Embed Size (px)
Citation preview
1 Mechanik
1.1 Erdbeschleunigung mit dem Pendel
Aufgaben: In diesem Experiment werden die Schwingungen eines physikalischenPendels untersucht. Aus der Schwingungsdauer eines physikalischen Pendels wirddie Erdbeschleunigung ermittelt.
Vorkenntnisse/Grundlagen: Beschreibung von Schwingungen, Winkelgeschwin-digkeit, Winkelbeschleunigung, Drehmoment, Tragheitsmoment, Satz von Steiner
Literatur:
• F. Kohlrausch: Praktische Physik 1, ISBN 3-519-23001-1,S.62 - S.64 (Orts-und Zeitabhangigkeit der Erdbeschleunigung)
• F. Kohlrausch : Praktische Physik 3, ISBN 3-519-23000-3,S.293 - S.295 (Tabellenwerte der Erdbeschleunigung)
1.1.1 Das mathematische Pendel
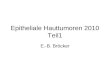
Das einfache mathematische Pendel besteht aus einer punktformigen, schwerenMasse mS, die an einem masselosen Faden der Lange l aufgehangt ist (Abb.1.1).In der Ruhelage bewirkt die Schwerkraft Fg = mS · g mit g als Erdbeschleu-nigung, dass das Pendel senkrecht hangt. Nach Auslenkung aus der Ruhelageum einen kleinen Winkel ϕmax (klein bedeutet hier sinϕmax ≈ ϕmax) entsteht einruckstellendes Drehmoment l·Fr, das das Pendel wegen seines Tragheitsmomentesin harmonische Schwingungen versetzt. Die Bewegungsgleichung lautet
J · ϕ = −mS · g · l · sin(ϕ) ≈ −mS · g · l · ϕ, (1.1)
wobei J = mT · l2 das Tragheitsmoment der tragen Masse mT in der Entfernungl vom Aufhangepunkt ist und die rechte Seite das rucktreibende Drehmomentdarstellt; ϕ ist der momentane Auslenkwinkel und ϕ = d2ϕ/dt2 die momenta-ne Winkelbeschleunigung. Mit mT = mS (Einstein’sches Aquivalenzprinzip derGleichheit von schwerer und trager Masse) wird die Bewegung unabhangig vonden Massen:
ϕ = −gl· ϕ = −ω2 · ϕ. (1.2)
Dies ist eine lineare, homogene Differentialgleichung zweiter Ordnung, deren all-gemeine Losung eine harmonische Schwingung darstellt:
ϕ(t) = A · cos(ωt) +B · sin(ωt). (1.3)
13
1 Mechanik
Abbildung 1.1: Das mathematische Pendel
ω =√g/l ist die Kreisfrequenz der Schwingung. Die Anfangsbedingungen legen
die Integrationskonstanten A und B fest. Mit ϕ(t = 0) = ϕmax und ϕ(t = 0) =0 (Start der Pendelbewegung vom Auslenkwinkel ϕmax ohne Anfangswinkelge-schwindigkeit) ergibt sich
ϕ(t) = ϕmax · cos(ωt). (1.4)
Die Schwingungsdauer betragt
T =2π
ω= 2π ·
√l
g, (1.5)
bzw.
T 2 = 4π2 · 1
g· l. (1.6)
Das Quadrat der Schwingungsdauer wachst also linear mit der Pendellange l.
1.1.2 Das physikalische Pendel
Die Bewegungsgleichung fur ein physikalisches Pendel, d.h. eines ausgedehnten,massebehafteten Systems, das um einen Aufhangepunkt bzw. um eine Achse
14
1.1 Erdbeschleunigung mit dem Pendel
schwingen kann, ist formal mit der des mathematischen Pendels identisch:
J · ϕ = −m · g · ls · ϕ. (1.7)
Das rucktreibende Drehmoment wird wieder von der Schwerkraft erzeugt. Nachdem Schwerpunktssatz verhalt sich das System so, als ob die Gesamtmasse m imSchwerpunkt konzentriert ist. Demgemaß ist ls die Distanz von Aufhangepunktbzw. Drehachse zum Schwerpunkt S. Die Tragheit ist gegeben durch das Ge-samttragheitsmoment J um die Drehachse. Man erhalt als Losung wieder eineharmonische Schwingung mit der Kreisfrequenz
ω2 =m · g · ls
J. (1.8)
Mit ω2 = 4π2/T 2 wird die Schwingungsdauer T dann
T 2 =1
g· 4π2 · J
mls. (1.9)
1.1.3 Bestimmung der Erdbeschleunigung
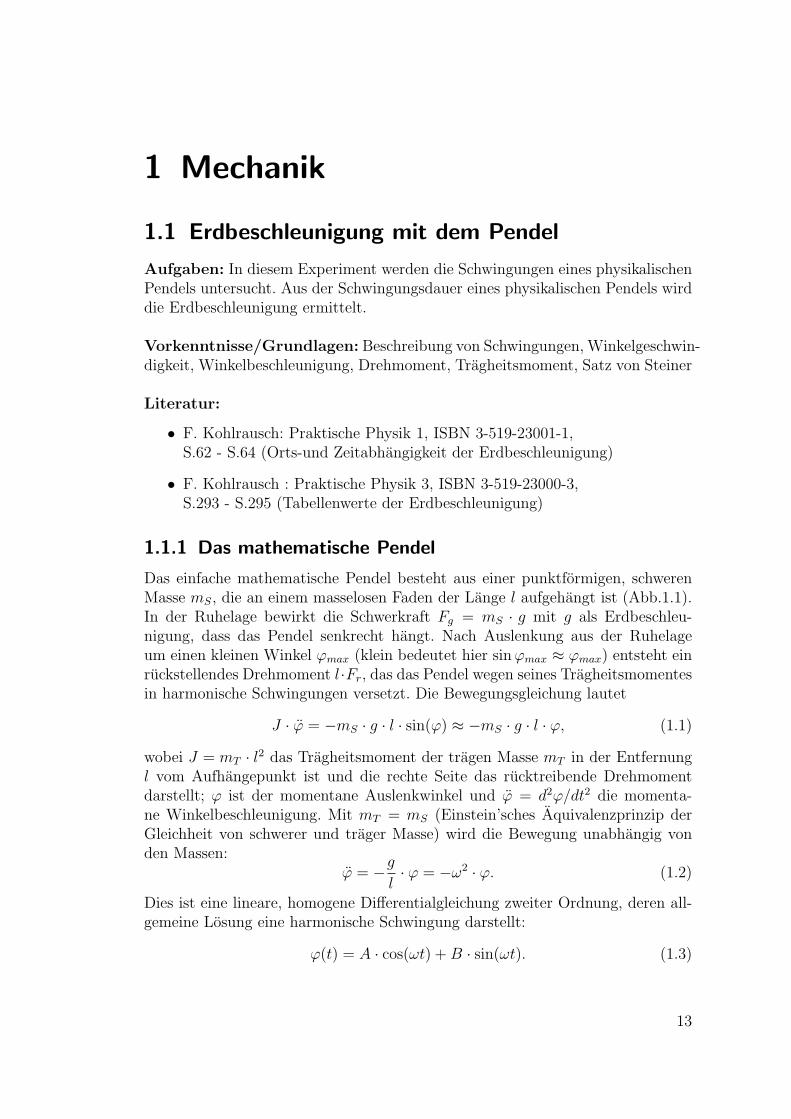
Abbildung 1.2: Pendel im Versuchsaufbau
15

1 Mechanik
Das vorliegende physikalische Pendel besteht aus dem Winkelaufnehmer-Profil,der Pendelstange und dem zylindrischen Pendelkorper (Abb. 1.2). Um die Erd-beschleunigung g aus der Pendelfrequenz zu bestimmen, musste man also das ge-samte Tragheitsmoment, Masse und Schwerpunkt des Pendels kennen. Im Prin-zip kann man die Tragheitsmomente der einzelnen Bestandteile um die Pende-laufhangung bestimmen und zum Gesamttragheitsmoment zusammenaddieren.Den Schwerpunkt erhalt man aus den Schwerpunkten der einzelnen Bestandteile,die man mit den Einzelmassen gewichtet mittelt:
~Sges =
∑mi · ~Si∑mi
, (1.10)
wobei ~Si die Schwerpunkte der Einzelteile und mi ihre Massen sind. Dabei wurdeman die Bestandteile durch einfache geometrische Objekte annahern, deren Trag-heitsmomente und Schwerpunkte sich mit vernunftigem Aufwand berechnen las-sen (Pendelkorper durch homogenen Zylinder, Stange durch homogene Stange,Winkelaufnehmer durch Hohlzylinder).Eine einfachere Moglichkeit, g zu bestimmen, besteht darin, den systematischenFehler, der durch das Tragheitsmoment JSt und das Ruckstellmoment DSt derStange (mit Winkelaufnehmer) auftritt, zu minimieren. Man geht dabei so vor,dass zunachst die Schwingungsfrequenz der Stange allein bestimmt wird. Danachwird der Pendelkorper an der Stelle angebracht, an der die Kombination Stan-ge/Pendel dieselbe Schwingungsfrequenz hat, wie die Stange allein. In diesem Fallbeeinflussen sich Pendelkorper und Stange nicht. Fur die Stange allein gilt:
ω2st =
Dst
Jst.
