Embed Size (px)
Citation preview
Member of theCenter for ComputationalEngineering Science
Entwurf nichtlinearer dynamischer Systeme mit Methoden der
konstruktiven nichtlinearen Dynamik
Martin Mönnigmann und Wolfgang Marquardt
Lehrstuhl für Prozesstechnik
RWTH Aachen
1/31
Übersicht
• Nichtlineare Systeme und Verfahrenstechnik?• Etablierte Methoden zur Analyse
verfahrenstechnischer Systeme• Grenzen der Analyse• Normalenvektor-Methode• Ablauf der Optimierung • Zusammenfassung und Ausblick
2/31
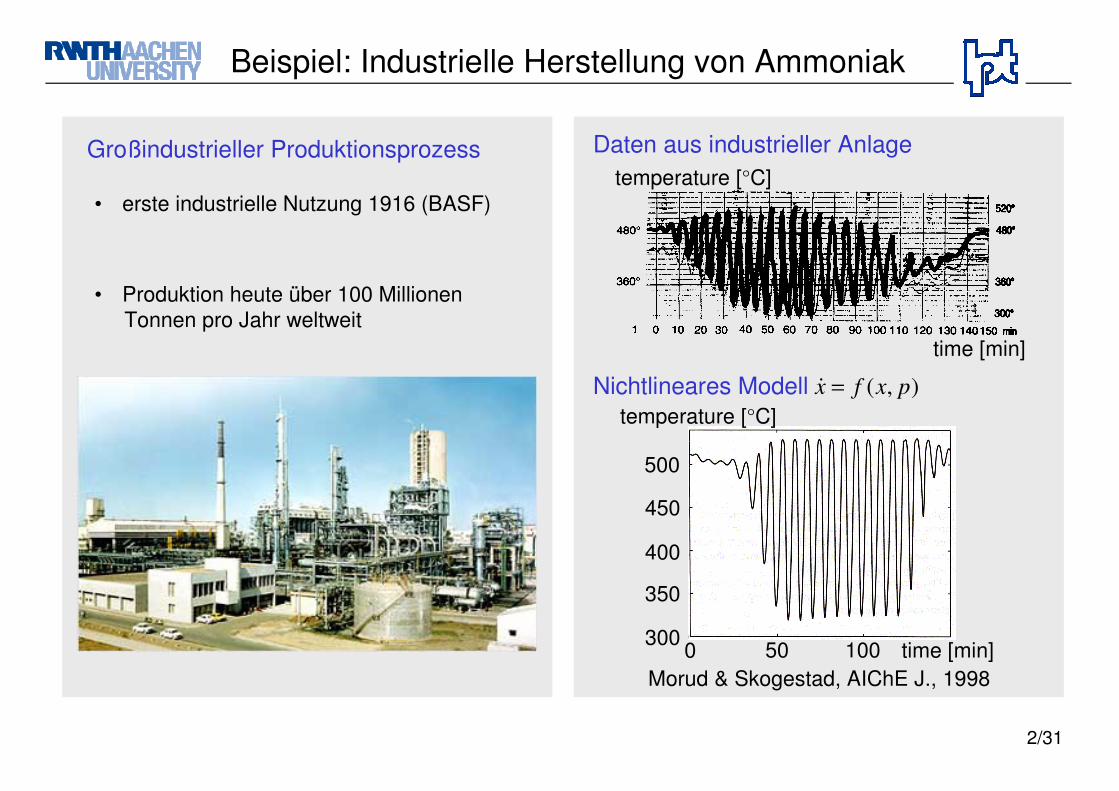
Beispiel: Industrielle Herstellung von Ammoniak
Morud & Skogestad, AIChE J., 1998
Daten aus industrieller Anlagetemperature [°C]
time [min]
Nichtlineares Modell ),( pxfx =&
100500300
500
350
400
450
temperature [°C]
time [min]
• erste industrielle Nutzung 1916 (BASF)
Großindustrieller Produktionsprozess
• Produktion heute über 100 MillionenTonnen pro Jahr weltweit
3/31
• Chemische ReaktorenBilous & Amundsen (1955), van Heerden (1958), Aris & Amundsen (1958),Razon & Schmitz (1987), Altimari et al. (2004), …
• DestillationskolonnenPetlyuk & Avet'yan (1971), Michelsen & Villadsen (1979), Kienle & Marquardt (1991), Jacobsen & Skogestad (1991), Bekiaris et al. (1993),Kienle et al. (1994), Li et al. (2004), …
• ReaktivdestillationPisarenko et al. (1987), Jacobs & Krishna (1993), Nijhuis et al. (1993), Ciric & Miao (1994), ...
• Chemische Reaktoren und Trennapparate mit Rückführung von Stoff und EnergieBildea & Dimian (1998), Kiss & Bildea (2002, 2003), Zeyer et al. (2003), Balasubramanian et al. (2003), Bildea et al. (2004), Schmidt & Jacobsen (2004)
Nichtlineare verfahrenstechnische Systeme
4/31
Übersicht
• Nichtlineare Systeme und Verfahrenstechnik?• Etablierte Methoden zur Analyse
verfahrenstechnischer Systeme• Grenzen der Analyse• Normalenvektor-Methode• Ablauf der Optimierung• Zusammenfassung und Ausblick
5/31
Systemklasse
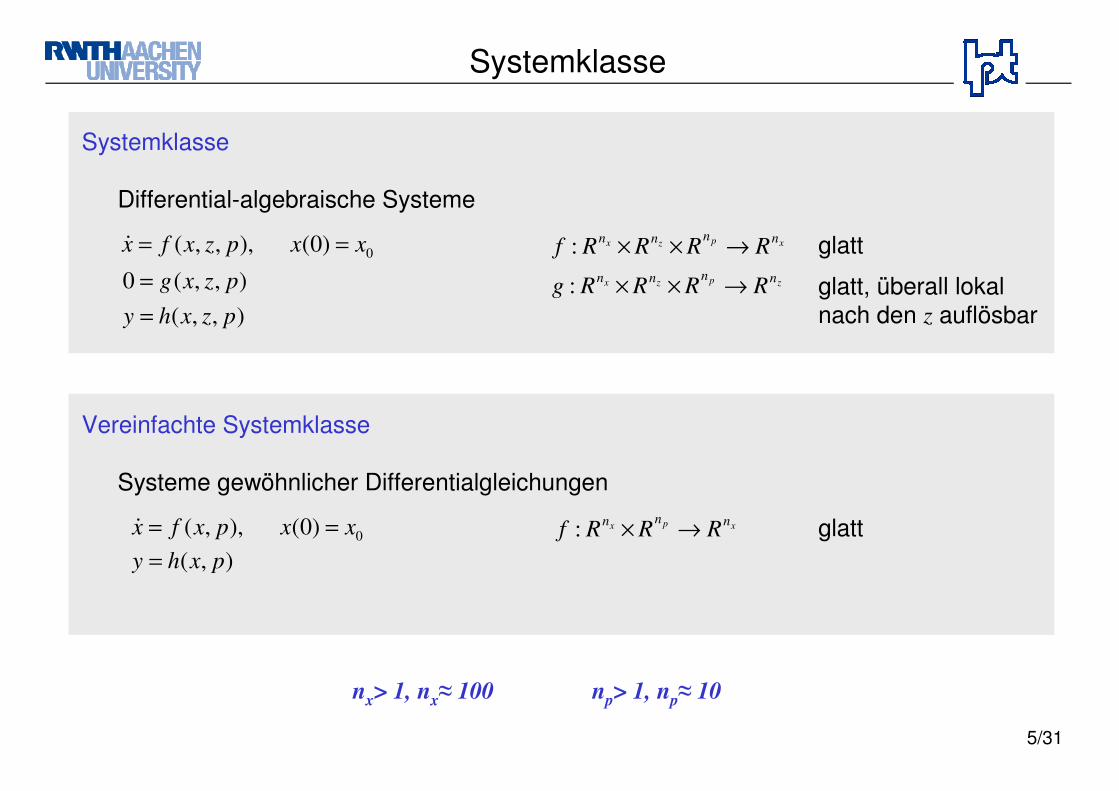
Systemklasse
