Embed Size (px)
Citation preview
(Allgemeine) Vektorräume (Teschl/Teschl 9)
Sei K ein beliebiger Körper. Ein Vektorraum über K ist eine(nichtleere) Menge V , auf der zwei Operationen de�niert sind,die bestimmten Rechenregeln genügen:
I Eine Addition, d. h. zu je zwei Elementen (Vektoren)v ,w ∈ V ist die Summe v + w ∈ V de�niert.
I Eine Mulitiplikation mit Skalaren aus K, d. h. zu a ∈ Kund v ∈ V ist das Produkt a · v ∈ V de�niert.
I Dabei müssen die folgenden Regeln gelten:
vektorraum12.pdf, Seite 1
RechenregelnI (V ,+) ist eine abelsche Gruppe, d. h.
I v + w = w + v für alle v ,w ∈ V (Kommutativgesetz),I (u + v) + w = u + (v + w) für alle u, v ,w ∈ V
(Assoziativgesetz),I Es gibt einen Nullvektor 0 ∈ V mit v + 0 = v für alle
v ∈ V ,I Zu jedem v ∈ V gibt es ein Inverses −v ∈ V mit
v + (−v) = 0.
I (ab) · v = a · (b · v) für a, b ∈ K, v ∈ V
(Assoziativgesetz),I 1 · v = v für v ∈ V und das Einselement 1 ∈ K,I a · (v + w) = a · v + a · w undI (a + b) · v = a · v + b · vfür a, b ∈ K und v ,w ∈ V (Distributivgesetze)
vektorraum12.pdf, Seite 2
Beispiele
I V = Rn ist ein Vektorraum über R.I Allgemeiner ist V = Kn = {(v1, ..., vn) : vi ∈ K} einVektorraum über K.
I Ist I ⊂ R ein Intervall, so bildet die Menge allerFunktionen von I nach R einen Vektorraum über R,ebenso die Menge aller stetigen (bzw. di�erenzierbaren)Funktionen.
I Die Menge aller Polynome über K bildet einenVektorraum über K, ebenso die Menge aller Polynomevom Grad ≤ n.
vektorraum12.pdf, Seite 3
Bemerkung
Die für Anwendungen wichtigsten Fälle sind K = R undK = C (komplexe Zahlen). In der Kodierungstheorie spielenzudem Vektorräume über endlichen Körpern (wie Z2 oderGaloiskörper Z2[x ]m(x)) eine Rolle.
Wir werden uns im Folgenden auf den Fall K = Rbeschränken, die gemachten Aussagen lassen sich jedochunmittelbar auf den allgemeinen Fall übertragen.
Unterräume
Sind U und V Vektorräume über K und gilt U ⊂ V , so heiÿtU Untervektorraum oder Unterraum (oder Teilraum) von V .
vektorraum12.pdf, Seite 4
Beispiele für UnterräumeI U = {(x , y) ∈ R2 : y = 0} ist ein Unterraum vonV = R2.
I Die Menge U = Menge aller Polynome mit Grad ≤ 2 istein Unterraum des Vektorraums V aller Polynome (mitbeliebigem Grad).
I Ist A eine beliebige m × n�Matrix, so bildet die Menge Ualler Lösungen des homogenen LGS Ax = 0 einenUnterraum des Rn.Dies folgt daraus, dass ein homogenes LGS immer lösbarist (⇒ U 6= ∅) und dass die Summe zweier Lösungensowie skalare Vielfache einer Lösung wieder Lösungensind.Umgekehrt ist jeder Unterraum des Rn Lösungsmengeeines geeigneten homogenen linearen Gleichungssystems.
I Zu jedem Vektorraum V ist U = {0} ein Unterraum, dertriviale Unterraum.
vektorraum12.pdf, Seite 5
BemerkungUm zu entscheiden, ob es sich bei einer gegebenen TeilmengeU eines Vektorraums V um einen Unterraum handelt, müssenlediglich 3 Bedingungen geprüft werden:
1. 0 ∈ U
(stellt sicher, dass U 6= ∅ ist),2. v + w ∈ U für alle u, v ∈ U und
3. av ∈ U für alle v ∈ U und a ∈ R.Bedingungen 2 und 3 stellen sicher, dass Vektoradditionund Multiplikationen mit Skalaren �innerhalb von U�de�niert sind, U also �abgeschlossen� unter denVektorraumoperationen ist.
