Embed Size (px)
Citation preview

Robotics
IMS – Integrated Motion SystemsEduardo De RobbioMichael Wombacher
Hintergrund Markt Applikationen SCARA Roboter Produkt Spektrum SCARA Vorteile Auslegung und Dimensionierung Beispiele Zubehör
Inhalt

Omron ist als Hersteller bereits auf vielen Märkten eingeführt. OMRON ist als Anbieter von Automatisierungslösungen
anerkannt.
Hintergrund
Ziel:
• komplette Motion-Control Produktpalette.
• bestehend aus: Control &Power (Drives) & Mechanics (Robots, Linear Sliders, etc.)
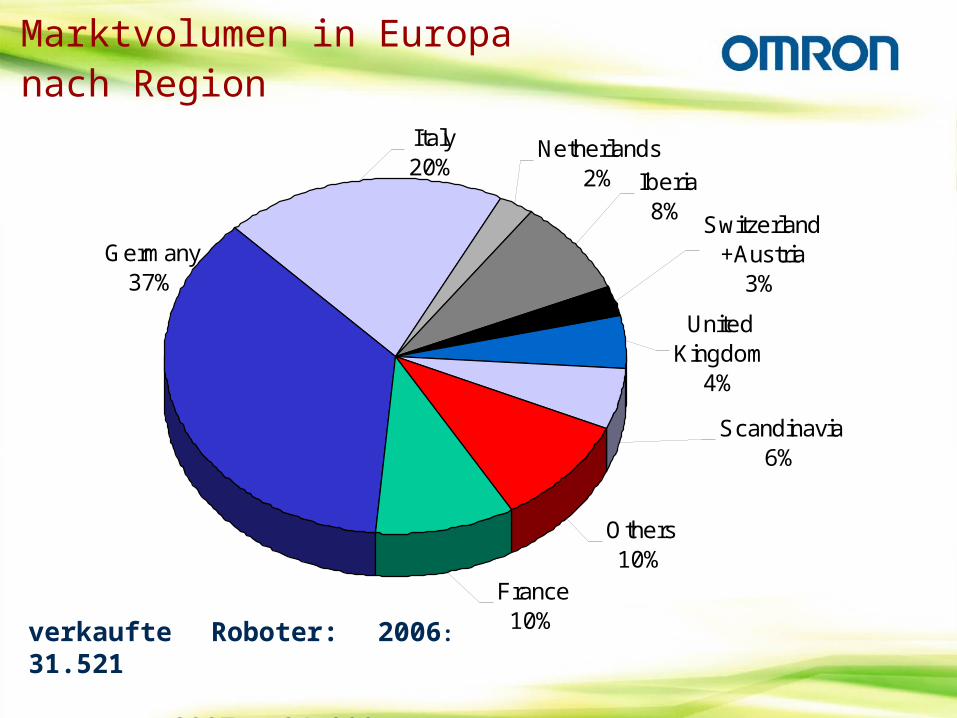
Marktvolumen in Europa nach Region
Others10%
United Kingdom
4%
Scandinavia6%
Germany37%
France 10%
Switzerland +Austria
3%
Iberia8%
Netherlands 2%
Italy20%
verkaufte Roboter: 2006: 31.521 2007: 34.900
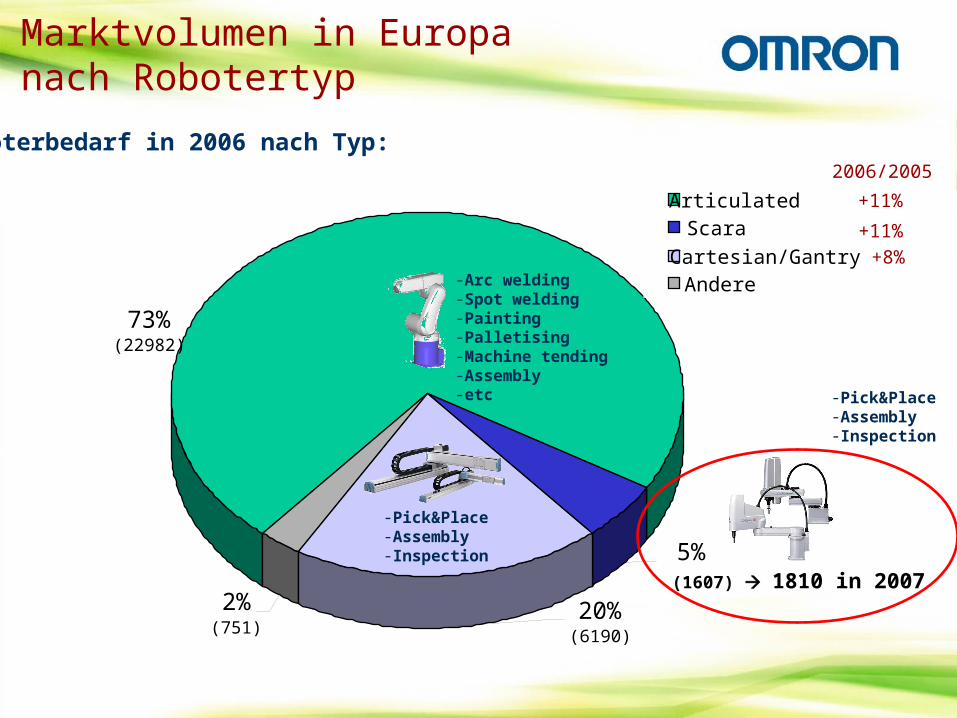
Roboterbedarf in 2006 nach Typ:
73%(22982)
5%(1607) 1810 in 2007
20%(6190)
2%(751)
ArticulatedScaraCartesian/GantryAndere
Marktvolumen in Europa nach Robotertyp
2006/2005+11% +11% +8%
-Arc welding-Spot welding-Painting-Palletising-Machine tending-Assembly-etc -Pick&Place
-Assembly -Inspection
-Pick&Place-Assembly -Inspection

Applikationen
Montage, Schweißen, Qualitätskontrolle
Pick & Place

Stückgut Verpackungs-Maschine
Lebensmittel
PHARMA
Ampullen oder Kapseln
Applikationen
Einsatzargumente Standard Lösung. Geringerer Zeitbedarf bei der mechanischen
Konstruktion. Kosteneinsparung. Wiederverwendbarkeit. Bei Prozeßänderungen
kann der Roboter angepaßt werden. Geringerer Verdrahtungsaufwand. Schnelle Inbetriebnahme. Vielseitigkeit.
