Embed Size (px)
Citation preview
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 1
Inhalt INHALT ....................................................................................................................................1
1. EINLEITUNG.......................................................................................................................2
2. FORDERUNGEN DER INDUSTRIE UND ÜBERBLICK ÜBER DAS ENTWURFSPROGRAMM.....................................................................................................3
2.1 ENTWURFSFORDERUNGEN .................................................................................................3 2.2 PROGRAMM E4 ..................................................................................................................4
3. AUSGANGSZUSTAND.......................................................................................................6 3.1 SCHIFFSLINIEN...................................................................................................................6 3.2 WIDERSTANDSPROGNOSE ..................................................................................................8 3.3 VARIABLER TIEFGANG ......................................................................................................9 3.4 ANTRIEBSVARIANTEN......................................................................................................10 3.5 VERGLEICH AUSGANGSZUSTAND – ENTWURFSFORDERUNGEN .......................................13
3.5.1 Kann die geforderte Geschwindigkeit erreicht werden?.........................................14 3.5.2 Kann das Schiff vom minimalen auf den maximalen Tiefgang abgesenkt werden? 19 3.5.3 Kann der geforderte Pfahlzug erreicht werden?.....................................................21 3.5.4 Zusammenfassung....................................................................................................22
4. OPTIMIERUNG DES SCHIFFES MIT POD-ANTRIEB .............................................23 4.1 SCHIFFSLINIEN.................................................................................................................23
4.2.1 Kann die geforderte Geschwindigkeit erreicht werden?.........................................28 4.3 VARIABLER TIEFGANG ....................................................................................................29
4.3.1 Kann das Schiff vom minimalen auf den maximalen Tiefgang abgesenkt werden? 30 4.4 ANTRIEB MIT SIEMENS-SCHOTTEL-PROPULSOREN ..........................................................32
4.4.1 Kann der geforderte Pfahlzug erreicht werden?.....................................................32 4.4.2 Azipod als Alternative zu SSP..................................................................................33
4.5 VERGLEICH OPTIMIERTES SCHIFF MIT POD – ENTWURFSFORDERUNGEN .........................34
5. OPTIMIERUNG DES SCHIFFES MIT VERSTELLPROPELLER............................36 5.1 SCHIFFSLINIEN.................................................................................................................36 5.2 WIDERSTANDSBERECHNUNG ...........................................................................................38 5.3 VARIABLER TIEFGANG ....................................................................................................42 5.4 VERSTELLPROPELLER ALS ANTRIEB ................................................................................42 5.5 VERGLEICH OPTIMIERTES SCHIFF MIT VPP – ENTWURFSFORDERUNGEN ........................42
6. ÜBERPRÜFUNG DER STABILITÄT UND MANÖVRIERFÄHIGKEIT .................44 6.1 MASSENVERTEILUNG.......................................................................................................44 6.2 STABILITÄT .....................................................................................................................48 6.3 MANÖVRIERFÄHIGKEIT ...................................................................................................49
6.3.3 Überprüfung der IMO-Manöver und der Gierstabilität..........................................54
7. DISKUSSION UND AUSBLICK......................................................................................58
8. LITERATUR- UND QUELLENVERZEICHNIS...........................................................60
9. GLOSSAR ...........................................................................................................................61
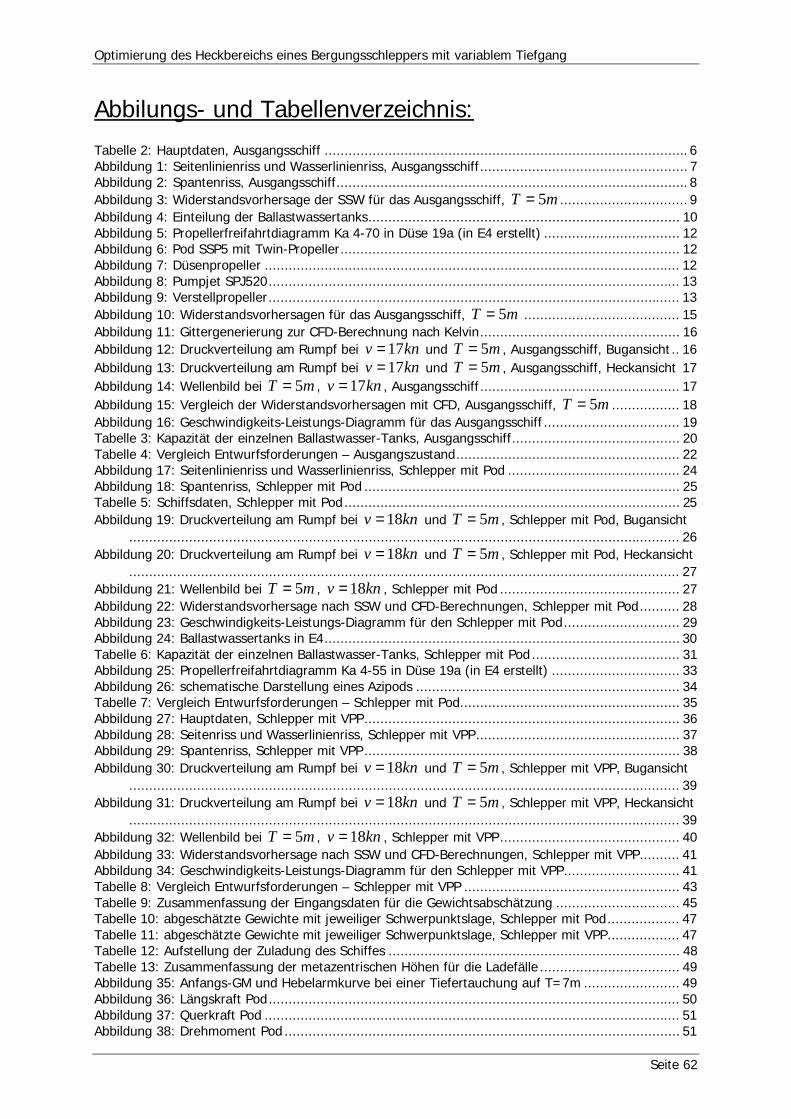
ABBILUNGS- UND TABELLENVERZEICHNIS:............................................................62
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 2
1. Einleitung Der Bund chartert zur Zeit Schlepper für die norddeutsche Bucht (Oceanic) und für die Ostsee (Fairplay21), um die notwendige Notschleppkapazität vorzuhalten. Die Oceanic ist ein relativ altes Schiff, jedoch mit hervorragenden Schleppeigenschaften. Allerdings kann ihr großer Tiefgang von 7,4m in der deutschen Bucht zu einem Hindernis werden. Auch die Ausrüstung ist lediglich auf Schlepp- und Bergungsaufgaben ausgelegt. Um nicht verschiedene Spezialschiffe in Bereitschaft halten zu müssen, werden vom Bund neue Ausschreibungen für Schiffe, die besser an die erforderlichen Bedürfnisse angepasst sind, erwartet. In der ersten Ausschreibung ist dem Bund ein geringer Tiefgang (Beschränkung auf maximal 6m), ein ausreichender Pfahlzug (mindestens 160t) und die Fähigkeit, havarierte Passagiere aufnehmen zu können, wichtig. Ebenfalls sollten Feuerlöscheinrichtungen an Bord installiert sein. Herr Dipl.-Ing. Wibel von T&S Transport & Service GmbH & Co. (T&S) hat in den letzten Jahren ein neues Konzept für einen Bergungsschlepper erarbeitet: das Sicherheitsschiff1. Grundlage waren die Eckdaten der Ausschreibung des Bundes sowie Forderungen der Küstenländer.2 Zur weiteren Ausarbeitung des Sicherheitsschiffs wurde die SSW Fähr- und Spezialschiffbau GmbH (SSW)3 sowie als Propulsionshersteller die Firma Schottel GmbH & Co. KG (Schottel)4 hinzugezogen. Für besagtes Sicherheitsschiff werde ich den Heckbereich optimieren für zwei verschiedene Antriebsvarianten mit Hilfe des Entwurfprogamms E4. Dabei ist die Einhaltung verschiedener Randbedingungen gefordert, die von T&S und SSW angegeben wurden. Von Seiten der Technischen Universität Hamburg-Harburg (TUHH) wird Herr Prof. Krüger vom Arbeitsbereich 3 – 14 Schiffsystem, Propulsions- und Informationstechnik die Diplomarbeit betreuen.
1 Schiff & Hafen, Sicherheitsschiff für Nord- und Ostsee /2/ 2 Schleppschifffahrt und Bergung, Der herkömmliche Bergungsschlepper genügt den Anforderungen nicht mehr /24/ 3 SSW /8/ 4 Schottel /11/
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 3
2. Forderungen der Industrie und Überblick über das Entwurfsprogramm Der Auftraggeber für das Thema der Diplomarbeit, die Firma T&S, hat das Konzept des sogenannten Sicherheitsschiffes entwickelt und die Entwurfsforderungen zusammen mit der SSW festgelegt. Die im folgenden Kapitel aufgeführten Entwurfsforderungen sind der Konsens von T&S und SSW. Die Diplomarbeit habe ich im Arbeitsbereich Schiffssystem, Produktions- und Informationstechnik der TUHH mit Hilfe des Methodenbank-Systems E4 erarbeitet. Eine kurze Darstellung des Programms folgt in Kapitel 2.2. 2.1 Entwurfsforderungen Die Entwurfsforderungen wurden von T&S gemeinsam mit der SSW erstellt. Ich habe die Randbedingungen nach Gesprächen mit den zuständigen Vertretern beider Firmen in einzuhaltende und wünschenswerte Forderungen unterteilt. Zu den einzuhaltenden Forderungen gehören: Bei einer Schiffslänge über alles von weniger als 100m ist ein Pfahlzug von 180t bei optimalen Wetter- und Seegangsbedingungen einzuhalten. Des weiteren ist ein variabler Tiefgang gefordert sowie eine maximale Geschwindigkeit von mindestens 18kn. Ein möglichst langer Balkenkiel ist vorzusehen. Die vorgegebene Schiffsbreite von mB 20= soll in jedem Fall beibehalten werden, um den Raumbedarf zu decken und eine genügend große Fläche für das Hubschrauberlandedeck auf dem Vorschiff zu erhalten. Wünschenswert sind folgende Forderungen: Ein minimaler Tiefgang von mT 5= und ein maximaler Tiefgang von mT 7= sollen eingehalten werden. Die SSW schlägt eine metazentrische Höhe von mGM 5,1= vor. Eine noch höhere Geschwindigkeit als knv 18= ist ein Wunsch von T&S. Bevorzugt wird die dieselelektrische Antriebsvariante mit zwei Pods von T&S. Das Schiff soll nach den Vorschriften des Germanischen Lloyd (GL) gebaut und klassifiziert werden. Es ist geplant, dass der Bergungsschlepper bei Charterung durch den Bund unter deutscher Flagge fährt. Somit sind die Forderungen der Seeberufsgenossenschaft (SeeBG) ebenfalls einzuhalten. Da das Schiff die Eisklasse E4 erhalten soll, sind spezielle Forderungen zu berücksichtigen.
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 4
Die Entwurfsforderungen sind in der folgende Tabelle 1 zusammengetragen. Bezeichnung Daten Art der Forderung Pfahlzug, optimale Bedingungen 180t einhalten Maximale Länge über alles <100m einhalten Breite 20m einhalten Minimaler Tiefgang 5m optional Maximaler Tiefgang 7m optional Maximale Geschwindigkeit 18kn einhalten Balkenkiel (Breite variabel) Schiffslänge einhalten 2 Antriebsvarianten 1 Pumpjet vorne
2xPod dieselelektrisch 2xVPP mechanisch
einhalten
Eisklasse E4 einhalten Metazentrische Höhe GM 1,5m optional GL-Klassifizierung, SeeBG Vorschriften einhalten Tabelle 1: Entwurfsforderungen 2.2 Programm E4 Die Abkürzung E4 bezeichnet ein offenes CAD-Methodenbank-System für den schiffbaulichen Entwurf. Es ist ein Entwurfs- und Optimierungsprogramm für Schiffe, welches in verschiedene Module unterteilt ist, die vom Nutzer selbst angepasst werden können. Die erste Version von E4 wurde als Forschungsvorhaben zwischen 1988 und 1991 an vier Institutionen entwickelt. Beteiligt waren das Institut für Schiffbau der Universität Hamburg (IfS, heute aufgeteilt in drei Arbeitsbereiche der Technischen Universität Hamburg-Harburg), die Flensburger Schiffbau-Gesellschaft mbH (FSG), das Forschungszentrum des Deutschen Schiffbaus in Hamburg (FDS) und das Institut für Schiffs- und Meerestechnik der Technischen Universität Berlin (ISM).5 Im Vergleich zu Konkurrenzprogrammen wie Napa6 hat E4 den Vorteil, dass Verbesserungen oder neue Programm-Module von Werft-Ingenieuren schnell und einfach in das bestehende Programm eingefügt werden können. Offenes System bedeutet, dass der Quellcode für den Benutzer zugänglich und veränderbar ist. Damit kann es ständig mit schnellem Feedback aus der Praxis weiterentwickelt und an die jeweiligen Anforderungen des Anwenders angepasst werden. Obwohl das System alle wichtigen Berechnungen, die auf einer Werft vor und während der Bauphasen eines Schiffes ausgeführt werden, abdeckt, wenden das Programm E4 nur wenige Nutzer an, so z. B. die FSG7 und der Arbeitsbereich Schiffssystem, Produktions- und Informationstechnik der Technischen Universität Hamburg-Harburg (TUHH).
5 Anwenderdokumentation von E4 Version 2.0, 1995 /7/ 6 Napa Oy, Helsinki, Finland 7 Jahrbuch der STG 92. Band, Einfluß moderner Entwurfsmethoden auf die Produktentwicklung einer Werft /10/
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 5
Das Methodenbank-System E4 ist in vier Hauptmodule aufgeteilt: - Entwurf - Stahl - Maschine - Sonstige
Die Einheit Maschine enthält Berechnungsmethoden aus dem Maschinenbau, der Bereich Stahl beinhaltet Methoden der Festigkeitsberechnung. In der Einheit Entwurf sind die Berechnungsmethoden und Daten zum Entwerfen und Optimieren zusammengefasst. Darin sind unter anderem folgende Module enthalten, die ich zur Erarbeitung der Diplomarbeit benutzt habe:
- Hauptdaten - Schiffsform - Raumaufteilung - Schiffsleergewicht und Ladefälle - Intakt- und Leckstabilität - Widerstand und Propulsion - Manövrierfähigkeit und Seegangseigenschaften
Im Bereich Hauptdaten sind unter anderem die Hauptabmessungen des Schiffes gespeichert. Das Modul Schiffsform enthält die Schiffsrumpfbeschreibung und die Methoden zur Verzerrung der Form. Auch weitere Anhänge, wie zum Beispiel die Pod-Gondel, können eingegeben werden. Außerdem gibt es hier die Möglichkeit, die Schiffsform mit Hilfe von Computational Fluid Dynamics (CFD) –Methoden zu optimieren. Es stehen zwei potenzialtheoretische Methoden – Kelvin und Shallo8 – zur Verfügung. Zur Beschreibung der verschiedenen Räume und Tanks mit Berechnung des Volumens ist das Kapitel Raumaufteilung vorgesehen. In Schiffsleergewicht und Ladefälle kann durch Eingabe der verschiedenen Gewichte der Bauteile eine Massenverteilung des Schiffes erstellt werden. Durch Zuladung von Einzellasten oder Beladung von Räumen beziehungsweise durch Flutung von Tanks können verschiedene Ladefälle konstruiert werden. Im nächsten Modul kann die Intakt- und die Leckstabilität überprüft werden. Im Bereich Widerstand und Propulsion lassen sich der Widerstand mit Hilfe unterschiedlicher Parametermethoden vorhersagen und für verschiedene Propellerserien Freifahrtdiagramme erstellen. Das Modul Manövrierfähigkeit enthält unter anderem die Berechnung der Ruderkräfte mit einer Panelmethode und die Möglichkeit zur Überprüfung von IMO-Manövern9. Eine ausführliche Beschreibung der einzelnen Module und Untermodule ist in dem Programm E4 enthalten.10
8 Kelvin /9/, Shallo (HSVA) 9 IMO: International Maritime Organization /15/ 10 Dokumentation im CAD-Methodenbank System E4 /7/
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 6
3. Ausgangszustand Um das Konzept Sicherheitsschiff weiter auszuarbeiten, hat die SSW einen vorläufigen Generalplan und eine vorläufige Schiffsrumpfbeschreibung erstellt. Für den Pod-Antrieb wurde der Propulsionshersteller Schottel herangezogen. Über den Ausgangszustand sind mir von der SSW die bisherigen Unterlagen zu dem Projekt zur Verfügung gestellt worden. Außerdem habe ich von Schottel Einbauskizzen für den Antrieb erhalten. Folgende Unterlagen beschreiben den Anfangszustand:
- vorläufige Schiffslinien als Spanten-, Seiten- und Wasserlinienriss - ein vorläufiger Generalplan - ein Vorschlag für Propulsion mit Freifahrtdiagramm für den Düsenpropeller
am Pod - Einbauskizzen für die Pods und den Pumpjet
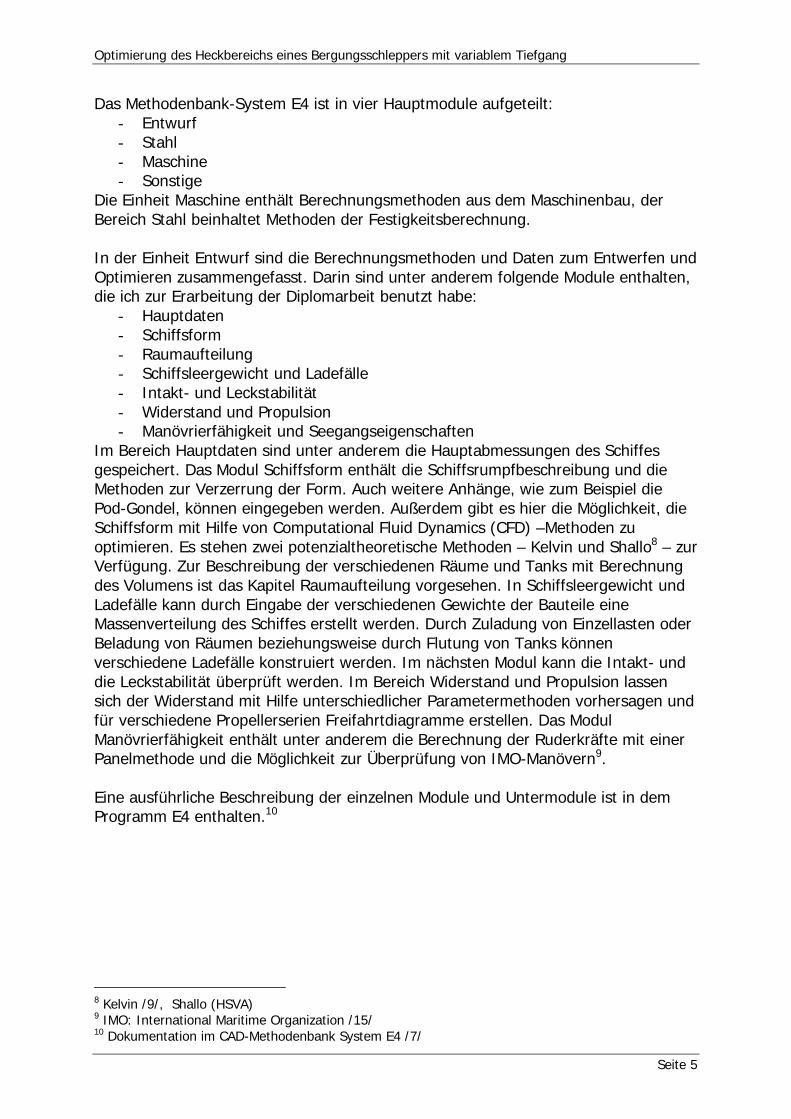
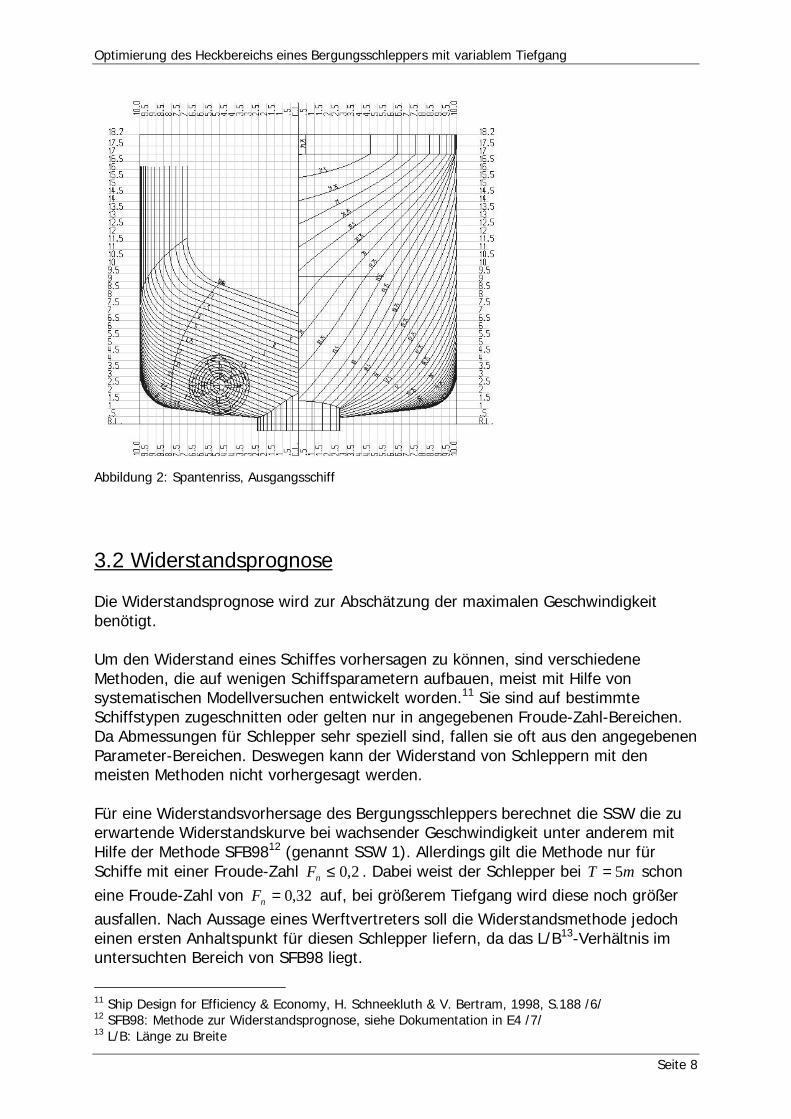
Diese Grunddaten sind von mir in das Programm E4 für die weitere Berechnung der geforderten Ziele eingepflegt worden. 3.1 Schiffslinien Anhand des Spantenrisses konnte ich den Schiffsrumpf in das Programm E4 eindigitalisieren. Der Schiffsrumpf wird dabei mit Hilfe von Spanten und Längslinien durch ein Digitalisiergerät, das auf einer vorgegebenen Fläche Knotenpunkte der Linien erfassen kann, eingegeben. Die Erfassungsmethode kann aus den Knotenpunkten eine der Schiffsform angenäherte Form errechnen. Nach Auswahl der Spanten, die den Schiffskörper bestmöglich beschreiben, habe ich durch die wichtigsten Punkte auf den Spanten – wie zum Beispiel Boden-, Längs- oder Seiteneinlauf – Längslinien gelegt. Die Linien, die durch die Eindigitalisierung nicht exakt erfasst wurden oder durch andere kleinere Unregelmäßigkeiten nicht strakten, wurden nachbearbeitet. Dabei habe ich mich mit Hilfe der vorgegebenen Linienrisse und dem Generalplan an die Schiffsform gehalten. Zur besseren Einhaltung der Schiffsform sind weitere Spanten und Längslinien hinzugekommen. Die Hauptdaten des Ausgangsschiffes sind in Tabelle 2 zu finden.
Tabelle 2: Hauptdaten, Ausgangsschiff
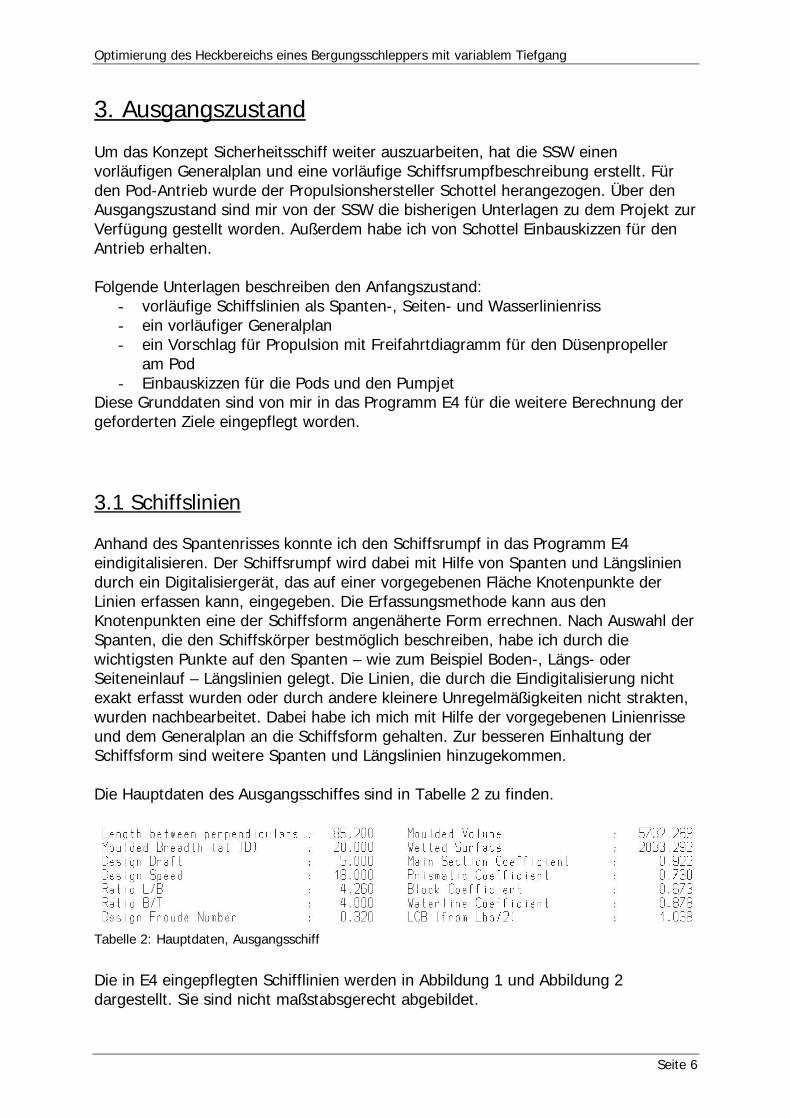
Die in E4 eingepflegten Schifflinien werden in Abbildung 1 und Abbildung 2 dargestellt. Sie sind nicht maßstabsgerecht abgebildet.