Die Gültigkeit der Rechenregeln ergibt sich dann automatischdaraus, dass diese in V gelten. Dies muss daher für U nichtmehr explizit nachgeprüft werden.
vektorraum12.pdf, Seite 6
Beispiel
Sei V der Vektorraum aller Polynome p(x) = ax2 + bx + c mitGrad ≤ 2 und U = {p ∈ V : p(1) = 0} die Teilmengederjenigen Polynome, die in x = 1 eine Nullstelle haben.
Dann ist U Unterraum von V , denn es gilt
1. Die Nullfunktion p(x) = 0 hat in x = 1 der Wert 0,gehört also zu U.
2. Sind p, q ∈ U, so gilt nach Voraussetzungp(1) = q(1) = 0. Für die Summe p + q folgt(p + q)(1) = p(1) + q(1) = 0⇒ p + q ∈ U
3. Für p ∈ U und Skalare λ ∈ R gilt sowie(λ · p)(1) = λ · p(1) = λ · 0 = 0⇒ λ · p ∈ U
vektorraum12.pdf, Seite 7
BemerkungUm zu zeigen, dass eine Teilmenge U eines Vektorraums Vkein Unterraum ist, muss ein Gegenbeispiel angegeben werden,bei dem eine der 3 Bedingungen verletzt ist.
Es sind also (im Fall U 6= ∅) entweder Vektoren v ,w ∈ U mitv + w 6∈ U zu �nden oder ein v ∈ U und ein Skalar a ∈ K mitav 6∈ U.
BeispieleI U =
{v =
(v1
v2
)∈ R2 : v1 = 0 oder v2 = 0
}ist kein
Unterraum von V = R2, denn es sind v =(
1
0
)und
w =(
0
1
)∈ U, aber v + w =
(1
1
)6∈ U.
I U = {v ∈ R2 : v1 ≥ 0} ist ebenfalls kein Unterraum,
denn es ist v =(
1
0
)∈ U, aber −1 · v =
(−10
)6∈ U.
vektorraum12.pdf, Seite 8
Unterräume des Rn geometrisch
I Der R2 hat folgende Unterräume:(a) den trivialen Unterraum U = {0},(b) den gesamten Raum R2,(c) alle Geraden durch 0.
I Im R3 gibt es folgende Unterräume:(a) {0},(b) Geraden durch 0,(c) Ebenen durch 0,(d) den gesamten Raum R3.
vektorraum12.pdf, Seite 9
Linearkombinationen
Zu Vektoren v1, ..., vn ∈ V heiÿt ein Ausdruck der Form
n∑i=1
ai · vi = a1 · v1 + a2 · v2 + ...+ an · vn
mit Skalaren a1, ..., an ∈ K Linearkombination von v1, ..., vn.Die Skalare a1, ..., an werden dabei als Koe�zienten bezeichnet.
Satz 1
Ist V Vektorraum über K, so bildet für beliebige (feste)
v1, ..., vn ∈ V die Menge aller Linearkombinationen
L(v1, ..., vn) =
{n∑
i=1
ai · vi : a1, ..., an ∈ K
}
einen Unterraum von V , der von v1, ..., vn erzeugte Unterraum oder
die lineare Hülle von v1, ..., vn.
vektorraum12.pdf, Seite 10
Lineare Hülle geometrisch
Die lineare Hülle L(v) = {t · v : t ∈ R}eines Vektors v 6= 0 ist eine Gerade durch den Nullpunkt.
Liegen die Ortsvektoren v und w auf einer Geraden, so istL(v ,w) ebenfalls eine Gerade, ansonsten ist
L(v ,w) = {t · v + s · w : s, t ∈ R} eine Ebene durch 0.
Liegen die 3 Vektoren u, v ,w ∈ R3 in einer Ebene, so ist dieseEbene ihre lineare Hülle, ansonsten ist die lineare Hülle dergesamte dreidimensionale Raum.
vektorraum12.pdf, Seite 11
ErzeugendensystemIst V = L(v1, ..., vn) (d. h. jeder Vektor als V lässt sich alsLinearkombination von v1, ..., vn darstellen), so heiÿt{v1, ..., vn} Erzeugendensystem von V .