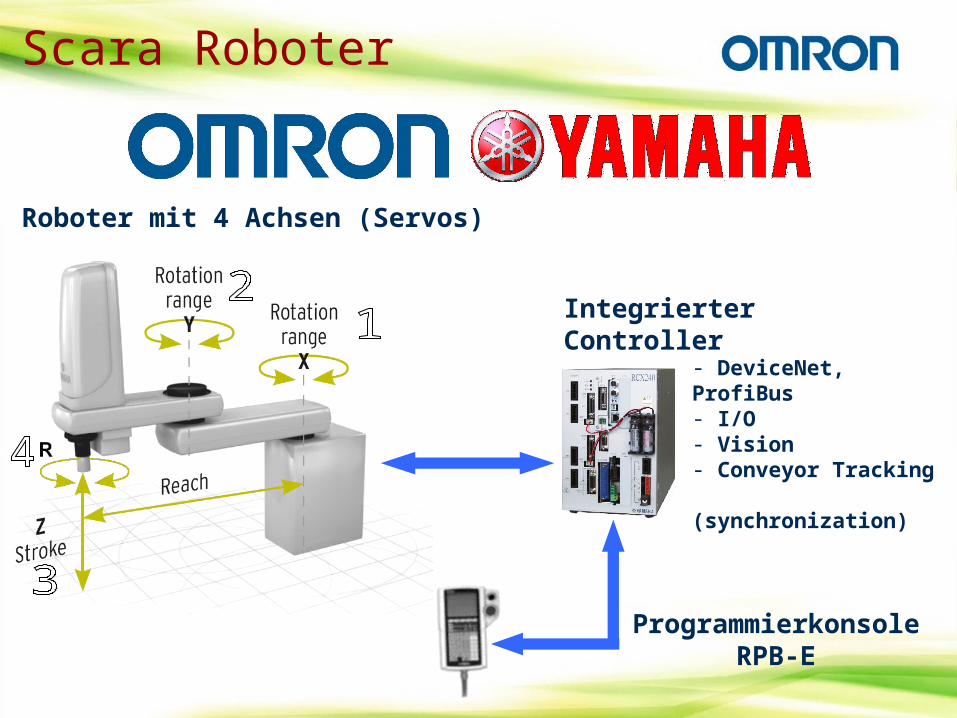
Scara Roboter
Roboter mit 4 Achsen (Servos)
Integrierter Controller
- DeviceNet, ProfiBus- I/O- Vision- Conveyor Tracking (synchronization)
ProgrammierkonsoleRPB-E
ProduktpaletteTiny-Serie
- Max. Last 1kg
- Max. Reichweite (mm): 120, 150, 180, 220
X Serie- Max. Last 3kg
- Max. Reichweite (mm): 250, 350, 400
XG Serie- Max. Last 10kg, 20 kg
- Max. Reichweite (mm): 500, 600, 700, 800, 900, 1000
- Die Steuerung beinhaltet standardmäßig eine Bremseinheit (RGU3).
ProduktpaletteSpecial X - Spezial X Version
- Max. Last 50kg
- Max. Reichweite (mm): 1200
- Bremseinheit integriert (RGU2).
XC Serie - Clean room C10
- Max. Last 3kg, 10kg, 20kg
- Max. Reichweite (mm): 250, 350, 400,500(*), 600(*), 700(*), 800(*),1000(*)
(*) Bremseinheit integriert (RGU2)
XP Serie - IP65
- Max. Last 3kg, 10kg, 20kg
- Max. Reichweite (mm): 250, 350, 400,500(*), 600(*), 700(*), 800(*),1000(*)
(*) Bremseinheit integriert (RGU2)
ProduktpaletteXSWandmontage
- Wandmontage
- Max. Last 3kg
- Max. Reichweite (mm): 300, 400
XSWandmontage(inverse)
XSDeckenmontage
XSDeckenmontage(inverse) - Deckenmontage
- Max. Last 10kg
- Max. Reichweite (mm): 500, 600
- Bremseinheit integriert (RGU2).
XSDeckenmontage - Deckenmontage
- Max. Last 20kg
- Max. Reichweite (mm): 700, 800, 1000
- Bremseinheit integriert (RGU2).
XSDeckenmontage(inverse)
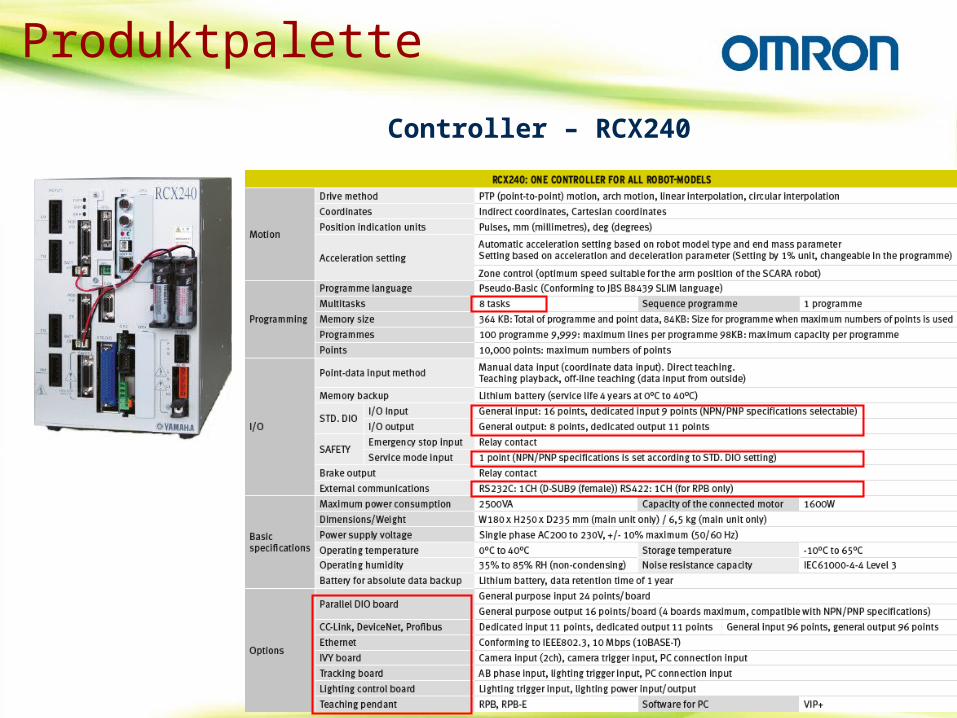
ProduktpaletteController – RCX240
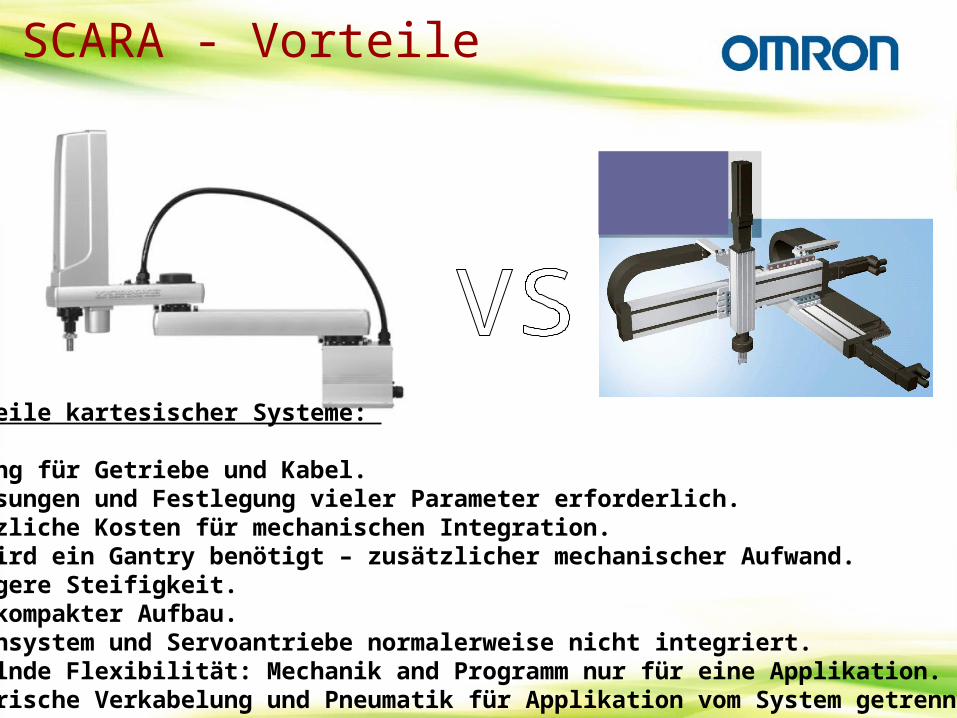
Nachteile kartesischer Systeme:
Wartung für Getriebe und Kabel.Anpassungen und Festlegung vieler Parameter erforderlich.Zusätzliche Kosten für mechanischen Integration. Oft wird ein Gantry benötigt – zusätzlicher mechanischer Aufwand. Geringere Steifigkeit.Kein kompakter Aufbau.Visionsystem und Servoantriebe normalerweise nicht integriert.Mangelnde Flexibilität: Mechanik and Programm nur für eine Applikation.Elektrische Verkabelung und Pneumatik für Applikation vom System getrennt.