Fur den Pendelkorper allein gilt:
ω2p =
Dp
Jp.
Das physikalische Pendel, bestehend aus Stange und Pendelkorper hat die Eigen-frequenz:
ω2 =Dst +Dp
Jst + Jp= ω2
p ·1 + Dst
Dp
1 + JstJp
= ω2st ·
1 + DpDst
1 + JpJst
. (1.11)
Hat man nun das Pendel so eingestellt, dass ω = ωst gilt, so sieht man aus Gl.1.11,dass dann auch gelten muss: Jp
Jst= Dp
Dst. Umgeformt ergibt sich
Dp
Jp=Dst
Jst≡ ω2
st = ω2 = ω2p.
Das heißt, dass man das Pendel nun so behandeln kann, als bestunde es bloßaus dem Pendelkorper, der masselos aufgehangt ist. Die Ausdehnung des Pen-delkorpers wird dabei nicht vernachlassigt. Man benutzt also das Tragheitsmoment
16
1.1 Erdbeschleunigung mit dem Pendel
eines homogenen Zylinders mit Radius rp, der im Abstand lp um den Aufhangepunktschwingt. Dieses ergibt sich mit Hilfe des Satzes von Steiner zu:
Jp =1
2mpr
2p +mpl
2p. (1.12)
Fur das Quadrat der Kreisfrequenz erhalt man dann
ω2 =Dp
Jp=
mp · g · lp12mpr2
p +mpl2p. (1.13)
Daraus ergibt sich die Erdbeschleunigung g zu
g = ω2lp
(1 +
1
2
r2p
l2p
). (1.14)
In der Klammer beschreibt die 1 das mathematische Pendel, wahrend der zweiteTerm die Korrektur ist, die die Ausdehnung des Pendelkorpers berucksichtigt.
Kreisfrequenz ω, Frequenz f und Periodendauer T hangen dabei stets uber
ω = 2πf =2π
T(1.15)
zusammen.
1.1.4 Versuchsaufbau und Durchfuhrung
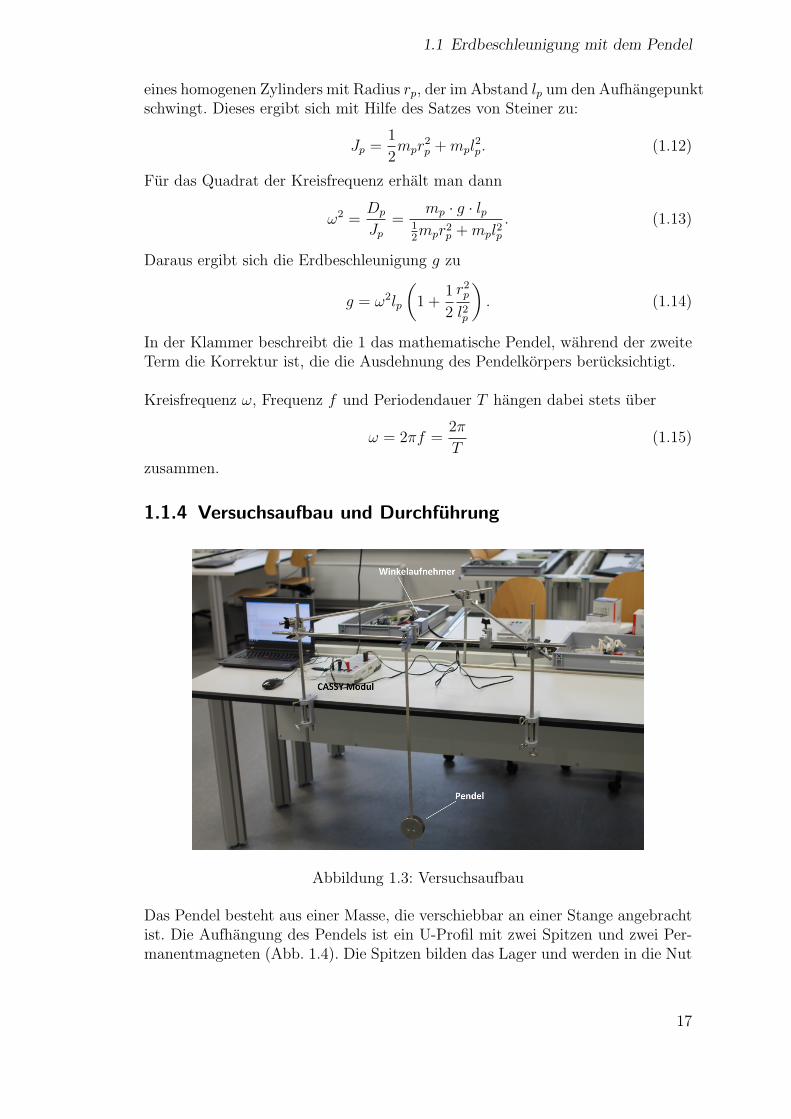
Abbildung 1.3: Versuchsaufbau
Das Pendel besteht aus einer Masse, die verschiebbar an einer Stange angebrachtist. Die Aufhangung des Pendels ist ein U-Profil mit zwei Spitzen und zwei Per-manentmagneten (Abb. 1.4). Die Spitzen bilden das Lager und werden in die Nut
17
1 Mechanik
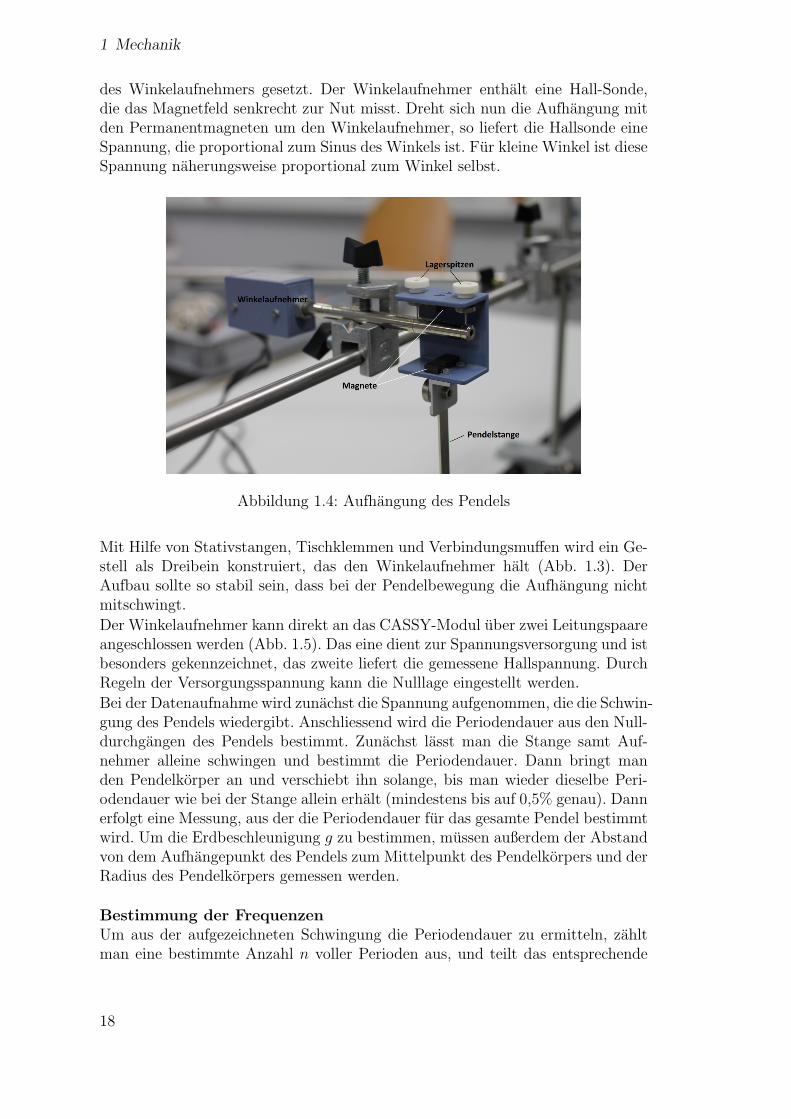
des Winkelaufnehmers gesetzt. Der Winkelaufnehmer enthalt eine Hall-Sonde,die das Magnetfeld senkrecht zur Nut misst. Dreht sich nun die Aufhangung mitden Permanentmagneten um den Winkelaufnehmer, so liefert die Hallsonde eineSpannung, die proportional zum Sinus des Winkels ist. Fur kleine Winkel ist dieseSpannung naherungsweise proportional zum Winkel selbst.
