Embed Size (px)
Citation preview
BioRobotikLabor.de
1
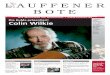
Stand der Technik robotischer Aktoren
Wilkie, 1976
Flu
idis
ch
e M
uskeln
(1
00
0 W
/kg
)
FerRobotics GmbH
Fluidische Muskeln, fluidic muscle:• ähnliches statische, dynamische Eigenschaften/Verhalten wie natürliche Muskeln• hohe gewichtsbezogene Leistung(leicht, kraftvoll), bis zu 300 (E-Motor bis zu 50)• kein stick-slip, keine Haltekräfte, hermetisch dicht, Reinraum geeignet, wartungsarm• inhärent/passiv nachgiebig, elastischfür Stoßeinwirkung (Kollision vs. Kontakt)• einstellbar/aktiv nachgiebig für Bewegung, sichere Mensch-Technik-Interaktion• Herausforderungen: Nachgiebigkeit, Druckluftversorgung, n.l. Beschreibungs-
funktion (Membran, Fluid), relativ neu am Markt, kaum Literatur bzw. Lehrbücher
BioRobotikLabor.de
2
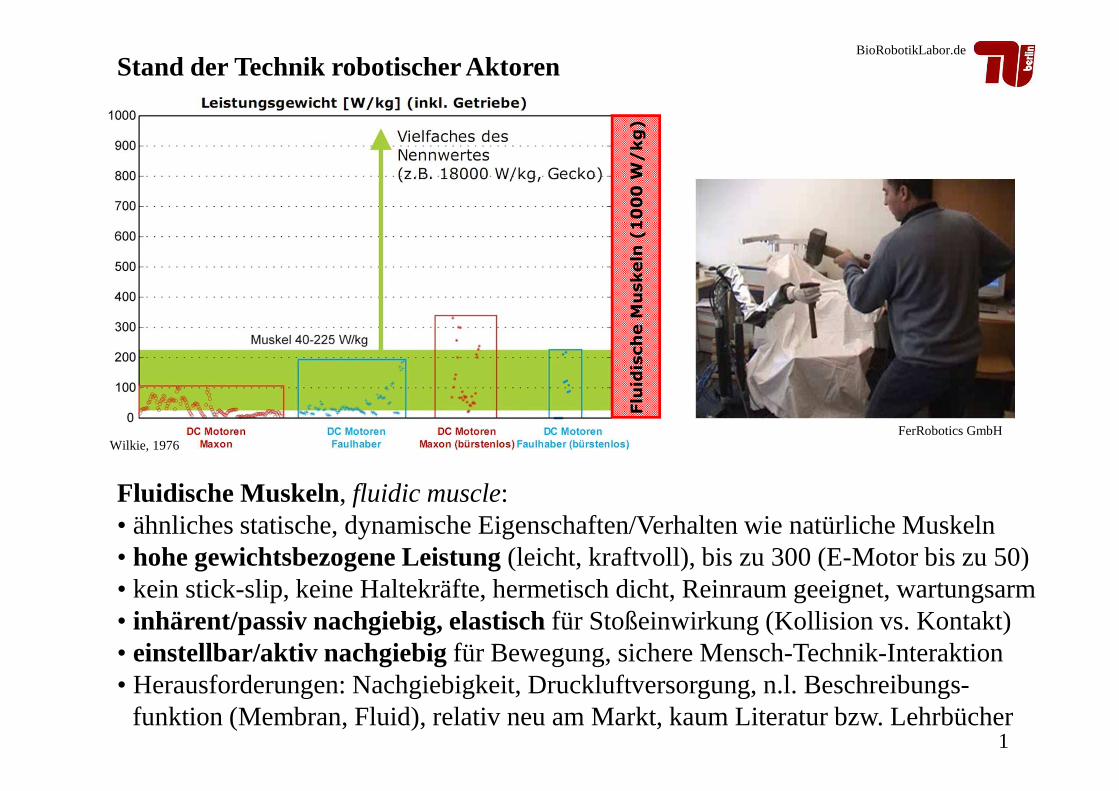
Geschichte fluidischer Muskeln
• Entwicklung beginnt mit der Entwicklung druckfester Schläuche• Aufbau: luftdichtes Material (Gummimischung) + hochfestes Fasergeflecht• Funktion: Formänderung des Schlauches -> Formänderung des Gitters• anfängliches Ziel: Unterbindung der Dehnungs- und Längenänderung bei P↑
-> „neutraler Winkel“ des Geflechtes, der dies verhindert
Historie:1892 – Patent zur Ummantelung von Gummischläuchen1900 – Prinzip eines Muskels durch Gummischlauch, Prof. Dr. Reuleaux1931 – Patent zum „neutralen Winkel“1931 – Patent zum Dämpfungselement für Druckausgleich
Patentschrift von 1892 Reuleaux‘s Schlauchkette Schlauchglied
BioRobotikLabor.de
3
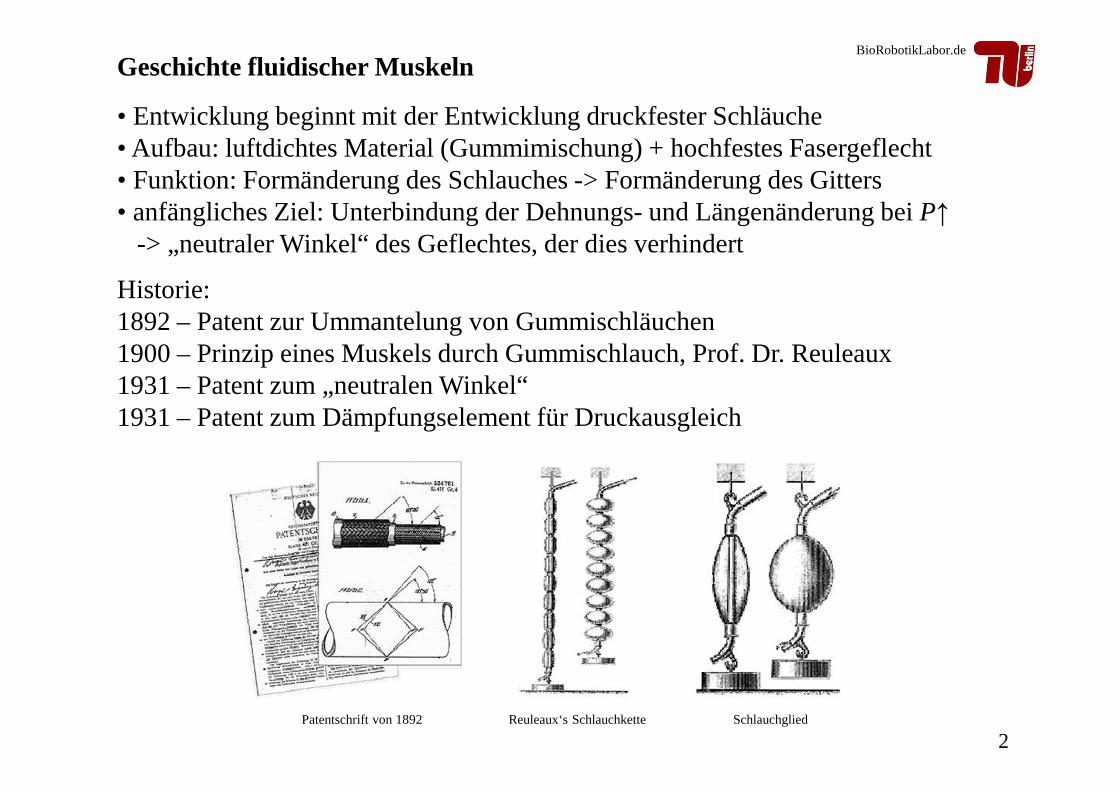
1950er – Experimente amerikanischer Wissenschaftlermit Kontraktionsmembranen für Orthesen-> Konzept des 1. pneum Muskels durch J.L. McKibben-> „McKibben-Muskel“- Lit.: Schulte1961, ChouHannaford1994, Caldwell1995
1980er – Weiterentwicklung für den Einsatz in Roboterndurch die Bridgestone Rubber Company (USA)
1990er – Übernahme zur Vermarktung und Weiterentwicklungdurch die Shadow Robot Group (UK)-> „Shadow-Muskel“
