Embed Size (px)
Citation preview
Vorlesung Echtzeitsysteme IIThema 5: Echtzeitfähige Kommunikation
Robert Baumgartl
11. Januar 2016
1 / 49
Literatur
I Jane W. S. Liu.Real-Time Systems. Kapitel 11Prentice Hall, 2000.
2 / 49
Überblick
I MedienzugriffsverfahrenI Time Triggered Architecture (TTA)I CAN und FlexRayI echtzeitfähige Protokolle fürs Internet
3 / 49
Einführung
Def. Echtzeitfähige Kommunikation sind Verfahren,Mechanismen, Schnittstellen und Protokolle zumDatenaustausch zwischen Aktivitäten, bei denen Garantienbezüglich bestimmter Parameter gegeben werden können.
Wiederum kann harte und weiche Echtzeitfähigkeitunterschieden werden.
Beispiele:I TelefonieI im Auto: CAN, FlexRay, LIN
Achtung! Fälschlich wird meist die umgangssprachlicheDefinition des Begriffes „Echtzeit“ verwendet. („Twitter ist einEchtzeit-Kommunikationsdienst“)
4 / 49
Typische Anforderungen an Echtzeitkommunikation
Latenz einer Nachricht: Zeit zwischen Start einerDatenübertragung in einem Knoten und Empfang der Daten aneinem anderen Knotenprimär (funktional):I maximale Latenz beschränkt und kleinI minimales Jitter (Schwankung) der LatenzI Durchsatz garantiertI Deadlines von Nachrichten eingehalten
sekundär (nicht-funktional):I Flexibilität und AdaptierbarkeitI Zuverlässigkeit: Fehlererkennung und -toleranz
5 / 49
Topologie
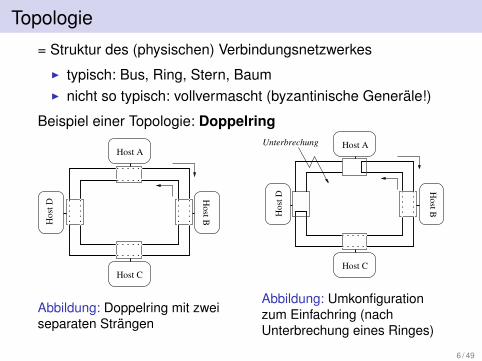
= Struktur des (physischen) Verbindungsnetzwerkes
I typisch: Bus, Ring, Stern, BaumI nicht so typisch: vollvermascht (byzantinische Generäle!)
Beispiel einer Topologie: Doppelring
Host A
Host CH
ost B
Ho
st
D
Abbildung: Doppelring mit zweiseparaten Strängen
Host A
Host B
Host C
Host
D
Unterbrechung
Abbildung: Umkonfigurationzum Einfachring (nachUnterbrechung eines Ringes)
6 / 49
GrundbegriffeFlusssteuerung
= Regulation der Senderate in Abhängigkeit vonGeschwindigkeit des Empfängers
I explizit: Empfänger sendet EmpfangsbestätigungenI implizit: Empfänger und Sender einigen sich a priori auf
Übertragungszeitpunkte
7 / 49
FlusssteuerungExplizite Flusssteuerung
Beispiel: Positive Acknowledgement and Retransmission(PAR)1
I Sender erhält für jedes Paket QuittungI keine Quittung nach Ablauf einer vordefinierten Zeitspanne
(Timeout)⇒ Schlussfolgerung: Quittung oder Paketverloren⇒ erneuter Versuch
I Abbruch, wenn maximale Anzahl Versuche fehlgeschlagen
Diskussion:I Sender initiiert KommunikationI Empfänger kann Sender verzögern (wie?)I Kommunikationsfehler auf dem Rückweg nur durch Sender
identifizierbar; Empfänger wird nicht informiertI ineffizient; Sender muss warten, bis Quittung eingetroffen
(→Window)1z. B. genutzt im TCP, HDLC
8 / 49
FlusssteuerungImplizite Flusssteuerung
I Empfänger und Sender stimmen überÜbertragungszeitpunkte überein
I keine QuittungenI Empfänger erkennt Fehler in Datenübertragung (fehlendes
Datum zum Übertragungszeitpunkt oder Prüfsumme ergibtFehler)
I Fehlertoleranz durch aktive Redundanz (n statt 1Nachricht)
I effizientI Verhalten gut determinierbarI ⇒ gut für Echtzeitsysteme geeignet
9 / 49
GrundbegriffeThrashing
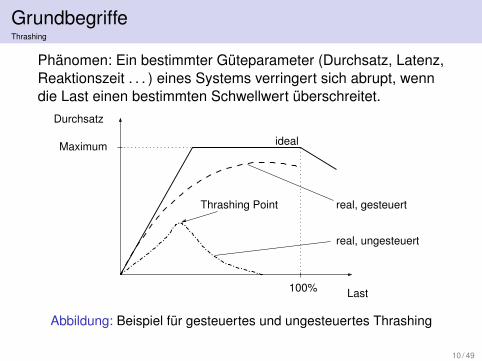
Phänomen: Ein bestimmter Güteparameter (Durchsatz, Latenz,Reaktionszeit . . . ) eines Systems verringert sich abrupt, wenndie Last einen bestimmten Schwellwert überschreitet.
