Embed Size (px)
Citation preview
Theoretische Physik II: AnalytischeMechanik und Grundlagen der
Thermodynamik
Matthias BartelmannInstitut für Theoretische Astrophysik
Universität Heidelberg

ii
Herzlichen Dank an viele Studentinnen und Studenten, die das Skriptkommentiert und korrigiert haben und damit sehr dazu beigetragen haben,es zu verbessern und verständlicher zu machen!
Inhaltsverzeichnis
1 Systeme mit Nebenbedingungen 1
1.1 Vorbereitung . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Zwangsbedingungen und verallgemeinerte Ko-ordinaten . . . . . . . . . . . . . . . . . . . . 1
1.1.2 Lagrange-Multiplikatoren . . . . . . . . . . . 3
1.2 Das d’Alembertsche Prinzip . . . . . . . . . . . . . . 5
1.2.1 Zwangskräfte . . . . . . . . . . . . . . . . . . 5
1.2.2 Allgemeine Formulierung des d’Alembert’schenPrinzips . . . . . . . . . . . . . . . . . . . . . 7
1.2.3 Erweiterung auf dynamische Systeme . . . . . 8
1.2.4 Lagrange-Gleichungen erster Art . . . . . . . 10
2 Lagrange-Formalismus 13
2.1 Lagrangegleichungen zweiter Art . . . . . . . . . . . . 13
2.1.1 Herleitung . . . . . . . . . . . . . . . . . . . 13
2.1.2 Einfache Beispiele . . . . . . . . . . . . . . . 15
2.1.3 Kräfte in beschleunigten Bezugssystemen . . . 16
2.2 Kreiselbewegung . . . . . . . . . . . . . . . . . . . . 17
2.2.1 Bewegung des kräftefreien, symmetrischen Krei-sels . . . . . . . . . . . . . . . . . . . . . . . 17
2.2.2 Euler’sche Gleichungen . . . . . . . . . . . . 19
2.2.3 Anwendung der Euler’schen Gleichungen . . . 20
2.2.4 Kreisel im Schwerefeld . . . . . . . . . . . . . 22
3 Extremalprinzipien 25
iii
iv INHALTSVERZEICHNIS
3.1 Hamiltons Prinzip der stationären Wirkung . . . . . . 25
3.1.1 Beispiel: Das Fermat’sche Prinzip . . . . . . . 25
3.1.2 Hamiltons Prinzip . . . . . . . . . . . . . . . 26
3.2 Hamiltonfunktion . . . . . . . . . . . . . . . . . . . . 28
3.2.1 Die kanonischen Gleichungen . . . . . . . . . 28
3.2.2 Hamiltonfunktion und Energie . . . . . . . . . 30
3.2.3 Kanonische Gleichungen aus dem Wirkungs-prinzip . . . . . . . . . . . . . . . . . . . . . 33
4 Mechanik kontinuierlicher Medien 35
4.1 Lineare Kette . . . . . . . . . . . . . . . . . . . . . . 35
4.1.1 Grenzübergang zum Kontinuierlichen . . . . . 35
4.1.2 Ableitung der Bewegungsgleichungen aus demLagrangefunktional . . . . . . . . . . . . . . . 38
4.1.3 Die d’Alembert’sche Gleichung . . . . . . . . 39
4.2 Schwingende Saite . . . . . . . . . . . . . . . . . . . 41
4.3 Schwingende Membran . . . . . . . . . . . . . . . . . 44
5 Symmetrien und Erhaltungssätze 47
5.1 Galilei-Invarianz . . . . . . . . . . . . . . . . . . . . 47
5.2 Noether-Theoreme . . . . . . . . . . . . . . . . . . . 50
5.3 Lorentz-Invarianz . . . . . . . . . . . . . . . . . . . . 52
5.3.1 Die spezielle Lorentztransformation . . . . . . 52
5.3.2 Der Minkowski-Raum . . . . . . . . . . . . . 54
6 Analytische Mechanik 57
6.1 Kanonische Transformationen . . . . . . . . . . . . . 57
6.1.1 Bahnen im erweiterten Phasenraum . . . . . . 57
6.1.2 Kanonische Transformationen . . . . . . . . . 59
6.2 Hamilton-Jacobi-Theorie . . . . . . . . . . . . . . . . 60
6.2.1 Die Hamilton-Jacobi-Gleichung . . . . . . . . 60
6.2.2 Harmonischer Oszillator . . . . . . . . . . . . 61
INHALTSVERZEICHNIS v
6.2.3 Bewegung des freien Massenpunkts . . . . . . 62
6.2.4 Lösung der Hamilton-Jacobi-Gleichung . . . . 63
6.3 Liouvillescher Satz, Poisson-Klammern . . . . . . . . 64
6.3.1 Der Liouvillesche Satz . . . . . . . . . . . . . 64
6.3.2 Poisson-Klammern . . . . . . . . . . . . . . . 65
7 Stabilität und Chaos 67
7.1 Stabilität . . . . . . . . . . . . . . . . . . . . . . . . . 67
7.1.1 Bewegung in der Nähe des Gleichgewichts . . 67
7.1.2 Definitionen und Sätze zur Stabilität . . . . . . 70
7.1.3 Hamiltonsche Systeme . . . . . . . . . . . . . 71
7.1.4 Attraktoren; die van-der-Polsche Gleichung . . 73
7.2 Chaos in der Himmelsmechanik . . . . . . . . . . . . 74
7.2.1 Beispiel: Saturnmond Hyperion . . . . . . . . 74
7.2.2 Chaotisches Taumeln auf der Ellipsenbahn . . 76
8 Grundlagen der statistischen Physik 79
8.1 Das Grundpostulat der statistischen Physik . . . . . . . 79
8.1.1 Mikro- und Makrozustände . . . . . . . . . . . 79
8.1.2 Aufenthaltswahrscheinlichkeiten im Phasenraum 80
8.1.3 Der Liouville’sche Satz . . . . . . . . . . . . . 82
8.1.4 Übergang ins Gleichgewicht . . . . . . . . . . 83
8.1.5 Anzahl zugänglicher Zustände . . . . . . . . . 84
8.2 Wechselwirkungen zwischen Systemen . . . . . . . . 86
8.2.1 Mechanische Arbeit und Wärme . . . . . . . . 86
8.2.2 Vollständige und unvollständige Differentiale . 87
8.2.3 Quasistatische Zustandsänderungen . . . . . . 89
9 Temperatur und Entropie 91
9.1 Übergänge zwischen Gleichgewichtszuständen . . . . 91
9.1.1 Reversible und irreversible Zustandsänderungen 91
vi INHALTSVERZEICHNIS
9.1.2 Äußere Parameter im Gleichgewicht . . . . . . 92
9.2 Thermisches Gleichgewicht . . . . . . . . . . . . . . . 93
9.2.1 Die absolute Temperatur . . . . . . . . . . . . 93
9.2.2 Physikalische Eigenschaften im thermischenGleichgewicht . . . . . . . . . . . . . . . . . 96
9.3 Entropie . . . . . . . . . . . . . . . . . . . . . . . . . 98
9.3.1 Definition . . . . . . . . . . . . . . . . . . . . 98
9.3.2 Allgemeine Wechselwirkung . . . . . . . . . . 99
9.4 Beispiele . . . . . . . . . . . . . . . . . . . . . . . . 102
9.4.1 Helium-Diffusion . . . . . . . . . . . . . . . . 102
9.4.2 Fermi-Druck . . . . . . . . . . . . . . . . . . 103
9.4.3 Verlauf einer Adiabate . . . . . . . . . . . . . 104
10 Wahrscheinlichkeit 105
10.1 Definitionen . . . . . . . . . . . . . . . . . . . . . . . 105
10.1.1 Kolmogorow’sche Axiome . . . . . . . . . . . 105
10.1.2 Beispiele . . . . . . . . . . . . . . . . . . . . 107
10.1.3 Mittelwert und Streuung . . . . . . . . . . . . 108
10.2 Zufallsbewegung . . . . . . . . . . . . . . . . . . . . 109
10.2.1 Zufallsbewegung . . . . . . . . . . . . . . . . 109
10.2.2 Grenzfall großer N . . . . . . . . . . . . . . . 112
10.3 Die Maxwell- und die Boltzmann-Verteilung . . . . . . 114
10.3.1 Die Maxwell-Verteilung . . . . . . . . . . . . 114
10.3.2 Die Boltzmann-Verteilung . . . . . . . . . . . 116
11 Einfache Anwendungen 117
11.1 Einfache thermodynamische Beziehungen . . . . . . . 117
11.1.1 Eindeutigkeit der Entropie . . . . . . . . . . . 117
11.1.2 Thermisches und mechanisches Gleichgewicht 118
11.1.3 Wärmekapazität und spezifische Wärme . . . . 119
11.2 Das ideale Gas . . . . . . . . . . . . . . . . . . . . . 120
INHALTSVERZEICHNIS vii
11.2.1 Vorbemerkungen . . . . . . . . . . . . . . . . 120
11.2.2 Spezifische Wärmen . . . . . . . . . . . . . . 123
11.2.3 Adiabatische Expansion . . . . . . . . . . . . 125
11.2.4 Erweiterungen . . . . . . . . . . . . . . . . . 126
11.2.5 Entropie . . . . . . . . . . . . . . . . . . . . . 127
12 Thermodynamische Funktionen 129
12.1 Thermodynamische Funktionen . . . . . . . . . . . . 129
12.1.1 Vorbemerkung . . . . . . . . . . . . . . . . . 129
12.1.2 Legendre-Transformationen . . . . . . . . . . 130
12.1.3 Die Enthalpie . . . . . . . . . . . . . . . . . . 132
12.1.4 Die freie Energie . . . . . . . . . . . . . . . . 132
12.1.5 Die freie Enthalpie . . . . . . . . . . . . . . . 133
12.1.6 Zusammenfassung; Maxwell-Relationen . . . . 134
12.2 Einige Anwendungen . . . . . . . . . . . . . . . . . . 135
12.2.1 Spezifische Wärmen . . . . . . . . . . . . . . 135
12.2.2 Entropie und Energie . . . . . . . . . . . . . . 137
12.2.3 Van der Waals-Gas . . . . . . . . . . . . . . . 139
13 Kreisprozesse 141
13.1 Der Joule-Thomson-Effekt . . . . . . . . . . . . . . . 141
13.1.1 Frei expandierendes Gas . . . . . . . . . . . . 141
13.1.2 Joule-Thomson-Koeffizient . . . . . . . . . . . 142
13.1.3 Joule-Thomson-Effekt im Van-der-Waals-Gas . 143
13.2 Kreisprozesse und Wärmekraftmaschinen . . . . . . . 146
13.2.1 Der Carnotsche Wirkungsgrad . . . . . . . . . 146
13.2.2 Der Carnot-Prozess . . . . . . . . . . . . . . . 147
13.2.3 Der Otto-Prozess . . . . . . . . . . . . . . . . 149
13.2.4 Die Clausius-Clapeyron’sche Gleichung . . . . 150
14 Phasengleichgewicht 153
viii INHALTSVERZEICHNIS
14.1 Gleichgewicht und Stabilität . . . . . . . . . . . . . . 153
14.1.1 Extremaleigenschaften im Gleichgewicht . . . 153
14.1.2 Stabilitätsbedingungen . . . . . . . . . . . . . 155
14.2 Das chemische Potential . . . . . . . . . . . . . . . . 157
14.2.1 Definition, Phasengleichgewicht . . . . . . . . 157
14.2.2 Die Gibbs’sche Phasenregel . . . . . . . . . . 158
14.2.3 Gibbs-Duhem-Beziehung, Reaktionsgleichge-wichte . . . . . . . . . . . . . . . . . . . . . . 160
14.3 Phasenübergang im van-der-Waals-Gas . . . . . . . . 161
14.3.1 Die freie Enthalpie . . . . . . . . . . . . . . . 161
14.3.2 Latente Wärme . . . . . . . . . . . . . . . . . 163
15 Ideale Hydrodynamik 165
15.1 Grundgleichungen . . . . . . . . . . . . . . . . . . . . 165
15.1.1 Vorbemerkung . . . . . . . . . . . . . . . . . 165
15.1.2 Die Kontinuitätsgleichung . . . . . . . . . . . 166
15.1.3 Die Eulersche Gleichung . . . . . . . . . . . . 167
15.1.4 Energieerhaltung . . . . . . . . . . . . . . . . 168
15.1.5 Zusammenfassung . . . . . . . . . . . . . . . 171
15.2 Einfache Anwendungen . . . . . . . . . . . . . . . . . 172
15.2.1 Die Bernoullische Gleichung . . . . . . . . . . 172
15.2.2 Schallwellen . . . . . . . . . . . . . . . . . . 173
15.2.3 Die barometrische Höhenformel . . . . . . . . 175
Kapitel 1
Systeme mit Nebenbedingungen
1.1 Vorbereitung
1.1.1 Zwangsbedingungen und verallgemeinerte Koor-dinaten
• Bereits in der Punktmechanik im ersten Teil der Vorlesung wur-de erwähnt, dass physikalische Systeme oft durch besondere Be-dingungen in ihrer Bewegung eingeschränkt werden. Ein einfa-ches Beispiel war das mathematische Pendel, dessen Pendelkörperdurch seine Pendelachse auf eine Ebene und durch die konstan-te Pendellänge auf die Bewegung längs einer Kreislinie einge-schränkt wird. Wir können diesen Sachverhalt dadurch ausdrücken,dass die ursprünglichen drei Freiheitsgrade des Massenpunkts immathematischen Pendel durch zwei Bedingungen auf einen redu-ziert werden.
• Weitere naheliegende und alltägliche Beispiele für Nebenbedin-gungen sind Kinder, die auf einer Rutschbahn rutschen; zweiMassenpunkte, die durch eine Stange zu einer Hantel verbundensind; Kugelbahnen, in denen eine herabrollende Kugel durch eineSchiene geführt wird; ein Planet, dessen Bewegung durch die Dre-himpulserhaltung auf eine Bahnebene eingeschränkt wird, usw.
• Bisher hatten wir die Freiheitsgrade von Körpern meistens durchkartesische Koordinaten beschrieben. Allgemein können Freiheits-grade aber durch weitgehend beliebige, unabhängige Lageparame-ter beschrieben werden, die zur vollständigen Charakterisierungder Lage des Systems notwendig (und hinreichend) sind. So hatein System von N Massenpunkten ohne einschränkende Nebenbe-dingungen f = 3N Freiheitsgrade, die durch die N Ortsvektoren~xi mit ihren jeweils drei Komponenten dargestellt werden können.Zwei Massenpunkte an einer Stange haben f = 3 × 2 − 1 = 5
1
2 KAPITEL 1. SYSTEME MIT NEBENBEDINGUNGEN
Freiheitsgrade, weil die Stange eine Nebenbedingung darstellt. Einstarrer Körper hat f = 6 Freiheitsgrade, nämlich die Lage seinesSchwerpunkts und die drei Eulerwinkel, die seine Orientierung imRaum angeben.
• Nebenbedingungen, die die Anzahl der Freiheitsgrade einschrän-ken, werden auch Zwangsbedingungen genannt. Sie können aufverschiedene Weisen formuliert werden. Oft ist es möglich, siedurch Gleichungen der Art
fi(~x1, . . . , ~xN , t) = 0 , 1 ≤ i ≤ r (1.1)
auszudrücken, die r Bedingungen an die N Ortsvektoren der Mas-senpunkte stellen. Wir nehmen im Folgenden an, dass die r Funk-tionen fi genügend oft differenzierbar sind und dass die Matrix
∂ f1∂x11
∂ f1∂x12
. . . ∂ f1∂x3N
......
...∂ fr∂x11
∂ fr∂x12
. . . ∂ fr∂x3N
(1.2)
dort den Rang r hat, wo fi(~x j, t) = 0 erfüllt ist1 Beispiele fürNebenbedingungen dieser Art sind:
– Eine Bewegung auf einer Ebene erfüllt die Bedingung ~x ·~n =
0, wenn ~n der Normalenvektor der Ebene ist.
– Eine Bewegung auf einer Kugel stellt die Bedingung |~x | =R = konst, also |~x | − R = 0.
Zwangsbedingungen des Typs (1.1) heißen holonom, anderen Typsnichtholonom. Ein Beispiel für eine nichtholonome Zwangsbedin-gung ist die für die Bewegung innerhalb einer Kugel, also mit|~x | ≤ R. Bedingungen, die die Zeit explizit enthalten, heißen rheo-nom, anderenfalls skleronom (griechisch rheos = fließend; skleros= starr). Bei r Zwangsbedingungen für N Massenpunkte reduziertsich die Anzahl der Freiheitsgrade auf f = 3N − r.
• Der Konfigurationsraum eines Systems ist der Teil des 3N-dimensionalen Raums, der von den Koordinaten oder Lagepara-metern der N Massenpunkte aufgespannt wird. Die r Bedingungs-gleichungen fi definieren eine (3N − r)-dimensionale sogenannteUntermannigfaltigkeit im Konfigurationsraum2. Zum Beispiel istder Konfigurationsraum eines freien Massenpunkts der dreidimen-sionale reelle Raum R3. Die Zwangsbedingung |~x | = R definiert
1Der Rang einer linearen Abbildung A : V → W aus einem Vektorraum V in einenVektorraum W ist die Dimension ihres Bildraums, d.h. die Dimension des Raums, dervon den Bildvektoren aller Vektoren aus dem Vektorraum V aufgespannt wird.
2n-dimensionale Mannigfaltigkeiten sind stetige, genügend glatte Räume, derenGeometrie allgemeiner als die des Rn sein kann. Eine genauere Definition ist hier nichtnotwendig.

1.1. VORBEREITUNG 3
eine zweidimensionale Untermannigfaltigkeit, nämlich eine Kugel-oberfläche.
• Auf dieser (3N− r)-dimensionalen Untermannigfaltigkeit kann dieLage des Systems durch f = 3N−r unabhängige Lageparameter qi
(1 ≤ i ≤ f ) angegeben werden, die als neue Koordinaten verwen-det werden können. Damit erscheinen die r Zwangsbedingungenals Bedingungen an die Koordinatendarstellung
~xi = ~xi(q1, . . . , q f ; t) , 1 ≤ i ≤ N (1.3)
der Lage eines Massenpunkts in seinem Konfigurationsraum.
• So zum Beispiel kann die Zwangsbedingung für die Bewegungeines Massenpunktes auf der Oberfläche einer Kugel mit RadiusR, |~x | − R = 0, durch
~x = R ·
sinϑ cosϕsinϑ sinϕ
cosϑ
(1.4)
mit 0 ≤ ϑ ≤ π, 0 ≤ ϕ ≤ 2π angegeben werden, d.h. die La-geparameter (q1, q2) können durch die Winkel (ϑ, ϕ) dargestelltwerden.
• Die den Freiheitsgraden angepassten Lageparameter qi heißen ver-allgemeinerte Koordinaten. Sie müssen keineswegs die Dimensioneiner Länge haben, wie das Beispiel der Winkel auf der Kugelzeigt! Sie müssen lediglich in ihrer Gesamtheit die Lage einesObjekts auf seiner Untermannigfaltigkeit im Konfigurationsraumeindeutig anzugeben erlauben.
1.1.2 Lagrange-Multiplikatoren
• Wir werden gleich vor dem Problem stehen, die Extrema vonFunktionen unter Nebenbedingungen finden zu müssen. Sei etwaeine (differenzierbare) Funktion f (~x ) gegeben, dann liegen ihreExtrema dort, wo ihr Gradient verschwindet,
~∇ f (~x ) = 0 . (1.5)
Wenn nun eine holonome Nebenbedingung auftritt, beispielsweisein Gestalt der Gleichung
g(~x ) = 0 , (1.6)
dann könnte man im Prinzip daraus eine der Variablen xi elimi-nieren und damit die Bedingung (1.5) in den zwei verbleibendenKoordinaten formulieren. Meistens ist eine andere Methode einfa-cher und effizienter.

4 KAPITEL 1. SYSTEME MIT NEBENBEDINGUNGEN
• Offenbar bedeutet (1.6), dass sich g(~x ) längs erlaubter Bewegun-gen längs des kleinen Vektors δ~x nicht ändern darf,
δg = ~∇g · δ~x = 0 . (1.7)
Ebenso muss am Extremum der Funktion f auch δ f = 0 gelten,aber daraus folgt nun nicht mehr (1.5), weil f wegen der Nebenbe-dingung nur noch eine Funktion zweier freier Variablen ist. Miteinem vorerst unbestimmten Faktor λ ∈ R können wir aber diebeiden Bedingungen δ f = 0 und δg = 0 kombinieren,
δ f + λδg = ~∇( f + λg) · δ~x = 0 . (1.8)
λ heißt Lagrange-Multiplikator.
• Die Bedingung (1.8) muss für beliebige kleine Verschiebungenδ~x gelten, also unabhängig für jede ihrer Komponenten δxi. Wirkönnen eine dieser Komponenten willkürlich herausgreifen, z.B.δx3, um daraus den Parameter λ passend zu bestimmen,
∂ f∂x3
+ λ∂g
∂x3= 0 , (1.9)
wenn ∂g/∂x3 , 0 ist. Ebenso müssen die beiden anderen Ableitun-gen separat verschwinden,
∂ f∂x1
+ λ∂g
∂x1= 0 ,
∂ f∂x2
+ λ∂g
∂x2= 0 . (1.10)
• Wenn statt einer Bedingung r > 1 Bedingungen gk = 0 (1 ≤k ≤ r) zu erfüllen sind, wird jede mit einem eigenen Lagrange-Multiplikator λk berücksichtigt, sodass dann die Bedingungen fürExtrema unter Nebenbedingungen
∂ f∂xi
+
r∑k=1
λk∂gk
∂xi= 0 (1 ≤ i ≤ N) (1.11)
lauten.
• Als Beispiel betrachten wir das Problem, dass die Oberfläche einesZylinders mit dem Radius R und der Höhe H bei konstantem Vo-lumen V minimiert werden soll, indem R und H geeignet gewähltwerden. Die Nebenbedingung lautet also
V = R2πH = konst. ⇒ R2πH − V = 0 , (1.12)
und die Bedingungsgleichungen für ein Extremum der gesamtenOberfläche A = 2RπH + 2R2π lauten
∂
∂R
[2RπH + 2R2π + λ(R2πH − V)
]= 0 ,
∂
∂H
[2RπH + 2R2π + λ(R2πH − V)
]= 0 . (1.13)

1.2. DAS D’ALEMBERTSCHE PRINZIP 5
Aus der zweiten Bedingung erhalten wir den Lagrange-Multiplikator
2Rπ + λR2π = 0 ⇒ λ = −2R. (1.14)
Die erste Bedingung lautet
2πH + 4Rπ + 2πλRH = 0 , (1.15)
woraus mit dem Lagrange-Multiplikator aus (1.14)
0 = 2πH + 4Rπ − 4πH = 4Rπ − 2πH ⇒ H = 2R (1.16)
folgt. Die Oberfläche eines Zylinders mit festem Volumen wirdalso gerade dann extremal, wenn sein Durchmesser gleich seinerHöhe ist. Beachten Sie, dass wir nirgendwo verwendet haben,wie groß das Volumen eigentlich ist: Die Bedingung (1.16) giltdemnach für Zylinder beliebiger Größe.
1.2 Das d’Alembertsche Prinzip
1.2.1 Zwangskräfte
Jean Baptiste le Rond d’Alembert• Diejenigen Kräfte, die die Zwangsbedingungen erzwingen, heißen
Zwangskräfte. Als Beispiel betrachten wir eine Kugel, die unterdem Einfluss der Schwerkraft ~F reibungsfrei in einer Röhre in dery-z-Ebene gleite, die durch z = z(y) bzw. f (y, z) = 0 beschriebenwird. Nur die Tangentialkomponente von ~F relativ zur Röhre kanneine Bewegung verursachen, da die Bewegung ja längs der Röhreerfolgen muss. Die Normalkomponente dagegen muss durch eineZwangskraft ~Z kompensiert werden,
~Z = − ~Fn = −(~F · ~n
)~n . (1.17)
• Die Gleichgewichtslage zeichnet sich dadurch aus, dass dort diegesamte wirkende Kraft verschwindet, in unserem Fall also dieSumme aus äußeren Kräften und Zwangskräften,
~F + ~Z = 0 . (1.18)
Da ~Z normal zur Röhre wirkt, s. (1.17), ist dies nur möglich, wennauch ~F in der Gleichgewichtslage normal zur Röhre gerichtetist; das kann nur in einem Minimum oder Maximum der Röhreeintreten.

6 KAPITEL 1. SYSTEME MIT NEBENBEDINGUNGEN
• Wie kann die Gleichgewichtsbedingung in allgemeinen Fällengefunden werden? Wir denken uns dazu eine virtuelle (nicht wirk-liche, nur gedachte) Verrückung3 δ~x des Massenpunkts längs derRöhre,
δ~x =
(δyδz
), (1.19)
für die
δ f = ~∇ f · δ~x =∂ f (y, z)∂y
δy +∂ f (y, z)∂z
δz = 0 (1.20)
gelten muss, weil der Massenpunkt in der Röhre bleiben muss.Diese virtuelle Verrückung erfordert die virtuelle Arbeit
δA =(~F + ~Z
)· δ~x . (1.21)
Da in der Gleichgewichtslage ~F + ~Z = 0 gilt, ist dort auch δA = 0.Die Gleichgewichtslage ist also dadurch charakterisiert, dass virtu-elle Verrückungen aus ihr heraus keine virtuelle Arbeit verrichten.
• Da δ~x tangential, ~Z aber normal zur Röhre ist, gilt ~Z · δ~x = 0,d.h. die Zwangskraft leistet in keiner Lage einen Beitrag zur vir-tuellen Arbeit. In der Gleichgewichtslage können also auch dieäußeren Kräfte für sich genommen keine virtuelle Arbeit leisten.Im Gleichgewicht gilt also
~F · δ~x = 0 , ~∇ f · δ~x = 0 . (1.22)
Das ist das Prinzip der virtuellen Arbeit oder das d’Alembert’schePrinzip. Umgekehrt legen die Zwangsbedingungen das Gleichge-wicht erst fest.
• Mithilfe eines Lagrange-Multiplikators λ lassen sich nun beideBedingungen aus (1.22) erfüllen. Dafür setzen wir(
~F + λ~∇ f)· δ~x = 0 (1.23)
an und folgern(Fy + λ
∂ f∂y
)δy +
(Fz + λ
∂ f∂z
)δz = 0 . (1.24)
• Die Bedingung ~∇ f · δ~x = 0 stellt einen Zusammenhang zwischenδy und δz her, wenn ~∇ f , 0 ist (sollte ~∇ f = 0 sein, ist die Zwangs-bedingung uninteressant, weil dann jedes δ~x sie erfüllt). Sei etwa∂ f /∂z , 0, dann lässt sich δz als Funktion von δy angeben,
δz = −∂ f /∂y∂ f /∂z
δy . (1.25)
3Bekanntlich regelt § 919 (1) BGB, was zu geschehen hat, „wenn ein Grenzsteinverrückt oder unkenntlich geworden“ ist.
1.2. DAS D’ALEMBERTSCHE PRINZIP 7
λ muss dann so gewählt werden, dass die Bedingungsgleichung(1.23) erfüllt ist. Wären die Komponenten δy und δz der virtuellenVerrückung unabhängig, müssten ihre Beiträge zu (1.23) separatverschwinden,(
Fy + λ∂ f∂y
)δy = 0 ,
(Fz + λ
∂ f∂z
)δz = 0 . (1.26)
Zusätzlich gilt aber die Zwangsbedingung f (y, z) = 0, die δy undδz miteinander verknüpft. Wir haben also drei Gleichungen für diedrei Unbekannten λ, y und z.
• Im Gleichgewicht muss ~F ebenso normal zur Kurve sein wie auch~∇ f . Da (1.23) für beliebige virtuelle Verrückungen δ~x gelten muss,folgt
~F = −λ~∇ f , (1.27)
und die Gleichgewichtsbedingung (1.18) verlangt dann
~Z = λ~∇ f . (1.28)
• Beispiel: Für einen Massenpunkt, der längs einer Parabel in der y-z-Ebene gleitet, ist z = y2, also f (y, z) = z− y2 = 0. Die Schwerkraftist ~F = −mg~ez. Das Prinzip der virtuellen Arbeit liefert zunächstfür die Gleichgewichtslage(
~F + λ~∇ f)· δ~x =
[(0−mg
)+ λ
(−2y
1
)]·
(δyδz
)= 0 , (1.29)
woraus die beiden Gleichungen
− 2λyδy = 0 , −mgδz + λδz = 0 (1.30)
folgen. Da die Verrückungen δy und δz beliebig sein dürfen, erhal-ten wir
λ = mg und y = 0 . (1.31)
Bei y = 0 muss wegen der Zwangsbedingung aber auch z = 0 sein.Also wird das Gleichgewicht bei (y, z) = (0, 0) erreicht, wo dieZwangskraft
~Z = λ ~∇ f∣∣∣∣y=0,z=0
= mg(
01
)= mg~ez (1.32)
beträgt.
1.2.2 Allgemeine Formulierung des d’Alembert’schenPrinzips
• Wir formulieren nun das d’Alembert’sche Prinzip um, sodass wires von statischen auf dynamische Systeme erweitern können. Ge-geben seien N Massenpunkte mit den Ortsvektoren ~xi, 1 ≤ i ≤ N,
8 KAPITEL 1. SYSTEME MIT NEBENBEDINGUNGEN
die sich unter dem Einfluss der äußeren Kräfte ~Fi bewegen. Wei-terhin sollen Zwangsbedingungen gelten, die durch Zwangskräfte~Z dargestellt werden. Wiederum heißt eine Verrückung δ~xi virtuell,die infinitesimal klein, mit den Zwangsbedingungen verträglichund sonst willkürlich ist. Wenn die Zwangskräfte keine virtuelleArbeit verrichten, also die Bedingung
N∑i=1
~Zi · δ~xi = 0 (1.33)
erfüllen, dann folgt im Gleichgewicht sofort
N∑i=1
~Fi · δ~xi = 0 . (1.34)
Im Gleichgewicht verschwindet demnach die virtuelle Arbeit deräußeren Kräfte.
• Beispiel: Ein Hebel mit den Armlängen a und b hat einen Frei-heitsgrad, der durch den Drehwinkel ϕ ausgedrückt werden kann.Die virtuelle Arbeit bei einer virtuellen Verrückung δϕ ist
δA = Fa(aδϕ) − Fb(bδϕ) = 0 , (1.35)
woraus unmittelbar das Hebelgesetz aFa = bFb folgt.
1.2.3 Erweiterung auf dynamische Systeme
• Abseits vom Gleichgewicht, also im dynamischen Fall, lautet dieBewegungsgleichung
~Fi + ~Zi = ~pi . (1.36)
Wenn die Zwangskräfte wieder von der Art sind, dass (1.33) erfülltist, dann gilt offenbar das d’Alembert’sche Prinzip in der Form
N∑i=1
( ~Fi − ~pi) · δ~xi = 0 . (1.37)
Man betrachtet dann die −~pi als Kräfte, die so genannten Träg-heitskräfte. Die Bewegung verläuft also so, dass die virtuelle Ar-beit der Summe von äußeren und Trägheitskräften verschwindet.Beachten Sie, dass der Lagrange-Multiplikator in (1.37) nichtmehr auftaucht. Wir bräuchten ihn nur, wenn wir den Betrag derZwangskraft berechnen wollten, aber wir geben von nun an das(physikalisch unerhebliche) Interesse an der Zwangskraft auf.
1.2. DAS D’ALEMBERTSCHE PRINZIP 9
• Beispiel: Ein Massenpunkt der Masse m bewege sich an einem En-de einer masselosen Stange der Länge l, die in ihrem anderen Endedrehbar aufgehängt ist. Sein Ortsvektor, seine Geschwindigkeitund seine Beschleunigung sind
~x =
(yz
)= l
(sinϕ− cosϕ
), ~x = lϕ
(cosϕsinϕ
),
~x = lϕ(
cosϕsinϕ
)+ lϕ2
(− sinϕcosϕ
). (1.38)
Eine Drehung mit konstanter Winkelgeschwindigkeit ϕ erzeugtdie Trägheitskraft
~p = −m~x = mlϕ2(
sinϕ− cosϕ
). (1.39)
Wegen v = |~x | = lϕ ist∣∣∣−~p ∣∣∣ =mv2
l, −~p =
mv2
l~xl
; (1.40)
das ist die Zentrifugalkraft in diesem speziellen Fall.
• Zur Illustration wenden wir das d’Alembert’sche Prinzip auf dasmathematische Pendel an. Die Zwangskraft ~Z muss senkrecht zurBewegung von m zeigen. Die äußere Kraft ist die Schwerkraft ~F =
−mg~ez. Die Zwangsbedingung legt den Massenpunkt auf einenKreisbogen fest, sodass sie in der Form y = l sinϕ, z = −l cosϕgeschrieben werden kann. Eine virtuelle Verrückung δ~x, die mitder Zwangsbedingung verträglich ist, muss demnach
δy = l cosϕδϕ und δz = l sinϕδϕ (1.41)
erfüllen, also
δ~x = lδϕ(
cosϕsinϕ
). (1.42)
Aus dem d’Alembert’schen Prinzip (1.37) mit der Trägheitskraft(1.38) erhalten wir[−mg
(01
)− mlϕ
(cosϕsinϕ
)− mlϕ2
(− sinϕcosϕ
)]· δ~x = 0 (1.43)
oder(−mgl sinϕ − ml2ϕ)δϕ = 0 . (1.44)
Da δϕ beliebig war, folgt daraus
ϕ = −g
lsinϕ ≈ −
g
lϕ . (1.45)
Für kleine Auslenkungen ϕ 1 ist dies offensichtlich die Glei-chung eines harmonischen Oszillators mit der Kreisfrequenzω =
√g/l, wie es für das mathematische Pendel sein muss.

10 KAPITEL 1. SYSTEME MIT NEBENBEDINGUNGEN
1.2.4 Lagrange-Gleichungen erster Art
• Gegeben sei wieder ein mechanisches System aus N Massenpunk-ten. Zur Vereinfachung der Notation betrachten wir die 3N Koordi-naten xi, 1 ≤ i ≤ 3N, der Massenpunkte statt ihrer N Ortsvektoren.Das System erfahre die äußeren Kräfte Fi, 1 ≤ i ≤ 3N, und un-terliege r holonomen Zwangsbedingungen f j(x1, . . . , x3N) = 0,1 ≤ j ≤ r.
• Das d’Alembert’sche Prinzip besagt
3N∑i=1
(Fi − mi xi)δxi = 0 , (1.46)
wobei die δxi wegen der Zwangsbedingungen die Gleichungen
3N∑i=1
∂ f j
∂xiδxi = 0 (1.47)
für alle 1 ≤ j ≤ r erfüllen müssen.
• Die beiden Gleichungen (1.46) und (1.47) lassen sich durch rLagrange-Multiplikatoren λ j kombinieren,
3N∑i=1
Fi − mi xi +
r∑j=1
λ j∂ f j
∂xi
δxi = 0 . (1.48)
Wegen der r Zwangsbedingungen sind nur 3N−r der Verrückungenδxi beliebig, während die r anderen davon abhängig sind.
• Die λ j können nun so gewählt werden, dass die Vorfaktoren der rabhängigen Verrückungen in (1.48) verschwinden. Nehmen wirohne Beschränkung der Allgemeinheit an, das seien die ersten rVerrückungen, dann folgt
Fi − mi xi +
r∑j=1
λ j∂ f j
∂xi= 0 , 1 ≤ i ≤ r , (1.49)
oder, in Matrix-Schreibweise,
F ~λ = ~Q , (1.50)
wobei die Abkürzungen
F = (Fi j) :=(∂ f j
∂xi
), ~Q = (Qi) := mi xi − Fi (1.51)
eingeführt wurden, in denen 1 ≤ i, j ≤ r sind.

1.2. DAS D’ALEMBERTSCHE PRINZIP 11
• Offensichtlich ist (1.50) ein lineares Gleichungssystem für die rMultiplikatoren λ j, das eindeutig lösbar ist, wenn detF , 0 gilt,was wir schon zu Beginn des Kapitels in (1.2) vorausgesetzt hatten.Dann können wir die r Lagrange-Multiplikatoren durch
~λ = F −1 ~Q (1.52)
bestimmen.
• Die derart bestimmten λ j, 1 ≤ j ≤ r, werden dann in die verblei-benden 3N − r Gleichungen eingesetzt,
3N∑i=r+1
Fi − mi xi +
r∑j=1
λ j∂ f j
∂xi
δxi = 0 . (1.53)
Die restlichen δxi, r + 1 ≤ i ≤ 3N, sind nun aber beliebig, alsomuss
Fi − mi xi +
r∑j=1
λ j∂ f j
∂xi= 0 , r + 1 ≤ i ≤ 3N (1.54)
gelten. Dies sind die Lagrange-Gleichungen erster Art.
• Daraus ergeben sich die Komponenten der Zwangskräfte
Zi =
r∑j=1
λ j∂ f j
∂xi. (1.55)
• Beispiel: Eine Perle gleite reibungslos auf einem masselosen Draht,der sich um eines seiner Enden dreht und dabei die x-y-Ebeneüberstreicht. Die eine Zwangsbedingung ist, dass die Perle denDraht nicht verlassen kann, sodass
y
x= tanϕ ⇒ f (x, y) = y cosϕ − x sinϕ = 0 (1.56)
gilt. Da keine äußeren Kräfte wirken, folgt aus demd’Alembert’schen Prinzip mit dem einen Lagrange-Multiplika-tor λ
− m(
xy
)+ λ~∇ f = −m
(xy
)+ λ
(− sinϕcosϕ
)= 0 . (1.57)
Der (wegen der Rotation naheliegende) Ansatz x = r cosϕ, y =
r sinϕ führt auf(xy
)= r
(cosϕsinϕ
)+ rϕ
(− sinϕcosϕ
)(1.58)(
xy
)= (r − rϕ2)
(cosϕsinϕ
)+ (2rϕ + rϕ)
(− sinϕcosϕ
)

12 KAPITEL 1. SYSTEME MIT NEBENBEDINGUNGEN
und, wenn wir das in (1.57) einsetzen, auf
(r − rϕ2)(
cosϕsinϕ
)+ (2rϕ + rϕ)
(− sinϕcosϕ
)=λ
m
(− sinϕcosϕ
).
(1.59)Multiplizieren wir diese Gleichung einmal mit (cosϕ, sinϕ) undeinmal mit (− sinϕ, cosϕ), folgen die beiden Gleichungen
r − rϕ2 = 0 und λ = m(2rϕ + rϕ) . (1.60)
Aus der ersten Gleichung sieht man, dass die Zentrifugalkraftmrϕ2 als Trägheitskraft auftritt, die die Perle radial nach außentreibt.
Kapitel 2
Lagrange-Formulierung derklassischen Mechanik
2.1 Lagrangegleichungen zweiter Art
2.1.1 Herleitung
• Wir gehen nun von den kartesischen zu den f = 3N − r verall-gemeinerten Koordinaten qi, 1 ≤ i ≤ f , über. Die kartesischenKoordinaten lassen sich dann in der Form
xi = xi(q1, . . . , q f ; t) (2.1)
als Funktionen der verallgemeinerten Koordinaten schreiben.Joseph Louis Lagrange
• Ausgedrückt durch die qi kann das d’Alembert’sche Prinzip um-formuliert werden. Zunächst ist die virtuelle Arbeit der äußerenKräfte durch
δAe =
3N∑i=1
Fiδxi =
f∑j=1
3N∑i=1
Fi∂xi
∂q j
δq j =:f∑
j=1
Q jδq j , (2.2)
gegeben, wobei wir die verallgemeinerten Kraftkomponenten
Q j :=3N∑i=1
Fi∂xi
∂q j(2.3)
eingeführt haben. Die virtuelle Arbeit der Trägheitskräfte ist
δAt = −
3N∑i=1
mi xiδxi . (2.4)
• Weiter benötigen wir den Zusammenhang
xi =
f∑j=1
∂xi
∂q jq j +
∂xi
∂t⇒
∂xi
∂q j=∂xi
∂q j(2.5)
13

14 KAPITEL 2. LAGRANGE-FORMALISMUS
zwischen den kartesischen und den verallgemeinerten Koordinatenbzw. Geschwindigkeiten.
• Damit können wir zunächst die virtuelle Arbeit der Trägheitskräftewie folgt umformen:
δAt = −
f∑j=1
3N∑i=1
mi xi∂xi
∂q jδq j (2.6)
= −
f∑j=1
ddt
3N∑i=1
mi xi∂xi
∂q j
− 3N∑i=1
mi xiddt∂xi
∂q j
δq j .
Die Zeitableitung im zweiten Term können wir vereinfachen, in-dem wir (2.5) verwenden:
ddt∂xi
∂q j=
f∑k=1
∂2xi
∂q j∂qkqk +
∂2xi
∂t∂q j
=∂
∂q j
f∑k=1
∂xi
∂qkqk +
∂xi
∂t
=∂xi
∂q j. (2.7)
Bringen wir dies zurück nach (2.6), setzen es dort ein und verwen-den (2.5) im ersten Term, folgt
δAt = −
f∑j=1
ddt
3N∑i=1
mi xi∂xi
∂q j
− 3N∑i=1
mi xi∂xi
∂q j
δq j
= −
f∑j=1
(ddt∂T∂q j−∂T∂q j
)δq j , (2.8)
wobei wir die kinetische Energie
T =12
3N∑i=1
mi x2i (2.9)
identifiziert haben.
• Nun muss nach dem d’Alembert’schen Prinzip die gesamte vir-tuelle Arbeit der äußeren und der Trägheitskräfte verschwinden,also
δAe + δAt = 0 =
f∑j=1
(Q j −
ddt∂T∂q j
+∂T∂q j
)δq j . (2.10)
Da die δq j alle beliebig waren, folgen die Lagrangegleichungenzweiter Art,
ddt∂T∂q j−∂T∂q j
= Q j , 1 ≤ j ≤ f . (2.11)
2.1. LAGRANGEGLEICHUNGEN ZWEITER ART 15
• Für Potentialkräfte gilt außerdem
Fi = −∂V(xk, t)∂xi
, (2.12)
sodass dann die verallgemeinerten Kräfte in die Form
Q j = −
3N∑i=1
∂xi
∂q j
∂V(xk, t)∂xi
= −∂V(xk(ql, t), t)
∂q j(2.13)
gebracht werden können.
• Definieren wir die Lagrangefunktion durch
L = T − V = T (q, q, t) − V(q, t) , (2.14)
dann lauten die Lagrangegleichungen zweiter Art einfach
ddt∂L∂qi−∂L∂qi
= 0 . (2.15)
In dieser Form werden sie gewöhnlich kurz als Lagrangegleichun-Diese Gleichungen sollten Sie in Ih-rem Physikerleben nie wieder ver-gessen.
gen bezeichnet. Sie stellen einen ganz wesentlichen Schritt in derEntwicklung der Mechanik dar. Mit ihrer Hilfe löst sich die Me-chanik von den kartesischen Koordinaten und beschreibt nur nochdie Freiheitsgrade physikalischer Systeme durch verallgemeinerteKoordinaten. Die Lagrangegleichungen zeigen dann, wie sich ausAbleitungen der Lagrangefunktion die Bewegungsgleichungen inden verallgemeinerten Koordinaten ergeben.
2.1.2 Einfache Beispiele
• Betrachten wir einen Massenpunkt der Masse m im Feld einervorgegebenen Potentialkraft, dann lauten die kinetische Energieund die Lagrangefunktion
T =m2~x 2 , L = T − V =
m2
3∑i=1
x2i − V(xi) . (2.16)
Aus den Lagrangegleichungen folgen die Bewegungsgleichungen
ddt
mxi +∂V∂xi
= 0 , (2.17)
wie erwartet.
• Zur Beschreibung eines Massenpunkts der Masse m im Feld einervorgegebenen Zentralkraft wählen wir ebene Polarkoordinaten(r, ϕ) als verallgemeinerte Koordinaten. Das Potential ist V = V(r),

16 KAPITEL 2. LAGRANGE-FORMALISMUS
und wegen ~x 2 = r2 + r2ϕ2 ist die kinetische Energie T = m(r2 +
r2ϕ2)/2. Damit lautet die Lagrangefunktion
L =m2
(r2 + r2ϕ2) − V(r) , (2.18)
und für die beiden verallgemeinerten Koordinaten r und ϕ erhaltenwir sofort die beiden Lagrangegleichungen
d(mr2ϕ)dt
= 0 , mr − mrϕ2 +∂V∂r
= 0 . (2.19)
Die erste Gleichung formuliert die Drehimpuls-Erhaltung, diezweite ist die radiale Bewegungsgleichung.
2.1.3 Kräfte in beschleunigten Bezugssystemen
• Kehren wir zurück zur Behandlung der Scheinkräfte, die in be-schleunigten Bezugssystemen deswegen auftreten, weil sie keineInertialsysteme sind. Sei also ein (ungestrichenes) Bezugssystemgegeben, das sich relativ zu einem (gestrichenen) Inertialsystemdreht und bewegt, sodass zwischen gestrichenen und ungestriche-nen Ortsvektoren die Beziehung
~x ′ = R (~a + ~x ) (2.20)
besteht, wobei ~a der zeitlich konstante Ortsvektor des Ursprungsdes Inertialsystems aus der Sicht des beschleunigten Systems ist.Zwischen den Geschwindigkeiten in beiden Systemen bestehtdann die Beziehung
~x ′ = R[~x + ~ω × (~a + ~x )
], (2.21)
wie im ersten Teil der Vorlesung gezeigt wurde [I, Gl. (9.29)].
• Um die Lagrangefunktion im gestrichenen System aufzustellen,brauchen wir zunächst die kinetische Energie, die sich wegen(2.21) durch
T =m2
[~x + ~ω × (~a + ~x)
]2(2.22)
darstellen lässt. Die Lagrangefunktion lautet demnach
L =m2
~x 2 + 2~x ·
[~ω × (~a + ~x)
]+
[~ω × (~a + ~x)
]2− V(~x) . (2.23)
• Die Ableitung nach den Koordinaten ~x ergibt
~∇L = m~x × ~ω + m[~ω × (~a + ~x)
]× ~ω − ~∇V , (2.24)
und die Ableitung nach den Geschwindigkeiten ~x liefert
∂L
∂~x= m~x + m~ω × (~a + ~x) . (2.25)
2.2. KREISELBEWEGUNG 17
Deswegen lauten die Bewegungsgleichungen
mddt
[~x + ~ω × (~a + ~x)
]− m~x × ~ω − m
[~ω × (~a + ~x)
]× ~ω + ~∇V = 0
(2.26)oder
m~x + m[~ω × (~a + ~x)
]+ 2m~ω × ~x
+ m[ω ×
(~ω × ~x
)]+ m
[ω ×
(~ω × ~a
)]+ ~∇V = 0 , (2.27)
in Übereinstimmung mit dem Ergebnis aus dem ersten Teil derVorlesung [I, Gl. (9.34)].
2.2 Kreiselbewegung
2.2.1 Bewegung des kräftefreien, symmetrischen Krei-sels
• Wir hatten im ersten Teil der Vorlesung [I, Gl. (10.51)] gesehen,dass die kinetische Energie der Rotation eines starren Körpers
Trot =12~ωT Θ ~ω (2.28)
ist, wobei Θ der Trägheitstensor des starren Körpers ist. Außerdemhatten wir dort die drei Euler-Winkel (ϕ, ϑ, ψ) dazu benutzt, umzu zeigen, dass sich die Komponenten der Winkelgeschwindigkeit~ω eines starren Körpers allgemein durch
ω1 = ϕ sinϑ sinψ + ϑ cosψ ,ω2 = ϕ sinϑ cosψ − ϑ sinψ ,ω3 = ϕ cosϑ + ψ (2.29)
darstellen lässt [I, Gl. (10.13)]. Die drei Euler-Winkel sind dienächstliegenden verallgemeinerten Koordinaten, durch die die dreiRotationsfreiheitsgrade des starren Körpers ausgedrückt werdenkönnen.
• Die Lagrangefunktion des kräftefreien Kreisels enthält zwei Beiträ-ge, nämlich die kinetischen Energien der Rotation und der Transla-tion. Wir wählen zunächst ein Bezugssystem, in dem der Schwer-punkt des Kreisels ruht, sodass die Rotationsenergie der einzigeverbliebene Beitrag zur Lagrangefunktion ist. Außerdem könnenwir natürlich die Rotationsenergie in einem beliebigen Bezugs-system auswerten, weil sie als skalare Größe unabhängig vomBezugssystem ist. Dafür bietet sich das Hauptachsensystem des

