Embed Size (px)
Citation preview
44. IWASA
Wasserbauliches Versuchswesen —
Aus Anlass der Neuen Wasserbauhalle des IWW
9. und 10. Januar 2014
Internationales Wasserbau-SymposiumAachen 2014
Lehrstuhl und Institutfür Wasserbau und WasserwirtschaftRheinisch-Westfälische Technische Hochschule Aachen
Herausgeber: Univ.-Professor Dr.-Ing. Holger Schüttrumpf


Die nichtlineare Fourier-Transformation (KdV-NLFT) im Wasserbau 1
Die nichtlineare Fourier-Transformation (KdV-NLFT) im Wasserbau
Grundlagen und Anwendungsbeispiele
Markus Brühl und Hocine Oumeraci
Abstract
Since 2008, at Leichtweiß-Institute for Hydraulic Engineering and Water Resources (LWI), TU Braunschweig, a nonlinear Fourier transform based on the Korteweg-deVries equation (KdV-NLFT) is implemented and successfully applied to shallow-water data from hydraulic model tests and numerical simulations. The advantage of this method compared to the conventional fast Fourier transform (FFT) is that a given signal is decomposed into cnoidal waves instead of cosine waves. This cnoidal basis is able to consider typical nonlinear shallow-water waves as well as their nonlinear wave-wave interactions. The paper presents the theoretical background and examples for the practi-cal application of this method to different problems from hydraulic and coastal engi-neering.
Zusammenfassung
Seit 2008 wird am Leichtweiß-Institut für Wasserbau (LWI), TU Braunschweig, eine nichtlineare Fourier-Transformation auf Grundlage der Korteweg-deVries-Gleichung (KdV-NLFT) implementiert und erfolgreich auf Flachwasserdaten aus Modellversuchen und numerischen Simulationen angewendet. Der Vorteil gegenüber der herkömmlichen linearen schnellen Fourier-Transformation (FFT) besteht darin, dass ein gegebenes Signal in cnoidale Wellen statt in Kosinuswellen zerlegt wird. Somit steht für die spekt-rale Analyse eine Basis zur Verfügung, die auch typische nichtlineare Flachwasserwel-len darstellen kann. Dadurch können der nichtlineare Charakter der einzelnen Wellen sowie die auftretenden nichtlinearen Wellen-Wellen-Interaktionen in der Zerlegung des Originalsignals ausdrücklich berücksichtigt werden. Im Folgenden werden die theoreti-schen Grundlagen des Verfahrens beschrieben sowie Beispiele für die praktische An-wendung auf verschiedene Probleme aus Wasserbau und Küsteningenieurwesen gege-ben.
1 Einleitung und Motivation Ein Hauptziel der Wellenanalyse im Wasserbau und im Küsteningenieurwesen besteht darin, die zugrundeliegenden physikalischen Prozesse zu erforschen, die die Interaktion zwischen den Oberflächenwellen und verschiedenen Strukturen, z. B. verschiedenen
2 M. Brühl und H. Oumeraci
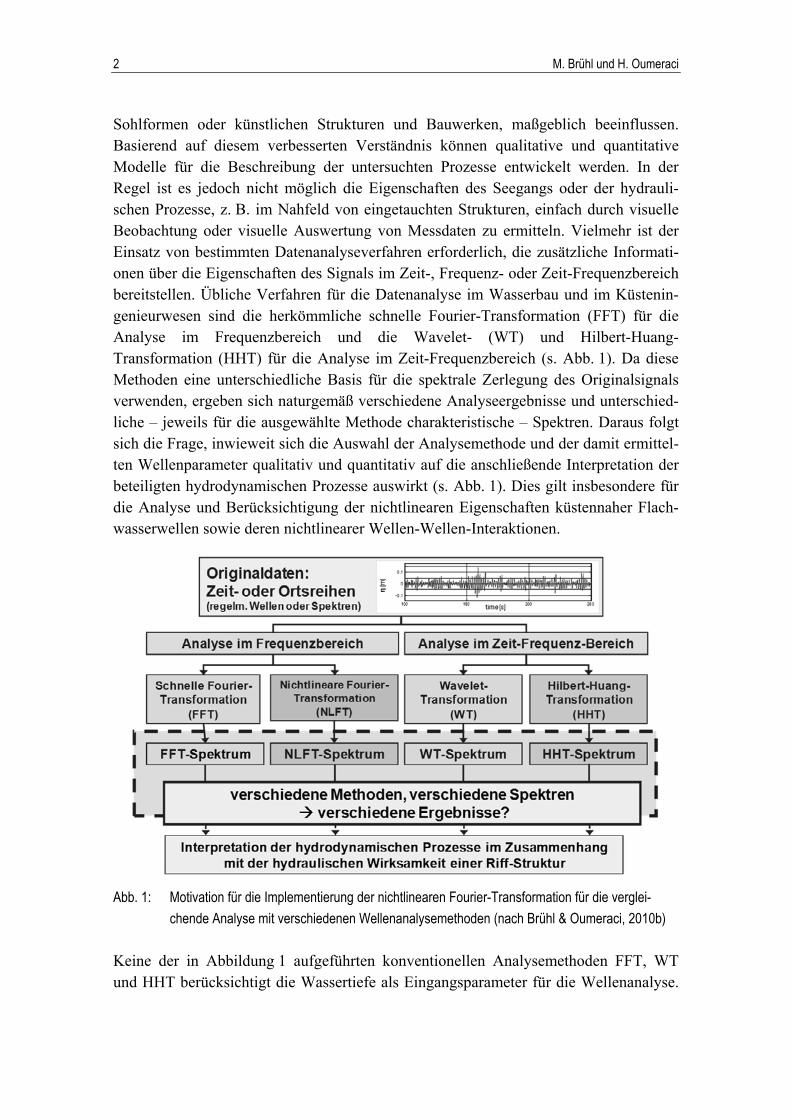
Sohlformen oder künstlichen Strukturen und Bauwerken, maßgeblich beeinflussen. Basierend auf diesem verbesserten Verständnis können qualitative und quantitative Modelle für die Beschreibung der untersuchten Prozesse entwickelt werden. In der Regel ist es jedoch nicht möglich die Eigenschaften des Seegangs oder der hydrauli-schen Prozesse, z. B. im Nahfeld von eingetauchten Strukturen, einfach durch visuelle Beobachtung oder visuelle Auswertung von Messdaten zu ermitteln. Vielmehr ist der Einsatz von bestimmten Datenanalyseverfahren erforderlich, die zusätzliche Informati-onen über die Eigenschaften des Signals im Zeit-, Frequenz- oder Zeit-Frequenzbereich bereitstellen. Übliche Verfahren für die Datenanalyse im Wasserbau und im Küstenin-genieurwesen sind die herkömmliche schnelle Fourier-Transformation (FFT) für die Analyse im Frequenzbereich und die Wavelet- (WT) und Hilbert-Huang-Transformation (HHT) für die Analyse im Zeit-Frequenzbereich (s. Abb. 1). Da diese Methoden eine unterschiedliche Basis für die spektrale Zerlegung des Originalsignals verwenden, ergeben sich naturgemäß verschiedene Analyseergebnisse und unterschied-liche – jeweils für die ausgewählte Methode charakteristische – Spektren. Daraus folgt sich die Frage, inwieweit sich die Auswahl der Analysemethode und der damit ermittel-ten Wellenparameter qualitativ und quantitativ auf die anschließende Interpretation der beteiligten hydrodynamischen Prozesse auswirkt (s. Abb. 1). Dies gilt insbesondere für die Analyse und Berücksichtigung der nichtlinearen Eigenschaften küstennaher Flach-wasserwellen sowie deren nichtlinearer Wellen-Wellen-Interaktionen.
Abb. 1: Motivation für die Implementierung der nichtlinearen Fourier-Transformation für die verglei-
chende Analyse mit verschiedenen Wellenanalysemethoden (nach Brühl & Oumeraci, 2010b)
Keine der in Abbildung 1 aufgeführten konventionellen Analysemethoden FFT, WT und HHT berücksichtigt die Wassertiefe als Eingangsparameter für die Wellenanalyse.
Die nichtlineare Fourier-Transformation (KdV-NLFT) im Wasserbau 3
Die Wassertiefe ist jedoch der maßgebende Faktor für die Nichtlinearität und die For-mänderungen von Wellen im flachen Wasser. Daher ist keiner dieser Ansätze in der Lage, das Originalsignal in physikalisch „korrekte“, an die jeweilige Wassertiefe ange-passte spektrale nichtlineare Basiskomponenten zu zerlegen, die auch nichtlineare Flachwasserwellenformen einschließen. Mit der hier beschriebenen nichtlinearen Fou-rier-Trans- formation auf Grundlage der Korteweg-deVries-Gleichung (KdV-NLFT) liegt ein sol-ches Verfahren für die praktische Anwendung vor. In den folgenden Abschnitten wer-den zunächst die theoretischen Grundlagen des Verfahrens erläutert und Beispiele für die praktische Anwendung gegeben.
