Embed Size (px)
Citation preview
Proximity and DeformationProximity and Deformation
Leonidas Guibas
Stanford University
“Tutto cambia perchè nulla cambi”T. di Lampedusa, Il Gattopardo (1860+)
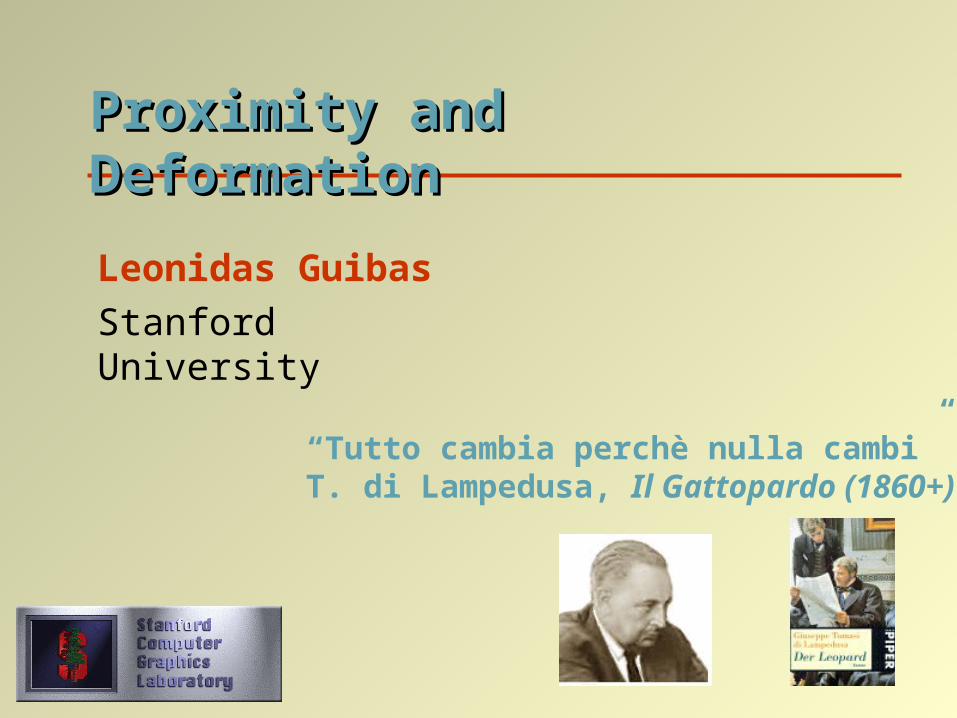
Proximity Maintenance in Physical Proximity Maintenance in Physical SimulationSimulation
Most forces in nature are short range
Collision detection
Drum hab ich mich der Magie ergeben,Ob mir durch Geistes Kraft und MundNicht manch Geheimnis würde kund;Daß ich nicht mehr mit saurem SchweißZu sagen brauche, was ich nicht weiß;Daß ich erkenne, was die WeltIm Innersten zusammenhält,Schau alle Wirkenskraft und Samen,Und tu nicht mehr in Worten kramen.
