Embed Size (px)
Citation preview
Prof. Dr. Martin Bayer1
Soft-SPS - Was ist eine SPS ?
� SPS = Speicherprogrammierbare SteuerungPLC = Programmable Logic Control
� Ursprünglich elektronischerErsatz von Relais-steuerungen (Schützsteuerung)
Prof. Dr. Martin Bayer2
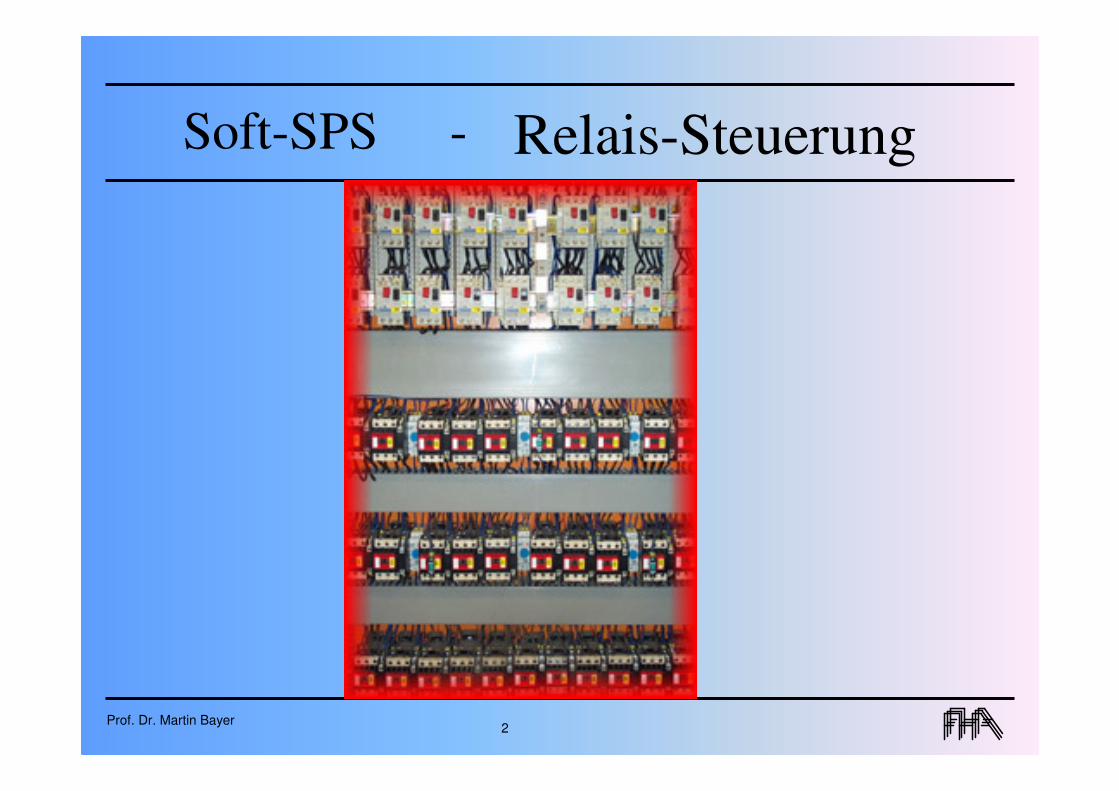
Soft-SPS - Relais-Steuerung
Prof. Dr. Martin Bayer3
Soft-SPS - Was ist eine SPS ?
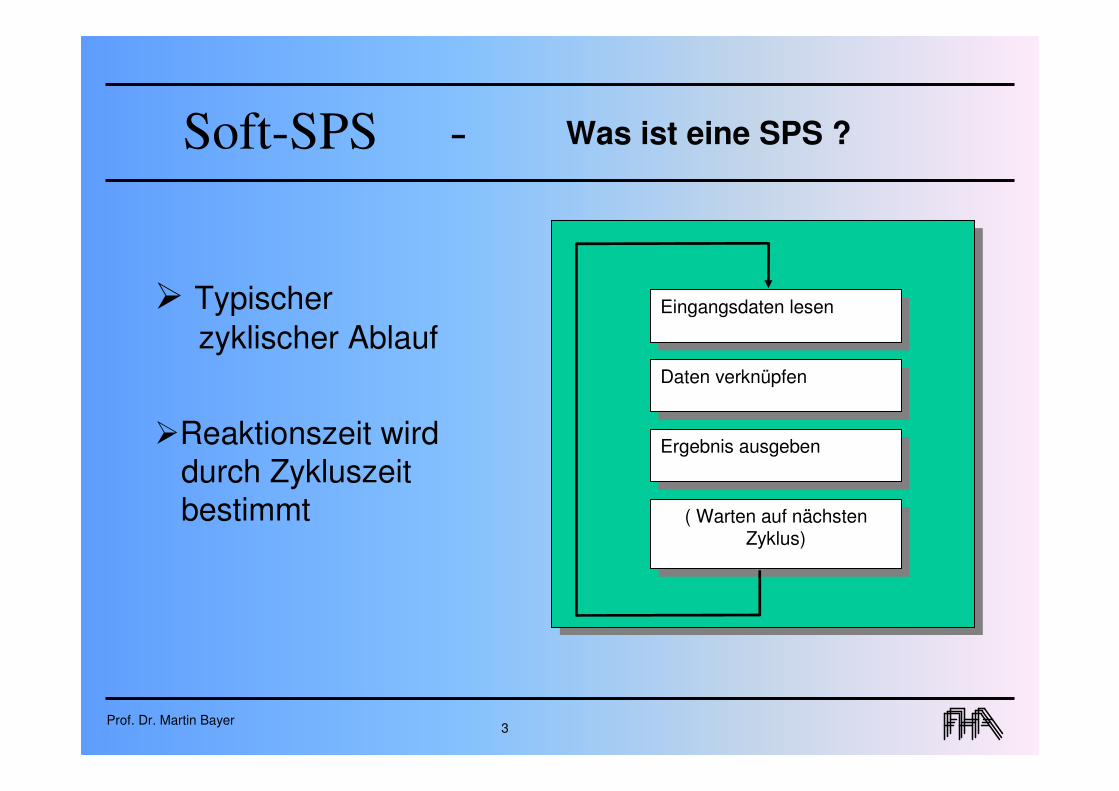
� Typischer zyklischer Ablauf
�Reaktionszeit wird durch Zykluszeitbestimmt
Eingangsdaten lesenEingangsdaten lesen
Daten verknüpfenDaten verknüpfen
Ergebnis ausgebenErgebnis ausgeben
( Warten auf nächsten Zyklus)
( Warten auf nächsten Zyklus)
Prof. Dr. Martin Bayer4
Soft-SPS - Beispiele zu HardSPS
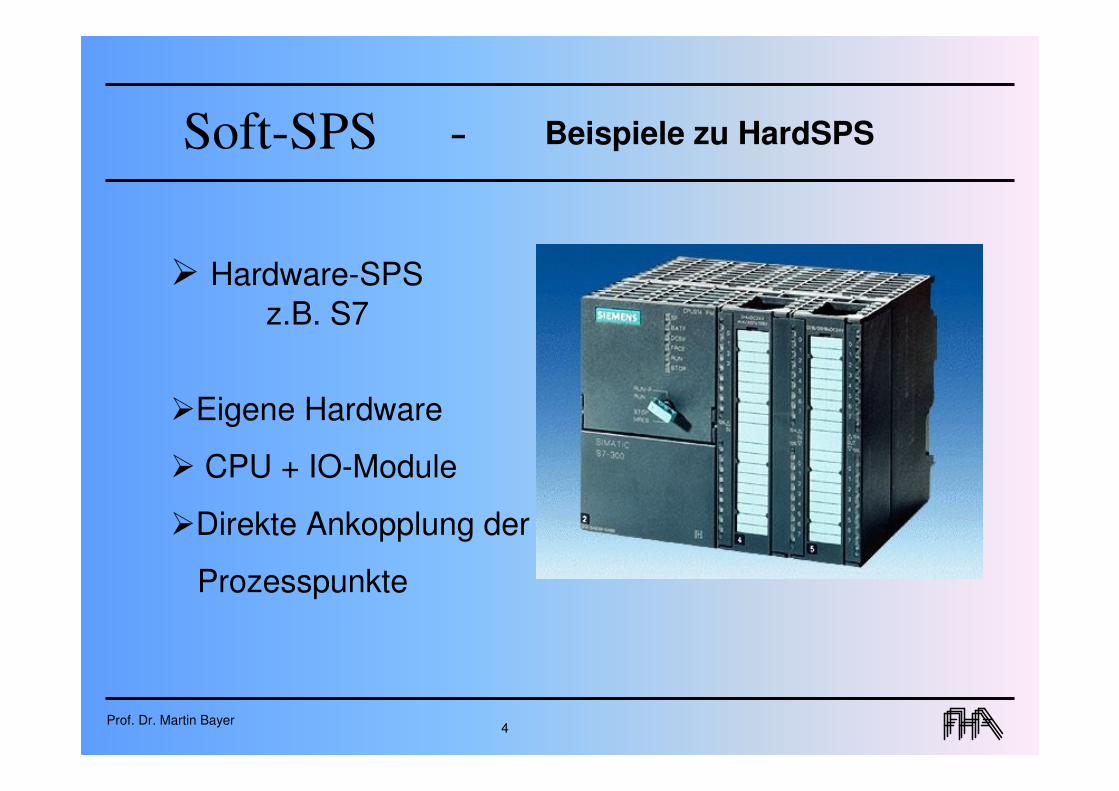
� Hardware-SPSz.B. S7
�Eigene Hardware
� CPU + IO-Module
�Direkte Ankopplung der
Prozesspunkte
Prof. Dr. Martin Bayer5
Soft-SPS - Beispiele zu HardSPS
� Omron-SPSCP1H
Prof. Dr. Martin Bayer6
Soft-SPS - Beispiele zu HardSPS
� Allen Bradley