SCARA - Vorteile
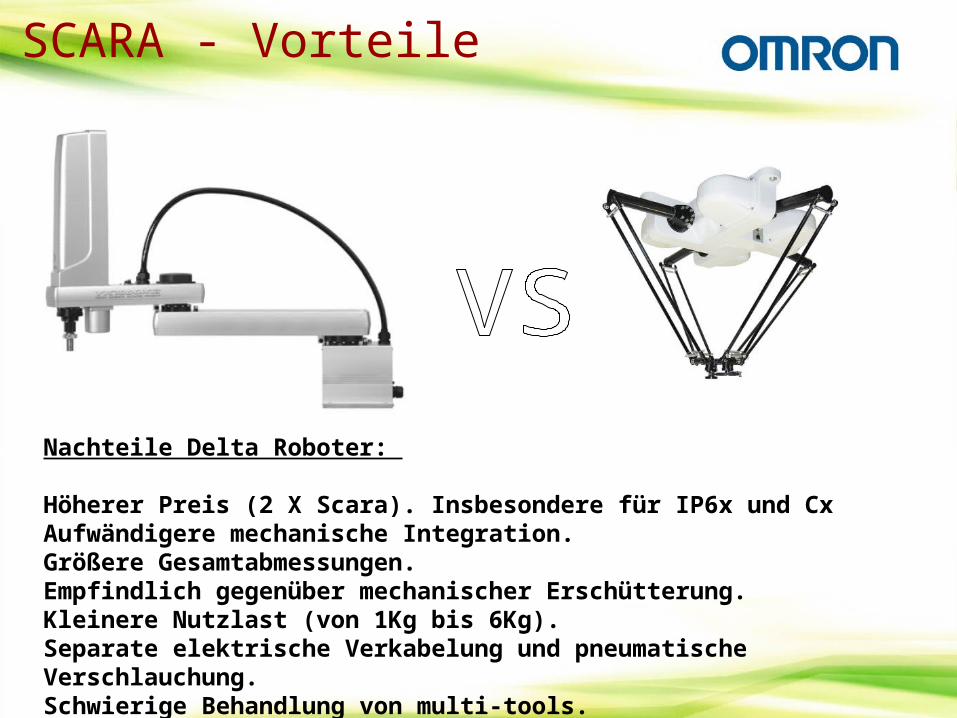
Nachteile Delta Roboter:
Höherer Preis (2 X Scara). Insbesondere für IP6x und CxAufwändigere mechanische Integration.Größere Gesamtabmessungen.Empfindlich gegenüber mechanischer Erschütterung. Kleinere Nutzlast (von 1Kg bis 6Kg).Separate elektrische Verkabelung und pneumatische Verschlauchung.Schwierige Behandlung von multi-tools.
SCARA - Vorteile
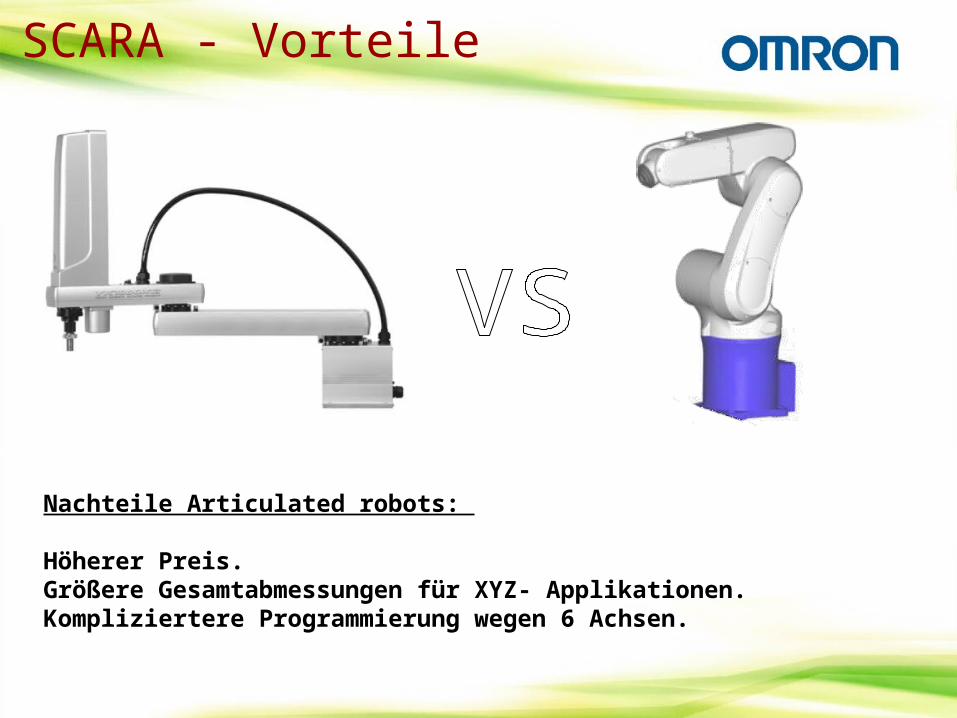
Nachteile Articulated robots:
Höherer Preis.Größere Gesamtabmessungen für XYZ- Applikationen.Kompliziertere Programmierung wegen 6 Achsen.
