Embed Size (px)
Citation preview
Entwicklung und Bau eines Greifers
für einen autonomen Roboter
Hausarbeit zur Ersten Staatsprüfung für die Sekundarstufe I
Themensteller: Prof. Dr. Chr. Hein (Institut für Technik und ihre Didaktik)
Verfasser: Thomas Weber
Datum: 21.12.2006
2
Inhaltsverzeichnis
Inhaltsverzeichnis .................................................................................................. 2
1 Einleitung....................................................................................................... 4
1.1 Zielstellung dieser Examensarbeit......................................................... 4
1.2 Methoden ............................................................................................... 7
1.3 Ergebnisform ......................................................................................... 8
2 Ausgangssituation.......................................................................................... 9
2.1 Merkmale eines Greifers ....................................................................... 9
2.2 Roboterarme .......................................................................................... 9
2.2.1 Stationäre Greifarme.................................................................... 10
2.2.1.1 Industrieroboter ....................................................................... 10
2.2.1.2 Schulungsroboter ..................................................................... 11
2.2.2 Mobile Greifarme ........................................................................ 13
2.2.2.1 Nasa Spirit ............................................................................... 13
2.2.2.2 Baufahrzeuge ........................................................................... 14
2.2.3 Zusammenfassung Arme ............................................................. 16
2.3 Roboterhände....................................................................................... 17
2.3.1 Hände mit zwei, drei, vier und fünf Fingern ............................... 18
2.3.2 Hände in Form von Greifzangen ................................................. 21
2.3.3 Zusammenfassung Hände............................................................ 22
2.4 Auswertung.......................................................................................... 23
2.5 Das FinRay-Prinzip ............................................................................. 25
2.6 Ergebniszusammenfassung.................................................................. 26
3 Entwicklung des Greifers ............................................................................ 27
3.1 Erstes Modell zum Funktionsprinzip................................................... 27
3.2 Bestimmung einzelner Elemente ......................................................... 29
3.2.1 Führungsschienen und Spindelantrieb......................................... 30
3.2.2 Motoren ....................................................................................... 33
3.2.3 Wellen, Zahnräder, Kugellager.................................................... 35
3.2.4 Greifhand nach dem FinRay-Prinzip........................................... 36
3
4 Konstruktion des Greifers............................................................................ 39
4.1 Anbringung der Führungsschienen...................................................... 39
4.2 Zusammenfügung der Elemente der Greifhand................................... 40
4.3 Montage der Greifhand an die Führungsschienen............................... 43
4.4 Installation der Motoren ...................................................................... 45
5 Zusammenfassung und Weiterentwicklung................................................. 46
5.1 Testbericht ........................................................................................... 46
5.2 Fazit ..................................................................................................... 49
5.3 Perspektiven......................................................................................... 50
6 Anhang......................................................................................................... 53
6.1 Datenblätter Fertigelemente................................................................. 53
6.2 Technische Zeichnungen ..................................................................... 57
Literaturverzeichnis ............................................................................................. 65
Abbildungsverzeichnis ........................................................................................ 68
4
1 Einleitung
1.1 Zielstellung dieser Examensarbeit
Das Ziel dieser Arbeit ist die Entwicklung und Herstellung eines Greifers für
einen autonomen Roboter. Dieser Roboter soll später am Institut für Technik und
ihre Didaktik in einem neu entstehenden Seminar zur Robotertechnik zum
Einsatz kommen. Dort werden Studenten die Möglichkeit bekommen, den
Roboter zu programmieren und weiter zu entwickeln. Dazu wird der Roboter
insgesamt so konstruiert, dass keine festen Verbindungen in Form von zum
Beispiel Schweißnähten verwendet werden. Sämtliche Verbindungen sind
geschraubt. Dadurch ist es jederzeit möglich, ihn in seine einzelnen
Komponenten zu zerlegen. Dies gewährleistet später ein besseres Verständnis
der Funktionsweise. Außerdem erlaubt die gewählte Art der Konstruktion ein
einfaches Austauschen der einzelnen Elemente, um ihn ständig weiter entwickeln
beziehungsweise verbessern zu können.
Die komplette Entwicklung des gesamten Roboters verteilt sich dabei auf
insgesamt vier Examensarbeiten:
- Die erste Examensarbeit befasst sich mit der Entwicklung und dem Bau
des Grundgerüstes und zugleich des Fahrwerkes mitsamt den beiden
Antriebsmotoren. In dieser Arbeit wird außerdem auch schon die
Anbringung und Verwendung der Ultraschallsensoren mit
eingeschlossen. Diese sind nötig, damit der Roboter sich autonom
bewegen und selbstständig wahrgenommenen Gegenständen ausweichen
kann. Autonom bedeutet in diesem Fall, dass er dabei nicht mehr auf eine
Verbindung zu einem externen Computer zur Steuerung angewiesen ist,
da diese Aufgaben von einem Mikrocontroller übernommen werden.
Dieser befindet sich ebenso direkt auf dem Roboter wie die zur
Stromversorgung für die Motoren und den Mikrocontroller benötigten
Akkus.
5
- Die zweite, die hier vorliegende Examensarbeit, ist für die Entwicklung
und den Bau eines Greifers verantwortlich. Dieser ermöglicht es dem
Roboter, mit seiner Umwelt zu agieren, indem er Gegenstände greifen
und anheben kann.
- Die dritte Examensarbeit umfasst die Verwendung einer Kamera und die
Auswertung der Bilder, die sie liefert. Erst dadurch bekommt der Roboter
die Fähigkeit, wirklich mit seiner Umwelt zu interagieren. Die bereits
erwähnten Ultraschallsensoren können lediglich dazu dienen, dass der
Roboter nicht mit Gegenständen zusammen stößt. Die Kamera wird es
aber ermöglichen, Gegenstände als solches anhand ihrer Form und Farbe
zu erkennen.
- Die vierte und abschließende Examensarbeit behandelt die Steuerung des
Roboters mittels eines Mikrocontrollers und die Entwicklung eines dazu
passenden Programms. Sämtliche einkommende Daten von den
Ultraschallsensoren und dem Kamerabild müssen dabei ausgewertet
werden. Je nach Situation hat das Programm dann dementsprechend die
Motoren des Fahrwerks oder die des Greifers anzusteuern.
Die Programmierung des Roboters, eine Betrachtung der Konstruktionsweise
sowie auch eine eventuelle Zerlegung in seine einzelnen Elemente, wird es den
Studenten ermöglichen, einen Einblick in mehrere Teilgebiete des Fachs Technik
zu erlangen.
Die Auswahl und Verwendung der an mehreren Stellen benötigten Zahnräder
setzt zum Beispiel ein Verständnis der Getriebelehre voraus. Bei der
Verwendung der Motoren spielt der Begriff Drehmoment eine wichtige Rolle.
Dies sind Begriffe, die in dem Teilgebiet Mechanik behandelt werden.
Die Verwendung von leistungsstarken Motoren und die Versorgung des
Mikrocontrollers mit Strom machen es nötig, sich mit Themen der Energie- und
Elektrotechnik auseinander zu setzten. Schließlich muss nicht nur eine
Energiequelle vorhanden sein, die die nötige Spannung liefert. Es muss ebenfalls
bedacht werden, dass diese dem Roboter über eine bestimmte Zeit zu Verfügung
stehen muss.
6
Die gesamte Steuerung es Roboters erfolgt letztlich über ein selbst erstelltes
Programm. Steuerung und Programmierung sind klassische Elemente der
Informationstechnik.
Inzwischen hat sich aus der Verbindung und dem Zusammenspiel der drei
Disziplinen Mechanik, Elektrotechnik und Informatik die Mechatronik
entwickelt.
„Die Mechatronik beschäftigt sich interdisziplinär mit dem Zusammenwirken
mechanischer, elektronischer und informationstechnischer Systeme.
Der Begriff Mechatronik (Mechanical Engineering-Electronic Engineering) ist
ein Kunstwort. Er wurde ab 1969 von der japanischen Firma Yaskawa Electric
Cooperation geprägt und findet seinen Ursprung in der Feinmechanik. Später
kam die Informatik als neue Kerndisziplin hinzu.“1
Eine intensive Beschäftigung mit dem Roboter wird den Studenten
verdeutlichen, wie stark die einzelnen Bereiche in dem Falle des vorliegenden
Roboters zusammenhängen. Aber auch, dass einzelne Komponenten ebenso stets
separat betrachtet werden können.
So ist es zum Beispiel möglich, die einzelnen Motoren des Roboters auch direkt
mit einer Spannungsquelle zu versorgen, um ihre Funktion zu überprüfen. Dafür
ist die Ansteuerung über den Mikrocontroller nicht nötig. Andererseits kann auch
das Steuerungsprogramm isoliert betrachtet werden. Es ist dabei nicht zwingend
notwendig, den Roboter wirklich mit dem Mikrocontroller zu verbinden. Eine
rein theoretische Überprüfung des Programms auf seine Struktur und
Funktionsweise ist ebenso denkbar.
Allerdings wird erst durch die Betrachtung des Zusammenspiels aller
Teilbereiche und ihrer einzelnen Komponenten ein umfangreicher Einblick in
den Bereich Roboterentwicklung bzw. Mechatronik gewährleistet.
1 http://de.wikipedia.org/wiki/Mechatronik
7
1.2 Methoden
Vor der Entwicklung des Greifers steht zuerst der Entscheidungsprozess, wie er
überhaupt beschaffen sein und aussehen soll. Dazu werden verschiedene Greifer,
die überwiegend in der Industrie eingesetzt werden, in Betracht gezogen. Aber
auch Robotermodelle aus der Forschung und noch weiteren Bereichen werden
auf ihre Umsetzungsmöglichkeit für dieses Projekt überprüft.
Dabei muss zu Beginn erst einmal geklärt werden, was für einen Gegenstand der
Greifer heben können soll. Wichtige Attribute sind hierbei Größe, Gewicht,
Form und Festigkeit. Es wird festgelegt, dass das Gewicht des zu hebenden
Gegenstands bis zu ca. 500 Gramm betragen kann. Wenn möglich, soll der
Greifer in der Lage sein, Gegenstände von unterschiedlicher Form und Größe zu
fassen.
Als Testgegenstände dienen während der Entwicklung ein roter Zylinder aus
Aluminium sowie ein roter Ball aus Plastik. Diese beiden Gegenstände können
im momentanen Entwicklungsstadium der Bilderkennung der angebrachten
Kamera gut von ihrer Umgebung unterschieden werden. Daher soll es dem
Greifer primär möglich sein, diesen Zylinder und Ball anzuheben.
Die verschiedenen Greifarme werden zuerst einzeln vorgestellt. Danach werden
sie miteinander verglichen und auf ihre generellen Vor- und Nachteile hin
untersucht. Dabei wird überprüft, ob sie in der Lage wären, Ball oder Zylinder zu
heben. Und ob ihr Konzept für diesen Roboter umgesetzt werden kann.
Aufgrund der gewonnenen Erkenntnisse kann anschließend ein erster schlichter
Prototyp aus Lego entworfen werden. Dieser soll die allgemeine Funktionsweise
des Greifers simulieren. Das dort entwickelte Prinzip wird dann in technische
Zeichnungen für den konkreten Bau des Greifers umgesetzt.
Bei dieser Umsetzung steht neben der Wahl der passenden Materialien auch die
Berechnung der zu verwendenden Motoren aus. Außerdem werden geeignete
Fertigbauteile wie Führungsschienen und passende Zahnräder ermittelt. Dabei
wird auf zwei wichtige Aspekte großen Wert gelegt:
8
- Erstens sollen die zu verwendenden Fertigelemente nicht den finanziellen
Rahmen dieser Arbeit sprengen. Daher muss von Spezialanfertigungen
aus der Industrie abgesehen und nach passenden Alternativen gesucht
werden.
- Zweitens soll die Anfertigung der verbleibenden Teile sowie die gesamte
Konstruktion des Greifers so einfach wie möglich gehalten werden, um
ihn leicht nachbauen aber auch verändern zu können. So erspart z.B. die
Verwendung von preisgünstigen Fertigelementen wie Lagerböcken den
Einsatz einer Drehmaschine, die ansonsten für eine eigene Herstellung
dieser Elemente nötig wäre.
1.3 Ergebnisform
Das Ergebnis neben dem fertig gestellten und funktionsfähigen Greifarm ist
diese vorliegende Examensarbeit. Sie dokumentiert die im Vorfeld getroffenen
Überlegungen, die Entwicklung sowie Herstellung des Greifarms. Außerdem
enthält sie sämtliche technische Zeichnungen, die zum Nachbau erforderlich
sind. Eine Auflistung mit technischen Daten und Bezugsquellen der verwendeten
Fertigelemente liegt ebenfalls bei.
9
2 Ausgangssituation
2.1 Merkmale eines Greifers
Wie sieht ein Greifer aus? Gibt es wesentliche Merkmale, die ihn zu einem
Greifer machen? Diese allerersten Überlegungen führen zu der Erkenntnis, dass
man wohl jeden Greifer bzw. Greifarm in die beiden grundlegenden Elemente
Arm und Hand unterteilen kann.
Dabei übernimmt die Hand die Funktion, einen beliebigen Gegenstand
festzuhalten – zu greifen. Der Arm dient dazu, die Position bzw. Lage des
gegriffenen Gegenstandes zu verändern. Bei der Betrachtung der folgenden
Beispiele wird also darauf geachtet, wie diese beiden Funktionen technisch
realisiert werden können.
In den meisten Fällen hängen bei Robotern die beiden Teilelemente Greifhand
und Arm zusammen. Es kann aber auch vorkommen, dass ein Arm anstelle einer
Greifhand mit einem anderen Werkzeug versehen ist. So kann sich am Ende
eines Armes beispielsweise eine Vorrichtung zum Schweißen, Kleben,
Schneiden etc. befinden.
Denkbar sind auch Greifhände ohne Arm. Diese müssten sich dann direkt an
dem Grundgerüst eines Roboters oder an einem Fahrwerk befinden.
Im Folgenden werden Arme und Greifhände getrennt auf ihre Eignung für die
Umsetzung hin untersucht.
2.2 Roboterarme
Generell kann man die Art der Roboter mit einem (Greif-) Arm auch noch in
stationäre und mobile Roboter unterteilen. Stationäre (Greif-) Arme sind
beispielsweise solche, die für einen Herstellungsprozess in einer Fabrik fest
montiert sind und ständig die gleichen Abläufe vornehmen. Mobile Varianten
von (Greif-) Armen können sich auf Fahrzeugen befinden und kommen für die
verschiedensten Aufgaben in Betracht.
10
2.2.1 Stationäre Greifarme
2.2.1.1 Industrieroboter
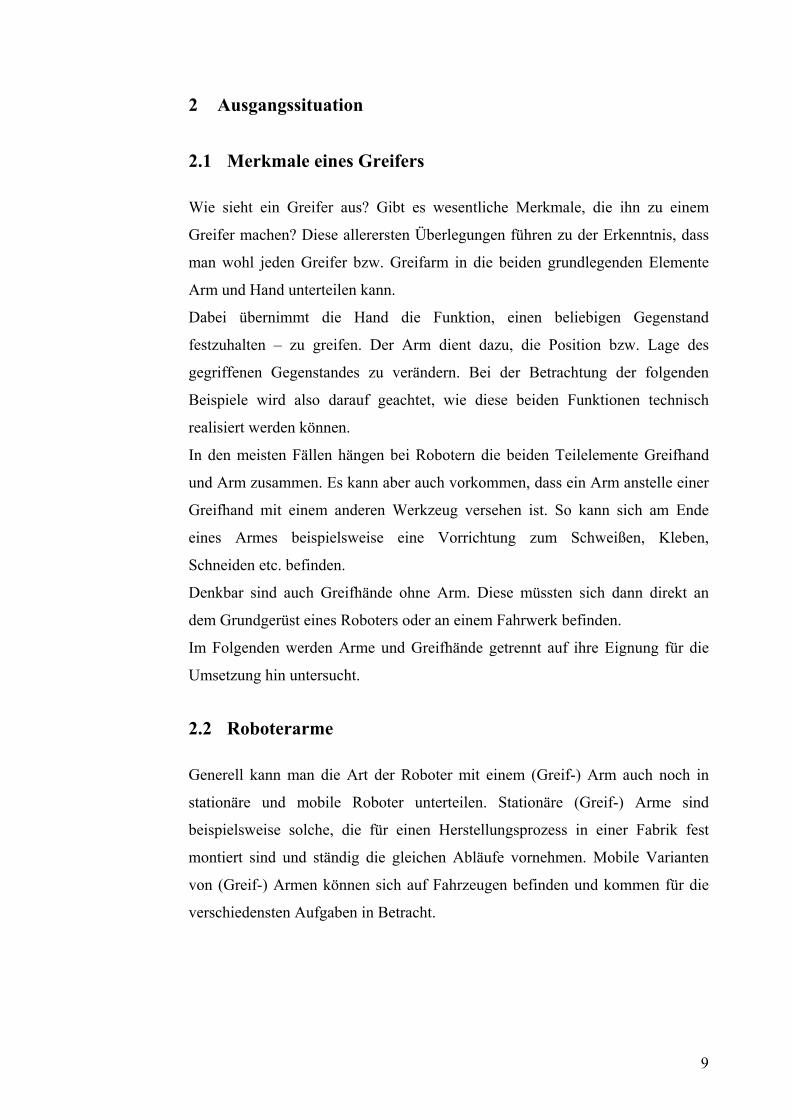
Eine große Auswahl von Roboterarmen lässt sich in der Produktion von
verschiedensten Gegenständen als Industrieroboter vorfinden. Abbildung 1 zeigt
ein typisches Beispiel für das Aussehen eines Solchen. Obwohl diese
Industrieroboter das unterschiedlichste Aussehen bezüglich Größe oder Form
haben können, haben sie alle grundlegend gemeinsame Eigenschaften.
„Sie bestehen im Allgemeinen aus dem Manipulator, der Steuerung und einem
Effektor wie Werkzeug oder Greifer. Oft werden Roboter auch mit verschiedenen
Sensoren ausgerüstet. Einmal programmiert ist eine solche Maschine in der
Lage, einen Arbeitsablauf autonom durchzuführen.“2
Abbildung 1: Industrieroboter3
2 http://www.tk-logo.de/basics/forschung-technik/rmenue.php3?li=ba-forsch-roboter.html 3 http://www.math.uni-bremen.de/zetem/projekte2004/robotersteuerung/industrieroboter.html
11
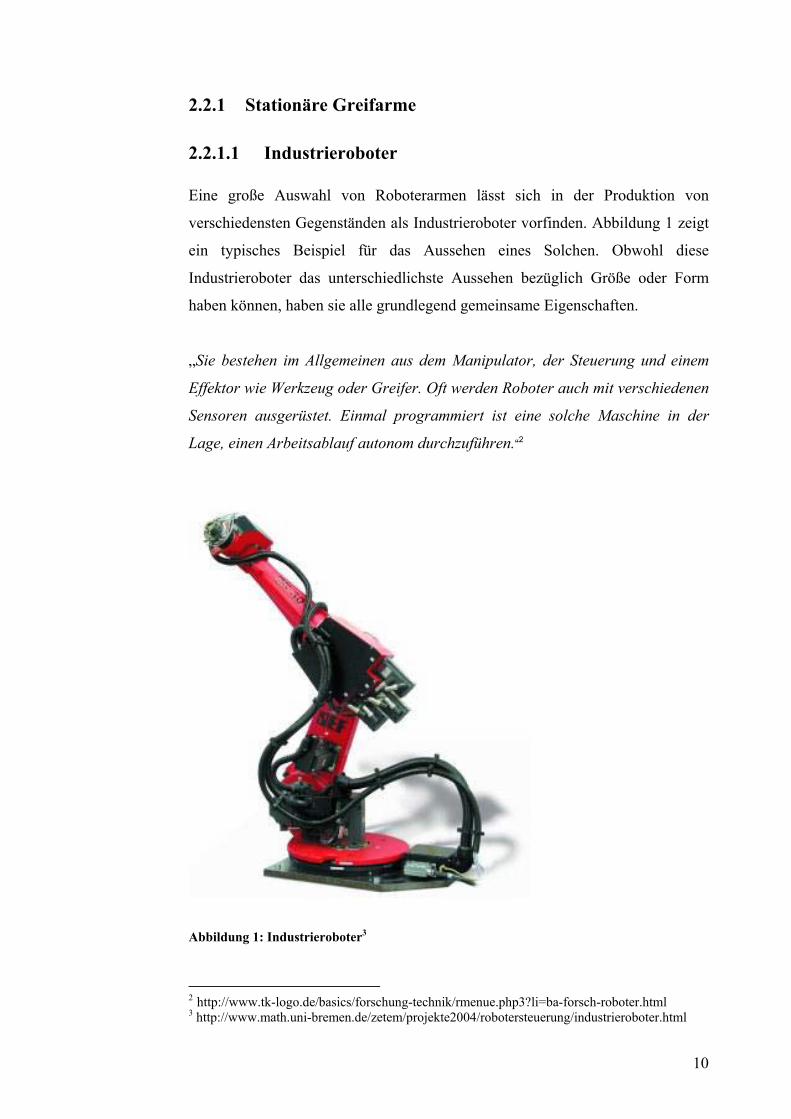
Oft wird eine große Anzahl von Industrierobotern entlang eines Fließbands so
hintereinander aufgebaut, dass sie zusammen eine Fertigungsstrecke bilden.
Abbildung 2 zeigt dies an einem Bespiel aus der Automobilherstellung.
Abbildung 2: Fertigungsstrecke mit Industrierobotern im Einsatz4
Dabei können diese Industrieroboter eine ganze Reihe von unterschiedlichen
Aufgaben übernehmen. Je nachdem welcher Effektor sich am Ende des Armes
befindet führen sie standardisierte Aufgaben wie Schweißen, Schrauben, Kleben,
Löten oder Schneiden aus. Sie können aber auch solche Anwendungen wie
Entgraten oder Lackieren übernehmen. Befindet sich am Ende des Armes ein
Greifer, dienen sie für Be- und Entladeaufgaben, zum Palettieren oder
Kommissionieren.
2.2.1.2 Schulungsroboter
Vorbilder für den Bau eines Greifers lassen sich aber nicht nur an Beispielen von
Industrierobotern finden. So gibt es auch Greifer in Form von Robotern, die für
Schulungszwecke konzipiert sind. An diesen soll, wie an dem für diese
Examensarbeit zu entwickelnden Greifer, die generelle Funktionsweise
verdeutlicht werden. Außerdem können sie mit passender Software frei
programmiert werden, um diverse Beispielaufgaben zu übernehmen. Die
4 http://newsfoxx.de/2395/Bild/Industrieroboter-im-Einsatz.html
12
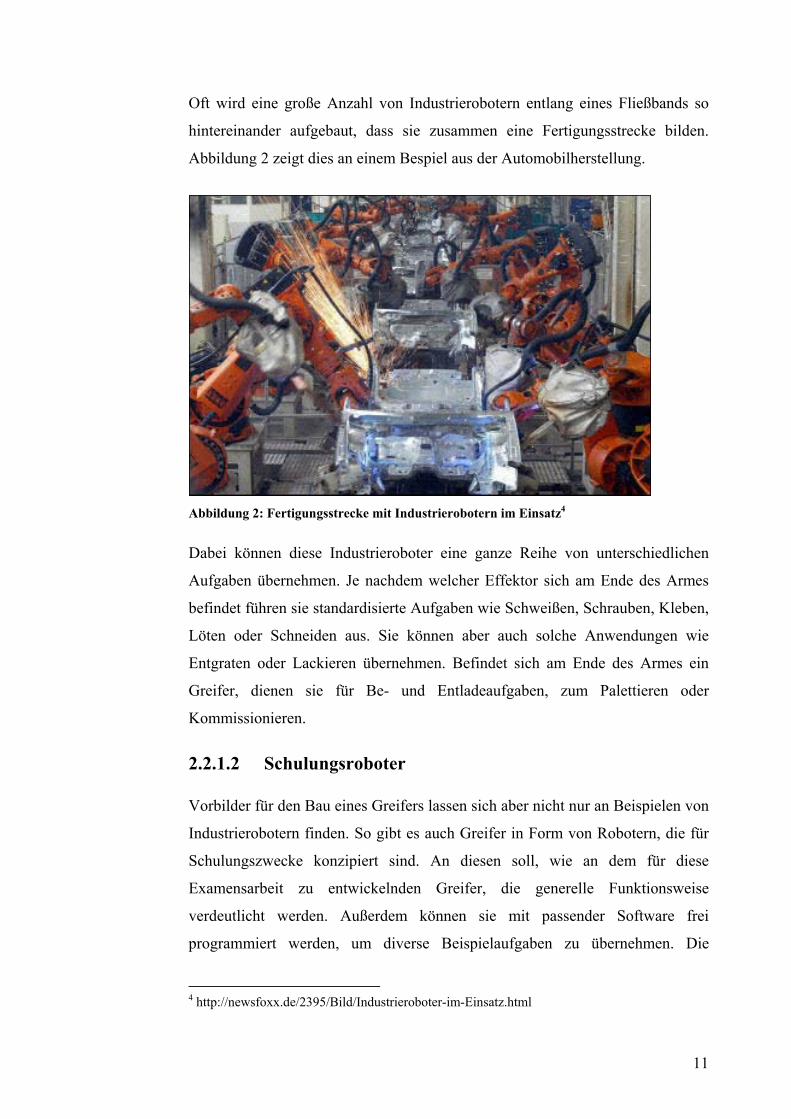
Abbildung 3 zeigt das Beispiel eines solchen Schulungsroboters, der beim
Fachhändler „Technik LPE“5 unter der Bestellnummer 71 301.369.001 erhältlich
ist.
Abbildung 3: Schulungsroboter6
Die Beschreibung im Onlinekatalog liefert folgende Informationen:
Dieser Schulungsroboter ist ein sechs- Achs- Knickarm- Roboter. Seine Gelenke
sind kugelgelagert. Eine präzise Ansteuerung erfolgt durch den Antrieb über
Schrittmotoren sowie angeflanschte Getriebe. Die Motoren befinden sich auf
einem kugelgelagerten Drehteller im Gehäuseinneren, um den Schwerpunkt
niedrig zu halten. Die Kraftleitung findet mittels Zahnriemen und Übersetzungen
statt. Die Wellen sind ebenso kugelgelagert. Die Drehung des Aufbaus erfolgt
per Zahnriemen und Ritzel. Die Greifhand wird mit einem direkt angeflanschten
Schrittmotor angetrieben. Die Drehung der Hand erfolgt über ein
Kegelradgetriebe.7
5 http://www.technik-lpe.de/ 6 http://technik-lpe.info/kataloge/multimedia.pdf 7 Vgl. http://technik-lpe.info/kataloge/multimedia.pdf
13
2.2.2 Mobile Greifarme
Greifer müssen aber nicht immer stationär angebracht sein. Sie können in
Verbindung mit einem Fahrwerk auch zu mobilem Einsatz kommen. Im
Folgenden werden zwei Fahrzeuge vorgestellt, bei denen dies der Fall ist.
