Embed Size (px)
Citation preview
1
Statische CMOS Schaltungen Lastkapazität und
Dimensionierung von CMOS-Invertern
gehalten von: Patrick Petzold am: 03.06.2005
Proseminar Statische CMOS Schaltungen Professor Dr. Zehendner
Sommersemester 05/ FSU Jena
2
Übersicht
• Ausgangskapazität• Inverter Design
– Gleichstromdesign• Symmetrische Inverter• Allgemeine Größe
– Transient Design• High Performance Design• Design für Lastkapazitäten
• Dimensionierung
3
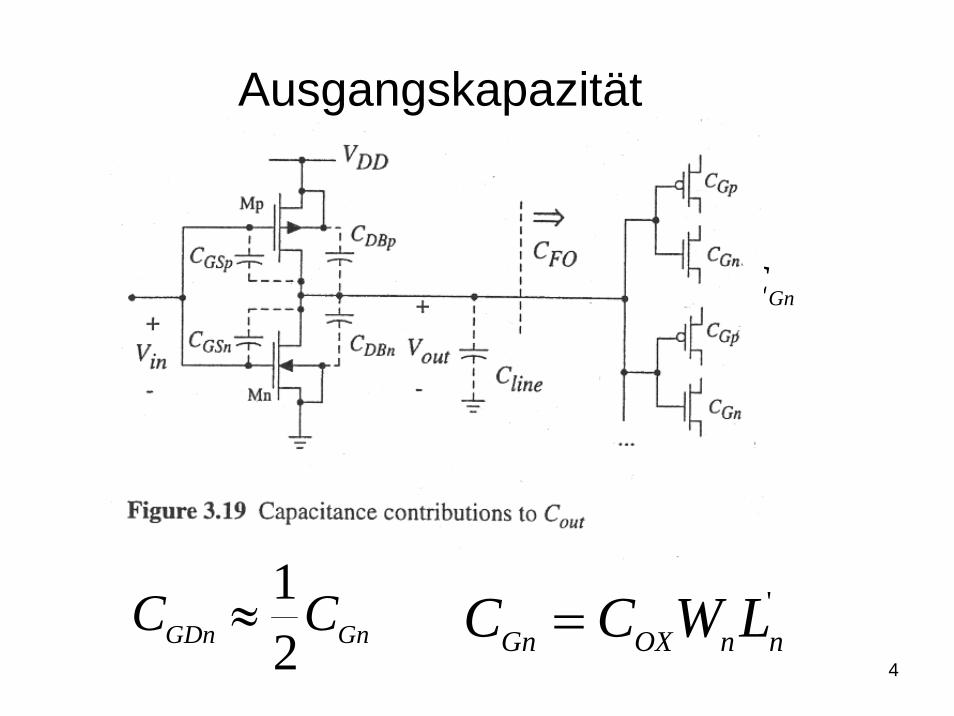
Ausgangskapazität
• Hauptproblem für die genäherten Werte ist die Vorraussetzung das Cout ein LTI Element ist
• gate-channel und depletion Kapazitäten sind nichtlineare Funktionen, von den Spannungen,
• Definition: Cout als Durchschnittswert über den Spannungsbereich
• Interpretation in den Endergebnissen mit gesunden Pessimismus betrachten
• Verwendung der Näherung für Anfangs-Design und Performance Einschätzung
4
Ausgangskapazität
GnGDn CC21≈
'nnOXGn LWCC =GnGDn CC
21≈
5
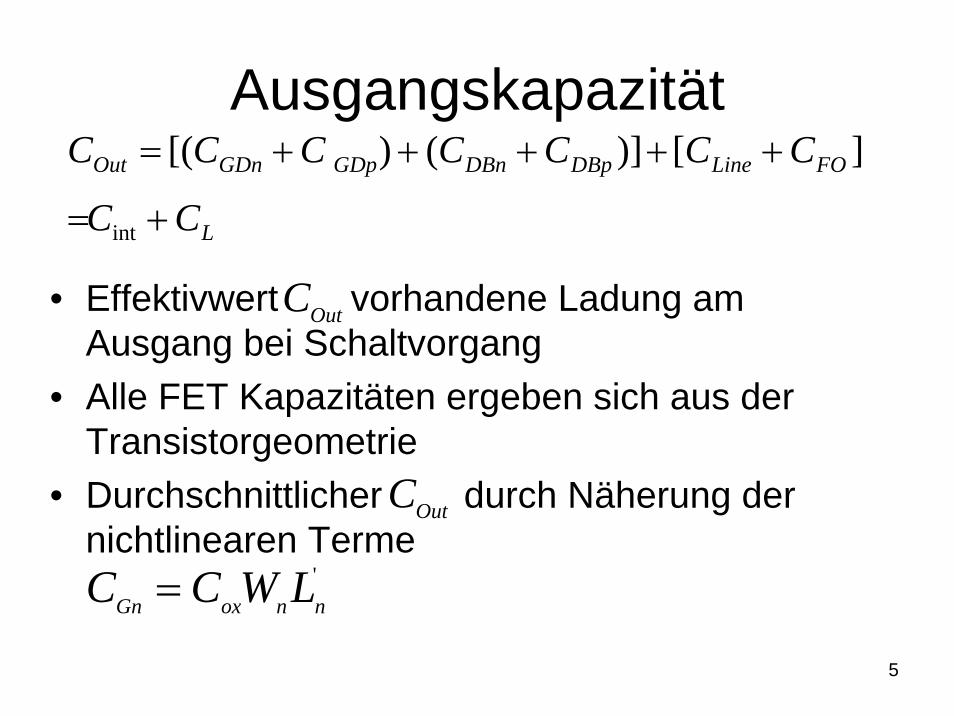
Ausgangskapazität