Durchsatz
Last100%
Maximum
Thrashing Point
ideal
real, gesteuert
real, ungesteuert
Abbildung: Beispiel für gesteuertes und ungesteuertes Thrashing
10 / 49
GrundbegriffeThrashing
darf in Echtzeit-Systemen nicht auftreten; muss alsogemanagt bzw. verhindert werden!
Thrashing-gefährdete Mechanismen:I Retry-Mechanismus bei Positive Acknowledgement and
Retransmission (PAR)I Medienzugriffsverfahren CSMA/CDI dynamisches Scheduling im BetriebssystemI Management virtuellen SpeichersI gegenseitiges Verschmutzen von Cachelines und TLBI Locking
Literatur: Peter J. Denning: Thrashing. Januar 2008http://denninginstitute.com/pjd/PUBS/ENC/thrash08.pdf
11 / 49
Problem des „Babbling Idiot“
I in Broadcastmedien kann ein einzelner Knoten dengesamten Datenverkehr stören, in dem er z. B.ununterbrochen sendet (→ “Babbling Idiot”)
I Hinzunahme eines zweiten Mediums ungünstig (teuer, wasist, wenn der fehlerhafte Knoten beide Medien stört?)
I Situation muss in echtzeitfähigen Systemen gesteuertwerden; Möglichkeiten:
I Erkennung des fehlerhaften Knotens und Ausschluss vomDatenverkehr
I Zuteilung des Mediums durch eine zentrale Instanz
12 / 49
MedienzugriffsverfahrenKollisionen
Problem: auf das Übertragungsmedium kann i. d. R. zu einemZeitpunkt nur ein Knoten schreibend zugreifen→ Kollisionenmöglich.Mögliche Strategien:I Vermeidung von Kollisionen durch Steuerung des Zugriffs
(collision avoidance), oderI Erkennung und (nachträgliche) Behebung von Kollisionen
(collision detection and resolution)I Medium limitiert Länge oder Abstand von Nachrichten
13 / 49
CSMA/CD
= Carrier Sense Multiple Access (with) Collision Detection
Prinzip:I jede Station lauscht auf DatenverkehrI solange Medium belegt, wird eigener Sendewunsch
verzögertI wenn frei und Sendewunsch→ schreibender Zugriff auf
MediumI während des Sendens wird Medium zur
Kollisionserkennung weiter abgehörtI Kollision: Senden des sog. Jam-Signals, Abbruch des
Sendevorgangs, zufällige Verzögerung, erneuterSendeversuch
I durch endliche Signallaufzeit sind auch Kollisionenmöglich, wenn Stationen nicht gleichzeitig senden
14 / 49
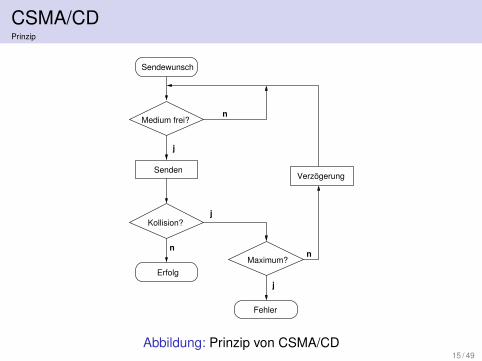
CSMA/CDPrinzip
Medium frei?