2 Grundlagen: Die einzelnen Schritte der KdV-NLFT Die KdV-NLFT löst die Korteweg-deVries-Gleichung (KdV-Gleichung) durch Anwen-dung der sogenannten inverse Streuungstransformation (IST) (Zabusky & Kruskal, 1965). Für periodische fortschreitende Wellen wird die KdV-Gleichung durch soge-nannte cnoidale Wellen gelöst. Diese cnoidalen Wellen sind in der Lage die physika-lisch real auftretende Flachwasserwellen darzustellen, und sind daher die perfekte Basis für die spektrale Zerlegung von Flachwasserdaten. In Anlehnung an die aus der her-kömmlichen schnellen Fourier-Transformation (FFT) bekannten Terminologie und Vorgehensweise kann die IST als eine Erweiterung – oder besser – als ein Ersatz der FFT durch eine generalisierte nichtlineare Fourier-Transformation (NLFT) beschrieben werden. Die wichtigste und interessanteste Eigenschaft der KdV-NLFT ist die Fähig-keit, ein gegebenen Signal η(x,t) explizit in cnoidale Wellenkomponenten ηcn,i(x,t) und deren nichtlineare Wellen-Wellen-Interaktionen ηint,j(x,t) zu zerlegen (Osborne, 1995b):
, ,( , ) ( , ) ( , )cn i int ji j
x t x t x t (1)
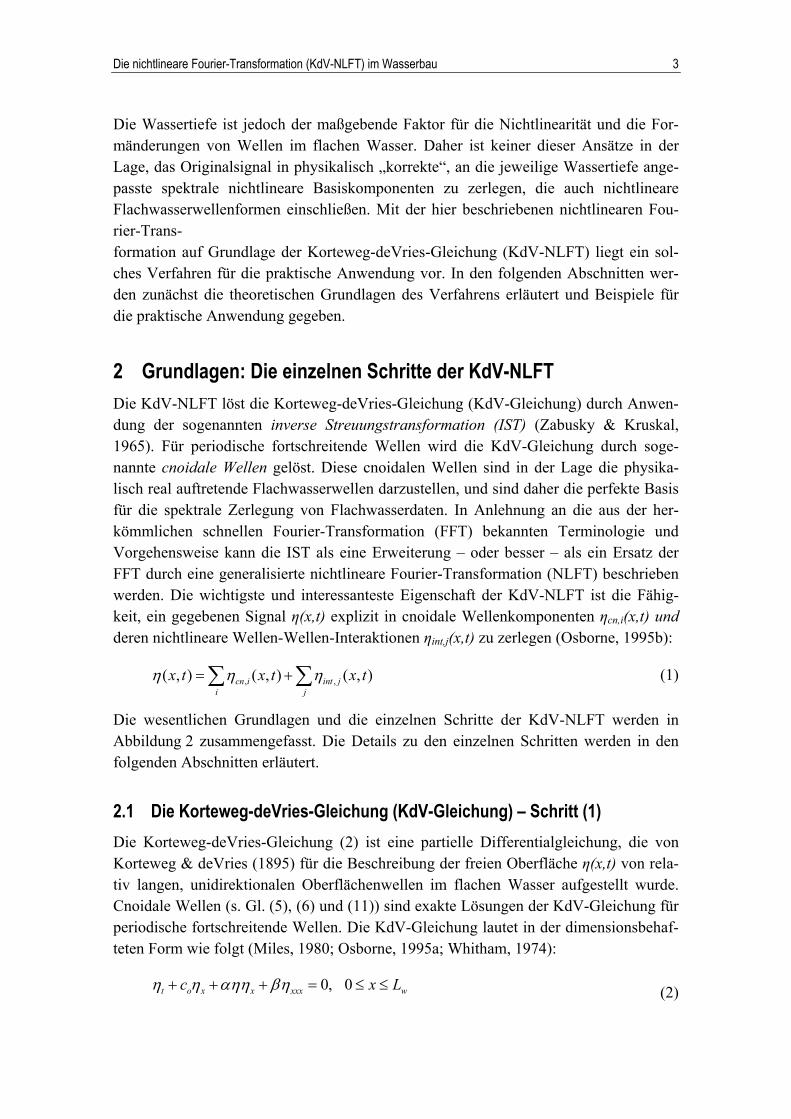
Die wesentlichen Grundlagen und die einzelnen Schritte der KdV-NLFT werden in Abbildung 2 zusammengefasst. Die Details zu den einzelnen Schritten werden in den folgenden Abschnitten erläutert.
2.1 Die Korteweg-deVries-Gleichung (KdV-Gleichung) – Schritt (1)
Die Korteweg-deVries-Gleichung (2) ist eine partielle Differentialgleichung, die von Korteweg & deVries (1895) für die Beschreibung der freien Oberfläche η(x,t) von rela-tiv langen, unidirektionalen Oberflächenwellen im flachen Wasser aufgestellt wurde. Cnoidale Wellen (s. Gl. (5), (6) und (11)) sind exakte Lösungen der KdV-Gleichung für periodische fortschreitende Wellen. Die KdV-Gleichung lautet in der dimensionsbehaf-teten Form wie folgt (Miles, 1980; Osborne, 1995a; Whitham, 1974):
0, 0t o x x xxx wc x L (2)

4 M. Brühl und H. Oumeraci
mit η(x,t) = Wasserspiegelauslenkung (oder Amplitude) der freien Oberfläche als Funk-tion des Ortes x und der Zeit t, /t t = Geschwindigkeit der vertikalen Änderung von η(x,t), /x x = Gradient von η(x,t) in Wellenausbreitungsrichtung x, ηxxx = dritte partiellen Ableitung von η(x,t) nach x, x = nichtlinearer konvektiven Term und xxx = Dispersionsterm. Die Variable Lw gibt die Größe des Analysefensters an. Die Wellenschnelligkeit im Flachwasser c0, die Koeffizienten für die Nichtlinearität und für die Dispersion und das Verhältnis λ zwischen Nichtlinearität und Dispersion hängen stark von den speziellen physikalischen Anwendungen und den Randbedingun-gen ab, vor allem jedoch von der Wassertiefe h. Für Oberflächenwellen als Funktion des Ortes x (Gl. (2)) gilt
20 0 0 3
33 / (2 ) / 6 / (6 )
2c c gh c h c h
h (3)
mit der Erdbeschleunigung g = 9.81 m/s².
Abb. 2: Übersicht über die Grundlagen und Schritte der direkten und inversen KdV-NLFT (nach Brühl,
2014)
Für Gl. (2) gilt die lineare Dispersionsrelation
30c k k (4)
Durch die Lösung der KdV-Gleichung ist die hier verwendete Version der NLFT auf die Analyse von Wellendaten mit relativen Werten von kh<1.36 bzw. h/L<0.22 be-schränkt (Osborne, 2010), wobei k die Wellenzahl ist, h die Wassertiefe und L die Wel-lenlänge. Für größere relative Wassertiefen mit kh≥1.36 muss z.B. die Lösung der nicht-linearen Schroedinger-Gleichung (NLS-Gleichung) durch die NLFT verwendet werden

Die nichtlineare Fourier-Transformation (KdV-NLFT) im Wasserbau 5
(NLS-NLFT), weil die KdV-Gleichung die hier vorherrschenden physikalischen Rand-bedingungen nicht mehr ausreichend abbilden kann (für weitere Details siehe Osborne (2010)).
Die KdV-Gleichung liefert, wie alle anderen verfügbaren Wellengleichungen auch, für viele Randbedingungen gute Näherungslösungen für das reale physikalische Verhalten der untersuchten Wellen, aber sie liefert nicht für jeden denkbaren Fall exakte Lösun-gen. Für spezielle Fragestellungen kann es daher sinnvoll sein, andere Ansätze wie z. B. die modifizierte KdV-Gleichung (mKdV) nach Ablowitz & Segur (1981), die Gardner-Gleichung nach McKean (1981) oder die Boussinesq-Gleichung nach Boussinesq (1871) , Boussinesq (1872) und McKean (1981) zu verwenden.
2.2 Cnoidale Wellen als spektrale Basiskomponenten – Schritt (2)
Für das Verständnis der folgenden Beschreibungen der direkten und inversen KdV-NLFT werden zunächst der Begriff und die Definition der cnoidalen Welle näher erläu-tert, da diese exakte Lösungen der KdV-Gleichung für fortschreitende Wellen unter periodischen Randbedingungen sind und als Basis für die spektrale Zerlegung der Ori-ginalsignale verwendet werden.
