Embed Size (px)
Citation preview

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-1
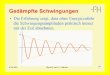
2. Freie gedämpfte Schwingungen
● Bei realen Systemen werden die Schwingungsausschläge mit der Zeit kleiner, und die Schwingung kommt zum Still-stand.
● Ursache sind Energieverluste durch Reibungs- und Dämpfungskräfte:
– Lagerreibung
– Luftwiderstand
– innere Reibung des Werkstoffs

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-2
2. Freie gedämpfte Schwingungen
● Dämpfungskräfte sind stets der Bewegungsrichtung ent-gegengesetzt.
● Die genaue Beschreibung aller dämpfenden Einflüsse ist aufwändig.
● Das einfachste Dämpfungsmodell ist das Modell einer ge-schwindigkeitsproportionalen Dämpfung:
● Dämpfungskonstante d:
– Einheit Kraft/Geschwindigkeit: 1Ns/m = 1kg/s
F D=d v=d x

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-3
2. Freie gedämpfte Schwingungen
2.1 Schwingungsgleichung
2.2 Dämpfungsfälle
2.3 Dissipierte Energie

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-4
2.1 Schwingungsgleichung
● Lösung der Bewegungsgleichung:
– Aus
folgt nach Division durch m die Schwingungsgleichung
– Dabei wurde die Abklingkonstante
eingeführt.
– Die Dimension der Abklingkonstante ist .
m xd xc x=0
x2 x2 x=0
=d2m
kgs⋅kg
=1s

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-5
2.1 Schwingungsgleichung
– Einsetzen des Lösungsansatzes
führt auf .
– Nichttriviale Lösungen mit existieren nur, wenn die charakteristische Gleichung
erfüllt ist.
– Sie hat die beiden Lösungen
x t =Ae t , x t = Ae t , x t =2 Ae t
222 Ae t=0
A≠0
222=0
1/2=−±2−
2=−±
2 2
2−1

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-6
2.1 Schwingungsgleichung
– Mit dem Lehrschen Dämpfungsmaß
folgt:
D=
1/2=−±D2−1
● Dämpfungsfälle:
– Starke Dämpfung:● D > 1: 2 reelle Lösungen
– Kritische Dämpfung:● D = 1: 1 reelle Lösung
– Schwache Dämpfung:● D < 1: 2 komplexe Lö-
sungen

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-7
2.2 Dämpfungsfälle
● Starke Dämpfung:
– Es gibt 2 reelle Lösungen
mit .
– Die allgemeine Lösung der Schwingungsgleichung ist
– Das ist eine exponentiell abklingende Funktion.
– Für die Geschwindigkeit folgt:
1/2=−±
=D2−1=2−
2
x t =A1e1 tA2e
2 t=e− t A1e tA2e
− t
x t =− e− t A1e tA2e
− t e− t A1e t−A2e
− t

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-8
2.2 Dämpfungsfälle
– Die Konstanten A1 und A
2 können aus den Anfangsbedin-
gungen bestimmt werden:● Verschiebung:● Geschwindigkeit: v0= x 0=− A1A2 A1−A2
=−− A1− A2
x 0=x 0=A1A2
A1 A2 = x0−− A1 − A2 = v0 ∣ ⋅
⋅1 ∣⋅− ⋅1 ∣
− A1= x0v0 A1= x0v0
2
−−− A2=− x0v0 A2=−− x0v0
2

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-9
2.2. Dämpfungsfälle
v0 > 0
v0 = 0
-δx0 < v
0 < 0
v0 < -δx
0

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-10
2.2 Dämpfungsfälle
● Kritische Dämpfung:
– Es gibt nur eine reelle Lösung
– Die allgemeine Lösung lautet:
– Die Konstanten A1 und A
2 können wieder aus den Anfangs-
bedingungen bestimmt werden:
– Dieser Fall wird auch als aperiodischer Grenzfall bezeich-net.
1=2=−
x t = A1A2 t e− t
x 0=x 0 A1=x0 , x 0=v0 A2=v0 x0

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-11
2.2 Dämpfungsfälle
– Der Ausschlag geht schneller gegen null als bei starker Dämpfung.
– Technische Anwendung findet der Grenzfall z.B. bei der Auslegung von Messgeräten.

