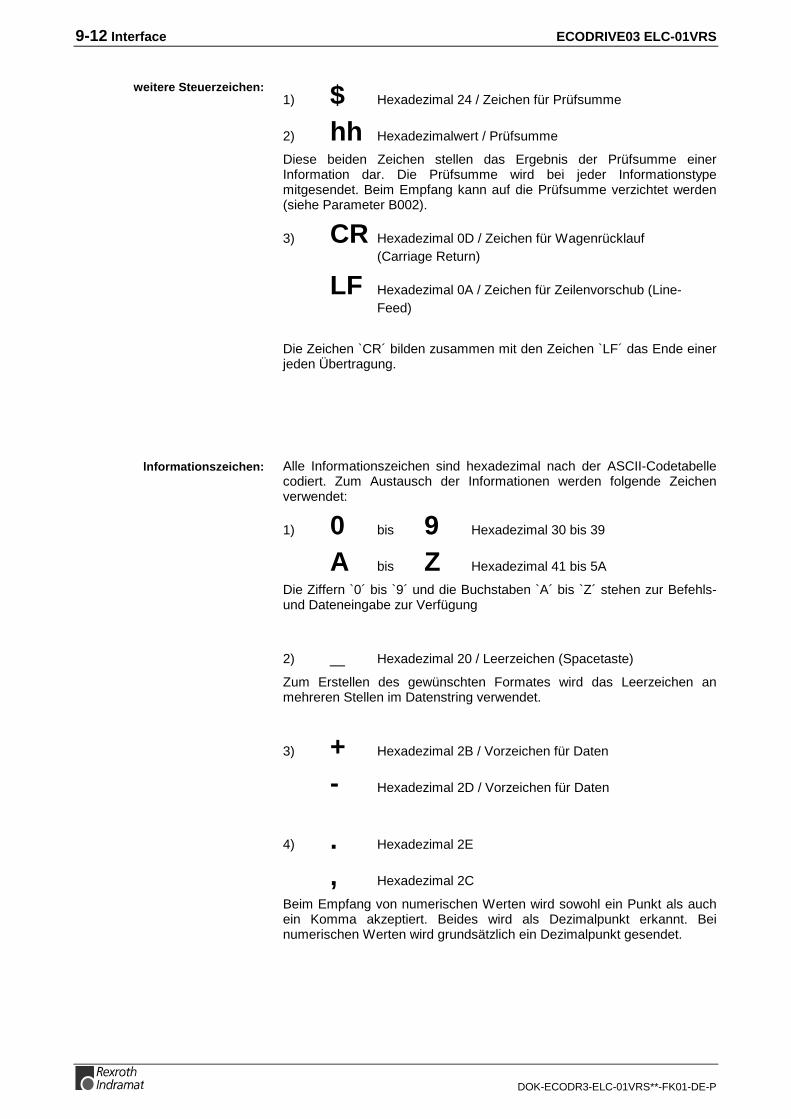
9-12 Interface ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
1) $ Hexadezimal 24 / Zeichen für Prüfsumme
2) hh Hexadezimalwert / Prüfsumme
Diese beiden Zeichen stellen das Ergebnis der Prüfsumme einerInformation dar. Die Prüfsumme wird bei jeder Informationstypemitgesendet. Beim Empfang kann auf die Prüfsumme verzichtet werden(siehe Parameter B002).
3) CR Hexadezimal 0D / Zeichen für Wagenrücklauf (Carriage Return)
LF Hexadezimal 0A / Zeichen für Zeilenvorschub (Line-Feed)
Die Zeichen `CR´ bilden zusammen mit den Zeichen `LF´ das Ende einerjeden Übertragung.
Alle Informationszeichen sind hexadezimal nach der ASCII-Codetabellecodiert. Zum Austausch der Informationen werden folgende Zeichenverwendet:
1) 0 bis 9 Hexadezimal 30 bis 39
A bis Z Hexadezimal 41 bis 5A
Die Ziffern `0´ bis `9´ und die Buchstaben `A´ bis `Z´ stehen zur Befehls-und Dateneingabe zur Verfügung
2) _ Hexadezimal 20 / Leerzeichen (Spacetaste)
Zum Erstellen des gewünschten Formates wird das Leerzeichen anmehreren Stellen im Datenstring verwendet.
3) + Hexadezimal 2B / Vorzeichen für Daten
- Hexadezimal 2D / Vorzeichen für Daten
4) . Hexadezimal 2E
, Hexadezimal 2C
Beim Empfang von numerischen Werten wird sowohl ein Punkt als auchein Komma akzeptiert. Beides wird als Dezimalpunkt erkannt. Beinumerischen Werten wird grundsätzlich ein Dezimalpunkt gesendet.
weitere Steuerzeichen:
lnformationszeichen:
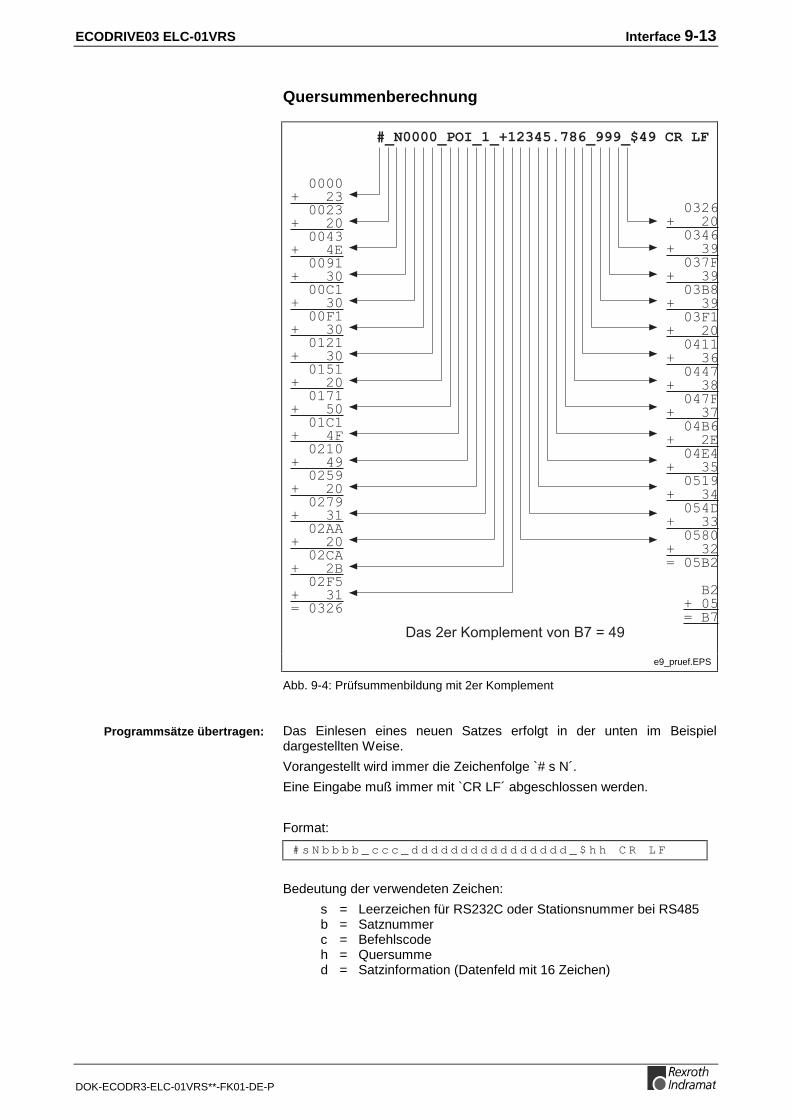
ECODRIVE03 ELC-01VRS Interface 9-13
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Quersummenberechnung
0326+ 20
0346+ 39
037F+ 39
03B8+ 39
03F1+ 20
0411+ 36
0447+ 38
047F+ 37
04B6+ 2E
04E4+ 35
0519+ 34
054D+ 33
0580+ 32= 05B2
B2+ 05= B7
0000+ 23
0023+ 20
0043+ 4E
0091+ 30
00C1+ 30
00F1+ 30
0121+ 30
0151+ 20
0171+ 50
01C1+ 4F
0210+ 49
0259+ 20
0279+ 31
02AA+ 20
02CA+ 2B
02F5+ 31= 0326
#_N0000_POI_1_+12345.786_999_$49 CR LF
Das 2er Komplement von B7 = 49
e9_pruef.EPS
Abb. 9-4: Prüfsummenbildung mit 2er Komplement
Das Einlesen eines neuen Satzes erfolgt in der unten im Beispieldargestellten Weise.
Vorangestellt wird immer die Zeichenfolge `# s N´.
Eine Eingabe muß immer mit `CR LF´ abgeschlossen werden.
Format:
# s N b b b b _ c c c _ d d d d d d d d d d d d d d d d _ $ h h C R L F
Bedeutung der verwendeten Zeichen:
s = Leerzeichen für RS232C oder Stationsnummer bei RS485b = Satznummerc = Befehlscode
h = Quersummed = Satzinformation (Datenfeld mit 16 Zeichen)
Programmsätze übertragen:
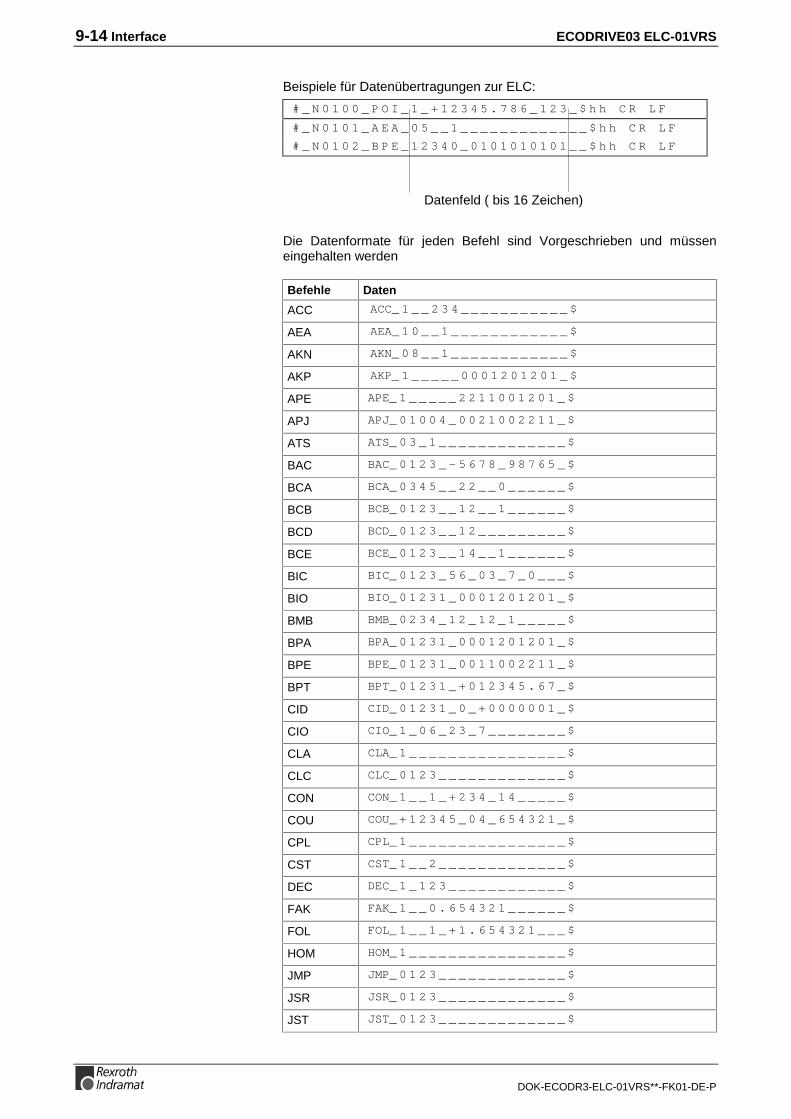
9-14 Interface ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Beispiele für Datenübertragungen zur ELC:
# _ N 0 1 0 0 _ P O I _ 1 _ + 1 2 3 4 5 . 7 8 6 _ 1 2 3 _ $ h h C R L F
# _ N 0 1 0 1 _ A E A _ 0 5 _ _ 1 _ _ _ _ _ _ _ _ _ _ _ _ _ $ h h C R L F
# _ N 0 1 0 2 _ B P E _ 1 2 3 4 0 _ 0 1 0 1 0 1 0 1 0 1 _ _ $ h h C R L F
Datenfeld ( bis 16 Zeichen)
Die Datenformate für jeden Befehl sind Vorgeschrieben und müsseneingehalten werden
Befehle Daten
ACC ACC_ 1 _ _ 2 3 4 _ _ _ _ _ _ _ _ _ _ _ $
AEA AEA_ 1 0 _ _ 1 _ _ _ _ _ _ _ _ _ _ _ _ $
AKN AKN_ 0 8 _ _ 1 _ _ _ _ _ _ _ _ _ _ _ _ $
AKP AKP_ 1 _ _ _ _ _ 0 0 0 1 2 0 1 2 0 1 _ $
APE APE_ 1 _ _ _ _ _ 2 2 1 1 0 0 1 2 0 1 _ $
APJ APJ_ 0 1 0 0 4 _ 0 0 2 1 0 0 2 2 1 1 _ $
ATS ATS_ 0 3 _ 1 _ _ _ _ _ _ _ _ _ _ _ _ _ $
BAC BAC_ 0 1 2 3 _ - 5 6 7 8 _ 9 8 7 6 5 _ $
BCA BCA_ 0 3 4 5 _ _ 2 2 _ _ 0 _ _ _ _ _ _ $
BCB BCB_ 0 1 2 3 _ _ 1 2 _ _ 1 _ _ _ _ _ _ $
BCD BCD_ 0 1 2 3 _ _ 1 2 _ _ _ _ _ _ _ _ _ $
BCE BCE_ 0 1 2 3 _ _ 1 4 _ _ 1 _ _ _ _ _ _ $
BIC BIC_ 0 1 2 3 _ 5 6 _ 0 3 _ 7 _ 0 _ _ _ $
BIO BIO_ 0 1 2 3 1 _ 0 0 0 1 2 0 1 2 0 1 _ $
BMB BMB_ 0 2 3 4 _ 1 2 _ 1 2 _ 1 _ _ _ _ _ $
BPA BPA_ 0 1 2 3 1 _ 0 0 0 1 2 0 1 2 0 1 _ $
BPE BPE_ 0 1 2 3 1 _ 0 0 1 1 0 0 2 2 1 1 _ $
BPT BPT_ 0 1 2 3 1 _ + 0 1 2 3 4 5 . 6 7 _ $
CID CID_ 0 1 2 3 1 _ 0 _ + 0 0 0 0 0 0 1 _ $
CIO CIO_ 1 _ 0 6 _ 2 3 _ 7 _ _ _ _ _ _ _ _ $
CLA CLA_ 1 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ $
CLC CLC_ 0 1 2 3 _ _ _ _ _ _ _ _ _ _ _ _ _ $
CON CON_ 1 _ _ 1 _ + 2 3 4 _ 1 4 _ _ _ _ _ $
COU COU_ + 1 2 3 4 5 _ 0 4 _ 6 5 4 3 2 1 _ $
CPL CPL_ 1 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ $
CST CST_ 1 _ _ 2 _ _ _ _ _ _ _ _ _ _ _ _ _ $
DEC DEC_ 1 _ 1 2 3 _ _ _ _ _ _ _ _ _ _ _ _ $
FAK FAK_ 1 _ _ 0 . 6 5 4 3 2 1 _ _ _ _ _ _ $
FOL FOL_ 1 _ _ 1 _ + 1 . 6 5 4 3 2 1 _ _ _ $
HOM HOM_ 1 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ $
JMP JMP_ 0 1 2 3 _ _ _ _ _ _ _ _ _ _ _ _ _ $
JSR JSR_ 0 1 2 3 _ _ _ _ _ _ _ _ _ _ _ _ _ $
JST JST_ 0 1 2 3 _ _ _ _ _ _ _ _ _ _ _ _ _ $
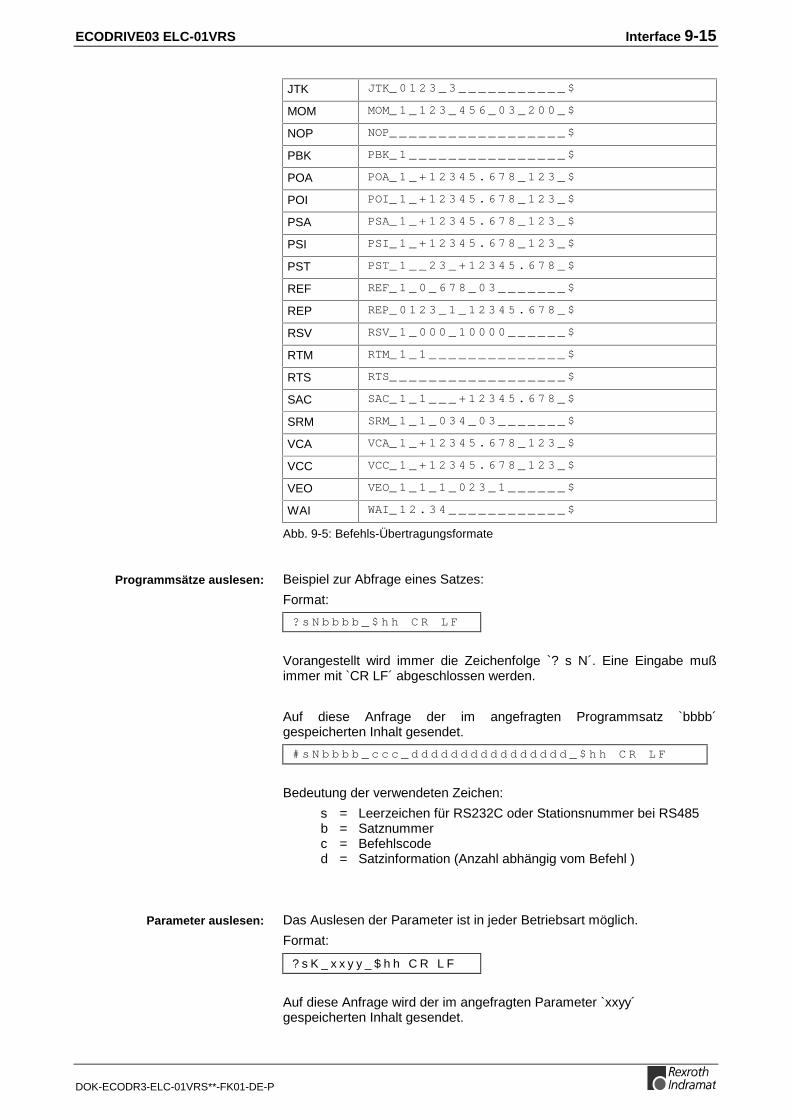
ECODRIVE03 ELC-01VRS Interface 9-15
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
JTK JTK_ 0 1 2 3 _ 3 _ _ _ _ _ _ _ _ _ _ _ $
MOM MOM_ 1 _ 1 2 3 _ 4 5 6 _ 0 3 _ 2 0 0 _ $
NOP NOP_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ $
PBK PBK_ 1 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ $
POA POA_ 1 _ + 1 2 3 4 5 . 6 7 8 _ 1 2 3 _ $
POI POI_ 1 _ + 1 2 3 4 5 . 6 7 8 _ 1 2 3 _ $
PSA PSA_ 1 _ + 1 2 3 4 5 . 6 7 8 _ 1 2 3 _ $
PSI PSI_ 1 _ + 1 2 3 4 5 . 6 7 8 _ 1 2 3 _ $
PST PST_ 1 _ _ 2 3 _ + 1 2 3 4 5 . 6 7 8 _ $
REF REF_ 1 _ 0 _ 6 7 8 _ 0 3 _ _ _ _ _ _ _ $
REP REP_ 0 1 2 3 _ 1 _ 1 2 3 4 5 . 6 7 8 _ $
RSV RSV_ 1 _ 0 0 0 _ 1 0 0 0 0 _ _ _ _ _ _ $
RTM RTM_ 1 _ 1 _ _ _ _ _ _ _ _ _ _ _ _ _ _ $
RTS RTS_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ $
SAC SAC_ 1 _ 1 _ _ _ + 1 2 3 4 5 . 6 7 8 _ $
SRM SRM_ 1 _ 1 _ 0 3 4 _ 0 3 _ _ _ _ _ _ _ $
VCA VCA_ 1 _ + 1 2 3 4 5 . 6 7 8 _ 1 2 3 _ $
VCC VCC_ 1 _ + 1 2 3 4 5 . 6 7 8 _ 1 2 3 _ $
VEO VEO_ 1 _ 1 _ 1 _ 0 2 3 _ 1 _ _ _ _ _ _ $
WAI WAI_ 1 2 . 3 4 _ _ _ _ _ _ _ _ _ _ _ _ $
Abb. 9-5: Befehls-Übertragungsformate
Beispiel zur Abfrage eines Satzes:
Format:
? s N b b b b _ $ h h C R L F
Vorangestellt wird immer die Zeichenfolge `? s N´. Eine Eingabe mußimmer mit `CR LF´ abgeschlossen werden.
Auf diese Anfrage der im angefragten Programmsatz `bbbb´gespeicherten Inhalt gesendet.
# s N b b b b _ c c c _ d d d d d d d d d d d d d d d d _ $ h h C R L F
Bedeutung der verwendeten Zeichen:
s = Leerzeichen für RS232C oder Stationsnummer bei RS485b = Satznummerc = Befehlscoded = Satzinformation (Anzahl abhängig vom Befehl )
Das Auslesen der Parameter ist in jeder Betriebsart möglich.
Format:
? s K _ x x y y _ $ h h C R L F
Auf diese Anfrage wird der im angefragten Parameter `xxyy´gespeicherten Inhalt gesendet.
Programmsätze auslesen:
Parameter auslesen:
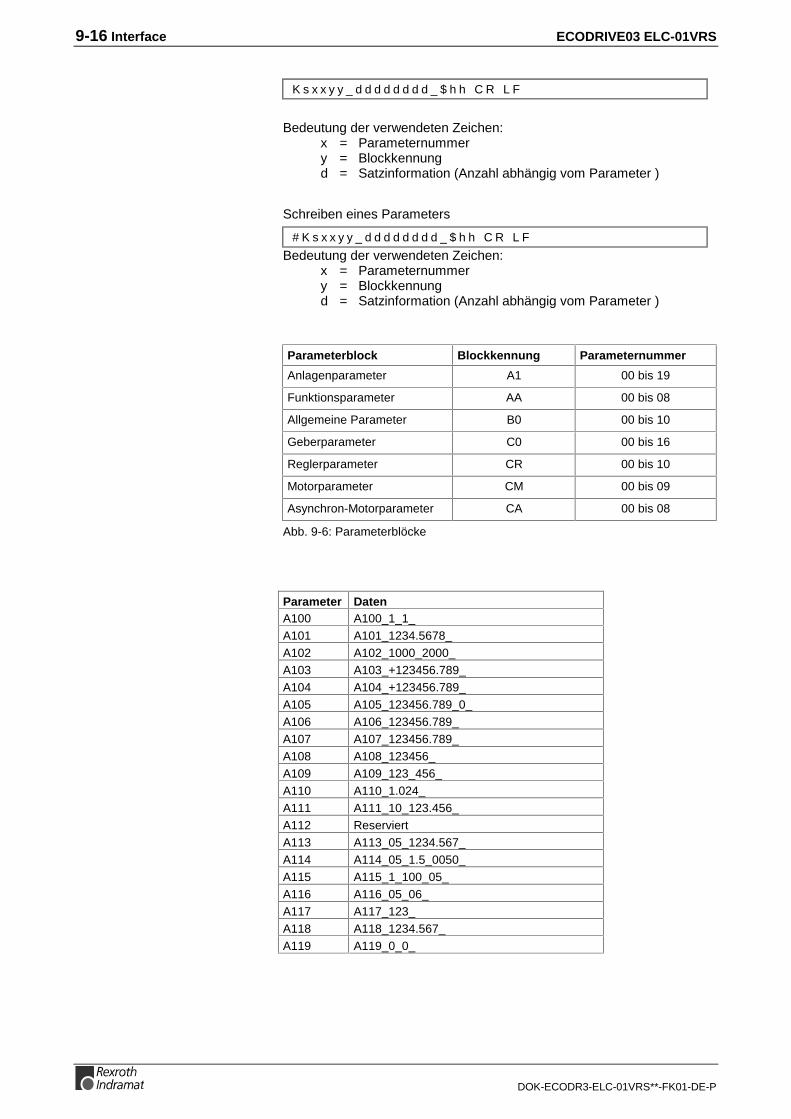
9-16 Interface ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
K s x x y y _ d d d d d d d d _ $ h h C R L F
Bedeutung der verwendeten Zeichen:x = Parameternummery = Blockkennungd = Satzinformation (Anzahl abhängig vom Parameter )
Schreiben eines Parameters
# K s x x y y _ d d d d d d d d _ $ h h C R L F
Bedeutung der verwendeten Zeichen:x = Parameternummery = Blockkennungd = Satzinformation (Anzahl abhängig vom Parameter )
Parameterblock Blockkennung Parameternummer
Anlagenparameter A1 00 bis 19
Funktionsparameter AA 00 bis 08
Allgemeine Parameter B0 00 bis 10
Geberparameter C0 00 bis 16
Reglerparameter CR 00 bis 10
Motorparameter CM 00 bis 09
Asynchron-Motorparameter CA 00 bis 08
Abb. 9-6: Parameterblöcke
Parameter DatenA100 A100_1_1_A101 A101_1234.5678_A102 A102_1000_2000_A103 A103_+123456.789_A104 A104_+123456.789_A105 A105_123456.789_0_A106 A106_123456.789_A107 A107_123456.789_A108 A108_123456_A109 A109_123_456_A110 A110_1.024_A111 A111_10_123.456_A112 ReserviertA113 A113_05_1234.567_A114 A114_05_1.5_0050_A115 A115_1_100_05_A116 A116_05_06_A117 A117_123_A118 A118_1234.567_A119 A119_0_0_
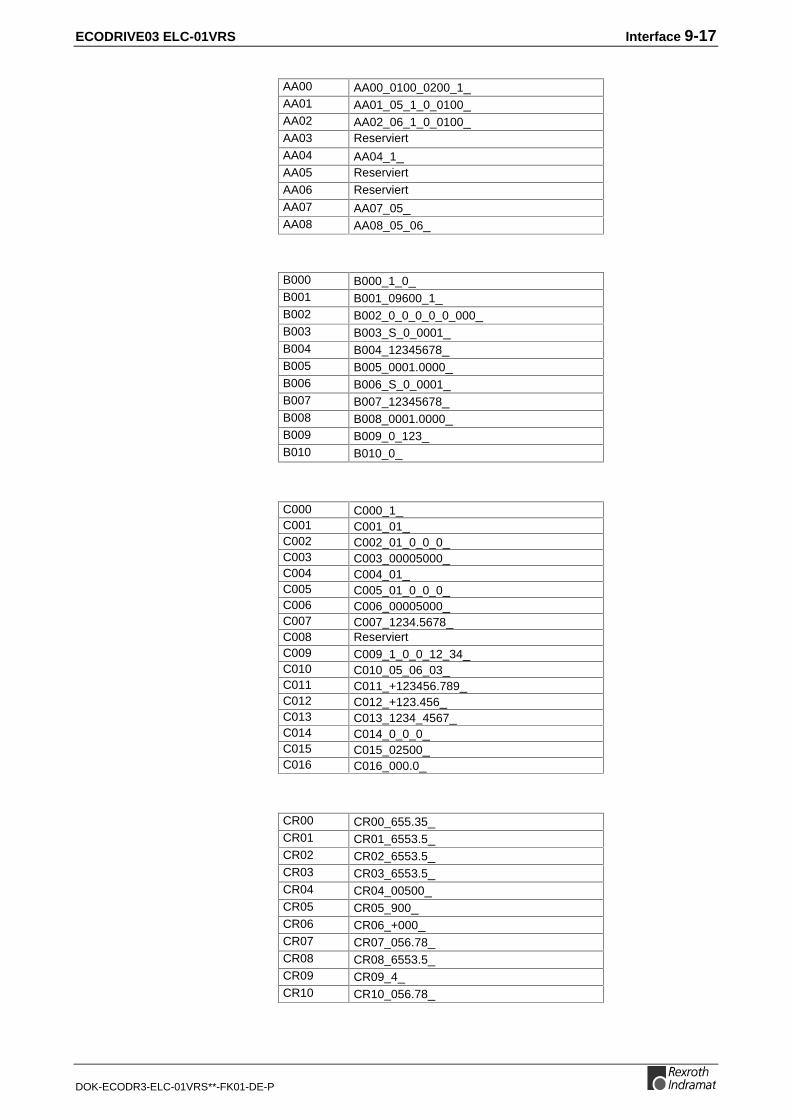
ECODRIVE03 ELC-01VRS Interface 9-17
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
AA00 AA00_0100_0200_1_AA01 AA01_05_1_0_0100_AA02 AA02_06_1_0_0100_AA03 ReserviertAA04 AA04_1_AA05 ReserviertAA06 ReserviertAA07 AA07_05_AA08 AA08_05_06_
B000 B000_1_0_B001 B001_09600_1_B002 B002_0_0_0_0_0_000_B003 B003_S_0_0001_B004 B004_12345678_B005 B005_0001.0000_B006 B006_S_0_0001_B007 B007_12345678_B008 B008_0001.0000_B009 B009_0_123_B010 B010_0_
C000 C000_1_C001 C001_01_C002 C002_01_0_0_0_C003 C003_00005000_C004 C004_01_C005 C005_01_0_0_0_C006 C006_00005000_C007 C007_1234.5678_C008 ReserviertC009 C009_1_0_0_12_34_C010 C010_05_06_03_C011 C011_+123456.789_C012 C012_+123.456_C013 C013_1234_4567_C014 C014_0_0_0_C015 C015_02500_C016 C016_000.0_
CR00 CR00_655.35_CR01 CR01_6553.5_CR02 CR02_6553.5_CR03 CR03_6553.5_CR04 CR04_00500_CR05 CR05_900_CR06 CR06_+000_CR07 CR07_056.78_CR08 CR08_6553.5_CR09 CR09_4_CR10 CR10_056.78_
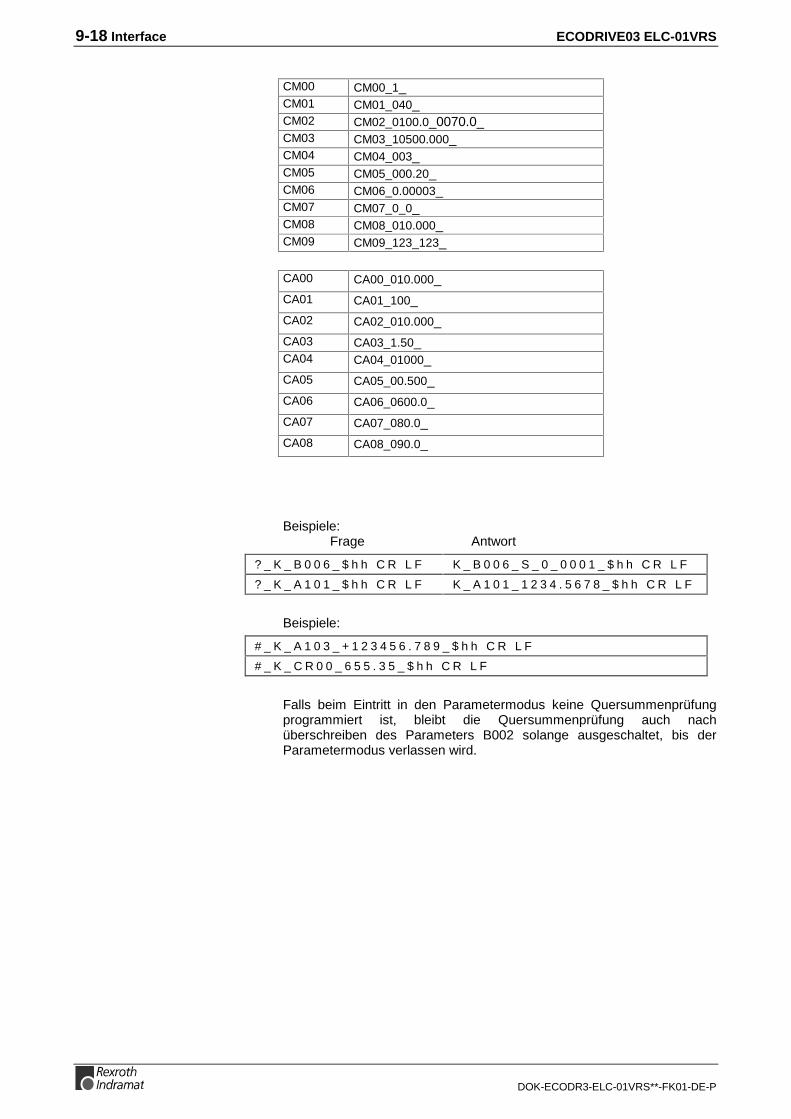
9-18 Interface ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
CM00 CM00_1_CM01 CM01_040_CM02 CM02_0100.0_0070.0_CM03 CM03_10500.000_CM04 CM04_003_CM05 CM05_000.20_CM06 CM06_0.00003_CM07 CM07_0_0_CM08 CM08_010.000_CM09 CM09_123_123_
CA00 CA00_010.000_
CA01 CA01_100_
CA02 CA02_010.000_
CA03 CA03_1.50_CA04 CA04_01000_
CA05 CA05_00.500_
CA06 CA06_0600.0_
CA07 CA07_080.0_
CA08 CA08_090.0_
Beispiele:Frage Antwort
? _ K _ B 0 0 6 _ $ h h C R L F K _ B 0 0 6 _ S _ 0 _ 0 0 0 1 _ $ h h C R L F
? _ K _ A 1 0 1 _ $ h h C R L F K _ A 1 0 1 _ 1 2 3 4 . 5 6 7 8 _ $ h h C R L F
Beispiele:
# _ K _ A 1 0 3 _ + 1 2 3 4 5 6 . 7 8 9 _ $ h h C R L F
# _ K _ C R 0 0 _ 6 5 5 . 3 5 _ $ h h C R L F
Falls beim Eintritt in den Parametermodus keine Quersummenprüfungprogrammiert ist, bleibt die Quersummenprüfung auch nachüberschreiben des Parameters B002 solange ausgeschaltet, bis derParametermodus verlassen wird.
