Embed Size (px)
Citation preview
KAPITEL 2
Grundlagen undForschungsübersicht
Da in der Literatur oft verschiedene Definitionen für den gleichen Begriff auftauchen, sol-len am Anfang dieses Kapitels (Abschnitt 2.1) die für das Verständnis der Arbeit wichtigenBegriffe nochmals kurz erläutert werden, um ein gemeinsames Grundverständnis der Mate-rie aufzubauen. Nach dieser Begriffsklärung wird eine Übersicht über die VANET-Forschunggegeben (Abschnitt 2.2).
Es sei darauf hingewiesen, dass auf weitere Begriffe speziell aus dem Umfeld der IT-Sicherheitin Abschnitt 3.1 eingegangen wird. Dabei wird beim Leser ein grundlegendes Verständnisder zum Schutz informationstechnischer Systeme eingesetzten Mechanismen vorausgesetzt.Mechanismen, wie z.B. symmetrische oder asymmetrische Kryptographie, werden folglichnicht näher beschrieben.
2.1 Begriffe
2.1.1 Mobiles Ad-hoc-Netz
Ein mobiles Ad-hoc-Netz (Mobile Ad-Hoc-Network, MANET) ist nach der Definition derIETF (Internet Engineering Task Force) in [MS02] ein unabhängiges, sich selbst organisie-rendes Netz aus mobilen Teilnehmern (Knoten). Die Datenübertragung erfolgt aufgrund derMobilität der Knoten drahtlos mit Hilfe von Funkverbindungen. Selbstorganisierend bedeutet,dass sich die Knoten spontan miteinander vernetzen, wenn sie sich in Funkreichweite befin-den, und sich selbständig an die ständigen unvorhersehbaren Veränderungen der Netztopologieanpassen, die sich durch die zufällige Mobilität der Knoten ergeben [GSB04].
Inhärent ist einem MANET auch der Multi-Hop-Charakter, der die Weiterleitung von Datenüber mehrere intermediäre Knoten (Hops) hinweg bezeichnet. Je nachdem über wie viele Hops
8 Kapitel 2 Grundlagen und Forschungsübersicht
Daten weitergeleitet werden, ergibt sich die Reichweite1 von Nachrichten, die so nicht mehrnur auf die physikalische Signalausbreitung eines einzelnen Senders (Single-Hop) begrenztist. Jeder Knoten ist somit gleichzeitig Teilnehmer und Router im MANET. Ein MANET kannnicht nur autonom von anderen Netzen oder Infrastruktur existieren, sondern auch mit weiterenNetzen, wie z.B. dem Internet, verbunden werden, wobei es dann als hybrid bezeichnet wird[CHJ04].
2.1.2 Automobiles Ad-hoc-Netz
Automobile Ad-hoc-Netze, auch Vehicular Ad-Hoc-Networks (VANETs) genannt, können alsUntergruppe der in [MS02] definierten MANETs verstanden werden. Das charakterisierendeMerkmal der VANETs ist, dass als Knoten Automobile wie PKWs, LKWs oder Busse ange-nommen werden. Die Bewegung der Knoten ist dadurch nicht mehr beliebig, sondern folgtden vorhandenen Straßen und Verkehrsregeln und wird teilweise vom Verhalten der anderenKnoten beeinflusst (vgl. [TC03]). Durch die relativ fest vorgegebenen Bewegungsmöglich-keiten können an neuralgischen Punkten (wie z.B. vielbefahrenen Straßen, gefährlichen Stel-len usw.) stationäre Transmitter (auch stationäre Infrastruktur, Roadside Units (RSUs) oderBaken genannt) aufgestellt bzw. an vorhandener Infrastruktur (wie z.B. Ampeln oder Not-rufsäulen) angebracht werden. Diese können bestimmte Dienste übernehmen und Zugriff aufandere (stationäre) Netze vermitteln (vgl. [RH05b]). Die mobilen und fest installierten Knoteneines VANETs können privater (im Eigentum von Privatpersonen oder -unternehmen) oderöffentlicher Natur (Busse, Einsatzfahrzeuge von Polizei, Feuerwehr etc.) sein (vgl. [RH05b]).Folglich gilt folgende Definition für den Begriff VANET in dieser Arbeit:
Ein VANET (Vehicular Ad-Hoc-Network) ist ein Ad-hoc-Netz aus Automobilen, dieselbstständig Funkverbindungen untereinander etablieren. Automobile bewegen sichi.d.R. entsprechend ihrer Rahmenbedingungen (Straßennetz, Verkehr und Verkehrs-regeln) und sind in der Lage, sich an daraus resultierende Veränderungen der Netz-topologie, die häufig und abrupt auftreten können, eigenständig anzupassen. Datenkönnen über mehrere Automobile hinweg weitergeleitet werden, um ihr Ziel zu er-reichen. Ein VANET kann sowohl autonom von anderen Netzen oder Infrastrukturexistieren als auch stationäre Transmitter nutzen und mit weiteren Netzen verbundenwerden (hybrides VANET).