Senden
Kollision?
Erfolg
j
n
n
j
j
n
Fehler
Sendewunsch
Verzögerung
Maximum?
Abbildung: Prinzip von CSMA/CD15 / 49
CSMA/CDDiskussion
I Verzögerung: Binary Exponential Backoff: n-te Kollisionwird mit einer zufällig aus den Intervall [0 . . . 2n − 1]gewählten Wartezeit verzögert
I Abbruch nach Maximalzahl erfolgloser Versuche (z.B. 16)I Kollisionsanzahl abhängig von Last (ungünstig)I Gefahr von ThrashingI Übertragungszeit einer Nachricht schlecht vorhersagbarI keine Priorisierung möglich, keine Garantie der
ÜbertragungI schlecht für Echtzeitkommunikation geeignetI viele Varianten, die Kollisionswahrscheinlichkeit reduzieren
16 / 49
CSMA/CA
I . . . Collision AvoidanceI nach der Erkennung eines freien Kanals wird eine zufällige
Zeitspanne gewartet, bis mit der Übertragung begonnenwird
17 / 49
CSMA/CR
I ... Collision ResolutionI in einer so genannten Arbitrierungsphase werden
Kollisionen erkannt und aufgelöst, indem genau 1 Sendergewinnt und den Sendevorgang fortsetzt
I verlierende Sender werden zufällig verzögert undversuchen erneut
I Beispiel: CAN (Controller Area Network)
18 / 49
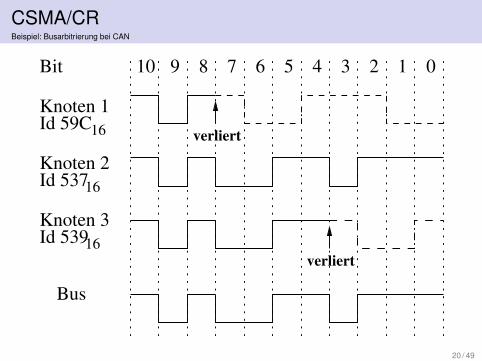
CSMA/CRBeispiel: Busarbitrierung bei CAN
I Jede Station besitzt eine ID (11 Bit)I notwendig: dominanter und rezessiver logischer Zustand
des Kommunikationskanals (hier: 0 – dominant, 1 –rezessiv)
I beim Senden wird der Nachricht die ID der Stationvorangestellt
I Nachricht (d. h. , zunächst Knoten-ID) wird bitweisebeginnend mit dem MSB auf den Bus geschrieben
I rezessive Bits ‘unterliegen’; Knoten stellt Senden ein,werden zufällig verzögert
I es „gewinnt“ der (sendewillige) Knoten mit der kleinsten IDI Voraussetzung: Sendeverzögerung der Nachricht ist
kleiner als 1 Bitzeit
19 / 49
CSMA/CRBeispiel: Busarbitrierung bei CAN
Bit
Knoten 1
Id 59C
Knoten 2
Id 537
Knoten 3
Id 539
Bus
10 9 8 7 6 5 4 3 2 1 0
16
16
16
verliert
verliert
20 / 49
Virtual Time CSMA (VTCSMA)Voraussetzungen
Idee: Nutzung einer individuellen Deadline zur Priorisierungvon NachrichtenVoraussetzungen:I Uhren aller Knoten sind synchronisiertI Abhören des Mediums möglich (Carrier Sensing)I Nachrichten M sind durch eine individuelle Deadline DM
charakterisiert (Zeitpunkt, bis zu dem die Nachrichtempfangen sein muss).
I Weitere Parameter:I τ – maximale Signallaufzeit des NetzesI TM – Zeit für das Senden einer Nachricht MI AM – Zeitpunkt des Eintreffens einer Nachricht M
21 / 49

Virtual Time CSMA (VTCSMA)Prinzip
I zwei Uhren auf jedem Knoten: RC, die (globale) Zeit desSystems (Real Clock) und VC, die so genannte Virtual Clock
I jeder Knoten hört das Medium ab und implementiert seine VCnach folgenden Regeln:
I wenn Kanal belegt→ VC gestopptI wenn Kanal frei→ VC wird mit Wert der RC initialisiert und
läuft mit einer Rate η (eta), die höher ist als die der RC (VC„geht vor“)
I VCs der Knoten sind somit ebenfalls synchronisiert.
