Embed Size (px)
Citation preview

Elektrische Antriebe 1 Wintersemester 2011/2012
Prof. Dr.-Ing. Heinrich Steinhart
Hochschule Aalen
Anton-Huber-Straße 25
73430 Aalen


© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Inhaltsverzeichnis
1 Einleitung ........................................ ............................................ 1
1.1 Grundlagen elektrischer Maschinen ................. ................................. 2
1.1.1 Magnetischer Kreis 3
1.1.2 Induktionsgesetz 4
1.1.3 Drehmomentenbildung 7
2 Gleichstrommaschine (GM) .......................... ............................. 9
2.1 Aufbau der Gleichstrommaschine .................... ................................ 10
2.1.1 Wickelschema des Ankers 15
2.1.2 Wirkungsweise der Wendepolwicklung 18
2.1.3 Wirkungsweise der Kompensationswicklung 23
2.1.4 Berechnung des inneren Drehmoments einer kompensierten GM 27
2.1.5 Berechnung der inneren Spannung 29
2.1.6 Fremderregte kompensierte Gleichstrommaschine 30
2.1.7 Stationäres Betriebsverhalten der fremderregten kompensierten GM 33
2.1.8 Fremderregte Gleichstrommaschine mit Vorwiderstand 36
2.1.9 Vierquadrantenbetrieb der fremderregten kompensierten GM 40
2.1.10 Unkompensierte fremderregte GM 43
2.1.11 Einfache Methode der Drehrichtungsumkehr 45
2.2 Betriebsverhalten der Gleichstrom-Reihenschlußmasch ine ......... 45
2.2.1 Feldschwächung bei der GM-Reihenschlußmaschine 48
2.2.2 Gleichstrom-Nebenschlußmaschine 50
2.2.3 Doppelschlußmaschine 50
2.3 Wirkungsgrad und Verluste ......................... ..................................... 52
2.4 Dynamisches Betriebsverhalten der GM .............. ........................... 57

Inhaltsverzeichnis II
09.10.2011 © Hochschule - Aalen Heinrich Steinhart
3 Asynchronmaschine (ASM) ........................... ........................... 65
3.1 Aufbau der Asynchronmaschine ...................... ................................ 66
3.1.1 Entstehung eines Drehfeldes 69
3.1.2 Aufstellung der Systemgleichungen 79
3.2 Ersatzschaltbild der Asynchronmaschine ............ ........................... 81
3.2.1 Leistungsbilanz der ASM 82
3.2.2 Berechnung des inneren Drehmoments 85
3.3 ASM mit Schleifringläufer ......................... ........................................ 96
3.4 Stern- Dreieckanlauf .............................. .......................................... 100
3.5 Läufer mit Stromverdrängung ....................... ................................. 104
3.6 Drehzahlverstellmethode ........................... ..................................... 106
3.6.1 Spannungs-Frequenzsteuerung 116
3.6.2 Drehzahlregelung 117
3.6.3 Frequenzen während eines Reversiervorgangs 119
3.6.4 Hochlauf am starren Netz bzw. mit einem Umrichter 121
3.7 Messtechnische Bestimmung der Maschinenparameter .. ........... 124
3.7.1 Leistungsmessung mit der Aronschaltung 126
3.7.1.1 Leerlaufversuch 128
3.7.1.2 Kurzschlussversuch 130
4 Synchronmaschine (SM) ............................. ........................... 135
4.1 Prinzipieller Aufbau der SM ....................... ..................................... 136
4.2 Stationäres Betriebsverhalten einer Vollpolmaschine ................. 143
4.2.1 Leistungsbilanz und inneres Drehmoment 146
4.2.2 Zeigerdiagramme einer Vollpolmaschine 151
4.2.3 Vollständiges Ersatzschaltbild einer Vollpolsynchronmaschine 154
4.2.4 Schenkelpolmaschine 155
4.2.4.1 Zeigerdiagramm einer Schenkelpolmaschine 157
4.2.5 Leistungsbilanz, Wirkungsgrad 163
4.2.6 Synchronisation 164

1.1 Grundlagen elektrischer Maschinen III
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
4.2.6.1 Dunkelschaltung 164
4.2.6.2 Gemischte Schaltung 165
5 Schrittmotor ...................................... ...................................... 167
5.1 Unipolarer Schrittmotor ........................... ....................................... 168
5.2 Bipolarer Schrittmotor ............................ ......................................... 170
5.2.1 Vollschrittbetrieb 171
5.2.2 Halbschrittbetrieb 172
5.3 Start-Stopp-Rampe ................................. ......................................... 173
5.4 Stromregelung ..................................... ............................................ 174
5.4.1 Alternierenden Taktung 176
5.4.2 Gleichzeitigen Taktung 177
6 Einsatzbedingungen ................................ ............................... 181
6.1 Schutzklassen ..................................... ............................................. 181
6.2 Bauformen von elektrischen Maschinen .............. ......................... 184
7 Literaturverzeichnis .............................. .................................. 187


© Hochschule - Aalen Heinrich Steinhart 09.10.2011
1 Einleitung
Eine elektrische Maschine ist ein Energiewandler. Dabei können zwei Betriebs-
arten unterschieden werden. Im sog. motorischen Betrieb nimmt die Maschine
über die Zuleitungen elektrische Energie auf und gibt über die Welle mecha-
nische Leistung ab. Beim generatorischen Betrieb nimmt die Maschine über die
Welle mechanische Energie auf und gibt elektrische Energie über die Anschluss-
klemmen ab. In diesem Betriebsfall wirkt die Maschine generatorisch. Die meisten
Maschinen können motorisch und generatorisch wirken.
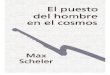
Entsprechend dem Wirkungsprinzip unterscheidet man zwischen Gleichstrom-
und Drehfeldmaschinen (vergl. Bild 1.1).
Gleichstrom-maschinen
Fremd-erregte GM
selgst-erregte GM
Nebenschluss-maschine
Schenkelpol-läufer
Schritt-motoren
Kurzschluss-läufer
Schleifring-motoren
Synchron-maschine
Asynchron-maschine
Drehfeld-maschinen
Reihenschluss-maschine
ElektrischeMaschinen
Vollpol-läufer
Bild 1.1 Einteilung von elektrischen Maschinen
Gleichstrommaschinen werden durch eine Gleichspannungsquelle, deren Aus-
gangsspannung im allgemeinen Fall verstellbar ist, gespeist. Entsprechend der

1 Einleitung 2
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Erregung der Maschine unterscheidet man zwischen fremd- und selbsterregten
Maschinen. Bei der fremderregten Maschine sorgt eine Erregerwicklung für die
Erregung. Die Erregerwicklung muss z. B. durch eine Spannungsquelle mit Ener-
gie versorgt werden. Bei kleinen Maschinen verzichtet man oft auf die Erreger-
wicklung und erregt die Maschine mit Permanentmagneten.
Drehfeldmaschinen werden in der Regel durch eine drei oder mehrphasige Dreh-
spannungsquelle versorgt. Dabei unterscheidet man zwischen Asynchron- und
Synchronmaschinen. Bei beiden Maschinentypen ist im Stator eine Drehspan-
nungswicklung untergebracht. Im Wesentlichen unterscheiden sich Asynchron-
und Synchronmaschine im Aufbau des Rotors. Bei der Synchronmaschine be-
steht ein fester Zusammenhang zwischen der Drehzahl der Maschine und der
Speisefrequenz des speisenden Netzes. Entsprechend dem Aufbau des Rotors,
der bei der Synchronmaschine meist als Läufer bezeichnet wird, untergliedert
man Synchronmaschinen in Schenkelpol- und Vollpolmaschinen. In der Fein-
werktechnik werden häufig Schrittmotoren eingesetzt. Im Grunde stellt ein
Schrittmotor eine Synchronmaschine dar, die durch ein leistungselektronisches
Stellglied gespeist wird.
Im Gegensatz zur Synchronmaschine ist die Drehzahl einer Asynchronmaschine
belastungsabhängig. Es besteht kein fester Zusammenhang zwischen der Dreh-
zahl der Maschine und der Winkelgeschwindigkeit des speisenden Netzes. Der
Läufer einer Asynchronmaschine kann als Kurzschlussläufer oder als Schleif-
ringläufer ausgeführt sein.
1.1 Grundlagen elektrischer Maschinen
Im nachfolgenden Abschnitt werden kurz die physikalischen Grundlagen, die für
das Verständnis und die Wirkungsweise von elektrischen Maschinen erforderlich
sind, kurz zusammengefasst.

1.1 Grundlagen elektrischer Maschinen 3
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
1.1.1 Magnetischer Kreis
Jede Maschine verfügt über mehrere magnetische Kreise. Das Bild 1.2 zeigt eine
Gegenüberstellung eines elektrischen und eines magnetischen Kreises.
elektrischer Kreis magnetischer Kreis
,m LR
,m FeR
N iΘ = ⋅
Φ
,m FeR
,m LR
iR
LRqU N iΘ = ⋅
Bild 1.2 Gegenüberstellung zwischen elektrischem und magnetischem Kreis
In der Tabelle 1.1 sind die wichtigsten elektrischen Größen den entsprechenden
magnetischen Größen gegenübergestellt.

1 Einleitung 4
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Tabelle 1.1 Gegenüberstellung von elektrischen und magnetischen Größen Elektrische Größe Einheit Magnetische Größe Einheit
Spannung qU V Durchflutung (Erregung) N iΘ = ⋅ A
Stromdichte s
2/A m Mag. Induktion, mag. Flussdichte B
2/Vs m
Leiterquerschnitt A 2m Querschnitt A 2m
Strom = ∫∫
L
L
A
i s d A A mag. Fluss A
B d AΦ = ∫∫
Vs
el. Feldstärke E V
m
mag. Feldstärke H A
m
Widerstand κ
=⋅l
RA
Ω
Mag. Widerstand 0
mr
lR
Aµ µ=
⋅ ⋅
A
Vs
Spez. Leitfähigkeit κ 1
mΩ
Mag. Feldkonstante 0µ Vs
Am
Permeabilitätszahl rµ
Für die Funktion von elektrischen Maschinen sind zwei physikalische Grund-
gesetze wichtig. Nach dem Induktionsgesetz wird in jedem Leiter, der sich mit
einer Geschwindigkeit v in einem magnetischen Feld bewegt, eine Spannung
induziert.
Zum Zweiten wirkt auf einen stromdurchflossenen Leiter, der sich in einem mag-
netischen Feld befindet, eine Kraft, die man als Lorenzkraft bezeichnet.
1.1.2 Induktionsgesetz
Nachfolgend wird das Induktionsgesetz anhand einer Leiterschleife mit N
Windungen erläutert.

1.1 Grundlagen elektrischer Maschinen 5
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
γ
iu
Ad
Al
B
B
Achse A
xF
Bild 1.3 Leiterschleife zur Erläuterung des Induktionsgesetzes
Die Spule kann sich um die Achse A drehen und schließt mit den Feldlinien des
magnetischen Felds den Winkel γ ein. Die Spule habe N Windungen, die Länge
Al und den Durchmesser Ad . Zur Vereinfachung sei das magnetische Feld
homogen, dass heißt die magnetische Induktion sei ortsunabhängig.
Unter diesen Voraussetzungen berechnet sich die induzierte Spannung zu
i
du N
dt
Φ= (1.1)
Dabei ist der Fluss Φ durch das Flächenintegral
A
B d AΦ = ⋅∫∫
(1.2)
definiert.

1 Einleitung 6
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Dabei ist B
die magnetische Induktion und d A
das Flächenelement, dessen Flä-
che senkrecht von den magnetischen Feldlinien durchsetzt wird. Hiermit resultiert
der Fluss zu
( ) ( ) ( ) ( )sin sinA AB t A B t l dγ γΦ = ⋅ ⋅ = ⋅ ⋅ ⋅ . (1.3)
Das heißt, der Fluss ist eine Funktion der mag. Induktion B und des Winkels γ .
Durch Einsetzen von Gl. (1.3) in Gl. (1.1) folgt
( ) ( )( )sini A A
du N l d B t
dtγ= ⋅ ⋅ ⋅ ⋅ . (1.4)
Die Differenziation nach der Produktregel führt zu
( ) ( ) ( ) ( )cos sini A A A A
d du N l d B t N l d B t B
dt dtγ γ γ= ⋅ ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ ⋅ . (1.5)
Für den Fall, dass die magnetische Induktion zeitlich konstant ist 0dB
dt =
,
vereinfacht sich die obige Gleichung zu
( )cos γ γ= ⋅ ⋅ ⋅ ⋅i A A
du N l d B
dt , (1.6)
mit d
dtγ ω= zu
( )cosω γ= ⋅ ⋅ ⋅ ⋅ ⋅i A Au N l d B . (1.7)
Dabei ist ω die mechanische Winkelgeschwindigkeit, mit der sich das Rähmchen
im mag. Feld dreht.

1.1 Grundlagen elektrischer Maschinen 7
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
1.1.3 Drehmomentenbildung
Auf einen stromdurchflossenen Leiter, der sich in einem magnetischen Feld be-
findet (vergl. Bild 1.3), wirkt die Lorenzkraft, die sich durch
( )AF i l B= ×
(1.8)
berechnen lässt. Dabei ist i die Stromstärke des Leiterstroms.
In horizontaler Richtung wirkt somit die Kraft xF
x AF i l B= ⋅ ⋅ (1.9)
auf den Leiter.
Damit resultiert das Drehmoment, das die Spule generiert, zu
( ) ( )2 cos cos2A
A A A
dM N B l i N d B l iγ γ= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ ⋅ ⋅ . (1.10)
Es ist dabei zu bedenken, dass jeder Hin- und jeder Rückleiter zur Drehmomen-
tenbildung beiträgt, mit anderen Worten es sind 2 N⋅ Leiter zu berücksichtigen.


© Hochschule - Aalen Heinrich Steinhart 09.10.2011
2 Gleichstrommaschine (GM)
Der Leistungsbereich von Gleichstrommaschinen erstreckt sich von 0,5W bei
Kleinantrieben bis 10MW bei Förderantriebe und Walzwerkantrieben. Aufgrund
des guten Regelverhaltens werden Gleichstrommaschinen häufig als Stell- und
Positionierantrieb eingesetzt. Der Kommutator einer GM muss in regelmäßigen
Abständen gewartet werden, da die Kohlenbürsten aufgrund der mechanischen
Reibung zwischen den Bürsten und den Kupferlamellen des Kommutators
verschleißen.
Aufgrund der Fortschritte in der Regelungstechnik und auf dem Gebiet der
Mikrorechnertechnik werden Gleichstromantriebe zunehmend durch
Drehfeldantriebe ersetzt. Die sog. feldorientierte Regelung ermöglicht eine
Entkoppelung von dem drehmomentenbildenden- und magnetisierenden Strom.
Dadurch erreicht man, dass eine Drehfeldmaschine die gleichen günstigen
Regeleigenschaften wie eine GM aufweist.
Die Tabelle 2.1 gibt eine Übersicht über den Einsatz und den Leistungsbereich
von verschiedenen Gleichstrommaschinen.
Tabelle 2.1 Einsatzgebiete und Leistungsbereiche von GM
Maschinentyp Einsatzgebiet Leistungsbereich
Permanent-erregte GM
Feinwerktechnik, Kfz-Elektronik, Servoantriebe, Spielzeug
0,1 10W kW−
Fremderregte GM
Hauptantriebe für Werkzeugmaschinen, Hebewerkzeuge, Prüfstände, Walzwerke
1 10kW MW−
Reihenschluss-GM
Anlasser für Verbrennungsmotoren, Fahrmotor für Bahnen, Straßenbahnen.
300 500W kW−

2 Gleichstrommaschine (GM) 10
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
2.1 Aufbau der Gleichstrommaschine
Jede elektrische Maschine besteht aus feststehenden und rotierenden Teilen. Die
feststehenden Teile bezeichnet man als Stator oder Ständer, die rotierenden
Maschinenteile heißen Rotor oder Läufer. Die Maschinenteile in denen eine
innere Spannung induziert wird bezeichnet man auch als Anker. Daher wird der
Rotor bei der GM meist als Anker bezeichnet.
Das Bild 2.1 zeigt eine vierpolige Gleichstrommaschine (Polpaarzahl 2p = ) mit
Erreger- und Wendepolwicklung. Die Wendepolwicklungen sind jeweils zwischen
den Hauptpolen angeordnet.
Ständer:
Der Ständer besteht aus einem hohlzylindrischen Joch, welches die die Haupt-
und Wendepole aufnimmt. Des Weiteren sind die mechanischen Lager zur
Lagerung der Ankers im Joch, der Montagefuß und der Anschlusskasten am
befestigt (vergl. Bild 2.1 und Bild 2.2). Das Joch ist meist aus Walzstahl gefertigt,
da das Joch in der Regel von einem magnetischen Gleichfeld durchsetzt wird.
Das Joch hat im Wesentlichen zwei Aufgaben. Es führt den Haupt- und
Wendepolfluss.

2.1 Aufbau der Gleichstrommaschine 11
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Lager
KommutatorErregerwicklung
Wendepolwicklung
HauptpolWendepol
Joch
Bild 2.1 GM mit Erreger- und Wendepolwicklung
Das Bild 2.2 zeigt das Joch , die Haupt- und Wendepole mit den Haupt und Er-
regerwicklungen einer vierpoligen GM.

2 Gleichstrommaschine (GM) 12
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Wendepol-wicklung
JochHauptpolErreger-wicklung
Wendepol Montage-fuß
Anschluss-kasten
Wendepol-wicklung
JochHauptpolErreger-wicklung
Wendepol Montage-fuß
Anschluss-kasten
JochHauptpolErreger-wicklung
Wendepol Montage-fuß
Anschluss-kasten
Bild 2.2 Joch, Wendepol, Hauptpol, Wendepolwicklung und Erregerwicklung einer vierpoligen GM
Anker:
Der Anker besteht aus einem rotationssymmetrischen Dynamoblechpaket mit
einer Stärke von 0,5 mm. Da sich der Anker im Ständerfeld dreht sind die
einzelnen Bleche mit Isolationslack gegeneinander Isoliert, um die
Wirbelstromverluste gering zu halten.
Im das Blechpaket sind entlang des Umfangs Nuten zur Aufnahme der
Ankerwicklung eingefräst. Die Ankerwicklung wird in die Nuten eingelegt und
danach mit einem Keil verschlossen. Das Bild 2.3 zeigt den Anker und
Kommutator einer vierpoligen GM.

2.1 Aufbau der Gleichstrommaschine 13
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Lüfter Bürste KommutatorNutWickelkopf
Bürste
Kommutator-lamelle
Isolations-steg
Bild 2.3 Anker und Kommutator einer vierpoligen GM
Das Bild 2.4 zeigt einen Schnitt durch eine Gleichstrommaschine (GM). Sowohl
der Hauptfluss Φ als auch der Wendepolfluss WΦ schließen sich über das Joch,
den Luftspalt und den Anker. Das aktive Eisen ist bei Maschinen mit einer Nenn-
leistung größer 1kW zur Vermeidung vom Wirbelstromverlusten geblecht. Die
Pole der Maschine und das Joch werden getrennt hergestellt und anschließend
mechanisch miteinander verbunden.

2 Gleichstrommaschine (GM) 14
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
iM
ErregerwicklungAnkerwicklung
WendepolwicklungKompensationswicklung
Hauptpol HP
Wendepol WP
Anker
Kommutator
Joch
Φ
WΦ
Bild 2.4 Schnitt durch eine zweipolige GM mit Erreger-, Wendepol- und Kom-pensationswicklung
Die beiden Hauptpole tragen einerseits die Erregerwicklung und haben anderer-
seits die Aufgabe, den Erregerfluss zu führen. Die Erregerwicklung besteht aus
zwei Teilwicklungen, wobei jede Teilwicklung um einen Hauptpol (HP) gewickelt
ist. Der Erregerfluss Φ schließt sich über die Hauptpole, den Luftspalt, den Anker
und das Joch. Das Joch hat im Wesentlichen zwei Aufgaben. Es führt den
Erreger- und den Wendepolfluss und nimmt mechanisch den Haupt- und
Wendepol auf. Des Weiteren befinden sich in den Stirnseiten des Jochs die
Ankerlager.
Zwischen je zwei Hauptpolen ist jeweils ein Wendepol untergebracht. Der
Wendepolfluss WΦ unterstützt die Stromwendung in den Teilankerwicklungen,
die sich unter einem Wendepol befinden. Die Wendepolwicklung besteht

2.1 Aufbau der Gleichstrommaschine 15
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
ebenfalls aus zwei Teilwicklungen, wobei jede Teilwicklung um einen der beiden
Wendepole gewickelt ist.
Die Kompensationswicklung ist in Nuten, die in die Hauptpole eingefräst sind,
untergebracht.
Die Ankerwicklung besteht aus möglichst vielen Ankerspulen, die entlang des
Rotorumfangs gleichmäßig verteilt sind. Die Ankerspulen werden in der Regel in
Nuten, die in den Rotor gefräst werden, untergebracht. Jede Ankerspule hat die
Windungszahl AN . Die Wicklungsenden der Ankerspulen sind elektrisch mit den
Kommutatorlamellen verbunden. Der Kommutator besteht aus einzelnen
Kupferlamellen, die rotationssymmetrisch angeordnet sind. Zwischen je zwei
Kupferlamellen befindet sich ein Isolationssteg.
2.1.1 Wickelschema des Ankers
Das Bild 2.5 zeigt schematisch die Verschaltung der Ankerwicklungen. In den
Anker sind 6 Nuten eingefräst. Der Anker besteht aus 6 Wicklungen, dabei hat
jede Ankerwicklung die Windungszahl 1AN = . Die Stromzuführung erfolgt über
die Bürsten, welche die Kommutatorlamellen kontaktieren. Zur besseren
Darstellung kontaktieren im Bild 2.5 die Bürsten von innen nach außen die
Kommutatorlamellen. Jede Kommutatorlamelle ist mit zwei Stromzuführungen zu
einer Ankerwicklung verbunden. Vom Über die Bürsten existieren zwei parallele
Strompfade vom Plus- zum Minuspol der Ankerspannungsquelle. Der erste
Strompfad führt über die Anschlüsse 1 1′→ , 2 2′→ , 3 3′→ der zweite Strompfad
führt über die Anschlüsse 4 4′→ , 5 5′→ und 6 6′→ .

2 Gleichstrommaschine (GM) 16
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
N
Sω
Zuordnungder Leiter
1 1'2 2 '3 3'4 4 '5 5'6 6 '
↔↔↔↔↔↔
AU
1 1' 2 2 ' 3 3'
4 4' 5 5' 6 6'
Bürste
Kommutator-lamelle
Ankerzweig 1
Ankerzweig 2
5
16
34
5'
2 '
6'1'
4 '3'
AU
2
SN
Hauptpol
Hauptpol
Wendepol
Wendepol
Bild 2.5 Verschaltung der Ankerwicklung
Während der Kommutierung des Ankerstroms in einer Ankerwicklung sind jeweils
zwei benachbarte Kommutatorlamellen durch ein Bürste kurzgeschlossen (vergl.
Bild 2.6). Hierdurch sind die beiden Wicklungen 1 1′→ und 6 6′→ ebenfalls
kurzgeschlossen. Durch das Wendepolfeld wird in den bewegten Ankerleitern, die
sich unter einem Wendepol befinden eine Spannung induziert, die die
Kommutierung des Ankerstroms gewährleistet.

2.1 Aufbau der Gleichstrommaschine 17
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
N
Sω
AU
1 1' 2 2 ' 3 3'
4 4 ' 5 5' 6 6'
Zuordnungder Leiter
1 1'2 2'3 3'4 4'5 5'6 6'
↔↔↔↔↔↔
Ankerzweig 1
Ankerzweig 2
5
1 6
34
5'
2 '
6 '1'
4 '
3'
AU
2
SN
Hauptpol
Hauptpol
Wendepol
Wendepol
Bild 2.6 Verschaltung der Ankerwicklung während der Kommutierung
Das Bild 2.7 zeigt die Verschaltung der Ankerwicklungen nach der
Kommutierung. Jede Bürste kontaktiert eine Kommutatorlamelle. Die zwei
Strompfade 2 2′→ , 3 3′→ , 6 6′ → und 1 1′ → , 4 4′ → und 5 5′→ führen vom
Plus- zum Minuspol der Ankerspannungsquelle.

2 Gleichstrommaschine (GM) 18
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Zuordnungder Leiter
1 1'2 2 '3 3'4 4 '5 5'6 6 '
↔↔↔↔↔↔
N
Sω
AU
2 2' 3 3' 6 ' 6
1' 1 4 4 '5 5'
25
16
3
4
5'2 '
6'1'
4 '
3'
AU
Ankerzweig 1
Ankerzweig 2
SN
Hauptpol
Hauptpol
Wendepol
Wendepol
Bild 2.7 Verschaltung der Ankerwicklung nach der Kommutierung
2.1.2 Wirkungsweise der Wendepolwicklung
Das Bild 2.8 zeigt den Leiterstrom Li einer Ankerspule als Funktion der Zeit. Da
sich der Ankerstrom AI in 2 a⋅ parallele Strompfade aufteilt, fließt in jedem
Leiter, der sich im Ankerstromkreis befindet, der Strom

2.1 Aufbau der Gleichstrommaschine 19
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
2A
L
Ii
a= ±
⋅ . (1.11)
Das Vorzeichen des Leiterstroms Li hängt davon ab, unter welchem Pol sich der
betreffende Ankerleiter befindet.
Li
,1 2A
L
Ii
a=
⋅
,1 2A
L
Ii
a= −
⋅KT
t
Bild 2.8 Idealisierter Verlauf des Leiterstroms einer Ankerspule
Jeweils zwischen zwei Hauptpolen muss der Leiterstrom Li gewendet werden.
Das heißt, der Leiterstrom Li muss sein Vorzeichen wechseln. Da jede
Ankerspule eine Eigeninduktivität besitzt, benötigt der Vorgang der
Stromwendung eine endliche Zeitdauer. Die Stromwendung auch Kommutierung
genannt, muss immer zwischen zwei Hauptpolen stattfinden.
Das Bild 2.9 zeigt exemplarisch die Verschaltung einer Ankerspule vor, während
und nach der Kommutierung. Der Übersichtlichkeit halber sind im Bild 2.9 die
Hauptpole, die sich jeweils zwischen den Wendepolen befinden nicht ein-
gezeichnet.