Differential-algebraische Systeme
xpzx nnnnRRRRf →××:
zpzx nnnnRRRRg →××:
glatt
glatt, überall lokal nach den z auflösbar
0)0(),,,( xxpzxfx ==&
),,(0 pzxg=
Vereinfachte Systemklasse
Systeme gewöhnlicher Differentialgleichungen
xpx nnnRRRf →×: glatt0)0(),,( xxpxfx ==&
),,( pzxhy =
),( pxhy =
np> 1, np≈ 10nx> 1, nx≈ 100
6/31
Analyse durch Lösungsfortsetzung
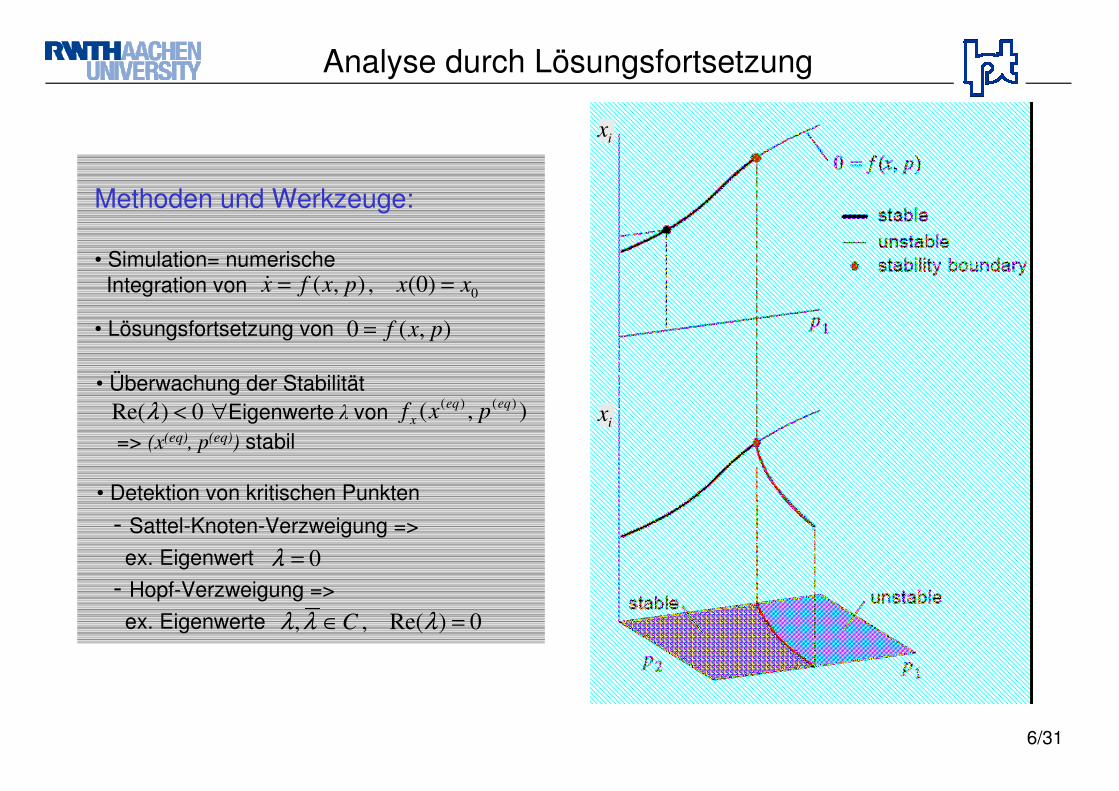
Methoden und Werkzeuge:
• Simulation= numerischeIntegration von 0)0(,),( xxpxfx ==&
• Lösungsfortsetzung von ),(0 pxf=
ix
- Sattel-Knoten-Verzweigung =>
ex. Eigenwert
- Hopf-Verzweigung =>
ex. Eigenwerte
0=λ
0)Re(,, =∈ λλλ C
• Detektion von kritischen Punkten
• Überwachung der Stabilität),( )()( eqeq
x pxf0)Re( <λ ∀Eigenwerte λ von=> (x(eq), p(eq)) stabil
ix
7/31
Zwei-Parameter-Fortsetzung
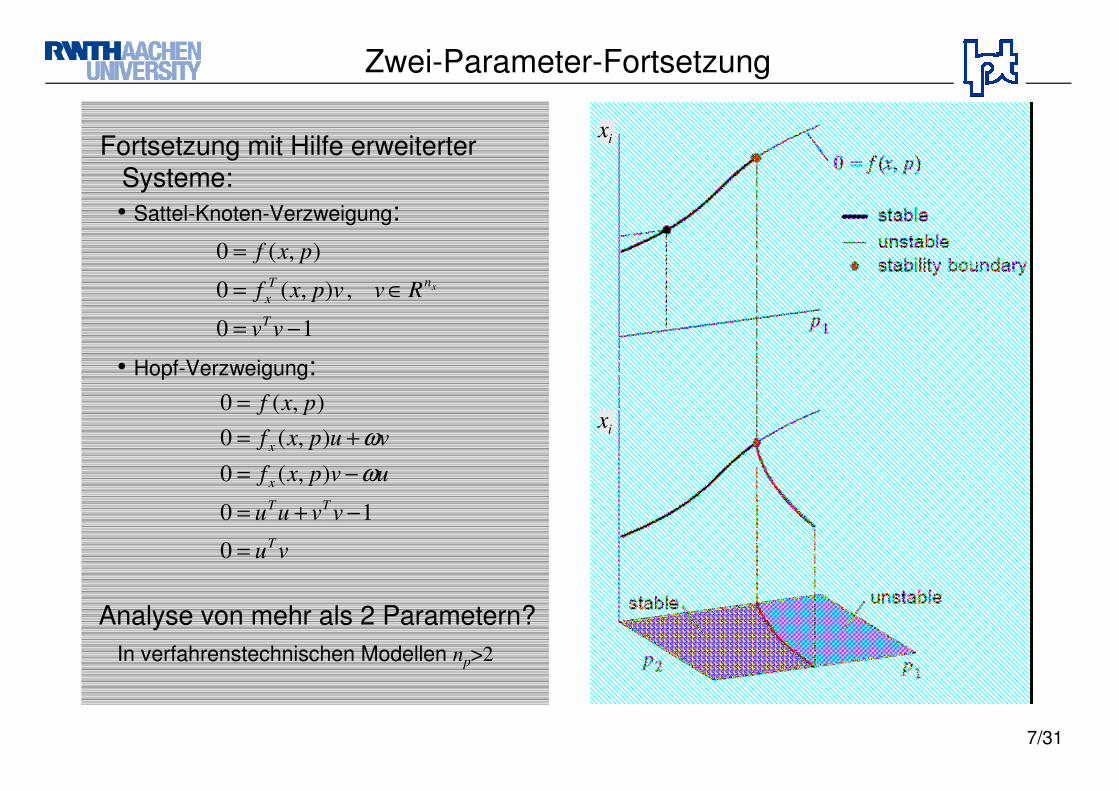
Fortsetzung mit Hilfe erweiterter Systeme:• Sattel-Knoten-Verzweigung:
10
,),(0
),(0
−=
∈=
=
vv
Rvvpxf
pxf
T
nT
xx
• Hopf-Verzweigung:
vu
vvuu
uvpxf
vupxf
pxf
T
TT
x
x
=
−+=
−=
+=
=
0
10
),(0
),(0
),(0
ω
ω ix
ix
Analyse von mehr als 2 Parametern?In verfahrenstechnischen Modellen np>2
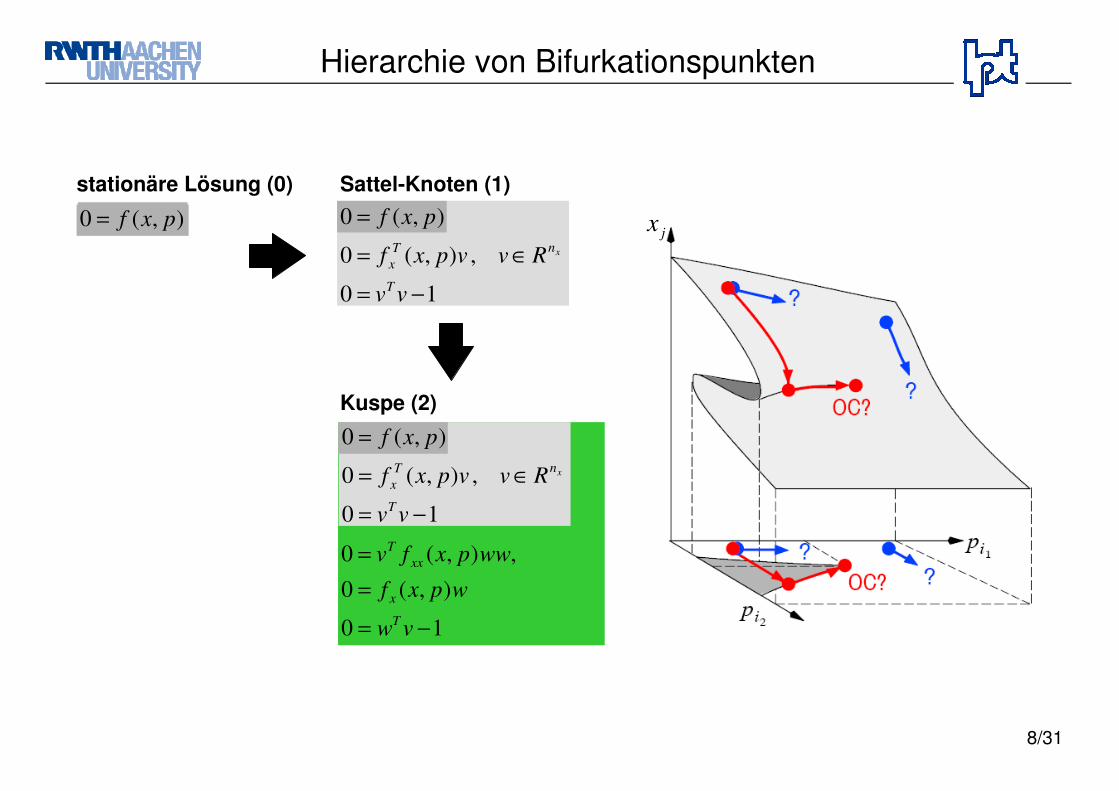
8/31
Hierarchie von Bifurkationspunkten
jx),(0 pxf=
10
,),(0
),(0
−=
∈=
=
vv
Rvvpxf
pxf
T
nT
xx
Sattel-Knoten (1)
10
),(0
,),(0
−=
=
=
vw
wpxf
wwpxfv
T
x
xx
T
10
,),(0
),(0
−=
∈=
=
vv
Rvvpxf
pxf
T
nT
xx
Kuspe (2)
stationäre Lösung (0)
9/31
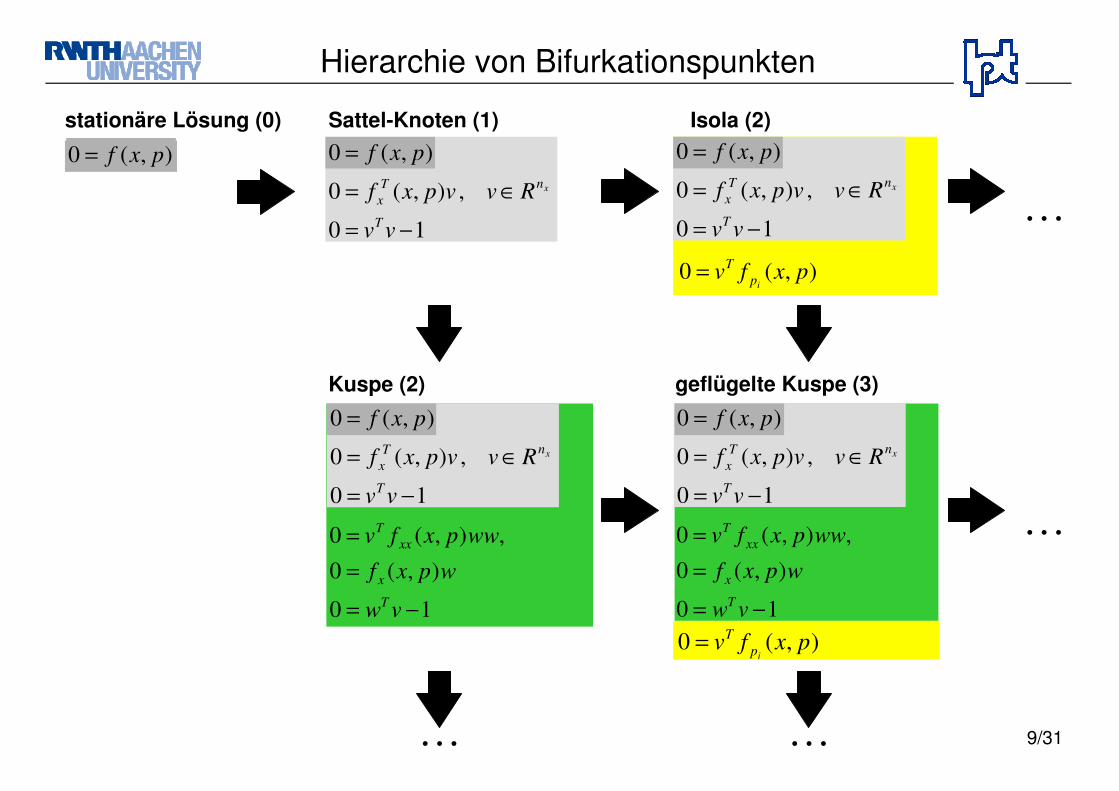
),(0 pxf=
Hierarchie von Bifurkationspunkten
10
,),(0
),(0
−=
∈=
=
vv
Rvvpxf
pxf
T
nT
xx
Sattel-Knoten (1)
10
,),(0
),(0
−=
∈=
=
vv
Rvvpxf
pxf
T
nT
xx
),(0 pxfvip
T=
Isola (2)
10
),(0
,),(0
−=
=
=
vw
wpxf
wwpxfv
T
x
xx
T
10
,),(0
),(0
−=
∈=
=
vv
Rvvpxf
pxf
T
nT
xx
Kuspe (2)
10
),(0
,),(0
−=
=
=
vw
wpxf
wwpxfv
T
x
xx
T
10
,),(0
),(0
−=
∈=
=
vv
Rvvpxf
pxf
T
nT
xx
geflügelte Kuspe (3)
),(0 pxfvip
T=
L
L
L L
stationäre Lösung (0)
10/31
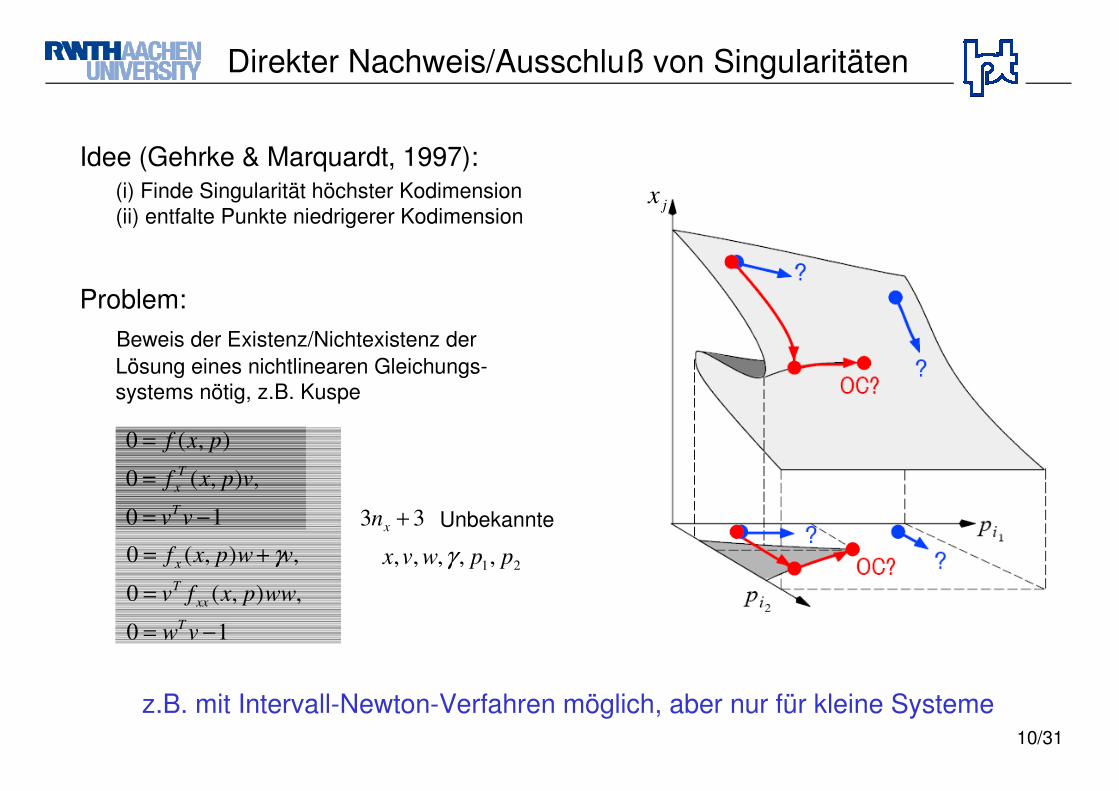
