Embed Size (px)
Citation preview

Skriptum zur Vorlesung
Mathematik 2
für Ingenieure
Differentialgleichungen
Prof. Dr.-Ing. Norbert Höptner
(nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner)
Fachhochschule Pforzheim
FB2-Ingenieurwissenschaften, Elektrotechnik/Informationstechnik
Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) I
Inhalt
1.1 Einführung
1.2 DGL 1. Ordnung
1.2.1 Trennung der Variablen 1.2.2 Integration durch Substitution 1.2.3 Lineare DGL 1. Ordnung 1.2.3.1 Homogene lineare DGL 1. Ordnung 1.2.3.2 Inhomogene lineare DGL 1. Ordnung
1.3 DGL 2. Ordnung
1.3.1 y'' = const. 1.3.2 y'' = f(x,y') 1.3.3 y'' = f(y) 1.3.4 y'' = f(y,y') 1.3.5 y'' = f(y,y') + S(x) 1.3.6 Erzwungene Schwingungen
1.4 Partielle DGL am Beispiel der Wellengleichung
Übungsblatt DGL 1
Übungsblatt DGL 2
Ergänzungsaufgaben zum Kapitel "Differentialgleichungen"

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 1
1. Differentialgleichungen
1.1 Einführung
Definitionen: 1. Jede Gleichung, die Ableitungen der gesuchten Funktion enthält, ist eine Differentialgleichung (DGL).
2. Jede Funktion, welche die DGL erfüllt, ist eine Lösung bzw. ein Integral der DGL.
Einführendes Beispiel: "Freier Fall"
x
g0
t = 0
t = t1
&&
&
&
& (*)
(**)
xd
dt
d x
dtg dt
d x g dt
d x g dt
x g t C
d x
dtg t C dt
d x g t dt C dt
d x g t dt C dt
x g t C t C
=
=
→ =
→ =
→ = +
= +
→ = +
→ = +
→ = + +
∫
∫∫
∫
∫ ∫ ∫
1
1
1
1
21 2
1
2
a = &&x = g
Ziel: x(t) = ?
Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 2
C1 und C2 aus Anfangsbedingungen, hier: t = 0 → x(t=0) = 0 ; &x (t=0) = 0
⇒ (*): C1 = 0 Anfangsgeschw. ⇒ (**): C2 = 0 Anfangsort
⇒ Lösung: x g t= ⋅ ⋅1
22
Definition: Ordnung der DGL = höchste vorkommende Ableitung
Beispiel: - dy/dx = y ⇒ n = 1 / 1. Ordnung - d2y/dx2 = y’ ⇒ n = 2 / 2. Ordnung
übliche Schreibweisen: Ableitung nach Zeit, dy/dt = &y " " Weg, dy/dx = y’
allgemeine Lösung: unbestimmte Integrationskonstanten (C1 , C2, ...)
Satz: Die allg. Lösung einer DGL n-ter Ordnung enthält genau n unbestimmte Integrationskonstanten.
spezielle Lösung: Integrationskonst. aus Anfangswerten bzw. Randbedingungen (s.o.)
partikuläre Lösung: Lösung mit weniger als n unbest. Konstanten
Beispiel: d y
dxa y
2
22= −
Allg. Lösung: ( ) ( )y C ax C ax= +1 2sin cos (nachprüfen!)
Spez. Lösg.: z.B. ( )y ax= sin (C1=1, C2=0)
Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 3
Einteilung gewöhnliche partielle DGL
Anzahl Veränderliche 1 mehrere
Beispiel: d y
dty
2
2 02 0+ =ω
y(t) = ?
Schwingungsgleichung
d y
dt c
d y
dx
2
2 2
2
2
1= − ⋅
y(x,t) = ?
Wellengleichung
Darstellung Beispiel 2. Ordnung
explizit y'' = f (x, y, y')
implizit F(x, y, y', y'') = 0
Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 4
1.2 DGL 1. Ordnung
Gleichung zwischen der gesuchten Funktion y = y(x) und deren Ableitung y' = dy/dx
explizite Darstellung: gegeben: y' = f(x, y) (DGL - 1)
gesucht: y(x) = ?
Beispiel: y' = y y-Wert = Steigung, Vermutung: y = ex
Vorgehen: dy/dx = y
dy/y = dx | ∫
∫1/y dy = ∫dx
→ ln |y| = x + C | e
|y| = ex+C
⇒ y = k ex allgemeine Lösung (mit k = ± eC)
Aus der allg. Lösung erhält man die spez. Lösung aus der Randbedingung y(x0) = y0
spezielle Lösung (Beispiel)
Randbedingung = Punkt Po (1,2)
y(x0) = y(1) = 2
2 = k e1
→ k = 2 / e1 ≈ 0,74
⇒ y = 0,74 ex

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 5
1.2.1 Trennung der Variablen
Lösungsmethode für DGLn der Form:
( ) ( )′ = ⋅y g x h y (DGL - 2)
1. Behandlung des Differentialquotienten dy/dx wie einen "normalen" Quotienten.
2. Alle Größen mit x auf eine Seite bringen; Größen mit y auf die andere:
( ) ( )dy
dxg x h y= ⋅ ( ) ( )dy
h yg x dx=
3. Integration auf beiden Seiten:
Lösung: d y
h yg x dx C
( )( )= +∫∫ (DGL - 3)
speziell: y' + f(x) y = 0 Lösung: y k ef x dx
= ∫− ( )
Beispiel:
y' - x² y² - x² = 0
Vorgehensweise
y' = x² ( 1 + y² ) 1. Auflösen nach y'
dy / (1+y²) = x² dx 2. Trennen der Veränderlichen
arctan(y) =1/3 x³ + C 3. Integration
y = tan(1/3 x³ + C ) 4. Allgemeine Lösung

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 6
1.2.2 Integration durch Substitution
a) Lösungsmethode für DGLn der Form:
( )′ = + +y f ax by c (DGL - 4)
Lösungsweg:
1. Substitution ( )u x y ax by c, = + +
2. Rückführung auf (DGL - 2) ′ = + ′u a by
( )′ = + ⋅u a b f u (y' = f(u), DGL - 4)
3. Trennung der Variablen (s.o) ( )g x = 1
( ) ( )h u a b f u= + ⋅
4. Einsetzen in Lösungsformel (DGL - 3)
Beispiel:
y' = x + y Substitution: u = x + y
→ u' = 1 + y' = 1 + x + y = 1 + u
⇒ u' = 1 + u
Trennen d. Variablen: du / (1+u) = dx
Integration: ln |1 + u| = x + C
→ 1 + u = k ex (k = ± eC)
⇒ u = k ex - 1
"alte" Variablen x + y = k ex - 1
⇒ allgemeine Lösung: y = k ex - x - 1
(Probe durch Einsetzen von y in DGL)