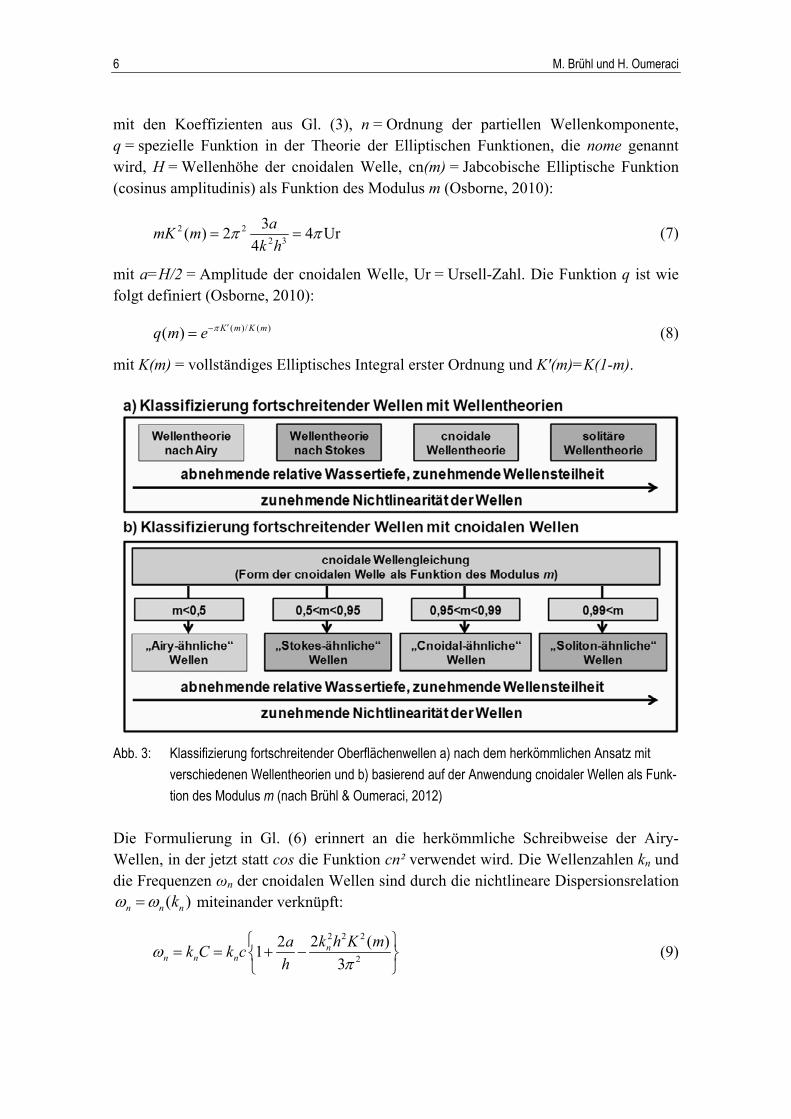
Im Wasserbau und im Küsteningenieurwesen ist es üblich, die verschiedenen natürlich auftretenden Wellenformen durch vier Wellentheorien zu beschreiben: Die Wellentheo-rien nach Airy und Stokes und die Theorien der cnoidalen und der (solitären) Einzelwel-len (s. Abb. 3). In dieser Aufzählung nimmt die Nichtlinearität der Wellen von der line-aren Airy-Welle bis hin zur stark nichtlinearen (solitären) Einzelwelle hin zu. In dieser Klassifizierung wird die cnoidale Wellentheorie angewendet, wenn die Gleichungen höherer Ordnung nach Stokes nicht mehr ausreichend sind, um die asymmetrischen Wellenformen ausreichend zu beschreiben, die Welle aber noch keine Einzelwelle ist. Aufgrund der komplexen mathematischen Formeln, die zur Berechnung der cnoidalen Wellen erforderlich sind, weicht man jedoch für deren Berechnung in der Praxis übli-cherweise auf numerische Verfahren wie z. B. die Streamfunktion-Methode (Dean, 1965) aus.
Die cnoidalen Wellen basieren auf dem Jacobischen Elliptischen Integral cn und können in verschiedenen Schreibweisen dargestellt werden (Dean & Dalrymple, 1991; Dingemans, 1997; Osborne, 2010):
2
21
4 ( 1)( , ) cos ( )
1
n n
nn
k n qx t nk x ct
q
(5)
2 ( )
( , ) cn [ ];K m
x t H kx ct m
(6)
6 M. Brühl und H. Oumeraci
mit den Koeffizienten aus Gl. (3), n = Ordnung der partiellen Wellenkomponente, q = spezielle Funktion in der Theorie der Elliptischen Funktionen, die nome genannt wird, H = Wellenhöhe der cnoidalen Welle, cn(m) = Jabcobische Elliptische Funktion (cosinus amplitudinis) als Funktion des Modulus m (Osborne, 2010):
2 22 3
3( ) 2 4 Ur
4
amK m
k h (7)
mit a=H/2 = Amplitude der cnoidalen Welle, Ur = Ursell-Zahl. Die Funktion q ist wie folgt definiert (Osborne, 2010):
( )/ ( )( ) K m K mq m e (8)
mit K(m) = vollständiges Elliptisches Integral erster Ordnung und K'(m)=K(1-m).
Abb. 3: Klassifizierung fortschreitender Oberflächenwellen a) nach dem herkömmlichen Ansatz mit
verschiedenen Wellentheorien und b) basierend auf der Anwendung cnoidaler Wellen als Funk-
tion des Modulus m (nach Brühl & Oumeraci, 2012)
Die Formulierung in Gl. (6) erinnert an die herkömmliche Schreibweise der Airy-Wellen, in der jetzt statt cos die Funktion cn² verwendet wird. Die Wellenzahlen kn und die Frequenzen ωn der cnoidalen Wellen sind durch die nichtlineare Dispersionsrelation
( )n n nk miteinander verknüpft:
2 2 2
2
2 ( )21
3n
n n n
k h K mak C k c
h
(9)

Die nichtlineare Fourier-Transformation (KdV-NLFT) im Wasserbau 7
mit C = nichtlineare Wellenschnelligkeit der cnoidalen Wellen:
2 2 2
2
2 2 ( )1
3
a k h K mC c
h
(10)
Die jeweilige Form und der nichtlineare Charakter der cnoidalen Wellen in Gl. (6) wird durch die Funktion cn bestimmt, die wiederum eine Funktion des Modulus m ist. Für
0m folgt coscn und die cnoidale Welle nimmt die Form einer linearen Airy-Welle an. Für 1m folgt sechcn und die cnoidale Welle wird zu einer solitären Welle. Daraus folgt wiederum, dass die Variation des Modulus innerhalb der Grenzen 0 1m dazu führt, dass cnoidale Wellen entstehen, die aufgrund ihrer verschieden hohen Nichtlinearitäten den gesamten Bereich der herkömmlichen Wellentheorien von Airy über Stokes und die herkömmliche, in ihrer Anwendung eng begrenzte cnoidale Wellentheorie bis hin zur Theorie der Einzelwelle abdecken (s. Abb. 3). Wird eine Wel-le mit Gl. (5), (6) oder (11) erzeugt, dann ist es nicht erforderlich, anhand der Randbe-dingungen vorher eine bestimmte Wellentheorie auszuwählen, weil sich die Form und Nichtlinearität der Wellen anhand der Randbedingungen durch den Einfluss des Modu-lus m automatisch ergibt.
2.3 Cnoidale Wellen mit Jacobischen θ-Funktionen – Schritt (3)
Für die Erzeugung einer einzelnen cnoidalen Welle ηcn(x,t) und die anschließende nicht-lineare Überlagerung verschiedener Wellen ist es sehr nützlich die cnoidalen Wellen anstatt mit Gl. (5) oder (6) unter Verwendung der Jacobischen θ-Funktionen (θ = ‘the-ta’) in der folgenden Form zu schreiben (Jacobi, 1828; Osborne, 2010):
2
2
2( , ) ln ( , )
cn x t x tx
(11)
mit
2
111
2
1
( , ) 1 2n B inkx in t in
n
x t e
(12)
2
111
2
1
( , ) 1 2 cos ( ]M n B
n
x t e n kx t
(13)
Die θ-Funktion in Gl. (12) kann als Fourier-Serie mit einer unendlichen Anzahl an par-tiellen θ-Komponenten verstanden werden. Für praktische Anwendungen kann diese Anzahl auf M Komponenten begrenzt werden, da die Amplituden dieser Komponenten mit dem Anstieg der Ordnung abnimmt und daher die Zahl der praktisch relevanten Komponenten begrenzt ist. Die Schreibweise in Gl. (13) zeigt, dass die θ-Funktion auch als herkömmliche Fourier-Serie beschrieben werden kann. Die Amplituden dieser parti-ellen Komponenten sind Funktionen von n²B11 und nehmen (i) mit abnehmender Nicht-

8 M. Brühl und H. Oumeraci
linearität der cnoidalen Welle (zunehmende Werte von B11) und (ii) mit zunehmendem Wert für n (Ordnung der Komponenten) ab, vergleichbar mit den abnehmenden Amplituden der Komponenten höherer Ordnung in den Wellentheorien nach Stokes. Nach der linearen Überlagerung der M partiellen θ-Funktionen in Gl. (12) oder (13) wird nach Gl. (11) der natürliche Logarithmus der θ-Funktion zweimal nach x abgeleitet und mit dem Faktor 2/λ skaliert, um als Ergebnis eine einzelne cnoidale Welle zu erhal-ten. Ein Beispiel für eine solche cnoidale Welle mit B11=2.6, m=0.992 (dieser Wert gehört zu einer solitären Welle) in einer Wassertiefe von h=0.60m wird in Abbildung 4 gezeigt.
In Abbildung 4a werden auf der linken Seite einzelne partielle θ-Komponenten für n=0 bis n=5 dargestellt, wobei sich für n=0 wegen e0=1 eine konstante Linie ohne Oszillati-on ergibt. Auf der rechten Seite in Abbildung 4a wird jeweils die Summenkurve ge-zeigt, die sich durch die lineare Addition der links daneben stehenden sowie der vorhe-rigen Summenkurve ergibt. Wegen der geringen Amplituden der partiellen Kurven höherer Ordnung wirken sich diese nicht signifikant auf den Verlauf der Summenkur-ven aus. In Abbildung 4b ist oben die endgültige θ-Summenkurve gegeben, in der Mitte der natürliche Logarithmus von θ(x) und unten die durch die Skalierung der zweiten partiellen Ableitung erhaltene cnoidale Welle ηcn(x), in diesem Fall eine solitäre Welle.
In Abbildung 5a wird, beginnend bei B11=20, zur Veranschaulichung der spezifischen Eigenschaften cnoidaler Wellen ηcn(x) deren Formänderung und zunehmende Asymmet-rie als Funktion des Parameters B11 dargestellt. Der Startwert von B11=20 entspricht einer (nahezu) linearen Airy-Welle mit sehr kleiner Amplitude (bezogen auf die Wel-lenlänge). Die geringe Wasserspiegelauslenkung ist bei dem hier gewählten Höhenmaß-stab daher in der Abbildung zunächst nicht zu erkennen. Mit abnehmendem Wert von B11 (entspricht einer Zunahme der Nichtlinearität der cnoidalen Welle) bis auf B11=4 (dieser Wert entspricht einer Stokes-Welle höherer Ordnung) in Abbildung 5a steigt die Amplitude stark an.