Large-Scale DeformationLarge-Scale Deformation
Most deformable models represent an object as a collection of many small elements
At each time step of a simulation, most elements move
We want to capture and maintain, under element motion, information that is useful for proximity detection, but is relatively stable at the same time (the KDS “Faustian dilemma”)
Bounding Volume Hierarchies for Bounding Volume Hierarchies for Deformable ObjectsDeformable Objects
Bounding volume hierarchies (BVH), using spheres, bounding boxes, etc., have been very successfully used for collision checking of rigid objects
Deformation brings up the issue of hierarchy recomputation or update
Tight Hierarchy Loose Hierarchy
Frequent updates
Faster collision checking
More stable
More wasted intersection tests
Implicit Hierarchies, Defined by Object Implicit Hierarchies, Defined by Object FeaturesFeatures
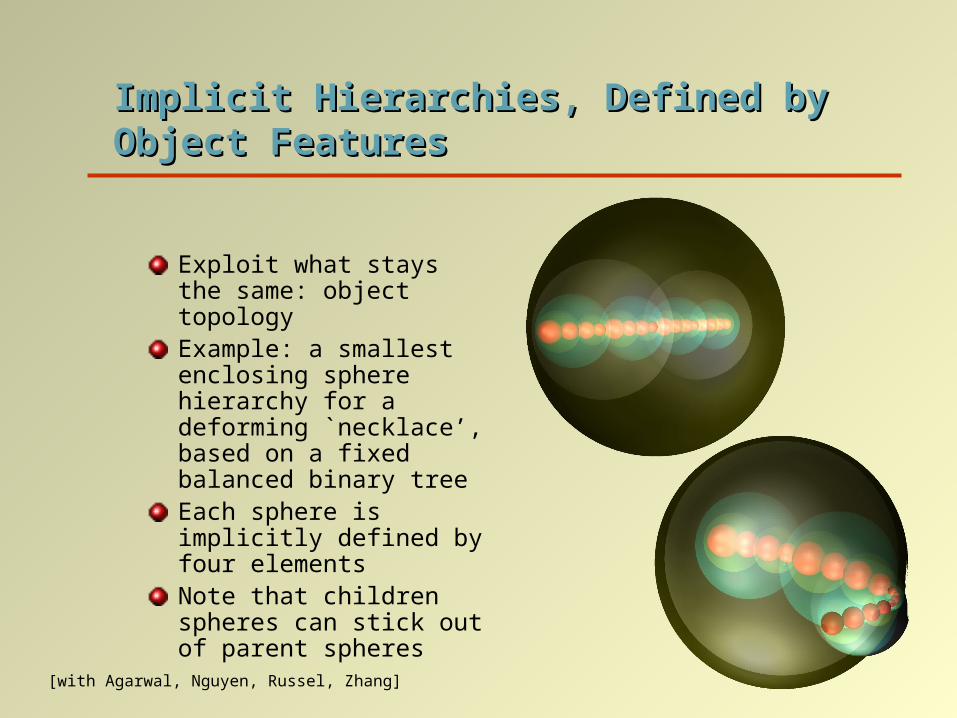
Exploit what stays the same: object topologyExample: a smallest enclosing sphere hierarchy for a deforming `necklace’, based on a fixed balanced binary treeEach sphere is implicitly defined by four elementsNote that children spheres can stick out of parent spheres
[with Agarwal, Nguyen, Russel, Zhang]
Combinatorial Descriptions are StableCombinatorial Descriptions are Stable
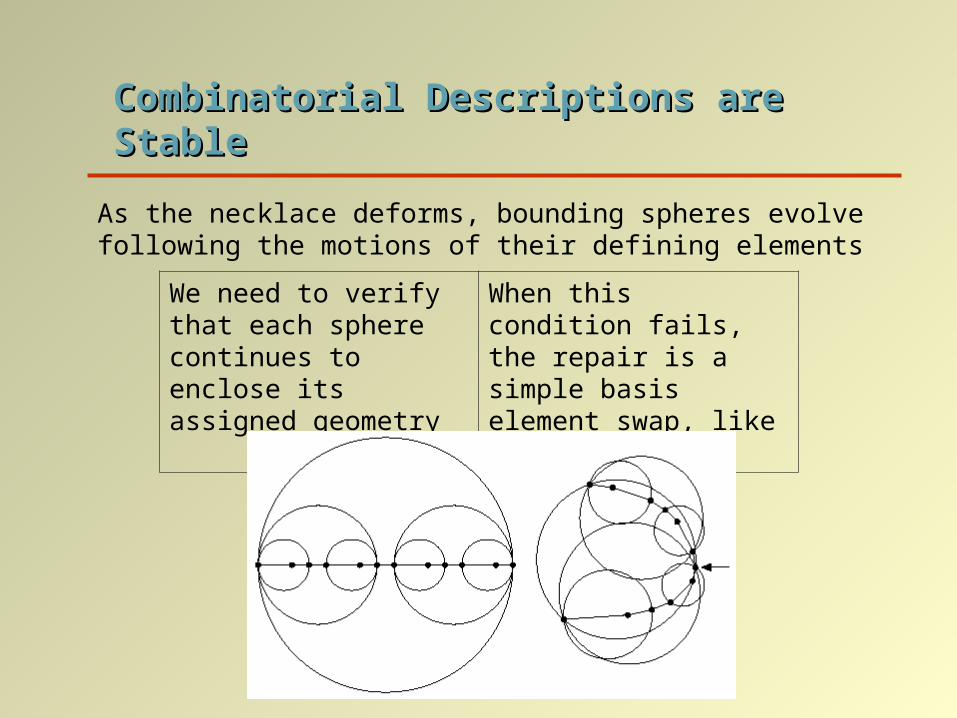
As the necklace deforms, bounding spheres evolve following the motions of their defining elements
We need to verify that each sphere continues to enclose its assigned geometry
When this condition fails, the repair is a simple basis element swap, like pivoting in LP
Maintaining the Sphere Hierarchy under Maintaining the Sphere Hierarchy under DeformationDeformation
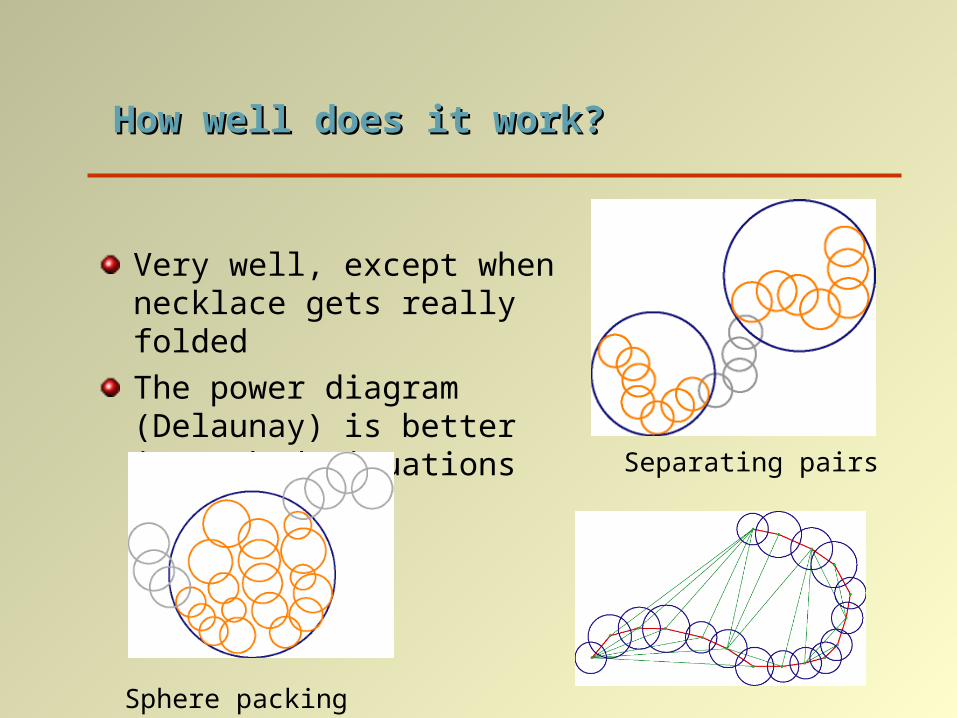
How well does it work?How well does it work?
