Embed Size (px)
Citation preview
März 2016
Entwicklung und Konstruktion mechatronisch
ausfahrbarer Arme für einen Torwart-Roboter
Yannick Schlamm 32207127
Semesterarbeit


Eidesstattliche Versicherung Hiermit versichere ich, dass ich die vorliegende Arbeit selbständig und ohne fremde Hilfe verfasst habe. Die verwendeten Hilfsmittel und Quellen sind vollständig angegeben. Wörtlich übernommene Textstellen, Bilder und Zeichnungen sind in jedem Einzelfall kenntlich gemacht worden. Kassel, den 20.02.2016 ____________________________
(Yannick Schlamm)
Aufgabenstellung zur Semesterarbeit für Yannick Schlamm, Matr.-Nr. 32207127
Entwicklung und Konstruktion mechatronisch ausfahrbarer Arme
für einen Torwart-Roboter
Aufgabenstellung:
Das Fachgebiet Maschinenelemente und Tribologie im FB 15 unterstützt das Fach-
gebiet Verteilte Systeme im FB 16 bei der Entwicklung der Roboter des Fußball-
Roboterteams „Carpe Noctem Cassel“ der Universität Kassel. Das Team tritt regel-
mäßig bei internationalen Wettkämpfen der RoboCup Research Foundation an. Das
Ziel der Foundation und damit auch von „Carpe Noctem Cassel“ ist die Förderung der Forschung und Lehre in den Bereichen Robotik und Künstliche Intelligenz. Um
bei der Teilnahme an den internationalen Wettkämpfen von Jahr zu Jahr konkurrenz-
fähig zu bleiben, unterliegen sowohl die Hardware als auch die Software des Teams
einer ständigen Weiterentwicklung. Der aktuell eingesetzte Torwart gehört noch zur
Robotergeneration 2005 und wird daher durch einen Neuentwurf auf den aktuellen
Stand der Technik gebracht. Eine Teilkomponente dieses neuen Torwarts sind seine
ausfahrbaren Arme (Extensions). Bisher wurden diese pneumatisch betrieben, je-
doch wird der neue Torwart keine Druckluftflasche mehr an Board haben. Daher
müssen die neuen Extensions elektronisch betrieben werden. Außerdem ist der Bau-
raum durch die Regeln des RoboCups eingeschränkt und bei der Integration der Ex-
tensions muss darauf geachtet werden, dass andere Sensoren in ihrer Funktion we-
nig beeinflusst werden. Darüber hinaus muss die Konstruktion leichtgewichtig sein,
um die gewünschte Agilität des Torwarts zu gewährleisten.
Folgende Arbeitsschritte sind zu bearbeiten:
Analyse des Stands der Technik
Entwicklung eines neuen Konzepts für die ausfahrbaren Arme
Erstellung von Konstruktionsdateien und technischen Zeichnungen
Zusammenstellung benötigter Sensoren und Aktoren
Zusammenschrift der Arbeit
Inhaltsverzeichnis
Symbolverzeichnis .................................................................................................................. VII
1 Einleitung ............................................................................................................................ 1
2 Motivation und Problemdarstellung .................................................................................... 2
3 Stand der Technik ............................................................................................................... 4
3.1 Alter Torwart Carpe Noctem Cassel .......................................................................... 4
3.2 Torwart TU Eindhoven .............................................................................................. 6
4 Konzeptfindung ................................................................................................................... 7
4.1 Vorauswahl verschiedener Konzeptmöglichkeiten ................................................... 7
4.1.1 Bewegungsvarianten ...................................................................................... 7
4.1.2 Armvarianten ................................................................................................. 8
4.1.3 Antriebstechniken .......................................................................................... 9
4.2 Konzept Radialbewegung ........................................................................................ 10
4.3 Konzept Zahnstange ................................................................................................ 11
4.4 Konzept Riemenantrieb ........................................................................................... 12
4.5 Konzept Riemenantrieb mit Feder ........................................................................... 13
5 Konstruktion ...................................................................................................................... 14
5.1 Funktionsweise ........................................................................................................ 14
5.2 Seitliche Extensions ................................................................................................. 14
5.2.1 Aufbau und Teilebennenung ........................................................................ 14
5.2.2 Arm Konstruktion ........................................................................................ 15
5.2.3 Antrieb ......................................................................................................... 17
5.2.4 Montage ....................................................................................................... 20
5.3 Obere Extension ....................................................................................................... 21
5.4 Zusammenbau Extensions ....................................................................................... 22
6 Ermittlung der Kosten ....................................................................................................... 23
7 Zusammenfassung und Ausblick ...................................................................................... 24
8 Literaturverzeichnis ........................................................................................................... 25
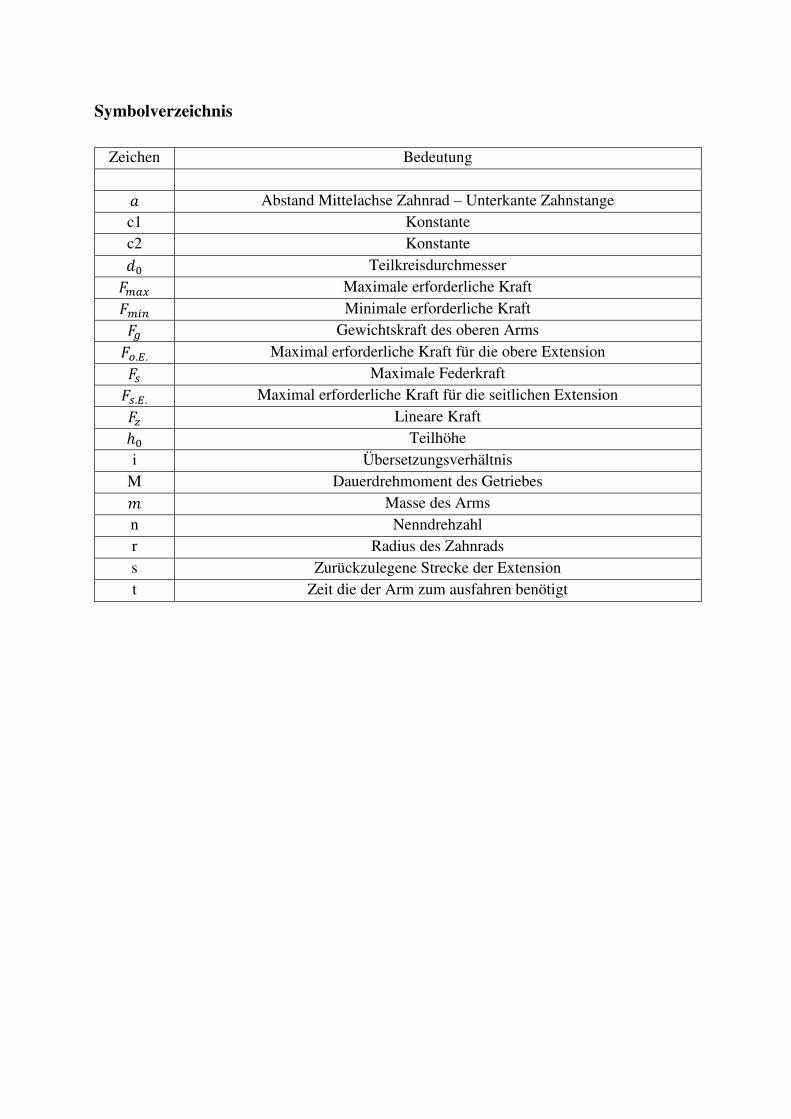
Symbolverzeichnis
Zeichen Bedeutung
� Abstand Mittelachse Zahnrad – Unterkante Zahnstange
c1 Konstante
c2 Konstante
Teilkreisdurchmesser � � Maximale erforderliche Kraft � � Minimale erforderliche Kraft �� Gewichtskraft des oberen Arms � .�. Maximal erforderliche Kraft für die obere Extension �� Maximale Federkraft ��.�. Maximal erforderliche Kraft für die seitlichen Extension �� Lineare Kraft ℎ Teilhöhe
i Übersetzungsverhältnis
M Dauerdrehmoment des Getriebes � Masse des Arms
n Nenndrehzahl
r Radius des Zahnrads
s Zurückzulegene Strecke der Extension
t Zeit die der Arm zum ausfahren benötigt


Einleitung 1
1 Einleitung
Der RoboCup ist ein jährlicher Roboterwettkampf, bei dem Roboter aus der ganzen Welt ge-
geneinander antreten. Das Team „Carpe Noctem Cassel“ von der Universität Kassel nimmt seit
2005 regelmäßig an Turnieren der Robocup Middle Size League teil. Bei dem Spiel treten je-
weils 4 Feldspieler und 1 Torwart gegeneinander an. Die Regeln orientieren sich am menschli-
chen Fußball (vgl. Abbildung 1).
Für das Team „Carpe Noctem Cassel“ soll ein neuer Torwart konstruiert werden, da der alte in
die Jahre gekommen ist. Die Konstruktion des Torwarts wurde auf verschiedene Arbeiten auf-
geteilt, diese Arbeit beschäftigt sich mit den „Extensions“. Diese sind den Armen eines mensch-
lichen Torwarts nachempfunden, mit diesen darf sich der Roboter alle vier Sekunden für eine
Sekunde vergrößern. Die Antriebstechnik der neuen Extensions, sollte aus Elektromotoren be-
stehen. Beim alten Torwart wurden die Bewegungen pneumatisch umgesetzt. Außerdem sollen
die Extensions leichter und robuster werden.
Abbildung 1: RoboCup Match
Motivation und Problemdarstellung 2
2 Motivation und Problemdarstellung
Der alte Torwart ist mit seinen 10 Jahren in die Jahre gekommen und hat das Team Carpe
Noctem Cassel oft im Stich gelassen. Durch die Verwendung von Druckluft musste stets dafür
gesorgt werden, dass Druckluft bereit stand, dies erwies sich als großer logistischer Aufwand.
Außerdem war er langsam und nicht besonders robust. Besonders die Extensions sind häufig
kaputt gegangen. Es wurde zwar notdürftig mit Wäscheleinen versucht, ihn ein wenig robuster
zu gestalten, doch mindestens einmal pro Turnier riss eine Leine. Besonders der Anblick der
Wäscheleinen hat mich motiviert, eine professionelle und robuste Lösung zu finden.
Die Extensions müssen besonders widerstandsfähig konstruiert werden, da der Roboter, inklu-
sive Extensions, Treffer mit einer Ballgeschwindigkeit von 20 – 30 m/s aushalten muss. Der
Ball wiegt 480 Gramm, wodurch große Kräfte entstehen können. Es muss drauf geachtet wer-
den, dass der Roboter keine Elemente oberhalb von 300 mm hat, mit denen er sich im Netz
verfangen könnte.
Für die RoboCup Middle Size Robot League (MSL) existiert ein ausführliches Regelwerk, in
dem unter anderem die FIFA Regeln angepasst und spezielle Regeln für die Roboter geschaffen
wurden [1]. Beim Konstruieren muss drauf geachtet werden, dass der Roboter diese Regeln
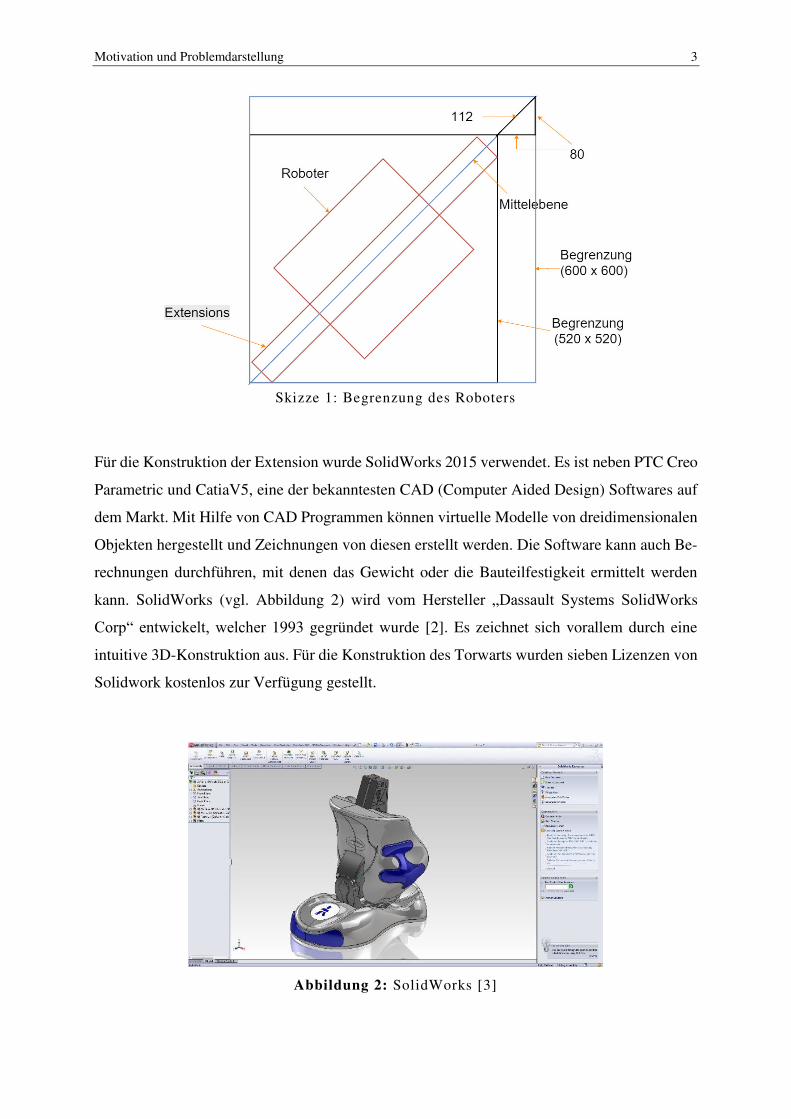
nicht verletzt. Der Torwart darf sich nach links, rechts und oben für die Dauer einer Sekunde
vergrößern, allerdings darf er dies nur in jeweils eine Richtung. Nachdem der Arm wieder ein-
gefahren ist, darf vier Sekunden lang keiner mehr ausgefahren werden. Bei diesem Vorgang
darf der Roboter von einer Grundfläche von 520 x 520 mm auf 600 x 600 mm wachsen, dies
ergibt einen Ausfahrweg von 112 mm für die Extension (vgl. Skizze 1). Die Höhe darf von 800
mm auf 900 mm ansteigen. Um eine größtmögliche Breite zu erreichen, wird der Torwart so
konstruiert, dass seine Mittelebene in der Diagonalen des Quadrats liegt. Dadurch sind Radi-
alebewegungen nur sehr schwer realisierbar.
Der Torwart darf, wie die Feldspieler, maximal 40 kg wiegen. Allerdings bedeutet jedes zu-
sätzliche Gewicht eine geringere Beschleunigung, daher sollte der Roboter so leicht wie mög-
lich konstruiert werden. Idealerweise sollte er unter 30 kg wiegen.
Motivation und Problemdarstellung 3
Für die Konstruktion der Extension wurde SolidWorks 2015 verwendet. Es ist neben PTC Creo
Parametric und CatiaV5, eine der bekanntesten CAD (Computer Aided Design) Softwares auf
dem Markt. Mit Hilfe von CAD Programmen können virtuelle Modelle von dreidimensionalen
Objekten hergestellt und Zeichnungen von diesen erstellt werden. Die Software kann auch Be-
rechnungen durchführen, mit denen das Gewicht oder die Bauteilfestigkeit ermittelt werden
kann. SolidWorks (vgl. Abbildung 2) wird vom Hersteller „Dassault Systems SolidWorks
Corp“ entwickelt, welcher 1993 gegründet wurde [2]. Es zeichnet sich vorallem durch eine
intuitive 3D-Konstruktion aus. Für die Konstruktion des Torwarts wurden sieben Lizenzen von
Solidwork kostenlos zur Verfügung gestellt.
Abbildung 2: SolidWorks [3]
Skizze 1: Begrenzung des Roboters
Stand der Technik 4
3 Stand der Technik
Das nachfolgende Kapitel beschäftigt sich mit dem Stand der Technik. Es wird zuerst auf den
alten Torwart des Teams „Carpe Noctem Cassel“ eingegangen, dabei werden besonders die
Extensions näher betrachtet. Anschließend wird kurz der Torwart des Teams „TU Eindhoven“
vorgestellt, da dieser einer der besten der Liga ist.
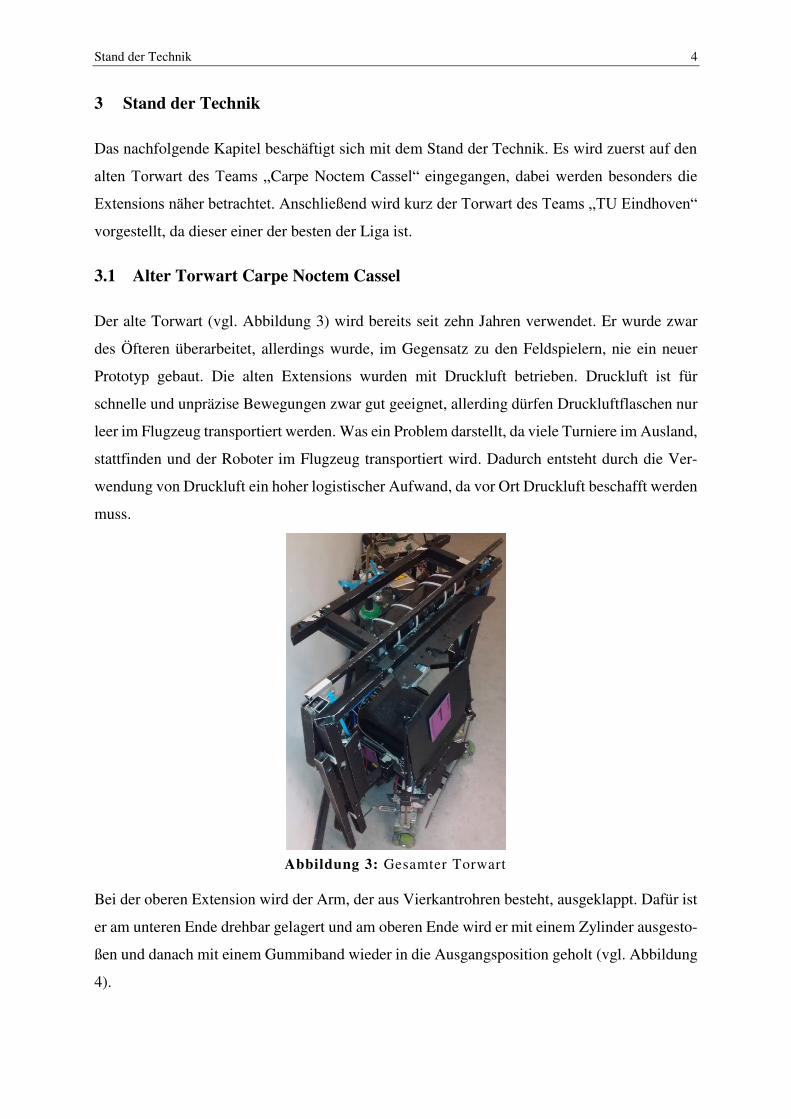
3.1 Alter Torwart Carpe Noctem Cassel
Der alte Torwart (vgl. Abbildung 3) wird bereits seit zehn Jahren verwendet. Er wurde zwar
des Öfteren überarbeitet, allerdings wurde, im Gegensatz zu den Feldspielern, nie ein neuer
Prototyp gebaut. Die alten Extensions wurden mit Druckluft betrieben. Druckluft ist für
schnelle und unpräzise Bewegungen zwar gut geeignet, allerding dürfen Druckluftflaschen nur
leer im Flugzeug transportiert werden. Was ein Problem darstellt, da viele Turniere im Ausland,
stattfinden und der Roboter im Flugzeug transportiert wird. Dadurch entsteht durch die Ver-
wendung von Druckluft ein hoher logistischer Aufwand, da vor Ort Druckluft beschafft werden
muss.
Bei der oberen Extension wird der Arm, der aus Vierkantrohren besteht, ausgeklappt. Dafür ist
er am unteren Ende drehbar gelagert und am oberen Ende wird er mit einem Zylinder ausgesto-
ßen und danach mit einem Gummiband wieder in die Ausgangsposition geholt (vgl. Abbildung
4).
Abbildung 3: Gesamter Torwart

Stand der Technik 5
Bei den seitlichten Extensions bestehen die Arme ebenfalls aus Vierkantrohren. Diese werden
über einen Seilzug ausgefahren. Der Seilzug wird per Druckluft nach unten gezogen, wodurch
der linke Teil des unteren Vierkantrohres nach oben gezogen wird. So klappt der ganze Arm
aus. Nachdem der Arm ausgeklappt ist, zieht das blaue Gummiband den rechten Teil des unte-
ren Vierkantrohres wieder hoch, wodurch der Arm wieder eingeklappt wird (vgl. Abbildung 5).
Da diese Konstruktion sehr instabil ist, wurde versucht, sie mit Wäscheleinen zu verstärken.
Allerdings sind die Wäscheleinen ca. einmal pro Turnier gerissen. Wenn der Roboter sich
schnell gedreht hat ist es passiert, dass die seitlichen Extensions ausgeklappt sind, was zu einem
Regelverstoß führen kann. Außerdem können sie sich leicht im Tor verhaken. Ingsgesamt ist
aber das größte Problem, dass stets Druckluft gebraucht wird, weswegen im neuen Roboter
keine Druckluft mehr verbaut werden soll.
Abbildung 4: Obere Extension
Abbildung 5: Seitliche Extension, eingefahren (links) und ausgefahren (rechts)
Stand der Technik 6
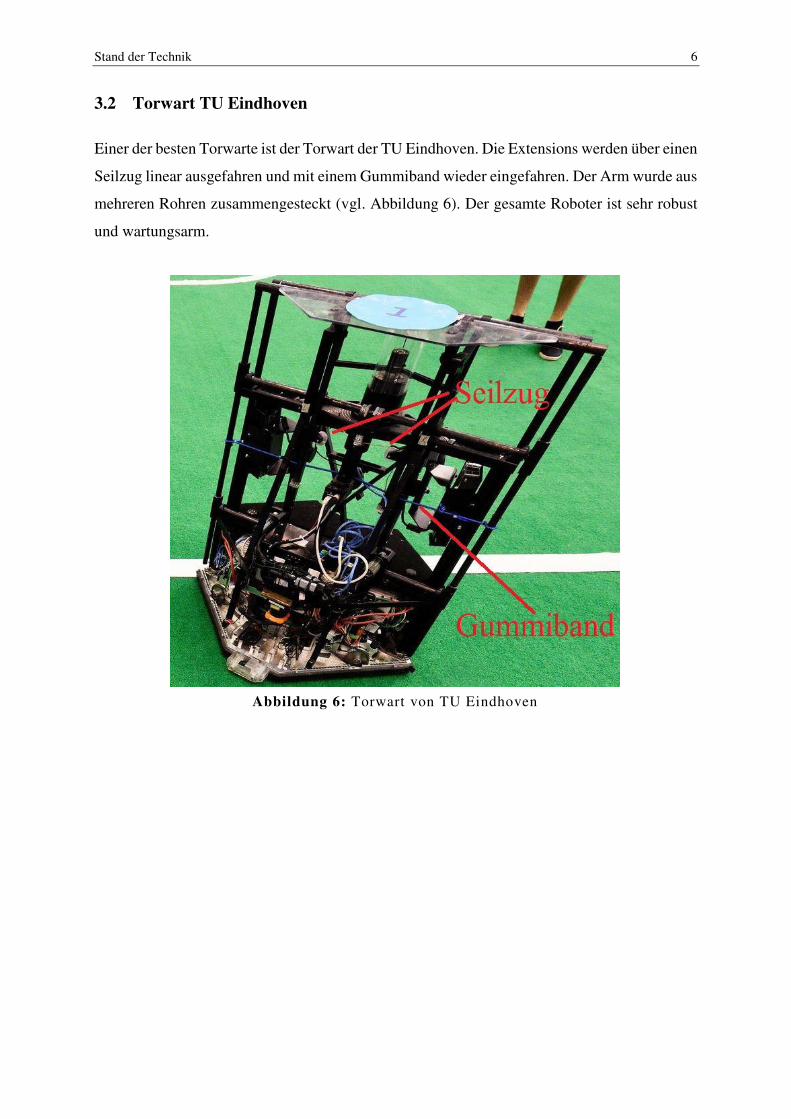
3.2 Torwart TU Eindhoven
Einer der besten Torwarte ist der Torwart der TU Eindhoven. Die Extensions werden über einen
Seilzug linear ausgefahren und mit einem Gummiband wieder eingefahren. Der Arm wurde aus
mehreren Rohren zusammengesteckt (vgl. Abbildung 6). Der gesamte Roboter ist sehr robust
und wartungsarm.
Abbildung 6: Torwart von TU Eindhoven
Konzeptfindung 7
4 Konzeptfindung
In diesem Kapitel werden die verschiedenen entwickelten Konzepte beschrieben und deren
Vor- und Nachteile diskutiert.
4.1 Vorauswahl verschiedener Konzeptmöglichkeiten
Für eine Extension kommt entweder einer Linearbewegung oder eine Radialbewegung in
Frage. Bei einer Linearbewegung wird der Arm herausgeschoben oder herausgezogen, wohin-
gegen bei einer Radialbewegung der Arm ausgeklappt wird. Zudem braucht es eine Antriebs-
möglichkeit und eine Realisierung des Arms. Daher sind die Ideen in drei verschiedene Kate-
gorien eingeteilt. Zuerst werden die unterschiedlichen Bewegungs- und Armvarianten beschrie-
ben und anschließend die verschiedenen Antriebsmöglichkeiten vorgestellt.
4.1.1 Bewegungsvarianten
Eine Idee ist, dass ein Antrieb den Arm herausschiebt oder herauszieht. Das Herausziehen wäre
durch einen Seilzug realisierbar. Diese Variante ist allerdings störungsanfällig und findet keine
große Anwendung im Maschinenbau. Um zu gewährleisten, dass sich das Seil immer richtig
aufwickelt, muss das Seil ständig unter Spannung stehen. Dafür wären weitere Bauteile not-
wendig und es würde sich zu einer komplizierteren und störungsanfälligeren Variante entwi-
ckeln. Deswegen wurde die Idee nicht weiterverfolgt.
Dagegen wäre es einfach zu realisieren den Arm herauszuschieben, der Arm müsste dafür nur
geführt werden und es müsste ein geeigneter Antrieb vorhanden sein. Daher ist diese Variante
weiter denkbar.
Eine andere Bewegungsvariante wäre es, den Arm ausklappen zu lassen, entweder mit einem
Zugmechanismus oder mit einem Stoß. Die Stoßvariante könnte ähnlich wie bei der oberen
Extension des alten Torwarts realisiert werden und die Zugvariante wie bei der seitlichen Ex-
tension des alten Torwarts (vgl. 3.1). Für ruckartige Stoßantriebe ist vorallem eine Pneumatik
Lösung sinnvoll, da elektrische Lösungen, wie der Hubmagnet große Nachteile haben (vgl.
4.1.3). Dadurch, dass eine elektrische Lösung gewünscht ist, ist diese Variante nicht empfeh-
lenswert.
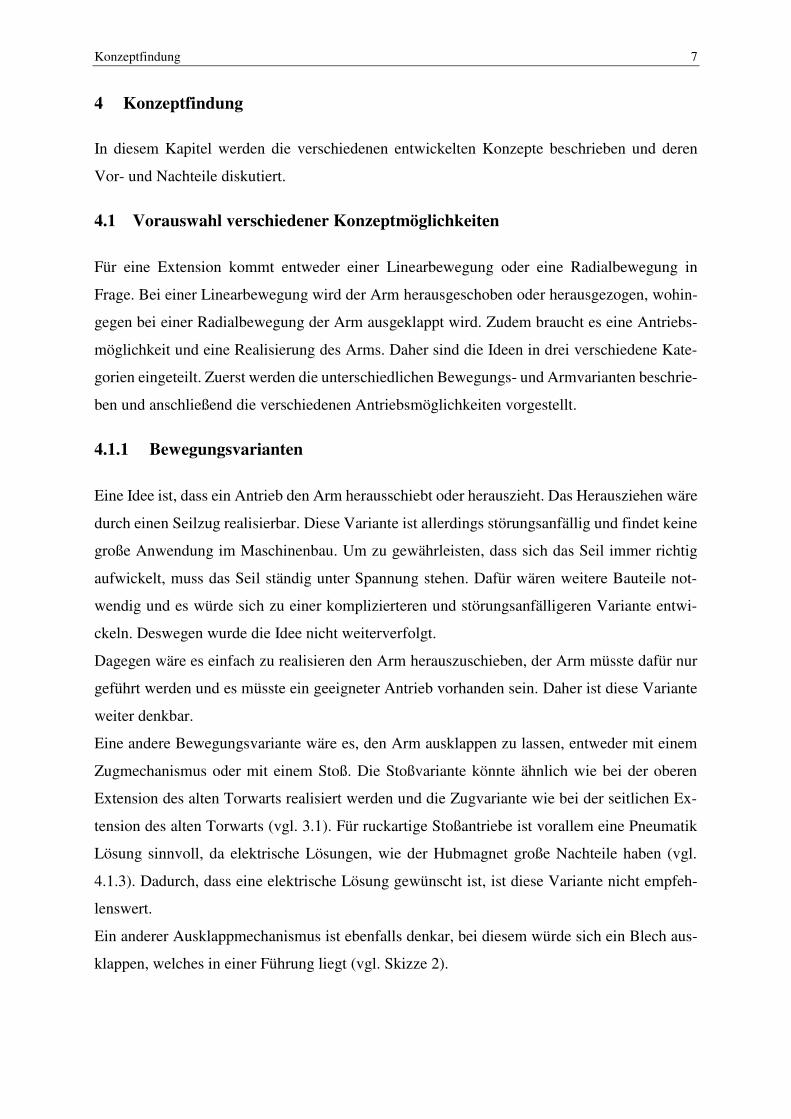
Ein anderer Ausklappmechanismus ist ebenfalls denkar, bei diesem würde sich ein Blech aus-
klappen, welches in einer Führung liegt (vgl. Skizze 2).
Konzeptfindung 8
Allerdings könnte diese Variante zu instabil sein, da die Führung zu einem Viertel offen sein
muss. Wenn der Ball den Arm trifft, müsste die Führung die ganze Kraft aufnehmen, und
dadurch, dass sie zu einem hinteren Viertel geöffnet ist, könnte dies ein Problem sein. Aller-
dings wäre diese Variante einfach zu konstruieren und ebenfalls günstig, weswegen sie weiter
in Betracht gezogen wird.
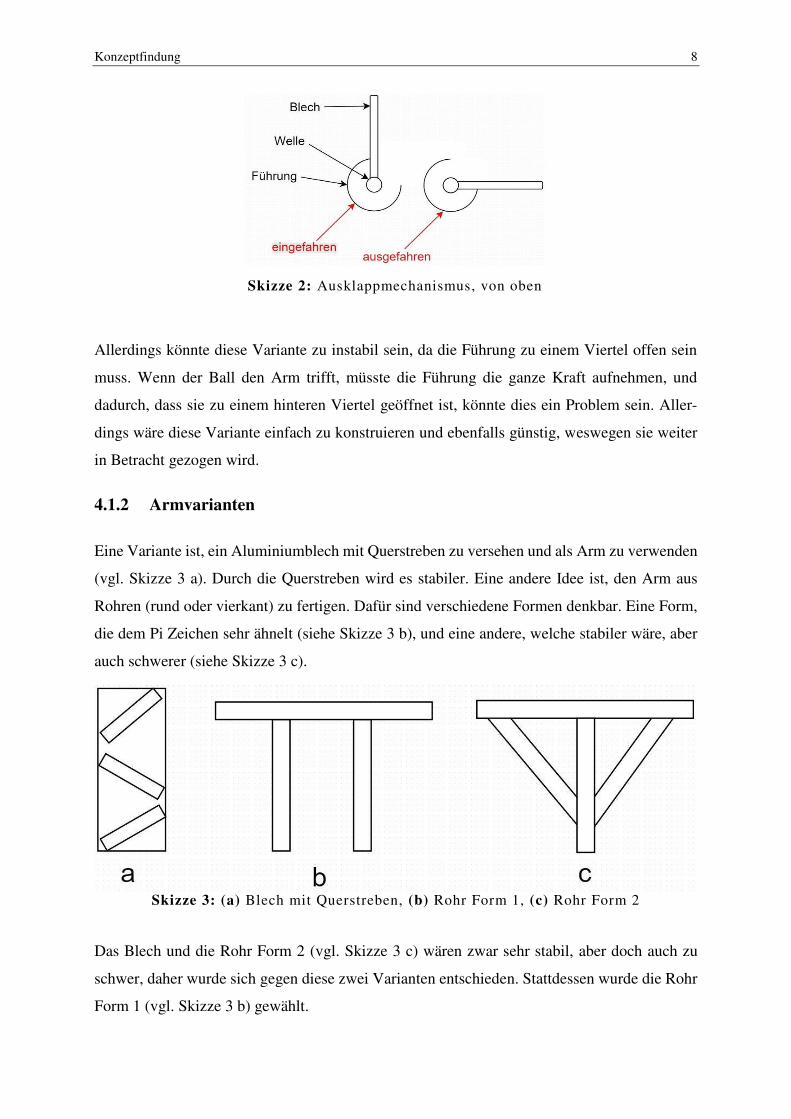
4.1.2 Armvarianten
Eine Variante ist, ein Aluminiumblech mit Querstreben zu versehen und als Arm zu verwenden
(vgl. Skizze 3 a). Durch die Querstreben wird es stabiler. Eine andere Idee ist, den Arm aus
Rohren (rund oder vierkant) zu fertigen. Dafür sind verschiedene Formen denkbar. Eine Form,
die dem Pi Zeichen sehr ähnelt (siehe Skizze 3 b), und eine andere, welche stabiler wäre, aber
auch schwerer (siehe Skizze 3 c).
Das Blech und die Rohr Form 2 (vgl. Skizze 3 c) wären zwar sehr stabil, aber doch auch zu
schwer, daher wurde sich gegen diese zwei Varianten entschieden. Stattdessen wurde die Rohr
Form 1 (vgl. Skizze 3 b) gewählt.
Skizze 2: Ausklappmechanismus, von oben
Skizze 3: (a) Blech mit Querstreben, (b) Rohr Form 1, (c) Rohr Form 2
Konzeptfindung 9
4.1.3 Antriebstechniken
Da die Antriebstechnik ein Großteil der Kosten ausmacht, wurde besonders viel Zeit in deren
Auswahl investiert. Es wurden verschiedene Techniken in Betracht gezogen. Da sowohl eine
Linearbewegung als auch eine Radialbewegung in Betracht kommen, wurden für beide Bewe-
gungen Antriebe ausgewählt.
Ein Hubmagnet (vgl. Abbildung 7 a) wäre eine einfache und günstige Lösung gewesen, um
eine Linearbewegung auszuführen, da dafür nur wenige Bauteile nötig gewesen wären. Aller-
dings haben Hubmagnete einen großen Energieverbrauch, da das Magnetfeld durchgehend mit
Strom versorgt werden muss. Außerdem sind sie nicht für derart große Strecken (112 mm)
geeignet [4].