2 Gleichstrommaschine (GM) 20
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
16
AI
,1 2A
L
Ii
a=
⋅
2 16 216 2
,1 2A
L
Ii
a
−=⋅,1L ki i=
AIAI
Av
NS NSNS
Wendepole
Ib BbKv
Bild 2.9 Verschaltung einer Ankerspule vor, während und nach der Kommutierung
Während der Kommutierung ist die Ankerspule, in welcher der Leiterstrom Li sein
Vorzeichen wechselt, über die Bürsten und die Kommutatorlamellen, mit denen
die Ankerspule kontaktiert ist, kurzgeschlossen. Vor und nach der Kommutierung
ist jede Ankerspule mit weiteren Ankerspulen in Serie geschaltet.
Der Kommutator bewegt sich mit der Umfangsgeschwindigkeit Kv an den
stehenden Bürsten vorbei. Zwischen jeweils zwei benachbarten Lamellen
befindet sich jeweils ein Isolationssteg der Breite Ib , die Bürstenbreite sei Bb .
Nachfolgend soll die Wendespannung WU berechnet werden, die erforderlich ist,
damit der Leiterstrom Li einer Ankerspule gerade während der
Kommutierungsdauer KT sein Vorzeichen wechselt (vergl. Bild 2.8).
Vernachlässigt man den ohmschen Widerstand der Ankerspule und die
Spannungsabfälle an den Bürsten, dann gilt die folgende Differenzialgleichung
LW S
diU L
dt= ⋅ . (1.12)

2.1 Aufbau der Gleichstrommaschine 21
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Hierin ist SL die Eigeninduktivität der Ankerspule. Da der Leiterstrom Li gerade
während der Kommutierungsdauer KT sein Vorzeichen wechseln soll, kann
GL. (1.12) in
2 LW S
K
iU L
T
− ⋅= ⋅ (1.13)
bzw.
AW S
K
IU L
a T= − ⋅
⋅ (1.14)
umgeschrieben werden. Dabei ist a die Anzahl der parallelen Strompfadzweige
(in Bild 2.6 ist 1a = ).
Im Folgenden soll die Kommutierungsdauer KT durch die mechanische Winkel-
geschwindigkeit ω ausgedrückt werden. Subtrahiert man von der Bürstenbreite
Bb die Breite des Isolationsstegs Ib , so erhält man den Weg, den eine
Kommutatorlamelle zurücklegt, während die kommutierende Ankerspule
kurzgeschlossen ist. Damit gilt für die Umfangsgeschwindigkeit des Kommutators
B IK
K
b bv
T
−= (1.15)
bzw. für die Kommutierungsdauer
B IK
K
b bT
v
−= . (1.16)
Die Umfangsgeschwindigkeit des Ankers Kv kann mit der mechanischen
Winkelgeschwindigkeit ω und dem Kommutatordurchmesser Kd zu

2 Gleichstrommaschine (GM) 22
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
1
2K Kv d ω= ⋅ ⋅ (1.17)
bestimmt werden. Durch Einsetzen von Gl. (1.17) in Gl. (1.16) und in Gl. (1.14)
resultiert für die Wendespannung
2 ( )K
W S AB I
dU L I
a b bω= − ⋅ ⋅ ⋅
⋅ ⋅ − . (1.18)
Wie der Gl. (1.18) entnommen werden kann, ist die erforderliche
Wendespannung proportional zur Winkelgeschwindigkeit ω und zum Ankerstrom
AI . Dies ist auch unmittelbar einsichtig. Dreht sich die Maschine z. B. mit der
doppelten Winkelgeschwindigkeit ω , so halbiert sich die Kommutierungsdauer KT
damit muss die Wendespannung WU auf den doppelten Wert ansteigen, damit
der Leiterstrom Li während der halbierten Kommutierungsdauer KT sein
Vorzeichen wechselt. Andererseits bedeutet eine Verdopplung des Ankerstroms
AI eine Verdopplung der Stromänderung während der Kommutierungsdauer KT .
Dies erfordert ebenfalls eine Verdopplung der Wendespannung WU .
Während der Kommutierung befindet sich die kurzgeschlossene Spule unter dem
Wendepol. Somit wird in jedem Leiter die Spannung
,i L W A AU B l v= − ⋅ ⋅ (1.19)
induziert. In Gl. (1.19) ist WB die magnetische Induktion des Wendepolfelds, Al
die aktive Ankerlänge und Av die Umfangsgeschwindigkeit des Ankers. Jede
Ankerwicklung hat nun ihrerseits AN Windungen und besteht aus einem Hin- und
einem Rückleiter. Damit resultiert für die Induktionsspannung einer Ankerspule
unterhalb des Wendepols

2.1 Aufbau der Gleichstrommaschine 23
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
, ,2 2= ⋅ ⋅ = − ⋅ ⋅ ⋅ ⋅i W A i L A W A AU N U N B l v . (1.20)
In Gl. (1.20) kann nun ebenfalls die Ankergeschwindigkeit Av mit der
mechanischen Winkelgeschwindigkeit ω und dem Ankerdurchmesser Ad zu
1
2A Av d ω= ⋅ ⋅ (1.21)
ausgedrückt werden. Durch Einsetzen von Gl. (1.21) in Gl.(1.20) resultiert
, ω= − ⋅ ⋅ ⋅ ⋅i W A W A AU N B l d (1.22)
für die Induktionsspannung. Die Induktionsspannung ,i WU ist proportional zur
Winkelgeschwindigkeit ω und zur Wendepolinduktion WB . Schaltet man nun die
Wendepolwicklung in Serie zur Ankerwicklung und setzt einen linearen
magnetischen Kreis voraus, dann ist die Induktionsspannung ,i WU auch
proportional zum Ankerstrom AI . Damit kann die Bedingung
,W i WU U= (1.23)
allgemein erfüllt werden.
Oder mit anderen Worten: Damit die Kommutierung gemäß dem Bild 2.8 abläuft,
muss die Induktionsspannung ,i WU gleich der Wendespannung WU sein.
2.1.3 Wirkungsweise der Kompensationswicklung
Das Bild 2.10 zeigt den Verlauf der mag. Induktion LEB im Leerlauf, das heißt für
0AI = entlang dem Umfang einer GM. fließt ein Ankerstrom, dann verursacht die

2 Gleichstrommaschine (GM) 24
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Ankerdurchflutung die mag. Induktion AB . Die resultierende mag. Induktion erhält
man durch Addition von LEB und AB zu resB .
HB HB
x
B
AB
resBLEB
Hauptpol Hauptpol
x∆
Anker
Bild 2.10 Verzerrung der Ankerinduktionsverteilung unter den Hauptpolen als Folge der Ankerrückwirkungen
Die Verzerrung des Feldes unter den Hauptpolen kann mit der
Kompensationswicklung kompensiert werden. Hierzu werden Nuten in die
Hauptpole eingefräst. In die Nuten wird dann die Kompensationswicklung
eingelegt. Die Kompensationswicklung wird vom Ankerstrom durchflossen.
Allerdings fließt der Strom in der Kompensationswicklung in die entgegengesetzte

2.1 Aufbau der Gleichstrommaschine 25
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Richtung im vergleich zum Ankerstrom. Damit kann die Ankerstromabhängige
Wirkung der Feldverzerrung kompensiert werden (vergl. Bild 2.11).
Hauptpol Hauptpol
Anker
Kompensations-Wicklung
Kompensations-Wicklung
Bild 2.11 Aufbau und Wirkungsweise der Kompensationswicklung
Das Bild 2.12 zeigt den Schnitt durch eine vierpolige (Polpaarzahl 2p = ) und eine
zweipolige (Polpaarzahl 1p = ) Gleichstrommaschine. Bei der vierpoligen
Gleichstrommaschine bilden sich entlang des Umfangs zwei Nord- und zwei
Südpole aus. Die zweipolige Gleichstrommaschine verfügt über einen Nord- und
einen Südpol. Bei der vierpoligen GM wird der Ankerstrom AI jeweils über zwei
Bürsten zugeführt.
Die Polteilung Pτ erstreckt sich von der Mitte der neutralen Zone eines Pols bis
zur nächsten Mitte der neutralen Zone (vergl. Bild 2.12). Allgemein gilt mit den
Ankerdurchmesser Ad
2p Ap dτ π⋅ ⋅ = ⋅ . (1.24)
Die Polbreite wird mit pb bezeichnet. Der Quotient aus Polbreite pb und
Polteilung Pτ wird Polbedeckung genannt

2 Gleichstrommaschine (GM) 26
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
p
P
bα
τ= . (1.25)
Bei gängigen Maschinen beträgt die Polbedeckung ca. 0,7α = . Das heißt, 70 %
der Ankerleiter befinden sich unter einem Hauptpol.
iM
AI
AU
pτ
iM
pτ
N
S
N
S
N
SAI
AU
2AI
2AI
Kommutator
Kommutator
pb
Bild 2.12 Aufbau und Schnitt durch den aktiven Teil einer vierpoligen (Polpaarzahl 2p = )und einer zweipoligen (Polpaarzahl 1p = )GM

2.1 Aufbau der Gleichstrommaschine 27
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
2.1.4 Berechnung des inneren Drehmoments einer komp ensierten GM
Auf jeden stromdurchflossenen Leiter, der sich unter einem Hauptpol befindet,
wirkt die Umfangskraft LF (wirkt in Richtung des Umfangs). Hierbei ist die
Umfangskraft LF direkt proportional zur aktiven Leiterlänge Al , zur magnetischen
Induktion LB und zum Leiterstrom. Der Ankerstrom AI teilt sich in 2 a⋅ parallele
Strompfade auf, so dass jeder Leiter vom Strom 2
AI
a⋅ durchflossen wird. Damit
wirkt auf jeden Leiter unter einem Hauptpol die Kraft
2A
L A L
IF l B
a= ⋅ ⋅
⋅ . (1.26)
Im Mittel befinden sich jedoch nur zα ⋅ der insgesamt z Ankerleiter unter einem
Hauptpol. Die gesamte Umfangskraft iF erhält man, indem man die
Umfangskräfte der zα ⋅ Ankerleiter zu
2A
i A L
IF z l B
aα= ⋅ ⋅ ⋅ ⋅
⋅ (1.27)
auf addiert.
Mit dem Ankerdurchmesser Ad errechnet sich das innere Drehmoment einer
fremderregten kompensierten GM zu
1
2i A iM d F= ⋅ ⋅ (1.28)
bzw.
4A
i A A L
IM d z l B
aα= ⋅ ⋅ ⋅ ⋅ ⋅
⋅ . (1.29)

2 Gleichstrommaschine (GM) 28
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Wie dem Bild 2.12 zu entnehmen ist, kann der Ankerumfang Ad π⋅ mit der Pol-
teilung pτ und der Polpaarzahl p durch 2A pd pπ τ⋅ = ⋅ ⋅ ausgedrückt werden.
Setzt man den Ankerdurchmesser
2A P
pd τ
π⋅= ⋅ (1.30)
in Gl. (1.29) ein, so folgt
2i P A L A
z pM l B I
aα τ
π⋅= ⋅ ⋅ ⋅ ⋅ ⋅
⋅ ⋅ . (1.31)
Betrachtet man Gl. (1.31) näher, so fällt auf, dass P A P Al b lα τ⋅ ⋅ = ⋅ die Fläche dar-
stellt, die von der magnetischen Induktion LB durchsetzt wird. Der Hauptfluss der
Maschine ist somit durch
P A Ll Bα τΦ = ⋅ ⋅ ⋅ . (1.32)
bestimmt. Zusammen mit der Maschinenkonstanten
2
p zc
aπ⋅=
⋅ ⋅ , (1.33)
die, sich aus der Polpaarzahl p , der Leiterzahl z und der Anzahl der parallelen
Leiterpaare a zusammensetzt, resultiert für das innere Drehmoment
i AM c I= ⋅Φ ⋅ (1.34)
Das heißt, das innere Drehmoment einer fremderregten kompensierten GM ist
direkt proportional zum Ankerstrom AI und drehzahlunabhängig. Die Richtung
des Drehmoments hängt von der Ankerstromrichtung ab. Hieraus resultiert die

2.1 Aufbau der Gleichstrommaschine 29
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
einfache Steuer- und Regelbarkeit der fremderregten kompensierten GM. Durch
Stromeinprägung steht regelungstechnisch ein Stellglied zur Verfügung, das ein
Drehmoment einprägen kann.
2.1.5 Berechnung der inneren Spannung
In einem Leiter, der sich unter einem Hauptpol HP mit der Geschwindigkeit Av
bewegt, wird die Spannung
,i L L A AU B l v= ⋅ ⋅ (1.35)
induziert.
Die Geschwindigkeit Av kann durch die Winkelgeschwindigkeitω , mit der sich die
Welle dreht und den Ankerdurchmesser Ad zu
1
2A Av d ω= ⋅ ⋅ (1.36)
ausgedrückt werden. Durch Einsetzen von Gl. (1.30) in Gl. (1.36) und Gl. (1.36) in
Gl. (1.35) resultiert für die induzierte Spannung in einem Leiter
,P
i L L A
pU B l
τωπ⋅= ⋅ ⋅ ⋅ . (1.37)
Im Mittel befinden sich jedoch nur zα ⋅ der insgesamt z -Leiter unter einem
Hauptpol. Hierbei sind 2 a⋅ Leiter parallel geschaltet, so dass insgesamt 2
z
a
α ⋅ ⋅
in Reihe geschaltet sind.
Die innere Spannung iU der fremderregten kompensierten GM kann bestimmt
werden, indem man die in einem Leiter induzierte Spannung mit der Anzahl der in
Reihe geschalteten Leitern multipliziert.

2 Gleichstrommaschine (GM) 30
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Damit folgt
2i L A P
p zU B l
aα τ ω
π⋅= ⋅ ⋅ ⋅ ⋅ ⋅
⋅ ⋅ (1.38)
Mit dem Hauptfluss Φ aus Gl. (1.32) und der Maschinenkonstanten aus
Gl. (1.33) lässt sich Gl. (1.38) zu
iU c ω= ⋅Φ ⋅ (1.39)
vereinfachen.
In jedem der 2 a⋅ parallelen Ankerzweige wird eine Spannung iU induziert, wobei
die Spannung vom Hauptfluss Φ , von der Maschinenkonstanten c und der me-
chanischen Winkelgeschwindigkeit ω abhängt.
2.1.6 Fremderregte kompensierte Gleichstrommaschine
Bei der fremderregten kompensierten GM sind die Anker- die Wendepol-, und die
Kompensationswicklung in Serie geschaltet. Die Erregerwicklung wird von einer
separaten Spannungsquelle, mit der Spannung EU gemäß Bild 2.13 versorgt.

2.1 Aufbau der Gleichstrommaschine 31
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
F2
F1
EU
EI
Bild 2.13 Verschaltung der Erregerwicklung
Für die Erregerwicklung der GM gilt folgende Differentialgleichung
EE E E E
dIU R I L
dt= ⋅ + ⋅ . (1.40)
Dabei wird der ohmsche Widerstand der Erregerwicklung mit ER und die In-
duktivität der Erregerwicklung mit EL bezeichnet. Im stationären Zustand (die
zeitliche Ableitung des Erregerstroms 0EI =ɺ ist null) gilt für den Erregerstrom
EE
E
UI
R= . (1.41)
Der Ankerkreis wird mit der Spannung AU versorgt und besteht aus der Serien-
schaltung von Anker-, Wendepol- und Kompensationswicklung (vergl. Bild 2.14).

2 Gleichstrommaschine (GM) 32
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
A1
A2
C1 C2B1 B2
AU
AI
Bild 2.14 Verschaltung des Ankerkreises einer fremderregten kompensierten GM
Hierbei hat die Wendepolwicklung die Bezeichnung B1-B2, die Kompensations-
wicklung die Bezeichnung C1-C2 und die Ankerwicklung die Bezeichnung A1-A2.
Fasst man die ohmschen Widerstände bzw. die Eigeninduktivitäten der Wende-
pol-, Kompensations- und der Ankerwicklung zu einem Ankerwiderstand AR bzw.
zu einer Ankerinduktivität AL zusammen, dann kann das folgende Ersatzschalt-
bild für den Ankerkreis abgeleitet werden.
iU c ω= ⋅Φ ⋅AU
AI AR AL
Bild 2.15: Ersatzschaltbild des Ankerkreises einer fremderregten kompen-sierten GM

2.1 Aufbau der Gleichstrommaschine 33
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Aus dem Ersatzschaltbild resultiert die Ankerspannungsgleichung
2AA A A A B
dIU R I L U c
dtω= ⋅ + ⋅ + ⋅ + ⋅Φ ⋅ . (1.42)
In Gl. (1.42) wird die Übergangsspannung zwischen den Bürsten und dem Kom-
mutatorlamellen mit BU bezeichnet. Da sich immer zwei Bürsten im Ankerkreis
befinden, muss diese Spannung doppelt berücksichtigt werden. Die Bürstenspan-
nung BU hängt vom Ankerstrom AI , der Temperatur, der Luftfeuchtigkeit und
weiteren Parametern ab. In der Regel liegt die Bürstenspannung zwischen 0,5V
und 2V . Für den Fall, dass die Bürstenspannung sehr viel kleiner als die Anker-
spannung B AU U≪ ist, kann sie vernachlässigt werden.
2.1.7 Stationäres Betriebsverhalten der fremderregt en kompensierten GM
Im stationären oder quasi stationären Betrieb ist die zeitliche Ableitung des An-
kerstroms null ( 0AI =ɺ ). In den nachfolgenden Betrachtungen wird davon aus-
gegangen, dass die Bürstenspannung BU im Vergleich zur Ankerspannung AU
vernachlässigbar sei. Unter diesen Annahmen resultiert für den Ankerkreis:
A A AU R I c ω= ⋅ + ⋅Φ ⋅ . (1.43)
Durch Multiplikation von Gl. (1.43) mit dem Ankerstrom AI berechnet sich die
Leistungsbilanz des Ankerkreises zu
2 ω⋅ = ⋅ + ⋅Φ ⋅ ⋅A A A A AU I R I c I . (1.44)
Die GM nimmt über den Ankerkreis die elektrische Leistung A AU I⋅ auf. Für
0A AU I⋅ > entnimmt die Maschine dem Netz elektrische Leistung. Ist das Produkt

2 Gleichstrommaschine (GM) 34
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
aus Ankerstrom und Ankerspannung negativ 0A AU I⋅ < , dann speist die Ma-
schine über den Ankerkreis Leistung in die Quelle ein. Der Term 2A AR I⋅ be-
schreibt die Stromwärmeverluste im Ankerkreis. Betrachtet man den letzten Term
ω⋅Φ ⋅ ⋅Ac I näher, dann fällt auf, dass ⋅Φ ⋅ Ac I gerade das innere Drehmoment
iM der GM darstellt. Damit beschreibt der letzte Ausdruck die innere
mechanische Leistung mechiP der GM:
mechi i AP M c Iω ω= ⋅ = ⋅Φ ⋅ ⋅ . (1.45)
Bei der obigen Herleitung wurden die Eisenverluste des Ankers vernachlässigt.
Wird die fremderregte kompensierte GM im Leerlauf d.h. 0AI = mit der Winkel-
geschwindigkeit ω angetrieben, dann berechnet sich aus Gl. (1.43) die Generator
Leerlaufspannung zu
0 0ω= ⋅Φ ⋅AU c . (1.46)
Bei einem verlustfreien Motor stellt sich die Leerlaufdrehzahl ( 0iM = ; 0AI = )
00ω =
⋅ΦAU
c (1.47)
ein, wenn die GM mit der Ankerspannung AU versorgt wird.
Nachfolgend soll eine Beziehung für die Winkelgeschwindigkeit ( )iMω als Funk-
tion des inneren Drehmomentes hergeleitet werden. Dazu wird Gl. (1.34) in
Gl. (1.43) eingesetzt und nach der Winkelgeschwindigkeit ω aufgelöst. Es re-
sultiert:
( )2A A
i
U RM
c cω = −
⋅Φ ⋅Φ . (1.48)

2.1 Aufbau der Gleichstrommaschine 35
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Um den Betriebszustand der Maschine eindeutig zu beschreiben, muss zusätzlich
zu den elektrischen Gleichungen noch die mechanische Gleichung hinzugezogen
werden. Die Gl. (1.48) stellt eine Geradengleichung mit dem Ordinatenabschnitt
⋅ΦAU
c und der Steigung
( )2⋅ΦAR
c dar. Wie dem Bild 2.16 entnommen werden kann,
nimmt die Winkelgeschwindigkeit ω mit zunehmender Belastung der Maschine
ab.
ω
iM
0ω =⋅ΦANU
c
0
121
2 ω⋅
⋅ =⋅Φ
ANU
c
Bild 2.16 Winkelgeschwindigkeit ω als Funktion des inneren Drehmoments für den stationären Betrieb
Die mechanische Gleichung beschreibt die Drehmomentenbilanz zu
i L
dM M J
dt
ω= + . (1.49)
Das Lastmoment, welches die mit der GM mechanisch verbundene Arbeits-
maschine aufnimmt, ist mit LM bezeichnet. J stellt das gesamte axiale Träg-
heitsmoment des Antriebs dar. Eventuell auftretende Verlustmomente (Lager-
Lüfterverluste) sind in Gl. (1.49) vernachlässigt.

2 Gleichstrommaschine (GM) 36
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Im stationären Betriebspunkt eines Antriebs muss das Lastmoment der Arbeits-
maschine ( )LM ω gleich dem inneren Drehmoment ( )iM ω der GM sein.
2.1.8 Fremderregte Gleichstrommaschine mit Vorwider stand
Steht keine Spannungsquelle mit variabler Ausgangsspannung zur Verfügung,
dann kann die GM mit Vorwiderständen betrieben werden. Durch Vorwider-
ständen kann zum einen der Anlassstrom begrenzt werden. Zum anderen kann
die Drehzahl eines GM-Antriebs mit geeigneten Vorwiderständen verstellt wer-
den. Diese Methode Drehzahlverstellung ist kostengünstig, da kein leistungs-
elektronisches Stellglied erforderlich ist, jedoch fallen im Vorwiderstand Strom-
wärmeverluste an. Beispielsweise wird bei Scheibenwischerantrieben die Dreh-
zahl durch einen Vorwiderstand verstellt. Das Bild 2.17 zeigt die grundsätzliche
Verschaltung.
F2
F1
EUiUAU
AI AR ALEI
1VR 2VR
1S 2S
1 2V V VR R R= +
Bild 2.17 Verschaltung einer fremderregten kompensierten GM mit Vorwider-stand VR
Betrachtet man die Betriebskennlinie der fremderregten kompensierten GM
( )iMω näher, dann wird deutlich, dass Gl. (1.48) eine Geradengleichung darstellt.
Der Ordinatenabschnitt

2.1 Aufbau der Gleichstrommaschine 37
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
0AU
cω =
⋅Φ (1.50)
ist durch die Leerlaufwinkelgeschwindigkeit ( 0LM = ) 0ω bestimmt. Die Leerlauf-
winkelgeschwindigkeit 0ω ist ihrerseits eine Funktion der Ankerspannung AU und
des Erregerflusses Φ . Mit zunehmender Belastung fällt die Winkelgeschwindig-
keit der fremderregten kompensierten GM linear mit dem Lastmoment LM ab.
Dabei ist die Steigung der Geraden durch ( )2
AR
c−
⋅Φ bestimmt.
Schaltet man nun in den Ankerkreis einen Vorwiderstand in Serie, dann muss in
Gl. (1.48) der Ankerwiderstand AR durch die Summe aus Anker- und Vorwider-
stand A VR R+ ersetzt werden. Damit wird durch
( )2ω += −⋅Φ ⋅Φ
A A Vi
U R RM
c c . (1.51)
das stationäre Verhalten der fremderregten kompensierten GM mit Vorwiderstand
beschrieben. Durch Vergrößern des Vorwiderstandes VR wird die Steigung
( )2A VR R
c
+−⋅Φ
der Betriebskennlinie vergrößert. Da sich die stationäre Winkelge-
schwindigkeit aus dem Schnittpunkt zwischen der Kennlinie der Arbeitsmaschine
und der Betriebskennlinie der GM errechnet, kann mit einem Vorwiderstand VR
die Winkelgeschwindigkeit verstellt werden. Das Bild 2.18 zeigt die Betriebs-
kennlinie einer fremderregten kompensierten GM für verschiedene Vorwider-
stände VR . Dabei wurde das Lastmoment bezüglich der Winkelgeschwindigkeit
als konstant LM const= angenommen. Dies ist z.B. bei einem Aufzug- oder Kran-
antrieb der Fall.

2 Gleichstrommaschine (GM) 38
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
ω
iM
LM
0VR =
7V AR R= ⋅
3V AR R= ⋅
0ω1ω
2ω
3ω
Bild 2.18 Drehzahlverstellung mit Vorwiderständen im Ankerkreis
Darüber hinaus kann der Anlaufstrom der fremderregten GM mit Vorwiderständen
begrenzt werden. Da die fremderregte GM im Stillstand noch keine innere Span-
nung iU entwickelt, kann der Ankerstrom AI während des Hochlaufs unzulässig
hohe Werte annehmen. Dies kann zu Kommutatorschäden führen. In der Regel
ist der Kommutator so ausgelegt, dass er kurzzeitig den doppelten Anker-
nennstrom aufnehmen kann. Vernachlässigt man den Spannungsabfall an der
Ankerinduktivität so kann der Anlaufstrom mit dem Vorwiderstand VR im Stillstand
zu
AA
A V
UI
R R=
+ (1.52)
eingestellt werden.
Das Bild 2.19 zeigt exemplarisch einen Hochlauf mit drei verschiedenen Vor-
widerständen. Als erstes wird ein Vorwiderstand mit dem Widerstand 7V AR R= ⋅ in
den Ankerkreis geschaltet. Der erste Vorwiderstand wurde so dimensioniert, dass

2.1 Aufbau der Gleichstrommaschine 39
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
die Maschine im Stillstand das doppelte Nennmoment entwickelt. Die fremd-
erregte kompensierte Maschine werde gerade mit Nennmoment belastet. Der
Antrieb beschleunigt bis zur Winkelgeschwindigkeit 1ω , die durch den Schnitt-
punkt zwischen der Belastungskennlinie der GM und der Lastkennlinie gegeben
ist. Würde man jetzt den Vorwiderstand kurzschließen, dann würde der Anker-
strom zu große Werte annehmen. Der Vorwiderstand wird nach Erreichen der
Winkelgeschwindigkeit 1ω auf 3V AR R= ⋅ verkleinert. Dadurch steigt der Anker-
strom AI und das innere Drehmoment iM der Maschine an. Der Antrieb be-
schleunigt bis er die Winkelgeschwindigkeit 2ω erreicht. Jetzt muss der Vorwider-
stand auf V AR R= verkleinert werden. Wenn der Antrieb die Winkelgeschwindig-
keit 3ω erreicht hat, kann der Vorwiderstand kurzgeschlossen werden. Da der
Antrieb mit dem Nennmoment belastet ist, beschleunigt er solange, bis der An-
trieb bei Nennspannung ANU und Nennfluss NΦ die Nennwinkelgeschwindigkeit
Nω erreicht.

2 Gleichstrommaschine (GM) 40
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
ω
i A
iN AN
M I
M I=1 2
L iNM M=
0VR =
7V AR R= ⋅
3V AR R= ⋅
V AR R=
1ω
2ω3ωNω
Bild 2.19 Hochlaufvorgang einer fremderregten GM mit verschiedenen Vor-widerständen VR
2.1.9 Vierquadrantenbetrieb der fremderregten kompe nsierten GM
Steht zur Speisung der fremderregten kompensierten GM ein bezüglich Aus-
gangsstrom und Ausgangsspannung vierquadrantenfähiges Stellglied zur Ver-
fügung, dann kann die GM im Drehmoment-Winkelgeschwindigkeitdiagramm
(vergl. Bild 2.21) alle vier Quadranten anfahren.
Für die nachfolgenden Betrachtungen soll die Ausgangsspannung des Stell-
gliedes im Bereich zwischen der positiven und negativen Ankernennspannung
AN St ANU U U− ≤ ≤ kontinuierlich verstellt werden können. Der Strom, den das Stell-
glied StI bereitstellen kann, liegt zwischen dem negativen und positiven An-
kernennstrom AN St ANI I I− ≤ ≤ . Das Bild 2.18 zeigt die Verschaltung der Anker-
und Erregerwicklung.