Deutlich zu erkennen ist hier, dass die cnoidale Welle eine zunehmend asymmetrische Form aufweist, in der der Betrag des Maximums größer ist als der Betrag des Mini-mums. Das entspricht der erwarteten Wellenform für nichtlineare Wellen nach Stokes oder der cnoidalen Wellentheorie. Aufgrund des starken Anstiegs der Amplituden bei weiter abnehmenden Werten von B11 werden die weiteren cnoidalen Wellen von B11=4 bis B11=0,7 (entspricht einer solitären Welle) in Abbildung 5b mit einem veränderten Höhenmaßstab dargestellt. Auch hier ist deutlich der Anstieg der Wellenhöhe bis hin zur Ausbildung der solitären Welle zu sehen. Die Darstellung der Solitonen in der Ab-bildung erfolgt unter rein mathematischen Gesichtspunkten. Ein mögliches Brechen der Wellen aufgrund von Wellenhöhe oder Wellensteilheit wird hier nicht berücksichtigt.

Die nichtlineare Fourier-Transformation (KdV-NLFT) im Wasserbau 9
Abb. 4: Erzeugung cnoidaler Wellen durch θ-Funktionen: a) Darstellung und Überlagerung der partiel-
len θ-Funktionen, b) Erzeugung der cnoidalen Welle aus der θ-Funktion (nach Brühl, 2014)
Abb. 5: Entwicklung und Formänderung cnoidaler Wellen ηcn(x) in einer Wassertiefe von h=0,50m als
Funktion von B11 als Parameter für die Nichtlinearität der Welle (nach Brühl, 2014)
Der Verlauf der Wellenformen in Abbildung 5 von linearen Wellen über die typischen asymmetrischen Wellenformen bis zu solitären Wellen unterstreicht noch einmal die Aussage von Abbildung 3, wonach es durch die Anwendung der cnoidalen Wellenglei-chung möglich ist, sämtliche im Flachwasser auftretenden natürlichen Wellenformen zu erzeugen, die in der herkömmlichen Klassifizierung durch die Auswahl und Anwen-dung von vier verschiedenen Wellentheorien abgedeckt werden.
2.4 Nichtlineare Überlagerung mit Riemannschen Θ-Funktionen – Schritt (5)
Die Schreibweise cnoidaler Wellen in Form von Jacobischen θ-Funktionen in Gl. (11) liefert eine einzelne cnoidale Welle. Um eine solche cnoidale Welle zu berechnen, müs-

10 M. Brühl und H. Oumeraci
sen die erforderlichen Wellenparameter bestimmt und in die Gleichung eingesetzt wer-den. Dies entspricht Schritt (4) in Abbildung 2. Bevor die inverse KdV-NLFT, beste-hend aus den Schritten (4) bis (6) in Abschnitt 2.5 ausführlicher erläutert wird, erfolgt hier vorab eine Beschreibung der Riemannschen Θ-Funktionen.
Wenn der Seegang im Küstenvorfeld durch die Überlagerung verschiedener cnoidaler Wellen repräsentiert oder reproduziert werden soll, dann müssen die real auftretenden nichtlinearen Interaktionen zwischen diesen nichtlinearen Basiskomponenten berück-sichtigt werden. Durch die Anwendung von Riemannschen Θ-Funktionen (Θ=‘Theta‘) können mehrere θ-Funktionen nichtlinear überlagert werden, wobei die Berechnung der Interaktionen automatisch erfolgt und die freie Oberfläche als Überlagerung aus cnoida-len Wellen und Interaktionen ermittelt wird. Anschließend ist es möglich, diese freie Oberfläche in die zugrunde liegenden cnoidalen Wellen sowie den Gesamtinteraktions-term aufzuteilen und getrennt voneinander auszugeben (Schritt (6) in Abb. 2) (Osborne, 1995c; Osborne, 1995b):
nichtlineare Interaktionen zwischen den cnoidalen Wellenlineare Überlagerung der cnoidalen Wellen
( , ) ( , ) ( , )cn intx t x t x t
(14)
Für die Überlagerung von N θ-Funktionen und die Berechnung der dabei auftretenden Interaktionen müssen lediglich die Variablen für k, ω und φ in Gl. (12) gegen Vektoren k, ω und φ der Länge N ausgetauscht werden, die die jeweiligen Werte der cnoidalen Wellen enthalten (s. Gl. (16) und (17)). Darüber hinaus muss die Variable B11 gegen eine NxN-Riemann- oder -Periodenmatrix B ausgetaucht werden, die auf der Diagonale die Werte B11 der einzelnen cnoidalen Wellen enthält (Osborne, 2010). Die nicht-diagonalen Elemente Bij repräsentieren die Interaktionen:
2
ln ,i jij ji
i j
k kB B i j
k k
(15)
Die Anwendung der Riemannschen Θ-Funktionen zur Überlagerung von N cnoidalen Wellen führt zur automatischen Berechnung von J=((2M+1)N)/2-N Interaktionen. Da-von sind N(N-1) sogenannte primäre Interaktionen zwischen jeweils zwei cnoidalen Wellen und die übrigen (sekundäre Interaktionen) resultieren aus gemischten Interakti-onstermen zwischen drei und mehr cnoidalen Wellen. Das Ergebnis der Überlagerung der θ-Funktionen der N cnoidalen Wellen sowie deren Interaktionen wird ΘN genannt:
1
2
1
( , ) 1 2TM i x i t i
Nn
x t e
nBn k nφnωn
(16)
102( , ) 1 2 cos
T
NM
x t e x t
n
nBnnk nω nφ (17)
mit

Die nichtlineare Fourier-Transformation (KdV-NLFT) im Wasserbau 11
,1 , ,1 ,
, N,int
Summe der cnoidalen Wellen Summe der nichtlinearen Interaktionen
( , ) ( , ) ( , ) ( , ) ( , )
( , ) Θ (x,t),
N cn cn N int int J
N cn
N J
x t x t x t x t x t
x t (18)
und 1 2[ , , , ]Nn n n n = Laufvariablen der einzelnen Wellen, 1 2[ , , , ]Nk k k k = Wel-lenzahlvektor, 1 2[ , , , ]N ω = Kreisfrequenzvektor und 1 2[ , , , ]N φ = Phasenvektor mit jeweils den Werten der N cnoidalen Wellen.
Cnoidale Wellen im Sinne der Abbildung 3 und Abbildung 5 können, wie bereits er-wähnt, auch linear sein. In diesem Fall werden die Amplituden der Interaktionsterme praktisch gleich Null, so dass keine Interaktionen hinzuaddiert werden und es zu einer linearen Überlagerung kommt, wie sie auch durch die herkömmliche Fourier-Transformation durchgeführt wird. Für den Fall nur einer einzelnen cnoidalen Welle reduzierten sich die Vektoren und die Matrix in Gl. (16) und (17) auf Variablen und die Riemannsche Θ-Funktion ist in diesem Fall identisch mit der Jacobischen θ-Funktion aus Gl. (12).
Die freie Oberfläche η(x,t) für die nichtlineare Überlagerung der N cnoidalen Wellen erhält man aus ΘN(x,t) durch die bereits bekannten Operationen aus Gl. (11):
2
2
2( , ) ln ( , )Nx t x t
x
(19)
Das Problem bei der numerischen Implementierung der Gleichungen für die praktische Anwendung besteht in der großen Anzahl von Einzelsummanden, die für die Berech-nung der Θ-Funktionen erforderlich sind. Deutlich wird dies durch die alternative Schreibweise von Gl. (16) mit geschachtelten Summen:
1 21 1 1 1 1 1
1( , ) 1 2 exp ( , )
2N
M M M N N N
N i i i j ijl l l i i j
x t i n X x t n n B
(20)
mit ( , )i i i iX x t k x t .
Bedingt durch das Auftreten von sekundären Interaktionen, die durch mehrere Wellen verursacht werden und die sich auch gegenseitig beeinflussen, ist es nicht möglich (für N>2), die zwischen zwei Wellen auftretenden Interaktionen getrennt voneinander zu ermitteln. Es ist daher nur möglich, den Gesamtinteraktionsterm auszugeben (Gl. (14) und Schritt (6) in Abb. 2).