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-12
2.2 Dämpfungsfälle
● Schwache Dämpfung:
– Es gibt 2 komplexe Lösungen
mit .
– Die allgemeine Lösung lautet
mit zwei komplexen Konstanten
1/2=−±id
d=1−D2
x t =A1e1 tA2e
2 t=e− t A1eid tA2e
−id t
A1=a1i b1 , A2=a2i b2

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-13
2.2 Dämpfungsfälle
– Mit den Eulerschen Formeln
folgt:
– Die Lösung ist reell für
eix=cos x i sin x , e−ix=cos x −i sin x
x t =e− t [a1i b1 cosd t i sin d t a2i b2 cosd t −i sin d t ]
=e− t [a1a2cos d t −b1−b2sin d t
i b1b2cosd t a1−a2sin d t ]
a1=a2=C c2, b1=−b2=−
C s
2

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-14
2.2 Dämpfungsfälle
– Damit lautet die allgemeine Lösung:
– Für die Geschwindigkeit folgt:
– Die Konstanten können aus den Anfangsbedingungen be-stimmt werden:
x t =e− t C c cos d t C s sin d t
x t =− e− t C ccos d t C s sin d t e− td −C c sin d t C s cosd t
=e− t [dC s−C ccosd t −dC cC ssin d t ]
x 0=x 0=C c C c=x0
v0= x 0=dC s−C c C s=v0 x0
d

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-15
2.2 Dämpfungsfälle
– Ergebnis:
– Wie im ungedämpften Fall lässt sich die Lösung auch in der Form
schreiben.
– Dabei gilt:
x t =e− t [ x 0cos d t v0 x 0d
sin d t ]
x t =C e− t cos d t
C= x02 v0 x 0d
2
, tan =−v0 x0d x 0
x 0=C cos ,v0 x 0
d=−C sin

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-16
2.2 Dämpfungsfälle
Td

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-17
2.2 Dämpfungsfälle
– Die Schwingung klingt exponentiell ab.
– Die Frequenz fd der ge-
dämpften Schwingung ist kleiner als die Frequenz f der ungedämpften Schwingung:
f df
=d
=1−D2
– Bei vielen praktischen Anwendungen ist D < 5%.
– Für D = 5% gilt:
– Für D < 5% ist die Abwei-chung von der unge-dämpften Frequenz klei-ner als 0,15%.
f df
=1−0,05²=0,9987

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-18
2.2 Dämpfungsfälle
– Logarithmisches Dekrement:● Für das Verhältnis von 2 Ausschlägen im Abstand einer Peri-
ode Td gilt:
● Das logarithmische Dekrement ist definiert durch
● Für sehr schwache Dämpfung (D < 10%) gilt die Näherung
x t x tT d
=C e− t cos d t
C e−tT d cos d tT d =eT d
=ln x t x tT d =T d=
2d
=2D
1−D2
1−D2≈1 ≈2 D

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-19
2.2 Dämpfungsfälle
● Beispiel: Dämpferprüfstand
– Daten:● Masse m = 1,5kg● Federkonstante c = 150N/m● Dämpferkonstante d = 1,8Ns/m
– Anfangsbedingungen:
● Auslenkung x0 = 1,5mm
● Geschwindigkeit v0 = 10mm/s
m
c/2 c/2dx

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-20
2.2 Dämpfungsfälle
– Gesucht:● Dämpfungsfall● maximale Auslenkung
– Dämpfungsfall:● Lehrsches Dämpfungsmaß:
● Das System ist schwach gedämpft.
D=
=d2m mc =
d2mc
D=1,8 kg / s
21,5kg⋅150 kg / s2=
1,82225
=1,82⋅15
=0,061

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-21
2.2 Dämpfungsfälle
– Maximale Auslenkung:● Auslenkung:● Geschwindigkeit:
● Bei maximalem Ausschlag ist die Geschwindigkeit null:
● Abkürzung:
x t =C e− t cos d t
x t =−C e− t cos d td sin d t
x tmax =0 : cos d tmaxd sin d tmax=0
=d tmax
cos=−d sin tan =−d
=−D
1−D2

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-22
2.2 Dämpfungsfälle
● Zahlenwerte:
= cm= 1501,5 kgms²m⋅kg
=101s
=D=101s⋅0,06=0,6
1s
d=1−D2=1−0,062=9,982 1s
tan =−v0 x0d x0
=−100,6⋅1,59,982⋅1,5
mm⋅ss⋅mm
=−0,7280 =−0,6293
C= x 02 v0 x0d
2
=1,52mm2 100,6⋅1,59,982mm
2
=1,855mm