2.1 Aufbau der Gleichstrommaschine 41
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
F2
F1
St AU U=
AIEI
GMStell-
glied
StI
Stell-
glied
Bild 2.20 Speisung einer GM mit einen Stellglied, das bezüglich Strom und Spannung vierquadrantenfähig ist
Die Erregerwicklung ist ebenfalls mit einem Stellglied oder mit einem Vorwider-
stand, dessen Widerstandswert verändert werden kann, verbunden. Durch Ver-
stellung des Erregerstroms EI soll der Hauptfluss im Bereich zwischen dem hal-
ben Nennfluss und Nennfluss 0,5 N N⋅Φ ≤ Φ ≤ Φ variiert werden können. Das
Bild 2.21 zeigt das Winkelgeschwindigkeit-Drehmomentdiagramm. Dabei sind
zwei Bertriebsmodi zu unterscheiden. Im so genannten Grunddrehzahlbereich ist
die Maschine mit Nennfluss erregt NΦ = Φ . Bei gegebener Belastung der Ma-
schine wird die Winkelgeschwindigkeit ω mit der Ankerspannung AU eingestellt.
Mit der Ankerspannung AU wird der Ordinatenabschnitt in Gl. (1.51) festgelegt.
Dies hat unmittelbaren Einfluss auf die Winkelgeschwindigkeit ω . Da die Anker-
spannung AU nicht über die Ankernennspannung A ANU U= erhöht werden kann,
muss zur weiteren Steigerung der Winkelgeschwindigkeit der Hauptfluss Φ ver-
mindert werden. Die GM wird im Feldschwächbereich betrieben. Das maximale
innere Drehmoment ist durch den maximalen Ausgangsstrom des Stellglieds
,maxStI und den Hauptfluss Φ limitiert. Im Grunddrehzahlbereich ist der Hauptfluss
Φ konstant. Somit ist auch das maximale innere Drehmoment ,maxiM konstant. Im
Feldschwächbereich nimmt der Hauptfluss Φ umgekehrt proportional zur Winkel-

2 Gleichstrommaschine (GM) 42
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
geschwindigkeit ab (vergl. Gl. (1.51)). Damit ist im Feldschwächbereich das
maximale innere Drehmoment ,maxiM durch eine Hyperbel begrenzt.
0N
ωω
i
iN
M
M
1
1
2
A ANI I=
0,5 ;N A ANU UΦ = ⋅Φ =
;
;A AN
N
U U=Φ = Φ
A ANI I=
;
;A AN
N
U U= −Φ = Φ
0,5 ;N A ANU UΦ = ⋅Φ = −
A ANI I= −
A ANI I= −
;NΦ = Φ
;NΦ = Φ
;N
A ANU U
Φ < Φ=
;N
A ANU U
Φ < Φ= −
0;
;A
N
U =Φ = Φ
0
1−
2−
motorischer
Betrieb Rechtslauf
generatorischer
Betrieb Rechtslauf
motorischer
Betrieb Linkslauf generatorischer
Betrieb Linkslauf
Bild 2.21 Vierquadrantenbetrieb einer fremderregten kompensierten GM

2.1 Aufbau der Gleichstrommaschine 43
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
2.1.10 Unkompensierte fremderregte GM
Bei der unkompensierten GM wird der Hauptfluss Φ infolge der Ankerrück-
wirkungen mit zunehmendem Ankerstrom AI geschwächt. In der Literatur wird
der ankerstromabhängige Hauptfluss Φ meist durch eine quadratische Gleichung
der Form
2
0( ) 1 AA
AN
II x
I
Φ = Φ ⋅ − ⋅
(1.53)
approximiert. Dabei ist 0Φ der Hauptfluss im Leerlauf ( 0AI = ), x ist ein
maschinenabhängiger Faktor. In der Regel liegt x zwischen 0,03 0,07x≤ ≤ .
Gl. (1.53) muss beim Berechnen der inneren Spannung iU (Gl. (1.39)) bzw. des
inneren Drehmoments iM (Gl. (1.34)) berücksichtigt werden. Der belastungsab-
hängige Hauptfluss Φ kann auch mit
2
0( ) 1 ii
N
MM x
M
Φ = Φ ⋅ − ⋅
(1.54)
sinnvoll angenähert werden. Das ist insbesondere dann sinnvoll, wenn Gl. (1.51)
ausgewertet werden muss. Das Bild 2.23 zeigt die Winkelgeschwindigkeit ω und
den Ankerstrom AI einer fremderregten GM, für die beiden Fälle, dass die
Maschine kompensiert bzw. unkompensiert ist. Die Maschine wurde mit der
Ankerspannung A ANU U= versorgt. Die Ankerrückwirkungen wurden mit
2
0( ) 1 0,06 ii
N
MM
M
Φ = Φ ⋅ − ⋅
belastungsabhänging berücksichtigt.
Maschinendaten: Nennspannung 220ANU V= , Ankerwiderstand 0,3AR = Ω ,
Leerlaufdrehzahl 10 1500 minn −= .

2 Gleichstrommaschine (GM) 44
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
0 0.25 0.5 0.75 10
0.2
0.4
0.6
0.8
1
1.2
i
iN
M
M
A
AN
I
I
fremderregte kompensierte GM
fremderregte unkompensierte GM
0.9
0.95
1
1.05
1.1
0N
ωω
fremderregte kompensierte GM
fremderregte unkompensierte GM
Bild 2.22 Winkelgeschwindigkeit und Ankerstrom als Funktion der Belastung
iM für eine kompensierte und eine unkompensierte GM
Im Bild 2.22 ist der Ankerstrom AI jeweils auf den Ankernennstrom ANI der kom-
pensierten GM bezogen. Da mit zunehmendem Ankerstrom AI der Hauptfluss Φ
der unkompensierten Maschine abnimmt, muss im Vergleich zur kompensierten
GM verminderte Hauptfluss Φ durch einen größeren Ankerstrom kompensiert
werden. Die Winkelgeschwindigkeit ω der unkompensierten GM nimmt ab einer
bestimmten Belastung zu. Die Ursache hierfür ist ebenfalls der im Vergleich zur
kompensierten GM der verminderte Hauptfluss Φ . Hierdurch wird die Maschine

2.2 Betriebsverhalten der Gleichstrom-Reihenschlußmaschine 45
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
mit zunehmender Belastung im Feldschwächbereich betrieben, somit steigt die
Winkelgeschwindigkeit ω an.
2.1.11 Einfache Methode der Drehrichtungsumkehr
Da das innere Drehmoment iM der fremderregten GM proportional zum Produkt
aus dem Ankerstrom AI und dem Hauptfluss Φ ist, kann die Drehrichtung bei
passiver Belastung durch Umkehr des Hauptflusses Φ oder durch Umkehr des
Ankerstroms AI erreicht werden. Beide Methoden werden in der Praxis an-
gewendet.
2.2 Betriebsverhalten der Gleichstrom-Reihenschlußm aschine
Das Bild 2.23 zeigt die Verschaltung einer Gleichstrom-Reihenschlußmaschine.
Bei der Gleichstrom-Reihenschlußmaschine sind im allgemeinen Fall die Wende-
pol-, die Kompensations-, die Erreger- und die Ankerwicklung in Serie geschaltet.
Dies bedeutet, dass die Erregerwicklung so dimensioniert sein muss, dass sie
den Ankerstrom AI führen kann, was bei der fremderregten GM im Allgemeinen
nicht der Fall ist.

2 Gleichstrommaschine (GM) 46
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
A1
A2
C1 C2B1 B2
AU
AI
D2 D1
Bild 2.23 Verschaltung der Wicklungen einer Gleichstrom-Reihenschluß-maschine mit A1-A2: Ankerwicklung; C1-C2: Kompensations-wicklung; B1-B2: Wendepolwicklung; D1-D2: Erregerwicklung
Setzt man einen linearen magnetischen Kreis voraus, so ist der Hauptfluss Φ
zum Erregerstrom EI proportional. Da die Erregerwicklung in Serie zur Anker-
wicklung geschaltet ist, ist der Hauptfluss Φ zum Ankerstrom AI proportional.
Das heißt, in der Ankerspannungsgleichung (1.43) ist der Hauptfluss Φ eine
Funktion des Ankerstroms AI . Es resultiert:
( )A A A AU R I c I ω= ⋅ + ⋅Φ ⋅ . (1.55)
Hierbei sind die ohmschen Widerstände der Anker-, Erreger-, Kompensations-
und Wendepolwicklung zum Widerstand AR zusammengefasst.
Analog berechnet sich das innere Drehmoment zu
( )i A AM c I I= ⋅Φ ⋅ . (1.56)
Unter der obigen Annahme eines linearen magnetischen Kreises kann der
Hauptfluss
( ) AA N
AN
II
IΦ = Φ ⋅ (1.57)

2.2 Betriebsverhalten der Gleichstrom-Reihenschlußmaschine 47
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
mit dem Nennfluss NΦ , den Ankernennstrom ANI und den Ankerstrom AI be-
rechnet werden. Mit der Abkürzung
N
AN
ck
I
⋅Φ= (1.58)
vereinfachen sich die Gln. (1.55)und (1.56) zu
A A A AU R I k I ω= ⋅ + ⋅ ⋅ (1.59)
bzw.
2i AM k I= ⋅ . (1.60)
Löst man nun Gl. (1.60) nach dem Ankerstrom AI auf und setzt sie in Gl. (1.59)
dann folgt
i iA A
M MU R k
k kω= ⋅ + ⋅ ⋅ . (1.61)
Durch Auflösen von Gl. (1.61) nach der Winkelgeschwindigkeit ω berechnet sich
die Betriebskennlinie für den stationären Betrieb zu
iA A
A A
i i
MU R
U Rkkk M k M
ω− ⋅
= = −⋅ ⋅
. (1.62)
Die Winkelgeschwindigkeit ω ist umgekehrt proportional zur Wurzel des inneren
Drehmoments iM . Im unbelasteten Fall 0LM = kann die Reihenschluß-Gleich-
strommaschine unzulässig hohe Winkelgeschwindigkeiten ω erreichen. Dies
kann zur mechanischen Zerstörung des Ankers führen.

2 Gleichstrommaschine (GM) 48
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Zum Anfahren der Reihenschlußmaschine aus dem Stillstand ist ein
Anlasswiderstand erforderlich, der den Anlassstrom AI auf zulässige Werte
begrenzt.
Das Anzugsmoment einer Reihenschlußmaschine mit Vorwiderstand VR be-
rechnet sich zu
2
( 0) Ai
A V
UM k
R Rω
= = ⋅ +
. (1.63)
Aufgrund der Drehmoment-Drehzahl-Charakteristik, großes Drehmoment bei
kleiner Winkelgeschwindigkeit, eignet sich die Reihenschlußmaschine als Fahr-
motor z.B. für Straßenbahnen oder als Anlasser für Verbrennungsmotoren be-
sonders gut.
2.2.1 Feldschwächung bei der GM-Reihenschlußmaschi ne
Im Teillastbetrieb der Maschine, kann die Winkelgeschwindigkeit ω durch Feld-
schwächung erhöht werden. Hierzu wird parallel zur Erregerwicklung ein Wider-
stand geschaltet, so dass die Erregerwicklung nicht mehr vom gesamten Anker-
strom AI durchflossen wird. Damit ist der Hauptfluss Φ eine Funktion des Er-
regerstroms EI , wobei der Erregerstrom EI immer kleiner oder gleich dem An-
kerstrom AI ist (vergl. Bild 2.24).

2.2 Betriebsverhalten der Gleichstrom-Reihenschlußmaschine 49
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
A1
A2
C1 C2B1 B2
AU
AI
D2 D1DR
PR
EI
Bild 2.24 Feldschwächung bei der Reihenschlußmaschine
Hiermit folgt aus Gl. (1.57)
( ) EE N
AN
II
IΦ = Φ ⋅ (1.64)
für den Hauptfluss
Der ohmsche Widerstand der Erregerwicklung D1-D2 betrage DR , der Parallel-
widerstand habe den Wert PR . Aus der Parallelschaltung vom DR und PR
resultiert
PE A
P D
RI I
R R=
+ (1.65)
für den Erregerstrom EI . Durch Auswerten der Gln. (1.65), (1.64), (1.56) und
(1.58) folgt die Beziehung für das innere Drehmoment zu

2 Gleichstrommaschine (GM) 50
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
2=+
Pi A
P D
RM k I
R R . (1.66)
2.2.2 Gleichstrom-Nebenschlußmaschine
Bei der Gleichstrom-Nebenschlußmaschine ist die Erregerwicklung parallel zur
Ankerwicklung geschaltet. Das heißt, der Hauptfluss Φ ist im stationären
Betriebszustand proportional zur Ankerspannung AU . Das Bild 2.25 zeigt die Ver-
schaltung
A1
A2
AU
AI
EIE1
E1
Bild 2.25 Verschaltung der Wicklungen einer Gleichstrom-Nebenschluß-maschine mit A1-A2: Ankerwicklung; E1-E2: Erregerwicklung
2.2.3 Doppelschlußmaschine
Bei der unkompensierten GM wird der Hauptfluss Φ infolge der ankerstrom-
abhängigen Ankerrückwirkungen geschwächt. Die Ankerrückwirkungen können
durch die Kompensationswicklung kompensiert werden. Allerdings ist die
Kompensationswicklung relativ teuer, da zusätzliche Nuten in den Hauptpol ein-

2.2 Betriebsverhalten der Gleichstrom-Reihenschlußmaschine 51
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
gefräst werden müssen, in die dann die Kompensationswicklung eingelegt wer-
den muss.
Wesentlich kostengünstiger ist es, zusätzlich zur Erregerwicklung eine so
genannte Kompoundwicklung, die wie die Erregerwicklung konzentrisch um den
Ankerpol gewickelt ist, einzulegen. Durch die Kompoundwicklung, die mit der An-
kerwicklung in Serie geschaltet ist, nimmt der Hauptfluss Φ mit zunehmendem
Ankerstrom AI zu. Hierdurch kann die Verzerrung des Hauptfeldes unter dem
Hauptpol zwar nicht wie bei der Kompensationswicklung vermieden werden. Je-
doch kann der resultierende Hauptfluss Φ näherungsweise belastungs-
unabhängig konstant gehalten werden. Das zeigt Bild 2.26 die Verschaltung der
Wicklungen einer Doppelschlußmaschine.
A1
A2
AU
AI B1 B2 D1 D2
F2
F1
EU
EI
Bild 2.26 Verschaltung der Wicklungen einer Doppelschlußmaschine mit A1-A2: Ankerwicklung; B1-B2: Wendepolwicklung; F1-F2: Erreger-wicklung und D1-D2: Kompoundwicklung

2 Gleichstrommaschine (GM) 52
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
2.3 Wirkungsgrad und Verluste
Unter dem Wirkungsgrad η versteht man allgemein den Quotienten aus der ab-
gegebenen Leistung abP und der aufgenommenen Leistung aufP . Es gilt die De-
finitionsgleichung
ab i
auf el
P M
P P
ωη ⋅= =∑
. (1.55)
Dies gilt auch für elektrische Maschinen. Ein Motor nimmt elektrische Leistung auf
und gibt mechanische Leistung ab. Ein Generator nimmt hingegen mechanische
Leistung auf und gibt elektrische Leistung ab.
Die direkte Auswertung von Gl.(1.55) bringt zwei Probleme mit sich. Zunächst
kann die elektrische Leistungsaufnahme durch Strom- und Spannungsmessung
relativ einfach ermittelt werden. Um die mechanische Leistung zu bestimmen,
muss die Winkelgeschwindigkeit ω und das Drehmoment an der Welle M
gemessen werden. Hierbei stellt die exakte Messung des Drehmoments ein
Problem dar. Darüber hinaus ist zu bedenken, dass bei Maschinen großer
Leistung der Wirkungsgrad sehr hoch ist. Dies bedeutet, dass die abgegebene
Leistung abP nur wenig kleiner als die aufgenommene Leistung aufP ist. Da die
Messung der abgegebenen und der aufgenommenen Leistung fehlerbehaftet ist,
kann die Bestimmung des Wirkungsgrads nach Gl. (1.55) leicht zu großen
Fehlern führen. Beispielsweise habe eine Maschine einen Wirkungsgrad von
98% die abgegebene Leistung und die aufgenommene Leistung werde jeweils
mit einer Messunsicherheit von 1,5% gemessen. Hiermit gilt für den errechneten
Wirkungsgrad
( )0,98 1,5%
1,5%auf
auf
P
Pη
⋅ ±=
± . (1.56)

2.3 Wirkungsgrad und Verluste 53
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Das heißt, der errechnete Wirkungsgrad η liegt im Bereich
95,1 % 100,98 %η≤ ≤ . Wie leicht zu erkennen ist, ist der größere Wert für den
Wirkungsgrad physikalisch nicht möglich, da der Wirkungsgrad größer als 100 %
ist.
Die abgegebene Leistung abP einer Maschine kann jedoch auch aus der auf-
genommenen Leistung aufP und der gesamten Verlustleistung VP∑ der
Maschine zu
ab auf VP P P= −∑ (1.57)
berechnet werden. Hiermit resultiert für den Wirkungsgrad
auf V
auf
P P
Pη
−= ∑ . (1.58)
Zur Auswertung von Gl. (1.58) müssen zunächst die einzelnen Verluste der
Maschine analysiert werden. Die Verluste können in lastabhängige und
lastunabhängige Verluste untergliedert werden.
Das Bild 2.27 zeigt den Leistungsfluss einer GM.

2 Gleichstrommaschine (GM) 54
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
aufP
ErrP
RbgP
AP
FeP
BP
ZP
abP
last
abhä
ngig
eVe
rlust
ela
stun
abhä
ngig
e
Verlu
ste
Erregerv.
Reibungsv.
Eisenv.
Ankerv.
Bürstenv.
Zusatzv.
Bild 2.27 Leistungsfluss einer Gleichstrommaschine
Die lastabhängigen Verluste setzen sich aus den Ankerverlusten AP den
Bürstenverlusten BP sowie den lastabhängigen Zusatzverlusten zusammen. Die
Ankerverluste berechnen sich mit dem Ankerwiderstand AR und dem Ankerstrom
AI zu
2A A AP R I= ⋅ . (1.59)

2.3 Wirkungsgrad und Verluste 55
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Die Bürstenverluste resultieren zu
2B B AP U I= ⋅ ⋅ , (1.60)
dabei wird die Bürstenspannung mit BU und der Ankerstrom mit AI bezeichnet.
Darüber hinaus müssen die lastabhängigen Zusatzverluste mit
2
0,01 AZ N
AN
IP P
I
= ⋅ ⋅
(1.61)
berücksichtigt werden. Hierin sind alle zusätzlichen Verluste wie z.B. Kom-
mutierungsverluste und Verluste infolge von Oberfeldern zusammengefasst. Die
lastunabhängigen Verluste setzen sich aus den Eisen- FeP , den Reib- RbgP und
den Erregerverlusten ErrP zusammen. Die Erregerverluste ErrP errechnen sich aus
den Erregerwiderstand ER und dem Erregerstrom EI zu
2Err E E E EP U I R I= ⋅ = ⋅ . (1.62)
Die Reibungsverluste RbgP einer Maschine setzen sich aus der Lager- und
Bürstenreibung LaP und den Lüfterverlusten LüP zusammen. Es gilt:
Rbg La LüP P P= + . (1.63)
Hierbei können bei Maschinen größerer Leistung meist die Lagerverluste LaP
vernachlässigt werden. Die Lagerverluste steigen näherungsweise proportional
mit der Winkelgeschwindigkeit ω an. Hiermit resultiert
LaP ω∼ . (1.64)

2 Gleichstrommaschine (GM) 56
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Die Leistungsaufnahme eines Lüfters nimmt im Allgemeinen kubisch mit der
Winkelgeschwindigkeit ω zu. Damit folgt
3LüP ω∼ . (1.65)
Die Eisenverluste FeP setzen sich aus den Hysterese- HyP und den Wirbelstrom-
verlusten WbP zusammen. Es folgt
Fe Hy WbP P P= + . (1.66)
Um den magnetischen Zustand von Eisen zu ändern, muss Arbeit aufgewendet
werden, die im Eisenkern in Wärme umgesetzt wird. Diese Verlustarbeit muss bei
jeder Ummagnetisierung aufgebracht werden. Sie ist proportional zur Fläche, die
von der Hystereseschleife aufgespannt wird. Damit sind die Hystereseverluste
2HyP f B⋅∼ (1.67)
proportional zur Frequenz f und näherungsweise proportional zum Quadrat der
magnetischen Induktion B .
Das vom Wechselfluss durchsetzte Eisen stellt einen in sich geschlossenen
Strompfad dar, in dem durch eine Flussänderung eine Spannung induziert wird.
Hierbei ist die induzierte Spannung proportional zum Produkt aus Frequenz f
und der magnetischen Induktion B . Da ohmsche Verluste proportional zum
Quadrat der Spannung sind, folgt für die Wirbelstromverluste
2 2WbP f B⋅∼ . (1.68)

2.4 Dynamisches Betriebsverhalten der GM 57
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
2.4 Dynamisches Betriebsverhalten der GM
Nachfolgend wird das dynamische Betriebsverhalten der kompensierten fremd-
erregten GM beschrieben. Hierzu muss in der Ankerspannungsgleichung die An-
kerinduktivität AL berücksichtigt werden. Vernachlässigt man die Spannungs-
abfälle an den Bürsten, so folgt
AA A A A
diu R i L c
dtω= ⋅ + ⋅ + ⋅Φ ⋅ . (1.69)
Das Bild 2.28 zeigt das Ersatzschaltbild des Ankerkreises einer GM.
iu c ω= ⋅ Φ ⋅Au
Ai AR AL
Bild 2.28 Ersatzschaltbild des Ankerkreises einer Gleichstrommaschine
Mit der Gleichung zur Berechnung des inneren Drehmoments
i Am c i= ⋅Φ ⋅ (1.70)
und der mechanischen Gleichung
i L
dm m J
dt
ω− = ⋅ (1.71)

2 Gleichstrommaschine (GM) 58
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
ist das dynamische Betriebsverhalten des Antriebs komplett beschrieben. Das
Lastmoment wird mit Lm bezeichnet, J stellt das axiale Trägheitsmoment des
Antriebs bestehend aus Antriebs- und Arbeitsmaschine dar.
Im Folgenden wird zur Vereinfachung das dynamische Betriebsverhalten der un-
belasteten kompensierten GM betrachtet. In diesem Fall ist das Lastmoment null
( 0Lm = ).
Setzt man Gl. (1.71) mit Gl. (1.70) gleich, so folgt durch Integration
0
( ) ( ) ( 0)t
A
ct i d t
J τ
ω τ τ ω=
⋅ Φ= + =∫ . (1.72)
Für die weiteren Betrachtungen sei der Einfachheit halber die mechanische
Winkelgeschwindigkeit ω zum Zeitpunkt 0t = null ( ( 0) 0tω = = ). Dann folgt durch
Einsetzen von Gl. (1.72) in Gl. (1.69)
( )2
0
( )t
AA A A A A
cdiu R i L i d
dt J τ
τ τ=
⋅Φ= ⋅ + ⋅ + ∫ . (1.73)
Die Ankerspannungsgleichung (1.73) ist eine Integralgleichung und entspricht der
Spannungsgleichung eines R, L, C-Reihenschwingkreises. In Analogie lässt sich
die mechanische Ersatzkapazität
( )2M
JC
c=
⋅Φ (1.74)
definieren. Die unbelastete fremderregte kompensierte GM stellt regelungs-
technisch ein Verzögerungsglied 2. Ordnung dar und verhält sich als Zweipol so
wie ein R, L, C-Reihenschwingkreis. Das lineare System verfügt über zwei
Energiespeicher. Die in der Ankerinduktivität AL gespeicherte magnetische
Energie berechnet sich zu

2.4 Dynamisches Betriebsverhalten der GM 59
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
21
2m A AE L i= ⋅ . (1.75)
Mit dem axialen Trägheitsmoment J und der mech. Winkelgeschwindigkeit ω
errechnet sich die kinetische Energie zu
2 21 1
2 2ω= ⋅ = ⋅ ⋅kin M iE J C U . (1.76)
In Analogie zum Reihenschwingkreis werden die Ankerzeitkonstante
AA
A
L
Rτ = (1.77)
und die mechanische Zeitkonstante
( )2τ ⋅= ⋅ =⋅ΦA
M M A
R JC R
c (1.78)
definiert.
Unter Verwendung der Gln. (1.78) und (1.77) vereinfacht sich die Spannungs-
gleichung (1.73) zu
0
1( )
tA
A A A A AM
diu R i i d
dt τ
τ τ ττ =
= ⋅ + ⋅ +
∫ . (1.79)
Unterzieht man die obige Spannungsgleichung der Laplace-Transformation, so
folgt im Bildbereich
1( ) 1 ( )A A A A
M
U s R s I ss
ττ
= ⋅ + ⋅ + ⋅
(1.80)

2 Gleichstrommaschine (GM) 60
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
bzw.
( ) 1 1
( ) 11
A
A AA
M
I s
U s Rs
sτ
τ
=
+ ⋅ + ⋅
. (1.81)
Die charakteristische Gleichung lautet
10 1 A
M
ss
ττ
= + ⋅ +⋅
(1.82)
bzw.
2 1 10
A M A
s sτ τ τ
= + ⋅ +⋅
(1.83)
und liefert folgende Lösungen
1,2 2
1 1 1
2 4A A M A
sτ τ τ τ
= − ± −⋅ ⋅ ⋅
. (1.84)
Ist die Diskriminante 2
1 10
4 A M Aτ τ τ
− < ⋅ ⋅ kleiner als Null, dann hat die
charakteristische Gleichung zwei konjugiert komplexe Lösungen. In diesem Fall
handelt es sich um ein schwingungsfähiges System, das auf eine sprungförmige
Änderung der Ankerspannungen mit einer gedämpften Schwingung des Anker-
stroms Ai und der Winkelgeschwindigkeit ω reagiert. Dies ist für
4 A Mτ τ⋅ > (1.85)

2.4 Dynamisches Betriebsverhalten der GM 61
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
der Fall. Andernfalls können Ankerstrom Ai und Winkelgeschwindigkeit ω durch
e-Funktionen beschrieben werden.
Nachfolgend wird das dynamische Verhalten einer unbelasteten fremderregten
kompensierten GM mit den folgenden Daten: 50ANU V= , 4,4ANI A= ,
4 20,8 10J Kg m−= ⋅ ⋅ , 4,5AL mH= , 1,5AR = Ω und 0 200 /N sω = berechnet. Die
Ankerspannung AU ändert sich sprungartig zum Zeitpunkt 0t = von Null auf
0,1= ⋅A ANU U . Mit der Laplace-Transformierten für die Sprungantwort
0,1( )A ANU s U
s= (1.86)
folgt
2
( ) 1 0,1
( ) 1 1A
AN A A
A M A
I s
U s Rs s
ττ τ τ
=⋅
+ + ⋅
. (1.87)
Durch Rücktransformation in den Zeitbereich errechnet sich der Ankerstrom ( )Ai t
zu
( )41( ) sin 0,1
4M
M
tA e AN
A A
i t e t UR
δτω
τ τ− ⋅⋅
= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅⋅ −
(1.88)
mit
2
41 und
2 4M
M
Ae
A A
τ τδ ω
τ τ τ⋅ −
= =⋅ ⋅ ⋅
(1.89)
Durch Einsetzen von Gl. (1.88) in Gl. (1.72) resultiert für die Winkelgeschwindig-
keit

2 Gleichstrommaschine (GM) 62
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
( )0
41( ) 0,1 sin
4M
M
t
AN eA A
ct U e t d
J Rδ τ
τ
τω ω τ
τ τ− ⋅
=
⋅⋅Φ= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅⋅ − ∫ . (1.90)
Die Integration liefert mit der Anfangsbedingung ( 0) 0ω = =t
( )
2 2
41 1( )
4
sin( ) cos( ) 0,1
M
MA A e
te e e AN
ct
J R
e t t Uδ
τω
τ τ ω δ
ω δ δ ω ω− ⋅
⋅⋅ Φ −= ⋅ ⋅ ⋅ ⋅⋅ − +
+ ⋅ ⋅ − ⋅ ⋅ ⋅ ⋅ . (1.91)
Das Bild 2.29 zeigt den zeitlichen Verlauf der Winkelgeschwindigkeit ω und des
Ankerstroms Ai nach einer sprungförmigen Änderung der Ankerspannung zum
Zeitpunkt 0t = von Null auf 0,1A ANU U= ⋅ .

