Embed Size (px)
Citation preview
Lehrstuhl für Elektrische Antriebssysteme und LeistungselektronikTechnische Universität München Prof. Dr.-Ing.R.Kennel
Arcisstraße 21D–80333 München
email: [email protected]: www.eal.ei.tum.de
Tel.: +49 (0)89 289–28358Fax: +49 (0)89 289–28336
Praktikum Energietechnik (SS2012)
Versuch S2: Regelung einer Gleichstrommaschine
Betreuer:Christoph Hackl, Zimmer Z902,Tel. 289− 28359, email: [email protected]
Ort:Lehrlabor des Lehrstuhls, Neubau Innenhof, Gebäude 9, Raum 0901(Erdgeschoss, ganz links, siehe Lageplan)
1 Überblick
In diesem Versuch werden Strom- und Drehzahlregelung einer Gleichstrommaschine behandelt. Diekaskadierte Regelkreisstruktur zur Strom- und Drehzahlregelung wird mithilfe von Matlab/Simulinkentworfen, auf einem Realzeitsystem (Standard PC mit Realtime-Windows-Target von Mathworks)implementiert und an einer fremderregten Gleichstrommaschine getestet und ausgewertet.
Lernziele und -inhalte:
• Verstehen der Funktionsweise einer Gleichstrommaschine und eines 4-fach IGBT-Stromrichters(Mehrquadrantenpulssteller)
• Aufbauen eines Sechspuls-Diodengleichrichters (B6U)
• Bestimmen der Streckenparameter von Gleichstrommaschine und 4-fach IGBT-Stromrichter
• Entwerfen, Implementieren und Bewerten der Strom- und Drehzahlregelung im Ankerstellbereichund
• Rapid-Prototyping mithilfe von Matlab/Simulink von kaskadierten Regelkreisstrukturen auf ei-nem Realtime-Windows-Target Desktoprechner.
2 Grundlagen
In diesem Abschnitt werden kurz die Modellierung der Gleichstrommaschine (GM) und die Funktions-weise eines 4-fach IGBT-Stromrichters wiederholt.
Hinweis: Die mit * gekennzeichneten Teilaufgaben sind vor Versuchsbeginn schriftlich vorzuberei-ten. Detaillierte Informationen zu den benötigten Vorkenntnissen finden Sie z.B. in:
• Elektrische Antriebe - Regelung von Antriebssystemen, D. Schröder, Springer, Berlin, 2009;
• Leistungselektronische Schaltungen, D. Schröder, Springer, Berlin, 2008.
2.1 Modellierung der Gleichstrommaschine (GM)
Eine fremderregte Gleichstrommaschine (GM) kann wie folgt modelliert werden
UA(t) = EA(t) +RAIA(t) + LAdIA(t)dt , IA(0) = 0 [A]
EA(t) = CM · ΩM (t) ·ΨE(t)ΨE(t) = f(IE(t)) (nichtlineare Magnetisierung)UE(t) = REIE(t) + dΨE(t)
dt ,ΨE(0) = 0 [Vs]dΩM (t)dt = 1
ΘM(MM (t)−ML(t)) ,ΩM (0) = 0
[rads
]MM (t) = CM ·ΨE(t) · IA(t).
(1)
Hierbei sind IA,E [A] der Anker- bzw. Erregerstrom, UA,E [V] die Anker- bzw. Erregerspannung,RA,E [Ω] der Anker- bzw. Erregerwiderstand, LA
[VsA
]die Ankerinduktivität, EA [V] die induzierte
Gegenspannung (EMK), CM [1] die Motorkonstante, ΩM
[rads
]die Motordrehzahl und ΨE
[VsA
]der
Erregerfluss. Das Motorträgheitsmoment ΘM
[kg m2
]wird durch das Beschleunigungsmoment – die
Differenz aus Motormoment MM [Nm] und Lastmoment ML [Nm] (mit Reibung) – beschleunigt.
– 1 –
2.1. Modellierung der Gleichstrommaschine (GM)
−
−
−
ΩM
ΩmM
MM
ML
CM
CM
U⋆A UA
UmA
IA
ImA
EA
TA1
RA
1ΘM
VSTR
VSTR
TSTR
TSTR
U⋆E UE IE ΨE
dΨE/dt
1RE
nX
nX
nX
Stromrichter
... für Erreger
... für Anker
Gleichstrommotor (GM)
Sensorik & Signalverarbeitung
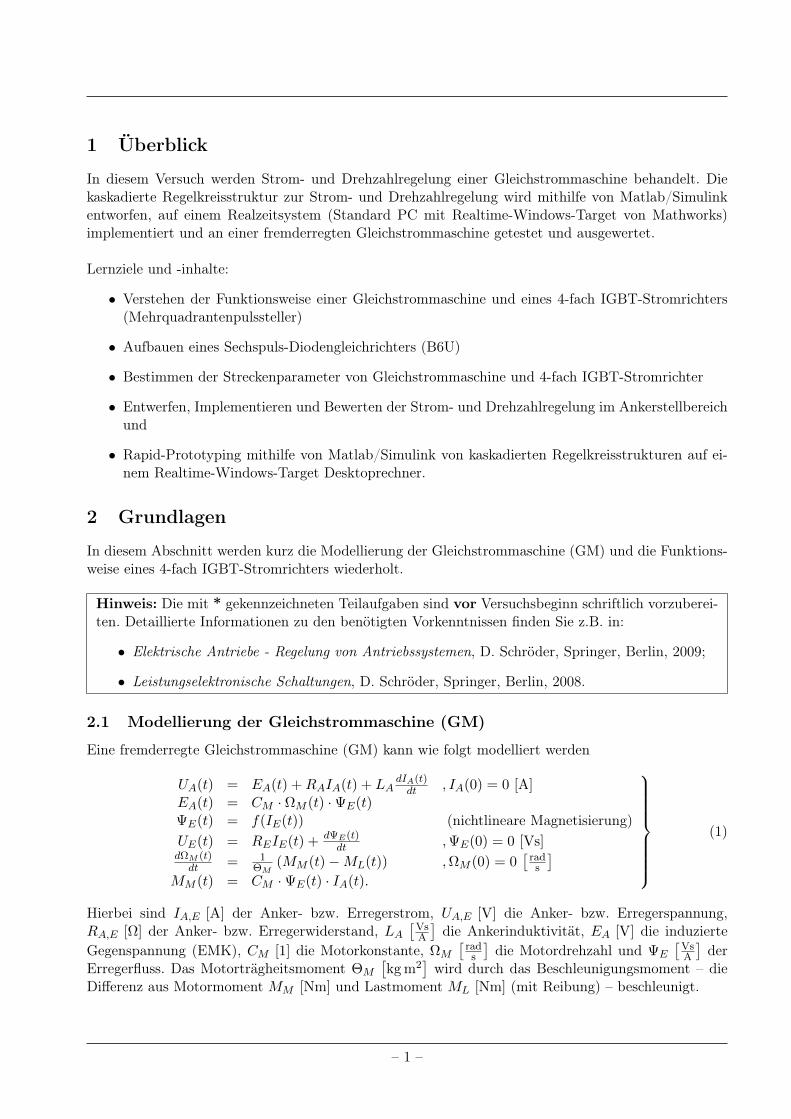
Abbildung 1: Signalflussplan einer fremderregten Gleichstrommaschine mit Anker- und Erregergleich-richter, Sensorik und Signalverarbeitung (mit Rauschen nX)
In Abb. 1 ist das Modell (1) der GM zu einem Signalflussplan umgesetzt worden. Anker- als auch Erre-gerkreis werden unabhängig voneinander durch Stromrichter bzw. Gleichrichter gespeist. Die lieferbareAusgangsspannung der Stromrichter ist auf die (konstante) Zwischenkreisspannung UZK = 230 [V]begrenzt, d.h. −UZK ≤ UA ≤ UZK (siehe Saturierungsblöcke in Abb. 1). Im Folgenden wird dasdynamische Verhalten des Stromrichters als Verzögerungsglied mit Verstärkung VSTR [1] und TotzeitTSTR [s] modelliert (ohne Saturierung)
FSTR(s) =UA,E(s)
U?A,E(s)= VSTRe
−sTSTR ≈ VSTR
1 + sTSTR, (2)
und deren Sprungantwort als PT1 angenähert. Der Ankerkreis ist nichtlinear (multiplikativ) mit demErregerkreis über den Erregerfluss ΨE gekoppelt. In diesem Versuch wird die Drehzahl der GM imAnkerstellbereich bei konstantem Fluss ΨE = ΨEN (Nennerregerfluss) über die Ankerspannung UAgesteuert, bis die maximale induzierte Gegenspannung EA = UAN (Elektro-Motorische Kraft (EMK))erreicht ist. Feldschwächung wird nicht betrachtet.