PLC-5
Prof. Dr. Martin Bayer7
Soft-SPS - Was ist Soft-SPS
• Die Funktionen einer SPS werden vollständig in Software nachgebildet, die Hardwareplattform ist meist ein üblicher PC mit Windows-Betriebssystem.
• Inzwischen existiert Soft-SPS auf Linux oderauf Mikrocontroller-Plattform ohne Betriebsystem
• In der Vorlesung wird das PC-System 4Control der Fa. Softing verwendet
Prof. Dr. Martin Bayer8
Soft-SPS - Vorteile
� Volle grafische Benutzeroberfläche
� Sehr hoher Bedienkomfort, d. h. benutzerfreundlich
� Hardware und Betriebssystem quasi standardisiert und sehr weit verbreitet.
� File-System, Netzanbindung, leistungsstarke CPU, großer Speicher automatisch vorhanden
Prof. Dr. Martin Bayer9
Soft-SPS - Nachteile
� Das PC-Betriebssystem ist nur eingeschränkt echtzeitfähig (Taskzyklus < 10 ms)
� Zuverlässigkeit der Steuerung hängt direkt an der Zuverlässigkeit des Windows-Systems
Prof. Dr. Martin Bayer10
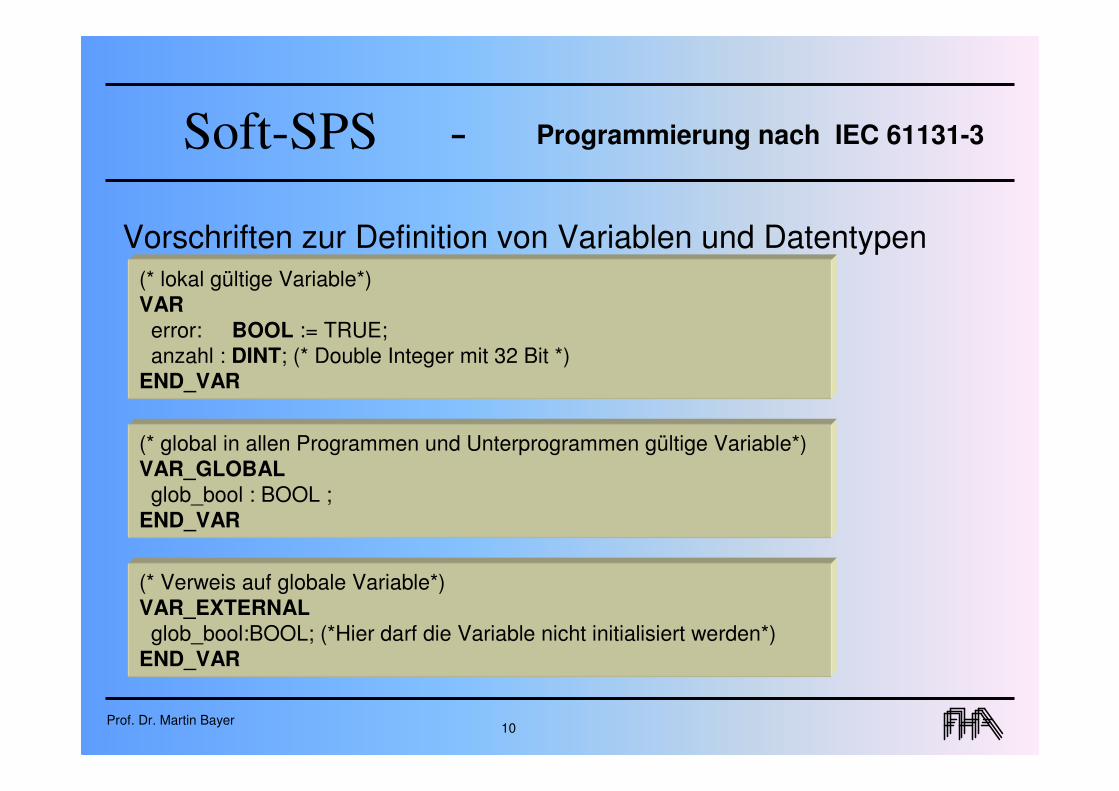
Soft-SPS - Programmierung nach IEC 61131-3