SCARA - Vorteile
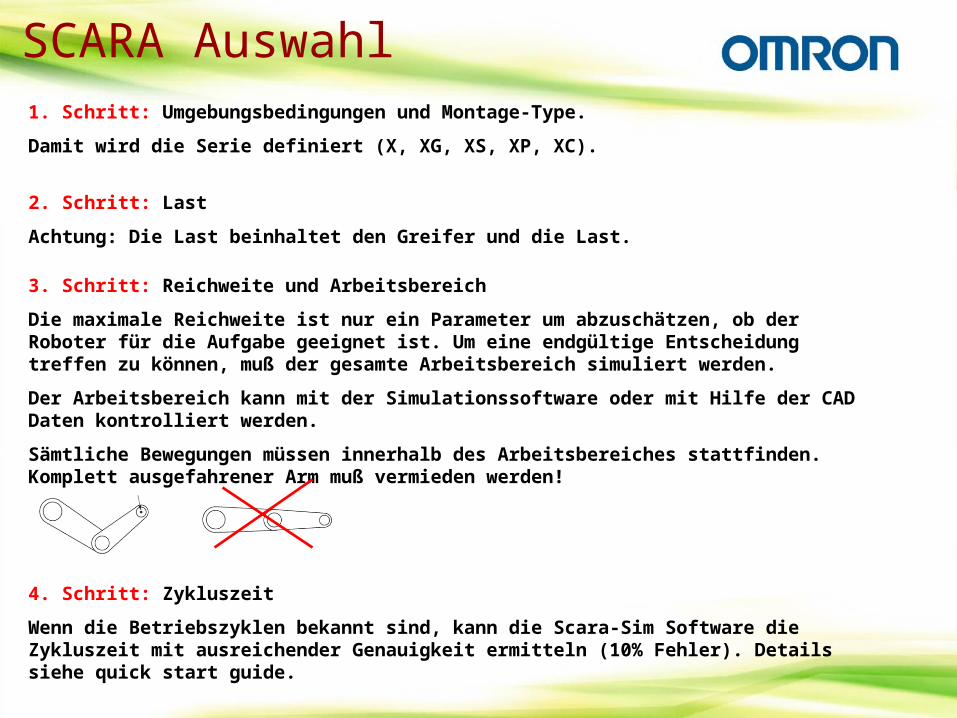
SCARA Auswahl1. Schritt: Umgebungsbedingungen und Montage-Type.
Damit wird die Serie definiert (X, XG, XS, XP, XC).
2. Schritt: Last
Achtung: Die Last beinhaltet den Greifer und die Last.
3. Schritt: Reichweite und Arbeitsbereich
Die maximale Reichweite ist nur ein Parameter um abzuschätzen, ob der Roboter für die Aufgabe geeignet ist. Um eine endgültige Entscheidung treffen zu können, muß der gesamte Arbeitsbereich simuliert werden.
Der Arbeitsbereich kann mit der Simulationssoftware oder mit Hilfe der CAD Daten kontrolliert werden.
Sämtliche Bewegungen müssen innerhalb des Arbeitsbereiches stattfinden. Komplett ausgefahrener Arm muß vermieden werden!
4. Schritt: Zykluszeit
Wenn die Betriebszyklen bekannt sind, kann die Scara-Sim Software die Zykluszeit mit ausreichender Genauigkeit ermitteln (10% Fehler). Details siehe quick start guide.
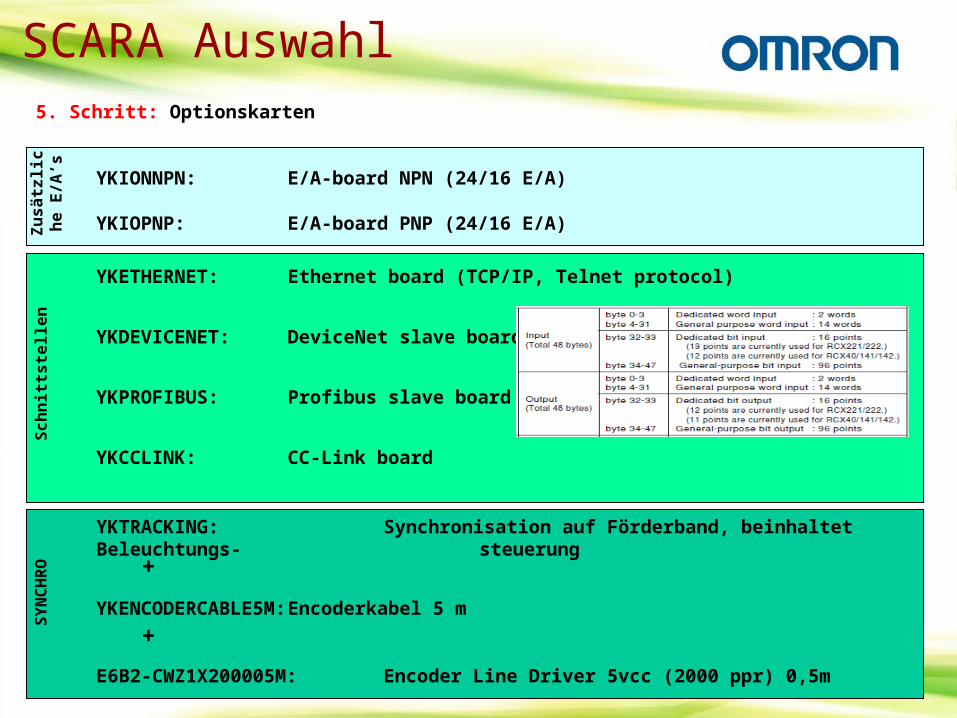
SCARA Auswahl5. Schritt: Optionskarten
YKIONNPN: E/A-board NPN (24/16 E/A)
YKIOPNP: E/A-board PNP (24/16 E/A)
YKETHERNET: Ethernet board (TCP/IP, Telnet protocol)
YKDEVICENET: DeviceNet slave board
YKPROFIBUS: Profibus slave board
YKTRACKING: Synchronisation auf Förderband, beinhaltet Beleuchtungs-steuerung
YKENCODERCABLE5M: Encoderkabel 5 m
YKCCLINK: CC-Link board
Zusä
tzlic
he
E/A
’sSc
hnitt
stel
len
SYN
CH
RO +
E6B2-CWZ1X200005M: Encoder Line Driver 5vcc (2000 ppr) 0,5m
+
SCARA Auswahl VisionYKVISION: Vision board für 2 Kameras
YKCAMERA: CCD Kamera. VGA Auflösung (640X480) monochrome.
YKCAMERACABLE35M: Verbindungskabel Kamera – Vision board (3.5 m)
YKCAMERACABLE6M: Verbindungskabel Kamer – Vision board (6m)
YKCAMERACABLE95M: Verbindungskabel Kamera – Vision board (9.5 m).
YKLIGTHING: Beleuchtungssteuerung zur Steuerung von 2 Beleuchtungen (12VDC or 24VDC) PWM.