Die Eingänge sind die Sollankerspannung U?A [V] und die Sollerregerspannung U?E [V] (später wird UEdurch einen Diodengleichrichter erzeugt und somit fällt U?E als Eingang weg). Die Ausgänge (Mess-größen) sind die verrauschten Signale der Ankerspannung UmA [V], des Ankerstroms ImA [A] und dieMotorwinkelgeschwindigkeit Ωm
M [rad/s]. Die Messgrößen sind jeweils durch Messrauschen und/oderSensorfehler – zusammengefasst in nX , X ∈ UA, IA, ΩM – verfälscht. In Abb. 2 sind alle Kompo-
– 2 –
2.2. Mehrquadrantenpulssteller und Pulsweitenmodulation
ΩM ΩmM ΩM
U⋆A UA
UA UmA UA
U⋆E UE
IA ImA IA
STRVSTR TSTR
GM
[Abb. 1]
Sensorik &Signalverar.
nX
Glättung
1 Tg,X
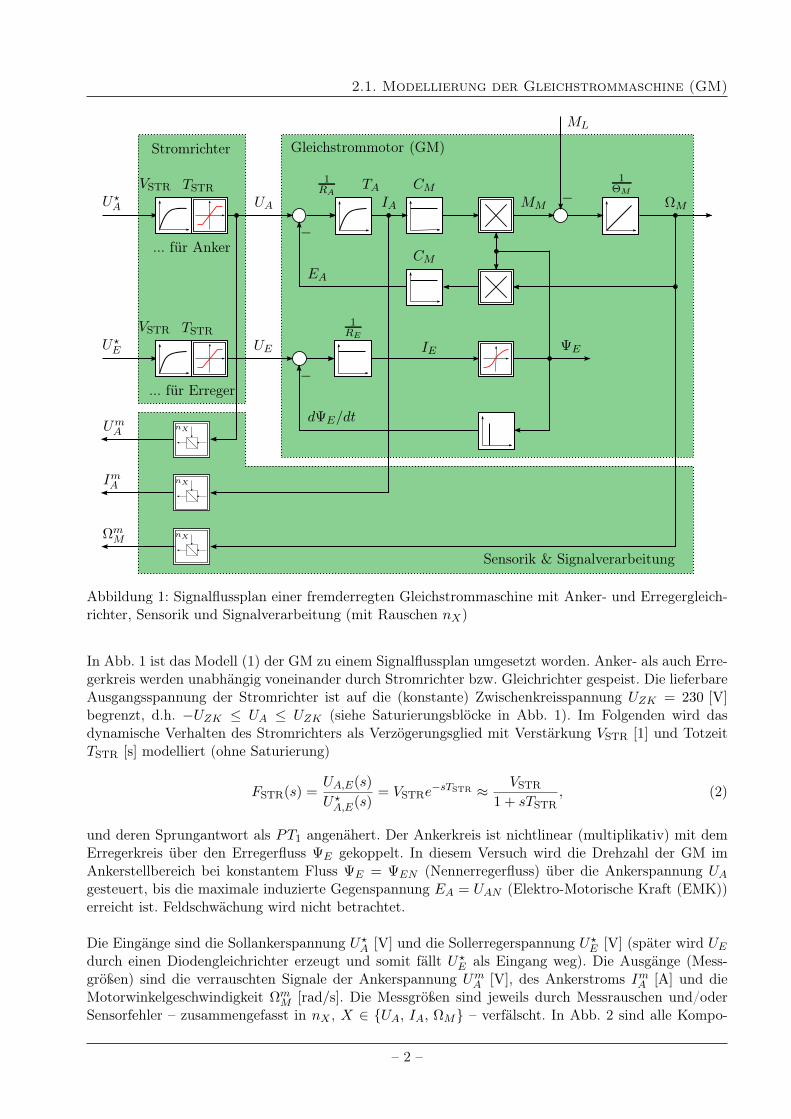
Abbildung 2: Komponenten der Regelstrecke und ihre (dynamische) Modellierung:a) Gleichrichter FSTR(s) = U(s)
U?(s) = VSTRe−sTSTR ≈ VSTR
1+sTSTRmit Totzeit TSTR,
b) Sensoren & Signalverarbeitung (Annahme: beides ohne Dynamik!) mit additivem Messrauschen nX ,d.h. Xm = X + nX ,c) Gleichstrommotor (siehe Abb. 1 und Gl. (1)) undd) Messwertglättung Fg,X(s) = X(s)
Xm(s) ≈ 11+sTg,X
für Signale X ∈ IA, UA,ΩM
nenten der Regelstrecke (ohne Reglerimplementierung) als kompakter Signalflussplan veranschaulicht.Für die spätere Reglerauslegung sind die dynamischen Näherungen der Teilstrecken dargestellt.
2.2 Mehrquadrantenpulssteller und Pulsweitenmodulation
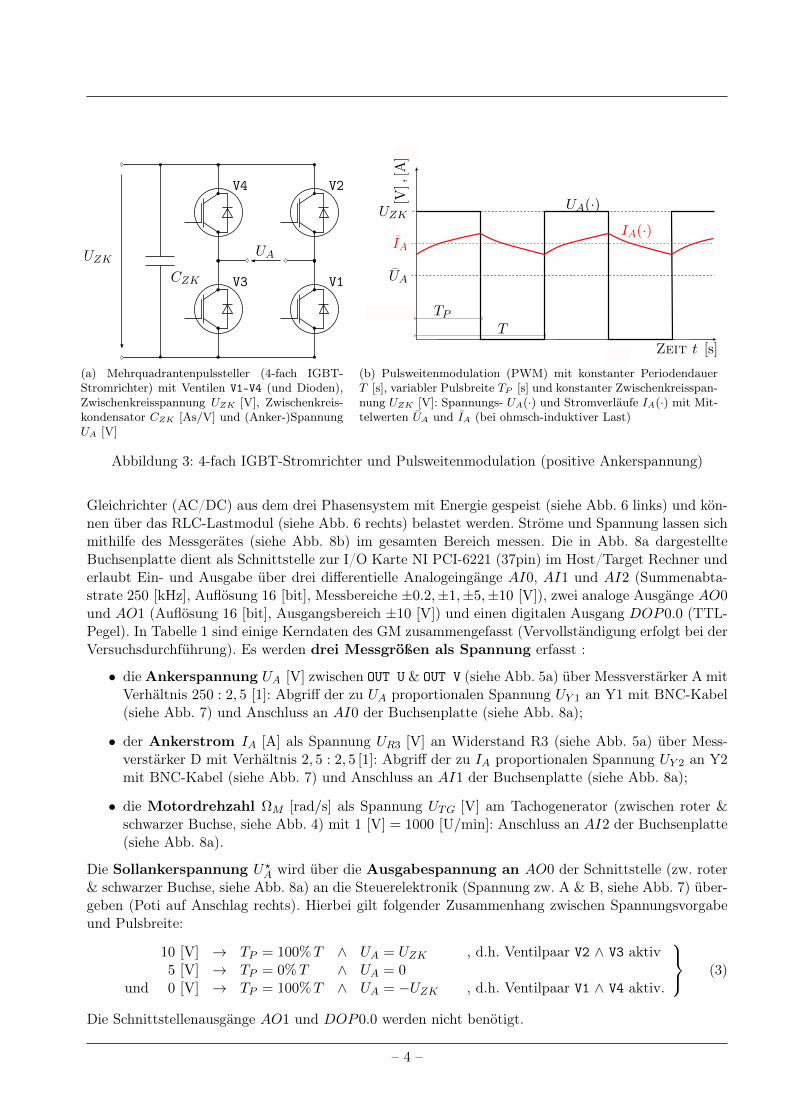
Während der Versuchsdurchführung wird der Ankerkreis der GM mithilfe eines Mehrquadrantenpuls-stellers (4-fach IGBT-Stromrichter) gespeist (siehe Abb. 3a). Die Ventile V1 bis V4 (IGBTs) könnenvereinfacht als Schalter betrachtet werden, die beliebig geöffnet (kurz ¬V4) bzw. geschlossen (kurz V4)werden können (auch wenn stromführend). Ein geschlossener Schalter (ein geöffnetes Ventil) entsprichteinem Kurzschluss. Durch entsprechendes ‘Durchschalten’ von Ventilpaaren (z.B. V2 ∧ V3) kann dieSpannung UA folgende Werte annehmen:
V2 ∧ V3 ∧ ¬V1 ∧ ¬V4 → UA = UZK
V1 ∧ V4 ∧ ¬V2 ∧ ¬V3 → UA = −UZK(V2 ∧ V4 ∧ ¬V1 ∧ ¬V3) ∨ (V1 ∧ V3 ∧ ¬V2 ∧ ¬V4) → UA = 0 [V] .