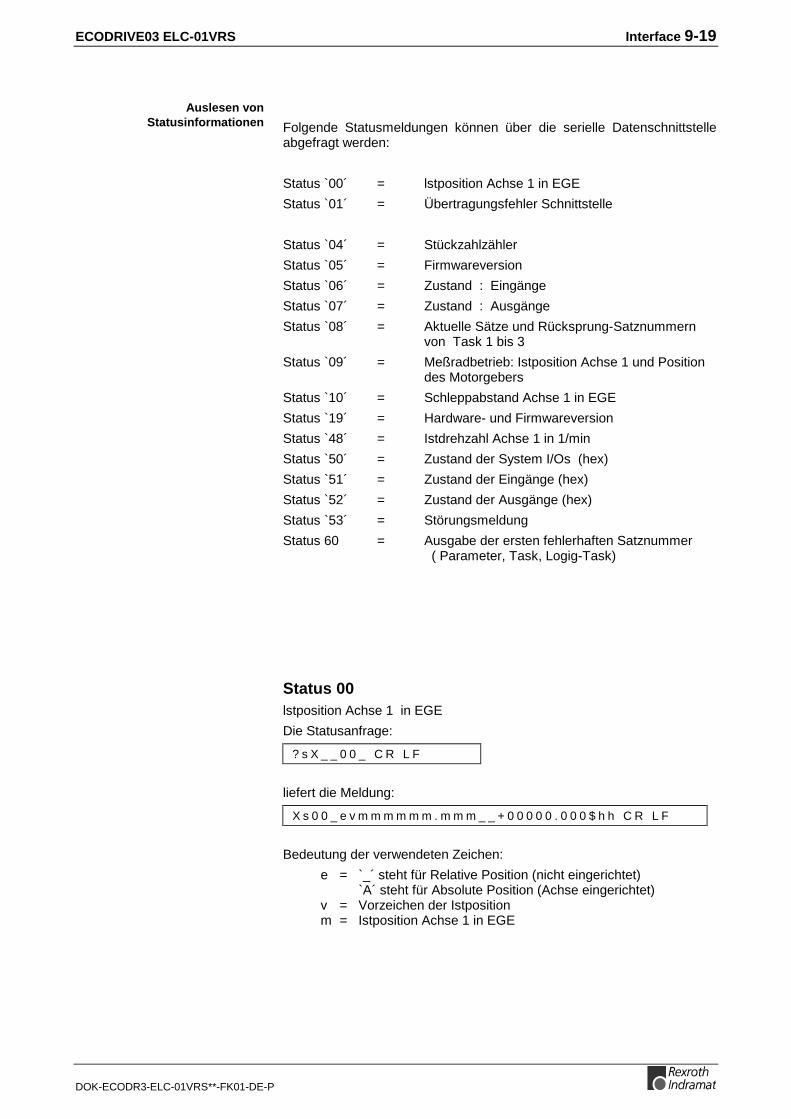
ECODRIVE03 ELC-01VRS Interface 9-19
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Folgende Statusmeldungen können über die serielle Datenschnittstelleabgefragt werden:
Status `00´ = lstposition Achse 1 in EGE
Status `01´ = Übertragungsfehler Schnittstelle
Status `04´ = Stückzahlzähler
Status `05´ = Firmwareversion
Status `06´ = Zustand : Eingänge
Status `07´ = Zustand : Ausgänge
Status `08´ = Aktuelle Sätze und Rücksprung-Satznummern von Task 1 bis 3
Status `09´ = Meßradbetrieb: Istposition Achse 1 und Positiondes Motorgebers
Status `10´ = Schleppabstand Achse 1 in EGE
Status `19´ = Hardware- und Firmwareversion
Status `48´ = Istdrehzahl Achse 1 in 1/min
Status `50´ = Zustand der System I/Os (hex)
Status `51´ = Zustand der Eingänge (hex)
Status `52´ = Zustand der Ausgänge (hex)
Status `53´ = Störungsmeldung
Status 60 = Ausgabe der ersten fehlerhaften Satznummer ( Parameter, Task, Logig-Task)
Status 00lstposition Achse 1 in EGE
Die Statusanfrage:
? s X _ _ 0 0 _ C R L F
liefert die Meldung:
X s 0 0 _ e v m m m m m m . m m m _ _ + 0 0 0 0 0 . 0 0 0 $ h h C R L F
Bedeutung der verwendeten Zeichen:
e = `_´ steht für Relative Position (nicht eingerichtet)`A´ steht für Absolute Position (Achse eingerichtet)
v = Vorzeichen der Istposition m = Istposition Achse 1 in EGE
Auslesen vonStatusinformationen
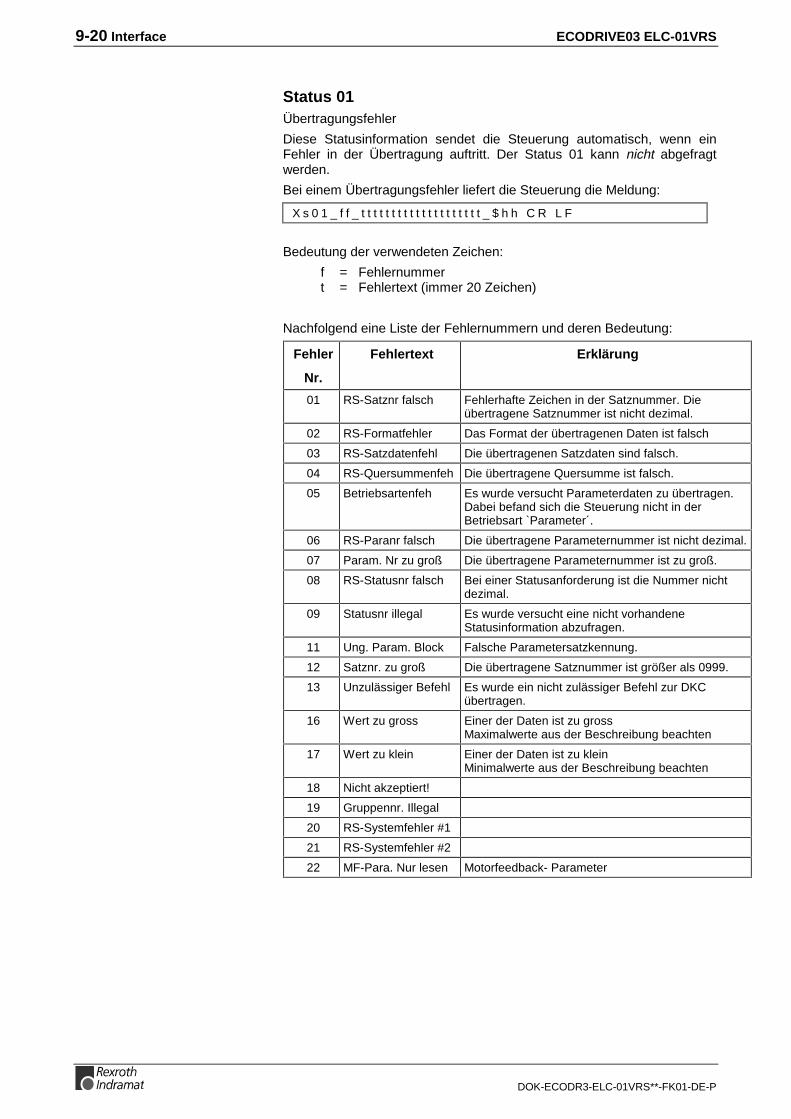
9-20 Interface ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Status 01Übertragungsfehler
Diese Statusinformation sendet die Steuerung automatisch, wenn einFehler in der Übertragung auftritt. Der Status 01 kann nicht abgefragtwerden.
Bei einem Übertragungsfehler liefert die Steuerung die Meldung:
X s 0 1 _ f f _ t t t t t t t t t t t t t t t t t t t t _ $ h h C R L F
Bedeutung der verwendeten Zeichen:
f = Fehlernummert = Fehlertext (immer 20 Zeichen)
Nachfolgend eine Liste der Fehlernummern und deren Bedeutung:
Fehler
Nr.
Fehlertext Erklärung
01 RS-Satznr falsch Fehlerhafte Zeichen in der Satznummer. Dieübertragene Satznummer ist nicht dezimal.
02 RS-Formatfehler Das Format der übertragenen Daten ist falsch
03 RS-Satzdatenfehl Die übertragenen Satzdaten sind falsch.
04 RS-Quersummenfeh Die übertragene Quersumme ist falsch.
05 Betriebsartenfeh Es wurde versucht Parameterdaten zu übertragen.Dabei befand sich die Steuerung nicht in derBetriebsart `Parameter´.
06 RS-Paranr falsch Die übertragene Parameternummer ist nicht dezimal.
07 Param. Nr zu groß Die übertragene Parameternummer ist zu groß.
08 RS-Statusnr falsch Bei einer Statusanforderung ist die Nummer nichtdezimal.
09 Statusnr illegal Es wurde versucht eine nicht vorhandeneStatusinformation abzufragen.
11 Ung. Param. Block Falsche Parametersatzkennung.
12 Satznr. zu groß Die übertragene Satznummer ist größer als 0999.
13 Unzulässiger Befehl Es wurde ein nicht zulässiger Befehl zur DKCübertragen.
16 Wert zu gross Einer der Daten ist zu grossMaximalwerte aus der Beschreibung beachten
17 Wert zu klein Einer der Daten ist zu kleinMinimalwerte aus der Beschreibung beachten
18 Nicht akzeptiert!
19 Gruppennr. Illegal
20 RS-Systemfehler #1
21 RS-Systemfehler #2
22 MF-Para. Nur lesen Motorfeedback- Parameter
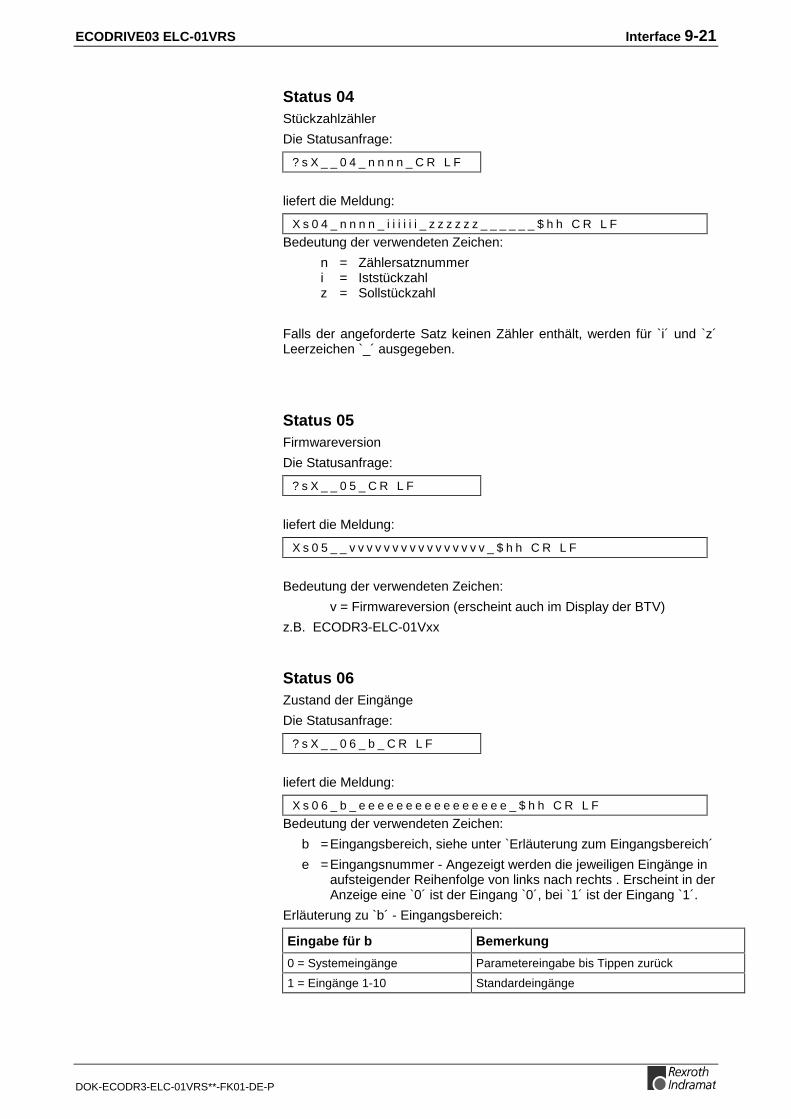
ECODRIVE03 ELC-01VRS Interface 9-21
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Status 04Stückzahlzähler
Die Statusanfrage:
? s X _ _ 0 4 _ n n n n _ C R L F
liefert die Meldung:
X s 0 4 _ n n n n _ i i i i i i _ z z z z z z _ _ _ _ _ _ $ h h C R L F
Bedeutung der verwendeten Zeichen:
n = Zählersatznummer i = Iststückzahl z = Sollstückzahl
Falls der angeforderte Satz keinen Zähler enthält, werden für `i´ und `z´Leerzeichen `_´ ausgegeben.
Status 05Firmwareversion
Die Statusanfrage:
? s X _ _ 0 5 _ C R L F
liefert die Meldung:
X s 0 5 _ _ v v v v v v v v v v v v v v v v _ $ h h C R L F
Bedeutung der verwendeten Zeichen:
v = Firmwareversion (erscheint auch im Display der BTV)
z.B. ECODR3-ELC-01Vxx
Status 06Zustand der Eingänge
Die Statusanfrage:
? s X _ _ 0 6 _ b _ C R L F
liefert die Meldung:
X s 0 6 _ b _ e e e e e e e e e e e e e e e e _ $ h h C R L F
Bedeutung der verwendeten Zeichen:
b =Eingangsbereich, siehe unter `Erläuterung zum Eingangsbereich´
e =Eingangsnummer - Angezeigt werden die jeweiligen Eingänge inaufsteigender Reihenfolge von links nach rechts . Erscheint in derAnzeige eine `0´ ist der Eingang `0´, bei `1´ ist der Eingang `1´.
Erläuterung zu `b´ - Eingangsbereich:
Eingabe für b Bemerkung
0 = Systemeingänge Parametereingabe bis Tippen zurück
1 = Eingänge 1-10 Standardeingänge
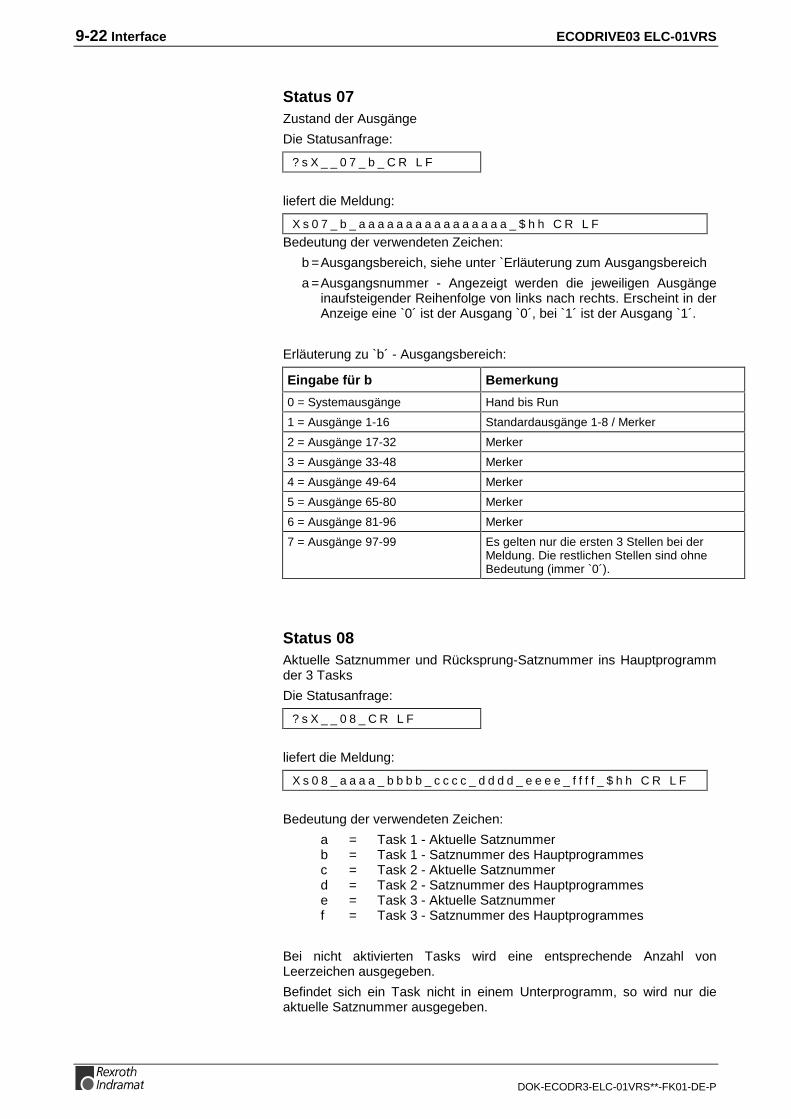
9-22 Interface ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Status 07Zustand der Ausgänge
Die Statusanfrage:
? s X _ _ 0 7 _ b _ C R L F
liefert die Meldung:
X s 0 7 _ b _ a a a a a a a a a a a a a a a a _ $ h h C R L F
Bedeutung der verwendeten Zeichen:
b =Ausgangsbereich, siehe unter `Erläuterung zum Ausgangsbereich
a =Ausgangsnummer - Angezeigt werden die jeweiligen Ausgängeinaufsteigender Reihenfolge von links nach rechts. Erscheint in derAnzeige eine `0´ ist der Ausgang `0´, bei `1´ ist der Ausgang `1´.
Erläuterung zu `b´ - Ausgangsbereich:
Eingabe für b Bemerkung
0 = Systemausgänge Hand bis Run
1 = Ausgänge 1-16 Standardausgänge 1-8 / Merker
2 = Ausgänge 17-32 Merker
3 = Ausgänge 33-48 Merker
4 = Ausgänge 49-64 Merker
5 = Ausgänge 65-80 Merker
6 = Ausgänge 81-96 Merker
7 = Ausgänge 97-99 Es gelten nur die ersten 3 Stellen bei derMeldung. Die restlichen Stellen sind ohneBedeutung (immer `0´).
Status 08Aktuelle Satznummer und Rücksprung-Satznummer ins Hauptprogrammder 3 Tasks
Die Statusanfrage:
? s X _ _ 0 8 _ C R L F
liefert die Meldung:
X s 0 8 _ a a a a _ b b b b _ c c c c _ d d d d _ e e e e _ f f f f _ $ h h C R L F
Bedeutung der verwendeten Zeichen:
a = Task 1 - Aktuelle Satznummerb = Task 1 - Satznummer des Hauptprogrammesc = Task 2 - Aktuelle Satznummerd = Task 2 - Satznummer des Hauptprogrammese = Task 3 - Aktuelle Satznummerf = Task 3 - Satznummer des Hauptprogrammes
Bei nicht aktivierten Tasks wird eine entsprechende Anzahl vonLeerzeichen ausgegeben.
Befindet sich ein Task nicht in einem Unterprogramm, so wird nur dieaktuelle Satznummer ausgegeben.
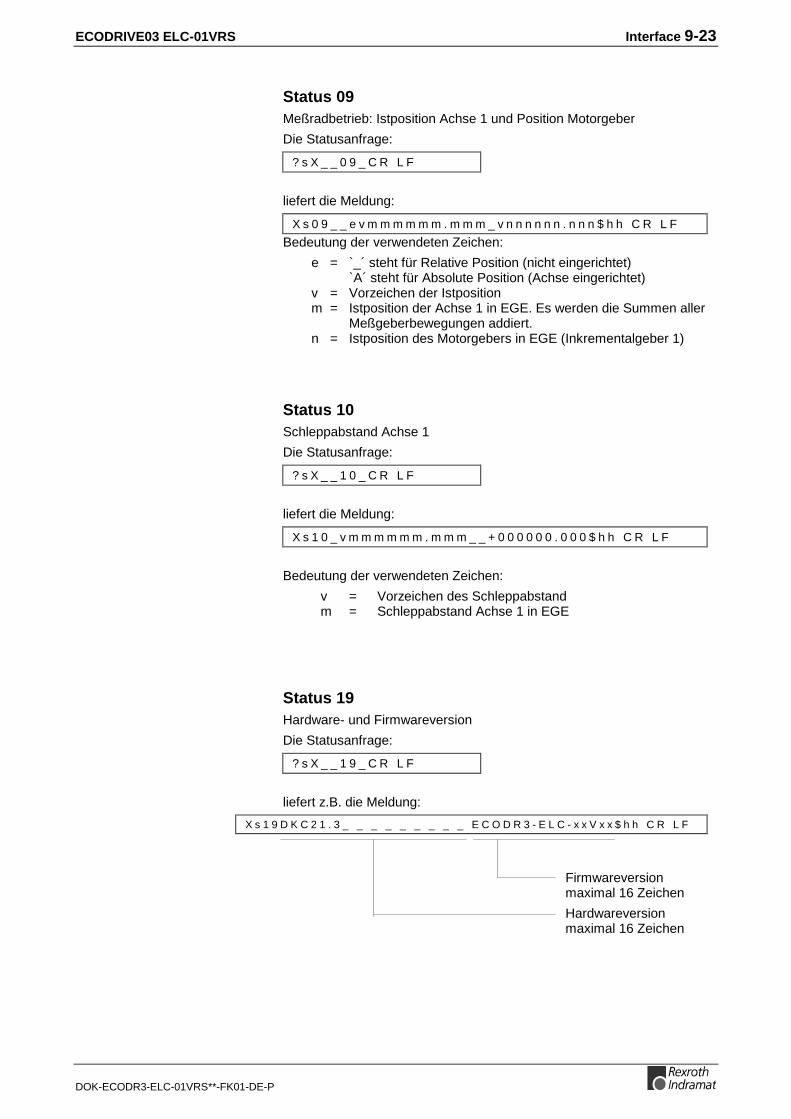
ECODRIVE03 ELC-01VRS Interface 9-23
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Status 09Meßradbetrieb: Istposition Achse 1 und Position Motorgeber
Die Statusanfrage:
? s X _ _ 0 9 _ C R L F
liefert die Meldung:
X s 0 9 _ _ e v m m m m m m . m m m _ v n n n n n n . n n n $ h h C R L F
Bedeutung der verwendeten Zeichen:
e = `_´ steht für Relative Position (nicht eingerichtet)`A´ steht für Absolute Position (Achse eingerichtet)
v = Vorzeichen der Istposition m = Istposition der Achse 1 in EGE. Es werden die Summen aller
Meßgeberbewegungen addiert.n = Istposition des Motorgebers in EGE (Inkrementalgeber 1)
Status 10Schleppabstand Achse 1
Die Statusanfrage:
? s X _ _ 1 0 _ C R L F
liefert die Meldung:
X s 1 0 _ v m m m m m m . m m m _ _ + 0 0 0 0 0 0 . 0 0 0 $ h h C R L F
Bedeutung der verwendeten Zeichen:
v = Vorzeichen des Schleppabstandm = Schleppabstand Achse 1 in EGE
Status 19Hardware- und Firmwareversion
Die Statusanfrage:
? s X _ _ 1 9 _ C R L F
liefert z.B. die Meldung:
X s 1 9 D K C 2 1 . 3 _ _ _ _ _ _ _ _ _ E C O D R 3 - E L C - x x V x x $ h h C R L F
Firmwareversion maximal 16 Zeichen
Hardwareversionmaximal 16 Zeichen
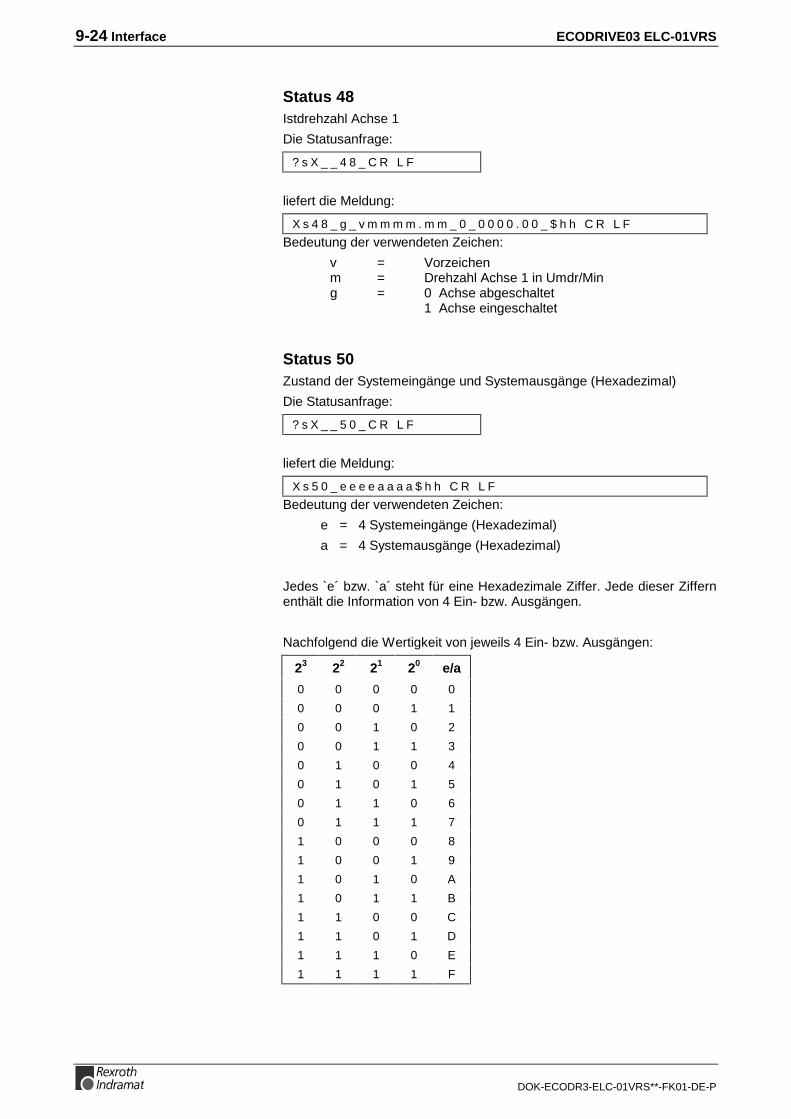
9-24 Interface ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Status 48Istdrehzahl Achse 1
Die Statusanfrage:
? s X _ _ 4 8 _ C R L F
liefert die Meldung:
X s 4 8 _ g _ v m m m m . m m _ 0 _ 0 0 0 0 . 0 0 _ $ h h C R L F
Bedeutung der verwendeten Zeichen:
v = Vorzeichenm = Drehzahl Achse 1 in Umdr/Ming = 0 Achse abgeschaltet
1 Achse eingeschaltet
Status 50Zustand der Systemeingänge und Systemausgänge (Hexadezimal)
Die Statusanfrage:
? s X _ _ 5 0 _ C R L F
liefert die Meldung:
X s 5 0 _ e e e e a a a a $ h h C R L F
Bedeutung der verwendeten Zeichen:
e = 4 Systemeingänge (Hexadezimal)
a = 4 Systemausgänge (Hexadezimal)
Jedes `e´ bzw. `a´ steht für eine Hexadezimale Ziffer. Jede dieser Ziffernenthält die Information von 4 Ein- bzw. Ausgängen.
Nachfolgend die Wertigkeit von jeweils 4 Ein- bzw. Ausgängen:
23 22 21 20 e/a
0 0 0 0 0
0 0 0 1 1
0 0 1 0 2
0 0 1 1 3
0 1 0 0 4
0 1 0 1 5
0 1 1 0 6
0 1 1 1 7
1 0 0 0 8
1 0 0 1 9
1 0 1 0 A
1 0 1 1 B
1 1 0 0 C
1 1 0 1 D
1 1 1 0 E
1 1 1 1 F
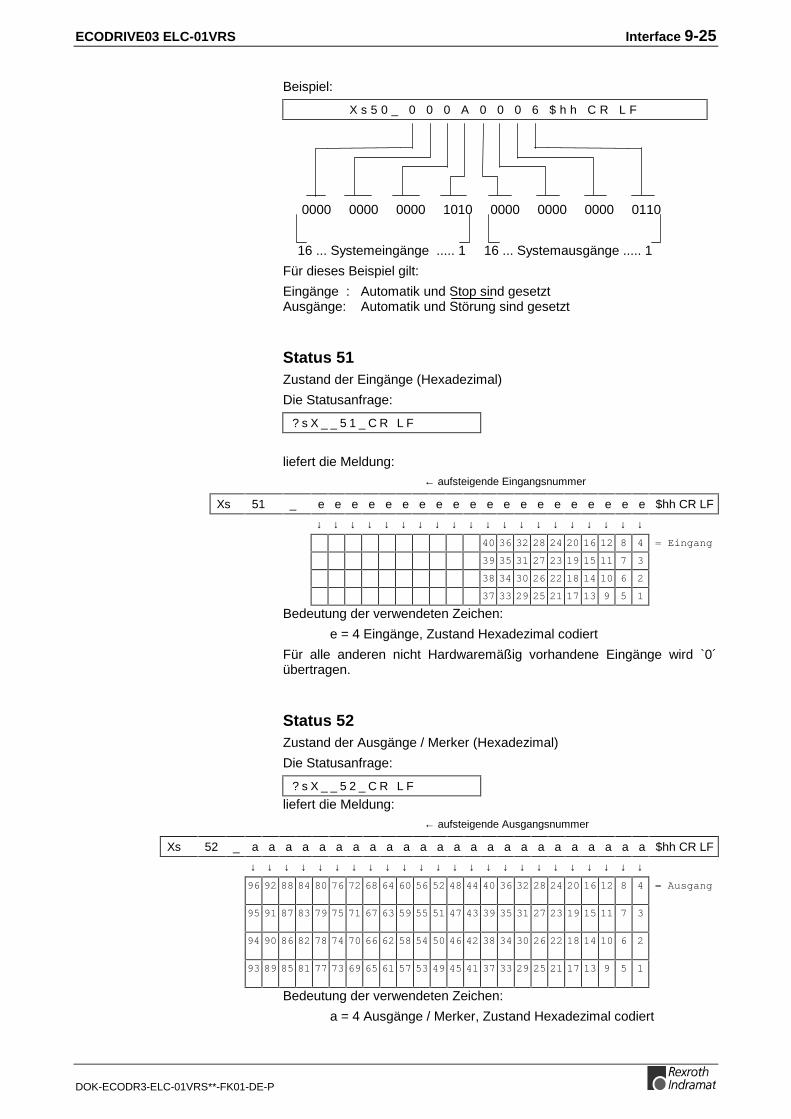
ECODRIVE03 ELC-01VRS Interface 9-25
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Beispiel:
X s 5 0 _ 0 0 0 A 0 0 0 6 $ h h C R L F
0000 0000 0000 1010 0000 0000 0000 0110
16 ... Systemeingänge ..... 1 16 ... Systemausgänge ..... 1
Für dieses Beispiel gilt:
Eingänge : Automatik und Stop sind gesetztAusgänge: Automatik und Störung sind gesetzt
Status 51Zustand der Eingänge (Hexadezimal)
Die Statusanfrage:
? s X _ _ 5 1 _ C R L F
liefert die Meldung:← aufsteigende Eingangsnummer
Xs 51 _ e e e e e e e e e e e e e e e e e e e e $hh CR LF
↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓
40 36 32 28 24 20 16 12 8 4 = Eingang
39 35 31 27 23 19 15 11 7 3
38 34 30 26 22 18 14 10 6 2
37 33 29 25 21 17 13 9 5 1
Bedeutung der verwendeten Zeichen:
e = 4 Eingänge, Zustand Hexadezimal codiert
Für alle anderen nicht Hardwaremäßig vorhandene Eingänge wird `0´übertragen.