Die Kommunikation der Fahrzeuge untereinander wird meist mit Vehicle-to-Vehicle(V2V) oder Car-to-Car (C2C) Communication bezeichnet. Auch der Begriff Inter-Vehicle-Communication (IVC) ist dafür gebräuchlich. Kommunizieren die Fahrzeuge mit stationärerInfrastruktur findet man die Begriffe Vehicle-to-Roadside (V2R) bzw. Roadside-to-Vehicle
1Die Reichweite wird durch folgende Punkte begrenzt: physikalisch mögliche Signalausbreitung, Time-to-Liveoder Hop-Count.
2.1 Begriffe 9
Internet
BE: Beacon
AA: AnhalteanweisungUW: Unfallwarnung
LBS: Location Based Servicefwd: Weitergeleitete Nachricht
Funkverbindung
: Infrastruktur
Polizei
Unfall
BE
UW
UW
(fw
d)
BEBE
UW
BE
BEBE
BE
LBS UW (fwd)AA
AA (fw
d)
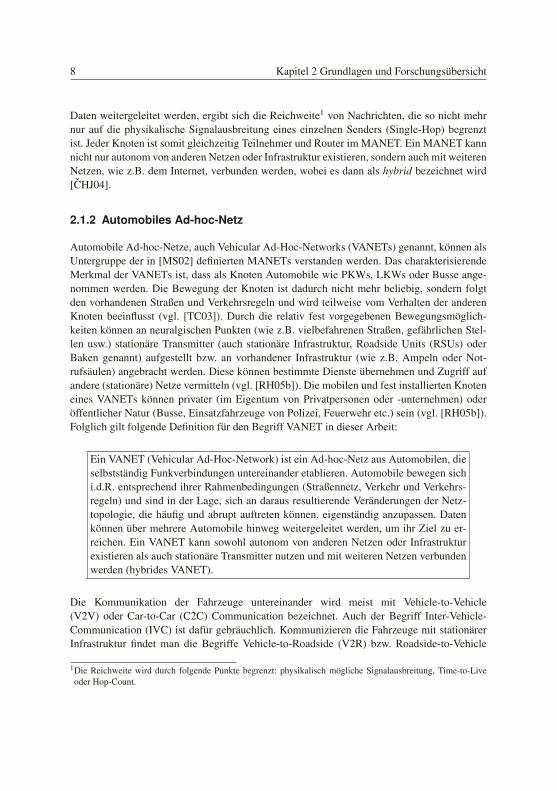
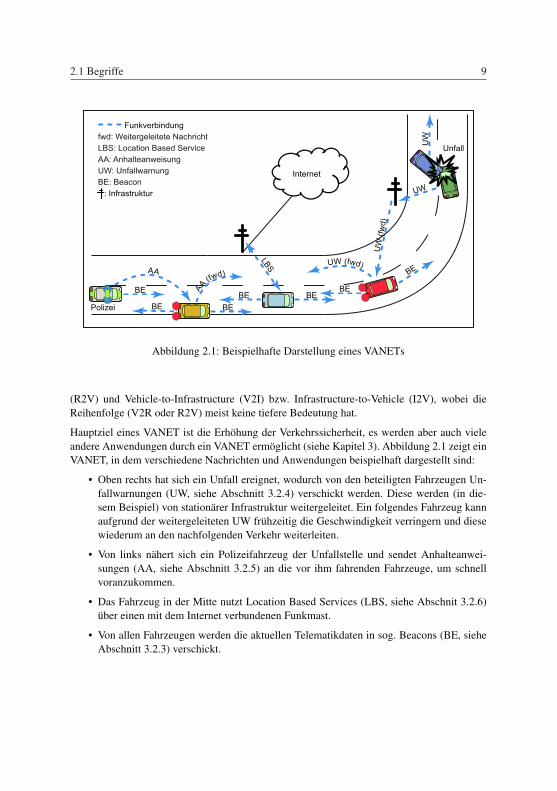
Abbildung 2.1: Beispielhafte Darstellung eines VANETs
(R2V) und Vehicle-to-Infrastructure (V2I) bzw. Infrastructure-to-Vehicle (I2V), wobei dieReihenfolge (V2R oder R2V) meist keine tiefere Bedeutung hat.