• Effektivwert vorhandene Ladung am Ausgang bei Schaltvorgang
• Alle FET Kapazitäten ergeben sich aus der Transistorgeometrie
• Durchschnittlicher durch Näherung der nichtlinearen Terme
L
FOLineDBpDBnGDpGDnOut
CC
CCCCCCC
+=
+++++=
int
][)]()[(
OutC
OutC
'nnoxGn LWCC =
6
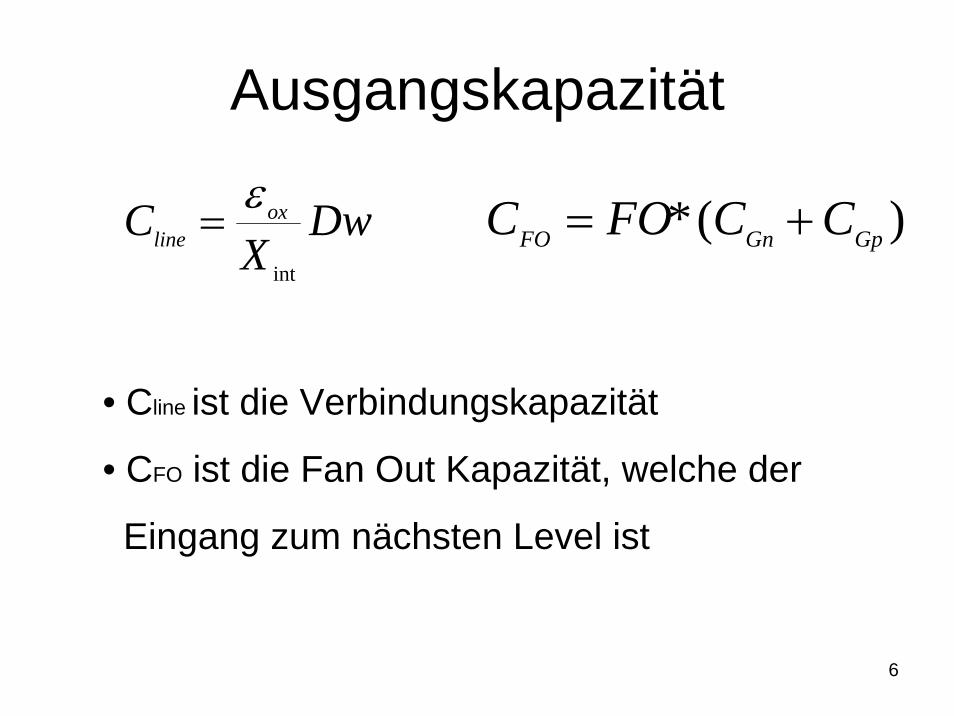
Ausgangskapazität
DwX
C oxline
int
ε= )(* GpGnFO CCFOC +=
• Cline ist die Verbindungskapazität
• CFO ist die Fan Out Kapazität, welche der
Eingang zum nächsten Level ist
7
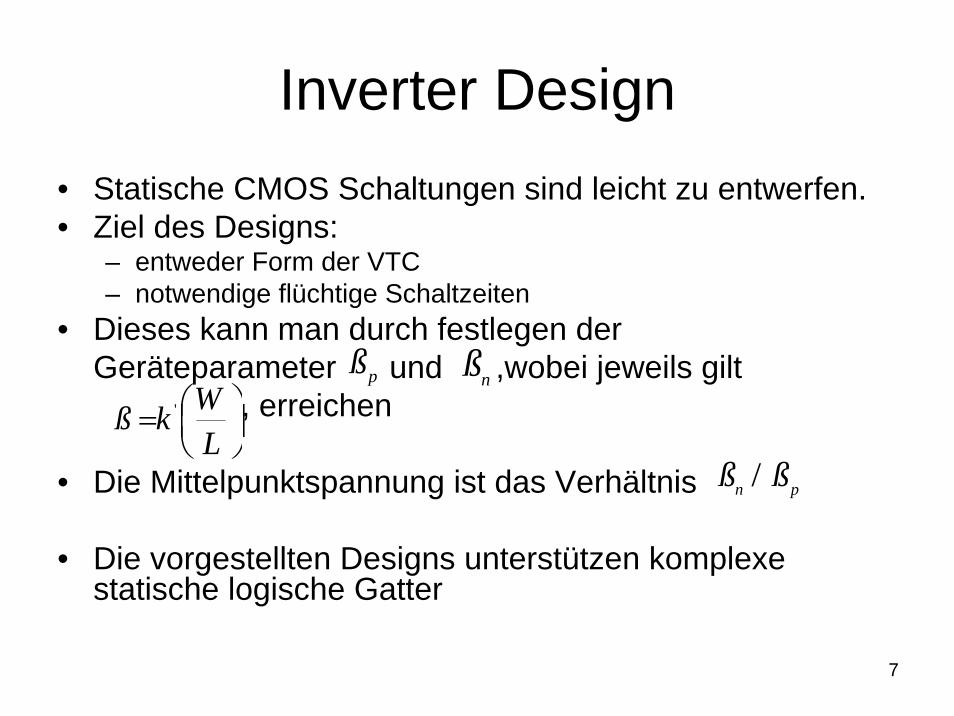
Inverter Design• Statische CMOS Schaltungen sind leicht zu entwerfen.• Ziel des Designs:
– entweder Form der VTC – notwendige flüchtige Schaltzeiten
• Dieses kann man durch festlegen der Geräteparameter und ,wobei jeweils gilt
, erreichen
• Die Mittelpunktspannung ist das Verhältnis
• Die vorgestellten Designs unterstützen komplexe statische logische Gatter
⎟⎠⎞
⎜⎝⎛=
LWkß '
nßpß
pn ßß /
8
Inverter Design Gleichstrom Design
• Der Wert von kann angepasst werden Gattern durch das Verhältnis von