18 KAPITEL 2. LAGRANGE-FORMALISMUS
starren Körpers an, in dem sein Trägheitstensor die einfachstmög-liche Form
Θ = diag(Θ1,Θ2,Θ2) (2.30)
annimmt.
Nehmen wir der Einfachheit halber weiter an, dass der starreKörper symmetrisch gegenüber Drehungen um die x3-Achse ist,gilt weiter Θ1 = Θ2. Die Lagrangefunktion lautet dann
L(ϕ, ϑ, ψ) =Θ1
2
(ω2
1 + ω22
)+
Θ3
2ω2
3 (2.31)
=Θ1
2
(ϕ2 sin2 ϑ + ϑ2
)+
Θ3
2
(ϕ cosϑ + ψ
)2.
• Offenbar hängt die Lagrangefunktion nicht von ϕ und ψ ab, wassofort auf die Erhaltung der zugehörigen konjugierten Impulseschließen lässt,
pψ =∂L∂ψ
= Θ3
(ϕ cosϑ + ψ
), (2.32)
pϕ =∂L∂ϕ
= Θ1ϕ sin2 ϑ + Θ3
(ϕ cosϑ + ψ
)cosϑ
Außerdem wissen wir, dass die Energie erhalten bleiben muss, alsoist E = Trot = L ebenfalls eine Konstante der Bewegung.
• Zunächst können wir mithilfe von pψ den Winkel ψ aus pϕ elimi-nieren,
pϕ = Θ1ϕ sin2 ϑ + pψ cosϑ , (2.33)
woraus
ϕ =pϕ − pψ cosϑ
Θ1 sin2 ϑ(2.34)
folgt. Damit können wir die erhaltene Energie durch
E =Θ1
2
(pϕ − pψ cosϑ
Θ1 sin2 ϑ
)2
sin2 ϑ +Θ1
2ϑ2 +
p2ψ
2Θ3(2.35)
ausdrücken. Diese Gleichung enthält weder ϕ noch ψ und ist einegewöhnliche Differentialgleichung erster Ordnung für ϑ.
• Um sie zu lösen, führen wir einige Abkürzungen ein, nämlich
α :=2
Θ1
E −p2ψ
2Θ3
, a :=pϕΘ1
, b :=pψΘ1
. (2.36)
Außerdem transformieren wir auf die unabhängige Variable y :=cosϑ. Dann ist y = − sinϑϑ, und (2.35) lautet
y2 = α(1 − y2) − (b − ay)2 . (2.37)
Ihre implizite Lösung lautet
t − t0 =
∫ y(t)
y0
dy√α(1 − y2) − (b − ay)2
. (2.38)
2.2. KREISELBEWEGUNG 19
• In dieser Form ist die Bewegung des freien, symmetrischen Krei-sels schwer zu durchschauen. Die Betrachtung wird einfacher,wenn man das inertiale Bezugssystem so orientiert, dass eineseiner Achsen, etwa die x′3-Achse, in Richtung des konstanten Dre-himpulses ~L′ zeigt. Zunächst stellen wir fest, dass die KomponenteL3 des Drehimpulses im Hauptachsensystem des Kreisels
L3 = Θ3ω3 = Θ3
(ϕ cosϑ + ψ
)= pψ (2.39)
ist. Wir wissen also bereits, dass L3 eine Konstante der Bewegungsein muss. Da der Euler-Winkel ϑ angibt, um welchen Winkeldie Symmetrieachse des Kreisels aus der x′3-Richtung verkippt ist,muss
L3 = |~L′| cosϑ (2.40)
gelten. Da sowohl |~L′| als auch L3 Konstanten der Bewegung seinmüssen, muss dann auch ϑ konstant sein, also ϑ = 0.
• Damit folgt aus (2.34) einfach
ϕ =pϕ − pψ cosϑ
Θ1 sin2 ϑt + ϕ0 , (2.41)
d.h. der Kreisel dreht sich um die x′3-Achse des Inertialsystemsmit der konstanten Winkelgeschwindigkeit
ωϕ =pϕ − pψ cosϑ
Θ1 sin2 ϑ. (2.42)
Aus der Konstanz von pψ folgt schließlich mithilfe von (2.32) diekonstante Winkelgeschwindigkeit des Kreisels einer Drehung umseine eigene Achse,
ωψ =pψΘ3− ωϕ cosϑ . (2.43)
2.2.2 Euler’sche Gleichungen
• Die Kreiselbewegung kann natürlich auch direkt mithilfe der Dre-himpulserhaltung untersucht werden. Wenn auf den i-ten Massen-punkt im Inertialsystem die äußere Kraft ~F′i wirkt, übt sie auf denKreisel das Drehmoment
d~L′
dt= ~M′ =
N∑i=1
(~x ′i × ~F
′i
)(2.44)
aus. Zu den Größen ~L und ~M im körperfesten System bestehen dieZusammenhänge
~L′ = R~L , ~M′ = R ~M , ~L = Θ~ω , (2.45)
20 KAPITEL 2. LAGRANGE-FORMALISMUS
und daher ist, wegen [I, Gl. (9.16)],
ddt~L′ = R
(~L + ~ω × ~L
)= R ~M . (2.46)
Nach Multiplikation mit R> von links folgen die Euler’schen Glei-chungen
~L + ~ω × ~L = Θ~ω + ~ω × Θ~ω = ~M , (2.47)
die im Hauptachsensystem die Form
M1 = Θ1ω1 + ω2ω3(Θ3 − Θ2)M2 = Θ2ω2 + ω1ω3(Θ1 − Θ3)M3 = Θ3ω3 + ω1ω2(Θ2 − Θ1) (2.48)
annehmen.
2.2.3 Anwendung der Euler’schen Gleichungen
• Wieder setzen wir für den symmetrischen Kreisel Θ1 = Θ2 ,Θ3 und nehmen an, dass er sich kräftefrei bewege, das äußereDrehmoment also verschwinde, ~M′ = 0. Mit der Definition ∆Θ :=Θ3 − Θ1 folgt aus den Euler’schen Gleichungen
Θ1ω1 + ω2ω3∆Θ = 0 ,Θ1ω2 − ω1ω3∆Θ = 0 ,
Θ1ω3 = 0 . (2.49)
Also ist ω3 konstant, was der Aussage aus (2.32) und (2.43) ent-spricht, dass ψ = pψ eine Konstante der Bewegung ist.
• Die verbleibenden Gleichungen
ω1 + ω2ω3∆Θ
Θ1= 0 ,
ω2 − ω1ω3∆Θ
Θ1= 0 (2.50)
können zu der einen Gleichung
ddt
(ω1 + iω2) − i(ω1 + iω2)ω3∆Θ
Θ1= 0 (2.51)
für die komplexe Winkelgeschwindigkeit ω1 + iω2 zusammenge-fasst werden. Trennung der Variablen ergibt sofort die Lösung
ω1 + iω2 = A exp[iω3∆Θ
Θ1t]
(2.52)
2.2. KREISELBEWEGUNG 21
oder
ω1 = A cos(ω3∆Θ
Θ1t), ω2 = A sin
(ω3∆Θ
Θ1t), (2.53)
die bedeutet, dass die Winkelgeschwindigkeit ~ω im körperfestenSystem mit der Frequenz ω3∆Θ/Θ1 um die Figurenachse umläuft.
• Wegen ~L = Θ~ω folgt ebenso für den Drehimpuls im körperfestenSystem
L1 = AΘ1 cos(ω3∆Θ
Θ1t), L2 = AΘ1 sin
(ω3∆Θ
Θ1t),
L3 = Θ3ω3 = konst. (2.54)
Wenn wir das raumfeste System wieder so wählen, dass ~e ′3 ‖ ~L′ ist,
dann ist der Winkel zwischen der Figurenachse und ~e ′3 konstant,ϑ = konst. und ϑ = 0, und
tanϑ =
√L2
1 + L22
L3=|A|Θ1
Θ3ω3. (2.55)
Wegen ϑ = 0 vereinfachen sich die Komponenten der Winkelge-schwindigkeit (2.29) zu
ω1 = ϕ sinϑ sinψ ,ω2 = ϕ sinϑ cosψ ,ω3 = ϕ cosϑ + ψ . (2.56)
Daraus erhalten wir
ω1 + iω2 = ϕ sinϑ(sinψ + i cosψ) = iϕ sinϑe−iψ ,
ω3 = ϕ cosϑ + ψ = konst. (2.57)
• Vergleichen wir dieses Ergebnis mit (2.52) und schreiben diekomplexe Amplitude A in der Form
A = |A|eiδ , (2.58)
erhalten wir
ϕ sinϑ = −i|A| exp[i(ω3∆Θ
Θ1t + δ + ψ
)]= |A| exp
[i(ω3∆Θ
Θ1t + δ + ψ −
π
2
)]. (2.59)
Da hier eine reelle mit einer komplexen Größe verglichen wird,kann dieses Ergebnis nur erreicht werden, wenn das Argument derExponentialfunktion verschwindet, also
ψ =π
2−ω3∆Θ
Θ1t − δ (2.60)

22 KAPITEL 2. LAGRANGE-FORMALISMUS
gilt. Damit ist dann auch ϕ sinϑ = |A|, demnach folgt mit (2.55)
ϕ =|A|
sinϑt + ϕ0 =
Θ3ω3
Θ1 cosϑt + ϕ0 , (2.61)
und daher läuft die Figurenachse mit der KreisfrequenzΘ3ω3/Θ1 cosϑ um den Drehimpulsvektor.
2.2.4 Kreisel im Schwerefeld
• Schließlich untersuchen wir noch kurz einen symmetrischen Krei-sel der Masse m mit Θ1 = Θ2 , Θ3 im Schwerefeld der Erde, deraußerhalb seines Schwerpunkts, aber auf der Figurenachse unter-stützt wird. Der Vektor vom Unterstützungspunkt zum Schwer-punkt sei ~s. Die Schwerkraft übt dann das Drehmoment
~M = m~s × ~g (2.62)
auf den Kreisel aus.
• Die Lagrangefunktion des kräftefreien Kreisels (2.31) ändert sichdurch die potentielle Energie V = −m~g · ~s = mgs cosϑ,
L =Θ1
2
(ϕ2 sin2 ϑ + ϑ2
)+
Θ3
2
(ϕ cosϑ + ψ
)2−mgs cosϑ . (2.63)
Wiederum kommen ϕ und ψ nicht explizit in der Lagrangefunktionvor, sodass pϕ und pψ wie in (2.32) Konstanten der Bewegungbleiben. Damit bleibt auch ϕ aus (2.34) gültig, aber die Energielautet nun
E = T + V = L + 2V (2.64)
=Θ1
2
(ϕ2 sin2 ϑ + ϑ2
)+
Θ3
2
(ϕ cosϑ + ψ
)2+ mgs cosϑ .
Der Term V = mgs cosϑ kommt also auch auf der rechten Seitevon (2.35) dazu. Definieren wir zusätzlich zu den Abkürzungen(2.36) noch
β :=2mgsΘ1
, (2.65)
verändert sich die vorige Differentialgleichung (2.37) zu
y2 = (α − βu)(1 − u2) − (b − au)2 , (2.66)
deren implizite Lösung
t − t0 =
∫ y(t)
y0
dy√(α − βu)(1 − y2) − (b − ay)2
(2.67)
im allgemeinen auf elliptische Integrale führt.
2.2. KREISELBEWEGUNG 23
• Wenn der Kreisel schnell um eine Drehachse nahe der Figurenach-se rotiert, liegt auch der Drehimpulsvektor nahe der Figurenachse.Wegen des Drehimpulssatzes
d~L′
dt= ~M′ = m(~s ′ × ~g ′) (2.68)
weicht der Drehimpulsvektor senkrecht zur Schwerkraft aus. DieFigurenachse folgt im wesentlichen dem Drehimpulsvektor. DieZeitskala, auf der sich der Drehimpuls ändert, ist
τ1 ∼L′
L′∼
L′
V, (2.69)
während die typische Zeitskala für die Rotation durch
τ2 ∼1ω∼
L′
T(2.70)
gegeben ist. Unter der Annahme schneller Rotation ist T V unddaher τ2 τ1, d.h. die Figurenachse präzediert im Vergleich zurRotation langsam um die Vertikale.
• Unter unseren Annahmen ist ~s ′ etwa parallel zu ~L′, also
~s ′ ≈s′
L′~L′ , (2.71)
und damit folgt aus dem Drehimpulssatz
d~L′
dt≈ −m
s′
L′(~g ′ × ~L′) , (2.72)
also~L′(t + dt) ≈ ~L′(t) +
(−
ms′
L′~g ′ × ~L′
)dt . (2.73)
Das hat die Form einer infinitesimalen Drehung mit dem Vektorder Winkelgeschwindigkeit
~Ω′ ≈ −ms′
L′~g ′ . (2.74)
Je rascher der Kreisel rotiert, desto langsamer präzediert er, weildann seine potentielle gegenüber seiner kinetischen Energie immerunwichtiger wird.
24 KAPITEL 2. LAGRANGE-FORMALISMUS
Kapitel 3
Extremalprinzipien
3.1 Hamiltons Prinzip der stationären Wir-kung
3.1.1 Beispiel: Das Fermat’sche Prinzip
• Bisher haben wir mechanische Systeme differentiell beschrieben,d.h. aus dem Zustand eines Systems zur Zeit t wurde seine Än-derung innerhalb der Zeit dt vorhergesagt. Jetzt bereiten wir denÜbergang zu einer Beschreibung vor, die die gesamte Bahn einesSystems zur Grundlage nimmt.
• Zunächst muss geklärt werden, was wir unter der Bahn eines Sys-tems verstehen. Gegeben sei ein System mit f Freiheitsgraden undverallgemeinerten Koordinaten (q1, . . . , q f ). Diese mögen in einemBereich B ⊂ R f variieren, dem so genannten Konfigurationsraum.Durch die Bewegung des Systems zwischen den Zeitpunkten t0
und t1 > t0 wird eine Kurve im Konfigurationsraum durchlaufen,die als Bahn des Systems bezeichnet wird. Sie liegt also in demRaum, den die verallgemeinerten Koordinaten aufspannen undnicht mehr im kartesischen Raum.
• Wir nehmen an, dass die Bewegungsgleichungen des Systemsaus einer Lagrangefunktion L(q, q, t) ableitbar seien. Wodurchunterscheidet sich dann die wirkliche Bahn q(t), t0 ≤ t ≤ t1,zwischen den zwei festen Punkten P0 und P1 von allen denkbarenanderen Bahnen q′(t) mit q′(t0) = q(t0) und q′(t1) = q(t1)?
• Ein Beispiel für diese Betrachtungsweise liefert das Fermat’schePrinzip der geometrischen Optik, das besagt, dass längs eines tat-sächlich realisierten Lichtstrahls die Lichtlaufzeit extremal wird.Betrachten wir als einfaches Beispiel den Übergang eines Licht-strahls aus dem linken Halbraum mit dem Brechungsindex n1 in
25

26 KAPITEL 3. EXTREMALPRINZIPIEN
den rechten Halbraum mit dem Brechungsindex n2. Der Licht-strahl soll zwischen zwei festen Punkten ~x1 und ~x2 verlaufen, undseine Bahnebene sei die x-y-Ebene.
y
x
n1 n2
α1
α2
x1
x2
y
y + δy
Verlauf eines Lichtstrahls nach demFermat’schen Prinzip
• Der Lichtstrahl wird in beiden Halbräumen durch Halbgeradenangegeben. Der Übergang vom linken in den rechten Halbraumfinde im Punkt (0, y) statt. Die gesamte Lichtlaufzeit ist dann
τ =n1
c
√x2
1 + (y − y1)2 +n2
c
√x2
2 + (y2 − y)2 , (3.1)
weil die Lichtgeschwindigkeit durch die Brechungsindizes aufc/n1,2 reduziert ist. Fermats Prinzip besagt
δτ = 0 , (3.2)
weil die Lichtlaufzeit extremal werden soll.
• Eine kleine Störung δτ bedeutet, dass y leicht verschoben wird,
δτ =dτdyδy , (3.3)
denn die Endpunkte des Lichtstrahls bleiben unverändert. Dasergibt
n1
cy − y1√
x2 + (y − y1)2=
n2
cy2 − y√
x2 + (y2 − y)2(3.4)
oder, mit den Winkeln α1,2 der Lichtstrahlen bezüglich der Norma-len zur Trennfläche zwischen den beiden Halbräumen,
n1 sinα1 = n2 sinα2 . (3.5)
Das ist das Snellius’sche Brechungsgesetz.
3.1.2 Hamiltons Prinzip
William Rowan Hamilton• Diese Vorgehensweise wird nun auf die Mechanik übertragen,
indem wir folgendes postulieren: Entlang der wirklichen Bahnwird die Wirkung
S [q(t)] :=∫ t1
t0L(q, q, t)dt (3.6)
extremal. Die Wirkung hat offensichtlich die Dimension Energie× Zeit. Sie ist ein Funktional der Kurve q(t), d.h. eine Funktioneiner Funktion.
3.1. HAMILTONS PRINZIP DER STATIONÄREN WIRKUNG 27
• Dieses Hamilton’sche Prinzip oder Prinzip der stationären Wir-kung lautet demnach
δS [q(t)] = δ
[∫ t1
t0L(q, q, t)dt
]= 0 . (3.7)
Wie man das Extremum eines Funktionals findet, ist Gegenstandder Variationsrechnung, die in ihren Anfängen bereits von Leon-hard Euler entwickelt wurde.
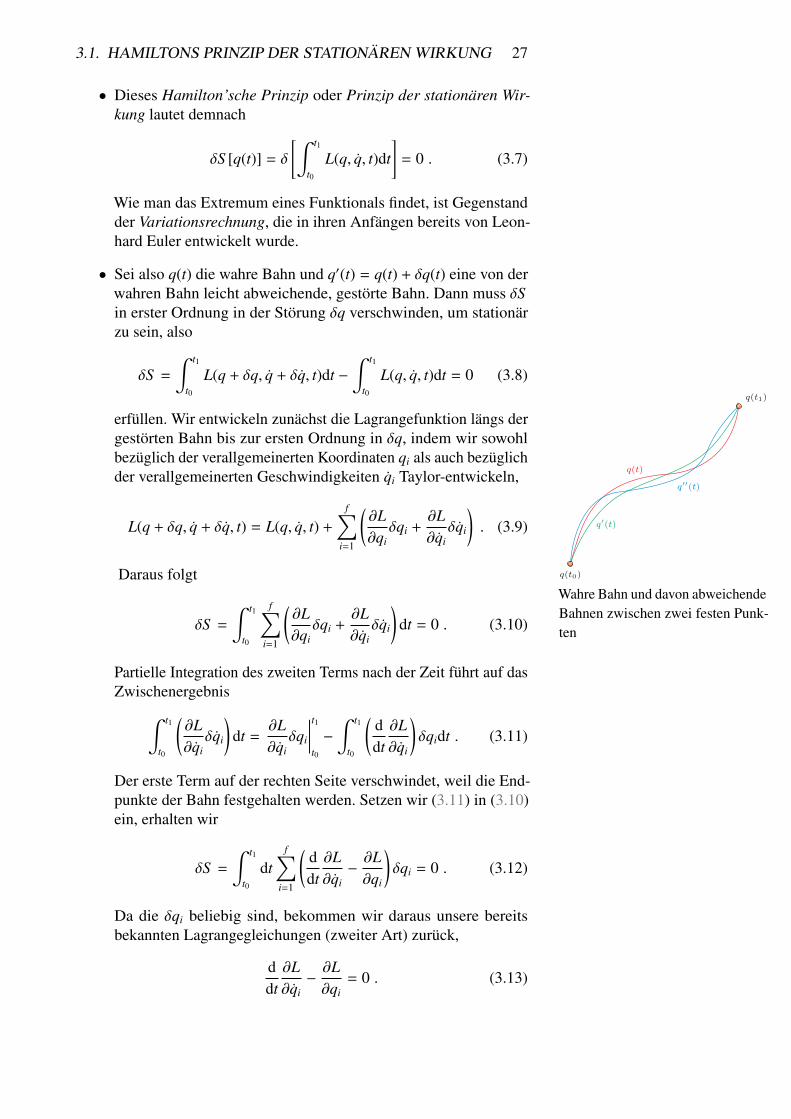
• Sei also q(t) die wahre Bahn und q′(t) = q(t) + δq(t) eine von derwahren Bahn leicht abweichende, gestörte Bahn. Dann muss δSin erster Ordnung in der Störung δq verschwinden, um stationärzu sein, also
δS =
∫ t1
t0L(q + δq, q + δq, t)dt −
∫ t1
t0L(q, q, t)dt = 0 (3.8)
erfüllen. Wir entwickeln zunächst die Lagrangefunktion längs dergestörten Bahn bis zur ersten Ordnung in δq, indem wir sowohlbezüglich der verallgemeinerten Koordinaten qi als auch bezüglichder verallgemeinerten Geschwindigkeiten qi Taylor-entwickeln,
L(q + δq, q + δq, t) = L(q, q, t) +
f∑i=1
(∂L∂qi
δqi +∂L∂qi
δqi
). (3.9)
Daraus folgt q(t0)
q(t1)
q(t)
q′(t)
q′′(t)
Wahre Bahn und davon abweichendeBahnen zwischen zwei festen Punk-tenδS =
∫ t1
t0
f∑i=1
(∂L∂qi
δqi +∂L∂qi
δqi
)dt = 0 . (3.10)
Partielle Integration des zweiten Terms nach der Zeit führt auf dasZwischenergebnis∫ t1
t0
(∂L∂qi
δqi
)dt =
∂L∂qi
δqi
∣∣∣∣∣t1t0
−
∫ t1
t0
(ddt∂L∂qi
)δqidt . (3.11)
Der erste Term auf der rechten Seite verschwindet, weil die End-punkte der Bahn festgehalten werden. Setzen wir (3.11) in (3.10)ein, erhalten wir
δS =
∫ t1
t0dt
f∑i=1
(ddt∂L∂qi−∂L∂qi
)δqi = 0 . (3.12)
Da die δqi beliebig sind, bekommen wir daraus unsere bereitsbekannten Lagrangegleichungen (zweiter Art) zurück,
ddt∂L∂qi−∂L∂qi
= 0 . (3.13)
28 KAPITEL 3. EXTREMALPRINZIPIEN
• Da jeder der vorangegangenen Rechenschritte reversibel war, istdas Hamilton’sche Prinzip bzw. das Prinzip der stationären Wir-kung äquivalent zu den Lagrangegleichungen. Das Prinzip derstationären Wirkung ist ebenso wie das Fermat’sche Prinzip einBeispiel für Extremalprinzipien, die sich als außerordentlich frucht-bar für die moderne Physik erwiesen haben.
• Das Wirkungsprinzip zeigt, dass die Lagrangefunktion nicht ein-deutig ist: Wenn man die Lagrangefunktion L durch einen Termergänzt, der die totale Zeitableitung einer beliebigen Funktionf (q, t) der Koordinaten und der Zeit ist,
L→ L +d f (q, t)
dt(3.14)
dann ändert sich dadurch die Wirkung lediglich um eine Konstante,
S → S + f (q1, t1) − f (q0, t0) , (3.15)
die bei der Variation verschwindet. Die Bewegungsgleichungenbleiben dadurch unverändert. Das ist ein sehr einfaches Beispielfür eine so genannte Eichinvarianz, die in der Feldtheorie eineentscheidend wichtige Rolle spielt.
3.2 Hamiltonfunktion und kanonische Glei-chungen
3.2.1 Die kanonischen Gleichungen
• Die Lagrangegleichungen sind f Differentialgleichungen zwei-ter Ordnung, deren Lösungen durch die 2 f Anfangsbedingungen(qi, qi) = (q(0)
i , q(0)i ) charakterisiert sind. Die im Folgenden be-
schriebene Transformation auf kanonische Form liefert nichts phy-sikalisch Neues, ist aber sehr nützlich in der statistischen Physikund der Quantenmechanik.
• Die Lagrangefunktion des freien Teilchens ist Lfrei = m/2(x21 + x2
2 +
x23), also ist
∂Lfrei
∂xi= mxi = pi (3.16)
der zu xi gehörige Impuls. Analog wird anhand der verallgemei-nerten Koordinaten ein verallgemeinerter Impuls definiert,
pi :=∂L∂qi
. (3.17)
Er heißt der zu qi kanonisch konjugierte Impuls. Er hat im allge-meinen nicht die Dimension eines Impulses, aber qi pi behält dieDimension Energie.

3.2. HAMILTONFUNKTION 29
• Wenn die Transformation von qi auf pi umkehrbar ist, können dieqi durch pi ersetzt werden,
qi = qi(qi, pi, t) . (3.18)
Dann können die 2 f Werte (q1, . . . , q f , p1, . . . , p f ) als Zustandspa-rameter verwendet werden.
• Die verallgemeinerten Koordinaten und ihre kanonisch konjugier-ten Impulse spannen einen 2 f -dimensionalen Raum auf, den sogenannten Phasenraum. Indem sich das gesamte System zeitlichverändert, werden diese 2 f Werte einen Bereich P ⊂ R2 f des ge-samten Phasenraums überstreichen. Einer Kurve im Phasenraumentspricht eine Bahn im Konfigurationsraum B ⊂ R f .
• Beispiel: Die Lagrangefunktion des harmonischen Oszillators ineiner Dimension lautet
L(x, x, t) =m2
x2 −k2
x2 =m2
(x2 − ω2
0x2). (3.19)
Der kanonisch zu x konjugierte Impuls ist
p =∂L∂x
= mx . (3.20)
Der Oszillator beschreibt die Kurve(xp
)= A0
(cos(ω0t − δ0)
−mω0 sin(ω0t − δ0)
), (3.21)
also eine Ellipse im Phasenraum.
x
p
A
mω0A
Bahn des harmonischen Oszillatorsim Phasenraum• Wie lauten nun die Bewegungsgleichungen, wenn man sie durch
(q, p) anstelle von (q, q) ausdrückt? Um das zu sehen, definierenwir zuerst die Hamiltonfunktion
H(q, p, t) :=f∑
i=1
qi pi − L(q, q, t) , q = q(q, p, t) . (3.22)
Ihre vollständiges Differential lautet
dH =
f∑i=1
∂H∂qi
dqi +
f∑i=1
∂H∂pi
dpi +∂H∂t
dt (3.23)
=
f∑i=1
(pidqi + qidpi −
∂L∂qi
dqi −∂L∂qi
dqi
)−∂L∂t
dt ,
aber wegen (3.17) heben sich die ersten und letzten Terme inKlammern in der zweiten Zeile heraus. Also folgt
dH =
f∑i=1
(qidpi −
∂L∂qi
dqi
)−∂L∂t
dt . (3.24)
30 KAPITEL 3. EXTREMALPRINZIPIEN
Daraus können wir die Ableitungen der Hamiltonfunktion
∂H∂pi
= qi ,∂H∂qi
= −∂L∂qi
,∂H∂t
= −∂L∂t
(3.25)
ablesen. Aus (3.13) und (3.17) entnehmen wir außerdem
pi =ddt∂L∂qi
=∂L∂qi
, (3.26)
und damit ergeben sich aus (3.25) die hochsymmetrischen Hamil-ton’schen oder kanonischen Gleichungen
∂H∂pi
= qi ,∂H∂qi
= −pi . (3.27)
• Daran sehen wir auch, dass der zu qi konjugierte Impuls pi erhaltenist, wenn L nicht explizit von qi abhängt, denn dann ist
∂L∂qi
= 0 ⇒dpi
dt= 0 . (3.28)
Koordinaten, von denen L nicht explizit abhängt, heißen zyklisch:Wenn qi nicht explizit in L vorkommt, kann ihr Nullpunkt beliebigverschoben werden, qi → qi + c, ohne dass sich die Bewegungs-gleichungen ändern. Das weist auf eine Invarianzeigenschaft hin,die wir später genauer untersuchen werden.
• Beispiel: Für den harmonischen Oszillator erhalten wir die Hamil-tonfunktion
H(x, p) = xp − L(x, x) =p2
2m+
m2ω2
0x2 , (3.29)
und die Hamilton’schen Gleichungen lauten
x =pm, p = −mω2
0x . (3.30)
Die erste Gleichung ist identisch mit der Definition des Impulses,und die zweite ist die Bewegungsgleichung für diesen Impuls.
3.2.2 Hamiltonfunktion und Energie
• Aus (3.24) folgt, dass die totale zeitliche Änderung der Hamilton-funktion
dHdt
=
f∑i=1
(∂H∂qi
qi +∂H∂pi
pi
)+∂H∂t
=∂H∂t
(3.31)
ist, denn der Ausdruck in Klammern verschwindet wegen derHamilton’schen Gleichungen. Wenn also H nicht explizit von derZeit abhängt, ist H eine Erhaltungsgröße.
3.2. HAMILTONFUNKTION 31
• Beispiel: Für einen Massenpunkt der Masse m, der im Feld einerPotentialkraft die potentielle Energie V(x1, x2, x3) hat, lautet dieLagrangefunktion
L =m2
(x21 + x2
2 + x23) − V(x1, x2, x3) , pi =
∂L∂xi
= mxi . (3.32)
Daraus ergibt sich die Hamiltonfunktion
H =
3∑i=1
pi xi − L =
3∑i=1
p2i
2m+ V = E , (3.33)
d.h. der Wert der Hamiltonfunktion erweist sich als die Gesamt-energie.
• Sei nun ein konservatives System von N Massenpunkten gegeben,d.h. die auftretenden Kräfte sind Gradienten einer Potentialfunkti-on V(~x1, . . . , ~xN). Es unterliege außerdem r holonom-skleronomenZwangsbedingungen f j(~xi) = 0, 1 ≤ i ≤ r. Diese werden durchEinführung von f = 3N − r verallgemeinerten Koordinaten qi,1 ≤ i ≤ f erfüllt, d.h. ~xi = ~xi(q1, . . . , q f ). Wegen der skleronomenZwangsbedingungen kommt die Zeit nicht explizit vor. Für dieGeschwindigkeiten gilt
~xi =
f∑j=1
∂~xi
∂q jq j , 1 ≤ i ≤ N . (3.34)
Die kinetische Energie
T =
N∑i=1
mi
2~x 2
i =
f∑j,k=1
3N∑i=1
mi
2∂xi
∂q j
∂xi
∂qk
q jqk (3.35)
ist eine homogene Funktion zweiten Grades in qi, und V hängtnicht explizit von qi ab.
• Aus der Lagrangefunktion L = T − V = T (q, q) − V(q) erhaltenwir die kanonischen Impulse
pi =∂L∂qi
=∂T∂qi
(3.36)
und damit die Hamiltonfunktion
H =
f∑i=1
piqi − L =
f∑i=1
qi∂T∂qi− T + V (3.37)
Nun können wir ein allgemeines Resultat für homogene Funktio-nen verwenden, demzufolge
~x · ~∇ f (~x) = k f (~x) (3.38)
32 KAPITEL 3. EXTREMALPRINZIPIEN
ist, wenn f (~x ) homogen vom Grad k in ~x ist [siehe I, Gl. (7.56)].Da T homogen vom Grad k = 2 in q ist, muss
f∑i=1
qi∂T∂qi
= 2T (3.39)
gelten. Also ist H = T + V = E, was bestätigt, dass der Wert derHamiltonfunktion die Gesamtenergie ist. Da H nicht explizit vonder Zeit abhängt, folgt die Erhaltung der Gesamtenergie,
dHdt
=∂H∂t
= 0 . (3.40)
• Es gibt zahlreiche weitere Extremalprinzipien. Als Beispiel ver-allgemeinern wir nun das Hamilton’sche Prinzip auf nichtkon-servative Systeme. Seien N Massenpunkte gegeben, die r < 3Nholonomen Zwangsbedingungen unterliegen. Für solche Systemeverschwindet die Variation
δ
∫ t1
t0T (q, q, t)dt +
∫ t1
t0δAedt = 0 , (3.41)
wobei wie vorher angenommen wird, dass die Bahnen im Konfi-gurationsraum dieselben Anfangs- und Endpunkte durchlaufen,
δq(t0) = 0 = δq(t1) . (3.42)
Unter Verwendung von (2.2) lautet die Variation (3.41)
∫ t1
t0dt
f∑j=1
[∂T∂q j
δq j +∂T∂q j
δq j + Q jδq j
]= 0 , (3.43)
woraus nach partieller Integration
∫ t1
t0dt
f∑j=1
[∂T∂q j
+ Q j −ddt∂T∂q j
]δq j +
∂T∂q j
δq j
∣∣∣∣∣∣t1t0
= 0 (3.44)
folgt. Die Randterme in (3.44) verschwinden wegen (3.42), undda die δq j beliebig sind, folgt
ddt∂T∂q j−∂T∂q j− Q j = 0 . (3.45)
Das sind die Lagrangegleichungen (zweiter Art) für den Fall nicht-konservativer Kräfte. Die Umkehrung erfolgt völlig analog, wo-durch gezeigt ist, dass das Extremalprinzip (3.41) zu den Lagran-gegleichungen zweiter Art (3.45) äquivalent ist.
3.2. HAMILTONFUNKTION 33
3.2.3 Kanonische Gleichungen aus dem Wirkungsprin-zip
• Entsprechend der Definition der Hamiltonfunktion lässt sich dieWirkung auch in die Form
S =
∫ t1
t0L(qi, qi, t)dt =
∫ t1
t0
f∑i=1
qi pi − H(qi, pi, t)
dt (3.46)
bringen. Die Variation der Wirkung führt dann auf
δS =
f∑i=1
∫ t1
t0
[piδqi + qiδpi −
∂H∂qi
δqi −∂H∂pi
δpi
]dt . (3.47)
• Der erste Term in eckigen Klammern kann partiell integriert wer-den,
f∑i=1
∫ t1
t0piδqidt =
f∑i=1
piδqi
∣∣∣∣∣∣∣t1
t0
−
f∑i=1
∫ t1
t0piδqi , (3.48)
wobei die Randterme verschwinden. Damit erhält man
δS =
f∑i=1
∫ t1
t0
[(qi −
∂H∂pi
)δpi −
(pi +
∂H∂qi
)δqi
]dt . (3.49)
Aus δS = 0 folgen die Hamilton’schen Gleichungen, weil die δqi
und δpi beliebig waren.

34 KAPITEL 3. EXTREMALPRINZIPIEN
Kapitel 4
Mechanik kontinuierlicherMedien
4.1 Lineare Kette
4.1.1 Grenzübergang zum Kontinuierlichen
• Wir werden nun die Mechanik von Systemen untersuchen, die ausso vielen Teilchen bestehen, dass eine Darstellung durch Massen-punkte unangemessen wird, weil die Zahl N der Massenpunkte zugroß wird und die Kräfte zwischen ihnen wegen der Unschärfe-relation der Quantenmechanik nicht mehr klassisch beschriebenwerden können. Wir waren auch beim starren Körper schon so vor-gegangen, als wir etwa bei der Berechnung des Trägheitstensorsvon der Summation über Massenpunkte zum Volumenintegral überdie Massendichte übergegangen sind. Im Gegensatz zum starrenKörper werden wir hier aber nicht annehmen, dass die Verbindun-gen zwischen den Massenpunkten starr seien, sondern sie als inGrenzen veränderlich ansehen.
• Als Beispiel für den Übergang zu den unendlich vielen Freiheits-graden eines solchen Kontinuums behandeln wir eine lineare Ketteaus N Massenpunkten der Masse m mit den Ruhelagen xi,0 = ia,wobei a der Ruheabstand zweier benachbarter Massenpunkte ist.Die Auslenkungen aus der Ruhelage seien qi. Auf den N-ten Mas-senpunkt wirke die Kraft F, und die Bewegung der Massenpunktesoll auf die x-Achse beschränkt sein. Wir gehen also ähnlich vorwie bei der Behandlung des linearen, dreiatomigen Moleküls imersten Teil der Vorlesung.
• Die kinetische und die potentielle Energie sind
T =12
N∑i=1
mq2i , V =
12
N∑i=1
k(qi − qi−1)2 − FqN , (4.1)
35

36 KAPITEL 4. MECHANIK KONTINUIERLICHER MEDIEN
wenn wir die Wechselwirkung zwischen benachbarten Teilchenals harmonisch annähern. Das bedeutet, dass wir die Wechselwir-kungskräfte linearisieren und sie durch Kraftkonstanten k beschrei-ben. Der Anfangspunkt bleibe fest, x0 = 0 = q0.
• Damit lautet die Lagrangefunktion
L =12
N∑j=1
[mq2
j − k(q j − q j−1)2]
+ FqN , (4.2)
und die Bewegungsgleichungen sind
ddt∂L∂qi−∂L∂qi
= mqi + k(qi − qi−1) − k(qi+1 − qi) = 0 (4.3)
für die Massenpunkte 1 ≤ i ≤ N − 1, und
mqN + k(qN − qN−1) − F = 0 (4.4)
für den Massenpunkt i = N.
• Im Gleichgewicht muss für jeden Massenpunkt mqi = 0 gelten,womit aus (4.3) und (4.4)
k(qi − qi−1) = k(qi+1 − qi) , k(qN − qN−1) = F
⇒ qi − qi−1 =Fk
(1 ≤ i ≤ N) . (4.5)
folgen. Durch die Kraft F werden demnach alle Federn um densel-ben Betrag verlängert oder verkürzt. Sei l := Na die Gesamtlängeder linearen Kette in Ruhe, dann ist ihre relative Änderung
∆ll
= N ×Fk×
1Na
=Fka
=:FY. (4.6)
• Wir müssen nun den Übergang a → 0 durchführen, dabei aberdie Gesamtlänge l = Na und die Gesamtmasse M = Nm konstantlassen. Zu diesem Zweck führen wir die lineare Massendichteµ := M/l = m/a und den Young’schen Elastizitätsmodul Y := kaein. Die Auslenkungen werden dann zu einer kontinuierlichenFeldfunktion des Ortes und der Zeit, qi → q(x, t), und die benach-barten Auslenkungen können durch Taylorentwicklung dargestelltwerden,
qi±1(t)→ q(x±a, t) = q(x, t)±a∂q∂x
∣∣∣∣∣(x,t)
+a2
2∂2q∂x2
∣∣∣∣∣∣(x,t)
+ . . . . (4.7)
• Die Lagrangefunktion schreiben wir zunächst mithilfe von µ undY um,
L =12
N∑i=1
mq2i −
12
N∑i=1
k(qi − qi−1)2 + F(t)qN
=a2
N∑i=1
[µq2
i − Y(qi − qi−1
a
)2]
+ F(t)qN , (4.8)

4.1. LINEARE KETTE 37
und führen dann den Grenzübergang a→ 0 durch,
L→ L(q, q) =12
∫ l
0dx
µ (∂q∂t
)2
− Y(∂q∂x
)2 + q(l, t)F(t) . (4.9)
Sie ist nun ein Funktional der Feldfunktion q und ihrer Zeitablei-tung q. Die Kraft F ist von außen vorgegeben.
• Ebenso können wir den Grenzübergang für die Bewegungsglei-chungen (4.3) durchführen. Zunächst erhalten wir
µq − Yqi+1 + qi−1 − 2qi
a2 = 0 , (4.10)
indem wir µ und Y einsetzen. Anhand der Taylorreihe (4.7) stelltsich heraus, dass der zweite Term als zweite Ableitung geschriebenwerden kann,
qi+1 + qi−1 − 2qi →[q(x + a) − q(x)
]+
[q(x − a) − q(x)
]= a2 ∂
2q∂x2 . (4.11)
Also lautet die Bewegungsgleichung für die kontinuierliche lineareKette
µ∂2q∂t2 − Y
∂2q∂x2 = 0 . (4.12)
Das ist eine partielle Differentialgleichung zweiter Ordnung fürq(x, t), definiert auf dem Intervall 0 ≤ x ≤ l.
• Die Randbedingungen ergeben sich wie folgt: Das Ende bei x = 0bleibt für alle Zeiten t fest, q(x = 0, t) = 0. Bei x = l folgt aus(4.4), wieder unter Verwendung der Taylorreihe (4.7) in niedrigsternichttrivialer Ordnung
µ∂2q∂t2 +
Ya2
[a∂q∂x
(l, t)]
=Fa
(4.13)
oder
µ∂2q∂t2 +
Ya
(∂q∂x
∣∣∣∣∣(l,t)−
FY
)= 0 . (4.14)
Für a → 0 würde der zweite Term in (4.14) divergieren, wennnicht
FY
=∂q∂x
∣∣∣∣∣(l,t)
(4.15)
wäre, d.h. die Randbedingung bei x = l muss für alle Zeiten t
∂q∂x
∣∣∣∣∣(l,t)
=FY
(4.16)
lauten.
38 KAPITEL 4. MECHANIK KONTINUIERLICHER MEDIEN
4.1.2 Ableitung der Bewegungsgleichungen aus demLagrangefunktional
• Mit dem Lagrangefunktional (4.9) lautet die Wirkung
S =12
∫ t1
t0dt
∫ l
0dx
µ (∂q∂t
)2
− Y(∂q∂x
)2 +
∫ t1
t0dtF(t)q(l, t) .
(4.17)Gemäß dem Hamilton’schen Prinzip muss die Wirkung für dietatsächlich realisierte Auslenkungsfunktion q(x, t) ein Extremumeinnehmen. Sei q′(x, t) = q(x, t) + δq(x, t) eine leicht gestörte„Bahn“, wobei hier mit einer „Bahn“ eine konkrete Realisierungder Auslenkungsfunktion zwischen zwei festen Zeiten t0 und t1
gemeint ist. Da die Endpunkte der Bahn bei der Variation festgehal-ten werden, muss für alle 0 ≤ x ≤ l auch δq(x, t0) = 0 = δq(x, t1)sein. Außerdem ist δq(x = 0, t) = 0 für alle t, denn das lineareBand bleibt bei x = 0 festgehalten.
• Die Variation der Wirkung ist durch
δS = S [q′, t] − S [q, t] (4.18)
definiert. Setzen wir q′ = q + δq in (4.17) ein, folgt wegen(∂(q + δq)
∂t
)2
=
(∂q∂t
+∂δq∂t
)2
≈
(∂q∂t
)2
+ 2∂q∂t∂δq∂t
(4.19)
zunächst
δS =
∫ t1
t0dt
∫ l
0dx
(µ∂q∂t∂δq∂t− Y
∂q∂x∂δq∂x
)+
∫ t1
t0dtδqF(t) .
(4.20)Durch partielle Integration in allen drei Termen erhalten wir daraus
δS =
∫ l
0dx
∫ t1
t0dt
(−µ
∂2q∂t2 + Y
∂2q∂x2
)δq +
∫ l
0dxµ
∂q∂tδq
∣∣∣∣∣t1t0
−
∫ t1
t0dtY
∂q∂xδq
∣∣∣∣∣l0
+
∫ t1
t0dtF(t)δq(l, t)
=
∫ t1
t0dt
∫ l
0dx
(−µ
∂2q∂t2 + Y
∂2q∂x2
)δq(x, t)
−
∫ t1
t0dt
(Y∂q∂x
∣∣∣∣∣l0− F
)δq(l, t) , (4.21)
wobei wir verwendet haben, dass die Störung δq bei t0 und t1
verschwinden muss, sodass der erste Randterm verschwindet.
• Da die δq beliebig sind und nach dem Hamilton’schen PrinzipδS = 0 sein muss, folgt
µ∂2q∂t2 − Y
∂2q∂x2 = 0 , Y
∂q∂x
∣∣∣∣∣l0− F = 0 , (4.22)
identisch mit (4.12) und (4.16).
4.1. LINEARE KETTE 39
• Beispiel: Sei F konstant, dann ist die Lösung q(x, t) = q(x) statischund die Bewegungsgleichungen reduzieren sich auf
Yd2qdx2 = 0 ,
dqdx
∣∣∣∣∣x=l
=FY. (4.23)
Die erste Gleichung bedeutet, dass q linear in x sein muss,
q(x) = C1x + C2 . (4.24)
Aufgrund der Bedingung q(x = 0) = 0 folgt C2 = 0, die zweiteGleichung verlangt C1 = F/Y , und daraus erhalten wir
q(x) =FY
x ,δll
=q(x = l)
l=
FY. (4.25)
Das ist das Hooke’sche Gesetz für das lineare, elastische Band.
4.1.3 Die d’Alembert’sche Gleichung
• Die Gleichung∂2q∂t2 − v
2∂2q∂x2 = 0 , (4.26)
die wir oben mit v :=√
Y/µ als Bewegungsgleichung für daslineare, elastische Band erhalten hatten, ist in der Physik sehr weitverbreitet und lohnt deswegen eine genauere Betrachtung. Wirführen zuerst die neuen Variablen
ξ := x + vt , η := x − vt (4.27)
ein, anhand derer x und t durch
x =12
(ξ + η) , t =12v
(ξ − η) (4.28)
dargestellt werden können. Dann ist offenbar die Ableitung nach xdurch
∂ f∂x
=
(∂ξ
∂x∂
∂ξ+∂η
∂x∂
∂η
)f (4.29)
mit den Ableitungen nach (ξ, η) verknüpft, und eine analoge Be-ziehung gilt für die Ableitung nach t. Aus unserer Definition (4.27)folgt
∂
∂x=
∂
∂ξ+∂
∂η,
∂
∂t= v
(∂
∂ξ−∂
∂η
)(4.30)
• In diesen neuen Koordinaten lautet der Differentialoperator in(4.26)
∂2
∂t2 − v2 ∂
2
∂x2 = −4v2 ∂2
∂ξ∂η, (4.31)
40 KAPITEL 4. MECHANIK KONTINUIERLICHER MEDIEN
sodass die Gleichung (4.26) auf die d’Alembert’sche Gleichung
− 4v2 ∂2q
∂ξ∂η= 0 (4.32)
transformiert wird.
• Seien nun g(ξ) und h(η) beliebige Funktionen von ξ und η. Dannist deren Summe q(ξ, η) = g(ξ) + h(η) offensichtlich wieder ei-ne Lösung der d’Alembert’schen Gleichung. Sie ist zugleich dieallgemeinste Form der Lösung. Ausgedrückt durch x und t lautetsie
q(x, t) = g(x + vt) + h(x − vt) , (4.33)
d.h. sie stellt eine Überlagerung zweier Wellen dar, von denen grück- und h vorläufig ist, weil g bei x + vt und h bei x− vt konstantbleibt. Eine einmal vorgegebene Form von g und h verschiebt sichdaher mit der Geschwindigkeit v nach links oder rechts.
• Als Beispiel betrachten wir ein unendlich ausgedehntes Band, dasfür x→ ±∞ zu allen Zeiten in Ruhe ist,
q(x, t)→ 0
∂q∂t
(x, t)→ 0
für x→ ±∞ . (4.34)
Die Anfangsbedingungen sind
q(x, 0) = q0(x) ,∂q∂t
(x, 0) = q0(x) . (4.35)
Für die Funktionen g und h folgt daraus
g(x) + h(x) = q0(x) , v[g′(x) − h′(x)
]= q0(x) , (4.36)
wobei die Striche Ableitungen der Funktionen nach ihren (einzi-gen) Argumenten bedeuten. Aus der zweiten Gleichung erhaltenwir
(g − h)(x) =1v
[∫ x
x0
q0(x′)dx′ + C]
(4.37)
und, indem wir dieses Ergebnis zur ersten Gleichung addieren bzw.von ihr subtrahieren,
g(x) =12
q0(x) +12v
[∫ x
x0
q0(x′)dx′ + C]
h(x) =12
q0(x) −12v
[∫ x
x0
q0(x′)dx′ + C]. (4.38)

4.2. SCHWINGENDE SAITE 41
Die Lösung q(x, t) der d’Alembert’schen Gleichung ist die Summeaus g und h,
q(x, t) = g(x + vt) + h(x − vt) (4.39)
=12
[q0(x + vt) + q0(x − vt)
]+
12v
[∫ x+vt
x0
q0(x′)dx′ + C]−
[∫ x−vt
x0
q0(x′)dx′ + C]
=12
[q0(x + vt) + q0(x − vt)
]+
12v
∫ x+vt
x−vtq0(x′)dx′ .
Eine Störung des Bandes breitet sich also mit der Geschwindigkeitv nach beiden Seiten aus.
4.2 Schwingende Saite
• Wieder seien N Massenpunkte der Masse m gegeben, die sich aberjetzt in drei Dimensionen bewegen können. Ihre Ruhelagen seien
~xi =
ai00
= ai~ex , (4.40)
die Auslenkungen aus den Ruhelagen seien ~qi(t), und die Endenwerden festgehalten, ~q0(t) = 0 = ~qN(t) für alle t.
• Die potentielle Energie setzen wir in der Form
V =k2
N∑i=1
[∣∣∣(~xi + ~qi) − (~xi−1 + ~qi−1)∣∣∣ − a0
]2(4.41)
an, wobei die Konstante a0 < a eine Vorspannung der Saite be-schreibt (das Minimum von V wird erreicht, wenn die Abständezwischen den Massenpunkten kleiner als a sind).
• Wenn die Vorspannung schwach ist, können wir |~qi − ~qi−1| anähern. Dann ist
|~xi − ~xi−1 + ~qi − ~qi−1| = |a~ex + ~qi − ~qi−1| (4.42)
=[a2 + 2a(~qi − ~qi−1)~ex + (~qi − ~qi−1)2
]1/2
≈ a + (qx,i − qx,i−1) +1
2a(~q⊥,i − ~q⊥,i−1)2 ,
worin die senkrechte Auslenkung
~q⊥ =
0qyqz
(4.43)

42 KAPITEL 4. MECHANIK KONTINUIERLICHER MEDIEN
eingeführt wurde. Also können wir(|~xi − ~xi−1 + ~qi − ~qi−1| − a0
)2
≈ (a − a0)2 + 2(a − a0)(qx,i − qx,i−1)
+ (qx,i − qx,i−1)2 +a − a0
a(~q⊥,i − ~q⊥,i−1)2 (4.44)
nähern, und die potentielle Energie lässt sich in der Form
V =k2
N∑i=1
[(a − a0)2 + 2(a − a0)(qx,i − qx,i−1)
+ (qx,i − qx,i−1)2 +a − a0
a(~q⊥,i − ~q⊥,i−1)2
](4.45)
schreiben, wobei Terme höherer als zweiter Ordnung in den Diffe-renzen der qi vernachlässigt wurden.
• In der potentiellen Energie ist (a−a0) eine unerhebliche Konstante,und außerdem ist
N∑i=1
(qx,i − qx,i−1) = 0 , (4.46)
weil qx,0 = 0 = qx,N vorausgesetzt wurde. Ferner setzen wir wieder
k =Ya,
∆ll
=a − a0
a0=
Fka0≈
Fka
(4.47)
ein, wobei F die vorspannende Kraft ist. Die Lagrangefunktionlautet dann
L =12
N−1∑i=1
m(q2
x,i + ~q 2⊥,i
)−
a2
N∑i=1
[Y
(qx,i − qx,i−1)2
a2 + F(~q⊥,i − ~q⊥,i−1)2
a2
]. (4.48)
Offenbar wird der Potentialterm in L für qx,i = qx,i−1 und ~q⊥,i =
~q⊥,i−1 minimiert, d.h. aus den Randbedingungen ~q0 = 0 = ~qN folgt,dass in der Ruhelage ~qi = 0 (1 ≤ i ≤ N) gilt.
• Beim Übergang zum Kontinuum halten wir wieder l = Na, µ =
m/a und Y = ka fest, während a gegen Null geht. Analog zurBehandlung des elastischen Bandes ergibt sich
L =
∫ l
0dx
µ (∂qx
∂t
)2
+ µ
(∂q⊥∂t
)2
− Y(∂qx
∂x
)2
− F(∂q⊥∂x
)2 .(4.49)

4.2. SCHWINGENDE SAITE 43
Wie vorhin erhalten wir aus dem Hamilton’schen Prinzip die Be-wegungsgleichungen für qx und q⊥,
∂2
∂t2 qx(x, t) − v2l∂2
∂x2 qx(x, t) = 0 ,
∂2
∂t2~q⊥(x, t) − v2t∂2
∂x2~q⊥(x, t) = 0 , (4.50)
wobei
vl :=
√Yµ
und vt :=
√Fµ
(4.51)
die longitudinale und die transversale Ausbreitungsgeschwindig-keit der Wellen sind. Die Enden der Saite werden festgehalten, d.h.die Randbedingungen sind
qx(0, t) = qx(l, t) = 0 und ~q⊥(0, t) = ~q⊥(l, t) = 0 . (4.52)
• Zur Lösung greifen wir willkürlich die Auslenkung in y-Richtungheraus, die die Gleichung
∂2qy∂t2 − v
2t∂2qy∂x2 = 0 (4.53)
mit den Randbedingungen qy(0, t) = 0 = qy(l, t) erfüllen muss. DerSeparationsansatz qy(x, t) = f (x)g(t) führt zu
fd2g
dt2 − v2t g
d2 fdx2 = 0 ⇒
1g
d2g
dt2 =v2
t
fd2 fdx2 . (4.54)
Da die linke Seite nur von t, die rechte nur von x abhängt, mussjede für sich konstant sein,
1g
d2g
dt2 = konst. =v2
t
fd2 fdx2 =: −c , (4.55)
d.h. f und g müssen die beiden harmonischen Oszillatorgleichun-gen
d2g
dt2 + cg = 0 ,d2 fdx2 +
cv2
tf = 0 (4.56)
erfüllen.
• Für c < 0 ergeben sich unphysikalische, exponentiell anwachsendeLösungen, also müssen wir c ≥ 0 annehmen. Sei ω :=
√c, dann
lauten die Lösungen der Gleichungen (4.56)
g(t) = C1 cos(ωt − δ) , f (x) = C2 sin(ω
vtx − η
)(4.57)
mit konstanten Amplituden C1,2 und Phasen δ, η.

