Embed Size (px)
Citation preview
Registrierungskonzepte für die Einsatzsynchrone Artefakt Reduktion mittels
virtueller Computertomographie
Matthias FRANZ, Stefan KASPERL, Entwicklungszentrum Röntgentechnik, Fürth
Kurzfassung. Dieser Beitrag befasst sich mit der Steigerung der Genauigkeit in der CT durch die Einsatzsynchrone Artefakt Reduktion (EAR) von Strahlaufhärtung und Streustrahlung, die durch die Wechselwirkung von Röntgenstrahlung mit Materie entstehen. Die EAR-Methode benötigt zur Simulation eine Registrierung des Prüflings. Hierfür werden zwei sehr unterschiedliche Registrierungskonzepte vorgestellt.
1. Einleitung
Die Computertomographie (CT) wird zunehmend für dimensionelle Messaufgaben eingesetzt, wie beispielsweise in der industriellen Werkstückprüfung. Neben der Bestimmung der Messunsicherheit ist die Verbesserung der Bildqualität Gegenstand aktueller Forschungen, um die CT als Messmittel zu etablieren.
Nichtlineare Effekte wie Strahlaufhärtung und Streustrahlung in den gemessenen Röntgenprojektionen führen zu störenden Artefakten, die die Bildqualität im rekonstruierten Volumen verringern und somit die Extraktion der Oberflächengeometrie für dimensionelle Messaufgaben erschweren. Mit der Iterativen Artefakt Reduktion (IAR) existiert ein Verfahren, welches referenzfrei durch die Kombination von vor- und nachverarbeitenden Bildverarbeitungsschritten eine Korrekturkennlinie für die genannten Nichtlinearitäten generiert. Diese Methode wurde bereits auf der DGZfP Jahrestagung 2002 [3] vorgestellt. Während die IAR die benötigten Durchstrahlungslängen, d.h. die Weglänge eines Röntgenstrahls durch das Objekt, aus einem artefaktbehafteten Volumen bestimmt, greift die hier vorgestellte Methode der Einsatzsynchronen Artefakt Reduktion (EAR) auf vorhandene Geometriedaten (CAD, STL) des Objekts zurück. Die Durchstrahlungslängen werden während der Datenaufnahme durch Simulation aus den registrierten Geometriedaten ermittelt, so dass die Korrekturkennlinie bereits zu Beginn der Rekonstruktion (einsatzsynchron) vorliegt.
Als der schwierigste Teil des Verfahrens erweist sich die hinreichend genaue Registrierung. Die räumliche Lage und Orientierung des CAD-Modells in der virtuellen CT muss durch Translation und Rotation auf das reale Objekt auf dem Drehteller ausgerichtet werden. Die gängigen Registrierungsverfahren benötigen eine hinreichend gute Startposition, welche in einem groben ersten Registrierungsschritt bestimmt wird. Der zweite Schritt beinhaltet dann die genaue Registrierung. Diese erfolgt einmal mittels eines 2D/3D-Registrierungsalgorithmus, der auf 2D-Projektionsdaten zurückgreift. Alternativ kommt bei der genauen 3D/3D-Registrierung ein Multisensorkonzept zum Einsatz, d.h. neben den Detektormessungen wird eine die Oberfläche beschreibende Punktewolke, die durch einen optischen Sensor gewonnen wird, verwendet.
DGZfP-Jahrestagung 2007 - Vortrag 87
1
Im nächsten Abschnitt werden kurz die Prinzipien der Iterativen und der Einsatzsynchronen Artefakt Reduktion erläutert. Abschnitt 3 und 4 stellen die beiden Registrierungskonzepte vor, deren Ergebnisse in Abschnitt 5 verglichen werden. Der Beitrag schließt mit einer Zusammenfassung.
2. Prinzipien der Artefaktkorrektur
Artefakte in der Computertomographie entstehen aus Nichtlinearitäten des Aufnahmesystems [4]. Eine weit verbreitete und effektive Korrekturmethode solcher Nichtlinearitäten für homogene Objekte basiert auf der Linearisierungstechnik. Das Prinzip der Linearisierung besteht darin, einen gemessenen polyenergetischen Projektionswert auf eine korrespondierende monoenergetische Strahlsumme zu transformieren.