Hauptziel eines VANET ist die Erhöhung der Verkehrssicherheit, es werden aber auch vieleandere Anwendungen durch ein VANET ermöglicht (siehe Kapitel 3). Abbildung 2.1 zeigt einVANET, in dem verschiedene Nachrichten und Anwendungen beispielhaft dargestellt sind:
• Oben rechts hat sich ein Unfall ereignet, wodurch von den beteiligten Fahrzeugen Un-fallwarnungen (UW, siehe Abschnitt 3.2.4) verschickt werden. Diese werden (in die-sem Beispiel) von stationärer Infrastruktur weitergeleitet. Ein folgendes Fahrzeug kannaufgrund der weitergeleiteten UW frühzeitig die Geschwindigkeit verringern und diesewiederum an den nachfolgenden Verkehr weiterleiten.
• Von links nähert sich ein Polizeifahrzeug der Unfallstelle und sendet Anhalteanwei-sungen (AA, siehe Abschnitt 3.2.5) an die vor ihm fahrenden Fahrzeuge, um schnellvoranzukommen.
• Das Fahrzeug in der Mitte nutzt Location Based Services (LBS, siehe Abschnit 3.2.6)über einen mit dem Internet verbundenen Funkmast.
• Von allen Fahrzeugen werden die aktuellen Telematikdaten in sog. Beacons (BE, sieheAbschnitt 3.2.3) verschickt.
10 Kapitel 2 Grundlagen und Forschungsübersicht
Fahrzeuge und somit auch die Teilnehmer2 eines VANET unterliegen in den Punkten Energie-versorgung, verfügbarer Platz und vorhandene Rechenkapazität nicht den strikten Beschrän-kungen, die üblicherweise in MANETs angenommen werden (vgl. [TC03], [FHW+04]).Nachteilig sind die potentiell sehr hohen Geschwindigkeiten der Knoten (bis zu 250 km/h),die zu sehr kurzen Kommunikationszeiten und einer sich sehr schnell ändernden Topologiedes Netzes führen. Eine weitere Herausforderung stellt die große Ausdehnung und die sehrhohe Teilnehmerzahl dar, die eine sehr hohe Skalierbarkeit für die verwendeten Mechanismenund Protokolle impliziert. Die Gebundenheit der Knoten an den Straßenverlauf begünstigt ei-nerseits zwar einige Anwendungen und die intelligente Verteilung von Nachrichten, erschwertaber andererseits auch den Schutz der Privatsphäre, da die Bewegung der Knoten durch denStraßenverlauf stark eingeschränkt und damit leichter vorhersehbar bzw. verfolgbar wird.
2.1.3 Mehrseitige Sicherheit
Da sich in einem VANET viele Parteien, wie „normale“ Teilnehmer (Automobile), Teilnehmermit Sonderstatus (Polizei, Feuerwehr etc.) oder Dienst- und Netzbetreiber gegenüberstehen,ist die mehrseitige Sicherheit von zentraler Bedeutung. Wie anfangs schon angedeutet verstehtman darunter nach [Fed99] „die Einbeziehung der Schutzinteressen aller Beteiligten sowiedas Austragen daraus resultierender Schutzkonflikte beim Entstehen einer Kommunikations-verbindung“.
Für diese Arbeit heißt das, dass die vorgeschlagenen Schutzmechanismen die Schutzinteressenaller Teilnehmer gleichermaßen berücksichtigen sollen und bei Interessenkonflikten ein für al-le tragbarer bzw. der für die Allgemeinheit dienlichste Kompromiss gefunden werden soll.Im Folgenden werden die wichtigsten Teilnehmerrollen mit kurzen Beispielen von möglicher-weise vorhandenen Zielen angeführt, die Konfliktpotential bergen (siehe dazu auch Abschnitt3.3). Es ist anzumerken, dass diese Ziele natürlich nicht von jeder Partei zwangsläufig verfolgtwerden und grundsätzlich alle Parteien an einem sicheren, reibungslosen und möglichst kos-tengünstigen Betrieb des VANETs interessiert sind, um die sich aus den Anwendungen desVANETs ergebenden Vorteile nutzen zu können.
• Fahrzeugführer (Besitzer): Die Fahrzeugführer wollen möglichst unerkannt und anonymunterwegs sein, um ihre Privatsphäre bestmöglich zu schützen. Sie wollen sich auf dieAnwendungen im VANET verlassen können und nicht durch falsche Informationen oderandere Parteien betrogen werden bzw. zu Schaden kommen.
• Fahrzeughalter (Eigentümer): Die Eigentümer möchten unter Umständen genau wis-sen, wo und wie ihr Fahrzeug bewegt wird. Sie wollen zudem nicht für Schäden oderStraftaten verantwortlich gemacht werden, die ein anderer Fahrer mit ihrem Fahrzeugverursacht.