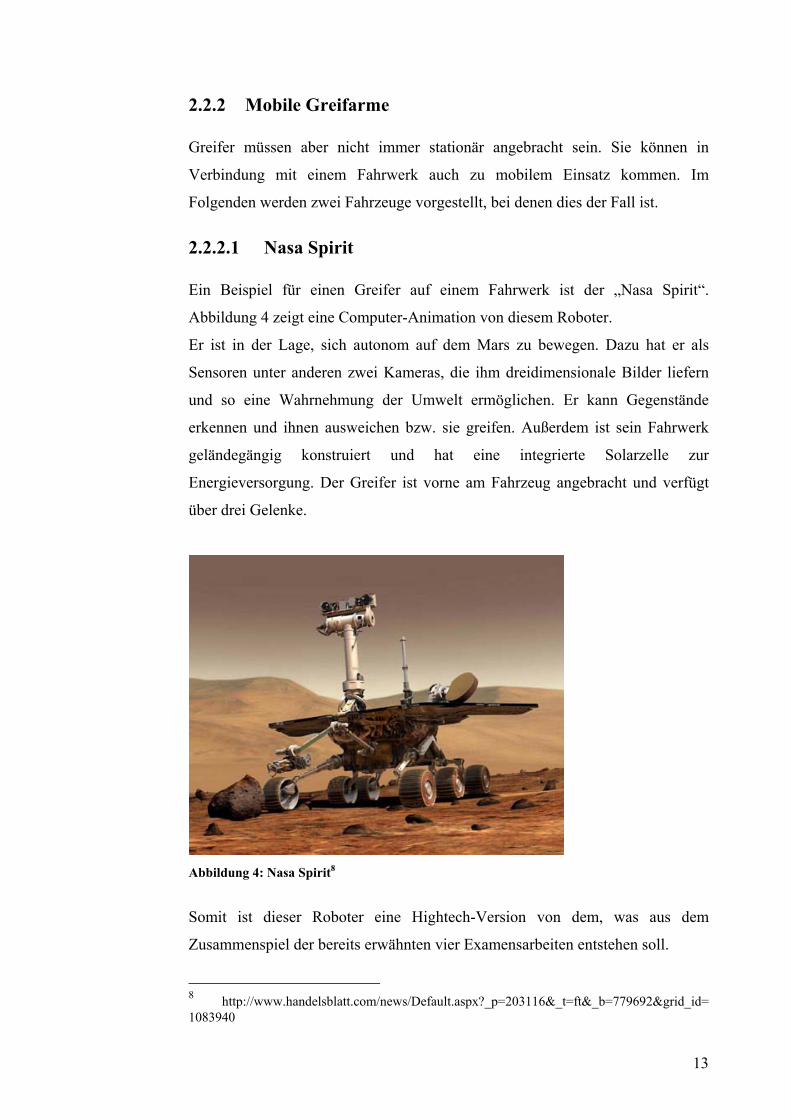
2.2.2.1 Nasa Spirit
Ein Beispiel für einen Greifer auf einem Fahrwerk ist der „Nasa Spirit“.
Abbildung 4 zeigt eine Computer-Animation von diesem Roboter.
Er ist in der Lage, sich autonom auf dem Mars zu bewegen. Dazu hat er als
Sensoren unter anderen zwei Kameras, die ihm dreidimensionale Bilder liefern
und so eine Wahrnehmung der Umwelt ermöglichen. Er kann Gegenstände
erkennen und ihnen ausweichen bzw. sie greifen. Außerdem ist sein Fahrwerk
geländegängig konstruiert und hat eine integrierte Solarzelle zur
Energieversorgung. Der Greifer ist vorne am Fahrzeug angebracht und verfügt
über drei Gelenke.
Abbildung 4: Nasa Spirit8
Somit ist dieser Roboter eine Hightech-Version von dem, was aus dem
Zusammenspiel der bereits erwähnten vier Examensarbeiten entstehen soll.
8 http://www.handelsblatt.com/news/Default.aspx?_p=203116&_t=ft&_b=779692&grid_id= 1083940
14
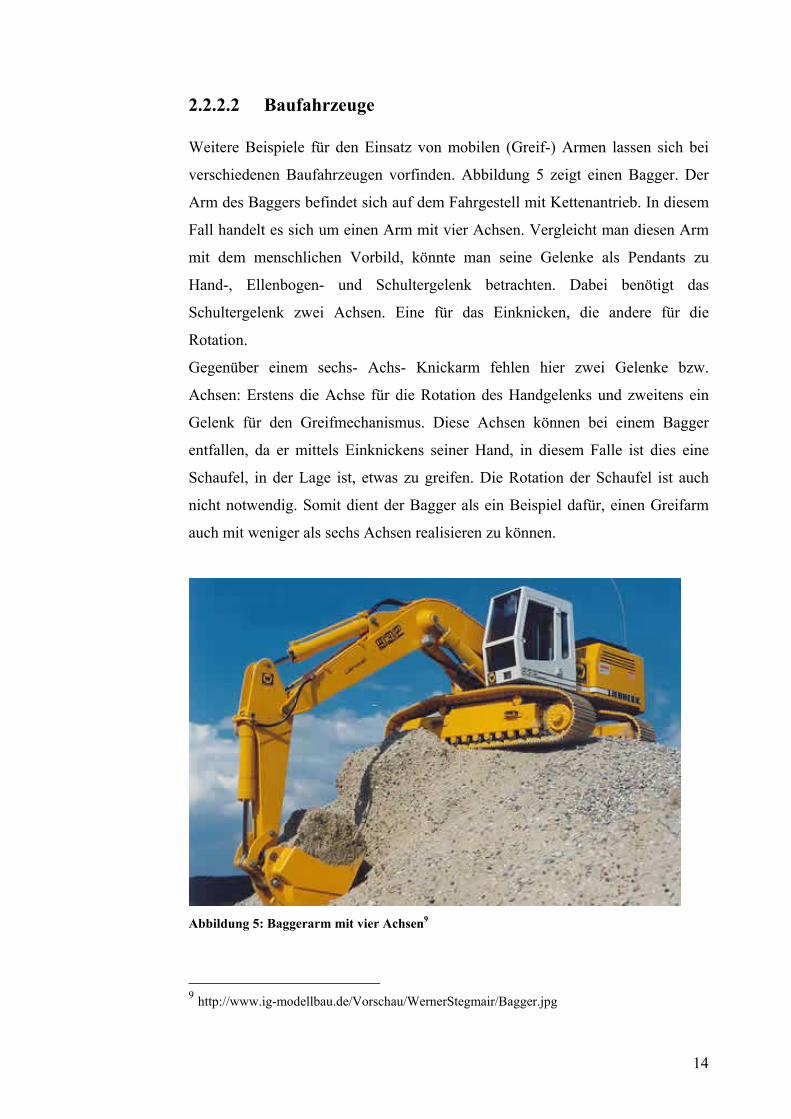
2.2.2.2 Baufahrzeuge
Weitere Beispiele für den Einsatz von mobilen (Greif-) Armen lassen sich bei
verschiedenen Baufahrzeugen vorfinden. Abbildung 5 zeigt einen Bagger. Der
Arm des Baggers befindet sich auf dem Fahrgestell mit Kettenantrieb. In diesem
Fall handelt es sich um einen Arm mit vier Achsen. Vergleicht man diesen Arm
mit dem menschlichen Vorbild, könnte man seine Gelenke als Pendants zu
Hand-, Ellenbogen- und Schultergelenk betrachten. Dabei benötigt das
Schultergelenk zwei Achsen. Eine für das Einknicken, die andere für die
Rotation.
Gegenüber einem sechs- Achs- Knickarm fehlen hier zwei Gelenke bzw.
Achsen: Erstens die Achse für die Rotation des Handgelenks und zweitens ein
Gelenk für den Greifmechanismus. Diese Achsen können bei einem Bagger
entfallen, da er mittels Einknickens seiner Hand, in diesem Falle ist dies eine
Schaufel, in der Lage ist, etwas zu greifen. Die Rotation der Schaufel ist auch
nicht notwendig. Somit dient der Bagger als ein Beispiel dafür, einen Greifarm
auch mit weniger als sechs Achsen realisieren zu können.
Abbildung 5: Baggerarm mit vier Achsen9
9 http://www.ig-modellbau.de/Vorschau/WernerStegmair/Bagger.jpg

15
Mit noch weniger Achsen als ein Bagger kommt der Arm eines Gabelstaplers
aus. Dieser ist im Prinzip nur in der Lage, mit seinem Arm etwas anzuheben. Die
Funktion des Armes in Form von Veränderung der Position übernimmt hierbei
letztlich das Fahrwerk. Dabei ist der Gabelstapler primär dafür ausgerichtet, mit
seiner Gabel unter Paletten zu greifen, um diese anzuheben. Da sich diese
Paletten jedoch in ihrer Form und Größe unterscheiden, muss er den Abstand
seiner beiden Zangen der Gabel verändern können. Dieser Mechanismus kann
dabei in begrenztem Maße ebenso dazu genutzt werden, um etwas zu greifen.
Indem er Gegenstände, welche fest genug sein müssen, zwischen seinen Zangen
einklemmt, kann er sie anschließend auch anheben.
Sieht man von der Möglichkeit ab, dass der Gabelstapler seinen Gabelbaum noch
nach vorne und hinten kippen kann, kommt er also im Prinzip mit zwei Achsen
aus, um seine Aufgaben zu erfüllen.
Abbildung 6: Gabelstapler10
Bei einem Gabelstapler wie in Abbildung 6 wird die Bewegung des Arms nicht
durch Rotation in einem Gelenk ausgeführt. Bei dieser Art von (Greif-) Arm
erfolgt die Bewegung linear entlang von Führungsschienen. Die benötigte Kraft
wird vom Motor über eine Kette auf die Gabel übertragen. 10 http://www.hinrichs-stapler.de/detail/diesel/D2556_Toyota_4_Rad_Frontstapler_Toyota_02-7FDA50.htm
16
2.2.3 Zusammenfassung Arme
Wenn man die Ergebnisse der oben betrachteten (Roboter-) Arme untersucht,
können folgende allgemeine Aussagen gemacht werden:
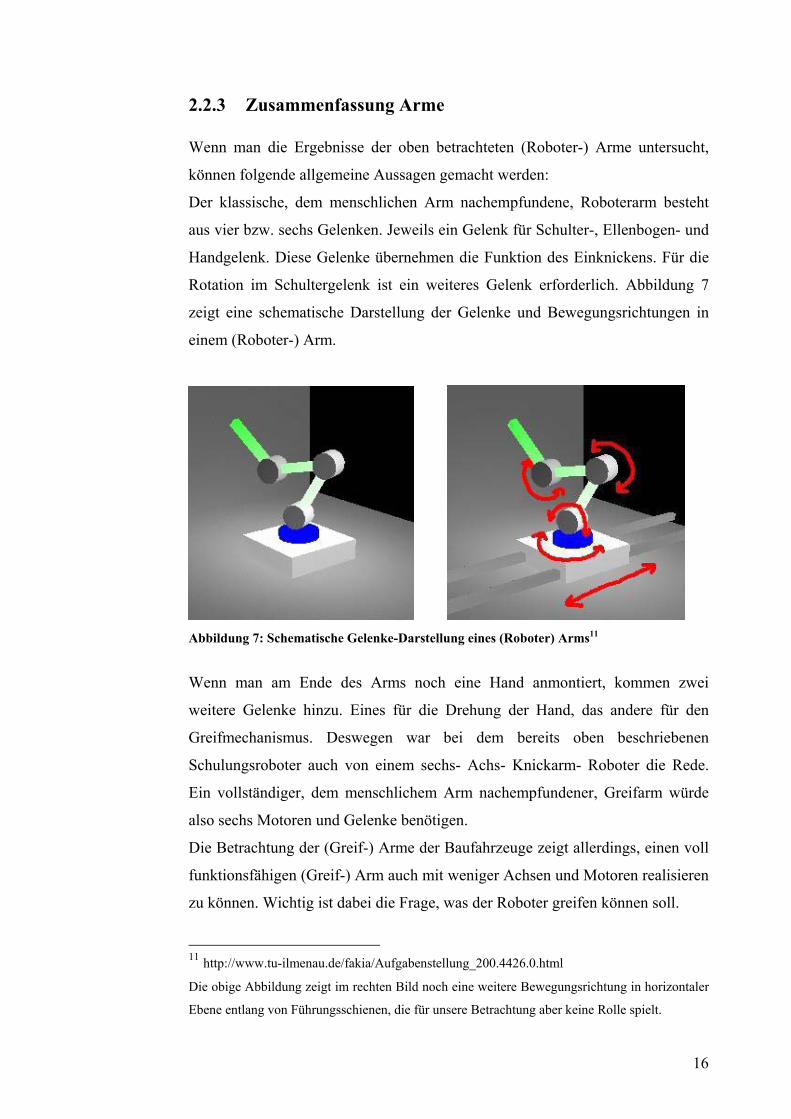
Der klassische, dem menschlichen Arm nachempfundene, Roboterarm besteht
aus vier bzw. sechs Gelenken. Jeweils ein Gelenk für Schulter-, Ellenbogen- und
Handgelenk. Diese Gelenke übernehmen die Funktion des Einknickens. Für die
Rotation im Schultergelenk ist ein weiteres Gelenk erforderlich. Abbildung 7
zeigt eine schematische Darstellung der Gelenke und Bewegungsrichtungen in
einem (Roboter-) Arm.
Abbildung 7: Schematische Gelenke-Darstellung eines (Roboter) Arms11
Wenn man am Ende des Arms noch eine Hand anmontiert, kommen zwei
weitere Gelenke hinzu. Eines für die Drehung der Hand, das andere für den
Greifmechanismus. Deswegen war bei dem bereits oben beschriebenen
Schulungsroboter auch von einem sechs- Achs- Knickarm- Roboter die Rede.
Ein vollständiger, dem menschlichem Arm nachempfundener, Greifarm würde
also sechs Motoren und Gelenke benötigen.
Die Betrachtung der (Greif-) Arme der Baufahrzeuge zeigt allerdings, einen voll
funktionsfähigen (Greif-) Arm auch mit weniger Achsen und Motoren realisieren
zu können. Wichtig ist dabei die Frage, was der Roboter greifen können soll.
11 http://www.tu-ilmenau.de/fakia/Aufgabenstellung_200.4426.0.html
Die obige Abbildung zeigt im rechten Bild noch eine weitere Bewegungsrichtung in horizontaler
Ebene entlang von Führungsschienen, die für unsere Betrachtung aber keine Rolle spielt.
17
Des Weiteren lässt sich festhalten, dass Schrittmotoren eine gute
Lösungsmöglichkeit bieten, um eine präzise Gelenkstellung zu erreichen. Sie
sind je nach Bauart in der Lage, sich auf den Grad genau um einen vorgegebenen
Winkel zu drehen.
Außerdem geben die betrachteten (Roboter-) Arme Informationen über eine
mögliche Positionierung der Motoren. Diese können sich entweder direkt in den
Gelenken befinden; es ist aber auch möglich, sie an anderer Stelle zu montieren
und die Kraft per Zahnriemen, Kette oder Zahnrädern zu übertragen. Dies kann
insofern von Vorteil sein, um das Gewicht des Arms so gering wie möglich zu
halten.
2.3 Roboterhände
„Hände sind unerlässlich für einen Roboter, wenn er seine Arme gebrauchen
will, um etwas zu greifen. Je nach Aufgabe kann eine Roboter-Hand zwei, drei,
vier oder fünf "Finger" haben. (…)
Manche "Finger" von Robotern sind recht einfach gestaltet. Einige haben, wie
unsere Finger, mehrere Gelenke, um noch feiner greifen zu können.
Dies ist z.B. notwendig, wenn der Roboter etwas greifen will, was nicht speziell
für Roboter entwickelt wurde, also z.B. ein Ei oder eine Erdbeere.“12
Da als Ergebnis dieser Examensarbeit ein funktionierender Greifer entstehen
soll, ist die Konstruktion einer angemessenen Greifhand zwingend erforderlich.
Aus diesem Grund erfolgt nun eine Betrachtung verschiedener Greifhände. Diese
werden sie in Bezug auf ihre Umsetzungsmöglichkeit und Eignung für den
Roboter ausgewertet.
Die Bilder auf der nächsten Seite sollen dabei erst einmal eine Übersicht darüber
geben, wie solche Hände mit Fingern überhaupt aussehen können.
12 http://www.robowelt.de/1tech/3grundbau/34haende.htm
18
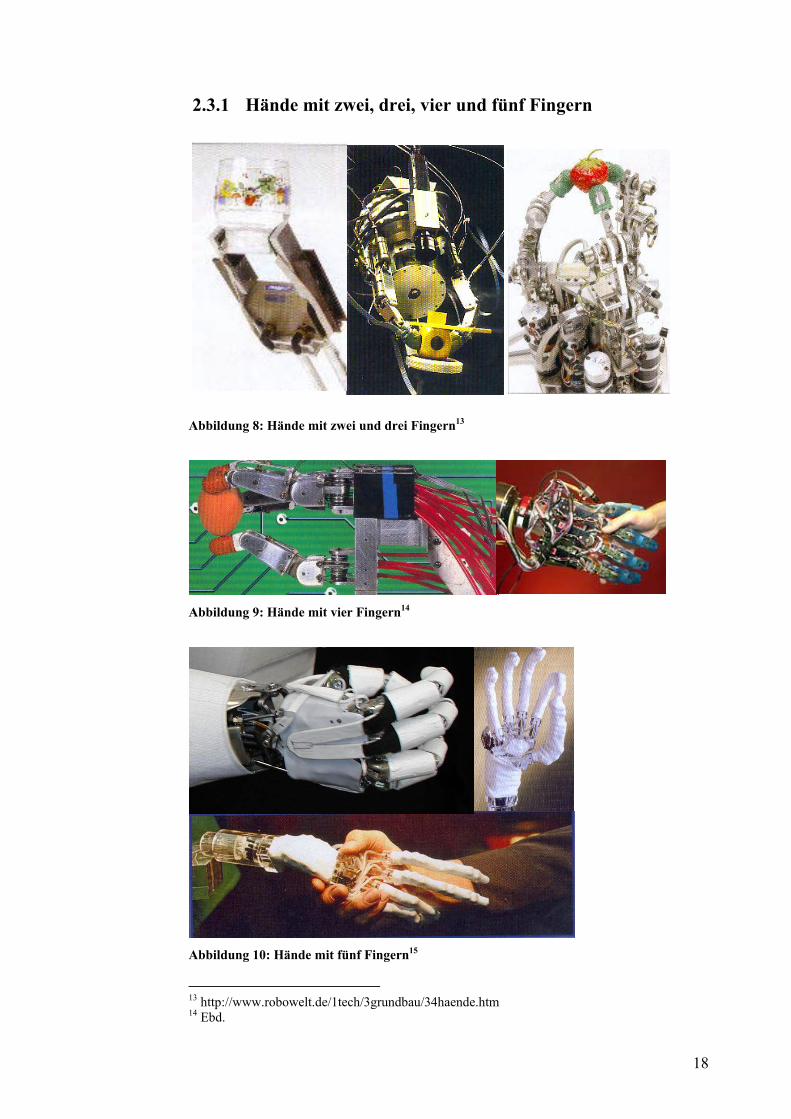
2.3.1 Hände mit zwei, drei, vier und fünf Fingern
Abbildung 8: Hände mit zwei und drei Fingern13
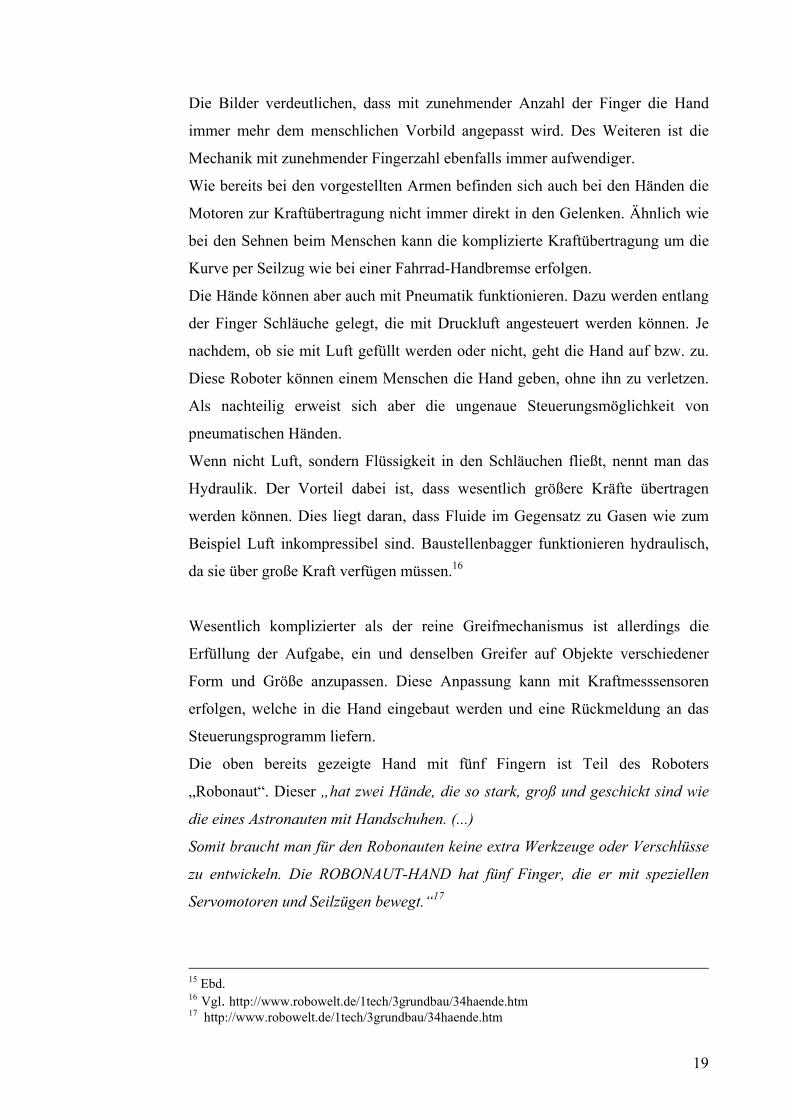
Abbildung 9: Hände mit vier Fingern14
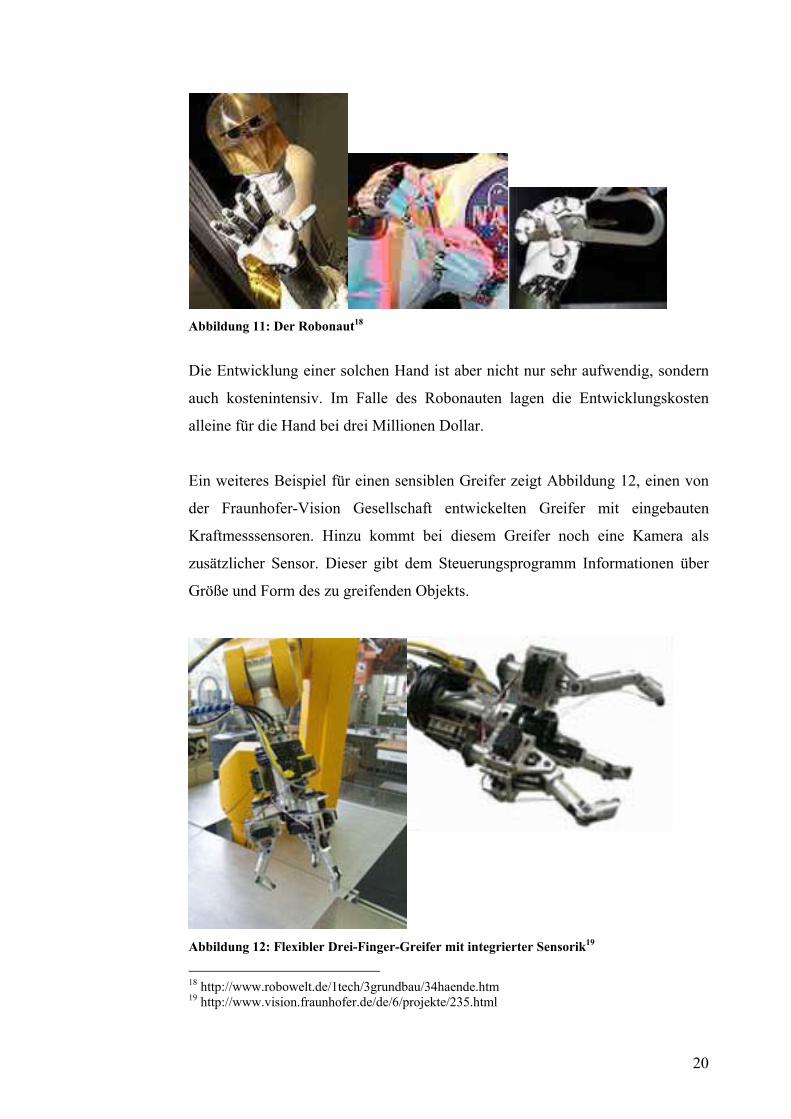
Abbildung 10: Hände mit fünf Fingern15
13 http://www.robowelt.de/1tech/3grundbau/34haende.htm 14 Ebd.
19
Die Bilder verdeutlichen, dass mit zunehmender Anzahl der Finger die Hand
immer mehr dem menschlichen Vorbild angepasst wird. Des Weiteren ist die
Mechanik mit zunehmender Fingerzahl ebenfalls immer aufwendiger.
Wie bereits bei den vorgestellten Armen befinden sich auch bei den Händen die
Motoren zur Kraftübertragung nicht immer direkt in den Gelenken. Ähnlich wie
bei den Sehnen beim Menschen kann die komplizierte Kraftübertragung um die
Kurve per Seilzug wie bei einer Fahrrad-Handbremse erfolgen.
Die Hände können aber auch mit Pneumatik funktionieren. Dazu werden entlang
der Finger Schläuche gelegt, die mit Druckluft angesteuert werden können. Je
nachdem, ob sie mit Luft gefüllt werden oder nicht, geht die Hand auf bzw. zu.
Diese Roboter können einem Menschen die Hand geben, ohne ihn zu verletzen.
Als nachteilig erweist sich aber die ungenaue Steuerungsmöglichkeit von
pneumatischen Händen.
Wenn nicht Luft, sondern Flüssigkeit in den Schläuchen fließt, nennt man das
Hydraulik. Der Vorteil dabei ist, dass wesentlich größere Kräfte übertragen
werden können. Dies liegt daran, dass Fluide im Gegensatz zu Gasen wie zum
Beispiel Luft inkompressibel sind. Baustellenbagger funktionieren hydraulisch,
da sie über große Kraft verfügen müssen.16
Wesentlich komplizierter als der reine Greifmechanismus ist allerdings die
Erfüllung der Aufgabe, ein und denselben Greifer auf Objekte verschiedener
Form und Größe anzupassen. Diese Anpassung kann mit Kraftmesssensoren
erfolgen, welche in die Hand eingebaut werden und eine Rückmeldung an das
Steuerungsprogramm liefern.
Die oben bereits gezeigte Hand mit fünf Fingern ist Teil des Roboters
„Robonaut“. Dieser „hat zwei Hände, die so stark, groß und geschickt sind wie
die eines Astronauten mit Handschuhen. (...)
Somit braucht man für den Robonauten keine extra Werkzeuge oder Verschlüsse
zu entwickeln. Die ROBONAUT-HAND hat fünf Finger, die er mit speziellen
Servomotoren und Seilzügen bewegt.“17
15 Ebd. 16 Vgl. http://www.robowelt.de/1tech/3grundbau/34haende.htm 17 http://www.robowelt.de/1tech/3grundbau/34haende.htm
20
Abbildung 11: Der Robonaut18
Die Entwicklung einer solchen Hand ist aber nicht nur sehr aufwendig, sondern
auch kostenintensiv. Im Falle des Robonauten lagen die Entwicklungskosten
alleine für die Hand bei drei Millionen Dollar.