22 / 49
Virtual Time CSMA (VTCSMA)Prinzip, contd.
I jede Nachricht M besitzt als Prioritätskriterium denspätestmöglichen Sendezeitpunkt LM , ohne ihre Deadline zuverletzen (analog zur Slack Time von zu planenden Jobs)
LM = DM − TM − τ
I Ein Knoten sendet eine Nachricht M, wenn das Medium frei istund LM ≤ VC gilt. Sind mehrere Nachrichten sendebereit, sowird die höchstpriorisierte (kleinstes LM ) gesendet.
I Da VC um η schneller läuft als die RC (die Realzeit), kann dieNachricht noch rechtzeitig eintreffen (keine Garantie!).
I Nachrichten, für die DM < RC gilt, werden verworfen, da sie ihreDeadline nicht mehr einhalten.
23 / 49
Virtual Time CSMA (VTCSMA)Kollisionsbehandlung
Da ggf. mehrere Knoten Nachrichten mit gleicher Prioritätversenden wollen, können Kollisionen auftreten.
Reaktion bei Detektion einer Kollision:I mit Wahrscheinlichkeit p: sofortiger erneuter SendeversuchI mit Wahrscheinlichkeit 1− p: Ersetzung der Priorität LM
durch einen Zufallswert aus [RC;LM ] (Priorität wird erhöht)
24 / 49
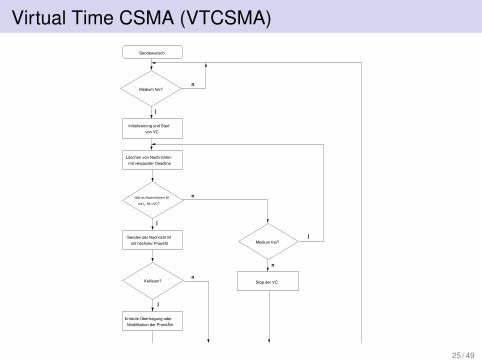
Virtual Time CSMA (VTCSMA)
Medium frei?
Stop der VC
mit verpasster Deadline
Löschen von Nachrichten
von VC
Initialisierung und Start
Gibt es Nachricht(en) M
Medium frei?
Sendewunsch
mit höchster Priorität
Senden der Nachricht M
Kollision?
Erneute Übertragung oder
j
n
j
n
j
n
j
n
mit L_M<=VC?
Modifikation der Priorität
25 / 49
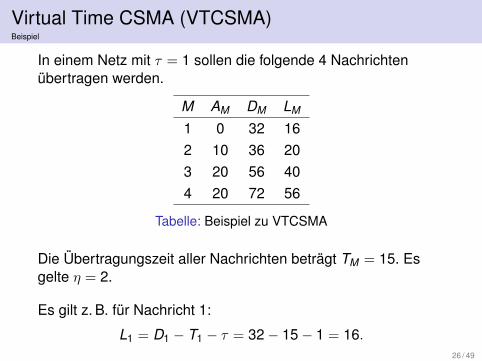
Virtual Time CSMA (VTCSMA)Beispiel
In einem Netz mit τ = 1 sollen die folgende 4 Nachrichtenübertragen werden.
M AM DM LM
1 0 32 162 10 36 203 20 56 404 20 72 56
Tabelle: Beispiel zu VTCSMA
Die Übertragungszeit aller Nachrichten beträgt TM = 15. Esgelte η = 2.