Status 52Zustand der Ausgänge / Merker (Hexadezimal)
Die Statusanfrage:
? s X _ _ 5 2 _ C R L F
liefert die Meldung:← aufsteigende Ausgangsnummer
Xs 52 _ a a a a a a a a a a a a a a a a a a a a a a a a $hh CR LF
↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓
96 92 88 84 80 76 72 68 64 60 56 52 48 44 40 36 32 28 24 20 16 12 8 4 = Ausgang
95 91 87 83 79 75 71 67 63 59 55 51 47 43 39 35 31 27 23 19 15 11 7 3
94 90 86 82 78 74 70 66 62 58 54 50 46 42 38 34 30 26 22 18 14 10 6 2
93 89 85 81 77 73 69 65 61 57 53 49 45 41 37 33 29 25 21 17 13 9 5 1
Bedeutung der verwendeten Zeichen:
a = 4 Ausgänge / Merker, Zustand Hexadezimal codiert
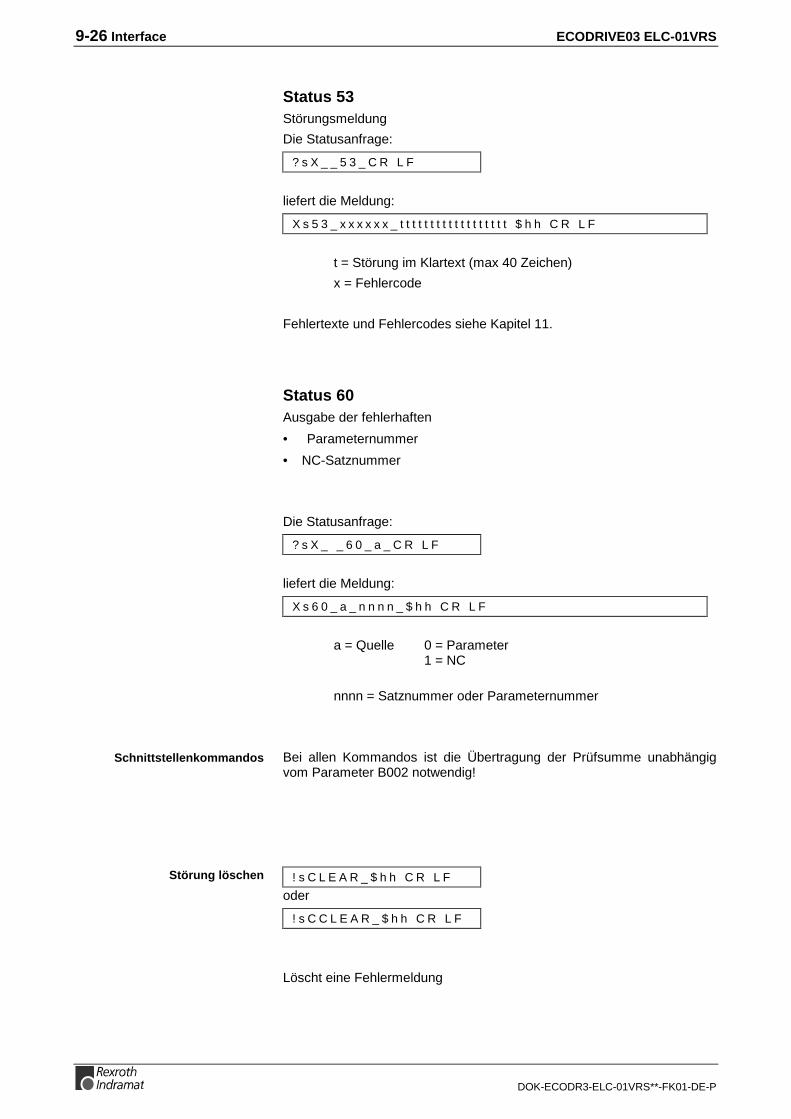
9-26 Interface ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Status 53Störungsmeldung
Die Statusanfrage:
? s X _ _ 5 3 _ C R L F
liefert die Meldung:
X s 5 3 _ x x x x x x _ t t t t t t t t t t t t t t t t t t $ h h C R L F
t = Störung im Klartext (max 40 Zeichen)
x = Fehlercode
Fehlertexte und Fehlercodes siehe Kapitel 11.
Status 60Ausgabe der fehlerhaften
• Parameternummer
• NC-Satznummer
Die Statusanfrage:
? s X _ _ 6 0 _ a _ C R L F
liefert die Meldung:
X s 6 0 _ a _ n n n n _ $ h h C R L F
a = Quelle 0 = Parameter1 = NC
nnnn = Satznummer oder Parameternummer
Bei allen Kommandos ist die Übertragung der Prüfsumme unabhängigvom Parameter B002 notwendig!
! s C L E A R _ $ h h C R L F
oder
! s C C L E A R _ $ h h C R L F
Löscht eine Fehlermeldung
Schnittstellenkommandos
Störung löschen
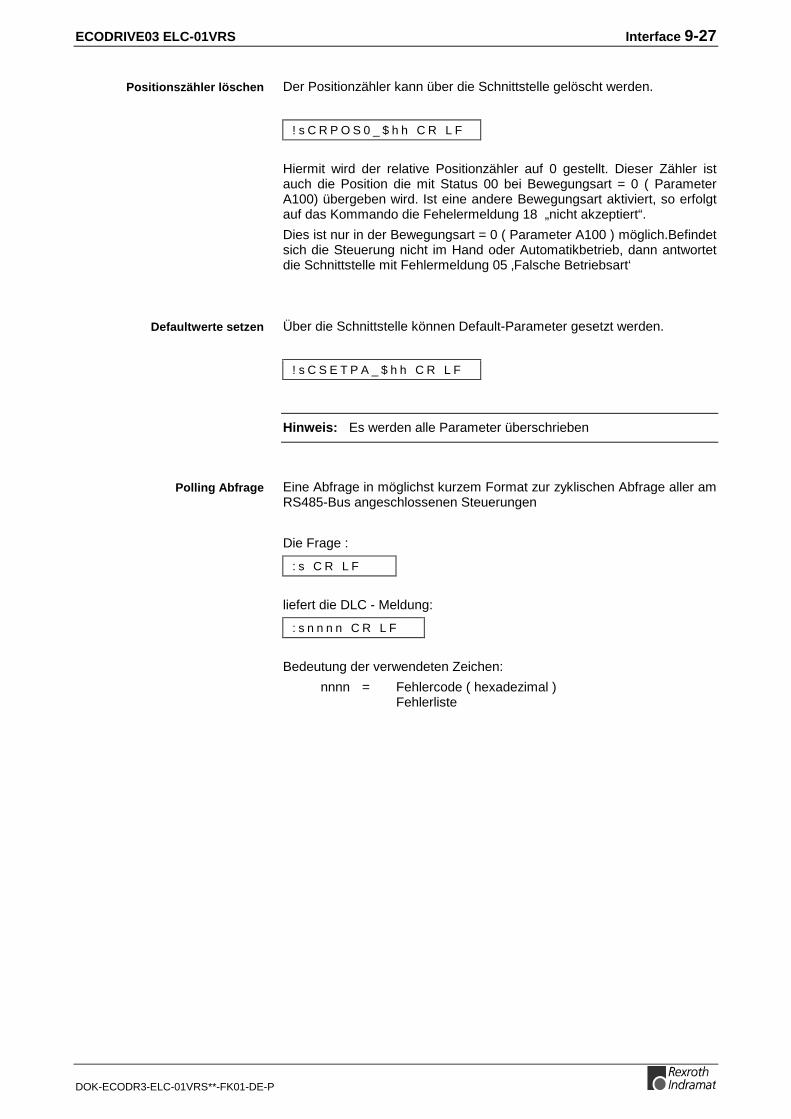
ECODRIVE03 ELC-01VRS Interface 9-27
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Der Positionzähler kann über die Schnittstelle gelöscht werden.
! s C R P O S 0 _ $ h h C R L F
Hiermit wird der relative Positionzähler auf 0 gestellt. Dieser Zähler istauch die Position die mit Status 00 bei Bewegungsart = 0 ( ParameterA100) übergeben wird. Ist eine andere Bewegungsart aktiviert, so erfolgtauf das Kommando die Fehelermeldung 18 „nicht akzeptiert“.
Dies ist nur in der Bewegungsart = 0 ( Parameter A100 ) möglich.Befindetsich die Steuerung nicht im Hand oder Automatikbetrieb, dann antwortetdie Schnittstelle mit Fehlermeldung 05 ‚Falsche Betriebsart‘
Über die Schnittstelle können Default-Parameter gesetzt werden.
! s C S E T P A _ $ h h C R L F
Hinweis: Es werden alle Parameter überschrieben
Eine Abfrage in möglichst kurzem Format zur zyklischen Abfrage aller amRS485-Bus angeschlossenen Steuerungen
Die Frage :
: s C R L F
liefert die DLC - Meldung:
: s n n n n C R L F
Bedeutung der verwendeten Zeichen:
nnnn = Fehlercode ( hexadezimal )Fehlerliste
Positionszähler löschen
Defaultwerte setzen
Polling Abfrage

9-28 Interface ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
SIS-ProtokollIn Vorbereitung
ECODRIVE03 ELC-01VRS Führungskommunikation 10-1
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
10 Führungskommunikation
10.1 Parallelinterface
DKC21.3Als Parallelschnittstelle sind 3 Stecker vorhanden.
X1 , X3 und X210
X1-SteckerHier wird die 24V Versorgung aufgelegt.
Außerdem wird die Reglerfreigabe beschaltet .
Der interne Bb-Kontakt muß in die Not-Aus-Kette verdrahtet werden.
X3-SteckerDer E-Stop-Eingang muß verdrahtet werden.
Alle anderen Eingänge oder Ausgänge müssen nur in Abhängigkeit vonden ausgewählen Betriebsarten und Funktionen verdrahtet werden.
X210-SteckerDie Systemeingänge müssen zu vollständige Inbetriebnahme verdrahtetwerden. Die Systemausgänge und die freiprogrammierbaren Eingängeund Ausgänge brauchen nur bei Bedarf verdrahtet werden.
Eine Ausnahme ist die Übergabe der Systemsteuerung an das BTV04durch die Parameter B009 und B010. Aber auch in diesem Fall ist essinnvoll den Parametereingang zu beschalten..

10-2 Führungskommunikation ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Notizen
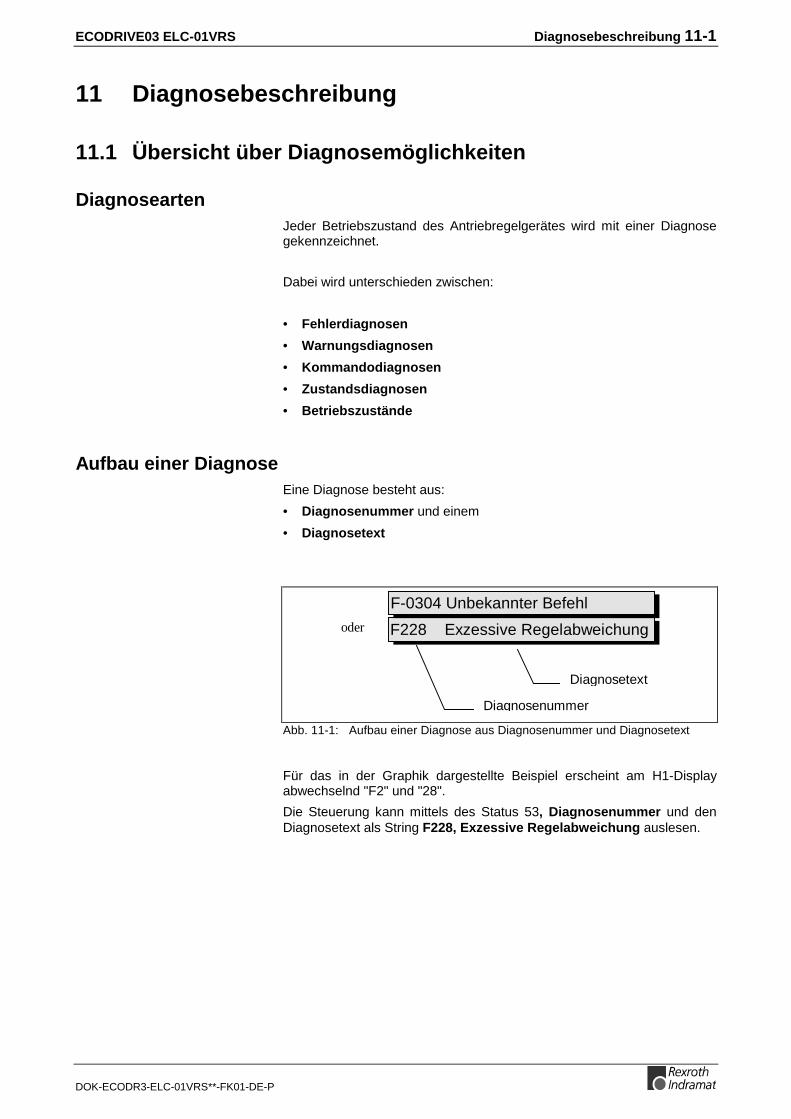
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-1
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
11 Diagnosebeschreibung
11.1 Übersicht über Diagnosemöglichkeiten
DiagnoseartenJeder Betriebszustand des Antriebregelgerätes wird mit einer Diagnosegekennzeichnet.
Dabei wird unterschieden zwischen:
• Fehlerdiagnosen
• Warnungsdiagnosen
• Kommandodiagnosen
• Zustandsdiagnosen
• Betriebszustände
Aufbau einer DiagnoseEine Diagnose besteht aus:
• Diagnosenummer und einem
• Diagnosetext
F228 Exzessive Regelabweichung
Diagnosenummer
Diagnosetext
F-0304 Unbekannter Befehl
oder
Abb. 11-1: Aufbau einer Diagnose aus Diagnosenummer und Diagnosetext
Für das in der Graphik dargestellte Beispiel erscheint am H1-Displayabwechselnd "F2" und "28".
Die Steuerung kann mittels des Status 53, Diagnosenummer und denDiagnosetext als String F228, Exzessive Regelabweichung auslesen.
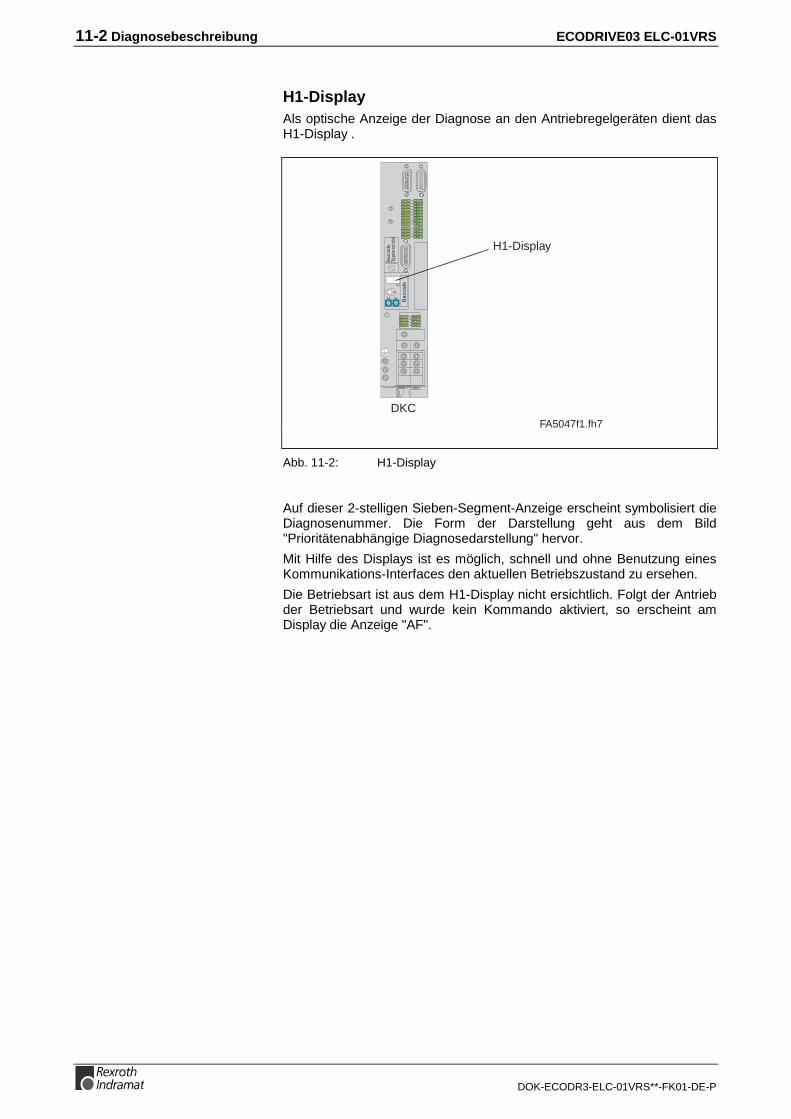
11-2 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
H1-DisplayAls optische Anzeige der Diagnose an den Antriebregelgeräten dient dasH1-Display .
Bar
code
0 1
23
456
78
90 1
23
456
78
9
H1
S1
S3 S2
Bar
code
Type
nsch
ild
12
34
56
78
9
12
34
56
78
9
12
34
12
34
111213
141516
1718
56
78
12
34
12
34
56
78
DKC
H1-Display
FA5047f1.fh7
Abb. 11-2: H1-Display
Auf dieser 2-stelligen Sieben-Segment-Anzeige erscheint symbolisiert dieDiagnosenummer. Die Form der Darstellung geht aus dem Bild"Prioritätenabhängige Diagnosedarstellung" hervor.
Mit Hilfe des Displays ist es möglich, schnell und ohne Benutzung einesKommunikations-Interfaces den aktuellen Betriebszustand zu ersehen.
Die Betriebsart ist aus dem H1-Display nicht ersichtlich. Folgt der Antriebder Betriebsart und wurde kein Kommando aktiviert, so erscheint amDisplay die Anzeige "AF".
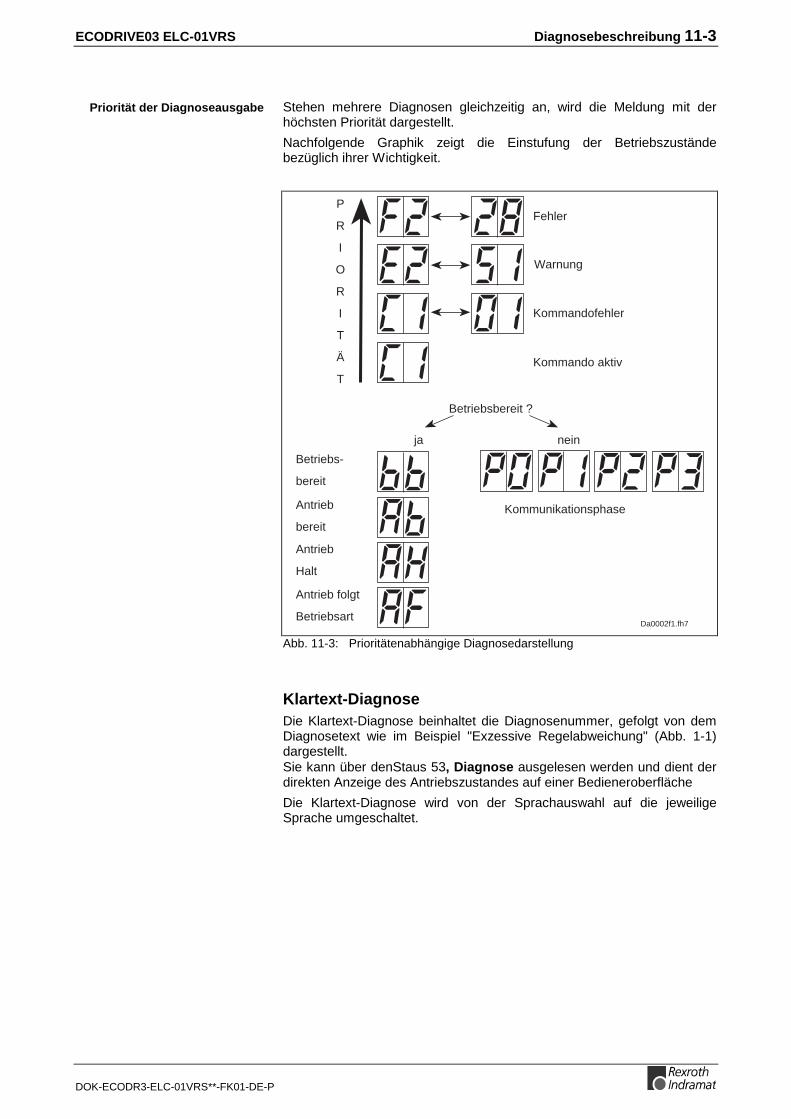
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-3
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Stehen mehrere Diagnosen gleichzeitig an, wird die Meldung mit derhöchsten Priorität dargestellt.
Nachfolgende Graphik zeigt die Einstufung der Betriebszuständebezüglich ihrer Wichtigkeit.
Da0002f1.fh7
Kommunikationsphase
P
R
I
O
R
I
T
Ä
T
Betriebsbereit ?
ja nein
Fehler
Warnung
Kommandofehler
Kommando aktiv
Betriebs-
bereit
Antrieb
bereit
Antrieb
Halt
Antrieb folgt
Betriebsart
Abb. 11-3: Prioritätenabhängige Diagnosedarstellung
Klartext-DiagnoseDie Klartext-Diagnose beinhaltet die Diagnosenummer, gefolgt von demDiagnosetext wie im Beispiel "Exzessive Regelabweichung" (Abb. 1-1)dargestellt.Sie kann über denStaus 53, Diagnose ausgelesen werden und dient derdirekten Anzeige des Antriebszustandes auf einer Bedieneroberfläche
Die Klartext-Diagnose wird von der Sprachauswahl auf die jeweiligeSprache umgeschaltet.
Priorität der Diagnoseausgabe
11-4 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
11.1 Fehlerdiagnosen
F208 UL Der Motortyp hat sich geändertDiese Anzeige tritt beim ersten Einschalten mit einem neuen Motor auf.
Die Regelkreiseinstellungen für den Stromregler, Drehzahlregler undLageregler sind im Feedback am Motor gespeichert. Nach demEinschalten vergleicht das Regelgerät den im Parameter gespeichertenMotortyp mit dem des angeschlossenen Motors. Wenn die beiden nichtübereinstimmen, so muss auch die Grundeinstellung für die Regelkreiseangepasst werden.
Mit dem Kommando Urladen werden die Default-Regelkreiseinstellungenaus dem Feedbackspeicher in das Antriebsregelgerät geladen. Diebisherigen Regelkreiseinstellungen werden überschrieben. Mit demDrücken der S1 Taste am Regelgerät wird das Kommando "Urladen"gestartet.
Ursachen:
• Der Motor wurde getauscht.
• Eine Parameter-Datei wurde geladen, bei dem sich der Motortyp vomvorhandenen Motortyp unterscheidet.
Abhilfe:
S1-Taste betätigen.
F208 - AttributeSS-Anzeige: UL
Diagnosenr.: F208 (hex)
Fehlernr.: 208
Klasse: Nichtfatal
F209 PL Defaultwerte der Parameter laden
Nach dem Tausch der Firmware-Version zeigt der Antrieb "PL", wennsich Parameter gegenüber der alten Firmware geändert haben. DurchDrücken der S1-Taste am Regelgerät werden alle Parameter gelöschtund mit dem Anfangswert (Default) vorbesetzt.
Ursache:
Die Firmware wurde getauscht; die Anzahl der Parameter der neuenFirmware hat sich gegenüber der alten geändert.
Abhilfe:
Taste S1 am Regelgerät drücken. Dadurch werden alle Parametergelöscht und mit den werksseitig vorgegebenen Parametern vorbesetzt.
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-5
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
ACHTUNG
Nach der Bestätigung der Taste S1 erfolgt noch eineSicherheitsabfrage. Hier können die Parameter über dieserielle Schnittstelle gesichert werden oder dasVorbesetzen der Parameter unterdrückt werden.
F209 - AttributeSS-Anzeige: PL
Diagnosenr.: F209 (hex)
Fehlernr.: 209
Klasse: nicht Fatal
F218 Verstärker-Übertemp.-AbschaltungDie Kühlkörpertemperatur des Verstärkers wird überwacht. Bei zu heißemKühlkörper wird das Gerät abgeschaltet, um es vor Zerstörung zuschützen.
Ursache:
1. Umgebungstemperatur zu hoch. Die spezifizierten Leistungsdatensind bis zu einer Umgebungstemperatur von 45°C gültig.
2. Kühlkörper des Verstärkers verschmutzt
3. Konvektion durch andere Bauteile bzw. Schaltschrankeinbauverhinder.
4. Gerätelüfter defekt
Abhilfe:
Zu 1. Umgebungstemperatur herabsetzen, z.B. durch Kühlung desSchaltschrankes.
Zu 2. Kühlkörper reinigen
Zu 3. Gerät senkrecht einbauen und für die Belüftung des Kühlkörpersausreichend Platz schaffen.
Zu 4. Gerät tauschen.
F218 - AttributeSS-Anzeige: F2/18
Diagnosenr.: F218 (hex)
Fehlernr.: 218
Klasse: NichtFatal
F219 Motor-Übertemp.-AbschaltungDer Motor hat sich unzulässig stark erwärmt.
Sobald die Temperaturfehlerschwelle (155°C) überschritten wird, erfolgteine sofortige Stillsetzung des Antriebes je nach gewählter Fehlerreaktion(A119, Bestmögliche Stillsetzung).
Hierbei gilt:
11-6 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Temperaturwarnschwelle < Temperaturfehlerschwelle
Siehe auch E251 Übertemperatur-Vorwarnung .
Ursache:
1. Der Motor ist überlastet . Das vom Motor geforderte effektiveDrehmoment lag zu lange über dem zulässigenDauerdrehmoment.
2. Leitungsunterbrechung, Erdschluss oder Kurzschluss in der Leitungzur Motortemperaturüberwachung
3. Instabilität im Drehzahlregelkreis
Abhilfe:
Zu 1. Motorauslegung überprüfen. Bei Anlagen, die schon über längereZeit in Betrieb sind, überprüfen, ob sich die Antriebsverhältnissegeändert haben. (hinsichtlich Verschmutzung, Reibung, bewegteMassen usw.)
Zu 2. Leitung zur Motortemperaturüberwachung aufLeitungsunterbrechung, Erdschluss oder Kurzschluss überprüfen.
Zu 3. Drehzahlregelkreis-Parametrierung prüfen.
Siehe auch Funktionsbeschreibung: "Temperaturüberwachung".
F219 - AttributeSS-Anzeige: F2/19
Diagnosenr.: F219 (hex)
Fehlernr.: 219
Klasse: Nichtfatal
F220 Abschaltung wegen BleederüberlastDie von der Maschinenmechanik über den Motor zurückgespeisteEnergie hat den Bremswiderstand (Bleeder) überlastet. BeiÜberschreitung der maximalen Bremsenergie wird der Antrieb nach demBremsen abgeschaltet. Dadurch wird der Bleeder vor thermischerZerstörung geschützt.
Ursache:
Die von der Maschinenmechanik über den Motor zurückgespeisteEnergie ist zu groß.
Abhilfe:
Bei zuviel Leistung Å Beschleunigungswerte herabsetzen.
Bei zuviel Energie Å Geschwindigkeit herabsetzen.
Antriebsauslegung überprüfen.
Eventuell Zusatzbleedermodul installieren.
F220 - AttributeSS-Anzeige: F2/20
Diagnosenr.: F220 (hex)
Fehlernr.: 220
Klasse: NichtFatal
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-7
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
F221 Motor-Temp.überwachung defektUrsache:
Leitungsunterbrechung in der Leitung zur Motortemperaturüberwachung.
Abhilfe:
Leitung zur Motortemperaturüberwachung (Signale MT(emp)+ undMT(emp)-) auf Leitungsunterbrechung und Kurzschluss überprüfen.
Siehe auch Funktionsbeschreibung: "Temperaturüberwachung".
F221 - AttributeSS-Anzeige: F2/21
Diagnosenr.: F221 (hex)
Fehlernr.: 221
Klasse: Nicht fatal
F226 Unterspannung im LeistungsteilDie Höhe der Zwischenkreisspannung wird vom Antriebsregelgerätüberwacht. Unterschreitet die Zwischenkreisspannung eine untereSchwelle, setzt sich der Antrieb gemäß der eingestellten Fehlerreaktionselbsttätig still.
Ursache:
1. Leistungsabschaltung, ohne vorherige Deaktivierung desAntriebes über die Reglerfreigabe (RF).
2. Störung in der Leistungsversorgung
Abhilfe:
Zu 1 Überprüfen der Logik zur Aktivierung des Antriebs in derangeschlossenen Steuerung.
Zu 2 Überprüfung der Leistungsversorgung.
Der Fehler verschwindet bei DKC03 bei Wegnahme der Reglerfreigabe.
F226 - AttributeSS-Anzeige: F2/26
Diagnosenr.: F226 (hex)
Fehlernr.: 226
Klasse: Nichtfatal
F228 Exzessive RegelabweichungWird der Lageregelkreis geschlossen, so überwacht der Antrieb, ob erdem vorgegebenen Sollwert folgen kann. Dazu wird im Antrieb einModell-Lageistwert berechnet und mit dem tatsächlichen Lageistwertverglichen. Überschreitet die Differenz von theoretischem undtatsächlichem Lageistwert den Wert des Parameters A115 ,Überwachung dauerhaft, so kann der Antrieb offenbar demvorgegebenen Sollwert nicht folgen. Dann wird dieser Fehler generiert.
11-8 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Ursache:
1. Das Beschleunigungsvermögen des Antriebes wurde überschritten.
2. Die Achse ist blockiert.
3. Fehlparametrierung in den Antriebsparametern.
4. Parameter A115, Überwachung falsch parametriert.
Abhilfe:
Zu 1. Programm überprüfen, ist in einem MOM_Befehl ein zu geringerWert eingegeben
Zu 2. Mechanik überprüfen und Achsklemmung beseitigen.
Zu 3. Antriebsparameter (Regelkreis-Einstellung) überprüfen.
Zu 4. Parameter A115, Überwachung parametrieren.
Siehe auch Funktionsbeschreibung: "Lageregelkreisüberwachung".
F228 - AttributeSS-Anzeige: F2/28
Diagnosenr.: F228 (hex)
Fehlernr.: 228
Klasse: Nichtfatal
F229 Fehler Geber 1: QuadrantenfehlerAn fehlerhaften Signalen bei der Geber-Auswertung wurde ein Hardware-Fehler auf dem verwendeten Interface für Geber 1 erkannt.
Ursache:
1. Geberkabel defekt
2. Störeinstrahlung auf das Geberkabel
3. Geber-Interface defekt
4. Antriebsregelgerät defekt
Abhilfe:
Zu 1. Geberkabel tauschen.
Zu 2. Geberkabel getrennt von leistungsführenden Kabeln verlegen.Geschirmte Motorkabel und Geberkabel verwenden.
Zu 3. Geber-Interface tauschen.
Zu 4. Antriebsregelgerät tauschen.
F229 - AttributeSS-Anzeige: F2/29
Diagnosenr.: F229 (hex)
Fehlernr.: 229
Klasse: Nicht fatal
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-9
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
F230 Max. Signalfrequenz für Geber 1 überschrittenDie Signalfrequenz des Gebers 1 (Motorgeber) wird dahingehendüberprüft, ob die maximal erlaubte Frequenz der Geberschnittstelleüberschritten wird.
