
Pilotstudie
„Bestimmung von Gebäude‐ und Vegetationshöhen/
‐strukturen aus hochaufgelösten Luftbildern“
– Abschlussbericht –
Projektleitung Corinna Brüßhaber
(Promovendin HU Berlin)
In Kooperation mit Deutsches Zentrum für Luft- und Raumfahrt e.V.
Einrichtung Optische Informationssysteme
am Institut für Robotik und Mechatronik
Auftraggeber: Senatsverwaltung für Stadtentwicklung und Umwelt
Abteilung III (Geoinformation)
Informationssystem Stadt und Umwelt
Berlin, Januar 2012
Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
Auftraggeber: Senatsverwaltung für Stadtentwicklung und Umwelt
Abt. Geoinformation, Informationssystem Stadt und Umwelt
Ansprechpartner: Jörn Welsch III F 12
Fehrbelliner Platz 1, Zimmer 4031, 10707 Berlin
Tel: +49 - 30 - 90139-5256
Fax: +49 - 30 - 90139-5251
Email: [email protected]
Projektleitung/ Durchführung:
Corinna Brüßhaber (Promovendin HU Berlin)
DLR e. V. - Einrichtung Optische Informationssysteme,
am Institut für Robotik und Mechatronik
Tel.: +49 -30- 67055 – 367
Email: [email protected]
Bereitstellung der Daten/ technische Peripherie:
DLR e.V. - Einrichtung Optische Informationssysteme,
am Institut für Robotik und Mechatronik
Ansprechpartner: Frank Lehmann (Abteilungsleiter)
Abt. Sensorkonzepte und Anwendungen
Tel: +49 -30- 67055 - 425
Email: [email protected]
Weitere Projektbeteiligte:
Firma GEO-NET Umweltconsulting GmbH (Gutachterbüro)
Ansprechpartner: Peter Trute (Geschäftsführer)
Große Pfahlstraße 5a, 30161 Hannover
Tel.: +49 - 511 388 72 04
Email: [email protected]
Web: www.geo-net.de
2
Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
3
INHALT
1. Projektumfeld..............................................................................................................7
1.1 Beteiligte Institutionen ..................................................................................................7
1.2 Klimamodellierung im urbanen Raum ..........................................................................8
2. Vorbereitung .............................................................................................................10
2.1 Workflow.....................................................................................................................10
2.2 Klassensystematik......................................................................................................11
3. Digitale Luftbilddaten...............................................................................................12
3.1 Aufnahmeprinzip und das Kamerasystem UltraCam X ..............................................12
3.2 Gewinnung des Digitalen Oberflächenmodells (DOM)...............................................13
3.3 Bildflug 2010 und Bildprodukte...................................................................................15
3.4 Normierte Digitale Oberflächenmodell (nDOM)..........................................................17
3.5 Die Stärke der Bilddaten.............................................................................................19
4. Grundlagen und erweiteter Datenbestand .............................................................21
4.1 Untersuchungsgebiet..................................................................................................21
4.2 Geobasisdaten und Fachplanungsdaten....................................................................23
5. Methodik....................................................................................................................25
5.1 Objekt- und Merkmalserkennung ...............................................................................25
5.2 Segmentierung ...........................................................................................................26
5.3 Klassifizierung ............................................................................................................28
5.4 Software eCognition ..................................................................................................29
5.5 Künstliche Kanäle/ Indizes .........................................................................................30
6. Strategie und Umsetzung ........................................................................................33
6.1 Datenvorverarbeitung .................................................................................................33
6.2 Durchführung..............................................................................................................34
6.3 Teilprozess Gebäude (ALK) .......................................................................................36
6.4 Teilprozess: Vegetation ..............................................................................................41
7. Ergebnis ....................................................................................................................46
8. Fazit ...........................................................................................................................47

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
4
ABBILDUNGEN
Abb. 2-1: Workflow – Gebäude ................................................................................................... 10
Abb. 2-2: Klassifizierungsschema für Bebauung und Vegetation. .............................................. 11
Abb. 3-1: Prinzip der Bildaufnahme einer Matrixkamera (Zentralperspektive). ........................... 12
Abb. 3-2: Orthophoto (DOP 2010) - Differentialentzerrung mit DGM (FIS-Broker Berlin) ........... 14
Abb. 3-3: True-Orthophoto 2010 (SGM), real messbare Größen und keine Verkippung............ 14
Abb. 3-4: RGB (Pilotgebiet)......................................................................................................... 16
Abb. 3-5: nDOM (Pilotgebiet). ..................................................................................................... 16
Abb. 3-6: Prinzip der nDOM-Generierung (nach Mayer, 2004)................................................... 17
Abb. 3-7: Vorgehen zur Detektion erhöhter Punkte für die Grundhöheninterpolation. ................ 18
Abb. 3-8: Image Drape, nDOM texturiert mit dem RGB (Elsenbrücke)....................................... 18
Abb. 3-9: Auf die Geländehöhe 0 normiertes Oberflächenmodell............................................... 19
Abb. 3-10: Gebäude im nDOM (Kirche); horizontales (links), vertikales (rechts) Profil............... 19
Abb. 3-11: Kirche im RGB, überlagert mit Ergebnis-Vektoren. ................................................... 19
Abb. 3-12: Einzelbaum im nDOM - horizontales (links), vertikales (rechts) Profil ....................... 20
Abb. 4-1: Lage des Untersuchungsgebietes. .............................................................................. 22
Abb. 4-2: Berliner Dach (Querschnitt). ........................................................................................ 22
Abb. 4-3: ALK-Ausschnitt – Folien 11 Gebäude und Folie 520 mit Straßenbäumen. ................. 23
Abb. 4-4: Unterirdisch liegende Gebäudeteile, hier am Beispiel Tiefgaragen (0112363) ........... 24
Abb. 5-1: Schematische Darstellung der Multilevel-Segmentierung. .......................................... 25
Abb. 5-2: Beispiele für Segmentierungslevel (Abb. a bis e). ....................................................... 28
Abb. 5-3: Feature View in eCognition.......................................................................................... 29
Abb. 5-4: NDVI (rechts) - Farbcodierte Darstellung in der Feauture View (Segmente) .............. 30
Abb. 5-5: Identifikation von Schattenbereichen (Bsp. Wasserfläche). ........................................ 31
Abb. 5-6: Sobel Kantenfilter (links); Slope (mitte); Aspect (rechts). ............................................ 32
Abb. 6-1: Index – Kacheln 1 bis 12 ............................................................................................. 33
Abb. 6-2: Klassensystematik Gebäude/ Vegetation .................................................................... 35
Abb. 6-3: Unterirdische Gebäude und Gebäudeteile (ALK). ....................................................... 36
Abb. 6-4: “Doppelte“ ALK- Polygone ........................................................................................... 36
Abb. 6-5: Gebäude (ALK) unter Baumkronen. ............................................................................ 36
Abb. 6-6: Blick Richtung Süd-Osten, Elsenbrücke und dem Bürokomplex des Treptowers ....... 37
Abb. 6-7: Gebäude mit wenig Differenzierung in der ALK (blau). ............................................... 37
Abb. 6-8: Gebäude an der „MediaSpree“ mit Türmen, spezielle Dachform. ............................... 37
Abb. 6-9: Segmentierung Scale Parameter 25 (links); 100 (rechts), Basis-Geometrie ALK. ...... 38
Abb. 6-10: Klassen Gebäude (ALK) je Höhenintervall (unsortierte). ........................................... 38
Abb. 6-11: Ergebnis (Treptower) - ALK-Umrisse (links) zzgl. der Segmentierung (rechts) ......... 39
Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
5
Abb. 6-12: Beispiel einer Segmentkorrektur, Walmdach auf ALK............................................... 39
Abb. 6-13:Ergebnis Gebäude – Finale Segmente umgesetzt in der Klassensystematik ............ 40
Abb. 6-14: Vollgeschosse (ALK) und Höhe je Gebäudetyp. ....................................................... 40
Abb. 6-15: Segmente der Klassen Vegetation Scale Parameter 20 (mitte) und 50 (rechts) ....... 41
Abb. 6-16: Vegetation Scale Parameter 20 (links) und 50 (rechts) - Detailansicht ..................... 42
Abb. 6-17: Klassifikationsergebnis „Baum“ überlagert mit Straßenbäumen der ALK.................. 43
Abb. 6-18: Klassen Vegetation je Höhenintervall (unsortierte Darstellung). ............................... 43
Abb. 6-19: Klassifikationsergebnis „Baum“ überlagert mit Straßenbäumen der ALK.................. 43
Abb. 6-20: Feature-Export (Attribut). ........................................................................................... 44
Abb. 6-21: DataBase (QGIS) mit Attributen der Gebäude .......................................................... 45
Abb. 6-22: Kartendarstellung der Kachel 01 ............................................................................... 45
Abb. 7-1: Zusammenschau des Ergebnisses.............................................................................. 46
Abb. 7-2: Kartendarstellung der Kachel 11 ................................................................................. 47

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
6
ABKÜRZUNGEN
ALK Automatisierte Liegenschaftskarte
ASMUS Ausbreitungs- und Strömungs-Modell für Urbane Stadtstrukturen
DBF DataBase File
DGM Digitales Geländemodell
DLR e.V. Deutsches Zentrum für Luft- und Raumfahrt e.V.
DOM/nDOM Digitales Oberflächenmodell/ normiertes Digitales Oberflächenmodell
DOP Digitales Orthophoto
EPSG European Petroleum Survey Group
ETRS89 Europäisches Terrestrisches Referenzsystem 1989
FITNAH-3D Flow Over Irregular Terrain With Natural And Anthropogenic Heat Sources
GIS Geo(graphisches) Informationssystem
GPS Globales Positionierungssystem
GRS80 Geodetic Reference System 1980
IR/NIR Infrarot/ Nahes Infrarot
ISU Informationssystem Stadt und Umwelt
NDVI Normalized Vegetation Index
NN Normal Null
OBIA Object-Based Image Analysis
OSKA Objektschlüsselkatalog
PAN panchromatisch
RGB Rot Grün Blau (Echtfarbe)
ROI Region of Interest
SAPOS Satellitenpositionierungsdienst
Shp Shape (Vektordatenformat)
SGM Semi Global Matching
SenStadtUm Senatsverwaltung für Stadtentwicklung und Umwelt
TOM True-Orthophotomosaik
UCX UltraCamX
UTM Universal Transverse Mercator
WGS84 World Geodetic Reference System 1984

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilo
tstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
7
1. Projektumfeld
1.1 Beteiligte Institutionen
Deutsches Zentrum für Luft‐ und Raumfahrt e.V. (DLR)
Das Deutsche Zentrum für Luft- und Raumfahrt e.V. (DLR) ist das nationale Forschungszentrum
für Luft- und Raumfahrt und die Raumfahrtagentur Deutschlands.
In den Schwerpunkten Luftfahrt, Weltraum, Energie, Verkehr und Sicherheit arbeiten insgesamt
rund 7000 Mitarbeiterinnen und Mitarbeiter, es unterhält 32 Institute, Test- und
Betriebseinrichtungen und ist an 16 Standorten vertreten1.
Senatsverwaltung für Stadtentwicklung und Umwelt (SenStadtUm) – Digitaler Umweltatlas von Berlin (ISU)
Der Umweltatlas von Berlin liegt seit 2000 auch in digitaler Form vor – als Informationssystem
Stadt und Umwelt - und beinhaltet die Themenbereiche Boden, Wasser, Luft, Klima, Biotope,
sowie Flächennutzung, Verkehr/Lärm und später auch Energie. Die thematischen Karten des
Umweltatlasses sollten zunächst die übergeordnete Planung unterstützen und umweltrelevante
Aspekte berücksichtigen, z. B. die Auswirkung von Bebauung und Vegetation auf das
Stadtklima. Heute ist der Umweltatlas vielmehr ein zentrales Element der
Umweltberichterstattung für Berlin.2
GEO‐NET Umweltconsulting GmbH
„GEO-NET ist ein interdisziplinär ausgerichtetes, technologieorientiertes Unternehmen im
Bereich Erneuerbare Energien, Umweltmeteorologie und Umweltplanung. GEO-NET führt seit
1996 Entwicklungen, Beratungen und Untersuchungen durch und ist Dienstleister für Wirtschaft,
Banken und Verbände sowie öffentliche Auftraggeber - von der Kommune bis hin zur
Bundesbehörde.“3
1 DLR auf www.dlr.de 2 SenStadtUm und Umwelt Online 3 GEO-NET auf www.geo-net.de
Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
8
1.2 Klimamodellierung im urbanen
Umweltatlas Berlin (Windefeldmodellierung)
Raum
Ziel dieses Projektes ist es, die Objektinformationen für Gebäude und Vegetation aus
flugzeuggestützten Bilddaten der UltraCamX so zu erfassen und zu verarbeiten, dass sie den
Anforderungen einer komplexen stadtklimatischen Bewertung am Beispiel des Siedlungsraums
Berlin standhalten. Eine konkrete Anwendung ist die darauf basierende Ableitung des
Windfeldes für das Stadtgebiet von Berlin mithilfe der Simulationsmodelle ASMUS/ FITNAH-3D.
Ziel: Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus
hochaufgelösten Luftbildern der UltraCamX, 2010-Befliegung
Rahmen: Vorbereitung eines Konzepts für die stadtweite Fortschreibung der
Klimakarten des Umweltatlasses des Landes für das Jahr 2012 seitens
SenStadtUm, Abt. III (ISU)
Idee: Zur Verfeinerung der Klimamodellierung durch zugrunde liegende
Eingangsdaten sollen möglichst hochaufgelöste Gebäudehöhen- und
Vegetationsdaten (Höhe, Begrenzung und Struktur) bereitgestellt werden
Veröffentlichung im Berliner Umweltatlas unter
http://www.stadtentwicklung.berlin.de/umwelt/umweltatlas/dinh_04.htm
Bisher: Angaben zu Vegetationshöhen liegen weder im Bebauungsbereich noch
innerhalb von Grünflächen flächendeckend und zugreifbar vor.
Berechnungsmodell: FITNAH 3D (Firma Geo-Net)/ ASMUS
Es wird eine Auflösung von 10* 10m angestrebt
Daten: Geometrien/ Fachdaten: für die Bearbeitung notwendigen Daten wie ALK,
ISU5_2010 (Nutzungsdaten) etc. werden von SenStadtUm kostenfrei zur
Verfügung gestellt.
Raster: Befliegung, Erfassung der Rohdaten für das Stadtgebiet Berlin und
Auswertung vom DLR bereitgestellt.