Durch den Zwischenkreiskondensator CZK [As/V] wird bei Belastung (Stromfluss ungleich Null) dieZwischenkreisspannung UZK (annähernd) konstant gehalten. Der 4-fach IGBT-Stromrichter arbeitetmit einer Schaltfrequenz von f = 1/T = 1800 [Hz], d.h. innerhalb der Periodendauer T = 1/1800 [s]kann einmal der Schaltzustand geändert werden. Abhängig von der Pulsbreite TP [s] (mit 0 ≤ TP ≤ T )und der zur Verfügung stehenden Zwischenkreisspannung UZK ergibt sich für das Ventilpaar V2 ∧ V3(bzw. V1 ∧ V4) eine mittlere Spannung pro Periode (siehe Abb. 3b) von
UA =1
T
∫ t0+T
t0
UA(τ) dτ =TPTUZK (bzw. − TP
TUZK).
Abhängig von der Lastbeschaltung entwickelt sich der Strom durch den 4-fach IGBT-Stromrichter. InAbb. 3b ist beispielhaft ein Stromverlauf IA(·) bei nicht negativer Spannung UA(·) für eine ohmsch-induktive Last dargestellt (Ventilpaar V2 ∧ V3).
3 Versuchsaufbau
Der Versuchsaufbau besteht aus Gleichstrommotor und starr gekoppeltem Tachogenerator (siehe Abb. 4)und (Universal-)Ansteuerelektronik (siehe Abb. 7 rechts) jeweils für IGBT-Modul (siehe Abb. 5a)und Thyristor-/Diodenmodul (siehe Abb. 5b). Die Leistungsmodule werden über Trenntrafo und/oder
– 3 –
UAUZK
CZK V1
V2
V3
V4
(a) Mehrquadrantenpulssteller (4-fach IGBT-Stromrichter) mit Ventilen V1-V4 (und Dioden),Zwischenkreisspannung UZK [V], Zwischenkreis-kondensator CZK [As/V] und (Anker-)SpannungUA [V]
UA(·)IA(·)
UA
IA
UZK
TP
T
[V],[A
]
Zeit t [s]
(b) Pulsweitenmodulation (PWM) mit konstanter PeriodendauerT [s], variabler Pulsbreite TP [s] und konstanter Zwischenkreisspan-nung UZK [V]: Spannungs- UA(·) und Stromverläufe IA(·) mit Mit-telwerten UA und IA (bei ohmsch-induktiver Last)
Abbildung 3: 4-fach IGBT-Stromrichter und Pulsweitenmodulation (positive Ankerspannung)
Gleichrichter (AC/DC) aus dem drei Phasensystem mit Energie gespeist (siehe Abb. 6 links) und kön-nen über das RLC-Lastmodul (siehe Abb. 6 rechts) belastet werden. Ströme und Spannung lassen sichmithilfe des Messgerätes (siehe Abb. 8b) im gesamten Bereich messen. Die in Abb. 8a dargestellteBuchsenplatte dient als Schnittstelle zur I/O Karte NI PCI-6221 (37pin) im Host/Target Rechner underlaubt Ein- und Ausgabe über drei differentielle Analogeingänge AI0, AI1 und AI2 (Summenabta-strate 250 [kHz], Auflösung 16 [bit], Messbereiche ±0.2,±1,±5,±10 [V]), zwei analoge Ausgänge AO0und AO1 (Auflösung 16 [bit], Ausgangsbereich ±10 [V]) und einen digitalen Ausgang DOP0.0 (TTL-Pegel). In Tabelle 1 sind einige Kerndaten des GM zusammengefasst (Vervollständigung erfolgt bei derVersuchsdurchführung). Es werden drei Messgrößen als Spannung erfasst :
• die Ankerspannung UA [V] zwischen OUT U & OUT V (siehe Abb. 5a) über Messverstärker A mitVerhältnis 250 : 2, 5 [1]: Abgriff der zu UA proportionalen Spannung UY 1 an Y1 mit BNC-Kabel(siehe Abb. 7) und Anschluss an AI0 der Buchsenplatte (siehe Abb. 8a);
• der Ankerstrom IA [A] als Spannung UR3 [V] an Widerstand R3 (siehe Abb. 5a) über Mess-verstärker D mit Verhältnis 2, 5 : 2, 5 [1]: Abgriff der zu IA proportionalen Spannung UY 2 an Y2mit BNC-Kabel (siehe Abb. 7) und Anschluss an AI1 der Buchsenplatte (siehe Abb. 8a);
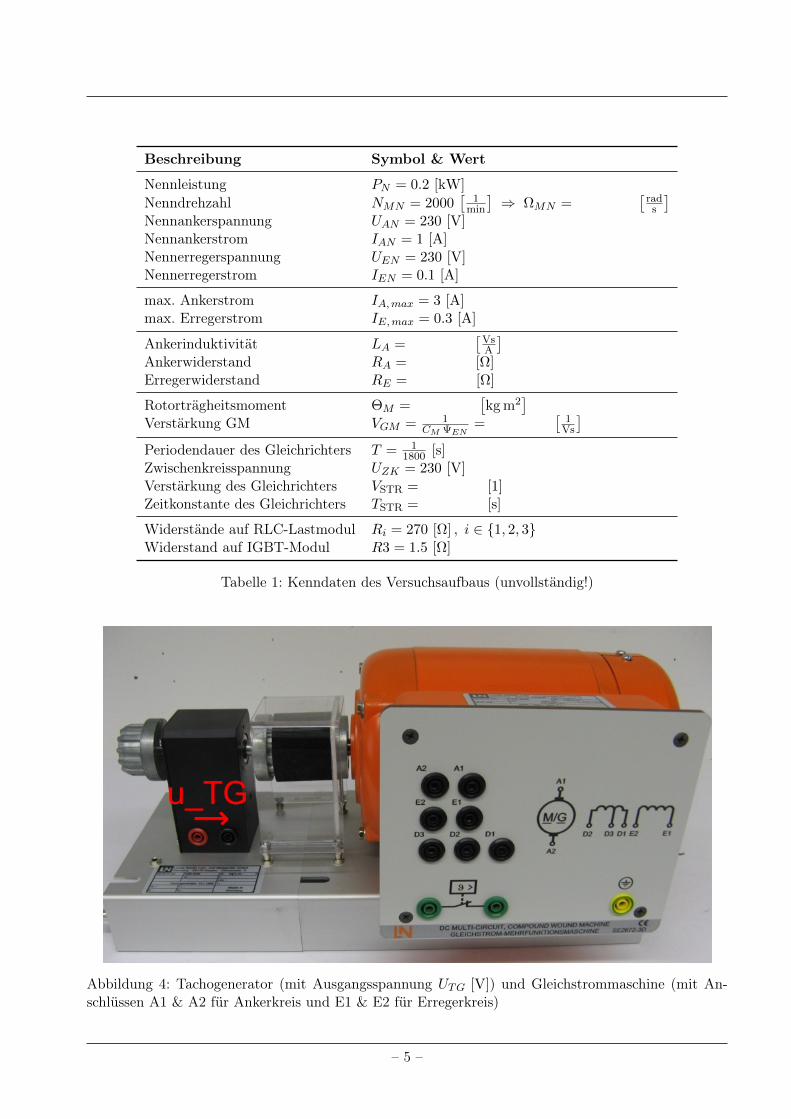
• die Motordrehzahl ΩM [rad/s] als Spannung UTG [V] am Tachogenerator (zwischen roter &schwarzer Buchse, siehe Abb. 4) mit 1 [V] = 1000 [U/min]: Anschluss an AI2 der Buchsenplatte(siehe Abb. 8a).