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 7
Abbildung 1: Seitenlinienriss und Wasserlinienriss, Ausgangsschiff
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 8
Abbildung 2: Spantenriss, Ausgangsschiff
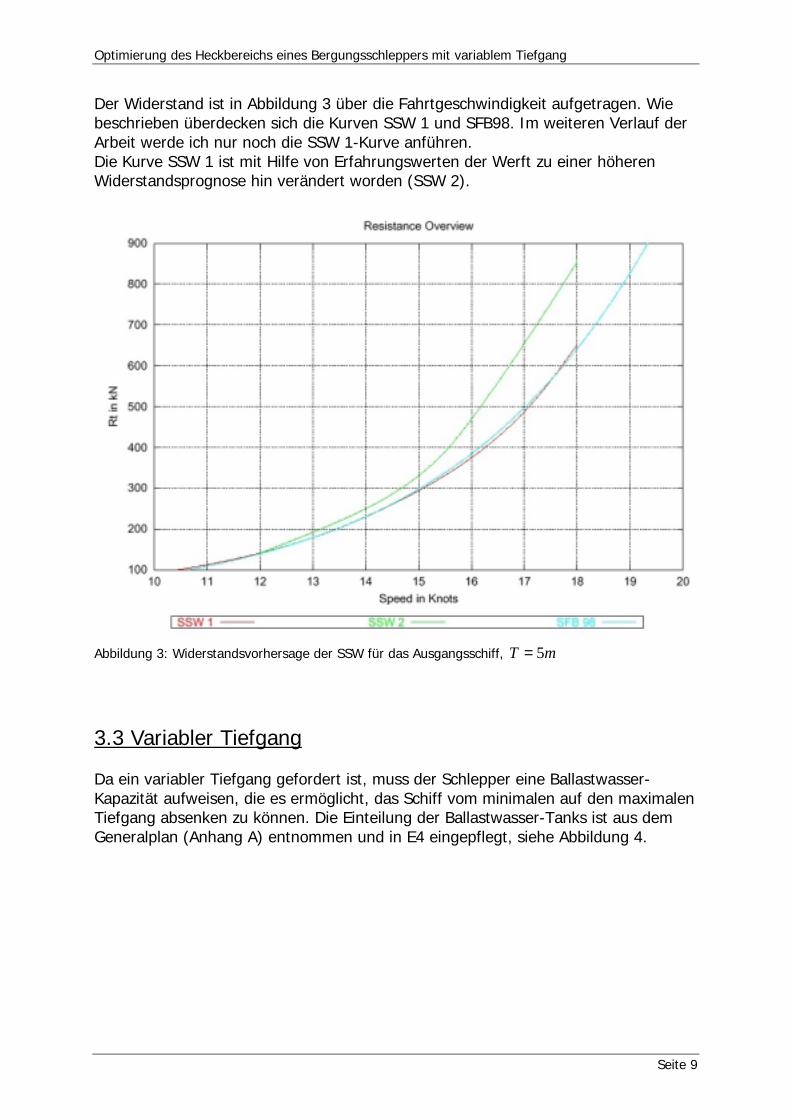
3.2 Widerstandsprognose Die Widerstandsprognose wird zur Abschätzung der maximalen Geschwindigkeit benötigt. Um den Widerstand eines Schiffes vorhersagen zu können, sind verschiedene Methoden, die auf wenigen Schiffsparametern aufbauen, meist mit Hilfe von systematischen Modellversuchen entwickelt worden.11 Sie sind auf bestimmte Schiffstypen zugeschnitten oder gelten nur in angegebenen Froude-Zahl-Bereichen. Da Abmessungen für Schlepper sehr speziell sind, fallen sie oft aus den angegebenen Parameter-Bereichen. Deswegen kann der Widerstand von Schleppern mit den meisten Methoden nicht vorhergesagt werden. Für eine Widerstandsvorhersage des Bergungsschleppers berechnet die SSW die zu erwartende Widerstandskurve bei wachsender Geschwindigkeit unter anderem mit Hilfe der Methode SFB9812 (genannt SSW 1). Allerdings gilt die Methode nur für Schiffe mit einer Froude-Zahl 2,0≤nF . Dabei weist der Schlepper bei mT 5= schon eine Froude-Zahl von 32,0=nF auf, bei größerem Tiefgang wird diese noch größer ausfallen. Nach Aussage eines Werftvertreters soll die Widerstandsmethode jedoch einen ersten Anhaltspunkt für diesen Schlepper liefern, da das L/B13-Verhältnis im untersuchten Bereich von SFB98 liegt.
11 Ship Design for Efficiency & Economy, H. Schneekluth & V. Bertram, 1998, S.188 /6/ 12 SFB98: Methode zur Widerstandsprognose, siehe Dokumentation in E4 /7/ 13 L/B: Länge zu Breite
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 9
Der Widerstand ist in Abbildung 3 über die Fahrtgeschwindigkeit aufgetragen. Wie beschrieben überdecken sich die Kurven SSW 1 und SFB98. Im weiteren Verlauf der Arbeit werde ich nur noch die SSW 1-Kurve anführen. Die Kurve SSW 1 ist mit Hilfe von Erfahrungswerten der Werft zu einer höheren Widerstandsprognose hin verändert worden (SSW 2).
Abbildung 3: Widerstandsvorhersage der SSW für das Ausgangsschiff, mT 5=
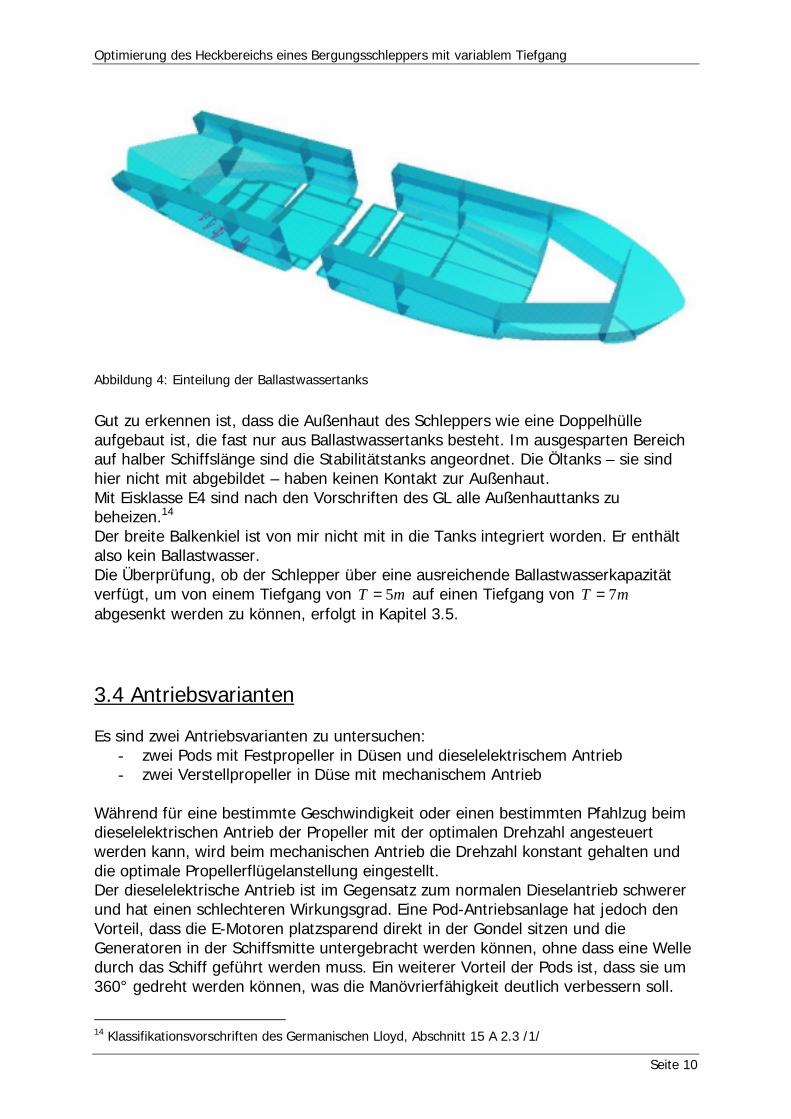
3.3 Variabler Tiefgang Da ein variabler Tiefgang gefordert ist, muss der Schlepper eine Ballastwasser-Kapazität aufweisen, die es ermöglicht, das Schiff vom minimalen auf den maximalen Tiefgang absenken zu können. Die Einteilung der Ballastwasser-Tanks ist aus dem Generalplan (Anhang A) entnommen und in E4 eingepflegt, siehe Abbildung 4.
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 10
Abbildung 4: Einteilung der Ballastwassertanks
Gut zu erkennen ist, dass die Außenhaut des Schleppers wie eine Doppelhülle aufgebaut ist, die fast nur aus Ballastwassertanks besteht. Im ausgesparten Bereich auf halber Schiffslänge sind die Stabilitätstanks angeordnet. Die Öltanks – sie sind hier nicht mit abgebildet – haben keinen Kontakt zur Außenhaut. Mit Eisklasse E4 sind nach den Vorschriften des GL alle Außenhauttanks zu beheizen.14 Der breite Balkenkiel ist von mir nicht mit in die Tanks integriert worden. Er enthält also kein Ballastwasser. Die Überprüfung, ob der Schlepper über eine ausreichende Ballastwasserkapazität verfügt, um von einem Tiefgang von mT 5= auf einen Tiefgang von mT 7= abgesenkt werden zu können, erfolgt in Kapitel 3.5. 3.4 Antriebsvarianten Es sind zwei Antriebsvarianten zu untersuchen:
- zwei Pods mit Festpropeller in Düsen und dieselelektrischem Antrieb - zwei Verstellpropeller in Düse mit mechanischem Antrieb
Während für eine bestimmte Geschwindigkeit oder einen bestimmten Pfahlzug beim dieselelektrischen Antrieb der Propeller mit der optimalen Drehzahl angesteuert werden kann, wird beim mechanischen Antrieb die Drehzahl konstant gehalten und die optimale Propellerflügelanstellung eingestellt. Der dieselelektrische Antrieb ist im Gegensatz zum normalen Dieselantrieb schwerer und hat einen schlechteren Wirkungsgrad. Eine Pod-Antriebsanlage hat jedoch den Vorteil, dass die E-Motoren platzsparend direkt in der Gondel sitzen und die Generatoren in der Schiffsmitte untergebracht werden können, ohne dass eine Welle durch das Schiff geführt werden muss. Ein weiterer Vorteil der Pods ist, dass sie um 360° gedreht werden können, was die Manövrierfähigkeit deutlich verbessern soll.
14 Klassifikationsvorschriften des Germanischen Lloyd, Abschnitt 15 A 2.3 /1/
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 11
Bei beiden Varianten soll ein Pumpjet im Vorschiff installiert werden, der zum dynamischen Positionieren bei Feuerlöscheinsätzen ausgelegt ist und die „come home“ Bedingung erfüllt. „Come home“ Bedingung bedeutet, dass das Schiff nach Ausfall der Hauptmaschinen mit Hilfe des Pumpjets mit einer Geschwindigkeit von 5kn eigenständig zum nächsten Hafen fahren kann. Die Propeller sind für den geforderten Pfahlzug ausgelegt. Sie sind mit einer Kortdüse versehen, um bei gleichem Propellerdurchmesser eine höhere Schubkraft zu erreichen und um den Propeller vor Grundberührung, Eis, Ketten oder Trossen zu schützen. Für den Pod-Antrieb hat Schottel folgende Ausgangsinformationen bereitgestellt:
- eine Einbauskizze des Pods SSP515 - die Leistung pro SSP5 beträgt kWP 5600= - das Freifahrtdiagramm des Propellers Ka 4-70 in Düse 19a mit einer Tabelle
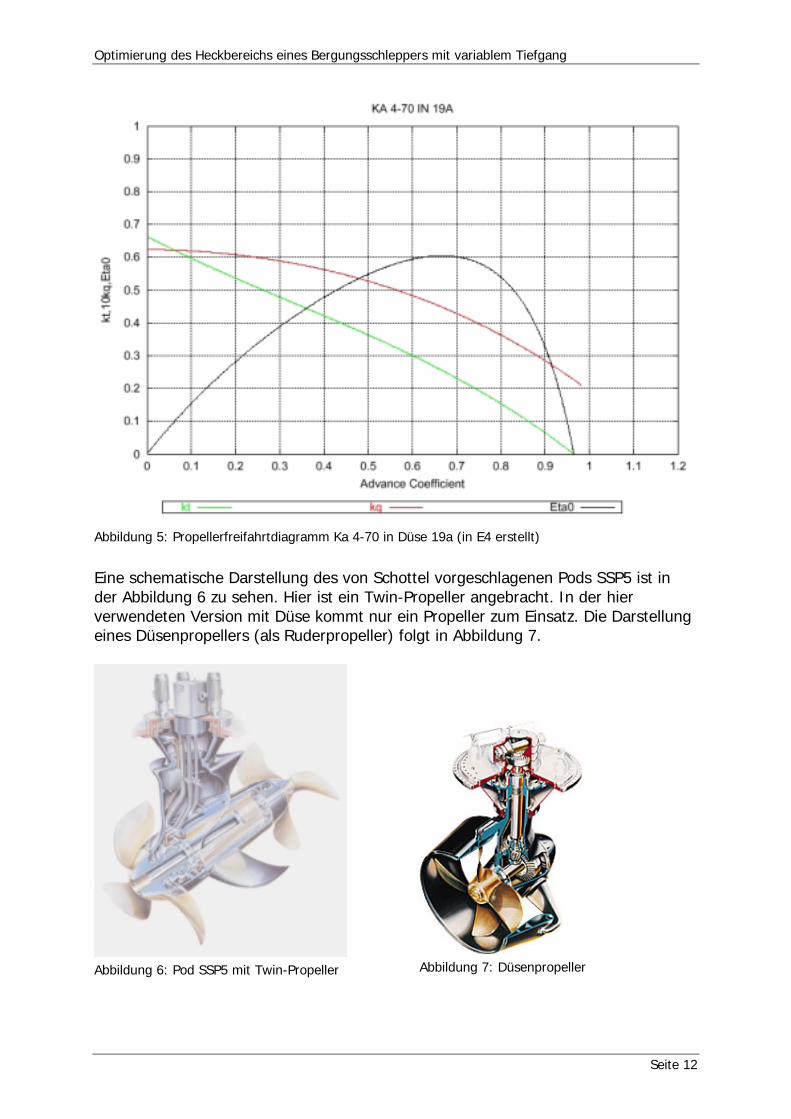
der Propellerhauptdaten Durch die Forderung eines minimalen Tiefgangs von mT 5= ist ein maximaler Durchmesser der Kortdüse vorgegeben, da sie vollständig getaucht sein muss. Wie in Abbildung 1 und Abbildung 2 der Schiffslinien zu sehen, sind die Propeller mit Düse in die Propulsionsmethoden von E4 einpflegt. Der Pod ist in den Schiffslinien der optimierten Schiffsform, Kapitel 4.1, zu sehen. Dabei wird die Gondel als Ruder eingegeben. Die Nachstromziffer w und die Sogziffer t sind von der SSW prognostiziert worden: 12,0=w und 15,0=t mit 0,1=Rη Das Propellerfreifahrtdiagramm aus E4 entspricht in etwa dem von Schottel (siehe Abbildung 5). Der Unterschied besteht darin, dass die Berechnung von Schottel bereits verschiedene Widerstände – wie zum Beispiel den Gehäusewiderstand – enthält. Die Widerstände beruhen auf Erfahrungswerten und experimentellen Untersuchungen. Im Vergleich wird daher die maximale Schubkraft des Propellers in der E4-Methode um etwa 10% zu hoch berechnet. Die Berechnungen in E4 haben bei diesem Propeller beispielsweise einen Propellerschub von kNET ropP 2,959)4( = ergeben, die Angabe von Schottel lautet
kNT ropP 75,883= .
15 SSP = Schottel Siemens Propulsor /11/
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 12
Abbildung 5: Propellerfreifahrtdiagramm Ka 4-70 in Düse 19a (in E4 erstellt)
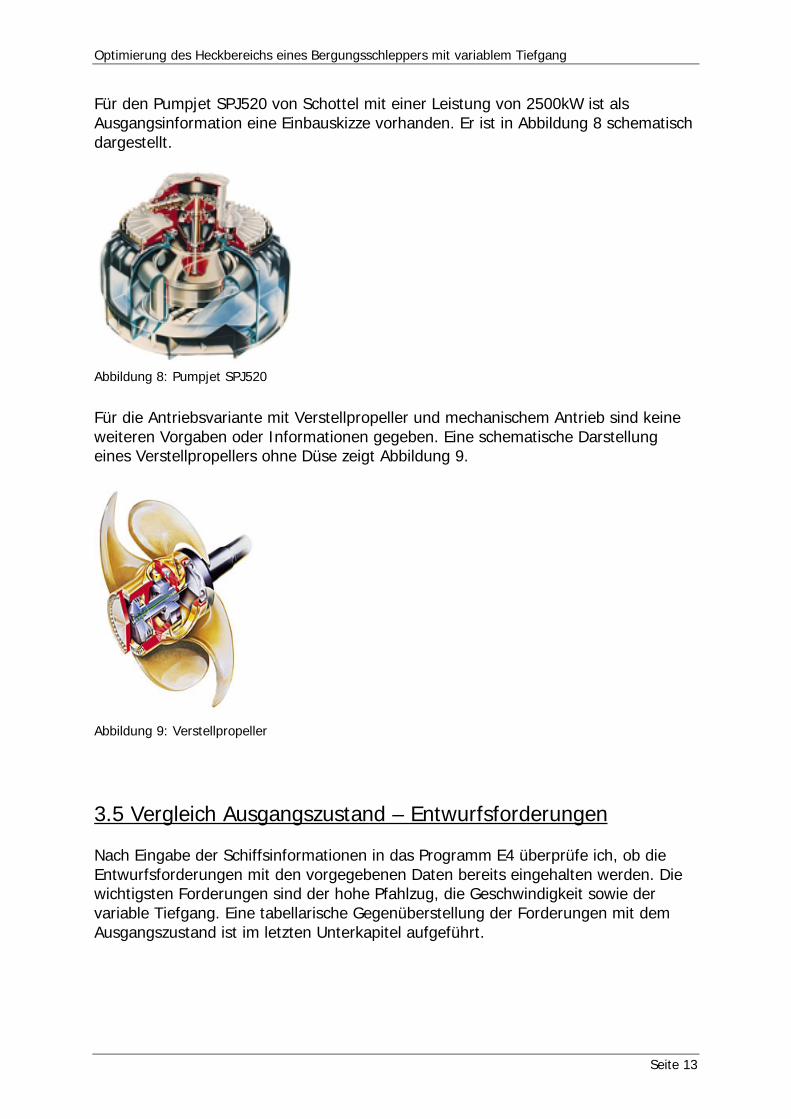
Eine schematische Darstellung des von Schottel vorgeschlagenen Pods SSP5 ist in der Abbildung 6 zu sehen. Hier ist ein Twin-Propeller angebracht. In der hier verwendeten Version mit Düse kommt nur ein Propeller zum Einsatz. Die Darstellung eines Düsenpropellers (als Ruderpropeller) folgt in Abbildung 7.
Abbildung 6: Pod SSP5 mit Twin-Propeller
Abbildung 7: Düsenpropeller
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 13
Für den Pumpjet SPJ520 von Schottel mit einer Leistung von 2500kW ist als Ausgangsinformation eine Einbauskizze vorhanden. Er ist in Abbildung 8 schematisch dargestellt.
Abbildung 8: Pumpjet SPJ520
Für die Antriebsvariante mit Verstellpropeller und mechanischem Antrieb sind keine weiteren Vorgaben oder Informationen gegeben. Eine schematische Darstellung eines Verstellpropellers ohne Düse zeigt Abbildung 9.
Abbildung 9: Verstellpropeller
3.5 Vergleich Ausgangszustand – Entwurfsforderungen Nach Eingabe der Schiffsinformationen in das Programm E4 überprüfe ich, ob die Entwurfsforderungen mit den vorgegebenen Daten bereits eingehalten werden. Die wichtigsten Forderungen sind der hohe Pfahlzug, die Geschwindigkeit sowie der variable Tiefgang. Eine tabellarische Gegenüberstellung der Forderungen mit dem Ausgangszustand ist im letzten Unterkapitel aufgeführt.
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 14
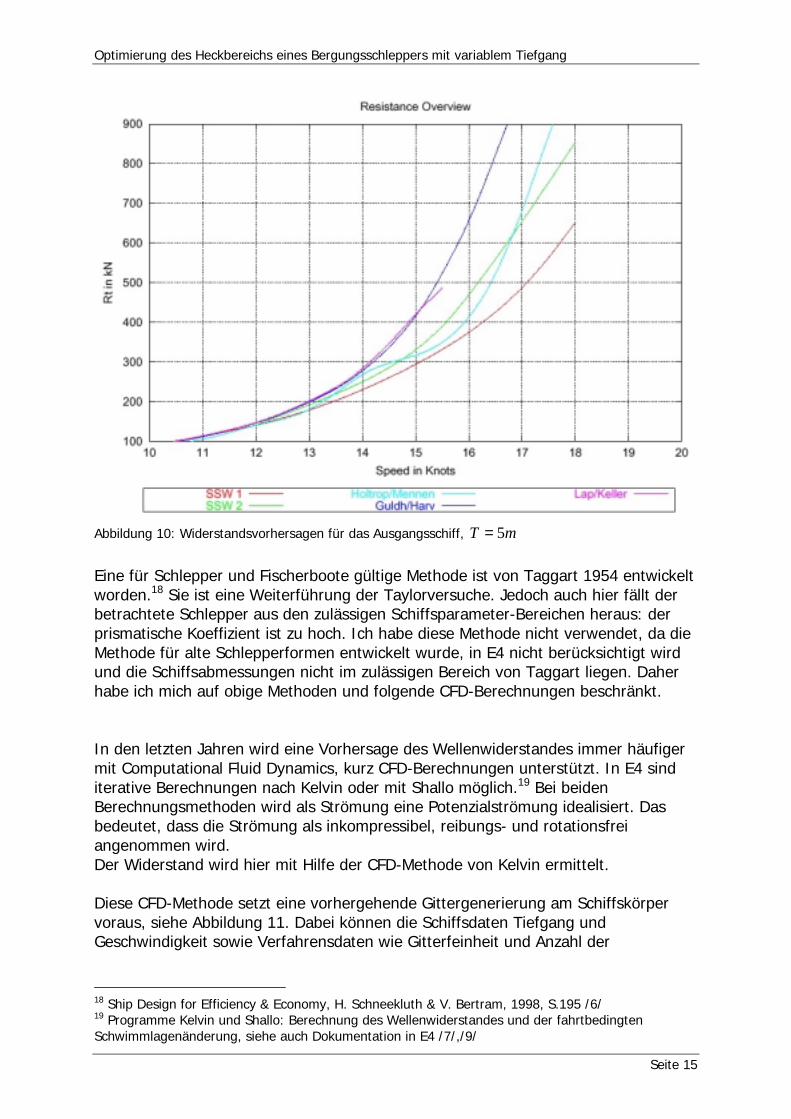
3.5.1 Kann die geforderte Geschwindigkeit erreicht werden? Zur Beantwortung dieser Frage wird der Schiffswiderstand zuerst mit weiteren Parametermethoden, dann mit CFD-Berechnungen untersucht. Es folgt eine Geschwindigkeits-Leistungs-Analyse basierend auf den Ergebnissen der Widerstandsprognosen. In E4 sind einige Methoden zur Vorhersage des Widerstandes enthalten.16 Da die Abmessungen für Schlepper bei fast allen Methoden aus mindestens einem Parameterbereich herausfallen, sind die Ergebnisse als Anhaltspunkt und nicht als realistische Widerstandsvorhersage zu verstehen. Die in Abbildung 10 aufgeführten Widerstandskurven sind ermittelt worden, um einen besseren Eindruck über den möglichen Verlauf des Widerstandes bei Zunahme der Geschwindigkeit zu erhalten. Zum Vergleich sind die SSW-Kurven ebenfalls im Diagramm enthalten. Sehr gut erkennbar ist, dass die SSW 1-Kurve, die dem SFB98-Ergebnis entspricht, den Widerstand am niedrigsten voraussagt. Die SSW 2-Kurve ist ähnlich der von Holtrop/Mennen17, allerdings steigt der Widerstand nach Holtrop/Mennen ab einer Geschwindigkeit von etwa knv 17= erheblich steiler an. Der Widerstand wird daher mindestens so hoch erwartet, wie es die SSW 2-Kurve prognostiziert. Die Nachstromziffer w und die Sogziffer t sind nach den Erfahrungswerten von Herrn Professor Krüger für die gegebene Rumpfform zu gut prognostiziert worden, da die Schiffsform nicht so strömungsgünstig ist. Er schlägt folgende Werte vor:
17,0=w und 16,0=t mit 03,1=Rη Die weiteren Berechnungen sind mit diesen Abschätzungen erfolgt.
16 siehe Dokumentation in E4 /7/ 17 Holtrop/Mennen: Methode zur Widerstandsprognose, siehe Dokumentation in E4 /7/
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 15
Abbildung 10: Widerstandsvorhersagen für das Ausgangsschiff, mT 5=
Eine für Schlepper und Fischerboote gültige Methode ist von Taggart 1954 entwickelt worden.18 Sie ist eine Weiterführung der Taylorversuche. Jedoch auch hier fällt der betrachtete Schlepper aus den zulässigen Schiffsparameter-Bereichen heraus: der prismatische Koeffizient ist zu hoch. Ich habe diese Methode nicht verwendet, da die Methode für alte Schlepperformen entwickelt wurde, in E4 nicht berücksichtigt wird und die Schiffsabmessungen nicht im zulässigen Bereich von Taggart liegen. Daher habe ich mich auf obige Methoden und folgende CFD-Berechnungen beschränkt. In den letzten Jahren wird eine Vorhersage des Wellenwiderstandes immer häufiger mit Computational Fluid Dynamics, kurz CFD-Berechnungen unterstützt. In E4 sind iterative Berechnungen nach Kelvin oder mit Shallo möglich.19 Bei beiden Berechnungsmethoden wird als Strömung eine Potenzialströmung idealisiert. Das bedeutet, dass die Strömung als inkompressibel, reibungs- und rotationsfrei angenommen wird. Der Widerstand wird hier mit Hilfe der CFD-Methode von Kelvin ermittelt. Diese CFD-Methode setzt eine vorhergehende Gittergenerierung am Schiffskörper voraus, siehe Abbildung 11. Dabei können die Schiffsdaten Tiefgang und Geschwindigkeit sowie Verfahrensdaten wie Gitterfeinheit und Anzahl der
18 Ship Design for Efficiency & Economy, H. Schneekluth & V. Bertram, 1998, S.195 /6/ 19 Programme Kelvin und Shallo: Berechnung des Wellenwiderstandes und der fahrtbedingten Schwimmlagenänderung, siehe auch Dokumentation in E4 /7/,/9/
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 16
Iterationsschritte selbst gewählt werden. Das Gitter kann in Blöcke unterteilt werden, wobei darauf zu achten ist, dass die Ränder aufeinander abgestimmt sind.