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-23
2.2 Dämpfungsfälle
tan =−D
1−D2=−
0,06
1−0,062=−0,06011 =−0,06004
=d tmax tmax=−
d
=−0,060040,6293
9,981 s−1=0,05703 s
xmax=C e− tmax cos =1,855mm⋅e−0,6 s−1⋅0,05703 s cos−0,06004
=0,1855mm⋅0,9664⋅0,9982=1,789mm

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-24
2.3 Dissipierte Energie
● Aufgabenstellung:
– Betrachtet wird ein schwach gedämpftes schwingendes System.
– Gesucht ist die Energie, die während einer Periode dissi-piert wird.
● Lösung:
– Potenzielle Energie zum Zeitpunkt t = tn:
E P tn=12c x 2tn=
12cC2e−2 t n cos2 d tn

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-25
2.3 Dissipierte Energie
– Kinetische Energie zum Zeitpunkt t = tn:
– Gesamte Energie zum Zeitpunkt t = tn:
– Zum Zeitpunkt tn+1
= tn + T
d gilt:
v t n= x tn=−C e− t n [ cos d tn d sin d t n ]
En=E tn=EP t nE
K tn
E K t n=12mC 2e−2 t n [ cos d t n d sin d t n ]
2
sin d t n1 =sin d t n , cos d t n1 =cos d tn

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-26
2.3 Dissipierte Energie
– Damit gilt für die Energien:
– Für das Verhältnis der Energien folgt:
E n1En
=e−2T d=e−2
E P tn1=12cC2e−2 t n1cos2 d tn =e−2T d EP t n
E K t n1=e−2T d E K t n
E n1=e−2T d En

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-27
2.3 Dissipierte Energie
– Für die während einer Periode dissipierte Energie gilt:
– Verhältnis der Energien nach den ersten N Perioden:
– Während der ersten N Perioden dissipierte Energie:
En=En−En1=E n−E n1E n
E n=1−e−2 En
E N1
E1=E N1
E N⋅E NEN−1
⋅⋅E2E1
=e−2N
EN=E1−E N1=1−e−2N E1

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-28
2.3 Dissipierte Energie
cm
d
a a a
● Beispiel:
– Eine masselose, starre Stange mit Feder und Dämpfer trägt eine Masse.

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-29
2.3. Dissipierte Energie
– Aufgabenstellung:● Wie lautet die Schwingungsgleichung?● Welche Bedingung muss die Dämpfungskonstante d erfüllen,
damit schwache Dämpfung vorliegt?● Wie lautet die Lösung der Schwingungsgleichung für die An-
fangsbedingungen θ(0) = θ0 und dθ/dt(0) = 0?
● Wie groß ist die für D = 0,01 während der ersten Periode dis-sipierte Energie?
– Schwingungsgleichung:● Die Bewegung der Stange wird durch den von der Gleichge-
wichtslage aus gemessenen Winkel θ beschrieben.

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-30
2.3 Dissipierte Energie
● Für kleine Auslenkungen lautet der Drallsatz be-züglich Punkt A:
FC
FD
A
θ
● Mit
folgt:
● Damit lautet die Schwin-gungsgleichung:
2a2m =−a F C−3aF D
FC=c asin ≈c aF D=d⋅3a
2 a2m 3a2d
ca2=0
29d8m
c4m
=0

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-31
2.3 Dissipierte Energie
– Bedingung für schwache Dämpfung:● Aus der Schwingungsgleichung kann abgelesen werden:
● Lehrsches Dämpfungsmaß:
● Bedingung für schwache Dämpfung:
=9d8m
, 2=c4m
D=
=9d8m
⋅2mc =9d4 mc
D1 d49
mc

Prof. Dr. Wandinger 2. Systeme mit einem FreiheitsgradElastodynamik
2.2-32
2.3 Dissipierte Energie
– Lösung der Schwingungsgleichung:● Allgemeine Lösung:
● Konstanten:
● Ergebnis:
– Dissipierte Energie:● Mit D = 0,01 gilt:
t =e− t [C c cos d t C s sin d t ]
C c=0 , C s=0d
=0
1−D2=0
D
1−D2
t =0e− t cos d t
D
1−D2sin d t
=2⋅D
1−D2=2⋅
0,01
1−0,012=0,06283
E1=E1−E2=1−e−2⋅0,06283 E1=0,1181E1