• bestimmt die kritischen Eingangsspannungen, aber Abhängigkeit ist nicht durch einfache geschlossene Ausdrücke zeigbar
• Das Verhältnis von für den Wert von ist durch
IVpn ßß /
pn ßß /IV
2
⎟⎟⎠
⎞⎜⎜⎝
⎛−−−
=TnI
TpIDD
p
n
VVVVV
ßß
9
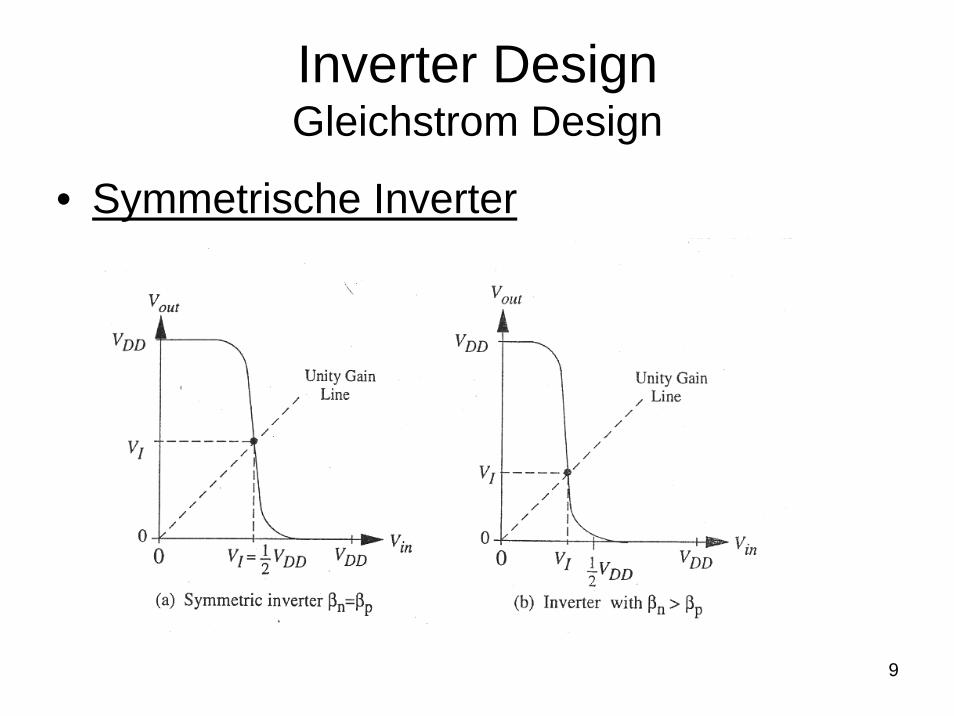
Inverter Design Gleichstrom Design
• Symmetrische Inverter
10
Inverter Design Gleichstrom Design
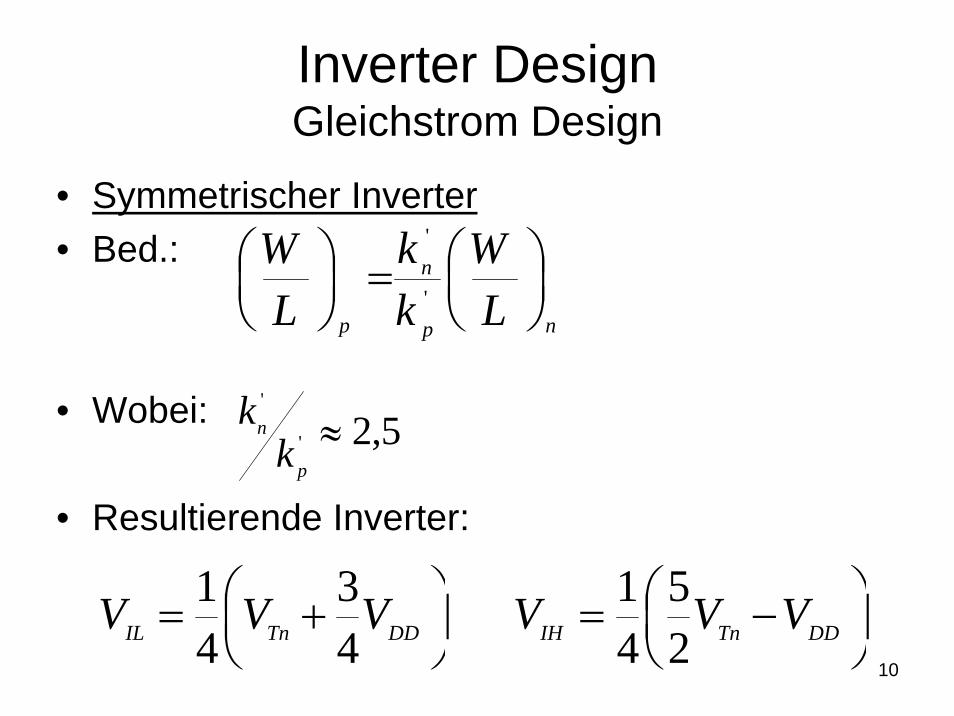
• Symmetrischer Inverter• Bed.:
• Wobei:
• Resultierende Inverter:
np
n
p LW
kk
LW
⎟⎠⎞
⎜⎝⎛=⎟
⎠⎞
⎜⎝⎛
'
'
5,2'
'
≈p
n
kk
⎟⎠⎞
⎜⎝⎛ += DDTnIL VVV
43
41
⎟⎠⎞
⎜⎝⎛ −= DDTnIH VVV25
41
11
Inverter Design Gleichstrom Design
• Symmetrische Inverter• Vorteil: - Schaltzeiten gleich• Nachteil: - Schaltung relativ groß
• Allgemeine Größe• MOSFET‘s gleichgroß
DDI VV21<
12
Inverter Design Gleichstrom Design
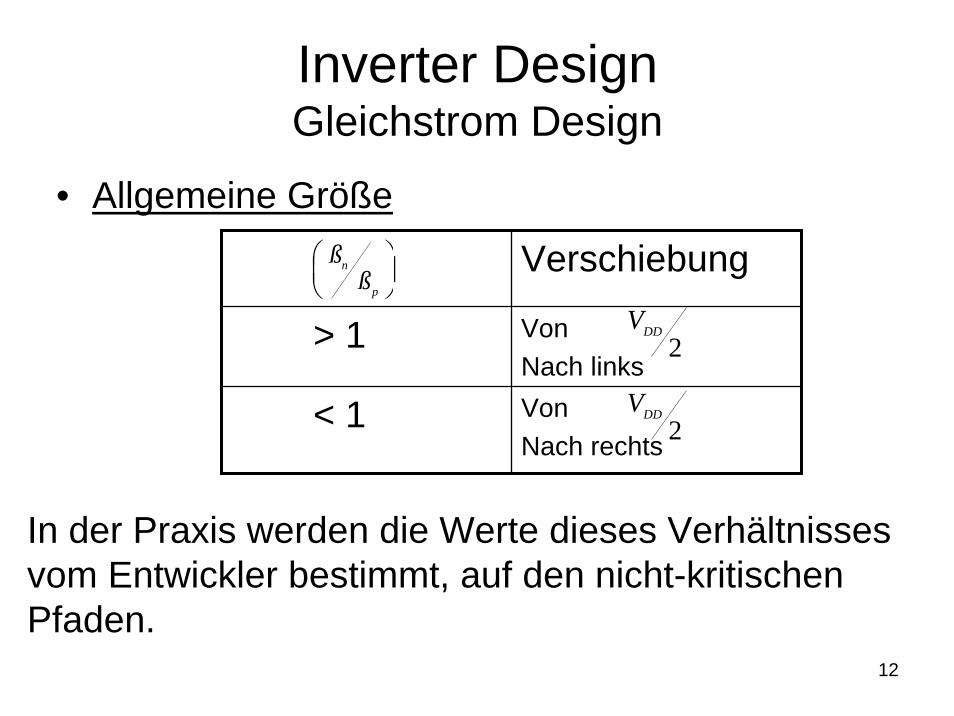
• Allgemeine Größe
Verschiebung
> 1 Von Nach links
< 1 Von Nach rechts
⎟⎠⎞
⎜⎝⎛
p
nß
ß
2DDV
2DDV
In der Praxis werden die Werte dieses Verhältnisses vom Entwickler bestimmt, auf den nicht-kritischen Pfaden.