Abbildung 11: Gittergenerierung zur CFD-Berechnung nach Kelvin
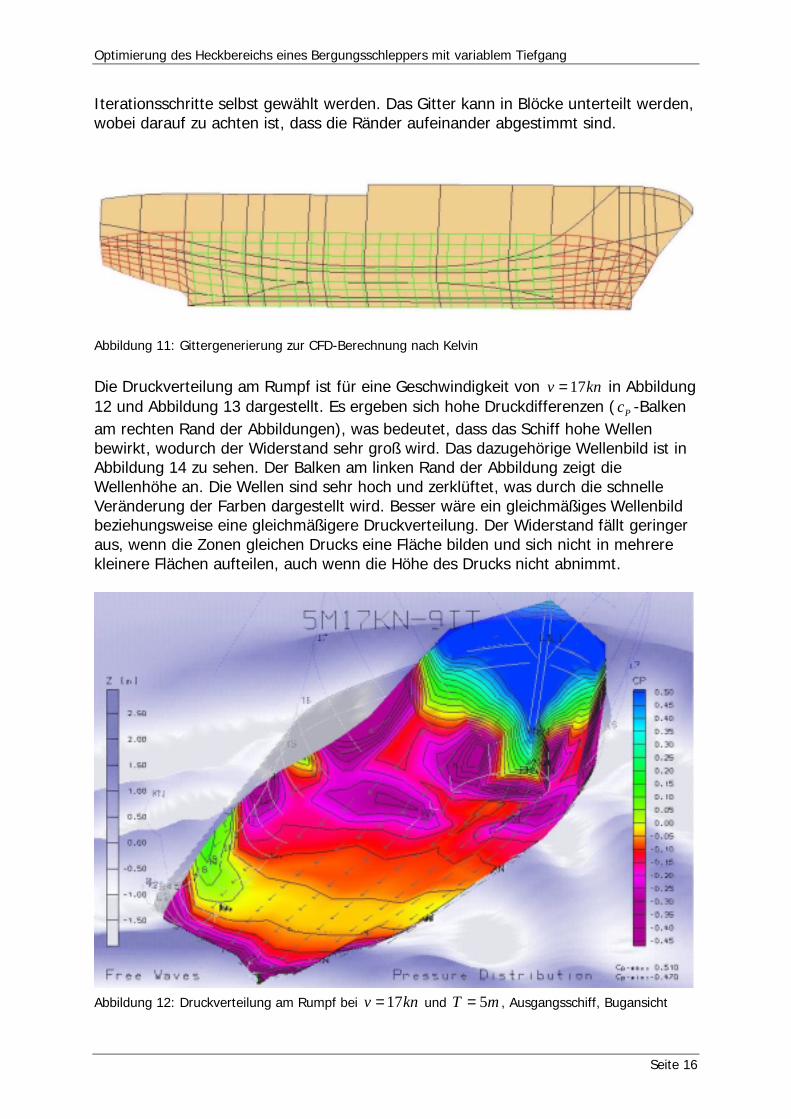
Die Druckverteilung am Rumpf ist für eine Geschwindigkeit von knv 17= in Abbildung 12 und Abbildung 13 dargestellt. Es ergeben sich hohe Druckdifferenzen ( Pc -Balken am rechten Rand der Abbildungen), was bedeutet, dass das Schiff hohe Wellen bewirkt, wodurch der Widerstand sehr groß wird. Das dazugehörige Wellenbild ist in Abbildung 14 zu sehen. Der Balken am linken Rand der Abbildung zeigt die Wellenhöhe an. Die Wellen sind sehr hoch und zerklüftet, was durch die schnelle Veränderung der Farben dargestellt wird. Besser wäre ein gleichmäßiges Wellenbild beziehungsweise eine gleichmäßigere Druckverteilung. Der Widerstand fällt geringer aus, wenn die Zonen gleichen Drucks eine Fläche bilden und sich nicht in mehrere kleinere Flächen aufteilen, auch wenn die Höhe des Drucks nicht abnimmt.
Abbildung 12: Druckverteilung am Rumpf bei knv 17= und mT 5= , Ausgangsschiff, Bugansicht
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 17
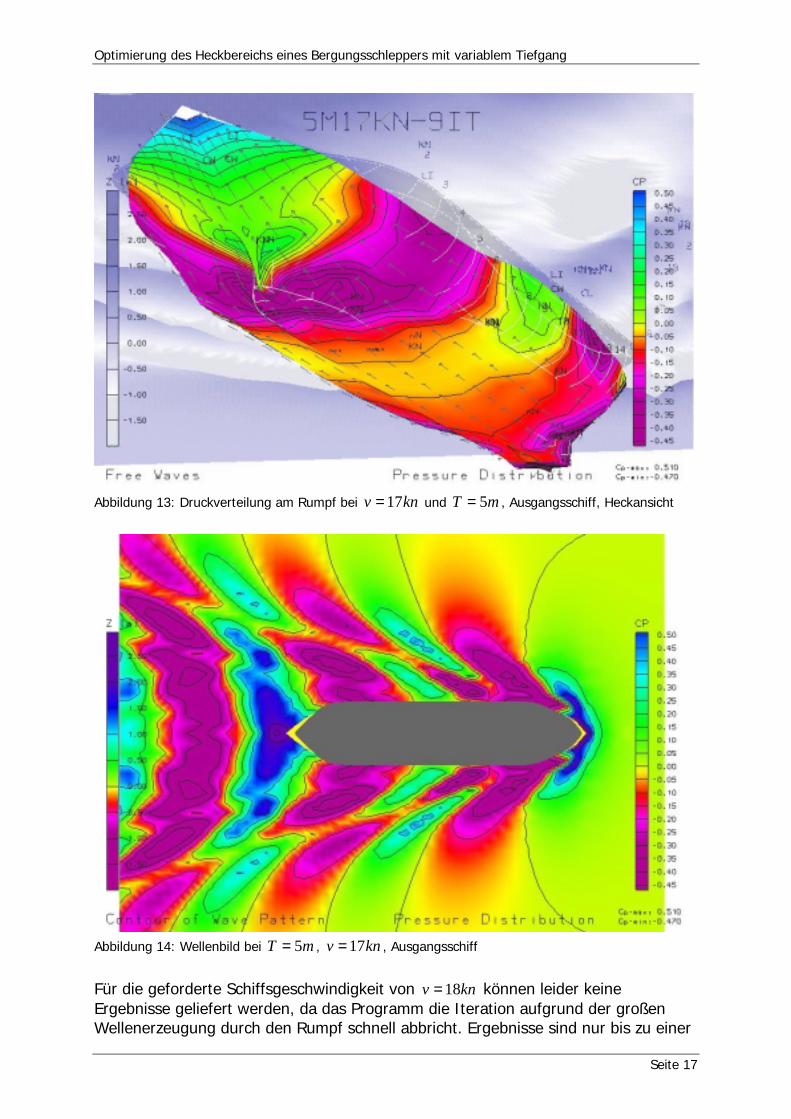
Abbildung 13: Druckverteilung am Rumpf bei knv 17= und mT 5= , Ausgangsschiff, Heckansicht
Abbildung 14: Wellenbild bei mT 5= , knv 17= , Ausgangsschiff
Für die geforderte Schiffsgeschwindigkeit von knv 18= können leider keine Ergebnisse geliefert werden, da das Programm die Iteration aufgrund der großen Wellenerzeugung durch den Rumpf schnell abbricht. Ergebnisse sind nur bis zu einer
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 18
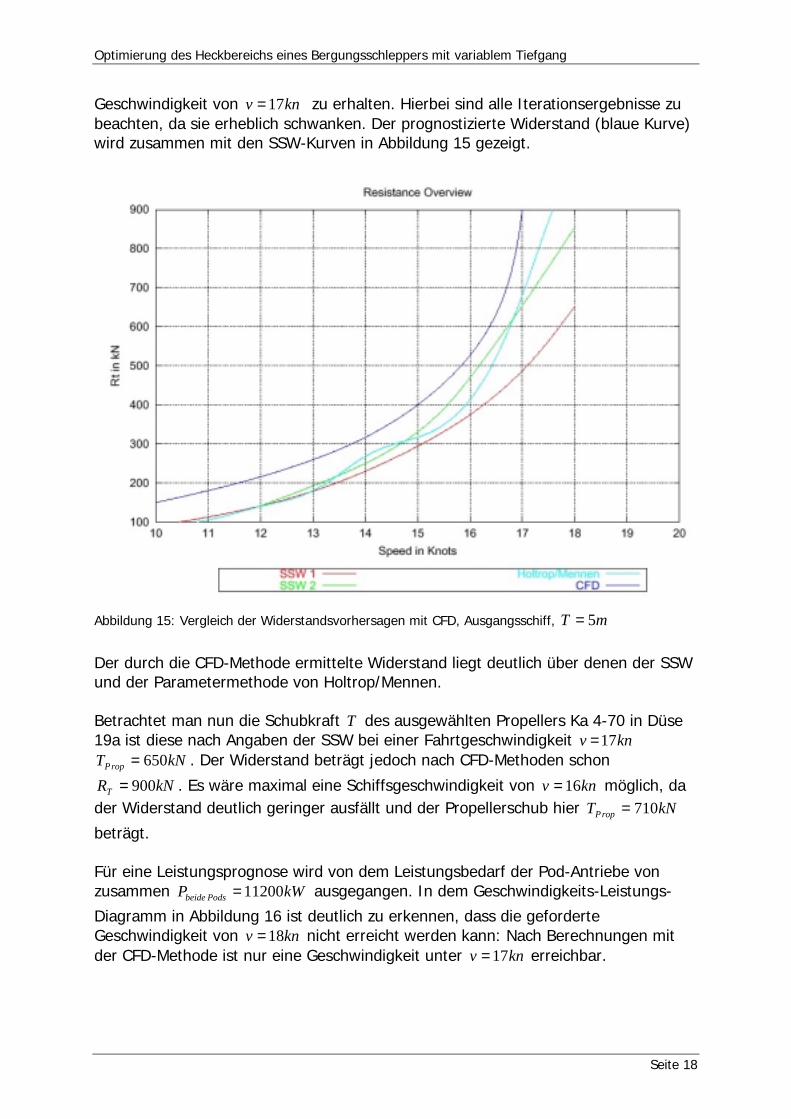
Geschwindigkeit von knv 17= zu erhalten. Hierbei sind alle Iterationsergebnisse zu beachten, da sie erheblich schwanken. Der prognostizierte Widerstand (blaue Kurve) wird zusammen mit den SSW-Kurven in Abbildung 15 gezeigt.
Abbildung 15: Vergleich der Widerstandsvorhersagen mit CFD, Ausgangsschiff, mT 5=
Der durch die CFD-Methode ermittelte Widerstand liegt deutlich über denen der SSW und der Parametermethode von Holtrop/Mennen. Betrachtet man nun die Schubkraft T des ausgewählten Propellers Ka 4-70 in Düse 19a ist diese nach Angaben der SSW bei einer Fahrtgeschwindigkeit knv 17=
kNT ropP 650= . Der Widerstand beträgt jedoch nach CFD-Methoden schon
kNRT 900= . Es wäre maximal eine Schiffsgeschwindigkeit von knv 16= möglich, da der Widerstand deutlich geringer ausfällt und der Propellerschub hier kNT ropP 710=
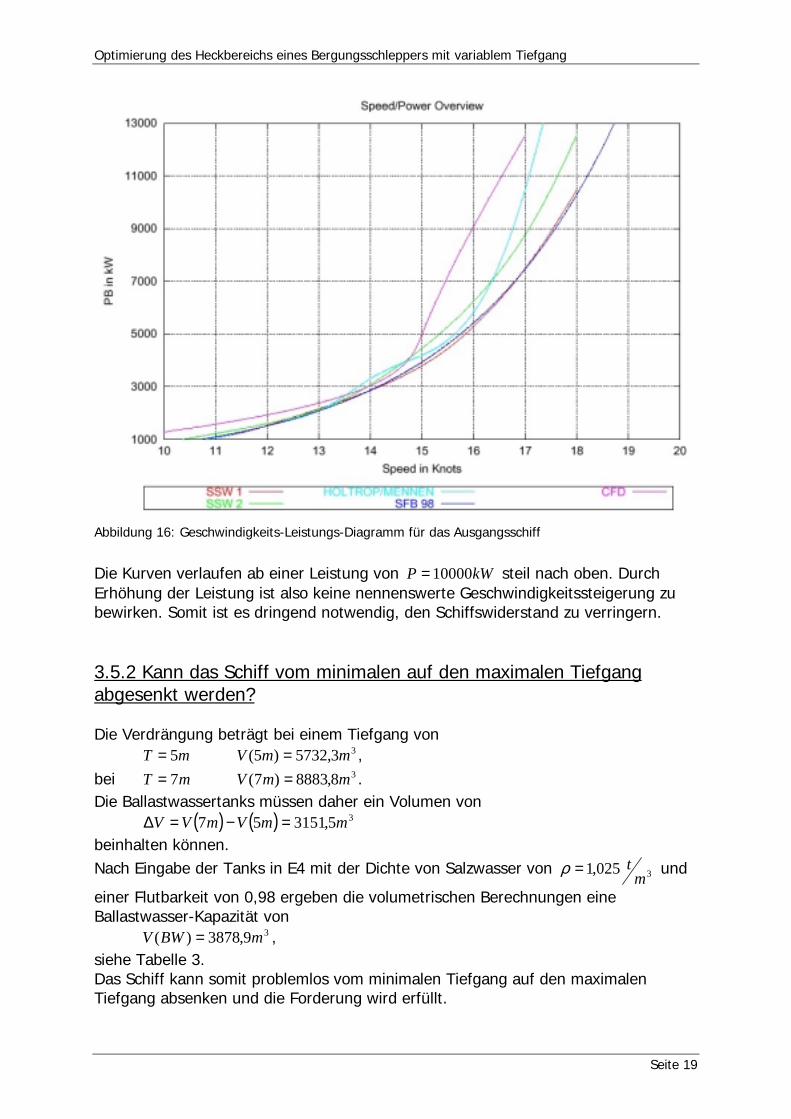
beträgt. Für eine Leistungsprognose wird von dem Leistungsbedarf der Pod-Antriebe von zusammen kWP Podsbeide 11200= ausgegangen. In dem Geschwindigkeits-Leistungs-
Diagramm in Abbildung 16 ist deutlich zu erkennen, dass die geforderte Geschwindigkeit von knv 18= nicht erreicht werden kann: Nach Berechnungen mit der CFD-Methode ist nur eine Geschwindigkeit unter knv 17= erreichbar.
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 19
Abbildung 16: Geschwindigkeits-Leistungs-Diagramm für das Ausgangsschiff
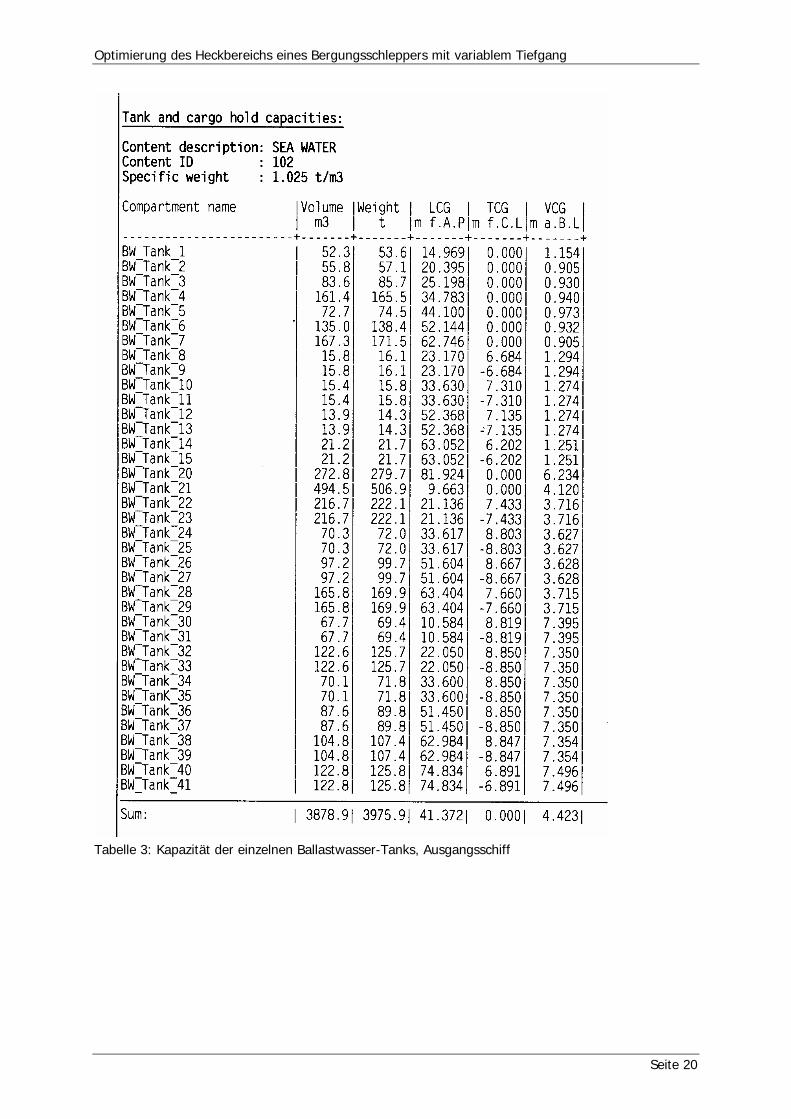
Die Kurven verlaufen ab einer Leistung von kWP 10000= steil nach oben. Durch Erhöhung der Leistung ist also keine nennenswerte Geschwindigkeitssteigerung zu bewirken. Somit ist es dringend notwendig, den Schiffswiderstand zu verringern. 3.5.2 Kann das Schiff vom minimalen auf den maximalen Tiefgang abgesenkt werden? Die Verdrängung beträgt bei einem Tiefgang von
mT 5= 33,5732)5( mmV = , bei mT 7= 38,8883)7( mmV = . Die Ballastwassertanks müssen daher ein Volumen von
( ) ( ) 35,315157 mmVmVV =−=∆ beinhalten können. Nach Eingabe der Tanks in E4 mit der Dichte von Salzwasser von 3025,1 m
t=ρ und
einer Flutbarkeit von 0,98 ergeben die volumetrischen Berechnungen eine Ballastwasser-Kapazität von
39,3878)( mBWV = , siehe Tabelle 3. Das Schiff kann somit problemlos vom minimalen Tiefgang auf den maximalen Tiefgang absenken und die Forderung wird erfüllt.
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 20
Tabelle 3: Kapazität der einzelnen Ballastwasser-Tanks, Ausgangsschiff
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 21
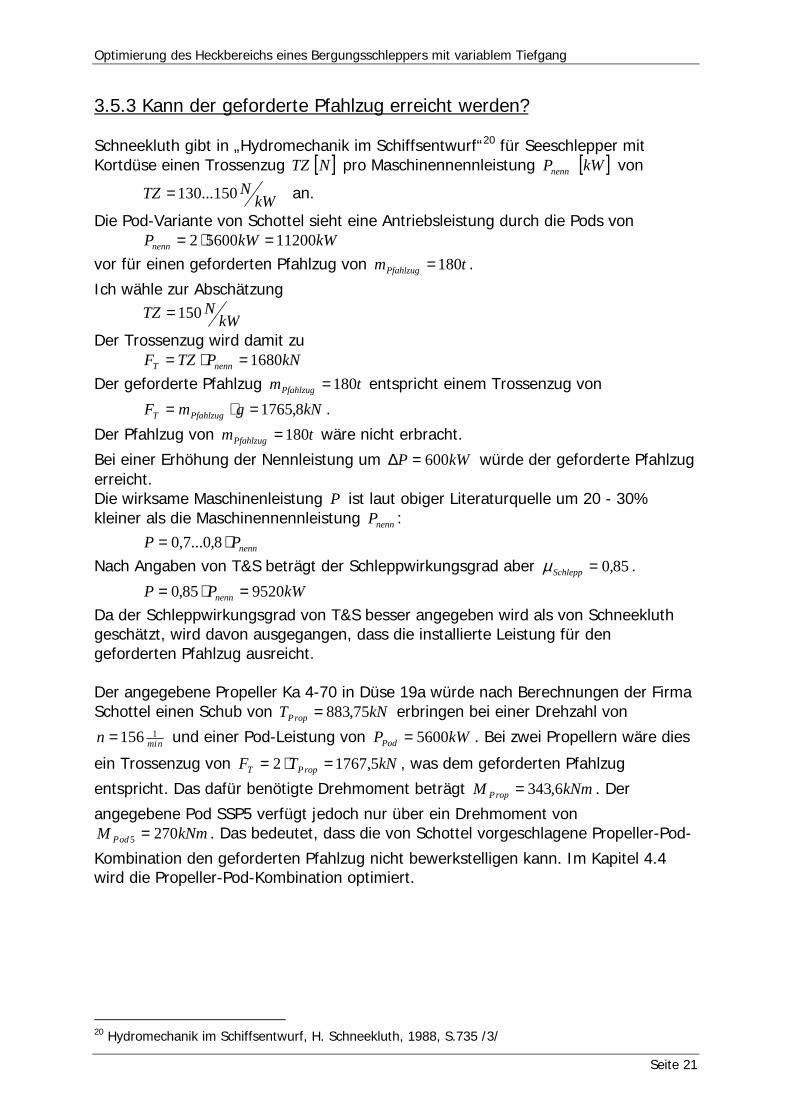
3.5.3 Kann der geforderte Pfahlzug erreicht werden? Schneekluth gibt in „Hydromechanik im Schiffsentwurf“20 für Seeschlepper mit Kortdüse einen Trossenzug [ ]NTZ pro Maschinennennleistung nennP [ ]kW von
kWNTZ 150...130= an.
Die Pod-Variante von Schottel sieht eine Antriebsleistung durch die Pods von kWkWPnenn 1120056002 =⋅=
vor für einen geforderten Pfahlzug von tmPfahlzug 180= .
Ich wähle zur Abschätzung
kWNTZ 150=
Der Trossenzug wird damit zu kNPTZF nennT 1680=⋅= Der geforderte Pfahlzug tmPfahlzug 180= entspricht einem Trossenzug von
kNgmF PfahlzugT 8,1765=⋅= .
Der Pfahlzug von tmPfahlzug 180= wäre nicht erbracht.
Bei einer Erhöhung der Nennleistung um kWP 600=∆ würde der geforderte Pfahlzug erreicht. Die wirksame Maschinenleistung P ist laut obiger Literaturquelle um 20 - 30% kleiner als die Maschinennennleistung nennP : nennPP ⋅= 8,0...7,0 Nach Angaben von T&S beträgt der Schleppwirkungsgrad aber 85,0=Schleppµ .
kWPP nenn 952085,0 =⋅= Da der Schleppwirkungsgrad von T&S besser angegeben wird als von Schneekluth geschätzt, wird davon ausgegangen, dass die installierte Leistung für den geforderten Pfahlzug ausreicht. Der angegebene Propeller Ka 4-70 in Düse 19a würde nach Berechnungen der Firma Schottel einen Schub von kNT ropP 75,883= erbringen bei einer Drehzahl von
nmin 1156= und einer Pod-Leistung von kWPPod 5600= . Bei zwei Propellern wäre dies
ein Trossenzug von kNTF ropPT 5,17672 =⋅= , was dem geforderten Pfahlzug
entspricht. Das dafür benötigte Drehmoment beträgt kNmM ropP 6,343= . Der
angegebene Pod SSP5 verfügt jedoch nur über ein Drehmoment von kNmM odP 2705 = . Das bedeutet, dass die von Schottel vorgeschlagene Propeller-Pod-
Kombination den geforderten Pfahlzug nicht bewerkstelligen kann. Im Kapitel 4.4 wird die Propeller-Pod-Kombination optimiert.
20 Hydromechanik im Schiffsentwurf, H. Schneekluth, 1988, S.735 /3/
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 22
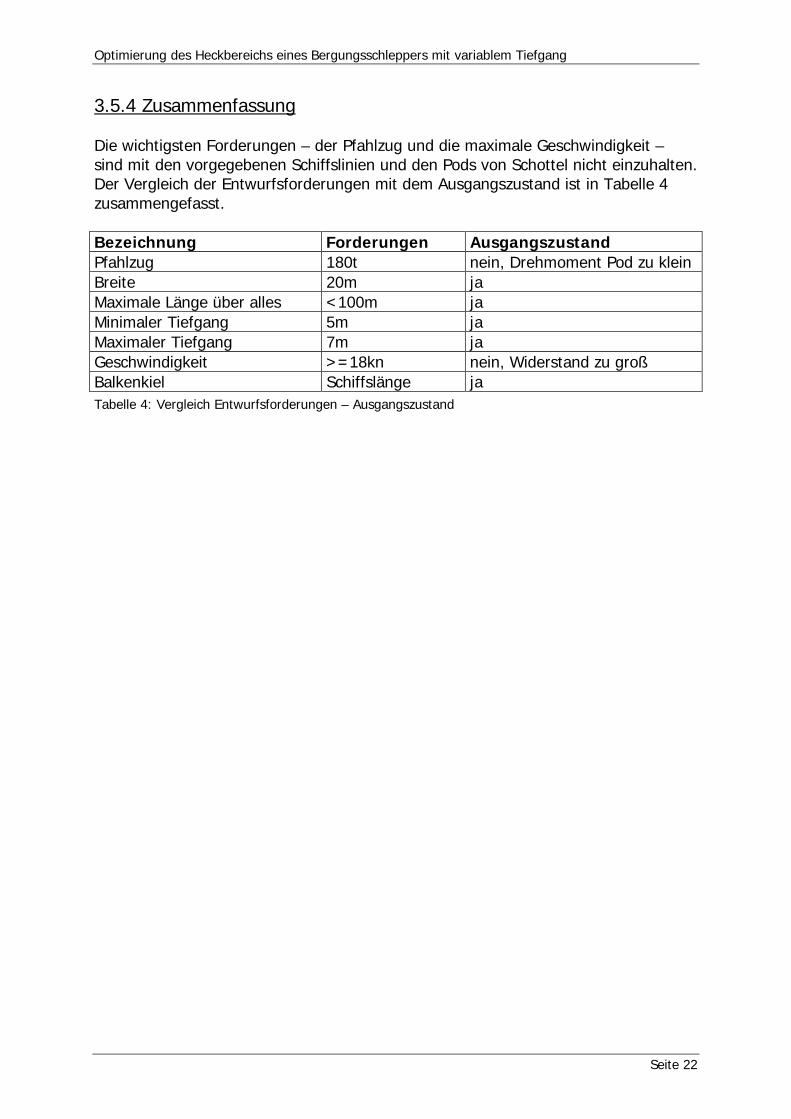
3.5.4 Zusammenfassung Die wichtigsten Forderungen – der Pfahlzug und die maximale Geschwindigkeit – sind mit den vorgegebenen Schiffslinien und den Pods von Schottel nicht einzuhalten. Der Vergleich der Entwurfsforderungen mit dem Ausgangszustand ist in Tabelle 4 zusammengefasst. Bezeichnung Forderungen Ausgangszustand Pfahlzug 180t nein, Drehmoment Pod zu klein Breite 20m ja Maximale Länge über alles <100m ja Minimaler Tiefgang 5m ja Maximaler Tiefgang 7m ja Geschwindigkeit >=18kn nein, Widerstand zu groß Balkenkiel Schiffslänge ja Tabelle 4: Vergleich Entwurfsforderungen – Ausgangszustand
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 23
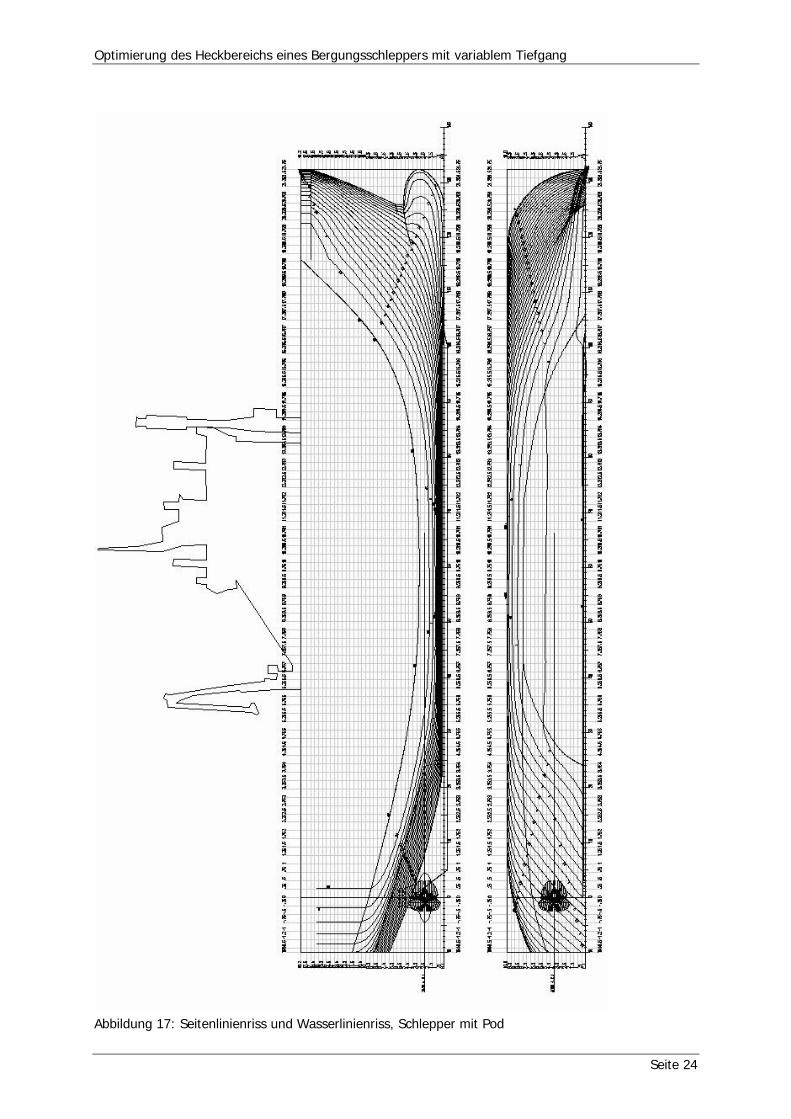
4. Optimierung des Schiffes mit Pod-Antrieb Bei den vorgegebenen Linien kann eine Geschwindigkeit von 18kn bei weitem nicht erreicht werden, da die Schiffsform sehr strömungsungünstig gewählt ist. Zur Widerstandsreduzierung muss daher nicht nur der Heckbereich des Schleppers, sondern der gesamte Rumpf, insbesondere das Vorschiff betrachtet und verändert werden. Zur Propulsionsverbesserung ist nach einem Propeller mit weniger Drehmoment, einem Pod mit mehr Drehmoment oder einer anderen Propeller-Pod-Variante zu suchen. 4.1 Schiffslinien Um den Widerstand zu reduzieren und so eine Fahrgeschwindigkeit von mindestens 18kn zu erreichen, habe ich folgende Veränderungen an den Schiffslinien vorgenommen: Am Vorschiff ist ein Bugwulst eingestrakt worden, wodurch auch die Spantformen zu verändern waren, damit sich im Winter Eisschollen nicht an Hohlspanten verkanten können. Mit dem Bugwulst ist auch der Stevenwinkel steiler geworden. (siehe Abbildung 17: Seitenlinienriss und Wasserlinienriss) Außerdem wurde der Balkenkiel angelehnt an die GL-Vorschriften21 dimensioniert – er fällt etwas größer als nach den Vorschriften berechnet aus, ähnlich wie bei der Oceanic22. Auch hört der Balkenkiel nicht an der hinteren Schulter auf, sondern wird als Totholz weitergeführt. Das Totholz verbessert die Manövrierfähigkeit des Schiffes, der lange Balkenkiel verschlechtert sie. Da der Auftraggeber T&S auf einen langen Balkenkiel besteht, um den Rumpf vor Grundberührung zu schützen, wird er beibehalten, aber erst ab dem Pumpjet. Nach den großen Veränderungen mit Bugwulst und Totholz sind weitere kleinere Verbesserungen mit Hilfe der CFD-Berechnung erarbeitet worden. Die Form des Bugwulstes wurde verbessert und die vordere Schulter etwas nach hinten verschoben, damit sie weicher wird. Im Heckbereich wurden nur kaum merkliche Veränderungen an hinterer Schulter und Kimmradius und Bodenkimmung durchgeführt, die aus der Änderung von Balkenkiel und der Verlängerung zum Totholz resultieren. Die Ergebnisse der CFD-Berechnungen sind in Abschnitt 4.2 Widerstandsberechnung diskutiert. Die neuen Schiffslinien sind in Abbildung 17 und Abbildung 18 dargestellt. Sehr gut zu erkennen ist die Veränderung der Vorschiffsform mit Einfügen des Bugwulstes und der schmalere Balkenkiel. Des weiteren sind die Seitenlateralfläche und die Frontlateralfläche mit angegeben. 21 Klassifikationsvorschriften des Germanischen Lloyd, Abschnitt 25 B /1/ 22 Unterlagen und Zeichnungen der Oceanic, aus dem Archiv der Bugsier-Reederei, die freundlicherweise zur Verfügung gestellt wurden.