Eine weitere Möglichkeit wären Linearmotoren (vgl. Abbildung 7 b). Sie hätten die nötige
Hublänge, Geschwindigkeit und Kraft und wären deshalb für eine Linearbewegung geeignet.
Allerdings sind sie kostspielig, so dass sie leider zu teuer für den Torwart sind [5].
Statt einer direkten Linearbewegung wäre eine weitere Möglichkeit eine Radialbewegung, wel-
che durch einen Elektromotor und ein Getriebe erzeugt wird, in eine Linearbewegung umzu-
wandeln. Dies könnte zum Beispiel mit einer Kombination aus Zahnstange und Zahnrad ge-
schehen (vgl. Abbildung 7 c). Ein Riemenantrieb oder Kettenantrieb wäre ebenfalls vorstellbar.
Dadurch könnten normale Elektromotoren verwenden werden. Die Auswahl an Elektromotoren
ist sehr vielfältig, außerdem sind sie günstig, daher wäre dies die beste Möglichkeit um eine
Linearbewegung zu realisieren.
Für eine Radialbewegung könnte ein Elektromotor mit einem Getriebe verwendet werden (vgl.
Abbildung 7 d). Dies ist mit Abstand die einfachste Antriebsmöglichkeit, da nur wenige Bau-
teile benötigt werden und es sehr kostengünstig ist. Für eine Radialbewegung wäre dies die
beste Lösung.
Die seitlichen Extensions und die obere Extension sollten möglichst identisch konstruiert wer-
den, da dies viel Zeit und Geld spart, durch die Verwendung gleicher Bauteile.

Konzeptfindung 10
4.2 Konzept Radialbewegung
Bei diesem Konzept wird eine Radialbewegung realisiert. Dadurch, dass die meisten Antriebe
auf Radialbewegungen ausgelegt sind, werden weniger Bauteile als bei einer Linearbewegung
benötigt. Dies spart wiederum Zeit, Geld und Gewicht.
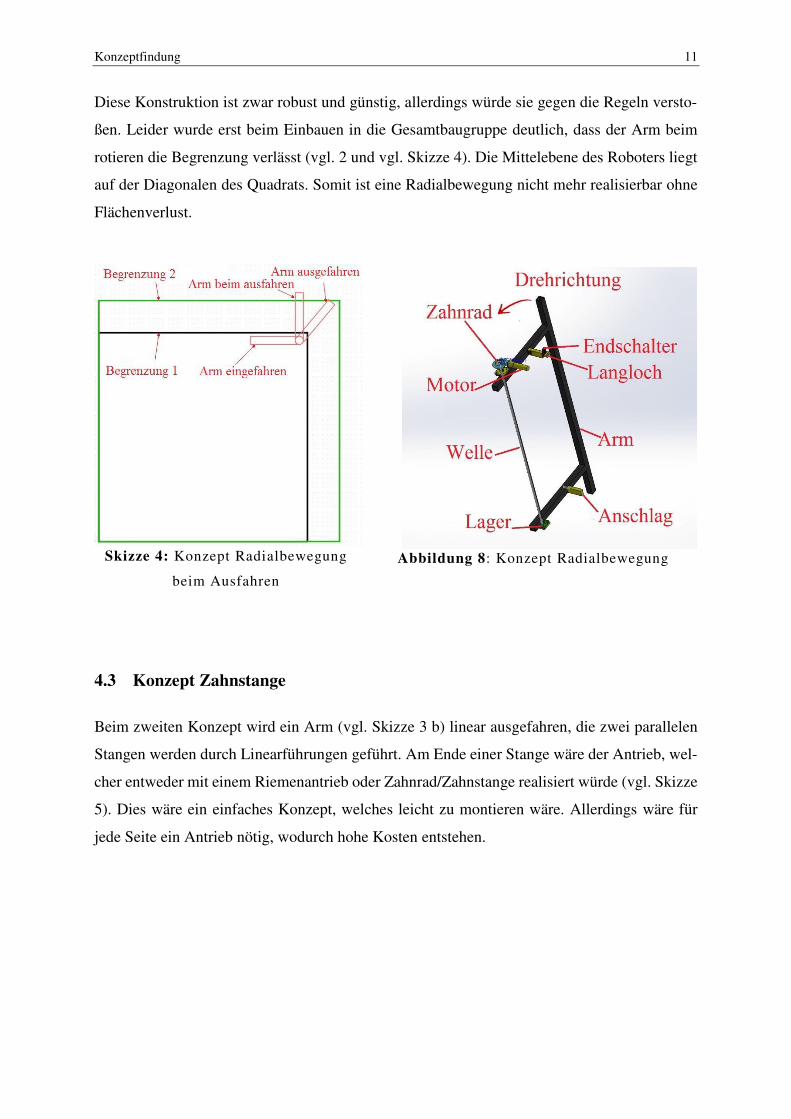
Bei der Konstruktion besteht der Arm aus drei Rohren, durch die zwei parallelen Rohre ist eine
Welle geführt, welche gelagert ist (siehe Abbildung 8). Für die Lagerung wurden Flanschlager
verwendet, da sie einfach montierbar sind. Sie sind fest am Roboter befestigt. Die Konstruktion
ähnelt einer früheren Variante (vgl. Skizze 2), allerdings ist dieses Konzept wesentlich stabiler,
da die Führung geschlossen ist. Auf der Welle ist ein Zahnrad montiert, welches mit einem
anderen Zahnrad verbunden ist. Dieses Zahnrad ist mit einem Getriebe und einem Motor ver-
bunden, welches den Arm um 90° dreht. Kurz vor dem Anschlag ist ein Endschalter platziert,
welcher durch ein Langloch nachjustiert werden kann. Dieser wird durch den Arm aktiviert,
wodurch ein Signal zum Motor gegeben wird, sodass dieser ausgeht und der Arm nicht mit der
vollen Kraft gegen den Anschlag schlägt. Nach ca. 1 Sekunde würde der Motor wieder ange-
schaltet und der Arm würde sich zurück in seine Ausgangsposition drehen. Wieder einen End-
schalter aktivieren, bevor er gegen den Anschlag schlägt. Die Konstruktion kann für alle drei
Seiten verwendet werden.
a
c d
b
Abbildung 7: (a) Hubmagnet [6], (b) Linearmotor [5], (c) Motor, Getriebe, Zahnrad
und Zahnstange [7], (d) Motor und Getriebe [7]
Konzeptfindung 11
Diese Konstruktion ist zwar robust und günstig, allerdings würde sie gegen die Regeln versto-
ßen. Leider wurde erst beim Einbauen in die Gesamtbaugruppe deutlich, dass der Arm beim
rotieren die Begrenzung verlässt (vgl. 2 und vgl. Skizze 4). Die Mittelebene des Roboters liegt
auf der Diagonalen des Quadrats. Somit ist eine Radialbewegung nicht mehr realisierbar ohne
Flächenverlust.
Skizze 4: Konzept Radialbewegung
beim Ausfahren
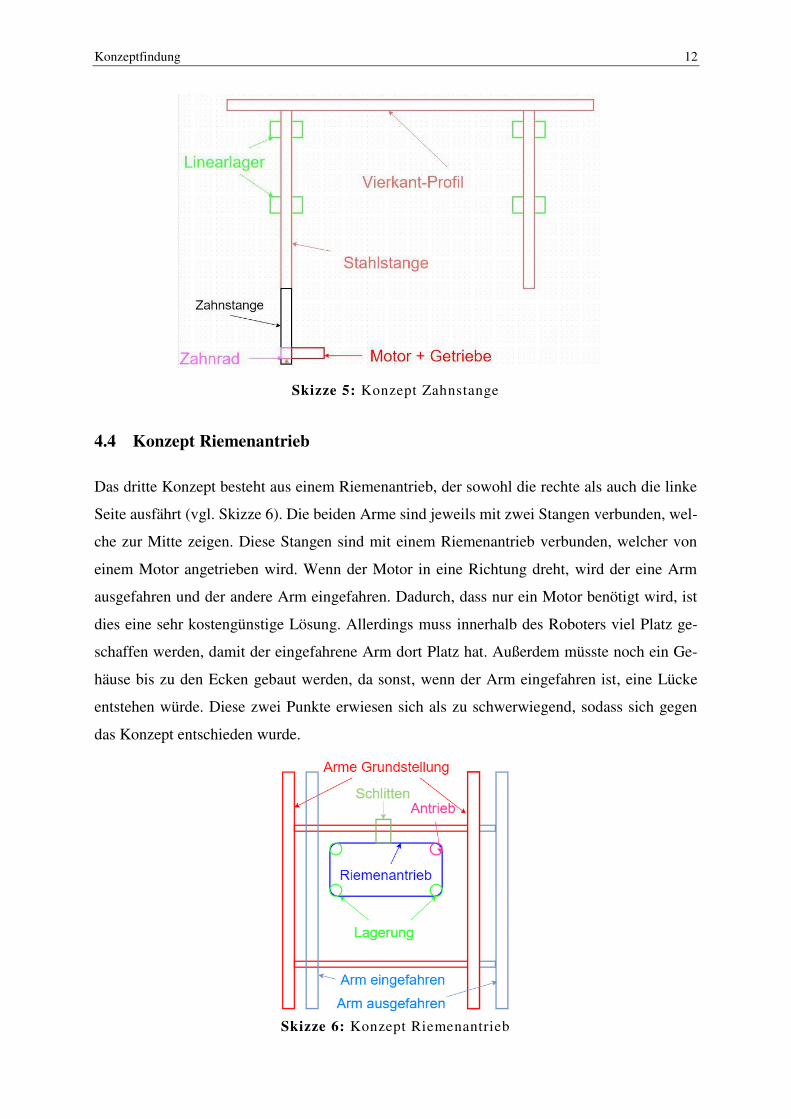
4.3 Konzept Zahnstange
Beim zweiten Konzept wird ein Arm (vgl. Skizze 3 b) linear ausgefahren, die zwei parallelen
Stangen werden durch Linearführungen geführt. Am Ende einer Stange wäre der Antrieb, wel-
cher entweder mit einem Riemenantrieb oder Zahnrad/Zahnstange realisiert würde (vgl. Skizze
5). Dies wäre ein einfaches Konzept, welches leicht zu montieren wäre. Allerdings wäre für
jede Seite ein Antrieb nötig, wodurch hohe Kosten entstehen.
Abbildung 8: Konzept Radialbewegung
Konzeptfindung 12
4.4 Konzept Riemenantrieb
Das dritte Konzept besteht aus einem Riemenantrieb, der sowohl die rechte als auch die linke
Seite ausfährt (vgl. Skizze 6). Die beiden Arme sind jeweils mit zwei Stangen verbunden, wel-
che zur Mitte zeigen. Diese Stangen sind mit einem Riemenantrieb verbunden, welcher von
einem Motor angetrieben wird. Wenn der Motor in eine Richtung dreht, wird der eine Arm
ausgefahren und der andere Arm eingefahren. Dadurch, dass nur ein Motor benötigt wird, ist
dies eine sehr kostengünstige Lösung. Allerdings muss innerhalb des Roboters viel Platz ge-
schaffen werden, damit der eingefahrene Arm dort Platz hat. Außerdem müsste noch ein Ge-
häuse bis zu den Ecken gebaut werden, da sonst, wenn der Arm eingefahren ist, eine Lücke
entstehen würde. Diese zwei Punkte erwiesen sich als zu schwerwiegend, sodass sich gegen
das Konzept entschieden wurde.
Skizze 5: Konzept Zahnstange
Skizze 6: Konzept Riemenantrieb
Konzeptfindung 13
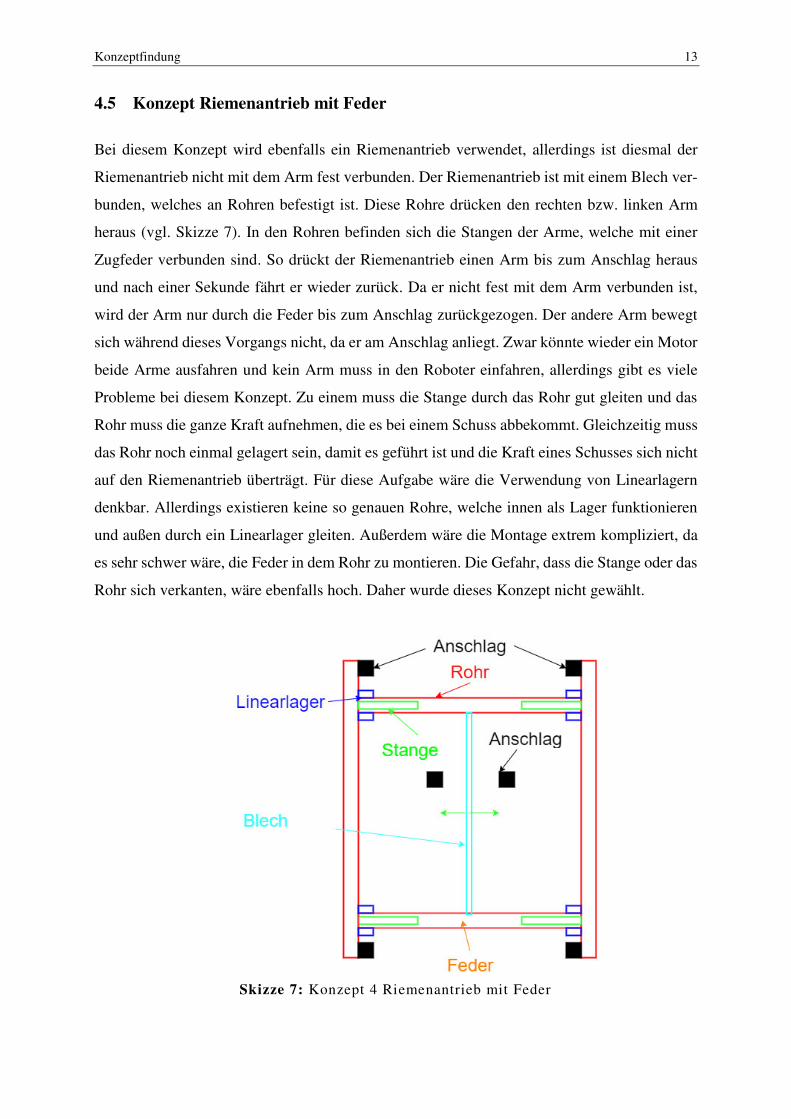
4.5 Konzept Riemenantrieb mit Feder
Bei diesem Konzept wird ebenfalls ein Riemenantrieb verwendet, allerdings ist diesmal der
Riemenantrieb nicht mit dem Arm fest verbunden. Der Riemenantrieb ist mit einem Blech ver-
bunden, welches an Rohren befestigt ist. Diese Rohre drücken den rechten bzw. linken Arm
heraus (vgl. Skizze 7). In den Rohren befinden sich die Stangen der Arme, welche mit einer
Zugfeder verbunden sind. So drückt der Riemenantrieb einen Arm bis zum Anschlag heraus
und nach einer Sekunde fährt er wieder zurück. Da er nicht fest mit dem Arm verbunden ist,
wird der Arm nur durch die Feder bis zum Anschlag zurückgezogen. Der andere Arm bewegt
sich während dieses Vorgangs nicht, da er am Anschlag anliegt. Zwar könnte wieder ein Motor
beide Arme ausfahren und kein Arm muss in den Roboter einfahren, allerdings gibt es viele
Probleme bei diesem Konzept. Zu einem muss die Stange durch das Rohr gut gleiten und das
Rohr muss die ganze Kraft aufnehmen, die es bei einem Schuss abbekommt. Gleichzeitig muss
das Rohr noch einmal gelagert sein, damit es geführt ist und die Kraft eines Schusses sich nicht
auf den Riemenantrieb überträgt. Für diese Aufgabe wäre die Verwendung von Linearlagern
denkbar. Allerdings existieren keine so genauen Rohre, welche innen als Lager funktionieren
und außen durch ein Linearlager gleiten. Außerdem wäre die Montage extrem kompliziert, da
es sehr schwer wäre, die Feder in dem Rohr zu montieren. Die Gefahr, dass die Stange oder das
Rohr sich verkanten, wäre ebenfalls hoch. Daher wurde dieses Konzept nicht gewählt.
Skizze 7: Konzept 4 Riemenantrieb mit Feder
Konstruktion 14
5 Konstruktion
Im nachfolgenden Kapitel wird die finale Konstruktion vorgestellt. Zuerst werden die Seitli-
chen Extensions erläutert und danach die oberen.
5.1 Funktionsweise
Bei der finalen Konstruktion wurden die Konzepte 3 und 4 weiterentwickelt. Die Extensions
werden von einer Zahnstange herausgeschoben, sind aber nicht fest mit der Zahnstange ver-
bunden. So wird wieder nur ein Motor für die seitlichen Extensions benötigt. Eine Feder zieht
die Extensions wieder in ihre Ausgangsposition. Die Zahnstange wird von einem Zahnrad in
Bewegung gesetzt, welches von einem Motor angetrieben wird. Zwischen dem Motor und der
Zahnstange befinden sich eine Rutschkupplung und ein Getriebe.
5.2 Seitliche Extensions
Im folgenden Unterkapitel sind die seitlichen Extensions beschrieben. Zuerst wird der Aufbau
erläutert und danach wird auf den Antrieb und auf die Arm Konstruktion eingegangen. Danach
wird noch die Montage beschrieben.
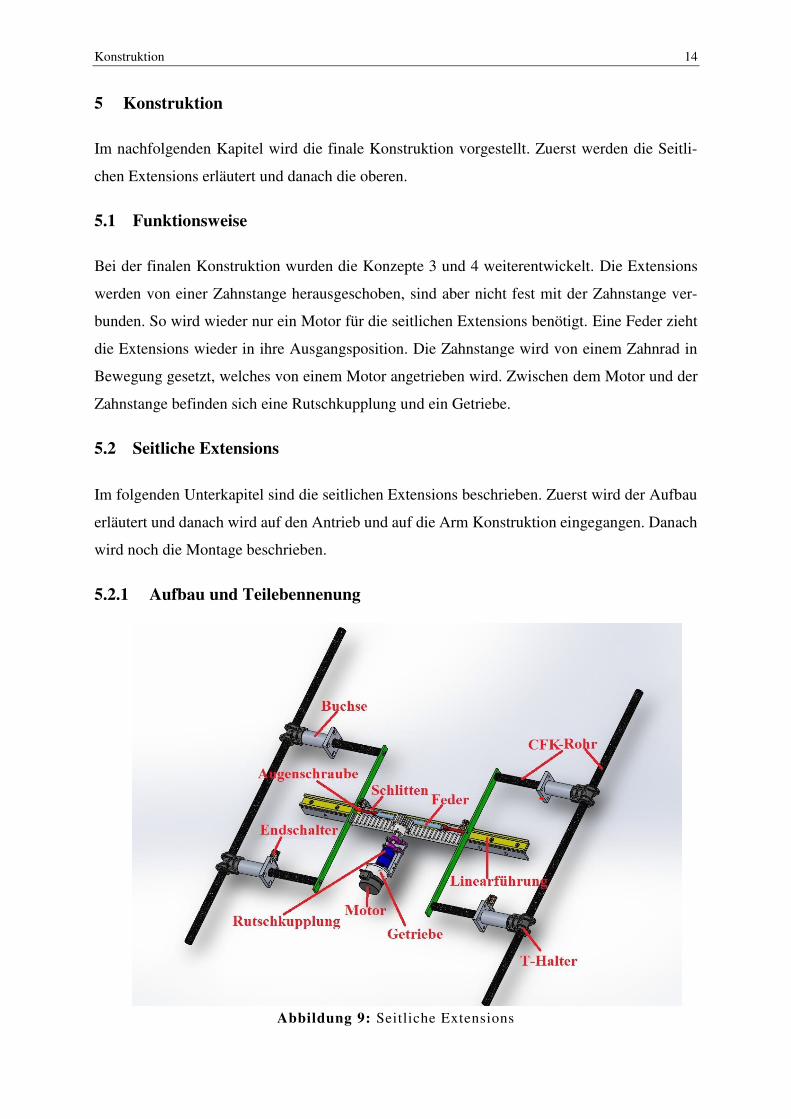
5.2.1 Aufbau und Teilebennenung
Abbildung 9: Seitliche Extensions
Konstruktion 15
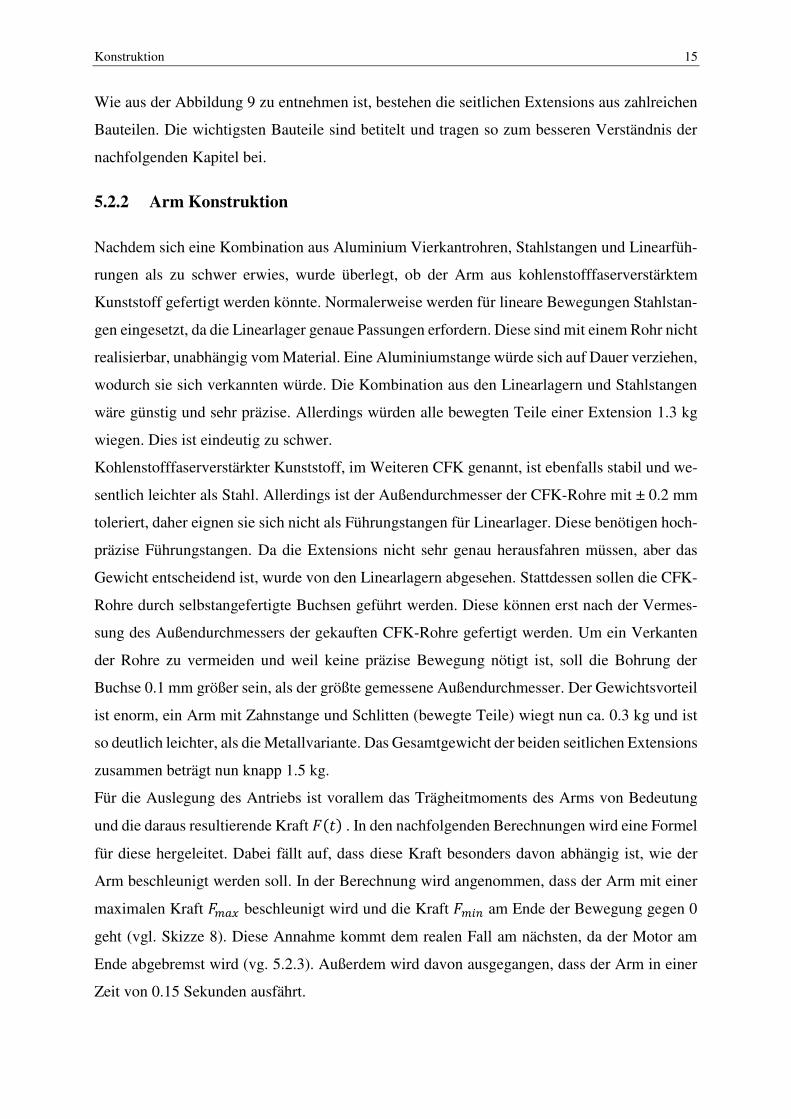
Wie aus der Abbildung 9 zu entnehmen ist, bestehen die seitlichen Extensions aus zahlreichen
Bauteilen. Die wichtigsten Bauteile sind betitelt und tragen so zum besseren Verständnis der
nachfolgenden Kapitel bei.
5.2.2 Arm Konstruktion
Nachdem sich eine Kombination aus Aluminium Vierkantrohren, Stahlstangen und Linearfüh-
rungen als zu schwer erwies, wurde überlegt, ob der Arm aus kohlenstofffaserverstärktem
Kunststoff gefertigt werden könnte. Normalerweise werden für lineare Bewegungen Stahlstan-
gen eingesetzt, da die Linearlager genaue Passungen erfordern. Diese sind mit einem Rohr nicht
realisierbar, unabhängig vom Material. Eine Aluminiumstange würde sich auf Dauer verziehen,
wodurch sie sich verkannten würde. Die Kombination aus den Linearlagern und Stahlstangen
wäre günstig und sehr präzise. Allerdings würden alle bewegten Teile einer Extension 1.3 kg
wiegen. Dies ist eindeutig zu schwer.
Kohlenstofffaserverstärkter Kunststoff, im Weiteren CFK genannt, ist ebenfalls stabil und we-
sentlich leichter als Stahl. Allerdings ist der Außendurchmesser der CFK-Rohre mit ± 0.2 mm
toleriert, daher eignen sie sich nicht als Führungstangen für Linearlager. Diese benötigen hoch-
präzise Führungstangen. Da die Extensions nicht sehr genau herausfahren müssen, aber das
Gewicht entscheidend ist, wurde von den Linearlagern abgesehen. Stattdessen sollen die CFK-
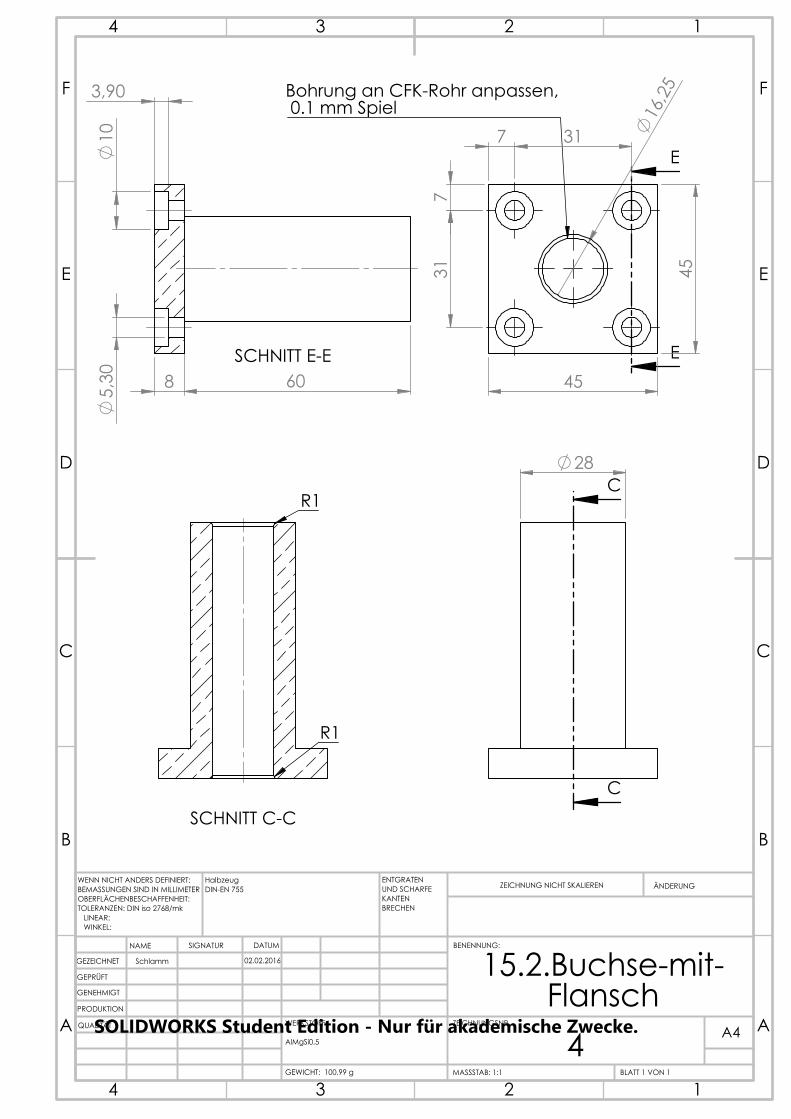
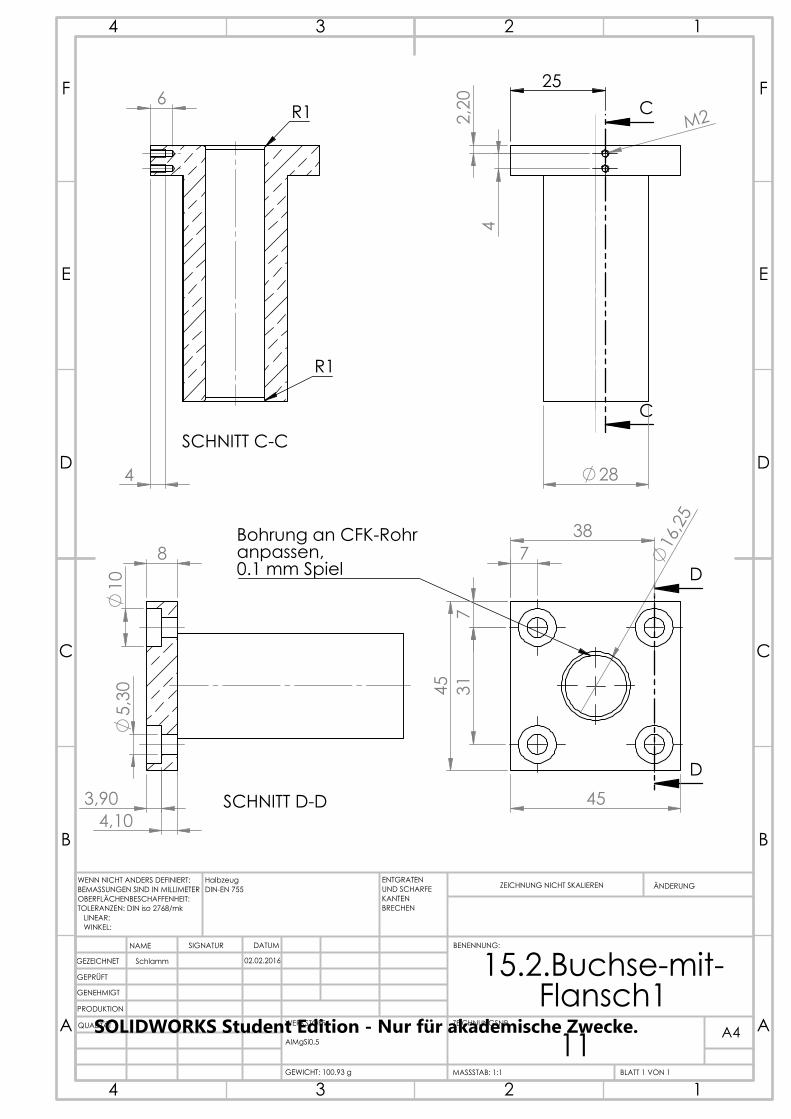
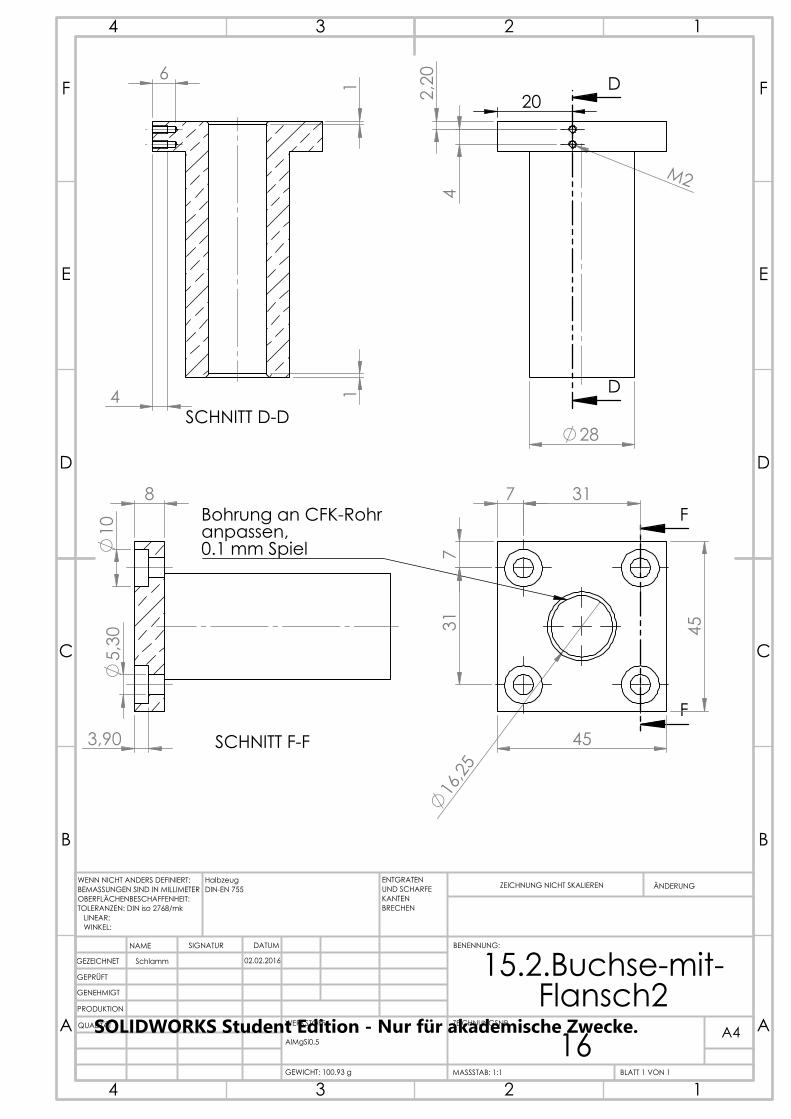
Rohre durch selbstangefertigte Buchsen geführt werden. Diese können erst nach der Vermes-
sung des Außendurchmessers der gekauften CFK-Rohre gefertigt werden. Um ein Verkanten
der Rohre zu vermeiden und weil keine präzise Bewegung nötigt ist, soll die Bohrung der
Buchse 0.1 mm größer sein, als der größte gemessene Außendurchmesser. Der Gewichtsvorteil
ist enorm, ein Arm mit Zahnstange und Schlitten (bewegte Teile) wiegt nun ca. 0.3 kg und ist
so deutlich leichter, als die Metallvariante. Das Gesamtgewicht der beiden seitlichen Extensions
zusammen beträgt nun knapp 1.5 kg.