Very well, except when necklace gets really folded
The power diagram (Delaunay) is better in packed situations
Separating pairs
Sphere packing
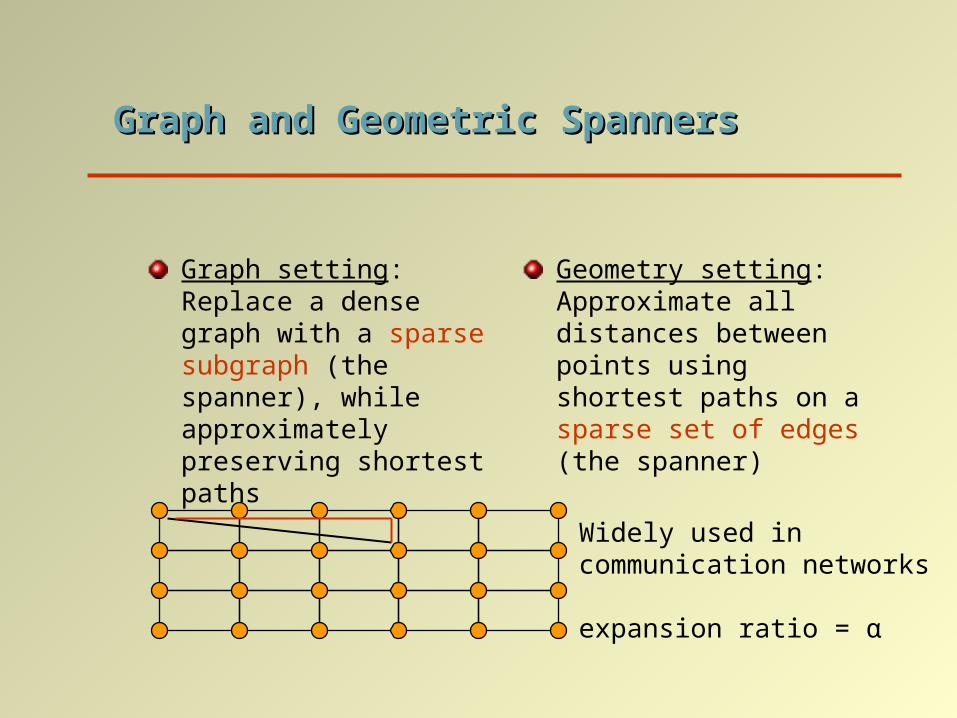
Graph and Geometric SpannersGraph and Geometric Spanners
Graph setting: Replace a dense graph with a sparse subgraph (the spanner), while approximately preserving shortest paths
Geometry setting: Approximate all distances between points using shortest paths on a sparse set of edges (the spanner)
Widely used incommunication networks
expansion ratio = α
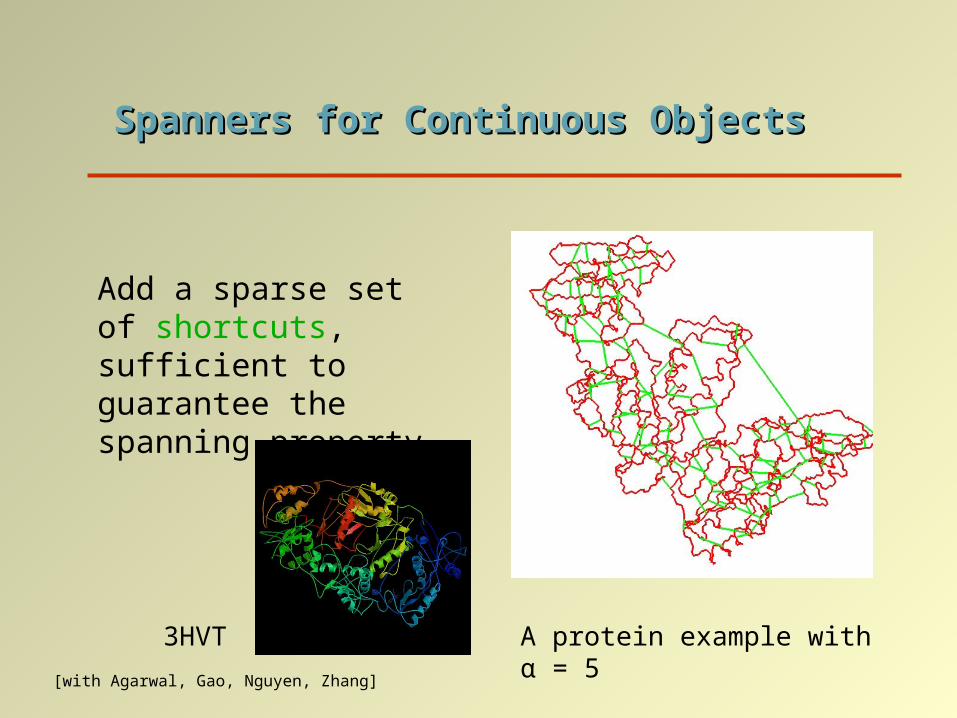
Spanners for Continuous ObjectsSpanners for Continuous Objects
Add a sparse set of shortcuts, sufficient to guarantee the spanning property
A protein example with α = 53HVT
[with Agarwal, Gao, Nguyen, Zhang]
Spanners are Useful for Spanners are Useful for Proximity/Collision DetectionProximity/Collision Detection