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 7
b) Lösungsmethode für DGLn der Form:
′ =
y f
y
x (DGL - 5)
Lösungsweg:
1. Substitution ( )u x yy
x, =
2. Rückführung auf (DGL - 2) y u x= ⋅ ′ = ′ ⋅ +y u x u (Produktregel)
( )xu u f u′ + =
( )[ ]′ = ⋅ −ux
f u u1
3. Trennung der Variablen (s.o) ( )g xx
=1
( ) ( )h u f u u= −
4. Einsetzen in Lösungsformel (DGL - 3)
Beispiel: xy y x′ − − = 0
Auflösen nach y': ′ = + =
y
y
xf
y
x1
Substitution: uy
x=
Rückführung: ′ = ′ +y u x u
xu u u′ + = +1
xu′ = 1
Trennung: ′ =ux
1
dux
dx=1
Integration: Cxu += ln
"alte" Variablen: xCxxy ⋅+⋅= ln = allg. Lösung
Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 8
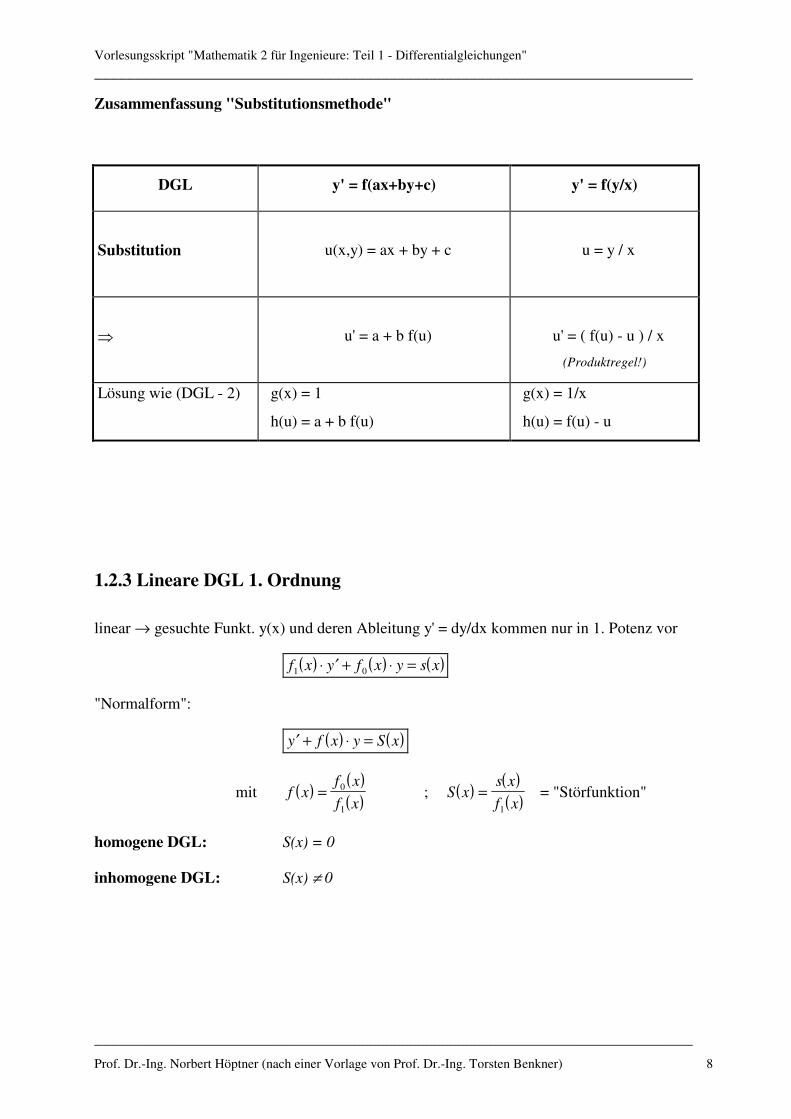
Zusammenfassung "Substitutionsmethode"
DGL y' = f(ax+by+c) y' = f(y/x)
Substitution
u(x,y) = ax + by + c
u = y / x
⇒
u' = a + b f(u)
u' = ( f(u) - u ) / x
(Produktregel!)
Lösung wie (DGL - 2) g(x) = 1
h(u) = a + b f(u)
g(x) = 1/x
h(u) = f(u) - u
1.2.3 Lineare DGL 1. Ordnung
linear → gesuchte Funkt. y(x) und deren Ableitung y' = dy/dx kommen nur in 1. Potenz vor
( ) ( ) ( )f x y f x y s x1 0⋅ ′ + ⋅ =
"Normalform":
( ) ( )′ + ⋅ =y f x y S x
mit ( )( )( )f x
f x
f x= 0
1
; ( )( )( )S x
s x
f x=
1
= "Störfunktion"
homogene DGL: S(x) = 0
inhomogene DGL: S(x) ≠ 0

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 9
1.2.3.1 Homogene lineare DGL 1. Ordnung
kann stets durch Trennen der Variablen gelöst werden:
( )dy
yf x dx= −
Integration: ( ) Cdxxfy +−= ∫ln
( )∫±=
− dxxfC
ey
allg. Lösung: ( )
y K ef x dx
= ⋅ ∫−
Beispiel: ( ) ( )′ ⋅ + ⋅ =y x y xcos sin 2 0
Normalform: ( )′ + ⋅ =y y x2 0sin mit ( ) ( ) ( )sin sin cos2 2x x x= ⋅ ⋅
Lösungsformel: ( ) ( )f x x= ⋅2 sin
⇒ ( )y K e x= ⋅ 2cos

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 10
1.2.3.2 Inhomogene lineare DGL 1. Ordnung
Lösungsmethode: "Variation der Konstanten"
1. Lösung der homogenen DGL (S(x) = 0):
( )
y K ef x dx
= ⋅ ∫−
2. Ersetzen von K durch noch unbekannte Funktion K(x):
( ) ( )y K x e
f x dx= ⋅ ∫−
3. Differenzieren:
( ) ( ) ( ) ( )′ = ′ ⋅ ∫ − ⋅ ∫ ⋅− −
∫y K x e K ed
dxf x dx
f x dx f x dx Produktregel
( ){ } ( )′ = ′ − ⋅ ⋅ ∫−
y K K f x ef x dx
4. Einsetzen in Normalform (s.o.):
( ){ } ( ) ( ) ( ) ( )′ − ⋅ ⋅ ∫ + ⋅ ⋅ ∫ =− −
K K f x e K f x e S xf x dx f x dx
daraus folgt:
( ) ( )′ = ⋅ ∫+
K S x ef x dx
5. Integration:
( ) ( ) ( )K x S x e dx C
f x dx= ⋅ ∫ +∫
⇒ allg. Lösungsformel für inhomogene lineare DGL 1. Ordnung:
( ) ( ) ( ) ( )y x e S x e dx C
f x dx f x dx= ∫ ⋅ ∫ +
−
∫
Homogene lineare DGL = Spezialfall der inhomogenen DGL, d.h. Lösungsformel geht für S(x) = 0 in Lösungsformel für homog. DGL über.