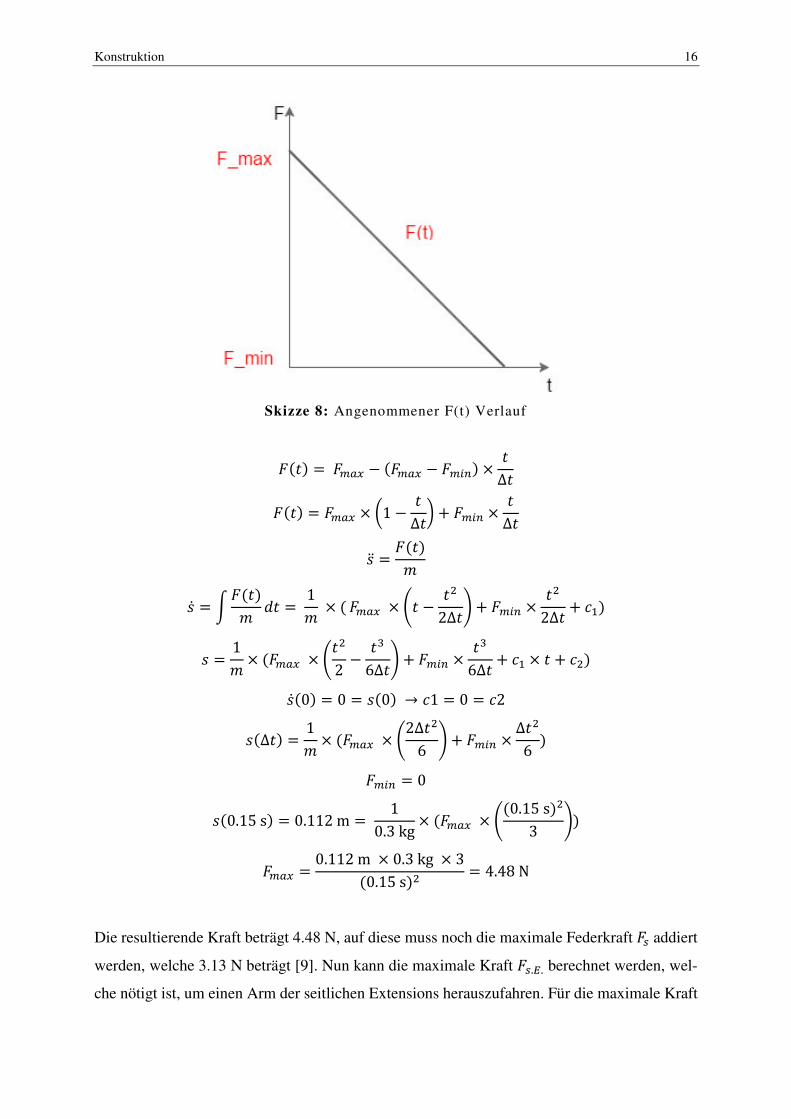
Für die Auslegung des Antriebs ist vorallem das Trägheitmoments des Arms von Bedeutung
und die daraus resultierende Kraft � . In den nachfolgenden Berechnungen wird eine Formel
für diese hergeleitet. Dabei fällt auf, dass diese Kraft besonders davon abhängig ist, wie der
Arm beschleunigt werden soll. In der Berechnung wird angenommen, dass der Arm mit einer
maximalen Kraft � � beschleunigt wird und die Kraft � � am Ende der Bewegung gegen 0
geht (vgl. Skizze 8). Diese Annahme kommt dem realen Fall am nächsten, da der Motor am
Ende abgebremst wird (vg. 5.2.3). Außerdem wird davon ausgegangen, dass der Arm in einer
Zeit von 0.15 Sekunden ausfährt.
Konstruktion 16
� = � � − � � − � � × ∆ � = � � × ( − ∆ ) + � � × ∆
= ��
= ∫ �� = � × � � × − ∆ + � � × ∆ +
= � × � � × − ∆ + � � × ∆ + × + = = → = = ∆ = � × � � × ∆ + � � × ∆ � � = . s = . m = . kg × � � × . s
� � = . m × . kg ×. s = . N
Die resultierende Kraft beträgt 4.48 N, auf diese muss noch die maximale Federkraft �� addiert
werden, welche 3.13 N beträgt [9]. Nun kann die maximale Kraft ��.�. berechnet werden, wel-
che nötigt ist, um einen Arm der seitlichen Extensions herauszufahren. Für die maximale Kraft
Skizze 8: Angenommener F(t) Verlauf
Konstruktion 17
� .�. für die obere Extension, muss auf die resultierende Kraft die Gewichtskraft �� des Arms
addiert werden.
��.�. = � � + �� ��.�. = . N + . N = . N � .�. = � � + �� � .�. = . N + . ms × . kg = . N
Für die seitliche Extensions beträgt die Kraft 7.61 N und für die obere 7.423 N. Da bei den
Berechnungen die Reibung vernachlässigt wurde, sollte ein großzügiger Sicherheitsfaktor ver-
wendet werden. Außerdem sollte drauf geachtet werden, dass der Arm nicht unter 0.15 Sekun-
den ausfährt, da sonst die Kraft stark ansteigt.
Die Rohre welche durch die Buchsen gleiten, und das Außenrohr werden durch einen CFK-T-
Halter miteinander verbunden. Der T-Halter verfügt über sechs Schrauben, welche eine feste
Verbindung zwischen den Rohren gewährleisten. Die äußerste Seite des Halters ist ca. 10 mm
vom Rohr entfernt, dadurch kann der Arm ca. 10 mm weniger ausfahren. Bei anderen Haltern
war dieser Abstand größer, wodurch wesentlich mehr Strecke verloren ging.
Die Rohre, welche durch die Buchsen gleiten, müssen auf der einen Seite mit einem Alumini-
umblech verbunden sein. Dafür wird eine kleine Aluminium Buchse mit einer Gewindebohrung
in das Rohr geklebt. Das Blech kann nun mit einer Schraube mit dem Rohr verbunden werden.
5.2.3 Antrieb
Für den Antrieb wurde der Motor EC 45 flat, 50 Watt, n = 5240 min− , und das Stirnradgetriebe
GS 45 A, i = 5, von Maxon Motor ausgesucht. Der Motor wird von der Steuerung ESCON 36/3
EC gesteuert. Die Steuerung bekommt das Signal, dass der Arm zu einer bestimmten Seite
ausfahren soll, dann sendet sie ein Signal an den Motor, welcher anfängt, sich zu drehen. Das
maximale Dauerdrehmoment wird durch das Getriebe auf ca. 0.4 Nm verstärkt. Über das Zahn-
rad wird das Drehmoment in eine lineare Kraft umgewandelt. Um diese Kraft �� zu berechnen,
muss das Drehmoment durch den Hebelweg, in diesem Fall der Radius des Zahnrads = mm [10], geteilt werden.
� = � = . Nm . m = . N

Konstruktion 18
Der Antrieb kann eine Kraft von 19.48 N aufbringen, die benötigte Kraft beträgt ca. 7.5 N (vgl.
5.2.2) so liegt der Sicherheitsfaktor bei ca. 2.5. Mit diesem Sicherheitsfaktor ist die Reibung
abgedeckt und die Kraft sollte ausreichen. Falls sie dennoch nicht ausreicht, darf der Motor
kurzzeitig überlastet werden.
Die Getriebewelle dreht sich mit einer Nenndrehzahl von ca. 1000 min− , wodurch der Arm in
0.051 Sekunden ausgefahren wird.
mm� ∗ mm = . U . U s− = . s
Allerdings sollte der Motor nicht mit maximaler Drehzahl drehen, da sonst die Kraft stark an-
steigt (vgl. 5.2.2). Bei den ersten Tests sollte der Arm nicht schneller als in 0.15 s ausgefahren
sein, dies entspricht einer Getriebedrehzahl von ca. 333 min− . Erst nach einigen erfolgreichen
Tests kann die Drehzahl leicht erhöht und so getestet werden, ob der Motor das Drehmoment
noch aufbringen kann. Bei einer Ausfahrzeit des Armes von 0.15 s, muss der Ball, bei einer
Ballgeschwindigkeit von 20 ms mindestens 3 m vom Torwart entfernt sein, damit der Arm noch
rechtzeitig ausfährt.
ms × . s = m
Auf der Getriebewelle ist eine Rutschkupplung montiert, welche zur Sicherheit dient. Die
Welle, welche auf der anderen Seite an der Rutschkupplung montiert ist, ist durch Stehlager
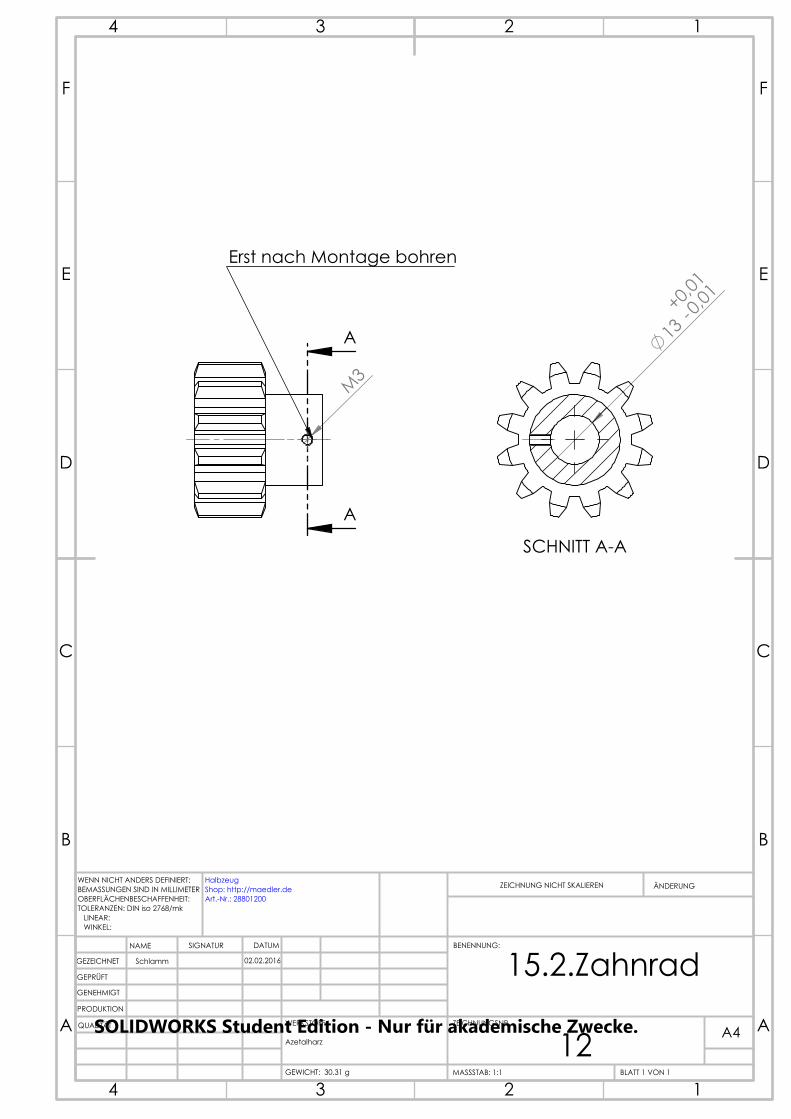
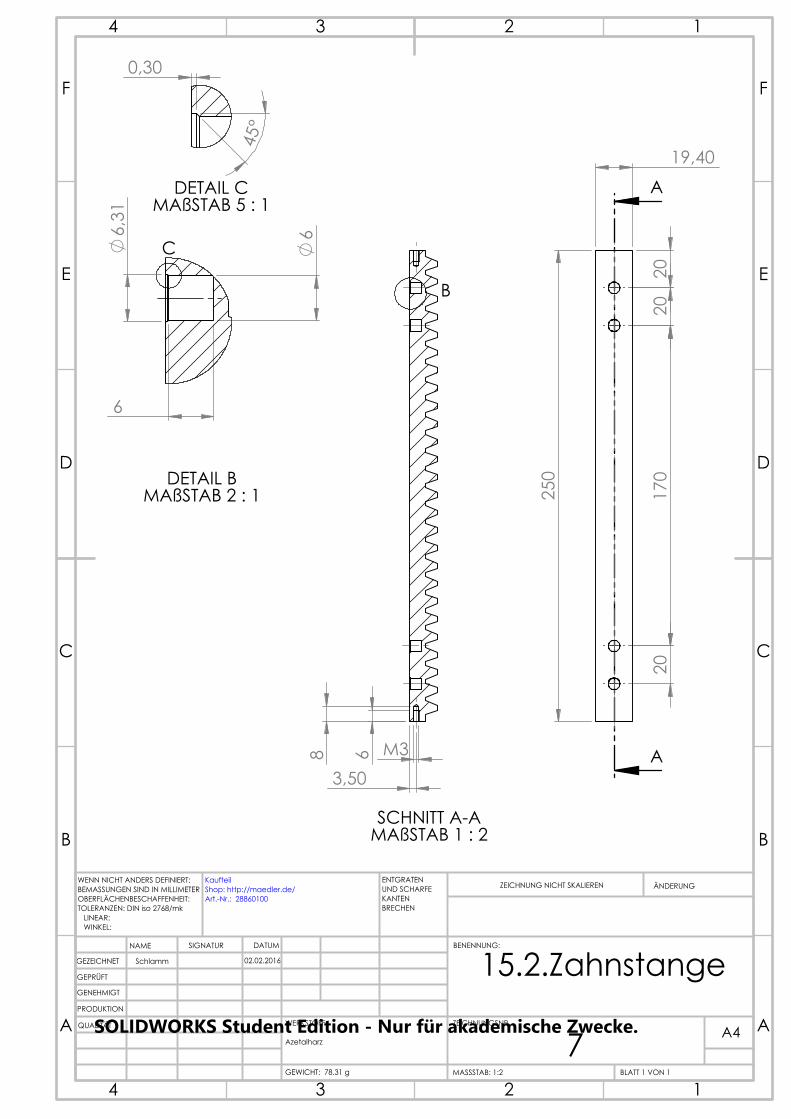
gelagert und treibt das Zahnrad an. Durch das Zahnrad bewegt sich die Zahnstange, welche auf
Schlitten einer Linearführung montiert ist. Die Linearführung gewährleistet eine saubere und
präzise Führung. Das Zahnrad und die Zahnstange bestehen jeweils aus Acrylharz, wodurch sie
günstig und leicht sind. Es wurde sich für das Modul (Maß für die Größe der Zähne) 3 entschie-
den, da es stabiler als ein kleineres Modul und nur geringfügig schwerer ist. Die Zahnstange
schiebt jeweils einen Arm aus. Damit der Kunststoff nicht jedes Mal auf das Blech schlägt, ist
ein kleines Blech fest auf jeder Seite der Zahnstange montiert. Das grüne Blech ist mit beiden
Führungsrohren verbunden. Dadurch, dass die Kraft in der Mitte des Bleches übertragen wird,
werden beide Rohre mit der gleichen Kraft ausgefahren. Dies gewährleistet ein sauberes Aus-
fahren ohne, dass die Rohre verkanten.
Konstruktion 19
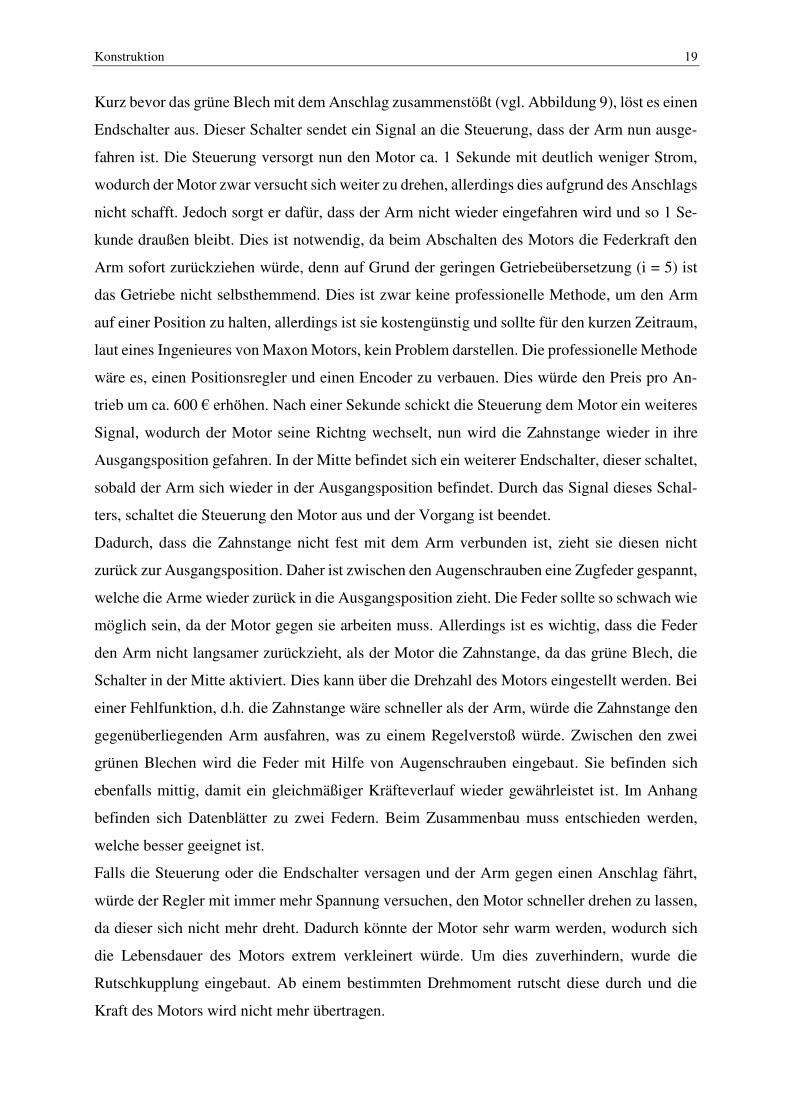
Kurz bevor das grüne Blech mit dem Anschlag zusammenstößt (vgl. Abbildung 9), löst es einen
Endschalter aus. Dieser Schalter sendet ein Signal an die Steuerung, dass der Arm nun ausge-
fahren ist. Die Steuerung versorgt nun den Motor ca. 1 Sekunde mit deutlich weniger Strom,
wodurch der Motor zwar versucht sich weiter zu drehen, allerdings dies aufgrund des Anschlags
nicht schafft. Jedoch sorgt er dafür, dass der Arm nicht wieder eingefahren wird und so 1 Se-
kunde draußen bleibt. Dies ist notwendig, da beim Abschalten des Motors die Federkraft den
Arm sofort zurückziehen würde, denn auf Grund der geringen Getriebeübersetzung (i = 5) ist
das Getriebe nicht selbsthemmend. Dies ist zwar keine professionelle Methode, um den Arm
auf einer Position zu halten, allerdings ist sie kostengünstig und sollte für den kurzen Zeitraum,
laut eines Ingenieures von Maxon Motors, kein Problem darstellen. Die professionelle Methode
wäre es, einen Positionsregler und einen Encoder zu verbauen. Dies würde den Preis pro An-
trieb um ca. 600 € erhöhen. Nach einer Sekunde schickt die Steuerung dem Motor ein weiteres
Signal, wodurch der Motor seine Richtng wechselt, nun wird die Zahnstange wieder in ihre
Ausgangsposition gefahren. In der Mitte befindet sich ein weiterer Endschalter, dieser schaltet,
sobald der Arm sich wieder in der Ausgangsposition befindet. Durch das Signal dieses Schal-
ters, schaltet die Steuerung den Motor aus und der Vorgang ist beendet.
Dadurch, dass die Zahnstange nicht fest mit dem Arm verbunden ist, zieht sie diesen nicht
zurück zur Ausgangsposition. Daher ist zwischen den Augenschrauben eine Zugfeder gespannt,
welche die Arme wieder zurück in die Ausgangsposition zieht. Die Feder sollte so schwach wie
möglich sein, da der Motor gegen sie arbeiten muss. Allerdings ist es wichtig, dass die Feder
den Arm nicht langsamer zurückzieht, als der Motor die Zahnstange, da das grüne Blech, die
Schalter in der Mitte aktiviert. Dies kann über die Drehzahl des Motors eingestellt werden. Bei
einer Fehlfunktion, d.h. die Zahnstange wäre schneller als der Arm, würde die Zahnstange den
gegenüberliegenden Arm ausfahren, was zu einem Regelverstoß würde. Zwischen den zwei
grünen Blechen wird die Feder mit Hilfe von Augenschrauben eingebaut. Sie befinden sich
ebenfalls mittig, damit ein gleichmäßiger Kräfteverlauf wieder gewährleistet ist. Im Anhang
befinden sich Datenblätter zu zwei Federn. Beim Zusammenbau muss entschieden werden,
welche besser geeignet ist.
Falls die Steuerung oder die Endschalter versagen und der Arm gegen einen Anschlag fährt,
würde der Regler mit immer mehr Spannung versuchen, den Motor schneller drehen zu lassen,
da dieser sich nicht mehr dreht. Dadurch könnte der Motor sehr warm werden, wodurch sich
die Lebensdauer des Motors extrem verkleinert würde. Um dies zuverhindern, wurde die
Rutschkupplung eingebaut. Ab einem bestimmten Drehmoment rutscht diese durch und die
Kraft des Motors wird nicht mehr übertragen.
Konstruktion 20
Es wurde sehr darauf geachtet, dass sich die Getriebewelle auf der gleichen Höhe befindet, wie
die Bohrung der Stehlager. Wäre dies nicht der Fall und wären die zwei Wellen nicht exakt
parallel, so würde die Lebenszeit des Getriebes ernorm verkürzt werden.
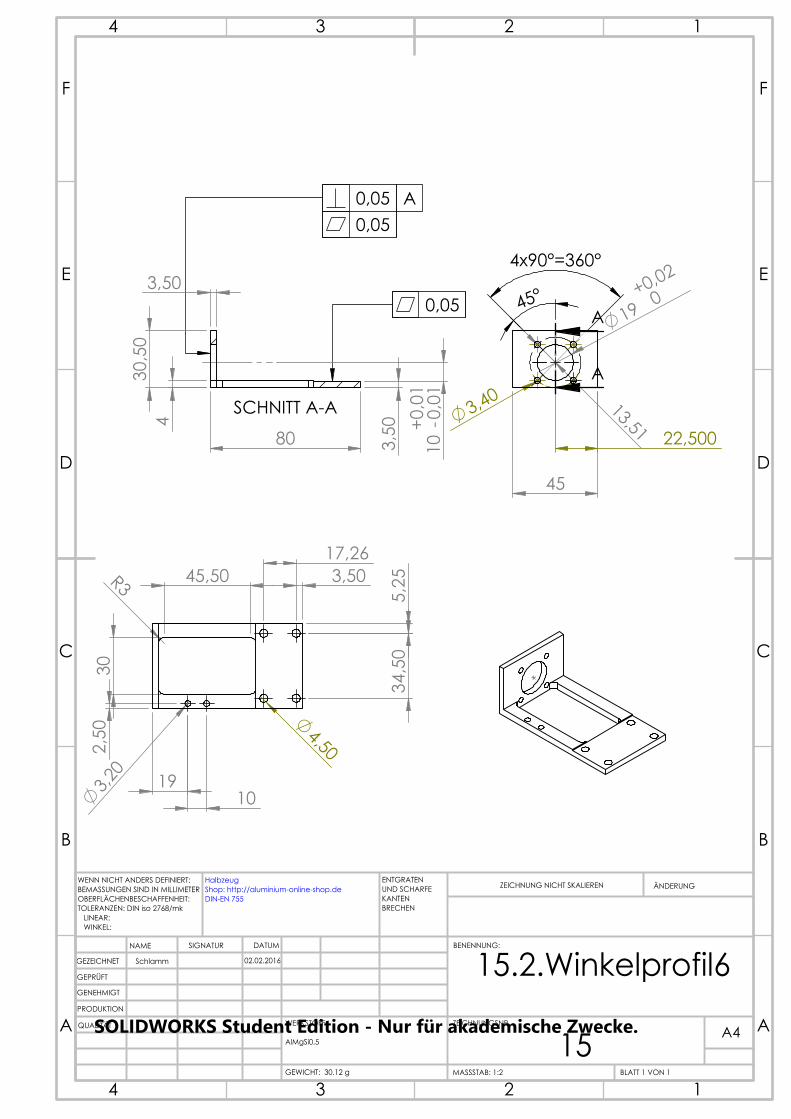
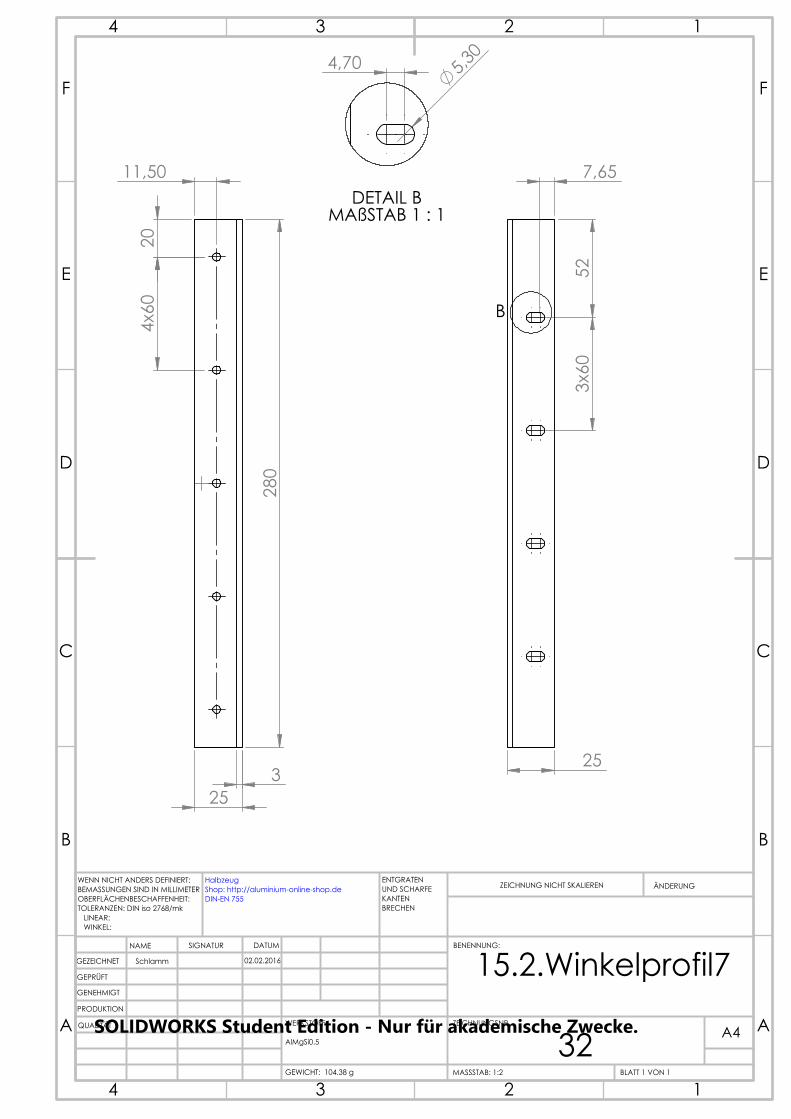
5.2.4 Montage
Die Linearführung ist auf einem Winkelprofil montiert, welches mit Langlöchern an das Grund-
gerüst des Roboters montiert wird. Durch die Langlöcher kann der Abstand zwischen der Zahn-
stange und dem Zahnrad eingestellt werden. Dieser Abstand ist abhängig von der Teilhöhe ℎ ,
welche 12 mm beträgt [11] und vom Teilkreisdurchmesser , welcher 36 mm beträgt [10].
Der Abstand � zwischen der Mittelachse des Zahnrads und der Unterkante der Zahnstange,
kann mit folgender Gleichung berechnet werden und beträgt 30 mm.
� = ℎ +
Die Endschalter können ebenfalls mit Langlöchern positioniert werden, wodurch variert wer-
den kann, wann sie auslösen. Die exakte Position kann erst nach einigen Tests ermittelt werden.
Die Buchsen, welche als Führung dienen, müssen ebenfalls an das Grundgerüst montiert wer-
den. Jede Buchse besitzt 4 Bohrungen für Schrauben, womit sie an dem Grundgerüst montiert
werden kann. Das Winkelprofil, worauf die Stehlager montiert sind, muss auch mit dem Gerüst
verbunden werden, es besitzt dafür noch keine Bohrungen. Es steht daher noch frei, wie es
genau befestigt werden soll, dadurch kann es an das Gerüst angepasst werden. Es sollte darauf
geachtet werden, dass es absolut parallel zur oberen Seite der Linearführung ist.
Konstruktion 21
5.3 Obere Extension
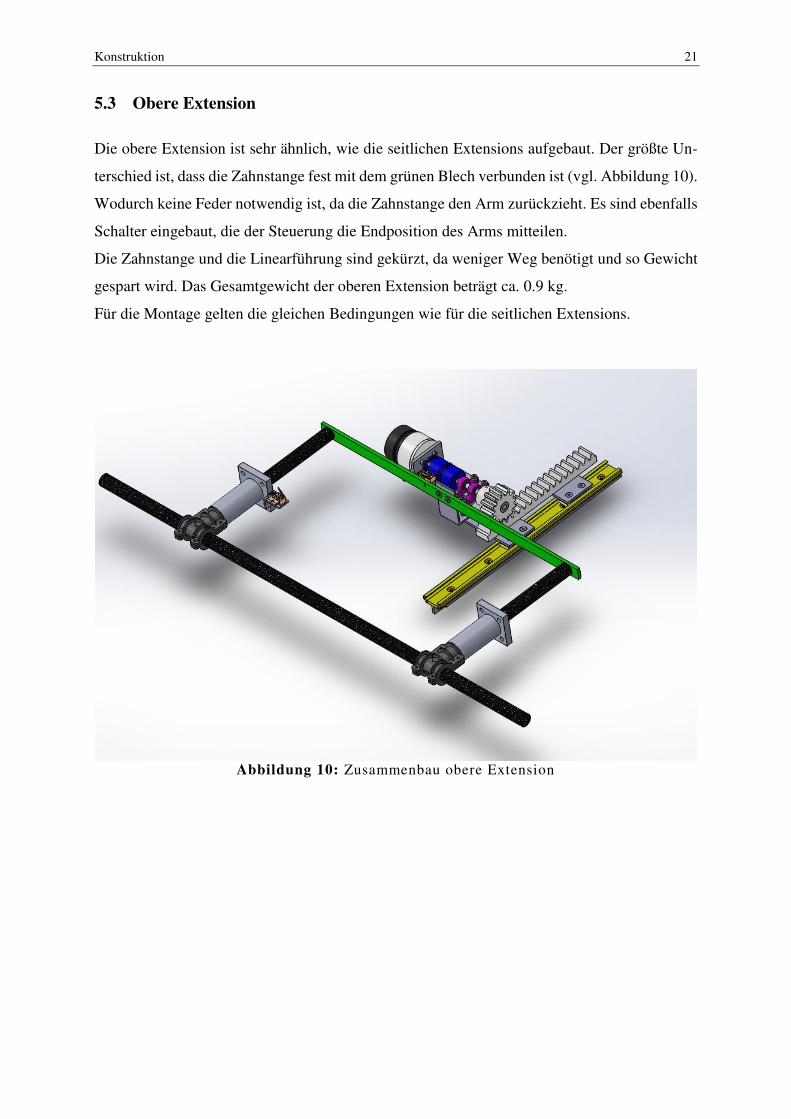
Die obere Extension ist sehr ähnlich, wie die seitlichen Extensions aufgebaut. Der größte Un-
terschied ist, dass die Zahnstange fest mit dem grünen Blech verbunden ist (vgl. Abbildung 10).
Wodurch keine Feder notwendig ist, da die Zahnstange den Arm zurückzieht. Es sind ebenfalls
Schalter eingebaut, die der Steuerung die Endposition des Arms mitteilen.
Die Zahnstange und die Linearführung sind gekürzt, da weniger Weg benötigt und so Gewicht
gespart wird. Das Gesamtgewicht der oberen Extension beträgt ca. 0.9 kg.
Für die Montage gelten die gleichen Bedingungen wie für die seitlichen Extensions.
Abbildung 10: Zusammenbau obere Extension
Konstruktion 22
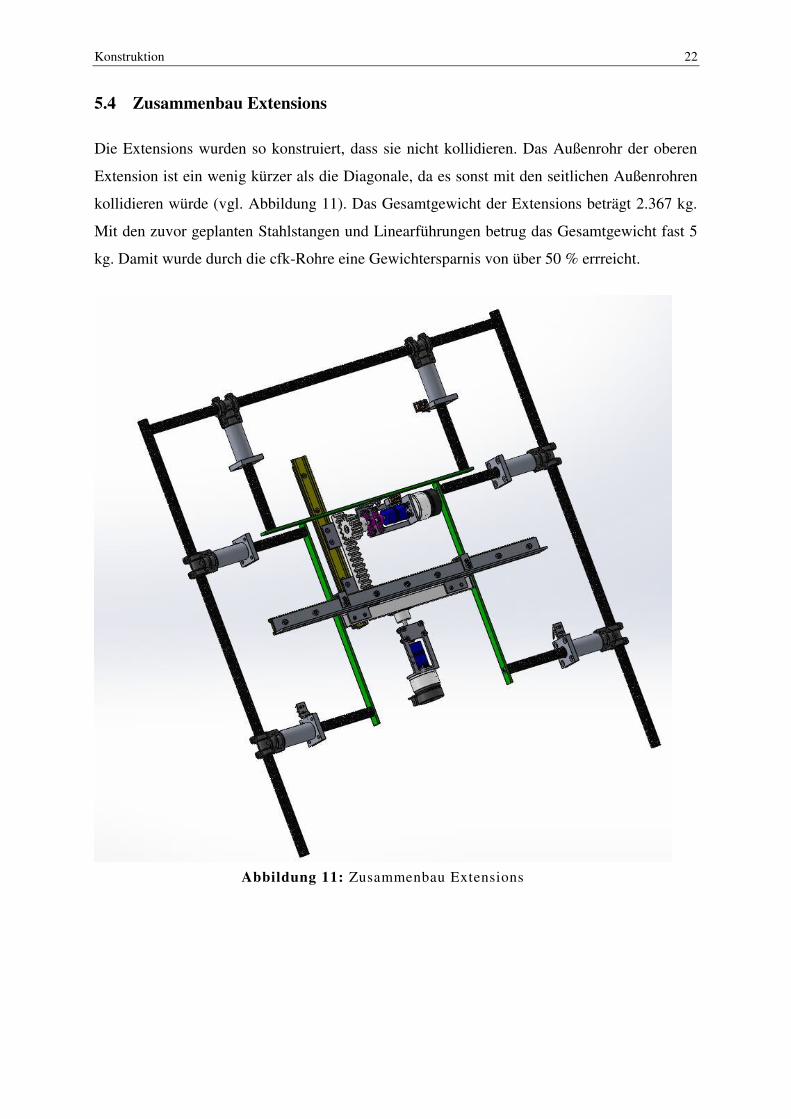
5.4 Zusammenbau Extensions
Die Extensions wurden so konstruiert, dass sie nicht kollidieren. Das Außenrohr der oberen
Extension ist ein wenig kürzer als die Diagonale, da es sonst mit den seitlichen Außenrohren
kollidieren würde (vgl. Abbildung 11). Das Gesamtgewicht der Extensions beträgt 2.367 kg.
Mit den zuvor geplanten Stahlstangen und Linearführungen betrug das Gesamtgewicht fast 5
kg. Damit wurde durch die cfk-Rohre eine Gewichtersparnis von über 50 % errreicht.