In der Praxis wird eine Korrekturkennlinie experimentell aus der Radiographie eines homogenen Kalibrierkörpers mit bekannten Längen ermittelt, dessen Materialeigenschaften möglichst mit dem Untersuchungsobjekt übereinstimmen sollten.
Die Iterative Artefakt Reduktion IAR ersetzt die aufwendige Kalibriermessung mit einem Referenzkörper und ermittelt die benötigten Durchstrahlungslängen zur Berechnung der Korrekturkennlinie direkt aus dem rekonstruierten Volumen des Prüflings. Eine Kenntnis des Energiespektrums oder des untersuchten Materials ist nicht erforderlich.
Die Einsatzsynchrone Artefakt Reduktion EAR ersetzt die aufwendigen nachverarbeitenden Bildverarbeitungsschritte der IAR und ermittelt die benötigten Durchstrahlungslängen aus Geometriedaten des Prüflings in Form eines Soll-Modells. Neben der im Vergleich zu einem artefaktbehaftetem Volumen höheren Qualität des Soll-Modells liegt der entscheidende Vorteil im Zeitgewinn. Bereits am Ende des Messprozesses liegt eine Korrekturkennlinie zur Rekonstruktion vor. Die Durchstrahlungslängen werden mit Hilfe einer Virtuellen CT aus dem Soll-Modell ermittelt. Hierfür muss das Soll-Modell in der Virtuellen CT exakt so ausgerichtet werden, wie der Testkörper in der reellen CT auf dem Drehteller positioniert ist. Die folgenden beiden Abschnitte behandeln zwei unterschiedliche Registrierungskonzepte.
3. 2D-3D-Registrierung
In der Literatur finden sich mehrere erfolgversprechende 2D-3D-Registrierungsalgorithmen, die aber alle eine hinreichend gute Startposition als bekannt voraussetzen. Die im Registrierungsprozess zu optimierende Funktion zeigt eine Vielzahl von lokalen Extrema, so dass nur bei hinreichend guter Startposition die Konvergenz zu der optimalen Position garantiert und damit eine erfolgreiche Registrierung erreicht werden kann [1,6]. Allerdings ist die Position des Objektes auf dem Drehteller bei den meisten CT-Systemen nicht bekannt. Ziel einer groben Vorregistrierung ist die Bestimmung dieser hinreichend guten Startposition ohne weitere Benutzerinteraktion. Darauf aufbauend erfolgt die genaue Registrierung, wobei auf die aus der Literatur bekannten Verfahren zurückgegriffen werden kann.