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 11
Beispiel: RL-Wechselstromkreis
Überführen in Normalform:
( )di
dta i b t+ ⋅ = ⋅sin ω mit a
R
L= u. b
U
L= 0
→ ( )f x a= ; ( ) ( )S x b t= ⋅sin ω
Einsetzen in Lösungsformel: ( ) ( ) ( ) ( )y x e S x e dx C
f x dx f x dx= ∫ ⋅ ∫ +
−
∫
( )f x dx a dt a t= = ⋅∫∫
( ) ( ) ( ) ( ) ( )[ ]K S x e dx b t e dtb e
aa t t C
f x dx at
at
= ⋅ ∫ = ⋅ ⋅ =⋅+
⋅ ⋅ − ⋅ +∫ ∫ sin sin cosωω
ω ω ω2 2
⇒ ( ) ( ) ( )[ ]i t C eb
aa t tat= ⋅ +
+⋅ ⋅ − ⋅−
2 2ωω ω ωsin cos allg. Lösung
spezielle Lösung: i(t=0) := 0 ( )i Cb
a0 02 2= −
+=
ωω
!
⇒ Cb
a=
+ωω2 2
⇒ ( ) ( ) ( )[ ]i tb
ae a t tat=
+⋅ ⋅ + ⋅ − ⋅−
2 2ωω ω ω ωsin cos
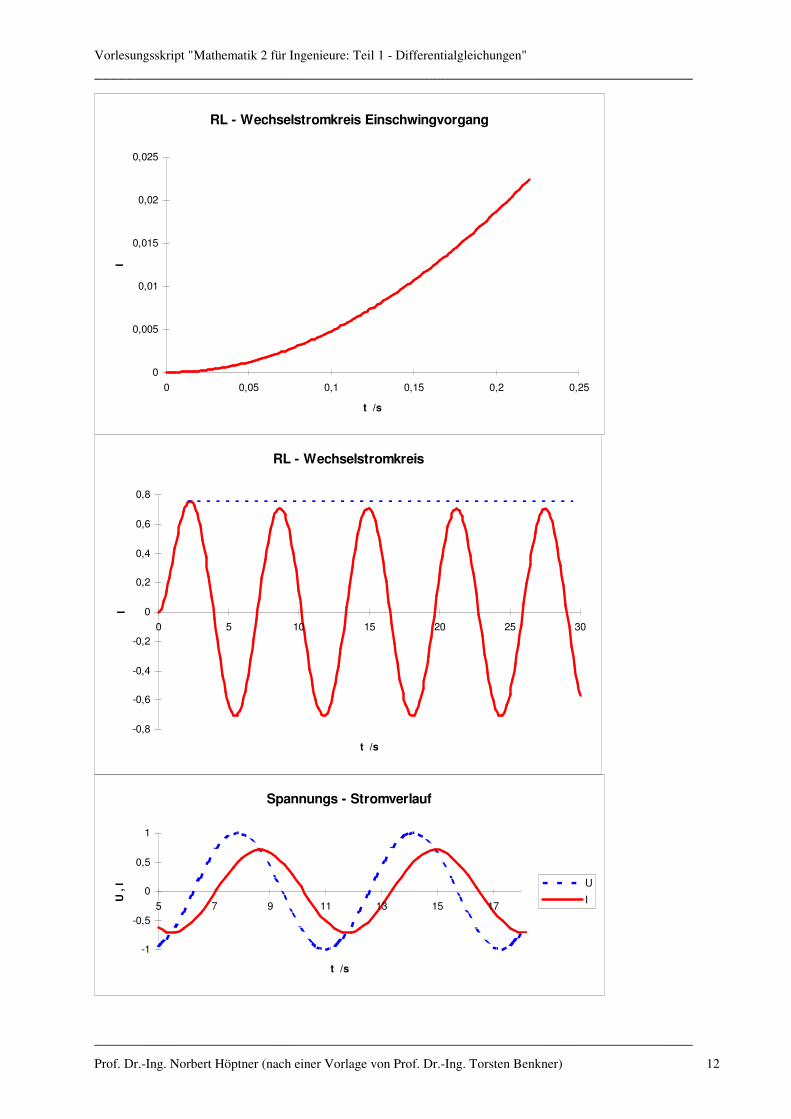
Interpretation: für "große" t wird e-at "klein" → Einschwingvorgang!
stationärer Zustand: ( ) ( ) ( )[ ]i tb
aa t t=
+⋅ ⋅ − ⋅2 2ω
ω ω ωsin cos (*)
Kirchhoff: u u uL R+ =
u = Wechselspannung: ( ) ( )u u t U t= = 0 sin ω
⇒ ( )Ldi
dtR i U t+ ⋅ = ⋅0 sin ω
Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 12
RL - Wechselstromkreis Einschwingvorgang
0
0,005
0,01
0,015
0,02
0,025
0 0,05 0,1 0,15 0,2 0,25
t /s
I
RL - Wechselstromkreis
-0,8
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0,8
0 5 10 15 20 25 30
t /s
I
Spannungs - Stromverlauf
-1
-0,5
0
0,5
1
5 7 9 11 13 15 17
t /s
U , I U
I
Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 13
Phasenverschiebung ϕ
Additionstheoreme: i(t) kann auch als reine Sinusschwingung mit Phasenverschiebung geschrieben werden.
a = A cosϕ ω = A sinϕ (**) in (*) : a sinωt - ω cosωt = A cosϕ sinωt - A sinϕ cosωt [Bronstein] = A sin(ωt - ϕ) A und ϕ aus (**): A sinϕ / A cosϕ = ω/a ⇒ tanϕ = ω/a ⇒ ϕ = arctan(ω/a) = arctan(ωL/R) andererseits: A² sin²ϕ + A² cos²ϕ = a² + ω² |--------------| = 1
→ A = a2 2+ ω
Endergebnis: ( )ϕωω
−+
= tLR
UtI o sin
²²²)(
Î(ω)
Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 14
1.3 DGL 2. Ordnung
Implizite Form: ( )F y y y x, , ,′ ′′ = 0
Explizite Form: ( )′′ = ′y f y y x, ,
es treten zwei Integrationskonstanten C1 und C2 auf, die durch zwei Rand- bzw. Anfangsbe-dingungen bestimmt werden können (spezielle Lösung).
hier behandelte Fälle:
1.) y'' = c siehe z.B. "freier Fall"
Lösung: 2* Integrieren "zu Fuß"
2.) y'' = f(x, y`) Lösung: Rückführung auf DGL 1. Ordnung
3.) y'' = f(y) homogene DGL (z.B. "Pendel")
Lösung: mit Formel bzw. Multipl. mit y'
4.) y’’ = f(y,y’) homogene DGL (z.B. gedämpfte Schwingungsglg.)
Lösung: Charakteristisches Polynom
5.) y’’ = f(y,y’) + S(x) inhomogene DGL (z.B. erzwungene Schwingungen)
Lösung: Y = Yh + Yp
Yh aus Fall 4.), Yp Ansatz aus Tabelle
1.3.1 y'' = const.
zweimalige Integration führt zur gesuchten Funktion y(x)
Beispiel: geradlinige Bewegung mit Kraft F ≠ f(s), Masse m
m s F⋅ =&& ("Newtonsches Kraftgesetz")
zweimalige Integration ergibt: ( )s tF
mt C t C= ⋅ + ⋅ +
1
22
1 2