Beispiele
I
{(1
0
),(
0
1
)}ist ein Erzeugendensystem des R2,
denn ein beliebiger Vektor(
b1
b2
)∈ R2 kann durch(
b1
b2
)= b1 ·
(1
0
)+ b2 ·
(0
1
)als Linearkombination von
e1 =(
1
0
)und e2 =
(0
1
)dargestellt werden.
I {1, x , x2} ist ein Erzeugendensystem des Vektorraums Valler Polynome vom Grad ≤ 2, den ein beliebiges Elementp ∈ V hat die Form p(x) = a2 · x2 + a1 · x + a0 · 1mit Skalaren a0, a1, a2 ∈ R.
vektorraum12.pdf, Seite 12
Weiteres Beispiel
{u, v ,w} ={(
1
1
),(
1
0
),(
1
−1
)}ist Erzeugendensystem des R2, denn um einen beliebigenVektor b ∈ R2 als Linearkombination von u, v ,w darzustellen,betrachtet man
a1 ·(
1
1
)+ a2 ·
(1
0
)+ a3 ·
(1
−1
)=(
1 1 1
1 0 −1
) a1
a2
a3
=(
b1
b2
),
was ein lineares Gleichungssystem für die gesuchten Skalare a1,a2 und a3 ist.
Die Koe�zientenmatrix hat Rang 2, also ist das LGS fürbeliebiges b ∈ R2 lösbar. Da es 3 Unbekannte gibt, ist dieLösung und damit die Darstellung von b als Linearkombinationvon u, v ,w nicht eindeutig.
vektorraum12.pdf, Seite 13
Bemerkung
Die Rechnung im letzten Beispiel zeigt ein allgemeines Prinzip:
Zu Vektoren v1, ..., vn ∈ Rm und Skalaren a1, ..., an ∈ Renspricht die Linearkombination∑n
i=1ai · vi = a1 · v1 + a2 · v2 + ...+ an · vn
der Multiplikation der m × n�Matrix V , deren Spalten dieVektoren v1, .., vn sind, mit dem Koe�zientenvektor a1
.
.
.
an
∈ Rn.
Für einen Vektor b ∈ Rm folgt b ∈ L(v1, ..., vn) genau dann,wenn das LGS Vx = b lösbar ist, also wenn rg(V |b) = rg(V ).
Insbesondere gilt: Ist rg(V ) = m, so lässt sich jedes b ∈ Rm
als Linearkombination der vi darstellen, d. h. v1, ..., vn bildenein Erzeugendensystem des Rm.
vektorraum12.pdf, Seite 14
Lineare Unabhängigkeit
Die Vektoren v1, ..., vn ∈ V heiÿen linear unabhängig, wenn
n∑i=1
aivi = 0⇒ a1 = a2 = ... = an = 0,
wenn also die einzige Möglichkeit, den Nullvektor alsLinearkombination von v1, ..., vn darzustellen darin besteht,dass alle Koe�zienten Null sind.
Sind die Vektoren nicht linear unabhängig, so heiÿen sie linearabhängig.
Dies ist der Fall, wenn es eine �nichttriviale� Möglichkeit gibt(d. h. mit Koe�zienten, die nicht alle Null sind), denNullvektor als Linearkombination von v1, ..., vn darzustellen.
vektorraum12.pdf, Seite 15
Beispiele
I v1 =(
1
0
)und v2 =
(0
1
)∈ R2 sind linear unabhängig, da
a1v1 + a2v2 =(
a1
a2
)=(
0
0
)⇒ a1 = a2 = 0.
I Mit v3 =(
1
1
)= v1 + v2 sind v1, v2, v3 linear abhängig,
da z. B. 1 · v1 + 1 · v2 − 1 · v3 = 0.I Die Spalten der Matrix A bilden genau dann linearunabhängige Vektoren, wenn das homogene LGS Ax = 0nur die Nulllösung hat.Das ist genau dann der Fall, wenn der Rang von A gleichder Zahl der Spalten ist.