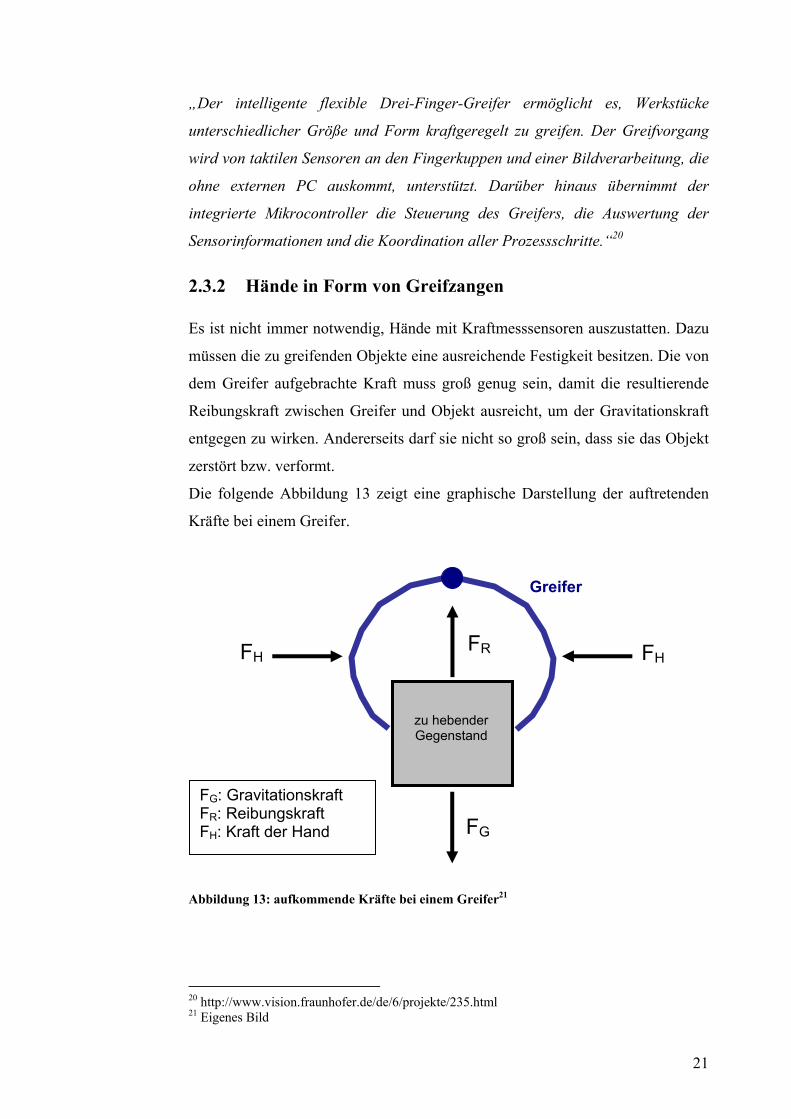
Ein weiteres Beispiel für einen sensiblen Greifer zeigt Abbildung 12, einen von
der Fraunhofer-Vision Gesellschaft entwickelten Greifer mit eingebauten
Kraftmesssensoren. Hinzu kommt bei diesem Greifer noch eine Kamera als
zusätzlicher Sensor. Dieser gibt dem Steuerungsprogramm Informationen über
Größe und Form des zu greifenden Objekts.
Abbildung 12: Flexibler Drei-Finger-Greifer mit integrierter Sensorik19
18 http://www.robowelt.de/1tech/3grundbau/34haende.htm 19 http://www.vision.fraunhofer.de/de/6/projekte/235.html
21
„Der intelligente flexible Drei-Finger-Greifer ermöglicht es, Werkstücke
unterschiedlicher Größe und Form kraftgeregelt zu greifen. Der Greifvorgang
wird von taktilen Sensoren an den Fingerkuppen und einer Bildverarbeitung, die
ohne externen PC auskommt, unterstützt. Darüber hinaus übernimmt der
integrierte Mikrocontroller die Steuerung des Greifers, die Auswertung der
Sensorinformationen und die Koordination aller Prozessschritte.“20
2.3.2 Hände in Form von Greifzangen
Es ist nicht immer notwendig, Hände mit Kraftmesssensoren auszustatten. Dazu
müssen die zu greifenden Objekte eine ausreichende Festigkeit besitzen. Die von
dem Greifer aufgebrachte Kraft muss groß genug sein, damit die resultierende
Reibungskraft zwischen Greifer und Objekt ausreicht, um der Gravitationskraft
entgegen zu wirken. Andererseits darf sie nicht so groß sein, dass sie das Objekt
zerstört bzw. verformt.
Die folgende Abbildung 13 zeigt eine graphische Darstellung der auftretenden
Kräfte bei einem Greifer.
Abbildung 13: aufkommende Kräfte bei einem Greifer21
20 http://www.vision.fraunhofer.de/de/6/projekte/235.html 21 Eigenes Bild
zu hebender Gegenstand
Greifer
FG
FR FH FH
FG: Gravitationskraft FR: Reibungskraft FH: Kraft der Hand
22
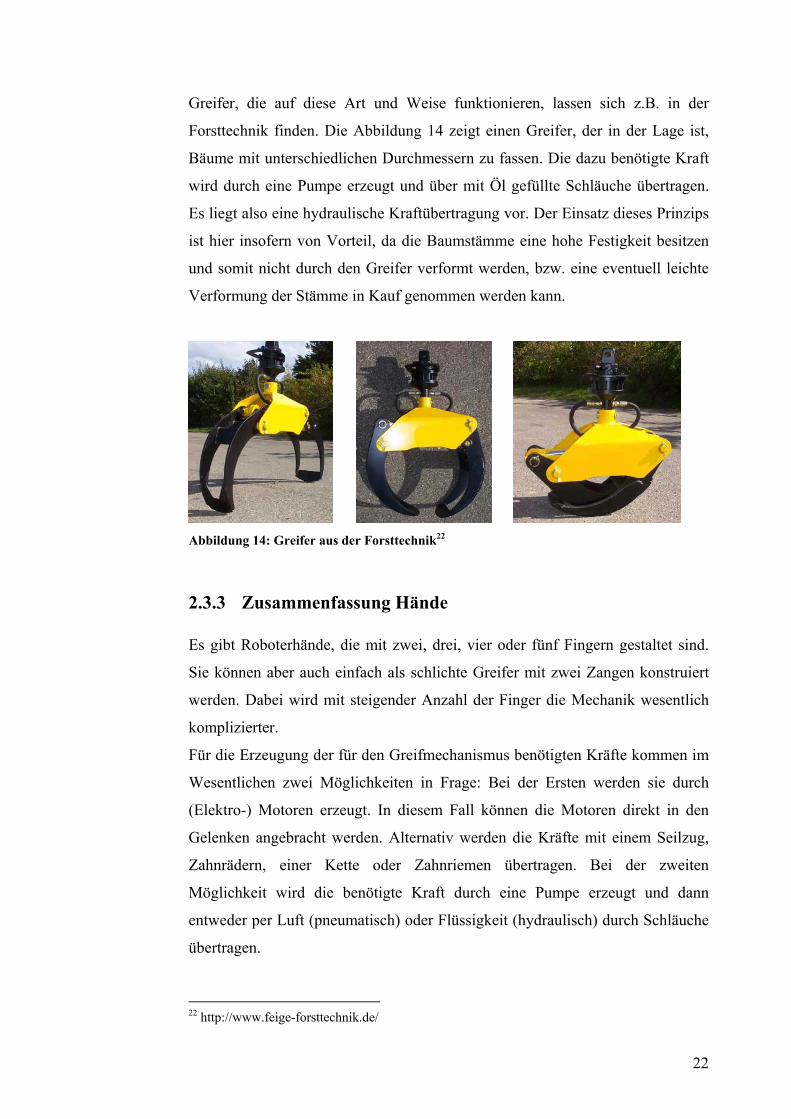
Greifer, die auf diese Art und Weise funktionieren, lassen sich z.B. in der
Forsttechnik finden. Die Abbildung 14 zeigt einen Greifer, der in der Lage ist,
Bäume mit unterschiedlichen Durchmessern zu fassen. Die dazu benötigte Kraft
wird durch eine Pumpe erzeugt und über mit Öl gefüllte Schläuche übertragen.
Es liegt also eine hydraulische Kraftübertragung vor. Der Einsatz dieses Prinzips
ist hier insofern von Vorteil, da die Baumstämme eine hohe Festigkeit besitzen
und somit nicht durch den Greifer verformt werden, bzw. eine eventuell leichte
Verformung der Stämme in Kauf genommen werden kann.
Abbildung 14: Greifer aus der Forsttechnik22
2.3.3 Zusammenfassung Hände
Es gibt Roboterhände, die mit zwei, drei, vier oder fünf Fingern gestaltet sind.
Sie können aber auch einfach als schlichte Greifer mit zwei Zangen konstruiert
werden. Dabei wird mit steigender Anzahl der Finger die Mechanik wesentlich
komplizierter.
Für die Erzeugung der für den Greifmechanismus benötigten Kräfte kommen im
Wesentlichen zwei Möglichkeiten in Frage: Bei der Ersten werden sie durch
(Elektro-) Motoren erzeugt. In diesem Fall können die Motoren direkt in den
Gelenken angebracht werden. Alternativ werden die Kräfte mit einem Seilzug,
Zahnrädern, einer Kette oder Zahnriemen übertragen. Bei der zweiten
Möglichkeit wird die benötigte Kraft durch eine Pumpe erzeugt und dann
entweder per Luft (pneumatisch) oder Flüssigkeit (hydraulisch) durch Schläuche
übertragen.
22 http://www.feige-forsttechnik.de/
23
Greifer lassen sich in zwei Gruppen unterteilen: solche mit und ohne integrierte
Sensoren. Bei denen ohne Sensoren ergeben sich folgende Probleme:
Entweder muss die Greifhand auf eine bestimmte Größe voreingestellt werden.
Dies ist zum Beispiel bei einem Industrieroboter möglich, der immer wieder das
gleiche Bauteil greift. In einem solchen Fall wird einmal eingestellt, wie weit er
die Greifhand schließen soll, um den Gegenstand fest halten zu können, ohne ihn
dabei zu zerstören. Ansonsten ist ein Greifer ohne Sensoren möglich, wenn die
zu greifenden Objekte fest genug sind, um von der Greifhand nicht zerstört zu
werden.
Ist ein Greifer mit Sensoren ausgestattet, muss folgendes beachten werden:
Der Einsatz von Kraftmesssensoren macht es erforderlich, diese ständig während
des Greifens abzufragen. Dies müsste von dem Steuerungsprogramm
übernommen werden und bedeutet für den Computer bzw. Mikrocontroller mehr
Rechenaufwand. Außerdem wäre es nötig, den Greifer so zu konstruieren, dass
eine Verwendung von Kraftmesssensoren überhaupt möglicht ist. Hinzu
kommen generell auch noch die Kosten für solche Sensorsysteme.
Die Steuerung des Greifers mit zusätzlichen Informationen von Bildern einer
Kamera stellt eine hohe Anforderung an die Präzision der Bildauswertung. Im
momentanen Stadium ist es mit der auf dem Roboter angebrachten Kamera
sowie dem benutzten Controller und der Software nicht möglich, sie für eine
derart präzise Ansteuerung der Greifhand zu nutzen.
2.4 Auswertung
Generell lässt sich sagen, dass Greifarme stets für einen bestimmten Zweck
konstruiert werden und dementsprechend unterschiedlich aufgebaut sind. Je
nachdem wie sie beschaffen sind, sind sie i.d.R. in der Lage, wesentlich schneller
und präziser zu arbeiten, als es ein Mensch kann.
Sie können in für Menschen zu gefährlichen oder unzumutbaren Umgebungen
eingesetzt werden und erbringen eine höhere Leistung als ein Mensch. Zudem
sind sie dabei unermüdlich und können rund um die Uhr eingesetzt werden.
Die Verwendung von Kraftmesssensoren und Kameras ermöglicht es ihnen
ebenfalls, Gegenstände genauso sensibel zu greifen wie die menschliche Hand.
24
Aber: eine Konstruktion eines solch präzisen, leistungsfähigen und zugleich
feinfühligen Roboterarms ist mit sehr hohem Aufwand und Kosten verbunden,
weshalb diese Art von Roboterarmen nicht für die Umsetzung im Rahmen dieser
Examensarbeit geeignet ist.
Die Herstellung eines voll funktionsfähigen sechs- Achs- Knickarms, die
Konstruktion einer Hand mit fünf Fingern sowie der Einsatz und die Auswertung
von Kraftmesssensoren kommen also nicht in Frage. Sie sind für die an uns
selbst gestellte Aufgabe, einen zylindrischen Gegenstand aus Metall bzw. einen
Ball aus Plastik heben zu können, eben so wenig nötig. Anders gesagt wäre ein
Greifer nach diesen Vorgaben einfach überdimensioniert.
Lediglich eins der vorgeführten Modelle kann als Vorbild für eine Umsetzung
dienen: Der Gabelstapler und seine Art und Weise, wie er Gegenstände anhebt
und transportiert. Da sich der Arm dabei auf einem Fahrwerk befindet, kann er
wesentlich einfacher konstruiert werden. Er muss einen Gegenstand nur greifen
und eine Bewegung in der Vertikalen (Z-Achse) ausführen können. Die
Bewegung in der Horizontalen (X- und Y- Achse) wird dem Fahrwerk
überlassen. Eine Drehung des Gegenstandes um seine eigene Achse ist dabei
allerdings nicht möglich.
Der Arm soll dementsprechend dem Prinzip des Gabelstaplers nachempfunden
werden, wobei sich die Greifhand entlang einer Führungsschiene in vertikaler
Richtung bewegen kann.
Die Umsetzung der Hand kann allerdings nicht nach dem Prinzip des
Gabelstaplers erfolgen. Dieser ist in erster Linie auch nicht dafür ausgelegt,
Gegenstände zu greifen. Auch keines der anderen bereits vorgestellten
Greifhandmodelle eignet sich für eine Umsetzung. Um Gegenstände
unterschiedlicher Größe greifen zu können, müssen diese entweder sehr fest sein
oder die Greifhände benötigen eine aufwendige Sensorsteuerung. Daher muss
nach weiteren Möglichkeiten für eine passende Greifhand gesucht werden.
25
2.5 Das FinRay-Prinzip
Eine Zange, welche nach dem FinRay-Prinzip konstruiert ist, stellt eine gute
Lösungsmöglichkeit für die Konstruktion einer Greifhand da.
Das FinRay-Prinzip wurde von einem Mitarbeiter von der Technischen
Universität Berlin entdeckt. Dieser stellte fest, „dass ein in der Faust gehaltener
Fisch, drückt man mit dem Finger gegen seine Seite, sich nicht
erwartungsgemäß vom Druckpunkt ab- sondern diesem „konstruktionsbedingt“
zuwendet.“23
Erste Anwendungen setzten dieses Prinzip für die Möbelindustrie um. Dabei
wird die Rückenlehne von Bürostühlen nach einer grätigen Struktur von
verbundenen Gelenken aufgebaut. Wird diese Lehne durch das Gewicht eines
Menschen belastet, passt sie sich automatisch der Form der Wirbelsäule an,
wodurch diese optimal gestützt wird.
Als mögliche Materialien für eine solche Konstruktion erweisen sich PVC,
Sperrholz oder dünnes Stahlblech.
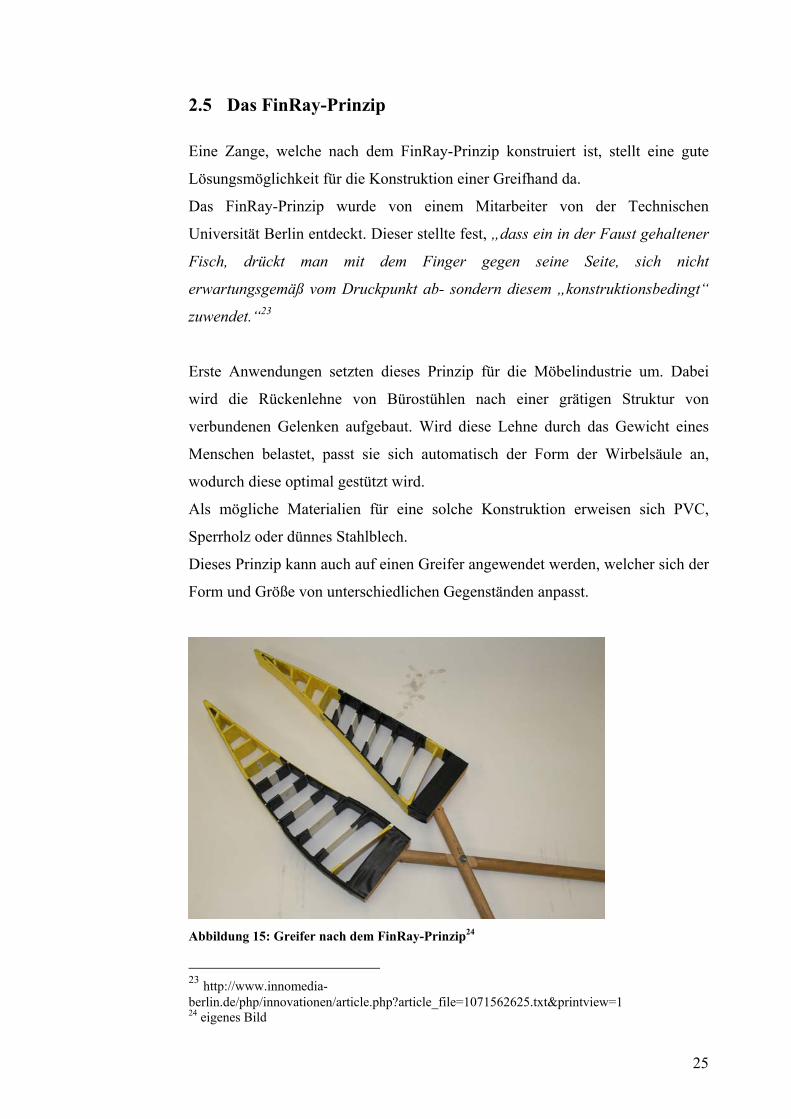
Dieses Prinzip kann auch auf einen Greifer angewendet werden, welcher sich der
Form und Größe von unterschiedlichen Gegenständen anpasst.
Abbildung 15: Greifer nach dem FinRay-Prinzip24
23 http://www.innomedia-berlin.de/php/innovationen/article.php?article_file=1071562625.txt&printview=1 24 eigenes Bild
26
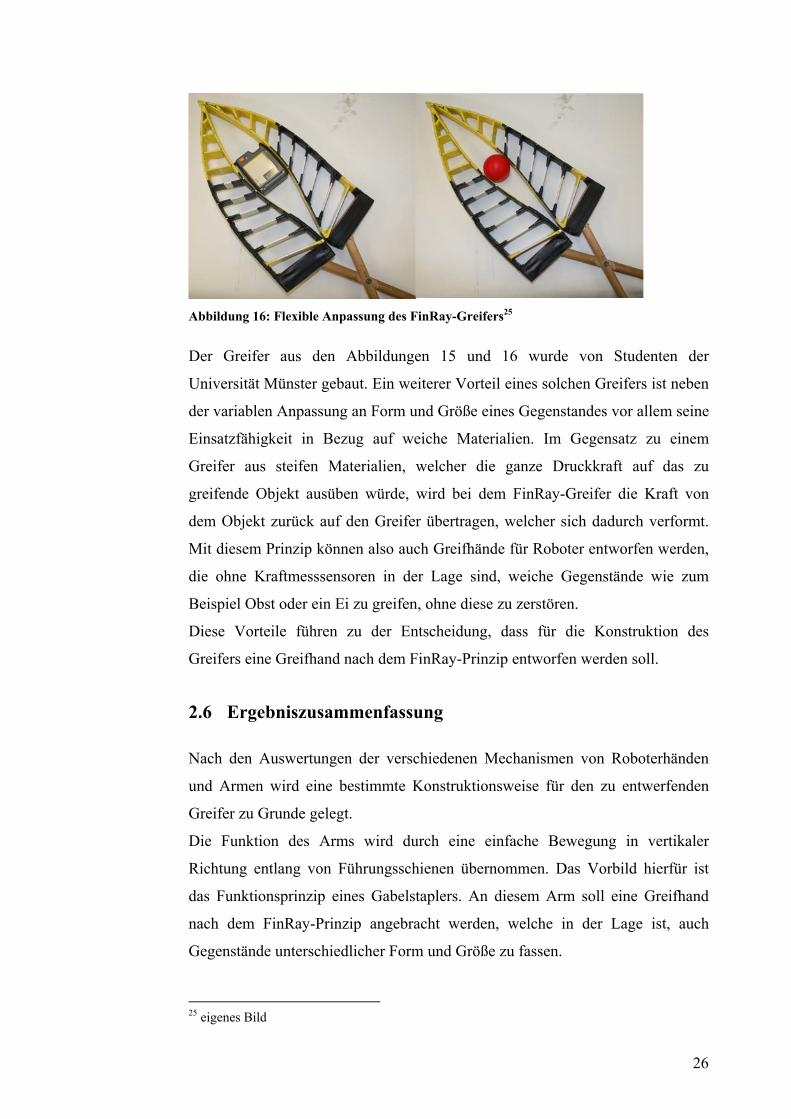
Abbildung 16: Flexible Anpassung des FinRay-Greifers25
Der Greifer aus den Abbildungen 15 und 16 wurde von Studenten der
Universität Münster gebaut. Ein weiterer Vorteil eines solchen Greifers ist neben
der variablen Anpassung an Form und Größe eines Gegenstandes vor allem seine
Einsatzfähigkeit in Bezug auf weiche Materialien. Im Gegensatz zu einem
Greifer aus steifen Materialien, welcher die ganze Druckkraft auf das zu
greifende Objekt ausüben würde, wird bei dem FinRay-Greifer die Kraft von
dem Objekt zurück auf den Greifer übertragen, welcher sich dadurch verformt.
Mit diesem Prinzip können also auch Greifhände für Roboter entworfen werden,
die ohne Kraftmesssensoren in der Lage sind, weiche Gegenstände wie zum
Beispiel Obst oder ein Ei zu greifen, ohne diese zu zerstören.
Diese Vorteile führen zu der Entscheidung, dass für die Konstruktion des
Greifers eine Greifhand nach dem FinRay-Prinzip entworfen werden soll.
2.6 Ergebniszusammenfassung
Nach den Auswertungen der verschiedenen Mechanismen von Roboterhänden
und Armen wird eine bestimmte Konstruktionsweise für den zu entwerfenden
Greifer zu Grunde gelegt.
Die Funktion des Arms wird durch eine einfache Bewegung in vertikaler
Richtung entlang von Führungsschienen übernommen. Das Vorbild hierfür ist
das Funktionsprinzip eines Gabelstaplers. An diesem Arm soll eine Greifhand
nach dem FinRay-Prinzip angebracht werden, welche in der Lage ist, auch
Gegenstände unterschiedlicher Form und Größe zu fassen.
25 eigenes Bild
27
3 Entwicklung des Greifers
Mit den gewonnenen Erkenntnissen können erste Modelle entworfen werden.
Um den generellen Aufbau des Greifers zu erproben, wird auf die Verwendung
von Lego-Steinen zurückgegriffen.
3.1 Erstes Modell zum Funktionsprinzip
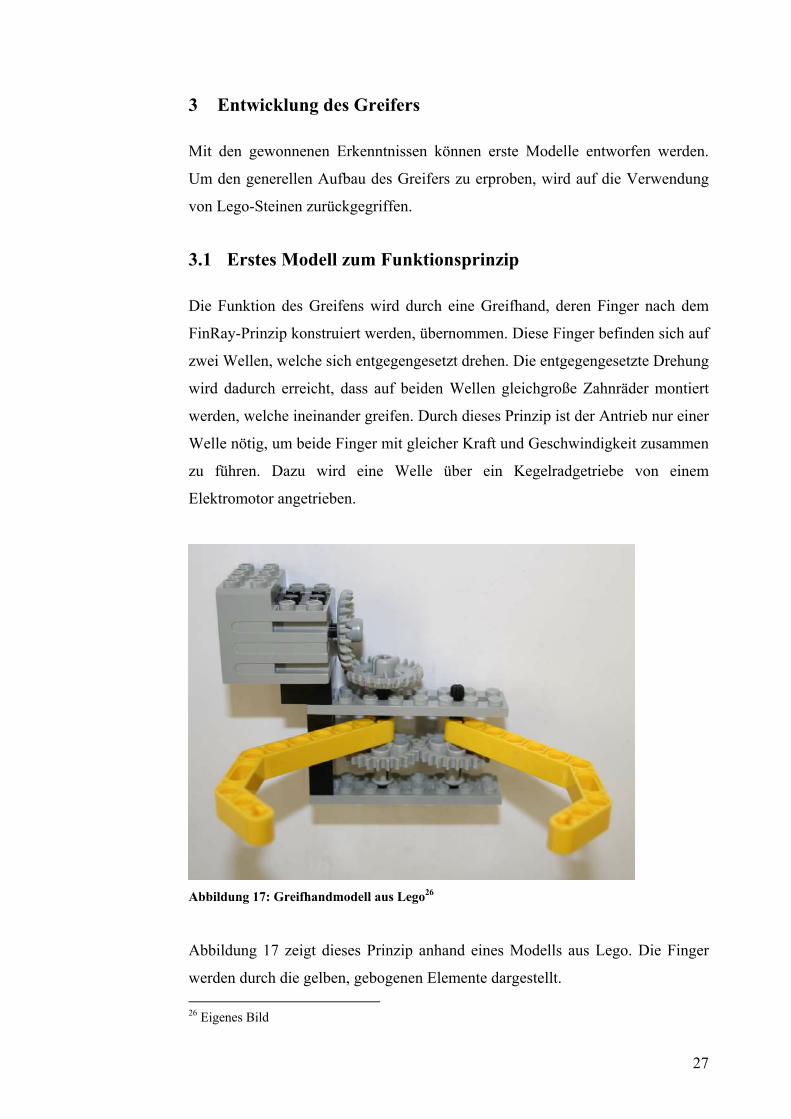
Die Funktion des Greifens wird durch eine Greifhand, deren Finger nach dem
FinRay-Prinzip konstruiert werden, übernommen. Diese Finger befinden sich auf
zwei Wellen, welche sich entgegengesetzt drehen. Die entgegengesetzte Drehung
wird dadurch erreicht, dass auf beiden Wellen gleichgroße Zahnräder montiert
werden, welche ineinander greifen. Durch dieses Prinzip ist der Antrieb nur einer
Welle nötig, um beide Finger mit gleicher Kraft und Geschwindigkeit zusammen
zu führen. Dazu wird eine Welle über ein Kegelradgetriebe von einem
Elektromotor angetrieben.
Abbildung 17: Greifhandmodell aus Lego26 Abbildung 17 zeigt dieses Prinzip anhand eines Modells aus Lego. Die Finger
werden durch die gelben, gebogenen Elemente dargestellt. 26 Eigenes Bild
28
Diese Greifhand soll sich auf einer Plattform befinden, welche durch Anheben
die Funktion des Arms übernimmt. Beim Bau des Modells stellt sich heraus, dass
eine genaue Umsetzung nach dem Prinzip des Gabelstaplers schlecht möglich
bzw. von Nachteil ist.
Bei diesem wird die Kraft vom Motor auf die zu hebende Gabel mittels einer
Kette übertragen. Erste Versuche, dieses Prinzip nachzubauen, scheitern an der
fehlenden Kette bei den Lego-Elementen. Aber auch eine Umsetzung des
generellen Prinzips ohne den Einbau einer Kette erweist sich als zu aufwendig.