Es gilt z. B. für Nachricht 1:
L1 = D1 − T1 − τ = 32− 15− 1 = 16.26 / 49
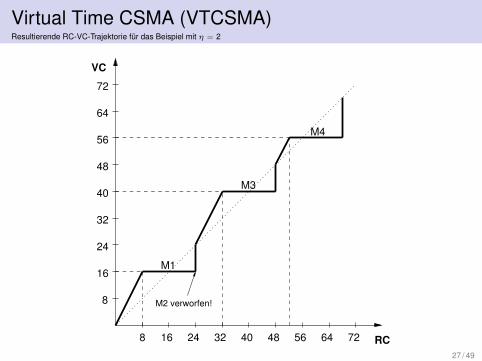
Virtual Time CSMA (VTCSMA)Resultierende RC-VC-Trajektorie für das Beispiel mit η = 2
8 16 3224 40 48 56 7264
24
32
40
48
56
64
72
16
8
M1
RC
VC
M3
M4
M2 verworfen!
27 / 49
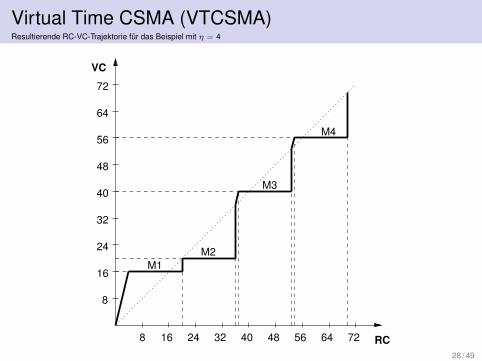
Virtual Time CSMA (VTCSMA)Resultierende RC-VC-Trajektorie für das Beispiel mit η = 4
8 16 3224 40 48 56 7264
24
32
40
48
56
64
72
16
8
RC
VC
M2
M1
M3
M4
28 / 49
Virtual Time CSMA (VTCSMA)Beispiel
Auswertung:I für η = 2 musste M2 verworfen werden (Ursache: im
Intervall [0;8] wurde gefaulenzt)I für η = 4 konnten alle 4 Nachrichten übertragen werden
Je größer Steuerungsparameter ηI desto schneller läuft die VC im Vergleich zur RCI umso eher wird eine wartende Nachricht verschicktI umso größer die Chance, trotz Kollision die Nachricht noch
rechtzeitig zu versendenI umso weniger Reserve für potentiell eintreffende
Nachrichten mit kurzfristiger Deadline(und umgekehrt)
29 / 49
Virtual Time CSMA (VTCSMA)Fazit
I Nachrichten werden entsprechend ihrer Deadlinepriorisiert→ besser als CSMA/CD
I keine Garantie der rechtzeitigen ÜbertragungI kein Schutz gegen Überlast
Weiterführende Literatur:I Mart L. Molle, Leonard Kleinrock: Virtual Time CSMA:
Why Two Clocks Are Better than One. IEEE Transactionson Communications, Vol. 33, No. 9, September 1985,919–933
I Wei Zhao, Krithi Ramamritham: Virtual Time CSMAProtocols for Hard Real-Time Communication. IEEETransactions on Software Engineering, Vol. 13, No. 8,August 1987, S.938–952
30 / 49
Token Passing
Ein Token ist ein exklusives Datum, dessen Besitz zum Sendeneiner Nachricht autorisiert.
I nur ein Token existiert→ keine Kollisionen möglichI Token zirkuliert zwischen allen KnotenI deterministisches ZugriffsprotokollI Besitzer des Tokens darf für eine gewisse Dauer (konstant
oder variabel) Daten übertragen und muss dann das Tokenweitergeben
I Topologie: gewöhnlich Ring oder BusI tokenbasierte Protokolle sind stabil bei hoher Last
(unempfindlich gegen Thrashing)I wesentlicher Parameter: Target Token Rotation Time
(TTRT) = angestrebter Wert für einen kompletten Umlaufsdes Tokens (mit Nutzdatenübertragung an jedem Knoten)
Anwendung: Timed Token Protocol (TTP), Profibus31 / 49
Time Division Multiple Access (TDMA)
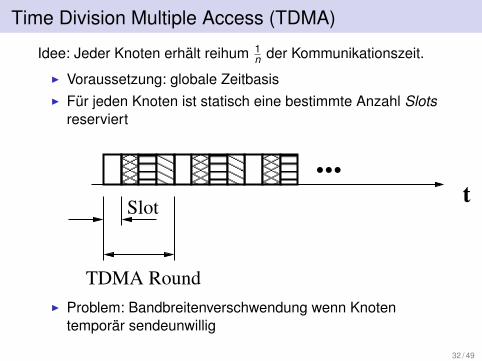
Idee: Jeder Knoten erhält reihum 1n der Kommunikationszeit.