To find all points at distance d from p, find all points within distance αd along the object and its shortcuts
Before two points p and q on a deformable object collide, there has to be a shortcut between them
Spanners can have sublinear complexity
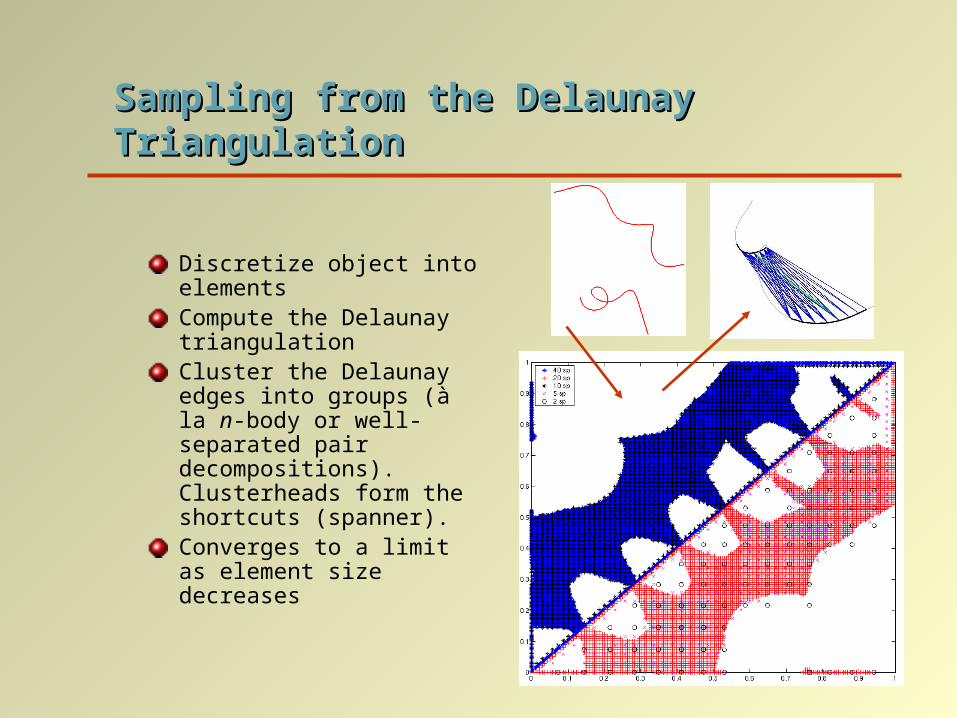
Sampling from the Delaunay TriangulationSampling from the Delaunay Triangulation
Discretize object into elementsCompute the Delaunay triangulationCluster the Delaunay edges into groups (à la n-body or well-separated pair decompositions). Clusterheads form the shortcuts (spanner).Converges to a limit as element size decreases
Maintaining the Shortcuts under Maintaining the Shortcuts under DeformationDeformation
α = 3
Many open algorithmic issues …
ConclusionsConclusions
Stable structures exist that encode proximity for deformable objects
Many open issues:
Improved theoretical analysis
Further experimental validation
Extension from space curves to surfaces
Everything rests by changing