1990er – Industrielle Eigenentwicklung eines fluidischen Muskelsdurch die Festo AG & Co. KG (D)-> „fluidic muscle“, „ Festo-Muskel“ (MAS, DMSP)
Entwicklung technischer Muskel-Aktoren (reine Zugaktoren)

BioRobotikLabor.de
4
Membranaufbau:Chloropren-Membran (Kautschuk)
Aramid-Fasergeflecht-Ummantelung (Kevlar)Type: MAS-, DMSP-5/10/20/40
• Zugkraft F[N] ~ Durchmesser D [mm]• Verkürzung L[%] ~ Ausgangslänge L0[mm]• Verkürzung L[%] ~ Typ ca. 25% - 35% L0
• Steifigkeit 1/δ[N/mm] ~ Innenluftdruck [Pa, bar]
Aufbau und Funktion des fluidischen Muskels
BioRobotikLabor.de
5
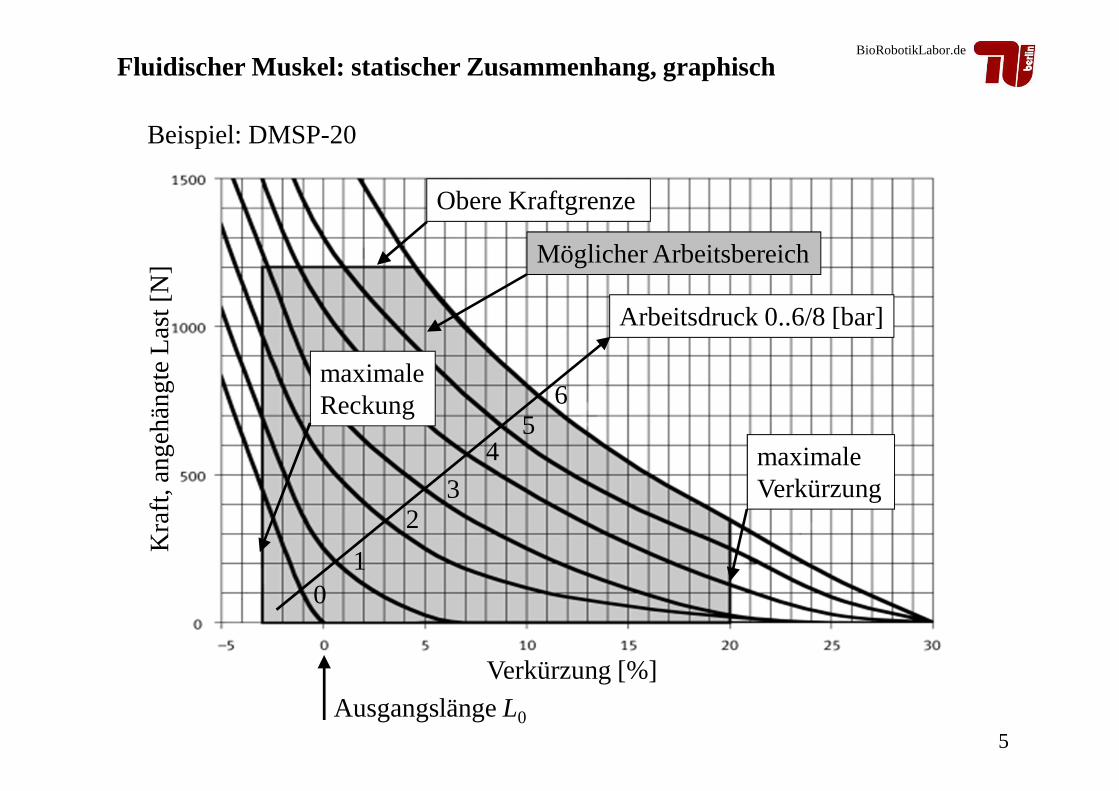
Fluidischer Muskel: statischer Zusammenhang, graphisch
Arbeitsdruck 0..6/8 [bar]
maximaleReckung
maximaleVerkürzung
Obere Kraftgrenze
Möglicher Arbeitsbereich
Kra
ft, a
ng
ehän
gte
Las
t [N
]
Verkürzung [%]
Ausgangslänge L0
Beispiel: DMSP-20
01
23
45
6
BioRobotikLabor.de
6
Modellbildung allgemein
Prinzipiell unterscheidet man zwischen statischer und dynamischer Modellbildung• statische Modelle und zugehörige Messmethoden finden Verwendung, wo sichParameter über die Zeit nicht (statisch) o. nur sehr langsam (quasi-statisch) ändern- Quasi-statisch heißt, den Prozess sich zw. den Messungen beruhigen lassen, dassalle Schwingprozesse (Eigenwerte) abgeklungen sind -> Messung des rein statischen Zusammenhangs
• die meisten Prozesse verändern sich aber über die Zeit x=f(y,t)• die Prozessparameter unterliegen zusätzlichen Einflussfaktoren, wie z.B. demMassenträgheitsmoment, die nicht zu vernachlässigen sind
• höhere Anforderungen an dynamische Modellbildung (z.B. zeitliche Auflösung)
Graphischer Zusammenhang F=f(L,P)• rein statischer Zusammenhang zur Konfektionierung eines Muskels• für eine Regelung reicht das aber bei weitem nicht aus-> dynamische Modellbildung
BioRobotikLabor.de
7
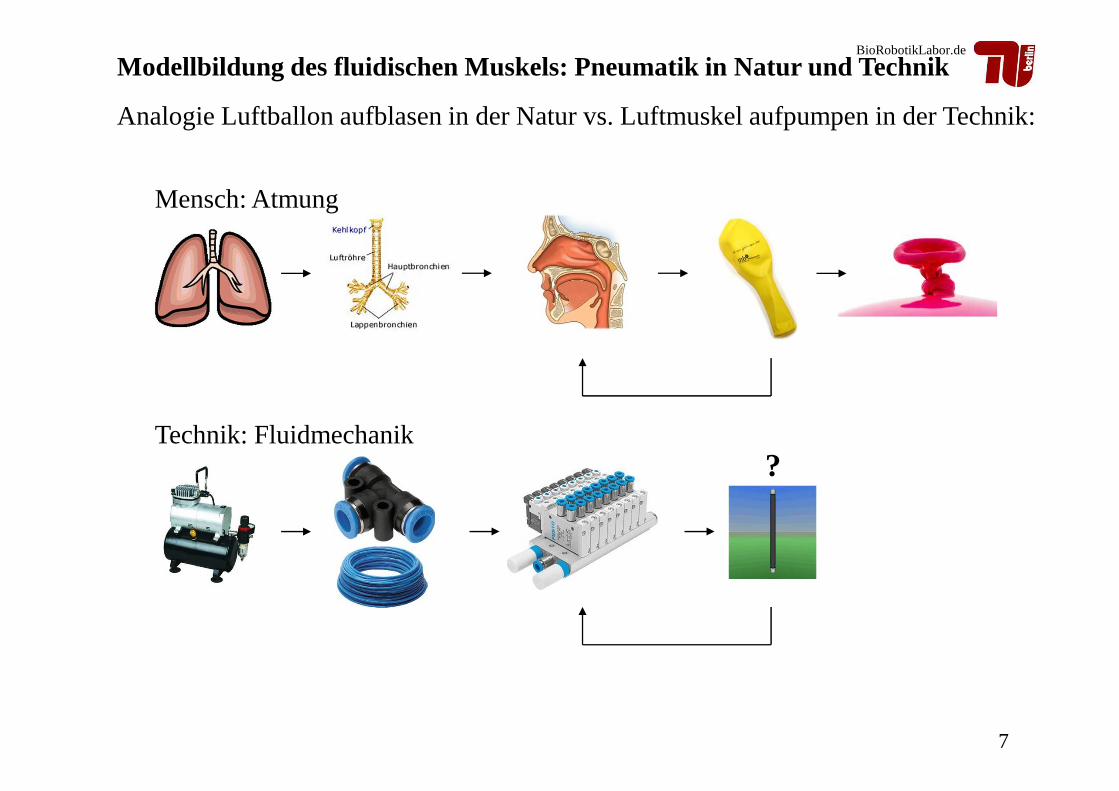
Technik: Fluidmechanik
Mensch: Atmung
?