(in der Förderbandsynchronisation bereits enthalten)
YKLENS8MM: Objektiv 8mm (C mount type).
YKLENS12MM: Objektiv 12mm (C mount type).
YKLENS16MM: Objektiv 16mm (C mount type).
YKLENS25MM: Objektiv 25mm (C mount type).
YKLENSRING: Ring für “extra zoom” (normalerweise nich notwendig)
+
+
+
EXTRAS
SCARA Auswahl Kabel6. Schritt: Roboter Kabellängen (Motor + Resolver)
Die Standardkabellänge beträgt 3.5m
Stellen Sie sicher, daß Sie die richtige Kabellänge ordern, berücksichtigen Sie genauestens die Umgebungs- und Montagebedingungen.
Die Kabel sind NICHT im Roboter mit Steckern montiert. Ein nachträglicher Umbau ist extrem aufwendig.
YKROBOTCABLEEXT5M: 5 m Kabellänge montiert.
YKROBOTCABLEEXT10M: 10 m Kabellänge montiert.
SCARA Auswahl Tools7. Schritt: ein komplettes funktionsfähiges System benötigt immer folgende Optionen:
YKRPBE: Teaching Box mit 3 Positionsschaltern.
YKVIP: VIP+ Programmiersoftware
YKCABLE: Kommunikationskabel Controller – PC. Wenn ein Ethernet board installiert ist, ist dieses Kabel nicht notwendig.
Training notwendig ???
SCARA Auswahl
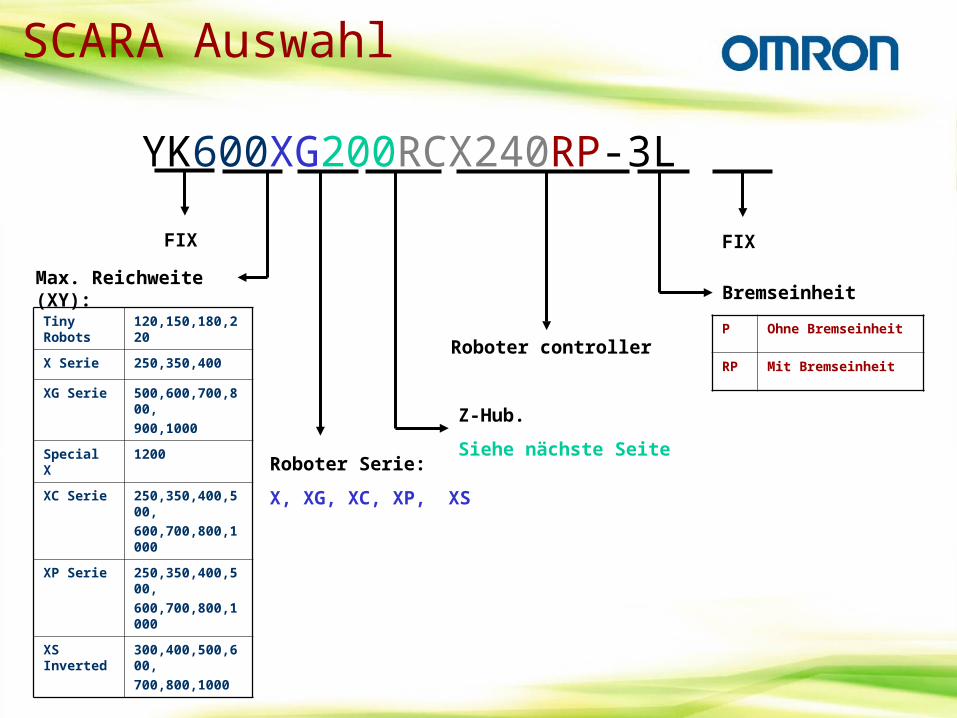
YK600XG200RCX240RP-3L
Max. Reichweite (XY):
Tiny Robots
120,150,180,220
X Serie 250,350,400
XG Serie 500,600,700,800,900,1000
Special X 1200
XC Serie 250,350,400,500,600,700,800,1000
XP Serie 250,350,400,500,600,700,800,1000
XS Inverted
300,400,500,600,700,800,1000
Roboter Serie:
X, XG, XC, XP, XS
Roboter controller