13
Inverter Design
• Transient Design • Schaltverhalten am wichtigsten• Dreht sich um das Verhältnis von Kanalbreite
und der Kanallänge für beide MOSFET‘s• Die Leitfähigkeit der nFET Schaltung
bestimmt den Wert • pFET verantwortlich für ,sodass bestimmt
nßHLt
outC pß
LHt
14
Inverter Design Transient Design
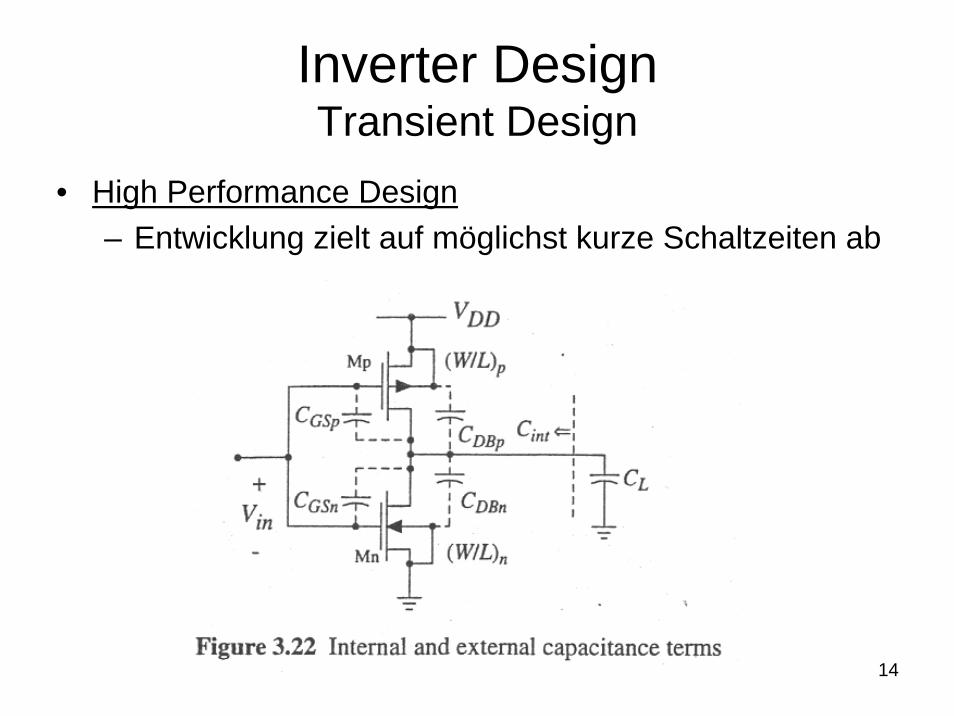
• High Performance Design– Entwicklung zielt auf möglichst kurze Schaltzeiten ab
15
Inverter Design Transient Design
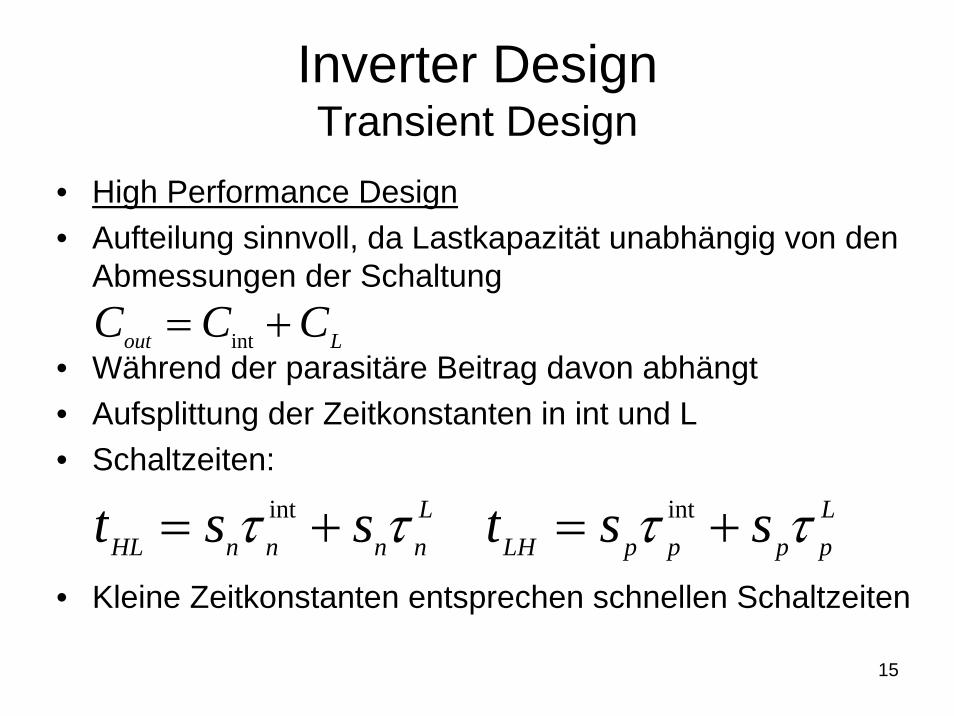
• High Performance Design• Aufteilung sinnvoll, da Lastkapazität unabhängig von den
Abmessungen der Schaltung
• Während der parasitäre Beitrag davon abhängt• Aufsplittung der Zeitkonstanten in int und L• Schaltzeiten:
• Kleine Zeitkonstanten entsprechen schnellen Schaltzeiten
Lout CCC += int
LnnnnHL sst ττ += int L
ppppLH sst ττ += int
16
Inverter Design Transient Design
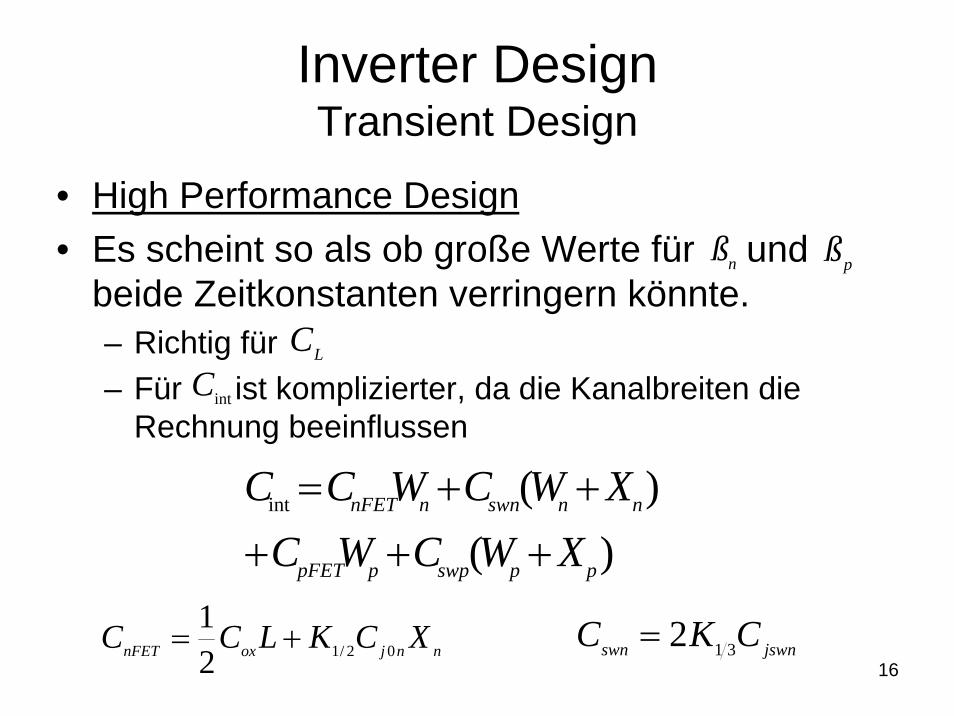
• High Performance Design• Es scheint so als ob große Werte für und
beide Zeitkonstanten verringern könnte.– Richtig für – Für ist komplizierter, da die Kanalbreiten die
Rechnung beeinflussen
nß pß
LCintC
)()(int
ppswpppFET