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 15
1.3.2 y'' = f(x,y')
rechte Seite enthält nicht y(x)
Substitution: ( ) ( )u x y x= ′
Rückführung: ( )′ =u f u x,
Lösung für u(x) siehe DGL 1. Ordnung (einschl. Integrationskonstante C1)
Integration: ( ) ( )y x u x C dx C= +∫ , 1 2 (allgemeine Lösung)
Beispiel: ( ) ( )′′ + ′ =y x y xcos sin 0
explizite Form: ( )′′ = − ′ ⋅y y xtan
Substitution: u y u y= ′ ′ = ′′
Rückführung: ( )′ = − ⋅u u xtan
Lösung z.B. durch Trennung der Variablen:
( )du
ux dx= − tan
( )du
ux dx∫ ∫= − tan
( ) ( ) ( )1lncoslncoslnln CxKxu +=+=
( )xCu cos~
1 ⋅=
Berechnung von y(x):
( )xCuy cos~
1 ⋅==′
( ) ( ) 211 sin~
cos~
CxCdxxCy +⋅=⋅= ∫
Anfangsbedingungen (gegeben): y(0) = 1 ; y'(0) = 2
y(0) = 1 = C1 sin(0) + C2 = C2 y'(0) = 2 = C1 cos(0) = C1
⇒ spezielle Lösung: ( )y x= +2 1sin
Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 16
1.3.3 y'' = f(y)
rechte Seite enthält nur y
Lösungsverfahren: Multiplikation mit y'
( )′ ⋅ ′′ = ⋅ ′y y f y y
Beachte: ( )′ ⋅ ′′ = ′y yd
dxy
1
22
⇒ ( ) ( ) ( )1
22d
dxy f y y f y
dy
dx′ = ⋅ ′ =
( ) ( )d y f y dy′ =2 2
Integration: ( )′ = +∫y f y dy C212
( )′ = ± +∫y f y dy C2 1
Lösung durch Trennung der Variablen (führt hier meistens auf "schwieriges" Integral!)
Beispiel 1: "Fall aus großer Höhe"
Es soll die Auftreffgeschwindigkeit beim Fall aus h0 = 30 km Höhe berechnet werden.
x
0
R
30km
FG
Newtonsches Gravitationsgesetz:
( ) xmx
mMxF &&⋅=−=
2γ
an Erdoberfläche (x = R) ist F(x) = - m.g
m gmM
R⋅ = γ 2 → 2RgM ⋅=γ
⇒ ( )&&x gR
xf x= − ⋅ =
2
2
Typ: y'' = f(y) Formel s.o.
⇒ & ²²
x g Rx
dx C= − +∫21
Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 17
∫1/x² dx = ∫ x-² dx = - 1/x
→ &²
xg R
xC= +
2
Anfangsbed.: t = 0 &x = 0 → C = - 2 g R² / xo xo: Höhe bei t = 0
Auftreffgeschwindigkeit v xg R
x
g R
xo
= = −&² ²2 2
x = R + h , Auftreffen: h = 0 ho = 30 km
→ v g RR R ho
= −+
21 1
²( )
mit 1/R - 1 / (R + ho) = (R + ho - R)/ (R + ho) = ho / R(R + ho)
→ v g Rh
R h
o
o
=+
2( )
R = 6370 km → v = 773 m/s
Beispiel 2: "Mathematisches Pendel"
ϕ'' = - ωo² ϕ (ϕmax klein, d.h. sin ϕ ≈ ϕ) |------| f(ϕ)
→ ′ = ± − +ϕ ω ϕo C2 2 ± : Richtung
Anfangsbedingung:
ϕmax : ϕ'(ϕmax) = 0 → C = ωo² ϕ max 2

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 18
→ ′ = ± −ϕ ω ϕ ϕ02 2max
|---------| immer ≥ 0, da ϕ max ≥ ϕ
→ d
dto
ϕ
ϕ ϕω
max2 2−
= ±
→ arcsin(ϕ / ϕ max) = ± ωo t + C | sin(...) (Bronstein: ∫ =− a
x
xa
dxarcsin
22 )
→ ϕ / ϕ max = sin(±ωo t + C)
→ ϕ = ϕ max sin(±ωo t +C) Anfangsbedingung: ϕ(t = 0) = ϕ max → ϕ max = ϕ max sin(C) C = π/2: sin → cos [ sin (x+π/2) = cos x ] → ϕ = ϕ max cos(ωo t) (± bestimmt durch Anfangsbed.)
1.3.4 y'' = f(y,y')
Satz: Sind Y1 und Y2 Lösungen, dann ist auch Y = C1Y1 + C2Y2 eine Lösung ebenso: Y = u(t) + j v(t) sei Lösung, dann sind der Realteil u(t) und der Imaginär-teil v(t) einzelne Lösungen.

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 19
Beispiel: ′′ + =y y 0
Lösung: y e jx= (spez. Lsg.)
Satz v. Euler: ( ) ( ) ( )y x x j x= + ⋅cos sin
⇒ cos(x) und sin(x) sind auch Lösungen der DGL (Probe machen!)
Allgemeiner Lösungsansatz für lineare homogene DGL mit konst. Koeffizienten:
( )y x e x= λ
Lösungsweg: Ansatz in DGL einsetzen, λi bestimmen ("Charakteristische Gleichung")
homogene lineare DGL 2. Ordnung: ′′ + ′ + =y a y a y1 0 0
Beispiel: Schwingungsgleichung
y'' + d y' + ωo² y = 0 / \ Dämpfung Eigenfrequenz des ωo² > 0 : Schwingung prop. y’ = v ungedämpften Systems ωo² ≤ 0 : keine Schwingung
Charakteristische Gleichung durch Einsetzen des Ansatzes y = eλt:
⇒ λ λ ωλ λ λ202 0⋅ + ⋅ + ⋅ =e d e et t t
Lösung der ch. Gl.:
λω
1 2
24
2/
²=
− ± −d d o
falls λ1 ≠ λ2: 2 Lösungen Y e Y et t
1 21 2= =λ λ,
⇒ allgemeine Lösung: Y = C1Y1 + C2Y2