44 KAPITEL 4. MECHANIK KONTINUIERLICHER MEDIEN
• Wegen der Randbedingungen qy(0, t) = 0 = qy(l, t) ist entwederC2 = 0, oder η = 0 und ωl = nπvt mit n ∈ N. C2 = 0 ergibteine (langweilige) ruhende Saite. Lösungen für f haben also diediskreten Kreisfrequenzen ωn und Wellenlängen λn,
ωn = nπvt
l, λn =
2πωnvt =
2ln. (4.58)
Die Lösungsfunktionen f können also in der Form
fn(x) = Nn sin(nπ
xl
)(4.59)
mit Nn , 0 geschrieben werden. Die Eigenfrequenzen der schwin-genden Saite sind
νn =ωn
2π=
n2vt
l, (4.60)
wobei n = 1 den Grundton und n ≥ 2 die Obertöne ergeben.
• Die Saite trägt stehende Wellen der Länge λn. Wegen der Rand-bedingungen müssen x = 0 und x = l Knoten dieser stehendenWellen sein. Die gesamte Lösung für die Auslenkung der schwin-genden Saite in y-Richtung ist
qy,n(x, t) = Nn cos(ωnt − δn) sin(nπ
xl
). (4.61)
• Die fn(x) heißen Eigenfunktionen der Differentialgleichung (4.53)zu vorgegebenen Randbedingungen. Es ist nützlich, die Amplitu-den Nn so zu wählen, dass∫ l
0f ∗n (x) fn(x)dx = 1 (4.62)
wird, was für Nn =√
2/l der Fall ist. Wegen der Orthonormalitätdes Sinus ergibt diese Normierung∫ l
0f ∗n (x) fm(x)dx = δnm . (4.63)
Wegen der Linearität der Differentialgleichung (4.53) ist jede li-neare Überlagerung (Superposition) von Lösungen (4.61) wiedereine Lösung,
qy(x, t) =
∞∑n=1
cn
√2l
cos(ωnt − δn) sin(nπ
xl
); (4.64)
Das ist eine Fourierreihe bezüglich x.
• Die Existenz von Eigenfunktionen einer Differentialgleichungzu diskreten Eigenwerten legt einen Zusammenhang zwischenDifferentialgleichungen und unendlich-dimensionalen Matrizennahe, der hier nur erwähnt, aber nicht näher ausgeführt werdensoll.
4.3. SCHWINGENDE MEMBRAN 45
4.3 Schwingende Membran
• Sei nun µ2 die als konstant angenommene zwei-dimensionale Mas-sendichte einer Membran M und T0 := Kraft/Länge die Spannungauf dem Rand ∂M der Membran. Mit völlig analogen Methodenwie für die Saite kann man die Bewegungsgleichung[
∂2
∂t2 − v2(∂2
∂x2 +∂2
∂y2
)]q(x, y, t) = 0 (4.65)
herleiten, worin
v :=
√T0
µ2(4.66)
ist. Das ist die d’Alembert’sche Gleichung in 1 + 2 Dimensionen.
• Die Membran sei am Rand eingespannt, d.h. die Randbedingungist q(x, y, t) = 0 für (x, y) ∈ ∂M und für alle Zeiten t. Der Separati-onsansatz q(x, y, t) = f (x, y)g(t) führt auf
g(t) = C1 cos(ωt − δ) (4.67)
und auf die Helmholtz’sche Differentialgleichung für f (x, y),[∂2
∂x2 +∂2
∂y2 +
(ω
v
)2]
f (x, y) = 0 . (4.68)
Dazu gilt die Dirichlet-Randbedingung f (x, y)|∂M = 0.
• Lösungen existieren nur für diskrete Eigenwerte ω2/v2, aus denensich die Eigenfrequenzen ergeben. Für eine rechteckige Membranlösen die Eigenfunktionen
fmn(x, y) = NnNm sin(mπ
xlx
)sin
(nπy
ly
)(4.69)
(m, n ∈ N) die Helmholtz’sche Differentialgleichung mit derDirichlet-Randbedingung und für die Eigenfrequenzen(
ωmn
v
)2= m2π
2
l2x
+ n2π2
l2y
. (4.70)

46 KAPITEL 4. MECHANIK KONTINUIERLICHER MEDIEN
Kapitel 5
Symmetrien undErhaltungssätze
5.1 Galilei-Invarianz
• Inertialsysteme waren im ersten Teil der Vorlesung als Idealisie-rungen eingeführt worden, die in der Realität in mehr oder wenigerguter Näherung identifiziert werden können. Ein Bezugssystem,das anhand der Positionen der Fixsterne definiert wird, kann zumBeispiel als Inertialsystem betrachtet werden.
• Wir stellen uns nun einen Beobachter in einem abgeschlossenenKasten vor, der sich im Fixsternsystem kräftefrei bewegt. Kannder Beobachter feststellen, ob der Kasten ein Inertialsystem ist,und wenn ja, wie? Als versierter Physiker wird er offenbar über-prüfen, welche Form die Bewegungsgleichungen in seinem Kastenannehmen.
• Er führe also ein Experiment durch, in dem N Massenpunkte derMassen mi an den Orten ~xi auftreten, zwischen denen Potentialkräf-te wirken, d.h. die potentielle Energie des Massenpunkts i relativzum Massenpunkt j sei V ji(|~xi − ~x j|), und damit ist die Kraft desj-ten auf den i-ten Massenpunkt durch ~F ji(~xi) = −~∇iV ji(|~xi − ~x j|)gegeben.
• Das System der N Massenpunkte lässt sich unter diesen Vorausset-zungen durch die Lagrangefunktion L = T − V beschreiben, ausder die Bewegungsgleichungen nach
ddt∂L(~x, ~x, t)
∂~xi
−∂L(~x, ~x, t)
∂~xi= 0 (1 ≤ i ≤ N) (5.1)
folgen.
47

48 KAPITEL 5. SYMMETRIEN UND ERHALTUNGSSÄTZE
• Wie wir schon in (3.14) gesehen hatten, ist die Lagrangefunktionaber nicht eindeutig, weil man zu ihr die totale zeitliche Ablei-tung einer beliebigen Funktion f (x, t) addieren kann, ohne dieBewegungsgleichungen zu ändern, weil dadurch die Variation derWirkung unberührt bleibt. Dies ist die einzige Willkür, die dieLagrangefunktion erlaubt.
• Das Bezugssystem im Kasten sei ungestrichen, (t, ~x ), das inertialeFixsternsystem gestrichen, (t′, ~x ′). Allgemein gilt dann
t′ = t + τ , ~x ′ = ~a(t) + R(t) · ~x(t) . (5.2)
Die erste Gleichung beschreibt eine Nullpunktsverschiebung derZeit, die zweite eine Translation und Rotation des Koordinatensys-tems.
• Wie kann sich der Kasten bewegen, ohne dass es der Beobachterfeststellen kann? Zunächst muss R(t) konstant sein, denn sonstträten Scheinkräfte auf, die er (z.B. mit einem Foucault’schenPendelversuch) nachweisen könnte. Damit lautet die Lagrange-funktion im inertialen Fixsternsystem
L(~x ′, ~x ′, t′) =12
N∑i=1
mi~x 2i −
∑j,i
V ji(|~xi − ~x j|)
+ ~a>(t)
N∑i=1
miR~xi +~a 2
2
N∑i=1
mi . (5.3)
• Die Bewegungsgleichungen im Kasten sind mit denen im Fixstern-system identisch, falls (3.14) gilt, d.h. falls es eine Funktion f (x, t)gibt, deren totale zeitliche Ableitung gerade die zusätzlichen Ter-me in (5.3) darstellen kann. Das bedeutet
d f (~x, t)dt
=∂ f (~x, t)∂t
+
N∑i=1
~x>i∂ f (~x, t)∂~xi
=
N∑i=1
(~x>i R>~a
)mi +
~a 2
2
N∑i=1
mi (5.4)
und ist offenbar genau dann der Fall, wenn die Bedingungen
∂ f (~x, t)∂t
=~a 2
2
N∑i=1
mi ,∂ f (~x, t)∂~xi
= miR>~a (5.5)
gelten. Offenbar muss dann auch
∂
∂t∂ f (~x, t)∂~xi
=∂
∂~xi
∂ f (~x, t)∂t
= 0 (5.6)

5.1. GALILEI-INVARIANZ 49
sein, und aus der zweiten Gleichung (5.5) folgt zunächst wegenR = 0
~a = 0 ⇒ ~a = ~a0 +~vt , ~a0,~v = konst. . (5.7)
Zu solchen Translationen gehört die Funktion
f (~x, t) = ~v>N∑
i=1
miR~xi +~v 2t2
N∑i=1
mi , (5.8)
deren totale Zeitableitung gerade
d fdt
= ~v>N∑
i=1
miR~xi +~v 2
2
N∑i=1
mi (5.9)
ist.
• Damit haben wir die allgemeine Gestalt derjenigen Transformatio-nen bestimmt, die im Kasten nicht nachweisbar sind, weil sie dieBewegungsgleichungen invariant lassen:
t′ = t + τ , ~x ′ = ~a0 +~vt + R · ~x , ~a0,~v,R = konst. (5.10)
Dies beweist die Behauptung aus dem ersten Teil der Vorlesung,dass die Newton’sche Mechanik unter solchen Transformationeninvariant bleibt, die der zehnparametrigen Galilei-Gruppe angehö-ren. Ein Parameter ist τ, und je drei gehören zu ~a0, ~v und R.
• Die Galilei-Invarianz hat folgenden physikalischen Gehalt:
1. Die Transformation t′ = t + τ und ~x ′ = ~x entspricht einerwillkürlichen Nullpunktsverschiebung der Zeit. Die Invarianzdemgegenüber bedeutet die Homogenität der Zeit.
2. Transformationen mit t′ = t und ~x ′ = ~a0 + ~x entsprecheneiner willkürlichen Wahl des Koordinatenursprungs. DieseInvarianz bedeutet die Homogenität des Raums.
3. Die Invarianz gegenüber Transformationen mit t′ = t und~x ′ = ~x + ~vt bedeutet, dass die Bewegungsgleichungen ge-genüber geradlinig-gleichförmiger Bewegung invariant sind.Eine demgegenüber beschleunigte Bewegung wäre feststell-bar.
4. Transformationen mit t′ = t und ~x ′ = R · ~x bedeuten einewillkürliche Drehung der Koordinatenachsen, sodass dieseInvarianz die Isotropie des Raums bedeutet. Dann ist keineRichtung ausgezeichnet.
• Was wir hier durchgeführt haben, ist charakteristisch für die moder-ne Physik. Wir haben allein aus der Eichinvarianz der klassischenMechanik, ausgedrückt durch (3.14), ihre Symmetrie gegenüberder zehnparametrigen Galilei-Gruppe gefolgert. Als Lie-Gruppehat die Galilei-Gruppe zehn Generatoren, die wiederum einentiefen physikalischen Sinn haben, wie wir gleich sehen werden.

50 KAPITEL 5. SYMMETRIEN UND ERHALTUNGSSÄTZE
5.2 Noether-Theoreme
• Wir betrachten nun infinitesimale Koordinaten-Transformationen,die die Lagrangefunktion nur um eine totale zeitliche Ableitungändern,
t → t′ = t + δt , ~xi(t)→ ~x ′i (t′) = ~xi(t) + δ~xi(t) , (5.11)
sodass die Transformation der Lagrangefunktion in der Form
L(x, x, t)→ L(x′, x′, t′) = L(x, x, t) +d f (x, t)
dt(5.12)
geschrieben werden kann. Die Zeitverschiebung sei konstant,δt = konst. Durch diese Transformation ändert sich das Wirkungs-integral zu
S ′ =
∫ t′1
t′0
dt′L(~x ′, ~x ′, t′) = S + f (~x, t)∣∣∣t1t0. (5.13)
• Ausgedrückt durch die ungestrichenen Koordinaten ist die gestri-chene Wirkung
S ′ = S +
∫ t1
t0dt
[∂L∂~xi
(~x ′i − ~xi) +∂L
∂~xi
(~x ′i − ~xi)]
+ δtL[~x(t1), ~x(t1), t1] − L[~x(t0), ~x(t0), t0]
, (5.14)
wobei der Ausdruck in der letzten Zeile durch die infinitesimaleVeränderung der Integrationsgrenzen zustande kommt. PartielleIntegration und Verwendung der Euler-Lagrange-Gleichungen füh-ren nun zunächst auf∫ t1
t0dt∂L
∂~xi
(~x ′i − ~xi) =∂L
∂~xi
(~x ′i − ~xi)
∣∣∣∣∣∣t1t0
−
∫ t1
t0
ddt∂L
∂~xi
(~x ′i − ~xi)dt
=∂L
∂~xi
(~x ′i − ~xi)
∣∣∣∣∣∣t1t0
−
∫ t1
t0
∂L∂~xi
(~x ′i − ~xi)dt . (5.15)
Setzen wir diesen Ausdruck in (5.14) ein, schrumpft die Gleichungauf
S ′ = S +
[∂L
∂~xi
(~x ′i − ~xi) + L(~x, ~x, t)δt]∣∣∣∣∣∣t1
t0
. (5.16)
• Schließlich gilt wegen
~x ′i (t′) = ~x ′i (t + δt) = ~xi(t) + δ~xi (5.17)
auch
~x ′i (t) = ~xi(t − δt) + δ~xi = ~xi(t) − ~xi(t)δt + δ~xi , (5.18)

5.2. NOETHER-THEOREME 51
womit sich der Term in eckigen Klammern in (5.16) zu
∂L
∂~xi
(~x ′i − ~xi) + L(~x, ~x, t)δt =∂L
∂~xi
δ~xi −
(∂L
∂~xi
~xi − L)δt (5.19)
umformen lässt. Wenn wir hier die Definitionen der konjugiertenImpulse und der Hamilton-Funktion verwenden,
∂L
∂~xi
= pi , pi~xi − L = H , (5.20)
folgt zunächst aus (5.19) und (5.16)
S ′ = S + piδ~xi − Hδt∣∣∣t1t0. (5.21)
Daraus und aus der Bedingung, dass die gestrichene Wirkung vonder Form (5.13) sein muss, erhalten wir, dass[
piδ~xi − Hδt − f (δ~x, δt)] ∣∣∣t1
t0= 0 (5.22)
sein muss. Also muss der Ausdruck
piδ~xi − Hδt − f (δ~x, δt) (5.23)
eine Erhaltungsgröße darstellen, weil t0 und t1 beliebige Zeitpunktewaren. Zugleich ist wegen (5.8)
f (δ~x, δt) = ~v>N∑
i=1
miRδ~xi +~v 2
2δt
N∑i=1
mi . (5.24)
Emmy Noether (1882-1935)• Zu welchen Erhaltungsgrößen führt die Symmetrie unter Transfor-
mationen aus der Galilei-Gruppe?
1. Reine Zeittranslationen t′ = t + δt, ~x ′ = ~x führen wegenδ~xi = 0 und ~v = 0 zunächst wegen (5.24) auf f = 0 unddann wegen (5.23) auf Hδt = konst. Da δt konstant ist, mussauch H konstant sein. Die Homogenität der Zeit führt alsozur Energieerhaltung.
2. Reine Ortstranslationen bedeuten t′ = t und ~x ′ = ~x+δ~a. Aus(5.24) folgt dann wegen δt = 0 und ~v = 0 zunächst wiederf = 0, was mit (5.23) auf
~pi · δ~a = konst. oder ~pi · ~ea = konst. (5.25)
führt, weil auch δ~a = |δ~a|~ea konstant ist. Die Homogenitätdes Raums führt also zur Impulserhaltung.

52 KAPITEL 5. SYMMETRIEN UND ERHALTUNGSSÄTZE
3. Seien nun t = t′ und ~x ′ = δ~v t + ~x. Dann ist wegen (5.24)
f = δ~v>N∑
i=1
mi~xi + O(δ~v 2) , (5.26)
und daher wegen (5.23)
δ~v>t N∑
i=1
~pi −
N∑i=1
mi~xi
= konst. (5.27)
Da die Translationsgeschwindigkeit δ~v konstant ist, folgtdaraus die geradlinig-gleichförmige Bewegung des Schwer-punkts,
~X =1M
N∑i=1
mi~xi = ~X0 +t
M
N∑i=1
~pi . (5.28)
4. Schließlich betrachten wir noch infinitesimale Rotationen.Sei also t′ = t und δ~x = δ~ϕ × ~x mit dem infinitesimalenDrehwinkel δ~ϕ; vgl. (I-9.27). Dann ist wegen ~v = 0 auchf = 0, wie (5.24) zeigt, und aus (5.23) folgt wegen δt = 0,dass
N∑i=1
~pi · (δ~ϕ × ~xi) = δ~ϕ ·
N∑i=1
(~xi × ~pi) = konst. (5.29)
sein muss. Da der Drehwinkel δ~ϕ konstant ist, folgt daraus~L = konst. Die Isotropie des Raums führt daher zur Drehim-pulserhaltung.
• Die zehn Parameter der Galilei-Gruppe, und damit ihre zehn Gene-ratoren, gehören also zu zehn Erhaltungsgrößen: Eine ist die Ener-gie, drei garantieren die Trägheitsbewegung des Schwerpunkts,und jeweils drei die Erhaltung des Impulses und des Drehimpulses.
5.3 Lorentz-Invarianz
5.3.1 Die spezielle Lorentztransformation
• Die Galilei-Invarianz führt zu Widersprüchen mit der Erfahrung.Beispiele dafür liefert etwa der Zerfall von Myonen. Myonen sindLeptonen wie etwa das Elektron, die nach
µ→ e− + νe + νµ (5.30)
in Elektronen und (Anti-)Neutrinos zerfallen, wobei die Lebens-dauer τµ = 2 × 10−6 s beträgt. Experimentell zeigt sich aber, dass

5.3. LORENTZ-INVARIANZ 53
die Lebensdauer zunimmt, wenn das Myon sich im Laborsystemmit Geschwindigkeiten nahe der Lichtgeschwindigkeit bewegt.Das beim Zerfall emittierte Elektron hat beinahe Lichtgeschwin-digkeit, aber selbst dann nie eine höhere Geschwindigkeit, wennsich bereits das Myon fast mit Lichtgeschwindigkeit bewegte.
• Die Lichtgeschwindigkeit im Vakuum beträgt c = 2.99792458 ×1010 cm s−1. Dass sie endlich ist, wurde bereits von dem dänischenAstronomen Ole Rømer (1644-1710) vermutet, der sie mithilfeder Jupitermonde zu c = 2.14 × 1010 cm s−1 bestimmte.
• Ausgehend von dem Postulat, dass die Lichtgeschwindigkeit c eineuniverselle Konstante sei, die nicht vom Bewegungszustand desInertialsystems abhänge, in dem sie gemessen wird, konstruierenwir nun eine Transformation zwischen Inertialsystemen, die beisehr hohen Geschwindigkeiten nahe c die Galilei-Transformationersetzen soll. Dazu geben wir uns zwei Inertialsysteme K und K′
vor, die zum Zeitpunkt t = 0 = t′ zusammenfallen. K bewege sichvon K′ aus gesehen mit der konstanten Geschwindigkeit v . clängs ihrer gemeinsamen ~e3-Achse.
• Für ein Lichtsignal, das bei t = 0 im gemeinsamen Ursprung von Kund K′ längs~e3 ausgesandt wird, muss aufgrund der Voraussetzung
(x3)2 − (ct)2 = (x′3)2 − (ct′)2 (5.31)
gelten. Lineare Transformationen zwischen K und K′ müssendemnach durch
(x′3 + ct′) = f (x3 + ct) , (x′3 − ct′) =1f
(x3 − ct) (5.32)
bestimmt sein. Summe und Differenz dieser beiden Gleichungenergeben
(x′3, ct′) =12
[f (x3 + ct) ±
1f
(x3 − ct)], (5.33)
wobei das positive Vorzeichen für x′3, das negative für ct′ gilt.
• Da sich der Ursprung von K′ mit der Geschwindigkeit −v in Kbewegt, muss außerdem für x′3 = 0
x3 = −vt = −v
c(ct) =: −β (ct) (5.34)
sein, wobei die dimensionslose Geschwindigkeit β := v/c ein-geführt wurde. Setzen wir dieses x3 in (5.33) ein und verlangenx′3 = 0, folgt sofort
f (1 − β) −1f
(1 + β) = 0 ⇒ f =
√1 + β
1 − β. (5.35)
54 KAPITEL 5. SYMMETRIEN UND ERHALTUNGSSÄTZE
Setzen wir dieses Ergebnis in (5.33) ein, erhalten wir
x′3 = γ(x3 + βct) , ct′ = γ(ct + βx3) , (5.36)
worin der Lorentz-Faktor
γ := (1 − β2)−1/2 (5.37)
eingeführt wurde. Im Grenzfall kleiner Geschwindigkeiten, β 1,ist γ ≈ 1 + β2/2 ≈ 1.
5.3.2 Der Minkowski-Raum
• Wir führen ct =: x0 als weitere Koordinate ein und fassen die Koor-dinatenquadrupel zu Vierervektoren x = (xµ) = (x0, x1, x2, x3) zu-sammen. Sie spannen den Minkowski-RaumM auf. Zwischen zweiverschiedenen Inertialsystemen im Minkowski-Raum vermitteltdie Lorentz-Transformation. Die spezielle Lorentz-Transformation(5.36) lässt sich durch
x′0x′1x′2x′3
=
γ 0 0 γβ0 1 0 00 0 1 0γβ 0 0 γ
·
x0
x1
x2
x3
(5.38)
darstellen. Da sie aufgrund ihrer Konstruktion den Ausdruck−(x0)2 + ~x 2 invariant lässt, definieren wir als Skalarprodukt zweierVierervektoren
〈xµ, xµ〉 = −(x0)2 + ~x 2 = gµνxµxν , (5.39)
worin die Komponenten (gµν) = diag(−1, 1, 1, 1) der Metrik ganstelle des Kronecker-Symbols auftreten.
• Die Metrik g ist ein symmetrischer Tensor zweiter Stufe, weil siezwei Vektoren aus einem Vektorraum V auf bilineare Weise in denZahlenkörper abbildet,
g : V × V → R , (v, w) 7→ g(v, w) . (5.40)
Mit ihrer Hilfe lässt sich eine lineare Abbildung
v∗ : V → R , w 7→ v∗(w) = g(v, w) = 〈v, w〉 (5.41)
einführen, die Vektoren nach R abbildet. Die Menge der linea-ren Abbildungen (5.41) wird als Dualraum des Vektorraums Vbezeichnet.

5.3. LORENTZ-INVARIANZ 55
• Vierervektoren werden mit oberen Indizes gekennzeichnet, Dual-vektoren mit unteren. Demnach hat wegen
〈x, y〉 = gµνxµyν = (gµνxµ)yν (5.42)
der Dualvektor x∗ eines Vierervektors x die Komponenten
xν = gµνxµ = (−x0, x1, x2, x3) . (5.43)
Im Euklidischen Raum ist der Unterschied zwischen Vektoren undDualvektoren unerheblich, weil die die Metrik dort durch die Ein-heitsmatrix dargestellt werden kann. In der Relativitätstheorie wirder entscheidend wichtig. Die Einstein’sche Summenkonventionwird in der Relativitätstheorie dadurch modifiziert, dass über glei-che Indizes summiert wird, wenn sie auf verschiedenen Niveausstehen.
• Daher lässt sich die spezielle Lorentz-Transformation (5.39) in derForm
(xµ)′ = Λµν xν (5.44)
schreiben, wobei die Λµν die Komponenten der Matrix aus (5.39)
sind. Wie man leicht nachrechnet, gilt
ΛµνΛ
µ′
ν′gµµ′ = gνν′ , (5.45)
was die Orthogonalitätsrelation für Koordinatentransformationenim Euklidischen Raum ersetzt.
• Allgemein ist das Quadrat eines Vierervektors invariant unterTransformationen der Lorentzgruppe, die sich aus speziellen Lor-entztransformationen, orthogonalen dreidimensionalen Transfor-mationen und Zeitumkehrtransformationen zusammensetzen.
• Als Beispiel für die Lorentz-Transformation betrachten wir dieAddition von Geschwindigkeiten. Sei w < c die Geschwindigkeiteines Teilchens im ungestrichenen System in x3-Richtung, (xµ) =
(ct, 0, 0, wt). Dann ist
(xµ)′ = γ
ct + βwt
00
βct + wt
. (5.46)
Seine Geschwindigkeit im gestrichenen System ist
w′ =(x3)′
t′=βct + wtct + βwt
c =w + v
1 + vw/c2 ; (5.47)
das ist das Geschwindigkeits-Additionstheorem.
56 KAPITEL 5. SYMMETRIEN UND ERHALTUNGSSÄTZE
Kapitel 6
Analytische Mechanik
6.1 Kanonische Transformationen
6.1.1 Bahnen im erweiterten Phasenraum
• Wir betrachten ein mechanisches System mit f Freiheitsgradenund den verallgemeinerten Koordinaten qi, 1 ≤ i ≤ f . Die Lagran-gefunktion sei L(q, q, t), und die Bewegungsgleichungen seiendementsprechend
ddt∂L∂q−∂L∂q
= 0 , 1 ≤ i ≤ f . (6.1)
Die zu den qi kanonisch konjugierten Impulse sind
pi =∂L∂qi
(q, q, t) , 1 ≤ i ≤ f . (6.2)
Wenn sich diese Gleichungen nach qi auflösen lassen, können dieqi durch die pi dargestellt werden.
• Die verallgemeinerten Koordinaten allein spannen den Konfigura-tionsraum (q) auf, während der Phasenraum durch die verallge-meinerten Koordinaten und Impulse (q, p) aufgespannt wird. Dererweiterte Phasenraum (q, p, t) schließt die Zeit mit ein.
• Die Hamiltonfunktion ist
H(q, p, t) = piqi − L(q, q, t) (6.3)
mit qi = qi(q, p, t). Die Bewegungsgleichungen sind die Hamilton-schen kanonischen Gleichungen
qi =∂H∂pi
, pi = −∂H∂qi
. (6.4)
57
58 KAPITEL 6. ANALYTISCHE MECHANIK
Wir betrachten nun das vollständige Differential
dS := pidqi − Hdt (6.5)
auf dem erweiterten Phasenraum. Das System werde zu zwei Zei-ten t1, t2 > t1 bei den Lagekoordinaten q1,2 mit den Impulsenp1,2 untersucht, d.h. an zwei Punkten P1,2 im erweiterten Phasen-raum. Wir behaupten, dass die wirkliche Bewegung des Systemsso verläuft, dass
δ
∫ P2
P1
dS = 0 (6.6)
gilt. Damit wäre das Hamiltonsche Prinzip auf Bahnen im erwei-terten Phasenraum übertragen.
• Zum Beweis geben wir die wirkliche Bahn des Systems im erwei-terten Phasenraum vor, qi = qi(t), pi = pi(t) für 1 ≤ i ≤ f , mit denAnfangs- und Endpunkten q(t j) = q( j), p(t j) = p( j), j = 1, 2. Dazuführen wir leicht gestörte Vergleichsbahnen ein, q′i = qi(t) + δqi(t),p′i = pi(t) + δpi(t), 1 ≤ i ≤ f , ohne die Anfangs- und Endpunktezu verändern, δqi(t1) = 0 = δqi(t2). Änderungen der Anfangs- undEndimpulse, δpi(t1) und δpi(t2), bleiben hier noch zugelassen.
• Die Variation (6.6) des Differentials (6.5) ist damit
δ
∫ t2
t1
[piqi − H(q, p, t)
]dt = 0 . (6.7)
Durch Einsetzen der wahren Bahn und der leicht gestörten Ver-gleichsbahnen folgt daraus∫ t2
t1
[(pi + δpi)(qi + δqi) − H(q + δq, p + δp, t)
]dt
−
∫ t2
t1
[piqi − H(q, p, t)
]dt = 0 , (6.8)
und daraus ergibt sich bis zur ersten Ordnung in den Störgrößen∫ t2
t1
[(pi
dδqi
dt+ qiδpi
)−
(∂H∂qi
δqi +∂H∂pi
δpi
)]dt = 0 . (6.9)
Nach partieller Integration im ersten Term folgt schließlich∫ t2
t1
[(−pi −
∂H∂qi
)δqi +
(qi −
∂H∂pi
)δpi
]dt = 0 . (6.10)
• Da die Störungen δqi und δpi beliebig waren, folgen aus der Va-riation (6.6) also die Hamiltonschen kanonischen Gleichungen.Die Umkehrung ist in jedem Schritt möglich, und damit ist dieBehauptung bewiesen, dass (6.6) die wahre Bahn des Systems imerweiterten Phasenraum beschreibt.
6.1. KANONISCHE TRANSFORMATIONEN 59
6.1.2 Kanonische Transformationen
• Welche Transformationen lassen nun die Hamiltonschen Gleichun-gen invariant? Da der Lagrange- und Hamiltonformalismus völligunabhängig von der speziellen Wahl der verallgemeinerten Ko-ordinaten im Konfigurationsraum gelten, können wir beliebigeneue verallgemeinerte Koordinaten q′i = q′i(q1, . . . , q f , t) einführen.Wenn die Funktionaldeterminante∣∣∣∣∣∣∂(q′1, . . . , q
′f )
∂(q1, . . . , q f )
∣∣∣∣∣∣ (6.11)
nicht verschwindet, können wir eindeutig auf die q j =
q j(q′1, . . . , q′f , t) zurücktransformieren. Die Lagrange-Gleichungen
bleiben ebenso unverändert wie die Hamiltonschen Gleichungen.Wegen
p′j =∂L∂q′j
=∂L∂qk
∂qk
∂q′j= a jk pk (6.12)
induziert der Übergang zu neuen verallgemeinerten Koordinatenq′i eine lineare Transformation der dazu konjugierten Impulse.
• Die Hamiltonschen Gleichungen erlauben aber eine erheblichgrößere Klasse von Transformationen. Um das einzusehen, gebenwir unabhängige Transformationen
q′i = q′i(q, p, t) , p′i = p′i(p, q, t) (6.13)
auf dem erweiterten Phasenraum vor und verlangen, dass es aufdem erweiterten Phasenraum eine Funktion Φ geben möge so, dasssich die Differentiale dS aus (6.5) vor und nach der Transformation(6.13) nur um das vollständige Differential von Φ unterscheiden,
dS = pidqi − Hdt = p′idq′i − H′dt + dΦ = dS ′ + dΦ . (6.14)
• Wenn das so ist, bleiben die Hamiltonschen Gleichungen erhalten,d.h. es gilt
q′i =∂H′
∂p′i, p′i = −
∂H′
∂q′i. (6.15)
Dies ist leicht einzusehen, denn∫dS =
∫dS ′ +
∫dΦ =
∫dS ′ + (Φ2 − Φ1) . (6.16)
Wenn nun die Endpunkte der Bahn im erweiterten Phasenraumnicht variiert werden, wenn also auch die Anfangs- und Endimpul-se unverändert bleiben, δpi(t1) = 0 = δpi(t2), folgt
δ
∫dS = δ
∫dS ′ , (6.17)
d.h. die Variationen der beiden Wirkungen sind äquivalent. SolcheTransformationen des erweiterten Phasenraums heißen kanonisch.

60 KAPITEL 6. ANALYTISCHE MECHANIK
• Ein Beispiel für eine kanonische Transformation ist die Vertau-schung
q′i = −pi , p′i = qi , (6.18)
denn
dS = pidqi − Hdt = −q′idp′i − Hdt= p′idq′i − Hdt − d
[p′iq′i], (6.19)
d.h. die Differentiale dS und dS ′ unterscheiden sich tatsächlichnur durch das vollständige Differential von
Φ = p′iq′i . (6.20)
Das verdeutlicht, dass q und p nach kanonischen Transformationenkeineswegs die physikalische Bedeutung von Orten und Impulsenhaben müssen!
6.2 Hamilton-Jacobi-Theorie
6.2.1 Die Hamilton-Jacobi-Gleichung
Carl Gustav Jakob Jacobi• Kanonische Transformationen können verwendet werden, um
die Bewegungsgleichungen möglichst einfach werden zu lassen,z.B. H′ ≡ 0, sodass q′i = 0 = p′i werden. Man nennt dies eine„Transformation auf Ruhe“.
• Dazu nehmen wir zunächst eine beliebige Funktion Φ, die nebenden f verallgemeinerten Koordinaten qi auch von weiteren f Pa-rametern q′i und von der Zeit t abhängen soll. Wir verlangen nur,dass
det ∂2Φ
∂qi∂q′j
, 0 (6.21)
sei, d.h. die Determinante der Krümmungsmatrix von Φ mögenicht verschwinden.
• Wir behaupten nun, dass die durch Φ erzeugte Transformation
p j =∂Φ
∂q j, p′j = −
∂Φ
∂q′j(6.22)
kanonisch sei. Das Differential von Φ ist
dΦ =∂Φ
∂tdt +
∂Φ
∂qidqi +
∂Φ
∂q′idq′i =
∂Φ
∂tdt + pidqi − p′idq′i
=∂Φ
∂tdt + dS + Hdt − p′idq′i , (6.23)

6.2. HAMILTON-JACOBI-THEORIE 61
woraus
dS = p′idq′i −(H +
∂Φ
∂t
)dt + dΦ (6.24)
folgt. Die Transformation (6.22) ist also aufgrund der Definition(6.15) in der Tat kanonisch. Die Funktion Φ heißt erzeugendeFunktion der Transformation.
• Nach der Transformation lautet die Hamiltonfunktion
H′ = H +∂Φ
∂t. (6.25)
Sie verschwindet offenbar, wenn Φ die Hamilton-Jacobi-Gleichung
H(q,∂Φ
∂q, t)
+∂Φ
∂t= 0 (6.26)
erfüllt. Eine kanonische Transformation, deren Erzeugende dieseGleichung erfüllt, transformiert also das System tatsächlich „aufRuhe“.
6.2.2 Harmonischer Oszillator
• Als ein erstes Beispiel für eine kanonische Transformation betrach-ten wir den harmonischen Oszillator. Seine Lagrange-Funktionlautet
L =m2
q2 −k2
q2 , (6.27)
wenn k die Konstante der linearen Rückstellkraft ist. Der kanonischkonjugierte Impuls ist p = mq, und damit lautet die Hamilton-Funktion
H(q, p) =p2
2m+
k2
q2 . (6.28)
• Wir betrachten nun diejenige kanonische Transformation, diedurch die Funktion
Φ(q, q′) =m2ωq2 cot q′ (6.29)
erzeugt wird. Die Impulse ergeben sich aus (6.22) zu
p =∂Φ
∂q= mωq cot q′ , p′ = −
∂Φ
∂q′=
m2ωq2 1
sin2 q′, (6.30)
wobei (cot x)′ = − sin−2 x verwendet wurde. Daraus erhält man,indem man nach q und p auflöst,
q =
√2p′
mωsin q′ , p =
√2mωp′ cos q′ . (6.31)
62 KAPITEL 6. ANALYTISCHE MECHANIK
• Da Φ nicht explizit von der Zeit abhängt, ist H′ = H. Wenn man qund p durch (6.31) ersetzt, folgt außerdem H′ = ωp′. Da H′ nichtvon q′ abhängt, ist q′ offenbar zyklisch, und es gilt
p′ = −∂H′
∂q′= 0 ⇒ p′ = konst. =: p′0 . (6.32)
Außerdem folgt für q′
q′ =∂H′
∂p′= ω ⇒ q′ = ωt + q′0 . (6.33)
• Setzt man dies wieder in q aus (6.31) ein, folgt
q =
√2p′
mωsin(ωt + q′0) (6.34)
mit den beiden Integrationskonstanten q′0 und p′0, durch die dieAmplitude und die Phase der Schwingung festlegt werden.
6.2.3 Bewegung des freien Massenpunkts
• Als weiteres instruktives Beispiel betrachten wir die kräftefreieBewegung eines Massenpunkts m mit kartesischen Koordinatenqi = xi. Die Lagrange- und die Hamilton-Funktion sind
L =m2~q 2 , H =
12m
~p 2 . (6.35)
In diesem Fall lautet die Hamilton-Jacobi-Gleichung
12m
( ∂Φ
∂q1
)2
+
(∂Φ
∂q2
)2
+
(∂Φ
∂q3
)2 +∂Φ
∂t= 0 . (6.36)
Zu ihrer Lösung verwenden wir den Ansatz
Φ = q′1q1 + q′2q2 + q′3q3 − Et (6.37)
mit Konstanten q′i und E. Offenbar ist damit die Voraussetzung(6.21) erfüllt, denn die Krümmungsmatrix von Φ ist die Einheits-matrix,
∂2Φ
∂qi∂q′j=∂q′i∂q′j
= δi j . (6.38)
• Die Hamilton-Jacobi-Gleichung verlangt dann
12m
[(q′1)2 + (q′2)2 + (q′3)2
]− E = 0 ⇒ E =
(~q ′)2
2m, (6.39)
und das legt die Funktion Φ auf
Φ = ~q ′ · ~x −(~q ′)2
2mt (6.40)
6.2. HAMILTON-JACOBI-THEORIE 63
fest. Für die kanonisch-konjugierten Impulse erhalten wir mittels(6.22)
pi =∂Φ
∂qi= q′i , p′i = −
∂Φ
∂q′i= −xi +
pi
mt . (6.41)
Aus den Bedingungen (q′i , p′i) = konst. folgt damit pi = konst. undxi = pit/m + konst., und E ist offenbar die Energie.
• Zu gegebener, fester Zeit t beschreibt
Φ = ~q ′ · ~x − Et = ~q ′ · ~x −(~q ′)2
2mt = konst. (6.42)
eine Ebenenschar mit dem Normalenvektor ~q ′. Wegen ~p = ~∇qΦ
stehen die Impulse senkrecht auf dieser Ebenenschar. Ebenen mitfestem Φ wandern mit der Geschwindigkeit v = E/|~q ′| in Richtung~q ′ weiter, also nicht mit der Geschwindigkeit eines Teilchens mitdem Impuls ~q ′!
• Diese Wanderung der Ebenen stellt eine Wellenbewegung dar, dieeine Analogie zwischen geometrischer Optik und theoretischerMechanik herstellt. In der geometrischen Optik heißt Φ Eikonal-funktion und stellt die Phase der Lichtwelle dar. Angeregt durchde Broglie und Einstein fasste Schrödinger die Punktmechanik alsGrenzfall der Wellenmechanik auf und setzte für die Wellenfunkti-on eines freien Teilchens
ψ(~x, t) = exp[
i~
Φ(~x, t, ~q′)]
(6.43)
an. Φ/~ ist die dimensionslose Phase mit ~ := h/(2π). Für dieseWellenfunktion verlangt die Hamilton-Jacobi-Gleichung
−~2
2m
(∂2
∂x21
+∂2
∂x22
+∂2
∂x23
)ψ = i~
∂
∂tψ , (6.44)
was bereits die Schrödinger-Gleichung für ein freies Teilchen ist.
6.2.4 Lösung der Hamilton-Jacobi-Gleichung
• Im Raum (q, t) seien q0 die Koordinaten des Systems zu einemfesten Zeitpunkt t0. Weiterhin sei Φ0 eine beliebige Funktion der fKoordinaten qi0, die noch von f weiteren Parametern q′i abhängeund für die die Unabhängigkeitsrelation
det ∂2Φ
∂qi0∂q′j
, 0 (6.45)
gelte. Orte und Impulse zur Zeit t0 sind
qi(t0) = qi0 , pi(t0) =∂Φ
∂qi
∣∣∣∣∣qi=qi0
. (6.46)

64 KAPITEL 6. ANALYTISCHE MECHANIK
• Wir suchen diejenige Bewegung des mechanischen Systems, diezur Zeit t0 an den Orten q0 mit den Impulsen p0 beginnt. Sieist durch Integration der Hamiltonschen kanonischen Gleichun-gen (6.4) gegeben. Eine Lösung existiert nach dem CauchyschenExistenz- und Eindeutigkeitssatz für gewöhnliche Differential-gleichungen. Damit wird jedem Punkt q0 eine Bahn des Systemszugeordnet. Zu einem anderen Zeitpunkt t wird durch jeden Punktq genau eine der so konstruierten Bahnen gehen, wenn t nahe beit0 liegt und H sich genügend gut verhält.
• Wir setzen nun
Φ(q, q′, t) = Φ0(q0, q′) +
∫ t
t0L[q(t′), q(t′), t′
]dt′ , (6.47)
d.h. Φ sei gleich einer beliebigen Funktion Φ0 am Ort q0, ver-mehrt um das Wirkungsintegral längs der Bahn von q0 nach q.Diese Funktion löst die Hamilton-Jacobi-Gleichung. Zum Beweisvariieren wir Φ,
δΦ =∂Φ0
∂qi0δqi0 + piδqi − H(q, p, t)δt − pi0δqi0
= piδqi − Hδt =∂Φ
∂qiδqi +
∂Φ
∂tδt , (6.48)
wobei im zweiten Schritt ∂Φ/∂qi0 = pi0 verwendet wurde. Darausfolgt
pi =∂Φ
∂qi,
∂Φ
∂t+ H = 0 , (6.49)
d.h. Φ genügt tatsächlich der Hamilton-Jacobi-Gleichung.
• Damit haben wir eine allgemeine Lösung für die Hamilton-Jacobi-Gleichung konstruiert und gezeigt, dass sich jedes mechanischeSystem „auf Ruhe“ transformieren lässt. Dieses Verfahren hat sichals grundlegend für die Pfadintegral-Methode in der Quantenme-chanik erwiesen.
6.3 Liouvillescher Satz, Poisson-Klammern
6.3.1 Der Liouvillesche Satz
• Gegeben sei ein Ensemble von Systemen, deren Bahnen bei t = t0
einen Bereich σ0 des Phasenraums überdecken. Der Satz vonLiouville besagt, dass das Volumen des überdeckten Phasenraumskonstant bleibt,
Volumen[σ(t)] = Volumen[σ0] (6.50)
6.3. LIOUVILLESCHER SATZ, POISSON-KLAMMERN 65
oder ∫σ0
f∏i=1
dqidpi =
∫σ(t)
f∏i=1
dqidpi . (6.51)
• Zum Beweis dieses wichtigen Satzes gehen wir in zwei Schrittenvor: Erstens haben wir oben gesehen, dass sich jedes Hamiltonschemechanische System durch eine geeignete kanonische Transfor-mation auf Ruhe transformieren lässt. Diese Transformation wirdim Allgemeinen von der Zeit abhängen. Mit ihrer Hilfe lässt sicheine Schar von Trajektorien im erweiterten Phasenraum in einGeradenbündel transformieren, das parallel zur Zeitachse verläuft.Dieses Geradenbündel schließt ein festes Phasenraumvolumen ein.
• Das beweist den Satz von Liouville noch nicht, weil die kanonischeTransformation das Phasenraumvolumen bereits geändert habenkann. Wir brauchen also zweitens die Aussage, dass kanonischeTransformationen das Phasenraumvolumen unverändert lassen.Dies wird dadurch ausgedrückt, dass bei kanonischen Transfor-mationen (q, p, t)→ (q′, p′, t) die Funktionaldeterminante immergleich eins ist, ∣∣∣∣∣∣∣∂(q1, . . . , q f , p1, . . . , p f )
∂(q′1, . . . , q′f , p′1, . . . , p′f )
∣∣∣∣∣∣∣ = 1 , (6.52)
was wir hier ohne Beweis verwenden. Das drückt gerade denbenötigten Sachverhalt aus, dass kanonische Transformationendas Volumenelement im Phasenraum konstant lassen.
• Beide Schritte zusammengenommen bedeuten also, dass jedesHamiltonsche System sich durch eine kanonische Transformationauf Ruhe transformieren lässt, dass sich dabei das Phasenraumvo-lumen nicht ändert, und dass dann trivialerweise σ(t) = σ0 gilt.Das beweist die Aussage des Satzes von Liouville.
6.3.2 Poisson-Klammern
• Sei ρ(q, p, t) die Dichteverteilung des Ensembles im Phasenraum,d.h. ρ(q, p, t)dqdp ist die Anzahl der Ensemblemitglieder zur Zeitt im Phasenraumelement zwischen [q, q + dq] und [p, p + dp]. DieSysteme können im erweiterten Phasenraum nicht verloren gehen,
ρ(q, p, t)dqdp = ρ(q0, p0, t0)dq0dp0 (6.53)
woraus mithilfe des Liouvilleschen Satzes
ρ(q, p, t) = ρ(q0, p0, t0) (6.54)

66 KAPITEL 6. ANALYTISCHE MECHANIK
folgt. Die totale Ableitung der Dichte ρ ist
∂ρ
∂t+
f∑i=1
(qi∂ρ
∂qi+ pi
∂ρ
∂pi
)=∂ρ
∂t+
f∑i=1
(∂H∂pi
∂ρ
∂qi−∂H∂qi
∂ρ
∂pi
).
(6.55)Der Ausdruck in Klammern heißt Poisson-Klammer. Sie ist allge-mein durch
f , g :=f∑
i=1
(∂ f∂pi
∂g
∂qi−∂ f∂qi
∂g
∂pi
)(6.56)
definiert und erfüllt folgende Eigenschaften:
f , g = −g, f (6.57) f , g1 + g2 = f , g1 + f , g2
f , g1g2 = g1 f , g2 + g2 f , g1
0 = f , g1, g2 + g1, g2, f + g2, f , g1 ;
die letzte Gleichung heißt Jacobis Identität.
• Mithilfe der Poisson-Klammern lautet (6.55)
∂ρ
∂t+ H, ρ = 0 , (6.58)
und die Hamiltonschen kanonischen Gleichungen lauten
qi = H, qi , pi = H, pi . (6.59)
In dieser Form wurden sie grundlegend für die HeisenbergscheFormulierung der Quantenmechanik.
Kapitel 7
Stabilität und Chaos
7.1 Stabilität
7.1.1 Bewegung in der Nähe des Gleichgewichts
• Nicht-konservative Systeme heißen dissipativ. Sie verlieren Ener-gie und können daher als Systeme betrachtet werden, die auf irgendeine Weise an ihre Umgebung oder an andere Systeme ankoppeln.Wichtig für das Verhalten dissipativer Systeme ist die Stärke dieserKopplung an andere Systeme. Diese Kopplungsstärke wird durchParameter bestimmt, etwa durch die Reibungskonstante λ beimgedämpften harmonischen Oszillator.
• Für die Kenntnis eines dissipativen Systems ist es wichtig zu wis-sen, bei welchen kritischen Werten dieser Kopplungsparameterwesentliche Änderungen im Verhalten des Systems auftreten. DieGesamtheit des Systems wird durch den Phasenfluss dargestellt,d.h. durch die Gesamtheit der Trajektorien des Systems, die durchalle möglichen Anfangsbedingungen und die Wahl der Kopplungs-parameter erlaubt werden.
• Damit tritt die Frage auf, ob es kritische Werte der Kopplungspa-rameter gibt, bei denen sich die Eigenschaften des Phasenflusseswesentlich ändern. Statt einzelner Trajektorien wird dann die ge-samte Lösungsmannigfaltigkeit des Systems betrachtet.
• Studiert wird dann das Langzeitverhalten des Systems unter al-len möglichen Anfangsbedingungen. Damit wird die qualitativeDynamik vorgegebener Bewegungsgleichungen zum Gegenstandder Untersuchung. Ein Beispiel wäre die Untersuchung der Fra-ge, wie sich der Phasenfluss für periodische, schwach gestörteBewegungen langfristig entwickelt.
67
68 KAPITEL 7. STABILITÄT UND CHAOS
• Bei dieser Vorgehensweise gehen wir von Bewegungsgleichungender Form
~z = ~F(~z, t) (7.1)
aus. Auf eine solche Form lassen sich die dynamischen Gleichun-gen immer bringen, indem man etwa (~x1, . . . , ~x3N; ~x1, . . . , ~x3N) zueinem Vektor ~z zusammenfasst.
• Beispiel: Für den gedämpften harmonischen Oszillator ist x+2λx+
ω2x = 0. Wir führen ~z := (x, x) ein, erhalten z2 = −2λz2 − ω2z1
und z1 = z2, womit (z1
z2
)=
(z2
−2λz2 − ω2z1
)(7.2)
folgt. Die „Kraft“ ~F kann Störterme oder nicht genau bekannteAnteile enthalten. In beiden Fällen würde die Größe der Störungenoder der zusätzlichen Anteile durch Parameter angegeben werden.
• Die Gleichgewichtslage ~z0 ist dadurch bestimmt, dass ~F(~z0) = 0ist. Autonom ist das System, wenn ~F nicht explizit von der Zeitabhängt, ~F(~z, t) = ~F[~z(t)]. Punkte ~z0, für die ~F(~z0) = 0 gilt, heißensinguläre oder kritische Punkte von ~F.
• Wir denken uns das System in einen solchen kritischen Punktversetzt und linearisieren in dessen Umgebung. Sei ~y := ~z − ~z0,dann ist
~y(t) =∂~F∂~z
∣∣∣∣∣∣~z=~z0
· ~y(t) . (7.3)
• Im allgemeineren, dynamischen Fall seien ~ζ(t) eine Lösungskurvevon ~z = ~F(~z, t) und ~y(t) := ~z(t) − ~ζ(t), dann ist offenbar
~y = ~F(~y + ~ζ, t) − ~ζ = ~F(~y + ~ζ, t) − ~F(~ζ, t) , (7.4)
und daher
~y =∂~F∂~z
∣∣∣∣∣∣~z=~ζ
· ~y . (7.5)
• In der Umgebung einer Lösungskurve ~ζ lassen sich die dynami-schen Gleichungen also in die Form
~y = A · ~y , Ai j =∂Fi
∂z j
∣∣∣∣∣∣~z=~ζ
(7.6)
bringen. Die Lösung dieser Gleichung ist
~y(t) = exp [A(t − t0)] · ~y0 . (7.7)

