-
UNIVERSITÄT DUISBURG-ESSEN Fakultät für Ingenieurwissenschaften,
Abt. Maschinenbau und Verfahrenstechnik Lehrstuhl Steuerung,
Regelung und Systemdynamik System Dynamics February 11th , 2011
60 Minutes Page 1
Reading-up-time
For reviewing purposes of the problem statements, there is a
"reading-up-time" of 10 minutes prior to the official examination
time. During this period it is not allowed to start solving the
problems. This means explicitly that during the entire
"reading-up-time" no writing utensils, e.g. pen, pencil, etc. at
all are allowed to be kept on the table. Furthermore the use of
carried documents, e.g. books,· (electronic) translater,
·(electronic) dictionaries, etc. is strictly forbidden. When the
supervisor refers to the end of the "reading-up-time" and thus the
beginning of the official examination time, you are allowed to take
your utensils and documents. Please then, begin with filling in the
complete information on the titlepage and on page 3.
Good Luck!
LAST NAME
FIRST NAME
MATRIKEL-NO.
TABLE-NO.
Klausurunterlagen'~-~ )
Ich versichere hiermit, dass ich sämtliche für die Durchführung
der Klausur vorgesehenen Unterlagen erhalten, und dass ich meine
Arbeit ohne fremde Hilfe und ohne Verwendung unerlaubter
Hilfsmittel und sonstiger unlauterer Mittel angefertigt ijabe. Ich
weiß, dass ein Bekanntwerden solcher Umstände auch nachträglich zum
Ausschluss von der Prüfung führt. Ich versichere weiter, dass ich
sämtliche mir überlassenen Arbeitsunterlagen sowie meine Lösung
vollständig zurück gegeben habe. Die Abgabe meiner Arbeit wurde in
der Teilnehmerliste von Aufsichtsführenden schriftlich
vermerkt.
Duisburg, den ____
(Unterschrift der/des Studierenden)
Falls Klausurunterlagen vorzeitig abgegeben:
-
Bewertungstabelle
Aufgabe 1
Aufgabe 2
Gesarntpunktzahl
Angehobene Punktzahl
%
Bewertung gern. PO
in Ziffern -
(Datum und Unterschrift 1. Prüfer, Univ.-Prof. DrAng. Dirk
Söffker)
(Datum und Unterschrift 2. Prüfer, Yan Liu, M.Eng.)
(Datum und Unterschrift des für die Prüfung verantwortlichen
Prüfers, Söffker)
Fachnote gemäß PfÜfungsordnung:
0 0 0 I 0 I [] 0 0 I 0 0 0 0 1,0 1,3 1,7 I 2,0 I 2,3 2,7 3,0 I
3,3 3,7 4,0 5,0
sehr gut gut befriedigend ausreichend mangelhaft
Bemerkung:
-
UNIVERSITÄT DUISBURG-ESSEN Fakultät für Ingenieurwissenschaften,
Abt. Maschinenbau und Verfahrenstechnik Lehrstuhl Steuerung,
Regelung und Systemdynamik System Dynamics February 11th , 2011
Page 3
Attention: Give your answers to ALL problems directly below the
questions in the exam question sheet.
You are NOT allowed to use a pencil and also NOT red color (red
color is used for corrections).
This exam "System Dynamics" is taken by me as a o mandatory
(Pflichtfach)
elective (Wahlfach)
prerequsite (Auflage)
subject (cross ONE option according to your own situation).
Maximum achievable points: 40 Minimum points for the grade 1,0:
95% Minimum for the 50%
-
80) (3 points) St80te the difference between 80 SISO-system and
a MIMO-system.
~1.~Q.:) -~~~\~~ ~ A Il\yJt A CU rpJ (I "
-
Fakultät fUr Ingenieurwissenschaften, Abt. Maschinenbau und
Verfahrenstechnik
Lehrsi~~rSteueriiiili~]1(;gehing ,und Systemdynamik ' '
, Sy~teIT1~yIi&mj(j~i~~:~X' -'~;;:~.Bi'@;flCXth,2Ql1 '
.e,~M.JL ... 'cri'3"p'QiilJs) " , ,"~
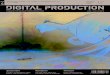
'" 'Tlre-j!genvalue-=distributronc-ofac systemis-givel1iIi
'FigureLl: ,~- ' " ',"". "_~:-.,.._;.' ,.h . " ,. ,_ -. ," , ".
"
Im
x x X
X X 0,001 +10,01)
-------&--'----+Re x x'
XX X
Figure 1.1: Eigenvalue distribution
Is the system asymptocally stable? Justify your statement.
~e ~b\.€~ \~ '{.\.et~e\ ~~~ le ,",,0' ~ \.~VV'\rto:AII ~~~\e
~e~e ~~ ~f\~tu.e ~ "cu. ,o~\iu·Q ~~ .