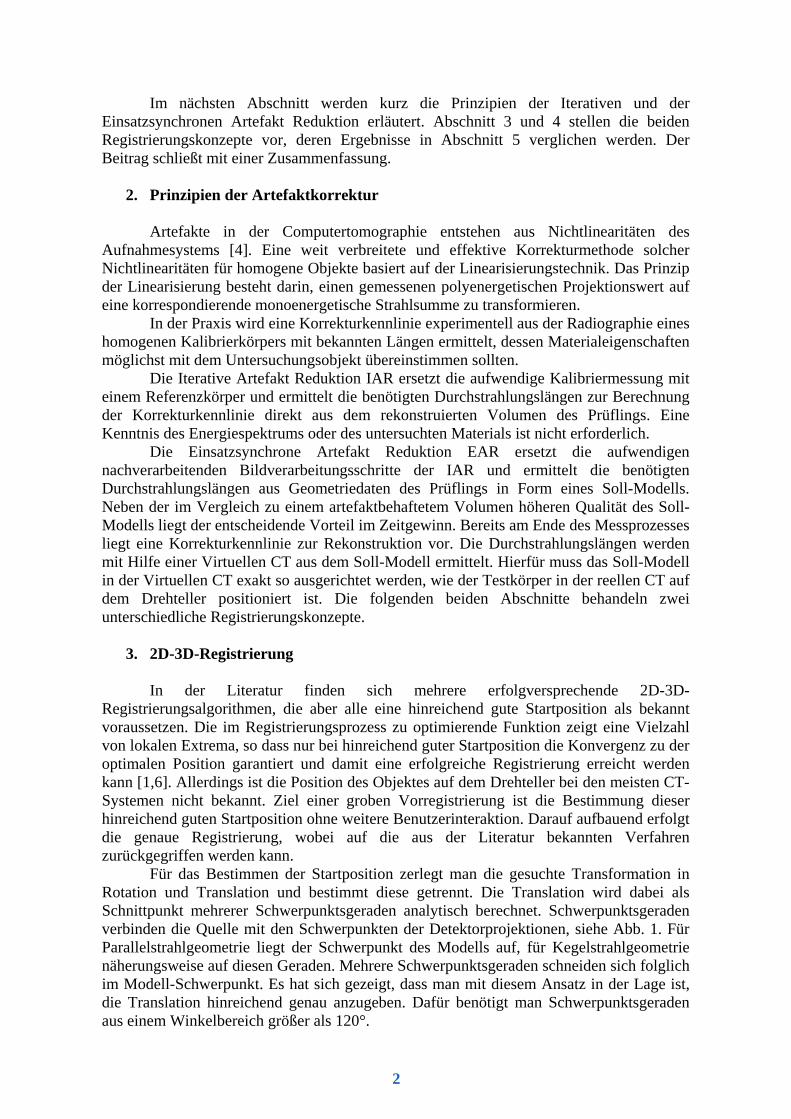
Für das Bestimmen der Startposition zerlegt man die gesuchte Transformation in Rotation und Translation und bestimmt diese getrennt. Die Translation wird dabei als Schnittpunkt mehrerer Schwerpunktsgeraden analytisch berechnet. Schwerpunktsgeraden verbinden die Quelle mit den Schwerpunkten der Detektorprojektionen, siehe Abb. 1. Für Parallelstrahlgeometrie liegt der Schwerpunkt des Modells auf, für Kegelstrahlgeometrie näherungsweise auf diesen Geraden. Mehrere Schwerpunktsgeraden schneiden sich folglich im Modell-Schwerpunkt. Es hat sich gezeigt, dass man mit diesem Ansatz in der Lage ist, die Translation hinreichend genau anzugeben. Dafür benötigt man Schwerpunktsgeraden aus einem Winkelbereich größer als 120°.
2
Abbildung 1: Die Schwerpunktsgerade verbindet die Quelle mit dem Detektorschwerpunkt BD bezüglich der gemessenen Abschwächungen. Der Schwerpunkt des Objektes BS liegt näherungsweise auf dieser Geraden.
Nun müssen noch die 3 freien Parameter der Rotation bestimmt werden. Dies
geschieht mit einem intensitätsbasierten empirischen Ansatz. Hierzu werden die Ähnlichkeiten von der Originalprojektion mit simulierten Längenprojektionen berechnet. Die simulierten Vergleichsprojektionen werden für ein äquidistantes Gitter im Raum der Rotationen erstellt. In [2] wurde gezeigt, dass Normalised Cross Correlation das am besten geeignete Maß für diese Aufgabe ist.
Für die im zweiten Schritt erforderliche genaue Registrierung finden sich zahlreiche Veröffentlichungen. Die im Projekt implementierte Vorgehensweise ist an eine Publikation von Penney [6] angelehnt. Ausgangspunkt ist die Erzeugung von Vergleichs-Längenprojektionen. Auf Grund von deren Ähnlichkeiten mit dem Referenzbild versucht man jetzt, die gesuchte Transformation zu bestimmen. Für diesen Zweck hat sich die Normalised Mutual Information als das vielversprechendste Maß erwiesen, da mit diesem ein gutes Konvergenzverhalten erreicht wird [2,6]. Die numerische Optimierung startet mit einer groben Auflösung und steigert diese nach jeder Iteration bis zur Größe der Referenzbilder. Diese Vorgehensweise beschleunigt den Optimierungsprozess deutlich.