Die Sollankerspannung U?A wird über die Ausgabespannung an AO0 der Schnittstelle (zw. roter& schwarzer Buchse, siehe Abb. 8a) an die Steuerelektronik (Spannung zw. A & B, siehe Abb. 7) über-geben (Poti auf Anschlag rechts). Hierbei gilt folgender Zusammenhang zwischen Spannungsvorgabeund Pulsbreite:
10 [V] → TP = 100%T ∧ UA = UZK , d.h. Ventilpaar V2 ∧ V3 aktiv5 [V] → TP = 0%T ∧ UA = 0
und 0 [V] → TP = 100%T ∧ UA = −UZK , d.h. Ventilpaar V1 ∧ V4 aktiv.
(3)
Die Schnittstellenausgänge AO1 und DOP0.0 werden nicht benötigt.
– 4 –
Beschreibung Symbol & Wert
Nennleistung PN = 0.2 [kW]
Nenndrehzahl NMN = 2000[
1min
]⇒ ΩMN =
[rads
]Nennankerspannung UAN = 230 [V]Nennankerstrom IAN = 1 [A]Nennerregerspannung UEN = 230 [V]Nennerregerstrom IEN = 0.1 [A]
max. Ankerstrom IA,max = 3 [A]max. Erregerstrom IE,max = 0.3 [A]
Ankerinduktivität LA =[
VsA
]Ankerwiderstand RA = [Ω]Erregerwiderstand RE = [Ω]
Rotorträgheitsmoment ΘM =[kg m2
]Verstärkung GM VGM = 1
CM ΨEN=
[1
Vs
]Periodendauer des Gleichrichters T = 1
1800 [s]Zwischenkreisspannung UZK = 230 [V]Verstärkung des Gleichrichters VSTR = [1]Zeitkonstante des Gleichrichters TSTR = [s]
Widerstände auf RLC-Lastmodul Ri = 270 [Ω] , i ∈ 1, 2, 3Widerstand auf IGBT-Modul R3 = 1.5 [Ω]
Tabelle 1: Kenndaten des Versuchsaufbaus (unvollständig!)
Abbildung 4: Tachogenerator (mit Ausgangsspannung UTG [V]) und Gleichstrommaschine (mit An-schlüssen A1 & A2 für Ankerkreis und E1 & E2 für Erregerkreis)
– 5 –
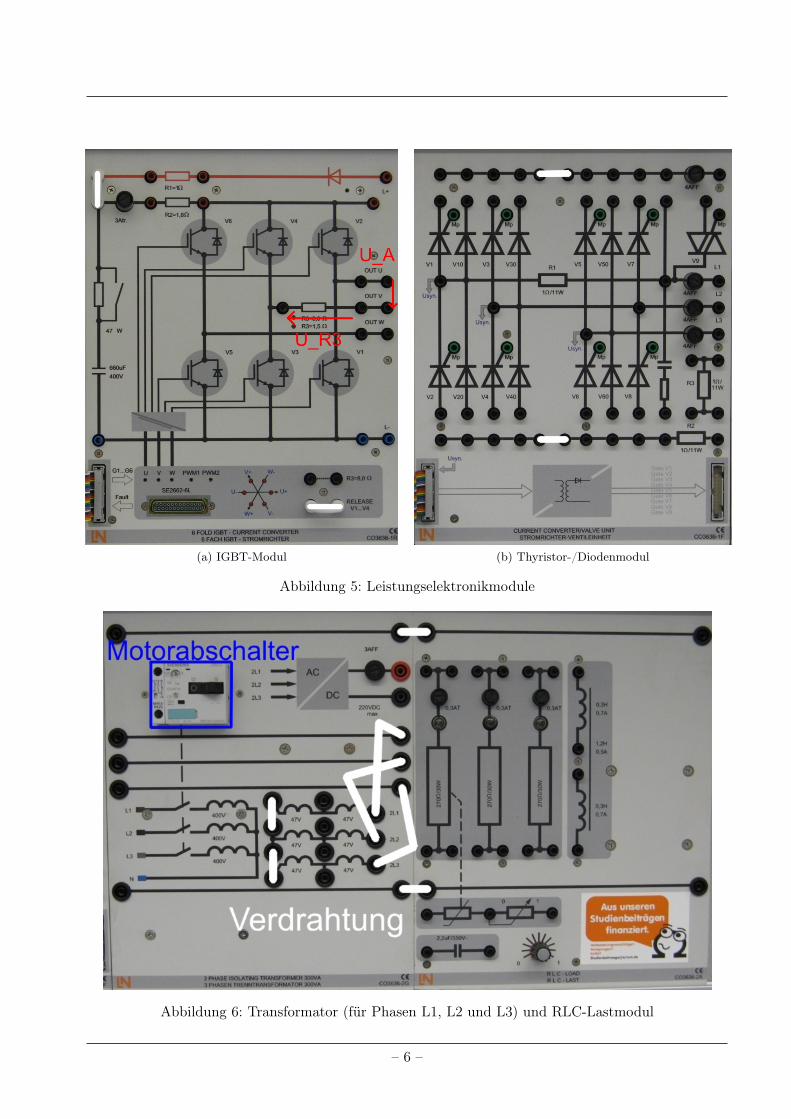
(a) IGBT-Modul (b) Thyristor-/Diodenmodul
Abbildung 5: Leistungselektronikmodule
Abbildung 6: Transformator (für Phasen L1, L2 und L3) und RLC-Lastmodul
– 6 –
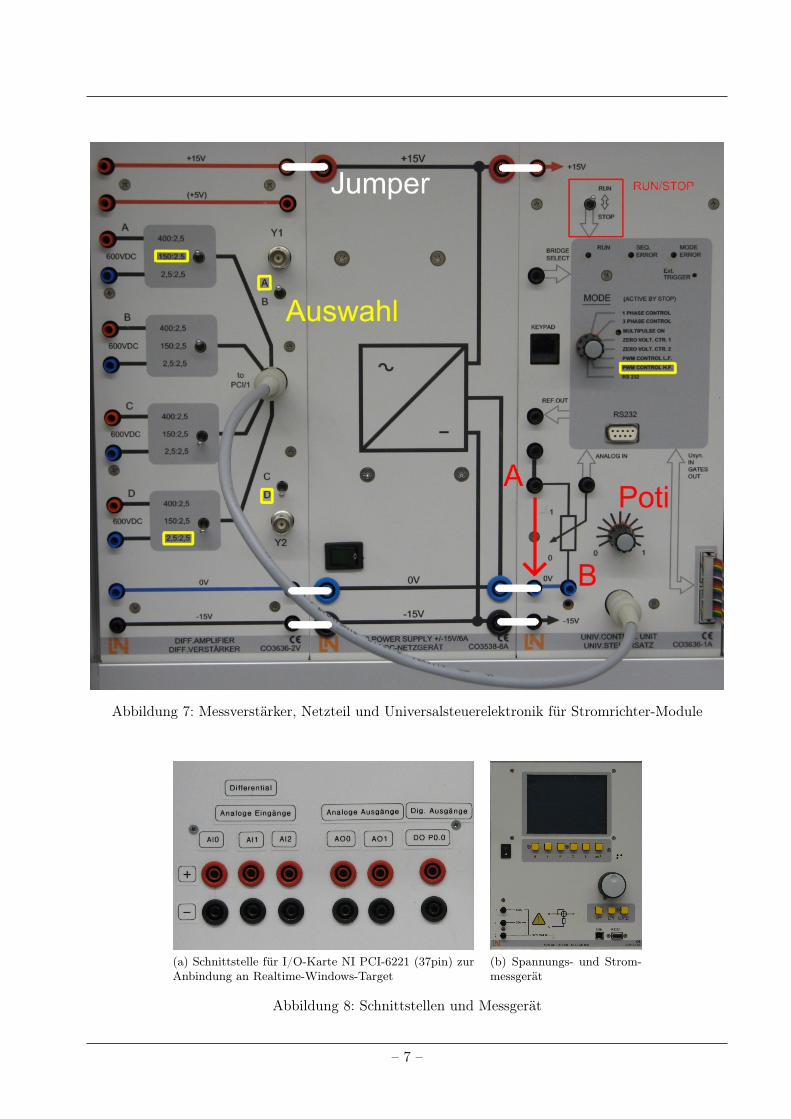
Abbildung 7: Messverstärker, Netzteil und Universalsteuerelektronik für Stromrichter-Module
(a) Schnittstelle für I/O-Karte NI PCI-6221 (37pin) zurAnbindung an Realtime-Windows-Target
(b) Spannungs- und Strom-messgerät
Abbildung 8: Schnittstellen und Messgerät
– 7 –
4 Versuchsdurchführung
Legen Sie den Kippschalter RUN/STOP auf STOP (siehe Abb. 7) und den Motorabschalter auf 0 (sie-he Abb. 6). Drehen Sie den Poti auf Anschlag rechts (siehe Abb. 7). Verdrahten Sie die Module mitJumpern bzw. Steckerverbindungen (weiss) entsprechend den Abb. 5, 6 und 7. Verbinden Sie auch dieobere (Universal-)Steuerelektronik mit dem Netzteil (siehe Abb. 7). Treffen Sie entsprechend Abb. 7die vorgegebene Auswahl (gelb) mithilfe der Kippschalter und des Drehschalters der Universalsteuer-elektronik. Verbinden Sie die einzelnen Module mit der Schnittstelle (AI0, AI1, AI2 und AO0, sieheAbb. 8a) entsprechend der Beschreibung auf Seite 4.