2.4 Dynamisches Betriebsverhalten der GM 63
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
0N
ωω
/t ms
A
AN
i
I
-0.2
-0.1
0
0.1
0.2
0.3
0 10 20 30 400
0.05
0.1
0.15
0.4
Bild 2.29 Ankerstrom Ai und Winkelgeschwindigkeit ω nach einer sprungför-
migen Änderung der Ankerspannung von Null auf 0,1A ANU U= ⋅


© Hochschule - Aalen Heinrich Steinhart 09.10.2011
3 Asynchronmaschine (ASM)
Der Leistungsbereich der Asynchronmaschine erstreckt sich von 5W bis zu
50MW . Aufgrund ihrer Robustheit ist die ASM die am häufigsten eingesetzte
elektrische Maschine. Daher sind über 80% aller elektrischen Maschinen im
Leistungsbereich über 1kW Asynchronmaschinen. Da die ASM im Gegensatz zur
GM keinen Kommutator mit Kohlebürsten hat, ist sie nahezu wartungsfrei bei. Nur
die mechanischen Lager sind verschleißbehaftet. Ein weiterer Vorteil der ASM ist
der einfache mechanische Aufbau. Aufgrund des einfachen mechanischen
Aufbaus kann die Asynchronmaschine in großen Stückzahlen sehr kostengünstig
hergestellt werden. Asynchronmaschinen im Leistungsbereich bis ca. 1MW sind
üblicherweise für das 400V -Niederspannungsnetz konzipiert. Die Maschinen im
Leistungsbereich über 1MW sind für den Anschluss an das Mittelspannungsnetz
ausgelegt. Dabei erstreckt sich die Versorgungsspannung bis zu 10kV .
Speist man die Asynchronmaschinen mit einem Frequenzumrichter, der ein
Drehspannungssystem mit variabler Frequenz und variabler Spannung generiert,
so kann mit der ASM ein drehzahlvariabler Antrieb aufgebaut werden.
In Verbindungen mit moderner Signalverarbeitung und einer sogenannten
feldorientierten Regelung hat die ASM genauso gute regelungstechnische
Eigenschaften wie die GM. Daher hat die ASM in den letzten Jahren die GM als
Positionierantrieb praktisch völlig abgelöst.
Nachteilig wirkt sich bei der ASM der induktive Blindleistungsbedarf aus.
In Tabelle 3.1 sind die verschiedenen Bauformen, die Leistungsbereiche und die
Einsatzgebiete der gängigen Asynchronmaschinen zusammengestellt.

3 Asynchronmaschine (ASM) 66
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Tabelle 3.1 Leistungsbereich und Einsatzgebiete von Asynchronmaschinen
Typ Leistungsbereich Einsatzgebiete
Spaltpolmotor 5 150W W− Lüfter, Gebläse, Pumpen,
Haushaltsgeräte
Kondensatormotor −50 3W kW Lüfter, Gebläse, Pumpen,
Haushaltsgeräte, Werkzeug-
maschinen
Schleifringläufer 100 10−W MW Pumpen, Hebewerkzeuge, Ver-
dichter, Umformer
Käfigläufer 100 50−W MW Industrieantriebe, Pumpen, Gebläse,
Fahrmotoren für Schienenfahrzeuge,
Umformer, Werkzeugmaschinen-
antriebe
3.1 Aufbau der Asynchronmaschine
Das Bild 3.1 zeigt den Aufbau einer ASM mit Kurzschlussläufer. Der Rotor der
Maschine ist mechanisch mit der Welle verbunden. Die Welle wird über Lager,
meist Kugel- oder Walzenlager, durch das Lagerschild aufgenommen. Zur
mechanischen Befestigung der Maschinen dient der Anschlussflansch. Für die
Kühlung der Maschine sorgt ein Lüfter, der ebenfalls mit der Welle verbunden ist.
Die Kühlrippen sorgen für die eigentliche Wärmeabfuhr.

3.1 Aufbau der Asynchronmaschine 67
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Kurzschlussläufer LagerschildAnschlussflansch
LüfterAnschlusskastenKühlrippen
Lager Kurzschlussläufer LagerschildAnschlussflansch
LüfterAnschlusskastenKühlrippen
Lager
Bild 3.1 Baugruppen einer ASM mit Kurzschlussläufer
Das Bild 3.2 zeigt den Stator (links) und den Rotor (rechts) einer ASM. Zur
Aufnahme der Statorwicklung sind Nuten in den Stator eingefräst, in die dann die
Statorwicklungen eingelegt sind. Der Rotor besteht aus einem magnetisch
leitenden Blechpaket, in welchem die Rotorstäbe platziert sind. Im
Leistungsbereich bis ca 100kW sind die Rotorstäbe aus Aluminiumdruckguss
hergestellt. Auf diese Weise können die Rotoren in großer Stückzahl
kostengünstig hergestellt werden. Im Leistungsbereich über 100kW werden
Rotorstäbe aus Kupfer eingesetzt, da der elektrische Widerstand von Kupfer
kleiner als der Widerstand von Aluminium ist. Hierdurch verbessert sich der
Wirkungsgrad der Maschine.

3 Asynchronmaschine (ASM) 68
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
StatorwicklungKühlrippen Stator StatorwicklungKühlrippen Stator RotorstabRotorWelle RotorstabRotorWelle
Bild 3.2 Aufbau des Stators und des Rotors einer ASM mit Kurzschlussläufer
Auf beiden Seiten des Rotors sind die Rotorstäbe durch die so genannten
Kurzschlussringe elektrisch miteinander verbunden (siehe Bild 3.3).
KurzschlussringLager Welle KurzschlussringLager Welle Kurzschlussring
LäuferstabWelle
Kurzschlussring
LäuferstabWelle
Kurzschlussring
LäuferstabWelle
Bild 3.3 Aufbau des Rotors einer ASM

3.1 Aufbau der Asynchronmaschine 69
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
3.1.1 Entstehung eines Drehfeldes
Der Aufbau des Stators von Asynchron- und Synchronmaschinen ist weitgehend
identisch, daher wird nachfolgend auf die Gemeinsamkeiten eingegangen.
Die Statur einer Drehfeldmaschine besteht aus einem Blechpaket, in das Nuten
eingefräßt sind. In den Nuten befinden sich die dreisträngigen, symmetrischen
Statorwicklungen. Die drei Statorwicklungen sind räumlich jeweils um den Winkel
2 / 3π⋅ gegeneinander versetzt.
Ein dreisträngiges symmetrisches Wicklungssystem zeichnet sich dadurch aus,
dass alle Wicklungen den gleichen Wickelwiderstand, die gleiche
Eigeninduktivität, die gleiche Windungszahl und die gleiche mag. Kopplung
haben. Dem Bild 3.4 kann der prinzipielle Aufbau eines Stators entnommen
werden.
a
b
c
a
b
c
iSa
uSa
SbiSbu
Sci
Scu
α
βWicklung a
Wicklung a
Wick
lung
b
Wicklung bW
icklu
ng c
Wicklung c
Wicklung a
Wicklung b
Wick
lung
c
Bild 3.4 Einfaches Wickelschema des Stators einer ASM
Durch Bestromung der Wicklung a richtet sich ein mag. Feld in Richtung der
a -Achse aus. Bestromt man die Wicklung b bzw. c , dann richtet sich ein Feld in
Richtung der b - bzw. c - Achse aus.
Jede Statorwicklung hat die Eigeninduktivität SSL . Die Eigeninduktivität SSL kann
mit der Hauptinduktivität ShL und der Streuinduktivität SL σ mit

3 Asynchronmaschine (ASM) 70
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
SS Sh SL L L σ= + (3.1)
dargestellt werden. Für die Statorflüsse in den drei Achsen gilt
( )( )( )
σ σ
σ σ
σ σ
ψ ψ ψψ ψ ψψ ψ ψ
+ + ⋅= + = + ⋅
+ + ⋅
, , ,
, , ,
, , ,
SS a Sh a S a Sh S Sa
SS b Sh b S b Sh S Sb
SS c Sh c S c Sh S Sc
L L i
L L i
L L i
. (3.2)
Dabei setzen sich die Statorflüsse ψ ,SS y (mit = , ,y a b c ) aus den Hauptflüssen
ψ ,Sh y (mit = , ,y a b c ) und den Streuflüssen σψ ,S y (mit = , ,y a b c ) zusammen
( , , ,SS y Sh y S yσψ ψ ψ= + ). Den Quotienten aus dem Streufluss bzw. der
Streuinduktivität SL σ bezogen auf dem Hauptfluss bzw. der Hauptinduktivität ShL
bezeichnet man als Statorstreuziffer
σ σψσψ
= =S SS
Sh Sh
LL
. (3.3)
Bei den folgenden Betrachtungen wird davon ausgegangen, dass die ASM durch
ein dreiphasiges, symmetrisches Drehspannungssystem der Form
( )ω ϕ
πω ϕ
πω ϕ
⋅ +
= ⋅ ⋅ ⋅ − +
⋅ − +
cos
22 cos
3
4cos
3
S
Sa
Sb S S
Sc
S
t
u
u U t
u
t
(3.4)
gespeist wird.
Der Effektivwert des Drehspannungssystems ist mit SU bezeichnet, ωS ist die
Winkelgeschwindigkeit des speisenden Drehspannungssystems.

3.1 Aufbau der Asynchronmaschine 71
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Im stationären eingeschwungenen Zustand resultieren die Maschinenströme zu
( )ω
πω
πω
⋅
= ⋅ ⋅ −
⋅ −
cos
2ˆ cos3
4cos
3
S
Sa
Sb S S
Sc
S
t
i
i i t
i
t
. (3.5)
Dabei ist der Scheitelwert der Statorströme mit Si bezeichnet. Zwischen den
Statorströmen , ,Sa Sb ScI I I und den Statorspannungen , ,Sa Sb ScU U U stellt sich der
Phasenwinkel ϕ ein. Dabei ist zu beachten, dass zur einfacheren Darstellung der
Phasenwinkel ϕ dem Drehspannungssystem (Gl. (3.4)) zugeordnet wurde.
Multipliziert man die Statorströme aus Gl. (3.5) mit der Hauptinduktivität, so erhält
man die drei Hauptflüsse ψ ψ ψ, , ,, ,Sh a Sh b Sh c zu
( )ωψ
πψ ψ ωψ
πω
⋅
= ⋅ ⋅ −
⋅ −
,
,
,
cos
2ˆ cos
3
4cos
3
S
Sh a
Sh b Sh S
Sh c
S
t
t
t
. (3.6)
In der obigen Gleichung sind die Amplituden der Hauptflüsse ψ ψ ψ, , ,, ,Sh a Sh b Sh c mit
ψ Sh bezeichnet. Die Ausrichtung der drei Hauptflüsse kann dem Bild 3.4
entnommen werden.
Für die weiteren Betrachtungen werden die drei Hauptflüsse ψ ψ ψ, , ,, ,Sh a Sh b Sh c auf
einen orthogonales αβ -Koordinatensystem (vergl. Bild 3.4) projiziert.
Für den Hauptfluss αψ ,Sh in der α -Achse gilt

3 Asynchronmaschine (ASM) 72
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
αψ ψ ψ ψ= − ⋅ − ⋅, , , ,
1 12 2Sh Sh a Sh b Sh c . (3.7)
Für den Hauptfluss βψ ,Sh in der β -Achse gilt
, , ,
3 32 2Sh Sh b Sh cβψ ψ ψ= ⋅ − ⋅ . (3.8)
Durch Einsetzen von Gl. (3.6) in Gl. (3.7) folgt für den Hauptfluss in der α -Achse
( )απ πψ ψ ω ω ω
= ⋅ ⋅ − ⋅ − + ⋅ −
,
1 2 4ˆ cos cos cos
2 3 3Sh Sh S S St t t . (3.9)
Mit
( ) ( ) ( ) ( ) ( )α β α β α β− = ⋅ + ⋅cos cos cos sinsin (3.10)
resultiert
( )(( ) ( )
( ) ( )
, ˆ cos1 2 2
cos cos sin sin2 3 3
4 4cos cos sin sin .
3 3
Sh Sh S
S S
S S
t
t t
t t
αψ ψ ωπ πω ω
π πω ω
= ⋅ − ⋅ ⋅ + ⋅ ⋅
+ ⋅ ⋅ + ⋅ ⋅
(3.11)
Mit
π π = = −
2 4 1cos cos
3 3 2,
π =
2 3sin
3 2
und

3.1 Aufbau der Asynchronmaschine 73
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
π = −
4 3sin
3 2
resultiert nach kurzer Rechnung
( )αψ ψ ω= ⋅ ⋅ ⋅,
3ˆ cos
2Sh Sh S t . (3.12)
Durch Einsetzen von Gl. (3.6) in Gl. (3.8) folgt mit Gl. (3.8) für den Hauptfluss in
der β -Achse
( ) ( )
( ) ( )
,
3 2 2ˆ cos cos sin sin
2 3 3
4 4cos cos sin sin .
3 3
βπ πψ ψ ω ω
π πω ω
= ⋅ ⋅ ⋅ ⋅ + ⋅ ⋅
− ⋅ ⋅ − ⋅ ⋅
Sh Sh S S
S S
t t
t t
(3.13)
Mit
π π = = −
2 4 1cos cos
3 3 2,
π =
2 3sin
3 2
Und
π = −
4 3sin
3 2
resultiert
( )βψ ψ ω= ⋅ ⋅ ⋅,
3ˆ sin
2Sh Sh S t . (3.14)
Betrachtet man die Gl. (3.12) und Gl. (3.14) näher, so wird deutlich, dass die
Amplitude des Hauptflusses ψ Sh konstant ist. Der Hauptfluss ψ Sh dreht sich mit
der Winkelgeschwindigkeit ωS .

3 Asynchronmaschine (ASM) 74
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Dem Bild 3.5 kann die Ausrichtung des Hauptfluss ψ Sh als Funktion des Winkels
ω ⋅S t gemäß den Gl. (3.12) und Gl. (3.14) entnommen werden.
α
β
( )βψ ψ ω= ⋅ ⋅ ⋅,
3ˆ sin
2Sh Sh S t
( )αψ ψ ω= ⋅ ⋅ ⋅,
3ˆ cos
2Sh Sh S t
ψ Sh
ω ⋅S t
Bild 3.5 Ausrichtung des Hauptflusses ψ Sh als Funktion des Winkels ω ⋅S t
Das Bild 3.6 zeigt den Zeitverlauf der drei Hauptflüsse ψ ψ ψ, , ,, ,Sh a Sh b Sh c sowie die
Ausrichtung des Hauptflusses für die Winkel ω ⋅ = 0S t und ω π⋅ = ⋅1,5S t .

3.1 Aufbau der Asynchronmaschine 75
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
-1
-0,5
0
0,5
1
-0,5 0 0,5 π 1 π 1,5 πStω
ψ ,S h cψ ,S h a ψ ,S h b
ˆ S hψ
α
β
ψ ,Sh a ψ ,Sh b ψ ,Sh c
α
β
ψ ,Sh b
ψ ,Sh c
ω ⋅ = 0S t ω π⋅ = ⋅1,5S t
-1
-0,5
0
0,5
1
-0,5 0 0,5 π 1 π 1,5 πStω
ψ ,S h cψ ,S h a ψ ,S h b
ˆ S hψ
α
β
ψ ,Sh a ψ ,Sh b ψ ,Sh c
α
β
ψ ,Sh b
ψ ,Sh c
ω ⋅ = 0S t ω π⋅ = ⋅1,5S t
Bild 3.6 Ausrichtung des Hauptflusses ψ Sh für ω ⋅ = 0S t und ω π⋅ = ⋅1,5S t
Das Bild 3.7 zeigt die Ausrichtung des Hauptflusses einer zweipoligen
(Polpaarzahl = 1p ) und einer vierpoligen (Polpaarzahl = 2p ) Asynchron-
maschine. Bei der zweipoligen Maschine bilden sich entlang des Umfangs ein
Nord- und ein Südpol aus, während sich bei der vierpoligen Maschine zwei Nord-
und zwei Südpole ausbilden.

3 Asynchronmaschine (ASM) 76
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
2γ π⋅≙
N
S
2γ π⋅≙
N
S
S
N
ω ⋅S t ω ⋅S t
Bild 3.7 Drehfeldbild des Stators einer zweipoligen ( = 1p ) und einer vierpoligen Asynchronmaschine ( = 2p )
Werden die drei Statorwicklungen an ein dreiphasiges symmetrisches
Drehspannungssystem angeschlossen, dann verursacht jede Statorwicklung
einen Statorfluss. Überlagert man die drei einzelnen Statorflüsse, so resultiert ein
magnetisches Drehfeld, das sich mit der Synchronwinkelgeschwindigkeit
ωω = ssyn p
. (3.15)
dreht. Dabei ist ωs die Winkelgeschwindigkeit des speisenden
Drehspannungssystems und p die Polpaarzahl der ASM.
Die sich drehenden Feldlinien des Statorfeldes schneiden die Rotorstäbe und
induzieren die Rotorspannung. Die Rotorspannung verursacht einen Rotorstrom,
der in Verbindung mit dem Statorfeld ein Drehmoment erzeugt.
Den bezogenen Unterschied zwischen der Drehfeldwinkelgeschwindigkeit des
Statorfelds ωsyn und der Winkelgeschwindigkeit, mit der sich die Welle der
Maschine dreht, bezeichnet man als Schlupf s . Der Schlupf ist mit

3.1 Aufbau der Asynchronmaschine 77
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
ω ωω
−= syn
syn
s . (3.16)
definiert.
Steht die Welle still ω = 0 , dann nimmt der Schlupf s den Wert = 1s an. Dreht
sich die Welle mit der Synchronwinkelgeschwindigkeit ω ω= syn , dann nimmt der
Schlupf s den Wert = 0s an.
Die Winkelgeschwindigkeit, mit der sich die Welle der ASM dreht, erhält man,
indem man Gl. (3.16) nach
( )ω ω= −1 syns . (3.17)
auflöst.
Die Winkelgeschwindigkeit der Rotorspannungen und der Rotorströme ωR hängt
von Differenz zwischen der Drehfeldwinkelgeschwindigkeit ωsyn und der Winkel-
geschwindigkeit der Welle ω ab.
• Wenn sich die Welle mit der Synchronwinkelgeschwindigkeit
ω ω= syn dreht, dann werden die Rotorleiter nicht von den Feldlinien
des Stators geschnitten. Damit ist die Frequenz der Rotorströme
bzw. der Rotorspannungen ωR Null (ω = 0R ) Die induzierte Rotor-
spannung ,q RU ist ebenfalls Null.
• Wenn die ASM still steht, dann gilt: ω = 0 und ω ω=R S .
Allgemein gilt:
ω ωω ω ω
ω−
= = ⋅synR s s
syn
s . (3.18)

3 Asynchronmaschine (ASM) 78
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Die induzierte Rotorspannung ,q RU , ist ebenfalls eine Funktion des Schlupfs s .
Die Rotorspannung kann mit
, , ,maxq R q RU U s= ⋅ . (3.19)
angegeben werden. Dabei ist , ,maxq RU die Rotorspannung im Stillstand ( = 1s ).
Das Bild 3.8 zeigt die Rotorspannung ,q RU und ωR als Funktion des Schlupfs s
bzw. als Funktion der Winkelgeschwindigkeit ω , mit der sich die Welle der
Maschine dreht.
,q RU
Rω
0s =1s =synω ω=0ω =
Sω
, ,maxq RU
untersynchronerBetrieb
übersynchronerBetrieb
gegensynchronerBetrieb
Bild 3.8 Rotorspannung RU und Winkelgeschwindigkeit der Rotorströme ωR als Funktion des Schlupfs s bzw. der Winkelgeschwindigkeit ω

3.1 Aufbau der Asynchronmaschine 79
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Man unterscheidet drei Betriebszustände. Im so genannten untersynchronen Be-
triebszustand ( < <0 1s ) dreht sich das Drehfeld schneller als die Welle der
Maschine ω ω< syn . Im gegensynchronen Betriebszustand > 1s dreht sich die die
Welle in die entgegengesetzte Richtung des Drehfeldes. Im übersynchronen
Betriebszustand ist die Winkelgeschwindigkeit der Welle ω größer als die
Synchronwinkelgeschwindigkeit des Drehfelds ωsyn (ω ω> syn ).
3.1.2 Aufstellung der Systemgleichungen
Die Statorspannungsgleichung eines Strangs kann in Analogie zum
Transformator für den stationären Zustand wie folgt dargestellt werden
,S SS S S q SU R I j X I Uσ= ⋅ + ⋅ ⋅ + . (3.20)
Dabei stellt SR den Wickelwiderstand der Statorwicklung dar, der
Statorstreublindwiderstand ist mit σ σω= ⋅S S SX L bezeichnet. σSL ist die
Statorstreuinduktivität.
Analog gilt für die kurzgeschlossene Rotorwicklung
,0 R RR R q RR I j s X I Uσ= ⋅ + ⋅ ⋅ ⋅ + , (3.21)
mit dem Rotorwiderstand RR und dem Rotorstreublindwiderstand R S RX Lσ σω= ⋅ .
Mit Gl. (3.18) kann der Rotorstreublindwiderstand ebenfalls mit
R s R R Rs X s L Lσ σ σω ω⋅ = ⋅ ⋅ = ⋅ ausgedrückt werden.
Die Stator- und Rotorwicklung sind mit dem gemeinsamen Drehfeld verkettet. Die
zeitliche Änderung des Hauptflusses Shψ erzeugt die beiden Quellenspannungen
,q SU und ,q RU .
Für die folgenden Betrachtungen werden alle Rotorgrößen auf die
Statorwindungszahl bezogen.

3 Asynchronmaschine (ASM) 80
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Mit dem Übersetzungsverhältnis
S
R
Nü
N= , (3.22)
das sich aus dem Quotient aus der Statorwindungszahl SN und der
Rotorwindungszahl RN berechnet, werden die Rotorgrößen umgerechnet.
Die auf die Statorwindungszahl umgerechneten Rotorgrößen sind mit einem
hochgestellten Strich X ′ gekennzeichnet.
Es gilt
1′ =R RI Iü
, (3.23)
2′ =R RR ü R , (3.24)
2σ σ′ =R RX ü X (3.25)
und
, ,q R q RU ü U′ = ⋅ . (3.26)
Da in Gl. (3.26) die Spannung ,q RU ′ auf die Statorwindungszahl bezogen ist, gilt
, , ,q R q R q SU ü U s U′ = ⋅ = ⋅ . (3.27)
Somit resultiert die Rotorspannungsgleichung zu
,0 σ′ ′ ′ ′= ⋅ + ⋅ ⋅ ⋅ + ⋅R RR R q SR I j s X I s U . (3.28)

3.2 Ersatzschaltbild der Asynchronmaschine 81
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Üblicherweise drückt man die innere Spannung ,q SU der ASM mit der
Hauptreaktanz ShX und dem Magnetisierungsstrom S RI I Iµ ′= + aus.
Es folgt für die Statorspannungsgleichung
S SS S S ShU R I j X I j X I µσ= ⋅ + ⋅ ⋅ + ⋅ ⋅ . (3.29)
Dividiert man Gl. (3.28) durch den Schlupf s , dann berechnet sich die
Rotorspannungsgleichung zu
10 µσ′ ′ ′ ′= ⋅ + ⋅ ⋅ + ⋅ ⋅R RR R ShR I j X I j X I
s . (3.30)
Die Gln. (3.29) und (3.30) können unmittelbar in das so genannte T-Ersatzs-
chaltbild, das den stationären Bertiebszustand der ASM beschreibt, umgesetzt
werden. An den Statorklemmen der ASM (vergl. Bild 3.9) liegt die Statorspannung
SU an. Der Statorkreis schließt sich über den Statorwiderstand SR , den
Statorstreublindwiderstand SX σ und die Hauptreaktanz ShX . Der
kurzgeschlossene Rotorkreis schließt sich über den Rotorwiderstand RR′ , den
Rotorstreublindwiderstand RX σ′ und die Hauptreaktanz ShX .
3.2 Ersatzschaltbild der Asynchronmaschine
Das Bild 3.9 zeigt das einphasige Ersatzschaltbild einer ASM.

3 Asynchronmaschine (ASM) 82
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
SU
SI SX σ SR RX σ′
ShX RRR R
s
sR
s
R ′−+′=′ 1
'RI
µI
Bild 3.9 Einphasiges Ersatzschaltbild der ASM mit Kurzschlussläufer
3.2.1 Leistungsbilanz der ASM
Nachfolgend wird die Leistungsbilanz einer dreisträngigen ASM erstellt. Dabei
werden die Eisen- und Reibverluste vernachlässigt. Aus der Leistungsbilanz kann
dann eine Beziehung zur Bestimmung des inneren Drehmoments iM der ASM
abgeleitet werden. Das Bild 3.10 veranschaulicht die Verhältnisse.

3.2 Ersatzschaltbild der Asynchronmaschine 83
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
ϕcos3 ⋅⋅⋅= SSS IUP
ω⋅= iimech MP ,
SVSD PPP ,−=
2, 3 SSSV IRP ⋅⋅=
2, 3 RRRV IRP ′⋅′⋅=
Luftspalt
Bild 3.10 Leistungsbilanz der ASM mit Kurzschlussläufer
Die Wirkleistung, die der Stator dem Netz entnimmt, berechnet sich für eine
dreisträngige ASM zu
3 cosS S SP U I= ⋅ ⋅ ϕ . (3.31)
Subtrahiert man von der Statorleistung SP die Statorverluste
2, 3V S S SP R I= ⋅ ⋅ (3.32)
so berechnet sich die Drehfeldleistung DP zu

3 Asynchronmaschine (ASM) 84
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
23D S S SP P R I= − ⋅ . (3.33)
Die Drehfeldleistung DP ist die Leistung, die über den Luftspalt vom Stator auf
den Rotor übertragen wird.
Analog zur Gl. (3.32) können die Rotorverluste zu
2, 3V R R RP R I′ ′= ⋅ ⋅ (3.34)
bestimmt werden.
Aus der Leistungsbilanz kann die innere mechanische Leistung imechP , der
Maschine zu
, ,mech i i D V RP M P P= ⋅ω = − (3.35)
bestimmt werden.
Wie dem Bild 3.9 entnommen werden kann, muss ebenfalls für die Drehfeld-
leistung
,23′ ′= ⋅ ⋅ = V RR
D R
PRP I
s s . (3.36)
gelten. Im Ersatzschaltbild (Bild 3.9 ) wird die Drehfeldleistung DP am Widerstand
( )sRR′ umgesetzt.
Eine weitere Bestimmungsgleichung für die innere mechanische Leistung imechP ,
erhält man durch Einsetzen von Gl. (3.36) in Gl.(3.35)
, ,, , , (1 ) (1 )V R V R
mech i D V R V R D
P PP P P P s P s
s s= − = − = ⋅ − = ⋅ − . (3.37)

3.2 Ersatzschaltbild der Asynchronmaschine 85
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Die mechanische Winkelgeschwindigkeit ω in Gl. (3.35) kann auch mit Hilfe des
Schlupfs s und der synchronen Winkelgeschwindigkeit synω ausgedrückt werden
syn(1 s)ω = − ⋅ω .
Man erhält dann
, (1 )mech i i synP M s= ⋅ − ⋅ω . (3.38)
Setzt man Gl. (3.38) und Gl. (3.37) gleich, dann berechnet sich die Drehfeld-
leistung DP zu
D i synP M= ⋅ω . (3.39)
Wie der Gl. (3.39) entnommen werden kann, hängt die Drehfeldleistung DP nur
vom inneren Drehmoment iM und der synchronen Winkelgeschwindigkeit synω
der ASM ab.
3.2.2 Berechnung des inneren Drehmoments
Mit den Gln. (3.36), und (3.39) erhält man eine Bestimmungsgleichung für das
innere Drehmoment iM als Funktion des Rotorstroms. Es gilt
213 R
i Rsyn
RM I
s
′ ′= ⋅ ⋅ ⋅ω
. (3.40)
Nachfolgend wird der Rotorstrom RI ′ als Funktion der Statorspannung SU be-
rechnet und dann in Gl. (3.40) eingesetzt.
Die Spannungsgleichungen der ASM können aus Bild 3.9 abgeleitet werden. Die
Stator- und Rotorspannungsgleichungen lauten

3 Asynchronmaschine (ASM) 86
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
S S S RS S S Sh ShU R I j X I j X I j X Iσ ′= ⋅ + ⋅ ⋅ + ⋅ ⋅ + ⋅ ⋅ , (3.41)
und
0 RS R R RSh R Sh
Rj X I j X I j X I I
sσ
′′ ′ ′ ′= ⋅ + ⋅ ⋅ + ⋅ ⋅ + ⋅ . (3.42)
Die Gln. (3.41) und (3.42) lassen sich mit
S Sh SX X X σ= + (3.43)
und
R Sh RX X X σ′ ′= + (3.44)
zu
S S RS S S ShU R I j X I j X I ′= ⋅ + ⋅ ⋅ + ⋅ ⋅ (3.45)
und
0 RS R RSh R
Rj X I j X I I
s
′′ ′ ′= ⋅ ⋅ + ⋅ ⋅ + ⋅ . (3.46)
vereinfachen.
Löst man Gl. (3.46) nach den Rotorstrom RI ′ auf und setzt sie in Gl. (3.45) ein,
dann errechnet sich der Statorstrom SI als Funktion der Statorspannung SU zu
( ) 2
′ ′+ ⋅ =
′ ′+ ⋅ ⋅ + ⋅ +
RR
S S
RR S S Sh
Rj X
sI U
Rj X R j X X
s
. (3.47)

3.2 Ersatzschaltbild der Asynchronmaschine 87
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Analog berechnet sich der Rotorstrom RI ′ als Funktion der Statorspannung SU
zu
2( )
− ⋅′ =′ ′+ ⋅ ⋅ + ⋅ +
ShR S
RR S S Sh
j XI U
Rj X R j X X
s
. (3.48)
Das Betragsquadrat vom Rotorstrom berechnet sich zu
22 2 2
2 22
′ ′= =′ ′ ′ ′+ − ⋅ + ⋅ +
ShR R S
R RS Sh S R S R S
XI I U
R RR X X X R X X
s s
. (3.49)
Durch Einsetzen von Gl. (3.48) in Gl. (3.40) kann das innere Drehmoment als
Funktion der Statorspannung SU für den stationären Betrieb berechnet werden.
Zur weiteren Vereinfachung werden die Statorstreuziffer Sσ , die Rotorstreuziffer
Rσ sowie die totale Streuziffer σ eingeführt. Die Definitionsgleichungen lauten:
SS
Sh
X
Xσσ = , (3.50)
RR
Sh
X
Xσσ
′= (3.51)
und
( ) ( )2 1
1 11 1
Sh
S R S R
X
X Xσ = − = −
′⋅ + σ ⋅ + σ . (3.52)
Die Stator- bzw. die Rotorstreuziffer sind ein Maß für die Flussverkettung zwi-
schen dem Stator- und dem Rotorfluss.