Direkter Nachweis/Ausschluß von Singularitäten
Problem:
Beweis der Existenz/Nichtexistenz derLösung eines nichtlinearen Gleichungs-systems nötig, z.B. Kuspe
10
,),(0
,),(0
−=
=
+=
vw
wwpxfv
vwpxf
T
xx
T
x γ
10
,),(0
),(0
−=
=
=
vv
vpxf
pxf
T
T
x
33 +xn Unbekannte
21,,,,, ppwvx γ
jx
z.B. mit Intervall-Newton-Verfahren möglich, aber nur für kleine Systeme
Idee (Gehrke & Marquardt, 1997):(i) Finde Singularität höchster Kodimension(ii) entfalte Punkte niedrigerer Kodimension
11/31
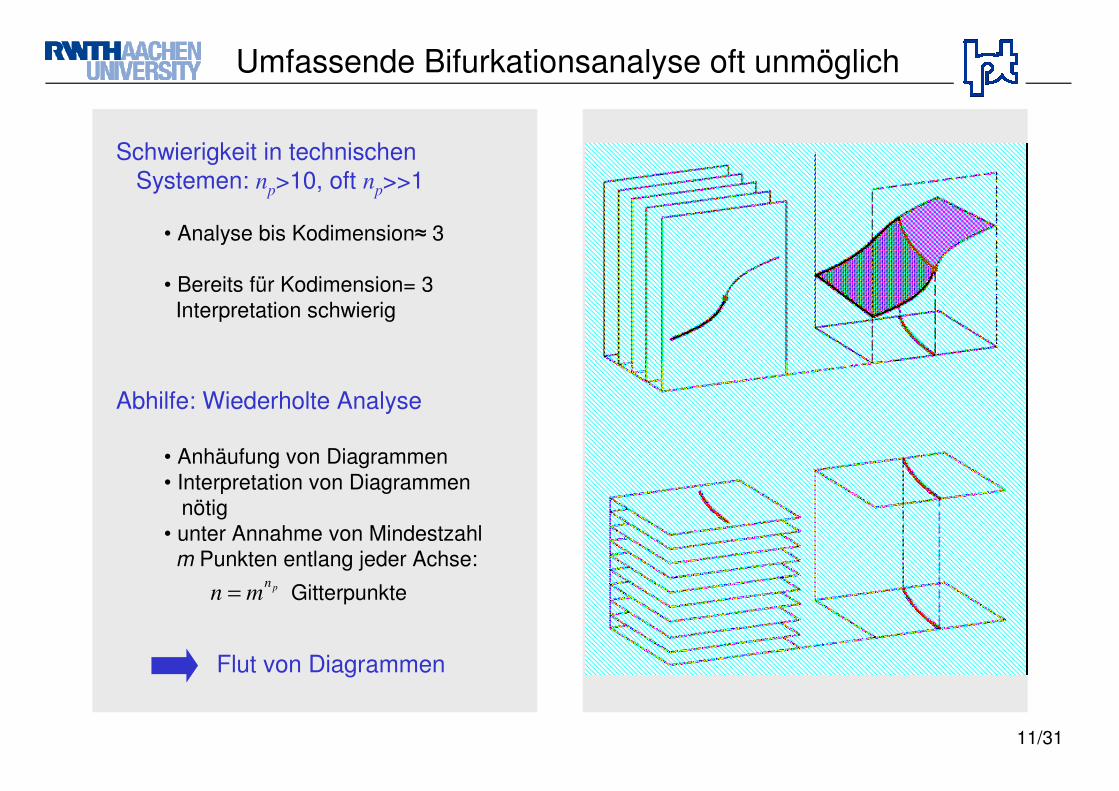
Umfassende Bifurkationsanalyse oft unmöglich
Schwierigkeit in technischenSystemen: np>10, oft np>>1
• Analyse bis Kodimension≈ 3
• Bereits für Kodimension= 3Interpretation schwierig
Flut von Diagrammen
Abhilfe: Wiederholte Analyse
• Anhäufung von Diagrammen• Interpretation von Diagrammen
nötig• unter Annahme von Mindestzahl
m Punkten entlang jeder Achse:pn
mn = Gitterpunkte
12/31
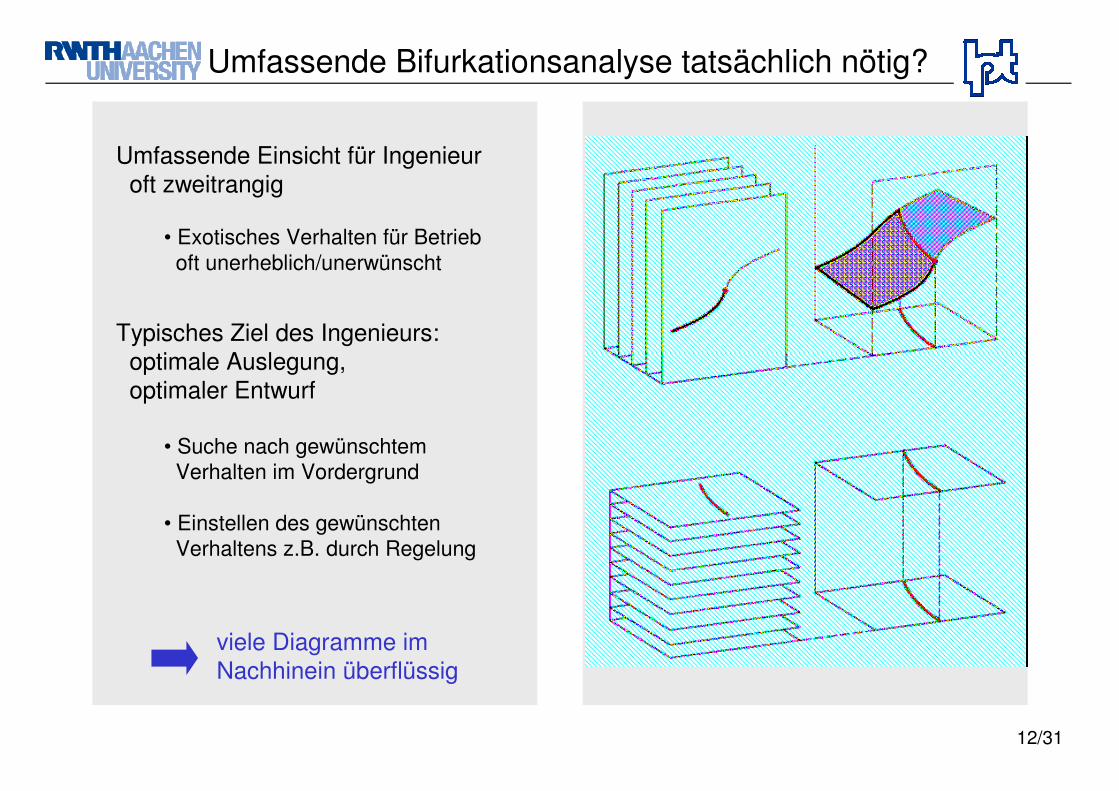
Umfassende Bifurkationsanalyse tatsächlich nötig?
Umfassende Einsicht für Ingenieuroft zweitrangig
• Exotisches Verhalten für Betrieboft unerheblich/unerwünscht
Typisches Ziel des Ingenieurs:optimale Auslegung, optimaler Entwurf
• Suche nach gewünschtemVerhalten im Vordergrund
• Einstellen des gewünschten Verhaltens z.B. durch Regelung
viele Diagramme imNachhinein überflüssig
13/31
Übersicht
• Nichtlineare Systeme und Verfahrenstechnik?• Etablierte Methoden zur Analyse
verfahrenstechnischer Systeme• Grenzen der Analyse• Normalenvektor-Methode• Ablauf der Optimierung• Zusammenfassung und Ausblick
14/31
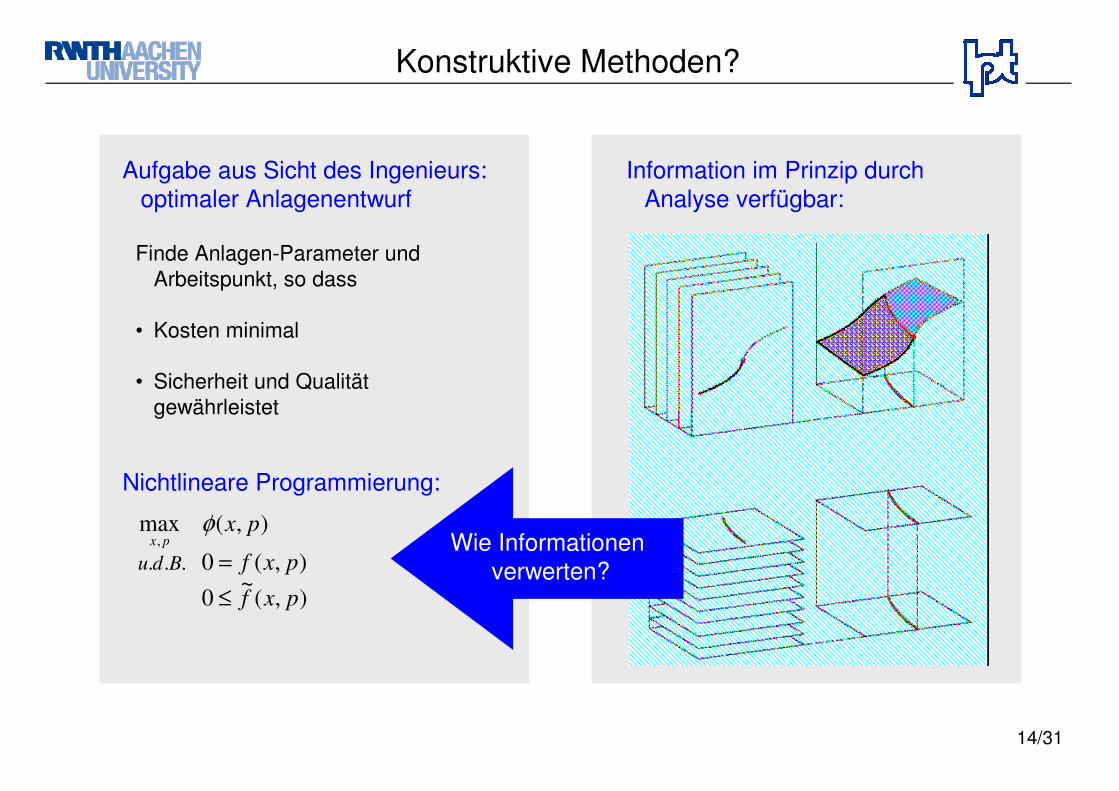
Konstruktive Methoden?
Information im Prinzip durch Analyse verfügbar:
Aufgabe aus Sicht des Ingenieurs:optimaler Anlagenentwurf
Finde Anlagen-Parameter und Arbeitspunkt, so dass
• Kosten minimal
• Sicherheit und Qualität gewährleistet
Nichtlineare Programmierung:
),(max,
pxpx
φ
),(0 pxf=
),(~
0 pxf≤
... BduWie Informationen
verwerten?