Analogie Luftballon aufblasen in der Natur vs. Luftmuskel aufpumpen in der Technik:
Modellbildung des fluidischen Muskels: Pneumatik in Natur und Technik
BioRobotikLabor.de
8
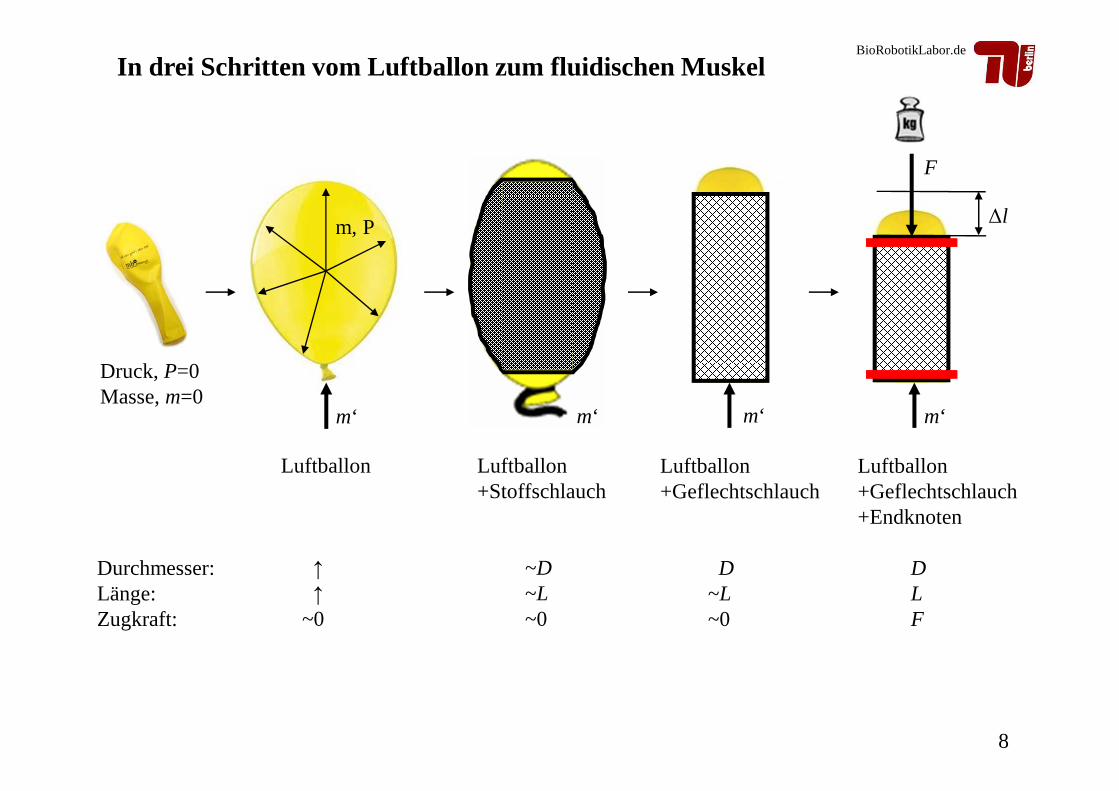
m‘
Luftballon+Stoffschlauch
~D~L~0
F
∆l
m‘
Luftballon+Geflechtschlauch+Endknoten
DLF
m‘
Luftballon+Geflechtschlauch
D~L~0
m‘
m, P
Luftballon
↑
↑
~0
Durchmesser:Länge:Zugkraft:
Druck, P=0Masse, m=0
In drei Schritten vom Luftballon zum fluidischen Muskel
BioRobotikLabor.de
9
Modellbildung des fluidischen Muskels
Zusammenhänge für aussagekräftiges Muskelmodell: 1. Zeitversatz einer Luftströmung im Anschlussschlauch (Messung) 2. Geometrisches Modell des aufgespannten Volumens3. Thermodynamische Beziehung – Gasgleichung4. Zeitkonstanten im isometrischen und isotonischen Versuch (Messung)5. Mechanischer Zusammenhang – Kraftgleichung (Messung)6. Modell der Materialeigenschaften und Materialkonstanten
Mess- und Versuchsaufbauten:Zu 1. Versuchsaufbau zur Messung des Verhaltens von LuftströmungZu 4. Versuchsaufbau zur Messung der Zeitkonstanten des isometrischen SystemsZu 5. Versuchsaufbau zur Messung des isotonischen/mechanischen Verhaltens-> Versuchsaufbau zur Parameteridentifikation und zur Modellbildung eines
antagonistischen Muskelpaares
Verifikationsmessung für alle (anderen) Modelle 2, 3 und 6
BioRobotikLabor.de
10
Zusammenhänge für aussagekräftiges Muskelmodell: 1. Zeitversatz einer Luftströmung im Anschlussschlauch (Messung)2. Geometrisches Modell des aufgespannten Volumens3. Thermodynamische Beziehung – Gasgleichung 4. Zeitkonstanten im isometrischen und isotonischen Versuch (Messung)5. Mechanischer Zusammenhang – Kraftgleichung (Messung)6. Modell der Materialeigenschaften und Materialkonstanten
• Luft (Druckluft) besteht aus Molekülen, die massebehaftet sind• Jeder Transport von Masse unterliegt einer Verzögerung durch Reibung• In pneumatischen Systemen werden Masseteilchen durch Druckerhöhung komprimiert und durch dünne Druckluftschläuche gepumpt
• Diese Masseteilchen treten in Interaktion miteinander und mit Ihrer Umgebung-> verursachen Reibung untereinander und an der Oberfläche im Schlauch-> führt zu Druckverlusten und Totzeiten über die Leitungslänge
• Bei langen Schlauchleitungen kann dieser Zeitverlust signifikant werden-> sollte deshalb im vorhinein abgeschätzt oder berechnet werden
Modellbildung des fluidischen Muskels
BioRobotikLabor.de
11
• Der in einem Staupunkt wirkende Gesamtdruck p0 ergibt sich aus der Addition von:1. Statischem Druck pstat.der freien Anströmung
- folgt aus der Lageenergie Epot des unter Druck stehenden Fluids (Luft, Wasser)2. Kinetischer Energie des dynamischen Drucks (Staudruck) pdyn.=ρ/2·v2
- folgt aus der Bewegungsenergie Ekin des strömenden Mediums- „Dichte ist die auf das Volumen bezogene Masse“, ρ ~ m für V = konst.