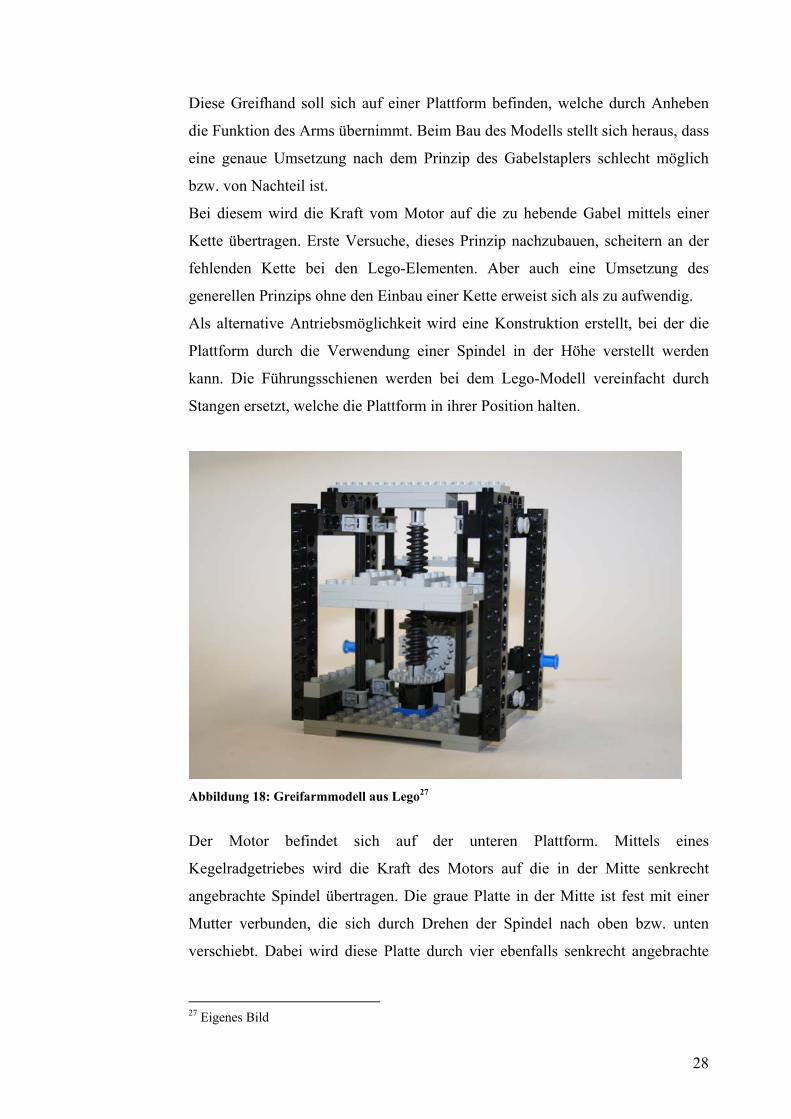
Als alternative Antriebsmöglichkeit wird eine Konstruktion erstellt, bei der die
Plattform durch die Verwendung einer Spindel in der Höhe verstellt werden
kann. Die Führungsschienen werden bei dem Lego-Modell vereinfacht durch
Stangen ersetzt, welche die Plattform in ihrer Position halten.
Abbildung 18: Greifarmmodell aus Lego27
Der Motor befindet sich auf der unteren Plattform. Mittels eines
Kegelradgetriebes wird die Kraft des Motors auf die in der Mitte senkrecht
angebrachte Spindel übertragen. Die graue Platte in der Mitte ist fest mit einer
Mutter verbunden, die sich durch Drehen der Spindel nach oben bzw. unten
verschiebt. Dabei wird diese Platte durch vier ebenfalls senkrecht angebrachte
27 Eigenes Bild
29
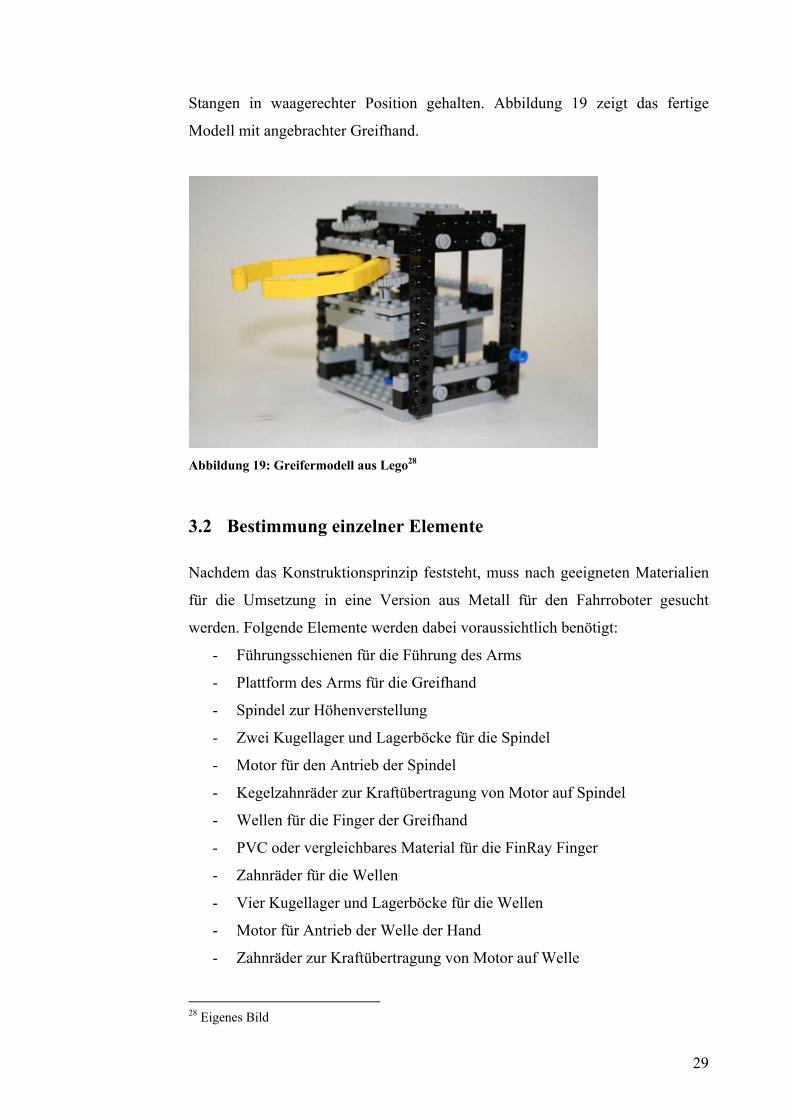
Stangen in waagerechter Position gehalten. Abbildung 19 zeigt das fertige
Modell mit angebrachter Greifhand.
Abbildung 19: Greifermodell aus Lego28
3.2 Bestimmung einzelner Elemente
Nachdem das Konstruktionsprinzip feststeht, muss nach geeigneten Materialien
für die Umsetzung in eine Version aus Metall für den Fahrroboter gesucht
werden. Folgende Elemente werden dabei voraussichtlich benötigt:
- Führungsschienen für die Führung des Arms
- Plattform des Arms für die Greifhand
- Spindel zur Höhenverstellung
- Zwei Kugellager und Lagerböcke für die Spindel
- Motor für den Antrieb der Spindel
- Kegelzahnräder zur Kraftübertragung von Motor auf Spindel
- Wellen für die Finger der Greifhand
- PVC oder vergleichbares Material für die FinRay Finger
- Zahnräder für die Wellen
- Vier Kugellager und Lagerböcke für die Wellen
- Motor für Antrieb der Welle der Hand
- Zahnräder zur Kraftübertragung von Motor auf Welle
28 Eigenes Bild
30
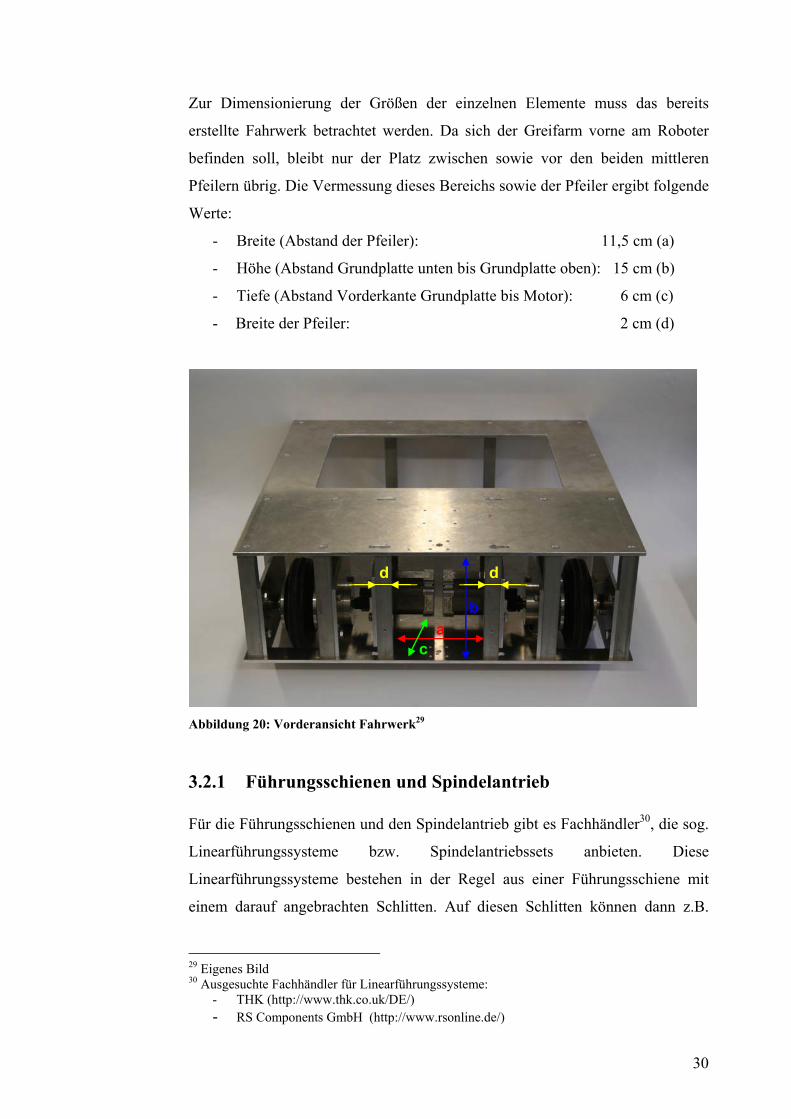
Zur Dimensionierung der Größen der einzelnen Elemente muss das bereits
erstellte Fahrwerk betrachtet werden. Da sich der Greifarm vorne am Roboter
befinden soll, bleibt nur der Platz zwischen sowie vor den beiden mittleren
Pfeilern übrig. Die Vermessung dieses Bereichs sowie der Pfeiler ergibt folgende
Werte:
- Breite (Abstand der Pfeiler): 11,5 cm (a)
- Höhe (Abstand Grundplatte unten bis Grundplatte oben): 15 cm (b)
- Tiefe (Abstand Vorderkante Grundplatte bis Motor): 6 cm (c)
- Breite der Pfeiler: 2 cm (d)
Abbildung 20: Vorderansicht Fahrwerk29
3.2.1 Führungsschienen und Spindelantrieb
Für die Führungsschienen und den Spindelantrieb gibt es Fachhändler30, die sog.
Linearführungssysteme bzw. Spindelantriebssets anbieten. Diese
Linearführungssysteme bestehen in der Regel aus einer Führungsschiene mit
einem darauf angebrachten Schlitten. Auf diesen Schlitten können dann z.B.
29 Eigenes Bild 30 Ausgesuchte Fachhändler für Linearführungssysteme:
- THK (http://www.thk.co.uk/DE/) - RS Components GmbH (http://www.rsonline.de/)
ac
b
dd
31
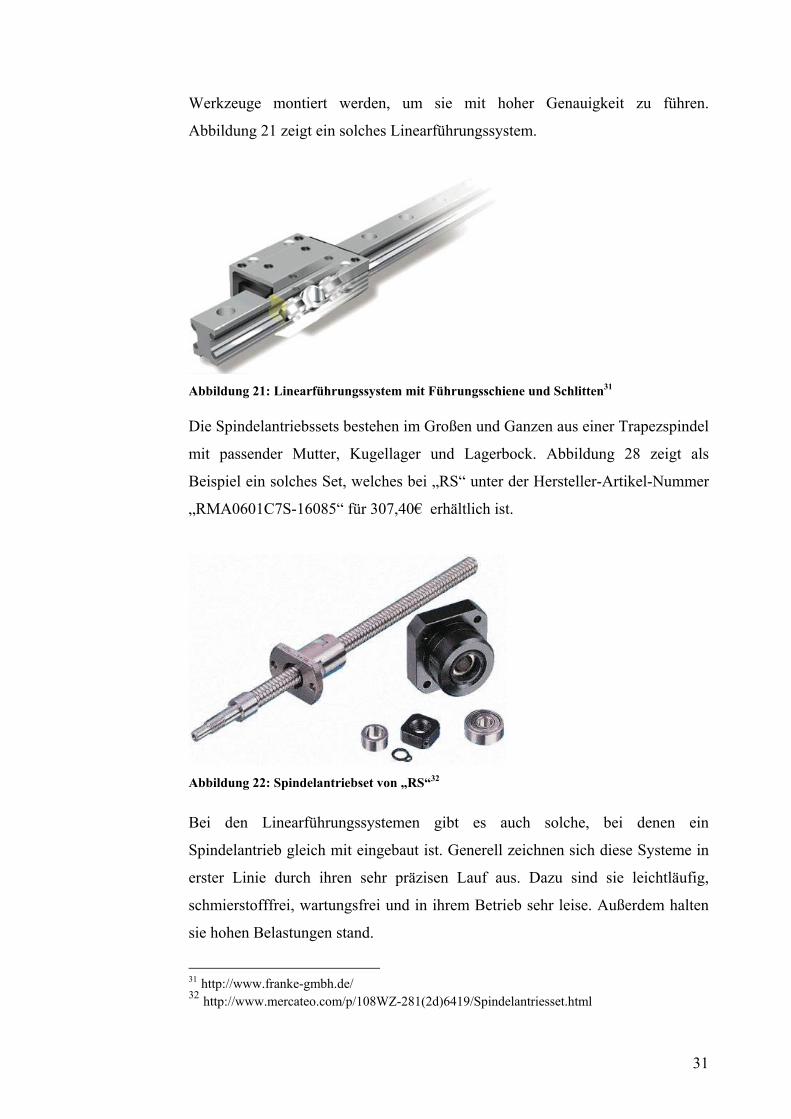
Werkzeuge montiert werden, um sie mit hoher Genauigkeit zu führen.
Abbildung 21 zeigt ein solches Linearführungssystem.
Abbildung 21: Linearführungssystem mit Führungsschiene und Schlitten31 Die Spindelantriebssets bestehen im Großen und Ganzen aus einer Trapezspindel
mit passender Mutter, Kugellager und Lagerbock. Abbildung 28 zeigt als
Beispiel ein solches Set, welches bei „RS“ unter der Hersteller-Artikel-Nummer
„RMA0601C7S-16085“ für 307,40€ erhältlich ist.
Abbildung 22: Spindelantriebset von „RS“32
Bei den Linearführungssystemen gibt es auch solche, bei denen ein
Spindelantrieb gleich mit eingebaut ist. Generell zeichnen sich diese Systeme in
erster Linie durch ihren sehr präzisen Lauf aus. Dazu sind sie leichtläufig,
schmierstofffrei, wartungsfrei und in ihrem Betrieb sehr leise. Außerdem halten
sie hohen Belastungen stand.
31 http://www.franke-gmbh.de/ 32 http://www.mercateo.com/p/108WZ-281(2d)6419/Spindelantriesset.html
32
Für die Umsetzung in einen Greifer sind sie in diesem Falle aber nicht geeignet.
Das liegt zum einen an ihrer Größe. Die Konstruktionsart von Führungsschiene
mit aufgebrachten Schlitten nimmt zuviel Platz in Anspruch. Außerdem erweist
sie sich schlicht als zu kompliziert für die vorgesehene Art, den Greifer zu
konstruieren.
Zum anderen ist ein Einsatz dieser Systeme mit sehr hohen Kosten verbunden,
da sie für Anforderungen in einem Maße konzipiert sind, wie sie in unserem Fall
nicht benötigt werden. Genau wie die bereits in Kapitel 2 gezeigten Hände mit
eingebauten Kraftmesssensoren sind auch diese Systeme für unseren Fall
überdimensioniert. Daher muss nach passenden Alternativen gesucht werden.
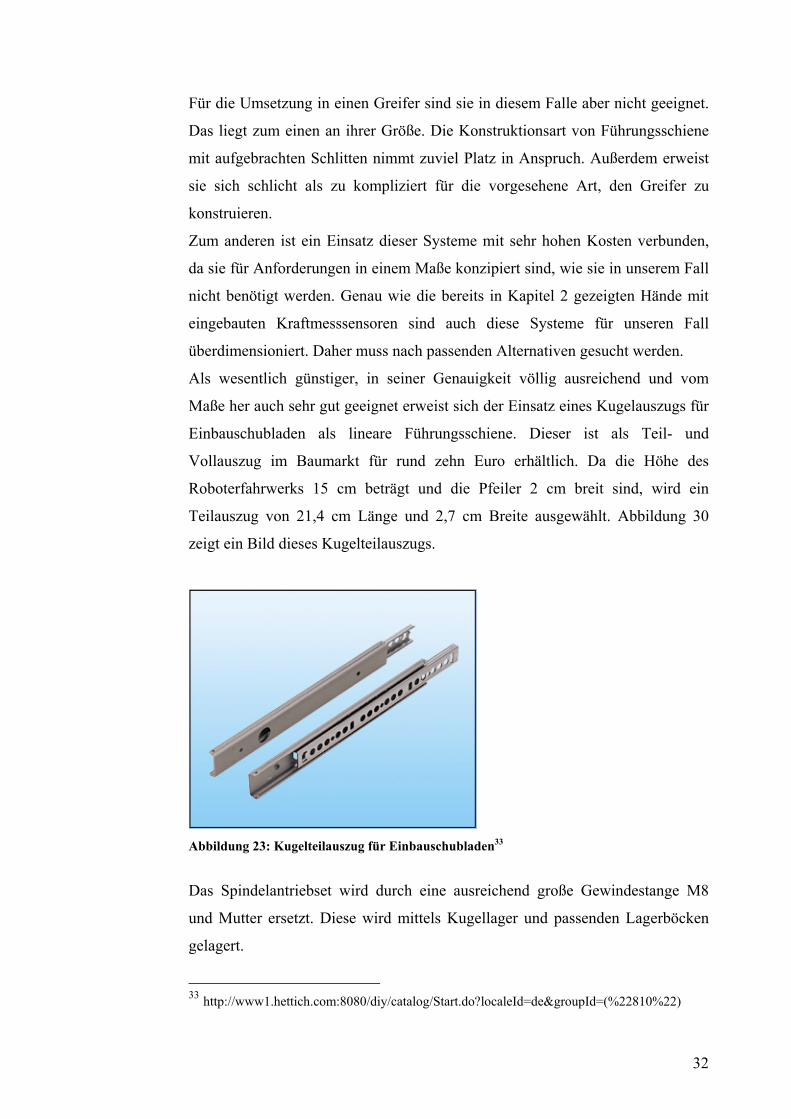
Als wesentlich günstiger, in seiner Genauigkeit völlig ausreichend und vom
Maße her auch sehr gut geeignet erweist sich der Einsatz eines Kugelauszugs für
Einbauschubladen als lineare Führungsschiene. Dieser ist als Teil- und
Vollauszug im Baumarkt für rund zehn Euro erhältlich. Da die Höhe des
Roboterfahrwerks 15 cm beträgt und die Pfeiler 2 cm breit sind, wird ein
Teilauszug von 21,4 cm Länge und 2,7 cm Breite ausgewählt. Abbildung 30
zeigt ein Bild dieses Kugelteilauszugs.
Abbildung 23: Kugelteilauszug für Einbauschubladen33
Das Spindelantriebset wird durch eine ausreichend große Gewindestange M8
und Mutter ersetzt. Diese wird mittels Kugellager und passenden Lagerböcken
gelagert.
33 http://www1.hettich.com:8080/diy/catalog/Start.do?localeId=de&groupId=(%22810%22)
33
3.2.2 Motoren
Für die Auswahl der Motoren muss festgelegt werden, welche Art von Motor
Verwendung finden soll. Wie auch schon beim Antrieb des Fahrwerks werden
beim Greifer Elektromotoren eingesetzt. Diese können noch in Schritt-, Servo-
und Getriebemotoren unterteilt werden. Neben der Entscheidung für eine
bestimmte Art von Motor muss ebenso berechnet werden, welche Leistung und
Umdrehungsgeschwindigkeit für den Greifer notwendig ist.
„Der Servomotor ist ein Motor, der verschiedene vorgebbare Positionen
anfahren kann und diese dann beibehält. (...) In gewissem Umfang können
Servomotoren durch Schrittmotoren ersetzt werden, die weniger technischen
Aufwand und Kosten verursachen. Schrittmotoren neigen jedoch unter
bestimmten Betriebszuständen zu Positionierungsfehlern (Überspringen von
Schritten).“34
Servo- und Schrittmotoren wären notwendig, wenn der Greifer eine starre
Greifhand hätte und auf (eine) bestimmte Objektgröße angepasst werden müsste.
In dem Fall könnte mittels dieser Motorenarten genau gesteuert werden, wie weit
sich die Hand schließen soll.
Da die Greifhand aber nach dem FinRay Prinzip gebaut wird, ist der Einsatz von
Servo- oder Schrittmotoren nicht notwendig. Die Idee dieses Prinzips ist ja
gerade die flexible Anpassung des Greifers an verschiedene Gegenstände,
welche durch Verformung der Greifhand erfolgt. Dazu muss die Hand sich noch
weiter schließen, auch wenn die Finger den Gegenstand bereits berühren.
Entscheidend für die Auswahl der Motoren sind also primär die Leistung sowie
sie Umdrehungsgeschwindigkeit. Dabei muss der erste Motor stark genug sein,
um die Plattform mit dem Greifer mittels Spindel anheben zu können. Der zweite
Motor muss ein so hohes Drehmoment erzeugen, um beim Schließen der Hand
eine Verformung der FinRay-Finger zu erreichen.
Eine bereits vom Motor passend vorgegebene Umdrehungsgeschwindigkeit
erspart die zusätzliche Konstruktion eines Getriebes. Bei Getriebemotoren ist ein
Getriebe zur Veränderung der Umdrehungsgeschwindigkeit bereits mit
integriert.
34 http://de.wikipedia.org/wiki/Servomotor
34
„Ein Getriebemotor besteht aus einem Motor, z.B. einem Elektromotor, und
einem Getriebe, das dafür sorgt, dass sich die Antriebswelle mit geringerer
Geschwindigkeit, aber wesentlich höherem Drehmoment dreht.“35
Conrad Electronic bietet mit dem „MFA Getriebemotor 540“ einen Motor, der
bei einer Versorgungsspannung von 12 Volt36 mit einem Drehmoment von 1,544
Ncm eine ausreichend große Kraft aufbringen kann. Seine Drehzahl beträgt im
Leerlauf 15800 U/min. Angeboten wird dieser Motor mit 7 verschiedenen
Untersetzungen, die Umdrehungsgeschwindigkeiten von maximal 6300 U/min
bis runter zu 5 U/min liefern.
Um die richtige Geschwindigkeit auszuwählen wird als erstes festgelegt, dass die
Übertragung der Kraft von den Motoren auf die Spindel bzw. die Welle mit
Kegelradgetrieben mit dem Verhältnis 1:1 vorgenommen wird, um die
Umdrehungsgeschwindigkeit der Motoren beizubehalten. Anschließend muss
festgelegt werden, welche Geschwindigkeit am besten für die Greifhand bzw. die
Spindel geeignet ist.
Die Greifhand soll sich möglichst langsam schließen. Also wird der Motor mit
der niedrigsten Umdrehungsgeschwindigkeit als Berechnungsgrundlage
genommen. Dieser erzeugt 5 U/min, was umgerechnet 12 Sekunden pro
Umdrehung bedeutet.
Eine Betrachtung des Lego-Modells des Greifers lässt erkennen, dass zum
Greifvorgang eine Viertelumdrehung ausgeführt werden muss. Bei 12 Sekunden
pro Umdrehung bedeutet dies, dass der Greifvorgang 3 Sekunden dauert. Diese
Zeit erscheint als passend. Der erste ausgewählte Motor hat somit eine
Untersetzung von 3000:1.
Der Motor für die Spindel soll die Platte der Greifhand einen Zentimeter pro
Sekunde anheben. Die verwendete M8-Gewindestange hat eine Steigung von
1,25. Für einen Zentimeter Hubhöhe sind also 8 Umdrehungen nötig. Der Motor
sollte dementsprechend eine Drehzahl von 8 U/s aufbringen. Eine Umrechnung
auf U/min ergibt einen Wert von 480 U/min. Da der Getriebemotor nicht in
35 http://de.wikipedia.org/wiki/Getriebemotor 36 Versorgungsspannung des gesamten Roboters durch die verwendeten Akkus
35
genau dieser passenden Geschwindigkeit angeboten wird, wird der Motor mit
dem nächstliegenden Wert genommen.
Der ausgewählte Motor erzeugt bei einer Untersetzung von 50:1 eine
Umdrehungsgeschwindigkeit von 316 U/min. Dadurch ändert sich auch die
Hubgeschwindigkeit. 316 U/min entsprechen etwa 5,26 U/s. Bei einer Steigung
von 1,25 beträgt die Hubhöhe pro Sekunde somit etwa 0,66 cm/s.
3.2.3 Wellen, Zahnräder, Kugellager
Sämtliche in der Überschrift genannten Elemente gibt es in unterschiedlichsten
Ausführungen als fertige Elemente zu kaufen.
Für die zu verwendenden Zahnräder wird festgelegt, Stahlzahnräder mit dem
Modul 1 zu benutzen. Erste Überlegungen, wie groß diese ausfallen müssen,
führen zu dem Ergebnis, dass die Wellen einen möglichst großen Abstand haben
sollten. Da auf den Wellen die FinRay-Finger montiert werden müssen, dürfen
diese nicht zu dicht beieinander stehen. Außerdem muss genügend Platz
vorhanden sein, um zwei Lagerböcke nebeneinander platzieren zu können. Es
wird ein Zahnrad mit 42 mm Durchmesser und 6 mm Bohrung ausgewählt.
Die weiteren Elemente werden an diese ermittelten Werte angepasst. Die Wellen
werden durch Eisenstangen mit einem Durchmesser von 6 mm realisiert. Dazu
passende Kugellager mit einem Innendurchmesser von 6 mm haben einen
Außendurchmesser von 19 mm. Die Lagerböcke für 19 mm Kugellager besitzen
eine quadratische Grundfläche mit 30 mm Kantenlänge. Somit können die
beiden Wellen der Greifhand vom Abstand zueinander her problemlos
nebeneinander gelagert werden.
Um die Lagerböcke einheitlich zu halten, werden die gleichen Lagerböcke auch
für den Spindelantrieb genutzt. Daher wird die M8-Gewindestange an beiden
Enden auf 6 mm abgedreht. Somit kann diese genau in die Kugellager eingepasst
werden.
Die Kegelräder sollen ebenfalls aus Stahl bestehen. Aus Kostengründen werden
welche mit 5 mm genommen und auf 6 mm aufgebohrt. Außerdem müssen diese
Kegelräder noch mit einem Gewinde in der Nabe für eine Feststellschraube
versehen werden.