15/31
Übersicht
• Nichtlineare Systeme und Verfahrenstechnik?• Etablierte Methoden zur Analyse
verfahrenstechnischer Systeme• Grenzen der Analyse• Normalenvektor-Methode• Ablauf der Optimierung• Zusammenfassung und Ausblick
16/31
stabil
instabilxi
p1p2
2α
1α
1
1
2p
1p
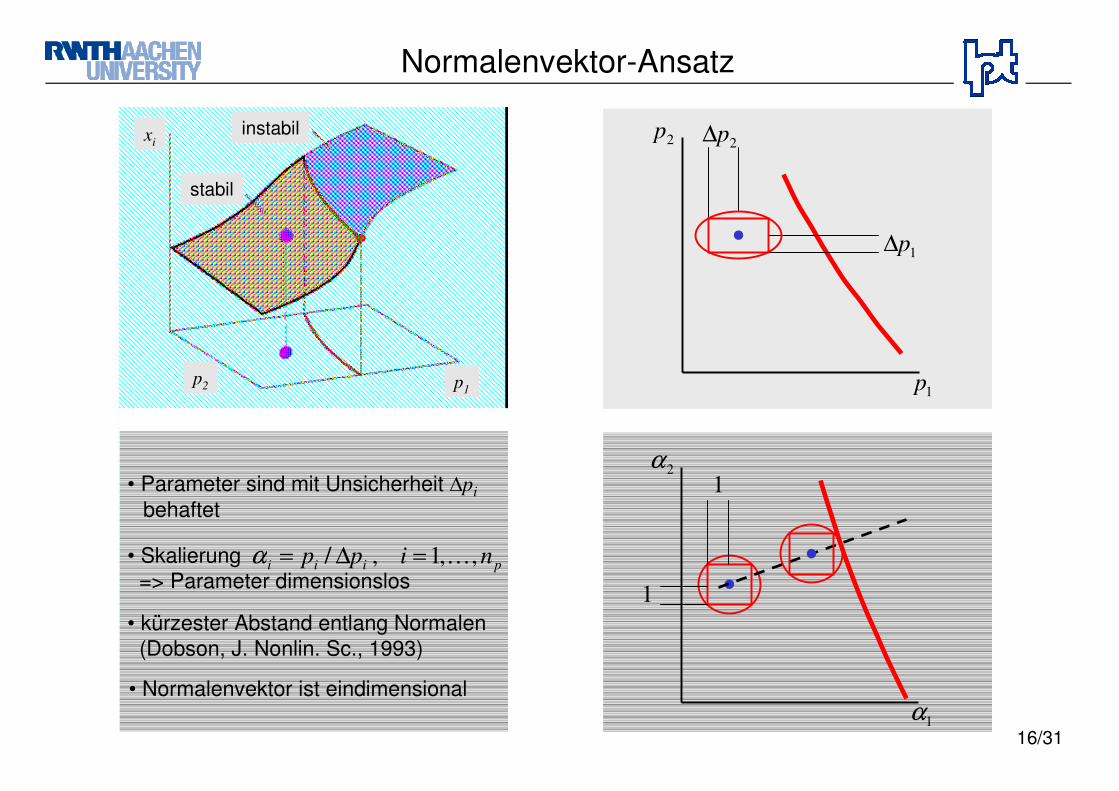
Normalenvektor-Ansatz
2p∆
1p∆
piii nipp ,,1,/ K=∆=α• Skalierung => Parameter dimensionslos
• kürzester Abstand entlang Normalen(Dobson, J. Nonlin. Sc., 1993)
• Parameter sind mit Unsicherheit ∆pi
behaftet
• Normalenvektor ist eindimensional
17/31
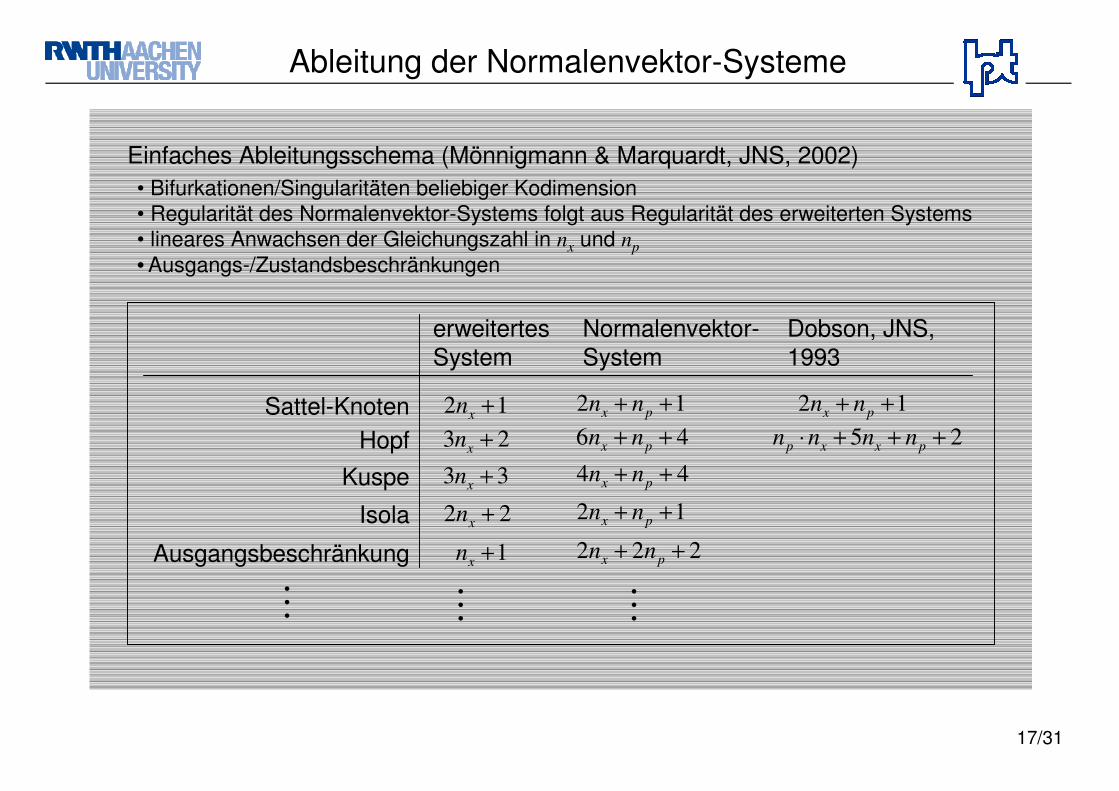
• Bifurkationen/Singularitäten beliebiger Kodimension• Regularität des Normalenvektor-Systems folgt aus Regularität des erweiterten Systems• lineares Anwachsen der Gleichungszahl in nx und np
• Ausgangs-/Zustandsbeschränkungen
Einfaches Ableitungsschema (Mönnigmann & Marquardt, JNS, 2002)
Ableitung der Normalenvektor-Systeme
12 +xn
23 +xn
33 +xn
1+xn
12 ++ px nn
erweitertesSystem
Normalenvektor-System
Dobson, JNS, 1993
Sattel-KnotenHopf
Kuspe
Isola
Ausgangsbeschränkung
M MM
22 +xn
12 ++ px nn
46 ++ px nn
44 ++ px nn
12 ++ px nn
222 ++ px nn
25 +++⋅ pxxp nnnn
18/31
19/31
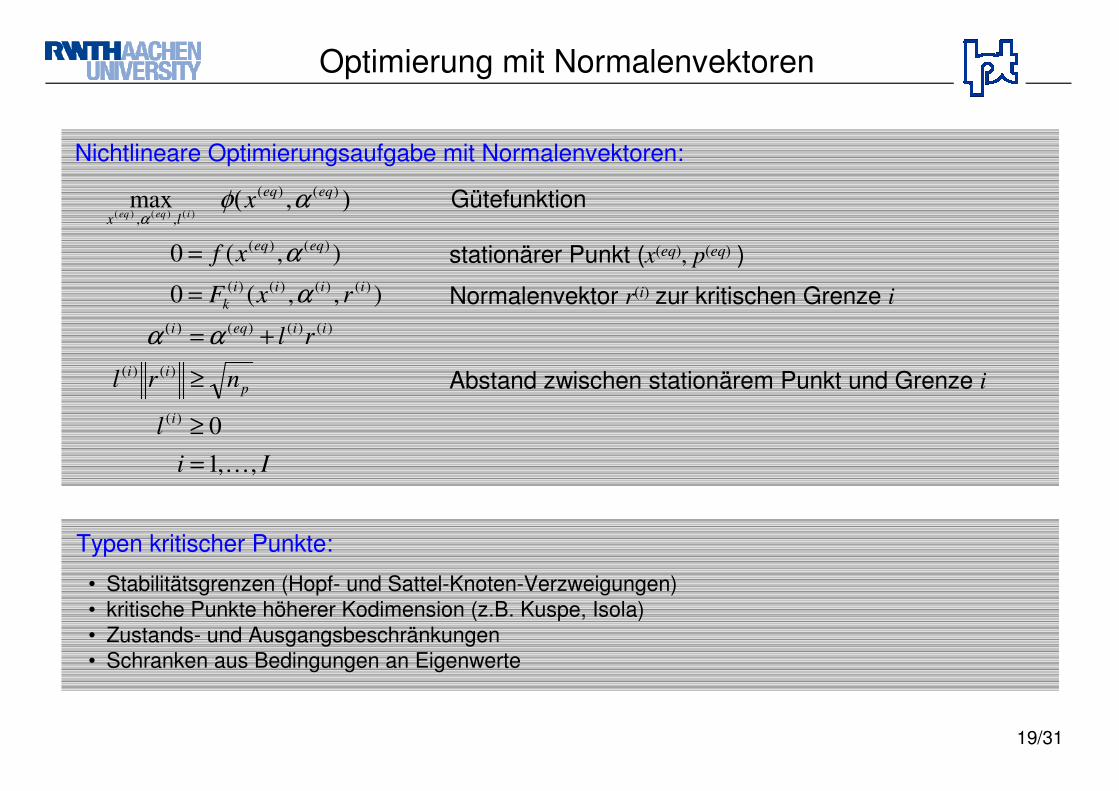
Gütefunktion
Normalenvektor r(i) zur kritischen Grenze i
Abstand zwischen stationärem Punkt und Grenze i
stationärer Punkt (x(eq), p(eq) )
Nichtlineare Optimierungsaufgabe mit Normalenvektoren:
Optimierung mit Normalenvektoren
Kk
Ii
l
nrl
rl
rxF
xf
x
i
p
ii
iieqi
iiii
k
eqeq
eqeq
lx ieqeq
∈
=
≥
≥
+=
=
=
)(
)(
,,1
0
),,(0
),(0
,max
)(
)()(
)()()(
)()()()(
)()(
)()(
,, )()()(
K
αα
α
α
αφα
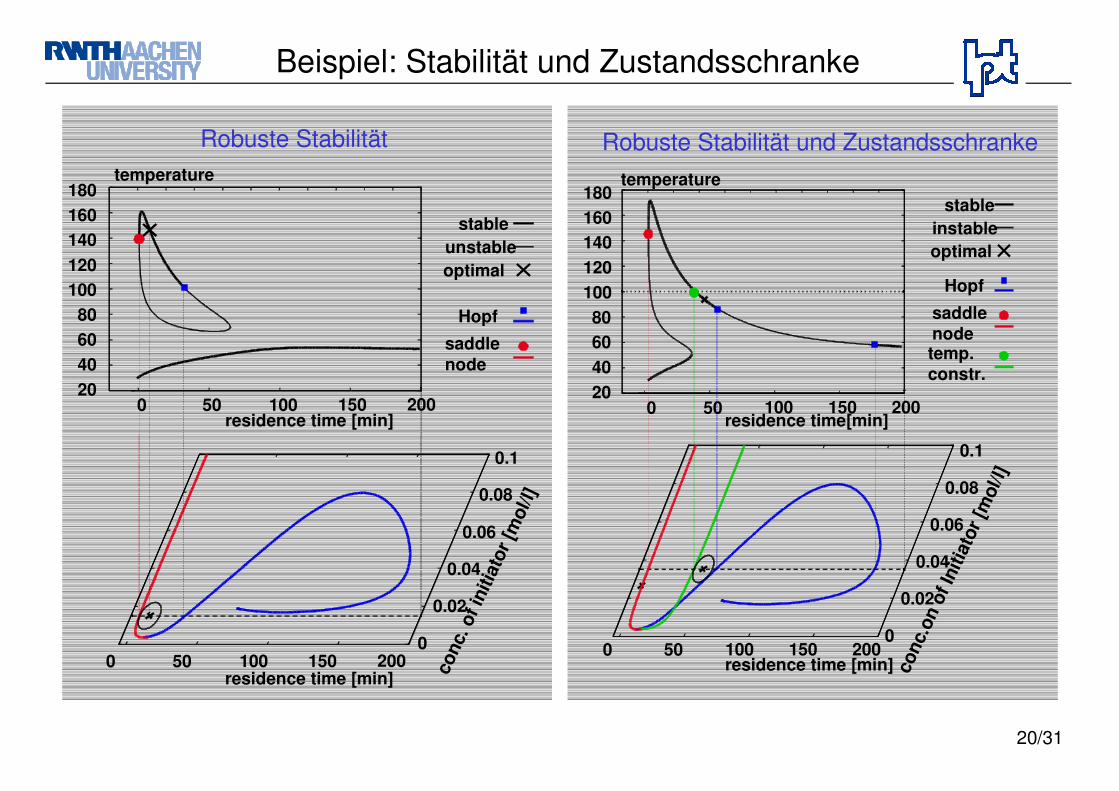
• Stabilitätsgrenzen (Hopf- und Sattel-Knoten-Verzweigungen)• kritische Punkte höherer Kodimension (z.B. Kuspe, Isola)• Zustands- und Ausgangsbeschränkungen• Schranken aus Bedingungen an Eigenwerte
Typen kritischer Punkte:
20/31
Beispiel: Stabilität und Zustandsschranke
residence time [min]
0
0.02
0.04
0.06
0.08
0.1
0 50 100 150 200
20
40
60
80
100
120
140
160
180temperature
0 50 100 150 200residence time [min]
stable
unstable
optimal
saddle
node
Hopf
conc. of in
itia
tor
[mol/l]
Robuste Stabilität
20
40
60
80
100
120
140
160
180temperature
0 50 100 150 200residence time[min]
stable
instable
optimal
saddlenode
Hopf
temp.constr.