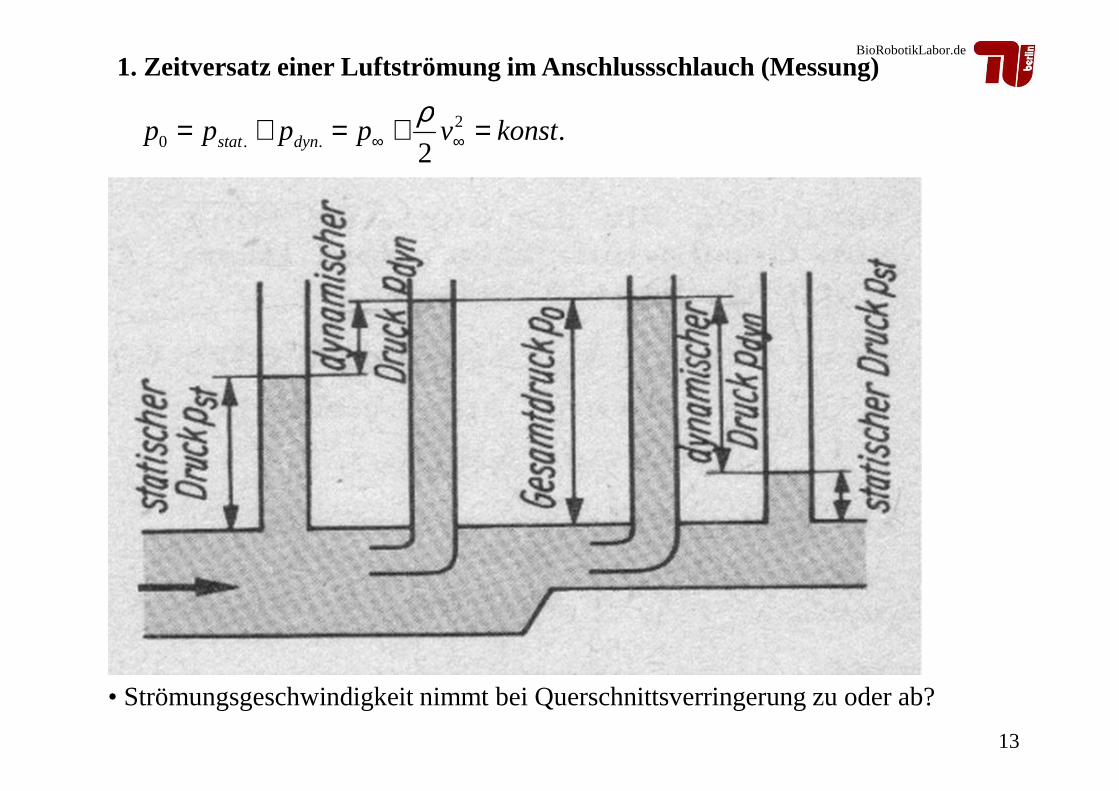
1. Zeitversatz einer Luftströmung im Anschlussschlauch (Messung)
.2
2..0 konstvpppp dynstat =+=+= ∞∞
ρ
Theoretische Betrachtungen• für kompressible Fluide (wie Luft) ist die Dichte ρ = m/V [kg/m3] ≠ konst.• Dichte ist bei isothermer Strömung (T = konst.) abhängig vom Druck P [N/m2]
BioRobotikLabor.de
12
1. Zeitversatz einer Luftströmung im Anschlussschlauch (Messung)
.2
2..0 konstvpppp dynstat =+=+= ∞∞
ρ
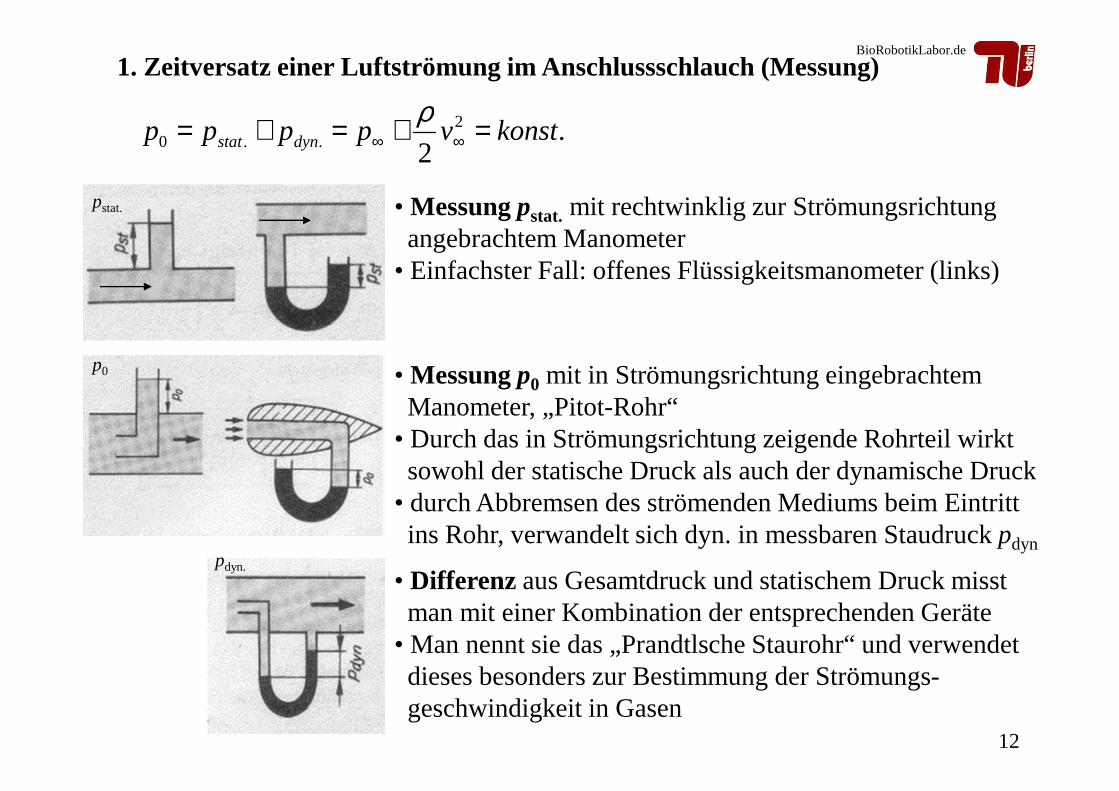
pstat.