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
9
Grundlagen
Die Stadt bewirkt im Gegensatz zum Umland und zu weitestgehend unberührten Landschaften
ihr ganz spezifisches Klima, das Stadtklima, hervorgerufen durch die Gestaltung der städtischen
Oberfläche unter verstärkter Versiegelung durch Gebäude, Verkehrswege, Parkanlagen. Hinzu
kommt die Belastung durch Industrie- und Verkehrsabgase (Schadstoffe), die die ‚Stadtluft’ und
darüber hinaus auch das menschliche Wohlbefinden beeinträchtigen (Fehrenbach, 2001; Junk
et al., 2003).
Klimaeffekte, die aus der urbanen Struktur hervorgehen sind nächtliche Wärmeinseln (erhöhte
Oberflächen- und Lufttemperaturen in der Nacht), ein stark modifizierter Strahlungshaushalt und
veränderte Windströmungen (Windstille und erhöhte Geschwindigkeiten) (Offerle et al. 2007;
Bruse, 2001). Erhöhte Objekte, wie Gebäude oder ganze Gebäudeblöcke stellen Hindernisse
dar, die sich bremsend bis hin zur Windstille oder aber kanalisierend und damit beschleunigend
auf die Windströme auswirken.
Um solche stadtspezifischen, klimatischen Wechselwirkungen zu analysieren und ihnen
rechtzeitig entgegenzuwirken, werden vermehrt dreidimensionale, numerische
Simulationsmodelle (Klimamodelle) herangezogen. Solche computergestützten Modelle können
stadtklimatische Phänomene innerhalb der städtischen Grenzschicht unter Berücksichtung von
Einflussfaktoren simulieren und im Zuge eines Planungsprozesses räumliche Klimaszenarien
sichtbar machen und sogar die Umsetzung einer räumlichen Planung positiv beeinflussen.
Modelle stellen damit nicht nur den Ist-Zustand dar, sondern können auch zukünftige
Entwicklungen unter verschiedensten Planungs- und Klimabedingungen voraussagen. Sie
gelten daher als ein starkes Werkzeug innerhalb des Entscheidungsprozesses und während der
verbindlichen Bauleitplanung (§§ 8–10 BauGB).
Mit Hilfe der flugzeuggestützten Fernerkundung lassen sich, neben Thermalbildverfahren, auch
auf indirektem Wege objektbezogene Informationen über stadtklimatische Zustände ableiten.
Die Gestaltung der urbanen Oberfläche durch künstliche Versiegelung (Wohn- und
Geschäftsbebauung, Industrie, Verkehrsflächen und Parkanlagen) ist dabei ein wesentlicher
Faktor. Die Versiegelungsarten, sowie die Gebäude- und Vegetationsstrukturen können mit
Methoden der Fernerkundung (detailliert) bestimmt werden. Neben der spektralen Information
werden über das Digitale Oberflächenmodell und dem daraus abgeleiteten normierten
Oberflächenmodell die Höhen der urbanen Objekte erfasst. Diese Objekthöhen sind ein
wichtiger Bestandteil der Eingabegrößen in ein numerisches Simulationsmodell.
Konkretes Beispiel wird die Ableitung der Windfelder für den Großraum Berlin sein, wobei sich
dieser Teil der Untersuchung im Umfeld der Pilotphase auf das Gebiet um den Spreeraum
Friedrichshain-Kreuzberg reduziert.

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilo
tstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
10
2. Vorbereitung
Einleitung
Anhand hochaufgelöster, flugzeuggestützter Bilddaten und der objektbasierten Klassifikation
wird versucht Vegetations- und Gebäudestrukturen, sowie deren Höhen zu detektieren und zu
erfassen. Dazu findet eine Kombination von optischen multispektralen Bilddaten (RGB, IR) mit
den Höheninformationen des Digitalen Oberflächenmodells und dem daraus abgeleiteten
normierten Oberflächenmodell statt.
2.1 Workflow
Abb. 2-1: Workflow – Gebäude
Analog zu diesem Vorgehen der Gebäudeklassifikation findet die Erfassung der Vegetation statt.
Das wesentliche Medium ist dabei das Hinzunehmen des NDVI (s. Kapitel 6) – basierend auf
dem Rot- und Infrarotkanal – der die Unterscheidung von Vegetation und Nicht-Vegetation
ermöglicht. Auch dabei wird die Ableitung der Höhen und die Differenzierung in Höhenklassen,
als wichtigstes Klassifikationskriterium über das nDOM (s. Kapitel 3) realisiert. Für die
Unterscheidung der Objekte (nach Höhe -> mean[nDOM]) fließt das nDOM mit einer höheren
Gewichtung in die eingangs stattfindende Segmentierung ein. Auf die abschließende Glättung
der Vegetationsgeometrien wird aufgrund der Andersartigkeit der natürlichen Strukturen
verzichtet.

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
In enger Abstimmung mit SenStadtUm; Abt. III – Geoinformation fand eine Definition der zu
erfassenden Objekte, sowie eine Erarbeitung von sinnvollen und praktikablen Klassen für die
Darstellung in Thematischen Karten statt.
2.2 Klassensystematik
Es handelt sich um die Klassifizierung von Landbedeckung d. h. um Objektklassen zur urbanen
Oberflächenbedeckung. Eine direkte Ableitung der Nutzungen (auch Stadtstrukturen) aus diesen
Oberflächenklassen findet dabei nicht statt. Diese Rückschlüsse würden eine Sinnbildung
bedeuten und so ein Wissen von Beziehungen der Objekte zueinander voraussetzen.
Die Oberflächenklassifikation wird zunächst mit einer Klassentiefe von jeweils 8 Klassen pro
Objektart (Gebäude und Vegetation) durchgeführt. Die visuelle Erkennbarkeit der Gebäude wird
mit Referenzdaten der ALK unterstützt. Gewässerflächen werden aus den ISU-Blockdaten
entnommen.
Abb. 2-2: Klassifizierungsschema für Bebauung und Vegetation.
Die zuvor definierte Klassifizierungssystematik (Grundlage der späteren Zuordnung der
Objektklassen) wurde im Laufe der Ergebniserarbeitung um die Klasse „Gebäude > 40 m“.
11

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilo ie im Rahmen der Promotion von C
tstud . Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
12
3. Digitale Luftbilddaten
3.1 Aufnahmeprinzip und das Kamerasystem UltraCam X
Matrixkameras realisieren die Aufnahme eines Bildes mittels digitaler matrixförmiger
Flächensensoren und der Zentralprojektion. Dabei beschränkt sich die Abbildung der
Erdoberfläche auf einen rechteckigen, meist quadratischen Bildausschnitt. Bei einer
Matrixkamera wird die Stereofähigkeit durch einen Überlappungsbereich in Flugrichtung von
üblicherweise etwa 60 % aus drei Bildern realisiert. Dieser Überlappungsbereich simuliert die
drei unabhängigen Blickwinkel über die bei einer Matrixkamera später das Stereobild realisiert
wird. Anschließend können die entstandenen Flugstreifen zu einem Bildblock über die zuvor
definierte Quer- und Längsüberdeckung verknüpft und im Zuge der Prozessierung als
Gesamtmosaik ausgegeben werden. Der Überlappungsbereich der drei Blickwinkel
gewährleistet die drei Sichtstrahlen zur Auffindung der notwendigen homologen Punkte zur
Generierung einer stabilen räumlichen Szene und eines Oberflächenmodells. Das GPS und INS
erreicht die hochgenaue Orientierung der Bilddaten.
Abb. 3-1: Prinzip der Bildaufnahme einer Matrixkamera (Zentralperspektive).
Bei einer Matrixkamera ändern sich bei der Aufnahme die Eigenschaften der äußeren
Orientierung von Bild zu Bild (vgl. Kraus, 2004), pro Bild entsteht eine eigenständige äußere
Orientierung. Durch die Abbildung in Zentralperspektive entstehen je Einzelbild Verklappungen
radial zu den Bildrändern. Eine Korrektur dieses Radialversatzes ermöglicht das digitale
Oberflächenmodell (DOM). Das so entstandene True-Orthobild (Beispiel in Abb. 3-2 und 3-3)
weist im Anschluss ebenfalls die Eigenschaften einer Karte auf und erhöhte Objekte werden
lagekorrigiert abgebildet (bei einem Orthobild bleiben die Verklappungen erhöhter Objekte

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
erhalten). Die Ableitung von tatsächlichen Entfernungsmesswerten aus dem Luftbild innerhalb
der Genauigkeiten ist darüber möglich. Die UltraCamX ist ein großformatiger, multispektraler
und digitaler Flächensensor. Das hochauflösende panchromatische Bild der Größe 9420 x
14430 Pixel (67.5mm x 103.5mm) wird von neun Flächendetektoren hinter vier Objektiven
erzeugt. Unter Verwendung von 4 Farbfiltern - für R, G, B und IR - gelingt die Gewinnung der
Farb- und Infrarotinformation in geringerer Auflösung. Zur Steigerung der Auflösung werden die
höher aufgelösten panchromatischen (PAN) Kanäle hinzugerechnet. (vgl. Gruber, 2009; Sandau
(Hrsg.), 2005 & Albertz, 2007)
Photogrammetrische Prozessierung
Anwendung findet hier eine Aerotriangulation, bei der die digital aufgezeichneten Einzelbilder zu
einem festen Bildverband unter Einbeziehung von Passpunkten (eindeutig identifizierbar und
Koordinaten im übergeordneten Referenzsystem bekannt) und hochpräziser Orientierungsdaten
verknüpft werden. Über das GPS wird fortlaufend die Flugbahn des Sensorträgers und mit Hilfe
des integrierten INS die ständige Position der Kamera und deren Bewegung während des
Messvorgangs erfasst. Nach Aufzeichnung der Spektraldaten und der Orientierungs- und
Navigationsdaten wird eine kombinierte Aerotriangulation zur direkten Sensororientierung mit
direkter Georeferenzierung durch GPS, IMU und zusätzlicher Passpunkte erreicht.
3.2 Gewinnung des Digitalen Oberflächenmodells (DOM)
Bei der Gewinnung des Oberflächenmodells kommt ein Algorithmus zum Tragen (SGM – Semi-
Global Matching), der ursprünglich am DLR, Institut für Robotik und Mechatronik von
Hirschmüller (2005) entwickelt wurde und fortwährend optimiert wird (vgl. Hirschmüller et al,
2010). Das SGM ist ein pixelbasiertes Verfahren zum Auffinden korrespondierender Bildpunkte.
Grundlage sind orientierte Luftbilder mit bekannter innerer und äußerer Orientierung, bei denen
entlang einer rekonstruierten Epipolarlinie nach diesen übereinstimmenden Pixel gesucht
werden kann. Die Epipolargeometrie beschreibt diese Abhängigkeit der korrespondierenden
Bildpunkte, die durch einen realen Objektbodenpunkt in den zueinander orientierten Luftbildern
erzeugt werden. (vgl. Schrerr, 2005) Eingerenzt wird die Suche durch das Bekanntsein einer
Höheninformation des gesuchten Objektpunktes. Das Verfahren wird ausführlich in Hirschmüller,
2005 & 2006 beschrieben. In einem DOM wird jedem Bildpixel die Höhe über dem definierten
Geoid bzw. Ellipsoid mit Hilfe eines Grauwerts zugeordnet. Zur Ableitung exakter Objekthöhen
wird das nDOM (auf die Grundhöhe NULL normiert) berechnet.
13

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
Abb. 3-2: Orthophoto (DOP 2010) - Differentialentzerrung mit DGM (FIS-Broker Berlin)
Abb. 3-3: True-Orthophoto 2010 (SGM), real messbare Größen und keine Verkippung.
Die Abbildungen (3-2 und 3-3) zeigen anschaulich die Unterschiede und den Vorteil eines True-
Orthophotos gegenüber dem DOP, welches lediglich mit Hilfe der Differentialentzerrung unter
Einbeziehung eines DGM korrigiert wird. Ebene Bereiche weisen die Eigenschaften einer Karte
auf, wogegen erhöhte Objekte aufgrund der Zentralprojektion noch immer verkippt dargestellt
werden. Bei einem True-Orthophoto wird das DOM in die Level 4-Prozessierung integriert. Auch
erhöhte Objekte werden nun lagekorrigiert dargestellt und ermöglichen das Messen realer
Entfernungen, Flächen und der exakten Position von Kanten.
14
Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
15
3.3 Bildflug 2010 und Bildprodukte
Der UCX-Bildflug fand im Spätsommer 2010 aus einer Flughöhe von ~2100 m über NN statt.
Bildflug durchgeführt von: BSF Swissphoto GmbH
Kamera: UltraCamX
Flugdatum: 23.09.2010
Bodeauflösung: 10cm
Längsüberdeckung: 80%
Querüberdeckung: 60%
Prozessierung Einzelbilder: UltraMap Fa. Microsoft
Höhe über Grund: 6850 ft
Höhe ü NN: 7000 ft
Koordinatensystem: UTM, 33N
Geodätisches Datum: ETRS89
Bezugsellipsoid: GRS80
Höhenbezugssystem: ellipsoidische Höhen bzgl. GRS80
GPS-Referenzstation: SAPOS-Station, Berlin-Wilmersdorf
Genauigkeit der GPS-Prozessierung: Lage und Höhe theoretisch 5-6 cm
Die eigentliche Prozessierung der Einzelbilder - zu einem für diese Studie benötigten True-
Orthomosaik (TOM) - findet am DLR, am Institut für Robotik und Mechatronik in Berlin Adlershof
unter Verwendung des im Kapitel „Photogrammetrische Prozessierung“ beschriebenen SGM-
Algorithmus statt.
Durch die Größe des Aufnahmegebietes (Stadtfläche Berlin) und die daraus resultierte Dauer
des Bildfluges sind in den Bilddaten Schattenbereiche zu verzeichnen. Besonders deutlich zu
erkennen sind Schlagschatten im Bereich sehr hoher Gebäude (siehe Abbildungen auf Seite
zuvor) Diese Schatten können in weiten Teilen durch die hohe radiometrische Tiefe (16bit)
aufgefangen werden. Das Ableiten von Vegetationsstrukturen durch das nahe Infrarot (NIR) ist
fast immer gewährleistet, dies wird im Zuge der folgenden Auswertung näher betrachtet.