36
3.2.4 Greifhand nach dem FinRay-Prinzip
Für die Konstruktion eines Greifers nach dem FinRay Prinzip lassen sich leider
keinerlei technischen Vorgaben finden. Weder auf der oben bereits erwähnten
Internetseite37 zu diesem Thema, noch bei der Firma „evologics“38, die
mittlerweile das Patent auf das FinRay-Prinzip hat oder auf der Homepage der
Fachhochschule Rosenheim39, die bereits im Jahr 2004 einen adaptiven Stuhl
nach diesem Prinzip gebaut und das Ganze dokumentiert hat.
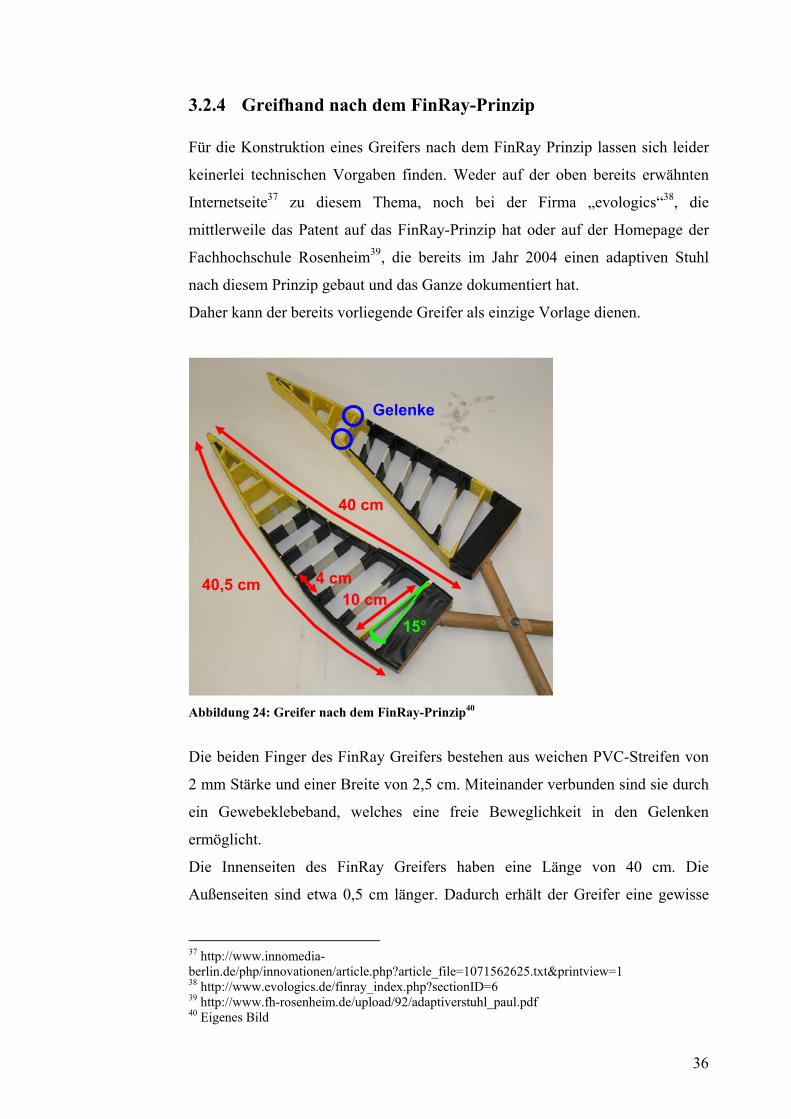
Daher kann der bereits vorliegende Greifer als einzige Vorlage dienen.
Abbildung 24: Greifer nach dem FinRay-Prinzip40
Die beiden Finger des FinRay Greifers bestehen aus weichen PVC-Streifen von
2 mm Stärke und einer Breite von 2,5 cm. Miteinander verbunden sind sie durch
ein Gewebeklebeband, welches eine freie Beweglichkeit in den Gelenken
ermöglicht.
Die Innenseiten des FinRay Greifers haben eine Länge von 40 cm. Die
Außenseiten sind etwa 0,5 cm länger. Dadurch erhält der Greifer eine gewisse
37 http://www.innomedia-berlin.de/php/innovationen/article.php?article_file=1071562625.txt&printview=1 38 http://www.evologics.de/finray_index.php?sectionID=6 39 http://www.fh-rosenheim.de/upload/92/adaptiverstuhl_paul.pdf 40 Eigenes Bild
40 cm
40,5 cm 10 cm
15°
4 cm
Gelenke
37
Vorspannung und Krümmung nach innen. Die einzelnen Rippen verlaufen
parallel zueinander. Die unterste Rippe steht in einem 15° Winkel zu der
Halterung der Finger. Die Breite der untersten Rippe beträgt 10 cm. Die 9
folgenden Rippen sind jeweils einen Zentimeter kürzer und haben stets 4 cm
Abstand zueinander.
Wenn der Greifer komplett geöffnet wird, hat er eine Spannweite von über 80
cm. Da das Fahrwerk des Roboters eine Breite von 50 cm hat, bietet sich eine
Umsetzung des Greifers im Maßstab 1:2 an. Die Spannweite beträgt dann 40 cm
und deckt fast die gesamte Breite des Fahrwerks ab.
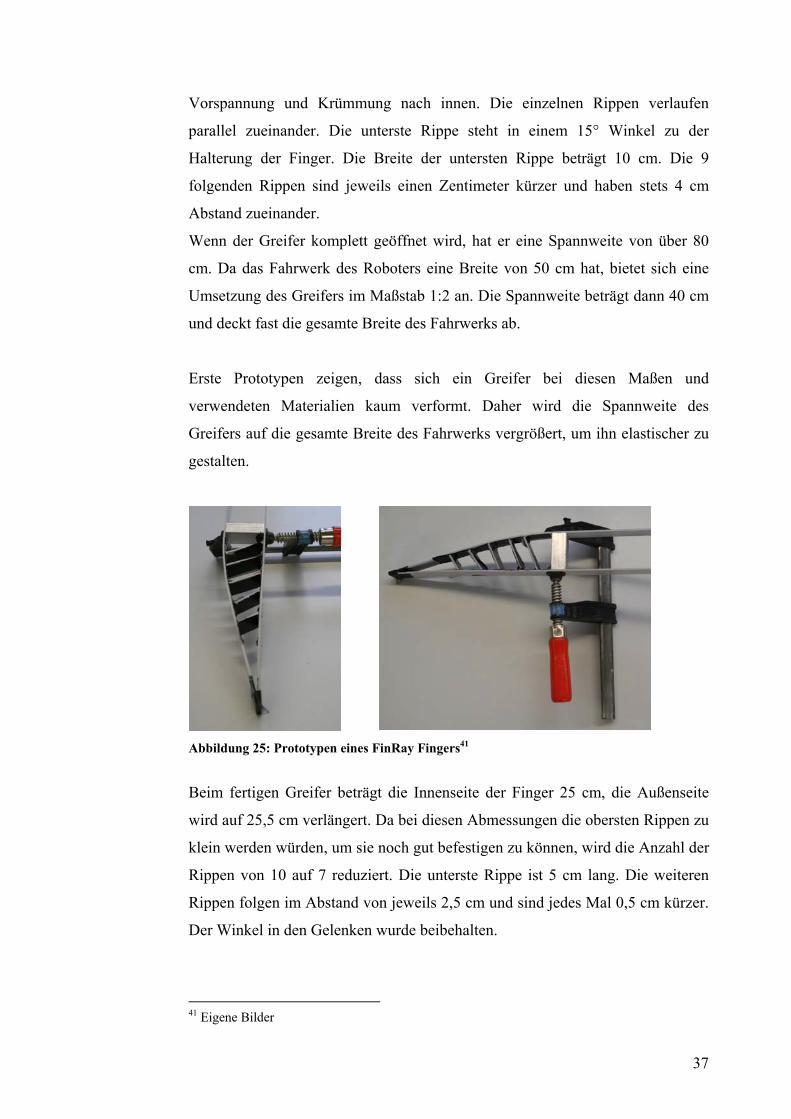
Erste Prototypen zeigen, dass sich ein Greifer bei diesen Maßen und
verwendeten Materialien kaum verformt. Daher wird die Spannweite des
Greifers auf die gesamte Breite des Fahrwerks vergrößert, um ihn elastischer zu
gestalten.
Abbildung 25: Prototypen eines FinRay Fingers41
Beim fertigen Greifer beträgt die Innenseite der Finger 25 cm, die Außenseite
wird auf 25,5 cm verlängert. Da bei diesen Abmessungen die obersten Rippen zu
klein werden würden, um sie noch gut befestigen zu können, wird die Anzahl der
Rippen von 10 auf 7 reduziert. Die unterste Rippe ist 5 cm lang. Die weiteren
Rippen folgen im Abstand von jeweils 2,5 cm und sind jedes Mal 0,5 cm kürzer.
Der Winkel in den Gelenken wurde beibehalten.
41 Eigene Bilder
38
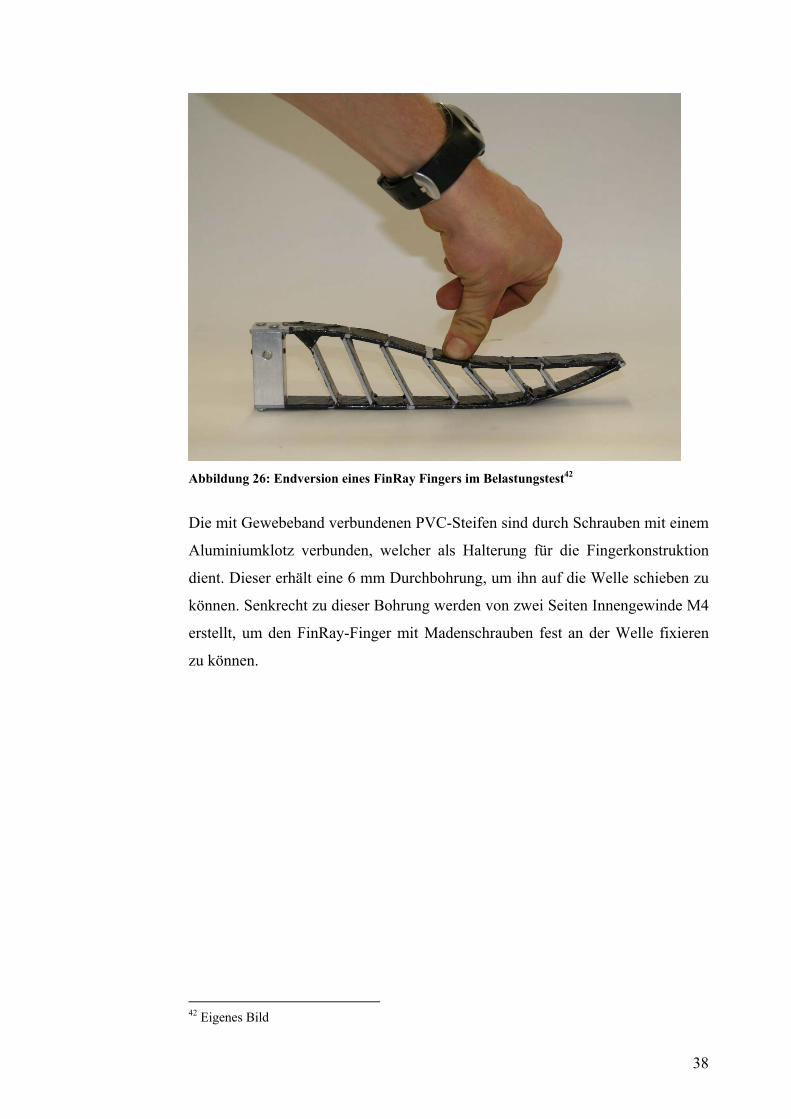
Abbildung 26: Endversion eines FinRay Fingers im Belastungstest42
Die mit Gewebeband verbundenen PVC-Steifen sind durch Schrauben mit einem
Aluminiumklotz verbunden, welcher als Halterung für die Fingerkonstruktion
dient. Dieser erhält eine 6 mm Durchbohrung, um ihn auf die Welle schieben zu
können. Senkrecht zu dieser Bohrung werden von zwei Seiten Innengewinde M4
erstellt, um den FinRay-Finger mit Madenschrauben fest an der Welle fixieren
zu können.
42 Eigenes Bild
39
4 Konstruktion des Greifers
Nachdem alle wesentlichen Elemente bestimmt sind, kann eine genaue
Konstruktionsplanung durchgeführt werden. Die technischen Zeichnungen zu
den Elementen, die noch angefertigt werden müssen, befinden sich im Anhang.
Des Weiteren liegen dort die Datenblätter der verwendeten Fertigelemente mit
den Angaben zur Ausstattung und den technischen Daten vor.
Die folgende Bilderreihe dokumentiert den Zusammenbau dieser einzelnen
Elemente.
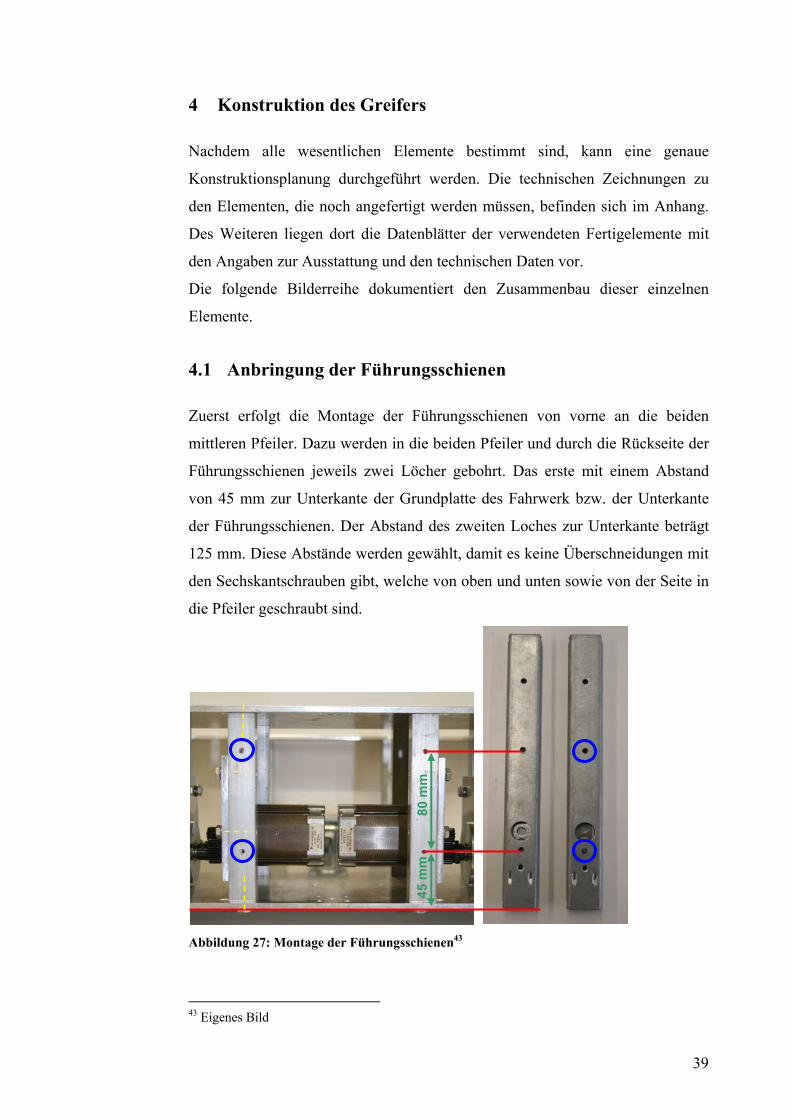
4.1 Anbringung der Führungsschienen
Zuerst erfolgt die Montage der Führungsschienen von vorne an die beiden
mittleren Pfeiler. Dazu werden in die beiden Pfeiler und durch die Rückseite der
Führungsschienen jeweils zwei Löcher gebohrt. Das erste mit einem Abstand
von 45 mm zur Unterkante der Grundplatte des Fahrwerk bzw. der Unterkante
der Führungsschienen. Der Abstand des zweiten Loches zur Unterkante beträgt
125 mm. Diese Abstände werden gewählt, damit es keine Überschneidungen mit
den Sechskantschrauben gibt, welche von oben und unten sowie von der Seite in
die Pfeiler geschraubt sind.
Abbildung 27: Montage der Führungsschienen43
43 Eigenes Bild
80 m
m
45 m
m
40
Die Durchbohrungen auf der Rückseite der Führungsschienen haben einen
Durchmesser von 4 mm, die in den Pfeilern einen von 3,3 mm. In die Löcher der
Pfeiler werden anschließend M4 Gewinde hinein geschnitten, um die
Führungsschienen mit 4*16 mm Rundkopfschrauben an die Pfeiler anschrauben
zu können.
4.2 Zusammenfügung der Elemente der Greifhand
Nach der Montage der Führungsschienen müssen die beiden Platten der
Greifhand zuerst mit allen nötigen Bohrungen versehen werden.
Dies sind im Einzelnen folgende:
- 4 mm Bohrungen für die Lagerböcke
- 4 mm Bohrungen für die Winkel zur Montage an die Führungsschienen
- 8 mm Bohrung für Welle der Greifhand
- 6 mm Bohrung zur Verbindung der beiden Platten mittels eines Pfeilers
- 9 mm Bohrung für die Spindel
- 3 mm Bohrungen für die Montage des Motors
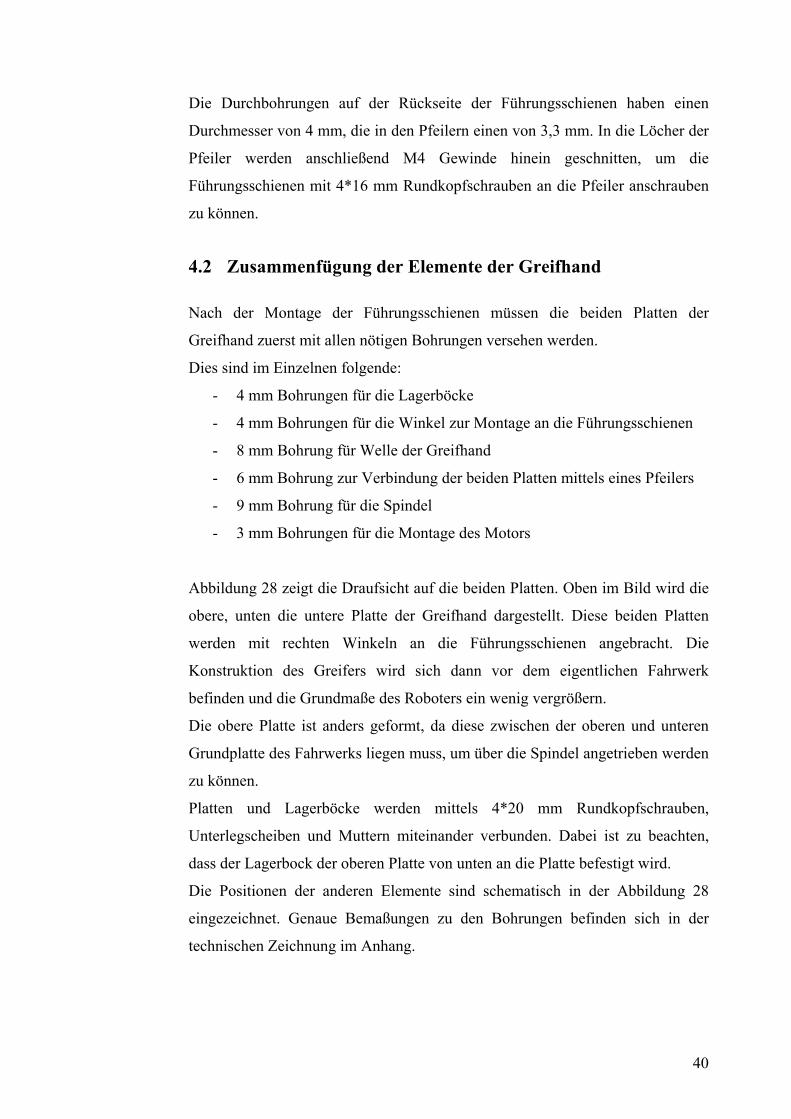
Abbildung 28 zeigt die Draufsicht auf die beiden Platten. Oben im Bild wird die
obere, unten die untere Platte der Greifhand dargestellt. Diese beiden Platten
werden mit rechten Winkeln an die Führungsschienen angebracht. Die
Konstruktion des Greifers wird sich dann vor dem eigentlichen Fahrwerk
befinden und die Grundmaße des Roboters ein wenig vergrößern.
Die obere Platte ist anders geformt, da diese zwischen der oberen und unteren
Grundplatte des Fahrwerks liegen muss, um über die Spindel angetrieben werden
zu können.
Platten und Lagerböcke werden mittels 4*20 mm Rundkopfschrauben,
Unterlegscheiben und Muttern miteinander verbunden. Dabei ist zu beachten,
dass der Lagerbock der oberen Platte von unten an die Platte befestigt wird.
Die Positionen der anderen Elemente sind schematisch in der Abbildung 28
eingezeichnet. Genaue Bemaßungen zu den Bohrungen befinden sich in der
technischen Zeichnung im Anhang.
41
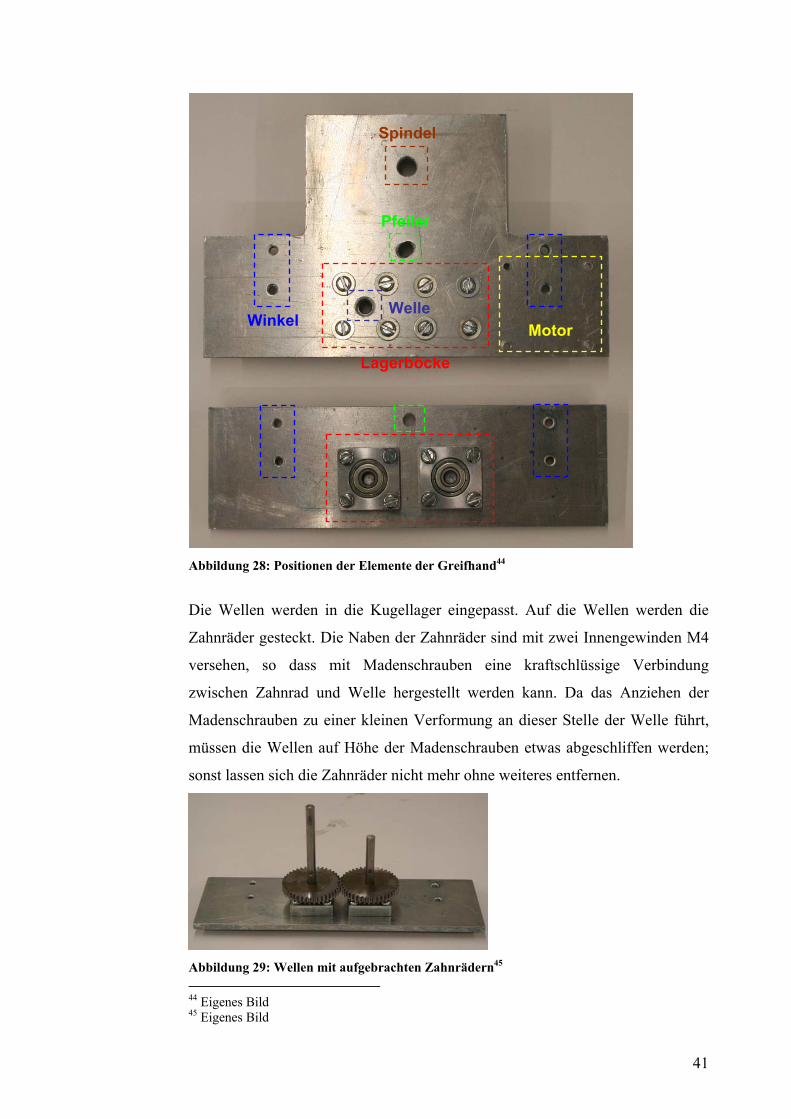
Abbildung 28: Positionen der Elemente der Greifhand44
Die Wellen werden in die Kugellager eingepasst. Auf die Wellen werden die
Zahnräder gesteckt. Die Naben der Zahnräder sind mit zwei Innengewinden M4
versehen, so dass mit Madenschrauben eine kraftschlüssige Verbindung
zwischen Zahnrad und Welle hergestellt werden kann. Da das Anziehen der
Madenschrauben zu einer kleinen Verformung an dieser Stelle der Welle führt,
müssen die Wellen auf Höhe der Madenschrauben etwas abgeschliffen werden;
sonst lassen sich die Zahnräder nicht mehr ohne weiteres entfernen.
Abbildung 29: Wellen mit aufgebrachten Zahnrädern45 44 Eigenes Bild 45 Eigenes Bild
Winkel
Lagerböcke
Motor Welle
Spindel
Pfeiler
42
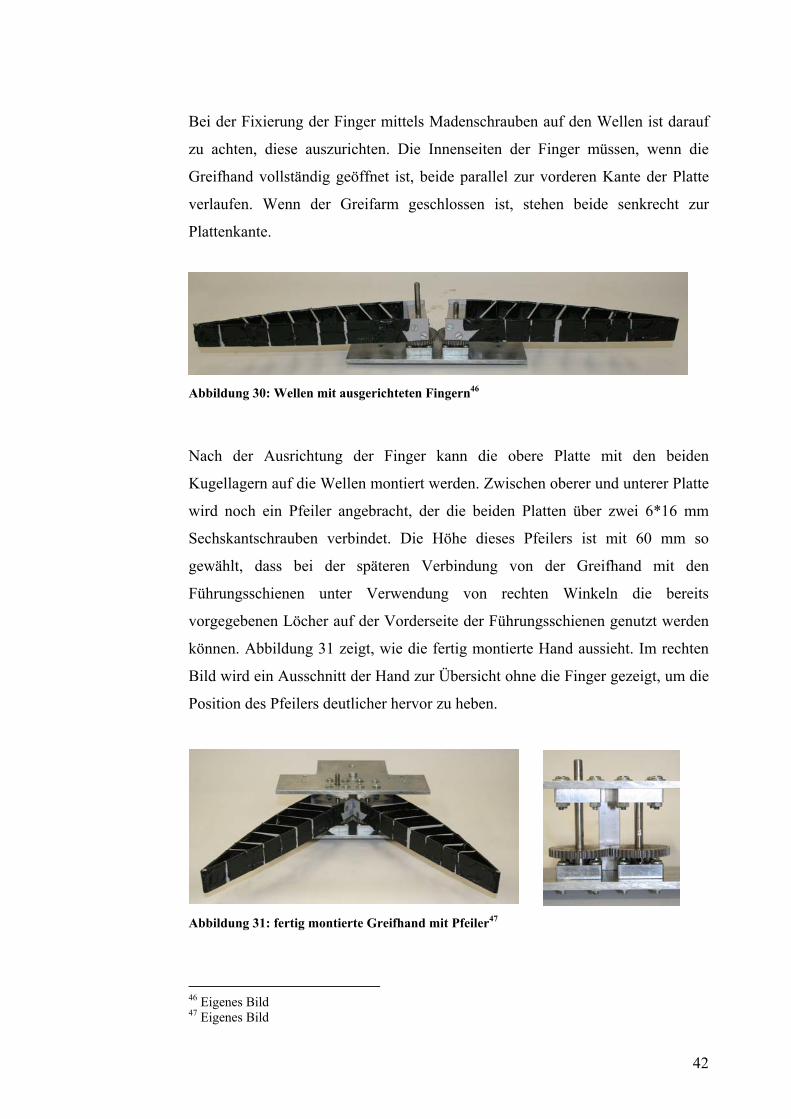
Bei der Fixierung der Finger mittels Madenschrauben auf den Wellen ist darauf
zu achten, diese auszurichten. Die Innenseiten der Finger müssen, wenn die
Greifhand vollständig geöffnet ist, beide parallel zur vorderen Kante der Platte
verlaufen. Wenn der Greifarm geschlossen ist, stehen beide senkrecht zur
Plattenkante.