• Differenz aus Gesamtdruck und statischem Druck misstman mit einer Kombination der entsprechenden Geräte
• Man nennt sie das „Prandtlsche Staurohr“ und verwendetdieses besonders zur Bestimmung der Strömungs-geschwindigkeit in Gasen
pdyn.
• Messung pstat. mit rechtwinklig zur Strömungsrichtungangebrachtem Manometer
• Einfachster Fall: offenes Flüssigkeitsmanometer (links)
p0 • Messung p0 mit in Strömungsrichtung eingebrachtemManometer, „Pitot-Rohr“
• Durch das in Strömungsrichtung zeigende Rohrteil wirktsowohl der statische Druck als auch der dynamische Druck
• durch Abbremsen des strömenden Mediums beim Eintrittins Rohr, verwandelt sich dyn. in messbaren Staudruck pdyn
BioRobotikLabor.de
13
1. Zeitversatz einer Luftströmung im Anschlussschlauch (Messung)
.2
2..0 konstvpppp dynstat =+=+= ∞∞
ρ
• Strömungsgeschwindigkeit nimmt bei Querschnittsverringerung zu oder ab?
BioRobotikLabor.de
14
1. Zeitversatz einer Luftströmung im Anschlussschlauch (Messung)
.2
2..0 konstvpppp dynstat =+=+= ∞∞
ρ
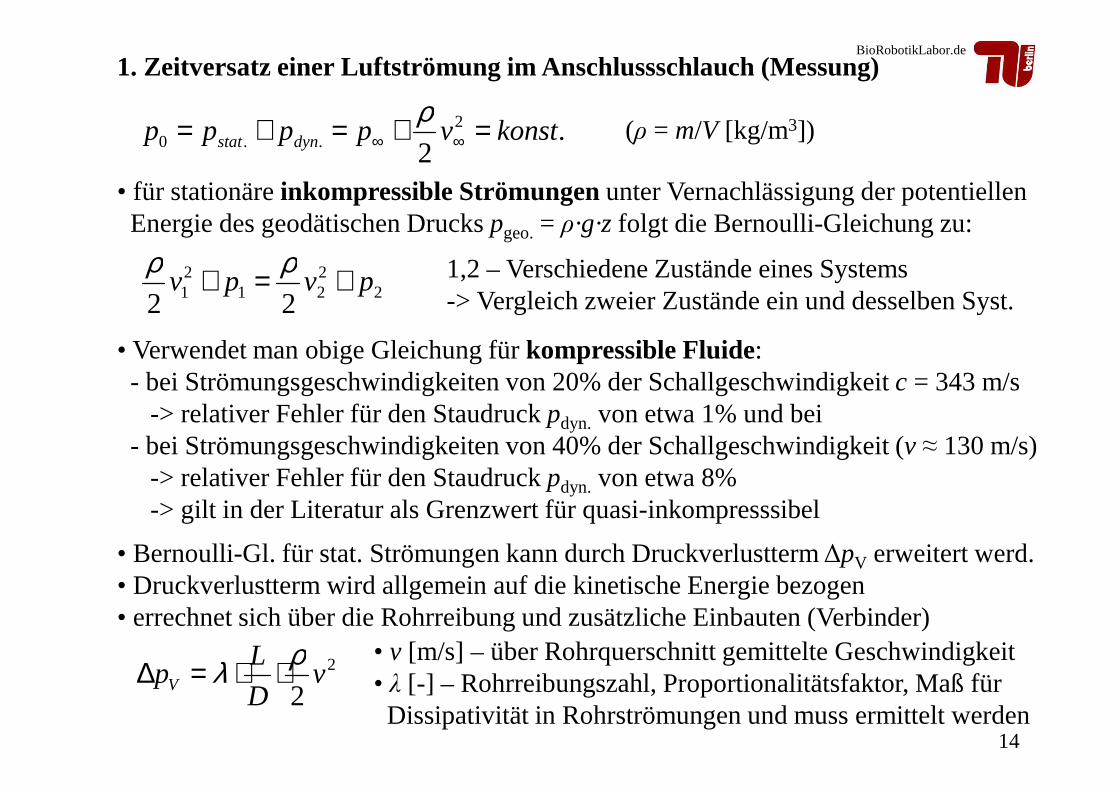
• für stationäre inkompressible Strömungenunter Vernachlässigung der potentiellenEnergie des geodätischen Drucks pgeo.= ρ·g·z folgt die Bernoulli-Gleichung zu:
2221
21 22
pvpv +=+ ρρ
• Verwendet man obige Gleichung für kompressible Fluide: - bei Strömungsgeschwindigkeiten von 20% der Schallgeschwindigkeit c = 343 m/s
-> relativer Fehler für den Staudruck pdyn. von etwa 1% und bei- bei Strömungsgeschwindigkeiten von 40% der Schallgeschwindigkeit (v ≈ 130 m/s)
-> relativer Fehler für den Staudruck pdyn. von etwa 8%-> gilt in der Literatur als Grenzwert für quasi-inkompresssibel
• Bernoulli-Gl. für stat. Strömungen kann durch Druckverlustterm ∆pV erweitert werd.• Druckverlustterm wird allgemein auf die kinetische Energie bezogen• errechnet sich über die Rohrreibung und zusätzliche Einbauten (Verbinder)
2
2v
D
LpV
ρλ ⋅⋅=∆• v [m/s] – über Rohrquerschnitt gemittelte Geschwindigkeit• λ [-] – Rohrreibungszahl, Proportionalitätsfaktor, Maß fürDissipativität in Rohrströmungen und muss ermittelt werden
(ρ = m/V [kg/m3])
1,2 – Verschiedene Zustände eines Systems-> Vergleich zweier Zustände ein und desselben Syst.