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
16
Produkte
Sensor: Matrixkamera UltraCam X
Aufnahmedatum: 23.09.2010
Geometrische Auflösung: x; y: 15cm; z: 10 cm
Radiometrische Tiefe: 16 bit
Bildprodukte: Echtfarbenbild (RGB) und Infrarotkanal (IR)
Digitales Oberflächenmodell (DOM)
abgeleitete Produkte: Normiertes Digitales Oberflächenmodell (nDOM)
Abb. 3-4: RGB (Pilotgebiet).
Abb. 3-5: nDOM (Pilotgebiet).
Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
17
3.4 Normierte Digitale Oberflächenmodell (nDOM)
Da die Geländehöhe in Berlin (~35m bis zu ~100m ü NN) nicht konstant ist, wenn auch im
Vergleich zu anderen Regionen wenig, wird ein auf die Grundhöhe Null normiertes
Oberflächenmodell erzeugt. Das Prinzip der Generierung des normierten Oberflächenmodells
(nDOM) gewährleistet die Ableitung der „echten“ Objekthöhen ohne die aufsummierte
Geländehöhe.
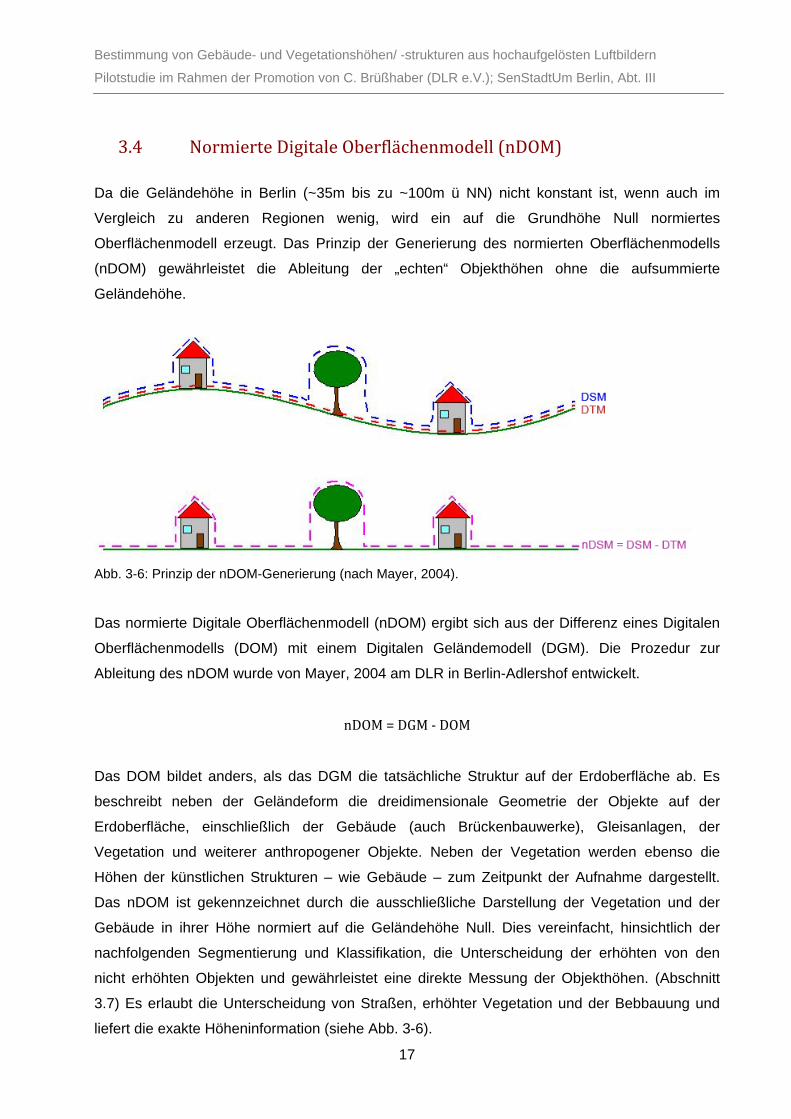
Abb. 3-6: Prinzip der nDOM-Generierung (nach Mayer, 2004).
Das normierte Digitale Oberflächenmodell (nDOM) ergibt sich aus der Differenz eines Digitalen
Oberflächenmodells (DOM) mit einem Digitalen Geländemodell (DGM). Die Prozedur zur
Ableitung des nDOM wurde von Mayer, 2004 am DLR in Berlin-Adlershof entwickelt.
nDOM = DGM ‐ DOM
Das DOM bildet anders, als das DGM die tatsächliche Struktur auf der Erdoberfläche ab. Es
beschreibt neben der Geländeform die dreidimensionale Geometrie der Objekte auf der
Erdoberfläche, einschließlich der Gebäude (auch Brückenbauwerke), Gleisanlagen, der
Vegetation und weiterer anthropogener Objekte. Neben der Vegetation werden ebenso die
Höhen der künstlichen Strukturen – wie Gebäude – zum Zeitpunkt der Aufnahme dargestellt.
Das nDOM ist gekennzeichnet durch die ausschließliche Darstellung der Vegetation und der
Gebäude in ihrer Höhe normiert auf die Geländehöhe Null. Dies vereinfacht, hinsichtlich der
nachfolgenden Segmentierung und Klassifikation, die Unterscheidung der erhöhten von den
nicht erhöhten Objekten und gewährleistet eine direkte Messung der Objekthöhen. (Abschnitt
3.7) Es erlaubt die Unterscheidung von Straßen, erhöhter Vegetation und der Bebbauung und
liefert die exakte Höheninformation (siehe Abb. 3-6).

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
Abb. 3-7: Vorgehen zur Detektion
erhöhter Punkte für die
Grundhöheninterpolation.
(Quelle Mayer, 2004)
Zur Erzeugung des nDOM wird in einem ersten Schritt zunächst ein DGM erzeugt. Zu diesem
Zweck werden Suchfenster definiert und darüber das DOM in iterativen Schritten nach Kanten
und abrupten Höhensprüngen durchsucht. Über die Definition eines Höhenschwellenwertes
werden die erhabenen Objekte (Objektpixel) bestimmt. Gleichzeitig werden Punkte identifiziert,
die sich eindeutig am Boden befinden (Grundpixel). Ist eine genügende Anzahl dieser
Bodenpunkte sicher identifiziert, werden diese Punkte zu einer Fläche interpoliert, die
abschließend das DGM bilden. Das entstandene DGM ergibt schließlich durch eine Subtraktion
mit dem DOM das nDOM.
Abb. 3-8: Image Drape, nDOM texturiert mit dem RGB (Elsenbrücke).
18

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
3.5 Die
Gebäudehöhen
Stärke der Bilddaten
Abb. 3-9: Auf die Geländehöhe 0 normiertes Oberflächenmodell.
Abb. 3-10: Gebäude im nDOM (Kirche); horizontales (links), vertikales (rechts) Profil.
Abb. 3-11: Kirche im RGB, überlagert mit Ergebnis-Vektoren.
19
Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
20
Vegetationshöhen
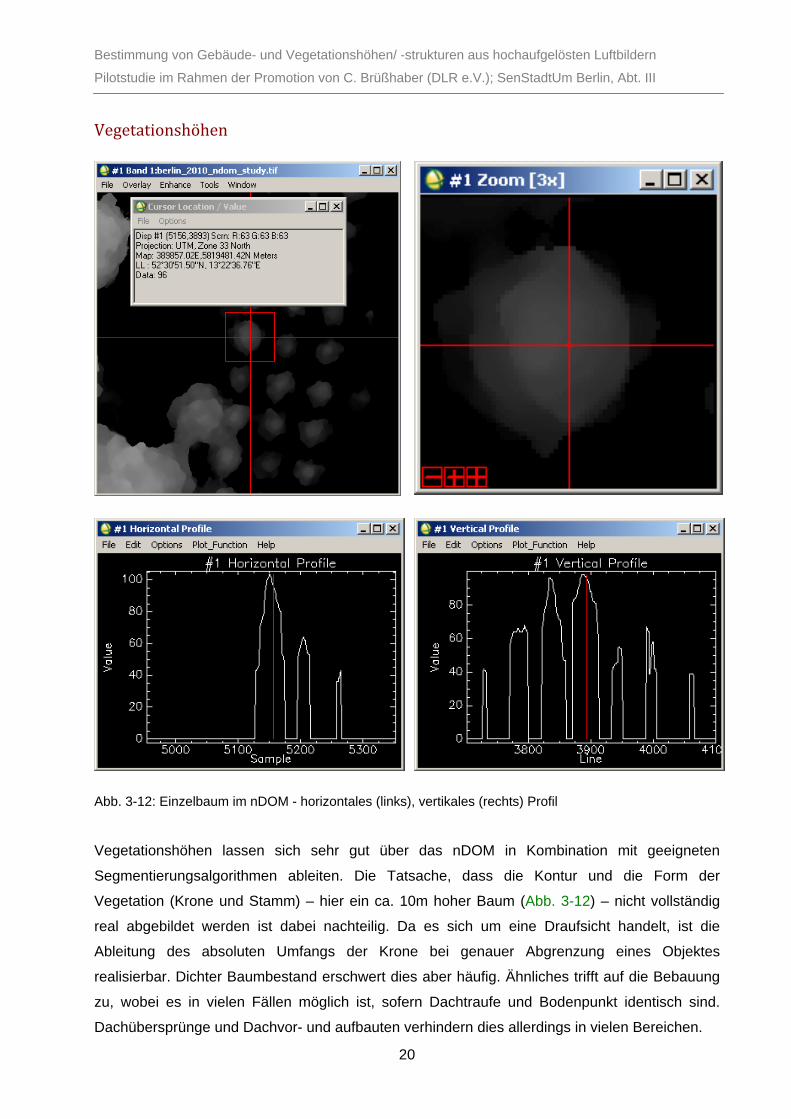
Abb. 3-12: Einzelbaum im nDOM - horizontales (links), vertikales (rechts) Profil
sen sich sehr gut über das nDOM in Kombination mit geeigneten
dass die Kontur und die Form der
d Stamm) – hier ein ca. 10m hoher Baum (Abb. 3-12) – nicht vollständig
n ist dabei nachteilig. Da es sich um eine Draufsicht handelt, ist die
Ableitung des absoluten Umfangs der Krone bei genauer Abgrenzung eines Objektes
realisierbar. Dichter Baumbestand erschwert dies aber häufig. Ähnliches trifft auf die Bebauung
zu, wobei es in vielen Fällen möglich ist, sofern Dachtraufe und Bodenpunkt identisch sind.
Dachübersprünge und Dachvor- und aufbauten verhindern dies allerdings in vielen Bereichen.
Vegetationshöhen las
Segmentierungsalgor
Vegetation (Krone un
real abgebildet werde
ithmen ableiten. Die Tatsache,

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
4. Grundlagen und erweiteter Datenbestand
4.1 Untersuchungsgebiet
Um die Eignung des gegebenen Rasterdatenbestandes, bestehend aus dem digitalen
multispektralen True-Orthophotomosaik (TOM) und des dafür erforderlichen Digitalen
Oberflächenmodell (DOM) - zur Ableitung der geforderten Objekthöhen - zu prüfen, liegt dieser
Pilotstudie ein rund 23 km² großer Bildausschnitt der Berliner Innenstadt zugrunde.
Geographische Ausdehnung
Fläche: 22,69 km²
UTM, WGS84, Zone33 (EPSG:32633)
UL X: 389084 UL Y: 5820065
LR X: 396500 LR Y: 5817000
Soldner Berlin (Rauenberg), Bessel, DE-40/83 to ETRS89 (EPSG: 3068)
UL X: 22342 UL Y: 18332
LR X: 29817 LR Y: 21539
Geometrische Ausdehnung
Pixel: 49.444px * 20.437 px (Originalpixel mit x/y 15cm, z 10cm)
Gebietsmerkmale
Das ausgewählte Projektgebiet für diese Pilotstudie erstreckt sich über weite Bereiche der
Innenstadt, zentral inmitten des Berliner S-Bahnrings und beinhaltet partiell die Stadtbezirke
Treptow-Köpenick, Friedrichshain-Kreuzberg und nordwestlich Berlin-Mitte mit dem
Reichstagsgebäude und dessen imposanter Kuppel, und einem ausgedehnten Bereich des
Stadtparks „Großer Tiergarten“. Dieser Bereich verfügt über einen hohen Anteil an
repräsentativen Grünflächen und höherem Bewuchs, sowie Bestand von bis zu über 20 Meter
hohen Bäumen.
21

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilo ie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenS
tstud tadtUm Berlin, Abt. III
22
Abb. 4-1: Lage des Untersuchungsgebietes.
Das Untersuchungsgeb
Wohnbebauung - den „Mietskasern charakteristischen Traufhöhe von 22 Metern und
den charakt Berliner Dächern (Abb.4-2) - eine Vielzahl von architektonisch auffälligen
ondergebäuden. Zu diesen zählen neben modernen Bürobauten, wie dem „Trias“ (Sitz der
BVG) a tstätten,
wie die alle „O n Kreuzberg oder das „Sony Center“
am Potsdamer Platz. Daneben bestehen entlang der Berliner Stadtspree Industrie- und
uch eine Vielzahl historischer Gebäude, Kirchen und
en, sowie der nachfolgenden Einschätzung der Genauigkeiten
ontagebauten“
ie verfügen über eine sehr klare Gebäudestruktur und dienen aufgrund der
als idealer Vergleichsgegenstand.
iet enthält neben einer erheblichen Anzahl der typischen Berliner
en“ mit der
eristischen
S
n der Holzmarkstraße oder dem „Treptower“ an der Elsenbrücke ebenso Even
Multifunktionsh 2-World“, das „Tempodrom“ i
Dienstleistungsflächen und a
monumentalen Bauten.
Zur Ableitung der Gebäudehöh
ieser H nen d öhen eig sich besonders die ebenso häufig wie identisch erbauten „M
und Wohngebäude. S
einheitlichen Höhen,
Quelle: Wikipedia (Berliner Dach)
Abb. 4-2: Berliner Dach (Querschnitt).