Abbildung 1.4: Aufhangung des Pendels
Mit Hilfe von Stativstangen, Tischklemmen und Verbindungsmuffen wird ein Ge-stell als Dreibein konstruiert, das den Winkelaufnehmer halt (Abb. 1.3). DerAufbau sollte so stabil sein, dass bei der Pendelbewegung die Aufhangung nichtmitschwingt.
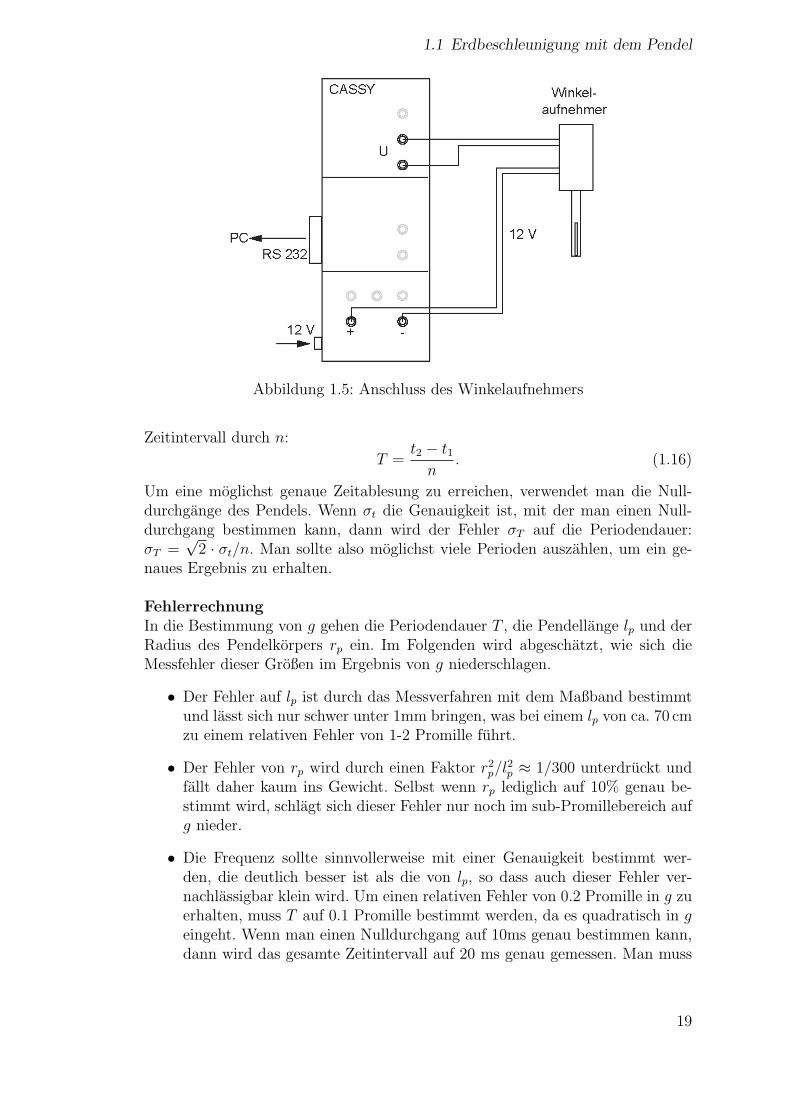
Der Winkelaufnehmer kann direkt an das CASSY-Modul uber zwei Leitungspaareangeschlossen werden (Abb. 1.5). Das eine dient zur Spannungsversorgung und istbesonders gekennzeichnet, das zweite liefert die gemessene Hallspannung. DurchRegeln der Versorgungsspannung kann die Nulllage eingestellt werden.
Bei der Datenaufnahme wird zunachst die Spannung aufgenommen, die die Schwin-gung des Pendels wiedergibt. Anschliessend wird die Periodendauer aus den Null-durchgangen des Pendels bestimmt. Zunachst lasst man die Stange samt Auf-nehmer alleine schwingen und bestimmt die Periodendauer. Dann bringt manden Pendelkorper an und verschiebt ihn solange, bis man wieder dieselbe Peri-odendauer wie bei der Stange allein erhalt (mindestens bis auf 0,5% genau). Dannerfolgt eine Messung, aus der die Periodendauer fur das gesamte Pendel bestimmtwird. Um die Erdbeschleunigung g zu bestimmen, mussen außerdem der Abstandvon dem Aufhangepunkt des Pendels zum Mittelpunkt des Pendelkorpers und derRadius des Pendelkorpers gemessen werden.
Bestimmung der FrequenzenUm aus der aufgezeichneten Schwingung die Periodendauer zu ermitteln, zahltman eine bestimmte Anzahl n voller Perioden aus, und teilt das entsprechende
18
1.1 Erdbeschleunigung mit dem Pendel
Abbildung 1.5: Anschluss des Winkelaufnehmers
Zeitintervall durch n:
T =t2 − t1n
. (1.16)
Um eine moglichst genaue Zeitablesung zu erreichen, verwendet man die Null-durchgange des Pendels. Wenn σt die Genauigkeit ist, mit der man einen Null-durchgang bestimmen kann, dann wird der Fehler σT auf die Periodendauer:σT =
√2 · σt/n. Man sollte also moglichst viele Perioden auszahlen, um ein ge-
naues Ergebnis zu erhalten.
FehlerrechnungIn die Bestimmung von g gehen die Periodendauer T , die Pendellange lp und derRadius des Pendelkorpers rp ein. Im Folgenden wird abgeschatzt, wie sich dieMessfehler dieser Großen im Ergebnis von g niederschlagen.
• Der Fehler auf lp ist durch das Messverfahren mit dem Maßband bestimmtund lasst sich nur schwer unter 1mm bringen, was bei einem lp von ca. 70 cmzu einem relativen Fehler von 1-2 Promille fuhrt.
• Der Fehler von rp wird durch einen Faktor r2p/l
2p ≈ 1/300 unterdruckt und
fallt daher kaum ins Gewicht. Selbst wenn rp lediglich auf 10% genau be-stimmt wird, schlagt sich dieser Fehler nur noch im sub-Promillebereich aufg nieder.
• Die Frequenz sollte sinnvollerweise mit einer Genauigkeit bestimmt wer-den, die deutlich besser ist als die von lp, so dass auch dieser Fehler ver-nachlassigbar klein wird. Um einen relativen Fehler von 0.2 Promille in g zuerhalten, muss T auf 0.1 Promille bestimmt werden, da es quadratisch in geingeht. Wenn man einen Nulldurchgang auf 10ms genau bestimmen kann,dann wird das gesamte Zeitintervall auf 20 ms genau gemessen. Man muss
19
1 Mechanik
also 200 s lang messen, um eine relative Genauigkeit von 0.1 Promille zuerreichen, was bei einer Frequenz von 0.6 Hz 120 vollen Perioden entspricht.
Geben Sie bei Ihrer Fehlerrechnung die Große der Einzelbeitrage an, die zu demGesamtfehler fuhren, und diskutieren Sie diese. Welcher Fehler dominiert den Ge-samtfehler?
Fehler durch Vernachlasssigung der StangeWie vorher gezeigt wurde, kann man das Pendel als masselos aufgehangten Zy-linder beschreiben und die Stange samt Aufhangung vernachlassigen. Dies giltallerdings nur, wenn ωSt genau gleich ωP wird. Tatsachlich, erreicht man abernie eine genaue Ubereinstimmung dieser beiden Kreisfrequenzen, sondern beob-achtet eine kleine Abweichung. Man kann abschatzen, wie diese Abweichung sichauf den ermittelten Wert der Erdbeschleunigung auswirkt. Wenn ω2
St = DStJSt
und
ω2 = DSt+DPJSt+JP
= ω2St + ε, dann gilt ω2
P = DPJP
= ω2 + ε · JStJp
. Da das Verhaltnis
der Tragheitsmomente von Stange und Pendelkorper ca. 0.1 ist, geht die relativeAbweichung der Frequenzen mit dem Faktor 0.2 in die Bestimmung von g ein,da g ∼ ω2. Um unter einem Promille Abweichung zu bleiben, mussen die beidenFrequenzen also besser als 0.5% ubereinstimmen. Im Prinzip kann man aus derAbweichung der Frequenzen einen Korrektur-Faktor fur g bestimmen und dasErgebnis damit korrigieren.