residence time [min]0 50 100 150 200
0
0.02
0.04
0.06
0.08
0.1
conc.o
nof In
itia
tor
[mol/l]
Robuste Stabilität und Zustandsschranke
21/31
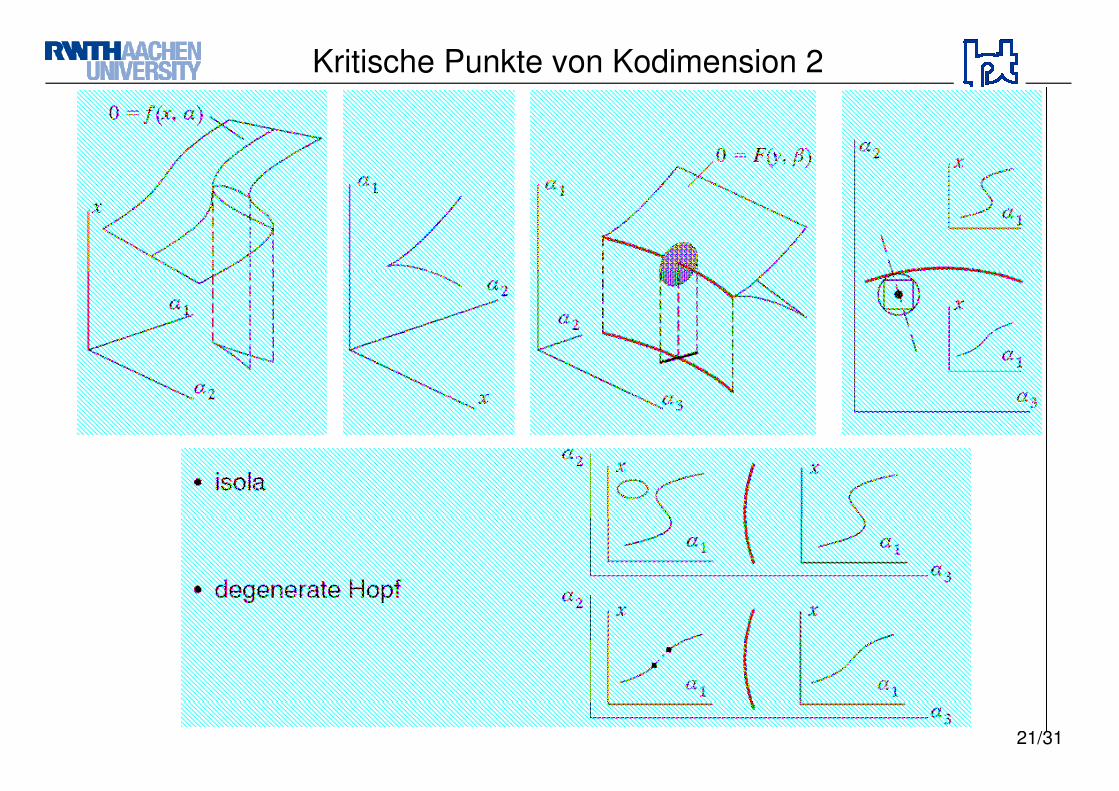
Kritische Punkte von Kodimension 2
22/31
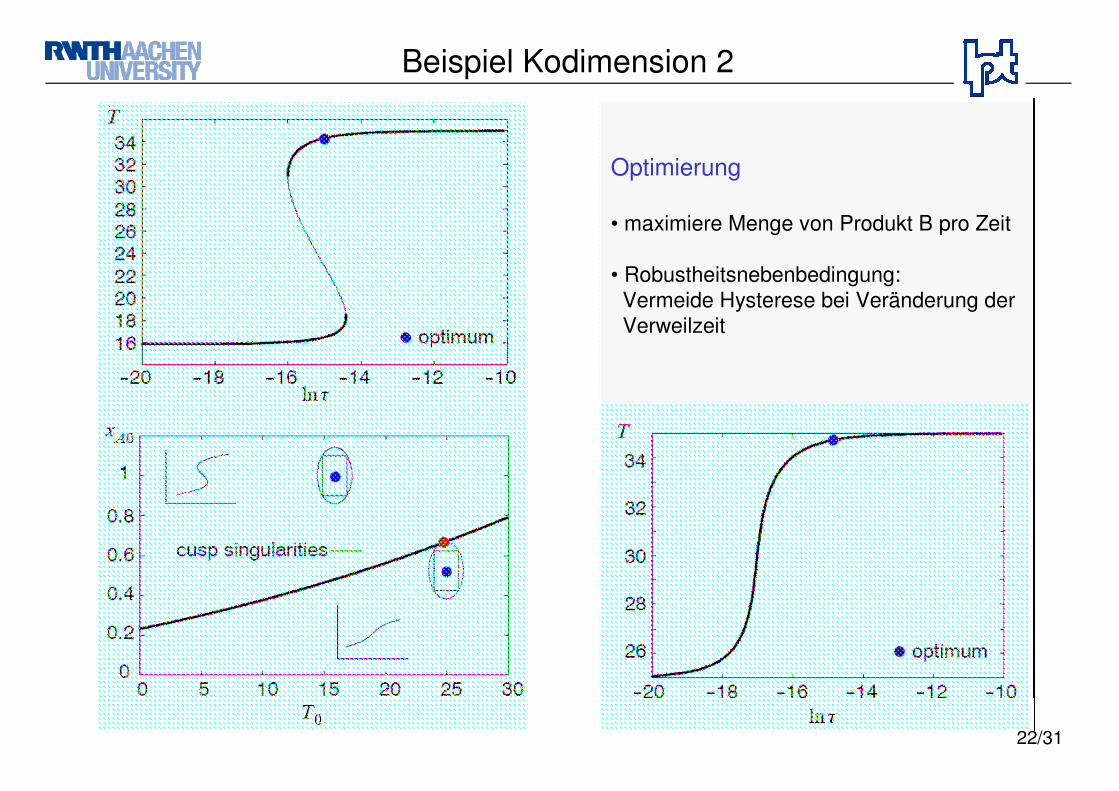
Beispiel Kodimension 2
Optimierung
• maximiere Menge von Produkt B pro Zeit
• Robustheitsnebenbedingung:Vermeide Hysterese bei Veränderung derVerweilzeit
23/31
Übersicht
• Nichtlineare Systeme und Verfahrenstechnik?• Etablierte Methoden zur Analyse
verfahrenstechnischer Systeme• Grenzen der Analyse• Normalenvektor-Methode• Ablauf der Optimierung• Zusammenfassung und Ausblick
24/31
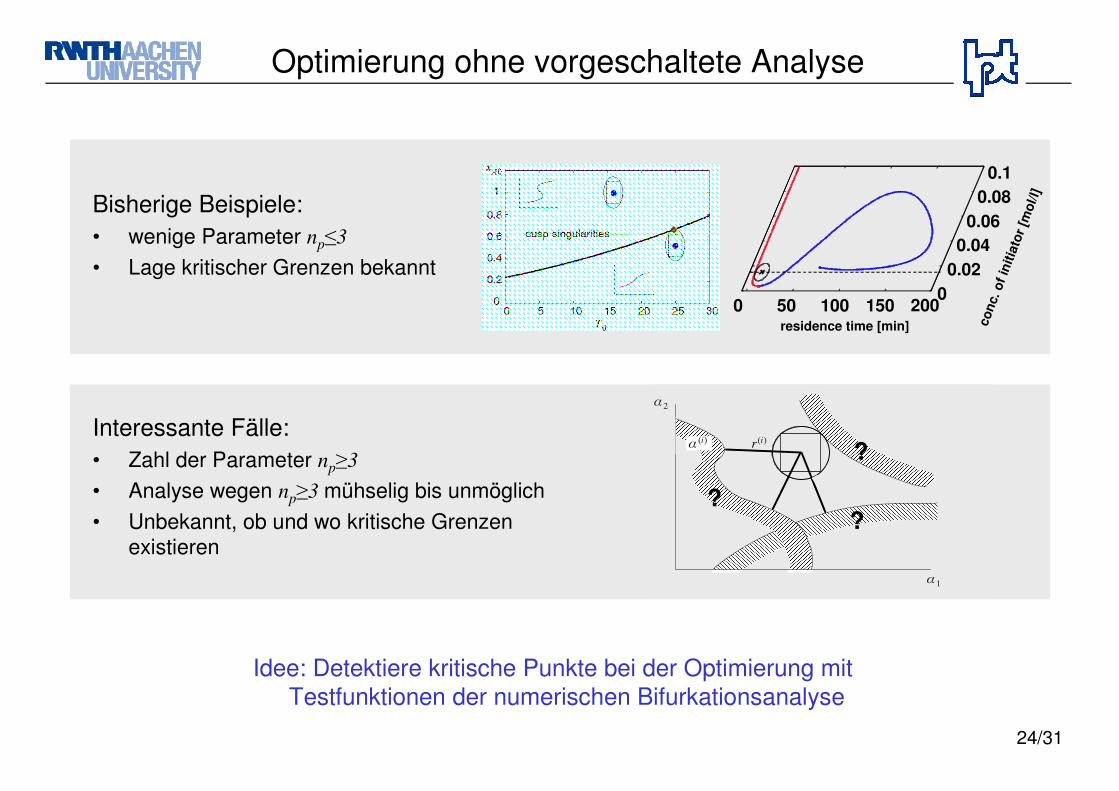
Optimierung ohne vorgeschaltete Analyse
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ��
��
����
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ����
����
??
?Interessante Fälle:• Zahl der Parameter np≥3
• Analyse wegen np≥3 mühselig bis unmöglich
• Unbekannt, ob und wo kritische Grenzen existieren
Idee: Detektiere kritische Punkte bei der Optimierung mit Testfunktionen der numerischen Bifurkationsanalyse
Bisherige Beispiele:• wenige Parameter np≤3
• Lage kritischer Grenzen bekannt
residence time [min]
0
0.02
0.04
0.06
0.08
0.1
0 50 100 150 200
co
nc. o
f in
itia
tor
[mo
l/l]
25/31
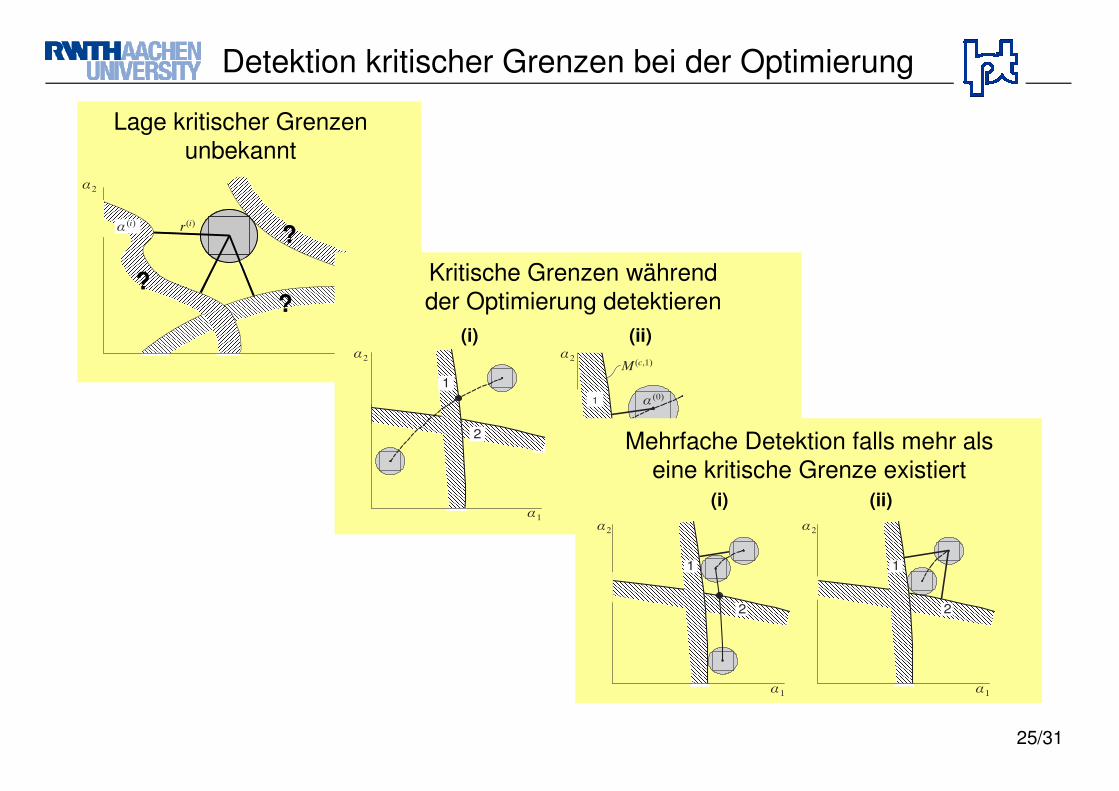
Detektion kritischer Grenzen bei der Optimierung
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
��
��
����
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ����
����
??
?