Vorschriften zur Definition von Variablen und Datentypen(* lokal gültige Variable*)VAR
error: BOOL := TRUE;anzahl : DINT; (* Double Integer mit 32 Bit *)
END_VAR
(* global in allen Programmen und Unterprogrammen gültige Variable*)VAR_GLOBAL
glob_bool : BOOL ; END_VAR
(* Verweis auf globale Variable*)VAR_EXTERNAL
glob_bool:BOOL; (*Hier darf die Variable nicht initialisiert werden*)END_VAR
Prof. Dr. Martin Bayer11
Soft-SPS -
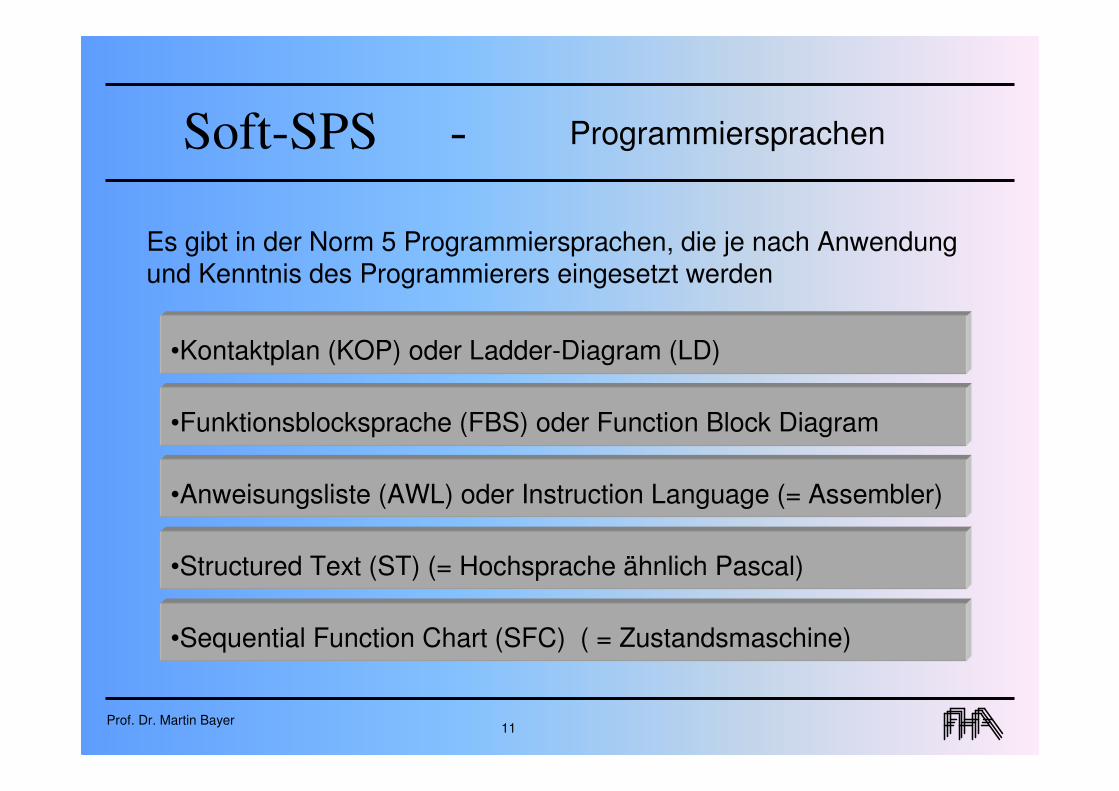
Es gibt in der Norm 5 Programmiersprachen, die je nach Anwendungund Kenntnis des Programmierers eingesetzt werden
Programmiersprachen
•Sequential Function Chart (SFC) ( = Zustandsmaschine)
•Structured Text (ST) (= Hochsprache ähnlich Pascal)
•Kontaktplan (KOP) oder Ladder-Diagram (LD)
•Anweisungsliste (AWL) oder Instruction Language (= Assembler)
•Funktionsblocksprache (FBS) oder Function Block Diagram
Prof. Dr. Martin Bayer12
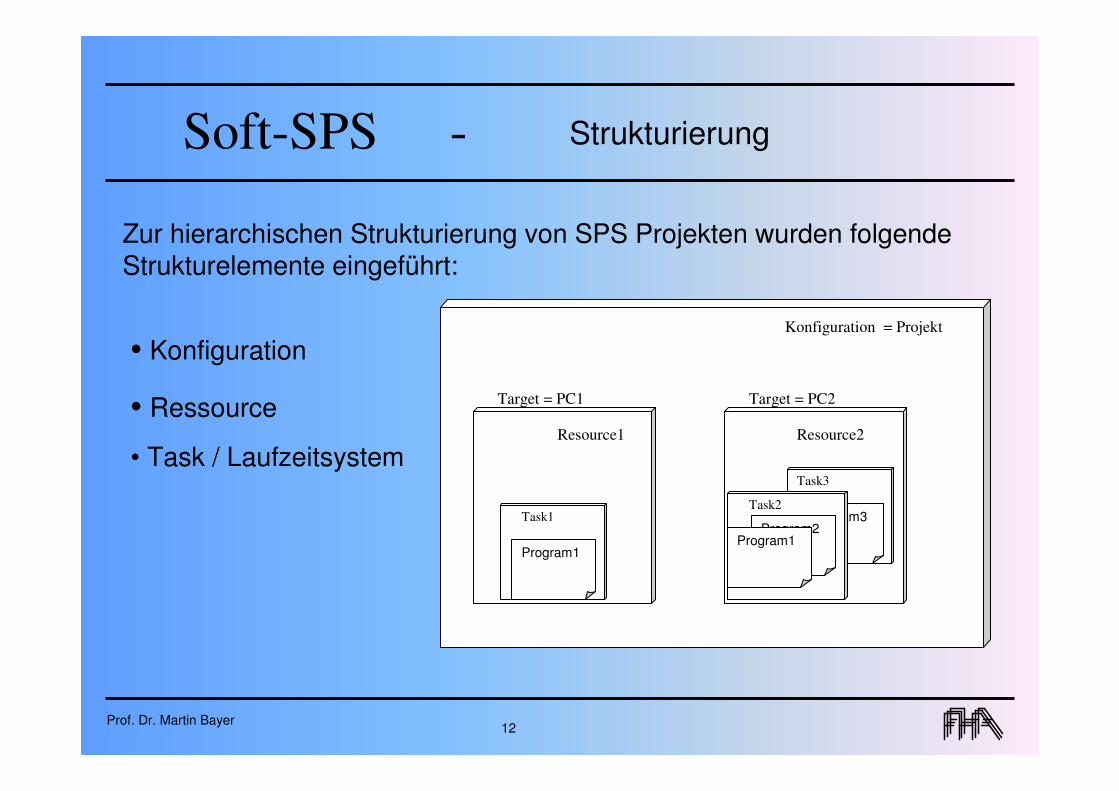
Soft-SPS - Strukturierung