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 24
Abbildung 17: Seitenlinienriss und Wasserlinienriss, Schlepper mit Pod
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 25
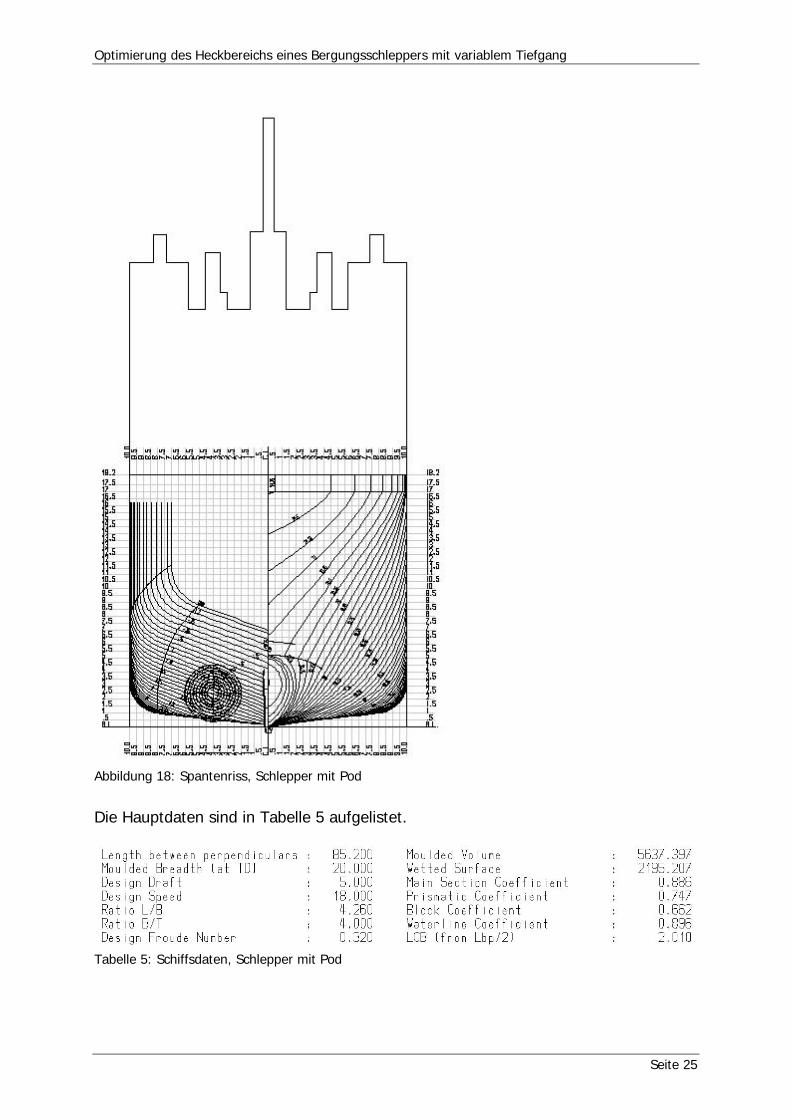
Abbildung 18: Spantenriss, Schlepper mit Pod
Die Hauptdaten sind in Tabelle 5 aufgelistet.
Tabelle 5: Schiffsdaten, Schlepper mit Pod
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 26
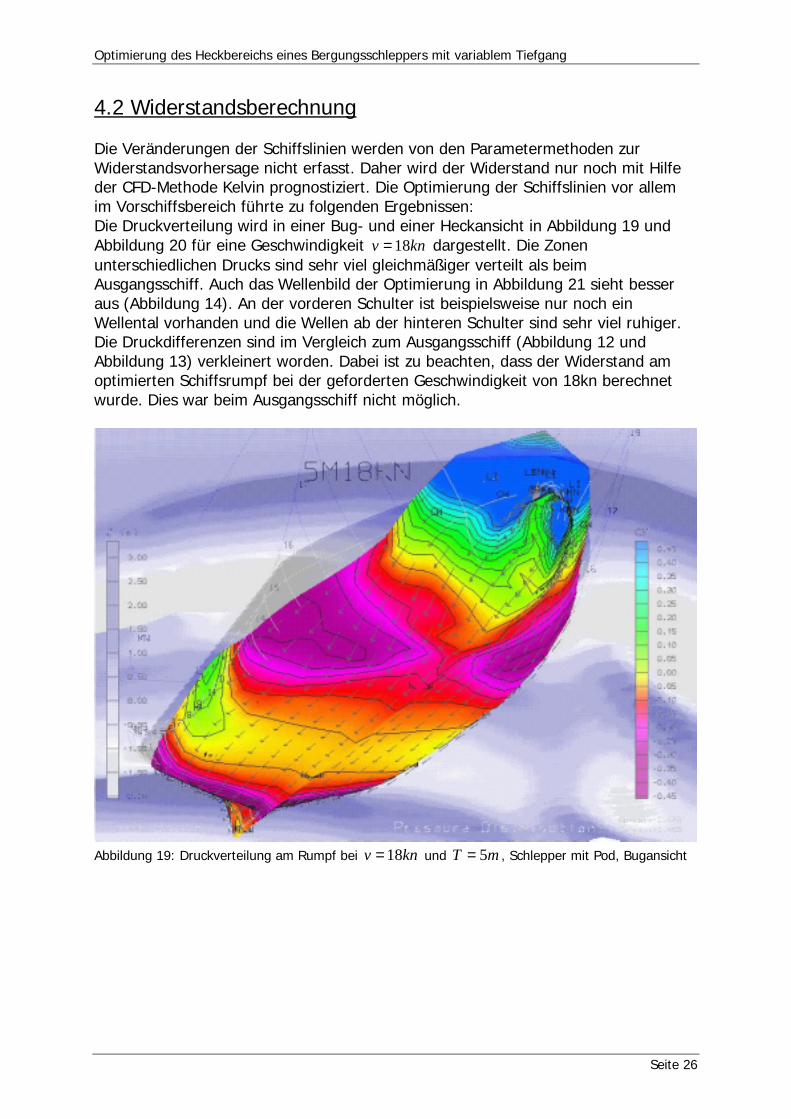
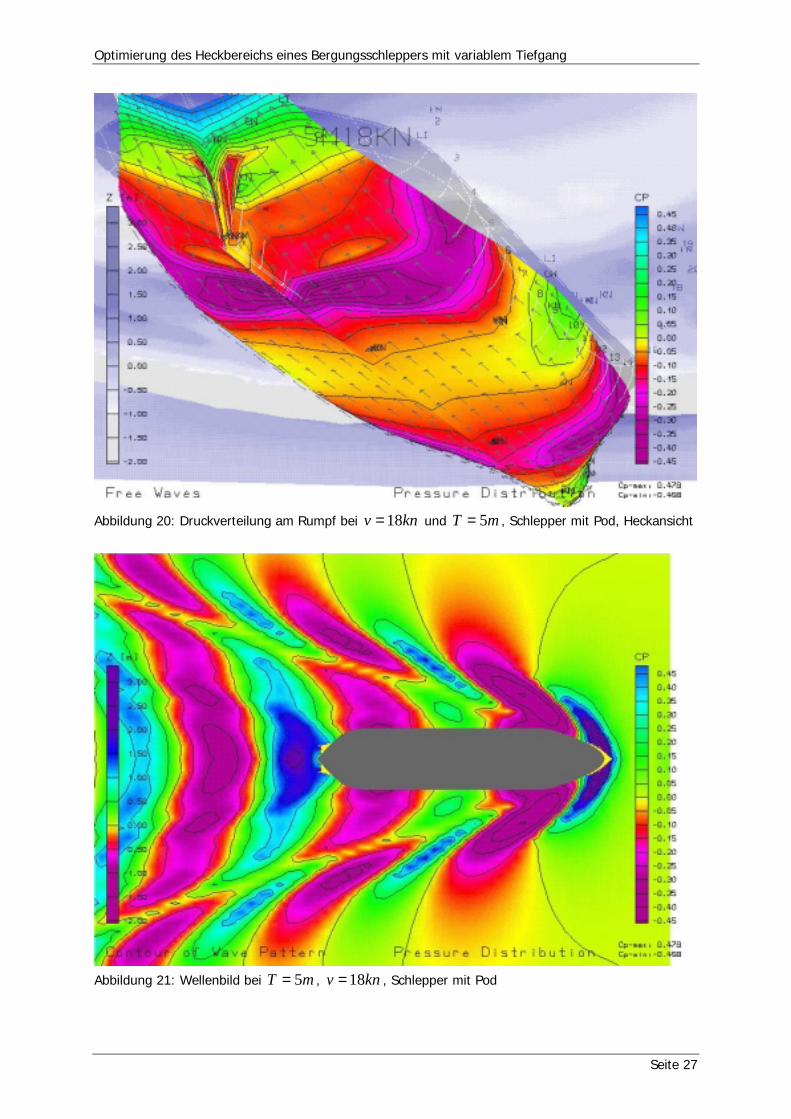
4.2 Widerstandsberechnung Die Veränderungen der Schiffslinien werden von den Parametermethoden zur Widerstandsvorhersage nicht erfasst. Daher wird der Widerstand nur noch mit Hilfe der CFD-Methode Kelvin prognostiziert. Die Optimierung der Schiffslinien vor allem im Vorschiffsbereich führte zu folgenden Ergebnissen: Die Druckverteilung wird in einer Bug- und einer Heckansicht in Abbildung 19 und Abbildung 20 für eine Geschwindigkeit knv 18= dargestellt. Die Zonen unterschiedlichen Drucks sind sehr viel gleichmäßiger verteilt als beim Ausgangsschiff. Auch das Wellenbild der Optimierung in Abbildung 21 sieht besser aus (Abbildung 14). An der vorderen Schulter ist beispielsweise nur noch ein Wellental vorhanden und die Wellen ab der hinteren Schulter sind sehr viel ruhiger. Die Druckdifferenzen sind im Vergleich zum Ausgangsschiff (Abbildung 12 und Abbildung 13) verkleinert worden. Dabei ist zu beachten, dass der Widerstand am optimierten Schiffsrumpf bei der geforderten Geschwindigkeit von 18kn berechnet wurde. Dies war beim Ausgangsschiff nicht möglich.
Abbildung 19: Druckverteilung am Rumpf bei knv 18= und mT 5= , Schlepper mit Pod, Bugansicht
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 27
Abbildung 20: Druckverteilung am Rumpf bei knv 18= und mT 5= , Schlepper mit Pod, Heckansicht
Abbildung 21: Wellenbild bei mT 5= , knv 18= , Schlepper mit Pod
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 28
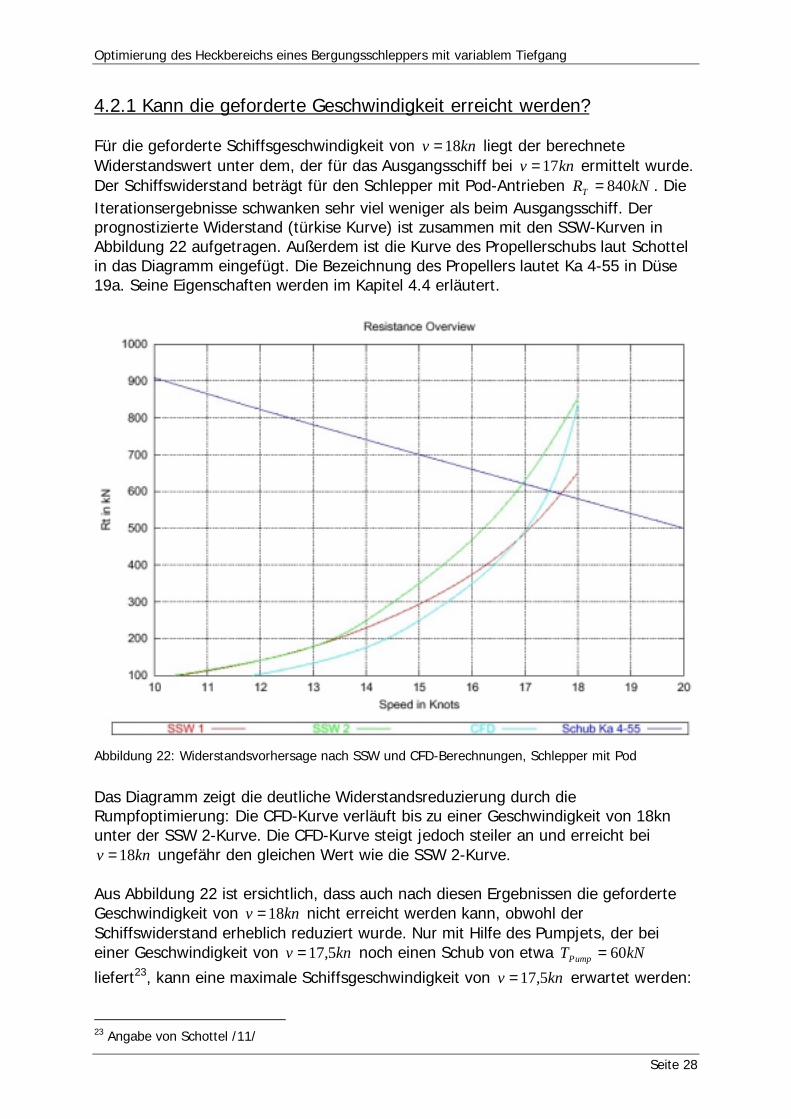
4.2.1 Kann die geforderte Geschwindigkeit erreicht werden? Für die geforderte Schiffsgeschwindigkeit von knv 18= liegt der berechnete Widerstandswert unter dem, der für das Ausgangsschiff bei knv 17= ermittelt wurde. Der Schiffswiderstand beträgt für den Schlepper mit Pod-Antrieben kNRT 840= . Die Iterationsergebnisse schwanken sehr viel weniger als beim Ausgangsschiff. Der prognostizierte Widerstand (türkise Kurve) ist zusammen mit den SSW-Kurven in Abbildung 22 aufgetragen. Außerdem ist die Kurve des Propellerschubs laut Schottel in das Diagramm eingefügt. Die Bezeichnung des Propellers lautet Ka 4-55 in Düse 19a. Seine Eigenschaften werden im Kapitel 4.4 erläutert.
Abbildung 22: Widerstandsvorhersage nach SSW und CFD-Berechnungen, Schlepper mit Pod
Das Diagramm zeigt die deutliche Widerstandsreduzierung durch die Rumpfoptimierung: Die CFD-Kurve verläuft bis zu einer Geschwindigkeit von 18kn unter der SSW 2-Kurve. Die CFD-Kurve steigt jedoch steiler an und erreicht bei
knv 18= ungefähr den gleichen Wert wie die SSW 2-Kurve. Aus Abbildung 22 ist ersichtlich, dass auch nach diesen Ergebnissen die geforderte Geschwindigkeit von knv 18= nicht erreicht werden kann, obwohl der Schiffswiderstand erheblich reduziert wurde. Nur mit Hilfe des Pumpjets, der bei einer Geschwindigkeit von knv 5,17= noch einen Schub von etwa kNT umpP 60=
liefert23, kann eine maximale Schiffsgeschwindigkeit von knv 5,17= erwartet werden:
23 Angabe von Schottel /11/
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 29
TPumpropP RTT >+
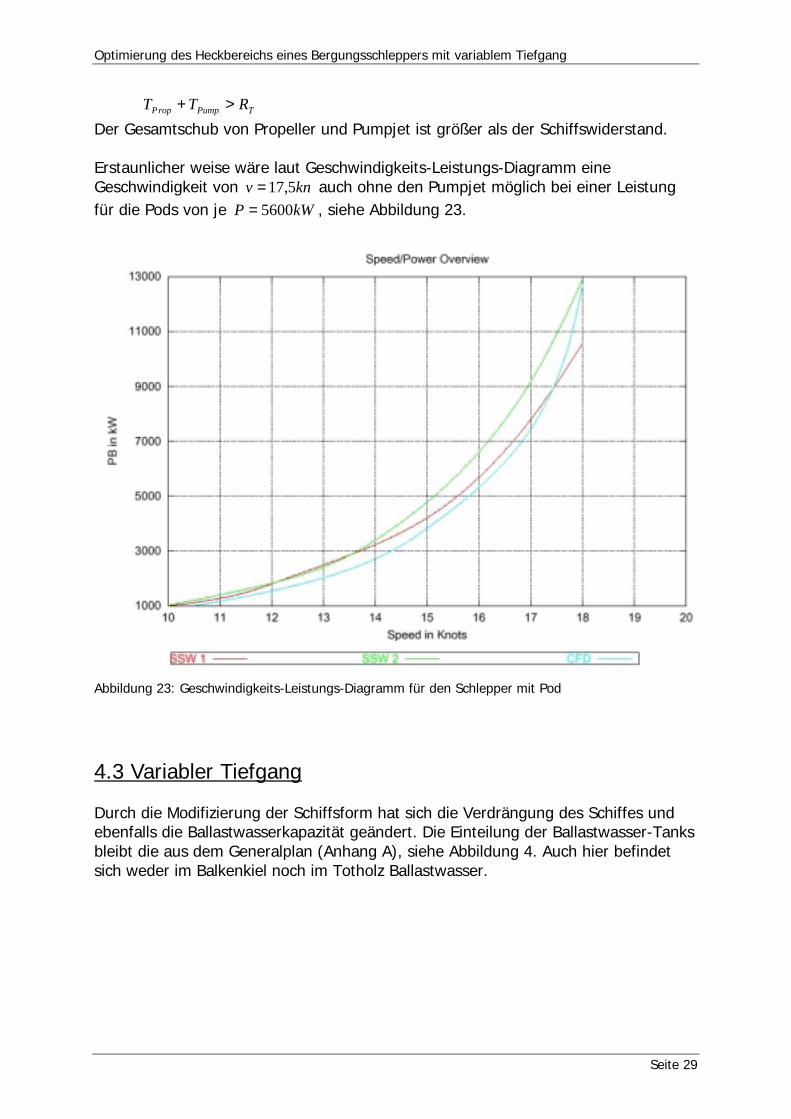
Der Gesamtschub von Propeller und Pumpjet ist größer als der Schiffswiderstand. Erstaunlicher weise wäre laut Geschwindigkeits-Leistungs-Diagramm eine Geschwindigkeit von knv 5,17= auch ohne den Pumpjet möglich bei einer Leistung für die Pods von je kWP 5600= , siehe Abbildung 23.
Abbildung 23: Geschwindigkeits-Leistungs-Diagramm für den Schlepper mit Pod
4.3 Variabler Tiefgang Durch die Modifizierung der Schiffsform hat sich die Verdrängung des Schiffes und ebenfalls die Ballastwasserkapazität geändert. Die Einteilung der Ballastwasser-Tanks bleibt die aus dem Generalplan (Anhang A), siehe Abbildung 4. Auch hier befindet sich weder im Balkenkiel noch im Totholz Ballastwasser.
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 30
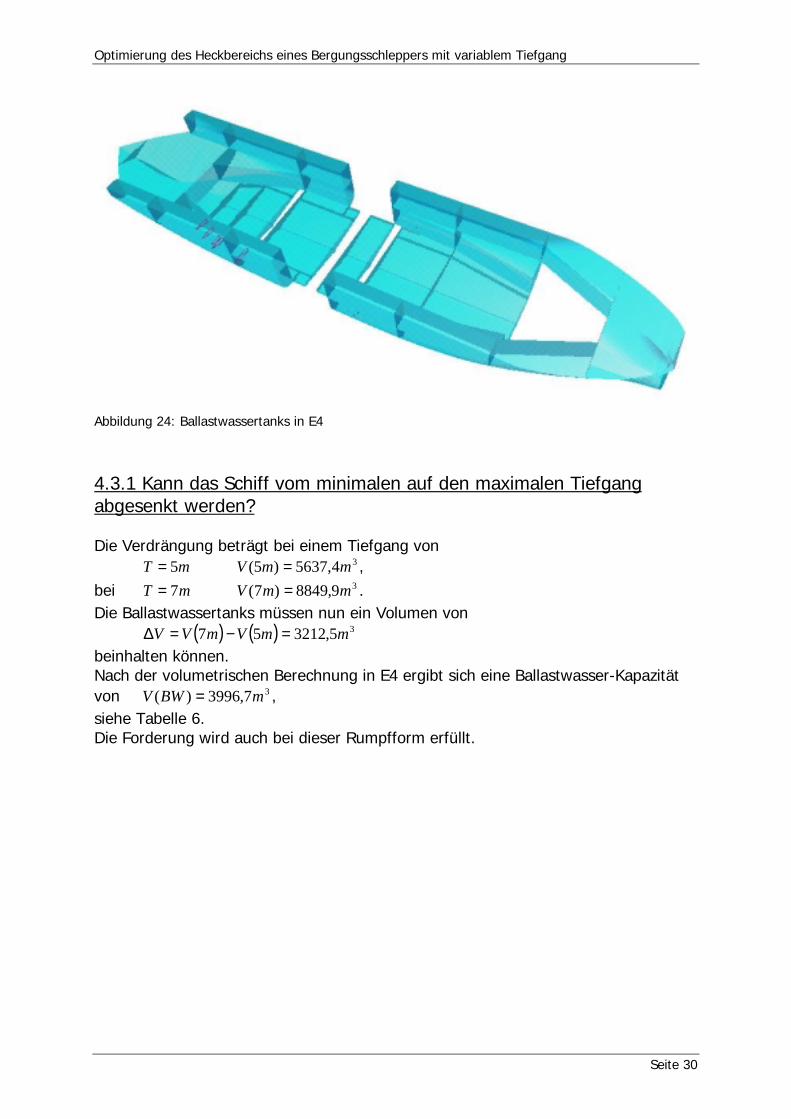
Abbildung 24: Ballastwassertanks in E4
4.3.1 Kann das Schiff vom minimalen auf den maximalen Tiefgang abgesenkt werden? Die Verdrängung beträgt bei einem Tiefgang von
mT 5= 34,5637)5( mmV = , bei mT 7= 39,8849)7( mmV = . Die Ballastwassertanks müssen nun ein Volumen von
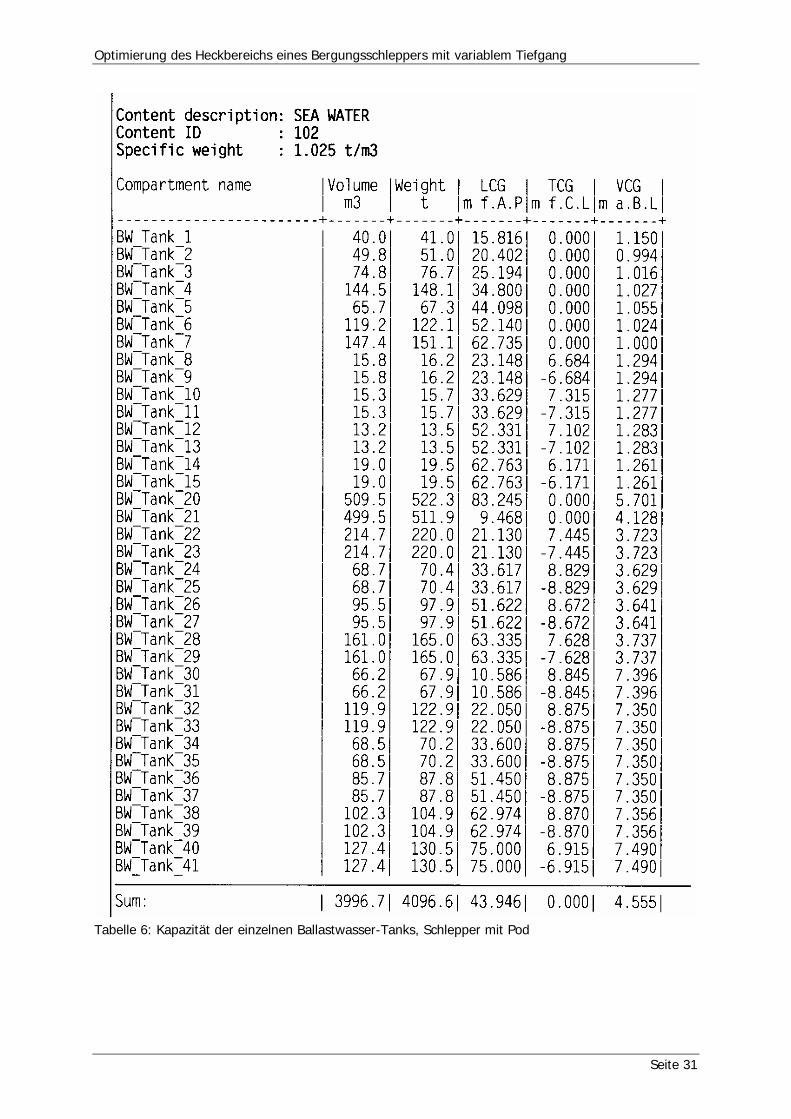
( ) ( ) 35,321257 mmVmVV =−=∆ beinhalten können. Nach der volumetrischen Berechnung in E4 ergibt sich eine Ballastwasser-Kapazität von 37,3996)( mBWV = , siehe Tabelle 6. Die Forderung wird auch bei dieser Rumpfform erfüllt.