2Die Begriffe Teilnehmer, Knoten und Fahrzeug werden in dieser Arbeit synonym verwendet, es sei denn es wirdauf einen anderen Kontext hingewiesen.
2.1 Begriffe 11
• Fahrzeughersteller: Die Fahrzeughersteller möchten einerseits möglichst wenig Infor-mationen preisgeben, die ihreWettbewerbsposition schwächen könnten, wie z.B. interneInformationen über Motorsteuerung oder ESP-Regelung. Andererseits sind sie aber na-türlich an möglichst vielen Informationen über den Zustand ihrer Fahrzeuge interessiert,um diese verbessern bzw. bei Mängeln schnell reagieren zu können.
• Netz- oder Dienstbetreiber: Diese sind potentiell an möglichst vielen Informationenüber ihre Nutzer interessiert, um ihre Dienste verbessern und ggf. personalisierte An-gebote machen zu können. Zudem möchten sie natürlich die Gefahr verringern, in ir-gendeiner Form von den Nutzern betrogen zu werden.
• Exekutive: Die Exekutive sorgt für die Einhaltung der in der Gesellschaft geltendenGesetze und benötigt dafür Instrumente, mit denen sie diese Einhaltung kontrollierenund ggf. durchsetzen bzw. Gesetzesübertretungen verfolgen kann.
Als konkretes Beispiel eines Interessenkonflikts kann man sich Folgendes vorstellen: In einemVANET werden periodisch Informationen über die eigene Position und Bewegung preisgege-ben (siehe Abschnitt 3.2.3). Die Exekutive könnte nun diese Informationen quasi als „Selbstan-zeige“ für eine automatisierte Strafverfolgung verwenden und beispielsweise schon geringsteGeschwindigkeitsüberschreitungen ohne Aufwand automatisiert ahnden3. Die Mehrheit dernormalen Teilnehmer des VANETs wird einer solchen Totalüberwachung allerdings (wie z.B.die in Abschnitt 3.1.1 angeführten aktuellen Urteile bestätigen, sogar zu Recht) ablehnend ge-genüberstehen. Im Sinne der mehrseitigen Sicherheit wäre das System nun so zu gestalten,dass die Exekutive beispielsweise bei genau definierten (schweren) Verstößen die Möglichkeitdes Zugriffs auf diese Informationen hat, im Regelfall die Daten aber nicht in für Strafverfol-gungszwecke geeigneter Form vorliegen.
2.1.4 Effizienz
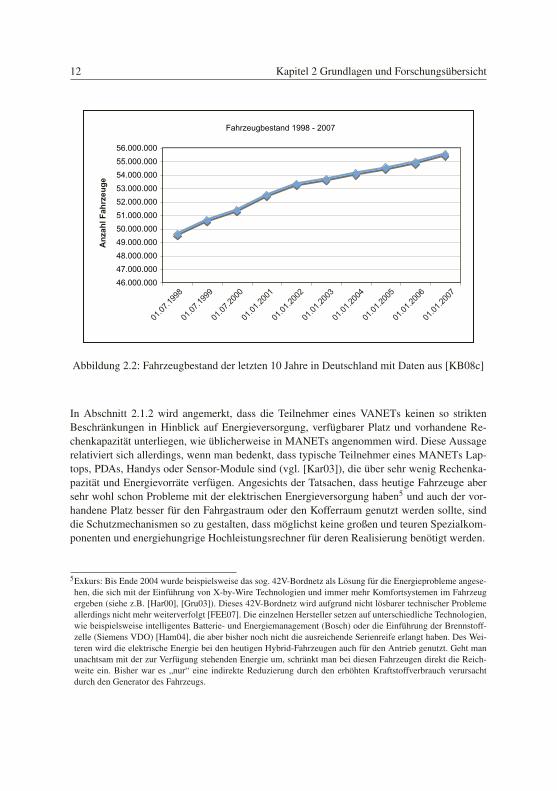
VANETs sind potentiell sehr große Netze mit sehr vielen Teilnehmern. Allein in Deutschlandwaren am 1. Januar 2008 50 Millionen Kraftfahrzeuge zugelassen [KB08b], Tendenz steigend(siehe Abbildung 2.2)4. Einerseits sollen möglichst viele dieser Fahrzeuge am VANET teilneh-men, um ein korrektes Funktionieren des Netzes und der darauf aufbauenden Anwendungenzu gewährleisten (siehe auch Abschnitt 3.2). Andererseits sind dann unter Umständen z.B. beieinem Stau auf einer vielbefahrenen Autobahn sehr viele Teilnehmer auf engstem Raum an-zutreffen und müssen sich dort unter anderem die begrenzte Kapazität des Funkkanals teilen.