nnswnnnFET
XWCWCXWCWCC
+++++=
nnjoxnFET XCKLCC 02/121 += jswnswn CKC 312=
17
Inverter Design Transient Design
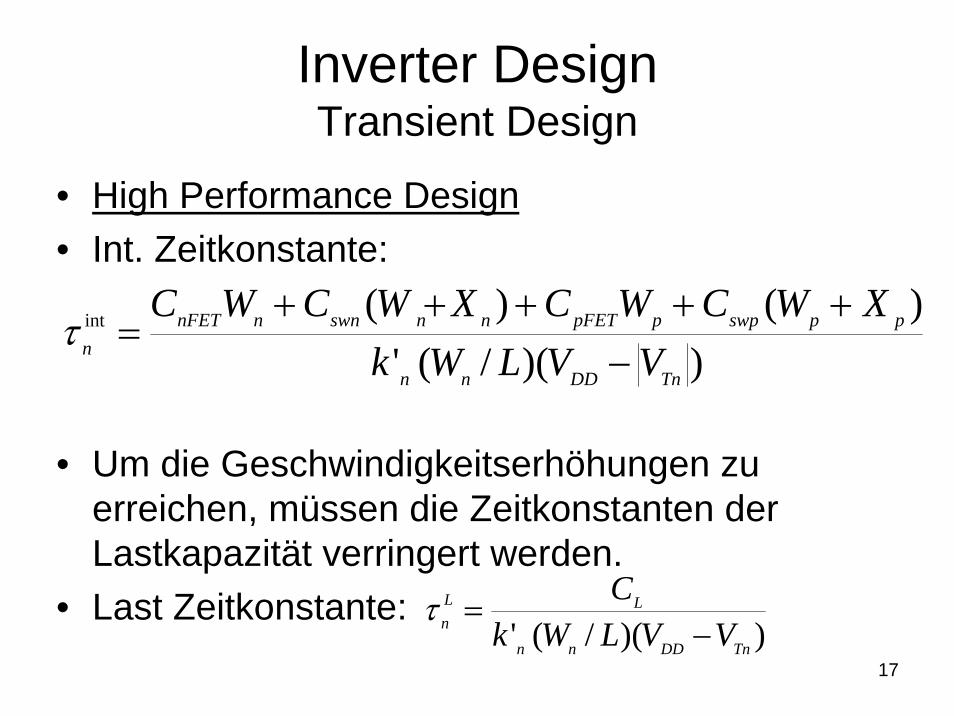
• High Performance Design• Int. Zeitkonstante:
• Um die Geschwindigkeitserhöhungen zu erreichen, müssen die Zeitkonstanten der Lastkapazität verringert werden.
• Last Zeitkonstante:
))(/(')()(int
TnDDnn
ppswpppFETnnswnnnFETn VVLWk
XWCWCXWCWC−
+++++=τ
))(/(' TnDDnn
LLn VVLWk
C−
=τ
18
Inverter Design Transient Design
• Beispiel: 74BCTxx/ABTxx• Bipolar Output High Speed CMOS Logik. • Weiterentwickelte High-Speed CMOS Bustreiber
Familie von Texas Instruments. • TTL-kompatible CMOS Eingänge kombiniert mit
hoher Treiberausgangsleistung • durch bipolare Ausgangsstufen.
Arbeits-Frequenzbereich: 25- bis 30 Mhz. Gatterlaufzeit : max. 3 ns Verlustleistung in Ruhe (stand-by): 250mW(Tristate)/30mA(Biploar Output on)
19
Inverter Design Transient Design
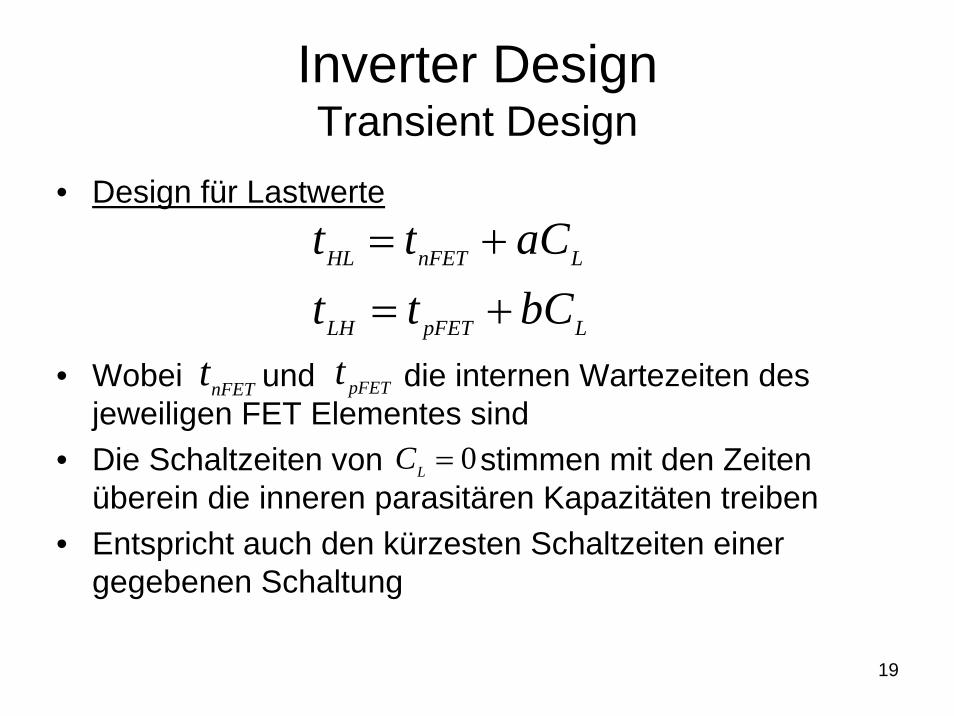
• Design für Lastwerte
• Wobei und die internen Wartezeiten des jeweiligen FET Elementes sind
• Die Schaltzeiten von stimmen mit den Zeiten überein die inneren parasitären Kapazitäten treiben