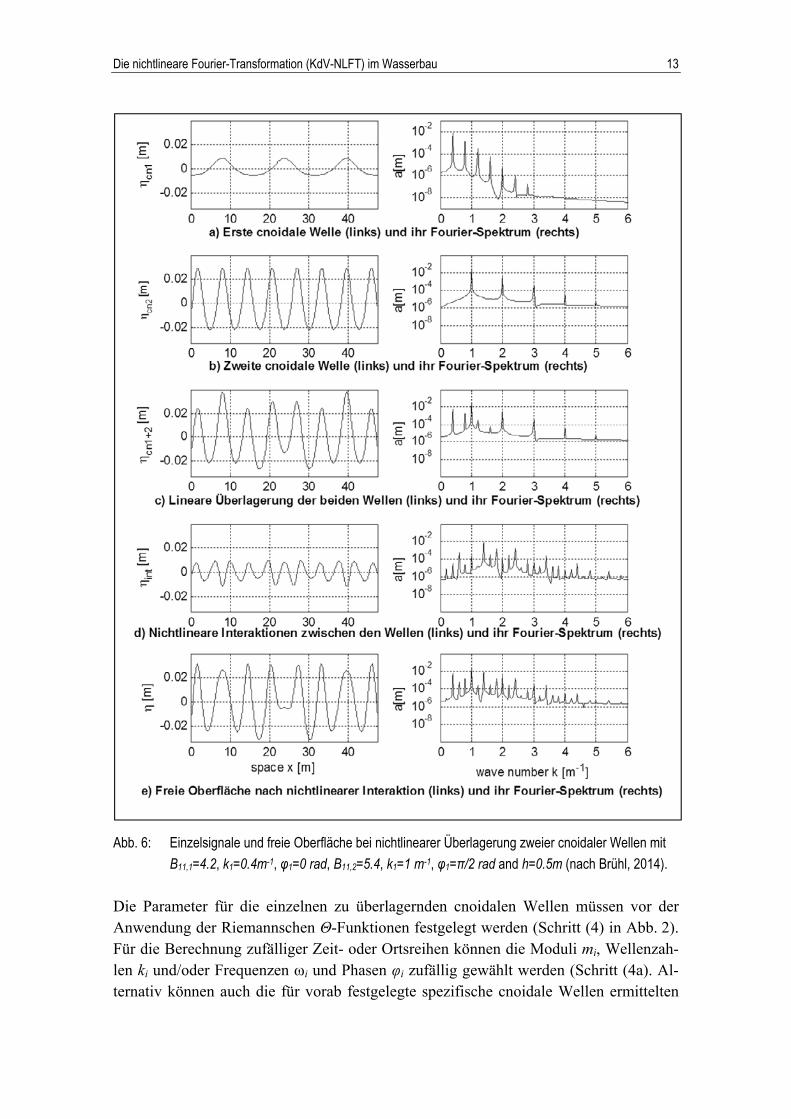
Ein weitere Folge der gemischten Interaktionsterme durch die multiplen Summen aus Gl. (20) ist die automatische Berechnung von subharmonischen (ki-kj oder fi-fj) und superharmonischen (ki+kj oder fi+fj) Interaktionskomponenten bei der Überlagerung von cnoidalen Wellen mit den Wellenzahlen ki und kj oder den Frequenzen fi und fj (Brühl, 2014). Das folgende theoretische Beispiel in Abbildung 6 zeigt die Details der nichtlinearen Überlagerung zweier Stokes-ähnlicher Wellen (B11,1=4,2, k1=0,4m-1, φ1=0rad, B11,2=5,4, k1=1,0m-1, φ1=π/2 rad und h=0,5m).
12 M. Brühl und H. Oumeraci
Dargestellt sind auf der linken Seite die verschiedenen Einzelsignale und auf der rechten Seite jeweils das zugehörige herkömmliche Fourier-Spektrum. In den Abbildungen 6a und 6b werden die beiden zu überlagernden cnoidalen Stokes-ähnlichen Wellen gezeigt. Es ist deutlich zu sehen, dass bereits diese Wellen im Fourier-Spektrum aufgrund ihrer Nichtlinearität durch verschiedene harmonische Kosinus-Komponenten dargestellt werden. Zur deutlicheren Darstellung auch der Frequenzkomponenten mit sehr kleinen Amplituden wurde für die Fourier-Spektren eine logarithmische Darstellung gewählt. Die lineare Überlagerung der beiden Wellen wird in Abbildung 6c gezeigt. Das zugehö-rige Fourier-Spektrum zeigt, dass hier genau dieselben Frequenzkomponenten vorhan-den sind, wie in den beiden Spektren der überlagerten Wellen aus den Abbildungen 6a und 6b. Die bei der Überlagerung der beiden Wellen auftretenden nichtlinearen Interak-tionen werden in Abbildung 6d dargestellt. Aus dem Signal ist zu erkennen, dass die Amplituden der Interaktionen dieselbe Größenordnung besitzen wie die cnoidalen Wel-le in Abbildung 6a. Das zugehörige Fourier-Spektrum weist zahlreiche Frequenzkom-ponenten auf, die in den beiden cnoidalen Wellen nicht enthalten waren. Es kann ge-zeigt werden, dass diese zusätzlichen Peaks alle möglichen sub- und superharmonischen Komponenten repräsentieren, die sich durch die jeweils paarweise Kombination der Frequenzkomponenten aus den beiden Spektren in den Abbildungen 6a und 6b ergeben (Brühl, 2014). Die sich in der inversen KdV-NLFT durch die nichtlineare Überlagerung ergebende freie Oberfläche wird in Abbildung 6e dargestellt. In dem zugehörigen Fou-rier-Spektrum sind schließlich sowohl die Komponenten der beiden cnoidalen Wellen als auch die des Interaktionsterms wieder zu finden. Der Vergleich der Signale und Spektren aus den Abbildungen 6c und 6e zeigt deutlich den Unterschied zwischen einer linearen Überlagerung der beiden cnoidalen Wellen und einer nichtlinearen Überlage-rung, bei der die freie Oberfläche durch die sub- und superharmonischen Frequenzkom-ponenten signifikant verändert werden kann.
2.5 Die inverse KdV-NLFT – Schritte (4) bis (6)
Die inverse KdV-NLFT liefert die nichtlineare Überlagerung η(x,t) von N cnoidalen Wellen ηcn,i(x,t) und deren nichtlinearer Interaktionen ηint(x,t) nach Gl. (14) und (19) und besteht aus den Schritten (4) bis (6) aus Abbildung 2. Sind die cnoidalen Wellen durch Jacobische θ-Funktionen gegeben, dann können die nichtlinearen Interaktionen durch die Anwendung der Riemannschen Θ-Funktionen nach Gl. (16) berechnet werden.
Die nichtlineare Fourier-Transformation (KdV-NLFT) im Wasserbau 13
Abb. 6: Einzelsignale und freie Oberfläche bei nichtlinearer Überlagerung zweier cnoidaler Wellen mit
B11,1=4.2, k1=0.4m-1, φ1=0 rad, B11,2=5.4, k1=1 m-1, φ1=π/2 rad and h=0.5m (nach Brühl, 2014).
Die Parameter für die einzelnen zu überlagernden cnoidalen Wellen müssen vor der Anwendung der Riemannschen Θ-Funktionen festgelegt werden (Schritt (4) in Abb. 2). Für die Berechnung zufälliger Zeit- oder Ortsreihen können die Moduli mi, Wellenzah-len ki und/oder Frequenzen ωi und Phasen φi zufällig gewählt werden (Schritt (4a). Al-ternativ können auch die für vorab festgelegte spezifische cnoidale Wellen ermittelten

14 M. Brühl und H. Oumeraci
Wellenparameter verwendet werden (ebenfalls Schritt (4a)). Wurde die direkte KdV-NLFT auf ein gegebenes Originalsignal η(x,t) angewendet, dann liefert die inverse KdV-NLFT mit den in der direkten Transformation ermittelten Wellenparametern das Originalsignal zurück (Schritte (4b) und (10a)). Wenn die aus der direkten KdV-NLFT ermittelten Daten vor Anwendung der inversen Transformation gefiltert wurden (Schritt (10b)), dann werden nicht nur die gefilterten cnoidalen Wellen, sondern auch deren Interaktionen einschließlich aller sub- und superharmonischen Wellenkomponenten aus dem Originalsignal entfernt (nichtlineare Filterung).
Die Prozedur der inversen KdV-NLFT wird in Abbildung 7 dargestellt.
Abb. 7: Übersicht über die in der inversen KdV-NLFT erforderlichen Einzelschritte (nach Brühl, 2014).
2.6 Die direkte KdV-NLFT – Schritte (7) bis (9)
Als direkte KdV-NLFT wird die Analyse bezeichnet, die für ein gegebenes Signal η(x,t) ermittelt, welche Basiskomponenten ηcn,i(x,t) in der inversen KdV-NLFT überlagert werden müssen, damit diese cnoidalen Wellen und deren nichtlineare Interaktionen ηint(x,t) das gegebene Ausgangssignal η(x,t) zurückliefern (Schritt (10a) in Abb. 2). Die direkte KdV-NLFT liefert die cnoidalen Wellen sowie deren Wellenparameter, nicht jedoch den Interaktionsterm, der gegebenenfalls durch die inverse Transformation sepa-rat ermittelt werden muss (Abramowitz & Stegun, 1972):
, int ( , )( , ) ( , )nichtlinearecn iZerlegung
x tx t x t nicht ermittelt
(21)
Die direkte Transformation nutzt cnoidale Wellen als spektrale Basis für die Zerlegung des gegebenen Originalsignals, ist aber im Rahmen der Bandbreite der cnoidalen Wel-
Die nichtlineare Fourier-Transformation (KdV-NLFT) im Wasserbau 15
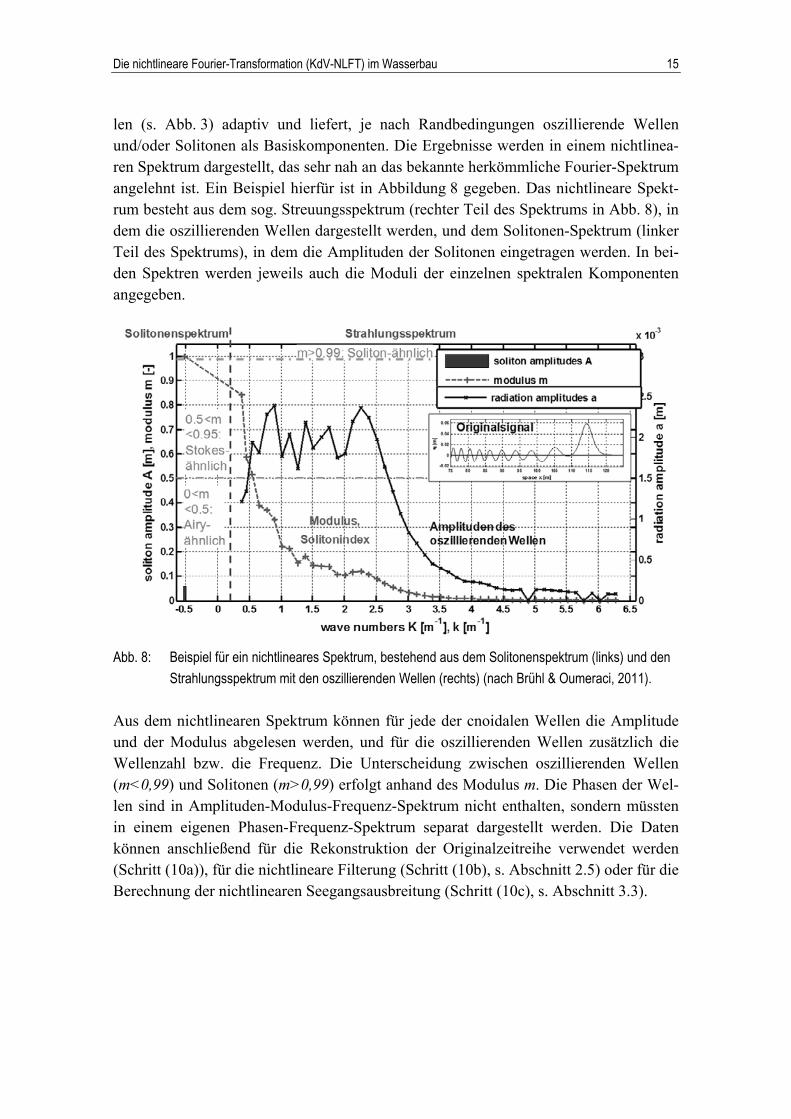
len (s. Abb. 3) adaptiv und liefert, je nach Randbedingungen oszillierende Wellen und/oder Solitonen als Basiskomponenten. Die Ergebnisse werden in einem nichtlinea-ren Spektrum dargestellt, das sehr nah an das bekannte herkömmliche Fourier-Spektrum angelehnt ist. Ein Beispiel hierfür ist in Abbildung 8 gegeben. Das nichtlineare Spekt-rum besteht aus dem sog. Streuungsspektrum (rechter Teil des Spektrums in Abb. 8), in dem die oszillierenden Wellen dargestellt werden, und dem Solitonen-Spektrum (linker Teil des Spektrums), in dem die Amplituden der Solitonen eingetragen werden. In bei-den Spektren werden jeweils auch die Moduli der einzelnen spektralen Komponenten angegeben.