3Dass eine solche automatisierte Strafverfolgung in manchen Kreisen bestimmt erwünscht wäre, zeigt folgendesBeispiel aus Großbritannien: Seit 2007 benutzt die Verwaltung des Londoner Stadtbezirks City of Westminsterein Funkkamera-System, das automatisiert nach Parksündern sucht [Wes07]. Wird ein Verstoß festgestellt wird(noch) ein Diensthabender in der Überwachungszentrale informiert, der das Bildmaterial sichtet und entscheidet,ob ein Strafzettel ausgestellt wird oder nicht. Das System soll sich bis spätestens 2010 amortisieren [Hei07b].
4Der vermeintliche Rückgang auf 50 Millionen ergibt sich durch eine Umstellung der Erhebung der Statistik, dieseit 1. Januar 2008 die vorübergehend stillgelegten Fahrzeuge nicht mehr enthält (vgl. [KB08b]).
12 Kapitel 2 Grundlagen und Forschungsübersicht
Fahrzeugbestand 1998 - 2007
46.000.000
47.000.000
48.000.000
49.000.000
50.000.000
51.000.000
52.000.000
53.000.000
54.000.000
55.000.000
56.000.000
An
zah
l Fah
rzeu
ge
01.0
7.19
98
01.0
7.19
99
01.0
7.20
00
01.0
1.20
01
01.0
1.20
02
01.0
1.20
03
01.0
1.20
04
01.0
1.20
05
01.0
1.20
06
01.0
1.20
07
Abbildung 2.2: Fahrzeugbestand der letzten 10 Jahre in Deutschland mit Daten aus [KB08c]
In Abschnitt 2.1.2 wird angemerkt, dass die Teilnehmer eines VANETs keinen so striktenBeschränkungen in Hinblick auf Energieversorgung, verfügbarer Platz und vorhandene Re-chenkapazität unterliegen, wie üblicherweise in MANETs angenommen wird. Diese Aussagerelativiert sich allerdings, wenn man bedenkt, dass typische Teilnehmer eines MANETs Lap-tops, PDAs, Handys oder Sensor-Module sind (vgl. [Kar03]), die über sehr wenig Rechenka-pazität und Energievorräte verfügen. Angesichts der Tatsachen, dass heutige Fahrzeuge abersehr wohl schon Probleme mit der elektrischen Energieversorgung haben5 und auch der vor-handene Platz besser für den Fahrgastraum oder den Kofferraum genutzt werden sollte, sinddie Schutzmechanismen so zu gestalten, dass möglichst keine großen und teuren Spezialkom-ponenten und energiehungrige Hochleistungsrechner für deren Realisierung benötigt werden.
5Exkurs: Bis Ende 2004 wurde beispielsweise das sog. 42V-Bordnetz als Lösung für die Energieprobleme angese-hen, die sich mit der Einführung von X-by-Wire Technologien und immer mehr Komfortsystemen im Fahrzeugergeben (siehe z.B. [Har00], [Gru03]). Dieses 42V-Bordnetz wird aufgrund nicht lösbarer technischer Problemeallerdings nicht mehr weiterverfolgt [FEE07]. Die einzelnen Hersteller setzen auf unterschiedliche Technologien,wie beispielsweise intelligentes Batterie- und Energiemanagement (Bosch) oder die Einführung der Brennstoff-zelle (Siemens VDO) [Ham04], die aber bisher noch nicht die ausreichende Serienreife erlangt haben. Des Wei-teren wird die elektrische Energie bei den heutigen Hybrid-Fahrzeugen auch für den Antrieb genutzt. Geht manunachtsam mit der zur Verfügung stehenden Energie um, schränkt man bei diesen Fahrzeugen direkt die Reich-weite ein. Bisher war es „nur“ eine indirekte Reduzierung durch den erhöhten Kraftstoffverbrauch verursachtdurch den Generator des Fahrzeugs.
2.2 Forschungsübersicht 13
Sind die vorgeschlagenen Maßnahmen kostengünstig umzusetzen, hat dies einen positivenEinfluss auf die Kosten für die Realisierung des Gesamtsystems. Und je kostengünstiger dasGesamtsystem ist, desto schneller wird es neben den Fahrzeugen des Hochpreissegments auchin Fahrzeugen des Niedrigpreissegments eingesetzt werden, was wiederum einen positivenEffekt auf die Anzahl der Teilnehmer und damit die Funktionsfähigkeit des Netzes hat (sieheauch Abschnitt 3.2.3). Unter Effizienz wird in dieser Arbeit folglich verstanden, dass die vor-geschlagenen Lösungen möglichst Ressourcen schonend und kostengünstig realisierbar seinsollen.