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
4.2 Geobasisdaten und Fachplanungsdaten
ALK – OSKA 2010/2011
o Gebäude
o Straßenbaum
Blockdaten ISU 2010
Die Automatisierte Liegenschaftskarte enthält die gesamten Liegenschaften des Landes Berlin
und liegt flächendeckend im Landeskoordinatensystem Soldner Berlin vor. Der Bestand wird
fortwährend aktuell gehalten und wöchentlich aktualisiert. Die Vektoren der ALK bestehen für
diese Anwendung aus geschlossenen Polygonen (Flächen).
Abb. 4-3: ALK-Ausschnitt – Folien 11 Gebäude und Folie 520 mit Straßenbäumen.4
In diesem Gebiet befinden sich – Angaben basierend auf der Automatisierten
iegenschaftskarte (ALK) – rund 11.600 eingemessene Gebäude und Gebäudeteile und rund
23.500 Straßenbäume (Laub- und Nadelbäume), welche im Sachdatenbestand der ALK einzeln
erfasst sind (Abb. 4-3, überlagert mit den statistischen Blöcken des ISU5). Nicht erfasst und
nummeriert ist der Baumbestand auf Privatgrundstücken, sowie in Hinterhöfen und Parkanlagen
bspw. der Baumbestand innerhalb der weitläufigen innerstädtischen Parkanlage „Großer
Tiergarten“.
L
4 (Stand des Gebäudebestandes ist 30.06.2011) 5 dt und Umwelt (ISU) der Senatsver ng und Datengrundlage: Informationssystem Sta
Umwelt Berlin.
waltung für Stadtentwicklu
23
Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
24
Automatisierte Liegenschaftskarte (ALK) Berlin/ Statisti
schlüsselkatalog B li
sche Blöcke (ISU)
Stand: 01.08.2005
Hier werden die Gebäudeumrisse des ALK-Datenbestandes dargestellt. Dieser Bestand wird
ge in einzelnen Folien vorgehalten. Die Gebäude bilden die Folie
1 i e tere Bezifferung beschreibt die Nutzung. Nach dieser Systematik ist es möglich die
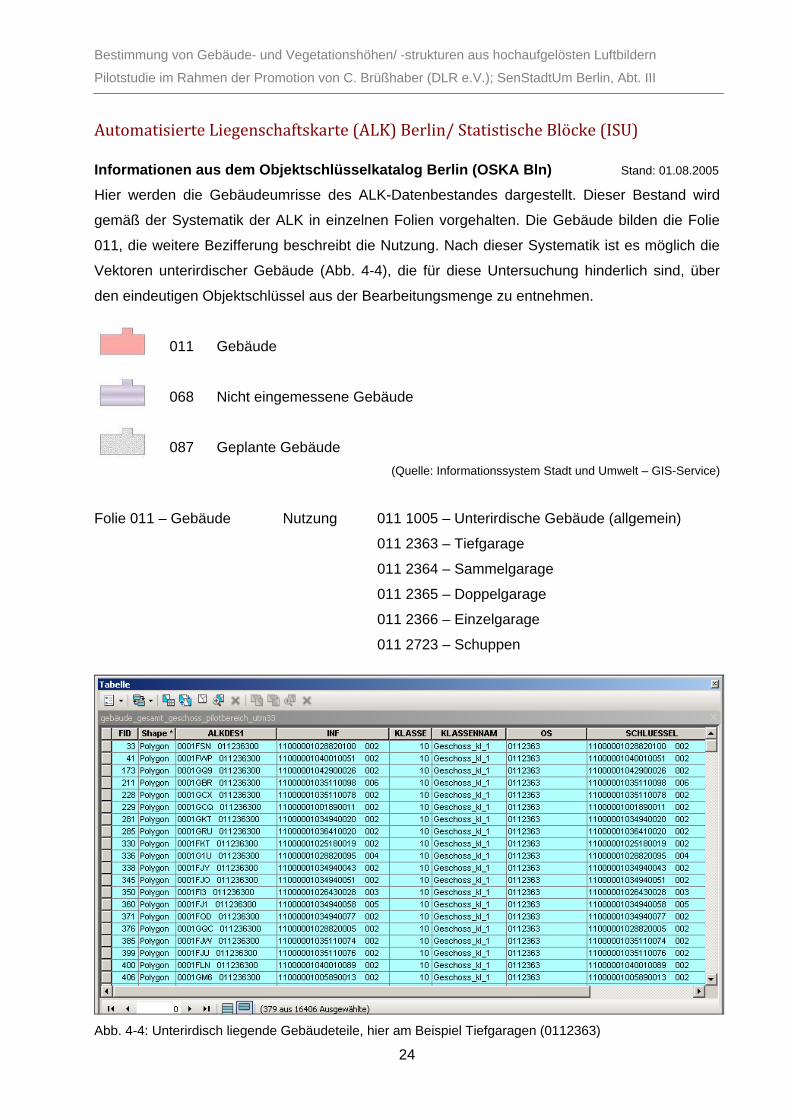
068 Nicht eingemessene Gebäude
087 Geplante Gebäude
(Quelle: Informationssystem Stadt und Umwelt – GIS-Service)
Folie 011 – Gebäude Nutzung 011 1005 – Unterirdische Gebäude (allgemein)
011 2363 – Tiefgarage
011 2364 – Sammelgarage
011 2365 – Doppelgarage
011 2366 – Einzelgarage
011 2723 – Schuppen
Informationen aus dem Objekt er n (OSKA Bln)
mäß der Systematik der ALK
1, d e w i0
Vektoren unterirdischer Gebäude (Abb. 4-4), die für diese Untersuchung hinderlich sind, über
den eindeutigen Objektschlüssel aus der Bearbeitungsmenge zu entnehmen.
011 Gebäude
Abb. 4-4: Unterirdisch liegende Gebäudeteile, hier am Beispiel Tiefgaragen (0112363)
Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
5. Methodik
5.1 Objekt‐ und Merkmalserkennung
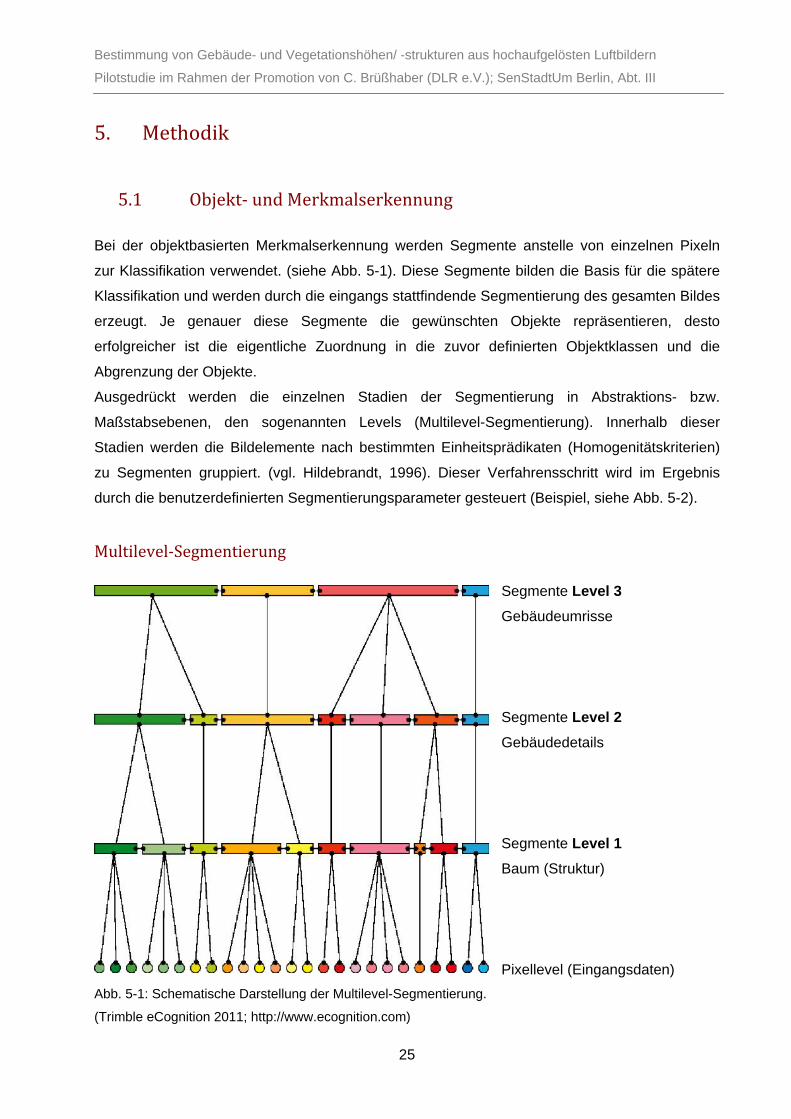
Bei der objektbasierten Merkmalserkennung werden Segmente anstelle von einzelnen Pixeln
zur Klassifikation verwendet. (siehe Abb. 5-1). Diese Segmente bilden die Basis für die spätere
Klassifikation und werden durch die eingangs stattfindende Segmentierung de
25
s gesamten Bildes
erzeugt. J genauer diese Segmente die gewünschten Objekte repräsentieren, desto
erfolgreiche che Zuordnung in die zuvor definierten Objektklassen und die
Abgrenzung der Objekte.
Ausgedrüc der Segmentierung in Abstraktions- bzw.
Maßstabsebenen, den sogenannten Levels (Multilevel-Segmentierung). Innerhalb dieser
Stadien werden die Bildelemente nach bestimmten Einheitsprädikaten (Homogenitätskriterien)
zu Segmenten gruppiert. (vgl. Hildebrandt, 1996). Dieser Verfahrensschritt wird im Ergebnis
urch die benutzerdefinierten Segmentierungsparameter gesteuert (Beispiel, siehe Abb. 5-2).
Multilevel‐Segmentierung
el 3
sse
Segmente Level 2
Gebäudedetails
Segmente Level 1
Baum (Struktur)
Pixellevel (Eingangsdaten)
Abb. 5-1: Schematische Darstellung der Multilevel-Segmentierung.
(Trimble eCognition 2011; http://www.ecognition.com)
e
r ist die eigentli
kt werden die einzelnen Stadien
d
Segmente Lev
Gebäudeumri