vektorraum12.pdf, Seite 16
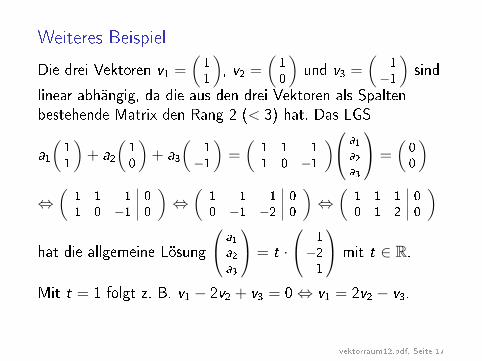
Weiteres Beispiel
Die drei Vektoren v1 =(
1
1
), v2 =
(1
0
)und v3 =
(1
−1
)sind
linear abhängig, da die aus den drei Vektoren als Spaltenbestehende Matrix den Rang 2 (< 3) hat. Das LGS
a1
(1
1
)+ a2
(1
0
)+ a3
(1
−1
)=(
1 1 1
1 0 −1
) a1
a2
a3
=(
0
0
)
⇔(
1 1 1 0
1 0 −1 0
)⇔(
1 1 1 0
0 −1 −2 0
)⇔(
1 1 1 0
0 1 2 0
)
hat die allgemeine Lösung
a1
a2
a3
= t · 1
−21
mit t ∈ R.
Mit t = 1 folgt z. B. v1 − 2v2 + v3 = 0⇔ v1 = 2v2 − v3.
vektorraum12.pdf, Seite 17
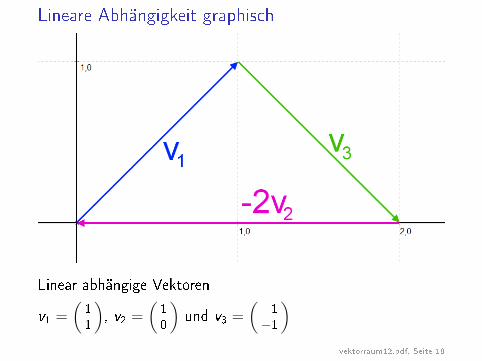
Lineare Abhängigkeit graphisch
Linear abhängige Vektoren
v1 =(
1
1
), v2 =
(1
0
)und v3 =
(1
−1
)vektorraum12.pdf, Seite 18
Lineare Abhängigkeit geometrisch
I Ein Vektor v ist genau dann linear abhängig, wenn er derNullvektor ist.
I Zwei Vektoren v1 und v2 sind genau dann linear abhängig,wenn sie auf einer Geraden liegen oder (mindestens) einervon ihnen der Nullvektor ist.
I Drei Vektoren v1, v2 und v3 sind genau dann linearabhängig, wenn sie in einer Ebene liegen oder(mindestens) einer von ihnen der Nullvektor ist.Ersteres ist genau dann der Fall, wenn durch eineLinearkombination die Seiten eines Dreicks gebildetwerden können.
BemerkungDie Eigenschaft �linear abhängig� bzw. �linear unabhängig�bezieht sich immer auf das System von Vektoren v1, ..., vn alsGanzes.
vektorraum12.pdf, Seite 19
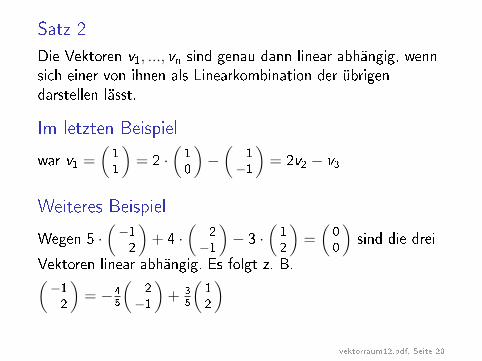
Satz 2
Die Vektoren v1, ..., vn sind genau dann linear abhängig, wennsich einer von ihnen als Linearkombination der übrigendarstellen lässt.
Im letzten Beispiel
war v1 =(
1
1
)= 2 ·
(1
0
)−(
1
−1
)= 2v2 − v3
Weiteres Beispiel
Wegen 5 ·(−12
)+ 4 ·
(2
−1
)− 3 ·
(1
2
)=(
0
0
)sind die drei
Vektoren linear abhängig. Es folgt z. B.(−12
)= −4
5
(2
−1
)+ 3
5
(1
2
)
vektorraum12.pdf, Seite 20
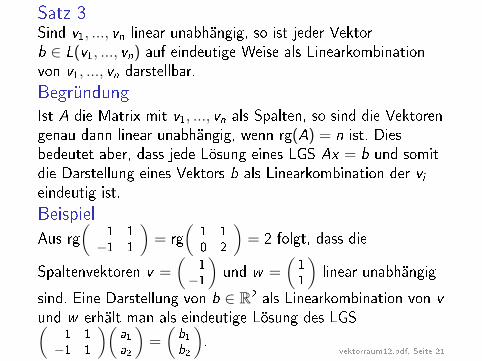
Satz 3Sind v1, ..., vn linear unabhängig, so ist jeder Vektorb ∈ L(v1, ..., vn) auf eindeutige Weise als Linearkombinationvon v1, ..., vn darstellbar.