3 Asynchronmaschine (ASM) 88
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Nach einigen Umformungen folgt aus den Gln. (3.40), ((3.49) – (3.52)) die Be-
ziehung
( ) ( )2
2 2 2 2 2
3 1( )
2 (1 )
i Ssyn R S S S S R
SS R S R
M s UR R X s R X X
Rs X X X R
− σ=ω ′ ′⋅ + ⋅ + σ ⋅ ⋅
+ + ⋅ ⋅ − σ ′ ′⋅ ⋅ ⋅
(3.53)
zur Berechnung des inneren Drehmoments )(sM i als Funktion des Schlupfs s.
Differenziert man Gl. (3.53) nach dem Schlupf s und setzt die Ableitung gleich
Null, so erhält man den Kippschlupf Ks .
2 2
2 2 2S SR
KR S S
R XRs
X R X
′ += ±′ + σ ⋅
. (3.54)
Bei Kss ±= nimmt die Funktion (3.54) gerade ihre Extremwerte an. Das heißt, die
Maschine gibt im Motorbetrieb gerade das Maximalmoment, das als Kippmoment
KM bezeichnet wird, ab. Wenn das Lastmoment LM größer als das Kippmoment
KM ist, bleibt die Maschine stehen. Im generatorischen Betrieb nimmt die
Maschine bei Kss −= das maximale Drehmoment auf.
Setzt man den Kippschlupf Kss += in Gl. (3.53) ein, dann berechnet sich das
motorische Kippmoment KM zu
2
22 2 2
2
3 1
2(1 ) ( ) 1
SK
syn SS S S
S
UM
RR R X
X
⋅ − σ=⋅ω
⋅ − σ + + σ ⋅ ⋅ +
. (3.55)
Löst man Gl. (3.54) nach
2 2 2
2 2S SR
KR S S
R XRs
X R X
′ + σ ⋅=′ +
(3.56)

3.2 Ersatzschaltbild der Asynchronmaschine 89
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
auf und ersetzt RR XR ′′ in Gl. (3.53) durch Gl. (3.56), dann folgt für das innere
Drehmoment iM die Kloss´sche Formel
( )2
22 2 2
2
13
2 (1 ) ( ) 1
Si
syn S KS S S
S K
UM
R s sR R X
X s s
σω
σ σ
−⋅=
⋅ − + + ⋅ ⋅ + ⋅ +
. (3.57)
Vernachlässigt man in Gl. (3.57) den Term S2 R (1 )⋅ ⋅ − σ und in Gl. (3.55) den
Term SR (1 )⋅ − σ , so berechnet sich das innere Drehmoment iM bezogen auf das
Kippmoment KM zu
s
s
s
sM
M
K
K
K
i
+= 2
. (3.58)
Die Gl. (3.54) zur Berechnung des Kippschlupfs Ks kann ebenfalls noch etwas
vereinfacht werden. Dazu muss zunächst der Term SXσ⋅ näher betrachtet wer-
den. Da insbesondere bei Maschinen großer Leistung und Betrieb mit Netz-
frequenz die Hauptreaktanz ShX sehr viel größer als die Statorstreureaktanz σSX
bzw. die Rotorstreureaktanz σRX ′ ist gilt:
S Sh S R R ShX X X X X Xσ σ′ ′+ = ≈ = + . (3.59)
Unter Verwendung von Gl. (3.52) und Gl. (3.44) folgt mit ( )1Sh R RX X σ′= +
2
1
1
1
σ σσ σ
σσ σ σ
′ ′ ′ −σ⋅ = − = + − = + − − ′ ′ ′ ′ ′σ ⋅ = + = +′ + σ
Sh R R RS S S Sh Sh S Sh Sh
R R R
RS S Sh S R
R R
X X X XX X X X X X X X
X X XX
X X X X XX
. (3.60)

3 Asynchronmaschine (ASM) 90
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Da in der Regel die Rotorstreuziffer Rσ sehr viel kleiner als Eins ist, gilt in guter
Näherung
S S RX X X Xσ σ σ′σ ⋅ ≈ + = . (3.61)
Da beim Betrieb der ASM am 50 Hz Netz die Statorreaktanz SX viel größer als
der Statorwiderstand SR ist und Stator- und Rotorreaktanzen ungefähr gleich
groß RS XX ′= sind, kann Gl. (3.54) zu
22σXR
Rs
S
RK
+
′= . (3.62)
vereinfacht werden.
Darüber hinaus kann bei Maschinen großer Leistung im 50 Hz Betrieb der Rotor-
widerstand SR vernachlässigt werden, da in diesen Fall SR viel kleiner als σX ist.
Damit vereinfacht sich Gl. (3.62) zu
σX
Rs R
K
′= . (3.63)
Für Maschinen mit kleiner Streuziffer 1<<σ und σSS XR << lässt sich Gl. (3.55)
zu
( ) ( )2 2
2 2 2
3 1 3 1
2 21 σ
σω ωσ σ⋅ − ⋅= ≈ ⋅⋅ ⋅⋅ − + + ⋅
S SK
syn synS S S
U UM
XR R X (3.64)
vereinfachen.
Die Gl. (3.58) kann für zwei Betriebszustände approximiert werden. Wird die
Maschine in der Nähe des Synchronpunktes betrieben d.h. der Schlupf s ist viel

3.2 Ersatzschaltbild der Asynchronmaschine 91
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
kleiner als der Kippschlupf Kss << , dann kann die Kloss´sche Formel durch eine
Gerade der Form
22i
KK K
K
M ss sM s
s s
= ≈ ⋅+
. (3.65)
approximiert werden.
Ist der Betrag des Schlupfs s viel größer als der Kippschlupf Kss >> , dann lässt
sich Gl. (3.58) durch eine Hyperbel der Gestalt
22i K
KK
K
M ss sM s
s s
= ≈ ⋅+
. (3.66)
annähern.
Das Bild 3.9 zeigt den Drehmomentverlauf iM als Funktion des Schlupfs s für
eine ASM mit den folgenden Daten:
230 ; 2 50 ; 22 ;0,138 ; 0,216 ;0,471 ; 0,471 ; 16σ σ
ω π= ∆ = ⋅ ⋅ =′= Ω = Ω
′= Ω = Ω = Ω
S S N
S R
S R Sh
U V Hz P kWR RX X X

3 Asynchronmaschine (ASM) 92
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
s1.5 1 0.5 0 0.5 1 1.5
2
1.5
1
0.5
0
0.5
1
1.5
2
k
i
M
M
ks
2i
K K
M s
M s≈ ⋅
2i K
K
M s
M s≈ ⋅
s
s
s
sM
M
K
K
K
i
+= 2
%23=ks
( ) ( )2 2 2
22 2 2
2
1
2 (1 ) ( ) 1
σσ σ
σ σ
⋅ − + + ⋅=
⋅ − + + ⋅ ⋅ + ⋅ +
S Si
k S KS S S
S K
R R XM
M R s sR R X
X s s
Bild 3.11 Stationäre Betriebskennlinien der ASM
Das Bild 3.12 zeigt den auf den Nennstatorstrom S ,NI bezogenen Statorstrom SI
der ASM, mit den obigen Daten als Funktion des Schlupfs s. Der Nennschlupf Ns
der ASM beträgt ca. 0,04. Bei Asynchronmaschinen ist der Anlaufstrom ( 1s = ) je
nach Maschinenauslegung 4 bis 10 mal größer als der Nennstrom S ,NI . Dabei wird
ein quasi stationärer Hochlauf vorausgesetzt. Der Nennschlupf von
Asynchronmaschinen Ns mit Kurzschlussläufer ist ebenfalls Auslegungsabhängig

3.2 Ersatzschaltbild der Asynchronmaschine 93
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
im Allgemeinen gilt: 0,01 0,06Ns≤ ≤ . Das Kippmoment KM von Normmaschinen
ist um den Faktor 2 bis 3 mal größer als das Nennmoment iNM . Bei der
Maschine mit den obigen Daten ist der Anlaufstrom ca. 5,5 mal größer als der
Nennstrom ,S NI . Der Leerlaufstrom ,0SI ist ca. um den Faktor drei kleiner als der
Nennstrom ,S NI der Maschine.
0 0.25 0.5 0.75 10
1
2
3
4
5
6
s
S
S ,N
I
I
Bild 3.12 Auf den Nennstatorstrom S ,NI bezogenen Statorstrom SI als Funktion des Schlupfs s
Bei der Herleitung von Gl. (3.58) wurde der Statorwiderstand SR vernachlässigt
( 0SR = ). Unter dieser Annahme ist die Statorleistung SP gleich der Drehfeldl-

3 Asynchronmaschine (ASM) 94
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
eistung DP . Da, wie der Gl. (3.39) entnommen werden kann, die Drehfeldleistung
proportional zum inneren Drehmoment iM der ASM ist ( D i synP M= ⋅ω ), gilt
2iD
KDK K
K
MPs sP Ms s
= =+
. (3.67)
Dabei wird die Drehfeldkippleistung mit DKP bezeichnet. Die Drehfeldkippleistung
resultiert aus den Gln. (3.39) und (3.64) zu
23 1
2S
DK
UP
Xσ
⋅≈ ⋅ . (3.68)
Beim Betrieb der ASM am starren Netz unterscheidet man drei Betriebsbereiche,
die im Bild 3.13 dargestellt sind.
• Im untersynchronen Betriebsbereich oder Motorbetrieb
0 1 bzw. 0 syns ω ω< < < < nimmt die ASM über den Stator elektrische Leistung
auf 0SP > und gibt an der Welle mechanische Leistung 0mechiP > ab.
• Im übersynchronen Betriebsbereich oder Generatorbetrieb
0 bzw. syns ω ω< > gibt die ASM über den Stator elektrische Leistung an das
Netz ab 0SP < und nimmt an der Welle mechanische Leistung 0mechiP < auf.
• Im gegensynchronen Betriebsbereich oder Gegenstrombremsbetrieb
1 bzw. 0s ω> < nimmt die ASM über den Stator elektrische Leistung 0SP >
und über die Welle mechanische Leistung 0mechiP < auf.

3.2 Ersatzschaltbild der Asynchronmaschine 95
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Das Bild 3.13 zeigt für die drei Betriebsbereiche, die Drehfeldleistung DP , das in-
nere Drehmoment iM , die Rotorverluste VR
P und die innere mechanische
Leistung mechiP .
s
i
k
D
Dk
VR
Dk
mechi
Dk
M
M
P
P
P
P
P
P
1.5 1 0.5 0 0.5 1 1.5 21.5
1
0.5
0
0.5
1
1.5
mechi D VRP P P= −
VR D i synP s P s M ω= ⋅ = ⋅ ⋅s
s
s
sP
P
M
M
K
K
Dk
D
K
i
+== 2
übersynchroner BetriebGeneratorbetrieb
untersynchroner BetriebMotorbetrieb
gegensynchroner BetriebGegenstrombremsbetrieb
Bild 3.13 Stationäre Betriebskennlinien der ASM am starren Netz unter der Annahme eines vernachlässigbar kleinen Statorwiderstands ( 0SR = )

3 Asynchronmaschine (ASM) 96
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
3.3 ASM mit Schleifringläufer
Der Läufer des Schleifringläufers besteht aus einem Blechpaket, das mit Nuten
versehen ist. In den Läufernuten sind die Rotordrehstromwicklungen unter-
gebracht. Dabei wird jeweils ein Ende jeder Drehstromwicklung über Bürsten und
Schleifringe mit einem Klemmbrett verbunden. Die Klemmbrettanschlüsse sind in
der Regel mit K, L und M bezeichnet.
Damit können zusätzliche Widerstände in den Rotorkreis geschaltet werden.
Hierdurch kann zum einen der Anlassstrom der Maschine vermindert werden,
zum anderen kann die Drehzahl der Maschine verstellt werden. Diese Methode
der Drehzahlverstellung wird überwiegend bei Hebewerkzeugen (Aufzüge, Kräne)
angewendet. Nachteilig wirkt sich aus, das die Verstellmethode verlustbehaftet
ist, da der Rotorstrom 'RI in den Widerständen VR zusätzliche Verluste ver-
ursacht. Darüber hinaus verschleißen die Bürsten, so dass die ASM mit Schleif-
ringläufer einen größeren Wartungsaufwand im Vergleich zur Kurzschluss-
läufermaschine hat.
Das Bild 3.14 und Bild 3.15 zeigen den grundsätzlichen Aufbau eines
Schleifringläufers. Jede der drei Rotorwicklungen 1
'
RL ,
2
'
RL und
2
'
RL hat den auf
den Stator bezogenen Rotorwiderstand 'RR . Zusätzlich ist ein dreiphasiger
symmetrischer Vorwiderstand VR in den Läuferkreis geschaltet, dessen
Widerstandswert sich stufig oder stufenlos verändern lässt.

3.3 ASM mit Schleifringläufer 97
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
WelleStatorwicklungLäuferLager Läuferwicklung Schleifringe WelleStatorwicklungLäuferLager Läuferwicklung Schleifringe
Bild 3.14 Prinzipieller Aufbau eines Schleifringläufers

3 Asynchronmaschine (ASM) 98
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
'RR
VR
Schleifring
Bürste
K L M
'1RL '
2RL '3RL
Bild 3.15 Prinzipieller Aufbau eines Schleifringläufers
Damit können unmittelbar die Systemgleichungen für die ASM mit Schleif-
ringläufer abgeleitet werden, indem man in den Gleichungen des Kurzschluss-
läufers den Rotorwiderstand 'RR durch die Serienschaltung aus Rotorwiderstand
und Vorwiderstand ersetzt 'R VR R+ . Es folgt aus Gl. (3.32) für den Kippschlupf
2 2
R VK
S
R Rs
R Xσ
′ +=+
. (3.69)
Wie Gl. (3.69) zu entnehmen ist, nimmt der Kippschlupf mit zunehmendem Vor-
widerstand größere Werte an. Aus Gl. (3.62) folgt, dass das Kippmoment unab-

3.3 ASM mit Schleifringläufer 99
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
hängig vom Rotorwiderstand 'RR ist. Das heißt, durch einen zusätzlichen Vor-
widerstand VR im Läuferkreis ändert sich nicht das Kippmoment KM . Das
Bild 3.16 zeigt die stationären Betriebskennlinien einer ASM mit Schleifringläufer
für verschiedene Widerstandswerte der Vorwiderstände VR
0.5 0 0.5 1 1.5 21.5
1
0.5
0
0.5
1
1.5
s
k
i
M
M
V RR R′=0VR =
ks mit wachsendem Widerstand im Läuferkreis ('
R VR R )→
+
4V RR R′= ⋅ 10V RR R′= ⋅
LM
Bild 3.16 Stationäre Betriebskennlinien einer ASM mit Schleifringläufer für verschiedene Widerstandswerte des Vorwiderstands VR
Durch zusätzliche Vorwiderstände VR im Läuferkreis kann der Anlaufstrom be-
grenzt werden, da der Anlassstrom im Wesentlichen durch die Serienschaltung

3 Asynchronmaschine (ASM) 100
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
aus der Stator- SX σ und Rotorstreureaktanz 'RX σ sowie dem Stator- SR , Rotor- '
RR
und Vorwiderstand VR begrenzt wird.
Darüber hinaus steigt das Anlaufmoment mit zunehmendem Vorwiderstand VR
an.
Wie dem Bild 3.16 ebenfalls entnommen werden kann, nimmt der Schlupf s der
ASM mit Schleifringläufer mit zunehmenden Vorwiderständen VR im Läuferkreis
zu. Das bedeutet, dass die Drehzahl der Maschine z.B. bei einer drehzahlunab-
hängigen Belastung ( LM const= ), abnimmt. Damit kann durch Verstellung der
Vorwiderstände die Drehzahl verstellt werden.
Der mechanische Aufbau einer Schleifringläufermaschine ist wesentlich kom-
plexer als der einer Kurzschlussläufermaschine. Des Weiteren verursachen die
Bürstenkontakte mechanischen Abrieb und sind daher wartungsbedürftig. Auf-
grund dieser beiden Nachteile werden Schleifringläufermaschinen zunehmend
durch Kurzschlussläufermaschinen, die durch einen Frequenzumrichter gespeist
werden abgelöst. Hierbei generiert der Frequenzumrichter ein Drehspannungs-
system, dessen Frequenz und Amplitude verstellt werden kann.
3.4 Stern- Dreieckanlauf
Um den Anlaufstrom zu vermindern ist es Zweckmäßig den sog. Stern Dreieck-
anlauf zu verwenden. Dies ist insbesondere dann sinnvoll, wenn die Antriebs-
maschine kein allzu großes Losbrechmoment aus dem Stillstand benötigt. Das ist
z.B. bei Sägen, Pumpen und Lüfterantrieben der Fall.
Beim Stern- Dreieckanlauf werden die drei Statorwicklungen über einen drei-
stufigen Schalter mit den Schalterstellungen „Aus“ „Y “ und ∆ zunächst in Stern
„Y “ geschaltet. Hat der Antrieb den stationären Betriebspunkt erreicht, dann
werden die Statorwicklungen in Dreieck „ ∆ “ geschaltet. Dabei sind die Stator-
wicklungen für die Dreieckschaltung auszulegen. Das Bild 3.17 zeigt die Span-
nungs- und Stromverhältnisse bei der Stern- bzw. Dreieckschaltung.

3.4 Stern- Dreieckanlauf 101
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
,S VU U∆ =
,,
3N
S
II ∆
∆ =
,NI ∆
VU
,
1
3S Y VU U= ⋅
,SY N YI I=
,N YI
VU
SZ SZ
Bild 3.17 Spannungen und Ströme bei der Stern- und Dreieckschaltung
Bei der Sternschaltung liegt an jeder Statorwicklung die Spannung 1
3S NU U= ⋅
an. Dabei wird die verkettete Spannung des speisenden Drehspannungssystem
mit NU bezeichnet. Die Strangspannung einer Statorwicklung ist mit SU bezeich-
net. Wie dem Bild 3.17 entnommen werden kann, ist der Strangstrom SI einer
Statorwicklung gleich dem Netzstrom NI .
Bei der Dreieckschaltung ist die Strangspannung SU jeder Statorwicklung
identisch mit der verketteten Spannung NU des speisenden Drehspannungs-
netzes.
Da bei der Dreieckschaltung die Strangspannung SU um den Faktor 3 größer
ist als bei der Sternschaltung ist, muss auch der Strangstrom SI der Stator-
wicklung bei der Dreieckschaltung um den Faktor 3 größer sein im Vergleich
zur Sternschaltung (vergl. Tabelle 3.2).

3 Asynchronmaschine (ASM) 102
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Tabelle 3.2 Strangspannungen und Ströme bei der Stern- bzw. Dreieck-schaltung.
Sternschaltung Dreieckschaltung
Netzspannung
VU
VU
Statorspannung ,
1
3S Y VU U= ⋅
,∆ =S VU U
Statorstrom
, ,S Y N YI I= , ,
1
3S NI I∆ ∆= ⋅
Netzstrom
,, 3
NN Y
II ∆=
, ,3N N YI I∆ = ⋅
Das Kippmoment einer ASM in Dreieckschaltung ,kM ∆ ist ebenfalls um den Faktor
3 größer im Vergleich zur Sternschaltung ,k YM , da das Kippmoment mit dem
Quadrat der Statorspannung SU zunimmt (vergl. Gl. (3.64)).
Das Bild 3.18 zeigt den Netzstrom NI und das innere Drehmoment iM einer ASM
bei einem Stern- Dreieckanlauf. Das innere Drehmoment ist auf das Kippmoment
,kM ∆ in Dreieckschaltung bezogen. Der Netzstrom NI ist auf den Netznennstrom
,NNI ∆ , in Dreieckschaltung bezogen. Des Weiteren wurde angenommen, dass das
Lastmoment LM quadratisch mit der Drehzahl n zunimmt. Als erstes wird die
Maschine in Stern geschaltet. Der Antrieb beschleunigt bis sich die Belastungs-
kennlinie LM mit der Drehmomentenkennlinie für die Sternschaltung ,i YM
schneiden. Dann erfolgt die Umschaltung von der Stern- in die Dreieckschaltung.
Da die ASM jetzt das dreifache innere Drehmoment entwickelt, beschleunigt der
Antrieb aufs Neue bis sich die Drehmomentenkennlinie ,iM ∆ mit der
Belastungskennlinie LM schneidet. Dabei wurden die transienten Vorgänge
während des Umschaltens vernachlässigt. Wie dem Bild 3.18 entnommen

3.4 Stern- Dreieckanlauf 103
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
werden kann, nimmt der Netzstrom NI bei der Umschaltung von Stern- auf
Dreieckschaltung beachtliche Werte an.
N
N ,
I
I ∆
0 0.25 0.5 0.75 10
1
2
3
4
5
6
syn
ωω
0
0,5
1
∆
i
k ,
M
M
,iM ∆
,N YI
,∆NI
,i YM
LM
N
N ,
I
I ∆
0 0.25 0.5 0.75 10
1
2
3
4
5
6
syn
ωω
0
0,5
1
∆
i
k ,
M
M
,iM ∆
,N YI
,∆NI
,i YM
LM
Bild 3.18 Netzstrom NI und inneres Drehmoment iM während eines quasi stationären Hochlaufs einer ASM mit Kurzschlussläufer

3 Asynchronmaschine (ASM) 104
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
3.5 Läufer mit Stromverdrängung
Stromverdrängungsläufer werden eingesetzt, um das Anzugsmoment zu ver-
größern. Nachfolgend wird die Wirkungsweise der Stromverdrängung be-
schrieben. Jeder stromdurchflossene Leiterstab in einer Rotornut verursacht ein
Nutstreufeld NutH , das den Leiterstab durchdringt. Das Bild 3.19 a) zeigt die
Stromdichte s , für den Fall, dass der Leiterstab von einem Gleichstrom durch-
flossen wird. In diesen Fall ist der Nutstreufluss NutΦ zeitlich konstant.
NutΦ
x
0Nut NutB H≈ ⋅µ
s x
0Nut NutB H≈ ⋅µ
s
B, s B, s
Rotorstab
RI ′
Wbi
Wbi
a) b)
c)
x
Bild 3.19 Verlauf der mag. Feldstärke NutH , der mag. Induktion NutB und der Stromdichte s in der Nut eines Hochstabläufers

3.5 Läufer mit Stromverdrängung 105
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Fließt jedoch im Leiterstab ein Wechselstrom, dann ist der Nutstreufluss NutΦ
ebenfalls eine Wechselgröße. Die zeitliche Änderung des Nutstreuflusses Nut
ddt
Φ
verursacht Wirbelströme. Das Integral der Wirbelströme über die gesamte
Leiterfläche ergibt Null. Die Wirbelströme verursachen jedoch wie dem
Bild 3.19 b) und c) entnommen werden kann, eine Ungleichverteilung der Strom-
dichte s entlang der x-Koordinate des Läuferstabs. Die Ungleichverteilung der
Stromdichte im Läuferstab ist abhängig von der Frequenz des Rotorstroms. Sie
wirkt sich wie eine rotorfrequenzabhängige Vergrößerung des Rotorwiderstands
RR′ und eine rotorfrequenzabhängige Verkleinerung der Rotorstreuinduktivität
RL σ′ aus. Die Stromverdrängung tritt umso stärker in Erscheinung, je größer die
Leiter Höhe ist. Hierdurch kann durch die geometrische Form des Leiterstabs
konstruktiv gezielt die Stromverdrängung beeinflusst werden. Bei Kupferleitern
und 50Hz Rotorfrequenz tritt die Stromverdrängung erst ab Leiterhöhen größer
1cm in Erscheinung. Da die Rotorfrequenz Rf
R Sf f p n= − ⋅ (3.70)
als Differenz zwischen der Statorfrequenz Sf und der Drehzahl n ausgedrückt
werden kann, nimmt die Rotorfrequenz Rf und damit die Stromverdrängung mit
zunehmender Drehzahl n ab.
Das Bild 3.20 zeigt das innere Drehmoment als Funktion der Drehzahl n für eine
ASM mit Stromverdrängungsläufer und für eine ASM mit Rundstabläufer, bei dem
keine nennenswerte Stromverdrängung auftritt.

3 Asynchronmaschine (ASM) 106
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
iM
n
Rundstab ohne Stromverdrängung
Hochstab mit Stromverdrängung
Bild 3.20 Inneres Drehmoment einer ASM mit einem Rundstab- bzw. mit Stromverdrängungsläufer (Hochstabläufer)
3.6 Drehzahlverstellmethode
Nachfolgend wird ein Steuergesetz für eine Asynchronmaschine mit Kurz-
schlussläufer, die durch einen Umrichter gespeist wird, abgeleitet. Das Ziel der
Steuerung besteht in einer kontinuierlichen Drehzahlverstellung. Die ASM wird
durch ein dreiphasiges leistungselektronisches Stellglied (Umrichter), dessen
Ausgangsspannung SU und Ausgangsfrequenz Sω kontinuierlich verstellt werden
können gespeist. Dabei erzeugt der Umrichter ein dreiphasiges symmetrisches
Drehspannungssystem, dessen Ausgangsspannung SU durch die Führungsgröße
,S wU eingestellt werden kann. Die Statorfrequenz lässt sich durch die
Führungsgröße ,S wω vorgeben.