7.1. STABILITÄT 69
• Die Exponentialfunktion der Matrix A(t − t0) hat die schon im TeilI der Vorlesung (I-15.11) eingeführte, naheliegende Bedeutung
exp[A(t − t0)] :=∞∑
n=0
(t − t0)n
n!An . (7.8)
Wenn A in Diagonalform gebracht wird und die Eigenwerte αi,1 ≤ i ≤ 2 f hat, dann ist auch exp[A(t − t0)] in Diagonalformund hat die Eigenwerte exp[αi(t − t0)]. Die Eigenwerte αi heißenkritische Exponenten des Vektorfeldes ~F in ~z0 bzw. entlang derLösungskurve ~ξ.
Beispiele
• Gegeben sei zum Beispiel ein ebenes Pendel der Länge l und derMasse m. Seine Lagrange-Funktion ist
L =m2
l2ϕ2 + mgl cosϕ , (7.9)
woraus bei linearer Näherung die Bewegungsgleichung
ϕ + ω2ϕ = 0 , ω :=√g
l(7.10)
folgt.
• Wir nennen y1 := ϕ und y2 = ϕ. Damit ist y1 = y2 und y2 = −ω2y1,und
~y =
(0 1−ω2 0
). (7.11)
Aus dem charakteristischen Polynom α2 + ω2 = 0 erhalten wirdie Eigenwerte α1,2 = ±iω, und damit lautet die Matrix A inDiagonalform
A =
(iω 00 −iω
). (7.12)
Beide kritische Exponenten sind imaginär und beschreiben daherSchwingungen des Pendels und nicht ein exponentielles Weglaufenaus dem Gleichgewicht.
• Betrachten wir statt dessen ein ebenes Pendel mit Reibung, dannlautet die Bewegungsgleichung
ϕ + 2λϕ + ω2ϕ = 0 . (7.13)
Mit derselben Definition von y1,2 wie oben folgt(y1
y2
)=
(0 1
−ω2 −2λ
). (7.14)
70 KAPITEL 7. STABILITÄT UND CHAOS
Das charakteristische Polynom α(α + 2λ) + ω2 = 0 ergibt dieEigenwerte
α1,2 = −λ ± i√ω2 − λ2 . (7.15)
Die Gleichgewichtslage y = 0 wird für λ = 0 nur im zeitlichenMittel erreicht. Für λ < 0 läuft das System exponentiell vomGleichgewicht weg, während die Bewegung für λ > 0 und t → ∞nach y = 0 läuft.
7.1.2 Definitionen und Sätze zur Stabilität
• Diese Überlegungen motivieren die folgenden Definitionen:
1. Ein Punkt ~z0 auf der Lösungskurve eines Systems heißt Lia-punov-stabil, wenn zu jeder Umgebung U von ~z0 eine Um-gebung V von ~z0 existiert so, dass die Lösungskurve, diezur Zeit t = 0 durch ~z ∈ V geht, für alle t ≥ 0 in U liegt.Mathematisch formuliert: ~z ∈ V : ζ~z(t) ∈ U (t ≥ 0).
2. Der Punkt ~z0 heißt asymptotisch stabil, wenn es zu ~z0 eineUmgebung U gibt so, dass die Lösungskurve durch ein belie-biges~z ∈ U für t → ∞ definiert ist und im Limes t → ∞ nach~z0 läuft. Ein asymptotisch stabiler Punkt ist auch Liapunov-stabil.
• Folgende Sätze beschreiben die Stabilität:
1. Sei ~z0 ein Gleichgewichtspunkt von ~F, ferner sei Re(αi) <−c < 0 für alle αi, dann existieren eine Umgebung U von~z0 so, dass der Fluss von ~F auf U für alle positiven Zeitendefiniert ist, und ein d ∈ R so, dass für alle ~z ∈ U und allet ≥ 0 gilt ∣∣∣∣~ζ~z ∣∣∣∣ ≤ de−ct
∣∣∣~z −~z0
∣∣∣ (7.16)
(exponentielle, gleichmäßige Konvergenz nach ~z0).
2. Wenn ~z0 stabil ist, hat keiner der Eigenwerte von A einenpositiven Realteil.
Beispiel für einen Freiheitsgrad
• Für ein System mit einem Freiheitsgrad gilt in der Nähe des Gleich-gewichts ~y = 0 (
y1
y2
)= A
(y1
y2
). (7.17)
Die Eigenwerte erfüllen die Gleichung
α2 − trAα + det A = 0 (7.18)
7.1. STABILITÄT 71
mit trA = α1 + α2 und det A = α1α2. Der Ausdruck
D := (trA)2 − 4 det A (7.19)
ist die Diskriminante.
• Wenn D ≥ 0 ist, sind α1,2 ∈ R. Dann werden drei Fälle unterschie-den:
1. α1 < α2 < 0: (det A > 0); dann gilt
y1 = eα1ty1,0 , y2 = eα2ty2,0 . (7.20)
Die y(t) bilden dann einen Knoten.2. α1 = α2 < 0: Der Knoten ist dann axialsymmetrisch.3. α2 < 0 < α1: (det A < 0); der Nullpunkt ist instabil, und die
y(t) bilden einen Sattelpunkt.
• Wenn D < 0 ist, sind α1,2 konjugiert-komplexe Zahlen. Die dyna-mische Gleichung beschreibt dann einen (gedämpften oder ange-triebenen) harmonischen Oszillator, der anhand des Vorzeichensvon Re(α) unterschieden wird.
7.1.3 Hamiltonsche Systeme
• Mit der Matrix
J :=(
0 1−1 0
)(7.21)
und der Identifikation q = z1, p = z2 lauten die HamiltonschenGleichungen
~z = J · ~∇H . (7.22)
Offenbar ist det J = 1. Die Inverse erfüllt
J−1 =
(0 −11 0
)= JT = −J , (7.23)
und außerdem ist J2 = −I (d.h. die negative Einheitsmatrix). Jinduziert damit eine so genannte symplektische Struktur auf demPhasenraum.
• Wenn ~z0 ein Gleichgewichtspunkt ist, gilt dort J · ~∇H = 0, alsoauch ~∇H
∣∣∣∣~z=~z0
= 0. Eine Linearisierung um ~z0 mit ~z := ~z −~z0 ergibt
~z = J ·(∂2H∂zi∂z j
)∣∣∣∣∣∣~z=~z0
· ~y . (7.24)
Die dabei auftretende Matrix
B :=(∂2H∂zi∂z j
)∣∣∣∣∣∣~z=~z0
(7.25)
ist offenbar symmetrisch.
72 KAPITEL 7. STABILITÄT UND CHAOS
• Per Definition ist JB = A. Für diese Matrix A gilt
AT J + JA = (JB)T J + JA = BT (JT J) + JA = B + JA= B + J2B = B − B = 0 . (7.26)
Sie stellt sich damit als infinitesimal symplektisch heraus. Für einesolche Matrix gilt der folgende Satz: Wenn α Eigenwert von A ist,dann ist auch −α Eigenwert von A.
• Um das einzusehen, zeigen wir, dass die beiden charakteristischenPolynome mit positiven und negativen α übereinstimmen, dassalso det(A − αI) = det(A + αI) gilt:
det(A − αI) = det(JB + αJ2) = det J det(B + αJ)= det
[(B + αJ)T
]= det(BT + αJT )
= det(B − αJ) = det [J(B − αJ)]= det(JB − αJ2) = det(A + αI) . (7.27)
Das bedeutet, dass für Hamiltonsche Systeme die Voraussetzungendes Satzes 1 nicht erfüllbar sind, denn zu jedem Eigenwert αi vonA = JB mit negativem Realteil muss es einen Eigenwert α j mitRe(α j) = −Re(αi) > 0 geben! Der Punkt ~z0 kann höchstens dannstabil sein, wenn alle Eigenwerte rein imaginär sind.
Stabilität des asymmetrischen Kreisels
• Als Beispiel betrachten wir einen kräftefreien, asymmetrischenKreisel mit den Hauptträgheitsmomenten 0 < Θ1 < Θ2 < Θ3. Mitder Definition zi := ωi können die Eulerschen Gleichungen (2.48)mit ~M = 0 in die Form
z1 = −Θ3 − Θ2
Θ1z2z3
z2 = +Θ3 − Θ1
Θ2z1z3
z3 = −Θ2 − Θ1
Θ3z1z2 (7.28)
gebracht werden. Also ist
~F =
(−
Θ3 − Θ2
Θ1z2z3,
Θ3 − Θ1
Θ2z1z3,
Θ2 − Θ1
Θ3z1z2
), (7.29)
und die Matrix A ist
(Ai j) =
(∂Fi
∂z j
)=
0 −
Θ3−Θ2Θ1
z3 −Θ3−Θ2
Θ1z2
Θ3−Θ1Θ2
z3 0 Θ3−Θ1Θ2
z1Θ2−Θ1
Θ3z2
Θ2−Θ1Θ3
z1 0
. (7.30)
7.1. STABILITÄT 73
• Die drei Gleichgewichtslagen des Systems sind durch
~z0,1 =
ω00 , ~z0,2 =
0ω0
, ~z0,3 =
00ω
(7.31)
gegeben, worin ω eine beliebige Konstante ist, denn damit ver-schwinden jeweils z1, z2 und z3.
• Zur Untersuchung der Stabilität dieser Gleichgewichtslagen setzenwir ~yi := ~zi − ~z0,i und linearisieren in ~y. So ergibt sich in derUmgebung von ~z0,1 das lineare Gleichungssystem
~y =
y1
y2
y3
= A · ~y =
0 0 00 0 ωΘ3−Θ1
Θ2
0 −ωΘ2−Θ1Θ3
0
y1
y2
y3
. (7.32)
• Die charakteristischen Exponenten zur Gleichgewichtslage ~x0,1
ergeben sich aus det(A − α1,iI) = 0, also
α1,1
(α1,2α1,3 + ω2 Θ3 − Θ1
Θ2
Θ2 − Θ1
Θ3
)= 0 (7.33)
zu
α1,1 = 0 , α1,2 = −α1,3 = iω[(Θ2 − Θ1)(Θ3 − Θ1)
Θ2Θ3
]1/2
. (7.34)
• Auf völlig analoge Weise findet man
α2,1 = 0 , α2,2 = −α2,3 = ω
[(Θ3 − Θ2)(Θ2 − Θ1)
Θ1Θ3
]1/2
α3,1 = 0 , α3,2 = −α3,3 = iω[(Θ3 − Θ2)(Θ3 − Θ1)
Θ1Θ2
]1/2
(7.35)
für die Eigenwerte der Entwicklung um die anderen beiden Gleich-gewichtslagen.
• Der Eigenwert α2,2 hat also einen positiven Realteil, d.h. dieGleichgewichtslage ~x0,2 erfüllt nicht die Voraussetzung für Stabili-tät. Tatsächlich sind Drehungen des kräftefreien, asymmetrischenKreisels um die Achse mit dem mittleren Hauptträgheitsmomentinstabil.
7.1.4 Attraktoren; die van-der-Polsche Gleichung
• Attraktoren sind Bereiche des Phasenraums, zu denen die Lö-sungskurven laufen. Als Beispiel dafür besprechen wir die van-
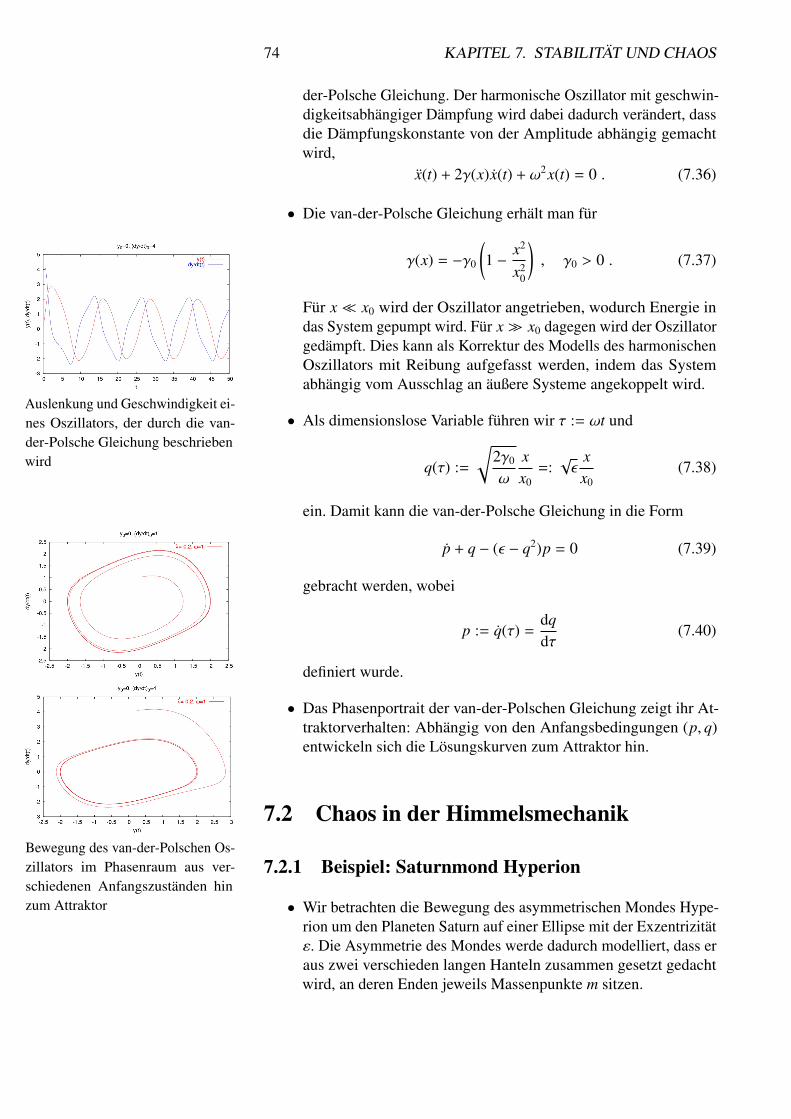
74 KAPITEL 7. STABILITÄT UND CHAOS
der-Polsche Gleichung. Der harmonische Oszillator mit geschwin-digkeitsabhängiger Dämpfung wird dabei dadurch verändert, dassdie Dämpfungskonstante von der Amplitude abhängig gemachtwird,
x(t) + 2γ(x)x(t) + ω2x(t) = 0 . (7.36)
• Die van-der-Polsche Gleichung erhält man für
γ(x) = −γ0
(1 −
x2
x20
), γ0 > 0 . (7.37)
Für x x0 wird der Oszillator angetrieben, wodurch Energie indas System gepumpt wird. Für x x0 dagegen wird der Oszillatorgedämpft. Dies kann als Korrektur des Modells des harmonischenOszillators mit Reibung aufgefasst werden, indem das Systemabhängig vom Ausschlag an äußere Systeme angekoppelt wird.
Auslenkung und Geschwindigkeit ei-nes Oszillators, der durch die van-der-Polsche Gleichung beschriebenwird
• Als dimensionslose Variable führen wir τ := ωt und
q(τ) :=
√2γ0
ω
xx0
=:√ε
xx0
(7.38)
ein. Damit kann die van-der-Polsche Gleichung in die Form
p + q − (ε − q2)p = 0 (7.39)
gebracht werden, wobei
p := q(τ) =dqdτ
(7.40)
definiert wurde.
Bewegung des van-der-Polschen Os-zillators im Phasenraum aus ver-schiedenen Anfangszuständen hinzum Attraktor
• Das Phasenportrait der van-der-Polschen Gleichung zeigt ihr At-traktorverhalten: Abhängig von den Anfangsbedingungen (p, q)entwickeln sich die Lösungskurven zum Attraktor hin.
7.2 Chaos in der Himmelsmechanik
7.2.1 Beispiel: Saturnmond Hyperion
• Wir betrachten die Bewegung des asymmetrischen Mondes Hype-rion um den Planeten Saturn auf einer Ellipse mit der Exzentrizitätε. Die Asymmetrie des Mondes werde dadurch modelliert, dass eraus zwei verschieden langen Hanteln zusammen gesetzt gedachtwird, an deren Enden jeweils Massenpunkte m sitzen.

7.2. CHAOS IN DER HIMMELSMECHANIK 75
• Die Längen der Hanteln seien d und e < d. Die Hauptträgheitsmo-mente ergeben sich zu
Θ1 =m2
e2 , Θ2 =m2
d2 , Θ3 =m2
(d2 + e2) . (7.41)
Die 1-Achse ist entlang der kürzeren, die 2-Achse entlang derlängeren Hantel gerichtet, die 3-Achse steht auf beiden senkrecht.
• Aufgrund der Asymmetrie Hyperions übt der Saturn auf die 2-Achse das Drehmoment
~M12 =~d2× ( ~F1 − ~F2) (7.42)
aus, wobei die ~Fi durch
~Fi = −GMm~ri
r3i
, ~r1,2 = ~r ±~d2
(7.43)
gegeben sind.
• Offenbar gilt dann wegen d |~r|
r31,2 =
~r ± ~d
2
23/2
≈ r3[1 ±
3d2r
cosα], (7.44)
wobei α der Winkel zwischen ~r und ~d ist.
• Die Kräfte ~F1,2 lauten also
~F1,2 = −GMm
r3
(1 ∓
3d2r
cosα) ~r +
~d2
, (7.45)
und die Beträge der Kreuzprodukte sind∣∣∣∣∣∣∣ ~d2 × ~F1,2
∣∣∣∣∣∣∣ = −GMm
2r3
(1 ∓
3d2r
cosα)
dr sinα . (7.46)
• Daraus ergibt sich das Drehmoment
~M12 =3GM2r3 Θ2 sin 2α~e3 . (7.47)
Entsprechend erhält man für die darauf senkrecht stehende Hantel
~M34 = −3GM2r3 Θ1 sin 2α~e3 . (7.48)
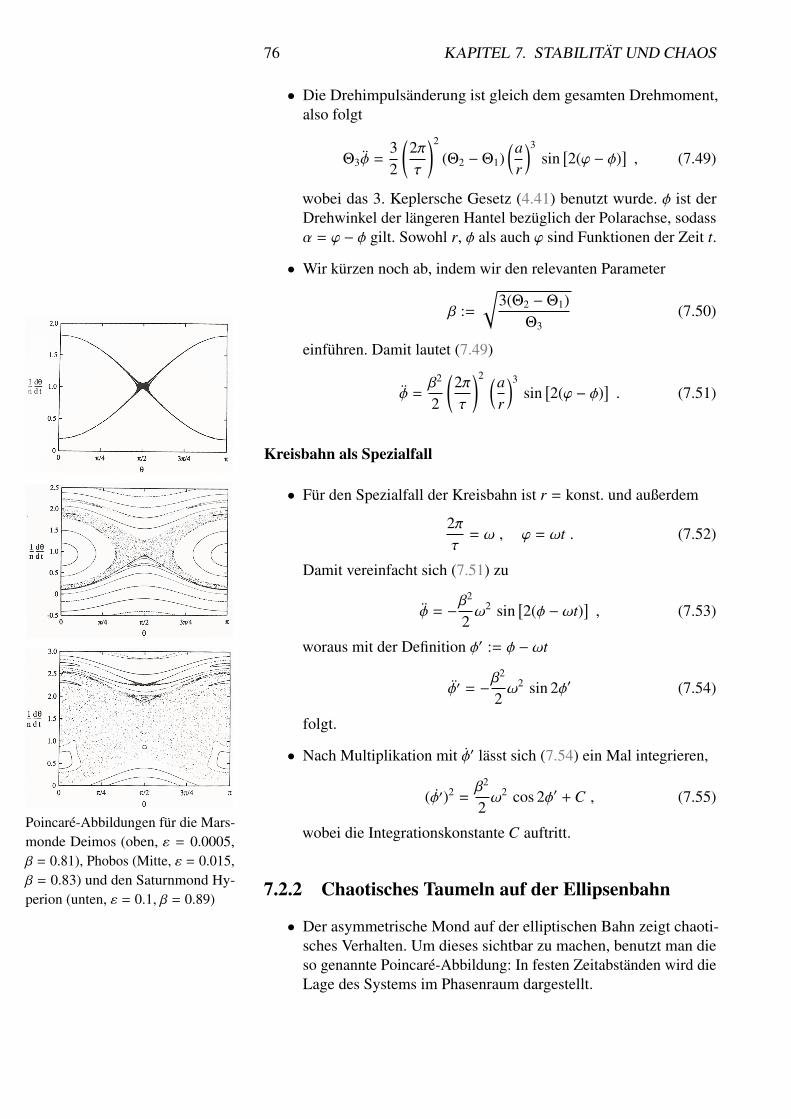
76 KAPITEL 7. STABILITÄT UND CHAOS
• Die Drehimpulsänderung ist gleich dem gesamten Drehmoment,also folgt
Θ3φ =32
(2πτ
)2
(Θ2 − Θ1)(a
r
)3sin
[2(ϕ − φ)
], (7.49)
wobei das 3. Keplersche Gesetz (4.41) benutzt wurde. φ ist derDrehwinkel der längeren Hantel bezüglich der Polarachse, sodassα = ϕ − φ gilt. Sowohl r, φ als auch ϕ sind Funktionen der Zeit t.
• Wir kürzen noch ab, indem wir den relevanten Parameter
β :=
√3(Θ2 − Θ1)
Θ3(7.50)
einführen. Damit lautet (7.49)
φ =β2
2
(2πτ
)2 (ar
)3sin
[2(ϕ − φ)
]. (7.51)
Kreisbahn als Spezialfall
Poincaré-Abbildungen für die Mars-monde Deimos (oben, ε = 0.0005,β = 0.81), Phobos (Mitte, ε = 0.015,β = 0.83) und den Saturnmond Hy-perion (unten, ε = 0.1, β = 0.89)
• Für den Spezialfall der Kreisbahn ist r = konst. und außerdem
2πτ
= ω , ϕ = ωt . (7.52)
Damit vereinfacht sich (7.51) zu
φ = −β2
2ω2 sin
[2(φ − ωt)
], (7.53)
woraus mit der Definition φ′ := φ − ωt
φ′ = −β2
2ω2 sin 2φ′ (7.54)
folgt.
• Nach Multiplikation mit φ′ lässt sich (7.54) ein Mal integrieren,
(φ′)2 =β2
2ω2 cos 2φ′ + C , (7.55)
wobei die Integrationskonstante C auftritt.
7.2.2 Chaotisches Taumeln auf der Ellipsenbahn
• Der asymmetrische Mond auf der elliptischen Bahn zeigt chaoti-sches Verhalten. Um dieses sichtbar zu machen, benutzt man dieso genannte Poincaré-Abbildung: In festen Zeitabständen wird dieLage des Systems im Phasenraum dargestellt.
7.2. CHAOS IN DER HIMMELSMECHANIK 77
• Im Fall des Mondes auf seiner Umlaufbahn wählt man als fes-ten Zeitabstand die Umlaufperiode um den Saturn und gibt etwabei jedem Durchgang des Mondes durch sein Perisaturnion seineOrientierung θ sowie dessen Änderung θ an.
• Führt man dies für einige zufällig gewählte Anfangswerte θ0 undθ0 durch und betrachtet die Poincaré-Abbildung nach sehr vielenUmläufen, zeigt sich ein charakteristisches Bild: Bereichen, indenen geordnetes Verhalten auftritt, stehen Bereiche gegenüber, indenen sich die Position des Systems im Phasenraum von Umlaufzu Umlauf unkontrollierbar ändert: Der asymmetrische Mondtaumelt. Die Abbildungen zeigen die Poincaré-Abbildungen fürdie Marsmonde Phobos und Deimos und für den SaturnmondHyperion.

78 KAPITEL 7. STABILITÄT UND CHAOS
Kapitel 8
Grundlagen der statistischenPhysik
8.1 Das Grundpostulat der statistischen Phy-sik
8.1.1 Mikro- und Makrozustände
• Die Beschreibung physikalischer Systeme mithilfe der Methodender klassischen Mechanik stößt an ihre Grenzen bei Systemen, dieaus sehr vielen Teilen zusammengesetzt sind und damit sehr vieleFreiheitsgrade f haben. Die Lösung der mechanischen Gleichun-gen, z.B. in Gestalt der Hamilton’schen Bewegungsgleichungen,wird dann schnell sehr kompliziert. Wenn man sie gelöst hätte, wä-ren die verallgemeinerten Koordinaten qi und die dazu kanonischkonjugierten Impulse pi, 1 ≤ i ≤ f , zu jedem Zeitpunkt bekannt,wenn sie je zu einem Zeitpunkt bekannt waren.
• Die verallgemeinerten Koordinaten und Impulse eines Systemsmit f Freiheitsgraden spannen den 2 f -dimensionalen Vielteilchen-Phasenraum Γ auf, dessen Punkte durch Angabe der 2 f Zahlen(q1, . . . , q f , p1, . . . , p f ) bzw. der f geordneten Paare xi := (qi, pi)mit 1 ≤ i ≤ f gekennzeichnet sind;
Γ :=(x1, . . . , x f ) |xi = (qi, pi)
. (8.1)
Eine vollständige Kenntnis des Systems bedeutet, dass diese Zah-len zu jedem beliebigen Zeitpunkt t bekannt sind und damit auchdie Trajektorien aller Freiheitsgrade des Systems im Phasenraum.
• Je größer die Anzahl f der Freiheitsgrade wird, umso wenigerist man in der Regel daran interessiert, die genaue Lage der Frei-heitsgrade des Systems im Phasenraum zu kennen. Es erfordert
79

80 KAPITEL 8. GRUNDLAGEN DER STATISTISCHEN PHYSIK
enormen Aufwand, sie zu berechnen, und sie enthält in der Regelsehr viel mehr Information als nötig. Betrachten wir zum Beispieleinen Liter eines Gases. Es enthält unter Normalbedingungen
N =1
22.4mol =
6.022 · 1023
22.4= 2.69 · 1022 (8.2)
Teilchen. (In diese Rechnung gingen das Molvolumen von22.4 l mol−1 und die Avogadrozahl NA = 6.022 · 1023 mol−1 ein.)Wenn wir sie als Punktteilchen auffassen, hat jedes davon dreiFreiheitsgrade, also ist f = 8.07 · 1022. Zweifellos sind nicht dergenaue Ort und der genaue Impuls aller dieser Teilchen zu jedembeliebigen Zeitpunkt irgendwie physikalisch relevant.
• Der genaue mechanische Mikrozustand des Systems, der durchdie Angabe aller Phasenraumkoordinaten gekennzeichnet ist, istdeshalb für unser physikalisches Verständnis unwichtig. Allein erwird aber durch die mechanischen Gleichungen beschrieben, z.B.durch die Hamilton’schen Gleichungen. Statt des Mikrozustandssind wir am Makrozustand des Systems interessiert, also an denphysikalischen Eigenschaften des Gesamtsystems, die durch we-nige, makroskopisch messbare Parameter y j ausgedrückt werdensollen. Solche makroskopischen Parameter können zum Beispieldie Gesamtenergie, das Volumen, der Druck usw. eines Gases sein.
• Um den Makrozustand physikalisch zu beschreiben, müssen wirzunächst eine Zustandsbeschreibung suchen, die keine genaueKenntnis aller Phasenraumkoordinaten voraussetzt. Dazu denkenwir uns zunächst den 2 f -dimensionalen Phasenraum Γ in Zellengleicher Größe gegliedert,
δqiδp j = h0 , (8.3)
wobei h0 in der klassischen Mechanik beliebig klein gewählt wer-den kann. Indem wir h0 geeignet einstellen, können wir wählen,wie genau wir den präzisen Zustand des Systems in die Betrach-tung einbeziehen wollen. Nach dieser Einteilung lassen sich dieZellen abzählen, sodass jeder Zelle eine Zahl n zugeordnet wer-den kann. Der Zustand des Systems kann nun durch die Angabederjenigen Zelle n gekennzeichnet werden, in der es sich geradebefindet. Jede Phasenraumzelle kennzeichnet einen Mikrozustanddes Systems.
8.1.2 Aufenthaltswahrscheinlichkeiten im Phasen-raum
• Ohne weitere Kenntnisse können wir nicht sagen, in welchem Mi-krozustand sich ein System gerade befindet. Das ist in der Regel
8.1. DAS GRUNDPOSTULAT DER STATISTISCHEN PHYSIK 81
auch ganz unwichtig. Stattdessen können wir fragen, mit wel-cher Wahrscheinlichkeit es sich in einer Zelle n des Phasenraumsbefindet, wenn die makroskopischen Zustandsparameter y j aufbestimmte Weise eingestellt sind.
• Damit ist folgendes gemeint: In der Regel wird sich das Systembei vorgegebenen y j in einer großen Anzahl verschiedener Pha-senraumzellen aufhalten können. Das bedeutet, dass in der Regelviele verschiedene Mikrozustände mit dem durch die Parameter y j
vorgegebenen Makrozustand vereinbar sein werden. Wir nennensie die dem System unter den gegebenen Bedingungen zugängli-chen Mikrozustände. Nun stellen wir uns vor, das physikalischeSystem bei gleichbleibenden makroskopisch einstell- und messba-ren Parametern y j viele verschiedene Male zu realisieren. Dadurchentsteht ein Ensemble (gedachter) physikalischer Systeme, diemakroskopisch gleichartig sind.
• Jedes System eines solchen Ensembles wird zu einem bestimmtenZeitpunkt einen der ihm zugänglichen Mikrozustände einnehmen,aber wir wissen nicht, welchen. Ohne weitere Kenntnis des Mi-krozustands können wir bestenfalls angeben, mit welcher Wahr-scheinlichkeit pn das System den Mikrozustand n einnehmen wird.Das bedeutet, dass wir erwarten, in einem Ensemble aus N makro-skopisch gleichartigen Systemen die mittlere Anzahl
Nn = pn N (8.4)
von Systemen im Zustand n zu finden.
• A priori können wir über die Wahrscheinlichkeiten pn nichts aus-sagen, weil wir keinerlei detaillierte Kenntnisse über den Mikro-zustand des Systems zur Verfügung haben (und dies auch nichtwollen). Wir können aber hoffen, zu allgemein gültigen Aussagenzu gelangen, wenn wir uns auf Systeme beschränken, für die sichdie Wahrscheinlichkeiten pn zeitlich nicht ändern. Von solchenSystemen sagen wir, sie seien im Gleichgewicht. Das bedeutet,dass sich das Ensemble aus vielen Systemen zeitlich nicht ändernwird.
• Für isolierte Systeme im Gleichgewicht, deren Gesamtenergie Ekonstant bleibt, führen wir nun das folgende plausible Grundpos-tulat der statistischen Physik ein:
Isolierte Systeme im Gleichgewicht halten sich mit gleicher Wahr-scheinlichkeit in jedem ihnen zugänglichen Mikrozustand auf.
Da die Energie in isolierten Systemen konstant bleibt, kennzeich-nen wir isolierte Systeme durch ihre Energie E und bezeichnendie Anzahl der ihnen zugänglichen Mikrozustände mit
Ω(E) := Anzahl zugänglicher Mikrozustände bei Energie E .(8.5)
82 KAPITEL 8. GRUNDLAGEN DER STATISTISCHEN PHYSIK
Da wir den Phasenraum in Zellen endlicher Größe eingeteilt haben,wird die Energie nicht genau einen beliebigen Wert E annehmenkönnen. Deswegen ist mit solchen Aussagen immer gemeint, dassdie Energie zwischen E und E + δE liegen soll, wobei δE E ist.
• Aus dieser Aussage können wir bereits schließen, welchen mittle-ren Wert ein bestimmter Parameter y j des Systems einnehmen wird.Seien w j,k alle möglichen Werte, die dieser Parameter in dembetrachteten System annehmen kann. Mit welcher Wahrschein-lichkeit wird ein bestimmter Wert w j,k angenommen? Dazu be-trachten wir denjenigen Bereich des dem System zugänglichenPhasenraums, in dem der Parameter diesen Wert w j,k annimmt.Die Anzahl der Zustände in diesem Bereich bezeichnen wir mitΩ(E;w j,k). Dann ist die Wahrscheinlichkeit dafür, dass der Wertw j,k angenommen wird, gleich dem Verhältnis
p(w j,k) =Ω(E;w j,k)
Ω(E), (8.6)
weil jeder Zustand mit gleicher Wahrscheinlichkeit angenommenwird. Demnach ist der Mittelwert des Parameters durch
w j =∑
k
w j,k p(w j,k) =
∑k w j,kΩ(E;w j,k)
Ω(E)(8.7)
gegeben.
8.1.3 Der Liouville’sche Satz
• Dass dieses Postulat nicht nur einleuchtend, sondern auch physi-kalisch plausibel und mit der klassischen Mechanik verträglich ist,zeigt der Liouville’sche Satz, den wir bereits unter 6.3.1 bespro-chen hatten. Betrachten wir ein Ensemble aus einer sehr großenZahl makroskopisch gleichartiger physikalischer Systeme. Ihr prä-ziser mechanischer Zustand wird durch die 2 f Phasenraumko-ordinaten (q1, . . . , q f , p1, . . . , p f ) gekennzeichnet. Einige dieserSysteme werden sich in einem infinitesimalen Volumen des Pha-senraums befinden, in dem die verallgemeinerten Koordinatenzwischen qi und qi + dqi und ihre kanonisch konjugierten Impulsezwischen p j und p j + dp j liegen. Die Anzahl dieser Systeme imEnsemble bezeichnen wir mit
ρ(q1, . . . , q f , p1, . . . , p f )dq1 · · · dq f dp1 · · · dp f . (8.8)
Der Liouville’sche Satz besagt, dass sich das Volumen im Phasen-raum, das diese Systeme einnehmen, zeitlich konstant bleiben wird.Die Anzahl (8.8) der Systeme, die sich im betrachteten Volumenaufhalten, muss also konstant sein,
dρdt
= 0 . (8.9)
8.1. DAS GRUNDPOSTULAT DER STATISTISCHEN PHYSIK 83
Die totale Zeitableitung
dρdt
=∂ρ
∂t+∂ρ
∂qiqi +
∂ρ
∂p jp j , (8.10)
in der nach der Einstein’schen Summenkonvention über alle dop-pelt auftretenden Indizes zu summieren ist, zeigt, dass sich das ein-mal vom System eingenommene Volumen im Phasenraum durch-aus verschieben und deformieren kann, aber der Liouville’scheSatz garantiert, dass sich sein Inhalt nicht verändert.
• Wenn in einem Ensemble von Systemen jeder zugängliche Zustandmit gleicher Wahrscheinlichkeit auftritt, ist offenbar die erwarteteAnzahl der Systeme im Ensemble in jedem dieser Zustände gleichgroß. Also ist ρ im Phasenraum konstant,
∂ρ
∂qi= 0 =
∂ρ
∂p j(1 ≤ i, j ≤ f ) . (8.11)
Daher ist wegen (8.10) und wegen des Liouville’schen Satzes (8.9)
dρdt
= 0 =∂ρ
∂t. (8.12)
Wenn also die Situation eingetreten ist, dass alle Zustände gleichwahrscheinlich sind, dann ändert sie sich allein aufgrund der klas-sischen Mechanik nicht mehr. Deswegen ist das statistische Grund-postulat, demzufolge ein isoliertes System im Gleichgewicht alleihm zugänglichen Mikrozustände mit gleicher Wahrscheinlichkeiteinnimmt, mit den Gesetzen der klassischen Mechanik verträglich.
8.1.4 Übergang ins Gleichgewicht
• Betrachten wir nun ein solches isoliertes System, das anfänglichim Gleichgewicht ist. Nach dem bisher Gesagten bedeutet das,dass es sich mit gleicher Wahrscheinlichkeit pn in jedem der ihmzugänglichen Mikrozustände aufhalten kann. In einem Ensembleaus einer großen Zahl N gleichartiger Systeme können wir erwar-ten, (8.4) Systeme in jedem einzelnen der Zustände zu finden.
• Welche Mikrozustände im Phasenraum dem System zugänglichsind, wird durch die makroskopischen Parameter y j vorgegeben.Da das System isoliert ist, wird seine Energie E konstant sein.Ändern wir einen der makroskopischen Parameter yk so, dass sichder zugängliche Bereich im Phasenraum ändert, wird das Systemaus dem Gleichgewicht gebracht.
• Wenn sich der dem System zugängliche Bereich vergrößert, gibtes nach der Parameteränderung zugängliche Mikrozustände im

84 KAPITEL 8. GRUNDLAGEN DER STATISTISCHEN PHYSIK
Phasenraum, die vorher unzugänglich waren und die daher im En-semble der Systeme unbesetzt sind. Um wieder ins Gleichgewichtzu kommen, müssen Wechselwirkungen zwischen den Komponen-ten des Systems – z.B. Stöße zwischen Gasteilchen – dafür sorgen,dass auch bislang unbesetzte Zustände erreicht werden. DieserProzess wird so lange dauern, bis alle jetzt zugänglichen Mikro-zustände mit gleicher Wahrscheinlichkeit besetzt sind, d.h. bis ineinem großen Ensemble gleichartiger Systeme jeder zugänglicheMikrozustand durch eine im Mittel gleiche Anzahl von Systemenbesetzt ist. Wie lange dieser Prozess dauern wird, hängt natürlichvon der Stärke der Wechselwirkung zwischen den Komponentendes Systems ab.
• Wenn sich der dem System zugängliche Bereich im Phasenraumdurch die Parameteränderung verkleinert, setzt ein analoger Pro-zess ein. Dadurch, dass bisher zugängliche Mikrozustände nunausgeschlossen werden, muss die Wahrscheinlichkeit dafür aufNull sinken, dass sich das System dort aufhält. Dementsprechendgrößer muss die Wahrscheinlichkeit werden, dass sich das Systemin den weiterhin zugänglichen Mikrozuständen des Phasenraumsbefindet. Wiederum müssen die Wechselwirkungen zwischen denKomponenten des Systems für diese Entwicklung sorgen.
• Ein offensichtliches Beispiel für solche Vorgänge ist ein isolier-tes Volumen, das zunächst durch eine undurchlässige Wand inzwei Hälften geteilt wird. Nur eine Hälfte sei anfänglich mit Gasgefüllt. Wenn jetzt die Wand entfernt wird, verdoppelt sich beigleichbleibender Gesamtenergie der Gasteilchen das zugänglicheVolumen. Umgekehrt kann das einem Gas zugängliche Volumenin einem Zylinder dadurch verringert werden, dass ein Kolben inden Zylinder geschoben wird.
8.1.5 Anzahl zugänglicher Zustände
• Wie groß die Anzahl der zugänglichen Mikrozustände eines ma-kroskopischen Systems aus sehr vielen Teilchen (oder allgemeiner:mit sehr vielen Freiheitsgraden) sein kann, zeigt die folgende Be-trachtung am Beispiel eines idealen Gases. Ideal heißt ein Gas,dessen Teilchen nur durch direkte Stöße miteinander wechselwir-ken und keine innere Struktur haben. Jedes Teilchen hat dann nurdie drei Freiheitsgrade der Translation, und die Gesamtenergie derTeilchen ist
E = T + V = T =
N∑i=1
~p 2i
2m. (8.13)
Die potentielle Energie verschwindet, weil die Teilchen keineKräfte aufeinander ausüben, wenn sie nicht direkt aneinander
8.1. DAS GRUNDPOSTULAT DER STATISTISCHEN PHYSIK 85
stoßen.
• Die Anzahl der Mikrozustände, die dem System bei vorgegebenerEnergie E zugänglich sind, ist gleich dem zugänglichen Volumenim Phasenraum, geteilt durch die Zellengröße h f
0 ,
Ω(E) =1
h f0
∫ E+δE
Edq1 · · · dq f dp1 · · · dp f , (8.14)
wobei die Integrationsgrenzen andeuten, dass die Gesamtenergie(8.13) zwischen E und E + δE liegen muss.
• Das Integral über die verallgemeinerten Koordinaten ist einfachauszuführen. Für jedes einzelne Gasteilchen muss∫
dq1dq2dq3 = V (8.15)
ergeben, wenn seine drei Freiheitsgrade der Einfachheit halber mit1, 2 und 3 nummeriert werden. Insgesamt ergibt das Integral überalle dqi also VN , wenn N die Teilchenzahl ist.
• Um das Integral über die Impulse abzuschätzen, betrachten wirzunächst die Anzahl Φ(E) der Zustände mit einer MaximalenergieE. Dann ist
Ω(E) = Φ(E + δE) − Φ(E) =∂Φ(E)∂E
δE . (8.16)
Wegen (8.13) ist E die Energie auf einer Kugelschale im f -dimensionalen Impulsraum, deren Radius durch
Rp =
√√N∑
i=1
~p 2i =√
2mE (8.17)
gegeben ist. Das gesamte Volumen dieser Kugel wird zu R fp pro-
portional sein, ebenso wie das Volumen einer Kugel in drei Dimen-sionen zu R3 proportional ist. Die Proportionalitätskonstante wirdvon der Größenordnung eins sein und ist für unsere Betrachtunguninteressant. Also haben wir
Φ(E) ∝ R fp = VN (2mE) f /2 (8.18)
und, wegen (8.16),
Ω(E) ∝ VN f2
2m (2mE) f /2−1 δE ∝ f E f /2−1δE . (8.19)
Wir ziehen aus diesem sehr allgemeinen Ergebnis drei wesentli-che Schlüsse. Erstens wird Ω(E) proportional zu δE sein, solangeδE E ist. Zweitens ist Ω(E) proportional zur Anzahl der Frei-heitsgrade f , was eine riesige Zahl sein wird. Drittens nimmt Ω(E)wie E f /2−1 ≈ E f /2 zu, hängt also extrem steil von der Energie Eab. Auf diese Eigenschaften von Ω(E) werden wir später wiederzurückkommen.