Z-Hub.
Siehe nächste Seite
FIX
Bremseinheit
P Ohne Bremseinheit
RP Mit Bremseinheit
FIX
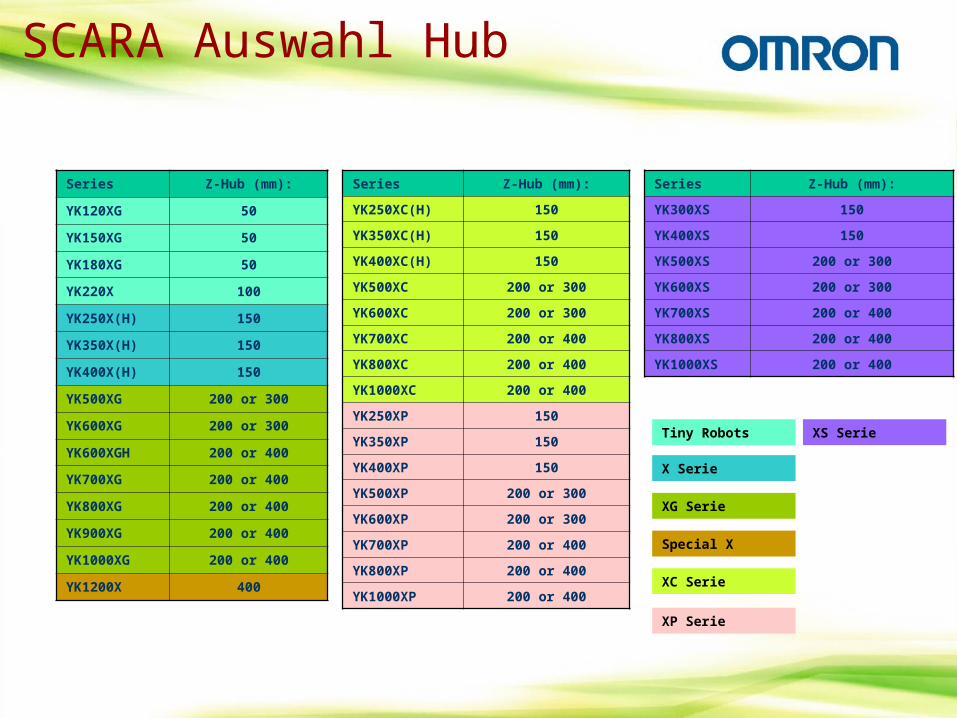
SCARA Auswahl Hub
Series Z-Hub (mm):
YK120XG 50
YK150XG 50
YK180XG 50
YK220X 100
YK250X(H) 150
YK350X(H) 150
YK400X(H) 150
YK500XG 200 or 300
YK600XG 200 or 300
YK600XGH 200 or 400
YK700XG 200 or 400
YK800XG 200 or 400
YK900XG 200 or 400
YK1000XG 200 or 400
YK1200X 400
Series Z-Hub (mm):
YK250XC(H) 150
YK350XC(H) 150
YK400XC(H) 150
YK500XC 200 or 300
YK600XC 200 or 300
YK700XC 200 or 400
YK800XC 200 or 400
YK1000XC 200 or 400
YK250XP 150
YK350XP 150
YK400XP 150
YK500XP 200 or 300
YK600XP 200 or 300
YK700XP 200 or 400
YK800XP 200 or 400
YK1000XP 200 or 400
Series Z-Hub (mm):
YK300XS 150
YK400XS 150
YK500XS 200 or 300
YK600XS 200 or 300
YK700XS 200 or 400
YK800XS 200 or 400
YK1000XS 200 or 400
Tiny Robots
X Serie
XG Serie
Special X
XC Serie
XP Serie
XS Serie
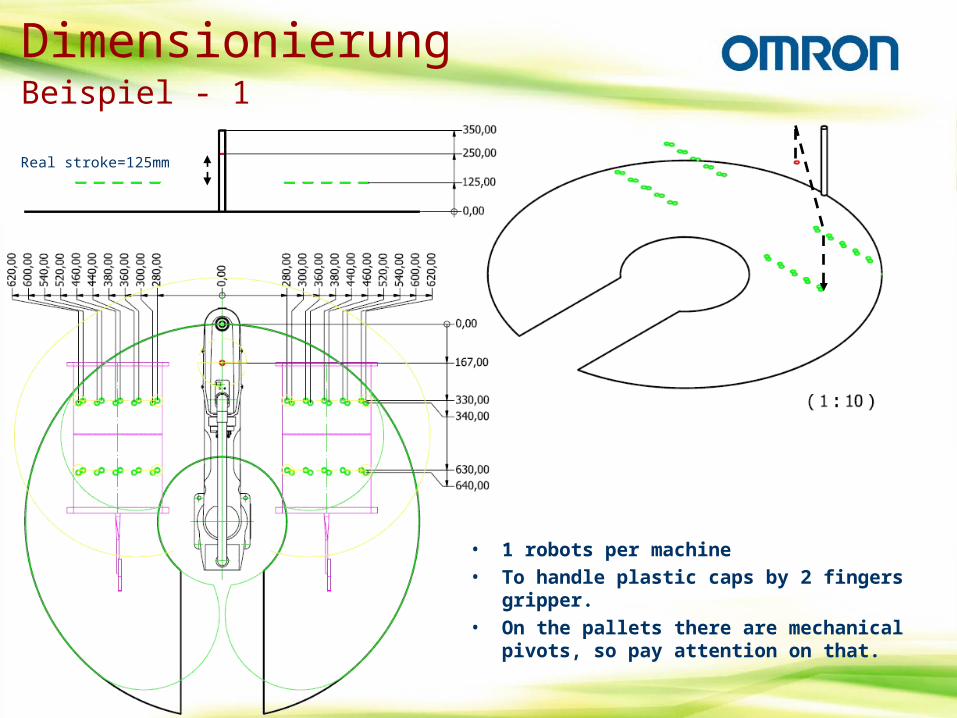
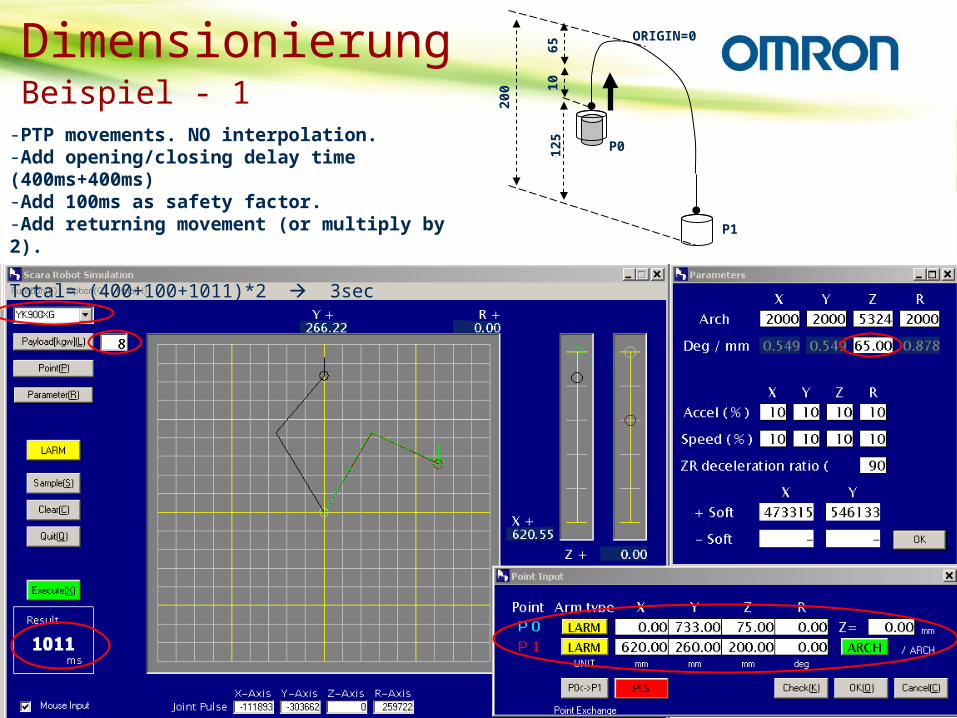
DimensionierungBeispiel - 1
• 1 robots per machine • To handle plastic caps by 2 fingers gripper.• On the pallets there are mechanical pivots,
so pay attention on that.
Real stroke=125mm
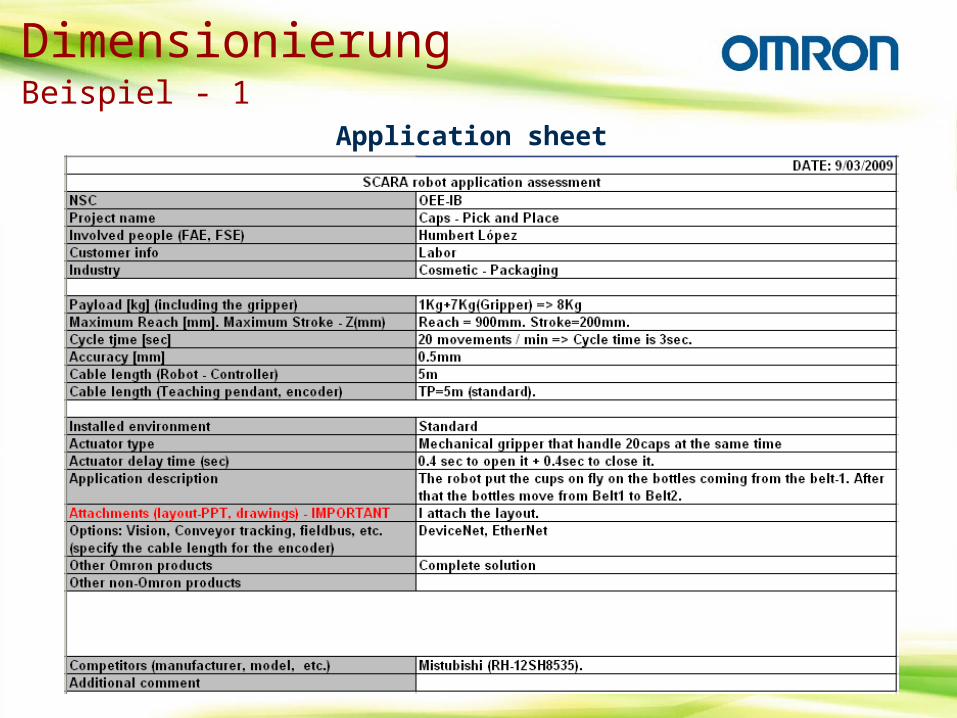
DimensionierungBeispiel - 1
Application sheet
ORIGIN=0
6512
5
Beispiel - 1-PTP movements. NO interpolation.-Add opening/closing delay time (400ms+400ms)-Add 100ms as safety factor.-Add returning movement (or multiply by 2).