4. 3D-3D-Registrierung
Der Multisensor Tomolibri kombiniert ein hochauflösendes CT-System mit einem Oberflächenscanner des Fraunhofer IOF. Der Oberflächenscanner arbeitet nach dem Streifenprojektionsprinzip und liefert 3D-Daten der zugänglichen Oberfläche mit einer Genauigkeit von wenigen Mikrometern. Im Rahmen eines gemeinsamen Forschungsprojektes wurde am Fraunhofer IPA ein Registrierungsalgorithmus entwickelt, der über eine merkmalsbasierte Ausrichtung die 3D-Daten des optischen Sensors mit den CAD-Daten registriert. Dazu werden korrespondierende geometrische Elemente aus beiden Datensätzen manuell einander zugeordnet und eine Koordinatentransformationsmatrix berechnet, mit welcher die CAD-Daten dann transformiert werden [5]. Es ist zu erwarten, dass diese Vorgehensweise den Registrierungsfehler verkleinert, da wegen der Übereinstimmung in der Dimensionalität ein weniger schlecht gestelltes Problem vorliegt.
5. Ergebnisse
Trägt man in einem Diagramm die detektierten Intensitäten (I) gegen die durchstrahlten Weglängen im Objekt (R) auf, erhält man eine IR-Punktewolke. Rauschen und andere Effekte bedingen IR-Paare, deren Längenwert nicht zur Intensität passt, und
3
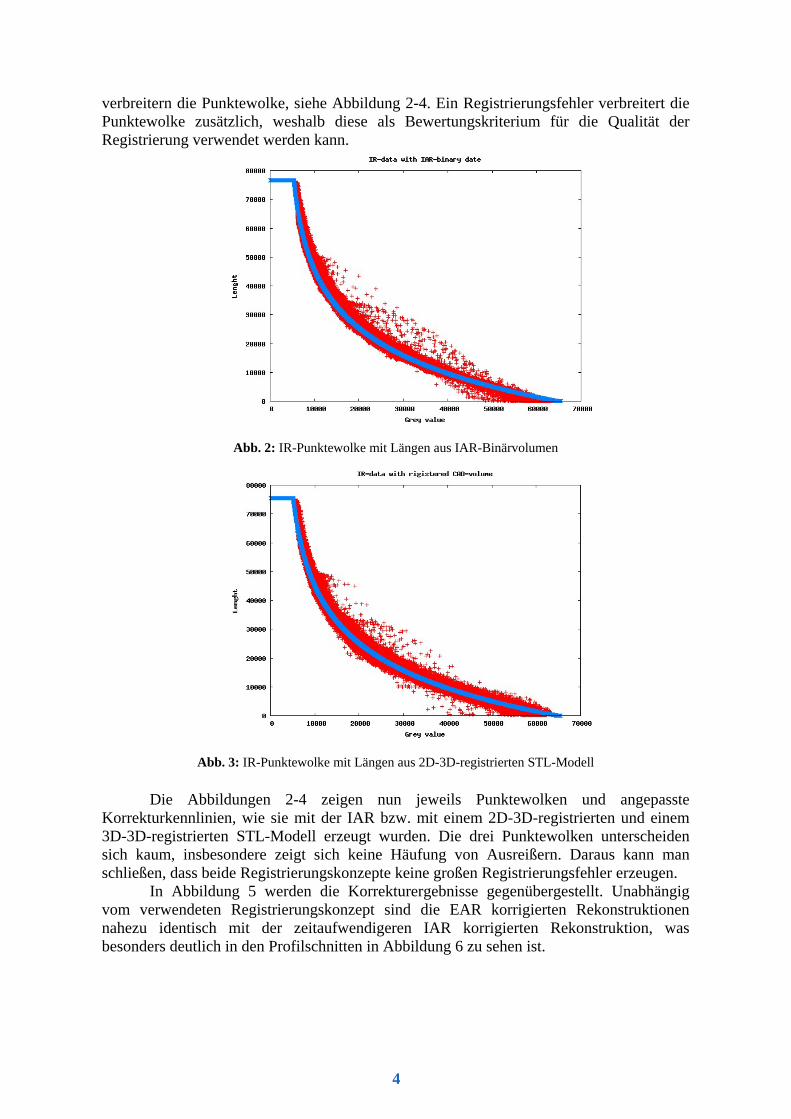
verbreitern die Punktewolke, siehe Abbildung 2-4. Ein Registrierungsfehler verbreitert die Punktewolke zusätzlich, weshalb diese als Bewertungskriterium für die Qualität der Registrierung verwendet werden kann.