BegründungIst A die Matrix mit v1, ..., vn als Spalten, so sind die Vektorengenau dann linear unabhängig, wenn rg(A) = n ist. Diesbedeutet aber, dass jede Lösung eines LGS Ax = b und somitdie Darstellung eines Vektors b als Linearkombination der vieindeutig ist.
BeispielAus rg
(1 1
−1 1
)= rg
(1 1
0 2
)= 2 folgt, dass die
Spaltenvektoren v =(
1
−1
)und w =
(1
1
)linear unabhängig
sind. Eine Darstellung von b ∈ R2 als Linearkombination von v
und w erhält man als eindeutige Lösung des LGS(1 1
−1 1
)(a1
a2
)=(
b1
b2
).
vektorraum12.pdf, Seite 21
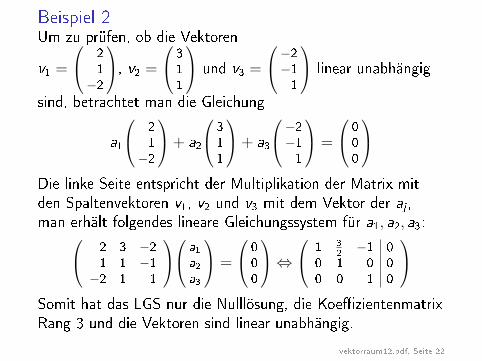
Beispiel 2Um zu prüfen, ob die Vektoren
v1 =
2
1
−2
, v2 = 3
1
1
und v3 =
−2−11
linear unabhängig
sind, betrachtet man die Gleichung
a1
2
1
−2
+ a2
3
1
1
+ a3
−2−11
=
0
0
0
Die linke Seite entspricht der Multiplikation der Matrix mitden Spaltenvektoren v1, v2 und v3 mit dem Vektor der aj ,man erhält folgendes lineare Gleichungssystem für a1, a2, a3: 2 3 −2
1 1 −1−2 1 1
a1
a2
a3
=
0
0
0
⇔ 1
3
2−1 0
0 1 0 0
0 0 1 0
Somit hat das LGS nur die Nulllösung, die Koe�zientenmatrixRang 3 und die Vektoren sind linear unabhängig.
vektorraum12.pdf, Seite 22
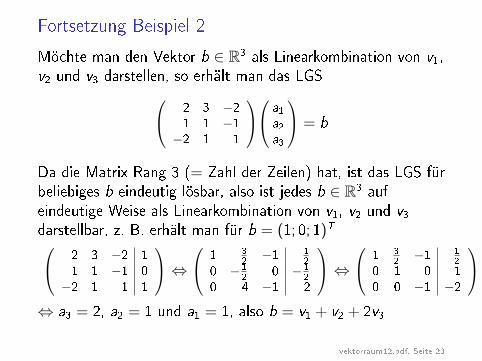
Fortsetzung Beispiel 2
Möchte man den Vektor b ∈ R3 als Linearkombination von v1,v2 und v3 darstellen, so erhält man das LGS 2 3 −2
1 1 −1−2 1 1
a1
a2
a3
= b
Da die Matrix Rang 3 (= Zahl der Zeilen) hat, ist das LGS fürbeliebiges b eindeutig lösbar, also ist jedes b ∈ R3 aufeindeutige Weise als Linearkombination von v1, v2 und v3darstellbar, z. B. erhält man für b = (1; 0; 1)T 2 3 −2 1
1 1 −1 0
−2 1 1 1
⇔ 1
3
2−1 1
2
0 − 1
20 − 1
2
0 4 −1 2
⇔ 1
3
2−1 1
2
0 1 0 1
0 0 −1 −2
⇔ a3 = 2, a2 = 1 und a1 = 1, also b = v1 + v2 + 2v3
vektorraum12.pdf, Seite 23
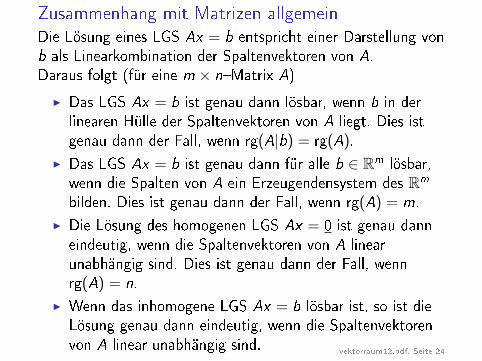
Zusammenhang mit Matrizen allgemeinDie Lösung eines LGS Ax = b entspricht einer Darstellung vonb als Linearkombination der Spaltenvektoren von A.Daraus folgt (für eine m × n�Matrix A)
I Das LGS Ax = b ist genau dann lösbar, wenn b in derlinearen Hülle der Spaltenvektoren von A liegt. Dies istgenau dann der Fall, wenn rg(A|b) = rg(A).