Zur hierarchischen Strukturierung von SPS Projekten wurden folgende Strukturelemente eingeführt:
Konfiguration = Projekt
Resource1
Target = PC1 Target = PC2
Resource2
Task3
Program3
Program1
Task1Program2
Program1
Task2
• Konfiguration
• Ressource
• Task / Laufzeitsystem
Prof. Dr. Martin Bayer13
Soft-SPS - Beispiel mit 4C
Project „Sprachen“ mit 4C
Prof. Dr. Martin Bayer14
Soft-SPS - OPC
OPC = Openness, Productivity, Collaboration(vormals für: OLE for Process Control).
OPC ist eine standardisierte Software-Schnittstelle, die es Anwendungen unterschiedlichster Hersteller ermöglicht, Daten auszutauschen.
Basis ist die in Windows integrierte Fähigkeit von Applikationen, untereinander Daten auszutauschen (Object Linking and Embedding)
Prof. Dr. Martin Bayer15
Soft-SPS - OLE
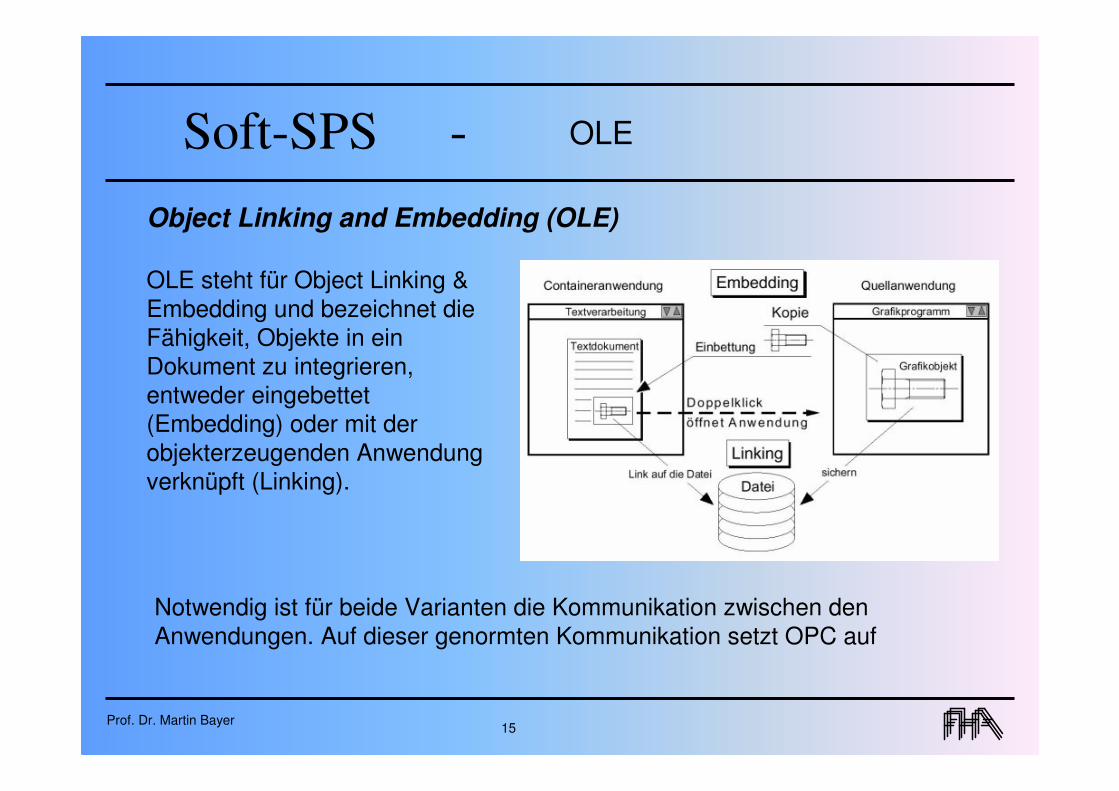
OLE steht für Object Linking &Embedding und bezeichnet die Fähigkeit, Objekte in ein Dokument zu integrieren, entweder eingebettet (Embedding) oder mit derobjekterzeugenden Anwendung verknüpft (Linking).