I Voraussetzung: globale ZeitbasisI Für jeden Knoten ist statisch eine bestimmte Anzahl Slots
reserviert
���
���
������
������
������
������
������
������
���
���
������
������
���
���
���
���
t
...
Slot
TDMA Round
I Problem: Bandbreitenverschwendung wenn Knotentemporär sendeunwillig
32 / 49
Minislottingaka Flexible Time Division Multiple Access (FTDMA)
Idee:I alle sendewilligen Prozesse warten zunächst eine so
genannte Synchronisation Gap (SG) Stille abI danach wartet jeder Prozess eine weitere (kurze)
Zeitspanne, die von Prozess zu Prozess differiert (TerminalGap (TG))
I je höher priorisiert der Prozess, desto kleiner TGI jeder sendewillige Prozess hört gleichzeitig das Medium
ab; wenn nach Ablauf der TG kein (höherpriorisierter)Prozess sendet, so sendet der betreffende Prozess
I Während des Sendevorgangs wird ein Watchdog genutzt,der das Timeout Interval (TI), das längstmöglicheSendeintervall, eines Prozesses kontrolliert, damit diesernicht den Kanal okkupiert.
I → keine Kollisionen33 / 49
MinislottingTimer
3 Timer pro Prozess nötig:I SG – startet, sobald Stille auf dem Bus detektiert wirdI TGi – startet nach Ablauf der SG, sofern weiterhin Stille
auf dem Bus vorliegtI TI – startet, sobald Prozess begonnen hat, zu senden
(d. h., nachdem TGi verstrichen ist)Es gilt
SG > max(TGi) und TI > SG
AnwendungenI ARINC 629 (Feldbussystem für Avionik; eingesetzt in der
Boeing 777)I dynamisches Segment im FlexRay
34 / 49
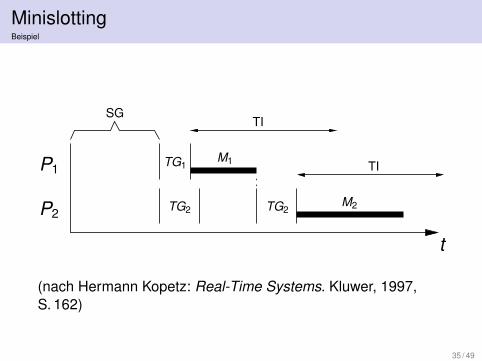
MinislottingBeispiel
TG1P1
P2 TG2 TG2M2
M1 TI
TI
t
SG
(nach Hermann Kopetz: Real-Time Systems. Kluwer, 1997,S. 162)
35 / 49
Feldbusse
I zur Kommunikation zwischenI Zentrale(n)I Sensoren und Aktoren
in industrieller Umgebung (mechanische Beanspruchung,großer Temperaturbereich, Verschmutzung usw.)