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 20
allg. Vorgehensweise 1. Charakteristische Gleichung
2. Berechnen von λ
3. y(x) = Linearkombination Y
3 Fälle: λλλλ1 , λλλλ2 Lösungstyp Name
a) konjugiert komplex, negativ ( )e A t B tt− +δ ω ωcos sin gedämpfte Schwingung
b) λ1 ≠ λ2, λ1 , λ2 ∈ R C e C et t
1 21 2λ λ+ Kriechfall
c) λ1 = λ2 ( )C t C et
1 2⋅ + ⋅ λ aperiodischer Grenzfall
a) gedämpfte Schwingung, d < 2 ωωωωo
λω
ω ρ ω1 2
221 4
2 2 4/
² ²=
− ± − −= − ± − = − ±
d d dj
dj
o
o ω < ωo
ω = Frequ. des gedämpften Systems
Y C e C et t= +1 21 2λ λ λ: komplex
( )Y C e C e e C e C ej t j t t j t j t= + = +− + − − − −
1 2 1 2( ) ( )ρ ω ρ ω ρ ω ω (*)
/ ---------|-----------
Einhüllende Schwingung
aus Schwingungsteil: ( ) ( )e t j tj tω ω ω= + ⋅cos sin (Euler)
( ) ( )C t j t C t j t C C t j C C t
A B
A t j B t
1 2 1 2 1 2cos sin cos sin ( )cos ( )sin
cos sin
ω ω ω ω ω ω
ω ω
+ + − = + + −
= +
in (*) : ( )Y A t j B t et= + −cos sinω ω ρ
Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 21
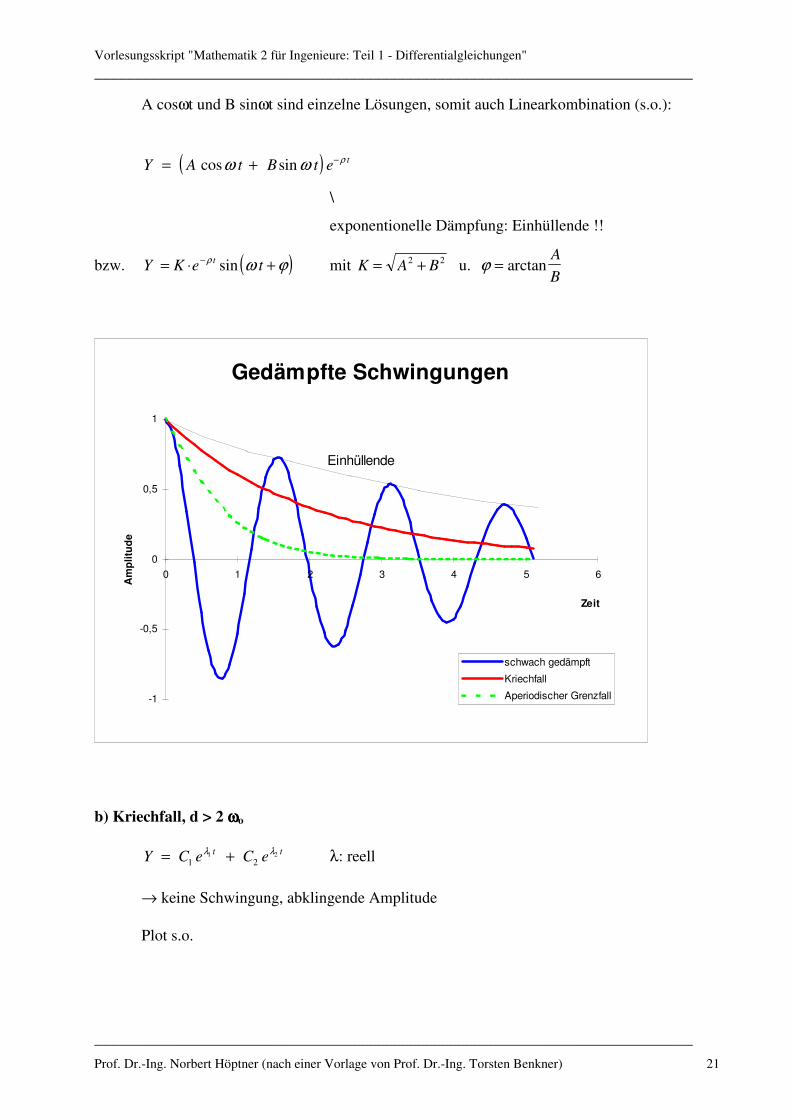
A cosωt und B sinωt sind einzelne Lösungen, somit auch Linearkombination (s.o.):
( )Y A t B t et= + −cos sinω ω ρ
\
exponentionelle Dämpfung: Einhüllende !!
bzw. ( )Y K e tt= ⋅ +−ρ ω ϕsin mit K A B= +2 2 u. ϕ = arctan
A
B
Gedämpfte Schwingungen
-1
-0,5
0
0,5
1
0 1 2 3 4 5 6
Zeit
Am
plitu
de
schwach gedämpft
Kriechfall
Aperiodischer Grenzfall
Einhüllende
b) Kriechfall, d > 2 ωωωωo
Y C e C et t= +1 2
1 2λ λ λ: reell → keine Schwingung, abklingende Amplitude Plot s.o.

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 22
c) aperiodischer Grenzfall, d = 2 ωωωωo
λ1 = λ2 da = 0
Beispiel: y’’ + 2 y’ + y = 0 → λ1 = λ2 = -1 ergibt nur eine Lösung y = C e-ρt ist aber nicht allgemeine Lsg mit 2 Integrationskonstanten!
Vorgehensweise: Variation der Konstanten (siehe 1.2.3.2) Y C t e t= −( ) ρ
( )Y C e C e C C et t t' ' '= − = −− − −ρ ρ ρρ ρ
( )Y C e C e C e C e C C C et t t t t' ' ' ' ' ' ² ' ' ' ²= − − + = − +− − − − −ρ ρ ρ ρ ρρ ρ ρ ρ ρ2
in DGL einsetzen (e-ρt kürzen)
{y dy y C C C d C d C C
C d C d C
o
y y
o
y
o
' ' ' ' ' ' ² '
' ' ( ) ' ( ² )
'' '
+ + = − + + − + =
→ + − + − + =
ω ρ ρ ρ ω
ρ ρ ρ ω
2 2
2
2 0
2 0
1 244 344 1 24 34
Fall: ρ = d/2 , 4 02ωo d− =²
→ + − + − +
=
− =
C d d Cd d
Co
do
' ' ( ) '² ²
²0
2
40
4 20
2
1231 244 344
ω
ω
⇒C'' = 0
2* Integrieren: C' = C1 C = C1 t + C2 ⇒ Y = (C1 t + C2) e
-ρt Anfangsbed.: t = 0 Y = C2 Endebed.: t → ∞ Y → 0 Plot s.o.

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 23
1.3.5 y'' = f(y,y') + S(x)
Inhomogener Fall mit Störfunktion S(x), z.B. bei erzwungenen Schwingungen
Inhomogene lineare DGL n-ter Ordnung mit konst. Koeffizienten
Allgemein: Die allgemeine Lösung Y = Y(x) ist die Summe aus der Lösung der allgemeinen Lösung yh der zugehörigen homogenen DGL und einer beliebigen partikulären Lösung yp der inhomogenen DGL:
( ) ( ) ( )y x y x y xh p= +
Lösungsansatz für partikuläre (spezielle) Lösung hängt vom Typ der Störfunktion ab:
angepaßter Lösungsansatz, d.h. "ähnliche" Funktion wählen
Typ I: ( )S x S S x S x S xn
n= + + + +0 1 22 K
Lösungsansatz: ( )y x s s x s x s xn
n= + + + +0 1 22 K
Beispiel:
y’’ + 2y’ - 8y = x
homogene Lsg.: λ² + 2λ - 8 = 0
λ1 2 1 1 8/ = − ± +
→ λ1 = 2 λ2 = - 4
⇒ yh = C1 e
2x + C2 e
-4x
inhomogene Lsg.: yp = A + Bx
yp' = B
yp'' = 0