20
1.2 Schwingungen von gekoppelten Pendeln
1.2 Schwingungen von gekoppelten Pendeln
Aufgaben: In diesem Experiment werden die Schwingungen von zwei Pendelnuntersucht, die durch eine Feder miteinander gekoppelt sind. Fur verschiedeneKopplungsstarken werden die Schwingungsdauern der beiden Grundschwingun-gen sowie der Schwebung des Systems gemessen und die Schwebungsdauer mitder Erwartung verglichen.
Vorkenntnisse/Grundlagen: Federverhalten (Hooke’sches Gesetz), Beschrei-bung von Schwingungen, Winkelgeschwindigkeit, Winkelbeschleunigung, Dreh-moment, Tragheitsmoment, Direktionsmoment
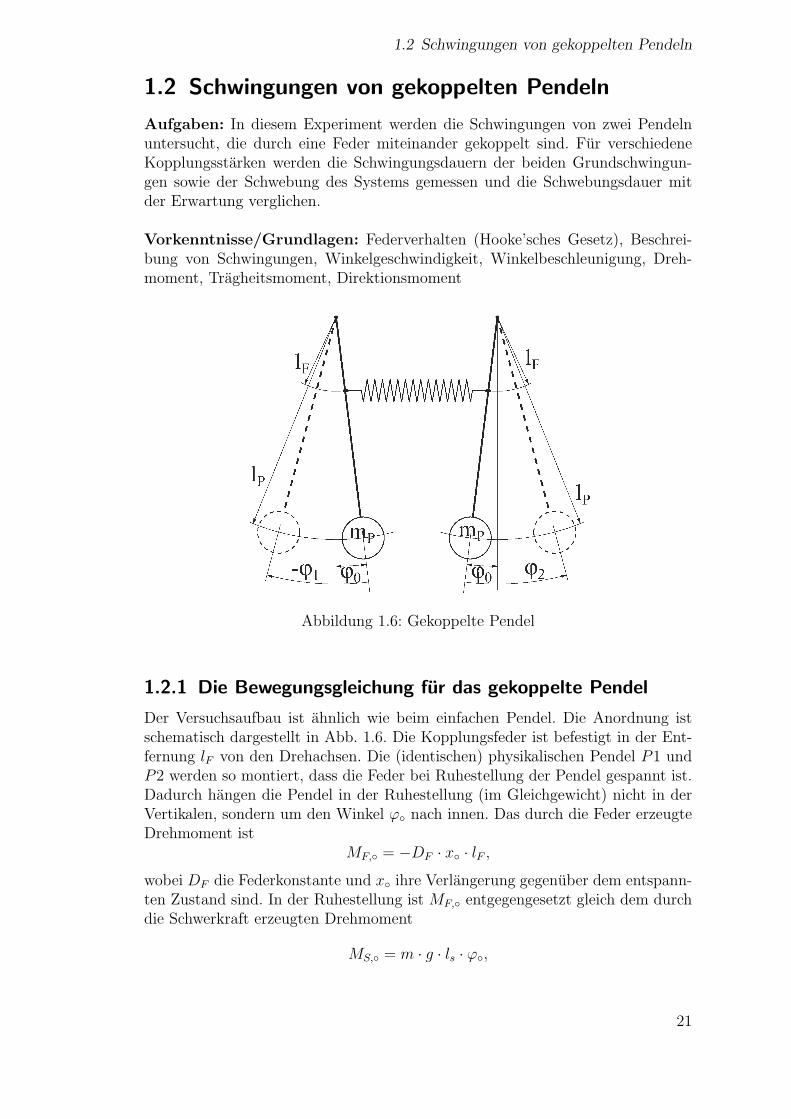
Abbildung 1.6: Gekoppelte Pendel
1.2.1 Die Bewegungsgleichung fur das gekoppelte Pendel
Der Versuchsaufbau ist ahnlich wie beim einfachen Pendel. Die Anordnung istschematisch dargestellt in Abb. 1.6. Die Kopplungsfeder ist befestigt in der Ent-fernung lF von den Drehachsen. Die (identischen) physikalischen Pendel P1 undP2 werden so montiert, dass die Feder bei Ruhestellung der Pendel gespannt ist.Dadurch hangen die Pendel in der Ruhestellung (im Gleichgewicht) nicht in derVertikalen, sondern um den Winkel ϕ nach innen. Das durch die Feder erzeugteDrehmoment ist
MF, = −DF · x · lF ,
wobei DF die Federkonstante und x ihre Verlangerung gegenuber dem entspann-ten Zustand sind. In der Ruhestellung ist MF, entgegengesetzt gleich dem durchdie Schwerkraft erzeugten Drehmoment
MS, = m · g · ls · ϕ,
21

1 Mechanik
wobei ls die Entfernung des Schwerpunktes jedes der beiden Pendel von seinerDrehachse und m die Gesamtmasse jedes Pendels bedeuten. Wird P2 um ϕ2 ausder Nullage ausgelenkt, so wirkt insgesamt das Drehmoment
M2 = −m · g · ls · (ϕ2 − ϕ)−DF · (x + lFϕ2) · lF
oderM2 = −m · g · ls · ϕ2 −DF · l2F · ϕ2.
Wird außerdem P1 um −ϕ1 verschoben, so kommt durch die Feder das Drehmo-ment DF l
2Fϕ1 hinzu, so dass sich insgesamt ergibt
M2 = −m · g · ls · ϕ2 −DF · l2F · (ϕ2 − ϕ1).
Analog wird fur P1
M1 = −m · g · ls · ϕ1 +DF · l2F · (ϕ2 − ϕ1).
Die Bewegungsgleichungen beider Pendel lauten somit
J · ϕ1 = M1 = −m · g · ls · ϕ1 +DF · l2F · (ϕ2 − ϕ1),
J · ϕ2 = M2 = −m · g · ls · ϕ2 −DF · l2F · (ϕ2 − ϕ1),
bzw. mit den Abkurzungen
ω2s =
mglsJ
,
Ω2 =DF l
2F
J:
ϕ1 = −ω2s · ϕ1 + Ω2 · (ϕ2 − ϕ1), (1.17)
ϕ2 = −ω2s · ϕ2 − Ω2 · (ϕ2 − ϕ1). (1.18)
Dies ist ein System gekoppelter linearer Differentialgleichungen. Die Losung wirdmit Hilfe der Substitutionen α = ϕ2 + ϕ1, β = ϕ2 − ϕ1 erreicht: Summe undDifferenz der beiden Gleichungen 1.17 und 1.18 fuhren auf die einfachen Differen-tialgleichungen
α = −ω2s · α (1.19)
β = −(ω2s + 2Ω2) · β = −ω2
sf · β (1.20)
mit den Losungen
α(t) = ϕ2(t) + ϕ1(t) = A · sin(ωst) +B · cos(ωsf t), (1.21)
β(t) = ϕ2(t)− ϕ1(t) = C · sin(ωst) +D · cos(ωsf t). (1.22)
Die Konstanten werden durch die Anfangsbedingungen festgelegt. Liegen beimStart der Bewegung keine Anfangswinkelgeschwindigkeiten vor, d.h. ϕ2(t = 0) = 0und ϕ1(t = 0) = 0, so wird A = C = 0 und aus der Summe der Gleichungen 1.21und 1.22 wird
2ϕ2(t) = B · cos(ωst) +D · cos(ωsf t),
22
1.2 Schwingungen von gekoppelten Pendeln
2ϕ1(t) = B · cos(ωst)−D · cos(ωsf t).