Object Linking and Embedding (OLE)
Notwendig ist für beide Varianten die Kommunikation zwischen den Anwendungen. Auf dieser genormten Kommunikation setzt OPC auf
Prof. Dr. Martin Bayer16
Soft-SPS -
OPC-
Client
OPC-Client/Server
OPC-
Client
MotorDruck Temp
OPC-
ServerFeldbus
TCP/IP
OPC-
Client
OPC-
Server
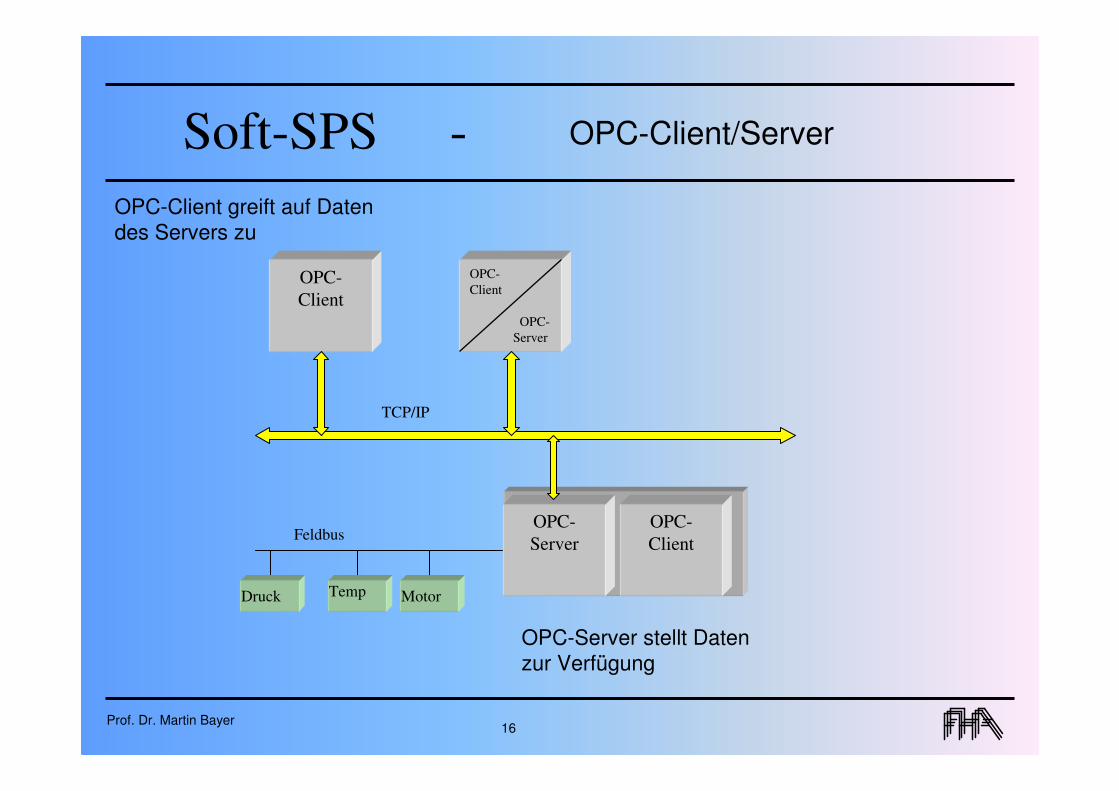
OPC-Server stellt Daten zur Verfügung
OPC-Client greift auf Daten des Servers zu
Prof. Dr. Martin Bayer17
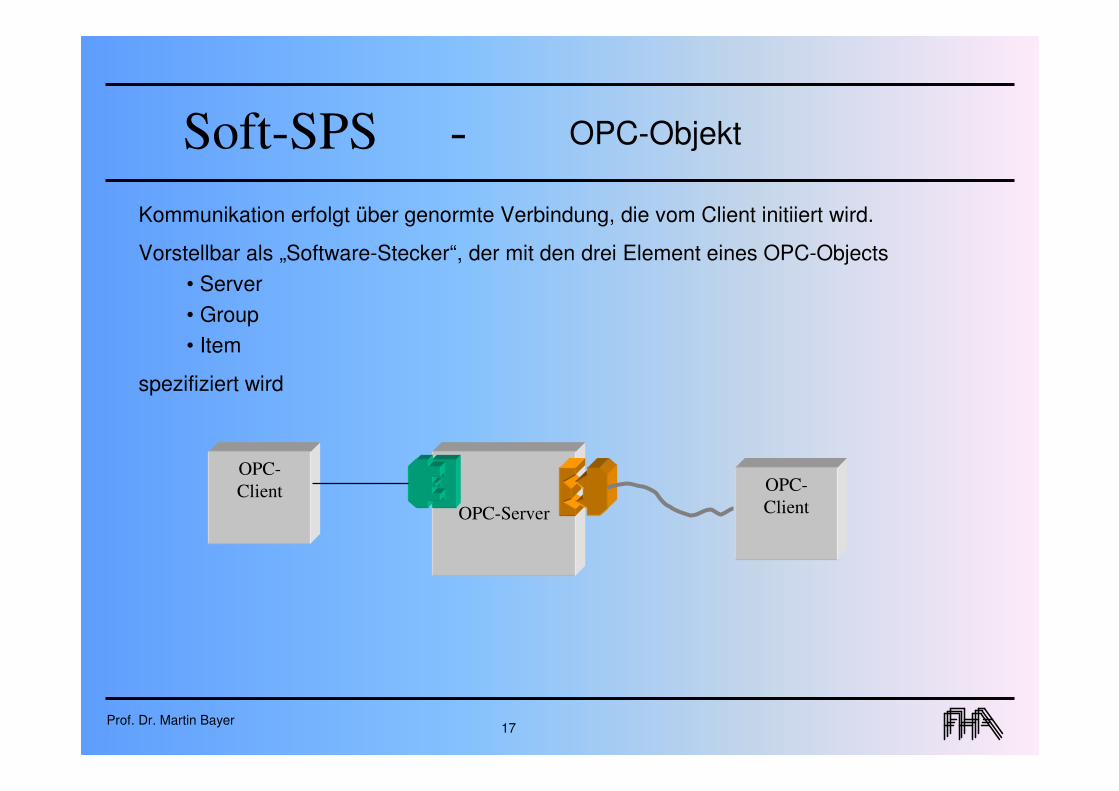
Soft-SPS - OPC-Objekt
OPC-
ClientOPC-Server
Kommunikation erfolgt über genormte Verbindung, die vom Client initiiert wird.