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilo
tstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
26
Bei der Segmentierun
bes ten Ho
der äteren
g der Bilddaten (RGB, IR und nDOM) werden benachbarte Pixel nach
mengefasst (geometrische Abgrenzung
erarbeitungsschritt kann auch als
in Richtung
nte stellt immer die zugrundeliegende
n die top-down-Strategie große in kleinere Bildsegmente zerlegt.
en
rbei auch die Festlegung einer Region of Interest. Dabei handelt
Liegenschaftskarte, welche die Begrenzung der segmentierten
und den Bereich der darauffolgenden Segmentierung eingrenzt.
5.2 Segmentierung
Jede Fragestellung benötigt ihren speziellen Auswertemaßstab: kleine Objekte benötigen eine
feinere Segmentierung (kleiner scale parameter 5-50), im Gegensatz zu flächenhaften, großen
Objekten. Für die Erfassung der Gebäude ist das zu erzielende Level eine grobe Segmentierung
(Umriss Gebäude und Gebäuteile, Abb. 5-2), wohingegen die Vegetation (bodennahe Sträucher,
Bäume) in ihrer Struktur wesentlich feiner abgebildet werden sollte, um vor allem feine lokale
Höhenunterschiede und Strukturen zu berücksichtigen. Die Standard-Segmentierung
Multiresolution Segmentation beruht auf Farb- und Formhomogenität und findet am häufigsten
Anwendung. Dieser Algorithmus ermöglicht die gleichzeitige Verarbeitung mehrerer Datensätze
(Kanäle RGB, IR, nDOM etc.) mit unterschiedlicher Gewichtun ameter bestimmt
die maximal zulässige Heterogenität der Objekte. Der Algorithmus Spectral Difference beruht
auf Grauwertdifferenzen, der Scale Parameter steht dabei für die maximal erlaubte
Grauwertdifferenz zweier Segmente. Die Spectral Difference Segmentierung kann nur auf einer
zuvor durchgeführten herkömmlichen Segmentierung erfolgen g der
nd die Gewichtung der Form- und
timm mogenitätskriterien zu Segmenten zusam
sp Klassifizierungsobjekte). Dieser V
Generalisierung der Bilddaten verstanden werden, da sich die Informationstiefe
logischer Objekte verringert. Die Summe aller Segme
Szene dar, d.h. die Topologie der Segmente sieht keine Überschneidungen vor. Unterschieden
wird in top-down (modellgetriebene) und bottom-up (datengetrieben) Verfahren. (vgl. Reference
Book: Trimble eCognition Developer 8.64.0/ User Guide 11/2010) Verwendet wird hier, bis auf
den Eingangsschritt, durchweg eine bottom-up Strategie, bei der kleinere benachbarte
Bildobjekte (paarweise) über Homogenitätskriterien zu größeren Segmenten verschmolzen
werden (merge), hingege
Leukert, (2005) beschreibt das Verfahren so: „Die bottom-up Methoden versuchen, aus den
Bildern heraus Objekte zu extrahieren, denen anschließend eine Bedeutung zugewiesen wird.
Im Gegensatz hierzu geht die top-down Vorgehensweise vom Objektmodell aus, um mit diesem
Wissen im Bild passende Objekte zu finden.“
ngsergebnis können auch in den Prozess integrierte VektorEinfluss auf das Segmentieru
haben. Diese unterstützen hie
es sich um die Automatisierte
Gebäude (vermessen) vorgibt
g. Der Scale Par
. Zudem spielt die Gewichtun
in den Prozess integrierten Bildkanäle, der Scale Parameter u
Kompaktheit eine wesentliche Rolle.
Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
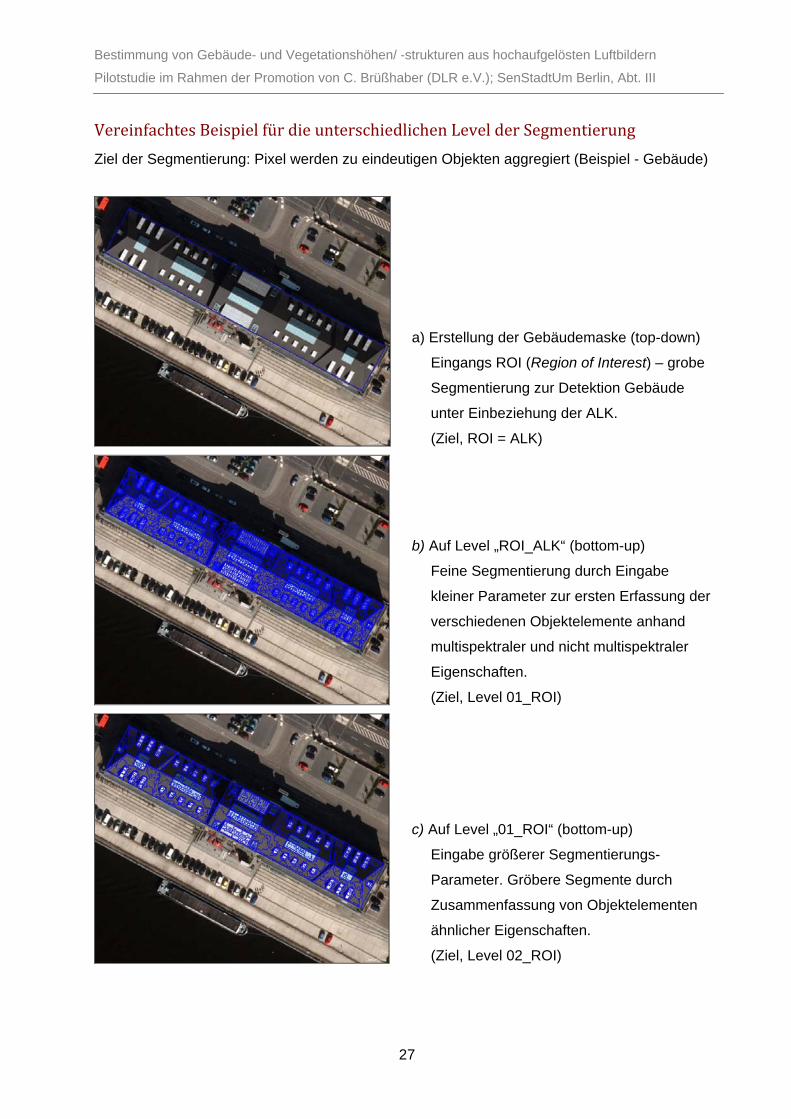
Vereinfachtes Beispiel für die unterschiedlichen Level der Segmentierung
Ziel der Segmentierung: Pixel werden zu eindeutigen Objekten aggregiert (Beispiel - Gebäude)
a) Erstellung der Gebäudemaske (top-down)
Eingangs ROI (Region of Interest) – grobe
Segmentierung zur Detektion Gebäude
unter Einbeziehung der ALK.
(Ziel, ROI = ALK)
b) Auf Level „ROI_ALK“ (bottom-up)
Feine Segmentierung durch Eingabe
kleiner Parameter zur ersten Erfassung der
verschiedenen Objektelemente anhand
multispektraler und nicht multispektraler
Eigenschaften.
(Ziel, Level 01_ROI)
c) Auf Level „01_ROI“ (bottom-up)
Eingabe größerer Segmentierungs-
Parameter. Gröbere Segmente durch
Zusammenfassung von Objektelementen
ähnlicher Eigenschaften.
(Ziel, Level 02_ROI)
27
Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
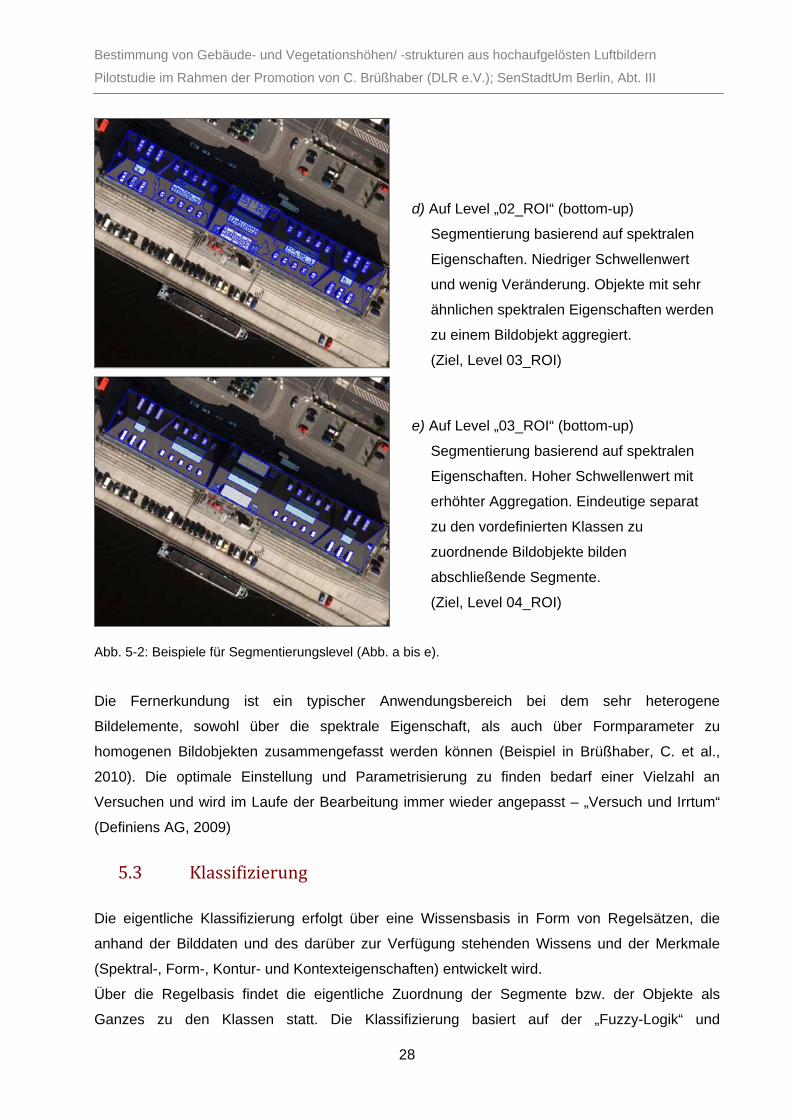
d) Auf Level „02_ROI“ (bottom-up)
Segmentierung basierend auf spektralen
Eigenschaften. Niedriger Schwellenwert
und wenig Veränderung. Objekte mit sehr
ähnlichen spektralen Eigenschaften werden
zu einem Bildobjekt aggregiert.
(Ziel, Level 03_ROI)
e) Auf Level „03_ROI“ (b
nd auf spektralen
Eigenschaften. Hoher Schwellenwert mit
erhöhter Aggregation. Eindeutige separat
zu den vordefinierten Klassen zu
Abb. 5-2: Beispiele für Segmentierungslevel (Abb. a bis e
Die Fernerkundung ist ein typischer A wend em sehr heterogene
Bildelemente, sowohl über die spektrale Eigenschaft, als auch über Formparameter zu
homogenen Bildobjekten zusammengefasst werden können (Beispiel in Brüßhaber, C. et al.,
2010). Die optimale Einstellung und Parametrisierung zu finden bedarf einer Vielzahl an
Versuchen und wird im Laufe der Bearbeitung immer wieder angepasst – „Versuch und Irrtum“
(Definiens AG, 2009)
5.3 Klassifizierung
Die eigentliche Klassifizierung erfolgt über eine Wissensb elsätzen, die
anhand der Bilddaten und des darüber zur Verfügung stehenden Wissens und der Merkmale
(Spektral-, Form-, Kontur- und Kontexteigenschaften) entwickelt wird.
Über die Regelbasis findet die eigentliche Zuordnung der Segmente bzw. der Objekte als
Ganzes zu den Klassen statt. Die Klassifizierung basiert auf der „Fuzzy-Logik“ und
ottom-up)
Segmentierung basiere
zuordnende Bildobjekte bilden
abschließende Segmente.
(Ziel, Level 04_ROI)
).
n ungsbereich bei d
asis in Form von Reg
28
Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
berücksichtigt demnach Unschärfen bei der Zuordnung der Objekte. Die Wahrscheinlichkeit
einer Erfüllung der zuvor definierten Kriterien fließt in die Zuordnung ein. Der Grad der
Zugehörigkeit wird mit Hilfe der Fuzzy-Funktion bestimmt. Es gibt naturgemäß keine harte
Abgrenzung zwischen Vegetationsklassen. Es be Unschärfen)
von einer Oberflächenbedeckungsart zur angrenz n.
Die Entwicklung der Regelbasis stellt neben en
aufwändigsten Part der Umsetzung dar. Ein hohes Wissen über die Bilddaten und deren
Eigenschaften werden vorausgesetzt.
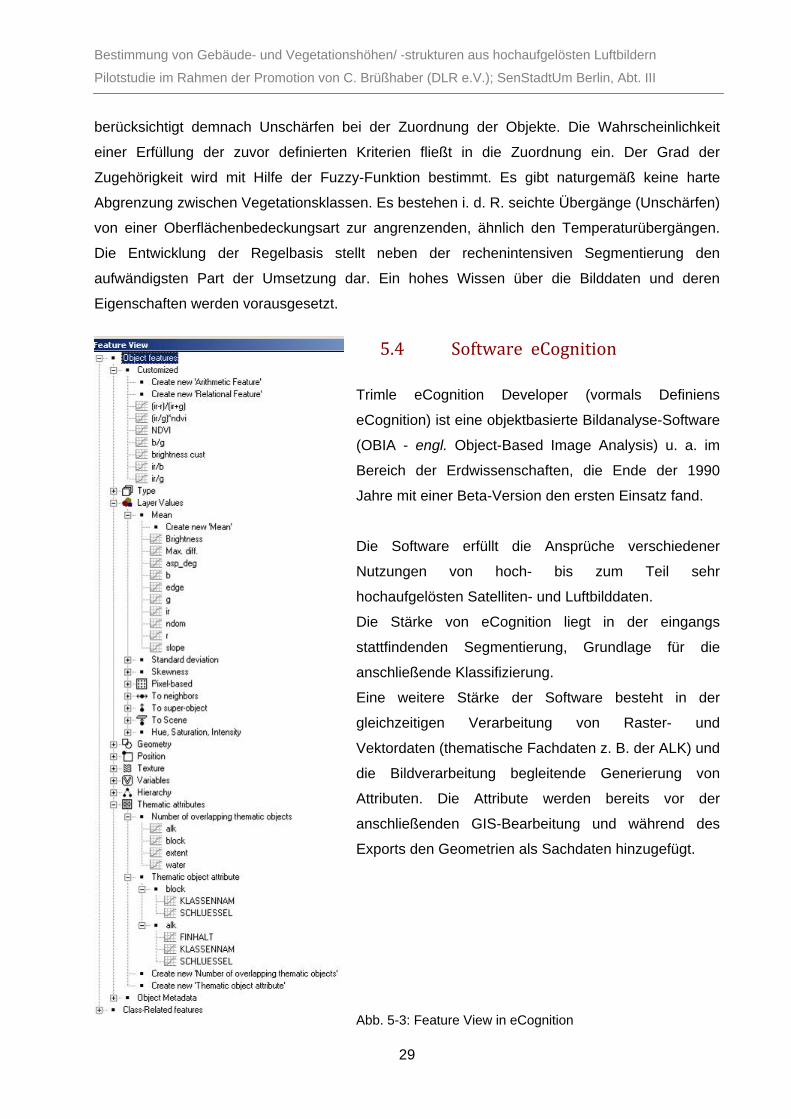
5.4
Trimle eCognition Developer (vormals Definiens
eCogniti se-Software
(OBIA - en im
Bereich de 90
Jahre mit e
Die Softw erschiedener
Nutzungen von hoch- bis zum Teil sehr
hochaufgel uftbilddaten.
Die Stärke von eCognition liegt in der eingangs
Segmentierung, Grundlage für die
anschließende Klassifizierung.
anschließenden GIS-Bearbeitung und während des
Exports den Geometrien als Sachdaten hinzugefügt.
stehen i. d. R. seichte Übergänge (
enden, ähnlich den Temperaturübergänge
der rechenintensiven Segmentierung d
Software eCognition
on) ist eine objektbasierte Bildanaly
gl. Object-Based Image Analysis) u. a.
r Erdwissenschaften, die Ende der 19
iner Beta-Version den ersten Einsatz fand.
are erfüllt die Ansprüche v
östen Satelliten- und L
stattfindenden
Eine weitere Stärke der Software besteht in der
gleichzeitigen Verarbeitung von Raster- und
Vektordaten (thematische Fachdaten z. B. der ALK) und
die Bildverarbeitung begleitende Generierung von
Attributen. Die Attribute werden bereits vor der
Abb. 5-3: Feature View in eCognition
29