• Entspricht auch den kürzesten Schaltzeiten einer gegebenen Schaltung
LpFETLH
LnFETHL
bCttaCtt
+=+=
nFETt pFETt
0=LC
20
Inverter Design Transient Design
• Design für Lastwerte• Sind lineare Funktionen von • Die Neigungen von A und B bestimmen
hauptsächlich die Lastkapazität• Änderung von beeinflusst auch die
Schaltzeit von der Nulllast und Neigung der Reaktionskurve
)( LW
0=LC
21
Dimensionierung
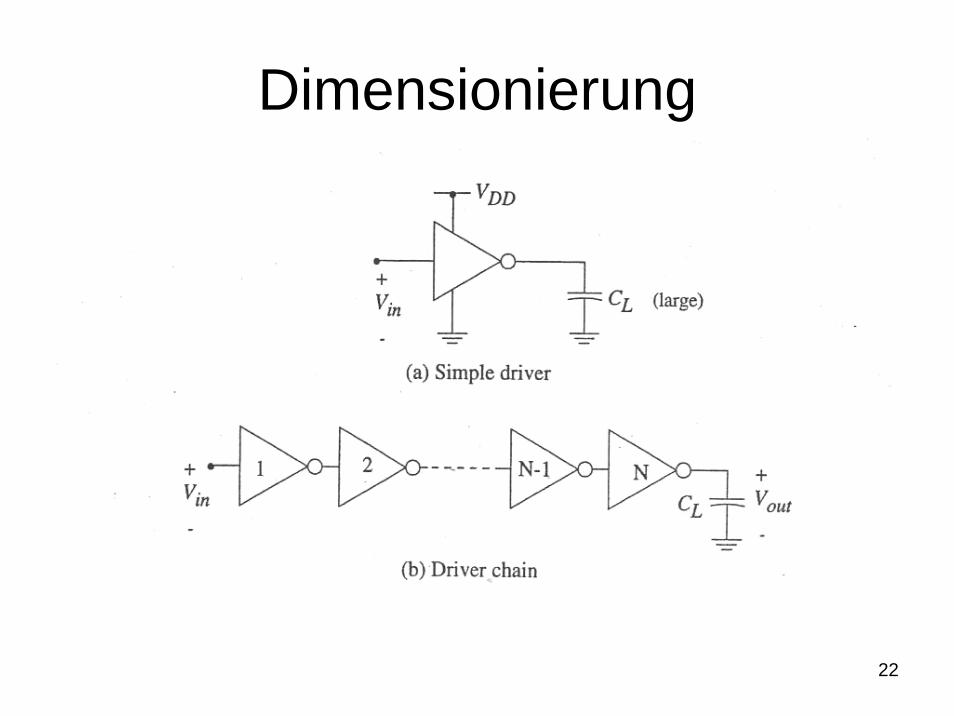
• Die Dimensionierung ist notwendig um „große“Lastkapazitäten zu erhalten
• In einem einzelnen CMOS Inverter würde das zu einer rapiden Verschlechterung der Schaltzeiten führen– Da die interne Kapazität direkt von den Abmessungen
abhängig ist• Die mehrstufige Hintereinanderschaltung kann
helfen die Schaltgeschwindigkeit aufrechtzuerhalten
22
Dimensionierung
23
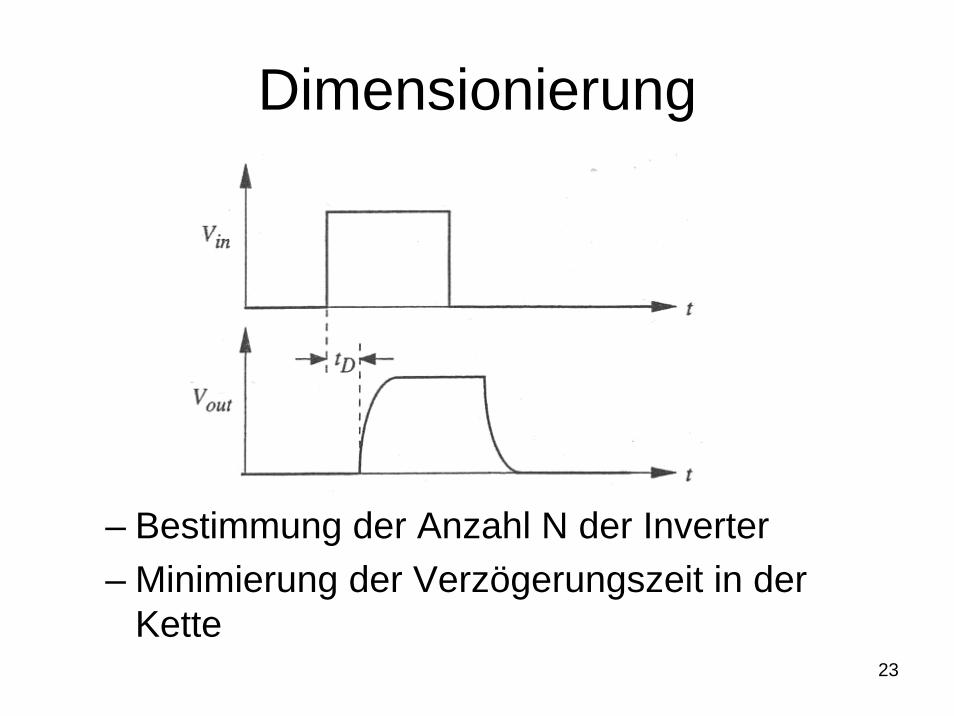
– Bestimmung der Anzahl N der Inverter– Minimierung der Verzögerungszeit in der
Kette
Dimensionierung
24
Dimensionierung
• der erste Inverter wird als Referenz genommen, die nachfolgenden Inverter steigen monoton an
• Sodass gilt:
• Inverter der Kette gilt:• Mit 2< <N
NLW
LW
LW
⎟⎠⎞
⎜⎝⎛<<⎟
⎠⎞
⎜⎝⎛<⎟
⎠⎞
⎜⎝⎛ ...