Abbildung 11: Zusammenbau Extensions
Ermittlung der Kosten 23
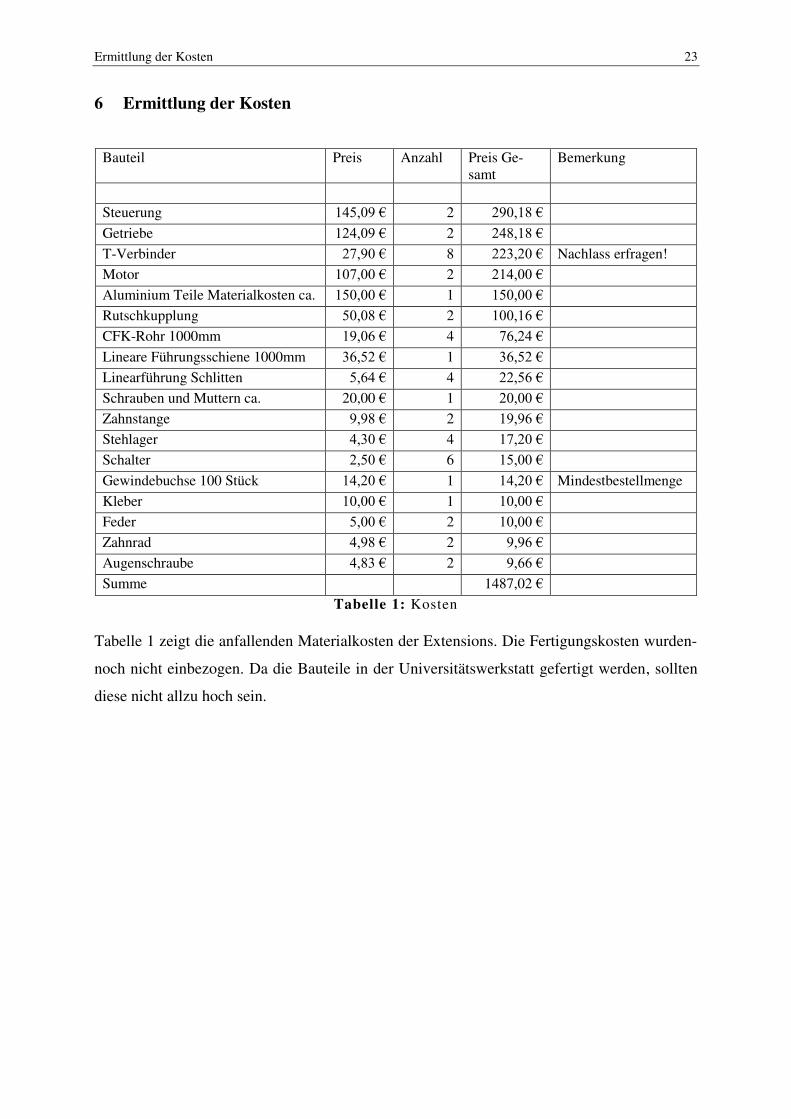
6 Ermittlung der Kosten
Bauteil Preis Anzahl Preis Ge-samt
Bemerkung
Steuerung 145,09 € 2 290,18 €
Getriebe 124,09 € 2 248,18 €
T-Verbinder 27,90 € 8 223,20 € Nachlass erfragen!
Motor 107,00 € 2 214,00 €
Aluminium Teile Materialkosten ca. 150,00 € 1 150,00 €
Rutschkupplung 50,08 € 2 100,16 €
CFK-Rohr 1000mm 19,06 € 4 76,24 €
Lineare Führungsschiene 1000mm 36,52 € 1 36,52 €
Linearführung Schlitten 5,64 € 4 22,56 €
Schrauben und Muttern ca. 20,00 € 1 20,00 €
Zahnstange 9,98 € 2 19,96 €
Stehlager 4,30 € 4 17,20 €
Schalter 2,50 € 6 15,00 €
Gewindebuchse 100 Stück 14,20 € 1 14,20 € Mindestbestellmenge
Kleber 10,00 € 1 10,00 €
Feder 5,00 € 2 10,00 €
Zahnrad 4,98 € 2 9,96 €
Augenschraube 4,83 € 2 9,66 €
Summe 1487,02 €
Tabelle 1: Kosten
Tabelle 1 zeigt die anfallenden Materialkosten der Extensions. Die Fertigungskosten wurden-
noch nicht einbezogen. Da die Bauteile in der Universitätswerkstatt gefertigt werden, sollten
diese nicht allzu hoch sein.

Zusammenfassung und Ausblick 24
7 Zusammenfassung und Ausblick
Die vorliegende Arbeit beschäftigt sich mit der Konstruktion von neuen Extensions für den
Torwart-Roboter des Teams Carpe Noctem Cassel. Die Extensions sind die Arme des Torwarts
und so sehr wichtige Komponenten um ein Tor zu verhindern. Das bisherige System wurde mit
Druckluft betrieben, allerdings war es oft ein logistischer Aufwand, über Druckluft bei den
Turnieren zu verfügen. Außerdem waren die Extensions instabil und sind so oft ausgefallen.
Durch eine Neukonstruktion sollte ein zuverlässigeres System gefunden werden, welches
elektrisch betrieben wird.
Am Anfang dieser Arbeit wurden verschiedene Konzepte ausgearbeitet und die Vor- und Nach-
teile dieser erläutert. Ein Konzept von einer Radialbewegung wurde komplett konstruiert, al-
lerdings ist dann aufgefallen, dass der Arm bei Radialbewegungen die Abmaße temporär über-
schreitet. Daher wurde sich auf eine Linearbewegung konzentriert. Für diese wurden genaue
Konzepte ausgearbeitet und sich dann auf eins spezialisiert. Mit diesem Konzept kann ein An-
trieb beide seitlichen Extensions ausfahren, wodurch ein ganzer Antrieb gespart wird.
Bei diesem Konzept treibt ein Motor über ein Zahnrad eine Zahnstange an. Diese Zahnstange
ist auf Schlitten einer Linearführung montiert, und drückt über ein Blech den Arm raus. Der
Arm wird bei den seitlichen Extensions über eine Feder und bei der oberen Extension vom
Motor zurückgezogen. Der Arm besteht komplett aus cfk-Rohren und ist so extrem leicht. Bei
der gesamten Konstruktion wurde besonders auf Gewicht und Stabilität geachtet.
Der Roboter konnte aus zeitlichen Gründen nicht gefertigt werden, daher muss die Funktiona-
lität des Systems noch erporbt werden. Sobald alles zusammengebaut ist, sollte die Steuerung
programmiert und der Antrieb mehrmals getestet werden. Es sollte mit einem geringen Strom
angefangen werden, außerdem sollte die Rutschkupplung bereits eingestellt sein. Nachdem der
Antrieb funktioniert, kann eine geeignete Feder gewählt werden. Außerdem müssen die End-
schalter richtig positioniert werden. Nachdem alles richtig eingestellt ist, sollten die Extensions
zuverlässig funktionieren. Die vorgestellten Extensions sind eine große Verbesserung im Ver-
gleich zu den alten, da sie wesentlich stabiler sind und keine Druckluft benötigen.
Literaturverzeichnis 25
8 Literaturverzeichnis
[1] Middle Size Robot League Rules and Regulations for 2016, http://wiki.robocup.org/im-ages/0/0f/Robocup-msl-rules-2016.pdf (abgerufen am 03.03.2016)
[2] SolidWorks, http://www.solidworks.de/ (abgerufen am 03.03.2016)
[3] SolidWorks, http://blogs.solidworks.com/teacher/wp-content/uploads/si-tes/3/6a00d83451706569e20168ec196f89970c.jpg (abgerufen am 03.03.2016)
[4] Tremba GmbH, http://www.tremba.de/hubmagnete/hubmagnete.php (abgerufen am 03.03.2016)
[5] Festo AG & Co. KG, https://www.festo.com/wiki/de/Linearmotoren (abgerufen am 03.03.2016)
[6] Conrad Electronic SE, https://www.conrad.de/medias/glo-bal/ce/5000_5999/5000/5030/5037/503743_BB_00_FB.EPS_1000.jpgO. Föllinger: Regelungstechnik I. Braunschweig: Vieweg, 1982. (abgerufen am 03.03.2016)
[7] Direct Industry, http://img.directindustry.de/images_di/photo-m2/8191-5112265.jpg (abgerufen am 03.03.2016)
[8] KeNext, http://www.ke-next.de/files/up-load/post/keg/2015/03/6057/post_image_96828_1.jpg (abgerufen am 03.03.2016)
[9] Anhang, Datenblatt-Feder2, F2
[10] Mädler GmbH, Artikelnummer 28801200, https://www.maedler.de/pro-duct/1643/1618/1034/1042/stirnzahnraeder-aus-azetalharz-modul-3 (abgerufen am 03.03.2016)
[11] Mädler GmbH, Artikelnummer 28860100 https://www.maedler.de/pro-duct/1643/1618/2130/zahnstangen-kunststoff-azetalharz-gespritzt-modul-05-bis-3 (ab-gerufen am 03.03.2016)
Literaturverzeichnis 26
Anhang
410
15
17,
50
208
1
4
377
7,50 6
A
A
4
B
C
SCHNITT A-A
5,
30
2,35 9
0°
DETAIL BMAßSTAB 1 : 1
3,0
8
2,15
7,4
2
DETAIL CMAßSTAB 1 : 1
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
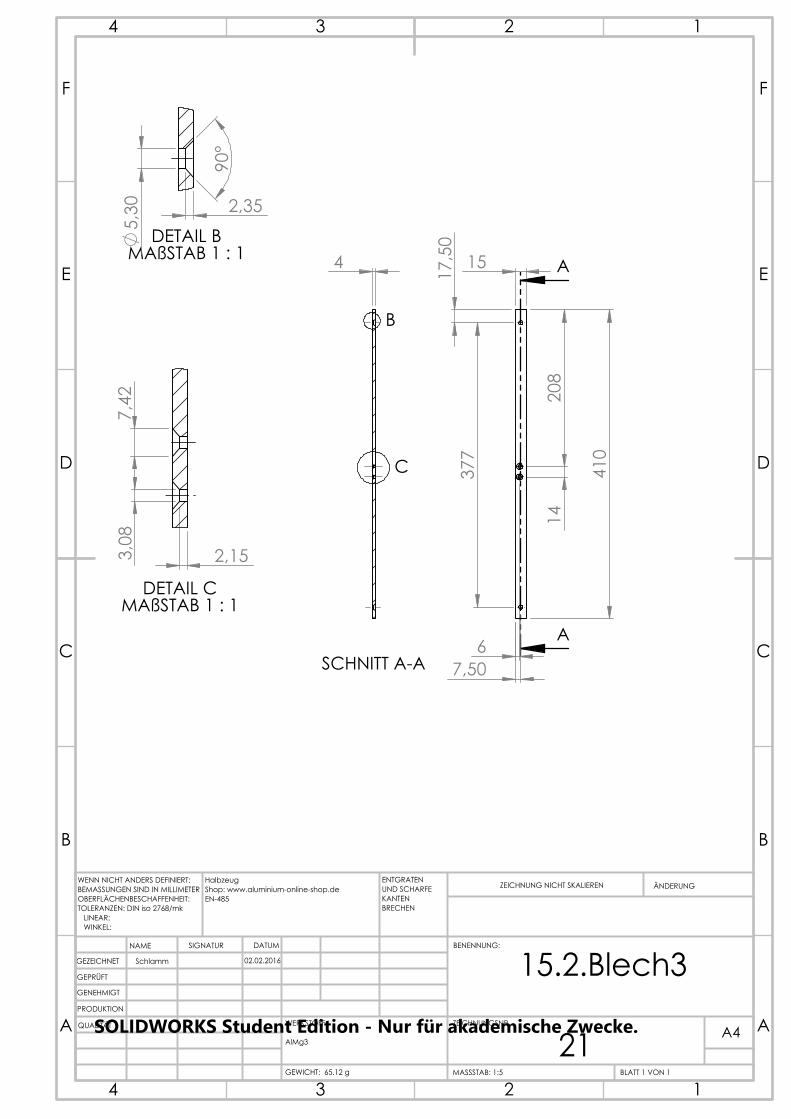
15.2.Blech3
21
02.02.2016Schlamm
GEWICHT: 65.12 g
A4
BLATT 1 VON 1MASSSTAB: 1:5
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
AlMg3
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugShop: www.aluminium-online-shop.deEN-485
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
40
40
100
15
10 20
8
25
5
3,2
0
10
78,
50
14
A
A 3
B
C
SCHNITT A-A
90°
1,85
4,
30
DETAIL BMAßSTAB 2 : 1
90°
3,
20
1,40
DETAIL CMAßSTAB 2 : 1
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
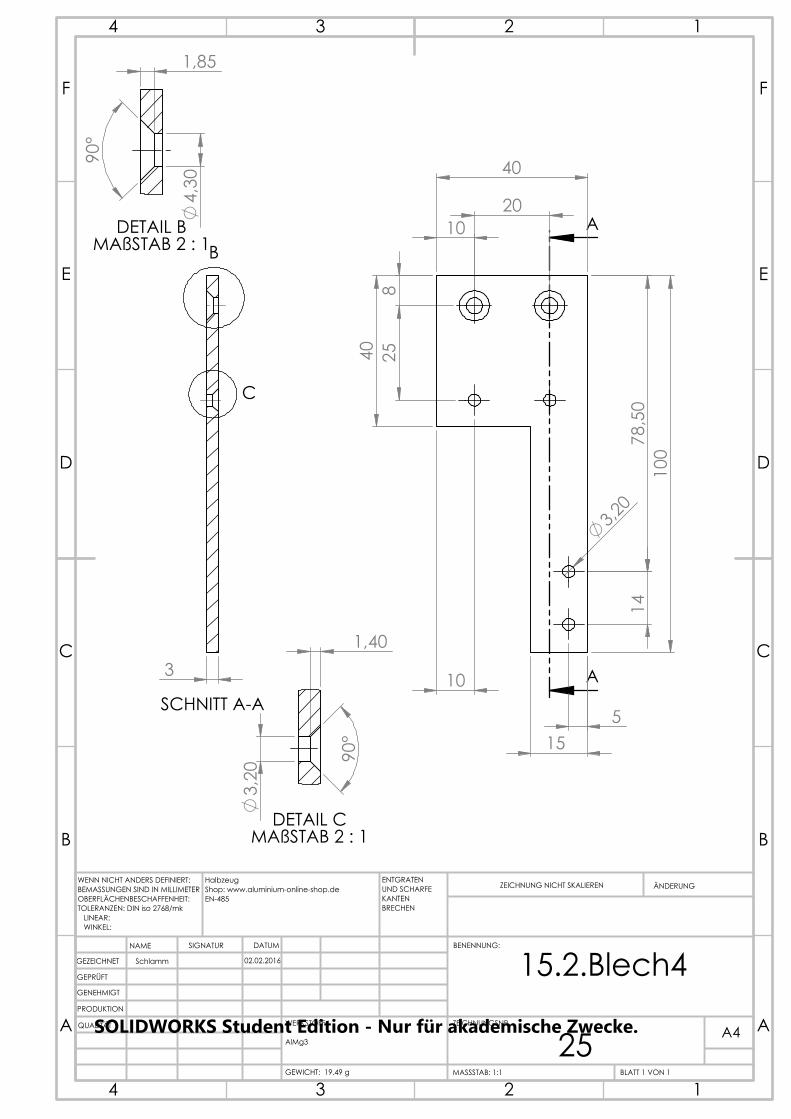
15.2.Blech4
25
02.02.2016Schlamm
GEWICHT: 19.49 g
A4
BLATT 1 VON 1MASSSTAB: 1:1
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
AlMg3
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugShop: www.aluminium-online-shop.deEN-485
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
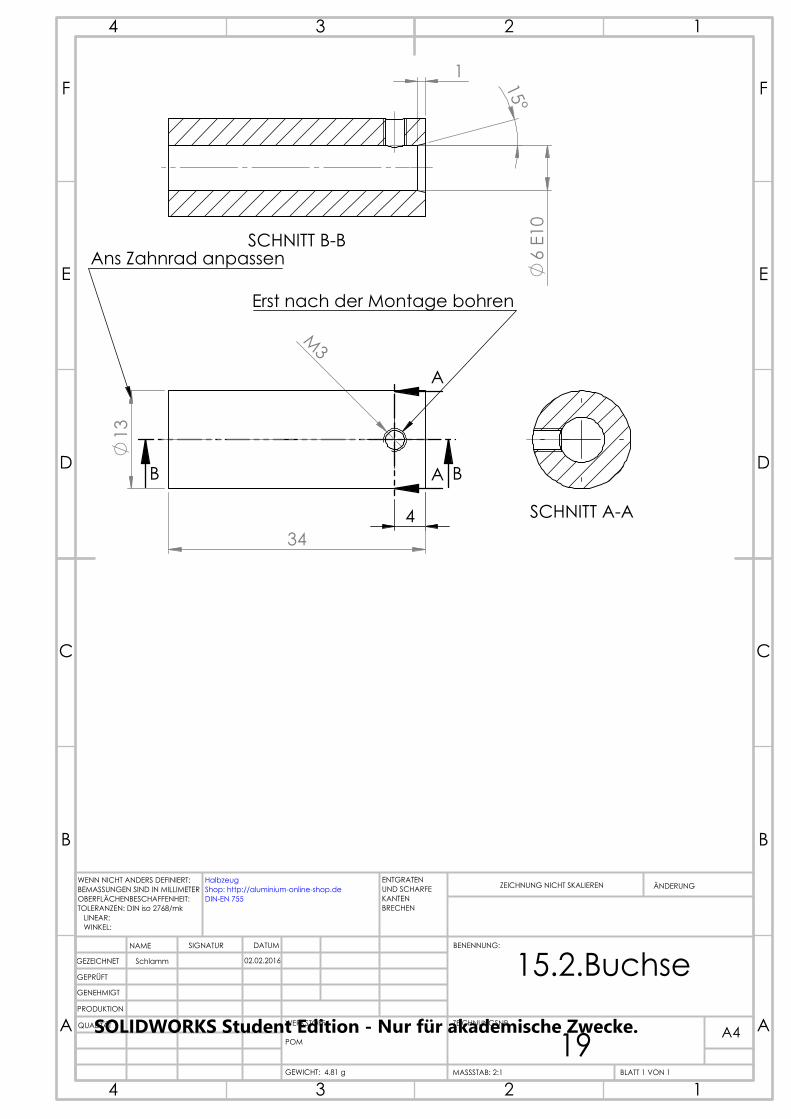
34
13
M3
4
A
A BB
Erst nach der Montage bohren
Ans Zahnrad anpassen
SCHNITT A-A
1 15°
6
E10
SCHNITT B-B
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
15.2.Buchse
19
02.02.2016Schlamm
GEWICHT: 4.81 g
A4
BLATT 1 VON 1MASSSTAB: 2:1
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
POM
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugShop: http://aluminium-online-shop.deDIN-EN 755
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
28 C
C
SCHNITT C-C
R1
R1
7
31
7 31 16
,25
45
45
E
E
Bohrung an CFK-Rohr anpassen, 0.1 mm Spiel
60 8
5,
30
10
3,90
SCHNITT E-E
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
15.2.Buchse-mit-Flansch
4
02.02.2016Schlamm
GEWICHT: 100.99 g
A4
BLATT 1 VON 1MASSSTAB: 1:1
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
AlMgSi0,5
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugDIN-EN 755
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
M2 2,2
0 4
28
25 C
C
6
4
SCHNITT C-C
R1
R1
7 38
31
7
45
45
16
,25
D
D
Bohrung an CFK-Rohr anpassen,0.1 mm Spiel
8
3,90 4,10
5,
30
10
SCHNITT D-D
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
15.2.Buchse-mit-Flansch1
11
02.02.2016Schlamm
GEWICHT: 100.93 g
A4
BLATT 1 VON 1MASSSTAB: 1:1
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
AlMgSi0,5
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugDIN-EN 755
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
2,2
0 4
M2
28
20 D
D
6
1
1
4 SCHNITT D-D
7
31
31 7
16
,25
45
45
F
F
Bohrung an CFK-Rohr anpassen,0.1 mm Spiel
8
3,90
5,
30
10
SCHNITT F-F
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
15.2.Buchse-mit-Flansch2
16
02.02.2016Schlamm
GEWICHT: 100.93 g
A4
BLATT 1 VON 1MASSSTAB: 1:1
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
AlMgSi0,5
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugDIN-EN 755