Im Fall der Überschreitung der erlaubten Frequenz wird der Fehler F230,Max. Signalfrequenz für Geber 1 überschritten generiert. Der AusgangReferenziert im Parameter C010 wird weggenommen
F230 - AttributeSS-Anzeige: F2/30
Diagnosenr.: F230 (hex)
Fehlernr.: 230
Klasse: Nicht fatal
F234 E-Stop aktiviertUrsache:
Die Funktion E-Stop (Emergency Stop) wurde durch Abschalten der +24Vam E-Stop- Eingang ausgelöst. Der Antrieb wurde mit der eingestelltenFehlerreaktion stillgesetzt.
Abhilfe:
1. Die Ursache, die zum Abschalten der +24V am E-Stop-Eingangführte, beheben.
2. Das Kommando “Reset Zustandsklasse 1“ ausführen, z.B. überdie Steuerung oder den S1-Taster am Antriebsregelgerät.
F234 - AttributeSS-Anzeige: F2/34
Diagnosenr.: F234 (hex)
Fehlernr.: 234
Klasse: Nichtfatal
F236 Exzessive LageistwertdifferenzUrsache:
Nach dem Neueinschalten werden Lageistwert 1 und Lageistwert 2 aufden gleichen Wert gesetzt und die zyklische Auswertung beider Gebergestartet. Im zyklischen Betrieb wird dann die Lageistwert-Differenzbeider Geber mit Parameter A117, Überwachung Geberdifferenzverglichen. Ist der Betrag der Differenz größer alsder Parameterwert, wirdder Fehler F236 Exzessive Lageistwertdifferenz diagnostiziert, dieparametrierte Fehlerreaktion durchgeführt und die Referenzbits(Parameter C010 ) beider Geber gelöscht.
Die Überwachung ist inaktiv, wenn im Parameter A117, ÜberwachungGeberdifferenz der Wert „0“ eingetragen ist.
Mögliche Ursachen :
1. Parameter für den Geber 2 falsch(Parameter C005, Lagegeberart- 2,Parameter C006, Auflösung Geber 2 )
2. Mechanik zwischen Motorwelle und Geber 2 falsch parametriert:(Parameter A102 Getriebe ,
Parameter A101, Vorschubkonstante )
11-10 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
3. Mechanik zwischen Motorwelle und Geber 2 nicht starr (z.B.Getriebespiel)
4. Geberkabel defekt
5. Maximale Eingangs-Frequenz des Geberinterface überschritten
6. Geber 2 ist nicht an angetriebener Achse montiert.
7. Maßbezug eines absoluten Gebers fehlerhaft
Abhilfe:
Zu 1. Parameter C005, Lagegeberart- 2, undParameter C006, Auflösung Geber 2 überprüfen.
Zu 2. Parameter A102 Getriebe überprüfen.
Zu 3. A117, Überwachung Geberdifferenz vergrößern.
Zu 4. Geberkabel tauschen.
Zu 5. Geschwindigkeit reduzieren.
Zu 6. Parameter A117, Überwachung Geberdifferenz auf 0 setzen(Überwachung abschalten).
Zu 7. Parameter C010, Absolutmaß setzen durchführen.
F236 - AttributeSS-Anzeige: F2/36
Diagnosenr.: F236 (hex)
Fehlernr.: 236
Klasse: Nichtfatal
F237 Exzessive LagesollwertdifferenzUrsache:
Die durch den Lageregler kreierten Lage-Sollwerte werden überwacht. Istdie Geschwindigkeit, die durch zwei aufeinanderfolgende Lage-Sollwertedem Antrieb abverlangt wird, gleich oder größer als der Wert inParameter A106, Maximalgeschwindigkeit, so spricht dieLagesollwertüberwachung an.
F237 - AttributeSS-Anzeige: F2/37
Diagnosenr.: F237 (hex)
Fehlernr.: 237
Klasse: Nichtfatal
F242 Fehler Geber 2: Signalamplitude fehlerhaftUrsache:
Bei der hochauflösenden Auswertung eines optionalen Meßsystemswerden die analogen Signale des Meßsystems genutzt. Diese werdennach 2 Kriterien hin überwacht:
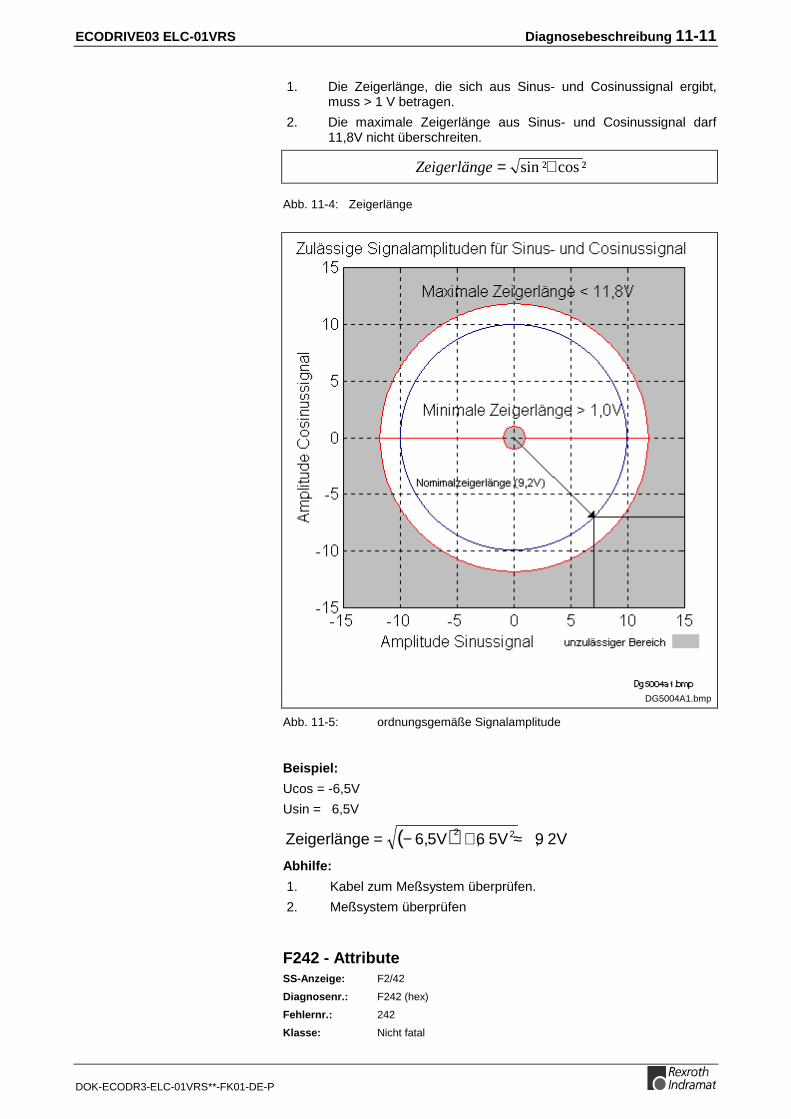
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-11
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
1. Die Zeigerlänge, die sich aus Sinus- und Cosinussignal ergibt,muss > 1 V betragen.
2. Die maximale Zeigerlänge aus Sinus- und Cosinussignal darf11,8V nicht überschreiten.
Zeigerlänge= +sin ² cos ²
Abb. 11-4: Zeigerlänge
DG5004A1.bmp
Abb. 11-5: ordnungsgemäße Signalamplitude
Beispiel:
Ucos = -6,5V
Usin = 6,5V
( )Zeigerlänge 6 5V 6 5V 9 2V= − , + , ≈ ,2 2
Abhilfe:
1. Kabel zum Meßsystem überprüfen.
2. Meßsystem überprüfen
F242 - AttributeSS-Anzeige: F2/42
Diagnosenr.: F242 (hex)
Fehlernr.: 242
Klasse: Nicht fatal
11-12 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
F245 Fehler Geber 2: QuadrantenfehlerDie Auswertung des zusätzlichen optionalen Gebers (Geber 2) istaktiviert. Bei der Auswertung der sinusförmigen Eingangssignale desoptionalen Gebers wird eine Plausibitätsprüfung zwischen diesenSignalen und dem durch diese Signale gespeisten Zähler durchgeführt.Dabei wurde ein Fehler erkannt.
Ursache:
1. Geberkabel defekt
2. Störeinstrahlung auf das Geberkabel
3. Geberschnittstelle defekt
Abhilfe:
Zu 1. Geberkabel tauschen
Zu 2. Geberkabel getrennt von leistungsführenden Kabeln verlegen
Zu 3. Gerät (Ecodrive) tauschen
F245 - AttributeSS-Anzeige: F2/45
Diagnosenr.: F245 (hex)
Fehlernr.: 245
Klasse: Nicht fatal
F246 max. Signalfrequenz für Geber 2 überschrittenDie Signalfrequenz des Gebers 2 (optionaler Geber) wird dahingehendüberprüft, ob die maximal erlaubte Frequenz der Geberschnittstelleüberschritten wird.
Im Fall der Überschreitung der erlaubten Frequenz wird der Fehler F246,Max. Signalfrequenz für Geber 2 überschritten generiert. Der AusgangReferenziert im Parameter C010 wird weggenommen
F246 - AttributeSS-Anzeige: F2/46
Diagnosenr.: F246 (hex)
Fehlernr.: 246
Klasse: Nicht fatal
F248 Batterie-UnterspannungUrsache:
Die absolute Lageinformation wird bei Motoren der Baureihe MKD undMKE durch eine batteriegepufferte Elektronik im Motorfeedbackgespeichert. Die Batterie ist für eine Nutzungsdauer von 10 Jahrenausgelegt. Sinkt die Batteriespannung unter 2,8 V, erfolgt diese Meldung.Die Absolutgeber-Funktion ist noch für ca. 2 Wochen sichergestellt.
VORSICHT
Fehler in der Ansteuerung von Motoren undbewegten Elementen
mechanische VerletzungenBatterie baldmöglichst errneuern
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-13
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Vorgehensweise zum Batteriewechsel
Folgende Werkzeuge und Hilfsmittel bereitlegen:
• Schraubendreher Torx Größe 10
• Spitzzange, Drehmomentschlüssel
• Neue, konfektionierte Batterie (Mat.Nr. 257101)
VORSICHT
Fehler in der Ansteuerung von Motoren undbewegten Elementen
mechanische VerletzungenLeistungsversorgung abschalten. GegenWiedereinschalten sichern. Batterietausch beieingeschalteter Steuerspannung durchführen.
Wird bei abgezogener Batterie die Steuerspannung abgeschaltet, gehtder absolute Maßbezug verloren. Der Maßbezug muss dann mit Hilfe desKommandos "Absolutmaß setzen “ erneut hergestellt werden.
Auswechseln der Batterie
• Torx-Schrauben (1) mit Schraubendreher Größe 10 herausdrehen
• Deckel der Resolverfeedback RSF von Hand herausziehen
• Stecker (2) der Batterie abziehen
• Klemmvorrichtung (3) der Batterie lösen und Batterie entfernen
• Konfektionierte Batterie in das Gehäuse einfügen undKlemmvorrichtung anschrauben. Achtung! Batteriekabel nichtquetschen.
• Stecker (2) der Batterie aufstecken
Deckel der Resolverfeedback schließen, 4 Torx-Schrauben (1) eindrehenund mit dem Drehmomentschlüssel 1,8 Nm anziehen.
F248 - AttributeSS-Anzeige: F2/48
Diagnosenr.: F248 (hex)
Fehlernr.: 248
Klasse: Nichtfatal
F253 Inkrementalgeberemulator: Frequenz zu hochUrsache:
Der Inkrementalgeber-Emulator kann maximal 1023 Striche proAbtastperiode von 250 µs verarbeiten; dieser Wert wurde überschritten.
Abhilfe:
1. Strichzahl des Inkrementalgeber-Emulators (Parameter C015)verringern.
oder
2. Verfahr-Geschwindigkeit verringern.
Siehe auch Funktionsbeschreibung: "Geber-Emulation".
F253 - AttributeSS-Anzeige: F2/53
Diagnosenr.: F253 (hex)
Fehlernr.: 253
Klasse: Nichtfatal
11-14 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
F267 Hardware-Synchronisation fehlerhaftUrsache:
Die Antriebsregelung wird über einen Phasenregelkreis auf dasBusinterface (DIO,SERCOS, Profibus, Interbus, ...) synchronisiert. Dieordnungsgemäße Funktion der Synchronisation wird überwacht. Ist derMittelwert der Abweichung größer als 5 µs, so wird dieser Fehlergeneriert.
Abhilfe:
Antriebsregelgerät tauschen.
F267 - AttributeSS-Anzeige: F2/67
Diagnosenr.: F267 (hex)
Fehlernr.: 267
Klasse: Nichtfatal
F276 Absolutgeber außerhalb des ÜberwachungsfenstersBeim Ausschalten eines Antriebsregelgerätes mit Absolutgeber-Motor(Multiturn) wird die aktuelle Istposition gespeichert. BeimWiedereinschalten wird die durch die Absolutgeber-Auswertung ermitteltePosition mit dieser gespeicherten verglichen. Ist die Abweichung größerals das parametrierte A118, Absolutgeber-Überwachungsfenster , wirdder Fehler F276 erzeugt und der Steuerung mitgeteilt.
Ursache:
1. Erstmaliges Einschalten (gespeicherte Position ungültig).
2. Die Achse wurde im ausgeschalteten Zustand um mehr als denim Parameter A118, Absolutgeber-Überwachungsfensterparametrierten Weg bewegt.
3. Fehlerhafte Positions-Initialisierung.
Abhilfe:
Zu 1. Fehler löschen (Maßbezug herstellen).
Zu 2. Die Achse wurde im abgeschalteten Zustand bewegt und stehtaußerhalb ihrer zulässigen Position. Sicherstellen, dass dieangezeigte Position in Bezug auf den Maschinen-Nullpunktkorrekt ist. Anschließend den Fehler löschen.
Zu 3. Unfallgefahr durch ungewollte Achsbewegung. Maßbezugüberprüfen. Bei falschem Maßbezug liegt ein Feedback-Defektvor. Der Motor ist zu tauschen und zur Überprüfung an denREXROTH-INDRAMAT-Kundendienst zu schicken.
F276 - AttributeSS-Anzeige: F2/76
Diagnosenr.: F276 (hex)
Fehlernr.: 276
Klasse: Nichtfatal
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-15
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
F277 Strommessabgleich fehlerhaftDieser Fehler kann nur beim Prüfen des Antriebsregelgeräts imINDRAMAT Werk auftreten.
Die Strommessung im Antriebsregelgerät wird im INDRAMAT Prüffeld miteinem Abgleichstrom präzise kalibriert. Dabei sind Korrekturwerteaußerhalb der vorgesehenen Toleranzen herausgekommen.
Ursache:
1. Hardware defekt im Antriebsregelgerät
2. Der richtige Abgleichstrom für die Messung fließt nicht.
Abhilfe:
1. Steuerkarte reparieren.
2. Abgleichstrom überprüfen.
F277 - AttributeSS-Anzeige: F2/77
Diagnosenr.: F277 (hex)
Fehlernr.: 277
Klasse: Nr. 1
F281 NetzausfallUrsache:
Im Betrieb ist die Netzspannung für min. 3 Netzperioden ausgefallen. DerAntrieb wurde daraufhin mit der eingestellten Fehlerreaktion (ParameterA119 )stillgesetzt.
Abhilfe:
Netzanschluss gemäß der Projektierungsunterlage prüfen.
F281 - AttributeSS-Anzeige: F2/81
Diagnosenr.: F281 (hex)
Fehlernr.: 281
Klasse: Nicht fatal
F386 Kein Betriebsbereit vom NetzteilUrsache:
Der Eingang BbN „betriebsbereit Netzteil“ am DKC liegt auf 24V, d.h. dasangeschlossene Netzteil gibt kein Betriebsbereit.
F386 - AttributeSS-Anzeige: F3/86
Diagnosenr.: F386 (hex)
Fehlernr.: 386
Klasse: Nicht fatal
11-16 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
F407 Fehler bei der InitialisierungBei der Initialisierung und Überprüfung derFührungskommunikationskarte (DIO1.1) ist einen Fehler aufgetreten.
Ursache:
• Keine Führungskommunikationskarte aufgesteckt
• Eine falsche Führungskommunikationskarte aufgesteckt
• Eine falsche Firmware geladen ist
Abhilfe:
• Richtige Führungskommunikationskarte aufstecken
• Firmeware tauschen
F407 - AttributeSS-Anzeige: F4/07
Diagnosenr.: F407 (hex)
Fehlernr.: 407
Klasse: Schnittstelle
F408 Fataler Fehler der DIO1.1-KarteDie Kommunikation zur Parallelschnitstellenkarte DIO1.1 des DKC21.3 istgestört
Ursache:
• DIO-Karte steckt nicht richtig
• Es erfolgt ein unzulässiger Speicherzugriff
Abhilfe:
• Sitz der Karte überprüfen
• Gerät aus-und einschalten, falls der Fehler immer noch anstehtHardware tauschen
F408 - AttributeSS-Anzeige: F4/08
Diagnosenr.: F408 (hex)
Fehlernr.: 408
Klasse: Schnittstelle
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-17
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
F434 E-Stop aktiviertDurch Betätigen des E-Stop-Schalters wurde der Antrieb veranlasst, dieüber Parameter A119, Bestmögliche Stillsetzung parametrierteNotstopp-Funktion auszuführen.
Ursache:
Der E-Stop-Schalter ist betätigt worden.
Abhilfe:
Die Störung, die zum Auslösen des E-Stop-Schalters geführt hat,beseitigen und den Fehler löschen.
Siehe auch Funktionsbeschreibung: "E-Stop-Funktion".
F434 - AttributeSS-Anzeige: F4/34
Diagnosenr.: F434 (hex)
Fehlernr.: 434
Klasse: Schnittstelle
F629 Lagegrenzwert positiv überschrittenEs wurde ein Befehl ausgelöst, der zu einer Achsposition außerhalb despositiven Verfahrbereiches führte. Die Achse wurde mit derFehlerreaktion "Geschwindigkeitssollwert-Nullschaltung" stillgesetzt.
Ursache:
Parameter A104, Lage-Grenzwert positiv überschritten.
Abhilfe:
1. Parameter A104, Lage-Grenzwert positiv überprüfen
2. Programm überprüfen
Vorgehensweise:
• Fehler löschen.
• Wurde die Leistungsspannung abgeschaltet, Leistung zuschalten.
• Achse in den zulässigen Arbeitsbereich verfahren.
Hinweis: Es werden nur solche Sollwerte akzeptiert, die in denzulässigen Arbeitsbereich hinein führen. Andere Sollwerteführen zu einer erneuten Stillsetzung des Antriebes.Der Parameter Parameter A111, Schaltschwelle wird zurRealisierung einer Hysteresefunktion verwendet.
F629 - AttributeSS-Anzeige: F6/29
Diagnosenr.: F629 (hex)
Fehlernr.: 629
Klasse: Nr. 1
11-18 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
F630 Lagegrenzwert negativ überschrittenEs wurde ein Befehl ausgelöst, der zu einer Achsposition außerhalb despositiven Verfahrbereiches führte. Die Achse wurde mit derFehlerreaktion "Geschwindigkeitssollwert-Nullschaltung" stillgesetzt.
Ursache:
Parameter A103, Lage-Grenzwert negativ überschritten.
Abhilfe:
1. Parameter A103, Lage-Grenzwert negativ überprüfen
2. Programm überprüfen
Vorgehensweise:
• Fehler löschen.
• Wurde die Leistungsspannung abgeschaltet, Leistung zuschalten.
• Achse in den zulässigen Arbeitsbereich verfahren.
Hinweis: Es werden nur solche Sollwerte akzeptiert, die in denzulässigen Arbeitsbereich hinein führen. Andere Sollwerteführen zu einer erneuten Stillsetzung des Antriebes.Der Parameter Parameter A111, Schaltschwelle wird zurRealisierung einer Hysteresefunktion verwendet.
F630 - AttributeSS-Anzeige: F6/30
Diagnosenr.: F630 (hex)
Fehlernr.: 630
Klasse: Fahrbereich
F634 E-Stop aktiviertDurch Betätigen des E-Stop-Schalters wurde der Antrieb veranlasst, denAntrieb über Geschwindigkeitssollwert-Nullschaltung stillzusetzen..
Ursache:
Der E-Stop-Schalter ist betätigt worden.
Abhilfe:
Die Störung, die zum Auslösen des E-Stop-Schalters geführt hat,beseitigen und den Fehler löschen.
F634 - AttributeSS-Anzeige: F6/34
Diagnosenr.: F634 (hex)
Fehlernr.: 634
Klasse: Fahrbereich
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-19
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
F643 Fahrbereichsendschalter positiv betätigtDer positive Fahrbereichsgrenzschalter wurde angefahren. Die Achsewurde mit der Fehlerreaktion "Geschwindigkeitssollwert-Nullschaltung"stillgesetzt.
Ursache:
Der positive Bereichsendschalter ist betätigt worden.
Abhilfe:
1. Fehler zurücksetzen
2. Leistungsversorgung wieder zuschalten
3. Achse in den zulässigen Verfahrbereich hinein bewegen
Hinweis: Sollwerte, die weiter aus dem zulässigen Bereich herausführen, werden nicht angenommen und führt erneut zudiesem Fehler.
F643 - AttributeSS-Anzeige: F6/43
Diagnosenr.: F643 (hex)
Fehlernr.: 643
Klasse: Nr. 1
F644 Fahrbereichsendschalter negativ betätigtDer negative Fahrbereichsgrenzschalter wurde angefahren. Die Achsewurde mit der Fehlerreaktion "Geschwindigkeitssollwert-Nullschaltung"stillgesetzt.
Ursache:
Der negative Bereichsendschalter ist betätigt worden.
Abhilfe:
1. Fehler zurücksetzen
2. Leistungsversorgung wieder zuschalten
3. Achse in den zulässigen Verfahrbereich hinein bewegen
Hinweis: Sollwerte, die weiter aus dem zulässigen Bereich herausführen, werden nicht angenommen und führt erneut zudiesem Fehler.
F644 - AttributeSS-Anzeige: F6/44
Diagnosenr.: F644 (hex)
Fehlernr.: 644
Klasse: Fahrbereich
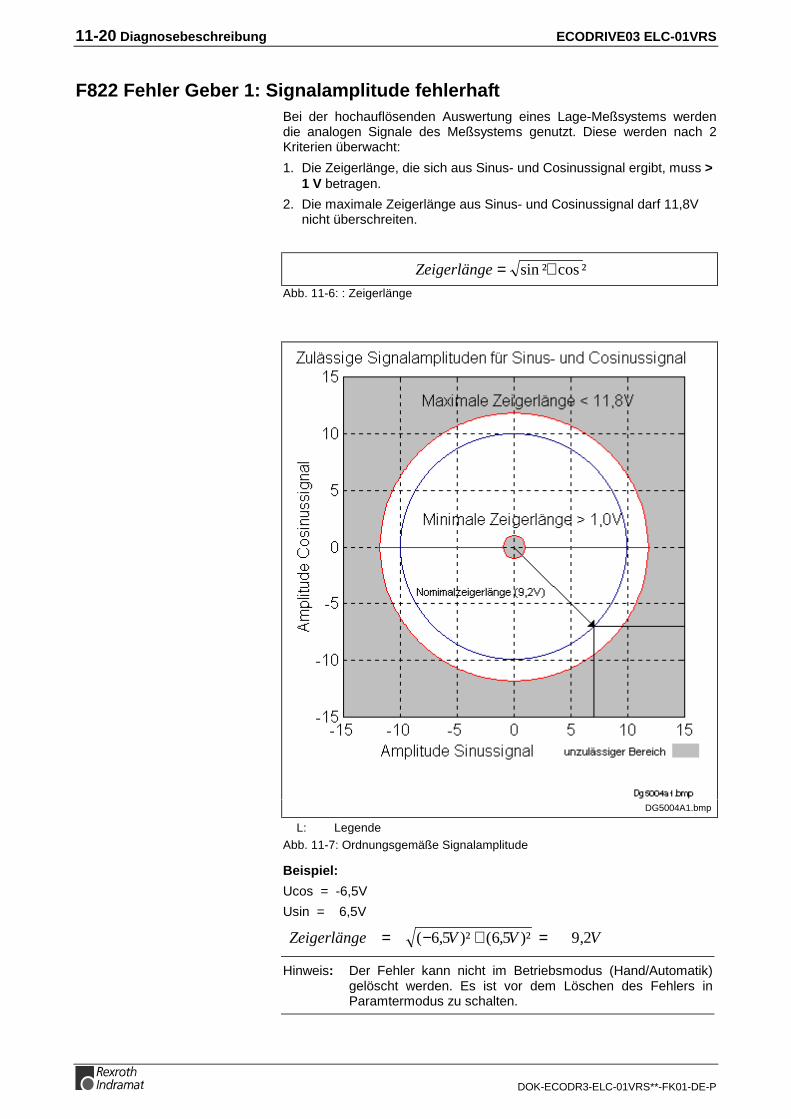
11-20 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
F822 Fehler Geber 1: Signalamplitude fehlerhaftBei der hochauflösenden Auswertung eines Lage-Meßsystems werdendie analogen Signale des Meßsystems genutzt. Diese werden nach 2Kriterien überwacht:
1. Die Zeigerlänge, die sich aus Sinus- und Cosinussignal ergibt, muss >1 V betragen.
2. Die maximale Zeigerlänge aus Sinus- und Cosinussignal darf 11,8Vnicht überschreiten.
Zeigerlänge= +sin ² cos ²
Abb. 11-6: : Zeigerlänge
DG5004A1.bmp
L: Legende Abb. 11-7: Ordnungsgemäße Signalamplitude
Beispiel:
Ucos = -6,5V
Usin = 6,5V
Zeigerlänge V V V= − + =( , )² ( , )² ,6 5 6 5 9 2
Hinweis: Der Fehler kann nicht im Betriebsmodus (Hand/Automatik)gelöscht werden. Es ist vor dem Löschen des Fehlers inParamtermodus zu schalten.
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-21
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Ursachen:
1. Feedback-Kabel defekt
2. Übertragung der Feedback-Signale gestört
3. Defektes Feedback
Abhilfe:
1. Kabel zum Meßsystem überprüfen.
2. Kabel getrennt vom Motorleistungskabel verlegen. Die Abschirmungmuss am Antriebsregelgerät aufgelegt sein.
3. Meßsystem überprüfen, gegebenfalls tauschen.
F822 - AttributeSS-Anzeige: F8/22
Diagnosenr.: F822 (hex)
Fehlernr.: 822
Klasse: Fatal
F860 BrückensicherungDer Strom in der Leistungstransistorbrücke hat den doppelten Wert desGerätespitzenstroms überschritten. Daraufhin wird der Antrieb sofortmomentenfrei geschaltet. Eine optional vorhandene Haltebremse fälltsofort ein.
Ursache:
1. Kurzschluss im Motorkabel
2. Leistungsteil des Antriebsregelgeräts defekt
3. Stromregler abweichend parametriert
Abhilfe:
Zu 1. Motorkabel auf Kurzschluss überprüfen.
Zu 2. Antriebsregelgerät tauschen.
Zu 3. Die Stromreglerparameter sollen von den Anfangswerten aus demFeedback nicht abweichen.
F860 - AttributeSS-Anzeige: F8/60
Diagnosenr.: F860 (hex)
Fehlernr.: 860
Klasse: Fatal
F870 +24Volt-FehlerDas Antriebsregelgerät benötigt eine 24V Steuer-Versorgung. BeimÜberschreiten der maximal zulässigen Toleranz von +-20% wird derAntrieb sofort momentenfrei geschaltet. Eine optional vorhandeneHaltebremse fällt ein.
Ursache:
1. Defektes Versorgungskabel für die Steuerspannungen
2. Überlastung der 24 V Versorgungsspannung
3. Versorgungseinheit defekt
4. Kurzschluss im Not-Aus-Kreis
11-22 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Abhilfe:
Zu 1. Versorgungskabel für Steuerspannungen bzw. Steckverbindungüberprüfen und ggf. tauschen.
Zu 2. 24 V Versorgungsspannung an der Versorgungseinheit überprüfen.
Zu 3. Versorgungseinheit überprüfen.
Zu 4. Not-Aus-Kreis auf Kurzschluss prüfen.
Hinweis: Der Fehler lässt sich nur im Parametermoduszurücksetzen. Der Fehler führt auch dazu, dass dieGeberemulation abgeschaltet wird.
F870 - AttributeSS-Anzeige: F8/70
Diagnosenr.: F870 (hex)
Fehlernr.: 870
Klasse: Fatal
F873 Spannung der Treiberstufen gestörtDie Spannungsversorgung der Treiberstufen wird überwacht. Bei zukleiner Spannung wird der Antrieb abgeschaltet.
Ursache:
Spannungsversorgung der Treiberstufen zu klein
Abhilfe:
Regelgerät tauschen
F873 - AttributeSS-Anzeige: F8/73
Diagnosenr.: F873 (hex)
Fehlernr.: 873
Klasse: Fatal
F878 Fehler im DrehzahlregelkreisDie Drehzahlregelkreisüberwachung spricht bei gleichzeitigem Auftretenfolgender Bedingungen an:
• Der Stromsollwert liegt an der Spitzenstromgrenze
• Die Differenz zwischen Istdrehzahl und Solldrehzahl ist größer als10% der Motormaximaldrehzahl.
• Istdrehzahl > 1,25% der Maximaldrehzahl
• Soll- und Istbeschleunigung haben unterschiedliche Vorzeichen.
Ursache:
1. Motorkabel falsch angeschlossen.
2. Leistungsteil des Antriebsregelgerätes defekt.
3. Feedback defekt.
4. Drehzahlreglerparametrierung falsch.
5. Kommutierungsoffset falsch
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-23
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Abhilfe:
Zu 1. Motorkabel-Anschluss überprüfen.
Zu 2. Antriebsregelgerät tauschen.
Zu 3. Motor tauschen.
Zu 4. Drehzahlregler gemäß der Anwendungsbeschreibung überprüfen
Zu 5. Motor tauschen
F878 - AttributeSS-Anzeige: F8/78
Diagnosenr.: F878 (hex)
Fehlernr.: 878
Klasse: Fatal
F895 4kHz Signal fehlerhaftDas 4kHz-Signal zur Erzeugung der Resolversignale ist synchronisiert mitder Softwareverarbeitung. Bei einer Fehlsynchronisation wird dieseFehlermeldung erzeugt.
Ursache:
1. Der Fehler kann durch eine elektrostatische Entladung verursachtsein.
2. Synchronisation der Resolvererregerspannung mit der Softwarenicht richtig.
Abhilfe:
Zu 1. Alles aus- und wieder einschalten. Führt dies nicht zum Erfolg:Antriebsregelgerät tauschen und zur Überprüfung schicken
Zu 2. Antriebsregelgerät tauschen und zur Überprüfung schicken.
F895 - AttributeSS-Anzeige: F8/95
Diagnosenr.: F895 (hex)
Fehlernr.: 895
Klasse: Fatal
11-24 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
11.2 Warnungsdiagnosen
E221 Warnung Motor-Temp.überwachung defektDie Temperaturüberwachung prüft, ob die gemessene Motortemperaturrealistisch ist. Wird festgestellt, dass sie kleiner als -10°C ist, wird davonausgegangen, dass die Messeinheit defekt ist. Es erscheint für 30 s dieWarnung E221 Warnung Motor-Temp.überwachung defekt .Anschließend wird der Antrieb mit der eingestellten Fehlerreaktion still-gesetzt und die Meldung F221 Fehler Motor-Temp.überwachungdefekt ausgegeben.
Ursache:
1. Motor-Temperatursensor nicht angeschlossen.
2. Kabelbruch.
3. Sensor defekt.
4. Kabelbruch im Antriebsregelgerät.
Abhilfe:
Zu 1. Sensor am Antriebsregelgerät und am Motor anschließen (sieheProjektierungsunterlage des Motors).
Zu 2. Leitung zwischen Regelgerät und Motor austauschen.
Zu 3. Motor tauschen.
Zu 4. Antriebsregelgerät tauschen.
E221 - AttributeSS-Anzeige: E2/21
Diagnosenr.: E221 (hex)
Klasse: Nichtfatal
E225 Motor-ÜberlastDer maximal mögliche Motorstrom wird reduziert, um den Motor vorZerstörung zu schützen.
Fließt im Motor ein Strom, der größer als der 2,2fache desMotorstillstandsstromes Parameter CM02 ist, wird der maximalmögliche Motorstrom ( Spitzenstrom Motor Parameter CM01) reduziert.Die Reduzierung setzt bei 4fachem Motorstillstandsstrom nach 400 msein. Bei 5fachem Strom setzt sie früher ein, bei 3fachem entsprechendspäter.