BioRobotikLabor.de
15
1. Zeitversatz einer Luftströmung im Anschlussschlauch (Messung)
• Druckverlust durch/und Reibung äußert sich:1. durch messbaren Zeitversatz einer Luftflanke von einem Sensor zum nächsten 2. durch Ausgleichsvorgänge nach dem Abschalten einströmender Luft ins System
• Beide Inhomogenitäten lassen sich quantitativ erfassen durch- zwei identische Drucksensoren in einem definierten Abstand voneinander-> Ermittlung der Zeitkonstanten des System
• Je nach Signifikanz sind die Zeitkonstanten in der Modellbildung zu berücksichtigen
• Geschwindigkeit eines Fluids im Rohr kann unter bestimmten Voraussetzungen über eine Zeitdifferenzmessung einer strömenden Druckflanke bestimmt werden-> vFluid = L/∆t
BioRobotikLabor.de
16
1. Zeitversatz einer Luftströmung im Anschlussschlauch (Messung)
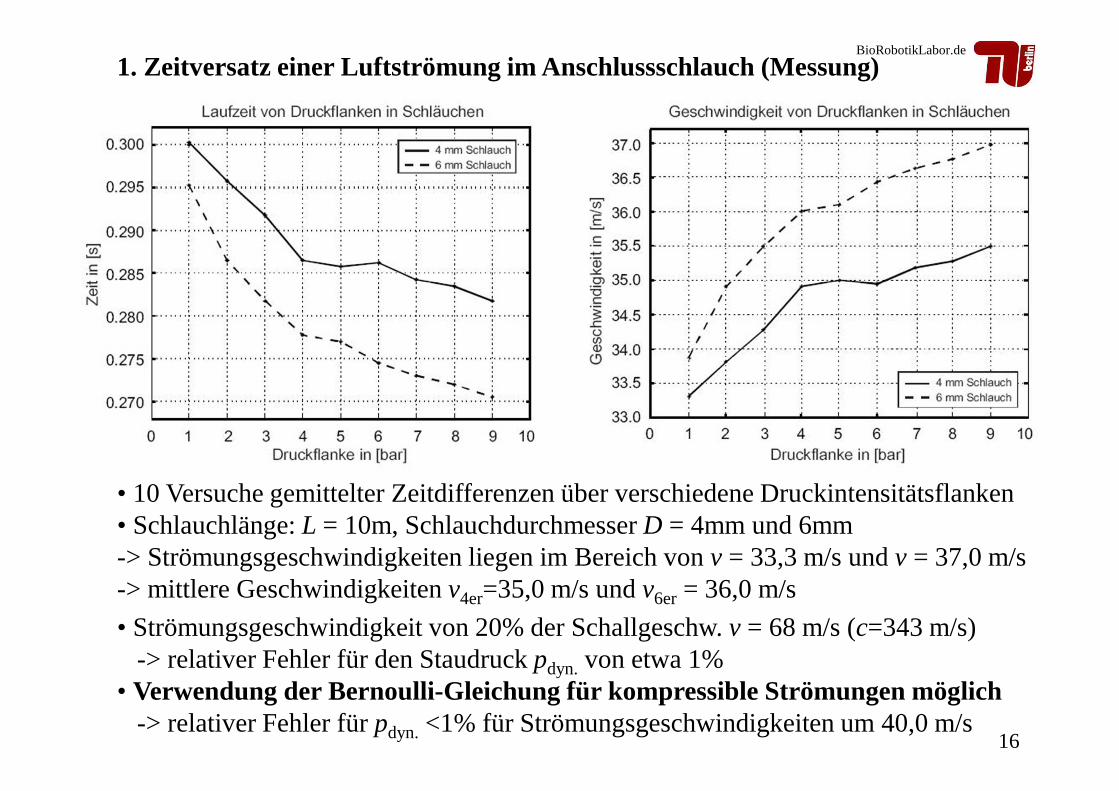
• Strömungsgeschwindigkeit von 20% der Schallgeschw. v = 68 m/s (c=343 m/s)-> relativer Fehler für den Staudruck pdyn. von etwa 1%
• Verwendung der Bernoulli-Gleichung für kompressible Strömungen möglich-> relativer Fehler für pdyn. <1% für Strömungsgeschwindigkeiten um 40,0 m/s
• 10 Versuche gemittelter Zeitdifferenzen über verschiedene Druckintensitätsflanken• Schlauchlänge: L = 10m, Schlauchdurchmesser D = 4mm und 6mm -> Strömungsgeschwindigkeiten liegen im Bereich von v = 33,3 m/s und v = 37,0 m/s-> mittlere Geschwindigkeiten v4er=35,0 m/s und v6er = 36,0 m/s
BioRobotikLabor.de
17
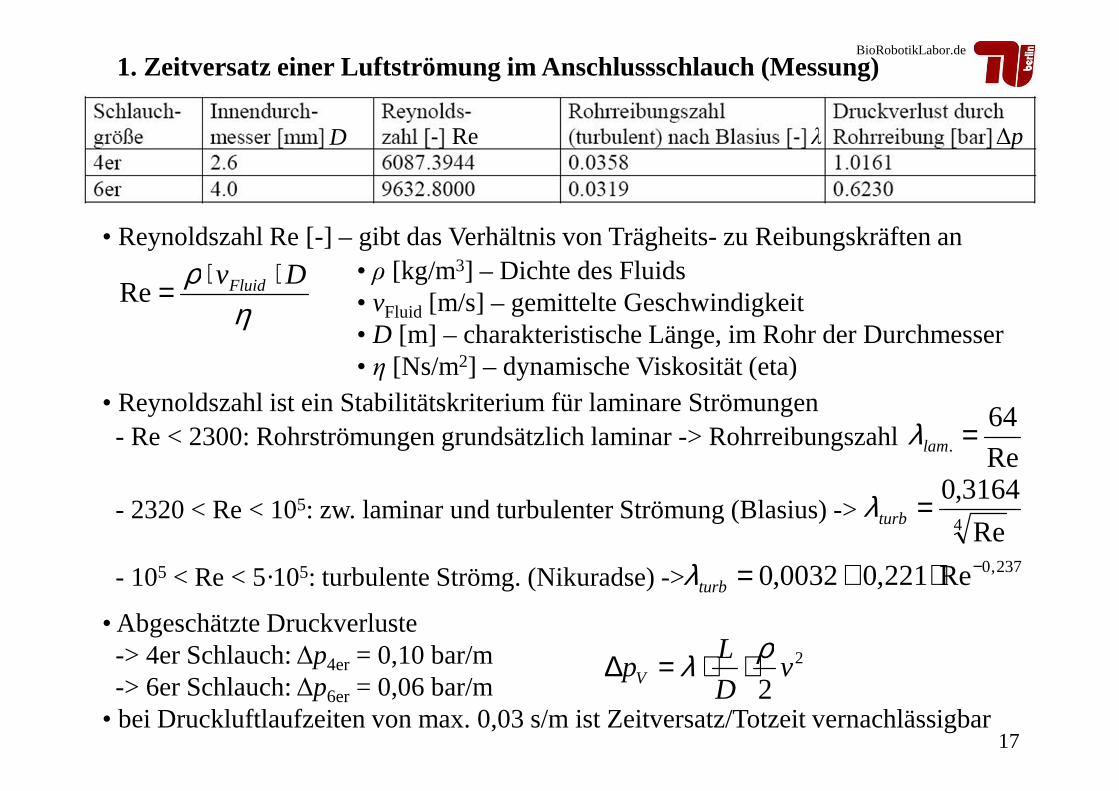
1. Zeitversatz einer Luftströmung im Anschlussschlauch (Messung)
- Re < 2300: Rohrströmungen grundsätzlich laminar -> RohrreibungszahlRe
64. =lamλ
- 2320 < Re < 105: zw. laminar und turbulenter Strömung (Blasius) -> 4 Re
3164,0=turbλ
- 105 < Re < 5·105: turbulente Strömg. (Nikuradse) -> 237,0Re221,00032,0 −⋅+=turbλ
• Reynoldszahl Re [-] – gibt das Verhältnis von Trägheits- zu Reibungskräften an
ηρ DvFluid ⋅⋅=Re
• ρ [kg/m3] – Dichte des Fluids• vFluid [m/s] – gemittelte Geschwindigkeit• D [m] – charakteristische Länge, im Rohr der Durchmesser• η [Ns/m2] – dynamische Viskosität (eta)