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
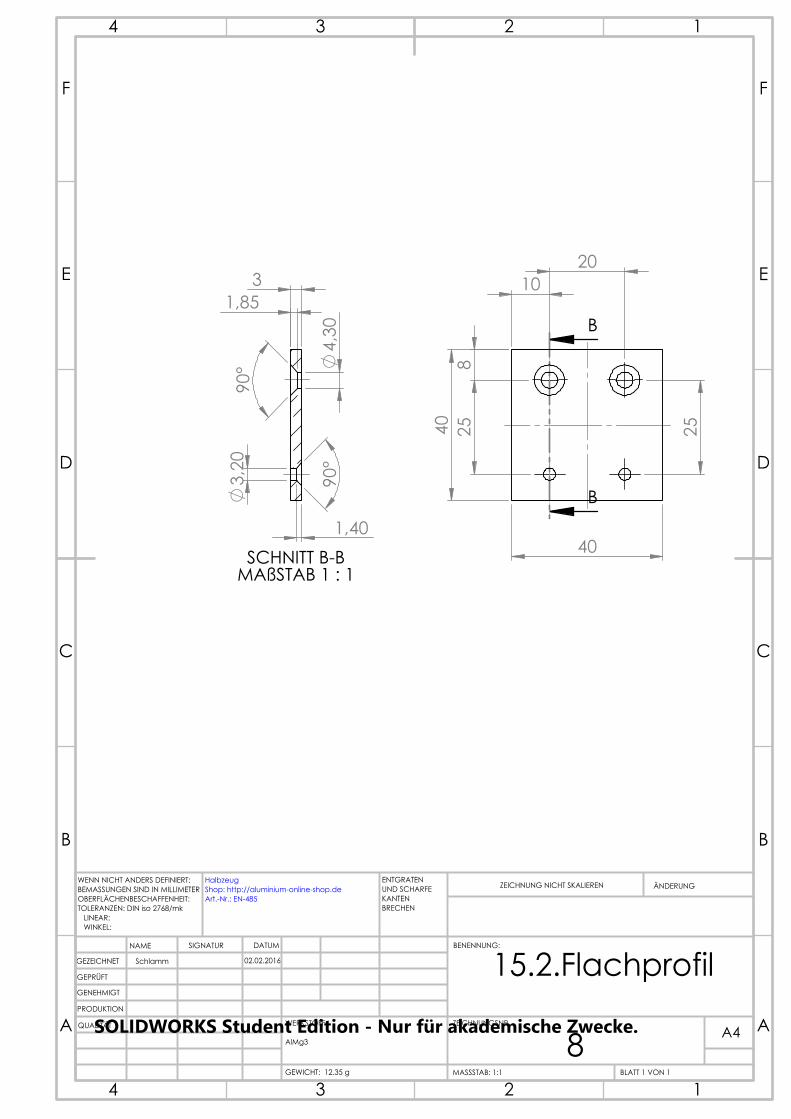
8
40
20 10
25
25
40
B
B
90°
1,85
4,30
3
90°
1,40
3,
20
SCHNITT B-BMAßSTAB 1 : 1
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
15.2.Flachprofil
8
02.02.2016Schlamm
GEWICHT: 12.35 g
A4
BLATT 1 VON 1MASSSTAB: 1:1
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
AlMg3
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugShop: http://aluminium-online-shop.deArt.-Nr.: EN-485
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
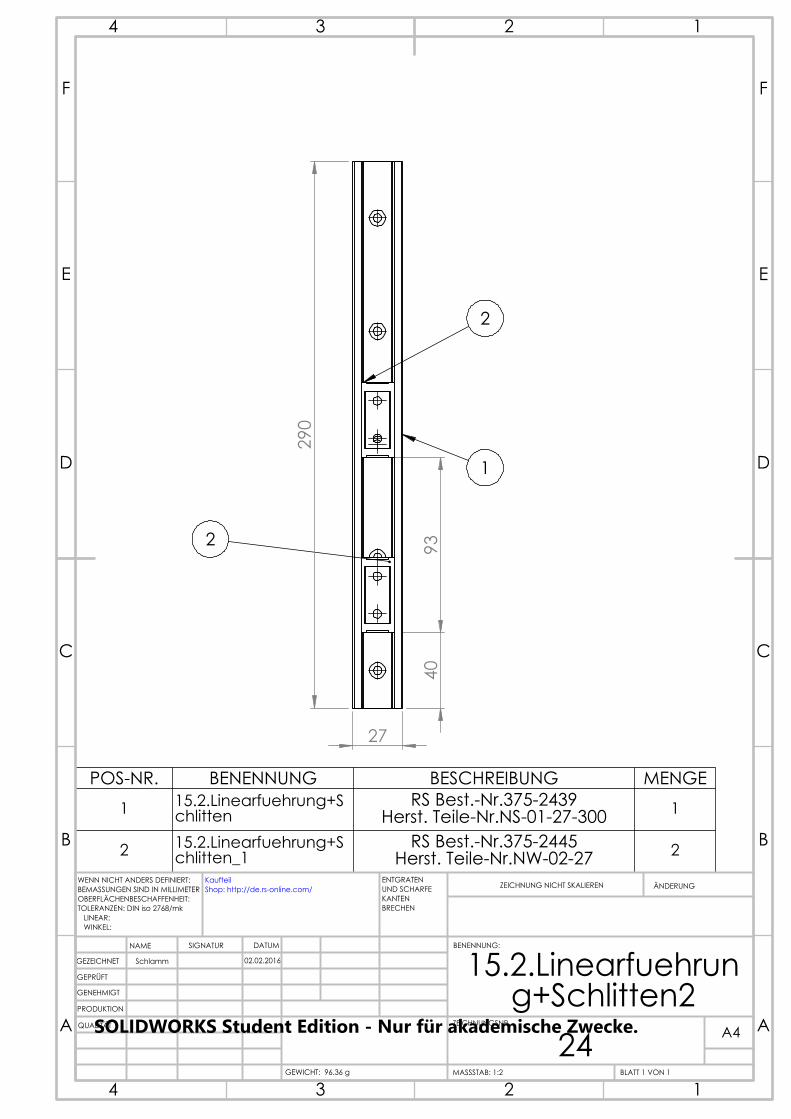
290
27
40
93
2
1
2
POS-NR. BENENNUNG BESCHREIBUNG MENGE1 15.2.Linearfuehrung+S
chlittenRS Best.-Nr.375-2439
Herst. Teile-Nr.NS-01-27-300 1
2 15.2.Linearfuehrung+Schlitten_1
RS Best.-Nr.375-2445 Herst. Teile-Nr.NW-02-27 2
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
15.2.Linearfuehrung+Schlitten2
24
02.02.2016Schlamm
GEWICHT: 96.36 g
A4
BLATT 1 VON 1MASSSTAB: 1:2
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
KaufteilShop: http://de.rs-online.com/
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
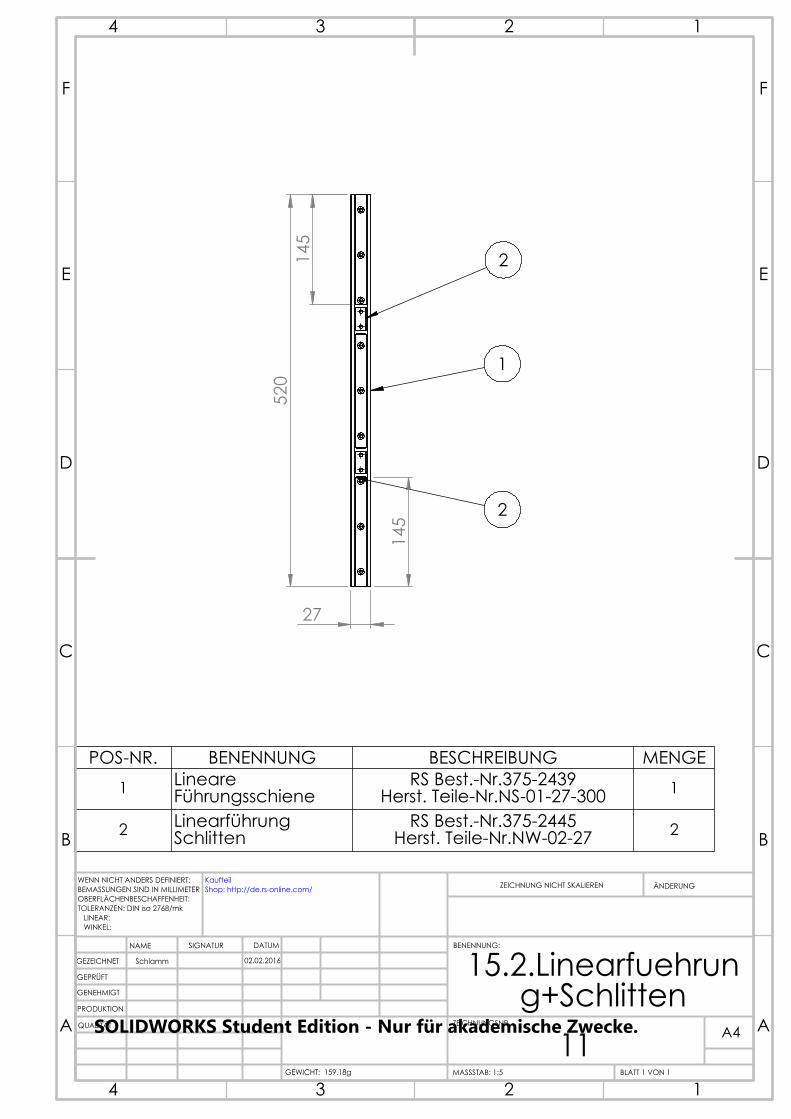
145
145
27
520
1
2
2
POS-NR. BENENNUNG BESCHREIBUNG MENGE1 Lineare
FührungsschieneRS Best.-Nr.375-2439
Herst. Teile-Nr.NS-01-27-300 1
2 Linearführung Schlitten
RS Best.-Nr.375-2445 Herst. Teile-Nr.NW-02-27 2
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
15.2.Linearfuehrung+Schlitten
11
02.02.2016Schlamm
GEWICHT: 159.18g
A4
BLATT 1 VON 1MASSSTAB: 1:5
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
DATUMSIGNATURNAME
KaufteilShop: http://de.rs-online.com/
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
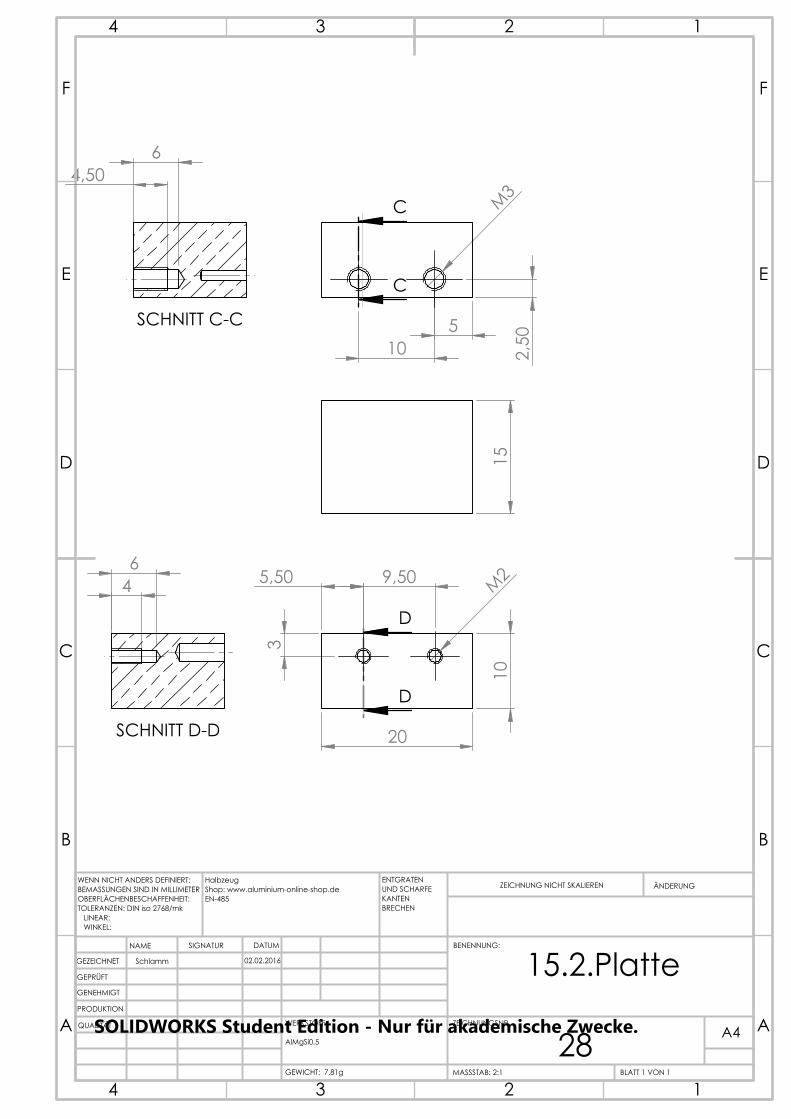
20
5,50 9,50
3
M2
10
D
D
5 10 2
,50
M3
C
C
15
4,50 6
SCHNITT C-C
4 6
SCHNITT D-D
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
15.2.Platte
28
02.02.2016Schlamm
GEWICHT: 7.81g
A4
BLATT 1 VON 1MASSSTAB: 2:1
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
AlMgSi0,5
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugShop: www.aluminium-online-shop.deEN-485
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
200
16
14
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
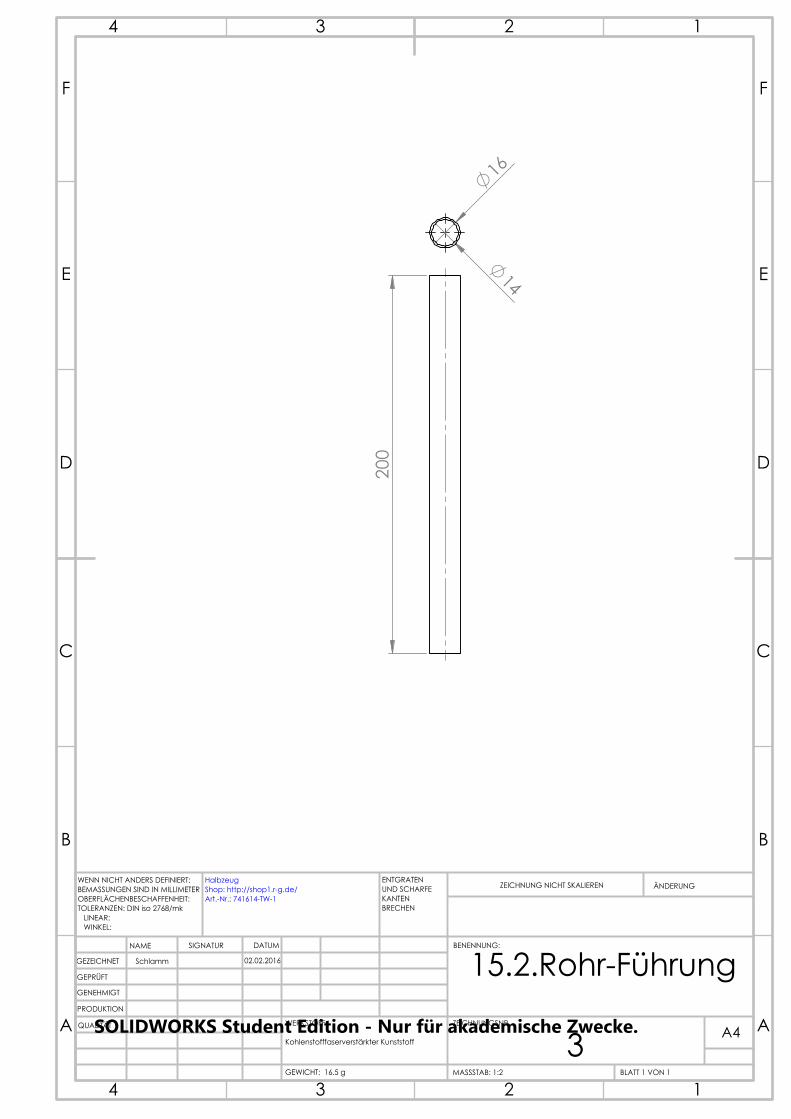
15.2.Rohr-Führung
3
02.02.2016Schlamm
GEWICHT: 16.5 g
A4
BLATT 1 VON 1MASSSTAB: 1:2
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
Kohlenstofffaserverstärkter Kunststoff
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugShop: http://shop1.r-g.de/Art.-Nr.: 741614-TW-1
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
6
8 H8 A
A
26
SCHNITT A-A
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
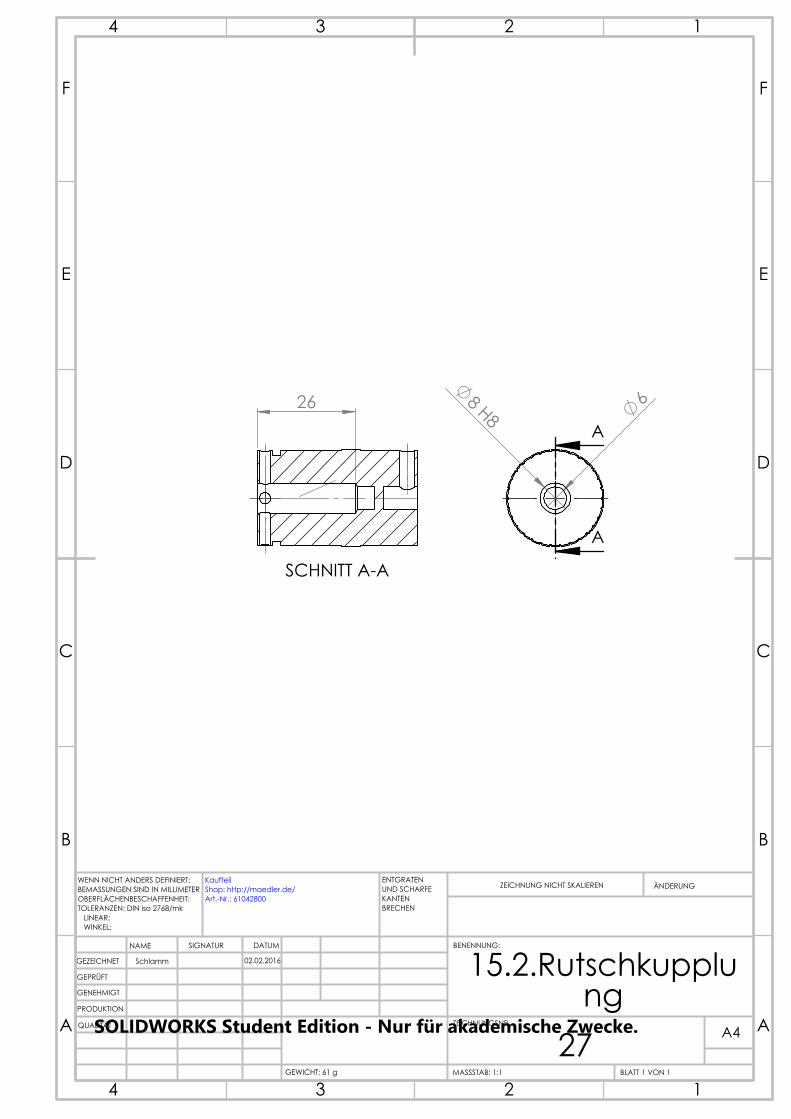
15.2.Rutschkupplung
27
02.02.2016Schlamm
GEWICHT: 61 g
A4
BLATT 1 VON 1MASSSTAB: 1:1
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
KaufteilShop: http://maedler.de/Art.-Nr.: 61042800
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
25
25
20 2
3,20
4,30
7
13,50
5,50
2,2
0
9,8
0 2
,10
15
5,10
9,50
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
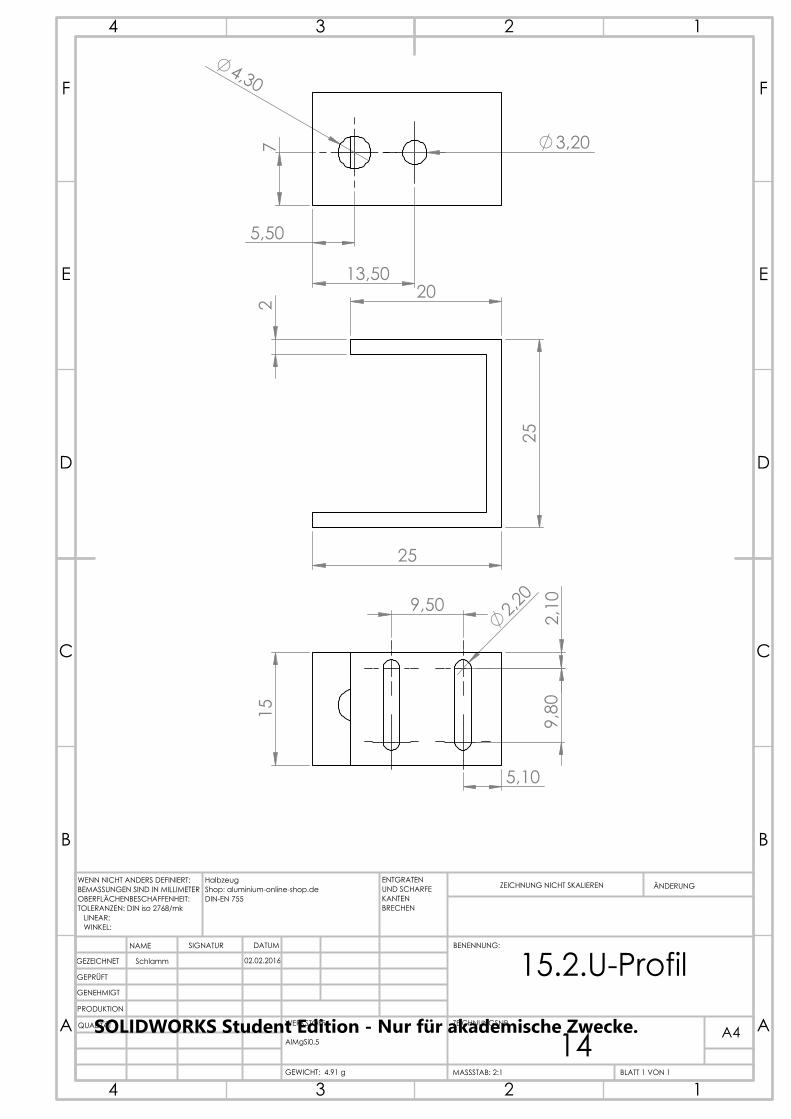
15.2.U-Profil
14
02.02.2016Schlamm
GEWICHT: 4.91 g
A4
BLATT 1 VON 1MASSSTAB: 2:1
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
AlMgSi0,5
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugShop: aluminium-online-shop.deDIN-EN 755
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
6
h6 -0 0,
008
81,80
A
9 + 0,100
0,80 H13 0,80 H13
5
11
8
5,
70 h1
0 DETAIL AMAßSTAB 2 : 1
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
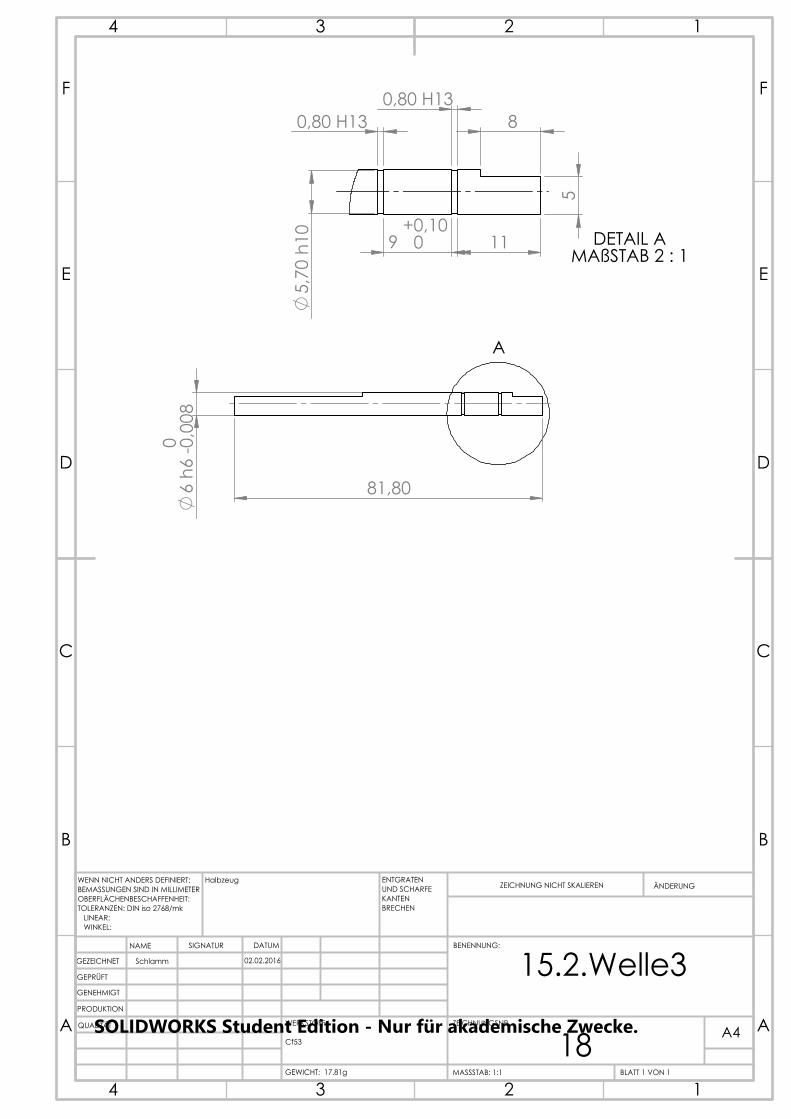
15.2.Welle3
18
02.02.2016Schlamm
GEWICHT: 17.81g
A4
BLATT 1 VON 1MASSSTAB: 1:1
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
Cf53
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugWENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
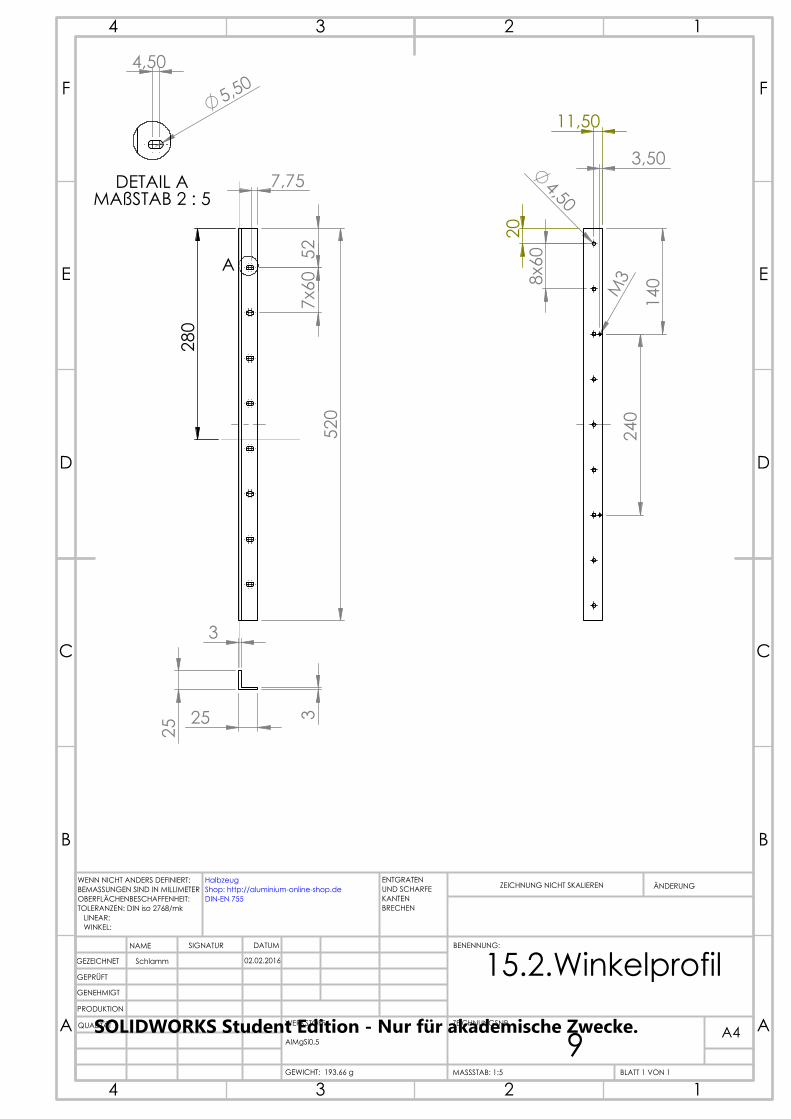
520
5
2
7,75
7x6
0
280
A
4,50
5,50
DETAIL AMAßSTAB 2 : 5
11,50
M3
3,50
140
4,50
20
8x6
0
240
25
25
3
3
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
15.2.Winkelprofil
9
02.02.2016Schlamm
GEWICHT: 193.66 g
A4
BLATT 1 VON 1MASSSTAB: 1:5
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
AlMgSi0,5
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugShop: http://aluminium-online-shop.deDIN-EN 755
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
50
30
8 14
13
A
A
5 8
14 2
20
4,
30
B
SCHNITT A-AMAßSTAB 1 : 1
90°
3,20
1,4
0 DETAIL B
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
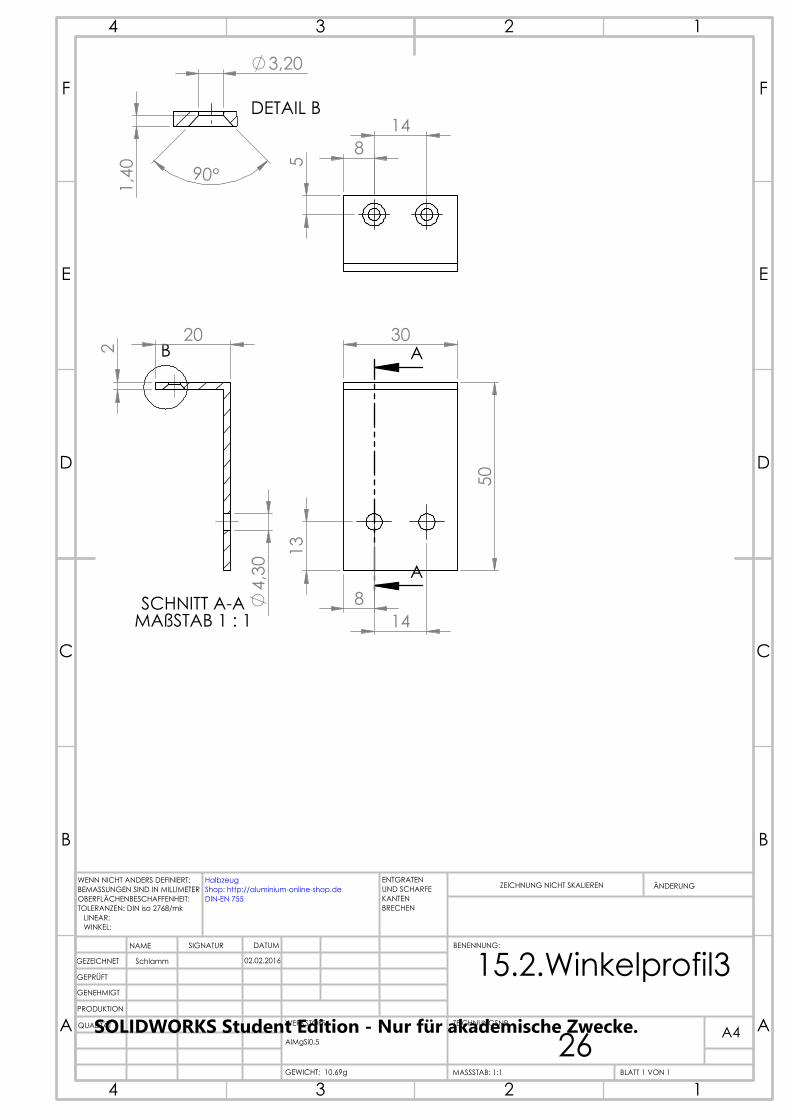
15.2.Winkelprofil3
26
02.02.2016Schlamm
GEWICHT: 10.69g
A4
BLATT 1 VON 1MASSSTAB: 1:1
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
AlMgSi0,5
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugShop: http://aluminium-online-shop.deDIN-EN 755
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
2,2
0
2
10
15
4
7,80
2,2
0
3,60 6
,50
9,5
0
25
15
2
2
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
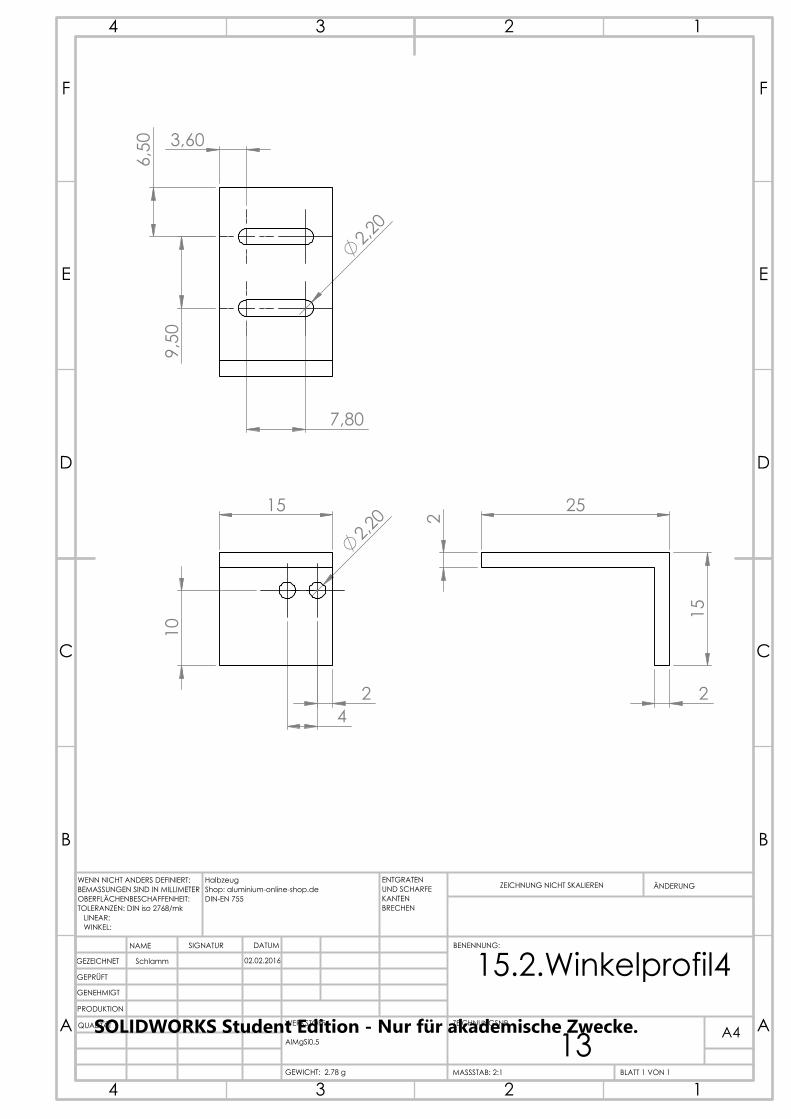
15.2.Winkelprofil4
13
02.02.2016Schlamm
GEWICHT: 2.78 g
A4
BLATT 1 VON 1MASSSTAB: 2:1
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
AlMgSi0,5
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugShop: aluminium-online-shop.deDIN-EN 755
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
2 4
10
15 2,2
0
2,2
0 7,80
6,5
0 9
,50
3,60
25
2
2
15
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
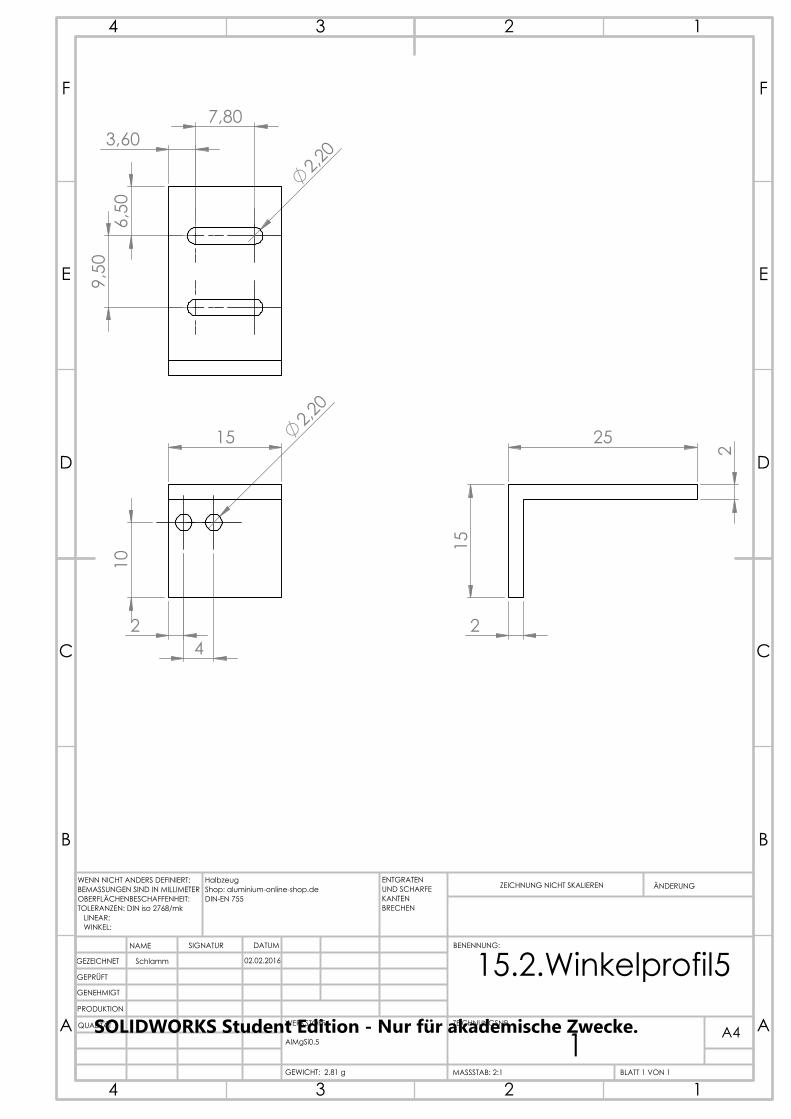
15.2.Winkelprofil5
1
02.02.2016Schlamm
GEWICHT: 2.81 g
A4
BLATT 1 VON 1MASSSTAB: 2:1
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
AlMgSi0.5
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugShop: aluminium-online-shop.deDIN-EN 755
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
4,50
3,2
0 2
,50
19 10
R3 45,50
30
3,50
5,2
5
17,26
34,
50
45
19 +
0,020
22,500
3,40 13,51
45°
4x90°=360°
A
A
80
30,
50
3,50
10
+ -0,01
0,01
4
3,5
0 SCHNITT A-A
0,05 A0,05
0,05
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
15.2.Winkelprofil6
15
02.02.2016Schlamm
GEWICHT: 30.12 g
A4
BLATT 1 VON 1MASSSTAB: 1:2
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
AlMgSi0,5
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugShop: http://aluminium-online-shop.deDIN-EN 755
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
25
52
3x6
0
7,65
B
280
25 3
20
4x6
0 11,50
5,3
0 4,70
DETAIL BMAßSTAB 1 : 1
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
15.2.Winkelprofil7
32
02.02.2016Schlamm
GEWICHT: 104.38 g
A4
BLATT 1 VON 1MASSSTAB: 1:2
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
AlMgSi0.5
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugShop: http://aluminium-online-shop.deDIN-EN 755
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
M3
A
A
Erst nach Montage bohren
13
+ -0,0
10,0
1
SCHNITT A-A
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
15.2.Zahnrad
12
02.02.2016Schlamm
GEWICHT: 30.31 g
A4
BLATT 1 VON 1MASSSTAB: 1:1
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
Azetalharz
DATUMSIGNATURNAME
HalbzeugShop: http://maedler.deArt.-Nr.: 28801200
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
250
20
20
170
2
0
19,40 A
A M3 8
6
3,50
B
SCHNITT A-AMAßSTAB 1 : 2
6,
31
6
6
C
DETAIL BMAßSTAB 2 : 1
0,30
45°
DETAIL CMAßSTAB 5 : 1
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
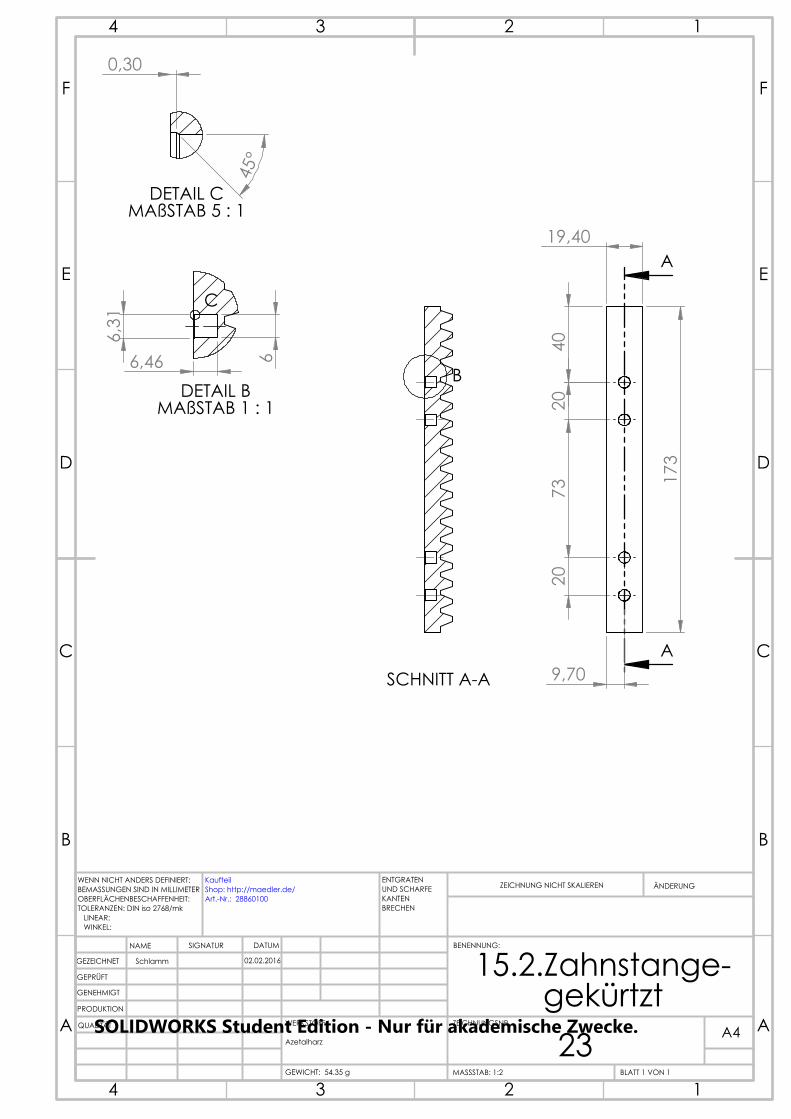
15.2.Zahnstange
7
02.02.2016Schlamm
GEWICHT: 78.31 g
A4
BLATT 1 VON 1MASSSTAB: 1:2
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
Azetalharz
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
KaufteilShop: http://maedler.de/Art.-Nr.: 28860100
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
173
19,40
40
20
73
20
9,70
A
A
B
SCHNITT A-A
6,46
6,3
1
6
C