D
-
_._.f.~~ulJ;~t(iir
IngeIJ,i~urwisse~chaf.t~Ib_Apt~.MaschiJ!E'ln1JaulJIl(LVerja.br(lm;technik
..•.•::..~J~e~[s.t1Jltl§~euerung,Regelung
undSYlltelD.dyl,lJ!"Q)ilc
_._:_.L::~~B~~rß.lem~dynamics".. .. .. . .."
3"-,,-c-=="":~':C''''"(fj=f:rpo1Dtsr=oc-=~'='"'"' . . . .;;-....
... .. ... . .. "~
··;::~·.·"Asystß~Ir-iniequ:i1iOfium.caIidititirilsmexcltet::I~-:f;;"O
witna·n.armönicruslgnäLwlth"arnplitude
_._._"A.=-2_and;:ftequel1cy~w_= O.5:..The
measuroo:olltpuLsignru..oUhe..system-is-a.har.monicsignal... with
amplitude A = 4 and frequency w=O.5. Classify·thestabiIity of·the
system and justify JOur statemant.
o
-
Fakll!!.~~ für Ing~.!li~llrwiss~n~sch~t~I1.•. i\bt.
Mas(!hinenbau und. V~rrahrenst~hnik .
Lehrstuhl Steuer.t~Jlg, ..• Reg~l1ffig.~uI!
-
UNIVERSITÄT DUISBURG-ESSEN Fakultät für Ingenieurwissenschaften,
Abt. Maschinenbau und Verfahrenstechnik Lehrstuhl Steuerung,
Regelung und Systemdynamik System Dynamics February 11th , 2011
Page 8
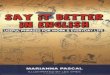
Aufgabe 2 (25 Points) In Fig. 2.1, a block diagram of a system
with four transfer elements is given. The input is denoted as u and
the output as y.
Element 1 Element 2
U Xl .. ... k"C X2 }zr( Y To .... ..
"!'-' : k2
," I ,- t TI,2 t
Element 3
X3 ~ .... .... TI,3 t
X5
, Element 4 ~
X4 ~ .... t
Figure 2.1: Block diagram of the given system
2a) (4 Points) Classify the transfer behavior of the four
elements of the system and determine the four corresponding
differential equations in a suitable form for classification under
consideration of the given inscriptions.
'/-"tl\-\ =l~ \-y;;;\\~ +1~ i~~lc'
'~;;;~~~-rr:~J;;'~ .-_=tafu:~~n).~;1i~~~fn-t~!1~j~~;
EI~~e~-~- 3: PI )(3l\, =l3l'1 l\\ ,. ~J"I l\) .1.\)
I fJ~u\ JiI,c"
-
UNIVERSITÄT DUISBURG-ESSEN Fakultät für Ingenieurwissenschaften,
Abt. Maschinenbau und Verfahrenstechnik Lehrstuhl Steuerung,
Regelung und Systemdynamik System Dynamics February 11t h, 2011
Page 9
o 2b) (4 Points)
Give the differential equation of the whole system with respect
to the input u and the output y as given in task a). The parameters
are given as TD = T2 = T1,2 11,3 = 11,4 = k1 k2 = k3 1.
-
UNIVERSITÄT DUISBURG-ESSEN Fakultät für Ingenieurwissenschaften,
Abt. Maschinenbau und Verfahrenstechnik Lehrstuhl Steuerung,
Regelung und Systemdynamik System Dynamics February 11t h, 2011
Page 10
-
UNIVERSITÄT DUISBURG-ESSEN Fakultät für Ingenieurwissenschaften,
Abt. Maschinenbau und Verfahrenstechnik Lehrstuhl Steuerung,
Regelung und Systemdynamik System Dynamics February 11th , 2011
Page 11
The mathematical model of an electrical system is described by
the equations
Xl(t) + Xl(t) = KX2(t),
JXl(t) dt = T1y(t) + Jy(t) dt, and
X2(t) = u(t) + ;1 Ju(t) dt.
2c) (4 Points) Utilize the given equations to determine the
scalar differential equation of the whole system (with input u and
output y) and classify the resulting transfer behavior.
Which kind of transfer behavior of the controller is suitable
for realizing stationary accuracy of the whole system (state
reasons)?
-;. ,.....
. ..-::~ .
t.. =>
=- '/ 1,Ql\\ -I- lH1,,) ~ l\\ ~ '1(\\ ~ \
-
UNIVERSITÄT DUISBURG-ESSEN Fakultät für Ingenieurwissenschaften,
Abt. Maschinenbau und Verfahrenstechnik Lehrstuhl Steuerung,
Regelung und Systemdynamik System Dynamics February 11th , 2011
Page 12
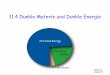
D 2d) (5 Points)
In Fig. 2.2, the eigenvalues of four different systems are
illustrated graphically. Furthermore, the step response behaviors
of two of the four systems are measured and given in Fig. 2.3.