2.2 Forschungsübersicht
Im Folgenden wird eine kurze Übersicht über Projekte, Förderprogramme und Konsortien ge-geben, die im Zusammenhang mit Intelligent Transport Systems and Services (ITS)6 stehen.Diese soll es dem Leser ermöglichen, die VANET-Forschung, die als ein Teilgebiet der ITSangesehen wird, in einen größeren Kontext einzuordnen und einen Überblick über die wich-tigsten Forschungsaktivitäten in diesem Bereich zu erhalten. Sie erhebt keinen Anspruch aufVollständigkeit.
2.2.1 Förderprogramme und Konsortien
Eines der ersten großen Forschungsprojekte, das Konzepte und Lösungen für den Straßen-verkehr im 21. Jahrhundert entwickeln und diesen dadurch sicherer, ökonomischer und ef-fizienter machen sollte, war Prometheus (Programme for a European Traffic with HighestEfficiency and Unprecedented Safety) [KFG06]. Es wurde 1986 von EUREKA ins Lebengerufen [URL98] und verdeutlichte, dass durch intelligente Fahrzeuge und deren VernetzungVerkehr zugleich umweltfreundlicher und sicherer gemacht werden kann. Ein weiteres Ergeb-nis des Projekts, in dem alle großen europäischen Automobilhersteller und Zulieferer forsch-ten, war, dass die Potentiale der Vernetzung nur vollständig genutzt werden konnten, wennentsprechend gut ausgestattete Infrastruktur („intelligente Straße“) vorhanden war [KFG06].
Von 1988 an gab es durch die europäischen Förderprogramme DRIVE I (Dedicated RoadInfrastructure for Vehicle Safety in Europe) und den Nachfolgeprogrammen DRIVE II undTAP for Transport (Telematics Applications for Transport) viele Projekte, die sich mit ITSbeschäftigten [Kuw98]. Die konkrete Vernetzung in VANETs spielte aber noch keine zentraleRolle. Im Jahr 1991 wurde nach Abschluss von DRIVE I die Organisation ERTICO (Euro-pean Road Transport Telematics Implementation Coordination Organisation) gegründet, die
6Unter ITS wird jedes System und jeder Service verstanden, der die Bewegung von Personen oder Gütern effizien-ter und ökonomischer, d.h. „intelligenter“, macht (vgl. [ERT07]). Bewegungs- bzw. Transportmittel können alleSchienen-, Land-, Wasser- und Luftfahrzeuge sein. Die Systeme können autonom oder vernetzt arbeiten. Bsp. fürITS sind automatische Verkehrsleitsysteme, Abstandswarnsysteme, elektronische Mautsysteme etc.

14 Kapitel 2 Grundlagen und Forschungsübersicht
auf einer Partnerschaft zwischen öffentlicher Hand und privaten Unternehmen basiert. ERTI-CO vertritt die Interessen seiner Mitglieder und koordiniert deren Forschung und Entwicklung.Viele Forschungsprojekte im europäischen Raum sind in ERTICO eingegliedert. Ziele der Or-ganisation sind laut [ERT06]:
• Erhöhung der Sicherheit der Beteiligten im Straßenverkehr
• Erhöhung der Transport-Effizienz über alle Verkehrsmittel hinweg
• Erhöhung der Sicherheit aller Transportmittel
• Stärkung der nationalen und internationalen Kooperation bei ITS
Hier wie auch im 2003 von der Europäischen Kommission im Rahmen des eSafety Pro-gramms7 gegründeten eSafety Forum, das eng mit ERTICO zusammenarbeitet, ist die drahtlo-se Vernetzung in VANETs nur eine Untergruppe der betrachteten Technologien. Den Schwer-punkt bildet bisher die Entwicklung und Einführung von Fahrerassistenz-Systemen, die haupt-sächlich auf Sensoren innerhalb des Fahrzeugs beruhen (vgl. [Int06]). Beispiele sind Spur-halteassistenten, Elektronische Stabilitätskontrolle, Nachtsichtgeräte, Spurwechselassistentenusw. Aber auch Systeme wie RDS-TMC8 oder eCall9 wurden mit Hilfe von ERTICO bzw. demeSafety Forum entwickelt und eingeführt. Im Februar 2006 wurde von der Europäischen Kom-mission die Initiative „Intelligentes Fahrzeug“ gestartet, das die Hürden bei der Verbreitungintelligenter Fahrzeugsysteme beseitigen und die Entwicklung und Einführung von Konzep-ten beschleunigen soll, die den Verkehr smarter, sicherer und sauberer machen [Eur07]. ImApril 2007 wurde die eSecurity Working Group im Rahmen des eSafety-Programms gebil-det, die sich mit der Sicherheit der im eSafety-Programm entwickelten Ansätze beschäftigensoll [Sil07]. In den USA und Japan gibt es mit ITS America (Intelligent Transportation SocietyAmerica) [URL08l] und ITS Japan [URL08n] Organisationen, die mit ERTICO vergleichbarsind und ähnliche Ziele haben.