Lage kritischer Grenzenunbekannt
Kritische Grenzen währendder Optimierung detektieren
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ��
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ��
1
2
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
����
������
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ1ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
��
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ ��
2
1
(i) (ii)
Mehrfache Detektion falls mehr als eine kritische Grenze existiert
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
��
��
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
2
1
(a)
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
��
��
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
(c)
2
1
(i) (ii)
26/31
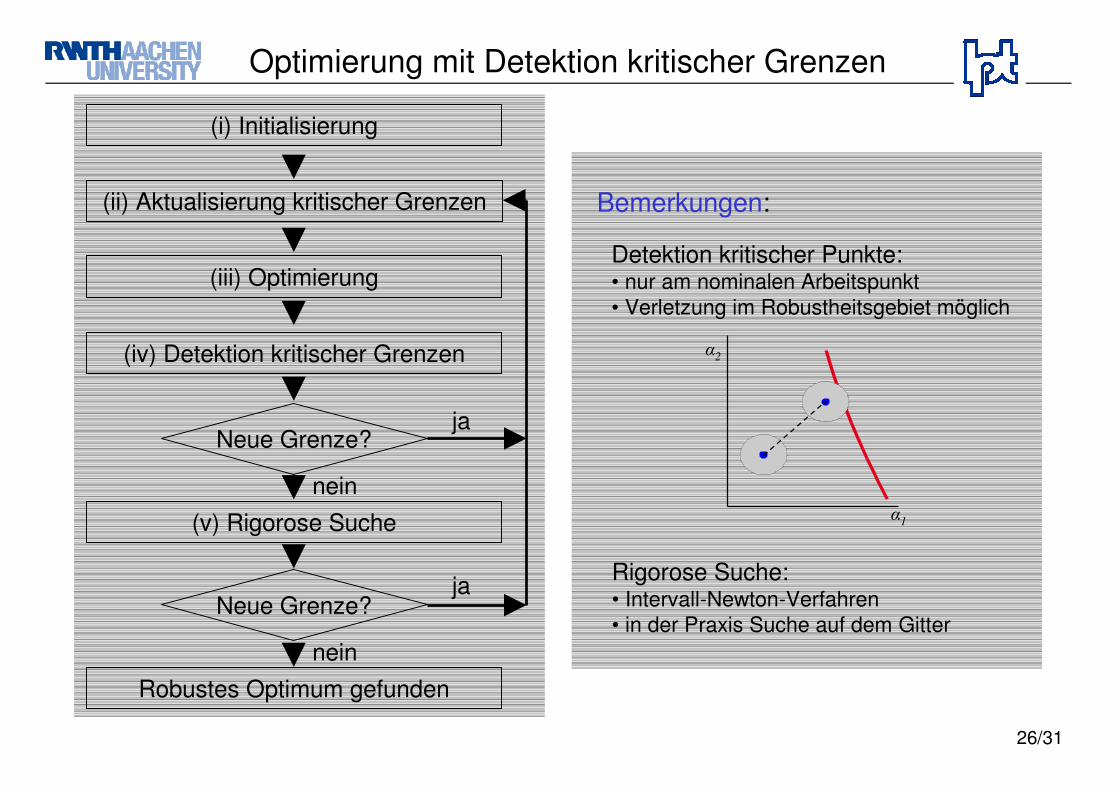
Optimierung mit Detektion kritischer Grenzen
(i) Initialisierung
(ii) Aktualisierung kritischer Grenzen
(iii) Optimierung
(iv) Detektion kritischer Grenzen
(v) Rigorose Suche
Robustes Optimum gefunden
Neue Grenze?
Neue Grenze?
ja
ja
nein
nein
Bemerkungen:
Detektion kritischer Punkte:• nur am nominalen Arbeitspunkt• Verletzung im Robustheitsgebiet möglich
α2
α1
Rigorose Suche:• Intervall-Newton-Verfahren• in der Praxis Suche auf dem Gitter
27/31
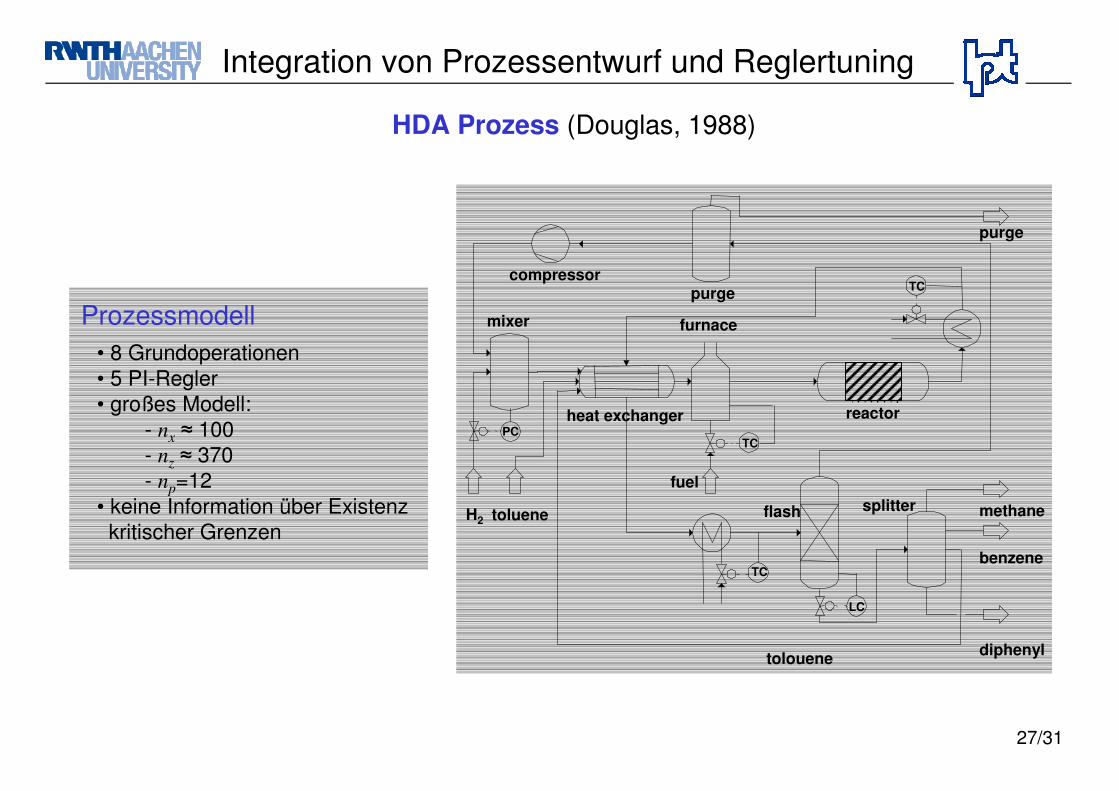
Integration von Prozessentwurf und Reglertuning
HDA Prozess (Douglas, 1988)
Prozessmodell• 8 Grundoperationen• 5 PI-Regler• großes Modell:
- nx ≈ 100- nz ≈ 370- np=12
• keine Information über Existenzkritischer Grenzen
compressorpurge
purge
mixer
heat exchanger
furnace
tolueneH2
TC
TC
TC
LC
PC
fuel
flash splitter methane
benzene
diphenyltolouene
reactor
28/31
Ergebnisse HDA
2.0
2.1
2.2
2.3
benzene prod. rate [kmol/min]
3.6
3.7
3.8
3.9
–1.20
–1.15
–1.10
–1.05
–4.00
–3.90
–3.80
–3.70
3.6
3.7
3.8
3.9
4.0
4.1
4.2
30 60 90 120 150 180
3.3
3.4
3.5
3.6
3.7
����������� �� [kJ/min]
������������� [kJ/min] ������������ [kJ/min]
0
���������� [kJ/min] ���������� [kJ/min]
30 60 90 120 150 1800time [min] time [min]
30 60 90 120 150 1800
30 60 90 120 150 1800
30 60 90 120 150 1800
30 60 90 120 150 1800
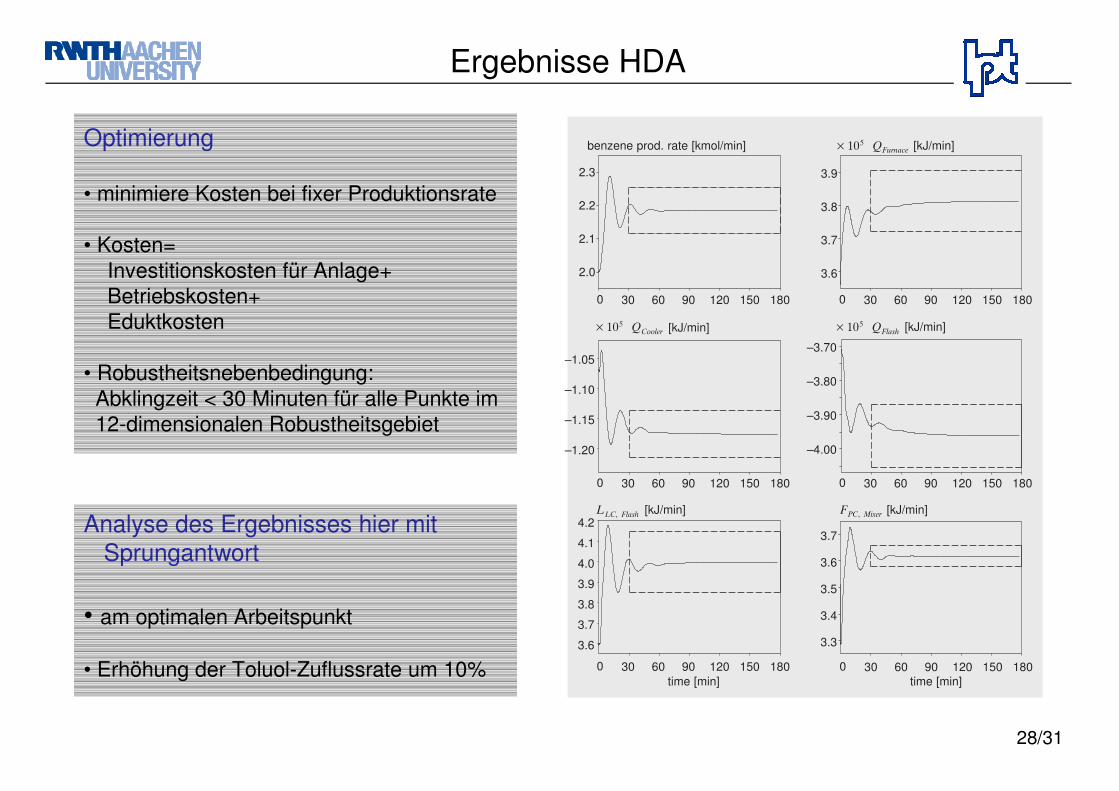