3.6 Drehzahlverstellmethode 107
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
33
,S SU I,N NU I
,S wU ,ωS wN
etz
Umrichter ASM
Bild 3.21 Speisung einer ASM durch einen Umrichter mit einstellbarer Frequenz Sω und einstellbaren Ausgangsspannungen ,SU ν
(mit ν = 1, 2, 3 )
Die maximale Ausgangsspannung ,maxSU ist durch die Nennspannung der
Maschine limitiert, so dass gilt:
≤ = ,maxS SN SU U U . (3.71)
Der maximale Ausgangsstrom ,maxSI des Umrichters ist ebenfalls durch den
Nennstrom der Maschine
≤ = ,maxS SN SI I I (3.72)
begrenzt.
Ein einfaches Steuergesetz erhält man, indem die Statorspannung und die
Statorfrequenz so verstellt werden, dass das Kippmoment einen konstanten Wert
annimmt ( .kM const= ). Bei den folgenden Ableitungen des Steuergesetzes wird
der Einfluss des Statorwiderstand vernachlässigt ( 0SR = ). Aus Gl. (3.64) folgt

3 Asynchronmaschine (ASM) 108
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
( ) ( )2 2 2
2
3 1 3 1 3
2 2 2σ σ σ σ σω ω ω ω⋅ ⋅ ⋅ ⋅ ⋅= ⋅ = ⋅ =
′ ′⋅ ⋅ + ⋅ + ⋅S S S
Ksyn S S R S R S S
U p U p UM
X L L L L . (3.73)
Aus der Gl. (3.73) kann unmittelbar das Steuergesetz abgelesen werden. Das
Kippmoment ist genau dann konstant, wenn die Statorfrequenz Sω proportional
zur Statorspannung SU (mit 1,2,3ν = ) verstellt wird. Hiermit folgt aus Gl. (3.73)
2 2
SN S
SN S
U Uω ω
=
(3.74)
bzw.
SNS S
SN
UUω
ω
⋅ =
. (3.75)
Das Bild 3.22 zeigt den Zusammenhang zwischen der Frequenz des speisenden
Drehspannungssystems Sf , der Frequenz der Rotorströme Rf und der mecha-
nischen Drehzahl n . Die Polpaarzahl ist mit p bezeichnet.

3.6 Drehzahlverstellmethode 109
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
0 10 20 30 40 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
i
K
M
M
f
LM
iM
p n⋅
Sf
Rf
0 10 20 30 40 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
i
K
M
M
f
LM
iM
p n⋅
Sf
Rf
Bild 3.22 Zusammenhang zwischen der Statorfrequenz Sf , der Frequenz der
Rotorströme Rf und der Drehzahl n
Es gilt folgende Beziehung für die Frequenzen
S Rf f p n= + ⋅ , (3.76)
bzw. die Winkelgeschwindigkeiten
S R pω ω ω= + ⋅ . (3.77)

3 Asynchronmaschine (ASM) 110
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Die Winkelgeschwindigkeit der Rotorströme kann mit dem Schlupf s und der
Winkelgeschwindigkeit des Statorspannungssystem Sω durch
R Ssω ω= ⋅ (3.78)
ausgedrückt werden. Setzt man in Gl. (3.78) den Kippschlupf ks s= ein, dann
folgt die Rotorkippwinkelgeschwindigkeit zu
Rk k Ssω ω= ⋅ . (3.79)
Dabei ist die Rotorkippwinkelgeschwindigkeit Rkω die Winkelgeschwindigkeit der
Rotorströme, bei der die ASM das Kippmoment i kM M= über die Welle abgibt.
Im Folgenden wird gezeigt, dass die Rotorkippfrequenz Rkω eine Maschinen-
konstante ist. Mit Gl. (3.63) und Gl. (3.79) folgt
( )Rk R R
KS S S R
R Rs
X L Lσ σ σ
ωω ω
′ ′= = =
′⋅ + (3.80)
bzw.
RRk
S R
RL Lσ σ
ω ′=
′+ . (3.81)
Die Rotorkippwinkelgeschwindigkeit ωRk ist eine Maschinenkonstante. Löst man
die Gln. (3.78) und (3.79) nach dem Schlupf s bzw. nach dem Kippschlupf ks
auf, und setzt die beiden Gleichungen in Gl. (3.58) ein, dann resultiert die
folgende Beziehung
2 2 2i
K Rk S S R Rk RK
K S R Rk S R Rk
Ms sMs s
ω ω ω ω ω ωω ω ω ω ω ω
= = =⋅ ⋅+ + +⋅ ⋅
. (3.82)

3.6 Drehzahlverstellmethode 111
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
zwischen dem inneren Drehmoment iM und der Winkelgeschwindigkeit der
Rotorströme Rω . Wie bereits gezeigt wurde, sind das Kippmoment kM und die
Rotorkippwinkelgeschwindigkeit Rkω Maschinenkonstanten.
In Gl. (3.82) kann die Winkelgeschwindigkeit der Rotorströme mit Gl. (3.77)
(ω ω ω= − ⋅R S p ) zu
2i
Rk SK
S Rk
MpM
pω ω ω
ω ω ω
=− ⋅+
− ⋅
. (3.83)
ersetzt werden. In Gl. (3.83) können die Winkelgeschwindigkeiten 2S Sfω π= ⋅ ⋅ ,
2Rk Rkfω π= ⋅ ⋅ und 2 nω π= ⋅ ⋅ ersetzt werden. Hiermit resultiert
2 2i
Rk R Rk SK
R Rk S Rk
Mf f f f p nMf f f p n f
= =− ⋅+ +
− ⋅
. (3.84)
Das Bild 3.23 zeigt das innere Drehmoment iM für verschiedene Stator-
frequenzen Sf , wobei die Statorspannung SU proportional mit der Statorfrequenz
Sf verstellt wurde ( S SU f∼ ). Die Rotorkippfrequenz Rkf beträgt 10Hz . Der im
Bild 3.23 dargestellte Stellbereich wird als Grunddrehzahlbereich bezeichnet.
Bei Statornennfrequenz SNf muss das leistungselektronische Stellglied Nenn-
spannung SNU an die Statorklemmen anlegen. Dieser Arbeitspunkt wird als
Nennpunkt bezeichnet.

3 Asynchronmaschine (ASM) 112
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
0 10 20 30 40 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
i
K
S
SN
M
M
U
U
Sf
10Sf Hz= 50Sf Hz=40Sf Hz=30Sf Hz=
iM
SU
20Sf Hz=
Sf
⋅p n Rf
Bild 3.23 Zusammenhang zwischen der Statorfrequenz Sf , der Frequenz der
Rotorströme Rf und der Drehzahl n für verschiedene Stator-frequenzen
Da im hier beschriebenen Fall die Ausgangsspannung des leistungs-
elektronischen Stellglieds durch die Statornennspannung SNU begrenzt ist, kann
ab dem Nennpunkt der Maschine nur noch die Statorfrequenz Sf erhöht werden,
um die Drehzahl der Maschine weiter zu steigern.
Mit .S SNU U const= = folgt für das Kippmoment gemäß Gl. (3.73)
( ) ( )2
2 2
3
2 2SN
K
R S S
p UM
L L fσ σ π⋅ ⋅=
′⋅ + ⋅ ⋅ ⋅ . (3.85)

3.6 Drehzahlverstellmethode 113
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Das heißt, für S SNf f> nimmt das Kippmoment umgekehrt proportional zum
Quadrat der Statorfrequenz 2
1∼K
S
Mf
ab. Diesen Bereich bezeichnet man als
Feldschwächbereich. Das Bild 3.24 zeigt verschiedene Drehmomentenkennlinien
für den Grunddrehzahlbereich und für den Feldschwächbereich. Im Grund-
drehzahlbereich wird die Statorspannung SU proportional mit der Statorfrequenz
verstellt. Damit ist das Kippmoment im Grunddrehzahlbereich konstant. Im Feld-
schwächbereich gilt 2
1∼K
S
Mf
.

3 Asynchronmaschine (ASM) 114
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
0 25 50 75 100 125 1500
0.2
0.4
0.6
0.8
1
1.2
i
K
S
SN
M
M
U
U
Sf
SU
=kM const
2
1∼k
S
Mf
Grunddrehzahlbereich Feldschwächbereich
Bild 3.24 Grund- und Feldschwächbereich einer ASM bei Speisung mit einem leistungselektronischen Stellglied
Das Bild 3.25 zeigt die stationären Kennlinien einer ASM, die mit Nennmoment
L iNM M= belastet wird. Im Grunddrehzahlbereich stellt sich dabei gerade die
Rotornennfrequenz RNf ein. Die ASM generiert ein konstantes inneres Dreh-
moment. Die mechanische Leistung berechnet sich aus dem Produkt aus dem
Drehmoment und der Winkelgeschwindigkeit. Das heißt im Grunddrehzahlbereich
nimmt die mechanische Leistung mechiP proportional mit der Drehzahl n zu.

3.6 Drehzahlverstellmethode 115
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
SNUkNM
iNM
RNf
Rkf
SNf 2⋅ SNf 3⋅ SNf
2
1∼k
S
Mf
1= ∼i LM Mn
2
1= ∼i LM Mn
.= =S SNU U const
∼SU n
,mechi NP
1∼mechiP
n
.=mechiP const
Bild 3.25 Grund- und Feldschwächbereich
Der Feldschwächbereich kann wiederum in zwei Bereiche unterteilt werden. Im
ersten Bereich ( 2S S Sf f f≤ ≤ ⋅ ) kann die innere mechanische mechiP Leistung der
Maschine konstant gehalten werden. Die Maschine nimmt bei Nennspannung
S SNU U= Nennstrom S SNI I= auf. Da im ersten Feldschwächbereich das Kipp-
moment quadratisch mit der Drehzahl n abnimmt, das innere Drehmoment iM
aber nur proportional zur Drehzahl abnimmt, muss die Rotorfrequenz Rf zu-
nehmen.
Erreicht die Rotorfrequenz Rf die Rotorkippfrequenz Rkf , dann muss das Last-
moment proportional zum Quadrat der Drehzahl verringert werden, da sich sonst
kein stabiler Arbeitspunkt einstellen kann. Im zweiten Feldschwächbereich nimmt
der Spitzenwert der inneren Leistung umgekehrt proportional mit der Drehzahl n
ab.
Bei der Ableitung der Spannungs-Frequenz-Kennliniensteuerung wurde der
Spannungsabfall am Statorwiderstand SR vernachlässigt. Der Spannungsabfall

3 Asynchronmaschine (ASM) 116
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
am Statorwiderstand SR kann dadurch kompensiert werden, indem die Span-
nungs-Frequenzkennlinie um einen Ordinatenabschnitt b (oft als Boost be-
zeichnet) abgehoben wird. Damit lautet das Steuergesetz
( ) SNS S S
SN
U bU f f b
f
−= ⋅ +
. (3.86)
Je nach Maschinentyp bewegt sich der Achsenabschnitt b zwischen
0,02 0,1SN SNSN
bU U
f⋅ ≤ ≤ ⋅ . Mit anderen Worten beträgt die Statorspannung bei der
Statorfrequenz 0Sf = zwischen 2 % und 10 % der Nennspannung.
3.6.1 Spannungs-Frequenzsteuerung
In vielen Fällen ist es gar nicht erforderlich, dass die Drehzahl der Arbeits-
maschine exakt eingeregelt wird. Beispiele hierfür sind z.B. Lüfter, Kompressoren
oder Pumpen. In diesen Fällen kann auf einen geschlossenen Drehzahlregelkreis
mit Drehzahlrückführung verzichtet werden. Vielmehr kann die Drehzahl des An-
triebs bei bekannter Belastungskennlinie durch Vorgabe der Statorfrequenz Sf
eingestellt werden. Für den Fall, dass die Rotorfrequenz Rf sehr klein im Ver-
gleich zur Statorfrequenz Sf ist, resultiert aus Gl. (3.76)
Sfnp
≈ . (3.87)

3.6 Drehzahlverstellmethode 117
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
ASM
Umrichter,S wf
,S wU
3
3
, , ,( ) SNS w S w S w
SN
U bU f f b
f
−= ⋅ +
SU
Bild 3.26 Spannungs-Frequenzsteuerung einer Umrichter gespeisten ASM
3.6.2 Drehzahlregelung
Die Steuerungsstruktur gemäß dem Bild 3.26 lässt sich relativ leicht zu einer
geschlossenen Regelung ergänzen.

3 Asynchronmaschine (ASM) 118
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
ASM
Umrichter
p
n
Rfwn
−
Drehzahl-regler
,i wM
3
3
, , ,( ) SNS w S w S w
SN
U bU f f b
f
−= ⋅ +
,S wf
,S wU
Tabelle
SU
Bild 3.27 Prinzipielle Struktur der Drehzahlregelung einer Umrichter ge-speisten ASM
Dazu muss die Drehzahl der Maschine n mit einem Drehzahlsensor (z. B. mit
Tachogenerator, Inkrementalgeber, Resolver..) erfasst werden. Die Regel-
differenz ( wn n− ) ist die Eingangsgröße des Drehzahlreglers, der in der Regel als
PI-Regler ausgeführt wird. Die Reglerausgangsgröße ist die Führungsgröße für
das innere Drehmoment ,i wM . Wie der Gl. (3.84) entnommen werden kann, ist
das innere Drehmoment ( )i RM f nur eine Funktion der Rotorfrequenz Rf .
Üblicherweise legt man Gl. (3.84) in Form einer Tabelle ab und bestimmt aus der
Führungsgröße für das innere Drehmoment ,i wM die zur Stellung des Dreh-
moments erforderliche Rotorfrequenz Rf . Mit der gemessenen Drehzahl n der
Maschine berechnet sich gemäß Gl.(3.76) die Statorfrequenz zu
S Rf f p n= + ⋅ . (3.88)
Die zugehörige Statorspannung SU berechnet sich durch Auswertung von
Gl. (3.86).

3.6 Drehzahlverstellmethode 119
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
3.6.3 Frequenzen während eines Reversiervorgangs
Das Bild 3.28 zeigt Rotor- und Statorfrequenz während eines Reversiervorgangs
einer unbelasteten ASM. Dabei ändert die ASM die Drehzahl von Sfnp
= −
(Linkslauf) auf Sfnp
= (Rechtslauf). Während des Reversiervorgangs regelt die
Steuerung gerade die Rotornennfrequenz R RNf f= ein. Die Statorspannung wird
gemäß Gl. (3.86) verstellt, so dass das Kippmoment der ASM während des
Reversiervorgangs konstante Werte annimmt. Damit stellt sich für R RNf f= gerade
das Nennmoment i iNM M= ein.

3 Asynchronmaschine (ASM) 120
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
p n⋅
f
SNf
SNf−
RNf
Sf
Rf
SNfSNf−
untersynchroner Betriebübersynchroner Betrieb gege
nsyn
chro
ner B
etrie
b
S R
S R
f f p n
pω ω ω
= + ⋅
= + ⋅
Bild 3.28 Rotor- und Statorfrequenz während eines Reversiervorgangs einer
unbelasteten ASM von SNfn
p= − auf Sfn
p= mit konstantem innerem
Drehmoment i iNM M= bzw. mit konstanter Rotorfrequenz R RNf f=
Während des Reversiervorgangs durchläuft die Maschine drei Betriebszustände.
• Im übersynchronen Betrieb ist der Betrag der Statorfrequenz Sf kleiner
als das Produkt aus Drehzahl und Polpaarzahl p n⋅ . Dies bedeutet die

3.6 Drehzahlverstellmethode 121
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Maschine wirkt generatorisch und speist die Bewegungsenergie
212
J ω ⋅ ⋅
in das speisende Netz zurück.
• Im gegensynchronen Betrieb haben die Statorfrequenz Sf und die
Drehzahl n unterschiedliche Vorzeichen.
• Im untersynchronen Betrieb ist die Statorfrequenz Sf größer als das
Produkt aus der Polpaarzahl und der Drehzahl p n⋅ . Der Rotor der
Maschine wird beschleunigt. Dazu nimmt die ASM elektrische Leistung
über die Statorklemmen auf.
3.6.4 Hochlauf am starren Netz bzw. mit einem Umric hter
Nachfolgend soll die Energiebilanz für einen Hochlauf einer unbelasteten 0LM =
ASM erstellt werden. Im ersten Fall wird die Maschine durch Schließen eines
Schützes direkt mit dem Drehspannungsnetz verbunden. Die Energie, die die
ASM dem Drehspannungsnetz entnimmt, kann durch Integration der
Statorleistung ( )SP t zu
0
( )N S
t
W P t dt∞
=
= ∫ (3.89)
berechnet werden. Dabei wird das Schütz zum Zeitpunkt 0t = geschlossen.
Für die weiteren Berechnungen wird zur Vereinfachung der Statorwiderstand
vernachlässigt ( 0SR = ), so dass Stator- und Drehfeldleistung identisch sind vergl.
Bild (3.2). Mit ( ) ( )S DP t P t= folgt

3 Asynchronmaschine (ASM) 122
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
0
( )N D
t
W P t dt∞
=
= ∫ (3.90)
Mit
D i synP M ω= ⋅ (3.91)
und ( 0LM = )
i
dM J
dtω= ⋅ (3.92)
folgt
2
00
synsyn
N syn syn synW J d J Jω
ω ω
ωω
ω ω ω ω ω=
==
= ⋅ = ⋅ ⋅ = ⋅∫ . (3.93)
Bei vernachlässigbaren Statorverlusten ( 0SR = ) gilt gemäß Bild 3.2 die folgende
Energiebilanz
,= +N kin V RW W W . (3.94)
Dabei ist
212kin synW J ω= ⋅ ⋅ (3.95)
die gespeicherte kinetische Energie. Hiermit resultiert die Verlustenergie, die im
Rotor in Wärme umgesetzt wird zu
2,
12V R synW J ω= ⋅ ⋅ . (3.96)

3.6 Drehzahlverstellmethode 123
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Im zweiten Fall wird die ASM von einem Umrichter gespeist. Während des
Beschleunigungsvorgangs regelt der Umrichter eine konstante Rotorfrequenz
Rf const= ein.
Vernachlässigt man die Statorverluste so folgt
0
( )N D
t
W P t dt∞
=
= ∫ , (3.97)
mit
SD i syn iP M M
pωω= ⋅ = ⋅ (3.98)
und ( 0LM = )
i
dM J
dtω= ⋅ (3.99)
folgt
ω ω
ω ω
ω ω ω ω= =
⋅= = ⋅∫ ∫, ,
0 0
syn N syn N
SN S
J JW d d
p p . (3.100)
Dabei ist ω ,syn N die synchrone Winkelgeschwindigkeit der ASM bei Speisung mit
Statornennfrequenz ω ω=S SN .
Mit Gl. (3.77) resultiert Gl. (3.100) zu
( ), ,
2
00
12
syn N syn N
N R R
J JW p d p
p p
ω ω
ω
ω ω ω ω ω ω=
= ⋅ ⋅ + = ⋅ ⋅ + ⋅
∫ (3.101)
bzw.

3 Asynchronmaschine (ASM) 124
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
,
2, ,
12
kin V R
N syn N R syn N
W W
JW J
pω ω ω= ⋅ ⋅ + ⋅ ⋅
. (3.102)
Erfolgt der Hochlauf mit Nennmoment ( i iNM M= ) dann beträgt die Rotorfrequenz
R RNω ω= . Mit dem Nennschlupf RNN
SN
sωω
= und SNsyn p
ωω = folgt
2,V R N SN syn N Syn
JW s J s
pω ω ω= ⋅ ⋅ ⋅ = ⋅ ⋅ . (3.103)
Für eine typische ASM mit einem Nennschlupf von 4%Ns = verringern sich die
Rotorverluste während eines Hochlaufs durch Umrichterspeisung auf 2
, 0,04V R SynW J ω= ⋅ ⋅ im Vergleich zu den Rotorverlusten 2, 0,5V R SynW J ω= ⋅ ⋅ bei
einem Hochlauf am starren Netz. Das heißt, ein „Umrichterhochlauf“ wirkt sich
günstig auf die thermische Belastung des Rotors aus.
3.7 Messtechnische Bestimmung der Maschinenparamete r
Im Folgenden wird beschrieben, wie man die Maschinenparameter zum ein-
phasigen Ersatzschaltbild einer ASM ermitteln kann. Die Eisen- und Reib-
verlustleistungen wurden im Widerstand ,Fe RbR zusammengefasst
(vergl. Bild 3.29).

3.7 Messtechnische Bestimmung der Maschinenparameter 125
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
SU
SI SX σ SR RX σ′
ShX RRR R
s
sR
s
R ′−+′=′ 1
'RI
µI,Fe RbI
,Fe RbR
Bild 3.29 Einphasiges Ersatzschaltbild einer ASM mit Kurzschlussläufer
Die Maschinenparameter einer ASM
• Statorstreuimpedanz SX σ ,
• Rotorstreuimpedanz RX σ′ ,
• Hauptimpedanz ShX ,
• Statorwiderstand SR ,
• Rotorwiderstand RR′ und
• Fiktiver Verlustwiderstand ,Fe RbR
können durch zwei Messungen, dem sog. Leerlaufversuch und dem Kurzschluss-
versuch, ermittelt werden. Zur Auswertung der beiden Versuche ist es erforder-

3 Asynchronmaschine (ASM) 126
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
lich, die Wirkleistungsaufnahme und die Scheinleistungsaufnahme der Maschine
zu ermitteln.
In der Praxis verwendet man häufig die Aronschaltung zur Leistungsmessung.
3.7.1 Leistungsmessung mit der Aronschaltung
Mit der Aronschaltung kann man die Wirkleistungsaufnahme eines beliebigen
dreiphasigen Verbrauchers ermitteln. Da der Nullleiter nicht angeschlossen ist,
muss die Summe der drei Netzströme
1 2 3 0i i i+ + = (3.104)
zu jedem Zeitpunkt null sein.
1i
2i
3i
1L
2L
3L
NL
1u 2u 3u
Z1U
2U 3U
12U
23U
31U
1
2 3
Bild 3.30 Spannungen und Ströme eines Dreiphasensystems
Die komplexe Scheinleistungsaufnahme S des Verbrauchers nach dem Bild 3.30
ist durch

3.7 Messtechnische Bestimmung der Maschinenparameter 127
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
* * *1 2 31 2 3S P j Q U I U I U I= + ⋅ = ⋅ + ⋅ + ⋅ (3.105)
gegeben. Dabei sind die Leiterspannungen mit 1U , 2U , 3U und die konjugiert-
komplexen Leiterströme mit *1I , *
2I und *3I bezeichnet. Wie dem Zeigerdiagramm
(Bild 3.30) zu entnehmen ist, können die Leiterspannungen 1U und 3U durch
1 12 2U U U= + (3.106)
und mit 32 23U U= −
3 32 2U U U= + (3.107)
ausgedrückt werden.
Durch Einsetzen der Gln. (3.107) und (3.106) in (3.105) resultiert
( )
* * * * *1 1 2 3 312 2 2 32 2
* * * * *1 3 1 2 312 32 2
0
S U I U I U I U I U I
S U I U I U I I I
=
= ⋅ + ⋅ + ⋅ + ⋅ + ⋅
= ⋅ + ⋅ + + +
. (3.108)
Der Realteil der Gl. (3.108) liefert die Wirkleistung, da die Summe der drei Leiter-
ströme null ist, kann die Wirkleistung mit zwei Leistungsmessern gemessen wer-
den. Die Wirkleistung folgt zu
12 1 12 32 3 32Re cos cosP S U I U Iϕ ϕ= = ⋅ ⋅ + ⋅ ⋅ . (3.109)
Um die Wirkleistung mit zwei Leistungsmessern zu erfassen, müssen mit dem
ersten Leistungsmesser die Spannung 12U und der Leiterstrom 1I und mit dem
zweiten Leistungsmesser die Spannung 32U und der Leiterstrom 3I gemessen

3 Asynchronmaschine (ASM) 128
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
werden. Das Bild 3.31 zeigt die Verschaltung von zwei Leistungsmessern zur
Erfassung der Wirkleistung eines dreiphasigen Verbrauchers (Aronschaltung).
1i
3i
1L
2L
3L
Z
12u
32u
2i
Bild 3.31 Messung der Wirkleistung eines beliebig dreiphasigen Verbrauchers
3.7.1.1 Leerlaufversuch
Zur Durchführung des Leerlaufversuchs wird die Maschine ohne mechanische
Belastung an ein Drehspannungsnetz mit Nennspannung und Nennfrequenz an-
geschlossen. Dabei werden der Leerlaufstrom ,0SI , die Leerlaufstatorspannug
,0SU und mit einem Leistungsmesser die Wirkleistungsaufnahme ,0SP gemessen.
Bei allen drei Größen handelt es sich um Stranggrößen. Bei der Durchführung
des Leerlaufversuchs dreht sich die Maschine mit synchroner Winkelge-
schwindigkeit synω , d. h. der Rotorstrom RI′ ist in guter Näherung null.

3.7 Messtechnische Bestimmung der Maschinenparameter 129
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Darüber hinaus wird angenommen, dass der Statorwiderstand SR sehr viel
kleiner ist als der Widerstand ,Fe RbR , der die Eisen- und Reibverluste reprä-
sentiert. Des Weiteren sei die Hauptinduktivität ShL sehr groß gegenüber der
statorseitigen Streuinduktivität SL σ .
Der Statorwiderstand SR lässt sich z. B. mit einer Gleichstrommessung be-
stimmen.
Bei bekanntem Statorwiderstand lassen sich die Statorleerlaufverluste zu
2, ,0V S S SP R I= ⋅ (3.110)
bestimmen. Die Statorleerlaufleistung ,0SP wird in den beiden Widerständen SR
und ,Fe RbR in Wärme umgesetzt. Mit
, , ,0 ,V Fe Rb S V SP P P= − (3.111)
können die Stromwärmeverluste des Widerstands ,Fe RbR berechnet werden. Da
voraussetzungsgemäß ,S Fe RbR R≪ und S ShL Lσ ≪ gilt, kann der Spannungsabfall
am Statorwiderstand SR und an der statorseitigen Streuinduktivität SL σ vernach-
lässigt werden. Hiermit kann der Strom durch den fiktiven Widerstand ,Fe RbR zu
, ,,
,0
≈ V Fe RbFe Rb
S
PI
U (3.112)
bestimmt werden.
Der Widerstand ,Fe RbR , der die Eisen- und Reibverluste repräsentiert, resultiert zu
2,0
,, ,
SFe Rb
V Fe Rb
UR
P≈ . (3.113)

3 Asynchronmaschine (ASM) 130
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Der Statorleerlaufstrom ,0SI setzt sich aus den beiden orthogonalen Strömen Iµ
und ,Fe RbI zusammen. Hiermit resultiert der Magnetisierungsstrom zu
2 2,0 ,S Fe RbI I Iµ = − . (3.114)
Näherungsweise gilt für die Hauptimpedanz
,0SS Sh Sh
UL X
Iµ
ω ⋅ = ≈ . (3.115)
3.7.1.2 Kurzschlussversuch
Der sog. Kurzschlussversuch wird bei festgebremster Maschine durchgeführt.
Gemessen werden der Statorkurzschlussstrom ,S KI , die Statorspannung ,S KU und
die Wirkleistungsaufnahme während des Kurzschlussversuchs ,S KP . Bei der Ver-
suchsdurchführung wird die Statorspannung z.B. mit einem Verstelltransformator
so lange vergrößert, bis der Statorstrom seinen Nennwert erreicht , ,S K S NI I= . Da
der Magnetisierungsstrom Iµ sehr klein gegenüber dem Statorkurzschlussstrom
,S KI ist, kann der Magnetisierungsstrom vernachlässigt werden. Somit muss nur
das Ersatzschaltbild bestehend aus Stator-, Rotorwiderstand, Statorstreu-
induktivität und Rotorstreuinduktivität betrachtet werden.
Mit der Statorkurzschlussleistung ,S KP und dem Statorkurzschlussstrom ,S KI kann
die Serienschaltung aus ,S k S RR R R′= + zu
,, 2
,
S KS k S R
S K
PR R R
I′= + = (3.116)

3.7 Messtechnische Bestimmung der Maschinenparameter 131
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
berechnet werden. Bei bereits bestimmtem Statorwiderstand SR lässt sich der
auf den Stator bezogene Rotorwiderstand RR′ berechnen.
Mit der Statorkurzschlussspannung ,S KU und dem Statorkurzschlussstrom ,S KI
resultiert die Kurzschlussimpedanz zu
,,
,
S KS K
S K
UZ
I= . (3.117)
Damit kann die Summe der Stator- und Rotorstreuinduktivität zu
( ) 2 2, ,S S R S R S K S KL L X X X Z Rσ σ σ σ σω ′ ′⋅ + = = + = − (3.118)
berechnet werden.
Bei den meisten realen Maschinen sind aus Symmetriegründen die beiden
Streuinduktivitäten etwa gleich groß, so dass gilt:
S RL Lσ σ′≈ (3.119)
bzw.
S RX Xσ σ′≈ . (3.120)


© Hochschule - Aalen Heinrich Steinhart 09.10.2011


© Hochschule - Aalen Heinrich Steinhart 09.10.2011
4 Synchronmaschine (SM)
In der Energieversorgung sowie in der Automatisierungstechnik ist die Synchron-
maschine weit verbreitet. Im Vergleich zur Asynchronmaschine weist die Syn-
chronmaschine zwei wesentliche Vorteile auf. Die Drehzahl der Maschine ist syn-
chron zur Frequenz Sf des speisenden Drehspannungssystems. Zum anderen
kann bei der fremderregten Synchronmaschine bei gegebener Wirkleistungsauf-
nahme die Blindleistungsaufnahme der Maschine über die Erregung verstellt
werden.
Die Entwicklung der Synchronmaschine ist eng mit dem Ausbau der elektrischen
Energieversorgung verbunden. Synchrongeneratoren werden im Leistungs-
bereich von 10 Wµ bis ca. 1,7GW gefertigt.
In den letzten Jahren hat die Synchronmaschine als Industrieantrieb mit verstell-
barer Drehzahl stark an Bedeutung gewonnen. Hierzu muss die SM z. B. mit ei-
nem leistungselektronischen Stellglied, das ein Drehspannungs- oder Dreh-
stromsystem mit verstellbarer Ausgangsspannung bzw. mit verstellbarem Aus-
gangsstrom und variabler Frequenz generiert, gespeist werden.
In der Feinwerktechnik werden Synchronmaschinen als Positionierantriebe z. B.
für Uhren, Drucker, Fotogeräte in großen Stückzahlen eingesetzt. Wenn es sich
um eine offene Regelkette handelt, spricht man von einem Schrittmotorantrieb.
Wird zur Kommutierung die Rotorposition herangezogen, dann spricht man von
einer elektronisch kommutierten Maschine (EC-Maschine). Die Tabelle 3.1 gibt
einen Überblick über die verschiedenen Einsatzgebiete und die
Leistungsbereiche der gängigen Synchronmaschinen.