DETAIL BMAßSTAB 1 : 1
0,30
45°
DETAIL CMAßSTAB 5 : 1
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
15.2.Zahnstange-gekürtzt23
02.02.2016Schlamm
GEWICHT: 54.35 g
A4
BLATT 1 VON 1MASSSTAB: 1:2
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
Azetalharz
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
KaufteilShop: http://maedler.de/Art.-Nr.: 28860100
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
14
M5
A
A
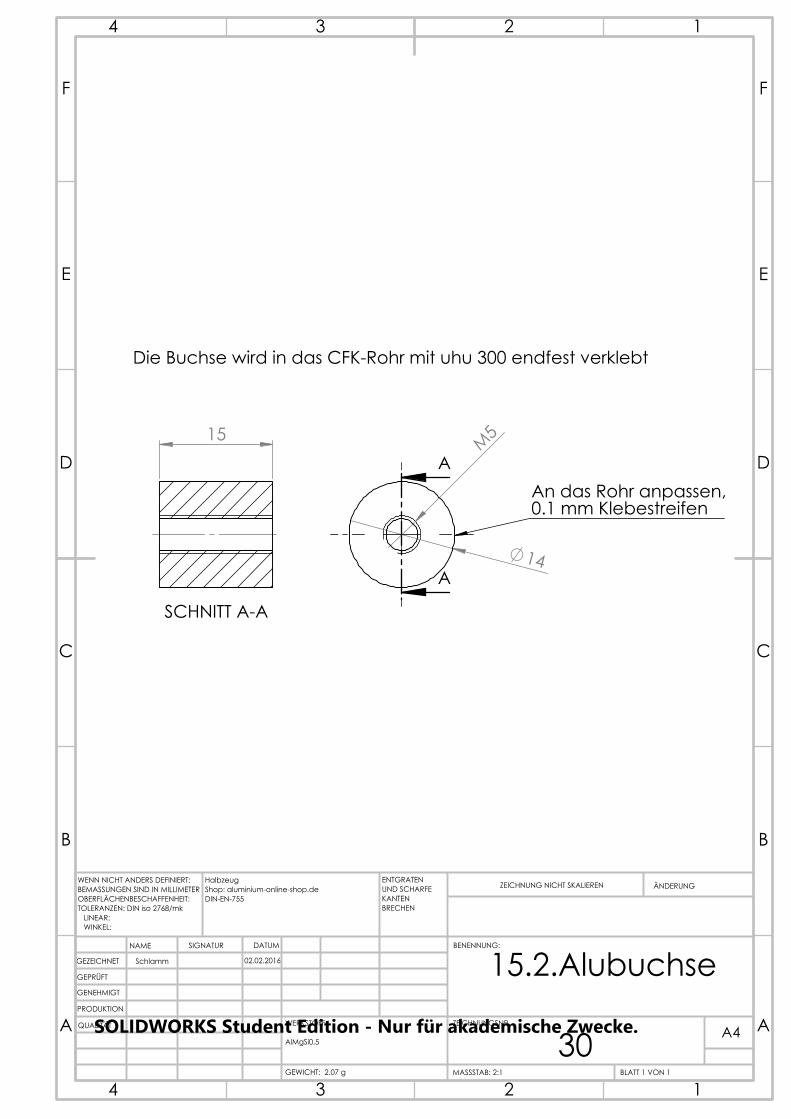
An das Rohr anpassen, 0.1 mm Klebestreifen
15
SCHNITT A-A
Die Buchse wird in das CFK-Rohr mit uhu 300 endfest verklebt
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
15.2.Alubuchse
30
02.02.2016Schlamm
GEWICHT: 2.07 g
A4
BLATT 1 VON 1MASSSTAB: 2:1
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
AlMgSi0,5
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugShop: aluminium-online-shop.deDIN-EN-755
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
674
16
14
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
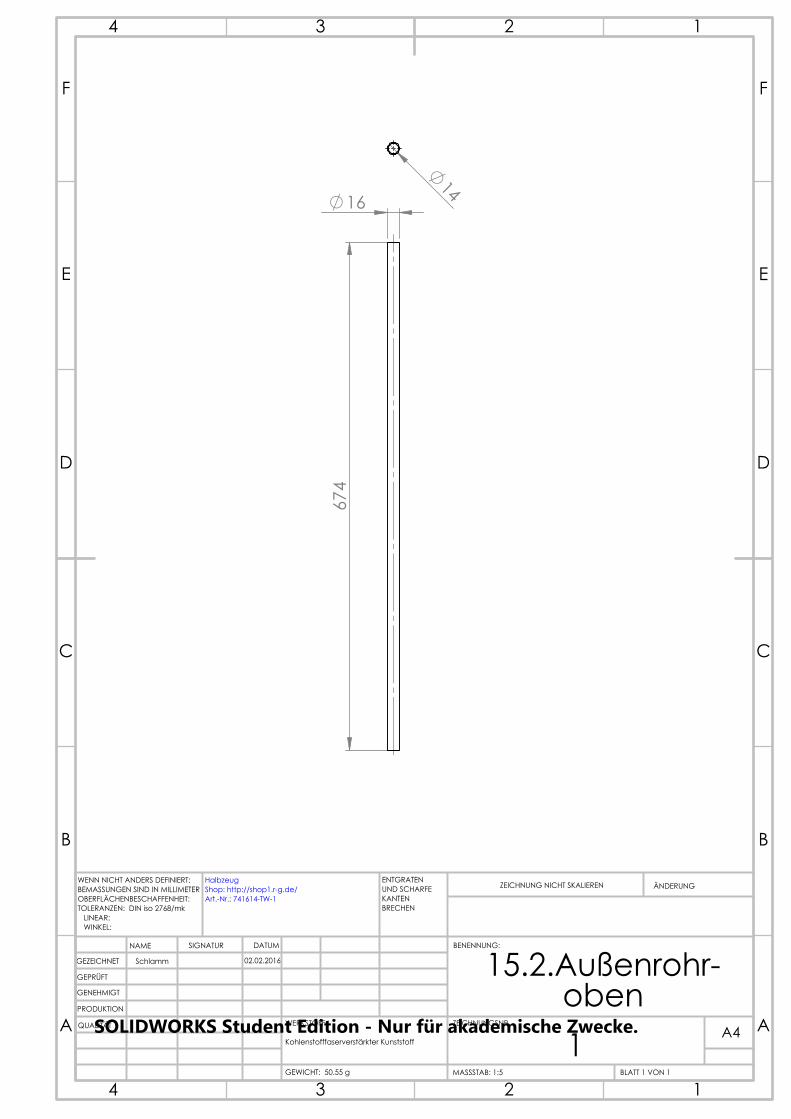
15.2.Außenrohr-oben1
02.02.2016Schlamm
GEWICHT: 50.55 g
A4
BLATT 1 VON 1MASSSTAB: 1:5
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
Kohlenstofffaserverstärkter Kunststoff
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugShop: http://shop1.r-g.de/Art.-Nr.: 741614-TW-1
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
750
16
14
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
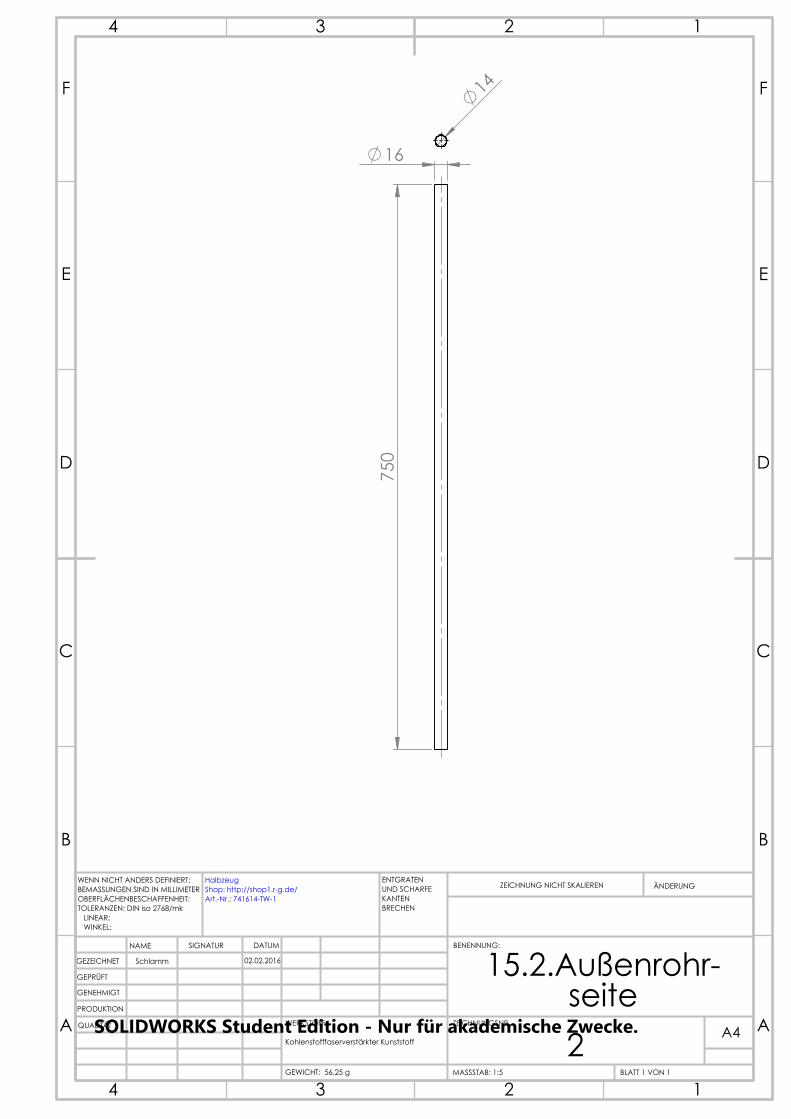
15.2.Außenrohr-seite2
02.02.2016Schlamm
GEWICHT: 56.25 g
A4
BLATT 1 VON 1MASSSTAB: 1:5
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
Kohlenstofffaserverstärkter Kunststoff
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugShop: http://shop1.r-g.de/Art.-Nr.: 741614-TW-1
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
20
15 9
,50
A
A
1,55 3,
20
4
90°
SCHNITT A-A
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
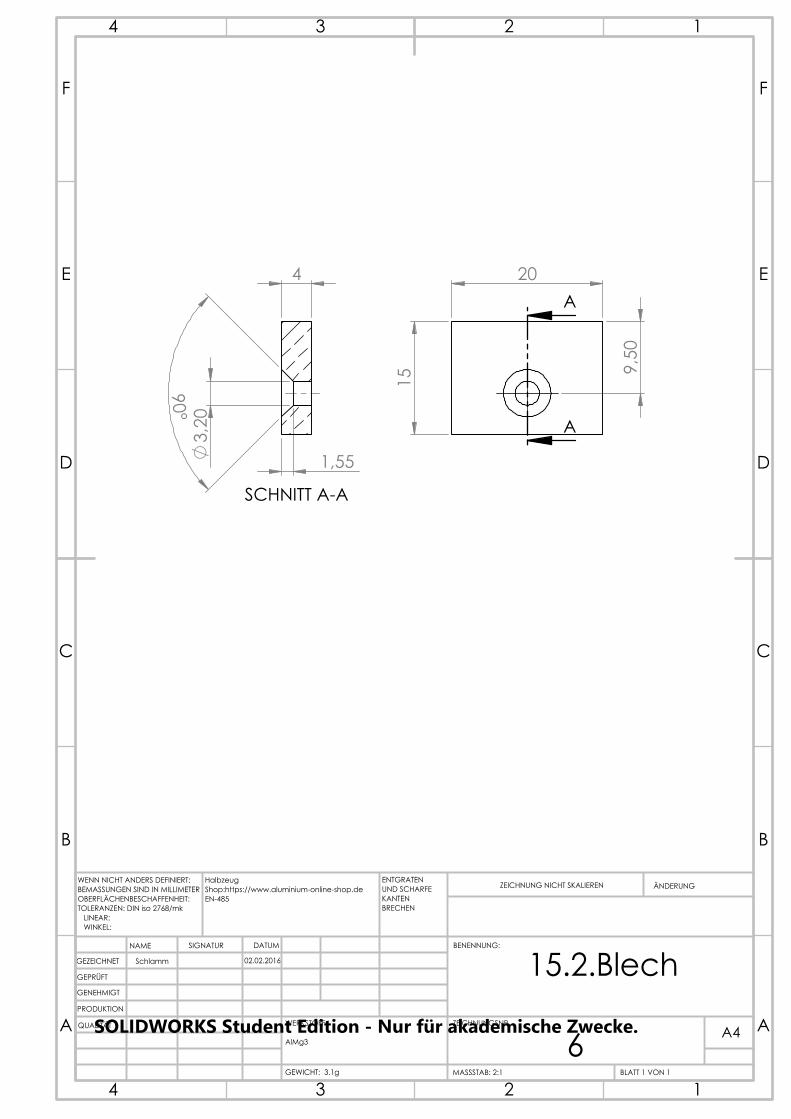
15.2.Blech
6
02.02.2016Schlamm
GEWICHT: 3.1g
A4
BLATT 1 VON 1MASSSTAB: 2:1
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
AlMg3
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugShop:https://www.aluminium-online-shop.deEN-485
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
9
15
M5
4 13,
50
310
3
46
151
A
A
4
C
SCHNITT A-AMAßSTAB 1 : 2
5,
30
90°
2,35
DETAIL CMAßSTAB 1 : 1
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
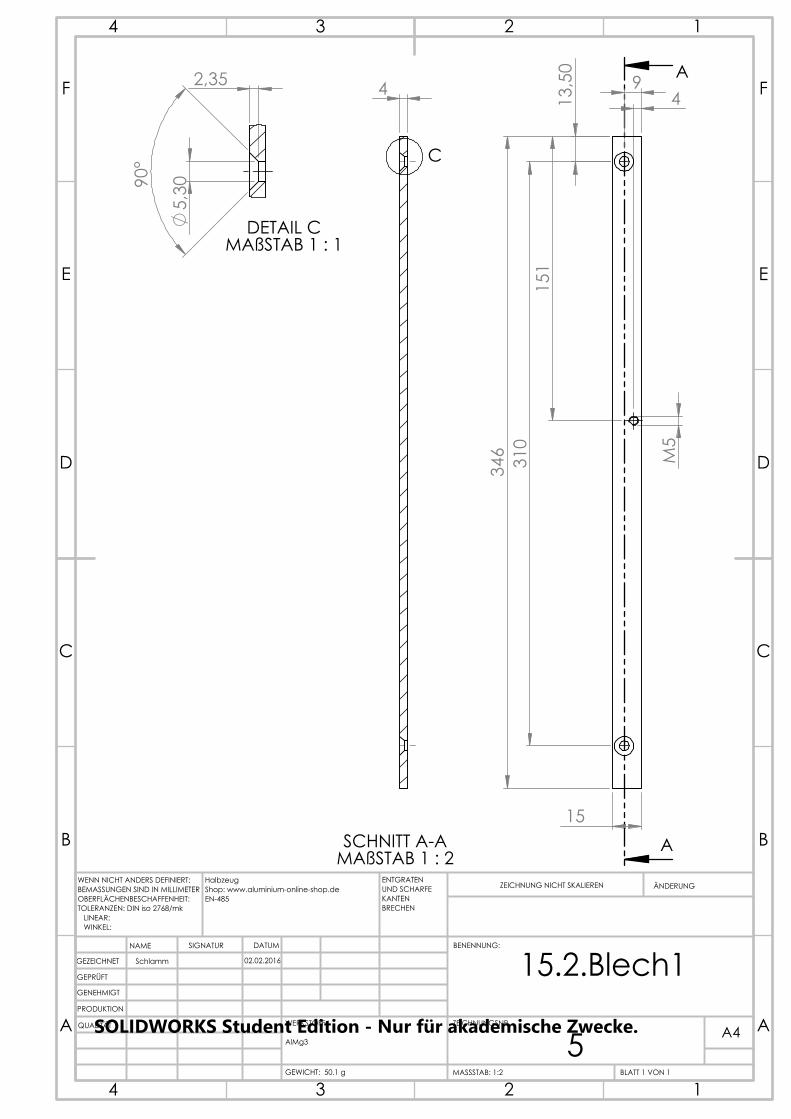
15.2.Blech1
5
02.02.2016Schlamm
GEWICHT: 50.1 g
A4
BLATT 1 VON 1MASSSTAB: 1:2
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
AlMg3
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugShop: www.aluminium-online-shop.deEN-485
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
346
14 13,
50
310
151
4
M5
5
A
A
4
B
SCHNITT A-AMAßSTAB 1 : 2
90°
2,35
5,
30
DETAIL BMAßSTAB 1 : 1
C
D
E
B
F
A
23 14
C
F
E
A
B
D
2 14 3
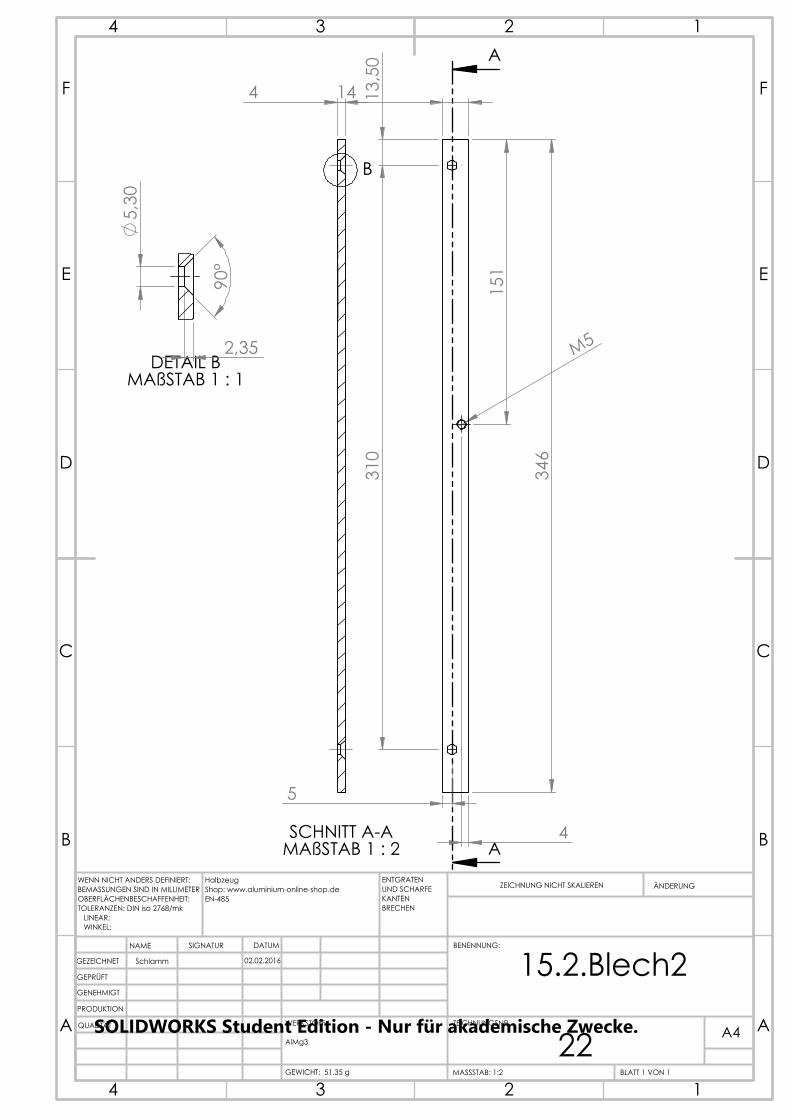
15.2.Blech2
22
02.02.2016Schlamm
GEWICHT: 51.35 g
A4
BLATT 1 VON 1MASSSTAB: 1:2
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
AlMg3
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
HalbzeugShop: www.aluminium-online-shop.deEN-485
WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: DIN iso 2768/mk LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
16 1 27 28 7 2 22 17 24 14
10
25
39
20
37
26
36
5982333018334112
21
354
38
31
11
44
43
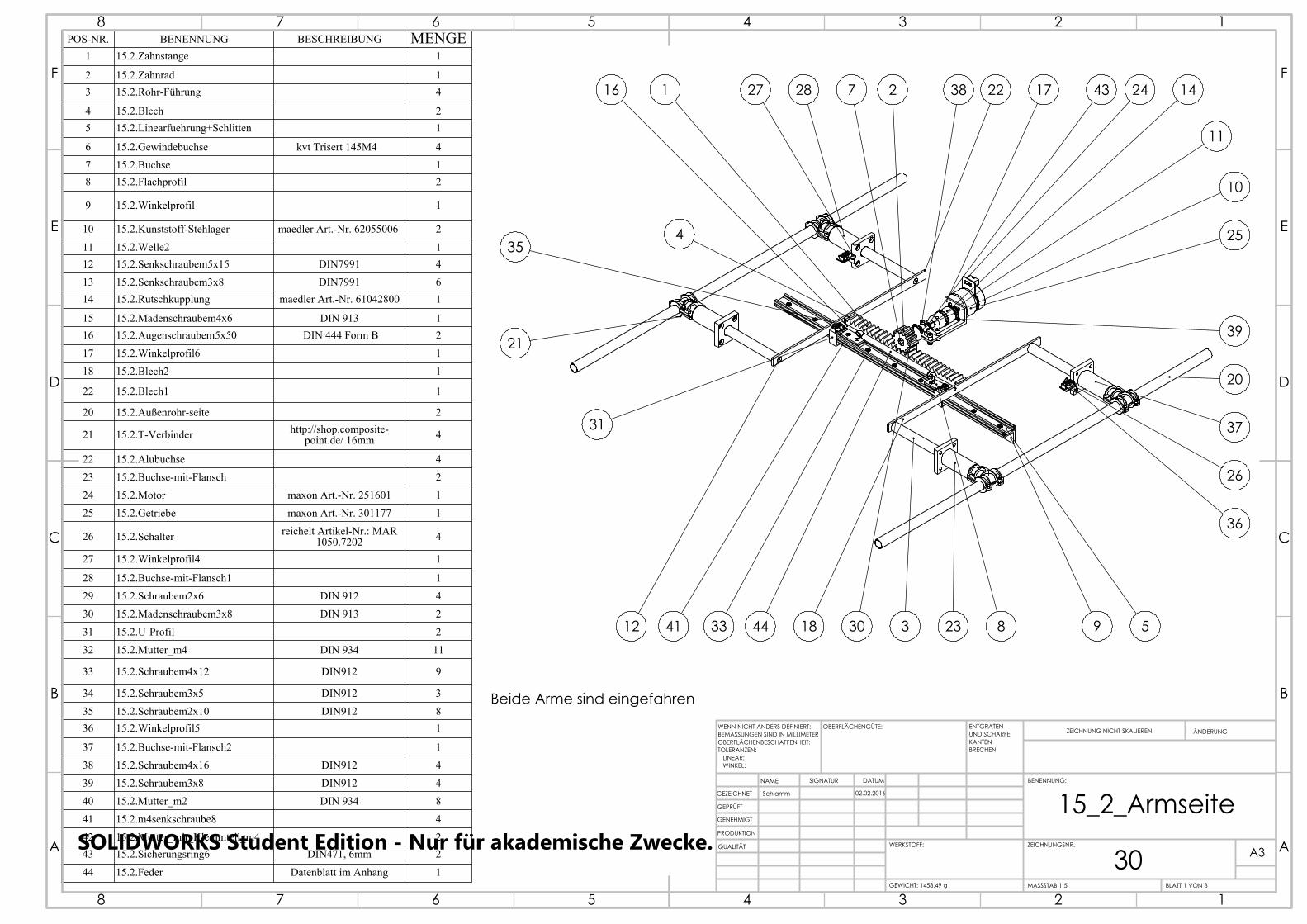
Beide Arme sind eingefahren
POS-NR. BENENNUNG BESCHREIBUNG MENGE1 15.2.Zahnstange 1
2 15.2.Zahnrad 13 15.2.Rohr-Führung 4
4 15.2.Blech 25 15.2.Linearfuehrung+Schlitten 1
6 15.2.Gewindebuchse kvt Trisert 145M4 47 15.2.Buchse 18 15.2.Flachprofil 2
9 15.2.Winkelprofil 1
10 15.2.Kunststoff-Stehlager maedler Art.-Nr. 62055006 211 15.2.Welle2 112 15.2.Senkschraubem5x15 DIN7991 413 15.2.Senkschraubem3x8 DIN7991 614 15.2.Rutschkupplung maedler Art.-Nr. 61042800 1
15 15.2.Madenschraubem4x6 DIN 913 116 15.2.Augenschraubem5x50 DIN 444 Form B 217 15.2.Winkelprofil6 118 15.2.Blech2 1
22 15.2.Blech1 1
20 15.2.Außenrohr-seite 2
21 15.2.T-Verbinder http://shop.composite-point.de/ 16mm 4
22 15.2.Alubuchse 423 15.2.Buchse-mit-Flansch 224 15.2.Motor maxon Art.-Nr. 251601 125 15.2.Getriebe maxon Art.-Nr. 301177 1
26 15.2.Schalter reichelt Artikel-Nr.: MAR 1050.7202 4
27 15.2.Winkelprofil4 1
28 15.2.Buchse-mit-Flansch1 129 15.2.Schraubem2x6 DIN 912 430 15.2.Madenschraubem3x8 DIN 913 231 15.2.U-Profil 232 15.2.Mutter_m4 DIN 934 11
33 15.2.Schraubem4x12 DIN912 9
34 15.2.Schraubem3x5 DIN912 335 15.2.Schraubem2x10 DIN912 836 15.2.Winkelprofil5 1
37 15.2.Buchse-mit-Flansch2 138 15.2.Schraubem4x16 DIN912 439 15.2.Schraubem3x8 DIN912 440 15.2.Mutter_m2 DIN 934 841 15.2.m4senkschraube8 442 15.2.Mutter_mit_Klemmteil_m4 243 15.2.Sicherungsring6 DIN471, 6mm 244 15.2.Feder Datenblatt im Anhang 1
8 7
A
B
23456 1
578 246 13
E
D
C
F F
D
B
A
E
C
15_2_Armseite02.02.2016Schlamm
GEWICHT: 1458.49 g
A3
BLATT 1 VON 3MASSSTAB 1:5
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
OBERFLÄCHENGÜTE:WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
30SOLIDWORKS Student Edition - Nur für akademische Zwecke.
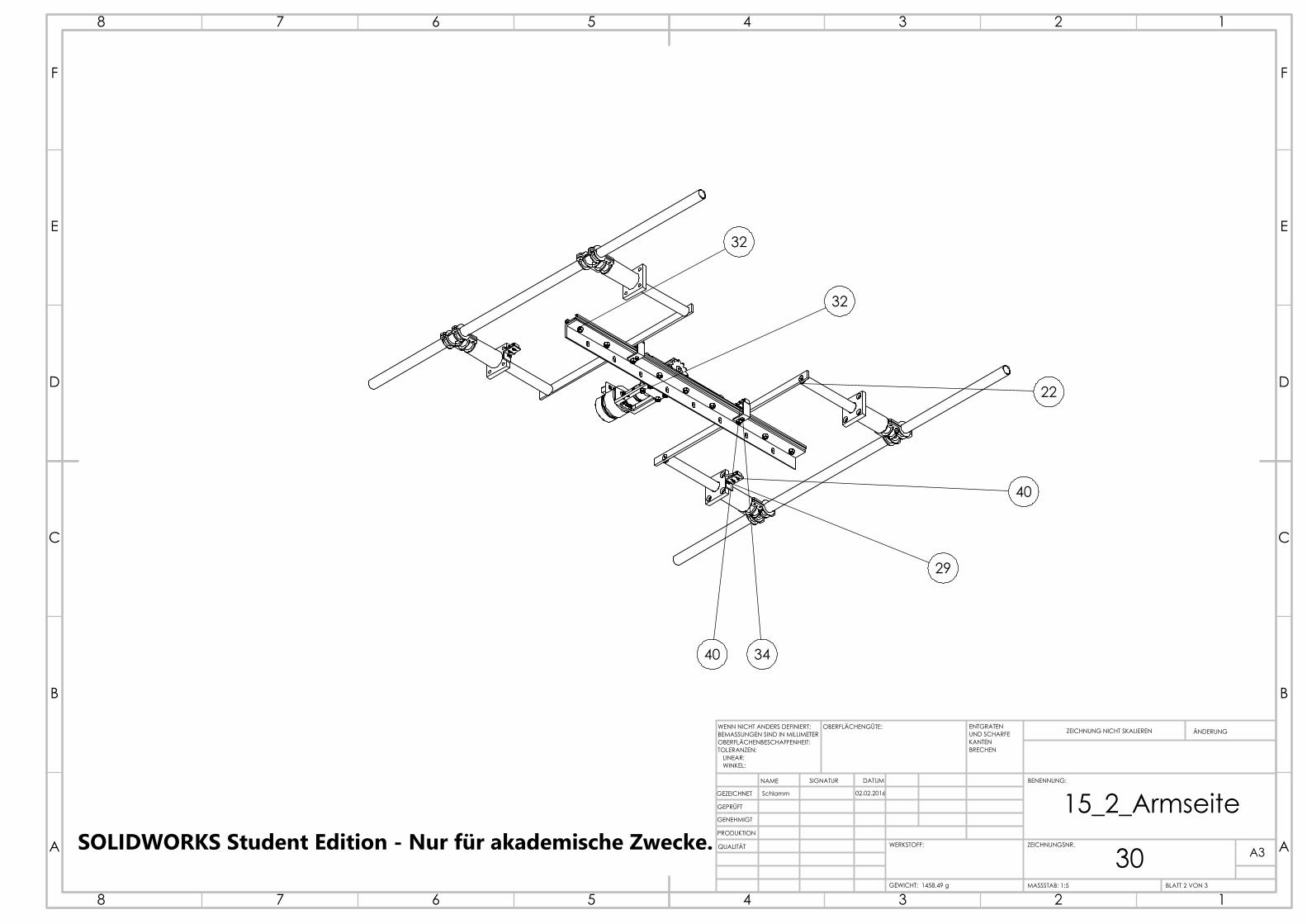
22
3440
40
29
32
32
8 7
A
B
23456 1
578 246 13
E
D
C
F F
D
B
A
E
C
15_2_Armseite02.02.2016Schlamm
GEWICHT: 1458.49 g
A3
BLATT 2 VON 3MASSSTAB: 1:5
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
OBERFLÄCHENGÜTE:WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
30SOLIDWORKS Student Edition - Nur für akademische Zwecke.
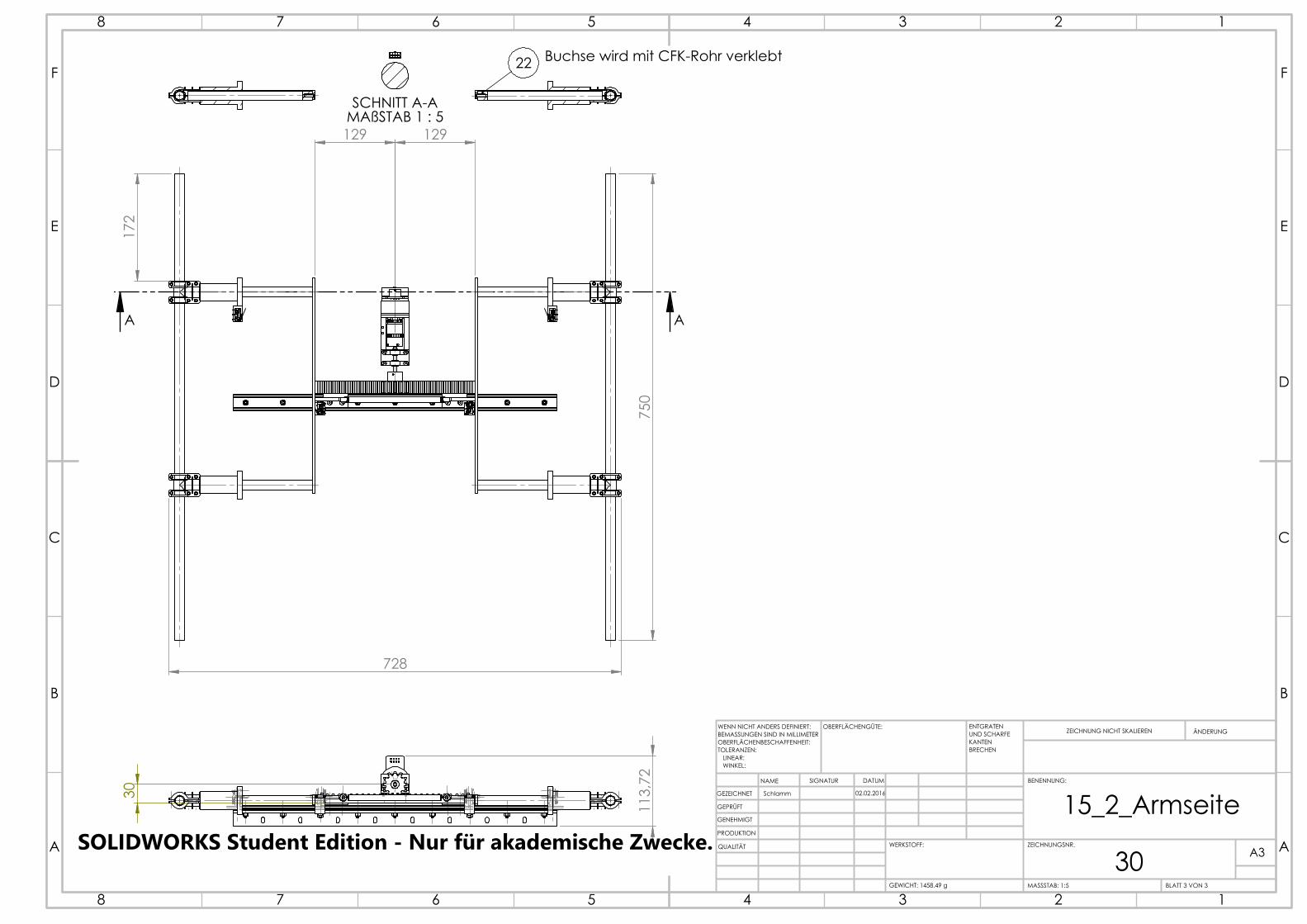
172
129 129
750
728
AA
30
113
,72
SCHNITT A-AMAßSTAB 1 : 5
22 Buchse wird mit CFK-Rohr verklebt
8 7
A
B
23456 1
578 246 13
E
D
C
F F
D
B
A
E
C
15_2_Armseite02.02.2016Schlamm
GEWICHT: 1458.49 g
A3
BLATT 3 VON 3MASSSTAB: 1:5
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
OBERFLÄCHENGÜTE:WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
30SOLIDWORKS Student Edition - Nur für akademische Zwecke.
10
34 19
28
29 31 39 9 7 2 5
1
13
?
17
12
3182540222136
33
26
32
27
Arm ist eingefahren
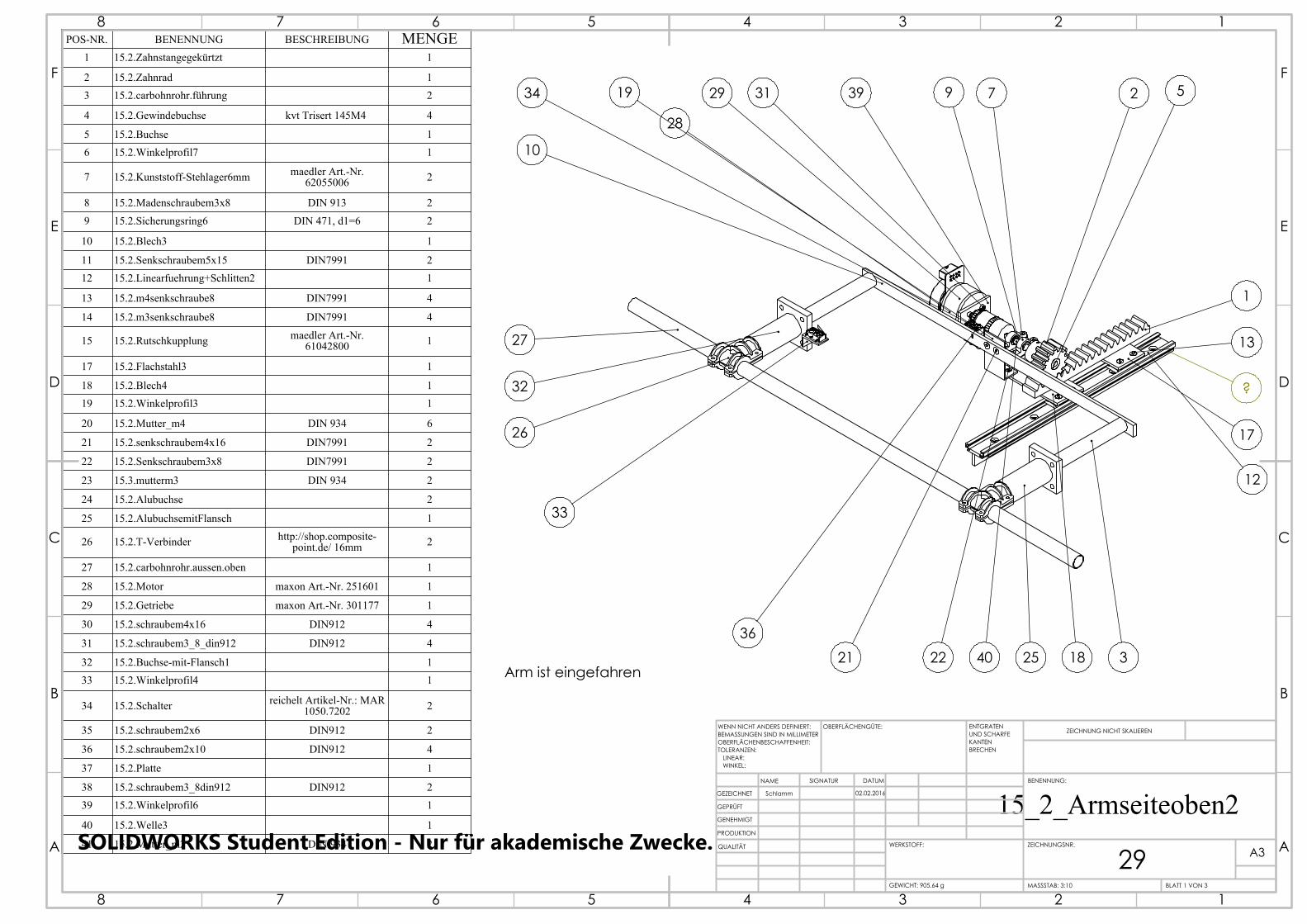
POS-NR. BENENNUNG BESCHREIBUNG MENGE1 15.2.Zahnstangegekürtzt 1
2 15.2.Zahnrad 13 15.2.carbohnrohr.führung 2
4 15.2.Gewindebuchse kvt Trisert 145M4 4
5 15.2.Buchse 16 15.2.Winkelprofil7 1
7 15.2.Kunststoff-Stehlager6mm maedler Art.-Nr. 62055006 2
8 15.2.Madenschraubem3x8 DIN 913 29 15.2.Sicherungsring6 DIN 471, d1=6 2
10 15.2.Blech3 1
11 15.2.Senkschraubem5x15 DIN7991 212 15.2.Linearfuehrung+Schlitten2 1
13 15.2.m4senkschraube8 DIN7991 4
14 15.2.m3senkschraube8 DIN7991 4
15 15.2.Rutschkupplung maedler Art.-Nr. 61042800 1
17 15.2.Flachstahl3 1
18 15.2.Blech4 119 15.2.Winkelprofil3 1
20 15.2.Mutter_m4 DIN 934 6
21 15.2.senkschraubem4x16 DIN7991 2
22 15.2.Senkschraubem3x8 DIN7991 2
23 15.3.mutterm3 DIN 934 2
24 15.2.Alubuchse 2
25 15.2.AlubuchsemitFlansch 1
26 15.2.T-Verbinder http://shop.composite-point.de/ 16mm 2
27 15.2.carbohnrohr.aussen.oben 1
28 15.2.Motor maxon Art.-Nr. 251601 1
29 15.2.Getriebe maxon Art.-Nr. 301177 1
30 15.2.schraubem4x16 DIN912 4
31 15.2.schraubem3_8_din912 DIN912 4
32 15.2.Buchse-mit-Flansch1 133 15.2.Winkelprofil4 1
34 15.2.Schalter reichelt Artikel-Nr.: MAR 1050.7202 2
35 15.2.schraubem2x6 DIN912 2
36 15.2.schraubem2x10 DIN912 4
37 15.2.Platte 1
38 15.2.schraubem3_8din912 DIN912 239 15.2.Winkelprofil6 1
40 15.2.Welle3 1
41 15.2.Mutter_m2 DIN 934 2
8 7
A
B
23456 1
578 246 13
E
D
C
F F
D
B
A
E
C
15_2_Armseiteoben202.02.2016Schlamm
GEWICHT: 905.64 g
A3
BLATT 1 VON 3MASSSTAB: 3:10
ZEICHNUNGSNR.
BENENNUNG:
ZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
OBERFLÄCHENGÜTE:WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET
29SOLIDWORKS Student Edition - Nur für akademische Zwecke.