Analyse des Ergebnisses hier mit Sprungantwort
• am optimalen Arbeitspunkt
• Erhöhung der Toluol-Zuflussrate um 10%
Optimierung
• minimiere Kosten bei fixer Produktionsrate
• Kosten=Investitionskosten für Anlage+Betriebskosten+Eduktkosten
• Robustheitsnebenbedingung:Abklingzeit < 30 Minuten für alle Punkte im 12-dimensionalen Robustheitsgebiet
29/31
• Erweiterung auf kritische dynamische Punkte
- Erste Anwendungen unter Berücksichtigung schneller Störungen (Gerhard et al. 2005)
• Integration von Prozess- und Regleroptimierung
- Kristallisationsprozesse mit autonomen Schwingungen (Grosch et al., 2003)
- Hydrodealkylierung von Toluol (Mönnigmann & Marquardt, 2004)
• Reglertuning
- Reaktor mit nicht modellierter Dynamik (Hahn et al. 2003, Gerhard et al., 2004)
- Fahrzeugmodelle mit unsicheren Reibungskoeffizienten (Gerhard et al. 2004)
Anwendungen
• Prozessentwurf für Modelle mit unsicheren Parametern
- Kontinuierlich betriebene Fermentation (Mönnigmann & Marquardt, 2002)
- Vinylazetat-Polymerisation (Mönnigmann & Marquardt, 2003)
Normalenvektor-Methode inzwischen auf unterschiedlicher Probleme angewendet:
30/31
α2
α1
α2
α1
xi
α1
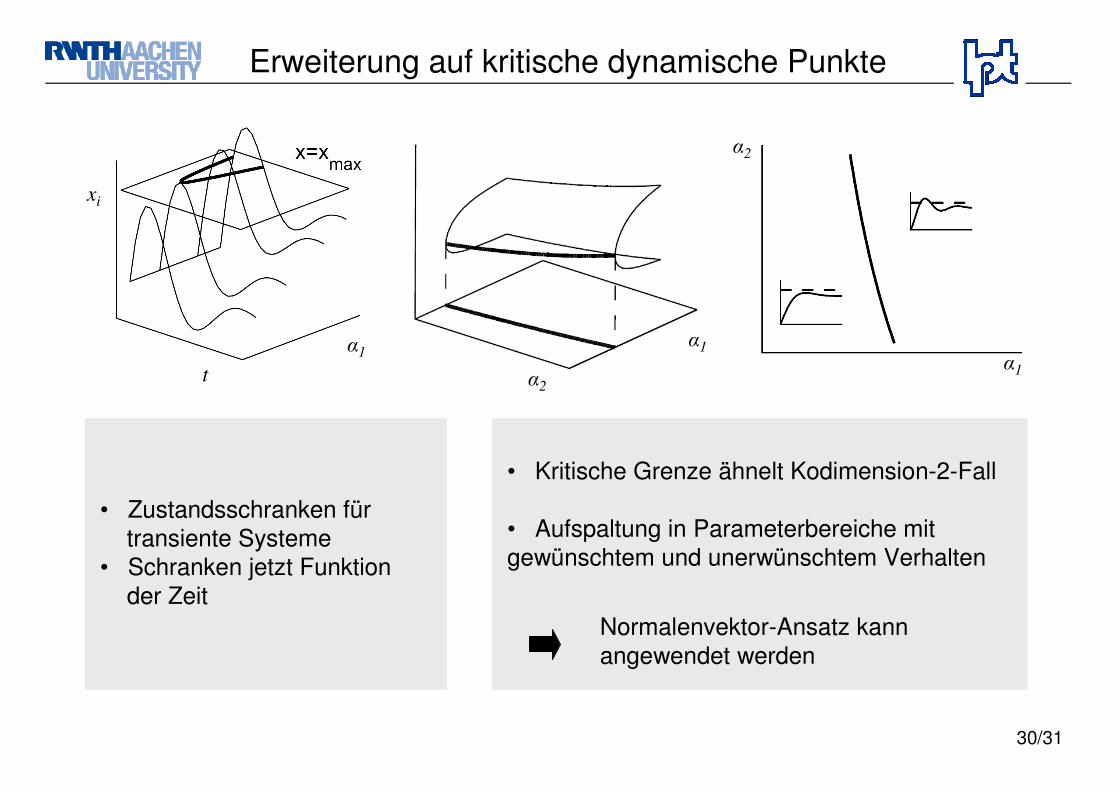
Erweiterung auf kritische dynamische Punkte
• Zustandsschranken für transiente Systeme
• Schranken jetzt Funktionder Zeit
• Kritische Grenze ähnelt Kodimension-2-Fall
• Aufspaltung in Parameterbereiche mit gewünschtem und unerwünschtem Verhalten
Normalenvektor-Ansatz kannangewendet werden
t
31/31
• Normalenvektor-Methode erlaubt Einbindung in die Optimierung
- Optimierung auch für np>3
Zusammenfassung
• Analyse-Methoden sind etabliert, aber stoßen an Grenzen
- nicht praktikabel, viele Parameter zu analysieren
• Erweiterungen
- zeitdiskrete Systeme
- transiente Systeme
• Analyse hilft bei der Optimierung/beim Entwurf oft nur indirekt
- Analyse-Methoden erzeugen Einsicht
- viele Diagramme stellen sich als überflüssig heraus
32/31
33/31
34/31
Outlook
Constructive Nonlinear Dynamics: from science to engineering
• a unifying framework for the treatment of parametric uncertainty in process and control system design
• computationally feasible even for large-scale processes