4 Synchronmaschine (SM) 136
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Tabelle 4.1 Leistungsbereich und Einsatzgebiete von Synchronmaschinen
Typ Leistungsbereich Einsatzgebiete
Permanenter-regte Synchron-maschine
100 30−W kW Servoantriebe, Werkzeug-maschinen, Gruppenantriebe
Schenkelpol-maschine
5 1kW GW− Notstromgeneratoren, lang-samlaufende Industrieantriebe, Generatoren für Wasserkraftwerke
Vollpolmaschine 100 1,7kW GW− Generatoren in Kraftwerken, Verdichter, Mühlenantriebe
Schrittmotoren 10 500W Wµ − Quarzuhren, Positionierantriebe, Feinwerktechnik
4.1 Prinzipieller Aufbau der SM
Synchronmaschinen können entsprechend der Erregung in fremd- und selbst-
erregte Maschinen unterteilt werden. Die Erregung der SM ist in der Regel im
Läufer untergebracht. Bei der permanenterregten SM ist die Erregung durch
Dauermagnete, die z. B. auf den Läufer aufgeklebt sind realisiert. Nachteilig ist,
dass die Erregung nicht verstellt werden kann. Bei der fremderregten SM befindet
sich auf dem Läufer eine Erregerwicklung. Die Stromzufuhr erfolgt über
Schleifringe.
Der Läufer einer SM kann als Vollpol- oder Schenkelpolläufer ausgeführt sein.
Das Bild 4.1 zeigt die möglichen Bauformen von Synchronmaschinen.

4.1 Prinzipieller Aufbau der SM 137
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Synchron-maschine
permanent-erregte
fremd-erregte
Vollpol-SM
Schenkelpol-SM
Vollpol-SM
Schenkelpol-SM
Bild 4.1 Bauformen von Synchronmaschinen
Der Luftspalt einer Vollpolmaschine ist bezüglich des Umfangs in guter Näherung
konstant. Höherpolige Maschinen werden in der Regel als Schenkelpolmaschinen
ausgeführt. Dabei sind auf den ausgeprägten Polen die Erregerwicklungen
untergebracht. Der Luftspalt ändert sich bedingt durch die mechanische
Konstruktion entlang des Umfangs der Maschine.
Das Bild 4.2 zeigt die Bestandteile einer permanenterregten Synchronmaschine
mit Rotorlagegeber.

4 Synchronmaschine (SM) 138
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
RotorLagerSchneckenrad Schneckenrad Lagerschild LagegeberRotorLagerSchneckenrad Schneckenrad Lagerschild Lagegeber
Bild 4.2 Baugruppen einer permanenterregten SM mit Rotorlagegeber
Das Bild 4.3 zeigt den Rotor einer Synchronmaschine mit eingebetteten
Permanentmagneten.

4.1 Prinzipieller Aufbau der SM 139
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Eingebettete Permanentmagnete
Rotor
Blechpaket(mag. leitend)
Bild 4.3 Rotor einer Synchronmaschine mit eingebetteten Permanentmagneten
Das Bild 4.4 zeigt den Aufbau des Stators einer Synchronmaschine.

4 Synchronmaschine (SM) 140
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Statorwicklung
Statorpol
Bild 4.4 Stator einer Synchronmaschine

4.1 Prinzipieller Aufbau der SM 141
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Sai
Sau
SbuSbi
ScuSci
S
N
Sai
Sau
SbuSbi
ScuSci
S
N
Bild 4.5 Prinzipieller Aufbau einer SM mit der Polpaarzahl 1p = links mit Vollpolläufer (oder Turborotor) rechts mit Schenkelpolläufer
Das Bild 4.5 zeigt den Aufbau einer SM mit der Polpaarzahl = 1p .
Der Läufer der SM dreht sich synchron mit der Winkelgeschwindigkeit des spei-
senden Drehspannungsnetz Sω . Mit der Polpaarzahl p resultiert für die
Winkelgeschwindigkeit der Welle
Ssyn p
ωω = , (4.1)
bzw.
2S S
syn
fn
p pωπ
= =⋅ ⋅
. (4.2)
Hierbei ist synn die Synchrondrehzahl der Maschine und Sf die Statorfrequenz. In
der Tabelle 4.2 sind die Synchrondrehzahlen einer SM bei Speisung mit der
Statorfrequenz 50Sf Hz= für verschiedene Polpaarzahlen p aufgelistet.

4 Synchronmaschine (SM) 142
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Tabelle 4.2 Synchrondrehzahl einer SM für 50Sf Hz= als Funktion der Polpaarzahl p
p 1 2 3 4
synn 13000min− 11500min− 11000min− 1750min−
Das Bild 4.6 zeigt exemplarisch eine Schenkelpolmaschine mit der Polpaarzahl
2p = . Entlang des mechanischen Umfangs des Läufers bilden sich zwei Nord-
und zwei Südpole aus. Im Ständer sind sechs Wicklungen untergebracht, von
denen jeweils die zwei um 180° versetzten Wicklungen in Serie oder parallel ge-
schaltet sind. Je nach Auslegung der Wicklungen und Netzspannung kann die
Maschine in Stern oder in Dreieck geschaltet werden.

4.2 Stationäres Betriebsverhalten einer Vollpolmaschine 143
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
N
S
N
S
N
Sai
Sau
SbuSbi
Sbu
ScuSci
Sai
Sau
SbuSbi
Scu
Sci
Bild 4.6 Schenkelpolmaschine mit 2p =
4.2 Stationäres Betriebsverhalten einer Vollpolmasc hine
Nachfolgend wird das stationäre Betriebsverhalten einer Vollpolmaschine abge-
leitet, wobei zunächst davon ausgegangen wird, dass der Statorwiderstand ver-
nachlässigt werden kann 0SR ≈ . Des Weiteren wird ein sinusförmiger Verlauf der
Luftspaltinduktion LB entlang des Umfangs (vergl. Bild 4.7) vorausgesetzt.

4 Synchronmaschine (SM) 144
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
S
N
aW
cW
bW
aW
cWbW
γLB
LB
γ2 π⋅
π
bI
cI
aIfI
Bild 4.7 Vollpolsynchronmaschine mit sinusförmigem Verlauf der Luftspalt-induktion LB
Wenn sich der Läufer dreht, wird in den drei Wicklungen aW , bW und cW eine
Spannung induziert. Die innere Spannung kann mit der aktiven Leiterlänge l , der
Luftspaltinduktion LB der Windungszahl SN und der Tangentialgeschwindigkeit v
zu
ν = ⋅ ⋅ ⋅2 Lu B l v mit , ,a b cν = (4.3)
berechnet werden. Der Faktor 2 berücksichtigt, dass jeweils ein Hin- und ein
Rückleiter in Serie geschaltet sind und damit die beiden Teilspannungen addiert
werden müssen.
Die innere Spannung der SM wird in der Literatur als Polradspannung PU be-
zeichnet. Setzt man einen linearen magnetischen Kreis voraus, dann resultiert die
Polradspannung zu
P f synU k I ω= ⋅ ⋅ . (4.4)

4.2 Stationäres Betriebsverhalten einer Vollpolmaschine 145
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Hierbei ist der Erregerstrom mit fI und die Winkelgeschwindigkeit mit der sich die
Welle dreht mit synω bezeichnet. In der Konstanten k sind alle Geometriefaktoren
der Maschine zusammengefasst.
Vernachlässigt man den SR Statorwiderstand sowie die Eisenverluste, dann kann
für den stationären Betrieb am Netz das folgende einphasige Ersatzschaltbild
abgeleitet werden.
SU
SI
PU
SS hj L Iω⋅ ⋅ ⋅
ω ⋅ =S h hL X
FU
FI
Bild 4.8 Ersatzschaltbild einer Vollpolsynchronmaschine
Die Statorspannung SU sowie die Polradspannung PU werden durch komplexe
Effektivwerte dargestellt. Der Winkel zwischen der Statorspannung SU und der
Polradspannung PU heißt Polradwinkel ϑ .
Ist die Polradspannung PU größer als die Ständerspannung SU , so spricht man
von einer übererregten Maschine. Ist die Polradspannung kleiner als die Ständer-
spannung, dann bezeichnet man die Maschine als untererregt.

4 Synchronmaschine (SM) 146
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
4.2.1 Leistungsbilanz und inneres Drehmoment
Ausgehend von der Definition der komplexen Scheinleistung werden nachfolgend
Beziehungen zur Berechnung der Wirk- und Blindleistungsaufnahme abgeleitet.
Bei vernachlässigbarem Ständerwiderstand SR lässt sich das innere Dreh-
moment der Maschine berechnen. Ausgangspunkt für die weiteren Betrachtun-
gen ist die Definition der komplexen Scheinleistung
*3 SS SS U I= ⋅ ⋅ . (4.5)
Der Maschine wird über die Ständerklemmen die komplexe Ständerleistung SS ,
die sich aus der Ständerspannung SU und dem konjugiert komplexen Ständer-
strom *SI berechnet, zugeführt. Der Faktor 3 in Gl. (4.5) berücksichtigt die drei
Stränge der Maschine.
Für die weiteren Analysen wird zur Vereinfachung der Zeiger der Ständerspan-
nung SU in die reelle Achse gelegt, sodass die Ständerspannung zu einer reellen
Größe wird S SU U→ .
Aus den Bild 4.8 kann mit der obigen Vereinfachung unmittelbar die Spannungs-
gleichung
S PS S hU j L I Uω= ⋅ ⋅ + (4.6)
abgelesen werden.
Aufgrund der Spannungsdifferenz zwischen der Ständer- SU und der Polrad-
spannung PU stellt sich der Ständerstrom
PSS
S h
U UI
j Lω−=
⋅ (4.7)
ein.

4.2 Stationäres Betriebsverhalten einer Vollpolmaschine 147
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Der konjugiert komplexe Ständerstrom resultiert zu
** PSS
S h
U UI
j Lω−=
− ⋅ . (4.8)
Da die Ständerspannung SU in die reelle Achse gelegt wurde, und die Polrad-
spannung mit der Ständerspannung den Polradwinkel ϑ einschließt, lässt sich
die Polradspannung durch
jP PU U e ϑ= ⋅ (4.9)
bzw. die konjugiert komplexe Polradspannung ist
* jP PU U e ϑ−= ⋅ (4.10)
darstellen.
Dabei ist PU gerade der Betrag der Polradspannung PPU U= .
Durch Einsetzen von Gl. (4.10) in Gl. (4.8) und Gl. (4.8) in (4.5) folgt
[ ]23 3 3
cos( ) sin( )j
S S P S S PS
S h S h S h
U U U e U U US j
j L j L j L
ϑ
ϑ ϑω ω ω
− ⋅ ⋅ − ⋅ ⋅ ⋅ ⋅ = = + ⋅ −− ⋅ − ⋅ ⋅
(4.11)
bzw.
3 3sin( ) cos( )S P S P S
S S SS h S h P
U U U U US P jQ j
L L Uϑ ϑ
ω ω ⋅ ⋅ ⋅ ⋅= + = − + − ⋅ ⋅
. (4.12)
Hiermit folgt die Wirk- und Blindleistungsaufnahme der Maschine zu
3sin( )S P
SS h
U UP
Lϑ
ω⋅ ⋅= −
⋅ , (4.13)

4 Synchronmaschine (SM) 148
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
bzw.
3cos( )S P S
SS h P
U U UQ
L Uϑ
ω ⋅ ⋅= − ⋅
. (4.14)
Wenn die Ständerverluste vernachlässigbar klein sind ( 0SR = ) muss die Wirk-
leistung SP , die die Maschine über den Ständer aufnimmt, gleich der inneren
mechanischen Leistung mechiP sein. Somit folgt
S mechi i synP P M ω= = ⋅ . (4.15)
Das innere Drehmoment iM resultiert mit Gl. (4.13) zu
3sin( )mechi S S P
isyn syn syn S h
P P U UM
Lϑ
ω ω ω ω⋅ ⋅= = = −
⋅ ⋅ . (4.16)
Der Gl. (4.16) kann entnommen werden, dass das innere Drehmoment für
Polradwinkel im Bereich 02π ϑ− ≤ < positive Werte annimmt. Das heißt, die
Maschine wirkt motorisch, sie nimmt über den Ständer elektrische Wirkleistung
auf und gibt mechanische Leistung über die Welle ab. Die Maschine entwickelt
bei dem Polradwinkel π ϑ− =2
(vergl. (4.16)) das maximale innere Drehmoment
,maxiM . Das Lastmoment LM der Arbeitsmaschine muss immer kleiner als das
maximale innere Drehmoment ,maxiM sein, da sich sonst kein stabiler Arbeitspunkt
einstellen kann. Wenn die Maschine motorisch überlastet wird fällt sie außer Tritt.
Sie generiert im Mittel kein Drehmoment mehr.
Wenn die SM über die Welle mechanische Leistung aufnimmt, was gleich-
bedeutend mit negativem inneren Drehmoment iM ist, dann stellt sich ein Polrad-

4.2 Stationäres Betriebsverhalten einer Vollpolmaschine 149
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
winkel in Bereich 02πϑ< ≤ ein. Die mechanische Leistung, die die Maschine
über die Welle aufnimmt, wird als elektrische Leistung in das Versorgungsnetz
eingespeist, die SM wirkt generatorisch. Für den Polradwinkel 2πϑ = stellt sich
gerade das maximale innere Drehmoment, das z.B. eine Turbine an der Welle
einprägen kann, ein. Wird das Antriebsmoment weiter erhöht, dann fällt die
Maschine ebenfalls außer Tritt. In diesen Fall überdreht die Maschine.
iM
ϑ2π−
2π
LM
,maxiM
Bild 4.9 Inneres Drehmoment iM in Abhängigkeit der Polradwinkels ϑ

4 Synchronmaschine (SM) 150
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Dem Bild 4.10 können die Wirk- und Blindleistungsverhältnisse einer SM für ver-
schiedene Polradspannungen und verschiedene Polradwinkel entnommen wer-
den.
ϑϑ
⋅⋅
hS
S
S
L
U
Q
ω
23
⋅⋅
hS
S
S
L
U
Q
ω
23
⋅⋅
hS
S
S
L
U
P
ω
23
⋅⋅
hS
S
S
L
U
P
ω
23
-1.5
-1
-0.5
0
0.5
1
1.5
-1.5
-1
-0.5
0
0.5
1
1.5
−π/2 −π/4 0 π/4 π/2
5,1=S
P
U
U
1=S
P
U
U
5,0=S
P
U
U
5,1=S
P
U
U
1=S
P
U
U5,0=
S
P
U
U
motorisch schgeneratori-1.5
-1
-0.5
0
0.5
1
1.5
-1.5
-1
-0.5
0
0.5
1
1.5
.kap
.ind
Bild 4.10 Wirk- SP und Blindleistung SQ als Funktion des Polradwinkels ϑ für
1,5P
S
UU
= , 1P
S
UU
= und 0,5P
S
UU
=

4.2 Stationäres Betriebsverhalten einer Vollpolmaschine 151
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Positive Blindleistungsaufnahme SQ bedeutet die Maschine wirkt induktiv, nega-
tive Blindleistungsaufnahme bedeutet die Maschine wirkt kapazitiv. Über das in-
nere Drehmoment iM kann die Wirkleistung, die die Maschine mit dem Ver-
sorgungsnetz austauscht, beeinflusst werden.
Für 0iM = folgt unmittelbar aus Gl. (4.16) 0ϑ = und damit 0SP = . Für P SU U=
ist die Blindleistung SQ ebenfalls null. Für P SU U< und 0iM = wirkt die Maschine
induktiv. Für P SU U> und 0iM = wirkt die Maschine kapazitiv. Das heißt, durch
Verstellen der Polradspannung kann die Blindleistungsbilanz beeinflusst werden.
4.2.2 Zeigerdiagramme einer Vollpolmaschine
Meist werden zur Analyse des stationären Betriebsverhaltens einer SM Zeiger-
diagramme verwendet. Das Bild 4.11 zeigt exemplarisch vier Zeigerdiagramme
für ausgewählte Betriebsmodi.

4 Synchronmaschine (SM) 152
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
PUSU
SS Sj L Iω ⋅ ⋅
SI
PUSU
SS Sj L Iω ⋅ ⋅
SI
SU
SI
PU
SS Sj L Iω ⋅ ⋅
SU
SI
PU
SS Sj L Iω ⋅ ⋅
übererregt, kapazitiv
untererregt, induktiv übererregt, generatorisch
übererregt, motorisch
00
S
S
PQ
<=
00
S
S
PQ
>=
00
S
S
PQ
=<
00
S
S
PQ
=>
ϑ
ϑ
Bild 4.11 Zeigerdiagramme für 0SP = und 0SQ > bzw. 0SQ < sowie 0SQ =
und 0SP > und 0SP <
Das Bild 4.12 zeigt die Ortskurve der Polradspannung für konstante Ständer-
spannung .SU const= und konstantem Ständerstrom .SI const= Dabei wurde
die Ständerleistung SP und die Polradspannung PU variiert.

4.2 Stationäres Betriebsverhalten einer Vollpolmaschine 153
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
SU
PU
S h Sj L Iω ⋅ ⋅
a
b
c
d
a
b
c
d
SI
ϕ
ϑ
untererregt
übererregt
motorischgeneratorisch
Bild 4.12 Zeigerdiagramm zu verschiedene Betriebszustände für .SI const= und SU const= . Der Phasenwinkel zwischen Statorstrom
und Statorspannung ϕ wird im Bereich π ϕ π− < < variiert a) motorischer Betrieb, übererregt b) Phasenschiebebetrieb, übererregt, kapazitiv c) generatorischer Betrieb, übererregt b) Phasenschiebebetrieb, untererregt, induktiv

4 Synchronmaschine (SM) 154
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
4.2.3 Vollständiges Ersatzschaltbild einer Vollpols ynchronmaschine
In den vorangegangenen Abschnitten wurde das stationäre Betriebsverhalten
eine Vollpolmaschine analysiert. Dabei wurde der Spannungsabfall am Ständer-
widerstand vernachlässigt d. h. 0SR = . Diese Vereinfachung ist insbesondere bei
kleinen Maschinen unzulässig. Das Bild 4.13 zeigt das vollständige Ersatz-
schaltbild einer Vollpolmaschine. Der Widerstand SR repräsentiert den
Wicklungswiderstand der Ständerwicklung. Die Hauptreaktanz hX wird durch den
Verkopplungsfluss gebildet. Die Ständerstreureaktanz ist mit SX σ bezeichnet.
SU
SI
PU
σSX
FU
FI
ShX SR
Bild 4.13 Vollständiges Ersatzschaltbild einer Vollpolsynchronmaschine
Im Zeigerdiagramm zum obigen Ersatzschaltbild sind die Spannungsabfälle an
dem Statorwiderstand SR , an der Hauptreaktanz hX und an der Ständerstreu-
reaktanz SX σ zu berücksichtigen. Das Bild 4.14 zeigt exemplarisch das Zeiger-
diagramm für 0SP < und 0SQ = . In diesem Fall ist die Maschine übererregt, sie
wirkt generatorisch.

4.2 Stationäres Betriebsverhalten einer Vollpolmaschine 155
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
SU
SI
PU
( ) SSh Sj X X Iσ⋅ + ⋅
00
S
S
PQ
<=
ϑ
SSR I⋅
Bild 4.14 Zeigerdiagramm einer Vollpolmaschine. Die Maschine wirkt rein generatorisch und ist übererregt
4.2.4 Schenkelpolmaschine
Bei der Schenkelpolmaschine, ist aufgrund des unterschiedlichen Luftspalts
entlang des Umfangs, die Hauptreaktanz der SM eine Funktion der
Polradstellung. Das Bild 4.15 zeigt die Ständerreaktanz als Funktion des
Polradwinkels.

4 Synchronmaschine (SM) 156
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
SX
ϑ0 π 32π⋅π
2
dX
qX
Bild 4.15 Ständerreaktanz als Funktion der Polradstellung
Entsprechend der Polradlage können gemäß dem Bild 4.16 die d- und q-Achse
eingeführt werden. Da in der d-Achse der Luftspalt minimal ist, nimmt die
Ständerinduktivität in der d-Achse das Maximum an. In der q-Achse nimmt der
Luftspalt den größten Wert an. Daher ist in der q-Achse die Ständerinduktivität
am kleinsten.
d-Achse
q-Achse
Bild 4.16 d- und q-Achse bei einer Schenkelpolmaschine
Die Ständerinduktivität der Synchronschenkelpolmaschine kann durch die zwei
Reaktanzen

4.2 Stationäres Betriebsverhalten einer Vollpolmaschine 157
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
d hd SX X X σ= + (4.17)
und
σ= +q hq SX X X (4.18)
beschrieben werden.
Dabei ist die Ständerstreureaktanz mit SX σ , die Hauptinduktivität in der d-Achse
mit hdX und die Hauptinduktivität in der q-Achse mit hqX bezeichnet. Hierbei gilt
hd hqX X> .
4.2.4.1 Zeigerdiagramm einer Schenkelpolmaschine
Das Bild 4.17 zeigt das Zeigerdiagramm einer Schenkelpolsynchronmaschine.
Dazu wurde der Statorstromzeiger SI bezüglich der Polradspannung in die zwei
orthogonalen Komponenten SdI und SqI zerlegt. Es gilt
S Sd SqI I I= + . (4.19)
Die Stromkomponente SdI verursacht in Verbindung mit der Reaktanz der
Maschine in der d -Achse den Spannungsabfall Sddj X I⋅ ⋅ in der d -Achse. Der
Spannungsabfall in der q -Achse berechnet sich zu Sqqj X I⋅ ⋅ .