I Standard IEC 61158I Motivation: teure DirektverkabelungI statt dessen: BusI VT: billiger, skalierbarI NT: Reaktionszeit ↑ (Thrashing!), Fehlertoleranz
problematischI ca. 50 verschiedene: Profibus, CAN, LON, FlexRay,
ARINC-629, TTP (Time-Triggered Protocol), EtherCAT,KNZ
I Tendenz: zunehmende Basis Ethernet36 / 49
Controller Area Network (CAN)
I durch die Robert Bosch GmbH ab 1983 entwickelt, ab1987 standardisiert (ISO 11898)
I Motivation: Verringerung VerkabelungsaufwandI weit verbreiteter fehlertoleranter Kommunikationsstandard
für Echtzeitsysteme, insbesondere im Automotive-BereichI Multicast-Protokoll, alle Knoten gleichberechtigtI Kollisionsvermeidung durch priorisierte bitweise
BusarbitrierungI 11 Bit großer Identifikator pro Nachricht, der die Station
identifiziert (später: auch 29 Bit)I max. Datenübertragungsrate: 1 MBit/s
37 / 49
Controller Area Network (CAN)Bit Stuffing
I Synchronisation der Teilnehmer aus DatensignalI lange Folgen gleicher Bitwerte stören Synchronisation
Regel: nach 5 Bits gleichen Werts erhält das 6. Bit(zwangsweise) den dazu inversen Wert.I Empfänger muss dieses Stuffing Bit wieder aus dem
Datenstrom entfernenI → 6 gleichwertige Bits hintereinander bedeuten einen
Fehlerzustand (Bit Stuffing Error)
38 / 49
Controller Area Network (CAN)Aufbau eines Frames
I 2 Längen: 11 und 29 Bit langer IdentifierI 2 Typen
I Data Frame: „normaler“ DatenverkehrI Remote Data Frame: Anforderung an einen speziellen
Knoten, Daten zu senden (Bit RTR gesetzt)
39 / 49
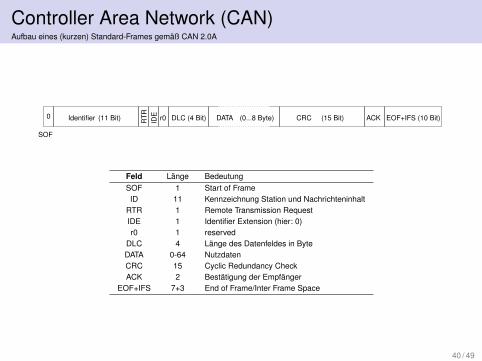
Controller Area Network (CAN)Aufbau eines (kurzen) Standard-Frames gemäß CAN 2.0A
SOF
0
IDE r0 DLC (4 Bit)Identifier (11 Bit) DATA (0...8 Byte) CRC (15 Bit) ACK EOF+IFS (10 Bit)R
TR
Feld Länge BedeutungSOF 1 Start of FrameID 11 Kennzeichnung Station und Nachrichteninhalt
RTR 1 Remote Transmission RequestIDE 1 Identifier Extension (hier: 0)r0 1 reserved
DLC 4 Länge des Datenfeldes in ByteDATA 0-64 NutzdatenCRC 15 Cyclic Redundancy CheckACK 2 Bestätigung der Empfänger
EOF+IFS 7+3 End of Frame/Inter Frame Space
40 / 49
Controller Area Network (CAN)Mechanismen zur Fehlererkennung
I CRC im FrameI Positive AcknowledgementI Fehler in der logischen Framestruktur („Formatfehler“)I Bitstuffing-Fehler (mehr als 5 gleichwertige Bits)I Sender lauscht gleichzeitig (Monitoring); dadurch
Erkennung von Verfälschungen
41 / 49
FlexRayEinführung
I Motivation: größere Datenraten als CAN; mehrFehlertoleranz
I Start: ca. 2000I Konsortium: Freescale, Bosch, NXP, BMW, VW, Daimler,
General MotorsI direkter Konkurrent: TTP (Time-Triggered Protocol)I zunächst in Modellen der „Premium“kategorie (BMW X5,
Audi A8, . . . )
42 / 49