Abb. 8: Beispiel für ein nichtlineares Spektrum, bestehend aus dem Solitonenspektrum (links) und den
Strahlungsspektrum mit den oszillierenden Wellen (rechts) (nach Brühl & Oumeraci, 2011).
Aus dem nichtlinearen Spektrum können für jede der cnoidalen Wellen die Amplitude und der Modulus abgelesen werden, und für die oszillierenden Wellen zusätzlich die Wellenzahl bzw. die Frequenz. Die Unterscheidung zwischen oszillierenden Wellen (m<0,99) und Solitonen (m>0,99) erfolgt anhand des Modulus m. Die Phasen der Wel-len sind in Amplituden-Modulus-Frequenz-Spektrum nicht enthalten, sondern müssten in einem eigenen Phasen-Frequenz-Spektrum separat dargestellt werden. Die Daten können anschließend für die Rekonstruktion der Originalzeitreihe verwendet werden (Schritt (10a)), für die nichtlineare Filterung (Schritt (10b), s. Abschnitt 2.5) oder für die Berechnung der nichtlinearen Seegangsausbreitung (Schritt (10c), s. Abschnitt 3.3).
16 M. Brühl und H. Oumeraci
3 Anwendungsbeispiele für die KdV-NLFT Die Vorteile der KdV-NLFT gegenüber den herkömmlichen Verfahren FFT, WT und HHT besteht darin, dass i) das Ausgangssignal in real existierende Flachwasserwellen (cnoidale Wellen) zerlegt wird, ii) das Verfahren innerhalb des Bandbreite der cnoidalen Wellen adaptiv ist und somit auch die Zerlegung gemäß den Randbedingungen automa-tisch in oszillierende Wellen und/oder Solitonen erfolgt, iii) die nichtlinearen Wellen-Wellen-Interaktionen berücksichtigt werden und vi) die KdV-NLFT für den Fall, dass ein Signal nur aus linearen Wellen besteht, dieselben Ergebnisse liefert wie die her-kömmliche lineare Fourier-Transformation. Im Folgenden werden verschiedene erste Anwendungsbeispiele für die KdV-NLFT beschrieben.
3.1 Identifizierung von Solitonen über und hinter getauchten Riffen
In Modellversuchen am LWI wurde die Transmission von Solitonen über künstliche, endliche Riffe untersucht. Als Hauptproblem bei der Auswertung der Versuchsdaten erwies sich die zuverlässige Identifizierung der transmittierten Solitonen hinter dem Riff. Zunächst wurde versucht, die Solitonen durch eine visuelle Auswertung der Pegel-daten zu ermitteln. Durch die Anwendung der KdV-NLFT auf die Messdaten konnte die Identifizierung der Solitonen auf eine objektivere Basis gestellt werden (Brühl & Oume-raci, 2010a, 2011, 2012).
Das Beispiel in Abbildung 9 zeigt die numerische Simulation der Transmission einer solitären Welle über ein unendlich langes Riff. Das für die Analyse ausgewählte Signal zeigt drei deutlich ausgeprägte Solitonen, gefolgt von einer zusätzlichen Wellenkompo-nente, die keine klar definierbare Wellenform aufweist. Dahinter folgen kleinere oszil-lierende Wellen. In dem nichtlinearen Spektrum in Abbildung 9 werden die höchsten drei Solitonen mit korrekter Amplitude dargestellt. Darüber hinaus werden noch weitere Solitonen im Spektrum angezeigt, die im Signal so nicht eindeutig zu erkennen sind. Diese zusätzlichen Solitonen sind noch in dem kleinen Wellenberg zwischen den drei abgelösten Solitonen und den nachfolgenden oszillierenden Wellen enthalten, werden sich bei fortschreitender Wellenausbreitung aus diesem Wellenberg herauslösen und dann ebenfalls als freie Solitonen ausbreiten. Die kleinen nachfolgenden oszillierenden Wellen finden sich im rechten Teil des nichtlinearen Spektrums, dem Strahlungsspekt-rum, mit ihren jeweiligen Amplituden und Wellenzahlen wieder. Der jeweils angegebe-ne Modulus definiert die Nichtlinearität jeder einzelnen Wellenkomponente im Spekt-rum.
Durch die Anwendung der KdV-NLFT ist es gelungen, die in dem Signal enthaltenen Solitonen zuverlässig und unabhängig von subjektiven Einflüssen zu identifizieren. Darüber hinaus gibt die KdV-NFLT auch an, welche Solitonen in im weiteren Verlauf der Wellenausbreitung noch aus dem Wellenpaket lösen werden. Vergleichsuntersu-chungen haben gezeigt, dass dies mit der FFT und der HHT nicht möglich ist.

Die nichtlineare Fourier-Transformation (KdV-NLFT) im Wasserbau 17
Abb. 9: Beispiel für die Anwendung der KdV-NLFT für die Identifizierung von Solitonen aus Simulati-
onsdaten Brühl & Oumeraci, 2010a).
3.2 Analyse von harmonischer Generierung
Unter harmonischer Generierung versteht man die Formänderung und die Ausbildung zusätzlicher Zwischenmaxima bei der Ausbreitung von relativ langen Wellen im Flach-wasser. Im herkömmlichen Fourier-Spektrum zeigt sich diese harmonische Generierung dadurch, dass sich mit zunehmender Ausbreitungsstrecke immer mehr höherharmoni-sche Frequenzkomponenten im Spektrum zeigen, diese also während der Wellenaus-breitung generiert werden. Das Beispiel in Abbildung 10 zeigt die Auswirkung von harmonischer Generierung auf die Ausbreitung einer Kosinuswelle (H=0,10m, T=6s, h=0,56m).
Das im Nahfeld der Wellenmaschine gemessene Signal in Abbildung 10a zeigt eine Kosinuskurve. Das zugehörige FFT-Spektrum in Abbildung 10b bestätigt, dass es sich hierbei um eine einzelne lineare Welle handelt. Das Signal im Fernfeld (Abb. 10c) zeigt hingegen deutliche Zwischenmaxima. Mit dem zugehörigen Spektrum in Abbildung 10 kann dieses Signal als Überlagerung verschiedener Kosinuswellen mit verschiedenen Frequenzen interpretiert werden kann. Hier zeigen die beiden FFT-Spektren deutlich, dass zwischen den Messungen in Nah- und Fernfeld eine harmonische Generierung stattgefunden hat.

18 M. Brühl und H. Oumeraci
Abb. 10: Beispiel für harmonische Generierung bei der Ausbreitung einer Kosinuswelle (nach Brühl,
2014).
Wird die KdV-NLFT auf eine dem Signal im Nahfeld entsprechende, mathematisch generierte Kosinuswelle (s. Abb. 11a) mit den gleichen Wellenparametern angewendet, dann ergibt sich das in Abbildung 11b dargestellte Ergebnis.
Abb. 11: Anwendung der KdV-NLFT auf eine dem Nahfeldsignal entsprechende Kosinuswelle (nach
Brühl, 2014).
Anstelle der linearen Kosinuswelle aus der FFT zerlegt die KdV-NLFT das Signal in vier verschiedene cnoidale Wellen, deren nichtlineare Überlagerung durch den Einfluss des Interaktionsterms zu der in Abbildung 11a dargestellten freien Oberfläche in Form einer Kosinuswelle führt. Hierbei handelt es sich jedoch nicht um eine sich in der vor-

Die nichtlineare Fourier-Transformation (KdV-NLFT) im Wasserbau 19
handenen Wassertiefe stabil ausbreitende Kosinuswelle, sondern um eine transiente Welle, die an diesem Ort durch die nichtlineare Überlagerung der vier Einzelwellen erzeugt wird. Aufgrund der verschiedenen Ausbreitungsgeschwindigkeiten dieser Wel-len tritt im weiteren Verlauf Dispersion auf, die dann zur Ausbildung der beobachteten Zwischenmaxima führt.