4 Synchronmaschine (SM) 158
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
PU
Sddj X I⋅ ⋅
Sqqj X I⋅ ⋅
SU
SI
SdI
SqI
ϑ
Bild 4.17 Zeigerdiagramm für eine Schenkelpolsynchronmaschine
In der d -Achse gilt die folgende Spannungsgleichung
cos( ) jSdS P dU e U j X Iϑϑ ⋅⋅ ⋅ = + ⋅ ⋅ , (4.20)
analog folgt die Spannungsgleichung für die q -Achse

4.2 Stationäres Betriebsverhalten einer Vollpolmaschine 159
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
sin( ) jSqS qj U e j X Iϑϑ ⋅− ⋅ ⋅ ⋅ = ⋅ ⋅ . (4.21)
Die Gl. (4.20) kann nach dem Strom SdI zu
cos( ) cos( )j jS P P S
Sdd d
U e U U U eI j
j X X
ϑ ϑϑ ϑ⋅ ⋅⋅ ⋅ − − ⋅ ⋅= = ⋅⋅
(4.22)
aufgelöst werden.
Aus der Gl. (4.21) folgt
sin( ) jS
Sqq
U eI
X
ϑϑ ⋅⋅ ⋅= − . (4.23)
Mit der eulerschen Beziehung
cos( ) sin( )je jϑ ϑ ϑ⋅ = + ⋅ (4.24)
folgt
[ ]sin( ) cos( ) sin( )SSq
q
UI j
Xϑ ϑ ϑ= − ⋅ + ⋅ , (4.25)
bzw.
[ ]cos( ) cos( ) sin( )P PSd
d d
U UI j j j
X Xϑ ϑ ϑ= ⋅ − ⋅ ⋅ + ⋅ . (4.26)
Wendet man die Additionstheoreme 1
sin( ) cos( ) sin(2 )2
ϑ ϑ ϑ⋅ = ⋅ ,
( )2 1sin ( ) 1 cos(2 )
2ϑ ϑ= − ⋅ und ( )2 1
cos ( ) cos(2 ) 12
ϑ ϑ= ⋅ − auf die beiden
Gln. (4.25) und (4.26) dann folgt

4 Synchronmaschine (SM) 160
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
1 1sin(2 )
2
1 1 1 1cos(2 )
2
S Sd Sq
SS
q d
S P
d q q d d
I I I
UI
X X
U Uj j
X X X X X
ϑ
ϑ
= +
= − ⋅ − ⋅ ⋅
− + − − ⋅ ⋅ +
(4.27)
Als nächstes muss der Statorstromzeiger SI bezüglich der Statorspannung SU in
die Wirkkomponente ,S wI und die Blindkomponente ,S bI aufgeteilt werden.
Hierzu multipliziert man Gl. (4.27) mit je ϑ , dann liegt der Statorspannungszeiger
SU in Richtung der reellen Achse (vergl. Bild 4.17).
Es folgt
( )
1 1sin(2 )
2
1 1 1 1cos(2 ) cos( ) sin( ) .
2
SS
q d
S P
d q q d d
UI
X X
U Uj j j
X X X X X
ϑ
ϑ ϑ ϑ
= − ⋅ − ⋅ ⋅
− + − − ⋅ ⋅ + ⋅ + ⋅
(4.28)
Der Realteil von Re SI entspricht dann dem Wirkstrom ,S wI , während der Im SI
den Blindstrom ,S bI darstellt. Für den Wirkstrom gilt
,
1 1sin(2 ) sin( )
2S P
S wq d d
U UI
X X Xϑ ϑ
= − ⋅ − ⋅ ⋅ −
, (4.29)
der Blindstrom berechnet sich zu
,
1 1 1 1cos( ) cos(2 )
2SP
S bd d q q d
UUI
X X X X Xϑ ϑ
= ⋅ − + − − ⋅ ⋅
. (4.30)
Die SM nimmt über den Stator die Blindleistung

4.2 Stationäres Betriebsverhalten einer Vollpolmaschine 161
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
,3S S S bQ U I= ⋅ ⋅ (4.31)
und die Wirkleistung
,3S S S wP U I= ⋅ ⋅ (4.32)
auf.
Unter der Voraussetzung, dass die Statorverlustleistung ( 0SR = ) und die
Eisenverluste vernachlässigbar klein sind, entspricht die über den Stator
aufgenommene Wirkleistung der mechanischen Leistung, welche die Maschine
über die Welle abgibt. Mit der obigen Voraussetzung gilt
, ,3mech i S S S wP P U I= = ⋅ ⋅ . (4.33)
Das innere Drehmoment, das die Maschine generiert, berechnet sich zu
, ,3mech i S S wSi
syn syn syn
P U IPM
ω ω ω⋅ ⋅
= = = , (4.34)
bzw.
3 1 1sin(2 ) sin( )
2S S P
isyn q d d
U U UM
X X Xϑ ϑ
ω ⋅= − ⋅ − ⋅ ⋅ +
, (4.35)
2
synchrones Drehmoment reluktantes Drehmoment
3 3 1 1sin( ) sin(2 )
2
syn R
S P Si
syn d syn q d
M M
U U UM
X X Xϑ ϑ
ω ω ⋅ ⋅ ⋅= − − − ⋅ ⋅ ⋅ ⋅
. (4.36)
Das innere Drehmoment der Schenkelpolsynchronmaschine setzt sich aus zwei
Komponenten zusammen. Das synchrone Drehmoment SynM hängt von der

4 Synchronmaschine (SM) 162
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Polradspannung PU , der Statorspannung SU und dem Polradwinkel ϑ ab. Bei
der Berechnung des reluktanten Drehmoments RM geht der doppelte Polrad-
winkel ϑ und das Quadrat der Statorspannung SU ein.
−π −π/2 0 π/2 π-1.5
-1
0.5
0
0.5
1
1.5
ϑ
3i
S P
d syn
M
U UX ω
⋅ ⋅ ⋅
i Syn RM M M= +
( ) ( )ϑω
⋅⋅⋅⋅⋅−⋅⋅
−= 2sin2
3 2
synqd
qdSR XX
XXUM
ϑω
sin3 ⋅
⋅⋅⋅−=
synd
PSSyn X
UUM
−π −π/2 0 π/2 π-1.5
-1
0.5
0
0.5
1
1.5
ϑϑ
3i
S P
d syn
M
U UX ω
⋅ ⋅ ⋅
3i
S P
d syn
M
U UX ω
⋅ ⋅ ⋅
i Syn RM M M= +
( ) ( )ϑω
⋅⋅⋅⋅⋅−⋅⋅
−= 2sin2
3 2
synqd
qdSR XX
XXUM
ϑω
sin3 ⋅
⋅⋅⋅−=
synd
PSSyn X
UUM
Bild 4.18 Abhängigkeit des synchronen, reluktanten und inneren Drehmoments einer Synchronmaschine vom Polradwinkel

4.2 Stationäres Betriebsverhalten einer Vollpolmaschine 163
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
4.2.5 Leistungsbilanz, Wirkungsgrad
In der Leistungsbilanz einer SM sind die Ständerverluste ,V SP und die Erreger-
verluste ,V ErrP zu berücksichtigen. Die dreisträngige Maschine nimmt über den
Ständer die elektrische Leistung
3 cos( )S S SP U I ϕ= ⋅ ⋅ ⋅ (4.37)
auf und gibt über die Welle die mechanische Leistung
,mech i i synP M ω= ⋅ (4.38)
ab.
Mit den Ständerverlusten
2, 3V S S SP R I= ⋅ ⋅ (4.39)
und den Erregerverlusten
2,V Err E FP R I= ⋅ (4.40)
resultiert der Wirkungsgrad zu
η−
= = =+ +
, ,
, ,
mech i S V Sab
auf S V Err S V Err
P P PPP P P P P
. (4.41)

4 Synchronmaschine (SM) 164
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
4.2.6 Synchronisation
Eine Synchronmaschine kann nicht ohne weiteres mittels eines Schützes auf ein
Drehspannungsnetz mit konstanter Spannung und konstanter Frequenz aufge-
schaltet werden. Damit während des Einschaltvorgangs keine unzulässig großen
Ausgleichsströme fließen, muss die Polradspannung mit der Spannung des
Drehspannungsnetzes in Betrag, Frequenz und Phasenwinkel übereinstimmen.
Die Polradspannung kann über die Erregungen der Maschine beeinflusst werden.
Frequenz und Phasenwinkel der Polradspannung können über die Winkel-
geschwindigkeit der Maschinenwelle beeinflusst werden.
4.2.6.1 Dunkelschaltung
Bei der so genannten Dunkelschaltung (Bild 4.19) wird parallel zu jedem
Schütztkontakt eine Lampe angeschlossen. Sobald alle drei Lampen dunkel sind,
ist die Bedingung für die Synchronisierung erfüllt. In der Praxis wird man wie folgt
vorgehen. Als Erstes wird bei geöffnetem Schütz die Synchronmaschine auf
Synchronwinkelgeschwindigkeit gebracht. Dann wird die Erregerspannung
solange vergrößert, bis die Polradspannung den gleichen Wert wie die
Netzspannung annimmt. Die Übereinstimmung der Phasenlage wird durch
gezieltes ausprobieren gefunden. Hierzu wird die Winkelgeschwindigkeit der
Synchronmaschinen vergrößert, beziehungsweise verringert bis alle drei Lampen
erlöschen. Dann wird das Schütz zugeschaltet. Das Bild 4.19 zeigt die
Dunkelschaltung einschließlich des zugehörigen Zeigerdiagramms.

4.2 Stationäres Betriebsverhalten einer Vollpolmaschine 165
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
3NU
SM
Netz
1U∆
2NU 1NU3NU
2PU 1PU3PU
1NU
2NU
1U∆
1PU
2PU
3PU
2U∆
3U∆
ω∆3L 2L 1L
Bild 4.19 Synchronisation einer Synchronmaschine auf ein Dreispannungsnetz mittels der Dunkelschaltung einschließlich des zugehörigen Zeigerdiagramms
4.2.6.2 Gemischte Schaltung
Häufig wird der Dunkelschaltung die empfindlichere gemischte Schaltung
vorgezogen (Bild 4.20). Die Lampe 3L zeigt die Differenz zwischen der
Netzspannung 3NU und der Polradspannug 3PU an. Wenn der Betrag und die
Spannung der beiden Drehspannungssysteme übereinstimmen, erlischt Lampe
3L . Die Lampen 1L und 2L zeigen jeweils eine verkettete Spannung ( )−2 1N PU U
beziehungsweise ( )−1 2N PU U an. Die Synchronisationsbedingung ist genau dann
erfüllt, wenn die Lampe 3L erlischt und die beiden anderen Lampen ( 1L und 2L )
gleich hell aufleuchten.

4 Synchronmaschine (SM) 166
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
3NU
SM
Netz
3U∆
2NU 1NU3NU
2PU 1PU3PU
1NU
2NU
1PU
2PU
3PU
ω∆
3L2L 1L
3L 2L 1L
3U∆
Bild 4.20 Synchronisation einer Synchronmaschine auf ein Dreispannungsnetz mittels der gemischten Schaltung einschließlich des zugehörigen Zeigerdiagramms
Ordnet man die drei Lampen kreisförmig an, so kann an der Reihenfolge in der
die Lampen aufleuchten abgelesen werden, ob sich die Synchronmaschine zu
schnell oder zu langsam dreht.

© Hochschule - Aalen Heinrich Steinhart 09.10.2011
5 Schrittmotor
Vom Aufbau und der Wirkungsweise her sind Schrittmotoren permanenterregte
Synchronmaschinen. Während sich bei der Synchronmaschine das Statorfeld
kontinuierlich dreht, wird beim Schrittmotor das Statorfeld getaktet, um einen
definierten Winkel weitergeschaltet.
Typische Einsatzgebiete des Schrittmotors sind Positionier-, Drucker-,
Uhrenantriebe und Anzeigensteuerungen. Er wird im Leistungsbereich zwischen
10 µW (Antrieb einer Quarzuhr) und 500 W verwendet. Bild 5.1 zeigt den Aufbau
eines Schrittmotorantriebs, bestehend aus dem eigentlichen Motor, einem
leistungselektronischen Stellglied und einer Signalverarbeitung. Dabei handelt es
sich um einen gesteuerten Antrieb (ohne Rückkopplung der Rotorposition).
Signal-verarbeitung
Leistungs-elektronischesStellglied
α2
4 Schritt-motor
sf
Energiequelle
/r l
Bild 5.1: Aufbau eines Schrittmotorantriebs
Die Signalverarbeitung wertet die Steuersignale /r l für Rechts- bzw Linkslauf
aus (Bild 5.2). Mit jedem Impuls auf der Sf -Leitung ( Sf , Schrittfrequenz) schaltet
die Signalverarbeitung den Winkel des Statorfeldes wα um den Schrittwinkel δ
weiter. Der Rotor schließt mit dem Stator den Winkel α ein. Da der Rotor eine
träge Masse besitzt, folgt der Rotor verzögert nach einer sprungförmigen
Änderung der Ausrichtung des Statorfeldes.

5 Schrittmotor 168
09.10.2011 © Hochschule - Aalen Heinrich Steinhart
/r l
sft
t
t
αwα Ausrichtung des StatorsαAusrichtung des Statorfeldeswα
Bild 5.2: Arbeitsweise der Signalverarbeitung
Bei Schrittmotoren unterscheidet man zwischen unipolaren und bipolaren
Schrittmotoren. Bild 5.3 zeigt den Aufbau eines unipolaren Schrittmotors.
5.1 Unipolarer Schrittmotor
Das Bild 5.3 zeigt den prinzipiellen Aufbau eines uniploaren Schrittmotors.

169 5.1 Unipolarer Schrittmotor
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
1A
Saψ
Sbψ
2A
1B 2B
S
N
Bild 5.3: Aufbau eines unipolaren Schrittmotors
Der Vorteil des unipolaren Schrittmotors liegt im einfachen Aufbau des
leistungselektronischen Stellglieds. Ein Nachteil stellt die schlechte Ausnutzung
dar, da nur jeweils eine Hälfte der Statorwicklungen bestromt wird und die
nichtbestromten Wicklungen keinen Beitrag zur Drehmomentenbildung leisten.
Das leistungselektronische Stellglied zur Ansteuerung eines unipolaren
Schrittmotors ist in Bild 5.4 dargestellt.

5 Schrittmotor 170
09.10.2011 © Hochschule - Aalen Heinrich Steinhart
1AL
1SAR
2AL 1BL 2BL
2SBR1SBR2SAR
1T 2T 3T 4T
ZU
Bild 5.4: Leistungselektronisches Stellglied zur Ansteuerung eines unipolaren Schrittmotors
Die vier Statorwicklungen können durch Einschalten der zugeordneten
Leistungstransistoren bestromt werden. Die Entmagnetisierung erfolgt über den
Freilaufkreis, der jeweils aus einer in Serie geschalteten Z-Diode und einer Diode
besteht.
5.2 Bipolarer Schrittmotor
Eine bessere magnetische Ausnutzung im Vergleich zum unipolaren Schrittmotor
erreicht man mit dem bipolaren Schrittmotor. Allerdings ist zu bedenken, dass das
leistungselektronische Stellglied zur Bestromung des bipolaren Schrittmotors die
doppelte Anzahl an Leistungstransistoren benötigt. Die Ansteuerung der „oberen“
Transistoren ist aufwendiger, da das Potenzial des Emitters der „oberen“
Transistoren vom Schaltzustand des Brückenzweigpaares abhängt. Bild 5.5 zeigt
den Aufbau eines bipolaren Schrittmotors.

171 5.2 Bipolarer Schrittmotor
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Saψ
Sbψ
SaI
SbI
A
B
S
N
Bild 5.5: Aufbau des bipolaren Schrittmotors
5.2.1 Vollschrittbetrieb
Bild 5.6 zeigt das Bestromungsmuster und die Ausrichtung des resultierenden
Statorflusses für den Vollschrittbetrieb. Dabei wird davon ausgegangen, dass in
die beiden Statorwicklungen die Ströme Sai bzw. Sbi eingeprägt werden. Unter
dieser Voraussetzung ändert sich die Ausrichtung des Statorflusses um jeweils

5 Schrittmotor 172
09.10.2011 © Hochschule - Aalen Heinrich Steinhart
90° . Der Rotor folgt wegen der trägen Masse verzögert und richtet sich im
unbelasteten Fall entlang der Richtung des Statorflusses aus.
SAi
SBi
t
t
2
6
1
5
43
7
1 32 4 5 6
ψ B
ψ A
Bild 5.6: Bestromungsmuster und Ausrichtung des Statorflusses für den Vollschrittbetrieb
5.2.2 Halbschrittbetrieb
Bild 5.7 zeigt das Bestromungsmuster und die Ausrichtung bei Verwendung des
Halbschrittbetriebs. Dabei werden abwechselnd beide Statorwicklungen bzw. nur
eine Statorwicklung bestromt. Hierdurch erreicht man eine feinere Auflösung im
Vergleich zum Vollschrittbetrieb, da sich die Ausrichtung des Statorflusses jeweils

173 5.3 Start-Stopp-Rampe
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
nur um 45° ändert. Nachteilig beim Halbschrittbetrieb ist, dass der Statorfluss
nicht konstant ist.
SAi
SBi
t
t
2
7
1
54
3
6
1 32 4 5 6
8
7 8 9
ψ B
ψ A
9
Bild 5.7: Bestromungsmuster und Ausrichtung des Statorflusses für den Halbschrittbetrieb
5.3 Start-Stopp-Rampe
Wie bereits erwähnt, handelt es sich bei einem Schrittmotorantrieb um eine reine
Steuerung ohne Rückkopplung der Rotorposition. Das heißt, der Rotor muss
unmittelbar der Ausrichtung des Statorflusses folgen können. Ist dies nicht der
Fall, so fällt der Schrittmotor außer Tritt. Mit anderen Worten, er verliert Schritte.
Bild 5.8 zeigt einen typischen Bewegungsablauf. Der Schrittmotor beginnt die

5 Schrittmotor 174
09.10.2011 © Hochschule - Aalen Heinrich Steinhart
Bewegung mit der Startfrequenz. Bei Aufschalten der Startfrequenz kann der
Antrieb unmittelbar folgen. Dann wird der Antrieb entsprechend einer Rampe
beschleunigt und verfährt im Anschluss mit konstanter Schrittfrequenz Sf . Im
Anschluss verzögert der Antrieb entsprechend einer Rampenfunktion. Ab der
Stoppfrequenz kann die Schrittfrequenz Sf auf Null reduziert werden, ohne dass
der Rotor überschwingt.
t
Startfrequenz
Stoppfrequenz
Sf
Bild 5.8: Start-Stopp-Rampe zum Beschleunigen und Verzögern eines Schrittmotors
5.4 Stromregelung
Bild 5.9 zeigt die leistungselektronische Ansteuerung eines bipolaren Schritt-
motors.

175 5.4 Stromregelung
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
1AT 2AT
3AT 4AT
SAU
SAR AL
1BT 2BT
3BT 4BT
SBU
SBR BLZU
Bild 5.9: Leistungselektronisches Stellglied zur Ansteuerung eines bipolaren Schrittmotors
Die Stromregelung kann mit der H-Brückenschaltung Bild 5.10 erfolgen.
Mono-flop −
+
3S 4S
2S1S
SAi
SLSAU
Messwiderstand
,maxSAi
ZU
1D
3D 4D
2D
Bild 5.10: H-Brückenschaltung zur Stromregelung

5 Schrittmotor 176
09.10.2011 © Hochschule - Aalen Heinrich Steinhart
5.4.1 Alternierenden Taktung
Die vier elektronischen Schalter S1 bis S4 können mit der alternierenden Taktung
angesteuert werden. Diese Art der Stromregelung ist in Bild 5.11 exemplarisch
dargestellt. Dabei soll ein positiver Statorstrom eingeprägt werden. Hier für
bleiben die elektronischen Schalter S2 und S3 ausgeschaltet, während zunächst
die beiden elektronischen Schalter S1 und S4 eingeschaltet werden. Der
Statorstrom SAi fließt über S1, die Statorwicklung S4 und den Messwiderstand
zum Minuspol. Wenn der Statorstrom SAi den vorgegebenen Maximalwert ,maxSAi
erreicht, dann schaltet das Monoflop einen der beiden elektronischen Schalter
(alternierend S1 oder S4 in Bild 5.11) für eine definierte Zeitdauer (z. B. 50 sµ )
aus und danach wieder ein. Während der Ausschaltzeit fließt der Statorstrom SAi
entweder über S1 und D2 oder über S4 und D3. Um einen negativen Statorstrom
einzuprägen, schaltet man stationär die beiden elektronischen Schalter S1 und
S4 aus, während mit den beiden elektronischen Schalter S2 und S3 der
Statorstrom eingeregelt wird.

177 5.4 Stromregelung
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
,maxSAi
SAi
ZU
SAU
S1 = einS4 = ein
S1 = einS4 = aus
S1 = einS4 = ein
S1 = ausS4 = ein
t
t1t 2t 3t 4t
Bild 5.11: Regelung mit der alternierenden Taktung
5.4.2 Gleichzeitigen Taktung
Eine weitere Möglichkeit, die leistungselektronischen Schalter S1 bis S4
anzusteuern, besteht in der gleichzeitigen Taktung der elektronischen Schalter S1
bis S4. Bild 5.12 verdeutlicht die Arbeitsweise der gleichzeitigen Taktung, für den
Fall, dass ein positiver Statorstrom SAi eingeprägt werden soll. Zunächst werden
die beiden elektronischen Schalter S1 und S4 eingeschaltet. Erreicht der

5 Schrittmotor 178
09.10.2011 © Hochschule - Aalen Heinrich Steinhart
Statorstrom den Maximalwert, dann werden die beiden elektronischen Schalter
S1 und S4 durch ein Monoflop für eine festgelegte Zeitdauer ausgeschaltet. Der
Statorstrom kommutiert auf die beiden Freilaufdioden D2 und D3, an der
Statorwicklung liegt die Spannung ZU− an. Danach werden wieder die beiden
elektronischen Schalter S1 und S4 eingeschaltet.

179 5.4 Stromregelung
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
,maxSAi
SAi
ZU
SAU
S1 = einS4 = ein
S1 = ausS4 = aus
S1 = einS4 = ein
S1 = ausS4 = aus
− ZU
t
t
1t 2t 3t 4t
Bild 5.12: Regelung mit der gleichzeitigen Taktung
Die gleichzeitige Taktung ist im Vergleich zur alternierenden Taktung einfacher zu
realisieren. Dies hat jedoch den Nachteil, dass die Welligkeit des Statorstroms
größer ist, da um den Statorstrom einzuregeln beide stromführenden Schalter
ausgeschaltet werden. Damit liegt an der Statorwicklung die Spannung ZU− an.

5 Schrittmotor 180
09.10.2011 © Hochschule - Aalen Heinrich Steinhart
Bei der alternierenden Taktung schaltet nur einer der beiden stromführenden
Schalter aus. In diesem Fall liegt an der Statorwicklung die Spannung Null an.

© Hochschule - Aalen Heinrich Steinhart 09.10.2011
6 Einsatzbedingungen
Elektrische Maschinen müssen an eine Vielzahl von Anforderungen erfüllen. Zum
einen sind die Maschinen an die Umweltbedingungen anzupassen.
Zum Beispiel
• Umgebungstemperatur
• Aufstellungshöhe
• Berührungsschutz
• Schutz vor eindringendem Wasser
Darüber hinaus muss die Maschine an die Netzanforderungen angepasst werden.
Die Bauform der Maschine muss so ausgewählt werden, dass die Arbeits-
maschine mechanisch montiert und mit der Arbeitsmaschine verbunden werden
kann. Zum Dritten muss die Antriebsmaschine auf den Belastungszyklus der
Arbeitsmaschine abgestimmt werden.
6.1 Schutzklassen
Die Schutzart gibt die Eignung von elektrischen Betriebsmitteln (Beispielsweise,
Motoren, Generatoren, Steuergeräte und Installationsmaterial) für verschiedene
Umgebungsbedingungen an und macht eine Aussage über den Schutz be-
ziehungsweise die Gefährdung von Personen bei der Benützung.
Bei vielen Anwendungen müssen elektrische Geräte unter erschwerten Umwelt-
bedingungen über viele Jahre sicher arbeiten. Außerdem zulässigen
Temperaturbereich stellt die chemische Belastung, hierunter wird die Beständig-
keit gegen aggressive Medien in der Industrie wie Dämpfe, Säuren, Laugen, Öle

6 Einsatzbedingungen 182
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
oder Kunststoffe verstanden, eine Einsatzbeschränkung dar. Zudem muss das
Eindringen von Nässe und Fremdkörpern, wie beispielsweise Staub, für eine zu-
verlässige Funktion verhindert werden.
Bezüglich ihrer Eignung für verschiedene Umgebungsbedingungen werden die
Systeme in entsprechende Schutzarten, sogenannte IP-Codes eingeteilt. Die Ab-
kürzung IP steht laut DIN für „International Protection“, wird aber im Englischen
Sprachraum als Ingress Protection (dt.: Eindringschutz) verwendet. Diese sind in
der DIN EN 60529 mit dem Titel Schutzarten durch Gehäuse (IP-Code) fest-
gehalten.
Der Abkürzung „IP“ folgen zwei Ziffern. Die erste Ziffer steht für den Schutz
gegen das Eindringen fester Körper. Die zweite Ziffer beschreibt den Schutzgrad
gegen das Eindringen von Wasser. Die Angaben beziehen sich auf unbearbeitete
Gehäuse ohne Berücksichtigung von Einflüssen wie Alterung, Temperatur-
wechsel u. ä. In der Tabelle 6.1 sind die IP-Schutzarten zusammengefasst.
Tabelle 6.1 IP-Schutzklassen, Berührungs-, Fremdkörper- und Wasserschutz für elektrische Betriebsmittel
Erste Kenn-ziffer
Schutzumfang Zweite Kenn-ziffer
Schutzumfang

6.1 Schutzklassen 183
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Schutz gegen
Berührung Schutz gegen
Wasser
0 Kein Schutz 0 Kein
Schutz
1 große
Fremd-körper
Schutz gegen zufälliges groß- flächiges Berühren aktiver und innerer bewegter Teile, z. B. mit der Hand, aber kein Schutz gegen absichtlichen Zugang zu diesen Teilen. Schutz gegen Eindringen von festen Fremd-körpern mit einem Durchmesser größer als 50 mm.
1
senkrecht fallendes
Tropf-wasser
Wassertropfen, die senkrecht fallen, dürfen keine schädliche Wirkung haben.
2
Mittel-große
Fremd-körper
Schutz gegen Berühren mit den Fingern aktiver oder innerer bewegter Teile. Schutz gegen Eindringen von festen Fremd-körpern mit einem Durchmesser größer als 12 mm.
2
schräg fallendes
Tropf-wasser
Wassertropfen, die in einem beliebigen Winkel bis 15° zur Senkrechten fallen, dürfen keine schädliche Wirkung haben.
3 kleine
Fremd-körper
Schutz gegen Berühren aktiver oder innerer bewegter Teile mit Werkzeugen, Drähten o.ä. mit einem Ø größer als 2,5 mm. Schutz gegen Eindringen von festen Fremdkörpern im Durch-messer größer als 2,5 mm.
3 Sprüh-wasser
Wasser, das in einem be-liebigen Winkel bis 60° zur Senkrechten fällt, darf keine schädliche Wirkung haben.
4
Korn-förmige Fremd-körper
Schutz gegen Berühren aktiver oder innerer bewegter Teile mit Werkzeugen, Drähten o.ä. mit einem Ø größer als 1 mm.
4 Spritz-wasser
Wasser, das aus allen Richtungen gegen das Be-triebsmittel spritzt, darf keine schädliche Wirkung haben.
5 Staub-
ablager-ung
Vollständiger Schutz gegen Berühren unter Spannung stehender oder innerer bewegter Teile. Schutz gegen schädliche Staubablagerungen. Das Ein-dringen von Staub ist nicht vollkommen verhindert, aber der Staub darf nicht in solchen Mengen eindringen, dass die Funktion beeinträchtigt wird.
5 Strahl-wasser
Ein Wasserstrahl aus einer Düse, der aus allen Richtungen gegen das Betriebsmittel ge-richtet wird, darf keine schäd-liche Wirkung haben.
6 Staub-eintritt
Vollständiger Schutz gegen Berühren unter Spannung stehender oder innerer bewegter Teile. Schutz gegen Eindringen von Staub.
6 Über-flutung
Wasser darf bei vorüber-gehender Überflutung, z.B. durch schwere Seen, nicht in schädlichem Maße eindringen.
7 Ein-
tauchen
Wasser darf nicht in schäd-licher Menge eindringen, wenn das Betriebsmittel unter den festgelegten Druck-/ Zeit-bedingungen von 0,15 - 1 m in Wasser eingetaucht wird.
8 Unter-
tauchen
Wasser darf nicht in schädlicher Menge eindringen, wenn das Betriebsmittel unter definierten Bedingungen in Wasser ge-taucht wird.
9K
Hoch-druck-/ Dampf-strahl-
reinigung
Wasser, das aus jeder Richtung unter stark erhöhtem Druck gegen das Gehäuse gerichtet ist, darf keine schädliche Wirkung haben.

6 Einsatzbedingungen 184
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
6.2 Bauformen von elektrischen Maschinen
Elektrische Maschinen werden in unterschiedlichen Bauformen angeboten. Die
Tabelle 6.2 zeigt auszugsweise eine Zusammenfassung der Bauformen nach
IEC 34-7 (International Electrotechnical Comission). Im Allgemeinen werden die
Bauformen IM B3, IM B5 und IM B14 listenmäßig angeboten. In der Regel ist die
Bauform der elektrischen Maschine durch die mechanische Konstruktion der
Arbeitsmaschine vorbestimmt.

6.2 Bauformen von elektrischen Maschinen 185
© Hochschule - Aalen Heinrich Steinhart 09.10.2011
Tabelle 6.2 Bauformen von elektrischen Maschinen nach IEC 34-7
Code Bauform Beschreibung Anforderung, Befestigung
Ausführung, Wellenende
IM B3
Maschine mit Füßen
waagerecht 2 Schildlager 1 Wellenende frei
IM B5
Flanschmotor waagerecht 2 Schildlager 1 Wellenende frei
IM B6
Motor mit Füßen
waagerecht, Wand
2 Schildlager 1 Wellenende links frei
IM B8
Motor mit Füßen
waagerecht, Decke
2 Schildlager 1 Wellenende frei
IM V1
Flanschmotor vertikal nach unten
2 Schildlager 1 Wellenende nach unten frei
IM V2
Flanschmotor vertikal nach unten
2 Schildlager 1 Wellenende nach oben frei
IM V3
Flanschmotor vertikal nach oben
2 Schildlager 1 Wellenende nach oben frei
IM V4
Flanschmotor vertikal nach oben
2 Schildlager 1 Wellenende nach unten frei
Flansch Anschlusskasten Anschlussfuß


© Hochschule - Aalen Heinrich Steinhart 09.10.2011
7 Literaturverzeichnis
Rolf Fischer; Elektrische Maschinen; Carl Hanser Verlag, 2003
Eckhard Spring; Elektrische Maschinen; Springer Verlag, 1998
Werner Böhm; Elektrische Antriebe; Vogel Fachbuch 1996
Andreas Kremser Elektrische Maschinen und Antriebe; Teubner Verlag 2004
H.-U. Giersch Elektrische Maschinen; Teubner Verlag 2003 Hans Harthus Norbert Vogelsang
Klaus Fuest; Elektrische Maschinen und Antriebe; Vieweg Verlag 1989
Manfred Mayer; Elektrische Antriebstechnik, Band 1; Springer Verlag 1985
Helmut Späth; Elektrische Maschinen und Stromrichter; G. Braun Verlag 1984
Peter Brosch; Moderne Stromrichterantriebe; Vogel Fachbuch 1998
Detlef Roseburg; Elektrische Maschinen und Antriebe; Carl Hanser Verlag, 2003
Ekbert Hering Taschenbuch der Mechatronik, Fachbuchverlag