Abb. 2: IR-Punktewolke mit Längen aus IAR-Binärvolumen
Abb. 3: IR-Punktewolke mit Längen aus 2D-3D-registrierten STL-Modell
Die Abbildungen 2-4 zeigen nun jeweils Punktewolken und angepasste Korrekturkennlinien, wie sie mit der IAR bzw. mit einem 2D-3D-registrierten und einem 3D-3D-registrierten STL-Modell erzeugt wurden. Die drei Punktewolken unterscheiden sich kaum, insbesondere zeigt sich keine Häufung von Ausreißern. Daraus kann man schließen, dass beide Registrierungskonzepte keine großen Registrierungsfehler erzeugen.
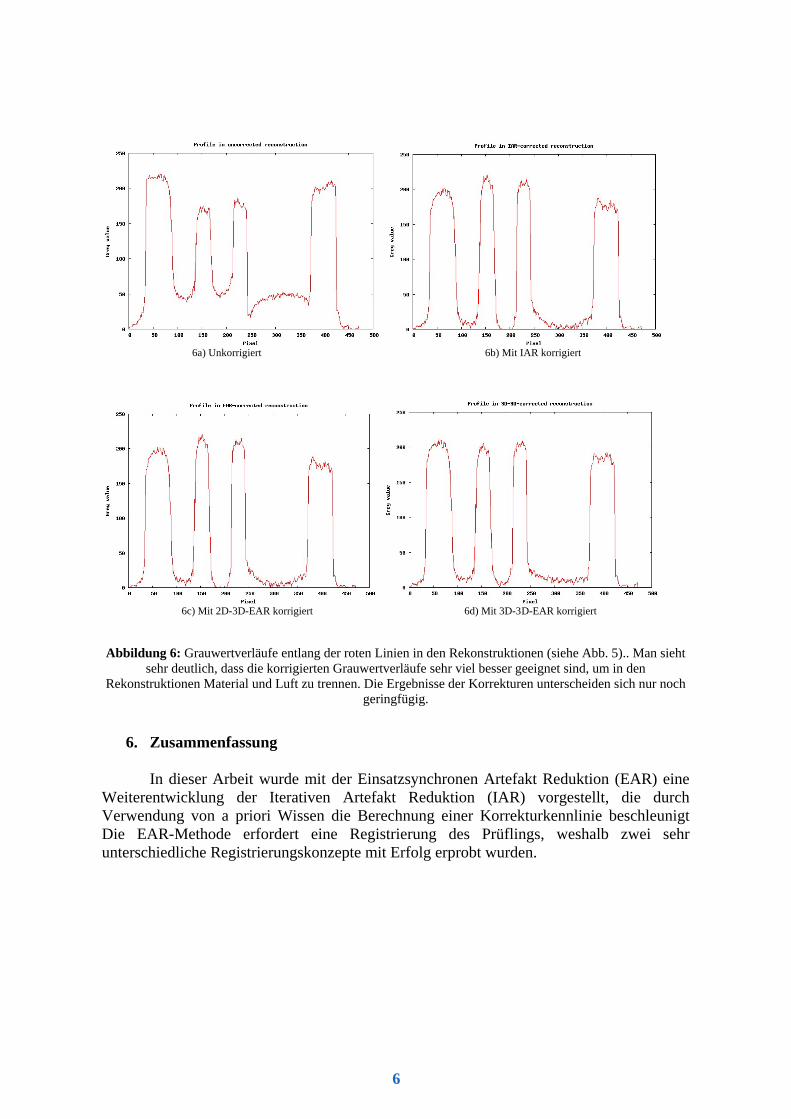
In Abbildung 5 werden die Korrekturergebnisse gegenübergestellt. Unabhängig vom verwendeten Registrierungskonzept sind die EAR korrigierten Rekonstruktionen nahezu identisch mit der zeitaufwendigeren IAR korrigierten Rekonstruktion, was besonders deutlich in den Profilschnitten in Abbildung 6 zu sehen ist.