Wird der Motor-Spitzenstrom von der Begrenzung reduziert, wird dieWarnung E225 Motor-Überlast ausgegeben.
E225 - AttributeSS-Anzeige: E2/25
Diagnosenr.: E225 (hex)
Klasse: Nicht fatal
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-25
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
E250 Verstärker Übertemp.-VorwarnungDie Temperatur des Kühlkörpers im Antriebsregelgerät hat die max.zulässige Temperatur erreicht. Für einen Zeitraum von 30 Sekunden folgtder Antrieb der Sollwertvorgabe. Es besteht somit die Möglichkeit, dieAchse über die Steuerung prozessgerecht stillzusetzen (z.B. Bearbeitungabschließen, Kollisionsbereich verlassen usw.).
Nach 30 Sekunden erfolgt antriebsseitig die im Parameter"Bestmögliche Stillsetzung, Parameter A119 " eingestellte Reaktion.
Ursache:
1. Ausfall des geräteinternen Lüfters
2. Ausfall der Schaltschrank-Klimatisierung
3. falsche Schaltschrank-Dimensionierung hinsichtlich derWärmeabfuhr
Abhilfe:
Zu 1. Bei Lüfter-Ausfall das Antriebsregelgerät tauschen.
Zu 2. Funktion der Schaltschrank-Klimatisierung herstellen.
Zu 3. Schaltschrank-Dimensionierung überprüfen.
E250 - AttributeSS-Anzeige: E2/50
Diagnosenr.: E250 (hex)
Klasse: Nichtfatal
11-26 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
E251 Motor Übertemp.-VorwarnungSobald die Temperaturwarnschwelle (145°C) überschritten ist, wird dieWarnung E251 ausgegeben, und der Antrieb folgt weiter derSollwertvorgabe.
Dieser Zustand kann lange bestehen, ohne dass eine Abschaltungerfolgt. Erst wenn die Temperaturfehlerschwelle überschritten wird,erfolgt die sofortige Abschaltung.
Siehe auch F219 Motor Übertemp.-Abschaltung .
Ursache:
Der Motor ist überlastet. Das vom Motor geforderte effektive Drehmomentlag zu lange über dem zulässigen Stillstandsdauerdrehmoment.
Abhilfe:
Motorauslegung überprüfen. Bei Anlagen, die schon über längere Zeitbetrieben wurden, prüfen, ob sich die Antriebsverhältnisse geänderthaben (hinsichtlich Verschmutzung, Reibung, bewegte Massen usw.).
E251 - AttributeSS-Anzeige: E2/51
Diagnosenr.: E251 (hex)
Klasse: Nichtfatal
E252 Bleeder-VorwarnungUrsache:
Der Bremswiderstand im Antriebsregelgerät ist durch die vom Motorzurückgespeiste Energie zu ca. 90% ausgelastet. Durch dieBleedervorwarnung wird angezeigt, dass bei weiter steigenderRückspeise-Energie eine Überlastung des Bleeders zu erwarten ist.
Abhilfe:
Beschleunigungswerte bzw. Geschwindigkeit herabsetzen und ggf.Antriebsauslegung überprüfen.
E252 - AttributeSS-Anzeige: E2/52
Diagnosenr.: E252 (hex)
Klasse: Nichtfatal
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-27
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
E256 Momenten-Grenzwert = 0Ursache:
1. Zum Schutz vor mechanischer Überlastung kann dasMaximaldrehmoment über den Befehl MOM begrenzt werden. Istder aktuelle Wert gleich 0, entwickelt der Motor kein Drehmomentund folgt nicht den vorgegebenen Sollwerten.
2. Drehmomentreduzierung über Analogkanal ist eingestellt, und dieangelegte Spannung beträgt 10 V.
Abhilfe:
Zu 1. Drehmomentgrenzwert auf einen Wert setzen, der größer Null ist.
Zu 2. Analogspannung kleiner als 10 V anlegen.
E256 - AttributeSS-Anzeige: E2/56
Diagnosenr.: E256 (hex)
Klasse: Nichtfatal
E257 Dauerstrombegrenzung aktivFür 400 ms stellt das Antriebsregelgerät den Spitzenstrom zur Verfügung.Danach wird die Dauerstrombegrenzung aktiv und begrenzt dynamischden Spitzenstrom bis auf den Dauerstrom.
Ursache:
Das erforderliche Dauerdrehmoment war größer als das zur Verfügungstehende.
Abhilfe:
1. Antriebsauslegung überprüfen.
2. Bei Anlagen, die schon über längere Zeit betrieben wurden, prüfen, obsich die Antriebsverhältnisse geändert haben hinsichtlich
• Verschmutzung
• Reibung
• bewegte Masse
E257 - AttributeSS-Anzeige: E2/57
Diagnosenr.: E257 (hex)
Klasse: Nichtfatal
11-28 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
E259 Geschwindigkeitssollwertbegrenzung aktivDer Geschwindigkeitssollwert wird auf auf den im Parameter A106,Maximalgeschwindigkeit stehenden Wert begrenzt.
Ursache:
Parameter A106, Maximalgeschwindigkeit zu niedrig parametriert.
Abhilfe:
Parameter und Programm überprüfen
E259 - AttributeSS-Anzeige: E2/59
Diagnosenr.: E259 (hex)
Klasse: Nichtfatal
E261 Dauerstrombegrenzung VorwarnungDigitale Antriebe werden über ein ständig laufendes Temperaturmodellüberwacht. Erreicht die thermische Auslastung 100 % , wird kurz daraufdie Dauerstrombegrenzung aktiviert.
Vor dieser Momentenreduzierung wird bei 90% dieDauerstrombegrenzungs-Vorwarnung ausgegeben.
Ursache:
Der Antriebsregler wurde überlastet.
Abhilfe:
1. Verstärker-Auslegung überprüfen.
2. Beschleunigung reduzieren.
3. Bei Anlagen, die schon über längere Zeit betrieben wurden,prüfen, ob sich die Antriebsverhältnisse geändert habenhinsichtlich:
- Reibung
- bewegte Massen
- Vorschub bei der Bearbeitung.
E261 - AttributeSS-Anzeige: E2/61
Diagnosenr.: E261 (hex)
Klasse: Nicht fatal
E263 Geschwindigkeitssollwert > Grenzwert A106Ursache:
Die Maximalgeschwindigkeit wurde größer als zulässig vorgegeben.
Abhilfe:
Er wird auf den Parameter A106, Maximalgeschwindigkeit begrenzt.
E263 - AttributeSS-Anzeige: E2/63
Diagnosenr.: E263 (hex)
Klasse: Nichtfatal
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-29
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
E300 Prozessor-WatchdogDer Prozessor im Antriebsregelgerät ist mit einerAnsprechüberwachung (Watchdog) ausgestattet. Dort muss sich derProzessor intern regelmäßig melden.
Was ist geschehen?
Die Ansprechüberwachungszeit ist abgelaufen (Timeout), ohne dass sichder Prozessor gemeldet hat. Ein sicherer Lauf des Firmware-Programmsist nicht mehr gewährleistet.
Ursache:
Eine Überlastung oder ein schwerer Fehler in der Firmware hat bewirkt,dass der Prozessor Interrupts nicht mehr bedient.
Abhilfe:
Setzen Sie sich bitte mit dem Rexroth-INDRAMAT Kundendienst inVerbindung. Erläutern Sie genau, unter welchen Umständen der Fehleraufgetreten ist. Die Firmware sollte ausgewechselt werden.
E300 - AttributeSS-Anzeige: E3
Diagnosenr.: E300 (hex)
Klasse: Fatal
E825 Überspannung im LeistungsteilDie Zwischenkreis-Spannung (Gleichspannung) ist zu hoch.
Ursache:
1. Beim Bremsen: Die von der Maschinenmechanik über den Motorzurückgespeiste Energie wurde kurzzeitig so groß, dass sie vomBremswiderstand (Bleeder) nicht ausreichend in Wärme umgewandeltwerden konnte. Der zurückgespeiste Strom konnte nicht abgeführtwerden und lud deshalb den Zwischenkreis auf, so dass die Spannungdort zu hoch geworden ist.
2. Netzspannung (Eingangs-Wechselspannung) zu hoch.
Wirkung:
Der Motor wird bei Überspannung momentenfrei geschaltet. Sinkt dieZwischenkreisspannung wieder unter den zulässigen Maximalwert, wirdder Regler wieder zugeschaltet.
Abhilfe:
Zu 1. Beschleunigungswerte herabsetzen.Ggf. Antriebsauslegung überprüfen.Eventuell Zusatzbleeder einsetzen.
Zu 2. Netz-Versorgungsspannung (Wechselspannung/3phasig) prüfen.
WARNUNG
Gefahr durch hohe Spannung!Für Berührungsschutz sorgen.
11-30 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
E825 - AttributeSS-Anzeige: E8/25
Diagnosenr.: E825 (hex)
Klasse: Fatal
E826 Unterspannung im LeistungsteilDie Unterspannung wird als "fatale Warnung“ mit Abschaltung desmotorischen Betriebs behandelt. Wenn dann die Antriebsfreigabevorhanden ist und die Zwischenkreisspannungsmeldung weggeht, bringtder Antrieb diese Warnung.
Ursache:
Abschaltung des Versorgungsgerätes oder Netzausfall bei gesetzterAntriebsfreigabe.
Abhilfe:
Antriebsfreigabe vor Abschaltung des Versorgungsgerätes wegnehmen.
E826 - AttributeSS-Anzeige: E8/26
Diagnosenr.: E826 (hex)
Klasse: Fatal
11.3 Kommandodiagnosen
C100 Umschaltvorbereitung Phase 2 nach 3Das Kommando C100 Umschaltvorbereitung auf Komm.-Phase 3 istaktiviert.
C100 - AttributeSS-Anzeige: C1
Diagnosenr.: C100 (hex)
C200 Umschaltvorbereitung Phase 3 nach 4Bedeutung:
Das Kommando C200 Umschaltvorbereitung auf Komm.-Phase 4 istaktiviert.
C200 - AttributeSS-Anzeige: C2
Diagnosenr.: C200 (hex)
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-31
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C201 Parametersatz unvollständigUrsache:
Parameter, die zum Betrieb des Antriebs in Kommunikationsphase 4(Betriebsmodus) benötigt werden, sind ungültig.
Abhilfe:
• Parameter überprüfen und richtigstellen
• Gerät aus-und einschalten
• Auf richtige Firmware überprüfen
C201 - AttributeSS-Anzeige: C2/01
Diagnosenr.: C201 (hex)
Klasse: Kommandofehler
C202 Parameter GrenzwertfehlerUrsache:
Parameter, die zum Betrieb des Antriebs in Kommunikationsphase 4(Hand/Automatik) benötigt werden, liegen außerhalb ihrer minimalen bzw.maximalen Eingabewerte, oder der eingebene Wert kann so nichtverarbeitet werden (bei Bitleisten).
Abhilfe:
• Parameter überprüfen und richtigstellen
• Auf richtige Firmware überprüfen
• Aus- und wieder einschalten. Führt dies nicht zum Erfolg:
• Gerät austauschen.
C202 - AttributeSS-Anzeige: C2/02
Diagnosenr.: C202 (hex)
Klasse: Kommandofehler
C203 Parameter UmrechnungsfehlerUrsache:
Parameter, die für den Betrieb in Phase 4 (Betriebsmodus) benötigtwerden, können so nicht verarbeitet werden.
Abhilfe:
• Parameter überprüfen und richtigstellen
• Auf richtige Firmware überprüfen
• Aus- und wieder einschalten. Führt dies nicht zum Erfolg:
• Gerät austauschen.
C203 - AttributeSS-Anzeige: C2/03
Diagnosenr.: C203 (hex)
Klasse: Kommandofehler
11-32 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C204 Motorart Parameter CM00 fehlerhaftEs ist ein MHD-, MKD oder MKE-Motorangebaut), jedoch wurde imMotorfeedback Datenspeicher, das entsprechende Kürzel "MHD" bzw."MKD" oder "MKE" nicht gefunden.
Ursache:
1. Motorart falsch parametriert
2. Der Motorfeedback-Datenspeicher kann nicht ausgelesenwerden.
Abhilfe:
Zu 1. Im Parameter CM00, Motorart den verwendeten Motortypeingeben.
Zu 2. Feedbackleitung prüfen. Wenn Feedback defekt, Motor tauschen.
C204 - AttributeSS-Anzeige: C2/04
Diagnosenr.: C204 (hex)
Klasse: Kommandofehler
C207 Ladefehler LCAUrsache:
Defekt des Gerätes.
Abhilfe:
1. Aus- und wieder einschalten. Führt dies nicht zum Erfolg:
2. Gerät austauschen.
C207 - AttributeSS-Anzeige: C2/07
Diagnosenr.: C207 (hex)
Klasse: Kommandofehler
C210 Geber 2 erforderlichUrsache:
Es wurden in dem Parametern A100, Anwendungsart Werteeingetragen, die einen optionalen Geber erforderlich machen. ImParameter C004, Interface Geber 2 ist jedoch 0 (für nicht vorhanden)eingetragen.
Abhilfe:
• Parametern A100, Anwendungsart richtigstellen
• Parameter C004, Interface Geber 2 richtigstellen
C210 - AttributeSS-Anzeige: C2/10
Diagnosenr.: C210 (hex)
Klasse: Kommandofehler
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-33
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C211 Ungültige FeedbackdatenBeim Auslesen der im Motorfeedback abgelegten Parameter wurdenungültige Daten gefunden, oder es ist ein Fehler beim Auslesen derDaten aufgetreten.
Ursachen:
1. Motorfeedback-Kabel nicht angeschlossen oder defekt
2. Motorfeedback defekt
3. Antriebsregler defekt
Abhilfe:
Zu 1. Motorfeedback-Kabel prüfen, beidseitig anschließen
Zu 2. Motor tauschen
Zu 3. Verstärker tauschen
C211 - AttributeSS-Anzeige: C2/11
Diagnosenr.: C211 (hex)
Klasse: Kommandofehler
C212 Ungültige VerstärkerdatenWährend der Antriebs-Initialisierung holt die Betriebssoftware Daten auseinem EEPROM im Antriebsregelgerät. Wenn dieser Zugrifffehlgeschlagen ist, wird diese Fehlermeldung generiert.
Ursache:
Hardware defekt im Antriebsregelgerät
Abhilfe:
Antriebsregelgerät tauschen
C212 - AttributeSS-Anzeige: C2/12
Diagnosenr.: C212 (hex)
Klasse: Kommandofehler
C213 Wichtung der Lagedaten fehlerhaftUrsache:
Das antriebsinterne Format der Lagedaten ist abhängig vom verwendetenMotorgeber und der Geberauflösung. Der Faktor für die Umrechnung derLagedaten vom antriebsinternen Format in das Anzeigeformat bzw.umgekehrt ist außerhalb des verarbeitbaren Bereichs, da entweder:
• Linearmotor und rotatorische Lagewichtung mit Motorbezug, oder
• Rotatorischer Motor und lineare Lagewichtung mit Motorbezug, oder
• Linearmotor und Modulowichtung eingestellt ist, oder
• der ermittelte Faktor zur Umrechnung der Lagedaten vonAnzeigeformat nach internem Format bzw. umgekehrt, nichtdarstellbar ist.
11-34 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Abhilfe:
• Parameter überprüfen und richtigstellen
• Auf richtige Firmware überprüfen
• Aus- und wieder einschalten. Führt dies nicht zum Erfolg:
• Gerät austauschen.
C213 - AttributeSS-Anzeige: C2/13
Diagnosenr.: C213 (hex)
Klasse: Kommandofehler
C214 Wichtung der Geschwindigkeitsdaten fehlerhaftUrsache:
Das antriebsinterne Format der Geschwindigkeitsdaten ist abhängig vomverwendeten Motorgeber und der Geberauflösung. Der Faktor für dieUmrechnung der Geschwindigkeitsdaten vom antriebsinternen Format indas Anzeigeformat bzw. umgekehrt ist außerhalb des verarbeitbarenBereichs.
Abhilfe:
• Parameter überprüfen und richtigstellen
• Auf richtige Firmware überprüfen
• Aus- und wieder einschalten. Führt dies nicht zum Erfolg:
• Gerät austauschen.
C214 - AttributeSS-Anzeige: C2/14
Diagnosenr.: C214 (hex)
Klasse: Kommandofehler
C215 Wichtung der Beschleunigungsdaten fehlerhaftUrsache:
Das antriebsinterne Format der Beschleunigungsdaten ist abhängig vomverwendeten Motorgeber und der Geberauflösung. Der Faktor für dieUmrechnung der Beschleunigungsdaten vom antriebsinternen Format indas Anzeigeformat bzw. umgekehrt ist außerhalb des verarbeitbarenBereichs.
Abhilfe:
• Parameter überprüfen und richtigstellen
• Auf richtige Firmware überprüfen
• Aus- und wieder einschalten. Führt dies nicht zum Erfolg:
• Gerät austauschen.
C215 - AttributeSS-Anzeige: C2/15
Diagnosenr.: C215 (hex)
Klasse: Kommandofehler
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-35
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C216 Wichtung der Drehmoment/Kraftdaten fehlerhaftUrsache:
Der Faktor für die Umrechnung der Drehmoment-/Kraftdaten vomantriebsinternen Format in das Anzeigeformat bzw. umgekehrt istaußerhalb des verarbeitbaren Bereichs.
Abhilfe:
• Parameter überprüfen und richtigstellen
• Auf richtige Firmware überprüfen
• Aus- und wieder einschalten. Führt dies nicht zum Erfolg:
• Gerät austauschen.
C216 - AttributeSS-Anzeige: C2/16
Diagnosenr.: C216 (hex)
Klasse: Kommandofehler
C217 Fehler beim Lesen der Daten Geber 1Alle MKD- und MHD-Motoren besitzen einen Feedbackdatenspeicher.Aus diesem werden Einstellungen für den Geber gelesen.
Ursache:
Beim Lesen der Werte aus dem Feedback ist ein Fehler aufgetreten.
Abhilfe:
Feedbackkabel überprüfen.
Motor tauschen.
C217 - AttributeSS-Anzeige: C2/17
Diagnosenr.: C217 (hex)
Klasse: Kommandofehler
C218 Fehler beim Lesen der Daten Geber 2Besitzt das zu initialisierende Meßsystem einen eigenen Datenspeicher,so wird dieser beim Einschalten der Betriebsart Hand/Automatikausgelesen. Der Fehler C218 Fehler beim Lesen der Daten Geber 2wird dann generiert, wenn ein zusätzlicher optionaler Geber (Geber 2)vorhanden und ausgewertet wird (Parameter C004, Interface Geber 2ungleich „0“) und beim Auslesen der Daten ein Fehler festgestellt wird.
Meßsysteme mit eigenem Datenspeicher sind :
• DSF/HSF/LSF und Resolver, sowie
• Meßsysteme mit Endat-Interface (Fa. Heidenhain)
11-36 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Ursache:
1. Meßsystem-Kabel defekt
2. Meßsytem defekt
Abhilfe:
Zu 1. Meßsystem-Kabel prüfen
Zu 2. Meßsystem tauschen
C218 - AttributeSS-Anzeige: C2/18
Diagnosenr.: C218 (hex)
Klasse: Kommandofehler
C220 Fehler bei der Initialisierung Geber 1Bei der Initialisierung des Motorgebers werden einige Überprüfungenvorgenommen. Dabei wurde ein Fehler festgestellt. Dieser Fehler kannsein:
• Fehler beim Lesen der Winkelkorrekturdaten
• Fehler beim Kopieren der Winkelkorrekturdaten
• Kommunikation mit Geber gestört
• Fehler beim Zusammenbau der Position einer Initialisierungsspur
• Fehler beim Lesen der Analogsignale einer Initialisierungsspur
• fehlerhafte Zeigerlänge der Analogsignale einer Initialisierungsspur
• ungültiger Offset zwischen hoch- und niedrigauflösender Spur
• Fehler im Microcontroller des Meßsystems
Ursache:
1. Motorfeedback-Kabel defekt
2. Motorfeedback defekt
3. Meßsystem-Interface defekt
Abhilfe:
Zu 1. Motorfeedback-Kabel prüfen
Zu 2. Motor tauschen
Zu 3. Meßsystem-Interface tauschen, wenn es ein Modul ist, oder daskomplette Antriebsregelgerät
C220 - AttributeDiagnosenr.: C220 (hex)
Klasse: Kommandofehler
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-37
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C221 Fehler bei Initialisierung Geber 2Bei der Initialisierung des optionalen Gebers werden einigeÜberprüfungen vorgenommen. Dabei wurde ein Fehler festgestellt. DieserFehler kann sein:
• Fehler beim Lesen der Winkelkorrekturdaten
• Fehler beim Kopieren der Winkelkorrekturdaten
• Kommunikation mit Geber gestört
• Fehler beim Zusammenbau der Position einer Initialisierungsspur
• Fehler beim Lesen der Analogsignale einer Initialisierungsspur
• fehlerhafte Zeigerlänge der Analogsignale einer Initialisierungsspur
• ungültiger Offset zwischen hoch- und niedrigauflösender Spur
• Fehler im Microcontroller des Meßsystems
• Bei DAG 1.2: Fehler externe 24V auf SSI-Interface eingestellt
Ursache:
1. opt. Feedback-Kabel defekt
2. Feedback defekt
3. Meßsystem-Interface defekt
Abhilfe:
Zu 1. opt. Feedback-Kabel prüfen
Zu 2. Feedback tauschen
Zu 3. Meßsystem-Interface (Modul) tauschen
C221 - AttributeSS-Anzeige: C2/21
Diagnosenr.: C221 (hex)
Klasse: Kommandofehler
C223 Eingabewert max. Verfahrbereich zu großUrsache:
Es wurde eine interne Lageauflösung eingestellt, die eine korrekteKommutierung des Motors nicht mehr gewährleistet.
Abhilfe:
• Parameter überprüfen und richtigstellen
• Auf richtige Firmware überprüfen
• Aus- und wieder einschalten. Führt dies nicht zum Erfolg:
• Gerät austauschen.
C223 - AttributeSS-Anzeige: C2/23
Diagnosenr.: C223 (hex)
Klasse: Kommandofehler
11-38 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C227 Modulo-Bereichs-FehlerUrsache:
Der eingegebene Modulowert ist größer als der halbePositionsdarstellungsbereich des Antriebs.
Abhilfe:
Modulowert kleiner wählen Parameter A105.
C227 - AttributeSS-Anzeige: C2/27
Diagnosenr.: C227 (hex)
Klasse: Kommandofehler
C228 Regelgerätetyp falschBei der Umschaltvorbereitung auf Komm.-phase 4 wird überprüft, ob dieim residenten Speicher des Verstärkers hinterlegten Daten für dasKühlkörpertemperaturmodell gültig sind. Wird dabei ein Fehler erkannt, soreagiert der Antrieb mit der Fehlermeldung C228 Regelgerätetyp falsch .
Ursache:
Verstärker EEProm defekt.
Abhilfe:
Regelgerät tauschen/reparieren.
C228 - AttributeSS-Anzeige: C2/28
Diagnosenr.: C228 (hex)
Klasse: Kommandofehler
C234 Geberkombination nicht möglichUrsache:
Die im Parameter C004, optionales Geberinterface gewählteGeberschnittstelle kann vom Antrieb nicht unterstützt werden, da siebereits durch den Motorgeber belegt ist.
Abhilfe:
Wahl eines anderen optionalen Gebers.
C234 - AttributeSS-Anzeige: C2/34
Diagnosenr.: C234 (hex)
Klasse: Kommandofehler
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-39
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C235 Lastseitiger Motorgeber nur bei AsynchronmotorUrsache:
Im Parameter A100, Anwendungsart kann die Funktionalität desoptionalen Gebers definiert werden. Wurde als Funktion des optionalenGebers "lastseitiger Motorgeber“ gewählt, so wird diese Funktion nur fürAsynchronmotore unterstützt.
Abhilfe:
Parameter CM00, Motorart entsprechend dem verwendeten Motortypsetzen.
Parameter A100, Anwendungsart überprüfen.
C235 - AttributeSS-Anzeige: C2/35
Diagnosenr.: C235 (hex)
Klasse: Kommandofehler
C236 Geber 1 erforderlichUrsache:
Wurde über Parameter Parameter A100, Anwendungsart einlastseitiger Motorgeber parametriert, so ist kein Motorgeber erforderlich(Parameter C001 = 0). Es sind jedoch in dem ParameternReferenzfahr-Parameter ein Werte eingetragen, die einen Motorgebererforderlich machen.
Abhilfe:
Referenzfahr-Parameter auf Verwendung des optionalen Gebersändern.
Den Motorgeber durch Eintragen eines Wertes ungleich 0 im ParameterC001, Interface Geber 1aktivieren.
C236 - AttributeSS-Anzeige: C2/36
Diagnosenr.: C236 (hex)
Klasse: Kommandofehler
C300 Absolutmaß setzenÜber den Parameter C010, Referenzieren wurde Absolutmaß setzenaktiviert.
C300 - AttributeSS-Anzeige: C3
Diagnosenr.: C300 (hex)
C301 Absolutmaß setzen bei gesetzter RF nicht möglichUrsache:
Das Kommando „C3 Kommando Absolutmaß-Emulator setzen“ wurde beigegebener Reglerfreigabe gestartet.
Abhilfe:
Kommando beenden und Reglerfreigabe deaktivieren.
11-40 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C301 - AttributeSS-Anzeige: C3/01
Diagnosenr.: C301 (hex)
Klasse: Kommandofehler
C302 Kein absolutes Meßsystem vorhandenDas Kommando Parameter C010, Homing „Absolutmaß setzen“wurde gestartet, ohne dass ein absolutes Meßsystem vorhanden ist.
Das Kommando kann nur ausgeführt werden, wenn ein absolutesMeßsystem vorhanden ist.
Ursache:
1. Das Kommando wurde fälschlicherweise aktiviert.
2. Der angeschlossene Motor oder das optionale Meßsystem sindnicht als Absolutgeber ausgeführt.
Abhilfe:
Zu 1. Die Kommandoauslösung unterbinden.
Zu 2. Motor oder optionales Meßsystem mit Absolutgeberfunktionausrüsten.
C302 - AttributeSS-Anzeige: C3/02
Diagnosenr.: C302 (hex)
Klasse: Kommandofehler
C400 Umschalten auf ParameterbetriebVor dem Editieren von Parametern, die nur im Parametriermodusbeschrieben werden können, muß auf Parameterbetrieb umgeschaltetwerden.
C400 - AttributeSS-Anzeige: C4
Diagnosenr.: C400 (hex)
C500 Reset, Fehler rücksetzenDas Eingang zum Fehlerlöschen wurde aktiviert. Alle antriebsinternenFehler werden gelöscht. Vorher müssen die Fehler jedoch behobenworden sein.
C500 - AttributeSS-Anzeige: C5
Diagnosenr.: C500 (hex)
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-41
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C600 Kommando Antriebsgeführtes ReferenzierenÜber eine Befehl oder Eingang wurde das Kommando Referenzierenaktiviert.
Siehe auch Funktionsbeschreibung: " Referenzieren"
C600 - AttributeSS-Anzeige: C6
Diagnosenr.: C600 (hex)
C601 Referenzieren nur mit Reglerfreigabe möglichUrsache:
Das Kommando Antriebsgeführtes Referenzieren wurde gestartet,ohne dass die Reglerfreigabe eingeschaltet ist. Dies ist nicht zulässig.
Abhilfe:
1. Reglerfreigabe einschalten.
2. Kommando erneut starten.
siehe auch Funktionsbeschreibung: "Referenzieren"
C601 - AttributeSS-Anzeige: C6/01
Diagnosenr.: C601 (hex)
Klasse: Kommandofehler
C602 Abstand Referenzschalter-Referenzmarke fehlerhaftUrsache:
Die Auswertung des Refernzschalters ist eingeschaltet. Der Abstandzwischen positiver Refernzschalter-Flanke und auszuwertenderReferenzmarke ist außerhalb des zulässigen Bereichs.
Abhilfe:
Den Wert in dem Parameter C012, Referenzschalter-Offset verändern.
Siehe auch Funktionsbeschreibung: "Anordnung des Referenzschalters"
C602 - AttributeSS-Anzeige: C6/02
Diagnosenr.: C602 (hex)
Klasse: Kommandofehler
C604 Referenzieren mit Absolutmaßgeber nicht möglichUrsache:
Wird beim Absolutwertgeber das Referenzierkommando aufgerufen,ohne dass vorher das Kommando Parameter C010, Absolutmaß setzen
11-42 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
ausgeführt wurde, wird das Referenzierkommando mit diesem Fehlerabgebrochen.
Wurde der Geber durch das "Absolutmaß setzen " referenziert, kann mitdem Referenzierkommando ein Positionieren auf den Referenzpunktausgelöst werden.
Abhilfe:
Absolutgeber durch das Kommando "Absolutmaß setzen"referenzieren.
Siehe auch Funktionsbeschreibung: "Mögliche Fehlermeldungen beimAntriebsgeführten Referenzieren".
C604 - AttributeSS-Anzeige: C6/04
Diagnosenr.: C604 (hex)
Klasse: Kommandofehler
C605 Referenziergeschwindigkeit zu großUrsache:
Die eindeutige Zuordnung einer Referenzmarke zum Nullschalter ist beigroßer Geschwinkigkeit nicht möglich, weil der Nullschalter nur alle 2msausgewertet wird.
Abhilfe:
Parameter C009, Referenziergeschwindigkeit verkleinern.
siehe auch Funktionsbeschreibung: " Referenzieren"
C605 - AttributeSS-Anzeige: C6/05
Diagnosenr.: C605 (hex)
Klasse: Kommandofehler
C700 UrladenEine Grundeinstellung der sich im Regelgerät befindendenReglerparameter für den angeschlossenen Motor erfolgt bei Motoren derBaureihen MHD, MKD, und MKE über das Aktivieren der in derMotorfeedback abgelegten Regler-Parameter. Über die Meldung C7signalisiert das Antriebsregelgerät, dass das Kommando C700 Urladenaktiviert wurde.
Ursache:
Das Kommando C700 Urladen wurde aktiviert.
C700 - AttributeSS-Anzeige: C7
Diagnosenr.: C700 (hex)
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-43
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C701 Urladen bei Reglerfreigabe nicht möglichUrsache:
Das Urladen ist bei gesetzter Reglerfreigabe nicht ausführbar.
Abhilfe:
1. Reglerfreigabe ausschalten.
2. Kommando erneut zu starten.
siehe auch Funktionsbeschreibung: "Fehlerursachen bei der Ausführungder Funktion Urladen"
C701 - AttributeSS-Anzeige: C7/01
Diagnosenr.: C701 (hex)
Klasse: Kommandofehler
C702 Keine Defaultparameter vorhandenDie Anpassung der Regelkreise an den angeschlossenen digitalenAntrieb erfolgt bei Motoren der Baureihe MHD, MKD und MKE über dasAktivieren der in der Motorfeedback abgelegten Drehzahlregler-Parameter. Über die Meldung C702 signalisiert das Antriebsregelgerät,dass Urladen aktiviert wurde, jedoch am angeschlossenen Motor keinDatenspeicher vorhanden ist.
Abhilfe:
Parameterblatt des verwendeten Motors über den REXROTHINDRAMAT-Kundendienst beziehen und Parameter eingeben.
C702 - AttributeSS-Anzeige: C7/02
Diagnosenr.: C702 (hex)
Klasse: Kommandofehler
C703 Default-Parameter ungültigUrsache:
Die Defaultparameter werden aus dem Motorfeedback-Datenspeicherausgelesen. Mindestens einer dieser Parameter ist ungültig.
Abhilfe:
Die Verbindung zum Motorfeedback ist zu überpüfen. Gegebenenfalls istder Motor auszutauschen.
C703 - AttributeSS-Anzeige: C7/03
Diagnosenr.: C703 (hex)
Klasse: Kommandofehler
11-44 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C704 Parameter nicht kopierbar
Ursache:
Die vorhandenen Default-Parameter sind mit dieser Software-Versionnicht kompatibel.
Abhilfe:
Bitte nehmen Sie Verbindung mit der Firma Indramat auf. Schildern Sie,welche Software-Version, welches Gerät und welchen Motortyp Siehaben.