21
1⎟⎠⎞
⎜⎝⎛=⎟
⎠⎞
⎜⎝⎛
LWS
LW
αα
α
25
Dimensionierung
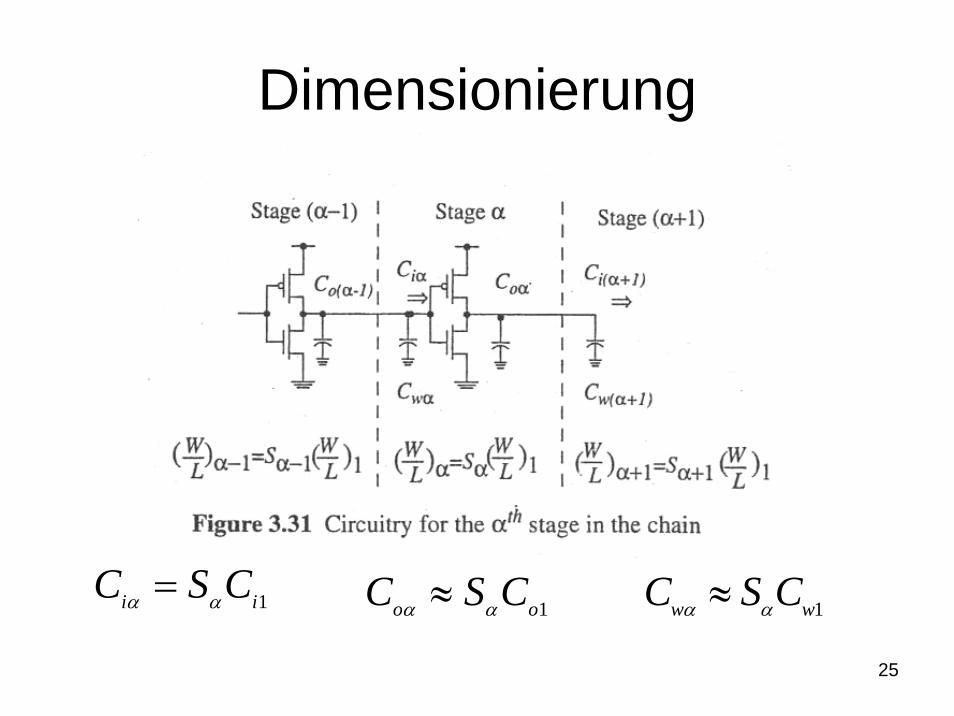
1oo CSC αα ≈1ii CSC αα = 1ww CSC αα ≈
26
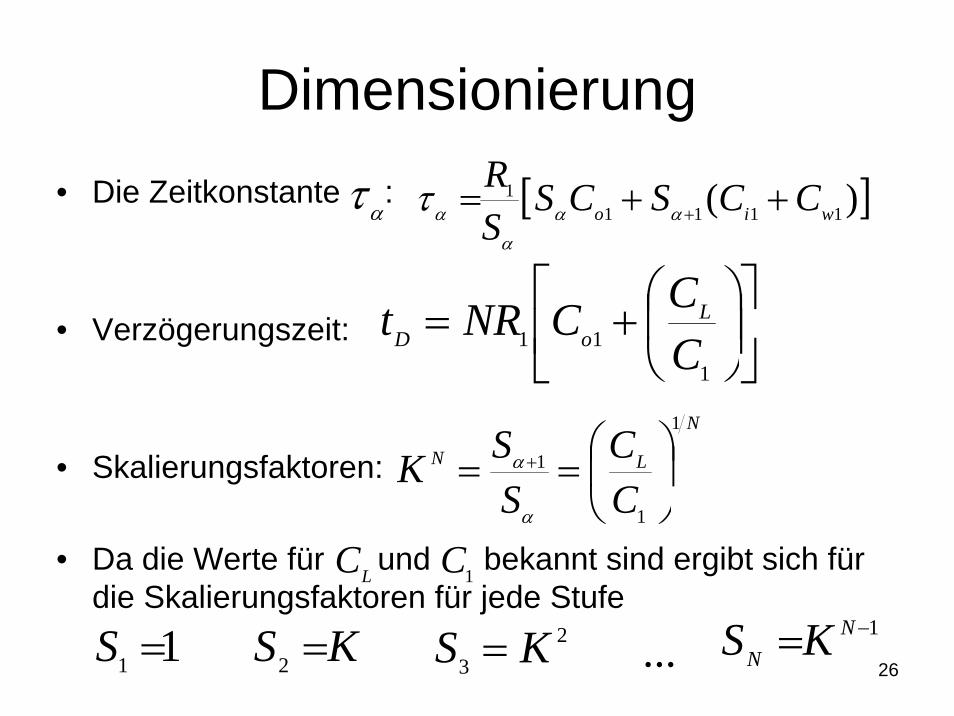
Dimensionierung• Die Zeitkonstante :
• Verzögerungszeit:
• Skalierungsfaktoren:
• Da die Werte für und bekannt sind ergibt sich für die Skalierungsfaktoren für jede Stufe
ατ [ ])( 11111
wio CCSCSSR ++= +αα
α
ατ
⎥⎦
⎤⎢⎣
⎡⎟⎠
⎞⎜⎝
⎛+=
111 C
CCNRt LoD
N
LN
CC
SSK
1
1
1 ⎟⎠
⎞⎜⎝
⎛== +
α
α
LC 1C
11 =S KS =22
3 KS = ...1−= N
N KS
27
Dimensionierung
28
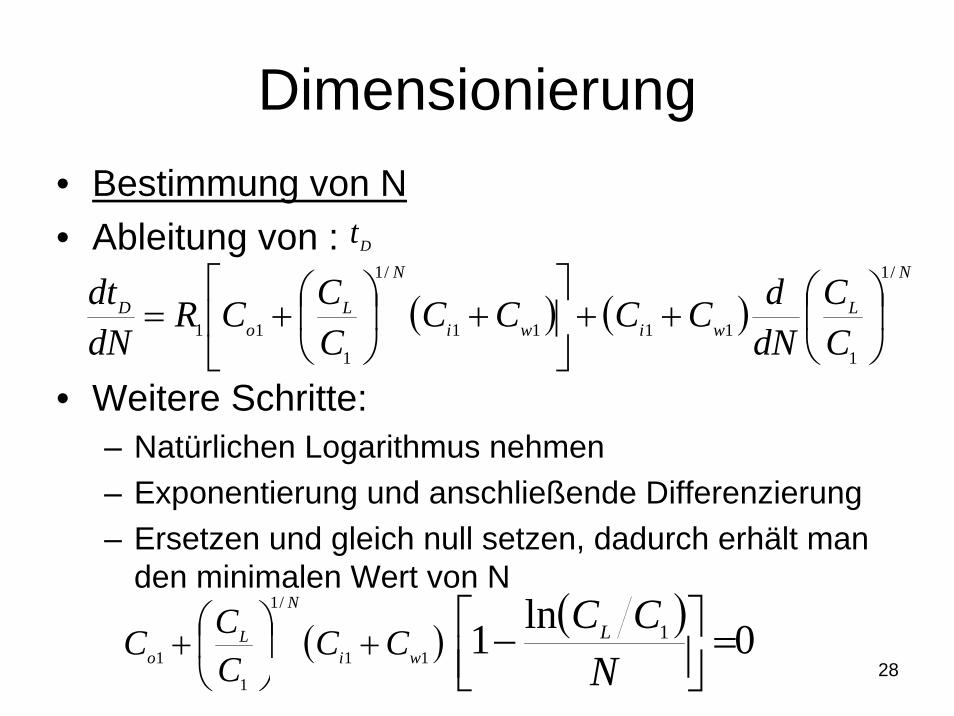
Dimensionierung• Bestimmung von N• Ableitung von :
• Weitere Schritte: – Natürlichen Logarithmus nehmen– Exponentierung und anschließende Differenzierung– Ersetzen und gleich null setzen, dadurch erhält man
den minimalen Wert von N
( ) ( )N
Lwiwi
N
Lo
D
CC
dNdCCCC
CCCR
dNdt
/1
11111
/1
111 ⎟
⎠
⎞⎜⎝
⎛++⎥
⎦
⎤⎢⎣
⎡+⎟
⎠
⎞⎜⎝
⎛+=
( )111
1 wiL
o CCC
C +⎟/1 N
C⎠
⎞⎛⎜⎝
+( ) 01 =⎥⎦⎢
ln 1 ⎤⎣⎡ −
NCCL
Dt
29
Dimensionierung
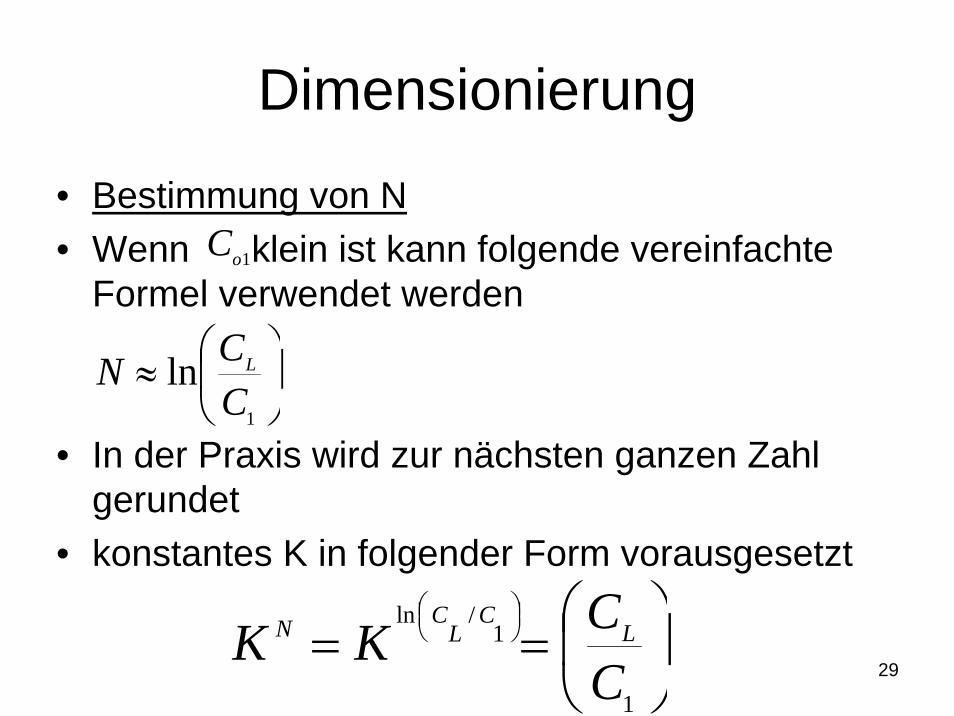
• Bestimmung von N• Wenn klein ist kann folgende vereinfachte
Formel verwendet werden
• In der Praxis wird zur nächsten ganzen Zahl gerundet