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 24
Einsetzen in DGL: 2B - 8A - 8Bx = x
Koeff.vgl. nach Potenzen -8B = 1 → B = -1/8 2B -8A = 0 → -1/4 - 8A = 0 → A = -1/32
partik. Lsg: yp = -1/32 - x/8
⇒ allgem. Lsg.: y = C1 e2x
+ C2 e-4x
- x/8 -1/32
Typ II: ( )S x K ecx= ⋅
Lösungsansatz: ( )y x A ecx= ⋅ (falls c keine Lsg. d. Charakterist. Glg.)
bzw. ( )y x A x ecx= ⋅ ⋅ (falls c einfache Lsg. " " )
bzw. ( )y x A x ecx= ⋅ ⋅2 (falls c doppelte Lsg. " " )
Beispiel: ′′ − ′ + =y y y e x15 56 5 4 3,
homog. Lsg.: ( ) ( )( )y e C x C xh
x= ⋅ + ⋅7 51 20 5 0 5, cos , sin , (nachrechnen!)
Ansatz: y A ep
x= ⋅ 3
Einsetzen: A e A e A e ex x x x⋅ ⋅ − ⋅ ⋅ ⋅ + ⋅ ⋅ = ⋅3 15 3 56 5 42 3 3 3 3,
⇒ A = 0,195
Allg. Lsg.: ( ) ( ) ( )( )y x e C x C x ex x= ⋅ + ⋅ +7 5
1 230 5 0 5 0 195, cos , sin , ,

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 25
Typ III: ( ) ( ) ( )S x S x S x= ⋅ + ⋅1 2cos sinω ω
Lösungsansatz: ( ) ( ) ( )y x A x B x= ⋅ + ⋅cos sinω ω
(Ansatz muß immer aus cos- und sin-Term bestehen, auch wenn S(x) nur aus einem Term besteht!)
Spezialfall: ω ist eine Lsg. der Charakt. Glg.
dann ( ) ( ) ( )[ ]y x x A x B x= ⋅ ⋅ + ⋅cos sinω ω wählen
Beispiel: ( )′′ − ′ + = ⋅y y y x4 4 2 3cos
homog. Lsg.: ( ) ( )y x K K x eh
x= + ⋅ ⋅1 22
(bitte nachrechnen, Hilfe: siehe Kap. 1.3.4, aperiod. Grenzfall)
Ansatz: ( ) ( ) ( )y x A x B xp = ⋅ + ⋅cos sin3 3
Einsetzen: ( ) ( )′ = − +y A x B xp 3 3 3 3sin cos
( ) ( )′′ = − −y A x B xp 9 3 9 3cos sin
( ) ( ) ( ) ( ) ( ) ( ) ( )− − + − + + =9 3 9 3 12 3 12 3 4 3 4 3 2 3A x B x A x B x A x B x xcos sin sin cos cos sin cos!
→ ( ) ( ) ( ) ( ) ( )− − + − =5 12 3 12 5 3 2 3A B x A B x xcos sin cos!
→ − − =5 12 2A B 12 5 0A B− =
⇒ A B= − = −10
169
24
169
partik. Lsg.: ( ) ( )y x xp = − −10
1693
24
1693cos sin
⇒ Allg. Lsg. der inhomogenen DGL: ( ) ( ) ( ) ( )y x K K x e x xx= + − −1 2
2 10
1693
24
1693cos sin

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 26
Typ IV: ( ) ( ) ( )S x f x f x= +1 2 Summe zweier Funktionen
Lösungsweg:
1. Lösung der homogenen DGL
2. Lösung der inhomogenen DGL mit S1(x) = f1(x)
3. Lösung der inhomogenen DGL mit S2(x) = f2(x)
4. Gesamtlsg.: ( ) ( ) ( )y x y x y x y xh( ) = + +1 2
Lineare DGL n-ter Ordnung mit konst. Koeffizienten
( )ad y
dxa
d y
dxa
dy
dxa y S xn
n
n n
n
n+ + + + =−
−
−1
1
1 1 0K
Anmerkungen zur inhomogenen linearen DGL n-ter Ordnung mit konst. Koeffizienten:
• Die Parameter (z.B. A, B, ϕ) sind so zu bestimmen, daß die Funktion die lineare DGL löst.
Dies führt zu einem linearen Gleichungssystem mit genau einer Lösung.
• Bei periodischen Störfunktionen kann man auch einen komplexen Ansatz ( )y C ep
j ax= ⋅ −ϕ
verwenden.
• Falls Störfunktion nicht Typ I...IV: Reihen- bzw. Fourierentwicklung möglich.
Zusammenfassung:
Das Vorgehen zur Lösung der inhomogenen linearen DGL 2. Ordnung mit konstanten Koeffizienten y'' + d y' + ωo² y = S(x) lautet: 1. Bestimmung der allgemeinen Lösung yh der homogenen DGL:
y'' + d y' + ωo² y = 0 2. Lösungsansatz für partikuläre Lösung yp
3. Addition von 1. und 2. zur allgemeinen Lösung: y(x) = yh + yp

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 27
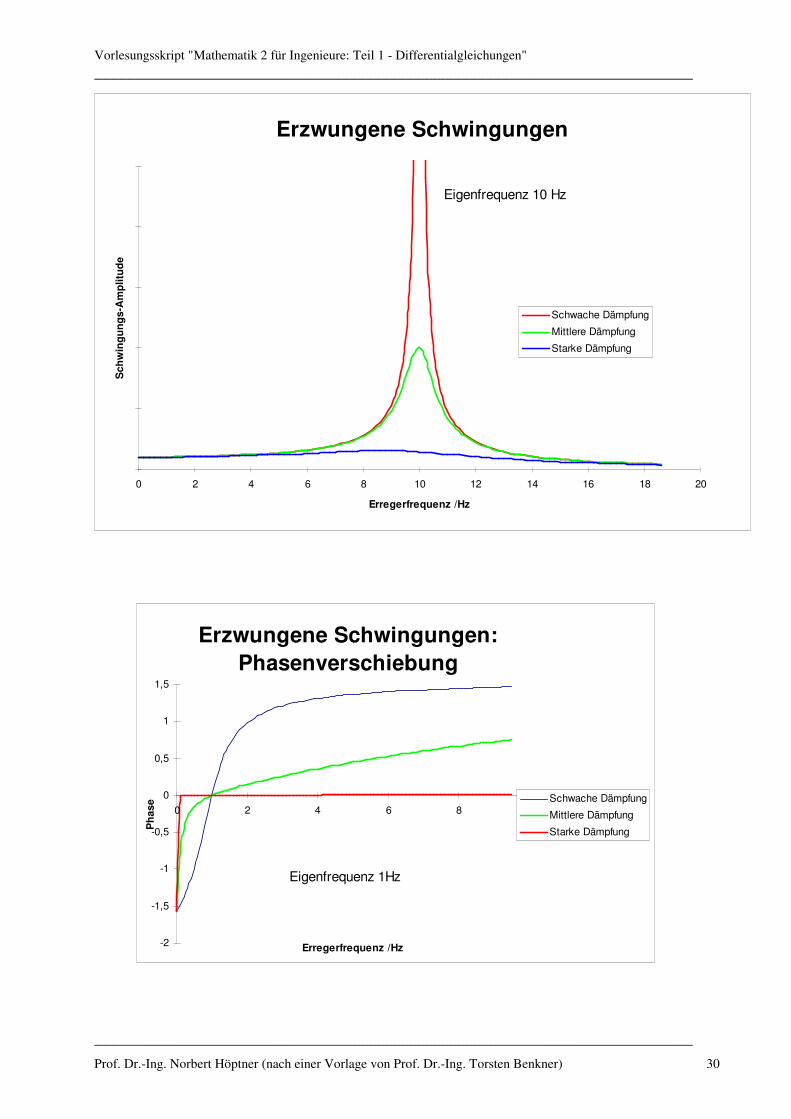
1.3.6 Erzwungene Schwingungen
Wirkt auf eine mechanische oder elektrische Anordnung eine periodische Kraft bzw. Spannung, z.B.
( ) ( )F t F t= ⋅0 0sin ω bzw. ( ) ( )U t U t= ⋅0 0sin ω
so führt das System erzwungene Dauerschwingungen aus.
Beschreibende DGL: ( )′′ + ⋅ ′ + ⋅ =y d y y S xω02
Beispiel 1: Elektromagnetischer Reihenschwingkreis
gilt ebenso für mechanisch gedämpfte Schwinger, z.B. Federpendel,... (siehe Physik I)
• Zuerst homogene Lösung: Freie Schwingung (Ua = 0)
am interessantesten: freie gedämpfte Schwingung (s. Kap. 1.3.4a).
Lösung mit Charakteristischem Polynom : I = eλt
→ λ2 + 2δλ + ωo2 = 0
für ωo > δ : λ δ ω δ δ ωω
1 22 2
/ = − ± − = − ±j jo D
D
1 24 34
allgemeine Lösung: ( )tjtjt
hDD eCeCetI
ωωδ −− +⋅= 21)(
Aus Kirchhoffschen Gesetzen:
&& &&
I I IU
L
mitR
Lund
LC
o
a
o
+ + =
= =
2
2
1
2δ ω
δ ω