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
5.5 Künstliche Kanäle/ Indizes
Vegetationsindex
Künstlich abgeleitete Kanäle, bei denen sich die spektralen Vorteile der Einzelkanäle zu Nutze
gemacht werden können, erleichtern den Vorgang der Klassifikation.
Die Unterscheidung von Vegetation und Nicht-Vegetation wird über den NDVI (Normalized
Differenced Vegetation Index) realisiert. Vorraussetzung dafür ist das Vorhandensein eines
Infrarotkanals (IR). Der NDVI kann Werte zwischen -1 und +1 annehmen. Herg
IR] ‐ [Mean R]) / ([Mean IR] + [Mean R])
eleitet wird er
über folgende Formel:
NDVI = ([Mean
Alternativ kann auch der künstliche In
ermöglichen, wobei der NDVI verlässli
Oberflächen und Vegetation exakter ist.
blaue Bereiche stellen die vitale bis we f
versiegelte Strukturen (Gebäude, Straßen). Der richtige Schwellenwert zur sicheren Erkennung
der Vegetation liegt meist bei ca. > 0.1 u
dex (MeanIR / MeanG) ein Erkennen der Vegetation
cher und in der Unterscheidung zwischen versiegelten
Die Abb. 5-4 zeigt eine Darstellung des NDVI. Grüne bis
niger vitale Vegetation dar, graue Bereiche deuten au
nd wurde anhand der Daten bestimmt.
Abb. 5-4: NDVI (rechts) - Fa
30
rbcodierte Darstellung in der Feauture View (Segmente)

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
Ide atio
Schattenbereiche kö
Schwellenwert und e
ntifik n von Schatten
nnen über das Feauture He
ine benutzerdefinierte Variable definier
lligkeit, speziell über einen vorher bestimmten
t und identifiziert werden. Besonders
geeignet ist für die Ableitung des Werts der Helligkeit je Pixel durch folgenden Index:
([Mean R] + [Mean G] + [Mean B]) / 3
Abb. 5-5: Identifikation von Schattenbereichen (Bsp. Wasserfläche).
Ein Schwellenwert von < 8000 und damit sehr dunkle Bildbereiche deutet auf Schattenflächen.
Sobel‐Kanten ‐Filter
Die Kantendetektion (edge detection) ist Teil einer Segmentierung von Elementen in der
Bildbearbeitung. Dabei wird versucht flächige Bildbereiche in einem Bild voneinander zu
trennen, wenn sie sich ausreichend in Farb- oder Grauwert, Helligkeit oder Textur
unterscheiden. Spezielle Kantenoperatoren sollen die Übergänge zwischen diesen Bereichen
erkennen und als Kanten markieren.
Der für diese Untersuchung verwendete Filter zur Erkennung von Kanten ist der sogenannte
Sobel-Kantenfilter. Dieser macht Bruchkanten sichtbar und unterstützt damit die Segmentierung
der Gebäude- und Vegetationsstrukturen. Auch Objektinformationen in Schattenbereichen
können mit Hilfe des Filters identifiziert werden. Das so gewonnene Kantenbild fließt neben
RGB, IR, nDOM und den thematischen Vektoren parallel und mit eigener Gewicht g in di
Segmenti
un
erung ein.
e
31

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
Abb. 5-6: Sobel Kantenfilter (links); Slope (mitte); Aspect (rechts).
Weitere Verwendung finden ggf. in dieser Untersuchung der Slope, sowie der Aspect.
ie Steigung wird als Änderung in der Höhe über eine vorgegebene Strecke ausgedrückt. In
n
auch in Grad berechnet werden. (vgl. ERDAS online help,
in, um Vegetationsstrukturen, aber auch Dachflächentypen
nDOM. Berechnet wird diese Neigung pro Pixel. Das
Slope (Steigung)
D
diesem Fall ist die Dista
in Prozent ausgedrückt, kann aber
2012) Der Slope kann hilfreich se
nz durch die Größe eines Pixels bestimmt. Der Slope wird am häufigste
über ihre scheinbare Beschaffenheit zu unterscheiden.
Aspect (Neigung)
Ein weiterer Wert ist der Aspect. Dieser ermöglicht die Darstellung der Neigung eines DHM
(digitales Höhenmodell), hier eines
Ergebnisbild bildet die Werte in Grad, gemessen im Uhrzeigersinn von Norden ab. Ein Pixelwert
von 361 bedeutet, dass keine Neigung (flach) vorhanden ist. (vgl. ERDAS online help, 2012) Für
eine erweiterte Betrachtung der Gebäude und Dachflächen könnte dieser Wert relevant sein.
32

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
6. Strategie und Umsetzung
6.1 Datenvorverarbeitung
Das Untersuchungsgebiet mit 15 cm Auflösung in x, y und der geometrischen Ausdehnung von
49.444 x 20.437 Pixel wird in 12 Kacheln von 12.361 x 6.812 Pixel zerlegt (Abb. 6-1).
Dies ist anlässlich der Datenmenge und der damit einhergehenden Rechenintensität und
Rechenzeit zwingend notwendig. Aufgrund der Erstreckung des Gebietes, der hohen Auflösung
und der daraus resultierenden Speicherintensität kann so unter Umständen die Rechenzeit und
die Anfälligkeit gegenüber Datenverlust während des Rechenvorgangs minimiert werden.
Realisiert wird die Kachelung durch das eCognition-Tool Tiling & Stitching und ist speziell auf die
Verarbeitung großer Datensätze ausgelegt. Auf das Zusammenfügen der Einzelkacheln wird
infolge der weiteren Bearbeitung verzichtet und könnte ggf. im Zuge der GIS-Auswertung
geschehen. Die zuvor entwickelte Regelbasis und Klassenhierarchie wird anschließend auf jede
der 12 Kacheln angewandt. Da die Regelbasis auf einem kleineren repräsentativen und damit
leichter handhabbaren Ausschnitt entwickelt und erprobt wird, werden im Zuge dessen ggf. nicht
he Änderungen an der Regelbasis
rgeben sich daher auch während der Verarbeitung der Einzelkacheln.
alle spektralen Erscheinungen berücksichtigt. Unvermeidlic
e
Abb. 6-1: Index – Kacheln 1 bis 12
Radiometrisch wurden die Datensätze nach der TOM-Generierung keiner weiteren Korrektur
unterzogen, der originale multispektrale Umfang blieb somit vollständig erhalten.
Die Originalauflösun
Auflösung könnte ab
g der Datensätze von 15 cm bleibt erhalten. Eine Verringerung der
er die Bearbeitungszeit, u. a. die Dauer der Bildsegmentierung drastisch
reduzieren. Je nach gewünschter Informationstiefe könnte die Reduzierung der Auflösung für
weitere Bearbeitungen berücksichtigt werden. Zudem verursacht eine sehr hohe Auflösung oft
die Erfassung von nicht gewünschten Oberflächenstrukturen und verfälscht Objektkanten. Diese
könnten durch Filter und der damit erreichten Glättung der Bilddaten reduziert werden.
33

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
34
6.2 Durchführung
Vorgehensweise
Objekt-/ Segmentbasierte Klassifika
E klung einer Regelbasis zur Tr
tion (in Trimble eCognition)
chritt 1 besteht aus der Erfassung der Gebäude unter Einbeziehung der ALK, Schritt 2 gilt der
Erfassung der Vegetation. Diese Teilprozesse bestehen wiederum aus einem zweistufigen
Verfahren innerhalb des Verarbeitungsprozesses. Zunächst findet im ersten Verfahrensschritt
die Segmentierung der Eingangsdaten statt. Dabei werden, wie im Kapitel zuvor beschrieben,
die Pixel mit ähnlichen oder gleichen Eigenschaften zu Segmenten zusammengefasst. Dies
erfolgt solange, bis das Ergebnis zufriedenstellend ist und ggf. bereits Objekte, wie Dachflächen
oder Grünstrukturen sinnvoll repräsentiert werden. Dieser Verfahrensschritt wird durch die
benutzerspezifischen Parameter beeinflusst.
unterschiedlichen Gewichtungen, die Kanäle
ntwic ennung einzelner Objektklassen (Klassenhierarchie)
o Bestimmung von Schwellenwerten über:
spektrale Eigenschaften (Verwendung von Indizes z.B. des NDVI)
Form, Flächen, Höhen (nDOM)
Texturmerkmale, künstliche Kanäle (Edge, Slope, Aspect)
Nachbarschaften (z. B. Brücke/ Gewässer)
Thematische Layer (ALK)
Zuordnung der Ergebnis-Segmente zu vordefinierten Klassen
Bereinigung der Objekte
Export als Shape zzgl. der Attribute Höhe und der Objektschlüssel für die GIS-Integration
GIS-Import, Bereinigung über „Area“ und ggf. Glättung der Geometrien (Gebäude)
Die Objektextraktion wird in zwei unabhängig voneinander durchgeführte Teilprozesse zerlegt.
Begründet ist dies durch die unterschiedliche Herangehensweise und Zielstellung bei der
Klassifizierung von Vegetation und Bebauung.
S
In die einleitende Segmentierung fließen, mit
Rot, Grün und Blau (RGB), das nahe Infrarot
(IR), das normierte Oberflächenmodell (nDOM)
und auch ein Kantenfilterbild (sowie Aspect und
Slope) ein. Darüber hinaus werden für die
Abgrenzung der Gebäude bereits in diesem Schritt die ALK (Vektordatensatz) und die
Geometrien der statistischen Blöcke integriert. Des Weiteren erhalten die Geometrien
Sachdaten (Objektschlüssel), welche insbesondere beim abschließenden Vektordatenexport als
integriertes Attribut berücksichtigt werden.
Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
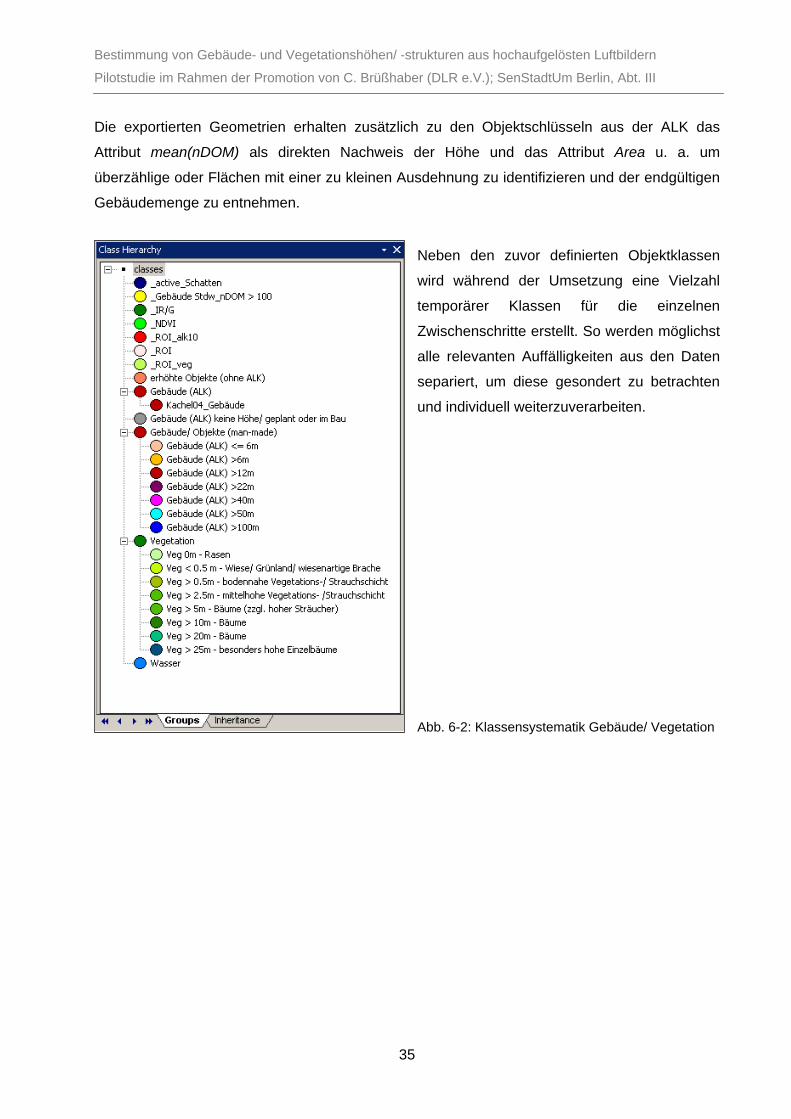
Die exportierten Geometrien erh
M) als direk
ächen mit eine
35
alten zusätzlich zu den Objektschlüsseln aus der ALK das
ten Nachweis der Höhe und das Attribut Area u. a. um
r zu kleinen Ausdehnung zu identifizieren und der endgültigen
den zuvor definierten Objektklassen
ielzahl
orärer Klassen für die einzelnen
rden möglichst
Auffälligkeiten aus den Daten
separiert, um diese gesondert zu betrachten
rzuverarbeiten.
Attribut mean(nDO
überzählige oder Fl
Geb ud
ä emenge zu entnehmen.
Neben
wird während der Umsetzung eine V
temp
Zwischenschritte erstellt. So we
alle relevanten
und individuell weite
Abb. 6-2: Klassensystematik Gebäude/ Vegetation

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
6.3 Teilprozess Gebäude (ALK)
Begonnen wird der
Prozess mit einer Top-
Um den Prozess der Klassifizierung des Gebäudebesta
bestehenden ALK (ROI) zu beschränken wird die Eingang
Polygonen der ALK mit einem einfachen Chessboard Segmentierungs Algorithmus und einer
hohen Objektgröße (square-size) durchgeführt. So wird sichergestellt, dass die Startmenge aus
ALK-Polygonen besteht und der Bereich der nachfolgenden Segmentierungsschritte räumlich
eingegrenzt wird. Positiver Effekt, die Rechenzeit vermindert sich.
down-Strategie.
Fortgesetzt wird auf der
Pixelebene mit einer
hierfür üblichen bottom-
up-Strategie.
nds zunächst auf den Bereich der
ssegmentierung, basierend auf den
Abb. 6-3: Unterirdische Gebäude und Gebäudeteile (ALK).
Abb. 6-4: “Doppelte“ ALK- Polygone Abb. 6-5: Gebäude (ALK) unter Baumkronen.
Unterirdische ALK-Gebäude und doppelte Polygone werden im Zuge der Vorverarbeitung aus
dem thematischen Daten anhand ihrer Objektschlüssel entnommen.
36