4
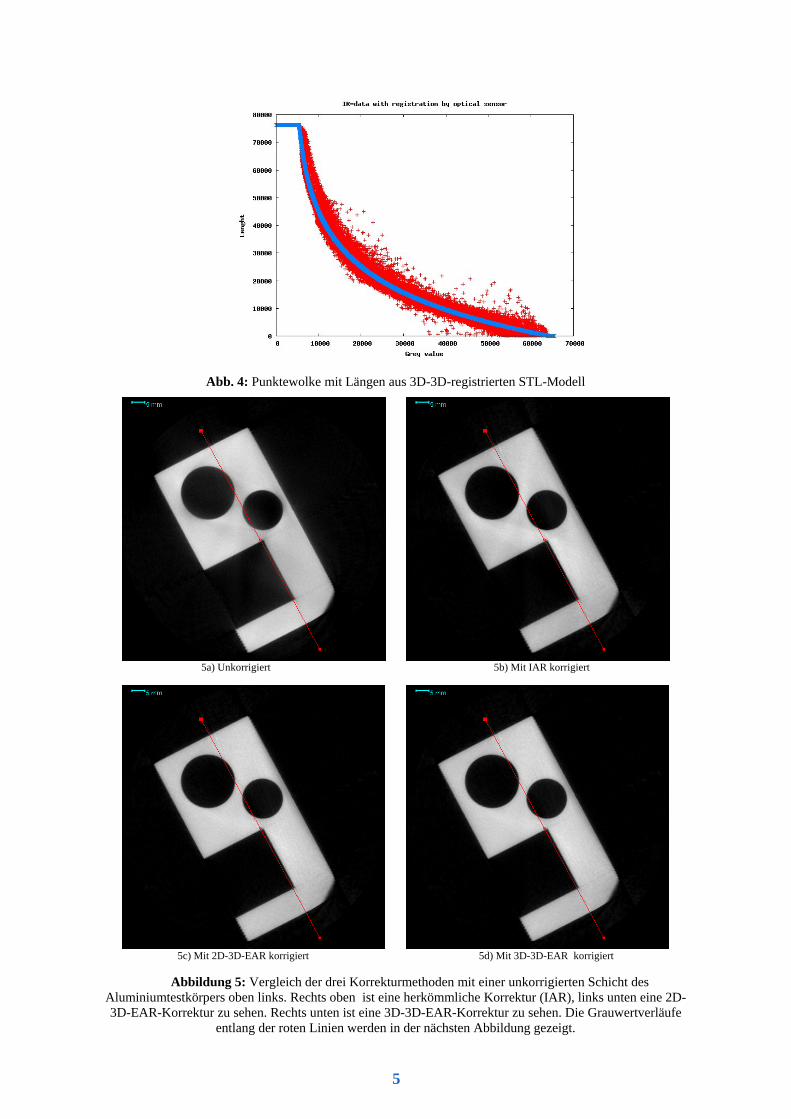
Abb. 4: Punktewolke mit Längen aus 3D-3D-registrierten STL-Modell
5a) Unkorrigiert 5b) Mit IAR korrigiert
5c) Mit 2D-3D-EAR korrigiert 5d) Mit 3D-3D-EAR korrigiert
Abbildung 5: Vergleich der drei Korrekturmethoden mit einer unkorrigierten Schicht des
Aluminiumtestkörpers oben links. Rechts oben ist eine herkömmliche Korrektur (IAR), links unten eine 2D-3D-EAR-Korrektur zu sehen. Rechts unten ist eine 3D-3D-EAR-Korrektur zu sehen. Die Grauwertverläufe
entlang der roten Linien werden in der nächsten Abbildung gezeigt.