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 31
Tabelle 6: Kapazität der einzelnen Ballastwasser-Tanks, Schlepper mit Pod
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 32
4.4 Antrieb mit Siemens-Schottel-Propulsoren Aufgrund der in Kapitel 3.5.3 beschriebenen Diskrepanz zwischen dem erforderlichen Drehmoment für den Propeller und dem möglichen Drehmoment des SSP5, sind von Schottel neue Vorschläge unterbreitet worden. Da kWP 5600= die größtmögliche Leistung für den SSP5 ist und der geforderte minimale Tiefgang den Düsendurchmesser des Propellers begrenzt, kann bei gegebenem Drehmoment nur die Drehzahl erhöht werden. Es gilt:
nQP ⋅⋅⋅= π2 mit Q als Drehmoment.24 Bei gegebener Leistung kWP 5600= und gegebenem Drehmoment kNmQSSP 2705 = erhält man eine Drehzahl von
nmiQPn 1198
2=
⋅⋅=
π.
Für diese Drehzahl ist jedoch der gewählte Propeller Ka 4-70 in Düse 19a nicht ausgelegt. Deshalb hebt Schottel das Drehmoment des Elektro-Motors „für diesen Fall“ auf kNmQSSP 2905 =′ mit einer Drehzahl nmin 1184= . Da die Drehzahl mit der
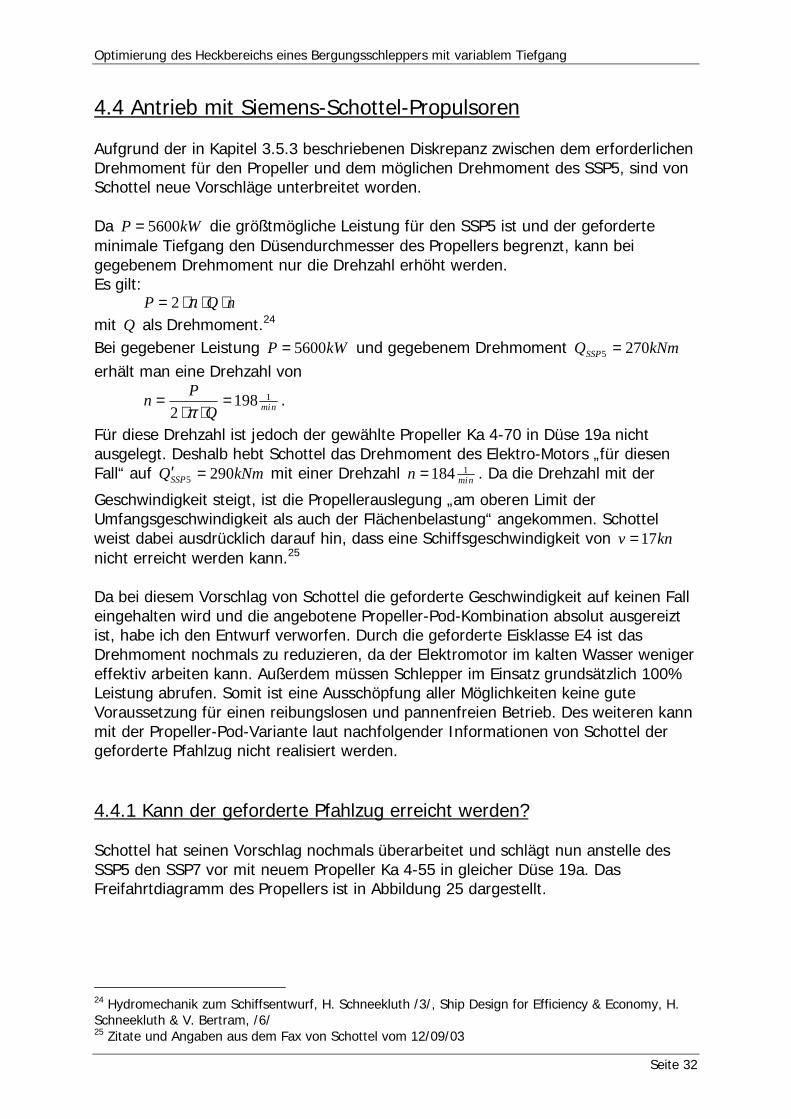
Geschwindigkeit steigt, ist die Propellerauslegung „am oberen Limit der Umfangsgeschwindigkeit als auch der Flächenbelastung“ angekommen. Schottel weist dabei ausdrücklich darauf hin, dass eine Schiffsgeschwindigkeit von knv 17= nicht erreicht werden kann.25 Da bei diesem Vorschlag von Schottel die geforderte Geschwindigkeit auf keinen Fall eingehalten wird und die angebotene Propeller-Pod-Kombination absolut ausgereizt ist, habe ich den Entwurf verworfen. Durch die geforderte Eisklasse E4 ist das Drehmoment nochmals zu reduzieren, da der Elektromotor im kalten Wasser weniger effektiv arbeiten kann. Außerdem müssen Schlepper im Einsatz grundsätzlich 100% Leistung abrufen. Somit ist eine Ausschöpfung aller Möglichkeiten keine gute Voraussetzung für einen reibungslosen und pannenfreien Betrieb. Des weiteren kann mit der Propeller-Pod-Variante laut nachfolgender Informationen von Schottel der geforderte Pfahlzug nicht realisiert werden. 4.4.1 Kann der geforderte Pfahlzug erreicht werden? Schottel hat seinen Vorschlag nochmals überarbeitet und schlägt nun anstelle des SSP5 den SSP7 vor mit neuem Propeller Ka 4-55 in gleicher Düse 19a. Das Freifahrtdiagramm des Propellers ist in Abbildung 25 dargestellt.
24 Hydromechanik zum Schiffsentwurf, H. Schneekluth /3/, Ship Design for Efficiency & Economy, H. Schneekluth & V. Bertram, /6/ 25 Zitate und Angaben aus dem Fax von Schottel vom 12/09/03
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 33
Abbildung 25: Propellerfreifahrtdiagramm Ka 4-55 in Düse 19a (in E4 erstellt)
Schottel prognostiziert bei dem neuen Propeller einen Gesamtschub von
kNT 2,1759= , mit dem ein Pfahlzug von 179,4t realisiert werden kann. 4.4.2 Azipod als Alternative zu SSP Aufgrund der teilweise zeitaufwendigen Kommunikation und den langen Wartezeiten bei Schottel, habe ich versucht, bei anderen Pod-Anbietern Informationen über ihre Produkte zu erhalten. Mit den wichtigsten Eckdaten sind Anfragen an Rolls Royce Marine (Mermaid)26 und an ABB (Azipod)27 verschickt worden. Durch die langen Verhandlungen mit Schottel blieben den neu angefragten Pod-Anbietern nur drei Wochen Zeit, um genügend Daten zu liefern. Von Rolls Royce Marine habe ich vor Beendigung der Arbeit keine Antwort erhalten. ABB haben sehr schnell reagiert und entsprechende Informationen geliefert. Dank schnellem Informationsaustausch kann ich die Daten von ABB noch grob berücksichtigen:
26 Rolls Royce Marine /60/ 27 ABB /609/
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 34
Bei einer Leistung von 6000kW pro Pod ist ein Pfahlzug von 180t mit einem Traktorpropeller erreichbar. Der Propellerdurchmesser inklusive Düse wird 5m nicht überschreiten.28 Die Abmaße des Azipods konnten nicht mehr in das Modell von E4 eingepflegt werden. Aber die Leistungswerte lassen vermuten, dass mit dieser Antriebsvariante die geforderten Werte erreicht werden können. Vor allem scheint der Azipod nicht bis auf das Äußerste ausgereizt zu sein. Das folgende Bild zeigt, dass der Azipod dem SSP im Aufbau ähnelt (siehe Abbildung 26).
Abbildung 26: schematische Darstellung eines Azipods
4.5 Vergleich optimiertes Schiff mit Pod – Entwurfsforderungen Mit der strömungsgünstigeren Schiffsform kann die geforderte Geschwindigkeit von
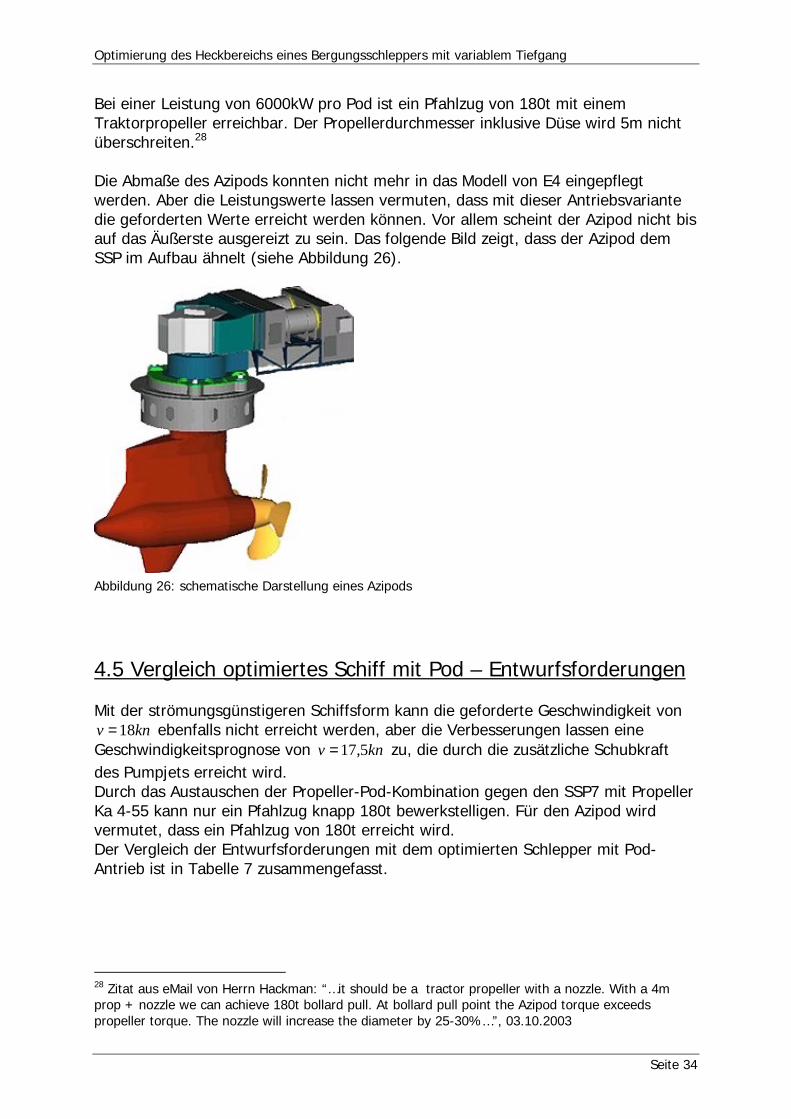
knv 18= ebenfalls nicht erreicht werden, aber die Verbesserungen lassen eine Geschwindigkeitsprognose von knv 5,17= zu, die durch die zusätzliche Schubkraft des Pumpjets erreicht wird. Durch das Austauschen der Propeller-Pod-Kombination gegen den SSP7 mit Propeller Ka 4-55 kann nur ein Pfahlzug knapp 180t bewerkstelligen. Für den Azipod wird vermutet, dass ein Pfahlzug von 180t erreicht wird. Der Vergleich der Entwurfsforderungen mit dem optimierten Schlepper mit Pod-Antrieb ist in Tabelle 7 zusammengefasst.
28 Zitat aus eMail von Herrn Hackman: “…it should be a tractor propeller with a nozzle. With a 4m prop + nozzle we can achieve 180t bollard pull. At bollard pull point the Azipod torque exceeds propeller torque. The nozzle will increase the diameter by 25-30%…”, 03.10.2003
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 35
Bezeichnung Forderungen Schlepper mit Pod Pfahlzug 180t ja, knapp Maximale Länge über alles <100m ja Breite 20m ja Minimaler Tiefgang 5m ja Maximaler Tiefgang 7m ja Geschwindigkeit >=18kn nein, aber 17,5kn Balkenkiel Schiffslänge nein, vorne erst ab
Pumpjet Tabelle 7: Vergleich Entwurfsforderungen – Schlepper mit Pod
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 36
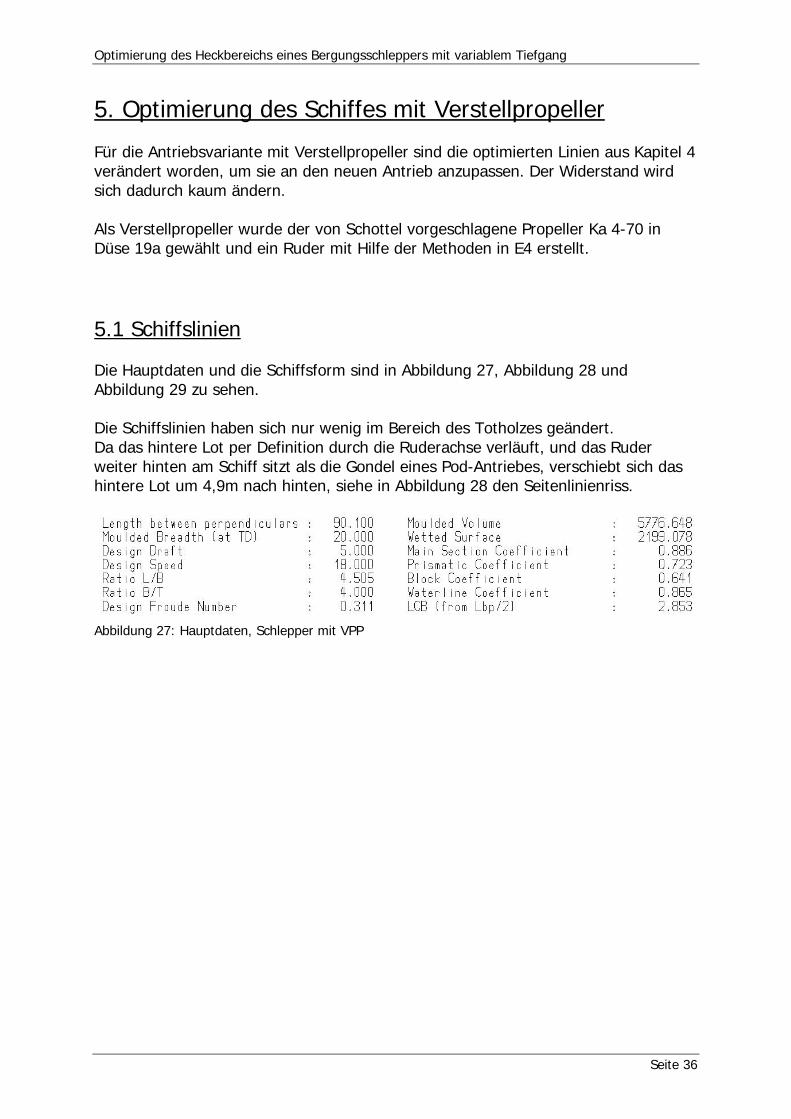
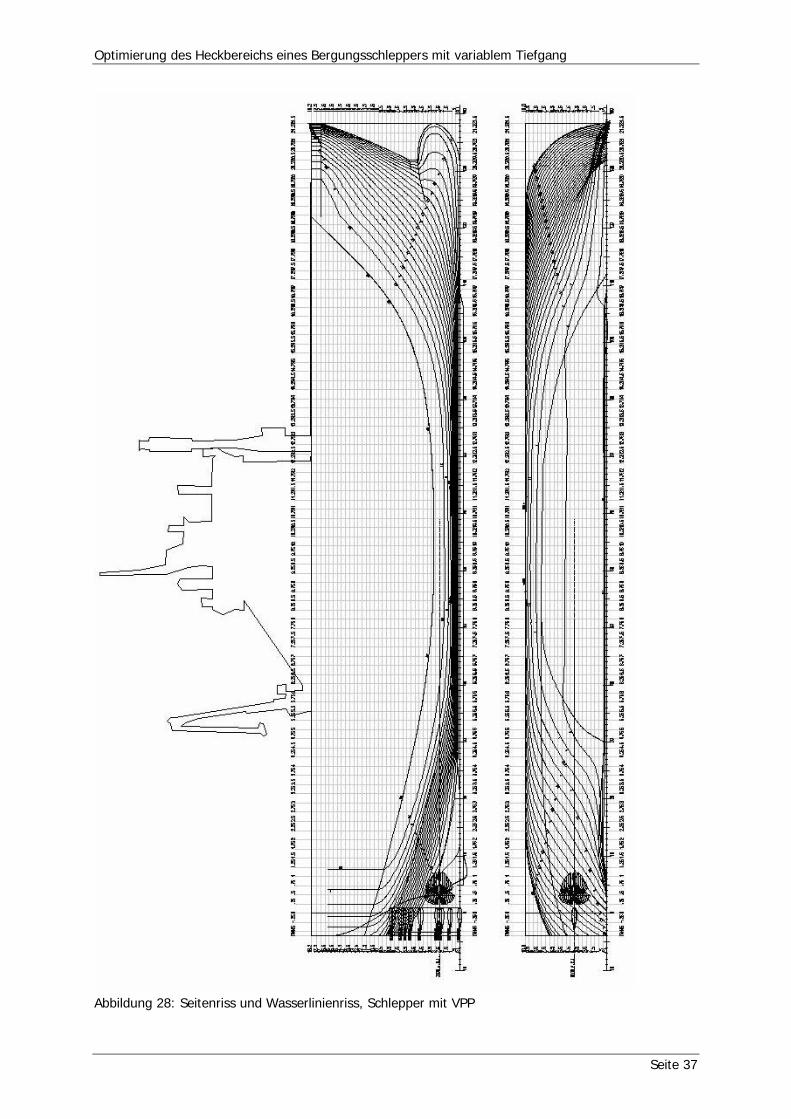
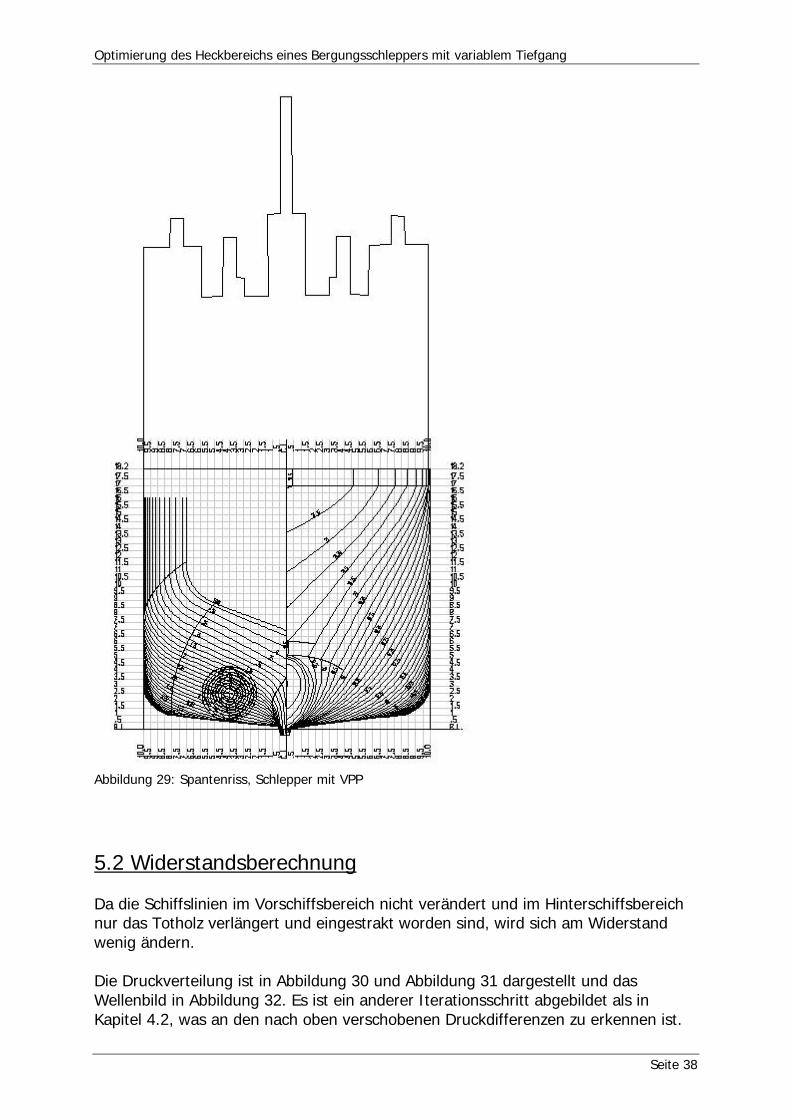
5. Optimierung des Schiffes mit Verstellpropeller Für die Antriebsvariante mit Verstellpropeller sind die optimierten Linien aus Kapitel 4 verändert worden, um sie an den neuen Antrieb anzupassen. Der Widerstand wird sich dadurch kaum ändern. Als Verstellpropeller wurde der von Schottel vorgeschlagene Propeller Ka 4-70 in Düse 19a gewählt und ein Ruder mit Hilfe der Methoden in E4 erstellt. 5.1 Schiffslinien Die Hauptdaten und die Schiffsform sind in Abbildung 27, Abbildung 28 und Abbildung 29 zu sehen. Die Schiffslinien haben sich nur wenig im Bereich des Totholzes geändert. Da das hintere Lot per Definition durch die Ruderachse verläuft, und das Ruder weiter hinten am Schiff sitzt als die Gondel eines Pod-Antriebes, verschiebt sich das hintere Lot um 4,9m nach hinten, siehe in Abbildung 28 den Seitenlinienriss.
Abbildung 27: Hauptdaten, Schlepper mit VPP
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 37
Abbildung 28: Seitenriss und Wasserlinienriss, Schlepper mit VPP
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 38
Abbildung 29: Spantenriss, Schlepper mit VPP
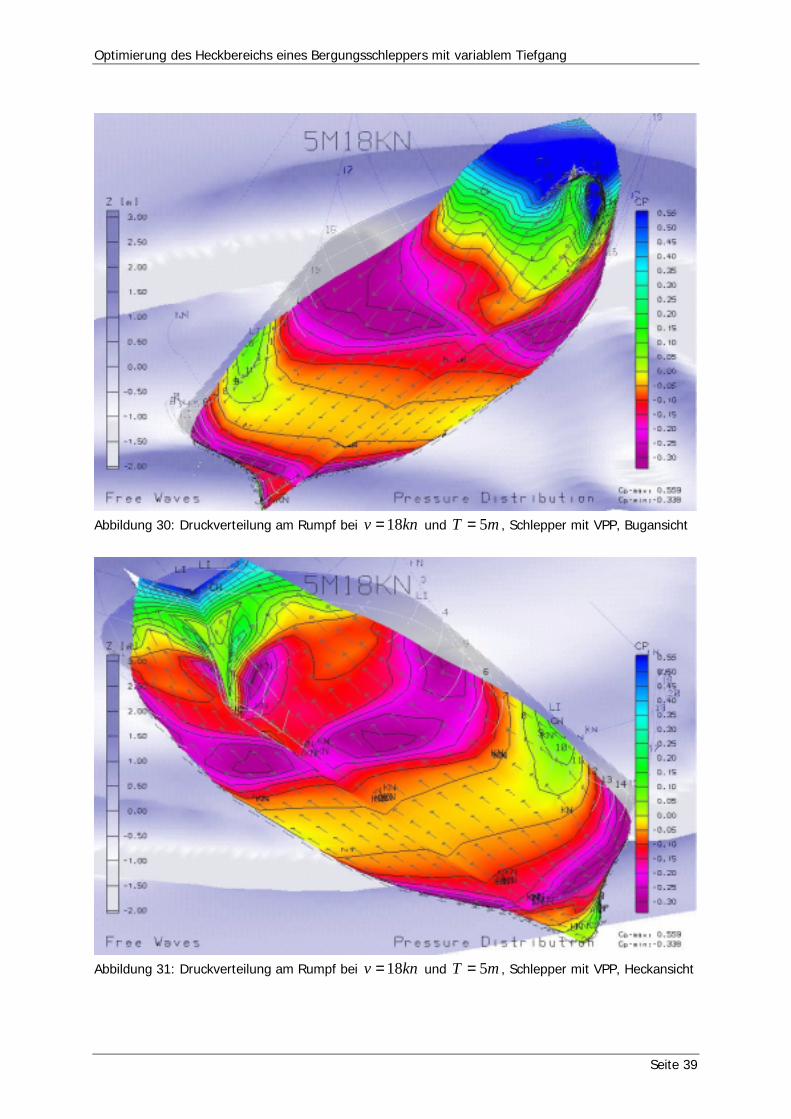
5.2 Widerstandsberechnung Da die Schiffslinien im Vorschiffsbereich nicht verändert und im Hinterschiffsbereich nur das Totholz verlängert und eingestrakt worden sind, wird sich am Widerstand wenig ändern. Die Druckverteilung ist in Abbildung 30 und Abbildung 31 dargestellt und das Wellenbild in Abbildung 32. Es ist ein anderer Iterationsschritt abgebildet als in Kapitel 4.2, was an den nach oben verschobenen Druckdifferenzen zu erkennen ist.