I Das LGS Ax = b ist genau dann für alle b ∈ Rm lösbar,wenn die Spalten von A ein Erzeugendensystem des Rm
bilden. Dies ist genau dann der Fall, wenn rg(A) = m.I Die Lösung des homogenen LGS Ax = 0 ist genau danneindeutig, wenn die Spaltenvektoren von A linearunabhängig sind. Dies ist genau dann der Fall, wennrg(A) = n.
I Wenn das inhomogene LGS Ax = b lösbar ist, so ist dieLösung genau dann eindeutig, wenn die Spaltenvektorenvon A linear unabhängig sind.
vektorraum12.pdf, Seite 24
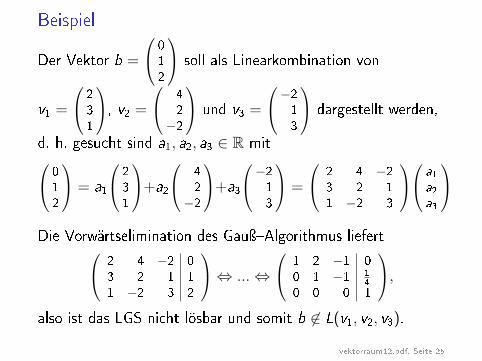
Beispiel
Der Vektor b =
0
1
2
soll als Linearkombination von
v1 =
2
3
1
, v2 = 4
2
−2
und v3 =
−213
dargestellt werden,
d. h. gesucht sind a1, a2, a3 ∈ R mit 0
1
2
= a1
2
3
1
+a2 4
2
−2
+a3−21
3
=
2 4 −23 2 1
1 −2 3
a1
a2
a3
Die Vorwärtselimination des Gauÿ�Algorithmus liefert 2 4 −2 0
3 2 1 1
1 −2 3 2
⇔ ...⇔ 1 2 −1 0
0 1 −1 1
4
0 0 0 1
,also ist das LGS nicht lösbar und somit b 6∈ L(v1, v2, v3).
vektorraum12.pdf, Seite 25
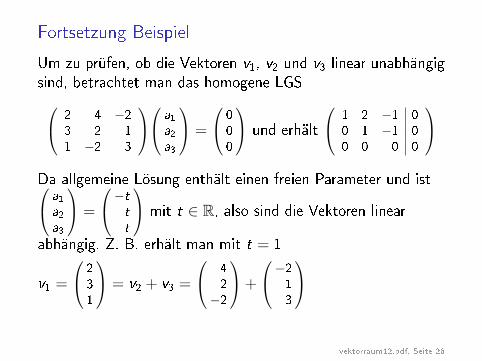
Fortsetzung Beispiel
Um zu prüfen, ob die Vektoren v1, v2 und v3 linear unabhängigsind, betrachtet man das homogene LGS 2 4 −2
3 2 1
1 −2 3
a1
a2
a3
=
0
0
0
und erhält
1 2 −1 0
0 1 −1 0
0 0 0 0
Da allgemeine Lösung enthält einen freien Parameter und ist a1
a2
a3
=
−ttt
mit t ∈ R, also sind die Vektoren linear
abhängig. Z. B. erhält man mit t = 1
v1 =
2
3
1
= v2 + v3 =
4
2
−2
+
−213
vektorraum12.pdf, Seite 26
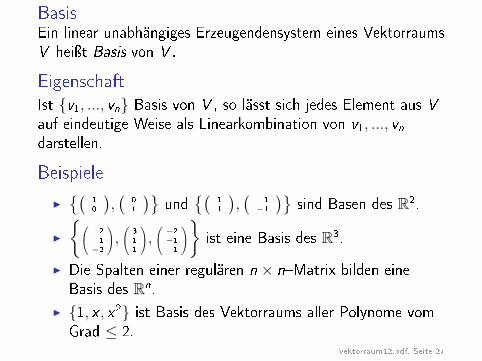
BasisEin linear unabhängiges Erzeugendensystem eines VektorraumsV heiÿt Basis von V .