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 28
mit ωDLC
R
L= −
1
4
2
2 ωD < ωo wegen Dämpfung durch R
• Partikuläre Lösung
Annahme: sinusförmige Spannung U U ea
j t= ⋅$ ω
→ && &$
I I I jU
Leo
j t+ + =2 2δ ω ω ω
partikulärer Lösungsansatz (siehe Kap. 1.3.5: periodische Störfunktion)
( )I t I ep
j t( ) $= −ω ϕ
⇒ inhomogene Lösung: ( ) ( )ϕωωωδ −−− ⋅++⋅= tjtjtjteIeCeCetI DD ˆ)( 21
Die Lösung der DGL der erzwungenen Schwingung besteht aus der von den Anfangsbedingungen abhängigen Lösung der homog. DGL, durch die der Einschwingvorgang beschrieben wird ( e
t
t
−→∞ →δ 0 ), und aus einer nur von den Parametern des
schwingungsfähigen Systems abhängigen partikulären Lösung der inhomogenen DGL, welche die ungedämpfte Schwingung des Dauerzustandes nach Abklingen des Einschwingvorgangs wiedergibt.
Bestimmen von Î und ϕ : durch Einsetzen von Ip in DGL
( )&I t j Ip p= ⋅ω ; &&I Ip p= − ⋅ω 2
→ − + + = ⋅ω δω ωω ω2
022I j I I
j U
Lep p p
j t$
( )ω ω δω ω ϕ02 2 2− + = ⋅j j
U
LIe
j$
$ Euler: e jjϕ ϕ ϕ= +cos sin
( ) ( )ω ω δωω
ϕ ϕ02 2 2− + = ⋅ − +j
U
LIj
$
$sin cos

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 29
Vergleich von Real- und Imaginärteil:
→ ( )sin$
$ϕ
ωω ω= ⋅ −
LI
U
202 cos
$
$ϕ
ωδω= ⋅
LI
U2
tansin
cosϕ
ϕϕ
ω ωδω
= =−2
02
2 ⇒ ϕ
ωω=
−arctan
LC
R
1
sin cos2 2 1ϕ ϕ+ =
( )[ ]LI
U
$
$ωω ω δ ω
− + =
2
202 2 2 24 1
( )
$
$$
I LU
U
R LC
2
2
22
202 2 2 2
2
22
4 1=
⋅
− +=
+ −
ω
ω ω δ ω ωω
⇒ $$ $
IU
Z
U
R LC
= =
+ −
2
21ω
ω
mit Scheinwiderstand Z R LC
= + −
2
21ω
ω
Stromverlauf nach dem Einschwingen ( t >>1
δ): ( ) ( ) ( )
I t I t I ep
j t≈ = ⋅ −$ ω ϕ
Resonanz für ω ω= =oLC
1 → Î = Û / R
Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 30
Erzwungene Schwingungen
0 2 4 6 8 10 12 14 16 18 20
Erregerfrequenz /Hz
Sch
win
gu
ng
s-A
mp
litu
de
Schwache Dämpfung
Mittlere Dämpfung
Starke Dämpfung
Eigenfrequenz 10 Hz
Erzwungene Schwingungen:
Phasenverschiebung
-2
-1,5
-1
-0,5
0
0,5
1
1,5
0 2 4 6 8 10
Erregerfrequenz /Hz
Ph
ase Schwache Dämpfung
Mittlere Dämpfung
Starke Dämpfung
Eigenfrequenz 1Hz
Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 31
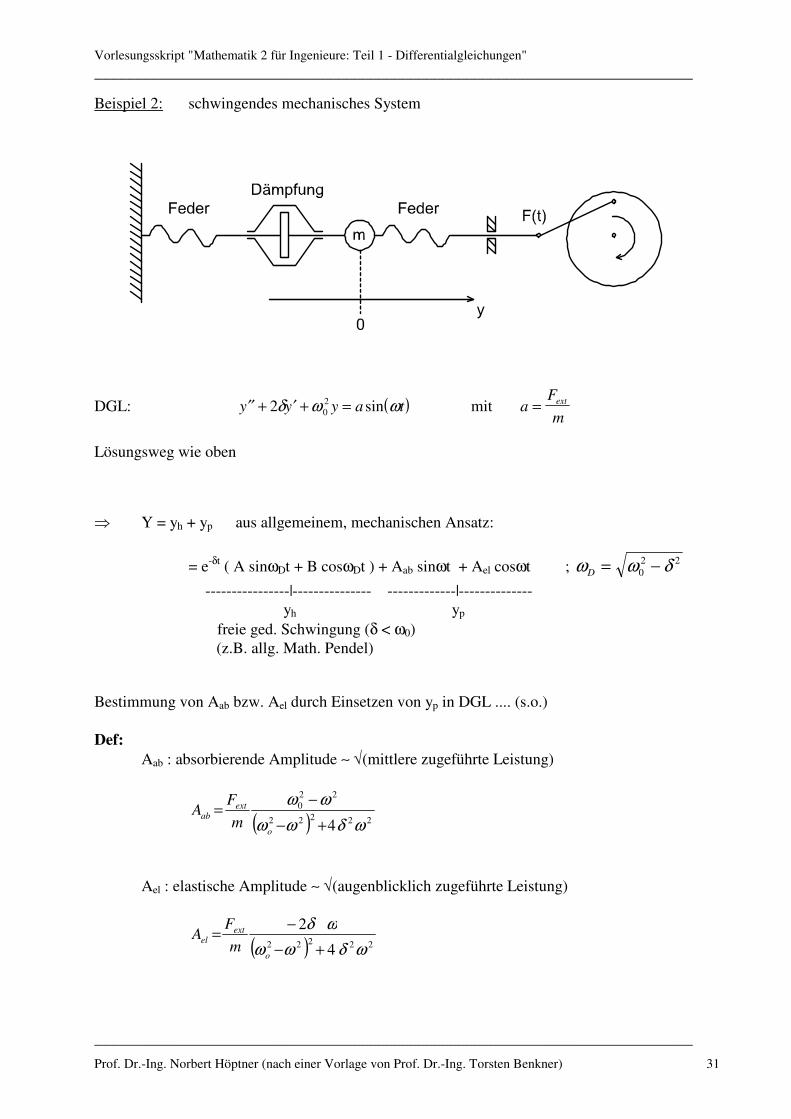
Beispiel 2: schwingendes mechanisches System
DGL: ( )′′ + ′ + =y y y a t2 02δ ω ωsin mit a
F
m
ext=
Lösungsweg wie oben
⇒ Y = yh + yp aus allgemeinem, mechanischen Ansatz:
= e-δt ( A sinωDt + B cosωDt ) + Aab sinωt + Ael cosωt ; ω ω δD = −02 2
----------------|--------------- -------------|-------------- yh yp freie ged. Schwingung (δ < ω0) (z.B. allg. Math. Pendel)
Bestimmung von Aab bzw. Ael durch Einsetzen von yp in DGL .... (s.o.) Def:
Aab : absorbierende Amplitude ∼ √(mittlere zugeführte Leistung)
( ) 22222
220
4 ωδωω
ωω
+−
−=
o
extab
m
FA
Ael : elastische Amplitude ∼ √(augenblicklich zugeführte Leistung)
( ) 22222 4
2
ωδωω
ωδ
+−
−=
o
extel
m
FA

Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 32
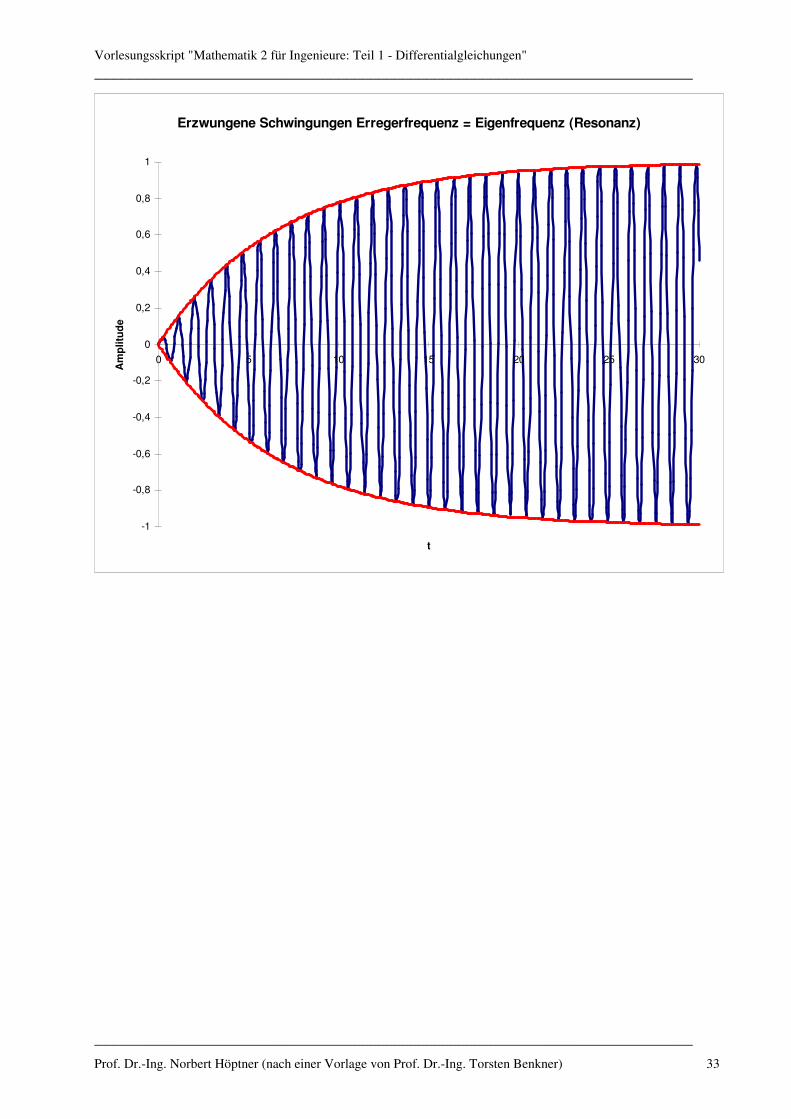
Anfänglich ruhende Oszillatoren mit schwacher Dämpfung und Erregerfreq. ≈ Eigenfreq.
Anfangsbedingung: Y(t=0) = 0 und Y'(t=0) = 0
Y(0): → B = - Ael
e-δt ist während 1 Schwingung praktisch konstant
Y'(t=0) ≈ ω Aab + ωD A mit ω ≈ ωD → A = - Aab Y'(t=0) ≈ ( ω - ωD ) Aab → Y(t) = Aab (sinωt - e-δt sinωDt) + Ael (cosωt - e-δt cosωDt) Resonanzfall: ωωωω = ωωωωD
Y(t) = ( 1 - e-δt) * (Aab sinωt + Ael cosωt )
= ( 1 - e-δt) yp mit Aab → 0
= - ( 1 - e-δt ) cosωt Fext / (2 m δ ω) |_____________| |__________| f(t) cosωt Maximalamplitude ω ≠ 0
nach Einschwingen (t groß) ⇒ Y(t) = -Amax cosωt
Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 33
Erzwungene Schwingungen Erregerfrequenz = Eigenfrequenz (Resonanz)
-1
-0,8
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0,8
1
0 5 10 15 20 25 30
t
Am
plitu
de
Vorlesungsskript "Mathematik 2 für Ingenieure: Teil 1 - Differentialgleichungen" ___________________________________________________________________________
___________________________________________________________________________
Prof. Dr.-Ing. Norbert Höptner (nach einer Vorlage von Prof. Dr.-Ing. Torsten Benkner) 34
1.4 Partielle DGL am Beispiel der Wellengleichung
Partielle DGL: mehrere Veränderliche in einer DGL, z.B. Ort und Zeit.
Wellengleichung im 3-dimensionalen Raum: ∆r
r
ac
d a
dt= ⋅
12
2
2 (z.B. EM-Wellen)
kartesische Koord.: ∆ = + +d
dx
d
dy
d
dz
2
2
2
2
2
2 (Laplace-Operator)
eindimensional: ∆ =d
dx
2
2
→ eindim. Wellengleichung: d a
dx c
d a
dt
2
2 2
2
2
1= ⋅ bzw. ′′ = ⋅a
ca
12 &&
Lösungsansatz: ( )a a e j t kx= ⋅ ±$ ω
einsetzen in DGL: − = − ⋅k ac
a22
2
ω
→ kc
=ω
(ω π λ= =2 fc
f; )
Wellenzahl k =2πλ
(nach rechts fortschreitende Welle)
Problem: Lösung der Wellengleichung unter Randbedingungen (z.B. Hohlleiter)





