Abbildung 30: Wellen mit ausgerichteten Fingern46
Nach der Ausrichtung der Finger kann die obere Platte mit den beiden
Kugellagern auf die Wellen montiert werden. Zwischen oberer und unterer Platte
wird noch ein Pfeiler angebracht, der die beiden Platten über zwei 6*16 mm
Sechskantschrauben verbindet. Die Höhe dieses Pfeilers ist mit 60 mm so
gewählt, dass bei der späteren Verbindung von der Greifhand mit den
Führungsschienen unter Verwendung von rechten Winkeln die bereits
vorgegebenen Löcher auf der Vorderseite der Führungsschienen genutzt werden
können. Abbildung 31 zeigt, wie die fertig montierte Hand aussieht. Im rechten
Bild wird ein Ausschnitt der Hand zur Übersicht ohne die Finger gezeigt, um die
Position des Pfeilers deutlicher hervor zu heben.
Abbildung 31: fertig montierte Greifhand mit Pfeiler47
46 Eigenes Bild 47 Eigenes Bild
43
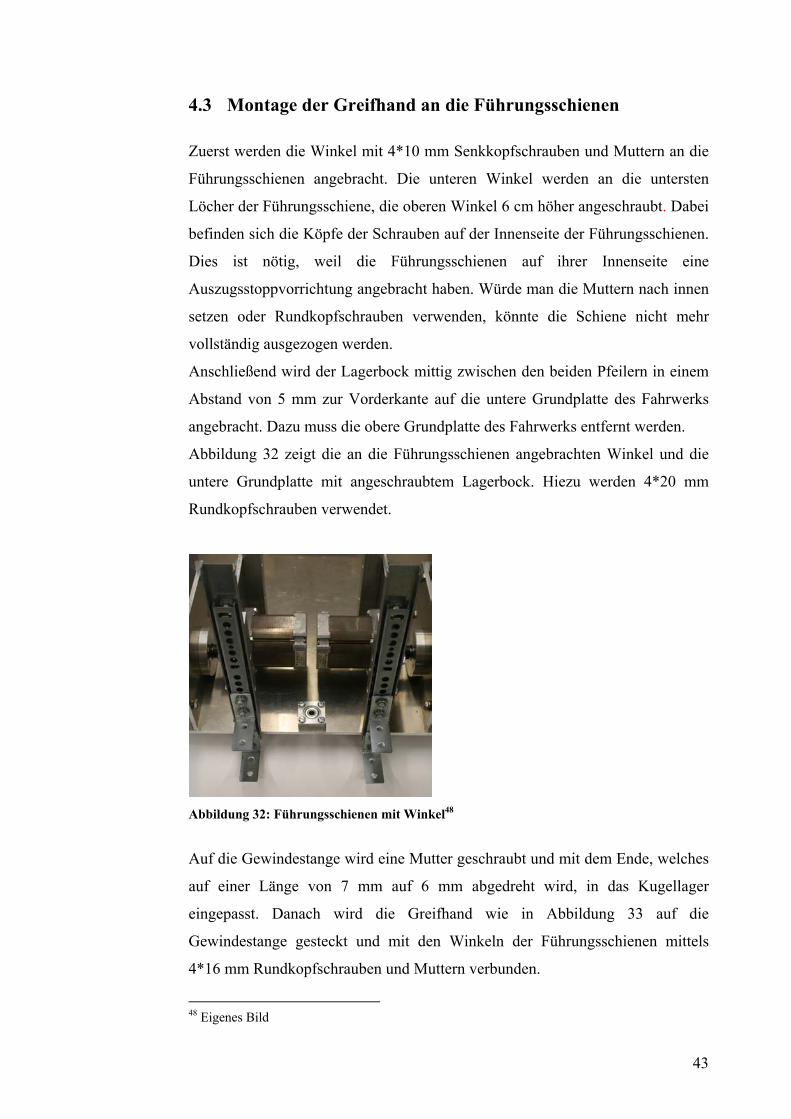
4.3 Montage der Greifhand an die Führungsschienen
Zuerst werden die Winkel mit 4*10 mm Senkkopfschrauben und Muttern an die
Führungsschienen angebracht. Die unteren Winkel werden an die untersten
Löcher der Führungsschiene, die oberen Winkel 6 cm höher angeschraubt. Dabei
befinden sich die Köpfe der Schrauben auf der Innenseite der Führungsschienen.
Dies ist nötig, weil die Führungsschienen auf ihrer Innenseite eine
Auszugsstoppvorrichtung angebracht haben. Würde man die Muttern nach innen
setzen oder Rundkopfschrauben verwenden, könnte die Schiene nicht mehr
vollständig ausgezogen werden.
Anschließend wird der Lagerbock mittig zwischen den beiden Pfeilern in einem
Abstand von 5 mm zur Vorderkante auf die untere Grundplatte des Fahrwerks
angebracht. Dazu muss die obere Grundplatte des Fahrwerks entfernt werden.
Abbildung 32 zeigt die an die Führungsschienen angebrachten Winkel und die
untere Grundplatte mit angeschraubtem Lagerbock. Hiezu werden 4*20 mm
Rundkopfschrauben verwendet.
Abbildung 32: Führungsschienen mit Winkel48
Auf die Gewindestange wird eine Mutter geschraubt und mit dem Ende, welches
auf einer Länge von 7 mm auf 6 mm abgedreht wird, in das Kugellager
eingepasst. Danach wird die Greifhand wie in Abbildung 33 auf die
Gewindestange gesteckt und mit den Winkeln der Führungsschienen mittels
4*16 mm Rundkopfschrauben und Muttern verbunden.
48 Eigenes Bild
44
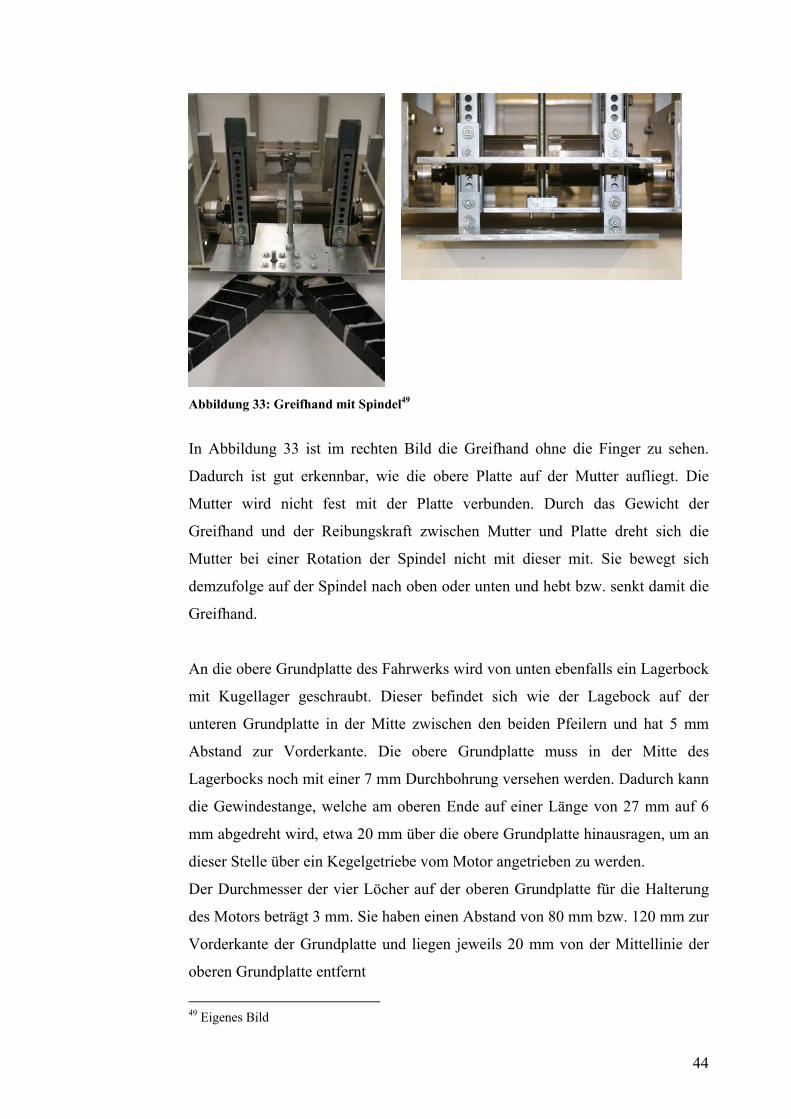
Abbildung 33: Greifhand mit Spindel49
In Abbildung 33 ist im rechten Bild die Greifhand ohne die Finger zu sehen.
Dadurch ist gut erkennbar, wie die obere Platte auf der Mutter aufliegt. Die
Mutter wird nicht fest mit der Platte verbunden. Durch das Gewicht der
Greifhand und der Reibungskraft zwischen Mutter und Platte dreht sich die
Mutter bei einer Rotation der Spindel nicht mit dieser mit. Sie bewegt sich
demzufolge auf der Spindel nach oben oder unten und hebt bzw. senkt damit die
Greifhand.
An die obere Grundplatte des Fahrwerks wird von unten ebenfalls ein Lagerbock
mit Kugellager geschraubt. Dieser befindet sich wie der Lagebock auf der
unteren Grundplatte in der Mitte zwischen den beiden Pfeilern und hat 5 mm
Abstand zur Vorderkante. Die obere Grundplatte muss in der Mitte des
Lagerbocks noch mit einer 7 mm Durchbohrung versehen werden. Dadurch kann
die Gewindestange, welche am oberen Ende auf einer Länge von 27 mm auf 6
mm abgedreht wird, etwa 20 mm über die obere Grundplatte hinausragen, um an
dieser Stelle über ein Kegelgetriebe vom Motor angetrieben zu werden.
Der Durchmesser der vier Löcher auf der oberen Grundplatte für die Halterung
des Motors beträgt 3 mm. Sie haben einen Abstand von 80 mm bzw. 120 mm zur
Vorderkante der Grundplatte und liegen jeweils 20 mm von der Mittellinie der
oberen Grundplatte entfernt
49 Eigenes Bild
45
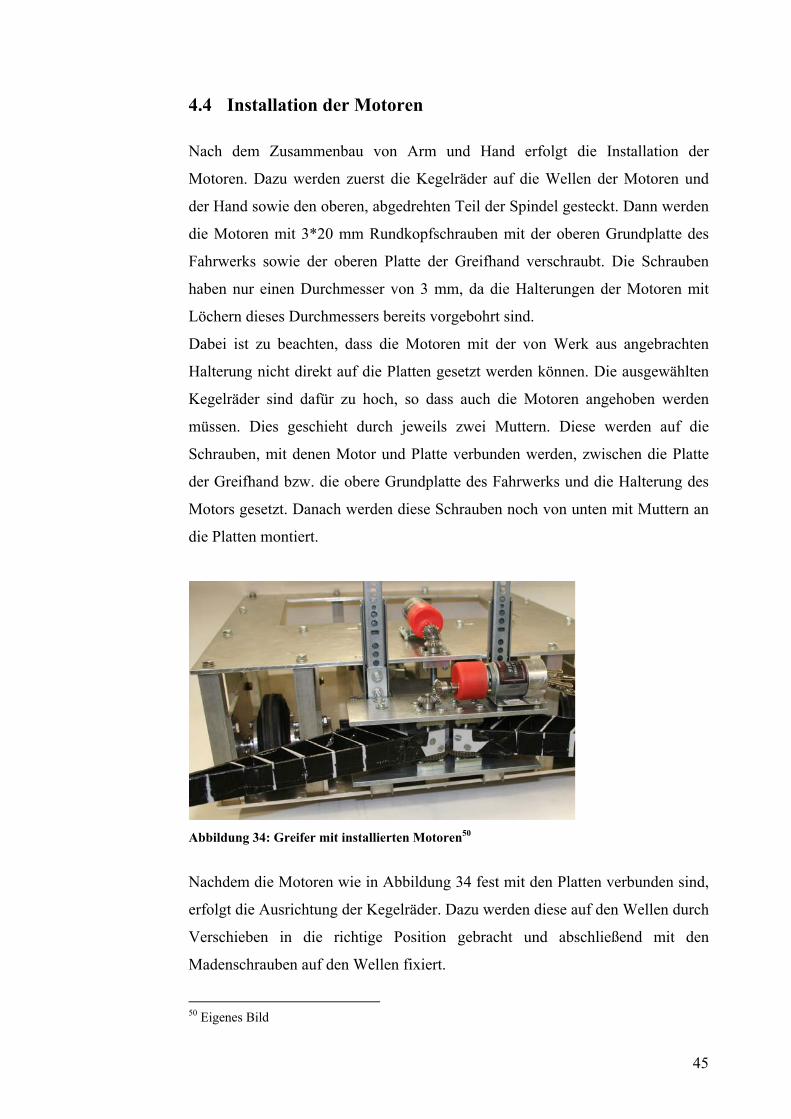
4.4 Installation der Motoren
Nach dem Zusammenbau von Arm und Hand erfolgt die Installation der
Motoren. Dazu werden zuerst die Kegelräder auf die Wellen der Motoren und
der Hand sowie den oberen, abgedrehten Teil der Spindel gesteckt. Dann werden
die Motoren mit 3*20 mm Rundkopfschrauben mit der oberen Grundplatte des
Fahrwerks sowie der oberen Platte der Greifhand verschraubt. Die Schrauben
haben nur einen Durchmesser von 3 mm, da die Halterungen der Motoren mit
Löchern dieses Durchmessers bereits vorgebohrt sind.
Dabei ist zu beachten, dass die Motoren mit der von Werk aus angebrachten
Halterung nicht direkt auf die Platten gesetzt werden können. Die ausgewählten
Kegelräder sind dafür zu hoch, so dass auch die Motoren angehoben werden
müssen. Dies geschieht durch jeweils zwei Muttern. Diese werden auf die
Schrauben, mit denen Motor und Platte verbunden werden, zwischen die Platte
der Greifhand bzw. die obere Grundplatte des Fahrwerks und die Halterung des
Motors gesetzt. Danach werden diese Schrauben noch von unten mit Muttern an
die Platten montiert.
Abbildung 34: Greifer mit installierten Motoren50
Nachdem die Motoren wie in Abbildung 34 fest mit den Platten verbunden sind,
erfolgt die Ausrichtung der Kegelräder. Dazu werden diese auf den Wellen durch
Verschieben in die richtige Position gebracht und abschließend mit den
Madenschrauben auf den Wellen fixiert.
50 Eigenes Bild

46
5 Zusammenfassung und Weiterentwicklung
5.1 Testbericht
Nach der Fertigstellung des Greifers wird dieser auf seine Funktion überprüft.
Zuerst wird der Testgegenstand, ein roter Zylinder, von dem Greifer erfolgreich
angehoben. Ebenso ist er in der Lage, eine Kontaktsprayflasche von ca. 400
Gramm Gewicht zu heben.
Abbildung 35: Erste Greifversuche mit Zylinder und Kontaktsprayflasche51
Um die genaue Leistungsfähigkeit des Greifers zu ermitteln, muss die Kraft des
Arms und die der Hand einzeln gemessen werden. Zuerst wird überprüft, wie
viel Gewicht der Arm theoretisch heben könnte. Dazu wird ein Federkraftmesser
senkrecht zwischen die Platte der Greifhand und einem Stativ gespannt und der
Motor der Spindel an ein Spannungsversorgungsgerät mit 12 Volt
angeschlossen.
Die durch den starken Motor in Verbindung mit der Übersetzung durch die
Spindel entstehen Kräfte sind dabei so hoch, dass der größtmöglich vorhandene
Federkraftmesser bis zu 30 Newton nicht ausreicht, um die Kraft des Arms zu
messen.
Auch die Aneinanderreihung zwei solcher Federkraftmesser wird von dem
Roboterarm spielend bis zum Anschlag gebracht. Weitere Messungen werden
nicht vorgenommen. Somit ist der Arm in der Lage, Gewichte bis mindestens 6
Kilogramm anzuheben.52
51 Eigene Bilder 52 Dies ist leider nur der theoretische Wert der Hebekraft des Arms. Es ist davon auszugehen, dass die Greifhand nicht in der Lage sein wird, ein Gewicht dieser Größe festzuhalten.
47
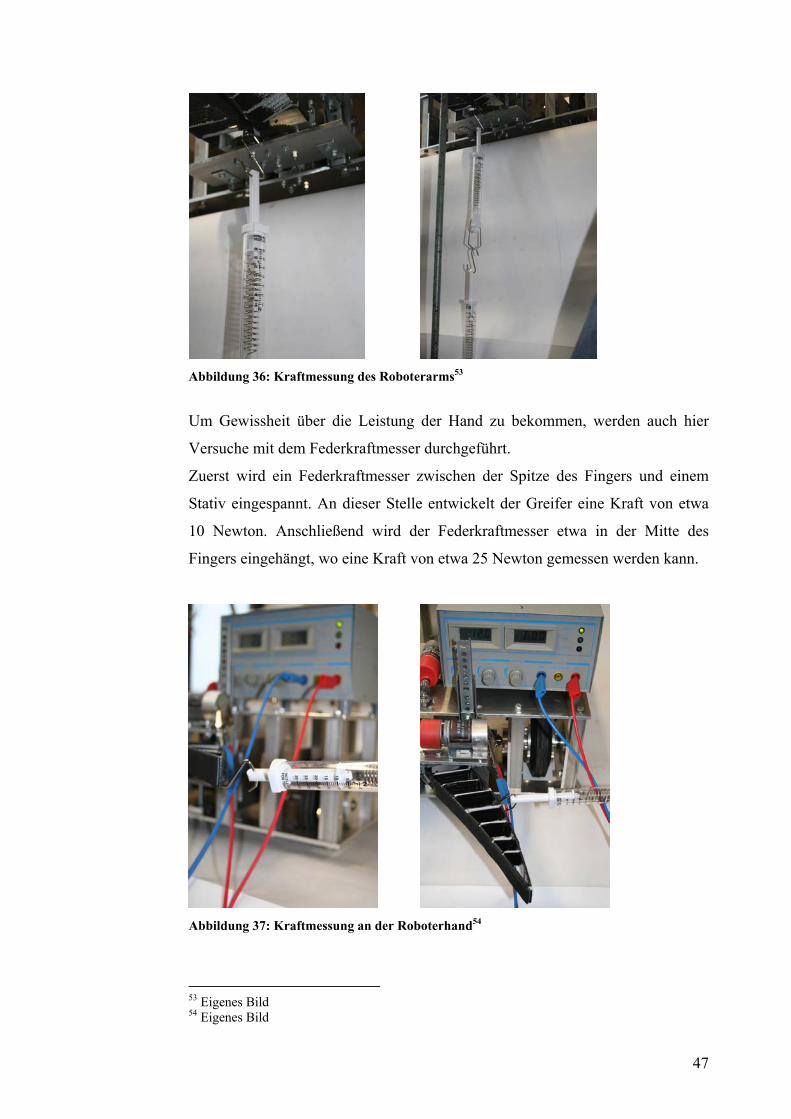
Abbildung 36: Kraftmessung des Roboterarms53
Um Gewissheit über die Leistung der Hand zu bekommen, werden auch hier
Versuche mit dem Federkraftmesser durchgeführt.
Zuerst wird ein Federkraftmesser zwischen der Spitze des Fingers und einem
Stativ eingespannt. An dieser Stelle entwickelt der Greifer eine Kraft von etwa
10 Newton. Anschließend wird der Federkraftmesser etwa in der Mitte des
Fingers eingehängt, wo eine Kraft von etwa 25 Newton gemessen werden kann.
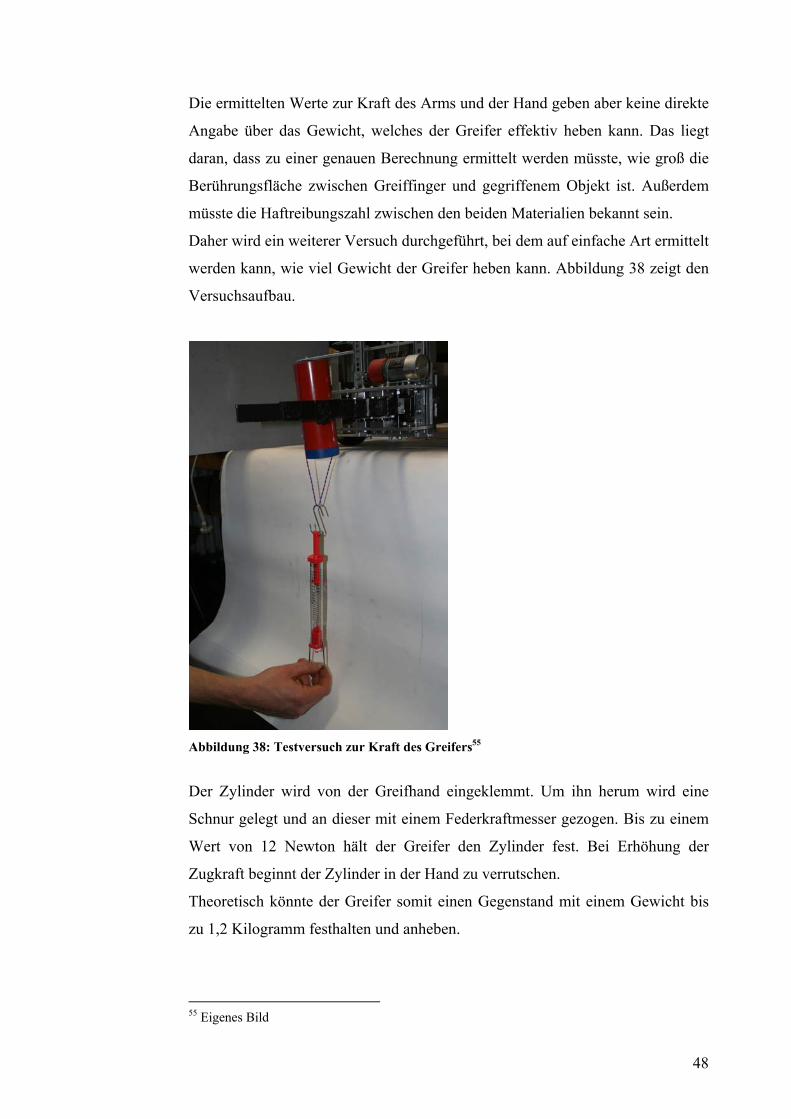
Abbildung 37: Kraftmessung an der Roboterhand54 53 Eigenes Bild 54 Eigenes Bild
48
Die ermittelten Werte zur Kraft des Arms und der Hand geben aber keine direkte
Angabe über das Gewicht, welches der Greifer effektiv heben kann. Das liegt
daran, dass zu einer genauen Berechnung ermittelt werden müsste, wie groß die
Berührungsfläche zwischen Greiffinger und gegriffenem Objekt ist. Außerdem
müsste die Haftreibungszahl zwischen den beiden Materialien bekannt sein.
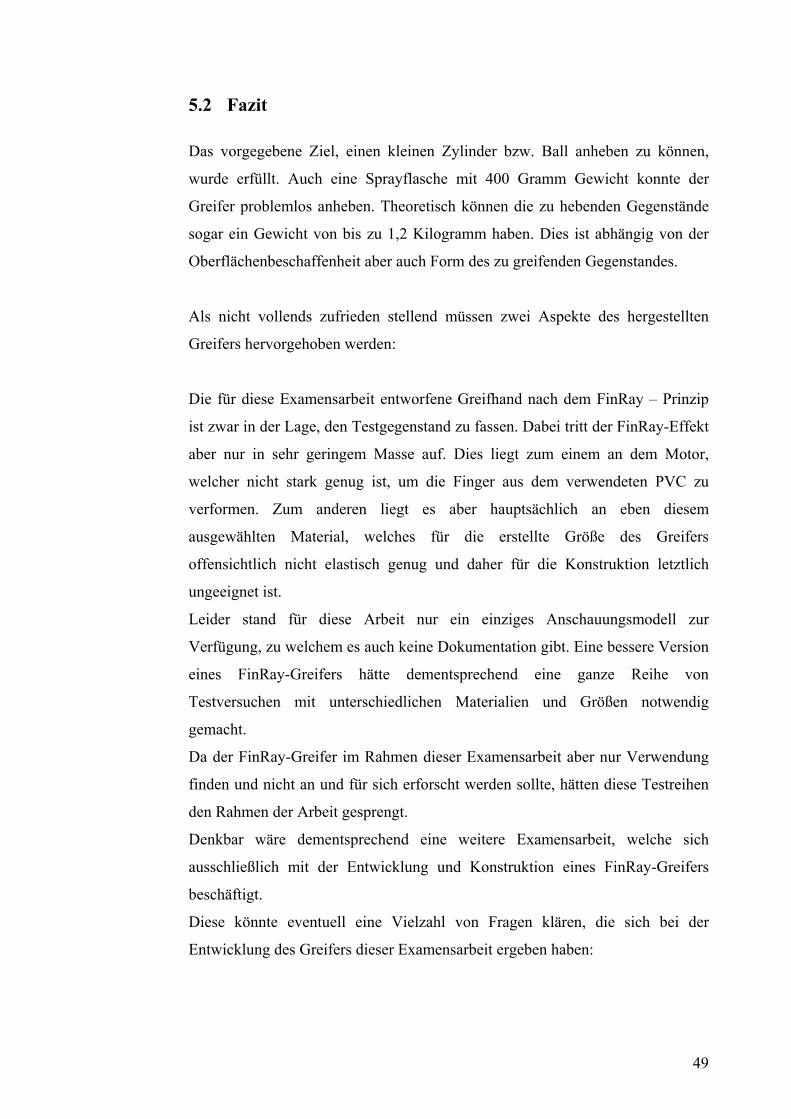
Daher wird ein weiterer Versuch durchgeführt, bei dem auf einfache Art ermittelt
werden kann, wie viel Gewicht der Greifer heben kann. Abbildung 38 zeigt den
Versuchsaufbau.
Abbildung 38: Testversuch zur Kraft des Greifers55
Der Zylinder wird von der Greifhand eingeklemmt. Um ihn herum wird eine
Schnur gelegt und an dieser mit einem Federkraftmesser gezogen. Bis zu einem
Wert von 12 Newton hält der Greifer den Zylinder fest. Bei Erhöhung der
Zugkraft beginnt der Zylinder in der Hand zu verrutschen.
Theoretisch könnte der Greifer somit einen Gegenstand mit einem Gewicht bis
zu 1,2 Kilogramm festhalten und anheben.
55 Eigenes Bild
49
5.2 Fazit
Das vorgegebene Ziel, einen kleinen Zylinder bzw. Ball anheben zu können,
wurde erfüllt. Auch eine Sprayflasche mit 400 Gramm Gewicht konnte der
Greifer problemlos anheben. Theoretisch können die zu hebenden Gegenstände
sogar ein Gewicht von bis zu 1,2 Kilogramm haben. Dies ist abhängig von der
Oberflächenbeschaffenheit aber auch Form des zu greifenden Gegenstandes.