In Matlab/Simulink stehen Ihnen die vorgefertigte Dateien ‘GM_Regelung_Init.m’ (Matlab-Skript)und ‘GM_Regelung.mdl’ (Simulink-Modell) zur Verfügung. Während der Versuchsdurchführung ergän-zen Sie beide Dateien entsprechend der Aufgabenstellungen. Zur Initialisierung Ihres Simulink-Modells‘GM_Regelung.mdl’ drücken Sie F5 im Matlab-Editor bei geöffnetem Skript ‘GM_Regelung_Init.m’.Zur Erzeugung (build-process) eines realzeitfähigen Programms zur Regelung der GM auf dem Tar-get/Host PC mithilfe von Realtime-Windows-Target drücken Sie STRG+B im geöffnetem Simulink-Modell ‘GM_Regelung.mdl’.
Achtung: Gehen Sie bei Ihrer Versuchsdurchführung sorgfältig vor und überprüfen Sie Ihre Steck-verbindungen. Bevor Sie Motor und Gleichrichter mit Energie speisen (d.h. Motorabschalterauf I, siehe Abb. 6 links) und die Pulsweitenmodulation (PWM) frei schalten (d.h. Kippschal-ter RUN/STOP auf RUN, siehe Abb. 7), zeigen Sie Ihre Verdrahtung dem Betreuer!Bei Problemen während einer Messung bzw. nach jeder Messung schalten Sie den KippschalterRUN/STOP auf STOP (“Notaus”) zurück! Bevor Sie Verdrahtungen bzw. Steckverbindungen ändern,stellen Sie sicher, dass der Kippschalter auf STOP und der Motorabschalter auf 0 geschaltet sind!
4.1 Signalanpassung
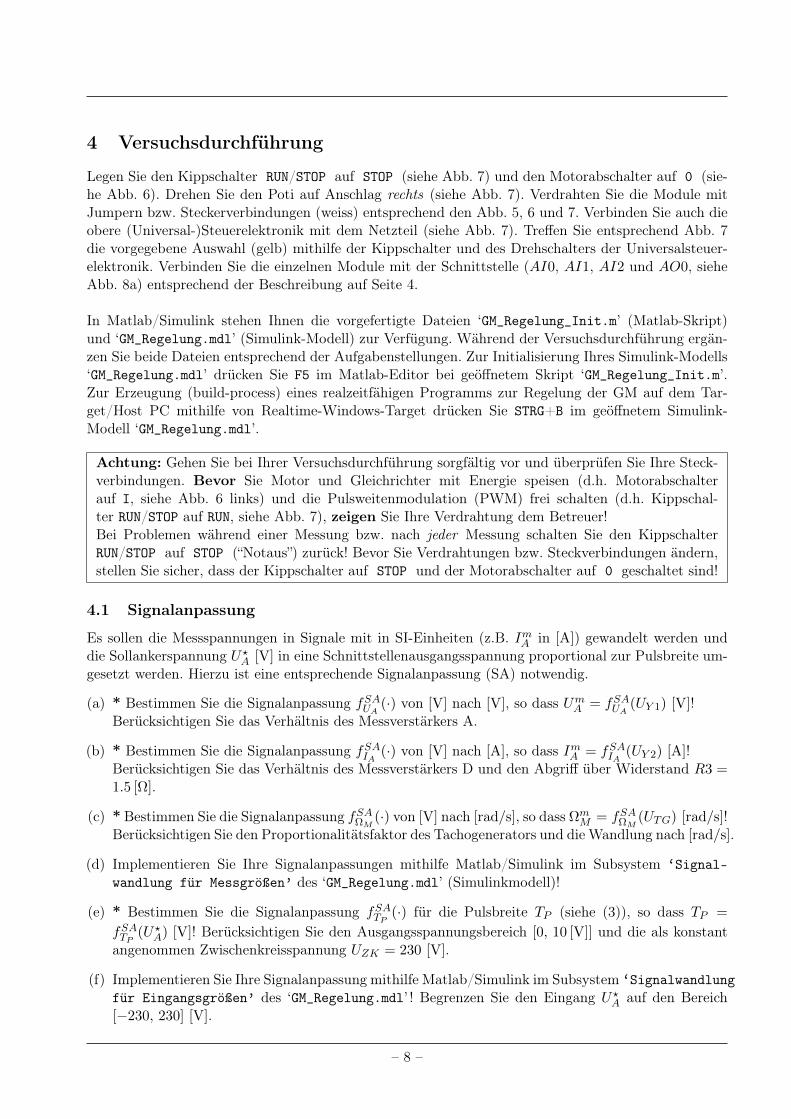
Es sollen die Messspannungen in Signale mit in SI-Einheiten (z.B. ImA in [A]) gewandelt werden unddie Sollankerspannung U?A [V] in eine Schnittstellenausgangsspannung proportional zur Pulsbreite um-gesetzt werden. Hierzu ist eine entsprechende Signalanpassung (SA) notwendig.
(a) * Bestimmen Sie die Signalanpassung fSAUA(·) von [V] nach [V], so dass UmA = fSAUA
(UY 1) [V]!Berücksichtigen Sie das Verhältnis des Messverstärkers A.
(b) * Bestimmen Sie die Signalanpassung fSAIA (·) von [V] nach [A], so dass ImA = fSAIA (UY 2) [A]!Berücksichtigen Sie das Verhältnis des Messverstärkers D und den Abgriff über Widerstand R3 =1.5 [Ω].
(c) * Bestimmen Sie die Signalanpassung fSAΩM(·) von [V] nach [rad/s], so dass Ωm
M = fSAΩM(UTG) [rad/s]!
Berücksichtigen Sie den Proportionalitätsfaktor des Tachogenerators und die Wandlung nach [rad/s].
(d) Implementieren Sie Ihre Signalanpassungen mithilfe Matlab/Simulink im Subsystem ‘Signal-wandlung für Messgrößen’ des ‘GM_Regelung.mdl’ (Simulinkmodell)!
(e) * Bestimmen Sie die Signalanpassung fSATP (·) für die Pulsbreite TP (siehe (3)), so dass TP =
fSATP (U?A) [V]! Berücksichtigen Sie den Ausgangsspannungsbereich [0, 10 [V]] und die als konstantangenommen Zwischenkreisspannung UZK = 230 [V].
(f) Implementieren Sie Ihre Signalanpassung mithilfe Matlab/Simulink im Subsystem ‘Signalwandlungfür Eingangsgrößen’ des ‘GM_Regelung.mdl’ ! Begrenzen Sie den Eingang U?A auf den Bereich[−230, 230] [V].