86 KAPITEL 8. GRUNDLAGEN DER STATISTISCHEN PHYSIK
8.2 Wechselwirkungen zwischen Systemen
8.2.1 Mechanische Arbeit und Wärme
• Die Energie eines Systems wird durch alle Parameter a j beeinflusst,die in seiner Hamiltonfunktion H auftauchen. Der Einfachheithalber fassen wir alle diese Parameter in einem einzigen Symbola zusammen. Die Energie En eines Zustands n wird daher vondiesen Parametern abhängen,
En = Hn(a) . (8.20)
Die Parameter a verändern den Makrozustand des Systems undheißen äußere Parameter oder Zustandsparameter. Beispiele dafürsind das Volumen eines Gases, ein von außen angelegtes elek-trisches oder magnetisches Feld, usw. Wir können Wechselwir-kungen, in deren Verlauf die Parameter a nicht verändert werden,von solchen unterscheiden, in denen sie sich ändern. Dies wirduns gleich auf die Unterscheidung von Wärme und mechanischerArbeit führen.
• Um zu klären, wie die Wechselwirkung zwischen Systemen be-schrieben werden kann, stellen wir uns zwei Systeme A und B vor,die gemeinsam gegenüber ihrer Umwelt isoliert sind, zwischendenen aber Energie ausgetauscht werden kann. Die Zustandspara-meter bleiben zunächst unverändert. Die Gesamtenergie der beidenSysteme muss dann erhalten bleiben, aber die Systeme könnenuntereinander Energie austauschen. Also gilt für die Energieände-rungen der beiden Systeme
∆EA = −∆EB , ∆EA + ∆EB = 0 . (8.21)
• Umgekehrt können wir uns den direkten Energieaustausch zwi-schen den beiden Systemen unterbunden denken, aber statt seinerzulassen, dass die beiden Systeme mechanisch miteinander wech-selwirken. Ein Beispiel ist ein Gasvolumen, das durch eine beweg-liche Wand in zwei Hälften A und B unterteilt wird. Indem dasGas in einem Teilvolumen die Wand zum anderen hin verschiebt,verrichtet es mechanische Arbeit am anderen System. Unter diesenUmständen ändern sich für beide Teilsysteme zumindest einigeder Zustandsparameter, und aufgrund dessen ändert sich derenEnergie um die Beträge ∆aEA bzw. ∆aEB. Diese rein mechanischeEnergieänderung wird mit der mechanischen Arbeit ∆W ′ identifi-ziert, die am System verrichtet wurde, bzw. mit der mechanischenArbeit ∆W = −∆W ′, die vom System verrichtet wurde. Also gilt
∆aE = −∆W , ∆aE + ∆W = 0 . (8.22)
8.2. WECHSELWIRKUNGEN ZWISCHEN SYSTEMEN 87
• Im allgemeinen wird sich die Energie jedes der beiden Systemesowohl durch direkten Energieaustausch mit dem anderen Systemals auch durch mechanische Arbeit verändern können. Für jedesder beiden Systeme gilt dann
∆E = ∆aE + ∆Q , (8.23)
wenn wir mit ∆Q die Energie bezeichnen, die ohne Veränderungder Zustandsparameter a vom jeweils anderen System kommt bzw.an das jeweils andere System abgegeben wird. Mit (8.22) gilt also
∆E = ∆Q − ∆W . (8.24)
Diese Gleichung definiert die Wärmemenge ∆Q als diejenige Ener-gieänderung eines Systems, die nicht aufgrund mechanischer Ar-beit, sondern ohne Veränderung der Zustandsparameter aufge-nommen oder abgegeben wird. Entsprechend der Definition (8.22)ist ∆W die vom System verrichtete mechanische Arbeit.
• Wenn wir zu infinitesimal kleinen Energieänderungen dE überge-hen, müssen wir bedenken, dass zwar die Energie des Systems einekontinuierliche Größe ist, sodass beliebig kleine Differenzen zwi-schen der Energie vor und nach einer Änderung sinnvoll definiertsind. Dies trifft aber auf die Wärmemenge und die mechanischeArbeit nicht zu, weil sie nicht als kleine Differenzen zwischenzwei verschiedenen Energiemengen aufgefasst werden können,die den Zustand des Systems kennzeichnen, sondern lediglich alskleine Beträge einer Energiemenge, die während eines Prozesseszwischen Systemen ausgetauscht wird. Um dies zu kennzeichnen,schreiben wir
dE = δQ − δW (8.25)
mit dem Symbol δ anstelle von d.
• Die Energie E, die den Zustand des Systems kennzeichnet, ist einBeispiel für eine Zustandgröße, während die Größen Q und W alsProzessgrößen bezeichnet werden.
8.2.2 Vollständige und unvollständige Differentiale
• Betrachten wir infinitesimale Größen wie δQ und δW etwas näher,und zwar zunächst von einem mathematischen Standpunkt aus.Eine Funktion F(x, y), die hier der Einfachheit halber nur von zweiVeränderlichen abhängen soll, hat das vollständige Differential
dF =∂F(x, y)∂x
dx +∂F(x, y)∂y
dy =: A(x, y)dx + B(x, y)dy , (8.26)
wobei wir die beiden Funktionen A(x, y) und B(x, y) zur Abkür-zung der partiellen Ableitungen von F nach x bzw. y eingeführthaben.
88 KAPITEL 8. GRUNDLAGEN DER STATISTISCHEN PHYSIK
• Nehmen wir umgekehrt zwei beliebige Funktionen C(x, y) undD(x, y), dann ist die Größe
δG(x, y) := C(x, y)dx + D(x, y)dy (8.27)
im Allgemeinen nicht das vollständige Differential einer FunktionG(x, y). Dann gibt es keine Funktion G(x, y), für die
C(x, y) =∂G(x, y)∂x
und D(x, y) =∂G(x, y)∂y
(8.28)
gilt. Die beiden Funktionen C und D können dann nicht als parti-elle Ableitungen einer Funktion nach den beiden Variablen x undy dargestellt werden.
• Als Beispiel setzen wir
C(x, y) = α , D(x, y) = βxy
(8.29)
mit beliebigen Konstanten α und β. Verlangen wir, dass diesebeiden Funktionen die Bedingungen (8.28) erfüllen sollen, erhaltenwir aus der ersten Gleichung
G(x, y) = αx + g(y) (8.30)
mit einer noch unbestimmten Funktion g(y), die nicht von x ab-hängt, und aus der zweiten
G(x, y) = βx ln y + h(x) , (8.31)
mit einer noch unbestimmten Funktion h(x). Die Gleichungen(8.30) und (8.31) sind aber offenbar widersprüchlich, d.h. die in-finitesimale Größe (8.27) ist nicht das vollständige Differentialeiner Funktion G(x, y). Der Ausdruck δG ist dann zwar eine in-finitesimal kleine Größe, kann aber nicht als Differenz zwischeninfinitesimal benachbarten Werten einer Funktion G aufgefasstwerden. Er wird als unvollständiges Differential bezeichnet.
• Das Integral ∫ 2
1δG (8.32)
von einem Anfangszustand (x1, y1) zu einem Endzustand (x2, y2)kann dennoch als Summe über infinitesimale Größen verstandenund berechnet werden, nur wird es in der Regel davon abhängen,wie wir vom Anfangs- zum Endzustand gelangen. Im Gegensatzdazu wird das Integral über das vollständige Differential dF nichtvom Weg abhängen, denn∫ 2
1dF =
∫ (x2,y1)
(x1,y1)A(x, y)dx +
∫ (x2,y2)
(x2,y1)B(x, y)dy
= F(x2, y2) − F(x1, y1) (8.33)
8.2. WECHSELWIRKUNGEN ZWISCHEN SYSTEMEN 89
kann nur vom Anfangs- und Endpunkt abhängen, weil in diesemFall eine Funktion F(x, y) existiert, deren Ableitungen die beidenFunktionen A und B sind. Dadurch wird der Zusammenhang zwi-schen vollständigen Differentialen und Funktionen hergestellt, dieals Gradient eines Potentials dargestellt werden können, wie wirsie im Zusammenhang mit konservativen Kraftfeldern unter (I-5)besprochen hatten.
• In diesem Sinn sind δQ und δW als unvollständige Differentialezu verstehen: Sie sind infinitesimal kleine Größen, aber nicht alsAbleitungen zweier Funktionen Q und W darstellbar. Die zwischenzwei Systemen ausgetauschte Wärme δQ bzw. die von einemSystem an einem anderen verrichtete mechanische Arbeit δW sindklarerweise nur während des jeweiligen Prozesses definiert, abernicht etwa als Unterschied zwischen zwei „Wärmemengen“ Q2
und Q1 oder zwei „Arbeitsmengen“ W2 und W1, die vor bzw. nachdem jeweiligen Prozess im System enthalten wären.
• Die während eines endlichen Prozesses ausgetauschte Wärmemen-ge oder die gesamte dabei verrichtete mechanische Arbeit
Q12 =
∫ 2
1δQ oder W12 =
∫ 2
1δW (8.34)
werden daher gewöhnlich davon abhängen, entlang welches Wegsder Prozess vom Zustand 1 zum Zustand 2 geführt wird. Wennallerdings während des Prozesses die äußeren Zustandsparameterkonstant gehalten werden, sodass δW = 0 und δQ = dE gilt,muss Q12 von der Prozessführung unabhängig werden, weil dEein vollständiges Differential ist. Gleiches gilt für W12, wenn dasbetrachtete Gesamtsystem während der Prozessführung isoliertbleibt, sodass δQ = 0 und daher δW = −dE gelten.
8.2.3 Quasistatische Zustandsänderungen
• Wenn sich die äußeren Parameter a der Hamiltonfunktion einesSystems ändern, werden sich im allgemeinen die Energien En allerZustände n ändern. Wie genau das geschieht, wird in der Regel da-von abhängen, wie schnell die Zustandsänderung geschieht. Wennsie so langsam abläuft, dass das System nach jedem infinitesimalkleinen Schritt Gelegenheit hat, sein Gleichgewicht wieder zu fin-den, dann können wir während der gesamten Zustandsänderungannehmen, dass das System eine Folge von Gleichgewichtszustän-den durchläuft.
• Zunächst bewirkt eine infinitesimale Änderung der äußeren Zu-standsparameter eine Änderung der Hamiltonfunktion H(x) am
90 KAPITEL 8. GRUNDLAGEN DER STATISTISCHEN PHYSIK
Punkt x im Phasenraum um
dH(x) =∂H(x)∂a
da . (8.35)
Das System reagiert auf diese Energieänderung aufgrund der Än-derung äußerer Parameter, indem es die Arbeit
δW = −dH(x) = −∂H(x)∂a
da =: X(x)da (8.36)
verrichtet, wobei wir die verallgemeinerte Kraft
X(x) := −∂H(x)∂a
(8.37)
am Ort x im Phasenraum eingeführt haben.
• Nun betrachten wir wieder ein Ensemble vieler gleichartiger Sys-teme, deren äußere Zustandsparameter a sich in derselben Weiseändern. Nach dem Postulat gleicher a-priori-Wahrscheinlichkeitenkommt in diesem Ensemble jeder Mikrozustand mit gleicher Wahr-scheinlichkeit vor, der überhaupt mit den Zustandsparametern ver-träglich ist. Dann erhalten wir die mittlere vom System verrichteteArbeit, indem wir über alle zugänglichen Zustände mitteln,
δW = Xda , (8.38)
wobei die gemittelte verallgemeinerte Kraft durch die Mittelungüber alle Zustände gegeben ist,
X := −⟨∂H(x)∂a
⟩= −
∑n
pn∂H(x)∂a
. (8.39)
• Als Beispiel betrachten wir die mechanische Arbeit, die durch denDruck eines Systems verrichtet wird. Ein isolierter, gasgefüllterZylinder der Querschnittsfläche A werde durch einen reibungsfreibeweglichen Kolben verschlossen. Verschiebt das Gas den Kol-ben um einen kleinen Weg ds, verrichtet es nach Definition diemechanische Arbeit
δW = Kraft ·Weg . (8.40)
Die Kraft ist aber das Produkt aus Druck P und Fläche A. Die vomSystem verrichtete Arbeit ist also
δW = (PA)ds = P(Ads) = PdV . (8.41)
Der veränderliche äußere Parameter ist hier das Volumen. Dawegen der Isolierung keine Wärme aufgenommen oder abgegebenwird, ist δQ = 0, damit wegen (8.25)
dE = −δW = −PdV , (8.42)
und der Druck stellt sich als die (negative) zum Volumen gehörigeverallgemeinerte Kraft heraus,
P = −∂E∂V
. (8.43)
Kapitel 9
Temperatur und Entropie
9.1 Übergänge zwischen Gleichgewichtszu-ständen
9.1.1 Reversible und irreversible Zustandsänderungen
• Wir hatten bereits im vorigen Kapitel besprochen, wie Systemeaus einem Nichtgleichgewichts- in einen Gleichgewichtszustandübergehen können. Für isolierte Systeme hatten wir das Grund-postulat der statistischen Physik verwendet, demzufolge jeder derdem System überhaupt zugänglichen Zustände mit gleicher Wahr-scheinlichkeit angenommen werden kann, wenn es sich im Gleich-gewicht befindet. Umgekehrt ist es nicht im Gleichgewicht, wennes sich mit verschiedener Wahrscheinlichkeit in verschiedenenTeilen des ihm zugänglichen Bereich des Phasenraums aufhält.
• Betrachten wir ein isoliertes System, das bestimmten Zwängenunterliegt. Als Beispiel kann wieder ein isoliertes Volumen dienen,das durch eine isolierende Wand in zwei Teilvolumina unterteiltist, von denen nur eines gasgefüllt ist. Dieses isolierte System ausGasteilchen befinde sich zunächst im Gleichgewicht. Nun werdedie Wand entfernt. Unmittelbar danach kann das System nicht imGleichgewicht sein, weil sich der ihm zugängliche Bereich desPhasenraums um einen Teil vergrößert hat, in dem das Systemgerade noch eine verschwindende Aufenthaltswahrscheinlichkeithatte. Erst nach einiger Zeit wird es wieder einen Gleichgewichts-zustand erreichen, in dem nun die Anzahl der ihm zugänglichenZustände größer ist als vorher.
• Die Zwangsbedingung kann dadurch formuliert werden, dass eineroder mehrere der äußeren Parameter y j auf bestimmte Werte festge-legt sind. Der Wegfall der Zwangsbedingung bedeutet eine Ände-rung dieses oder dieser äußeren Parameter. Wie im obigen Beispiel
91
92 KAPITEL 9. TEMPERATUR UND ENTROPIE
vergrößert sich dadurch in der Regel die Anzahl der zugänglichenZustände, Ωf > Ωi („final“ und „initial“), weil das System nachdem Wegfall von Zwangsbedingungen typischerweise wenigereingeschränkt ist als vorher, sicher aber nicht eingeschränkter.
• Andere Zustandsänderungen sind denkbar, durch die sich die An-zahl zugänglicher Zustände nicht ändert, obwohl Zwangsbedin-gungen wegfallen. Betrachten wir wieder das isolierte Gesamt-volumen, das aber nun zuerst vollständig mit Gas gefüllt und insGleichgewicht gebracht wird, bevor die isolierende Wand einge-schoben wird. Das System als Ganzes wird nun nicht mehr ver-ändert, wenn wir die Wand wieder entfernen. In diesem Fall wirdtrotz des Wegfalls der Zwangsbedingung die Anzahl zugänglicherZustände unverändert bleiben, Ωf = Ωi.
• Wir folgern daraus, dass die Anzahl der einem isolierten Systemzugänglichen Zustände nicht abnehmen kann, wenn es von einemGleichgewichtszustand in einen anderen übergeht, indem vorheri-ge Zwangsbedingungen wegfallen,
Ωf ≥ Ωi . (9.1)
• Die beiden diskutierten Fälle unterscheiden sich grundlegend. Imersten Fall, in dem ein Teil des Volumens überhaupt erst zugänglichwurde, nachdem die Wand entfernt wurde, wird das System nichtin seinen Ausgangszustand zurückkehren können, wenn die Wandwieder eingeführt wird. Im zweiten Fall dagegen hängt der Zustanddes Gesamtsystems gar nicht davon ab, ob die Wand eingesetzt istoder nicht. Wenn sie entfernt und dann wieder eingeschoben wird,kehrt das System in seinen Ausgangszustand zurück. Der ersteVorgang wird demnach als irreversibel, der zweite als reversibelbezeichnet. Zusammen mit der obigen Feststellung (9.1) könnenwir diese Definition präzisieren:
Eine Zustandsänderung eines isolierten Systems ist reversibel,wenn sich die Anzahl der ihm zugänglichen Zustände nicht verän-dert, und irreversibel, wenn sie zunimmt.
9.1.2 Äußere Parameter im Gleichgewicht
• Nehmen wir an, die äußeren Parameter y j seien zunächst auf Wertew j eingestellt, y j = w j, und das System befinde sich im Gleichge-wicht. Nun werde einem der Parameter, sagen wir yk, erlaubt, sichinnerhalb bestimmter Grenzen frei zu verändern. Dadurch wirddas System in einen neuen Gleichgewichtszustand übergehen, indem in der Regel Ωf > Ωi, sicher aber Ωf ≥ Ωi sein wird. DieWahrscheinlichkeit, für den Parameter yk seinen vorigen Wert wk
9.2. THERMISCHES GLEICHGEWICHT 93
zu messen, ist dann proportional zur Anzahl der zugänglichenZustände, in denen yk den Wert wk annehmen kann,
p(wk) ∝ Ω(E, wk) , (9.2)
weil im Gleichgewicht alle zugänglichen Zustände mit gleicherWahrscheinlichkeit eingenommen werden.
• In einem großen Ensemble gleichartiger Systeme wird daher mitgrößter Wahrscheinlichkeit derjenige Wert wk der Größe yk gemes-sen, zu dem die größte Zahl zugänglicher Zustände gehört undder damit am häufigsten realisiert wird. Wir können also aus demstatistischen Grundpostulat folgern, dass sich die äußeren Para-meter eines isolierten Systems dahin entwickeln werden, dass dieAnzahl der damit verträglichen zugänglichen Zustände maximalwird. Aus dem statistischen Grundpostulat folgt also direkt einExtremalprinzip.
9.2 Thermisches Gleichgewicht zwischen ma-kroskopischen Systemen
9.2.1 Die absolute Temperatur
• Betrachten wir nun zwei makroskopische Systeme, die gemeinsamisoliert sind und keine mechanische Arbeit aneinander verrichten,aber in thermischen Kontakt gebracht werden. Wenn sie nichtschon im thermischen Gleichgewicht waren, werden sie sich dort-hin entwickeln. Die Gesamtenergie E bleibt dabei konstant, aberder Teil E1, der auf eines der Systeme entfällt, mag sich ändern,bis das Gleichgewicht erreicht ist. Entsprechend muss sich dieEnergie E2 des zweiten Systems ändern, weil E2 = E − E1 seinmuss.
• Wiederholen wir an diesem Beispiel die obige, abstraktere Dis-kussion. Zunächst seien beide Systeme voneinander isoliert, aberjeweils separat im Gleichgewicht. Indem wir sie in thermischenKontakt bringen, erlauben wir jedem der beiden Systeme, seineEnergie zu ändern, wobei sie aber die Konstanz der Gesamtenergiegarantieren müssen. Aus der Sicht eines der beteiligten Systemeist zunächst der äußere Parameter E1 konstant. Durch den thermi-schen Kontakt wird dieser Zwang entfernt, und E1 darf variieren.Nach einer gewissen Zeit wird ein neuer Gleichgewichtszustanderreicht werden. Er wird dadurch gekennzeichnet sein, dass E1
einen Wert annimmt, mit dem eine maximal mögliche Anzahlzugänglicher Zustände verträglich ist.
94 KAPITEL 9. TEMPERATUR UND ENTROPIE
• Da wir keine weiteren äußeren Parameter in die Betrachtung ein-beziehen, können wir die Anzahl zugänglicher Zustände allein alsFunktion der Energie E1 auffassen, Ω = Ω(E1). Wir müssen aller-dings berücksichtigen, dass wir die Anzahl der Zustände abzählenmüssen, die beiden Systemen zugänglich sind. Für jeden Zustand,den das erste System unter der Vorgabe der Energie E1 einnehmenkann, kann das zweite System jeden Zustand einnehmen, der mitE2 = E − E1 verträglich ist. Also muss
Ω(E1) = Ω1(E1)Ω2(E − E1) (9.3)
sein. Wegen (9.2) bedeutet das nichts anderes, als dass die Wahr-scheinlichkeit, das Gesamtsystem in einem Zustand zu finden, indem sich die Gesamtenergie E in die Teile E1 und E − E1 aufteilt,gleich dem Produkt der Wahrscheinlichkeiten ist, dass das eineTeilsystem die Energie E1 und das andere die Energie E − E1 hat.
• Die Aufteilung der Energie im thermischen Gleichgewicht ge-schieht also so, dass das Produkt (9.3) bezüglich E1 maximiertwird. Wir hatten aber vorher gesehen, dass Ω(E) extrem steil mit Ezunehmen und proportional zur sehr großen Anzahl der Freiheits-grade sein muss. Demnach wird das Produkt (9.3) eine sehr großeZahl sein. Weiterhin wird, wenn E1 zunimmt, der erste Faktor sehrschnell zu-, der zweite aber sehr schnell abnehmen. Deswegenmüssen die beiden Faktoren ein extrem scharfes Maximum defi-nieren. Wegen der großen auftretenden Zahlen verwenden wir denLogarithmus von Ω,
ln Ω(E1) = ln Ω1(E1) + ln Ω2(E − E1) . (9.4)
Da der Logarithmus streng monoton wächst, wird Ω dort maximalsein, wo auch ln Ω maximal ist. Wir bestimmen also E1 so, dass
0 =∂ ln Ω
∂E1=∂ ln Ω1(E′)
∂E′
∣∣∣∣∣E′=E1
−∂ ln Ω2(E′)
∂E′
∣∣∣∣∣E′=E−E1
(9.5)
gilt.
• Führen wir die Abkürzung
β(E) :=∂ ln Ω(E′)
∂E′
∣∣∣∣∣E′=E
(9.6)
ein, lautet die Gleichgewichtsbedingung (9.5)
β1(E1) = β2(E − E1) . (9.7)
Wegen (8.19) ist
∂ ln Ω
∂E≈
f2∂ ln E∂E
=f
2E, (9.8)
sodass β(E) wie 1/E abnimmt, wenn E zunimmt.
9.2. THERMISCHES GLEICHGEWICHT 95
• Phänomenologisch wurde die Temperatur T gerade dazu einge-führt, um thermisches Gleichgewicht zwischen zwei Systemenzu kennzeichnen: Demnach sind zwei Systeme im thermischenGleichgewicht, wenn ihre Temperaturen übereinstimmen.
• Mathematisch gesprochen, wird mithilfe der Temperatur eine Äqui-valenzrelation1 auf der Menge der Makrozustände eines Systemserrichtet: Wenn zwei Systeme im thermischen Gleichgewicht sind,sind ihre Temperaturen gleich. Daraus folgt, dass, wenn System Amit System B im Gleichgewicht ist und System B mit System C,dann auch System A mit System C im Gleichgewicht sein muss.
• Diese empirische Relation muss gerade durch die Bedingung (9.7)ausgedrückt werden. Da wegen (9.8) β ∝ 1/E ist, die Temperaturaber mit zunehmender Energie zunehmen sollte, ist es sinnvoll,β ∝ 1/T zu identifizieren. Da Ω mit E in der Regel sehr steilzunimmt, ist β normalerweise positiv, und damit ist es auch dieTemperatur, T ≥ 0. Negative Temperaturen können offenbar nurdann auftreten, wenn aufgrund spezieller äußerer Umstände dieAnzahl zugänglicher Zustände mit der Energie abnimmt. SolcheSituationen sind möglich, aber außergewöhnlich.
• Da es, zumindest im Prinzip, möglich ist, die Anzahl der Zuständeabzuzählen, die einem isolierten System bei vorgegebener Energiezugänglich sind, kann Ω(E) bestimmt werden, und damit auch β.Daher legt die Definition (9.6) eine absolute Temperaturskala fest,die in Kelvin (K) gemessen wird.
• Offenbar muss β die Dimension einer reziproken Energie haben.Deswegen führt man eine Proportionalitätskonstante kB mit der Di-mension Energie pro Temperatur ein, die so genannte Boltzmann-Konstante
kB = 1.38 × 10−16 ergK
, (9.9)
sodass
β =1
kBT(9.10)
wird.
1Eine Äquivalenzrelation (geschrieben ∼) ist eine Relation zwischen den Elementeneiner Menge M, die reflexiv, symmetrisch und transitiv ist. Reflexiv bedeutet, dassa ∼ a ∀ a ∈ M ist; symmetrisch, dass a ∼ b ⇔ b ∼ a ∀ a, b ∈ M gilt; und transitiv,dass a ∼ b ∧ b ∼ c ⇒ a ∼ c ∀ a, b, c ∈ M impliziert.

96 KAPITEL 9. TEMPERATUR UND ENTROPIE
9.2.2 Physikalische Eigenschaften im thermischenGleichgewicht
• Aus (9.6) und (9.8) folgt
β ≈f
2E,
Ef≈
kBT2
. (9.11)
Das begründet die Erwartung, dass die Energie pro Freiheitsgradim Gleichgewicht etwa gleich kBT/2 ist. Diese Aussage gilt untersehr allgemeinen Voraussetzungen streng und wird durch denGleichverteilungssatz formuliert: Im thermischen Gleichgewichtist die Energie pro Freiheitsgrad gleich kBT/2.
• Bringen wir zwei Systeme mit leicht verschiedenen Temperaturenin Kontakt, nimmt Ω insgesamt nicht ab. Wenn die beiden Systemevor dem Kontakt die Energien E1i und E − E1i hatten und nachherdie Energien E1f und E − E1f annehmen, gilt
ln Ωf − ln Ωi = (ln Ω1f + ln Ω2f) − (ln Ω1i + ln Ω2i)
=∂ ln Ω1(E′)
∂E′
∣∣∣∣∣E′=E1i
(E1f − E1i)
+∂ ln Ω2(E′)
∂E′
∣∣∣∣∣E′=E−E1i
(E1i − E1f)
= (β1 − β2)δQ ≥ 0 , (9.12)
wenn δQ = E1f − E1i die Wärmemenge bezeichnet, die in das Sys-tem 1 fließt. Demzufolge kann das System 1 Wärme aufnehmen,δQ > 0, wenn β1 > β2 oder T1 < T2 ist. Wärme fließt demnachvom wärmeren zum kälteren System, woduch die Konsistenz derabsoluten Temperaturdefinition (9.6) bestätigt wird.
• Wir hatten oben argumentiert, dass das Maximum im Produkt (9.3)der Zustandszahlen extrem scharf sein müsse. Da die Energie E1
eines Systems im thermischen Kontakt mit einem anderen nachder Einstellung thermischen Gleichgewichts durch die Lage desMaximums von Ω bestimmt wird, interessiert uns, wie genau siefestgelegt, wie scharf also das Maximum von Ω bestimmt seinwird. Dazu führen wir zunächst folgende Abkürzungen ein: SeiEmax die Lage des Maximums,
ε := E1 − Emax (9.13)
eine Abweichung der Energie E1 davon, und
λ := −∂2 ln Ω
∂E2 (9.14)
die negative zweite Ableitung von ln Ω nach E. Dann entwickelnwir ln Ω um das Maximum in eine Taylorreihe bis zur zweiten
9.2. THERMISCHES GLEICHGEWICHT 97
Ordnung in ε und verwenden dabei
ln Ω(E) ≈ ln Ω(Emax) + βε −λ
2ε2 (9.15)
für jeden der beiden Faktoren in (9.3). Damit erhalten wir
ln [Ω1(E1)Ω2(E − E1)] ≈ ln [Ω1(Emax)Ω2(E − Emax)]
+ (β1 − β2)ε −ε2
2(λ1 + λ2) . (9.16)
Im thermischen Gleichgewicht ist definitionsgemäß β1 = β2. Set-zen wir λ := λ1 + λ2, folgt
ln Ω(E1) ≈ ln Ω(Emax) −λ
2ε2 , (9.17)
oder
Ω(E1) ≈ Ω(Emax) exp[−λ
2(E1 − Emax)2
]. (9.18)
• Wir sehen daran zweierlei. Erstens nimmt Ω(E1) in der Nähe desMaximums bei E1 = Emax die Form einer Gaußverteilung an. Diemittlere Energie E1 wird also genau gleich Emax sein. Zweitens hatdiese Gaußverteilung die Breite
σ =1√λ
=
(∂2 ln Ω(E)
∂E2
)−1/2
, (9.19)
die wir mithilfe von (8.19) bzw. (9.11) abschätzen können,
λ = −∂β
∂E≈
fE2 , σ ≈
E√f. (9.20)
Die relative Abweichung der mittleren Energie E1 vom MaximumEmax ist demnach
|E1 − Emax|
Emax≈
σ
Emax≈
1√f, (9.21)
was wegen der großen Anzahl der Freiheitsgrade eine extremkleine Zahl ist. Im thermischen Gleichgewicht wird ein makrosko-pisches System daher mit fantastischer Genauigkeit die Energieeinnehmen, die der Lage des Maximums von Ω entspricht.
• Wir können eine weitere Schlussfolgerung aus (9.15) ziehen. DieseGleichung beschreibt nur dann ein Maximum, wenn λ > 0 ist. Dasbedeutet, dass
−∂β
∂E> 0 oder
1kBT 2
∂T∂E
> 0 . (9.22)
Insbesondere folgt daraus, dass ein stabiles thermisches Gleich-gewicht dann erreicht werden kann, wenn die Temperatur einesSystems mit seiner Energie zunimmt.

98 KAPITEL 9. TEMPERATUR UND ENTROPIE
9.3 Entropie
9.3.1 Definition
• Die Entropie S wird als ein logarithmisches Maß für die Anzahlder zugänglichen Zustände, S ∝ ln Ω, definiert, wobei ebenfallsdie Boltzmann-Konstante als Proportionalitätskonstante verwendetwird,
S := kB ln Ω . (9.23)
Damit erhalten wir aus (9.6) den Zusammenhang
1T
=∂S∂E
. (9.24)
Die Entropie gibt an, wieviele Zustände einem isolierten Systemunter den gegebenen Bedingungen zugänglich sind. Sie als ein„Maß für die Unordnung“ eines Systems zu bezeichnen, wie es oftgeschieht, ist mindestens irreführend. Als ein Maß für die Anzahlmöglicher Mikrozustände bei vorgegebenem Makrozustand könn-te man sie mit größerem Recht als ein Maß für die „Gestaltenfülle“eines Systems ansehen, also für die verschiedenen Realisierun-gen, die einem System unter gleichen äußeren Bedingungen zurVerfügung stehen.
• Wenn ein isoliertes System durch den Wegfall von Zwangsbedin-gungen von einem Gleichgewicht in ein neues übergeht, nimmtdie Anzahl der verfügbaren Zustände zumindest nicht ab. Ist derÜbergang reversibel, bleibt sie gleich, anderenfalls nimmt sie zu.Dasselbe folgt nun für die Entropie,
∆S ≥ 0 . (9.25)
• Die Entropie eines isolierten Systems wird von seiner Energie undden makroskopischen Parametern y j abhängen, die das Systemcharakterisieren. Wenn allein Wärme ausgetauscht wird, ist δW =
0 und dE = δQ. Wegen (9.24) ist
dS =∂S∂E
dE =dET
, (9.26)
und daher
dE = δQ = TdS , dS =δQT
. (9.27)
Die infinitesimale Entropieänderung eines Systems stellt sich da-mit als die ihm zugeführte Wärmemenge pro Temperatur heraus.Je heißer das System schon war, desto weniger wird seine Entropieerhöht, wenn ihm weitere Wärme zugeführt wird.
9.3. ENTROPIE 99
• Eine ähnliche Beziehung erhalten wir, wenn wir zwei Systemeim thermischen Gleichgewicht betrachten, von denen das einesehr viel „größer“ als das andere ist. Bezeichnen wir das größereSystem mit dem Index 1, ist damit gemeint, dass das System 2sehr viel weniger Energie enthält als das System 1,
E2
E1 1 , (9.28)
wenn beide Systeme miteinander im thermischen Gleichgewichtstehen. Wenn das so ist, wird sich die Temperatur T1 des großenSystems kaum merklich ändern, wenn das kleine mit ihm in ther-mischen Kontakt gebracht wird, sodass∣∣∣∣∣∂β1(E1)
∂E1δQ
∣∣∣∣∣ β1(E1) (9.29)
gilt, wenn zwischen den beiden Systemen die Wärmemenge δQausgetauscht wird: Weil das System 2 so viel kleiner als das Sys-tem 1 ist, muss jede Wärmemenge, die es aufnehmen oder abge-geben kann, klein gegenüber der Energie sein, die das System 1enthält. Das große System 1 wird dann als Wärmereservoir oderWärmebad bezeichnet.
• Die Anzahl der dem Wärmereservoir zugänglichen Zustände ver-ändert sich dann durch die Wärmemenge δQ nur wenig, sodasswir die Taylor-Entwicklung
ln Ω1(E1 + δQ) ≈ ln Ω(E1) +∂ ln Ω(E1)
∂E1δQ +
12∂2 ln Ω(E1)
∂E21
δQ2
≈ ln Ω(E1) + β1δQ (9.30)
bis zur ersten Ordnung verwenden können. Multiplizieren wir mitkB, erhalten wir die Entropieänderung
dS =δQT1
. (9.31)
Die Entropie des Wärmereservoirs ändert sich im Kontakt miteinem sehr viel kleineren System um die ausgetauschte Wärme-menge, geteilt durch die Temperatur des Reservoirs.
9.3.2 Allgemeine Wechselwirkung
• Was geschieht nun bei einer Wechselwirkung zwischen Systemen,bei denen nicht nur Energie ausgetauscht wird, sondern bei dersich auch äußere Parameter der Hamiltonfunktion ändern können,sodass auch mechanische Arbeit verrichtet wird? Beschränken wiruns zunächst der Einfachheit halber wieder auf einen einzigen
100 KAPITEL 9. TEMPERATUR UND ENTROPIE
äußeren Parameter a. Die Energie En jedes Zustands n wird vonihm abhängen, En = Hn(a), und sich in der Regel verändern, wenna sich ändert,
dEn =∂Hn(a)∂a
da = −Xnda . (9.32)
Dabei haben wir die Definition der verallgemeinerten Kraft aus(8.37) verwendet.
• Die Anzahl aller zugänglichen Zustände im Energieintervall zwi-schen E und E + δE war Ω(E). Entsprechend bezeichnen wir mitΩX(E) die Anzahl aller Zustände zwischen E und E + δE, derenEnergie sich um −Xda verändert, wenn a um da verändert wird.Die gesamte Anzahl Ω(E) aller zugänglichen Zustände ist dannnatürlich eine geeignete Summe (möglicherweise ein Integral)über alle möglichen Werte von X,
Ω(E) =∑
X
ΩX(E) . (9.33)
Die Energien der zugänglichen Zustände verändern sich daher imMittel um Xda, wobei
X :=1
Ω(E)
∑X
XΩX(E) (9.34)
definiert ist.
• Durch die Energieänderung der Zustände werden einige Zuständein das Energieband zwischen E und E + δE eintreten und einigeaus ihm austreten, wenn a sich ändert. Da die Anzahl der Zu-stände pro Energieeinheit gleich Ω(E)/δE ist, treten durch dieEnergieverschiebung am unteren Rand des Energiebands
dΩ+(E) = −Ω(E)δE
X(E)da (9.35)
Zustände in das Energieband ein, während am oberen Rand
dΩ−(E) = −Ω(E + δE)
δEX(E + δE)da (9.36)
Zustände aus ihm austreten. Diese Redeweise setzt voraus, dass Xnegativ ist. Wenn stattdessen X positiv wäre, träten die Zuständeam unteren Rand des Energiebandes aus und an seinem oberenRand ein, aber dadurch würde sich diese Betrachtung nicht ändern.
• Die Anzahl zugänglicher Zustände im Energieband ändert sichalso insgesamt um
dΩ(E) = dΩ+(E) − dΩ−(E) =(ΩX)(E + δE) − (ΩX)(E)
δEda
=∂(ΩX)(E)
∂Eda , (9.37)
9.3. ENTROPIE 101
woraus∂Ω
∂a=∂(ΩX)∂E
= X∂Ω
∂E+ Ω
∂X∂E
(9.38)
folgt. Während der erste Term auf der rechten Seite dieser Glei-chung proportional zu f und damit sehr groß ist, ist der zweiteTerm dagegen vernachlässigbar klein. Also können wir in besterNäherung
∂Ω
∂a= X
∂Ω
∂E(9.39)
setzen. Teilen wir auf beiden Seiten durch Ω(E) und verwenden(9.6), folgt schließlich
∂ ln Ω
∂a= βX . (9.40)
• Bei einer Wechselwirkung zwischen zwei gemeinsam isoliertenSystemen, die nicht nur Wärme austauschen, sondern auch mecha-nische Arbeit aneinander verrichten können, ist das vollständigeDifferential von ln Ω durch
d ln Ω =∂ ln Ω
∂EdE +
∂ ln Ω
∂ada (9.41)
gegeben. Wenn die Wechselwirkung quasistatisch erfolgt, sodassdie verallgemeinerte Kraft X definiert ist, und wenn sie zweiGleichgewichtszustände miteinander verbindet, folgt daraus mit(9.40)
d ln Ω = β(dE + Xda) =1
kBT(dE + Xda) . (9.42)
Nach Multiplikation mit kB erhalten wir schließlich
TdS = dE + δW = δQ . (9.43)
Die Beziehung (9.27) bleibt also auch dann gültig, wenn durch dieWechselwirkung zweier Systeme nicht nur Wärme ausgetauscht,sondern auch auf quasistatische Weise mechanische Arbeit ver-richtet wird.
• Wird in einem Prozess keine Wärme ausgetauscht, heißt er adiaba-tisch. Ist dies bei einem quasistatischen Prozess der Fall, ist wegen(9.43) auch dS = 0. Das zeigt, dass sich die Entropie auch dannnicht ändert, wenn an einem isolierten System auf quasistatischeWeise eine endliche Menge Arbeit verrichtet wird. Damit sindsolche endlichen, adiabatischen und quasistatischen Prozesse auchreversibel. Beachten Sie aber, dass die Entropie auch bei adiaba-tischen Prozessen durchaus zunehmen kann, wenn der Prozessnicht quasistatisch geführt wird. Nur unter dieser Einschränkungtrifft die häufige Identifizierung zu, dass adiabatisch auch isentropbedeute.

102 KAPITEL 9. TEMPERATUR UND ENTROPIE
9.4 Beispiele
9.4.1 Helium-Diffusion
• Als erstes Beispiel betrachten wir einen Glasballon mit dem Vo-lumen V1, der anfänglich mit Argon gefüllt sei. Das umgebendeVolumen V2 sei anfänglich mit Helium gefüllt. Beide VoluminaV1+V2 = V seien gemeinsam nach außen isoliert, aber miteinanderim thermischen Gleichgewicht bei der Temperatur T . Anfänglichherrsche Druckgleichgewicht zwischen den beiden, P1i = P2i. DasGlas sei so beschaffen, dass es Helium durchlässt, Argon abernicht. Was passiert?
• Da das Helium in den Ballon eindringen kann, erfordert schonallein das statistische Grundpostulat, dass es sich gleichmäßig imgesamten Volumen V ausbreiten wird. Die Verteilung des Argonsbleibt dagegen unverändert. Wenn NHe,Ar die Gesamtzahlen derHelium- bzw. Argonatome sind, dringen
NHe,1 =V1
VNHe (9.44)
Heliumatome in V1 ein.
• Da die Temperatur gleich bleibt, brauchen wir nur die Abhän-gigkeit der Entropie vom Volumen zu betrachten. Wegen (8.19)ist
Ω ∝ VN , S ∝ N ln V . (9.45)
Wegen (9.42) und (9.43) ist daher der Druck
P = T∂S∂V∝
NV. (9.46)
Vor der Heliumdiffusion ist wegen
P1i = P2i ⇒NHe
V2=
NAr
V1. (9.47)
Nachher muss der Druck im Volumen V1 wegen der zusätzlichenTeilchen auf
P1f ∝NHe,1 + NAr
V1=
NHe
V+
NAr
V1=
NHe
V2
V2
V+
NAr
V1
∝ P1i
(1 +
V2
V
)(9.48)
ansteigen, während der Druck in V2 auf
P2f ∝NHe,2
V2=
NHe − NHe,1
V2∝ P1i
(1 −
V1
V
)(9.49)
abfällt. Wenn V1 V2 ist, steigt der Druck in V1 gerade auf dendoppelten Ausgangsdruck an.
9.4. BEISPIELE 103
9.4.2 Fermi-Druck
• Fermionen sind Teilchen, von denen höchstens zwei dieselbe Pha-senraumzelle besetzen dürfen. Elektronen gehören dazu. Wenn ineinem festen Volumen V eine Anzahl Ne Elektronen untergebrachtwerden sollen, geht das nur, wenn der Phasenraum zu genügendhohen Impulsen pF erweitert wird. Selbst bei T = 0 müssen Elek-tronen daher einen endlichen Druck haben, wenn sie in einemVolumen V eingesperrt sind. Wie groß ist dieser Druck?
• Die Anzahl der Phasenraumzellen, die einem Elektron mit Impulsp ≤ pF zur Verfügung stehen, ist
Ω =Vh3
0
4π∫ pF
0p2dp =
4π3h3
0
V p3F ; (9.50)
das ist das Volumen im Ortsraum V , multipliziert mit dem Volumenim Impulsraum, geteilt durch die Größe h3
0 der Phasenraumzellen.Für Quantensysteme ist h0 = h, das Planck’sche Wirkungsquan-tum.
• Die Anzahl der Phasenraumzellen muss für Ne Elektronen reichen,Ne = 2Ω, wobei der Faktor zwei berücksichtigt, dass jede Pha-senraumzelle durch zwei Elektronen besetzt werden darf, die sichdurch ihren Spin unterscheiden müssen. Wir ersetzen außerdemden Fermi-Impuls pF durch die Fermi-Energie
εF =p2
F
2m(9.51)
und erhalten aus (9.50)
Ne =8π3h3 V(2mεF)3/2 . (9.52)
Die Fermi-Energie ist also durch
εF =1
2m
(3h3Ne
8πV
)2/3
(9.53)
gegeben, und die mittlere Energie eines Fermions beträgt
ε =1
2m
(∫ pF
0p2dp
)−1 (∫ pF
0p4dp
)=
35εF . (9.54)
Die Gesamtenergie der N Fermionen ist demnach
E = Neε =35
NeεF =3
10
(3
8π
)2/3 h2N5/3e
meV2/3 . (9.55)

104 KAPITEL 9. TEMPERATUR UND ENTROPIE
• Daraus erhalten wir den Fermi-Druck
PF = −∂E∂V
=23
EV, (9.56)
d.h. der Fermi-Druck ist gerade gleich 2/3 der Energiedichte.Dieser Druck baut sich allein deswegen auf, weil Elektronen denPhasenraum nicht beliebig dicht füllen dürfen. Er ist ein Beispielfür einen temperaturunabhängigen Druck.
Beachten Sie, dass wir in den letzten beiden Beispielen nur dieAbzählung von Zuständen im Phasenraum und das Grundpostulatder statistischen Physik verwendet haben und trotzdem zu weitrei-chenden physikalischen Schlüssen gelangt sind!
9.4.3 Verlauf einer Adiabate
• Eine Adiabate ist eine Kurve oder Fläche, auf der sich ein Systemunter adiabatischen Zustandsänderungen im Zustandsraum be-wegt. Betrachten wir zum Beispiel ein Fermi-Gas, dessen Energiewie oben gezeigt durch
E =32
PV (9.57)
gegeben ist. Adiabatische Zustandsänderungen bedeuten δQ = 0,und daher mit (9.43) und (8.42)
− PdV = −δW = dE =32
(PdV + VdP) . (9.58)
Division durch PV und Trennung der Variablen P und V führt auf
−52
dVV
=32
dPP
⇒ −53
ln V = ln P + C′ , (9.59)
woraus sofort die Beziehung
P = CV−5/3 , C := eC′ (9.60)
für die Adiabate im P-V-Diagramm folgt.
• Die Bedeutung der Konstante C wird klarer, wenn wir verlangen,dass der Druck gleich P0 wird wenn das Volumen gleich V0 ist.Das können wir erreichen, indem wir C := P0V5/3
0 setzen. Dannlautet die Adiabatengleichung für dieses System
P = P0
(V0
V
)5/3
. (9.61)
Kapitel 10
Wahrscheinlichkeit
10.1 Definitionen
10.1.1 Kolmogorow’sche Axiome
• Bevor wir mit der Thermodynamik fortfahren, ist es nützlich,Grundbegriffe der Wahrscheinlichkeitsrechnung genauer zu be-sprechen, weil bei der weiteren Diskussion der Thermodynamikviel davon die Rede sein wird, mit welcher Wahrscheinlichkeit einphysikalisches System sich auf bestimmte Weise verhalten wird.
• Von Wahrscheinlichkeiten bestimmter (physikalischer) Ereignis-se zu reden, hat offenbar nur dann einen Sinn, wenn man sichvorstellt, dass eine vorgegebene, feste Ausgangssituation immerwieder hergestellt wird, aus der heraus sich eine Menge von Ereig-nissen Ai | 1 ≤ i ≤ n ergeben kann, die nicht exakt vorhergesagtwerden können. Wenn die Ausgangssituation, beispielsweise einebestimmte experimentelle Konfiguration, N mal hergestellt wirdund die Ereignisse Ai jeweils ni mal eintreten, bezeichnet man dieZahlen
ni
N(10.1)
als die relativen Häufigkeiten der Ereignisse Ai.
• Ein naheliegendes Beispiel ist das N-malige Werfen eines Würfels.Die Menge der Ereignisse sind die Zahlen 1 bis 6, die der Würfelzeigen kann. Wird der Wurf oft wiederholt, stellen die relativenHäufigkeiten der Zahlen ein Maß dafür da, wie „gut“ der Würfelist. Seine „Güte“ wird dadurch bestimmt, dass man die relativenHäufigkeiten damit vergleicht, welche Werte man dafür erwartet.Der Erwartungswert der relativen Häufigkeit eines Zufallsereig-nisses Ai heißt seine Wahrscheinlichkeit pi. Im Fall des Würfels istnatürlich pi = 1/6 für alle 1 ≤ i ≤ 6. Irgendwelche Abweichungen
105

106 KAPITEL 10. WAHRSCHEINLICHKEIT
der relativen Häufigkeiten von diesem Wert werden als Hinweisauf die Qualität des Würfels interpretiert.
• Da die Summe aller Häufigkeiten ni die gesamte Anzahl der Er-eignisse N ergeben muss, gilt die Normierungsbedingung
N∑i=1
ni
N= 1 ,
N∑i=1
pi = 1 . (10.2)
• Der Wahrscheinlichkeitsrechnung liegen die Kolmogorow’schenAxiome zu Grunde. Sie lauten:
1. Jedem zufälligen Ereignis Ai wird eine reelle Zahl 0 ≤ pi :=p(Ai) ≤ 1 zugeordnet, die Wahrscheinlichkeit von Ai.
2. Die Wahrscheinlichkeit des sicheren Ereignisses ist p = 1.
3. Sind A1, A2, . . . , An paarweise unvereinbare Ereignisse, Ai ∩
A j = ∅ für i , j, dann gilt
p
n⋃i=1
Ai
=
n∑i=1
pi , (10.3)
d.h. die Wahrscheinlichkeit, dass irgendeines der EreignisseAi eintritt, ist die Summe ihrer Einzelwahrscheinlichkeiten.Insbesondere ist die Wahrscheinlichkeit, dass ein bestimmtesEreignis Ai nicht eintritt,
p(Ai) = p(Ai) + p(Ai) − p(Ai) = 1 − p(Ai) , (10.4)
wenn Ai das Ereignis „nicht Ai“ kennzeichnet.
• Wenn bereits bekannt ist, dass das Ereignis Ai eingetreten ist,ändert sich in der Regel die Wahrscheinlichkeit dafür, dass einanderes Ereignis A j eintreten kann. Solche Wahrscheinlichkeitenheißen bedingt und werden durch p(A j|Ai) („Wahrscheinlichkeitfür A j gegeben Ai“) notiert. Die bedingte Wahrscheinlichkeit istdurch den unmittelbar einleuchtenden Bayes’schen Satz
p(Ai ∩ A j) = p(A j|Ai)p(Ai) (10.5)
mit den unbedingten Wahrscheinlichkeiten p(Ai) und p(Ai ∩ A j)verbunden. Zwei Ereignisse Ai und A j heißen unabhängig, wenn
p(A j|Ai) = p(A j) (10.6)
ist. In diesem Falle folgt aus dem Bayes’schen Satz die Multipli-kationsregel
p(Ai ∩ A j) = p(Ai)p(A j) (10.7)
für die Wahrscheinlichkeiten unabhängiger Ereignisse.
10.1. DEFINITIONEN 107
10.1.2 Beispiele
• Beim Russischen Roulette wird eine der sechs Kammern einesTrommelrevolvers geladen, während die anderen leer bleiben. DerSpieler dreht die Trommel zufällig und drückt ab. Die Wahr-scheinlichkeit, einen Schuß abzugeben, ist p = 1/6. Da jederneue Versuch vom vorherigen unabhängig ist, ist die Wahrschein-lichkeit, auch nach dem N-ten Versuch noch keinen Schuß ab-gegeben zu haben, gleich (1 − p)N = (5/6)N . Die Wahrschein-lichkeit, den Schuß genau beim N-ten Versuch abzugeben, ist(1 − p)N−1 p = (5/6)N−1 · (1/6); bei N = 10 beträgt sie 3.2%.
• Varianten des folgenden Problems wurden unter vielen verschie-denen Namen bekannt: Ein Zauberer fordert Sie auf, eines vondrei verschlossenen Kästchen A, B und C zu wählen, aber nichtzu öffnen. In einem sei ein Diamant, in den anderen beiden Kohle.Sie wählen A. Daraufhin öffnet der Zauberer B, worin sich Kohlebefindet, und fragt Sie, ob Sie Ihre Wahl ändern möchten. SolltenSie das?
• Seien DA,B,C die Ereignisse „Diamant in A, B oder C“ und ZA,B,C
die Ereignisse „Zauberer öffnet A, B oder C“. Für Ihre Entschei-dung brauchen Sie die bedingte Wahrscheinlichkeit p(DC |ZB), denDiamant in C zu finden, nachdem der Zauberer Ihnen B gezeigthat. Nach dem Bayes’schen Satz (10.5) ist
p(DC |ZB)p(ZB) = p(DC ∩ ZB) = p(ZB ∩ DC) = p(ZB|DC)p(DC) .(10.8)
Die Wahrscheinlichkeit, dass Ihnen der Zauberer B zeigt, ist da-durch bedingt, wo der Diamant tatsächlich ist,
p(ZB) = p(ZB|DA)p(DA) + p(ZB|DB)p(DB) + p(ZB|DC)p(DC) .(10.9)
Aus (10.8) und (10.9) folgt
p(DC |ZB) =p(ZB|DC)p(DC)
p(ZB|DA)p(DA) + p(ZB|DB)p(DB) + p(ZB|DC)p(DC).
(10.10)
• Alle Wahrscheinlichkeiten auf der rechten Seite dieser Gleichungsind bekannt. Zunächst ist p(DA) = p(DB) = p(DC) = 1/3. DaSie A gewählt haben, muss p(ZB|DC) = 1 sein, weil der ZaubererIhnen dann nur B zeigen kann. Dagegen ist p(ZB|DA) = 1/2, weilder Zauberer Ihnen B oder C zeigen kann, wenn der Diamant inA ist, und p(ZB|DB) = 0, weil der Zauberer Ihnen dann nicht Bzeigen wird. Daher ist
p(DC |ZB) =1/3
1/2 · 1/3 + 0 · 1/3 + 1 · 1/3=
23. (10.11)
Sie sollten also durchaus zu C wechseln, denn p(DA) = 1/3!

108 KAPITEL 10. WAHRSCHEINLICHKEIT
10.1.3 Mittelwert und Streuung
• Wenn eine Größe die n diskreten Werte ui annehmen kann, die mitden Wahrscheinlichkeiten pi auftreten, dann ist der Mittelwert vonu durch
〈u〉 =
∑ni=1 ui pi∑n
i=1 pi=
n∑i=1
ui pi (10.12)
gegeben, wobei im letzten Schritt verwendet wurde, dass die Wahr-scheinlichkeiten normiert sind. Dies gilt natürlich ebenso für jedeFunktion f (u) von u, sodass
〈 f (u)〉 =
n∑i=1
f (ui)pi (10.13)
der Mittelwert von f (u) ist. Daraus können wir gleich zwei wichti-ge Ergebnisse folgern, nämlich
〈 f (u) + g(u)〉 =
n∑i=1
[f (ui) + g(ui)
]pi = 〈 f (u)〉 + 〈g(u)〉 (10.14)
und
〈λ f (u)〉 =
n∑i=1
[λ f (ui)
]pi = λ〈 f (u)〉 . (10.15)
• Der Mittelwert der Abweichung vom Mittelwert verschwindetnatürlich,
〈u − 〈u〉〉 =
n∑i=1
(ui − 〈u〉) pi = 〈u〉 − 〈u〉 = 0 . (10.16)
Eine sehr wichtige Information über Wahrscheinlichkeitsverteilun-gen ist, wie sehr die Werte ui um ihren Mittelwert streuen. Dieswird durch die Varianz oder Streuung
⟨(u − 〈u〉)2
⟩=
n∑i=1
(ui − 〈u〉)2 pi ≥ 0 (10.17)
angegeben. Offenbar gilt aufgrund der Definition⟨(u − 〈u〉)2
⟩=
⟨u2
⟩− 2〈u〉2 + 〈u〉2 =
⟨u2
⟩− 〈u〉2 , (10.18)
und wegen (10.17) muss ⟨u2
⟩≥ 〈u〉2 (10.19)
sein.
10.2. ZUFALLSBEWEGUNG 109
10.2 Zufallsbewegung, Binomial- und Gauß-verteilung
10.2.1 Zufallsbewegung
• Betrachten wir die Bewegung eines Teilchens in einer Dimensi-on, das in regelmäßigen Zeitabständen gleich lange Schritte derLänge 1 nach rechts oder links ausführen kann, wobei beide Rich-tungen gleich wahrscheinlich seien. Wenn viele Teilchen vomselben Punkt aus auf diese Zufallsreise geschickt werden und nacheiner festen Zeit untersucht wird, wie sie sich räumlich verteilthaben, welche Verteilung wird man finden?
• Zu jedem Zeitpunkt kann das Teilchen zwischen rechts und linkswählen. Es gibt also zwei mögliche Ereignisse, „Schritt nachrechts“ oder „Schritt nach links“. Wenn „Schritt nach rechts“ dieWahrscheinlichkeit p bekommt, muss „Schritt nach links“ dieWahrscheinlichkeit 1 − p bekommen. Bezeichnet m den Abstanddes Teilchens vom Ausgangspunkt, dann ist offenbar
m = n1 − n2 , (10.20)
wenn n1 und n2 die Anzahlen der Schritte nach rechts und linkssind. Insgesamt muss natürlich
n1 + n2 = N (10.21)
sein, wenn insgesamt N Schritte ausgeführt wurden. Kombinationder beiden Gleichungen (10.20) und (10.21) ergibt
m = 2n1 − N . (10.22)
• Die Wahrscheinlichkeit, in einer bestimmten Reihenfolge n1 Schrit-te nach rechts und n2 Schritte nach links zu gehen, ist
pn1(1 − p)n2 . (10.23)
Da die Schritte aber in beliebiger Reihenfolge ausgeführt werdenkönnen, gibt es dafür
N!n1!n2!
=N!
n1!(N − n1)!(10.24)
Möglichkeiten, weil zunächst die N Schritte auf N! Weisen permu-tiert werden können, ebenso aber auch die Schritte nach rechts undlinks. Die Wahrscheinlichkeit, dass das Teilchen nach N Schritteninsgesamt n1 Schritte nach rechts und n2 = N − n1 Schritte nachlinks gegangen ist, muss also
WN(n1) =N!
n1!(N − n1)!pn1(1 − p)N−n1 =:
(Nn1
)pn1(1 − p)N−n1
(10.25)
110 KAPITEL 10. WAHRSCHEINLICHKEIT
sein. Diese Verteilung der Wahrscheinlichkeiten heißt Binomial-verteilung, weil sie an die allgemeine binomische Formel
(p + q)N =
N∑i=0
(Ni
)piqN−i (10.26)
erinnert.
• Wie wir oben gesehen haben, steht m fest, wenn n1 gegeben ist.Also folgt aus (10.25) sofort die Wahrscheinlichkeitsverteilungdafür, dass das Teilchen sich nach N Schritten im Abstand m vomAusgangspunkt befindet,
PN(m) = WN
(N + m2
)=
(N
(N + m)/2
)p(N+m)/2(1 − p)(N−m)/2 .
(10.27)Für p = 1/2 nimmt sie die symmetrische Form
PN(m) =
(N
(N + m)/2
)2−N (10.28)
an.
• Für die Binomialverteilung (10.27) erhalten wir Mittelwerte durcheinen häufig sehr nützlichen Trick. Der Abstand m vom Ursprungkann alle ganzzahligen Werte zwischen −N ≤ m ≤ N annehmen.Damit ist der Mittelwert durch
〈m〉 =
N∑m=−N
mPN(m)
=
N∑m=−N
m(
N(N + m)/2
)p(N+m)/2(1 − p)(N−m)/2 (10.29)
bestimmt. Um dies zu berechnen, gehen wir zurück zu
WN(n1) =
(Nn1
)pn1qN−n1 , (10.30)
worin jetzt p und q als unabhängig angesehen werden. Die bino-mische Formel (10.26) verlangt
N∑n1=0
WN(n1) = (p + q)N . (10.31)
Dann ist
p∂
∂pWN(n1) = n1WN(n1) (10.32)

10.2. ZUFALLSBEWEGUNG 111
und daher
N∑n1=0
n1WN(n1) = p∂
∂p
N∑n1=0
WN(n1)
= p∂
∂p(p + q)N = N p(p + q)N−1 . (10.33)
Setzen wir hier wieder p = 1 − q, folgt
〈n1〉 = N p =N2
(10.34)
für p = 1/2, und damit aus (10.22)
〈m〉 = 2〈n1〉 − N = 0 . (10.35)
Natürlich muss das so sein, weil der mittlere Ort des Teilchens derUrsprung bleiben muss, wenn es sich mit gleicher Wahrscheinlich-keit nach rechts oder links bewegen kann.
• Die Streuung von m kann mit demselben Trick berechnet werden.Zunächst ist⟨
(m − 〈m〉)2⟩
=⟨m2
⟩=
⟨(2n1 − N)2
⟩= 4
⟨n2
1
⟩− 4〈n1〉N + N2 = 4
⟨n2
1
⟩− N2 . (10.36)
Dann verwenden wir (10.32) ein zweites Mal,(p∂
∂p
)2
WN(n1) = n21WN(n1) , (10.37)
summieren über alle n1 und bekommen
N∑n1=0
n21WN(n1) =
(p∂
∂p
)2
(p + q)N = (N p)2 + N p − N p2
= 〈n1〉2 + N p(1 − p) . (10.38)
Nach (10.18) ist die Streuung von n1⟨(n1 − 〈n1〉)2
⟩=
⟨n2
1
⟩− 〈n1〉
2 = N p(1 − p) =N4, (10.39)
wenn p = 1/2 ist. Außerdem erhalten wir aus (10.36) mit (10.34)und (10.38)⟨
m2⟩
= 4[〈n1〉
2 + N p(1 − p)]− N2 = N . (10.40)

112 KAPITEL 10. WAHRSCHEINLICHKEIT
10.2.2 Grenzfall großer N
• Die Streuung (10.39) von n1 nimmt linear mit N zu, ebenso wie derMittelwert 〈n1〉 = N/2. Ein Maß für die typische Abweichung vonn1 vom Mittelwert 〈n1〉 ist die Standardabweichung, die allgemeinals Wurzel aus der Streuung
σu :=⟨(u − 〈u〉)2
⟩1/2(10.41)
definiert ist und im Fall von n1
σn1 =
√N
2(10.42)
beträgt. Relativ zum Mittelwert nimmt die Standardabweichungalso wie
σn1
〈n1〉=
1√
N(10.43)
ab. Das Maximum der Verteilung WN(n1) wird also umso schärfer,je größer N wird.
• Im Grenzfall sehr großer N können wir die Zahlen n1 als kontinu-ierlich auffassen. Dann kann WN(n1) nach n1 abgeleitet werden,und wir können WN(n1) in eine Taylorreihe um 〈n1〉 entwickeln.Praktischer ist es jedoch, statt dessen ln WN(n1) zu entwickeln,weil dann die Rechnung erheblich einfacher wird. Also betrachtenwir
ln WN(n1) = ln WN(〈n1〉) +∂ ln WN(n1)
∂n1
∣∣∣∣∣〈n1〉
(n1 − 〈n1〉)
+12∂2 ln WN(n1)
∂n21
∣∣∣∣∣∣〈n1〉
(n1 − 〈n1〉)2 + . . . (10.44)
und brechen nach der zweiten Ordnung ab, weil typische Ab-weichungen vom Mittelwert mit wachsendem N immer kleinerwerden. Da wir um das Maximum entwickeln, verschwindet dieerste Ableitung, sodass
ln WN(n1) ≈ ln WN(〈n1〉) +12∂2 ln WN(n1)
∂n21
∣∣∣∣∣∣〈n1〉
(n1 − 〈n1〉)2
(10.45)genähert werden kann.
• Mit dem Ausdruck für WN(n1) aus (10.25) erhalten wir
ln WN(n1) = ln N! − ln n1! − ln(N − n1)!+ n1 ln p + (N − n1) ln(1 − p) . (10.46)
10.2. ZUFALLSBEWEGUNG 113
Für große n können wir ln n als kontinuierlich ansehen und dieAbleitung durch
d ln n!dn
≈ln(n + 1)! − ln n!
1= ln
(n + 1)!n!
= ln(n + 1)
≈ ln n (10.47)
nähern. Damit wird die Ableitung von ln WN(n1)
d ln WN(n1)dn1
= − ln n1 + ln(N − n1) + ln p − ln(1 − p)
= ln[N − n1
n1
p1 − p
]. (10.48)
Sie verschwindet, wenn
(N − n1)p = n1(1 − p) ⇒ n1 = N p = 〈n1〉 (10.49)
ist, d.h. das Maximum der Verteilung liegt tatsächlich beim Mittel-wert 〈n1〉.
• Die zweite Ableitung ergibt bei n1 = 〈n1〉 = N/2
d2 ln WN(n1)dn2
1
∣∣∣∣∣∣〈n1〉
= −1〈n1〉−
1N − 〈n1〉
= −4N
= −σ−2n1. (10.50)
Sie ist offensichtlich negativ und bestätigt dadurch, dass das Extre-mum bei n1 = 〈n1〉 wirklich ein Maximum ist.
• Zusammenfassend sehen wir, dass die Verteilung WN(n1) bei sehrgroßen N in die Gaußverteilung
W(n1) = W0 exp[−
(n1 − 〈n1〉)2
2σ2n1
](10.51)
übergeht. Die Amplitude W0 muss so gewählt werden, dass dieSumme aller Wahrscheinlichkeiten eins ergibt. Für kontinuierlichen1 bedeutet das
1 =
∫ ∞
−∞
W(n1)dn1 = W0
∫ ∞
−∞
exp(−
x2
2σ2n1
)dx = W0
√2πσ2 ,
(10.52)sodass die normierte Verteilung
W(n1) =1
√2πσ2
exp(−
(n1 − 〈n1〉)2
2σ2n1
)(10.53)
lautet.
114 KAPITEL 10. WAHRSCHEINLICHKEIT
• Das ist die Gauß’sche Normalverteilung, die allgemein in derForm
G(x; µ, σ) =1
√2πσ2
exp(−
(x − µ)2
2σ2
)(10.54)
geschrieben wird, wenn sie den Mittelwert µ und die Standard-abweichung σ hat. Sie besagt, dass die Wahrscheinlichkeit, einenormalverteilte Größe im kleinen Intervall zwischen x und x + dxzu finden, gerade gleich
dP(x) = G(x; µ, σ)dx (10.55)
ist.
10.3 Die Maxwell- und die Boltzmann-Verteilung
10.3.1 Die Maxwell-Verteilung
• Wir fragen nun danach, wie die Geschwindigkeiten der Teilcheneines Gases verteilt sein mögen, d.h. wir suchen eine Verteilungs-funktion f (vx, vy, vz) im Geschwindigkeitsraum so, dass die Größe
f (vx, vy, vz)dvxdvydvz (10.56)
die Wahrscheinlichkeit angibt, ein Teilchen mit einer Geschwin-digkeit zwischen (vx, vy, vz) und (vx + dvx, vy + dvy, vz + dvz) zufinden.
• Von Maxwell selbst stammt folgende elegante Überlegung: Ineinem Gas im thermodynamischen Gleichgewicht wird die Ge-schwindigkeitsverteilung nicht mehr von der Richtung der Bewe-gung abhängen, weil alle Richtungen mit gleicher Wahrscheinlich-keit auftreten werden. Also kann die Verteilung nur vom Betragvon ~v oder, äquivalent dazu, nur von ~v 2 abhängen. Weiterhin müs-sen die Wahrscheinlichkeiten dafür voneinander unabhängig sein,in welcher Raumrichtung sich die Teilchen bewegen. Also muss
f (~v 2) = f (v2x + v2
y + v2z ) = f (v2
x) f (v2y) f (v2
z ) (10.57)
gelten. Das Produkt der Verteilungsfunktionen der Geschwindig-keitsquadrate in allen Koordinatenrichtungen muss also gleichder Verteilungsfunktion der Summe der Geschwindigkeitsquadratesein.