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 39
Abbildung 30: Druckverteilung am Rumpf bei knv 18= und mT 5= , Schlepper mit VPP, Bugansicht
Abbildung 31: Druckverteilung am Rumpf bei knv 18= und mT 5= , Schlepper mit VPP, Heckansicht
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 40
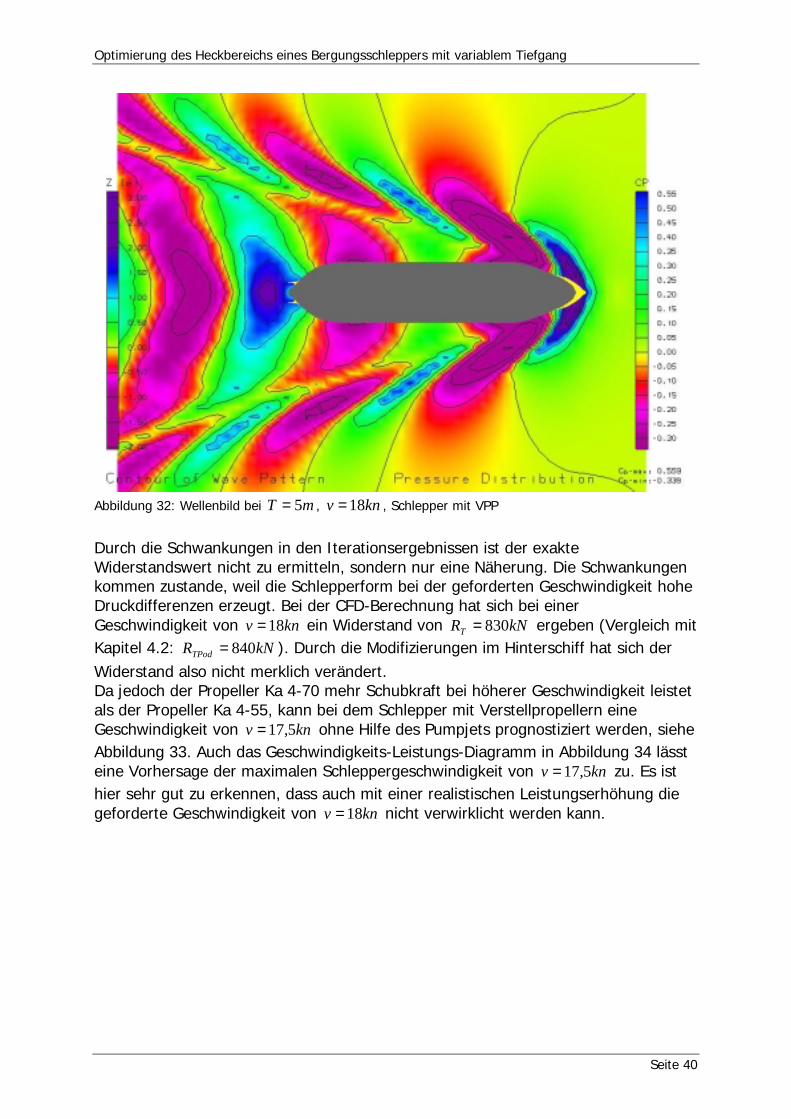
Abbildung 32: Wellenbild bei mT 5= , knv 18= , Schlepper mit VPP
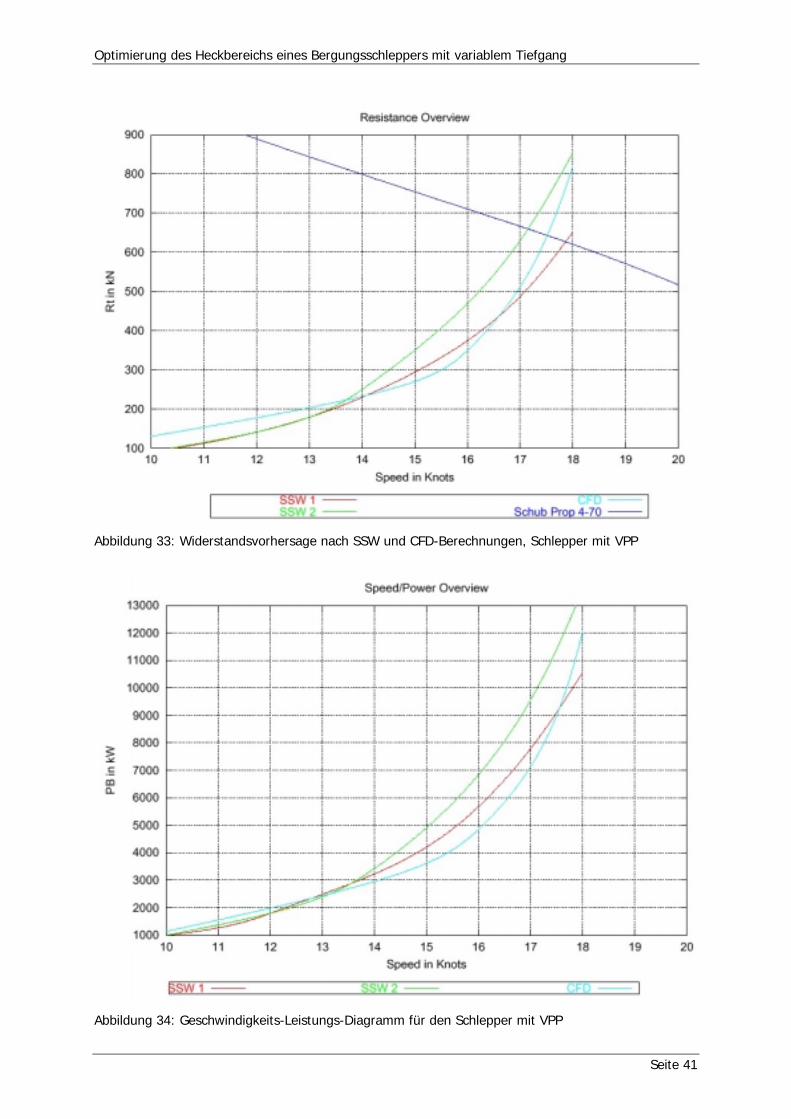
Durch die Schwankungen in den Iterationsergebnissen ist der exakte Widerstandswert nicht zu ermitteln, sondern nur eine Näherung. Die Schwankungen kommen zustande, weil die Schlepperform bei der geforderten Geschwindigkeit hohe Druckdifferenzen erzeugt. Bei der CFD-Berechnung hat sich bei einer Geschwindigkeit von knv 18= ein Widerstand von kNRT 830= ergeben (Vergleich mit Kapitel 4.2: kNRTPod 840= ). Durch die Modifizierungen im Hinterschiff hat sich der Widerstand also nicht merklich verändert. Da jedoch der Propeller Ka 4-70 mehr Schubkraft bei höherer Geschwindigkeit leistet als der Propeller Ka 4-55, kann bei dem Schlepper mit Verstellpropellern eine Geschwindigkeit von knv 5,17= ohne Hilfe des Pumpjets prognostiziert werden, siehe Abbildung 33. Auch das Geschwindigkeits-Leistungs-Diagramm in Abbildung 34 lässt eine Vorhersage der maximalen Schleppergeschwindigkeit von knv 5,17= zu. Es ist hier sehr gut zu erkennen, dass auch mit einer realistischen Leistungserhöhung die geforderte Geschwindigkeit von knv 18= nicht verwirklicht werden kann.
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 41
Abbildung 33: Widerstandsvorhersage nach SSW und CFD-Berechnungen, Schlepper mit VPP
Abbildung 34: Geschwindigkeits-Leistungs-Diagramm für den Schlepper mit VPP
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 42
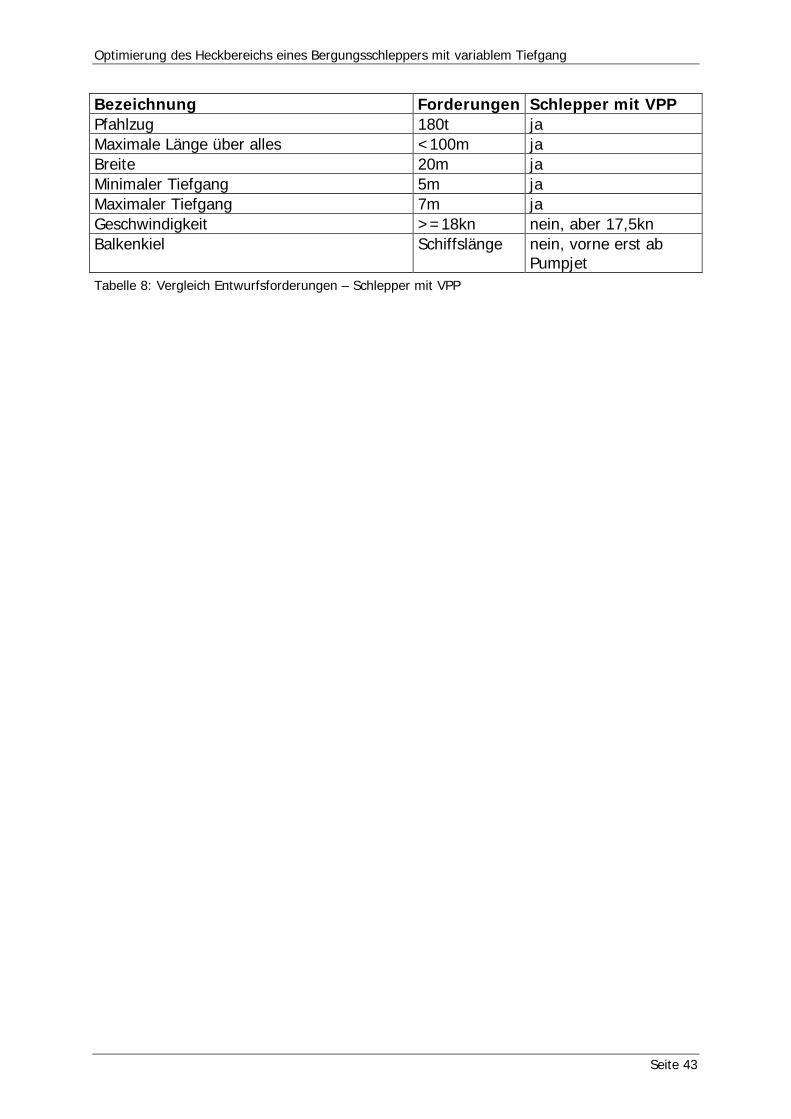
5.3 Variabler Tiefgang Da sich die Schiffsform nur minimal ändert, reicht die Kapazität an Ballastwassertanks aus, um die Tiefertauchung von mT 5= auf mT 7= zu ermöglichen. Die durch die Durchführung der Wellen durch die Außenhaut betroffenen Ballastwassertanks machen eine Verkleinerung der Kapazität um maximal 200m³ aus, wobei die Tiefertauchung immer noch gewährleistet werden kann. 5.4 Verstellpropeller als Antrieb Als Verstellpropeller wurde der Propeller Ka 4-70 in Düse 19a gewählt. Da der Propeller für den Pod-Antrieb ausgelegt war, ist der Nabendurchmesser größer als beim Festpropeller. Ich gehe davon aus, dass der Nabendurchmesser für dem Verstellpropeller ausreichend groß ist. Das Propellerfreifahrtdiagramm ist in Kapitel 3.4, Abbildung 5 zu finden. Nach Schneekluth sollte ein Ruder eine Ruderfläche von 12 bis 16% der Hauptspantfläche haben. Damit wäre die Ruderfläche bei Anordnung eines Ruders ungefähr 30m². Meines Erachtens muss die Gesamt-Ruderfläche bei Anordnung von zwei Rudern etwas größer ausfallen. Mit Hilfe der Dimensionierungsmethode eines Ruders in E4, ist ein Ruder nach GL-Vorschriften erstellt worden. Es ist von mir ein HSVA-MP73 Profilruder mit einem Seitenverhältnis von 2 ausgewählt worden. Bei einer Höhe von 6m und einer Sehnenlänge von 3m wird ein Ruder die Ruderfläche von 18m² aufweisen. Die Gesamtruderfläche beträgt dann 36m². Da das Ruder möglichst weit hinten, sitzt ist die Lage des hinteren Lotes um 4,9m nach hinten verschoben worden. 5.5 Vergleich optimiertes Schiff mit VPP – Entwurfsforderungen Die Ergebnisse des Schleppers mit Verstellpropeller-Antrieb sind in Tabelle 8 zusammengetragen.
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 43
Bezeichnung Forderungen Schlepper mit VPP Pfahlzug 180t ja Maximale Länge über alles <100m ja Breite 20m ja Minimaler Tiefgang 5m ja Maximaler Tiefgang 7m ja Geschwindigkeit >=18kn nein, aber 17,5kn Balkenkiel Schiffslänge nein, vorne erst ab
Pumpjet Tabelle 8: Vergleich Entwurfsforderungen – Schlepper mit VPP
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 44
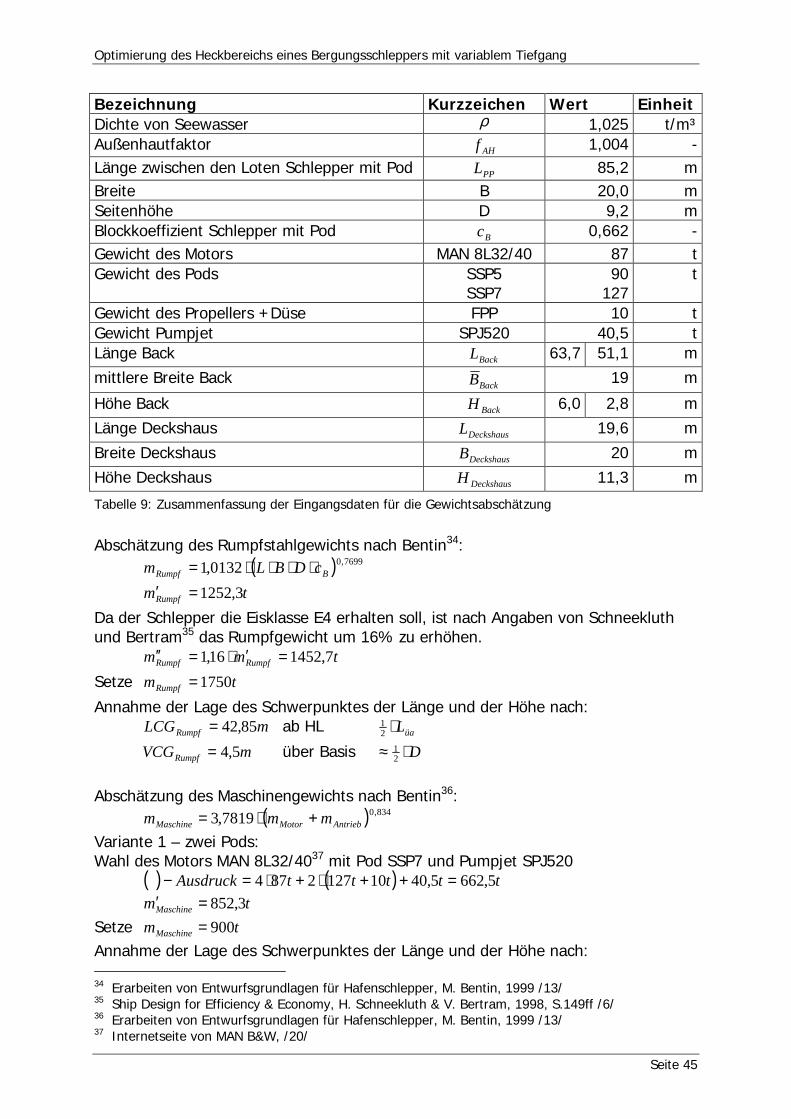
6. Überprüfung der Stabilität und Manövrierfähigkeit Zur Überprüfung der Stabilität und der Manövrierfähigkeit werden nur die optimierten Varianten des Schleppers betrachtet. Zuvor werden zwei grobe Massenverteilungen für die beiden Antriebsvarianten erstellt. 6.1 Massenverteilung Da die SSW noch keine Massenverteilung für das Sicherheitsschiff ausgearbeitet hat und auch keine Informationen von Vergleichsschiffen vorhanden sind, werden zwei Massenverteilungen mit Hilfe einer groben Gewichtsabschätzung erstellt. In der Studienarbeit „Entwurfsstudie eines Mehrzweckschleppers für die deutsche Bucht“29 wird die Gewichtsverteilung nach Formeln für Trockenfrachter berechnet, die dem Vorlesungsmanuskript „Einführung in die Projektarbeit“30 entnommen sind. In einer anderen Studienarbeit „Erarbeiten von Entwurfsgrundlagen für Hafenschlepper“31 sind Formeln zur Gewichtsabschätzung von Hafenschleppern entwickelt worden. In „Ship Design for Efficiency & Economy“32 sind für kleine Schlepper verschiedene Gewichte relativ zum Leerschiffsgewicht in Prozent angegeben, jedoch sind bei den folgenden Formeln meist keine Faktorangaben für Schlepper zu finden. Ich habe anhand der oben genannten Literaturquellen die Formeln gewählt, die meines Erachtens die plausibelsten Ergebnisse bei der Abschätzung der betreffenden Gewichtsgruppe liefern. Die Abschätzung der Daten ist für die Pod-Antriebsvariante im Folgenden ausführlich erklärt. Die benötigten Daten für die Berechnung sind in Tabelle 9 angegeben. Das Deplacement ∆ des Schiffes setzt sich zusammen aus Leerschiffsgewicht leer∆ und Zuladung dw33: dwleer +∆=∆ Das Leerschiffsgewicht wird unterteilt in Rumpfstahlgewicht, Maschinengewicht, Gewicht der Aufbauten und Deckshäuser und Gewicht von Einrichtung und Ausrüstung. Bei der Gewichtsabschätzung wird eine Baureserve vorgesehen.30 eserveRAEDeckshausBackMaschineRumpfleer mmmmmm +++++=∆ +
Tanks müssen nicht mehr abgeschätzt werden, da sie durch den Generalplan vorgegeben sind.
29 Entwurfsstudie eines Mehrzweckschleppers für die deutsche Bucht, S. Bühring, 2001 /12/ 30 Einführung in die Projektarbeit, W. Abicht, 1987 /5/ 31 Erarbeiten von Entwurfsgrundlagen für Hafenschlepper, M. Bentin, 1999 /13/ 32 Ship Design for Efficiency & Economy, H. Schneekluth & V. Bertram, 1998, S.149ff /6/ 33 dw = deadweight (englisch für Zuladung)
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 45
Bezeichnung Kurzzeichen Wert EinheitDichte von Seewasser ρ 1,025 t/m³Außenhautfaktor AHf 1,004 -Länge zwischen den Loten Schlepper mit Pod PPL 85,2 mBreite B 20,0 mSeitenhöhe D 9,2 mBlockkoeffizient Schlepper mit Pod Bc 0,662 -Gewicht des Motors MAN 8L32/40 87 tGewicht des Pods
SSP5 SSP7
90 127
t
Gewicht des Propellers +Düse FPP 10 tGewicht Pumpjet SPJ520 40,5 tLänge Back BackL 63,7 51,1 mmittlere Breite Back BackB 19 m
Höhe Back BackH 6,0 2,8 mLänge Deckshaus DeckshausL 19,6 mBreite Deckshaus DeckshausB 20 mHöhe Deckshaus DeckshausH 11,3 m
Tabelle 9: Zusammenfassung der Eingangsdaten für die Gewichtsabschätzung
Abschätzung des Rumpfstahlgewichts nach Bentin34: ( ) 7699,00132,1 BRumpf cDBLm ⋅⋅⋅⋅=
tmRumpf 3,1252=′
Da der Schlepper die Eisklasse E4 erhalten soll, ist nach Angaben von Schneekluth und Bertram35 das Rumpfgewicht um 16% zu erhöhen.
tmm RumpfRumpf 7,145216,1 =′⋅=′′
Setze tmRumpf 1750=
Annahme der Lage des Schwerpunktes der Länge und der Höhe nach: mLCGRumpf 85,42= ab HL üaL⋅2
1
mVCGRumpf 5,4= über Basis D⋅≈ 21
Abschätzung des Maschinengewichts nach Bentin36: ( ) 834,07819,3 AntriebMotorMaschine mmm +⋅= Variante 1 – zwei Pods: Wahl des Motors MAN 8L32/4037 mit Pod SSP7 und Pumpjet SPJ520 ( ) ( ) tttttAusdruck 5,6625,40101272874 =++⋅+⋅=− tmMaschine 3,852=′ Setze tmMaschine 900= Annahme der Lage des Schwerpunktes der Länge und der Höhe nach: 34 Erarbeiten von Entwurfsgrundlagen für Hafenschlepper, M. Bentin, 1999 /13/ 35 Ship Design for Efficiency & Economy, H. Schneekluth & V. Bertram, 1998, S.149ff /6/ 36 Erarbeiten von Entwurfsgrundlagen für Hafenschlepper, M. Bentin, 1999 /13/ 37 Internetseite von MAN B&W, /20/
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 46
mLCGMaschine 5,38= ab HL Lage der Motoren im Generalplan, völligster Spant mVCGMaschine 5,4= über Basis D⋅≈ 2
1 Nach Angaben von Schneekluth/Bertram38 wird das Backgewicht und das Deckshausgewicht abgeschätzt. Für die Back setze ich eine spezifische Masse von
3, 07,0 mtm Backspez = an. Der bei Schneekluth/Bertram angegebene Wert von 0,013 ist
für dieses Schiff meines Erachtens zu hoch, da in der Back auch Wohn- und Aufenthaltsräume vorgesehen sind. Beim Deckshaus gehe ich von einer gemittelten spezifischen Masse von 3, 052,0 m
tm Deckshausspez = aus.
Abschätzung des Backgewichts: ( )BackspezBack HBLmm ⋅⋅⋅=
tmBack 6,698=′ Setze tmBack 700= Annahme der Lage des Schwerpunktes der Länge und der Höhe nach:
mLCGBack 0,55= ab HL BackL⋅31
mVCGBack 5,13= über Basis BackHD ⋅+ 21
Abschätzung des Deckshausgewichts: ( )DeckshausspezDeckshaus HBLmm ⋅⋅⋅=
tmDeckshaus 3,230=′ Setze tmDeckshaus 250= Annahme der Lage des Schwerpunktes der Länge und der Höhe nach: mLCGDeckshaus 50= ab HL DeckshausL⋅2
1 mVCGDeckshaus 6,23= über Basis DeckshausBack HHD ⋅++ 2
1 Das Gewicht von Einrichtung und Ausrüstung lässt sich nicht mit den Formeln für Hafenschlepper abschätzen, deswegen wird auch hier auf die Formel von Schneekluth/Bertram zurückgegriffen: BLkm AE ⋅⋅=+ mit 4,0=k tm AE 704=+ Setze tm AE 800=+ Annahme der Lage des Schwerpunktes der Länge und der Höhe nach: mLCG AE 46=+ ab HL mVCG AE 11=+ über Basis Baureserve: Laut Abicht39 ist eine Baureserve von 2...8% vom Leerschiffsgewicht einzuplanen. Ich wähle tm eserveR 100= ,
was 2,2% von leer∆ entspricht.
38 Ship Design for Efficiency & Economy, H. Schneekluth & V. Bertram, 1998, S.149ff /6/ 39 Einführung in die Projektarbeit, W. Abicht, 1987 /5/
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 47
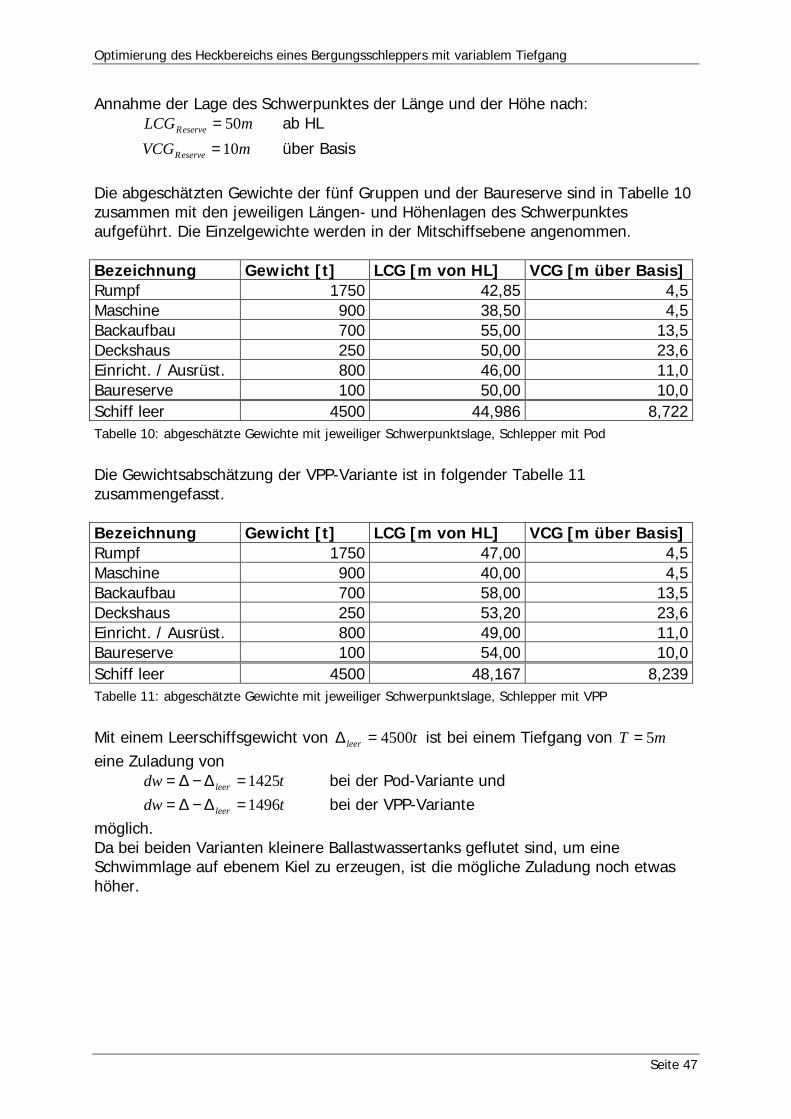
Annahme der Lage des Schwerpunktes der Länge und der Höhe nach: mLCG eserveR 50= ab HL
mVCG eserveR 10= über Basis
Die abgeschätzten Gewichte der fünf Gruppen und der Baureserve sind in Tabelle 10 zusammen mit den jeweiligen Längen- und Höhenlagen des Schwerpunktes aufgeführt. Die Einzelgewichte werden in der Mitschiffsebene angenommen. Bezeichnung Gewicht [t] LCG [m von HL] VCG [m über Basis]Rumpf 1750 42,85 4,5Maschine 900 38,50 4,5Backaufbau 700 55,00 13,5Deckshaus 250 50,00 23,6Einricht. / Ausrüst. 800 46,00 11,0Baureserve 100 50,00 10,0Schiff leer 4500 44,986 8,722Tabelle 10: abgeschätzte Gewichte mit jeweiliger Schwerpunktslage, Schlepper mit Pod
Die Gewichtsabschätzung der VPP-Variante ist in folgender Tabelle 11 zusammengefasst. Bezeichnung Gewicht [t] LCG [m von HL] VCG [m über Basis]Rumpf 1750 47,00 4,5Maschine 900 40,00 4,5Backaufbau 700 58,00 13,5Deckshaus 250 53,20 23,6Einricht. / Ausrüst. 800 49,00 11,0Baureserve 100 54,00 10,0Schiff leer 4500 48,167 8,239Tabelle 11: abgeschätzte Gewichte mit jeweiliger Schwerpunktslage, Schlepper mit VPP
Mit einem Leerschiffsgewicht von tleer 4500=∆ ist bei einem Tiefgang von mT 5= eine Zuladung von
tdw leer 1425=∆−∆= bei der Pod-Variante und tdw leer 1496=∆−∆= bei der VPP-Variante
möglich. Da bei beiden Varianten kleinere Ballastwassertanks geflutet sind, um eine Schwimmlage auf ebenem Kiel zu erzeugen, ist die mögliche Zuladung noch etwas höher.