Assign the two measurements to the related systems and state the
reasons for your decisions (why or why not for each of the four
systems).
-)1/t ~Sv;,c.W\eV\ 't "\ '" ~ [.'" J.'~I(')
~'fte"$",,,_..~I -'-;> '5'1~L;)
l\,+ LI"'~1 ,~s~~ "( ~ "o~ s\J\< -> (o-~ ",J bc
\Yl('",-s~,( J ~'isk"" ~! J9..""f~"'~ ~~ ~c:>o ~~ ~r s*rp~~
o~\lQ.~·o~
(~O\)I\Q.\ 'Mi.~F.sc;.\\~~Cv\)
-
UNIVERSITÄT DUISBURG-ESSEN Fakultät für Ingenieurwissenschaften,
Abt. Maschinenbau und Verfahrenstechnik Lehrstuhl Steuerung,
Regelung und Systemdynamik System Dynamics February 11t h, 2011
Page 13
x
-2 /.,-2 ... ··· 2 Re2 Re .....····-2 ............/·-2
........... X..... System 1 System 2
Im X
............ 2
.........
-2 ...... .·····-2
..........
.' X...
Im X" ....
" . .........~.. -2 ......2 Re 2 Re .·····-2
.?G//"
System 3 System 4
Figure 2.2: Eigenvalue distribution of four different
systems
y
1
o.
-1~------~------~------~~------~------+ o 2 4 6 8 t [5] y
Mea5urement 1
1
-1~------~------~------~~------~------+ o 2 4 6 , 8 t [5]
Mea5urement 2
Figure 2.3: Measurement of the dynamic behaviors of two
different systems
-
UNIVERSITÄT DUISBURG-ESSEN Fakultät für Ingenieurwissenschaften,
Abt. Maschinenbau und Verfahrenstechnik Lehrstuhl Steuerung,
Regelung und Systemdynamik System Dynamics February 11th , 2011
Page 14
D
-
UNIVERSITÄT DUISBURG-ESSEN Fakultät für Ingenieurwissenschaften,
Abt. Maschinenbau und Verfahrenstechnik Lehrstuhl Steuerung,
Regelung und Systemdynamik System Dynamics February 11th, 2011
Page 15
2e) (3 Points) In the following, the block diagram describing a
vehicle's automatie air condition system (ac) and a driver's
behavior (adjusting the ac) has to be given.
The driver senses the temperature inside the vehicle. The
difference between the temperature convenient for the driver and
the real temperature within the vehicle causes that the driver
ehanges the desired value of the automatie ac to a new one.
Depending on the differenee between the desired and the real
temperature inside the vehicle, the automatie ac heats or eools the
air flowing inside the vehicle by affecting humidity.
Mark additionally the part of the block diagram, whieh does not
exist if an air eonditioner does not support automatie eontrol
regarding the temperature inside the ear.
-
----N
(Q
deslred· dlfference air tempo temp.2convenlent dlfference flow
current " temperature temp.1
air condltlon
vehlcle Intenor
tempo driver.,
r"1"
'.,L
" i wlthout automatie control -
-
UNIVERSITÄT DUISBURG-ESSEN Fakultät für Ingenieurwissenschaften,
Abt. Maschinenbau und Verfahrenstechnik Lehrstuhl Steuerung,
Regelung und Systemdynamik System Dynamics February 11th , 2011
Page 16
•
D
• 2f) (5 Points)
The system matrix of a dynamic system is given by
-2 0 k1]A = 0 -1 2 .
[ k2 0 0
Determine the characteristic polynomial p(>.) of the system.
For which values of the parameter kl and k2 is the system
asymptotically stable? Use the Hurwitz criterion for your
calculation.
-
. . . ,...-~'-. ~., . .
. ',' . . .' '. ~_~ __ ~ _____~. ___ L_M___ ~~_~ • __•• _.. •
.....___.... , ••
~ j :::> 0 . f.. ~ ; "'. --I") ~ ~ \:. 3\ \ ~o
. . "
\\ *\
. .
\::3 -k1kl\ _. I ~ L '..,t\1. '::. . ' - > 0 _/ ~ ~ ..J_
," 1 l-t.,~ =
H3= {-k1 k'l.)"H.l/o --:-7> \('1r2 k.'~2 c..~
3 ··-1("1k'2 0
:::> ":: . 1 2-- t1 t4 0 o .3 ·-~t'2
I















![II. LUTHER PICTURED BY PENCIL AND PEN. - … · Web view[[@Page:22]] II. LUTHER PICTURED BY PENCIL AND PEN. Dr. Martin Luther der Deutsche Reformator. In bildlichen Darstellungen](https://img.pdfslide.org/doc/110x75/5ffe87d1af46a526672d3935/ii-luther-pictured-by-pencil-and-pen-web-view-page22-ii-luther-pictured.jpg)