10.3. DIE MAXWELL- UND DIE BOLTZMANN-VERTEILUNG115
• Die einzige Funktion f , die dieser Forderung genügt, ist die Expo-nentialfunktion. Wir müssen also
f (~v 2) = C exp(a~v 2) (10.58)
fordern. Die Größen C und a dürfen nicht von der Geschwindigkeitabhängen, sind aber sonst vorerst beliebig.
• Damit die Verteilung (10.58) überhaupt normiert werden kann,muss a < 0 sein. Damit nimmt die Verteilung die Form einerGaußverteilung im Geschwindigkeitsraum mit dem Mittelwert〈vx〉 = 〈vy〉 = 〈vz〉 = 0 und der Standardabweichung
σv =1√
2a(10.59)
an. Die Normierung ergibt sich dann direkt aus (10.54),
C =1
(2πσ2v )3/2 , (10.60)
wobei der Exponent 3/2 daher kommt, dass ja in jeder Raumrich-tung normiert werden muss.
• Nun bleibt nur noch die Bedeutung von a zu bestimmen. Offenbarmuss die Streuung jeder Geschwindigkeitskomponente um ihrenMittelwert gleich σv sein. Also müssen wir⟨
v2i
⟩= σ2
v . (10.61)
fordern. Die mittleren Geschwindigkeitsquadrate hängen natürlichmit der mittleren Energie ε der Gasteilchen zusammen. In derBewegung in jede Raumrichtung muss im Mittel dieselbe Energiestecken, weil die Raumrichtungen nicht voneinander verschiedensind. Deswegen muss
ε =m2
(⟨v2
x
⟩+
⟨v2y
⟩+
⟨v2
z
⟩)=
3m2
⟨v2
x
⟩=
3m2σ2v (10.62)
gelten. Die Streuung der Geschwindigkeit muss demnach propor-tional zur mittleren Energie eines Gasteilchens sein. In (11.42)werden wir sehen, dass die Energie eines idealen Gases aus NTeilchen
E =32
NkBT (10.63)
ist, weshalb
ε =32
kBT ⇒ σ2v =
kBTm
(10.64)
sein muss. Wir erhalten damit die Maxwell’sche Geschwindigkeits-verteilung
f (~v 2) =
(m
2πkBT
)3/2
exp(−
m~v 2
2kBT
). (10.65)

116 KAPITEL 10. WAHRSCHEINLICHKEIT
10.3.2 Die Boltzmann-Verteilung
• Betrachten wir ein isoliertes Gesamtsystem der Energie E, dasaus einem Wärmereservoir A1 der Energie E1 und einem sehrviel kleineren System A2 mit der Energie E2 = E − E1 besteht,das mit A1 im thermischen Gleichgewicht steht. Wie groß ist dieWahrscheinlichkeit, das System A2 im Zustand n bei der EnergieEn zu finden?
• Nach dem statistischen Grundpostulat ist diese Wahrscheinlichkeitproportional zur Anzahl der dem Gesamtsystem zugänglichenMikrozustände. Da das System A2 gerade in dem einen festenZustand n sein soll, ist
pn ∝ Ω1(E − En) , (10.66)
wobei Ω1(E1) wie üblich die Anzahl der dem Reservoir zugängli-chen Mikrozustände ist.
• Da En E sein muss, weil es sich bei A1 um ein Wärmereservoirhandelt, können wir ln Ω1(E − En) wieder um die GesamtenergieE entwickeln,
ln Ω1(E−En) = ln Ω1(E)−∂ ln Ω1(E1)
∂E1
∣∣∣∣∣E1=E
En+O(E2n) . (10.67)
Verwenden wir hier (9.6), folgt zunächst
Ω1(E − En) = Ω1(E) e−β1En , (10.68)
und darauspn ∝ e−βEn = e−En/kBT , (10.69)
wobei T die Temperatur des Wärmereservoirs (und damit auchdes Systems A2) ist. Die Proportionalitätskonstante folgt aus derBedingung, dass die Wahrscheinlichkeiten auf eins normiert seinmüssen,
pn = C−1 e−En/kBT , C :=∑
n
e−En/kBT . (10.70)
Dieses sehr allgemein gültige Ergebnis ist die Boltzmann-Verteilung. Sie zeigt, dass die Besetzung der Zustände eines Sys-tems, das sich im thermischen Gleichgewicht mit einem Wärme-reservoir befindet, exponentiell von dem Verhältnis der Zustands-energie En zur thermischen Energie kBT abhängt.
Kapitel 11
Einfache Anwendungen auf dieThermodynamik
11.1 Einfache thermodynamische Beziehun-gen
11.1.1 Eindeutigkeit der Entropie
• Die Entropie ist ein logarithmisches Maß für die Anzahl der Mi-krozustände, die ein isoliertes System einnehmen kann. In wieviele Mikrozustände der zugängliche Bereich des Phasenraumsgegliedert wird, hängt aber von unserer willkürlichen Wahl derKonstante h0 in (8.3) ab, denn
Ω =1
h f0
∫ f∏i=1
dqi
∫ f∏j=1
dp j =:Γ
h f0
(11.1)
hängt offensichtlich von h0 ab. Die Größe Γ ist das gesamte zu-gängliche Phasenraumvolumen. Die Entropie
S = kB ln Ω = kB ln Γ − kB f ln h0 (11.2)
ist wegen der willkürlichen Wahl von h0 nur bis auf eine additiveKonstante festgelegt.
• Dies gilt jedoch nur in der klassischen Mechanik, die einen kon-tinuierlichen Phasenraum zur Verfügung hat. In der Quantenme-chanik stellt sich heraus, dass es eine natürliche Wahl für h0 gibt,nämlich das Planck’sche Wirkungsquantum
h = 6.626 · 10−27 erg s−1 . (11.3)
Erst dann verliert die Entropie ihre Uneindeutigkeit.
117
118 KAPITEL 11. EINFACHE ANWENDUNGEN
• Nimmt die Energie eines Systems immer weiter ab, wird sichdas ihm zugängliche Phasenraumvolumen Γ drastisch verringern.Wenn die Energie gegen Null geht, E → 0, werden nur einer oderwenige Zustände übrig bleiben, in denen sich das System aufhaltenkann, sodass ln Γ ebenfalls gegen Null schrumpft. Da die Entropiein der klassischen Physik nur bis auf eine Konstante bestimmt ist,wird sie im Allgemeinen nicht gegen Null gehen. Die Konstantekann aber so gewählt werden, dass S → 0 geht, wenn E → 0 geht.Gleichzeitig wird auch die Temperatur gegen Null gehen, T → 0.In diesem Sinn ist die Aussage gerechtfertigt,
S → 0 für T → 0 . (11.4)
Sie wird als dritter Hauptsatz der Thermodynamik bezeichnet. DerNullpunkt der absoluten Temperaturskala liegt bei
T0 = −273.15 Celsius . (11.5)
• Eine aufgenommene oder abgegebene infinitesimale Wärmemen-ge δQ hatten wir als unvollständiges Differential identifiziert, aberbemerkenswerterweise muss das Differential der Entropie voll-ständig sein, weil die Entropie als Zustandsgröße des Systems nurden Anfangs- und Endzustand einer quasi-statischen Zustandsän-derung kennzeichnet,
S f − S i =
∫ f
idS =
∫ f
i
δQT
. (11.6)
Die bemerkenswerte Feststellung darin ist, dass der Faktor 1/Toffenbar ein integrierender Faktor für δQ ist.
• Größen wie die Masse, die Energie, die Entropie und das Volu-men addieren sich, wenn zwei Systeme, die im Gleichgewichtzueinander stehen, kombiniert werden. Solche Größen heißen ex-tensiv. Intensive Größen sind dagegen solche, die gleich bleiben,wenn die beiden Systeme kombiniert werden. Dazu gehören dieMassendichte, die Temperatur und der Druck.
11.1.2 Thermisches und mechanisches Gleichgewicht
• Betrachten wir zwei gemeinsam isolierte Systeme, die untereinan-der Wärme austauschen und dadurch mechanische Arbeit aneinan-der verrichten können, dass sie ihre Volumina ändern. Der einzigeäußere Zustandsparameter ist demnach das Volumen V , und wirkönnen die Entropie in der Form
S (E,V) = S 1(E1,V1) + S 2(E − E1,V − V1) (11.7)
11.1. EINFACHE THERMODYNAMISCHE BEZIEHUNGEN 119
schreiben. In (8.41) haben wir gesehen, dass die zum Volumengehörende verallgemeinerte Kraft der Druck P ist. Gleichgewichtwird dort eintreten, wo S (E,V) maximal wird. Dort verschwindetdS , woraus
dS =∂S 1
∂E1dE1 +
∂S 2
∂E2dE2 +
∂S 1
∂V1dV1 +
∂S 2
∂V2dV2
=
(1T1−
1T2
)dE1 +
(P1
T1−
P2
T2
)dV1 = 0 (11.8)
folgt, weil die Ableitung der Entropie nach dem Volumen beikonstanter Energie wegen (9.42) durch
δQ = TdS = δW = PdV ⇒∂S∂V
=PT
(11.9)
gegeben ist. Die Energieänderung dE1 und die VolumenänderungdV1 müssen infinitesimal klein sein, sind aber sonst beliebig. Dahermüssen ihre beiden Vorfaktoren in (11.8) separat verschwinden,weshalb
1T1−
1T2
= 0 undP1
T1−
P2
T2= 0 (11.10)
gelten müssen. Außer den Temperaturen gleichen sich also dieDrücke in den beiden Systemen aneinander an.
11.1.3 Wärmekapazität und spezifische Wärme
• Die Aufnahmefähigkeit eines Systems für Wärme wird durch dieWärmekapazität beschrieben, die durch
Cx =
(δQdT
)x
(11.11)
beschrieben wird. Dabei ist x ein äußerer Zustandsparameter, derwährend der Wärmeaufnahme konstant gehalten wird. Die Notati-on (
∂A∂B
)x
(11.12)
drückt dies allgemein und explizit aus: Die partielle Ableitung vonA nach B wird ausgeführt, wobei x konstant bleibt. Zum Beispielkönnte x das Volumen oder der Druck sein, je nachdem, ob dasGas sein Volumen oder seinen Druck beibehalten muss, währendes seine Energie um δQ erhöht.
• Die Wärmekapazität selbst ist noch keine Materialgröße, weil sienoch davon abhängt, wie viele Teilchen bzw. welche Masse dasSystem enthält. Deswegen führt man die spezifische Wärme cx ein,
120 KAPITEL 11. EINFACHE ANWENDUNGEN
indem man Cx entweder durch die Stoffmenge ν oder die Masse mteilt. Das Ergebnis ist
cx =Cx
νoder cx =
Cx
m, (11.13)
mit den Einheiten erg K−1 mol−1 im ersten und erg K−1 g−1 im zwei-ten Fall. Zur Erinnerung: Die Stoffmenge ist die Anzahl der Teil-chen N in Einheiten der Avogadrozahl,
ν :=NNA
=N
6.022 · 1023 . (11.14)
• Damit können wir sofort angeben, welche Temperatur sich einstel-len wird, wenn zwei gemeinsam isolierte Systeme in thermischenKontakt gebracht werden. Wenn keinerlei mechanische Arbeitausgeübt wird, gilt
Q1 + Q2 = 0 = m1
∫ T
T1
cV1(T ′)dT ′+m2
∫ T
T2
cV2(T ′)dT ′ , (11.15)
wenn cV die spezifische Wärme pro Masse bei konstantem Volu-men ist. Wenn zudem noch cV von der Temperatur zumindest ingenügender Näherung unabhängig ist, erhalten wir daraus
m1cV1(T − T1) + m2cV2(T − T2) = 0 , (11.16)
woraus die Mischungstemperatur
T =m1cV1T1 + m2cV2T2
m1cV1 + m2cV2(11.17)
folgt.
• Ebenso können wir die Entropie berechnen. Bei quasistatischerProzessführung von einer Temperatur Ti zu einer anderen Tf gilt,wenn der äußere Parameter x konstant gehalten wird,
S f − S i =
∫ f
i
δQT
=
∫ f
iCx
dTT
= Cx lnTf
Ti, (11.18)
wenn die Wärmekapazität Cx wieder nicht oder kaum von T ab-hängt.
11.2 Das ideale Gas
11.2.1 Vorbemerkungen
• Wir werden nun die bisher gewonnenen Aussagen über thermo-dynamische Systeme im Gleichgewicht auf konkrete Beispiele
11.2. DAS IDEALE GAS 121
anwenden. Allen diesen Betrachtungen wird der erste Hauptsatzder Thermodynamik
δQ = TdS = dE + δW (11.19)
zu Grunde liegen. Die mechanische Arbeit δW wird in der Regeldurch Änderung des Volumens verrichtet werden, sodass δW =
PdV gilt. Wenn keine weiteren äußeren Parameter auftreten, istS = S (E,V).
• Wie unter (11.12) erwähnt, werden die auftretenden partiellenAbleitungen nach bestimmten äußeren Parametern in der Thermo-dynamik dadurch gekennzeichnet, dass man die jeweils konstantgehaltenen Parameter als Subskript angibt. Diese Notation magzunächst künstlich erscheinen, weil die partielle Ableitung einerFunktion f (x1, . . . , xn) nach xi gerade so definiert ist, dass dabeialle x j mit j , i konstant gehalten werden. Die explizite Angabeder konstant zu haltenden Größe ist in der Thermodynamik aberdeswegen wichtig, weil oft ganz andere Größen als die explizitenoder „natürlichen“ unabhängigen Variablen der thermodynami-schen Funktionen konstant gehalten werden müssen.
• So betrachten wir z.B. die Entropie als Funktion der Energie E unddes Volumens V , müssen aber bei der Betrachtung der spezifischenWärmekapazität bei konstantem Druck eine andere Größe als Eoder V konstant halten. Dabei treten die Ableitungen(
∂S∂E
)V
oder(∂S∂E
)P
(11.20)
auf.
• Dies wird durch folgendes Bild illustriert. Eine vollständige Mengeäußerer, makroskopischer Zustandsparameter spannt einen Raumauf, den Zustandsraum. Dafür können in einfachen Fällen E undV gewählt werden, aber ebensogut kämen auch E und P in Frage.Die Entropie S (E,V) definiert nun eine Funktion auf diesem zwei-dimensionalen Zustandsraum. Im Gleichgewicht wird sie sich überjedem Punkt (E,V) auf einen bestimmten Wert einstellen, sofernder makroskopische Zustand (E,V) überhaupt mit dem Systemverträglich ist. Dadurch entsteht die Zustandsfläche S (E,V), aufder das System sich bei einer Änderung der ZustandsparameterE und V bewegen wird, sofern es im Gleichgewicht bleibt. Einkonstanter Druck P definiert eine Kurve in der E-V-Ebene, derenProjektion auf die Zustandsfläche angibt, wohin sich das Systemim Gleichgewicht bewegen wird, wenn E und V so verändertwerden, dass P konstant bleibt.
• Wir beginnen damit, Aussagen über ideale Gase herzuleiten. Wieschon erwähnt, heißen Gase ideal, wenn ihre Teilchen nur durch
122 KAPITEL 11. EINFACHE ANWENDUNGEN
direkte Stöße miteinander wechselwirken und als Punktteilchenbehandelt werden können. Dann ist die Anzahl der zugänglichenZustände im Phasenraum
Ω =VNω(E)
h3N0
, (11.21)
wobei ω(E) eine Funktion der Energie allein ist. Damit ist dieEntropie
S = kBN ln V + kB lnω(E) − 3NkB ln h0 , (11.22)
woraus wir bereits nach (9.40) die Zustandsgleichung
PT
=∂S∂V
=kBNV
⇒ PV = NkBT (11.23)
erhalten. Die Temperatur, nach (9.24) durch
1T
=∂S∂E
=kB
ω(E)∂ω(E)∂E
(11.24)
bestimmt, hängt allein von der Energie, aber nicht vom Volumenab. Demnach ist die Energie eines idealen Gases eine Funktion derTemperatur allein, E = E(T ).
• Umgekehrt können wir die Zustandsgleichung (11.23) als expe-rimentell gegeben ansehen und unsere bisher erarbeitete Kennt-nis thermodynamischer Zusammenhänge bereits dazu benutzen,Schlüsse über Gase zu ziehen, die dieser Zustandsgleichung ge-nügen. Zunächst verwenden wir die rein mathematische Aussageüber die Entropie S = S (T,V),
dS =∂S∂T
dT +∂S∂V
dV . (11.25)
Ausgehend vom ersten Hauptsatz der Thermodynamik können wiraußerdem feststellen, dass
dS =dET
+PdV
T(11.26)
ist. Die Energie schreiben wir ebenfalls als Funktion der Tempera-tur und des Volumens, E = E(T,V), und bekommen
dE =∂E∂T
dT +∂E∂V
dV . (11.27)
Eingesetzt in (11.26), ergibt das
dS =1T∂E∂T
dT +
(PT
+1T∂E∂V
)dV (11.28)
11.2. DAS IDEALE GAS 123
und damit
∂S∂T
=1T∂E∂T
,
∂S∂V
=PT
+1T∂E∂V
=NkV
+1T∂E∂V
, (11.29)
wobei wir im letzten Schritt die Zustandsgleichung (11.23) ver-wendet haben.
• Die gemischten Ableitungen müssen aber übereinstimmen,
∂2S∂T∂V
=∂2S∂V∂T
, (11.30)
woraus wir sofort
1T
∂2E∂V∂T
=∂
∂T
(1T∂E∂V
)= −
1T 2
∂E∂V
+1T
∂2E∂T∂V
(11.31)
und daraus∂E∂V
= 0 (11.32)
erhalten. Die Energie eines thermodynamischen Systems mit dergemessenen Zustandsgleichung (11.23) kann daher nicht vomVolumen abhängen. Zusammen mit den thermodynamischen Ge-setzen können wir also aus dem experimentellen Befund schließen,dass die Teilchen des Systems nur durch direkte Stöße miteinanderwechselwirken können.
11.2.2 Spezifische Wärmen
• Für die spezifische Wärme pro Mol bei konstantem Volumen, cV ,erhalten wir aus ihrer Definition und dem ersten Hauptsatz
cV =1ν
δQdT
=1ν
dE + PdVdT
=1ν
∂E∂T
. (11.33)
Die Energie hängt aber nur von der Temperatur ab, sodass außer-dem
dE =∂E∂T
dT = νcVdT (11.34)
ist.
• Dies gilt weiterhin, wenn wir statt des Volumens den Druck kon-stant halten. Stattdessen müssen wir dann aber erlauben, dass sichdas Volumen ändern kann, dV , 0. Die spezifische Wärme proMol bei konstantem Druck ist
cP =1ν
dE + PdVdT
= cV +PdVνdT
. (11.35)
124 KAPITEL 11. EINFACHE ANWENDUNGEN
Aus der Zustandsgleichung (11.23) können wir außerdem schlie-ßen, dass
PdV = NkBdT (11.36)
ist, sodass die spezifische Wärme bei konstantem Druck
cP = cV +NkB
ν= cV +
νNAkB
ν=: cV + R (11.37)
wird, wobei wir die Gaskonstante
R := NAkB = 8.31 · 107 ergmol K
(11.38)
eingeführt haben.
• Die spezifische Wärme bei konstantem Druck ist größer als diespezifische Wärme bei konstantem Volumen, weil das Gas beikonstantem Druck mechanische Arbeit verrichten kann, indemes sein Volumen vergrößert. Diese Arbeit muss der zugeführtenWärme entnommen werden, sodass für eine vorgegebene Tempe-raturerhöhung eine größere Wärmemenge aufgenommen werdenmuss.
• Um weiter voranzukommen, müssen wir eine der beiden Wärme-kapazitäten ausrechnen, indem wir auf die mikroskopische Ebenegehen. Die Anzahl zugänglicher Zustände ist, wie wir schon mehr-fach festgestellt haben,
Ω = B VN E f /2−1 ≈ B VN E f /2 , (11.39)
worin die unbekannte Konstante B auftaucht, weil wir den genau-en numerischen Vorfaktor des Energiebeitrags nicht berechnenwollten. Die Entropie ist
S = kB ln B + kN ln V +f kB
2ln E , (11.40)
woraus der Zusammenhang
1T
=∂S∂E
=f kB
2E=
3NkB
2E(11.41)
oderE =
32
NkBT (11.42)
Nun ist nach (11.33) und nach dem ersten Hauptsatz bei dV = 0
cV =1ν
∂E∂T
=32
NkB
ν=
32
R , (11.43)
und damit haben wir aus (11.37) auch die Wärmekapazität beikonstantem Druck,
cP =52
R . (11.44)
Um ein Mol eines idealen Gases um ein Grad zu erwärmen, sinddemnach bei konstantem Volumen 1.24 · 108 erg erforderlich, und2.1 · 108 erg bei konstantem Druck.
11.2. DAS IDEALE GAS 125
11.2.3 Adiabatische Expansion
• Wenn ein Gas im Kontakt mit einem Wärmereservoir expandierenkann, bleibt seine Temperatur konstant. Aufgrund der Zustands-gleichung wissen wir dann, dass das Gas sich so ausdehnen muss,dass
PV = konst. (11.45)
bleibt: Wenn der Druck auf die Hälfte sinkt, steigt das Volumenauf das Doppelte.
• Anders verläuft die Expansion, wenn das ideale Gas thermischisoliert ist, sodass keine Wärme aufgenommen oder abgegebenwerden kann. Diese adiabatische Expansion muss dann δQ = 0erfüllen, sodass
0 = dE + PdV = νcVdT + PdV (11.46)
gilt. Die Zustandsgleichung sagt uns
d(PV) = VdP + PdV = NkdT = νRdT . (11.47)
Eliminieren wir dT zwischen den beiden Gleichungen (11.46) und(11.47), folgt
cV
R(VdP + PdV) + PdV = 0 , (11.48)
und mit (11.37)
cV
RVdP = −
cV + RR
PdV = −cP
RPdV . (11.49)
Trennung der Variablen und Integration führt schließlich zu
P ∝ V−γ oder PVγ = konst. , (11.50)
wobei wir den Adiabatenindex
γ :=cP
cV=
53
(11.51)
eingeführt haben. Wenn nun der Druck auf die Hälfte sinkt, steigtdas Volumen nur auf das ≈ 1.5-fache.
• Nachdem außerdem die Zustandsgleichung gelten muss, PV =
νRT , führt (11.50) sofort auf einen Zusammenhang zwischen demVolumen und der Temperatur,
PVγ = (PV)Vγ−1 = νRTVγ−1 = konst. ⇒ TVγ−1 = konst.(11.52)
Eine Verdoppelung der Temperatur erfordert demnach eine adia-batische Kompression um einen Faktor 21−γ = 2−2/3 ≈ 0.63.

126 KAPITEL 11. EINFACHE ANWENDUNGEN
11.2.4 Erweiterungen
• Oft können die Teilchen des Gases nicht als punktförmig ange-nommen werden. Dann muss berücksichtigt werden, dass sie eineinnere Struktur haben können, deren Anregungen zu weiterenFreiheitsgraden Anlass geben.
• Betrachten wir ein Gas, das aus zweiatomigen Molekülen besteht.Zu den drei Freiheitsgraden der Translation kommen dann nochzwei Freiheitsgrade der Rotation dazu; nicht drei, weil die Drehungum die Verbindungsachse der Atome keine Energie aufnimmt,solange die Atome punktförmig bleiben. Da jedes Teilchen dannfünf Freiheitsgrade hat, ist f = 5N. Weiterhin sind Schwingungender beiden Atome gegeneinander möglich, durch die ein weitererFreiheitsgrad dazu kommt, sodass f = 6N wird.
• Unsere vorangegangenen Betrachtungen ändern sich dadurch aufminimale Weise. Zunächst lauten (11.41) und (11.42) jetzt
1T
=f kB
2E=
6NkB
2E=
3NkB
E, E = 3NkBT . (11.53)
Damit erhöhen sich die spezifischen Wärmen bei konstantem Vo-lumen bzw. konstantem Druck auf
cV = 3R , cP = cV + R = 4R , (11.54)
und der Adiabatenindex verringert sich auf
γ =cP
cV=
43. (11.55)
• Die Anzahl der effektiven Freiheitsgrade wird außerdem davonabhängen, ob die Rotations- und die Vibrationsfreiheitsgrade über-haupt angeregt werden können. Bei niedriger Temperatur mag dasnicht der Fall sein, sodass cV von 3R/2 über 5R/2 zu 3R zunimmt,wenn zunächst die Rotations- und dann die Vibrationsfreiheitsgra-de zu den Translationsfreiheitsgraden dazukommen.
• Wenn sich die Gasteilchen mit relativistischen Geschwindigkeitenbewegen, also mit Geschwindigkeiten, die einen nennenswertenBruchteil der Lichtgeschwindigkeit c ausmachen, ändert sich derZusammenhang zwischen Impuls und kinetischer Energie. Statt
E =~p 2
2m(11.56)
gilt dann für extrem relativistische Teilchen wie z.B. Photonen
E = cp . (11.57)
11.2. DAS IDEALE GAS 127
• Damit ändert sich der Zusammenhang (11.39), den wir bei dermikroskopischen Berechnung der Anzahl zugänglicher Zuständeverwendet hatten. Weil die Energie jetzt linear vom Impuls abhängtund nicht mehr quadratisch, gilt
Ω ≈ BVN E f statt Ω ≈ BVN E f /2 . (11.58)
Die Entropie wird dadurch zu
S = kB ln B + kBN ln V + kB f ln E , (11.59)
woraus
1T
=kB fE
=3NkB
Eund E = 3NkBT (11.60)
folgen. Daraus erhalten wir die spezifischen Wärmen bei konstan-tem Volumen bzw. bei konstantem Druck und den Adiabatenindex
cV = 3R , cP = 4R , γ =43. (11.61)
• Dehnt sich ein Gemisch aus einem einatomigen, nichtrelativisti-schen idealen Gas und Photonen adiabatisch aus, fällt nach (11.52)die Temperatur Tg des nichtrelativistischen Gases schneller als dieTemperatur Tγ der Photonen ab, denn
Tg ∝ V−2/3 , Tγ ∝ V−1/3 . (11.62)
Wenn keine Wechselwirkung zwischen den Photonen und denGasteilchen für thermisches Gleichgewicht zwischen beiden sorgt,wird es daher sinnlos, von einer einzigen Temperatur des Gemischszu sprechen.
11.2.5 Entropie
• Auf ähnliche Weise erhalten wir einen Ausdruck für die Entropieeines idealen Gases. Natürlich werden wir sie nur bis auf eineKonstante bestimmen können, weil eine absolute Bestimmung inder klassischen Mechanik gar nicht möglich ist. Aufgrund desersten Hauptsatzes und wegen des Zusammenhangs (11.34) habenwir
TdS = dE + PdV = νcVdT + PdV (11.63)
oder, mithilfe der Zustandsgleichung,
dS = νcVdTT
+PT
dV = νcVdTT
+ νRdVV
. (11.64)
128 KAPITEL 11. EINFACHE ANWENDUNGEN
• Wir beziehen uns auf ν0 = 1 Mol eines idealen Gases mit einerTemperatur T0 und einem Volumen V0. Ein Gas mit derselbenTemperatur T0 und ν Mol hat das Volumen (ν/ν0)V0, weil dasVolumen eine extensive Größe ist. Nun gehen wir zunächst beikonstanter Temperatur zum Volumen V und anschließend bei kon-stantem Volumen zur Temperatur T . Beide Prozesse müssen wirquasi-statisch führen, damit (11.63) seine Gültigkeit behält. Dadie Entropieänderung vom Weg unabhängig ist, erhalten wir damitnicht nur einen, sondern den Ausdruck für die Entropieänderungbeim Übergang vom Zustand (T0, (ν/ν0)V0) zum Zustand (T,V).Wir bekommen
∆S = νcV
∫ T
T0
dT ′
T ′+ νR
∫ V
(ν/ν0)V0
dV ′
V ′
= νcV lnTT0
+ νR lnV
(ν/ν0)V0
= νcV lnTT0
+ νR lnVV0− νR ln
ν
ν0. (11.65)
Indem wir die Stoffmengen ν durch Teilchenzahlen N = νNA
ersetzen und die Gaskonstante R = kBNA verwenden, erhalten wirden alternativen Ausdruck
∆S =3NkB
2ln
TT0
+ NkB lnVV0− NkB ln N . (11.66)
• So einfach das Ergebnis (11.66) hergeleitet wurde, so problema-tisch ist es wegen des Terms, der ∝ N ln N ist. Denken wir uns einGasvolumen mit N Teilchen gefüllt und betrachten die Beiträgezur Entropie getrennt, die von jeweils einer Hälfte der Teilchenbeigesteuert werden. Natürlich erwarten wir, dass die gesamteEntropie gleich der Summe der Entropien der beiden Hälften, al-so das Doppelte der Entropie einer Hälfte ist. Gleichung (11.66)besagt aber für eine Hälfte
∆S 1/2 =12
(3NkB
2ln
TT0
+ NkB lnVV0
)−
N2
kB lnN2. (11.67)
Das Doppelte davon ist offenbar
2∆S 1/2 = ∆S + NkB ln N − NkB lnN2
= ∆S + NkB ln 2 (11.68)
und nicht ∆S ! Sollte die Entropie von N Teilchen davon abhängen,wie sie bei der Berechnung willkürlich aufgeteilt werden? Diesesganz und gar unerwünschte Ergebnis ist das Gibbs’sche Paradoxon,das uns später noch beschäftigen wird.
Kapitel 12
Thermodynamische Funktionenund Maxwell-Relationen
12.1 Thermodynamische Funktionen
12.1.1 Vorbemerkung
• Wir haben bei der Behandlung des idealen Gases mehrmals davonGebrauch gemacht, dass seine Energie nur eine Funktion der Tem-peratur und nicht des Volumens ist, sodass (11.32) gilt. Wenn wirdas aufgeben und allgemeinere Systeme betrachten, müssen wirneue Beziehungen zwischen thermodynamischen Größen findenund benutzen.
• Betrachten wir erneut ein System im Gleichgewicht, dessen allei-niger äußerer Parameter wiederum das Volumen sei. Die einzigeverallgemeinerte Kraft ist demnach der Druck. Für quasistatischeProzesse gilt dann der erste Hauptsatz in der Form
δQ = TdS = dE + PdV ⇒ dE = TdS − PdV . (12.1)
Die letzte Gleichung legt es nahe, die Energie E als Funktion derEntropie S und des Volumens V aufzufassen, sodass ihr vollstän-diges Differential
dE =
(∂E∂S
)V
dS +
(∂E∂V
)S
dV (12.2)
lautet. Identifizieren wir die beiden Darstellungen (12.1) und (12.2)von dE, erhalten wir(
∂E∂S
)V
= T ,
(∂E∂V
)S
= −P . (12.3)
129
130 KAPITEL 12. THERMODYNAMISCHE FUNKTIONEN
• Diese Beziehungen gelten, weil dE ein vollständiges Differentialist, sodass die verschiedenen partiellen Ableitungen von E nichtunabhängig sein können. Aus demselben Grund können wir einenSchritt weiter gehen und gemischte zweite Ableitungen von Emiteinander identifizieren, so zum Beispiel
∂2E∂V∂S
=∂2E∂S ∂V
. (12.4)
Das bedeutet zunächst, dass(∂
∂V
)S
(∂E∂S
)V
=
(∂
∂S
)V
(∂E∂V
)S
(12.5)
gelten muss, wobei wieder die bei den partiellen Ableitungenjeweils konstant zu haltenden Größen explizit angegeben wurden.Mit den Identifikationen (12.3) erhalten wir daraus(
∂T∂V
)S
= −
(∂P∂S
)V. (12.6)
Natürlich ist diese interessante Beziehung zunächst sehr abstrakt:Die Änderung der Temperatur mit dem Volumen bei konstanterEntropie ist gleich der negativen Änderung des Drucks mit derEntropie bei gleichem Volumen. Solche Beziehungen werden unstrotzdem gleich sehr nützlich werden.
12.1.2 Legendre-Transformationen
• Oft kann der Druck wesentlich besser experimentell kontrolliertwerden als das Volumen. Experimente in offenen Behältern laufenbeispielsweise bei konstantem äußeren Druck ab. Um solche Fällezu beschreiben, lohnt es sich, die Eigenschaften des betrachtetenphysikalischen Systems nicht als Funktionen der Entropie und desVolumens, sondern der Entropie und des Drucks zu beschreiben,also die Variablentransformation (S ,V)→ (S , P) durchzuführen.
• Da der Druck als die zum Volumen gehörende verallgemeinerteKraft gerade die (negative) Ableitung der Energie nach dem Volu-men ist, siehe (12.3), handelt es sich bei der Transformation von Vnach P um ein Beispiel einer allgemeinen Klasse von Transforma-tionen, bei der eine Funktion f (x) in eine Funktion g(u) überführtwerden soll, wobei die neue Variable u gerade durch die Ableitung
u = ±d f (x)
dx(12.7)
bestimmt ist. Das Vorzeichen spielt keine wesentliche Rolle, so-dass wir der Einfachheit halber das negative ignorieren.
12.1. THERMODYNAMISCHE FUNKTIONEN 131
• Wenn die vollständigen Differentiale von f (x) und g(u) durch
d f =d f (x)
dxdx = u dx , dg(u) =
dg(u)du
du = −x du (12.8)
festgelegt werden, gilt
dg = −x du = u dx − (x du + u dx) = d f − d(ux) , (12.9)
woraus durch Integration bis auf eine Konstante
g = f − ux bzw. g(u) = f [x(u)] − ux(u) (12.10)
folgt. Die Funktion g(u) heißt Legendre-Transformierte der Funk-tion f (x).
• Sie ist gerade so bestimmt, dass an jedem Punkt x
u =f (x) − g(u)
x(12.11)
gilt. Das bedeutet, dass die Legendre-Transformierte g(u) geradeder Achsenabschnitt f0 der Tangente an f (x) im Punkt x ist, denner ist durch
u =d f (x)
dx=
∆ f (x)∆x
=f (x) − f0
x(12.12)
bestimmt. Deswegen ist die Legendre-Transformation ein Beispielfür eine so genannte Berührungstransformation.
• Sei beispielsweise f (x) = x2 + 1, dann ist u(x) = 2x oder x(u) =
u/2. Aus (12.10) folgt die Legendre-Transformierte
g(u) = f(u2
)−
u2
2= 1 −
u2
4. (12.13)
Wenn x(u) nicht eindeutig bestimmt ist, wird die Legendre-Transformation allgemein durch
g(u) = infx f [x(u)] − ux(u) (12.14)
bestimmt. Sei etwa f (x) = x3/6 − x2/2, dann ist u(x) = x2/2 −x, und x(u) = 1 ±
√1 + 2u wird zweideutig. Die Legendre-
Transformierte von f (x) ist dann durch die kleinere der beidenLösungen x(u) definiert.
• Eine Legendre-Transformation war uns schon bei der Hamilton-Formulierung der klassischen Mechanik begegnet. Dort wolltenwir die Darstellung eines mechanischen Zustands anhand von Ortund Geschwindigkeit durch eine Darstellung ersetzen, in der Ortund kanonisch-konjugierter Impuls vorkamen, (q, q) → (q, p),wobei der kanonisch-konjugierte Impuls p = ∂L/∂q gerade dieAbleitung der Lagrange-Funktion nach der Geschwindigkeit war,also nach der zu ersetzenden Variablen. Die Hamilton-Funktionwar dann
H(q, p) = qp − L(q, q) , (12.15)
was bis auf ein unerhebliches Vorzeichen von der Form (12.10)ist.
132 KAPITEL 12. THERMODYNAMISCHE FUNKTIONEN
12.1.3 Die Enthalpie
• Genauso gehen wir hier vor, indem wir statt der Energie E(S ,V)die neue Funktion H(S , P) einführen, wo P = −(∂E/∂V)S ist. Dieentsprechende Legendre-Transformation lautet
H(S , P) = E(S ,V) + PV , (12.16)
wobei das positive Vorzeichen in diesem Fall physikalisch sinnvollist. Die Funktion H heißt Enthalpie des Systems. Ihr vollständigesDifferential ist
dH = d(PV) + dE = VdP + PdV + TdS − PdV = TdS + VdP ,(12.17)
woraus zunächst(∂H∂S
)P
= T und(∂H∂P
)S
= V (12.18)
folgen. Wie die Ableitung von E nach S ist auch die Ableitungvon H nach S gerade die Temperatur. Da wir jetzt aber den Druckanstelle des Volumens kontrollieren wollen, wird das Volumen zurunbekannten Größe, die durch die Ableitung nach dem Druck zubestimmen ist.
• Abermals ist dH ein vollständiges Differential, sodass wiederumBeziehungen zwischen den partiellen Ableitungen der Enthalpiegelten müssen. Wieder identifizieren wir die zweiten Ableitungennach den beiden unabhängigen Variablen S und P,
∂2H∂S ∂P
=∂2H∂P∂S
, (12.19)
erhalten daraus (∂
∂S
)P
(∂H∂P
)S
=
(∂
∂P
)S
(∂H∂S
)P
(12.20)
und verwenden die Ergebnisse (12.18), um(∂V∂S
)P
=
(∂T∂P
)S
(12.21)
zu finden.
12.1.4 Die freie Energie
• Natürlich ist auch die Entropie eine Größe, die sich experimen-tell kaum kontrollieren lässt. Viel einfacher ließe sich meistensdie Temperatur einstellen. Deswegen liegt eine Transformation
12.1. THERMODYNAMISCHE FUNKTIONEN 133
nahe, die (S ,V) → (T,V) zu ersetzen erlaubt. Das ist selbstver-ständlich wieder eine Legendre-Transformation, weil wir S durchT = (∂E/∂S )V ersetzt haben wollen. Also führen wir eine neueFunktion F(T,V) ein, indem wir
F(T,V) = E(S ,V) − TS (12.22)
definieren, wobei die Vorzeichen wieder physikalisch sinnvollgewählt wurden. Diese Funktion heißt freie Energie. Ihr vollstän-diges Differential ist
dF(T,V) = dE−d(TS ) = TdS−PdV−S dT−TdS = −PdV−S dT ,(12.23)
woraus wir wie vorher(∂F∂V
)T
= −P ,
(∂F∂T
)V
= −S (12.24)
erhalten. Die Gleichsetzung der gemischten zweiten Ableitungenergibt in diesem Fall
∂2F∂T∂V
=∂2F∂V∂T
, (12.25)
sodass wir mit (12.24) (∂P∂T
)V
=
(∂S∂V
)T
(12.26)
ableiten können.
12.1.5 Die freie Enthalpie
• Schließlich bleibt noch eine Transformation, die dann sinnvollist, wenn Temperatur und Druck statt Temperatur und Volumenexperimentell kontrolliert werden können. Dementsprechend wün-schen wir uns eine Transformation (T,V) → (T, P), die wiedereine Legendre-Transformation ist, weil P = −(∂F/∂V)T ist. Alsodefinieren wir eine neue Funktion G(T, P), die freie Enthalpie,durch
G(T, P) = F(T,V) + PV = E(S ,V) − TS + PV , (12.27)
deren vollständiges Differential nun offenbar
dG = dF +VdP+PdV = −PdV−S dT +VdP+PdV = VdP−S dT(12.28)
ist. Die nun schon gewohnte Prozedur, die auf der Gleichsetzungder gemischten zweiten Ableitungen beruht, führt mit(
∂G∂T
)P
= −S ,
(∂G∂P
)T
= V (12.29)
auf die weitere Relation(∂S∂P
)T
= −
(∂V∂T
)P. (12.30)

134 KAPITEL 12. THERMODYNAMISCHE FUNKTIONEN
12.1.6 Zusammenfassung; Maxwell-Relationen
• Fassen wir zusammen: Wir hatten anfänglich physikalische Sys-teme zunächst durch ihre Energie E gekennzeichnet und einge-schränkt, dass das Volumen V der alleinige äußere Parameter seinsolle. Die Entropie S (E,V) hatten wir als ein logarithmisches Maßdafür eingeführt, wie viele Zustände dem System unter Vorgabevon E und V zugänglich sind. Damit waren wir für quasi-statischeZustandsänderungen auf den ersten Hauptsatz (12.1) gekommen,in dem die unvollständigen Differentiale δQ und δW mithilfe derTemperatur und des Drucks durch die vollständigen DifferentialeTdS der Entropie und PdV des Volumens ersetzt werden konnten.
• Dann hatten wir umgekehrt die Entropie als Zustandsgröße ver-wendet und die Energie E(S ,V) als Funktion der Entropie und desVolumens aufgefasst. Davon ausgehend, hatten wir durch vier ver-schiedene Legendre-Transformationen die unabhängigen Größendurch andere ersetzt, die sich experimentell u.U. leichter kon-trollieren lassen. Diese Legendre-Transformationen überführenentweder V → P oder S → T , oder beide. Dadurch entstehenanstelle der Energie E neue thermodynamische Funktionen, dienatürlich alle die Dimension einer Energie haben. Funktionen,in denen die Temperatur statt der Entropie unabhängig ist, hei-ßen „frei“; Funktionen, in denen der Druck anstelle des Volumensunabhängig ist, heißen „Enthalpie“.
• So hatten wir die folgenden thermodynamischen Funktionen bzw.thermodynamischen Potentiale bekommen:
Energie E(S ,V)freie Energie F(T,V) = E(S ,V) − TSEnthalpie H(S , P) = E(S ,V) + PVfreie Enthalpie G(T, P) = F(T,V) + PV = E(S ,V) − TS + PVJames Clerk Maxwell
Ihre vollständigen Differentiale waren:
dE = TdS − PdVdF = −S dT − PdVdH = TdS + VdPdG = −S dT + VdP (12.31)
Aus der Voraussetzung, dass alle diese Differentiale vollständigsein müssen, hatten wir schließlich noch die Maxwell-Relationenabgeleitet,(
∂T∂V
)S
= −
(∂P∂S
)V
,
(∂T∂P
)S
=
(∂V∂S
)P,(
∂S∂V
)T
=
(∂P∂T
)V
,
(∂S∂P
)T
= −
(∂V∂T
)P. (12.32)
12.2. EINIGE ANWENDUNGEN 135
Diese Relationen folgen letztendlich daraus, dass die Entropieeine Funktion ist, die den Zustand eines Systems kennzeichnetund deren Differential deshalb vollständig sein muss. Sie sind invielen Rechnungen sehr nützlich, wenn es darum geht, unbekannteoder experimentell kaum bestimmbare Ableitungen durch andere,anschaulichere oder besser messbare zu ersetzen.
12.2 Einige Anwendungen
12.2.1 Spezifische Wärmen
• Sehen wir uns zunächst wieder die spezifischen Wärmen bei kon-stantem Volumen oder bei konstantem Druck an. Sie waren durch(11.10) definiert,
CV =
(δQdT
)V
= T(∂S∂T
)V, CP =
(δQdT
)P
= T(∂S∂T
)P. (12.33)
Wir wählen (T, P) als unabhängige Variable, schreiben die Entro-pie als Funktion derselben, S = S (T, P), und bekommen daraus
TdS = T[(∂S∂T
)P
dT +
(∂S∂P
)T
dP]
= CPdT + T(∂S∂P
)T
dP ,
(12.34)wobei bereits CP aus (12.33) eingesetzt wurde. Wenn der Druckkonstant gehalten wird, ist dP = 0, und (12.34) fällt auf die Defini-tion (12.33) von CP zurück.
• Wenn statt des Drucks das Volumen festgehalten wird, kann derDruck nur von der Temperatur abhängen,
dP =
(∂P∂T
)V
dT , (12.35)
sodass aus (12.34)
CVdT = CPdT + T(∂S∂P
)T
(∂P∂T
)V
dT (12.36)
folgt. Nun machen wir von einer der Maxwell-Relationen (12.32)Gebrauch, um die Ableitung der Entropie zu ersetzen,(
∂S∂P
)T
= −
(∂V∂T
)P. (12.37)
Die Größe auf der rechten Seite hat eine anschauliche Bedeutung:Sie beschreibt, wie das Volumen auf Grund einer Temperaturän-derung zunimmt, wenn der Druck konstant bleibt, und ist damit
136 KAPITEL 12. THERMODYNAMISCHE FUNKTIONEN
die isobare Wärmeausdehnung des Systems. Wir definieren denWärmeausdehnungskoeffizienten
α :=1V
(∂V∂T
)P
(12.38)
und bekommen aus (12.37)
CV = CP − αVT(∂P∂T
)V. (12.39)
• Die verbliebene Ableitung erhalten wir, indem wir das Volumen alsFunktion von Druck und Temperatur auffassen. Sein vollständigesDifferential
dV =
(∂V∂P
)T
dP +
(∂V∂T
)P
dT = 0 (12.40)
muss verschwinden, weil wir von konstantem Volumen ausgehen.Deswegen muss (
∂V∂P
)T
dP = −
(∂V∂T
)P
dT (12.41)
sein, woraus wir mit (12.35)
(∂V∂P
)T
(∂P∂T
)V
= −
(∂V∂T
)P⇒
(∂P∂T
)V
= −
(∂V∂T
)P(
∂V∂P
)T
(12.42)
bekommen. Den Zähler kennen wir bereits aus (12.38). Der Nen-ner beschreibt, wie sich das Volumen bei konstanter Temperaturändert, wenn der Druck verändert wird, und damit die isothermeKompressibilität
κ := −1V
(∂V∂P
)T. (12.43)
Fassen wir (12.42), (12.42) und (12.38) zusammen, erhalten wiraus (12.39) den allgemeinen Zusammenhang
CP −CV = VTα2
κ(12.44)
zwischen den beiden Wärmekapazitäten bei konstantem Druckbzw. konstantem Volumen.
• Bekommen wir daraus das bekannte Ergebnis (11.35) für das idea-le Gas zurück? Zunächst bestimmen wir den Wärmeausdehnungs-koeffizienten des idealen Gases. Wegen der Zustandsgleichung desidealen Gases, PV = NkT = νRT , ist VdP + PdV = νRdT . Bei
12.2. EINIGE ANWENDUNGEN 137
konstantem Druck, dP = 0, ist PdV = νRdT , und daher ist derisobare Wärmeausdehnungskoeffizient
α =1V
(∂V∂T
)P
=νRPV
=1T. (12.45)
Ähnlich einfach bekommen wir die isotherme Kompressibilität,denn bei dT = 0 ist VdP + PdV = 0, daher dV/dP = −V/P, und
κ = −1V
(∂V∂P
)T
=1P. (12.46)
Setzen wir (12.45) und (12.46) in die allgemeine Formel (12.44)ein, bekommen wir
CP −CV = VTPT 2 =
PVT
= νR , (12.47)
wie es sein muss.
12.2.2 Entropie und Energie
• Sehen wir die Entropie als Funktion der Temperatur und des Volu-mens an, S = S (T,V), ist ihr vollständiges Differential
dS =
(∂S∂T
)V
dT +
(∂S∂V
)T
dV =CV
TdT +
(∂P∂T
)V
dV , (12.48)
wobei im zweiten Schritt wieder eine der Maxwell-Relationen(12.32) Verwendung fand. Wenn wir die Zustandsgleichung ken-nen, beispielsweise durch Messung, ist der zweite Term auf derrechten Seite schon bekannt.
• Mit der Wärmekapazität können wir wie folgt verfahren: Aufgrundihrer Definition ist(
∂CV
∂V
)T
=
(∂
∂V
)T
[T
(∂S∂T
)V
]= T
∂2S∂V∂T
. (12.49)
Hier kehren wir die Reihenfolge der partiellen Ableitungen umund finden, wiederum unter Einsatz einer der Maxwell-Relationen(12.32)
T∂2S∂T∂V
= T(∂
∂T
)V
(∂S∂V
)T
= T(∂
∂T
)V
(∂P∂T
)V. (12.50)
Die Kombination von (12.50) mit (12.49) erlaubt es, auch dieWärmekapazität durch die Zustandsgleichung auszudrücken, denn(
∂CV
∂V
)T
= T(∂2P∂T 2
)V. (12.51)