• Reynoldszahl ist ein Stabilitätskriterium für laminare Strömungen
• Abgeschätzte Druckverluste-> 4er Schlauch: ∆p4er = 0,10 bar/m-> 6er Schlauch: ∆p6er = 0,06 bar/m
• bei Druckluftlaufzeiten von max. 0,03 s/m ist Zeitversatz/Totzeit vernachlässigbar
2
2v
D
LpV
ρλ ⋅⋅=∆
Re λ ∆pD
BioRobotikLabor.de
18
Zusammenhänge für aussagekräftiges Muskelmodell: 1. Zeitversatz einer Luftströmung im Anschlussschlauch (Messung): vernachlässigbar2. Geometrisches Modell des aufgespannten Volumens 3. Thermodynamische Beziehung – Gasgleichung 4. Zeitkonstanten im isometrischen und isotonischen Versuch (Messung)5. Mechanischer Zusammenhang – Kraftgleichung (Messung)6. Modell der Materialeigenschaften und Materialkonstanten
• Geometrische Modellbildung: V=f(L,D…)• Muskelvolumen kann geometrisch als idealer Zylinder beschrieben werden
Modellbildung des fluidischen Muskels
LDLhV ⋅⋅⋅== 2
4
1)( π
BioRobotikLabor.de
19
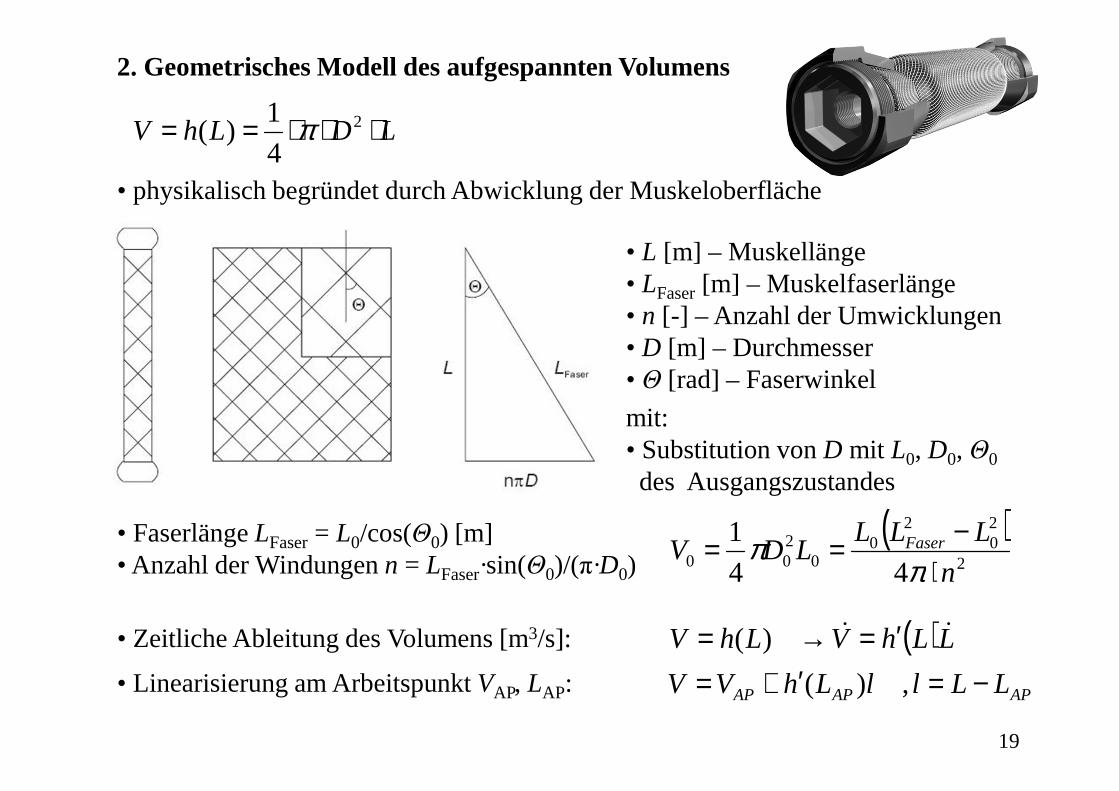
2. Geometrisches Modell des aufgespannten Volumens
LDLhV ⋅⋅⋅== 2
4
1)( π
• physikalisch begründet durch Abwicklung der Muskeloberfläche
mit:• Substitution von D mit L0, D0, Θ0
des Ausgangszustandes
• Faserlänge LFaser= L0/cos(Θ0) [m]• Anzahl der Windungen n = LFaser·sin(Θ0)/(π·D0)
( )2
20
20
0200 44
1
n
LLLLDV Faser
⋅−==
ππ
• L [m] – Muskellänge• LFaser[m] – Muskelfaserlänge• n [-] – Anzahl der Umwicklungen• D [m] – Durchmesser• Θ [rad] – Faserwinkel
( )LLhVLhV && ′=→= )(• Zeitliche Ableitung des Volumens [m3/s]:
• Linearisierung am Arbeitspunkt VAP, LAP: APAPAP LLllLhVV −=′+= ,)(
BioRobotikLabor.de
20
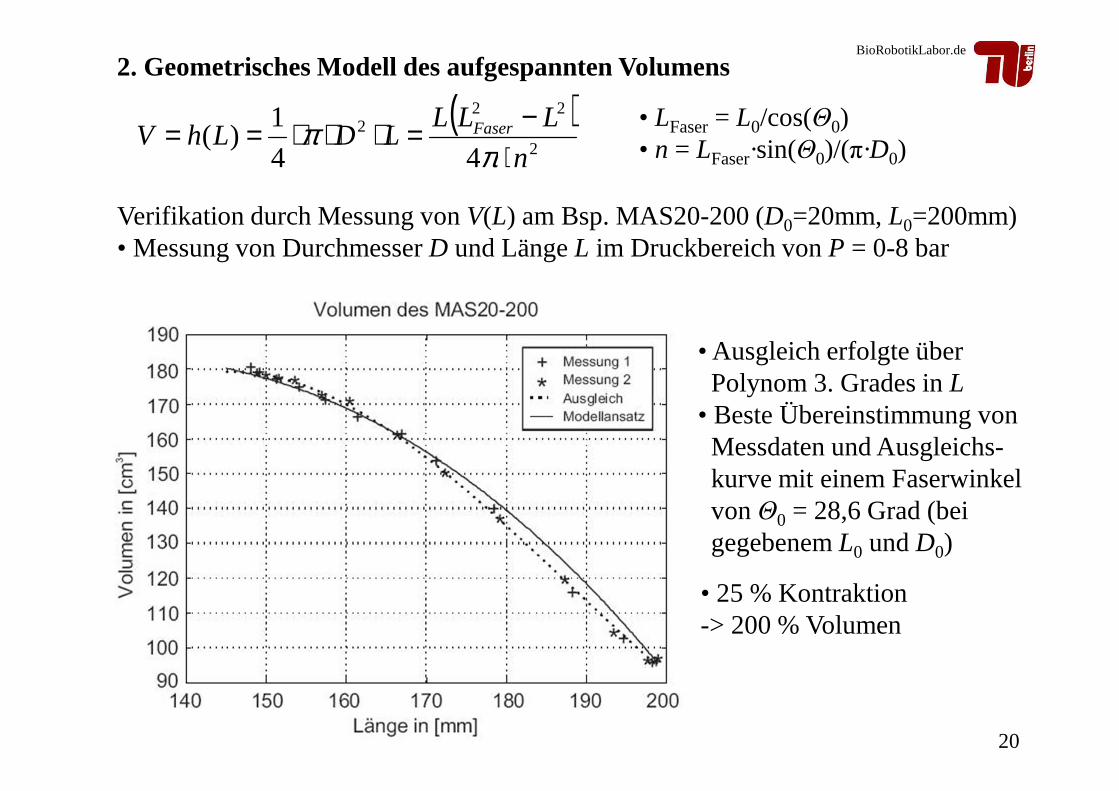
2. Geometrisches Modell des aufgespannten Volumens
( )2
222
44
1)(
n
LLLLDLhV Faser
⋅−=⋅⋅⋅==
ππ
Verifikation durch Messung von V(L) am Bsp. MAS20-200 (D0=20mm, L0=200mm)• Messung von Durchmesser D und Länge L im Druckbereich von P = 0-8 bar
• Ausgleich erfolgte überPolynom 3. Grades in L
• Beste Übereinstimmung vonMessdaten und Ausgleichs-kurve mit einem Faserwinkelvon Θ0 = 28,6 Grad (beigegebenem L0 und D0)
• 25 % Kontraktion-> 200 % Volumen
• LFaser= L0/cos(Θ0)• n = LFaser·sin(Θ0)/(π·D0)