Als nicht vollends zufrieden stellend müssen zwei Aspekte des hergestellten
Greifers hervorgehoben werden:
Die für diese Examensarbeit entworfene Greifhand nach dem FinRay – Prinzip
ist zwar in der Lage, den Testgegenstand zu fassen. Dabei tritt der FinRay-Effekt
aber nur in sehr geringem Masse auf. Dies liegt zum einem an dem Motor,
welcher nicht stark genug ist, um die Finger aus dem verwendeten PVC zu
verformen. Zum anderen liegt es aber hauptsächlich an eben diesem
ausgewählten Material, welches für die erstellte Größe des Greifers
offensichtlich nicht elastisch genug und daher für die Konstruktion letztlich
ungeeignet ist.
Leider stand für diese Arbeit nur ein einziges Anschauungsmodell zur
Verfügung, zu welchem es auch keine Dokumentation gibt. Eine bessere Version
eines FinRay-Greifers hätte dementsprechend eine ganze Reihe von
Testversuchen mit unterschiedlichen Materialien und Größen notwendig
gemacht.
Da der FinRay-Greifer im Rahmen dieser Examensarbeit aber nur Verwendung
finden und nicht an und für sich erforscht werden sollte, hätten diese Testreihen
den Rahmen der Arbeit gesprengt.
Denkbar wäre dementsprechend eine weitere Examensarbeit, welche sich
ausschließlich mit der Entwicklung und Konstruktion eines FinRay-Greifers
beschäftigt.
Diese könnte eventuell eine Vielzahl von Fragen klären, die sich bei der
Entwicklung des Greifers dieser Examensarbeit ergeben haben:
50
- Welches Material eignet sich am Besten für die Konstruktion?
- Wie können die Gelenke konstruiert werden, um auf eine Befestigung mit
Klebeband verzichten zu können?
- Spielt die Größe des Geifers eine entscheidende Rolle? Gibt es eine
minimale oder optimale Größe für einen FinRay-Greifer?
- Welche Rolle spielen die Anzahl und der Winkel der Rippen? Kann man
aus der Größe des Greifers auf eine bestimmte Rippenzahl schließen?
- Welche Kräfte treten an den unterschiedlichen Stellen wie z.B. in den
Gelenken auf?
- Ist es möglich, generelle Formeln zur Berechnung der Konstruktion eines
solchen Greifers zu entwickeln? Oder können lediglich Erfahrungswerte
gesammelt werden?
Die Lagerung der Motoren ist der zweite Punkt der Konstruktion, der noch
verbessert werden muss. Nach Fertigstellung des gesamten Greifers stellte sich
heraus, dass die bereits an den Motoren angebrachten Halterungen den
auftretenden Kräften nicht standhalten können. Bei zu starker Belastung kommt
es zu einer Verdrehung dieser Halterungen, bis die Kegelräder nicht mehr
ineinander greifen und anfangen zu springen. Daher muss hierfür noch nach
einer neuen Befestigungsmöglichkeit der Motoren gesucht werden. Die Verbesserung der Motorenhalterungen wird noch umgehend vorgenommen
werden. Erste Pläne dazu bestehen bereits. Aus Zeitgründen können diese aber
nicht mehr in die Dokumentation dieser Examensarbeit aufgenommen werden.
5.3 Perspektiven
Die Betrachtung des Fazits gibt gleich zwei Hinweise darauf, wie sich dieser
autonome Roboter weiter entwickeln könnte bzw. sollte.
Zuerst sollte eine nach einer geeigneten Befestigungsmöglichkeit für die
Motoren gesucht werden. Diese ist, wie schon erwähnt, bereits in Planung.
Als weiterer Schritt stehen die bereits im Fazit aufgeführten und umfangreichen
Maßnahmen zur Verbesserung der FinRay Greifhand an.
Denkbar wäre aber auch eine komplett andere Konstruktion des Greifers als die
gewählte Lösungsmöglichkeit unter Verwendung des FinRay-Prinzips. Die
51
potentielle Verwendung von Kraftmesssensoren oder einer genaueren Steuerung
des Greifers über die Bilderkennung ist dabei durchaus denkbar. Für unseren Fall
war dies allerdings nicht möglich.
Erstens kann die Kamera dafür nicht ausreichend präzise Bilder liefern, zumal
beim Greifvorgang im Prinzip auch zwei Kameras für ein dreidimensionales
Sehen nötig wären. Und zweitens sind der gewählte Mikrocontroller und das bis
zu diesem Zeitpunkt entwickelte Programm nicht in der Lage, eine solche
Datenmenge zu verarbeiten. Selbst im aktuellen Entwicklungsstadium fährt der
Roboter bereits ruckartig, da zwischen den Befehlen vom Steuerungsprogramm
an die Motoren immer wieder die Ultraschallsensoren abgefragt werden müssen
und die vorhandene Rechengeschwindigkeit des Mikrocontrollers dafür nicht
ausreicht.
Daher wurde bei dem Entwurf dieser Arbeit auch darauf verzichtet, eine
Ansteuerung von genauen Positionen des Greifers zu erreichen. Diese ist nur mit
dem Einbau weiterer Sensoren möglich, würden aber Mikrocontroller und
Programm zu stark beanspruchen. Ein anderer Mikrocontroller könnte aber
generell eine solche Positionsbestimmung ermöglichen.
Von der Konstruktion her wäre auch der Einbau mehrerer Gelenke eine
Möglichkeit, den Greifer weiter zu entwickeln. Ein drehbares Handgelenk würde
es dem Roboter z.B. ermöglichen, eine bereits angehobene Flasche auch noch
auszugießen.
Ein Aspekt, der auf jeden Fall in Betracht gezogen werden sollte, ist eine
generell kleinere Version des gesamten Roboters. Ursprünglich wurde er so groß
konzipiert, da die Steuerung von einem auf ihn angebrachten Laptop
übernommen werden sollte. Der erst nach der Fertigstellung des Fahrwerks zum
Einsatz gekommene Mikrocontroller hätte aber nur ein wesentlich kleineres
Grundgerüst erfordert.
Dabei stellt sich aufgrund der mittlerweile auftretenden Probleme, die durch den
Mikrocontroller entstehen, allerdings fast schon wieder die Frage, ob nicht ein
Schritt zurück gemacht werden sollte; hin zu einem leistungsfähigeren Controller
oder vielleicht wieder einem Laptop, der dann eventuell wieder auf eine große
Konstruktionsart angewiesen ist.
52
Abschließend lässt sich an dieser Stelle nur sagen, dass die gesamte Entwicklung
dieses Roboters nur als Grundsteinlegung betrachtet werden kann. Während aller
vier Examensarbeiten zu diesem Roboter gab und gibt es ständig neue Ideen und
Verbesserungsmöglichkeiten. Diese entstehen dabei in der Regel gerade während
der Konstruktionsphase, können dann aber nicht mehr umgesetzt werden. Dies
liegt an dem für eine Examensarbeit beschränkt zur Verfügung stehenden
Zeitraum, der eine abschließende Arbeit erwartet. Ansonsten wäre es aufgrund
der während der Entwicklung und Konstruktion neu gewonnenen Erkenntnisse
denkbar gewesen, ursprüngliche Konzepte komplett zu verwerfen und von vorne
zu beginnen.
Dabei zeigt gerade die Entwicklung dieses Roboters aus den vier einzelnen
Examensarbeiten beispielhaft das in der Einleitung bereits erwähnte wichtige
Zusammenspiel der verschiedenen Teilbereiche. So gibt die Kamera zum
Beispiel vor, was überhaupt erkannt werden kann. Der Greifer muss also in der
Lage sein, genau solche Gegenstände anzuheben. In diesem Fall gibt die
Informatik die Vorgaben für die Mechanik.
Dabei ist die Bildererkennungsfähigkeit der Kamera abhängig von dem
Programm, welches ihre Daten auswertet. Dieses wiederum hängt stark mit der
Rechengeschwindigkeit des Controllers bzw. Computers zusammen. Hieran wird
der Zusammenhang von Hard- und Software schnell deutlich.
Bei dem Ganzen gibt das Grundgerüst durch seine Größe allerdings vor, was auf
ihm überhaupt angebracht werden kann. Wäre es zu klein, käme der Einsatz
eines Laptops überhaupt nicht in Frage. Hier ist also in umgekehrter Form die
Informatik in Bezug auf den Einsatz bestimmter Elemente von der Mechanik
abhängig. Außerdem schreibt das Grundgerüst vor, wie viel Platz und
Tragfähigkeit für Controller, Greifarm, und Akkus zur Verfügung steht. Die
Auswahl der daraufhin möglichen Akkus hat wiederum direkten Einfluss auf die
verwendete Elektronik.
In diesem Sinne sollen sämtliche im Rahmen dieser vier Examensarbeiten
gewonnenen Erkenntnisse dazu dienen, die erlangten Erfahrungen weiter zu
geben, um mit ihnen an einer Weiter- oder Neuentwicklung eines zweiten
Roboters zu arbeiten.
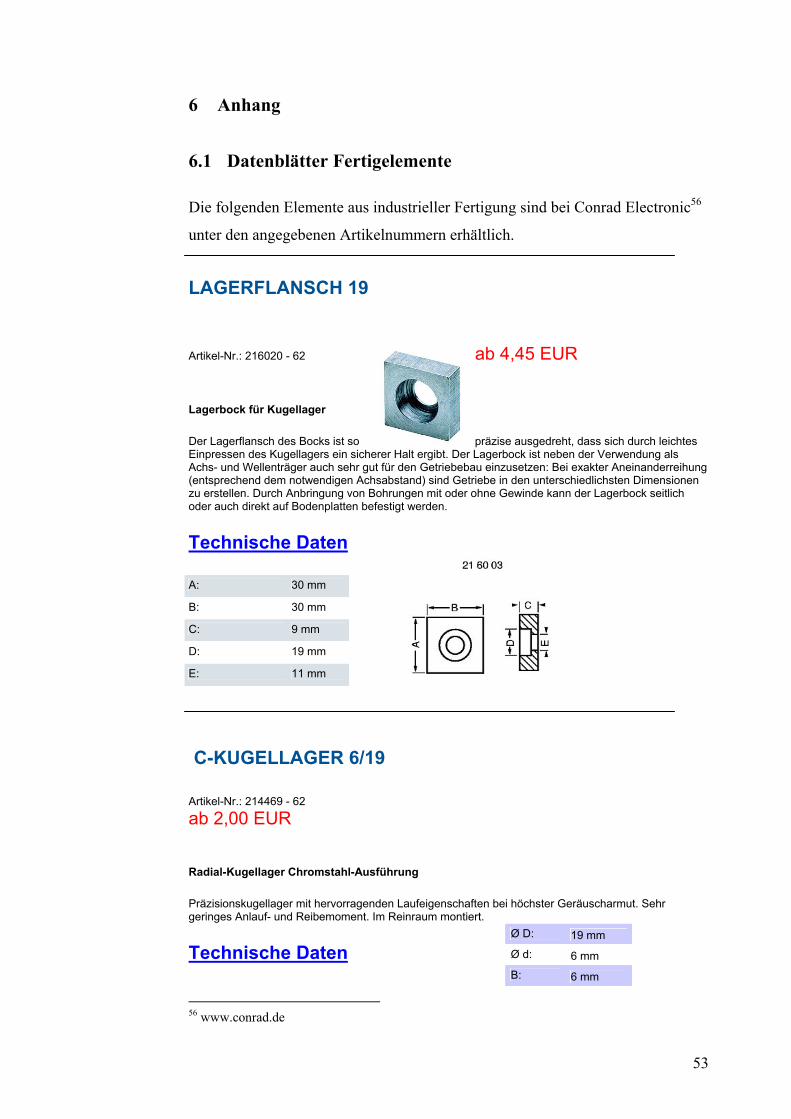
53
6 Anhang
6.1 Datenblätter Fertigelemente
Die folgenden Elemente aus industrieller Fertigung sind bei Conrad Electronic56
unter den angegebenen Artikelnummern erhältlich.
LAGERFLANSCH 19
Artikel-Nr.: 216020 - 62 ab 4,45 EUR
Lagerbock für Kugellager
Der Lagerflansch des Bocks ist so präzise ausgedreht, dass sich durch leichtes Einpressen des Kugellagers ein sicherer Halt ergibt. Der Lagerbock ist neben der Verwendung als Achs- und Wellenträger auch sehr gut für den Getriebebau einzusetzen: Bei exakter Aneinanderreihung (entsprechend dem notwendigen Achsabstand) sind Getriebe in den unterschiedlichsten Dimensionen zu erstellen. Durch Anbringung von Bohrungen mit oder ohne Gewinde kann der Lagerbock seitlich oder auch direkt auf Bodenplatten befestigt werden.
Technische Daten
A: 30 mm
B: 30 mm
C: 9 mm
D: 19 mm
E: 11 mm
C-KUGELLAGER 6/19
Artikel-Nr.: 214469 - 62 ab 2,00 EUR
Radial-Kugellager Chromstahl-Ausführung
Präzisionskugellager mit hervorragenden Laufeigenschaften bei höchster Geräuscharmut. Sehr geringes Anlauf- und Reibemoment. Im Reinraum montiert.
Technische Daten
56 www.conrad.de
Ø D: 19 mm
Ø d: 6 mm
B: 6 mm
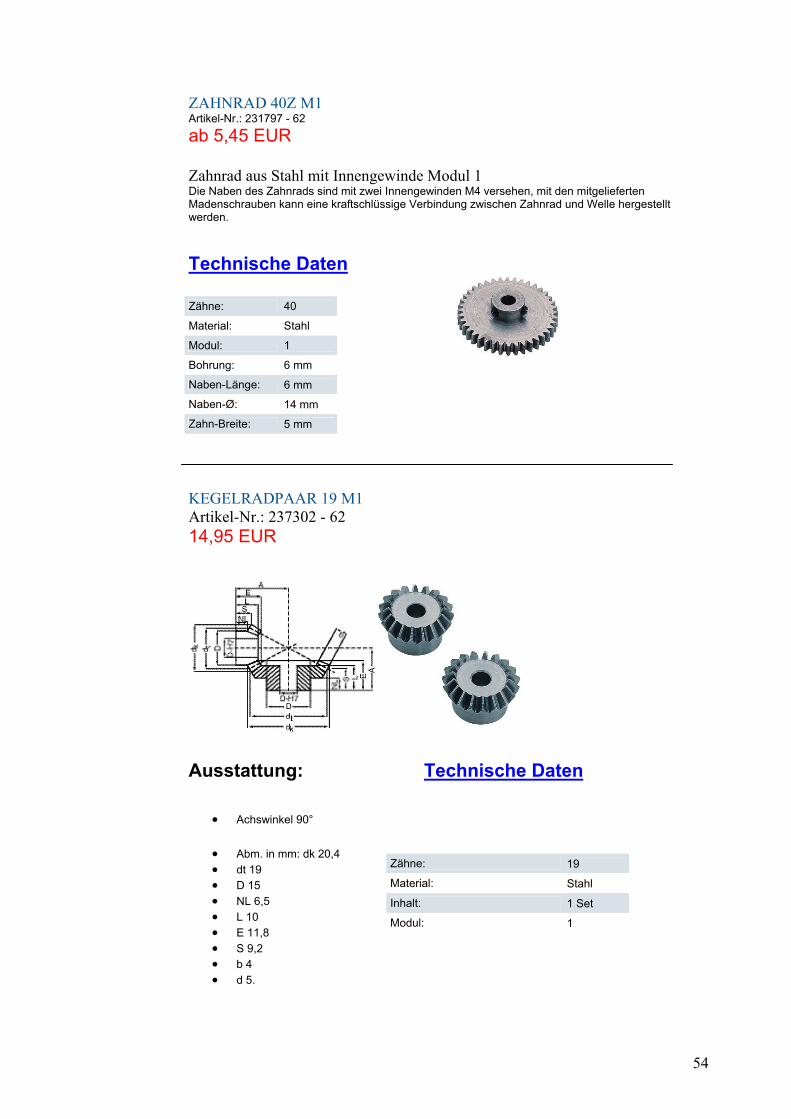
54
ZAHNRAD 40Z M1 Artikel-Nr.: 231797 - 62 ab 5,45 EUR Zahnrad aus Stahl mit Innengewinde Modul 1 Die Naben des Zahnrads sind mit zwei Innengewinden M4 versehen, mit den mitgelieferten Madenschrauben kann eine kraftschlüssige Verbindung zwischen Zahnrad und Welle hergestellt werden.
Technische Daten
Zähne: 40
Material: Stahl
Modul: 1
Bohrung: 6 mm
Naben-Länge: 6 mm
Naben-Ø: 14 mm
Zahn-Breite: 5 mm
KEGELRADPAAR 19 M1 Artikel-Nr.: 237302 - 62 14,95 EUR
Ausstattung: Technische Daten
• Achswinkel 90°
• Abm. in mm: dk 20,4 • dt 19 • D 15 • NL 6,5 • L 10 • E 11,8 • S 9,2 • b 4 • d 5.
Zähne: 19
Material: Stahl
Inhalt: 1 Set
Modul: 1
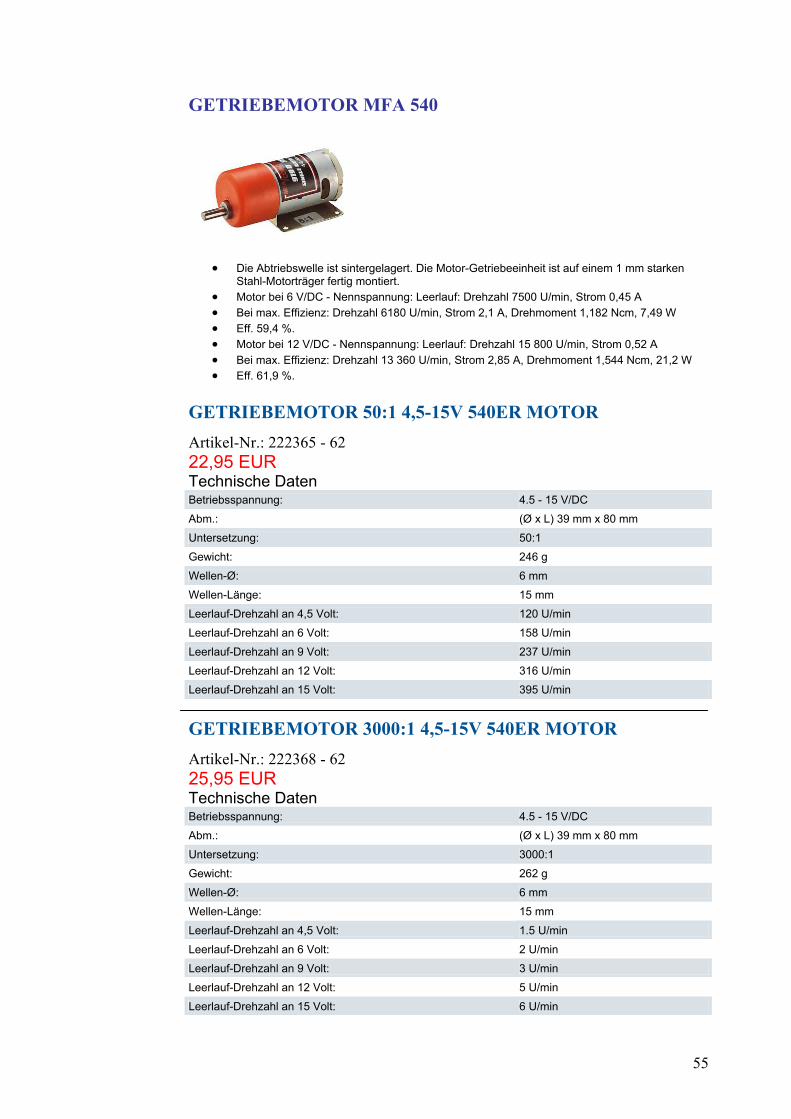
55
GETRIEBEMOTOR MFA 540
• Die Abtriebswelle ist sintergelagert. Die Motor-Getriebeeinheit ist auf einem 1 mm starken Stahl-Motorträger fertig montiert.
• Motor bei 6 V/DC - Nennspannung: Leerlauf: Drehzahl 7500 U/min, Strom 0,45 A • Bei max. Effizienz: Drehzahl 6180 U/min, Strom 2,1 A, Drehmoment 1,182 Ncm, 7,49 W • Eff. 59,4 %. • Motor bei 12 V/DC - Nennspannung: Leerlauf: Drehzahl 15 800 U/min, Strom 0,52 A • Bei max. Effizienz: Drehzahl 13 360 U/min, Strom 2,85 A, Drehmoment 1,544 Ncm, 21,2 W • Eff. 61,9 %.
GETRIEBEMOTOR 50:1 4,5-15V 540ER MOTOR Artikel-Nr.: 222365 - 62 22,95 EUR Technische Daten Betriebsspannung: 4.5 - 15 V/DC
Abm.: (Ø x L) 39 mm x 80 mm
Untersetzung: 50:1
Gewicht: 246 g
Wellen-Ø: 6 mm
Wellen-Länge: 15 mm
Leerlauf-Drehzahl an 4,5 Volt: 120 U/min
Leerlauf-Drehzahl an 6 Volt: 158 U/min
Leerlauf-Drehzahl an 9 Volt: 237 U/min
Leerlauf-Drehzahl an 12 Volt: 316 U/min
Leerlauf-Drehzahl an 15 Volt: 395 U/min
GETRIEBEMOTOR 3000:1 4,5-15V 540ER MOTOR Artikel-Nr.: 222368 - 62 25,95 EUR Technische Daten Betriebsspannung: 4.5 - 15 V/DC
Abm.: (Ø x L) 39 mm x 80 mm
Untersetzung: 3000:1
Gewicht: 262 g
Wellen-Ø: 6 mm
Wellen-Länge: 15 mm
Leerlauf-Drehzahl an 4,5 Volt: 1.5 U/min
Leerlauf-Drehzahl an 6 Volt: 2 U/min
Leerlauf-Drehzahl an 9 Volt: 3 U/min
Leerlauf-Drehzahl an 12 Volt: 5 U/min
Leerlauf-Drehzahl an 15 Volt: 6 U/min
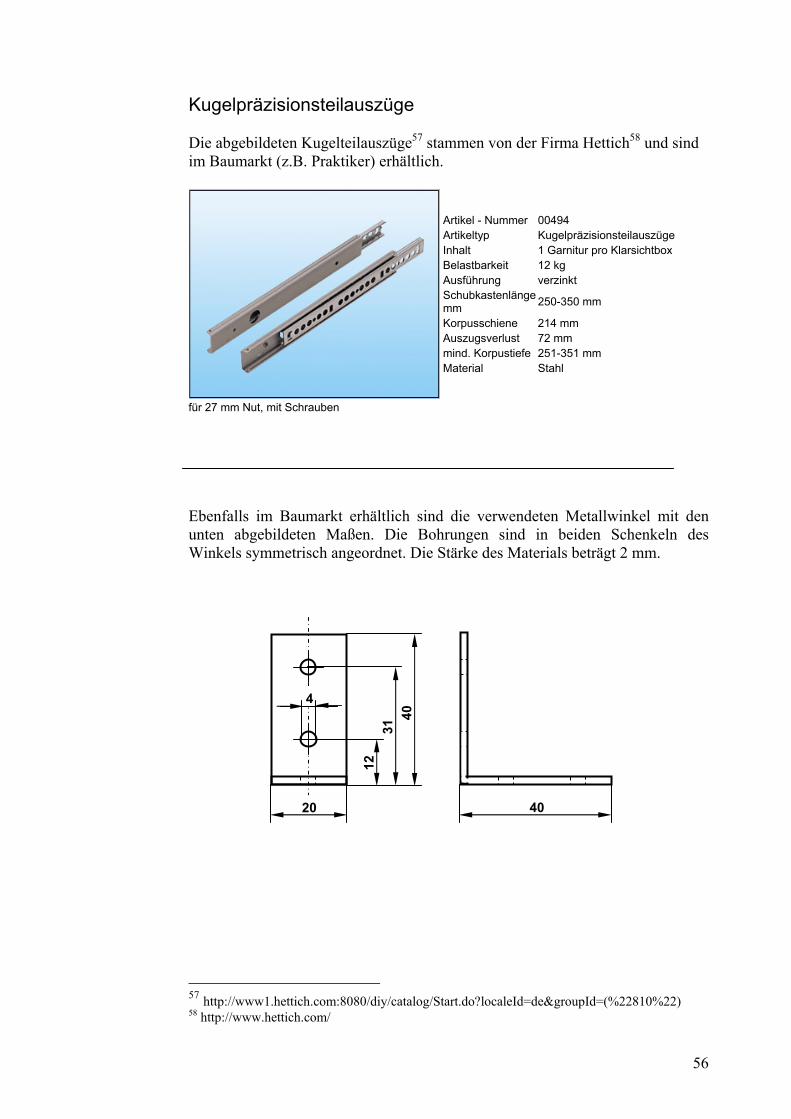
56
Kugelpräzisionsteilauszüge Die abgebildeten Kugelteilauszüge57 stammen von der Firma Hettich58 und sind im Baumarkt (z.B. Praktiker) erhältlich.
Artikel - Nummer 00494 Artikeltyp Kugelpräzisionsteilauszüge Inhalt 1 Garnitur pro Klarsichtbox Belastbarkeit 12 kg Ausführung verzinkt Schubkastenlänge mm 250-350 mm
Korpusschiene 214 mm Auszugsverlust 72 mm mind. Korpustiefe 251-351 mm Material Stahl
für 27 mm Nut, mit Schrauben Ebenfalls im Baumarkt erhältlich sind die verwendeten Metallwinkel mit den unten abgebildeten Maßen. Die Bohrungen sind in beiden Schenkeln des Winkels symmetrisch angeordnet. Die Stärke des Materials beträgt 2 mm.
57 http://www1.hettich.com:8080/diy/catalog/Start.do?localeId=de&groupId=(%22810%22) 58 http://www.hettich.com/
40
31
12
4
40
20
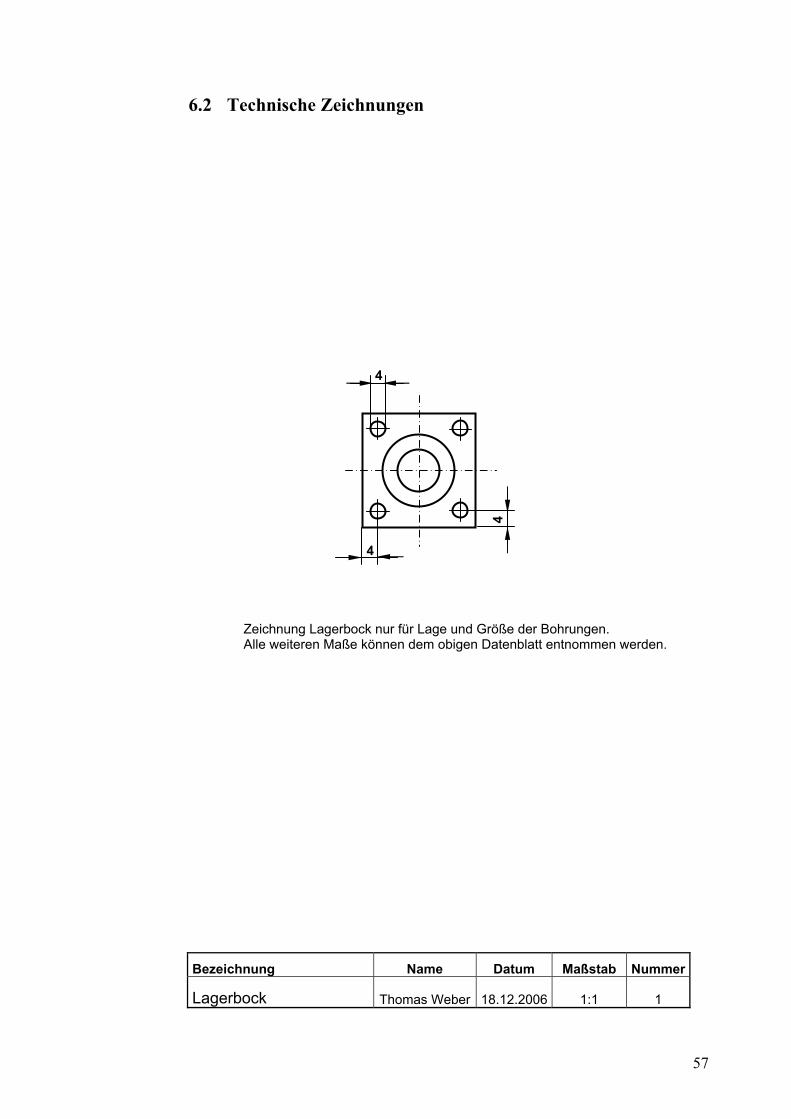
57
4
4
4
6.2 Technische Zeichnungen
Bezeichnung Name Datum Maßstab Nummer
Lagerbock Thomas Weber 18.12.2006 1:1 1
Zeichnung Lagerbock nur für Lage und Größe der Bohrungen. Alle weiteren Maße können dem obigen Datenblatt entnommen werden.