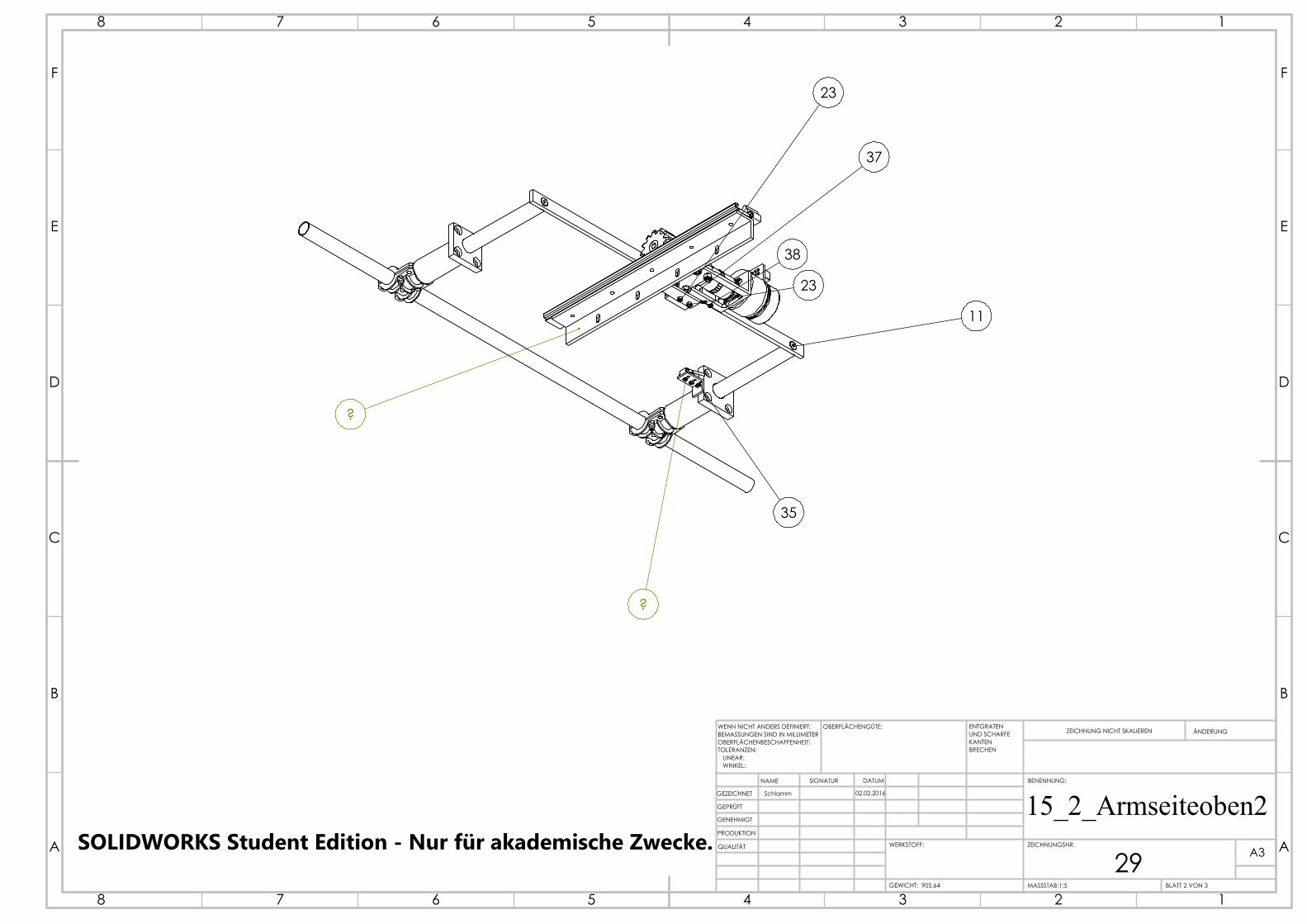
23
11
35
?
?
38
23
37
8 7
A
B
23456 1
578 246 13
E
D
C
F F
D
B
A
E
C
29
02.02.2016Schlamm
GEWICHT: 905.64
A3
BLATT 2 VON 3MASSSTAB:1:5
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
OBERFLÄCHENGÜTE:WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET 15_2_Armseiteoben2SOLIDWORKS Student Edition - Nur für akademische Zwecke.
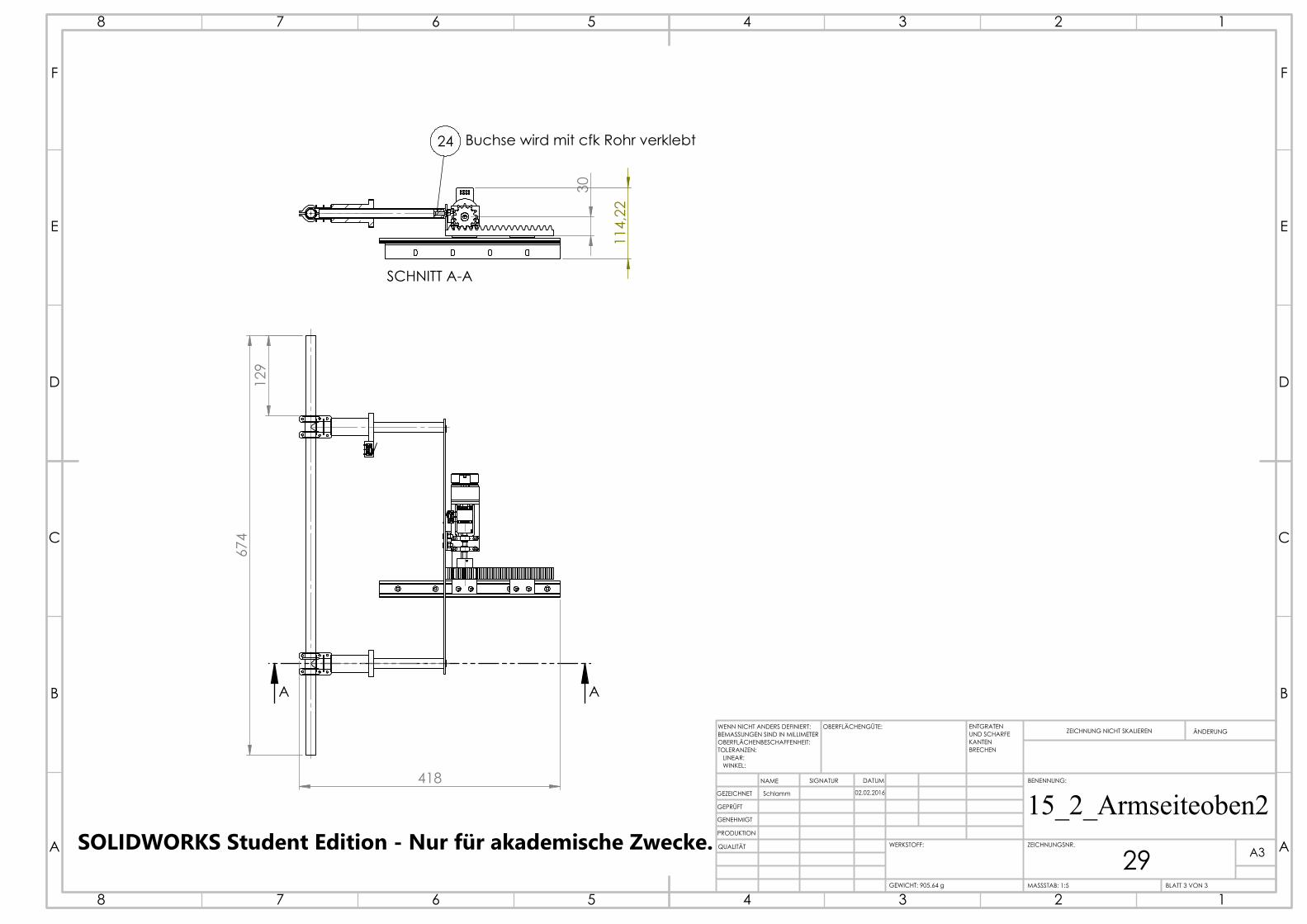
129
418
674
AA
30
114
,22
SCHNITT A-A
24 Buchse wird mit cfk Rohr verklebt
15_2_Armseiteoben2
298 7
A
B
23456 1
578 246 13
E
D
C
F F
D
B
A
E
C
Schlamm
GEWICHT: 905.64 g
A3
BLATT 3 VON 3MASSSTAB: 1:5
ZEICHNUNGSNR.
BENENNUNG:
ÄNDERUNGZEICHNUNG NICHT SKALIEREN
WERKSTOFF:
DATUMSIGNATURNAME
ENTGRATENUND SCHARFEKANTENBRECHEN
OBERFLÄCHENGÜTE:WENN NICHT ANDERS DEFINIERT:BEMASSUNGEN SIND IN MILLIMETEROBERFLÄCHENBESCHAFFENHEIT:TOLERANZEN: LINEAR: WINKEL:
QUALITÄT
PRODUKTION
GENEHMIGT
GEPRÜFT
GEZEICHNET 02.02.2016
SOLIDWORKS Student Edition - Nur für akademische Zwecke.
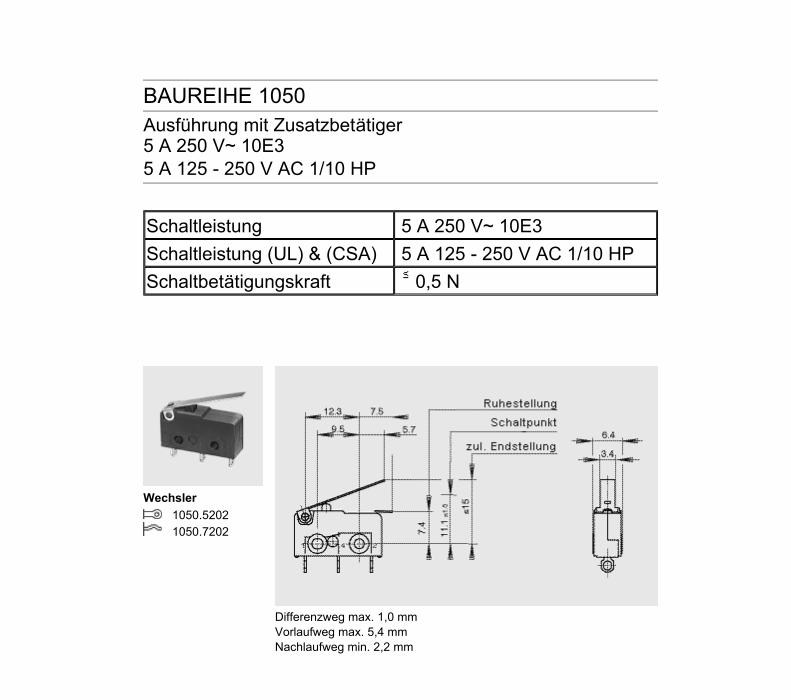
BAUREIHE 1050
Ausführung mit Zusatzbetätiger5 A 250 V~ 10E3
5 A 125 - 250 V AC 1/10 HP
Schaltleistung 5 A 250 V~ 10E3
Schaltleistung (UL) & (CSA) 5 A 125 - 250 V AC 1/10 HP
Schaltbetätigungskraft 0,5 N
Wechsler
1050.5202
1050.7202
Differenzweg max. 1,0 mm
Vorlaufweg max. 5,4 mm
Nachlaufweg min. 2,2 mm
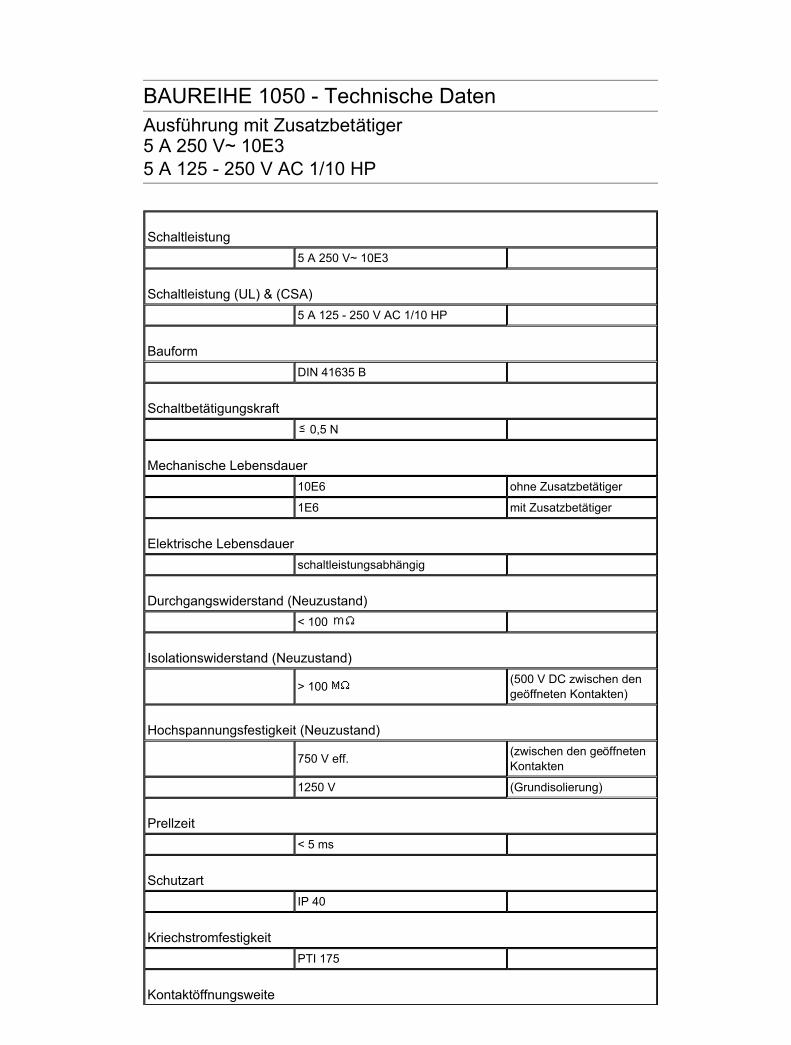
BAUREIHE 1050 - Technische Daten
Ausführung mit Zusatzbetätiger5 A 250 V~ 10E3
5 A 125 - 250 V AC 1/10 HP
Schaltleistung
5 A 250 V~ 10E3
Schaltleistung (UL) & (CSA)
5 A 125 - 250 V AC 1/10 HP
Bauform
DIN 41635 B
Schaltbetätigungskraft
0,5 N
Mechanische Lebensdauer
10E6 ohne Zusatzbetätiger
1E6 mit Zusatzbetätiger
Elektrische Lebensdauer
schaltleistungsabhängig
Durchgangswiderstand (Neuzustand)
< 100
Isolationswiderstand (Neuzustand)
> 100 (500 V DC zwischen den
geöffneten Kontakten)
Hochspannungsfestigkeit (Neuzustand)
750 V eff. (zwischen den geöffneten
Kontakten
1250 V (Grundisolierung)
Prellzeit
< 5 ms
Schutzart
IP 40
Kriechstromfestigkeit
PTI 175
Kontaktöffnungsweite
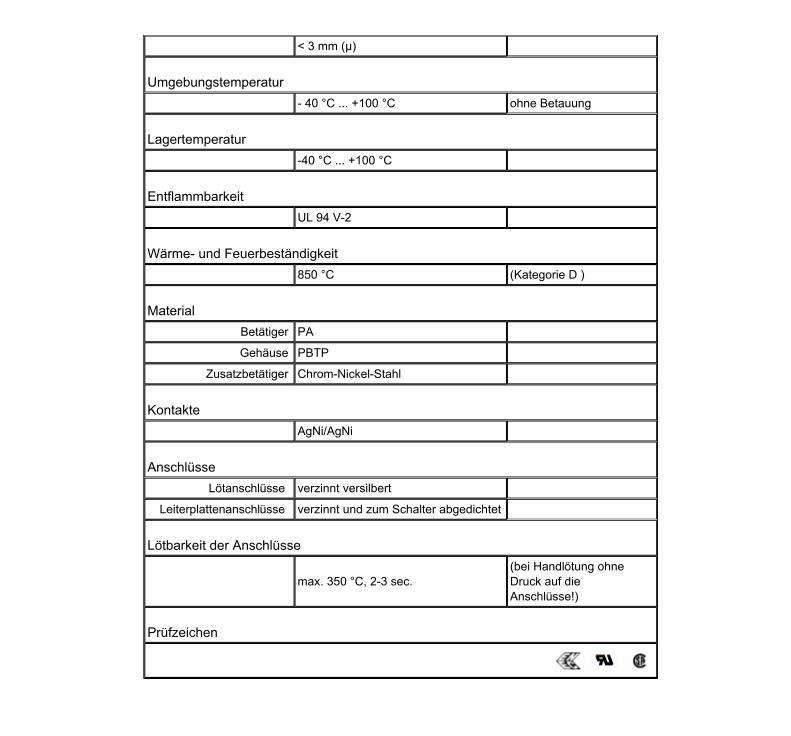
< 3 mm (µ)
Umgebungstemperatur
- 40 °C ... +100 °C ohne Betauung
Lagertemperatur
-40 °C ... +100 °C
Entflammbarkeit
UL 94 V-2
Wärme- und Feuerbeständigkeit
850 °C (Kategorie D )
Material
Betätiger PA
Gehäuse PBTP
Zusatzbetätiger Chrom-Nickel-Stahl
Kontakte
AgNi/AgNi
Anschlüsse
Lötanschlüsse verzinnt versilbert
Leiterplattenanschlüsse verzinnt und zum Schalter abgedichtet
Lötbarkeit der Anschlüsse
max. 350 °C, 2-3 sec.
(bei Handlötung ohne
Druck auf die
Anschlüsse!)
Prüfzeichen
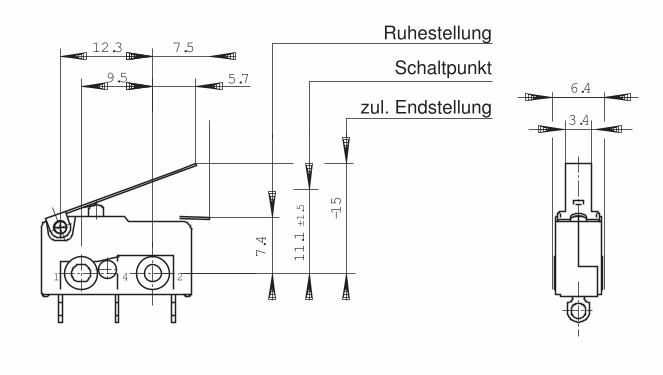
1 4 2
5.7
7.5
7.4
11.1 ±1.5
-15
9.5
12.3
3.4
6.4
Ruhestellung
Schaltpunkt
zul. Endstellung
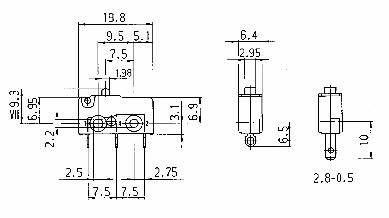
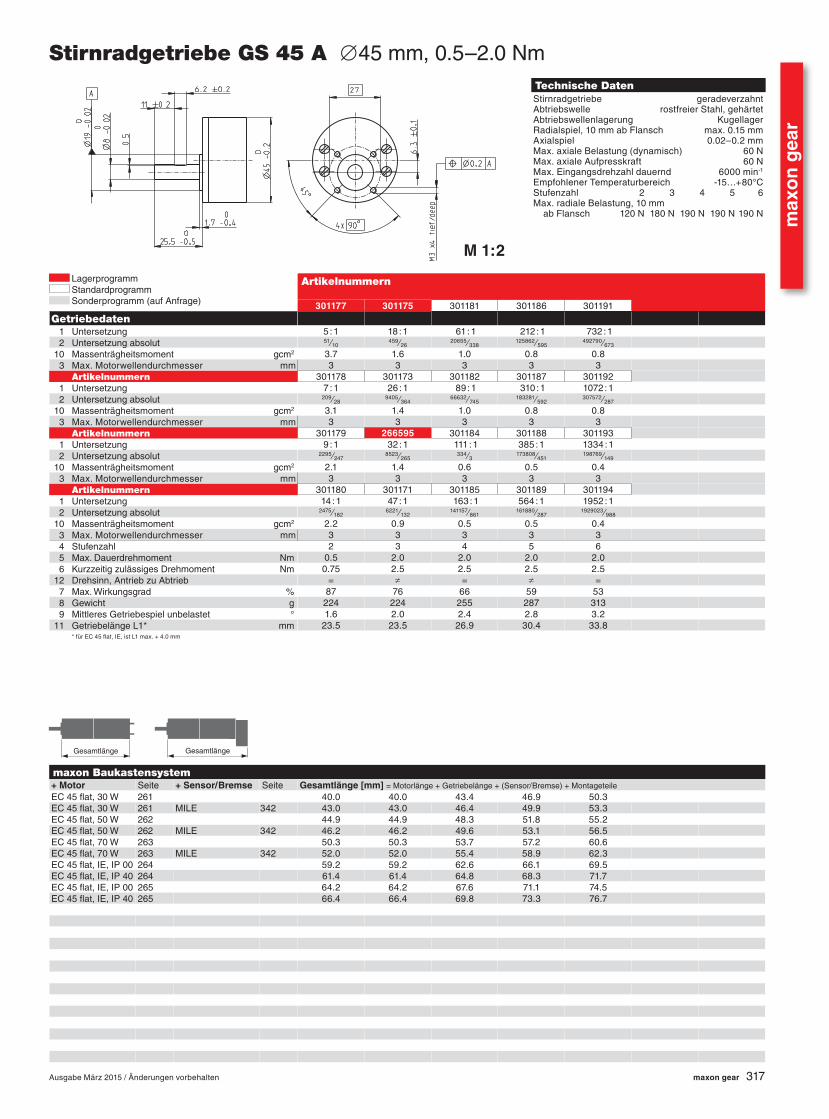
maxo
n g
ear
317
EC 45 flat, 30 W 261 40.0 40.0 43.4 46.9 50.3EC 45 flat, 30 W 261 MILE 342 43.0 43.0 46.4 49.9 53.3EC 45 flat, 50 W 262 44.9 44.9 48.3 51.8 55.2EC 45 flat, 50 W 262 MILE 342 46.2 46.2 49.6 53.1 56.5EC 45 flat, 70 W 263 50.3 50.3 53.7 57.2 60.6EC 45 flat, 70 W 263 MILE 342 52.0 52.0 55.4 58.9 62.3EC 45 flat, IE, IP 00 264 59.2 59.2 62.6 66.1 69.5EC 45 flat, IE, IP 40 264 61.4 61.4 64.8 68.3 71.7EC 45 flat, IE, IP 00 265 64.2 64.2 67.6 71.1 74.5EC 45 flat, IE, IP 40 265 66.4 66.4 69.8 73.3 76.7
301177 301175 301181 301186 301191
5 : 1 18 : 1 61 : 1 212 : 1 732 : 151⁄10
459⁄2620655⁄338
125862 ⁄595492790⁄673
3.7 1.6 1.0 0.8 0.83 3 3 3 3
301178 301173 301182 301187 3011927 : 1 26 : 1 89 : 1 310 : 1 1072 : 1
209⁄289405⁄364
66632 ⁄ 745183281⁄592
307572 ⁄287
3.1 1.4 1.0 0.8 0.83 3 3 3 3
301179 266595 301184 301188 3011939 : 1 32 : 1 111 : 1 385 : 1 1334 : 1
2295⁄2478523⁄265
334⁄3 173808⁄451198769⁄149
2.1 1.4 0.6 0.5 0.43 3 3 3 3
301180 301171 301185 301189 30119414 : 1 47 : 1 163 : 1 564 : 1 1952 : 1
2475⁄1826221⁄132
141157⁄861161880⁄287
1929023⁄988
2.2 0.9 0.5 0.5 0.43 3 3 3 32 3 4 5 6
0.5 2.0 2.0 2.0 2.00.75 2.5 2.5 2.5 2.5
= ≠ = ≠ =87 76 66 59 53
224 224 255 287 3131.6 2.0 2.4 2.8 3.2
23.5 23.5 26.9 30.4 33.8
M 1:2
LagerprogrammStandardprogrammSonderprogramm (auf Anfrage)
Ausgabe März 2015 / Änderungen vorbehalten maxon gear
Gesamtlänge Gesamtlänge
maxon Baukastensystem
+ Motor Seite + Sensor/Bremse Seite Gesamtlänge [mm] = Motorlänge + Getriebelänge + (Sensor/Bremse) + Montageteile
Technische Daten
Stirnradgetriebe geradeverzahntAbtriebswelle rostfreier Stahl, gehärtetAbtriebswellenlagerung KugellagerRadialspiel, 10 mm ab Flansch max. 0.15 mmAxialspiel 0.02–0.2 mmMax. axiale Belastung (dynamisch) 60 NMax. axiale Aufpresskraft 60 NMax. Eingangsdrehzahl dauernd 6000 min-1
Empfohlener Temperaturbereich -15…+80°CStufenzahl 2 3 4 5 6Max. radiale Belastung, 10 mm ab Flansch 120 N 180 N 190 N 190 N 190 N
Stirnradgetriebe GS 45 A ∅45 mm, 0.5–2.0 Nm
Artikelnummern
Getriebedaten
1 Untersetzung 2 Untersetzung absolut 10 Massenträgheitsmoment gcm2
3 Max. Motorwellendurchmesser mmArtikelnummern
1 Untersetzung 2 Untersetzung absolut 10 Massenträgheitsmoment gcm2
3 Max. Motorwellendurchmesser mmArtikelnummern
1 Untersetzung 2 Untersetzung absolut 10 Massenträgheitsmoment gcm2
3 Max. Motorwellendurchmesser mmArtikelnummern
1 Untersetzung 2 Untersetzung absolut 10 Massenträgheitsmoment gcm2
3 Max. Motorwellendurchmesser mm 4 Stufenzahl 5 Max. Dauerdrehmoment Nm 6 Kurzzeitig zulässiges Drehmoment Nm 12 Drehsinn, Antrieb zu Abtrieb 7 Max. Wirkungsgrad % 8 Gewicht g 9 Mittleres Getriebespiel unbelastet ° 11 Getriebelänge L1* mm
* für EC 45 flat, IE, ist L1 max. + 4.0 mm
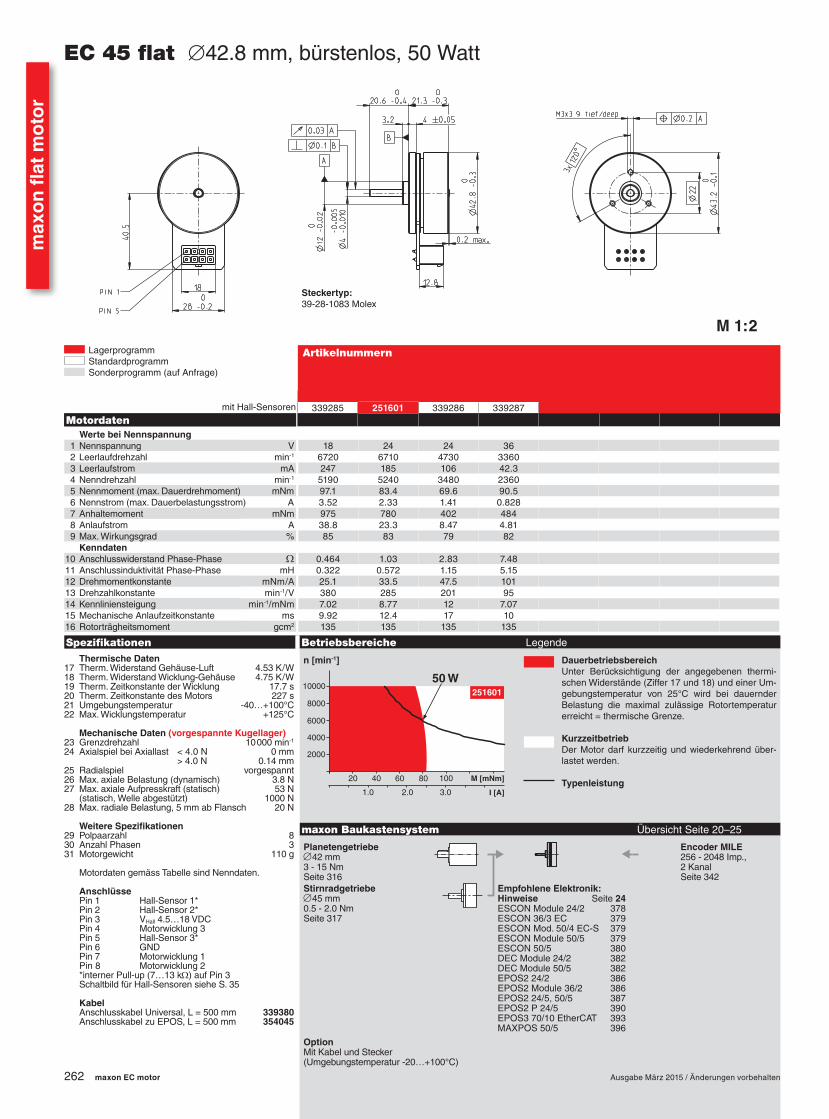
maxo
n E
C m
oto
r
262
maxo
n fl
at
mo
tor
18 24 24 366720 6710 4730 3360247 185 106 42.3
5190 5240 3480 236097.1 83.4 69.6 90.53.52 2.33 1.41 0.828975 780 402 48438.8 23.3 8.47 4.8185 83 79 82
0.464 1.03 2.83 7.480.322 0.572 1.15 5.1525.1 33.5 47.5 101380 285 201 957.02 8.77 12 7.079.92 12.4 17 10135 135 135 135
M 1:2
339285 251601 339286 339287
4.53 K/W 4.75 K/W 17.7 s 227 s -40…+100°C +125°C
< 4.0 N 0 mm > 4.0 N 0.14 mm
3.8 N 53 N
1000 N 20 N
8 3 110 g
ESCON Module 24/2 378ESCON 36/3 EC 379 ESCON Mod. 50/4 EC-S 379ESCON Module 50/5 379ESCON 50/5 380DEC Module 24/2 382 DEC Module 50/5 382EPOS2 24/2 386EPOS2 Module 36/2 386EPOS2 24/5, 50/5 387EPOS2 P 24/5 390EPOS3 70/10 EtherCAT 393MAXPOS 50/5 396
maxon EC motor Ausgabe März 2015 / Änderungen vorbehalten
LagerprogrammStandardprogrammSonderprogramm (auf Anfrage)
Artikelnummern
Spezifikationen Betriebsbereiche Legende
n [min-1] Dauerbetriebsbereich
Unter Berücksichtigung der angegebenen thermi-schen Widerstände (Ziffer 17 und 18) und einer Um-gebungstemperatur von 25°C wird bei dauernder Belastung die maximal zulässige Rotortemperatur erreicht = thermische Grenze.
Kurzzeitbetrieb
Der Motor darf kurzzeitig und wiederkehrend über-lastet werden.
Typenleistung
maxon Baukastensystem Übersicht Seite 20–25
EC 45 flat ∅42.8 mm, bürstenlos, 50 Watt
Motordaten
Werte bei Nennspannung
1 Nennspannung V2 Leerlaufdrehzahl min-1
3 Leerlaufstrom mA4 Nenndrehzahl min-1
5 Nennmoment (max. Dauerdrehmoment) mNm6 Nennstrom (max. Dauerbelastungsstrom) A7 Anhaltemoment mNm8 Anlaufstrom A9 Max. Wirkungsgrad %
Kenndaten
10 Anschlusswiderstand Phase-Phase W11 Anschlussinduktivität Phase-Phase mH12 Drehmomentkonstante mNm/A13 Drehzahlkonstante min-1/V14 Kennliniensteigung min-1/mNm15 Mechanische Anlaufzeitkonstante ms16 Rotorträgheitsmoment gcm2
Thermische Daten17 Therm. Widerstand Gehäuse-Luft 18 Therm. Widerstand Wicklung-Gehäuse 19 Therm. Zeitkonstante der Wicklung 20 Therm. Zeitkonstante des Motors 21 Umgebungstemperatur 22 Max. Wicklungstemperatur
Mechanische Daten (vorgespannte Kugellager)23 Grenzdrehzahl 10 000 min-1
24 Axialspiel bei Axiallast
25 Radialspiel vorgespannt26 Max. axiale Belastung (dynamisch) 27 Max. axiale Aufpresskraft (statisch)
(statisch, Welle abgestützt) 28 Max. radiale Belastung, 5 mm ab Flansch
Weitere Spezifikationen29 Polpaarzahl 30 Anzahl Phasen 31 Motorgewicht
Motordaten gemäss Tabelle sind Nenndaten.
Anschlüsse Pin 1 Hall-Sensor 1* Pin 2 Hall-Sensor 2* Pin 3 VHall 4.5…18 VDC Pin 4 Motorwicklung 3 Pin 5 Hall-Sensor 3* Pin 6 GND Pin 7 Motorwicklung 1 Pin 8 Motorwicklung 2 *interner Pull-up (7…13 kW) auf Pin 3 Schaltbild für Hall-Sensoren siehe S. 35
Kabel Anschlusskabel Universal, L = 500 mm 339380 Anschlusskabel zu EPOS, L = 500 mm 354045
Empfohlene Elektronik:Hinweise Seite 24
mit Hall-Sensoren
Planetengetriebe∅42 mm3 - 15 NmSeite 316Stirnradgetriebe∅45 mm0.5 - 2.0 NmSeite 317
Steckertyp: 39-28-1083 Molex
OptionMit Kabel und Stecker (Umgebungstemperatur -20…+100°C)
Encoder MILE256 - 2048 Imp.,2 KanalSeite 342
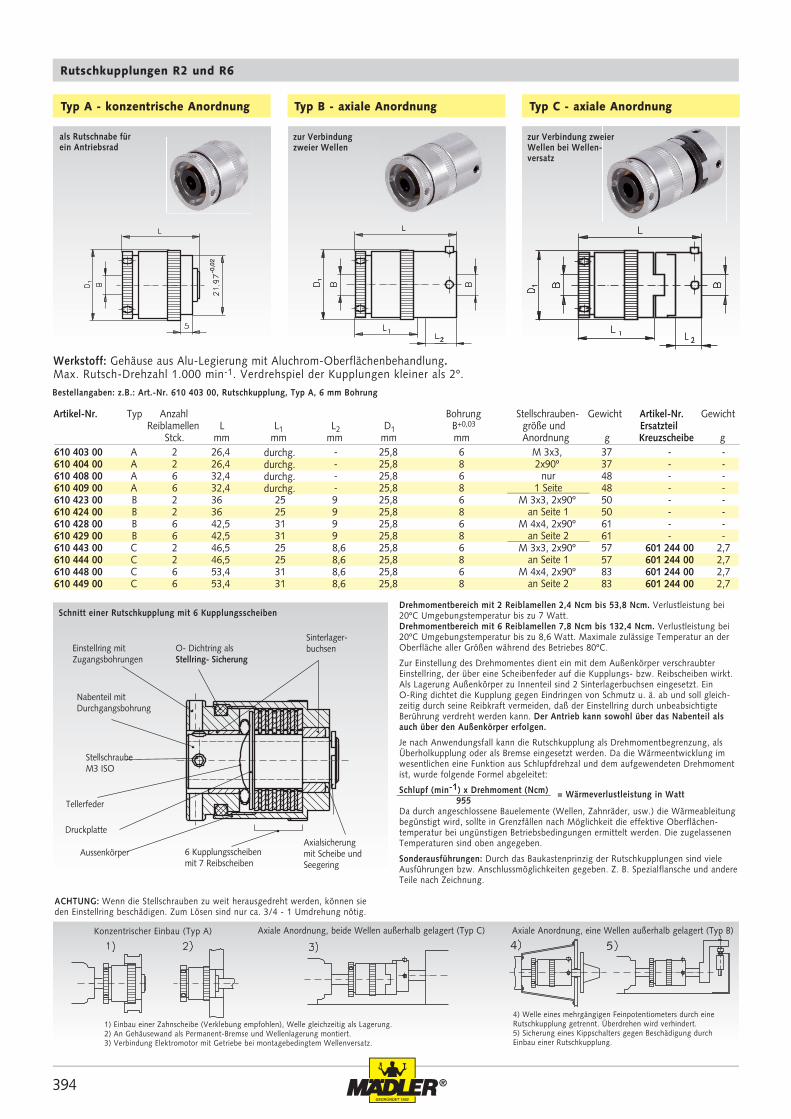
394 ®
610 403 00 A 2 26,4 - 25,8 6 M 3x3, 37 - -610 404 00 A 2 26,4 - 25,8 8 2x90º 37 - -610 408 00 A 6 32,4 - 25,8 6 48 - -610 409 00 A 6 32,4 - 25,8 8 48 - -610 423 00 B 2 36 25 9 25,8 6 M 3x3, 2x90º 50 - -610 424 00 B 2 36 25 9 25,8 8 50 - -610 428 00 B 6 42,5 31 9 25,8 6 M 4x4, 2x90º 61 - -610 429 00 B 6 42,5 31 9 25,8 8 61 - -610 443 00 C 2 46,5 25 8,6 25,8 6 M 3x3, 2x90º 57 601 244 00 2,7610 444 00 C 2 46,5 25 8,6 25,8 8 57 601 244 00 2,7610 448 00 C 6 53,4 31 8,6 25,8 6 M 4x4, 2x90º 83 601 244 00 2,7610 449 00 C 6 53,4 31 8,6 25,8 8 83 601 244 00 2,7
Werkstoff: Gehäuse aus Alu-Legierung mit Aluchrom-Oberflächenbehandlung. Max. Rutsch-Drehzahl 1.000 min-1. Verdrehspiel der Kupplungen kleiner als 2º.