Total= (400+100+1011)*2 3sec
10
P0
P1
200
Dimensionierung
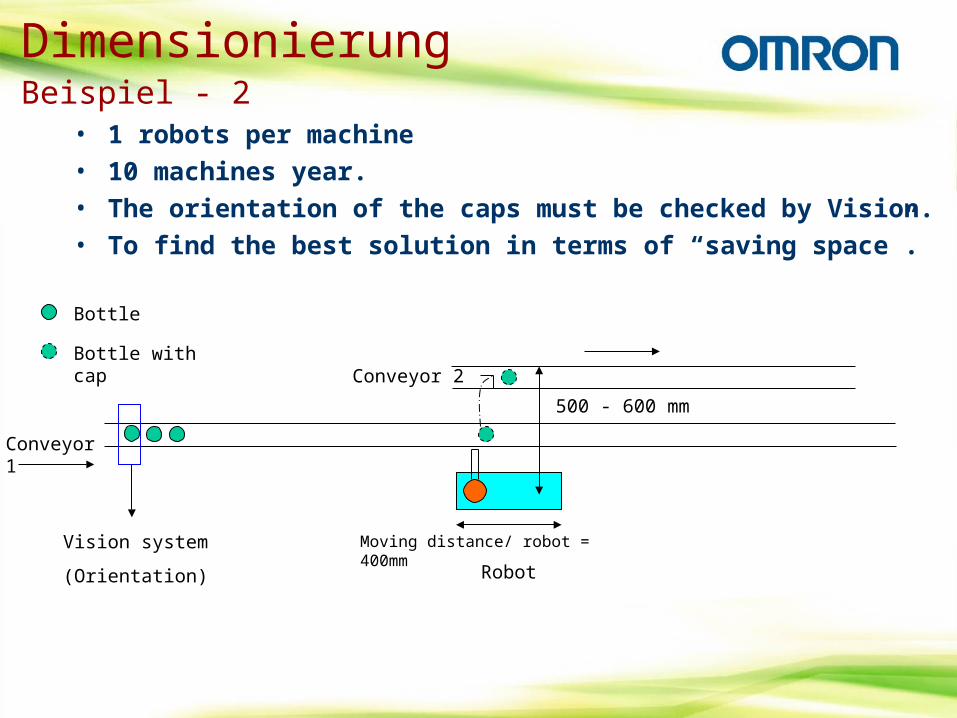
DimensionierungBeispiel - 2
• 1 robots per machine • 10 machines year.• The orientation of the caps must be checked by Vision.• To find the best solution in terms of “saving space”.
Conveyor 1
Conveyor 2
Vision system
(Orientation)
Bottle
Robot
Moving distance/ robot = 400mm
500 - 600 mm
Bottle with cap
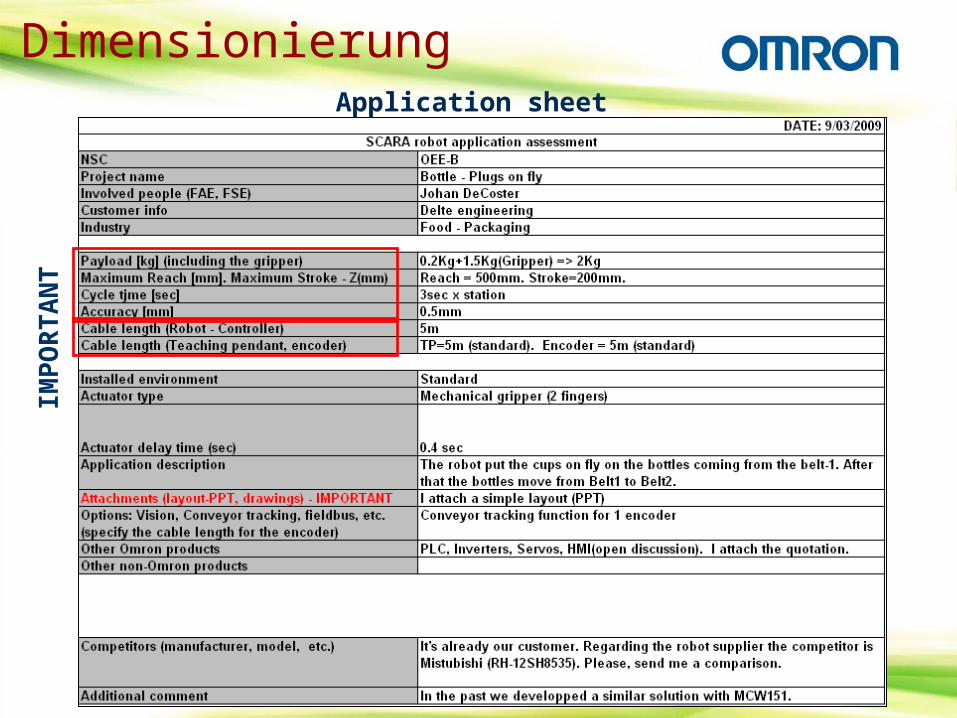
DimensionierungApplication sheet
IMPO
RTA
NT
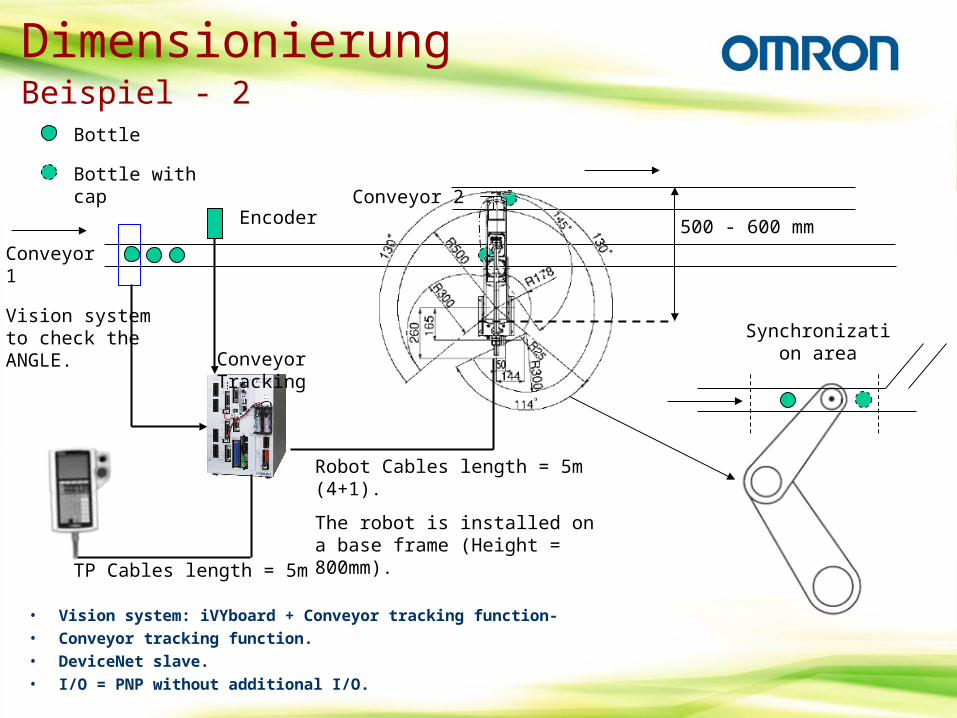
DimensionierungBeispiel - 2
Conveyor 1
Conveyor 2
Vision systemto check the ANGLE.