• konstantes K in folgender Form vorausgesetzt
1oC
⎟⎠
⎞⎜⎝
⎛≈
1
lnCCN L
⎟⎠
⎞⎜⎛
==⎟⎠⎞⎜
⎝⎛
1/ln CKK LC
LCN
⎝ 1C
30
Dimensionierung
• Für K ergibt sich somit die Euler Konstante• Wenn die anderen Terme mit
eingeschlossen sind ist K größer als e
31
Dimensionierung
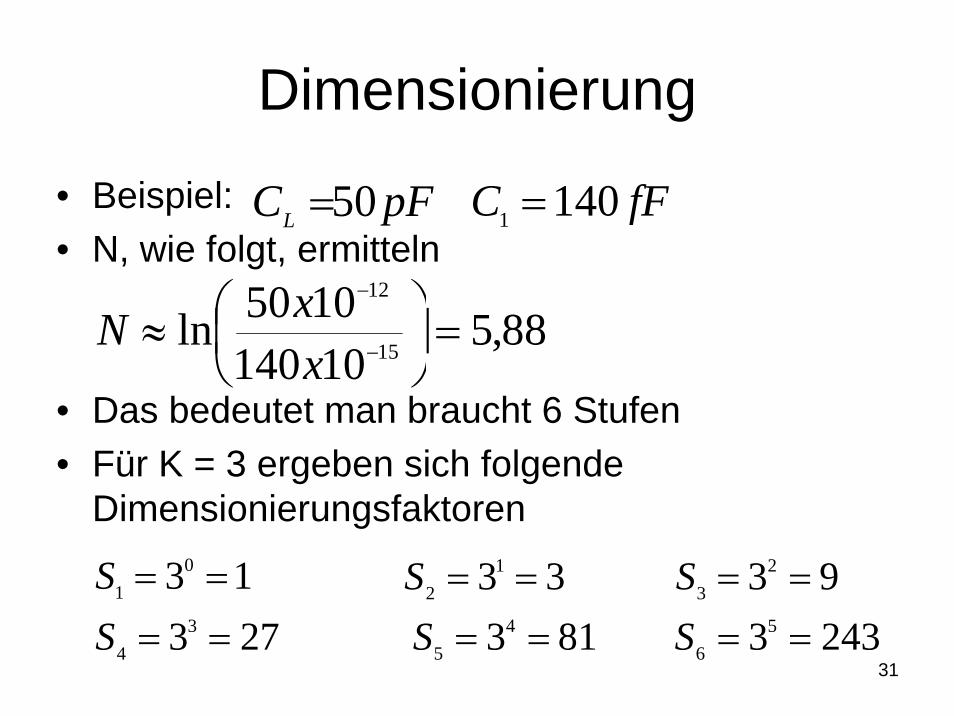
• Beispiel:• N, wie folgt, ermitteln
• Das bedeutet man braucht 6 Stufen• Für K = 3 ergeben sich folgende
Dimensionierungsfaktoren
pFCL 50= fFC 1401 =
88,5101401050ln
15
12
=⎟⎠⎞
⎜⎝⎛≈
−
−
xxN
1301 ==S 331
2 ==S 9323 ==S
27334 ==S 8134
5 ==S 243356 ==S
32
Dimensionierung
• Beispiel:• außergewöhnlich Große FET‘s in den
letzten beiden Stufen• in der Praxis ist ein Verhältnis von
Kenngrößen von 100 nicht unakzeptabel• Die daraus resultierende Schaltung ist
sehr schwer zu optimieren
33
Literatur• CMOS Logic Circuit Design
John P. Uyemura, Kluwer 1999 S. 125-128 + 134-140 + 144-151
• http://www.wikipedia.orgInternet-Enzyklopädie deutsch und englisch
• http://www.tfh-Berlin.de/~schucker/Schaltkreisfamilien.pdf
• http://land.heim.at/yellowstone/231971/datasheets/stdlogik.html
• http://horst-lehner.mausnet.de/efaq/kapitel/Digitalseminar.html#hcmos

34