Car-to-Car Communications Consortium
Konkret mit VANETs beschäftigt sich in Europa das Car-to-Car Communications Consor-tium (C2C-CC, [URL08x]), das sich als non-profit Organisation zum Ziel gesetzt hat, dieVerkehrssicherheit und -effizienz durch Nutzung von Fahrzeug-zu-Fahrzeug Kommunikationzu verbessern. Dem Konsortium gehören viele große Automobilhersteller (z.B. Audi, BMW,
7Das eSafety Programm [URL08f] wurde von der Europäischen Kommission initiiert, um die Zahl der Verkehrs-toten bis zum Jahre 2010 im Vergleich zu 2000 um die Hälfte zu verringern (vgl. [Eur03b]).
8Mit RDS-TMC (Radio Data System - Traffic Message Channel) werden in Nordamerika und Europa Meldungenzur aktuellen Verkehrslage undWarnungen z.B. vor Unfällen oder Staus an die Navigationssysteme der Fahrzeugeverteilt. Diese sind praktisch nicht gesichert und können beliebig gefälscht werden [BB07].
9Das eCall-System ist ein europaweites Notrufsystem, das bei einem Unfall wichtige Daten, wie z.B. den genauenStandort, an die Rettungsdienste übermittelt. Dadurch soll die Zahl der Todesfälle, die Schwere der Verletzungenund der Stress nach einem Unfall verringert werden, indem die Zeitspanne bis zum Einsatz der Rettungsdiensteverkürzt wird [KFG06].
2.2 Forschungsübersicht 15
DaimlerChrysler, Fiat, Renault, Volkswagen) an. Es definiert seine Aufgaben folgendermaßen(vgl. [URL07]):
• Schaffen und Etablieren eines EU-weiten offenen Industriestandards für Fahrzeug-zu-Fahrzeug Kommunikation auf WLAN-Basis
• Spezifizieren und Entwickeln von Prototypen und Demonstrationssystemen
• Fördern einer gebührenfreien europaweiten Frequenzzuweisung
• Vorantreiben und Vereinheitlichen der weltweiten Standardisierungsbemühungen
• Entwickeln von Markteinführungsstrategien und Geschäftsmodellen
Der Zeitplan des Konsortiums sieht Prototypen und Spezifizierungen für die Standardisierungfür Ende 2008 vor [URL08y]. Etwas weiter sind die im Folgenden kurz beschriebenen ameri-kanischen Standardisierungsbemühungen im VANET-Bereich.
US-amerikanische Standardisierungsbemühungen
In den USA wird bereits seit 1999 an einem Standard für die Funkübertragung in VANETs ge-arbeitet. Die Spezifikation der physischen Übertragungsschicht des ISO/OSI-Referenzmodellsund die MAC-Teilschicht der Sicherungsschicht werden unter dem Namen Dedicated ShortRange Communications (DSRC)-System von der IEEE (Institute of Electrical and ElectronicsEngineers)-Arbeitsgruppe 802.11p vorangetrieben (siehe auch Annahmen für die Funkverbin-dung in Abschnitt 4.9). Das im Mai 2002 gegründete Vehicle Safety Communications Consor-tium (welches das US-amerikanische Pendant zum europäischen Car-to-Car CommunicationsConsortium ist) beschäftigte sich im Vehicle Safety Communications (VSC)-Projekt10 mit denEinsatzmöglichkeiten von DSRC und hat das Ziel, die Markteinführung dieses Systems zu un-terstützen [Fra04].