Werden die Pendel aus den Positionen ϕ1(t = 0) = ϕmax und ϕ2(t = 0) = ϕmaxgestartet, so wird D = 0 und B = 2ϕmax und die Pendel schwingen gleichsinniggemaß
ϕ2(t) = ϕmax · cos(ωst) (1.23)
ϕ1(t) = ϕmax · cos(ωst) (1.24)
mit der Kreisfrequenz ωs, d.h. der Kreisfrequenz jedes Pendels ohne Kopplung.Werden die Pendel aus den entgegengesetzten Positionen ϕ1(t = 0) = −ϕmax,ϕ2(t = 0) = +ϕmax gestartet, so wird B = 0 und D = 2ϕmax und die Pendelschwingen gegensinnig:
ϕ2(t) = ϕmax · cos(ωsf t) (1.25)
ϕ1(t) = −ϕmax · cos(ωsf t) (1.26)
mit der Kreisfrequenz ωsf :ω2sf = ω2
s + 2Ω2. (1.27)
Wird die Schwingung mit Pendel P1 mit ϕ1(t = 0) = ϕmax und Pendel P2 inRuheposition, ϕ2(t = 0) = 0 gestartet, so wird B = D = ϕmax und
ϕ2(t) =1
2ϕmax · cos(ωst) +
1
2ϕmax · cos(ωsf t) (1.28)
ϕ1(t) =1
2ϕmax · cos(ωst)−
1
2ϕmax · cos(ωsf t). (1.29)
Jedes Pendel schwingt mit einer Uberlagerung von zwei verschiedenen Frequenzen.Mit Hilfe eines Additionstheorems fur trigonometrische Funktionen lassen sich dieGleichungen umschreiben in
ϕ1(t) = ϕmax · cos
(ωsf − ωs
2t
)· cos
(ωsf + ωs
2t
), (1.30)
ϕ2(t) = ϕmax · sin(ωsf − ωs
2t
)· sin
(ωsf + ωs
2t
). (1.31)
Mit den Abkurzungen
ωk =ωsf + ωs
2(1.32)
ωsch =ωsf − ωs
2(1.33)
wird darausϕ1(t) = ϕmax · cos(ωscht) · cos(ωkt), (1.34)
ϕ2(t) = ϕmax · sin(ωscht) · sin(ωkt). (1.35)
Die Bewegung jedes der beiden Pendel besteht also aus der Uberlagerung zweierSchwingungen mit den Kreisfrequenzen ωsch und ωk. Sie kann als Schwingung derhoheren Frequenz ωk angesehen werden, die mit der niedrigeren Frequenz ωschmoduliert ist. Diese Erscheinung wird Schwebung genannt.
23
1 Mechanik
1.2.2 Messgroßen
Der Messung zuganglich sind die Schwingungsdauern der gleichsinnigen Mode,
Ts =2π
ωs, (1.36)
der gegensinnigen Mode,
Tsf =2π
ωsf, (1.37)
sowie im Falle der Schwebung:
Tk =2π
ωk=
4π
ωsf + ωsund Tsch =
2π
ωsch=
4π
ωsf − ωs. (1.38)
Durch Einsetzen von ωs und ωsf ergeben sich folgende Beziehungen zwischen denSchwingungsdauern:
Tk = 2 · TsTsfTs + Tsf
, (1.39)
Tsch = 2 · TsTsfTs − Tsf
. (1.40)
Als Kopplungsgrad κ des Pendelsystems wird das Verhaltnis
κ =Ω2
ω2s + Ω2
=DF l
2F
mgls +DF l2F(1.41)
definiert. Mit ω2sf = ω2
s + 2Ω2 folgt
κ =12(ω2
sf − ω2s)
12(ω2
sf + ω2s)
=T 2s − T 2
sf
T 2s + T 2
sf
. (1.42)
Der Kopplungsgrad ist umso kleiner (die Kopplung also umso schwacher), je naherdie Befestigungspunkte der Feder an den Drehachsen der Pendel liegen.
1.2.3 Versuchsaufbau und Durchfuhrung
Es werden nun zwei Pendel im Abstand von ca. 50 cm an dem Gestell befestigtund uber ein Federpaar gekoppelt. Die Federn werden in verschiedenen Hohenan den Pendelstangen befestigt, wodurch unterschiedliche Kopplungskonstantenerzielt werden. Da die Federn nicht gestaucht werden konnen, mussen die Pendelso weit auseinander sein, dass die Federn in der Ruhelage schon gespannt sind.Es muss darauf geachtet werden, dass die Pendelauschlage so klein bleiben, dassdie Federn nie vollig entspannt sind.Beide Winkelaufnehmer konnen gleichzeitig mit einem CASSY-Modul ausgelesenwerden und haben einen unabhangigen Nullabgleich. Um eine gunstige Darstel-lung auf dem Bildschirm zu erzielen, kann die Nulllage eines Pendels entwederdurch die Versorgungsspannung des Winkelaufnehmers oder durch Einstellungeines Offsets in der CASSY-Software verschoben werden.
24

1.2 Schwingungen von gekoppelten Pendeln
Es werden die Pendelausschlage aufgenommen und die Fouriertransformierten be-stimmt. Im allgemeinen Fall erhalt man eine Schwebung, die eine Uberlagerungaus zwei Schwingungen mit dicht benachbarten Frequenzen ist. Im Fourierspek-trum erkennt man deshalb zwei Spitzen, die mit abnehmender Kopplungsstarkezusammenrucken. Lasst man die Pendel gleichsinnig (in Phase) schwingen, sotaucht nur die kleinere der beiden Frequenzen auf. Schwingen die Pendel gegen-sinnig, so erhalt man im Spektrum nur die Spitze der hoheren Frequenz. Um denFehler der Frequenzmessung zu erhalten, wird eine Messung mehrmals durch-gefuhrt und empirisch die Standardabweichung sowie daraus der Fehler des Mit-telwerts bestimmt. Die Abstande lF zwischen dem Aufhangepunkt des Pendelsund der Befestigung der Feder werden gemessen.
1.2.4 Auswertung
Aus den gemessenen Frequenzen wird der Kopplungsgrad κ bestimmt (Gl. (1.42)).Tragt man 1/κ als Funktion von 1/l2F auf, so ergibt sich nach Gl. (1.41) eineGerade, aus deren Steigung die Federkonstante ermittelt werden kann:
1
κ= 1 +
mlsg
DF
· 1
l2F. (1.43)
25
1 Mechanik
1.3 Tragheitsmomente
Physikalische Grundlagen: Definition des Tragheitsmomentes, Satz von Stei-ner, Direktionsmoment, Schwingungen
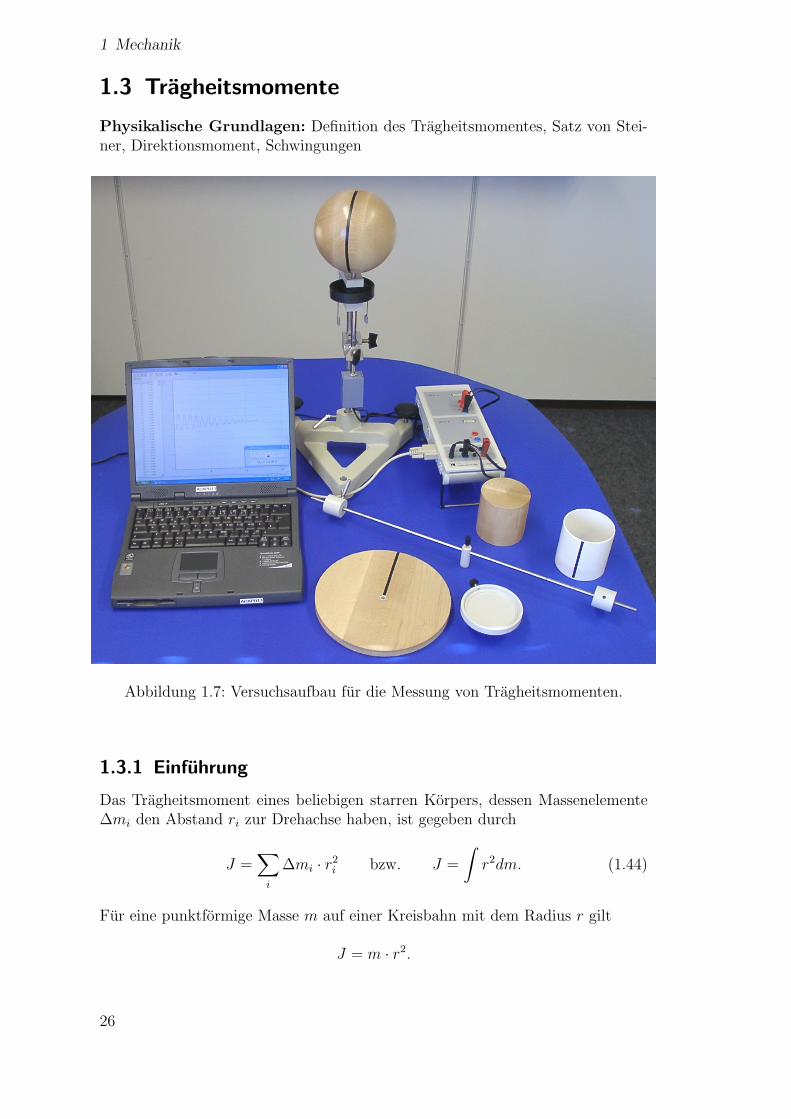
Abbildung 1.7: Versuchsaufbau fur die Messung von Tragheitsmomenten.