C704 - AttributeSS-Anzeige: C7/04
Diagnosenr.: C704 (hex)
Klasse: Kommandofehler
C705 Verriegelt mit PasswortDefaultparameter setzen
C705 - AttributeSS-Anzeige: C7/05
Diagnosenr.: C705 (hex)
Klasse: Kommandofehler
C800 Default-Parameter ladenAuslösen des Kommandos:
Dieses Kommando kann auf 2 Wegen ausgelöst werden:
1. Bei Anzeige „PL“ am Antriebsregelgerät (kommt nach einem Tauschder Firmware-Version) durch Drücken der S1-Taste bei der Anzeige.
2. Durch Starten des , Kommando C8 Basisparameter laden über dieserielle Schnittstelle
Wirkung:
Es werden alle Parameter gelöscht und mit ihrem jeweiligen Defaultwert(Anfangswert) vorbesetzt. Auch Positioniersätze und Regelkreis-Einstellungen werden überschrieben .
Siehe auch Funktionsbeschreibung: "Basisparametersatz".
C800 - AttributeSS-Anzeige: C8
Diagnosenr.: C800 (hex)
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-45
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
C801 Parameter-Defaultwert fehlerhaftUrsache:
Während des Kommandos, C800 Kommando Basisparameter ladenwurde ein im Antrieb abgelegter Defaultwert als fehlerhaft erkannt.
C801 - AttributeSS-Anzeige: C8/01
Diagnosenr.: C801 (hex)
Klasse: Kommandofehler
C802 Verriegelt mit PasswortAbhilfe:
Basisparameter laden.
Siehe auch Kapitel 3: "Inbetriebnahme"
C802 - AttributeSS-Anzeige: C8/02
Diagnosenr.: C802 (hex)
Klasse: Kommandofehler
D300 Kommando KommutierungseinstellungZum Betrieb von Synchronmotoren ist ein korrekt eingestellterKommutierungsoffset zwingend erforderlich. Über die Anzeige "D3“ wirdsignalisiert, dass das Kommando zur Ermittlung desKommutierungsoffsets aktiviert wurde.
Ursache:
Das Kommando Kommutierungseinstellung wurde aktiviert.
D300 - AttributeSS-Anzeige: d3
Diagnosenr.: D300 (hex)
D301 Antrieb für Komm.einstellung nicht bereitUrsache beim Linearmotor:
Beim Start des Kommandos darf keine Reglerfreigabe vorhanden sein, ermuss sich jedoch in Kommunikationsphase 4 (Anzeige "bb“ oder "Ab“)befinden.
Ursache beim rotatorischen Synchronmotor:
Beim Start des Kommandos "D3“ muss sich der Antrieb inMomentenregelung befinden.
Sind diese Bedingungen nicht erfüllt, so wird diese Fehlermeldunggeneriert.
Abhilfe beim Linearmotor:
Je nach Motortype Reglerfreigabe abschalten und Komando erneutstarten.
11-46 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Abhilfe beim rotatorischen Synchronmotor:
Momentenregelung aktivieren und Kommando erneut starten.
D301 - AttributeSS-Anzeige: d3/01
Diagnosenr.: D301 (hex)
Klasse: Kommandofehler
D302 Drehmoment/Kraft zu klein für BewegungDas Kommando D3 Kommutierungs-Einstellung wurde gestartet.Dazu muss sich der Motor bewegen. Aber er bewegt sich nicht.
Ursache:
1. Das Drehmoment ist zu klein, um mechanische Widerstände (Reibungoder Gewichtslast) zu überwinden.
2. Der Motor ist mechanisch blockiert.
Abhilfe:
1. S-0-0092, Drehmoment/Kraft-Grenzwert bipolar so weit erhöhen,dass der Motor die mechanischen Widerstände überwindet und sichdrehen kann. P-0-0109, Spitzendrehmoment-/Kraft-Begrenzungebenfalls überprüfen; dieser Parameter-Wert soll mindestens genauso groß sein wie S-0-0092.
2. Klemmung beseitigen. Ggf. auch die Bremse überprüfen.
Hinweis: Bei Geräten mit analogen Eingängen kann derDrehmoment-Grenzwert über eine analoge Drehmoment-Reduzierung begrenzt sein.
D302 - AttributeSS-Anzeige: d3/02
Diagnosenr.: D302 (hex)
Klasse: Kommandofehler
D500 Kommando Markerposition erfassenNicht bekanntes Kommando aufgerufen
Ursache:
Fehlverhalten der Firmware
D500 - AttributeSS-Anzeige: d5
Diagnosenr.: D500 (hex)
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-47
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
D501 Kein inkrementelles MeßsystemUrsache:
Das Kommando wurde für ein Meßsystem gestartet, welches keineechten Referenzmarken besitzt. Diese sind u.a. Meßsysteme wie DSF,EnDat, SSI oder Resolvermeßsysteme.
Abhilfe:
Prüfen, ob im Parameter C009, Referenzfahr-Pameter der richtigeGeber parametriert ist.
Gebersystem mit echten Referenzmarken einsetzen.
D501 - AttributeSS-Anzeige: d5/01
Diagnosenr.: D501 (hex)
Klasse: Kommandofehler
11.4 Zustandsdiagnosen
A002 Kommunikationsphase 2Parametriermodus“.
A002 - AttributeSS-Anzeige: P2
Diagnosenr.: A002 (hex)
A003 Kommunikationsphase 3Vorbereitung auf die Kommunikationsphase 4 (Hand/Automatik)
A003 - AttributeSS-Anzeige: P3
Diagnosenr.: A003 (hex)
A010 Antrieb HALTDie Eingang Antrieb-Halt dient zum Anhalten einer Achse mit definierterBeschleunigung und definiertem Ruck.
A010 - AttributeSS-Anzeige: AH
Diagnosenr.: A010 (hex)
11-48 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
A012 Steuer- und Leistungsteil betriebsbereitDer Antrieb ist mit Steuerspannung versorgt, und die Leistung istzugeschaltet. Der Antrieb ist bereit zur Leistungsabgabe.
A012 - AttributeSS-Anzeige: Ab
Diagnosenr.: A012 (hex)
A013 Bereit zur LeistungszuschaltungDer Antrieb ist mit Steuerspannung versorgt, und es liegt kein Fehler imAntrieb vor. Der Antrieb ist bereit zur Leistungszuschaltung.
Siehe auch Funktionsbeschreibung: "Parametriermodus - Betriebsmodus"
A013 - AttributeSS-Anzeige: bb
Diagnosenr.: A013 (hex)
A102 Lageregelung mit Geber 1Der Antrieb befindet sich in Lageregelung. Der Lageregelkreis wird imAntrieb über einen Lagegeber geschlossen. Die Steuerung gibt nur denLagesollwertverlauf vor, der Antrieb folgt dem Sollwert mit einemsystematischen Schleppabstand.
Geber 1 bedeutet, dass der Lagegeber an der Motorwelle angebaut ist(indirekte Messung der Achsposition).
Siehe auch Funktionsbeschreibung: "Lageregelung".
A102 - AttributeSS-Anzeige: AF
Diagnosenr.: A102 (hex)
A103 Lageregelung mit Geber 2Der Antrieb befindet sich in Lageregelung. Der Lageregelkreis wird imAntrieb über einen Lagegeber geschlossen. Die Steuerung gibt nur denLagesollwertverlauf vor, der Antrieb folgt dem Sollwert mit einemsystematischen Schleppabstand.
Geber 2 bedeutet, dass der Lagegeber an der Maschinenachse angebautist (direkte Messung der Achsposition).
A103 - AttributeSS-Anzeige: Diag. Name:AF
Diagnosenr.: A103 (hex)
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-49
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
A104 Lageregelung schleppabstandsfrei, Geber 1Der Antrieb befindet sich in Lageregelung. Der Lageregelkreis wird imAntrieb über einen Lagegeber geschlossen. Die Steuerung gibt nur denLagesollwertverlauf vor, der Antrieb folgt dem Sollwert schleppfehlerfrei.
Geber 1 bedeutet, dass der Lagegeber an Motorwelle angebaut ist(indirekte Messung der Achsposition).
A104 - AttributeSS-Anzeige: AF
Diagnosenr.: A104 (hex)
A105 Lageregelung schleppabstandsfrei, Geber 2Der Antrieb befindet sich in Lageregelung. Der Lageregelkreis wird imAntrieb über einen Lagegeber geschlossen. Die Steuerung gibt nur denLagesollwertverlauf vor, der Antrieb folgt dem Sollwert schleppfehlerfrei.
Geber 2 bedeutet, dass der Lagegeber an der Maschinenachse angebautist (direkte Messung der Achsposition).
A105 - AttributeSS-Anzeige: AF
Diagnosenr.: A105 (hex)
A800 Unbekannte BetriebsartFür die aktivierte Betriebsart existiert keine Diagnose.
A800 - AttributeSS-Anzeige: AF
Diagnosenr.: A800 (hex)
11-50 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
11.5 Diagnosen der Grundinitialisierung und bei fatalenSystemfehlern
Diagnoseanzeige: -0Der beschreibbare Datenspeicher des Regelgerätes wird auf seineFunktionsfähigkeit getestet.
Diagnoseanzeige: -1• Die Hardware des Verstärkers wird initialisiert.
Diagnoseanzeige: -2Ursache:
Steuerspannung der Geberversorgung steht nicht an.
Abhilfe:
Hardware tauschen.
Diagnoseanzeige: -3Initialisieren der Parameter aus NovRam und berechnen derentsprechenden Daten abhängig von den Parameterinhalten.
Diagnoseanzeige: -4Initialisieren und Test der Führungskommunikation.
Diagnoseanzeige: -5Systemsteuerung initialisieren.
Diagnoseanzeige: -6Systemsteuerung starten.
Diagnoseanzeige: Watchdog Diagnoseanzeige: E1Ursache:
Prozessorfehler, ausgelöst durch Überspannungsentladung,Programmierfehler, oder Hardwarefehler. Mehr Information über einTerminal, das an die RS232 angeschlossen ist, erhältlich.
Abhilfe:
Verstärker ein- ausschalten, wenn Fehler immer noch ansteht, Hardwaretauschen. Auf jeden Fall den Kundendienst informieren.
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-51
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Diagnoseanzeige: Watchdog Diagnoseanzeige: E2Ursache:
Test des Ram’s auf dem Programmiermodul nicht fehlerfrei.
Ram defekt oder Programmiermodul nicht richtig aufgesteckt.
Abhilfe:
Ausschalten, Steckverbindung überprüfen und wieder einschalten.
Tritt der Fehler wieder auf Firmwaremodul tauschen.
Diagnoseanzeige: Watchdog Diagnoseanzeige: E3Ursache:
Ausgelöst durch einen Hardware-Fehler oder durch eineHochspannungsentladung hat der 1. Watchdog des Verstärkersangesprochen.
Abhilfe:
Verstärker ausschalten und wieder einschalten. Tritt E3 wieder auf,Verstärker tauschen. Auf jeden Fall den Kundendienst informieren.
Diagnoseanzeige: Watchdog Diagnoseanzeige: E4Ursache:
Ausgelöst durch einen Hardware-Fehler oder durch eineHochspannungsentladung hat der 2. Watchdog des Verstärkersangesprochen.
Abhilfe:
Verstärker ausschalten und wieder einschalten. Tritt E4 wieder auf,Verstärker tauschen. Auf jeden Fall den Kundendienst informieren.
Diagnoseanzeige: Watchdog Diagnoseanzeige: E5Ursache:
Test des Dual-Port-Rams zur Führungskommunikation fehlerhaft.
Evtl. ist die Führungskommunikationshardware nicht richtig aufgesteckt.
Abhilfe:
Steckverbindung prüfen, wenn ok Verstärker tauschen.
11-52 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
11.6 Betriebszustände
Im folgenden sind die möglichen Betriebszustände alphabetischaufgelistet. Diese werden mit Hilfe des H1-Displays am Gerät angezeigt:
bb"betriebsbereit"
siehe auch: A013 Bereit zur Leistungszuschaltung
Ab"Antrieb bereit"
siehe auch Diagnose: A012 Steuer- und Leistungsteil betriebsbereit
AF"Antrieb Freigabe"
Je nach verwendeter Betriebsart findet man unter der entsprechendenZustandsdiagnose (A101 - A800) eine genauere Beschreibung derAnzeige "AF".
AH"Antrieb Halt"
siehe auch: A010 Antrieb HALT
AU"Automatik"
siehe auch: Automatik
HA"Hand"
siehe auch: Hand
PA"Antrieb Halt"
siehe auch: Parameter
Jb"Joggen backward"
siehe auch: A218 Tipp-Betrieb negativ
JF"Joggen forward"
siehe auch: A208 Tipp-Betrieb positiv
P2"Phase 2"
Die Steuerung befindet sich in der Betriebsart Parameter und überprüftdie Parameterdaten. Es ist keine Leistungszuschaltung möglich.
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-53
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
P3"Phase 3"
Die Steuerung wechselt von der Phase 2 in die Phase 4 ( BetriebsartHand oder Automatik)
P4"Phase 4"
Die Steuerung befindet sich in der Betriebsart Hand oder Automatik).
Normalerweise erscheint diese Anzeige nur sehr kurze Zeit.
PL"Parameter Laden mit Basiswerten"
siehe auch: F209 PL Defaultwerte der Parameter laden
UL"Urladen"
siehe auch: F208 UL Der Motortyp hat sich geändert
11-54 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
F- 0300 Ungültige I/O-Nummer im Befehlssatz
F- 0301 Zustand I/O im Befehl fehlerhaft
F- 0302 Befehlssatznummer zu groß
F- 0304 Unbekannter Befehl
F- 0305 Antrieb nicht absolut eingerichtet
F- 0306 Überlauf der Vorschubstrecke
F- 0307 Datenverlust Parameter
F- 0308 Antriebstelegramm nicht gesendet
F- 0309 Masterdatentelegramm nicht bearbeitet
F- 0310 Fehleingabe im Parameter
F- 0311 Stack-Korrekturwert > 9
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-55
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
F- 0312 Quittung eines Initialisierungsfehler und nicht im Parameter-Mode
F- 0313 Sprungweite zu groß, BCB/BCD-Befehl
F- 0314 Satzoffset zu groß beim BIC-Befehl
F- 0315 BCB-Befehl : Auswahl fehlerhaft
F- 0316 Keine Kommunikation mit BTV04
F- 0317 Keine E/A Kommunikation mit BTV04
F- 0318 Falsche Achsnummer im NC-Befehl
F- 0319 NC-Zykluszeit überschritten
F- 0320 Systemfehler ( Firmwarefehler )
F- 0321 Ungültige Variablennummer im NC-Befehl
F-0200 Parameter und Automatikeingang gleichzeitig
F-0201 Phasenumschaltung fehlerhaft
11-56 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
F-0203 Zielposition < Lagegrenzwert negativ
F- 0204 Zielposition > Lagegrenzwert positiv
F- 0205 Stacküberlauf beim JSR-Befehl
F- 0206 Stacküberlauf beim RTS-Befehl
F- 0207 Ungültige Zieltask-Nummer
F- 0208 Promillewert im Befehl ACC > 999
F- 0209 Wert im FAK-Befehl ungültig
F- 0210 Vorschubüberwachung
F- 0211 Drehmoment > 500%
F- 0212 Programm Run ohne Leistung
F- 0213 Max.Differenz zwischen Motor und Meßradgeber zu groß
ECODRIVE03 ELC-01VRS Diagnosebeschreibung 11-57
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
F- 0214 Fehlerhafte BCD-Information
F- 0215 Fehleingabe Folgefaktor
F- 0216 Promillewert im Befehl > 999
F- 0217 HOM-Befehl nicht erlaubt
F- 0218 RTM-Befehl nicht erlaubt
F- 0219 Variablenwert im NC-Befehl > zulässigem Eingabewert
F- 0220 Konstantenwert im NC-Befehl > zulässigem Eingabewert
11-58 Diagnosebeschreibung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
E- 0100 Geschwindigkeit = 0
E- 0102 Beide Tippeingänge gleichzeitig
E- 0103 Hardwareausgänge überlastet
E- 0104 Keine Kommunikation mit BTV04
E- 0105 Keine E/A Kommunikation mit BTV04
E- 0106 Tippen zurück nicht möglichLagegrenzwert negativ überschritten
E- 0107 Tippen vor nicht möglichLagegrenzwert positiv überschritten
A- 0007 Stopp aktiv
A- 0008 Handvektorprogramm aktiv
A- 0009 Funktion Unterbrechung aktiv
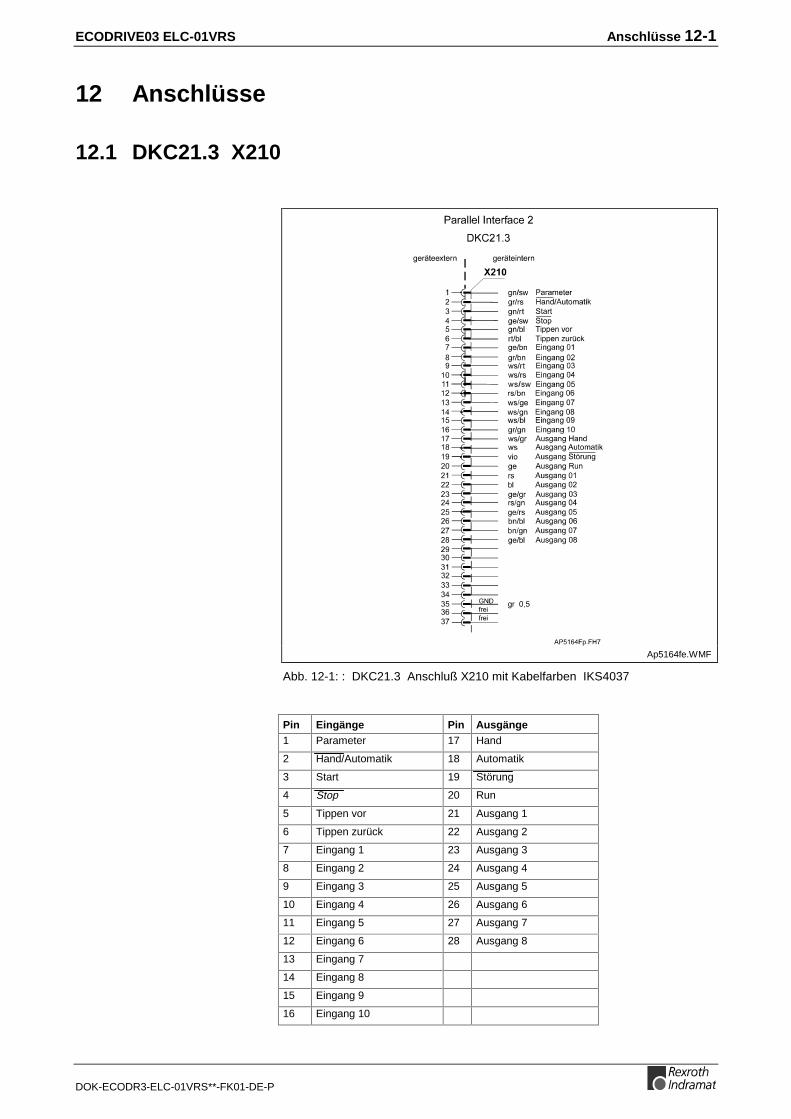
ECODRIVE03 ELC-01VRS Anschlüsse 12-1
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
12 Anschlüsse
12.1 DKC21.3 X210
Ap5164fe.WMF
Abb. 12-1: : DKC21.3 Anschluß X210 mit Kabelfarben IKS4037
Pin Eingänge Pin Ausgänge1 Parameter 17 Hand
2 Hand/Automatik 18 Automatik
3 Start 19 Störung
4 Stop 20 Run
5 Tippen vor 21 Ausgang 1
6 Tippen zurück 22 Ausgang 2
7 Eingang 1 23 Ausgang 3
8 Eingang 2 24 Ausgang 4
9 Eingang 3 25 Ausgang 5
10 Eingang 4 26 Ausgang 6
11 Eingang 5 27 Ausgang 7
12 Eingang 6 28 Ausgang 8
13 Eingang 7
14 Eingang 8
15 Eingang 9
16 Eingang 10
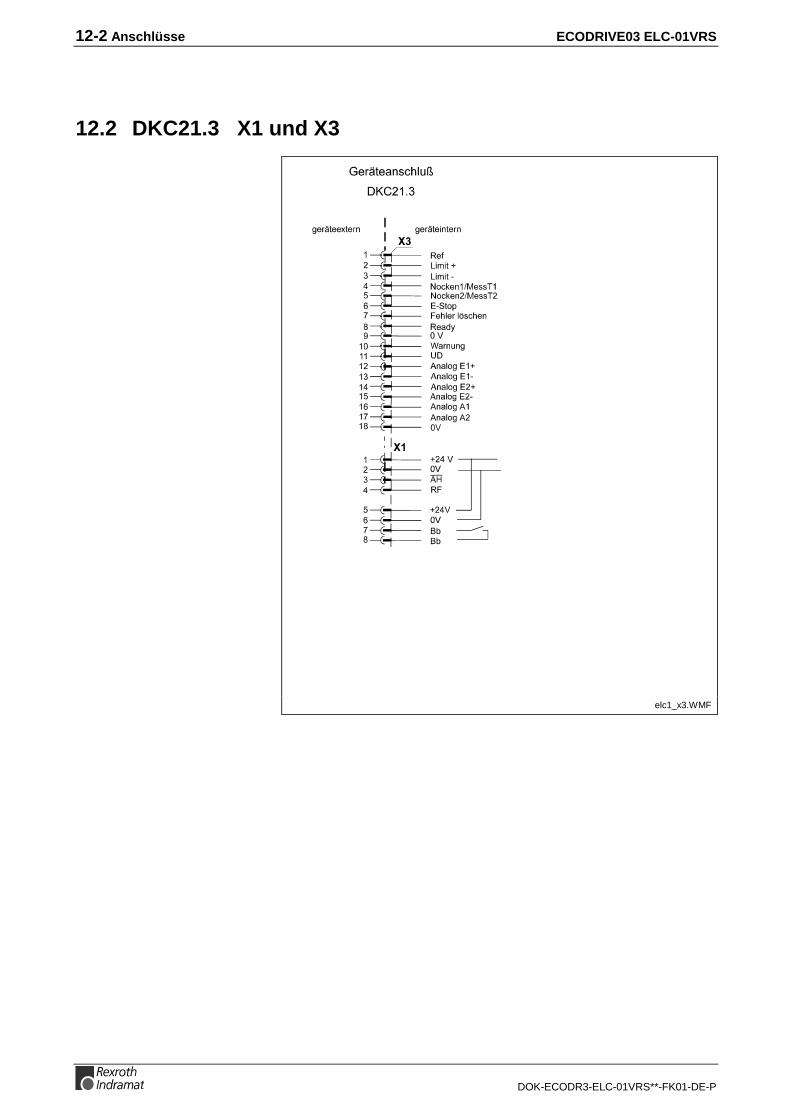
12-2 Anschlüsse ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
12.2 DKC21.3 X1 und X3
elc1_x3.WMF
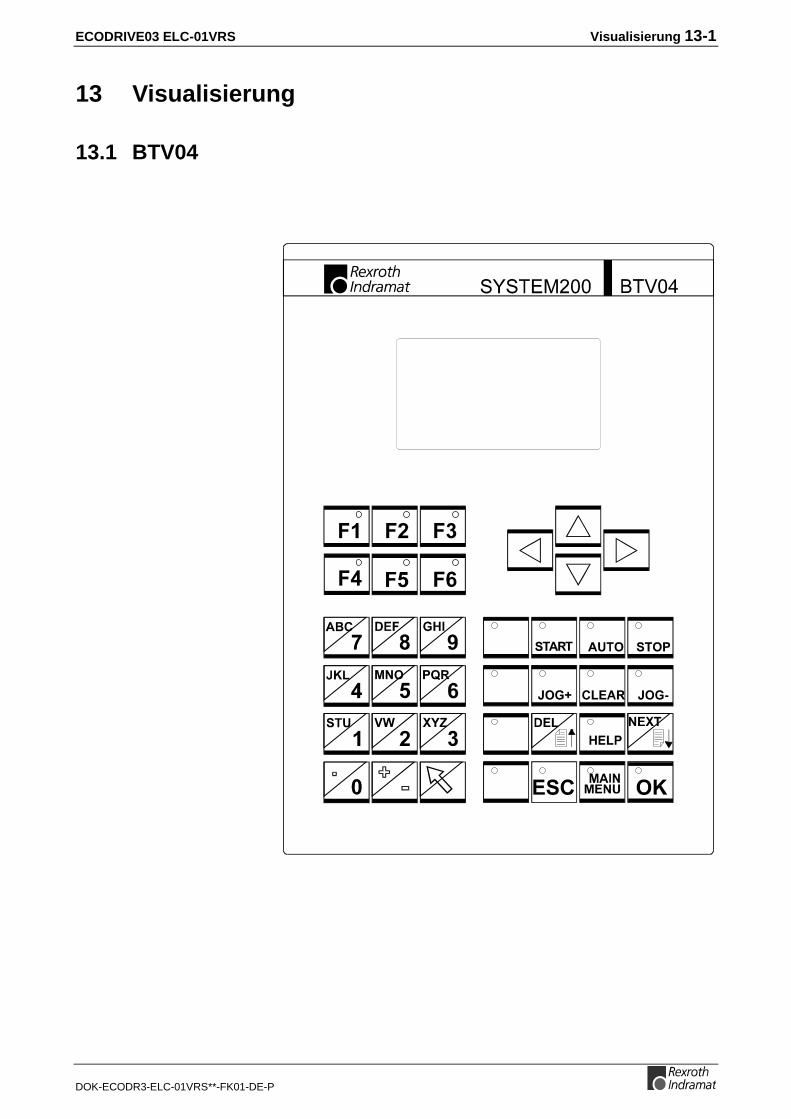
ECODRIVE03 ELC-01VRS Visualisierung 13-1
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
13 Visualisierung
13.1 BTV04
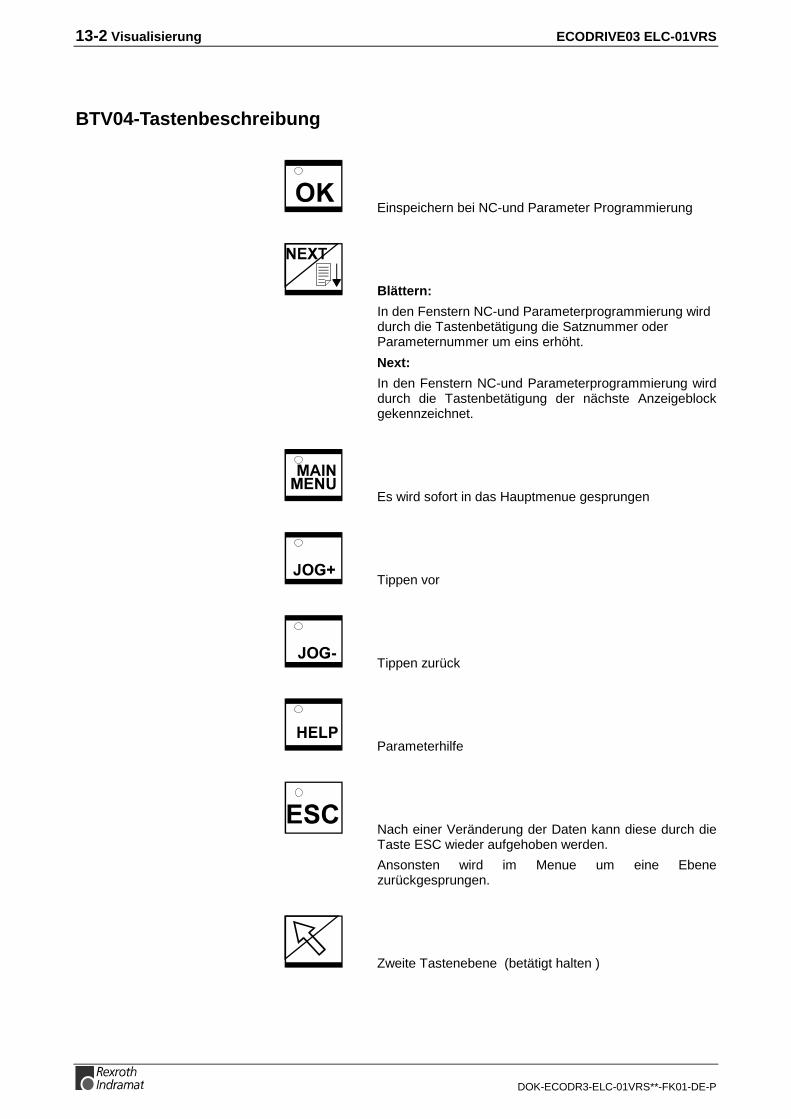
13-2 Visualisierung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
BTV04-Tastenbeschreibung
Einspeichern bei NC-und Parameter Programmierung
Blättern:
In den Fenstern NC-und Parameterprogrammierung wirddurch die Tastenbetätigung die Satznummer oderParameternummer um eins erhöht.
Next:
In den Fenstern NC-und Parameterprogrammierung wirddurch die Tastenbetätigung der nächste Anzeigeblockgekennzeichnet.
Es wird sofort in das Hauptmenue gesprungen
Tippen vor
Tippen zurück
Parameterhilfe
Nach einer Veränderung der Daten kann diese durch dieTaste ESC wieder aufgehoben werden.
Ansonsten wird im Menue um eine Ebenezurückgesprungen.
Zweite Tastenebene (betätigt halten )
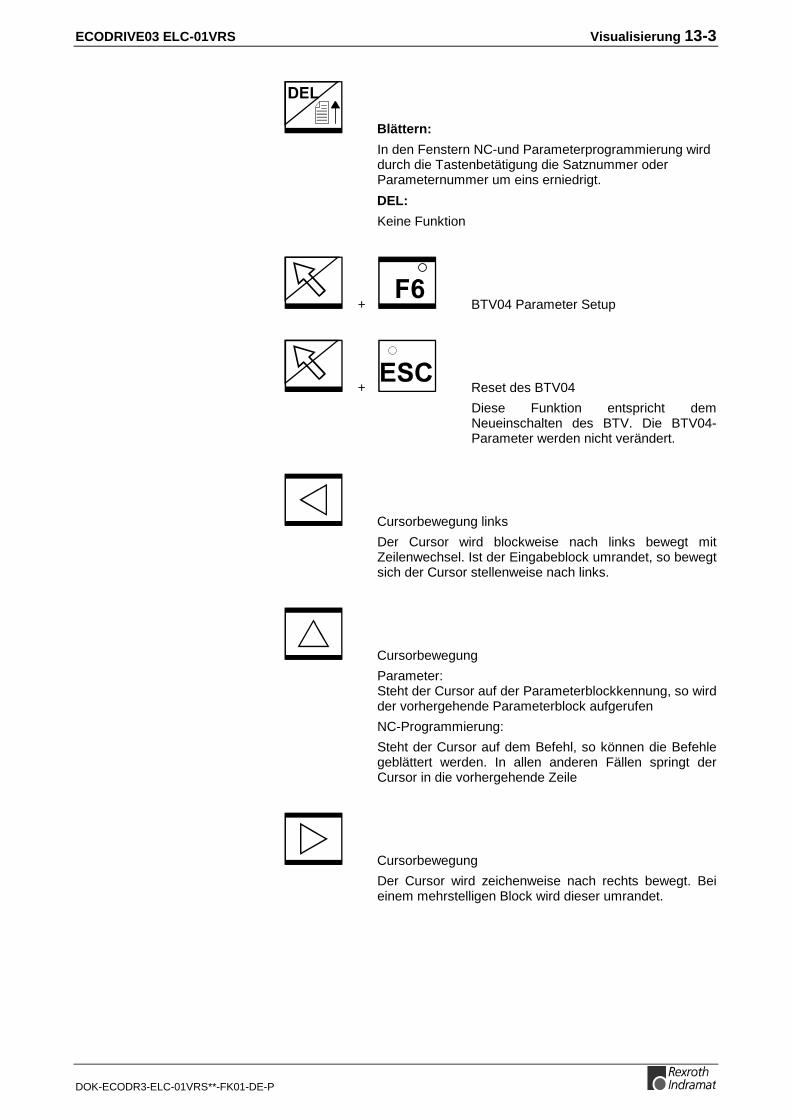
ECODRIVE03 ELC-01VRS Visualisierung 13-3
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Blättern:
In den Fenstern NC-und Parameterprogrammierung wirddurch die Tastenbetätigung die Satznummer oderParameternummer um eins erniedrigt.
DEL:
Keine Funktion
+ BTV04 Parameter Setup
+ Reset des BTV04
Diese Funktion entspricht demNeueinschalten des BTV. Die BTV04-Parameter werden nicht verändert.