– 8 –

4.2. Ankerstromregelung
4.2 Ankerstromregelung
Hinweis: Sie können durch Aufruf (F5 im Editor drücken) des Matlab-Skriptes ‘GM_Plot_Figure.m’eine Figure erzeugen, die – jeweils über der Zeit t [s] – die Größen Ωm
M , ΩM ,Ω?M [rad/s],
ImA , IA, I?A [A] und UmA , UA, U
?A [V] darstellt. Speichern Sie die erzeugten Figuren jeweils in einem
geeigneten Verzeichnis ab.
4.2.1 Nenngrößen
(a) * Berechnen Sie die Nennwinkelgeschwindigkeit ΩMN [rad/s] und das Nennmoment MMN [Nm]des Gleichstrommotors!
(b) * Berechnen Sie (symbolisch) die stationäre Verstärkung VGM = 1CM ΨEN
[radVs
]des Gleichstrom-
motors im Nennpunkt!
(c) * Berechnen Sie (symbolisch) die Leerlaufwinkelgeschwindigkeit Ω0MN [Nm] des Gleichstrommo-tors?
(d) * Welche Erregerspannung UE [V] muss am Erregerkreis anliegen, so dass sich Nennfluss ΨEN
einstellt?
(e) * Welche Ankerspannung UA [V] muss am Ankerkreis anliegen, so dass sich die LeerlaufdrehzahlΩ0MN einstellt?
4.2.2 Bestimmen (Schätzen) der Ankerkreisparameter
(a) Messen Sie mithilfe des Multimeters den Ankerkreiswiderstand RA [Ω] und tragen Sie den Wert in‘GM_Regelung_Init.m’ ein!
(b) * Bestimmen Sie Verstärkung VSTR und Zeitkonstante TSTR des selbstgeführten IGBT-Strom-richters! Müssen Sie Ihre Signalwandlung aus Aufgabe 4.1e berücksichtigen?
(c) * Überlegen Sie sich eine Möglichkeit zur Schätzung der Ankerzeitkonstante TA = LA/RA [s]!
(d) Bestimmen Sie die Ankerzeitkonstante T ′A = LA/R′A [s] (wobei R′A = R2 + R3 + RA +
∑iRi,
siehe Tab. 1). Begrenzen Sie bei Ihrer Messung durch entsprechende Serienschaltung von Wider-ständen (mithilfe des RLC-Lastmoduls in Abb. 6 rechts) den maximalen Ankerstrom auf 0.3 [A]und überwachen Sie den Stromverlauf IA mithilfe des Messgerätes (siehe Abb. 8b)! Regen Sie denAnkerkreis mit folgendem Sollankerspannungsverlauf an
∀ t ∈ [0, 10] [s] : U?A(t) = UZK(σ(t− 1)− σ(t− 2)
)− UZK
(σ(t− 3)− σ(t− 4)
)−UZK
(σ(t− 5)− σ(t− 6)
)+ UZK
(σ(t− 7)− σ(t− 8)
)[V]
(4)
wobei für t0 ≥ 0
σ(t− t0) =
0 , t < t0 [s]
1 , t ≥ t0 [s]
die um t0 nach rechts verschobene Sprungfunktion darstellt. Verwenden Sie hierzu z.B. den Simulink-Block ‘Repeating Sequence Stair’ (siehe Simulink-Bibliothek:Sources) und verbinden Sie dasSignal U?A mit dem Subsystem ‘Signalrouting für Scope’.
(e) Berechnen Sie die Ankerinduktivität LA [Vs/A] aus T ′A [s] und die reale Ankerzeitkonstante TA =LA
R2+R3+RA[s]. Tragen Sie deren Werte in ‘GM_Regelung_Init.m’ ein!
– 9 –
4.2. Ankerstromregelung
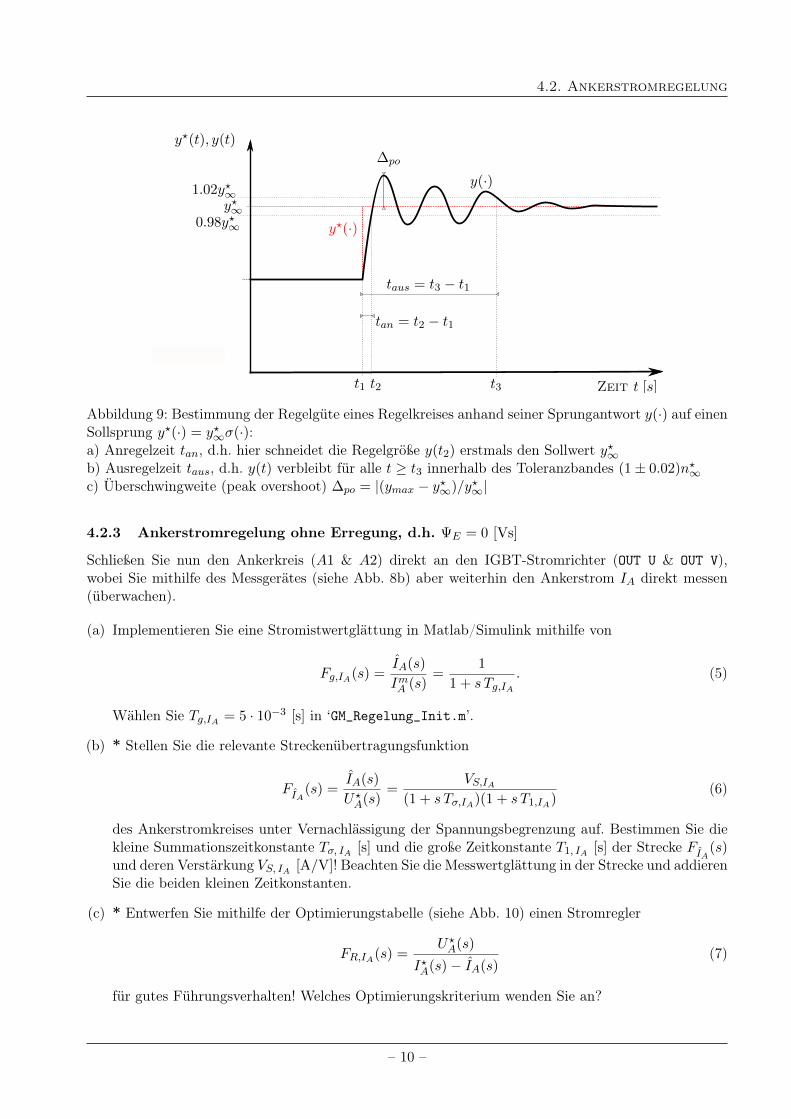
y⋆(·)y⋆∞
y(·)
y⋆(t), y(t)
1.02y⋆∞
0.98y⋆∞
taus = t3 − t1
tan = t2 − t1
t1 t2 t3
∆po
Zeit t [s]
Abbildung 9: Bestimmung der Regelgüte eines Regelkreises anhand seiner Sprungantwort y(·) auf einenSollsprung y?(·) = y?∞σ(·):a) Anregelzeit tan, d.h. hier schneidet die Regelgröße y(t2) erstmals den Sollwert y?∞b) Ausregelzeit taus, d.h. y(t) verbleibt für alle t ≥ t3 innerhalb des Toleranzbandes (1± 0.02)n?∞c) Überschwingweite (peak overshoot) ∆po = |(ymax − y?∞)/y?∞|
4.2.3 Ankerstromregelung ohne Erregung, d.h. ΨE = 0 [Vs]
Schließen Sie nun den Ankerkreis (A1 & A2) direkt an den IGBT-Stromrichter (OUT U & OUT V),wobei Sie mithilfe des Messgerätes (siehe Abb. 8b) aber weiterhin den Ankerstrom IA direkt messen(überwachen).
(a) Implementieren Sie eine Stromistwertglättung in Matlab/Simulink mithilfe von
Fg,IA(s) =IA(s)
ImA (s)=
1
1 + s Tg,IA. (5)
Wählen Sie Tg,IA = 5 · 10−3 [s] in ‘GM_Regelung_Init.m’.