1.3.1 Einfuhrung
Das Tragheitsmoment eines beliebigen starren Korpers, dessen Massenelemente∆mi den Abstand ri zur Drehachse haben, ist gegeben durch
J =∑i
∆mi · r2i bzw. J =
∫r2dm. (1.44)
Fur eine punktformige Masse m auf einer Kreisbahn mit dem Radius r gilt
J = m · r2.
26
1.3 Tragheitsmomente
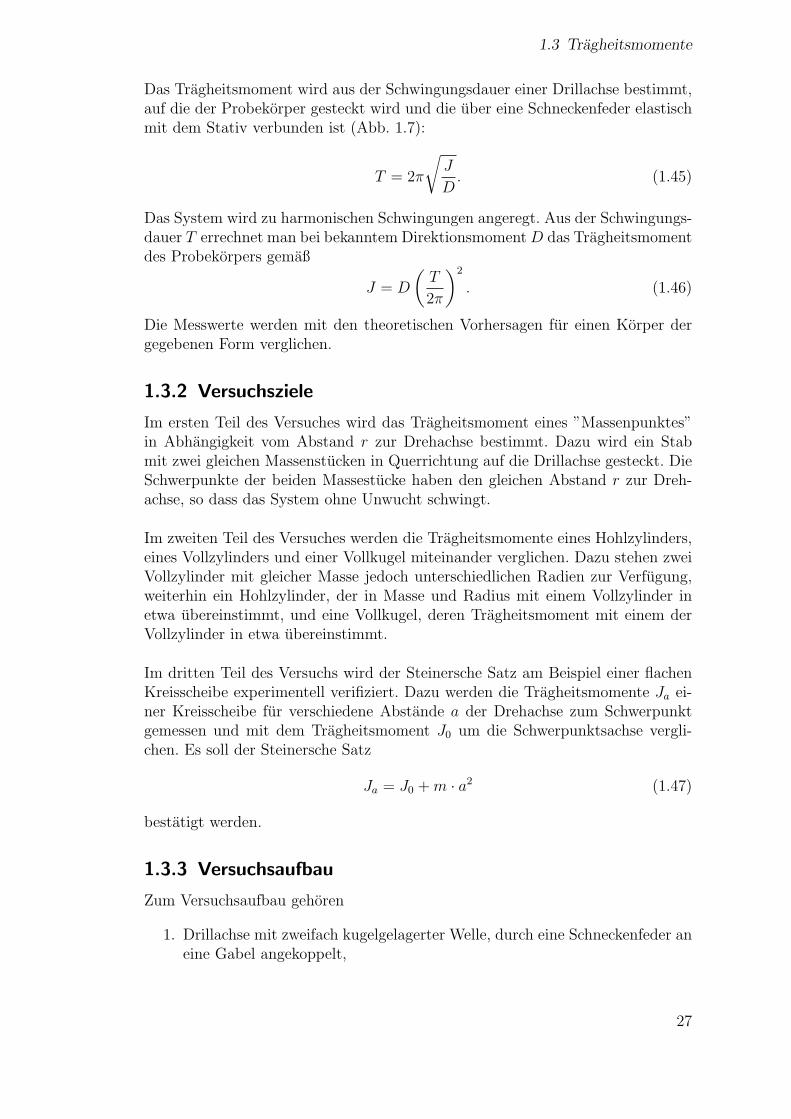
Das Tragheitsmoment wird aus der Schwingungsdauer einer Drillachse bestimmt,auf die der Probekorper gesteckt wird und die uber eine Schneckenfeder elastischmit dem Stativ verbunden ist (Abb. 1.7):
T = 2π
√J
D. (1.45)
Das System wird zu harmonischen Schwingungen angeregt. Aus der Schwingungs-dauer T errechnet man bei bekanntem DirektionsmomentD das Tragheitsmomentdes Probekorpers gemaß
J = D
(T
2π
)2
. (1.46)
Die Messwerte werden mit den theoretischen Vorhersagen fur einen Korper dergegebenen Form verglichen.
1.3.2 Versuchsziele
Im ersten Teil des Versuches wird das Tragheitsmoment eines ”Massenpunktes”in Abhangigkeit vom Abstand r zur Drehachse bestimmt. Dazu wird ein Stabmit zwei gleichen Massenstucken in Querrichtung auf die Drillachse gesteckt. DieSchwerpunkte der beiden Massestucke haben den gleichen Abstand r zur Dreh-achse, so dass das System ohne Unwucht schwingt.
Im zweiten Teil des Versuches werden die Tragheitsmomente eines Hohlzylinders,eines Vollzylinders und einer Vollkugel miteinander verglichen. Dazu stehen zweiVollzylinder mit gleicher Masse jedoch unterschiedlichen Radien zur Verfugung,weiterhin ein Hohlzylinder, der in Masse und Radius mit einem Vollzylinder inetwa ubereinstimmt, und eine Vollkugel, deren Tragheitsmoment mit einem derVollzylinder in etwa ubereinstimmt.
Im dritten Teil des Versuchs wird der Steinersche Satz am Beispiel einer flachenKreisscheibe experimentell verifiziert. Dazu werden die Tragheitsmomente Ja ei-ner Kreisscheibe fur verschiedene Abstande a der Drehachse zum Schwerpunktgemessen und mit dem Tragheitsmoment J0 um die Schwerpunktsachse vergli-chen. Es soll der Steinersche Satz
Ja = J0 +m · a2 (1.47)
bestatigt werden.
1.3.3 Versuchsaufbau
Zum Versuchsaufbau gehoren
1. Drillachse mit zweifach kugelgelagerter Welle, durch eine Schneckenfeder aneine Gabel angekoppelt,
27
1 Mechanik
2. Stab mit Kupplungsstuck zum Aufstecken auf die Drillachse; je 5 Kerben inca. 0, 05 m Abstanden zu beiden Seiten der ebenfalls gekerbten Stabmitte,
3. zwei Massen (als Modell von Massenpunkten), langs des Stabes (2) ver-schiebbar, mit Kugelrasten, die in die Kerben des Stabes greifen, so dassdie Massen in definierten Abstanden von der Stabmitte gehalten werden,
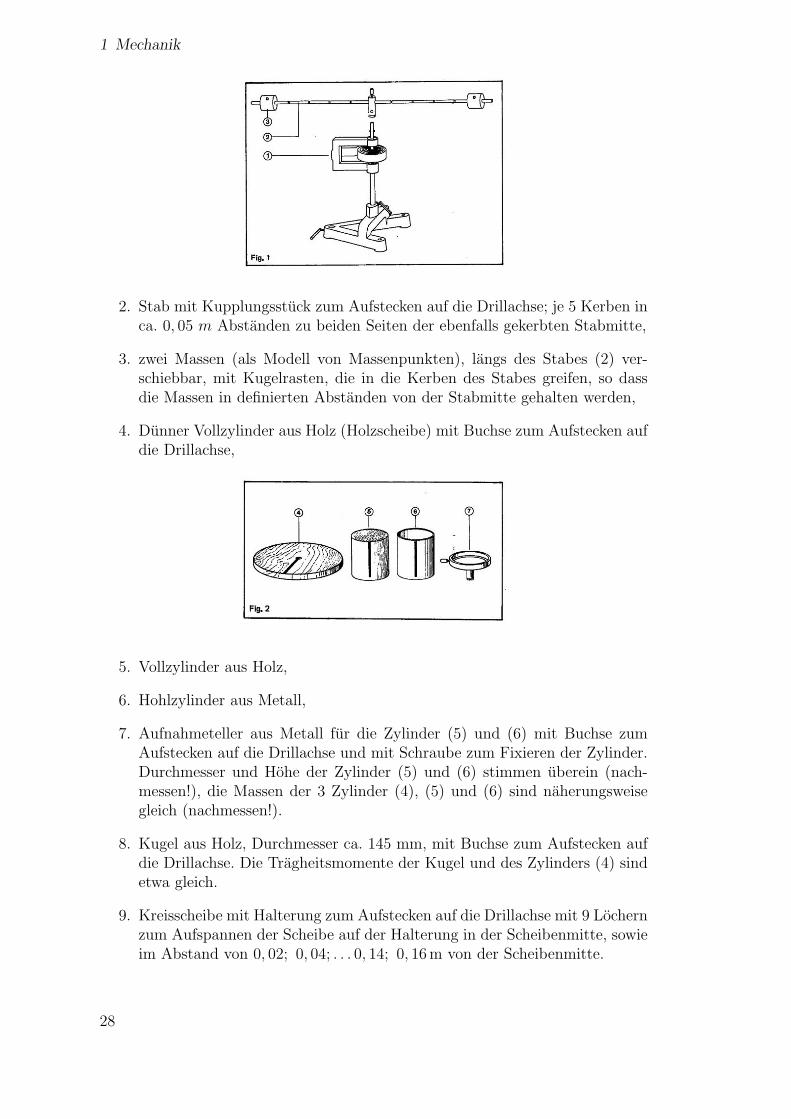
4. Dunner Vollzylinder aus Holz (Holzscheibe) mit Buchse zum Aufstecken aufdie Drillachse,
5. Vollzylinder aus Holz,
6. Hohlzylinder aus Metall,
7. Aufnahmeteller aus Metall fur die Zylinder (5) und (6) mit Buchse zumAufstecken auf die Drillachse und mit Schraube zum Fixieren der Zylinder.Durchmesser und Hohe der Zylinder (5) und (6) stimmen uberein (nach-messen!), die Massen der 3 Zylinder (4), (5) und (6) sind naherungsweisegleich (nachmessen!).