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
Abb. 6-6: Blick Richtung Süd-Osten, Elsenbrücke und dem Bürokomplex des Treptowers
Um Gebäude mit starken Höhendifferenzen zu identifizieren kommt die Standardabweichung
zum Einsatz. Diese ist sinnvoll, da Gebäude in der ALK häufig nicht differenziert genug
dargestellt werden. Höhensprünge und deutliche Abweichungen werden oft nicht berücksichtigt.
Der Gebäudekomplex rund um den „Treptower“ (Abb. 6-6 bis 6-8) besteht aus einem flacheren
Gebäudeteil mit einer Höhe < 40m und dem eigentlichen Büroturm mit ca. 120m. In der ALK
wird dies durch ein einziges Gebäudepolygon dargestellt. Das Ergebnis ist in Abbildung 6-11 im
direkten Vergleich zur ALK abgebildet.
Um solche Gebäude vor Beginn der eigentlichen Segmentierung zu identifizieren und ggf.
gesondert zu betrachten, wird eine temporäre Klasse Gebäude Stdw >100 erzeugt, deren
Klassifikationsmenge im späteren Prozess wieder in die Verarbeitung fließt.
Abb. 6-7: Gebäude mit wenig Differenzierung in der ALK (blau).
Abb. 6-8: Gebäude an der „MediaSpree“ mit T m , spezielle Dachform.
Region of Interest (ALK) erfolgt nun die weitere, feinere Segmentierung (bottom-
ür en
Auf Basis der
up), die mit immer wieder angepassten Parametern solange fortgesetzt wird, bis die
gewünschten Objekte als jeweils ein Zielsegment erfasst sind.
37
Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
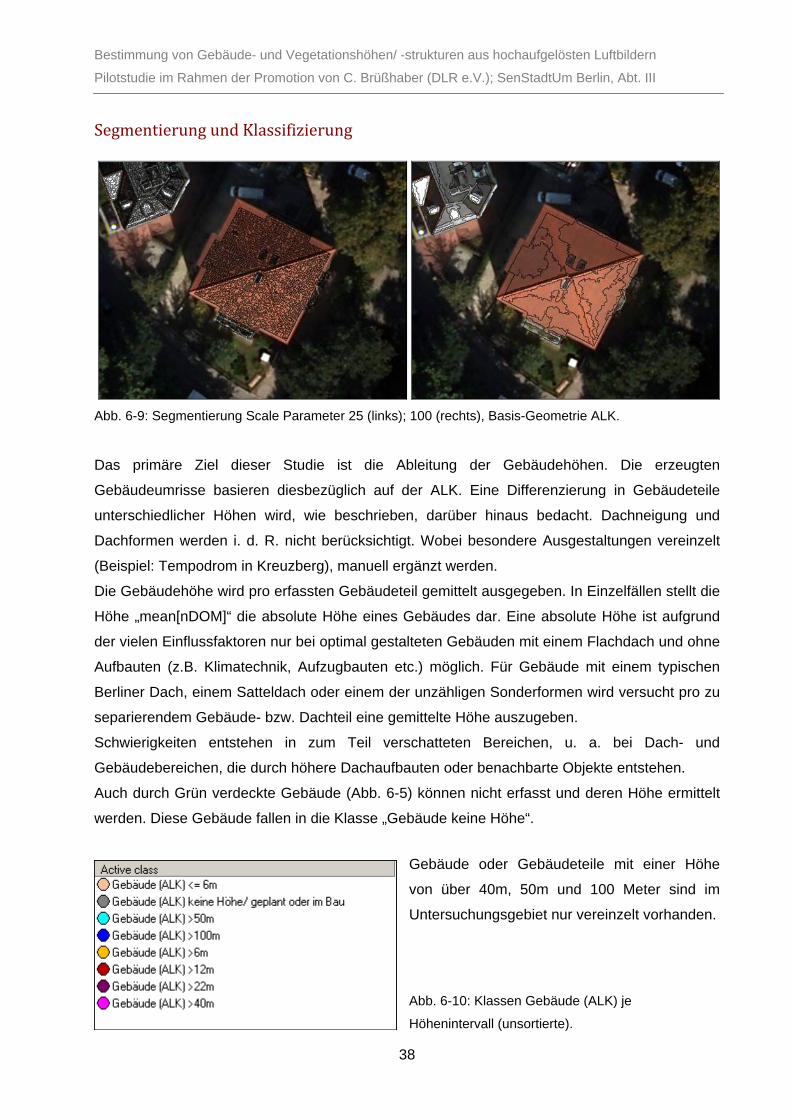
Segmentierung und Klassifizierung
Abb. 6-9: Segmentierung Scale Parameter 25 (links); 100 (rechts), Basis-Geometrie ALK.
Das primäre Ziel dieser Studie ist die Ableitung der Gebäudehöhen. Die erzeugten
Gebäudeumrisse basieren diesbezüglich auf der ALK. Eine Differenzierung in Gebäudeteile
unterschiedlicher Höhen wird, wie beschrieben, darüber hinaus bedacht. Dachneigung und
Dachformen werden i. d. R. nicht berücksichtigt. Wobei besondere Ausgestaltungen vereinzelt
(Beispiel: Tempodrom in Kreuzberg), manuell ergänzt werden.
Die Gebäudehöhe wird pro erfassten Gebäudeteil gemittelt ausgegeben. In Einzelfällen stellt die
Höhe „mean[nDOM]“ die absolute Höhe eines Gebäudes dar. Eine absolute Höhe ist aufgrund
der vielen Einflussfaktoren nur bei optimal gestalteten Gebäuden mit einem Flachdach und ohne
Aufbauten (z.B. Klimatechnik, Aufzugbauten etc.) möglich. Für Gebäude mit einem typischen
Berliner Dach, einem Satteldach oder einem der unzähligen Sonderformen wird versucht pro zu
separierendem Gebäude- bzw. Dachteil eine gemittelte Höhe auszugeben.
Schwierigkeiten entstehen in zum Teil verschatteten Bereichen, u. a. bei Dach- und
Gebäudebereichen, die durch höhere Dachaufbauten oder benachbarte Objekte entstehen.
Auch durch Grün verdeckte Gebäude (Abb. 6-5) können nicht erfasst und deren Höhe ermittelt
werden. Diese Gebäude fallen in die Klasse „Gebäude keine Höhe“.
Gebäude oder Gebäudeteile mit einer Höhe
von über 40m, 50m und 100 Meter sind im
ungsgebiet nur vereinzelt vorhanden.
nsortierte).
Untersuch
Abb. 6-10: Klassen Gebäude (ALK) je
Höhenintervall (u
38

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
Abb. 6-11: Ergebnis (Treptower) - ALK-Umrisse (links) zzgl. der Segmentierung (rechts)
ereinigung der Gebäudesegmente
er abgehenden Grate.
über einen solchen
B
Die schematische Abbildung 6-12 zeigt ein Walmdach bei welchem die Dachsegmente im
Wesentlichen durch die vorherrschenden Lichteinflüsse abgegrenzt werden, insbesondere durch
die spektrale Differenz von Sonnen- und Schattenseite. Das zuvor erstellte Kantenbild (Sobel-
Filter) verstärkt die Detektion des hier sehr kurzen Firstes und d
Neben der nicht sauberen Erfassung der Dachkanten, begründet durch die spektralen Einflüsse
z. B. kleinste Schattenwürfe entlang von Bruchkanten, werden auch Dachfenster, Schornsteine
und sogar durch andersfarbige Dachziegel sehr kleine Segmente abgebildet. Diese störenden
Segmente werden wiederum über einen Schwellenwert eliminiert (bspw. Remove Objects -
Number of Pixels <= 100). Das gilt zugleich für schmale Segmente, die durch besagten
Schattenwurf entlang von Kanten zu finden sind. Sie werden ebenfalls
Zwischenschritt, über das Verhältnis von Segmentbreite zu Segmnentlänge identifiziert und
entfernt.
Abb. 6-12: Beispiel einer Segmentkorrektur, Walmda
ch auf ALK.
39
Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
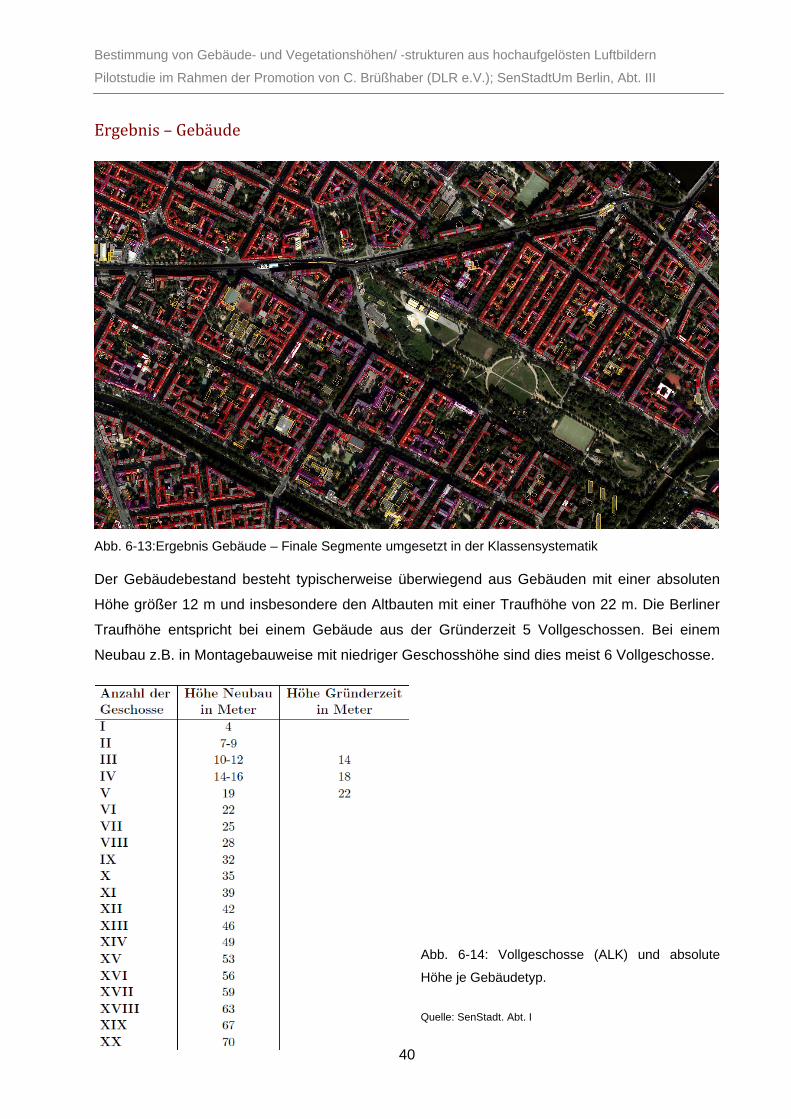
Ergebnis – Gebäude
Abb. 6-13:Ergebnis Gebäude – Finale Segmente umgesetzt in der Klassensystematik
Der Gebäudebestand besteht typischerweise überwiegend aus Gebäuden mit einer absoluten
Höhe größer 12 m und insbesondere den Altbauten mit einer Traufhöhe von 22 m. Die Berliner
Traufhöhe entspricht bei einem Gebäude aus der Gründerzeit 5 Vollgeschossen. Bei einem
Neubau z.B. in Montagebauweise mit niedriger Geschosshöhe sind dies meist 6 Vollgeschosse.
Abb. 6-14: Vollgeschosse (ALK) und absolute
ebäudetyp.
Quelle: SenStadt. Abt. I
Höhe je G
40