EigenschaftIst {v1, ..., vn} Basis von V , so lässt sich jedes Element aus Vauf eindeutige Weise als Linearkombination von v1, ..., vndarstellen.
Beispiele
I{(
1
0
),(
0
1
)}und
{(1
1
),(
1
−1
)}sind Basen des R2.
I
{ 2
1
−2
, 3
1
1
, −2
−1
1
}
ist eine Basis des R3.
I Die Spalten einer regulären n × n�Matrix bilden eineBasis des Rn.
I {1, x , x2} ist Basis des Vektorraums aller Polynome vomGrad ≤ 2.
vektorraum12.pdf, Seite 27
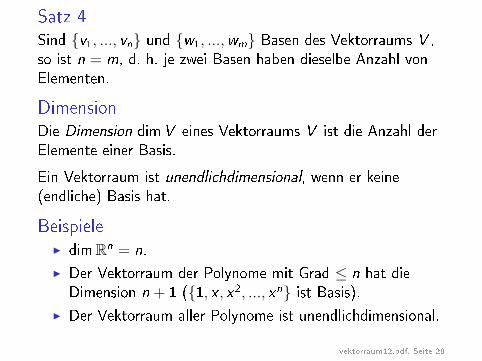
Satz 4Sind {v1, ..., vn} und {w1, ...,wm} Basen des Vektorraums V ,so ist n = m, d. h. je zwei Basen haben dieselbe Anzahl vonElementen.
DimensionDie Dimension dimV eines Vektorraums V ist die Anzahl derElemente einer Basis.
Ein Vektorraum ist unendlichdimensional, wenn er keine(endliche) Basis hat.
BeispieleI dimRn = n.I Der Vektorraum der Polynome mit Grad ≤ n hat dieDimension n + 1 ({1, x , x2, ..., xn} ist Basis).
I Der Vektorraum aller Polynome ist unendlichdimensional.
vektorraum12.pdf, Seite 28
Dimension von Unterräumen des R3
(bzw. allgemeiner des Rn)
I Der triviale Unterraum {0} hat die Dimension 0.I Eindimensionale Unterräume sind Geraden durch 0, eineBasis besteht aus einem Richtungsvektor.
I Zweidimensionale Unterräume sind Ebenen durch 0, eineBasis besteht aus zwei Richtungsvektoren, die nicht aufeiner Geraden liegen (dies sichert die lineareUnabhängigkeit).
I Drei Vektoren, die nicht in einer Ebene liegen, sind linearunabhängig und bilden eine Basis des dreidimensionalenRaumes.
vektorraum12.pdf, Seite 29
Bemerkungen
I Ist dimV = k , so bilden k linear unabhängige Vektorenimmer eine Basis.
I Jedes Erzeugendensystem enthält eine Basis, d. h.:Hat der von v1, ..., vn erzeugte Unterraum die Dimensionk , so gibt es eine k�elementige Teilmenge von{v1, ..., vn}, welche Basis von L(v1, ..., vn) ist.Man �ndet eine solche (i. a. nicht eindeutig bestimmte)Basis, indem man aus {v1, ..., vn} schrittweise solcheVektoren entfernt, die sich als Linearkombination derübrigen darstellen lassen, solange, bis die verbleibendenVektoren linear unabhängig sind.
vektorraum12.pdf, Seite 30
Beispiel und Bemerkung
Gesucht ist eine Basis des von v1 =
1
2
−1
, v2 = 2
4
−2
,v3 =
3
3
0
und v4 =
4
1
3
erzeugten Unterraums des R3.
Das LGS
1 2 3 4 0
2 4 3 1 0
−1 −2 0 3 0
⇔ 1 2 3 4 0
0 0 1 7/3 0
0 0 0 0 0
ist nicht eindeutig lösbar, also sind die Vektoren linearabhängig.