• necessary extensions
– transient critical boundaries
– fast inputs
• further development of software
– large-scale problems
– part of process modeling environments
35/31
Software besser motivieren: hoehere Ableitungen sind noetig
36/31
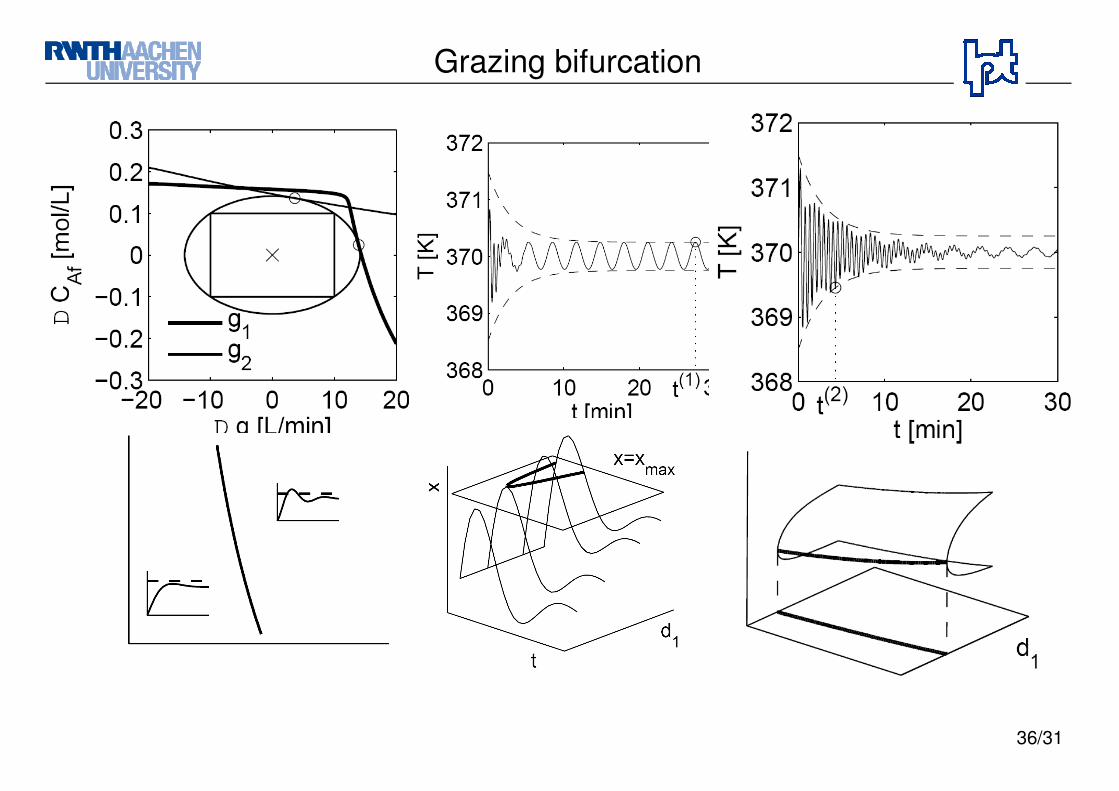
Grazing bifurcation
37/31
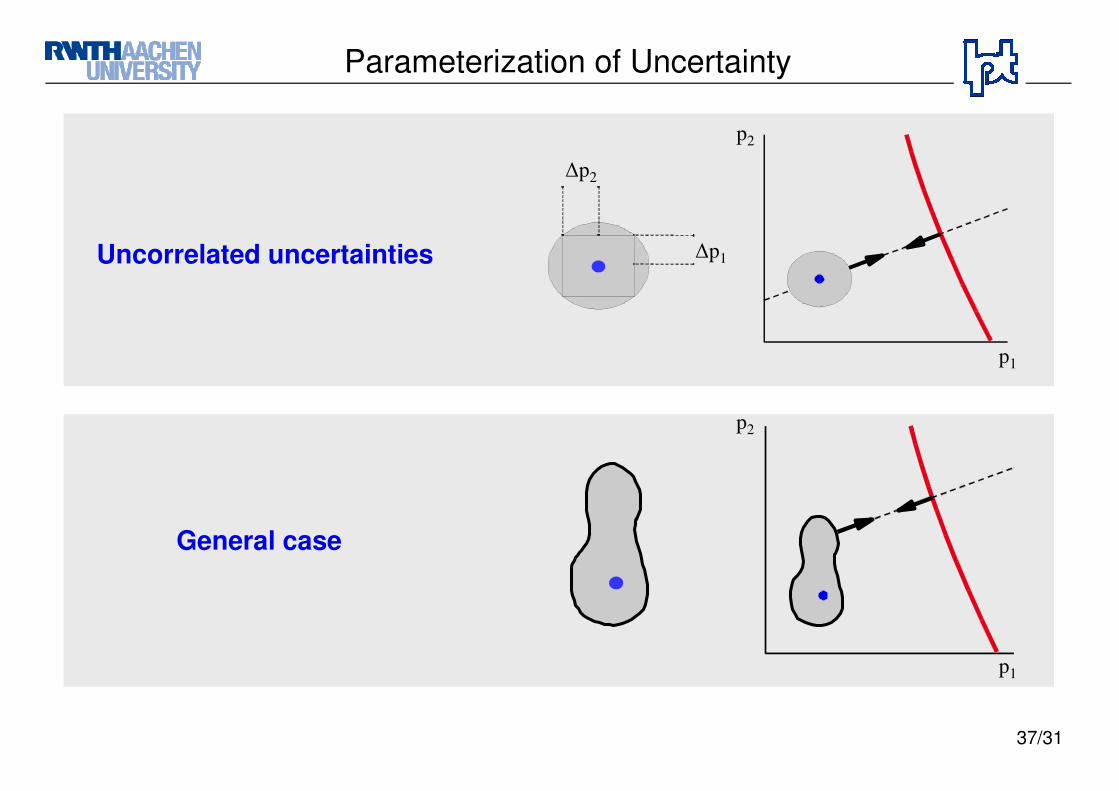
Uncorrelated uncertainties
Parameterization of Uncertainty
∆p1
∆p2
p1
p2
p2
p1
General case
38/31
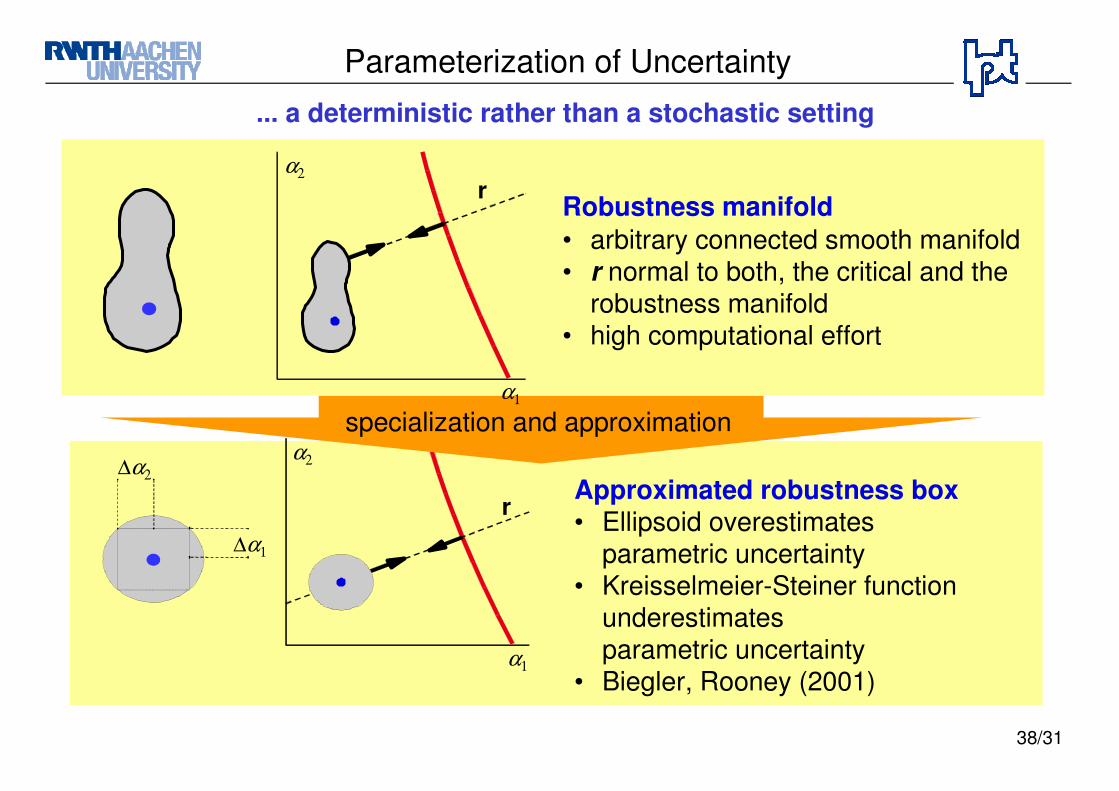
Approximated robustness box • Ellipsoid overestimates
parametric uncertainty• Kreisselmeier-Steiner function
underestimatesparametric uncertainty
• Biegler, Rooney (2001)
∆α2
∆α1
α1
r
α2
specialization and approximation
Parameterization of Uncertainty
Robustness manifold
• arbitrary connected smooth manifold• r normal to both, the critical and the
robustness manifold• high computational effort
rα2
α1
... a deterministic rather than a stochastic setting
39/31
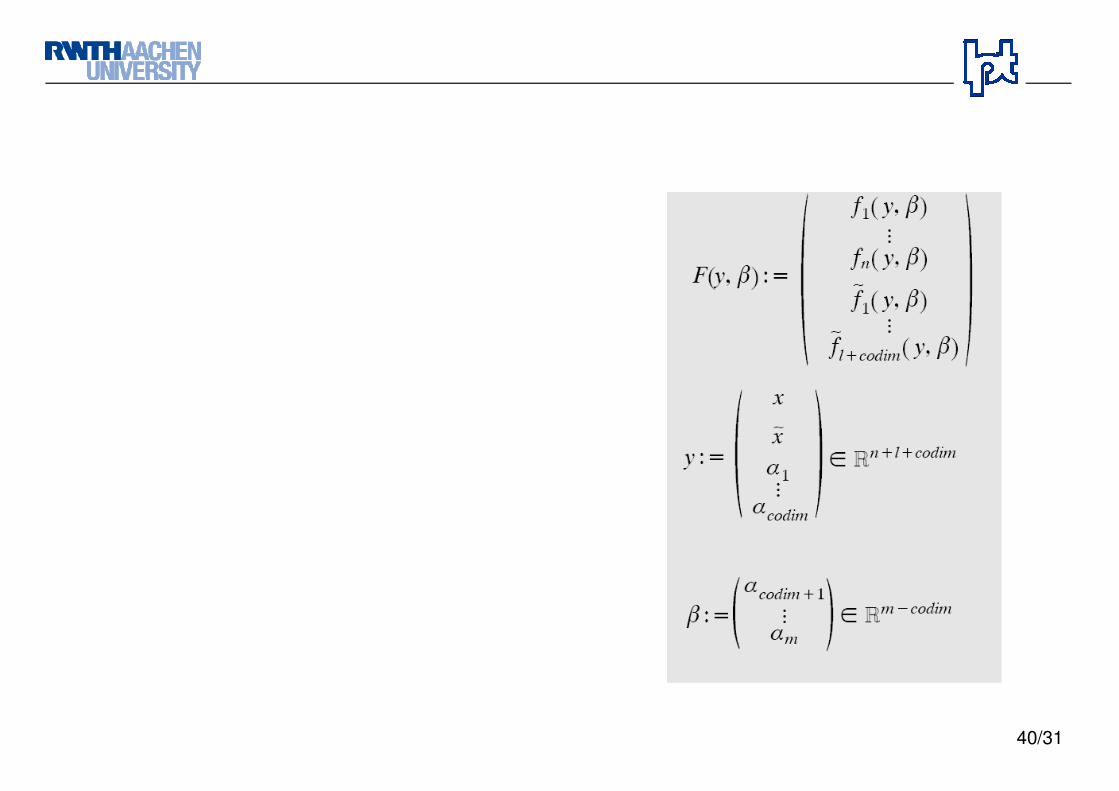
40/31
41/31
42/31
43/31
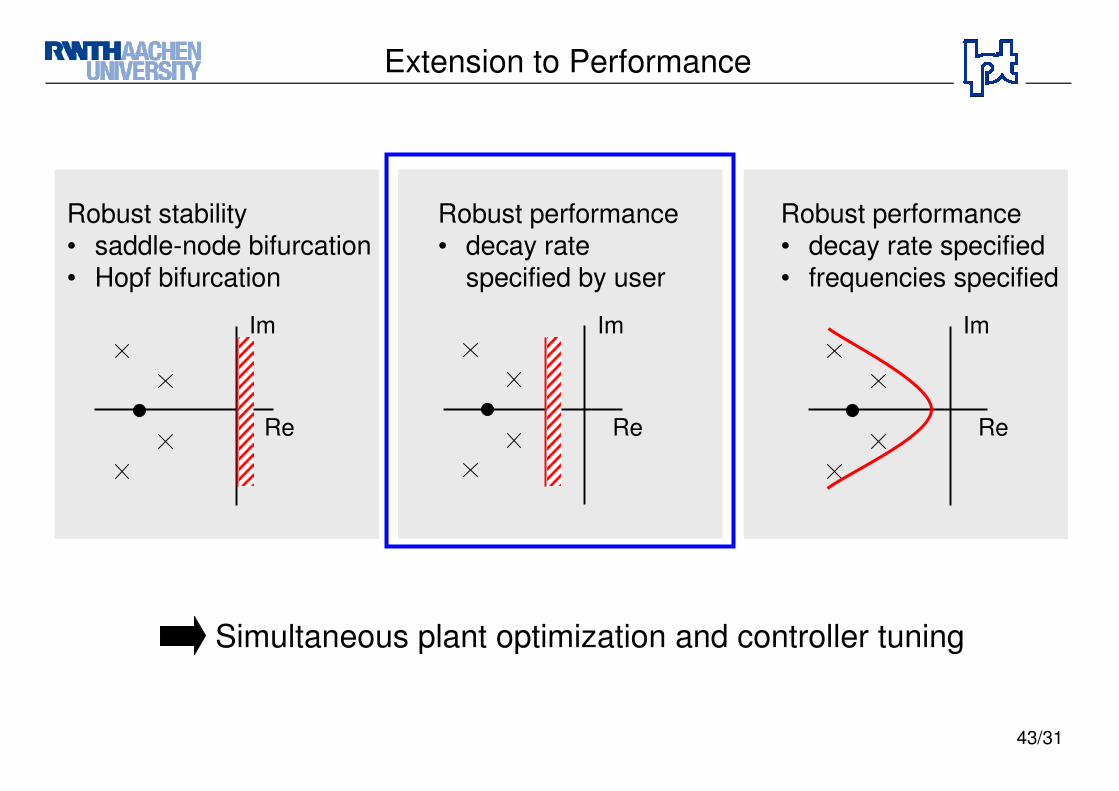
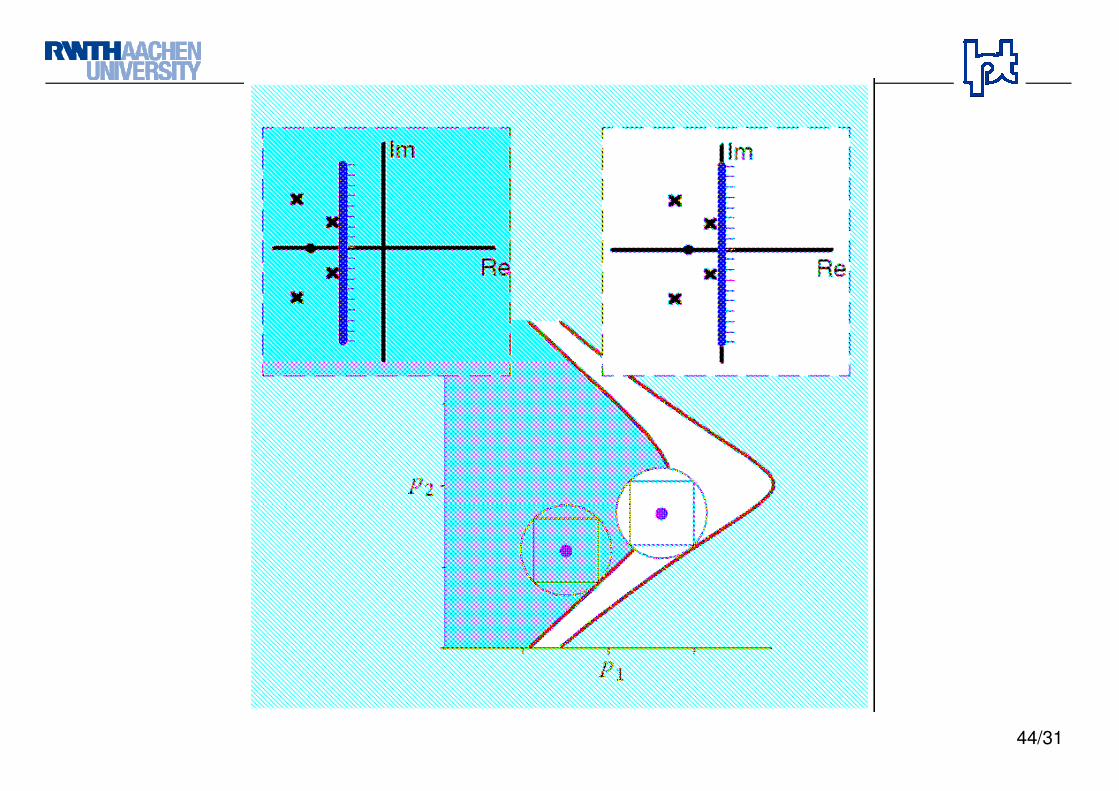
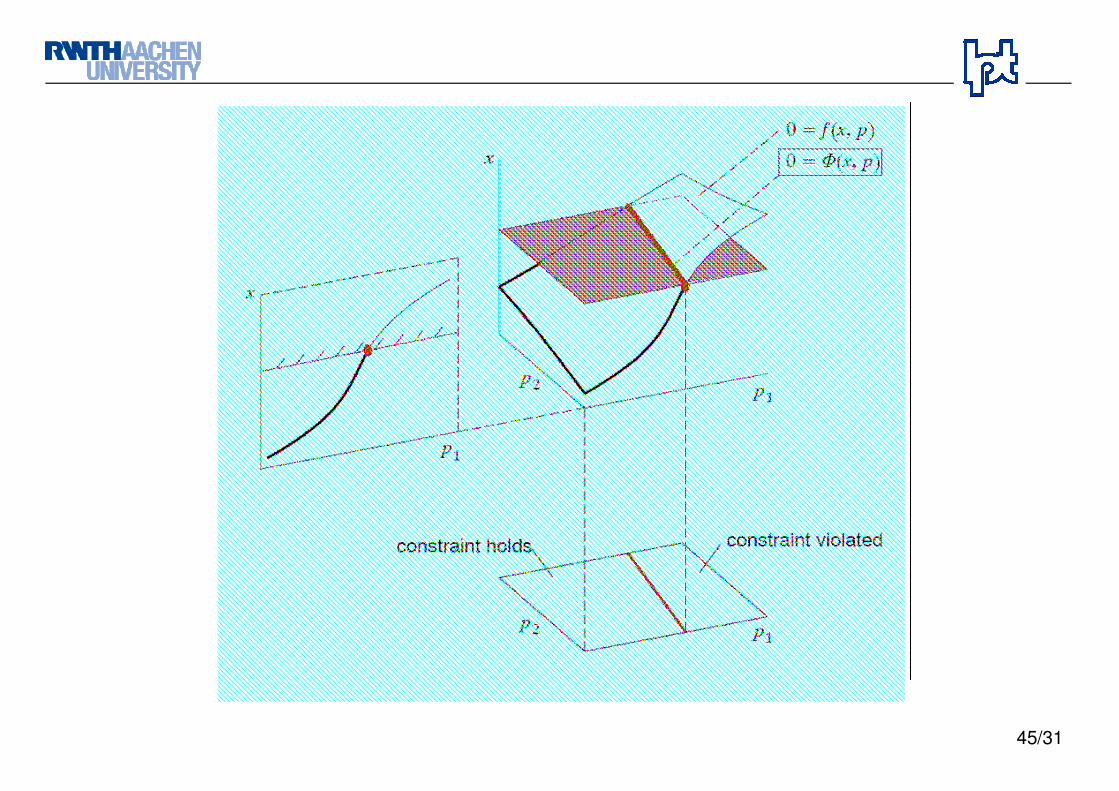
Extension to Performance
Re
Im
Re
Im
Robust performance• decay rate
specified by user
Re
Im
Robust stability• saddle-node bifurcation• Hopf bifurcation
Simultaneous plant optimization and controller tuning
Robust performance• decay rate specified• frequencies specified
44/31
45/31

![Apparative Diagnostik der Dysphagie mittels FEES · [Dziewas et al. 2004, Mann et al. 1999, Smithard et al. 1996] ... [Wu et al. Laryngoscope 1997, Crary et al. Dysphagia 1997, Leder](https://img.pdfslide.org/doc/110x75/5b6080ae7f8b9a40488b563b/apparative-diagnostik-der-dysphagie-mittels-fees-dziewas-et-al-2004-mann.jpg)














![ESI[tronic] 2.0 Online: Highlights ESI[tronic] 2.0 alle ...upm.bosch.com/News/2018_3/ESI_News_2018-3_de.pdf · Die zeitnahe Verfügbarkeit von Fahrzeugabdeckung für neues-te Fahrzeugmodelle](https://img.pdfslide.org/doc/110x75/5c5e113b09d3f2ca618bb3cf/esitronic-20-online-highlights-esitronic-20-alle-upmboschcomnews20183esinews2018-3depdf.jpg)