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
41
6.4 Teilpro
Da für die Vegetation se
zess: Vegetation
hr viel kleinere Strukturen zu erfassen sind, kommt eine sehr viel feinere
Segmentierung (Scale Parameter 15 bis 20) zum Einsatz. Neben äußerst differenzierten
Baumstrukturen wird so vor allem niedriger Bewuchs berücksichtigt. Es kann verhindert werden,
dass durch das Verschmelzen (merge) benachbarter, ähnlich erscheinender Pixel feinere,
kleinflächige Strukturen verschluckt werden (siehe Abb. S. 42).
Die Segmentierung der Vegetation erwartet demnach ein feiner skaliertes Ergebnis der
Geometrien. Anders als dies bei Gebäuden der Fall ist, ist die Struktur der Vegetation - bis auf
sehr flache Vegetationsklassen (Rasen) – sehr inhomogen und eine absolute Höhe nicht genau
feststellbar. Daher sollten feinere Strukturen erhalten bleiben.
Diese feine Segmentierung hat aber auch zur Folge, dass neben der arbeitspeicherintensiven
Verarbeitung das abschließende Ergebnis – bestehend aus zahlreichen sehr kleinen Segmenten
– auch durch die Attributierung (Zuordnung der Höhe) sehr viel mehr Speicherkapazität benötigt.
Des Weiteren müssen die nachfolgende Bearbeitung und das eigentliche Ziel, das Klimamodell
auf diese Datenmenge ausgelegt sein. Ggf. müssen die Ergebnisse wiederum zu größeren
Objekten im Zuge der Modellierung aggregiert werden. Begründet durch die eingangs erwähnte
Skalierung des Klimamodells auf 10 x 10m findet dieser Vorgang u. U. in jedem Fall statt.
Abb. 6-15: Segmente der Klassen Vegetation Scale Pa meter 20 (mitte) und 50 (rechts) ra
Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
42
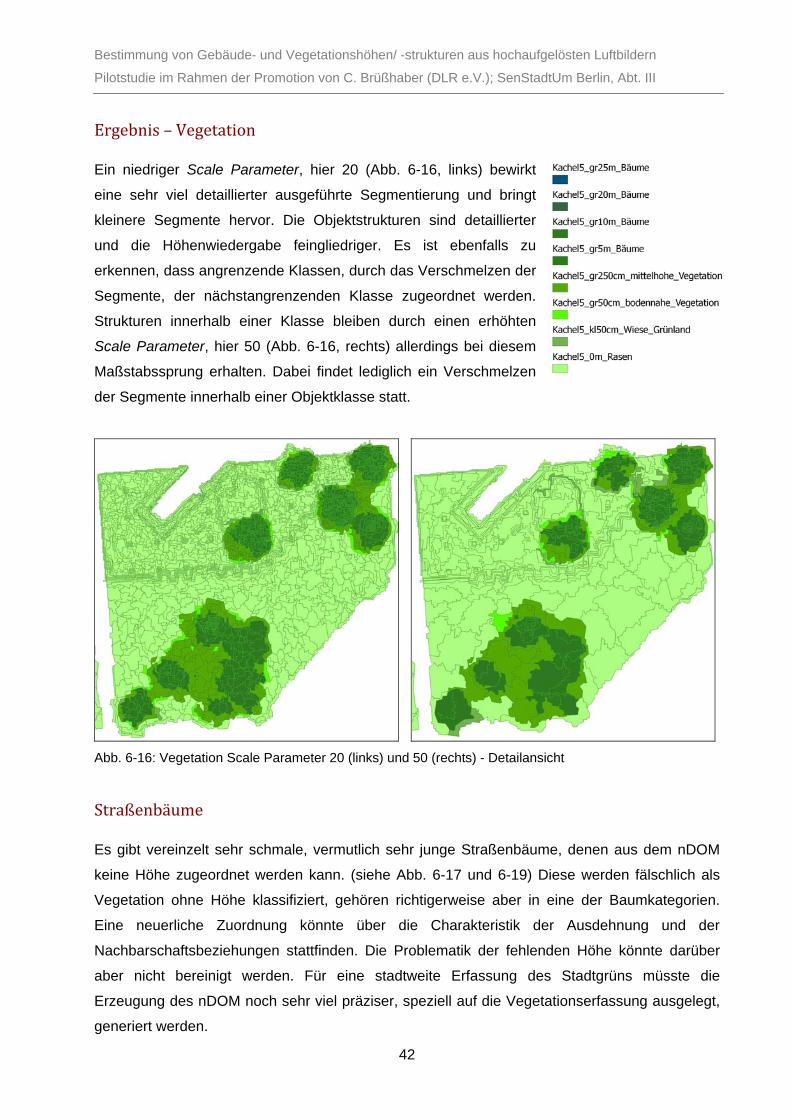
Ergebnis – Vegetation
Ein niedriger Scale Parameter, hier 20 (Abb. 6-16, links) bewirkt
eine sehr viel detaillierter ausgeführte Segmentierung und bringt
kleinere Segmente hervor. Die Objektstrukturen sind detaillierter
und die Höhenwiedergabe feingliedriger. Es ist ebenfalls zu
erkennen, dass angrenzende Klassen, durch das Verschmelzen der
lzen
Segmente, der nächstangrenzenden Klasse zugeordnet werden.
Strukturen innerhalb einer Klasse bleiben durch einen erhöhten
Scale Parameter, hier 50 (Abb. 6-16, rechts) allerdings bei diesem
Maßstabssprung erhalten. Dabei findet lediglich ein Verschme
der Segmente innerhalb einer Objektklasse statt.
Abb. 6-16: Vegetation Scale Parameter 20 (links) und 50 (rechts) - Detailansicht
Straßenbäume
Es gibt vereinzelt sehr schmale, vermutlich sehr junge Straßenbäume, denen aus dem nDOM
keine Höhe zugeordnet werden kann. (siehe Abb. 6-17 und 6-19) Diese werden fälschlich als
Vegetation ohne Höhe klassifiziert, gehören richtigerweise aber in eine der Baumkategorien.
Eine neuerliche Zuordnung könnte über die Charakteristik der Ausdehnung und der
Nachbarschaftsbeziehungen stattfinden. Die Problematik der fehlenden Höhe könnte darüber
aber nicht bereinigt werden. Für eine stadtweite Erfassung des Stadtgrüns müsste die
ung ausgelegt,
generiert werden.
Erzeugung des nDOM noch sehr viel präziser, speziell auf die Vegetationserfass

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
Abb. 6-17: Klassifikationsergebnis „Baum“ überlagert m
43
it Straßenbäumen der ALK.
Auch Schattenbereiche, besonders in engen
Straßenzügen ergeben Schwierigkeiten bei
der Erfassung und vor allem der Höhenbe-
stimmung. Dies ist u. a. in der Beschaffenheit
des normierten DOM begründet.
Abb. 6-18: Klassen Vegetation je Höhenintervall
(unsortierte Darstellung).
Abb. 6-19: Klassifikationsergebnis „Baum“ überlagert mit Straßenbäumen der ALK.

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
GIS‐Export
Zur Weiterverarbeitung der Klassifikationsergebnisse werden die Geometrien der Vegetation
und Gebäudesegmente als geschlossene Polygone ins Shape-Format (*.shp) exportiert.
Export Type: Shape file
Content type: Polygon smoothed
Format: Shapefile (*.shp)
Level: ROI_veg
Export File Name:
Kachel6_gr250cm_mittelhohe_Vgt
Neben der Klasse und den dazugehörigen Polygonen werden auch Features und auch
verknüpfte Attribute aus den thematischen Daten (ALK, ISU Blockdaten) z. B. die OSKA-
Schlüssel in die dazugehörige Database (DBF) integriert (Abb. 6-20).
In den Export wird als Attribut die durchschnittliche Höhe des nDOM pro Segment
(mean[nDOM]) und im Fall der Gebäude auch d s
ermöglicht die Bereinigung von Fehlsegmentierungen – Segmente, die etwa nur aus einem Pixel
estehen werden während der GIS-Verarbeitung eliminiert.
Abb. 6-20: Feature-Export (Attribut).
ie Fläche pro Segment (Area) integriert. Die
b
44

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
45
Verarbeitung im Quantum‐GIS
Die Attribute der Shape-Dateien werden um die Spalte „Klasse“ erweitert (Abb.6-21).
Abb. 6-21: DataBase (QGIS) mit Attributen der Gebäude
Die Höhen im normierten Oberflächenmodell werden in D ben. Das nDOM
verfügt über eine Auflösung in z von 10 cm. Die unzähligen n sind im Zuge
der Klassifikation entstanden und müssen in der DBF und in der Umsetzung der Höhen
demnach nicht weiter berücksichtigt werden.
ezimeter angege
Nachkommastelle
Abb. 6-22: Kartendarstellung der Kachel 01

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
46
7. Ergebnis
Bei der Genauigkeitsbetrachtung wird auf ein für die objektbasierte Klassifikation übliches
Accuracy Assessment und eine Error-Matrix verzichtet. Die Eindeutigkeit der Gebäudeerfassung
wird durch die Einbeziehung der ALK als amtliche Referenz gewährleistet. Schwierigkeiten
ergaben sich lediglich im Bereich großer Baustellen, wie am Bahnhof Ostkreuz. In der ALK
t mehr vorhanden. Diese wurden demnach
er Kategorie Gebäude_keine Höhe zugeordnet. Auch Gebäude, die sich noch im Bau befanden
ng des nDOM. Auffällig ist das nicht durchgängig
orhandensein von Baumhöhen. Des Weiteren wurden Straßenbäume detektiert, die noch nicht
in der ALK erfasst sind. Schwierigkeiten ergaben sich zudem in verschatteten Bereichen entlang
von Gebäudezügen, die wiederum auf das nDOM zurückzuführen ist.
verzeichnete, kleinere Gebäude waren zum Teil nich
d
wurden nicht berücksichtigt.
Die Genauigkeit des erfassten Grün- und Baumbestandes wird visuell über eine Stichprobe
gewonnen. Verglichen wurde die Klassifikation der detektierten Bäume mit den Polygonen der
Straßenbäume aus der ALK unter Betrachtu
V
Abb. 7-1: Zusammenschau des Ergebnisses
Insgesamt als sehr auffällig zeigt sich die Fülle an Grünflächen und hohem bis sehr hohem
Baumbestand in der Berliner Innenstadt, was sich im Vergleich der einzelnen Kacheln
zueinander aber sehr unterschiedlich darstellt. In Kachel 1 (im Bereich „Großer Tiergarten“) ist
aufgrund des Stadtparks sehr viel Grün vorhanden, der übrige Bereich verfügt vermutlich wegen
Baum- und Grünflächenbestand (s. Abb. 6-22). Kachel
11 dagegen, im Süden des Untersuchungsgebiets, verfügt im direkten Umfeld der Wohn- und
Geschäftsbebauung vergleichsweise über einen sehr viel höheren Grünflächen- und
Baumbestand (Abb. 7-2).
der dichten Bebauung, über sehr wenig

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
otion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
47
Pilotstudie im Rahmen der Prom
Abb. 7-2: Kartendarstellung der Kachel 11
8. Fazit
Die objektbasierte Klassifikation in Kombination mit den hochaufgelösten Luftbilddaten der
UltraCamX und dem abgeleiteten normierten Oberflächenmodell bilden ein geeignetes
Werkzeug zur Erfassung von Vegetations- und Höheninformationen.
Die verwendete Datenbasis, bestehend aus digitalen, multispektralen Luftbilddaten (zzgl. des
matisierten Liegenschaftskarte von Berlin
nd den abgeleiteten, künstlichen Kanälen und Indizes bildet im Zusammenspiel mit der
sichtigt werden können.
DOM und nDOM), den amtlichen Geometrien der Auto
u
gewählten Methodik die Grundlage einer gezielten Bestandsaufnahme des Stadtgrüns und der
Objekthöhen von Berlin.
Für eine stadtweite Erfassung sollte ggf. die gewünschte Detailtiefe der zu erfassenden Objekte
berücksichtigt und dem eigentlichen Verwendungszweck, der Klimamodellierung entsprechend
angepasst werden. Ebenso denkbar ist die Reduzierung der Auflösung, um die Performanz der
verwendeten Software zu steigern und die durchgeführte Segmentierung zu beschleunigen.
Das nDOM müsste soweit angepasst werden, dass kleinere Vegetationsstrukturen auch in
Schattenbereichen berück

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
QUELLEN
Baatz, M. et al. (2000) Multiresolution Segmentation: an optimization approach for high quality
multi-scale image segmentation, Proc. AGIT-Symposium, S. 12-23.
Blaschke, T. (2000): Objektextraktion und regelbasierte Klassifikation von
Fernerkundungsdaten: Neue Möglichkeiten für GIS-Anwender und Planer. Schrenk, M. (Ed.),
CORP’ 2000, Computergestützte Raumplanung, Wien, Vol. 1, S. 153-162.
Bruse, M. (2001): Anwendung von mikroskaligen Simulationsmodellen in der Stadtplanung.
Geographisches Institut, AG Klimaforschung, Ruhr-Universität Bochum.
Brüßhaber, C. et al. (2010) Possibilities and constraints in the use of very high spatial resolution
UltraCamX airborne imagery and Digital Surface Models for classification in densely built-up
areas – a case study Berlin. In: Remote Sensing f. Environmtl. Monitoring, GIS Applications, and
Geololgy X, 7831. SPIE, 2010, Toulouse.
Fehrenbach, U.; Scherer, D. Parlow E. (2001): Automated classification of planning objectives
for the consideration of climate and air quality in urban and regional planning for the example o
ospheric Environment 35, S. 5605–5615.
007), UltraCamX, the new Digital Aerial Camera System by Microsoft
y, Fritsch D. (Ed.) Photogrammetric Week ’07, S. 137-145.
Stereo Vision in Structured Environment by Consistent Semi-Global
ng,
f
the ion of Ba
Gruber, M. (2
Photogrammetr
reg sel/Switzerland. In: Atm
Hildebrandt, G. (1996): Fernerkundung und Luftbildmessung, Wichmann Verlag, Heidelberg.
Hirschmüller, H., (2005): Accurate and Efficient Stereo Processing by Semi-Global Matching and
Mutual Information. In Pro. of the IEEE International Conference on Computer Vision and
Pattern Recognition (CVPR 2005), San Diego, CA, USA, S. 807-814, 20-25.
Hirschmüller, H., (2006):
Matching. In Proc. of the IEEE, International Conference on Computer Vision and Pattern
Recognition (CVPR 2006), New York, NY, USA.
Hirschmüller, H. et al. (2010): Evaluation of Digital Surface Models by Semi-Global-Matchi
DGPF Tagungsband 19/2010, Dreiländertagung OVG, DGPF and SGPF, 571-580
48

Bestimmung von Gebäude- und Vegetationshöhen/ -strukturen aus hochaufgelösten Luftbildern
Pilotstudie im Rahmen der Promotion von C. Brüßhaber (DLR e.V.); SenStadtUm Berlin, Abt. III
49
Junk, J. et al. (
Biometeorology
2003): Urban climate and air quality in Trier Germany. In: International Journal of
, 47 (4), S. 230–238.
ionen aus Photographien
nd Laseraufnahmen. 7. Aufl. de Gruyter Lehrbuch, Walter de Gruyter Berlin, New York.
BW München.
04.
tbildkamera – Einführung und Grundlagen. 1. Aufl.
erbert Wichmann Verlag, Hüthig GmbH & Co. KG, Heidelberg, S. 5.
Kraus, K. (2004): Photogrammetrie Band 1 – Geometrische Informat
u
Leukert, K. (2005): Übertragbarkeit der objektbasierten Analyse bei der Gewinnung von GIS-
Daten aus Satellitenbildern mittlerer Auflösung, Dissertation Universität der
Mayer, S., (2004): Automatisierte Objekterkennung zur Interpretation hochauflösender Bilddaten
in der Erdfernerkundung, Dissertation, Humboldt-Universität zu Berlin, 20
Offerle, B. et al. (2007): Surface heating in relation to air temperature, wind and turbulence in an
urban street canyon. In: Boundary-Layer Meteorol 122 (2), S. 273–292.
Sandau, R. (Hrsg.), (2005): Digitale Luf
H
Schrerr, O., (2005): Stereoanalyse und Bildanalyse, Springer Verlag Berlin Heidelberg, S. 65-78.
Recommended

