Die Vektoren, denen kein Pivotelement zugeordnet ist (also v2und v4) sind als Linearkombination der anderen darstellbar undkönnen entfernt werden. Die verbleibenden Vektoren v1 und v3sind dann linear unabhängig und bilden eine Basis desUnterraums L(v1, v2, v3, v4), der somit die Dimension 2 hat.
vektorraum12.pdf, Seite 31
Bemerkung
Ist {v1, ..., vn} ein Erzeugendensystem oder eine Basis desUnterraums U, so ändert sich diese Eigenschaft nicht, wennman zu einem der Vektoren ein skalares Vielfaches einesanderen dazuaddiert. Gleiches gilt bei Vertauschen zweierVektoren und Multiplikation eines Vektors mit einem Skalar6= 0.
Die obige Überlegung kann zur Vereinfachung einer Basis bzw.eines Erzeugendensystems eines Unterraums des Rn genutztwerden.
vektorraum12.pdf, Seite 32
Rang und Dimension
Die Spalten einer m × n�Matrix A
I erzeugen einen rg(A)�dimensionalen Unterraum des Rm,I sind ein Erzeugendensystem des Rm, wenn rg(A) = m,I sind linear unabhängig, wenn rg(A) = n,I sind eine Basis des Rn, wenn m = n und A regulär ist.
Eine analoge Aussage gilt für die Zeilen von A.
Damit ist rg(A) die maximale Zahl linear unabhängigerSpalten von A sowie die maximale Zahl linear unabhängigerZeilen von A.
vektorraum12.pdf, Seite 33
Reguläre MatrizenDie folgenden Eigenschaften einer quadratischen n × n�MatrixA sind äquivalent (d. h. wenn eine davon erfüllt ist, sindautomatisch alle anderen erfüllt):
I A ist regulärI A ist invertierbarI detA 6= 0I rg(A) = n
I Die Spaltenvektoren von A sind linear unabhängigI Die Spaltenvektoren von A bilden eine Basis des Rn
I Die Zeilenvektoren von A sind linear unabhängigI Die Zeilenvektoren von A bilden eine Basis des Rn
I Das homogene LGS Ax = 0 hat nur die NulllösungI Das LGS Ax = b ist für ein b ∈ Rn eindeutig lösbarI Das LGS Ax = b ist für alle b ∈ Rn eindeutig lösbar
vektorraum12.pdf, Seite 34
Bemerkungen
I Aus det(AB) = det(A) · det(B) folgt, dass ein Produktzweier n × n�Matrizen genau dann regulär ist, wenn A
und B regulär sind.Daraus folgt, dass die Menge aller regulärenn × n�Matrizen mit der Matrizenmultiplikation alsVerknüpfung eine (nichtkommutative) Gruppe bildet, dieallgemeine lineare Gruppe Gl(n,R).Das neutrale Element ist die Einheitsmatrix In, für dieInversen gilt (AB)−1 = B−1A−1.
I Für die Summe A+ B gibt es keine vergleichbareAussage. Wenn A und B regulär sind, muss A+ B nichtregulär sein, umgekehrt kann die Summe zweier nichtregulärer Matrizen regulär sein.
vektorraum12.pdf, Seite 35











![Das pascalsche Dreieck - Fachbereich Mathematik und ...fbmn.h-da.de/~tksprosem/uploads/Main/HessAusarbeitung.pdf · Abbildung 3: Pascalsches Dreieck [3] Mithilfe dieses einfachen](https://img.pdfslide.org/doc/110x75/5b1d62417f8b9a8e158b6a95/das-pascalsche-dreieck-fachbereich-mathematik-und-fbmnh-dadetksprosemuploadsmain.jpg)











![Mein Wunschzettel: Informatik - uni-mainz.de...Mein Wunschzettel: Informatik Liebe Oma, zu Weihnachten wünsche ich mir.... [bitte ankreuzen und weitergeben] G. Teschl, S. Teschl Mathematik](https://img.pdfslide.org/doc/110x75/5f021fe17e708231d402b131/mein-wunschzettel-informatik-uni-mainzde-mein-wunschzettel-informatik-liebe.jpg)