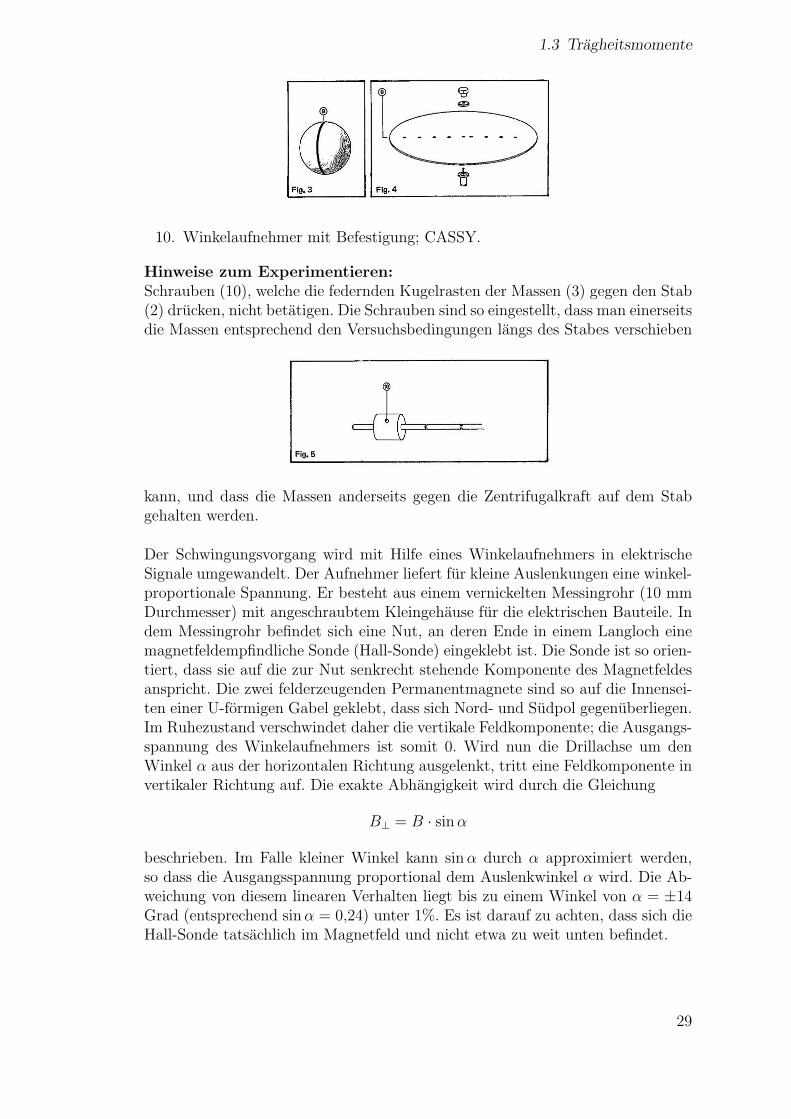
8. Kugel aus Holz, Durchmesser ca. 145 mm, mit Buchse zum Aufstecken aufdie Drillachse. Die Tragheitsmomente der Kugel und des Zylinders (4) sindetwa gleich.
9. Kreisscheibe mit Halterung zum Aufstecken auf die Drillachse mit 9 Lochernzum Aufspannen der Scheibe auf der Halterung in der Scheibenmitte, sowieim Abstand von 0, 02; 0, 04; . . . 0, 14; 0, 16 m von der Scheibenmitte.
28
1.3 Tragheitsmomente
10. Winkelaufnehmer mit Befestigung; CASSY.
Hinweise zum Experimentieren:Schrauben (10), welche die federnden Kugelrasten der Massen (3) gegen den Stab(2) drucken, nicht betatigen. Die Schrauben sind so eingestellt, dass man einerseitsdie Massen entsprechend den Versuchsbedingungen langs des Stabes verschieben
kann, und dass die Massen anderseits gegen die Zentrifugalkraft auf dem Stabgehalten werden.
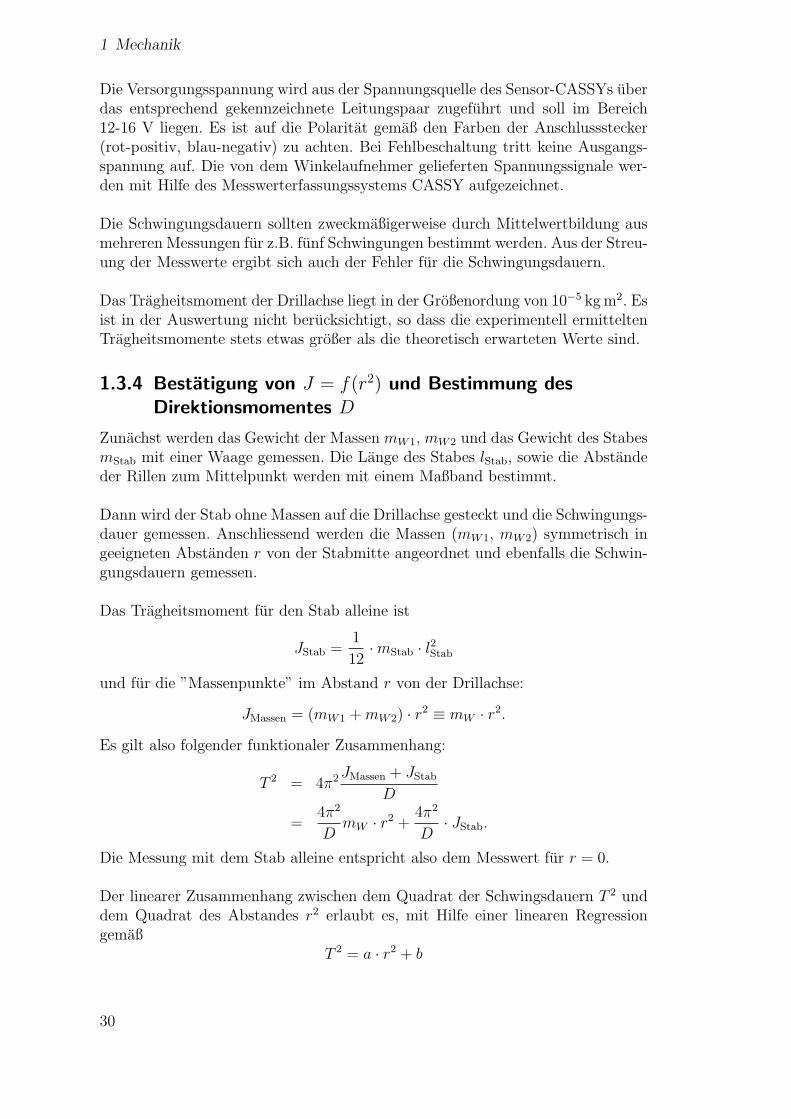
Der Schwingungsvorgang wird mit Hilfe eines Winkelaufnehmers in elektrischeSignale umgewandelt. Der Aufnehmer liefert fur kleine Auslenkungen eine winkel-proportionale Spannung. Er besteht aus einem vernickelten Messingrohr (10 mmDurchmesser) mit angeschraubtem Kleingehause fur die elektrischen Bauteile. Indem Messingrohr befindet sich eine Nut, an deren Ende in einem Langloch einemagnetfeldempfindliche Sonde (Hall-Sonde) eingeklebt ist. Die Sonde ist so orien-tiert, dass sie auf die zur Nut senkrecht stehende Komponente des Magnetfeldesanspricht. Die zwei felderzeugenden Permanentmagnete sind so auf die Innensei-ten einer U-formigen Gabel geklebt, dass sich Nord- und Sudpol gegenuberliegen.Im Ruhezustand verschwindet daher die vertikale Feldkomponente; die Ausgangs-spannung des Winkelaufnehmers ist somit 0. Wird nun die Drillachse um denWinkel α aus der horizontalen Richtung ausgelenkt, tritt eine Feldkomponente invertikaler Richtung auf. Die exakte Abhangigkeit wird durch die Gleichung
B⊥ = B · sinα
beschrieben. Im Falle kleiner Winkel kann sinα durch α approximiert werden,so dass die Ausgangsspannung proportional dem Auslenkwinkel α wird. Die Ab-weichung von diesem linearen Verhalten liegt bis zu einem Winkel von α = ±14Grad (entsprechend sinα = 0,24) unter 1%. Es ist darauf zu achten, dass sich dieHall-Sonde tatsachlich im Magnetfeld und nicht etwa zu weit unten befindet.