Vorstellbar als „Software-Stecker“, der mit den drei Element eines OPC-Objects
• Server
• Group
• Item
spezifiziert wird
OPC-
Client
Prof. Dr. Martin Bayer18
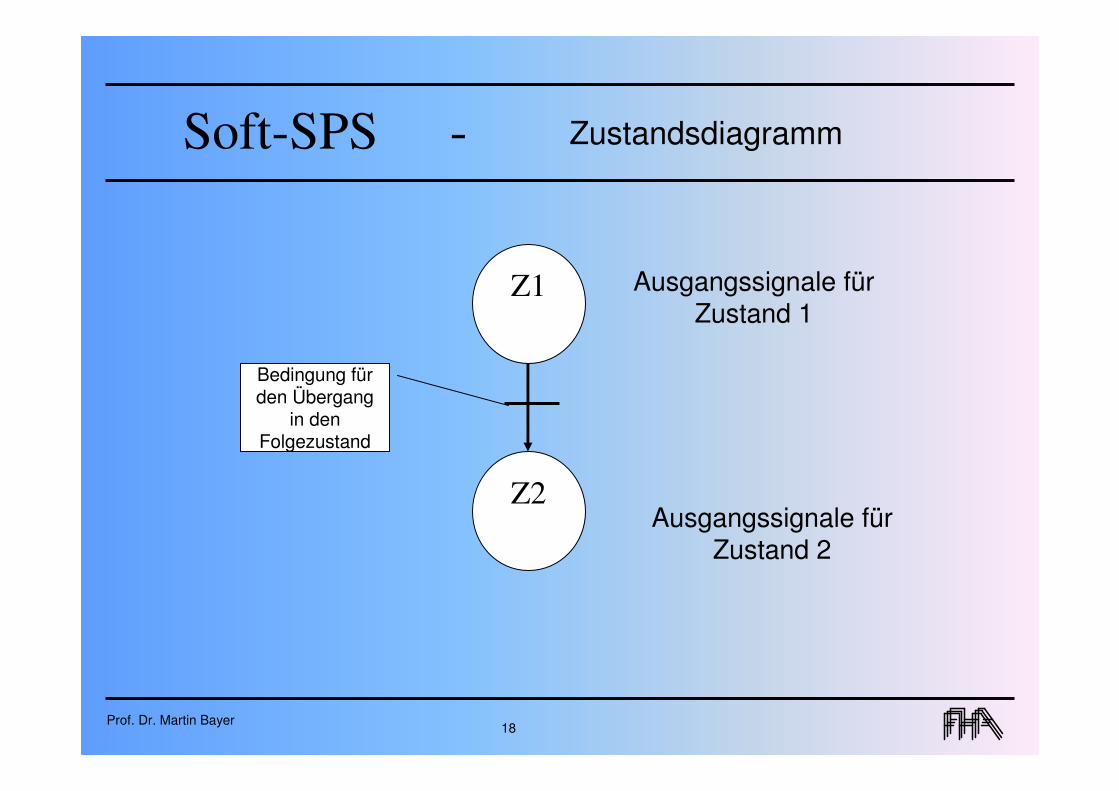
Soft-SPS - Zustandsdiagramm
Z1 Ausgangssignale fürZustand 1
Z2Ausgangssignale für
Zustand 2
Bedingung für den Übergang
in den Folgezustand
Prof. Dr. Martin Bayer19
Soft-SPS - SFC
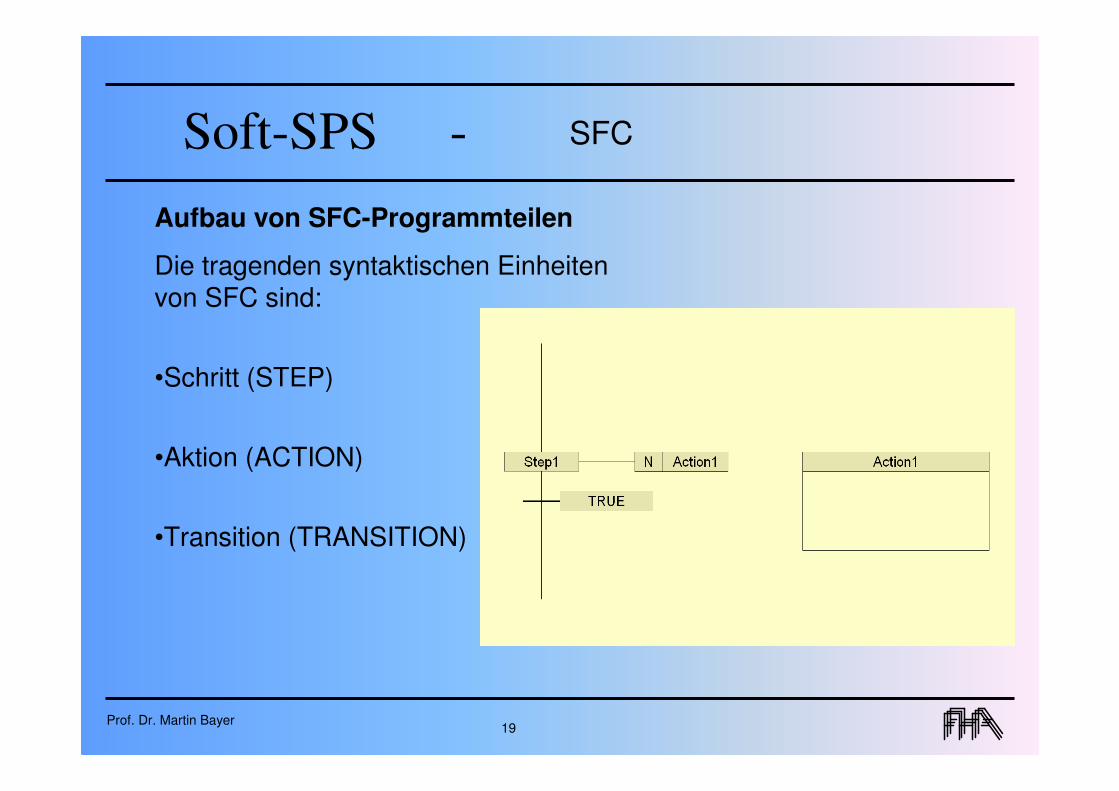
Aufbau von SFC-Programmteilen
Die tragenden syntaktischen Einheiten von SFC sind:
•Schritt (STEP)
•Aktion (ACTION)
•Transition (TRANSITION)
Prof. Dr. Martin Bayer20
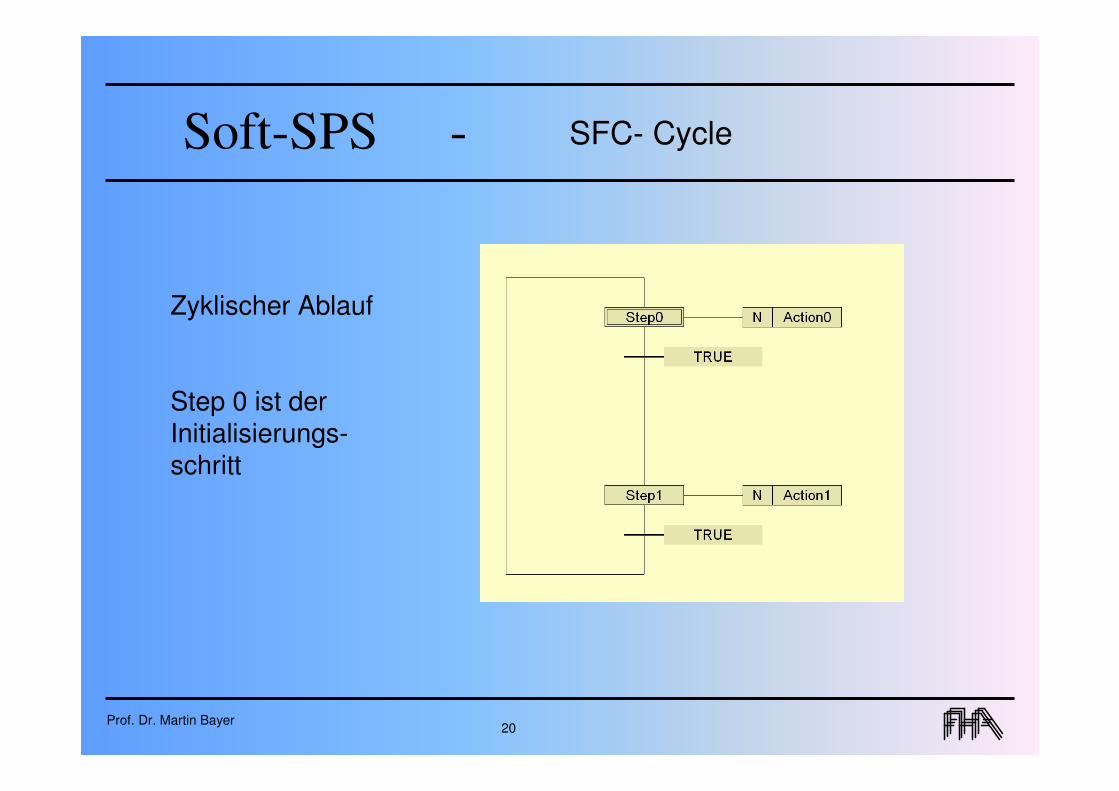