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 48
6.2 Stabilität Um die Intaktstabilität des Schleppers zu untersuchen, sind verschiedene Ladefälle definiert worden:
- leeres Schiff - Anfang der Reise - Ende der Reise - Tiefertauchung 7m - Tiefertauchung 6m
Die sogenannte Zuladung des Schleppers ist aus der Besatzung und dem Proviant, der Ausrüstung und dem Löschschaum zusammengesetzt, siehe Tabelle 12. Des weiteren sind die Öltanks und die Frischwassertanks voll. Bei den Ladefällen Ende der Reise und Tiefertauchung sind die Massen entsprechend verringert worden. Ladefall Zuladung Masse [t] LCG [m] VCG [m] Antrieb Pod VPP Pod VPP Anfang der Reise Besatzung und
Proviant 50 50 54 15 15
Ausrüstung 400 45 49 13,5 13,5 Löschraum 20 50 54 3 3 Öl & Frischwasser 822,66 45,22 3,51 Tabelle 12: Aufstellung der Zuladung des Schiffes
Nach dem GL sind für Schlepper folgende Vorschriften für jeden möglichen Ladefall einzuhalten:40
- metazentrische Höhe mGM 6,0= bei °= 0ϕ - Hebelarm mh 3,0= bei °= 30ϕ - Fläche unter der aufrichtenden Hebelarmkurve von °= 0ϕ bis °= 30ϕ :
radmA ⋅= 055,030 - Fläche unter der aufrichtenden Hebelarmkurve von °= 0ϕ bis °= 40ϕ :
radmA ⋅= 09,040 - Fläche unter der aufrichtenden Hebelarmkurve von °= 30ϕ bis °= 40ϕ :
radmA ⋅= 03,040/30 - Hebelarmumfang °= 60Umfang
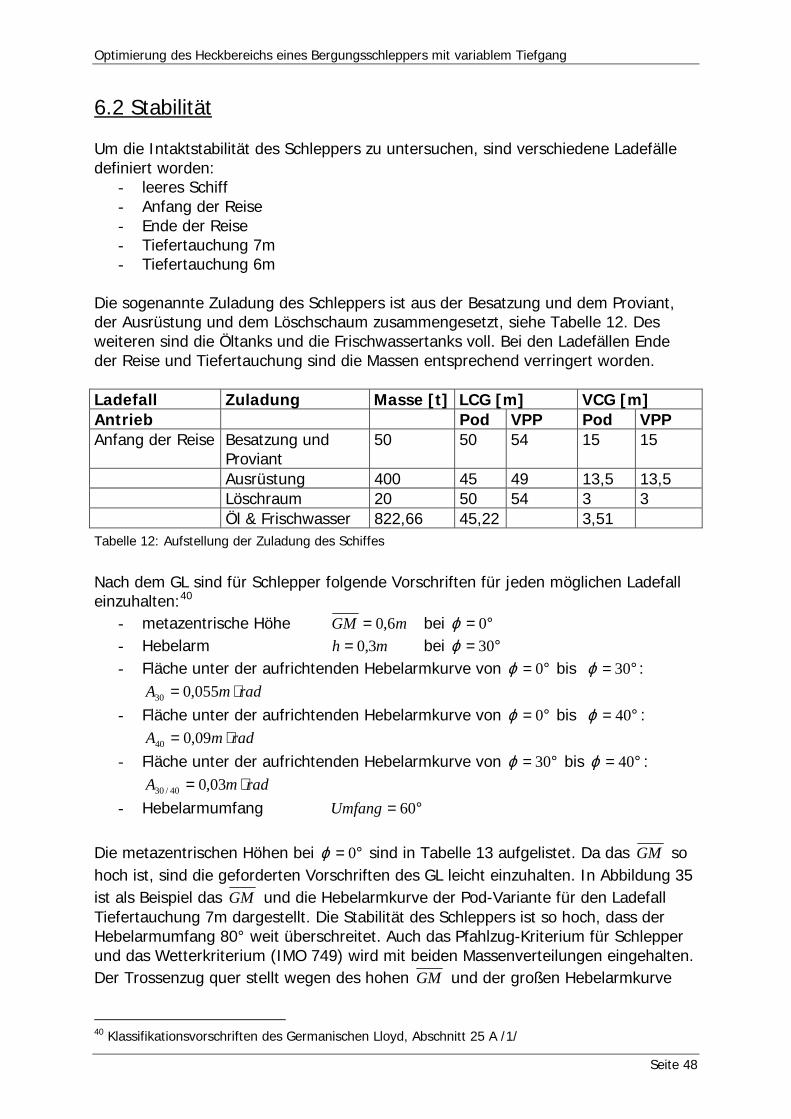
Die metazentrischen Höhen bei °= 0ϕ sind in Tabelle 13 aufgelistet. Da das GM so hoch ist, sind die geforderten Vorschriften des GL leicht einzuhalten. In Abbildung 35 ist als Beispiel das GM und die Hebelarmkurve der Pod-Variante für den Ladefall Tiefertauchung 7m dargestellt. Die Stabilität des Schleppers ist so hoch, dass der Hebelarmumfang 80° weit überschreitet. Auch das Pfahlzug-Kriterium für Schlepper und das Wetterkriterium (IMO 749) wird mit beiden Massenverteilungen eingehalten. Der Trossenzug quer stellt wegen des hohen GM und der großen Hebelarmkurve
40 Klassifikationsvorschriften des Germanischen Lloyd, Abschnitt 25 A /1/
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 49
keine Gefahr für den Schlepper dar.41 Für das Wohlbefinden der Mannschaft ist die metazentrische Höhe jedoch zu reduzieren. Lastfall GM von Schlepper mit Pod GM von Schlepper mit VPP Leeres Schiff 3,241m 3,748mAnfang der Reise 2,385m 2,566mEnde der Reise 2,057m 2,303mTiefertauchung 6m 1,893m 2,221mTiefertauchung 7m 1,419m 1,815mTabelle 13: Zusammenfassung der metazentrischen Höhen für die Ladefälle
Abbildung 35: Anfangs-GM und Hebelarmkurve bei einer Tiefertauchung auf T=7m
6.3 Manövrierfähigkeit Um die Manövrierfähigkeit des Schleppers bestimmen zu können, sind zuvor die Kräfte am Pod beziehungsweise am Ruder mit Hilfe des Ruderprogramms in E4 zu ermitteln. Dabei ist der Propeller der Pods auf die Ruderachse gelegt worden, da die Methode nur Ruderkräfte berechnet, wenn in Strömungsrichtung der Propeller vor dem Ruder angeordnet ist.
41 Stabilitätsvorschriften von Schleppern, Studienarbeit /14/
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 50
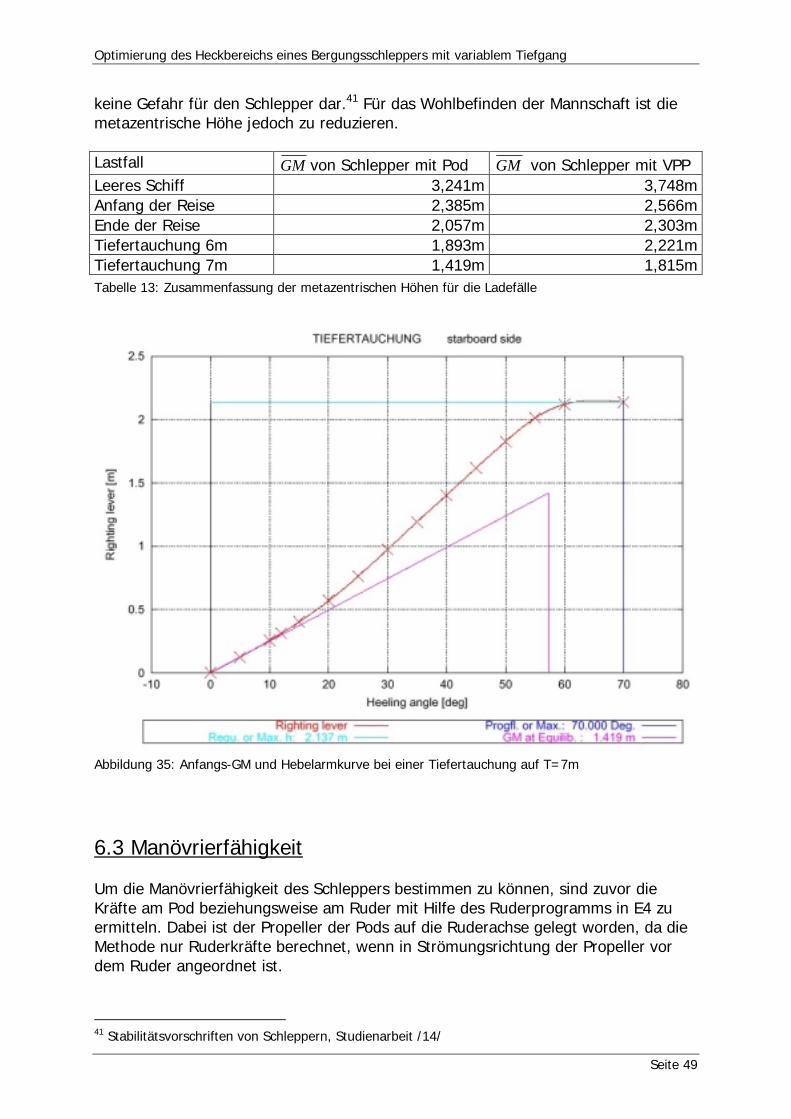
Die Berechnung der Ruderkräfte erfolgte für die Anstellwinkel von –45° bis +45° in 5°-Abständen für sechs Geschwindigkeiten knv 18,17,16,14,12,10= . Sie sind als Längskraft, Querkraft oder Drehmoment über dem Ruderanstellwinkel aufgetragen. Der Schubbelastungsgrad thc ist definiert als
itchwindigkeZuströmgesderStaudruck
Schuberspezifischcth = .
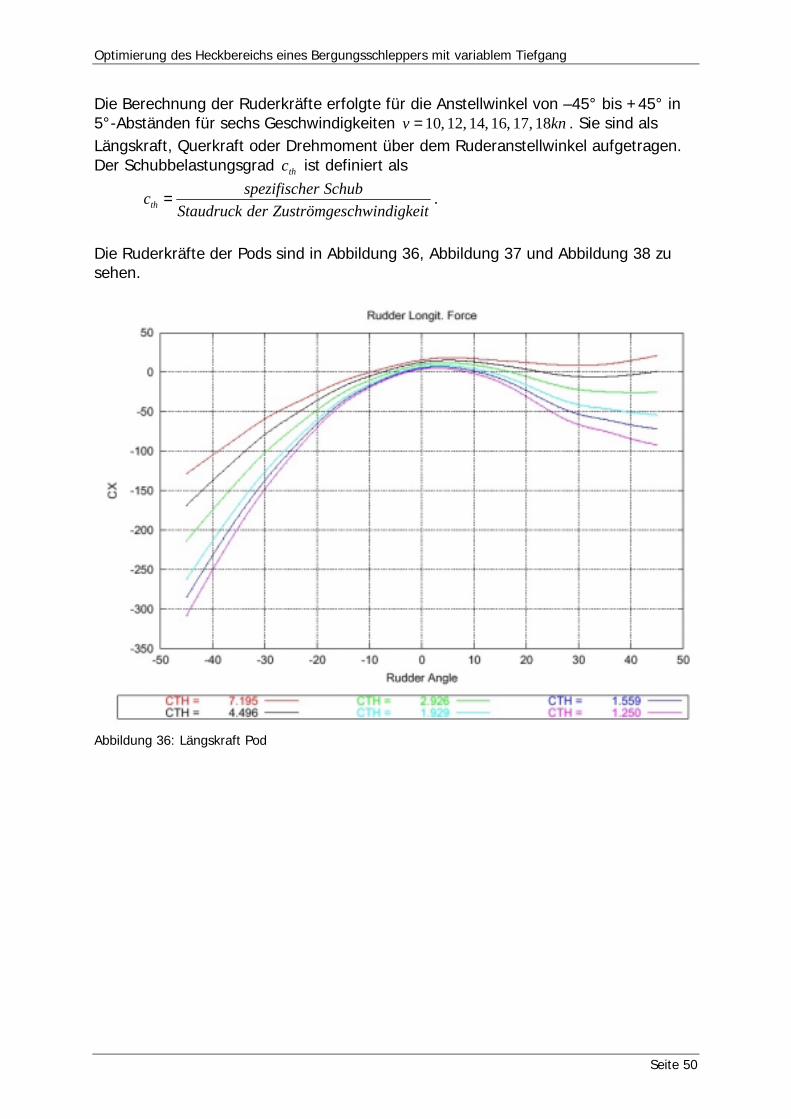
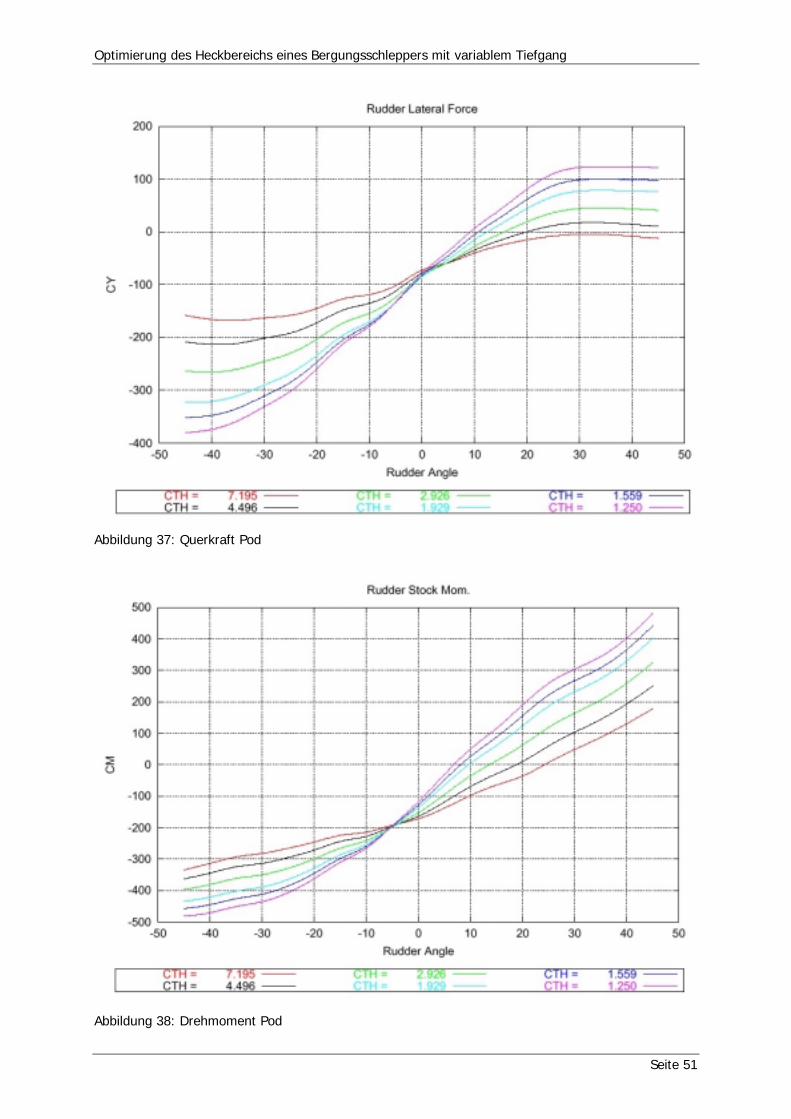
Die Ruderkräfte der Pods sind in Abbildung 36, Abbildung 37 und Abbildung 38 zu sehen.
Abbildung 36: Längskraft Pod
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 51
Abbildung 37: Querkraft Pod
Abbildung 38: Drehmoment Pod
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 52
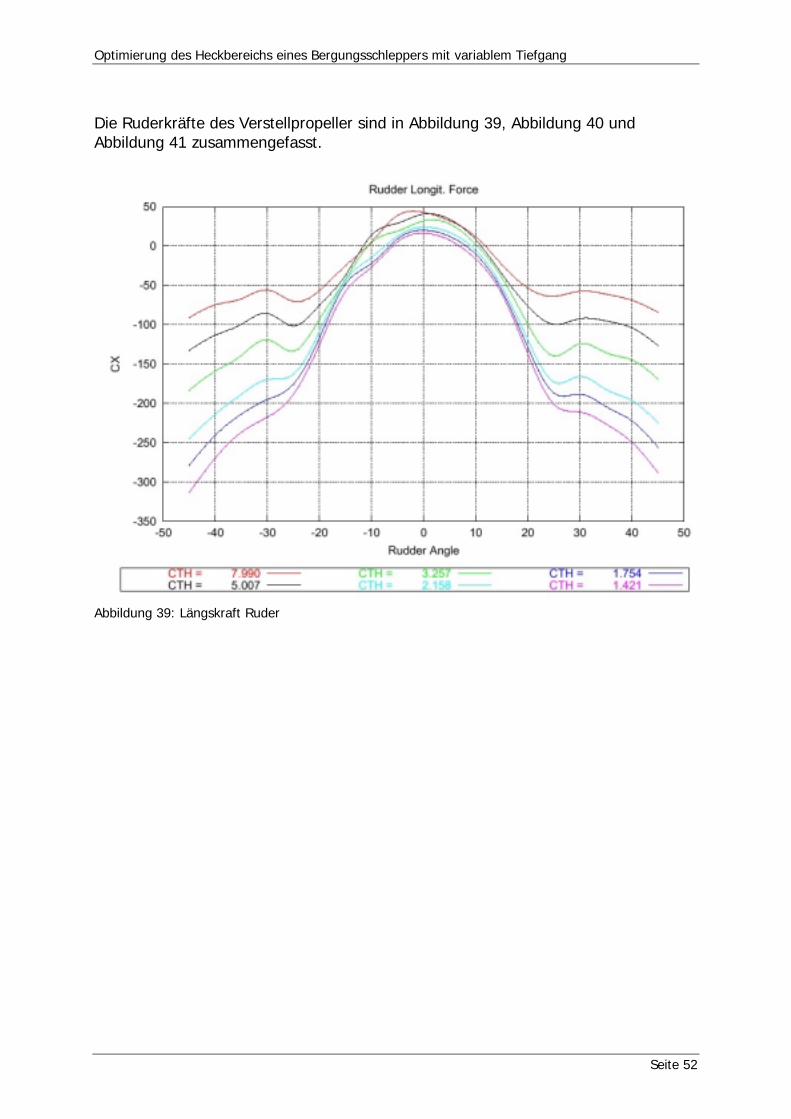
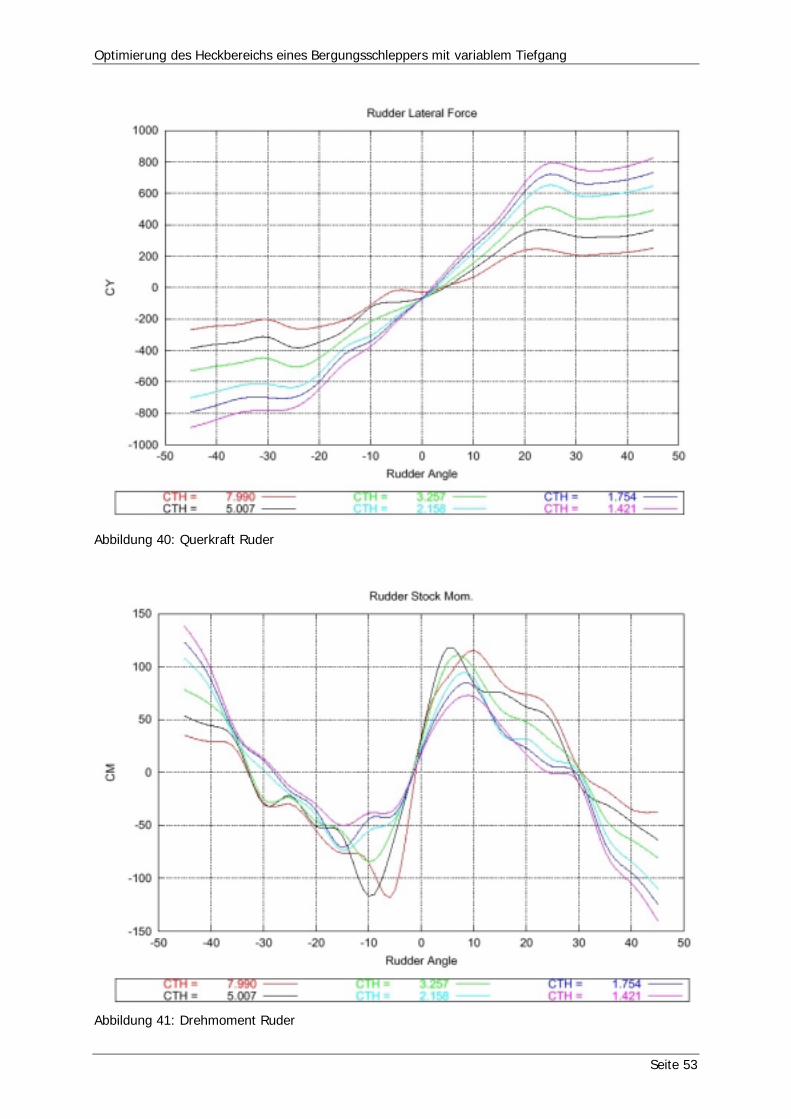
Die Ruderkräfte des Verstellpropeller sind in Abbildung 39, Abbildung 40 und Abbildung 41 zusammengefasst.
Abbildung 39: Längskraft Ruder
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 53
Abbildung 40: Querkraft Ruder
Abbildung 41: Drehmoment Ruder
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 54
6.3.3 Überprüfung der IMO-Manöver und der Gierstabilität Die IMO-Resolution A.751(18) gilt für Schiff, die eine Länge von 100m oder größer haben. Da die Länge zwischen den Loten mLPP 2,85= beziehungsweise mLPP 1,90= beträgt, sind die IMO-Vorschriften nicht einzuhalten. Um jedoch einen Überblick über die Manövrierfähigkeit des Schleppers zu erhalten, sind sie von mir trotzdem herangezogen worden. Die Versuche sind bei 90% der Schiffsgeschwindigkeit, die bei 85% Motorenleistung erreicht wird, durchzuführen. Da die prognostizierte Geschwindigkeit von knv 5,17= bei 100% Leistung der Elektromotoren ermittelt wurde, sind die Versuche bei einer Geschwindigkeit von knv 15= (anstelle von knv 16= ) absolviert worden. Folgende Manöver sind durchzuführen:
- Drehkreismanöver - Zickzack-Manöver 10°/10° - Zickzack-Manöver 20°/20° - Stoppen
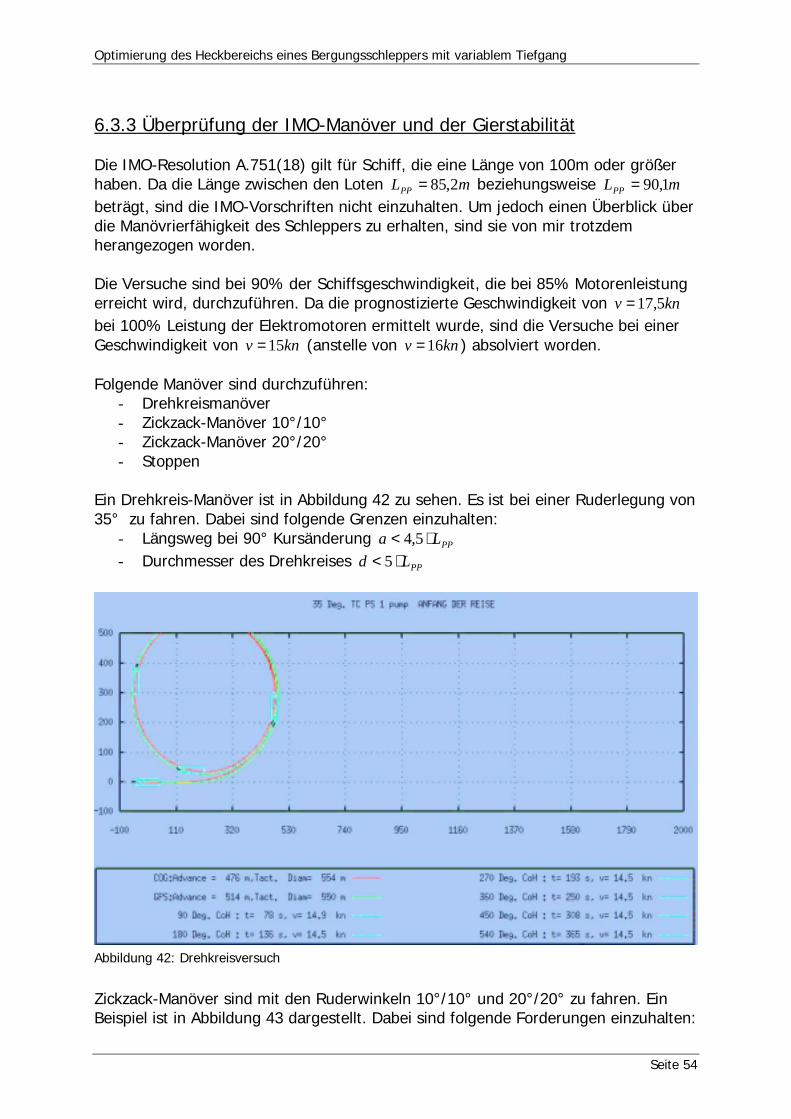
Ein Drehkreis-Manöver ist in Abbildung 42 zu sehen. Es ist bei einer Ruderlegung von 35° zu fahren. Dabei sind folgende Grenzen einzuhalten:
- Längsweg bei 90° Kursänderung PPLa ⋅< 5,4 - Durchmesser des Drehkreises PPLd ⋅< 5
Abbildung 42: Drehkreisversuch
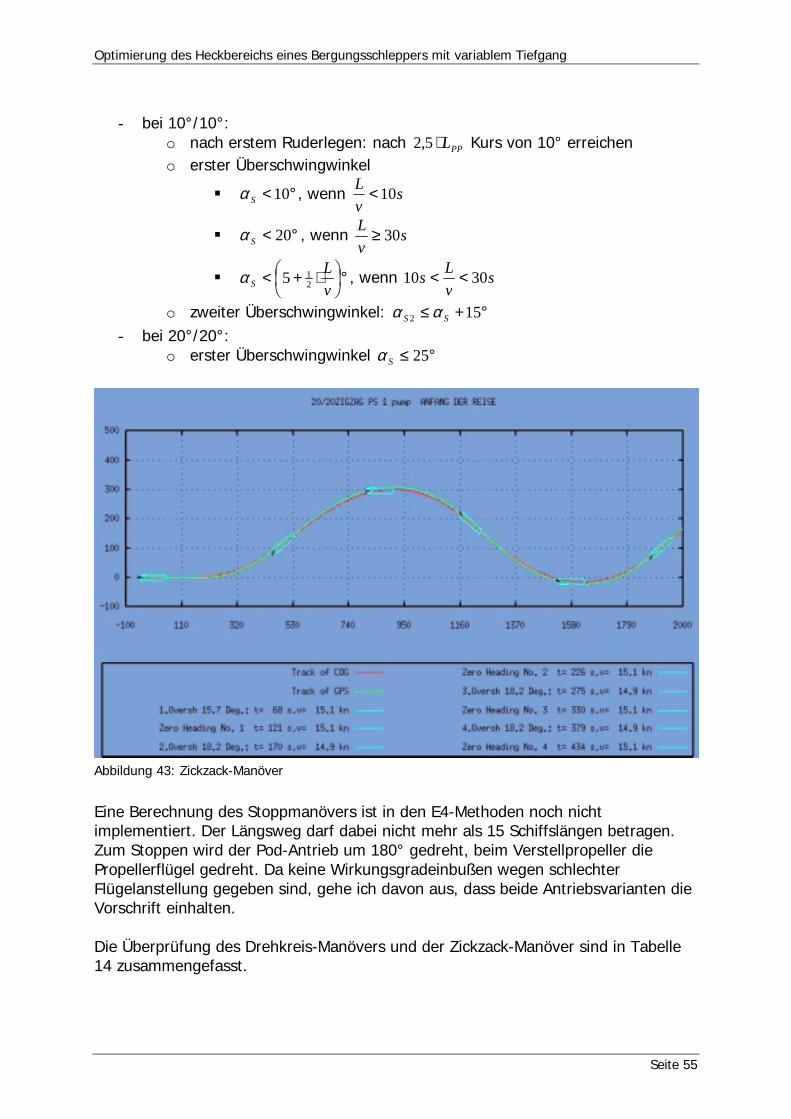
Zickzack-Manöver sind mit den Ruderwinkeln 10°/10° und 20°/20° zu fahren. Ein Beispiel ist in Abbildung 43 dargestellt. Dabei sind folgende Forderungen einzuhalten:
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 55
- bei 10°/10°:
o nach erstem Ruderlegen: nach PPL⋅5,2 Kurs von 10° erreichen o erster Überschwingwinkel
� °<10Sα , wenn svL 10<
� °< 20Sα , wenn svL 30≥
� °
⋅+<vL
S 215α , wenn s
vLs 3010 <<
o zweiter Überschwingwinkel: °+≤ 152 SS αα - bei 20°/20°:
o erster Überschwingwinkel °≤ 25Sα
Abbildung 43: Zickzack-Manöver
Eine Berechnung des Stoppmanövers ist in den E4-Methoden noch nicht implementiert. Der Längsweg darf dabei nicht mehr als 15 Schiffslängen betragen. Zum Stoppen wird der Pod-Antrieb um 180° gedreht, beim Verstellpropeller die Propellerflügel gedreht. Da keine Wirkungsgradeinbußen wegen schlechter Flügelanstellung gegeben sind, gehe ich davon aus, dass beide Antriebsvarianten die Vorschrift einhalten. Die Überprüfung des Drehkreis-Manövers und der Zickzack-Manöver sind in Tabelle 14 zusammengefasst.