FlexRayTechnische Merkmale
I Kommunikation über 2 physisch getrennte Kanäle á 10MBit/s (Redundanz, Verdopplung derKommunikationsbandbreite)
I Topologien: Bus, Stern, mehrere Sterne, KombinationenI Austausch von NachrichtenI Medienzugriff: Kombination aus TDMA (statisches
Segment) und Minislotting (dynamisches Segment)I Stationen sind so genannte Steuergeräte (Electronic
Control Unit (ECU))I Bus Guardian verhindert den “Babbling Idiot”
43 / 49
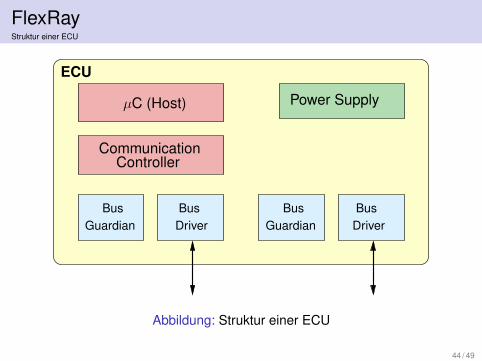
FlexRayStruktur einer ECU
Power Supply
BusGuardian
BusDriver
BusDriver
Bus
ECU
CommunicationController
µC (Host)
Guardian
Abbildung: Struktur einer ECU
44 / 49
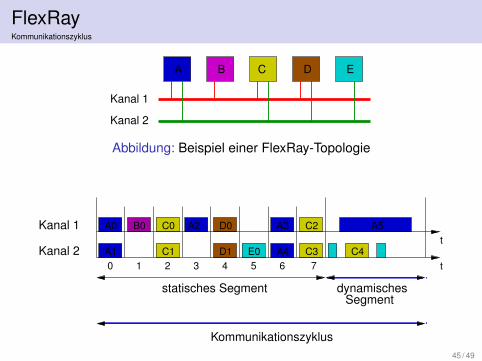
FlexRayKommunikationszyklus
A B C D E
Kanal 1
Kanal 2
Abbildung: Beispiel einer FlexRay-Topologie
Kanal 1 A0 B0 A2 D0C0 A3 C2
statisches Segment
0 1 2 3 4 5 6 7A1 E0D1C1 A4 C3Kanal 2
t
t
dynamischesSegment
Kommunikationszyklus
A5
C4
Abbildung: Kommunikationszyklus45 / 49
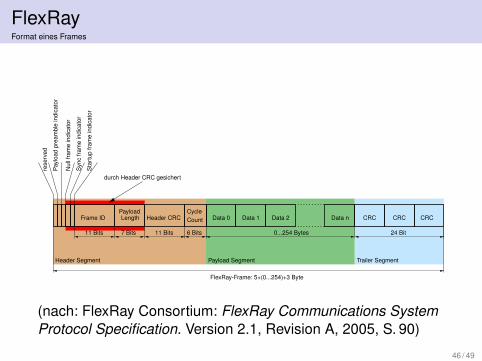
FlexRayFormat eines Frames
Data 1 Data 2 Data n CRC CRC CRCData 0CycleCountHeader CRCFrame ID
durch Header CRC gesichert
Nul
lfra
me
indi
cato
r
Syn
cfra
me
indi
cato
r
Pay
load
prea
mbl
ein
dica
tor
Sta
rtup
fram
ein
dica
tor
rese
rved
11 Bits 7 Bits 11 Bits 6 Bits 0...254 Bytes 24 Bit
Payload Segment Trailer SegmentHeader Segment
PayloadLength
FlexRay-Frame: 5+(0...254)+3 Byte
(nach: FlexRay Consortium: FlexRay Communications SystemProtocol Specification. Version 2.1, Revision A, 2005, S. 90)
46 / 49
FlexRayAnmerkungen zum Frameformat
I Frame ID bestimmt den SlotI Payload Length enthält Anzahl Bytes des Payload
Segmentes, dividiert durch 2I im statischen Segment konstant und gleich für alle KnotenI im dynamischen Segment variabel (für verschiedene
Knoten und Zyklen)I Header (20 Bit) durch extra CRC (11 Bit) geschützt;
Hamming-Distanz von 6
47 / 49
FlexRaySynchronisation der Uhren
I ähnlich dezentrale Mittelwertbildung (↑ EZS1)I “Fault-Tolerant Midpoint Averaging”I Broadcast der lokalen Uhren in regelmäßigen Abständen
(mittels Sync Frame)I Elimination der f größten und f kleinsten UhrenwerteI von den verbleibenden Werten wird das arithmetische
Mittel aus Minimum und Maximum gebildet (= fault-tolerantmidpoint)
I Jennifer Lundelius Welch, Nancy Lynch: A NewFault-Tolerant Algorithm for Clock Synchronization.Information and Computation, Nr. 77, 1988, S. 1–36
48 / 49
ZusammenfassungWas haben wir gelernt?
Vor- und Nachteile von Medienzugriffsverfahren:I CSMA/CDI VTCSMAI Token-basierte VerfahrenI TDMAI Minislotting
2 typische Beispiele für FeldbusseI CANI FlexRay
Was fehlt?I Echtzeitaspekte des InternetI Time-Triggered Architecture (TTA)
49 / 49