BioRobotikLabor.de
21
Modellbildung des fluidischen Muskels
Zusammenhänge für aussagekräftiges Muskelmodell: 1. Zeitversatz einer Luftströmung im Anschlussschlauch (Messung)2. Geometrisches Modell des aufgespannten Volumens 3. Thermodynamische Beziehung – Gasgleichung 4. Zeitkonstanten im isometrischen und isotonischen Versuch (Messung)5. Mechanischer Zusammenhang – Kraftgleichung (Messung)6. Modell der Materialeigenschaften und Materialkonstanten
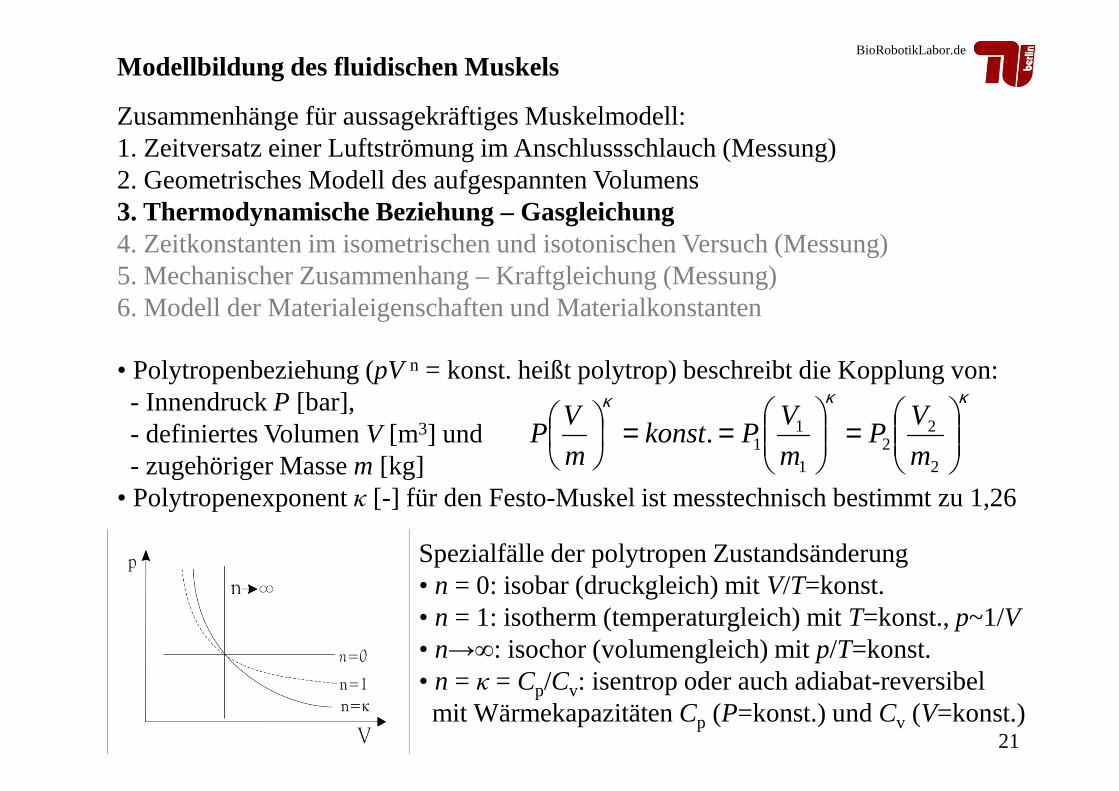
• Polytropenbeziehung (pV n = konst. heißt polytrop) beschreibt die Kopplung von:- Innendruck P [bar],- definiertes Volumen V [m3] und- zugehöriger Masse m [kg]
• Polytropenexponent κ [-] für den Festo-Muskel ist messtechnisch bestimmt zu 1,26
κκκ
=
==
2
22
1
11.
m
VP
m
VPkonst
m
VP
Spezialfälle der polytropen Zustandsänderung• n = 0: isobar (druckgleich) mit V/T=konst.• n = 1: isotherm (temperaturgleich) mit T=konst., p~1/V• n→∞: isochor (volumengleich) mit p/T=konst.• n = κ = Cp/Cv: isentrop oder auch adiabat-reversibelmit Wärmekapazitäten Cp (P=konst.) und Cv (V=konst.)
BioRobotikLabor.de
22
3. Thermodynamische Beziehung – Gasgleichungκκκ
=
==
2
22
1
11.
m
VP
m
VPkonst
m
VP
-> Polytropenbeziehung (Bilanz) differenzieren und Null setzen:
m&
−⋅=→=
′
V
V
m
mPP
m
VP
&&& κ
κ
0
• Linearisierung am Arbeitspunkt P0, V0, m0:
−⋅=
000 V
V
m
mPp
&&& κ
• Einfacher wird die thermodynamische Zustandsgleichung für V,Rspec,T = konst.:
∫=
===
dtmV
RTp
mV
RTpdm
V
RTdpm
V
RTp
&
&& ,,,
• Geom. Entsprechung der Ableitung: Tangentensteigung (≙ lin. Anteil der Änderung)-> Ableitung f()‘ - Linearisierung an allen Punkten (S-Fall: f(x0)‘ – Lin. am Punkt x0) -> Ableitung f()‘ = 0: Extremwerte (Min, Max) bzw. Wendepunkte der Polytropenbez.-> Ableitung f()‘ bzw. Steigung = 0: keine Änderungen im Eingabewert (z.B. t, x etc.)
• Beim Ein- und Ausströmen in den Muskel wird Masse bewegt -> dm/dt• Kopplung der mit den Aktoren über thermodynamische Beschreibung der Luft (über die Ventile in die Muskeln)
• für n≈1 isotherme Zustandsänderungenwird keine Wärme ausgetauscht, ∆Q=0 (z.B. Thermoskanne)