Cursorbewegung links
Der Cursor wird blockweise nach links bewegt mitZeilenwechsel. Ist der Eingabeblock umrandet, so bewegtsich der Cursor stellenweise nach links.
Cursorbewegung
Parameter:Steht der Cursor auf der Parameterblockkennung, so wirdder vorhergehende Parameterblock aufgerufen
NC-Programmierung:
Steht der Cursor auf dem Befehl, so können die Befehlegeblättert werden. In allen anderen Fällen springt derCursor in die vorhergehende Zeile
Cursorbewegung
Der Cursor wird zeichenweise nach rechts bewegt. Beieinem mehrstelligen Block wird dieser umrandet.

13-4 Visualisierung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Cursorbewegung links
Parameter:Steht der Cursor auf der Parameterblockkennung, so wirdder nächste Parameterblock aufgerufen
NC-Programmierung:
Steht der Cursor auf dem Befehl, so können die Befehlegeblättert werden. In allen anderen Fällen springt derCursor in die vorhergehende Zeile
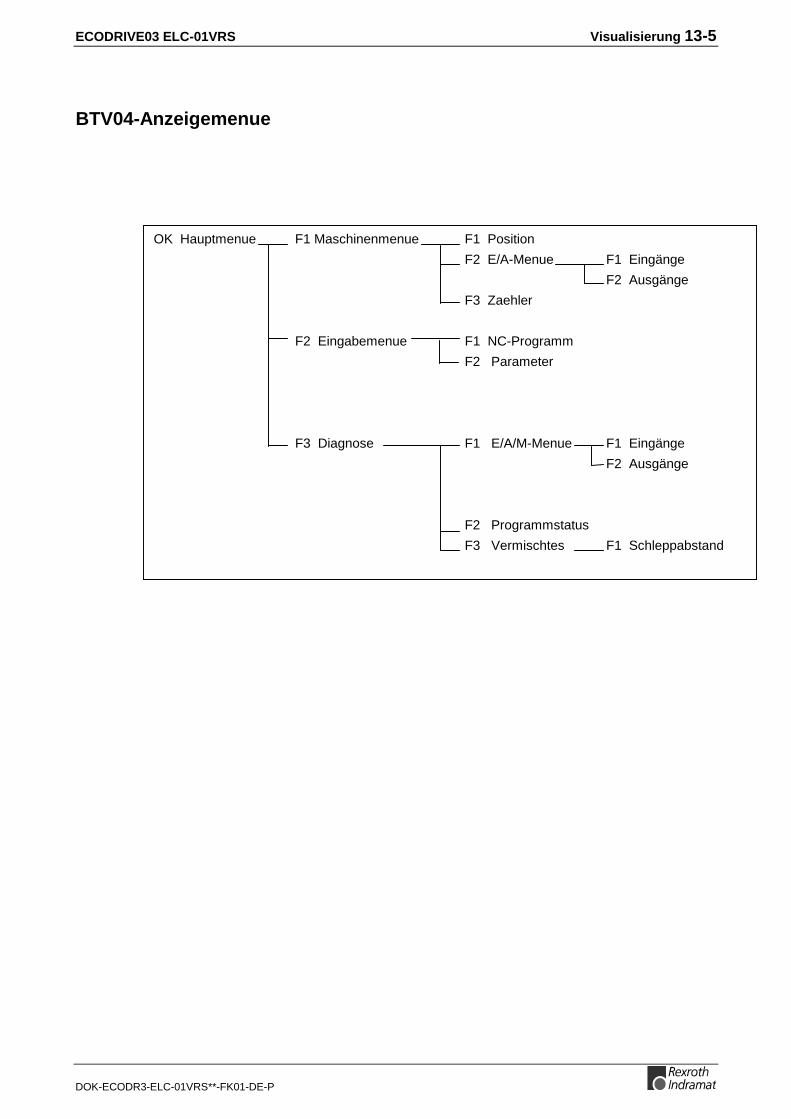
ECODRIVE03 ELC-01VRS Visualisierung 13-5
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
BTV04-Anzeigemenue
OK Hauptmenue F1 Maschinenmenue F1 Position
F2 E/A-Menue F1 Eingänge
F2 Ausgänge
F3 Zaehler
F2 Eingabemenue F1 NC-Programm
F2 Parameter
F3 Diagnose F1 E/A/M-Menue F1 Eingänge
F2 Ausgänge
F2 Programmstatus
F3 Vermischtes F1 Schleppabstand
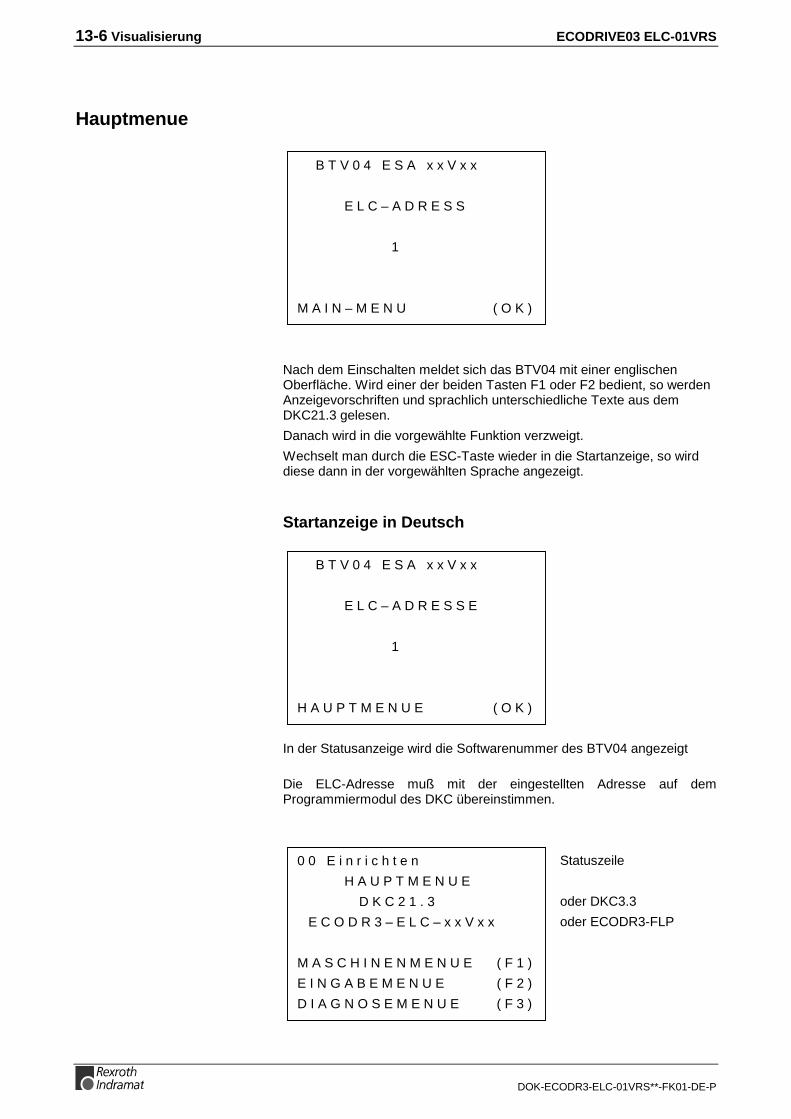
13-6 Visualisierung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Hauptmenue
Nach dem Einschalten meldet sich das BTV04 mit einer englischenOberfläche. Wird einer der beiden Tasten F1 oder F2 bedient, so werdenAnzeigevorschriften und sprachlich unterschiedliche Texte aus demDKC21.3 gelesen.
Danach wird in die vorgewählte Funktion verzweigt.
Wechselt man durch die ESC-Taste wieder in die Startanzeige, so wirddiese dann in der vorgewählten Sprache angezeigt.
Startanzeige in Deutsch
In der Statusanzeige wird die Softwarenummer des BTV04 angezeigt
Die ELC-Adresse muß mit der eingestellten Adresse auf demProgrammiermodul des DKC übereinstimmen.
Statuszeile
oder DKC3.3
oder ECODR3-FLP
B T V 0 4 E S A x x V x x
E L C – A D R E S S
1
M A I N – M E N U ( O K )
B T V 0 4 E S A x x V x x
E L C – A D R E S S E
1
H A U P T M E N U E ( O K )
0 0 E i n r i c h t e n
H A U P T M E N U E
D K C 2 1 . 3
E C O D R 3 – E L C – x x V x x
M A S C H I N E N M E N U E ( F 1 )
E I N G A B E M E N U E ( F 2 )
D I A G N O S E M E N U E ( F 3 )
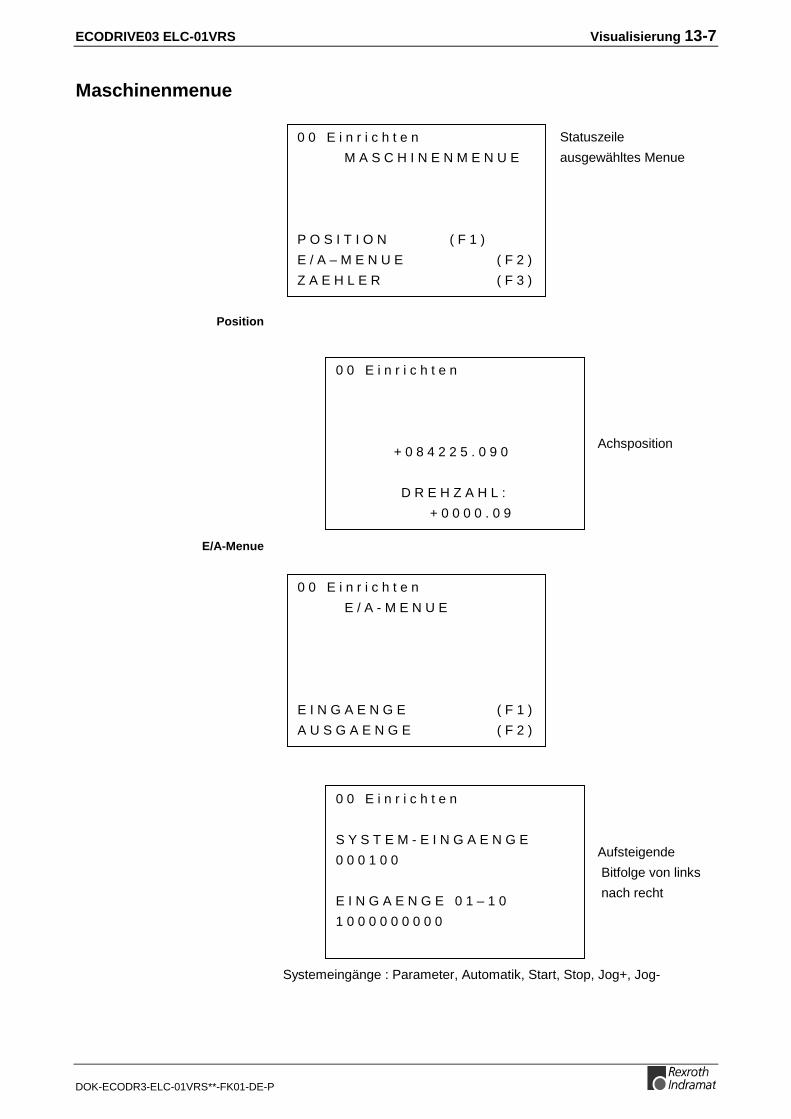
ECODRIVE03 ELC-01VRS Visualisierung 13-7
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Maschinenmenue
Statuszeile
ausgewähltes Menue
Achsposition
Aufsteigende
Bitfolge von links
nach recht
Systemeingänge : Parameter, Automatik, Start, Stop, Jog+, Jog-
Position
E/A-Menue
0 0 E i n r i c h t e n
M A S C H I N E N M E N U E
P O S I T I O N ( F 1 )
E / A – M E N U E ( F 2 )
Z A E H L E R ( F 3 )
0 0 E i n r i c h t e n
+ 0 8 4 2 2 5 . 0 9 0
D R E H Z A H L :
+ 0 0 0 0 . 0 9
0 0 E i n r i c h t e n
E / A - M E N U E
E I N G A E N G E ( F 1 )
A U S G A E N G E ( F 2 )
0 0 E i n r i c h t e n
S Y S T E M - E I N G A E N G E
0 0 0 1 0 0
E I N G A E N G E 0 1 – 1 0
1 0 0 0 0 0 0 0 0 0
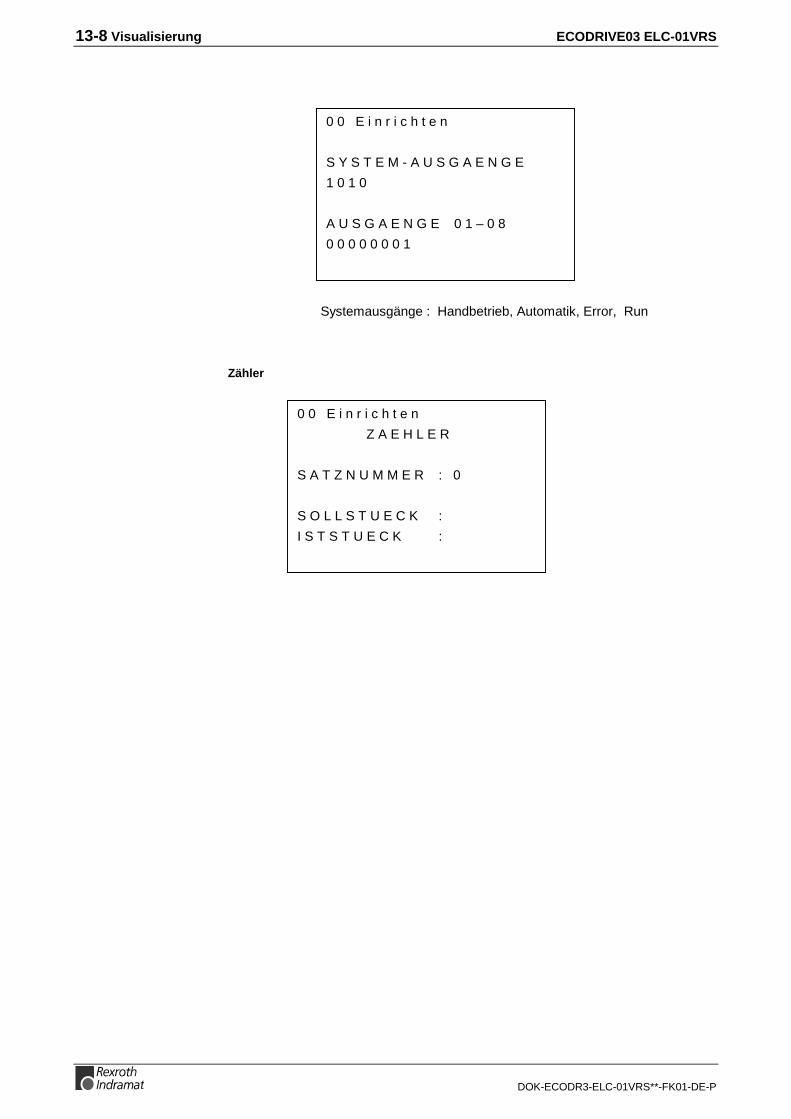
13-8 Visualisierung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Systemausgänge : Handbetrieb, Automatik, Error, Run
Zähler
0 0 E i n r i c h t e n
S Y S T E M - A U S G A E N G E
1 0 1 0
A U S G A E N G E 0 1 – 0 8
0 0 0 0 0 0 0 1
0 0 E i n r i c h t e n
Z A E H L E R
S A T Z N U M M E R : 0
S O L L S T U E C K :
I S T S T U E C K :
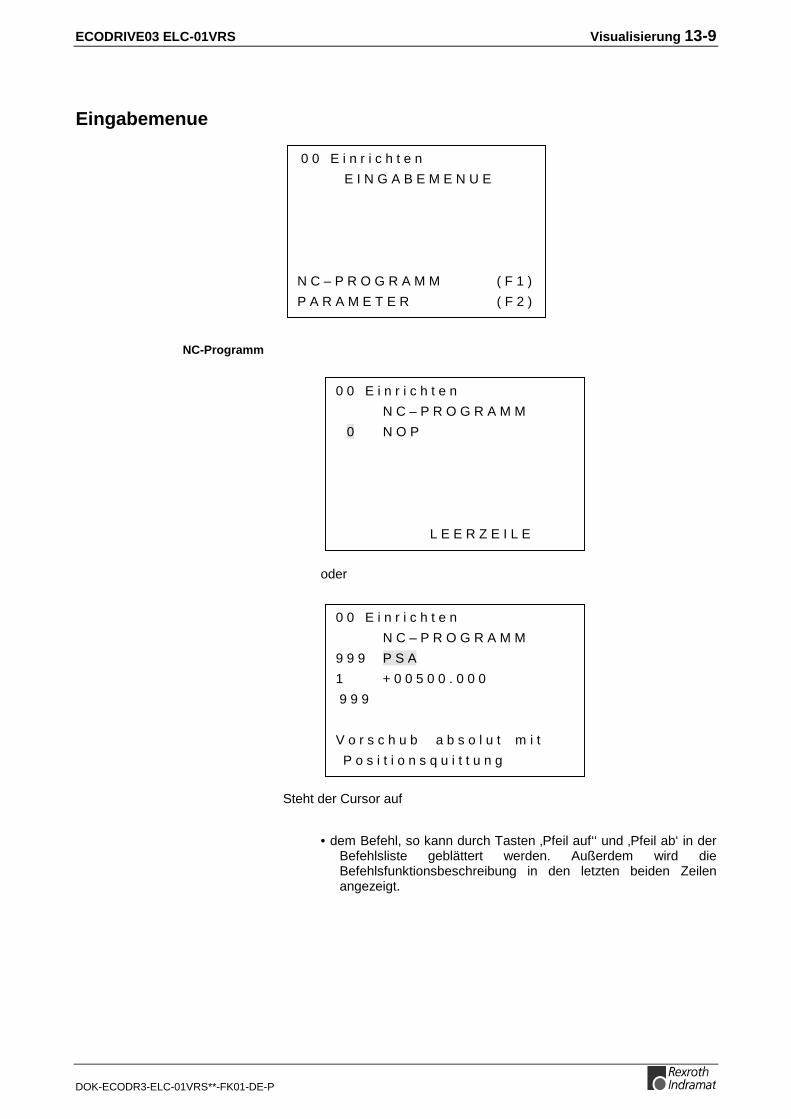
ECODRIVE03 ELC-01VRS Visualisierung 13-9
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Eingabemenue
oder
Steht der Cursor auf
• dem Befehl, so kann durch Tasten ‚Pfeil auf‘‘ und ‚Pfeil ab‘ in derBefehlsliste geblättert werden. Außerdem wird dieBefehlsfunktionsbeschreibung in den letzten beiden Zeilenangezeigt.
NC-Programm
0 0 E i n r i c h t e n
E I N G A B E M E N U E
N C – P R O G R A M M ( F 1 )
P A R A M E T E R ( F 2 )
0 0 E i n r i c h t e n
N C – P R O G R A M M
0 N O P
L E E R Z E I L E
0 0 E i n r i c h t e n
N C – P R O G R A M M
9 9 9 P S A
1 + 0 0 5 0 0 . 0 0 0
9 9 9
V o r s c h u b a b s o l u t m i t
P o s i t i o n s q u i t t u n g
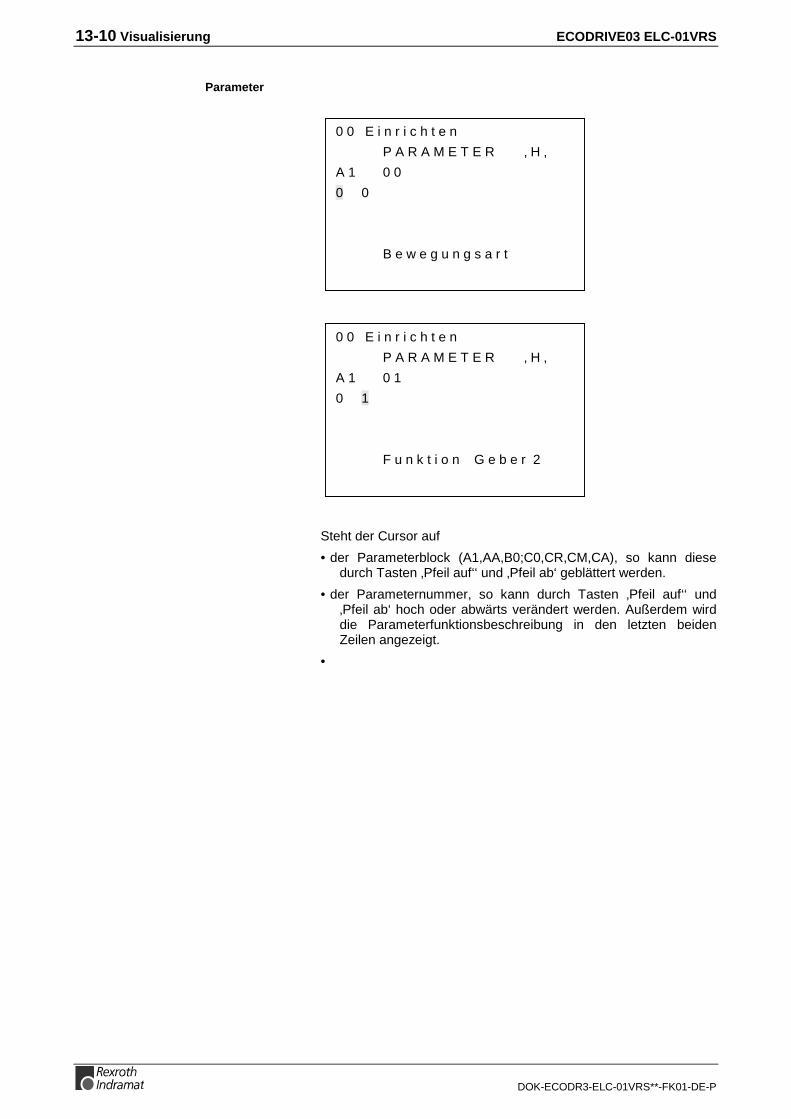
13-10 Visualisierung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Steht der Cursor auf
• der Parameterblock (A1,AA,B0;C0,CR,CM,CA), so kann diesedurch Tasten ‚Pfeil auf‘‘ und ‚Pfeil ab‘ geblättert werden.
• der Parameternummer, so kann durch Tasten ‚Pfeil auf‘‘ und‚Pfeil ab‘ hoch oder abwärts verändert werden. Außerdem wirddie Parameterfunktionsbeschreibung in den letzten beidenZeilen angezeigt.
•
Parameter
0 0 E i n r i c h t e n
P A R A M E T E R ‚ H ‚
A 1 0 0
0 0
B e w e g u n g s a r t
0 0 E i n r i c h t e n
P A R A M E T E R ‚ H ‚
A 1 0 1
0 1
F u n k t i o n G e b e r 2
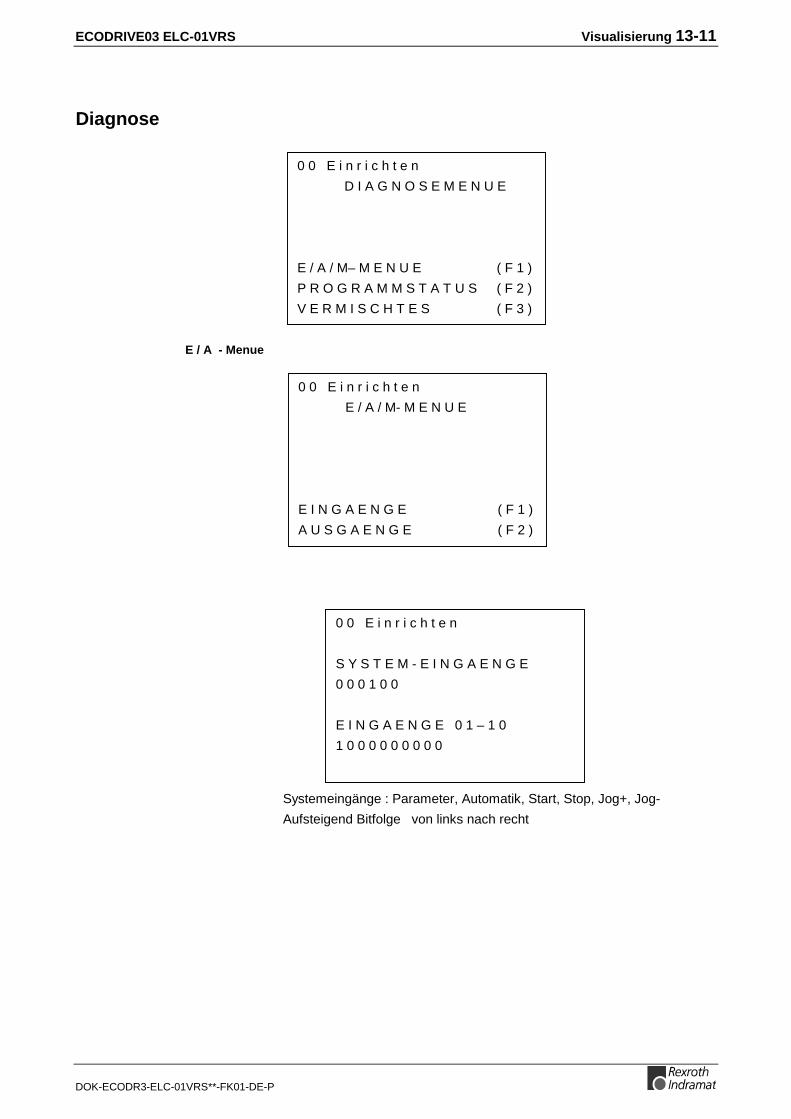
ECODRIVE03 ELC-01VRS Visualisierung 13-11
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Diagnose
Systemeingänge : Parameter, Automatik, Start, Stop, Jog+, Jog-
Aufsteigend Bitfolge von links nach recht
E / A - Menue
0 0 E i n r i c h t e n
D I A G N O S E M E N U E
E / A / M– M E N U E ( F 1 )
P R O G R A M M S T A T U S ( F 2 )
V E R M I S C H T E S ( F 3 )
0 0 E i n r i c h t e n
E / A / M- M E N U E
E I N G A E N G E ( F 1 )
A U S G A E N G E ( F 2 )
0 0 E i n r i c h t e n
S Y S T E M - E I N G A E N G E
0 0 0 1 0 0
E I N G A E N G E 0 1 – 1 0
1 0 0 0 0 0 0 0 0 0
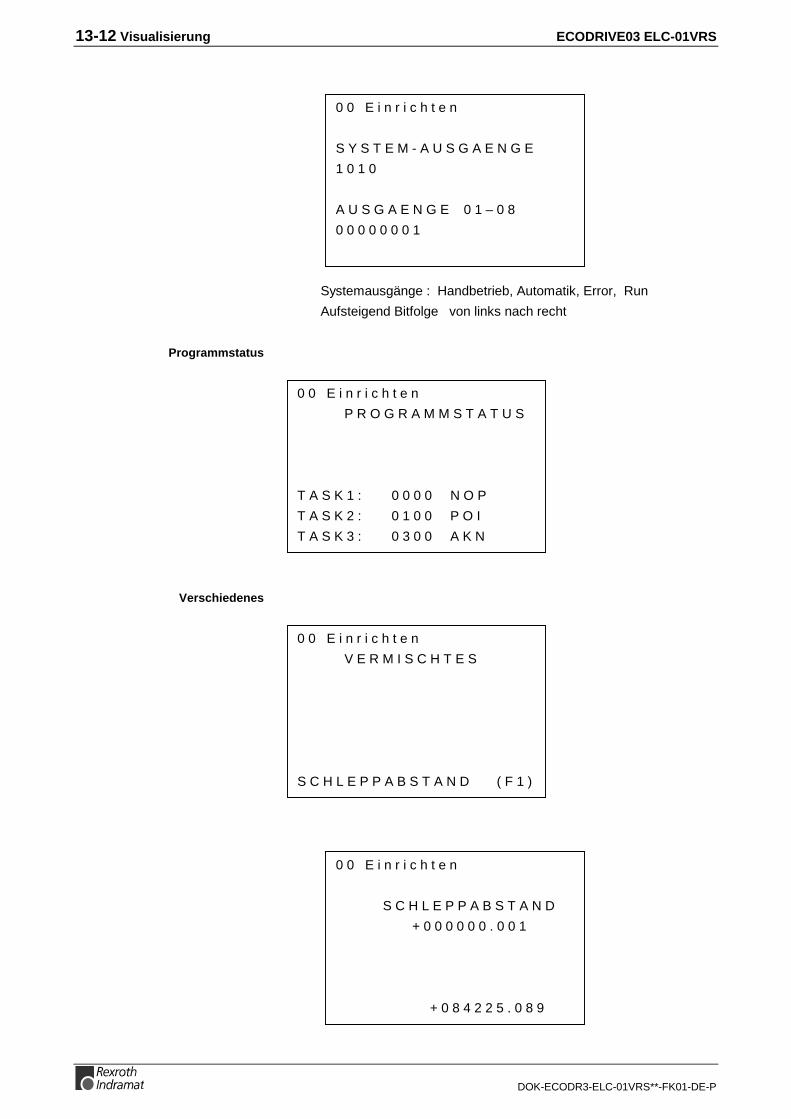
13-12 Visualisierung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Systemausgänge : Handbetrieb, Automatik, Error, Run
Aufsteigend Bitfolge von links nach recht
Programmstatus
Verschiedenes
0 0 E i n r i c h t e n
P R O G R A M M S T A T U S
T A S K 1 : 0 0 0 0 N O P
T A S K 2 : 0 1 0 0 P O I
T A S K 3 : 0 3 0 0 A K N
0 0 E i n r i c h t e n
V E R M I S C H T E S
S C H L E P P A B S T A N D ( F 1 )
0 0 E i n r i c h t e n
S C H L E P P A B S T A N D
+ 0 0 0 0 0 0 . 0 0 1
+ 0 8 4 2 2 5 . 0 8 9
0 0 E i n r i c h t e n
S Y S T E M - A U S G A E N G E
1 0 1 0
A U S G A E N G E 0 1 – 0 8
0 0 0 0 0 0 0 1
ECODRIVE03 ELC-01VRS Visualisierung 13-13
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Sonderanzeigen
Unter F1 wird die fehlerhafte Parameternummer angezeigt.