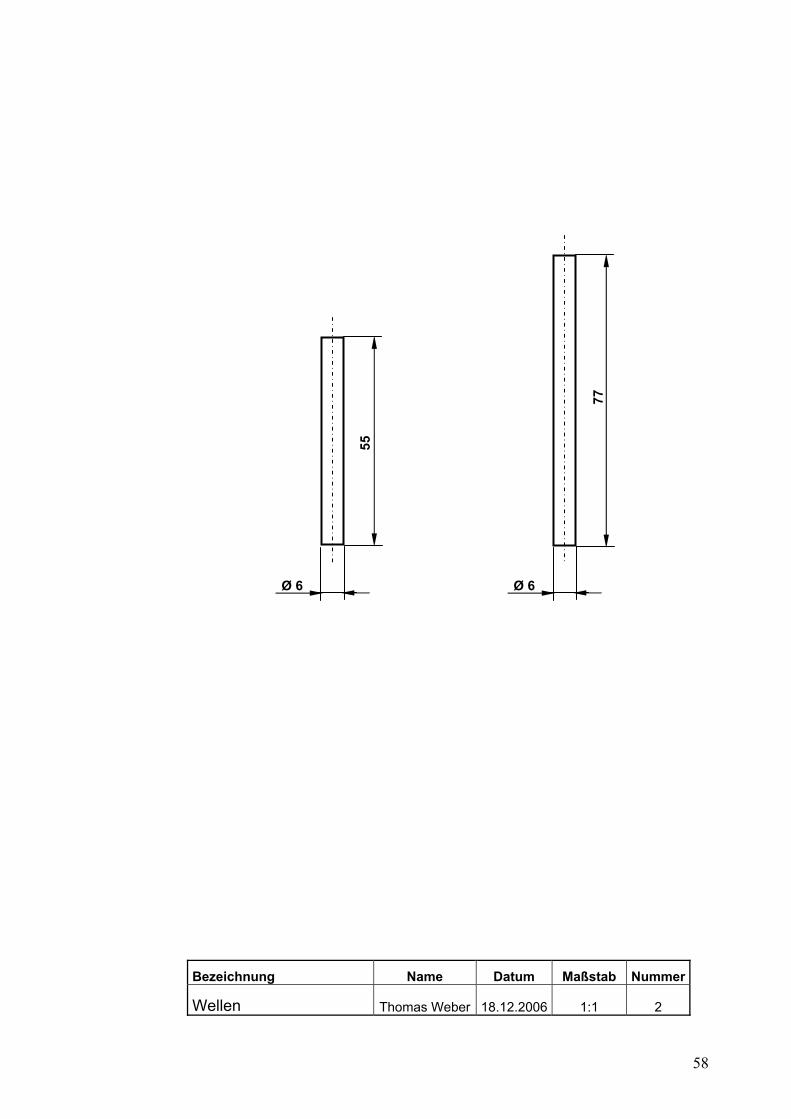
58
Bezeichnung Name Datum Maßstab Nummer
Wellen Thomas Weber 18.12.2006 1:1 2
Ø 6 77
Ø 6
55
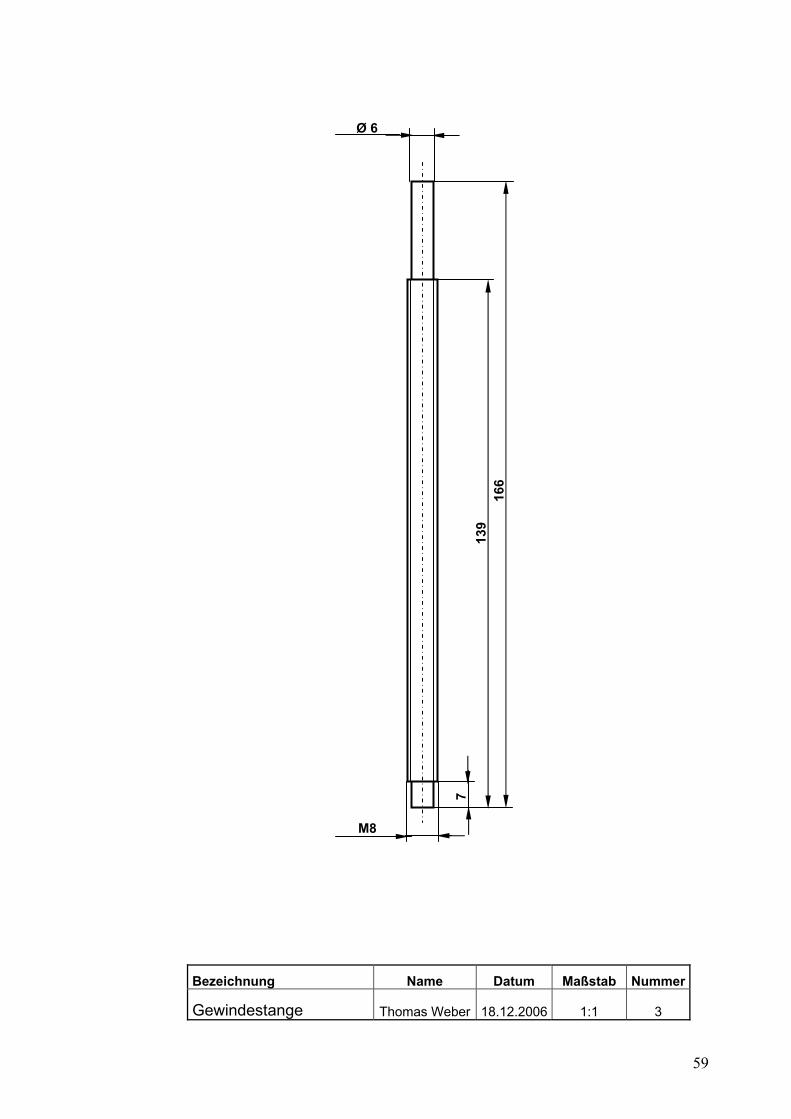
59
Bezeichnung Name Datum Maßstab Nummer
Gewindestange Thomas Weber 18.12.2006 1:1 3
7 13
9 16
6
Ø 6
M8
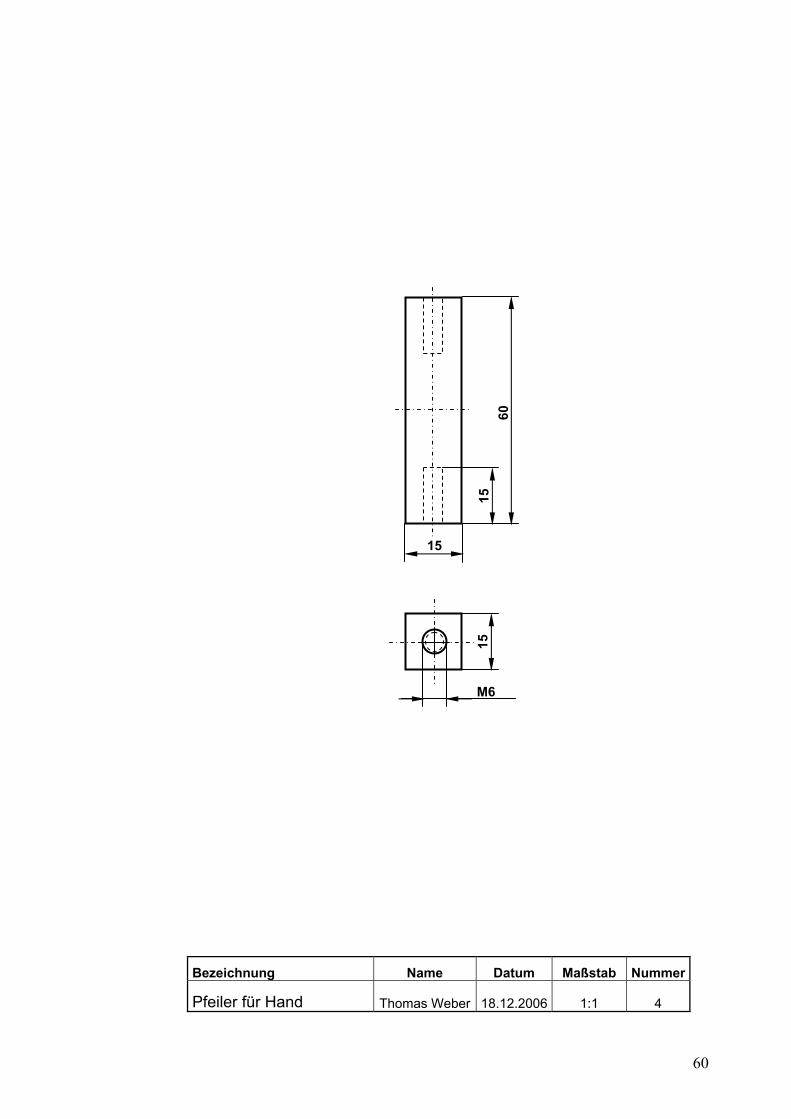
60
Bezeichnung Name Datum Maßstab Nummer
Pfeiler für Hand Thomas Weber 18.12.2006 1:1 4
15
60
15
M6
15
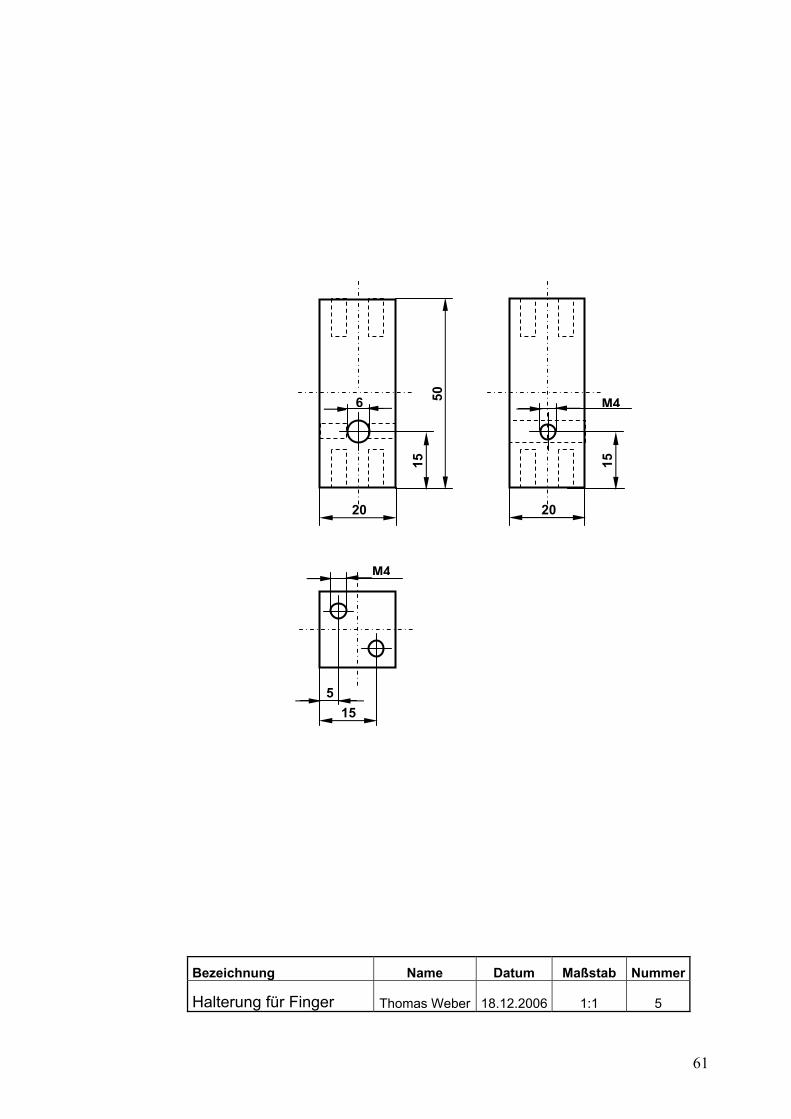
61
Bezeichnung Name Datum Maßstab Nummer
Halterung für Finger Thomas Weber 18.12.2006 1:1 5
20
50
15
6
20
15
M4
M4
5 15
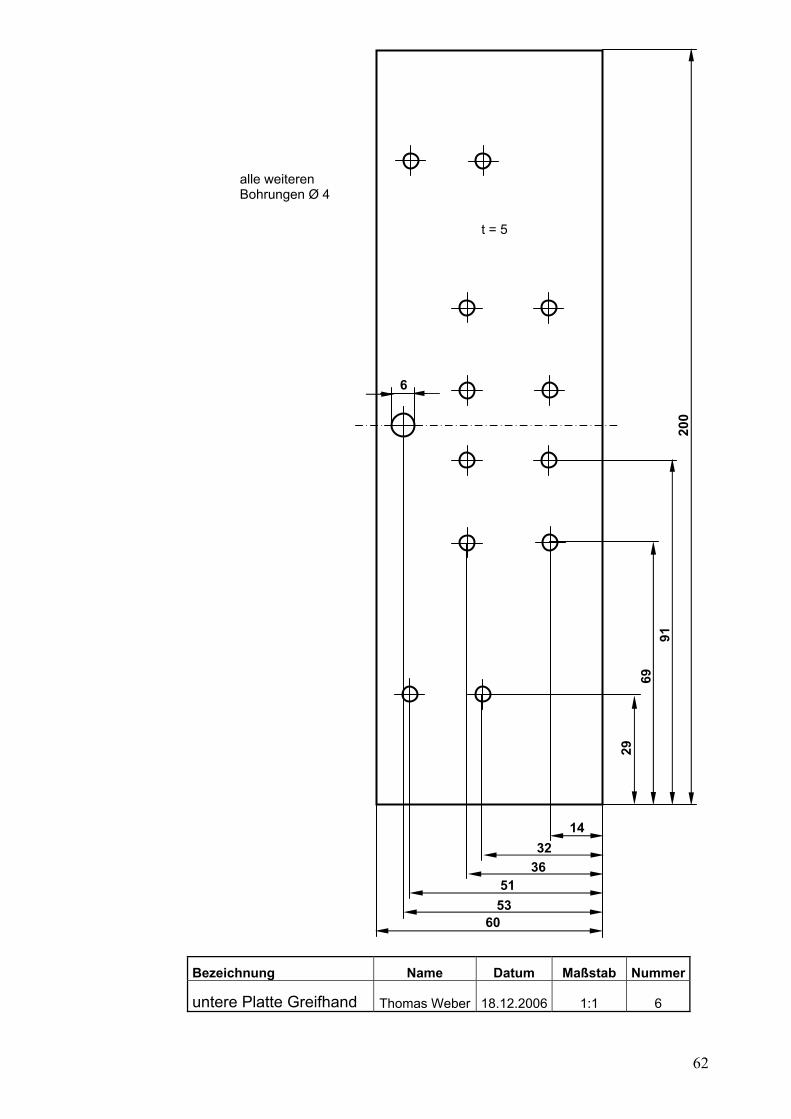
62
Bezeichnung Name Datum Maßstab Nummer
untere Platte Greifhand Thomas Weber 18.12.2006 1:1 6
60
alle weiteren Bohrungen Ø 4
6
29
91
200
69
53 51
36
14 32
t = 5
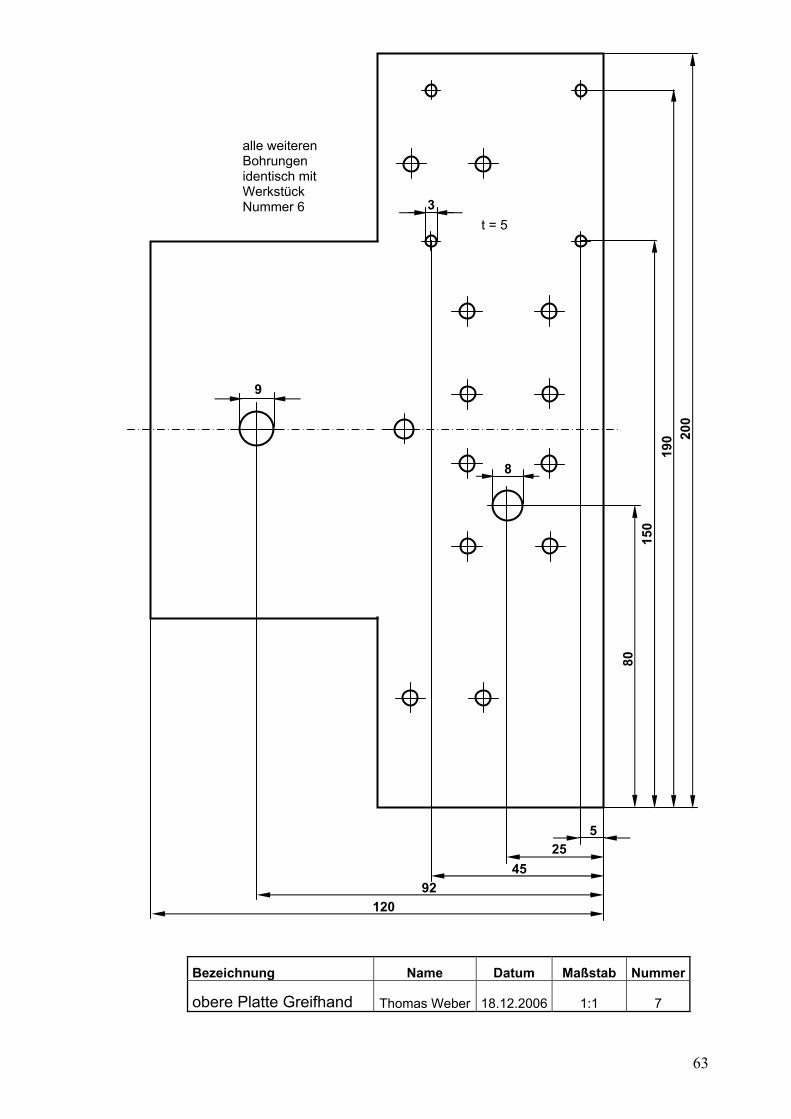
63
Bezeichnung Name Datum Maßstab Nummer
obere Platte Greifhand Thomas Weber 18.12.2006 1:1 7
9
8
200
80
190
150
92
5
45 25
120
3
alle weiteren Bohrungen identisch mit Werkstück Nummer 6
t = 5
64
Literaturverzeichnis
- EvoLogics GmbH, Berlin: Finray Technology, online im Internet:
http://www.evologics.de/finray_index.php?sectionID=6 [abgerufen am
18.12.2006]
- Fachhochschule Rosenheim (2004): adaptiver Stuhl, online im Internet:
http://www.fh-rosenheim.de/upload/92/adaptiverstuhl_paul.pdf
[abgerufen am 18.12.2006]
- Feige Forsttechnik GmbH, Wiehl-Drabenderhöhe (2005):
Transportzangen, online im Internet:
http://www.feige-forsttechnik.de/ [abgerufen am 18.12.2006]
- Franke GmbH, Aalen: Linearführungssystem, online im Internet:
http://www.franke-gmbh.de/, [abgerufen am 18.12.2006]
- Fraunhofer-Vision, Erlangen (2006): Intelligenter, flexibler Drei-Finger-
Greifer mit integrierter Sensorik, Autor unbekannt, online im Internet:
http://www.vision.fraunhofer.de/de/6/projekte/235.html [abgerufen am
18.12.2006]
- Handelsblatt (2004): Mars-Rover findet mysteriöses Gestein, online im
Internet:
http://www.handelsblatt.com/news/Default.aspx?_p=203116&_t=ft&_b=
779692&grid_id= 1083940 [abgerufen am 18.12.2006]
- Hettich International, Kirchlengern (2006): Kugelpräzionsauszüge, online
im Internet:
http://www1.hettich.com:8080/diy/catalog/Start.do?localeId=de&groupId
=(%22810%22) [abgerufen am 18.12.2006]
65
- Hinrichs Flurfördergeräte GmbH & Co. KG, Oldenburg (2006): Toyota
Gabelstapler, online im Internet:
http://www.hinrichs-
stapler.de/detail/diesel/D2556_Toyota_4_Rad_Frontstapler_Toyota_02-
7FDA50.htm [abgerufen am 18.12.2006]
- IG Modellbau Höchst i.Odw.(2006): Bagger, online im Internet:
http://www.ig-modellbau.de/Vorschau/WernerStegmair/Bagger.jpg
[abgerufen am 18.12.2006]
- InnoMedia - Innovationen heute (2003): Kiementräger als Ideengeber,
Autor unbekannt, online im Internet:
http://www.innomedia-
berlin.de/php/innovationen/article.php?article_file=1071562625.txt&print
view=1 [abgerufen am 18.12.2006]
- Mercateo AG, Köthen: Spindelantriebsset, online im Internet:
http://www.mercateo.com/p/108WZ-281(2d)6419/Spindelantriesset.html
[abgerufen am 18.12.2006]
- Newsfoxx (2006): Industrieroboter im Einsatz, online im Internet:
http://newsfoxx.de/2395/Bild/Industrieroboter-im-Einsatz.html
[abgerufen am 18.12.2006]
- RoboWelt. Infos, Tipps und Austausch rund um die Welt der Roboter:
Die Grundbausteine des Roboters - Hände, online im Internet:
http://www.robowelt.de/1tech/3grundbau/34haende.htm [abgerufen am
18.12.2006]
- Technik LPE: Katalog Multimedia, Beschreibung sechs- Achs-
Knickarm, Seite 200, online im Internet:
http://technik-lpe.info/kataloge/multimedia.pdf [abgerufen am
18.12.2006]
66
- TK Logo. Das Wissenschafts-Magazin der Techniker Krankenkasse:
Forschung / Technik, Roboter – mehr als malochende Maschinen, Autor
unbekannt, online im Internet:
http://www.tk-logo.de/basics/forschung-technik/rmenue.php3?li=ba-
forsch-roboter.html [abgerufen am 18.12.2006]
- TU Ilmenau (2006): Komplexpraktikum Grafische Datenverarbeitung –
Aufgabenstellung, online im Internet:
http://www.tu-ilmenau.de/fakia/Aufgabenstellung_200.4426.0.html
[abgerufen am 18.12.2006]
- Universität Bremen (2004): Minimale Identifikation und Modellierung
der Dynamiken von Industrierobotern, online im Internet:
http://www.math.uni-
bremen.de/zetem/projekte2004/robotersteuerung/industrieroboter.html
[abgerufen am 18.12.2006]
- Wikipedia - die freie Enzyklopädie: Getriebemotor, Autor unbekannt,
online im Internet:
http://de.wikipedia.org/wiki/Getriebemotor [abgerufen am 18.12.2006]
- Wikipedia - die freie Enzyklopädie: Mechatronik, Autor unbekannt,
online im Internet:
http://de.wikipedia.org/wiki/Mechatronik [abgerufen am 18.12.2006]
- Wikipedia - die freie Enzyklopädie: Servomotor, Autor unbekannt, online
im Internet:
http://de.wikipedia.org/wiki/Servomotor [abgerufen am 18.12.2006]
67
Abbildungsverzeichnis
Abbildung 1: Industrieroboter ............................................................................. 10
Abbildung 2: Fertigungsstrecke mit Industrierobotern im Einsatz ..................... 11
Abbildung 3: Schulungsroboter........................................................................... 12
Abbildung 4: Nasa Spirit ..................................................................................... 13
Abbildung 5: Baggerarm mit vier Achsen........................................................... 14
Abbildung 6: Gabelstapler................................................................................... 15
Abbildung 7: Schematische Gelenke-Darstellung eines (Roboter) Arms ........... 16
Abbildung 8: Hände mit zwei und drei Fingern .................................................. 18
Abbildung 9: Hände mit vier Fingern.................................................................. 18
Abbildung 10: Hände mit fünf Fingern ............................................................... 18
Abbildung 11: Der Robonaut .............................................................................. 20
Abbildung 12: Flexibler Drei-Finger-Greifer mit integrierter Sensorik.............. 20
Abbildung 13: aufkommende Kräfte bei einem Greifer...................................... 21
Abbildung 14: Greifer aus der Forsttechnik ........................................................ 22
Abbildung 15: Greifer nach dem FinRay-Prinzip ............................................... 25
Abbildung 16: Flexible Anpassung des FinRay-Greifers.................................... 26
Abbildung 17: Greifhandmodell aus Lego .......................................................... 27
Abbildung 18: Greifarmmodell aus Lego............................................................ 28
Abbildung 19: Greifermodell aus Lego............................................................... 29
Abbildung 20: Vorderansicht Fahrwerk .............................................................. 30
Abbildung 21: Linearführungssystem mit Führungsschiene und Schlitten......... 31
Abbildung 22: Spindelantriebset von „RS“......................................................... 31
Abbildung 23: Kugelteilauszug für Einbauschubladen ....................................... 32
Abbildung 24: Greifer nach dem FinRay-Prinzip ............................................... 36
Abbildung 25: Prototypen eines FinRay Fingers ................................................ 37
Abbildung 26: Endversion eines FinRay Fingers im Belastungstest .................. 38
Abbildung 27: Montage der Führungsschienen................................................... 39
Abbildung 28: Positionen der Elemente der Greifhand....................................... 41
Abbildung 29: Wellen mit aufgebrachten Zahnrädern ........................................ 41
Abbildung 30: Wellen mit ausgerichteten Fingern.............................................. 42
Abbildung 31: fertig montierte Greifhand mit Pfeiler......................................... 42
Abbildung 32: Führungsschienen mit Winkel..................................................... 43

68
Abbildung 33: Greifhand mit Spindel ................................................................. 44
Abbildung 34: Greifer mit installierten Motoren ................................................ 45
Abbildung 35: Erste Greifversuche mit Zylinder und Kontaktsprayflasche ....... 46
Abbildung 36: Kraftmessung des Roboterarms................................................... 47
Abbildung 37: Kraftmessung an der Roboterhand .............................................. 47
Abbildung 38: Testversuch zur Kraft des Greifers.............................................. 48
69
Schlusserklärung „Ich versichere, dass ich die schriftliche Hausarbeit selbstständig verfasst und keine anderen als die angegebenen Quellen und Hilfsmittel benutzt habe. Alle Stellen der Arbeit, die anderen Werken dem Wortlaut oder Sinn nach entnommen wurden, habe ich in jedem Fall unter Angabe der Quelle als Entlehnung kenntlich gemacht. Das gleiche gilt auch für die beigelegten Zeichnungen, Kartenskizzen und Darstellungen.“ Thomas Weber





