Soft-SPS - SFC- Cycle
Zyklischer Ablauf
Step 0 ist der Initialisierungs-schritt
Prof. Dr. Martin Bayer21
Soft-SPS - SFC- Verzweigung
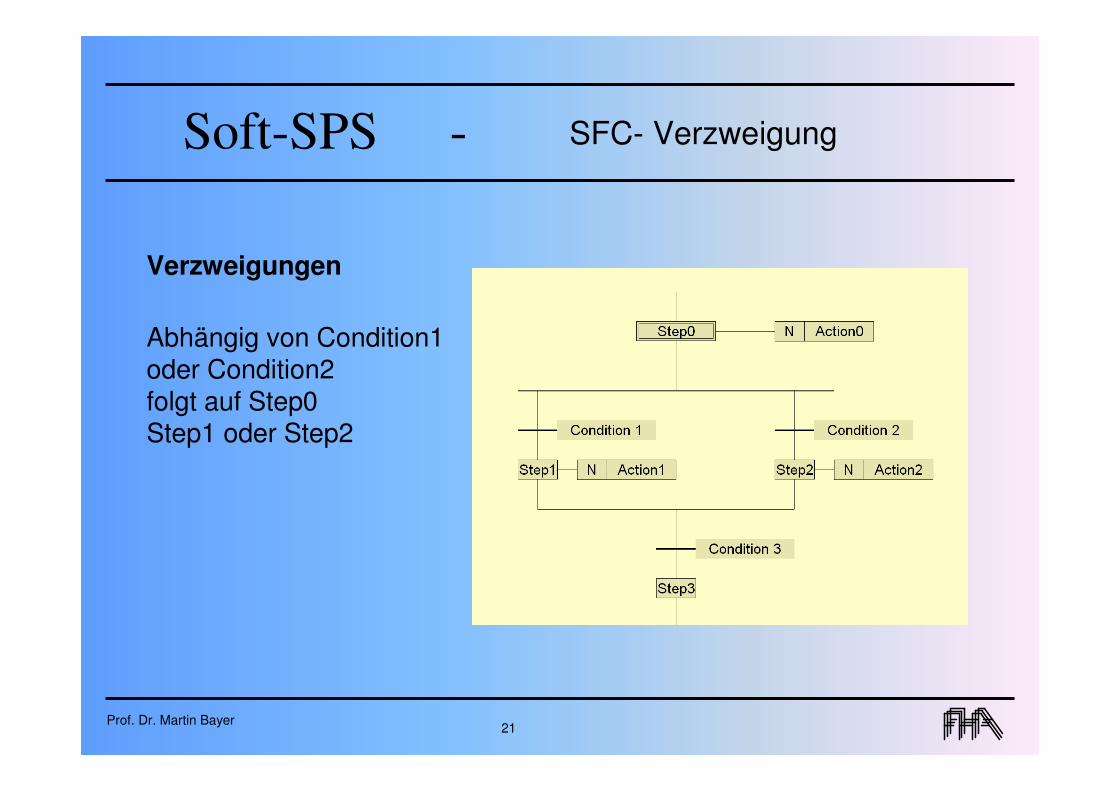
Verzweigungen
Abhängig von Condition1 oder Condition2 folgt auf Step0 Step1 oder Step2
Prof. Dr. Martin Bayer22
Soft-SPS - Aufgabenstellung
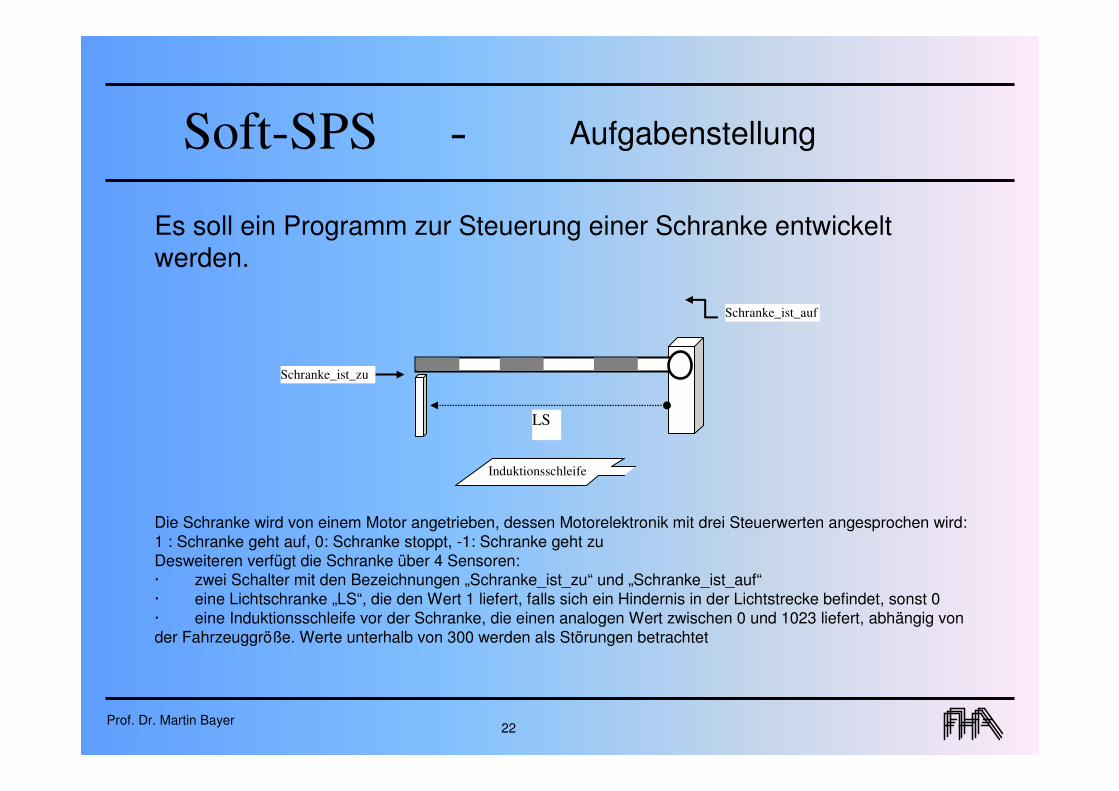
Es soll ein Programm zur Steuerung einer Schranke entwickelt werden.
LS
Induktionsschleife
Schranke_ist_zu
Schranke_ist_auf
Die Schranke wird von einem Motor angetrieben, dessen Motorelektronik mit drei Steuerwerten angesprochen wird: 