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 56
Forderung Pod Ergebnis Pod
VPP Ergebnis VPP
Drehkreis PPLa ⋅< 5,4 mLPP 4,3835,4 =⋅ 476m mLPP 45,4055,4 =⋅ 250m
PPLd ⋅< 5 mLPP 4265 =⋅ 554m mLPP 5,4505 =⋅ 247m Zickzack 10/10
svLs 3010 << s
vL 04,11= - s
vL 68,11= -
°
⋅+<vL
S 215α °=°
⋅+ 52,105 21
vL 8°
°=°
⋅+ 84,105 21
vL
10°
°+≤ 152 SS αα - 13° - 14° Zickzack 20/20
°≤ 25Sα - 16° - 27°
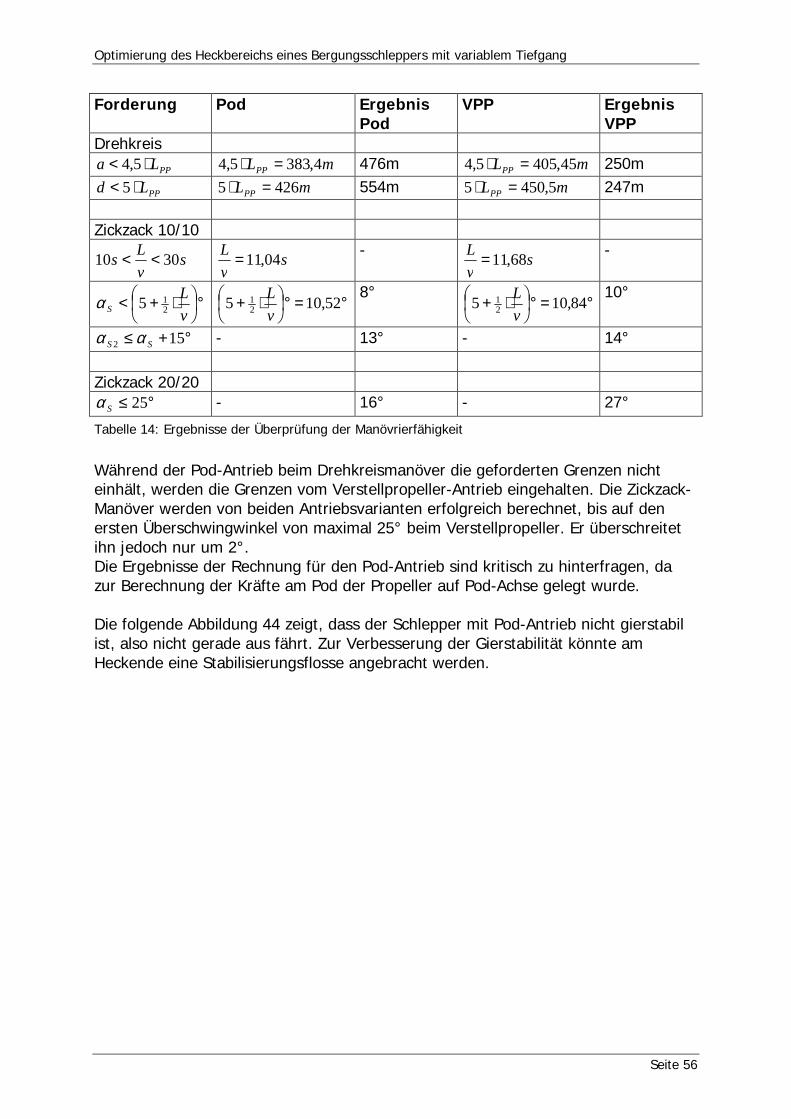
Tabelle 14: Ergebnisse der Überprüfung der Manövrierfähigkeit
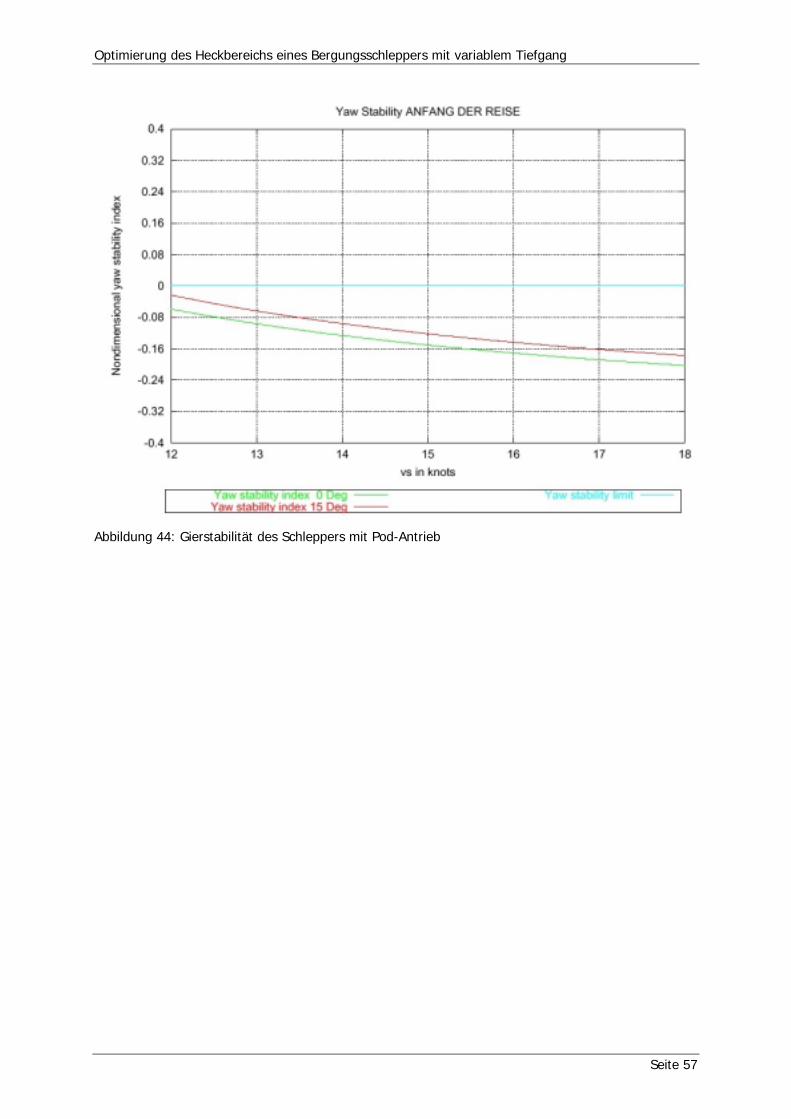
Während der Pod-Antrieb beim Drehkreismanöver die geforderten Grenzen nicht einhält, werden die Grenzen vom Verstellpropeller-Antrieb eingehalten. Die Zickzack-Manöver werden von beiden Antriebsvarianten erfolgreich berechnet, bis auf den ersten Überschwingwinkel von maximal 25° beim Verstellpropeller. Er überschreitet ihn jedoch nur um 2°. Die Ergebnisse der Rechnung für den Pod-Antrieb sind kritisch zu hinterfragen, da zur Berechnung der Kräfte am Pod der Propeller auf Pod-Achse gelegt wurde. Die folgende Abbildung 44 zeigt, dass der Schlepper mit Pod-Antrieb nicht gierstabil ist, also nicht gerade aus fährt. Zur Verbesserung der Gierstabilität könnte am Heckende eine Stabilisierungsflosse angebracht werden.
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 57
Abbildung 44: Gierstabilität des Schleppers mit Pod-Antrieb
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 58
7. Diskussion und Ausblick Mit der optimierten Rumpfform wird eine maximale Geschwindigkeit von 17,5kn mit beiden Antriebsvarianten prognostiziert. Damit liegt das Ergebnis der Widerstandsreduzierung knapp unter der geforderten Geschwindigkeit von 18kn. Eine höhere Geschwindigkeit als 17,5kn würde sich nur durch eine sehr viel größere Leistung ermöglichen lassen, was eine äußerst unwirtschaftlich und teuer wäre. Besser wäre es, zu versuchen, den Rumpf weiter nach strömungsgünstigen Gesichtspunkten zu optimieren. Wenn der minimale Tiefgang höher gesetzt würde, zum Beispiel auf T=5,5m oder T=6m, wäre die Möglichkeit, einen größeren Propellerdurchmesser zu installieren, der einen höheren Schub für Pfahlzug und Geschwindigkeit liefern würde. Durch eine Tiefgangsvergrößerung wären auch die Probleme, die der Pod-Antrieb mit den Gondelabmessungen und der Drehmomentbegrenzung hervorgerufen hat, leichter zu lösen. Dabei sollte der Vorschlag von ABB mit einem Traktor-Propeller in Düse besondere Beachtung finden, da die Azipods sich als Antrieb bei mehreren Eisbrechern bewährt haben und somit einen robusten Eindruck erwecken. Die im Generalplan angegebenen Dieselöltanks haben weniger Fassungsvermögen als angegeben. In der nächsten Entwurfsschleife sollte überprüft werden, ob die Dieselölkapazität über einen gegebenen Zeitraum für verschiedene Einsatzanforderungen ausreichend dimensioniert ist. Zur Überprüfung der Stabilität und der Manövrierfähigkeit sind die Massenverteilungen sehr grob aufgeteilt. Bei der nächsten Entwurfsschleife wäre eine weitere Veränderung der Schifflinien eine gute Möglichkeit, den Widerstand weiter zu reduzieren und gleichzeitig das GM zu vermindern: Wenn der Kimmradius vergrößert würde und die Seite des Schiffes nicht senkrecht zur Wasserfläche, sondern in einem kleinen Winkel nach unten verlaufen würde, würde sich der Gewichtsschwerpunkt weiter nach oben verlagern. Außerdem ist damit die Gefahr sich hochkant stellender Eisschollen geringer. Die Ballastwasserkapazität ist meines Erachtens hoch genug, um trotz der vorgeschlagenen Veränderung der Schiffsrumpfform eine Tiefertauchung von 2m zu gewährleisten. Von T&S wurde ein Balkenkiel über die gesamte Schiffslänge gefordert. Diese Forderung habe ich ab dem Pumpjet eingehalten. Im Vorschiffsbereicht noch einen 3m langen zusätzlichen Balkenkiel anzusetzen, erbringt meines Erachtens in keiner Einsatzsituation Vorteile. Bei Seegangsberechnungen sollte überprüft werden, ob ein Pfahlzug von 160t bei gegebenen Wetter- und Seegangsbedingungen eingehalten werden kann. Außerdem ist darauf zu achten, dass die maximale Aufwärtsbeschleunigung auf Hubschrauberlandedeck bei gegebenem Seegang nicht den Grenzwert von 0,5 m/s² übersteigt. Leider war es mir zeitlich nicht möglich, diese Berechnungen durchzuführen.

Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 59
Das Konzept Sicherheitsschiff mit einem variablen Tiefgang ist eine gute Antwort auf den vom Bund geforderten Tiefgang von 6m für einen Notfallschlepper in der Deutschen Bucht.
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 60
8. Literatur- und Quellenverzeichnis 1. Klassifikations- und Bauvorschriften des Germanischen Lloyd, I. Schiffstechnik, Teil 1
Schiffskörper, 2000 2. Carsten S. Wibel, Schiff & Hafen, Heft 11/2000, Seite 31f: „Sicherheitsschiff für Nord- und
Ostsee“ 3. H. Schneekluth “Hydromechanik zum Schiffsentwurf”, 3. Auflage 1988 4. M. Kloppenburg: Widerstand und Propulsion, Vorlesungsmanuskript sowie die Skripte zu den
„Physikalisch Technischen Laboren“. 5. W. Abicht „Einführung in die Projektarbeit“, Vorlesungsmanuskript Nr.38, 1987 6. H. Schneekluth & V. Bertram „Ship Design for Efficiency and Economy”, 1998 7. Stefan Krüger „CAD Einsatz im Schiffsentwurf“, Vorlesungsmanuskript sowie online
Dokumentation in E4, 1999/2003 8. Internetpräsentation der Firma SSW Fähr- und Spezialschiffbau GmbH: http://www.ssw-
faehr.com, (10.2003) 9. H. Söding „Das Wellenwiderstands-Programmsystem Kelvin“, Institut für Schiffbau, Hamburg,
1999. 10. Stefan Krüger „Einfluß moderner Entwurfsmethoden auf die Produktentwicklung einer Werft“,
Jahrbuch der STG 92. Band, 1998 11. Internetpräsentation der Firma Schottel: http://www.schottel.de, (20.12.2000) 12. S. Bühring, Studienarbeit „Entwurfsstudie eines Mehrzweckschleppers für die Deutsche Bucht“
09/2001 13. M. Bentin, Studienarbeit „Entwurfsschleife für Hafenschlepper“, 1999 14. L. Laubenstein, Studienarbeit „Stabilitätsvorschriften von Schleppern“, 2000 15. International Maritime Organization (IMO): Resolution A749(18) , Resolution 75(69), MSC
Circ.884 und SLF 42/Inf.6 16. K. von Dokkum „Ship Knowledge, a modern encyclopedia”, 2003 17. Thomas Hackmann „Electric Propulsion and Power Plants
Applied in Recent Tanker Newbuildings”, Jahrbuch der STG 88. Band, 1994 18. Internetpräsentation der Firma Rolls Royce: http://www.rollsroycemarine.com, (09.2003) 19. Internetpräsentation der Firma ABB: http://www.abb.com, (09.2003) 20. Internetpräsentation der Firma MAN B&W: http://www.manbw.de, (16.09.2003) 21. Hans Gerd Knoop „Sicherheits- und Notfallkonzept Deutsche Bucht“, Schiff & Hafen
10/1997, Seite 76 f. 22. Internetpräsentation des Bundesministerium für Verkehr, Bau- und Wohnungswesen (bmvbw):
http://www.bmvbw.de (09.2003) 23. Schiff & Hafen, Hefte 12/98 und 1/99, SUBS „Neuwerk“: „Ein in der technischen Ausführung
einmaliges Mehrzweckschiff“ 24. Carsten S. Wibel „Der herkömmliche Bergungsschlepper genügt den Anforderungen nicht mehr“,
Schleppschifffahrt & Bergung (eine Sonderbeilage der „Deutsche Schiffahrts-Zeitung), Seite 5ff, 06/2000
25. Internetpräsentation der Wasser- und Schifffahrtsverwaltung der Bundesrepublik Deutschland: http://www.wsv.de (09.2003)
26. Report of Lord Donaldson’s Inquiry into the prevention of pollution from merchant shipping, “Safer ships, clearer seas”, 05/1994
27. Hans-Jürgen Golchert „Schiffssicherheit und mariner Umweltschutz – Übersicht über Tendenzen, Zielvorstellungen und neue Rechtsvorschriften am Beginn eines neuen Jahrtausends“, Verband Deutscher Reeder e.V., STG-Reedereisprechtag am 25.Januar 2001 in Hamburg
28. Internetpräsentation der GAUSS (Gesellschaft für Angewandten Umweltschutz und Sicherheit im Seeverkehr mbH, Bremen: http://www.gauss.org (09.2003), insbesondere die Materialsammlung zum Thema Sicherheit- und Notfallkonzept Deutsche Bucht (Stand 12.01.1999)
29. Uwe Gragen, Joachim Gloel „Ein neues hocheffizientes Antriebssystem“, Schiff & Hafen 10/1997, Seite 40 ff
30. Internetpräsentation der Schutzgemeinschaft Deutsche Nordseeküste e.V.: http://www.sdn-web.de (09.2003), u.a. der Bericht vom SDN-Kolloguium „Sicherheit im Seeverkehr“.
31. H. Söding „Manövrierfähigkeit von Schiffen“, Vorlesungsmanuskript, 1995
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 61
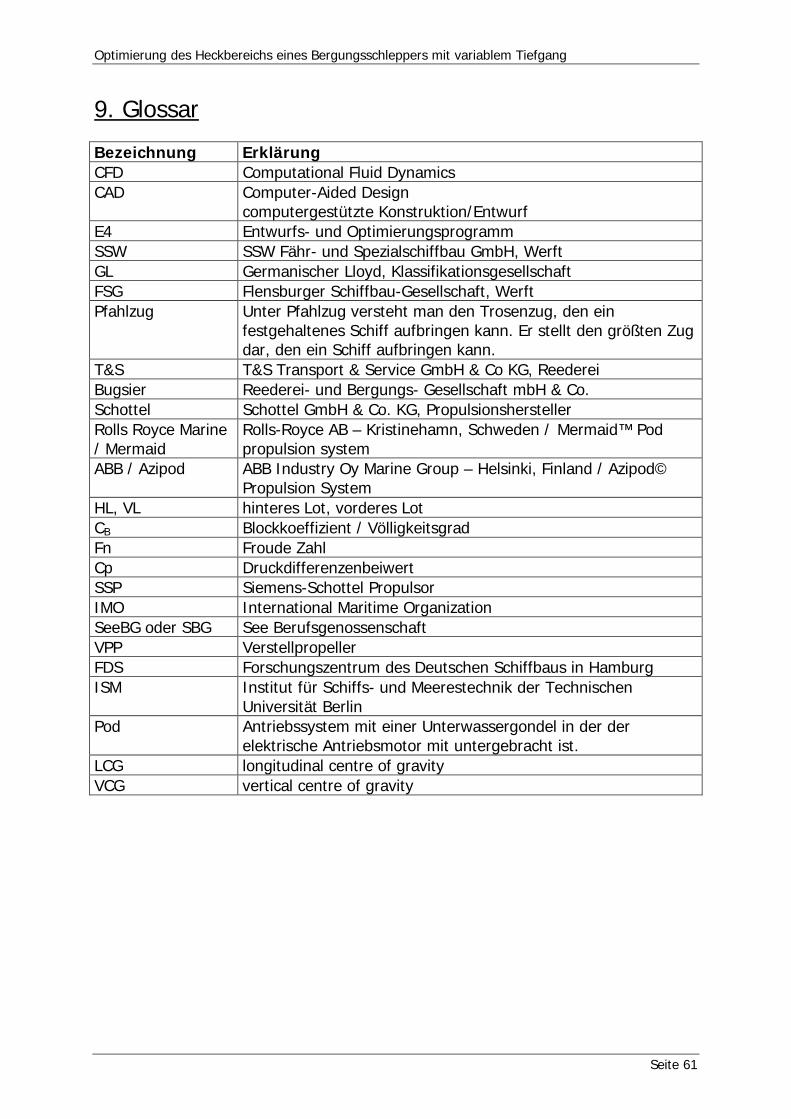
9. Glossar Bezeichnung Erklärung CFD Computational Fluid Dynamics CAD Computer-Aided Design
computergestützte Konstruktion/Entwurf E4 Entwurfs- und Optimierungsprogramm SSW SSW Fähr- und Spezialschiffbau GmbH, Werft GL Germanischer Lloyd, Klassifikationsgesellschaft FSG Flensburger Schiffbau-Gesellschaft, Werft Pfahlzug Unter Pfahlzug versteht man den Trosenzug, den ein
festgehaltenes Schiff aufbringen kann. Er stellt den größten Zug dar, den ein Schiff aufbringen kann.
T&S T&S Transport & Service GmbH & Co KG, Reederei Bugsier Reederei- und Bergungs- Gesellschaft mbH & Co. Schottel Schottel GmbH & Co. KG, Propulsionshersteller Rolls Royce Marine / Mermaid
Rolls-Royce AB – Kristinehamn, Schweden / Mermaid™ Pod propulsion system
ABB / Azipod ABB Industry Oy Marine Group – Helsinki, Finland / Azipod© Propulsion System
HL, VL hinteres Lot, vorderes Lot CB Blockkoeffizient / Völligkeitsgrad Fn Froude Zahl Cp Druckdifferenzenbeiwert SSP Siemens-Schottel Propulsor IMO International Maritime Organization SeeBG oder SBG See Berufsgenossenschaft VPP Verstellpropeller FDS Forschungszentrum des Deutschen Schiffbaus in Hamburg ISM Institut für Schiffs- und Meerestechnik der Technischen
Universität Berlin Pod Antriebssystem mit einer Unterwassergondel in der der
elektrische Antriebsmotor mit untergebracht ist. LCG longitudinal centre of gravity VCG vertical centre of gravity
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 62
Abbilungs- und Tabellenverzeichnis: Tabelle 2: Hauptdaten, Ausgangsschiff ........................................................................................... 6 Abbildung 1: Seitenlinienriss und Wasserlinienriss, Ausgangsschiff.................................................... 7 Abbildung 2: Spantenriss, Ausgangsschiff........................................................................................ 8 Abbildung 3: Widerstandsvorhersage der SSW für das Ausgangsschiff, mT 5= ................................ 9 Abbildung 4: Einteilung der Ballastwassertanks.............................................................................. 10 Abbildung 5: Propellerfreifahrtdiagramm Ka 4-70 in Düse 19a (in E4 erstellt) .................................. 12 Abbildung 6: Pod SSP5 mit Twin-Propeller..................................................................................... 12 Abbildung 7: Düsenpropeller ........................................................................................................ 12 Abbildung 8: Pumpjet SPJ520....................................................................................................... 13 Abbildung 9: Verstellpropeller....................................................................................................... 13 Abbildung 10: Widerstandsvorhersagen für das Ausgangsschiff, mT 5= ....................................... 15 Abbildung 11: Gittergenerierung zur CFD-Berechnung nach Kelvin.................................................. 16 Abbildung 12: Druckverteilung am Rumpf bei knv 17= und mT 5= , Ausgangsschiff, Bugansicht .. 16 Abbildung 13: Druckverteilung am Rumpf bei knv 17= und mT 5= , Ausgangsschiff, Heckansicht 17 Abbildung 14: Wellenbild bei mT 5= , knv 17= , Ausgangsschiff.................................................. 17 Abbildung 15: Vergleich der Widerstandsvorhersagen mit CFD, Ausgangsschiff, mT 5= ................. 18 Abbildung 16: Geschwindigkeits-Leistungs-Diagramm für das Ausgangsschiff .................................. 19 Tabelle 3: Kapazität der einzelnen Ballastwasser-Tanks, Ausgangsschiff.......................................... 20 Tabelle 4: Vergleich Entwurfsforderungen – Ausgangszustand........................................................ 22 Abbildung 17: Seitenlinienriss und Wasserlinienriss, Schlepper mit Pod ........................................... 24 Abbildung 18: Spantenriss, Schlepper mit Pod ............................................................................... 25 Tabelle 5: Schiffsdaten, Schlepper mit Pod.................................................................................... 25 Abbildung 19: Druckverteilung am Rumpf bei knv 18= und mT 5= , Schlepper mit Pod, Bugansicht
.......................................................................................................................................... 26 Abbildung 20: Druckverteilung am Rumpf bei knv 18= und mT 5= , Schlepper mit Pod, Heckansicht
.......................................................................................................................................... 27 Abbildung 21: Wellenbild bei mT 5= , knv 18= , Schlepper mit Pod ............................................. 27 Abbildung 22: Widerstandsvorhersage nach SSW und CFD-Berechnungen, Schlepper mit Pod.......... 28 Abbildung 23: Geschwindigkeits-Leistungs-Diagramm für den Schlepper mit Pod............................. 29 Abbildung 24: Ballastwassertanks in E4......................................................................................... 30 Tabelle 6: Kapazität der einzelnen Ballastwasser-Tanks, Schlepper mit Pod ..................................... 31 Abbildung 25: Propellerfreifahrtdiagramm Ka 4-55 in Düse 19a (in E4 erstellt) ................................ 33 Abbildung 26: schematische Darstellung eines Azipods .................................................................. 34 Tabelle 7: Vergleich Entwurfsforderungen – Schlepper mit Pod....................................................... 35 Abbildung 27: Hauptdaten, Schlepper mit VPP............................................................................... 36 Abbildung 28: Seitenriss und Wasserlinienriss, Schlepper mit VPP................................................... 37 Abbildung 29: Spantenriss, Schlepper mit VPP............................................................................... 38 Abbildung 30: Druckverteilung am Rumpf bei knv 18= und mT 5= , Schlepper mit VPP, Bugansicht
.......................................................................................................................................... 39 Abbildung 31: Druckverteilung am Rumpf bei knv 18= und mT 5= , Schlepper mit VPP, Heckansicht
.......................................................................................................................................... 39 Abbildung 32: Wellenbild bei mT 5= , knv 18= , Schlepper mit VPP............................................. 40 Abbildung 33: Widerstandsvorhersage nach SSW und CFD-Berechnungen, Schlepper mit VPP.......... 41 Abbildung 34: Geschwindigkeits-Leistungs-Diagramm für den Schlepper mit VPP............................. 41 Tabelle 8: Vergleich Entwurfsforderungen – Schlepper mit VPP ...................................................... 43 Tabelle 9: Zusammenfassung der Eingangsdaten für die Gewichtsabschätzung ............................... 45 Tabelle 10: abgeschätzte Gewichte mit jeweiliger Schwerpunktslage, Schlepper mit Pod.................. 47 Tabelle 11: abgeschätzte Gewichte mit jeweiliger Schwerpunktslage, Schlepper mit VPP.................. 47 Tabelle 12: Aufstellung der Zuladung des Schiffes ......................................................................... 48 Tabelle 13: Zusammenfassung der metazentrischen Höhen für die Ladefälle ................................... 49 Abbildung 35: Anfangs-GM und Hebelarmkurve bei einer Tiefertauchung auf T=7m ........................ 49 Abbildung 36: Längskraft Pod....................................................................................................... 50 Abbildung 37: Querkraft Pod ........................................................................................................ 51 Abbildung 38: Drehmoment Pod ................................................................................................... 51
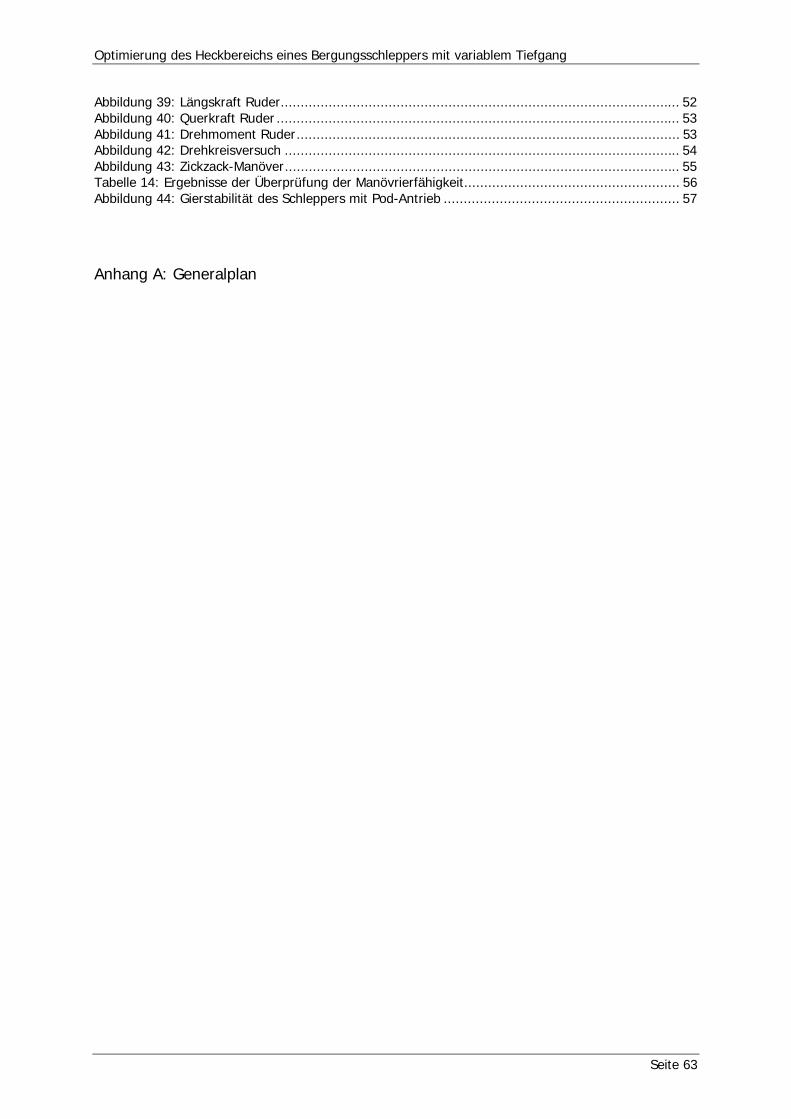
Optimierung des Heckbereichs eines Bergungsschleppers mit variablem Tiefgang
Seite 63
Abbildung 39: Längskraft Ruder.................................................................................................... 52 Abbildung 40: Querkraft Ruder ..................................................................................................... 53 Abbildung 41: Drehmoment Ruder................................................................................................ 53 Abbildung 42: Drehkreisversuch ................................................................................................... 54 Abbildung 43: Zickzack-Manöver................................................................................................... 55 Tabelle 14: Ergebnisse der Überprüfung der Manövrierfähigkeit...................................................... 56 Abbildung 44: Gierstabilität des Schleppers mit Pod-Antrieb ........................................................... 57 Anhang A: Generalplan