138 KAPITEL 12. THERMODYNAMISCHE FUNKTIONEN
Das erlaubt zuerst die bemerkenswerte Schlussfolgerung, dassjedes System, dessen Druck nur linear von der Temperatur abhängt,eine Wärmekapazität hat, die nicht vom Volumen abhängt, wiewir das beim idealen Gas kennengelernt hatten.
• Mit (12.51) können wir die Wärmekapazität, die wir aus der zwei-ten Ableitung der Zustandsgleichung erhalten hatten, nach derTemperatur integrieren, denn für jede Temperatur T gilt
CV(T,V) = CV(T,V0) + T∫ V
V0
(∂CV
∂V
)T
dV ′ . (12.52)
Sobald CV(T,V) innerhalb des benötigten Temperaturbereichsbekannt ist, kann dann die Entropie aus (12.48) konstruiert werden.Die Kenntnis der Zustandsgleichung und der Wärmekapazität beikonstantem Volumen als Funktion der Temperatur reicht also aus,um die Entropie zu berechnen.
• Wenn wir auch die Energie als Funktion von T und V darstellen,schreiben wir das vollständige Differential der Entropie wie in(12.48) und erhalten aus dem ersten Hauptsatz
dE = TdS − PdV = T[CV
TdT +
(∂S∂V
)T
dV]− PdV
= CVdT +
[T
(∂P∂T
)V− P
]dV . (12.53)
Die partiellen Ableitungen der Energie lauten demnach(∂E∂T
)V
= CV ,
(∂E∂V
)T
= T(∂P∂T
)V− P . (12.54)
Wenn die Zustandsgleichung und die spezifische Wärme bekanntsind, kann also auch die Energie direkt durch Integration bestimmtwerden.
• Eine sehr schöne Anwendung der letzten Gleichung auf die Elek-trodynamik liefert ein wichtiges und häufig angewandtes Ergebnis.Der Druck, der durch ein elektromagnetisches Feld der Energie-dichte ε ausgeübt wird, ist
P =ε
3⇒ E = εV = 3PV . (12.55)
• Davon kann man sich wie folgt überzeugen: Ein elektromagne-tisches Feld kann als Photonengas aufgefasst werden, also alsideales Gas masseloser, relativistischer Teilchen. Wegen des dannlinearen Zusammenhangs E = cp zwischen Energie und Impulsgilt (11.58). Bei konstanter Entropie ist
dS = 0 = d ln Ω = Nd ln V + f d ln E = NdVV
+ fdEE
, (12.56)

12.2. EINIGE ANWENDUNGEN 139
woraus gleich mit (12.3)(∂E∂V
)S
= −P = −Nf
EV
⇒ P =ε
3(12.57)
folgt, denn f = 3N und die Energiedichte ist ε = E/V .
• Eingesetzt in die zweite Gleichung (12.54) ergibt (12.55)
3P = T(∂P∂T
)V− P ⇒ T
(∂P∂T
)V
= 4P . (12.58)
Variablentrennung und Integration nach T führt auf
P ∝ T 4 , E ∝ T 4 , (12.59)
d.h. Druck und Energie eines elektromagnetischen Feldes im ther-modynamischen Gleichgewicht sind proportional zur vierten Po-tenz der Temperatur. Das ist das Stefan-Boltzmann’sche Gesetz.
12.2.3 Van der Waals-Gas
• Die Zustandsgleichung des idealen Gases muss auf zwei Weisenmodifiziert werden, wenn die Wechselwirkung zwischen Gasteil-chen und deren eigenes, endliches Volumen berücksichtigt werden.Die Van-der-Waals’sche Gasgleichung, die experimentell gefun-den wurde und theoretisch gut begründet werden kann, lautet(
P +aν2
V2
)(V − νb) = νRT . (12.60)
Darin haben P, V , T und ν die übliche Bedeutung. Die Konstantea beschreibt, um wieviel der Druck aufgrund der Wechselwirkungzwischen den Gasteilchen erhöht wird, und die Konstante b quan-tifiziert das Volumen der Gasteilchen. Für a = 0 = b kehrt dieseGleichung in die Form der idealen Gasgleichung zurück. Offenbarhaben a und b die Dimensionen
[a] =[Druck][Volumen]2
[mol]2 , [b] =[Volumen]
[mol]. (12.61)
Sie hängen vom jeweils untersuchten Gas ab.Johannes D. van der Waals
• Wir berechnen zunächst die Energie des Van-der-Waals-Gases.Wegen (12.54) brauchen wir zuerst(
∂P∂T
)V
=
(∂
∂T
)V
(νRT
V − νb−
aν2
V2
)=
νRV − νb
, (12.62)

140 KAPITEL 12. THERMODYNAMISCHE FUNKTIONEN
womit wir(∂E∂V
)T
=νRT
V − νb−
(νRT
V − νb−
aν2
V2
)=
aν2
V2 (12.63)
bekommen. Die Energie hängt jetzt vom Volumen ab, weil in derWechselwirkung der Gasteilchen eine potentielle Energie steckt,die zunimmt, wenn die Gasteilchen sich voneinander entfernen.Die Energie ist dann
E(T,V) =
∫ T
T0
CV(T ′)dT ′ + aν2∫ V
V0
dVV2 . (12.64)
Wenn CV nicht von der Temperatur abhängt, was experimentell zuprüfen ist, folgt
E(T,V) = CV(T − T0) − aν2(
1V−
1V0
). (12.65)
• Um die Entropie zu berechnen, bestätigen wir zunächst mit (12.51),dass die Wärmekapazität bei konstantem Volumen nicht vom Vo-lumen abhängt, (
∂CV
∂V
)T
= 0 , (12.66)
weil der Druck nur linear von der Temperatur abhängt. Also istCV = CV(T ). Gehen wir damit nach (12.48), erhalten wir dieEntropie
S (T,V) =
∫ T
T0
CVdTT
+ νR∫ V
V0
dVV − νb
. (12.67)
Wenn CV wieder nicht von T abhängt, folgt
S (T,V) = CV lnTT0
+ νR lnV − νbV0 − νb
(12.68)
für das Van-der-Waals-Gas.
• Van-der-Waals-Konstanten und Wärmekapazitäten einiger realerGase:Gas a b cP cV(
104 bar cm6
mol2
) (cm3
mol
) (107 erg
g K
)He 3.34 24.0 5.23 3.21CO2 362 42.5 0.837 0.647O2 137 31.6 0.917 0.656N2 136 38.5 1.038 0.741H2 25 26.7 14.32 10.18H2O (Dampf) 555 31.0 – –
Kapitel 13
Joule-Thomson-Effekt undKreisprozesse
13.1 Der Joule-Thomson-Effekt
13.1.1 Frei expandierendes Gas
• Stellen wir uns vor, ein wärmeisolierter Zylinder sei in zwei Teileunterteilt. Der linke Teil mit dem Volumen V1 enthalte Gas miteiner Temperatur T1, der rechte Teil mit dem Volumen V2 seivorerst leer. Nun werde in der Trennwand ein Ventil geöffnet,wodurch das Gas in die rechte Hälfte strömen kann. Ändert sichseine Temperatur?
• Da der Zylinder wärmeisoliert ist, wird keine Wärme aufgenom-men oder abgegeben, sodass δQ = 0 ist. Es wird auch keinemechanische Arbeit verrichtet, δW = 0, weil die Wände des Zylin-ders und die Trennwand unverändert bleiben und aus dem vorerstleeren Teil des Volumens kein Gas verdrängt werden muss. Wennder Prozess quasi-statisch verläuft, muss nach dem ersten Haupt-satz auch die Energie erhalten bleiben, dE = 0. Die Energie zuBeginn des Vorgangs muss also gleich der am Ende des Vorgangssein,
E(T1,V1) = E(T2,V2) . (13.1)
• Wenn die Energie wie beim idealen Gas nur von der Temperatur,aber nicht vom Volumen abhängt, E = E(T ), kann sich also dieTemperatur nicht ändern, T1 = T2. Anders wird es beim Van-der-Waals-Gas sein, denn dafür hatten wir die Energie (12.53)hergeleitet, die auch vom Volumen abhängt. Entsprechend erhalten
141

142 KAPITEL 13. KREISPROZESSE
wir für ein Van-der-Waals-Gas
CV(T1 − T0) − aν2(
1V1−
1V0
)= CV(T2 − T0) − aν2
(1V2−
1V0
),
(13.2)woraus die Temperaturänderung
T1 − T2 =aν2
CV
(1V1−
1V2
)(13.3)
folgt. Im Van-der-Waals-Gas sorgen die langreichweitigen Wech-selwirkungen der Gasteilchen untereinander für eine Abkühlung,wenn das Gas sich frei ausdehnt.
13.1.2 Joule-Thomson-Koeffizient
• Betrachten wir nun ein wärmeisoliertes Rohr, durch das in einemkontinuierlichen Strom ein Gas von links nach rechts strömt. DasRohr wird senkrecht zu seiner Achse durch eine poröse Platteunterbrochen, durch die das Gas zwar strömen kann, die aberdafür sorgt, dass der Gasdruck von links nach rechts abfällt. Wennwir die Bereiche links und rechts der Platte mit den Indizes 1 und2 kennzeichnen, ist P1 > P2. Wie verändert sich die Temperaturdes Gases, wenn es durch diese Vorrichtung strömt?
• Wieder ist δQ = 0, weil keine Wärme mit der Umgebung ausge-tauscht wird. Die Rohrwand und die Platte verändern sich auchnicht, aber das Gas muss Arbeit verrichten. Um das Gasvolu-men V1 links der Platte durch die Platte zu schieben, muss derDruck P1 die Arbeit W1 = P1V1 aufbringen. Rechts der Plattemuss das Volumen V2 gegen den Druck P2 verschoben werden,sodass W2 = P2V2 ist und insgesamt die Arbeit ∆W = W1 −W2
aufgewandt wird. Wegen δQ = 0 ist dann
∆E + ∆W = E(T1,V1) − E(T2,V2) + P1V1 − P2V2 = 0 (13.4)
oder, indem wir uns an die Definition der Enthalpie in (12.16)erinnern,
H(T,V) = konstant . (13.5)
Bei diesem Joule-Thomson-Prozess bleibt also die Enthalpie desGases erhalten. Demnach muss, mit (12.17),
dH = TdS + VdP = 0 (13.6)
gelten.
• Die Entropie schreiben wir zweckdienlich als Funktion der Tem-peratur und des Drucks, S = S (T, P), sodass wir
dS =
(∂S∂T
)P
dT +
(∂S∂P
)T
dP (13.7)

13.1. DER JOULE-THOMSON-EFFEKT 143
in (13.6) einsetzen können, woraus
0 = T(∂S∂T
)P
dT +
[T
(∂S∂P
)T
+ V]
dP (13.8)
folgt. Im ersten Term identifizieren wir die Wärmekapazität beikonstantem Druck, CP. Im zweiten Term verwenden wir dieMaxwell-Relation (
∂S∂P
)T
= −
(∂V∂T
)P
= −Vα , (13.9)
wodurch der Ausdehnungskoeffizient (12.38) auftritt. Damit wirdaus (13.8)
CPdT + (V − TVα)dP = 0 (13.10)
oder, indem wir dT und dP zu einer Ableitung zusammenfassen,(∂T∂P
)H
=: µ =VCP
(αT − 1) . (13.11)
• Die hier definierte Größe µ ist der Joule-Thomson-Koeffizient. Erentscheidet darüber, ob sich das Gas abkühlt oder erwärmt, wäh-rend es durch die poröse Platte strömt. Ist nämlich µ > 0, nimmtbei konstanter Enthalpie die Temperatur ab, wenn der Druck ab-fällt, sodass der Joule-Thomson-Prozess dann zu einer Abküh-lung führt. Ist umgekehrt µ < 0, erwärmt sich das Gas im Joule-Thomson-Prozess.
13.1.3 Joule-Thomson-Effekt im Van-der-Waals-Gas
• Sehen wir uns den Joule-Thomson-Effekt eines realen Gases an-hand des Van-der-Waals-Gases näher an. Seine Zustandsgleichungwar durch (12.60) gegeben. Der Bequemlichkeit halber bringenwir sie zunächst in eine dimensionslose Form.
• Da wir in (12.61) festgestellt hatten, dass die Dimension von b[Volumen] pro [mol] sein muss, ist V0 = νb das Gesamtvolumenaller Teilchen des Gases. Mit drücken nun das Volumen V durchV0 aus, d.h. wir definieren das dimensionslose Volumen
v :=VV0
=Vνb
. (13.12)
Ebenso legen wir einen Bezugsdruck P0 := a/b2 fest und damitden dimensionslosen Druck
p :=PP0
=b2 P
a. (13.13)

144 KAPITEL 13. KREISPROZESSE
Damit können wir die linke Seite der van-der-Waals’schen Zu-standsgleichung (12.60) in die Form(
P +aν2
V2
)(V − νb) = P0V0
(p +
1v2
)(v − 1) (13.14)
bringen. Führen wir schließlich noch die dimensionslose Tempera-tur
t :=TT0
=νRTP0V0
, T0 :=P0V0
νR=
abR
(13.15)
ein, lautet die van-der-Waals’sche Zustandsgleichung in dimensi-onsloser Form (
p +1v2
)(v − 1) = t . (13.16)
• Differenzieren wir sie bei konstantem Druck nach t, erhalten wir
−2v3
(∂v
∂t
)p
+
(p +
1v2
) (∂v
∂t
)p
= 1 (13.17)
und daraus sofort
α =1V
(∂V∂T
)P
=1
T0v
(∂v
∂t
)p
=1T0
v2
pv3 + v − 2. (13.18)
Der Joule-Thomson-Koeffizient verschwindet dann, wenn Tα = 1wird, was für das Van-der-Waals-Gas eintritt, wenn
Tα = T0tα =tv2
pv3 + v − 2=
(pv2 + 1)(v − 1)pv3 + v − 2
= 1 (13.19)
ist, wobei im letzten Schritt die Zustandsgleichung (13.16) einge-setzt wurde. Aufgelöst nach p folgt
pinv =2v−
3v2 . (13.20)
Dieser Zusammenhang kennzeichnet diejenige Kurve im p-v-Diagramm, die den Bereich mit µ > 0 von dem mit µ < 0 trennt.Sie heißt Inversionskurve des Gases. Unter ihr ist µ > 0, d.h. dasGas kühlt sich ab, wenn p < pinv ist.
• Um diese Bedingung besser zu verstehen, leiten wir die van-der-Waals-Gleichung (13.16) zunächst bei konstanter Temperatur nachdem Volumen V ab und erhalten[(
∂p∂v
)t−
2v3
](v − 1) +
(p +
1v2
)= 0 . (13.21)
Der zweite Summand kann wieder mittels der Zustandsgleichungersetzt werden, sodass(
∂p∂v
)t= −
t(v − 1)2 +
2v3 (13.22)
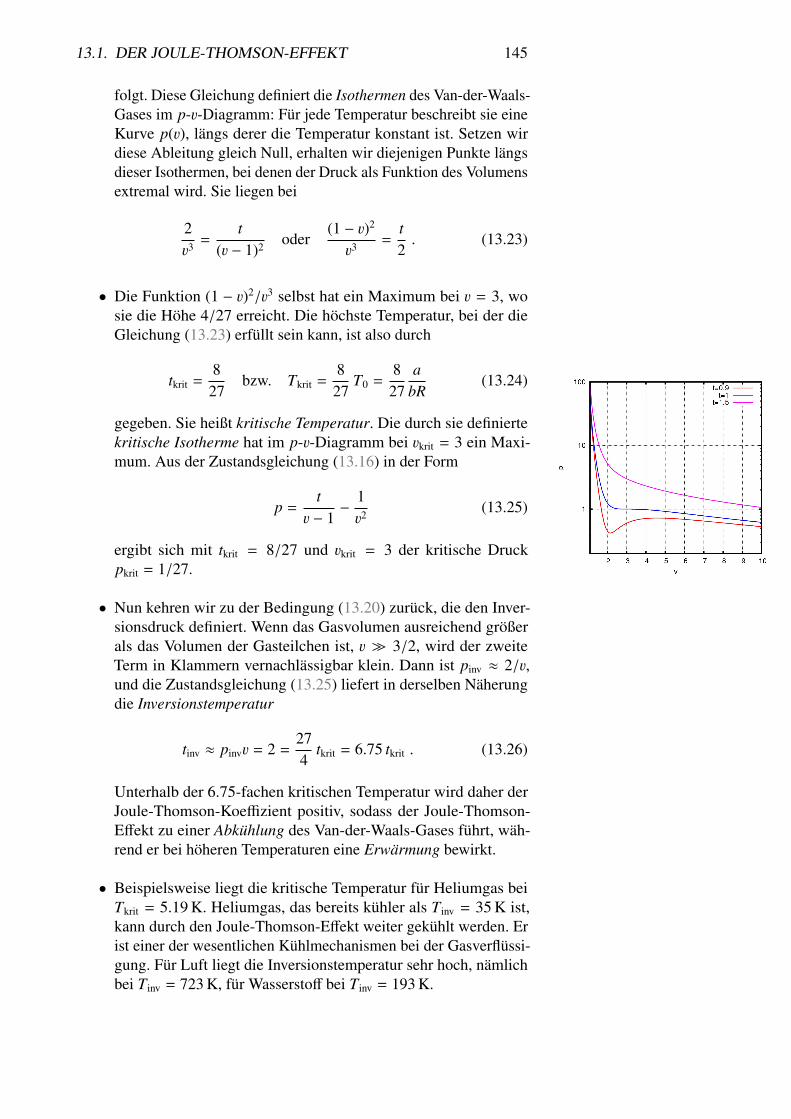
13.1. DER JOULE-THOMSON-EFFEKT 145
folgt. Diese Gleichung definiert die Isothermen des Van-der-Waals-Gases im p-v-Diagramm: Für jede Temperatur beschreibt sie eineKurve p(v), längs derer die Temperatur konstant ist. Setzen wirdiese Ableitung gleich Null, erhalten wir diejenigen Punkte längsdieser Isothermen, bei denen der Druck als Funktion des Volumensextremal wird. Sie liegen bei
2v3 =
t(v − 1)2 oder
(1 − v)2
v3 =t2. (13.23)
• Die Funktion (1 − v)2/v3 selbst hat ein Maximum bei v = 3, wosie die Höhe 4/27 erreicht. Die höchste Temperatur, bei der dieGleichung (13.23) erfüllt sein kann, ist also durch
tkrit =827
bzw. Tkrit =8
27T0 =
827
abR
(13.24)
gegeben. Sie heißt kritische Temperatur. Die durch sie definiertekritische Isotherme hat im p-v-Diagramm bei vkrit = 3 ein Maxi-mum. Aus der Zustandsgleichung (13.16) in der Form
p =t
v − 1−
1v2 (13.25)
ergibt sich mit tkrit = 8/27 und vkrit = 3 der kritische Druckpkrit = 1/27.
• Nun kehren wir zu der Bedingung (13.20) zurück, die den Inver-sionsdruck definiert. Wenn das Gasvolumen ausreichend größerals das Volumen der Gasteilchen ist, v 3/2, wird der zweiteTerm in Klammern vernachlässigbar klein. Dann ist pinv ≈ 2/v,und die Zustandsgleichung (13.25) liefert in derselben Näherungdie Inversionstemperatur
tinv ≈ pinvv = 2 =274
tkrit = 6.75 tkrit . (13.26)
Unterhalb der 6.75-fachen kritischen Temperatur wird daher derJoule-Thomson-Koeffizient positiv, sodass der Joule-Thomson-Effekt zu einer Abkühlung des Van-der-Waals-Gases führt, wäh-rend er bei höheren Temperaturen eine Erwärmung bewirkt.
• Beispielsweise liegt die kritische Temperatur für Heliumgas beiTkrit = 5.19 K. Heliumgas, das bereits kühler als Tinv = 35 K ist,kann durch den Joule-Thomson-Effekt weiter gekühlt werden. Erist einer der wesentlichen Kühlmechanismen bei der Gasverflüssi-gung. Für Luft liegt die Inversionstemperatur sehr hoch, nämlichbei Tinv = 723 K, für Wasserstoff bei Tinv = 193 K.
146 KAPITEL 13. KREISPROZESSE
13.2 Kreisprozesse und Wärmekraftmaschi-nen
13.2.1 Der Carnotsche Wirkungsgrad
Nicolas Léonard Sadi Carnot
• Mechanische Arbeit in Wärme umzusetzen, ist einfach: Reibungin ihren vielfältigen Formen ist dafür das alltäglichste Beispiel.Aber ist es auch möglich, Wärme zurück in mechanische Arbeitzu verwandeln?
• Stellen wir uns ein Wärmereservoir mit der Temperatur T1 vor,aus dem wir im Rahmen eines Gedankenexperiments unbegrenztWärme beziehen können. Aus diesem Reservoir möchten wir eineWärmemenge |Q| beziehen, um sie auf irgendeine Weise in me-chanische Arbeit W zu verwandeln. Die gesamte Vorrichtung, alsodas Wärmereservoir und das Gerät, das wir zur Umwandlung vonWärme in Arbeit brauchen, sei abgeschlossen. Dadurch, dass dasWärmereservoir die Wärmemenge Q1 = −|Q| verliert, sinkt seineEntropie um den Betrag
∆S 1 =Q1
T1= −|Q|T1
, (13.27)
wie wir in (9.31) hergeleitet hatten. Da wir die Wärmemenge |Q| inArbeit W umsetzen möchten, müssten wir dafür die Entropie desWärmereservoirs verringern. Das ist unmöglich, weil die Entropieeines abgeschlossenen Systems nicht abnehmen kann. Der zweiteHauptsatz sagt uns also sofort, dass die vollständige Umwandlungvon Wärme in mechanische Arbeit ausgeschlossen ist.
• Um dennoch Wärme in Arbeit umzuwandeln, muss die Entropie,die wir dem Wärmereservoir bei der Temperatur T1 entziehen,durch eine Entropieerhöhung an anderer Stelle kompensiert wer-den. Das können wir durch ein zweites Wärmereservoir erreichen,das auf niedrigerer Temperatur T2 < T1 gehalten wird. Dann kannnämlich dieselbe Wärmemenge eine größere Entropieänderungbewirken, sodass die gesamte Entropieänderung
∆S = ∆S 2 + ∆S 1 =Q2
T2−|Q1|
T1= |Q|
(1T2−
1T1
)(13.28)
positiv sein kann, wie es der zweite Hauptsatz verlangt.
• Unter dieser Voraussetzung bleibt Spielraum für uns, mechanischeArbeit abzuzweigen und trotzdem den zweiten Hauptsatz zu er-füllen. Dazu stellen wir uns eine zyklisch arbeitende Maschinevor, die Wärme aus dem wärmeren Reservoir entnimmt, sie zurVerrichtung mechanischer Arbeit benutzt und dem kälteren Reser-voir Wärme zuführt, und daraufhin wieder in den Ausgangspunkt
13.2. KREISPROZESSE UND WÄRMEKRAFTMASCHINEN 147
zurückkehrt. Nach einem vollständigen Zyklus soll die Maschineunverändert sein, damit sie nicht während des Prozesses Schadennimmt. Sie soll also insbesondere selbst keine Energie aufnehmenoder abgeben, damit sie im Lauf des Betriebs weder überhitzt nocherstarrt. Wir müssen also verlangen, dass die Wärmemengen unddie mechanische Arbeit zusammengenommen die Energieerhal-tung erfüllen,
|Q1| = −Q1 = Q2 + W . (13.29)
Wie viel mechanische Arbeit wir dabei maximal gewinnen kön-nen, schreibt uns der zweite Hauptsatz vor. Insgesamt darf ja dieEntropie nicht abnehmen, sodass
∆S =Q2
T2−|Q1|
T1=|Q1| −W
T2−|Q1|
T1≥ 0 (13.30)
sein muss. Daraus erhalten wir sofort
W ≤ |Q1|
(1 −
T2
T1
). (13.31)
Das bedeutet, dass der maximale Wirkungsgrad einer Wärmekraft-maschine, die zwischen zwei Wärmereservoiren mit den Tempera-turen T1 und T2 < T1 arbeitet, durch
η :=W|Q1|
= 1 −T2
T1(13.32)
bestimmt ist. Das ist der Carnot’sche Wirkungsgrad. Gemäß sei-ner Herleitung gilt er für quasi-statische Prozesse, denn nur fürdiese gilt der Zusammenhang (9.31) zwischen Entropie und Wär-memenge. Beachten Sie, dass wir ausschließlich den ersten undden zweiten Hauptsatz verwendet haben, um den Carnot’schenWirkungsgrad zu bekommen. Er setzt damit die obere Grenze fürden Wirkungsgrad aller möglichen quasi-statischen Kreisprozesse.
13.2.2 Der Carnot-Prozess
• Wie können nun quasi-statische Kreisprozesse konkret realisiertwerden? Wir besprechen hier zwei Beispiele, zunächst den Car-not’schen Kreisprozess. Dabei werden zwei isotherme mit zweiadiabatischen Zustandsänderungen verknüpft. Es ist nützlich,den Kreisprozess im P-V-Diagramm zu verfolgen. Arbeitet derKreisprozess mit einem idealen Gas, werden Isothermen und Adia-baten durch
(PV)iso = konst. und (PVγ)ad = konst. (13.33)
gekennzeichnet, vgl. (11.48). Im P-V-Diagramm stellen sie daherKurven der Form
P =Ciso
Vund P =
Cad
Vγ=
Cad
V5/3 (13.34)

148 KAPITEL 13. KREISPROZESSE
dar, wenn das ideale Gas einatomig und daher γ = 5/3 ist. DieAdiabaten verlaufen also steiler als die Isothermen.
• Kommen wir zum konkreten Prozess. Zunächst wird, ausgehendvom Punkt (P1,V1), isotherm die Wärmemenge |Q1| aus dem wär-meren Reservoir aufgenommen. Das führt zu einer isothermenExpansion bei T = T1 bis zu einem Volumen V2 > V1 und einemgeringeren Druck P2 = P1V1/V2. Danach wird die Maschine iso-liert und adiabatisch auf die geringere Temperatur T2 des kühlerenWärmereservoirs gebracht. Dazu muss sie weiter auf das VolumenV3 > V2 expandieren, wobei der Druck weiter auf P3 = P2(V2/V3)γ
abnimmt. Bei diesem Vorgang kann sie Arbeit verrichten, etwaindem sie einen Kolben aus einem Zylinder schiebt. Nun wird siein Kontakt mit dem kühleren Wärmereservoir bei T = T2 gebracht,wobei sie isotherm die Wärmemenge Q2 an das Reservoir abgibt.Dadurch verringern sich ihr Volumen auf V4 < V3 und ihr Druckauf P4 = P3V3/V4. Schließlich wird sie vom kühleren Wärmere-servoir isoliert und adiabatisch auf die Temperatur des wärmerenReservoirs gebracht, wobei das Volumen wieder auf V1 abnimmtund der Druck wieder auf P1 steigt. Das kann geschehen, indemder Kolben wieder in den Zylinder geschoben wird.
• Betrachten wir die jeweils verrichtete Arbeit im Detail. WegenδW = PdV ist sie jeweils als Integral über P(V)dV gegeben. Dar-aus erhalten wir für die beiden isothermen Schritte des Kreispro-zesses
W1→2 =
∫ V2
V1
P1V1
VdV = νRT1 ln
V2
V1,
W3→4 = νRT2 lnV4
V3. (13.35)
Da die Energie eines idealen Gases nur von seiner Temperaturabhängt, kann sie sich im ersten und im dritten Schritt nicht än-dern, weil beide Schritte isotherm sind. Im zweiten und im viertenSchritt wird keine Wärme aufgenommen, sodass dort die Energiejeweils um die verrichtete Arbeit verringert bzw. erhöht werdenmuss. Also müssen die jeweiligen Energieänderungen
∆E1→2 = 0 = ∆E3→4 , ∆E2→3 = −W2→3 , ∆E4→1 = −W4→1
(13.36)sein. Da aber die Energie nur von T abhängt, muss außerdem∆E2→3 = −∆E4→1 sein, sodass sich die beiden längs der Adiaba-ten verrichteten Arbeiten W2→3 und W4→1 auch gerade aufhebenmüssen. Also ist die gesamte verrichtete Arbeit
W = W1→2 + W3→4 = νR(T1 ln
V2
V1+ T2 ln
V4
V3
). (13.37)

13.2. KREISPROZESSE UND WÄRMEKRAFTMASCHINEN 149
• Die dazu aufgenommene Wärmemenge ist |Q1| = W1→2, worausder Wirkungsgrad
η =W|Q1|
=W
W1→2= 1 +
T2
T1
ln(V4/V3)ln(V2/V1)
(13.38)
folgt. Schließlich wissen wir aus (11.50), dass sich die Voluminabei einer adiabatischen Expansion so ändern, dass TVγ−1 kon-stant bleibt. Demnach muss für die am Carnot’schen Kreisprozessbeteiligten Volumina
V4
V1=
(T1
T2
)1/(γ−1)
=V3
V2⇒ ln
V2
V1= − ln
V4
V3(13.39)
gelten, sodass der Wirkungsgrad (13.38) gerade gleich dem Carnot-Wirkungsgrad wird.
13.2.3 Der Otto-Prozess
• Ein weiterer Kreisprozess von erheblicher Bedeutung ist der Otto-Prozess, der in Ottomotoren (näherungsweise) verwirklicht ist.Hier wechseln adiabatische Prozesse mit isochoren ab, bei denendas Volumen konstant bleibt. Ausgehend vom Punkt (P1,V1) imP-V-Diagramm und von der Temperatur T1 wird zunächst adiaba-tisch expandiert, sodass der Druck auf P2 = P1(V1/V2)γ und dieTemperatur auf T2 = T1(V1/V2)γ−1 sinken. Dann wird isochor ab-gekühlt, wodurch eine Wärmemenge Q2 abgegeben wird. Dadurchsinkt der Druck weiter auf P3 = P2(T3/T2). Nun wird adiabatischkomprimiert, wodurch der Druck P4 = P3(V3/V4)γ = P3(V2/V1)γ
und die Temperatur T4 = T3(V3/V4)γ−1 = T3(V2/V1)γ−1 erreichtwerden. Abschließend wird isochor erwärmt, wobei die Wärme-menge |Q1| aufgenommen wird. Dadurch erreichen Druck undTemperatur wieder ihre Ausgangswerte P1 = P4(T1/T4).
• Bei den beiden isochoren Schritten wird natürlich keine Arbeitverrichtet, sodass die aufgenommene bzw. abgegebene Wärmegerade gleich der jeweiligen Änderung der Energie ist. Dadurchändern sich die Temperaturen um
T3 − T2 =−|Q2|
CV, T1 − T4 =
|Q1|
CV. (13.40)
Bei den beiden adiabatischen Schritten wird keine Wärme ausge-tauscht, sodass dort
W1→2 = −∆E1→2 = CV(T1−T2) , W3→4 = CV(T3−T4) (13.41)
gelten. Dabei haben wir verwendet, dass die Energie eines idea-len Gases nicht vom Volumen abhängt, sodass (11.34) gilt. Der

150 KAPITEL 13. KREISPROZESSE
Wirkungsgrad ist demnach
η =W|Q1|
=T1 − T2 + T3 − T4
T1 − T4= 1 −
T2 − T3
T1 − T4. (13.42)
Wie oben besprochen, sind die Temperaturverhältnisse an denEnden der Adiabaten durch
T2
T1=
(V1
V2
)γ−1
=T3
T4(13.43)
gegeben. Daraus erhalten wir
T2 − T3 = T2
(1 −
T4
T1
), (13.44)
was es erlaubt, den Wirkungsgrad in der Form
η = 1 −T2
T1= 1 −
(V1
V2
)γ−1
=: 1 − v1−γ (13.45)
zu schreiben. Daher ist der maximale Wirkungsgrad im Otto-Prozess durch die Kompression v := V2/V1 bestimmt. Wennγ = 5/3 und v = 5 sind, ist η = 66%. Er steigt, wenn v undγ zunehmen.
13.2.4 Die Clausius-Clapeyron’sche Gleichung
• Dass die Methode der Kreisprozesse nicht nur auf die Behand-lung von Wärmekraftmaschinen anwendbar ist, zeigt das folgendeinstruktive Beispiel. Unser Ziel ist zu bestimmen, wie sich derDampfdruck einer Flüssigkeit mit der Temperatur ändert.
• Dazu betrachten wir einen Behälter, der durch einen reibungsfreigleitenden, schweren Deckel nach oben abgeschlossen ist. Im Be-hälter befinde sich eine Flüssigkeit, von der an ihrer Oberflächegerade so viel verdampft, dass der Dampfdruck gleich dem Druckist, den der Deckel ausübt. Nun stellen wir uns diesen Behälter imKontakt mit einem Wärmereservoir der Temperatur T vor, wobeizunächst der Deckel mit der Oberfläche der Flüssigkeit abschließt.Das Volumen der Flüssigkeit sei V1. Nun lassen wir den Deckellangsam steigen, indem wir sein Gewicht minimal verringern.Dabei expandiert das Volumen isobar und nimmt aus dem Wärme-reservoir eine Wärmemenge |Q| auf. Diesen Vorgang beenden wir,sobald die gesamte Flüssigkeit verdampft und das Volumen auf V2
angestiegen ist. Insgesamt wurde dann dem Wärmereservoir dieVerdampfungswärme der gesamten Flüssigkeitsmenge entzogen.
Rudolf Clausius
13.2. KREISPROZESSE UND WÄRMEKRAFTMASCHINEN 151
• Anschließend isolieren wir den Behälter thermisch und expan-dieren adiabatisch weiter, sodass die Temperatur um den kleinenBetrag dT sinkt. Daraufhin wird er in ein Wärmebad der Tem-peratur T − dT verbracht, wodurch der Druck um einen kleinenBetrag dP sinkt. Die Temperaturänderung um dT bewirkt eine Vo-lumenänderung dV , die zusammen mit der Druckänderung dP zurmechanischen Arbeit dPdV führt. Da dT beliebig klein eingestelltwerden kann, ist diese Arbeit vernachlässigbar. Nun kondensierenwir bei der Temperatur T − dT , indem wir das Volumen isobarabsenken, bis aller Dampf kondensiert ist. Am Ende entfernen wirden Behälter wieder aus dem Wärmebad, um den Kreisprozess zuschließen. Dabei muss wieder mechanische Arbeit aufgewendetwerden, die aber vernachlässigt werden kann.
• Insgesamt wird also nur während der beiden isobaren VorgängeArbeit verrichtet, und zwar
W = P(V2 − V1) + (P − dP)(V1 − V2) = (V2 − V1)dP . (13.46)
Diese mechanische Arbeit muss mit der aufgenommenen Wärme-menge |Q| durch den Carnot’schen Wirkungsgrad zusammenhän-gen, woraus wir
η =W|Q|
= 1 −T − dT
T⇒ (V2 − V1)dP = |Q|
dTT
(13.47)
schließen können. Daraus folgt, dass der Dampfdruck mit derTemperatur wie
dPdT
=|Q|
(V2 − V1)T(13.48)
variiert. Dies ist die Clausius-Clapeyron’sche Gleichung. Da inder Regel das Dampfvolumen sehr viel größer als das Flüssigkeits-volumen ist, V1 V2 =: V , können wir
dPdT
=|Q|VT
(13.49)
nähern. Wenn der Dampf zudem noch als ideales Gas genähertwerden kann, bekommen wir
d ln PdT
=|Q|
PVT=|Q|νRT 2 . (13.50)
Bei einer kleinen Temperaturänderung wird die Verdampfungs-wärme etwa konstant sein. Dann erhalten wir aus (13.50)
δ ln P ≈δPP
=|Q|νR
δTT 2 . (13.51)
Eine kleine Druckerhöhung δP sorgt daher für eine Siedepunktser-höhung um
δT =νRT 2
|Q|δPP
=TqδP , (13.52)
wobei q := |Q|/V die Verdampfungswärme pro Dampfvolumenist.

152 KAPITEL 13. KREISPROZESSE
• Um ein Gramm Wasser bei Normaldruck (P = 1013 mbar =
10.13 N cm−2) und 100C zu verdampfen, sind |Q| = 2088 J er-forderlich. Bei einem Molekulargewicht von 18 atomaren Mas-seneinheiten sind in 1 g Wasser N = 3.74 × 1022 Teilchen oderν = 0.06 mol enthalten. Der Dampf nimmt deswegen ein Volumenvon V = (22.4 × 0.06) l = 1390 cm3 ein, sodass q = 1.5 J cm−3 ist.Der Siedepunkt von T = 373 K verschiebt sich mit dem Druckdaher um
δT =373 K cm3
1.5 J0.01 N
cm2
δPmbar
= 0.025 KδP
mbar. (13.53)
Eine Druckänderung um 40 mbar bewirkt daher eine Siedepunkts-änderung um etwa ein Grad.
Kapitel 14
Phasengleichgewicht undPhasenübergänge
14.1 Gleichgewicht und Stabilität
14.1.1 Extremaleigenschaften im Gleichgewicht
• In Kapitel 10 hatten wir bereits besprochen, dass der einem iso-lierten System zugängliche Bereich des Phasenraums nicht ab-nehmen kann, wenn äußere Einschränkungen wegfallen. Wenneine Zwangsbedingung vorher darin bestand, dass ein äußerer Pa-rameter a auf Werte zwischen A und A + dA eingeschränkt war,kann a nach dem Wegfall der Zwangsbedingung in einem weiterenBereich variieren. Die Wahrscheinlichkeit, in einem Ensemblegleichartiger Systeme den Wert A zu messen, wird proportionalzur Anzahl der Zustände im Phasenraum sein, die mit dem Wert Ades Parameters a verträglich sind,
p(A) ∝ Ω(A) . (14.1)
Im Gleichgewicht wird mit größter Wahrscheinlichkeit der Wertvon a gemessen werden, der Ω(A) maximiert. Da die Entropie in(9.23) als logarithmisches Maß für die Anzahl der zugänglichenZustände im Phasenraum eingeführt worden war, ist
p(A) ∝ exp(S (A)
kB
). (14.2)
Im Gleichgewicht bei vorgegebenen äußeren Parametern a wirdsich ein isoliertes System so einstellen, dass die Wahrscheinlich-keit und damit wegen (14.2) auch die Entropie maximal wird.Dann muss
dS = 0 und∂2S∂a2 ≤ 0 (14.3)
für alle äußeren Parameter a sein.
153

154 KAPITEL 14. PHASENGLEICHGEWICHT
• Beachten Sie, dass diese Aussage im Lichte der Wahrscheinlich-keitsinterpretation der Entropie beinahe eine Trivialität darstellt:Das System wird seine äußeren Parameter im Gleichgewicht soeinstellen, dass sie ihm einen möglichst großen Bereich im Phasen-raum erlauben, weil dann die Wahrscheinlichkeit möglichst großwird, das System dort zu finden. Das könnte man in der Formu-lierung „wahrscheinlich geschieht immer das Wahrscheinlichste“zusammenfassen.
• Dennoch beruht diese fundamentale Aussage auf einem Postu-lat und einer bemerkenswerten Tatsache, nämlich dem Postulatgleicher a-priori-Wahrscheinlichkeiten und der Tatsache, dassdie Entropie als logarithmisches Maß des Phasenraumvolumenseine Zustandsfunktion physikalischer Systeme darstellt. Die Ma-ximierung der Entropie im Gleichgewicht isolierter Systeme istdeswegen sowohl eine Aussage über Wahrscheinlichkeiten alsauch über die äußeren physikalischen Parameter dieser Systeme.
• Die Energie isolierter Systeme ist konstant. Darüber hinaus wirdkeine Arbeit am oder vom System verrichtet. Dann sind (E,V)vorgegeben, und der Gleichgewichtszustand ist durch (14.3) ge-kennzeichnet, dS = 0.
• Bringen wir das System stattdessen in thermischen Kontakt miteinem Wärmereservoir der Temperatur T und warten, bis sich einneues Gleichgewicht eingestellt hat, müssen wir das Reservoirin die Entropieüberlegung einbeziehen. Sei S die Entropie desgesamten Systems, S 1 die des Reservoirs und S 2 die des Systems,gilt
0 = dS =δQ1
T+ dS 2 = −
dE2
T+ T
dS 2
T, (14.4)
weil die Wärmeänderung δQ1 des Reservoirs allein die Energiedes Systems verändert, so lange das Volumen unverändert bleibt.Da die Temperatur im thermischen Gleichgewicht mit dem Wär-mereservoir eine Konstante ist, kann das Ergebnis (14.4) in derForm
d(−E2 + TS 2)T
=−dF2
T= 0 (14.5)
geschrieben werden.
• Im Gleichgewicht mit einem Wärmereservoir wird also nicht dieEntropie des Systems, sondern die freie Energie (12.22) extremal.Die Herleitung zeigt, dass dies eine Konsequenz der maximalenEntropie des Gesamtsystems aus Reservoir und betrachtetem Sys-tem ist. Die Extremaleigenschaft der Entropie bei konstantem(E,V) vererbt sich daher auf eine Extremaleigenschaft der freienEnergie bei konstantem (T,V). Allerdings hat das Minuszeichen in(14.5) zur Folge, dass maximale Entropie minimale freie Energiebedeutet.
14.1. GLEICHGEWICHT UND STABILITÄT 155
Wir kommen so zu dem Schluss, dass sich ein System bei vorgege-bener Temperatur und festem Volumen so einstellt, dass die freieEnergie F(T,V) minimal wird.
• Ebensogut können wir statt des Volumens V den Druck P vorge-ben. Dann würden wir die Kombination aus Wärmereservoir unddaran angekoppeltem System gemeinsam wärmeisolieren, aberdem System erlauben, sein Volumen zu ändern. Dann muss dasSystem aus dem Reservoir so viel Wärme entnehmen, dass esnicht nur seine Energie, sondern auch sein Volumen geeignet ein-stellen kann. Das Wärmereservoir muss dann auch für die Arbeitaufkommen, die das System gegebenenfalls verrichten muss.
• Nach dem ersten Hauptsatz muss dann
− δQ1 = dE2 + P2dV2 (14.6)
sein, woraus sich die Änderung der gesamten Entropie zu
0 = dS =−dE2 − P2dV2
T+
TdS 2
T= −
dGT
(14.7)
bestimmen lässt, worin wir die freie Enthalpie G aus (12.27) iden-tifiziert haben. Wiederum wird die freie Enthalpie minimal, wenndie Entropie maximal wird.
Bei festem Druck und vorgegebener Temperatur stellt sich dasGleichgewicht eines Systems demnach so ein, dass die freie Ent-halpie G(T, P) minimal wird.
Natürlich ist auch das „nur“ eine vererbte Konsequenz der Extre-maleigenschaft der Entropie.
14.1.2 Stabilitätsbedingungen
• Die Feststellung, dass G im Gleichgewicht ein Minimum einneh-men muss, stellt neben der Bedingung dG = 0 natürlich auchForderungen an ihre zweiten Ableitungen. Betrachten wir ein Sys-tem mit Volumen V und Temperatur T . Ein Extremum von G istdann ein Minimum, wenn(
∂2G∂T 2
)V> 0 und
(∂2G∂V2
)T> 0 (14.8)
gelten. Dann ist es offenbar gegenüber kleinen Schwankungen derTemperatur und des Volumens stabil.
• Daraus ergeben sich interessante Stabilitätsbedingungen. Aus derallgemeinen Definition der freien Enthalpie, G = E − TS + PV ,folgt zuerst
G = E − T0S + P0V (14.9)
156 KAPITEL 14. PHASENGLEICHGEWICHT
für diejenigen Werte der freien Enthalpie, die mit den vorgegebe-nen Größen (T0, P0) verträglich sind. Deren Ableitung nach T beikonstantem Volumen ist(
∂G∂T
)V
=
(∂E∂T
)V− T0
(∂S∂T
)V. (14.10)
Ebenfalls bei konstantem Volumen verlangt der erste Hauptsatz
TdS = dE ⇒ T(∂S∂T
)V
=
(∂E∂T
)V, (14.11)
womit aus (14.10) (∂G∂T
)V
= (T − T0)(∂S∂T
)V
(14.12)
folgt. Daraus folgt wegen dG = 0 natürlich sofort T = T0 imGleichgewicht, aber wir haben es auf die zweite Ableitung abgese-hen, (
∂2G∂T 2
)V
=
(∂S∂T
)V
+ (T − T0)(∂2S∂T 2
)V. (14.13)
Der zweite Term verschwindet im Gleichgewicht, so dass dieBedingung für ein Minimum der freien Enthalpie in der Form(
∂S∂T
)V
=CV
T> 0 (14.14)
geschrieben werden kann.
• Das Gleichgewicht ist also dann und nur dann gegenüber Tempe-raturänderungen stabil, wenn die Wärmekapazität bei konstantemVolumen positiv ist. Dann nimmt die Energie des Systems beisteigender Temperatur zu.
• Eine ähnliche Bedingung folgt für die Stabilität gegenüber kleinenVolumenänderungen. Wieder gehen wir von (14.9) aus, halten jetztaber die Temperatur konstant und leiten nach V ab,(
∂G∂V
)T
=
(∂E∂V
)T− T0
(∂S∂V
)T
+ P0 . (14.15)
Hier verlangt der erste Hauptsatz
TdS = dE + PdV ⇒ T(∂S∂V
)T
=
(∂E∂V
)T
+ P , (14.16)
so dass aus (14.15) zunächst(∂G∂V
)T
= (T − T0)(∂S∂V
)T
+ P0 − P (14.17)
14.2. DAS CHEMISCHE POTENTIAL 157
folgt. Eine weitere Ableitung nach V ergibt(∂2G∂V2
)T
= −
(∂P∂V
)T
+ (T − T0)(∂2S∂V2
)T. (14.18)
wieder verschwindet der zweite Term im Gleichgewicht, und dieStabilitätsbedingung verlangt(
∂P∂V
)T< 0 . (14.19)
Diese Bedingung ist äquivalent dazu, dass die isotherme Kompres-sibilität κ aus (12.43) positiv ist,
κ := −1V
(∂V∂P
)T> 0 . (14.20)
Dann verkleinert sich das Volumen bei wachsendem Druck.
14.2 Das chemische Potential
14.2.1 Definition, Phasengleichgewicht
• Erlauben wir außer Veränderungen des Volumens bzw. des Drucksoder der Temperatur bzw. der Energie auch Änderungen der Teil-chenzahl N, kommt diese als weiterer äußerer Parameter dazu.Dann ist beispielsweise die Energie eine Funktion der Entropie,des Volumens und der Teilchenzahl, E = E(S ,V,N), und es tritteine weitere verallgemeinerte Kraft im Sinn der Definition (8.37)auf,
µ :=(∂E∂N
)T,S
. (14.21)
Sie heißt chemisches Potential und gibt offenbar an, wie sichdie Energie ändert, wenn Teilchen zum System hinzugefügt oderdavon weggenommen werden. Dann lautet das vollständige Diffe-rential der Energie
dE =
(∂E∂S
)V,N
dS +
(∂E∂V
)S ,N
dV +
(∂E∂N
)S ,V
dN
= TdS − PdV + µdN , (14.22)
und dementsprechend das Differential der Entropie
dS =dET
+PdV
T−µdN
T. (14.23)