1 : Schranke geht auf, 0: Schranke stoppt, -1: Schranke geht zuDesweiteren verfügt die Schranke über 4 Sensoren:· zwei Schalter mit den Bezeichnungen „Schranke_ist_zu“ und „Schranke_ist_auf“· eine Lichtschranke „LS“, die den Wert 1 liefert, falls sich ein Hindernis in der Lichtstrecke befindet, sonst 0· eine Induktionsschleife vor der Schranke, die einen analogen Wert zwischen 0 und 1023 liefert, abhängig vonder Fahrzeuggröße. Werte unterhalb von 300 werden als Störungen betrachtet
Prof. Dr. Martin Bayer23
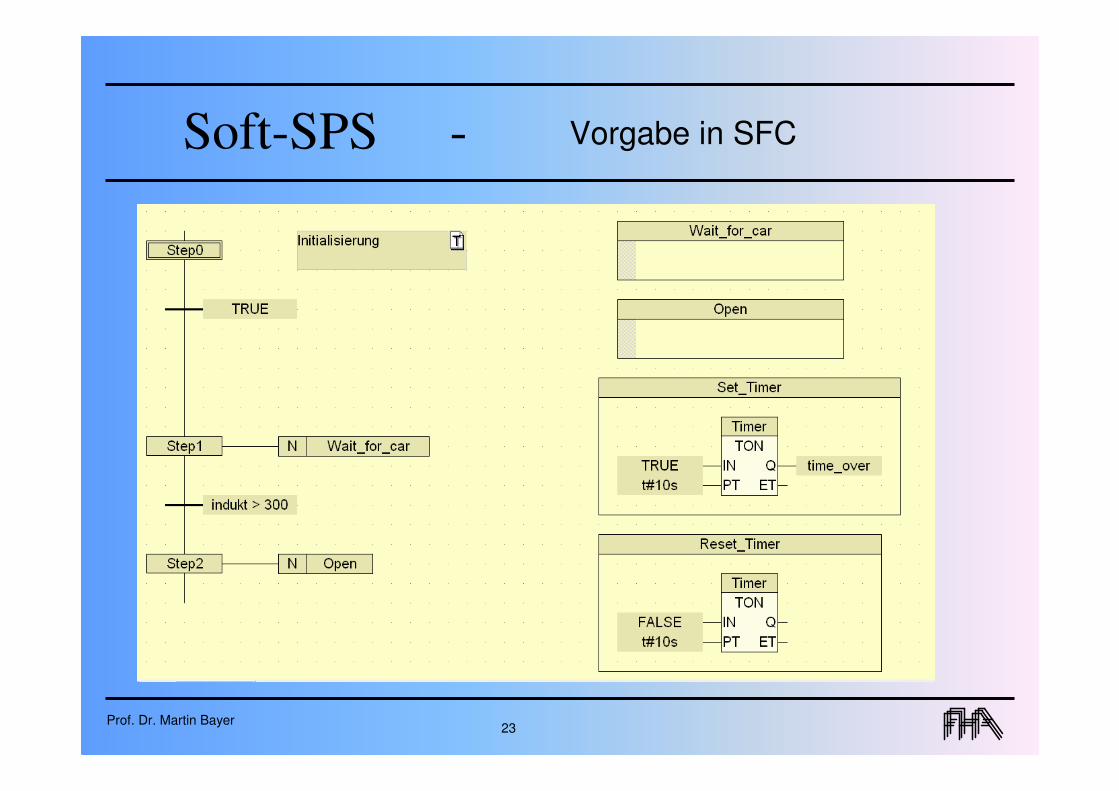
Soft-SPS - Vorgabe in SFC





