Es kann darüber hinaus gezeigt werden, dass die nichtlinearen Spektren der Signale im Nah- und Fernfeld (Abb. 10a und 10c) in der KdV-NLFT nahezu identisch sind und sich nur geringfügig voneinander unterscheiden. Daraus folgt, dass die durch die KdV-NLFT im Fernfeldsignal ermittelten cnoidalen Wellenkomponenten bereits im kosinus-förmigen Nahfeldsignal enthalten sind, anschließend durch Dispersion die Änderung der freien Oberfläche mit den zusätzlichen Zwischenmaxima hervorrufen und nicht erst durch harmonische Generierung während der Wellenausbreitung generiert werden. Die Ursache für diesen gravierenden Unterschied in den Ergebnissen der FFT und der KdV-NLFT liegt darin, dass die KdV-NLFT im Gegensatz zur herkömmlichen FFT die Was-sertiefe als maßgeblichen Einflussparameter berücksichtigt. Die KdV-NLFT erkennt daher, dass das kosinusförmige Signal in der gegebenen Wassertiefe keine stabile Kosi-nuswelle ist. Es handelt sich vielmehr um eine transiente Welle, die durch die nichtline-are Überlagerung der vier cnoidalen Wellen bei speziellen Phasen im Nahfeld der Wel-lenmaschine auftritt. Im Fernfeld sind diese speziellen Phasen nicht mehr vorhanden, so dass dort durch die Dispersion eine andere Form der Wasseroberfläche auftritt. Die in den FFT-Spektren beobachtete harmonische Generierung ist daher dem Versuch ge-schuldet, nichtlineare Prozesse aufgrund mangelnder nichtlinearer Analyseverfahren durch lineare Methoden zu untersuchen und zu erklären.
In diesem Beispiel führt die Anwendung der KdV-NLFT zur Zerlegung des Original-signals in oszillierende Wellen. Bei weiter abnehmender Wassertiefe bzw. zunehmender Wellenlänge wird das Signal schließlich in Solitonen und/oder oszillierende Wellen zerlegt, weil für sehr geringe relative Wassertiefen die KdV-Gleichung nur durch Soli-tonen gelöst werden kann. In diesem Fall extrem geringer Wassertiefen würde eine gegebene Kosinuswelle als transiente Welle erkannt werden, die durch die nichtlineare Überlagerung von Solitonen entstanden ist und während der Wellenausbreitung Disper-sionseffekten unterliegt, die auch hier zu Formänderungen und schließlich harmonischer Generierung führt (Brühl, 2014).
3.3 Nichtlineare Ausbreitung von Seegang – Schritt (10c)
Durch die Anwendung der direkten KdV-NLFT werden die in der Originalzeitreihe enthalten cnoidalen Basiskomponenten ermittelt. Die Welleninteraktionen werden in der direkten Analyse nicht ermittelt und im nichtlinearen Spektrum nicht mit ausgegeben. In Abschnitt 3.2 wurde bei der Analyse von Signalen, die in der herkömmlichen FFT har-monischer Generierung unterliegen, bereits implizit erwähnt, dass die spektralen cnoi-dalen Basiskomponenten sich unabhängig voneinander ausbreiten und die nichtlinearen
20 M. Brühl und H. Oumeraci
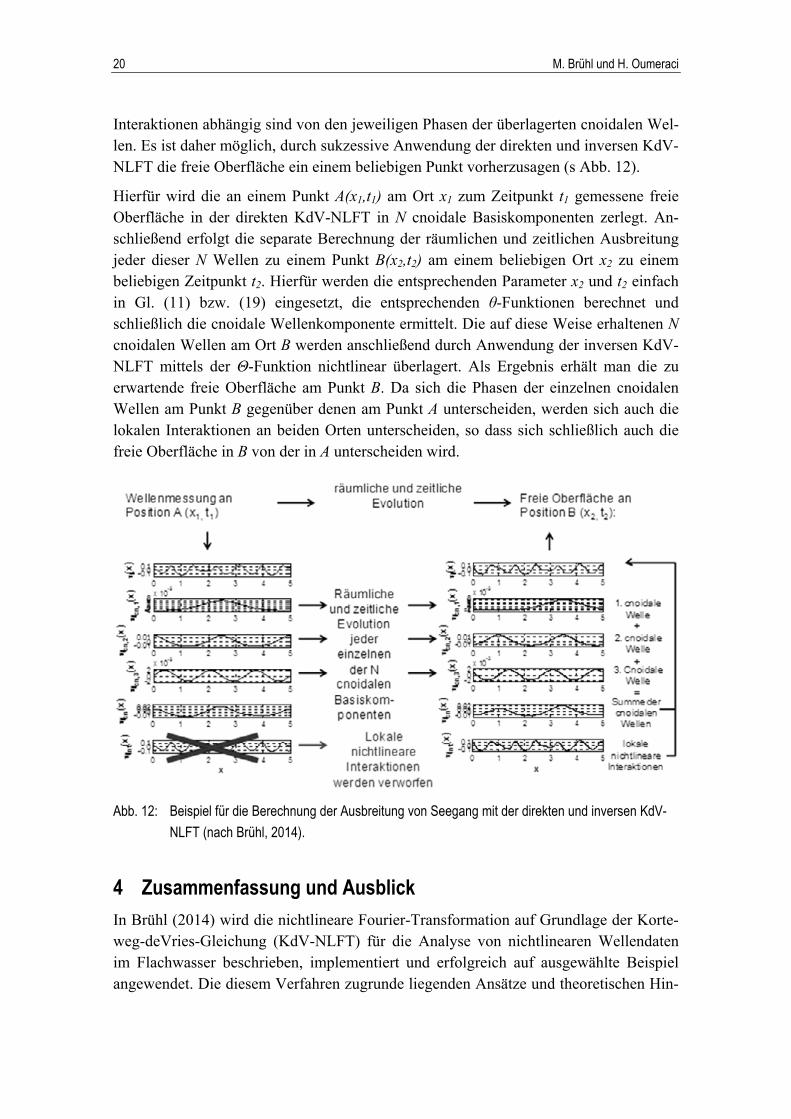
Interaktionen abhängig sind von den jeweiligen Phasen der überlagerten cnoidalen Wel-len. Es ist daher möglich, durch sukzessive Anwendung der direkten und inversen KdV-NLFT die freie Oberfläche ein einem beliebigen Punkt vorherzusagen (s Abb. 12).
Hierfür wird die an einem Punkt A(x1,t1) am Ort x1 zum Zeitpunkt t1 gemessene freie Oberfläche in der direkten KdV-NLFT in N cnoidale Basiskomponenten zerlegt. An-schließend erfolgt die separate Berechnung der räumlichen und zeitlichen Ausbreitung jeder dieser N Wellen zu einem Punkt B(x2,t2) am einem beliebigen Ort x2 zu einem beliebigen Zeitpunkt t2. Hierfür werden die entsprechenden Parameter x2 und t2 einfach in Gl. (11) bzw. (19) eingesetzt, die entsprechenden θ-Funktionen berechnet und schließlich die cnoidale Wellenkomponente ermittelt. Die auf diese Weise erhaltenen N cnoidalen Wellen am Ort B werden anschließend durch Anwendung der inversen KdV-NLFT mittels der Θ-Funktion nichtlinear überlagert. Als Ergebnis erhält man die zu erwartende freie Oberfläche am Punkt B. Da sich die Phasen der einzelnen cnoidalen Wellen am Punkt B gegenüber denen am Punkt A unterscheiden, werden sich auch die lokalen Interaktionen an beiden Orten unterscheiden, so dass sich schließlich auch die freie Oberfläche in B von der in A unterscheiden wird.
Abb. 12: Beispiel für die Berechnung der Ausbreitung von Seegang mit der direkten und inversen KdV-
NLFT (nach Brühl, 2014).
4 Zusammenfassung und Ausblick In Brühl (2014) wird die nichtlineare Fourier-Transformation auf Grundlage der Korte-weg-deVries-Gleichung (KdV-NLFT) für die Analyse von nichtlinearen Wellendaten im Flachwasser beschrieben, implementiert und erfolgreich auf ausgewählte Beispiel angewendet. Die diesem Verfahren zugrunde liegenden Ansätze und theoretischen Hin-
Die nichtlineare Fourier-Transformation (KdV-NLFT) im Wasserbau 21
tergründe wurden hier kurz dargestellt. Es konnte gezeigt werden, dass die KdV-NLFT als eine Erweiterung der herkömmlichen linearen Fourier-Transformation verstanden werden kann, in der ein Originalsignal nicht nur in Kosinuswellen, sondern in cnoidale Wellen zerlegt wird, die eine größere Bandbreite von typischen nichtlinearen Wellen-formen im Flachwasser abdecken. Durch die Berücksichtigung der Wassertiefe als maßgebendem Parameter erfolgt die Zerlegung hierbei stets nur in solche Wellen, die in der jeweiligen Wassertiefe physikalisch tatsächlich als stabile Wellen auftreten. Das Verfahren ist somit adaptiv im Rahmen der cnoidalen Wellen aus Gl. (11) im Gegensatz zur der Festlegung auf lineare Kosinuswellen in der herkömmlichen FFT.