Die höheren Schichten (Sicherung, Netzwerk, Transport und Anwendung) werden unter demNamen WAVE (Wireless Access in Vehicular Environments) von der IEEE-Arbeitsgruppe1609 bearbeitet, die einem starken Einfluss des amerikanischen Department of Transportation(US-DOT) unterliegt. Dieses plant auf Basis dieser Standards unter anderem die Einführungeines einheitlichen Mautsystems in den USA, weswegen in dem in den Jahren 2006 und 2007veröffentlichten vierteiligen WAVE-Standard viel Gewicht auf die Kommunikation mit statio-närer Infrastruktur (V2I) gelegt und die Fahrzeug-zu-Fahrzeug-Kommunikation nicht sehr aus-führlich berücksichtigt wird (vgl. [SZ07]). Die P1556-Arbeitsgruppe, die ihren Schwerpunktauf die Entwicklung essentieller Schutzmechanismen für V2V- und V2I-Kommunikation, dieErmittlung der zu schützenden Entitäten, den Schutz der Privatsphäre und der Informationsin-tegrität legte (siehe [Kur03]), ging in der 1609-Arbeitsgruppe und dem Teil-Standard 1609.2(Security Services for Applications and Management Messages) auf [Kur06].10Das VSC-Projekt wurde im Rahmen von CAMP (Crash Avoidance Metrics Partnership) gegründet und vomamerikanischen Department of Transportation (US-DOT) unterstützt. Es waren alle großen Automobilherstellervertreten. [Fra04]
16 Kapitel 2 Grundlagen und Forschungsübersicht
Der oben erwähnte starke Einfluss des US-DOT lässt sich damit erklären, dass es mit dem In-telligent Transportation Systems Programm mehrere Initiativen ins Leben gerufen und finan-ziert hat, die Technologien entwickeln und einführen sollen, welche Effizienz, Sicherheit undKomfort im Straßenverkehr (und anderen Transportmitteln) erhöhen sollen [DOT08a]. Kon-kret sind die Intelligent Vehicle Initiative (IVI, [DOT07]) und deren aktuell laufende Nachfol-geprojekte Vehicle Infrastructure Integration (VII, [DOT08d]), Cooperative Intersection Col-lision Avoidance Systems (CICAS, [DOT08b]) und Integrated Vehicle Based Safey Systems(IVBSS, [DOT08c]) zu nennen. Speziell in VII soll die V2V- und V2I-Kommunikation aufBasis von DSRC weiterentwickelt, getestet und in Kooperation mit der Automobilindustrieeingeführt werden (vgl. [Pan05], [DOT08e]). Die Einflussnahme des US-DOT spiegelt sichz.B. auch darin wieder, dass zwar im IVI-Abschlussbericht für VII die anonyme Datenerhe-bung zum Zweck der Erhöhung der Verkehrssicherheit und -effizienz erwähnt wird. Gleich-zeitig wird aber auch ein Opt-in Verfahren gefordert, das den Anwendern eine personalisier-te Nutzung von Diensten (namentlich der elektronischen Mautabrechnung) ermöglichen soll(vgl. [HS05]).
2.2.2 Projekte
Die ersten Projekte, die sich im Rahmen der ITS-Förderung mit der Vernetzung von Fahr-zeugen beschäftigten, betrachteten nur einige ausgewählte Aspekte, wie z.B. die Übertragungvon Warnnachrichten (Inter-Vehicle Hazard Warning, IVHW, [URL08o]), das Platooning11
von Lkws (CHAUFFEUR 1/2, [URL08d]) oder die Steigerung des Verkehrsflusses (INVENTVLA, [URL08m]). In diesen, wie auch in dem im Jahre 2003 abgeschlossenen Projekt „Fleet-net – Internet on the Road“ [URL08h], spielte die Informationssicherheit keine oder eine starkuntergeordnete Rolle.
Die Autoren von [ZMTV02] und [HK02] sind unter den Ersten, die sich mit der Sicherheit vonVANETs befassen. Seitdem sind innerhalb der Forschungsprojekte, an denen neben Hochschu-len auch Industriepartner, wie Audi, BMW, Mercedes oder VW, maßgeblich beteiligt sind,einige weitere Veröffentlichungen mit Sicherheitsbezug entstanden. So wurden z.B. in Car-TALK2000 [URL08c], einem bereits abgeschlossenen Projekt, schon verschiedene Aspekteder Informationssicherheit und des Datenschutzes am Rande betrachtet.
Erst neuere Projekte, wie GST (Global System for Telematics, [URL08i]), NoW (Networkon Wheels, [URL08s]) oder PReVENT [URL08t], haben Datensicherheit mit in ihre Zielset-zung aufgenommen und Lösungen für einige Teilbereiche vorgeschlagen, wie z.B. ein Proto-koll, mit dem Einsatzfahrzeuge die Ampelschaltung beeinflussen können (siehe [DKKS05]).Der Schutz der Privatsphäre ist bisher lediglich im Projekt NoW und dem SubprojektDEPN (Deployment Enablers) des CVIS (Cooperative Vehicle-Infrastructure Systems) Pro-jekts [URL08e] mit betrachtet worden. Das einzige Projekt, das auch den Schutz der Pri-
11Platooning: Durch die Übertragung von Fahrdaten vom führenden Fahrzeug zu den folgenden können diese ohneEinwirken des Fahrers dem ersten Fahrzeug folgen.

2.2 Forschungsübersicht 17
vatsphäre explizit als ein Hauptziel nennt, ist Secure Vehicular Communication (SeVeCom,[URL08v]).
An dieser Stelle wird nicht genauer auf die Ergebnisse bzw. die aktuellen Vorschläge dieserProjekte eingegangen, da diese später jeweils als existierende Ansätze genauer erläutert undbewertet werden.