29
1 Mechanik
Die Versorgungsspannung wird aus der Spannungsquelle des Sensor-CASSYs uberdas entsprechend gekennzeichnete Leitungspaar zugefuhrt und soll im Bereich12-16 V liegen. Es ist auf die Polaritat gemaß den Farben der Anschlussstecker(rot-positiv, blau-negativ) zu achten. Bei Fehlbeschaltung tritt keine Ausgangs-spannung auf. Die von dem Winkelaufnehmer gelieferten Spannungssignale wer-den mit Hilfe des Messwerterfassungssystems CASSY aufgezeichnet.
Die Schwingungsdauern sollten zweckmaßigerweise durch Mittelwertbildung ausmehreren Messungen fur z.B. funf Schwingungen bestimmt werden. Aus der Streu-ung der Messwerte ergibt sich auch der Fehler fur die Schwingungsdauern.
Das Tragheitsmoment der Drillachse liegt in der Großenordung von 10−5 kg m2. Esist in der Auswertung nicht berucksichtigt, so dass die experimentell ermitteltenTragheitsmomente stets etwas großer als die theoretisch erwarteten Werte sind.
1.3.4 Bestatigung von J = f(r2) und Bestimmung desDirektionsmomentes D
Zunachst werden das Gewicht der Massen mW1, mW2 und das Gewicht des StabesmStab mit einer Waage gemessen. Die Lange des Stabes lStab, sowie die Abstandeder Rillen zum Mittelpunkt werden mit einem Maßband bestimmt.
Dann wird der Stab ohne Massen auf die Drillachse gesteckt und die Schwingungs-dauer gemessen. Anschliessend werden die Massen (mW1, mW2) symmetrisch ingeeigneten Abstanden r von der Stabmitte angeordnet und ebenfalls die Schwin-gungsdauern gemessen.
Das Tragheitsmoment fur den Stab alleine ist
JStab =1
12·mStab · l2Stab
und fur die ”Massenpunkte” im Abstand r von der Drillachse:
JMassen = (mW1 +mW2) · r2 ≡ mW · r2.
Es gilt also folgender funktionaler Zusammenhang:
T 2 = 4π2JMassen + JStab
D
=4π2
DmW · r2 +
4π2
D· JStab.
Die Messung mit dem Stab alleine entspricht also dem Messwert fur r = 0.
Der linearer Zusammenhang zwischen dem Quadrat der Schwingsdauern T 2 unddem Quadrat des Abstandes r2 erlaubt es, mit Hilfe einer linearen Regressiongemaß
T 2 = a · r2 + b
30

1.3 Tragheitsmomente
aus der Steigung der Geraden a das Direktionsmoment D zu bestimmen:
D =4π2
a·mW .
Mit bekanntem Direktionsmoment D kann anschließend aus dem Achsenabschnittb das Tragheitsmoment des Stabes experimentell bestimmt werden,
Jexp.Stab =bD
4π2,
und mit der theoretischen Vorhersage
J theo.Stab =1
12·mStab · l2Stab
verglichen werden.
1.3.5 Vergleich der Tragheitsmomente von Zylindern gleicherMasse mit verschiedener Massenverteilung
Dunner Vollzylinder aus Holz (Holzscheibe)Die Masse des dunnen Vollzylinders aus Holz (Holzscheibe - HS) mHS wird durchWiegen und sein Durchmesser dHS mit dem Maßband bestimmt. Dann wird dieHolzscheibe auf der Drillachse befestigt und die Schwingungsdauer gemessen.
JexpHS =1
4π2·D · T 2
HS
Der theoretisch zu erwartende Wert ergibt sich zu:
J theoHS =1
2mHS
(dHS
2
)2
Vollzylinder (VZ) und Hohlzylinder (HZ)Beide Zylinder werden auf einen Aufnahmeteller (T) gesetzt, so dass sich dieTragheitsmomente JVZ und JHZ nicht unmittelbar experimentell, sondern durchDifferenzbildung ermitteln lassen:
JVZ = JVZ+T − JT
JHZ = JHZ+T − JT
Aufnahmeteller:
JexpT =1
4π2·D · T 2
T
Aufnahmeteller + Vollzylinder:
JVZ+T =1
4π2·D · T 2
VZ+T
31

1 Mechanik
Damit ergibt sich fur das Tragheitsmoment des Vollzylinders
JexpVZ = JVZ+T − JT
im Vergleich zu dem theoretisch zu erwartenden Wert von
J theoVZ =1
2mVZ
(dVZ
2
)2
.
Aufnahmeteller + Hohlzylinder:
JHZ+T =1
4π2·D · T 2
HZ+T
Damit ergibt sich fur das Tragheitsmoment des Hohlzylinders
JexpHZ = JHZ+T − JT
im Vergleich zu dem theoretisch zu erwartenden Wert von
J theoHZ = mHZ
(dHZ
2
)2
.
1.3.6 Tragheitsmoment der Kugel
JexpK =1
4π2·D · T 2
K
Um das experimentelle Ergebnis mit der theoretischen Vorhersage
J theoK =2
5mKR
2K
vergleichen zu konnen, benotigen wir den Radius der Kugel RK . Dieser lasst sichmit dem Maßband nur sehr ungenau abschatzen. Wesentlich genauer ist es, dieDichte der Kugel ρK zu verwenden, um uber die Beziehung
mK = VK · ρK =4
3πR3
KρK
den Radius zu bestimmen. Mit ρK = (0, 63± 0, 02) · 103 kg/m3 erhalten wir:
RK =
[mK
43πρK
] 13
.
Bestimmt man Massen und Radien der Versuchskorper, so lasst sich experimentellbestatigen, dass Kugel und Holzscheibe das gleiche Tragheitsmoment haben, wenngilt:
mHS ·R2HS =
4
5mK ·R2
K .
32

1.3 Tragheitsmomente
1.3.7 Bestatigung des Steinerschen Satzes
In diesem Versuchsteil soll die Abhangigkeit des Tragheitsmomentes J vom Ab-stand a zwischen Rotations- und Schwerpunktachse untersucht werden. Der Stei-nersche Satz
Ja = J0 +m · a2 (1.48)
soll bestatigt werden. J0 ist hierbei das Tragheitsmoment bei Rotation um dieSchwerpunktsachse.
Die Kreisscheibe wird zunachst um ihre Schwerpunktsachse rotieren gelassen(a = 0). Zur besseren Genauigkeit und um die Schwankung der Messwerte ab-zuschatzen, wird die Messung mehrfach wiederholt. In gleicher Weise wird dieSchwingungsdauer T als Funktion des Abstandes a = 0, 02; 0, 04; . . . 0, 16 m zwi-schen Rotations- und Schwerpunktsachse bestimmt.
Wichtig:
Nach jeder Anderung von a den Stativfuß mit Hilfe der Dosenlibelle wieder soausrichten, dass die Kreisscheibe in der Horizontalen rotiert.Zur Auswertung trage man J = f(a2) auf, bestimme die Steigung und vergleichemit der Erwartung.
33