Bottle
Robot Cables length = 5m (4+1).
The robot is installed on a base frame (Height = 800mm).
500 - 600 mm
Bottle with cap
• Vision system: iVYboard + Conveyor tracking function-• Conveyor tracking function.• DeviceNet slave.• I/O = PNP without additional I/O.
Encoder
Conveyor Tracking
TP Cables length = 5m
Synchronization area
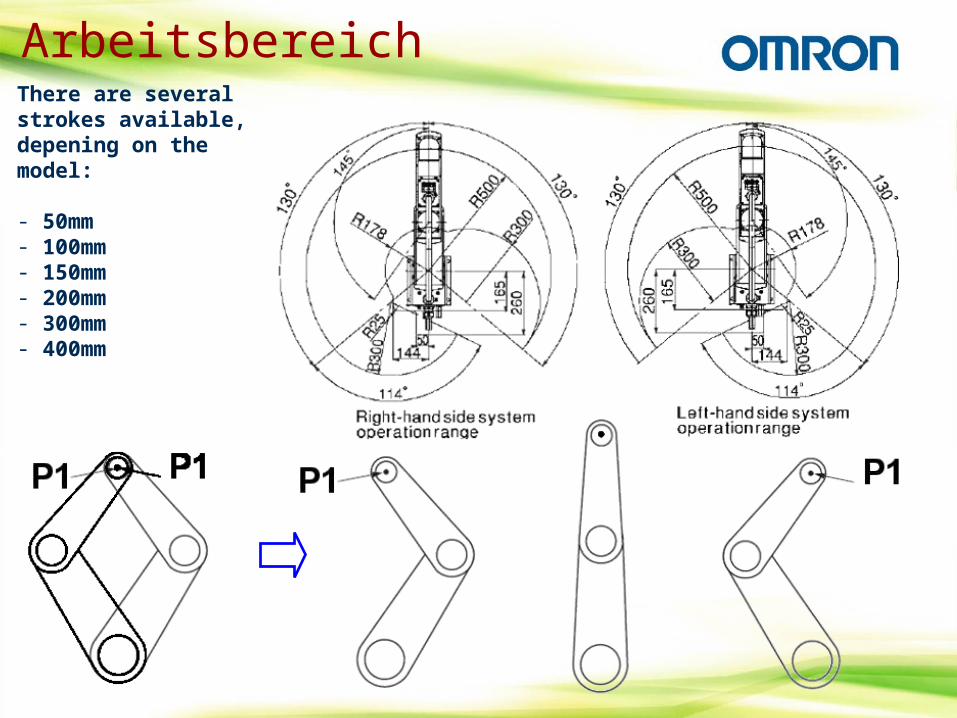
ArbeitsbereichThere are several strokes available, depening on the model:
- 50mm- 100mm- 150mm- 200mm- 300mm- 400mm
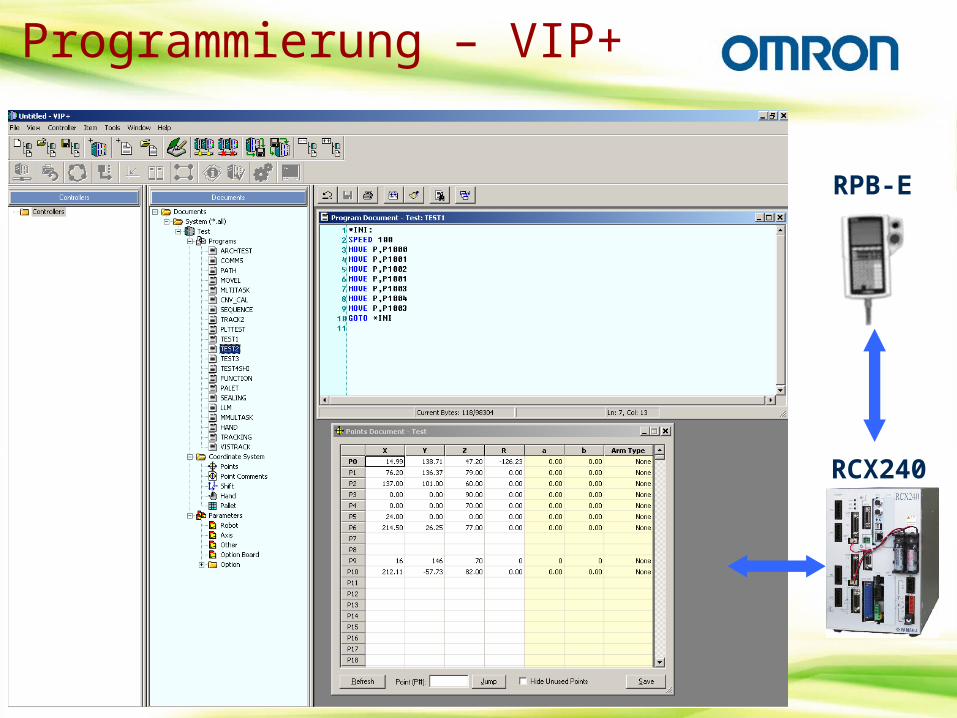
Programmierung – VIP+
RPB-E
RCX240

Zubehör - Grippers
Vacuum
3 fingers (SMC, Schunk, etc.)
2 fingers (SMC, Schunk, etc.)

Zubehör
To handle bottles
UNIGRIPPER
Vielen Dank für Ihre Aufmerksamkeit.