(b) * Stellen Sie die relevante Streckenübertragungsfunktion
FIA(s) =IA(s)
U?A(s)=
VS,IA(1 + s Tσ,IA)(1 + s T1,IA)
(6)
des Ankerstromkreises unter Vernachlässigung der Spannungsbegrenzung auf. Bestimmen Sie diekleine Summationszeitkonstante Tσ, IA [s] und die große Zeitkonstante T1, IA [s] der Strecke FIA(s)und deren Verstärkung VS, IA [A/V]! Beachten Sie die Messwertglättung in der Strecke und addierenSie die beiden kleinen Zeitkonstanten.
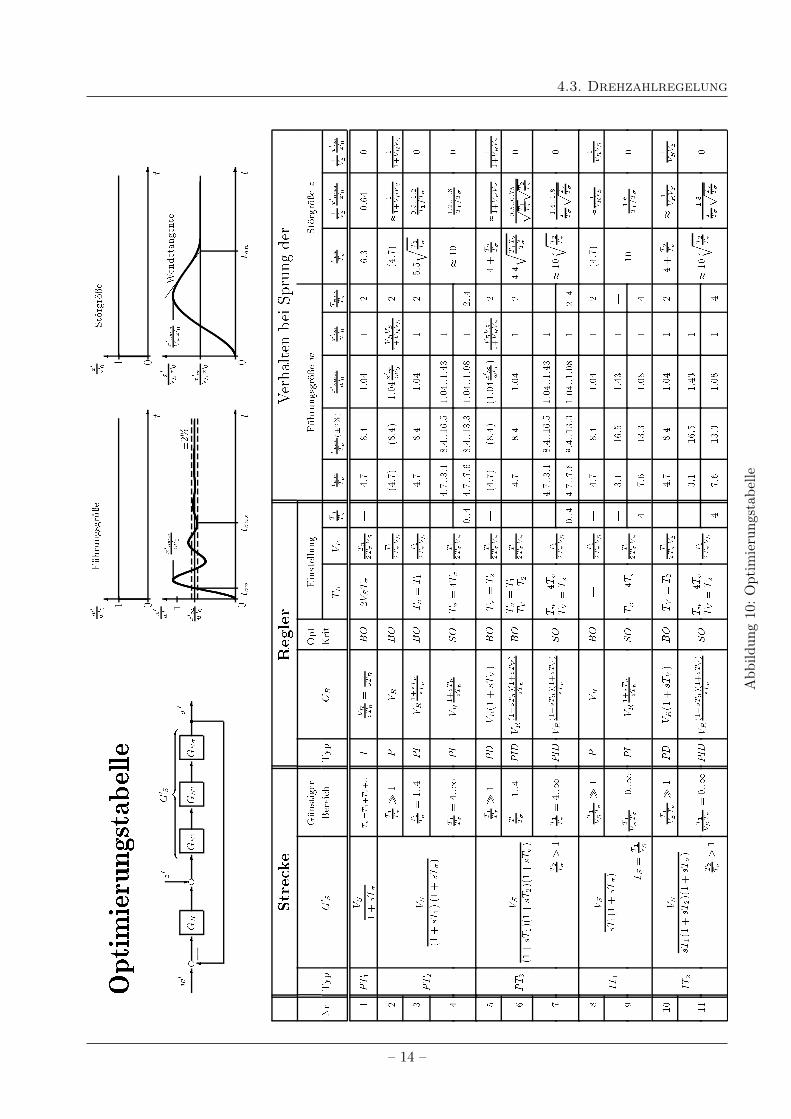
(c) * Entwerfen Sie mithilfe der Optimierungstabelle (siehe Abb. 10) einen Stromregler
FR,IA(s) =U?A(s)
I?A(s)− IA(s)(7)
für gutes Führungsverhalten! Welches Optimierungskriterium wenden Sie an?
– 10 –
4.2. Ankerstromregelung
(d) * Berechnen Sie die Übertragungsfunktion
Fw,IA(s) =IA(s)
I?A(s)=
FR,IA(s)FIA(s)
1 + FR,IA(s)FIA(s)(8)
des geschlossenen Stromregelkreises! Bei Ihrer Berechnung ersetzen Sie die Reglerparameter durchdie Streckenparameter.
(e) Erweitern Sie Modell ‘GM_Regelung.mdl’ und Init-Skript ‘GM_Regelung_Init.m’ um den entwor-fenen Stromregler bzw. dessen Reglerparameter und verbinden Sie die Signale I?A und IA mit demSubsystem ‘Signalrouting für Scope’ !
(f) Verifizieren Sie das Verhalten Ihres Stromregelkreises für einen rechteckigen Verlauf des Stromsoll-wertes
∀ t ∈ [0, 10] [s] : I?A(t) = 0.2(σ(t− 1)− σ(t− 2)
)− 0.2
(σ(t− 3)− σ(t− 4)
)+0.3
(σ(t− 5)− σ(t− 6)
)− 0.3
(σ(t− 7)− σ(t− 8)
)[A] .
Implementieren Sie den Stromsollwertverlauf wieder mithilfe des ‘Repeating Sequence Stair’Simulink-Blocks.
(g) Entsprechend Abb. 9 bestimmen Sie Anregelzeit, Ausregelzeit (bei einem Toleranzband von ±2%)und maximales Überschwingen! Vergleichen Sie Ihre Ergebnisse mit den Vorgaben der Optimie-rungstabelle. Gibt es Abweichungen zur Optimierungstabelle? Wenn ja, warum?
4.2.4 Ankerstromregelung mit Erregung, d.h. ΨE = ΨEN [Vs]
(a) * Wie können Sie die nötige (konstante) Erregernennspannung UEN = 230 [V] erzeugen, umdie Gleichstrommaschine mit Nennfluss ΨE = ΨEN [Vs] zu erregen? Skizzieren Sie hierzu einenSechspuls-Gleichrichter (B6U) aus Leistungsdioden. Überlegen Sie sich die nötige Verdrahtunganhand des Diodenmoduls in Abb. 5b.
(b) Verdrahten Sie das Diodenmodul, so dass ein Sechspuls-Gleichrichter realisiert wird! Verbinden Sieden Dioden-Gleichrichter mit den drei Versorgungsspannungen aus 2L1, 2L2 und 2L3 und messenSie die Ausgangsspannung mithilfe des Messgerätes (siehe Abb. 8b)! Verbinden Sie Erregerkreis(E1 & E2, siehe Abb. 4) mit dem Ausgang Ihres Diodengleichrichters!
(c) Wiederholen Sie Teilaufgabe 4.2.3(f). Warum ergibt sich ein stationärer Regelfehler?
(d) * Berechnen Sie aus Gl. (1) die Übertragungsfunktion
FGM (s) =ΩM (s)
UA(s)(9)
der Gleichstrommaschine (Annahme: ΨE = ΨEN )!
(e) * Wie lässt sich die stationäre Verstärkung VGM = 1CM ΨEN
[radVs
]der Übertragungsfunktion
FGM (s) der GM aus den Nenngrößen bestimmen? Überlegen Sie sich eine Möglichkeit zur Ve-rifikation der Verstärkung VGM anhand von Messergebnissen!
(f) Implementieren Sie eine Drehzahlistwertglättung in Matlab/Simulink mithilfe von
Fg,ΩM(s) =
ΩM (s)
ΩmM (s)
=1
1 + s Tg,ΩM
. (10)
– 11 –
4.3. Drehzahlregelung
Wählen Sie Tg,ΩM= 10 · 10−3 [s] in ‘GM_Regelung_Init.m’ und verbinden Sie das Signal ΩM mit
dem Subsystem ‘Signalrouting für Scope’ !
(g) Führen Sie die entsprechende Messung zur Validierung von VGM durch! Regen Sie die Gleichstrom-maschine hierzu mit dem in Gl. (4) angegebenen Sollspannungsverlauf U?A an!
(h) * Überlegen Sie sich eine Möglichkeit zur Elimination des Einflusses der induzierten Gegenspan-nung EA (Hinweis: Störgrößenaufschaltung)! Nehmen Sie an, dass Ihnen die geglättete DrehzahlΩM (t) als Signal zur Verfügung steht.
(i) Implementieren Sie Ihre Idee zur EMK-Kompensation in ‘GM_Regelung.mdl’ ! Wiederholen SieTeilaufgabe 4.2.3(f). Ergibt sich weiterhin ein stationärer Regelfehler?