Durch die Zerlegung eines Flachwassersignals in seine nichtlinearen cnoidalen Basis-komponenten werden gleichzeitig auch die zwischen diesen Wellen auftretenden nicht-linearen Wellen-Wellen-Interaktionen berücksichtigt und in der direkten KdV-NLFT automatisch aus dem Signal entfernt. Das schließt auch die in den Interaktionen enthal-tenen sub- und superharmonischen Wellenkomponenten ein. Hierdurch ist es möglich, einen unverstellten Blick auf die dem Signal tatsächlich zugrunde liegenden Wellen-komponenten zu erhalten, ohne dass dieser durch die Interaktionen gestört wird, die sich signifikant auf die Form der freien Oberfläche auswirken können. Die Beispiele in Ab-bildung 10 und Abbildung 11 zeigen deutlich, dass die nichtlineare Überlagerung von vier verschiedenen cnoidalen Wellen bei bestimmter Phasenverteilung zur Ausbildung einer transienten Kosinuswelle führen kann, die später durch Dispersionseffekte in eine komplexere Wasseroberfläche mit zusätzlichen Zwischenmaxima übergeht. Durch die Anwendung der KdV-NLFT wird der transiente Charakter dieser Kosinuswelle in fla-chem Wasser erkannt. Dadurch können die durch die verschiedenen Ausbreitungsge-schwindigkeiten der cnoidalen Basiskomponenten entstehenden Dispersionseffekte vorhergesagt werden. Die herkömmliche FFT ist im Gegensatz dazu nicht in der Lage, in der initialen Kosinusform den transienten Charakter zu erkennen, so dass die sich ergebenden Unterschiede in den FFT-Spektren der Abbildung 10 durch das Konzept der harmonischen Generierung erklärt werden muss. Dies ist bei der Anwendung der KdV-NLFT nicht erforderlich.
Die hier gegebenen Erklärungen und Beispiele sind in Anbetracht der Komplexität der Methode nur relativ kurz gehalten. Sie zeigen jedoch, dass mit der KdV-NLFT ein Ana-lysewerkzeug zur Verfügung steht, das bei der Analyse von Problemstellungen mit Flachwasserwellen neue Einblicke in die zugrunde liegenden nichtlinearen Wellen und Interaktionsprozesse liefert, und damit für ein verbessertes Verständnis der beteiligten nichtlinearen Prozesse sorgen kann. Dies wurde durch die Anwendung auf ausgewählte Beispiele bereits eindrucksvoll bestätigt. Das Ziel zukünftiger Anwendungen ist es zunächst, durch Vergleichsanalysen mit herkömmlichen Methoden das Potenzial dieser Methode aufzuzeigen und herauszufinden, i) für welche Anwendungen die herkömmli-chen Methoden ausreichend genaue Ergebnisse liefern, und ii) für welche Anwendun-gen die mathematisch komplexere und aufwändigere KdV-NLFT aufgrund ihrer besse-

22 M. Brühl und H. Oumeraci
ren Berücksichtigung der nichtlinearen Welleneigenschaften und der Interaktionen aussagekräftigere und weiterführende Analyseergebnisse liefert.
Es ist bereits erwähnt worden, dass die Gültigkeit der KdV-NLFT auf Oberflächenwel-len in relativen Wassertiefen mit h/L<0.22 beschränkt ist. Die Anwendung auf Wellen-daten in tieferem Wasser oder auf gänzlich andere Daten aus dem Wasserbau wie z. B. Drücke, Kräfte oder Wasserstände ist theoretisch möglich, die KdV-NLFT erfordert jedoch immer die Angabe einer Wassertiefe und wird die zu analysierenden Daten stets als in dieser Wassertiefe gemessene freie Oberfläche interpretieren. Eine Anwendung auf diese Daten ist daher mathematisch möglich, basiert dann jedoch nicht auf entspre-chenden physikalischen Grundlagen.
Abschließend kann festgestellt werden, dass es gelungen ist, durch die Implementierung und Anwendung der KdV-NLFT für die Analyse von Flachwasserdaten im Wasserbau und Küsteningenieurwesen ein Verfahren zur Verfügung zu stellen, das gegenüber der herkömmlichen FFT deutliche Vorteile besitzt. Die KdV-NLFT wird daher in Zukunft eine wichtige Rolle für die Analyse von nichtlinearen Daten und die Untersuchung und Erklärung nichtlinearer Prozesse im Flachwasser spielen.
5 Literatur Ablowitz, M.J.; Segur, H. (1981): Solitons and the Inverse Scattering Transform. Phila-delphia: SIAM, 425 pp.
Abramowitz, M.; Stegun, I.A. (1972): Handbook of Mathematical Functions. New York: Dover, Issued June 1964, Tenth Printing, December 1972, with corrections.
Boussinesq, J. (1871): Theorie de l’intumescence liquide appelée onde solitaire ou de translation se propageant dans un canal rectangulaire. Comptes rendus hebdomadaires des séances de l'Académie des sciences, 72, pp. 755-759.
Boussinesq, J. (1872): Théorie des ondes et des remous qui se progagent le long d'un canal rectangulaire horizontal, en communiquant au liqueide contenu dans ce canal des vitesses sensiblement pareilles de la surface au fond. J. Math. Pures Appl., 17, pp. 55-108.
Brühl, M. (2014): Direct and inverse nonlinear Fourier transform based on the Korteweg-deVries equation (KdV-NLFT) - An innovative approach for the nonlinear analysis of waves in shallow water (in preparation). Doctoral thesis, Leichtweiß-Institute für Hydraulic Engineering and Water Resources, Technische Universität Braunschweig, Braunschweig, Germany.
Brühl, M.; Oumeraci, H. (2010a): Analysis of soliton fission over a submerged structure using 'Nonlinear Fourier Transform (NLFT)'. Proceedings of the International Confer-ence on Coastal Engineering (ICCE 2010), No. 32(2010), Paper #: waves.59, Shanghai, China, 12 pp. Retrieved from http://journals.tdl.org/ICCE/.

Die nichtlineare Fourier-Transformation (KdV-NLFT) im Wasserbau 23
Brühl, M.; Oumeraci, H. (2010b): Nonlinear Fourier Transform (NLFT) for wave anal-ysis and nonlinear processes in wave-structure interaction. 5th Workshop on Water Waves, September 30th - October 1st, 2010, Berlin, Conference presentation.
Brühl, M.; Oumeraci, H. (2011): Application of 'nonlinear Fourier transform (NLFT)' for the analysis of soliton fission behind submerged reefs with finite width. Proceedings of the ASME 2011 30th International Conference on Ocean, Offshore and Arctic Engi-neering (OMAE 2011), OMAE2011-49668, June 19-24, 2011, Rotterdam, The Nether-lands, 8 pp.
Brühl, M.; Oumeraci, H. (2012): Nonlinear decomposition of transmitted wave trains from soliton fission using "Nonlinear Fourier transform (NLFT)": The spectral basic components. Proceedings of the ASME 2012 31st International Conference on Ocean, Offshore and Arctic Engineering (OMAE 2012), OMAE2012-83418, July 1-6, 2012, Rio de Janeiro, Brasil, 10 pp.
Dean, R.G. (1965): Stream function representation of nonlinear ocean waves. J. Ge-ophys. Res., Vol. 70, No. 18, pp. 4561.4572.
Dean, R.G.; Dalrymple, R.A. (1991): Water Wave Mechanics for Engineers and Scien-tists. Advanced Series on Ocean Engineering - Volume 2, Singapore: World Scientific, 353 pp.
Dingemans, M.W. (1997): Water wave propagation over uneven bottoms. Part 1 - Line-ar wave propagation. Advances Series on Ocean Engineering, Volume 13, World Sci-entific, 471 pp.
Jacobi, C.G.J. (1828): Suite des notices sur les fonctions elliptiques. Journal für die reine und angewandte Mathematik, Band 1828, Heft 3, pp. 403-404.
Korteweg, D.J.; deVries, G. (1895): On the change of form of long waves advancing in a rectangular canal, and on a new type of long stationary waves. Philos. Mag. Ser., 5, 39, pp. 422-443.
McKean, H.P. (1981): Boussinesq's equation on the circle. Commun. Pure Appl. Math, 34, 599-691.
Miles, J.W. (1980): Solitary Waves. Annu. Rev. Fluid Mech., 12, pp. 11-43.
Osborne, A. (2010): Nonlinear ocean waves and the inverse scattering transform. Am-sterdam: Elsevier, 977 pp.
Osborne, A.R. (1995a): The Inverse Scattering Transform: Tools for the Nonlinear Fourier Analysis and Filtering of Ocean Surface Waves. Chaos, Solitons & Fractals, 5, 12, pp. 2623-2637.
Osborne, A.R. (1995b): Soliton physics and the periodic inverse scattering transform. Physica D, 86, 81-89.
24 M. Brühl und H. Oumeraci
Osborne, A.R. (1995c): Solitons in the periodic Korteweg-deVries equation, the Q-function representation, and the analysis of nonlinear, stochastic wave trains. Physical Review E, vol. 52, no. 1, pp. 1105-1122.
Whitham, G.B. (1974): Linear and Nonlinear Waves. New York: Wiley, 635 pp.
Zabusky, N.J.; Kruskal, M.D. (1965): Interaction of 'solitons' in a collisionless plasma and the recurrence of inital states. Physical Review Letters, 15, 6, pp. 240-243.
Anschrift der Verfasser
Dipl.-Ing. M. Brühl, Prof. Dr.-Ing. H. Oumeraci Technische Universität Braunschweig Leichtweiß-Institut für Wasserbau (LWI) Abt. Hydromechanik und Küsteningenieurwesen Beethovenstraße 51a 38106 Braunschweig