0 0 E i n r i c h t e n
P A R A M E T E R H I L F E
P A R . – F E H L E R ( F 1 )
S T A N D A R D - W E R T ( F 2 )

13-14 Visualisierung ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Notizen
ECODRIVE03 ELC-01VRS Index 14-1
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
14 Index
++24Volt-Fehler 11-21
00x9002 (dL / 00) Firmware wurde gelöscht 3-110x9003 Laden in Phase 3 nicht erlaubt 3-110x9004 Laden in Phase 4 nicht erlaubt 3-110x9102 (dL / 03) Firmware wurde gelöscht 3-110x9103 Neustart in Phase 3 nicht erlaubt 3-120x9104 Neustart in Phase 4 nicht erlaubt 3-120x9200 (dL / 06) Fehler beim Lesen 3-120x9400 (dL / 07) Timeout während Löschvorgang 3-120x9402 (dL / 0F) Adressbereich liegt nicht im Flash 3-120x940A Löschen nur im Lader möglich 3-120x96E0 (dL / 0b) Fehler beim Verifizieren des Flash 3-120x96E1 (dL / 0C) Timeout beim Programmieren des Flash 3-130x96FF (dL / 09) Fehler beim Schreiben ins RAM 3-130x9701 (dL / 0d) Additionschecksumme fehlerhaft 3-130x9702 (dL / 0e) CRC32-Checksumme fehlerhaft 3-13
44kHz Signal fehlerhaft 11-23
77-Segment-Anzeige
Diagnosenummer 3-9
AAb 11-52Abschaltung wegen Bleederüberlast 11-6Absolutgeber außerhalb des Überwachungsfensters 11-14Absolutgeber setzen 8-34Absolutgeber-Emulation 7-36, 7-39, 7-40Absolutmaß setzen 11-39Absolutmaß setzen bei gesetzter RF nicht möglich 11-39Abstand Referenzschalter-Referenzmarke fehlerhaft 11-41Additionschecksumme fehlerhaft 3-10Adressbereich liegt nicht im Flash-Speicher 3-10AF 11-52AH 11-52Allgemeine Funktionen 1-4Allgemeines zur Regelkreiseinstellung 7-23Anordnung der Referenzmarken 7-5Anordnung des Referenzschalters 7-16Anschluß der Motorhaltebremse 4-6Antrieb für Komm.einstellung nicht bereit 11-45Antrieb HALT 11-47Antriebsfehlerreaktion 3-5Antriebsgeführtes Referenzieren 7-3Antriebsregelgeräte und Motore 1-2AS 11-52, 11-53ASCII-Protokoll 9-9Auflösung bei der Absolutgeber-Emulation 7-40Auswahl der Download-Baudrate 3-14Auswertung des Referenzschalters 7-8Automatik 9-1Automatikbetrieb 7-1Automatische Einstellung der Motorart bei Motoren mit Feedbackspeicher 4-2Automatisches Ausführen der Funktion "Basisparametersatz laden" 3-6
14-2 Index ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
BBandfilter 7-28Basisparametersatz 3-6Batterie-Unterspannung 11-12Baudrate 3-15bb 11-52Bereit zur Leistungszuschaltung 11-48Beschleunigungsvorsteuerung
Einstellung 7-32Bestimmung der kritischen Lageregler-Verstärkung 7-30Bestimmung der kritischen Nachstellzeit 7-26Bestimmung der kritischen Proportionalverstärkung und CR04,Glättungszeitkonstante 7-26Bestmögliche Stillsetzung 8-15
Antriebsfehlerreaktion 3-5Beteiligte Parameter bei der Geberemulation 7-36Beteiligte Parameter bei der Motorhaltebremse 4-3Beteiligte Parameter beim Messradbetrieb 7-2Beteiligte Parameter beim Referenzieren 7-4Betriebsarten 7-1Bezug der emulierten Position 7-40Bleeder-Vorwarnung 11-26Brückensicherung 11-21BTV04 13-1BTV04-Anzeigemenue 13-5BTV04-Tastenbeschreibung 13-2
CC201 Parametersatz unvollständig 11-31C202 Parameter Grenzwertfehler 11-31C203 Parameter Umrechnungsfehler 11-31C204 Motorart Parameter CM00 fehlerhaft 11-32C210 Geber 2 erforderlich 11-32C211 Ungültige Feedbackdaten 11-33C212 Ungültige Verstärkerdaten 11-33C236 Geber 1 erforderlich 11-39C500 Reset, Fehler rücksetzen 11-40C801 Parameter-Defaultwert fehlerhaft 11-45CRC32-Checksumme fehlerhaft 3-10
DDas Programmieren eines Moduls wurde abgebrochen 3-13Datenspeicher 3-3Dauerstrombegrenzung aktiv 11-27Dauerstrombegrenzung Vorwarnung 11-28Deaktivieren der Lageregelkreisüberwachung 7-32Default-Parameter laden 11-44Default-Parameter ungültig 11-43Diagnose
Aufbau der Diagnose 3-8Diagnosenummer 3-9
Diagnoseanzeige-0 11-50-1 11-50-2 11-50-3 11-50-5 11-50-6 11-50Watchdog 11-50, 11-51
Diagnosemeldungen beim Messradbetrieb 7-3Dolfi 3-9Dolfi kann die ibf-Datei nicht öffnen 3-14Dolfi meldet Timeout 3-14Drehmoment/Kraft zu klein für Bewegung 11-46
ECODRIVE03 ELC-01VRS Index 14-3
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
EE263 Geschwindigkeitssollwert > Grenzwert A106 11-28ECODRIVE03 - die universelle Antriebslösung für die Automatisierung 1-1ECODRIVE03 - eine Antriebsfamilie 1-1Eigenschaften 9-10Eigenschaften: 9-9Eingabewert max. Verfahrbereich zu groß 11-37Einschränkung der Inkrementalgeber - Emulation 7-38Einstellung der Beschleunigungsvorsteuerung 7-33Einstellung der Lageregelkreisüberwachung 7-32Einstellung der Motorart 4-2Einstellung des Geschwindigkeitsreglers 7-25Einstellung des Lagereglers 7-30Einstellung des Stromreglers 7-25E-Stop aktiviert 11-9, 11-17, 11-18Exzessive Lageistwertdifferenz 11-9Exzessive Lagesollwertdifferenz 11-10Exzessive Regelabweichung 11-7
FFahrbereichsendschalter negativ betätigt 11-19Fahrbereichsendschalter positiv betätigt 11-19Fataler Fehler der DIO1.1-Karte 11-16Fehler 3-4
Antriebsfehlerreaktion 3-5Fehler löschen 3-5
Fehler bei der Initialisierung 11-16Fehler bei der Initialisierung Geber 1 11-36Fehler bei Initialisierung Geber 2 11-37Fehler beim Lesen 3-10Fehler beim Lesen der Daten Geber 1 11-35Fehler beim Lesen der Daten Geber 2 11-35Fehler beim Schreiben ins RAM 3-10Fehler beim Verifizieren des Flash 3-10Fehler Geber 1
Quadrantenfehler 11-8Signalamplitude fehlerhaft 11-20
Fehler Geber 2Quadrantenfehler 11-12Signalamplitude fehlerhaft 11-10
Fehler im Drehzahlregelkreis 11-22Fehler löschen 3-5, 9-3Fehler löschen bei gesetzter Reglerfreigabe 3-5Fehlermeldung im Firmwareloader 3-10Fehlerreaktion
Antriebsfehlerreaktion 3-5Festlegung der Drehzahlregler-Einstellung 7-26Festlegung der Lageregler-Einstellung 7-31Filter 7-28Filterung mechanischer Resonanzschwingungen 7-27Firmware wurde gelöscht 3-10Firmwareloader 3-10Firmware-Update des Ecodrive 3-15Firmware-Update im BTV04/05 3-15Firmware-Update mit dem Programm Dolfi 3-9Führungskommunikationsschnittstelle 1-3Funktionsübersicht 1-3Funktionsweise des Messradbetriebes 7-2
14-4 Index ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
GGeber-Emulation 7-36Geberkombination nicht möglich 11-38Geschwindigkeitsregelkreisüberwachung 7-30
Kriterien für das Auslösen 7-30Ursachen für das Auslösen 7-30
GeschwindigkeitsreglerEinstellung 7-25
Geschwindigkeitssollwertbegrenzung aktiv 11-28Getriebe
Getriebeübersetzung 7-34Vorschubkonstante 7-34
Glättungszeitkonstante 7-26Bestimmung der Glättungszeitkonstante 7-26
HH1 Display 3-1H1-Display 3-9Hand 9-1Handbetrieb 7-1Handvektorprogramm 7-19Hardware-Synchronisation fehlerhaft 11-14
IInkrementalgeber-Emulation 7-36, 7-37Inkrementalgeberemulator: Frequenz zu hoch 11-13Interruptvektor 7-20
KKein absolutes Meßsystem vorhanden 11-40Kein Betriebsbereit vom Netzteil 11-15Kein inkrementelles Meßsystem 11-47Keine Defaultparameter vorhanden 11-43Klartext-Diagnose 3-9Kommando Antriebsgeführtes Referenzieren 11-41Kommando Kommutierungseinstellung 11-45Kommando Markerposition erfassen 11-46Kommunikation über RS232-Schnittstelle 9-9Kommunikation über RS485-Schnittstelle 9-10Kommunikationsphase 2 11-47Kommunikationsphase 3 11-47Kriterien für das Auslösen der Überwachung 7-30
LLadefehler LCA 11-32Laden in Phase 3 nicht erlaubt 3-10Laden in Phase 4 nicht erlaubt 3-10LAF 4-1Lagegrenzwert negativ überschritten 11-18Lagegrenzwert positiv überschritten 11-17Lageregelkreisüberwachung 7-31Lageregelung
Einstellung des Lagereglers 7-30Lageregelung mit Geber 1 11-48Lageregelung mit Geber 2 11-48Lageregelung schleppabstandsfrei, Geber 1 11-49Lageregelung schleppabstandsfrei, Geber 2 11-49Lageregler
Einstellen der Beschleunigungsvorsteuerung 7-32kritische Lageregler-Verstärkung 7-31
LAR 4-1Löschen nur im Lader möglich 3-10LSF 4-1
ECODRIVE03 ELC-01VRS Index 14-5
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
MMax. Signalfrequenz für Geber 1 überschritten 11-9max. Signalfrequenz für Geber 2 überschritten 11-12Mechanische Übersetzungselemente 7-34Messradbetrieb 7-1Meßradbetrieb 7-1MHD 4-1
Motorfeedback-Datenspeicher 4-1Temperaturüberwachung 4-2
Mit Dolfi kann keine Verbindung hergestellt werden 3-14MKD 4-1
Automatische Einstellung der Motorart 4-2Motorfeedback-Datenspeicher 4-1Temperaturüberwachung 4-2
MKE 4-1Modulo-Bereichs-Fehler 11-38Modulofunktion 7-35Momenten-Grenzwert = 0 11-27Motor Übertemp.-Vorwarnung 11-26Motorarten
Eigenschaften der Motore 4-1Einstellung der Motorart 4-2Unterstützte Motorarten 4-1
MotorfeedbackGespeicherte Parameter 4-1
Motorhaltebremse 4-3Anschluß 4-6Motorhaltebremsentyp 4-4
Motor-Temp.überwachung defekt 11-7Motor-Überlast 11-24Motor-Übertemp.-Abschaltung 11-5
NNach dem Einschalten des Gerätes steht dL im Display 3-13Nachstellzeit
Bestimmung der kritischen Nachstellzeit 7-26Nennstrom
Speicherung im Motorfeedback 4-1Netzausfall 11-15Neustart in Phase 3 nicht erlaubt 3-10Neustart in Phase 4 nicht erlaubt 3-10NTC 4-1Nullimpuls 7-38
PP2 11-52P3 11-53P4 11-53Parallel Interface 2 1-3Parameter 9-1Parameter nicht kopierbar 11-44Parameterbetrieb 7-1Parametrierung des Messradgebers 7-3Phase 2 11-52Phase 3 11-53Phase 4 11-53PL 3-6PL Defaultwerte der Parameter laden 11-4Position des Nullimpulses bezogen auf die Motorposition 7-37Power-Failure-Bit 7-39Prinzipielle Wirkungsweise der Lageregelkreisüberwachung 7-31Programmieren nur im Lader möglich 3-10Proportionalverstärkung
Bestimmung der kritischen Proportionalverstärkung 7-26Prozessor-Watchdog 11-29PTC 4-1
14-6 Index ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
QQuersummenberechnung 9-13
RReferenzieren
Parametrierung 7-4Referenzmarken 7-4
Referenzieren bei der Absolutgeber-Emulation 7-40Referenzieren mit Absolutmaßgeber nicht möglich 11-41Referenzieren nur mit Reglerfreigabe möglich 11-41Referenziergeschwindigkeit zu groß 11-42Referenzmarke 7-10Regelkreisstruktur 7-23RS232-Modus 9-7RS485-Modus 9-7
SS1 3-6S1-Taste 3-1Schnittstellenmodus 9-7Schnittstellenprotokoll 9-7Schreibzugriff 3-3Serielle Kommunikation 9-7Sicherheitshinweise für elektrische Antriebe 2-1SIS 3-8Sollwertprofil bei betätigtem Referenzschalter 7-10Spannung der Treiberstufen gestört 11-22Sperrfilter 7-29Spitzenstrom
Speicherung im Motorfeedback 4-1Sprachumschaltung 3-9SSI-Format 7-39Start 9-1Statusmeldungen 9-19Steuer- und Leistungsteil betriebsbereit 11-48Stop 9-1Strommessabgleich fehlerhaft 11-15Stromregler
Einstellung des Stromreglers 7-25Synchronmotoren 4-3
TTask 7-20Temperaturüberwachung
der Motortemperatur 4-2Timeout beim Programmieren des Flash 3-10Timeout während Löschvorgang 3-10
ÜÜberspannung im Leistungsteil 11-29Überwachung des Abstandes von Referenzschalter zu Referenzmarke 7-10Überwachungen
Geschwindigkeitsregelkreis 7-30Lageregelkreis 7-31
UL Der Motortyp hat sich geändert 11-4Umschaltvorbereitung Phase 2 nach 3 11-30Umschaltvorbereitung Phase 3 nach 4 11-30Unbekannte Betriebsart 11-49Unterspannung im Leistungsteil 11-7, 11-30Unterstützte Meßsysteme 1-3Unterstützte Motorarten 1-3Urladen 11-42Urladen bei Reglerfreigabe nicht möglich 11-43Ursachen für das Auslösen der Geschwindigkeitsregelkreisüberwachung 7-30
ECODRIVE03 ELC-01VRS Index 14-7
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
VVerriegelt mit Passwort 11-44, 11-45Verstärker Übertemp.-Vorwarnung 11-25Verstärker-Übertemp.-Abschaltung 11-5Voraussetzungen für eine korrekte Einstellung der Beschleunigungsvorsteuerung7-33Vorbereitungen zur Einstellung des Geschwindigkeitsreglers 7-25Vorbereitungen zur Einstellung des Lageregelkreises 7-30Vorschubkonstante 7-34
WWarnung Motor-Temp.überwachung defekt 11-24Warnungsklassen 3-4Weitere Probleme beim Firmwareladen 3-13Wichtung der Beschleunigungsdaten fehlerhaft 11-34Wichtung der Drehmoment/Kraftdaten fehlerhaft 11-35Wichtung der Geschwindigkeitsdaten fehlerhaft 11-34Wichtung der Lagedaten fehlerhaft 11-33
ZZustandsklassen
Reset-Zustandsklasse-1 3-5

14-8 Index ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
ECODRIVE03 ELC-01VRS Kundenbetreuungsstellen - Sales & Service Facilities 15-1
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
15 Kundenbetreuungsstellen - Sales & ServiceFacilities
Kundenbetreuungsstellen - Sales & Service Facilities
Deutschland – Germany vom Ausland: (x) nach Landeskennziffer weglassen!!from abroad: don’t dial (x) after country code!
Vertriebsgebiet Mitte SALES
Germany Centre Service
Rexroth Indramat GmbHBgm.-Dr.-Nebel-Str. 297816 Lohr am Main
Telefon: +49 (0)9352/40-0Telefax: +49 (0)9352/40-4885
Vertriebsgebiet Mitte SALES
Germany Centre Service
Mannesmann Rexroth AGGesch.ber. Rexroth IndramatLilistraße 14-1863067 Offenbach
Telefon: +49 (0) 69/82 00 90-0Telefax: +49 (0) 69/82 00 90-80
Vertriebsgebiet Ost SALES
Germany East Service
Rexroth Indramat GmbHBeckerstraße 3109120 Chemnitz
Telefon: +49 (0)371/35 55-0Telefax: +49 (0)371/35 55-333
Vertriebsgebiet Ost SALES
Germany East Service
Mannesmann Rexroth AGGB Rexroth Indramat GmbHHolzhäuser Str. 12204299 Leipzig
Telefon: +49 (0)341/86 77-0Telefax: +49 (0)341/86 77-219
Vertriebsgebiet Süd SALES
Germany South Service
Rexroth Indramat GmbHRidlerstraße 7580339 München
Telefon: +49 (0)89/540138-30Telefax: +49 (0)89/[email protected]
Gebiet Südwest SALES
Germany South-West Service
Mannesmann Rexroth AGVertrieb Deutschland – VD-BIGeschäftsbereich RexrothIndramatRegionalzentrum SüdwestRingstrasse 70 / Postfach 114470736 Fellbach / 70701 Fellbach
Tel.: +49 (0)711/57 61–100Fax: +49 (0)711/57 61–125
Vertriebsgebiet Nord SALES
Germany North Service
Rexroth Indramat GmbHKieler Straße 21222525 Hamburg
Telefon: +49 (0)40/85 31 57-0Telefax: +49 (0)40/85 31 57-15
Vertriebsgebiet Nord SALES
Germany North Service
Mannesmann Rexroth AGVertriebsniederlassung Region NordGesch.ber. Rexroth IndramatWalsroder Str. 9330853 Langenhagen
Telefon: +49 (0) 511/72 66 57-0Telefax: +49 (0) 511/72 66 57-93
Vertriebsgebiet West SALES
Germany West Service
Mannesmann Rexroth AGVertrieb DeutschlandRegionalzentrum WestBorsigstrasse 15D - 40880 Ratingen
Telefon: +49 (0)2102/409-0Telefax: +49 (0)2102/409-406
SERVICE - Hotline - 7 Tage / 24h -
H E L P D E S KMO – FR - von 7 – 17 UhrTelefax +49 (0)9352/40-4941Telefon +49 (0)9352/40- Bernard A. -4894 Kolb R. -4922 Roeper P. -4359 Scheiner W. -4921
H O TLIN E (17 - 07 + SA / SO)Telefon: +49 (0)172/660 04 06oder/orTelefon: +49 (0)171/333 88 26
ERSATZTEIL - Hotline
♦ nur an Werktagen - only on working days -
♦ von 15 -18 Uhr - from 15-18 o’clock -
Tel. +49 (0) 93 52/40 42 22
Kundenbetreuungsstellen in Deutschland - Service agencies in Germany
15-2 Kundenbetreuungsstellen - Sales & Service Facilities ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Europa – Europe vom Ausland: (x) nach Landeskennziffer weglassen, 0 nach Landeskennziffer mitwählen (Italien)!from abroad: don’t dial (x) after country code, dial 0 after country code (Italy)!
Austria SALES Service
Mannesmann Rexroth Ges.m.b.H.Gesch.ber. Rexroth IndramatHägelingasse 3A - 1140 Wien
Telefon: +43 (0)1/9852540-400Telefax: +43 (0)1/9852540-93
Austria SALES Service
Mannesmann Rexroth G.m.b.H.Gesch.ber. Rexroth IndramatIndustriepark 18A - 4061 Pasching
Telefon: +43 (0)7221/605-0Telefax: +43 (0)7221/605-21
Belgium SALES Service
Mannesmann Rexroth N.V.-S.A.Gesch.ber. Rexroth IndramatIndustrielaan 8B-1740 Ternat
Telefon: +32 (0)2/5830719Telefax: +32 (0)2/5830731E-mail: [email protected]
Denmark SALES Service
BEC ASZinkvej 6DK-8900 Randers
Telefon: +45 (0)87/11 90 60Telefax: +45 (0)87/11 90 61
Chechia SALES Service
Mannesmann-Rexroth, spol.s.r.o.Hviezdoslavova 5CS - 627 00 Brno
Telefon: +420 (0)5/48 126 358Telefax: +420 (0)5/48 126 112
England SALES Service
Mannesmann Rexroth Ltd.Rexroth Indramat DivisionBroadway Lane, South CerneyGB - Cirencester, Glos GL7 5UH
Telefon: +44 (0)1285/863000Telefax: +44 (0)1285/863030
Finland SALES Service
Rexroth Mecman OyRexroth Indramat divisionAnsatie 6SF-017 40 Vantaa
Telefon: +358 (0)9/84 91-11Telefax: +358 (0)9/84 91-13 60
France SALES Service
Mannesmann Rexroth S.A.Division Rexroth IndramatParc des Barbanniers4, Place du VillageF-92632 Gennevilliers Cedex
Telefon: +33 (0)141 47 54 30Telefax: +33 (0)147 94 69 41Hotline: +33 (0)6 08 33 43 28
France SALES Service
Mannesmann Rexroth S.A.Division Rexroth Indramat270, Avenue de LardenneF - 31100 Toulouse
Telefon: +33 (0)5 61 49 95 19Telefax: +33 (0)5 61 31 00 41
France SALES Service
Mannesmann Rexroth S.A.Division Rexroth Indramat91, Bd. Irène Joliot-CurieF - 69634 Vénissieux – Cedex
Telefon: +33 (0)4 78 78 53 65Telefax: +33 (0)4 78 78 53 62
Hungary SALES Service
Mannesmann Rexroth Kft.Angol utca 34H - 1149 Budapest
Telefon: +36 (1) 364 00 02Telefax: +36 (1) 383 19 80
Italy SALES Service
Mannesmann Rexroth S.p.A.Divisione Rexroth IndramatVia G. Di Vittoria, 1I - 20063 Cernusco S/N.MI
Telefon: +39 02/92 36 52 70Telefax: +39 02/92 36 55 12
Italy SALES Service
Mannesmann Rexroth S.p.A.Divisione Rexroth IndramatVia Borgomanero, 11I - 10145 Torino
Telefon: +39 011/7 50 38 11Telefax: +39 011/7 71 01 90
Italy SALES Service
Mannesmann Rexroth S.p.A.Divisione Rexroth IndramatVia del Progresso, 16 (Zona Ind.)I - 35020 Padova
Telefon: +39 049/8 70 13 70Telefax: +39 049/8 70 13 77
Italy SALES Service
Mannesmann Rexroth S.p.A.Divisione Rexroth IndramatVia Mascia, 1I - 80053 Castellamare di Stabia NA
Telefon: +39 081/8 71 57 00Telefax: +39 081/8 71 68 86
Italy SALES Service
Mannesmann Rexroth S.p.A.Divisione Rexroth IndramatViale Oriani, 38/AI - 40137 Bologna
Telefon: +39 051/34 14 14Telefax: +39 051/34 14 22
Netherlands SALES Service
Hydraudyne Hydrauliek B.V.Kruisbroeksestraat 1(P.O. Box 32)NL - 5281 RV Boxtel
Telefon: +31 (0)411/65 19 51Telefax: +31 (0)411/65 14 83e-mail: [email protected]
Netherlands SALES Service
Hydrocare B.V.Kruisbroeksestraat 1(P.O. Box 32)NL - 5281 RV Boxtel
Telefon: +31 (0)411/65 19 51Telefax: +31 (0)411/67 78 14
Norway SALES Service
Rexroth Mecman ASRexroth Indramat DivisionBerghagan 1 or: Box 3007N -1405 Ski-Langhus N -1402 Ski
Telefon: +47 (0)64 86 41 00Telefax: +47 (0)64 86 90 62
Poland SALES Service
Mannesmann Rexroth Sp.zo.o.Biuro Poznanul. Dabrowskiego 81/85PL - 60-529 Poznan
Telefon: +48 061/847 67 99Telefax: +48 061/847 64 02
Russia SALES Service
Tschudnenko E.B.Arsenia 22RUS - 153000 IvanovoRußland
Telefon: +7 093/223 96 33oder/or +7 093/223 95 48Telefax: +7 093/223 46 01
Spain SALES Service
Mannesmann Rexroth S.A.Divisiòn Rexroth IndramatCentro Industrial SantigaObradors s/nE-08130 Santa Perpetua de MogodaBarcelona
Telefon: +34 937 47 94 00Telefax: +34 937 47 94 01
Spain SALES Service
Goimendi S.A.División Rexroth IndramatJolastokieta (Herrera)Apartado 11 37E - 20017 San Sebastian
Telefon: +34 9 43/40 01 63Telefax: +34 9 43/39 17 99
ECODRIVE03 ELC-01VRS Kundenbetreuungsstellen - Sales & Service Facilities 15-3
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Sweden SALES Service
Rexroth Mecman Svenska ABRexroth Indramat DivisionVaruvägen 7S - 125 81 Stockholm
Telefon: +46 (0)8/727 92 00Telefax: +46 (0)8/647 32 77
Slowenia SALES Service
Rexroth Indramatelektromotorji d.o.o.Otoki 21SLO - 64 228 Zelezniki
Telefon: +386 64/61 73 32Telefax: +386 64/64 71 50
Switzerland SALES
-East- Service
Mannesmann Rexroth Schweiz AGGesch.ber. Rexroth IndramatGewerbestraße 3CH - 8500 Frauenfeld
Telefon: +41 (0)52/720 21 00Telefax: +41 (0)52/720 21 11
Switzerland SALES
-West- Service
Mannesmann Rexroth Suisse SADépartement Rexroth IndramatRue du village 1CH - 1020 Renens
Telefon: +41 (0)21/632 84 20Telefax: +41 (0)21/632 84 21
Turkey SALES Service
Mannesmann Rexroth Hidropar A..S.Fevzi Cakmak Cad No. 3TR - 34630 Sefaköy Istanbul
Telefon: +90 212/541 60 70Telefax: +90 212/599 34 07
Europäische Kundenbetreuungsstellen (ohne Deutschland)European Service agencies (without Germany)
15-4 Kundenbetreuungsstellen - Sales & Service Facilities ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Außerhalb Europa - outside Europe vom Ausland: (x) nach Landeskennziffer weglassen!from abroad: don’t dial (x) after country code!
Argentina SALES Service
Mannesmann Rexroth S.A.I.C.Division Rexroth IndramatAcassusso 48 41/7RA - 1605 Munro (Buenos Aires)
Telefon: +54 (0)11/4756 01 40Telefax: +54 (0)11/4762 6862e-mail:[email protected]
Argentina SALES Service
NAKASEServicio Tecnico CNCCalle 49, No. 5764/66RA - 1653 Villa BalesterProv. - Buenos Aires
Telefon: +54 (0) 11/4768 36 43Telefax: +54 (0) 11/4768 24 13e-mail: [email protected]
Australia SALES Service
AIMS - Australian IndustrialMachinery Services Pty. Ltd.Unit 3/45 Horne STCampbellfield , VIC 3061AUS - Melbourne
Telefon: +61 (0)3/93 59 02 28Telefax: +61 (0)3/93 59 02 86
Australia SALES Service
Mannesmann Rexroth Pty. Ltd.No. 7, Endeavour WayBraeside Victoria, 31 95AUS – Melbourne
Telefon: +61 (0)3/95 80 39 33Telefax: +61 (0)3/95 80 17 33Email: [email protected]
Brazil SALES Service
Mannesmann RexrothAutomação Ltda.Divisão Rexroth IndramatRua Georg Rexroth, 609Vila Padre AnchietaBR - 09951-270 Diadema-SP[ Caixa Postal 377 ][ BR-09901-970 Diadema-SP ]
Telefon: +55 (0)11/745 90 60+55 (0)11/745 90 70
Telefax: +55 (0)11/745 90 50e-mail: [email protected]
Brazil SALES Service
Mannesmann RexrothAutomação Ltda.Divisão Rexroth IndramatR. Dr.Humberto Pinheiro Vieira, 100Distrito IndustrialBR - 89220-390 Joinville - SC[ Caixa Postal 1273 ]
Tel./Fax: +55 (0)47/473 58 33Mobil: +55 (0)47 974 66 45e-mail: [email protected]
Canada SALES Service
Basic Technologies CorporationBurlington Division3426 Mainway DriveBurlington, OntarioCanada L7M 1A8
Telefon: +1 905/335 55 11Telefax: +1 905/335-41 84
China SALES Service
Rexroth International Trade(Shanghai) Co., Ldt.Wai Gaoqiao Free Trade ZoneNo.122, Fu Te Dong Yi RoadShanghai 200131 - P.R.China
Telefon: +86 21/58 66 30 30Telefax: +86 21/58 66 55 23
China SALES Service
Mannesmann Rexroth (China) Ldt.15/F China World Trade Center1, Jianguomenwai AvenueBeijing 100004, P.R.China
Telefon: +86 10/65 05 03 80Telefax: +86 10/65 05 03 79
China SALES Service
Mannesmann Rexroth (China) Ldt.A-5F., 123 Lian Shan StreetSha He Kou DistrictDalian 116 023, P.R.China
Telefon: +86 411/46 78 930Telefax: +86 411/46 78 932
China SALES Service
Mannesmann Rexroth (China) Ldt.Guangzhou Repres. OfficeRoom 1014-1016, Metro Plaza,Tian He District, 183 Tian He Bei RdGuangzhou 510075, P.R.China
Telefon: +86 20/8755-0030+86 20/8755-0011
Telefax: +86 20/8755-2387
Hongkong SALES Service
Rexroth (China) Ldt.1/F., 19 Cheung Shun StreetCheung Sha Wan,Kowloon, Hongkong
Telefon: +852 22 62 51 00Telefax: +852 27 44 02 78
India SALES Service
Mannesmann Rexroth (India) Ltd.Rexroth Indramat DivisionPlot. 96, Phase IIIPeenya Industrial AreaIND - Bangalore - 560058
Telefon: +91 (0)80/8 39 73 74Telefax: +91 (0)80/8 39 43 45
India SALES Service
Mannesmann Rexroth (India) Ltd.Rexroth Indramat DivisionPlot. A-58, TTC Industrial AreaThane Turbhe Midc RoadMahape VillageIND - Navi Mumbai - 400 701
Telefon: +91 (0)22/7 61 46 22Telefax: +91 (0)22/7 68 15 31
Indonesia SALES Service
PT. Rexroth WijayakusumaJl. Raya Bekasi Km 21PulogadungRI - Jakarta Timur 13920
Telefon: +62 21/4 61 04 87+62 21/4 61 04 88
Telefax: +62 21/4 60 01 52
Japan SALES Service
Rexroth Automation Co., Ltd.Service Center JapanYutakagaoka 1810, Meito-ku,NAGOYA 465-0035, Japan
Telefon: +81 (0)52/777 88 41+81 (0)52/777 88 53+81 (0)52/777 88 79
Telefax: +81 (0)52/777 89 01
Japan SALES Service
Rexroth Automation Co., Ltd.Rexroth Indramat Division1F, I.R. BuildingNakamachidai 4-26-44, Tsuzuki-kuYOKOHAMA 224-0041, Japan
Telefon: +81 (0)45/942 72 10Telefax: +81 (0)45/942 03 41
Mexico SALES Service
Mannesmann Rexroth Mexico S.A.de C.V.Calle Neptuno 72Unidad Ind. VallejoMEX - 07700 Mexico, D.F.
Telefon: +52 5 754 17 11+52 5 754 36 84+52 5 754 12 60
Telefax: +52 5 754 50 73+52 5 752 59 43
e-mail: [email protected]
Korea SALES Service
Mannesmann Rexroth-Korea Ltd.Rexroth Indramat Division1500-12 Dadae-Dong- Saha-KuPusan, 604-050Republic of South Korea
Telefon: +82 (0)51/2600 741Telefax: +82 (0)51/2600 747
Korea SALES Service
Seo Chang Corporation Ltd.Room 903, Jeail Building44-35 Yeouido-DongYeoungdeungpo-KuC.P.O.Box 97 56ROK - Seoul
Telefon: +82 (0)2/7 80 82 08+82 (0)2/7 80 82 09
Telefax: +82 (0)2/7 84 54 08
Taiwan SALES Service
Rexroth Uchida Co., Ltd.No.1, Tsu Chiang StreetTu Cheng Ind. EstateTaipei Hsien, Taiwan, R.O.C.
Telefon: +886 2/2 68 13 47Telefax: +886 2/2 68 53 88
South Africa SALES Service
TECTRA Automation (Pty) Ltd.28 Banfield Road,Industria NorthRSA - Maraisburg 1700
Telefon: +27 (0)11/673 20 80Telefax: +27 (0)11/673 72 69
Kundenbetreuungsstellen außerhalb Europa - Service agencies outside Europe
ECODRIVE03 ELC-01VRS Kundenbetreuungsstellen - Sales & Service Facilities 15-5
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Außerhalb Europa / USA - outside Europe / USAUSA SALES Service
Mannesmann Rexroth CorporationRexroth Indramat Division5150 Prairie Stone ParkwayUSA -Hoffman Estates, IL 60192-3707
Telefon: +1 847/6 45 36 00Telefax: +1 847/6 45 62 01 [email protected]
USA SALES Service
Mannesmann Rexroth CorporationRexroth Indramat DivisionCentral Region Technical CenterUSA - Auburn Hills, MI 48326
Telefon: +1 248/3 93 33 30Telefax: +1 248/3 93 29 06
USA SALES Service
Mannesmann Rexroth CorporationRexroth Indramat DivisionSoutheastern Technical Center3625 Swiftwater Park DriveUSA - SuwaneeGeorgia 30174
Telefon: +1 770/9 32 32 00+1 770/9 32 19 03
USA SALES Service
Mannesmann Rexroth CorporationRexroth Indramat DivisionNortheastern Technical Center99 Rainbow RoadUSA - East Granby,Connecticut 06026
Telefon: +1 860/8 44 83 77+1 860/8 44 85 95
USA SALES Service
Mannesmann Rexroth CorporationRexroth Indramat DivisionCharlotte Regional Sales Office 14001South Lakes DriveUSA - Charlotte,North Carolina 28273
Telefon: +1 704/5 83 97 62+1 704/5 83 14 86
USA Service HOTLINE
+1-800-860-1055
- 7 days / 24hrs -
Kundenbetreuungsstellen außerhalb Europa / USA Service agencies outside Europe / USA

15-6 Kundenbetreuungsstellen - Sales & Service Facilities ECODRIVE03 ELC-01VRS
DOK-ECODR3-ELC-01VRS**-FK01-DE-P
Notizen

287129
IndramatRexroth
Prin
ted
in G
erm
any





