(j) Gibt es Wind-Up Probleme? Falls ja, implementieren Sie eine einfache Anti-Wind-Up Strategie!
4.3 Drehzahlregelung
(a) * Überlegen Sie sich eine Möglichkeit zur Schätzung des Trägheitmomentes ΘM
[kg m2
]der
Gleichstrommaschine! Verwenden Sie bisherige Erkenntnisse und den Stromregelkreis mit EMK-Kompensation.
(b) Führen Sie entsprechende Messungen zur Schätzung des Trägheitmomentes ΘM
[kg m2
]durch und
tragen Sie dessen Wert in ‘GM_Regelung_Init.m’ ein!
(c) * Ersetzen Sie zunächst den Stromregelkreis
Fw, IA(s) =IA(s)
I?A(s)≈ 1
1 + sTers, IA(11)
durch eine Ersatz-Übertragungsfunktion mit PT1-Verhalten und der Zeitkonstanten Ters, IA (An-nahme: ideale EMK-Kompensation). Verwenden Sie die Übertragungsfunktion (6) aus Aufgabe 4.2und beachten Sie hierbei den Zusammenhang zwischen IA(s) (bzw. ImA (s)) und IA(s) aufgrund derStromglättung (5)! Wie groß ist Ters, IA (Polynomdivision notwendig)?
(d) * Stellen Sie mithilfe der Ersatzübertragungsfunktion (11) die (genäherte) Streckenübertragungs-funktion
FΩM(s) =
ΩM (s)
I?A(s)=
VS,ΩM
s T1,ΩM(1 + s Tσ,ΩM
)(12)
für den Drehzahlreglerentwurf auf! Bestimmen Sie die kleine Summationszeitkonstante Tσ,ΩMund
die Verstärkung VS,ΩMder Strecke FΩM
(s) für Nennfluss ΨE = ΨEN und große ZeitkonstanteT1,ΩM
= 1 [s]. Warum ist diese Wahl für T1,ΩMzulässig?
(e) * Welchen Reglertyp schlagen Sie vor und nach welchem Optimierungskriterium legen Sie denDrehzahlregler aus (siehe Optimierungstabelle in Abb. 10)!
(f) Erweitern Sie Ihre Regelkreisstruktur in ‘GM_Regelung.mdl’ und das Init-Skript‘GM_Regelung_Init.m’ um den entworfenen Drehzahlregler! Begrenzen Sie den Drehzahlregler-ausgang I?A auf den Bereich [−I?A,max, I?A,max] mit I?A,max = 5 [A]!
– 12 –
4.3. Drehzahlregelung
(g) Bestimmen Sie wieder Anregelzeit, Ausregelzeit und maximales Überschwingen für alle Sprüngedes folgenden Solldrehzahlverlaufes
∀ t ∈ [0, 10] [s] : Ω?M (t) = 50
(σ(t− 1)− σ(t− 2)
)− 50
(σ(t− 3)− σ(t− 4)
)+100
(σ(t− 5)− σ(t− 6)
)− 100
(σ(t− 7)− σ(t− 8)
) [rad
s
].
Verbinden Sie das Signal Ω?M mit dem Subsystem ‘Signalrouting für Scope’ ! Gibt es Abwei-
chungen zu den Vorgaben in der Optimierungstabelle? Wenn ja, warum?
(h) Ihnen ist die erzielte Überschwingweite zu hoch. Implementieren Sie eine entsprechende Maßnah-me, die das Überschwingen reduziert. Betrachten Sie die Signalverläufe! Was fällt Ihnen beimAnkerstrom IA auf?
(i) Nehmen Sie an, dass der Sollankerstrom den (neuen) Maximalwert I?A,max = 0.5A nicht über-schreiten soll und begrenzen Sie das Signal des Stromsollwerts I?A entsprechend! Wiederholen Siedie Messung aus Aufgabe 4.3(g) (ohne Sollwertglättung!) und vergleichen Sie die Signalverläufemit der Messung von Aufgabe 4.3(g). Welche Unterschiede sind erkennbar (Begründung)? Müs-sen zum Erreichen einer befriedigenden Regelgüte evtl. noch weitere Maßnahmen getroffen werden(Hinweis: Wind-Up Problematik)?
– 13 –
4.3. Drehzahlregelung
Optimierungstabelle ----
---6? dd
rG RG S1G S2G S
w0z0x0G0 S z |
F uhrungsgr oe 6- t01w0 w0 0 6
- t01x0 w0 0 x0 1 w0 0 t ant ausx0 max w0 0 2%
St orgr oe 6- t01z0 z0 0 6
- t0ZZZZZ t anx0 V Sz0 0 x0 1 V Sz0 0x0 max V Sz0 0Wendetangente
StreckeReglerVerhaltenbeiSprungder
G unstigerOpt.EinstellungF uhrungsgr oewSt orgr oez
Nr.TypG0 SBereichTypG RKrit. T RV RT g T t an T t aus T (2%)x0 max w0 0x0 1 w0 0T ers T t an T 1 V Sx0 max z0 01 V Sx0 1 z0 0
1PT 1V S 1+sT T =T 1+T 2+::IV R sT n=1 sT RBO2V ST Tn 2T V S|4:78:41:04126:30:640
2T 1 T 1 PV RBO|T 1 2T V S|(4:7)(8:4)1:04x0 1 w0 0V RV S 1+V RV S2(4:7)1 1+V RV S1 1+V RV S
3T 1 T =1::4PIV R1+sT n sT nBOT n=T 1T 1 2T V S|4:78:41:04125:5q T 1 T 0:5::1:2 T 1=T 0
|4:7::3:18:4::16:51:04::1:431|
4PT 2V S (1+sT 1)(1+sT ) T 1 T =4::1PIV R1+sT n sT nSOT n=4T T 1 2T V S 0::44:7::7:68:4::13:
31:04::1:0812::4101:2::1:6 T 1=T 0
5T 1 T 1 PDV R(1+sTV)BOT V=T 2T 1 2T VS|(4:7)(8:4)(1:04x0 1 w0 0)V RV S 1+V RV S24+T 2 T 1 1+V RV S1 1+V RV S
6PT 3V S (1+sT 1)(1+sT 2)(1+sT )T 1 T =1::4 PIDV R(1+sT n)(1+sT V) sT nBOT n=T 1 T V=T 2T 1 2T V S|4:78:41:04124:4q T 1T 2 T2 0:5::0:75 p T 1 T p T 2 T 0
|4:7::3:18:4::16:51:04::1:431|
7T2 T >1T 1 T =4::1 PIDV R(1+sT n)(1+sT V) sT nSOT n=4T T V=T 2T 1 2T V S 0::44:7::7:68:4::13:
31:04::1:0812::4104q T 2 T 1:4::1:8 T 1 T p T 2 T 0
8T 1 V ST 1PV RBO|T 1 2T V S|4:78:41:0412(4:7)1 V RV S1 V RV S
IT 1V S sT 1(1+sT )
|3:116:51:431|
9 T S=T 1 V ST 1 V ST =0::1PIV R1+
sT n sT nSOT n=4T T 1 2T V S 47:613:3
1:0814101:6 T 1=T 0
10T 1 V ST 1PDV R(1+sT V)BOT V=T 2T 1 2T V S|4:78:41:04124+T 2 T 1 V RV S1 V RV S
IT 2V S sT 1(1+sT 2)(1+sT )|3:116:51:431|
11T 2 T >1T 1 V ST =0::1 PIDV R(1+sT n
)(1+sT V) sT nSOT n=4T T V=T 2T 1 2T V S 47:613:31:0814104q T 2 T 1:8 T 1 T p T 2 T 0
Abb
ildun
g10
:Optim
ierung
stab
elle
– 14 –











![Systeminformationen - RIB Software Home · Querschnittswerte bezogen auf Eideell= 37300N/mm² x [m] Zeitpunkt Ac,ideell[cm²] Iy,ideell[cm⁴] zs,ideell[cm] Wo[cm³] Wu[cm³] 0.000](https://img.pdfslide.org/doc/110x75/605de9727d45eb60d549d012/systeminformationen-rib-software-home-querschnittswerte-bezogen-auf-eideell-37300nmm.jpg)

