5
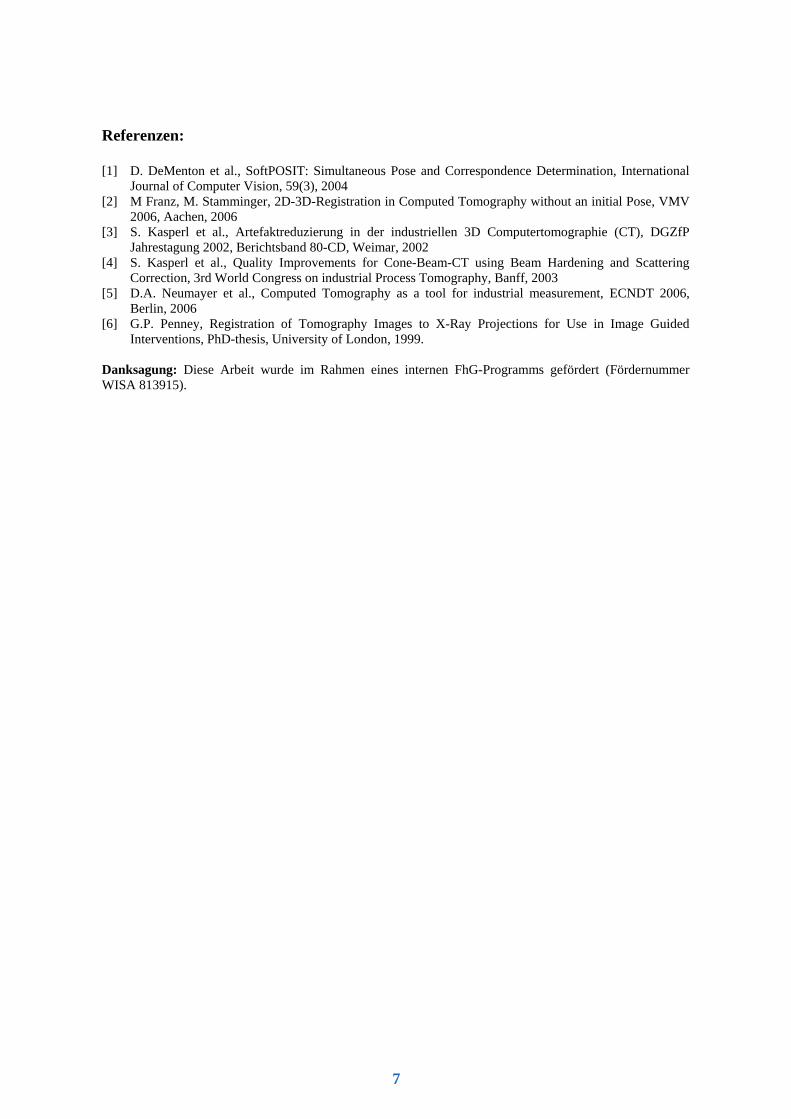
6a) Unkorrigiert 6b) Mit IAR korrigiert
6c) Mit 2D-3D-EAR korrigiert 6d) Mit 3D-3D-EAR korrigiert
Abbildung 6: Grauwertverläufe entlang der roten Linien in den Rekonstruktionen (siehe Abb. 5).. Man sieht sehr deutlich, dass die korrigierten Grauwertverläufe sehr viel besser geeignet sind, um in den
Rekonstruktionen Material und Luft zu trennen. Die Ergebnisse der Korrekturen unterscheiden sich nur noch geringfügig.
6. Zusammenfassung
In dieser Arbeit wurde mit der Einsatzsynchronen Artefakt Reduktion (EAR) eine
Weiterentwicklung der Iterativen Artefakt Reduktion (IAR) vorgestellt, die durch Verwendung von a priori Wissen die Berechnung einer Korrekturkennlinie beschleunigt Die EAR-Methode erfordert eine Registrierung des Prüflings, weshalb zwei sehr unterschiedliche Registrierungskonzepte mit Erfolg erprobt wurden.
6
Referenzen:
[1] D. DeMenton et al., SoftPOSIT: Simultaneous Pose and Correspondence Determination, International Journal of Computer Vision, 59(3), 2004
[2] M Franz, M. Stamminger, 2D-3D-Registration in Computed Tomography without an initial Pose, VMV 2006, Aachen, 2006
[3] S. Kasperl et al., Artefaktreduzierung in der industriellen 3D Computertomographie (CT), DGZfP Jahrestagung 2002, Berichtsband 80-CD, Weimar, 2002
[4] S. Kasperl et al., Quality Improvements for Cone-Beam-CT using Beam Hardening and Scattering Correction, 3rd World Congress on industrial Process Tomography, Banff, 2003
[5] D.A. Neumayer et al., Computed Tomography as a tool for industrial measurement, ECNDT 2006, Berlin, 2006
[6] G.P. Penney, Registration of Tomography Images to X-Ray Projections for Use in Image Guided Interventions, PhD-thesis, University of London, 1999.
Danksagung: Diese Arbeit wurde im Rahmen eines internen FhG-Programms gefördert (Fördernummer WISA 813915).
7