158 KAPITEL 14. PHASENGLEICHGEWICHT
• Betrachten wir nun ein isoliertes System, das aus zwei Phasenbesteht. Als Phase wird ein chemisch und physikalisch homogenerBereich bezeichnet, also beispielsweise ein Eiswürfel im Wasser-glas: Wasser und Eis sind zwar chemisch homogen, physikalischhomogen sind aber nur der Eiswürfel und das flüssige Wasser fürsich genommen.
• Beide Phasen seien durch ihre Energien, Volumina und Teilchen-zahlen (E1,V1,N1) und (E2,V2,N2) gekennzeichnet. Da die Ge-samtgrößen (E,V,N) konstant gehalten werden, sind die Energien,Volumina und Teilchenzahlen der beiden Phasen nicht unabhängigvoneinander,
E2 = E − E1 , V2 = V − V1 , N2 = N − N1 . (14.24)
Das Gleichgewicht stellt sich zwischen beiden Phasen dann ein,wenn die Entropie ein Extremum erreicht,
0 = dS = dS 1 + dS 2 (14.25)
=
(∂S 1
∂E1−∂S 2
∂E1
)dE1 +
(∂S 1
∂V1−∂S 2
∂V1
)dV1 +
(∂S 1
∂N1−∂S 2
∂N1
)dN1 .
Da die Änderungen der dE1, dV1 und dN1 willkürlich sind, bedeu-tet dies, dass die Gleichgewichtsbedingungen
T1 = T2 , P1 = P2 , µ1 = µ2 (14.26)
lauten müssen. Die ersten beiden sind uns natürlich schon alsBedingungen für thermisches und mechanisches Gleichgewichtbekannt, die dritte ist neu und beschreibt das so genannte Phasen-gleichgewicht. Phasengleichgewicht herrscht also dann, wenn diechemischen Potentiale der beteiligten Phasen gleich sind.
14.2.2 Die Gibbs’sche Phasenregel
• In einem System, das aus mehreren Komponenten und Phasenbesteht, setzt sich die Energie aus den Energien aller Bestandteilezusammen. Komponenten sind die verschiedenen chemischen Stof-fe, aus denen eine Phase zusammengesetzt ist. Ein Beispiel für einSystem aus zwei Komponenten und zwei Phasen ist ein flüssigesAlkohol-Wasser-Gemisch in einem offenen Glas. An ihrer Ober-fläche verdampft die Flüssigkeit, daher gibt es zwei Phasen, undbeide Phasen enthalten zwei Komponenten.
• Wir bezeichnen Größen, die für die Komponente i in der Phase jcharakteristisch sind, mit einem Index j und einem hochgestellteni. Beispielsweise sei µ(i)
j das chemische Potential der Komponentei in der Phase j.
14.2. DAS CHEMISCHE POTENTIAL 159
• Für die Energie gilt dann
dE = TdS − PdV +∑
i, j
µ(i)j dN(i)
j . (14.27)
Die Bedingung für das Phasengleichgewicht muss dann separat füralle Komponenten in allen Phasen gelten, d.h. für die chemischenPotentiale muss
µ(i)j = µ(i)
k (14.28)
gelten. Befinden sich mehr als zwei Phasen gleichzeitig im Gleich-gewicht, müssen alle separat miteinander im Gleichgewicht sein,so dass (14.28) sich zu
µ(i)1 = µ(i)
2 = . . . = µ(i)nP
(14.29)
erweitert, wenn nP die Anzahl der gleichzeitig existierenden Pha-sen ist.
• Da dies für jede Komponente i gelten muss, entsteht ein Systemaus (nP − 1)nK Gleichungen,
µ(1)1 = µ(1)
2 = . . . = µ(1)nP,
µ(2)1 = µ(2)
2 = . . . = µ(2)nP,
...
µ(nK )1 = µ(nK )
2 = . . . = µ(nK )nP
, (14.30)
wobei nK die Anzahl der Komponenten des Systems ist.
• Die beteiligten Variablen sind Druck und Temperatur sowie dieTeilchenzahlen N1, . . . ,NnK aller beteiligten Komponenten. Vondiesen nK Teilchenzahlen sind aber nur (nK − 1) unabhängig, wenndie Gesamtzahl der Teilchen aller Komponenten festgehalten wird.
• Für diese insgesamt 2 + nP(nK − 1) Variablen stehen uns die (nP −
1)nK Gleichungen zur Verfügung, so dass
nF = 2 + nP(nK − 1) − (nP − 1)nK = 2 − nP + nK (14.31)
Freiheitsgrade unbestimmt bleiben. Das ist die Gibbs’sche Pha-senregel.
• Was sie bedeutet, sehen wir uns am Beispiel eines Systems an, dasnur aus Wasser besteht. Dann ist nK = 1, aber Wasser kann in dreiPhasen vorliegen; fest, flüssig oder gasförmig. Wenn gleichzeitigzwei Phasen auftreten sollen, nP = 2, bleibt ein Freiheitsgrad übrig,nF = 1. Das Gleichgewicht zwischen den beiden Phasen legt alsoDruck und Temperatur nicht eindeutig fest, sondern nur z.B. denDruck als Funktion der Temperatur, bei denen beide Phasen imGleichgewicht koexistieren können.
160 KAPITEL 14. PHASENGLEICHGEWICHT
• Die Dampfdruckkurve des Wassers ist dafür ein Beispiel. Sol-len die drei Phasen gleichzeitig im Gleichgewicht stehen, ist dieFreiheit aufgebraucht, nF = 0. Dann sind Druck und Temperatureindeutig bestimmt, so dass Koexistenz der drei Phasen nur aneinem Punkt im Zustandsraum, dem Tripelpunkt, möglich ist.
14.2.3 Gibbs-Duhem-Beziehung, Reaktionsgleichge-wichte
• Im ersten Teil der Vorlesung (vgl. I-7.3.3) hatten wir homogeneFunktionen vom Grad k besprochen, die sich durch die Bedingung
f (λ~x ) = λk f (x) (14.32)
auszeichnen. Die thermodynamischen Funktionen müssen auf-grund ihrer Bedeutung als extensive Größen homogen vom Gradeins sein, denn wenn ein System beispielsweise halbiert wird,müssen sich auch seine Entropie, seine Energie usw. halbieren,
E(λS , λV, λNi) = λE(S ,V,Ni) . (14.33)
Damit gilt aber auch der Eulersche Satz über homogene Funktio-nen (I-7.52),
~x · ~∇ f (~x) = k f (~x) , (14.34)
der im Falle der Energie
S(∂E∂S
)V,N
+ V(∂E∂V
)S ,N
+ Ni
(∂E∂Ni
)S ,V
= E(S ,V,Ni) (14.35)
besagt. Ersetzen wir die Ableitungen durch die thermodynami-schen Größen, die sie darstellen, folgt die eigenartige Gibbs-Duhem-Beziehung,
TS − PV + µiNi = E oder G = µiNi , (14.36)
wenn wir die freie Enthalpie G = E + PV − TS einführen. Bestehtdas System aus nur einer Komponente, ist
G = µN oder µ =GN. (14.37)
• Gleichgewicht zwischen zwei Phasen 1 und 2 in einem Systemmit nur einer Komponente setzt
µ1 = µ2 bzw. dµ1 = dµ2 (14.38)
voraus. Aus der Gibbs-Duhem-Beziehung wissen wir, dass
dµi =dGi
Ni=−S idT + VidP
Ni= −sidT + vidP (14.39)
14.3. PHASENÜBERGANG IM VAN-DER-WAALS-GAS 161
ist, worin s und v Entropie und Volumen pro Teilchen sind. Darausfolgt
− s1dT + v1dP = −s2dT + v2dP . (14.40)
Lösen wir diese Gleichung nach dT/dP auf, bekommen wir
dPdT
=s1 − s2
v1 − v2. (14.41)
Das ist wieder die Clausius-Clapeyron’sche Gleichung (13.48),weil sich der Entropieunterschied zwischen den beiden Phasengerade durch die Verdampfungswärme pro Teilchen ausdrückenlässt, s1 − s2 = |Q|/(NT ).
• Chemische Reaktionsgleichungen wie z.B. die der Verbrennungvon Wasserstoff zu Wasser,
2H2 + O2 → 2H2O , (14.42)
lassen sich in die Gestalt
ν jA j = 0 (14.43)
bringen, wenn ν j die beteiligten Stoffmengen sind und Reaktions-produkte mit negativen ν j gekennzeichnet werden. Im Beispielder Wasserstoffverbrennung wären demnach νH2 = 2, νO2 = 1 undνH2O = −2. Die Änderungen in den Teilchenzahlen der Reaktions-partner müssen proportional zu den Stoffmengen ν j sein,
dN j = λν j , (14.44)
damit das chemische Gleichgewicht gemäß der Reaktionsglei-chung (14.43) erhalten bleibt. Deswegen können wir die Bedin-gung dG = 0 für das Reaktionsgleichgewicht durch
dG =∂G∂Ni
dNi = µidNi = 0 (14.45)
oder, mit (14.44), durch
µiνi = 0 (14.46)
darstellen.
14.3 Phasenübergang im van-der-Waals-Gas
14.3.1 Die freie Enthalpie
• Wir hatten schon gesehen, dass die Isothermen eines van-der-Waals-Gases im P-V-Diagramm ein Maximum und ein Minimum
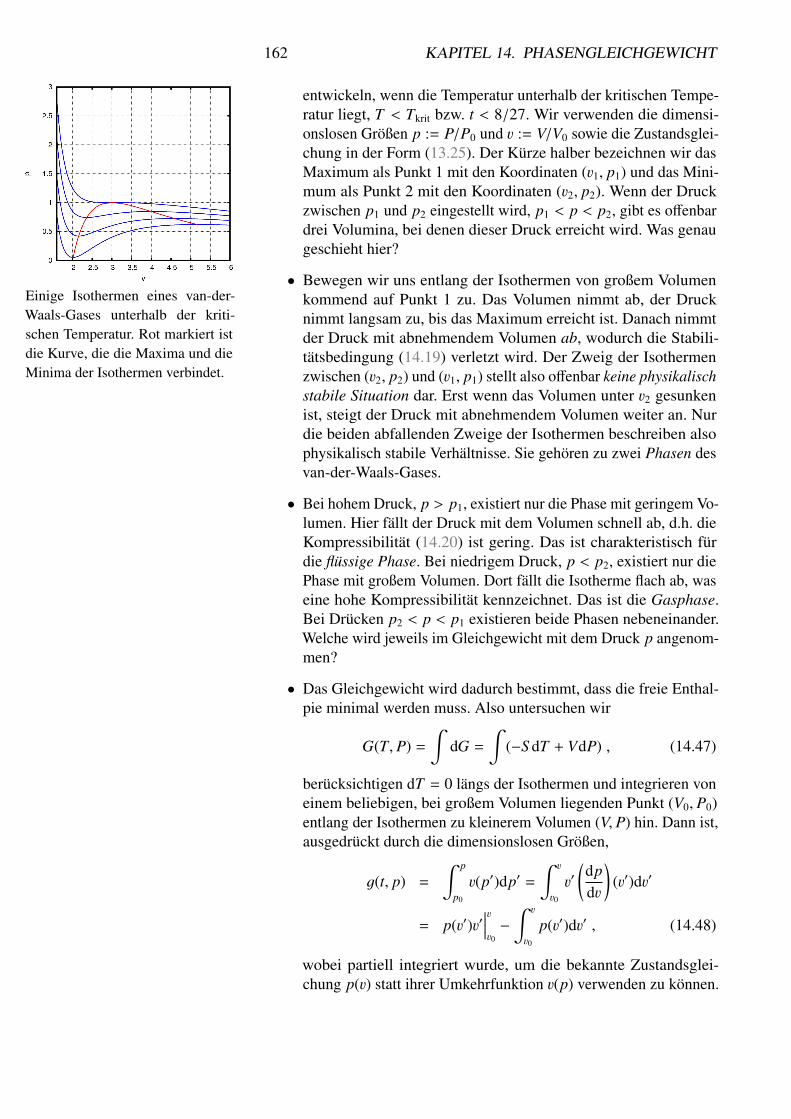
162 KAPITEL 14. PHASENGLEICHGEWICHT
entwickeln, wenn die Temperatur unterhalb der kritischen Tempe-ratur liegt, T < Tkrit bzw. t < 8/27. Wir verwenden die dimensi-onslosen Größen p := P/P0 und v := V/V0 sowie die Zustandsglei-chung in der Form (13.25). Der Kürze halber bezeichnen wir dasMaximum als Punkt 1 mit den Koordinaten (v1, p1) und das Mini-mum als Punkt 2 mit den Koordinaten (v2, p2). Wenn der Druckzwischen p1 und p2 eingestellt wird, p1 < p < p2, gibt es offenbardrei Volumina, bei denen dieser Druck erreicht wird. Was genaugeschieht hier?
Einige Isothermen eines van-der-Waals-Gases unterhalb der kriti-schen Temperatur. Rot markiert istdie Kurve, die die Maxima und dieMinima der Isothermen verbindet.
• Bewegen wir uns entlang der Isothermen von großem Volumenkommend auf Punkt 1 zu. Das Volumen nimmt ab, der Drucknimmt langsam zu, bis das Maximum erreicht ist. Danach nimmtder Druck mit abnehmendem Volumen ab, wodurch die Stabili-tätsbedingung (14.19) verletzt wird. Der Zweig der Isothermenzwischen (v2, p2) und (v1, p1) stellt also offenbar keine physikalischstabile Situation dar. Erst wenn das Volumen unter v2 gesunkenist, steigt der Druck mit abnehmendem Volumen weiter an. Nurdie beiden abfallenden Zweige der Isothermen beschreiben alsophysikalisch stabile Verhältnisse. Sie gehören zu zwei Phasen desvan-der-Waals-Gases.
• Bei hohem Druck, p > p1, existiert nur die Phase mit geringem Vo-lumen. Hier fällt der Druck mit dem Volumen schnell ab, d.h. dieKompressibilität (14.20) ist gering. Das ist charakteristisch fürdie flüssige Phase. Bei niedrigem Druck, p < p2, existiert nur diePhase mit großem Volumen. Dort fällt die Isotherme flach ab, waseine hohe Kompressibilität kennzeichnet. Das ist die Gasphase.Bei Drücken p2 < p < p1 existieren beide Phasen nebeneinander.Welche wird jeweils im Gleichgewicht mit dem Druck p angenom-men?
• Das Gleichgewicht wird dadurch bestimmt, dass die freie Enthal-pie minimal werden muss. Also untersuchen wir
G(T, P) =
∫dG =
∫(−S dT + VdP) , (14.47)
berücksichtigen dT = 0 längs der Isothermen und integrieren voneinem beliebigen, bei großem Volumen liegenden Punkt (V0, P0)entlang der Isothermen zu kleinerem Volumen (V, P) hin. Dann ist,ausgedrückt durch die dimensionslosen Größen,
g(t, p) =
∫ p
p0
v(p′)dp′ =
∫ v
v0
v′(dpdv
)(v′)dv′
= p(v′)v′∣∣∣∣vv0−
∫ v
v0
p(v′)dv′ , (14.48)
wobei partiell integriert wurde, um die bekannte Zustandsglei-chung p(v) statt ihrer Umkehrfunktion v(p) verwenden zu können.
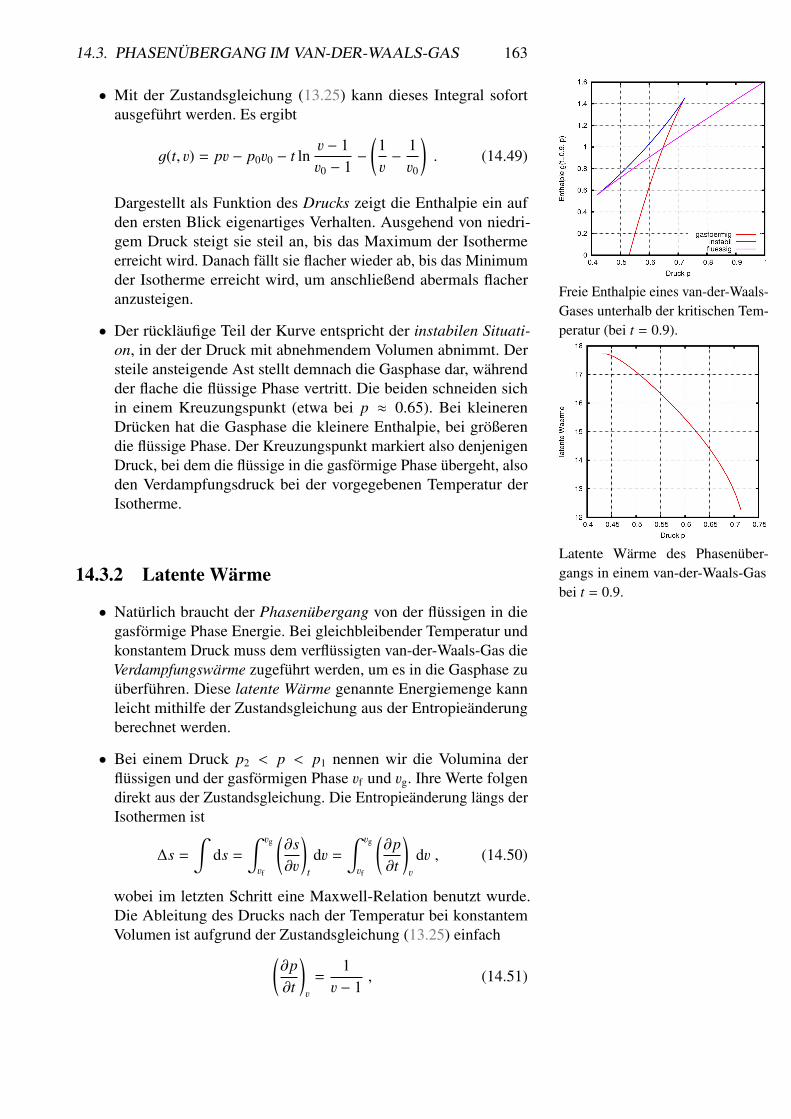
14.3. PHASENÜBERGANG IM VAN-DER-WAALS-GAS 163
• Mit der Zustandsgleichung (13.25) kann dieses Integral sofortausgeführt werden. Es ergibt
g(t, v) = pv − p0v0 − t lnv − 1v0 − 1
−
(1v−
1v0
). (14.49)
Freie Enthalpie eines van-der-Waals-Gases unterhalb der kritischen Tem-peratur (bei t = 0.9).
Dargestellt als Funktion des Drucks zeigt die Enthalpie ein aufden ersten Blick eigenartiges Verhalten. Ausgehend von niedri-gem Druck steigt sie steil an, bis das Maximum der Isothermeerreicht wird. Danach fällt sie flacher wieder ab, bis das Minimumder Isotherme erreicht wird, um anschließend abermals flacheranzusteigen.
• Der rückläufige Teil der Kurve entspricht der instabilen Situati-on, in der der Druck mit abnehmendem Volumen abnimmt. Dersteile ansteigende Ast stellt demnach die Gasphase dar, währendder flache die flüssige Phase vertritt. Die beiden schneiden sichin einem Kreuzungspunkt (etwa bei p ≈ 0.65). Bei kleinerenDrücken hat die Gasphase die kleinere Enthalpie, bei größerendie flüssige Phase. Der Kreuzungspunkt markiert also denjenigenDruck, bei dem die flüssige in die gasförmige Phase übergeht, alsoden Verdampfungsdruck bei der vorgegebenen Temperatur derIsotherme.
Latente Wärme des Phasenüber-gangs in einem van-der-Waals-Gasbei t = 0.9.
14.3.2 Latente Wärme
• Natürlich braucht der Phasenübergang von der flüssigen in diegasförmige Phase Energie. Bei gleichbleibender Temperatur undkonstantem Druck muss dem verflüssigten van-der-Waals-Gas dieVerdampfungswärme zugeführt werden, um es in die Gasphase zuüberführen. Diese latente Wärme genannte Energiemenge kannleicht mithilfe der Zustandsgleichung aus der Entropieänderungberechnet werden.
• Bei einem Druck p2 < p < p1 nennen wir die Volumina derflüssigen und der gasförmigen Phase vf und vg. Ihre Werte folgendirekt aus der Zustandsgleichung. Die Entropieänderung längs derIsothermen ist
∆s =
∫ds =
∫ vg
vf
(∂s∂v
)tdv =
∫ vg
vf
(∂p∂t
)v
dv , (14.50)
wobei im letzten Schritt eine Maxwell-Relation benutzt wurde.Die Ableitung des Drucks nach der Temperatur bei konstantemVolumen ist aufgrund der Zustandsgleichung (13.25) einfach(
∂p∂t
)v
=1
v − 1, (14.51)

164 KAPITEL 14. PHASENGLEICHGEWICHT
so dass die Entropieänderung während des Phasenübergangs
∆s = lnvf − 1vg − 1
(14.52)
wird. Die latente Wärme ist dann einfach durch
∆q = t∆s = t lnvf − 1vg − 1
(14.53)
gegeben. Phasenübergänge, bei denen latente Wärme auftritt, hei-ßen erster Art.
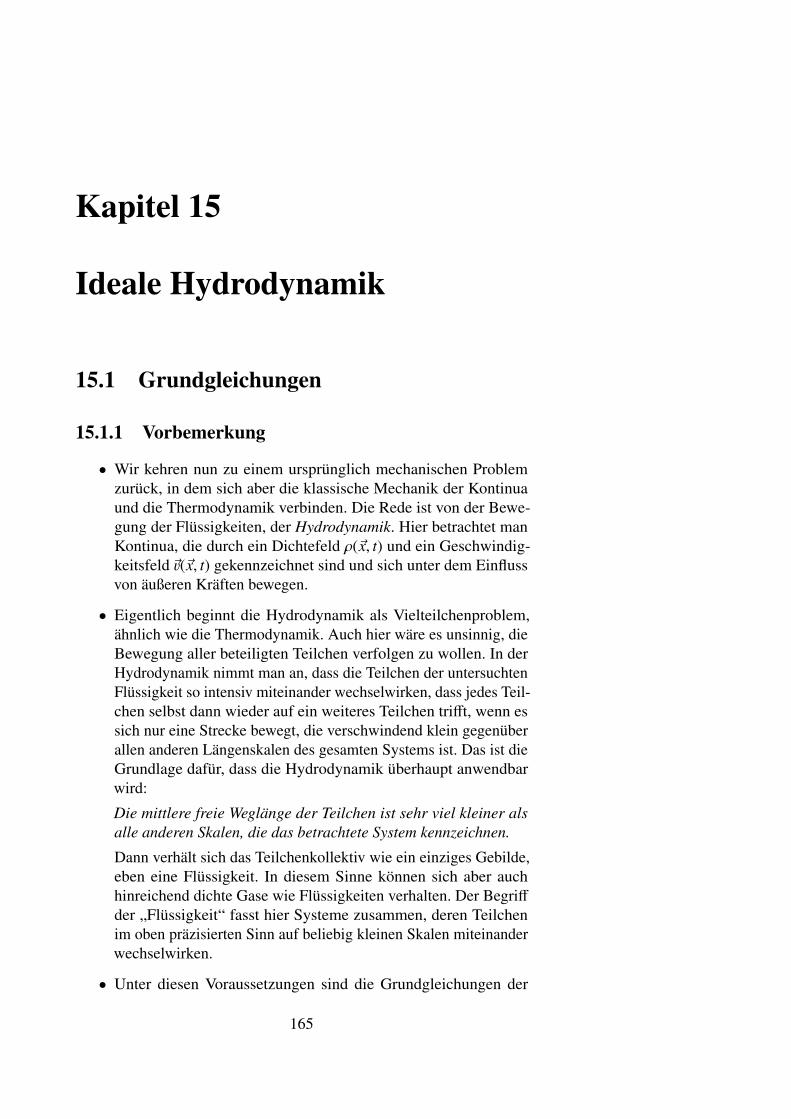
Kapitel 15
Ideale Hydrodynamik
15.1 Grundgleichungen
15.1.1 Vorbemerkung
• Wir kehren nun zu einem ursprünglich mechanischen Problemzurück, in dem sich aber die klassische Mechanik der Kontinuaund die Thermodynamik verbinden. Die Rede ist von der Bewe-gung der Flüssigkeiten, der Hydrodynamik. Hier betrachtet manKontinua, die durch ein Dichtefeld ρ(~x, t) und ein Geschwindig-keitsfeld ~v(~x, t) gekennzeichnet sind und sich unter dem Einflussvon äußeren Kräften bewegen.
• Eigentlich beginnt die Hydrodynamik als Vielteilchenproblem,ähnlich wie die Thermodynamik. Auch hier wäre es unsinnig, dieBewegung aller beteiligten Teilchen verfolgen zu wollen. In derHydrodynamik nimmt man an, dass die Teilchen der untersuchtenFlüssigkeit so intensiv miteinander wechselwirken, dass jedes Teil-chen selbst dann wieder auf ein weiteres Teilchen trifft, wenn essich nur eine Strecke bewegt, die verschwindend klein gegenüberallen anderen Längenskalen des gesamten Systems ist. Das ist dieGrundlage dafür, dass die Hydrodynamik überhaupt anwendbarwird:
Die mittlere freie Weglänge der Teilchen ist sehr viel kleiner alsalle anderen Skalen, die das betrachtete System kennzeichnen.
Dann verhält sich das Teilchenkollektiv wie ein einziges Gebilde,eben eine Flüssigkeit. In diesem Sinne können sich aber auchhinreichend dichte Gase wie Flüssigkeiten verhalten. Der Begriffder „Flüssigkeit“ fasst hier Systeme zusammen, deren Teilchenim oben präzisierten Sinn auf beliebig kleinen Skalen miteinanderwechselwirken.
• Unter diesen Voraussetzungen sind die Grundgleichungen der
165
166 KAPITEL 15. IDEALE HYDRODYNAMIK
idealen Hydrodynamik die Erhaltungsgleichungen der Masse, desImpulses und der Energie.
15.1.2 Die Kontinuitätsgleichung
• Formulieren wir zunächst die Massenerhaltung. Betrachten wirdazu einen kleines Volumen am Ort ~x zur Zeit t innerhalb einesflüssigkeitsgefüllten Raumes. Die Dichte innerhalb dieses Volu-mens ist ρ(~x, t), und die Flüssigkeit strömt mit der Geschwindigkeit~v(~x, t) hindurch. Durch die Oberfläche des Volumens entsteht soein Massenstrom, der durch den Stromdichtevektor
~j = ρ~v (15.1)
angegeben wird. Offenbar hat ~j die Dimension
[~j ] =Masse
Volumen×
StreckeZeit
=Masse
Fläche × Zeit(15.2)
und gibt an, wieviel Masse pro Zeiteinheit durch eine Flächenein-heit fließt. Integrieren wir ~j über den gesamten Rand des Volumens,muss herauskommen, wieviel Masse pro Zeiteinheit aus dem Vo-lumen fließt. Die Erhaltung der Masse verlangt dann, dass sichdie im Volumen enthaltene Masse um gerade diesen Betrag ändert.Daraus erhalten wir
−∂
∂t
∫Vρ dV =
∫∂V
~j · d~a =
∫∂Vρ~v · d~a , (15.3)
worin ~a das gerichtete Flächenelement auf dem Rand ∂V desVolumens V ist.
• Auf der rechten Seite von (15.3) verwenden wir den GaußschenSatz, um das Flächen- in ein Volumenintegral umzuschreiben.Damit erhalten wir
−∂
∂t
∫Vρ dV =
∫V
~∇ · (ρ~v) dV . (15.4)
Da dies für völlig beliebige Volumina gelten muss, müssen dieIntegranden gleich sein. Das ergibt die Kontinuitätsgleichung
∂ρ
∂t+ ~∇ · (ρ~v) =
∂ρ
∂t+ ~∇ · ~j = 0 . (15.5)
Wenn man die Divergenz des Produkts ρ~v ausschreibt, lautet dieKontinuitätsgleichung
∂ρ
∂t+ ρ~∇ ·~v +~v · ~∇ρ = 0 . (15.6)
15.1. GRUNDGLEICHUNGEN 167
Da die Dichte ρ eine Funktion von ~x und t ist, lautet ihre totaleZeitableitung
dρdt
=∂ρ
∂t+ ~∇ρ ·
d~xdt
=∂ρ
∂t+~v · ~∇ρ . (15.7)
Eingesetzt in (15.6) erlaubt dieser Ausdruck, die Kontinuitätsglei-chung in der Form
dρdt
+ ρ~∇ ·~v = 0 (15.8)
zu schreiben.
• Zwei allgemeine Bemerkungen sind hier angebracht. Erstens stelltdie Kontinuitätsgleichung in der Form (15.5) eine typische diffe-rentielle Erhaltungsgleichung für eine kontinuierliche Größe dar:Die (partielle) Zeitableitung einer Dichte ist gleich der negativenDivergenz einer Stromdichte. Salopp ausgedrückt besagt dieseGleichung, „was nicht im Volumen bleibt, muss abfließen“. Glei-chungen derselben Form werden natürlich auch die Impuls- unddie Energieerhaltung darstellen.
• Zweitens lohnt es sich, die Bedeutungen der partiellen und dertotalen Zeitableitung genauer anzusehen. Während die partielleZeitableitung angibt, wie sich eine Größe an einem festen Ort mitder Zeit ändert, bezieht die totale Zeitableitung die Strömung mitein. Die totale Zeitableitung innerhalb einer Flüssigkeit zeigt, wiesich eine bestimmte Größe ändert, wenn man mit ihr mitschwimmt.Die Zeitableitung
ddt
=∂
∂t+~v · ~∇ (15.9)
heißt deswegen auch substantielle Ableitung.
15.1.3 Die Eulersche Gleichung
• Nun formulieren wir die Impulserhaltung, indem wir wieder einkleines Volumen aus der Flüssigkeit herausgreifen. Die gesamteKraft, die innerhalb der Flüssigkeit darauf wirkt, entsteht durchden Druck P, den wir über den Rand des Volumens integrierenmüssen. Wenn P der Druck innerhalb des Volumens ist, wirkt aufdas Volumen die Kraft
−
∫∂V
P d~a = −
∫V
~∇P dV , (15.10)
wobei wir im zweiten Schritt wieder den Gaußschen Satz verwen-det haben.

168 KAPITEL 15. IDEALE HYDRODYNAMIK
• Die infinitesimale Kraft −~∇P dV auf das Volumenelement dVbewirkt nach dem zweiten Newtonschen Axiom eine Impulsände-rung. Ein infinitesimal kleines Volumenelement am Ort ~x erfährtdemnach die Beschleunigung
ρ dVd~vdt
= −~∇P dV , (15.11)
wobei links wieder die substantielle Ableitung einzusetzen ist. Dasergibt die Eulersche Gleichung
∂~v
∂t+ (~v · ~∇)~v = −
1ρ~∇P . (15.12)
• Vergewissern wir uns zunächst, dass die Dimensionen richtig sind.Links steht die Zeitableitung einer Geschwindigkeit, also eineBeschleunigung. Rechts steht der Quotient aus einem Druckgradi-enten und einer Massendichte, der die Dimension
Druck × FlächeMasse
=KraftMasse
(15.13)
hat. Das entspricht genau der Erwartung aus dem zweiten Newton-schen Axiom.
• Der zweite Term auf der linken Seite der Eulerschen Gleichungwird klarer, wenn man ihn in Komponenten ausschreibt. Dannlautet er
(~v · ~∇)~v = (vi∂i)~v =
(vi∂i)vx
(vi∂i)vy(vi∂i)vz
. (15.14)
• Schließlich können noch äußere Kräfte in der Eulerschen Glei-chung auftreten, von denen wir bisher keine berücksichtigt haben.Wenn die Strömung beispielsweise in einem Gravitationsfeld ver-läuft, das die Gravitationsbeschleunigung
~g = −~∇Φ (15.15)
ausübt, erweitert sich die Eulersche Gleichung zu
∂~v
∂t+ (~v · ~∇)~v = −
1ρ~∇P − ~∇Φ , (15.16)
wobei Φ natürlich das Gravitationspotential ist.
15.1.4 Energieerhaltung
• Nach Massen- und Impulserhaltung untersuchen wir die Energie-erhaltung. Die Energiedichte setzt sich aus zwei Beiträgen zusam-men, der inneren (thermischen) Energiedichte der Flüssigkeit und

15.1. GRUNDGLEICHUNGEN 169
ihrer kinetischen Energiedichte. Wenn ε die innere Energie proMasseneinheit bezeichnet, ist die gesamte Energiedichte
ρ~v 2
2+ ρε . (15.17)
• Die partielle zeitliche Ableitung des kinetischen Anteils ist
∂
∂t
(ρ~v 2
2
)=v2
2∂ρ
∂t+ ρ~v ·
∂~v
∂t. (15.18)
Nun können wir für die Zeitableitung der Dichte die Kontinuitäts-und für die der Geschwindigkeit die Eulersche Gleichung verwen-den. Das ergibt
∂
∂t
(ρ~v 2
2
)= −
v2
2~∇ · (ρ~v) −~v · ~∇P − ρ~v(~v · ~∇)~v . (15.19)
• Wegen (15.14) lautet der letzte Term auf der rechten Seite
ρ~v(~v · ~∇)~v = vx(vi∂i)vx + vy(vi∂i)vy + vz(vi∂i)vz (15.20)
und lässt sich offenbar in die kompaktere Form
ρ~v(~v · ~∇)~v = (~v · ~∇)v2
2(15.21)
bringen.
• Für den Druckgradienten bemühen wir thermodynamische Be-ziehungen. Nach (12.17) war das vollständige Differential derEnthalpie
dH = TdS + VdP . (15.22)
Dividieren wir durch die Masse ρV und bezeichnen die Enthal-pie und die Entropie pro Masseneinheit mit h und s, lautet dieseGleichung
dh = Tds +dPρ. (15.23)
Demnach kann der Druckgradient durch die Gradienten der Ent-halpie und der Entropie ausgedrückt werden,
~∇P = ρ~∇h − ρT ~∇s . (15.24)
Damit und mit (15.21) erhalten wir aus (15.19) das Zwischener-gebnis
∂
∂t
(ρ~v 2
2
)= −
v2
2~∇ · (ρ~v) − ρ(~v · ~∇)
(v2
2+ h
)+ ρT~v · ~∇s . (15.25)

170 KAPITEL 15. IDEALE HYDRODYNAMIK
• Nun kommt die Zeitableitung von ρε aus (15.17) an die Reihe.Hierzu schreiben wir das vollständige Differential der Energie,
dE = TdS − PdV , (15.26)
wieder in massenbezogene Größen um,
dε = Tds −Pm
dV , (15.27)
wobei m = ρV eingesetzt wurde. Drücken wir V durch ρ und maus, folgt
dV = d(mρ
)= md
(1ρ
)= −m
dρρ2 , (15.28)
denn dm = 0. Also lautet das vollständige Differential von ε
dε = Tds +Pρ2 dρ . (15.29)
• Die Enthalpie geht durch die Legendre-Transformation (12.16)
H = E + PV (15.30)
aus der inneren Energie hervor. Bezogen auf die Masseneinheitgilt also
h = ε +Pρ
⇔ ρε = ρh − P . (15.31)
Das vollständige Differential davon ist
d(ρε) = εdρ + ρdε = hdρ + ρdh − dP , (15.32)
aber wegen (15.23) ist auch
ρdh = ρTds + dP , (15.33)
so dassd(ρε) = hdρ + ρTds (15.34)
geschrieben werden kann. Also folgt für die Zeitableitung von ρε
∂(ρε)∂t
= h∂ρ
∂t+ ρT
∂s∂t
. (15.35)
• In der idealen Hydrodynamik tauscht die Flüssigkeit keine Wärmemit der Umgebung aus und produziert auch keine durch innereReibung. Also muss die Entropie erhalten bleiben, woraus
dsdt
=∂s∂t
+ (~v · ~∇)s = 0 (15.36)
folgt. Verwenden wir dieses Ergebnis und die Kontinuitätsglei-chung (15.5) in (15.35), können wir die Zeitableitung von ρε in
∂(ρε)∂t
= −h~∇ · (ρ~v) − ρT~v · ~∇s (15.37)
umformen.
15.1. GRUNDGLEICHUNGEN 171
• Nun kombinieren wir die beiden Zeitableitungen (15.25) und(15.37), um
∂
∂t
(ρv2
2+ ρε
)= −
(v2
2+ h
)~∇ · (ρ~v) − ρ(~v · ~∇)
(v2
2+ h
)(15.38)
zu bekommen. Dies lässt sich weiter vereinfachen, um die endgül-tige Form
∂
∂t
(ρv2
2+ ρε
)+ ~∇ ·
[ρ~v
(v2
2+ h
)]= 0 (15.39)
zu erhalten.
• Diese Gleichung hat wiederum die charakteristische Form einerErhaltungsgleichung: Die (partielle) Zeitableitung einer Dichtewird durch die Divergenz einer Stromdichte ausgeglichen. Wirkönnen also die Größe
ρ~v
(v2
2+ h
)(15.40)
als Energiestromdichte identifizieren. Es ist wichtig, dass hier dieEnthalpie pro Masseneinheit h auftritt, weil die Flüssigkeit, indemsie strömt, mechanische Arbeit verrichten kann.
15.1.5 Zusammenfassung
• Die bisherigen Überlegungen haben auf die drei zentralen Glei-chungen der idealen Hydrodynamik geführt, durch die die Erhal-tung der Masse, des Impulses und der Energie formuliert werden.Diese Gleichungen lauten
∂ρ
∂t+ ~∇ · (ρ~v) = 0 , (15.41)
∂~v
∂t+ (~v · ~∇)~v = −
1ρ~∇P + ~g , (15.42)
∂
∂t
(ρv2
2+ ρε
)+ ~∇ ·
[ρ~v
(v2
2+ h
)]= 0 . (15.43)
Sie bilden einen Satz von fünf Gleichungen für die sechs Variablenρ, ~v, P und ε, denn wenn P, ε und ρ gegeben sind, steht auch hdurch (15.31) fest. Die eine Gleichung, die noch gebraucht wird, istdie Zustandsgleichung der Flüssigkeit, die den Druck als Funktiondes Volumens und der Temperatur angibt.

172 KAPITEL 15. IDEALE HYDRODYNAMIK
15.2 Einfache Anwendungen
15.2.1 Die Bernoullische Gleichung
• Wir gehen von der Eulerschen Gleichung (15.42) aus, vernachläs-sigen die Schwerkraft und verwenden explizit, dass die Entropieerhalten ist, ds = 0. Daher bekommen wir aus (15.23)
dh =dPρ
⇒1ρ~∇P = ~∇h . (15.44)
Damit lautet die Eulersche Gleichung
∂~v
∂t+ (~v · ~∇)~v = −~∇h . (15.45)
• Weiterhin verwenden wir die Identität
~v × (~∇ ×~v) =12~∇(v2) − (~v · ~∇)~v , (15.46)
die sich mithilfe des Levi-Civita-Symbols einfach beweisen lässt,um (15.45) in die Form
∂~v
∂t−~v × (~∇ ×~v) = −~∇
(v2
2+ h
)(15.47)
zu bringen.
• Nun setzen wir eine stationäre Strömung voraus, also eine, diesich zeitlich nicht ändert. Die Flüssigkeit bewegt sich zwar, aberan jedem Ort bleiben das Dichte- und das Geschwindigkeitsfeldkonstant. Dann verschwindet die partielle Zeitableitung des Ge-schwindigkeitsfeldes, und von der Eulerschen Gleichung bleibt
~v × (~∇ ×~v) = ~∇
(v2
2+ h
)(15.48)
übrig. Schließlich projizieren wir diese Gleichung noch auf diegedachten Stromlinien der Flüssigkeit. Das sind Linien, derenTangente in jedem Punkt der Richtung des Geschwindigkeitsfeldesfolgt. Dazu multiplizieren wir (15.48) mit dem Einheitsvektor ~evin Richtung der Geschwindigkeit. Dadurch entfällt der Term aufder linken Seite, weil er wegen des Kreuzprodukts mit ~v senkrechtauf der Geschwindigkeit steht. Damit reduziert sich (15.48) auf
~ev · ~∇(v2
2+ h
)= 0 . (15.49)
Dies bedeutet aber, dass die Größe
v2
2+ h (15.50)
15.2. EINFACHE ANWENDUNGEN 173
in einer stationären Strömung längs Stromlinien konstant bleibt,
v2
2+ h = C , (15.51)
wobei die Konstante C von Stromlinie zu Stromlinie verschiedensein kann. Das ist die Bernoullische Gleichung. Sie kann häufig da-zu verwendet werden, um sich auf einfache Weise einen Eindruckdavon zu verschaffen, wie die Strömung verläuft.
15.2.2 Schallwellen
• Wie breiten sich Störungen in einer Flüssigkeit aus? Dazu be-trachten wir eine Strömung, deren ungestörte Größen die idealenhydrodynamischen Gleichungen erfüllen und mit einem Index 0gekennzeichnet werden, also ρ0, ~v0, P0 usw. Diese Größen störenwir durch kleine Beträge δρ, δ~v, δP und vernachlässigen in denhydrodynamischen Gleichungen alle Terme, die von höherer alserster Ordnung in den Störgrößen sind.
• Die Kontinuitätsgleichung lautet dann
0 =∂(ρ0 + δρ)
∂t+ ~∇ ·
[(ρ0 + δρ)(~v0 + δv)
]≈
∂(ρ0 + δρ)∂t
+ ~∇ ·[ρ0~v0 + δρ~v0 + ρ0δ~v
]=
∂δρ
∂t+ ~∇ ·
[δρ~v0 + ρ0δ~v
], (15.52)
wobei im letzten Schritt berücksichtigt wurde, dass ρ0 und ~v0 be-reits die Kontinuitätsgleichung erfüllen müssen. Hier führen wirnoch ein Koordinatensystem ein, das mit der ungestörten Flüssig-keit schwimmt, so dass ~v0 = 0 gesetzt werden kann, und nehmendie Dichte ρ0 als homogen an. Unter diesen Vereinfachungen giltin erster Ordnung in den Störungen
∂δρ
∂t+ ρ0~∇ · δ~v = 0 . (15.53)
• Die Eulersche Gleichung (15.42) schreiben wir unter denselbenAnnahmen und ohne Gravitationsfeld als
∂δ~v
∂t= −
1ρ0 + δρ
~∇(P0 + δP) . (15.54)
Da wir mit der Flüssigkeit schwimmen, ist ~v0 = 0, so dass derungestörte Druck ebenfalls homogen sein muss, ~∇P0 = 0. Re-duziert auf Terme höchstens erster Ordnung lautet die EulerscheGleichung dann
∂δ~v
∂t= −
~∇δPρ0
. (15.55)
174 KAPITEL 15. IDEALE HYDRODYNAMIK
• Wir kommen nur weiter, wenn wir die Dichte- und die Druck-schwankung miteinander verbinden. Dazu schreiben wir
δP =
(∂P∂ρ
)sδρ =: c2
sδρ (15.56)
und definieren die Größe cs durch die Ableitung des Drucks nachder Dichte bei konstanter Entropie. Aus der Kontinuitätsgleichung(15.53) wird dann
∂δP∂t
+ ρ0c2s~∇ · δ~v = 0 . (15.57)
Diese Gleichung leiten wir partiell nach der Zeit ab und verglei-chen sie mit der Divergenz von (15.55),
∂2δP∂t2 + ρ0c2
s~∇ ·
∂δ~v
∂t= 0 ,
~∇ ·∂δ~v
∂t+~∇2δPρ0
= 0 . (15.58)
Multiplizieren wir die zweite Gleichung (15.58) mit ρ0c2s und
subtrahieren sie von der ersten, folgt
∂2δP∂t2 − c2
s~∇2δP = 0 . (15.59)
Das ist natürlich nichts anderes als die d’Alembertsche Gleichung(4.26) in drei Dimensionen für die Druckschwankung δP. Wie wirin Kapitel 4 gesehen hatten, erlaubt sie Wellenlösungen beliebigerForm, die sich mit der charakteristischen Geschwindigkeit
cs =
√(∂P∂ρ
)s
(15.60)
ausbreiten. Diese Wellen sind Schallwellen, und cs ist die Schall-geschwindigkeit.
• In einem idealen Gas ist
P =NkT
V=ρkTm
, (15.61)
weil sich die Masse des Gases aus der Anzahl N der Gasteilchennach M = ρVNm berechnen lässt, wenn m die Masse eines Gas-teilchens ist. Bei konstanter Entropie ist PVγ konstant, daher auchPρ−γ, so dass
P = P0
(ρ
ρ0
)γ(15.62)
geschrieben werden kann. Demnach ist das Quadrat der Schallge-schwindigkeit
c2s = γ
P0
ρ0
(ρ
ρ0
)γ−1
= γPρ
(15.63)
15.2. EINFACHE ANWENDUNGEN 175
oder, mit (15.61),
cs =
√γ kT
m. (15.64)
Für Luft ist m ≈ 28 mp ≈ 5×10−23 g. Nehmen wir insgesamt f = 7Freiheitsgrade an (drei der Translation, zwei der Vibration, zweider Rotation), ist γ = ( f + 2)/ f = 9/7. Daraus ergibt sich beiT = 300 K die Schallgeschwindigkeit cs ≈ 3.4 × 104 cm s−1 ergibt,also etwa 340 m s−1.
15.2.3 Die barometrische Höhenformel
• Abschließend untersuchen wir noch, wie der Luftdruck mit derHöhe über dem Erdboden abnimmt. Dazu verwenden wir dieEulersche Gleichung im statischen Fall, d.h. wir setzen ~v = 0.Außerdem orientieren wir das Koordinatensystem so, dass ~g inRichtung der negativen z-Achse zeigt, so dass die Höhe über demErdboden durch z angegeben wird. Dann ist
dPdz
= −ρg . (15.65)
Dann ersetzen wir die Dichte ρ mithilfe von (15.61) durch denDruck P,
ρ =mPkT
, (15.66)
nehmen an, dass die Temperatur konstant ist, und erhalten diegewöhnliche Differentialgleichung erster Ordnung
d ln Pdz
= −mkT
g , (15.67)
deren offensichtliche Lösung
P(z) = P0 exp(−
mgkT
z)
=: P0e−z/z0 (15.68)
ist, wobei P0 der Druck am Erdboden ist. Der Luftdruck fällt alsoexponentiell mit der Höhe ab, wobei die Druckskalenhöhe
z0 =kTmg≈ 8.6 × 105 cm ≈ 8.6 km (15.69)
zeigt, dass auf dem Mount Everest der Druck auf das ≈ 1/e ≈ 0.37-fache des Luftdrucks auf Meereshöhe abgefallen ist.

176 KAPITEL 15. IDEALE HYDRODYNAMIK
Index
Überlagerung von Wellen, 40
Adiabate, 104Adiabatenindex, 125adiabatischer Prozess, 101Arbeit
virtuelle, 6Ausbreitungsgeschwindigkeit
longitudinale und transversale,42
Ausdehnungskoeffizient, 143Avogadrozahl, 80
Bayes’scher Satz, 106Binomialverteilung, 110Boltzmann-Konstante, 95Boltzmann-Verteilung, 116Brechungsgesetz
Snellius’sches, 26Brechungsindex, 25
Carnot’scher Kreisprozess, 147chemische Reaktionsgleichung,
161chemisches Potential, 157Clausius-Clapeyron’sche Glei-
chung, 151, 161
d’Alembert’sche Gleichung, 39d’Alembert’sches Prinzip, 6Dampfdruck einer Flüssigkeit, 150Differential
unvollständiges, 88Dirichlet-Randbedingung, 45Drehimpulserhaltung, 16, 52Drehmoment, 19Dualraum, 54
Eichinvarianz, 28, 49Eigenfrequenz, 43Eigenfunktionen einer Differential-
gleichung, 44
Einstein’sche Summenkonvention,55
Energiefreie, 133mittlere pro Freiheitsgrad, 96
Energieerhaltung, 51Ensemble, 81Enthalpie, 132
freie, 133Entropie, 98
und Irreversibilität, 98und Unordnung, 98
Entropieänderungeines Wärmereservoirs, 99
Ereignis, 105Erwartungswert
der relativen Häufigkeit, 105Euler’sche Gleichungen, 20Euler-Winkel, 17
als verallgemeinerte Koordina-ten, 17
Extremalbedingungbei konstantem Druck, 157bei konstantem Volumen, 156
Extremaleigenschaftder Entropie, 153der freien Energie, 154der freien Enthalpie, 155
Extremalprinzip, 28aus dem statistischen Grund-
postulat, 93
Feld, 36Feldfunktion, 36Fermat’sches Prinzip, 25Fermi-Druck, 104Fermi-Energie, 103Fermi-Impuls, 103Foucault’sches Pendel, 48Fourierreihe, 44
177
178 INDEX
freie Energie, 133freie Enthalpie, 133Freiheitsgrad, 1Funktion
homogene, 31Funktional, 26, 37
Galilei-Gruppe, 49Galilei-Invarianz, 49Gaskonstante, 124Gauß’sche Normalverteilung, 114Gaußverteilung, 97geometrische Optik, 25Geschwindigkeits-
Additionstheorem, 55Gibbs’sche Phasenregel, 159Gibbs’sches Paradoxon, 128Gibbs-Duhem-Beziehung, 160Gleichgewicht, 81Gleichverteilungssatz, 96Größen
intensive und extensive, 118Grundpostulat der statistischen
Physik, 81Grundton, 43
Hamilton’sche Gleichungen, 30Hamilton’sches Prinzip, 27Hamilton-Funktion, 51Hamiltonfunktion, 29Hauptachsensystem
eines Kreisels, 18Hauptsatz der Thermodynamik
dritter, 118Helmholtz’sche Differentialglei-
chung, 45Homogenität der Zeit, 49Homogenität des Raums, 49Hooke’sches Gesetz, 39
ideales Gas, 121Impuls
kanonisch konjugierter, 28konjugierter, 18verallgemeinerter, 28
Impulsekanonisch konjugierte, 51
Impulserhaltung, 51
Inertialsystem, 47Integral
elliptisches, 22integrierender Faktor, 118Inversionskurve, 144Inversionstemperatur, 145irreversible Vorgänge, 92Isotherme, 145
kritische, 145Isotropie des Raums, 49
Joule-Thomson-Koeffizient, 143Joule-Thomson-Prozess, 142
Kelvin (Temperaturskala), 95Kolmogorow’sche Axiome, 106Komponenten, 158Kompressibilität
isotherme, 136Konfigurationsraum, 2, 25Kontinuum, 35Koordinaten
verallgemeinerte, 3zyklische, 30
Kraftverallgemeinerte, 13
Kreiselschnelle Rotation, 23
KreisprozessCarnot’scher, 147
Lageparameter, 1Lagrange-Gleichungen
erster Art, 11Lagrange-Multiplikator, 4Lagrangefunktion, 15
des kräftefreien Kreisels, 17Uneindeutigkeit, 48
Lagrangegleichungen, 15, 27erster Art, 14für nichtkonservative Kräfte,
32latente Wärme, 163Legendre-Transformation, 131Lichtgeschwindigkeit, 53Liouville’scher Satz, 82Lorentz-Faktor, 54Lorentz-Transformation, 54
INDEX 179
Lorentzgruppe, 55
Makrozustand, 80Maxwell’sche Geschwindigkeits-
verteilung, 115Maxwell-Relationen, 134mechanische Arbeit, 86Membran, 44Metrik, 54Mikrozustand, 80
zugänglicher, 81Minkowski-Raum, 54Mischungstemperatur, 120Mittelwert, 108Molvolumen, 80Myonzerfall, 52
Nebenbedingung, 3Normierung, 106
Obertöne, 43Otto-Prozess, 149
Parameter der Hamiltonfunktion,86
Phasen, 158Phasenübergang, 163Phasenübergang erster Art, 164Phasengleichgewicht, 158Phasenraum, 29Phasenraumzelle, 80Planck’sches Wirkungsquantum,
103, 117Potentiale
thermodynamische, 134Präzession, 23Prinzip der stationären Wirkung,
27Prinzip der virtuellen Arbeit, 6Prozessgröße, 87
Rang einer linearen Abbildung, 2relative Häufigkeit, 105reversible Vorgänge, 92Rotationsenergie, 17
Scheinkräfte, 16, 48Separationsansatz, 43Siedepunktsänderung, 151
spezifische Wärme, 119bei konstantem Druck, 123bei konstantem Volumen, 123
Standardabweichung, 112Stefan-Boltzmann’sches Gesetz,
139stehende Welle, 44
Knoten, 44Stoffmenge, 120Streuung, 108Superposition, 44
Temperatur, 95absolute, 95kritische, 145negative, 95und thermisches Gleichge-
wicht, 95thermodynamische Potentiale, 134Trägheitskraft, 8Trägheitstensor, 17Tripelpunkt, 160
Untermannigfaltigkeit, 2
Van-der-Waals’sche Gasgleichung,139
Varianz, 108Variationsrechnung, 27verallgemeinerte Kraft, 90, 100Verdampfungswärme, 163Vielteilchen-Phasenraum, 79Vierervektoren, 54
Skalarprodukt, 54virtuelle Verrückung, 6
Wärme, 86Wärmeausdehnungskoeffizient,
136Wärmebad, 99Wärmekapazität, 119Wärmekraftmaschine, 147Wärmemenge, 87Wärmereservoir, 99Wahrscheinlichkeit, 105
bedingte, 106Besetzung im Phasenraum, 81
Wahrscheinlichkeitsverteilung, 110

180 INDEX
Wirkung, 26Wirkungsgrad
Carnot’scher, 147
Young’scher Elastizitätsmodul, 36
Zustandsfläche, 121Zustandsgleichung
des idealen Gases, 122Zustandsgröße, 87Zustandsparameter, 86Zustandsraum, 121Zwangsbedingung, 2, 91
holonome und nichtholonome,2
rheonome und skleronome, 2Zwangskraft, 5