Rutschkupplungen R2 und R6
Bestellangaben: z.B.: Art.-Nr. 610 403 00, Rutschkupplung, Typ A, 6 mm Bohrung
Typ A - konzentrische Anordnung Typ B - axiale Anordnung Typ C - axiale Anordnung
Artikel-Nr. Typ Anzahl Bohrung Stellschrauben- Gewicht Artikel-Nr. Gewicht Reiblamellen L L1 L2 D1 B+0,03 größe und Ersatzteil Stck. mm mm mm mm mm Anordnung g Kreuzscheibe g
als Rutschnabe für ein Antriebsrad
zur Verbindungzweier Wellen
zur Verbindung zweier Wellen bei Wellen-versatz
Drehmomentbereich mit 2 Reiblamellen 2,4 Ncm bis 53,8 Ncm. Verlustleistung bei 20ºC Umgebungstemperatur bis zu 7 Watt. Drehmomentbereich mit 6 Reiblamellen 7,8 Ncm bis 132,4 Ncm. Verlustleistung bei 20ºC Umgebungstemperatur bis zu 8,6 Watt. Maximale zulässige Temperatur an der Oberfläche aller Größen während des Betriebes 80ºC.
Zur Einstellung des Drehmomentes dient ein mit dem Außenkörper verschraubter Einstellring, der über eine Scheibenfeder auf die Kupplungs- bzw. Reibscheiben wirkt. Als Lagerung Außenkörper zu Innenteil sind 2 Sinterlagerbuchsen eingesetzt. Ein O-Ring dichtet die Kupplung gegen Eindringen von Schmutz u. ä. ab und soll gleich-zeitig durch seine Reibkraft vermeiden, daß der Einstellring durch unbeabsichtigte Berührung verdreht werden kann. Der Antrieb kann sowohl über das Nabenteil als auch über den Außenkörper erfolgen.
Je nach Anwendungsfall kann die Rutschkupplung als Drehmomentbegrenzung, als Überholkupplung oder als Bremse eingesetzt werden. Da die Wärmeentwicklung im wesentlichen eine Funktion aus Schlupfdrehzal und dem aufgewendeten Drehmoment ist, wurde folgende Formel abgeleitet:
Schlupf (min-1) x Drehmoment (Ncm) 955Da durch angeschlossene Bauelemente (Wellen, Zahnräder, usw.) die Wärmeableitung begünstigt wird, sollte in Grenzfällen nach Möglichkeit die effektive Oberflächen-temperatur bei ungünstigen Betriebsbedingungen ermittelt werden. Die zugelassenen Temperaturen sind oben angegeben.
Sonderausführungen: Durch das Baukastenprinzig der Rutschkupplungen sind viele Ausführungen bzw. Anschlussmöglichkeiten gegeben. Z. B. Spezialflansche und andere Teile nach Zeichnung.
nur1 Seite
an Seite 1
an Seite 2
an Seite 1
an Seite 2
= Wärmeverlustleistung in Watt
Schnitt einer Rutschkupplung mit 6 Kupplungsscheiben
ACHTUNG: Wenn die Stellschrauben zu weit herausgedreht werden, können sie den Einstellring beschädigen. Zum Lösen sind nur ca. 3/4 - 1 Umdrehung nötig.
Axiale Anordnung, beide Wellen außerhalb gelagert (Typ C) Axiale Anordnung, eine Wellen außerhalb gelagert (Typ B)
1) Einbau einer Zahnscheibe (Verklebung empfohlen), Welle gleichzeitig als Lagerung.2) An Gehäusewand als Permanent-Bremse und Wellenlagerung montiert.3) Verbindung Elektromotor mit Getriebe bei montagebedingtem Wellenversatz.
4) Welle eines mehrgängigen Feinpotentiometers durch eine Rutschkupplung getrennt. Überdrehen wird verhindert.5) Sicherung eines Kippschalters gegen Beschädigung durch Einbau einer Rutschkupplung.
Konzentrischer Einbau (Typ A)
durchg.durchg.durchg.durchg.
O- Dichtring als Stellring- Sicherung
Einstellring mit Zugangsbohrungen
Nabenteil mit Durchgangsbohrung
StellschraubeM3 ISO
Tellerfeder
Druckplatte
6 Kupplungsscheiben mit 7 Reibscheiben
Axialsicherung mit Scheibe und Seegering
Sinterlager-buchsen
Aussenkörper
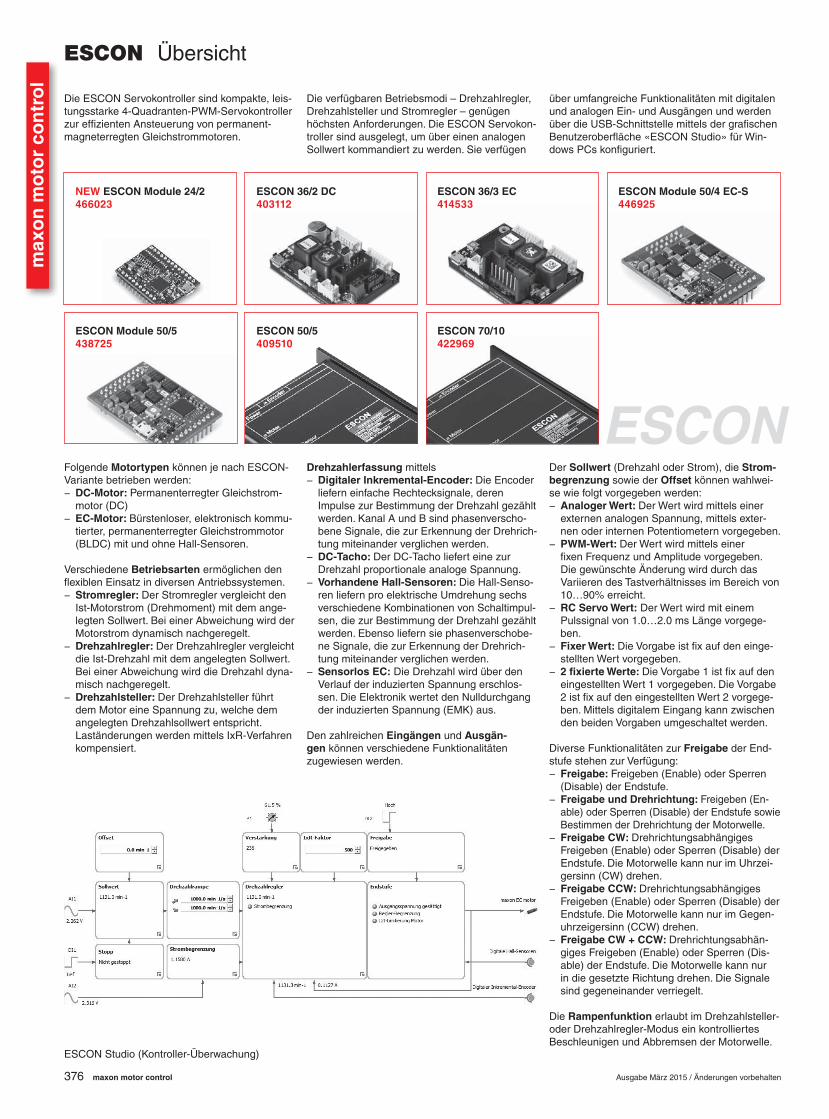
376
maxo
n m
oto
r co
ntr
ol
ESCON Module 50/5
438725
ESCON 50/5
409510
ESCON 70/10
422969
NEW ESCON Module 24/2
466023
ESCON 36/2 DC
403112
ESCON 36/3 EC
414533
ESCON Module 50/4 EC-S
446925
ESCON
maxon motor control Ausgabe März 2015 / Änderungen vorbehalten
ESCON Übersicht
Die ESCON Servokontroller sind kompakte, leis-tungsstarke 4-Quadranten-PWM-Servokontroller zur effizienten Ansteuerung von permanent-magnet erregten Gleichstrommotoren.
Die verfügbaren Betriebsmodi – Drehzahlregler, Drehzahlsteller und Stromregler – genügen höchsten Anforderungen. Die ESCON Servokon-troller sind ausgelegt, um über einen analogen Sollwert kommandiert zu werden. Sie verfügen
über umfangreiche Funktionalitäten mit digitalen und analogen Ein- und Ausgängen und werden über die USB-Schnittstelle mittels der grafischen Benutzeroberfläche «ESCON Studio» für Win-dows PCs konfiguriert.
Folgende Motortypen können je nach ESCON-Variante betrieben werden:
− DC-Motor: Permanenterregter Gleichstrom-motor (DC)
− EC-Motor: Bürstenloser, elektronisch kommu-tierter, permanenterregter Gleichstrommotor (BLDC) mit und ohne Hall-Sensoren.
Verschiedene Betriebsarten ermöglichen den flexiblen Einsatz in diversen Antriebssystemen.
− Stromregler: Der Stromregler vergleicht den Ist-Motorstrom (Drehmoment) mit dem ange-legten Sollwert. Bei einer Abweichung wird der Motorstrom dynamisch nachgeregelt.
− Drehzahlregler: Der Drehzahlregler vergleicht die Ist-Drehzahl mit dem angelegten Sollwert. Bei einer Abweichung wird die Drehzahl dyna-misch nachgeregelt.
− Drehzahlsteller: Der Drehzahlsteller führt dem Motor eine Spannung zu, welche dem angelegten Drehzahlsollwert entspricht. Laständerungen werden mittels IxR-Verfahren kompensiert.
Drehzahlerfassung mittels − Digitaler Inkremental-Encoder: Die Encoder liefern einfache Rechtecksignale, deren Impulse zur Bestimmung der Drehzahl gezählt werden. Kanal A und B sind phasenverscho-bene Signale, die zur Erkennung der Drehrich-tung miteinander verglichen werden.
− DC-Tacho: Der DC-Tacho liefert eine zur Drehzahl proportionale analoge Spannung.
− Vorhandene Hall-Sensoren: Die Hall-Senso-ren liefern pro elektrische Umdrehung sechs verschiedene Kombinationen von Schaltimpul-sen, die zur Bestimmung der Drehzahl gezählt werden. Ebenso liefern sie phasenverschobe-ne Signale, die zur Erkennung der Drehrich-tung miteinander verglichen werden.
− Sensorlos EC: Die Drehzahl wird über den Verlauf der induzierten Spannung erschlos-sen. Die Elektronik wertet den Nulldurchgang der induzierten Spannung (EMK) aus.
Den zahlreichen Eingängen und Ausgän-
gen können verschiedene Funktionalitäten zugewiesen werden.
Der Sollwert (Drehzahl oder Strom), die Strom-
begrenzung sowie der Offset können wahlwei-se wie folgt vorgegeben werden:
− Analoger Wert: Der Wert wird mittels einer externen analogen Spannung, mittels exter-nen oder internen Potentiometern vorgegeben.
− PWM-Wert: Der Wert wird mittels einer fixen Frequenz und Amplitude vorgegeben. Die gewünschte Änderung wird durch das Variieren des Tastverhältnisses im Bereich von 10…90% erreicht.
− RC Servo Wert: Der Wert wird mit einem Pulssignal von 1.0…2.0 ms Länge vorgege-ben.
− Fixer Wert: Die Vorgabe ist fix auf den einge-stellten Wert vorgegeben.
− 2 fixierte Werte: Die Vorgabe 1 ist fix auf den eingestellten Wert 1 vorgegeben. Die Vorgabe 2 ist fix auf den eingestellten Wert 2 vorgege-ben. Mittels digitalem Eingang kann zwischen den beiden Vorgaben umgeschaltet werden.
Diverse Funktionalitäten zur Freigabe der End-stufe stehen zur Verfügung:
− Freigabe: Freigeben (Enable) oder Sperren (Disable) der Endstufe.
− Freigabe und Drehrichtung: Freigeben (En-able) oder Sperren (Disable) der Endstufe sowie Bestimmen der Drehrichtung der Motorwelle.
− Freigabe CW: Drehrichtungsabhängiges Freigeben (Enable) oder Sperren (Disable) der Endstufe. Die Motorwelle kann nur im Uhrzei-gersinn (CW) drehen.
− Freigabe CCW: Drehrichtungsabhängiges Freigeben (Enable) oder Sperren (Disable) der Endstufe. Die Motorwelle kann nur im Gegen-uhrzeigersinn (CCW) drehen.
− Freigabe CW + CCW: Drehrichtungsabhän-giges Freigeben (Enable) oder Sperren (Dis-able) der Endstufe. Die Motorwelle kann nur in die gesetzte Richtung drehen. Die Signale sind gegeneinander verriegelt.
Die Rampenfunktion erlaubt im Drehzahl steller- oder Drehzahlregler-Modus ein kontrolliertes Beschleunigen und Abbremsen der Motorwelle.
ESCON Studio (Kontroller-Überwachung)
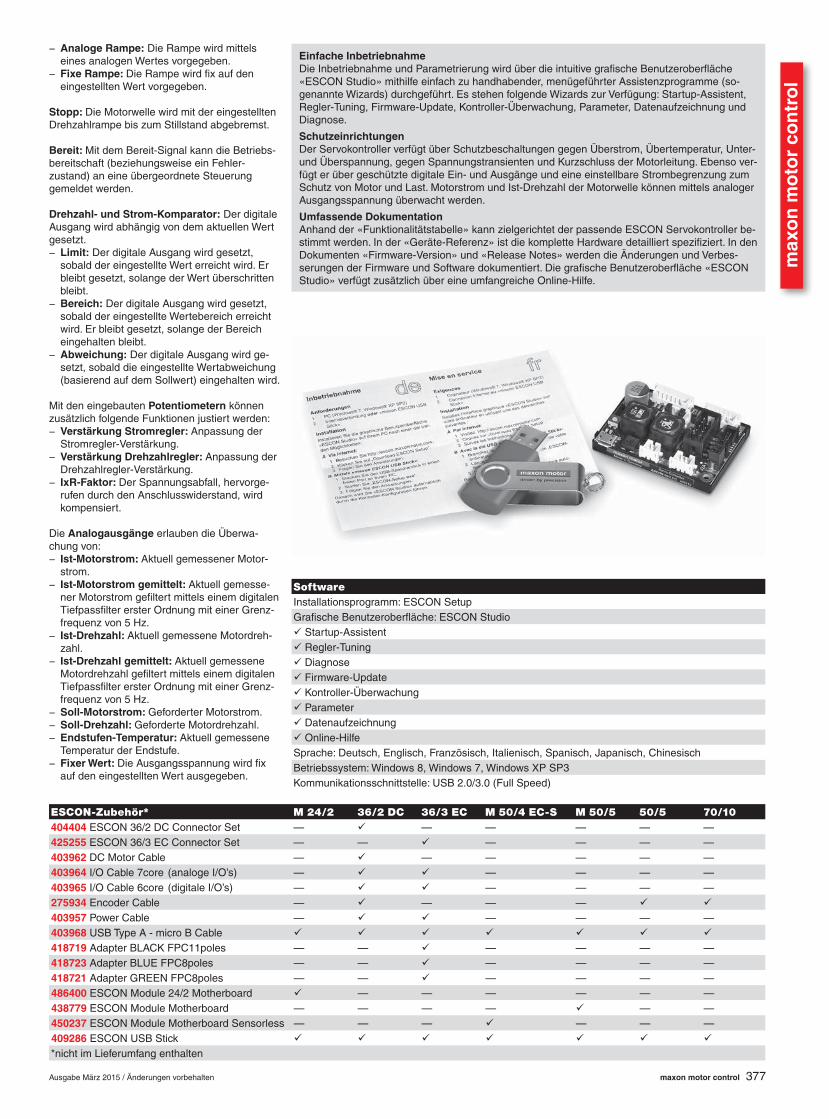
377
maxo
n m
oto
r co
ntr
ol
M 24/2 36/2 DC 36/3 EC M 50/4 EC-S M 50/5 50/5 70/10
404404 ESCON 36/2 DC Connector Set — — — — — —
425255 ESCON 36/3 EC Connector Set — — — — — —
403962 DC Motor Cable — — — — — —
403964 I/O Cable 7core — — — — —
403965 I/O Cable 6core — — — — —
275934 Encoder Cable — — — —
403957 Power Cable — — — — —
403968 USB Type A - micro B Cable
418719 Adapter BLACK FPC11poles — — — — — —
418723 Adapter BLUE FPC8poles — — — — — —
418721 Adapter GREEN FPC8poles — — — — — —
486400 ESCON Module 24/2 Motherboard — — — — — —
438779 ESCON Module Motherboard — — — — — —
450237 ESCON Module Motherboard Sensorless — — — — — —
409286 ESCON USB Stick
Ausgabe März 2015 / Änderungen vorbehalten maxon motor control
Einfache Inbetriebnahme
Die Inbetriebnahme und Parametrierung wird über die intuitive grafische Benutzeroberfläche «ESCON Studio» mithilfe einfach zu handhabender, menügeführter Assistenzprogramme (so-genannte Wizards) durchgeführt. Es stehen folgende Wizards zur Verfügung: Startup-Assistent, Regler-Tuning, Firmware-Update, Kontroller-Überwachung, Parameter, Datenaufzeichnung und Diagnose.
Schutzeinrichtungen
Der Servokontroller verfügt über Schutzbeschaltungen gegen Überstrom, Übertemperatur, Unter- und Überspannung, gegen Spannungstransienten und Kurzschluss der Motorleitung. Ebenso ver-fügt er über geschützte digitale Ein- und Ausgänge und eine einstellbare Strombegrenzung zum Schutz von Motor und Last. Motorstrom und Ist-Drehzahl der Motorwelle können mittels analoger Ausgangsspannung überwacht werden.
Umfassende Dokumentation
Anhand der «Funktionalitätstabelle» kann zielgerichtet der passende ESCON Servokontroller be-stimmt werden. In der «Geräte-Referenz» ist die komplette Hardware detailliert spezifiziert. In den Dokumenten «Firmware-Version» und «Release Notes» werden die Änderungen und Verbes-serungen der Firmware und Software dokumentiert. Die grafische Benutzeroberfläche «ESCON Studio» verfügt zusätzlich über eine umfangreiche Online-Hilfe.
− Analoge Rampe: Die Rampe wird mittels eines analogen Wertes vorgegeben.
− Fixe Rampe: Die Rampe wird fix auf den eingestellten Wert vorgegeben.
Stopp: Die Motorwelle wird mit der eingestellten Drehzahlrampe bis zum Stillstand abgebremst.
Bereit: Mit dem Bereit-Signal kann die Betriebs-bereitschaft (beziehungsweise ein Fehler-zustand) an eine übergeordnete Steuerung gemeldet werden.
Drehzahl- und Strom-Komparator: Der digitale Ausgang wird abhängig von dem aktuellen Wert gesetzt.
− Limit: Der digitale Ausgang wird gesetzt, sobald der eingestellte Wert erreicht wird. Er bleibt gesetzt, solange der Wert überschritten bleibt.
− Bereich: Der digitale Ausgang wird gesetzt, sobald der eingestellte Wertebereich erreicht wird. Er bleibt gesetzt, solange der Bereich eingehalten bleibt.
− Abweichung: Der digitale Ausgang wird ge-setzt, sobald die eingestellte Wertabweichung (basierend auf dem Sollwert) eingehalten wird.
Mit den eingebauten Potentiometern können zusätzlich folgende Funktionen justiert werden:
− Verstärkung Stromregler: Anpassung der Stromregler-Verstärkung.
− Verstärkung Drehzahlregler: Anpassung der Drehzahlregler-Verstärkung.
− IxR-Faktor: Der Spannungsabfall, hervorge-rufen durch den Anschlusswiderstand, wird kompensiert.
Die Analogausgänge erlauben die Überwa-chung von:
− Ist-Motorstrom: Aktuell gemessener Motor-strom.
− Ist-Motorstrom gemittelt: Aktuell gemesse-ner Motorstrom gefiltert mittels einem digitalen Tiefpassfilter erster Ordnung mit einer Grenz-frequenz von 5 Hz.
− Ist-Drehzahl: Aktuell gemessene Motordreh-zahl.
− Ist-Drehzahl gemittelt: Aktuell gemessene Motordrehzahl gefiltert mittels einem digitalen Tiefpassfilter erster Ordnung mit einer Grenz-frequenz von 5 Hz.
− Soll-Motorstrom: Geforderter Motorstrom. − Soll-Drehzahl: Geforderte Motordrehzahl. − Endstufen-Temperatur: Aktuell gemessene Temperatur der Endstufe.
− Fixer Wert: Die Ausgangsspannung wird fix auf den eingestellten Wert ausgegeben.
Software
Installationsprogramm: ESCON Setup
Grafische Benutzeroberfläche: ESCON Studio
Startup-Assistent
Regler-Tuning
Diagnose
Firmware-Update
Kontroller-Überwachung
Parameter
Datenaufzeichnung
Online-Hilfe
Sprache: Deutsch, Englisch, Französisch, Italienisch, Spanisch, Japanisch, Chinesisch
Betriebssystem: Windows 8, Windows 7, Windows XP SP3
Kommunikationsschnittstelle: USB 2.0/3.0 (Full Speed)
ESCON-Zubehör*
(analoge I/O’s)
(digitale I/O’s)
*nicht im Lieferumfang enthalten
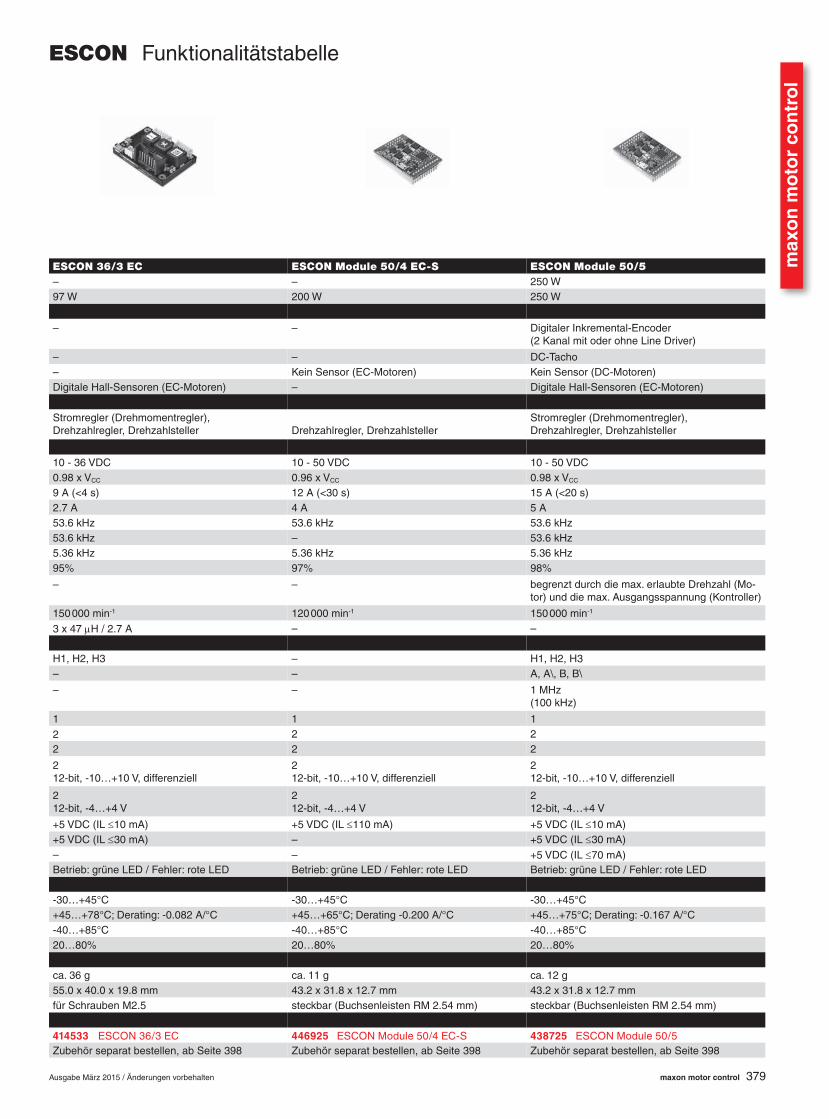
379
maxo
n m
oto
r co
ntr
ol
Ausgabe März 2015 / Änderungen vorbehalten maxon motor control
ESCON Funktionalitätstabelle
ESCON Module 50/4 EC-S
–
200 W
–
–
Kein Sensor (EC-Motoren)
–
Drehzahl regler, Drehzahlsteller
10 - 50 VDC
0.96 x VCC
12 A (<30 s)
4 A
53.6 kHz
–
5.36 kHz
97%
–
120 000 min-1
–
–
–
–
1
2
2
2 12-bit, -10…+10 V, differenziell
2 12-bit, -4…+4 V
+5 VDC (IL ≤110 mA)
–
–Betrieb: grüne LED / Fehler: rote LED
-30…+45°C
+45…+65°C; Derating -0.200 A/°C
-40…+85°C
20…80%
ca. 11 g
43.2 x 31.8 x 12.7 mm
steckbar (Buchsenleisten RM 2.54 mm)
446925 ESCON Module 50/4 EC-SZubehör separat bestellen, ab Seite 398
ESCON Module 50/5
250 W
250 W
Digitaler Inkremental-Encoder (2 Kanal mit oder ohne Line Driver)
DC-Tacho
Kein Sensor (DC-Motoren)
Digitale Hall-Sensoren (EC-Motoren)
Stromregler (Drehmomentregler), Drehzahl regler, Drehzahlsteller
10 - 50 VDC
0.98 x VCC
15 A (<20 s)
5 A
53.6 kHz
53.6 kHz
5.36 kHz
98%
begrenzt durch die max. erlaubte Drehzahl (Mo-tor) und die max. Ausgangsspannung (Kontroller)
150 000 min-1
–
H1, H2, H3
A, A\, B, B\
1 MHz (100 kHz)
1
2
2
2 12-bit, -10…+10 V, differenziell
2 12-bit, -4…+4 V
+5 VDC (IL ≤10 mA)
+5 VDC (IL ≤30 mA)
+5 VDC (IL ≤70 mA)Betrieb: grüne LED / Fehler: rote LED
-30…+45°C
+45…+75°C; Derating: -0.167 A/°C
-40…+85°C
20…80%
ca. 12 g
43.2 x 31.8 x 12.7 mm
steckbar (Buchsenleisten RM 2.54 mm)
438725 ESCON Module 50/5Zubehör separat bestellen, ab Seite 398
ESCON 36/3 EC
–
97 W
–
–
–
Digitale Hall-Sensoren (EC-Motoren)
Stromregler (Drehmomentregler), Drehzahl regler, Drehzahlsteller
10 - 36 VDC
0.98 x VCC
9 A (<4 s)
2.7 A
53.6 kHz
53.6 kHz
5.36 kHz
95%
–
150 000 min-1
3 x 47 mH / 2.7 A
H1, H2, H3
–
–
1
22
2 12-bit, -10…+10 V, differenziell
2 12-bit, -4…+4 V
+5 VDC (IL ≤10 mA)
+5 VDC (IL ≤30 mA)
–
Betrieb: grüne LED / Fehler: rote LED
-30…+45°C
+45…+78°C; Derating: -0.082 A/°C
-40…+85°C
20…80%
ca. 36 g
55.0 x 40.0 x 19.8 mm
für Schrauben M2.5
414533 ESCON 36/3 ECZubehör separat bestellen, ab Seite 398
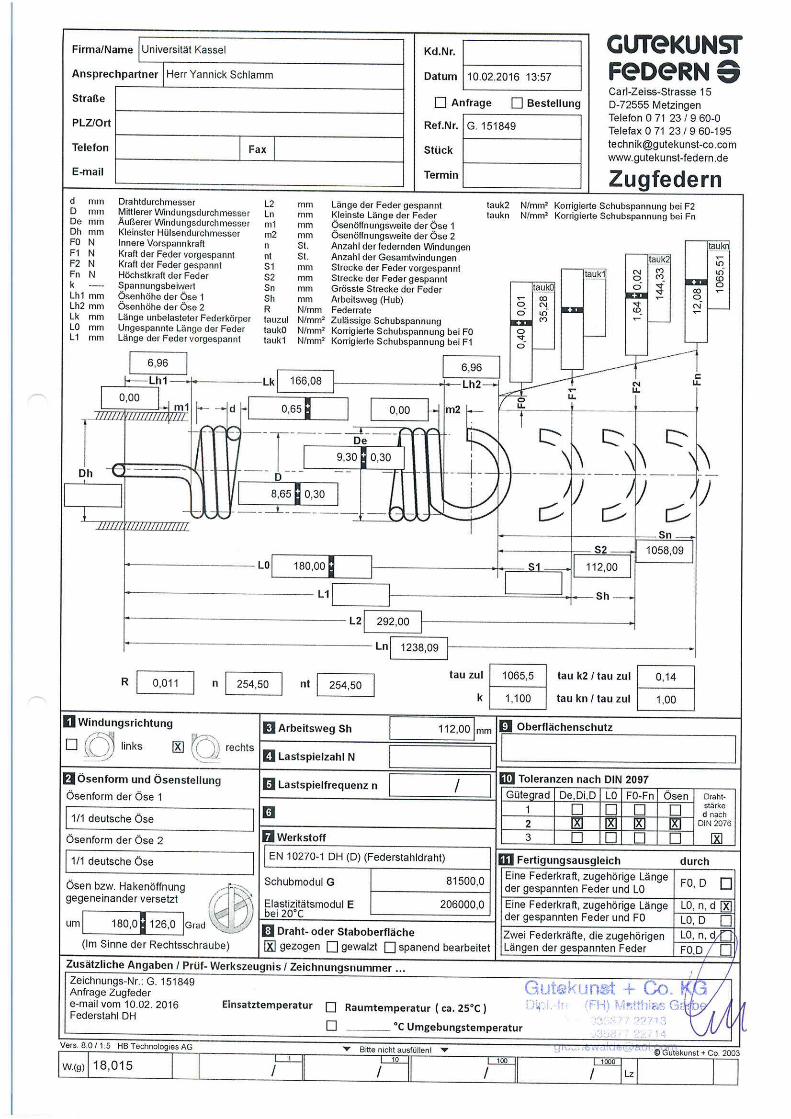
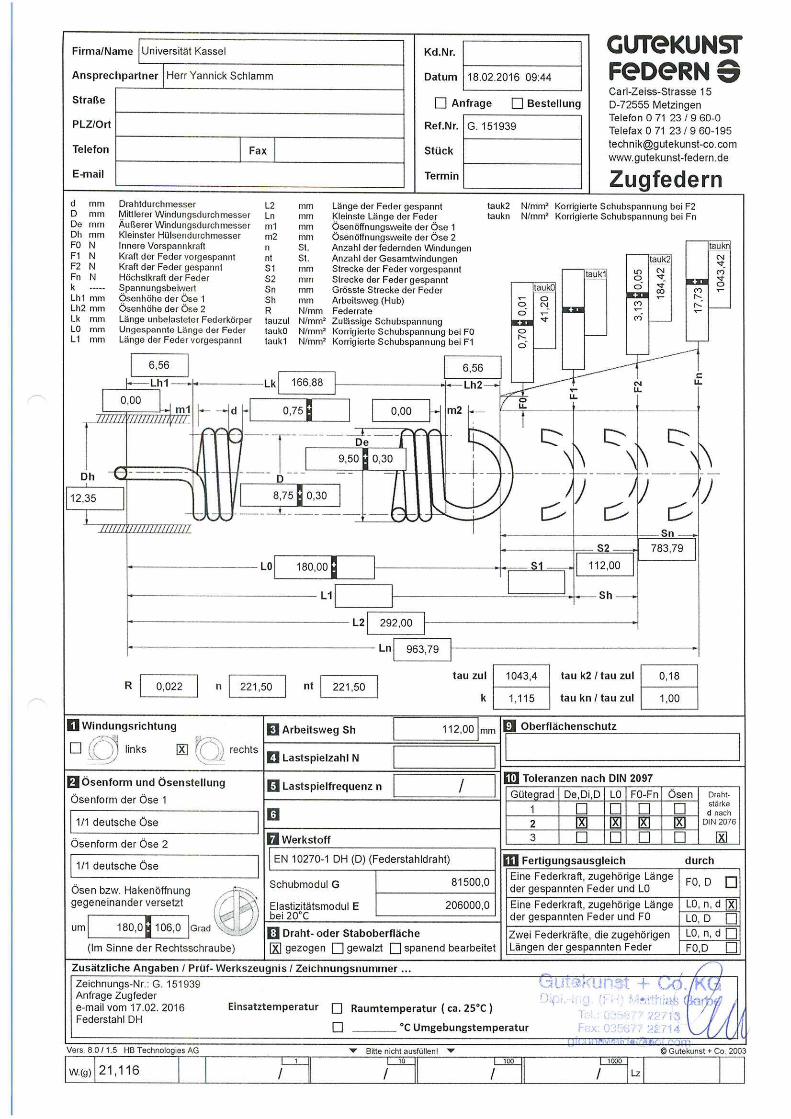













![Home [] · Karl Jenkins (vorallem durch das Adiemus-Projekt bekannt geworden), verbindet in seinen Kompositionen europäische mit afrikanischer Oder arabischer Musik; so werden Klassiker,](https://img.pdfslide.org/doc/110x75/5f5a274f496fc01e4253d287/home-karl-jenkins-vorallem-durch-das-adiemus-projekt-bekannt-geworden-verbindet.jpg)







